

Page 1

Altivar 31
Guide simplifié
Simplified manual
Kurzanleitung
Guía simplificada
Guida semplificata
简明手册
V3.7
09/2009
Variateurs de vitesse
pour moteurs asynchrones
Variable speed drives for
asynchronous motors
Frequenzumrichter für
Asynchronmotoren
Variadores de velocidad
para motores asíncronos
Variatori di velocità
per motori asincroni
www.schneider-electric.com
1624580
异步电机变频器
Page 2

Variateurs de vitesse
pour moteurs asynchrones Page 1
FRANÇAISENGLISHDEUTSCHITALIANO ESPAÑOL
Variable speed drives
for asynchronous motors Page 21
Frequenzumrichter
für Asynchronmotoren Seite 41
Variadores de velocidad
para motores asíncronos Página 61
Variatori di velocità
per motori asincroni Pagina 81
101
Requirements for North American market
according to UL and CSA standards Page 121
Page 3

Sommaire
En exploitation le moteur peut être arrêté, par suppression des ordres de marche ou de la consigne
vitesse, alors que le variateur reste sous tension. Si la sécurité du personnel exige l'interdiction de
tout redémarrage intempestif, ce verrouillage électronique est insuffisant : Prévoir une coupure
sur le circuit de puissance.
Le variateur comporte des dispositifs de sécurité qui peuvent en cas de défauts commander l'arrêt
du variateur et par là-même l'arrêt du moteur. Ce moteur peut lui-même subir un arrêt par blocage
mécanique. Enfin, des variations de tension, des coupures d'alimentation en particulier, peuvent
également être à l'origine d'arrêts.
La disparition des causes d'arrêt risque de provoquer un redémarrage entraînant un danger pour
certaines machines ou installations, en particulier pour celles qui doivent être conformes aux
réglementations relatives à la sécurité.
ll importe donc que, dans ces cas-là, l'utilisateur se prémunisse contre ces possibilités de
redémarrage notamment par l'emploi d'un détecteur de vitesse basse, provoquant en cas d'arrêt
non programmé du moteur, la coupure de l'alimentation du variateur.
L'installation et la mise en œuvre de ce variateur doivent être effectuées conformément aux
normes internationales IEC et aux normes nationales de son lieu d'utilisation. Cette mise en
conformité est de la responsabilité de l'intégrateur qui doit respecter entre autres, pour la
communauté européenne, la directive CEM.
Le respect des exigences essentielles de la directive CEM est conditionné notamment par
l'application des prescriptions contenues dans ce document.
L'Altivar 31 doit être considéré comme un composant, ce n'est ni une machine ni un appareil prêt
à l'utilisation selon les directives européennes (directive machine et directive compatibilité
électromagnétique). Il est de la responsabilité du client final de garantir la conformité de sa
machine à ces normes
Le variateur ne doit pas être utilisé comme organe de sécurité pour les machines présentant un
risque matériel ou humain (appareils de levage par exemple). Les surveillances de survitesse ou
de non contrôle de trajectoire doivent être assurées dans ces cas là par des organes distincts et
indépendants du variateur.
Les produits et matériels présentés dans ce document sont à tout moment susceptibles
d'évolution ou de modification tant au plan technique et d'aspect que de l'utilisation. Leur
description ne peut en aucun cas revêtir un aspect contractuel.
Recommandations préliminaires __________________________________________________________ 2
Les étapes de la mise en œuvre __________________________________________________________ 3
Configuration usine _____________________________________________________________________ 4
Remplacement d’un ATV 28 par un ATV 31 _________________________________________________ 4
Evolutions du logiciel ___________________________________________________________________ 5
Schéma de raccordement pour préréglage usine _____________________________________________ 6
Exemples de schémas conseillés __________________________________________________________ 7
Compatibilité électromagnétique __________________________________________________________ 8
Fonctions de l'afficheur et des touches _____________________________________________________ 9
Accès aux menus ___________________________________________________________ _________ 10
Configuration du paramètre bFr __________________________________________________________ 11
Menu réglages SEt- ______________________________________________________ _____________ 11
Menu contrôle moteur drC- ______________________________________________________________ 13
Menu Entrées /sorties I-O- ______________________________________________________________ 16
Menu Surveillance SUP- _______________________________________________________________ 17
Défauts - causes - remèdes ________________________________________________________ _____ 18
FRANÇAIS
1
Page 4

Recommandations préliminaires
Ce guide simplifié décrit la mise en œuvre minimale, pour la configuration usine du variateur.
Pour les ATV31pppppT (fonction traverse control), consulter le "guide de programmmation Traverse control"
sur le cédérom.
Tous les fonctionnements, paramètres et défauts décrits dans ce document concernent la configuration usine.
Si cette configuration a été modifiée par un des menus CtL-, FUn- ou FLt-, des dif férences peuvent app araître.
Le cédérom fourni avec le variateur comporte la description co mplète ainsi que tous les menus de configuration.
FRANÇAIS
Avant de mettre sous tension et de configurer le variateur
- Vérifier que la tension du réseau est compatible avec la plage de tension d’alimentation
du variateur. Risque de destruction si non respect de la tension réseau.
- Mettre les entrées logiques hors tension (état 0) pour éviter tout démarrage intempestif.
A défaut, à la sortie des menus de configuration, une entrée affectée à un ordre de marche
entraînerait immédiatement le démarrage du moteur.
Réglage utilisateur et extensions de fonctionnalités
Si nécessaire, l'afficheur et les boutons permettent la modification des réglages et l'extension des
fonctionnalités. Le retour au réglage usine est possible aisément par le par amètre FCS du menu drC-.
Les paramètres sont de trois types :
- affichage : valeurs affichées par le variateur
- réglage : modifiables en fonctionnement et à l'arrêt
- configuration : seulement modifiables à l'arrêt et hors freinage. Visualisables en fonctionnement
.
- S'assurer que les changements de réglages en cours de fonctionnement ne présentent
pas de danger ; les effectuer de préférence à l'arrêt.
Démarrage
Important : en réglage usine, lors d’une mise sous tension ou d’une remise à zéro de défaut manuelle ou après
une commande d’arrêt, le moteur ne peut être alimenté qu’après une remise à zéro préalable des ordres
"avant", "arrière". A défaut, le variateur affiche "nst" mais ne démarre pas.
Essai sur moteur de faible puissance ou sans moteur
En réglage usine, la détection perte phase moteur est active. Pour vérifier le variateur dans un environnement
de test ou de maintenance, et sans avoir recours à un moteur équivalent au calibre du variateur (en particulier
pour les variateurs de fortes puissances), désactiver la détection de phase moteur et configurer la loi tension /
fréquence UFt = L (voir cédérom).
Utilisation sur réseau IT
Réseau IT : Neutre isolé ou impédant.
Utiliser un contrôleur permanent d’isolement compat ible avec les charges non linéaires : type XM200 de mar que
Merlin Gerin, par exemple.
Les ATV 31
déconnecter ces filtres de la masse.
Consulter le cédérom fourni avec le variateur.
2 1624580 09/2009
pppM2 et N4 comportent des filtres RFI intégrés. Pour utilisation sur réseau IT, il est possible de
Page 5

Les étapes de la mise en œuvre
1 - Réceptionner le variateur
• S’assurer que la référence du variateur inscrite sur l’étiquette est conforme au bordereau de livraison
correspondant au bon de commande.
• Ouvrir l’emballage, et vérifier que l’Altivar 31 n’a pas été endommagé pen dant le transport.
2 - Vérifier que la tension réseau est compatible avec la plage
d’alimentation du variateur
- Risque de destruction du variateur si non respect de la tension réseau
3 - Fixer le variateur
4 - Raccorder au variateur :
• le réseau d’alimentation, en s’assurant qu’il est :
- dans la plage de tension du variateur
- hors tension
• le moteur en s’assurant que son couplage correspond à la tension du réseau
• la commande par les entrées logiques
• la consigne de vitesse par les entrées logiques ou analogiques
5 - Mettre sous tension sans donner d’ordre de marche
6 - Configurer :
La fréquence nominale (bFr) du moteur, si elle est différente de 50 Hz.
7 - Configurer dans le menu drC- :
Les paramètres moteurs, seulement si la configuration usine du variateur ne convient pas.
8 - Configurer dans le menu I-O- :
Seulement si la configuration usine du variateur ne convient pas, le mode de contrôle : 3 fils, ou 2 fils sur
transition, ou 2 fils sur niveau, ou 2 fils sur niveau avec priorité sens avant, ou commande locale pour
ATV31
pppA.
Il faut s’assurer que les fonctions programmées sont compatibles avec le schéma de câblage
utilisé.
9 - Régler dans le menu SEt- :
- les paramètres ACC (Accélération) et dEC (Décélération),
- les paramètres LSP (Petite vitesse quand la consigne est nulle) et HSP (Grande vitesse quand la consigne
est maximale),
- le paramètre ItH (Protection thermique moteur),
10 - Démarrer
Conseils pratiques
• Un retour aux réglages usine est toujours possible par le paramètre FCS (mettre FCS = InI), dans les
menus drC- (page 15) ou I-O- (page 16).
• Pour obtenir une optimisation des performances d’entraînement en précision et en temp s de rép onse, il est
obligatoire :
- d’entrer les valeurs lues sur la plaque signalétique du moteur dans le menu Contrôle moteur drC-.
- d’effectuer un autoréglage moteur froid et connecté, par le paramèt re tUn du menu drC- page 14.
- d’ajuster les paramètres FLG et StA du menu Réglage SEt- page 12.
1624580 09/2009 3
(voir l’étiquette signalétique du variateur)
FRANÇAIS
Page 6

Configuration usine
L'Altivar 31 est préréglé en usine pour les conditions d'emploi les plus courantes :
• Affichage : variateur prêt (rdY) moteur à l'arrêt , et fréquence moteur en marche.
• Fréquence moteur (bFr) : 50 Hz.
• Application à couple constant, contrôle vectoriel de flux sans capteur (UFt = n).
• Mode d’arrêt normal sur rampe de décélération.
• Mode d’arrêt sur défaut : roue libre
• Rampes linéaires (ACC, dEC) : 3 secondes.
• Petite vitesse (LSP) : 0 Hz.
• Grande vitesse (HSP) : 50 Hz.
FRANÇAIS
• Courant thermique moteur (ItH) = courant nominal moteur (valeur selon calibre du variat eur).
• Courant de freinage par injection à l'arrêt (SdC1) = 0,7 x courant nominal variateur, pendant 0,5 seconde.
• Adaptation automatique de la rampe de décélération en cas de surtension au freinage.
• Pas de redémarrage automatique après un défaut.
• Fréquence de découpage 4 kHz.
• Entrées logiques :
- LI1, LI2 (2 sens de marche) : commande 2 fils sur transition,
LI1 = marche avant, LI2 = marche arrière, inactives sur les ATV 31
- LI3, LI4 : 4 vitesses présélectionnées
(vitesse 1 = consigne vitesse ou LSP, vitesse 2 = 10 Hz, vitesse 3 = 15 Hz, vitesse 4 = 20 Hz).
- LI5 - LI6 : inactives (non affectées).
• Entrées analogiques :
- AI1 : consigne vitesse 0-10 V, inactive sur les ATV 31
- AI2 : consigne sommatrice vitesse 0±10 V.
- AI3 : 4-20 mA inactive (non affectée).
• Relais R1 : le contact s'ouvre en cas de défaut (ou variateur hors tension)
• Relais R2 : inactif (non affecté).
• Sortie analogique AOC : 0-20 mA, inactive (non affectée).
ppppppA (non affectée).
ppppppA (non affectées).
Gamme ATV 31ppppppA
Les ATV 31ppppppA sortis d’usine sont livrés avec la commande locale activée : les boutons RUN, STOP et
le potentiomètre du variateur sont actifs. Les entrées logiques LI1 et LI2 ainsi que l’entrée analogique AI1 sont
inactives (non affectées).
Si les valeurs ci-dessus sont compatibles avec l'application, le variateur peut être utilisé sans modification des
réglages.
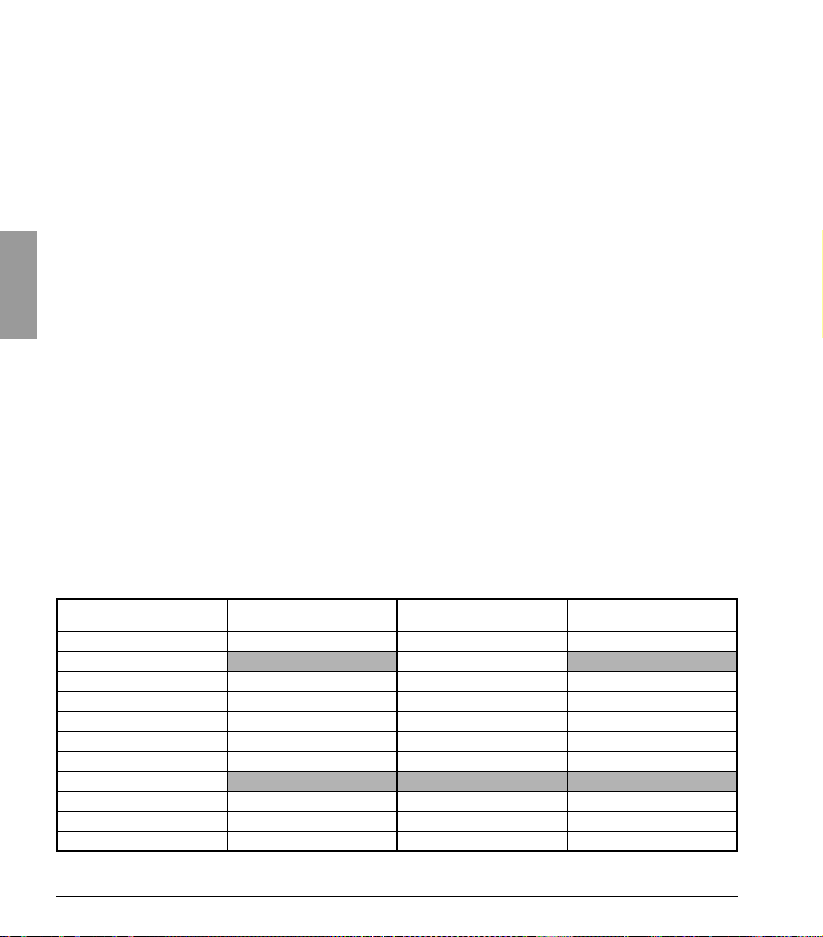
Remplacement d’un ATV 28 par un ATV 31
Le tableau ci-dessous indique la correspondance des bornes contrôle entre les deux modèles de variateurs.
Bornes de contrôle ATV 28 Fonction en réglage usine Bornes de contrôle ATV 31 Fonction en réglage usine
R1A - R1B - R1C Relais de défaut R1A - R1B - R1C Relais de défaut
R2A - R2C Consigne vitesse atteinte R2A - R2C Non affectée
COM 0 V COM 0 V
AI1 (0 - 10 V) Consigne vitesse AI1 (0 - 10 V) Consigne vitesse
+ 10 V + 10 V 10 V + 10 V
AI2 (0 - 10 V) Consigne sommatrice vitesse AI2 (0 - ± 10 V) Consigne sommatrice vitesse
AIC (X - Y mA) Non affectée AI3 (X - Y mA) Non affectée
AO Fréquence moteur AOC / AOV Non affectée
LI1 - LI2 Marche avant / arrière LI1 - LI2 Marche avant / arrière
LI3 - LI4 Vitesses présélectionnées LI3 - LI4 Vitesses présélectionnées
+ 24 V + 24 V 24 V + 24 V
4 1624580 09/2009
Page 7

Evolutions du logiciel
Depuis le début de sa commercialisation l’Altivar ATV 31 a bénéficié de fonctionnalités supplémentaires. La
version du logiciel V1.7 devient V3.7. Cette documentation est relative à la version V3.7.
La version du logiciel figure sur l’étiquette signalétique collée sur le flanc du variateur.
Evolution de la version V3.7 par rapport à V1.7
Nouveaux paramètres
Menu Défauts FLt-
• rP: Ce paramètre permet d’effa ce r l es défauts sur le produit
Evolution de la version V1.7 par rapport à V1.2
Nouveaux paramètres
Menu Contrôle moteur
• /23 : Choix de la configuration source pour la fonction réglage usine.
Ce paramètre est également accessible dans les menus I-O- , CtL- , et FUn-.
Menu Fonctions applications FUn-
• Inr: Incrément rampe (Voir cédérom).
Menu Défauts FLt-
• LEt: Configuration de la détection de défaut externe (Voir cédérom).
Nouvelles affectations possibles pour les relais R1 et R2
• Les relais R1 et R2 peuvent maintenant être af fectés à LI1.. LI6. Il retourne alors la valeur de l’entrée logique
sélectionnée.
FRANÇAIS
1624580 09/2009 5
Page 8

Schéma de raccordement pour préréglage usine
U / T1
V / T2
W / T3P0PA / +
+10
AI1
COM
AI3
R / L1
U1
W1
V1
M
3 a
S / L2
T / L3
R1A
R1C
R1B
LI1
CLI
R2A
R2C
LI2
LI3
LI4
LI5
LI6
24V
AI2
AOV
AOC
(2)
(1)
(1)
PB
PC / -
R / L1
S / L2
COM
A0C
Utilisation de la sortie
analogique en sortie logique
Relais 24 V
ou
Entrée d’automate 24V
ou
Voyant à LED
ATV31ppppM2
Réseau monophasé
ATV31ppppM3X/N4/S6X
Réseau triphasé
X-Y mA
0 ± 10 V
Potentiomètre
de référence
Résistance de
freinage éventuelle
0V
SOURCE
CLI
SINK
CLI LI1 LIx
CLI LI1 LIx
24V
CLI LI1 LIx
ATV31
ATV31
ATV31
CLI au 0V (réglage usine)
CLI "en l’air"
CLI au 24 V
FRANÇAIS
(1) Inductance de ligne éventuelle (1 phase ou 3 phases)
(2) Contacts du relais de défaut, pour signaler à dist ance l'état du variateur
Nota : Equiper d'antiparasites tous les circuits selfiques proches du variateur ou couplés sur le même circuit
(relais, contacteurs, électrovannes,…)
Choix des constituants associés :
Voir catalogue.
Commutateur des entrées logiques
Ce commutateur affecte la liaison du commun des entrées logiques au zéro volt, au 24 V ou "en l’air" :
6 1624580 09/2009
Page 9

0V
LI1
24V
ATV31
ATV31
24V
LI1
COM
ATV31
24V
0V
LI1COM CLI
Automate
0V
LI1COM
CLI
24V
ATV31
Automate
Exemples de schémas conseillés
Utilisation de contacts secs
• Commutateur en position "Source"
(réglage usine des ATV31 autres que
ATV31
ppppA)
Utilisation de sorties d’automates à transistors
• Commutateur en position CLI • Commu tateur en position CLI
Précautions de câblage
Puissance
Le variateur doit être impérativement raccordé à la terre, en conformité avec les réglementat ions portant sur les
courants de fuite élevés (supérieurs à 3,5 mA).
Lorsqu’une protection amont par "dispositif différentiel résiduel" est imposée par les normes d’installation il est
nécessaire d’utiliser un dispositif type A pour les variateurs monophasés et type B pour les variateurs tripha sés.
Choisir un modèle adapté intégrant :
un filtrage des courants HF,
une temporisation évitant tout déclenchement dû à la charge des capacités parasites à la mise sous tension. La
temporisation n’est pas possible pour des appareils 30 mA. Dans ce cas choisir des appareils immunisés contre
les déclenchements intempestifs, par exemple des "dispositifs différentiels résiduels" à immunité renforcée de
la gamme
Si l'installation comporte plusieurs variateurs, prévoir un "dispositif différentiel résiduel" par variateur.
Séparer les câbles de puissance des circuits à signaux bas niveaux de l'installation (détecteurs, automates
programmables, appareils de mesure, vidéo, téléphone).
Cas des longueurs de câbles > 50 m entre le variateur et le moteur : ajouter des filtres de sort ie (voir catalogue).
Commande
Séparer les circuits de commande et les câbles de puissance. Pour les circuits de commande et de consigne
de vitesse, il est recommandé d'utiliser du câble blindé et torsadé au pas compris entre 25 et 50 mm en reliant
le blindage à la masse à chaque extrémité.
s.i (marque Merlin Gerin).
• Commutateur en position "SINK"
(réglage usine des ATV31
Dans ce cas le commun ne doit jamais être
relié à la masse ou à la terre, car alors il y a
risque de démarrage intempestif au premier
défaut d’isolement.
ppppA)
FRANÇAIS
1624580 09/2009 7
Page 10

Compatibilité électromagnétique
2
3
1
8
6
5
4
7
Principe
• Équipotentialité "haute fréquence" des masses entre le variateur, le moteur et les blindages des câbles.
• Utilisation de câbles blindés avec blindages reliés à la masse sur 360° aux deux extrémités pour les câbles
moteur 6, résistance de freinage éventuelle 8, et contrôle-commande 7. Ce blindage pe ut être réalisé sur une
partie du parcours par tubes ou goulottes mét alliques à con dition qu'il n'y ait pas de d iscontinuité. En cas de
borniers intermédiaires, ceux-ci doivent être en boîtier métallique blindé CEM.
• Séparer le plus possible le câble d'alimentation (réseau) du câble moteur.
FRANÇAIS
Plan d'installation (exemple)
1 Plan de masse en tôle fourni avec le variateur, à monter sur
celui-ci, comme indiqué sur le dessin.
2 Altivar 31
3 Fils ou câble d'alimentation non blindés.
4 Fils non blindés pour la sortie des contacts des relais.
5 Fixation et mise à la masse des blindages des câbles 6, 7 et 8
au plus près du variateur :
- mettre les blindages à nu,
- utiliser des colliers métalliques inoxydables de dimensions
appropriées, sur les parties dénudées des blindages, pour la
fixation sur la tôle 1.
Les blindages doivent être suffisamment serrés sur la tôle pour
que les contacts soient corrects.
6 Câble blindé pour raccordement du moteur. Pour les variateur s
de 0,18 à 1,5 kW, si la fréquence de découpage est supérieure
à 12 kHz, utiliser des câbles à faible capacité linéique : 130 pF
(picoFarad) maxi par mètre.
7 Câble blindé pour raccordement du contrôle/commande.
Pour les utilisations nécessitant de nombreux conducteurs,
utiliser des faibles sections (0,5 mm
8 Câble blindé pour raccordement de la résistance de freinage
éventuelle.
Nota :
• En cas d'utilisation d'un filtre d'en trée additionnel, celui ci est mont é sous le variateur, et directemen t raccordé
au réseau par câble non blindé. La liaison 3 sur le variateur est alors réalisée par le câbl e de sortie du filtre.
• Le raccordement équipotentiel HF des masses entre variateur, moteur, et blindages des câ bles ne dispense
pas de raccorder les conducteurs de protection PE (vert-jaune) aux bornes prévues à cet effet sur chacun
des appareils.
2
).
8 1624580 09/2009
Page 11

Fonctions de l'afficheur et des touches
Altivar 31
RUN
ESC
ENT
STOP
RESET
RUN
ERR
CAN
• Potentiomètre de consigne,
actif si le paramètre Fr1
du menu CtL reste configuré à AIP
• 4 afficheurs "7 segments"
• Passe au menu ou au
paramètre précédent, ou
augmente la valeur affichée
• Passe au menu ou au
paramètre suivant, ou
diminue la valeur affichée
• Bouton RUN : il commande la mise
sous tension du moteur dans le sens
avant, si le paramètre tCC du menu I-O
reste configuré à LOC
• Voyant rouge
"bus DC sous tension"
• Sort d’un menu ou d’un
paramètre, ou abandonne la
valeur affichée pour revenir à
la valeur précédente en
mémoire
Bouton STOP/RESET
• il permet la remise à zéro des défauts
• il peut toujours commander l’arr êt du mo te ur .
- Si tCC (menu I-O) n’est pas configuré en LOC, l’ar rêt se
fait en roue libre.
- Si tCC (menu I-O) reste configuré en LOC, l’arrêt se fait
sur rampe, mais si le freinage par injection est en cours,
il se fait alors en roue libre.
• 2 voyants d’état CANopen
• Entre dans un menu ou
dans un paramètre, ou
enregistre le paramètre ou la
valeur affichée
Pour ATV 31
ppppppA seulement
ENT
La mémorisation s'accompagne d'un clignotement de l'affichage
Affichage normal hors défaut et hors mise en service :
En cas de défaut, celui ci est affiché en clignotant.
Option terminal déporté
Consulter le cédérom.
1624580 09/2009 9
• L'action sur ou ne mémorise pas le choix.
• L’appui prolongé (>2 s) de ou entraîne un défilement rapide.
Mémorisation, enregistrement du choix affiché :
- 43.0 : Affichage du paramètre sélectionné dans le menu SUP (par défaut : fréquence moteu r).
En cas de limitation de courant, l’affichage est clignotant.
- init : Séquence d’initialisation
- rdY : Variateur prêt.
- dcb : Freinage par injection de courant continu en cours.
- nSt : Arrêt en roue libre.
- FSt : Arrêt rapide
- tUn : Autoréglage en cours.
FRANÇAIS
Page 12

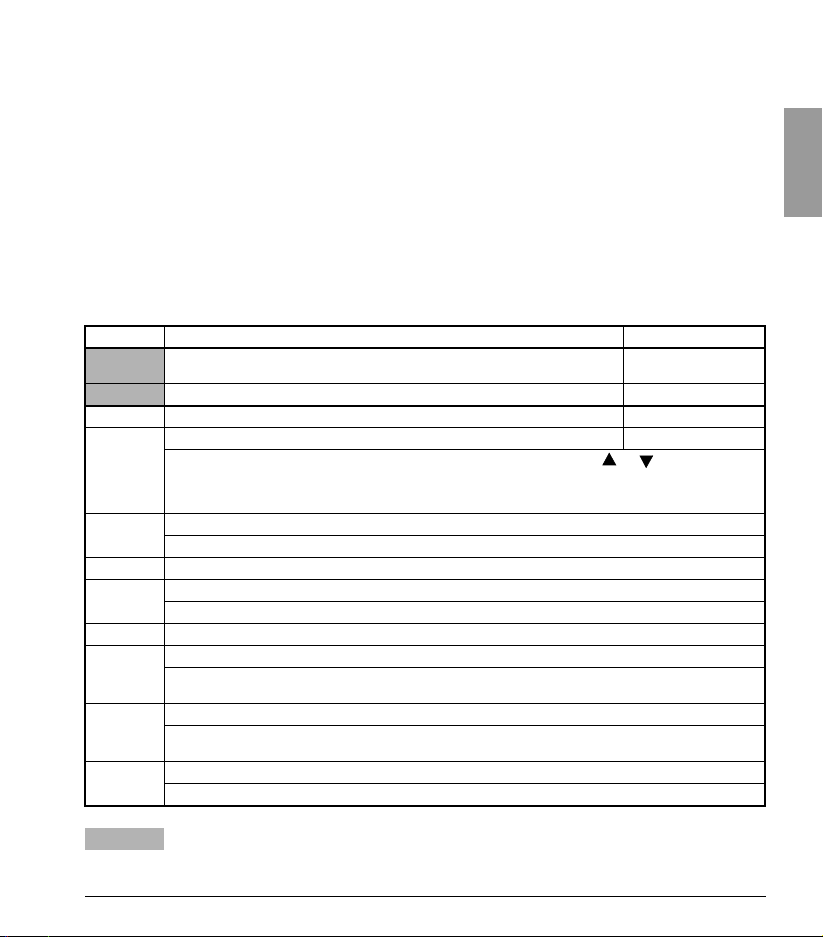
Accès aux menus
Affiche l’état du variateur
Fréquence moteur (préréglage visible
uniquement à la première mise sous tension)
Contrôle moteur
Défauts
Communication
Surveillance
Réglages
Menus
Entrées / sorties
Commande
Fonctions
Mise sous tension
Voir cédérom
ENT
ACC 15.0
ENT
ESC
ENT
ESC
26.0 26.0
ESC
dEC
ENT
SEt-
Menu
Valeur ou affectation
1 clignotement
(enregistrement)
Paramètre
(Paramètre suivant)
La mémorisation
s'accompagne
d'un clignotement
de l'affichage
FRANÇAIS
Les codes des menus sont différenciés des codes de paramètres par un tiret à droite. Exemple : menu SEt-,
paramètre ACC.
Mémorisation, enregistrement du choix affiché :
Exemple :
10 1624580 09/2009
Page 13

