

Page 1

Guide d'exploitation
User's manual
Bedienungsanleitung
Guía de explotación
Altivar 18
Telemecanique
variateurs de vitesse pour
moteurs asynchrones,
variable speed controllers
for asynchronous motors,
Frequenzumrichter
für Drehstrom-Asynchronmotoren,
variadores de velocidad
para motores asíncronos.
Merlin Gerin
Modicon
Square D
Telemecanique
Page 2
Altivar 18
Variateur de vitesse pour moteurs asynchrones Page 2
Speed controller for asynchronous motors Page 34
F
R
A
N
Ç
A
I
S
E
N
G
L
I
S
H
Umrichter für Drehstrom-Asynchronmotoren Seite 66
Variador de velocidad para motores asíncronos Página 98
D
E
U
T
S
C
H
E
S
P
A
Ñ
O
L
1
Page 3
F
R
A
Lorsque le variateur est sous tension, les éléments de puissance ainsi qu'un certain nombre de
N
composants de contrôle sont reliés au réseau d'alimentation.
Ç
les toucher.
A
I
Après mise hors tension réseau de l'ALTIVAR,
S
l'appareil
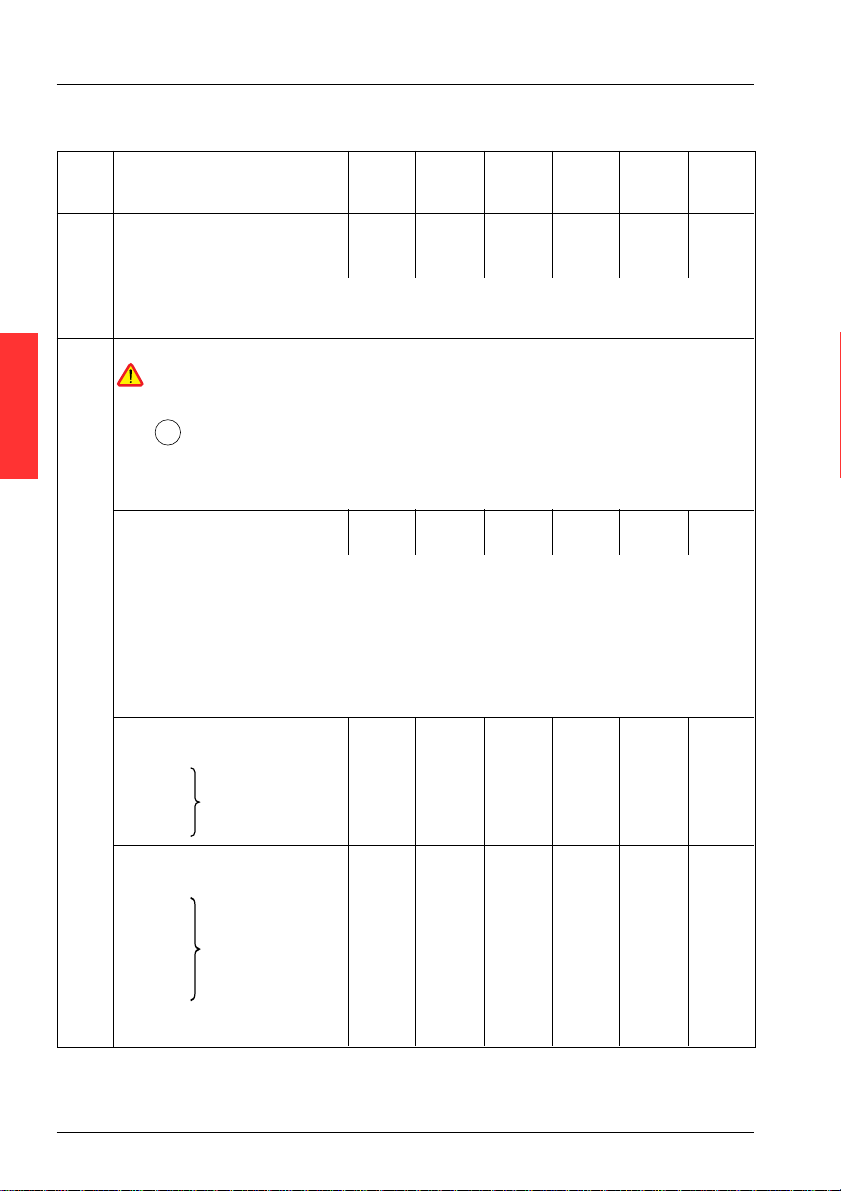
En exploitation le moteur peut être arrêté, par suppression des ordres de marche ou de la
ATTENTION
consigne vitesse, alors que le variateur reste sous tension. Si la sécurité du personnel exige
l'interdiction de tout redémarrage intempestif, ce verrouillage électronique est insuffisant :
Prévoir une coupure sur le circuit de puissance.
Le variateur comporte des dispositifs de sécurité qui peuvent en cas de défauts commander
l'arrêt du variateur et par là-même l'arrêt du moteur. Ce moteur peut lui-même subir un arrêt par
blocage mécanique. Enfin, des variations de tension, des coupures d'alimentation en particulier,
peuvent également être à l'origine d'arrêts.
La disparition des causes d'arrêt risque de provoquer un redémarrage entraînant un danger pour
certaines machines ou installations, en particulier pour celles qui doivent être conformes aux
réglementations relatives à la sécurité.
Il importe donc que, dans ces cas-là, l'utilisateur se prémunisse contre ces possibilités de
redémarrage notamment par l'emploi d'un détecteur de vitesse basse, provoquant en cas d'arrêt
non programmé du moteur, la coupure de l'alimentation du variateur.
. Ce délai correspond à la constante de temps de décharge des condensateurs.
attendre 1 minute avant d'intervenir dans
Il est extrêmement dangereux de
La conception des équipements doit être conforme aux prescriptions des normes IEC.
D'une façon générale toute intervention, tant sur la partie électrique que sur la partie mécanique
de l'installation ou de la machine, doit être précédée
NOTE
Les produits et matériels présentés dans ce document sont à tout moment susceptibles
d'évolution ou de modification tant au plan technique et d'aspect que de l'utilisation. Leur
description ne peut en aucun cas revêtir un aspect contractuel.
2
de la coupure de l'alimentation du variateur.
Page 4
Avertissement
L'Altivar 18 doit être considéré comme un composant, ce n'est ni une machine ni un appareil prêt
à l'utilisation selon les directives européennes (directive machine et directive compatibilité
électromagnétique). Il est de la responsabilité du client final de garantir la conformité de sa
machine à ces normes.
L'installation et la mise en œuvre de ce variateur doivent être effectuées conformément aux
normes internationales et aux normes nationales de son lieu d'utilisation. Cette mise en
conformité est de la responsabilité de l'intégrateur qui doit respecter entre autres, pour la
communauté européenne, la directive CEM.
Le respect des exigences essentielles de la directive CEM est conditionné notamment par
l'application des prescriptions contenues dans ce document.
F
R
A
N
Ç
A
I
S
3
Page 5

F
R
A
N
Ç
A
I
S
4
Page 6
Sommaire
L' "Altivar 18" 1
Vérifications préliminaires 6
Choix du variateur 6
Couple disponible 7
Caractéristiques techniques 8
Encombrements - Précautions de montage 9
Montage en coffret ou armoire 10
Compatibilité électromagnétique 11
Accès aux borniers - Borniers puissance 12 et 13
Bornier contrôle 14
Schéma de raccordement 15
Fonctions sans réglage 16
Fonctions configurables des entrées logiques et analogiques 17 à 19
Tableau de compatibilité des fonctions 20
Mise en service 21 à 30
Maintenance - Rechanges réparations 31
Assistance à la maintenance 32
F
R
A
N
Ç
A
I
S
5
Page 7

