

Page 1

Quick Start
Motion Control PTO Application Building Block
Connected Components Accelerator Toolkit
Page 2
Important User Information
IMPORTANT
Read this document and the documents listed in the additional resources section about installation, configuration, and
operation of this equipment before you install, configure, operate, or maintain this product. Users are required to
familiarize themselves with installation and wiring instructions in addition to requirements of all applicable codes, laws,
and standards.
Activities including installation, adjustments, putting into service, use, assembly, disassembly, and maintenance are required
to be carried out by suitably trained personnel in accordance with applicable code of practice.
If this equipment is used in a manner not specified by the manufacturer, the protection provided by the equipment may be
impaired.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from the
use or application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and
requirements associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or
liability for actual use based on the examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or
software described in this manual.
Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation,
Inc., is prohibited.
Throughout this manual, when necessary, we use notes to make you aware of safety considerations.
WARNING: Identifies information about practices or circumstances that can cause an explosion in a hazardous environment,
which may lead to personal injury or death, property damage, or economic loss.
ATTENTION: Identifies information about practices or circumstances that can lead to personal injury or death, property
damage, or economic loss. Attentions help you identify a hazard, avoid a hazard, and recognize the consequence.
Identifies information that is critical for successful application and understanding of the product.
Labels may also be on or inside the equipment to provide specific precautions.
SHOCK HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that dangerous
voltage may be present.
BURN HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that surfaces may
reach dangerous temperatures.
ARC FLASH HAZARD: Labels may be on or inside the equipment, for example, a motor control center, to alert people to
potential Arc Flash. Arc Flash will cause severe injury or death. Wear proper Personal Protective Equipment (PPE). Follow ALL
Regulatory requirements for safe work practices and for Personal Protective Equipment (PPE).
Allen-Bradley, Connected Components Workbench, Micro830, Micro800, PanelView, Kinetix, Rockwell Software, and Rockwell Automation are trademarks of Rockwell Automation, Inc.
Trademarks not belonging to Rockwell Automation are property of their respective companies.
Page 3

Connected Components Accelerator Toolkit Outline
Chapter 1 - Micro800 Controller PTO Axis Setup
Chapter 2 - System Validation
Getting Started CCAT with System
Design Assistant Quick Start,
publication CC-QS035
Follow this path to complete your Connected Components Accelerator Toolkit (CCAT) project.
Where to Start
RockRockwell Automation Publication CC-QS033A-EN-P - February 2014 3
Page 4

Where to Start
Notes:
4 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 5

Table of Contents
Preface
About This Publication. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Terminology. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Additional Resources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Available Connected Components Accelerator Toolkits . . . . . . . . . . . . . . 9
Chapter 1
Micro800 Controller PTO Axis Setup
System Validation
Before You Begin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
What You Need . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Follow These Steps. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Configure the Kinetix 3 Drive. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Configure Your Kinetix 3 Drive and Personal Computer
Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Connect to Your Drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Configure Your Drive by Using Connected Components
Workbench Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Configure the Micro800 Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Change to Your Controller Type . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Configure the PTO Channel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
I/O Assignment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Configure Drive Communication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Configure Communication Attributes . . . . . . . . . . . . . . . . . . . . . . . . . 28
Chapter 2
Before You Begin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
What You Need . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Follow These Steps. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
System Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Configure Your Controller Serial Port . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Configure Input Filter for High Speed Counter . . . . . . . . . . . . . . . . . . . . 36
Configure PanelView Component Terminal Communication
Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Connect Your Devices. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Download Your Program to the Controller . . . . . . . . . . . . . . . . . . . . . . . . 41
Configure the IP Address for Your PanelView Component
Terminal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Transfer Your HMI Application to the PanelView Component
Terminal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Validate Your System. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Understand the Machine Overview Screen . . . . . . . . . . . . . . . . . . . . . 46
Understand the Machine Functions Screen . . . . . . . . . . . . . . . . . . . . . 46
Explore the Command and Status Screen. . . . . . . . . . . . . . . . . . . . . . . 48
Explore the Axis Configuration Screen . . . . . . . . . . . . . . . . . . . . . . . . . 50
Explore the Kinetix 3 and HSC Configuration Screen . . . . . . . . . . . 51
Explore the Advance Move Screen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 5
Page 6

Table of Contents
Explore the Kinetix 3 Status Screen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Explore the Fault Screen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Appendix A
Kinetix 3 Drive Component-class
User-defined Functional Block
Global Variables
Motion Axis Setup for PTO Building
Block
Configure a Series A Kinetix 3 Drive
PTO Application Building Block User-defined Function Block . . . . . . 59
RA_Motion_Move_Cmd User-defined Function Block . . . . . . . . 59
RA_K3_MBUS_STS User-defined Function Block . . . . . . . . . . . . . . . . . 64
RA_K3_MBUS_STS_Extended User-defined Function Block. . . . . . . 67
Appendix B
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Appendix C
I/O assignment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
General. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
Motor and Load. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Limits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Dynamics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Homing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Appendix D
What You Need. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Configure Your Personal Computer and Kinetix 3 Drive
Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Configure Your Drive with Ultraware Software. . . . . . . . . . . . . . . . . . . . . 91
Configure Your Drive for Modbus Communication Protocol . . . . . . . . 93
6 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 7

Preface
About This Publication
This quick start is designed to provide instructions for implementing a Pulse-Train Output (PTO) motion control of a
Kinetix® 3 component-class drive by using Connected Components Workbench™ software and a Micro800™ programmable
logic controller (PLC).
To assist in the design and installation of your system, application files and other information are provided by the
Connected Components Accelerator Toolkit (CCAT). The CCAT provides bills of materials (BOM), CAD drawings for
panel layout and wiring, control programs, Human-machine interface (HMI) screens, and more. With these tools and the
built-in best-practices design, the system designer is free to focus on the design of their machine control and not on design
overhead tasks.
The CCAT is available on the Connected Components Accelerator Toolkit DVD, publication CC-QR002, or through
the Rockwell Software Download and Registration System (SDRS) at
rockwellautomation/products-technologies/connected-components/tools/accelerator-toolkit.page.
The beginning of each chapter contains the following information. Read these sections carefully before beginning work in
each chapter:
• Before You Begin - This section lists the steps that must be completed and decisions that must be made before
starting that chapter. The chapters in this quick start do not have to be completed in the order in that they appear,
but this section defines the minimum amount of preparation required before completing the current chapter.
• What You Need - This section lists the tools that are required to complete the steps in the current chapter. This
includes, but is not limited to, hardware and software.
• Follow These Steps - This section illustrates the steps in the current chapter and identifies the steps that are required
to complete the examples.
http://www.rockwellautomation.com/
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 7
Page 8

Preface
Terminology
Term (abbreviation) Definition
Application Sequence Programs User-modified programs that work together with the standard state machine logic to
Auto/manual Operation When the PanelView™ Component terminal is in Auto mode, the controller logic controls
Bill of Materials (BOM) A list of components needed for your system.
Building Block (BB) Tools for accelerating and simplifying the development of a Micro800 controller-based
Computer-Aided Design (CAD) A computer-based system developed to facilitate design of mechanical parts.
Connected Comp onents Accelerator Toolkit (CCAT) Software with application files and other information to speed the design and star tup of
Connected Components Workbench Software environment for configuring or programming Micro800 controllers, PanelView
Connected Components Workbench Project A project consists of one or more of the following:
Global Variables Project variables that can be accessed by any program, including all I/O and system
State Machine Control Code Machine logic for coordinating overall machine operation based on states. The state
Tag s A PanelView Component term for variables.
User-defined Function Blocks (UDFBs) Function block instructions that can be used like standard function block instruc tions
User-defined Object (UDO) A collection of PanelView Component terminal screen objects that can be pasted into a
control what the machine does while in the abort, clear, reset, run and stop states.
the machine and monitors machine status.
When the PanelView Component terminal switches to Manual mode, the terminal takes
over control. Command buttons and numeric entry fields are available only when the
machine is in Manual mode.
application. A typical building block includes a starting Bill of Material (BOM), ComputerAided Design (CAD) drawings, Micro800 controller programs, PanelView Component
terminal applications, and a quick star t document.
component-based machines.
Component terminals, Kinetix 3 drives, and other component-level products.
• Micro800 controller configuration
• Up to 256 Micro800 controller programs, each with program local variables
• Micro800 controller global variables
• PanelView Component terminal application
• Kinetix 3 drive parameter lists
variab les.
machine broadcasts commands and receives feedback information from each of the
building blocks via user-modified application sequence programs.
within any Connected Components Workbench programming language. These can be
written by anyone using Connected Components Workbench software. Many UDFBs are
posted on the Rockwell Automation sample code website: http://
samplecode.rockwellautomation.com/idc/groups/public/documents/webassets/
sc_home_page.hcst.
new screen.
8 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 9
Additional Resources
These documents contain additional information concerning related products from Rockwell Automation.
Resource Description
Connected Components Accelerator Toolkit DVD,
publication CC-QR002
Micro800 and Connected Components Workbench Getting
Started Guide, publication 2080-QR001
Micro800 and Connected Components Workbench Application
Guide, publication 2080-QR002
Micro800 Programmable Controller External AC Power Supply
Installation Instructions, publication 2080-IN001
Micro800 Plug-in Modules User Manual,
publication 2080-UM004
Micro820 Programmable Controllers User Manual,
publication 2080-UM005
Micro830™ Programmable Controllers User Manual, publication
2080-UM002
PanelView Component Installation Instructions, publication
2711C-IN001
PanelView Component Operator Terminals User Manual,
publication 2711C-UM001
Kinetix 3 Component Servo Drives User Manual, publication 2071-
UM001
Kinetix 3 Host Commands for Serial Communication Reference
Manual, publication 2071-RM001
Kinetix 3 Component Servo Drives Installation Instruction,
publication 2071-IN001
Provides files for the Connected Component Accelerator Toolkits.
Provides information on basic Micro800 controller and Connected Components Workbench software functions.
Provides procedures for completing basic tasks in Connected Components Workbench software and for using
Connected Components Workbench software with component-class products.
Provides information on mounting and wiring the optional external power supply.
Provides information on installing Micro800 plug-in modules and accessories including wiring and
troubleshooting.
Provides information on installing Micro820 controllers including wiring and troubleshooting.
Provides information on installing the Micro830 Programmable Controller including wiring and troubleshooting.
Provides information on installing the PanelView Component HMI terminals including wiring, grounding, and
troubleshooting.
Provides information about using PanelView Component HMI terminals.
Provides a reference guide for Kinetix 3 drive systems, and accessories. It also contains procedures on how to
install, wire, and troubleshoot your drive.
Provides information on the serial communication commands, both ASCII and ModBus-RTU, for interfacing a
motion controller with the Kinetix 3 drive.
Provides information on installing your Kinetix 3 drive system.
Preface
You can view or download publications at http://www.rockwellautomation.com/literature. To order paper copies of
technical documentation, contact your local Allen-Bradley distributor or Rockwell Automation sales representative.
Available Connected Components Accelerator Toolkits
For the most up-to-date listing of available Connected Components Accelerator Toolkits and related quick starts, refer to
these resources:
• Rockwell Automation Connected Components Accelerator Toolkit website at http://
www.rockwellautomation.com/rockwellautomation/products-technologies/connected-components/tools/
accelerator-toolkit.page
• Connected Components Accelerator Toolkit Building Block Project Descriptions Quick Reference, publication
CC-QR003
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 9
Page 10

Preface
Notes:Notes:
10 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 11
Chapter 1
Micro800 Controller PTO Axis Setup
In this chapter, you configure a Pulse-Train-Output channel in a Micro800 controller to control a Kinetix 3 drive. You set
up the Modbus RTU communication for the controller to monitor drive status.
Before You Begin
Review the Getting Started CCAT with System Design Assistant Quick Start, publication CC-QS035.
What You Need
Kinetix 3 Drive Setup:
• Personal computer with an available USB port
• Connected Components Workbench software, version 6 or later
• RSLinx® Classic software
• 1203-USB converter
• 2090-CCMUSDS-48AAxx Communication cable
• Kinetix 3 drive Series B or later; firmware revision 3.005 or later
Micro800 Controller Setup:
• Personal computer with an available USB port
• Connected Components Workbench software, version 6 or later
• USB printer cable (A to B) for personal computer to Micro800 controller communication
• Micro830 or Micro850 controller with transistor output
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 11
Page 12
Chapter 1 Micro800 Controller PTO Axis Setup
Start
Configure the Kinetix 3 Drive
on page 13
Configure Your Kinetix 3 Drive
and Personal Computer
Connection on page 14
Connect to Your Drive on
page 18
Configure Your Drive by Using
Connected Components
Workbench Software on
page 21
Configure the Micro800
Controller on page 24
Configure the PTO Channel on
page 26
Configure Drive
Communication on page 28
Follow These Steps
Follow these steps to configure your Micro800 Controller and Kinetix 3 drive for PTO.
12 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 13

Micro800 Controller PTO Axis Setup Chapter 1
Configure the Kinetix 3 Drive
In this section, you configure your personal computer and Series B Kinetix 3 drive with firmware revision 3.005 by using
Connected Components Workbench version
attached to the side of the product.
See Figure 1 and Figure 2 to identify the Series of your Kinetix 3 drive.
Figure 1 - Label of Series B Kinetix 3 Drive - That Is Supported by Connected Components Workbench Version 6 or Later
BULLETIN 2071 Kinetix 3 Component Servo Drive, 400W
CAT. NO. 2071-AP1 SERIES B PN-185999
INSTRUCTION MANUAL 2071-IN001x-EN-P FIRMWARE VER. V03.01
Figure 2 - Label of a Series A Kinetix 3 Drive - That Is Supported by Ultraware Software Only
6 or later software. You can find the hardware series identifier on the label
MAX SHORT CIRCUIT 1000,000A
BULLETIN 2071 Kinetix 3 Component Servo Drive, 1.1A
CAT. NO. 2071-AP1 SERIES A
MAX SHORT CIRCUIT 1000,000A
INSTRUCTION MANUAL 2071-IN001x-EN-P FIRMWARE VER. V02.00
To configure a Series A Kinetix 3 drive, refer to Configure a Series A Kinetix 3 Drive in Appendix D.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 13
Page 14

