


TO Basics
Vesa Kovalainen & Pyry-Pekka Lehto
siemens.com/tia-portalUnrestricted © Siemens AG 2020
Unrestricted © Siemens AG 2018
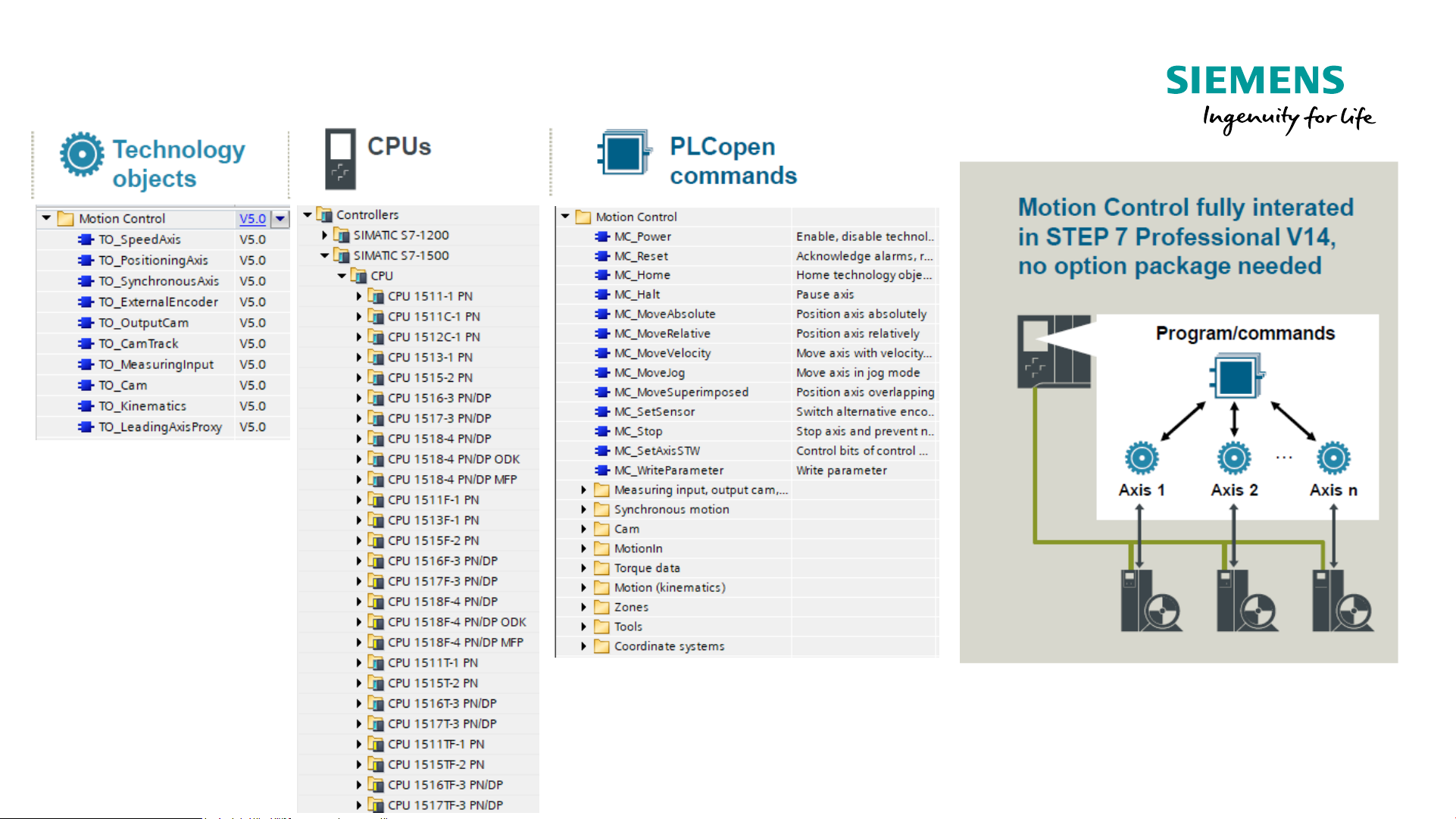
Technology objects for Motion Control
- Motion control function in 1200/1500-CPU
- Easy to configure w/o deep knowledge of
drives
- Can be configured as Real or Virtual
1)
axis
- Visual user interface
- Each TO has it’s own:
• Configuration
• Control panel
2)
• Diagnostics
3)
• Datablock
• Simulation
2)
- PLC-open commands
- Similar programming apart which drive is used
- No additional installations nor licenses are
needed
1) Not 1200
2) Not MeasuringInput, OutputCam, Camtrack, Cam
3) Not Cam
Unrestricted © Siemens AG 2018
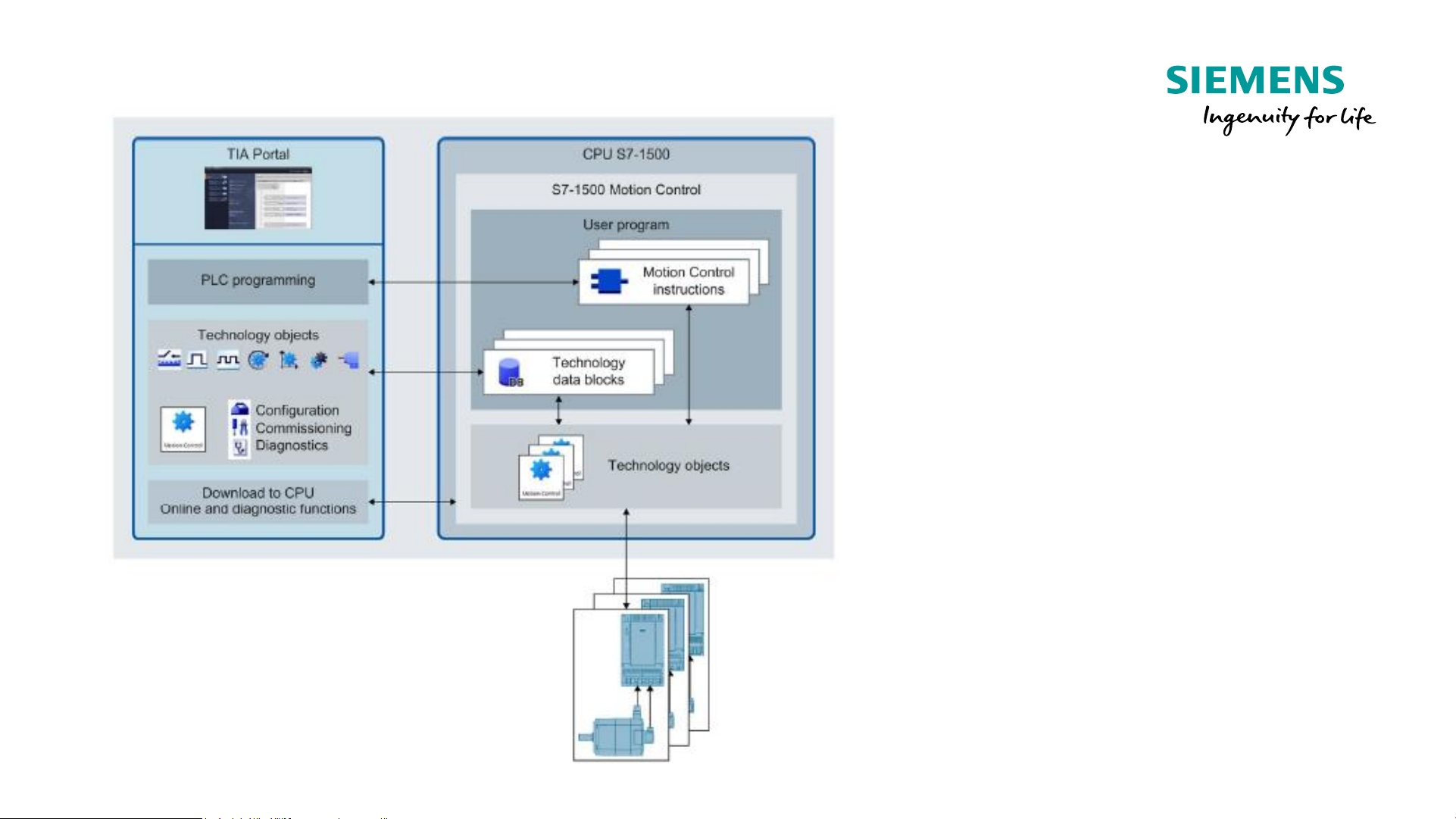
