

Page 1

© 2009 Horizon Hobby, Inc.
4105 Fieldstone Road
Champaign, Illinois 61822 USA
(877) 504-0233
horizonhobby.com
3-Channel, 4-Model Memory
DSM® Racing System
Horizon Hobby UK
Units 1-4 Ployters Rd
Staple Tye
Harlow, Essex
CM18 7NS
United Kingdom
Horizon Hobby Deutschland GmbH
Hamburger Strasse 10
25335 Elmshorn
Germany
DSM and DSM2 are trademarks or registered trademarks of Horizon Hobby, Inc. The Spektrum trademark is used with permission of
Bachmann Industries, Inc. Spektrum radios and accessories are exclusively available from Horizon Hobby, Inc.
US patent number 7,391,320. Other patents pending.
Revised 08/09
.
9291.2
Page 2

2
3
Table of
Contents
Introduction............................................................................................................................. 3
DX3.0 Quick Start Setup.......................................................................................................... 3
DX3.0 Quick Start Setup (continued)....................................................................................... 4
DX3.0 Quick Start Setup (continued)....................................................................................... 5
Direct Trim Access .................................................................................................................. 5
DX3.0 with Digital Spectrum Modulation ................................................................................ 6
Binding ...................................................................................................................................6
Binding (continued) ................................................................................................................7
Antenna ...................................................................................................................................7
Receiver Power System Requirements ....................................................................................8
Power System Test Guidelines ................................................................................................ 8
Typical Range .......................................................................................................................... 8
System Features ...................................................................................................................... 9
Tips on Using Spektrum 2.4GHz ............................................................................................. 9
RC Safety Precautions ........................................................................................................... 10
Steering Tension Adjustment ................................................................................................. 10
Control Identification and Location .......................................................................................11
Receiver Compatibility ..........................................................................................................12
Receiver Connections and Installation................................................................................... 12
Charging Jack ....................................................................................................................... 13
Key Input and Display ...........................................................................................................13
Display Screens ....................................................................................................................14
Accessing the System Mode .................................................................................................15
Model Select ......................................................................................................................... 16
Model Name Entry ................................................................................................................ 16
Frame Rate ............................................................................................................................ 17
Auxiliary Channel 3 Function Select ..................................................................................... 17
Auxiliary Channel 3 Function Select (continued) .................................................................. 18
Grip Button C Function Select ............................................................................................... 18
Grip Button C Function Select (continued) ............................................................................ 19
Data Reset ............................................................................................................................. 20
Copy Model Data ..................................................................................................................20
RF Mode ...............................................................................................................................21
Accessing the Function Mode ............................................................................................... 22
Mode Key .............................................................................................................................. 22
Throttle Deadband ................................................................................................................. 23
Exponential ..........................................................................................................................24
Endpoint Adjustment ............................................................................................................. 25
Programmable Mixing........................................................................................................... 26
Lap Timer .............................................................................................................................. 27
Sub-Trim ............................................................................................................................... 28
Servo Reversing .................................................................................................................... 28
Accessing the Direct Trim Mode ............................................................................................ 29
Steering Trim (STC) .............................................................................................................. 30
Throttle Trim (THC) ...............................................................................................................31
Grip Lever B: Steering Dual Rate Trim Adjustment STG ......................................................... 32
Grip Lever A: Brake Endpoint Adjustment BRK/Auxiliary Channel 3 Access .......................... 33
Auxiliary Channel 3 Access (Fuel Mixture) ...........................................................................34
Auxiliary Channel 3 (Transmission Shift Selector) ................................................................ 34
Warranty and Service Information .........................................................................................35
FCC Information.................................................................................................................... 38
CE Compliance Information for the European Union ........................................................ 39
Introduction
DX3.0 Quick
Start Setup
Thank you for purchasing Spektrum’s DX3.0 radio system. The DX3.0 is designed to provide
RC racers with a bulletproof 2.4GHz spread spectrum radio link. With the DX3.0 DSM system
you’ll no longer have to wait for a frequency clip, worry about radio interference from noisy
motors or ESCs or be concerned that someone may turn on a radio on your channel causing
interference. In addition, the DX3.0’s programming is user-friendly and offers the most
important features and functions that racers demand. It’s important that you carefully read
this manual before attempting to operate your DX3.0 system.
For those who would like to get out to the track quickly with just the basic radio setup, please
refer to the Quick Start section that follows.
Included in this manual are in-depth instructions detailing all the steps and procedures
needed to program each of the DX3.0’s functions. For those racers who want to get to the
track fast, we have provided the Quick Start section below. Quick Start covers the basic
programming information necessary to get you racing right away.
Later, when you want to learn more about the specific functions of the DX3.0, refer to the
appropriate page(s) in this manual for more detailed programming information.
Note: If braking adjustment via Grip Lever A is required, refer to the third channel system
setup mode (page 32) for instructions.
Binding
It’s necessary to program the receiver to a specific transmitter so that the receiver will only
recognize that transmitter, ignoring signals from any other sources. If the receiver is not
bound to a transmitter, the system will not operate. Also, during the binding process, the
servo failsafe positions are set.
1. Make sure the transmitter and receiver are turned off.
2. With the receiver off, insert the bind plug into the BIND port on the receiver.
3. Power the receiver through any port. The green LED will flash continuously, indicating
the receiver is in bind mode.
4. Hold down on the SCROLL and CHANNEL buttons while turning on the transmitter.
To enter System Mode, press the SCROLL button until “BND” appears on the screen.
5. With the steering wheel and the throttle trigger in their desired failsafe positions, press
the INCREASE and DECREASE buttons at the same time to enter bind mode. “BND” will
flash when in bind mode.
6. After several seconds the LED on the receiver will quit flashing and remain solid,
indicating that the binding process was successful. Once binding is complete, the
system will automatically connect.
7. Once the bind process is complete and before power is cycled on the receiver, remove
the bind plug from the receiver and store it in a convenient place. Failure to remove the
bind plug will result in the receiver going back into bind mode.
Note: See page 6–7 for a detailed description of the binding process.
Page 3
4
5
DX3.0 Quick
Start Setup
(continued)
Servo Reversing
–
st
REV • NORM
–
1. With the transmitter power switch on, press the
SCROLL key to enter the Function mode.
2. Press the SCROLL key until REV.NORM appears on the screen.
The “ST” indicates the steering servo reversing screen.
3. Press the INCREASE or DECREASE key to move the cursor
to the desired servo direction (REV.NORM).
4. Press the CHANNEL key once to access the throttle servo reversing screen.
5. To select the direction of the throttle servo, repeat Step 3 above.
6. Repeat Steps 2 and 3 to adjust Auxiliary Channel 3 if needed.
Indicates Current Channel
ST = Steering
TH = Throttle
AUX = Auxiliary Channel 3 (optional)
Indicates Current Servo Direction
SCROLL
ENtER
ChaNNEL
INCREaSE
Endpoint (Travel) Adjustment
Indicates Current Adjustment Position
ST = Steering
TH = Throttle
AUX = Auxiliary Channel 3 (optional)
Indicates Current Value
R/B
–
E P A
st
I00
CLEaR
DECREaSE
DX3.0 Quick
Start Setup
(continued)
Direct Trim
Access
Servo Trim Adjustment
TRIM
TRIM
–
STC
0
THC
Indicates Steering
Trim Function
Indicates Current Value
Indicates Throttle
Trim Function
Indicates Current Value
0
Steering
1. With the transmitter power switch on, move the digital steering trim lever in the desired
position to be adjusted. The steering trim value screen will appear automatically.
Throttle
2. With the transmitter power switch on, move the digital throttle trim lever in the desired
position to be adjusted. The throttle trim value screen will appear automatically.
L/F = Left/Forward
R/B = Right/Brake
1. From the Servo Reverse function, press the SCROLL key once to access
the Endpoint (Travel) Adjustment function (the EPA screen with “ST” will appear).
Steering Adjustment
2. Rotate the steering wheel in the desired direction (left or right) to be adjusted.
3. Press the INCREASE or DECREASE key to select the desired travel value.
Throttle Adjustment
4. Press the CHANNEL key once. TH will appear on the screen.
5. Pull the trigger for forward or push the trigger for brake adjustment.
6. Press the INCREASE or DECREASE key to select the desired travel value.
Auxiliary Channel 3 Adjustment
Note: AUX will need to be programmed for either Grip Lever A or Grip Button C.
See page 17.
If a third channel is not required, proceed to Step 10.
7. Press the CHANNEL key once. AUX will appear on the screen.
8. Toggle the appropriate lever/button to select the desired endpoint.
9. Press the INCREASE or DECREASE key to select the desired travel value.
10. Press the SCROLL and CHANNEL keys at the same time to exit the function mode.
Steering Trim
Throttle Trim
Page 4
6
7
DX3.0 with
Digital
Spectrum
Modulation
Binding
The DSM® system operates in the 2.4GHz band (that’s 2400MHz). This high frequency offers
a significant advantage, as it’s well out of the range of model-generated radio interference
(like motor and ESC noise). All the complex issues that now exist using 27 and 75MHz
radios with model-generated interfering noise are eliminated with this system. The DSM
system uses Direct Sequencing Spread Spectrum modulation to generate a wide signal on a
single frequency. The FCC requires that these systems be “smart”– incorporating collision
avoidance such that when a system is turned on, it scans the 2.4GHz band and selects a
channel that is not being used, then begins transmitting on that unused channel. Seventynine channels are available and the odds of one DSS spread spectrum system interfering
with another are astronomically remote.
During the first installation, the receiver(s) must be bound to the transmitter. Binding is
necessary to program the receiver(s) to distinguish its corresponding transmitter from
others. Also failsafe positions are transferred from the transmitter to the receiver during
binding.
It is necessary to bind the receiver to the transmitter during the first installation, and is
recommended when the receiver is moved from one vehicle to another. Receivers can be
re-bound to the same transmitter or to other transmitters an infinite number of times. Also
multiple receivers can be bound to a single transmitter, which is common when using one
transmitter to operate several models.
Only bound receivers and transmitters can connect. During power-up, the transmitter
scans for a free channel while the receiver scans for its bound transmitter. When control is
achieved, the LED on the receiver remains on continuously.
Binding
(continued)
Antenna
4. Hold down on the SCROLL and CHANNEL buttons while turning on the transmitter.
To enter System Mode, press the SCROLL button until “BND” appears on the screen.
-
-
b D
M
5. With the steering wheel and the throttle trigger in their desired failsafe positions, press
the INCREASE and DECREASE buttons at the same time to enter bind mode. “BND”
will flash when in bind mode.
6. After several seconds the LED on the receiver will quit flashing and remain solid,
indicating that the binding process was successful. Once binding is complete, the
system will automatically connect.
7. Once the bind process is complete and before power is cycled on the receiver, remove
the bind plug from the receiver and store it in a convenient place. Failure to remove the
bind plug will result in the receiver going back into bind mode.
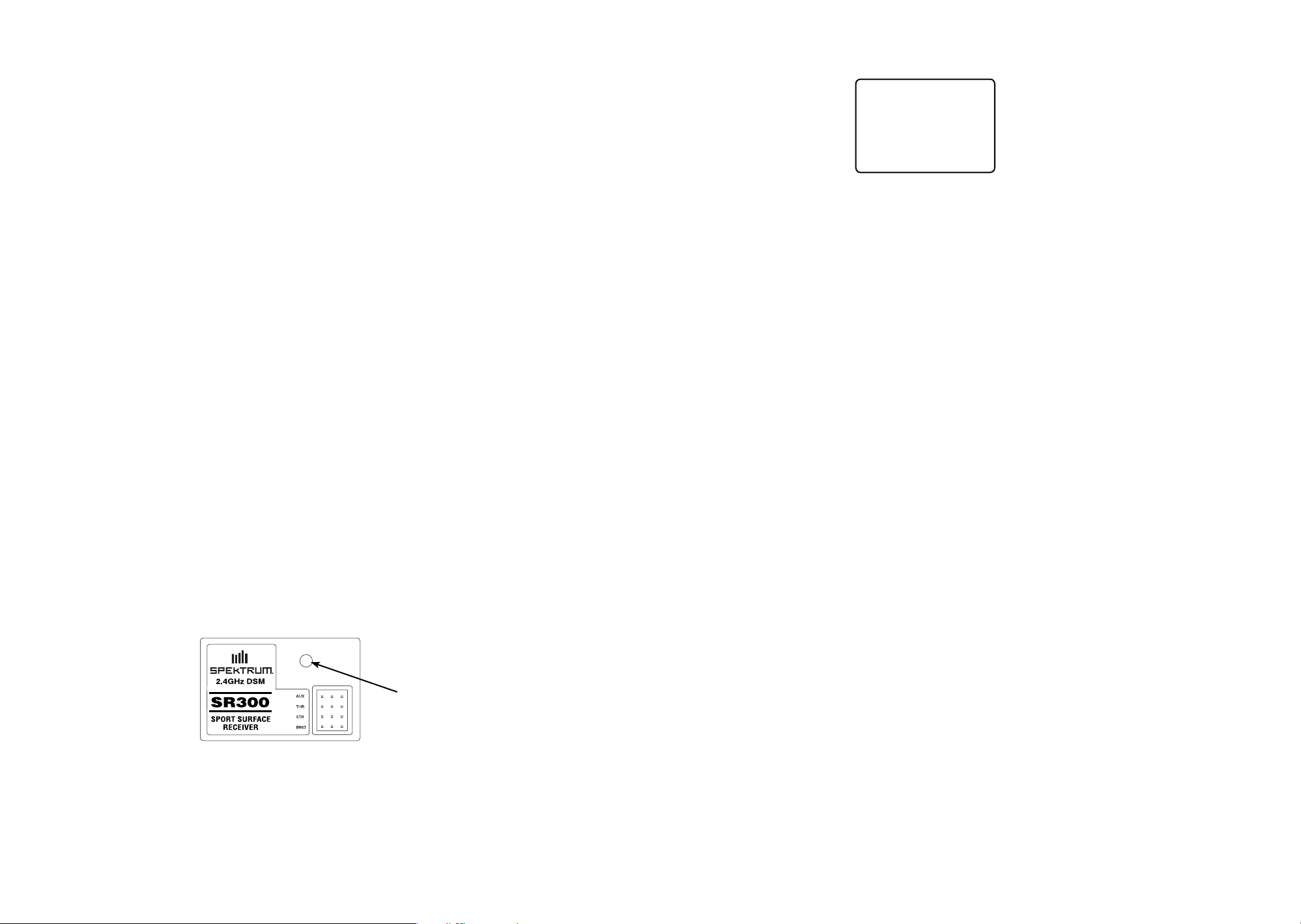
At 3.6 inches in length, the receiver antenna is significantly shorter than conventional
antennas. Like all antennas, it’s important to mount the antenna vertically. In most cases the
antenna can be mounted inside the body with no loss of range. Mount the receiver antenna
as recommended by the manufacturer of the vehicle, however, it may be necessary to trim the
plastic antenna tube (included with your vehicle).
In the unlikely event that the link is lost during use, the receiver will drive the servos to
their failsafe positions that were preset during the binding process. If the receiver is turned
on prior to turning on the transmitter, the receiver will enter the failsafe mode, driving the
servos to their preset failsafe position. When the transmitter is turned on, normal control is
resumed.
To bind the receiver to the transmitter
1. Make sure the transmitter and receiver are turned off.
LED
2. With the receiver off, insert the bind plug into the BIND port on the receiver.
3. Power the receiver through any port. The green LED will flash continuously, indicating
the receiver is in bind mode.
Page 5

