

SERVICE MANUAL
LN-9400-00.9
(Replaced LN-9400-00.8)
December 2012
DYNAFLOW
TM
USER MANUAL
MODEL: 77376 and A12233
IMPORTANT: Before using this equipment,
carefully read SAFETY PRECAUTIONS, starting on page 1, and all instructions in this
manual. Keep this Service Manual for future
reference.
Service Manual Price: $50.00 (U.S.)
NOTE: This manual has been changed from revision LN-9400-00.8 to revision LN-9400-00.9
Reasons for this change are noted under “Manual Change Summary” inside the back
cover of this manual.
LN-9400-00.9
DynaFlowTM User Manual - Contents
CONTENTS
SAFETY:
SAFETY PRECAUTIONS.........................................................................................
HAZARDS / SAFEGUARDS..............................................................................................
PAGE
1-5
1
2-5
INTRODUCTION:
FEATURES........................................................................................................................
DESCRIPTION.................................................................................................................
BLOCK DIAGRAM.............................................................................................................
DYNAFLOW SPECIFICATIONS...................................................................................
INSTALLATION:
SYSTEM GUIDELINES, EQUIPMENT GROUNDING, LOCATIONS, MOUNTING.............
BLOCK DIAGRAM FOR A SINGLE-COMPONENT GUN................................................
BLOCK DIAGRAM FOR A TWO-COMPONENT GUN.............................................................
BLOCK DIAGRAM FOR A THREE-COMPONENT GUN.........................................................
INPUT POWER.............................................................................................................
INTERFACING TO THE FLOW CONTROLLER........................................................
MOTHER BOARD TERMINALS, HARDWARECONFIGURATION, TRANSDUCERS.........
OPERATION:
OVERVIEW.....................................................................................................................
PARAMETER DESCRIPTIONS.........................................................................................
AUTOMATIC GUN APPLICATIONS.................................................................................
MANUAL HAND GUN APPLICATIONS.............................................................................
GENERAL........................................................................................................................
JOB SELECT TIMING DIAGRAM..................................................................................
JOB SELECT TIMING DIAGRAM SAMPLE, JOB QUEUE, REVERSE FLOW.................
PROCEDURES, FIRST TIME STARTUP, NORMAL STARTUP..........................
PID CONTROL........................................................................................................
6-13
6
6-9
10
11-13
14-27
14-15
16
17
18
19
20-23
24-26
28-61
28-29
30-43
44-45
45-46
46-47
48-49
50-54
54-56
56-61
MAINTENANCE:
TROUBLESHOOTING......................................................................................................
SYSTEM PREVENTIVE MAINTENANCE INSTRUCTIONS............................................
SYSTEM COMPONENTS AND PARTS IDENTIFICATION...........................................
RECOMMENDED SPARE PARTS................................................................................
HARDWARE SETTINGS................................................................................................
NEW CHANNEL CARD JUMPERS...........................................................................
INTERFACE MODULE DIP SETTINGS.................................................................
CONTROL RACK TERMINAL IDENTIFICATION......................................................
SERIAL COMMUNICATION PROTOCOLS................................................................
RATIO CONVERSION......................................................................................
WARRANTY POLICIES:
LIMITED WARRANTY..............................................................................................
(Continued Next Page)
LN-9400-00.9
62-87
62-71
71
72
73-74
75-78
79-80
81
82-85
86
87
88
88
DynaFlowTM User Manual - Contents
CONTENTS (Cont.)
PAGE
APPENDIX:
ADDENDUM A....................................................................................................................
ADDENDUM B..................................................................................................................
ADDENDUM C................................................................................................................
89-93
89-90
91-92
93
LN-9400-00.9

SAFETY
DynaFlowTM User Manual - Safety
SAFETY PRECAUTIONS
Before operating, maintaining or servicing any
Ransburg electrostatic coating system, read and
understand all of the technical and safety literature for your Ransburg products. This manual
contains information that is important for you to
know and understand. This information relates to
USER SAFETY and PREVENTING EQUIPMENT
PROBLEMS. To help you recognize this information, we use the following symbols. Please pay
particular attention to these sections.
A WARNING! states information to alert you
to a situation that might cause serious injury
if instructions are not followed.
A CAUTION! states information that tells how
to prevent damage to equipment or how to
avoid a situation that might cause minor injury.
A NOTE is information relevant to the procedure in progress.
W A R N I N G
!