Technology objects for Motion Control
1) Application
2) Technology object
3) CPU
4) Programming
Unrestricted © Siemens AG 2018
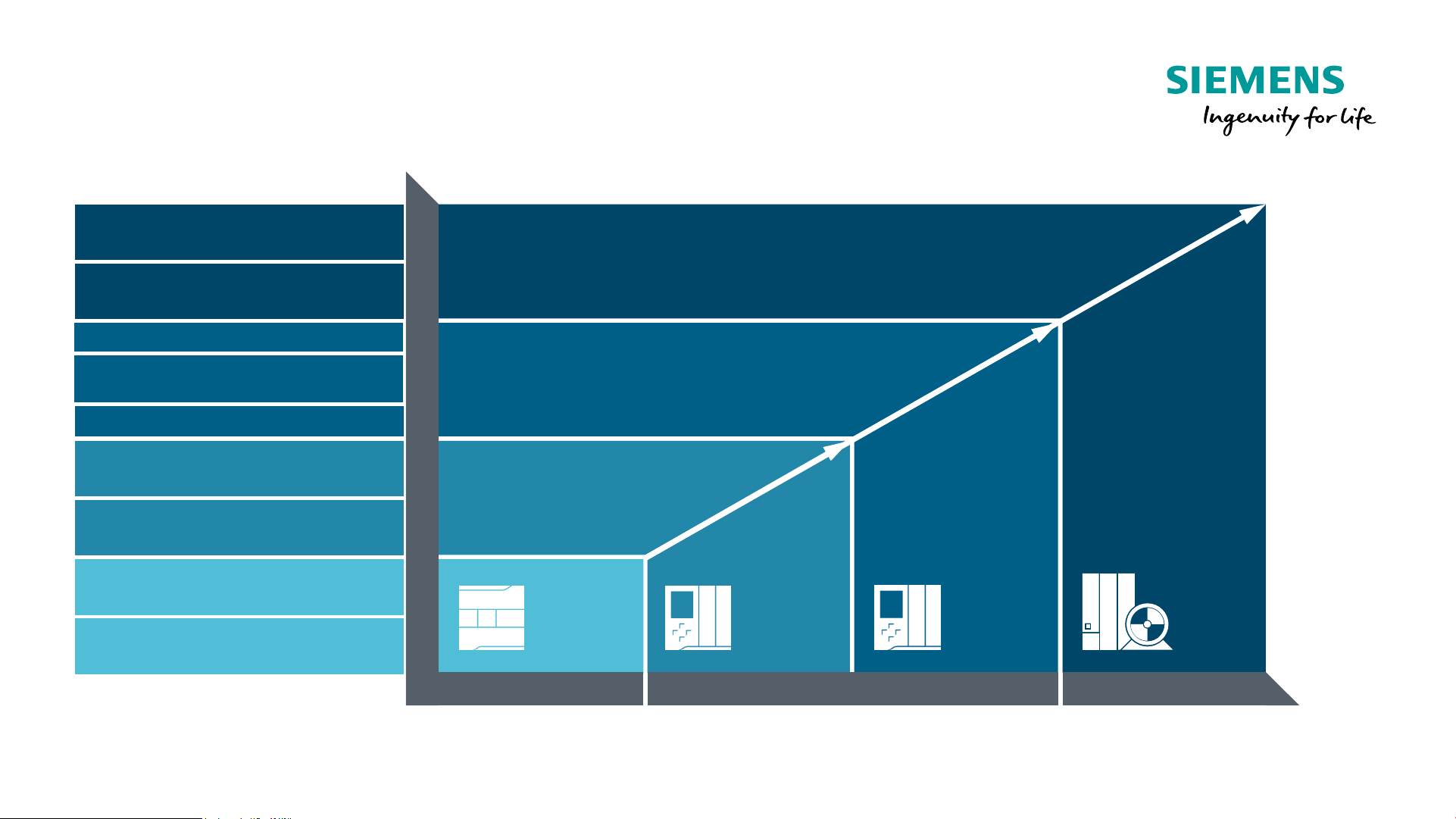
Technology objects for Motion Control
Correct controller to each application
2nd PROFINET IRT interface
High-performance Motion Control
4)
Gearing
1)
Output cams
Measuring input
Positioning
Speed control
Basic Midrange High-End
Basic
Controller
Standard CPU
Advanced
Controller
Standard CPU
T
Advanced
Controller
T-CPU
SIMOTION
Motion
Controller
Cross-PLC synchronous operation
3)
Camming & Gearing
2)
Kinematic functions
with conveyor tracking
5)
1)
Synchronization without specification of the synchronous position
2)
Synchronization with specification of the synchronous position
3)