8
9
Receiver
Power System
Requirements
Power
System Test
Guidelines
Inadequate or intermittent power to the receiver that is unable to provide the necessary
minimum voltage during operation is the number one cause of control failures with Spektrum
systems. Some of the power system components that affect the ability to properly deliver
adequate power include:
•Receiverbatterypack(numberofcells,batteryconstructionquality,connectorandstate
of charge)
•TheESC’scapabilitytodelivercurrenttothereceiverandservosinelectricvehicles
•Theswitchharness,batteryleads,servoleads,regulatorsetc.
All Spektrum receivers have a minimum operational voltage of 3.5 volts. If the voltage drops
below 3.5 volts, the system will cease control until power is regained.
If a questionable power system is being used (e.g. small or old battery, ESC that may
not have a BEC that will support the servo’s current draw, etc.), it is recommended that a
voltmeter be used to perform the following test.
Plug the voltmeter into an open channel port in the receiver and with the system on, load
the servos (apply pressure with your hand) while monitoring the voltage at the receiver. The
voltage should remain above 4.8 volts even when all servos are loaded. For gas vehicles,
tap and twist the receiver battery pack while watching the voltmeter. Some battery packs
have poorly welded tabs that give only intermittent power. Such a defect will show up during
shock and vibration, so this test will verify that the battery construction is good.
System
Features
Tips on Using
Spektrum
2.4GHz
•DSM2.4GHzSpreadSpectrumModulation
•NowcompatiblewithDSM2andMarinesurfacereceivers,inadditionto
DSM surface receivers
•Threechannels
•Easy-to-readLCDgraphicsdisplay
•Four-modelmemory
•Three-charactermodelnameentry
•Electronicdigitaltrimleversforthrottleandsteering
•Twoassignableelectronicgripswitches(LeverAandButtonC)
•ThirdchannelaccessiblethroughGripLeverAorGripButtonC
•Directdisplaytrimfunction
•Sub-trim
•Steeringrateadjustment
•Independentsteeringendpointadjustments
•Brake/throttleendpointadjustment
• Low battery alarm
• Charge jack receptacle (rechargeable batteries not included; order JRPB958)
While your DSM equipped 2.4GHz system is intuitive to operate, functioning nearly
identically to 27 and 75MHz systems, following are a few common questions from
customers.
1. Q: Which do I turn on first, the transmitter or the receiver?
Typical Range
Your system’s range can vary greatly due to your installation and the environment. In most
cases you should be able to have full control of your vehicle to the limits of sight (about 300
ft with a 1/10-scale car). If range issues exist your installation can be optimized by extending
the receiver’s antenna as vertically as possible locating it as high in the vehicle as practical
and also by routing the antenna away from any onboard electronics.
A: If the receiver is turned on first—all servos will be driven to their preset failsafe
positions set during binding. When the transmitter is then turned on the transmitter scans the
2.4GHz band and acquires an open channel. Then the receiver that was previously bound to
the transmitter scans the band and finds the GUID (Globally Unique Identifier code) stored
during binding. The system then connects and operates normally.
If the transmitter is turned on first—the transmitter scans the 2.4GHz band and acquires an
open channel. When the receiver is then turned on all servos are driven to their preset failsafe
positions for a short period of time (the time it takes to connect). The receiver scans the
2.4GHz band looking for the previously stored GUID and when it locates the specific GUID
code and confirms uncorrupted repeatable packet information, the system connects and
normal operation takes place. Typically this takes 2 to 6 seconds.
2. Q: Sometimes the system takes longer to connect and sometimes it doesn’t connect at all.
A: In order for the system to connect (after the receiver is bound) the receiver must
receive a large number of consecutive uninterrupted perfect packets from the transmitter.
This process is purposely critical of the environment ensuring that it’s safe to operate when
the system does connect. If the transmitter is too close to the receiver (less than 4 ft.) or if
the transmitter is located near metal objects (metal TX case, the bed of a truck, the top of a
metal work bench, etc.) connection will take longer and in some cases connection will not
occur as the system is receiving reflected 2.4GHz energy from itself and is interpreting this
as unfriendly noise. Moving the system away from metal objects or moving the transmitter
away from the receiver and powering the system again will cause a connection to occur. This
only happens during the initial connection. Once connected the system is locked in and
should a loss of signal occur (failsafe) the system connects immediately (4ms) when signal
is regained.
Page 6