Vérifications préliminaires
Sortir l'Altivar 18 de son emballage, et vérifier qu'il n'a pas été endommagé pendant le transport. S'assurer
que la référence du variateur inscrite sur l'étiquette est conforme au bordereau de livraison correspondant
au bon de commande.
Choix du variateur
Réseau Moteur Altivar 18
Tension Courant Puissance Courant Courant Puis- Référence Masse
d'alimen- de ligne (1) indiquée de sortie transi- sance
tation à U1 à U2 sur plaque perma- toire dissipée
F
U1…U2 charge
R
A
V AAkWHPAAW kg
N
200…240 4,4 3,9 0,37 0,5 2,1 3,1 23 ATV-18U09M2 1,5
Ç
50/60 Hz
A
monophasé 7,6 6,8 0,75 1 3,6 5,4 39 ATV-18U18M2 1,5
I
S
200…230 16,2 14,9 3 – 12,3 18,5 104 ATV-18U54M2 3,3
50/60 Hz
triphasé 20,4 18,8 4 5 16,4 24,6 141 ATV-18U72M2 3,3
13,9 12,4 1,5 2 6,8 10,2 60 ATV-18U29M2 2,1
19,4 17,4 2,2 3 9,6 14,4 78 ATV-18U41M2 2,8
28,7 26,5 5,5 7,5 22 33 200 ATV-18U90M2 7,8
ment maxi (2) à la
nominale
38,4 35,3 7,5 10 28 42 264 ATV-18D12M2 7,8
380…460 2,9 2,7 0,75 1 2,1 3,2 24 ATV-18U18N4 2
50/60 Hz
triphasé 5,1 4,8 1,5 2 3,7 5,6 34 ATV-18U29N4 2,1
6,8 6,3 2,2 3 5,3 8 49 ATV-18U41N4 3,1
9,8 8,4 3 – 7,1 10,7 69 ATV-18U54N4 3,3
12,5 10,9 4 5 9,2 13,8 94 ATV-18U72N4 3,3
16,9 15,3 5,5 7,5 11,8 17,7 135 ATV-18U90N4 8
21,5 19,4 7,5 10 16 24 175 ATV-18D12N4 8
31,8 28,7 11 15 22 33 261 ATV-18D16N4 12
42,9 38,6 15 20 29,3 44 342 ATV-18D23N4 12
(1) Valeur typique sans inductance additionnelle.
(2) Pendant 60 secondes.
L'Altivar 18 a été conçu pour alimenter les moteurs d'une puissance adaptée à chacun de ses
calibres.
6
Page 8
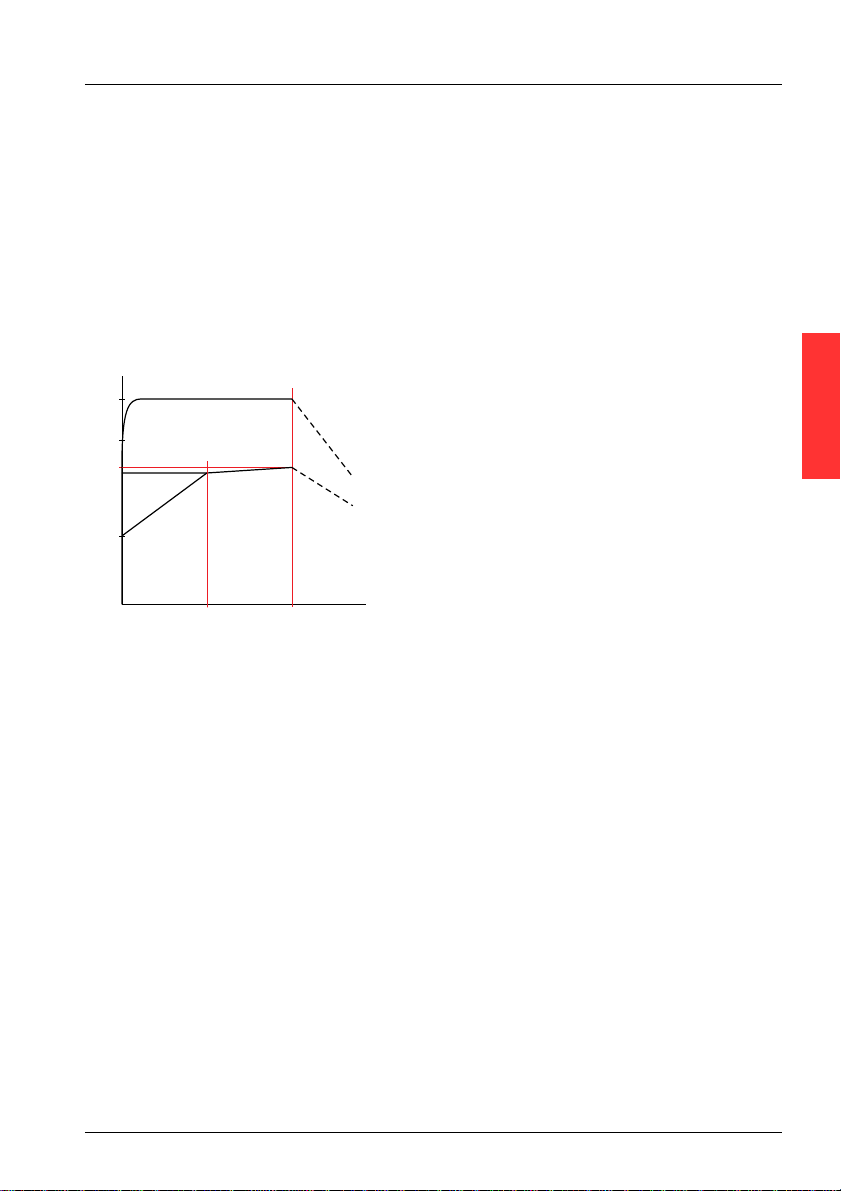
Couple disponible
Régime permanent
Pour les moteurs autoventilés, le refroidissement du moteur est lié à sa vitesse. Il en résulte un déclassement
pour les vitesses inférieures à la moitié de la vitesse nominale.
Fonctionnement en survitesse
La tension ne pouvant plus évoluer avec la fréquence, il en résulte une diminution de l'induction dans le
moteur qui se traduit par une perte de couple. S'assurer auprès du constructeur que le moteur peut
fonctionner en survitesse.
Caractéristiques de couple :
C/Cn
1,5
1,2
0,95
1
3
21
1 Couple utile permanent: moteur autoventilé
2 Couple utile permanent: moteur motoventilé
3 Surcouple transitoire: courbe typique à ± 10 %
Valeur : 1,5 Cn pendant 60 s
0,5
0
1
25
30
50
60
N (Hz)
Nota : Avec un moteur spécial, la fréquence nominale et la fréquence maximale sont réglables de 40 à
320 Hz.
F
R
A
N
Ç
A
I
S
7
Page 9
Caractéristiques techniques
Environnement
Degré de protection IP31
Tenue aux vibrations et aux chocs 0,6 gn de 10 à 50 Hz
selon EN50178 2 gn de 50 à 150 Hz
Pollution ambiante maximale Degré 2 selon IEC664. Protéger le variateur des poussières, des
Humidité relative maximale 93 % sans condensation ni ruissellement. S'il y a risque de conden-
F
R
A
Température de l'air ambiant Pour stockage : - 25 °C à + 65 °C
N
au voisinage de l'appareil Pour fonctionnement :
Ç
selon EN50178 - 10 °C à + 40 °C sans déclassement, avec l'obturateur
A
I
Altitude maximale d'utilisation 1000 m sans déclassement. Au-delà, déclasser le courant de 3 %
S
IP20 sans l'obturateur de la partie supérieure du capot
gaz corrosifs, des projections de liquides…
sation, prévoir un système de réchauffage
-10°C à + 50 °C sans déclassement, sans l'obturateur
par 1000 m supplémentaires
Caractéristiques électriques
Alimentation Tension - monophasé : 200 V - 15 % à 240 V + 10 %
Fréquence 50/60 Hz ± 5%
Tension de sortie Tension maximale égale à la tension d'alimentation
Gamme de fréquence en sortie 0,5 à 320 Hz
Courant transitoire maximum 150 % du courant nominal variateur pendant 60 secondes
- triphasé : . 200 V - 15 % à 230 V + 10 %
. 380 V - 15 % à 460 V + 10 %
Couple de freinage 30 % du couple nominal moteur sans résistance de freinage (valeur
Résolution de fréquence - Afficheurs : 0,1 Hz
Fréquence de découpage Réglable de 2,2 à 12 kHz
Protections et sécurités - Isolement galvanique entre puissance et contrôle (entrées, sorties,
du variateur sources)
Protection du moteur Protection intégrée dans le variateur par calcul du I2t
8
typique). Jusqu'à 150 % avec résistance de freinage en option
- Entrées analogiques : 0,1 Hz pour 100 Hz maxi
- Protection contre les courts-circuits :
. des sources internes disponibles
. entre les phases de sortie U - V - W
. entre les phases de sortie et la terre pour les calibres
5,5 à 15 kW
- Protection thermique contre les échauffements excessifs
et les surintensités
- Sécurités de sous tension et surtension réseau
- Sécurité de surtension au freinage
Page 10
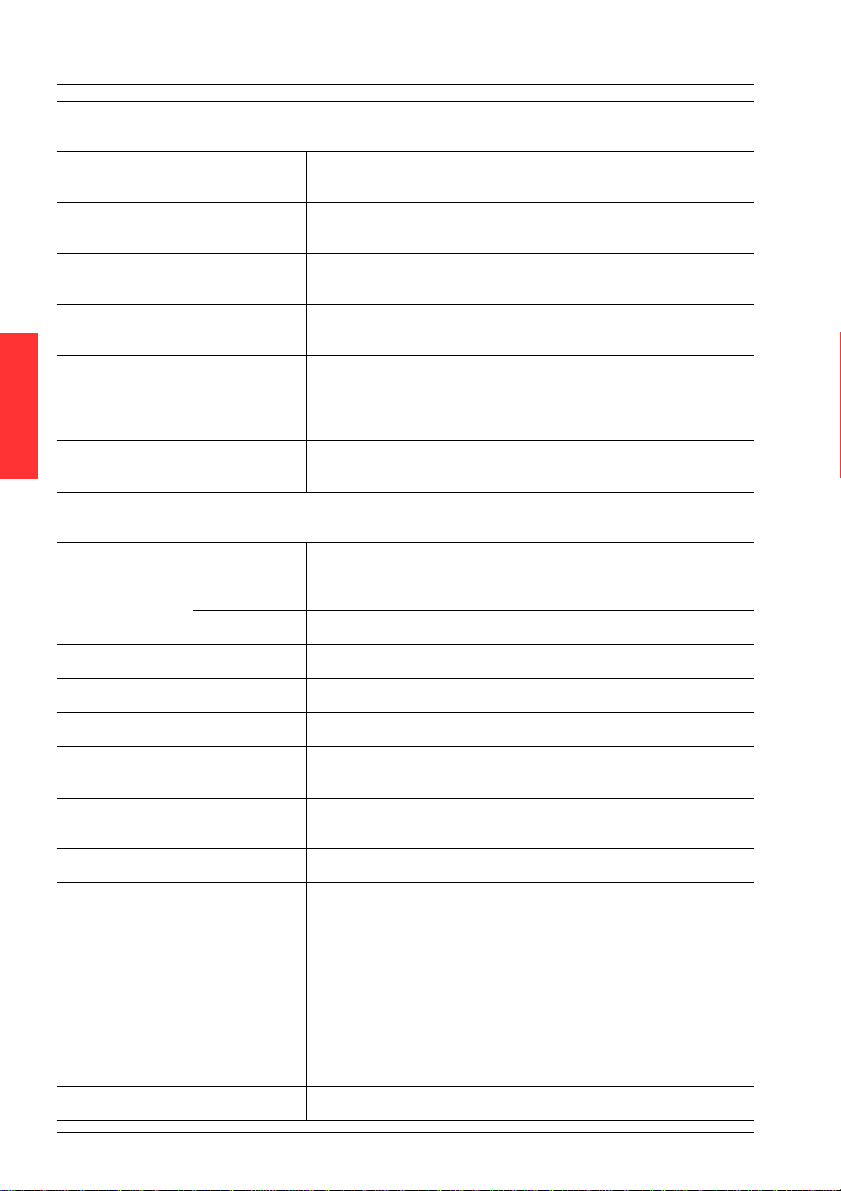
Encombrements - Précautions de montage
Encombrements
ATV18iiii
b
c
ATV18 abcGHØ
U09M2, U18M2 112 182 121 100 170 5
U29M2, U18N4, U29N4 149 184 157 137 172 5
U41M2, U54M2, U72M2, U41N4, U54N4, U72N4 185 215 158 171 202 6
U90M2, D12M2, U90N4, D12N4 210 300 170 190 280 7
D16N4, D23N4 245 390 190 225 370 10
Ø
H==
G
==
a
Précautions de montage
Installer l'appareil verticalement.
Eviter de le placer à proximité d'éléments chauffants.
Respecter un espace libre suffisant pour assurer la circulation de l'air nécessaire au refroidissement, qui se
fait par ventilation du bas vers le haut.
IP2O : retirer l'obturateur de la partie supérieure du capot (pellicule autocollante).
F
R
A
N
Ç
A
I
S
≥ 100
≥ 50 ≥ 50
≥ 100
Débit des ventilateurs
ATV-18U09M2, U18M2, U18N4 : non ventilés.
ATV-18U29M2, U29N4 : 0,25 m3/minute.
ATV-18U41M2, U54M2, U72M2, U41N4, U54N4, U72N4 :
0,75 m3/minute.
ATV-18U90M2, D12M2, U90N4, D12N4, D16N4, D23N4 :
1,3 m3/minute.
9
Page 11
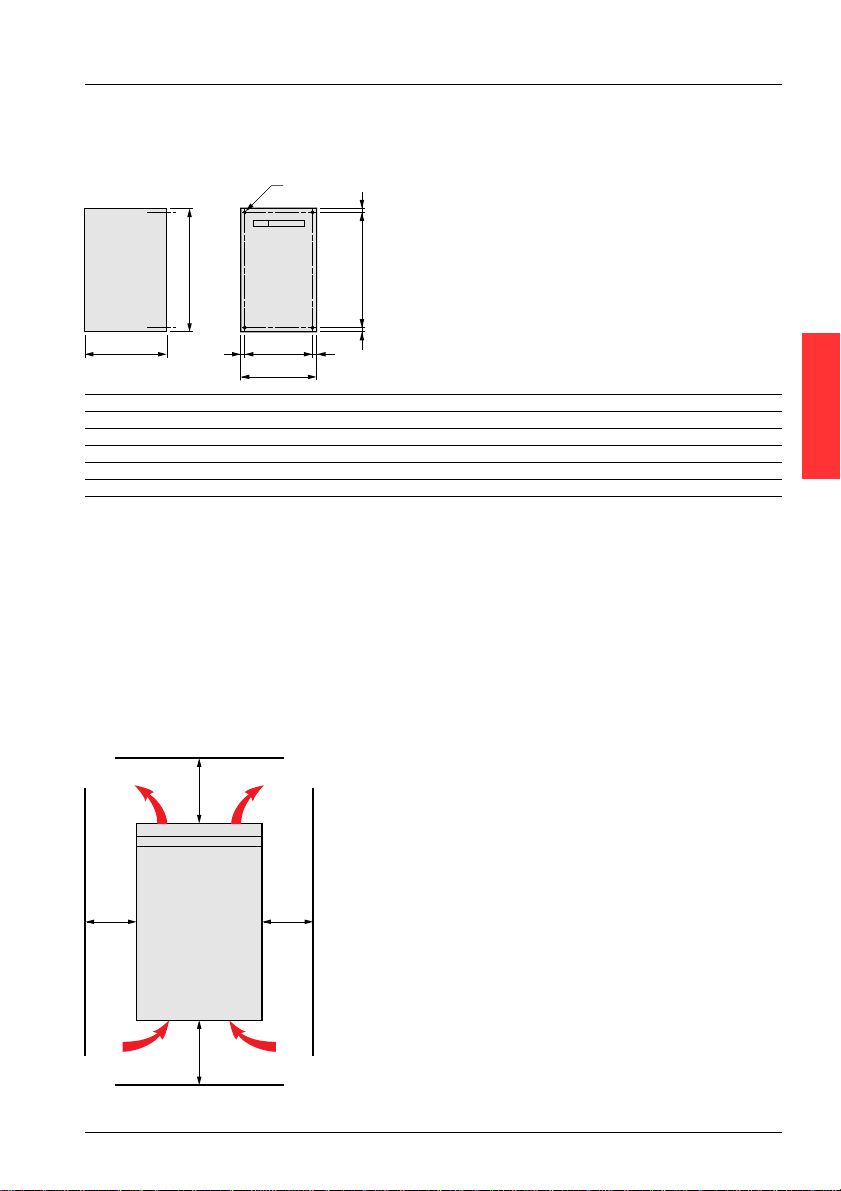
Montage en coffret ou armoire
Respecter les précautions de montage indiquées page 9.
Afin d'assurer une bonne circulation d'air dans le variateur :
- prévoir des ouïes de ventilation,
- s'assurer que la ventilation est suffisante, sinon installer
une ventilation forcée avec filtre,
- utiliser des filtres spéciaux en IP 54,
- ôter l'obturateur de la partie supérieure du variateur.
F
Coffret ou armoire métallique étanche (degré de protection IP 54)
R
A
Le montage du variateur dans une enveloppe étanche est nécessaire dans certaines conditions
N
d'environnement : poussières, gaz corrosifs, forte humidité avec risques de condensation et de ruissellement,
Ç
projection de liquide,…
A
I
Afin d'éviter les points chauds dans le variateur, s'il s'agit d'un modèle non ventilé, prévoir l'adjonction d'une
S
ventilation pour brasser l'air à l'intérieur.
Cet aménagement permet d'utiliser le variateur dans une enveloppe dont la température interne maximale
peut atteindre 50 °C.
Calcul de la dimension du coffret
Résistance thermique maximale Rth (°C/W) :
θ° ≤ 40 °C θ° ≤ 40 °C
θ° - θ°e
Rth =
Puissance dissipée par le variateur : voir page 6.
Rajouter la puissance dissipée par les autres constituants de l'équipement.
Surface d'échange utile de l'enveloppe S (m2):
(côtés + dessus + face avant, dans le cas d'une fixation murale)
S =
Pour coffret métallique : K = 0,12 avec ventilateur interne,
Attention : Ne pas utiliser de coffrets isolants, à cause de leur faible conductibilité.
10
P P = puissance totale dissipée dans le coffret en W.
K
Rth
θ° = température maximale dans le coffret en °C,
θ°e = température extérieure maximale en °C,
K = résistance thermique au m2 de l'enveloppe.
K = 0,15 sans ventilateur.
Page 12
Compatibilité électromagnétique
Mise en œuvre : pour le respect des normes EN55011 classe A, EN61800-3 et IEC1800-3.
Règles générales
- Équipotentialité "haute fréquence" des masses entre le variateur, le moteur et les blindages des câbles.
- Utilisation de câbles blindés avec blindages reliés à la masse sur 360° aux deux extrêmités pour le câble
moteur et les câbles contrôle-commande. Ce blindage peut être réalisé sur une partie du parcours par tubes
ou goulottes métalliques à condition qu'il n'y ait pas de discontinuité.
Plan d'installation
1
2
ATV 18
5
F
R
A
N
Ç
A
I
S
3
4
1- Platine en tôle non peinte, avec traitement anti-corrosion conducteur (plan de masse). Une tôle peinte peut
être utilisée à condition d'assurer un bon contact électrique des surfaces d'appui et de fixation avec
2 et 5.
2- L'Altivar 18 directement fixé sur la platine (équipotentialité des masses).
3- Fils ou câble d'alimentation non blindés, liaison éventuelle vers l'inductance de ligne.
4- Fils non blindés pour la sortie des contacts du relais de sécurité.
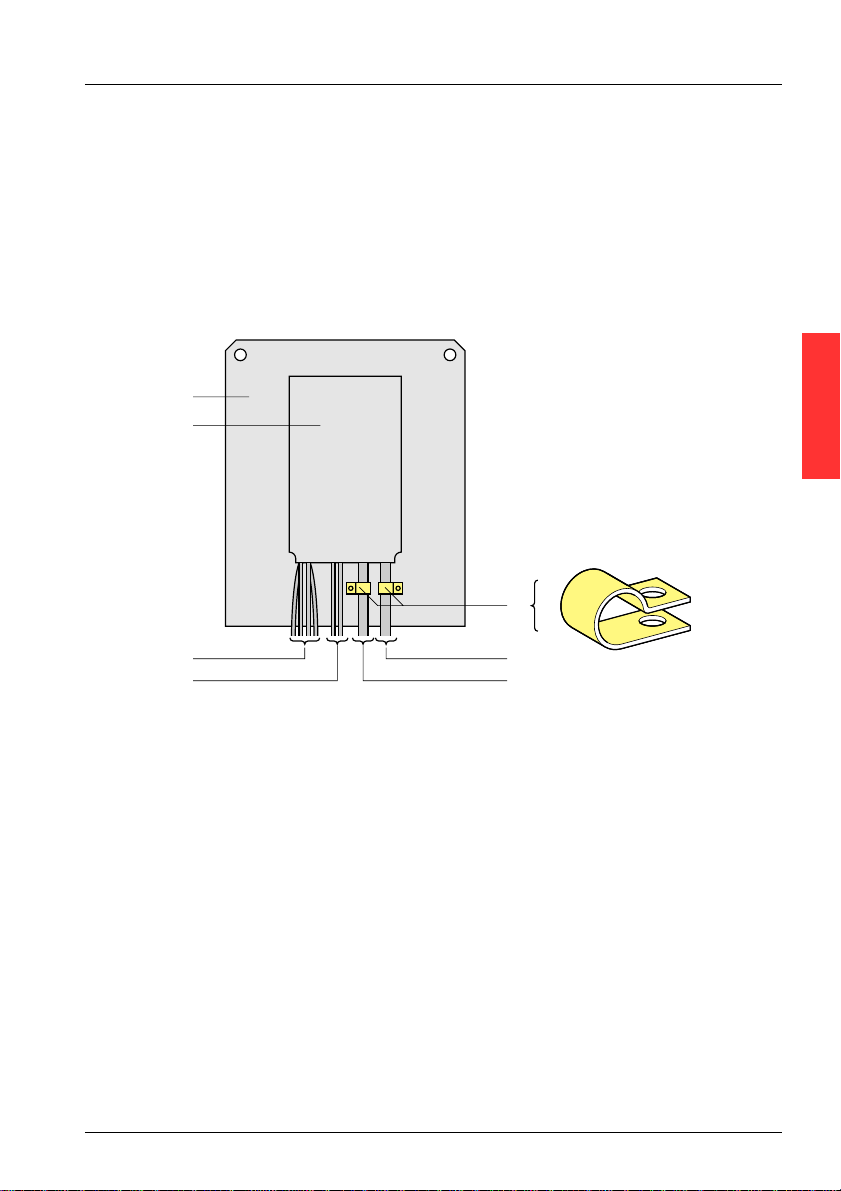
5- Fixation et mise à la masse des blindages des câbles 6 et 7 au plus près du variateur :
- mettre les blindages à nu,
- utiliser des colliers de dimensions appropriées, sur les parties dénudées des blindages, pour fixation sur
la tôle,
- types de colliers : métalliques inoxydables.
Les blindages doivent être suffisamment serrés sur la tôle pour que les contacts soient bons.
6- Câble blindé pour raccordement du moteur, avec blindage raccordé à la masse aux deux extrémités.
Ce blindage ne doit pas être interrompu et en cas de borniers intermédiaires ceux-ci doivent être en boîtier
métallique blindé CEM.
7- Câble blindé pour raccordement du contrôle/commande.
Pour les utilisations nécessitant de nombreux conducteurs, il faudra utiliser des faibles sections (0,5 mm2).
Le blindage doit être raccordé à la masse aux deux extrémités. Ce blindage ne doit pas être interrompu
et en cas de borniers intermédiaires ceux-ci doivent être en boîtier métallique blindé CEM.
Nota : Le raccordement équipotentiel HF des masses entre variateur, moteur et blindages des câbles ne
dispense pas de raccorder les conducteurs de protection PE (vert-jaune) aux bornes prévues à cet effet sur
chacun des appareils.
6
7
11
Page 13
Accès aux borniers - Borniers puissance
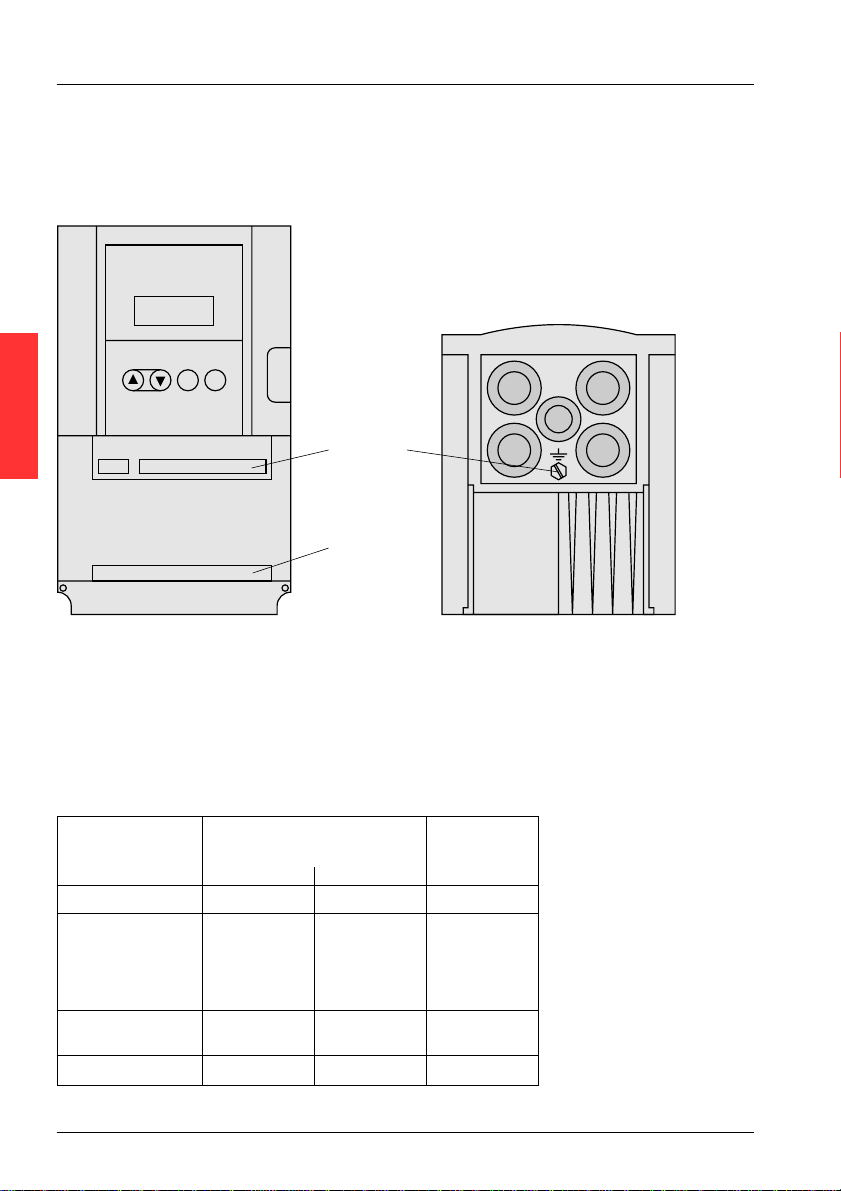
Accès aux borniers
Pour accéder aux borniers, ôter le capot fixé par 2 vis.
Emplacement des borniers : à la partie inférieure de l'Altivar.
1 - Contrôle
2 - Puissance
3 - Borne pour raccordement d'un conducteur de protection de
section 10 mm2 conformément à EN50178 (courant de fuite
à la terre)
F
R
A
N
Ç
A
I
S
DATA ENT
13
2
Les variateurs sont munis de trappes "passe-câble" métalliques avec des trous équipés d'obturateurs en
caoutchouc perforables pour le passage et la protection des câbles. Ces trappes métalliques peuvent
recevoir des presse-étoupes CEM métalliques.
Borniers puissance
Caractéristiques des bornes
Altivar ATV-18 de raccordement de serrage
U09M2, U18M2 AWG14 2,5 1
U29M2, U41M2
U54M2, U72M2
U18N4, U29N4 AWG10 6 1,2
U41N4, U54N4
U72N4
U90M2, D12M2,
U90N4, D12N4
D16N4, D23N4 AWG6 16 4
12
Capacité maximale Couple
AWG mm
AWG8 10 2,4
2
en Nm
Page 14
Borniers puissance
Fonction des bornes
Bornes Fonction
L1
L2 Alimentation
L3
s
PA Sortie vers la
PB résistance de freinage
U
V Tous calibres
W
s
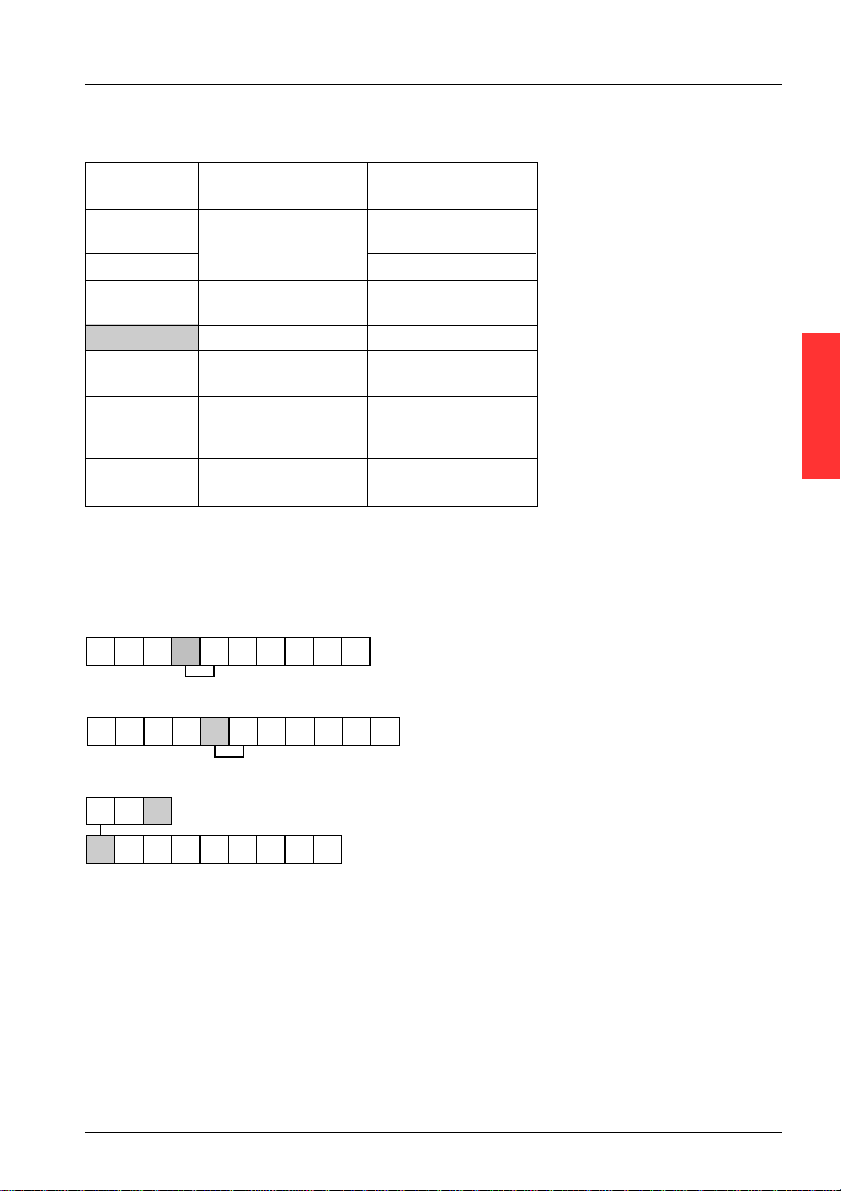
Disposition des bornes
L1 L2 s PA PB U V W s
L1 L2 L3
s PA PB U V
Puissance
Borne de masse
de l'Altivar
Ne pas utiliser Tous calibres
Sorties vers
le moteur
Borne de masse
de l'Altivar
W s
Pour Altivar
ATV-18
Tous calibres
Triphasés seuls
Tous calibres
Tous calibres
Tous calibres
ATV-18 monophasés
ATV-18 triphasés sauf D16N4 et D23N4
F
R
A
N
Ç
A
I
S
PA PB
L1 L2 L3 s U V W s
ATV-18D16N4 et D23N4
13
Page 15
Bornier contrôle
Capacité maximale de raccordement : 1,5 mm2, AWG16.
Couple de serrage : 0,5 mN
Configuration du variateur en préréglage usine.
Bornier contrôle isolé galvaniquement de la puissance.
Borne Fonction Caractéristiques
SA Contact OF du relais de Pouvoir de commutation des contacts :
SC sécurité. Enclenché pour - mini 10 mA pour 5 Va
SB variateur sous tension, - maxi sur charge inductive (cos ϕ 0,4, L/R 7 ms)
F
R
A
N
Ç
A
I
S
+10 Alimentation pour potentiomètre 10 V
AI1 Consigne de vitesse en Entrée analogique 0 + 10 V impédance 30 kΩ
AI2 Consigne en tension Entrée analogique 0 + 10 V impédance 30,55 kΩ
AIC Consigne en courant, entrée analogique 0 - 20 mA (préréglage usine)
COM Commun pour entrées
LI1 Commande du sens direct Entrées logiques impédance 3,5 kΩ
LI2
LI3
LI4 LI2, LI3, LI4 sont affectables
+ 24 Alimentation des entrées + 24 V protégé, débit maximal 100 mA
LO+ Alimentation de la sortie A raccorder au + 24 V interne ou au + 24 V
LO Référence vitesse atteinte Sortie logique compatible API (collecteur ouvert)
sans défaut 1,5 A pour 250 Vc et 1,5 A pour 30 Va
de consigne 1 à 10 kΩ
tension
ou ou
sommatrice de AI1 ou 4 - 20 mA, impédance 400 Ω
logiques et analogiques
et sortie logique
Commande du sens inverse
Vitesses présélectionnées
et sorties logiques
logique (maxi 30 V) d'une alimentation externe
+15%
10 mA maxi, protégé
+ 0
AI2 ou AIC sont affectables. Ne pas les utiliser
simultanément.
Alimentation + 24 V (maxi 30 V)
État 0 si < 5 V, état 1 si > 11 V
+ 24 V maxi 20 mA avec source interne
ou 200 mA avec source externe.
LO est affectable.
14
Page 16
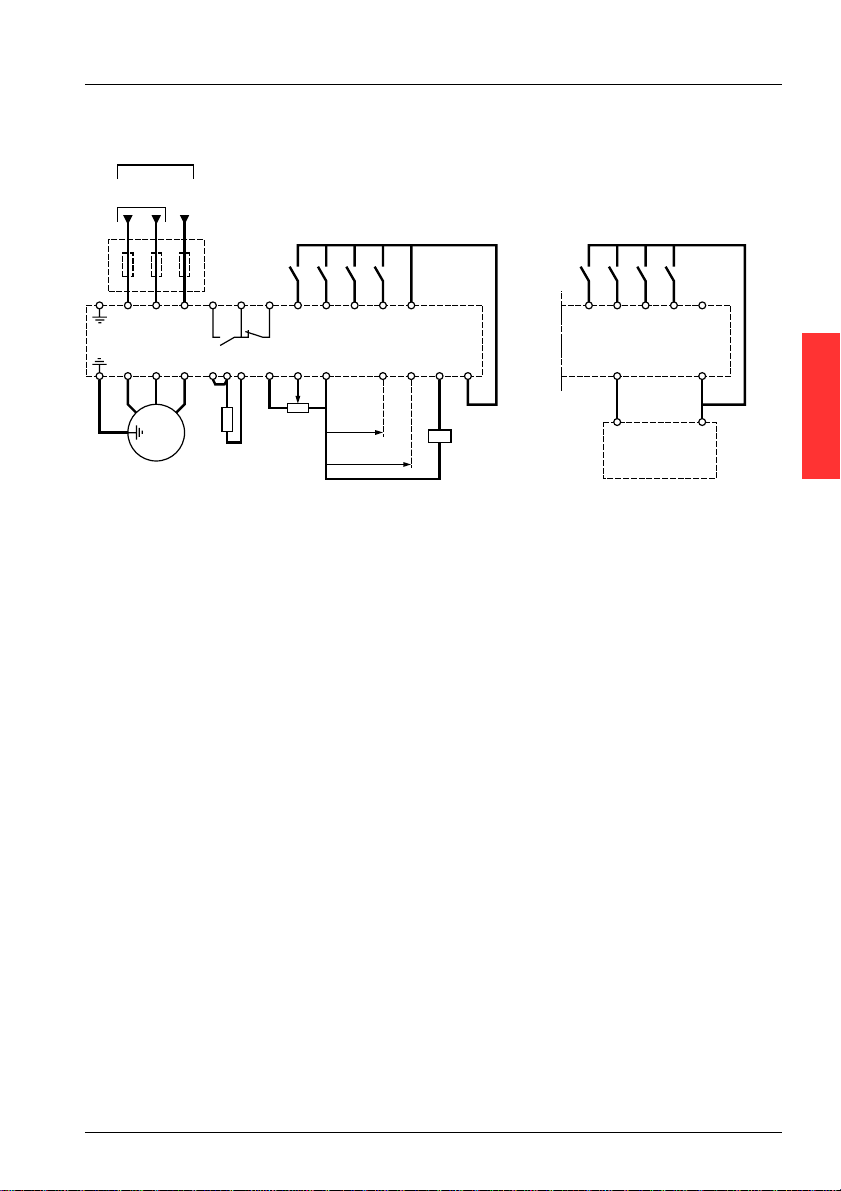
Schéma de raccordement
Schéma de raccordement pour préréglage usine
Alimentation triphasée
Alimentation monophasée
(1)
L2
L3
L1
U
U1
3 c
V
W
V1
W1
M
Résistance de
freinage éventuelle
SB
(2)
SC
PAPB+10
PO
Potentiomètre
de référence
SA
LI1
AI1
LI2
LI3
COM
0-20 mA
4-20 mA
ou
0 + 10 V
(4)
LI4
+24
AIC
AI2LOLO+
KA
(3)
Autres raccordements
(source 24 V externe)
LI2
LI3
LI1
LI4
COM
0 V
Source 24 V
(4)
+24
LO+
+24 V
(1) Inductance de ligne éventuelle (1 phase ou 3 phases).
(2) Contacts du relais de sécurité, pour signaler à distance l'état du variateur.
(3) Relais ou entrée d'automate a 24 V.
(4) + 24 V interne. En cas d'utilisation d'une source externe + 24 V, relier le 0 V de celle-ci à la borne COM,
et ne pas utiliser la borne + 24 du variateur.
Nota : Equiper d'antiparasites tous les circuits selfiques proches du variateur ou couplés sur le même circuit
(relais, contacteurs, électrovannes,…)
Choix des constituants associés
Voir catalogue Altivar 18.
Précautions de câblage
F
R
A
N
Ç
A
I
S
Puissance
Respecter les sections des câbles préconisées par les normes.
Le variateur doit être impérativement raccordé à la terre, afin d'être en conformité avec les réglementations
portant sur les courants de fuite élevés (supérieurs à 3,5 mA). Une protection amont par disjoncteur
différentiel est déconseillée en raison des composantes continues pouvant être générées par les courants
de fuite du variateur. Si l'installation comporte plusieurs variateurs sur la même ligne, raccorder séparément
chaque variateur à la terre. Si nécessaire, prévoir une inductance de ligne (consulter le catalogue).
Séparer les câbles de puissance des circuits à signaux bas niveau de l'installation (détecteurs, automates
programmables, appareils de mesure, vidéo, téléphone).
Commande
Séparer les circuits de commande et les câbles de puissance. Pour les circuits de commande et de consigne
de vitesse, il est recommandé d'utiliser du câble blindé et torsadé au pas compris entre 25 et 50 mm en reliant
le blindage à chaque extrêmité.
15
Page 17
Fonctions sans réglage
Relais de défaut, déverrouillage
Le relais de défaut est excité lorsque le variateur est sous tension et qu'il n'est pas en défaut. Il comporte un
contact OF à point commun.
Le déverrouillage du variateur après un défaut s'effectue :
- par mise hors tension jusqu'à extinction de l'affichage et du voyant rouge puis remise sous tension du
variateur,
- automatiquement dans les cas décrits à la fonction "redémarrage automatique".
Protection thermique du variateur
F
R
Fonction :
A
N
Protection par thermistance fixée sur le radiateur.
Ç
A
Protection indirecte du variateur par calcul du I2t.
I
S
Cette fonction assure la protection thermique du variateur pour des conditions normales de température
ambiante.
Points de déclenchement typiques :
- courant moteur = 185 % du courant nominal variateur : 2 secondes,
- courant moteur = 150 % du courant nominal variateur : 60 secondes,
- courant moteur ≤ 110 % du courant nominal variateur : pas de déclenchement.
Les déclassements éventuels pour les fréquences de découpage > 4 kHz sont pris en compte automatiquement
et réduisent l'I2t admissible.
Attention : En cas de mise hors tension du variateur, le calcul du I2t est remis à zéro.
Ventilation des variateurs
Pour les modèles comportant un ventilateur, celui-ci est alimenté automatiquement au déverrouillage du
variateur (sens de marche + référence). Il est mis hors tension quelques secondes après le verrouillage du
variateur (vitesse moteur < 0,5 Hz et freinage par injection terminé).
16
Page 18
Fonctions configurab les des entrées logiques et analogiques
Entrées logiques
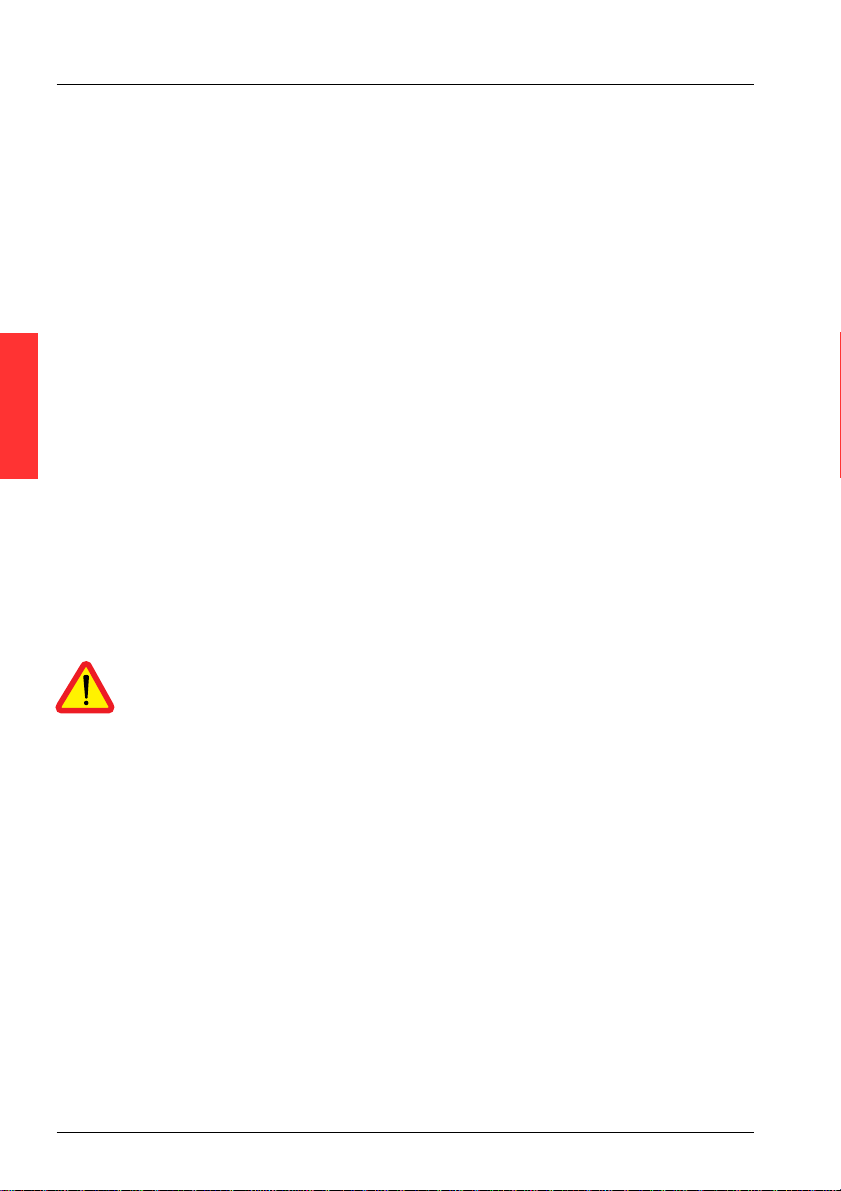
• LI1 : sens de marche direct (avant). Non affectable à une autre fonction.
Lorsque le contact est fermé, la consigne de fréquence est appliquée au
LI1 +24
• LI2, LI3, LI4 : affectables aux fonctions suivantes :
- sens de marche inverse (arrière) : affectation rrS
sens direct (avant).
Lorsque le contact est fermé, la consigne de fréquence est appliquée au
sens inverse (arrière). Si LI1 est également fermé, c'est le premier fermé
LI2
LI3
LI4
+24
qui a priorité.
- 2 vitesses : affectation PS2
Contact ouvert : référence = LSP + référence analogique.
LI2
LI3
LI4
+24
Contact fermé : référence = HSP.
- 4 vitesses : affectation d'une entrée à PS2 et d'une autre à PS4 (l'affectation de P54 seul est
impossible)
LI2
LI3
LI4
(PS4)
LI2
LI3
LI4
(PS2)
K2
K1
+24
K1 et K2 ouverts : consigne = L5P + consigne analogique.
K1 fermé et K2 ouvert : consigne = SP3 (réglage niveau 1).
K1 ouvert et K2 fermé : consigne = SP4 (réglage niveau 1).
K1 et K2 fermés : consigne = HSP.
F
R
A
N
Ç
A
I
S
17
Page 19
Fonctions configurables des entrées logiques et analogiques
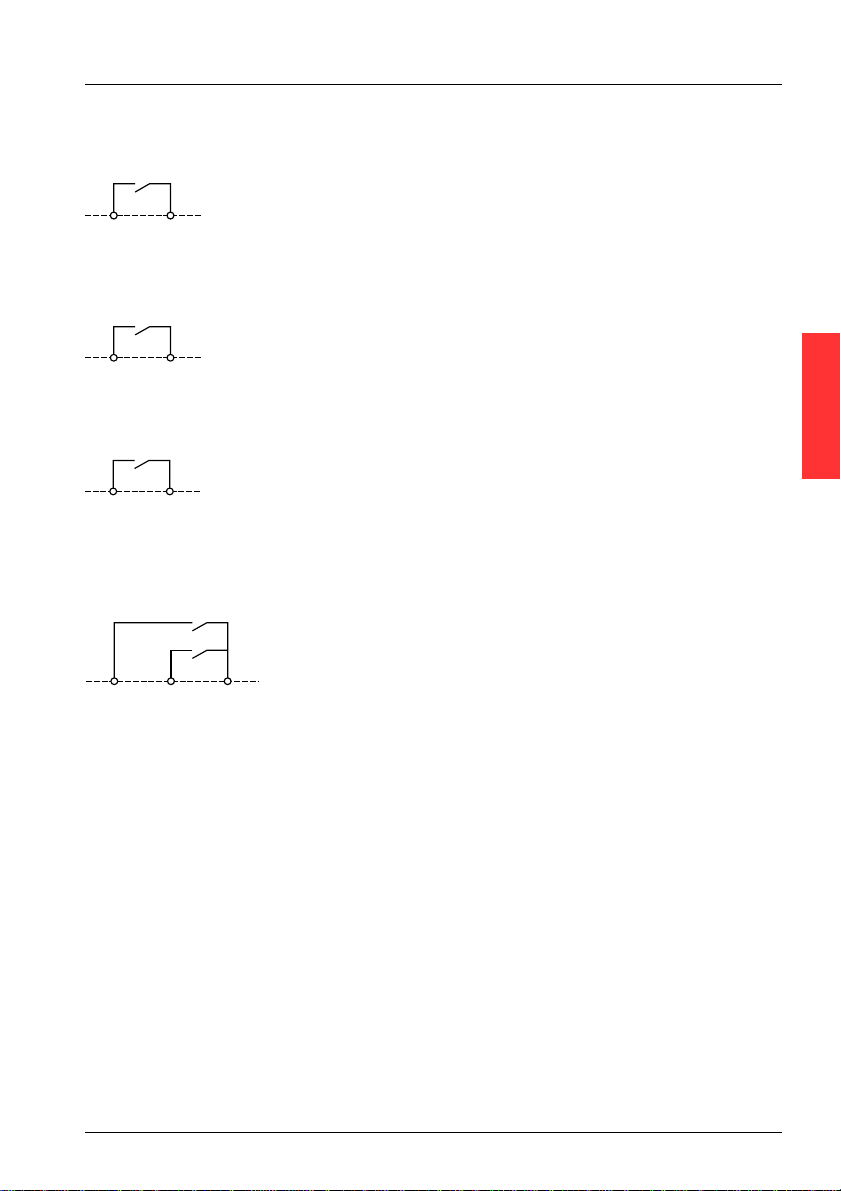
• JOG : marche pas à pas (jog). Affectation JOG
Si le contact est fermé puis que le contact de sens de marche est fermé, le temps
de rampe est de 0,1 s quels que soient les réglages ACC et dEC.
Si le variateur est déjà en marche puis que le contact affecté à JOG est fermé,
les temps de rampes sont ceux de ACC et dEC.
Le temps mini entre deux opérations JOG est de 0,5 s.
Réf.
JOG JOG JOG
Réf.
F
R
A
N
Ç
A
I
S
LI2
LI3
LI4
JOG
Sens de marche
Référence
Fréquence
+24
Nota : 1- Lors de la marche “pas à pas” (jog), le freinage automatique par injection de courant continu à l'arrêt
est inhibé.
2- Le freinage par injection sur entrée logique est prioritaire sur la marche JOG.
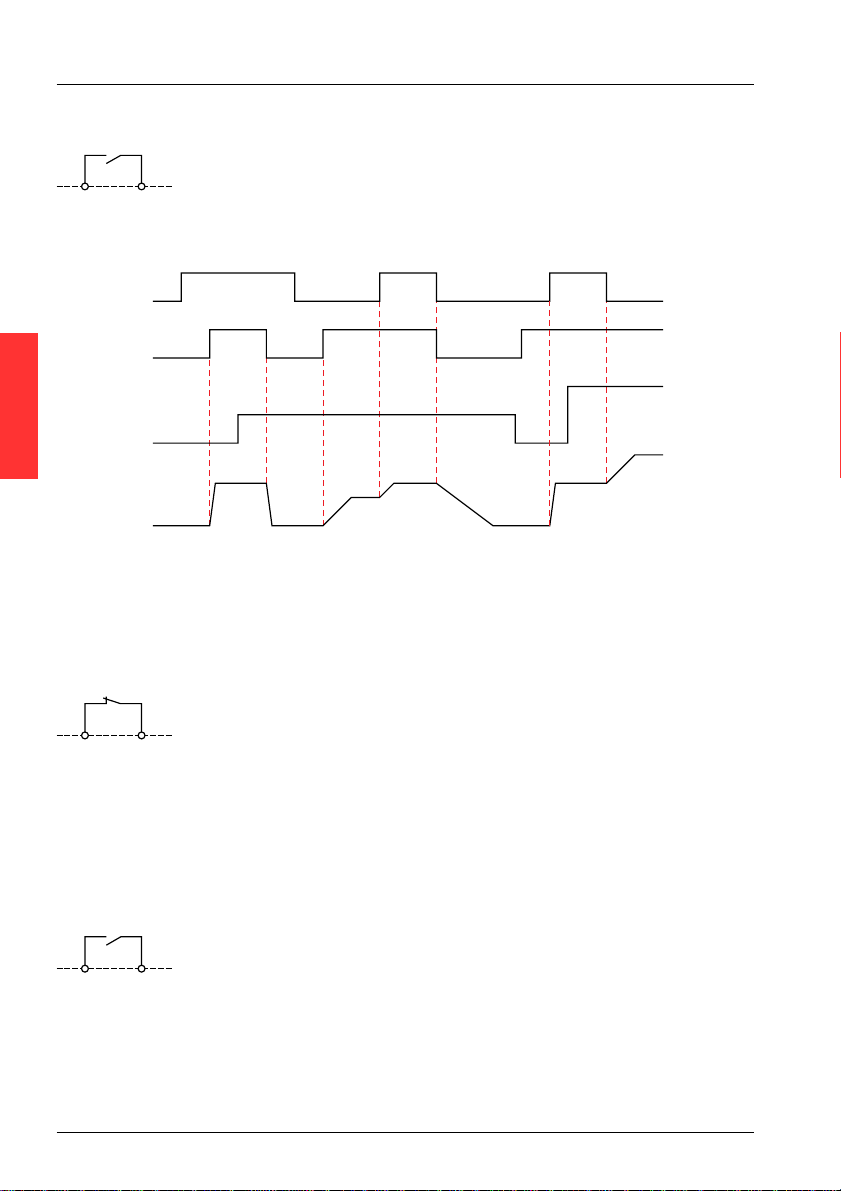
• Arrêt rapide : affectation FSt
Nota : L'arrêt rapide est commandé lorsque le contact entre l'entrée et le
+ 24 V est ouvert.
LI2
+24
LI3
LI4
Arrêt freiné, avec le temps de rampe dEC divisé par 4, mais limité au minimum acceptable sans verrouillage
sur défaut "freinage excessif" (auto-adaptation si la possibilité de freinage est dépassée).
Nota : Lors de l'arrêt rapide, le freinage par injection de courant continu automatique ou sur entrée logique
est inhibé.
• Freinage par injection de courant continu : affectation dCI
Nota : Le freinage par injection est commandé lorsque le contact entre
l'entrée et le + 24 V est fermé.
LI2
+24
LI3
LI4
Le courant de freinage est égal au courant nominal variateur pendant 5 secondes, au bout de 5 secondes,
le courant de freinage est écrêté à une valeur maximale de 0,5 ItH moteur.
Nota : 1- Le freinage automatique par injection à l'arrêt reste actif si la fonction dCI est affectée.
2- L'arrêt rapide est prioritaire sur le freinage par injection.
18
Page 20
Fonctions configurables des entrées logiques et analogiques
Entrées analogiques
Une entrée analogique supplémentaire utilisable soit :
- en tension sur AI2,
- en courant sur AIC.
et affectable soit :
- en entrée sommatrice de AI1,
- en retour du régulateur PI.
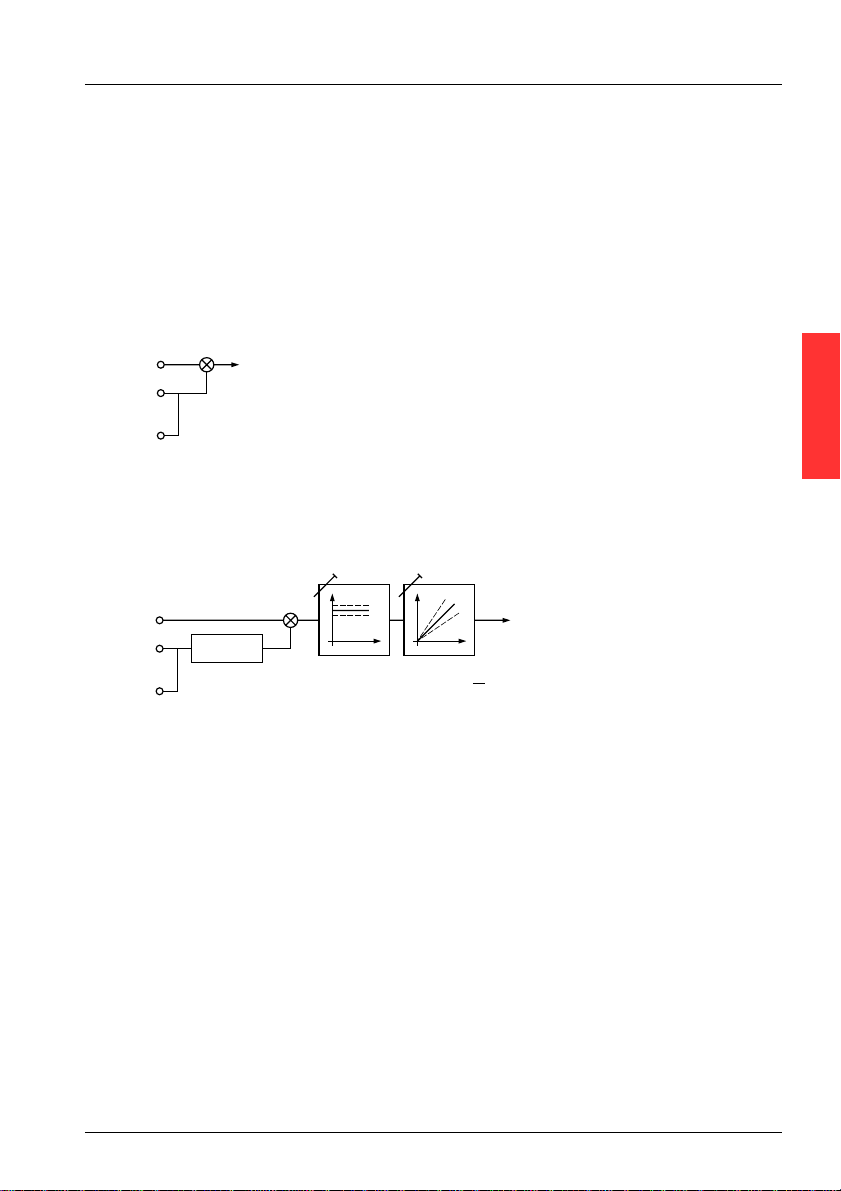
Sommatrice avec AI1 : affectation SAI
AI1
0 ; +10 V
AI2
0 ; +10 V
ou
AIC
0 ; 20 mA ou 4 ; 20 mA
+
Réf.
+
Retour du régulateur PI : affectation PIF
Cette affectation configure automatiquement AI1 en référence du régulateur PI.
I
rIG
0,01 à 100 x
Réf.
1
S
AI1
0 ; +10 V
AI2
0 ; +10 V
ou
AIC
0 ; 20 mA ou 4 ; 20 mA
x Fb5
(0,1…100)
P
rPG
0,01 à 100
Les paramètres de réglage rPG, rIG et FbS sont dans le niveau 1.
- Paramétrage de AIC : choix 0 - 20 mA ou 4 - 20 mA.
Nota : La fonction PI est incompatible avec certaines fonctions des entrées logiques :
- vitesses présélectionnées (2 ou 4),
- marche pas à pas (JOG).
F
R
A
N
Ç
A
I
S
19
Page 21
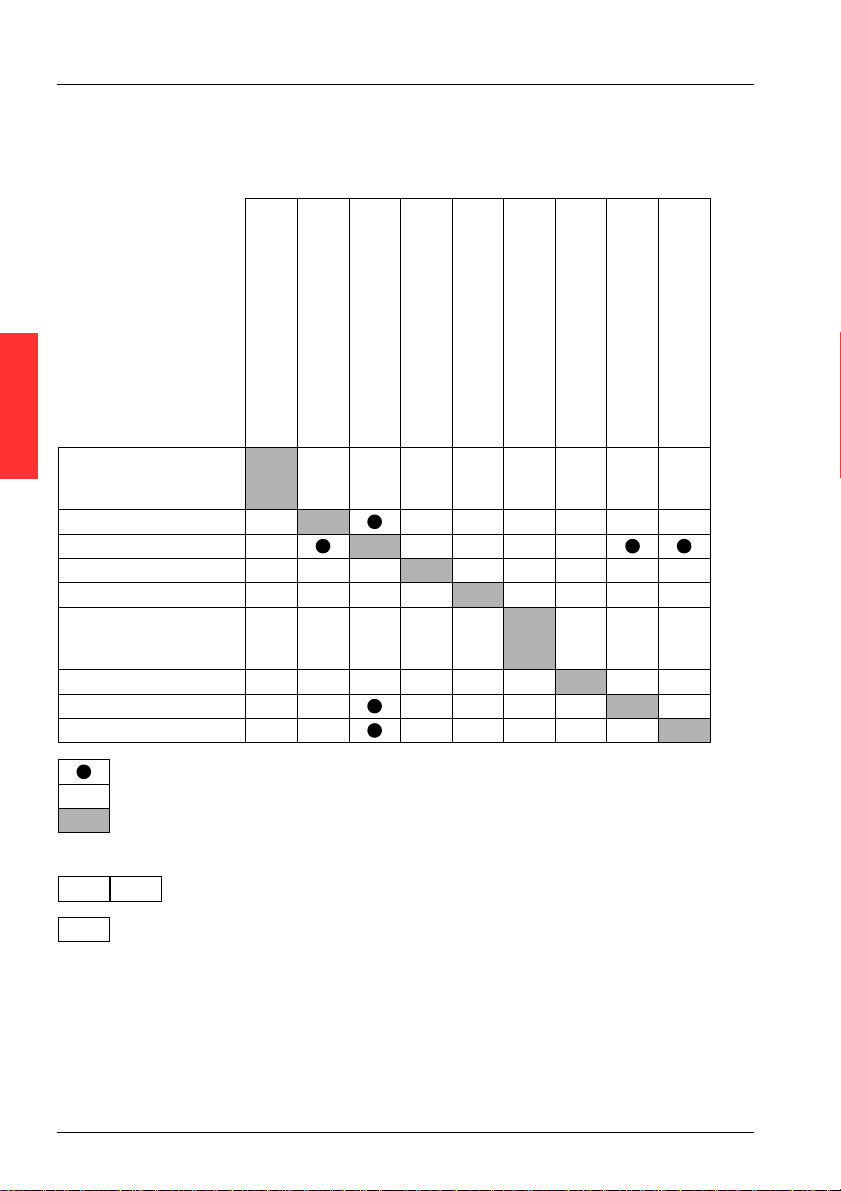
Tableau de compatibilité des fonctions
Le choix des fonctions d'application est limité par l'incompatibilité de certaines fonctions entre elles.
Les fonctions qui ne sont pas listées dans ce tableau ne font l'objet d'aucune incompatibilité.
F
R
A
N
Ç
A
I
Freinage automatique par
S
injection de courant
continu à l'arrêt
Entrées sommatrices
Régulateur PI
Sens de rotation direct
Sens de rotation inverse
Freinage par injection de
courant continu sur
entrée logique
Arrêt rapide
Marche Pas à Pas
Vitesses présélectionnées
Freinage automatique par injection
de courant continu à l'arrêt
Entrées sommatrices
Sens de rotation direct
Régulateur PI
➞
➞
➞
➞
➞
Sens de rotation inverse
Freinage par injection de courant
Arrêt rapide
continu sur entrée logique
➞➞
➞
➞
➞➞➞
➞
➞
➞
➞
Marche Pas à Pas
Vitesses présélectionnées
➞
➞
➞
➞➞
➞
Fonctions incompatibles
Fonctions compatibles
sans objet
Fonctions prioritaires (fonctions qui ne peuvent être actives en même temps) :
➞
➞
➞
Le choix des fonctionalités est également limité par le nombre d'entrées logiques affectables (3).
Fonctions utilisant des entrées logiques affectables :
- une entrée pour chacune des fonctions :
sens de rotation inverse, injection de courant continu, arrêt rapide, marche pas à pas, 2 vitesses
présélectionnées.
- deux entrées pour la fonction :
4 vitesses présélectionnées.
20
La fonction indiquée par la flèche est prioritaire sur l'autre.
➞
La première activée est prioritaire.
Page 22

