

Schneider ATV312H055M2, ATV312HU30N4, ATV312H037M2, ATV312HU15N4, ATV312H055N4 User Manual
...Page 1

2354235 11/2008
Altivar 312
Variable speed drives
for asynchronous motors
DeviceNet communication manual
09/2012
S1A10387
www.schneider-electric.com
Page 2

Page 3

Contents
Important Information __________________________________________________________________________________________ 4
Before you begin______________________________________________________________________________________________ 5
Documentation structure________________________________________________________________________________________ 6
Introduction__________________________________________________________________________________________________ 7
Hardware setup ______________________________________________________________________________________________ 8
Wiring to the network _________________________________________________________________________________________ 11
Configuration _______________________________________________________________________________________________ 14
Configuring by the drive HMI ___________________________________________________________________________________ 16
Integration of the ATV312 in a DeviceNet network___________________________________________________________________ 21
Diagnostics by the drive HMI ___________________________________________________________________________________ 27
Supervision and control in LINE mode ____________________________________________________________________________ 28
Supported CIP objects ________________________________________________________________________________________ 32
S1A10387 09/2012 3
Page 4

Important Information
The addition of this symbol to a Danger or Warning safety label indicates that an electrical hazard exists, which will result in
personal injury if the instructions are not followed.
This is the safety alert symbol. It is used to alert you to potential personal injury hazards. Obey all safety messages that follow
this symbol to avoid possible injury or death.
NOTICE
Read these instructions carefully, and look at the equipment to become familiar with the device before trying to install, operate, or maintain
it. The following special messages may appear throughout this documentation or on the equipment to warn of potential hazards or to call
attention to information that clarifies or simplifies a procedure.
DANGER
DANGER indicates an imminently hazardous situation, which, if not avoided, will result in death or serious injury.
WARNING
WARNING indicates a potentially hazardous situation, which, if not avoided, can result in death, serious injury or
equipment damage.
CAUTION
CAUTION indicates a potentially hazardous situation, which, if not avoided, can result in injury or equipment
damage.
CAUTION
CAUTION, used without the safety alert symbol, indicates a potentially hazardous situation which, if not avoided,
can result in equipment damage.
PLEASE NOTE
The word "drive" as used in this manual refers to the controller portion of the adjustable speed drive as defined by NEC.
Electrical equipment should be installed, operated, serviced, and maintained only by qualified personnel. No responsibility is assumed by
Schneider Electric for any consequences arising out of the use of this product.
© 2012 Schneider Electric. All Rights Reserved.
4 S1A10387 09/2012
Page 5

Before you begin
Read and understand these instructions before performing any procedure with this drive.
DANGER
HAZARD OF ELECTRIC SHOCK, EXPLOSION, OR ARC FLASH
• Read and understand this manual before installing or operating the Altivar 312 drive. Installation, adjustment, repair, and
maintenance must be performed by qualified personnel.
• The user is responsible for compliance with all international and national electrical code requirements with respect to grounding of
all equipment.
• Many parts of this drive, including the printed circuit boards, operate at the line voltage. DO NOT TOUCH. Use only electrically
insulated tools.
• DO NOT touch unshielded components or terminal strip screw connections with voltage present.
• DO NOT short across terminals PA/+ and PC/– or across the DC bus capacitors.
• Before servicing the drive:
- Disconnect all power, including external control power that may be present.
- Place a “DO NOT TURN ON” label on all power disconnects.
- Lock all power disconnects in the open position.
- WAIT 15 MINUTES to allow the DC bus capacitors to discharge.
- Measure the voltage of the DC bus between the PA/+ and PC/– terminals to ensure that the voltage is less than 42 Vdc.
- If the DC bus capacitors do not discharge completely, contact your local Schneider Electric representative. Do not repair or
operate the drive
• Install and close all covers before applying power or starting and stopping the drive.
Failure to follow these instructions will result in death or serious injury.
DANGER
UNINTENDED EQUIPMENT OPERATION
• Read and understand this manual before installing or operating the Altivar 312 drive.
• Any changes made to the parameter settings must be performed by qualified personnel.
Failure to follow these instructions will result in death or serious injury.
WARNING
DAMAGED DRIVE EQUIPMENT
Do not operate or install any drive or drive accessory that appears damaged.
Failure to follow these instructions can result in death, serious injury, or equipment damage.
WARNING
LOSS OF CONTROL
• The designer of any control scheme must consider the potential failure modes of control paths and, for certain critical control
functions, provide a means to achieve a safe state during and after a path failure.
Examples of critical control functions are emergency stop and overtravel stop.
• Separate or redundant control paths must be provided for critical control functions.
• System control paths may include communication links. Consideration must be given to the implications of unanticipated
transmission delays or failures of the link.
a
Failure to follow these instructions can result in death, serious injury, or equipment damage.
a. For additional information, refer to NEMA ICS 1.1 (latest edition), “Safety Guidelines for the Application, Installation, and Maintenance of Solid State Control” and to
NEMA ICS 7.1 (latest edition), “Safety Standards for Construction and Guide for Selection, Installation and Operation of Adjustable-Speed Drive Systems.”
S1A10387 09/2012 5
Page 6

Documentation structure
The following Altivar 312 technical documents are available on the Schneider Electric website (www.schneider-electric.com) as well as on
DVD-ROM (reference VW3A8200).
Installation manual
This manual describes how to install and wire the drive.
Programming manual
This manual describes the functions, parameters and use of the drive terminal (integrated display terminal, optional graphic display terminal
and optional remote terminal).
The communication functions are not described in this manual, but in the manual for the bus or network used.
Simplified manual
This manual is a simplified version of the User manual. This manual is delivered with the drive.
Quick Start sheet
The Quick Start describes how to wire and configure the drive to start motor quickly and simply for simple applications. This document is
delivered with the drive.
Communication manuals: CANopen, DeviceNet, Modbus and Profibus
These manuals describe the assembly, connection to the bus or network, signaling, diagnostics, and configuration of the communicationspecific parameters.
They also describe the protocol communication services.
Communication variables guide
This manual defines the drive control processes and the drive variables which can be accessed by the communication buses: Modbus,
CANopen, ...
6 S1A10387 09/2012
Page 7

Introduction
Presentation
The DeviceNet communication card (catalog number VW3A312 09) is used to connect an Altivar 312 drive to a DeviceNet network.
The communication card has an open-style 5-pin connector for connection to the network.
Data exchanges give access to all Altivar 312 functions:
• Command,
• Monitoring,
• Diagnostics.
DeviceNet cables and connecting accessories must be ordered separately.
The graphic display terminal or the integrated display terminal can be used to access numerous functions for communication diagnostics.
Notation
Drive terminal displays
The graphic display terminal menus, available with the remote graphic display terminal option are shown in square brackets.
Example: [1.9 COMMUNICATION].
The integrated 7-segment display terminal menus are shown in round brackets.
Example: (COM-).
Parameter names are displayed on the graphic display terminal in square brackets.
Example: [Fallback speed]
Parameter codes are displayed on the integrated 7-segment display terminal in round brackets.
Example: (LFF).
Formats
Hexadecimal values are written as follows: 16#
Binary values are written as follows: 2#
Vocabulary
Depending on DeviceNet document and tools, equivalent wordings are used. The table below shows vocabulary used in the present
document and other corresponding definitions.
In this document Other Comments
Node address DeviceNet address, MAC ID
Data rate Baud rate
kbit/s kbps
Setpoint Reference, target
Path Object Address Class, instance, attribute
The reader should avoid mixing two terms:
- DeviceNet scanner, which is the master device on the DeviceNet network.
- Communication scanner, which is a function inside the Altivar drive.
Abbreviations
Req. = Required
Opt. = Optional
S1A10387 09/2012 7
Page 8

Hardware setup
Relay outputs
Logic inputs
DeviceNet
Analog inputs
Addressing
switches, SW1
RJ45 socket
LEDs
D1 - MS / Module Status
D2 - NS / Network Status
Presentation
Receipt
• Check that the card reference printed on the label is the same as that on the delivery note corresponding to the purchase order.
• Remove the option card from its packaging and check that it has not been damaged in transit.
Installing the card in the drive
DANGER
UNINTENDED EQUIPMENT OPERATION
• Do not plug or unplug the terminal board while drive is powered.
• Check the tightening of the fixing screw after any manipulation on the terminal board.
Failure to follow these instructions will result in death or serious injury.
DANGER
HAZARD OF ELECTRIC SHOCK, EXPLOSION, OR ARC FLASH
Do not touch the terminal board before:
• removing power on the drive,
• removing any voltage on input and output terminals.
Failure to follow these instructions will result in death or serious injury.
8 S1A10387 09/2012
Page 9

Hardware setup
Install the card in ATV312 as follows:
1. Open the ATV312 front cover. Remove the plastic cover plate from the power terminals (see Installation manual).
2 & 3. Remove the terminal board fixing screw and take off the ATV312 standard terminal board.
(Be careful not to lose the terminal board fixing screw when removed since it may be used again.)
This step does not apply if you are using an ATV312.... B (product without standard IO terminal).
4. Install the DeviceNet card and secure it with the board fixing screw.
(M3 tapping screw tightening torque: 0.7 to 0.8Nm)
5. Stick the new cabling label above the DeviceNet option card.
Stick the DeviceNet card nameplate near the ATV312 nameplate. (Be careful not to cover slits on the ATV312 enclosure)
6. Perform wiring on the DeviceNet card (see page 11
7. Wire and screw the EMC clamps for the DeviceNet cables (and control wires if required).
Note: To install or remove the terminal board, make it slide in or out in parallel with board.
S1A10387 09/2012 9
).
Page 10