Chapter 1 Micro800 Controller PTO Axis Setup
5
2
1
3
4
Configure Your Kinetix 3 Drive and Personal Computer Connection
Follow these steps to configure the connection between your personal computer and your drive.
1. Verify your Kinetix 3 drive is Series B with firmware revision 3.005 or later.
Refer to page 13 for examples.
2. Use the keypad on the front of the drive to set the following parameters.
Parameter Name Parameter Setting
Drive Address Pr0.07 248
Serial Port Configuration Pr0.09 1102
where, 2 - 19,200 Kbps Baud Rate
0 - 8 Data Bits, No Parity, 1 Stop Bit
1 - Modbus-RTU protocol
1 - RS-485
3. Connect the Kinetix 3 drive to your personal computer by using cables shown here.
Item Description
1 Kinetix 3 drive
2 1203-USB converter cable, catalog number 2090-CCMUSDS-48AAxx
3 1203-USB converter
4 USB cable
5 Personal computer with Connected Components Workbench software
If you are prompted to install drivers, use the recommended drivers.
4. Verify the COM port number of the 1203-USB adapter in Device Manager on your computer, from the Start menu,
choose Run.
The Run dialog box appears.
5. Type devmgmt.msc in the Open field.
14 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 15
Micro800 Controller PTO Axis Setup Chapter 1
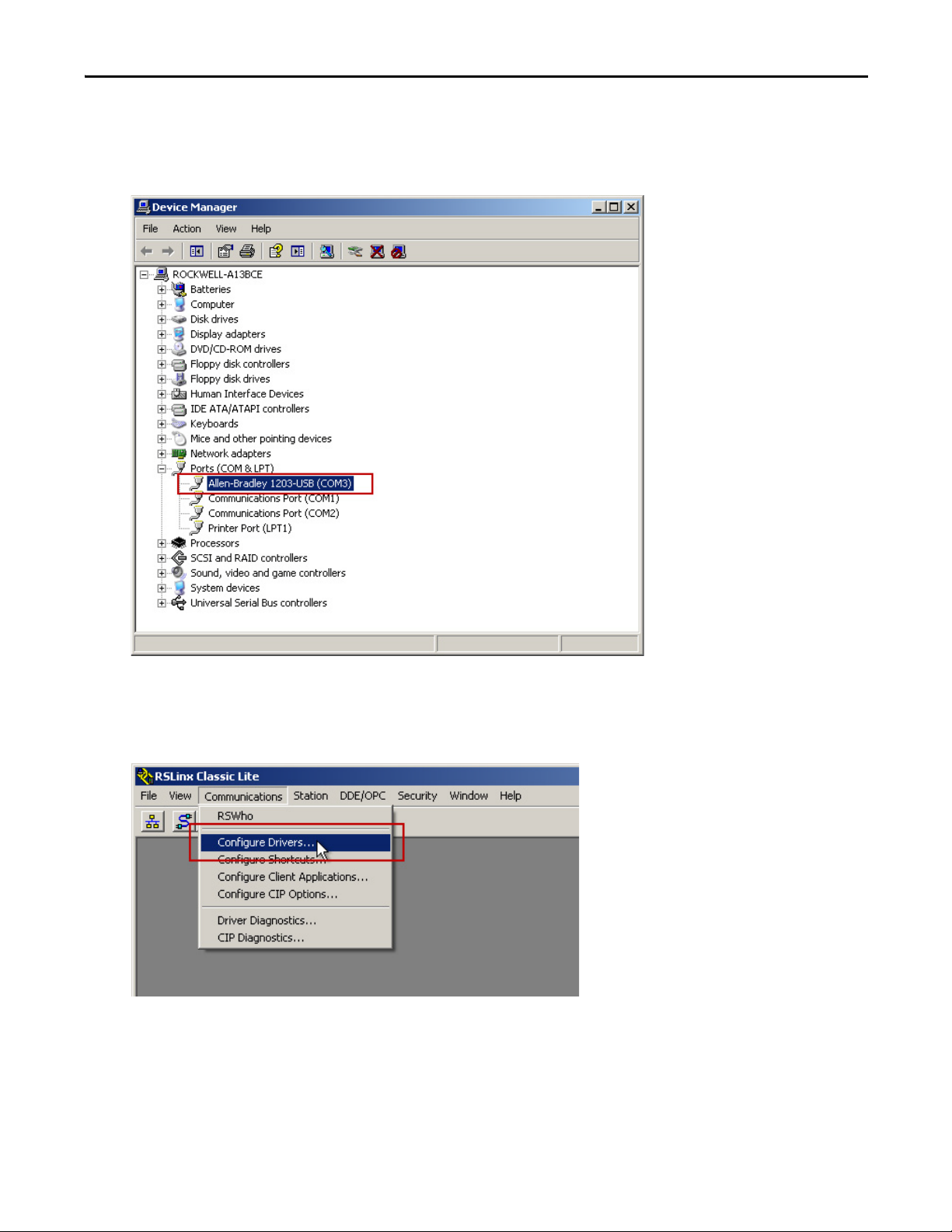
6. Expand the Ports (COM & LPT) group, and locate the Allen-Bradley® 1203-USB device.
The COM port is specified in parenthesis next to the device name, COM3 in this example. It can be different on
your computer.
7. Note your COM port name and close the Device Manager window.
8. To configure an RS-232 DF1 driver, start RSLinx® Classic software.
9. From the Communication menu, choose Configure Drivers.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 15
Page 16
Chapter 1 Micro800 Controller PTO Axis Setup
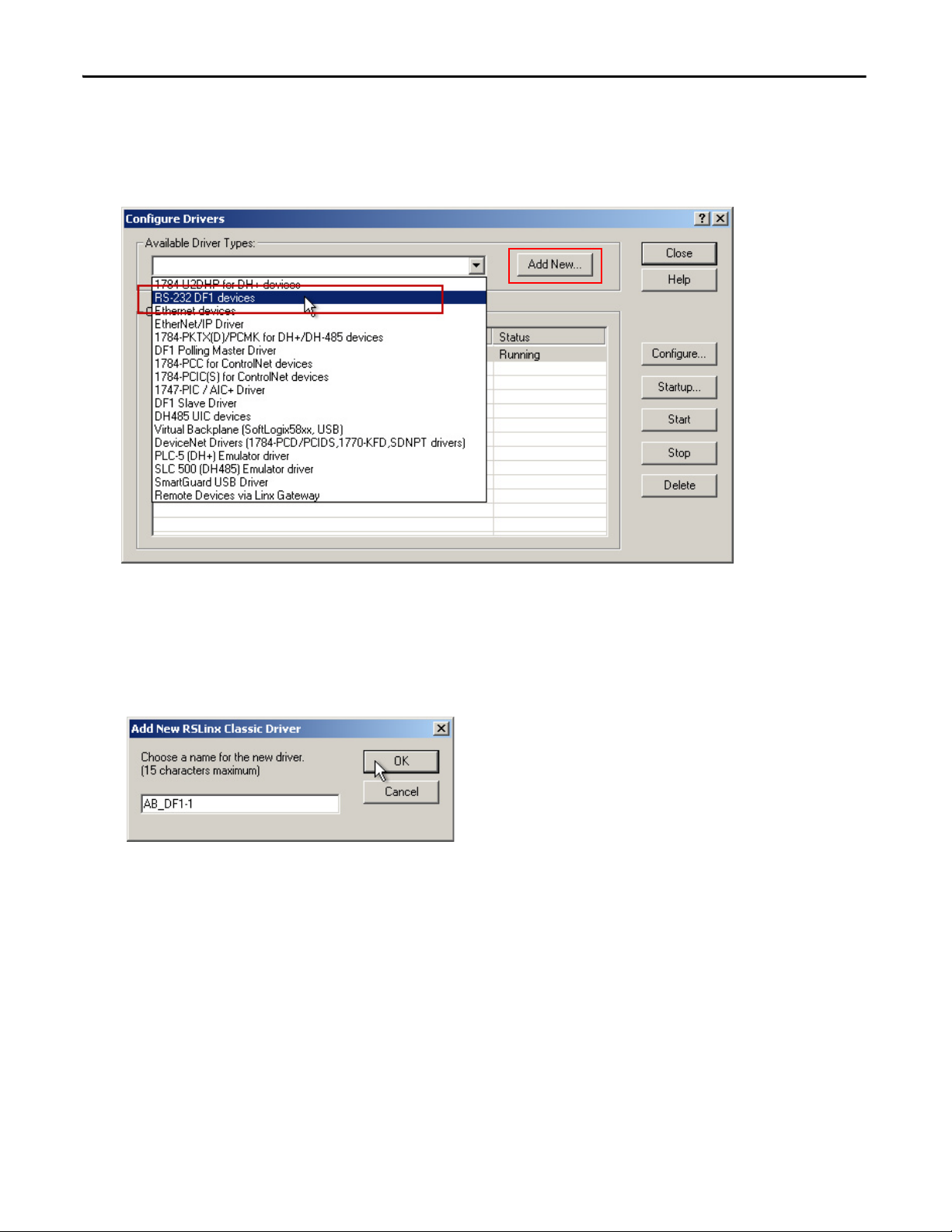
The Configure Drivers dialog box appears.
10. From the Available Driver Types pull-down menu, choose RS-232 DF1 devices.
11. Click Add New.
The Add New RSLinx Classic Driver dialog box appears.
12. Type a name for your driver,
You can use the default name, if desired.
13. Click OK.
16 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 17
Micro800 Controller PTO Axis Setup Chapter 1
IMPORTANT
a
b
c
d
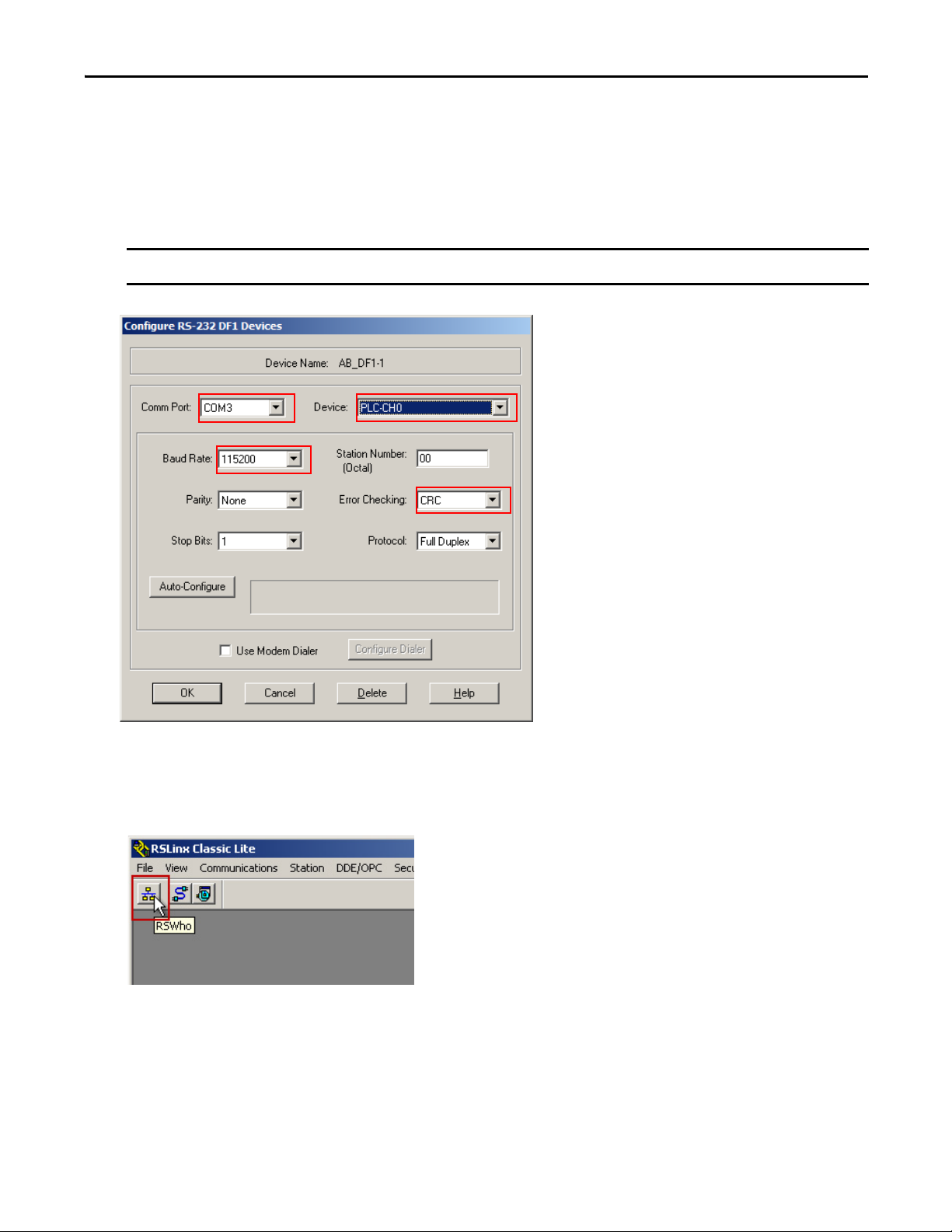
14. Configure the driver settings.
a. From the Comm Port pull-down menu, choose the port number of your 1203-USB serial adapter.
b. From the Device pull-down menu, choose PLC-CH0.
c. From the Baud Rate pull-down menu, choose 115200 baud rate.
d. From the Error Checking pull-down menu, choose CRC.