Mise en service
L'Altivar est préréglé en usine pour les conditions d'emploi les plus courantes :
- applications à couple constant.
Préréglages
- Affichage : variateur prêt (à l'arrêt), fréquence moteur (en marche).
- Réseau : 50 Hz.
- Tension moteur : 230 V ou 400 V, selon modèle.
- Rampes : 3 secondes.
- Petite vitesse : 0 Hz - Grande vitesse : 50 Hz.
- Gain boucle fréquence : standard.
- Courant thermique moteur = courant nominal variateur.
- Courant de freinage par injection à l'arrêt = 0,7 courant nominal variateur, pendant 0,5 seconde.
- Fonctionnement à couple constant, avec contrôle vectoriel de flux sans capteur.
- Entrées logiques :
. 2 sens de marche (LI1, LI2),
. 4 vitesses présélectionnées (LI3, LI4) : 0 Hz, 5 Hz, 25 Hz, 50 Hz.
- Entrées analogiques :
. AI1 : consigne vitesse 0 + 10 V,
. AI2 (0 + 10 V) ou AIC (0, 20 mA) sommatrice de AI1.
- Sortie logique :
. LO : consigne vitesse atteinte.
- Adaptation automatique de la rampe de décélération en cas de surtension au freinage.
- Fréquence de découpage 4 kHz.
Si les valeurs ci-dessus sont compatibles avec l'application, le variateur peut être utilisé sans modification
des réglages.
En commande de puissance par contacteur de ligne :
F
R
A
N
Ç
A
I
S
- éviter de manœuvrer fréquemment le contacteur KM1 (vieillissement prématuré des
condensateurs de filtrage), utiliser les entrées LI1 à LI4 pour commander le variateur,
- en cas de cycles < 60 s, ces dispositions sont impératives, sinon il y a risque de destruction
de la résistance de charge.
Réglage utilisateur et extensions de fonctionnalités
Si nécessaire, l'afficheur et les boutons permettent la modification des réglages et l'extension des
fonctionnalités détaillées dans les pages suivantes. Il y a deux niveaux d'accès hiérarchisés :
- niveau 1 : réglages (configuration de base),
- niveau 2 : extensions de fonctionnalité.
Le retour au réglage usine est possible aisément.
Les paramètres sont de trois types :
- affichage : valeurs affichées par le variateur,
- réglage : modifiables en fonctionnement et à l'arrêt,
- configuration : seulement modifiables à l'arrêt et hors freinage. Visualisables en fonctionnement.
- s'assurer que les changements de réglages en cours de fonctionnement ne présentent
pas de danger ; les effectuer de préférence à l'arrêt.
21
Page 23
Mise en service
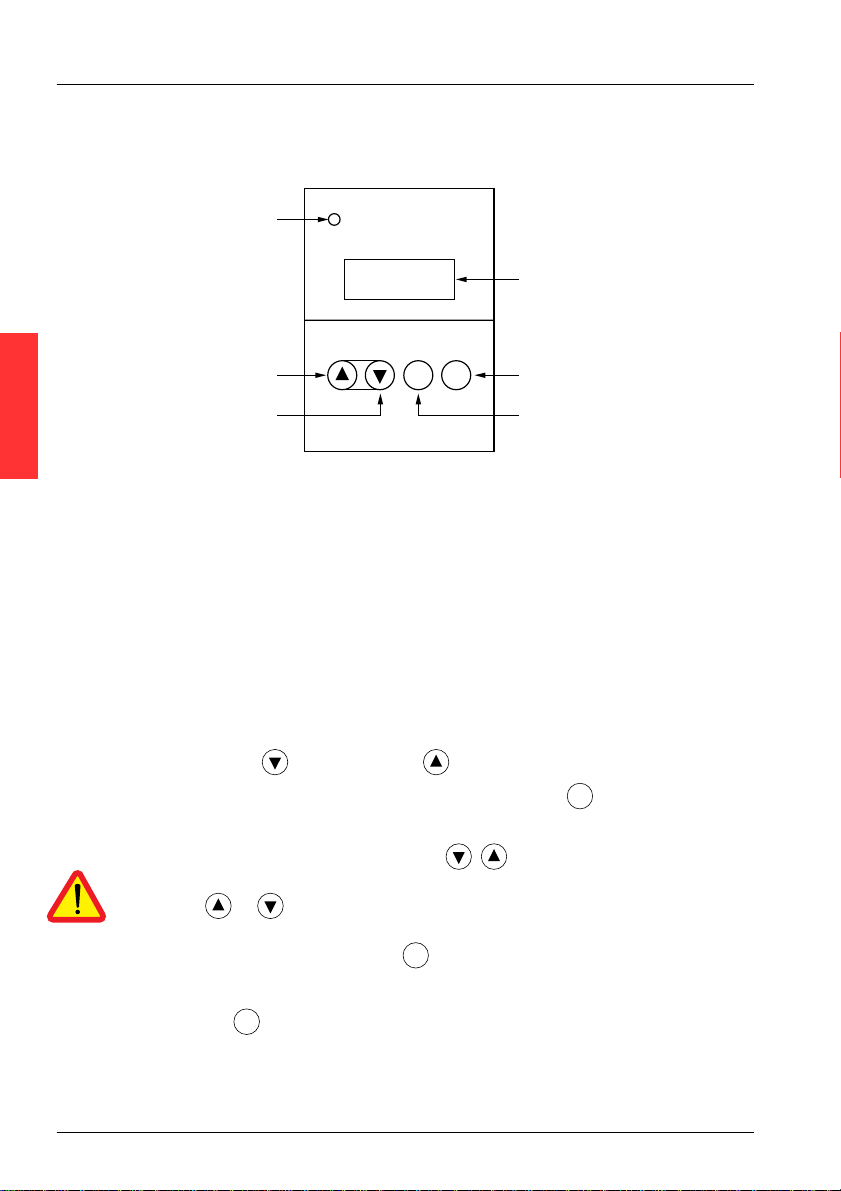
Terminal intégré
Fonctions des touches et de l'afficheur
LED rouge : sous tension
(tension du bus continu
rdY
F
R
Passe au paramètre précédent
A
ou augmente la valeur affichée
N
Ç
A
S
Passe au paramètre suivant
ou diminue la valeur affichée
I
Affichage normal hors défaut et hors mise en service.
- Init : Séquence d'initialisation.
- rdY : Variateur prêt.
- 4“0 : Affichage de la consigne de fréquence.
- dcb : Freinage par injection de courant continu en cours.
- rtrY : Redémarrage automatique en cours.
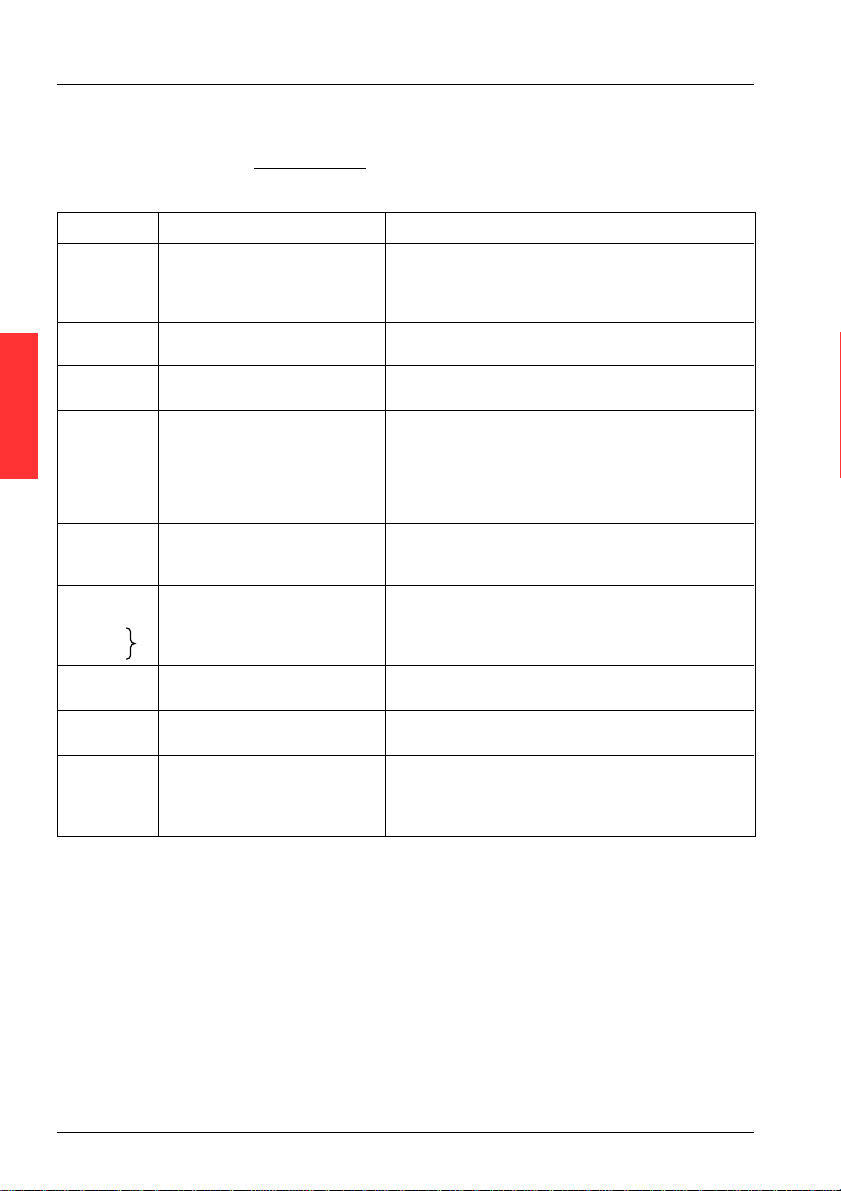
Utilisation du terminal intégré
Défilement des paramètres : Paramètre suivant, Paramètre précédent
Affichage de la valeur du paramètre, de son état ou de son affectation:
Modification de la valeur, de l'état ou de l'affectation :
DATA ENT
4 afficheurs "7 segments"
Enregistre le paramètre
ou la valeur affichée
Passe du type de paramètre
à sa valeur numérique
et vice-versa
DATA
L'action sur ou ne mémorise pas le choix.
Mémorisation, enregistrement du choix affiché :
La mémorisation s'accompagne d'un clignotement de l'affichage
Retour aux paramètres :
22
DATA
ENT
Page 24
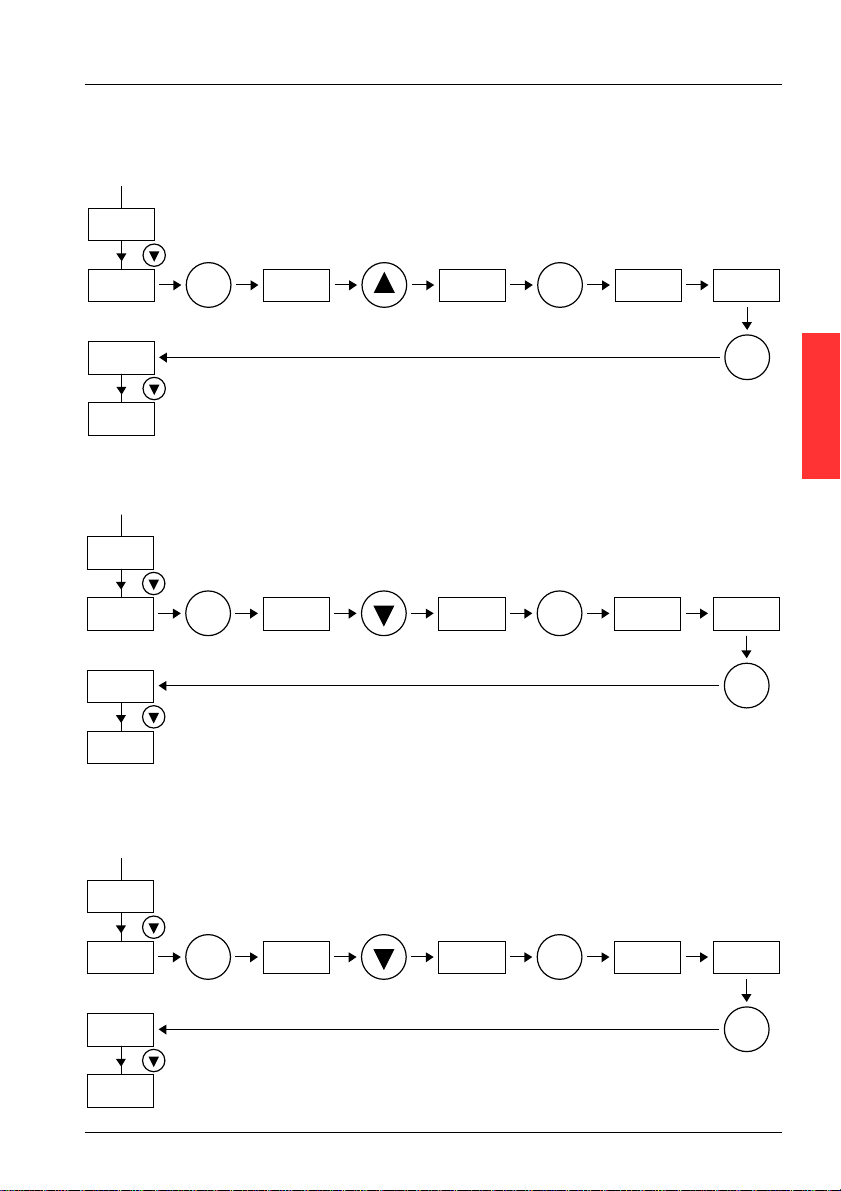
Mise en service
Utilisation du terminal intégré
Exemple 1 : réglage de rampe
bFr
ACC “0
DATA ENT
(1 clignotement)
{8 {8
ACC
dEC
Exemple 2 : accès aux paramètres de deuxième niveau
Etc.
FLt
L2A no
L2A
UFt
Exemple 3 : configuration de la sortie logique
DATA ENT
accès au 2ème niveau
Etc.
YES YES
LI4
LO SrA
DATA ENT
FtA FtA
DATA
(1 clignotement)
DATA
(1 clignotement)
F
R
A
N
Ç
A
I
S
LO
AIC
DATA
Etc.
23
Page 25
Mise en service
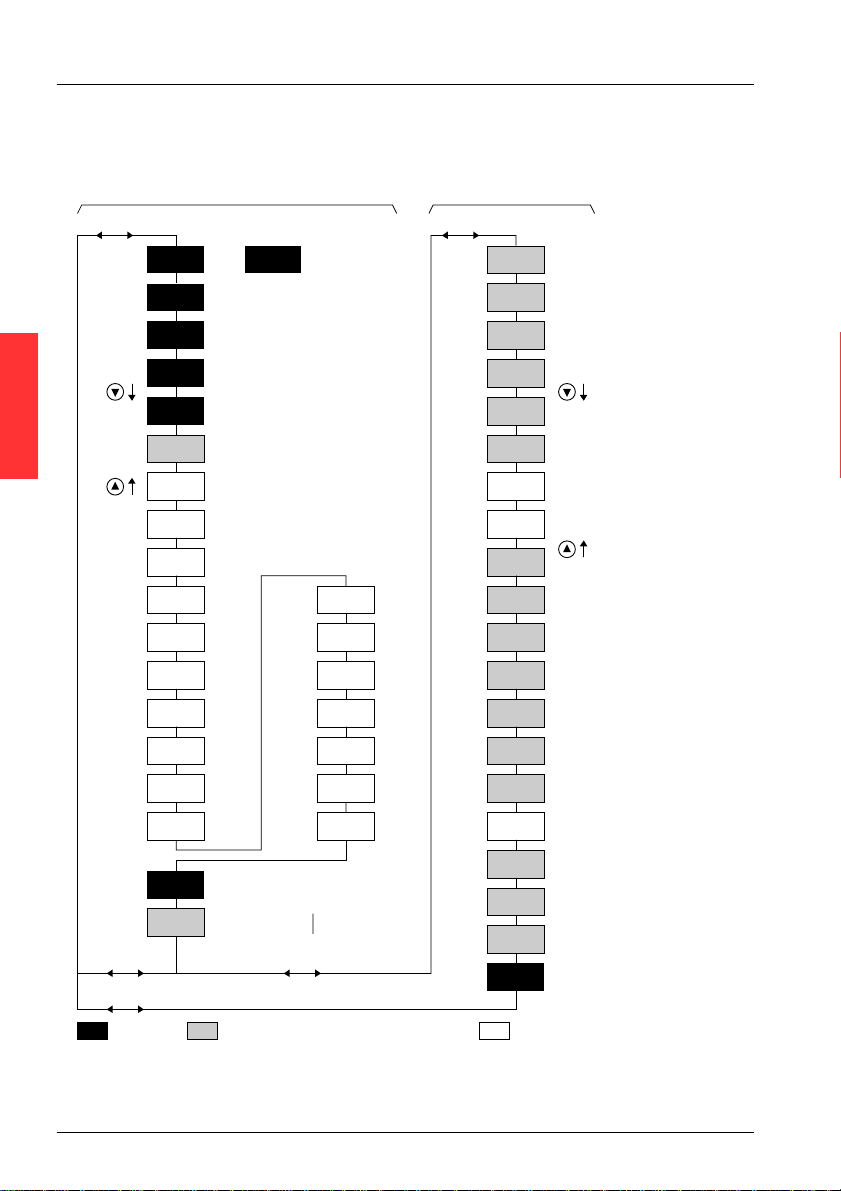
Accès hiérarchisé aux paramètres
Paramètres de niveau 1
Réglages
rdYrdY 4{54{5
ou
Etat initial
(affichage normal)
FrHFrH
F
R
A
N
Ç
A
I
S
LCrLCr
rFrrFr
ULnULn
bFr
ACC
dEC
LSP
HSP
FLG
ItH
JPF
IdC
tdC
UFr
SP3
*
SP4
*
JOG
*
Fdt
*
rPG
*
rIG
*
FbS
*
Paramètres de niveau 2
Extensions de fonctionnalités
UFt
tUn
*
UnS
FrS
tFr
brA
SLP
*
tLS
LI2
LI3
LI4
LO
AIC
CrL
SPr
SFr
StP
FLtFLt
Atr
FCS
CPUCPU
L2A
= no
L2A
Accès au niveau 2
L2A = YES
YES
no
L2A = YES
Affichage
Paramètre présenté seulement si la fonction correspondante est configurée
*
24
Configuration modifiable seulement à l'arrêt
Réglage modifiable à l'arrêt et en marche
Page 26
Mise en service
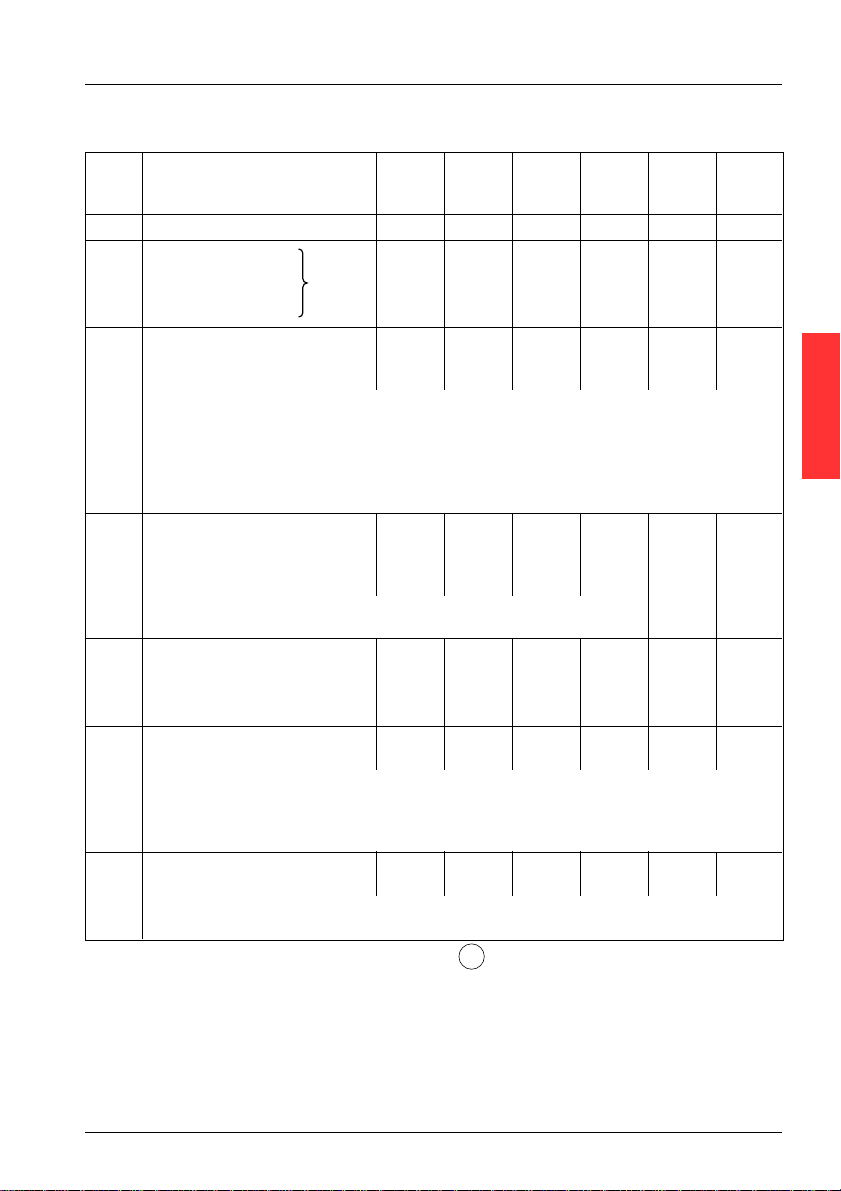
Réglage du variateur (paramètres niveau 1)
Code Fonction
rdY Variateur prêt Affichage
FrH Consigne en fréquence FrH Hz 0.1 Affichage
LCr Courant moteur A 0.1 Affichage
rFr Fréquence de rotation Hz 0.1 Affichage
ULn Tension réseau V 1 Affichage
bFr Fréquence de base. Choisir la 50 60 50 Hz Configu-
même fréquence que celle du ration
réseau.
La valeur de bFr prérègle la fréquence et la tension nominales moteur aux valeurs suivantes :
ATV18…M2 : - bFr = 50 : 230 V/50 Hz
- bFr = 60 : 230 V/60 Hz
ATV18…N4 : - bFr = 50 : 400 V/50 Hz
- bFr = 60 : 460 V/60 Hz
Ces préréglages sont modifiables dans les paramètres de niveau 2.
ACC Rampe d'accélération linéaire “0 3600 ø1 s 0.1 ou 1 Réglage
dEC Rampe de décélération linéaire “0 3600 ø1 s 0.1 ou 1 Réglage
Les rampes sont définies pour la (0,1 à
fréquence de base. 999,9 puis
Exemple : rampe 10 s : - si bFr = 50 Hz, il faut 5 s pour varier de 25 Hz, 1000 à
LSP Petite vitesse 0 = HSP 0 Hz 0.1 Réglage
HSP Grande vitesse : s'assurer que ce 50 = tFr = LSP Hz 0.1 Réglage
réglage convient au moteur et à (2)
l'application.
FLG Gain de la boucle fréquence 33 100 0 1 Réglage
Lié à l'inertie et au couple résistant
de la mécanique entraînée :
- machines à fort couple résistant ou forte inertie : réduire progressivement dans la zone 33 à 0,
- machines à cycles rapides, à faible couple résistant et faible inertie : augmenter progressivement
le gain dans la zone 33 à 100. Un excès de gain peut entraîner une instabilité de fonctionnement
ItH Protection thermique moteur (4). I
Régler ItH à l'intensité nominale (3) (3) (3)
lue sur la plaque signalétique du moteur. Pour inhiber la protection thermique, augmenter la valeur
jusqu'à la valeur maximale.
Choix du
paramètre
affiché en
fonctionnement (1)
- si bFr = 60 Hz, il faut 5 s pour varier de 30 Hz. 3600)
Préréglage
usine maxi mini
(1) LCr, rFr et ULn ne sont pas mémorisables par
N
Valeur Valeur
1,15 IN0,5 I
ENT
, mais visualisables momentanément, jusqu'à
N
Résolution
Unité (
incrément
mini)
A 0.1 Réglage
Type
l'arrêt ou au passage au paramètre suivant.
tFrtFr
(2)
tFr est un paramètre de niveau 2 réglable de 40 à 320 Hz, préréglé à 60 Hz. Pour
tFrtFr
modifier préalablement le réglage de
tFrtFr
tFr (niveau 2).
tFrtFr
HSPHSP
HSP >60Hz,
HSPHSP
(3) IN = courant de sortie permanent du variateur.
(4) Attention : - en cas de moteurs en parallèle sur un même variateur, mettre un relais thermique par départ
moteur pour pallier le risque de non répartition de la charge.
- en cas de mise hors tension du variateur le calcul I2t repasse à zéro.
F
R
A
N
Ç
A
I
S
25
Page 27
Mise en service
Réglage du variateur (paramètres niveau 1)
Code Fonction
JPF Suppression de la vitesse critique 0 HSP 0 Hz 0.1 Réglage
qui entraîne une résonnance
mécanique : il est possible d'interdire le fonctionnement prolongé sur une plage de fréquence de 2 Hz,
réglable sur la gamme d'utilisation.
Le préréglage usine à 0 rend la fonction inactive.
F
R
Idc Courant de freinage par injection de 0,7 I
A
N
Ç
A
I
S
*
*
*
*
*
*
*
courant continu automatique à l'arrêt (1) (1)
tdc Temps de freinage par injection 0,5 25,5 0 s 0.1 Réglage
automatique à l'arrêt.
Le réglage à 0 supprime l'injection à l'arrêt, le réglage à 25,5 le rend permanent (2).
UFr Paramètre permettant d'optimiser 20 100 0 1 Réglage
le couple à très basse vitesse
SP3 3ème vitesse présélectionnée S HSP LSP Hz 0.1 Réglage
SP4 4ème vitesse présélectionnée 25 HSP LSP Hz 0.1 Réglage
JOG Consigne en marche "pas à pas" 10 10 0 Hz 0.1 Réglage
Fdt Seuil de fréquence associé à la 0 HSP LSP Hz 0.1 Réglage
fonction "seuil de fréquence atteint"
de la sortie LO. Ce seuil comporte un hystérésis anti-battement de 0,2 Hz.
rPG Gain proportionnel de la fonction 1 10ø0 ø01 ø01 Réglage
régulateur PI
rIG Gain intégral de la fonction 1 10ø0 ø01 1/s ø01 Réglage
régulateur PI
FbS Coefficient multiplicateur du retour 1 10ø0 ø1 ø1 Réglage
de la fonction régulateur PI, associé
à l'entrée analogique AIC ou AI2.
FLt Affichage du dernier défaut survenu, Affichage
par action sur la touche :
Lorsqu'il n'y a pas eu de défaut,l'affichage est : nErr .
DATA
Préréglage
usine maxi mini
Valeur Valeur
JPF
IN0,25
N
f
2 Hz
Consigne
ItH A 0.1 Réglage
Unité (
Résolution
incrément
mini)
Type
L2A Accès aux paramètres de niveau 2. no YES no Configu-
non : no → l'affichage suivant sera rdY (affichage initial) si
oui : YES → l'affichage suivant sera le premier paramètre de niveau 2 si
(1) IN = courant de sortie permanent du variateur.
(2) Attention, pendant le freinage, les paramètres de configuration ne sont pas modifiables. Régler 25,5 s
en dernière opération si le freinage permanent est nécessaire.
Ces paramètres n'apparaissent que si les fonctions associées sont sélectionnées.
*
Exemple : SP3 et SP4 apparaissent seuls en préréglage usine.
26
ration
Page 28
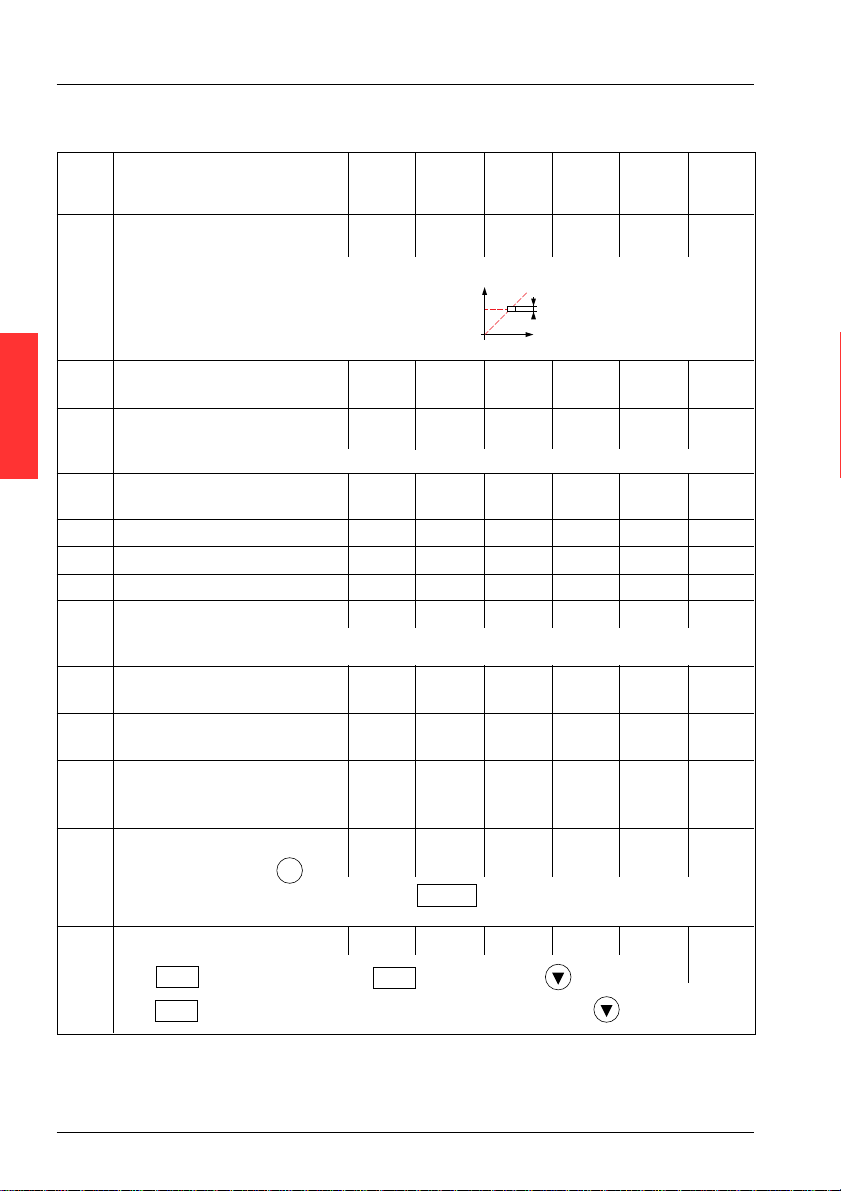
Mise en service
Extensions de fonctionnalités (paramètres niveau 2)
Code Fonction
UFt Choix du type de loi tension/ n nLd L Configu-
fréquence ration
- L : couple constant pour moteurs en parallèle ou moteurs spéciaux
- P : couple variable
- n : contrôle vectoriel de flux sans capteur pour applications à couple constant
- nLd : économie d'énergie, pour applications à couple variable sans à coups
tUn Auto réglage no YES no Configu-
Actif seulement pour les lois V/F : ration
n et nLd
- no : non (paramètres usines des moteurs standards IEC)
- donE (auto réglage déjà fait) : utilisation des paramètres de l'auto réglage déjà fait
- YES : déclenche l'auto réglage.
Quand l'auto réglage est terminé, rdY est affiché. Le retour à tUn fera ensuite apparaître
donE. Si le défaut tnF apparaît, c'est que le moteur n'est pas adapté : utiliser la loi L ou
la loi P.
UnS Tension nominale moteur. Configu-
Mettre la valeur lue sur la plaque ration
signalétique du moteur.
Les valeurs maxi, mini et préréglage usine dépendent du modèle et du paramètre bFr (niveau 1)
ATV18…M2. 230 240 200 V1
ATV18…N4 .bFr = 50 400 460 380 V1
ATV18…N4. bFr = 60 460 460 380 V1
FrS Fréquence nominale moteur bFr 320 40 Hz ø1 Configu-
Mettre la valeur lue sur la plaque ration
signalétique du moteur si elle est différente de la fréquence réseau réglée par bFr
tFr Fréquence maximale de sortie 60 320 40 Hz ø1 Configu-
brA Adaptation automatique du temps YES YES no Configu-
de rampe de décélération, si celui-ci ration
entraîne une surtension au freinage.
Cette fonction évite le verrouillage en défaut ObF.
YES : Fonction active, no : Fonction inactive
Cette fonction peut être incompatible avec le positionnement sur rampe et avec l'utilisation d'une
résistance de freinage.
SLP Compensation de glissement (1) 50Hz ø1 Réglage
Ce paramètre n'apparaît que si la loi
UFt configurée est la loi n.
La valeur en Hz correspond au glissement au couple nominal
Préréglage
usine maxi mini
Valeur Valeur
Unité (
Résolution
incrément
mini)
Type
ration
F
R
A
N
Ç
A
I
S
(1) Le préréglage usine dépend du calibre de variateur.
27
Page 29
Mise en service
Extensions de fonctionnalités (paramètres niveau 2)
Code Fonction
tLS Limitation du temps de marche à 0 2{5 0 s ø1 Réglage
petite vitesse (consigne nulle et
ordre de marche présent).
tLS = 0 : fonction inactive.
Le redémarrage s'effectue automatiquement sur rampe lorsque la référence réapparait ou sur
F
R
A
N
Ç
A
I
S
coupure et rétablissement de l'ordre de marche.
LI2 Réaffectation de l'entrée logique LI2
S'assurer préalablement que les entrées logiques sont hors tension.
- Si une fonction est déjà affectée à une autre entrée, elle apparaît néanmoins, mais sa mémorisation
ENT
ne sera pas active.
par
- Si les fonctions P52 et P54 sont toutes deux affectées, un changement de l'affectation de
l'entrée liée à la fonction P52 ne peut être effectif qu'après changement de l'affectation de l'entrée
liée à la fonction P54.
Quand AIC est affectée en rrS PS4 OFF Configusommatrice de AI1 et qu'une des ration
entrées logiques est affectée à PS2 (1) :
- OFF : non affectée
- rrS : sens de rotation "inverse" (2 sens de marche)
- dCI : freinage par injection de courant continu fixe (In variateur pendant 5 s, puis 0,5 Ith)
- FSt : arrêt rapide. Cette fonction est active lorsque l'entrée est hors tension
- JOG : Marche pas à pas (2)
- PS2 : 2 vitesses présélectionnées
- PS4 : 4 vitesses présélectionnées (2)
Quand AIC est affectée en retour rrS FSt OFF Configudu régulateur PI : ration
- OFF Voir fonctions
- rrS et
- dCI remarques
- FSt ci-dessus
Quand aucune entrée logique rrS PS2 OFF Configun'est affectée à PS2 : ration
- OFF
- rrS Voir fonctions
- dCI et
- FSt remarques
- JOG ci-dessus
- PS2
Préréglage
usine maxi mini
Valeur Valeur
Résolution
Unité (
incrément
mini)
Type
(1) C'est le cas en préréglage usine.
(2) Ces fonctions font apparaître les réglages correspondants dans les paramètres de niveau 1. Régler ces
paramètres (JOG, SP2, SP4).
28
Page 30
Mise en service
Extensions de fonctionnalités (paramètres niveau 2)
Code Fonction
LI3 Réaffectation de l'entrée logique PS2 " " Configu-
LI3 : idem LI2 ration
LI4 Réaffectation de l'entrée logique PS4 " " Configu-
LI4 : idem LI2 ration
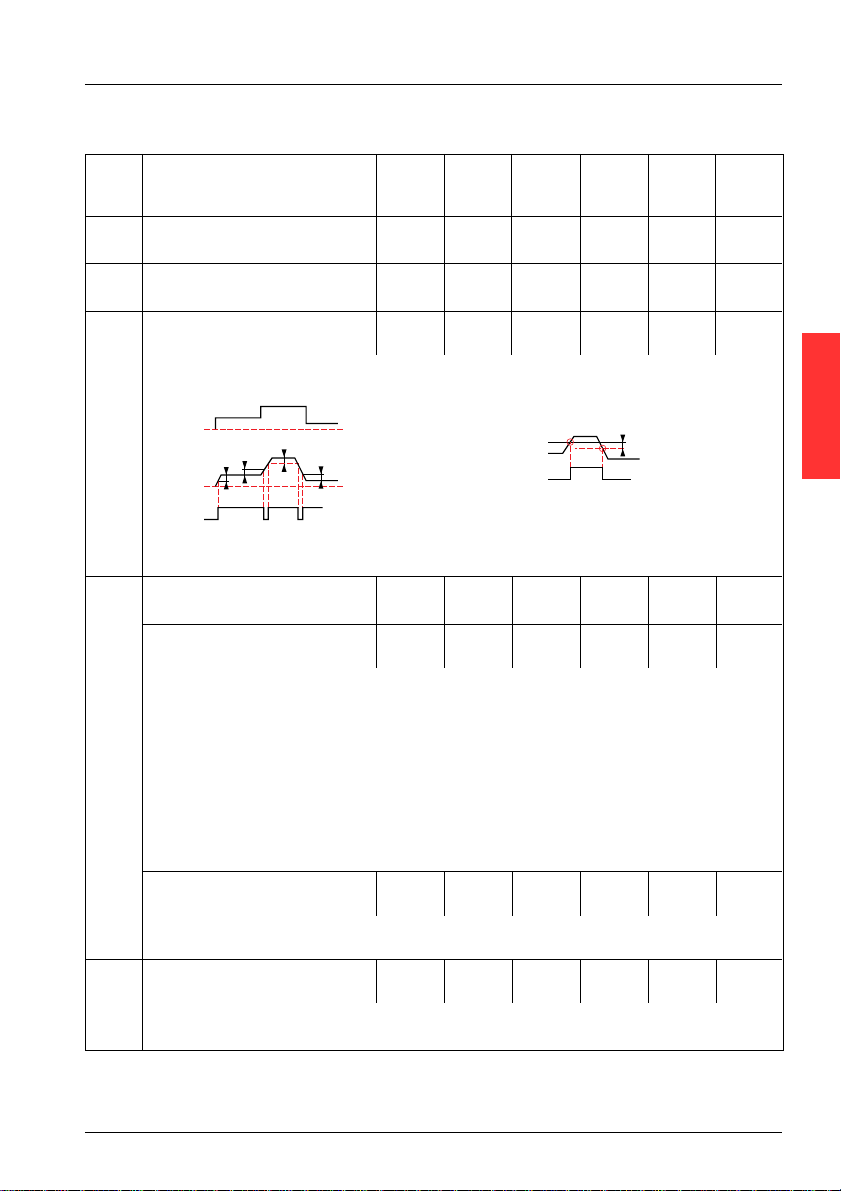
LO Affectation de la sortie logique SrA SrA FtA Configu-
1) SrA : consigne vitesse atteinte ration
par le moteur, avec un seuil de
± 2,5 Hz 2) FtA : seuil de fréquence franchi (Fdt)
Consigne
+2,5 Hz
Vitesse
LO
Nota : Si la consigne est inférieure de niveau 1. Régler ce paramètre
à 0,5 Hz, la sortie LO repasse à 0.
AIC Affectation de l'entrée analogique
AIC/AI2.
Si les entrées logiques ne sont pas SAI PIF SAI Configu-
affectées aux vitesses présélection- ration
nées (PS2 - PS4) ou à la marche pas à pas (JOG):
- SAI : Sommatrice avec AI1
- PIF : Retour du régulateur PI.
Cette configuration affecte automatiquement l'entrée AI1 en référence du régulateur et fait
apparaître dans les paramètres de niveau 1 les réglages à effectuer : rPG, rIG, FbS.
Nota : Cette configuration n'est possible que si on a préalablement procédé aux configurations
suivantes, dans l'ordre :
1) LI4 = OFF ou FSt
2) LI3 = OFF ou dCI
3) LI2 = OFF ou rrS
Si une entrée logique est affectée SAI SAI SAI Configuaux vitesses présélectionnées ration
(PS2 - PS4) ou à la marche pas à pas (JOG):
- SAI : Sommatrice avec AI1
CrL Configuration de l'entrée AIC/AI2 : ø0 ‘0 ø0 mA Configu-
- ø0 : AIC : 0 - 20 mA / AI2 : 0 + 10 V
- ‘0 : AIC : 4 - 20 mA / AI2 : 2 + 10 V
-2,5 Hz
-2,5 Hz
Préréglage
usine maxi mini
+2,5 Hz
Valeur Valeur
Seuil Fdt
Fréquence
LO
L'affectation FtA fait apparaître le
réglage Fdt dans les paramètres
Unité (
Hystérésis
0,2 Hz
Résolution
incrément
mini)
Type
ration
F
R
A
N
Ç
A
I
S
29
Page 31