The user MUST read and be familiar with
the Safety Section in this manual and the
Ransburg safety literature therein identied.
This manual MUST be read and thoroughly understood by ALL personnel
who operate, clean or maintain this
equipment! Special care should be
taken to ensure that the WARNINGS and
safety requirements for operating and
servicing the equipment are followed.
The user should be aware of and adhere
to ALL local building and re codes and
ordinances as well as NFPA-33 SAFETY
STANDARD, LATEST EDITION, prior to
installing, operating, and/or servicing
this equipment.
W A R N I N G
!
While this manual lists standard specications
and service procedures, some minor deviations
may be found between this literature and your
equipment. Differences in local codes and plant
requirements, material delivery requirements,
etc., make such variations inevitable. Compare
this manual with your system installation drawings
and appropriate Ransburg equipment manuals to
reconcile such differences.
Careful study and continued use of this manual
will provide a better understanding of the equip-
ment and process, resulting in more efcient
operation, longer trouble-free service and faster,
easier troubleshooting. If you do not have the
manuals and safety literature for your Ransburg
system, contact your local Ransburg representative or Ransburg.
The hazards shown on the following
page may occur during the normal use of
this equipment. Please read the hazard
chart beginning on page 2.
LN-9400-00.9
1
DynaFlowTM User Manual - Safety
AREA
Tells where hazards
may occur.
Spray Area
HAZARD
Tells what the hazard is.
Fire Hazard
Improper or inadequate opera-tion
and maintenance procedures will
cause a re hazard.
Protection against inadvertent
arcing that is capable of causing
re or explosion is lost if any safety
interlocks are disabled during operation. Frequent power supply
shutdown indicates a problem in
the system requiring correction.
SAFEGUARDS
Tells how to avoid the hazard.
Fire extinguishing equipment must be present in the
spray area and tested periodically.
Spray areas must be kept clean to prevent the accumulation of combustible residues.
Smoking must never be allowed in the spray area.
The high voltage supplied to the atomizer must be
turned off prior to cleaning, ushing or maintenance.
When using solvents for cleaning:
Those used for equipment ushing should have ash
points equal to or higher than those of the coating
material.
Those used for general cleaning must have ash
points above 100
Spray booth ventilation must be kept at the rates
required by NFPA-33, OSHA, and local codes. In addition, ventilation must be maintained during cleaning
operations using ammable or combustible solvents.
o
F (37.8oC).
Electrostatic arcing must be prevented.
Test only in areas free of combustible material.
Testing may require high voltage to be on, but only
as instructed.
Non-factory replacement parts or unauthorized
equipment modications may cause re or injury.
If used, the key switch bypass is intended for use
only during setup operations. Production should
never be done with safety interlocks disabled.
Never use equipment intended for use in waterborne
installations to spray solvent based materials.
The paint process and equipment should be set up
and operated in accordance with NFPA-33, NEC,
and OSHA requirements.
2
LN-9400-00.9
DynaFlowTM User Manual - Safety
AREA
Tells where hazards
may occur.
General Use and
Maintenance
Electrical
Equipment
HAZARD
Tells what the hazard is.
Improper operation or maintenance may create a hazard.
Personnel must be properly
trained in the use of this equipment.
High voltage equipment is utilized.
Arcing in areas of ammable or
combustible materials may oc-
cur. Personnel are exposed to
high voltage during operation and
maintenance.
Protection against inadvertent
arcing that may cause a re or
explosion is lost if safety circuits
are disabled during operation.
Frequent power supply shut-down
indicates a problem in the system
which requires correction.
An electrical arc can ignite coat-
ing materials and cause a re or
explosion.
SAFEGUARDS
Tells how to avoid the hazard.
Personnel must be given training in accordance with
the requirements of NFPA-33.
Instructions and safety precautions must be read
and understood prior to using this equipment.
Comply with appropriate local, state, and national
codes governing ventilation, re protection, operation maintenance, and housekeeping. Reference
OSHA, NFPA- 33, and your insurance company
requirements.
The power supply, optional remote control cabinet,
and all other electrical equipment must be located
outside Class I or II, Division 1 and 2 hazardous
areas refer to NFPA-33.
Turn the power supply OFF before working on the
equipment.
Test only in areas free of ammable or combustible
material.
Testing may require high voltage to be on, but only
as instructed.
Production should never be done with the safety
circuits disabled.
Before turning the high voltage on, make sure no
objects are within the sparking distance.