Do not click auto-configure.
15. Click OK.
16. In the RSLinx tool bar, click the RSWho icon to verify that your drive is properly communicating with RSLinx
Classic software.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 17
Page 18
Chapter 1 Micro800 Controller PTO Axis Setup
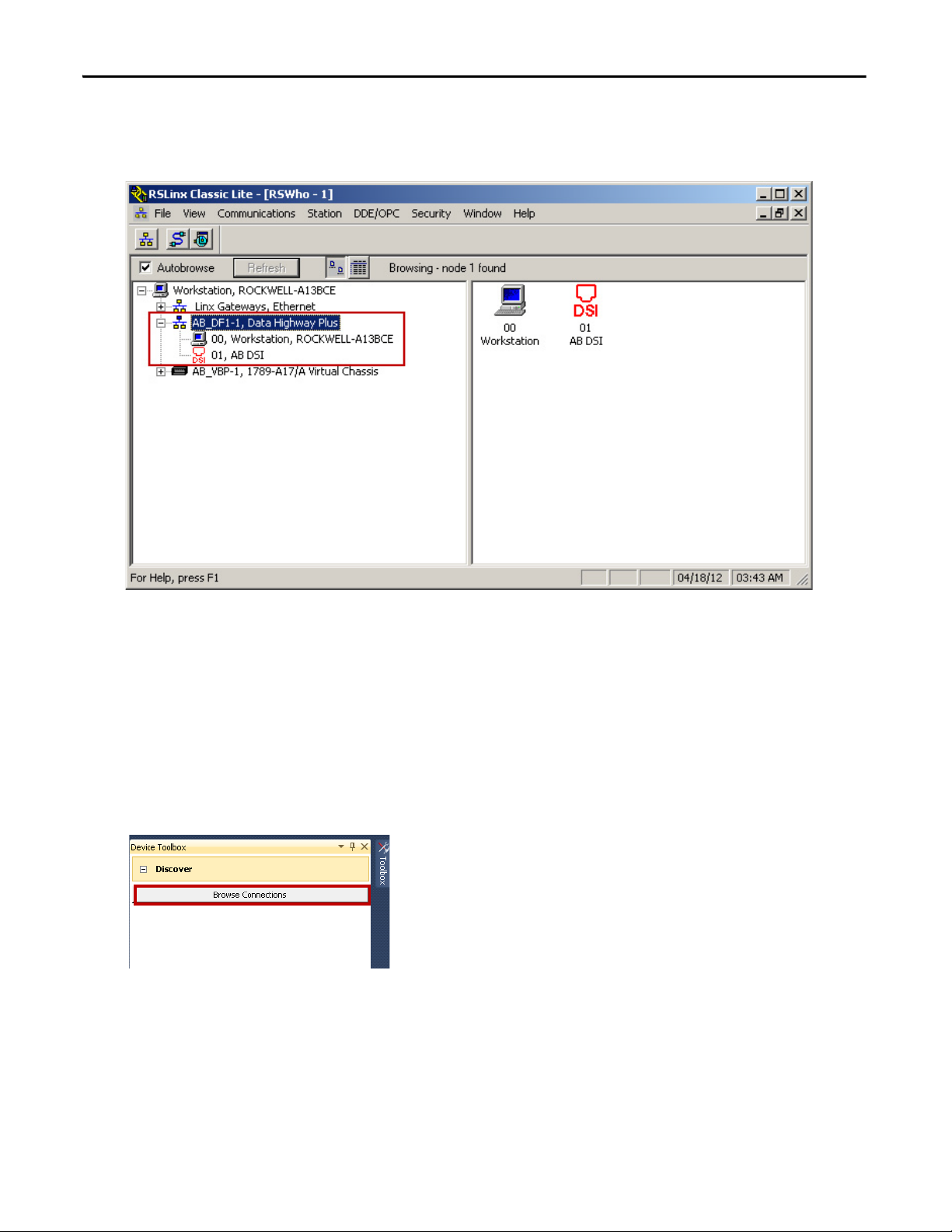
17. Expand your RS-232 DF1 driver, and verify that your drive is displayed.
It is listed as 01, AB DSI. If the drive is not displayed below the driver, check your COM port and driver settings.
18. Close RSLinx Classic software.
Connect to Your Drive
Follow these steps to connect to the Kinetix 3 drive. The Kinetix 3 drive must be Series B or later with firmware revision
3.005 or later.
1. From the Connected Components Workbench Device Toolbox, expand Discover, and click Browse Connections.
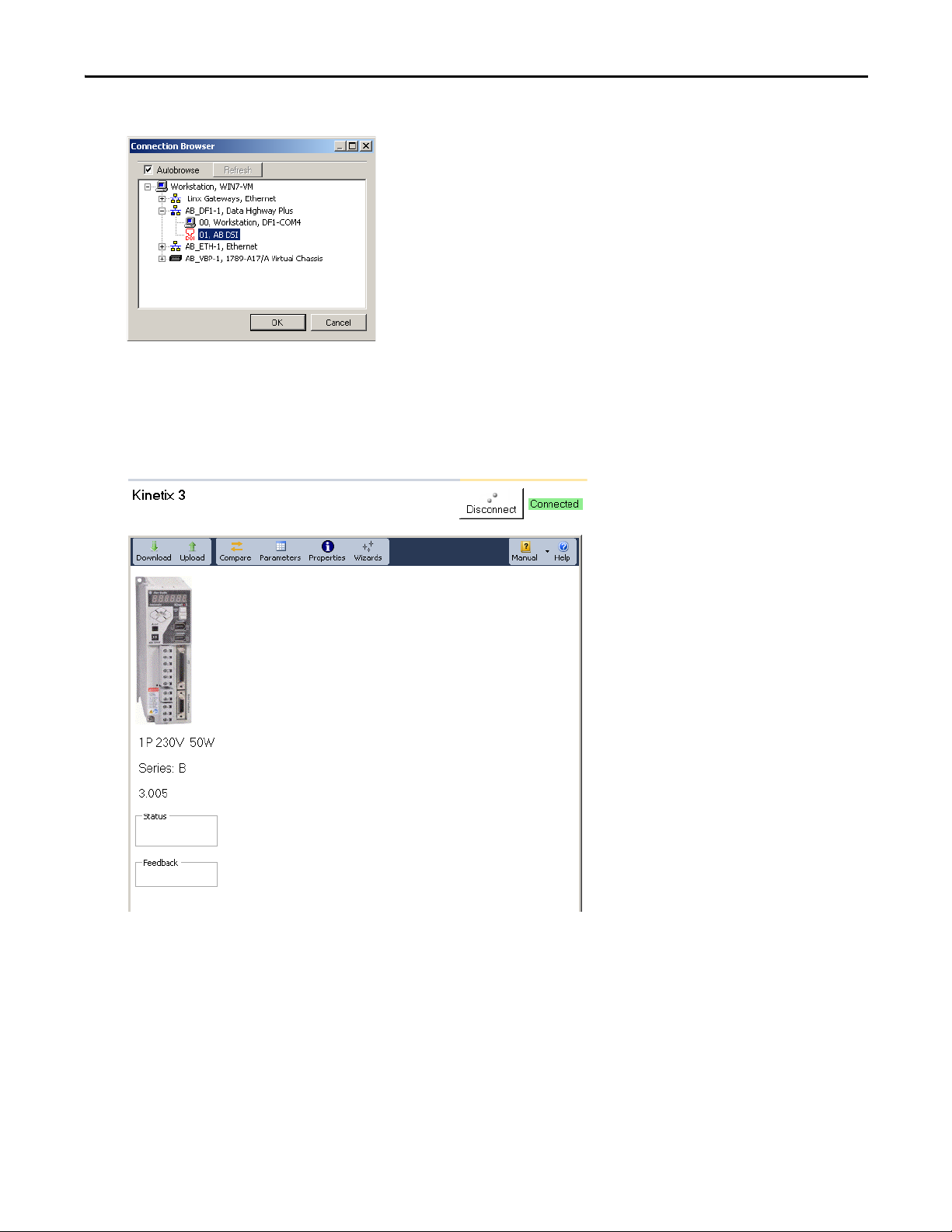
The Connection Browser dialog box appears.
18 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 19
Micro800 Controller PTO Axis Setup Chapter 1
TIP
2. From the Connection Browser, under AB_DF1-1, select your drive (01, AB DSI) and click OK.
A drive is added to the Project Organizer and the drive's Device Details window appears in the main project
workspace.
First time uploads take longer.
3. Follow these step to reset the drive to default settings.
This provides consistent drive settings.
a. From the Toolbar, click the Wizard icon.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 19
Page 20
Chapter 1 Micro800 Controller PTO Axis Setup
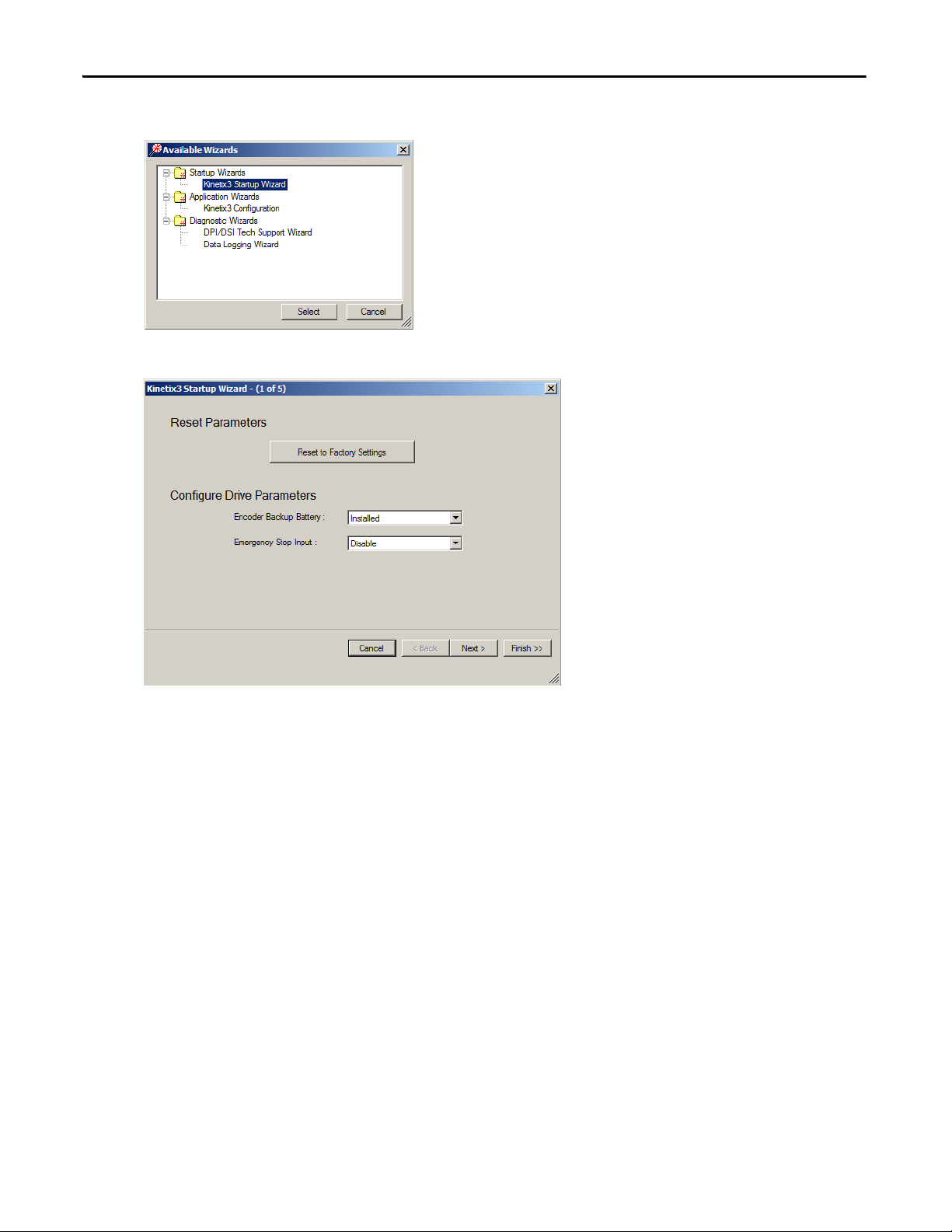
b. Select Kinetic 3 Startup Wizard and click Select.
c. Click Reset to Factory Settings.
The drive is resets.
d. Click Finish.
20 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 21
Micro800 Controller PTO Axis Setup Chapter 1
b
c
d
e
Configure Your Drive by Using Connected Components Workbench Software
Follow these steps to configure your drive parameters for the PTO building block.
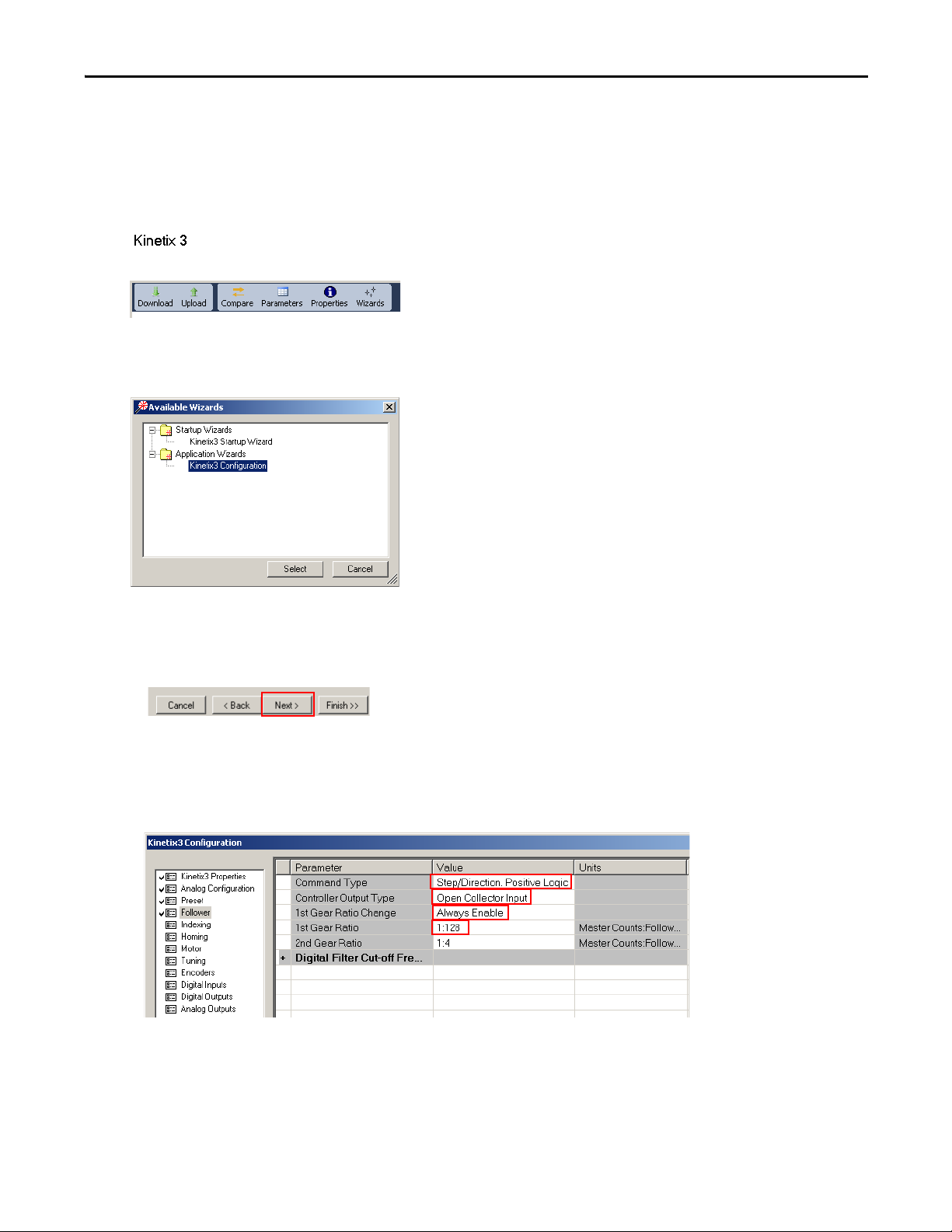
1. From the Tool bar, click the Wizard icon.
The Available Wizards dialog box appears.
2. From the list, select the Kinetix 3 Configuration wizard and click Select.
The application window appears.
3. Follow these steps to configure the Follower mode.
a. Click Next until Follower is highlighted.
b. From the Set Command Type pull-down menu, choose Step/Direction, Positive Logic.
c. From the Controller Output Type pull-down menu, choose Open Collector Input.
d. From the 1st Gear Ratio Change pull-down menu, choose Always Enable.
e. Type 1:128 for 1st Gear Ratio.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 21
Page 22