10
11
3. Q: I’ve heard that the DSM system is less tolerant of low voltage. Is that correct?
Control
RC Safety
Precautions
Steering
Tension
Adjustment
A: All DSM receivers have an operational voltage range of 3.5 to 9.6 volts. With most
systems this is not a problem as in fact most servos cease to operate at around 3.8 volts.
When using multiple high-current draw servos with a single or inadequate battery/power
source, heavy momentary loads can cause the voltage to dip below this 3.5-volt threshold
thus causing the entire system (servos and receiver) to brown out.
4. Q: Sometimes my receiver loses its bind and won’t connect requiring rebinding. What
happens if the bind is lost during use?
A: The receiver will never lose its bind unless it’s instructed to. It’s important to understand
that during the binding process the receiver not only learns the GUID (code) of the
transmitter but the transmitter learns and stores the type of receiver that it’s bound to. If the
transmitter is placed into bind mode, the transmitter looks for the binding protocol signal
from a receiver. If no signal is present, the transmitter no longer has the correct information
to connect to a specific receiver and in essence the transmitter has been “unbound” from the
receiver.
For safe and reliable performance of your RC model, please carefully read and follow these
guidelines.
1. Radio control models are not toys. They are capable of inflicting serious injury to
people and property. Use caution at all times when operating your model.
2. You are responsible for the safe operation of your RC model. You must properly install,
test and operate your model with a clear sense of that responsibility. Do not take risks
that might endanger yourself or others.
3. Running an RC car in the streets is very dangerous to both drivers and models. Avoid
running your model in areas occupied by full-size automobiles. To locate areas where
you can safely operate your model, you should contact your local hobby shop for RC
tracks or clubs in your area.
4. When running an RC boat, keep it away from any swimmers, full-size boats, or wildlife.
Also, watch carefully for fishing lines that can get tangled in the propeller.
5. If at any time while operating your RC model you observe abnormal model functioning,
end your operation immediately. Do not operate your model again until you are certain
the problem has been corrected.
CAUTION: Control of your model is impossible without sufficient voltage for the
transmitter and receiver. A weak transmitter battery will decrease your range of
operation and a weak receiver battery will slow servo movement and decrease
your range of operation. Check your receiver pack voltage often to avoid losing
control of your model.
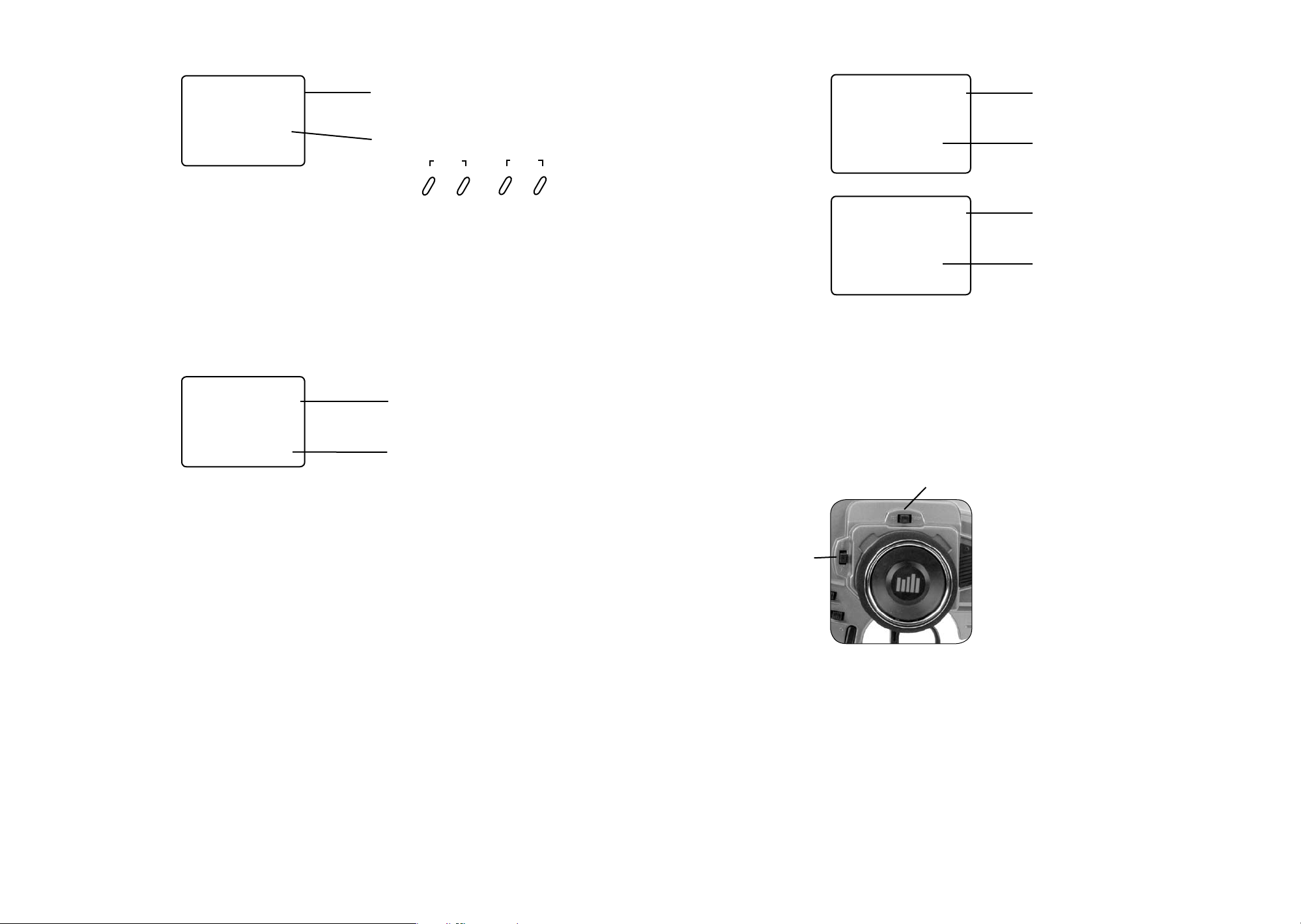
Steering tension is adjustable via the recessed screw located beneath the steering wheel
(see page 11 for exact location). Turning the screw clockwise increases the steering tension.
Identification
and Location
Digital Voltage Reading
Channel Button
Enter Function
Mode Button
Increase Button
Clear Function
Decrease Button
Electronic Digital
Throttle Trim Lever
Electronic Digital
Grip Lever A
(Access to Third Channel)
Electronic Digital
Grip Lever B
Charge Jack
* To remove the Battery Cover, press down on the ridges and push the cover in the direction
of the arrow. Remove the battery cover and install 8 AA batteries in the direction as molded
into the battery holder. If the transmitter voltage fails to register, check for correct battery
installation and review voltage again.
Multidata LCD Display
Three Character
Name Input
Antenna
Throttle Trigger
Grip Button C
Electronic Digital
Steering Trim Lever
Power Switch
Steering Wheel
Adjustable
Steering
Tension
Battery cover *
(8 AA Batteries Required)
Page 7