Configuration du paramètre bFr
Ce paramètre n’est modifiable qu’à l’arrêt, variateur verrouillé.
Code Descriptio n Plage de
>2H Fréquence standard moteur 50
Ce paramètre n’est visible ici qu’à la première mise sous tension.
Il reste toujours modifiable dans le menu drC-.
50 Hz : IEC
60 Hz : NEMA
Ce paramètre modifie les préréglages des par amètres : HSP page 11, Ftd page 13, FrS page 13 et
tFr page 14.
réglage
Menu réglages SEt-
Les paramètres de réglage sont modifiables en marche et à l’arrêt.
S’assurer que les changements en cours de fonctionnement sont sans danger ;
les effectuer de préférence à l’arrêt.
Réglage
usine
FRANÇAIS
Code Description Plage de
-//
@1/
7;: Petite vitesse 0 à HSP 0 Hz
4;: Grande vitesse LSP à tFr bFr
5I4 Protection thermique du moteur - courant thermique maxi 0 à 1,5 In (1) Selon calibr e
<2H Compensation RI / Boost de tension 0 à 100 % 20 %
(1) In correspond au courant nominal variateur indiqué dans le catalogue et sur l’étiquette signalétique du
1624580 09/2009 11
Temps des rampes d’accélération et de décélération selon la valeur
Définis pour accélérer et décélérer entre 0 e t la fréquen ce nominale Fr S (paramèt re du menu drC- ).
S’assurer que la valeur de dEC n’est pas trop faible par rapport à la charge à arrêter.
(Fréquence moteur à consigne mini).
(fréquence moteur à consigne maxi) : s’assurer que ce réglage convient au moteur et à
l’application.
Régler ItH à l’intensité nominale lue sur la plaque signalétique moteur.
Pour supprimer la protection thermique, voir le cédérom.
Permet d’optimiser le couple à t rès basse vit esse ( augmen ter UFr s’il y a manque de co uple).
S’assurer que la valeur de UFr n’est pas trop élevée moteur à chaud (risque d’instabilité).
Si on modifie UFt (page 14) UFr repasse à son r égl age usin e (2 0 %).
variateur.
réglage
du paramètre
Inr
Réglage
usine
3 s
3 s
variateur
Page 14
Code Description Plage de
réglage
273 Gain de la boucle fréquence 1 à 100 % 20
Paramètre accessible seulement si UFt (page 14) = n ou nLd.
Le paramètre FLG ajuste le suivi de la rampe de vitesse en fonction de l’inertie de la machine
entraînée.
Valeur trop faible : allongement du temps de réponse.
Valeur trop forte : dépassement de vitesse, instabilité.
;I- Stabilité de la boucle fréquence 1 à 100 % 20
FRANÇAIS
Paramètre accessible seulement si UFt (page 14) = n ou nLd.
Valeur trop faible : dépassement de vitesse, instabilité.
Valeur trop forte : allongement du temps de réponse.
;7: Compensation de glissement 0 à 150% 100
Paramètre accessible seulement si UFt (page 14) = n ou nLd.
Permet d’ajuster la compensation de glissement autour de la valeur fixée par la vitesse nominale moteur.
Sur les plaques moteurs, les indications de vitesse ne sont pas forcément exactes.
• Si le glissement réglé est < glissement réel : le moteur ne tourne pas à la bonne vitesse en régime
établi.
• Si le glissement réglé est > glissement réel : le moteur est surcompensé et la vitesse est instable.
I@/$ Temps d’injection de courant continu automatique à l’arrêt. 0,1 à 30 s 0,5 s
;@/$ Intensité du courant d’injection automatique à l’arrêt 0 à 1,2 In (1) 0,7 In (1)
S'assurer que le moteur supporte ce courant sans surchauffe.
I@/% 2
;@/% 2
ème
temps d’injection de courant continu automatique à
l’arrêt.
Voir cédérom.
ème
intensité du courant d’injection automatique à l’arrêt .
Voir cédérom.
0 à 30 s 0 s
0 à 1,2 In (1) 0,5 In (1)
6:2 Fréquence occultée 0 à 500 0 Hz
Interdit un fonctionnement prolongé sur une plage de fré quence de ± 1 Hz autour de JPF. Cette
fonction permet de supprimer une vitesse critique qui entraîne une résonance. Le réglage à 0 rend
la fonction inactive.
62% 2
;:% 2
;:& 3
;:' 4
ème
fréquence occultée 0 à 500 0 Hz
Interdit un fonctionnement prolongé sur une plage de fréquence de ± 1 Hz autour de JF2. Cette
fonction permet de supprimer une vitesse critique qui entraîne une résonance. Le réglage à 0 rend
la fonction inactive.
ème
vitesse présélectionnée. 0,0 à 500,0 Hz 10 Hz
ème
vitesse présélectionnée. 0,0 à 500,0 Hz 15 Hz
ème
vitesse présélectionnée. 0,0 à 500,0 Hz 20 Hz
/75 Limitation de courant 0,25 à 1,5 In (1) 1,5 In (1)
Permet de limiter le couple et l’échauffement du moteur.
Réglage
usine
(1) In correspond au courant nominal variateur indiqué dans le catalogue et sur l’étiquette signalétique du
variateur.
12 1624580 09/2009
Page 15
Code Description Plage de
I7; Temps de fonctionnement en petite vitesse 0 à 999,9 s 0 (pas de
Suite à un fonctionnement en LSP pendant le temps défini, l’arrêt du moteur est demandé
automatiquement. Le moteur redémarre si la référence fréquence est supérieure à LSP et si un ordre de
marche est toujours présent. Attention, la valeur 0 correspond à un temps non limité.
2I@ Non utilisé, voir cédérom
II@ Non utilisé, voir cédérom
/I@ Non utilisé, voir cédérom
;@; Non utilisé, voir cédérom
;2H Fréquence de découpage 2,0 à 16 kHz 4 kHz
Ce paramètre est également accessible dans le menu drC-.
réglage
Réglage
usine
limitation de
temps)
Menu contrôle moteur drC-
Les paramètres ne sont modifiables qu’à l’arrêt, sans ordre de marche, sauf tUn, qui peut provoquer la
mise sous tension du moteur.
L’optimisation des performances d’entraînement est obtenue :
- en entrant les valeurs lues sur la plaque signalétique du moteur dans le menu entraînement,
- en déclenchant un auto-réglage (sur un moteur asynchrone standard).
Code Description Plage de
>2H Fréquence standard moteur 50
50 Hz : IEC
60 Hz : NEMA
Ce paramètre modifie les préréglages des paramètres : HSP page 11, Ftd page 13, FrS page 13
et tFr page 14.
<D; Tension nominale moteur lue sur sa plaque signalétique Selon calibre
2H; Fréquence nominale moteur lue sur sa plaque signalétique 10 à 500 Hz 50 Hz
Le réglage usine est 50 Hz, remplacé par un préréglage de 60 Hz si bFr est mis à 60 Hz.
D/H Courant nominal moteur lu sur sa plaque signalétique 0,25 à 1,5 In (1) Selon calibre
D;: Vitesse nominale moteur lue sur sa plaque signalétique 0 à 32760 RPM Selon calibre
0 à 9999 RPM puis 10.00 à 32.76 KRPM
Si la plaque signalétique n’indique pas la vitesse nominale, consulter le cédérom.
/9; Cosinus Phi moteur lu sur sa plaque signalétique 0,5 à 1 Selon calibre
H;/ Laisser à nO ou voir cédérom. nO
(1) In correspond au courant nominal variateur indiqué dans le catalogue et sur l’étiquette signalétique du
variateur.
réglage
variateur
Réglage
usine
Selon calibre
variateur
variateur
variateur
variateur
FRANÇAIS
1624580 09/2009 13
Page 16
Code Description Plage de
I<D Autoréglage de la commande du moteur nO
Il est impératif que tous les paramètres moteurs (UnS, FrS, nCr, nSP, COS) soi ent correctement
configurés avant d’effectuer l’autoréglage.
D9 : Autoréglage non fait.
=1; : L’autoréglage est fait dès que possible, puis le paramètre passe aut omatiquement à dOnE
ou nO en cas de défaut (affichage du défaut tnF).
@9D1 : Utilisation des valeurs données par le précédent autoréglage.
FRANÇAIS
I<; Etat de l’autoréglage (information, non paramétrable) tAb
<2I Choix du type de loi tension / fréquence n
DH@ Fréquence de découpage aléatoire YES
;2H Fréquence de découpage (1) 2,0 à 16 kHz 4 kHz
I2H Fréquence maximale de sortie 10 à 500 Hz 60 Hz
;H2 Suppression du filtre de la boucle de vitesse nO
(1) Paramètre également accessible dans le menu réglage SEt-..
14 1624580 09/2009
H<D : L’autoréglage est fait à chaque ordre de marche.
:9D : L’autoréglage est fait à chaque mise sous tension.
75$ à 75) : L’autoréglage est fait lors de la transition 0
cette fonction.
Attention :
L'autoréglage s'effectue seulement si aucune commande n'est actionnée.
L’autoréglage peut durer 1 à 2 secondes. Ne pas l’interrompre et attendre que l’affichage passe
à "dOnE" ou à "nO".
Pendant l’autoréglage le moteur est parcouru par son courant nominal .
I-> : La valeur par défaut de résistance du stator est utilisée pour commander le moteur.
:1D@ : L’autoréglage a été demandé mais n'est pas encore effectué.
:H93 : Autoréglage en cours.
2-57 : L’autoréglage a échoué.
@9D1 : La résistance stator mesurée par la fonction autoréglage est utilisée pour commander le
moteur.
;IH@ : La résistance stator à froid (rSC différent de nO) est utilisée pour commander le mot eur.
7 : Couple constant pour moteurs en parallèle ou moteurs spéciaux
: : Couple variable : applications pompes et ventilateurs
D : Contrôle vectoriel de flux sans capteur pour applications à couple constant
D7@ : Economie d'énergie, pour applications à couple variable sans besoin de dynamique
importante (comportement voisin de la loi P à vide et de la loi n en charge).
=1; : Fréquence avec modulation aléatoire
D9 : Fréquence fixe
La modulation de fréquence aléatoire évite les bruits de résonance éventuels qui pourraient
survenir à une fréquence fixe.
La fréquence est réglable pour rédu ir e le b rui t g éné ré par le mot e ur.
Si la fréquence est réglée à plus de 4 kHz, en cas d’échauffement excessif le variateur diminue
automatiquement la fréquence de découpage, et la rétablit lorsqu e sa température est redevenue
normale.
Le réglage usine est 60 Hz, remplacé par un préréglage à 72 Hz si bFr est mis à 60 Hz
D9 : Le filtre de la boucle de vitesse reste actif (évite les dépassements de consigne).
=1; : Le filtre de la boucle de vitesse est supprimé (pour applications avec positionnement,
entraîne un temps de réponse réduit, avec dépassement de consigne possible).
réglage
V 1 d’une entrée logique affectée à
Réglage
usine
Page 17

Code Description Plage de
;/; Sauvegarde de la configuration (1) nO
D9 : Fonction inactive
;IH5 : Effectue une sauvegarde de la configuration en cours (sauf le résultat de l’autoréglage)
en mémoire EEPROM. SCS repasse automatiquement à nO dès que la sauvegarde est
effectuée. Cette fonction permet de conserver une configuration en réserve en plus de la
configuration en cours.
Dans les variateurs sortis d’usine la configuration en cours et la conf iguration en sauvegarde sont
initialisées à la configuration usine.
/23 Configuration source (nouveau paramètre de la version V1.7) Std
Choix de la configuration source.
;I; : Configuration marche/arrêt.
Identique à la configuration usine sauf pour les affectations des entrées/sorti es :
Entrées logiques :
LI1, LI2 (2 sens de marche) : commande 2 fils sur transition, LI1 = marche avant, LI2 = marche
arrière, inactives sur les ATV 31
LI3 à LI6 : inactives (non affectées).
Entrées analogiques :
AI1 : consigne vitesse 0-10 V, inactive sur les ATV 31
AI2, AI3 : inactive (non affectée).
Relais R1 : le contact s'ouvre en cas de défaut (ou variateur hors tension)
Relais R2 : inactif (non affecté).
Sortie analogique AOC : 0-20 mA, inactive (non affectée).
;I@ : Configuration usine (voir page 4).
L’affectation de CFG entraîne directement un retour à la configuration sélectionnée.
2/; Retour au réglage usine / Rappel de configuration (1) nO
D9 : Fonction inactive
H1/5 : La configuration en cours devient identique à la configuration sauvegardée
précédemment par SCS = StrI. rECI n’est visible que si une sauveg arde a été faite. FCS r epasse
automatiquement à nO dès que cette action est effectuée.
5D5 : La configuration en cours est remplacée par la configuration sélectionnée par le
paramètre CFG (2). FCS repasse automatiquement à nO dès que cette action est effectuée.
Pour être pris en compte, rECI et InI nécessitent un appui pr olongé (2 s) de la touche
ENT.
ppppppA (non affectées).
ppppppA (non affectée).
réglage
Réglage
usine
FRANÇAIS
(1) SCS, CFG et FCS sont accessibles depuis plusieurs menus de configuration, mais ils concernent
l’ensemble de tous les menus et paramètres.
(2) Les paramètres suivants ne sont pas modifiés par cette fonction, ils conservent leur configuration :
- bFr (Fréquence standard moteur) page 11.
- LCC (Commande par le terminal déporté) dans le menu CtL-. Voir le cédérom.
- COd (Code de verrouillage du terminal) page 18.
- Les paramètres du menu Communication COM-. Voir le cédérom.
- Les paramètres du menu Surveillance SUP-. Voir le cédérom.
1624580 09/2009 15
Page 18

Menu Entrées /sorties I-O-
Les paramètres ne sont modifiables qu’à l’arrêt, sans ordre de marche.
Code Description Réglage
I// Commande 2 fils / 3 fils (Type de contrôle) 2C
Configuration de la commande :
FRANÇAIS
I/I Type de commande 2 fils (paramètre accessible seulement si tCC = 2C) t rn
HH; Marche arrière par entrée logique si tCC = 2C : LI2
/H7&
/H4&
-9$I
;/;
/23
2/;
%/ = commande 2 fils
&/ = commande 3 fils
79/ = commande locale (RUN / STOP / RESET du variateur) pour ATV31
Commande 2 fils : C’est l’état ouvert ou fermé de l’entrée qui commande la marche ou l’arrêt.
Commande 3 fils (Commande par impulsions) : une impulsion "avant" ou arrière" suffit pour
commander le démarrage, une impulsion "stop" suffit pour commander l’arrêt. Voir le cédérom.
Sur ATV31
(marche arrière). Le bouton RUN du variateur devient alors inactif, mais la référence vitesse reste
donnée par le potentiomètre. Il est possible de désactiver le potentiomètre et d’affecter la
consigne vitesse à l’entrée analogique AI1, en configurant le paramètre Fr1 = AI1 dans le menu
CtL-. Voir le cédérom.
717 : L’état 0 ou 1 est pris en compte pour la marche ou l’arrêt.
IHD : Un changement d’état (transition ou front) est nécessaire pou r encle ncher la marche af in
d’éviter un redémarrage intempestif après une interruption de l’alimentation.
:29 : L’état 0 ou 1 est pris en compte pour la marche ou l’arrêt, mais l’entrée de sens "avant"
est toujours prioritaire sur l’entrée de sens "arrière".
Si rrS = nO la marche arrière reste active, par tension négative sur AI2 par exemple.
D9 : Non affectée
75$ : Entrée logique LI1
75% : Entrée logique LI2, accessible si tCC = 2C
75& : Entrée logique LI3,
75' : Entrée logique LI4
75( : Entrée logique LI5
75) : Entrée logique LI6.
Consulter le cédérom
@9
H$
H%
Identique à menu drC, page 15
pppA, la reconfiguration de tCC = 2C réaffecte les entrées LI1 (marche avant) et LI2
Le changement d’affectation de tCC nécessite un appui prolongé (2 s) de la touche
"ENT", il entraîne un retour au réglage usine des fonctions : rrS, tCt et de toutes les
fonctions affectant des entrées logiques.
usine
ATV31
pppA : LOC
pppA seulement .
si tCC = 3C : LI3
si tCC = LOC : nO
16 1624580 09/2009
Page 19
Menu Surveillance SUP-
Les paramètres sont accessibles en marche et à l’arrêt.
Certaines fonctions comportent de nombreux paramètres. Pour clarifier la programmation et pour éviter un
défilement fastidieux de paramètres, ces fonctions ont été groupées dans des sous-menus.
Les sous-menus sont reconnaissables au ti ret placé à droite de leur code, comme pour les menus : LIF- par
exemple.
Lorsque le variateur est en marche, la valeur affichée correspond à la valeur de l’un des paramètres de
surveillance. Par défaut, la valeur affichée est la fréquence de sortie appliquée au moteur (paramètre rFr).
Durant l’affichage de la valeur du nouveau paramètre de surveillance désiré, il faut un second appui prolongé
(2 secondes) sur la touche "ENT" pour valider le chan gement de paramètre de surveillance et mémoriser celuici. Dès lors c’est la valeur de ce paramètre qui sera affichée en marche (même après une mise hors tension).
Si le nouveau choix n’est pas confirmé par ce second appui prolongé sur "ENT", il reviendra au paramètre
précédent après mise hors tension.
Nota : Après une mise h ors tension ou coupur e réseau, le paramètr e affiché est toujours l’état du va riateur (rdY
par exemple). Le paramètre sélectionné est affiché après un ordre de marche.
Code Description Plage de variation
72H Consigne fréquence pour la commande par le terminal intégré ou par
H:5 Consigne interne PI 0 à 100%
2H4 Consigne de fréquence avant rampe (en valeur absolue) 0 à 500 Hz
H2H Fréquence de sortie appliquée au moteur - 500 Hz à + 500 Hz
;:@ Fréquence de sortie en unité client
7/H Courant dans le moteur
9:H Puissance moteur
<7D Tension réseau (donne la tension réseau via le bus DC, en régime moteur ou à l'arrêt)
I4H Etat thermique moteur
I4@ Etat thermique variateur
72I Dernier défaut apparu
le terminal déporté
Ce paramètre sert également à la fonction + vite/- vite par les touches et du clavier ou du
terminal.
Il affiche et valide le fonctionnement. En cas de coupur e réseau rFr n ’est pas mémori sé, et il faut
revenir dans SUP- et rFr pour revalider la fonction + vite/- vite.
Voir cédérom.
100 % = Puissance nominale du moteur
100 % = Etat thermique nominal
118 % = Seuil "OLF" (surcharge moteur)
100 % = Etat thermique nominal
118 % = Seuil "OHF" (surcharge moteur)
Voir Défauts - causes - remèdes, page 18
0 à 500 Hz
FRANÇAIS
Ces paramètres n’apparaissent que si la fonction a été validée.
1624580 09/2009 17
Page 20

Code Description Plage de variation
9IH Couple moteur
100 % = couple nominal du moteur
HI4 Temps de fonctionnement 0 à 65530 heures
Temps cumulé de mise sous tension du moteur :
de 0 à 9999 (heures), puis 10.00 à 65.53 (kiloheures).
Peut être remis à zéro par le paramètre rPr du menu FLt- (voir cédérom).
/9@ Code de verrouillage du terminal
FRANÇAIS
I<; Etat de l’autoréglage
<@: Affichage de la version logiciel de l’ATV31
75-! Fonctions des entrées logiques
-5-! Fonctions des entrées analogiques
Voir cédérom
I-> : La valeur par défaut de résistance du stator est utilisée pour commander le moteur.
:1D@ : L’autoréglage a été demandé mais n'est pas encore effectué.
:H93 : Autoréglage en cours.
2-57 : L’autoréglage a échoué.
@9D1 : La gestion de l'entraînement utilise la résistance stator mesurée par la fonction
autoréglage
Ex : 1102 = V1.1 IE02.
Voir cédérom.
Voir cédérom.
Défauts - causes - remèdes
Assistance à la maintenance, affichage de défaut
En cas d’anomalie à la mise en service ou en exploitation, s’assurer tout d’abord que les recommandations
relatives à l’environnement, au montage et aux raccordements ont été respectées.
Le premier défaut détecté est mémorisé et affiché en clignotant sur l’écran : le variateur se verrouille, et le
contact du relais de défaut (R1A - R1C ou R2A - R2C) s’ouvre.
Non démarrage sans affichage de défaut
• S'il n'y a aucun affichage, vérifier que le variateur est bien alimenté et vérif i er le cablage des entrées AI1 et
AI2 ainsi que le raccordement sur le connecteur RJ45.
• Autres cas : consulter le cédérom.
18 1624580 09/2009
Page 21

Défauts à réarmer
La cause du défaut doit être supprimée avant réarmement par mise hors t ension jusqu'à extinction de l' affichage
puis remise sous tension du variateur.
Défaut Cause probable Procédure remède
/92
défaut CANopen
/H2
circuit de charge
condensateurs
112
défaut EEPROM
5D2
défaut interne
722
perte 4-20 mA
9>2
surtension
en décélération
9/2
surintensité
942
surcharge variateur
972
surcharge moteur
9:2
coupure phase
moteur
9;2
surtension
• interruption de communication sur bus
CANopen
• défaut de commande du relais de charge
ou résistance de charge détériorée
• défaut mé m oi re interne • Vérifier l'environnement (compatibilité
• court-circuit sur alimentation 10 V
•défaut interne
• perte de la consigne 4-20 mA sur l’entrée
AI3
• freinage trop brutal
• charge entraînante
• Paramètres des menus SEt- et drC- non
corrects
• inertie ou charge trop forte
• blocage mécanique
• température variateur trop élevée • Contrôler la charge moteur, la
• déclenchement par courant moteur trop
élevé
• valeur paramètre rSC erronée
• coupure d’une phase en sortie du
variateur
• contacteur aval ouvert
• moteur non câblé ou de trop faible
puissance
• instabilités instantanées du courant
moteur
• tension réseau trop élevée
• réseau perturbé
• Vérifier le bus de communication.
• Consulter la documentation spécifique.
• Remplacer le variateur.
électromagnétique).
• Remplacer le variateur.
• Vérifier les circuits raccordés au 10 V
• Vérifier le câblage des entrées AI1 et
AI2 et le raccordement sur le
connecteur RJ45.
• Vérifier l'environnement (compatibilité
électromagnétique).
• Remplacer le variateur.
• Vérifier le raccordement sur l’entrée
AI3.
• Augmenter le temps de décélération.
• Adjoindre une résistance de freinage si
nécessaire.
• Voir la fonction brA (voir cédérom).
• Vérifier les paramètres de SEt- et drC-.
• Vérifier le dimensionnement moteur/
variateur/charge.
• Vérifier l'état de la mécanique.
ventilation variateur et l'environnement.
Attendre le refroidissement pour
redémarrer.
• Vérifier le réglage ItH (page 11) de la
protection thermique moteur, contrôler
la charge du moteur. Attendre le
refroidissement pour redémarrer.
• Refaire la mesure de rSC (page 13).
• Vérifier les raccordements du variateur
au moteur
• Dans le cas de l’utilisation d’un
contacteur aval, paramétrer OPL à OAC
(voir cédérom, menu FLt-).
• Essai sur moteur de faible puissance ou
sans moteur : paramétrer OPL à nO
(voir cédérom, menu FLt-).
• Vérifier et optimiser les para mètres UFr
(page 11), UnS et nCr (page 13), et faire
un autoréglage par tUn (page 14).
• Vérifier la tension réseau.
FRANÇAIS
1624580 09/2009 19
Page 22

Défaut Cause probable Procédure remède
:42
coupure phase
réseau
;/2
court-circuit moteur
FRANÇAIS
;72
défaut Modbus
;92
survitesse
ID2
erreur autoréglage
• coupure d’une phase
• utilisation sur réseau monophasé d'un
ATV31 triphasé
• charge avec balourd
Cette protection agit seulement en charge.
• court-circuit ou mise à la terre en sorti e du
variateur
• courant de fuite important à la terre en
sortie du variateur dans le cas de
plusieurs moteurs en parallèle.
• interruption de communication sur bus
Modbus
• validation du terminal déporté
LCC = YES et terminal débranché.
• instabilité
• charge entraînante trop forte
• moteur spécial ou moteur de puissance non
adaptée au variateur
• moteur non raccordé au variateur
• Vérifier le raccordement et les fusibles.
• Utiliser un réseau triphasé.
• Inhiber le défaut par IPL = nO (voir
cédérom)
• Vérifier les câbles de liaison du
variateur au moteur, et l’isolement du
moteur.
• Réduire la fréquence de découpage.
• Ajouter des inductances en série avec
le moteur.
• Vérifier le bus de communication.
• Consulter la documentation spécifique.
• Vérifier la liaison avec le terminal
• Vérifier les paramètres moteur, gain et
stabilité.
• Ajouter une résistance de freinage.
• Vérifier le dimensionnement moteur /
variateur / charge.
• Utiliser la loi L ou la loi P (UFt page 14).
• Vérifier la présence du moteur lors de
l’autoréglage.
• Dans le cas de l’utilisation d’un
contacteur aval, le fermer pendant
l’autoréglage.
Défauts réarmés spontanément à la disparition de la cause
Défaut Cause probable Procédure remède
/22
défaut configuration
/25
défaut configuration
par liaison série
<;2
sous-tension
• la configuration en cours est
incohérente.
• configuration invalide (la configuration
chargée dans le variateur par liaison
série est incohérente)
• réseau trop faible
• baisse de tension passagère
• résistance de charge détériorée
• Faire un retour en réglage usine ou un
rappel de la configuration en
sauvegarde si elle est valide. Voir
paramètre FCS du menu drC- page 15.
• Vérifier la configuration précédemment
chargée.
• Charger une configuration cohérente.
• Vérifier la tension et le paramètre
tension.
• Remplacer le variateur.
20 1624580 09/2009
Page 23

Contents
The motor can be stopped during operation by inhibiting start commands or the speed reference
while the drive remains powered up. If personnel safety requires prevention of sudden restarts,
this electronic locking system is not sufficient: fit a cut-off on the power circuit.
The drive is fitted with safety devices which, in the event of a fault, can shut down the drive and
consequently the motor. The motor itself may be stopped by a mechanical blockage. Finally,
voltage variations, especially line supply failures, can also cause shutdowns.
If the cause of the shutdown disappears, there is a risk of restarting which may endanger certain
machines or installations, especially those which must conform to safety regulations.
In this case the user must take precautions against the possi bility of restarts, in partic ular by using
a low speed detector to cut off power to the drive if the motor performs an unprogrammed
shutdown.
The drive must be installed and set up in accordance with both international and national
standards. Bringing the device into conformity is the responsibility of the systems inte grator who
must observe the EMC directive among others within the European Union.
The specifications contained in this document must be applied in order to comply with the
essential requirements of the EMC directive.
The Altivar 31 must be considered as a component: it is neither a machine nor a device ready for
use in accordance with European directives (machinery directive and electromagnetic
compatibility directive). It is the responsibility of the end user to ensure that the machine meets
these standards.
The drive must not be used as a safety device for machines posing a potential risk of material
damage or personal injury (lifting equipment, for example). In such applications, overspeed
checks and checks to ensure that the trajectory remains under constant control must be made by
separate devices which are independent of the drive.
The products and equipment described in this document may be changed or modified at any time,
either from a technical point of view or in the way they are operated. Their description can in no
way be considered contractual.
Preliminary recommendations ___________________________________________________________ 22
Steps for setting up the drive ____________________________________________________________ 23
Factory configuration __________________________________________________________________ 24
Replacing an ATV 28 with an ATV 31 _____________________________________________________ 24
Software enhancements ________________________________________________________________ 25
Wiring diagram for factory settings ________________________________________________________ 26
Examples of recommended circuit diagrams ________________________________________________ 27
Electromagnetic compatibility ____________________________________________________________ 28
Functions of the display and the keys _____________________________________________________ 29
Access to menus _____________________________________________________________________ 30
Configuration of the bFr parameter _______________________________________________________ 31
Settings menu SEt- ____________________________________________________________________ 31
Motor control menu drC- ________________________________________________________________ 33
I/O menu I-O- ________________________________________________________________________ 36
Display menu SUP- ___________________________________________________________________ 37
Faults - Causes - Remedies _____________________________________________________________ 38
ENGLISH
21
Page 24
Preliminary recommendations
This simplified guide describes the minimum setup for the factory configuration of the drive.
For ATV31pppppT drives (with traverse control function), please consult the "Traverse control programming
manual" on the CD-ROM.
All operations, parameters and faults described in this document relate to the factory conf igurati on. Difference s
may become apparent if this configuration has been modified by the CtL-, FUn- or FLt- menus.
The CD-ROM supplied with the drive contains the complete description along with all the configuration menus.
Prior to switching on and configuring the drive
- Check that the line voltage is compatible with the supply voltage range of the drive. The
drive may be damaged if the line voltage is not compatible.
- Ensure the logic inputs are switched off (state 0) to prevent accidental starting.
Otherwise, an input assigned to the run command may cause the motor to start
immediately on exiting the configuration menus.
User adjustment and extension of functions
ENGLISH
If necessary, the display and buttons can be used to modify the settings and to extend the functions. It is very
easy to return to the factory settings using the FCS parameter in the drC- menu.
There are three types of parameter:
- Display: Values displayed by the drive
- Adjustment: Can be changed during operation or when stopped
- Configuration: Can only be modified when stopped and no braking is taking place. Can be displayed during
operation.
- Check that changes to the current operating settings do not present any danger. Changes
should preferably be made with the drive stopped.
Start up
Important: In factory settings mode, when the drive is switched on, or in a manual fault reset, or after a stop
command, the motor can only be supplied with power once the "forward" and "reverse" commands have been
reset. If they have not been reset, the drive will display "nst" but will not start.
Test on a low power motor or without a motor
In factory settings mode, motor phase loss detection is active. To check the drive in a test or maintenance
environment without having to switch to a motor with the sa me rating as the drive (particularly useful in the case
of high power drives), deactivate motor phase loss detection and configure the voltage/frequency ratio UFt = L
(see CD-ROM).
Operation on an IT system
IT system: Isolated or impedance earthed neutral.
Use a permanent insulation monitor compatible with non-linear loads: a Merlin Gerin type XM200, for example.
ATV 31
pppM2 and N4 drives feature built-in RFI filters. These filters can be disconnected from ground for
operation on an IT system.
Please refer to the CD-ROM supplied with the drive.
22 1624580 09/2009
Page 25