Chapter 1 Micro800 Controller PTO Axis Setup
b
c
4. Follow these steps to configure the encoder.
a. Click Next to highlight Encoder.
b. Type 1:128 for the Output Ratio.
c. From the Encoder Backup Battery pull-down menu, choose Not Installed.
5. Follow these steps to auto tune your motor.
a. Choose Tuning.
b. From the right pane, click Start Autotuning.
22 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 23

6. Follow these steps to configure the Digital Inputs.
a. Click Next to highlight Digital Inputs.
b. From Input 2 pull-down menu, choose Fault Reset.
7. Follow these steps to configure the Digital Outputs.
a. Click Next to highlight Digital Outputs.
b. From Output 1 pull-down menu, choose Ready.
Micro800 Controller PTO Axis Setup Chapter 1
8. Click Next.
9. Click Finish.
10. Save the project.
11. Click the Disconnect icon.
12. Upload the online values to project file.
13. Change the Drive Address (Pr0.07) to 1 by using the keypad interface.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 23
Page 24
Chapter 1 Micro800 Controller PTO Axis Setup
Configure the Micro800 Controller
In this section you generate or get a Connected Components Workbench project with servo drive for a PTO application.
You do this by using the CCAT generation function or download the starting project Starting_PTO_r6 from sample code.
To get a starting project go to the website:
search?site=sample_code&client=samplecode&output=xml_no_dtd&proxystylesheet=samplecode.
Change to Your Controller Type
If the starting project does not use your controller, this section shows you how to change it. In this Quick Start, we use
Micro800 controller catalog number 2080-LC50-24QBB.
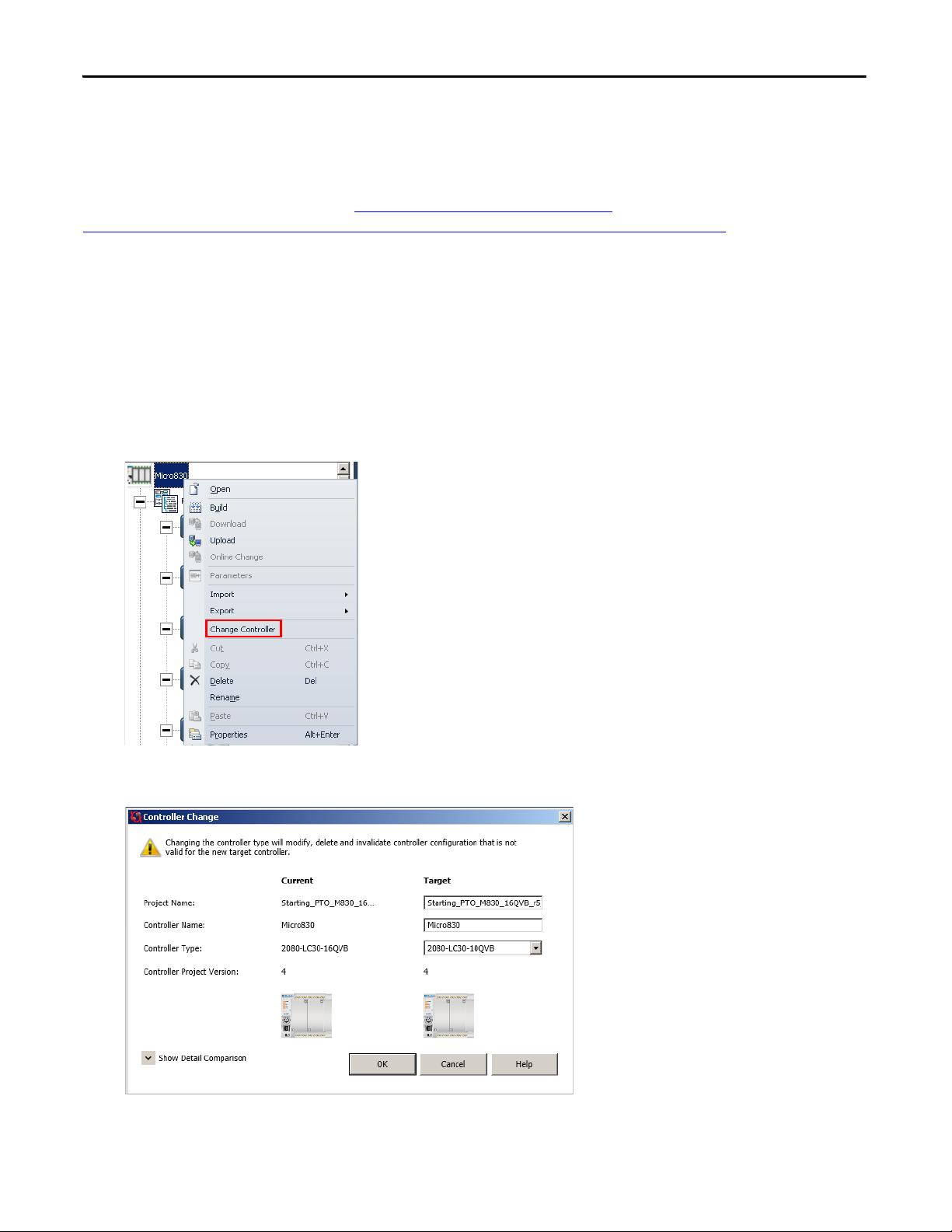
Follow these steps to change the controller.
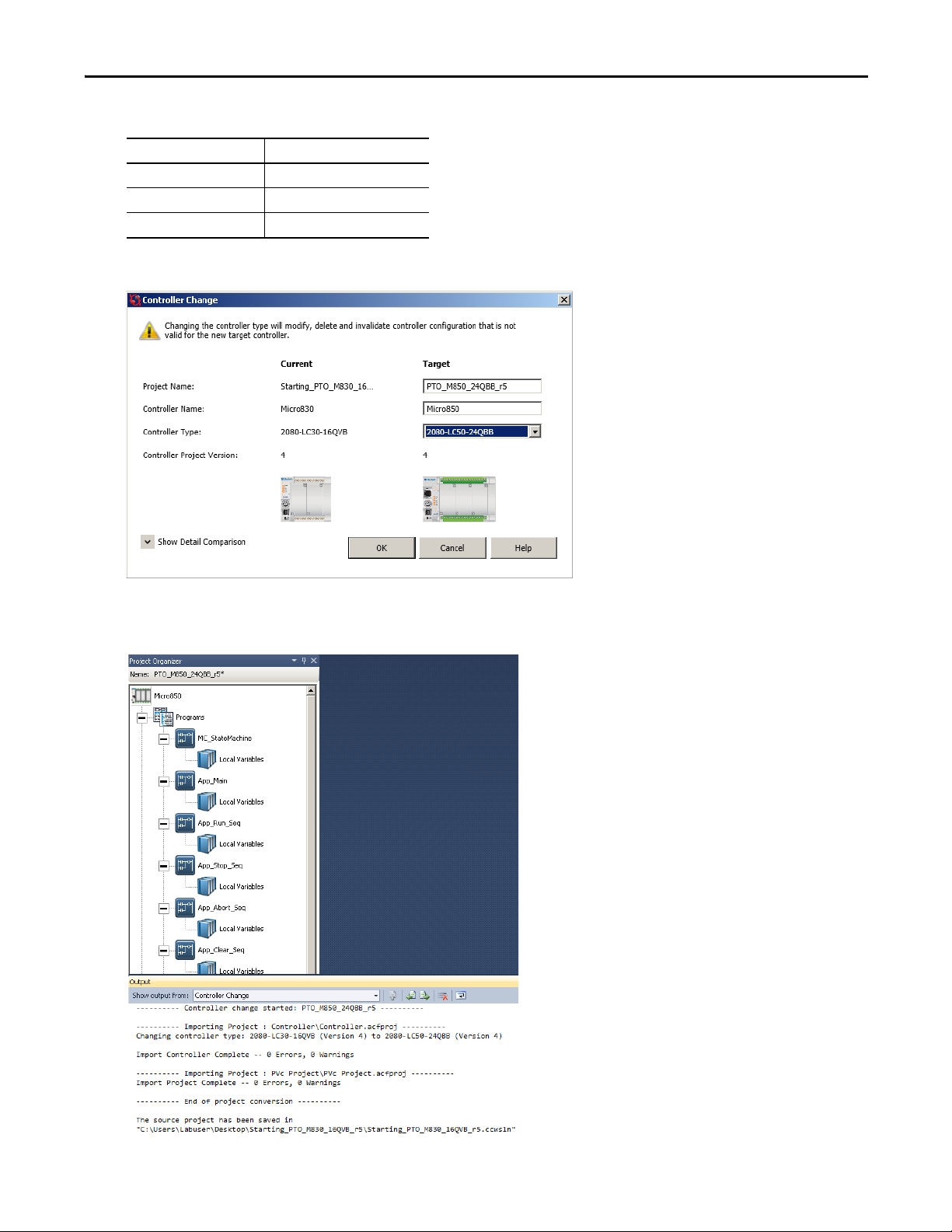
1. Right-click the Micro830 and choose Change Controller.
http://search.rockwellautomation.com/
The Controller Change dialog box appears.
24 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 25
Micro800 Controller PTO Axis Setup Chapter 1
2. From the Controller Change dialog box, type and use the pull-down menu to set the following attributes.
Attribute Setting
Project Name PTO_M850_24QBB_r5
Controller Name Micro850
Controller type 2080-LC50-24QBB
3. Click OK.
A new project named, PTO_M850_24QBB_r5, is created in your My Document > CCW folder and the output
dialog box reports that the controller change is successful.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 25
Page 26
Chapter 1 Micro800 Controller PTO Axis Setup
Configure the PTO Channel
The starting project from sample code website is configured to work with the Kinetix 3 drive and wiring diagram. The
default configuration includes a PTO axis. You can find out more about the configuration in
Axis Setup in Appendix C.
For project that is generated with the CCAT generation function the PTO is not configured. You must configure it
manually by using
Appendix C as a reference.
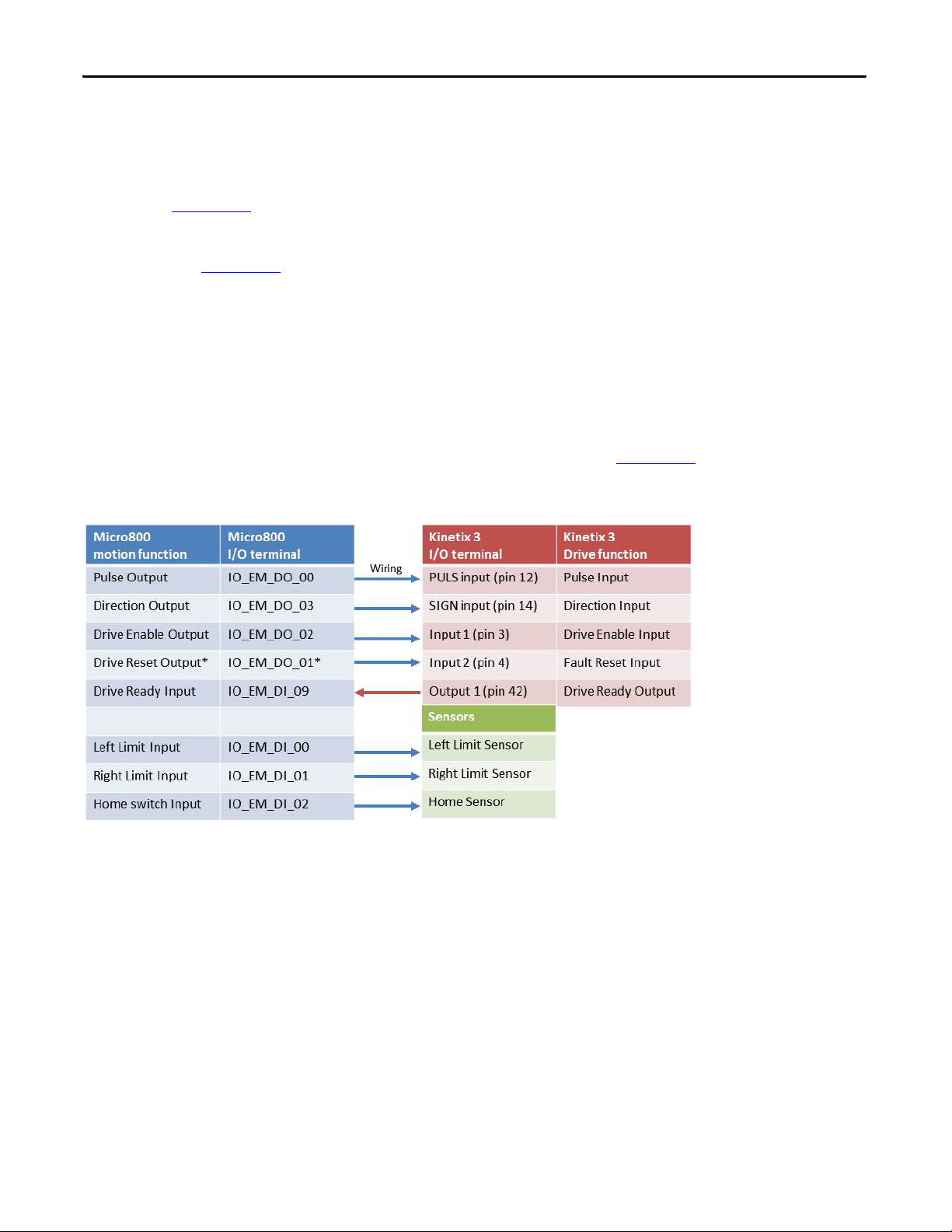
I/O Assignment
Each PTO channel has its own fixed and default I/O assignments for its motion functions. For example, PTO channel 0
uses embedded output 0 and 3 for pulse and direction signal and PTO channel 1 uses embedded output 1 and 4. If you
make any changes to the I/O assignment from the original project, also make the changes to corresponding hard-wiring.
The diagram below shows the I/O assignment for a single PTO application, downloaded from sample code website, a more
detail list of I/O assignments for double and triple PTO applications is provided in
Figure 3 - I/O Assignment for a Single PTO Application
Appendix C.
Micro800 Controller PTO
26 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 27
Micro800 Controller PTO Axis Setup Chapter 1
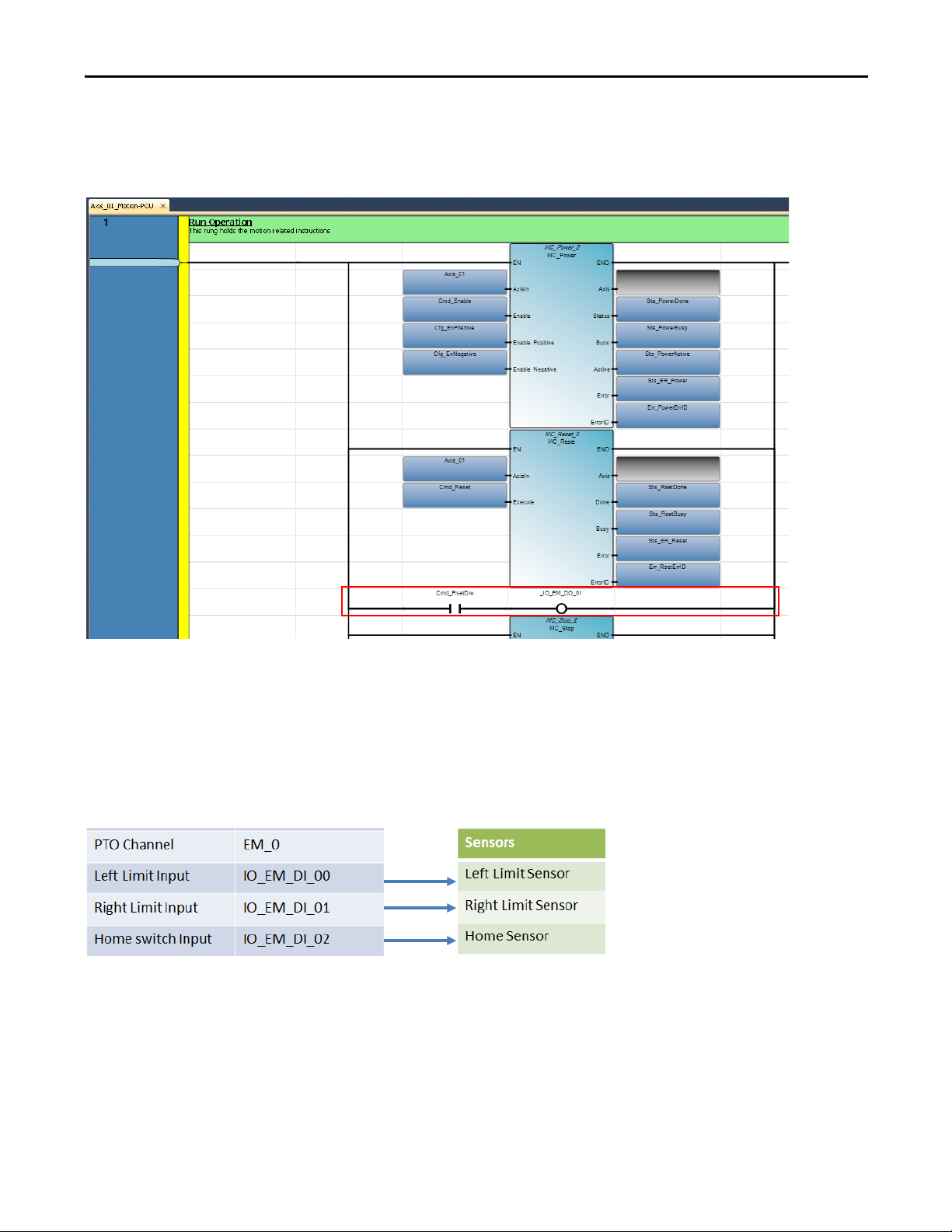
The output terminal for Drive Reset Output must be properly assigned in each ladder program. The output terminal is on
the third branch of rung
Figure 4 - Output Terminal for Drive Reset Output Assignment
one each <User-defined prefix>_Motion ladder diagram.
Sensors
In the I/O assignment diagram above, there is a section for sensor connections. The sensors are connected to dedicated
input terminals corresponding to the PTO channel selected.
Figure 5 - Sensor Connections
When you add a PTO application using the CCAT System Design Assistant (SDA), you must add three sensors for each
one. Identify the sensors and enter them in the Sensor section of the System Design Assistant.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 27
Page 28
Chapter 1 Micro800 Controller PTO Axis Setup
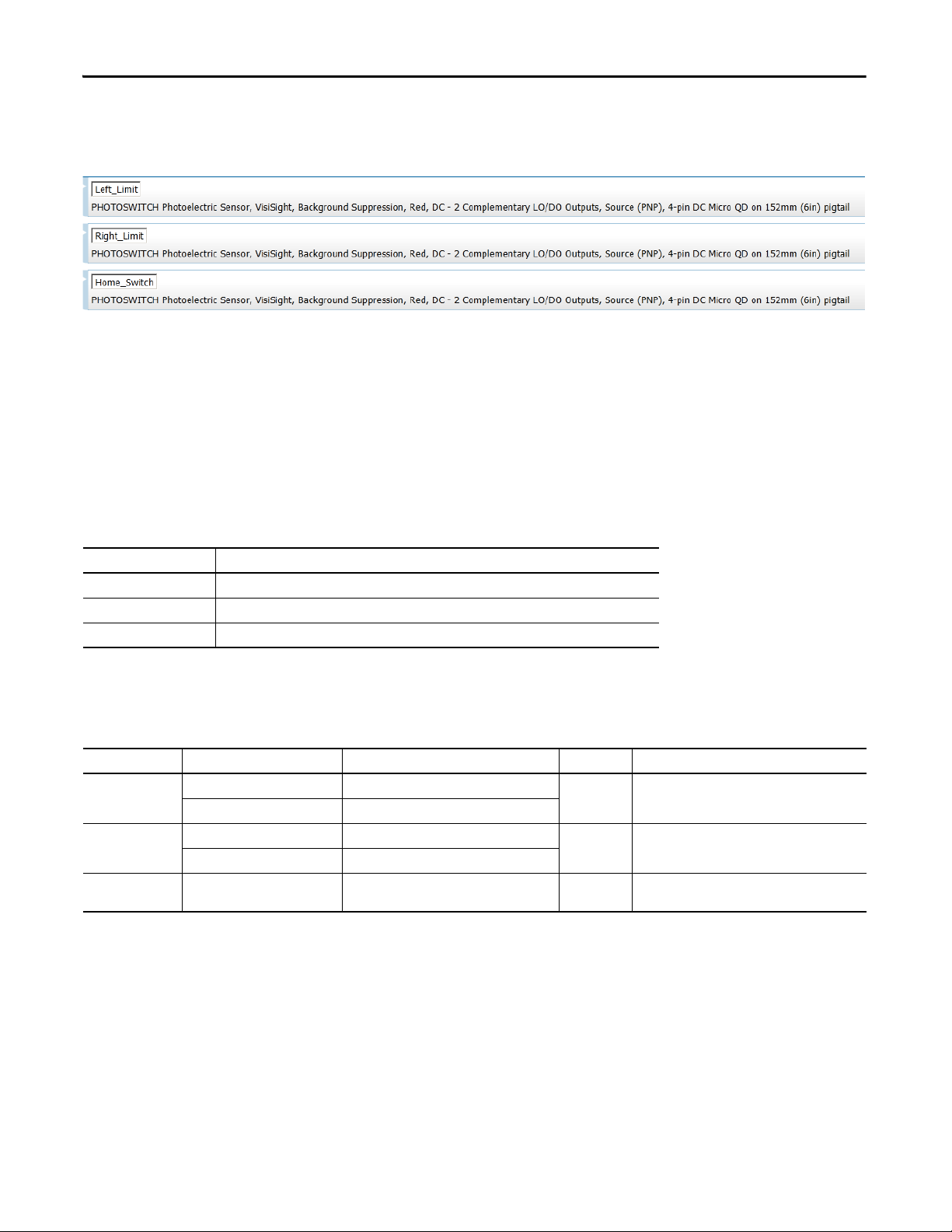
Here's an example of photoelectric type sensor selected and added in the Sensor section of SDA.
Figure 6 - Example Of Photoelectric Sensor Type
Configure Drive Communication
There is no default communication configuration in the starting project file. You must enter the attributes for the drivestatus communication you want to monitor.
Enter the attributes for the following variables.
Table 1 - Communication Variables
Attribute Description
Channel Number This is the location of the SERIALISOL plug-in module on the Micro800 controller plug-in slot.
Node Address This is drive address.
Interval This is the refresh rate of the drive status in milliseconds.
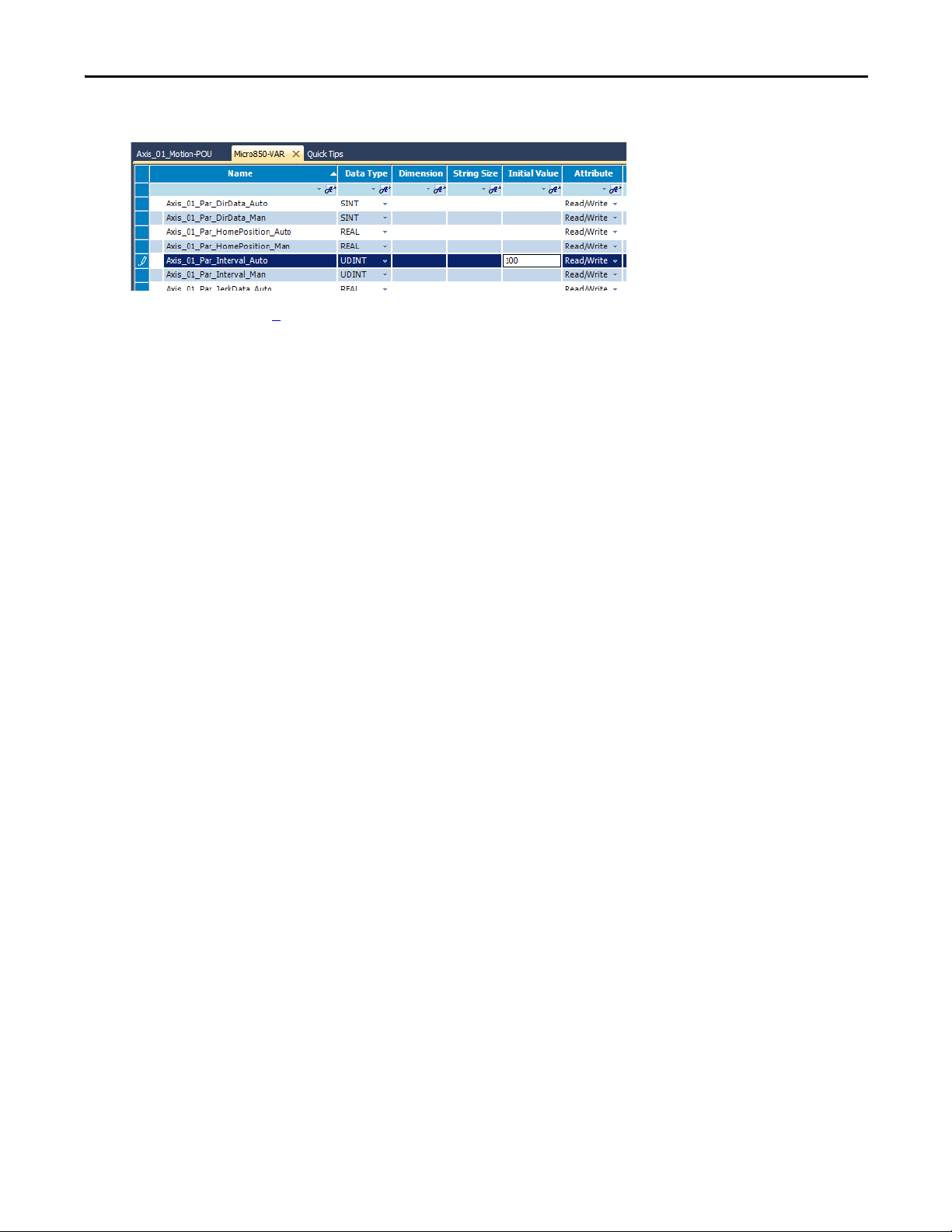
The example in the table below uses the name [Axis_01] for the PTO motion building block, communicating through the
SERIALISOL plug-in module in slot 1, at a refresh rate of 100 ms interval.
Table 2 - Communication Variables Example
Attribute Global Variable Name Description Initial Value Description
Channel Number Axis_01_Cfg_Channel_Man Channel number in Manual mode control. 5 This indicates that the SERIALISOL plug-in module is
Axis_01_Cfg_Channel_Auto Channel number in Auto mode.
Node Address Axis_01_Cfg_Node Addr_Man Node address in Manual mode control. 1 This indicates that the communicating drive has an
Axis_01_Cfg_ NodeAddr _Auto Node address in Auto mode.
Interval Axis_01_Par_Interval_Man Status refresh in Manual mode control. 100 This indicates that the status refresh for the drive
in plug-in slot 1.
address of 1.
status is 100 ms.
Configure Communication Attributes
Follow these steps to configure the commutation attributes.
1. From the starting project or the project generated by the CCAT generation function, double-click Global Variables.
2. Scroll to find and select the global variable names that require updating.
28 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 29
Micro800 Controller PTO Axis Setup Chapter 1
3. Type value under the Initial Value column for each variable.
4. Repeat starting at step 1 until you have updated all six variables required for monitoring the drive status.
5. Build and download your project.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 29
Page 30