Hardware setup
Characteristics and functions of the terminals
Terminal Function Electrical characteristics
R2A
R2B
R2C
SCR (Screen)
COM Analog I/O common 0 V
+10 Power supply for reference
AI2 Analog voltage input Bipolar analog input 0 ± 10 V (maximum safe voltage ± 30 V)
AI3 Analog current input Analog current input X-Y mA by programming X and Y from 0 to 20 mA:
+24 Logic input power supply • + 24 V protected against short-circuits and overloads, minimum 19 V, maximum 30 V
LI1
LI2
LI3
RJ45 Communication port Connection for SoMove software, Modbus, remote display, loader tools.
SW1 Addressing switches See page 15
DeviceNet Communication DeviceNet open style connector for connection to the fieldbus, see page 11
D1 - MS Module Status LED See page 27
D2 - NS Network Status LED See page 27
Configurable relay outputs:
1 relay logic output, one “N/C”
contact and one “N/O” contact
with common point.
potentiometer (2.2 to 10 k
Logic inputs Programmable logic inputs in source mode
• Minimum switching capacity: 10 mA for 5 V
• Maximum switching capacity on resistive load (cos ϕ = 1 and L/R = 0 ms):
5 A for 250 V
• Maximum switching capacity on inductive load (cos ϕ = 0.4 and L/R = 7 ms):
2 A for 250 V
• Sampling time: 8 ms
• Service life: 100,000 operations at maximum switching power
Communication shield terminal.
This terminal is not connected to other circuits in this board.
Ground this terminal in a location separated from the ground of power line.
• +10 V (+ 8% - 0%)
Ω)
• 10 mA max
• Protected against short-circuits and overloads
The + or - polarity of the voltage on AI2 affects the direction of the setpoint and
therefore the direction of operation.
• Impedance: 30 k
• Resolution: 0.01 V, 10-bit + sign converter
• Precision ± 4.3%, linearity ± 0.2%, of maximum value
• Sampling time: 8 ms
• Operation with shielded cable 100 m maximum
• Impedance: 250
• Maximum customer current available: 100 mA
• Impedance: 3.5 k
• + 24 V internal or 24 V external power supply (min. 19 V, max. 30 V)
• Max. current: 100 mA
• Max. sampling time: 4 ms
Positive logic State 0 if < 5 V or logic input not wired, state 1 if > 11 V
a and 30 V c
a and 30 V c
Ω
Ω
Ω
.
.
.
c
.
10 S1A10387 09/2012
Page 11

Wiring to the network
EMC clamps
DeviceNet
connector
Connection to the Modbus base port
1 Not connected
2 Not connected
3 Not connected
4D1
5D0
6 Not connected
7VP (1)
8 Common
(1) Reserved for RS232/RS485 converter
Wiring the DeviceNet connector
The figures and the table below show the pin-outs of the card connectors. The removable DeviceNet female connector attaches to the
network cable.
Pin Name Color
1GND Black
2 CAN_L Blue
3SHIELD Bare
4CAN_H White
5V+ Red
Line termination: If the drive is the first or the last device on the DeviceNet network, a line terminator (121 Ohm resistor) must be wired on
the removable DeviceNet female connector, between pins 2 and 4 (CAN_L and CAN_H).
S1A10387 09/2012 11
Page 12

Wiring to the network
Cable routing practices
When wiring Altivar 312 drives to a DeviceNet network, follow all wiring practices required by national and local electrical codes.
Also observe the following guidelines:
• Avoid areas of high temperature, moisture, vibration, or other mechanical stress.
• Secure the cable where necessary to prevent its weight and the weight of other cables from pulling or twisting the cable.
• Use cable ducts, raceways, or other structures to protect the cable. Use these structures for signal wiring paths. They must not contain
power wiring.
• Avoid sources of electrical interference that can induce noise into the cable. Use the maximum practicable separation from such
sources.
When planning cable routing within a building, follow these guidelines:
• Maintain a minimum separation of 1 m (40 in) from the following equipment:
- air conditioners and large blowers,
- elevators and escalators,
- radios and televisions,
- intercom and security systems,
- fluorescent, incandescent, and neon lighting fixtures.
• Maintain a minimum separation of 3 m (118 in) from the following equipment:
- line and motor power wiring,
- transformers,
- generators,
- alternators.
When wiring in electrical equipment rooms or large electrical equipment line-ups, observe the following guidelines for cable segregation
and separation of circuits:
• Use metallic conduit for drive wiring. Do not run control network and power wiring in the same conduit.
• Separate non-metallic conduits or cable trays used to carry power wiring from metallic conduit carrying low-level control network
wiring by at least 300 mm (11.9 in).
• Separate metallic conduits carrying power wiring or low-level control network wiring by at least 80 mm (3.15 in).
• Cross the metallic conduits and non-metallic conduits at right angles whenever power and control network wiring cross.
• Attenuate conducted emissions from the drive to the line in some installations to prevent interference with telecommunication, radio,
and sensitive electronic equipment. Such instances may require attenuating filters. Consult the Altivar catalog for selection and
application of these filters.
The ODVA standards (Release 2.0) specify 7 types of cables for use in DeviceNet networks:
• Thick cable
• Thin cable
•Flat cable
• Cable I
• Cable II
• Cable IV
• Cable V
The table below lists main specifications of cables. For more information, refer to the ODVA specifications.
Type of cable Data conductor pair size Power conductor pair size Data impedance
Thick cable 18 AWG 15 AWG 120 Ohm +/- 10 % (at 1 MHz)
Thin cable 24 AWG 22 AWG 120 Ohm +/- 10 % (at 1 MHz)
Flat cable 16 AWG 16 AWG 120 Ohm +/- 10 % (at 500 kHz)
Cable I 24 AWG 22 AWG 120 Ohm +/- 10 % (at 1 MHz)
Cable II 18 AWG 15 AWG 120 Ohm +/- 10 % (at 1 MHz)
Cable IV 18 AWG 16 AWG 120 Ohm +/- 10 % (at 500 kHz)
Cable V 18 AWG 16 AWG 120 Ohm +/- 10 % (at 500 kHz)
12 S1A10387 09/2012
Page 13

Wiring to the network
The maximum permissible length of the network cable depends an the data rate and the type of cable.
Type of cable Data rate
125 kbit/s 250 kbit/s 500 kbit/s
Thick cable 500 m (1640 ft) 250 m (820 ft) 100 m (328 ft)
Thin cable 100 m (328 ft) 100 m (328 ft) 100 m (328 ft)
Flat cable 420 m (1378 ft) 200 m (656 ft) 75 m (246 ft)
Cable I 100 m (328 ft) 100 m (328 ft) 100 m (328 ft)
Cable II 500 m (1640 ft) 250 m (820 ft) 100 m (328 ft)
Cable IV - - -
Cable V 420 m (1378 ft) 200 m (656 ft) 75 m (246 ft)
For maximum length of the drops refer to table, whatever type of cable:
Data rate Cumulative drop Maximum drop
125 kbit/s 156 m (516 ft) 6 m (20 ft)
250 kbit/s 78 m (256 ft) 6 m (20 ft)
500 kbit/s 39 m (128 ft) 6 m (20 ft)
S1A10387 09/2012 13
Page 14
Configuration
Drive behaviour at first Power on with a PROFIBUS DP option card
At the first power on, the message (CFF) [Incorrect config.] appears on the product.
Press Enter to see [Restore config.] (FCS) menu.
Select the [Config. CFG] (InI) parameter to recover the factory settings.
For more information, see the [Restore config.] (FCS) parameter in ATV312 programming manual on www.schneider-electric.com
DANGER
UNINTENDED EQUIPMENT OPERATION
Check that the modification of the current configuration is compatible with the wiring diagram used.
Failure to follow these instructions will result in death or serious injury.
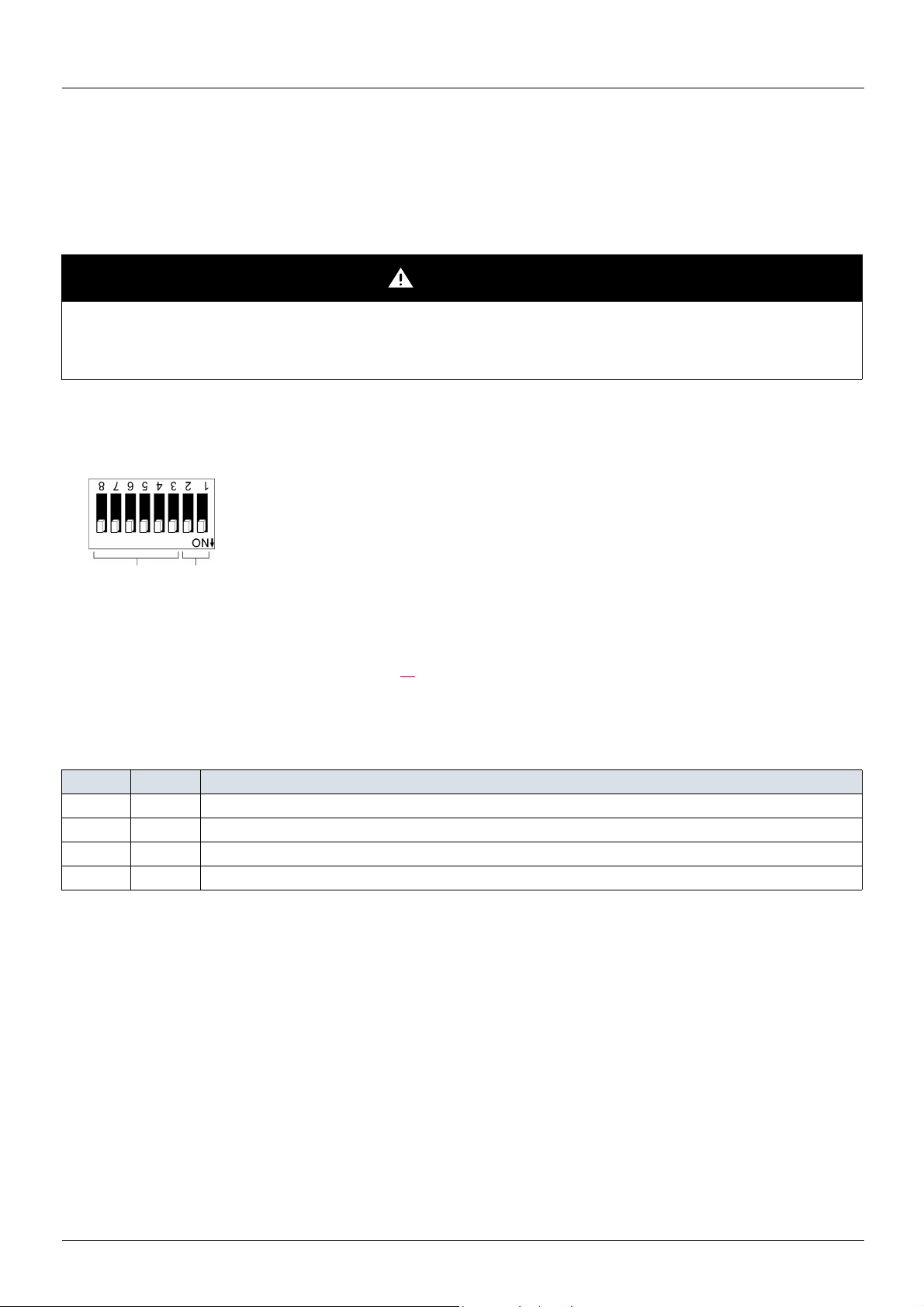
Coding the switches
Switches description
High = OFF = 0
Low = ON = 1
Node address Data rate
Overriding the switches
When switches 2 and 1 are set in position low (ON = 1), the data rate of the drive must be set by a network tool (refer to the chapter
"Integration of the ATV312 in a DeviceNet network", page 21
). Default values are 125 kbit/s and node address 63.
Coding the data rate
All devices connected to the DeviceNet network must communicate at the same data rate: 125, 250, or 500 kbit/s. The table below shows
the switch settings that configure the DeviceNet data rate on the drive.
Switch 2 Switch 1 Data rate
0 0 125 kbit/s
0 1 250 kbit/s
1 0 500 kbit/s
1 1 The DeviceNet data rate of the drive must be set by a network tool.
Any change to the switch setting takes effect at the next power-up.
14 S1A10387 09/2012
Page 15

