

Page 1
www.simrad-yachting.com A brand by Navico - Leader in Marine Electronics
Installation manual
Simrad AP24/AP28 Autopilots with
AC12/AC42 Autopilot Computers
English
Page 2
Installation manual
Simrad AP24/AP28 Autopilots with
AC12/AC42 Autopilot Computers
English
Document no: 20222568
Revision: D
Date: January 2009
The original language for this document is English. In the
event of any discrepancy between translated versions
and the English version of this document, the English
document will be the official version.
To the best of our knowledge, the content in this
publication was correct at the time of printing.
As we are continuously improving our products we retain
the right to make changes to the product and the
documentation at any time. Updated manuals are
available from our website www.simrad-yachting.com,
and are free to download.
© Copyright 2009 by Navico Holding AS.
Page 3
2 | AC12/AC42 Installation manual
About this manual
Rev. A 19.10.07 First issue
Rev. B 03.07.08 Corrections on system drawings.
Spare parts list updated.
Rev. C 10.11.08 Correction on board terminals
page 13.
Rev. D 27.01.09 Correction page 13.
This manual is intended as a reference guide for installing
and maintaining the Simrad AC12 and AC42 autopilot
computers and other components in an autopilot system.
Please take time to read this manual to get a thorough
understanding of the system components and their
relationship to a complete autopilot system.
Important text that requires special attention from the
reader is emphasized as follows:
Used to draw the reader’s attention to a comment or
some important information.
Used when it is necessary to warn personnel that a
risk of damage to the equipment or hazard exists if
care is not exercised.
Page 4

AC12/AC42 Installation manual | 3
Content
1 System description ..................................... 5
1.1 General ..................................................5
1.2 How to use this manual.............................5
1.3 Software record.......................................6
2 Installation................................................. 7
2.1 Installation checklist.................................7
2.2 Unpacking and handling............................7
2.3 Determine system configuration.................8
2.4 Autopilot system layout.............................9
2.5 Autopilot computer installation................. 11
2.6 Rudder Feedback installation ................... 14
2.7 LF3000 Linear Feedback.......................... 16
2.8 Drive unit installation..............................18
2.9 AP24 and AP28 Control unit installation..... 20
2.10 FC40 and RC42 Compass installation....... 23
2.11 R3000X Remote Control installation ........ 24
2.12 JS10 Joystick.......................................24
2.13 S35 NFU Lever installation..................... 25
2.14 Interfacing .......................................... 25
2.15 SimNet ...............................................26
2.16 External Alarm.....................................30
3 Spare Parts List ........................................ 31
Page 5

4 | AC12/AC42 Installation manual
4 Technical specifications............................ 35
4.1 AP24 Autopilot System............................35
4.2 AP24 Control Unit...................................36
4.3 AP28 Control Unit...................................38
4.4 Autopilot Computers............................... 39
4.5 FC40 Fluxgate Compass.......................... 41
4.6 RC42 Rate Compass...............................42
4.7 RF300 Rudder Feedback.......................... 43
4.8 RF25 Rudder Feedback ...........................45
4.9 R3000X Remote Control.......................... 45
4.10 JS10 Joystick.......................................46
4.11 SimNet ...............................................47
4.12 IP protection........................................ 47
4.13 AT10 SimNet/NMEA0183 converter.........48
5 Index........................................................ 51
Page 6

System description | 5
1 System description
1.1 General
The autopilot computer is the main unit in the AP24 and
AP28 autopilot systems. It contains the steering
computer and electronics for the drive unit motor and
clutch and provides interface to other system
components. Two models, AC12 (8/16 A motor current)
and AC42 (30/50 A motor current) are available.
It communicates on the proprietary SimNet data and
control network to establish a reliable digital
communication and power distribution between the units
in the autopilot system as well as other Simrad products.
SimNet provides high speed data transfer and control of
Simrad products integrated in a total steering and
navigation system.
1.2 How to use this manual
This manual is intended as a reference guide for installing
and maintaining the Simrad AC12 and AC42 autopilot
computers and other components in an autopilot system.
Please take time to read this manual to get a thorough
understanding of the system components and their
relationship to a complete autopilot system.
Other documentation material that is provided with your
system includes an operator manual which includes the
setup instructions for the system, a control unit
installation guide and a warranty card. The warranty card
must be filled out by the authorized dealer that
performed the installation.
Page 7
6 | System description
1.3 Software record
Control units
When the system is switched on, a status display shows
the serial number and software version for the control
unit.
The shown readout is only an example!
Autopilot computers
Serial number and software version for autopilot
computers and other SimNet sources can be found under
the control unit User setup menu. Refer to Manual source
selection in the autopilot operator manual.
1.4 Exchange of software program
For upgrading the software of Simrad products/devices,
refer to Manual for Software Upgrade Tool, part no.
20222956.
Page 8

Installation | 7
2 Installation
An autopilot system includes several units that need to
be mounted in different locations on the boat, and also
need to interface with at least three different systems on
the boat:
• The boat's steering system
• The boats electrical system (input power)
• Other equipment on board (SimNet interfacing)
In addition, the advanced capabilities of the system
require the installer to perform a series of settings and
tests to verify proper operation of the system, refer to
the check list below.
2.1 Installation checklist
1. Determine the system configuration you are
installing (Page 8)
2. Perform the hardware i
nstallation (Page 11)
3. Connect Si
mNet devices to SimNet (page 26)
4. Perform S
et-up (refer to Operator manual)
5. Test Autopilot Operation at Sea (refer to Sea Trial
instructions in the Operator manual)
2.2 Unpacking and handling
Care should be taken when unpacking and handling the
equipment. A visual inspection should be made to see
that the equipment has not been damaged during
shipment and that all components and parts are present
according to the packing list.
An autopilot system will include:
• Control unit (AP24 or AP28) with accessories
− Installation accessories
− Operator manual
Page 9