In one project
4)
Cross-project synchronization; cams with dynamic size;
2 servo for axis groups
5)
planned for FW-Update V2.8.x (V16)
Unrestricted © Siemens AG 2018
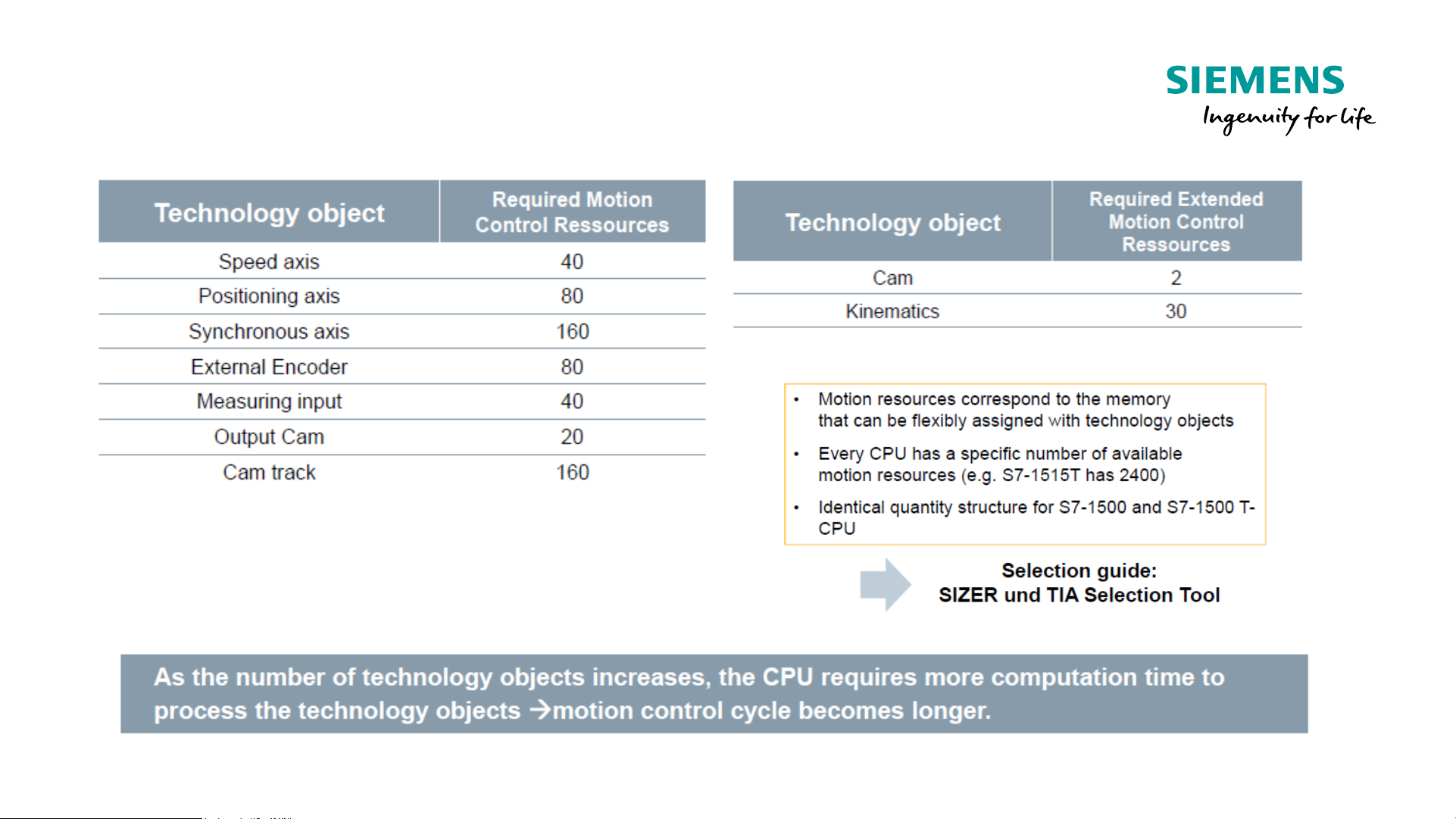
Technology objects for Motion Control
Motion Control resources
Unrestricted © Siemens AG 2018
Technology objects for Motion Control
Amount of axes and performance
Scalable according to amount of axes and
performance
Identical basic motion control functions in each CPU
*)
IPC4x7D, IPC6x7D ja IPC8x7D
1)
Positioning axes
1511 1513 1515 1516
1517
1510SP
1512SP
1515SP PC
ET 200SP
Open Controller
1507S*
S7-1500
Software Controller
1511T/TF 1515T/TF
1517T/TF
1516T/TF
Max. 5-10 Axes
1)
7-30 Axes
1)
30-60 Axes
1)
64-128 Axes
1)
40-80 Axes
1)
1518