Configuration
Data rate = 250 kbit/s (switches 1 and 2 = 2#01)
Node address = 25 (switches 3 to 8 = 2#01 1001)
Data rate = 500 kbit/s (switches 1 and 2 = 2#10)
Node address = 52 (switches 3 to 8 = 2#11 0100)
Coding the node address
All devices connected to the DeviceNet network must have a unique address, ranging from 0 to 63 (decimal).
The table below lists the switch setting for each valid node address.
Any change to the switch setting takes effect at the next power-up.
Node
address
00 00 0000 16 01 0000 32 10 0000 48 11 0000
01 00 0001 17 01 0001 33 10 0001 49 11 0001
02 00 0010 18 01 0010 34 10 0010 50 11 0010
03 00 0011 19 01 0011 35 10 0011 51 11 0011
04 00 0100 20 01 0100 36 10 0100 52 11 0100
05 00 0101 21 01 0101 37 10 0101 53 11 0101
06 00 0110 22 01 0110 38 10 0110 54 11 0110
07 00 0111 23 01 0111 39 10 0111 55 11 0111
08 00 1000 24 01 1000 40 10 1000 56 11 1000
09 00 1001 25 01 1001 41 10 1001 57 11 1001
10 00 1010 26 01 1010 42 10 1010 58 11 1010
11 00 1011 27 01 1011 43 10 1011 59 11 1011
12 00 1100 28 01 1100 44 10 1100 60 11 1100
13 00 1101 29 01 1101 45 10 1101 61 11 1101
14 00 1110 30 01 1110 46 10 1110 62 11 1110
15 00 1111 31 01 1111 47 10 1111 63 11 1111
Switches
876543
Node
address
Switches
876543
Node
address
Switches
876543
Node
address
Switches
876543
Examples
S1A10387 09/2012 15
Page 16

Configuring by the drive HMI
Configuring the control
Principle
By the configuration of the control, it is possible to decide from what channel the drive receives its commands and setpoint, either
permanently or depending on a switching command.
Numerous configurations are possible. For more information, refer to the Programming manual and Communication parameters manual.
The following configurations are some of the possibilities available.
The choice of the assembly set is defined by the application at the DeviceNet scanner level. It cannot be set at the device level. See the
paragraph "Assembly Selection" in the chapter "Integration of the ATV312 in a DeviceNet network", page 26
M Control with native profile
• 100: Native profile control input made of CMD and LFR
• 101: Native profile control output made of ETA and RFR
.
Please refer to the chapter "Supervision and control in LINE mode", page 28
M Control according to ODVA AC drive profile
The ODVA AC drive profile is activated when one of the following assemblies is selected:
• 20: Basic speed control output
• 21: Extended speed control output
• 70: Basic speed control input
• 71: Extended speed control input
The advantage of using the ODVA drive profile standard is the interchangeability with other brands.
The DeviceNet card translates the commands, behaviour and monitoring information from of ODVA profile (on the network) to the Drivecom
profile (in the drive).
.
Available configurations
M If you use the native profile:
• 100: Native command Word and speed reference (CMD and LFRD)
• 101: Native status and current speed (ETA and RFRD)
The examples below are only possible if you use the communication scanner.
M If you use the ODVA AC drive profile, that is, the assemblies:
• 20: Basic speed control output
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
Fault reset Run fwd
1
2
3
• 21: Extended speed control output
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1
2
3
16 S1A10387 09/2012
NetRef NetCtrl Fault reset Run rev Run fwd
Speed reference (Low byte)
Speed reference (High byte)
Speed reference (Low byte)
Speed reference (High byte)
Page 17

Configuring by the drive HMI
Terminals/Keypad
Remote display terminal
Forced local mode
NET:
DeviceNet
or any communication
option
• 70: Basic speed control input
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1
Running1 Faulted
2
3
• 71: Extended speed control input
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1
2
3
At
reference
Ref from
net
Ctrl from
net
Speed actual (Low byte)
Speed actual (High byte)
Ready Running2
(Rev)
Drive state
Speed actual (Low byte)
Speed actual (High byte)
Running1
(Fwd)
Warning Faulted
Control signal of an ATV312 from DeviceNet or from a communication card
There are several ways to control an ATV 312 from a communication card:
• The control word and the speed reference are controlled from the network in the same time.
• The control word and the speed reference come from separate sources.
However separate mode is only allowed when the [ACCESS LEVEL] (LAC) parameter in the [COMMAND] (CtL-) menu is set to L3.
The Control of the drive is also detailed in the programming manual of the ATV312 in the chapter "Control Menu".
Control of the drive when LAC = L1 or L2
There is now particular settings, the channels are managed in order of priority.
Control of the drive when LAC = L3
When configured with LAC = L3 several configurations are possible:
Control and reference come from the communication card
The command and the target come from DeviceNet.
Control is in native profile (CiA402).
S1A10387 09/2012 17
Page 18

Configuring by the drive HMI
Configure the following parameters:
Parameter Value Comment
Profile Combined native profile
(CiA402)
Target 1 configuration Network card The command comes from DeviceNet.
Configuration via the graphic display terminal or the integrated display terminal:
Menu Parameter Value
[COMMAND] (CtL-) [Profile] (CHCF) [Not separ.] (SIM) (factory setting)
[Ref.1 channel] (Fr1) [Network] (nEt)
Control via DeviceNet or the terminals in native profile (CiA402)
The command and the target both come from DeviceNet or the terminals. Input LI3 at the terminals is used to switch between DeviceNet
and the terminals.
Control is in native profile (CiA402).
Configure the following parameters:
Parameter Value Comment
Profile Combined native profile (CiA402) The run commands are in native profile (CiA402), the command and the
Target 1 configuration Network card Target 1 comes from DeviceNet.
Target 2 configuration Analog input 2 on the terminals Target 2 comes from input AI2 on the terminals.
Target switching Input LI3 Input LI3 switches the target (1
The run commands are in native profile (CiA402), the command and the target
come from the same channel.
target come from the same channel.
↔ 2) and the command.
Configuration via the graphic display terminal or the integrated display terminal:
Menu Parameter Value
[COMMAND] (CtL-) [Profile] (CHCF) [Not separ.] (SIM)
[Ref.1 channel] (Fr1) [Network] (nEt)
[Ref.2 channel] (Fr2) [AI2] (AI2)
[Ref 2 switching] (rFC) [LI3] (LI3)
Control is separated from reference channel
Control via DeviceNet or the terminals in native profile (CiA402)
The command and the target both come from DeviceNet or the terminals. Input LI3 at the terminals is used to switch between DeviceNet
and the terminals.
Control is in native profile (CiA402).
Configure the following parameters:
Parameter Value Comment
Profile Separate native profile (CiA402) The run commands are in Drivecom profile, the command and the
setpoint can come from different channels.
Target 1 configuration Network card Target 1 comes from DeviceNet.
Target 2 configuration Analog input 2 on the terminals Target 2 comes from input AI2 on the terminals.
Target switching Input LI3 Input LI3 switches the target (1
Command 1 configuration Network card Command 1 comes from DeviceNet.
Command 2 configuration Terminals Command 2 comes from the terminals.
Command switching Input LI3 Input LI3 switches the command.
↔ 2) and the command.
18 S1A10387 09/2012
Page 19