Steps for setting up the drive
1 - Delivery of the drive
• Check that the drive reference printed on the label is the same as that on the delivery no te correspond ing to
the purchase order.
• Remove the Altivar 31 from its packaging and check that it has not been damaged in transit.
2 - Check that the line voltage is compatible with the supply voltage
range of the drive
- The drive may be damaged if the line voltage is not compatible.
3 - Fit the drive
4 - Connect the following to the drive:
• The line supply, ensuring that it is:
- compatible with the voltage range of the drive
- switched off
• The motor, ensuring that its coupling corresponds to the line voltage
• The control via the logic inputs
• The speed reference via the logic or analog inputs
5 - Switch on the drive, but do not give a run command
6 - Configure the following:
The nominal frequency (bFr) of the motor, if it is different from 50 Hz.
7 - Configure the following in the drC- menu:
The motor parameters, only if the factory configuration of the drive is not suitable.
8 - Configure the following in the I-O- menu:
The control mode (only if the factory configura tion is not suitable): 3-wire, or 2-wire transit ion detection, or 2-wi re
level detection, or 2-wire level detection with forward direction priority, or local control for ATV31
The user must ensure that the programmed functions are compatible with the wiring diagram
used.
9 - Set the following in the SEt- menu:
- The ACC (Acceleration) and dEC (Deceleration) parameters
- The LSP (Low speed when the reference is zero) and HSP (High speed when the reference is maximum)
parameters
- The ItH parameter (Motor thermal protection)
10 - Start the drive
Practical recommendations
• It is always possible to return to the factory settings using the FCS parameter (set FCS = InlI) in the drC(page 35) or I-O- (page 36) menus.
• The following operations must be performed to ensure optimum drive performance in te rms of accuracy and
response time:
- Enter the values indicated on the motor rating plate in the Motor control menu drC-.
- Perform an autotune operation, with the motor cold and connected, via parameter tUn in the drC- menu,
(page 34).
- Adjust the FLG and StA parameters in the Settings menu SEt- (page 32).
(see the drive rating plate).
pppA.
ENGLISH
1624580 09/2009 23
Page 26
Factory configuration
The Altivar 31 is factory-set for the most common operating conditions:
• Display: Drive ready (rdY) with motor stopped, and motor frequency with motor running
• Motor frequency (bFr): 50 Hz
• Constant torque application with sensorless flux vector control (UFt = n)
• Normal stop mode on deceleration ramp
• Stop mode in the event of a fault: Freewheel
• Linear ramps (ACC, dEC): 3 seconds
• Low speed (LSP): 0 Hz
• High speed (HSP): 50 Hz
• Motor thermal current (ItH) = nominal motor current (value depending on drive rati ng)
• Standstill injection braking current (SdC1) = 0.7 x nominal drive current, for 0.5 seconds
• Automatic adaptation of the deceleration ramp in the event of overvoltage on braking
• No automatic restarting after a fault
• Switching frequency 4 kHz
• Logic inputs:
- LI1, LI2 (2 directions of operation): 2-wire transition detection con trol
LI1 = forward, LI2 = reverse, inactive on ATV 31
- LI3, LI4: 4 preset speeds
ENGLISH
(speed 1 = speed reference or LSP, speed 2 = 10 Hz, speed 3 = 15 Hz, speed 4 = 20 Hz)
- LI5 - LI6: Inactive (not assigned)
• Analog inputs:
- AI1: Speed reference 0-10 V, inactive on ATV 31
- AI2: Summed speed reference 0±10 V
- AI3: 4-20 mA inactive (not assigned)
• Relay R1: The contact opens in the event of a fault (or drive off)
• Relay R2: Inactive (not assigned)
• Analog output AOC: 0-20 mA inactive (not assigned)
ppppppA drives (not assigned)
ppppppA (not assigned)
ATV 31ppppppA range
When they leave the factory, ATV 31ppppppA drives are supplied with local control activated: the RUN, STOP
buttons and the drive potentiometer are active. Logic inputs LI1 and LI2 and analog input AI1 are inactive (not
assigned).
If the above values are compatible with the application, the drive can be used without ch anging the settings.
Replacing an ATV 28 with an ATV 31
The table below shows the similarities and differences in terms of the control terminals on ea ch of the two drives.
ATV 28 control terminals Function in factory settings
R1A - R1B - R1C Fault relay R1A - R1B - R1C Fault relay
R2A - R2C
COM 0 V COM 0 V
AI1 (0 - 10 V) Speed reference AI1 (0 - 10 V) Speed reference
+10 V +10 V 10 V +10 V
AI2 (0 - ± 10 V) Summed speed reference AI2 (0 - ± 10 V) Summed speed reference
AIC (X - Y mA) Not assigned AI3 (X - Y mA) Not assigned
AO Motor frequency AOC/AOV Not assigned
LI1 - LI2 Forward/rev erse LI1 - LI2 Forward/reverse
LI3 - LI4 Preset speeds LI3 - LI4 Preset speeds
+24 V +24 V 24 V +24 V
Speed reference reached R2A - R2C Not assigned
mode
ATV 31 control terminals Function in factory settings
mode
24 1624580 09/2009
Page 27

Software enhancements
Since the Altivar ATV 31 was first launched, it has benefi ted from the addition of several new functions. Software
version V1.7 has now been updated to V3.7. This documentation relates to version V3.7.
The software version is indicated on the identification label fixed to the body of the drive.
Enhancements made to version V3.7 in comparison to V1.7
New parameters
Fault menu FLt-
• rP: This new parameter allows to reset all the product faults
Enhancements made to version V1.7 in comparison to V1.2
New parameters
Motor control menu
• /23: Choice of source configuration for the factory settings function.
This parameter can also be accessed in the I-O-, CtL-, and FUn- menus.
Application functions menu FUn-
• Inr: Ramp increment (please refer to the CD-ROM)
Fault menu FLt-
• LEt: Configuration of the external fault detection function (see CD-ROM)
New assignments available for relays R1 and R2
• Relays R1 and R2 can now be assigned to LI1..LI6 to feed back the value of the selected logic input.
ENGLISH
1624580 09/2009 25
Page 28

Wiring diagram for factory settings
U / T1
V / T2
W / T3P0PA / +
+10
AI1
COM
AI3
R / L1
U1
W1
V1
M
3 a
S / L2
T / L3
R1A
R1C
R1B
LI1
CLI
R2A
R2C
LI2
LI3
LI4
LI5
LI6
24V
AI2
AOV
AOC
(2)
(1)
(1)
PB
PC / -
R / L1
S / L2
COM
A0C
Use of the analog output
as a logic output
24 V relay
or
24V PLC input
or
LED
ATV31ppppM2
Single phase supply
ATV31ppppM3X/N4/S6X
3-phase supply
X - Y mA
0 ± 10 V
Reference
potentiometer
Braking resistor
(if used)
0V
SOURCE
CLI
SINK
CLI LI1 LIx
CLI LI1 LIx
24V
CLI LI1 LIx
ATV31
ATV31
ATV31
CLI at 0V (factory setting)
CLI "floating"
CLI at 24 V
ENGLISH
(1) Line choke, if used (single phase or 3-phase)
(2) Fault relay contacts for remote signalling of drive status
Note: Fit interference suppressors to all inductive circuits near the drive or coupled to the same circuit (relays,
contactors, solenoid valves, etc).
Choice of associated components:
Please refer to the catalogue.
Logic input switch
This switch assigns the logic input common link to 0V, 24 V or "floating":
26 1624580 09/2009
Page 29

0V
LI1
24V
ATV31
ATV31
24V
LI1
COM
ATV31
24V
0V
LI1COM CLI
PLC
0V
LI1COM
CLI
24V
ATV31
PLC
Examples of recommended circuit diagrams
Using volt-free contacts
• Switch in "Source" position
(factory setting for ATV31 drives, except for
ATV31
ppppA)
Using PLC transistor outputs
• Switch in CLI position • Switch in CLI position
Wiring recommendations
Power
The drive must be earthed to conform to the regulations concerning high leakage currents (over 3.5 mA).
When upstream protection by means of a "residual current device" is required by the installation standards, a
type A device should be used for single-phase drives and type B for 3-phase drives. Choose a suitable model
incorporating:
HF current filtering
A time delay which prevents tripping caused by the load from stray capaci tance on po wer-up . The time de lay is
not possible for 30 mA devices. In this case, choose devices with immunity against unintentional tripping, for
example RCDs (residual current devices) with reinforced immunity from the
If the installation includes several drives, provide one "residual current device" per drive.
Keep the power cables away from low-level signal circuits in the installation (detectors, PLCs, measuring
apparatus, video, telephone).
If you are using cables > 50 m between the drive and the motor, add output filters (please refer t o the catalogue).
Control
Keep the control circuits away from the power cables. For control and speed reference circuits, we recommend
using shielded twisted cables with a pitch of between 25 and 50 mm, connecting the shielding to earth at each
end.
• Switch in "SINK" position
(factory setting for ATV31ppppA drives)
In this instance, the common must never be
connected to earth or earth ground, as this
presents a risk of unintended equipment
operation on the first insulation fault.
s.i range (Merlin Gerin brand).
ENGLISH
1624580 09/2009 27
Page 30

Electromagnetic compatibility
2
3
1
8
6
5
4
7
Principle
• Grounds between the drive, motor and cable shielding must have "high frequency" equipotentiality.
• Use shielded cables with shielding connected to ground throughou t 360° at bot h ends fo r the motor cable 6,
braking resistor (if used) 8, and control-signalling cables 7. Metal ducting or conduit can be used for part of
the shielding length provided that there is no break in continuity. If intermediate termina ls are used, they must
be housed in EMC shielded metal cases.
• Ensure maximum separation between the power supply cable (line supply) and the motor cable.
Installation diagram (example)
1 Sheet steel grounded plate supplied with the drive, to be fitted
as indicated on the diagram.
2 Altivar 31
3 Non-shielded power supply wires or cable
4 Non-shielded wires for relay contacts
ENGLISH
Note:
• If using an additional input filte r, it should be mounted under t he drive and connected directly to the line supply
via an unshielded cable. Link 3 on the drive is then via the filter output cable.
• The HF equipotential ground connection between the drive, motor and cable shielding does not remove the
need to connect the PE protective conductors (green-yellow) to the appropriate terminals on each unit.
5 Fix and ground the shielding of cables 6, 7 and 8 as close as
possible to the drive:
- Strip the shielding.
- Use stainless steel cable clamps of an appropriate size on the
parts from which the shielding has been stripped, to attach them
to the plate 1.
The shielding must be clamped tightly enough to the metal plate
to ensure correct contact.
6 Shielded cable for connecting the motor. For 0.18 to 1.5 kW
drives, if the switching frequency is higher than 12 kHz, use
cables with low lineic capacitance: max. 130 pF (picoFarads)
per metre.
7 Shielded cable for connecting the control/signalling wiring.
For applications requiring several conductors, use cables with
a small cross-section (0.5 mm
8 Shielded cable for connecting the braking resistor (if fitted).
2
).
28 1624580 09/2009
Page 31

Functions of the display and the keys
Altivar 31
RUN
ESC
ENT
STOP
RESET
RUN
ERR
CAN
• Reference potentiometer,
active if parameter Fr 1 i n th e
CtL- menu is configured as AIP
• Four 7-segment displays
• Returns to the previous
menu or parameter, or
increases the displayed
value
• Goes to the next menu or
parameter, or decreases the
displayed value
• RUN button: Controls motor switch-on
in forward mode if parameter tCC in the
I-O- menu is configured as LOC
• Red LED
"DC bus ON"
• Enters a menu or a
parameter, or saves the
displayed parameter or
value
• Exits a menu or parameter, or
clears the displayed value to
return to the previous stored
value
STOP/RESET button
• Used to reset faults to zero
• It can be used to control motor stopping
- If tCC (I-O- menu) is not configured as LOC, it is a
freewheel stop.
- If tCC (I-O- menu) is configured as LOC, stopping is on
a ramp, but if injection braking is in progress, a
freewheel stop takes place.
• 2 CANopen status LEDs
For ATV 31ppppppA only
ENT
The display flashes when a value is stor e d .
Normal display, with no fault present and no starting:
The display flashes to indicate the presence of a fault.
Remote terminal option
Please refer to the CD-ROM.
1624580 09/2009 29
• Pressing or does not store the selection.
• Press and hold down (>2 s) or to scroll through the data quickly.
To save and store the selection:
- 43.0: Display of the parameter selected in the SUP- menu (default selection: motor frequency).
In current limiting mode, the display flashes.
- init: Initialization sequence
- rdY: Drive ready
- dcb: DC injection braking in progress
- nSt: Freewheel stop
- FSt: Fast stop
- tUn: Auto-tuning in progress
ENGLISH
Page 32

Access to menus
Displays the drive status
Motor frequency (the factory setting is only visible
the first time the drive is powered up)
Motor control
Faults
Communication
Monitoring
Settings
Menus
I/O
Control
Functions
Power-up
Please refer to
the CD-ROM.
ENT
ACC 15.0
ENT
ESC
ENT
ESC
26.0 26.0
ESC
dEC
ENT
SEt-
Menu
Value or assignment
1 flash
(save)
Parameter
(Next parameter)
The display flashes
when a value
is stored.
ENGLISH
A dash appears after menu codes to differentiate them from parameter codes. Example: SEt- menu, ACC
parameter.
To save and store the selection:
Example:
30 1624580 09/2009
Page 33

Configuration of the bFr parameter
This parameter can only be modified in stop mode with the drive locked.
Code Descriptio n Adjustment
>2H Standard motor frequency 50
This parameter is only visible the first time the drive is switched on.
It can be modified at any time in the drC- menu.
50 Hz: IEC
60 Hz: NEMA
This parameter modifies the presets of the following parameters: HSP page 31, Ftd page 33, FrS
page 33 and tFr page 34.
range
Settings menu SEt-
The adjustment parameters can be modified with the drive running or stopped.
Check that it is safe to make changes during operation.
Changes should preferably be made with the drive stopped.
Factory
setting
ENGLISH
Code Description Adjustment
-//
@1/
7;: Low speed 0 to HSP 0 Hz
4;: High speed LSP to tFr bFr
5I4 Motor thermal protection - max. thermal current 0 to 1.5 In (1) According to
<2H IR compensation/Voltage boost 0 to 100% 20%
(1) In corresponds to the nominal drive current indicated in the catalogue and on the drive rating plate.
1624580 09/2009 31
Acceleration and deceleration ramp times according to the
Defined for accelerating and decele rat i ng be t ween 0 a nd the n ominal f requ ency FrS (par ame ter in
the drC- menu).
Check that the value of dEC is not too low in relation to the load to be stopped.
(motor frequency to min. reference)
(motor frequency to max. reference): Check that this setting is suitable for the motor and the
application.
Set ItH to the nominal current on the motor rating plate.
Please refer to the CD-ROM if you wish to suppress thermal protection.
Used to optimise torque at very low speed (increase UFr if the torque is insufficient).
Check that the value of UFr is not too high for when the motor is warm (risk of instability).
Modifying UFt (page 34) will cause UFr to return to the factory setting (20%).
range
value of
parameter Inr
Factory
setting
3 s
3 s
drive rating
Page 34

Code Description Adjustment
273 Frequency loop gain 1 to 100% 20
Parameter can only be accessed if UFt (page 27) = n or nLd.
The FLG parameter adjusts the following of the speed ramp on the basis of the inertia of the
machine being driven.
Value too low: Longer response time
Value too high: Overspeed, instability
;I- Frequency loop stability 1 to 100% 20
Parameter can only be accessed if UFt (page 27) = n or nLd.
Value too low: Overspeed, instability
Value too high: Longer response time
;7: Slip compensation 0 to 150% 100
Parameter can only be accessed if UFt (page 27) = n or nLd.
Used to adjust the slip compensation value fixed by motor nominal speed.
The speeds given on motor rating plates are not necessarily exact.
ENGLISH
I@/$ Automatic standstill DC injection time 0.1 to 30 s 0.5 s
;@/$ Level of automa tic standstill DC injection current 0 to 1.2 In (1) 0.7 In (1)
I@/% Second automatic standstill DC injection time
;@/% Second level of standstill DC injection current
6:2 Skip frequency 0 to 500 0 Hz
62% Second skip frequency 0 to 500 0 Hz
;:% Second preset speed 0.0 to 500.0 Hz 10 Hz
;:& Third preset speed 0.0 to 500.0 Hz 15 Hz
;:' Fourth preset speed 0.0 to 500.0 Hz 20 Hz
/75 Current limiting 0.25 to 1.5 In (1) 1.5 In (1)
• If slip setting < actual slip: The motor is not rotating at the correct speed in steady state.
• If slip setting > actual slip: The motor is overcompensated and the speed is unstable.
Check that the motor will withstand this current without overheating.
Please refer to the CD-ROM.
Please refer to the CD-ROM.
Prevents prolonged operation at a frequency range of ± 1 Hz around JPF. This f unction prevent s
a critical speed which leads to resonance. Setting the function to 0 renders it inactive.
Prevents prolonged operation at a frequency ra nge of ± 1 Hz ar ound JF2. This fu nctio n prevent s
a critical speed which leads to resonance. Setting the function to 0 renders it inactive.
Used to the torque and the temperature rise of the motor.
range
0 to 30 s 0 s
0 to 1.2 In (1) 0.5 In (1)
Factory
setting
(1) In corresponds to the nominal drive current indicated in the catalogue and on the drive rating plate.
32 1624580 09/2009
Page 35

Code Description Adjustment
I7; Low speed operating time 0 to 999.9 s 0 (no time
Following operation at LSP for a defined period, a motor stop is requested automatically. The
motor restarts if the frequency reference is greater than LSP and if a run command is still pr esent.
Caution: Value 0 corresponds to an unlimited period.
2I@ Not used (please refer to CD-ROM).
II@ Not used (please refer to CD-ROM).
/I@ Not used (please refer to CD-ROM).
;@; Not used (please refer to CD-ROM).
;2H Switching frequency 2.0 to 16 kHz 4 kHz
This parameter can also be accessed in the drC- menu.
range
Factory
setting
limit)
Motor control menu drC-
With the exception of tUn, which can power up the motor, parameters can only be modified when the
drive is stopped and there is no run command present.
Drive performance can be optimized by:
- Entering the values given on the motor rating plate in the drive menu
- Performing an auto-tune operation (on a standard asynchronous motor)
Code Description Adjustment
>2H Standard motor frequency 50
50 Hz: IEC
60 Hz: NEMA
This parameter modifies the presets of the following parameters: HSP page 31, Ftd page 33, FrS
page 33 and tFr page 34.
<D; Nominal motor voltage given on the rating plate According to
2H; Nominal motor frequency given on the rating plate 10 to 500 Hz 50 Hz
The factory setting is 50 Hz, or 60 Hz if bFr is set to 60 Hz.
D/H Nominal motor current given on the rating plate 0.25 to 1.5 In
D;: Nominal motor speed given on the rating plate 0 to 32760
0 to 9999 RPM then 10.00 to 32.76 KRPM
If the nominal speed is not given on the rating plate, please refer to the CD-ROM.
/9; Motor Cos Phi given on the rating plate 0.5 to 1 According to
H;/ Leave at nO or see CD-ROM. nO
(1) In corresponds to the nominal drive current indicated in the catalogue and on the drive rating plate.
range
drive rating
(1)
RPM
Factory
setting
According to
drive rating
According to
drive rating
According to
drive rating
drive rating
ENGLISH
1624580 09/2009 33
Page 36

Code Description Adjustment
I<D Motor control auto-tuning nO
It is essential that all the motor parameters (UnS, FrS, nCr, nSP, COS) are configured correctly
before performing auto-tuning.
D9: Auto-tuning not performed.
=1;: Auto-tuning is performed as soon as possible, then the parameter automat ically switches
to dOnE or nO in the event of a fault (the tnF fault is displayed).
@9D1: Use of the values given the last time auto-tuning was performed.
H<D: Auto-tuning is performed every time a run command is sent.
:9D: Auto-tuning is performed on every power-up.
75$ to 75): Auto-tuning is performed on the transition from 0
this function.
Caution:
Auto-tuning is only performed if no command has been activated.
Auto-tuning may last for 1 to 2 se conds. Do n ot int errupt ; wait f or the displa y t o change to "d OnE"
or "nO".
ENGLISH
I<; Auto-tuning status (information only, cannot be modified) tAb
<2I Selection of the type of voltage/frequency ratio n
DH@ Random switching frequency YES
;2H Switching frequency (1) 2.0 to 16 kHz 4 kHz
I2H Maximum output frequency 10 to 500 Hz 60 Hz
;;7 Suppression of the speed loop filter nO
(1) Parameter can also be accessed in the SEt- menu.
During auto-tuning the motor operates at nominal current.
I->: The default stator resistance value is used to control the motor.
:1D@: Auto-tuning has been requested but not yet performed.
:H93: Auto-tuning in progress.
2-57: Auto-tuning has failed.
@9D1: The stator resistance measured by the auto-tuning functi on is used to con trol the mo tor.
7: Constant torque for motors connected in parallel or special motors
:: Variable torque: Pump and fan applications
D: Sensorless flux vector control for constant torque applications
D7@: Energy saving, for variable torque applications not requirin g high dynamics (b ehaves in a
similar way to the P ratio at no-load and the n ratio on load).
=1;: Frequency with random modulation
D9: Fixed frequency
Random frequency modulation prevents any resonance which may occur at a fixed fre quency.
The frequency can be adjusted to reduce the noise ge ne rated by t he moto r.
If the frequency has been set to a value higher than 4 kHz, in the event of excessive temperature
rise, the drive will automatically reduce the switching frequency and increase it again once the
temperature has returned to normal.
The factory setting is 60 Hz, or 72 Hz if bFr is set to 60 Hz.
D9: The speed loop filter is active (prevents the reference being exceeded).
=1;: The speed loop filter is suppressed (in position control applications, this reduces the
response time and the reference may be exceeded).
range
V 1 of a logic input assigned to
Factory
setting
34 1624580 09/2009
Page 37

Code Description Adjustment
;/; Saving the configuration (1) nO
D9: Function inactive
;IH5: Saves the current configuration (but not the result of auto-tuning) to EEPROM. SCS
automatically switches to nO as soon as the save has been performed. This function is used to
keep another configuration in reserve, in addition to the current configuration.
When drives leave the factory the current configur ation and the backup configuration are both
initialized with the factory configuration.
/23 Config. Source (new parameter in version V1.7) Std
Choice of source configuration.
;I;: Start/stop configuration.
Identical to the factory configuration apart from the I/O assignments:
Logic inputs:
LI1, LI2 (2 directions of operation): 2-wire transition detection control, LI1 = forward, LI2 = reverse,
inactive on ATV 31
LI3 to LI6: Inactive (not assigned)
Analog inputs:
AI1: Speed reference 0-10 V, inactive on ATV 31
AI2, AI3: Inactive (not assigned)
Relay R1: The contact opens in the event of a fault (or drive off)
Relay R2: Inactive (not assigned)
Analog output AOC: 0-20 mA inactive (not assigned)
;I@: Factory configuration (see page 24).
The assignment of CFG results directly in a return to the selected configuration.
2/; Return to factory setting/Restore configuration (1) nO
D9: Function inactive
H1/5: The current configuration becomes identical to the backup conf iguration previously
saved by SCS = StrI. rECI is only visible if the backup has been carried out. FCS automatically
switches to nO as soon as this action has been performed.
5D5: The current configuration is replaced by the con figuration selecte d by parameter CFG (2).
FCS automatically changes to nO as soon as this action has been performed.
The ENT key must be pressed and held down (for 2 s) for rECI and InI to be taken into
account.
ppppppA drives (not assigned)
ppppppA (not assigned)
range
Factory
setting
ENGLISH
(1) SCS, CFG and FCS can be accessed from several configuration menus, but they apply to all menus and
parameters.
(2) The following parameters are not modified by this function; they retain their configuration:
- bFr (Standard motor frequency) page 31
- LCC (Control via remote display terminal) in the CtL- menu. Please refer to the CD-ROM.
- COd (Terminal locking code) page 38
- The Communication menu COM- parameters. Please refer to the CD-ROM.
- The Display menu SUP-. Please refer to the CD-ROM.
1624580 09/2009 35
Page 38

I/O menu I-O-
Parameters can only be modified when the drive is stopped and no run command is present.
Code Description Factory setting
I// 2-wire/3-wire control (type of control) 2C
Control configuration:
%/ = 2-wire control
&/= 3-wire control
79/ = local control (drive RUN/STOP/RESET) for ATV31
2-wire control: The open or closed state of the input controls running or stopping.
3-wire control (pulse control): A "forward" or "reverse" pulse is sufficient to control startin g, a "stop"
pulse is sufficient to control stopping. Please refer to the CD-ROM.
On ATV31
Although this renders the RUN button on the drive inactive, the speed reference is still provided
ENGLISH
I/I Type of 2-wire control (parameter only accessible if tCC = 2C) trn
HH; Reverse operation via logic input if tCC = 2C: LI2
/H7&
/H4&
-9$I
;/;
/23
2/;
by the potentiometer. The potentiometer can be deactivated and the speed refe rence assigned to
analog input AI1 by configuring parameter Fr1 = AI1 in the CtL- menu. Please refer to the
CD-ROM.
717: State 0 or 1 is taken into account for run or stop.
IHD: A change of state (transition or edge) is necessary t o initiate opera tion, in order to prevent
accidental restarts after a break in the power supply.
:29: State 0 or 1 is taken into account for run or stop, but t he "forward" input always takes priority
over the "reverse" input.
If rrS = nO, reverse operation is active, by means of negative voltage on AI2 for example.
D9: Not assigned
75$: Logic input LI1
75%: Logic input LI2, can be accessed if tCC = 2C
75&: Logic input LI3
75': Logic input LI4
75(: Logic input LI5
75): Logic input LI6
Please refer to the CD-ROM.
@9
H$
H%
Identical to drC- menu, page 35
pppA, reconfiguring tCC = 2C reassigns the LI1 (forward) and LI2 (reverse) inputs.
To change the assignment of tCC press the "ENT" key for 2 s. This causes the fo llowing
functions to return to their factory setting: rrS, tCt and all functions affecting logic input s.
pppA only.
ATV31
pppA: LOC
if tCC = 3C: LI3
if tCC = LOC: nO
36 1624580 09/2009
Page 39

Display menu SUP-
Parameters can be accessed with the drive running or stopped.
Some functions have numerous parameters. In o rder to cla rify programming and avoid havin g to scroll through
lists of parameters, these functions have been grouped in sub-menus.
Like menus, sub-menus are identified by a dash after their code: LIF-, for example.
When the drive is running, the value displayed is that of one of the monitor ing parameters. By default , the value
displayed is the output frequency applied to the motor (rFr parameter).
While the value of the required new moni toring parameter is be ing displayed, the "ENT" key mu st be pressed and
held down a second time (for 2 seconds) to confirm the ch ange of monitoring pa rameter and to store it . From then
on the value of this parameter will be displaye d du ri ng oper at ion (e ven a fter th e drive h as be en switch ed o ff).
If the new choice is not confirmed by pressing the "ENT" key a second time, the drive will return to the previous
parameter after it has been switched off.
Note: Following a power off or loss of line supply, the parameter displayed is always the drive status (rdY for
example). The selected parameter is displayed following a run command.
Code Description Variation range
72H Frequency reference for control via integrated terminal or remote
H:5 Internal PI reference 0 to 100%
2H4 Frequency reference before ramp (absolute value) 0 to 500 Hz
H2H Output frequency applied to the motor - 500 Hz to + 500 Hz
;:@ Output value in customer units
7/H Current in the motor
9:H Motor power
<7D Line voltage (gives the line voltage via the DC bus, motor running or stopped)
I4H Motor thermal state
I4@ Drive thermal state
72I Last fault
terminal.
This parameter is also used for the +/- speed function using the and keys on the display
terminal or keypad.
It displays and validates operation. In the event of a loss of line supply, rFr is not stored and the
+/- speed function must be re-validated in the SUP-\rFr menu.
Please refer to the CD-ROM.
100% = Nominal motor power
100% = Nominal thermal state
118% = "OLF" threshold (motor overload)
100% = Nominal thermal state
118% = "OHF" threshold (motor overload)
See Faults - Causes - Remedies, page 38
0 to 500 Hz
ENGLISH
These parameters only appear if the function has been enabled.
1624580 09/2009 37
Page 40

Code Description Variation range
9IH Motor torque
100% = nominal motor torque
HI4 Operating time 0 to 65530 hours
Total time the motor has been powered up:
0 to 9999 (hours), then 10.00 to 65.53 (kilo-hours).
Can be reset to zero by the rPr parameter in the FLt- menu (please refer to the CD-ROM).
/9@ Terminal locking code
Please refer to the CD-ROM.
I<; Auto-tuning status
I->: The default stator resistance value is used to control the motor.
:1D@: Auto-tuning has been requested but not yet performed.
:H93: Auto-tuning in progress
2-57: Auto-tuning has failed.
ENGLISH
<@: Indicates the ATV31 software version
75-! Logic input functions
-5-! Analog input functions
@9D1: The stator resistance measured by the auto-tuning function is used to manage driving.
E.g.: 1102 = V1.1 IE02.
Please refer to the CD-ROM.
Please refer to the CD-ROM.
Faults - Causes - Remedies
Assistance with maintenance, fault display
If a problem arises during setup or operation, ensure that the recommendations relating to the environment,
mounting and connections have been observed.
The first fault detected is stored and displayed, flashing, on the screen: the drive locks and the fault relay (R1AR1C or R2A - R) contact opens.
Drive does not start, no fault displayed
• If there is no display, check the power supply to the drive, the wiring of inputs AI1 and AI2 and the RJ45
connection.
• Other cases: Please refer to the CD-ROM.
38 1624580 09/2009
Page 41

Faults to be reset
The cause of the fault should be rectified before resetting by powering down until the display goes out, then
switching on again.
Fault Probable cause Remedy
/92
CANopen fault
/H2
capacitor load circuit
112
EEPROM fault
5D2
internal fault
722
Loss of 4-20mA
9>2
overvoltage
during deceleration
9/2
overcurrent
942
drive overload
972
motor overload
9:2
motor phase break
9;2
overvoltage
• CANopen bus communication
interrupted
• Load relay control fault or charging
resistor damaged
• internal memory fault • Check the environment
• Short-circuit on 10 V supply
• Internal fault
• Loss of the 4-20 mA reference on input
AI3
• Braking too sudden
• Driving load
• Incorrect parameters in the SEt- and
drC- menus
• Inertia or load too high
• Mechanical locking
• Drive temperature too high • Check the motor load, the drive
• Triggered by excessive motor current
• Incorrect value for parameter rSC
• Loss of phase at drive output
• Downstream contactor open
• Motor not connected or motor power
too low
• Instantaneous instability in the motor
current
• Line voltage too high
• Disturbed line supply
• Check the communication bus.
• Please refer to the product-specific
documentation.
• Replace the drive.
(electromagnetic compatibility).
• Replace the drive.
• Check the circuits connected to the 10 V.
• Check the wiring of inputs AI1 and AI2
and the RJ45 connection.
• Check the environment
(electromagnetic compatibility).
• Replace the drive.
• Check the connection on input AI3.
• Increase the deceleration ti m e .
• Install a braking resistor if necessary.
• See the brA function (please refer to the
CD-ROM).
• Check the SEt- and drC- parameters.
• Check the size of the motor/drive/load.
• Check the state of the mechanism.
ventilation and the environment. Wait
for the drive to cool down before
restarting.
• Check the ItH setting (motor thermal
protection) (page 31), check the motor
load. Wait for the drive to cool down
before restarting.
• Re-measure rSC (see page 33).
• Check the connections from the drive to
the motor.
• If a downstream contactor is being
used, set OPL to OAC (please refer to
the CD-ROM, FLt- menu).
• Test on a low power motor or without a
motor: set OPL to nO (please refer to
the CD-ROM, FLt- menu).
• Check and optimise the UFr (page 31),
UnS and nCr (page 33) parameters and
perform auto-tuning with tUn (page 34).
• Check the line voltage.
ENGLISH
1624580 09/2009 39
Page 42

Fault Probable cause Remedy
:42
input phase failure
;/2
motor short-circuit
;72
Modbus fault
;92
ENGLISH
overspeed
ID2
auto-tuning fault
• Failure of one phase
• 3-phase ATV31 used on a sing le pha se
line supply
• Unbalanced load
This protection only operates with the
drive on load.
• Short-circuit or earthing at th e drive
output
• Significant earth leakage curren t a t the
drive output if several motors are
connected in parallel
• Modbus bus communication
interrupted
• Confirmation of remote terminal
LCC = YES and terminal disconnected
• Instability
• Driving load too high
• Special motor or motor whose power is
not suitable for the drive
• Motor not connected to the drive
• Check the connection and the fuses.
• Use a 3-phase line supply.
• Disable the fault by setting IPL = nO
(please refer to the CD-ROM)
• Check the cables connecting the drive
to the motor, and the motor insulation.
• Reduce the switching frequency.
• Connect chokes in series with the
motor.
• Check the communication bus.
• Please refer to the product-specific
documentation.
• Check the display terminal connection.
• Check the motor, gain and stability
parameters.
• Add a braking resistor.
• Check the size of the motor/drive/load.
• Use the L or the P ratio (Uft page 34).
• Check the presence of the motor during
auto-tuning.
• If a downstream contactor is being
used, close it during auto-tuning.
Faults which can be reset as soon as their cause disappears
Fault Probable cause Remedy
/22
configuration fault
/25
configuration fault via
serial link
<;2
undervoltage
• The current configuration is
incompatible.
• Invalid configuration (the configuration
loaded in the drive via the serial link is
incompatible).
• Line supply too low
• Transient voltage dip
• Damaged load resistor
• Return to factory settings or call up the
backup configuration, if it is valid. See
parameter FCS in the drC- menu, page
35.
• Check the configuration loaded
previously.
• Load a compatible configuration.
• Check the voltage and the voltage
parameter.
• Replace the drive.
40 1624580 09/2009
Page 43