12
13
n
7.2V Battery
To Motor
Electronic
Speed Controller
Receiver
Servo
Receiver
Compatibility
The DX3.0 features DSM technology and is compatible with Spektrum DSM and DSM2
surface receivers and the marine receiver.
COMPATIBLE SPEKTRUM RECEIVERS
The DX3.0 is compatible with the following receivers.
Note: The DX3.0 operates in 11ms frame rate when in fast mode and 16.5ms frame
rate when in normal mode. See page 17 for more information about frame rates.
DSM: SR300 - 3-channel Sport - SPMSR300
SR3000 - 3-channel Standard - SPM1200
SR3001 - 3-channel Pro - SPM1205
SR3300T - 3-channel with built-in telemetry - SPMSR3300T
SR3500 - 3-channel Micro Race - SPM1210
Note: The SR3000HRS (SPM1202) receiver is designed to be used with
Spektrum’s Futaba HRS compatible module system only and is not compatible
with the DX3.0.
DSM2: SR3100 - 3-channel Pro - SPMSR3100
SR3520 - 3-channel Micro Pro - SPMSR3520
Charging Jack
Located on the left-hand side of the transmitter is the charging jack, which accepts only
JR® or Spektrum™ style wall chargers. Please do not attempt to use any other brand of wall
charger as it may be the reverse polarity and can cause damage to your system. Only use the
JR or Spektrum type wall charger when the DX3.0 is equipped with NiMH batteries.
Warning: Charge only rechargeable batteries. Non-rechargeable batteries may burst
causing injury to persons and/or damage to property.
Charger Pigtail For Transmitter
Black To Positive
Black With White Stripe To Negative
Spektrum Transmitter Charge Jack Polarity
Receiver
Connections
and
Installation
Marine: MR3000 - 3-channel Marine - SPMMR3000
Please note that DSM2 and marine compatible transmitters can be identified by the following
logo located on the back of the transmitter:
Note: When using a separate NiMH receiver as a power source, the operating voltage
range is 4.8–6.0V (4–5 cells) under load.
Attention: Make sure the male and female connectors have the correct polarity (+/–)
before connecting. Be sure to orient the servo plug correctly for proper insertion.
Most electronic speed controllers are set up for BEC (Battery Elimination Circuitry) operation
and plug directly into your receiver. See Figure A for a typical setup and check your speed
controller’s manual for correct installation.
Key Input and
Display
Key Use
SCROLL Used to move up through the available functions
CHANNEL Used to select the desired channel
INCREASE Used to increase the value of the selected function
DECREASE Used to decrease the value of the selected function
To enter the System Mode press the SCROLL andCHANNEL keys
simultaneously and hold while turning on the transmitter.
ENtER
SCROLL
ChaNNEL
To enter the Function Mode, press the
SCROLL key while the transmitter is on.
Press the INCREASE and DECREASE
keys simultaneously to clear the screen or
return to factory preset settings.
INCREaSE
CLEaR
DECREaSE
Figure A – Connections to BEC and receiver with electronic speed controller. NiMH battery
speed controller and servos are not included in the radio set.
Page 8

14
15
Display
Screens
Normal Display Screen
When the power switch is turned on, the LCD screen will read as shown below. This screen
is referred to as the Normal Display.
Note: If any of the electronic trim buttons are moved while in this screen, the screen
will automatically change to display the trim in use. This is called the Direct Trim
Mode. For more information on the feature, please see page 5 of this manual.
-
-
MD1
10.2
Low Battery Screen/Lithium Battery Backup
v
Accessing the
System Mode
To enter the System Mode, press both the SCROLL and CHANNEL keys at the same time
while turning on the transmitter power switch. By pressing the SCROLL key, you can now
choose Model Select, Model Name Input, Auxiliary Channel 3, Grip Button C function, Data
Reset or the Model Copy function as shown here on the System Mode flow chart. Information
for each function is located on the page number listed next to the function name on the flow
chart.
To exit the System Mode, press the SCROLL and CHANNEL keys at the same time, or
simply turn off the transmitter.
Note: If you turn the transmitter off and immediately enter System mode again, you
will be returned to the last System mode function used instead of the Model Select
function. While in System mode, there is no RF output generated by the transmitter.
Adjustments can be performed with reduced battery power consumption. If you exit
System mode by pressing the SCROLL and CHANNEL keys at the same time, RF
output will not be enabled until you first turn off the transmitter.
When the voltage of the eight AA batteries drops below 9.0 volts, the DX3.0’s display
screen will alternate between the Normal (see above) and Low Battery screen (BAT).
A beeping will occur, indicating that the batteries need to be replaced or recharged before
further use.
bat
8.9
Lithium Battery
Your DX3.0 radio system is equipped with a five-year lithium battery backup system.
This system is designed to protect and retain all radio programming in the event that
the transmitter batteries drop below the required 9.0 volts, or the transmitter battery case
is removed during battery changes. If after five years it becomes necessary to replace the
lithium battery, return your system to the Horizon Service Center for repair
(see address, page 34–36).
Memory Backup Screen
If the Memory Backup screen appears, this indicates the possibility of a memory issue or
the lithium battery is dead. If you switch the power off and on again, and the transmitter is in
default mode with all data lost, it is suggested that the DX3.0 transmitter be returned to the
Horizon Service Center for servicing (see Warranty Information, page 34–36).
bak
v
–
-
-
MDL
I
-
-
MDI
I
-
FRM
Model Select
(Page 16)
Model Name
Entry
(Page 16)
-
Frame Rate
(Page 17)
GBC
0
clr
I
CPY
–
Grip Button C
Function
(Page 19)
Data Reset
(Page 20)
Copy Model
Data
(Page 20)
2
-
-
b D
AUX
Auxiliary
Channel 3
Function
(Page 17)
M
Bind (Page 6)
0
RF Mode
RF
(Page 21)
–
ER
Page 9

16
17
Model Select
System Mode
The DX3.0 has memory for four models. This feature allows for four different models to
be operated with the same transmitter (additional receivers and servos must be purchased
separately) or one model with four different race setups.
-
-
MDL
Model Select Function
Frame Rate
System Mode
Two frame rates are available: F and N.
F = Fast (11ms)
N = Normal (16.5ms)
While most servos are compatible with the fast frame rate, some older analog servos require
the use of the slower normal frame rate.
Model Name
Entry
System Mode
I
Model Number
Accessing the Model Select Function
1. Press the SCROLL and CHANNEL keys at the same time and hold.
2. Turn the transmitter power switch on to enter System Mode.
3. If “MDL” does not appear on the screen, press the SCROLL key until MDL appears.
4. Press the INCREASE or DECREASE key to select the desired model number
(1, 2, 3, or 4).
5. Press the SCROLL key to access the Model Name Entry function.
6. To exit System Mode, either turn the transmitter power switch off or press the SCROLL
and CHANNEL keys at the same time.
The DX3.0 allows a three-character name to be input for each of the four models available.
The current model, with name, will then be displayed in the Normal display screen. This
feature is useful to help identify different models, setups, etc. For information on selecting
models 1, 2, 3 or 4, please refer to the Model Select function above.
-
-
MDI
I
Flashing character indicates
the character to be adjusted
Current Model Number
Auxiliary
Channel 3
Function
Select
System Mode
Accessing the Frame Rate Function
1. Press the SCROLL and CHANNEL keys at the same time and hold.
2. Turn on the transmitter power switch to enter the System Mode.
3. Press the SCROLL key until FRM appears on the screen.
4. Press the INCREASE or DECREASE key to select the desired frame rate (N or F).
5. Press the SCROLL key to access the Auxiliary Channel 3 function.
6. To exit the System Mode, either turn the transmitter power switch off or press the
SCROLL and CHANNEL keys at the same time.
The Auxiliary Channel 3 function of the DX3.0 allows you to select from two different types
of Channel 3 servo travel movements, or to inhibit the Auxiliary Channel 3 function. Use the
information below to select the correct Auxiliary Channel 3 function type for your particular
installation. It is suggested the O function (factory preset) be selected for most applications.
LN = The LN, or linear, servo travel function is designed to be used when an engine fuel
mixture servo is required. This function is most commonly used with gas-powered RC racing
boats and is accessible through the Grip Lever A. In this function, the maximum travel of the
servo is determined by the Endpoint Adjust function, page 24. The servo neutral position can
be altered proportionately via the Grip Lever A for fuel mixture adjustment. When activated,
fuel mixture trim values are visible for the Direct Trim function, page 28.
Auxiliary Channel 3
AUX
Function
Linear Movement
(fuel mixture servo)
Accessing the Model Name Entry Function
1. Press the SCROLL and CHANNEL keys at the same time and hold.
2. Turn on the transmitter power switch to enter the System Mode.
3. Press the SCROLL key until MD1 appears on the screen.
4. Press the INCREASE or DECREASE key to select the correct letter/number for the first
character (flashing).
5. To change the remaining two characters, press the CHANNEL key until the desired
character to be changed is flashing.
6. Press the SCROLL key to access the Frame Rate function.
7. To exit the System Mode, either turn the transmitter power switch off or press the
SCROLL and CHANNEL keys at the same time.
2P = The 2P, or 2 position, Servo Travel function is designed to be used as a transmission
gear shift channel. This feature is designed for use only with vehicles such as the Traxxas
T-Maxx. This function is accessible through the Grip Button C or Grip Lever A if Grip Button
C is occupied by another function. The left and right travel values are determined by the
Endpoint Adjustment function, page 24.
Auxiliary Channel 3
AUX
2P
Function
Non-linear Two-Position Movement
(Traxxas shiftable transmission use)
Page 10