Chapter 1 Micro800 Controller PTO Axis Setup
Notes:
30 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 31

System Validation
In this chapter, you confirm the following:
• Communication between controller and PanelView Component terminal
• Controller generates the appropriate pulse output to control the motor
• Communication between controller and Kinetix 3 servo drive
The operation of the sample code and screens is also explained.
Before You Begin
• Review all steps in Chapter 1.
• Verify that all of the devices are connected as shown in the wiring diagram.
• Verify that the Micro800 controller, the Kinetix 3 drive, and the PanelView Component terminal have power
applied to them.
• Review the Getting Started CCAT with System Design Assistant Quick Start, publication CC-QS035.
Chapter 2
What You Need
• Personal computer with Connected Components Workbench software version 6 or later installed
• 6 in. (or larger) PanelView Component terminal and 1761-CBL-PM02 communication cable
• Kinetix 3 drive and 2080-CCMDSDS-48AA01 communication cable
• Micro830 or Micro850, transistor-type output controller with 2080-SERIALISOL module
• USB printer cable (A to B) for personal computer to Micro800 controller communication
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 31
Page 32

Chapter 2 System Validation
Start
Configure Your Controller
Serial Port on page 34
Configure Input Filter for High
Speed Counter on page 36
Connect Your Devices
on page 39
Download Your Program to
the Controller on page 41
Configure the IP Address for
Your PanelView Component
Ter minal on page 43
Transfer Your HMI Application
to the PanelView Component
Ter mina l on page 43
Validate Your System
on page 46
Configure PanelView
Component Terminal
Communication Settings on
Follow These Steps
Complete these steps to configure, connect your devices, down load program to the controller, transfer HMI application to
PanelView component terminal, and validate your system.
32 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 33

System Validation Chapter 2
Kinetix 3
Servo Drive
Kinetix 3
Servo Drive
Kinetix 3
Servo Drive
2080-SERIALSOL
Plug-in
2090-DAIO-D5003
Modbus
PanelView
Component
Ter min al
Micro800 48 point
Controller
1761-CBL-PM02
PTO 1 PTO 2 PTO 3
System Overview
The PTO Building Block is a device building block that consists of screen designs for PanelView Component terminal and
logic code for Micro800 controller to send pulse-train-output commands to control servo or stepper drives. Utilizing the
screen design and code, you can perform move commands, homing, and troubleshoot motion faults.
The PanelView Component terminal is connected to the embedded serial port of Micro800 controller. The two devices
communicate though CIP serial protocol over RS232C with the 1761-CBL-PM002 cable. The Kinetix 3 drive is
connected to the embedded I/O terminal of Micro800 controller for pulse-train output and other motion signals with the
2090-DAIO-D5003 cable. The Kinetix 3 drive is also connected to the 2080-SERIALISOL plug-in to monitor servo drive
status through Modbus protocol over RS485.
The figure below shows a 48 point controller supporting pulse-train output to three drives. A 24 point controller supports
pulse-train output to two drives.
Figure 7 - A 48 Point Controller Connected to Three Drives for PTO
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 33
Page 34

Chapter 2 System Validation
Configure Your Controller Serial Port
The Micro800 controller communicates with PanelView Component terminal and Kinetix 3 drive through the embedded
serial port and 2080-SERIALISOL plug-in. The embedded serial port is called channel 2 and the first plug-in slot is called
channel 5.
The following settings are used for each port.
Table 3 - Embedded Serial Port
Parameter Setting
Driver CIP Serial
Baud Rate 38400
Pari ty None
Station Address 1
Advanced Settings
Error Detection CRC
Embedded Responses After One Received
Duplicate Packet Detection TRUE
ACK Timeout (x20ms) 50
NAK Retries 3
ENQ Retries 3
Transmit Retries 3
RTS off-Delay 0
RTS Send-Delay 0
Table 4 - 2080-SERIALISOL Plug-in Module
Parameter Setting
Driver Modbus RTU
Baud Rate 19200
Pari ty None
Modbus role Modbus RTU Master
Advanced Settings
Media RS485
Data bits 8
Stop bits 1
Response Timer 200
Broadcast Pause 200
Inter-Char Timeout 0
RST Pre-Delay 0
RTS Post-Delay 0
34 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 35

Follow these steps to modify the serial port settings.
1. From the Project Organizer, double-click the Controller icon.
2. From the Controller tree select the serial port and edit the settings.
System Validation Chapter 2
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 35
Page 36

Chapter 2 System Validation
Configure Input Filter for High Speed Counter
The default input filter value can be adjusted to count the high-speed pulses from your encoder.
Follow these steps to change the input terminal filter value for your encoder input.
1. Identify the input terminal with reference to the High Speed Counter (HSC) selected for your application.
Each HSC ID corresponds to a set of input terminals.
High Speed Counter Inputs Used
HSC0 0…3
HSC1 2,3
HSC2 4…7
HSC3 6, 7
HSC4 8…11
HSC5 10, 11
2. From the Controller Organizer, select Embedded I/O.
3. Choose the input filter value for your input terminal identified in step1.
The default is 8 ms.
Set the input filter value to less than the minimum for you application. You can calculate the minimum requirement by
using this formula:
Minimum input filter (seconds) = 1/ (max revolution per second * encoder resolution per revolution)
36 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 37

System Validation Chapter 2
Configure PanelView Component Terminal Communication Settings
In the default project, the communication and controller settings have already been configured. Here are the default
settings.
Table 5 - Driver Configuration
Parameter Setting
Protocol Serial CIP
Por t RS232
Baud Rate 38400
Pari ty None
Stop Bits 1
Flow Control None
Report Errors FAS LE
Station Address 0
Protocol Full Duplex
Accept responses for station address only FAS LE
Table 6 - Controller Settings
Parameter Setting
Name PLC-1
Controller Type Micro800
Address 1
Follow these steps to modify the settings in your Connected Components Workbench project.
1. From the Project Organizer, double-click the PanelView Component terminal icon.
The Design Station is launched.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 37
Page 38

Chapter 2 System Validation
2. Click the Communication icon.
38 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 39

3. Edit the communication settings to your needs.
System Validation Chapter 2
Connect Your Devices
1. Connect the PanelView Component terminal to your controller's embedded serial port by using a 1761-CBL-PM02
cable.
1761-CBL-PM02
2. Connect your Kinetix 3 drive's IEEE1394 plug to your Micro800 controller's isolated serial port (2080SERIALISOL) by using a modified 2090-CCMDSDS-48AA01 cable.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 39
Page 40

Chapter 2 System Validation
1
B
A
234
123 4
(View in to terminal block)
Pin A1 RS485 + 485Pin B1 RS232 DCD
Pin A2 RS232/485 GNDPin B2 RS232 RXD
Pin A3 RS232 RTS Pin B3 RS232 TXD
Pin A4 RS232 CTS Pin B4 RS485 - 485
Comm0A or
Comm0B Pin
Description Signal
1 RS-232 transmit XMT
2 RS-232 receive RCV
3Reserved —
4 +5V power ground GND
5 RS-485+ DX+
6 RS-485 DX-
Pin 2
Pin 6
Pin 5
Pin 1
Back
Front
Red
Brown
Black
The modified cable can be made by removing one end to expose the conductors. See the following wiring diagram,
but note that the red wire does not need to be connected.
40 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 41

System Validation Chapter 2
Download Your Program to the Controller
Follow these steps to download your program to your controller.
1. Connect an available USB port on your personal computer to the USB programming port on your Micro800
controller by using a USB A-to-B cable.
2. Build your program.
If you are prompted to install drivers, specify to use the recommended drivers.
3. From your Connected Components Workbench project, right-click on your device icon.
4. From the Project Organizer, choose Build.
When the program is done building, the Output pane at the bottom of your project window displays a build success
message.
5. If there are errors, fix your program errors, and build the program again.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 41
Page 42

Chapter 2 System Validation
6. From the Project Organizer, right-click on your device icon and choose Download.
7. From the Connection Browser dialog box, select your controller and click OK.
8. If prompted to change the Controller mode to Remote Program, click Yes.
The program downloads and you are prompted to change the Controller mode to Remote Run.
9. Click Yes.
42 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 43

System Validation Chapter 2
Configure the IP Address for Your PanelView Component Terminal
Follow these steps to configure a static IP address on the PanelView Component terminal.
1. From the Main menu, press Communication to open the Communication screen.
2. Press Set Static IP Address.
3. Configure the IP Address and Mask values so they are in the same range as your Micro800 controller.
4. Press Main to return to the Main menu.
Transfer Your HMI Application to the PanelView Component Terminal
Follow these steps to transfer your HMI application to the PanelView Component terminal operator interface terminal.
1. Choose your HMI application.
2. From the General properties check that Validity is TRUE.
3. If Validity is FALSE, right-click PVC application and choose Validate Application.
A Validation Result dialog box shows various warning for overlap object and if the application is valid Validity
displays TRUE.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 43
Page 44

Chapter 2 System Validation
4. In the Project Organizer, right-click the PanelView Component terminal icon and choose Download.
5. In the Graphic Terminal Application Download dialog box, enter the IP address of your PanelView Component
terminal that you configured in the section above.
6. Click Download.
7. Verify that the download completed successfully.
8. From the Main menu of your PanelView Component terminal, press File Manager.
9. On the File Manager screen, select Internal as your Source.
10. Select your application.
44 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 45

11. Press Run.
System Validation Chapter 2
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 45
Page 46

Chapter 2 System Validation
a
d
c
b
a
debc
Validate Your System
In this section, you review the Machine Overview and Machine Functions screens and explore the Status and Command
screens to test the manual control of the building block.
Understand the Machine Overview Screen
The Machine Overview screen in the default project is common to all CCATs. When this screen is first loaded, you can
complete the following tasks:
a. Return to the Configuration screen and exit the program.
b. View and change current machine state.
c. Start and stop Auto mode program.
d. Go to Machine Functions screen.
Understand the Machine Functions Screen
The Machine Functions screen is also common to all CCATs. You can complete the following tasks in the Machine
Functions screen:
a. Return to Machine Overview screen.
b. Look at a particular machine function or device in detail.
c. Start and stop Auto mode program.
d. View and change current machine state.
e. Go to State Diagram for an overview of machine state.
46 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 47

System Validation Chapter 2
From Axis_01 screen in Auto mode, you can monitor the following status:
• Axis command velocity
• Axis command position
• High Speed Counter (HSC) count
•Axis status
•Servo drive status
Here you test the manual control of the Building Block. There are two manual modes for selection, Basic and Advance
modes. Press Manual and Axis_01 buttons to enter the first manual screen
.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 47
Page 48