Explosion Hazard/
Incompatible
Materials
LN-9400-00.9
Halogenated hydrocarbon solvents for example: methylene
chloride and 1,1,1,-Trichloroethane are not chemically compatible
with the aluminum that might be
used in many system components.
The chemical reaction caused by
these solvents reacting with aluminum can become violent and
lead to an equipment explosion.
Aluminum is widely used in other spray application
equipment - such as material pumps, regulators,
triggering valves, etc. Halogenated hydrocarbon
solvents must never be used with aluminum equip-
ment during spraying, ushing, or cleaning. Read
the label or data sheet for the material you intend to
spray. If in doubt as to whether or not a coating or
cleaning material is compatible, contact your material supplier. Any other type of solvent may be used
with aluminum equipment.
3
DynaFlowTM User Manual - Safety
AREA
Tells where hazards
may occur.
Toxic Substances
Toxic Substances
HAZARD
Tells what the hazard is.
Certain material may be harmful
if inhaled, or if there is contact
with the skin.
SAFEGUARDS
Tells how to avoid the hazard.
Follow the requirements of the Material Safety Data
Sheet supplied by coating material manufacturer.
Adequate exhaust must be provided to keep the air
free of accumulations of toxic materials.
Use a mask or respirator whenever there is a chance
of inhaling sprayed materials. The mask must be
compatible with the material being sprayed and its
concentration. Equipment must be as prescribed
by an industrial hygienist or safety expert, and be
NIOSH approved.
4
LN-9400-00.9

NOTES
DynaFlowTM User Manual - Safety
LN-9400-00.9
5
DynaFlowTM User Manual - Introduction
INTRODUCTION
FEATURES
• Congurable operating parameters (JOBs)
which can be saved and recalled on demand.
• Graphic diagnostics for troubleshooting and
for achieving maximum system performance.
• Comprehensive help information easily view-
ed on the OPERATOR INTERFACE.
• Congurable manual and/or automatic GUN
applications.
• Dynamic analog uid control – the control of
ow rate while running a JOB.
• Reverse uid ow detection provides added
protection for system components.
NOTE
DESCRIPTION
The ability to control the delivery of material greatly
increases the overall efciency of the spray operating system and results directly in more uniform
and consistent paint nish quality and reduces the
amount of material waste. The ability of the uid
ow controller to respond with quick, concise, and
repeatable control maximizes nish quality and
minimizes material waste.
The DynaFlowTM Flow Controller design utilizes
a form of distributed processing similar to many
of the industrial network architectures available
today. The entire task of uid ow control is broken
up into parts. Each portion of the system is de-
signed for a specic purpose. Since each element
of the system is performing specialized functions,
and all elements are operating at the same time,
overall performance of the system is enhanced.
Functionality of the control system components
is as follows:
This feature requires ow meters that
provide reverse ow output.
• Pot-life timer alarms.
• Local and remote monitoring and control.
• Discrete PLC interface capability for remote
control.
• Remote I/O (RIO) communications link for
direct connection to Allen-Bradley PLCs.
• Process and conguration error and fault de-
tection and reporting.
• USB memory stick, backup of conguration
and operational data.
• Versatile system integration.
• Easy to use.
Channel Module
The Channel Module represents the core of the
system. Each Channel Module is responsible for:
• Monitoring the CHANNEL specic inputs and
supplying the necessary CHANNEL specic
outputs for control and status.
• Receiving and processing the ow meter
feedback pulses.
• Determining the analog PID output control
signal by performing high-speed oating-
point math.
• Receiving and interpreting commands from
the Interface Module through high speed
Ransburg CAN Bus communication.
• Supplying data and status upon request to
and from the Interface Module.
• Help text and troubleshooting guide available
on screens.
6
LN-9400-00.9

DynaFlowTM User Manual - Introduction
Located on the front panel of the Channel Module are several status indicator lights (LEDs).
These are:
1. CPU - Is ON when the microprocessor is operating normally.
2. ACTIVE - Is ON when communication is taking
place to the Interface Module.
3. FAULT - Is ON when there is a problem with
the module.
Interface Module
The Interface Module performs the following:
• Stores system conguration and data
tables.
• Acts as an interpreter for communication
with an external Host computer, PLC and/
or the local Operator Interface. Communi cates through a high speed Ransburg CAN
Bus data link to each Channel Module.