18
19
Auxiliary
Channel 3
Function
Select
System Mode
(continued)
0 = The 0 or Inhibit function allows the Brake Endpoint Adjustment function, page 32, to be
used. This function is designed to be used with most types of electric and gas-powered RC
cars. This feature is extremely popular, as it allows the amount of panic braking accessible
through the throttle trigger’s braking position to be adjusted during operation for maximum
effectiveness. When activated, the braking valves will be visible via the Direct Trim function,
page 28.
Auxiliary Channel 3
AUX
0
Function
Channel 3 is inhibited
(Grip Lever A braking function is now activated)
Accessing the Auxiliary Channel 3 Function
LN = Linear servo movement
2P = 2-position servo movement
0 = Inhibited (Grip Lever A Braking is now activated)
Grip Button C
Function
Select
System Mode
(continued)
2P = The 0 or off function is the default setting and does not assign a function to Grip Button
C. If the Auxiliary Channel 3 function is set to “2P” or 2-position, “2P” will appear in this
screen in place of “0” and Grip Button C will function as the gear select button.
Grip Button C
GBC
0
E6 = The Eb or Emergency Steering Button function is designed to momentarily override
the value of Grip Lever B and provide 100% steering rate. This feature is useful if you have
reduced the steering rate to make your vehicle easier to drive but need full steering in an
emergency situation such as a collision. The override occurs only while the Grip Button C is
depressed.
GBC
Function
Grip Button C is inhibited
Grip Button C
Function
Grip Button C
Function
Select
System Mode
1. Press the SCROLL and CHANNEL keys at the same time and hold.
2. Turn on the transmitter power switch to enter the System Mode.
3. Press the SCROLL key until AUX appears on the screen.
4. Press the INCREASE or DECREASE key to select the correct Auxiliary Channel 3
function type to be used.
5. Press the SCROLL key to access the Grip Button C Select function.
6. To exit the System mode, either turn the transmitter power switch off or press the
SCROLL and CHANNEL keys at the same time.
The Grip Button C function of the DX3.0 allows you to select from three different functions
available. Use the information below to select the correct Grip Button C assignment for your
particular installation.
Grip Button C
GBC
A
“0”: Off. (Default) If “AUX” is “2P”, then “2P” replaces “0” in this screen.
“Eb”: ESB (Emergency Steering Button). To cancel the “STG” regulation
for panic steering.
“LA”: Lap Timer.
Function
Lap Timer
Emergency Steering Button
E6
LA = The LA or Lap Timer function is designed to be used when you want to enable the
recording of individual lap time. The Lap Timer function is described on page 26.
GBC
LA
1. Press the SCROLL and CHANNEL keys at the same time and hold.
2. Turn on the transmitter power switch to enter System Mode.
3. Press the SCROLL key until GBC appears on the screen.
4. Press the INCREASE or DECREASE key to select the correct Grip Button C function
type to be used.
5. Press the SCROLL key to access the Data Reset function.
6. To exit System mode, either turn the transmitter power switch off or press the SCROLL
and CHANNEL keys at the same time.
is activated
Grip Button C
Function
Lap Timer Button
is activated
Note: If “LA” or “Eb” is selected and “2P” is assigned to the Auxiliary Channel 3 function,
the Auxiliary Channel 3 function is moved to Grip Lever A (factory preset).
Page 11

20
21
Data Reset
System Mode
The Data Reset function allows you to reset all the programming in the selected model
(1, 2, 3 or 4) to the factory default settings and to copy model data from one model memory
to another. Before using the Data Reset function, it’s important to enter the Model Select
function and check to make sure the current model number indicated (1, 2, 3 or 4) is the
model which you want to reset to the factory default settings. The Model Select function is
described on page 16.
CLR
Model to be Reset
I
RF Mode
The DX3.0 features a selectable RF mode. N is the standard RF mode. FR is the France RF
mode and should only be selected if the transmitter is used in France.
Accessing the RF Mode Function
To access the RF Mode function, follow the steps below:
1. Press the SCROLL and CHANNEL keys at the same time and hold.
2. Turn on the transmitter power switch to enter the System Mode.
3. Press the SCROLL key until RF appears on the screen.
4. Press the INCREASE and DECREASE keys to select the desired RF mode.
5. To exit the System Mode, either turn the transmitter power switch off or press the
SCROLL and CHANNEL keys at the same time.
Copy Model
Data
System Mode
Accessing the Data Reset Function
1. Press the SCROLL and CHANNEL keys at the same time and hold.
2. Turn on the transmitter power switch to enter the System Mode.
3. Press the SCROLL key until CLR appears on the screen.
4. Press the INCREASE or DECREASE key at the same time to reset the data. To confirm
that the selected model’s programming has been reset, a beep will sound and the model
number selected (1, 2, 3 or 4) will stop flashing.
5. Press the SCROLL key to access the Copy Model Data function.
6. To exit the System mode, either turn the transmitter power switch off or press the
SCROLL and CHANNEL keys at the same time.
CPY
Model being copied to
2
Accessing the Copy Model Data Function
1. Press the SCROLL and CHANNEL keys at the same time and hold.
2. Turn on the transmitter power switch to enter the System Mode.
3. Press the SCROLL key until CPY appears on the screen.
4. Press the INCREASE or DECREASE key to select the desired model number you want
the current model data copied to. The selected model number should be flashing.
5. Press the INCREASE and DECREASE keys at the same time to copy the current model
data into the selected model number. To confirm that the selected model has been copied
to, a beep will sound and the model number selected (1, 2, 3 or 4) will stop flashing.
6. To exit the System mode, either turn the transmitter power switch off or press the
SCROLL and CHANNEL keys at the same time.
RF
Page 12

22
23
Accessing
the Function
Mode
Mode Key
TDB
To enter the Function Mode, turn on the transmitter and then press the SCROLL key. The
display will change to show the first function listed on the Function Mode flow chart as
shown below. Press the SCROLL key to scroll down through the functions one by one, as
shown in the flow chart. Once the desired function has been reached, use the CHANNEL key
to select the appropriate channel (if applicable). To adjust the values of the function, simply
press the INCREASE (+) or DECREASE (-) keys until the desired value is displayed on the
screen. To exit function mode, press the SCROLL and CHANNEL keys at the same time.
The next time you enter Function mode, you will be returned to the last function accessed.
Channel Key
Throttle
Deadband
(page 22)
Throttle
Deadband
Function Mode
The throttle deadband feature is used to reduce/eliminate the dead throttle area that exists at
neutral to the starting point of throttle and from neutral to the starting point of braking. This
area is sometimes known as deadband. As more throttle trim (also known as static brake)
is applied, more of the dead trigger area right off neutral exists. To eliminate the throttle
deadband, adjust a forward value such that your vehicle’s wheels just start to turn when the
trigger is slightly squeezed. This provides the most accurate feel and eliminates the dead
area in the throttle. To eliminate the braking deadband, adjust the brake value such that
your vehicle starts to slow down when the trigger is slightly pushed. This provides the most
accurate brake feel and eliminates the dead area when braking.
Forward Adjustment
TDB
(depends on trigger position)
R/B
E X P
E P A
L/F
M I X
L A P
0
–
ST
–
ST
I00
–
STL
0
40
Channel
Key
Channel
Key
Channel
Key
E X P
E P A
R/B
M I X
THF
TH
I00
THB
0
Lap Timer (If Grip Button C is activated for Lap Timer)
(page 26)
Exponential
(page 23)
Channel
Key
Mixing
(page 25)
E P A
L/F
AUX
I00
Endpoint
Adjustment
(page 24)
Current Value
L/F
R/B
0
TDB
0
Brake Adjustment
(depends on trigger position)
Current Value
Value: 0% to 100%
Clear = 0%
Accessing the Throttle Deadband Function
1. Turn the transmitter power switch on.
2. Press the SCROLL key to access Function mode.
3. Press the SCROLL key until TDB appears on the screen.
4. Move the trigger accordingly to adjust the forward or braking deadband.
5. Press the INCREASE or DECREASE key to select the desired value necessary to
eliminate dead area.
6. Press the SCROLL key to access Exponential mode.
7. To exit the Function mode, either turn the transmitter power switch off or press the
SCROLL and CHANNEL keys at the same time.
TRIM
20
–
STS
0
–
ST
REV • NORM
–
–
Channel
Key
Channel
Key
TRIM
SB • TRM
–
THS
0
TH
REV • NORM
–
Channel
Key
Channel
Key
TRIM
SB • TRM
–
AUS
0
AUX
REV • NORM
–
Sub-Trim
(page 27)
Servo
Reversing
(page 27)
Page 13