Inhaltsverzeichnis
Während des Betriebs kann es durch das Zurücksetzen von Fahrbefehlen oder Sollwerten zu
einem Anhalten des Motors kommen, wobei das Gerät weiterhin unter Spannung steht. Wenn zur
Sicherheit des Bedienpersonals ein unkontrolliertes Wiederanfahren ausgeschlossen sein muss,
reicht diese elektronische Verriegelung nicht aus: Sehen Sie zu diesem Zweck eine Trennung des
Leistungsschaltkreises vor.
Der Umrichter verfügt über Sicherheitsvorrichtungen, die bei Störungen das Gerät selbst und
damit auch den Motor abschalten können. Der Motor kann auch durch mechanische Fehler
blockiert werden. Ebenso können Schwankungen der Versorgungsspannung oder Stromausfälle
die Ursache für das Anhalten der Motoren sein.
Nach Beseitigung der Ursache, die das Anhalten ausgelöst hat, kann es bei einigen Mas chinen und
Anlagen durch den automatischen Wiederanlauf zu einem erhöhten Risiko kommen; insbesondere
ist dies bei Maschinen zu berücksichtigen, die bestimmten Sicherheitsa nforderungen entsprechen
müssen.
Sofern dies der Fall ist, hat der Betreiber durch die Verwendung von Drehzahlwächtern, welche die
Versorgungsspannung des Umrichters abschalten, dafür Sorge zu tragen, dass ein
Wiederanfahren des Motors nach einem nicht vorgesehenen Anhaltevorgang nicht möglich ist.
Einbau und Inbetriebnahme dieses Umrichters müssen den internationalen IEC-Normen und den
am Einbauort geltenden nationalen Normen entsprechen. Der Anwender ist für die Einhaltung
dieser Normen verantwortlich. Innerhalb der Europäischen Union sind außerdem die
entsprechenden Vorschriften zur Elektromagnetischen Verträglichkeit (EMV) zu befolgen.
Die in diesem Dokument enthaltenen Angaben müssen angewendet werden, um die
grundlegenden Anforderungen der EMV-Richtlinie zu erfüllen.
Der Altivar 31 muss als Komponente angesehen werden. Er ist weder eine Maschine noch ein
einsatzbereites Gerät nach europäischen Vorschriften (Maschinenrichtlinie und Richtlinie zur
elektromagnetischen Verträglichkeit). Es liegt in der Verantwortung des Betreibers, dafür zu
sorgen, dass seine Anlage diesen Vorschriften entspricht.
Der Frequenzumrichter darf nicht als Sicherheitseinrichtung für Maschinen verwendet werden, die
eine Gefahr für Mensch oder Material darstellen (beispielsweise Hebezeuge). Die Überwachung
von Überdrehzahl oder Ausreißen muss gegebenenfalls durch andere, vom Frequenzumrichter
unabhängige Geräte gewährleistet sein.
Technische und betriebsrelevante Änderungen zu den in diesen Unterlagen aufgeführten
Produkten und Geräten sind jederzeit auch ohne Vorankündigung vorbehalten. Die hierin
enthaltenen Beschreibungen sind unverbindlich.
Einleitende Empfehlungen ______________________________________________________________ 42
Vorgehensweise zur Inbetriebnahme ______________________________________________________ 43
Werkseitige Konfiguration _______________________________________________________________ 44
Ersetzen eines ATV 28 durch einen ATV 31 ________________________________________________ 44
Weiterentwicklungen der Software ________________________________________________________ 45
Verdrahtungsschema für die werkseitige Voreinstellung _______________________________________ 46
Beispiele für empfohlene Verdrahtungen ___________________________________________________ 47
Elektromagnetische Verträglichkeit _______________________________________________________ 48
Funktionen der Anzeige und der Tasten ___________________________________________________ 49
Zugriff auf die Menüs __________________________________________________________________ 50
Konfiguration des Parameters bFr ________________________________________________________ 51
Menü „Einstellung“ Set- ________________________________________________________________ 51
Menü „Antrieb“ drC- ___________________________________________________________________ 53
Menü „Eingänge/Ausgänge“ I-O- _________________________________________________________ 56
Menü „Überwachung“ SUP- _____________________________________________________________ 57
Fehler - Ursachen - Behebung ___________________________________________________________ 58
DEUTSCH
41
Page 44

Einleitende Empfehlungen
Diese Kurzanleitung beschreibt die Schnellinbetriebnahme für die werkseitige Konfiguration des
Frequenzumrichters. Für die Modelle ATV31pppppT (Funktion "Traverse Control") ist die Programmieranleitung für "Traverse Control" auf der CD-ROM heranzuziehen.
Alle in diesem Dokument beschriebenen Funktionen, Parameter und Fehler beziehen sich auf die
Werkskonfiguration. Wurde diese Konfiguration über eines der Menüs CtL-, FUn- oder FLt- geändert, können
sich Abweichungen ergeben.
Die mit dem Frequenzumrichter gelieferte CD-ROM enthält die vollständige Beschreibung sowie alle
Konfigurationsmenüs.
Bevor Sie den Umrichter einsc halten und konf igurier en:
- Stellen Sie sicher, dass die Netzspannung mit dem zulässigen Spannungsbereich des
Umrichters kompatibel ist. Bei falscher Netzspannung besteht die Gefahr, dass der
Umrichter beschädigt wird.
- Schalten Sie die Logikeingänge (logisch 0) aus, um einen versehentlichen Anlauf zu
verhindern. Unterbleibt dies, kann nach Verlassen der Konfigurationsmenüs ein mit
einem Fahrbefehl belegter Eingang sofort das Anlaufen des Motors auslösen.
Benutzereinstellung und Funktionserweiterungen
Falls notwendig, können mit Hilfe der Anzeige und der Tastatur die Einstellungen verän dert und die Funktio nen
erweitert werden. Die Rückkehr zu den Werkseinstellungen erfolgt auf einfache Weise über den Parameter
FCS des Menüs drC-.
Drei verschiedene Parameter stehen zur Auswahl:
DEUTSCH
- Anzeige: vom Frequenzumrichter angezeigte Werte
- Einstellung: sowohl im Betrieb als auch bei Stillstand veränderbar
- Konfiguration: nur bei Stillstand und ohne Bremsung veränderbar. Kann bei Betri eb angezeigt werden.
- Stellen Sie sicher, dass während des Betriebs vorgenommene Änderungen an den
Einstellungen keine Gefahr darstellen. Führen Sie diese am besten bei Stillstand durch.
Anlauf
Wichtig: Gemäss Werkseinstellung kann der Motor beim Einschalten, beim manuellen Rücksetzen nach einer
Störung oder nach einem Haltebefehl erst nach dem Rücksetzen der Befehle „Rechtslauf“ oder „Linkslauf“
wieder anlaufen. In Ermangelung dessen zeigt der Umrichter auf dem Display “nst” an, läuft aber nicht an.
Test mit einem Motor mit geringer Leistung oder ohne Motor
Bei der werkseitigen Einstellung ist die Funktion zur Erkennung eines Phasenausfalls des Motors aktiviert.
Wenn der Umrichter getestet werden soll oder Wartungsarb eiten durchzuführ en sind, ohn e dass auf einen dem
Umrichtermodell entsprechenden Motor zurückgegriffen werden soll (dies gilt vor allem für
Hochleistungsumrichter), ist die Funktion zur Erkennung von Motorphasenausfällen zu deaktivieren und die
Spannung/Frequenz-Kennlinie UFt = L (vgl. CD-ROM) zu konfigurieren.
Betrieb in IT-Netzen
IT-Netz: Isolierter oder über eine hohe Impedanz geerdeter Neutralleiter.
Verwenden Sie ein permanentes Isolationsüberwachungsgerät, das mit nicht-linearen Lasten kompatibel ist:
beispielsweise des Typs XM200 von Merlin Gerin.
ATV 31
pppM2 und N4 enthalten integrierte EMV-Filter. Für den Betrieb in IT-Netzen können diese Filter von
der Masse abgeklemmt werden.
Weitere Informationen finden Sie auf der mit dem Umrichter gelieferten CD-ROM.
42 1624580 09/2009
Page 45

Vorgehensweise zur Inbetriebnahme
1 - Empfang des Frequenzumrichters
• Überprüfen Sie, ob die Angaben auf dem Typenschild des Umrichters mit denen auf dem Lieferschein und
dem Bestellschein übereinstimmen.
• Öffnen Sie die Verpackung und prüfen Sie, ob der Altivar 31 währen d des Transports beschädigt wurde.
2 – Überprüfen Sie, ob die Netzspannung mit dem
Spannungsbereich des Umrichters
- Bei falscher Netzspannung besteht die Gefahr, dass der Umrichter beschädigt wird.
3 - Einbau des Umrichters
4 - Anschlüsse am Umrichter:
• Versorgungsnetz: achten Sie darauf, dass es:
- im Spannungsbereich des Umrichters liegt
- ausgeschaltet ist
• Motor: achten Sie darauf, dass die Motorschaltung der Netzspannung entspricht
• Steuerung über die Logikeingänge
• Frequenzsollwert über die Logik- oder Analogeingänge
5 - Einschalten ohne Fahrbefehl
6 - Konfiguration:
Nennfrequenz (bFr) des Motors, falls sie nicht 50 Hz beträgt.
7 - Konfiguration im Menü drC-:
Die Motorparameter sind nur zu konfigurieren, wenn die Werkseinstellung des Umrichters nicht geeignet ist.
8 - Konfiguration im Menü I-O-:
Nur wenn die Werkseinstellung des Frequenzumrichters nicht geeignet ist, findet folgender Steuermodus
Anwendung: 3-Draht-Steuerung, 2-Draht-Steuerung bei Übergang, 2-Draht-Steuerung bei Niveau, 2-DrahtSteuerung bei Niveau mit Vorrang für Rechtslauf oder lokale Steuerung bei ATV31
Stellen Sie unbedingt sicher, dass die programmierten Funktionen mit der jeweiligen
Verdrahtung vereinbar sind.
9 - Einstellung im Menü SEt-:
- Parameter ACC (Hochlauframpe) und dEC (Auslauframpe),
- Parameter LSP (Kleine Frequenz bei Sollwert Null) und HSP (Große Frequenz bei maximalem Sollwert),
- Parameter ItH (Thermoschutz des Motors),
10 - Starten
Praktische Hinweise
• Die Rückkehr zu den Werkseinstellungen kann jederzeit über den FCS-Parameter (FCS = InI setzen) in
den Menüs drC- (Seite 55) oder I-O- (Seite 56) erfolgen.
• Um eine Optimierung der Antriebsleistung in Bezug auf Genauigkeit und Ansprechzeit zu erreichen, sind
folgende Schritte auszuführen:
- Eingabe der auf dem Motortypenschild angegebenen Werte im Menü „Antrieb“ drC-.
- Motormessung bei kaltem und angeschlossenem Motor über den Parameter tUn i m Menü dr C-, Seit e 54.
- Abgleich der Parameter FLG und StA im Menü „Einstellung“ SEt-, Seite 52.
kompatibel ist (vgl. Typenschild des Umrichters)
pppA.
DEUTSCH
1624580 09/2009 43
Page 46

Werkseitige Konfiguration
Der Altivar ATV 31 wurde werkseitig für die am häufigsten benötigten Anwendungen voreingestellt:
• Anzeige: Umrichter bereit (rdY) (im Stillstand) und Motorfrequenz (in Betrieb).
• Motorfrequenz (bFr): 50 Hz.
• Betrieb bei konstantem Drehmoment, mit vektorieller Regelung ohne Rückführung (UFt = n).
• Modus: Normales Anhalten über Auslauframpe.
• Modus: Anhalten bei Störung: Freilauf
• Lineare Rampen (ACC, dEC): 3 Sekunden.
• Kleine Frequenz (LSP): 0 Hz.
• Große Frequenz (HSP): 50 Hz.
• Thermischer Motorstrom (ItH) = Motornennstrom (Wert je nach Baugröße des Umrichters).
• Bremsstrom bei DC-Aufschaltung im Stillstand (SdC1) = 0,7 x Nennstrom des Umrichters, während 0,5
Sekunden.
• Automatische Anpassung der Auslauframpe im Falle von Überspannung beim Bremsen.
• Kein automatischer Wiederanlauf nach einer Störung.
• Taktfrequenz 4 kHz.
• Logikeingänge:
- LI1, LI2 (2 Drehrichtungen): 2-Draht-Steuerung bei Übergang,
LI1 = Rechtslauf, LI2 = Linkslauf, inaktiv bei ATV 31
- LI3, LI4: 4 Vorwahlfrequenzen
(Frequenz 1 = Frequenzsollwert oder LSP, Frequenz 2 = 10 Hz, Frequenz 3 = 15 Hz, Frequenz 4 = 20 Hz).
- LI5 - LI6: inaktiv (nicht zugordnet).
• Analogeingänge:
- AI1: Frequenzsollwert 0-10 V, inaktiv bei ATV 31
- AI2: Frequenzsollwert-Summierung 0±10 V.
- AI3: 4-20 mA inaktiv (nicht belegt).
• Relais R1: bei einer Störung (oder Umrichter ohne Spannung) fällt der Kontakt ab.
DEUTSCH
• Relais R2: inaktiv (nicht belegt).
• Analogausgang AOC: 0-20 mA inaktiv (nicht belegt).
ppppppA (nicht belegt).
ppppppA (nicht belegt).
Reihe ATV 31ppppppA
Die Umrichter ATV 31ppppppA werden ab Werk mit aktivierter lokaler Steuerung ausgeliefert: die Tasten RUN,
STOP und das Potentiometer des Umrichters sind aktiv. Die Logikeingänge LI1 und LI2 sowie der
Analogeingang AI1 sind inaktiv (nicht belegt).
Wenn die oben genannten Werte mit der Anwendung vereinbar sind, kann der Umrichter ohne Modifizierung
der Einstellungen eingesetzt werden.
Ersetzen eines ATV 28 durch einen ATV 31
Die untenstehende Tabelle zeigt die Entsprechung der Steuerklemmenleisten zwischen beiden
Umrichtermodellen an.
Steuerklemmleisten ATV 28 Werkseinstellung Fkt. Steuerklemmleisten ATV 31 Werkseinstellung Fkt.
R1A - R1B - R1C Störmelderelais R1A - R1B - R1C Störmelderelais
R2A - R2C Drehzahlsollwert erreicht R2A - R2C Nicht belegt
COM 0 V COM 0 V
AI1 (0 -10 V) Drehzahlsollwert AI1 (0 - 10 V) Drehzahlsollwert
+10 V +10 V 10 V +10 V
AI2 (0 - 10 V) Frequenzsollwert-Summierung AI2 (0 - ± 10 V) Frequenzsollwert-Summierung
AIC (X - Y mA) Nicht belegt AI3 (X - Y mA) Nicht belegt
AO Motorfrequenz AOC / AOV Nicht belegt
LI1 - LI2 Rechtslauf / Linkslauf LI1 - LI2 Rechtslauf / Linkslauf
LI3 - LI4 Vorwahlfrequenzen LI3 - LI4 Vorwahlfrequenzen
+24 V + 24 V 24 V + 24 V
44 1624580 09/2009
Page 47

Weiterentwicklungen der Software
Der Altivar ATV 31 wurde seit seiner Vermarktung kontinuierlich durch Zusatzfunktionen erweitert. Die
Softwareversion V1.7 hat sich somit zur Version V3.7 entwickelt. Die vorliegende Dokumentation bezieht sich
auf die Version V3.7.
Die Angaben zur Softwareversion befinden sich auf dem Typenschild an der Umrichterseitenwand.
Weiterentwicklung der Version V3.7 im Vergleich zu Version V1.7
Neue Parameter
Menü „Fehlerbehandlung“ FLt-
• rP: Dieser Parameter ermöglicht die Quittierung aller Fehler .
Weiterentwicklung der Version V1.7 im Vergleich zu Version V1.2
Neue Parameter
Menü „Antrieb“
• /23: Wahl der Quellkonfiguration für die Funktion „Werkseinstellung“.
Der Zugriff auf diesen Parameter ist auch über die Menüs I-O- , CtL- und FUn- möglich.
Menü „Anwendungsfunktionen“ FUn-
• Inr: Inkrement der Rampe (siehe CD-ROM).
Menü „Fehlerbehandlung“ FLt-
• LEt: Konfiguration der Erkennung externer Störungen (siehe CD-ROM).
Neue mögliche Zuordnungen für die Relais R1 und R2
• Die Relais R1 und 2 können jetzt LI1..LI6 zugeordnet werden. Zurückgegeben wird dann der Wert des
gewählten logischen Eingangs.
DEUTSCH
1624580 09/2009 45
Page 48

Verdrahtungsschema für die werkseitige Voreinstellung
U / T1
V / T2
W / T3P0PA / +
+10
AI1
COM
AI3
R / L1
U1
W1
V1
M
3 a
S / L2
T / L3
R1A
R1C
R1B
LI1
CLI
R2A
R2C
LI2
LI3
LI4
LI5
LI6
24V
AI2
AOV
AOC
(2)
(1)
(1)
PB
PC / -
R / L1
S / L2
COM
A0C
Verwendung des Analogausgangs
als Logikausgang
24-V-Relais
oder
24-V-Eingang der SPS
oder
LED-Anzeige
ATV31ppppM2
Einphasiges Netz
ATV31ppppM3X/N4/S6X
Dreiphasiges Netz
X-Y mA
0 ± 10 V
Sollwert-
potentiometer
Eventuell
vorhandener Bremswiderstand
0V
SOURCE
CLI
SINK
CLI LI1 LIx
CLI LI1 LIx
24V
CLI LI1 LIx
ATV31
ATV31
ATV31
CLI an 0 V (Werkseinstellung)
CLI „Schwebend“
CLI an 24 V
DEUTSCH
(1) Gegebenenfalls Netzdrossel (1 Phase oder 3 Phasen)
(2) Störmelderelaiskontakte für die dezentrale Signalisierung des Umrichterzustands
Hinweis: Alle induktiven Komponenten, die sich in der Nähe des Umrichters befinden oder mit diesem
galvanisch gekoppelt sind, müssen entstört werden, wie beispielsweise Relais, Schaltschütze, Magnetventile
usw.
Auswahl von Zubehörteilen:
Siehe Katalog.
Wahlschalter der Logikeingänge
Dieser Schalter weist dem Bezugspotential der Logikeingänge entweder 0V, 24 V oder „Schwebend“ zu:
46 1624580 09/2009
Page 49

0V
LI1
24V
ATV31
ATV31
24V
LI1
COM
ATV31
24V
0V
LI1COM CLI
SPS
0V
LI1COM
CLI
24V
ATV31
SPS
Beispiele für empfohlene Verdrahtungen
Verwendung von potentialfreien Kontakten
• Schalter in Position „Source“
(andere ATV31-Werkseinstellung als
ATV31
ppppA)
Verwendung von 24-V-Transistor-Ausgängen einer SPS
• Schalter in Position CLI • Schalter in Position CLI
Empfehlungen zur Verdrahtung
Stromversorgung
Der Umrichter muss geerdet werden, um den Vorschriften hinsichtlich hoher Kriechströme (über 3,5 mA) zu
genügen.
Wenn gemäß der Installationsvorschriften ein vorgeschalteter Schutz durch einen FI-Schutzschalter oder
Differenzstromauslöser erforderlich ist, müssen Sie bei einphasigen Umrichtern ein Gerät vom „Typ A“ und bei
dreiphasigen Umrichtern ein Gerät vom „Typ B“ verwenden. Wählen Sie ein Produkt mit folgenden
Eigenschaften:
Filterung hochfrequenter Ströme.
Verzögerung, die ein Auslösen aufgrund eventuell beim Einschalten ge ladener Störungskapazitäten ver hindert.
Diese Verzögerung ist bei 30-mA-Geräten nicht möglich. Wählen Sie in diesem Fall Geräte, die unempfindlich
gegenüber einer unbeabsichtigten Auslösung sind, beispielsweise FI-Schutzschalter mit verstärkter
Störfestigkeit der Reihe
Wenn die Anlage aus mehreren Frequenzumrichtern besteht, muss eine Fehlerstrom-Schutzeinrichtung (FISchutzschalter) pro Umrichter eingesetzt werden.
Verlegen Sie die Leistungskabel getrennt von den Niedrigpegel-Signalkreisen in der Installation (Sensoren,
SPS, Messvorrichtungen, Video, Telefon).
Bei Kabellängen > 50 m zwischen Umrichter und Motor: Fügen Sie Ausgangsfilter hinzu (siehe Katalog).
Steuerung
Die Steuer- und Leistungskreise sind voneinander getrennt zu halten und getrennt zu verlegen. Für Steuer - und
Sollwertleitungen empfiehlt es sich, ein abgeschirmtes und verdrilltes Kabel mit einem Verdrillungsschlag
zwischen 25 und 50 mm zu verwenden. Die Abschirmung wird dabei an jedem Ende geerdet.
1624580 09/2009 47
s.i (super-immunisiert) (Marke Merlin Geri n).
• Schalter in Position „SINK“
(Werkseinstellung des ATV31
In diesem Fall darf das Bezugspotential nie
mit der Masse oder der Schutzerde
verbunden werden, da sonst beim ersten
Isolationsfehler die Gefahr eines
unerwünschten Anlaufs besteht.
ppppA)
DEUTSCH
Page 50

Elektromagnetische Verträglichkeit
2
3
1
8
6
5
4
7
Prinzip
• Erdverbindungen zwischen Frequenzumrichter, Motor und Kabelabschirmung müssen nach HochfrequenzGesichtspunkten niederohmig gestaltet sein.
• Verwenden Sie abgeschirmte Kabel, wobei die Abschirmung der Motorkabel 6, des eventuellen
Bremswiderstands 8 sowie von Steuerung und Überwachung 7 beidseitig rundum kontakti ert und geerdet
sein muss. Diese Abschirmung kann ganz oder teilweise in Form von Rohren oder Metallkanälen ausgeführt
werden, solange keine Unterbrechungen der Verbindungen vorkommen. Im Falle zwischenliegender
Klemmleisten, müssen sich diese in einem abgeschirmten Metallgehäuse befinden.
• Das Spannungsversorgungskabel (Netz) so weit entf ernt wie möglich vom Motorkabel verlegen.
Installationsdiagramm (Beispiel)
1 Im Lieferumfang enthaltene EMV-Platte, die wie in der
Abbildung angegeben auf den Umrichter zu montieren ist.
2 Altivar 31
3 Nicht abgeschirmte Netzanschlusskabel.
4 Nicht abgeschirmte Kabel für Relaiskontakte.
5 Die Abschirmung für die Kabel 6, 7 und 8 muss so nahe wie
möglich am Frequenzumrichter befestigt und niederohmig
geerdet werden:
- Die Abschirmung abisolieren,
- Die abisolierten Teile der Abschirmung mit Edelstahl-
DEUTSCH
Hinweis:
• Bei Verwendung eines zusätzlichen Netzfilters muss dieser unter dem Umrichter angebracht und über ein
nicht abgeschirmtes Kabel direkt an das Netz angeschlossen werden. Der Ansch luss (3) am Umrichter wird
durch das Ausgangskabel des Filters realisiert.
• Die niederohmige Erdung von Frequenzumrichter, Motor und Kabelabschirmung entbindet nicht davon, die
Schutzleiter PE (grün-gelb) an die entsprechenden Anschlüsse an jeder Komponente anzuschließen.
Kabelschellen der richtigen Größe an der EMV-Platte 1
befestigen.
Die Kabelschellen müssen fest angezogen werden, um einen
guten Kontakt zu gewährleisten.
6 Abgeschirmtes Motoranschlusskabel. Verwenden Sie bei
Frequenzumrichtern von 0,18 bis 1,5 kW niedrigpaarige Kabel,
wenn die Taktfrequenz über 12 kHz liegt: maximal 130 pF
(picoFarad) pro Meter.
7 Abgeschirmtes Steuerkabel für den Anschluss der Steuerung/
Überwachung.
Verwenden Sie für Anwendungen, die zahlreiche Leiter
erfordern, kleine Querschnitte (0,5 mm
8 Abgeschirmtes Kabel für den Anschluss des eventuell
vorhandenen Bremswiderstandes.
2
).
48 1624580 09/2009
Page 51

Funktionen der Anzeige und der Tasten
• Sollwertpotentiometer,
aktiv, wenn der Parameter Fr1
des Menüs CtL- weiterhin auf AIP
eingestellt ist.
• 4-stellige 7-Segment-
Anzeige
• Wechsel zum vorherigen
Menü oder Parameter oder
Erhöhen des angezeigten
Werts
• Wechsel zum nächsten Menü
oder Parameter oder
Verringerung des
angezeigten Werts
• RUN-Taste: Steuert das Einschalten
des Motors im Rechtslauf, wenn der
Parameter tCC im Menü I-O- auf LOC
eingestellt ist
• Rote LED
"DC-Bus unter Spannung"
• Aufruf eines Menüs oder
Parameters oder
Speicherung des
Parameters oder des
angezeigten Werts
• Verlassen eines Menüs oder
Parameters oder Rückkehr
vom angezeigten Wert zum
zuletzt gespeicherten Wert
STOP/RESET-Taste
• Setzt den Fehler auf Null zurück.
• Kann jederzeit den Stillstand des Motors erwir k en.
- Wenn tCC (Menü I-O-) nicht auf LOC eingestellt ist,
erfolgt das Anhalten im freien Auslauf.
- Wenn tCC (Menü I-O-) auf LOC eingestellt ist, erfolgt
das Anhalten über Rampe. Ist jedoch eine Bremsung mit
DC-Aufschaltung aktiv, erfolgt das Anhalten im freien
Auslauf.
• 2 Zustandsanzeigen
CANopen
Nur für ATV 31ppppppA
ENT
Bei Speicherung blinkt die Anzeige
Normalanzeige ohne Störung und außer Betrieb:
• oder speichert nicht die Auswahl.
• Längeres Drücken (>2 s) von oder bewirkt einen Schnelldurchlauf.
Speicherung, Aufzeichnung der angezeigten Auswahl:
- 43.0: Anzeige des gewählten Parameters im Menü SUP (Voreinstellung: Motorfrequenz).
Im Falle einer Strombegrenzung blinkt die Anzeige.
- init: Initialisierungssequenz
- rdY: Umrichter bereit
- dcb: Bremsung mit DC-Aufschaltung erfolgt
- nSt: Freier Auslauf
- FSt: Schnellhalt
- tUn: Motormessung läuft
Eine Störung wird durch Blinken angezeigt.
Option Bedienterminal
Informationen hierzu finden Sie auf der CD-ROM.
1624580 09/2009 49
Altivar 31
RUN
RUN
CAN
ERR
ESC
ENT
STOP
RESET
DEUTSCH
Page 52

Zugriff auf die Menüs
Zeigt den Zustand des Umrichters an
Motorfrequenz (Voreinstellung nur beim
ersten Einschalten sichtbar)
Antrieb
Fehler
Kommunikation
Überwachung
Einstellung
Menüs
Eingänge / Ausgänge
Steuerung
Funktionen
Einschalten
Vgl. CD-ROM
ENT
ACC 15.0
ENT
ESC
ENT
ESC
26.0 26.0
ESC
dEC
ENT
SEt-
Menü
Wert oder Belegung
1 Aufblinken
(Speicherung)
Parameter
(nächster Parameter)
Bei Speicherung
blinkt die
Anzeige
DEUTSCH
Die Menücodes unterscheiden sich von den Parametercodes durch einen Bindestrich auf der rechten Seite.
Beispiel: Menü =SEt-, Parameter = ACC.
Speicherung/Aufzeichnung der angezeigten Auswahl :
Beispiel:
50 1624580 09/2009
Page 53

Konfiguration des Parameters bFr
Dieser Parameter kann nur im Stillstand bei verriegeltem Umrichter geändert werden.
Code Besch reibung Einstell-
>2H Standardfrequenz des Motors 50
Dieser Parameter ist hier nur beim ersten Einschalten sichtbar.
Im Menü drC- kann er jedoch jederzeit geändert werden.
50 Hz: IEC
60 Hz: NEMA
Dieser Parameter ändert die Voreinstellung der Paramet er: HSP Seite 51, Ftd Seite 53, FrS Se ite 53
und tFr Seite 54.
bereich
Werkseinstellung
Menü „Einstellung“ Set-
Die Einstellparameter können sowohl während des Betriebs als auch im Stillstand geändert werden.
Überprüfen Sie, ob die während des Betriebs vorgenommenen Änderungen ge fahrlos sind;
Änderungen sollten vorzugsweise im Stillstand erfolgen.
Code Beschreibung Einstell-
-//
@1/
7;: Kleine Frequenz 0 bis HSP 0 Hz
4;: Große Frequenz LSP bis tFr bFr
5I4 Thermischer Motorschutz - Maximaler thermischer Strom 0 bis 1,5 In (1) Je nach
<2H RI-Kompensation / Boost-Spannung 0 bis 100% 20%
(1) In entspricht dem im Katalog und auf dem Typenschild des Umrichters angegebenen
1624580 09/2009 51
Zeit der Hochlauf- und Auslauframpen Gemäß dem
Für den Hoch- und Auslauf im Bereich von 0 bis zur Nennfrequ enz Fr S defi nie rt (Para mete r im
Menüs drC-).
Stellen Sie sicher, dass der dEC-Wert im Hinblick auf die anzuhaltende Last nicht zu niedrig ist.
(Motorfrequenz bei minimalem Sollwert)
(Motorfrequenz bei maximalem Sollwert): Stellen Sie sicher, dass die Einstellung mit Motor und
Anwendung vereinbar ist.
Stellen Sie ItH auf den Bemessungsbetriebsstrom ein, der auf dem Typenschild angegebe nen ist.
Angaben zum Löschen des thermischen Schutzes finden Sie auf der CD-ROM.
Ermöglicht die Optimierung des Drehmoments bei sehr niedriger Drehzahl (UFr erhöhen, falls
Drehmoment nicht ausreicht).
Stellen Sie sicher, dass der UFr-Wert im Hinblick auf den erhitzten Motor nicht zu hoch liegt (Gefahr
der Instabilität).
Wenn Sie UFt ändern (Seite 54), wechselt UFr auf die Werkseinstellung (20%).
Bemessungsbetriebsstrom des Umrichters.
bereich
Wert des
Parameters Inr
Werkseinstellung
3 s
3 s
Umrichter
DEUTSCH
Page 54