8 | Installation
• Autopilot computer (AC12 or AC42) with accessories
− SimNet cable 5,5 m (18’)
− Installation accessories
− AC12/AC42 Installation Manual
• Compass (FC40 or RC42) with 5,5 m (18') SimNet
cable attached
• Feedback unit (RF300 or RF25) with transmission rod
and cable attached.
• Appropriate drive unit for the installation (unless the
autopilot is going to operate an existing drive unit or
solenoids).
• Optional equipment that may have been ordered for
the installation.
2.3 Determine system configuration
It is important to become familiar with the configuration
of the system prior to beginning the installation. An
autopilot basic single station system is shown in Figure
2-1 and a system l
ayout with options is shown in Figure
2-2
Pl
an your cabling and configure the SimNet network in
accordance with chapter 2.15 on page 26. Pay particular
attenti
on to the autopilot computer/drive unit
combinations.
As most of the units are communicating on a common
network (SimNet) with identical connectors, the
installation is simple. Try to mount the units within the
standard cable length supplied with each unit. SimNet
cables are available from your distributor (see page 33)
for connecti
on to other SimNet devices and cable
extension.
1 On boats powered by outboards or stern drives it
may be difficult to install a rudder feedback unit
(Refer to RF300, RF25 or LF3000 in this manual).
Use of the Virtual Rudder Feedback, VRF™,
algorithms in the software may then be preferred
as this requires no installation of a rudder feedback
Page 10
Installation | 9
unit. The VRF can be used on boats up to 40 ft.
2 The VRF technology requires a Simrad rate
compass (RC42) for heading information to the
autopilot system.
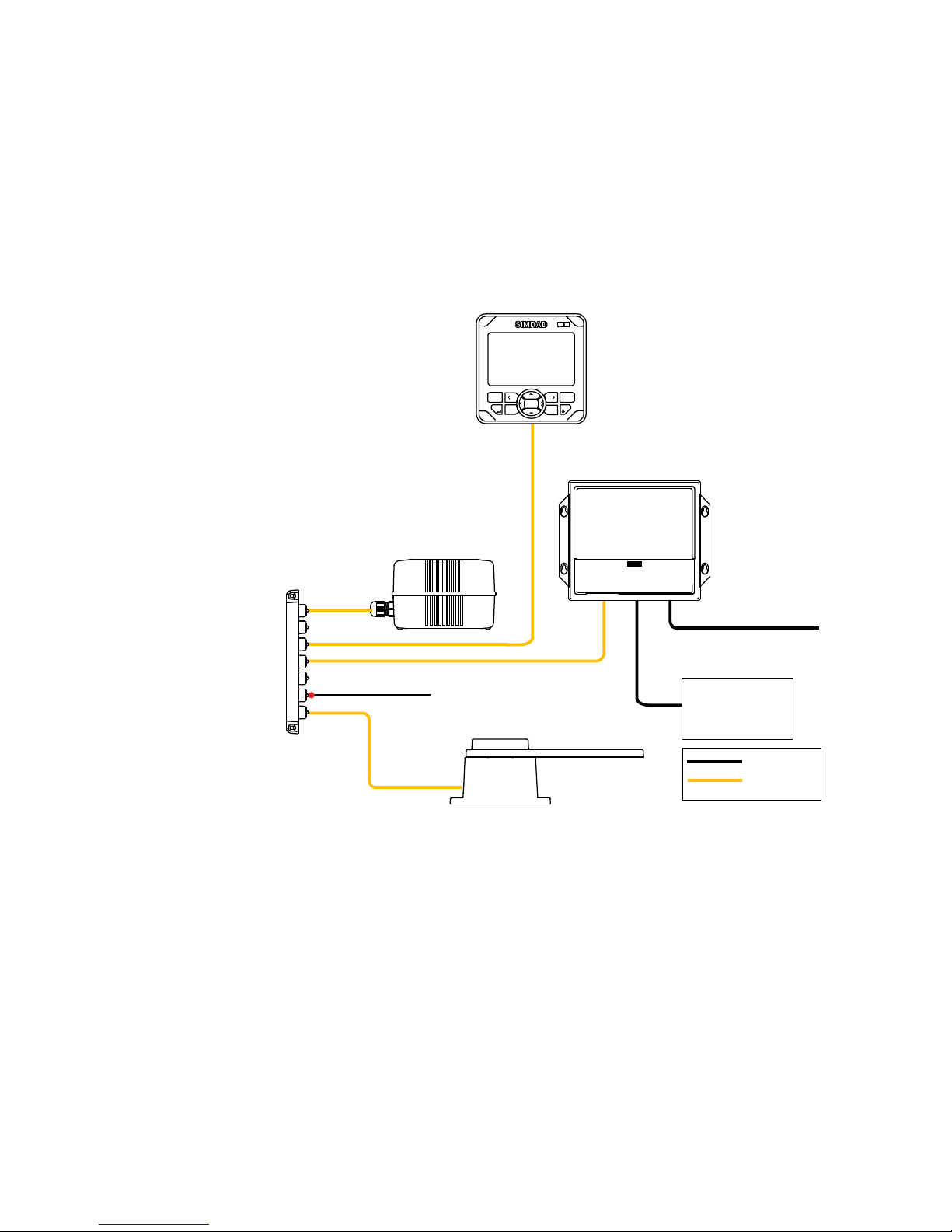
2.4 Autopilot system layout
12/24V Motor supply
Drive unit
AP24
Control Unit
Multijoiner
Compass
5,5 m
5,5 m
5,5 m
24
AP
MODE
MENU
AUTO
STBY
TURN
1010
PWR
1
1
RF25 Rudder Feedback
12V SimNet supply
(SimNet cable with terminator)
Autopilot
Computer
Non SimNet
SimNet
Figure 2-1 AP24 basic system layout
Page 11
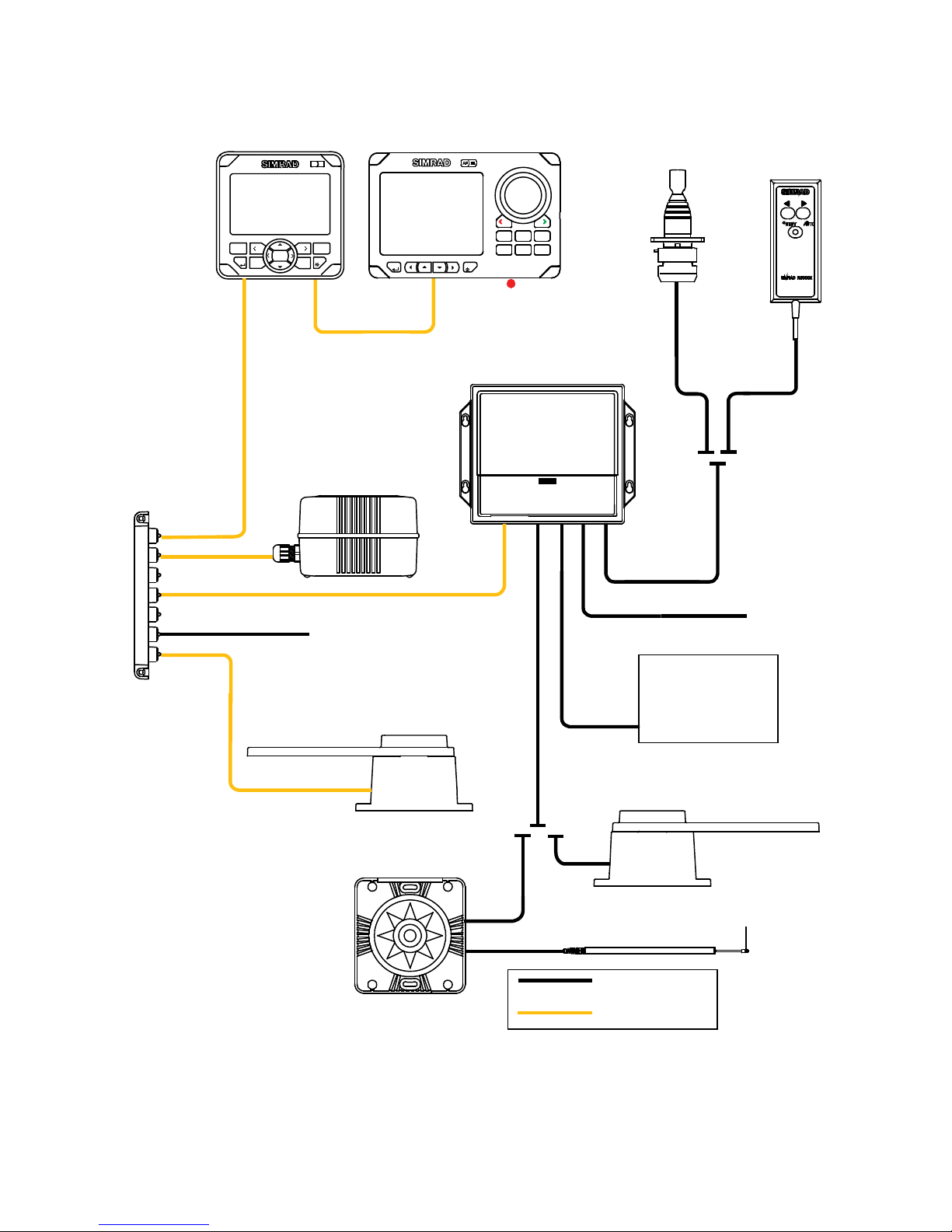
10 | Installation
Drive unit
Non SimNet
SimNet
AP24
Control Unit
AP28
Control Unit
JS10
Joystick
R3000
X
Remote
Control
RF300 Rudder Feedback Unit (optional)
LF3000 Linear Feedback (optional)
LFI3000
Interface
(optional)
RF25 Rudder Feedback Unit
12/24V Motor supply
24AP
MODE
MENU
AUTO
STBY
TURN
10
10
PWR
1
1
Autopilot Computer
Multijoiner
Compass
5,5 m
5,5 m
5,5 m
12V SimNet supply
(SimNet cable with terminator)
PWR
NAV WIN DTURN
STBY
DRIFT
NO-
AUTO
MENU
Termination
plug
Figure 2-2 AP24 system layout with options
Page 12
Installation | 11
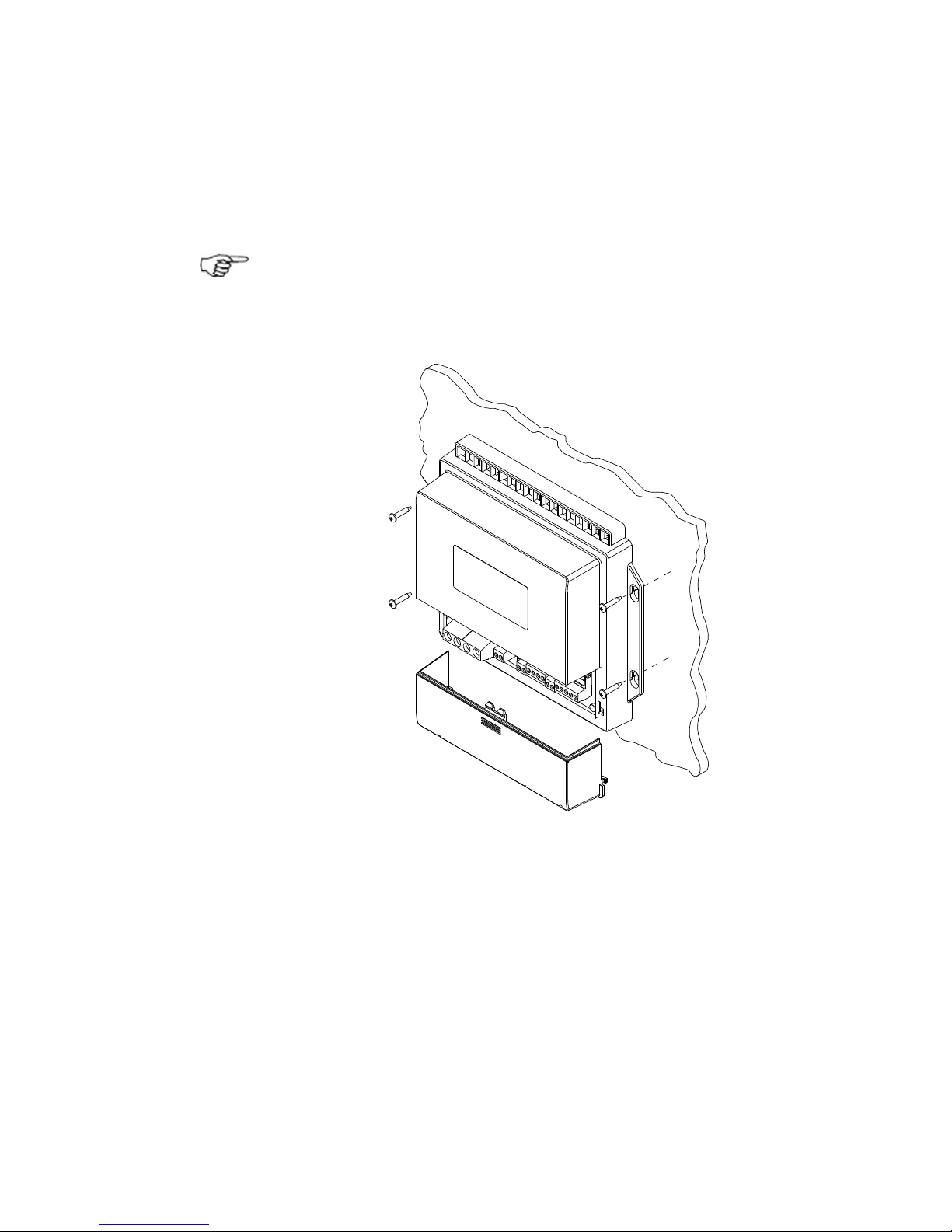
2.5 Autopilot computer installation
The autopilot computer is designed to operate in a
location with ambient temperatures below +55°C
(+130°F).
The autopilot computer units (AC12 and AC42) should be
mounted vertically in a place between the control unit and
the drive unit. The unit should not be exposed to dripping
or splashing water.
Figure 2-3 Autopilot computer mounting
Cabling
Use only shielded cables and ready made SimNet cables
and accessories. This includes motor supply, drive unit
cables and, if necessary, extension of the optional rudder
feedback cable(s). The clutch/bypass cable and the
solenoid cable should be 1,5 mm
2
(AWG14).
The motor supply cable and the drive unit motor cable
should have sufficient wire gauge. This will minimize
voltage drop and allow the drive unit to operate at full
power.
Page 13