Configuring by the drive HMI
Menu Parameter Value
[COMMAND] (CtL-) [Profile] (CHCF) is configured in not separate mode [Not separ.] (SIM)
[Cmd channel 1] (Cd1) Channel 1 is used with the communication [Network] (nEt)
[Cmd channel 2] (Cd2) Channel 2 is used with the terminal blocks [Terminal] (tEr)
[Cmd switching] (CCS) LI3 is used for switching between channel 1 and 2.
(see also the programming manual of the ATV312 for more details)
[Ref.1 channel] (Fr1) [Network] (nEt)
[Ref.2 channel] (Fr2) [AI2] (AI2)
[Ref 2 switching] (rFC) [LI3] (LI3)
For more information, see the chapter "Assembly selection", page 26.
Control and reference with assembly sets 20/70 or 21/71
The ODVA profile 20/70 or 21/71 integrates a control/reference switching.
See command word 20 and 21 page 16
Configure the drive as described below.
NetRef and NetCtrl need to be associated to a command bit (C2XX).
Menu Parameter Value
[COMMAND] (CtL-) [Ref.1 channel] (Fr1) [Network] (nEt): Reference via network communication protocol
[Ref.2 channel] (Fr2) [AI2] (AI2): Analog input AI2
[Ref.2 switching] (rFC) [C213] (C213): Bit 13 of network control word
[Profile] (CHCF) [Separate] (SEP): Separate mode
[Cmd channel 1] (Cd1) [Network] (nEt): Control via the network
[Cmd channel 2] (Cd2) [Terminal] (tEr): Control via terminals
[Cmd switching] (CCS) [C212] (C212): Bit 12 of network control word
, and status word 70 or 71 page 17.
OR
[AI3] (AI3): Analog input AI3
(See the ATV312 programming manual for more details)
[LI3] (LI3)
Explicit Messaging
Class Code
Hexadecimal Decimal
16#70 to 16#A8 112 to 424
The drive parameters are grouped in classes:
• Each application class has only 1 instance.
• Each instance groups 200 parameters.
• Each attribute in an instance relates to a parameter.
• The first parameter registered in the first application.
Examples
Class code = ((ADL - 3000)/200) + 70hex
Attribute ID = (ADL modulo 200)+1
Instance = 1
Drive logical address Hexadecimal path
3 000 16# 70 / 01 / 01
3 100 16# 70 / 01 / 65
3 201 16# 71 / 01 / 02
NOTE: ADL = Parameter Number = Modbus@.
S1A10387 09/2012 19
Page 20

Configuring by the drive HMI
Communication fault management
The behaviour of the drive in case of communication interruption is described in the ATV312 programming manual.
The communication between the master (external management system) and the drive is broken:
In this case, the drive will generate an (CnF) error message.
The communication card is not working properly:
In this case, the drive will generate a (COF) message.
Code Name Probable cause Remedy
CFF
CnF
COF
ILF
[INCORRECT
CONFIG.]
[NETWORK
FAULT]
[CANopen FAULT] • Interruption in communication
[INTERNAL LINK
FAULT]
• The current configuration is
inconsistent.
• Addition or removal of an option
• Communication detected fault on the
communication card
between the option card and the drive
• Interruption in communication
between the option card and the drive
• Return to factory settings or retrieve the backup
configuration, if it is valid. See the [Restore config.]
(FCS) parameter in ATV312 programming manual.
• Check the environment (electromagnetic compatibility).
• Check the wiring.
• Check the time out.
• Replace the option card.
• See the [CANopen fault mgt] (COL) parameter in the
ATV312 programming manual to define the stop mode
with a (CnF).
• Check the communication bus.
• Check the option card.
• Replace the option card.
(CnF) [Network fault]: Option card fault code
This parameter is read-only and is only visible if an option card is present.
The fault code remains saved in the parameter, even if the cause disappears.
The parameter is reset after the drive is disconnected and then reconnected.
The values of this parameter is:
1: Time out on the reception of the periodic variables addressed to the drive
For the full list of the fault detected codes, see ATV312 programming manual on www.schneider-electric.com
20 S1A10387 09/2012
Page 21
Integration of the ATV312 in a DeviceNet network
This chapter describes how to integrate an Altivar 312 in a DeviceNet network controlled by a Rockwell Automation PLC.
Installing the eds file
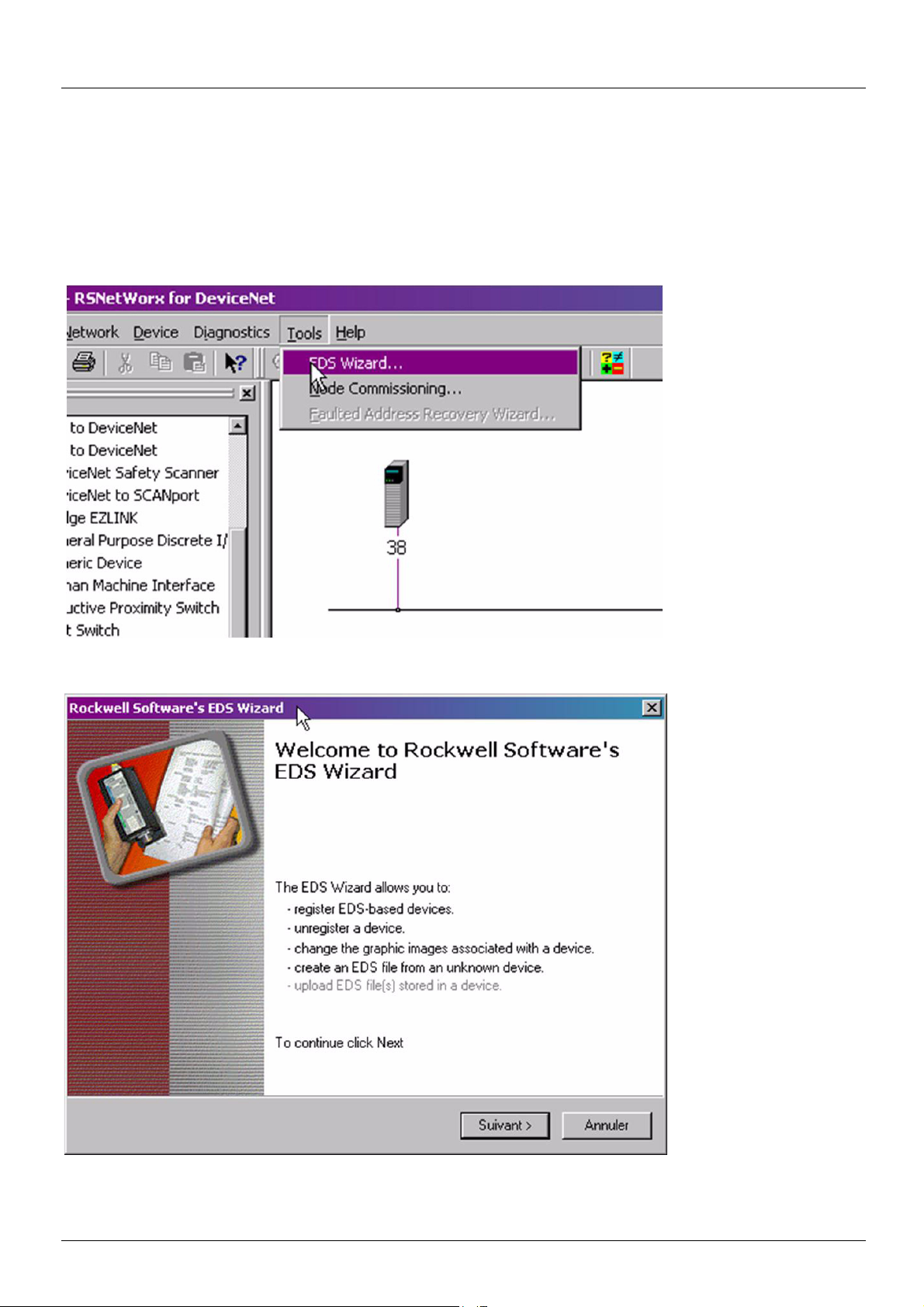
The eds file of the VW3 A312 09 communication card can be downloaded from Schneider Electric website (www.schneider-electric.com).
1. To install the new eds file, you can launch the EDS wizard from RSNetWorx for DeviceNet by selecting Tools > FDS Wizard.
Note: We recommend to use a recent version of RSNetWorx (V7.0 or later).
2. Click Next.
S1A10387 09/2012 21
Page 22

Integration of the ATV312 in a DeviceNet network
3. Select Register an EDS file(s), and then click Next.
4. Select the location where the eds file has been recorded, and then click Next.
22 S1A10387 09/2012
Page 23

Integration of the ATV312 in a DeviceNet network
You should get the following result, that indicates that the eds file has been successfully imported.
5. Click Next.
6. The wizard will propose you to change the icon picture associated to the device.
If you don't need to change the icon file, click Next to terminate the eds registration.
7. Click Finish.
S1A10387 09/2012 23
Page 24

Integration of the ATV312 in a DeviceNet network
Configuration of the DeviceNet Module in the Rockwell PLC
In the example, the module is installed in the first slot of the local base plate of a 1755 CPU:
The DeviceNet module is identified with the following symbol: Module_DNET. This identifier will be used later with tools like the Class
Instance Editor.
Configuring the implicit exchanges
The ATV312 allows the use of 3 assemblies set as described in the chapter "Configuring by the drive HMI", page 16.
In the 3 cases, the input size and the output size are the same. (Command word and speed reference = 4 bytes, status word and actual
speed = 4 bytes)
24 S1A10387 09/2012
Page 25

Integration of the ATV312 in a DeviceNet network
Class Instance Editor
With the Class Instance Editor, you can directly access to the Device objects and use the methods Get/set to edit drive parameters.
The indication about the Class, Instance, Attribute of the ATV 312 objects is detailed in the chapter "Supported CIP objects" of this manual,
page 28
.
S1A10387 09/2012 25
Page 26