Chapter 2 System Validation
Explore the Command and Status Screen
The left side shows the servo status indicator is describe here.
Parameter Description
Axis Enabled This status indicator displays whether the axis is ac tive and the drive is maintaining control of the motor.
Homed This status indicator displays the home status of the drive. If the status indicator is green, the drive has an absolute position refere nce. When the box is gray,
Homing This status indicator displays the homing status of the drive. When the status indicator is green, the drive has started homing and has not yet attained an
In Motion When is status indicator is green the axis is moving,
Axis Error Wh en this sta tus indica tor is gray th e motion ax is is healt hy. When the st atus indica tor is red, the re is a faul t on the mot ion axis and the error number is shown
Motion Error When this status indicator is gray the instruction has been executed properly, When the status indicator is red, there is instruction execution fault and the error
the drive is not homed.
absolute position reference, otherwise, the status indicator is gray.
in the text.
number is shown in the text.
The right side shows some numeric displays and inputs described below.
Parameter Description Range
Mode The machine is able to jog when in Maintenance mode. —
Home Mode There are five different types of homing methods. For more information, refer to the help for MC_Home instruction. 0… 4
Deceleration This is the deceleration rate that is used for jogging, in mm/s2. 0… 90,000
Acceleration This is the acceleration rate that is used for jogging, in mm/s2. 0… 90,000
Jog Speed This is the velocity for the jog axis, in mm/s. 0… 833
Posi tion This displays the axis position. Homing resets the axis position to the home value. —
HSC This displays High Speed Counter value if an encoder is properly wired and configured to the controller. —
48 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 49

System Validation Chapter 2
The bottom of the screen has control buttons that inactivate depending on the program operation mode.
Parameter Description
Servo Enable/
Disable
Start Homing This momentary-push button starts the homing process for the drive. It is available only when the drive is stopped, enabled, and while the program is in
Jog Forward This momentary-push button jogs the axis in the forward direction at the specified jog speed. This button must be held down to continue jogging. It is
Jog Reverse This momentary-push button jogs the axis in the reverse direction at the specified jog speed. This button must be held down to continue jogging. It is
Axis Config This is a Go To Button. When pressed, the Configuration page for motion axis screen appears.
Advance move This is a Go To button. When pressed the Advance Move screen appears where you can perform position and velocity control.
Drive Status This is a Go To Button. When pressed, the Drive Status screen appears.
Fault Help This is a Go To Button. When pressed an information screen appears for diagnosing motion instructions and motion axis faults.
Clear Faults When the Clear Faults button appears, you can use this momentary-push button to attempt to clear faults on the controller.
This maintain-push button enables and disables the servo drive.
Manual mode.
functional only when in Maintenance mode.
functional only when in Maintenance mode.
Follow these steps to use the Command and Status screen.
1. Press Servo Enable.
This energizes the motor, and attempts to hold it at its present position.
2. Set the deceleration, acceleration, and jog speed.
3. Press and hold Jog Forward.
The motor turns forward.
4. Release Jog Forward.
The motor stops.
5. Press and hold Jog Reverse.
The motor turns in the reverse direction.
6. Release the Jog Reverse.
The motor stops.
7. Enter your preferred homing mode (0-4).
8. Press Start Homing.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 49
Page 50

Chapter 2 System Validation
The motor begins to home according to the selected homing method shown here.
Homing Mode
Value
0x00 MC_HOME_ABS_SWITCH Homing process searches for Home Absolute switch.
0x01 MC_HOME_LIMIT_SWITCH Homing process searches for limit switch.
0x02 MC_HOME_REF_WITH_ABS Homing process searches for the Home Absolute switch and the encoder
0x03 MC_HOME_REF_PULSE Homing process searches for limit switch and the encoder reference pulse.
0x04 MC_HOME_DIRECT Static homing process with direct forcing a home position from user
Homing Mode Name Homing Mode Description
reference pulse.
reference. The function block sets current position the mechanism is in as
home position, with its position determined by the input parameter,
Posi tion.
9. Press Servo Disable.
The motor de-energizes and the Advance mode button appears.
10. Press Advance Move.
The Advance Move screen is displayed.
Explore the Axis Configuration Screen
The axis configuration screen is accessed by pressing the Axis Config button. In this screen you can configure some of the
advance settings for position and velocity control.
Parameter Description Range
Enable Positive This is a maintain-push button. Press to enable the motion to travel in the positive direction. —
Enable Negative This is a maintain-push button. Press to enable the motion to travel in the negative direction. —
Home Mode There are five different types of homing methods. For more information, refer to the help for MC_Home instruction. 0…4
Home Position Defines the initial position for when axis is homed. —
Config HSC_K3 This is a Go To Button. When pressed, the configuration screen for Kinetix 3 drive and High Speed Counter appears. —
50 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 51

Follow these steps to use the Axis Configuration screen.
1. From Command & Status Screen, press the Axis Config button.
System Validation Chapter 2
2. Press the Enable buttons for Enable Positive and Enable Negative.
Explore the Kinetix 3 and HSC Configuration Screen
The left side is where you configure communication settings and monitor the status for Kinetix 3 drive.
Parameter Description Range
Channel This is the channel on the controller that is connected to the drive. The channel number is for the left-most plug-in slot
starting with five.
Node Each drive has one node address that the building block uses to reference that drive. This address must be unique. 1…247
Interval This parameter indicates the update rate of Kinetix 3 drive parameters. 0… 65,536 ms
DrvRdy This status indicator shows if a drive is properly configured and connected. It indicates Rdy when there is a valid Kinetix 3
drive.
DrvAlarm This status indicator monitors the alarm for Kinetix 3 drive. If there is a fault, the indicator shows Drv Fault. —
AlmCode This status indicator shows the alarm code if the drive is faulted. —
5…9
—
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 51
Page 52

Chapter 2 System Validation
The right side is where you configure and monitor status of the High Speed Counter.
Parameter Description Range
HSC ID This parameter shows the ID of HSC selected. The ID selected also corresponds to the input terminals for the encoder. 0…5
HSC mode This is the HSC mode selected, refer to Micro830 and Micro850 Programmable Controllers, publication 2080-UM002 for
details.
Initial Pos This is the star ting count value during initial startup and upon reset. —
Enable Press this button to start HSC. —
Disable Press this button to stop HSC. —
Reset Press this button to reset count value to Initial Pos. —
HSC Rdy This status indicator shows if a High Speed Counter is properly configured. —
HSC Err This status indicator shows if there is a HSC fault. —
HSC Cnt This status indicator shows the count value of the HSC. —
0…9
To use the Kinetix 3 and HSC Configuration screen, do the following.
1. Press the Config HSC_K3 button.
The Kinetix 3 drive and HSC configuration screen is displayed.
2. Type the following for Kinetix 3 drive configuration.
Attribute Setting
Channel 5
Node 1
Interval 10
The Kinetix 3 drive status displays the following.
Attribute Setting
DrvRdy Rdy
DrvAlarm no fault (if there is no fault)
AlmCode 0 (if there is no fault)
52 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 53

3. Type the following for HSC configuration.
Attribute Setting
HSC ID 2
HSC mode 6
Initial Pos 0
4. Press the Enable button.
The HSC status displays the following.
Attribute Setting
HSC Rdy HSC On
HSC Err No Fault
HSC Cnt 0 (the value changes as you
rotate your encoder)
5. Press the X button.
You are returned to Axis Configuration Screen.
System Validation Chapter 2
6. Press X button again.
7. You are returned to Command & Status Screen.
Explore the Advance Move Screen
The left side shows the servo status indicators describe below.
Parameter Description Range
Move type This is a multi-selection button. Press this button to switch between Select Move, Velocity, Absolute, and Relative move types. 0… 3
Deceleration This parameter is the deceleration rate that is used for any move command initiated, in mm/s2. 0… 90,000
Acceleration This parameter is the acceleration rate that is used for any move command initiated, in mm/s2. 0… 90,000
Jerk This parameter is the rate of acceleration or deceleration used for any move command initiated. A 0 value denotes a trapezoidal
motion profile.
Direction This parameter controls the direction for velocity move. 1 = Positive direction
Velo cit y This parameter is the velocity for any move command initiated, in mm/s. 0… 833
Posi tion This parameter determines the position value and reference for relative and absolute position control respectively. —
0… 90,000
-1 = Negative direction
0 = Follow previous direction
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 53
Page 54

Chapter 2 System Validation
The right side shows some numeric displays and inputs described below.
Parameter Description
Axis Enabled The status indicator shows whether the axis is ac tive and the drive is maintaining control of the motor.
Homed This status indicator shows the home status of the drive. When the status indicator is gray, the drive is not homed. When the status indicator is green, the
Homing This status indicator displays the homing status of the drive. When this status indicator is green, the drive has started homing but has not attained an
In Motion When this status indicator is green the axis is moving.
Axis Error When this status indicator is gray, the motion axis is healthy. When it is red, there is a fault on the motion axis and the text shows the error number.
Motion Error When this status indicator is gray, the instruction executed properly. When it is red, instruction execution faulted and the text shows the error number.
HSC cnts This status indicator shows the count value of the HSC.
mm/s This display the axis velocity when the controller is controlling the axis.
mm This display the axis position. Homing resets this to the home value.
drive has an absolute position reference.
absolute position reference; other wise, it is gray.
The bottom of the screen has control buttons that are inactive depending on the program operation mode.
Parameter Description
Servo Enable/Disable This maintain push button enables and disables the servo drive.
Start Homing This momentary push button starts the homing process for the drive. It is available only when the drive is stopped and enabled while the program is in
Move This momentary push button triggers the move command according to the selection and parameters defined.
Halt This momentary push button stops the axis regardless of whether the axis has completed its previous command.
Axis Config This is a Go To Button. When pressed, the configuration page for motion axis screen is displayed.
Drive Status This is a Go To Button. When pressed, the servo drive status screen is displayed.
Fault Help This is a Go To Button. When pressed an information screen appears for diagnosing motion instructions and motion axis faults.
Clear Faults When the Clear Faults button appears, you can use this momentary push button to attempt to clear faults on the controller.
Manual mode.
To use the Advance Move screen, follow these steps.
1. Press the Select Move button once for Velocity.
54 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 55

2. Enter value for the following motion parameter for velocity control.
Parameter Val ue Description
Deceleration 100 100 mm/s
Acceleration 100 100 mm/s
Direction 1 Forwa rd
Velo cit y 100 100 mm/s
2
2
3. Press the Servo Enable button.
This energizes the motor, and it attempts to hold its present position.
4. Press the Move button.
The motor turns, accelerates, and cruises at 100 mm/s.
5. Press the Halt button.
Motor decelerates to a stop.
6. Press the Move Type button once more till Absolute is displayed.
This lets you do Absolute position control.
System Validation Chapter 2
7. Press the Start Homing button.
The motor returns to home position and resets the mm.
8. Type 500 mm for Position.
9. Press the Move button.
Motor turn to absolute position 500 and stops.
10. Press Move Type once more to Relative for Relative position control.
11. Enter 100 mm for Position.
12. Press the Move button.
Motor turns an incremental of 100 mm to position 600 mm.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 55
Page 56

Chapter 2 System Validation
Explore the Kinetix 3 Status Screen
This screen indicates the status of any configured Kinetix 3 drive. It does not work with any other servo drive.
Parameter Description
Node This parameter shows the node address of connected drive.
Comm When this status indicator is gray, communication is active. When this status indicator is red communication has breaks.
Alarm When this status indicator is grey, there are no alarms. When the status indicator is red there is an alarm.
Ready When this status indicator is green, the drive can be enabled. When the status indicator is red, the drive cannot be enabled.
Velo cit y This value is the motor feedback veloci ty in revolutions per minute.
Posi tion This value is the motor feedback position in encoder counts.
Error code This is the most recent alarm code registered by the drive.
Error text This is the alarm message associated with the most recent alarm code.
56 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 57

System Validation Chapter 2
Explore the Fault Screen
There are two separate faults in this screen. The Command Fault is fault related to the command you issued to an axis. For
example, asking the axis to move or stop with invalid parameter. The Axis Fault is fault related to the axis. For example, the
axis has detected a hard limit.
Parameter Description
Command Fault
Error code This shows the error code for motion instruction.
Error ID This shows a short name for the error.
Description This describe the error in detail.
Axis Fault
Error code This shows the error code for the motion axis.
Error ID This shows a short name for the error.
Description This describes the error in detail.
Use the Fault Screen when you encounter either Axis or Motion Error, press Fault Help for the Fault Screen to look at more
descriptive message about the error.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 57
Page 58

Chapter 2 System Validation
Notes:
58 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 59

Appendix A
Kinetix 3 Drive Component-class User-defined Functional Block
Six user-defined function blocks (UDFBs) are included with the Kinetix 3 Drive Building Block. All are used in
the device module code for returning the status of the drive, sending commands to the drive, and configuring
parameters.
PTO Application Building Block User-defined Function Block
This appendix describes the user-defined function blocks used in the PTO building block and the associated inputs and
outputs.
RA_Motion_Move_Cmd User-defined Function Block
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 59
Page 60

Appendix A Kinetix 3 Drive Component-class User-defined Functional Block
Table 7 - RA_Motion_Move_Cmd Inputs
Variab le Data type Description Range
FBEN BOOL Set this bit TRUE to enable the function block. 0, 1
AxisIn Axis_Ref Assign this to the motion axis created via the configurator. —
MoveMode INT 0: Maintenance mode, Jogging is permitted.
1: Velocity control, Motion is in Velocity Move mode.
2: Absolute control, Motion is in Absolute Position Move mode.
3: Relative control, Motion is in Relative Position Move mode.
Posi tionDa ta Real Valid only in Mode 2 and 3.
2: Absolute position.
3: Relative position.
Velo cit yDat a Real This value sets the speed of the motor. -3.40282347E+38…3.40282347E+38
AccData Real This value sets the acceleration of the motor. -3.40282347E+38…3.40282347E+38
DecData Real This value sets the deceleration of the motor. -3.40282347E+38…3.40282347E+38
JerkData Real This value sets the jerk of the motor. -3.40282347E+38…3.40282347E+38
DirData SINT Valid only in Velocity control mode. This value sets the rotating direction of the motor. -128…127
Execute BOOL Set this bit TRUE to execute motion. 0, 1
Halt BOOL Set this bit TRUE to stop motion. 0, 1
Jog_Positive BOOL Set this bit TRUE to execute jog in the positive direction.
Set this bit FALSE stops jog.
Jog_Negative BOOL Set this bit TRUE to execute jog in the negative direction.
Set this bit FALSE stops jog.
0…3
-3.40282347E+38…3.40282347E+38
0, 1
0, 1
Table 8 - RA_Motion_Move_Cmd Outputs
Variab le Data type Description Range
FBENO BOOL This variable reflects the state of FBEN. 0, 1
AxisState USINT This value returns the status of the axis with respect to the motion currently in progress. 0…7
CurrentMoveMode INT This value returns the Current Move mode. 0…3
MoveDone BOOL When Move mode is:
0 or 1: This bit is TRUE when the motor has reached the set velocity.
2 or 3: This bit is TRUE when the motion is complete.
MoveBusy BOOL This bit is TRUE when the motion axis is busy. 0, 1
MoveAct ive BOOL This bit is TRUE when the function block is in control of the axis. 0, 1
MoveAborted BOOL This bit is TRUE when the command was aborted by another command. 0, 1
Error BOOL This bit is TRUE when an error was detected. 0, 1
ErrorID UINT This value returns the motion error code. —
ErrorMsg String This value returns the command that caused the error. —
0, 1
60 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 61

Figure 8 - RA_Motion_Move_Cmd Function Block Flowchart
Start
Select Move
Mode
Error?
Correct
Para meter
Read
Motion
Para meter s
Execute
Halt?
Execute
Move?
Stop PTO
Motion
Error?
Awai t
Action
Compl eted
End
Start PTO
Yes
No
Ye s
No
Yes
No
Yes
No
Yes
Axis
Error?
No
Motion
Error?
Correc t
Para meter
Servo Off
Servo On
Clear Fault
Ye s
Kinetix 3 Drive Component-class User-defined Functional Block Appendix A
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 61
Page 62