12 | Installation
Refer to the table below for recommended cable sizes.
Cable length Drive unit voltage
1. Breaker panel to autopilot computer. 12 V 24 V
2. Autopilot computer to drive unit motor
(Length refers to each of the two cables)
AWG mm
2
AWG mm2
Up to 3 m (10 ft.) 12 2,5 12 2,5
Up to 6 m (20 ft.) 10 4 10 2,5
Up to 10 m (32 ft.) 8 6 10 4
Up to 16 m (52 ft.) 6 10 8 6
Remove the bottom cover to get access to the plug-in
terminals.
Provide sufficient wire length so that the plug-in
terminals can be easily connected and disconnected.
Pull out each terminal before connecting the wires.
Remove all strands before putting back the terminal
cover.
Plug-in terminal
Cable strap
Cable retainer
Ground terminal
Fuse
Page 14
Installation | 13
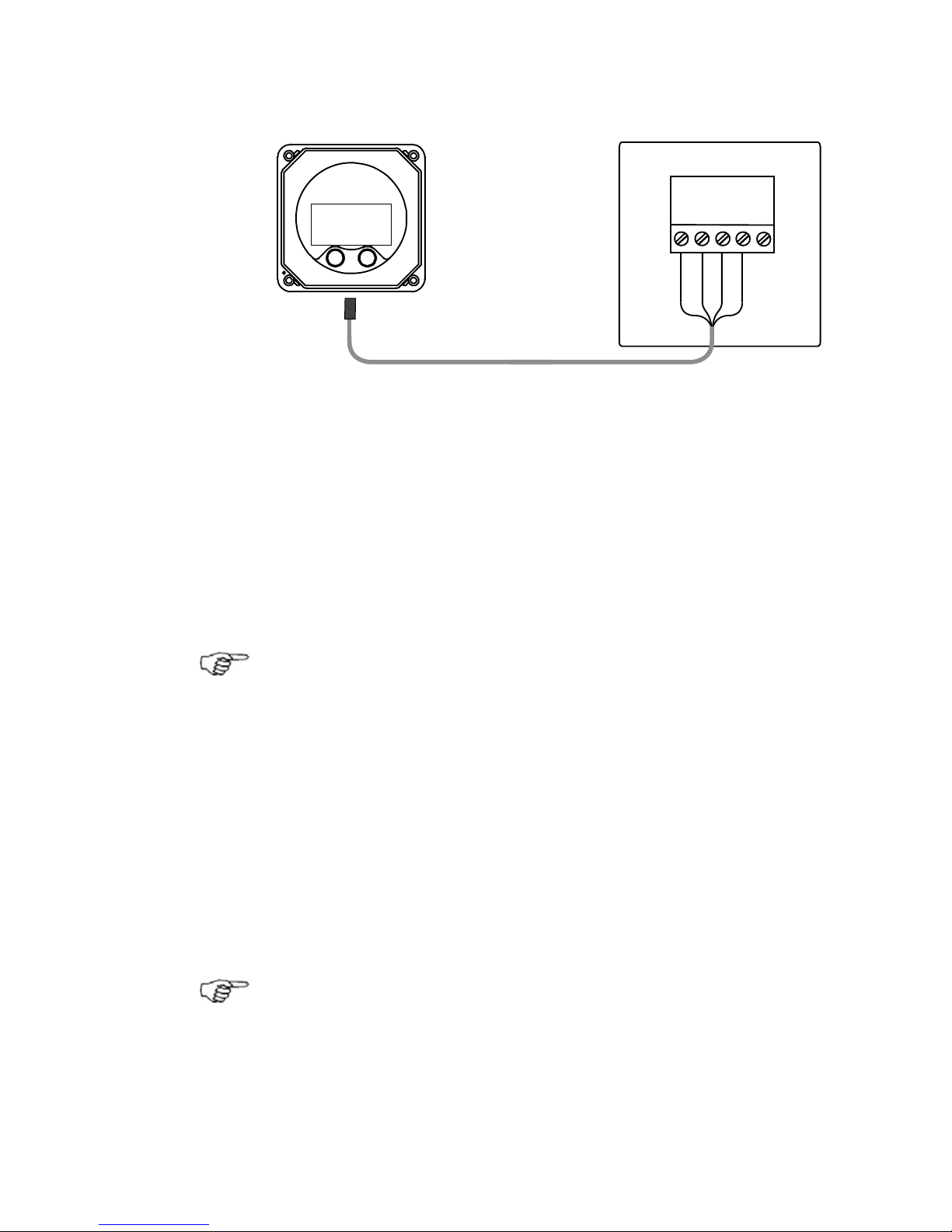
A SimNet cable is supplied with the autopilot computer. It
has a connector only at the control unit end. The other
end is prepared for screw terminals.
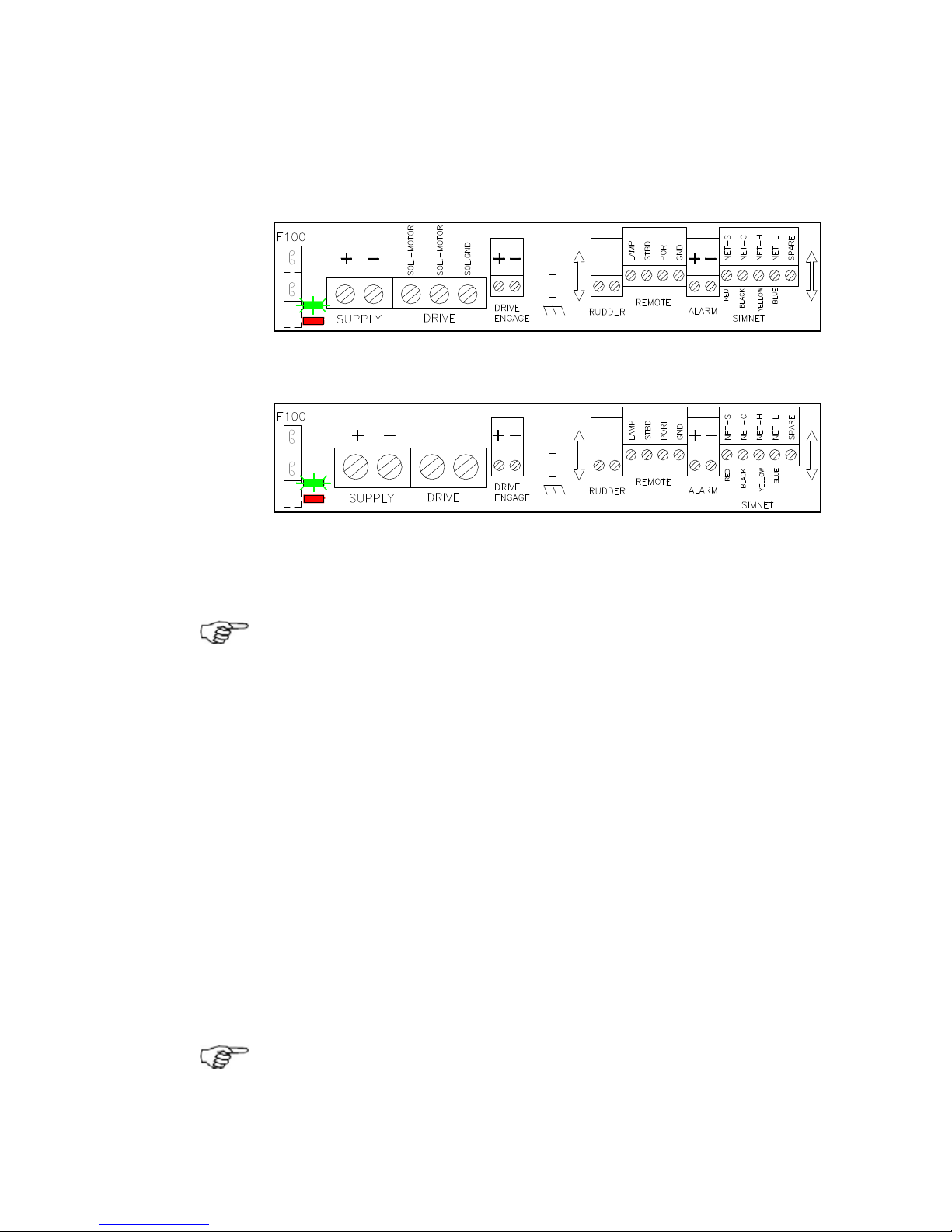
AC12 Board Terminals
AC42 Board Terminals
Polarity protection
The fuse located in the lower left corner of the AC board
is not put in its final position when supplied from factory.
When the motor supply is connected to the terminal, a
diode will light. If the light is red, you have to swap the
wires. When the light is green, the polarity is correct.
Switch off the supply voltage and put the fuse into
correct position.
Radio Frequency Interference (RFI)
The autopilot system has excellent RFI protection as per
EMC Directive 2004/108/EC.
SimNet cables and other signal cables (feedback, NMEA)
should not be run in parallel with other cables carrying RF
or high current, such as VHF and SSB transmitters,
battery chargers/ generators, winches and thrusters.
If problems occur with RFI, make provisions to connect
the supply cable shield to the fast-on ground terminal.
This terminal must also be connected to the hull bonding.
Page 15
14 | Installation
SIMNET
NET-S
NET-C
NET-H
NET-L
SPARE
Autopilot Computer
AP24 Control Unit
SimNet
RED
BLACK
YELLO
W
BLUE
J1
J2
Figure 2-4 Control unit connection
J1 and J2 are the SimNet connectors.
2.6 Rudder feedback installation
The RF300 and RF25 Rudder feedback units mount close
to the rudder, and are mechanically linked to the rudder
tiller arm or rudder quadrant. Refer to Figure 2-5 for the
recommended mounti
ng arrangement.
Do not remove the transmitter lever from the feedback
unit. The unit is factory adjusted and need no further
adjustment at installation than described below.
Turn the helm wheel to set the rudder tiller arm to
approximate centre position.
Set the mounting location to be in accordance with Figure
2-5.
The centre of the feedback unit should be in line
with the centre of the rudder post. Mount the feedback
unit to a suitable platform using the screws provided. If
necessary, add blocking material under the feedback unit
to adjust the height of the transmitter lever to be level
with the rudder tiller arm.
Due to space limitations, it may be necessary to cut the
length of the transmitter rod to move the feedback unit
closer to the rudder post.
Rotate the feedback transmitter lever to centre position.
(Use the alignment mark to line up the transmitter lever
to be opposite the cable entry into the feedback).
Page 16
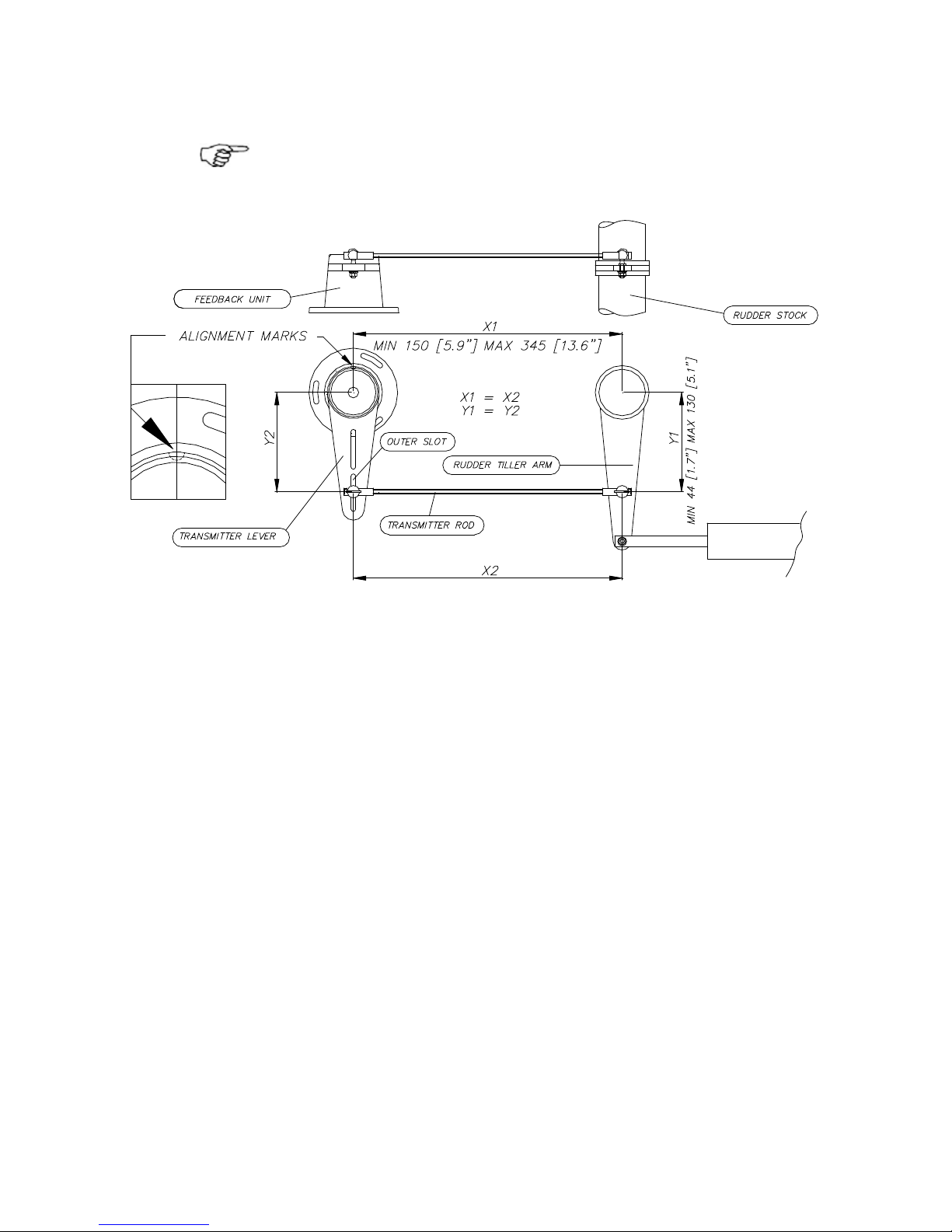
Installation | 15
Carefully observe the alignment marks. A rudder
feedback alarm may be the result if the alignment
instructions as per Figure 2-5 are neglected.
Figure 2-5 Rudder feedback mounting (019356)
Note that the transmitter lever has two slots for the
transmitter link. The slots enable maximum flexibility to
provide the 1:1 mechanical linkage relationship. As a
starting point, set the transmitter rod to the inner limit of
the outer slot if possible. (Refer to Figure 2-5). Drill and
tap the rudder ti
ller arm so that the Y1 dimension is
equal to the Y2 dimension (Use 4.2 mm drill and 5 mm
tap). Attach the ball joint to the tiller arm, and connect
the transmitter rod to the ball joint at the rudder tiller
arm.
Tighten the mounting screws for both the feedback unit
and the transmitter rod ball joint.
Observe the feedback unit while someone turns the helm
wheel through the complete travel H.O. to H.O. and
verify that the mechanical linkage moves freely.
Page 17
16 | Installation
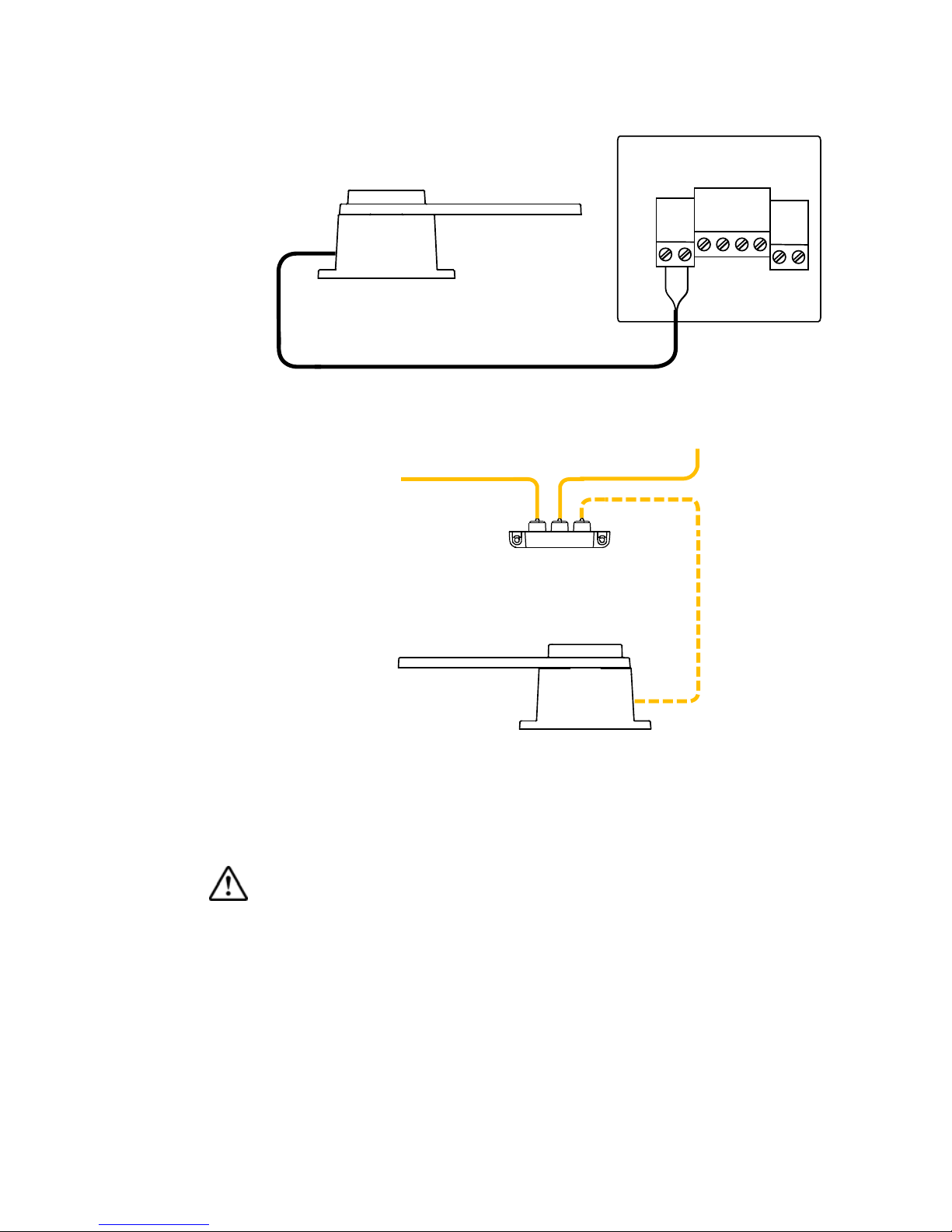
Autopilot Computer
*
Non polarized
(color independent)
Optional RF300 Rudder Feedback
*
RUDDER
Figure 2-6 RF300 connection
RF25 Rudder Feedback Unit
8-16V SimNet supply
SimNet
T-joiner
Figure 2-7 RF25 connection to SimNet
2.7 LF3000 Linear Feedback
The rod of the LF3000 is not locked in place in the
cylinder. Pay attention as it may slip out of its
housing and end up on the seabed.
The LF3000 is a waterproof feedback unit. It has a 300
mm (11,8") stroke and comes with a spec ial moun ting
bracket which secures the LF3000 to the cylinder of the
existing outboard drive unit.
The 8,5 m (28') cable is terminated in the LFI3000 Mk2
Linear Feedback Interface according to Figure 2-9.
T
he mounting hardware prov ided is made t o int erface with
Teleflex HC5340 cylinder s and Hyn autic K 7 and K1 0
Page 18