Integration of the ATV312 in a DeviceNet network
Assembly selection
The choice of the assembly set should be done from the PLC, by applying the required assembly number to the following objects:
• Output assembly: 5/0/64
• Input assembly: 5/0/65
The default setting of these assemblies is 21/71.
It is recommended to set by program (when PLC starts) the assemblies needed for the application.
26 S1A10387 09/2012
Page 27
Diagnostics by the drive HMI
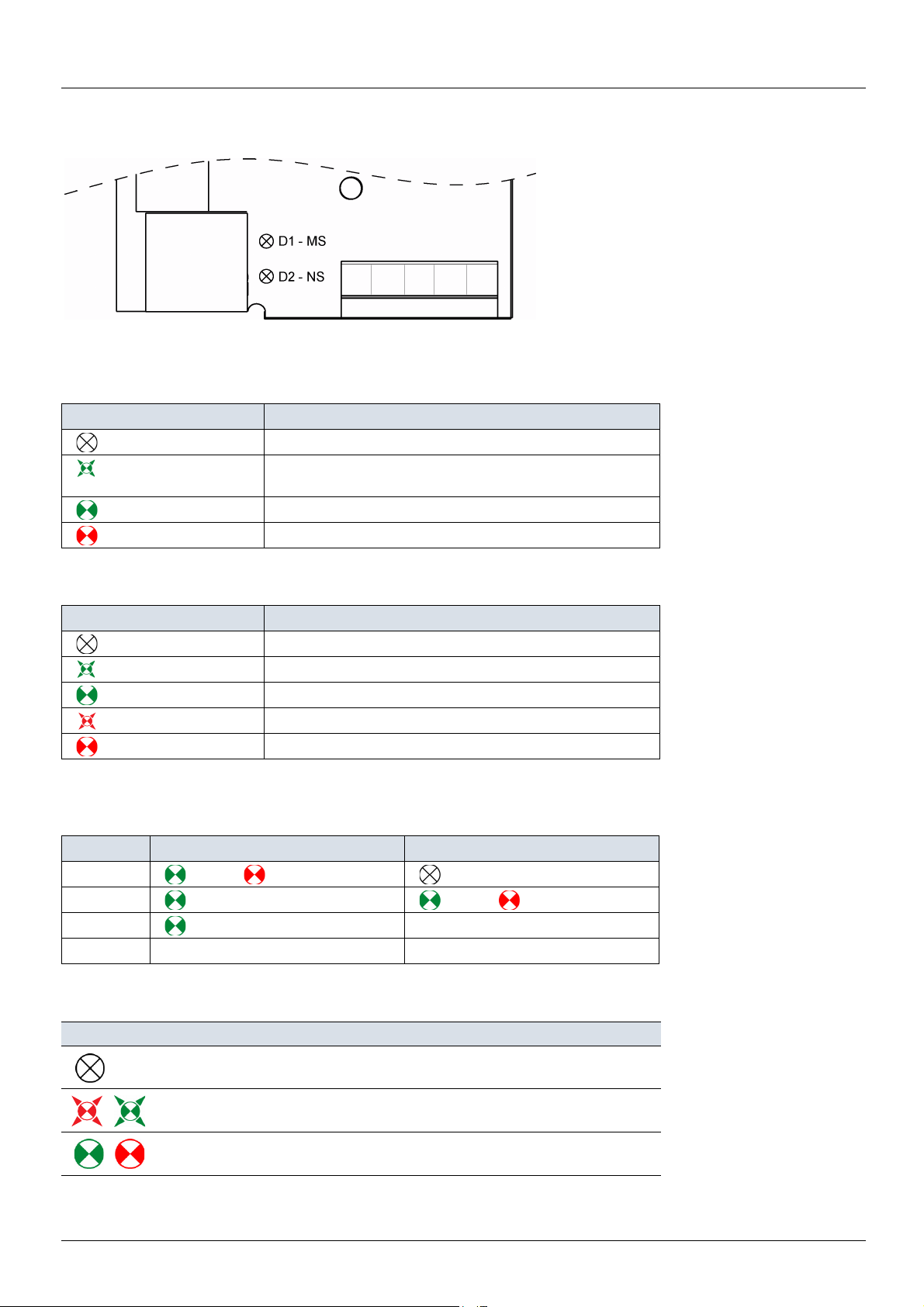
Signalling LEDs
Two LED indicators are placed on the board.
The behaviour is described in the following chapter.
LED "D1 - MS" - Module Status
LED State Indicates
Off No power
Flashing Green (1 Hz) Needs commissioning due to configuration missing, incomplete or
incorrect. Device may be in standby state. See the identity object.
Green Operating in normal condition
Red Unrecoverable detected fault(s), EXCEPTION, Fatal event
LED "D2 - NS" - Network Status
LED State Indicates
Off Not online / No power
Flashing Green (1 Hz) On-line, no connections established
Green On-line, one or more connections are established
Flashing Red (1 Hz) One or more connections timed-out
Red Critical link failure, Fatal event
Start-up sequence
A LED test is performed during start-up, after module init is complete.
Step Module Status LED "D1 - MS" Network Status LED "D2 - NS"
1 0.25s 0.25s Turned off
2 0.25s 0.25s
3 Turned off
Finished Standard indication Standard indication
LED states
LED state Visual description of the LED state
The LED is OFF
The LED is FLASHING
The LED is ON
S1A10387 09/2012 27
Page 28
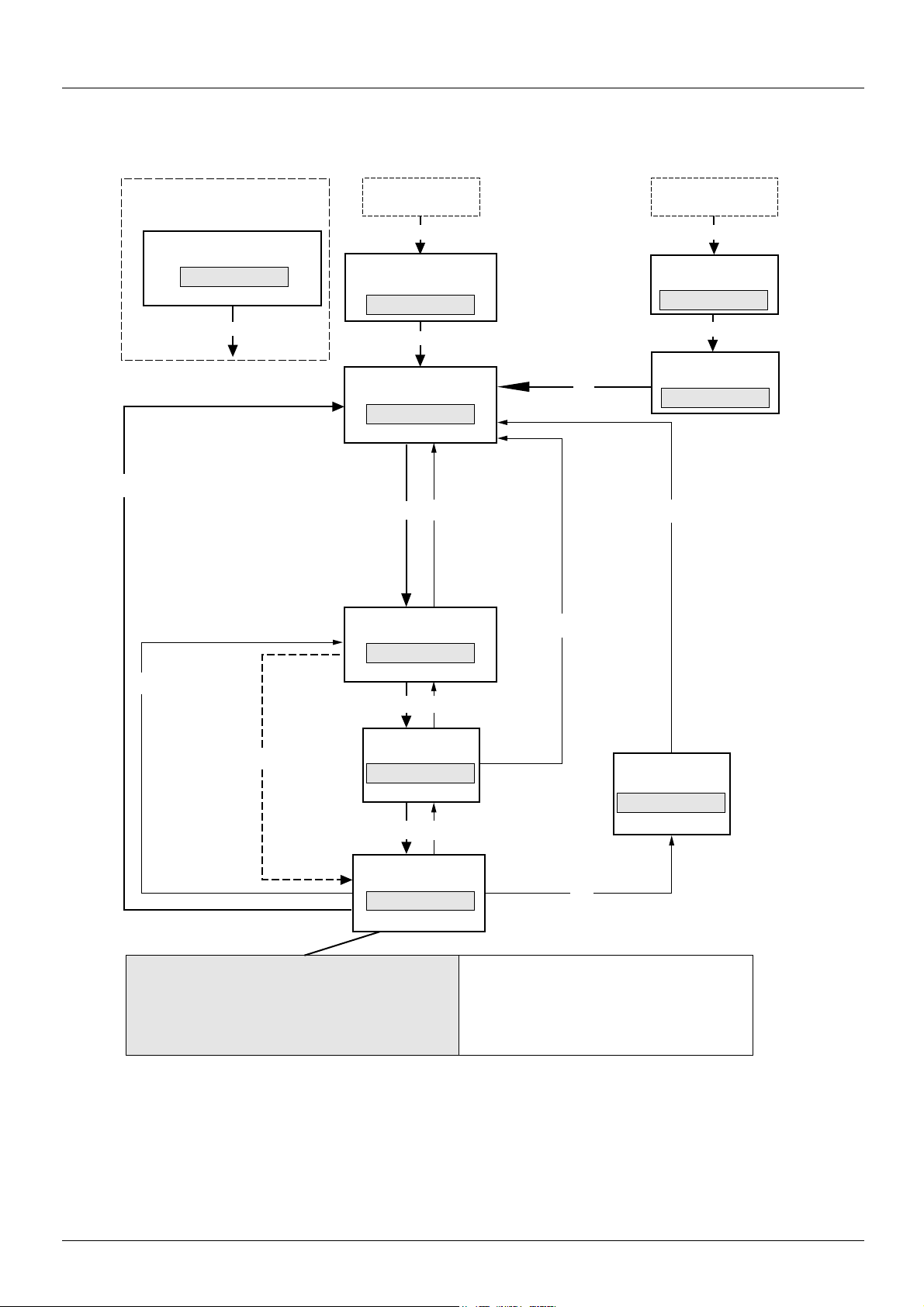
Supervision and control in LINE mode
Shutdown
CMD =16#0006
13
0
X
1
Quick stop active
Emergency stop
MSK =16#0007
"rdY, dCb"
2
7
14
15
Enable
operation
CMD =16#xxxF
Enable
operation
CMD =16#xxxF
Disable
operation
CMD =16#0007
45
11
12
Switch on
CMD =16#0007
Shutdown
CMD =16#0006
Shutdown
CMD =16#0006
Quick stop
CMD =16#0002
3
3A
8
9
6
10
Key
IEC 61800-7 drive status
Drive status applied to ATV
MSK= 16#xxxx
"ATV terminal display"
Transition
condition
CMD = 16#xxxx
Not ready to switch on
ATV powered off
MSK= 16#0000
Enter the status
chart
Switch on disabled
ATV locked
MSK= 16#0040
"nSt"
Fault cleared and
ATV fault state reset
CMD =16#0080
Detected
fault
All states
Malfunction
reaction active
MSK= 16#xxxx
Malfunction
ATV in fault state
MSK = 16#0008
Disable
voltage
CMD = 16#0000
or
modification of
a configuration
parameter
(motor stopped)
or
Quick stop
CMD = 16#0002
Disable
voltage
CMD = 16#0000
or
modification of
a configuration
parameter
(motor stopped)
or
Quick stop
CMD = 16#0002
Disable voltage
CMD = 16#0000
or
modification of
a configuration
parameter
(motor stopped)
or
STOP key on
display terminal
or
STOP at terminals
Switched on
ATV ready
MSK = 16#0023
"nSt"
Ready to switch on
ATV waiting
MSK = 16#0021
"nSt"
Operation enabled
ATV running
MSK = 16#0027
"rUn, rdY, ..."
Examples:
ETA = 16#0627 : Normal stop or
Forward operation, speed reached
ETA = 16#8627 : Reverse operation, speed reached
ETA = 16#0227 : Forward operation, ACC or DEC
ETA = 16#8227 : Reverse operation, ACC or DEC
Examples (default configuration):
CMD = 16#000F : Forward operation
CMD = 16#080F : Reverse operation
CMD = 16#100F : Stop (configured by "Stt")
CMD = 16#200F : DC injection stop
CMD = 16#400F : Fast stop
Exiting the "Operation enabled" status via a "Disable voltage" (9) or "Shutdown" (8) command causes a freewheel stop.
Disable voltage
CMD = 16#0000
or
modification of
a configuration
parameter
(motor stopped)
or
STOP key on
display terminal
or
STOP at terminals
MSK - ETA masked by 16#006F
IEC 61800-7 status chart
28 S1A10387 09/2012
Page 29

