

Page 1
AP44
Quick Guide
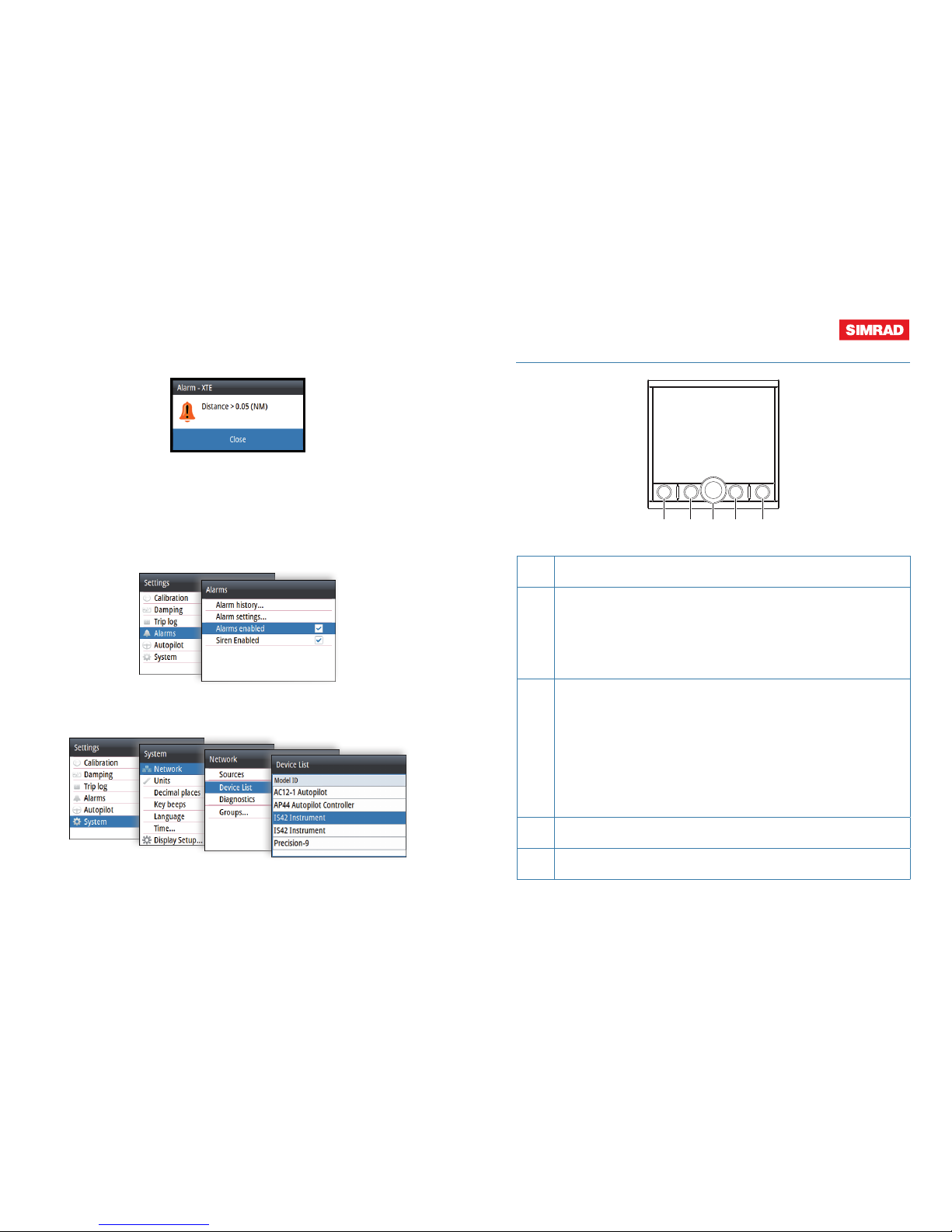
1 2 3 4 5
STBY MODE AUTO
MENU
X
1
STBY key
Press to turn the autopilot to Standby mode.
2
MENU/X key
With no menu active:
• Press to display the Settings menu
• Press and hold to display the Display setup dialog
Menu and dialog operation:
• Press to return to previous menu level or to exit a dialog.
3
Rotary knob
Menu and dialog operation:
• Turn to move up and down in menus and dialogs
• Turn to adjust a value
• Press to select a menu option and to enter the next menu level
In FU mode:
• Turn to set rudder angle
In AUTO, NoDrift and Wind mode:
• Turn to change set heading/set course/set wind angle
4
MODE key
Press to display the Mode list
5
AUTO key
Press to turn the autopilot to AUTO mode
EN
Alarms
Alarm indication
Acknowledging the alarms
Acknowledge alarms by pressing the rotary knob. A reminder reappears at given
intervals for as long as the alarm condition exists.
Enabling the alarm system and the alarm siren
Accessing the Device list
*988-11194-001*
Page 2
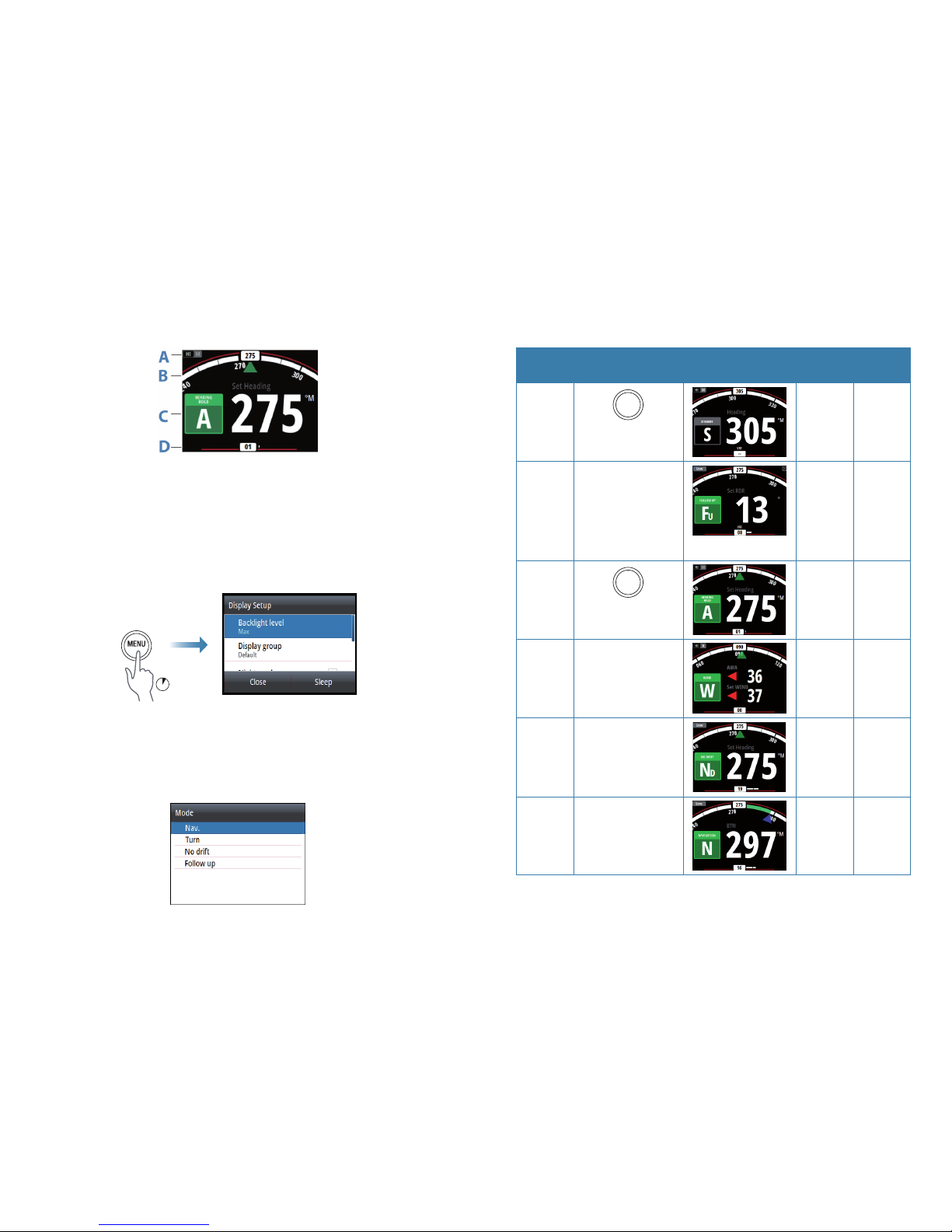
Autopilot modes
Mode Activate Mode display Rotary knob
Press Rotate
Standby
STBY
Switch to
FU mode
No action
Follow-up From any mode:
select the Follow-up
option in the Mode
list.
From Standby mode:
press the rotary knob.
No action Set the
rudder
angle
AUTO
AUTO
No action Adjust
the set
heading
Wind* From AUTO mode:
select the Wind
option in the Mode
list
No action Adjust set
wind
NoDrift From AUTO mode:
select the NoDrift
option in the Mode
list.
No action Adjust the
set course
NAV From any mode:
select the NAV option
in the Mode list.
No action No action
¼ Note: * Mode is only available when the boat type is set to SAIL.
The autopilot page
The content varies with active mode. All modes include:
• Response (AC12N/AC42N/SG05) / Profile (NAC-2/NAC-3) mode (A)
• Heading indicator, analog and digital (B)
• Autopilot mode indication (C)
• Rudder indicator, analog and digital (D)
Display setup
x
3s
When the Backlight level field is active, subsequent presses on the MENU key adjusts
backlight level in decrements of 30% .
Selecting an autopilot mode using the MODE key
Press the MODE key and select the relevant option from the Mode list.
Page 3

ENGLISH
AP44
Operator Manual
www.simrad-yachting.com
Page 4

Page 5

Preface
Disclaimer
As Navico is continuously improving this product, we retain the
right to make changes to the product at any time which may not be
reflected in this version of the manual. Please contact your nearest
distributor if you require any further assistance.
It is the owner’s sole responsibility to install and use the equipment
in a manner that will not cause accidents, personal injury or
property damage. The user of this product is solely responsible for
observing safe boating practices.
NAVICO HOLDING AS AND ITS SUBSIDIARIES, BRANCHES AND
AFFILIATES DISCLAIM ALL LIABILITY FOR ANY USE OF THIS PRODUCT
IN A WAY THAT MAY CAUSE ACCIDENTS, DAMAGE OR THAT MAY
VIOLATE THE LAW.
Governing Language: This statement, any instruction manuals, user
guides and other information relating to the product
(Documentation) may be translated to, or has been translated from,
another language (Translation). In the event of any conflict between
any Translation of the Documentation, the English language version
of the Documentation will be the official version of the
Documentation.
This manual represents the product as at the time of printing.
Navico Holding AS and its subsidiaries, branches and affiliates
reserve the right to make changes to specifications without notice.
Trademarks
Simrad® is used by license from Kongsberg.
NMEA® and NMEA 2000® are registered trademarks of the National
Marine Electronics Association.
Copyright
Copyright © 2016 Navico Holding AS.
Warranty
The warranty card is supplied as a separate document.
In case of any queries, refer to the brand website of your display or
system: www.simrad-yachting.com.
Preface | AP44 Operator Manual
3
Page 6