Code Beschreibung Einstell-
bereich
273 Verstärkung des Frequenzreglers 1 bis 100% 20
Parameter nur abrufbar, wenn UFt (Seite 43) = n oder nLd.
Mit dem Parameter FLG werden die Werte der Frequenzrampe in Abhängig ke it de r Trägheit der
Maschine abgeglichen.
Zu niedriger Wert: Verlängerung der Ansprechzeit.
Zu hoher Wert: Überschwingen der Frequenz, führt zu Instabilität.
;I- Stabilität des Frequenzreglers 1 bis 100% 20
Parameter nur abrufbar, wenn UFt (Seite 43) = n oder nLd.
Zu niedriger Wert: Überschwingen der Frequenz, führt zu Instabilität.
Zu hoher Wert: Verlängerung der Ansprechzeit.
;7: Schlupfkompensation 0 bis 150% 100
Parameter nur abrufbar, wenn UFt (Seite 43) = n oder nLd.
Ermöglicht den Abgleich der durch Eingabe der Motornenndrehzahl festgelegten Schlupfkompensation.
Die Geschwindigkeitsangaben auf den Motortypenschildern sind nicht unbedingt exakt.
• Ist die eingestellte Schlupffrequenz < als die tatsächliche Schlupffrequenz: läuft der Motor nicht
mit der korrekten Drehzahl im stabilen Betrieb.
• Ist die eingestellte Schlupffrequenz > als die tatsächliche Schlupffrequenz: ist die
Kompensation des Motors zu hoch, und die Drehzahl ist nicht stabil.
I@/$ Dauer der automatischen Gleichstromeinspeisung im
;@/$ Höhe der automatischen Gleichstromeinspeisung bei
DEUTSCH
Stillstand
Stillstand
0,1 bis 30 s 0,5 s
0 bis 1,2 In (1) 0,7 In (1)
Stellen Sie sicher, dass der Motor diesem Strom ohne Überhitzen standhält.
I@/% 2. Dauer der automatischen Gleichstromeinspeisung im
;@/% 2.
Stillstand
Vgl. CD-ROM.
Höhe der automatischen Gleichstromeinspeisung bei
Stillstand
Vgl. CD-ROM.
0 bis 30 s 0 s
0 bis 1,2 In (1) 0,5 In (1)
6:2 Frequenzausblendung 0 bis 500 0 Hz
Verbietet längeren Betrieb über einen Frequenzbereich von ±1 Hz um JPF herum. Mit dieser
Funktion können Sie eine kritische Frequenz unterdrücken, die eine Resonanz zur Folge hätte.
Die Einstellung auf 0 deaktiviert die Funktion.
62% 2. Frequenzausblendung 0 bis 500 0 Hz
Verbietet längeren Betrieb über einen Frequenzbereich von ±1 Hz um JF2 herum. Mit dieser
Funktion können Sie eine kritische Frequenz unterdrücken, die eine Resonanz zur Folge hätte.
Die Einstellung auf 0 deaktiviert die Funktion.
;:% 2. Vorwahlfrequenz 0,0 bis 500,0 Hz 10 Hz
;:& 3. Vorwahlfrequenz 0,0 bis 500,0 Hz 15 Hz
;:' 4. Vorwahlfrequenz 0,0 bis 500,0 Hz 20 Hz
/75 Strombegrenzung 0,25 bis 1,5 In (1) 1,5 In (1)
Ermöglicht die Begrenzung des Drehmoments und die Erhitzung des Motors.
(1) In entspricht dem im Katalog und auf dem Typenschild des Umrichters angegebenen Bemessungs-
betriebsstrom des Umrichters.
52 1624580 09/2009
Werkseinstellung
Page 55

Code Beschreibung Einstell-
I7; Betriebsdauer bei kleiner Frequenz 0 bis 999,9 s 0 (keine Zeit-
Nach Betrieb in LSP während der festgelegten Dauer wird automatisch das Anhalten de s Motors
angefordert. Der Motor läuft wieder an, wenn der Frequenzsollwert über LSP liegt und wenn
weiterhin ein Fahrbefehl vorhanden ist. Achtung, der Wert 0 entspricht ei ner unbegrenzten Zeit.
2I@ Nicht verwendet, siehe CD-ROM
II@ Nicht verwendet, siehe CD-ROM
/I@ Nicht verwendet, siehe CD-ROM
;@; Nicht verwendet, siehe CD-ROM
;2H Taktfrequenz 2,0 bis 16 kHz 4 kHz
Auf diesen Parameter kann auch im Menü drC- zugegriffen werden.
bereich
Werkseinstellung
begrenzung)
Menü „Antrieb“ drC-
Die Parameter können nur bei Stillstand und ohne Fahrbefehl geändert werden. Eine Ausnahme bildet
der Parameter tUn, der evtl. das Einschalten des Motors bewirken kann.
Die Optimierung der Antriebsleistungen wird wie folgt erreicht:
- durch Eingabe der auf dem Motortypenschild angegebenen Werte im Menü Antrieb,
- durch Auslösen einer Motormessung (über einen asynchronen Standardmotor).
Code Beschreibung Einstell-
>2H Standardfrequenz des Motors 50
50 Hz: IEC
60 Hz: NEMA
Dieser Parameter ändert die Voreinstellung der Parameter: HSP Seite 51, Ftd Seite 53, FrS Seite
53 und tFr Seite 54.
<D; Vom Typenschild abgelesene Nennspannung des Motors Je nach
2H; Vom Typenschild abgelesene Nennfrequenz des Motors 10 bis 500 Hz 50 Hz
Die Werkseinstellung ist 50 Hz, und wird durch eine Voreinstellung von 60 Hz ersetzt, wenn bFr
auf 60 Hz gesetzt wird.
D/H Vom Leistungsschild abgelesener Nennstrom des Motors 0,25 bis 1,5 In
D;: Vom Typenschild abgelesene Nenndrehzahl des Motors 0 bis 32760
0 bis 9999 1/min, dann 10.00 bis 32.76 1000/min
Wenn auf dem Typenschild nicht die Nenndrehzahl angegeben wird, finden Sie die entsprechenden
Angaben auf der CD-ROM.
/9; Vom Typenschild abgelesener Leistungsfaktor des Motors 0,5 bis 1 Je nach
H;/ Auf nO lassen oder CD-ROM verwenden. nO
(1) In entspricht dem im Katalog und auf dem Typenschild des Umrichters angegebenen
Bemessungsbetriebsstrom des Umrichters.
1624580 09/2009 53
bereich
Umrichter
(1)
1/min
Werkseinstellung
Je nach
Umrichter
Je nach
Umrichter
Je nach
Umrichter
Umrichter
DEUTSCH
Page 56

Code Beschreibung Einstell-
I<D Motormessung der Motorsteuerung nO
Es ist unbedingt erforderlich, dass alle Motorparameter (UnS, FrS, nCr, nS P, COS) richtig
konfiguriert sind, bevor die Motormessung durchgeführt wird.
D9: Motormessung nicht durchgeführt.
=1;: Die Motormessung wird sobald wie möglich durchgeführt. Der Parameter wechselt dann
im Fehlerfall automatisch auf dOnE oder nO (Anzeige der Störung tnF).
@9D1: Verwendung der durch die vorherige Motormessung gegebenen Werte.
H<D: Die Motormessung erfolgt bei jedem Fahrbefehl.
:9D: Die Motormessung erfolgt bei jedem Einschalten.
75$ bis 75): Die Motormessung erfolgt während des Übergangs 0
Eingangs, der dieser Funktion zugeordnet ist.
Achtung:
Die Motormessung wird nur dann durchgeführt, wenn zuvor kein Befehl aktiv ist.
Die Motormessung kann 1 bis 2 Sekunden dauern. Unterbrechen Sie nicht und warten Sie ab,
dass die Anzeige auf "dOnE" oder "nO" wechselt.
Während der Motormessung wird der Motor von seinem Nennstrom durchflossen.
I<; Zustand der Motormessung (Nur zur Information, nicht einstellbar) tAb
I->: Der Standardwert des Stato r widerstands wird verwendet, um den Motor zu steuern.
:1D@: Die Motormessung wurde angefordert, aber noch nicht ausgeführt.
:H93: Motormessung läuft.
2-57: Die Motormessung ist fehlgeschlagen.
DEUTSCH
<2I Wahl der U/f-Kennlinie n
DH@ Zufallsgesteuerte Taktfrequenz YES
;2H Taktfrequenz (1) 2,0 bis 16 kHz 4 kHz
I2H Maximale Ausgangsfrequenz 10 bis 500 Hz 60 Hz
;;7 Löschen des Filters für die Drehzahlregelung nO
(1) Der Zugriff auf diesen Parameter ist auch über das Menü SEt- möglich.
54 1624580 09/2009
@9D1: Der von der Motormessfunktion gemessene Statorwiderstand wird verwendet, um den
Motor zu steuern.
7: Konstantes Drehmoment für parallel geschaltete Motoren oder Sondermotoren
:: Variables Moment: Pumpen- und Lüfteranwendungen
D: Vektorielle Regelung ohne Rückführung (open loop) für Anwendungen mit konstantem
Drehmoment
D7@: Energiesparmodus für Anwendungen mit variablem Drehmoment ohne hohe dynamische
Beanspruchung (Verhalten ähnlich der P-Kennlinie bei Leerlauf und der n-Kennl inie unter Last).
=1;: Frequenz mit zufallsgesteuerter Modulation
D9: Feste Frequenz
Die zufallsgesteuerte Frequenzmodulation verhindert eventuelle Störgeräusche und
Resonanzen, die bei einer festen Frequenz auftreten könnten.
Die Frequenz kann so eingestellt werden, dass der vom Motor erzeugte Geräuschpegel gesenkt wird.
Ist die Frequenz auf mehr als 4 kHz eingestellt, reduziert der Umrichter automatisch die
Taktfrequenz und stellt sie wieder her, wenn die Temperatur wieder normal ist.
Die Werkseinstellung beträgt 60 Hz, und wird durch eine Voreinstellu ng von 72 Hz erse tzt, wenn
bFr auf 60 Hz gesetzt wird.
D9: Der Filter für die Drehzahlregelung bleibt aktiv (verhindert Sollwertüberschreitungen).
=1;: Der Filter für die Drehzahlregelung wird gelöscht (führt bei Anwendungen mit
Positionierung zu einer verkürzten Ansprechzeit mit möglicher Sollwertüberschreitung).
bereich
V 1 eines logischen
Werkseinstellung
Page 57

Code Beschreibung Einstell-
;/; Speichern der Konfiguration (1) nO
D9: Funktion inaktiv
;IH5: Speichert die laufende Konfiguration (mit Ausnahme des Ergebnisses der
Motormessung) im EEPROM-Speicher. SCS stellt sich automatisch auf nO zurück, sobald das
Speichern erfolgt ist. Mit dieser Funktion kann zusätzlich zur aktuellen Konfiguration eine
Konfiguration in Reserve gehalten werden.
Bei Verlassen des Werks sind die aktuelle und die gesicherte Ko nfiguration der Umrichter auf die
Werkskonfiguration eingestellt.
/23 Quellkonfiguration (neuer Parameter der Version V1.7) Std
Wahl der Quellkonfiguration.
;I;: Konfiguration Start/Stopp.
Identisch mit der Werkskonfiguration, mit Ausnahme der Belegung der Ein-/Ausgänge:
Logikeingänge:
LI1, LI2 (2 Drehrichtungen): 2-Draht-Steuerung bei Übergang; LI1 = Rechtslauf, LI2 = Linkslauf,
inaktiv bei ATV 31
LI3 bis LI6: Inaktiv (nicht belegt).
Analogeingänge:
AI1: Frequenzsollwert 0-10 V, inaktiv bei ATV 31
AI2, AI3: Inaktiv (nicht belegt).
Relais R1: Bei einer Störung (oder Umrichter ohne Spannung) fällt der Kontakt ab.
Relais R2: Inaktiv (nicht belegt)
Analogausgang AOC: 0-20 mA, inaktiv (nicht belegt).
;I@: Werkskonfiguration (siehe Seite 44).
2/; Rückkehr zur Werkseinstellung / Aufruf der Konfiguration (1) nO
D9: Funktion inaktiv
H1/5: Die zuvor über SCS = StrI gesicherte Konfiguration wird zur aktuellen Konfiguration.
rECI ist nur dann sichtbar, wenn bereits eine Sicherung erfolgt ist . FCS wechselt automatisch
zurück auf nO, sobald diese Aktion erfolgt ist.
5D5: Die aktuelle Konfiguration wird durch die über den Parameter CFG (2) gewählte
Konfiguration ersetzt. FCS wechselt automatisch auf nO zurück, sobald diese Aktion erfolgt ist.
ppppppA (nicht belegt).
ppppppA (nicht belegt).
Die Zuordnung von CFG bewirkt die direkte Rückkehr zur gewählten Konfiguration.
Zur Berücksichtigung von rECI und InI muss die Taste ENT länger (2s) gedrückt werden.
bereich
Werkseinstellung
DEUTSCH
(1) Auf SCS, CFG und FCS kann von verschiedenen Konfigurationsmenüs aus zugegriffen werden, sie
beziehen sich jedoch auf alle Menüs und Parameter.
(2) Die folgenden Parameter werden durch diese Funktion nicht geändert, ihre Konfiguration bleibt unverändert:
- bFr (Motor-Nennfrequenz), Seite 51.
- LCC (Steuerung über das Bedienterminal) im Menü CtL-. Siehe CD-ROM.
- COd (Zugriffscode des Terminals), Seite 58.
- Die Parameter des Menüs „Kommunikation“ COM-. Siehe CD-ROM.
- Die Parameter des Menüs „Überwachung“ SUP-. Siehe CD-ROM.
1624580 09/2009 55
Page 58

Menü „Eingänge/Ausgänge“ I-O-
Die Parameter sind nur im Stillstand, ohne Fahrbefehl veränderbar.
Code Beschreibung Werksein-
I// 2-Draht-/3-Draht-Steuerung (Art der Steuerung) 2C
Konfiguration der Steuerung:
%/ = 2-Draht-Steuerung
&/= 3-Draht-Steuerung
79/ = lokale Steuerung (RUN / STOP / RESET des Umrichters) nur für ATV31
2-Draht-Steuerung: Das Ein- oder Ausschalten wird über den geöffneten oder geschlossenen
Zustand des Eingangs gesteuert.
3-Draht-Steuerung (Flankengesteuert): Ein Impuls „Rechtslauf“ oder „Linkslauf“ reicht aus, um
das Anlaufen des Motors zu steuern; ein Impuls „Stopp“ reicht aus, um das Anhalten des Motors
zu steuern. Vgl. CD-ROM.
Bei ATV31
LI2 (Linkslauf) neu zugeordnet. Die RUN-Taste des Umrichters wird folglich nicht aktiv, der
Frequenzsollwert wird jedoch weiterhin vom Potentiometer angegeben. Sie können das
Potentiometer deaktivieren und dem Analogeingang AI1 den Frequenzsollwert zuweisen, indem
Sie den Parameter Fr1 = AI1 im Menü CtL- konfigurieren. Vgl. CD-ROM.
DEUTSCH
I/I Art der 2-Draht-Steuerung (Parameter nur zugänglich, wenn tCC = 2C) trn
717: Logisch 0 oder 1 wird für den Fahrbefehl wie auch das Anhalten verwendet.
IHD: Für den Fahrbefehl ist ein Zustandswechsel (Übergang oder Flanke) erfor derlich, dadurch
lässt sich ein unbeabsichtigter Wiederanlauf nach einer Unterbrechung der
Spannungsversorgung vermeiden.
:29: Der Fahrbefehl oder das Anhalten werden durch die Zustände „logisch 0 oder 1“ gesteuert.
Der Eingang „Rechtslauf“ hat jedoch immer den Vorrang gegenüber dem Eingang „Linkslauf“.
HH; Linkslauf durch Logikeingang wenn tCC = 2C: LI2
Wenn rrS = nO bleibt der Linkslauf aktiv, beispielsweise durch negative Spannung an AI2.
D9: Nicht belegt
75$: Logikeingang LI1
75%: Logikeingang LI2 zugänglich, wenn tCC = 2C
75&: Logikeingang LI3
75': Logikeingang LI4
75(: Logikeingang LI5
75): Logikeingang LI6
/H7&
/H4&
-9$I
;/;
/23
2/;
56 1624580 09/2009
Weitere Informationen finden Sie auf der CD-ROM.
@9
H$
H%
Identisch mit dem Menü drC-, Seite 55
pppA werden durch Neukonfiguration von tCC = 2C die Eingänge LI1 (Rechtslauf) und
Zum Ändern der Belegung von tCC muss länger (2 s) auf die Taste „ENT“ gedrückt
werden. Hierdurch werden folgende Funktion en auf die Werkseinstellung zurückg esetzt:
rrS, tCt und alle Funktionen, die Logikeingängen zugeordnet sind.
stellung
ATV31
pppA.
wenn tCC = 3C: LI3
wenn tCC = LOC: nO
pppA: LOC
Page 59

Menü „Überwachung“ SUP-
Die Parameter können sowohl während des Betriebs als auch im Stillstand geändert werden.
Einige Funktionen enthalten zahlreiche Par ame ter. Zur Verde utl ichung der Pro gr ammi erung , und u m ein
langwieriges Durchsuchen der Parameter zu vermeiden , wurd en diese Funkt io nen in Un te rmenü s aufge gli edert .
Sie erkennen die Untermenüs am Bindstrich rechts des Codes, wie beispielsweise das Menü: LIF- .
Wenn der Umrichter in Betrieb ist, en tspric ht der angeze igte We rt dem W ert ein es der Übe rwachun gsparamet er.
Standardgemäß ist der angezeigte Wer t die a uf den Mot or ein wirke nde Au sg an gsfre que nz (P aramet e r rFr ).
Während der Anzeige des Wertes des neuen, gewünschte n Überwachungsparameters muss die Taste "ENT"
ein zweites Mal 2 Sekunden lang gedrückt werden, um die Änderung des Überwachungsparameters
freizugeben und diesen zu speichern. Daraufhin wird der Wert dieses Parameters während des Betriebs
angezeigt (selbst nach dem Abschalten).
Wenn Sie die neue Auswahl nicht durch ein zweites längeres Drücken von "ENT" bestätigen, wechselt der
Parameter nach dem Abschalten zum vorherigen Parameter zurück.
Hinweis: Nach einem Ausschalten oder einer Netzunterbrechung gibt der angezeigte Parameter nach wie vor
den Zustand des Umrichters an (beispielsweise rdY). Der gewählte Parameter wird nach einem Fahrbefehl
angezeigt.
Code Beschreibung Änderungsbereich
72H Frequenzsollwert für eine Steuerung durch das interne oder das
H:5 Interner PI-Sollwert 0 bis 100%
2H4 Frequenzsollwert vor Rampe (Absolutwert) 0 bis 500 Hz
H2H Auf den Motor wirkende Ausgangsfrequenz -500 Hz bis +500 Hz
;:@ Ausgangsfrequenz in Kundeneinheiten
7/H Motorstrom
9:H Motorleistung
<7D Netzspannung (gibt die Netzspannung über den DC-Bus an, bei Betrieb des Motors oder bei
I4H Thermischer Zustand des Motors
I4@ Thermischer Zustand des Umrichters
externe Bedienterminal
Dieser Parameter dient gleichzeitig der Funktion +/- Drehzahl über die Tasten und der
Tastatur oder des Terminals.
Er aktiviert die Funktion und zeigt diese an. Bei einer Netzunterbrechung wird rFr nicht
gespeichert. Es muss erneut auf SUP- und rFr zugegriffe n werden, um die Funktio n +/- Drehzahl
wieder freizugeben.
Vgl. CD-ROM.
100% = Nennleistung des Motors
Stillstand)
100% = Thermischer Nennzustand
118% = Schwellwert "OLF" (Motorüberlast)
100% = Thermischer Nennzustand
118% = Schwellwert "OHF" (Motorüberlast)
0 bis 500 Hz
DEUTSCH
Diese Parameter erscheinen nur, wenn die Funktion bestätigt wurde.
1624580 09/2009 57
Page 60

Code Beschreibung Änderungsbereich
72I Letzte aufgetretene Störung
Siehe Fehler – Ursachen – Fehlerbeseitigung, Seite 58
9IH Drehmoment des Motors
100% = Nennmoment des Motors
HI4 Betriebsdauer 0 bis 65530 Stunden
Kumulierte Einschaltdauer des Motors:
von 0 bis 9999 (Stunden), dann 10.00 bis 65.53 (1000 Stunden).
Kann über den Parameter rPr des Menüs FLt- auf Null gesetzt werden (vgl. CD-ROM).
/9@ Zugriffscode des Terminals
Vgl. CD-ROM
I<; Zustand der Motormessung
I->: Der Standardwert des Statorwiderstands wird verwendet, um den Motor zu steuern.
:1D@: Die Motormessung wurde angefordert, aber noch nicht ausgeführt.
:H93: Die Motormessung läuft.
2-57: Die Motormessung ist fehlgeschlagen.
@9D1: Die Antriebsverwaltung verwendet den mit der Motormessfunktion gemessenen
Statorwiderstand.
<@: Anzeige der ATV31-Softwareversion
Beispiel: 1102 = V1.1 IE02.
75-! Funktionen der Logikeingänge
DEUTSCH
-5-! Funktionen der Analogeingänge
Vgl. CD-ROM.
Vgl. CD-ROM.
Fehler - Ursachen - Behebung
Unterstützung bei der Wartung, Anzeige von Störmeldungen
Bei einer Störung während der Inbetriebnahme oder beim Betrieb muss zuerst sichergestellt werden, dass die
Anweisungen bezüglich der Umgebung, des Einbaus und der Anschlüsse befolgt wurden.
Der erste festgestellte Fehler wird gespeichert und durch Blinken auf dem Display angezeigt: der Umrichter wird
gesperrt, und der Kontakt des Störmelderelais (R1A - R1C oder R2A – R2C) fällt ab.
Betriebsstörung ohne Fehleranzeige
• Erfolgt keine Anzeige, dann überprüfen Sie, o b der Umrichter korrekt versorgt wird. Prüfen Sie gl eichfalls die
Verdrahtung der Eingänge AI1 und AI2 sowie den Anschluss des Steckers RJ-45.
• Andere Fälle: Weitere Informationen finden Sie auf der CD-ROM.
58 1624580 09/2009
Page 61

Fehler, bei denen kein automatischer Wiederanlauf erfolgt
Vor dem Wiederanlauf muss erst die S törungsursa che beseitig t werden. Hierzu ist der Umrichter auszuschalt en
(die Anzeige muss erlöschen) und dann wiedereinzuschalten.
Fehler Wahrscheinliche Ursache Maßnahmen zur Behebung
/92
CANopen-Fehler
/H2
Ladeschaltung
Kondensatoren
112
EEPROM-Fehler
5D2
Interne Störung
722
Verlust 4-20 mA
9>2
Überspannung
bei Auslauf
9/2
Überstrom
942
Überlast des
Umrichters
972
Überlast Motor
9:2
Ausfall
Motorphase
9;2
Überspannung
• Kommunikationsunterbrechung
am CANopen-Bus
• Störung der Steuerung des
Lastrelais oder Lastwiderstand
beschädigt
• Störung des internen Speichers • Umgebung prüfen (elektromagnetische
• Kurzschluss an der
10-V-Versorgung
• Interne Störung
• Verlust des Sollwerts 4-20mA am
Eingang AI3
• Zu starke Bremsung
• Antreibende Last
• Parameter der Menüs SEt- und
drC- nicht korrekt
• Massenträgheit oder Last zu hoch
• Mechanische Blockierung
• Überhitzung des Umrichters • Motorlast, Belüftung des Umrichters und Umgebung
• Auslösung durch zu hohen
Motorstrom
• Wert des rSC-Parameters
fehlerhaft
• Unterbrechung einer Phase am
Umrichterausgang
• Motorschütz geöffnet
• Motor nicht angeschlossen oder zu
geringe Leistung
• Plötzlich auftretende
Motorstromverstimmungen
• Netzspannung zu hoch
• Störung im Netz
• Den Kommunikationsbus überprüfen.
• Vgl. spezifische Dokumentation.
• Den Umrichter ersetzen
Verträglichkeit).
• Den Umrichter ersetzen.
• Die an die 10-V-Versorgung angeschlossenen
Schaltkreise prüfen.
• Die Verdrahtung der Eingänge AI1 und AI2 und
den Anschluss am Stecker RJ-45 prüfen.
• Umgebung überprüfen (elektromagnetische
Verträglichkeit).
• Den Umrichter ersetzen.
• Die Verbindung an Eingang AI3 überprüfen.
• Auslaufzeit erhöhen.
• Bei Bedarf einen Bremswiderstand einbauen.
• Siehe Funktion brA (vgl. CD-ROM).
• Parameter von SEt- und drC- überprüfen
• Dimensionierung von Motor/Umrichter/Last überprüfen
• Zustand der Mechanik überprüfen
überprüfen. Vor dem Wied erei nscha lte n den Motor
abkühlen lassen.
• Einstellung ItH (Seite 51) des Motorthermoschutzes
und die Motorlast überprüfen Vor dem
Wiedereinschalten den Mot or abkü hlen lassen.
• Messung von rSC neu durchführen (Seite 53).
• Anschlüsse zwischen Umrichter und Motor
überprüfen.
• Wird ein Motorschütz verwendet, OPL auf OAC
einstellen (vgl. CD-ROM, Menü FLt-).
• Test mit einem Motor mit geringer Leistung oder
ohne Motor: OPL auf nO einstellen (vgl. CD-ROM,
Menü FLt-).
• Parameter UFr (Seite 51), UnS und nCr (Seite 53 )
überprüfen und optimieren, und eine
Motormessung über tUn ausführen (Seite 54).
• Netzspannung überprüfen
DEUTSCH
1624580 09/2009 59
Page 62

Fehler Wahrscheinliche Ursache Maßnahmen zur Behebung
:42
Verlust
Netzphase
;/2
Kurzschluss im
Motor
;72
Modbus-Fehler
;92
Überdrehzahl
ID2
Fehler
Motormessung
DEUTSCH
• Ausfall einer Phase
• Verwendung eines dreiphasigen
ATV 31 in einem einphasigen Netz
• Last mit Unwucht
Diese Schutzfunktion wirkt nur unter
Last.
• Kurzschluss oder Erdschluss am
Umrichterausgang
• Starker Kriechstrom gegen Erde
am Umrichterausgang bei Parallelanschluss mehrerer Motoren.
• Kommunikationsunterbrechung
am Modbus-Bus
• Freigabe des Bedienterminals
(LCC = YES) und Terminal
abgeklemmt
• Instabilität
• Zu stark antreibende Last
• Sondermotor oder Leistungsmo tor
ist nicht auf den Umrichter
abgestimmt
• Motor ist nicht an den Umrichter
angeschlossen
• Überprüfen Sie den Anschluss und die
Sicherungen.
• Ein dreiphasiges Netz verwenden.
• Den Fehler über IPL = nO sperren (vgl. CD-ROM)
• Anschlusskabel vom Umrichter zum Motor und
die Isolierung des Motors überprüfen.
• Taktfrequenz herabsetzen.
• Drosseln in Reihenschaltung zum Motor
hinzufügen.
• Den Kommunikationsbus überprüfen.
• Vgl. spezifische Dokumentation.
• Die Verbindung zum Terminal überprüfen.
• Überprüfen Sie die Parameter von Motor ,
Verstärkung und Stabilität.
• Fügen Sie einen Bremswiderstand hin zu.
• Dimensionierung von Motor/Umrichter/La st prüfen.
• Kennlinie L oder P verwenden (UFt, Seite 54).
• Prüfen, ob Motor bei der Motormessung erkannt wird.
• Bei Verwendung eines nachgeschalteten
Motorschützes diesen während der Vermessung
schließen.
Störungen, bei denen nach Beseitigung der Ursache ein Wiederanlauf
erfolgt
Fehler Wahrscheinliche Ursache Maßnahmen zur Behebung
/22
Konfigurationsfehler
/25
Konfigurationsfehler
durch serielle
Schnittstelle
<;2
Unterspannung
• Die aktuelle Konfiguration ist
inkonsistent.
• Ungültige Konfiguration (die über die
serielle Schnittstelle im Umrichter
eingelesene Konfiguration ist
inkonsistent)
• Netzspannung zu niedrig
• Vorübergehender Spannungsabfall
• Lastwiderstand beschädigt
• Zu den Werkseinstellungen
zurückkehren oder die gesicherte
Konfiguration aufrufen, falls diese
verwendbar ist. Vgl. Parameter FCS
des Menüs drC-, Seite 55.
• Die zuvor eingelesene Konfiguration
überprüfen.
• Eine konsistente Konfiguration laden.
• Die Netzspannung und den Parameter
„Netzspannung“ überprüfen.
• Den Umrichter ersetzen.
60 1624580 09/2009
Page 63