Supervision and control in LINE mode
The Altivar control process using the communication bus is based on the CiA 402 profile status chart compatible with the IEC 61800-7
standard. Each state represents an aspect of the internal behaviour of the drive.
This chart evolves according to whether the control word is sent (CMD W8501) or an event occurs (example: lock following malfunction).
The drive status can be identified by the value of the status word (ETA W3201).
Not ready to switch on (Initialization):
Communication is being initialized.
Transient state invisible to the communication bus.
Switch on disabled (Configuration):
Initialization of the drive is complete.
The configuration and adjustment parameters can be modified.
If all or part of the configuration and settings are to be loaded, we recommend disabling the consistency check function during the transfer
(CMI W8504, bit 15 = 1). On completion of the transfer, the consistency check must be enabled (CMI W8504, bit 15 = 0).
The drive is locked.
Ready to switch on and Switched on (Drive initialized):
The drive is locked.
The power stage of the drive is ready to operate, but voltage has not yet been applied to the output.
The configuration and adjustment parameters can be modified, but modifying a configuration parameter returns the drive to the "Switch on
disabled" state.
Operation enabled (Operational):
The drive is unlocked and voltage can be applied to the motor terminals.
[Auto tuning] (tUn) requires an injection of current. The drive must therefore be in this state to perform this command.
The adjustment parameters can be modified even if a run command or a DC injection current is present. However, a configuration parameter
can only be modified if the motor is stopped, and this returns the drive to the "Switch on disabled" state.
Quick stop active (Emergency stop active):
Fast stop
Restarting is only possible after the drive has changed to the "Switch on disabled" state.
Malfunction reaction active (Reaction on fault detection):
Transient state during which the drive performs an action appropriate to the type of detected fault.
Malfunction (Detected fault):
The drive is locked.
Difference between a fast stop and a Quick stop
A fast stop (CMD = 16#400F) is a stop on a short ramp that maintains the drive in the "Operation enabled" state.
The drive remains locked after a fast stop.
A run command can be executed immediately after a fast stop.
A Quick stop (CMD = 16#0002) is an emergency stop that causes a stop on a short ramp followed by locking in the "Quick stop active" state.
To be able to restart the drive, you must first change to the "Switch on disabled" state via the "Disable voltage" command (CMD = 16#0000).
It is not possible, therefore, to execute a run command immediately after a Quick stop.
Note:
In access level L1 or L2 (parameter LAC):
• Priorities between channels are managed by the drive.
• At switch-on, the drive is in control via the terminals and changes automatically to the "Operation enabled" state. This means that, when
a run command is applied (for example: CMD = 16#000F), it starts without needing to follow the IEC 61800-7 status chart procedure.
When the drive is controlled via a communication bus, it is advisable to configure the access level LAC = L3:
• The active channel is set by configuring the following parameters: [Profile] (CHCF), [Ref. 2 switching] (rFC), [Cmd switching] (CCS), [Cmd
channel 1] (Cd1), [Cmd channel 2] (Cd2), [Ref.1 channel] (Fr1) and [Ref.2 channel] (Fr2).
• At switch-on, the drive configured for control via the bus changes to the "Switch on disabled" state. This means that it must follow the IEC
61800-7 status chart procedure to be able to start, and to help prevent any unwanted behaviour.
S1A10387 09/2012 29
Page 30

Supervision and control in LINE mode
CMD control word (W8501)
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
Fault state
reset
bit 15 bit 14 bit 13 bit 12 bit 11 bit 10 bit 9 bit 8
(1) (1) (1) (1) (1) 0 0 0
(1)This bit action depends on the [ACCESS LEVEL] (LAC) parameter and the functions configured by the user.
For example, to use bit 15 to switch the ramp, simply configure LAC = L3 (Access to advanced functions and management of mixed
modes) and set the [Ramp switch ass.] (rPS) configuration parameter to Cd15.
000
Enable
operation
Quick stop
(active at 0)
Enable voltage Switch on
Command
Shut down 2, 6, 8
Switch on 3 Switched on x x 1 1 1 16#0007
Enable
operation
Disable
operation
Disable voltage 7, 9, 10, 12
Quick stop
Fault state
reset
x: State not significant
V 1: Change from 0 to 1
0
Transition
address
4
5 Switched on x 0 1 1 1 16#0007
11
7, 10
15
Final state
Ready to
switch on
Operation
enabled
Switch on
disabled
Quick stop
active
Switch on
disabled
Switch on
disabled
bit 7bit 3bit 2bit 1bit 0
Reset
x x 1 1 0 16#0006
x 1 1 1 1 16#000F
x x x 0 x 16#0000
x x 0 1 x 16#0002
V 1 x x x x 16#0080
0
Enable
operation
Quick stop
Enable
voltage
Switch
on
Typical value of CMD
(W8501)
30 S1A10387 09/2012
Page 31

Supervision and control in LINE mode
ETA status word (W3201)
bit 7bit 6bit 5bit 4 bit 3bit 2bit 1bit 0
Alarm
bit 15 bit 14 bit 13 bit 12 bit 11 bit 10 bit 9 bit 8
Direction of
rotation
Switch on
disabled
Stop via STOP
key
Quick stop
active at 0
00
0 Malfunction
Reference
exceeded
Operation
enabled
Reference
reached
Switched on
Forced local
mode
(active at 0)
Ready to switch
on
0
bit 6bit 5bit 3bit 2bit 1bit 0MSK = ETA
State
Not ready to switch on 0 x 0 0 0 0
Switch on disabled 1 x 0 0 0 0
Ready to switch on 0 1 0 0 0 1 16#0021
Switched on 0 1 0 0 1 1 16#0023
Operation enabled 0 1 0 1 1 1 16#0027
Malfunction 0 x 1 0 0 0
Malfunction reaction
active
Quick stop active 0 0 0 1 1 1 16#0007
x: State not significant
Switch on
disabled
0x1111
Quick stop Malfunction
Operation
enabled
Switched on
Ready to
switch on
(W3201)
masked by
16#006F
16#0000
16#0020
16#0040
16#0060
16#0008
16#0028
16#000F
16#002F
S1A10387 09/2012 31
Page 32

Supported CIP objects
CIP require some mandatory objects; these are implemented as well as some vendor specific objects.
Standard CIP objects
Object name Class Description
Identity object 0x01 The identification object
Message router object 0x02 Message router
DeviceNet object 0x03 DeviceNet object
Assembly object 0x04 Assembly object
Connection object 0x05 Connection object
Motor data object 0x28 Defines motor data for the motor connected to this device
Control supervisor object 0x29 Manages drive functions, operational states and control
AC/DC drive object 0x2A Provides drive configuration
Acknowledge handler object 0x2B Object that acknowledges IO messages
Schneider Electric objects
Object name Class Description
Application objects 0x70 Object used to access ATV312 parameters
DeviceNet Object model
32 S1A10387 09/2012
Page 33

Supported CIP objects
Identity object (Class 0x01)
Services
Class services Get_Attribute_Single
Instance services Get_Attribute_Single
Reset
Class attributes
# Access Name Type Value Description
1 Get Revision UINT 0x0001 Revision 1
Instance attributes
# Access Name Type Value Description
1 Get Vendor ID UINT 0x00F3
2 Get Device type UINT 0x0002 AC Drive:
• Vendor Name: Schneider Electric
• Vendor ID: 0x00F3
• Product code: 0xXXXX
• Product Name: ATV-312
• Catalog: ATV-312
• EDS file name: 00F30002XXXX0100.EDS
3 Get Product code UINT 6153
4 Get Revision Struct of:
Major revision USINT N/A Firmware major version
Minor revision USINT N/A Firmware minor version
5 Get Status WORD - Status of the device, see table below.
6 Get Serial number UDINT Serial number The low 4 bytes of the drive serial number
7 Get Product name SHORT_STRING ATV312
100 Get Fatal log Array of UINT8 N/A
S1A10387 09/2012 33
Page 34

Supported CIP objects
Bit Status attribute Extended device status (Bit 4-7)
Bit 0 Owned, shall be set when at least one connection is configured 0000 = Unknown
Bit 1 Reserved, set to 0 0010 = Faulted I/O connection
Bit 2 Configured (1) 0011 = No I/O connection established
Bit 3 Reserved, set to 0 0100 = Non volatile configuration bad
Bit 4-7 See extended device status 0101 = Major Fault
Bit 8 Is set for minor recoverable faults (2) 0110 = Connection in run mode
Bit 9 Is set for minor unrecoverable faults (2) 0111 = Connection in idle mode
Bit 10 Is set for major recoverable faults (2)
Bit 11 Is set for major unrecoverable faults (2)
Bit 12-15 Reserved, set to 0
(1)This bit shows if the product has other settings than "out-of box". The value is set to true if the module's NV storage is changed from
default and the value is currently in use.
(2) See error codes table below.
Error codes
Fault type Fault source
Minor Recoverable Faults Duplicate MACID, Switch value changed
Minor Unrecoverable Faults
Major Recoverable Faults Non-Volatile Fault (CRC-error on read), Faulted, Connection to ATV312 lost
Major Unrecoverable Faults Non-Volatile Fault (CRC-error on write)
34 S1A10387 09/2012
Page 35