• Responsible for system specic inputs and
supplying the necessary system specic
outputs for control and status.
Located on the front panel of the Interface Module are several status indicator lights (LEDs).
These are:
1. CPU - Is ON when the microprocessor is operating normally.
2. ACTIVE - Is ON when RIO communication
is taking place to an Allen-Bradley PLC.
3. FAULT - Is ON when there is a problem with
the module.
Local Operator Interface
Supplied as part of the DynaFlow Stand-Alone
Control Cabinet, Model# 77376 and A12233.
• Permits total control of the system.
• Displays system conguration and data to
the operator.
• Computes and displays text and graphic di-
agnostic information.
• Organizes, formats, and reports all data
and conguration tables.
The DynaFlow uid ow control system achieves
real-time closed loop control through the use of
CHANNELs and GUNs. A CHANNEL consists
of an electrical-to-pneumatic (E/P) transducer,
material regulator and uid ow meter combination through which a single material is controlled.
A GUN represents a single applicator through
which one or more materials are delivered. One
or more CHANNELs are congured for each GUN.
Two-component delivery systems (referred to as
2K systems) have two CHANNELs assigned to
a single GUN. The materials are statically mixed
before being delivered to the GUN.
Each CHANNEL operates independently of, and
simultaneously with all the other CHANNELs. This
lets the DynaFlow controller provide accurate dynamic regulation for each CHANNEL, regard-less
of minor system wear or changes in system variables. With a single-component coating material,
the DynaFlow controller detects changes from the
programmed ow rate and adjusts the output to
correct it. With two-component coatings (where
both the resin and catalyst are regulated and
monitored), the DynaFlow controller detects any
change in the total ow and makes the required
adjustments to maintain the programmed ow
and ratio. This holds the ow rates of the coating
components constant. Deviations from the desired
mix ratio are also immediately corrected using this
same closed loop process.
A detailed guide on PID control is supplied in this
manual to assist you should you want to adjust
the control parameters. There are many additional
features included in the DynaFlow Fluid Flow Con-
trol which reect on the many years of experience
accumulated by Ransburg.
The control rack and OPERATOR INTERFACE
panels are consistent with and easily integrated
with other Ransburg control products into larger
custom system control panels. This optimizes
costs, space and functionality for control of multiple
applicator spray stations. Spray stations may also
LN-9400-00.9
7

DynaFlowTM User Manual - Introduction
incorporate rotary atomizer speed control, shaping
air, high voltage power supplies and more.
The standard stand-alone control cabinet includes
control of up to 8 CHANNELs. It incorporates an
integrated 15" color LCD touch screen, PC based
display/interface sub-panel.
Congurable Operating
Parameters
The design of the DynaFlow system allows it to
be congured to meet the specic requirements
of each application. The 8 available CHANNELs
can be linked together, using 1 of 8 GUNs, to
control the ow and mixing regulation of two-
component materials. The installed channels can
be congured to suit the application. If you are
using single-component coatings, the DynaFlow
controller can support 8 separate single CHANNEL GUNs operating simultaneously. If you are
using two-component materials, then 4 separate
2-CHANNEL GUNs operating simultaneously
can be supported. For example, you can use 4
CHANNELs assigned to 2 GUNs to spray 2 dual
component paints on automatic machines, and 2
CHANNELs assigned to 1 GUN to spray one dual
component paint with a manual hand spray GUN.
In addition to the above, a GUN congured for
two-component operation can be dynamically
changed to operate in a single-component mode
by simply setting the ratio JOB parameter to
100. This allows a GUN to operate in either dual
or single-component modes by simply changing
JOB numbers.
The controlling parameters for each GUN and the
CHANNEL(S) assigned to that GUN, are called
JOBs. The JOB values dene ow characteristics
such as Target Flow Rate, Mix Ratio, Flow Toler-
ance, etc. JOBs include all of the parameters that
may be dependent on the material used. This offers
the ability to optimize system control as needed
per material and then recall the settings each
time that material is requested. There are up to
100 JOB #s for each GUN. By saving frequently
used JOB #s to memory you can later recall them
by loading the number representing that JOB #.
All of the JOB #s can be backed-up to, and restored
from a USB memory device. Reference the "Opera-
tor Interface Users Manual" and "Program-mers
Manual" for details on data transfer operation and
available formats.