Installation | 17
Cylinders. The hardware may not be appr opr iate fo r ot her
systems.
Center the drives. Loosely secure the LF3000 to the
supplied mounting bra cket, a cro ss t he ce nte r of th e drive
unit cylinder. Either cylinder ma y be used if there is a d ual
set up. You may mount the feedback in either direction,
i.e. the shaft of LF3000 may point to port or starboard.
Loosen the end bolt (a) used to secure the cylinder to the
drive unit mount. Insert the rod retaining assembly (b)
and retighten the bolt. Secure the feedback rod to the
retainer plate using the two washers and the cap nut
provided. Adjust the location of the LF3000 Linear
Feedback to allow full travel of the hydraulic cylinder
without causing the retainer plate to hit the end of the
cylinder. Check that the outboard motor can be tilted
freely. Tighten all nuts and the mounting bracket.
Turn the helm slowly by hand to the stop on either side,
check that the rod does not bind up in any direction. Make
a “drip nose” (c) on the cable to the unit and clamp the
cable to allow full eng ine move me nt to port and st arbo ard .
LF3000
BRACKET
CYLINDER
(END VIEW)
RETAINER PLATE
LOCK NUT
FLAT WASHERS (2)
LF3000
LINEAR FEEDBACK
ALLEN HEX SCREWS (2)
FLAT WASHERS (2)
MOUNTING BRACKET
CLAMPS (2 HALVES)
Figure 2-8 LF3000 mounting
a
b
c
Page 19