Supported CIP objects
Message router (Class 0x02)
Services
Class services No class services supported
Instance services No instance services supported
Class attributes
No supported class attributes
Instance attributes
No supported instance attributes
S1A10387 09/2012 35
Page 36

Supported CIP objects
DeviceNet object (Class 0x03)
Services
Class services Get_Attribute_Single
Instance services Get_Attribute_Single
Set_Attribute_Single
Allocate_Master/Slave_Connection_Set (0x4B)
Release_group_2_Identifier_Set (0x4C)
Class attributes
# Access Name Type Value Description
1 Get Revision UINT 0x0002 Revision 2
Instance attributes
# Access Name Type Value Description
1 Get MAC ID USINT N/A The used node address 0-63
2 Get Baud Rate USINT N/A The used baud rate:
0 = 125 k baud
1 = 250 k baud
2 = 500 k baud
3 Get/Set BOI BOOL N/A Bus off interrupt, default = FALSE
4 Get/Set Bus off Counter USINT N/A Bus off counter
5Get Allocation
Information
Allocation
choice byte
Master's MAC IDUSINT N/A MAC ID of master
Struct of:
BYTE N/A Allocation choice byte
6Get MAC ID Switch
Changed
7 Get Baud Rate
Switch Changed
8 Get Mac ID Switch
Value
9 Get Baud Rate
Switch Value
10 Get/Set Quick Connect BOOL 0 = Disable
BOOL N/A 0 - No change
BOOL N/A 0 - No change
USINT N/A Actual value of Node Address switch 0-63
USINT N/A Actual value of Baud Rate switch 0-3
1 = Enable
1 - The Node Address switch have changed since last
power-up/reset
1 - The Baud Rate switch have changed since last
power-up/reset
Enable/Disable of Quick Connect feature. Disabled
by default. Stored in NVRAM.
36 S1A10387 09/2012
Page 37

Supported CIP objects
Assembly object (Class 0x04)
The Assembly object uses static assemblies. The default assembly instance IDs used are in the vendor specific range. The assembly object
contains the process data to/from the module.
Services
Class services Get_Attribute_Single
Instance services Get_Attribute_Single
Set_Attribute_Single
Class attributes
# Access Name Type Value Description
1 Get Revision UINT 2 Revision 2
2 Get Max Instance UINT 101 Max instance 101
Instance attributes
# Access Name Type Value Description
3 Get/Set Data ARRAY of BYTE - Data produced/consumed by the module
Consuming instances (Output assemblies)
Write requests are rejected if there's an I/O connection against the instance.
Instance 20 - Basic speed control output
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1
2
3
Instance 21 - Extended speed control output
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1
NetRef NetCtrl Fault reset Run rev Run fwd
Speed reference (Low byte)
Speed reference (High byte)
Fault reset Run fwd
2
3
Instance 100 - Transparent output
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1
2
3
S1A10387 09/2012 37
DRIVECOM control word (ATV: 6040) (Low Byte)
DRIVECOM control word (ATV: 6040) (High Byte)
Speed reference (Low byte)
Speed reference (High byte)
Reference speed (ATV:6042) (Low Byte)
Reference speed (ATV:6042) (High Byte)
Page 38

Supported CIP objects
Producing instances (Input assemblies)
Instance 70 - Basic speed control input
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1
Running1 Faulted
2
3
Instance 71 - Extended speed control input
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1
2
3
Instance 101 - Transparent input
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1
2
3
At
reference
Ref from
net
Ctrl from
net
DRIVECOM status word (ATV: 6041) (Low Byte)
DRIVECOM status word (ATV: 6041) (High Byte)
Speed actual (Low byte)
Speed actual (High byte)
Ready Running2
(Rev)
Drive state
Speed actual (Low byte)
Speed actual (High byte)
Output speed (ATV: 6044) (Low Byte)
Output speed (ATV: 6044) (High Byte)
Running1
(Fwd)
Warning Faulted
38 S1A10387 09/2012
Page 39

Supported CIP objects
Data definitions output assemblies
Name Class Instance Attribute Description
Run rev Control Supervisor 1 4
Run fwd Control Supervisor 1 3
Fault reset Control Supervisor 1 12
Speed reference AC/DC Drive 1 8
NetCtrl Control Supervisor 1 5
NetRef AC/DC Drive 1 4
Data definitions intput assemblies
Name Class Instance Attribute Description
Faulted Control Supervisor 1 10
Warning Control Supervisor 1 11
Running1 (Fwd) Control Supervisor 1 7
Running2 (Rev) Control Supervisor 1 8
Ready Control Supervisor 1 9
Ctrl from net Control Supervisor 1 15
Ref from net AC/DC Drive 1 29
At reference AC/DC Drive 1 3
Drive state Control Supervisor 1 6 CIP state machine state
Speed actual AC/DC Drive 1 7
S1A10387 09/2012 39
Page 40

Supported CIP objects
Connection object (Class 0x05)
Services
Class services Get_Attribute_Single
Set_Attribute_Single
Instance services Get_Attribute_Single
Set_Attribute_Single
Class attributes
# Access Name Type Value Description
1 Get Revision UINT 0x0001 Revision 1
100 Get/Set Polled/ COS/
Cyclic Consuming
Instance
101 Get/Set Polled/ COS/
Cyclic Producing
Instance
UINT 20, 21, 100 Default value is assembly instance 21.
For a change to this attribute will require a restart of
the ATV-312-DEV to have effect. (When read the
stored value is returned).
Stored in NVRAM.
UINT 70, 71, 101 Default value is assembly instance 71.
For a change to this attribute will require a restart of
the ATV-312-DEV to have effect. (When read the
stored value is returned).
Stored in NVRAM.
Instance descriptions
Instance 1 = Explicit messaging connection (Predefined in DeviceNet object)
Instance 2 = Polled connection / COS/Cyclic consuming connection
Instance 4 = COS/Cyclic producing connection
Instances 10-14 = Explicit server instances
40 S1A10387 09/2012
Page 41

Supported CIP objects
Instances 1, 10-14 (Explicit messaging) attributes
# Access Name Type Value Description
1 Get State USINT N/A 0 = Non existent
1 = Configuring
2 = Waiting for connection ID
3 = Established
4 = Time out
5 = Deferred Delete
2 Get Instance type USINT 0 Explicit messaging connection
3 Get Transport Class trigger BYTE 0x83 Server, Transport class 3
4 Get Produced connection ID UINT N/A CAN ID for transmission
5 Get Consumed connection ID UINT N/A CAN ID for reception
6 Get Initial Comm
Characteristics
7 Get Produced Connection Size UINT 0x0040 64 Bytes
8 Get Consumed Connection
Size
9 Get/Set Expected Packet Rate UINT 0x09C8 Timing associated with this connection (2504ms)
12 Get/Set
(1)
13 Get Produced Connection path
14 Get Produced Connection path EPATH No value No connection path
15 Get Consumed Connection
16 Get Consumed Connection
17 Get Production Inhibit Time UINT 0 Minimum time between new data production
18 Get/Set Connection Timeout
(1)Only settable for instance 1
Watchdog timeout action USINT 1 1 = Auto delete
length
path length
path
Multiplier
BYTE 21 (Inst 1)
33 (Inst 10-14)
UINT 0x0040 64 Bytes
UINT 0 Number of bytes in the produced connection path
UINT 0 Number of bytes in the consumed connection path
EPATH No value No connection path
USINT 0 Specifies the multiplier applied to the expected
The message group over which the communication
occurs.
3 = Deferred delete
attribute
attribute
packet rate value to derive the value for the Inactivity/
Watchdog Timer.
0 = x4
1 = x8
2 = x16
3 = x32
4 = x64
5 = x128
6 = x256
7 = x512
8 - 255 = Reserved
S1A10387 09/2012 41
Page 42

Supported CIP objects
Instance 2 (Poll or "COS/Cyclic consuming") attributes
# Access Name Type Value Description
1 Get State USINT N/A 0 = Non existent
1 = Configuring
2 = Waiting for connection ID
3 = Established
4 = Time out
2 Get Instance type USINT 1 IO Connection
3 Get Transport Class trigger BYTE 0x82 Server, Polled, Class 2
0x80 Server, COS/Cyclic, Class 0, No Ack
0x82 Server, COS/Cyclic, Class 2
Acknowledged
4 Get Produced connection ID UINT N/A CAN ID for transmission
0xFFFF Not consuming (COS/Cyclic)
5 Get Consumed connection ID UINT N/A CAN ID for reception (Polled)
6 Get Initial Comm
Characteristics
7 Get Produced Connection Size UINT N/A Size of produced data/mapped process data.
8 Get Consumed Connection
Size
9 Get/Set Expected Packet Rate UINT N/A Timing associated with this connection
12 Get Watchdog timeout action USINT 0 0 = Transition to the timed out state
13 Get Produced Connection path
length
14 Get Produced Connection path EPATH 0x20 0x04
15 Get Consumed Connection
path length
16 Get Consumed Connection
path
17 Get Production Inhibit Time UINT 0 Minimum time between new data production
BYTE 0x01
(Polled)
0xF1
(COS/Cyclic,
No Ack)
0x01
(COS/Cyclic,
Ack)
0 COS/Cyclic
UINT N/A Size of consumed data/mapped process data
UINT 0x0007
(Polled)
0x0000
(COS/Cyclic)
0x25 0xII 0xII
0x30 0x03
(Polled)
No value
(COS/Cyclic)
UINT 0x0007 Number of bytes in the consumed connection path
EPATH 0x20 0x04
0x25 0xII 0xII
0x30 0x03
Produces over message group 1
Consumes over message group 2
Consuming only over message group 2
Produces over message group 1 (Ack)
Consumes over message group 2
(Polled)
Number of bytes in the produced connection path
attribute
Path to producing object
II = Producing instance number in assembly object
No producing object
attribute
Path to consuming object
II = Consuming instance number in assembly object
42 S1A10387 09/2012
Page 43