Contenido
En explotación, el motor se puede detener al suprimir las órdenes de marcha o de la consigna de
velocidad, téngase en cuenta que el variador permanece en tensión. Si la seguridad del personal
exige la prohibición de cualquier arranque inesperado, este bloqueo electrónico se hace
insuficiente: Prevea una interrupción del circuito de potencia.
El variador incluye dispositivos de seguridad que pueden, en caso de que se produzcan fallos,
controlar la parada del variador y la parada del motor. Sin embargo este motor puede sufrir una
parada también debido a un bloqueo mecánico, variaciones de tensión o interrupciones en la
alimentación.
Téngase en cuenta que la desaparición de las causas de las paradas puede provocar un
rearranque que suponga un riesgo para determinadas máquinas o instalaciones, especialmente
para las que deben ser conformes a las normas relativas a la seguridad.
Es importante, por tanto, para estos casos, que el usuario se proteja contra dichas posibilidades
de rearranque con la ayuda de un detector de baja velocidad que provoque, en caso de parada no
programada del motor, la interrupción de la alimentación del variador.
La instalación y la puesta en marcha de este variador deben efectuarse según las normas
internacionales IEC y las normas nacionales locales. Su cumplimiento es responsabilidad del
integrador, que si se encuentra en la comunidad europea, debe respetar, entre otras normas, la
directiva CEM.
El respeto de estas normas fundamentales de la directiva CEM viene condicionado especialmente
por la aplicación de las prescripciones que contiene el presente documento.
El Altivar 31 debe considerarse como un componente, no se trata de una máquina ni de un aparato
preparado para el uso según las directivas europeas (directiva sobre máquinas y directiva sobre
compatibilidad electromagnética). Garantizar la conformidad de la máquina con dichas directivas
es responsabilidad del cliente final.
El variador no debe utilizarse como componente de seguridad para las máquinas que presenten
un riesgo material o humano (aparatos de elevación, por ejemplo). En tales casos, la supervisión
de la sobrevelocidad o de pérdida de control de la trayectoria debe estar asegurada por
componentes diferentes e independientes del variador.
Los productos y materiales que se presentan en este documento son susceptibles de sufrir
cambios o modificaciones tanto en el aspecto técnico como en el de utilización. La descr ipción de
los mismos no puede, bajo ningún concepto, revestir un carácter contractual.
Recomendaciones preliminares __________________________________________________________ 62
Etapas de la instalación ________________________________________________________________ 63
Configuración de fábrica ________________________________________________________________ 64
Sustitución de un ATV 28 por un ATV 31 ___________________________________________________ 64
Evolución del software _________________________________________________________________ 65
Esquema de conexión para el preajuste de fábrica __________________________________________ _ 65
Ejemplos de esquemas aconsejados ______________________________________________________ 66
Compatibilidad electromagnética _________________________________________________________ 68
Funciones del display y de las teclas ______________________________________________________ 69
Acceso a los menús ___________________________________________________________________ 70
Configuración del parámetro bFr ________________________________________________________ _ 71
Menú Ajustes SEt- ____________________________________________________________________ 71
Menú de control del motor drC- __________________________________________________________ 73
Menú Entradas/Salidas I-O- _____________________________________________________________ 76
Menú de supervisión SUP- ______________________________________________________________ 77
Fallos - causas - soluciones _____________________________________________________________ 78
ESPAÑOL
61
Page 64

Recomendaciones preliminares
Esta g u í a s i m plifi c a da describe la puesta en servicio mínima para la configuración de fábrica del variador.
Para los ATV31pppppT (función de guiado de hilo), consulte la guÌa de programación de guiado de hilo en el
CD-rom.
Todas las funciones, parámetros y fallos descritos en este documento se refieren a la configu ración de fábr ica.
Si esta configuración es modificada con alguno de los menús CtL-, FUn- o FLt-, los resultados pueden ser
diferentes.
El CD-ROM suministrado con el variador incluye una descripción completa de las recomendaciones y de todo s
los menús de configuración.
Antes de poner el variador en tensión y configurarlo
- Compruebe que la tensión de red es compatible con el rango de tensión de alimentación
del variador. Existe el riesgo de destrucción si no se respeta la tensión de la red.
- Deje las entradas lógicas sin tensión (estado 0) para evitar que el variador arranque
inesperadamente. Por defecto, al salir de los menús de configuración, toda entrada
asignada a una orden de marcha provocaría el arranque inmediato del motor.
Ajuste de usuario y ampliación de las funciones
En caso necesario, el display y los botones permiten modif icar los ajustes y ampliar las funciones. El parámet ro
FCS del menú drC- hace posible el retorno al ajuste de fábrica.
Hay tres tipos de parámetros :
- visualización: valores que muestra el variador,
- ajustes: modificables tanto en funcionamiento como cuando está parado,
- configuración: modificables únicamente cuando está parado y no está frenando. Pueden visualizarse en
funcionamiento.
- Asegúrese de que los cambios de ajustes durante el funcionamiento no comportan
riesgo. Es preferible efectuarlos cuando el variador está parado.
Arranque
ESPAÑOL
Importante: (con el ajuste de fábrica) Cuando se produce una puesta e n tensión o un a re iniciali zació n de fallo
bien manual, o bien tras una orden de parada, sólo arrancará el motor una vez que se han reiniciado las
órdenes "adelante" y "atrás". Por defecto, el display muestra el mensaje "nst", pero el variador no arranca.
Prueba en motor de baja potencia o sin motor
Con el ajuste de fábrica, la detección de pérdida de fase del motor está activada. Para comprobar el variador
en un entorno de prueba o de mantenimiento, y sin tener que recurrir a un motor equivalente al calibre del
variador (en particular para los variadores de grandes potencias), desactive la detección de fase del motor y
configure la ley tensión/frecuencia UFt = L (consulte el CD-ROM).
Uso en una red IT
Red IT: Neutro aislado o impedante.
Utilice un dispositivo de control de aisla miento compatible con cargas no lineales: por ejemplo, del tipo XM200
de la marca Merlin Gerin.
Los ATV 31
filtros.
Consulte el CD-ROM suministrado con el variador.
62 1624580 09/2009
pppM2 y N4 incluyen filtros RFI integrados. Para el uso en redes IT, es necesario desconectar esto s
Page 65

Etapas de la instalación
1 - Recepción del variador
• Asegúrese de que la referencia del variador que aparece inscrita en la etiqueta pertenece a la factura de
entrega correspondiente a la orden de pedido.
• Abra el embalaje y compruebe que el Altivar 31 no ha sufrido daños durante el transporte.
2 - Compruebe que la tensión de la red es compatible con el rango
de alimentación del variador
- Existe el riesgo de destrucción del variador si no se respeta la tensión de la red
3 - Fije el variador
4 - Conecte al variador:
• la red de alimentación, asegurándose de que:
- se encuentra en el rango de tensión del variador.
- está sin tensión.
• el motor, asegurándose de que la conexión de motor corresponde a la tensión de la red,
• el mando, a través de las entradas lógicas,
• la consigna de velocidad, a través de las entradas lógicas o analógicas.
5 - Ponga en tensión el variador sin dar la orden de marcha
6 - Configure:
La frecuencia nominal (bFr) del motor en caso de que no sea de 50 Hz.
7 - Configure en el menú drC-:
Los parámetros del motor, si la configuración de fábrica del variador no es adecuada.
8 - Configure en el menú I-O-:
Si la configuración de fábrica del variador no es la adecuada se puede configurar el modo de control: 3 hilos o
2 hilos por transición, 2 hilos por nivel, 2 hilos por nivel con prioridad de giro adelante, o bien control local para
la gama ATV31
pppA.
Es necesario comprobar que las funciones programadas son compatibles con el esquema de
cableado utilizado.
9 - Ajuste en el menú SEt-:
- los parámetros ACC (Aceleración) y dEC (Deceleración),
- los parámetros LSP (Mínima velocidad cuando la consigna es nula) y HSP (Máxima velocidad cuando la
consigna es máxima),
- el parámetro ItH (Protección térmica del motor).
10 - Arranque
Consejos prácticos
• El retorno a los ajustes de fábrica siempre es posible con el parámetro FCS (especi fique FCS = InI), en
los menús drC- (página 75) o I-O- (página 76).
• Para obtener una mejora del rendimiento del a rrast re en pr ecisión y del ti empo de respu esta, e s obli gat orio:
- introducir los valores que figuran en la placa de características del motor en el menú de contr ol del motor
drC-.
- realizar un autoajuste con el motor en frío y conect ado, mediante el parámetro tUn del menú drC-, página
74.
- ajustar los parámetros FLG y StA del menú de ajuste SEt-, página 72.
(véase la placa de características del variador)
ESPAÑOL
1624580 09/2009 63
Page 66

Configuración de fábrica
El Altivar 31 se entrega preajustado de fábrica para las condiciones de uso más habituales:
• Visualización: variador listo (rdY) con el motor parado y frecuen cia del motor en marcha.
• Frecuencia del motor (bFr): 50 Hz.
• Aplicación de par constante, control vectorial de flujo sin captador (UFt = n).
• Modo de paro normal en rampa de deceleración.
• Modo de paro por fallo: rueda libre
• Rampas lineales (ACC, dEC): 3 segundos.
• Mínima velocidad (LSP): 0 Hz.
• Máxima velocidad (HSP): 50 Hz.
• Corriente térmica del motor (ItH) = corriente nominal del motor (valor según el calibre del variador).
• Corriente de frenado por inyección en la parada (SdC1) = 0,7 x corriente nominal del variador, durante
0,5 segundos.
• Adaptación automática de la rampa de deceleración cuando hay sobretensión en el frenado.
• Sin rearranque automático después de un fallo.
• Frecuencia de corte 4 kHz.
• Entradas lógicas:
- LI1, LI2 (2 sentidos de marcha): control 2 hilos por transición,
LI1 = marcha adelante, LI2 = marcha atrás, inactivas en los ATV 31
- LI3, LI4: 4 velocidades preseleccionadas
(velocidad 1 = consigna de velocidad o LSP, velocidad 2 = 10 Hz, velocidad 3 = 15 Hz, velocidad 4 = 20 Hz).
- LI5 - LI6: inactivas (no asignadas).
• Entradas analógicas:
- AI1: consigna de velocidad 0-10 V, inactiva en los ATV 31
- AI2: consigna sumatoria de velocidad 0±10 V.
- AI3: 4-20 mA inactiva (no asignada).
• Relé R1: el contacto se abre en caso de fallo (o si el variador está sin tensión)
• Relé R2: inactivo (no asignado).
• Salida analógica AOC: 0-20 mA, inactiva (no asignada).
ppppppA (no asignadas).
ppppppA (no asignada).
Gama ATV 31ppppppA
Los ATV 31ppppppA con ajustes de fábrica se suministran con el control local activado: los botones RUN y
STOP y el potenciómetro del variador están activos. Las entradas lógicas LI1 y LI2, así como la entrada
analógica AI1, están inactivas (no asignadas).
En caso de que los valores mencionados sean compatibles con la aplicación, puede utilizarse el variador sin
modificar los ajustes.
ESPAÑOL
Sustitución de un ATV 28 por un ATV 31
La siguiente tabla indica la correspondencia de las bornas de control entre los dos modelos de variadores.
Bornas de control ATV 28 Función en ajuste de fábrica Bornas de control ATV 31 Función en ajuste de fábrica
R1A - R1B - R1C Relé de fallo R1A - R1B - R1C Relé de fallo
R2A - R2C Consigna de velocidad alcanzada R2A - R2C No asignada
COM 0 V COM 0 V
AI1 (0 -10 V) Consigna velocidad AI1 (0 -10 V) Consigna velocidad
+10 V +10 V 10 V +10 V
AI2 (0 -10 V) Consigna sumatoria de
AIC (X - Y mA) No asignada AI3 (X - Y mA) No asignada
AO
LI1 - LI2 Marcha adelante/atrás LI1 - LI2 Marcha adelante/atrás
LI3 - LI4 Velocidades preseleccionadas LI3 - LI4 Velocidades preseleccionadas
+24 V +24 V 24 V +24 V
velocidad
Frecuencia del motor AOC/AOV No asignada
AI2 (0 - ± 10 V) Consign a sumatoria de
velocidad
64 1624580 09/2009
Page 67

Evolución del software
Desde que se inició su comercialización, se han agregado funciones complementa rias al Altivar ATV 31 . Se ha
pasado de la versión de software V1.7 a la versión V3.7. En la presente documentación se describe dicha
versión V3.7.
La versión del software aparece en la etiqueta de características adherida a uno de los lados del variador.
Evolución de la versión V3.7 en relación con la V1.7
Nuevos parámetros
Menú de fallos FLt-
• rP: Este parámetro permite borrar los defectos sobre el producto
Evolución de la versión V1.7 en relación con la V1.2
Nuevos parámetros
Menú de control del motor
• /23: Selección de la configuración fuente para la función de ajuste de fábrica.
También es posible acceder a este parámetro a través de los menús I-O- , CtL- y FUn-.
Menú de funciones de aplicaciones FUn-
• Inr: Incremento de la rampa (véase el CD-ROM).
Menú de fallos FLt-
• LEt: Configuración de la detección de fallos externos (véase el CD-ROM).
Nuevas asignaciones posibles para los relés R1 y R2
• Los relés R1 y R2 ahora se pueden asignar a LI1..LI6. De esta forma, se devolverá el valor de la entrada
lógica seleccionada.
ESPAÑOL
1624580 09/2009 65
Page 68

Esquema de conexión para el preajuste de fábrica
U / T1
V / T2
W / T3P0PA / +
+10
AI1
COM
AI3
R / L1
U1
W1
V1
M
3 a
S / L2
T / L3
R1A
R1C
R1B
LI1
CLI
R2A
R2C
LI2
LI3
LI4
LI5
LI6
24V
AI2
AOV
AOC
(2)
(1)
(1)
PB
PC / -
R / L1
S / L2
COM
A0C
Utilización de la salida
analógica en salida lógica
Relé 24 V
o bien
entrada del autómata
24 V
o bien
indicador LED
ATV31ppppM2
Red monofásica
ATV31ppppM3X/N4/S6X
Red trifásica
X - Y mA
0 ± 10 V
Potenciómetro
de referencia
Resistencia de
frenado eventual
0V
SOURCE
CLI
SINK
CLI LI1 LIx
CLI LI1 LIx
24V
CLI LI1 LIx
ATV31
ATV31
ATV31
CLI a 0 V (ajuste de fábrica)
CLI “al aire”
CLI a 24 V
(1) Inductancia de línea eventual (monofásica o trifásica)
(2) Contactos del relé de fallo, para señalar a distancia el estado del variador
Nota: Equipe con antiparásitos todos los circuitos inductivos próximos al variador o acoplados al mismo, tales
como relés, contactores, electroválvulas, etc.
Elección de los componentes asociados:
ESPAÑOL
Véase catálogo.
Conmutador de las entradas lógicas
Este conmutador cambia la tensión de la conexión común de las entradas lógicas: a 0 V, a 24 V o "al aire".
66 1624580 09/2009
Page 69

0V
LI1
24V
ATV31
ATV31
24V
LI1
COM
ATV31
24V
0V
LI1COM CLI
Autómata
0V
LI1COM
CLI
24V
ATV31
Autómata
Ejemplos de esquemas aconsejados
Uso de contactos sin potencial
• Conmutador en posición "Source"
(ajuste de fábrica de los modelos ATV31 que no
sean ATV31
ppppA)
Uso de salidas de autómatas con transistores
• Conmutador en posición CLI • Conmutador en posición CLI
Precauciones de cableado
Potencia
El variador debe conectarse obligatoriamente a tierra para cumplir las normas re lativas a las corriente s de fuga
elevadas (superiores a 3,5 mA).
Cuando la normativa exija la instalación de una protección de cabecera de “dispositivo diferencial residual”,
debe utilizarse un dispositivo de tipo A para los variadores monofásicos y de tipo B para los variadores
trifásicos. Elija un modelo adaptado que integre:
El filtrado de las corrientes de HF.
Una temporización que evite cualquier disparo debido a la carga de las capacidades par ásitas en la puest a en
tensión. La temporización no es posible para aparatos de 30 mA. En ese caso, elija aparatos inmunizados
contra los disparos imprevistos, por ejemplo, "dispositivos difer enciales residuales" con inmunidad reforzada de
la gama
s.i (marca Merlin Gerin).
Si la instalación cuenta con más de un variador, prevea un “dispositivo diferencial residual” por variador.
Aleje los cables de potencia de los circuitos con señales de bajo nivel de la instalación (detectores, autómatas
programables, aparatos de medida, vídeo o teléfono).
En caso de longitudes de cable > 50 m entre el variador y el motor: añada filtros de salida (véase catálogo).
Control
Separe los circuitos de control y los cables de potencia. En el caso de los circuitos de control y consigna de
velocidad, es aconsejable utilizar cable blindado y trenzado de sección comprendida entre 25 y 50 mm que
conecte el blindaje a tierra en cada uno de los extremos.
• Conmutador en posición "SINK"
(ajuste de fábrica de los modelos ATV31
En este caso, el común no debe conectarse
a masa ni a tierra, ya que entonces existe
riesgo de arranque inesperado cuando se
produzca el primer fallo de aislamiento.
ppppA)
ESPAÑOL
1624580 09/2009 67
Page 70

Compatibilidad electromagnética
2
3
1
8
6
5
4
7
Principio
• Equipotencialidad de "alta frecuencia" de las masas entre el variador, el motor y las pantallas de los cables.
• Uso de cables apantallados con pantalla conectada a tierra, en todo su perímetro, en los dos extremos de
los cables del motor 6, la resistencia de frenado eventual 8 y el control/mando 7. En parte del recorrido, dicha
pantalla se puede realizar con tubos o con conductos metálicos con la condición de que no se produzcan
discontinuidades. En caso de borneros intermedios, éstos deben estar en una caja metálica apantallad a
CEM.
• Aleje el cable de alimentación (red) del cable del motor tanto como sea posible.
Plano de instalación (ejemplo)
1 Plano de tierra en chapa incluido con el variador; para mo ntarlo
sobre éste según muestra el dibujo.
2 Altivar 31
3 Hilos o cable de alimentación no apantallados.
4 Hilos no apantallados para la salida de los contactos de los
relés.
5 Fijación y conexión a tierra de las pantallas de los cables 6, 7 y
8 lo más cerca posible del variador:
- pele las pantallas,
- utilice abrazaderas metálicas inoxidables de un tamaño
adecuado sobre las partes peladas de las pantallas para la
fijación a la chapa 1.
Las pantallas deben estar lo suficientemente apretadas a la
chapa para que los contactos sean correctos.
6 Cable apantallado para la conexión del motor. Para los
variadores de 0,18 a 1,5 kW, si la frecuencia de corte es
superior a 12 kHz, utilice cables de baja capacidad: 130 pF
(picoFarad) máx. por metro.
7 Cable apantallado para conectar el control/mando.
Cuando sean necesarios muchos conductores, utilice los de
ESPAÑOL
Nota:
• Si se utiliza un filtro de entrada adicional, éste se monta en el variador y se conecta directament e a la red
mediante un cable no apantallado. La conexión 3 al variador se realiza ento nces mediante el cable de salida
del filtro.
• Aunque se realice la conexión equipotencial HF de las masas entre el variador, el motor y las pantallas de
los cables es necesario conectar los conductores de protección PE (verde-amaril lo) a los bornes previstos a
tal efecto sobre cada uno de los aparatos.
pequeña sección (0,5 mm
8 Cable apantallado para conectar la resistencia de frenado
eventual.
2
).
68 1624580 09/2009
Page 71

Funciones del display y de las teclas
Altivar 31
RUN
ESC
ENT
STOP
RESET
RUN
ERR
CAN
• Potenciómetro de consigna,
activo si el parámetro Fr1
del menú CtL- está configurado en
AIP
• 4 visualizadores de 7
segmentos
• Para pasar al menú o al
parámetro previo o para
aumentar el valor mostrado
• Para pasar al menú o al
parámetro siguiente o para
disminuir el valor mostrado
• Botón RUN: controla la orden de inicio
de rotación del motor en el giro
adelante si el parámetro tCC del menú
I-O se ha configurado en LO C .
•LED rojo
"bus CC en tensión"
• "Para entrar en un menú o
en un parámetro o para
registrar el parámetro o el
valor mostrado
• Para salir de un menú o de
un parámetro o para
desechar el valor mostrado y
volver al valor anterior
grabado en la memoria
Botón STOP/RESET:
• Permite reinicializar los fallos.
• Siempre puede controlar la parada del mo tor.
- Si tCC (menú I-O) no está configurado en LOC, la
parada se realiza en rueda libre.
- Si tCC (menú I-O) está configurado en LOC, la parada
se realiza en rampa, pero si el frenado por inyección
está en curso, se realiza en rueda libre.
• 2 indicadores de estado
CANopen
Sólo para ATV 31ppppppA
ENT
• Al pulsar el botón o no se graba en memoria el valor elegido.
• Si se pulsa de forma continua (>2 s) o , se obtiene un desplazamiento rápido.
Grabación en memoria y registro de los valores mostrados:
Al grabar un valor en la memoria, el display parpadea.
Visualización normal si no hay fallos y no está en puesta en servicio:
- 43.0: Visualización del parámetro seleccionado en el menú SUP- (por defecto: fr ecuencia motor).
En caso de limitación de la corriente, el parámetro visualizado parpadea.
- init: Secuencia de inicialización.
- rdY: Variador listo.
- dcb: Frenado por inyección de corriente continua en curso.
- nSt: Parada en rueda libre.
- FSt: Parada rápida.
- tUn: Autoajuste en curso.
En caso de fallo, el código de fallo aparece parpadeando.
Opción terminal remoto
Consulte el CD-ROM.
1624580 09/2009 69
ESPAÑOL
Page 72

Acceso a los menús
Visualización del estado del variador
Frecuencia motor (preajuste visible
únicamente en la primera puesta en tensión)
Control del motor
Fallos
Comunicación
Supervisión
Ajustes
Menús
Entradas/Salidas
Control
Funciones
Puesta en tensión
Véase el CD-ROM
ENT
ACC 15.0
ENT
ESC
ENT
ESC
26.0 26.0
ESC
dEC
ENT
SEt-
Menú
Valor o asignación
1 parpadeo
(registro)
Parámetro
(Parámetro siguiente)
La memorización se
identifica por el
parpadeo del display
ESPAÑOL
Los códigos de los menús se diferencian de los códigos de los parámetros por un guión a la derecha.
Ejemplo: menú SEt-, parámetro ACC.
Grabación en memoria y registro de los valores mostrados:
Ejemplo:
70 1624580 09/2009
Page 73

Configuración del parámetro bFr
Este parámetro sólo puede modificarse con el variador en parado.
Cód. Descripción Rango de
>2H Frecuencia estándar de motor 50
Este parámetro sólo aparece en este menú en la primera puesta en tensión.
Siempre se puede modificar en el menú drC-.
50 Hz: IEC
60 Hz: NEMA
Este parámetro modifica los preajustes de los parámetros: HSP (página 71), Ftd (página 73), FrS
(página 73) y tFr (página 74).
ajuste
Menú Ajustes SEt-
Los parámetros de ajuste se pueden modificar con el motor en marcha o parado.
Asegúrese de que los cambios durante el funcionamiento no comportan riesgo.
Es preferible efectuarlos con el motor parado.
Ajuste
de fábrica
Cód. Descripción Rango de
-//
@1/
7;: Mínima velocidad 0 a HSP 0 Hz
4;: Máxima velocidad LSP a tFr bFr
5I4 Protección térmica del motor (corriente térmica máx.) 0 a 1,5 In (1) Según el
<2H Compensación RI/Boost de tensión 0 a 100% 20%
(1) In corresponde a la corriente nominal del variador que se indica en el catálogo y en la etiqueta de
1624580 09/2009 71
Tiempos de rampas de aceleración y deceleración según el valor
Definidos para acelerar y decelerar entre 0 y la frecuencia nominal FrS (paráme tro del menú drC- ).
Asegúrese de que el valor de dEC no es demasiado bajo con respecto a la carga que se va a
detener.
(Frecuencia del motor con consigna mín.)
(Frecuencia del motor con consigna máx.): asegúrese de que este ajuste conviene al motor y a
la aplicación.
Ajuste ItH a la corriente nominal que figura en la placa de características del motor.
Para eliminar la protección térmica, consulte el CD-ROM.
Permite optimizar el par a velocidad mu y baja (aumente el va lor de UFr en caso de par insuficiente).
Asegúrese de que el valor de UFr no es demasiado elevado con el motor en caliente (riesgo de
inestabilidad).
Si se modifica el valor de UFt (página 74), UFr vuelve a su ajuste de fábrica (20%).
características del variador.
ajuste
del parámetro
Inr
Ajuste
de fábrica
3 s
3 s
calibre del
variador
ESPAÑOL
Page 74

Cód. Descripción Rango de
ajuste
273 Ganancia del bucle de frecuencia 1 a 100% 20
Sólo se puede acceder al parámetro si UFt (página 61) = n o nLd.
El parámetro FLG ajusta el seguimiento de la rampa de velocidad en función de la inercia de la
máquina accionada.
Valor demasiado bajo: prolongación del tiempo de respuesta.
Valor demasiado elevado: rebasamiento de velocidad, inestabilidad.
;I- Estabilidad del bucle de frecuencia 1 a 100% 20
Sólo se puede acceder al parámetro si UFt (página 61) = n o nLd.
Valor demasiado bajo: rebasamiento de velocidad, inestabilidad.
Valor demasiado elevado: prolongación del tiempo de respuesta.
;7: Compensación de deslizamiento 0 a 150% 100
Sólo se puede acceder al parámetro si UFt (página 61) = n o nLd.
Permite ajustar la compensación de deslizamiento en torno al valor fijado por la velocidad nominal del motor.
En las placas de características de los motores las indicaciones de velocidad no son siempre exactas.
• Si el deslizamiento ajustado es < el deslizamiento real: el motor no gir a a la velocidad correcta
en el régimen establecido.
• Si el deslizamiento ajustado es > el deslizamiento real: el motor está sobrecompensado y la
velocidad es inestable.
I@/$ Tiempo de inyección automática de corriente continua en la
;@/$ Intensidad de la corriente de inyección automática en la
parada
parada
0,1 a 30 s 0,5 s
0 a 1,2 In (1) 0,7 In (1)
Asegúrese de que el motor admite esta corriente sin sobrecalentamiento.
o
tiempo de inyección de corriente continua automática a la
parada
Véase el CD-ROM.
a
intensidad de la corriente de inyección automática a la
parada
Véase el CD-ROM.
0 a 30 s 0 s
0 a 1,2 In (1) 0,5 In (1)
ESPAÑOL
I@/% 2
;@/% 2
6:2 Frecuencias ocultas 0 a 500 0 Hz
Impide el funcionamiento prolongado en una rango de frecuencias de ± 1 Hz alrededor de JPF.
Esta función permite eliminar las velocidades críticas que comporten resonancia. El ajuste a 0
desactiva la función.
62% 2
;:% 2
;:& 3
;:' 4
a
frecuencia oculta 0 a 500 0 Hz
Impide el funcionamiento prolongado en una rango de frecuencias de ± 1 Hz alrededor de JF2.
Esta función permite eliminar las velocidades críticas que comporten resonancia. El ajuste a 0
desactiva la función.
a
velocidad preseleccionada. 0,0 a 500,0 Hz 10 Hz
a
velocidad preseleccionada. 0,0 a 500,0 Hz 15 Hz
a
velocidad preseleccionada. 0,0 a 500,0 Hz 20 Hz
/75 Limitación de corriente 0,25 a 1,5 In (1) 1,5 In (1)
Permite limitar el par y el calentamiento del motor.
(1) In corresponde a la corriente nominal del variador que se indica en el catálogo y en la etiqueta de
características del variador.
72 1624580 09/2009
Ajuste
de fábrica
Page 75

Cód. Descripción Rango de
I7; Tiempo de funcionamiento a mínima velocidad 0 a 999,9 s 0 (sin límite
Después de estar funcionando en LSP d urante el tiempo establecido , la parada del motor se gener a
automáticamente. El motor rearranc a si la ref erencia de frecu encia es su perior a L SP y si hay un a
orden de marcha activa. Atención: el val or 0 cor resp onde a un t iempo ilim it ado de fu ncio namien t o.
2I@ No utilizado. Véase el CD-ROM.
II@ No utilizado. Véase el CD-ROM.
/I@ No utilizado. Véase el CD-ROM.
;@; No utilizado. Véase el CD-ROM.
;2H Frecuencias de corte 2,0 a 16 kHz 4 kHz
También se puede acceder a este parámetro en el menú drC-.
ajuste
Ajuste
de fábrica
de tiempo)
Menú de control del motor drC-
Los parámetros sólo se pueden modificar en parado (sin orden de marcha), excepto tUn, que puede
provocar la puesta en tensión del motor.
Para optimizar el rendimiento del arrastre:
- introduzca los valores que figuran en la placa de características del motor en el menú a ccionamient o,
- ejecute un autoajuste (en un motor asíncrono estándar).
Cód. Descripción Rango de
>2H Frecuencia estándar de motor 50
50 Hz: IEC
60 Hz: NEMA
Este parámetro modifica los preajustes de los parámetros: HSP (página 71), Ftd (página 73), FrS
(página 73) y tFr (página 74).
<D; Tensión nominal del motor que aparece en la placa de
2H; Frecuencia nominal del motor que aparece en la placa de
D/H Corriente nominal del motor que figura en la placa de
D;: Velocidad nominal del motor que aparece en la placa de
/9; Coseno de ángulo de desfase del motor, que figura en la
H;/ Dejar en nO o consultar el CD-ROM. nO
(1) In corresponde a la corriente nominal del variador que se indica en el catálogo y en la etiqueta de
características del variador.
1624580 09/2009 73
características
características
El ajuste de fábrica es de 5 0 Hz, y es susti tuido por un pre ajuste de 60 H z si bFr se esta blece en 60 Hz.
características
características
0 a 9999 rpm y luego 10,00 a 32,76 krpm
Si la placa de características no indica la velocidad nominal, consulte el CD-ROM.
placa de características
ajuste
Según calibre
del variador
10 a 500 Hz 50 Hz
0,25 a 1,5 In (1) Según
0 a 32760 rpm Según
0,5 a 1 Según
Ajuste
de fábrica
Según
calibre del
variador
calibre del
variador
calibre del
variador
calibre del
variador
ESPAÑOL
Page 76

Cód. Descripción Rango de
I<D Autoajuste del control del motor nO
Es obligatorio configurar correctamente todos los parámetros del motor (UnS, FrS, nCr, nSP y
COS) antes de realizar el autoajuste.
D9: Autoajuste no realizado.
=1;: El autoajuste se realiza cuando es posible hacerlo, puesto que el parámetro pasa
automáticamente a dOnE o nO en caso de fallo (visualización del fallo tnF).
@9D1: Uso de los valores proporcionados por el autoajuste anterior.
H<D: El autoajuste se realiza cada vez que hay una orden de marcha.
:9D: El autoajuste se realiza cada vez que hay una puesta en tensión.
75$ a 75): El autoajuste se realiza en el momento de la transición 0
lógica asignada a esta función.
Atención:
El autoajuste tiene lugar únicamente si no hay ninguna orden activada.
El proceso de autoajuste puede durar de 1 a 2 segundos. No lo interrumpa y espere a visualizar
"dOnE" o "nO".
Durante el autoajuste, la corriente nominal recorre el motor.
I<; Estado del autoajuste (información, no parametrizable) tAb
I->: Se utiliza el valor por defecto de la resistencia del estator para controlar el motor.
:1D@: El autoajuste se ha solicitado pero todavía no se ha efectuado.
:H93: Autoajuste en curso.
2-57: El autoajuste ha fallado.
@9D1: Se utiliza la resistencia del estator medida por la función de autoajuste para controlar el motor.
<2I Elección del tipo de ley tensión/frecuencia n
7: Par constante para motores en paralelo o motores especiales
:: Par variable: aplicaciones de bombas y ventiladores
D: Control vectorial del flujo sin captador para aplicaciones de par constante
D7@: Ahorro energético, para aplicaciones de par variable sin necesidades dinámicas
importantes (comportamiento cercano a la ley P en vacío y a la ley n en carga).
DH@ Frecuencia de corte aleatoria YES
ESPAÑOL
;2H Frecuencia de corte (1) 2,0 a 16 kHz 4 kHz
I2H Frecuencia máxima de salida 10 a 500 Hz 60 Hz
;;7 Eliminación del filtro del bucle de velocidad nO
(1) Parámetro igualmente accesible en el menú de ajuste SEt-.
=1;: Frecuencia con modulación aleatoria
D9: Frecuencia fija
La modulación de frecuencia aleatoria evita los posibles ruidos de resonancia que pueden
producirse con una frecuencia fija.
La frecuencia se puede ajustar para reducir el ruid o de l motor .
Si la frecuencia se ajusta a más de 4 kHz, en caso de sobrecalentamiento el variador disminuirá
automáticamente la frecuencia de corte, y la restablecerá cuando su temperatura vuelva a ser
normal.
El ajuste de fábrica es de 60 Hz, y es sustituido por un preajuste de 72 Hz si bFr se establece en
60 Hz
D9: El filtro del bucle de velocidad permanece activo (evita los rebasamientos de consigna).
=1;: El filtro del bucle de velocidad se elimina (en las aplicaciones con posici onamiento, implica
un tiempo de respuesta reducido, con un posible rebasamiento de consigna).
ajuste
Ajuste
de fábrica
V 1 de una entrada
74 1624580 09/2009
Page 77