The ow control unit includes one Interface Module
and up to 8 hardware PID control CHANNELs,
2 CHANNELs located on each of the 4 possible
Channel Modules. The Interface Module will communicate to a host controller. The host is one of
the following:
• PLC using discrete I/O
• Allen-Bradley PLC using RIO
• Local Operator Interface using an RS-
232C communication port
3-K Operation
DynaFlow was designed for either single or twocomponent operation. Three-component operation
is possible by conguring two, two-component,
guns. The rst Gun is set up as follows:
Gun 1 =
Master Channel =
Material = Resin
Flow Controller = Color Change
Value (CCV)
Flow Meter = Standard Gear-Type
Slave Channel =
Material = 2nd Component
Flow Controller = MVR, with appropriate size
needle
Flow Meter = Piston or Gear, depending on
min/max ow rates
(see Notes 4 and 5)
Operating Mode = Manual
8
LN-9400-00.9
DynaFlowTM User Manual - Introduction
The output of the rst Gun is then fed into the
Master Channel input of the second Gun. The
second Gun is setup as follows:
Gun 2 =
Master Channel =
Material = Output of Gun 1 (Resin + 2
nd
Component)
Flow Controller = Color Change Value
(CCV)
(see Notes 1, 2, and 3)
Flow Meter = Gear-Type
Slave Channel =
Material = 3rd Component
Flow Controller = MVR, with appropriate
size needle
Flow Meter = Piston or Gear, depending on
min/max ow rates
(see Notes 4 and 5)
Operating Mode = Manual or Auto
(see Notes 1, 2, and 3)
NOTE
Refer to Addendum C for complete
information regarding the ow limitations of
the DynaFlow Channel cards.
NOTES:
1. If the output of Gun 2 supplies one or more
hand guns, then Gun 2 should be operated in
Manual mode using a CCV for the Master
Channel ow controller.
2. If the output of Gun 2 supplies a single applicator, then an MVR should be used for the
Master Channel ow controller and Gun 2
should be operated in Auto mode.
3. If the output of Gun 2 supplies multiple applicators other then hand guns, then Gun 2 should
be operated in Manual mode using a CCV for the
Master Channel ow controller. Additional Guns
should be congured for each applicator as shown
below to provide automatic ow control for each
applicator.
Gun 3 through 6 =
Master Channel =
Material = Output of Gun 2 (Resin + 2
nd
+
3rd Components)
Flow Controller = DR1
Flow Meter = Gear-Type
Operating Mode = Auto
LN-9400-00.9
9
DynaFlowTM User Manual - Introduction