18 | Installation
Autopilot Computer
RUDDER
*
Non polarized
(color independent)
LFI3000 Mk2
Interface
LF3000
Linear
Feedback
*
TB2TB1
WHITE
BROWN
YELLOW
GREEN
BROWN
WHITE
Figure 2-9 LF3000/LFI3000 Mk2 connections
2.8 Drive unit installation
The relations between drive units, drive unit voltage,
autopilot computer, drive performance and interface to
the steering gear are shown in the tables below.
Refer to the connecting diagram for the different drive
units on page 19 onwards.
Instal
lation instruction for the drive units are found in the
manual for the individual units.
The maximum drive current capability of the AC12 and
AC42 autopilot computers are different. Use the table
below as reference and observe the notes on next page.
HYDRAULIC PUMPS
RAM CAPACITY
MODEL MOTOR
VOLTS
AUTOPILOT
COMPU-
TER
MIN
cm
3
(cu. in.)
MAX
cm
3
(cu. in.)
FLOW RATE
AT 10 bar
cm3/min
(cu. in/min)
MAX
PRESSURE
bar
PWR.
CONSUM-
PTION
RPU80 12V AC12 80 (4,9) 250 (15,2)
800 (49) 50 2,5-6 A
RPU160 12V AC42 160 (9,8) 550 (33,5)
1600 (98) 60 3-10 A
RPU300 12V AC42 290 (17,7) 960 (58,5) 3000 (183) 60 5-25 A
RPU300 24V AC42 290 (17,7) 960 (58,5) 3000 (183) 60 2,5-12 A
Page 20

Installation | 19
LINEAR DRIVE UNITS
MODEL MOTOR
VOLTS
AUTO-
PILOT
COM-
PUTER
MAX
STROKE
mm (in.)
PEAK
THRUST
kg (lb.)
MAX
RUDDER
TORQUE
Nm (lb.in.)
HARD-OVER
TIME
sec.
(30% load)
PWR.
CON-
SUMP.
TILLER
ARM
mm
(in.)
DD15 12V AC42 – – 150 Kgm 2 A –
HLD350 12V AC12 200 (7,9)
350
(770)
610
(5400)
12 2,5-8 A
175
(6,9)
HLD2000L 12V AC42 340 (13,4)
500
(1100)
1460 (12850)
19 3-10 A
298
(11,7)
HLD2000D 24V AC42 200 (7,9)
1050
(2310)
1800
(15900)
11 3-10 A
175
(6,9)
HLD2000LD 24V AC42 340 (13,4)
1050
(2310)
3180
(28000)
19 3-10 A
298
(11,7)
MSD50* 12V AC12 190 (7,5)
60
(132)
– 15 0,8-2 A
–
Steering gear interface: Connects to quadrant or tiller.
* For stern drive power assisted steering only.
1. For 12V drive units the motor voltage is stepped
down by the autopilot computer when operating from
24V supply.
2. The specified autopilot computer is necessary to
achieve max drive unit capacity.
3. Recommended operational thrust or torque is 70% of
listed peak value.
4. Typical average power consumption is 40% of listed
maximum value.
Connecting a reversible pump
+
DRIVE
DRIVE
ENGAGE
SOL.-MOTOR
SOL.-MOTOR
SOL.GND
AC12 Autopilot Computer
SIMRAD Reversible Pump
Figure 2-10 Connecting a reversible pump
Page 21

20 | Installation
Connecting a hydraulic linear drive
+
DRIVE
DRIVE
ENGAGE
SOL.-MOTOR
SOL.-MOTOR
SOL.GND
AC12 Autopilot ComputerHydraulic Linear Drive
Figure 2-11 Connecting a hydr aulic linear drive
Connecting a solenoid valve
Sol.
Sol. gnd.
Sol.
DRIVE
SOL.-MOTOR
SOL.-MOTOR
SOL.GND
AC12 Autopilot Computer
Solenoid Valve
Figure 2-12 Connecting a solenoid valve
2.9 AP24 and AP28 Control unit
installation
Avoid mounting the control unit(s) where it is easily
exposed to sunlight, as this will shorten the lifetime of
the display.
Do not install the control unit where moisture is
present at the rear. It may cause damage by
entering the breathing hole or by coming into
contact with the electrical connectors.
Page 22