Compliance statements
This equipment complies with:
• CE under EMC directive 2014/30/EU
• The requirements of level 2 devices of the Radio communications
(Electromagnetic Compatibility) standard 2008
The relevant Declaration of conformity is available in the product's
section at the following website: www.simrad-yachting.com.
About this manual
This manual is a reference guide for operating the AP44. It assumes
that all equipment is installed and configured, and that the system
is ready to use.
The manual assumes that the user has basic knowledge of
navigation, nautical terminology and practices.
Important text that requires special attention from the reader is
emphasized as follows:
Ú
Note: Used to draw the reader’s attention to a comment or
some important information.
Warning: Used when it is necessary to warn
personnel that they should proceed carefully to
prevent risk of injury and/or damage to equipment/
personnel.
Manual version
This manual is written for software version 1.0. The manual is
continually updated to match new software releases. The latest
available manual version can be downloaded from www.simradyachting.com.
4
Preface | AP44 Operator Manual
Page 7

Contents
7 Introduction
7
Manuals
8 AP44 Front panel and keys
9 The autopilot page
10 Basic operation
10 Safe operation with the autopilot
10 Turning the unit on and off
11 Operating the menu system
12 Display setup
13 Autopilot modes
13 Selecting an autopilot mode
13 Standby mode
13 Follow-up (FU) mode
13 AUTO mode (Heading hold)
15 Wind mode
16 NoDrift mode
17 Heading capture
17 NAV mode
19 Turn pattern steering
23 Using the autopilot in an EVC system
24 Trip log
25 Alarms
25 Alarm indication
25 Acknowledging the alarms
26 Enabling the alarm system and the alarm siren
27 Alarm history
28 Software setup
28 Calibration
33 Damping
34 Autopilot settings
40 System settings
Contents | AP44 Operator Manual
5
Page 8

45 Maintenance
45
Preventive maintenance
45 Cleaning the display unit
45 Checking the connectors
45 Software update
48 Menu flow chart
50 Technical specifications
51 Dimensional drawing
52 Terms and abbreviations
54 Supported data
54 NMEA 2000 PGN (transmit)
54 NMEA 2000 PGN (receive)
6
Contents | AP44 Operator Manual
Page 9

Introduction
The AP44 is a networked autopilot display and control unit.
The unit is compatible with a range of Navico autopilot computers,
including AC12N, AC42N, NAC-2, NAC-3 and SG05 autopilot
computers.
The AP44 systems include several modules that need to be
mounted in different locations on the vessel and that need to
interface with at least three different systems on the boat:
• The boat’s steering system
• The boat’s electrical system (input power)
• Other equipment onboard
All parts of the autopilot system must be installed and configured
according to supplied documentation prior to using the autopilot.
The following steps are required:
• Mechanical installation and wiring of all units. Refer to separate
documentation for the units
• Software setup of the system. Refer to "Software setup" on page 28
• Commissioning and setup of the autopilot computer. Refer to
the installation and commissioning documentation for your
autopilot computer
Manuals
The following documentation is available for the AP44 system:
• AP44 Operator manual (988-11189-00n) - this manual
•
AP44/IS42/Triton2 Installation guide (988-11229-00n)
•
AP44/IS42/Triton2 Mounting template (988-11230-00n)
• NAC-2/NAC-3 Autopilot computer Commissioning manual
(988-11233-00n)
• AC12N/AC42N Installation manual (988-10276-00n)
Ú
Note: The last digit in the part numbers is the document's
revision code. The latest version of all documents can be
downloaded from the product website on www.simradyachting.com.
1
Introduction | AP44 Operator Manual
7
Page 10