24
25
Exponential
Function Mode
The Exponential feature of the DX3.0 allows you to alter the response rate of the steering or
throttle control around neutral without affecting the maximum amount of steering or throttle
available. The adjustment range is from -100% to 0% (Linear) to +100%. Exponential is
factory-set to linear for both steering and throttle. Exponential is often used to settle down a
car that is twitchy around center without giving up maximum steering response. The DX3.0
provides both positive (increase sensitivity at neutral) and negative (decrease sensitivity at
neutral) exponential values.
Endpoint
Adjustment
Function Mode
The Endpoint Adjustment feature of the DX3.0 allows the maximum travel for the steering,
throttle and Auxiliary Channel 3 (optional) servos to be increased or decreased in each
direction to achieve the exact servo movement needed. The Endpoint Adjustment range is
from 0% to 125% and is factory-set to 100% for all three channels. The value displayed on
the screen depends on the current position of the steering wheel, trigger, or trim lever to be
adjusted. This feature is very useful either to maximize servo travel or to reduce servo overtravel to eliminate servo binding (servos move further than the control mechanism allows),
without the need for mechanical linkage adjustment.
Steering Exponential
Adjustment
Current Value
E X P
–
ST
Forward Throttle Exponential
E X P
THF
Adjustment
Current Value
Braking Exponential
E X P
THB
Adjustment
Current Value
Values: -100% to Linear (LN) to +100%
Accessing the Exponential Function
1. Turn the transmitter power switch on.
2. Press the SCROLL key to access Function mode.
3. Press the SCROLL key until EXP appears on the screen.
4. Press the INCREASE or DECREASE key to select the desired exponential value.
5. Press the SCROLL key to access the travel Endpoint Adjustment function.
6. To exit the Function mode, either turn the transmitter power switch off or press the
SCROLL and CHANNEL keys at the same time.
The screens below are accessed by turning the wheel to the desired direction to be adjusted
(left or right), by moving the trigger to the forward or backward (brake) position, or by
toggling the Grip Button C.
L/F
R/B
E P A
I00
E P A
I00
–
ST
ST
Steering Left
Endpoint Adjustment
Current Value
Values: 0 to 125
Clear = 100
Steering Right
Endpoint Adjustment
Current Value
Values: 0 to 125
Clear = 100
E P A
L/F
E P A
R/B
TH
I00
TH
I00
Forward Throttle
Endpoint Adjustment
Current Value
Values: 0 to 125
Clear = 100
Backward Throttle (Brake)
Endpoint Adjustment
Current Value
Values: 0 to 125
Clear = 100
Channel 3 Screens (optional)
Left/Right Travel
Adjustment (function LN)
AUX
E P A
L/F
I00
Functions & 2P Functions 2P only
or Forward Travel Adj.
(function 2P) accessible
through Grip Button C
Current Value
Values: 0 to 90
Clear = 100
E P A
R/B
I00
AUX
Rearward Travel
Adjustment
(function 2P)
accessible through
Grip Button C
Current Value
Values: 0 to 90
Clear = 100
Accessing the Endpoint Adjustment Function
1. Turn the transmitter power switch on.
2. Press the SCROLL key to access Function mode.
3. Press the SCROLL key until EPA appears on the left side of the screen.
4. Press the CHANNEL key to select the desired channel to be adjusted.
5. Move the steering wheel, trigger or Grip Button C in the desired direction for adjustment
(left/right, forward/reverse or brake). Press the INCREASE or DECREASE key to
achieve the desired amount of travel. Move the wheel, trigger or Grip Button C in the
opposite direction to adjust travel in the opposite direction.
Note: For Auxiliary Channel 3 function, if LN is selected, only L/F is adjustable. And if
Emergency Steering Button is Eb or LA, Auxiliary Channel 3 defaults to Grip Lever A.
6. Press the SCROLL key to access the Mixing Adjustment function.
7. To exit the Function mode, either turn the transmitter power switch off or press the
SCROLL and CHANNEL keys at the same time.
Note: When setting the Endpoint Adjustment values for the Steering function, it is
suggested that, if possible, the maximum travel values be set to an equal value in both
directions to maintain proper steering control.
Page 14

26
27
Programmable
Mixing
Function Mode
The DX3.0 offers two different mixing adjustments that allow for mixing one channel to another
channel. The mixes available are Steering-to-Auxiliary Channel Mixing and Throttle-to-Auxiliary
Channel Mixing. Each direction is independently adjustable. Popular use of this function
includes 4-wheel steering and independent front and rear wheel brakes.
For example, Throttle-to-Auxiliary channel mixing can be used for independent front and rear
wheel brakes. Each time the throttle/brakes are moved, the auxiliary channel will move in the
direction and to the value input being given by the throttle channel. Mixing is proportional, so
small inputs to the throttle will result in small output from the auxiliary
channel. The adjustment range is from -125% to 0% to 125%. If the rate is negative, the
channel is mixed in the opposite direction.
Both mixes share a single mixing “offset.” The purpose of the mixing offset is to redefine the
neutral position of the auxiliary channel, which can be set using Grip Lever A when
“LN” is selected in the Auxiliary Channel 3 function. If the “LN” selection is turned off in the
Auxiliary Channel 3 function with an offset value currently present, the value will
continue to act as a mixing offset until the value is either cleared or changed. If a mix is not
required, it is strongly suggested the mixing rate be set for 0%, which is the default.
Lap Timer
Function Mode
The Lap Timer function of the DX3.0 allows the recording of individual lap times based on a
999 second up-timer. Up to 50 laps and times from 3.0 to 99.9 seconds can be stored in
memory for review at a later time. The Lap Timer function will only be enabled and shown in
Function mode if Grip Button C (System Mode) is set to “LA.” With the Lap Timer enabled,
pressing the channel key will alternate between the Normal display screen and Up-Timer
display screen.
The Lap Timer is started by pressing Grip Button C. Once active, as shown by the blinking word
“LAP,” pressing Grip Button C again will begin recording the time of the next lap.
Note: A 3.0-second lap is the quickest lap allowed. This prevents accidental double pushing of
Grip Button C when recording lap times. If more than 50 laps are recorded, each new lap will
overwrite the oldest lap held in memory.
To stop the Lap Timer, press the Increase and Decrease keys at the same time. To restart the Lap
Timer, press Grip Button C. To reset the Up-Timer, press the Channel key to show the Up-Timer
display screen. With the Up-Timer stopped, press the Increase and Decrease keys at the same
time to reset.
–
M I X
STL
I0
M I X
–
THB
I0
Accessing the Mixing Adjustment Function
1. Turn the transmitter power switch on.
2. Press the SCROLL key to access Function mode.
3. Press the SCROLL key until MIX appears in the screen.
4. Press the CHANNEL key to select the desired mix to be used.
5. Move the steering wheel or trigger in the desired direction for adjustment (left/right,
forward/reverse or brake). Press the INCREASE or DECREASE key to achieve the
desired amount of mixing. Move the wheel or trigger in the opposite direction to adjust
the mixing in the opposite direction.
Note: For Auxiliary Channel 3 function, if LN is selected, only L/F is adjustable.
6. Press the SCROLL key to access the Lap Timer (if enabled) or Sub-Trim function.
7. To exit the Function mode, either turn the transmitter power switch off or press the
SCROLL and CHANNEL keys at the same time.
To review or reset lap times you must be in the Lap Timer function mode screen. Upon entering
this function, the screen will always show the last lap time recorded. Use the
Increase or Decrease keys to view the desired lap(s).
Note: If a recorded lap time is greater than 99.9 seconds, “OVR” will be displayed.
To clear all lap times, press the Increase and Decrease keys at the same time.
Recorded Lap Time to 1/10th of a second
(e.g., 40.1 sec.)
Current Lap Number
–
L A P
4 0I
20
Accessing the Lap Timer Function
1. Turn the transmitter power switch on.
2. Press the SCROLL key to access Function mode.
3. Press the SCROLL key until LAP appears in the screen.
4. Press the INCREASE or DECREASE key to view the desired lap time(s).
5. To reset all lap times, press the INCREASE and DECREASE keys at the same time.
6. Press the SCROLL key to access the Sub-Trim function.
7. To exit the Function mode, either turn the transmitter power switch off or press the
SCROLL and CHANNEL keys at the same time.
Page 15