Unrestricted © Siemens AG 2018
New
System Portfolio – SIMATIC S7-1500 Motion Control
Amount of axes and features
Motion Control
functionality
Performance
(TIA Portal V16)
SIMATIC S7
-1500 Controller
Distributed
Controller
Drive
Controller
CPU 1511
CPU
1513
CPU 1515
CPU
1516
CPU 1516T
CPU 1517
CPU 1518
CPU 1515SP PC2
1504D TF
1507D TF
Number
Positioning
axes
Typical
3)
5 7 55 70 128 30 10 55
Maximum
10 30 80 128 128 30 30 160
Cross-PLC
synchronous operation
Technology
Kinematics functions
Camming
Gearing1(with
synchronous position)
Gearing2(without
synchronous position)
Standard
Output cam /
Measuring input
Positioning
Open-
loop speed control
abs
.
rel.
1)
Synchronization with specification of the synchronous position
2)
Synchronization without specification of the synchronous position
3)
In 4 ms at 35% CPU load

Unrestricted © Siemens AG 2018
Technology objects for Motion Control
When to use Technology objects
-”If motion control is something else than speed control -> TO”
-Readymade FBs w/o TO for speed controlled axis:
SINA_SPEED, SINA_SPEED_20, SINA_SPEED_352 (G120_PZD352)
https://support.industry.siemens.com/cs/document/109747655/sinamics-s-g-v%3A-simple-cyclic-funktions-blocks-forcontrolling-a-sinamics-in-tia-portal-?dti=0&lc=en-US
https://support.industry.siemens.com/cs/document/109738702/libraries-in-the-tia-portal?dti=0&lc=en-WW
.
TIA15.1
TIA13..15
Reference variables: Drive param. p2000→