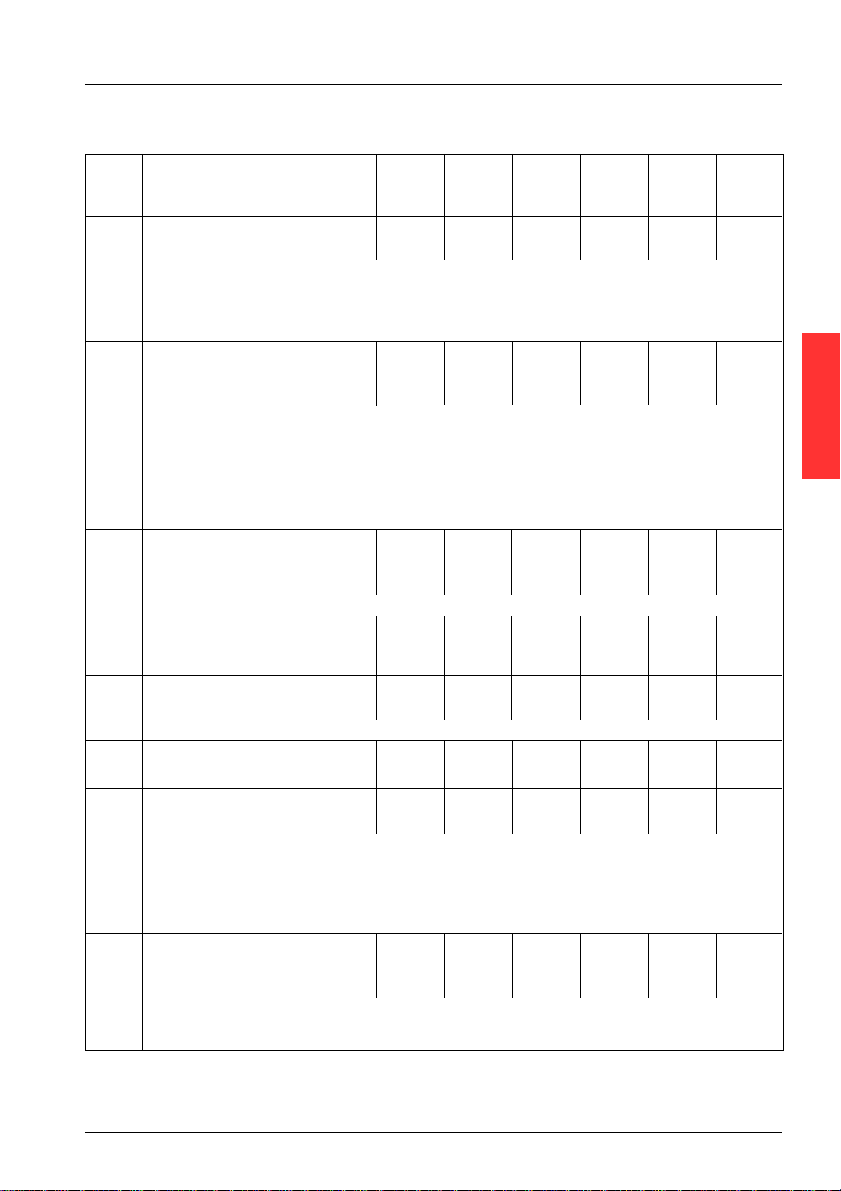
Mise en service
Extensions de fonctionnalités (paramètres niveau 2)
Code Fonction
SPr Rattrapage automatique avec no YES no Configu-
recherche de vitesse. Après une ration
coupure brève de réseau, le moteur redémarre sur rampe depuis sa vitesse effective. Le temps de
recherche de vitesse peut atteindre 3,2 s. La consigne de vitesse et le sens de marche doivent rester
maintenus à la remise sous tension.
F
R
A
N
Ç
A
I
S
- no : Fonction inactive
- YES : Fonction active
SFr Fréquence de découpage ‘0 1ë0 ë2 kHz ø1 Réglage
La fréquence de découpage est
réglable pour réduire le bruit généré par le moteur.
Au-delà de 4 kHz, un déclassement doit être appliqué au courant de sortie du variateur, selon le
modèle :
- ATV-18U09M2, U18M2, U29M2, U41M2, U54M2 : pas de déclassement,
- autres références :
. jusqu'à 8 kHz : déclassement de 5 %,
. au-delà de 8 kHz : déclassement de 10 %.
StP Arrêt contrôlé sur coupure réseau : no YES no Configu-
Contrôle de l'arrêt du moteur lors ration
d'une coupure de réseau, suivant une rampe auto adaptée en fonction de l'énergie cinétique restituée.
- no : Fonction inactive
- YES : Fonction active
Atr Redémarrage automatique, après no YES no Configu-
verrouillage sur défaut, si celui-ci a ration
disparu et que les autres conditions de fonctionnement le permettent.
Le redémarrage s'effectue par une série de tentatives automatiques séparées par des temps d'attente
croissants : 1 s, 5 s, 10 s, puis 1 mn pour les suivants.
Si le démarrage ne s'est pas effectué au bout de 6 mn, la procédure est abandonnée et le variateur
reste verrouillé jusqu'à la mise hors puis sous tension.
Les défauts qui autorisent cette fonction sont : OHF, OLF, USF, ObF, O5F.
Le relais de sécurité du variateur reste alors enclenché si la fonction est active. La consigne de
vitesse et le sens de marche doivent rester maintenus.
S'assurer que le redémarrage intempestif ne présente pas de danger humain ou matériel.
- no : Fonction inactive
- YES : Fonction active
FCS Retour au préréglage usine no YES no Configu-
no : non ration
YES : oui, l'affichage suivant sera
rdY
CPU Version logicielle (information) Affichage
Affichage de la version logicielle
Préréglage
usine maxi mini
Valeur Valeur
Unité (
Résolution
incrément
mini)
Type
30
Page 32