Appendix A Kinetix 3 Drive Component-class User-defined Functional Block
Table 9 - RA_HSC_CfgAndSts Inputs
Variab le Data type Description Range
FBEN BOOL Set this bit TRUE to enable the function block. 0, 1
HscID UINT This value sets the ID in use. 0…5
HscMode USINT This value sets the HSC mode. 0…9
Enable BOOL Set this bit TRUE to enable the HSC. 0, 1
Disable BOOL Set this bit TRUE to disable the HSC. 0, 1
InitialPosition REAL This value sets the initial position after reset. -3.40282347E+38…3.40282347E+38
Reset BOOL Set this bit TRUE to reset HSC count value and HSC error. 0, 1
HPSetting DINT This value sets the High preset setting. -2147483648…2147483647
LPSetting DINT This value sets the Low preset setting. -2147483648…2147483647
Table 10 - RA_HSC_CfgAndSts Outputs
Variab le Data type Description Range
FBENO BOOL This variable reflects the state of FBEN. 0, 1
HscOK BOOL This bit is TRUE when HSC is counting. 0, 1
HscCount DINT This value return the count value. -2147483648… 2147483647
LP_Reached BOOL Low pre set reached. 0, 1
HP_Reached BOOL High preset reached. 0, 1
Underflow BOOL Underflow detected. 0, 1
Overflow BOOL Overflow detected. 0, 1
Error BOOL This bit is TRUE when an error was detected. 0, 1
ErrorCode UINT This value returns the HSC error code:
00: No error.
01: Invalid HSC Counting mode. (Can require a re-download of program to
correct).
02: Invalid high preset. (Can require a re-download of the program to correct).
03: Invalid overflow. (Can require a re-download of the program to correct).
04: Invalid underflow. (Can require a re-download of the program to correct).
05: No PLS data. (Can require a re-download of the program to correct).
06: Invalid HscID.
07: Invalid HscMode.
0…255
62 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 63

Figure 9 - RA_HSC_CFGandSTS Function Block Flowchart
Start
Initialize
HSC
Read HSC
Param eter
Rest
HSC?
Rest Initial
Count Value
Enable
HSC ?
Invalid
Parameter?
Reset HSC
HSC Counting
Disable
HSC
End
No
No
No
Yes
Yes
Yes
Yes
No
Kinetix 3 Drive Component-class User-defined Functional Block Appendix A
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 63
Page 64

Appendix A Kinetix 3 Drive Component-class User-defined Functional Block
RA_K3_MBUS_STS User-defined Function Block
This UDFB provides the basic status word for the Kinetix 3 drive. The outputs are updated at the interval
specified on the input side of the function block.
64 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 65

Kinetix 3 Drive Component-class User-defined Functional Block Appendix A
Table 11 - RA_K3_MBUS_STS Inputs
Variable Type Description Range
FBEN BOOL The Function Block Enable bit (FBEN) controls the operation of the function. On the rising edge of
1, 0
this bit, the function block initialization takes place. While this bit is held high, the function block
continues to execute.
Channel UINT This is the port or channel on the controller that is connected to the drive. For this UDFB, it is
2, 5, 6, 7, 8, and 9
recommended to use a 2080-SERIALISOL module instead of the embedded serial port.
NodeAddr USINT Each drive has a node address that the Modbus Master uses to reference that drive. For each
1…247
Modbus network, those addresses must be unique.
Interval UDINT This parameter controls how often the UDFB sends Modbus messages to the device, with zero
0…65,536 ms
representing the Continuous Operation mode. In Continuous mode, the drive status updates as
often as possible given the network traffic and buffer.
Table 12 - RA_K3_MBUS_STS Outputs
Variable Type Description Range
FBENO BOOL This variable reflects the state of the Function Block Enable bit (FBEN). 1, 0
FB_Q BOOL This variable shows whether the status message has completed. After the response from the
1, 0
drive has been received, this bit becomes true. It stays true until another message is sent or until
the UDFB sees a rising edge of the enable input.
CommLoss BOOL This bit signifies a communication timeout between the controller and the drive. This also
1, 0
triggers FB_Error to be true. This is cleared after a successful completion of a message to the
drive, or the UDFB sees a rising edge of the enable input.
FB_Error BOOL This bit shows that an error occurred within the UDFB. For a more detailed description of the
1, 0
error code, see FB_ErrCode.
FB_ErrCode UDINT This variable enumerates the errors that have occurred within the UDFB.
—
Bit 0 - Modbus Message Communication Error.
Bit 1 - Invalid Channel.
Bit 2 - Invalid Node Address.
ServoAlarm BOOL This bit is normally true for a ‘healthy’ drive. If the bit changes to false, there is a servo alarm
1, 0
within the drive.
With inPosn BOOL This bit is true when the motor feedback position is within the position tolerance specified by
1, 0
parameter Pr5.00 - In Position Size.
UpToSpeed BOOL) This bit is true when the motor feedback velocity is greater than the value in Pr5.04 - Up To
1, 0
Speed.
Active BOOL This bit is true when the drive is disabled and goes false when the drive is enabled. This operates
1, 0
opposite of the digital output associated with the Brake.
With inSpee d BOOL This bit is true when the motor feedback velocity is within the speed tolerance specified by
1, 0
parameter Pr5.03 - Speed Window.
PosnVal id BOOL This bit is true when the drive is connected to an absolute encoder configured with battery
1, 0
backup and it can read a valid position from the encoder.
Ready BOOL This bit is true when the drive is not faulted and can be enabled. 1, 0
CurrentLmt BOOL This bit is true when the current is being limited by the drive. The current limits are entered in
1, 0
parameters Pr4.01 - Positive Internal Current Limit, Pr4.02 - Negative Internal Current Limit,
Pr4.03 - Positive External Current Limit, and Pr4.04 - Negative External Current Limit.
Vel ocit yLm t BOOL This bit is true when the velocity is being limited by the drive. The velocity limit can be derived
1, 0
from the analog velocity input or the manual limit entered in parameter Pr2.12 - Manual
Velocity Lim it.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 65
Page 66

Appendix A Kinetix 3 Drive Component-class User-defined Functional Block
First Scan?
Initialize Variables
Run Diagnostics
Yes
No
Are Channel
and Node Address Within
Range;
Read Drive Status
End
Diagnostics?
No
Yes
Start
End
Set Error Bits
Yes
Table 12 - RA_K3_MBUS_STS Outputs (continued)
Variable Type Description Range
NearPosn BOOL This bit is true when the motor feedback position is within the position tolerance specified by
parameter Pr5.02 - Near Position Size.
War ning BOOL This bit is true when there is a warning on the drive. Warning descriptions can be seen in the
Kinetix 3 drive’s user manual. See the
Additional Resources on page 9.
InMotion BOOL This bit is true when the drive is moving as part of an index. 1, 0
InDwell BOOL This bit is true when the drive is holding position for a specified time as part of an index. 1, 0
Homed BOOL This bit is true when the drive has completed the homing sequence and has a valid home
position. This bit does not clear if the encoder exceeds its range; however, it does not have a valid
absolute position reference.
IndexSelect UINT This is binary combination representing the current index that is being acted on. If no index is in
process, it represents the value of the last index that was acted on.
EndOfSeq BOOL This bit is true when motion has stopped on the axis in Indexing mode. This could be due to
completion of the motion cycle, or an aborted index.
Figure 10 - RA_K3_MBUS_STS Function Block Flowchart
1, 0
1, 0
1, 0
0…63
1, 0
66 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 67

Kinetix 3 Drive Component-class User-defined Functional Block Appendix A
RA_K3_MBUS_STS_Extended User-defined Function Block
This UDFB retrieves the extended status information from the drive. The drive supports only two analog
outputs; this lets many more values be updated. The output values are updated at the interval specified by the
input interval.
Table 13 - RA_K3_MBUS_STS_Extended Inputs
Variable Type Description Range
FBEN BOOL The Function Block Enable bit (FBEN) controls the operation of the function. On the rising edge of
this bit, the function block initialization takes place. While this bit is held high, the function
block continues to execute.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 67
1, 0
Page 68

Appendix A Kinetix 3 Drive Component-class User-defined Functional Block
Table 13 - RA_K3_MBUS_STS_Extended Inputs (continued)
Variable Type Description Range
Channel UINT This is the port or channel on the controller that is connected to the drive. For this UDFB, it is
2, 5, 6, 7, 8, and 9
recommended to use a 2080-SERIALISOL module instead of the embedded serial port.
NodeAddr USINT Each drive has a node address that the Modbus Master uses to reference that drive. For each
1…247
Modbus network, those addresses must be unique.
Interval UDINT This parameter is used to control how often the UDFB sends Modbus messages to the device.
0…65,536 ms
Zero representing the Continuous Operation mode. In Continuous mode, the drive status updates
as often as possible given the network traffic and buffer.
Table 14 - RA_K3_MBUS_STS_Extended Input
Variable Type Description Range
FBENO BOOL This variable reflects the state of the Function Block Enable bit (FBEN). 1, 0
FB_Q BOOL This variable shows whether the status message has completed. After the response from the
1, 0
drive has been received, this bit becomes true. It stays true until another message is sent or until
UDFB sees a rising edge of the enable input.
CommLoss BOOL This bit signifies a communication timeout between the controller and the drive. This also
1, 0
triggers FB_Error to be true. This is cleared after a successful completion of a message to the
drive or the UDFB sees a rising edge of the enable input.
FB_Error BOOL This bit shows that an error occurred within the UDFB. For a more detailed description of the
1, 0
error code, see FB_ErrCode.
FB_ErrCode UDINT This variable enumerates the errors that have occurred within the UDFB. This UDFB has the
—
following error designations:
Bit 0 - Modbus Message Communication Error.
Bit 1 - Invalid Channel.
Bit 2 - Invalid Node Address.
Vel ocit yFd bk INT This value is the motor feedback velocity in revolutions per minute. —
VelocityCmd INT This value is the motor command velocity in revolutions per minute. —
Vel ocit yEr r INT This value is the difference between the motor command and motor feedback velocity, in
—
revolutions per minute.
TorqueCmd REAL This value is the commanded current to the motor, in percent of maximum for the drive. —
PosnFd bk DINT This value is the motor feedback position in encoder counts. —
PosnCmd DINT This value is the motor command position in encoder counts. —
PosnE rr DINT This value is the difference between the motor command and motor feedback position, in
—
encoder counts.
PlsCmdFreq REAL This is the frequency of pulses, in pulses per second, while in Position Follower mode. —
ElecAngle REAL This is the electrical angle of the motor, in degrees. —
MechAngle REAL This is the mechanical angle of the motor, in degrees. —
ShuntLoad INT This is the regenerative loading, in percent of maximum. —
BusVoltage INT This is the bus voltage, in volts. —
EncTurnCount INT This is the absolute encoder turn count. It is active only when the encoder is using absolute
—
feedback with a battery.
AlarmCode INT This is the most recent alarm code registered by the drive. —
AlarmText STRING This is the alarm message associated with the most recent alarm code. —
68 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 69

Figure 11 - RA_K3_MBUS_STS_Extended Function Block Flowchart
First Scan?
Initialize Variables
Run Diagnostics
Yes
No
Are Channel
and Node Address Within
Range?
Read Drive Status
End
Diagnostics?
No
Yes
Start
End
Set Error Bits
Yes
Kinetix 3 Drive Component-class User-defined Functional Block Appendix A
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 69
Page 70

Appendix A Kinetix 3 Drive Component-class User-defined Functional Block
Notes:
70 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 71

Appendix B
Global Variables
This appendix contains the global variables used for the user program interfacing.
Table 15 - Global Variable
Variab le Name Data Type Variable Description
(User-defined prefix)_Cfg_MoveMode_Auto INT 0: Maintenance mode (lets only the axis jog)
1: Velocity Move mode
2: Absolute Move mode
3: Relative Move mode
(User-defined prefix)_Cfg_EnNegative_Auto BOOL Enable motion in the negative direction.
(User-defined prefix)_Cfg_EnPositive_Auto BOOL Enable motion in the positive direction.
(User-defined prefix)_Cmd_Reset_Auto BOOL Execute to clear FB fault.
(User-defined prefix)_Cmd_RsetDrv_Auto BOOL Execute to clear servo drive fault.
(User-defined prefix)_Cmd_Home_Auto BOOL Execute to home axis.
(User-defined prefix)_Cmd_Move_Auto BOOL Execute to move axis according to Move mode, acceleration, deceleration, jerk, position,
(User-defined prefix)_Cmd_Enable_Auto BOOL Execute to power on servo drive.
(User-defined prefix)_Cmd_Stop_Auto BOOL Execute to stop PTO with reference to emergency stop profile (Setting not available in
(User-defined prefix)_Cmd_Halt_Auto BOOL Execute to stop Pulse Train Output (PTO).
(User-defined prefix)_Cfg_HomeMode_Auto SINT Selection of homing method.
(User-defined prefix)_Par_AccData_Auto REAL Set acceleration value for Move command.
(User-defined prefix)_Par_DecData_Auto REAL Set deceleration value for Move and Halt command.
(User-defined prefix)_Par_StopDec_Auto REAL Set deceleration value for Stop command. (Setting not available in faceplate)
(User-defined prefix)_Par_DirData_Auto SINT Set direction value for Move command.
(User-defined prefix)_Par_JerkData_Auto REAL Set jerk value for Move command.
(User-defined prefix)_Par_StopJerk_Auto REAL Set jerk value for Stop command. (Setting not available in faceplate)
(User-defined prefix)_Par_PositionData_Auto REAL Set Position value Move command.
(User-defined prefix)_Par_HomePosition_Auto REAL Set the absolute home position value when axis is homed.
(User-defined prefix)_Par_VelocityData_Auto REAL Set velocity value for Move command.
(User-defined prefix)_Cfg_Channel_Auto
Channel number of serial port for communication to drive
(User-defined prefix)_Par_Interval_Auto
Set polling interval for drive
(User-defined prefix)_Cfg_NodeAddr_Auto
Set the node address of drive. For communication with controller
(User-defined prefix)_Cmd_HscDsEn_Auto
Execute to disable High Speed Counter
(User-defined prefix)_Cmd_HscEn_Auto
Execute to enable High Speed Counter
UINT For drive communication.
UDINT For drive communication.
USINT For drive communication.
BOOL Applicable only when using an encoder.
BOOL Applicable only when using an encoder.
direction and velocity value.
faceplate).
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 71
Page 72

Appendix B Global Variables
Table 15 - Global Variable (continued)
Variable Name Data Type Variable Description
(User-defined prefix)_Cmd_HscRset_Auto
Execute to reset High Speed Counter
(User-defined prefix)_Cfg_HscMode_Auto
Selection of High Speed Count mode
(User-defined prefix)_Cfg_HscID_Auto
Selection of High Speed Counter
(User-defined prefix)_Cfg_HscIniPos_Auto
Set initial value for High Speed Counter
(User-defined prefix)_Cfg_HPSetting_Auto
Set the high preset setting for High Speed Counter (Setting not
available in faceplate)
(User-defined prefix)_Cfg_LPSetting_Auto
Set the low preset setting for High Speed Counter (Setting not
available in faceplate)
(User-defined prefix)_Alm_DrvCode INT This is the most recent alarm code registered by the drive.
(User-defined prefix)_Alm_DrvText STRING This is the alarm message associated with the most recent alarm code.
(User-defined prefix)_Err_AxisErrID UINT This shows a short name error for motion axis.
(User-defined prefix)_Err_HscErrID UINT (Status not available in faceplate)
(User-defined prefix)_Err_MotionErrID UINT This shows a short name error for motion instruction.
(User-defined prefix)_Sts_AxisEn BOOL True when axis is powered on.
(User-defined prefix)_Sts_AxisErr BOOL True when there is a motion axis error.
(User-defined prefix)_Sts_AxisHomed BOOL True when axis is homed.
(User-defined prefix)_Sts_AxisHoming BOOL True when axis is homing.
(User-defined prefix)_Sts_AxisState USINT This value returns the status of the axis with respect to the motion currently in progress.
(User-defined prefix)_Sts_CmdPos REAL This value returns the actual command position of the axis
(User-defined prefix)_Sts_CmdVel REAL This value returns the actual command velocity of the axis.
(User-defined prefix)_Sts_CurrentMode INT This value returns the Move mode. (Status not available in faceplate)
(User-defined prefix)_Sts_DrvAlm BOOL True when the drive faulted.
(User-defined prefix)_Sts_DrvComm BOOL True when drive communication is lost.
(User-defined prefix)_Sts_DrvPosFdbk DINT This value returns the position feedback from drive.
(User-defined prefix)_Sts_DrvRdy BOOL True when drive is not faulted.
(User-defined prefix)_Sts_DrvVelFdbk INT This value returns the velocity feedback from drive.
(User-defined prefix)_Sts_ER_Hsc BOOL True when there is an error in the configured High Speed Counter.
(User-defined prefix)_Sts_HomeDone BOOL True when home instruction is completed. (Status not available in faceplate)
(User-defined prefix)_Sts_HscRdy BOOL True when High Speed Counter is ready to count.
(User-defined prefix)_Sts_InMotion BOOL True when axis is in motion.
(User-defined prefix)_Sts_MotionErr BOOL True when there is a motion instruction error.
(User-defined prefix)_Sts_MoveDone BOOL True when move instruction is completed. (Status not available in faceplate)
(User-defined prefix)_Sts_RsetDone BOOL True when axis is reset. (Status not available in faceplate)
(User-defined prefix)_Sts_StopDone BOOL True when Stop command is completed. (Status not available in faceplate)
(User-defined prefix)_Val_HscCnt DINT This value returns the encoder count value.
BOOL Applicable only when using an encoder.
UINT Applicable only when using an encoder.
UINT Applicable only when using an encoder.
DINT Applicable only when using an encoder.
DINT Applicable only when using an encoder.
DINT Applicable only when using an encoder.
(Status not available in faceplate)
72 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 73