Unrestricted © Siemens AG 2018
LdrvSafe: SIMATIC-safety library for SINAMICS G/S
Readymade FBs for PROFIsafe-control
SIMATIC - Failsafe library LDrvSafe to control the Safety Integrated functions of the SINAMICS drive family
https://support.industry.siemens.com/cs/ww/en/view/109485794

Unrestricted © Siemens AG 2018
Technology objects for Motion Control
Organization blocks
- When TO is created, simultaneously OB91 and OB92 are created where
motion control tasks are executed
• Highest priority (1500: 26, 1200: 25)
• Shall not to be interrupted
- OB91 Cycle time
- Shorter cycle loads CPU
• Cyclic: RT, cyclic but not synchronous: G120
• Synchronous to the bus: IRT, synchronous execution tied to CPU’s
send clock. HW support required: V90/S210/S120
• With IRT and DSC: longer Cycle time do not affect positioning
accuracy because position control at Servo CU.
RT = Real time
IRT= Isochronous real time
DSC = Dynamic servo control

Unrestricted © Siemens AG 2018
Teknologiaobjektit liikkeenohjaukseen
Control loop
-Drive speed controller must be tuned before tuning TO
position controller
-DSC “positiong controller at servo CU; TO gives only
setpoint”
-PreControl ja Gain improves motion dynamics and
reduce following error
• Too large gains cause position overshoot
especially with frequency converters
-Substitute time delays setpoint to position controller in
relation to PreControl. Can be used to compensate
position overshoot with large gains. In typical cases no
need to adjust from 0.
SERVO
FREQUENCY CONVERTER