Maintenance - Rechanges réparations
Avant toute intervention dans le variateur, couper l'alimentation et attendre la décharge des condensateurs
(environ 1 minute). Le voyant rouge doit être éteint.
La tension continue aux bornes PA et PB et bornes masquées PO, PC peut atteindre 800
à 900 V suivant la tension du réseau.
En cas d'anomalie à la mise en service ou en exploitation, s'assurer tout d'abord que les recommandations
relatives à l'environnement, au montage et aux raccordements ont été respectées.
Entretien
L'Altivar 18 ne nécessite pas d'entretien préventif. Il est néanmoins conseillé à intervalles réguliers de :
- vérifier l'état et le serrage des connexions,
- s'assurer que la température au voisinage de l'appareil reste à un niveau acceptable, et que la ventilation
est efficace (durée de vie moyenne des ventilateurs : 3 à 5 ans selon les conditions d'exploitation),
- dépoussiérer le variateur si nécessaire.
Assistance à la maintenance
Le premier défaut détecté est mémorisé et affiché sur l'écran du terminal si la tension est maintenue : le
variateur se verrouille et le relais de sécurité déclenche.
Effacement du défaut
Couper l'alimentation du variateur.
Rechercher la cause du défaut pour l'éliminer.
Rétablir l'alimentation : ceci a pour effet d'effacer le défaut si celui-ci a disparu.
Dans certains cas, il peut y avoir redémarrage automatique après disparition du défaut, si cette fonction a
été programmée.
Rechanges réparations
Pour les réparations et les rechanges des variateurs Altivar 18, consultez les services du groupe Schneider.
F
R
A
N
Ç
A
I
S
31
Page 33

Assistance à la maintenance
Défauts réarmables avec la fonction redémarrage automatique, après disparition de la cause
Défaut Cause probable Procédure remède
OHF -I2t trop élevé - Contrôler la charge moteur, la
surcharge ou ventilation variateur et l'environnement.
variateur - température variateur Attendre le refroidissement
OLF - Déclenchement par I2t - Vérifier le réglage de la protection
surcharge moteur moteur trop élevé thermique moteur, contrôler la charge
F
OSF - tension réseau trop élevée - vérifier la tension réseau.
R
surtension - réseau perturbé
A
en régime établi
N
ou en accélération
Ç
USF - Réseau trop faible - Vérifier la tension et le paramètre tension.
A
sous tension - Baisse de tension passagère - Réarmer.
I
S
ObF - Freinage trop brutal - Augmenter le temps de décélération.
surtension ou charge entraînante - Adjoindre une résistance de freinage
en décélération si nécessaire.
Défauts non réarmables automatiquement. La cause du défaut doit être supprimée avant réarmement
par mise hors puis sous tension
trop élevée pour redémarrer.
du moteur. Attendre le refroidissement
pour redémarrer.
- Résistance de charge - Changer la résistance de charge.
détériorée
- Activer la fonction brA si compatible
avec l'application.
Défaut Cause probable Procédure remède
OCF - Court-circuit ou mise à la terre - Variateur débranché, vérifier les câbles
surintensité en sortie du variateur de liaison, l'isolement du moteur et
- Surintensité dans la - Vérifier le choix de la résistance.
résistance de freinage Variateur débranché, vérifier les câbles
dbF - Dépassement des capacités - Vérifier le choix de la résistance de
surcharge du circuit de freinage freinage.
circuit de Vérifier la valeur ohmique de la résistance.
freinage S'assurer que le calibre du variateur
InF - Défaut interne - Vérifier l'environnement
défaut interne (compatibilité électromagnétique).
tnF - Moteur spécial - Utiliser la loi L ou la loi P.
erreur autoréglage - Moteur de puissance non
adaptée au variateur
EEF - Défaut interne - Retourner le variateur pour
32
l'état des bobinages.
de liaison, l'isolement de la résistance
et sa valeur ohmique.
convient à l'application.
- Retourner le variateur pour
contrôle/réparation.
contrôle/réparation.
Page 34

When the speed controller has power on, a number of components are connected to the supply.
It is extremely dangerous to touch them.
After switching off the supply to the Altivar wait for 1 minute before touching the equipment. This
is the time taken for the capacitors to discharge.
During operation the motor can be stopped or started by inhibiting the start command with the
E
speed controller still connected to the supply. For personnel safety during maintenance
N
G
L
I
S
H
WARNING
electronic locking should not be used, the supply should be switched-off.
The speed controller incorporates safety devices which can shutdown the speed controller and
stop the motor in the event of a fault. These faults may be caused by a mechanical blockage of
the motor or alternatively problems with the electrical supply.
The removal of the problem may cause the motor to re-start, creating danger for certain machines
and installations, especially those which must conform to safety regulations.
In such cases, therefore, the user must take precautions to avoid re-starting of the motor. A
device such as a speed detector should be incorporated to remove the supply in the event of an
unscheduled stopping of the motor.
The equipment has been designed to conform to IEC standards.
NOTE
In general, power to the speed controller must be switched off before any electrical or mechanical
intervention on the installation or machine.
The products and materials presented in this document may be changed or modified at any time,
either from a technical point of view or in the way they are operated. Their description can in no
way be considered contractual.
34
Page 35

Warning
The Altivar 18 must be considered a component. It is neither a machine nor a piece of equipment
ready for use in accordance with European directives (machinery directive and electromagnetic
compatibility directive). It is the responsibility of the user to ensure that his machine meets these
standards.
This speed controller must be installed and set up in accordance with international and national
standards. This compliance is the responsibility of the systems integrator who must respect the
European community EMC directive amongst others.
The specifications contained in this document must be applied in order to comply with the
essential requirements of the EMC directive.
E
N
G
L
I
S
H
35
Page 36

E
N
G
L
I
S
H
36
Page 37

Contents
The "Altivar 18" 34
Preliminary checks 38
Choice of speed controller 38
Available torque 39
Technical characteristics 40
Dimensions - Mounting recommendations 41
Mounting in a wall-fixing or floor standing enclosure 42
Electromagnetic compatibility 43
Accessing terminals - Power terminals 44 and 45
Control terminals 46
Connection diagram 47
Functions which do not require adjustment 48
Logic and analog input functions which can be configured 49 to 51
Function compatibility table 52
Installation 53 to 62
Maintenance - Replacement and repairs 63
E
N
G
L
I
S
H
Maintenance assistance 64
37
Page 38

Preliminary checks
Remove the Altivar 18 from its packaging, and check that it has not been damaged in transit. Check that the
reference of the speed controller on the label is the same as that on the delivery note and corresponds to the
order form.
Choice of speed controller
A.C. supply Motor Altivar 18
Power Line Power Permanent Maximum Power Reference Weight
supply current (1) indicated output transient dissipated
voltage at U1 at U2 on plate current current (2) at nominal
U1…U2
V AAkWHPAAW kg
200…240 4.4 3.9 0.37 0.5 2.1 3.1 23 ATV-18U09M2 1.5
50/60 Hz
single phase 7.6 6.8 0.75 1 3.6 5.4 39 ATV-18U18M2 1.5
E
N
G
200…230 16.2 14.9 3 – 12.3 18.5 104 ATV-18U54M2 3.3
L
50/60 Hz
I
3-phase 20.4 18.8 4 5 16.4 24.6 141 ATV-18U72M2 3.3
S
H
13.9 12.4 1.5 2 6.8 10.2 60 ATV-18U29M2 2.1
19.4 17.4 2.2 3 9.6 14.4 78 ATV-18U41M2 2.8
28.7 26.5 5.5 7.5 22 33 200 ATV-18U90M2 7.8
load
38.4 35.3 7.5 10 28 42 264 ATV-18D12M2 7.8
380…460 2.9 2.7 0.75 1 2.1 3.2 24 ATV-18U18N4 2
50/60 Hz
3-phase 5.1 4.8 1.5 2 3.7 5.6 34 ATV-18U29N4 2.1
6.8 6.3 2.2 3 5.3 8 49 ATV-18U41N4 3.1
9.8 8.4 3 – 7.1 10.7 69 ATV-18U54N4 3.3
12.5 10.9 4 5 9.2 13.8 94 ATV-18U72N4 3.3
16.9 15.3 5.5 7.5 11.8 17.7 135 ATV-18U90N4 8
21.5 19.4 7.5 10 16 24 175 ATV-18D12N4 8
31.8 28.7 11 15 22 33 261 ATV-18D16N4 12
42.9 38.6 15 20 29.3 44 342 ATV-18D23N4 12
(1) Typical value without additional inductance.
(2) For 60 seconds.
The Altivar 18 is designed to supply the required power for the appropriate motor.
38
Page 39

Available torque
Continuous operation
For self-ventilated motors, motor cooling is linked to speed. Derating occurs at speeds of less than half the
nominal speed.
Operation in overspeed
Since the voltage can no longer change with the frequency, there is a decrease in motor induction resulting
in a loss of torque. Consult the manufacturer to find out whether the machine can operate in overspeed.
Torque characteristics :
T/Tn
1,5
1,2
0,95
0,5
1
0
1
3
21
25
30
50
60
1 Continuous usable torque : self-ventilated motor
2 Continuous usable torque : force-ventilated
motor
3 Transient overtorque : typical curve at ± 10 %
Value : 1.5 Tn for 60 s
N (Hz)
E
N
G
L
I
S
H
Note : With a special motor, the nominal frequency and the maximum frequency can be adjusted from 40 to
320 Hz.
39
Page 40

Technical characteristics
Environment
Degree of protection IP31
Vibration and shock resistance 0.6 gn from 10 to 50 Hz
in accordance with EN50178 2 gn from 50 to 150 Hz
Degree of pollution Degree 2 according to IEC664. Protect the speed controller from
Relative maximum humidity 93 % without condensation or dripping water. If there is a risk of
Ambient air temperature For storage : - 25 °C to + 65 °C
in accordance with EN50178 For operation :
Maximum operating altitude 1000 m without derating. Above this, derate the current by 3 %
E
Electrical characteristics
N
G
L
Power supply Voltage - single phase : 200 V - 15 % to 240 V + 10 %
I
S
H
Frequency 50/60 Hz ± 5%
Output voltage Maximum voltage equal to mains voltage
Output frequency range 0.5 to 320 Hz
Maximum transient current 150 % of speed controller nominal current for 60 seconds
IP20 without the blanking cover on the top
dust, corrosive gases, splashing liquid, etc.
condensation, provide a heating system
-10°C to + 40 °C without derating, with the blanking cover
-10°C to + 50 °C without derating, without the blanking cover
for each additional 1000 m
- 3-phase : 200 V - 15 % to 230 V + 10 %
380 V - 15 % to 460 V + 10 %
Braking torque 30 % of the nominal motor torque without brake resistor (typical
Frequency resolution - Display : 0.1 Hz
Switching frequency Can be adjusted from 2.2 to 12 kHz
Speed controller protection and - Electrical isolation between power and control circuits (inputs,
safety outputs, supplies)
Motor protection Protection integrated in the speed controller by calculating I2t
40
value). Up to 150 % with brake resistor as an option
- Analog inputs : 0.1 Hz for 100 Hz maximum
- Protection against short-circuits :
. internal supplies available
. between output phases U - V - W
. between the output phases and earth for ratings 5.5 to 15 kW
- Thermal protection from excessive overheating and overcurrents
- Under and overvoltage supply
- Overvoltage safe on braking
Page 41

Dimensions - Mounting recommendations
Dimensions
ATV18iiii
b
c
ATV18 abcGHØ
U09M2, U18M2 112 182 121 100 170 5
U29M2, U18N4, U29N4 149 184 157 137 172 5
U41M2, U54M2, U72M2, U41N4, U54N4, U72N4 185 215 158 171 202 6
U90M2, D12M2, U90N4, D12N4 210 300 170 190 280 7
D16N4, D23N4 245 390 190 225 370 10
Ø
H==
G
==
a
Mounting recommendations
Mount the unit vertically.
Avoid placing close to any heating equipment.
Leave enough free space to ensure that sufficient air can circulate for cooling. The unit is ventilated from the
bottom upwards.
IP2O : remove the blanking cover from the top (self-adhesive film).
E
N
G
L
I
S
H
≥ 100
≥ 50 ≥ 50
≥ 100
Ventilation flow rate
ATV-18U09M2, U18M2, U18N4 : not ventilated.
ATV-18U29M2, U29N4 : 0.25 m3/minute.
ATV-18U41M2, U54M2, U72M2, U41N4, U54N4, U72N4 :
0.75 m3/minute.
ATV-18U90M2, D12M2, U90N4, D12N4, D16N4, D23N4 :
1.3 m3/minute.
41
Page 42

Mounting in a wall-fixing or floor-standing enclosure
Observe the mounting recommendations given on page 41.
To ensure air circulation in the speed controller :
- provide ventilation louvres,
- ensure that ventilation is sufficient. If not install forced
ventilation with a filter,
- use special filters in IP 54,
- remove the blanking cover from the top of the speed
controller.
Dust and damp proof metal enclosure (degree of protection IP 54)
The speed controller needs to be mounted in a dust and damp proof enclosure under certain environmental
conditions : dust, corrosive gas, high humidity with a risk of condensation or dripping water, splashing liquid,
etc.
To avoid hot spots in the speed controller, if it is a non-ventilated model, add a fan to circulate the air inside
the enclosure.
E
N
This means that the speed controller can be used in an enclosure where the maximum internal temperature
G
can reach 50 °C.
L
I
Calculating the size of the enclosure
S
Maximum thermal resistance Rth (°C/W) :
H
Rth =
θ° - θ°e
P P = total power dissipated in the enclosure in W.
θ° = maximum temperature in the enclosure in °C,
θ°e = maximum external temperature in °C,
θ° ≤ 40 °C θ° ≤ 40 °C
Power dissipated by the speed controller : see page 38.
Add the power dissipated by the other equipment.
Useful heat dissipation surface of the enclosure S (m2):
(sides + top + front, when the controller is wall-mounted)
Rth
K
K = thermal resistance per m2 of the enclosure.
K = 0.15 with no fan.
S =
For a metal enclosure : K = 0.12 with an internal fan,
Warning : Do not use insulated enclosures, as they have a poor level of conductivity.
42
Page 43

Electromagnetic compatibility
Installation : to comply with standards EN55011 class A, EN61800-3, IEC1800-3.
General rules
- Grounds between speed controller, motor and cable shielding must have "high frequency" equipotentiality.
- Use shielded cables with shielding connected to the ground at 360° at both ends of the motor cable and
the control cables. This shielding can be conduit or metal ducting as long as there is no break in continuity.
Installation diagram
1
2
ATV 18
5
3
4
1- Mounting plate, unpainted flat sheet steel, with anti-corrosion treated conductors (machine ground wiring).
Painted steel can be used on condition that good electrical contact is ensured between the mounting
surfaces with 2 and 5.
2- Altivar 18 fixed directly to the mounting plate (equipotential grounds).
3- Non-shielded supply wires or cable for connecting the line choke, if used.
4- Non-shielded wires for fault relay contact output wires.
5- The shielding for cables 6 and 7 should be fixed and grounded as close to the controller as possible :
- strip the shielding,
- use the correct size clamps on the stripped parts of the shielding to fix to the backplate,
- type of clamps : stainless steel.
The shielding must be clamped tightly enough to the backplate for the contacts to be good.
6- Shielded cable for connecting the motor, with shielding connected to ground at both ends.
This shielding must be uninterrupted, and any intermediate terminal blocks must be in an EMC shielded
metalcase.
7- Shielded cable for connecting the control/command system.
For uses which may require several conductors, small cross sections should be used (0.5 mm2).
The shielding must be connected to ground at both ends. This shielding must be uninterrupted, and any
intermediate terminal blocks must be in an EMC shielded metal case.
6
7
E
N
G
L
I
S
H
Note : The HF equipotential ground connection between speed controller, motor and cable shielding does
not remove the need to connect the protective conductors PE (green-yellow), to the appropriate terminals on
each of the units.
43
Page 44

Accessing terminals - Po wer terminals
Accessing terminal blocks
To access terminal blocks, remove cover fixed by 2 screws.
Terminal blocks : on the lower part of the Altivar.
1 - Control
2 - Power
3 - Terminal for connecting a protection conductor with a 10 mm
cross section in accordance with EN50178 (earth leakage
current)
DATA ENT
13
E
N
G
L
I
S
H
2
2
Speed controllers are fitted with metal gland plates equipped with rubber blanking plugs which can be
perforated to enable cables to be passed through them and also to protect the cables.The gland plates can
take EMC metal cable glands.
Power terminals
Terminal characteristics
Altivar ATV-18 capacity torque
U09M2, U18M2 AWG14 2.5 1
U29M2, U41M2
U54M2, U72M2
U18N4, U29N4 AWG10 6 1.2
U41N4, U54N4
U72N4
U90M2, D12M2,
U90N4, D12N4
D16N4, D23N4 AWG6 16 4
44
Maximum connection Tightening
AWG mm
AWG8 10 2.4
2
in Nm
Page 45

Power terminals
Function of terminals
Terminals Function
L1
L2 Power
L3
s
PA Output to
PB brake resistor
U
V All ratings
W
s
Terminal connections
L1 L2 s PA PB U V W s
L1 L2 L3
s PA PB U V
supply
Altivar
ground terminal
Do not use All ratings
Output to
the motor
Altivar
ground terminal
W s
For Altivar
ATV-18
All ratings
3-phase only
All ratings
All ratings
All ratings
E
N
G
L
I
S
H
ATV-18 single phase
ATV-18 3-phase except D16N4 and D23N4
PA PB
L1 L2 L3 s U V W s
ATV-18D16N4 and D23N4
45
Page 46

Control terminals
Maximum connection capacity : 1.5 mm2, AWG16.
Tightening torque : 0.5 mN
Factory preset speed controller configuration.
Control terminal block electrically isolated from power terminal block.
Terminal Function Characteristics
SA C/O contact of the fault relay. Contact switching capacity :
SC Activated when speed controller - minimum 10 mA for 5 Va
SB powered-up, - maximum on inductive load (cos ϕ 0.4, L/R 7 ms)
+10 Power supply for setpoint 10 V
AI1 Voltage speed reference Analog input 0 + 10 V impedance 30 kΩ
AI2 Voltage setpoint Analog input 0 + 10 V impedance 30.55 kΩ
AIC Current setpoint, analog input 0 - 20 mA (factory preset)
E
N
G
L
I
S
H
COM Common for logic and
LI1 Run forward command Logic inputs impedance 3.5 kΩ
LI2
LI3
LI4 LI2, LI3, LI4 can be assigned
+ 24 Logic input and output supply + 24 V protected, maximum rate 100 mA
no fault 1.5 A for 250 Vc and 1.5 A for 30 Va
potentiometer 1 to 10 kΩ
or or
summing of AI1 or 4 - 20 mA, impedance 400 Ω
analog inputs and the logic
output
Run reverse
Preset speeds
command Power supply + 24 V (maximum 30 V)
AI2 or AIC can be assigned. Do not use them both at the
same time.
State 0 if < 5 V, state 1 if > 11 V
+15%
10 mA maximum, protected
+ 0
LO+ Logic output supply To be connected to the internal + 24 V or to the + 24 V
LO Speed reference reached PLC compatible logic output (open collector)
46
(maximum 30 V) of an external supply
+ 24 V maximum 20 mA with internal supply
or 200 mA with external supply.
LO can be assigned.
Page 47

Connection diagram
Connection diagram with factory preset values
3-phase power supply
Single phase power supply
(1)
L2
L3
L1
U
U1
3 c
V
V1
M
SB
W
W1
Brake resistor
if required
(2)
SC
PAPB+10
PO
Reference
potentiometer
SA
LI1
AI1
LI2
COM
0-20 mA
4-20 mA
or
0 + 10 V
LI3
(4)
LI4
+24
AIC
AI2LOLO+
KA
(3)
Other connections
(external 24 V supply)
LI2
LI3
LI1
LI4
COM
0 V
24 V supply
(4)
+24
LO+
+24 V
(1) Line choke if required (1 phase or 3 phases).
(2) Fault relay contacts, for remote signalling of the speed controller state.
(3) PLC relay or input a 24 V.
(4) + 24 V internal. When using a + 24 V external supply, connect the 0 V to the COM terminal, and do not
use the + 24 terminal of the speed controller.
Note : Suppressors should be fitted to all inductive circuits close to the speed controller or connected on the
same circuit (relays, contactors, solenoid valves, etc).
Choice of associated components
See Altivar 18 catalog.
Wiring recommendations
E
N
G
L
I
S
H
Power
Follow the cable cross-section recommendations specified in the standards.
The speed controller must be earthed, in order to comply with regulations concerning high leakage currents
(over 3.5 mA). Upstream protection by differential circuit-breaker is not advised as DC elements may be
generated by leakage currents from the speed controller. If the installation has several speed controllers on
the same supply, connect each speed controller to earth separately. If necessary, provide a line choke
(consult the catalogue).
Keep the power cables apart from low-level signal circuits (detectors, PLCs, measuring equipment, video,
telephone).
Control
Keep the control circuits and the power cables apart. For control circuits and speed reference circuits, it is
advisable to use a shielded, twisted pair cable at intervals of between 25 and 50 mm by connecting the
shielding at each end.
47
Page 48

Functions which do not require adjustment
Fault relay, resetting
The fault relay is energized when the speed controller is powered up and not faulty. It comprises a C/O contact.
The speed controller is reset after a fault :
- by switching it off until the display and the red indicator lamp disappear and then restarting the speed
controller,
- automatically in the cases described under the "automatic restart" function.
Thermal protection of the speed controller
Function :
Protection via a thermistor fixed to the heatsink.
Indirect protection of the speed controller by calculating the I2t.
This function ensures thermal protection of the speed controller in normal ambient temperature conditions.
Typical tripping points :
E
N
- motor current = 185 % of the nominal speed controller current : 2 seconds,
G
- motor current = 150 % of the nominal speed controller current : 60 seconds,
L
- motor current ≤ 110 % of the nominal speed controller current : does not trip.
I
S
Possible deratings for switching frequencies of > 4 kHz are automatically taken into account and reduce the
H
admissible I2t.
Warning : If the speed controller is switched off, the I2t calculation is reset to 0.
Speed controller ventilation
For models which have a fan, the fan is supplied automatically when the speed controller is reset (operating
direction + reference). It is switched off several seconds after the speed controller is locked (motor speed
< 0.5 Hz and injection braking completed).
48
Page 49

Logic and analog input functions which can be configured
Logic inputs
• LI1 : forward operation. Cannot be assigned to another function.
When the contact is closed, the frequency setpoint is applied in the forward
LI1 +24
• LI2, LI3, LI4 : can be assigned to the following functions :
- reverse direction : rrS assignment
LI2
+24
LI3
LI4
- 2 speeds : PS2 assignment
direction.
When the contact is closed, the frequency setpoint is applied in reverse
direction. If LI1 is also closed, the first one to have been closed has priority.
Open contact : reference = LSP + analog reference.
LI2
+24
LI3
LI4
- 4 speeds : assignment of one input to PS2 and another to PS4 (it is not possible to assign PS4 only)
Closed contact : reference = HSP.
K2
K1
K1 and K2 open : setpoint = L5P + analog setpoint.
K1 closed and K2 open : setpoint = SP3 (level 1 adjustment).
K1 open and K2 closed : setpoint = SP4 (level 1 adjustment).
LI2
LI2
LI3
LI4
(PS4)
(PS2)
LI3
LI4
+24
K1 and K2 closed : setpoint = HSP.
E
N
G
L
I
S
H
49
Page 50

Logic and analog input functions which can be configured
• JOG : jog operation. JOG assignment
If the contact is closed and then operating direction contact is also closed, the ramp
time is 0.1 s irrespective of the ACC and dEC settings.
LI2
LI3
LI4
JOG
Operating
direction
+24
If the speed controller is already operating and the contact assigned to JOG is
closed, the ramp times are those of ACC and dEC.
The minimum time between two JOG operations is 0.5 s.
Reference
JOG JOG JOG
E
N
Frequency
G
Ref.
Ref.
L
I
Note : 1- During "jog" operation, automatic DC injection braking when the motor is stopped is inhibited.
S
H
2- Injection braking on the logic input has priority over JOG operation.
• Fast stop : FSt assignment
Note : Fast stop command is activated when the contact between the
input and the + 24 V is open.
LI2
+24
LI3
LI4
Braked stop, with the dEC ramp time divided by 4, but limited to the acceptable minimum without locking
on an "excessive braking" fault (self-adaptation if the braking capability is exceeded).
Note : During fast stop, braking either by automatic DC injection or on the logic input is inhibited.
• DC injection braking : dCI assignment
Note : Injection braking command is activated when the contact between
the input and the + 24 V is closed.
LI2
+24
LI3
LI4
The braking current is equal to the speed controller nominal current during 5 seconds. After 5 seconds,
braking current is peak limited to a maximum value of 0.5 ItH motor.
Note : 1- Automatic injection braking when stopped remains active if the dCI function is assigned.
2- Fast stop has priority over injection braking.
50
Page 51

Logic and analog input functions which can be configured
Analog inputs
An extra analog input can be used as :
- voltage on AI2,
- current on AIC.
and can be assigned as :
- a summing input of AI1,
- PI regulator feedback.
Summing with AI1 : SAI assignment
AI1
0 ; +10 V
AI2
0 ; +10 V
or
AIC
0 ; 20 mA or 4 ; 20 mA
+
Ref.
+
PI regulator feedback : PIF assignment
This assignment automatically configures AI1 as a reference for the PI regulator.
I
rIG
0.01 to 100 x
Ref.
1
S
AI1
0 ; +10 V
AI2
0 ; +10 V
or
AIC
0 ; 20 mA or 4 ; 20 mA
x Fb5
(0.1…100)
P
rPG
0.01 to 100
Adjustment parameters rPG, rIG and FbS are in level 1.
- AIC parameter setting : 0 - 20 mA or 4 - 20 mA.
Note : The PI function is not compatible with certain logic input functions :
- preset speeds (2 or 4),
- jog operation (JOG).
E
N
G
L
I
S
H
51
Page 52

Function compatibility table
The choice of application selections is restricted due to incompatibility between certain functions. Those
functions which are not listed can be used without restriction.
Automatic D.C. braking
Automatic D.C. braking
E
N
Summing input
G
PI regulator
L
Forward direction
I
S
Reverse direction
H
D.C. braking by logic input
Fast stop
Jog
Preset Speeds
Non-compatible functions
Compatible functions
not significant
Function priority (Functions unable to be used at the same time) :
➞
➞
➞
The choice of functions is limited by the number of configurable logic inputs (3).
Functions using configurable logic inputs :
The function indicated by the arrow has priority over the other one.
➞
The first operated has priority.
➞
➞
PI regulator
Summing input
Reverse direction
Forward direction
➞
➞
➞
➞
Fast stop
D.C. braking by logic input
➞➞
➞
➞➞➞
➞
➞
➞
➞
Jog
Preset Speeds
➞
➞
➞
➞➞
➞
- One input for each function :
reverse direction, D.C. braking, fast stop, jog, 2 preset speeds.
- Two inputs for the function :
4 preset speeds.
52
Page 53