AP44 Front panel and keys
1 2 3 4 5
STBY
MODE AUTO
MENU
X
1 STBY key
Press to turn the autopilot to Standby mode.
2 MENU/X key
With no menu active:
• Press to display the Settings menu
• Press and hold to display the Display setup dialog
Menu and dialog operation:
• Press to return to previous menu level or to exit a dialog
3 Rotary knob
Menu and dialog operation:
• Turn to move up and down in menus and dialogs
• Turn to adjust a value
• Press to select a menu option and to enter the next menu
level
In FU mode:
• Turn to set rudder angle
In AUTO, NoDrift and Wind mode:
• Turn to change set heading/set course/set wind angle
4 MODE key
Press to display the Mode list
5 AUTO key
Press to turn the autopilot to AUTO mode
8
Introduction | AP44 Operator Manual
Page 11
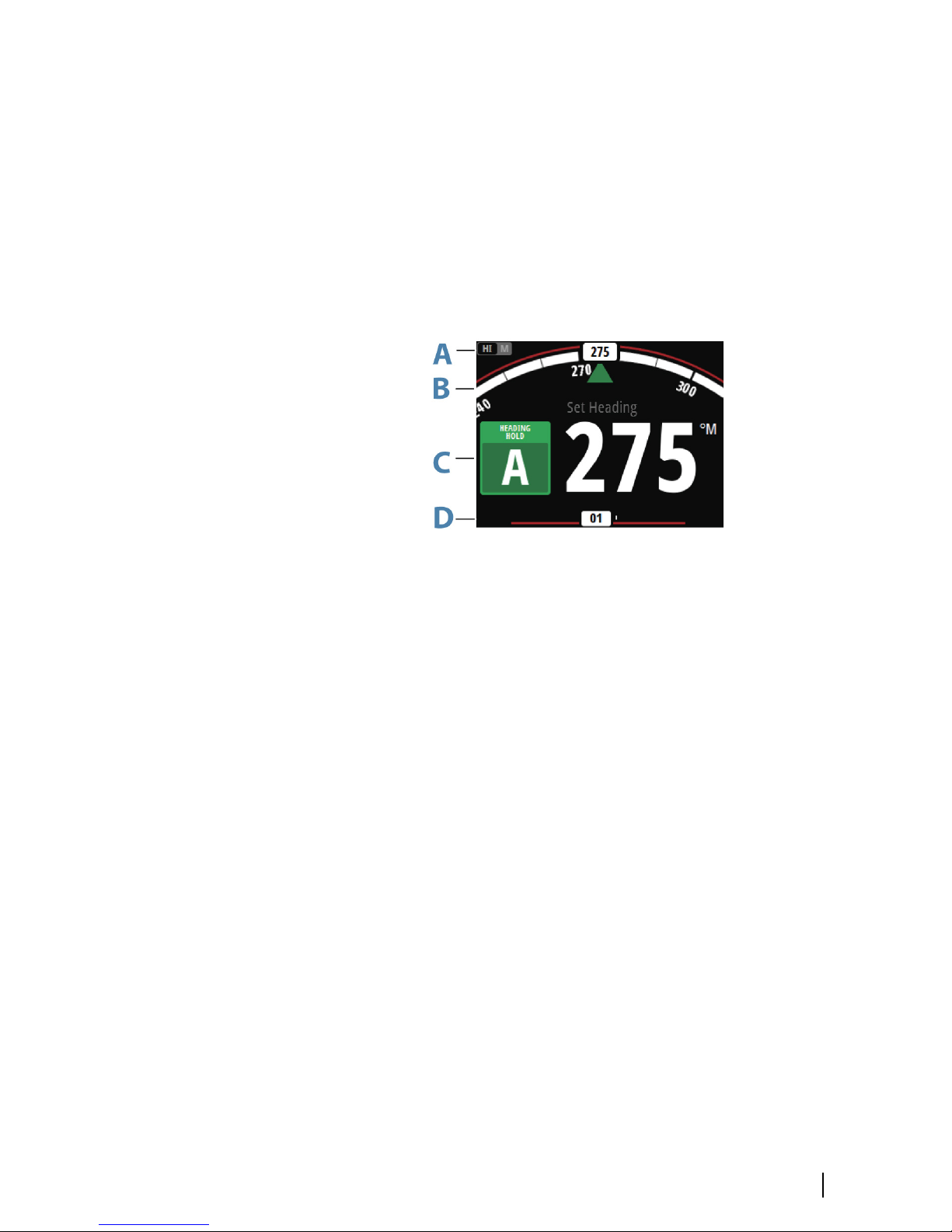
The autopilot page
The content of the autopilot page varies with active mode. All
modes include:
• Response (AC12N/AC42N/SG05) / Profile (NAC-2/NAC-3) mode
(A)
• Heading indicator, analog and digital (B)
• Autopilot mode indication (C)
• Rudder indicator, analog and digital (D)
For more information, refer to the separate mode descriptions and
to the "Terms and abbreviations" on page 52.
Introduction | AP44 Operator Manual
9
Page 12
Basic operation
Safe operation with the autopilot
Warning: An autopilot is a useful navigational aid,
but DOES NOT replace a human navigator.
Warning: Ensure the autopilot has been installed
correctly, commissioned and calibrated before use.
Do not use automatic steering when:
• In heavy traffic areas or in narrow waters
• In poor visibility or extreme sea conditions
• When in areas where use of an autopilot is prohibited by law
When using an autopilot:
• Do not leave the helm unattended
• Do not place any magnetic material or equipment near the
heading sensor used by the autopilot system
• Verify at regular intervals the course and position of the vessel
• Always switch to Standby mode and reduce speed in due time to
avoid hazardous situations
Turning the unit on and off
The unit has no power key, and it will be running as long as power is
connected to the NMEA 2000 network backbone.
First time startup
When the unit is started for the first time and after a factory reset,
the unit displays a setup wizard. Respond to the setup wizard
prompts to select some fundamental setup options. These settings
can later be changed and further configuration made as described
in "Software setup" on page 28.
2
10
Basic operation | AP44 Operator Manual
Page 13
Sleep mode
In Sleep mode, the backlight for screen and keys are turned off to
save power. The system continues to run in the background.
You select Sleep mode from the Display setup dialog, activated by
pressing and holding the MENU key. Switch from Sleep mode to
normal operation by a short press on the MENU key.
Operating the menu system
All settings and configuration in the unit are available from the
Settings menu, activated by pressing the MENU key.
• Turn the Rotary knob to move up and down in the menus and in
the dialogs
• Confirm a selection by pressing the Rotary knob
• Return to previous menu level by pressing the MENU key
Edit a numeric value
1. Turn the Rotary knob to select the entry field
2. Press Rotary knob to turn the field into edit mode
-
The left digit starts flashing
3. Turn the Rotary knob to set the value for the flashing digit
4. Press the Rotary knob to move focus to the next digit
5. Repeat step 3 and 4 until all digits are set
6. Press the Rotary knob to leave edit mode for the selected field
7. Turn the Rotary knob to select the Cancel or Save buttons, then
press the Rotary knob to confirm your selection and to close the
dialog
Selected field Field in edit mode
Ú
Note: You can at any time press the MENU key to leave a
dialog without saving the entries.
Basic operation | AP44 Operator Manual
11
Page 14
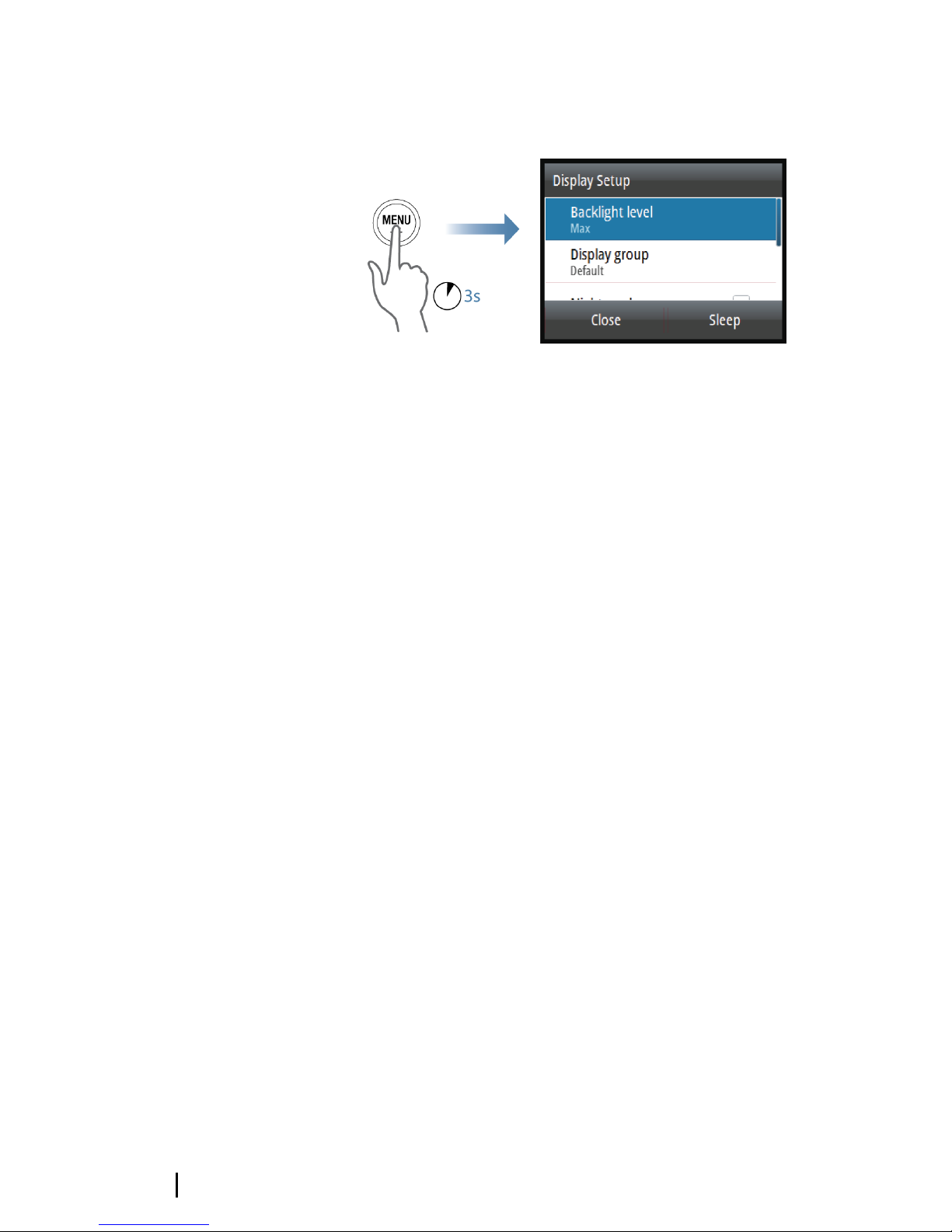
Display setup
The display setup can be adjusted at any time from the Display
setup dialog, activated by pressing and holding the MENU key.
The following options are available:
• Backlight level: Adjusts the backlight level from Min (10%) to Max
(100%) in 10% increments
-
When the Backlight level field is active, subsequent presses on
the MENU key adjusts backlight level in decrements of 30%
• Display group: Defines which network group the unit belongs to
• Night mode: Activates/deactivates the night mode color palette
• Night mode color: Sets the night mode color palette
• Invert day color: Changes the background color for the pages
from default black to white
• Sleep: Turns the backlight for screen and keys off to save power
Ú
Note: All changes made to the display setup will apply to all
units belonging to the same display group. For more
information about network groups, refer to "Network groups" on
page 43.
12
Basic operation | AP44 Operator Manual
Page 15
Autopilot modes
The autopilot has several steering modes. The number of modes
and features within the mode depend on the autopilot computer,
the boat type and available inputs, as explained in the description of
the following steering modes.
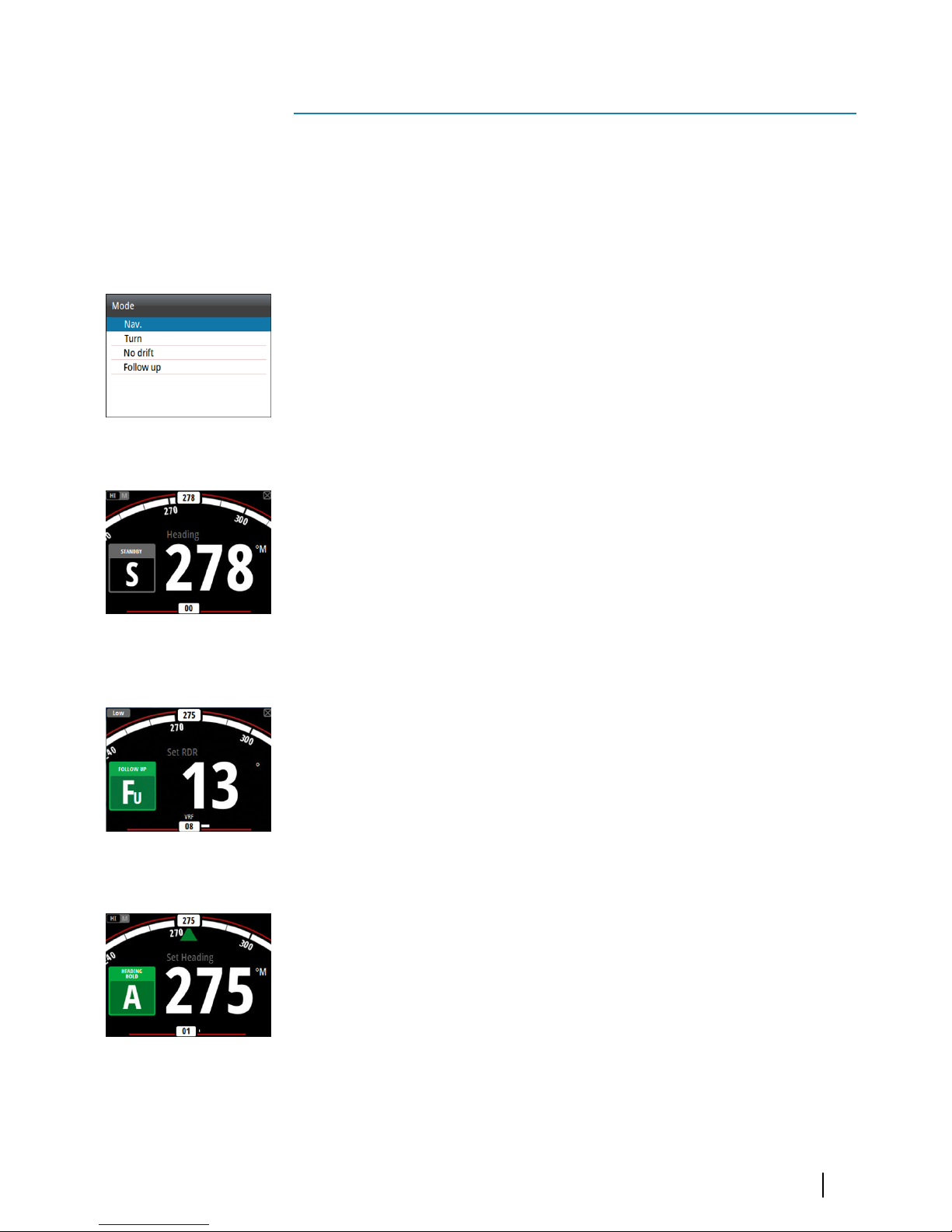
Selecting an autopilot mode
You select Standby mode and AUTO mode by pressing the
dedicated STBY and AUTO keys.
You select other modes and automatic features by selecting the
relevant option from the Mode list, activated by pressing the MODE
key.
Standby mode
Standby mode is used when you steer the boat at the helm.
• Switch to Standby mode by pressing the STBY key.
Ú
Note: If sensor data vital for autopilot operation (e.g. rudder
response) is lost when the autopilot is running in an automatic
mode, the system will automatically switch to Standby mode.
Follow-up (FU) mode
In FU mode you turn the rotary knob to set the rudder angle. The
rudder will move to the commanded angle and then stop.
• Switch to FU mode from any mode by selecting the Follow-up
option in the Mode list, or switch directly from Standy mode to
FU mode by pressing the rotary knob.
AUTO mode (Heading hold)
In AUTO mode the autopilot issues rudder commands required to
steer the vessel automatically on a set heading. In this mode the
autopilot does not compensate for any drifting caused by current
and/or wind (A).
3
Autopilot modes | AP44 Operator Manual
13
Page 16
A
• Switch to AUTO mode by pressing the AUTO key. When the
mode is activated, the autopilot selects the current boat heading
as the set heading.
Changing set heading in AUTO mode
You adjust the set heading by turning the rotary knob.
An immediate heading change takes place. The new heading is
maintained until a new heading is set.
Tacking and Gybing in AUTO mode
Ú
Note: Only available when the boat type is set to SAIL.
Tacking and Gybing in AUTO mode uses the heading as reference.
The tacking/gybing operation changes the set heading to port or
starboard with a fixed angle.
The tacking parameters are set in the Setup/Sailing parameters: The
Tack angle defines the tacking angle, while the Tack time defines
the rate of turn during the tack/gybe. Refer to "Autopilot settings" on
page 34.
• Initiate the Tack or Gybe function by selecting the Tack/Gybe
option in the Mode list.
-
The turn is started when the direction is selected in the dialog.
14
Autopilot modes | AP44 Operator Manual
Page 17
Wind mode
Ú
Note: Wind mode is only available when the boat type is set to
SAIL. It is not possible to activate wind mode if wind
information is missing.
When wind mode is engaged, the autopilot captures the current
wind angle as steering reference, and adjusts the heading of the
boat to maintain this wind angle.
Prior to entering wind mode the autopilot system must be
operating in AUTO mode and with valid input from the wind
transducer.
• Switch to Wind mode by selecting the Wind option in the Mode
list
Warning: In wind mode the autopilot steers to the
apparent or true wind angle and not to a compass
heading. Any wind shift could result in the vessel
steering on an undesired course.
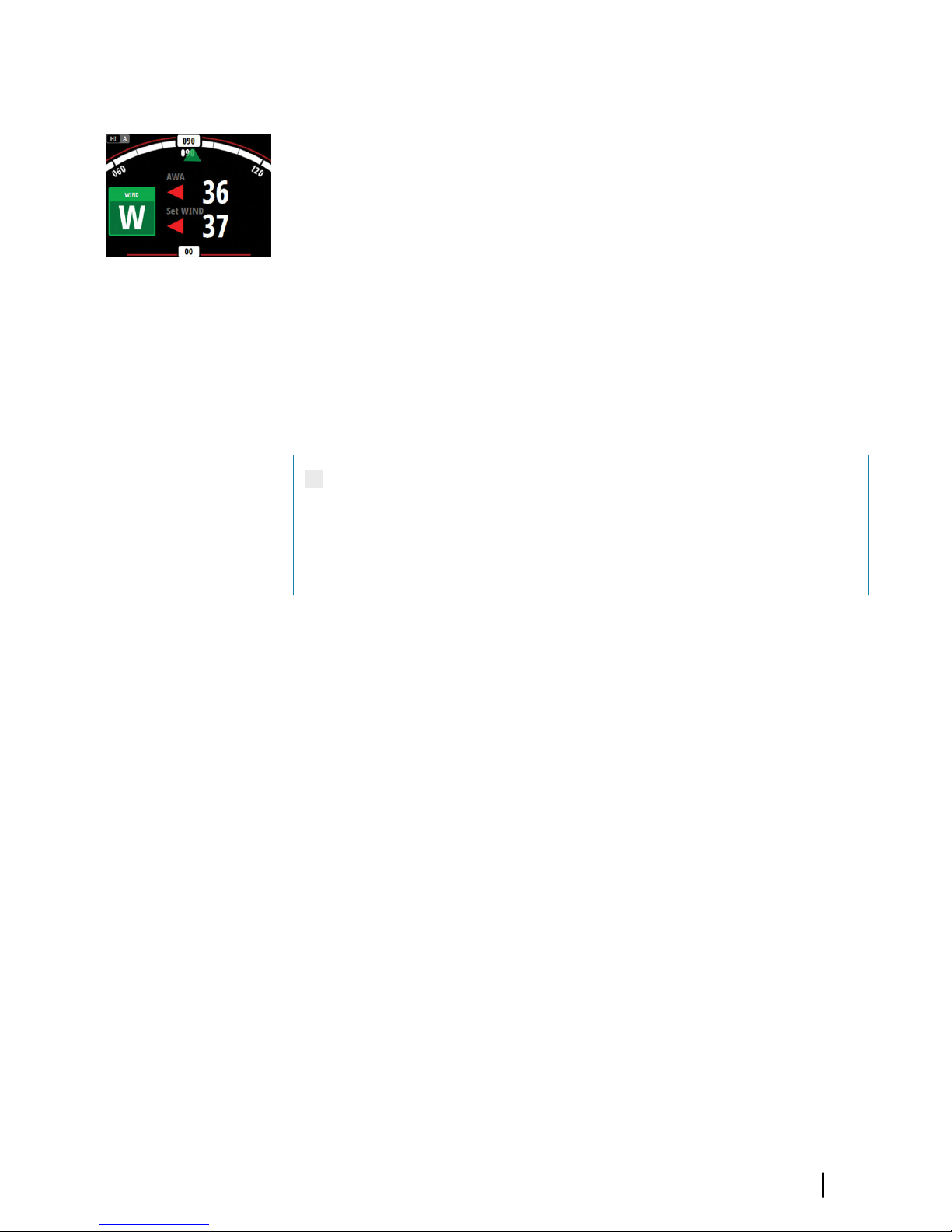
Tacking and Gybing in Wind mode
Tacking and Gybing in Wind mode can be performed when sailing
with apparent or true wind as the reference. In either case the true
wind angle must be less than 90 degrees (tacking) and more than
120° (gybing).
The tacking/gybing operation will mirror the set wind angle on the
opposite tack.
The rate of turn during the tack/gybe is set by the Tack time in the
Setup/Sailing menu. Refer to "Autopilot settings" on page 34.
• Initiate the Tack or Gybe function by selecting the Tack/Gybe
option in the Mode list.
• Confirm the tack/gybe in the dialog.
Autopilot modes | AP44 Operator Manual
15
Page 18
Ú
Note: The autopilot will temporarily add a 5 degree bear-away
on the new tack to allow the boat to pick up speed. After a
short period the wind angle will return to the set angle.
Ú
Note: If the Tack/Gybe is not confirmed the dialog will close
after 10 seconds, and the requested tack/gybe will not be
initiated.
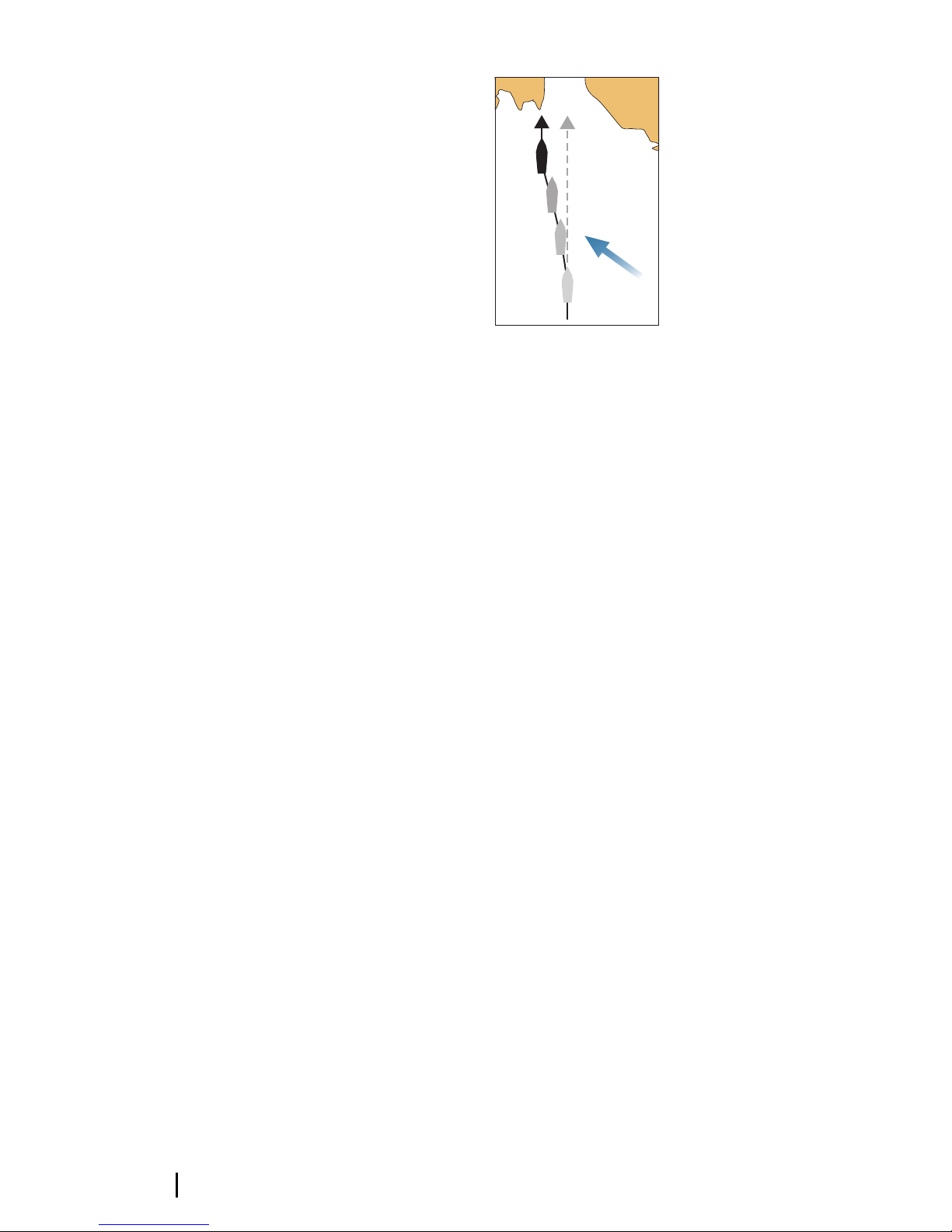
NoDrift mode
Ú
Note: It is not possible to select NoDrift mode if GPS position
and heading information is missing.
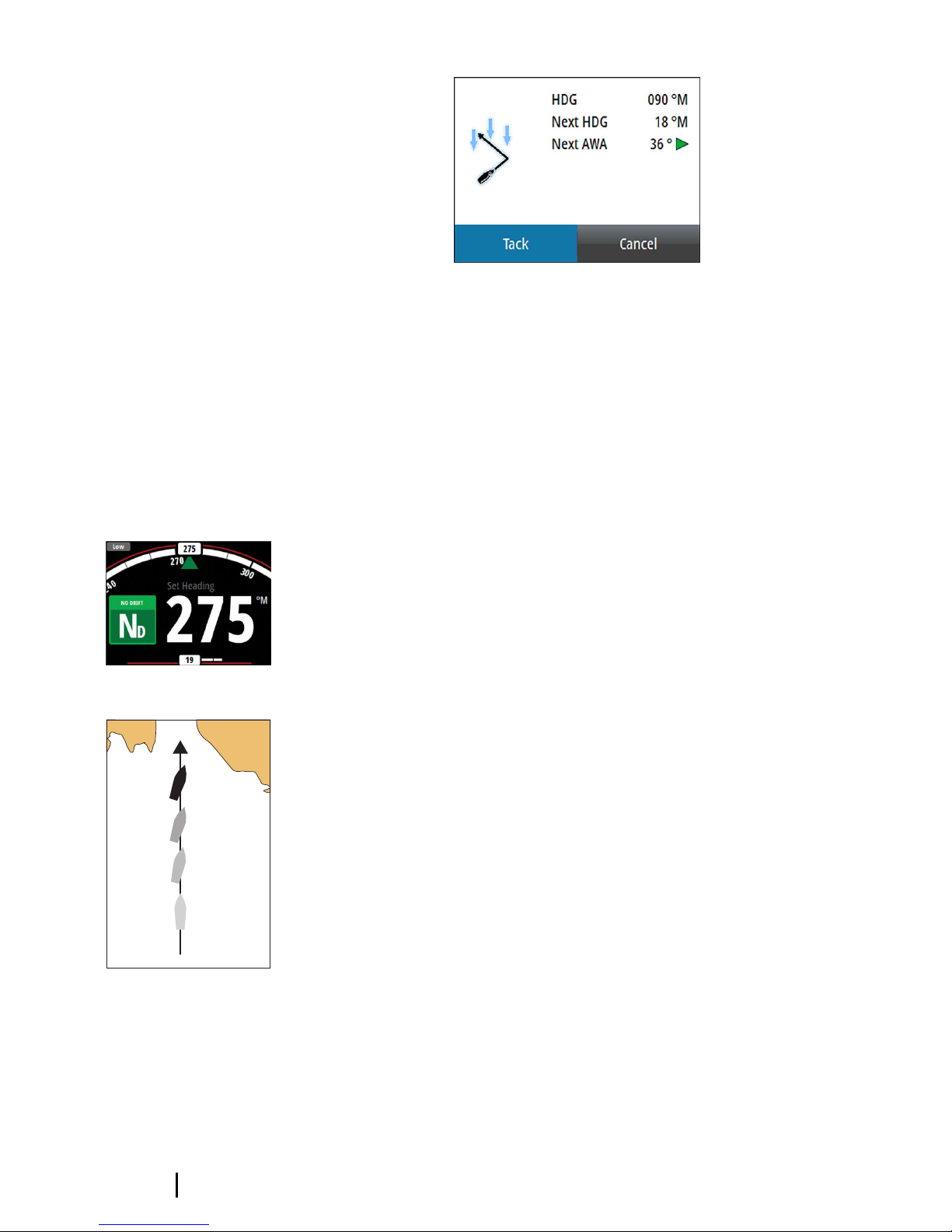
In NoDrift mode the vessel is steered along a calculated track line,
from present position and in a direction set by the user. If the vessel
is drifting away from the track line due to current and/or wind (A),
the vessel will follow the line with a crab angle.
Prior to entering NoDrift mode the autopilot system must be
operating in AUTO mode and with valid input from GPS and
heading sensor.
• Switch to NoDrift mode by selecting the NoDrift option in the
Mode list
-
The autopilot will draw an invisible track line based on current
heading from the vessel’s position
The autopilot will now use the position information to calculate the
cross track distance, and automatically steer along the calculated
track.
Changing set course in NoDrift mode
You adjust the set course by turning the rotary knob.
An immediate course change takes place. The new course is
maintained until a new course is set.
16
Autopilot modes | AP44 Operator Manual
Page 19