28
29
Sub-Trim
Function Mode
The Sub-Trim function of the DX3.0 is an electronic trimming feature that allows the neutral
position of the servo on either the steering, throttle or auxiliary channel (optional) to be moved,
while allowing the electronic trim lever for that channel to remain in the center position. This
feature is very useful as it allows the servo arm/wheel position to be moved to help with control
linkage installation, eliminating the need to make mechanical linkage adjustments.
Although the Sub-Trim function is a very useful feature, it is suggested that only small amounts
of Sub-Trim be used so that no unwanted, non-equal servo travel is created. It is suggested that
less than 30 points of Sub-Trim be used during adjustment. If more than 30 points of Sub-Trim
are required, it is suggested that a mechanical linkage adjustment be performed.
Accessing the
Direct Trim
Mode
The Direct Trim Mode function of the DX3.0 is accessible through the use of the electronic
throttle or steering trim levers, as well as the two electronic grip levers (A&B) located on
the upper portion of the grip handle. This function allows for quick trim adjustment of these
controls.
–
–
Steering Trim
TRIM
STS
(page 29)
0
Servo
Reversing
Function Mode
–
TRIM
–
STS
0
Values: R/B 125 0 R/F 125
Current Channel
STS = Steering
THS = Throttle
AUS = Auxiliary Channel 3
Current Value
Accessing the Sub-Trim Function
1. Turn the transmitter power switch on.
2. Press the SCROLL key to access Function mode.
3. Press the SCROLL key until TRIM appears in the screen.
4. Press the CHANNEL key to select the desired channel to be adjusted (Steering, Throttle
or Auxiliary Channel 3).
5. Press the INCREASE or DECREASE key until the proper servo position is achieved.
6. Press the SCROLL key to access the Servo Reversing function.
7. To exit the Function mode, either turn the transmitter power switch off or press the
SCROLL and CHANNEL keys at the same time.
The Servo Reversing feature of the DX3.0 is a very convenient feature when setting up a new
model. The purpose of the servo reversing function is to change the direction of the
servo rotation in relation to the wheel/trigger movement. The Servo Reversing function is
available for the steering, throttle and Auxiliary Channel 3.
–
ST
REV • NORM
–
Current Channel
STS = Steering
THS = Throttle
AUS = Auxiliary Channel 3
Current Servo Direction
Accessing the Servo Reversing Function
1. Turn the transmitter power switch on.
2. Press the SCROLL key to access Function mode.
3. Press the SCROLL keyuntilREV•NORMappearsinthescreen.
4. Press the CHANNEL key to select the desired channel to be changed (Steering, Throttle
or Auxiliary Channel 3).
5. Press the INCREASE or DECREASE key to move the cursor to the desired direction
of travel.
6. To exit the Function mode, either turn the transmitter power switch off or press the
SCROLL and CHANNEL keys at the same time.
Throttle Trim
TRIM
THC
(page 30)
0
RATE
–
STG
Steering Dual-Rate
(Grip Lever B)
(page 30)
70
To access the Direct Trim Mode function, turn the transmitter power switch on. Next, move
the desired trim lever to be adjusted. The appropriate screen for the selected trim lever will
be displayed. To adjust, simply move the trim lever in the desired direction until the correct
amount of trim is achieved. Once the desired trim is achieved, the screen will return to the
Normal display screen after approximately two seconds from the last trim input. If the
Increase or Decrease keys are pressed any time during the two seconds, the system will
return to the previous screen in use.
Only present when Auxiliary function “0” is selected
Brake Travel Adjustment
(Grip Lever A), (page 32)
Only visible when the Auxiliary Channel
3 function “0” has been selected. Refer to
Auxiliary Channel 3 function, page 17,
for clarification.
Auxiliary Channel 3 Trim Adjustment (LN
mode only). Refer to Auxiliary Channel 3
function, page 33, for clarification.
*
E P A
R/B
BRK
50
AUX
0
*
*Note: When Auxiliary Channel 3 function 2P is selected, the two screens above are not
present.
Page 16

30
31
Steering Trim
(STC)
The DX3.0 electronic Steering Trim lever, located just above the steering wheel, allows the
center position of the servo to be manipulated in either direction to achieve precise centering
of the steering assembly. Steering Travel Endpoint Adjustment values (page 24) remain
completely independent from the steering trim, unless the trim value exceeds the selected
endpoint values. (For example: If trim value is set at 30 and endpoint values at 15, steering
trim will override/alter the endpoint value.)
Throttle Trim
(THC)
The DX3.0’s electronic Throttle Trim lever, located to the left of the steering wheel, allows the
center position of the servo to be manipulated in either direction to achieve precise centering
of the throttle trigger neutral position. Throttle Endpoint adjustment values (page 24) remain
completely independent from the throttle trim, unless the trim value exceeds the selected
endpoint values. (For example: If the trim value is set at 40 and the endpoint values at 30,
Throttle Trim will override/alter the endpoint value.)
–
TRIM
stC
0
Values: L/F 30 0 R/B 30
Each click will provide 0.3° of trim to the center of the steering servo with a maximum of 12° allowed.
Note: Each click will not always result in a change of the value displayed.
To adjust the steering trim servo position, move the electronic Steering Trim lever either to
the left (+) or the right (-). As soon as the trim is moved, the STC Steering Trim screen will
appear and will continue to be displayed unless the trim lever is untouched for a period of
two seconds. To reset the trim value to 0, press the INCREASE and DECREASE keys at the
same time while the “STC” screen is displayed.
Steering Trim Screen
Indicates current value
Steering Trim
TRIM
Values: L/F 60 0 R/B 60
Each click will provide 0.3° of trim to the throttle servo with a maximum of 24° allowed.
Note: Each click will not always result in a change of the value displayed.
To adjust the Throttle Trim servo position, move the electronic steering trim lever either up
(+) or down (-). As soon as the trim is moved, the THC Throttle Trim screen will appear and
will continue to be displayed unless the trim lever is untouched for a period of two seconds.
To reset the trim value to zero, press the INCREASE and DECREASE keys at the same time
while the “THC” screen is displayed.
Throttle Trim
Increase
Decrease
THC
0
Current value
Steering Trim Location
Throttle Trim Location
Page 17

32
33
Grip Lever B:
Steering Dual
Rate Trim
Adjustment
STG
The Steering Dual Rate Trim Adjustment, located at Grip Lever B, allows the dual rate value
(maximum servo travel) to be increased or decreased within a range from 100% through
20% of the total endpoint value established in the steering EPA function. This function
is very useful in race conditions as it allows you to custom tailor the steering radius and
sensitivity for the current track conditions. Please note that since the Dual Rate value shown
in the “STG” screen is the percentage of the endpoint value established in the steering EPA
function, the value will not always increase or decrease each time the Grip Lever B is moved.
–
RATE
stG
Grip Lever A:
Brake Endpoint
Adjustment
BRK/Auxiliary
Channel 3
Access
The Brake Endpoint Adjustment, located at Grip Lever A, allows the maximum servo travel
on the braking side of the throttle trigger to be increased or decreased from 100% to 0%
(off). This function is very useful in race conditions as it allows the racer to custom tailor
the “panic” brake value to maximize the car’s braking power for the current track conditions.
Please note that since the brake endpoint value shown in the BRK screen is a percentage of
the total braking value established in the Endpoint Adjustment function (page 24), the value
will not always increase or decrease each time the Grip Lever A is moved.
Note: If Grip Lever A is assigned an Auxiliary Channel 3 function by selecting “LN” or “2P”
with Grip Button C in use, the Brake Endpoint Adjustment will not be available.
%
70
If the Emergency Steering button function (page 18) is active, pressing Grip Button C will
restore the steering dual rate to 100% until the button is released.
To adjust the Steering Dual Rate value, move the electronic Grip Lever B either left (-) or right
(+). As soon as the trim is moved, the STG Steering Dual Rate screen will appear and will
continue to be displayed unless the Grip Lever B is untouched for a period of two seconds.
To reset the trim value to the factory preset setting of 70%, press the INCREASE and
DECREASE keys at the same time while the “STG” screen is displayed.
Grip Lever B
Steering
Dual-Rate Trim
Current Value
(20% to 100%)
Decrease
Increase
To adjust the brake endpoint value, move the electronic Grip Lever A either left (–) or right (+).
As soon as the grip lever is moved, the BRK Endpoint Adjustment screen will appear and will
continue to be displayed unless the Grip Lever A is untouched for a period of two seconds.
E P A
R/B
BRK
50
Grip Lever A
Brake Trim
Current Value
(100 to 0%)
Decrease Increase
Move the Grip Lever A to the left or right to
decrease or increase values.
Page 18