Installation
The Altivar is factory preset for standard applications :
- applications with constant torque.
Preset values
- Display : speed controller ready (when stopped), motor frequency (in operation).
- Supply : 50 Hz.
- Motor voltage : 230 V or 400 V, depending on the product.
- Ramps : 3 seconds.
- Low speed : 0 Hz - High speed : 50 Hz.
- Frequency loop gain : standard.
- Thermal motor current = nominal speed controller current.
- Injection braking current when stopped = 0.7 nominal speed controller current, for 0.5 seconds.
- Operation at constant torque, with sensorless flux vector control.
- Logic inputs :
. 2 operating directions (LI1, LI2),
. 4 preset speeds (LI3, LI4) : 0 Hz, 5 Hz, 25 Hz, 50 Hz.
- Analog inputs :
. AI1 : speed reference 0 + 10 V,
. AI2 (0 + 10 V) or AIC (0, 20 mA) summing of AI1.
- Logic output :
. LO : speed reference reached.
- Automatic adaptation of the deceleration ramp if there is overvoltage on braking.
- Switching frequency of 4 kHz.
If the above values are compatible with the application, the speed controller can be used without modifying
the settings.
In power control with line contactor :
E
N
G
L
I
S
H
- avoid frequent operation of contactor KM1 (premature ageing of capacitors), use inputs LI1
to LI4 to control the speed controller,
- in the case of cycles < 60 s, these measures are essential, otherwise the load resistor may
be destroyed.
User adjustment and function extensions
If necessary, the display can be used to make adjustments and to expand the functions using those listed
on the following pages. There are two levels of access :
- level 1 : adjustments (standard configuration),
- level 2 : extension of functions.
It is easy to return to the factory setting.
There are three types of parameter :
- display : values displayed by the speed controller,
- adjustment : can be modified during operation or when stopped,
- configuration : can only be modified when stopped and with no braking. Can be displayed during operation.
- ensure that the setting changes made during operation present no danger. It is advisable
to perform modifications when the machine has stopped.
53
Page 54

Installation
Integrated display terminal
Functions of keys and display
(voltage on the DC bus)
Red LED : on
rdY
Goes to the previous parameter
or increases the value displayed
Goes to the next parameter
or decreases the value displayed
E
Normal display (no faults and after installation).
N
G
- Init : Initialization sequence.
L
- rdY : Speed controller ready.
I
S
- 4“0 : Display of the frequency setpoint.
H
- dcb : DC injection braking in progress.
- rtrY : Automatic restart in progress.
Using the integrated display terminal
Scrolling through the parameters : Next parameter, Previous parameter
Display of the parameter value, its state or its assignment :
DATA ENT
DATA
Four "7-segment" displays
Saves the parameter
or value displayed
Switches between the
parameter type
and its numerical value
Modifying the value, state or assignment :
Pressing or does not memorize the selection.
Memorizing, saving the selection displayed :
The display flashes during memorization.
Return to parameters :
54
DATA
ENT
Page 55

Installation
Using the integrated display terminal
Example 1 : ramp adjustment
bFr
ACC “0
DATA ENT
(1 flashing)
{8 {8
ACC
dEC
Example 2 : access to second level parameters
Etc.
FLt
L2A no
L2A
UFt
Example 3 : configuration of the logic output
DATA ENT
access to second level
Etc.
LI4
LO SrA
DATA ENT
DATA
(1 flashing)
YES YES
DATA
(1 flashing)
FtA FtA
E
N
G
L
I
S
H
LO
AIC
DATA
Etc.
55
Page 56

Installation
Hierarchical access to parameters
Level 1 parameters
Adjustments
rdYrdY 4{54{5
or
Initial state
(normal display)
FrHFrH
LCrLCr
rFrrFr
ULnULn
bFr
E
N
G
L
I
S
H
ACC
dEC
LSP
HSP
FLG
ItH
JPF
IdC
tdC
UFr
SP3
*
SP4
*
JOG
*
Fdt
*
rPG
*
rIG
*
FbS
*
Level 2 parameters
Extension of functions
UFt
tUn
*
UnS
FrS
tFr
brA
SLP
*
tLS
LI2
LI3
LI4
LO
AIC
CrL
SPr
SFr
StP
FLtFLt
Atr
FCS
CPUCPU
L2A
= no
L2A
Access to level 2
L2A = YES
YES
no
L2A = YES
Display
Parameter shown only if the corresponding function is configured
*
56
Configuration can only be modified when stopped
Adjustment can be modified when stopped and
when running
Page 57

Installation
Adjustment of the speed controller (level 1 parameters)
Factory
Code Function
rdY Speed controller ready Display
FrH Frequency setpoint FrH Hz 0.1 Display
LCr Motor current A 0.1 Display
rFr Frequency of rotation Hz 0.1 Display
ULn Mains voltage V 1 Display
bFr Base frequency. Select the same 50 60 50 Hz Configu-
frequency as the supply frequency. ration
The value of bFr presets the nominal motor frequency and voltage to the following values :
ATV18…M2 : - bFr = 50 : 230 V/50 Hz
- bFr = 60 : 230 V/60 Hz
ATV18…N4 : - bFr = 50 : 400 V/50 Hz
- bFr = 60 : 460 V/60 Hz
These presets can be modified in level 2 parameters.
ACC Linear acceleration ramp “0 3600 ø1 s 0.1 or 1 Adjust.
dEC Linear deceleration ramp “0 3600 ø1 s 0.1 or 1 Adjust.
The ramps are defined for the base (0.1 to
frequency. 999.9 then
Example : ramp 10 s : - if bFr = 50 Hz, 5 s needed for variation of 25 Hz, 1000 to
LSP Low speed 0 = HSP 0 Hz 0.1 Adjust.
HSP High speed : ensure that this 50 = tFr = LSP Hz 0.1 Adjust.
setting is suitable for the motor (2)
and the application.
FLG Frequency loop gain 33 100 0 1 Adjust.
Linked to the inertia and resistive
torque of the driven mechanism :
- machines with high resistive torque or high inertia : gradually reduce to between 33 and 0,
- machines with fast cycles, low resistive torque and low inertia : gradually increase the gain to
between 33 and 100. Too high a gain may lead to unstable operation
ItH Motor thermal protection (4). I
Adjust ItH to nominal current (3) (3) (3)
shown on the motor rating plate. To inhibit thermal protection, increase the value up to its maximum
value.
Choice of
parameter
displayed
during
operation (1)
- if bFr = 60 Hz, 5 s needed for variation of 30 Hz. 3600)
(1) LCr, rFr and ULn cannot be memorized using
Maximum Minimum
preset value value
1.15 IN0.5 I
N
ENT
, but can be displayed for a few moments, until
N
Resolution
Unit (
minimum
increment)
A 0.1 Adjust.
Type
the machine stops or goes to the next parameter.
tFrtFr
(2)
tFr is a level 2 parameter which can be adjusted from 40 to 320 Hz, preset at 60 Hz. For
tFrtFr
> 60 Hz, modify the setting of
tFrtFr
tFr beforehand (level 2).
tFrtFr
HSPHSP
HSP
HSPHSP
(3) IN = speed controller permanent output current.
(4) Warning : - in the case of motors connected in parallel on a single speed controller, used thermal relay
for each motor to offset the risk of the load not being distributed.
- if the speed controller is switched off the I2t calculation changes to zero.
E
N
G
L
I
S
H
57
Page 58

Installation
Adjustment of speed controller (level 1 parameters)
Factory
Code Function
JPF Cancellation of a critical speed 0 HSP 0 Hz 0.1 Adjust.
which leads to mechanical
resonance : it is possible to prevent prolonged operation in a 2 Hz frequency range, which can be
adjusted anywhere between LSP and HSP.
Factory preset of 0 deactivates the function.
Idc Automatic DC injection braking 0.7 I
current when stopped (1) (1)
tdc Automatic injection braking time 0.5 25.5 0 s 0.1 Adjust.
when stopped.
Setting of 0 cancels the injection when stopped, setting to 25.5 makes this permanent (2).
UFr Parameter enabling the torque 20 100 0 1 Adjust.
E
N
G
*
L
*
I
S
*
H
*
*
*
*
to be optimized at a very low speed
SP3 3rd preset speed S HSP LSP Hz 0.1 Adjust.
SP4 4th preset speed 25 HSP LSP Hz 0.1 Adjust.
JOG Setpoint in "jog" operation 10 10 0 Hz 0.1 Adjust.
Fdt Frequency threshold associated with 0 HSP LSP Hz 0.1 Adjust.
the "frequency threshold reached"
function of output LO. This threshold comprises an anti-repeat hysteresis of 0.2 Hz.
rPG Proportional gain of the PI regulator 1 10ø0 ø01 ø01 Adjust.
function
rIG Integral gain of the PI regulator 1 10ø0 ø01 1/s ø01 Adjust.
function
FbS Multiplication coefficient of feedback of 1 10ø0 ø1 ø1 Adjust.
PI regulator function, associated
with analog input AIC or AI2.
FLt Display of the last fault which occurred, Display
by pressing the
When no fault has occurred the display reads : nErr .
DATA
key.
Maximum Minimum
preset value value
f
JPF
N
IN0.25
ItH A 0.1 Adjust.
Unit (
increment)
2 Hz
Setpoint
Resolution
minimum
Type
L2A Access to level 2 parameters. no YES no Configu-
no : no → the next display will be rdY (initial display) if
yes : YES → the next display will be the first parameter of level 2 if
(1) IN = speed controller permanent output current.
(2) Warning, the configuration parameters cannot be modified during braking. Set 25.5 s as the last
operation if permanent braking is required.
These parameters only appear if the associated functions are selected.
*
Example : SP3 and SP4 only appear as a factory preset.
58
ration
Page 59

Installation
Extension of functions (level 2 parameters)
Factory
Code Function
UFt Selection of the type of n nLd L Configu-
voltage/frequency ratio ration
- L : constant torque for motors connected in parallel or special motors
- P : variable torque
- n : sensorless flux vector control for applications with a constant torque
- nLd : energy saving, for applications with variable torque
tUn Auto-tune no YES no Configu-
Only active for V/F ratios : ration
n and nLd
- no : no (factory parameters of standard IEC motors)
- donE (auto-tune has already been performed) : auto-tune parameters already in use
- YES : triggers auto-tune.
When auto-tune is completed, rdY is displayed. Returning to tUn, donE appears next.
If the tnF fault appears, it is because the motor is not adapted : use L or P mode.
UnS Nominal motor voltage. Configu-
Use the value shown on the motor ration
rating plate.
Maximum, minimum and factory preset values depend on the model and the bFr parameter (level 1)
ATV18…M2. 230 240 200 V1
ATV18…N4 .bFr = 50 400 460 380 V1
ATV18…N4. bFr = 60 460 460 380 V1
FrS Nominal motor frequency bFr 320 40 Hz ø1 Configu-
Use the value shown on the motor ration
rating plate if it is different from the supply frequency set by bFr
tFr Maximum output frequency 60 320 40 Hz ø1 Configu-
brA Automatic adaptation of the YES YES no Configu-
deceleration ramp time, if the latter ration
leads to overvoltage on braking.
This function prevents tripping when there is a ObF fault.
YES : Active function, no : Inactive function
This function may be incompatible with ramp positioning and with the use of a brake resistor.
SLP Slip compensation (1) 50Hz ø1 Adjust.
This parameter only appears if the
UFt mode is configured for n mode.
The value in Hz corresponds to the slip in nominal torque
Maximum Minimum
preset value value
Unit (
Resolution
minimum
increment)
Type
ration
E
N
G
L
I
S
H
(1) The factory preset depends on the speed controller rating.
59
Page 60

Installation
Extension of functions (level 2 parameters)
Factory
Code Function
tLS Limiting of operation time at 0 2{5 0 s ø1 Adjust.
low speed (zero setpoint and start
command present).
tLS = 0 : function inactive.
Automatic restart occurs on the ramp when the reference reappears or after a break when the start
command is reestablished.
LI2 Reassignment of logic input LI2
Ensure that the logic inputs are switched off beforehand.
- If a function has already been assigned to another input, it will still appear, but
to be memorized.
- If functions PS2 and PS4 are both assigned, any change to the assignment of the input linked to
the function PS2 will only be recognized when the assignment of the input linked to the PS4
E
N
G
L
I
S
H
function has been changed.
When AIC is assigned as a rrS PS4 OFF Configusumming input for AI1 and one of the ration
logic inputs is assigned to PS2 (1) :
- OFF : not assigned
- rrS : "reverse" rotation direction (2 operating directions)
- dCI : fixed DC injection braking (In speed controller for 5 s, then 0.5 Ith)
- FSt : fast stop. This function is active when the input is switched off
- JOG : jog operation (2)
- PS2 : 2 preset speeds
- PS4 : 4 preset speeds (2)
When AIC is assigned as rrS FSt OFF Configu-
PI regulator feedback : ration
- OFF See functions
- rrS and
- dCI comments
- FSt above
When no logic input rrS PS2 OFF Configu-
is assigned to PS2 : ration
- OFF
- rrS See functions
- dCI and
- FSt comments
- JOG above
- PS2
Maximum Minimum
preset value value
Unit (
increment)
Resolution
minimum
ENT
will not cause it
Type
(1) This is the case for a factory preset.
(2) These functions display the corresponding adjustments in level 1 parameters. Set these parameters
(JOG, SP2, SP4).
60
Page 61

Installation
Extension of functions (level 2 parameters)
Code Function
Factory
Maximum Minimum
preset value value
Unit (
Resolution
minimum
increment)
Type
LI3 Reassignment of logic input PS2 " " Configu-
LI3 : same as LI2 ration
LI4 Reassignment of logic input PS4 " " Configu-
LI4 : same as LI2 ration
LO Assignment of the logic input SrA SrA FtA Configu-
1) SrA : speed reference reached ration
by the motor, with a threshold of
± 2,5 Hz 2) FtA : frequency threshold crossed (Fdt)
Hysteresis
Reference
Speed
LO
+2,5 Hz
-2,5 Hz
-2,5 Hz
+2,5 Hz
Threshold Fdt
Frequency
LO
Assigning FtA causes the
Fdt setting to appear in level 1 parameters.
0.2 Hz
Note : If the reference is less than Set this parameter
0.5 Hz, the output LO is reset to 0.
AIC Assignment of the analog input
AIC/AI2.
If the logic inputs are not assigned SAI PIF SAI Configu-
to the preset speeds (PS2 - PS4) ration
or to jog operation (JOG):
- SAI : Summing with AI1
- PIF : PI regulator feedback.
This configuration automatically assigns input AI1 as the regulator reference and displays the
adjustments in the level 1 parameters : rPG, rIG, FbS.
Note : This configuration is only possible if the user has previously been using the following
configurations, in the order :
1) LI4 = OFF or FSt
2) LI3 = OFF or dCI
3) LI2 = OFF or rrS
If a logic input is assigned SAI SAI SAI Configuto the preset speeds ration
(PS2 - PS4) or to jog operation (JOG):
- SAI : Summing with AI1
CrL Configuration of input AIC/AI2 : ø0 ‘0 ø0 mA Configu-
ration
- ø0 : AIC : 0 - 20 mA / AI2 : 0 + 10 V
- ‘0 : AIC : 4 - 20 mA / AI2 : 2 + 10 V
E
N
G
L
I
S
H
61
Page 62

Installation
Extension of functions (level 2 parameters)
Factory
Code Function
SPr Automatic catching a spinning load no YES no Configu-
with speed search. After a short ration
power break, the motor restarts on a ramp using its effective speed. The speed search time canreach
3.2 s. The speed reference and operating direction should be maintained on a restart.
- no : Function not active
- YES : Function active
SFr Switching frequency ‘0 1ë0 ë2 kHz ø1 Adjust.
The switching frequency can be
adjusted to reduce the noise generated by the motor.
Over 4 kHz, derating must be applied to the output current of the speed controller, depending on
the model :
- ATV-18U09M2, U18M2, U29M2, U41M2, U54M2 : no derating,
- other references :
E
N
G
StP Controlled stop on power break : no YES no Configu-
L
I
S
H
Atr Automatic restart, after no YES no Configu-
FCS Return to the factory preset no YES no Configu-
CPU Software version (information) Display
. up to 8 kHz : 5 % derating,
. over 8 kHz : 10 % derating.
Control of motor stopping during a ration
power break, following a ramp which is self adapting as a function of the restored kinetic energy.
- no : Function inactive
- YES : Function active
locking on fault, if the fault is no ration
longer present and the other
operating conditions allow. To restart, a series of automatic attempts are performed at increasing
intervals : 1 s, 5 s, 10 s, then 1 min for subsequent attempts.
If the start has not been achieved after 6 min, the procedure is abandoned and the speed controller
remains locked until it is switched off and then switched on again.
The faults which enable this function are : OHF, OLF, USF, ObF, O5F.
The fault relay of the speed controller then remains activated if the function is active. The speed
setpoint and the operating direction must be retained.
Ensure that an unespected restart does not present any risk to people or equipment.
- no : Function inactive
- YES : Function active
no : no ration
YES : yes, the next display will be
rdY
Display of the software version
Maximum Minimum
preset value value
Resolution
Unit (
increment)
minimum
Type
62
Page 63

Maintenance - Replacements and repairs
Before performing any operation on the speed controller, switch off the power supply and wait for the
capacitors to discharge (takes approximately 1 minute). The red indicator lamp should be off.
DC voltage to terminals PA and PB and hidden terminals PO, PC can reach 800 to 900 V
depending on the mains voltage.
In case of a fault during installation or operation, firstly ensure that the guidelines relating to the environment,
mounting and connections have been followed.
Maintenance
The Altivar 18 does not require any preventive maintenance. However, the user is advised to do the following
at regular intervals :
- check the state and tightness of connections,
- ensure that the temperature in the area around the equipment remains at an acceptable level, and that
ventilation is effective (average lifetime of fans : 3 to 5 years depending on the conditions of use),
- ensure the speed controller is free from dust.
Maintenance assistance
The first fault detected is memorized and displayed on the display if the voltage is maintained : the speed
controller locks itself and the fault relay trips.
Clearing the fault
Remove the power supply to the speed controller.
Find the cause of the fault in order to eliminate it.
Reconnect the power supply : this will clear the fault if it has been corrected.
E
N
G
L
I
S
H
In some cases the equipment may automatically restart after the fault has disappeared, if this function has
been programmed.
Replacements and repairs
For repairs and replacements on Altivar 18 speed controllers, consult your local Schneider office.
63
Page 64

Maintenance assistance
Faults which can be reset with the automatic restart function, after the cause of the fault has been
corrected
Fault Probable cause Remedies
OHF -I2t too high - Check the motor load, the speed controller
speed controller or ventilation and the environment.
overload - speed controller temperature Wait for it to cool before restarting.
OLF -I2t motor too high - Check the setting of the motor thermal
motor overload protection, and check the motor load.
OSF - mains voltage too high - Check the mains voltage.
overvoltage - mains interference
in steady state
or during acceleration
USF - Mains supply voltage too low - Check the voltage and the voltage parameter.
under voltage - Momentary drop in voltage - Reset.
ObF - Braking too abrupt - Increase the deceleration time.
E
overvoltage or driving load - Add brake resistor if necessary.
on deceleration - Activate the function brA if it is compatible
N
G
L
I
S
Faults which cannot be automatically reset. The cause of the fault must be corrected before resetting
H
by switching the controller off and then on again
too high
Wait for it to cool before restarting.
- Weakened load resistance - Change the load resistance.
with the application.
Fault Probable cause Remedies
OCF - Short-circuit or earthing - Having disconnected the speed controller,
overcurrent at speed controller output check the connection cables, motor isolation
- Overcurrent in the brake - Check the resistor selected.
resistor Having disconnected the speed controller,
dbF - Exceeding the capacity - Check the brake resistor selected.
braking circuit of the braking circuit Check the ohmic resistance value.
overload Ensure that the speed controller rating is
InF - Internal fault - Check the environment
internal fault (electromagnetic compatibility).
tnF - Special motor - Use L or P mode.
auto-tune error - Power motor not adapted to
the speed controller
EEF - Internal fault - Return the speed controller for
64
and state of the windings.
check the connection cables, insulation of
the resistor and its ohmic value.
suitable for the application.
- Return the speed controller for
servicing/repair.
servicing/repair.
Page 65

Beim Einschalten des Frequenzumrichters werden die Komponenten des Leistungsteils und
eine Reihe anderer Steuerungskomponenten mit der Netzstromversorgung verbunden.
Berühren dieser Teile ist äußerst gefährlich.
Das
Nach dem Ausschalten des ALTIVAR
wird.
Diese Zeitdauer wird von den Kondensatoren für die Entladung benötigt.
Der Motor kann während des Betriebs angehalten werden, indem der Fahrbefehl oder der
WARNUNG
Frequenzsollwert gesperrt werden, während der Frequenzumrichter eingeschaltet bleibt. Wenn
die Sicherheit von Personen es erfordert, daß unvorhergesehene Neustarts verhindert werden,
ist diese elektronische Sperre nicht ausreichend,
werden, die den Stromkreis unterbrechen.
D
E
U
Der Frequenzumrichter verfügt über Sicherheitsvorrichtungen, die den Frequenzumrichter und
T
damit den Motor im Fall von Fehlern ausschalten können. Der Motor selbst kann durch
S
mechanische Fehler blockiert werden. Außerdem können Spannungsschwankungen und
C
insbesondere Stromausfälle zum Stehenbleiben führen.
H
Die Beseitigung der Ursachen des Stehenbleibens kann bewirken, daß der Motor erneut startet,
wodurch Gefahren für bestimmte Geräte oder Anlagen auftreten können, insbesondere solchen,
die Sicherheitsbestimmungen entsprechen.
In solchen Fällen muß der Benutzer Vorkehrungen treffen, die ein erneutes Starten verhindern.
Dies kann insbesondere durch einen Sillstandswächter geschehen, der die Spannungsversorgung
HINWEIS
des Frequenzumrichters unterbricht, wenn der Motor unvorhergesehen anhält.
Das Gerät entspricht den IEC-Normen.
Im allgemeinen
bevor ein elektrischer oder mechanischer Eingriff an der Anlage oder am Gerät erfolgt.
Die Änderung oder Weiterentwicklung der in diesem Dokument vorgestellten Produkte und
Materialien bleibt jederzeit vorbehalten, sowohl aus technischen Gesichtspunkten als auch in
der Art ihrer Bedienung. Ihre Beschreibung darf in keiner Weise als bindend angesehen werden.
muß die Spannungsversorgung des Frequenzumrichters ausgeschaltet werden,
muß 1 Minute gewartet werden, bevor das Gerät berührt
vielmehr müssen Vorrichtungen vorgesehen
66
Page 66

Warnung
Der Altivar 18 muß als Bauteil angesehen werden. Er ist weder ein Gerät noch ein einsatzbereites
Ausrüstungsteil nach europäischen Vorschriften (Maschinen-Richtlinie und Richtlinie über
elektromagnetische Verträglichkeit). Es unterliegt der Verantwortung des Betreibers, dafür zu
sorgen, daß seine Anlage diesen Vorschriften entspricht.
Dieser Frequenzumrichter muß gemäß internationalen und nationalen Normen installiert und
angeschlossen werden. Diese Übereinstimmung unterliegt der Verantwortung desjenigen, der
das System zusammenbaut und der unter anderem die EMV-Richtlinie der Europäischen
Gemeinschaft beachten muß.
Die in diesem Dokument enthaltenen Angaben müssen angewendet werden, um die grundlegenden
Anforderungen der EMV-Richtlinie zu erfüllen.
D
E
U
T
S
C
H
67
Page 67

D
E
U
T
S
C
H
68
Page 68

Inhalt
Der "Altivar 18" 66
Einleitende Prüfungen 70
Wahl des Frequenzumrichters 70
Verfügbares Drehmoment 71
Technische Daten 72
Abmessungen - Vorsichtsmaßnahmen beim Einbau 73
Einbau in ein Gehäuse oder einen Schaltschrank 74
Elektromagnetische Verträglichkeit 75
Zugang zu den Klemmen - Leistungsklemmen 76 und 77
Steuerklemmen 78
Schaltungsempfehlung 79
Funktionen, die keine Einstellung erfordern 80
Funktionen der Ein- und Ausgänge 81 bis 83
Kompatibilität von Funktionen 84
Parametrierung 85 bis 89
Installation 90 bis 94
Wartung - Auswechseln von Teilen und Reparaturen 95
Unterstützung bei der Wartung 96
D
E
U
T
S
C
H
69
Page 69

Einleitende Prüfungen
Nach dem Auspacken des Altivar 18 prüfen, daß er beim Transport nicht beschädigt wurde. Es muß überprüft
werden, daß die Angaben auf dem Typenschild des Frequenzumrichters mit denen auf dem Lieferschein und
auf dem Bestellschein übereinstimmen.
Wahl des Frequenzumrichters
Versorgungsnetz Motor Altivar 18
Netz- Leitungs- Leistung Daueraus- Max. Verlust- Typ Gewicht
span- strom (1) auf gangs- Über- leistung
nung bei U1 bei U2 Typenschild strom gangs- bei Nenn-
U1…U2
V AAkWHPAAW kg
200…240 4,4 3,9 0,37 0,5 2,1 3,1 23 ATV-18U09M2 1,5
50/60 Hz
einphasig 7,6 6,8 0,75 1 3,6 5,4 39 ATV-18U18M2 1,5
13,9 12,4 1,5 2 6,8 10,2 60 ATV-18U29M2 2,1
19,4 17,4 2,2 3 9,6 14,4 78 ATV-18U41M2 2,8
200…230 16,2 14,9 3 – 12,3 18,5 104 ATV-18U54M2 3,3
50/60 Hz
dreiphasig 20,4 18,8 4 5 16,4 24,6 141 ATV-18U72M2 3,3
28,7 26,5 5,5 7,5 22 33 200 ATV-18U90M2 7,8
D
E
380…460 2,9 2,7 0,75 1 2,1 3,2 24 ATV-18U18N4 2
U
50/60 Hz
T
dreiphasig 5,1 4,8 1,5 2 3,7 5,6 34 ATV-18U29N4 2,1
S
C
H
38,4 35,3 7,5 10 28 42 264 ATV-18D12M2 7,8
6,8 6,3 2,2 3 5,3 8 49 ATV-18U41N4 3,1
9,8 8,4 3 – 7,1 10,7 69 ATV-18U54N4 3,3
strom (2) last
12,5 10,9 4 5 9,2 13,8 94 ATV-18U72N4 3,3
16,9 15,3 5,5 7,5 11,8 17,7 135 ATV-18U90N4 8
21,5 19,4 7,5 10 16 24 175 ATV-18D12N4 8
31,8 28,7 11 15 22 33 261 ATV-18D16N4 12
42,9 38,6 15 20 29,3 44 342 ATV-18D23N4 12
(1) Typischer Wert ohne zusätzliche Drossel
(2) Für 60 Sekunden
Der Altivar 18 ist für die Bereitstellung der erforderlichen Leistung für jede dieser Motorgrößen
ausgelegt.
70
Page 70

Verfügbares Drehmoment
Dauerbetrieb
Bei eigenbelüfteten Motoren hängt die Motorkühlung von der Drehzahl ab. Eine Leistungsminderung tritt bei
Drehzahlen unterhalb der halben Nenndrehzahl auf.
Betrieb bei Überdrehzahl
Da die Spannung sich nicht mehr mit steigender Frequenz ändern kann, verringert sich die Magnetisierung
des Motors, es kommt zu Drehmomentverlusten. Beim Hersteller ist in Erfahrung zu bringen, ob der Motor
bei Überdrehzahl betrieben werden darf.
Drehmomenteigenschaften:
C/Cn
1,5
1,2
0,95
0,5
1
3
21
1 Dauermoment: eigenbelüfteter Motor
2 Dauermoment: fremdbelüfteter Motor
3 Maximales Drehmoment in Übergangs-
zuständen: typische Kurve bei ±10 % Wert:
1,5 Mn für 60 s
0
1
25
30
50
60
N (Hz)
Hinweis: Bei einem Sondermotor können die Nennfrequenz und die maximale Frequenz von 40 bis 320 Hz
eingestellt werden.
D
E
U
T
S
C
H
71
Page 71

Technische Daten
Umgebung
Schutzart IP31
Vibrations- und Stoßfestigkeit 0,6 gn von 10 bis 50 Hz
nach EN 50178 2 gn von 50 bis 150 Hz
Schmutzfestigkeit IEC 664, Schärfegrad 2. Den Frequenzumrichter vor Staub,
Maximale relative Luftfeuchtigkeit 93 % ohne Kondensation und Tropfwasser. Besteht die
Umgebungslufttemperatur Lagerung: -25°C bis +65°C
nach EN 50178 Betrieb:
Max. Aufstellhöhe für Betrieb 1000 m ohne Leistungsminderung. Darüber mindert sich der
IP20 (ohne Abdeckplatte auf Oberseite des Umrichters)
ätzenden Gasen, Flüssigkeitsspritzern usw. schützen.
Gefahr von Kondensation, ist ein Heizsystem vorzusehen.
-10°C bis +40°C ohne Leistungsminderung, mit Abdeckplatte
-10°C bis +50°C ohne Leistungsminderung, ohne Abdeckplatte
Strom um 3 % pro zusätzliche 1000 m.
Elektrische Eigenschaften
Stromversorgung Spannung - einphasig: 200 V -15 % bis 240 V +10 %
D
E
Ausgangsspannung Maximale Spannung gleich der Netzspannung
U
Ausgangsfrequenzbereich 0,5 bis 320 Hz
T
S
Max. Übergangsstrom 150 % des Nennstroms des Frequenzumrichters für 60 Sekunden
C
H
Bremsmoment 30 % des Motor-Nenndrehmoments ohne Bremswiderstand
Frequenz 50/60 Hz ±5%
- dreiphasig: 200 V -15 % bis 230 V +10 %
380 V -15 % bis 460 V +10 %
(typischer Wert). Bis zu 150 % mit optionalem Bremswiderstand.
Frequenzauflösung - Anzeige: 0,1 Hz
Taktfrequenz Kann von 2,2 bis 12 kHz eingestellt werden.
Schutzvorrichtungen des - Elektrische Isolation zwischen Strom- und Steuerungskreisen
Frequenzumrichters (Eingänge, Ausgänge, Quellen)
Motorschutz Schutz im Frequenzumrichter integriert durch Berechnung von I2t
72
- Analogeingänge: 0,1 Hz für max. 100 Hz
- Schutz gegen Kurzschlüsse:
. interne Quellen verfügbar
. zwischen Ausgangsphasen U - V - W
. zwischen den Ausgangsphasen und Erde für Umrichter von 5,5
bis 15 kW
- Thermischer Schutz gegen übermäßige Überhitzung und
Überströme
- Sicherheitsvorrichtungen bei Unter- und Überspannungen
- Überspannungsschutz bei Bremsung
Page 72