Dodging
Ú
Note: Only available for AC12N/AC42N autopilot computers.
If you need to avoid an obstacle when using NoDrift mode, you can
set the autopilot to Standby mode and power steer or use the helm
until the obstacle is passed.
If you return to NoDrift mode within 60 seconds you can select to
continue on previous set bearing line.
If you do not respond, the dialog disappears and the autopilot goes
to NoDrift mode with current heading as set bearing line.
Heading capture
When the vessel is turning in AUTO or NoDrift mode, an instant repress on the AUTO key activates the heading capture function. This
will automatically cancel the turn, and the vessel will continue on
the heading read from the compass the very moment you pressed
the AUTO key.
NAV mode
Ú
Note: NAV mode requires a compatible chartplotter connected
to the network.
It is not possible to select NAV mode if heading information is
missing, or if steering information is not received from the
external chartplotter.
Warning: NAV mode should only be used in open
waters. Navigation mode must not be used while
sailing, as course changes may result in unexpected
tacks or gybes!
In NAV mode the autopilot uses steering information from an
external chartplotter to direct the vessel to one specific waypoint
location, or through a series of waypoints.
In NAV mode, the autopilot's heading sensor is used as heading
source for course keeping. Speed information is taken from SOG or
from selected speed sensor. The steering information received from
the external chartplotter alters the set course to direct the vessel to
the destination waypoint.
Autopilot modes | AP44 Operator Manual
17
Page 20