Cód. Descripción Rango de
;/; Grabación de la configuración (1) nO
D9: Función inactiva.
;IH5: Efectúa una grabación de la configuración e n curso (excepto el resultado del autoajuste)
en la memoria EEPROM. SCS vuelve a pasar automáticamente a nO en el mo mento en que se
ha efectuado la grabación. Esta función permite conservar una confi guración de reserva además
de la configuración en curso.
En los variadores salidos de fábrica, la configuración en curso y la configuración guardada se
inicializan a la configuración de fábrica.
/23 Configuración fuente (parámetro nuevo de la versión V1.7) Std
Selección de la configuración fuente.
;I;: Configuración marcha/paro.
Idéntica a la configuración de fábrica, salvo por lo que se refiere a las asignaciones de las
entradas/salidas:
Entradas lógicas:
LI1, LI2 (2 sentidos de marcha): control 2 hilos por transición, LI1 = marcha adelante,
LI2 = marcha atrás, inactivas en los ATV 31
LI3 a LI6: inactivas (no asignadas).
Entradas analógicas:
AI1: consigna de velocidad 0-10 V, inactiva en los ATV 31
AI2, AI3: inactiva (no asignada).
Relé R1: el contacto se abre en caso de fallo (o si el variador está sin tensión).
Relé R2: inactivo (no asignado).
Salida analógica AOC: 0-20 mA, inactiva (no asignada).
;I@: Configuración de fábrica (véase la página 64).
La asignación de CFG implica directamente volver a la configuración seleccionada.
2/; Retorno al ajuste de fábrica/Recuperación de la
configuración (1)
D9: Función inactiva.
H1/5: La configuración en curso pasa a ser igual a la configuración guardada anteriormente
por SCS = StrI. Sólo se puede ver rECI si se ha efectuado una grabación. FCS vuelve a pasar
automáticamente a nO en el momento en que se ha efectuado la grabación.
5D5: La configuración actual se sustituye por la configuración seleccionada por el parámetro
CFG (2). FCS vuelve a pasar automáticamente a n O en el momento en que se ha efectuado esta
acción.
Para que se tengan en cuenta rECI e InI, es preciso pulsar de forma continua (2 s) la
tecla ENT.
ppppppA (no asignadas).
ajuste
ppppppA (no asignada).
Ajuste
de fábrica
nO
ESPAÑOL
(1) Se puede acceder a SCS, CFG y FCS desde varios menús de configuración, pero se refieren a todo el
conjunto de menús y parámetros.
(2) Esta función no modifica los parámetros siguientes, sino que conservan su configuración:
- bFr (Frecuencia estándar del motor), página 71.
- LCC (Control a través del terminal remoto) en el menú CtL-. Véase el CD-ROM.
- COd (Código de bloqueo del terminal), página 78.
- Los parámetros del menú de comunicación COM-. Véase el CD-ROM.
- Los parámetros del menú de supervisión SUP-. Véase el CD-ROM.
1624580 09/2009 75
Page 78

Menú Entradas/Salidas I-O-
Los parámetros sólo pueden modificarse en parado, sin orden de marcha.
Cód. Descripción Ajuste
I// Control 2 hilos/3 hilos (tipo de control) 2C
Configuración del control:
%/ = control 2 hilos
&/= control 3 hilos
79/ = control local (RUN/STOP/RESET del variador) sólo para ATV31
Control 2 hilos: El estado abierto o cerrado de la entrada controla la marcha o la parada.
Control 3 hilos (control por pulsos): Un pulso "adelante" o "atrás" es suficiente para controlar el
arranque, un pulso de "parada" es suficiente para controlar la parada. Véase el CD-ROM.
En ATV31
LI2 (marcha atrás). El botón RUN del variador se desactiva , pero la ref erencia de velocidad sigue
siendo la que indica el potenciómetro. Es posible desactivar el potenciómetro y asignar la
consigna de velocidad a la entrada analógica AI1, configur ando el parámetro Fr1 = AI1 en el menú
CtL-. Véase el CD-ROM.
I/I Tipo de control 2 hilos (sólo se puede acceder al parámetro si tCC = 2C) trn
717: El estado 0 ó 1 se tiene en cuenta para la marcha o la parada.
IHD: Es necesario cambiar de estado (transición o flanco) para activar la marcha a fin de evitar
un rearranque imprevisto tras una interrupción de la alimentación.
:29: El estado 0 ó 1 se tiene en cuenta para la marcha o la parada, pero la entrada de giro
ESPAÑOL
HH; Marcha atrás por entrada lógica si tCC = 2C: LI2
/H7&
/H4&
-9$I
;/;
/23
2/;
"adelante" siempre tiene prioridad sobre la entrada de giro "atrás".
Si rrS = nO, la marcha atrás permanece activa, por tensión negativa en AI2, por ejemplo.
D9: No asignada
75$: Entrada lógica LI1
75%: Entrada lógica LI2, accesible si tCC = 2C
75&: Entrada lógica LI3,
75': Entrada lógica LI4
75(: Entrada lógica LI5
75): Entrada lógica LI6.
Consulte el CD-ROM.
@9
H$
H%
Igual que el menú drC-, página 75.
pppA, la reconfiguración de tCC = 2C reasigna las entradas LI1 (marcha adelante) y
Para cambiar la asignación de tCC es necesario pulsar de forma continu a (2 s) la tecla
"ENT", con lo que las funciones siguientes vuelven al ajust e de fá brica: rrS, tCt y todas
las funciones que afecten a las entradas lógicas.
pppA.
de fábrica
ATV31
pppA: LOC
si tCC = 3C: LI3
si tCC = LOC: nO
76 1624580 09/2009
Page 79

Menú de supervisión SUP-
Los parámetros son accesibles en marcha o en parado.
Ciertas funciones incluyen numerosos parámetros. Para facilitar la programación y evitar una ted iosa serie de
parámetros, estas funciones han sido agrupadas en submenús.
Los submenús se identifican por un guión situado a la derecha de su código, como en los menús: LIF-, por
ejemplo.
Cuando el variador está en marcha, el valor mostrado corresponde al valor de uno de los parámetros de
supervisión. Por defecto, el valor asignado es la frecuencia de salida aplicada al motor (parámetro rFr).
Durante la visualización del valor del nuevo parámetro de supervisión deseado, es necesario pulsar una
segunda vez la tecla "ENT" de forma continuada (2 segundos) para validar el cambio de parámetro y
memorizarlo. Desde ese momento, será el valor de ese parámetro el que se visualizará en marcha (i ncluso tras
una desconexión en tensión).
Si no se confirma la nueva selección pulsando por segu nda vez la tecla "ENT" de forma continuada, se volverá
al parámetro anterior después de la desconexión.
Nota: Tras una desconexión o un corte de red, el parámetr o que se visualiza siempr e es el estado de l variador
(por ejemplo, rdY). El parámetro seleccionado se visualiza tras una orden de marcha.
Cód. Descripción Rango de variación
72H Consigna de frecuencia para el control efectuado por el terminal
H:5 Consigna interna PI 0 a 100%
2H4 Consigna de frecuencia antes de rampa (en valor absoluto) 0 a 500 Hz
H2H Frecuencia de salida aplicada al motor - 500 Hz a + 500 Hz
;:@ Frecuencia de salida en unidad seleccionada por el cliente
7/H Corriente en el motor
9:H Potencia del motor
<7D Tensión de red (proporciona la tensión de red a través del bus CC, en régimen motor o en
I4H Estado térmico del motor
I4@ Estado térmico del variador
72I Último fallo aparec ido
integrado o por el terminal remoto
Este parámetro también se utiliza en la función + velocidad/- velocidad a través de las teclas
y del teclado o del terminal.
Muestra y valida el funcionamiento. En el caso de un corte de red, no se memoriza rFr y es
necesario volver a SUP- y rFr para volver a validar la función + velocidad/- velocidad.
Véase el CD-ROM.
100% = Potencia nominal del motor
parado)
100% = Estado térmico nominal
118% = Nivel "OLF" (sobrecarga motor)
100% = Estado térmico nominal
118% = Nivel "OHF" (sobrecarga motor)
Véase Fallos - causas - soluciones, página 78
0 a 500 Hz
ESPAÑOL
Estos parámetros sólo aparecen si la función ha sido validada.
1624580 09/2009 77
Page 80

Cód. Descripción Rango de variación
9IH Par motor
100% = Par nominal del motor
HI4 Tiempo de funcionamiento 0 a 65530 horas
Tiempo acumulado de puesta en tensión del motor:
de 0 a 9999 (horas), y luego de 10,00 a 65,53 (kilohoras).
Puede restablecerse a cero con el parámetro rPr del menú FLt- (consulte el CD-ROM).
/9@ Código de bloqueo del terminal
Véase el CD-ROM
I<; Estado del autoajuste
I->: Se utiliza el valor por defecto de la resistencia del estator para controlar el motor.
:1D@: El autoajuste se ha solicitado pero todavía no se ha efectuado.
:H93: Autoajuste en curso.
2-57: El autoajuste ha fallado.
@9D1: La gestión del arrastre utiliza la resistencia del estator medida por la función de
autoajuste.
<@: Visualización de la versión de software del ATV31
P.ej.: 1102 = V1.1 IE02.
75-! Funciones de las entradas lógicas
Véase el CD-ROM.
-5-! Funciones de las entradas analógicas
Véase el CD-ROM.
Fallos - causas - soluciones
Asistencia a la manipulación, visualización de fallo
Si detecta anomalías en la puesta en servicio o durante la explotación, compruebe en primer lugar que las
ESPAÑOL
recomendaciones relativas a las condiciones ambientales, el montaje y las conexiones se han respetado.
El primer fallo que se detecta queda grabado en memoria y aparece parpadeando en la panta lla: el variador se
bloquea y el contacto del relé de fallo (R1A - R1C o R2A - R2C) se abre.
El variador no arranca y no muestra ningún fallo
• Si no se visualiza ningún elemento, verifique que el variador esté conectado a la corriente y compruebe los
cables de las entradas AI1 y AI2 y la conexión del conector RJ45.
• Otros casos: consulte el CD-ROM.
78 1624580 09/2009
Page 81

Fallos que necesitan rearme
La causa del fallo debe eliminarse antes del rearme dejando sin tensión de alimentación al variador hasta que
el display se apague y, seguidamente, poniéndolo de nuevo en tensión.
Fallo Causa probable Solución
/92
fallo CANopen
/H2
circuito de carga de
condensadores
112
fallo EEPROM
5D2
fallo interno
722
corte 4-20 mA
9>2
sobretensión
en deceleración
9/2
sobreintensidad
942
sobrecarga del
variador
972
sobrecarga del
motor
9:2
corte de fase del
motor
9;2
sobretensión
• interrupción de comunicación en bus
CANopen
• fallo de control del relé de carga o
resistencia de carga deteriorada
• fallo de memoria interno • verifique las condiciones del entorno
• cortocircuito en la alimentación 10 V
• fallo interno
• pérdida de la consigna de 4-20 mA
en la entrada AI3
• frenado demasiado brusco
• carga arrastrante
• parámetros de los menús SEt- y drCincorrectos
• inercia o carga demasiado alta
• bloqueo mecánico
• temperatura del variador demasiado
elevada
• disparo por corriente del motor
demasiado elevada
• valor del parámetro rSC erróneo
• corte de fase a la salida del variador
• contactor aguas abajo abierto
• motor sin cablear o de potencia
demasiado baja
• inestabilidades instantáneas de la
corriente del motor
• tensión de red demasiado elevada
• red perturbada
• verifique el bus de comunicación.
• consulte la documentación específica.
• contacte al servicio técnico.
(compatibilidad electromagnética).
• sustituya el variador.
• compruebe los circuitos conectados al 10 V
• compruebe los cables de las entradas AI1 y
AI2 y la conexión del conector RJ45.
• verifique las condiciones del entorno
(compatibilidad electromagnética).
• sustituya el variador.
• verifique la conexión en la entrada
• aumente el tiempo de deceleración.
• añada una resistencia de frenado en caso
necesario.
• consulte la función brA (en el CD-ROM).
• compruebe los parámetros de SEt- y drC-.
• compruebe el dimensionamiento motor/
variador/carga.
• compruebe el estado de la mecánica.
• compruebe la carga del motor, la vent ilación
del variador y las condiciones ambientales.
Espere a que se enfríe para volver a
arrancarlo.
• verifique los ajustes ItH (página 71) de la
protección térmica del motor y compruebe la
carga del mismo. Espere a que se enfríe
para volver a arrancarlo.
• vuelva a calcular el rSC (página 73).
• verifique las conexiones del variador al
motor.
• en caso de utilizar un co ntactor aguas abajo,
fije los parámetros OPL a OAC (consulte el
CD-ROM, menú FLt-).
• prueba con motor de baja potencia o sin
motor: fije los parámetros OPL a nO
(consulte el CD-ROM, menú FLt-).
• compruebe y optimice los parámetros UFr
(página 71), UnS y nCr (página 73), y
efectúe un autoajuste mediante tUn (página
74).
• verifique la tensión de red.
ESPAÑOL
1624580 09/2009 79
Page 82

Fallo Causa probable Solución
:42
corte de fase
de la red
;/2
cortocircuito del
motor
;72
fallo Modbus
;92
sobrevelocidad
ID2
error de autoajuste
• corte de una fase
• utilización de un ATV31 trifásico en
red monofásica
• carga con equilibrado
Esta protección actúa únicamente en
carga.
• cortocircuito o puesta a tierra en la
salida del variador
• corriente de fuga importante a tier ra
en la salida del variador en el caso de
varios motores en paralelo.
• interrupción de comunicación en bus
Modbus
• validación del terminal remoto
LCC = YES y terminal desconectado.
• inestabilidad
• carga de accionamiento muy elevada
• motor especial o motor de potencia
no adaptada al variador
• motor no conectado al variador
• compruebe la conexión y los fusibles.
• utilice una red trifásica.
• inhiba el fallo por IPL = nO (consulte el CDROM)
• verifique los cables de conexión d el variador
al motor y el aislamiento del motor.
• reduzca la frecuencia de corte.
• añada inductancias en serie con el motor.
• verifique el bus de comunicación.
• consulte la documentación específica.
• compruebe el enlace con el terminal.
• compruebe los parámetros del motor, la
ganancia y la estabilidad.
• añada una resistencia de frenado.
• compruebe el dimensionamiento motor/
variador/carga.
• utilice la ley L o la ley P (UFt, página 74).
• compruebe la presencia del motor durante
el autoajuste.
• en caso de utilizar un contactor aguas abajo,
ciérrelo durante el autoajuste.
Fallos rearmados automáticamente a la desaparición de la causa
Fallo Causa probable Solución
/22
fallo de configuración
ESPAÑOL
/25
fallo de configuración
por enlace serie
<;2
subtensión
• la configuración actual es incoherente • vuelva al ajuste de fábrica o a la
• configuración no válida (la
configuración cargada en el variador
por enlace serie es incoherente)
• red sin potencia suficiente
• bajada de tensión transitoria
• resistencia de carga defectuosa
configuración guardada si es válida.
Véase el parámetro FCS del menú drC(página 75).
• compruebe la configuración
previamente cargada.
• cargue una configuración coherente.
• verifique la tensión y el parámetro de
tensión.
• contacte al servicio técnico.
80 1624580 09/2009
Page 83

Sommario
Il motore può essere fermato anche con variatore in funzione mediante annullamento dei comandi
di marcia o del riferimento di velocità, sempre con il variatore alimentato. Se la sicurezza del
personale impone di impedire eventuali riavviamenti intempestivi, il blocco elettronico è
insufficiente: prevedere un dispositivo d’interruzione sul circuito di potenza.
Il variatore integra dei dispositivi di sicurezza che possono, in caso di guasto, comandare l'arresto
del variatore e di conseguenza l'arresto del motore. Il motore può a sua volta subire un arresto per
blocco meccanico. Gli arresti possono inoltre essere dovuti a variazioni di tensione e in modo
particolare a interruzioni dell’alimentazione.
La scomparsa delle cause di arresto rischia di provocare un riavviamento che potrebbe costituire
un pericolo per alcune macchine o impianti, in particolare per quelle che devono essere conformi
alle normative in materia di sicurezza.
In questo caso è quindi importante che l’operatore si tuteli contro l’eventualità di un riavviamento
utilizzando ad esempio un rilevatore di bassa velocità che, in caso di arresto non programmato del
motore comandi l’interruzione dell'alimentazione del variatore.
L'installazione e la messa in servizio del variatore devono essere effettuate in conformità con
quanto previsto dalle norme internazionali IEC e nazionali del Paese di utilizzo.
La messa in conformità spetta all'installatore che, per quanto concerne la Comunità Europea,
deve rispettare, tra le altre normative, la Direttiva EMC.
Il rispetto dei requisiti essenziali della Direttiva EMC è condizionato naturalmente dall’applicazione
di quanto previsto dal documento.
L'Altivar 31 deve essere considerato un componente poichè in base alle Direttive europee
(Direttiva Macchine e Direttiva Compatibilità Elettromagnetica) non si tratta né di una macchina né
di un apparecchio pronto all'impiego. Spetta all’utilizzatore finale garantire la conformità della sua
macchina a tali norme.
Il variatore non deve essere utilizzato come dispositivo di sicurezza per le macchine che
presentano un rischio per beni o persone (apparecchiature di sollevamento ad esempio).
I controlli di sovravelocità o di non controllo traiettoria devono essere in questo caso garantiti da
dispositivi di sicurezza distinti e indipendenti dal variatore.
I prodotti e i materiali presentati in questo manuale sono in qualsiasi momento suscettibili di
evoluzione o modifiche sia sul piano estetico che tecnico e d’impiego. La loro descrizione non può
in alcun caso rivestire un aspetto contrattuale.
Consigli preliminari ____________________________________________________________________ 82
Le fasi di installazione e messa in servizio __________________________________________________ 83
Configurazione di base _________________________________________________________________ 84
Sostituzione di un ATV 28 con un ATV 31 __________________________________________________ 84
Evoluzioni del software _________________________________________________________________ 85
Schema di collegamento per preregolazione di base __________________________________________ 86
Esempi di schemi consigliati _____________________________________________________________ 87
Compatibilità elettromagnetica ___________________________________________________________ 88
Funzioni del display e dei tasti ___________________________________________________________ 89
Accesso ai menu _____________________________________________________________________ 90
Configurazione del parametro bFr ___________________________________________________ _____ 91
Menu regolazioni SEt- _________________________________________________________________ 91
Menu controllo motore drC- _____________________________________________________________ 93
Menu Ingressi / Uscite I-O- ______________________________________________________________ 96
Menu Visualizzazione SUP- _____________________________________________________________ 97
Difetti - cause - procedure di intervento ____________________________________________________ 98
ITALIANO
81
Page 84

Consigli preliminari
Quest a g u ida se m p l i ficat a descr i v e l a mess a i n serv i z i o minim a per la configurazione di base del variatore.
Per i variatori ATV31ppppppT (funzione traverse control), consultare la "guida alla programmazione Traverse
control" su CD-rom.
Tutti i funzionamenti, parametri e difetti descritti in questo documento si riferiscono alla configurazione di base.
Se quest’ultima è stata modificata in uno dei menu CtL-, FUn- o FLt-, è possibile che possano essere riscontrat e
delle differenze.
Il CD-rom fornito con il variatore comprende la descrizione completa e tutti i menu di configurazione.
Prima di alimentare e configurare il variatore
- Verificare che la tensione di rete sia compatibile con la gamma della tensione di
alimentazione del variatore. Il mancato rispetto della tensione di rete può provocare danni
irreversibili.
- Scollegare gli ingressi logici (stato 0) per evitare eventuali riavviamenti intempestivi.
Di default, all’uscita dai menu di configurazione, l’assegnazione di un ingresso ad un
ordine di marcia provoca l’avviamento immediato del motore.
Regolazione utente ed estensione delle funzioni
Se necessario il display e i pulsanti consentono la modifica delle regolazioni e l’estensione delle funzioni.
Il ripristino della preregolazione di base è facilmente effettuabile attraverso il parametro FCS del menu drC-.
I parametri sono di tre tipi:
- parametri di visualizzazione: valori visualizzati dal variatore
- parametri di regolazione: modificabili a motore fermo o in funzione
- parametri di configurazione: modificabili solo a motore f ermo e non in frenatura. Visualizzabili in f unzionamento
.
- Accertarsi che le modifiche delle regolazioni effettuate in funzionamento non presentino
pericoli; si consiglia comunque di effettuarle preferibilmente a motore fermo.
Avviamento
Importante: nella preregolazione di base, in caso di messa in tensione o reset manuale dei difetti o ancora in
seguito ad un comando di arresto, il motore può essere alimentato solo in seguito al reset dei comandi "avanti" ,
"indietro". Di default il variatore visualizza "nst" ma non parte.
Prova su motore di debole potenza o senza motore
Nella preregolazione di base la funzione di rilevament o perdita di fase motore è at tiva . Per verif icare il var iatore
in condizioni di test o di manutenzione e senza ricorrere ad un motore di potenza equivalente al calibro del
variatore (in particolare per i variatori di forte potenza), disattivare la funzione di rilevamento perdita di fase
motore e configurare la legge tensione / frequenza UFt = L (vedere CD-rom).
ITALIANO
Utilizzo su rete IT
Rete IT: Neutro isolato o impedente.
Utilizzare un controllore permanente d’isolamento compatibile con i carichi non lineari: tipo XM200 di marchio
Merlin Gerin, ad esempio.
I variatori ATV 31
dalla terra.
Consultare il CD-rom fornito con il variatore.
ppppppM2 e N4 integrano dei filtri RFI. Per impiego su rete IT, è possibile scollegare i filtri
82 1624580 09/2009
Page 85

Le fasi di installazione e messa in servizio
1 - Ricevimento del variatore
• Accertarsi che il riferimento dell’avviatore riportato sull’etichetta sia conforme a quanto indicato sulla bolla di
consegna e sull’ordine.
• Aprire l’imballo e verificare che l’Altivar 31 non sia stato danneggiato durante il trasporto .
2 - Verificare che la tensione di rete sia compatibile con la gamma
di alimentazione del variatore
- Il mancato rispetto della tensione di rete può provocare danni irreversibili al variatore.
3 - Fissare il variatore
4 - Collegare al variatore:
• la rete di alimentazione, assicurandosi che:
- sia compatibile con la gamma di tensione del variatore
- sia fuori tensione
• il motore, assicurandosi che gli avvolgimenti motore siano collegati secondo la tensione della rete di
alimentazione
• il comando tramite gli ingressi logici
• la regolazione della velocità tramite gli ingressi logici o analogi
5 - Alimentare il variatore senza dare l’ordine di marcia
6 - Configurare:
La frequenza nominale (bFr) del motore, se diversa da 50 Hz.
7 - Configurare nel menu drC- :
I parametri motore, solo nel caso in cui la configurazione di base del variatore non sia adatta all’applicazione.
8 - Configurare nei menu I-O- :
Solo nel caso in cui la configurazione di base del variatore non sia adatta all’applicazione, il tipo di controllo: 3
fili, o 2 fili su transizione, o 2 fili su livello, o 2 fili su livello con priorità marcia avanti, o comando locale per
ATV31
ppppppA.
Si consiglia di accertarsi che le funzioni programmate siano compatibili con lo schema di
cablaggio utilizzato.
9 - Regolare nel menu SEt- :
- i parametri ACC (Accelerazione) e dEC (Decelerazione),
- i parametri LSP (Velocità minima quando il valore è zero) e HSP (Velocità massima quando il valore è al
massimo),
- il parametro ItH (Protezione termica motore),
10 - Avviare
Consigli pratici
• Un ritorno alle preregolazioni base è sempre possibile con il parametro FCS (mettere FCS = InI), nei menu
drC- (pagina 95) o I-O- (pagina 96).
• Per ottenere prestazioni ottimali di funzionamento in termini di precisione e in tempi di risposta è necessario:
- inserire i valori indicati sulla targa motore nel menu Controllo motore drC-.
- effettuare un autotuning del motore collegato e a freddo con il parametro tUn del menu drC- pagina 94.
- regolare i parametri FLG e StA del menu Regolazione SEt- pagina 92.
(vedere la targhetta del variatore)
ITALIANO
1624580 09/2009 83
Page 86

Configurazione di base
L'Altivar 31 è preregolato di base per le condizioni d'impiego più comuni e frequenti:
• Visualizzazione: variatore pronto (rdY) a motore fermo e frequenza motore con motore in funzione.
• Frequenza motore (bFr): 50 Hz.
• Applicazione a coppia costante, controllo vettoriale del flusso senza trasduttore (UFt = n).
• Modo di arresto normale su rampa di decelerazione.
• Modo di arresto su difetto: ruota libera
• Rampe lineari (ACC, dEC): 3 secondi.
• Piccola velocità (LSP): 0 Hz.
• Grande velocità (HSP): 50 Hz.
• Corrente termica motore (ItH) = corrente nominale motore (valore in base al calibro del variatore).
• Corrente di frenatura con iniezione all’arresto (SdC1) = 0,7 x corrente nominale variatore, per 0,5 secondi.
• Adattamento automatico della rampa di decelerazione in caso di sovratensione alla frenatura.
• Nessun riavviamento automatico in seguito ad un difetto.
• Frequenza di commutazione 4 kHz.
• Ingressi logici:
- LI1, LI2 (2 sensi di marcia): comando 2 fili su transizione,
LI1 = marcia avanti, LI2 = marcia indietro, non attivi sui variatori ATV 31
- LI3, LI4: 4 velocità preselezionate
(velocità 1 = riferimento velocità o LSP, velocità 2 = 10 Hz, velocità 3 = 15 Hz, velocità 4 = 20 Hz).
- LI5 - LI6: non attivi (non configurati).
• Ingressi analogici:
- AI1: riferimento velocità 0-10 V, non attivo sugli ATV 31
- AI2: riferimento sommatore velocità 0±10 V.
- AI3: 4-20 mA non attivo (non configurato).
• Relè R1: il contatto si apre in caso di difetto (o di va riatore fuori tensione)
• Relè R2: non attivo (non configurato).
• Uscita analogica AOC: 0-20 mA, non attiva (non configurata).
ppppppA (non configurato).
ppppppA (non configurati).
Gamma ATV 31ppppppA
Gli ATV 31ppppppA preregolati in fabbrica sono forniti con comando locale attivato: i pulsanti RUN, STOP e il
potenziometro del variatore sono attivi. Gli ingressi logici LI1 e LI2 così come l’ingresso an alogico AI1 non sono
attivi (non configurati).
Se i valori sopra riportati sono compatibili con l'applicazione, il variatore è pronto per essere utilizzato senza
dover procedere alla modifica delle regolazioni.
Sostituzione di un ATV 28 con un ATV 31
La tabella sottostante riporta la corrispondenza dei morsetti controllo tra i due modelli di variatori.
Morsetti di controllo ATV 28 Funzione preregolaz. di base Morsetti di controllo ATV 31 Funzione preregolaz. di base
R1A - R1B - R1C Relè di difetto R1A - R1B - R1C Relè di difetto
R2A - R2C
COM 0 V COM 0 V
ITALIANO
AI1 (0 - 10 V) Riferimento velocità AI1 (0 - 10 V) Riferimento velocità
+ 10 V + 10 V 10 V + 10 V
AI2 (0 - 10 V) Riferim. sommatore velocità AI2 (0 - ± 10 V) Riferim. sommatore velocità
AIC (X - Y mA) Non configurato AI3 (X - Y mA) Non configurato
AO Frequenza motore AOC / AOV Non configurato
LI1 - LI2 Marcia avanti / indietro LI1 - LI2 Marcia avanti / indietro
LI3 - LI4 Velocità preselezionate LI3 - LI4 Velocità preselezionate
+ 24 V + 24 V 24 V + 24 V
Riferimento velocità raggiunta R2A - R2C Non configurato
84 1624580 09/2009
Page 87

Evoluzioni del software
Dalla sua uscita sul mercato l’Altivar ATV 31 ha beneficiato di funzioni supplementari.
La versione software V1.2 diventa V1.7. Questo manuale si riferisce alla versione V1.7.
La versione software è indicata sull’etichetta incollata sul fianco del variatore.
Evoluzione della versione V3.7 rispetto alla V1.7
Nuovi parametri
Menu Difetti FLt-
• rP: Questo parametro permette di resettare i difetti sul prodotto
Evoluzione della versione V1.7 rispetto alla V1.2
Nuovi parametri
Menu Controllo motore
• /23 : Scelta della configurazione di partenza per la funzione di prer egolazione base.
Questo parametro è accessibile anche nei menu I-O- , CtL- e FUn-.
Menu Funzioni applicative FUn-
• 5DH: Incremento rampa (Vedere CD-rom).
Menu Difetti FLt-
• 71I: Configurazione del rilevamento difetto esterno (Vedere CD-rom).
Nuove configurazioni possibili per i relè R1 e R2
• I relè R1 e R2 possono ora essere assegnati agli ingressi logici da LI1 a LI6. Forniscono di ritorno quindi il
valore dell’ingresso logico selezionato.
1624580 09/2009 85
ITALIANO
Page 88