Abmessungen - Vorsichtsmaßnahmen beim Einbau
Abmessungen
ATV18iiii
b
c
ATV18 abcGHØ
U09M2, U18M2 112 182 121 100 170 5
U29M2, U18N4, U29N4 149 184 157 137 172 5
U41M2, U54M2, U72M2, U41N4, U54N4, U72N4 185 215 158 171 202 6
U90M2, D12M2, U90N4, D12N4 210 300 170 190 280 7
D16N4, D23N4 245 390 190 225 370 10
Ø
H==
G
==
a
Vorsichtsmaßnahmen beim Einbau
Das Gerät vertikal einbauen.
Nicht in der Nähe von Heizvorrichtungen einbauen.
Ausreichend Freiraum lassen, damit genug Luft für Kühlung zirkulieren kann. Das Gerät wird von unten nach
oben belüftet.
IP2O: Die Abdeckplatte auf der Oberseite entfernen (selbstklebende Folie).
Durchsatz der geräteinternen Lüfter
≥ 100
ATV-18U09M2, U18M2, U18N4 : nicht belüftet
ATV-18U29M2, U29N4 : 0,25 m3/Minute
ATV-18U41M2, U54M2, U72M2, U41N4, U54N4, U72N4 :
0,75 m3/Minute
ATV-18U90M2, D12M2, U90N4, D12N4, D16N4, D23N4 :
1,3 m3/Minute.
D
E
U
T
S
C
H
≥ 50 ≥ 50
≥ 100
73
Page 73

Einbau in ein Gehäuse oder einen Schaltschrank
Die auf Seite 73 aufgeführten Vorsichtsmaßnahmen müssen beachtet werden.
Zur Gewährleistung der Luftzirkulation im Frequenzumrichter:
- Belüftungsgitter vorsehen.
- Prüfen, ob die Belüftung ausreicht. Falls nicht, Fremdbelüftung mit einem Filter vorsehen.
- Für IP 54 Spezialfilter vorsehen.
- Die Blindplatte von der Oberseite des Frequenzumrichters entfernen.
Staub- und feuchtigkeitsgeschütztes Metallgehäuse (Schutzart IP 54)
Der Frequenzumrichter muß unter bestimmten Umgebungsbedingungen in einem staub- und
feuchtigkeitsgeschützten Gehäuse eingebaut werden: Staub, ätzendes Gas, hohe Luftfeuchtigkeit mit
Gefahr von Kondensation oder Tropfwasser, Flüssigkeitsspritzer usw.
Wenn der Frequenzumrichter ein nicht belüftetes Modell ist, ein Gebläse für die Luftzirkulation im Gehäuse
vorsehen, um warme Stellen im Gerät zu vermeiden.
Dies bedeutet, daß der Frequenzumrichter in einem Gehäuse verwendet werden kann, wo die maximale
Innentemperatur 50 °C erreichen kann.
Berechnung der Größe des Gehäuses
Maximaler thermischer Widerstand Rth (°C/W):
D
E
U
T
S
C
H
θ° - θ°e
Rth =
Verlustleistung des Frequenzumrichters: siehe Seite 70.
Die Verlustleistung der anderen Geräte muß addiert werden.
Wirksame Wärmeableitungsfläche des Gehäuses S (m2):
(Seiten + Oberseite + Vorderseite, wenn der Frequenzumrichter an der Wand befestigt wird)
S =
Bei einem Metallgehäuse: K = 0,12 mit einem internen Gebläse
P P = gesamte im Gehäuse auftretende Verlustleistung in W
K
Rth
θ° = maximale Temperatur im Gehäuse in °C
θ°e = maximale externe Temperatur in °C
K = thermischer Widerstand pro m2 des Gehäuses
K = 0,15 ohne Gebläse
θ° ≤ 40 °C θ° ≤ 40 °C
Warnung: Keine isolierten Gehäuse verwenden, da diese eine geringe Leitfähigkeit aufweisen.
74
Page 74

Elektromagnetische V erträglichkeit
Installation : in Übereinstimmung mit Normen EN55011, Klasse A, EN61800-3, IEC1800-3.
Allgemeine Regeln
- Erdverbindungen zwischen Frequenzumrichter, Motor und Kabelabschirmung müssen nach HochfrequenzGesichtspunkten niederohmig gestaltet sein.
- Abgeschirmte Kabel verwenden, wobei die Abschirmung Motor- und Steuerkabeln beidseitig rundum
kontaktiert und geerdet sein muß. Diese Abschirmung kann ganz oder teilweise in Form von Rohren oder
Metallkanälen ausgeführt werden, solange keine Unterbrechungen der Verbindungen vorkommen.
Installationsdiagramm
1
2
ATV 18
5
3
4
1- Montageplatte (nicht lackiertes Stahlblech) mit korrosionsgeschützten Leitern (Verdrahtung
für Maschinenerdung). Lackierter Stahl kann unter der Bedingung verwendet werden, daß niederohmiger
Kontakt zu den Auflageflächen von Umrichter (2) und Kabelschellen (5) gewährleistet ist.
2- Altivar 18 direkt auf der Montageplatte befestigt (niederohmige Erdung).
3- Nicht abgeschirmte Netzanschlußkabel oder Kabel für Netzdrossel, falls verwendet.
4- Nicht abgeschirmte Kabel für Kontakte des Störmelderelais.
5- Die Abschirmung für die Motor- (6) und Steuerkabel (7) muß so nahe wie möglich am Frequenzumrichter
befestigt und niederohmiggeerdet werden:
- Die Abschirmung abisolieren.
- Die abisolierten Teile der Abschirmung mit Kabelschellen der richtigen Größe am Blech befestigen.
- Art der Kabelschellen: rostfreier Stahl
Die Kabelschellen müssen fest angezogen werden, um einen guten Kontakt zu gewährleisten.
6- Abgeschirmtes Motorkabel, Abschirmung an beiden Enden geerdet
Diese Abschirmung muß ununterbrochen sein, etwaige zwischenliegende Anschlußleisten müssen
sich in einem abgeschirmten Metallgehäuse befinden.
7- Abgeschirmtes Steuerkabel.
Für Anwendungen, die zahlreiche Leiter erfordern, sollten kleine Querschnitte verwendet werden
(0,5 mm2).Die Abschirmung muß an beiden Enden geerdet werden. Sie muß ununterbrochen sein,
etwaige zwischenliegende Anschlußleisten müssen sich in einem abgeschirmten Metallgehäuse befinden.
Hinweis: Die niederohmige Erdung von Frequenzumrichter, Motor und Kabelabschirmung entbindet nicht
davon, die Schutzleiter PE (grün-gelb) an die entsprechenden Anschlüsse an jedem der Geräte anzuschließen.
6
7
75
D
E
U
T
S
C
H
Page 75

Zugang zu den Klemmenleisten - Leistungsklemmen
Zugang zu den Klemmenleisten
Um Zugang zu den Klemmenleisten zu erhalten, muß die mit 2 Schrauben befestigte Abdeckung entfernt
werden.
Position der Anschlußleiste: am unteren Teil des Altivar
1 - Steuerklemmen
2 - Leistungsklemmen
3 - Klemme zum Anschließen eines Schutzleiters mit einem
Querschnitt von 10 mm2 nach EN50178 (Kriechstrom gegen
Erde)
DATA ENT
13
2
D
E
Die Frequenzumrichter sind mit einer Kabeldurchführplatte aus Metallversehen, in deren Öffnungen sich
U
Blindstopfen aus Gummi befinden, die durchstochen werden können, um Kabel hindurchzuführen, und die
T
Kabel gleichzeitig schützen. Diese Metall-Durchführungen können EMV-PG-Verschraubungen aus Metall
S
aufnehmen.
C
H
Leistungsklemmenleisten
Eigenschaften der Anschlüsse
Altivar ATV-18 kapazität moment
U09M2, U18M2 AWG14 2,5 1
U29M2, U41M2
U54M2, U72M2
U18N4, U29N4 AWG10 6 1,2
U41N4, U54N4
U72N4
U90M2, D12M2,
U90N4, D12N4
D16N4, D23N4 AWG6 16 4
76
Max. Anschluß- Anzugs-
AWG mm
AWG8 10 2,4
2
in Nm
Page 76

Leistungsklemmenleisten
Funktion der Anschlüsse
Anschluß Funktion
L1
L2 Netz-
L3
s
PA Ausgang zum
PB Bremswiderstand
U
V alle Typen
W
s
Anschlußbelegungen
L1 L2 s PA PB U V W s
L1 L2 L3
s PA PB U V
spannung
Altivar-
Erdungsanschluß
nicht verwenden alle Typen
Ausgänge zum
Motor
Altivar-
Erdungsanschluß
W s
für Altivar
ATV-18
alle Typen
nur dreiphasige
alle Typen
alle Typen
alle Typen
ATV-18 einphasig
ATV-18 dreiphasig außer D16N4 und D23N4
D
E
U
T
S
C
H
PA PB
L1 L2 L3 s U V W s
ATV-18D16N4 und D23N4
77
Page 77

Steuerklemmen
Maximale Anschlußkapazität: 1,5 mm2, AWG16
Anzugsmoment: 0,5 Nm
Werkseinstellung des Frequenzumrichters
Steuerklemmen galvanisch vom Leistungsteil getrennt
Anschluß Funktion Kenndaten
SA Störmelderelais: Schaltvermögen der Kontakte:
SC Kontakt "NC" zieht bei Ein- - min. 10 mA für 5 Va
SB schalten des Umrichters an, - max. bei induktiver Belastung (cos ϕ = 0,4, L/R = 7 ms)
+10 Stromversorgung für Sollwert- 10 V
AI1 Frequenzsollwert als Spannung Analogeingang 0 +10 V, Impedanz 30 kΩ
AI2 Spannungs- Analogeingang 0 +10 V, Impedanz 30,55 kΩ
AIC Stromsollwert, Analogeingang 0 -20 mA (Werkseinstellung)
COM Bezugspotential für Logik- und
LI1 Fahrbefehl Rechtslauf Logikeingänge Impedanz 3,5 kΩ
LI2
LI3
D
E
U
T
S
C
H
LI4 LI2, LI3, LI4 können konfiguriert werden.
+ 24 Stromversorgung für + 24 V geschützt, max. Rate 100 mA
LO+ Stromversorgung für Wird mit intern +24 V oder +24 V
LO Frequenzsollwert erreicht SPS-kompatibler Logikausgang (Open Collector)
fällt bei Störung ab 1,5 A bei 250 Vc und 1,5 A bei 30 Va
Potentiometer 1 auf 10 kΩ
oder oder
(Aufsummierung von AI1) AI2/AIC kann konfiguriert werden. Nicht beide
Analogeingänge sowie den
Logikausgang
Fahrbefehl Linkslauf
voreingestellte Frequenzen
Logikeingänge und -ausgänge
Logikausgang (max. 30 V) einer externen Quelle verbunden.
+15%
10 mA max. geschützt
+ 0
oder 4 - 20 mA, Impedanz 400 Ω
gleichzeitig verdrahten
Spannungsversorgung +24 V (max. 30 V)
Zustand 0 wenn <5 V, Zustand 1 wenn >11 V
+24 V max., 20 mA bei interner Quelle
oder 200 mA bei externer Quelle.
LO kann konfiguriert werden.
78
Page 78

Schaltungsempfehlung
Schaltungsempfehlung bei Verwendung aller Ein- und Ausgänge
Netzspannung 3-phasig
Netzspannung 1-phasig
(1)
L2
L3
L1
U
V
W
V1
U1
W1
M
3 c
Bremswiderstand,
falls erforderlich
SB
PAPB+10
PO
(2)
SA
SC
SollwertPotentiometer
LI1
AI1
LI2
COM
0-20 mA
4-20 mA
oder
0 +10 V
LI3
(4)
LI4
+24
AIC
AI2LOLO+
KA
(3)
Alternative Verdrahtung
(externe 24-V-Quelle)
LI2
LI3
LI1
LI4
COM
0 V
24-V-Quelle
(4)
+24
LO+
+24 V
(1) Netzdrossel, falls erforderlich (ein- oder dreiphasig je nach Netz und Umrichtertyp)
(2) Störmelderelaiskontakte, für Signalisierung des Umrichterzustands
(3) Externes Relais oder 24 V-Eingang von SPS
(4) Interne +24 V-Quelle. Bei Verwendung einer externen 24 V-Quelle die 0 V mit dem COM-Anschluß
verdrahten, den Anschluß +24 des Frequenzumrichters nicht verwenden.
Hinweis: Alle induktiven Komponenten, die sich in der Nähe des Umrichters befinden oder mit diesem
galvanisch gekoppelt sind, müssen entstört werden (Relais, Schaltschütze, Magnetventile usw.).
Auswahl von zugehörigen Komponenten
Siehe Altivar 18-Katalog.
Empfehlungen zur Verdrahtung
D
E
U
T
S
C
H
Stromversorgung
Die Empfehlungen für Kabelquerschnitte befolgen, die in den Normen angegeben sind.
Der Frequenzumrichter muß geerdet werden, um Vorschriften hinsichtlich hoher Ableitströme (über 3,5 mA)
zu erfüllen. Ein Schutz der Anlage durch einen FI-Schutzschalter wird nicht empfohlen, da der Ableitstrom
des Umrichters Gleichstromanteile enthält. Wenn mehrere Frequenzumrichter an einer Netzzuleitung
installiert sind, muß jeder Frequenzumrichter separat geerdet werden. Es wird empfohlen, eine Netzdrossel
vorzusehen (siehe Katalog).
Die Leistungskabel getrennt von den niedrigpegeligen Signalkreisen in der Installation (Detektoren, SPS,
Meßvorrichtungen, Video, Telefon) verlegen.
Befehle
Die Steuerkreise und Leistungskreise voneinander trennen. Für Steuer- und Sollwertleitungen empfiehlt es
sich, ein abgeschirmtes und verdrilltes Kabel mit einer Verdrillungsschlag zwischen 25 und 50 mm zu
verwenden. Die Abschirmung wird dabei an jedem Ende geerdet.
79
Page 79

Funktionen, die keine Einstellung erfordern
Störmelderelais, Quittierung von Fehlern
Das Störmelderelais zieht an, wenn der Frequenzumrichter eingeschaltet wird und keine Störung aufweist.
Es besteht aus einem Wechselkontakt mit einem gemeinsamen Kontaktpunkt.
Störungen werden wie folgt quittiert:
- Umrichter spannungslos schalten und nach Erlöschen derAnzeige und der roten LED, erneut zuschalten.
- Automatisch in den unter der Funktion "Automatischer Wiederanlauf" beschriebenen Fällen.
Thermischer Schutz des Frequenzumrichters
Funktion:
Schutz über einen am Kühlkörper angebrachten Thermistor
Indirekter Schutz des Frequenzumrichters durch Berechnung von I2t
Diese Funktion gewährleistet den Temperaturschutz des Frequenzumrichters bei normalen Umgebungs-
temperaturbedingungen.
Typische Auslösepunkte:
- Motorstrom = 185 % des Nennstroms des Frequenzumrichters: 2 Sekunden
- Motorstrom = 150 % des Nennstroms des Frequenzumrichters: 60 Sekunden
- Motorstrom ≤ 110 % des Nennstroms des Frequenzumrichters: keine Auslösung
Mögliche Leistungsminderungen für Taktfrequenzen oberhalb 4 kHz werden automatisch berücksichtigt und
reduzieren das zulässige I2t.
D
E
U
T
S
C
H
Belüftung des Frequenzumrichters
Warnung: Wenn der Frequenzumrichter ausgeschaltet wird, wird die Berechnung von I2t auf 0
zurückgesetzt.
Bei Modellen mit einem Gebläse wird das Gebläse automatisch mit Strom versorgt, wenn der Frequenzumrichter
entriegelt wird (Betriebsrichtung + Sollwert). Es wird mehrere Sekunden, nachdem sich der Frequenzumrichter
verriegelt hat, ausgeschaltet (Motorfrequenz < 0,5 Hz und Gleichstromremsung beendet).
80
Page 80

Funktionen der Ein- und Ausgänge
Logikeingänge
• LI1: Rechtslauf. Kann nicht neu zugeordnet werden.
Wenn der Kontakt geschlossen ist, wird ein dem Frequenzsollwert
entsprechendes rechtslaufendes Drehfeld erzeugt*.
LI1 +24
• LI2, LI3, LI4: können den folgenden Funktionen zugewiesen werden:
- Linkslauf: Zuweisung von rrS
Wenn der Kontakt geschlossen ist, wird ein dem Frequenzsollwert
LI2
+24
LI3
LI4
- 2 Frequenzen: Zuweisung von PS2
entsprechendes linkslaufendes Drehfeld erzeugt*.
Kontakt offen: Sollwert = LSP + Analogsollwert
LI2
LI3
LI4
+24
Kontakt geschlossen: Sollwert = HSP
- 4 Frequenzen: Zuweisung von einem Eingang zu PS2 und einem anderen zu PS4 (es ist nicht möglich,
nur PS4 zuzuweisen)
K2
K1
K1 und K2 offen: Sollwert = L5P + Analog-Sollwert
K1 geschlossen und K2 offen: Sollwert = SP3 (Niveau 1)
K1 offen und K2 geschlossen: Sollwert = SP4 (Niveau 2)
LI2
LI2
LI3
LI4
(PS4)
(PS2)
LI3
LI4
+24
K1 und K2 geschlossen: Sollwert = HSP
D
E
U
T
S
C
H
*
): Der zuerst angelegte Fahrbefehl ist vorrangig, werden beide Fahrbefehle gleichzeitig angelegt, läuft der
Motor im Rechtslauf.
81
Page 81

Funktionen der Ein- und Ausgänge
- JOG: Einrichtbetrieb. Zuweisung von JOG
Wenn der JOG- und ein Fahrbefehlkontakt geschlossen sind, beträgt die
Rampenzeit 0,1 s unabhängig von den Hoch- und Auslaufzeiten (ACC/dEC).
Wenn der Frequenzumrichter sich bereits in Betrieb befindet und der JOGKontakt geschlossen wird, gelten die Rampenzeiten ACC und dEC.
Die minimale Zeit zwischen zwei JOG Operationen ist 0,5 s.
JOG
Fahrbefehl
LI2
LI3
LI4
+24
Sollwert
Frequenz
JOG JOG JOG
Soll.
Soll.
Hinweise: 1- Während des "Einrichtbetriebs" ist die automatische Gleichstrombremsung beim Motorhalt
gesperrt.
2- Gleichstrombremsung über den Logikeingang hat Priorität vor dem JOG Betrieb.
D
- Schnellhalt: Zuweisung von FSt
E
U
T
S
C
H
LI2
+24
LI3
LI4
Gefûhrter Auslauf mit 1/4 der Auslaufzeit dEC (Selbstanpassung, wenn die Bremskapazität überschritten
Hinweis: Der Schnellhalt-Befehl wird aktiviert, wenn der Kontakt zwischen
dem Eingang und +24 V offen ist.
wird).
Hinweis: Beim Schnellhalt ist Bremsen durch Gleichstrombremsung (automatisch oder über den Logikeingang)
gesperrt.
- Gleichstrombremsung: Zuweisung von dCI
Hinweis: Der Befehl für Gleichstrombremsung wird aktiviert, wenn der
Kontakt zwischen dem Eingang und +24 V geschlossen ist.
LI2
+24
LI3
LI4
Der Bremsstrom ist gleich dem Nennstrom des Frequenzumrichters für 5 Sekunden. Nach 5 Sekunden wird
der Bremsstrom begrenzt auf 0,5 ItH Motor.
Hinweise: 1- Die automatische Gleichstrombremsung beim Motorhalt bleibt aktiv, auch wenn die Funktion
dCI zugewiesen wurde.
2- Schnellhalt hat Priorität über Gleichstrombremsung.
82
Page 82

Funktionen der Ein- und Ausgänge
Analogeingänge
Ein zusätzlicher Analogeingang kann verwendet werden als:
- Spannungseingang AI2
- Stromeingang AIC
und kann zugewiesen werden als:
- Summiereingang von AI1
- PI-Regler-Istwert
Summierung mit AI1: Zuweisung von SAI
AI1
0 ; +10 V
AI2
0 ; +10 V
oder
AIC
0 ; 20 mA oder 4 ; 20 mA
PI-Regler-Istwert: Zuweisung von PIF
Diese Zuweisung konfiguriert AI1 automatisch als Sollwert für den PI-Regler.
+
Soll.
+
I
rIG
0,01 bis 100
x
Soll.
1
S
AI1
0 ; +10 V
AI2
0 ; +10 V
oder
AIC
0 ; 20 mA oder 4 ; 20 mA
(0.1…100)
P
x Fb5
rPG
0,01 bis 100
Die Einstellparameter rPG, rIG und FbS sind in Niveau 1 zugänglich.
- Einstellung des Parameters AIC: 0 - 20 mA oder 4 - 20 mA
Hinweis: Die PI-Funktion ist mit den folgenden Funktionen inkompatibel:
- voreingestellte Frequenzen (PS2/PS4)
- Einrichtbetrieb (JOG)
D
E
U
T
S
C
H
83
Page 83

Kompatibilität von Funktionen
Nicht alle Funktionen können miteinander kombiniert werden.
Funktionen, die nicht in der untenstehenden Tabelle aufgeführt sind, sind mit allen Funktionen kompatibel.
Gleichstrombremsung
Gleichstrombremsung
beim Anhalten des Motors
Summierende Sollwerte
PI-Regelung
Fahrbefehl Rechtslauf
Fahrbefehl Linkslauf
Gleichstrombremsung
über
D
Logikeingang
E
Schnellhalt
U
JOG (Einrichtbetrieb)
T
S
voreingestellte Frequenzen
C
H
Nicht gleichzeitig nutzbare Funktionen
inkompatible Funktionen
kompatible Funktionen
nicht verwendet
➞
➞
➞
Die Funktion auf die der Pfeil zeigt, unterbricht die andere.
➞
Die zuerst aktivierte Funktion ist prioritär, d. h. die danach aufgerufene Funktion wird nicht
ausgeführt.
beim Anhalten des Motors
Summierende Sollwerte
Fahrbefehl Rechtslauf
PI-Regelung
➞
➞
➞
➞
Fahrbefehl Linkslauf
Gleichstrombremsung
➞
➞
➞
➞
über Logikeingang
➞
➞
JOG (Einrichtbetrieb)
Schnellhalt
➞➞
➞
➞➞➞
➞
➞➞
➞
voreingestellte Frequenzen
➞
➞
Die Kombination von Funktionen wird außerdem dadurch begrenzt, daß der Altivar 18 insgesamt 3 logische
Eingänge zur Verfügung stellt.
Funktionen, die logische Eingänge zur Aktivierung benötigen:
- einen Eingang für die Funktionen:
Fahrbefehl Linkslauf, Gleichstrombremsung, Schnellhalt, JOG, 2 voreingestellte Drehzahlen.
- zwei Eingänge für die Funktion:
4 voreingestellte Drehzahlen.
84
Page 84

Parametrierung
Der Altivar ist werkseitig für die gebräuchlichsten Einsatzbedingungen voreingestellt:
- Anwendungen mit konstantem Drehmoment
Voreinstellungen
- Anzeige: Frequenzumrichter bereit (bei Motorhalt), Motorfrequenz (im Betrieb)
- Versorgung: 50 Hz
- Motorspannung: 230 V oder 400 V, je nach Typ
- Hochlaufzeit, Auslaufzeit: 3 Sekunden
- Kleine Frequenz: 0 Hz - Große Frequenz: 50 Hz
- Verstärkung Frequenzregelkreis: Standard (33 %)
- Thermischer Motor-Nennstrom = Frequenzumrichter-Nennstrom
- Gleichstrombremsung bei Motorhalt = 0,7 Frequenzumrichter-Nennstrom, für 0,5 Sekunden
- Betrieb mit konstantem Drehmoment, vektororientierte Regelung ohne Rückführung (SVC)
- Logikeingänge:
. 2 Drehrichtungen (LI1, LI2)
. 4 voreingestellte Frequenzen (LI3, LI4): 0 Hz, 5 Hz, 25 Hz, 50 Hz
- Analogeingänge:
. AI1: Frequenzsollwert 0 +10 V
. AI2 (0 +10 V) oder AIC (0, 20 mA) Summierung von AI1
- Logikausgang:
. LO: Frequenzsollwert erreicht
- Automatische Anpassung der Auslaufzeit bei Überspannung im Zwischenkreis während des Bremsens
- Taktfrequenz: 4 kHz
Wenn diese Werte der Anwendung entsprechen, kann der Frequenzumrichter verwendet werden ohne
Veränderung der Einstellungen verwendet werden.
Bei Ansteuerung über Netzschütz:
- Häufige Betätigung des Netzschützes KM1 vermeiden (vorzeitige Alterung der
Glättungskondensatoren), die Eingänge LI1 bis LI4 zur Steuerung des Frequenzumrichters
verwenden.
- Im Fall von Betriebszyklen < 60 s sind diese Maßnahmen von höchster Wichtigkeit, sonst
kann der Ladewiderstand zerstört werden.
Einstellung durch den Benutzer und Sonderfunktionen
Falls erforderlich, werden die Anzeige und die Tasten verwendet, um Einstellungen vorzunehmen und die
auf den folgenden Seiten aufgeführten Funktionen zu konfigurieren. Es gibt zwei Zugangsniveaus:
- Niveau 1: Einstellungen (Standardkonfiguration)
- Niveau 2: Sonderfunktionen
Es ist einfach, die Werkseinstellung wiederherzustellen.
Es gibt drei Arten von Parametern:
- Anzeige: vom Frequenzumrichter angezeigte Werte
- Einstellung: Änderung während des Betriebs oder bei Motorhalt möglich
- Konfiguration: Änderung nur bei Motorhalt, nach Beendigung der Gleichstrombremsung möglich, kann
während des Betriebs nur angezeigt werden
- Es muß sichergestellt werden, daß die während des Betriebs vorgenommenen Änderungen
keine Gefahren mit sich bringen. Es ist ratsam, Änderungen nur bei Motorhalt
durchzuführen.
D
E
U
T
S
C
H
85
Page 85

Parametrierung
Integriertes Terminal
Funktionen der Tasten und Anzeige
rote LED : leuchtet solange GleistromZwischenkreis nicht entladen ist
rdY
Wechselt zum vorherigen Parameter
oder erhöht den angezeigten Wert
Wechselt zum nächsten Parameter
oder vermindert den angezeigten Wert
Normale Anzeige (keine Störungen, und nach der Inbetriebnahme)
- Init : Initialisierungsabfolge
- rdY : Frequenzumrichter bereit
- 4“0 : Anzeige des Frequenzsollwerts
- dcb : Gleichstrombremsung erfolgt
D
- rtrY : Automatischer Wiederanlauf erfolgt
E
U
T
Verwendung des integrierten Terminals
S
C
Durchlaufen der Parameter: nächster Parameter, vorheriger Parameter
H
Anzeige des Parameterwerts, seines Zustands oder seiner Zuweisung:
Ändern des Werts, des Zustands oder der Zuweisung:
DATA ENT
vier 7-Segment-Anzeigen
Speichert den angezeigten
Wert oder Parameter
Umschaltung zwischen
Parametercode und -wert
DATA
Durch Drücken von oder wird die Einstellung nicht gespeichert.
Speicherung der angezeigten Einstellung:
Die Anzeige blinkt während der Speicherung.
Rückkehr zu den Parametercodes:
86
DATA
ENT
Page 86

Parametrierung
Verwendung des integrierten Terminals
Beispiel 1: Einstellung der Hochlaufzeit
bFr
ACC “0
DATA ENT
(1 Blinken)
{8 {8
ACC
dEC
Beispiel 2: Zugang zu den Parametern von Niveau 2
usw.
FLt
L2A no
L2A
UFt
Beispiel 3: Konfiguration des Logikausgangs
DATA ENT
Zugang Niveau 2
usw.
LI4
LO SrA
DATA ENT
DATA
(1 Blinken)
YES YES
DATA
(1 Blinken)
FtA FtA
D
E
U
T
S
C
H
LO
AIC
DATA
usw.
87
Page 87