To obtain satisfactory navigation steering, the autopilot system
must have valid input from the chartplotter. Autosteering must be
tested and determined satisfactory prior to entering NAV mode.
Ú
Note: If the chartplotter does not transmit a message with
bearing to next waypoint, the autopilot will steer using Cross
Track Error (XTE) only. In that case you must revert to AUTO
mode at each waypoint and manually change set course to
equal bearing to next waypoint and then select NAV mode
again.
Prior to entering NAV mode the chartplotter must be navigating a
route or towards a waypoint.
• Initiate NAV mode by selecting the NAV option in the Mode list
• Confirm to switch to NAV mode in the dialog.
Turning in NAV mode
When your vessel reaches a waypoint, the autopilot will give an
audible warning and display a dialog with the new course
information.
There is a user defined limit for the allowed automatic course
change to next waypoint in a route. If the course change is more
than this set limit, you are prompted to verify that the upcoming
course change is acceptable.
• If the required course change to the next waypoint is less than
the course change limit, the autopilot will automatically change
the course. The dialog will disappear after 8 seconds unless
cleared by the Pages key.
• If the required course change to next waypoint is more than the
set limit, you are prompted to verify that the upcoming course
change is acceptable. If the turn is not accepted, the vessel will
continue with the current set heading.
18
Autopilot modes | AP44 Operator Manual
Page 21

Course change less than set limit Course change larger than set limit
The course change limit setting depends on the autopilot
computer:
• NAC-2/NAC-3: Course chg confirm angle, refer to "Steering (NAC-2/
NAC-3)" on page 35
• AC12N/42N and SG05: Navigation change limit, refer to
"Automatic steering (AC12N/AC42N)" on page 39
Turn pattern steering
The system includes a number of automatic turn steering features
when the autopilot is in AUTO mode.
Ú
Note: Turn pattern steering is not available if the boat type is
set to Sail. Instead the tack/gybe feature is implemented.
Turn variables
All turn patters, except the U-turn, have settings that you adjust
before you start a turn or at any time when the boat is in a turn.
The turn settings are available from the Autopilot settings dialog.
The variables are described for each turn pattern option in the
following pages.
Starting and stopping a turn
Ú
Note: For starting a DCT turn, see "Depth contour tracking (DCT)" on
page 21.
You start the turn by selecting the turn option in the Mode list,
followed by selecting the port or starboard options in the turn
dialog to select the turn direction.
Autopilot modes | AP44 Operator Manual
19
Page 22

You can at any time stop the turn by pressing the STBY key to
return to Standby mode and manual steering.
C-turn (Continuous turn)
Steers the vessel in a circle.
• Turn variable:
-
Rate of turn. Increasing the value makes the vessel turn a
smaller circle.
U-turn
Changes the current set heading to be 180° in the opposite
direction.
The turn rate is identical to Turn rate (NAC-2/NAC-3) and Rate limit
(AC12N/AC42N) setting (refer to "Autopilot settings" on page 34). The
turn rate cannot be changed during the turn.
Spiral turn
Makes the vessel turn in a spiral with a decreasing or increasing
radius.
• Turn variables:
- Initial radius
- Change/turn. If this value is set to zero, the boat will turn in a
circle. Negative values indicate decreasing radius while positive
values indicate increasing radius.
Zigzag turn
Steers the vessel in a zigzag pattern.
You set the initial heading change before the turn is started.
During the turn you can alter the main heading by turning the
rotaty knob (only for AC12N/AC42N autopilot computers).
20
Autopilot modes | AP44 Operator Manual
Page 23

• Turn variables:
-
Course change (A)
- Leg distance (B)
B
A
Square turn
Makes the vessel automatically turn 90° after having travelled a
defined leg distance.
During the turn you can alter the main heading by turning the
rotaty knob (only for AC12N/AC42N autopilot computers).
• Turn variable:
-
Leg distance
Lazy-S turn
Makes the vessel yaw around the main heading.
You set the selected heading change before the turn is started.
During the turn you can alter the main heading by turning the
rotaty knob (only for AC12N/AC42N autopilot computers).
• Turn variables:
- Course change (C)
- Turn radius (D)
D
C
Depth contour tracking (DCT)
Makes the autopilot follow a depth contour.
Ú
Note: DCT turn pattern is only available if the system has a valid
depth input.
Warning: Do not use the DCT turn pattern unless the
seabed is suitable. Do not use it in rocky waters where
the depth is varying significantly over a small area.
Autopilot modes | AP44 Operator Manual
21
Page 24

To initiate a DCT turn:
• Ensure that you have depth reading on the panel or on a
separate depth instrument
• Steer the boat to the depth you want to track, and in the
direction of the depth contour
• Activate AUTO mode, then select depth contour tracking while
monitoring the depth reading
• Select the port or starboard option in the turn dialog to initiate
the depth contour steering to follow the bottom sloping to
starboard or to port
Port option
(depth decreases to port)
Starboard option
(depth decreases to starboard)
• Turn variables:
-
Depth gain. This parameter determines the ratio between
commanded rudder and the deviation from the selected depth
contour. The higher depth gain value the more rudder is
applied. If the value is too small it will take a long time to
compensate for drifting off the set depth contour, and the
autopilot will fail to keep the boat on the selected depth. If the
22
Autopilot modes | AP44 Operator Manual
Page 25

value is set too high the overshoot will increase and the
steering will be unstable.
-
CCA. The CCA is an angle that is added to or subtracted from
the set course. With this parameter you can make the boat yaw
around the reference depth with lazy-s movements. The larger
the CCA the bigger yawing will be allowed. If the CCA is set to
zero there is no S-ing.
- Ref. depth. This is the reference depth for the DCT function.
When DCT is initiated the autopilot reads the current depth
and set this as the reference depth. The reference depth can be
changed when the function is running.
Ú
Note: If depth data is lost during DCT the autopilot will
automatically switch to AUTO mode.
It is recommended to turn ON the AP Depth Data Missing alarm
when using DCT. When this alarm is activated an alarm will be
raised if the depth data is lost during DCT.
Using the autopilot in an EVC system
When the AP44 is connected to an EVC system via the SG05, you
can take manual control of the steering regardless of the autopilot
mode.
The mode indicator is replaced by a dash to indicate EVC override.
The system returns to AP44 control in Standby mode if no rudder
command is given from the EVC system within a predefined period.
Autopilot modes | AP44 Operator Manual
23
Page 26

Trip log
The Trip log is available from the Settings menu.
The Trip log is a temporary page. It remains on the screen until you
press the STBY or AUTO key.
There are three log options available:
• Trip 1: records distance traveled through the water (Log input)
• Trip 2: records distance traveled via GPS input
• Log: shows total distance run from system installation or from a
system restore
Ú
Note: Trip 1 requires correctly calibrated boat speed for
accurate trip records.
Trip 2 requires a compatible GPS connected to the network.
You start, stop and reset the active Trip log from the menu,
activated by pressing the rotary knob.
4
24
Trip log| AP44 Operator Manual
Page 27

Alarms
The system continuously checks for dangerous situations and
system faults while the system is running. The alarm system can be
activated if any alarm settings are exceeded.
Ú
Note: If sensor data vital for autopilot operation (e.g. rudder
response) is lost when the autopilot is running in an automatic
mode, the system will automatically switch to Standby mode.
Alarm indication
An alarm situation is indicated with an alarm pop-up. If you have
enabled the siren, the alarm message is followed by an audible
alarm.
A single alarm is displayed with the name of the alarm as the title,
and with details for the alarm.
If more than one alarm is activated simultaneously, the alarm popup can display 2 alarms. The alarms are listed in the order they occur
with the alarm activated first at the top. The remaining alarms are
available in the Alarms dialog.
Type of messages
The messages are classified according to how the reported situation
affects your vessel. The following color codes are used:
Color Importance
Red Critical
Orange Important
Yellow Standard
Blue Warning
Green Light warning
Acknowledging the alarms
The most recent alarm is acknowledged by pressing the rotary
knob.
5
Alarms| AP44 Operator Manual
25
Page 28