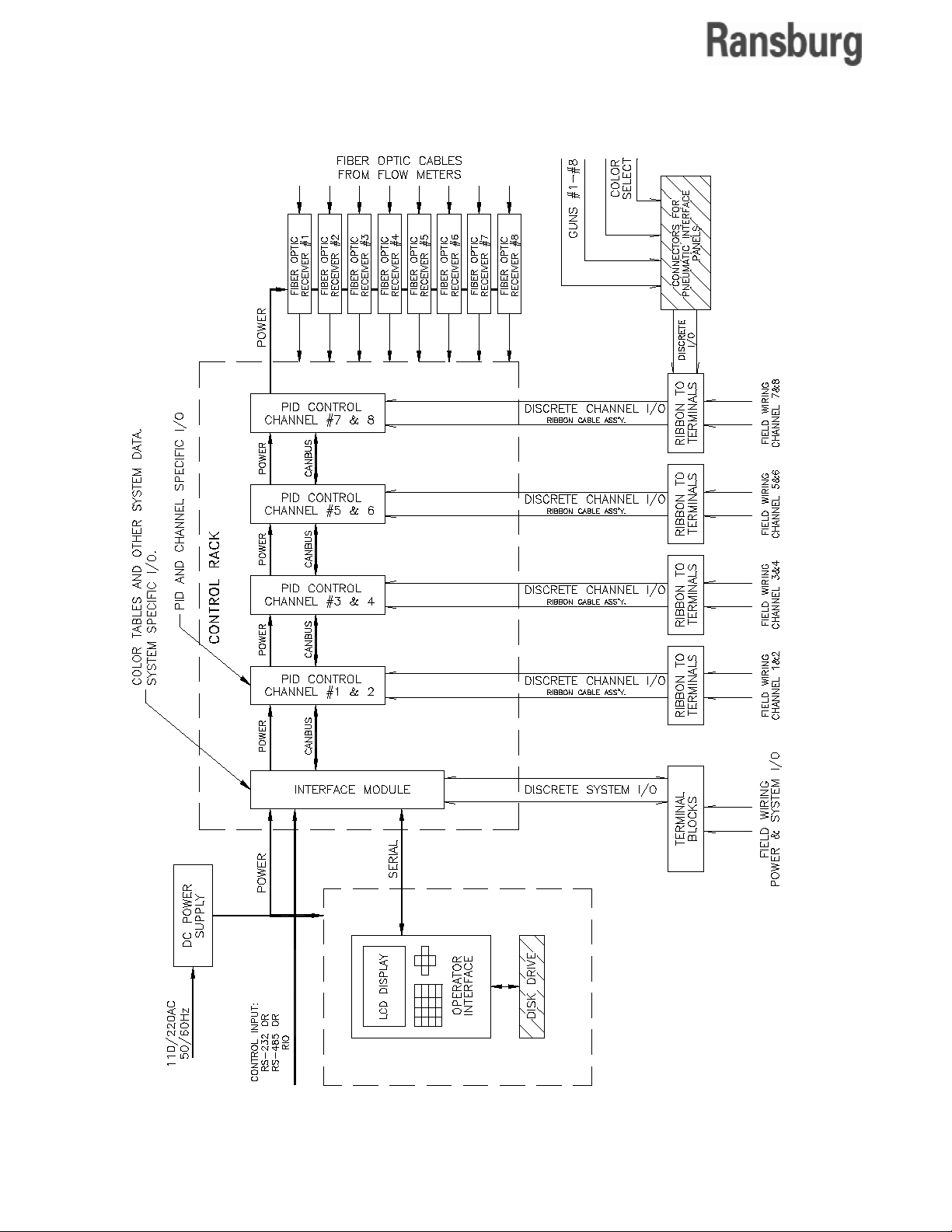
10
Figure 1: Block Diagram
LN-9400-00.9
DynaFlowTM User Manual - Introduction
DYNAFLOW SPECIFICATIONS
Pneumatic Requirements
Transducers: The air supplied to the trans-
ducers must be clean and dry
and meet the following general
specications:
Filtration: 20 Micron
Supply Pressure: 90 PSIG min. to 150 PSIG
max.
Volume: 0.04 to 0.13 Cv
Operating Temperature:
32o to 150o F (0o to 65.5o C)
Control Rack (Up to 8 Channels Per
1/2 of 19" Rack)
Dimensions: 83mm H X 250mm W X
184mm D standard half rack
Power Requirements:
24 VDC at 1 Amp typical, all 8
CHANNELs installed
The following must be followed if the ow control
rack and/or Operator Interface is to be integrated
into a larger system control panel:
- The 24 VDC Power Supply must be located in the
same control panel as the uid ow control.
- DO NOT use a central power supply located else
where. The power supplies may be sized for and
used for other controls within the same cabinet
WITH THE EXCEPTION OF HIGH VOLT-
AGE POWER SUPPLY CONTROLLERS.
High voltage power supply controllers MUST have
a dedicated power supply.
Interface Module Hardware
General: This Module is responsible for
local display/keyboard control and
communication to the Host control ler. Responsible also for non-vola tile storage of all JOB data tables
and system conguration param-
eters.
Dimensions: 3U (130.5 mm) H x 7H
(35.2 m) W standard 19" rack module
Interface Module Hardware (Cont.)
Digital Inputs: 24 VDC at 2.3 ma typical per input
(optically isolated, source by de fault, sink selectable)
- JOB Select Strobe
- JOB Select 1 (lower signicant
BCD digit)
- JOB Select 2
- JOB Select 4
- JOB Select 8
- JOB Select 10 (middle signicant
BCD digit)
- JOB Select 20
- JOB Select 40
- JOB Select 80
BCD digit)
- System Ready/Halt
- Global Gun Enable
Digital Outputs: 24 VDC sourced at 300 ma maxi-
mum per output (Solid state relay
contacts)
System Pulse: Used as watchdog timer by an
external supervisory PLC or com-
puter.
System Fault: Used to activate an alarm and to
supply a signal remotely that a
System, GUN, or other fault has
occurred.
Communications
RS-232C Port: Communication with local
Opperator Interface unit.
Allen-Bradley
RIO Port: For direct high-speed communi-
cation with Allen-Bradley PLC's.
CAN: Control Area Network (CAN) high
speed communication with all
channel Modules and with other
racks.