Supported CIP objects
# Access Name Type Value Description
18 Get/Set Connection Timeout
Multiplier
USINT 0 Specifies the multiplier applied to the expected
packet rate value to derive the value for the Inactivity/
Watchdog Timer.
0 = x4
1 = x8
2 = x16
3 = x32
4 = x64
5 = x128
6 = x256
7 = x512
8 - 255 = Reserved
S1A10387 09/2012 43
Page 44

Supported CIP objects
Instance 4 (COS/Cyclic producing) attributes
# Access Name Type Value Description
1 Get State USINT N/A 0 = Non existent
1 = Configuring
2 = Waiting for connection ID
3 = Established
4 = Time out
2 Get Instance type USINT 1 IO Connection
3 Get Transport Class trigger BYTE 0x00 Client, Cyclic, Class 0 (No Ack)
0x10 Client, COS, Class 0 (No Ack)
0x02 Client, Cyclic, Class 2 (Acknowledged)
0x12 Client, COS, Class 2 (Acknowledged)
4 Get Produced connection ID UINT N/A CAN ID for transmission
5 Get Consumed connection ID UINT 0xFFFF Not acknowledged
N/A CAN ID for reception
(Acknowledged)
6 Get Initial Comm
Characteristics
7 Get Produced Connection Size UINT N/A Size of produced data on this connection
8 Get Consumed Connection
Size
9 Get/Set Expected Packet Rate UINT N/A Timing associated with this connection
12 Get Watchdog timeout action USINT 0 0 = Transition to the timed out state
13 Get Produced Connection path
length
14 Get Produced Connection path EPATH 0x20 0x04
15 Get Consumed Connection
path length
16 Get Consumed Connection
path
17 Get/Set Production Inhibit Time UINT 0 Minimum time between new data production
18 Get/Set Connection Timeout
Multiplier
BYTE 0x0F
(No ACK)
0x01
(Acknowledged)
UINT 0 Consumes 0 bytes on this connection
UINT 0x0007 Number of bytes in the produced connection path
0x25 0xII 0xII
0x30 0x03
UINT 0x0000
(No ACK)
0x0005
(Acknowledged)
EPATH No value
(No ACK)
0x20 0x2B
0x25 0x01 0x00
(Acknowledged)
USINT 0 Specifies the multiplier applied to the expected
Producing only over message group 1
Produces over message group 1
Consumes over message group 2 (Ack)
attribute
Path to producing object
II = Producing instance number in assembly object
Number of bytes in the consumed connection path
attribute
Empty
Acknowledge Handler Object, Instance 1
packet rate value to derive the value for the Inactivity/
Watchdog Timer.
0 = x4
1 = x8
2 = x16
3 = x32
4 = x64
5 = x128
6 = x256
7 = x512
8 - 255 = Reserved
44 S1A10387 09/2012
Page 45
Supported CIP objects
Motor data object (Class 0x28)
This object serves as a database for motor parameters.
Services
Class services Get_Attribute_Single
Instance services Get_Attribute_Single
Set_Attribute_Single
Class attributes
# Access Name Type Value Description
1 Get Revision UINT 0x0001 Revision of the object
Instance attributes for Schneider Electric brand
# Access Name Type Value Description
3 Get/Set MotorType USINT N/A 7 - Squirrel Cage Induction Motor
6 Get/Set RatedCurrent UINT N/A Rated Stator Current
Units: [100mA]
7 Get/Set RatedVoltage UINT N/A Rated Base Voltage
Units: [V]
S1A10387 09/2012 45
Page 46
Supported CIP objects
Control Supervisor Object (Class 0x29)
This object models all the management functions for devices within the "Hierarchy of Motor Control Devices". The behaviour of motor control
devices is described in the State Transition Diagram and the State Event Matrix.
Services
Class services Get_Attribute_Single
Instance services Get_Attribute_Single
Set_Attribute_Single
Reset
Class attributes
# Access Name Type Value Description
1 Get Revision UINT 0x0001 Revision of the object
Instance attributes
# Access Name Type Value Description
3 Get/Set Run1 BOOL N/A Run forward
See Run/Stop Event Triggers
4 Get/Set Run2 BOOL N/A Run reverse
See Run/Stop Event Triggers
5 Get/Set NetCtrl BOOL N/A Requests Run/Stop control to be local or from
network.
0 = Local Control
1 = Network Control
6 Get State USINT N/A 1 = Startup
2 = Not_Ready
3 = Ready
4 = Enabled
5 = Stopping
6 = Fault_Strop
7 = Faulted
For ATV312 DRIVECOM status to State translation,
see page 47
7 Get Running1 BOOL N/A Enabled or Stopping or Fault_Stop
8 Get Running2 BOOL 0 Running2 is always 0 since negative speed indicated
on the Actual speed reference.
9 Get Ready BOOL N/A 1 = Ready or Enabled or Stopping
0 = Other state
10 Get Faulted BOOL N/A 0 = No Faults present
1 = Fault Occurred (latched)
ATV:6041#3
11 Get Warning BOOL N/A 0 = No Warnings present
1 = Warning (not latched)
12 Get/Set FaultRst BOOL N/A 0->1 = Fault Reset
0 = No Action
ATV:6040#7
15 Get CtrlFromNet BOOL N/A Status of Run/Stop control source.
0 = Control is local
1 = Control is from network
.
46 S1A10387 09/2012
Page 47

Supported CIP objects
Control supervisor state diagram
The state transition diagram is specified by the drive profile. Note that the state machine shall be updated independently of if the drive is
controlled locally or remote.
DRIVECOM status to CS state translation
The CS state is get from ATV312 DRIVECOM status according to the table below:
CS state DRIVECOM state MSK
(DRIVECOM status & 0x006F)
Startup Not ready to switch on 0x0000
0x0020
Not_Ready Switch on disabled 0x0040
0x0060
Ready Ready to switch on 0x0021
Switched on 0x0023
Enabled Operation enabled 0x0027
Stopping cmdd Bit 3 = 0 0x0027
Quick stop active 0x0007
Fault_Stop Malfunction reaction active 0x000F
0x002F
Faulted Malfunction 0x0008
0x0028
S1A10387 09/2012 47
Page 48

Supported CIP objects
Run/Stop event triggers
Run/Stop events are generated from Run1 and Run2 attributes according to the table below:
Run1 Run2 Trigger Event Run Type DRIVECOM command
0 0 Stop N/A Operation enable state
Other states: Shutdown
0->1 0 Run Run1 Enable operation
0 0->1 Run Run2 Enable operation
0->1 0->1 No Action N/A Last command still valid
1 1 No Action N/A Last command still valid
1->0 1 Run Run2 Enable operation
Reversed speed reference
1 1->0 Run Run1 Enable operation
The following table defines how DRIVECOM commands are generated in the DRIVECOM control word. All other bits are unaffected.
DRIVECOM command
Bit 3 Bit 2 Bit 1 Bit 0
Shutdown 0110
Disable operation0111
Enable operation1111
DRIVECOM control word
48 S1A10387 09/2012
Page 49

Supported CIP objects
AC/DC drive object (Class 0x2A)
This object models the functions specific to an AC or DC Drive. e.g. speed ramp, torque control etc.
Services
Class services No services implemented
Instance services Get_Attribute_Single
Set_Attribute_Single
Class attributes
No attributes are implemented at class level.
Instance attributes for Schneider Electric brand
# Access Name Type Value Description
3 Get AtReference BOOL N/A 1 = Drive actual at reference
ATV:6041#10
4 Get/Set NetRef BOOL N/A Request speed reference to be local or from network.
0 = Local speed setpoint
1 = Network speed setpoint
6 Get DriveMode USINT 0 0 = Vendor specific mode
7 Get SpeedActual INT N/A Actual drive speed
Units: RPM
ATV:6044 [RPM]
8 Get/Set SpeedRef INT N/A Speed reference
Units: RPM
ATV:6042 [RPM]
29 Get RefFromNet BOOL N/A Status of speed reference.
0 = Local speed reference
1 = Network speed reference
S1A10387 09/2012 49
Page 50

Supported CIP objects
Acknowledge handler object (Class 0x2B)
Services
Class services Get_Attribute_Single
Instance services Get_Attribute_Single
Set_Attribute_Single
Class attributes
# Access Name Type Value Description
1 Get Revision UINT 0x0001 Revision of the object
Instance 1 attributes
# Access Name Type Value Description
1 Get/Set Acknowledge
Timer
2 Get/Set Retry Limit USINT 1 Number of Ack timeouts before retry limit reached
3 Get Producing
connection
Instance
UINT 16 Time to wait for acknowledge (in ms) before
resending
event
UINT 4 Connection instance, which contains the path of the
producing I/O application object, which will be notified
of Ack Handler events.
50 S1A10387 09/2012
Page 51
Supported CIP objects
Application objects (Class 0x70)
This object allows access to all parameters in the ATV-312 by converting CANopen Index and Sub-index to CIP instance and attributes.
The CANopen Index and Sub-index are linearly mapped to CIP instance and attribute.
CIP Get_Attribute_Single service is converted to the CANopen request code 0x40 and the Set_Attribute_Single service the CANopen
request code 0x2B.
Services
Class services Get_Attribute_Single
Instance services Get_Attribute_Single
Set_Attribute_Single
Class attributes
# Access Name Type Value Description
1 Get Revision UINT 0x0001 Revision of the object
Instance attributes
# Access Name Type Value Description
1 Get/Set Parameter with
Sub-index 0
... ... ... ... ... ...
N Get/Set Parameter with
Sub-index N
N/A N/A
N/A N/A
S1A10387 09/2012 51
Page 52

52 S1A10387 09/2012
Page 53

Page 54

ATV312_DeviceNet_S1A10387_02
S1A10387 09/2012
 Loading...
Loading...