This removes the alarm notification, and silences the alarm from all
units that belong to the same alarm group. A reminder reappears at
given intervals for as long as the alarm condition exists.
Ú
Note: An alarm received from non Navico units on the network
must be acknowledged on the unit generating the alarm.
Enabling the alarm system and the alarm
siren
You enable the alarm system and the alarm siren from the Alarms
menu.
Individual alarm settings
You enable/disable the single alarm and set the alarm limits from
the Alarms settings dialog.
• Press the rotary knob to display the menu from where you can
enable/disable the alarm and set the alarm limit
26
Alarms| AP44 Operator Manual
Page 29

Alarm history
The Alarm history dialog stores alarm messages until they are
manually cleared.
You show alarm details for a selected alarm and clear all alarms in
the alarm history by pressing the rotary knob when the Alarm
history dialog is active.
Menu options Alarm details
Alarms| AP44 Operator Manual
27
Page 30

Software setup
Prior to use, the AP44 requires a number of settings be configured
in order for the system to perform as expected. Access to the
required options are found in the Settings menu, accessed by
pressing the MENU key.
Ú
Note: The following settings are described in other sections of
this manual:
"Trip log" on page 24
"Alarms" on page 25
Calibration
Ú
Note: Once the unit is setup and before you proceed with
calibration ensure all network sources are selected and
configured. Refer to "System settings" on page 40.
Boat speed
Speed calibration is necessary to compensate for hull shape and
paddlewheel location on your boat. For accurate speed and log
readings, it is essential that the paddlewheel is calibrated.
SOG reference
This is an auto calibration option that uses speed over ground (SOG)
from your GPS, and compares the average of SOG against the
average boat speed from the speed sensor for the duration of the
calibration run.
Ú
Note: This calibration should be made in calm sea with no
effect from wind or tidal current.
6
28
Software setup| AP44 Operator Manual
Page 31

• Bring the boat up to cruising speed (above 5 knots), then
• Select the SOG reference option
When the calibration is completed the Boat speed calibration scale
will show the adjusted percentage value of the boat speed.
Distance reference
Allows you to calibrate the log via a distance reference. You will
need to complete consecutive runs, under power at a constant
speed made along a given course and distance.
Ú
Note: The distance should be greater than 0.5 NM, ideally 1 NM.
To eliminate the effect of tidal conditions it is advisable to
perform at least two runs, preferably three, along the measured
course.
Referring to the diagram, A and B are the markers for each run. X is
the actual distance for each run.
• Enter the desired distance in nautical miles that you would like to
calculate the distance reference over
• When the boat gets to the predetermined starting position of the
distance reference calculation, start the calibration timer
• As the boat passes marks A and B on each run, instruct the
system to start and stop and finally OK to end calibration.
x
BA
Use SOG as boat speed
If boat speed is not available from a paddle wheel sensor, it is
possible to use speed over ground from a GPS. SOG will be
displayed as boat speed and used in the true wind calculations and
the speed log.
Software setup| AP44 Operator Manual
29
Page 32

Wind
MHU (Masthead unit) alignment
This provides an off set calibration in degrees to compensate for any
mechanical misalignment between the masthead unit and the
center line of the vessel.
To check the masthead unit alignment error we recommend you
use the following method which involves a sailing trial:
• Sail on a starboard tack on a close hauled course and record the
wind angle, then repeat the process on a port tack
• Divide the difference between the two recorded numbers and
enter this as the wind angle off set
If the starboard apparent wind angle is greater than the port angle,
then divide the difference by 2 and enter this as a negative offset.
If the port angle is greater than the starboard then divide the
difference by 2 and enter this as a positive offset.
Enter the offset it into the MHU Align calibration field.
Depth
Depth offset
All transducers measure water depth from the transducer to the
bottom. As a result, water depth readings do not account for the
distance from the transducer to the lowest point of the boat (for
example; bottom of the keel, rudder, or propeller) in the water or
from the transducer to the water surface.
• For depth below keel (A): Set the distance from transducer to the
bottom of the keel as a negative value. For example, -2.0.
• For depth below transducer (B): no offset required.
• For depth below surface (waterline) (C): Set the distance from
transducer to the surface as a positive value. For example,+0.5.
30
Software setup| AP44 Operator Manual
Page 33

A B C
+0.5
+0.0
-2.0
Aft depth offset
This option allows the system to display two depth readings.
The Aft depth is calibrated in the same manner as the Depth offset.
Ú
Note: Aft Depth is only available when a valid signal is received
from a second and compatible NMEA 2000 or NMEA 0183
device.
Heading
Ú
Note: All magnetic compasses must be calibrated to ensure
correct heading reference.
The calibration must be made on the active compass.
The calibration should be done in calm sea conditions and with
minimal wind and current to obtain good results.
Offset
The Offset option is used for compensating for any difference
between the boat’s center line (A) and the compass lubber line (B).
1. Find the bearing from the boat position to a visible object. Use a
chart or a chart plotter
2. Steer the boat so that the center line of the boat is aligned with
the bearing line pointing towards the object.
3. Change the offset parameter so that the bearing to the object
and the compass readout becomes equal.
Ú
Note: Make sure that both the compass heading and the
bearing to the object have the same unit (°M or °T).
B
A
x
Software setup| AP44 Operator Manual
31
Page 34

User triggered calibration
Ú
Note: Before the calibration is started, make sure that there is
enough open water around the vessel to make a full turn.
The Calibrate option is used for manually starting the heading
calibration procedure.
During this calibration, the compass measures the magnitude and
direction of the local magnetic field.
The illustration shows magnitude of local field in percentage of
earth's magnetic field (A), direction of local field (B) with respect to
the boat's centerline (C).
Follow the on-screen instruction, and use about 60-90 seconds to
make a full circle. Keep turning until the system reports a pass.
• If the local magnetic field is stronger than the earth’s magnetic
field (the local field is reading more than 100%), the compass
calibration will fail.
• If the local field is reading more than 30%, you should look for
any interfering magnetic objects and remove them, or you
should move the compass to a different location. The (local) field
angle guides you to the local interfering magnetic object.
Ú
Note: In certain areas and at high latitudes the local magnetic
interference becomes more significant, and heading errors
exceeding ±3° may have to be accepted.
Automatic calibration
An auto calibration option is available for compasses that offers a
fully automatic calibration procedure.
See more instructions in the documentation delivered with your
compass.
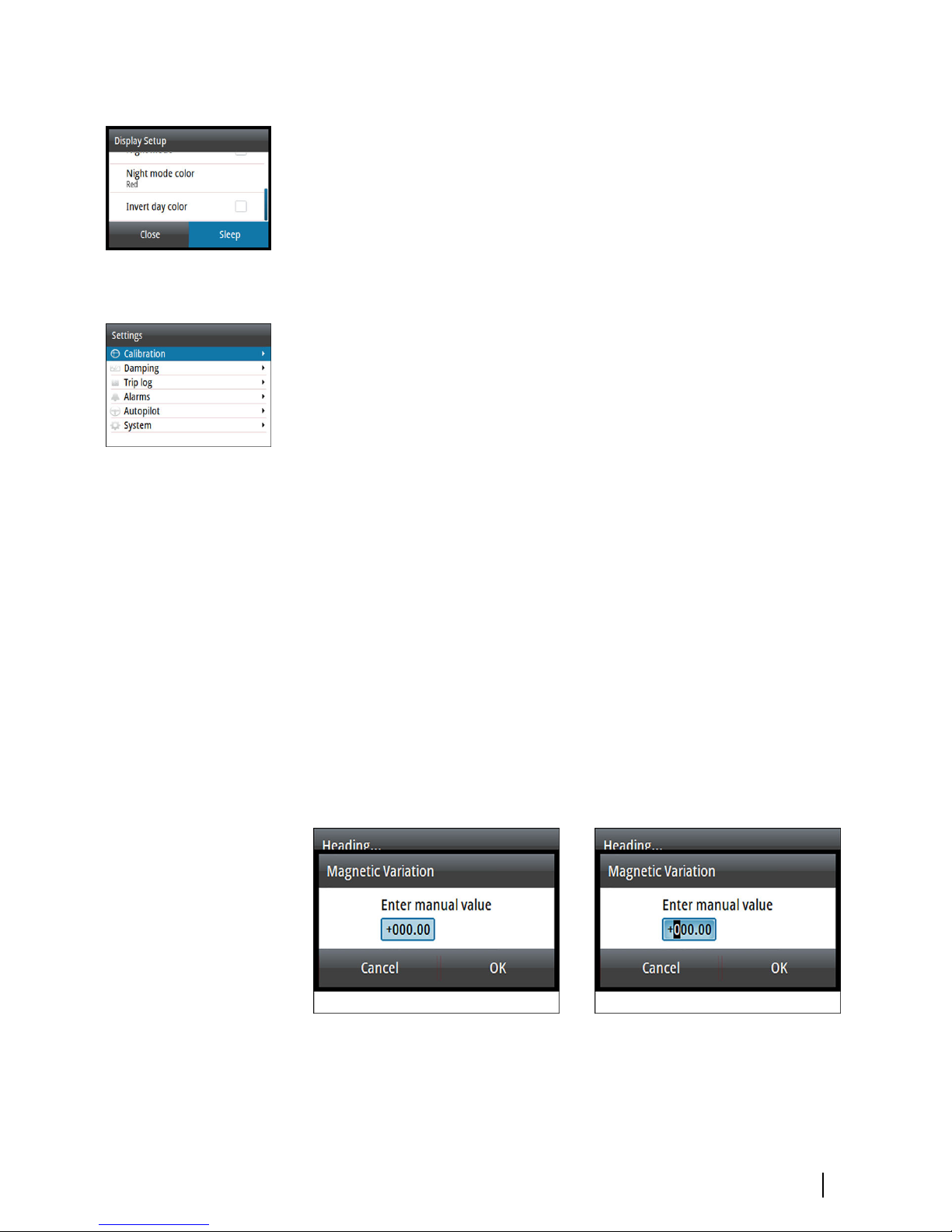
Magnetic variation
Defines how magnetic variation is handled by the system.
• Auto: Receives variation data from a network source
• Manual: Used for manually entering a value for the magnetic
variation
20%
0
30˚
030˚
B
C
A
32
Software setup| AP44 Operator Manual
Page 35