Schema di collegamento per preregolazione di base
U / T1
V / T2
W / T3P0PA / +
+10
AI1
COM
AI3
R / L1
U1
W1
V1
M
3 a
S / L2
T / L3
R1A
R1C
R1B
LI1
CLI
R2A
R2C
LI2
LI3
LI4
LI5
LI6
24V
AI2
AOV
AOC
(2)
(1)
(1)
PB
PC / -
R / L1
S / L2
COM
A0C
Utilizzo dell’uscita
analogica in uscita logica
Relè 24 V
o
Ingresso PLC 24V
o
Spia LED
ATV31ppppM2
Rete monofase
ATV31ppppM3X/N4/S6X
Rete trifase
X-Y mA
0 ± 10 V
Potenziometro
di riferimento
Eventuale resisitenza
di frenatura
0V
SOURCE
CLI
SINK
CLI LI1 LIx
CLI LI1 LIx
24V
CLI LI1 LIx
ATV31
ATV31
ATV31
CLI a 0V (regolazione base)
CLI "in aria"
CLI al 24 V
(1) Eventuale induttanza di linea (1 fase o 3 fasi)
(2) Contatti del relè di difetto per segnalare a distanza lo stato del variatore
Nota : Installare dei filtri antidisturbi su tutti i circuiti induttivi vicini al variatore o collegati sullo stesso circuito
(relè, contattori, elettrovalvole, ecc…)
Scelta dei componenti associati:
Vedere catalogo.
Commutatore degli ingressi logici
Questo commutatore configura il collegamento del comune degli ingressi logici zero volt, al 24 V o "in aria" :
ITALIANO
86 1624580 09/2009
Page 89

0V
LI1
24V
ATV31
ATV31
24V
LI1
COM
ATV31
24V
0V
LI1COM CLI
PLC
0V
LI1COM
CLI
24V
ATV31
PLC
Esempi di schemi consigliati
Utilizzo di contatti a secco
• Commutatore in posizione "Source"
(regolazione base dei variatori ATV31 diversi dal
modello ATV31
ppppppA)
Utilizzo di uscite PLC a transistor
• Commutatore in posizione CLI • Commutatore in posizione CLI
Consigli di cablaggio
Potenza
Il variatore deve essere tassativamente collegato alla terra, conformemente con le normative riguardanti le
correnti di fuga elevate (superiori a 3,5 mA).
Quando le norme d’installazione richiedono una protezione a monte mediant e "dispositivo differenziale r esiduo"
è necessario utilizzare un dispositivo tipo A per i variatori monofase e tipo B per i variatori trifase. Scegliere un
modello adatto che garantisca:
- un filtraggio delle correnti AF,
- una temporizzazione che eviti sganci dovuti al carico delle capacità parassite alla messa sotto tensione. La
temporizzazione non è possibile per apparecchi 30 mA. In questo caso scegliere apparecchi immunizzati contro
gli sganci intempestivi, quali ad esempio degli "interruttori differenziali residui" a immunità maggiorata della
gamma
si (marchio Merlin Gerin).
Se l’installazione comprende più variatori prevedere un "dispositivo differenziale residuo" per variatore.
Separare i cavi potenza dei circuiti con segnali basso livello dell'installazione (interruttori, controllori
programmabili, dispositivi di misura, video, telefono).
In caso di cavi di collegamento tra variatore e motore di lunghezza superiore ai 50 m aggiungere dei filt ri di uscita
(vedere catalogo).
Comando
Separare i circuiti di comando dai cavi potenza. Per i circuiti di comando e riferimento velocità si consiglia di
utilizzare un cavo schermato e "twistato" di passo compreso tra 25 e 50 mm collegando la schermatura alla
massa ad ogni estremità.
1624580 09/2009 87
• Commutatore in posizione "SINK"
(regolazione base dei variatori ATV31
In questo caso il comune non deve mai
essere collegato alla massa o alla terra,
perchè altrimenti vi sarebbe il rischio di
avviamento inatteso al primo difetto d’isolamento.
ppppppA)
ITALIANO
Page 90

Compatibilità elettromagnetica
2
3
1
8
6
5
4
7
Principio
• Equipotenzialità "alta frequenza" delle masse tra il variatore, il motore e le schermatur e dei cavi.
• Utilizzo dei cavi schermati collegati alla massa a 360° ad entrambe le estremità per i cavi motore 6, i cavi
dell’eventuale resistenza di frenatura 8 e i cavi di comando 7. La schermatura può essere realizzat a su una
parte del percorso con tubi o canaline metalliche a condizione che non vi sia discontinuità. In caso di
morsettiere intermedie queste devono essere protette da un involucro metallico schermato EMC.
• Separare il più possibile il cavo di alimentazione (rete) dal cavo motore.
Schema d'installazione (esempio)
1 Piano di massa in lamiera fornito con il variatore, da montare su
quest’ultimo, come illustrato dal disegno.
2 Altivar 31
3 Fili o cavo di alimentazione non schermati.
4 Fili non schermati per l’uscita dei contatti dei relè di sicurezza.
5 Fissaggio e messa a massa delle schermature dei cavi 6, 7
e 8 il più vicino possibile al variatore:
- scoprire le schermature,
- utilizzare collari in metallo inossidabile di dimensioni adatte,
sulle parti scoperte delle schermature, per il fissaggio sulla
lamiera 1.
Le schermature devono essere sufficientemente serrate sulla
lamiera affinchè i contatti siano effettivi.
6 Cavo schermato per collegamento del motore. Per i var iatori da
0,18 a 1,5 kW, se la frequenza di commutazione supera i 12
kHz, utilizzare dei cavi a bassa capacità lineare : 130 pF
(picoFarad) max al metro.
7 Cavo schermato per collegamento del dispositivo di comando.
Per gli impieghi che richiedono numerosi conduttori utilizzare
sezioni ridotte (0,5 mm
8 Cavo schermato per collegamento dell’eventuale resistenza di
frenatura.
Nota :
• In caso d’utilizzo d’un filtro d'ingresso su pplementare questo sarà montato sotto al variatore e collegato
direttamente alla rete con un cavo non sche rmato. Il collegamento al variatore viene quindi realizzato con il
cavo di uscita del filtro.
• Il collegamento equipotenziale AF delle masse tra il variatore, il motore e le schermature dei cavi richiede
comunque il collegamento dei conduttori di protezione PE (verde-giallo) agli appositi morsetti di ciascun
apparecchio.
ITALIANO
2
).
88 1624580 09/2009
Page 91

Funzioni del display e dei tasti
Altivar 31
RUN
ESC
ENT
STOP
RESET
RUN
ERR
CAN
• Potenziometro di regolazione,
attivo se il parametro Fr1 del
menu CtL resta configurato su AIP
• 4 display "7 segmenti"
• Consente di passare al
menu o al parametro
precedente, o di aumentare
il valore visualizzato
• Consent e d i pa ssare al menu
o al parametro successivo, o
di diminuire il valore
visualizzato
• Pulsante RUN: comanda la messa
in tensione del motore in marcia avanti,
se il parametro tCC del menu I-O resta
configurato su LOC
• Spia rossa
"bus DC sotto tensione"
• Consente di entrare in un
menu o in un parametro, o di
salvare il parametro o il
valore visualizzati
• Consente di uscire da un
menu o da un parametro, o di
lasciare il valore visualizzato
per tornare al valore
precedente in memoria
Pulsante STOP/RESET
• permette il reset dei difetti
• può sempre comandare l’arresto del motore.
- Se tCC (menu I-O) non è impostato su LOC, l’arresto
avviene a ruota libera.
- Se tCC (menu I-O) resta impostato su LOC, l’arresto
avviene su rampa, ma se è in corso la frenatura con
iniezione di cc, questo avverrà a ruota libera.
• 2 spie di stato CANopen
Solo per ATV 31ppppppA
ENT
La memorizzazione è segnalata dal lampeggio del valore visualizzato
Visualizzazione normale con variatore non in difetto o in fase di messa in servizio:
In caso di difetto questo viene visualizzato tramite lampeggio.
Opzione terminale remotato
Consultare il CD-rom.
1624580 09/2009 89
• Premendo i tasti o la scelta non viene memorizzata.
• Tenendo premuti (>2 s) i tasti o si ottiene uno scorrimento rapido dei valori.
Memorizzazione, registrazione della scelta visualizzata: tasto
- 43.0: Visualizzazione del parametro selezionato nel menu SUP (di default: frequenza motore).
In caso di limitazione di corrente, il valore visualizzato lampeggia.
- init: Sequenza d’inizializzazione
- rdY: Variatore pronto.
- dcb: Frenatura con iniezione di corrente continua in corso.
- nSt: Arresto a ruota libera.
- FSt: Arresto rapido
- tUn: Autotuning in corso.
ITALIANO
Page 92

Accesso ai menu
Visualizza lo stato del variatore
Frequenza motore (preregolazione visibile
solo alla prima messa sotto tensione)
Controllo motore
Difetti
Comunicazione
Visualizzazione
Regolazioni
Menu
Ingressi / uscite
Comando
Funzioni
Messa sotto tensione
Vedere CD-rom
ENT
ACC 15.0
ENT
ESC
ENT
ESC
26.0 26.0
ESC
dEC
ENT
SEt-
Menu
Valore o configurazione
1 lampeggio
(salvataggio)
Parametro
(Parametro successivo)
La memorizzazione
è segnalata
dal lampeggio
del valore visualizzato
I codici dei menu sono divisi dai codici dei parametri con un trattino a destra. Es.: menu SEt-, parametro ACC.
Memorizzazione, registrazione della scelta visualizzata: tasto :
ITALIANO
Esempio :
90 1624580 09/2009
Page 93

Configurazione del parametro bFr
Questo parametro può essere modificato solo a motore fermo, variatore bloccato.
Cod. Descrizione Gamma di
>2H Frequenza standard motore 50
Questo parametro è visibile in questo caso solo alla prima messa sotto tensione.
Resta sempre modificabile nel menu drC-.
50 Hz: IEC
60 Hz: NEMA
Questo parametro modifica le preregolazioni dei parametri: HSP pagina 91, Ftd pagina 93, FrS
pagina 93 e tFr pagina 94.
regolazione
Menu regolazioni SEt-
I parametri di regolazione possono essere modificati sia in marcia che a motore fermo.
Accertarsi che le modifiche effettuate con motore in funzione non presentino alcun pericolo;
si consiglia tuttavia di effettuarle preferibilmente a motore fermo.
Regolazione
di base
Cod. Descrizione Gamma di
-//
@1/
7;: Velocità minima da 0 a HSP 0 Hz
4;: Velocità massima da LSP a tFr bFr
5I4 Protezione termica del motore - corrente termica max da 0 a 1,5 In (1) In base al
<2H Compensazione RI / Boost di tensione da 0 a 100 % 20 %
(1) In corrisponde alla corrente nominale variatore indicata nel catalogo e sulla targhetta del variatore
(2) Vedere Cd Rom.
1624580 09/2009 91
Tempo delle rampe di accelerazione e di decelerazione in base al
Definiti per accelerare e decelerare passando da 0 alla frequenza nominale FrS e viceversa (parametro
del menu drC-). Accertarsi che il valore di dEC non sia troppo basso rispetto al carico da fermare.
(Frequenza motore a riferimento min)
(frequenza motore a riferimento max): accertarsi che questa regolazione sia adatt a al motore e
all’applicazione.
Regolare ItH all’intensità nominale indicata sulla targhetta del motore.
Per disattivare la protezione termica, vedere il CD-rom.
Consente di ottimizzare la coppia a bassissima velocità (aumentare UFr in caso di debole coppia).
Accertarsi che il valore di UFr non sia troppo alto con motore a caldo (rischio d’instabilità).
Se si modifica UFt (pagina 94) UFr tor na alla preg olaz ione di base (20 %).
regolazione
valore del
parametro Inr (2)
Regolazione
di base
3 s
3 s
calibro var.
ITALIANO
Page 94

Cod. Descrizione Gamma di
regolazione
FLG Guadagno dell’anello di frequenza da 1 a 100 % 20
Parametro accessibile solamente se UFt ( pagina 94)=n o nLd
Il parametro FLG regola la rampa di velocità in funzione dell’inerzia della macchina comandata.
Valore troppo basso: prolungarsi del tempo di risposta.
Valore eccessivo: superamento della velocità, instabilità.
StA Stabilità dell’anello di frequenza da 1 a 100 % 20
Parametro accessibile solamente se UFt (pagina 94)=n o nLd
Valore troppo basso: superamento della velocità, instabilità.
Valore eccessivo: prolungarsi del tempo di risposta.
SLP Compensazione di scorrimento da 0 a 150% 100
Parametro accessibile solo se UFt (pagina 94)=n o nLd
Consente di regolare la compensazione di scorrimento intorno al valore fissato dalla velocità nominale
del motore. Sulle targhe motore le velocità indicate non sono obbligatoriamente esatte.
• Se lo scorrimento regolato è < scorrimento reale: il motore non gira alla velocità corretta al regime
stabilito.
• Se lo scorrimento regolato è > scorrimento reale: il motore è sovracompensato e la velocità è instabile.
tdC1 Tempo di iniezione corrente continua automati ca all’arresto. da 0,1 a 30 s 0,5 s
SdC1 Intensità della corrente d’iniezione automatica all’arresto da 0 a 1,2 In (1) 0,7 In (1)
Accertarsi che il motore sia in grado di sopportare questa corrente senza surriscaldarsi.
tdC2 2
SdC2 2
o
tempo d’iniezione cc automatica all’arresto.
Vedere CD-rom.
a
intensità della corrente d’iniezione automatica all’arresto.
Vedere CD-rom.
da 0 a 30 s 0 s
da 0 a 1,2 In (1) 0,5 In (1)
JPF Frequenza mascherata da 0 a 500 0 Hz
Impedisce un funzionamento prolungato su una gamma di frequenza di ± 1 Hz vicino a JPF.
Questa funzione consente di eliminare una velocità critica che provocherebbe una risonanza.
La regolazione a 0 disattiva la funzione.
a
frequenza mascherata da 0 a 500 0 Hz
Impedisce un funzionamento prolungato su una gamma di frequenza di ± 1 Hz vicino aJF2. Questa
funzione consente di eliminare una velocità critica che provocherebbe una risonanza. La regolazione a
0 disattiva la funzione.
a
velocità preselezionata. 0,0 a 500,0 Hz 10 Hz
a
velocità preselezionata. 0,0 a 500,0 Hz 15 Hz
a
velocità preselezionata. 0,0 a 500,0 Hz 20 Hz
ITALIANO
JF2 2
SP2 2
SP3 3
SP4 4
CLI Limitazione di corrente 0,25 a 1,5 In (1) 1,5 In (1)
Consente di limitare la coppia e il riscaldamento del motore.
(1) In corrisponde alla corrente nominale variatore indicata nel catalogo e sulla targhetta del variatore.
Regolazione
di base
92 1624580 09/2009
Page 95

Cod. Descrizione Gamma di
I7; Tempo di funzionamento a piccola velocità da 0 a 999,9 s 0 (nessuna
In seguito ad un funzionamento a LSP per un tempo prestabilito, l’arresto del motore viene comandato
automaticamente. Il motore si riavvia se il riferimento di frequenza è superiore a LSP e se è sempre
presente un ordine di marcia. Attenzione: il valore 0 corrisponde ad un tempo illimitato.
2I@ Non utilizzato, vedere cd-rom
II@ Non utilizzato, vedere cd-rom
/I@ Non utilizzato, vedere cd-rom
;@; Non utilizzato, vedere cd-rom
;2H Frequenza di commutazione da 2,0 a 16 kHz 4 kHz
Questo parametro è accessibile anche nel menu drC-.
regolazione
Regolazione
di base
limitazione
tempi)
Menu controllo motore drC-
I parametri possono essere modificati solo a motore fermo, senza ordine di marcia, tranne tUn, che può
provocare la messa sotto tensione del motore.
L’ottimizzazione delle prestazioni di funzionamento si ottiene:
- inserendo i valori indicati sulla targhetta del motore nel menu controllo,
- avviando un autotuning (su un motore asincrono standard).
Cod. Descrizione Gamma di
>2H Frequenza standard motore 50
50 Hz: IEC
60 Hz: NEMA
Questo parametro modifica le preregolazioni dei parametri: HSP pagina 91, Ftd pagina 93, FrS
pagina 93 e tFr pagina 94.
<D; Tensione nominale motore indicata sulla targhetta motore In base al
2H; Frequenza nominale motore indicata sulla targhetta motore da 10 a 500 Hz 50 Hz
La pregolazione di base è 50 Hz, sostituita da un valore di 60 Hz se bFr è impostato a 60 Hz.
D/H Corrente nominale motore indicata sulla targhetta motore da 0,25 a 1,5 In
D;: Velocità nominale motore indicata sulla targhetta motore da 0 a 32760
da 0 a 9999 RPM quindi da 10.00 a 32.76 KRPM
Se sulla targa non è riportata la velocità nominale, consultare il CD-rom.
/9; Cos Phi motore indicato sulla targhetta motore da 0,5 a 1 In base al
H;/ Lasciare a nO oppure consultare il Cd Rom nO
(1) In corrisponde alla corrente nominale variatore indicata nel catalogo e sulla targhetta del variatore.
regolazione
calibro variat.
(1)
RPM
Regolazione
di base
In base al
calibro variat.
In base al
calibro variat.
In base al
calibro variat.
calibro variat.
ITALIANO
1624580 09/2009 93
Page 96

Cod. Descrizione Gamma di
I<D Autotuning del comando del motore nO
Occorre che tutti i parametri motore (UnS, FrS, nCr, nSP, COS) siano correttamente configurati
prima di procedere all’autotuning.
D9: Autotuning non eseguito.
=1;: L’autotuning viene eseguito appena possibile, quindi il p arametro passa automaticamente
a dOnE o nO in caso di difetto (visualizzazione del difetto tnF).
@9D1: Utilizzo dei valori forniti dal precedente autotuning.
H<D: L’autotuning viene eseguito ad ogni ordine di marcia.
:9D: L’autotuning viene eseguito ad ogni messa sotto tensione.
75$ a 75): L’autotuning viene eseguito al passaggio 0
questa funzione.
Attenzione:
L'autotuning viene eseguito solo se non è attivo alcun comando.
L’autotuning può durare da 1 a 2 secondi. Non interromperne l’esecuzione ed attendere che la
visualizzazione passi a "dOnE" o a "nO".
L’autotuning è effettuato alla corrente nominale motore.
I<; Stato dell’autotuning (informazione non configurabile) tAb
I->: Il valore di default della resistenza statorica viene utilizzato per comandare il motore.
:1D@: L’autotuning è stato richiesto ma non ancora effettuato.
:H93: Autotuning in corso.
2-57: L’autotuning non è riuscito.
@9D1: La resistenza statorica misurata dalla funzione autotuning è utilizzata per comandare il motore.
<2I Scelta del tipo di legge tensione / frequenza n
7: Coppia costante per motori in parallelo o motori speciali
:: Coppia variabile: applicazioni pompe e ventilatori
D: Controllo vettoriale del flusso senza trasduttore per applicazioni a coppia costante
D7@: Risparmio energetico, per applicazioni a coppia variabile senza necessità di dinamica
importante (comportamento vicino alla legge P a vuoto e alla legge n in carico).
DH@ Frequenza di commutazione aleatoria YES
=1;: Frequenza con modulazione aleatoria
D9 : Frequenza fissa
La modulazione di frequenza aleatoria evita gli eventuali rumori di risonanza che potrebbero
verificarsi ad una frequenza fissa.
;2H Frequenza di commutazione (1) da 2,0 a 16 kHz 4 kHz
La frequenza è regolabile per ridurre i l rum ore gener at o da l moto re.
ITALIANO
I2H Frequenza massima di uscita da 10 a 500 Hz 60 Hz
;;7 Eliminazione del filtro dell’anello di velocità nO
(1) Parametro accessibile anche nel menu regolazione SEt-..
Se la frequenza è regolata ad oltre 4 kHz, in caso di surriscaldamento il variatore riduce
automaticamente la frequenza di commutazione ripristinandola quando la temperatura torna
normale.
La preregolazione di base è 60 Hz, sostituita da un valore di 72 Hz se bFr è impostato a 60 Hz
D9: Il filtro dell’anello di velocità resta attivo (evita che venga superato il valore impostato).
=1;: Il filtro dell’anello di velocità è disattivato (per applicazioni con posizionamento comporta
un tempo di risposta ridotto, con possibilità di superamento del valore impostato).
regolazione
V 1 di un ingresso logico assegnato a
Regolazione
di base
94 1624580 09/2009
Page 97

Cod. Descrizione Gamma di
;/; Salvataggio della configurazione (1) nO
D9: Funzione non attiva
;IH5: Effettua un salvataggio della configurazione in corso (tranne il risultato dell’autotuning)
nella memoria EEPROM. Terminato il salvataggio SCS torna automaticamente a nO. Questa
funzione consente di conservare una configurazione di riserva oltr e alla co nfi gurazione in co rso.
Nei variatori all’uscita dalla fabbrica entrambe le configurazioni (in corso e di salvataggio) sono
inizializzate alla configurazione di base.
/23 Configurazione sorgente (nuovo parametro della versione V1.7) Std
Scelta della configurazione sorgente.
;I; : Configurazione marcia/arresto.
Identica alla configurazione di base tranne che per le configurazioni degli ingressi/uscite :
Ingressi logici :
LI1, LI2 (2 sensi di marcia) : comando 2 fili su transizione, LI1 = marcia avanti, LI2 = marcia
indietro, non attivi sui variatori ATV 31
da LI3 a LI6 : non attivi (non configurati).
Ingressi analogici :
AI1 : riferimento velocità 0-10 V, non attivo sui variatori ATV 31
AI2, AI3 : non attivo (non config.).
Relè R1 : il contatto si apre in caso di difetto (o variatore non alimentato)
Relè R2 : non attivo (non config.).
Uscita analogica AOC : 0-20 mA, non attiva (non config.).
;I@ : Configurazione di base (vedere pagina 84).
La configurazione di CFG provoca il ritorno diretto alla configurazione selezionata.
2/; Ritorno alla regolazione base / Richiamo configurazione (1) nO
D9 : Funzione non attiva
H1/5 : La configurazione in corso diventa identica a quella salvata precedente mente con SCS
= StrI. rECI è visibile solo se è stato effettuato un salvataggio. Non appena viene effettuata questa
operazione FCS torna automaticamente a nO.
5D5 : La configurazione in corso viene sostituita dalla configurazione selezionata con il
parametro CFG (2). Non appena viene effettuata questa operazione FCS torna automaticamente
a nO.
Per essere elaborati, rECI e InI richiedono la pressione prolungata (2 s) del tasto ENT.
ppppppA (non configurati).
regolazione
ppppppA (non configurato).
Regolazione
di base
(1) SCS, CFG e FCS sono accessibili da diversi menu di configurazione, ma riguardano l’insieme di tutti i menu
e parametri.
(2) I seguenti parametri non vengono modificati da questa funzione ma conservano la loro configurazione:
- bFr (Frequenza motore standard) pagina 91.
- LCC (Comando da terminale a distanza) nel menu CtL-. Vedere CD-rom.
- COd (Codice di blocco del terminale) pagina 98.
- I parametri del menu Comunicazione COM-. Vedere CD-rom.
- I parametri del menu Visualizzazione SUP-. Vedere CD-rom.
1624580 09/2009 95
ITALIANO
Page 98

Menu Ingressi / Uscite I-O-
I parametri possono essere modificati solo a motore fermo, senza ordine di marcia.
Cod. Descrizione Regolazione
I// Comando 2 fili / 3 fili (Tipo di controllo) 2C
Configurazione del comando:
%/ = comando 2 fili
&/ = comando 3 fili
79/ = comando locale (RUN / STOP / RESET del variatore) solo per ATV31
Comando 2 fili: Stato aperto o chiuso dell’ingresso che comanda la marcia o l’arresto.
Comando 3 fili (Comando ad impulsi): un impulso "avanti" o "indietro" è sufficiente a comandare
l’avviamento, un impulso "stop" è sufficiente a comandare l’arresto. Vedere il CD-rom.
Sui variatori ATV31
avanti) e LI2 (marcia indietro). Il pulsante RUN del variatore torna ad essere non attivo, ma il
riferimento di velocità è sempre dato dal potenziometro. E’ possibile disattivare il potenziometr o e
assegnare il riferimento di velocità all’ingresso analogico AI1, conf igurando il parametro Fr1 = AI1
nel menu CtL-. Vedere il CD-rom.
Per modificare la configurazione di tCC è necessaria una pressione p rolungata (2 s) del
tasto "ENT", che provoca il ritorno alla preregolazione di base delle funzioni: rrS, tCt e di
tutte le funzioni che interessano gli ingressi logici..
I/I Tipo di comando 2 fili (parametro accessibile solo se tCC = 2C) trn
717: Lo stato 0 o 1 viene acquisito per la marcia o l’arresto.
IHD: Una modifica di stato (transizione o fronte) è necessaria per attivare la marcia allo scopo
di evitare un riavviamento intempestivo in seguito ad un’interruzione dell’alimentazione.
:29: Lo stato 0 o 1 viene acquisito per la marcia o l’arresto, ma l’ingresso "marcia avanti" ha
sempre priorità sull’ingresso "marcia indietro".
HH; Marcia indietro mediante ingresso logico se tCC = 2C : LI2
Se rrS = nO la marcia indietro resta attiva, con tensione negativa su AI2 ad esempio.
D9 : Non configurato
75$ : Ingresso logico LI1
ITALIANO
/H7&
/H4&
-9$I
;/;
/23
2/;
96 1624580 09/2009
75% : Ingresso logico LI2, accessibile se tCC = 2C
75& : Ingresso logico LI3,
75' : Ingresso logico LI4
75( : Ingresso logico LI5
75) : Ingresso logico LI6.
Consultare il CD-rom
@9
H$
H%
Identico al menu drC, pagina 95
ppppppA, la riconfigurazione di tCC = 2C riassegna gli ingressi LI1 (marcia
di base
ATV31
LOC
ppppppA.
se tCC = 3C : LI3
se tCC = LOC : nO
ppppppA:
Page 99

Menu Visualizzazione SUP-
I parametri sono accessibili sia in marcia che a motore fermo.
Alcune funzioni comprendono numerosi parametri. Per rendere chiara la programmazione ed evitare un
fastidioso scorrimento dei parametri, le funzioni sono state raggruppate in sotto-menu.
I sotto-menu sono riconoscibili grazie al trattino posto alla destra del loro codice, come per i menu: LIF- ad
esempio.
Quando il variatore è in funzione il valore visualizzato corrisponde al valore di uno dei parametri di controllo.
Di default, il valore visualizzato è la frequenza di uscita applicata al motore (parametro rFr).
Quando a display è visualizzato il valore del nuovo parametr o di controllo desiderato, è necessaria una seconda
pressione prolungata (2 secondi) del tasto "ENT" per validare la modifica del parametro di controllo ed
effettuarne il salvataggio. Da questo momento in poi sarà il valore di questo parametro ad esse re visualizzato
con motore in marcia (anche in seguito ad una messa fuori tensione).
Se la nuova scelta non viene confermata con una seconda pressione prolungata del tasto "ENT", alla messa
fuori tensione si tornerà al parametro precedente.
Nota : In seguito alla messa fuori tensione o ad un’interruzione dell’alimentazione, il parametro visualizzato è
sempre lo stato del variatore (rdY ad esempio). Il parametro selezionato viene visualizzato dopo un ordine di
marcia.
Cod. Descrizione Gamma di variazione
72H Riferimento frequenza per il comando tramite terminale integrato
H:5 Riferimento interno PI da 0 a 100%
2H4 Riferimento frequenza prima della rampa (in valore assoluto) da 0 a 500 Hz
H2H Frequenza di uscita applicata al motore da - 500 Hz a + 500 Hz
;:@ Frequenza di uscita in unità cliente
7/H Corrente motore
9:H Potenza motore
<7D Tensione rete (fornisce la tensione rete misurata su bus DC, con motore a regime o fermo)
I4H Stato termico motore
I4@ Stato termico variatore
72I Ultimo difetto comparso
o terminale remotato
Questo parametro serve anche alla funzione + vel oce/- veloce con i tasti e della tastiera o
del terminale.
Visualizza e conferma il funzionamento. In caso di interruzione dell’alimentazione rFr non viene
memorizzato e bisogna tornare in SUP- e rFr per rivalidare la funzione + veloce/- veloce.
Vedere CD-rom.
100 % = Potenza nominale del motore
100 % = Stato termico nominale
118 % = Soglia "OLF" (sovraccarico motore)
100 % = Stato termico nominale
118 % = Soglia "OHF" (sovraccarico variatore)
Vedere Difetti - cause - procedure di intervento, pagina 98
da 0 a 500 Hz
ITALIANO
Questi parametri appaiono solo se la funzione è stata validata.
1624580 09/2009 97
Page 100

Cod. Descrizione Gamma di variazione
9IH Coppia motore
100 % = coppia nominale del motore
HI4 Tempo di funzionamento da 0 a 65530 ore
Tempo totale di messa sotto tensione del motore:
da 0 a 9999 (ore), quindi da 10.00 a 65.53 (Kore).
Può essere resettato con il parametro rPr del menu FLt- (vedere cd-rom).
/9@ Codice di blocco del terminale
Vedere CD-rom.
I<; Stato dell’autotuning
I->: Il valore di default della resistenza statorica è utilizzato per comandare il motore.
:1D@: L’autotuning è stato richiesto ma non ancora eseguito.
:H93: Autotuning in corso.
2-57: L’autotuning non è riuscito.
@9D1: La resistenza statorica misurata dalla funzione autotuning è utilizzata per comandare
il motore.
<@: Visualizzazione della versione software dell’ATV31
Es. : 1102 = V1.1 IE02.
75-! Funzioni degli ingressi logici
Vedere CD-rom.
-5-! Funzioni degli ingressi analogici
Vedere CD-rom.
Difetti - cause - procedure di intervento
Assistenza alla manutenzione, visualizzazione di difetto
In caso di anomalia alla messa in servizio o in fase di impiego, accertarsi per prima cosa che siano state
rispettate le indicazioni fornite riguardo alle condizioni ambientali, al montaggio ed ai collegamenti.
Il primo difetto rilevato viene memorizzato e visualizzato sul display lampeggiante: il variatore si blocca e il
contatto del relè di difetto (R1 nella preregolazione di base) si apre.
ITALIANO
Mancato avviamento senza visualizzazione del difetto
• Se sul display non viene visualizzato nul la verificare che i l variatore sia correttament e alimentato e controllare
il cablaggio degli ingressi AI1 e AI2 oltre al collegamento sul connettore RJ45.
• Altri casi: consultare il CD-rom.
98 1624580 09/2009
 Loading...
Loading...