34
35
Auxiliary
Channel 3
Access
(Fuel Mixture)
Auxiliary
Channel 3
(Transmission
Shift Selector)
When selected, Grip Lever A can be used to access the Auxiliary Channel 3 function of the
DX3.0 for use as a fuel mixture channel.
AUX
0
Current value
When the LN (linear) Auxiliary Channel 3 function is selected, Grip Lever A can be used to
change the neutral position of the servo to lean or richen the engine’s fuel mixture. Once the
desired fuel mixture has been achieved, the Grip Lever A value indicated on this screen can
be transferred manually to the Sub-Trim function (page 27) and the value of the AUX screen
can be returned to zero. Please refer to the diagram below for proper grip lever operation.
When the 2P Auxiliary Channel function is selected, the Grip Lever A can be used to move
the Auxiliary 3 Channel servo to one of two positions (left/right or forward/reverse) when LA
or Eb is selected for the Grip Button C function. Please refer to diagram A below for proper
shifting procedures.
Note: The Endpoint Adjustment function (page 24) is used to set the forward and reverse
gear servo travel positions.
(Transmission Use)
(Fuel Mixture Use)
Forward Gear Reverse Gear
Decrease
Grip Lever A
Brake Trim
Increase
Warranty
and Service
Information
Warranty Period
Exclusive Warranty- Horizon Hobby, Inc., (Horizon) warranties that the Products
purchased (the “Product”) will be free from defects in materials and workmanship
for a period of 1 year from the date of purchase by the Purchaser.
Limited Warranty
(a) This warranty is limited to the original Purchaser (“Purchaser”) and is
not transferable. REPAIR OR REPLACEMENT AS PROVIDED UNDER THIS
WARRANTY IS THE EXCLUSIVE REMEDY OF THE PURCHASER. This warranty
covers only those Products purchased from an authorized Horizon dealer. Third
party transactions are not covered by this warranty. Proof of purchase is required
for warranty claims. Further, Horizon reserves the right to change or modify this
warranty without notice and disclaims all other warranties, express or implied.
(b) Limitations- HORIZON MAKES NO WARRANTY OR REPRESENTATION,
EXPRESS OR IMPLIED, ABOUT NON-INFRINGEMENT, MERCHANTABILITY OR
FITNESS FOR A PARTICULAR PURPOSE OF THE PRODUCT. THE PURCHASER
ACKNOWLEDGES THAT THEY ALONE HAVE DETERMINED THAT THE PRODUCT
WILL SUITABLY MEET THE REQUIREMENTS OF THE PURCHASER’S INTENDED
USE.
(c) Purchaser Remedy- Horizon’s sole obligation hereunder shall be that Horizon
will, at its option, (i) repair or (ii) replace, any Product determined by Horizon
to be defective. In the event of a defect, these are the Purchaser’s exclusive
remedies. Horizon reserves the right to inspect any and all equipment involved
in a warranty claim. Repair or replacement decisions are at the sole discretion of
Horizon. This warranty does not cover cosmetic damage or damage due to acts of
God, accident, misuse, abuse, negligence, commercial use, or modification of or
to any part of the Product. This warranty does not cover damage due to improper
installation, operation, maintenance, or attempted repair by anyone other than
Horizon. Return of any goods by Purchaser must be approved in writing by
Horizon before shipment.
Damage Limits
HORIZON SHALL NOT BE LIABLE FOR SPECIAL, INDIRECT OR CONSEQUENTIAL
DAMAGES, LOSS OF PROFITS OR PRODUCTION OR COMMERCIAL LOSS IN
ANY WAY CONNECTED WITH THE PRODUCT, WHETHER SUCH CLAIM IS BASED
IN CONTRACT, WARRANTY, NEGLIGENCE, OR STRICT LIABILITY. Further, in
no event shall the liability of Horizon exceed the individual price of the Product
on which liability is asserted. As Horizon has no control over use, setup, final
assembly, modification or misuse, no liability shall be assumed nor accepted for
any resulting damage or injury. By the act of use, setup or assembly, the user
accepts all resulting liability.
If you as the Purchaser or user are not prepared to accept the liability associated
with the use of this Product, you are advised to return this Product immediately in
new and unused condition to the place of purchase.
Law: These Terms are governed by Illinois law (without regard to conflict of law
principals).
Safety Precautions:
This is a sophisticated hobby Product and not a toy. It must be operated with
caution and common sense and requires some basic mechanical ability. Failure
to operate this Product in a safe and responsible manner could result in injury
Page 19

36
37
or damage to the Product or other property. This Product is not intended for
use by children without direct adult supervision. The Product manual contains
instructions for safety, operation and maintenance. It is essential to read and
follow all the instructions and warnings in the manual, prior to assembly, setup or
use, in order to operate correctly and avoid damage or injury.
Questions, Assistance, and Repairs
Your local hobby store and/or place of purchase cannot provide warranty support
or repair. Once assembly, setup or use of the Product has been started, you must
contact Horizon directly. This will enable Horizon to better answer your questions
and service you in the event that you may need any assistance. For questions or
assistance, please direct your email to productsupport@horizonhobby.com, or
call 877.504.0233 toll free to speak to the product support department.
Inspection or Repairs
If this Product needs to be inspected or repaired, please call for a Return
Merchandise Authorization (RMA). Pack the Product securely using a shipping
carton. Please note that original boxes may be included, but are not designed
to withstand the rigors of shipping without additional protection. Ship via a
carrier that provides tracking and insurance for lost or damaged parcels, as
Horizon is not responsible for merchandise until it arrives and is accepted at our
facility. A Service Repair Request is available at www.horizonhobby.com on the
“Support” tab. If you do not have internet access, please include a letter with
your complete name, street address, email address and phone number where you
can be reached during business days, your RMA number, a list of the included
items, method of payment for any non-warranty expenses and a brief summary
of the problem. Your original sales receipt must also be included for warranty
consideration. Be sure your name, address, and RMA number are clearly written
on the outside of the shipping carton.
United States:
Electronics and engines requiring inspection or repair should be shipped to the
following address:
Horizon Service Center
4105 Fieldstone Road
Champaign, Illinois 61822 USA
All other Products requiring warranty inspection or repair should be shipped to
the following address:
Horizon Product Support
4105 Fieldstone Road
Champaign, Illinois 61822 USA
Please call 877-504-0233 or e-mail us at productsupport@horizonhobby.com
with any questions or concerns regarding this product or warranty.
United Kingdom:
Electronics and engines requiring inspection or repair should be shipped to the
following address:
Horizon Hobby UK
Units 1-4 Ployters Rd
Staple Tye
Harlow, Essex
CM18 7NS
United Kingdom
Please call +44 (0) 1279 641 097 or e-mail us at sales@horizonhobby.co.uk with
any questions or concerns regarding this product or warranty.
Warranty Inspection and Repairs
To receive warranty service, you must include your original sales receipt verifying
the proof-of-purchase date. Provided warranty conditions have been met, your
Product will be repaired or replaced free of charge. Repair or replacement
decisions are at the sole discretion of Horizon Hobby.
Non-Warranty Repairs
Should your repair not be covered by warranty the repair will be completed and
payment will be required without notification or estimate of the expense unless
the expense exceeds 50% of the retail purchase cost. By submitting the item
for repair you are agreeing to payment of the repair without notification. Repair
estimates are available upon request. You must include this request with your
repair. Non-warranty repair estimates will be billed a minimum of ½ hour of labor.
In addition you will be billed for return freight. Please advise us of your preferred
method of payment. Horizon accepts money orders and cashiers checks, as well
as Visa, MasterCard, American Express, and Discover cards. If you choose to pay
by credit card, please include your credit card number and expiration date. Any
repair left unpaid or unclaimed after 90 days will be considered abandoned and
will be disposed of accordingly. Please note: non-warranty repair is only available
on electronics and model engines.
Germany:
Electronics and engines requiring inspection or repair should be shipped to the
following address:
Horizon Technischer Service
Hamburger Strasse 10
25335 Elmshorn
Germany
Please call +49 4121 46199 66 or e-mail us at service@horizonhobby.de with any
questions or concerns regarding this product or warranty.
Page 20

38
39
FCC
Information
This device complies with part 15 of the FCC rules. Operation is subject to the following
two conditions: (1) This device may not cause harmful interference, and (2) this device must
accept any interference received, including interference that may cause undesired operation.
Caution: Changes or modifications not expressly approved by the party responsible for
compliance could void the user’s authority to operate the equipment.
CE
Compliance
Information
for the
The associated regulatory agencies of the following countries recognize the noted
certifications for this product as authorized for sale and use.
UK DE DK BG SE FI EE LV LT
PL CZ SK HU RO SI AT IT ES
This product contains a radio transmitter with wireless technology which has been tested and
found to be compliant with the applicable regulations governing a radio transmitter in the
2.400GHz to 2.4835GHz frequency range.
Antenna Separation Distance
When operating your Spektrum transmitter, please be sure to maintain a separation distance
of at least 5 cm between your body (excluding fingers, hands, wrists, ankles and feet) and the
antenna to meet RF exposure safety requirements as determined by FCC regulations.
The illustrations below show the approximate 5 cm RF exposure area and typical hand
placement when operating your Spektrum transmitter.
European
Union
Instructions
for Disposal
of WEEE by
Users in the
European
Union
Declaration of
Conformity
(in accordance
with ISO/IEC
17050-1)
PT IE NL LU MT CY GR FR
This product must not be disposed of with other waste. Instead, it is the
user’s responsibility to dispose of their waste equipment by handing it over
to a designated collection point for the recycling of waste electrical and
electronic equipment. The separate collection and recycling of your waste
equipment at the time of disposal will help to conserve natural resources
and ensure that it is recycled in a manner that protects human health and the
environment. For more information about where you can drop off your waste
equipment for recycling, please contact your local city office, your household waste disposal
service or where you purchased the product.
No. HH2008111004
Product(s): Spektrum DX3.0 Transmitter
Item Number(s): SPM20320E
Equipment class: 2
The objects of declaration described above are in conformity with the requirements of
the specifications listed below, following the provisions of the European R&TTE directive
1999/5/EC:
EN 300-328 v1.7.1 ERM requirements for wideband transmission systems operating
in the 2.4 GHz ISM band
EN 301 489-1 v.1.6.1 General EMC requirements for Radio equipment
EN 301 489-17 v.1.2.1
Signed for and on behalf of:
Horizon Hobby, Inc.
Champaign, IL USA
November 10, 2008
Steven A. Hall
Vice President
International Operations and Risk Management
Horizon Hobby, Inc.
 Loading...
Loading...