Installation | 21
Panel mounting
The mounting surface must be flat and even to within 0.5
mm.
• Drill the 4 mounting holes and make a panel cut-out
according to supplied template.
• Connect the SimNet cable(s) to the control unit
connector(s)
• To daisy chain units remove the blocking plug with a
pair of pliers.
• Use the supplied 19 mm screws to fasten the control
unit to the panel.
• Apply the front panel corners.
Do not over-tighten the mounting screws!
Figure 2-13 AP24 Panel mounting
Optional bracket mounting
Figure 2-14 AP24 Bracket mounting
Page 23

22 | Installation
Figure 2-15 AP28 Panel mounting
Figure 2-16 AP28 Bracket mounting
Page 24

Installation | 23
2.10 FC40 and RC42 Compass
installation
Figure 2-17 Mounting
The heading sensor is the
most important part of
the autopilot system and great care should be taken
when deciding the mounting location. As the heading is
displayed on the control unit, the heading sensor can be
mounted at a remote location.
The compass can be mounted on deck or bulkhead,
athwart ship or along ship. Some of the products
connected to the SimNet network may have a heading
offset feature. This will compensate for the mechanical
offsets that may be a result of the selected location and
orientation of the compass.
If the connected products have no offset feature, the
compass must be deck or bulkhead mounted athwart ship
with the cable gland pointing back.
Select a location that provides a solid mounting place free
from vibration, and as close to the vessel's centre of roll
and pitch as possible, i.e. close to the water line. It
should be as far as possible from disturbing magnetic
interference e.g. engines (min. 2 meters), engine igniti on
cables, other large metal objects and particularly the
autopilot drive unit. On steel hull boats it should be
mounted 0,75-1 m above the wheel house on a non
magnetic stand.
Page 25

24 | Installation
The compass face plate is the TOP. Never mount it upside
down! Level the sensor as close to horizontal as possible.
Use the supplied mounting kit and drill holes through the
centre of the slots.
Connect the compass to an available SimNet connector in
the SimNet “backbone”.
2.11 R3000X Remote Control
installation
R3000X should be mounted in the supplied bracket that
can be fixed by four mounting screws. The unit is
weather proof and can be mounted outdoor.
Autopilot ComputerR3000X
REMOTE
LAMP
YELLOW
GRE
EN
RED
BLUE
STBD
PORT
GND
Figure 2-18 R3000X connection
2.12 JS10 Joystick
Refer to separate installation instructions supplied with
the JS10 Joystick.
Page 26

Installation | 25
2.13 S35 NFU Lever installation
The unit is mounted to a bulkhead or panel by two screws
from the front. The cable is connected to the autopilot
computer according to Figure 2-19. Interchange the Port
and Stbd wi
res to the screw terminals if necessary to
make the direction of the lever movement coincide with
the direction of the rudder movement.
Autopilot Computer
S35
Steering
Lever
REMOTE
LAMP
Yellow
Brn/Wht
Pnk/Gry
Green
STBD
PORT
GND
Figure 2-19 S35 connections
The unit is opened by removing the three screws on the
back cover. Inside are two sets of micro-switches, a
printed circuit board with a plug-in terminal and a jumper
strap.
2.14 Interfacing
With the autopilot system there are several possibiliti es
to connect to other equipment for data collection and
exchange:
1 Use SimNet
2 Use SimNet via AT10 Universal SimNet/NMEA
Converter
3 Connect to a NMEA2000 network via adapter
(drop) cable, part no. 24005729.
The different connecting diagrams on the following pages
illustrate the interface possibilities of the autopilots.
Page 27

26 | Installation
2.15 SimNet
The SimNet cable system with very small plugs in both
ends makes it easy to run the cables, only 10 mm (3/8”)
holes are required through panels and bulkheads. The
SimNet accessory program contains the necessary items
to make a successful installation. Refer to SimNet
cables and accessories, page 33.
SimNet network cables
A SimNet unit has one or two yellow SimNet connectors.
There are no dedicated “in” or “out” connectors. Route
the SimNet cables with Figure 2-20, Figure 2-21 or Figure
2-22 as a gui
deline. Select cables and accessories from
the SimNet accessory program. Connect products with
two SimNet connectors in a daisy chain and use drop
cables and T-joiners when required. For cable extension
in-line cable joiners are available. Total length of SimNet
cable installed in a system should not exceed 150 meter
(500’).
If you plan to extend your SimNet system in the future it
may be advantageous to prepare for it by adding a few Tjoiners in central locations. The T-joiners provide easy
access to the network and can be replaced with a new
product, or the new product can be connected via a drop
cable.
The connectors are weather proof according to IP66,
when properly installed. All unused SimNet connectors
must be fitted with the plastic cap to protect them against
dirt and moisture.
SimNet power and termination
The following rules should be observed when installing
SimNet.
1 It must have a separate 12VDC power from the
battery bus or the circuit breaker board to reduce
interference
2 It must not be connected to the supply voltage
terminals on the Autopilot Computer.
Page 28

Installation | 27
3 It will power a SimNet compatible instrument
system. Hence SimNet to other equipment can be
supplied via the autopilot, see Figure 2-20, Figure
2-21 and Figure 2-22.
4 S
imNet must be properly terminated, i.e. unless it
is a small system (see Figure 2-20) there must be
termi
nations at each end of the Simrad backbone.
The SimNet network has to be terminated according to
the number and type of products connected.
In a small system consisting of maximum 5 SimNet
products and a total length of 5 m SimNet backbone
cable you only need the SimNet power cable with built in
termination (red disc on cable plug).
For additional information about SimNet ask for the
separate SimNet Manual.
AP24
IS20 Graphic
12V SimNet supply
T-joiner
T-joiner
5,5 m
5,5 m
5,5 m
Compass
Non SimNet
SimNet backbone
SimNet drop ca ble
24
AP
MODE
MENU
AUTO
STBY
TURN
10
10
PWR
1
1
RF25 Rudder Feedback
(SimNet cable with t er m inator)
AC12/AC42
Figure 2-20 SimNet network, sma ll system
Page 29

28 | Installation
Instrument
Instrument
Termination
plug
Wind
transducer *
T-joiner
AT45
Multijoiner
Compass
NX45
5,5 m
5,5 m
1,0 m
2
0
m
/
3
0
m
/
4
0
m
5,5 m
5,5 m
Active
depth
transducer
Analog
Speed/Tem p
sensor
Autopilot
24AP
MODE
MENU
AUTO
STBY
TURN
10
10
PWR
1
1
RF25 Rudder Feedback
12V SimNet supply
(SimNet cable without terminator)
Autopilot Computer
Non SimNet
SimNet backb on e
SimNet drop cable
Figure 2-21 SimNet network, medium system
Page 30

Installation | 29
AP24 AP28
GS10
IS20 Compass
IS20 Graphic
Termination
plug
Wind
transducer *
Multijoiner
Multijoiner
Compass
5,5 m
2
0
m
/
3
0
m
/
4
0
m
5,5 m
5,5 m
5,5 m
5,5 m
Depth
Speed/Temp
RS82
WR20
WB20
RS82
Black box
GB40
GB40 NavComputer
OP30
24
AP
MODE
MENU
AUTO
STBY
TURN
1010
PWR
1
1
RF25 Rudder Feedback
12V SimNet supply
(Cable without te r m inator)
AC12/AC42
Non SimNet
SimNet backbone
SimNet drop cable
SIMRAD RS82
WR20
Figure 2-22 SimNet network, expanded system
1. Maximum total length of SimNet cables is 150 m
(500 ft.)
2. Drop cables must not exceed 6 m (19 ft) of length
and the total length of drop cables must not exceed
60 m (200 ft).
3. Equipment should not be daisy-chained in a drop
cable.
4. The wind transducer (*) has a built in terminator.
Page 31

30 | Installation
2.16 External alarm
The external alarm circuit has an open collector output
for an external alarm relay or buzzer. The operating
voltage for the circuit is the main supply voltage. Max.
load on external alarm output is 0.75 Amp.
+
+
Autopilot Computer
ALARM
Figure 2-23 External alarm connection
Page 32

Spare parts list | 31
3 Spare parts
AP24 Control Unit
22096614 AP24 Control Unit
22096630 Mounting kit consisting of:
22095483 Cabinet corners (6)
44165181 Screw 3,5x19 (4)
24006355 SimNet blocking plug
22096820 Optional mounting bracket
24006355 SimNet blocking plug
22096515 AP24 Weather Cover
AP28 Control Unit
22096622 AP28 Control Unit
22096630 Mounting kit consisting of:
22095483 Cabinet corners (6)
44165181 Screw 3,5x19 (4)
24006355 SimNet blocking plug
22096820 Optional mounting bracket
24006355 SimNet blocking plug
22096572 AP28 Weather Cover
Autopilot Computers
22089841 AC12 Autopilot Computer
22097166 AC12 Installation accessories
22089858 AC42 Autopilot Computer
22097125 AC42 Installation accessories
22096986 Terminal cover
44161974 Fuse blade fast acting 15A/32V Blue (AC12)
44143022 Fuse blade fast acting 30A/32V Green
(AC42)
Page 33