Use COG as heading
If heading data is not available from a compass sensor, it is possible
to use COG from a GPS. COG will be used in the true wind
calculations.
Ú
Note: The autopilot cannot be operated using COG as the
heading source. COG cannot be calculated when stationary.
Pitch/Roll
If a suitable sensor is fitted, the system will monitor the inclination of
the vessel. The offset value should be entered to adjust the readings
so that while the vessel is stationary at the dock, the Pitch and Roll
value reads 0.
Environment
If a suitable sensor is fitted, the system will monitor the current
sea/air temperature and barometric pressure.
The offset value to be entered should adjust the reading from the
sensor to match a calibrated source.
Rudder
Starts the automatic calibration of the rudder feedback. This
procedure sets the correct relationship between the physical rudder
movement and the rudder angle readout.
Follow the instructions on the display to perform the rudder
feedback calibration procedure.
Advanced
This option is used for manually applying an offset to the displayed
data for third party sensors which cannot be calibrated through the
AP44.
Damping
If data appears erratic or too sensitive, damping may be applied to
make the information appear more stable. With damping set to off,
the data is presented in raw form with no damping applied.
Software setup| AP44 Operator Manual
33
Page 36

Autopilot settings
The autopilot settings can be split between settings done by the
user, and settings done during installation and commissioning of
the autopilot system.
• User settings can be changed for various operational conditions
or user preferences
• Installation settings are defined during commissioning of the
autopilot system. No changes should later be done to these
settings
Both user settings and installation settings depends on which
autopilot computer that is connected to the system.
NAC-2/NAC-3 Autopilot computer settings AC12N/AC42N Autopilot computer settings
The following sections describe the settings that can be changed by
the user. The settings are described per autopilot computer.
Installation settings are available in the documentation following
the autopilot computers.
Ú
Note: For Turn pattern settings, refer to "Turn pattern steering" on
page 19.
NAC-2/NAC-3 Autopilot computer
34
Software setup| AP44 Operator Manual
Page 37

Steering (NAC-2/NAC-3)
These options allow for manually changing parameters that were
set during the commissioning of the autopilot computer. For more
details, refer to the separate documentation for the autopilot
computer.
• Turn rate: Preferred turn rate used while turning in degrees per
minute
• Rudder gain: This parameter determines the ratio between
commanded rudder and the heading error. The higher rudder
value the more rudder is applied. If the value is too small it will
take a long time to compensate for a heading error, and the
autopilot will fail to keep a steady course. If the value is set too
high the overshoot will increase and the steering will be
unstable.
• Counter rudder: Relation between change in heading error and
applied rudder. Higher counter rudder will reduce applied rudder
faster when approaching the set heading
• Autotrim: Controls how aggressively the autopilot will apply
rudder to compensate for a constant heading offset, e.g. when
external forces such as wind or current affects the heading.
Lower autotrim will give faster elimination of a constant heading
offset
Ú
Note: In VRF mode this parameter controls the time constant of
the rudder estimate. A lower value makes the rudder estimate
faster, i.e. that it will more quickly catch up with the boat's
movements.
• Init rudder: Defines how the system moves the rudder when
switching from power steering to an automatic mode.
- Center: Moves the rudder to zero position
- Actual: Maintains the rudder offset
• Rudder limit: Determines the maximum rudder movement in
degrees from midship position that the autopilot can command
the rudder in the automatic modes. The Rudder limit setting is
only active during autosteering on straight courses, NOT during
course changes. Rudder limit does not affect Non-Follow-up
steering
Software setup| AP44 Operator Manual
35
Page 38

• Off heading limit: Sets the limit for the off heading alarm. An
alarm occurs when the actual heading deviates from the set
heading more than the selected limit
• Track response: Defines how fast the autopilot shall respond after
having registered a cross track distance
• Track approach angle: Defines the angle used when the vessel is
approaching a leg. This setting is used both when you start
navigating and when you use track offset
• Course change confirm angle: Defines the limits for course
change to next waypoint in a route. If the course change is more
than this set limit, you are prompted to verify that the upcoming
course change is acceptable.
Sailing (NAC-2/NAC-3)
Ú
Note: Sailing parameters are only available when the boat type
is set to Sail.
• Wind mode: Select what wind function the autopilot will use
when in wind mode
-
Auto:
If TWA is <70º: Wind mode will use AWA
If TWA is ≥70º: Wind mode will use TWA
- Apparent
- True
• Tack time: Controls the rate of turn (tack time) when performing
a tack in wind mode.
• Tack angle: Controls the angle that the boat will tack to between
50º - 150º in AUTO mode
• Manual speed: If neither boat speed or SOG data is available and
or deemed reliable a manual value for speed source can be
entered and used by the autopilot to aid steering calculations
36
Software setup| AP44 Operator Manual
Page 39

AC12N/AC42N Autopilot computer
Response (AC12N/AC42N)
The AC12N/42N includes three different sets of steering modes;
High (HI), Low (LO) and Wind. The mode can be automatically or
manually selected.
The speed at which the autopilot automatically changes from LO to
HI parameters (or opposite) is determined by the Transition speed
setting, defined during the commissioning of the autopilot. Refer to
the detailed description in the autopilot computer's
documentation.
You can manually fine tune each of the three response modes.
Level 4 is default with parameter values as set by the autotune
function. If no autotune is made (not recommended) the level 4
values are the factory default values.
• A low response level reduces the rudder activity and provides a
more “loose” steering
• A high response level increases the rudder activity and provides a
more “tight” steering. A too high response level causes the boat
to start lazy-s movements.
The Wind response is used on sailboats
• Increase the Wind value if the difference between the set wind
angle and the actual wind angle is too big
• Decrease the Wind value if the actual wind angle is S-ing around
the set wind angle, or if the rudder activity is too high
The performance mode is indicated in the top left corner of the
autopilot page.
• HI-A: High response mode set automatically
Software setup| AP44 Operator Manual
37
Page 40

• LO-A: Low response mode set automatically
• HI-M: High response mode set manually
• LO-M: Low response mode set manually
Ú
Note: If no speed input is available the autopilot defaults to LO
steering parameters when engaging an automatic mode. This is
a safety feature to prevent oversteering
Sea state filter (AC12N/AC42N)
This filter is used to reduce rudder activity and autopilot sensitivity
in rough weather.
• OFF: Sea state filter is disabled. This is the default setting.
• AUTO: Reduces rudder activity and autopilot sensitivity in rough
weather by an adaptive process. The AUTO setting is
recommended if you want to use the sea state filter.
• MANUAL: Linked to the steering response control settings
described previously. It may be used to manually find the
optimum combination of course keeping and low rudder activity
in rough but steady sea conditions.
Sailing (AC12N/AC42N)
Ú
Note: Sailing parameters are only available when the boat type
is set to Sail.
• Tack time: Controls the rate of turn (tack time) when performing
a tack in wind mode.
• Tack angle: Controls the angle that the boat will tack to between
50º - 150º in AUTO mode
• Wind mode: Select what wind function the autopilot will use
when in wind mode
-
Auto:
If AWA is ≤60º: Wind mode will use AWA
If AWA is >60º: Wind mode will use TWA
- Apparent
- True
• VMG optimizing: Optimize the VMG to wind. The function will be
active for 5–10 minutes after a new wind angle has been set and
only when beating.
38
Software setup| AP44 Operator Manual
Page 41

• Layline steering: When enabled the Cross Track Error (XTE) from
the navigator will keep the boat on the track line. If the XTE from
the navigator exceeds 0.15 Nm, the autopilot will calculate the
layline and track towards the waypoint.
Automatic steering (AC12N/AC42N)
This option allows for manually changing parameters that were set
during the commissioning of the autopilot computer. For more
details of the settings, refer to the separate documentation for the
autopilot computer.
• Transition speed: This is the speed at which the autopilot will
automatically change the steering parameter set from HI to LO
parameters, or vice versa. On power boats it is recommended to
set the Transition speed to a speed that represents the speed
where the hull begins to plane or the speed where you change
from slow to cruising speed
On sailboats the Transition speed should be set to 3-4 knots to
give the best response in a tack
• High/Low
-
Rudder gain: This parameter determines the ratio between
commanded rudder and the heading error. The higher rudder
value the more rudder is applied. If the value is too small it will
take a long time to compensate for a heading error, and the
autopilot will fail to keep a steady course. If the value is set too
high the overshoot will increase and the steering will be
unstable.
- Counter rudder: Relation between change in heading error and
applied rudder. Higher counter rudder will reduce applied
rudder faster when approaching the set heading
- Auto trim: Controls how aggressively the autopilot will apply
rudder to compensate for a constant heading offset, e.g. when
external forces such as wind or current affects the heading.
Lower autotrim will give faster elimination of a constant
heading offset
- Rate limit: The rate the vessel is turning in degrees per minute
• Minimum rudder: Some boats may have a tendency of not
responding to small rudder commands around the course
keeping position because of a small rudder, a rudder deadband,
Software setup| AP44 Operator Manual
39
Page 42

whirls/disturbance of the water-stream passing the rudder or it is
a single nozzle water jet boat. By manually adjusting the
minimum rudder function, the course keeping performance
might be improved on some boats. This will however increase
the rudder activity.
• Min wind angle starboard / Min wind angle port: This is the
minimum apparent wind angle that will keep the sails well
shaped and give an acceptable thrust. This parameter will vary
from boat to boat. The setting applies for the tack-prevent
function. It also applies when the autopilot is operating in
WindNAV mode. You can select different minimum wind angles
for port and starboard. The difference between port and
starboard will be taken into account when calculating the
Distance To Turn (DTT).
• Navigation change limit: Defines the limits for course change to
next waypoint in a route. If the course change is more than this
set limit, you are prompted to verify that the upcoming course
change is acceptable
System settings
Network
Sources
Data sources provide live data to the system.
The data may originate from modules internal to the unit (for
example internal GPS or sonar), or external modules connected to
the NMEA 2000 or via NMEA 0183 if available on the unit.
When a device is connected to more than one source providing the
same data, the user can choose the preferred source. Before
commencing with source selection make sure all external devices
and the NMEA 2000 backbone are connected and are turned on.
• Auto select: Looks for all sources connected to the device. If more
than one source is available for each data type, selection is made
from an internal priority list. This option is suitable for the
majority of installations.
40
Software setup| AP44 Operator Manual
Page 43

• Manual source selection: Manual selection is generally only
required where there is more than one source for the same data,
and the automatically selected source is not the one desired.
Device list
The Device list shows the devices that provide data. This may
include a module inside the unit, or any external NMEA 2000 device.
Selecting a device in this list will bring up additional details and
actions:
All devices allow allocation of an instance number in the configure
option. Set unique instance numbers on any identical devices on
the network to allow for the unit to distinguish between them. The
data option shows all data being output by the device. Some
devices will show additional options specific to the device.
Ú
Note: Setting the instance number on a 3rd party product is
typically not possible.
Diagnostics
The NMEA 2000 tab on the diagnostics page can provide
information useful for identifying an issue with the network.
Software setup| AP44 Operator Manual
41
Page 44