Parametrierung
Zugang zu den Parametern und Funktionen
Niveau 1
oder
rdYrdY 4{54{5
Anfangszustand
(normale Anzeige)
FrHFrH
LCrLCr
rFrrFr
ULnULn
bFr
ACC
dEC
LSP
HSP
D
E
U
T
S
C
H
FLG
ItH
JPF
IdC
tdC
UFr
SP3
*
SP4
*
JOG
*
Fdt
*
rPG
*
rIG
*
FbS
*
Niveau 2
SonderfunktionenEinstellungen
UFt
tUn
*
UnS
FrS
tFr
brA
SLP
*
tLS
LI2
LI3
LI4
LO
AIC
CrL
SPr
SFr
StP
L2A
= no
FLtFLt
L2A
Zugang zu Niveau 2
L2A = YES
YES
no
Atr
FCS
CPU
L2A = YES
Anzeige
Parameter wird nur angezeigt, wenn die zugehörige Funktion konfiguriert wurde.
*
Konfiguration, kann nur bei Motorhalt geändert
werden.
Einstellung, kann bei Motorhalt und im Betrieb
geändert werden.
88
Page 88

Parametrierung
Einstellung des Frequenzumrichters (Niveau-1-Parameter)
Code Funktion
rdY Frequenzumrichter bereit Anzeige
FrH Frequenz-Sollwert FrH Hz 0,1 Anzeige
LCr Motorstrom A 0,1 Anzeige
rFr Rotationsfrequenz Hz 0,1 Anzeige
ULn Netzspannung V 1 Anzeige
bFr Eckfrequenz. Die gleiche Frequenz 50 60 50 Hz Konfigu-
wie die Netzfrequenz wählen. ration
Der Wert von bFr stellt die Motor-Nennfrequenz und -spannung auf die folgenden Werte ein:
ATV18…M2: - bFr = 50: 230 V/50 Hz
ATV18…N4: - bFr = 50: 400 V/50 Hz
Diese Voreinstellungen können mit Parametern von Niveau 2 verändert werden.
ACC Hochlaufzeit “0 3600 ø1 s 0,1 oder 1 Einstell.
dEC Auslaufzeit “0 3600 ø1 s 0,1 oder 1 Einstell.
Die Zeiten sind auf die Eck- (0,1 bis
frequenz bFr bezogen. 999,9 dann
Beispiel: Rampe 10 s: - wenn bFr = 50 Hz, 5 s benötigt für Veränderung um 25 Hz, 1000 bis
- wenn bFr = 60 Hz, 5 s benötigt für Veränderung um 30 Hz. 3600)
LSP Kleine Frequenz 0 = HSP 0 Hz 0,1 Einstell.
HSP Hohe Frequenz: Sicherstellen, daß 50 = tFr = LSP Hz 0,1 Einstell.
diese Einstellung für den Motor und (2)
die Anwendung geeignet ist.
FLG Verstärkung Frequenzregelkreis 33 100 0 1 Einstell.
Abhängig von der Trägheit und dem
Widerstandsmoment der Maschine:
- Maschinen mit hohem Widerstandsmoment oder hoher Massenträgheit: Schrittweise auf einen Wert
zwischen 33 und 0 verringern.
- Maschinen mit schnellen Zyklen, niedrigem Widerstandsmoment und niedriger Massenträgheit:
Die Verstärkung schrittweise auf einen Wert zwischen 33 und 100 erhöhen. Eine zu hohe
Verstärkung kann zu instabilem Betrieb führen.
ItH Thermischer Motorschutz (4). I
ItH auf Nennstrom einstellen, (3) (3) (3)
der auf dem Typenschild des Motors angegeben ist. Um den thermischen Motorschutz aufzuheben,
den Wert bis auf seinen Maximalwert erhöhen.
Wahl des
Parameters,
der im Betrieb
angezeigt
wird (1)
- bFr = 60: 230 V/60 Hz
- bFr = 60: 460 V/60 Hz
Werksein-
stellung wert wert
(1) LCr, rFr und ULn können nicht mit
Maximal- Minimal-
1,15 IN0,5 I
N
ENT
gespeichert werden, die Parameter werden solange
Einheit
A 0.1 Einstell.
N
Auflösung
Art
angezeigt, wie der Motor läuft oder bis ein anderer Parameter gewählt wird.
tFrtFr
(2)
tFr ist ein Niveau-2-Parameter, der von 40 bis 320 Hz eingestellt werden kann und auf 60 Hz
tFrtFr
voreingestellt ist. Für
HSPHSP
HSP >60 Hz zuerst die Einstellung von
HSPHSP
tFrtFr
tFr vorher ändern.
tFrtFr
(3) IN = Dauerausgangsstrom des Frequenzumrichters
(4) Warnung: - Wenn Motoren in Parallelschaltung an einen Frequenzumrichter angeschlossen sind, für
jeden Motoranschluß ein Temperaturrelais vorsehen, um das Risiko einer ungleichmäßigen
Lastaufteilung zu vermindern.
- Wenn der Frequenzumrichter ausgeschaltet wird, wird I2t auf Null zurückgesetzt.
D
E
U
T
S
C
H
89
Page 89

Installation
Einstellung des Frequenzumrichters (Niveau-1-Parameter)
Werks-
Code Funktion
JPF Unterdrückung einer kritischen 0 HSP 0 Hz 0,1 Einstell.
Frequenz,die zu mechanischen
Resonanzen führt: Der statische Betrieb wird in einem 2 Hz breiten Band (JPF +/-1Hz) unterbunden.
Einstellung auf 0 deaktiviert die Funktion.
(Werkseinstellung)
einstellung wert wert
Maximal- Minimal-
f
JPF
Einheit
2 Hz
Sollwert
Auflösung
Art
Idc Strom der automatischen Gleichstrom- 0,7 I
bremsung bei Motorhalt (1) (1)
tdc Zeit der automatischen Gleichstrom- 0,5 25,5 0 s 0,1 Einstell.
bremsung bei Motorhalt
Die Einstellung auf 0 hebt die Gleichstrombremsung bei Motorhalt auf, bei Einstellung auf 25,5
wird permanent gebremst(2).
UFr Parameter zur Optimierung des Dreh- 20 100 0 1 Einstell.
moments bei niedriger Frequenz
SP3 3. voreingestellte Frequenz S HSP LSP Hz 0,1 Einstell.
*
SP4 4. voreingestellte Frequenz 25 HSP LSP Hz 0.1 Einstell.
*
JOG Sollwert bei Einrichtbetrieb 10 10 0 Hz 0,1 Einstell.
*
Fdt Frequenzschwelle für die 0 HSP LSP Hz 0,1 Einstell.
*
D
E
U
T
*
S
C
*
H
*
Funktion "Frequenzschwelle erreicht"
des Ausgangs LO. Dieser Schwellwert ist mit einer Hysterese von 0,2 Hz behaftet.
rPG P-Anteil des 1 10ø0 ø01 ø01 Einstell.
PI-Reglers
rIG I-Anteil des 1 10ø0 ø01 1/s ø01 Einstell.
PI-Reglers
FbS Multiplikationsfaktor für Istwert des 1 10ø0 ø1 ø1 Einstell.
PI-Reglers, bezogen
auf den Analogeingang AIC/AI2
FLt Anz. der zuletzt aufgetretenen Störung Anzeige
durch Drücken der Taste
Wenn keine Störung aufgetreten war, wird nErr angezeigt.
DATA
N
IN0,25
ItH A 0,1 Einstell.
L2A Zugang zu Parametern in Niveau 2 no YES no Konfigu-
nein: no → die nächste Anzeige ist rdY (Anfangsanzeige) mit
ja: YES → die nächste Anzeige ist der erste Parameter von Niveau 2 mit
(1) IN = Dauerausgangsstrom des Frequenzumrichters
(2) Achtung! Die Konfigurationsparameter können nicht während der Gleichstrombremsung geändert
werden. 25,5 s als letzte Operation einstellen, wenn Dauerbremsung erforderlich ist.
Diese Parameter erscheinen nur, wenn die zugehörigen Funktionen gewählt werden.
*
Beispiel: SP3 und SP4 erscheinen nur wenn PS2 und PS4 Logikeingängen zugeordnet sind.
90
ration
Page 90

Installation
Funktionserweiterung (Niveau-2-Parameter)
Werks-
Code Funktion
UFt Art der Spannungs-/Frequenz- n nLd L Konfigu-
kennlinie (U/f-Kennlinie) ration
- L: konstantes Moment für parallel geschaltete oder Sondermotoren
- P: variables Moment
- n: vektororientierte Regelung ohne Drehgeber (SVC) für Anwendungen mit konstantem Moment
- nLd: Energieeinsparung, für stoßfreie Anwendungen mit variablem Drehmoment
tUn Automatische Motorvermessung no YES no Konfigu-
Nur aktiv für U/f-Kennlinien: ration
n und nLd
- no : nein (Verwendung von Standardparametern
- donE: Motor wurde bereits vermessen
- YES: aktiviert automatische Motorvermessung
Nach Beendigung der automatischen Motorvermessung wird rdY angezeigt. Durch Rückkehr zu
tUn erscheint anschließend donE. Wenn der Fehler tnF angezeigt wird, konnte der Motor nicht
vermessen werden: Kennlinie L oder P verwenden.
UnS Motor-Nennspannung Konfigu-
Den Wert verwenden, der auf dem ration
Typenschild des Motors angegeben ist.
Maximal-, Minimalwerte und Werkseinstellungen sind vom Typ und dem Parameter bFr
(Niveau 1) abhängig.
ATV18…M2. 230 240 200 V1
ATV18…N4 .bFr = 50 400 460 380 V1
ATV18…N4. bFr = 60 460 460 380 V1
FrS Motor-Nennfrequenz bFr 320 40 Hz ø1 Konfigu-
Den Wert verwenden, der auf dem ration
Typenschild des Motors angegeben ist, wenn er sich von der mit bFr eingestellten Netzfrequenz
unterscheidet.
tFr Maximale Motorfrequenz 60 320 40 Hz ø1 Konfigu-
brA Automatische Anpassung der YES YES no Konfigu-
Auslaufzeit, wenn beim Bremsen ration
Überspannung im Zwischenkreis entsteht.
Diese Funktion verhindert Verriegelung, mit dem Fehler ObF.
YES: Funktion aktiv, no: Funktion nicht aktiv
Diese Funktion ist bei Positionieranwendungen auszuschalten (no), evtl ist ein
Bremswiderstand vorzusehen.
SLP Schlupfkompensation (1) 50Hz ø1 Einstell.
Dieser Parameter erscheint nur, wenn die U/f-Kennlinie n (Parameter UFt) konfiguriert wurde.
Der Wert in Hz entspricht dem Schlupf bei Nennmoment.
einstellung wert wert
Maximal- Minimal-
Einheit
Auflösung
Art
ration
D
E
U
T
S
C
H
(1) Die Werkseinstellung ist je nach Umrichtertyp unterschiedlich.
91
Page 91

Installation
Funktionserweiterung (Niveau-2-Parameter)
Werks-
Code Funktion
tLS Begrenzung der Betriebszeit bei 0 2{5 0 s ø1 Einstell.
kleiner Frequenz LSP (Sollwert Null
und Startbefehl vorhanden)
tLS = 0: Funktion nicht aktiv
Neustart erfolgt gemäß Hochlqufzeit, wenn der Sollwert wieder vorliegt oder wenn nach
einer Bremsung der Fqhrbefehl wieder anliegt.
LI2 Neuzuweisung des Logikeingangs LI2
Sicherstellen, daß die Logikeingänge vorher ausgeschaltet werden.
- Wenn eine Funktion bereits einem anderen Eingang zugeordnet wurde, wird sie noch angezeigt,
aber wird durch Drücken von
- Wenn die Funktionen PS2 und PS4 beide zugewiesen wurden, wird eine Veränderung des
Eingangs, der mit der Funktion PS2 belegt ist, nur gespeichert, wenn vorher der mit der Funktion
PS4 belegte Eingang geändert wurde.
Wenn AIC als Summiereingang für rrS PS4 OFF KonfiguAI1 zugewiesen ist und einer der ration
Logikeingänge PS2 zugewiesen ist (1):
- OFF: nicht belegt
- rrS: Drehrichtung "links" (2 Drehrichtungen)
- dCI: Gleichstrombremsung (in Frequenzumrichter für 5 s, dann 0,5 Ith)
D
E
U
T
S
C
H
- FSt: Schnellhalt. Diese Funktion ist aktiv, wenn der Eingang ausgeschaltet ist.
- JOG: Einrichtbetrieb (2)
- PS2: 2 voreingestellte Frequenzen
- PS4: 4 voreingestellte Frequenzen (2)
Wenn AIC dem Istwert des rrS FSt OFF KonfiguPI-Reglers zugewiesen wurde: ration
- OFF Siehe Funktionen
- rrS und
- dCI Anmerkungen
- FSt oben.
Wenn kein Logikeingang rrS PS2 OFF KonfiguPS2 zugewiesen wurde: ration
- OFF
- rrS Siehe Funktionen
- dCI und
- FSt Anmerkungen
- JOG oben.
- PS2
einstellung wert wert
ENT
nicht gespeichert.
Maximal- Minimal-
Einheit
Auflösung
Art
(1) Werkseinstellung.
(2) Diese Funktionen fügen Niveau 1 die entsprechenden Parameter hinzu (JOG, SP2, SP4).
92
Page 92

Installation
Funktionserweiterung (Niveau-2-Parameter)
Werks-
Code Funktion
einstellung wert wert
LI3 Neuzuweisung des Logikeingangs PS2 " " Konfigu-
LI3: vgl. LI2 ration
LI4 Neuzuweisung des Logikeingangs PS4 " " Konfigu-
LI4: vgl. LI2 ration
LO Zuweisung des Logikausgangs SrA SrA FtA Konfigu-
1) SrA: Frequenzsollwert ration
erreicht, Hysterese ±2,5 Hz
Sollwert
-2,5 Hz
+2,5 Hz
Frequenz
LO
+2,5 Hz
-2,5 Hz
Hinweis: Wenn der Sollwert weniger als Schwellwert Fdt bei den Parametern
0,5 Hz beträgt, wird der Ausgang LO auf in Niveau 1.
0 zurückgesetzt
AIC Zuweisung des Analogeingangs
AIC/AI2.
Wenn die Logikeingänge nicht den SAI PIF SAI Konfigu-
voreingestellten Frequenzen ration
(PS2, PS4)oder dem Einrichtbetrieb (JOG)zugeordnet wurden:
- SAI: Summierung mit AI1
- PIF: Istwert PI-Regler
Diese Konfiguration belegt automatisch den Eingang AI1 als Regelsollwert und zeigt die PI-ReglerEinstellungen in den Parametern des Niveau 1 an: rPG, rIG, FbS.
Hinweis: Diese Konfiguration ist nur möglich, wenn der Benutzer vorher die folgenden
Konfigurationen in der nachstehenden Reihenfolge durchgeführt hat:
1) LI4 = OFF oder FSt
2) LI3 = OFF oder dCI
3) LI2 = OFF oder rrS
Wenn ein Logikeingang den SAI SAI SAI Konfiguvoreingestellten Frequenzen ration
(PS2 - PS4) oder dem Einrichtbetrieb (JOG) zugeordnet wurde:
- SAI: Summierung mit AI1
CrL Konfiguration des Eingangs AIC/AI2: ø0 ‘0 ø0 mA Konfigu-
- ø0: AIC: 0 - 20 mA / AI2: 0 +10 V
- ‘0: AIC: 4 - 20 mA / AI2: 2 +10 V
Maximal- Minimal-
Einheit
Auflösung
2) FtA: Frequenzschwelle überschritten
(Fdt)
Hysterese
Schwelle Fdt
Frequenz
LO
0,2 Hz
Durch Zuweisung von FtA erscheint der
Art
ration
D
E
U
T
S
C
H
93
Page 93

Installation
Funktionserweiterung (Niveau-2-Parameter)
Werks-
Code Funktion
SPr Automatisches Einfangen einer sich no YES no Konfigu-
drehenden Last mit Frequenzsuche. Nach einer Unterbrechung der ration
Versorgungspannung wird der Motor bei seiner aktuellen Frequenz eingefangen und gemäßRampe
auf den Sollwert gebracht. Die Zeitdauer der Frequenzsuche kann 3,2 s erreichen. Der
Frequenzsollwert und die Betriebsrichtung müssen bei einem Neustart aufrechterhalten werden.
- no : Funktion nicht aktiv
- YES: Funktion aktiv
SFr Taktfrequenz ‘0 1ë0 ë2 kHz ø1 Einstell.
Die Taktfrequenz kann eingestellt
werden, um die vom Motor erzeugten Geräusche zu reduzieren.
Über 4 kHz wird der Ausgangsstrom des Frequenzumrichters je nach Typ reduziert:
- ATV-18U09M2, U18M2, U29M2, U41M2, U54M2: keine Leistungsminderung
- andere Typen:
. bis 8 kHz: 5 % Leistungsminderung
. oberhalb 8 kHz: 10 % Leistungsminderung
StP Geführter Auslauf bei Netzausfall: no YES no Konfigu-
Der Motor wird geführt zum Stillstand gebracht, ration
die Rampenzeit richtet sich nach der kinetischen Energie und dem Widerstandsmoment der Last.
- no : Funktion nicht aktiv
- YES : Funktion aktiv
Atr Automatischer Wiederanlauf nach no YES no Konfigu-
D
E
U
T
S
C
H
einem Fehler, wenn der ration
Fehler nicht mehr besteht und
die anderen Betriebsbedingungen dies zulassen. Für den Wiederanlauf wird eine Reihe von
automatischen Versuchen mit zunehmenden Abständen durchgeführt: 1 s, 5 s, 10 s, dann 1 min für
nachfolgende Versuche.
Ist der Start innerhalb von 6 min nicht möglich, wird der Vorgang abgebrochen, und der
Frequenzumrichter bleibt verriegelt, bis er aus- und dann wieder eingeschaltet wird.
Die folgenden Fehler aktivieren diese Funktion: OHF, OLF, USF, ObF, O5F
Das Störmelderelais des Frequenzumrichters bleibt angezogen, wenn die Funktion aktiv ist. Der
Frequenzsollwert und die Betriebsrichtung müssen aufrechterhalten werden.
Es muß sichergestellt werden, daß ein Wiederanlauf zu einem ungeeigneten Zeitpunkt keine
Gefahr für Personen und Geräte darstellt.
- no : Funktion nicht aktiv
- YES : Funktion aktiv
FCS Rückkehr zur Werkseinstellung no YES no Konfigu-
no: nein ration
YES: ja, die nächste Anzeige ist
rdY
CPU Software-Version (Information) Anzeige
Anzeige der Software-Version
einstellung wert wert
Maximal- Minimal-
Einheit
Auflösung
Art
94
Page 94

Wartung - Auswechseln von Teilen und Reparaturen
Vor der Durchführung jeglicher Arbeiten am Frequenzumrichter die Stromversorgung ausschalten und
warten, bis die Kondensatoren entladen sind (dauert etwa 1 Minute). Die rote Anzeigelampe muß
erloschen sein.
Die Gleichspannung an den Anschlüssen PA und PB und den verdeckten Anschlüssen PO,
PC kann je nach Netzspannung 800 bis 900 V erreichen.
Bei einer Störung während der Installation oder im Betrieb muß zuerst sichergestellt werden, daß die
Anweisungen bezüglich der Umgebung, des Einbaus und der Anschlüsse befolgt wurden.
Wartung
Der Altivar 18 erfordert keine vorbeugende Wartung. Dem Benutzer wird jedoch empfohlen, folgende
Inspektionen in regelmäßigen Abständen durchzuführen:
- Überprüfung des Zustands und der Festigkeit der Verbindungen
- Sicherstellung, daß die Temperatur im Bereich um das Gerät auf dem zulässigen Niveau bleibt und daß
die Belüftung wirksam ist (durchschnittliche Nutzungsdauer von Gebläsen: 3 bis 5 Jahre, abhängig von den
Einsatzbedingungen)
- Erforderlichenfalls Staub vom Frequenzumrichter entfernen
Unterstützung bei der Wartung
Der erste festgestellte Fehler wird gespeichert und im Display angezeigt, wenn die Spannung aufrechterhalten
wird: der Frequenzumrichter wird gesperrt, das Störmelderelais fällt ab.
Aufhebung der Störung
Die Spannungsversorgung desFrequenzumrichters unterbrechen.
Die Ursache der Störung feststellen und beheben.
Die Spannungsversorgung wieder herstellen: die Störung wird quittiert wenn sie beseitigt wurde.
Bei bestimmten Fehlern erfolgt bereits nach der Beseitigung des Fehlers ein automatischer Wiederanlauf,
falls diese Funktion konfiguriert wurde.
D
E
U
T
S
C
H
Auswechseln von Teilen und Reparaturen
Wenden Sie sich für Reparaturen und Auswechseln von Teilen an Frequenzumrichtern des Typs Altivar 18
an Ihre Schneider-Niederlassung.
95
Page 95

Unterstützung bei der Wartung
Störungen, die quittiert werden können, nachdem die Ursache der Störung beseitigt wurde
Störung Wahrscheinliche Ursache Behebung
OHF -I2t zu hoch - Die Motorbelastung, die Belüftung des
Überlastung des oder Umrichters und die Umgebung prüfen.
Frequenzumrichters - Temperatur des Umrichters Vor dem Neustart abkühlen lassen.
OLF -I2t Motor zu hoch - Die Einstellung des Motor-Temperatur-
Motorüberlast Vor dem Neustart abkühlen lassen.
OSF - Netzspannung zu hoch - Die Netzspannung prüfen.
Überspannung bei - Netzstörungen
erreichter Frequenz
oder bei Hochlauf
USF - Netzspannung zu niedrig - Die Spannung und den
Unterspannung - Kurzzeitiger Spannungsabfall - Zurückstellen.
ObF - Bremsung zu abrupt, - Die Auslaufzeit dEC erhöhen.
Überspannung oder treibende Last - Erforderlichenfalls Bremswiderstand
bei Auslauf anschließen.
Störungen, die nicht automatisch quittiert werden können. Die Störungsursache muß beseitigt
D
werden, bevor Rückstellung durch Aus- und erneutes Einschalten des Frequenzumrichters erfolgt.
E
U
T
Störung Wahrscheinliche Ursache Behebung
S
OCF - Kurzschluß oder Erdschluß am - Den Frequenzumrichter abklemmen und die
C
Überstrom Ausgang des Umrichters Anschlußkabel, die Motorisolierung und den
H
zu hoch
schutzes und die Motorbelastung prüfen.
Spannungsparameter prüfen.
- Ladewiderstand beschädigt - Den Ladewiderstand prüfen.
- Die Funktion brA aktivieren, wenn sie mit
der Anwendung kompatibel ist.
Zustand der Wicklungen prüfen.
- Überstrom im - Den Bremswiderstand überprüfen.
Bremswiderstand Den Frequenzumrichter abklemmen und die
Anschlußkabel, die Isolation des Widerstands und seinen Ohm-Wert prüfen.
dbF - Überschreitung der Kapazität - Den gewählten Bremswiderstand prüfen.
Überlastung des des Bremskreises Den Widerstandswert in Ohm prüfen.
Bremskreises Sicherstellen, daß die Ausführung des
InF - Interner Fehler - Die Umgebung prüfen
interner Fehler (elektromagnetische Verträglichkeit).
tnF - Sondermotor - U/f-Kennlinie L oder P verwenden.
Fehler bei automat. - Motorleistung nicht an
Motorvermessung Frequenzumrichter angepaßt
EEF - Interner Fehler - Den Umrichter für Wartung/Reparatur
96
Frequenzumrichters für die Anwendung
geeignet ist.
- Den Umrichter für Wartung/Reparatur
einsenden.
einsenden.
Page 96

Cuando el variador está bajo tensión, los elementos de potencia así como un cierto número de
componentes de control están conectados a la red de alimentación.
peligroso tocarlos.
Es extremadamente
Después de desconectar la tensión del ALTIVAR,
aparato.
Este tiempo corresponde a la constante de tiempo de descarga de los condensadores.
En explotación, el motor puede pararse suprimiendo las ordenes de marcha o la consigna de
ATENCION
velocidad, mientras que el variador queda bajo tensión. Si la seguridad del personal exige evitar
cualquier rearranque intempestivo, este bloqueo electrónico es insuficiente:
circuito de potencia.
El variador comporta dispositivos de seguridad que pueden en caso de fallo ordenar la parada
del variador y por lo tanto la parada del motor. Este motor puede también sufrir una parada por
bloqueo mecánico. Finalmente, las variaciones de tensión, los cortes de alimentación en
particular, pueden igualmente originar paradas.
La desaparición de las causas de parada puede provocar un rearranque que provoque un peligro
E
para ciertas máquinas o instalaciones, en particular para aquellas que deben estar conformes
S
con las reglamentaciones relativas a la seguridad.
P
A
Es importante por lo tanto que en estos casos, el usuario se prevenga contra estas posibilidades
de rearranque principalmente mediante el empleo de un detector de velocidad baja, que
Ñ
provoque en caso de parada no programada del motor, el corte de la alimentación del variador.
O
L
La concepción de los equipos deberá estar conforme con las prescripciones de las normas IEC.
De forma general toda intervención, tanto en la parte eléctrica como en la parte mecánica de la
instalación o de la máquina, debe estar precedida
NOTA
Los productos y materiales presentados en este documento son en todo momento susceptibles
de evolución o de modificación tanto desde el punto de vista técnico y de aspecto como desde
el punto de vista de utilización. Su descripción no puede en ningún caso tener un aspecto
contractual.
esperar un minuto antes de intervenir en el
Prever un corte del
del corte de alimentación del variador.
98
Page 97

Aviso
El Altivar 18 debe ser considerado como un componente, no es ni una máquina ni un aparato listo
para su utilización según las directivas europeas (directiva de máquina y directiva de compatibilidad electromagnética). Es responsabilidad del cliente final garantizar la conformidad de su
máquina con estas normas.
La instalación y la puesta en marcha de este variador deben ser efectuadas en conformidad con
las normas internacionales y las normas nacionales del lugar de utilización. Esta puesta en
conformidad es responsabilidad del integrador el cual debe respetar entre otras, para la
comunidad europea, la directiva CEM.
El respeto de las exigencias esenciales de la directiva CEM está supeditado a la aplicación de las
instrucciones contenidas en este documento.
E
S
P
A
Ñ
O
L
99
Page 98

E
S
P
A
Ñ
O
L
100
Page 99

Sumario
El "Altivar 18" 98
Verificaciones preliminares 102
Elección del variador 102
Par disponible 103
Características técnicas 104
Dimensiones - precauciones de montaje 105
Montaje en cofre o en armario 106
Compatibilidad electromagnética 107
Acceso a los borneros - Borneros de potencia 108 y 109
Bornero de control 110
Esquema de conexionado 111
Funciones sin ajuste 112
Funciones configurables de las entradas lógicas y analógicas 113 a 115
Tabla de compatibilidad de las functiones 116
Puesta en servicio 117 a 126
Mantenimiento - Recambios y reparaciones 127
Asistencia al mantenimiento 128
101
E
S
P
A
Ñ
O
L
Page 100

Verificaciones preliminares
Sacar el Altivar 18 de su embalaje, y verificar que no ha sido dañado durante el transporte. Asegurarse de
que la referencia del variador escrita en la etiqueta está conforme con el albarán de entrega correspondiente
al pedido.
Elección del variador
Red Motor Altivar 18
Tensión Corriente Potencia Corriente Corriente Potencia Referencia Peso
de alimen- de línea (1) indicada de salida transi- disipada
tación a U1 a U2 en la placa perma- toria a carga
U1…U2
V AAkWHPAAW kg
200…240 4,4 3,9 0,37 0,5 2,1 3,1 23 ATV-18U09M2 1,5
50/60 Hz
monofásica 7,6 6,8 0,75 1 3,6 5,4 39 ATV-18U18M2 1,5
13,9 12,4 1,5 2 6,8 10,2 60 ATV-18U29M2 2,1
19,4 17,4 2,2 3 9,6 14,4 78 ATV-18U41M2 2,8
200…230 16,2 14,9 3 – 12,3 18,5 104 ATV-18U54M2 3,3
50/60 Hz
trifásica 20,4 18,8 4 5 16,4 24,6 141 ATV-18U72M2 3,3
28,7 26,5 5,5 7,5 22 33 200 ATV-18U90M2 7,8
38,4 35,3 7,5 10 28 42 264 ATV-18D12M2 7,8
380…460 2,9 2,7 0,75 1 2,1 3,2 24 ATV-18U18N4 2
50/60 Hz
trifásica 5,1 4,8 1,5 2 3,7 5,6 34 ATV-18U29N4 2,1
nente máx. (2) nominal
6,8 6,3 2,2 3 5,3 8 49 ATV-18U41N4 3,1
9,8 8,4 3 – 7,1 10,7 69 ATV-18U54N4 3,3
E
S
P
A
Ñ
O
L
(1) Valor típico sin inductancia adicional.
(2) Durante 60 segundos.
El Altivar 18 ha sido diseñado para alimentar motores con una potencia adaptada a cada uno de sus
calibres.
102
12,5 10,9 4 5 9,2 13,8 94 ATV-18U72N4 3,3
16,9 15,3 5,5 7,5 11,8 17,7 135 ATV-18U90N4 8
21,5 19,4 7,5 10 16 24 175 ATV-18D12N4 8
31,8 28,7 11 15 22 33 261 ATV-18D16N4 12
42,9 38,6 15 20 29,3 44 342 ATV-18D23N4 12
 Loading...
Loading...