32 | Spare parts list
FC40 Electronic Fluxgate Compass
22090187 FC40 Fluxgate Compass w/accessories
22081442 Installation accessories consisting of:
20104972 Mounting plate (2)
44140762 Screw 3.5x25 (2)
44140770 Screw 30x9 (4)
22081376 Plug (2)
24006363 SimNet Cable, 5.5 m (18’) with one plug
RC42 Rate Compass
22090195 RC42 Rate Compass w/accessories
22081442 Installation Accessories Consisting of:
20104972 Mounting plate (2)
44140762 Screw 3.5x25 (2)
44140770 Screw 30x9 (4)
22081376 Plug (2)
24006363 SimNet Cable, 5.5 m (18’) with one plug
RF300 Rudder Feedback Unit
20193462 RF300 Rudder Feedback
20193454 Transmitter link
44133122 Transmitter rod M5x325mm
20193624 Ball joint Ass'y (2)
RF25 Rudder Feedback Unit
22014302 RF25 Rudder Feedback
24005241 SimNet cable 5 m
20193454 Transmitter link
44133122 Transmitter rod M5x325mm
20193624 Ball joint Ass'y (2)
Page 34

Spare parts list | 33
SimNet cables and accessories
24005829 SimNet cable 0.3 m (1’)
24005837 SimNet cable 2 m (6.6’)
24005845 SimNet cable 5 m (16.6’)
24005852 SimNet cable 10 m (33’)
24006363 SimNet Cable, 5.5 m (18’) with one plug
24005902 SimNet power w/termination 2 m (6.6’)
24005910 SimNet power w/o termination 2 m (6.6’)
24005729 SimNet cable to Micro-C. Adapter cable for
SimNet products in a NMEA2000 network.
24005860 SimNet T-joiner (3p)
24006298 SimNet multijoiner (7p)
24005878 SimNet cable gland
24005886 SimNet protection plug
24006355 SimNet blocking plug
24005894 SimNet termination plug
24005928 SimNet cable protection cap
44172260 SimNet In-line joiner w/o termination
44172278 SimNet In-line joiner w/termination
24005936 AT10 Universal NMEA0183 converter
24005944 AT15 Active Tee w/connector, IS15
24006694 AT10HD Heading NMEA0183 converter
AS000469 AT40 NX40 Gateway
AA010169 AT45 NX45 Gateway
Page 35

34 | Spare parts list
Blank page
Page 36

Technical specifications | 35
4 Technical specifications
4.1 Autopilot System
Boat type and size:........ Sail- and Motor boat (displacement and
planning), up to 80 ft.
*
Steering system types:............................ Hydraulic, Mechanical
Inter-unit connection: ..................................... SimNet network
Maximum number of products connected in a network: ..........50
System ON/OFF:..........................................From control units
Supply voltage: ............................................ See sy stem units
Power consumption:.............Dependent on system configuration
EMC protection:.................CE IEC60945 Fourth edition 2002-08
Automatic Steering control:
Rudder Drive: ............ Proportional rate or solenoid on/off
Parameter selection:............... Automatic (Autotune) with
manual override
Sea state control:........ Adaptive sea state filter or manual
Language selection: .................Dutch, English, French, German,
Italian, Norwegian, Spanish, Swedish.
NMEA2000 interface:................................. Via SimNet port and
SimNet/NMEA2000 adapter cable
Heading sensors:
Standard:....................................... RC42 Rate Compass
Options:.................................... FC40 Fluxgate compass
Rudder feedback units: RF25, RF300 (optional), LF3000 (optional)
Course Selection:.......................Push keys, Rotary knob (AP28)
Alarms: ............................ Audible and visual, optional external
Alarm modes: ................... Off course, system failures, overload
*
Depending on hull and steering type, displacement and drive
type, it may steer boats up to approximately 110 ft.
Page 37

36 | Technical specifications
Steering modes:........................Standby, Power steering , Auto,
NoDrift, Nav, Wind, W ind
NAV
Special Turn modes: ............Tack, Gybe, U-Turn, C-Turn, Spiral,
Zigzag, Square, Lazy S, Depth Contour Tracking DTC.
Instrument data page interface:
Instrument screen SimNet/NMEA2000 PGN*
Heading PGN127250, PGN130577
Rudder angle PGN127245
Speed PGN128259, PGN129026, PGN130577
Depth PGN128267
Wind angle, speed
and direction
PGN130306
Position PGN126992, PGN127250, PGN127258,
PGN129025, PGN129026, PGN129029,
PGN129033, PGN130577
NAV PGN129283, PGN129284, PGN129285,
PGN129029, PGN129291
Log PGN128275
Sea temperature
PGN130310, PGN130311
* Parameter Group Number
Page 38

Technical specifications | 37
4.2 AP24 Control Unit
Dimensions:.....................................................See Figure 4-1
Weight: ..........................................................0,3 kg (0,7 lbs)
Material:........... Front: Black ABS+PC, Back: Dark gray ABS+GF
Supply and interface: ....................................8-16V via SimNet
Power consumption....................................................... 1,2 W
SimNet Network load factor (NL): ..........................................2
SimNet ports (input/output): ................................................2
Display:
Type:.....................................Backli t LCD matrix display
Resolution:............................................ 130 x 79 pixels
Illumination (Red or white):........... Adjustable in 10 steps
Safe distance to compass: ................................. 0.3 m (1.0 ft.)
Environmental Protection:..........IP56 from front, IP43 from back
Temperature:
Operating:........................0 to +55 °C (+32 to +130 °F)
Storage:........................ –30 to +70 °C (–22 to +158 °F)
Figure 4-1 AP24 Control Unit – dimensions
(Mounting bracket is optional equipment)
Page 39

38 | Technical specifications
4.3 AP28 Control Unit
Dimensions:.....................................................See Figure 4-2
Weight: ..........................................................0,5 kg (1.1 lbs)
Material:........... Front: Black ABS+PC, Back: Dark gray ABS+GF
Supply and interface: ....................................8-16V via SimNet
Power consumption....................................................... 1,7 W
SimNet Network load factor (NL): ..........................................3
SimNet ports (input/output): ................................................2
Display:
Type:.....................................Backli t LCD matrix display
Resolution:.......................................... 130 x 104 pixels
Illumination (Red or white):........... Adjustable in 10 steps
Safe distance to compass: ................................. 0.3 m (1.0 ft.)
Environmental Protection:.........IP56 from front, IP43 from back.
Temperature:
Operating:........................0 to +55 °C (+32 to +130 °F)
Storage:........................ –30 to +70 °C (–22 to +158 °F)
Figure 4-2 AP28 Control Unit – dimensions
(Mounting bracket is optional equipment)
Page 40

Technical specifications | 39
4.4 Autopilot Computers
Dimensions:............................... See Figure 4-3 and Figure 4-4
Weight:
AC12 ...................................................1,3 kg (2,9 lbs.)
AC42 ....................................................2,8 kg (6,2 lbs)
Material:..............................Anodized aluminum and black ABS
SimNet supply and interface: .........................8-16V via SimNet
Supply voltage: AC12/AC42 .................................... 12-24V DC
Power consumption:.......................................5 W (electronics)
0,5 W (SimNet)
SimNet Network load factor (NL): ..........................................1
SimNet ports (input/output): ................................................1
Clutch/bypass current: ........................................ 0,6 mA - 3 A
Reverse voltage indication: ................................................Yes
Motor / solenoid drive:
AC12: ......................8 A continuous, 16 A for 1 sec. peak
AC42: ....................30 A continuous, 50 A for 1 sec. peak
Heading Sensor input: SimNet/NMEA2000 PGN127250, PGN130577
NFU control input: ............................................................Yes
Rudder feedback input: ............. SimNet/NMEA2000 PGN127245
Optional rudder feedback input: ....... Frequency signal, 3400 Hz,
20 Hz/deg.
Solenoid output:..................................................... AC12 only
External Alarm: ................................................ Open collector
Temperature range:
Operation:........................ 0 to +55 °C (+32 to +130 °F)
Storage:........................ –30 to +70 °C (–22 to +158 °F)
Mounting:......................................................Bulkhead mount
Page 41

40 | Technical specifications
Figure 4-3 AC12 Autopilot Computer - Dimensions
Figure 4-4 AC42 Autopilot Computer – Dimensions
Page 42

Technical specifications | 41
Figure 4-5 AC12/AC42 Cable retainer
4.5 FC40 Fluxgate Compass
Dimensions:.....................................................See Figure 4-6
Weight: ..........................................................0,9 kg (2,0 lbs)
Material:................................................................ Black ABS
Environmental Protection:................................................ IP56
Temperature range:
Operation:....................... 0 to +55 °C (+32 to + 130 °F)
Storage:........................ –30 to +70 °C (–22 to +158 °F)
Supply and interface: ....................................8-16V via SimNet
Power consumption:...................................................... 1,4 W
SimNet Network load factor (NL): ..........................................3
SimNet ports (input/output): ................................................1
Cable supplied:............ 5.5 m (18’) SimNet cable with conn ector
Mounting:.................................................... Deck or bulkhead
Automatic Performance:
Calibration: ......Automatically activated from control head
Gain control:.............Automatica lly adjusted continuously
Deviation control:.......................................... Automatic
Static Performance:
Roll/Pitch: ...........................................................± 35°
Accuracy:.......................................± 3° after calibration
Repeatability: .....................................................± 1.0°
Page 43