Ú
Note: The following information may not always indicate an
issue that can be simply resolved with minor adjustment to
network layout or connected devices and their activity on the
network. However, Rx and Tx errors are most likely indicating
issues with the physical network, which may be resolved by
correcting termination, reducing backbone or drop lengths, or
reducing the number of network nodes (devices).
Bus state
Simply indicates whether the bus is powered, but not necessarily
connected to any data sources. However, if bus shows as ‘off’, but
power is present along with an increasing error count, it is possible
that termination or cable topology is incorrect.
Rx Overflows
The unit received too many messages for its buffer before the
application could read them.
Rx Overruns
The unit contained too many messages for its buffer before the
driver could read them.
Rx/Tx Errors
These two numbers increase when there are error messages, and
decrease when messages are received successfully. These (unlike
the other values) are not a cumulative count. Under normal
operation these should be at 0. Values around 96 upwards indicate
a heavily error prone network. If these numbers go too high for a
given device, it will automatically drop off the bus.
Rx/Tx Messages
Shows actual traffic in and out of device.
Bus Load
A high value here indicates network is near full capacity. Some
devices automatically adjust rate of transmission, if network traffic is
heavy.
Fast Packet Errors
Cumulative counter of any fast packet error. This could be a missed
frame, or a frame out of sequence etc. NMEA 2000 PGNs are made
42
Software setup| AP44 Operator Manual
Page 45

of up to 32 frames. The entire message will be discarded when a
frame is missed.
Ú
Note: Rx and Tx Errors often indicate an issue with the physical
network, which may be resolved by correcting termination,
reducing backbone or drop lengths, or reducing the number of
network nodes (devices).
Network groups
The Network Group function is used to control parameter settings,
either globally or in groups of units. The function is used on larger
vessels where several units are connected to the network. By
assigning several units to the same group, a parameter update on
one unit will have the same effect on the rest of the group
members.
Units
Provides setup of units of measure used on various data types.
Decimal places
Defines number of decimals used for speed and sea temperature.
Key beeps
Controls the loudness of the beep sound when a key is pressed.
Default setting: Loud
Language
Controls the language used on this unit for panels, menus, and
dialogs. Changing the language causes the unit to restart.
Time
Controls the local time zone offset, and the format of the time and
date.
Display setup
Displays the Display setup dialog.
The following options are available:
Software setup| AP44 Operator Manual
43
Page 46

• Backlight level: Adjusts the backlight level from Min (10%) to Max
(100%) in 10% increments
-
When the Backlight level field is active, subsequent presses on
the backlight key adjusts backlight level in decrements of 30%
• Display group: Defines which network group the unit belongs to
• Night mode: Activates/deactivates the night mode color palette
• Night mode color: Sets the night mode color palette
• Invert day color: Changes the background color for the pages
from default black to white
• Sleep: Turns the backlight for screen and keys off to save power
Files
File management system. Used to browse the contents of the unit's
internal memory and the content of a device plugged into the unit's
USB port.
Simulate
Runs the display with simulated data. Use the simulator to become
familiar with your unit before using it on the water.
When activated, the simulator mode is indicated on the display.
Restore defaults
Allows you to select which settings are to be restored to their
original factory settings.
Global reset
Resets the source selection on all displays connected to the
network.
About
Displays copyright information, software version, and technical
information for this unit.
44
Software setup| AP44 Operator Manual
Page 47

Maintenance
Preventive maintenance
The unit does not contain any field serviceable components.
Therefore, the operator is required to perform only a very limited
amount of preventative maintenance.
It is recommended that you always fit the supplied protective sun
cover when the unit is not in use.
Cleaning the display unit
A proper cleaning cloth should be used to clean the screen, where
possible. Use plenty of water to dissolve and take away salt remains.
Crystalized salt may scratch the coating if using a damp cloth. Apply
minimal pressure to the screen.
Where marks on the screen cannot be removed by the cloth alone,
use a 50/50 mixture of warm water and isopropyl alcohol to clean
the screen. Avoid any contact with solvents (acetone, mineral
turpentine, etc.), or ammonia based cleaning products, as they may
damage the anti-glare layer or plastic bezel.
To prevent UV damage to the plastic bezel, it is recommended that
the sun cover be fitted when the unit is not in use for an extended
period.
Checking the connectors
The connectors should be checked by visual inspection only.
Push the connector plugs into the connector. If the connector plugs
are equipped with a lock, ensure that it is in the correct position.
Software update
The AP44 includes a USB port of the back of the units. You use this
port for software updates.
You can update the software for the AP44 unit itself and for NMEA
2000 sensors connected to the network from the AP44.
You can check the units software version from the About dialog.
7
Maintenance| AP44 Operator Manual
45
Page 48

The software version for connected NMEA 2000 sensors is available
in the Device list.
The latest software is available for download from our website:
www.simrad-yachting.com.
Software update for the unit
1. Download the latest software from our website: www.simrad-
yachting.com, and save it to a USB device
2. Insert the USB device to the AP44 unit, and restart the AP44 unit
-
The upgrade will now start automatically the upgrade
procedure for all units
3. Remove the USB device when the update is completed.
Warning: Do not remove the USB device until the
update is completed. Removing the USB device before
the update is completed may damage the unit.
46
Maintenance| AP44 Operator Manual
Page 49

Software update for remote devices
1. Download the latest software from our website: www.simrad-
yachting.com, and save it to a USB device
2. Insert the USB device to the AP44 unit
3. Start the File explorer, and select the update file on the USB
device
4. Start the update from the file details dialog
5. Remove the USB device when the update is completed.
Maintenance| AP44 Operator Manual
47
Page 50

Menu flow chart
The system includes a Settings menu, accessed by pressing the
MENU key. The Settings menu gives access to settings for the
sensors, the vessel, the autopilot computer and for the system.
Level 1 Level 2
Calibration Boat speed...
Wind...
Depth...
Heading...
Roll/Pitch...
Environment...
Rudder...
Advanced...
Damping Heading
Aparent wind
True wind
Boat speed
SOG
COG
Attitude Roll
Attitude Pitch
Tide
Trip log Trip 1...
Trip 2...
Log...
Alarms Alarm history...
Alarm settings...
Alarms enabled
Siren Enabled
8
48
Menu flow chart| AP44 Operator Manual
Page 51

Level 1 Level 2
Autopilot, NAC-2 and NAC-3
* Refer to the NAC-2/NAC-3
Commissioning manual
(988-11233-00n)
Steering
Sailing
Turn patterns
Installation *
Autopilot, AC12N, AC42N
and SG05
** Refer to the AC12N/AC42N
Installation manual
(988-10276-00n)
Response
Sea state filter
Sailing
Automatic steering
Turn patterns
Installation **
System Network
Units
Decimal places
Key beeps
Language
Time
Display Setup...
Files
Simulate
Restore defaults...
Global reset...
About
Menu flow chart| AP44 Operator Manual
49
Page 52

Technical specifications
Dimensions Refer to "Dimensional drawing" on
page 51
Weight 0.32 kg (0.7 lbs)
Power consumption(@ 13.5
V)
Backlight OFF 1.35 W (100 mA)
Backlight MAX 2.16 W (160 mA)
Network load 4 LEN
Color Black
Display
Size 4.1" (diagonal). 4:3 Aspect ratio
Type Transmissive TFT-LCD. White
LED backlight
Resolution 320 x 240 pixels
Illumination White for day mode. Red, green,
blue or white for night mode
Environmental protection
Waterproof rating IPx7
Humidity 100% RH
Temperature
Operating -25° to +65ºC (-13°F to +149 ºF)
Storage -40° to +85ºC (-40°F to +185 ºF)
9
50
Technical specifications| AP44 Operator Manual
Page 53

Dimensional drawing
118 mm (4.64")
115 mm (4.52")
8 mm
(0.31")
36.5 mm
(1.43")
28.5 mm
(1.12")
97.5 mm (3.83")
48.5 mm (1.91")
STBY
MODE AUTO
MENU
X
10
Dimensional drawing| AP44 Operator Manual
51
Page 54

Terms and abbreviations
This list shows terms and abbreviations used in the pages and in
dialogs in the AP44 system.
AIR TEMP Air temperature
AIS Automatic Identification System
AVG SPD Average speed
AWA Apparent wind angle
AWS Apparent wind speed
BSPD Boat speed
BTW Bearing to waypoint
BWW Bearing Waypoint To Waypoint
COG Course Over Ground
CTS Course To Steer
DGPS Differential Gps
DTW Distance to next waypoint
DSC Digital Selective Calling
EPFS Electronic Position Fixing System
EPIRB Emergency Position Indicating Radio Beacon
ETA Estimated Time Of Arrival
ETW Estimated time of arrival to next waypoint
GLONASS Global Orbiting Navigation Satellite System
GMDSS Global Maritime Distress And Safety System
GNSS Global Navigation Satellite System
GPS Global Positioning System
HDG Heading
Km Kilometer
KN Knots
LL DIST Layline distance
LL TIME Layline time
m Meters
11
52
Terms and abbreviations| AP44 Operator Manual
Page 55

MAX SPD Maximum speed
MIN Minimum
MOB Man Over Board
NM Nautical Mile
OPP HDG Heading on opposite tack
POS Position
RM Relative Motion
RNG Range
ROT Rate Of Turn
RTE Route
SAR Search And Rescue
SOG Speed Over Ground
SPD Speed
STBD Starboard
STW Speed Through Water
TCPA Time To Closest Point Of Approach
TGT Target
TIME LOC Local time
TM True Motion
TRK Track
TRK CRS Track course to next waypoint
TWA True wind angle
TWD True wind direction
TWS True wind speed
WOL Wheel Over Line
WOP Wheel Over Point
WPT Waypoint name
WPT BRG Bearing to waypoint
WPT DIST Distance to waypoint
XTE Cross track error
Terms and abbreviations| AP44 Operator Manual
53
Page 56

Supported data
NMEA 2000 PGN (transmit)
59904 ISO Request
60928 ISO Address Claim
126208 ISO Command Group Function
126996 Product Info
127258 Magnetic Variation
NMEA 2000 PGN (receive)
59392 ISO Acknowledgement
59904 ISO Request
60928 ISO Address Claim
126208 ISO Command Group Function
126992 System Time
126996 Product Info
127237 Heading/Track Control
127245 Rudder
127250 Vessel Heading
127251 Rate of Turn
127257 Attitude
127258 Magnetic Variation
128259 Speed, Water referenced
128267 Water Depth
128275 Distance Log
129025 Position, Rapid Update
129026 COG & SOG, Rapid Update
129029 GNSS Position Data
129033 Time & Date
12
54
Supported data| AP44 Operator Manual
Page 57

129283 Cross Track Error
129284 Navigation Data
129539 GNSS DOPs
129283 Cross Track Error
129284 Navigation Data
130074 Route and WP Service - WP List - WP Name & Position
130306 Wind Data
130576 Small Craft Status
130577 Direction Data
Supported data| AP44 Operator Manual
55
Page 58

56
Supported data| AP44 Operator Manual
Page 59

Index
A
Alarms
Type of messages
25
Autopilot
Dodging 17
Modes 13
D
Damping 33
Device list 41
Diagnostics 41
K
Key beeps 43
L
Language 43
M
Manual
About 4
Version 4
P
Preventive maintenance 45
S
Settings
Unit of measure 43
System Settings
Key beeps 43
Language 43
Time 43
T
Time 43
U
Units of measure, setting
43
W
Warranty 3
Page 60

*988-11189-002*
 Loading...
Loading...