Unrestricted © Siemens AG 2018
Technology objects for Motion Control
Manuals
https://support.industry.siemens.com/cs/document/109749263/simatic-s7-1500-s7-1500t-motion-control-v4-0-in-tia-portal-v15?lc=en-US
Motion control manual for TIA Portal – 1500T
https://support.industry.siemens.com/cs/document/109749262/simatic-s7-1500-s7%E2%80%911500-motion-control-v4-0-in-tia-portal-v15?lc=en-US
Motion control manual for TIA Portal - 1500
Motion control manual for TIA Portal - Kinematics
https://support.industry.siemens.com/cs/document/109749264/simatic-s7-1500-s7-1500t-kinematics-functions-v4-0-in-tia-portal-v15?lc=en-US
Motion control manual for TIA Portal - 1200
https://support.industry.siemens.com/cs/document/109754206/simatic-step-7-s7-1200-motion-control-v6-0-in-tia-portal-v15?lc=en-US
Application examples for motion control
https://www.automation.siemens.com/mc-app/sinamics-application-examples/Home/Index?language=en

Unrestricted © Siemens AG 2018
Technology objects for Motion Control
Tips
1) Frequency converters OFF1-ramps has to set 0s! All addional ramps at frequency converter cause additional delay
to position controller and worsen the quality of positioning.
2) The datatype of Technology object is not automatically recognized (i.g TO_PositioningAxis). They have to manually
typed completly.
3) Enable: level 0-1-0, Execute: rising edge
4) Motion tasks can be intrerrupted with another task
5) For same axis (TO) can have multiple similar or different motion tasks
6) Commands’ ”Done” stays True as long as ”Execute” stays True. If only pulse (1 cycle) given to ”Execute”; Done
stays True only one program cycle.
7) Motion task commands are ”normally” called in OB1. If faster reaction due to very rapid sequencies is needed,
commands can be called in other OBs as well, i.g in Pre/PostServo-OB:ssa. Command is effective when OB-servo
is executed next time .
8) MC_MoveVelocity and MC_MoveJog are positioning controlled as default. Set ”PositionControlled”-input False if
this not preferable.

Live Demo

Unrestricted © Siemens AG 2018

Unrestricted © Siemens AG 20XX
17.04.2019Page 16
Interested to hear about the upcoming
webinars?
You will find all the upcoming webinars from here:
www.siemens.fi/webinaarit
If you want to be the first one to hear about our webinars –
register to our distribution list!
Also feel free to register straight away to any of the
interesting webinars.
www.siemens.fi/webinaarit
Upcoming industry
webinars
Next webinar:
Advanced Technology Objects for efficient motion control
Friday 3.4.2020 at 14:00-14:45

Unrestricted © Siemens AG 20XX
17.04.2019Page 17
Contact Customer Care Center
Prepare to provide the following information:
✓ Question or fault description
✓ All Siemens product, system and/or software version related
information regarding the support request
✓ Please attach files and pictures to support request sent with
email
✓ How do you wish to be contacted? (we call you or send email)
010 511 3100customercare.fi
@siemens.com
Our experts at your service during weekdays 8:00 – 16:00
System failure?
Technical detail?
Feedback?
www.siemens.fi/asiakaspalvelu

Unrestricted © Siemens AG 20XX
17.04.2019Page 18
Productivity and inspiration with the help
of expert training
Have a look at our upcoming training offerings, enroll
for courses and login to your MyTraining account
050 4783 555koulutus.fi@
siemens.com
Web-based e-learning or tailored training program?
Let’s plan it together!
Vikatilanne?
Tekninen kysymys?
Palaute?
www.siemens.fi/koulutus
SITRAIN
Automation Training

Unrestricted © Siemens AG 2018
siemens.com
Subject to changes and errors. The information given in this document only contains general descriptions and/or performance features which may
not always specifically reflect those described, or which may undergo modification in the course of further development of the products. The requested
performance features are binding only when they are expressly agreed upon in the concluded contract.
All product designations, product names, etc. may contain trademarks or other rights of Siemens AG, its affiliated companies or third parties.
Their unauthorized use may infringe the rights of the respective owner.
Vesa Kovalainen
Application Engineer
vesa.kovalainen@siemens.com
Pyry-Pekka Lehto
Sales Specialist Motion Control
pyry-pekka.lehto@siemens.com
Thank you for your attention!
Subject to changes and errors. The information given in this document only contains general descriptionsand/or performance features which may
not always specifically reflect those described, or which may undergo modification in the course of further development of the products. The requested
performance features are binding only when they are expressly agreed upon in the concluded contract.
All product designations, product names, etc. may contain trademarks or other rights of Siemens AG, its affiliated companies or thirdparties.
Their unauthorized use may infringe the rights of the respective owner.
siemens.com/tia-portal
 Loading...
Loading...