42 | Technical specifications
Dynamic Performance:
With random excitation of ±10° at max. 1 Hz:
Heading error <5°
With heading step input of 90° at a rate of 10°/s:
Heading error 10 sec after turn <5°
Output signal: ......................................................PGN127250
NMEA2000 compliant
Figure 4-6 FC40 Fluxgate Compass - Dimensions
4.6 RC42 Rate Compass
Dimensions:...............................Same as FC40. See Figure 4-6
Weight: ..........................................................0,9 kg (2,0 lbs)
Material:...........................................................Off-white ABS
Environmental Protection:................................................ IP56
Temperature range:
Operation:....................... 0 to +55 °C (+32 to + 130 °F)
Storage:........................ –30 to +70 °C (–22 to +158 °F)
Supply and interface: ....................................8-16V via SimNet
Page 44

Technical specifications | 43
Power consumption:...................................................... 1,4 W
SimNet Network load factor (NL): ..........................................3
SimNet ports (input/output): ................................................1
Cable supplied:............ 5.5 m (18’) SimNet cable with conn ector
Mounting:.................................................... Deck or bulkhead
Automatic Performance:
Calibration: ......Automatically activated from control head
Gain control:.............Automatica lly adjusted continuously
Deviation control:.......................................... Automatic
Heading output:............................Rate sensor stabilized
Static Performance:
Roll/Pitch: ...........................................................± 35°
Accuracy:............................ ± 3 degrees after calibration
Repeatability: .....................................................± 1.0°
Dynamic Performance:
With random excitation of ±10° at max. 1 Hz:
Heading error <2°
With heading step input of 90° at a rate of 10°/s:
Heading error 10 sec after turn <2°
Output signal .......................................... PGN127250, 127251
NMEA2000 compliant
4.7 RF300 Rudder Feedback
Dimensions:.............................. See Figure 4-7 and Figure 4-8.
Weight: ..........................................................0,5 kg (1,1 lbs)
Material: .................................................. Arnite T06 200 PBT
Environmental Protection:................................................ IP56
Temperature range:
Operation:..................... –25 to +55 °C (–13 to +130 °F)
Storage:....................... –30 to +70 °C (–22 to + 158 °F)
Mounting: ..........................Horizontal, vertical, or upside down
Page 45

44 | Technical specifications
Cable supplied:............. 10 m (33 ft.) twisted pair shielded cable
Rudder angle: ..............................................................± 90 °
Output signal: .....Polarity independent two wire frequen cy signal
Frequency resolution: ...... Centre: 3400 Hz, 20 Hz/degree
of change
Linearity: ................................± 3 ° up to 45 ° of rudder
Transmitter link:......Stainless 345 mm (13.6") with 2 ball joints.
Ball joint stud for rudder arm requires
4.2 mm diameter hole and 5 mm tap.
Figure 4-7 Rudder Feedback - Dimensions
Figure 4-8 Transmitter link - Dimensions
Page 46

Technical specifications | 45
4.8 RF25 Rudder Feedback
Dimensions:.............................. See Figure 4-7 and Figure 4-8.
Weight: ..........................................................0,5 kg (1,1 lbs)
Material: .................................................. Arnite T06 200 PBT
Environmental Protection:................................................ IP56
Temperature range:
Operation:..................... –25 to +55 °C (–13 to +130 °F)
Storage:....................... –30 to +70 °C (–22 to + 158 °F)
Mounting: ..........................Horizontal, vertical, or upside down
Supply and interface: ....................................8-16V via SimNet
Power consumption:...................................................... 0,4 W
SimNet Network load factor (NL): ..........................................1
SimNet ports (input/output): ................................................1
Cable supplied:............ 5,5 m (18’) SimNet cable with conn ector
Rudder angle: ....................................................±120 degrees
Output signal: .......................... SimNet/NMEA2000 PGN127245
Accuracy:............................................................±0.7°
Repeatability: ......................................................±0.1°
Transmitter link:......Stainless 345 mm (13.6") with 2 ball joints.
Ball joint stud for rudder arm requires
4.2 mm diameter hole and 5 mm tap.
NMEA2000 compliant
4.9 R3000X Remote Control
Dimensions:.....................................................See Figure 4-9
Weight: ..........................................................0,4 kg (0,9 lbs)
Material:.............................................Epoxy coated aluminum
Environmental Protection................................................. IP56
Safe distance to compass: ............................... 0.15 m (0.5 ft.)
Temperature range:
Operation:..................... –25 to +55 °C (–13 to +130 °F)
Storage:....................... –30 to +70 °C (–22 to + 158 °F)
Page 47

46 | Technical specifications
Cable length: .....................................................7 m, shielded
Mounting bracket:..................................................... Supplied
Figure 4-9 R3000X -
Dimensions
Figure 4-10 JS10 Joystick
Dimensions
4.10 JS10 Joystick
Dimensions: ..................................................See Figure 4-10
Weight: .........................................................0.5 kg (1.1 lbs.)
Environmental Protection:
Joystick................................................................ IP66
Terminals .............................................................IP20
Safe distance to compass: ............................... 0.15 m (0.5 ft.)
Temperature range:
Operation:..................... –25 to +70 °C (–13 to +158 °F)
Storage:........................ –40 to +70 °C (–40 to +158 °F)
Mounting:...........................................................Panel-mount
Cable: ........................................................ 10 meters (33 ft.)
Shock resistance (according to MIL 202 B method 202 A):
1/2 sinusoid 11 ms: No damage or disassembling at 100g
Page 48

Technical specifications | 47
Vibration resistance (according to IEC 68-2-6):
16 g with frequency range from 40 to 500 Hz and
maximum shifting 0,75 mm (peak -to- peak)
4.11 SimNet
Maximum number of products connected in a network: ..........50
Maximum cable length: .......................................150 m (500’)
Bit rate of the bus:..........................................250 Kbit/second
Maximum DC current through a single S imNet plug................5A
SimNet power supply: ..................................................12VDC
Maximum drop cable length: ..................................... 6 m (20’)
Maximum total length of all drop cables (accumulated): 60 m (200’)
Environmental protection: Cable and plug/connector system IP66
Maximum temperature:.....................................70 °C (158 °F)
4.12 IP protection
Each part of a Simrad autopilot system has a two digits
IP protection code.
The IP rating is a method to classify the degree of
protection against solid objects, water ingress and impact
afforded by electrical equipment and enclosures. The
system is recognized in most European countries and is
set out in a number of British and European standards.
The first code number describes the protection against
solid objects, and the second number describes the
protection against liquids.
Page 49

48 | Technical specifications
FIRST NUMBER
Protection against solid objects
SECOND NUMBER
Protection against liquids
IP TESTS IP TESTS
0 No protection 0 No protection
1 Protection against solid objects
up to 50 mm, e.g. accidental
touches by hands.
1 Protected against vertically falling
drops of water (e.g.
condensation).
2 Protection against solid objects
up to 12 mm, e.g. fingers.
2 Protected against direct sprays of
water up to 15° from the vertical.
3 Protection against solid objects
over 2.5 mm (tools + wires)
3 Protected against sprays to 60°
from the vertical.
4 Protection against solid objects
over 1 mm (tools + wires +
small wires)
4 Protected against water sprayed
from any direction.
5 Protection against dust - limited
ingress (no harmful deposit)
5 Protected against low pressure
jets of water from all directions limited ingress permitted.
6 Totally protected against dust 6 Protected against strong jets of
water, e.g. for use on ship decks
- limited ingress permitted.
7 Protected against the effects of
immersion between 15 cm and 1
m.
8 Protected against long periods of
immersion under pressure.
4.13 AT10 SimNet/NMEA0183 converter
Page 50

Technical specifications | 49
Data converted from SimNet/NMEA2000 to NMEA0183
(TX) and vice versa (RX).
NMEA0183 sentence TX (max rate [Hz]) RX
APB 0.5 x
BWC 0.5 x
BWR x
DBT x
DPT 0.5 11) x
GGA x
GLL 0.52) x
HDG 4 x
HDM x2)
HDT 4 x
HSC 0.1
MTW 0.2 x
MWV Relative Wind 1 x
MWV True Wind 1 x
RMA x
RMB 0.5 x
RMC 0.5 x
RSA 3.33
VHW 0.5 x
VTG 0.5 x
VLW 0.2 0.51) x
VWR x
WPL x
XTE x
ZDA 0.5 x
ZTG x
Open cells indicates no transmission or reception.
1)
Applies only for units with P/N – S/N code AA
2)
Applies for units with P/N – S/N code BA onwards
Page 51

50 | Technical specifications
Page 52

Index | 51
5 Index
A
autopilot computer
installation, 11
specifications, 39
C
cable
specifications, 11
control unit
specifications, 37, 38
D
drive unit
hydraulic pumps, 18
linear drive, 18
E
external alarm, 30
F
fluxgate compass
specifications, 41
G
grounding, 13
I
interfacing, 25
IP protection code, 47
N
NMEA0183, 49
NMEA2000, 49
P
polarity, 13
R
remote control
specifications, 46
rudder feedback
installation, 14
specifications, 43, 45
S
SimNet, 26
specifications, 35
steering lever
installation, 25
system
specifications, 35
T
terminal board, 13
V
virtual feedback, 8
Page 53

52 | Index
Blank page
Page 54

AP24/AP28 with AC12/AC42 Autopilot Computer manual EN, Doc.no.20222568
 Loading...
Loading...