Appendix C
Motion Axis Setup for PTO Building Block
I/O Assignment
The I/O assignments differ for the number of PTO applications used. The following figures are shown for your reference.
You can change the assignment as needed for your application.
Figure 12 - I/O Assignment for a Drive with One PTO Application
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 73
Page 74

Appendix C Motion Axis Setup for PTO Building Block
Figure 13 - I/O Assignment for a Drive with Two PTO Applications
74 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 75

Figure 14 - I/O Assignment for a Drive with Three PTO Applications
Motion Axis Setup for PTO Building Block Appendix C
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 75
Page 76

Appendix C Motion Axis Setup for PTO Building Block
The output terminal for each Drive Reset Output is assigned in each ladder program. The assignment is on the third
branch of rung 1 for each of the PTO building block ladder diagrams
Figure 15 - Sample of a PTO Building Block Ladder Diagram
General
1. Type your axis name in the Axis Name field.
A system variable is created for the name entered in the Axis Name field. The name of the motion axis created in the
starting project downloaded from the sample code website is Axis_01.
76 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 77

Motion Axis Setup for PTO Building Block Appendix C
If your project was generated by CCAT System Design Assistant, use the name given when you set up the PTO
application. By default, the first PTO application is call ServoDrive1 and subsequent applications are called
ServoDrive2 and ServoDrive3.
The names of axes for PTO applications created with Connect Components Workbench motion configuration are
shown here.
2. Select your preferred PTO channel.
Each PTO channel has its own corresponding Pulse Output and Direction Output terminal. PTO channel 0 has
been selected for this building block. Pulse and direction signal are generated from output 0 and 3.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 77
Page 78

Appendix C Motion Axis Setup for PTO Building Block
a
b
c
a
b
c
3. Verify Drive Enable Output is enabled.
In the configuration shown, the motion command, MC_Power, activates the output when executed successfully.
a. Check Drive Enable Output.
When this box checked the MC_Power initiates motor enable.
b. From the Output pull-down menu, choose the output terminal to initiate motor enable.
c. From the Active Level pull-down menu, choose the Output signal active level.
If Active Level is set to High the output terminal becomes TRUE when MC_Power is executed successfully.
4. Verify In-Position Input has been disabled.
In the configuration shown, the controller does not wait for an external input signal to indicate the servo motor has
reached a valid position. If you want to use In-Position Input do the following.
a. Check In-Position Input
When the box is checked, In-Position function is enabled.
b. From the Input pull-down menu, choose the input terminal you want to use for In-Position signal.
c. From the Active Level pull-down menu, choose your Input signal active level.
If Active Level set to High, the controller acknowledges that drive is at a valid position when input is TRUE.
78 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 79

Motion Axis Setup for PTO Building Block Appendix C
a
b
c
a
b
c
5. Verify Drive Ready Input has been enabled.
In the configuration shown, the controller requires an external signal to indicate that the drive is ready. It is usually
used to show if a drive is faulted. The drive sends a TRUE to this input if it is ready.
a. Check Drive Ready.
When checked, Drive Ready Input is enabled.
b. From the Input pull-down menu, choose the input terminal you want to use for Drive Ready signal.
c. From the Active Level pull-down menu, choose your Input signal active level.
If Active Level is set to High, the controller acknowledges that drive is ready when input terminal is TRUE.
6. Verify Touch Probe Input has been disabled.
In the configuration shown, the fixed input dedicated for touch probe can be reassign for other use. For more details
on Touch Probe, please refer to Connected Components Workbench Help on MC_TouchProbe function block. If
you want to use the Touch Probe Input do the following.
a. Check Touch Probe Input.
When checked, Touch Probe function is enabled.
b. No action, the input terminal is fixed according to PTO channel. It cannot be reallocated.
c. From the Active Level pull-down menu, choose your Input signal active level.
If Active Level is set to High, the controller activates Touch Probe when input is TRUE.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 79
Page 80

Appendix C Motion Axis Setup for PTO Building Block
a
b
Motor and Load
1. Verify the SI unit for position has been set to mm.
This unit is used in the rest of the configuration for position and speed. This setting does not have any effect on the
configuration.
2. Verify the ratio of 10:1,024 has been set.
This ratio generates the number of pulses to reach the required position value.
a. Type value for Pulse per Revolution.
This value syncs up with the drive settings. The drive has been configured to rotate the motor by one revolution
when it receives 1,024 pulses.
b. Type value for Travel for Revolution.
This value syncs up with the mechanical system, such as ball screw, lead screw or linear belt. The mechanical
system moves 10 mm when the motor rotates one revolution.
80 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 81

Motion Axis Setup for PTO Building Block Appendix C
a
b
c
a
b
c
d
3. Verify the direction configuration for the PTO channel.
a. From the Polarity pull-down menu, choose the setting appropriate for your application.
This setting lets you to invert the directional signal.
b. From the Mode pull-down menu, choose the Mode appropriate for your application.
The Bi-Directional setting to let the motion axis to move in the positive and negative direction.
c. From the Change Delay Time pull-down menu, choose a delay time for your application.
In this example the minimum time delay has been set to 10ms. This is the minimum time delay for any directional
change motion command.
Limits
1. Verify the hard limit configuration.
a. From the When hard limit us reached, apply pull-down menu, choose a profile that is appropriate for your
application.
In the configuration shown, the Emergency Stop Profile has been selected for when hard limit is triggered.
b. Check Lower Hard Limit and Upper Hard Limit.
When the boxes are checked, the hard limit inputs are enabled.
c. From the Active Level pull-down menus, choose the active level for your input signals.
If Active Level is set to Low, the controller acknowledges that hard limit is reached when input terminal is
FALSE .
d. No action, the input terminals correspond with the PTO channel selected. It cannot be reallocated.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 81
Page 82

Appendix C Motion Axis Setup for PTO Building Block
a
b
2. Verify the soft limit configuration.
In the configuration shown the soft limits are not used, if your application uses soft limits do the following.
a. Check Lower Soft Limit and Upper Soft Limit.
When the boxes are checked, the soft limit are enabled.
b. Type the values for the soft limit position.
The SI unit is in mm, as defined in Motor Load section.
82 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 83

Dynamics
a
b
c
1. Verify the maximum motion profile level for your application.
a. Type the value for maximum speed for your application.
The maximum speed for a Kinetix 3 drive is 5000 rpm.
b. Type the value for Start/Stop Velocity.
The Start and Stop velocity is define as 50% of the max velocity.
c. Verify the values for acceleration, deceleration and jerk.
In this example the maximum value has been set for acceleration, deceleration and jerk.
For definition of each parameter, please refer to Connected Components Workbench Help.
Motion Axis Setup for PTO Building Block Appendix C
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 83
Page 84

Appendix C Motion Axis Setup for PTO Building Block
a
b
c
2. Define the motion type and dynamics for Emergency Stop Profile.
a. From the Stop Type pull-down menu, choose an Emergency Stop Profile for your application.
In this example Deceleration Stop is defined as the Emergency Stop Profile.
b. Type the value for Stop Velocity
In this example the Stop Velocity has been set to 50.0 rpm.
c. Type values for Stop Deceleration and Stop Jerk.
In this example Stop Deceleration and Stop Jerk has been set to 90,000 and 0 respectively.
84 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 85

Motion Axis Setup for PTO Building Block Appendix C
a
b
c
d
e
f
g
h
i
j
k
Homing
1. Define the parameters for the homing sequence.
a. From the Homing Direction pull-down menu, choose a home direction for your application.
In this configuration the Home direction is set to negative. The axis moves in the negative direction when motion
home command is executed.
b. Type a the value for Homing Velocity.
In this configuration the axis moves at 5.0 mm/s when MC_Home is executed.
c. Type the values for Homing acceleration, deceleration, and jerk.
d. Type the value for Creep Velocity.
In this configuration the Creep Velocity is 5.0 mm/s. It can be set to a lower value. This speed is activated when
home switch is triggered while the axis is homing.
e. Type the value for Home Offset.
In this configuration no position offset is required when the axis is homed.
f. Check Home Switch Input.
When this box is checked, motion axis requires Home switch to trigger during homing. This indicates that the
axis is near home position.
g. No action, the Home Input Terminal corresponds to the selected PTO channel. It cannot be reallocated.
h. From the Active Level pull-down, choose the active level for your Home Switch Input.
If Active Level is High the controller acknowledges that the home sensor is triggered when terminal is TRUE.
i. Clear Home Marker Input.
In this configuration the Home Marker Input is set to disabled. When the Home Marker Input is set to enabled,
motion axis requires additional trigger from the selected input during homing. This is usually the Z phase of
encoder input.
j. If your application uses a home marker, from the Input pull-down menu, choose an input terminal for the Home
Marker Input.
k. If your application uses a home marker, from the Active Level pull-down menu, choose an active level for the
Home Marker Input signal.
If Active Level is High the controller acknowledges that Home Marker Input is triggered when terminal is TRUE.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 85
Page 86

Appendix C Motion Axis Setup for PTO Building Block
Notes:
86 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 87

Appendix D
Configure a Series A Kinetix 3 Drive
This appendix provides the steps for configuring Kinetix 3 drive Series A hardware with Ultraware software.
What You Need
Kinetix 3 drive setup:
• Personal computer with an available RS232 port
If RS232 port is not available, you can use an available USB port and USB/RS232 converter.
• Ultraware Software version 1.82.00 or later
• 2090-CCMPCDS-23AAxx communication cable for Kinetix 3 drive
•Kinetix 3 drive
Configure Your Personal Computer and Kinetix 3 Drive Connection
Series A drives ship configured to communicate with Ultraware software. You can verify the configuration by using the
keypad. Do this before you connect the drive to your personal computer.
Follow these steps to verify the current drive configuration.
1. Apply control power to the drive.
2. Press Mode/Set until the first two characters of the 7-segment status indicator display Pr.
3. Press the arrow key until the status indicator displays Pr0.09
4. Press Enter to view the setting.
The status indicator displays 0005.
5. If 0005 is not displayed, do the following.
a. Use the arrow keys to change the value to 0005.
b. Press Mode/Set.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 87
Page 88

Appendix D Configure a Series A Kinetix 3 Drive
3
2
1
6. Connect the drive to your personal computer with the RS-232 serial communication cable.
If RS232 port is not available, you can do this with an available USB port and USB/RS232 converter.
Item Description
1 Kinetix 3 drive
2 RS-232 serial communication cable, catalog number 2090-CCMPCDS-23AA
3 Personal computer with Ultraware software
Follow these steps to connect the Kinetix 3 drive to your personal computer and the Ultraware software.
1. From your personal computer, start the Ultraware software.
2. Select Create new file and click OK.
3. If you receive a warning that the COM port is not available, click OK.
4. Connect the IEEE1394 connector of 2090-CCMPCDS-23AA, RS-232 serial communication cable to
your drive and the serial connector to your personal computer.
88 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 89

Configure a Series A Kinetix 3 Drive Appendix D
5. Navigate to your personal computer’s Device Manager or use the Run command and enter ‘devmgmt.msc’.
6. Determine the COM port you want to use with Ultraware software.
This example shows a serial-to-USB converter on Port 3.
7. From the Tools menu in Ultraware software, choose Serial Port.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 89
Page 90

Appendix D Configure a Series A Kinetix 3 Drive
8. In the personal computer Communication Setup dialog box, configure the serial port, as follows:
– Serial Port chosen in step 6
– Baud Rate: 57600
– Format: 8 Data Bits, No Parity
9. Click OK.
10. From the Tools menu, choose Rescan.
The drive attaches at Node 1 and appears in the On-Line Drives tree when the scan is complete.
If Then
Communication was established. You are prompted to use a wizard to set up the Kinetix 3 drive. You are not required to use it, but it simplifies configuration.
Communication was not established There is an error in the communication setup, the drivers, or the wiring
90 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 91

Configure Your Drive with Ultraware Software
Follow these steps to configure your Kinetix 3 drive for the building block.
1. Factory reset the drive to provide a consistent starting point.
a. From the top-level branch, double-click Drive.
b. From the right pane, click Reset to Factory Settings.
c. Click Yes.
Configure a Series A Kinetix 3 Drive Appendix D
2. Configure the Follower mode.
a. Expand Mode Configuration.
b. Double-click Follower branch.
The parameters are shown in the right pane.
c. Set the Command Type to Step/Direction. Positive Logic.
d. Set the 1st Gear Ratio Change to Always Enable.
e. Set the 1st Gear Ratio to 1:128.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 91
Page 92

Appendix D Configure a Series A Kinetix 3 Drive
3. Configure the Encoders settings.
a. Double-click the Encoders branch.
The parameters are shown in the right pane.
b. Set Output Ratio to 1:128.
c. Set the Encoder Backup Battery to Not Installed.
d. Click Yes.
4. Auto tune the servo motor.
a. Double-click the Tuning branch.
The parameters are shown in the right pane.
b. Click Start Autotuning.
c. Check that the motor is safe to operate.
d. Click Yes.
The motor enables and moves a few steps. Auto tune is completed when the motor is disabled.
92 Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Page 93

5. Configure Digital Input.
a. Double-click the Digital Inputs branch.
b. Set Input 2 to Fault reset.
6. Configure Digital Output.
a. Double-click the Digital Output branch.
b. Set Output 1 to Ready.
Configure a Series A Kinetix 3 Drive Appendix D
Configure Your Drive for Modbus Communication Protocol
After you configure your Kinetix 3 drive with Ultraware software, follow these steps to set the drive to Modbus mode.
1. Disconnect the serial cable from the personal computer and the drive.
2. Press Mode/Set until the first two characters of the status indicator display Pr.
3. Use the arrow keys to change the status indicator to display Pr0.09.
4. Press Enter.
The status indicator displays 0005.
5. Use the arrow keys to change the value to 1102.
6. Press Mode/Set.
7. Press Enter.
8. Use the arrow keys to change the number until the display reads Pr0.07.
9. Press Enter.
10. Change the node address shown to a unique Modbus node address for the drive, and press Mode/Set.
By default, the node address is 1.
11. Click Enter.
Rockwell Automation Publication CC-QS033A-EN-P - February 2014 93
Page 94

Rockwell Automation Support
Rockwell Otomasyon Ticaret A.Ş., Kar Plaza İş Merkezi E Blok Kat:6 34752 İçerenköy, İstanbul, Tel: +90 (216) 5698400
Rockwell Automation provides technical information on the Web to assist you in using its products.
At http://www.rockwellautomation.com/support
software service packs. You can also visit our Support Center at https://rockwellautomation.custhelp.com/
updates, support chats and forums, technical information, FAQs, and to sign up for product notification updates.
In addition, we offer multiple support programs for installation, configuration, and troubleshooting. For more
information, contact your local distributor or Rockwell Automation representative, or visit
http://www.rockwellautomation.com/services/online-phone
Installation Assistance
If you experience a problem within the first 24 hours of installation, review the information that is contained in this
manual. You can contact Customer Support for initial help in getting your product up and running.
United States or Canada 1.440.646.3434
Outside United States or Canada Use the Wor ldwi de Lo cato r
Rockwell Automation representative.
at http://www.rockwellautomation.com/rockwellautomation/support/overview.page, or contact your local
New Product Satisfaction Return
you can find technical and application notes, sample code, and links to
for software
.
Rockwell Automation tests all of its products to help ensure that they are fully operational when shipped from the
manufacturing facility. However, if your product is not functioning and needs to be returned, follow these procedures.
United States Contact your distributor. You must provide a Customer Support case number (call the phone number above to obtain one) to your
Outside United States Please contact your local Rockwell Automation representative for the return procedure.
distributor to complete the return process.
Documentation Feedback
Your comments will help us serve your documentation needs better. If you have any suggestions on how to improve this
document, complete this form, publication RA-DU002
, available at http://www.rockwellautomation.com/literature/.
Publication CC-QS033A-EN-P - February 2014
Copyright © 2014 Rockwell Auto mation, Inc. All rights reserved. Pr inted in the U.S.A.
 Loading...
Loading...