Power Requirement: 24 VDC at 100 ma typical
Operating Temperature: 0
JOB Select 100 (upper signi
o
to 55o C
cant
LN-9400-00.9
11
DynaFlowTM User Manual - Introduction
Channel Module Hardware
Specications
General: Each Channel Module is responsible
for processing channel specic dis-
crete I/O and performing all of the
necessary PID closed loop control
functions. Data and control I/O other
than discrete is communicated
through Ransburg CAN Bus located
on the Motherboard.
Dimensions: 3U (130.5mm) H x 7H (35.2mm) W
standard 19" rack module
24 Digital Inputs
(2 Channels):
(optically isolated, source by default,
sink selectable)
Trigger (level): Automatic mode only - For
manual mode, uid starts with uid
ow on master channel.
Halt (edge): Stops current JOB # (no effect on
next JOB # in queue)
Clean (edge): Forces regulator full on for
cleaning
Run (edge): Gets next JOB # - used in conjunc-
tion with JOB # and Toggle select
bits
Gun Mask (edge): Used in conjunction with
JOB # select bits
Total Reset (edge): Resets all totals
Total Hold (level): Holds present total value
regardless of uid ow
Transparent/PID (level): When active directs
the external analog input directly to
the transducer output
Analog Hold (level):
Freezes PID and holds cur-
rent analog control output
Load (edge): Loads uid with controlled mix ratio
for GUNs operating in MANUAL
Mode
External Fault/
Enable (level): Enable signal input. Must
be active for uid to be delivered by
GUN regardless of the operating
mode.
Spare: Not used presently
24 VDC at 2.3 ma typical per input
Channel Module Hardware
Specications (Cont.)
12 Digital Outputs
(2 Channels): 24 VDC sourced at 300 ma max-
imum per output (Solid state relay
contacts)
Ready: Everything is ready for operation,
congured correctly and I/O logic
OK
Active: CHANNEL is active and controlling
Fault: Fault has occurred
Pot Life Timer: Pot life timer expired
Clean/Load/Calibrate: Indicates Clean, Load, or
Calibrate mode is active
MVR Enable: Used to control trigger valve for
CHANNEL in fast trigger applica-
tions with Analog Hold enabled
4 Analog Inputs
(2 Channels): Jumper selectable 0-10 VDC (de-
10-bit A/D.
Set Point Control #1: Used for external analog
control. When used, offset and full
scale need to be set. This is
accomplished through the
MAXIMUM FLOW RATE and
MINI MUM FLOW RATE JOB
parameters.
Set Point Control #2: Used for external analog
10-bit A/D control. When used, off set and full scale need to be set.
This is accomplished through the
MAXIMUM FLOW RATE and
MINIMUM FLOW RATE JOB
parameters.
Spare #1: Not used presently
Spare #2: Not used presently
4 Analog Outputs
(2 Channels): Jumper selectable 0-10 VDC (de-
12-bit D/A.
Transducer Control #1: Output to proportional
E/P 12-bit D/A controller
Transducer Control #2: Output to proportional
E/P controller
Flow Rate #1: Flow Rate (scaled between MINI MUM FLOW RATE and MAXI MUM FLOW RATE JOB param-
eters)
Flow Rate #2: Flow Rate (scaled between MINI
MUM FLOW RATE and MAXIMUM
fault) or 4-20 ma, op-amp buff
fault) or 4-20 ma, op-amp buff
ered,
ered,
12
LN-9400-00.9
DynaFlowTM User Manual - Introduction
Channel Module Hardware Specications (Cont.)
FLOW RATE JOB parameters)
4 Frequency Inputs: From ow meters (reverse
ow capable)
Source Signal #1 & #2:
Frequency used to determine
ow rate (pulses per volume or
weight).
Maximum Frequency = 435 Hz
Minimum Frequency = 1 Hz
(Refer to Addendum C for ow limitations.)
Phase Signal #1 & #2: State used to determine
direction of ow rate, forward or
reverse.
PID Control: Closed loop control based on
the Kp, Ki, Kd and deadband
JOB parameters. 30ms PID up
date time (default), each chan-
nel.
Control Enclosure (A12233)
Dimensions: 610mm H X 610mm W X 410mm D
Weight: 45.5 Kg (100 lbs)
AC Power: 115/230 VAC, 3A
50/60 HZ
1 Phase
Temperature: 5°C - 40° C
Humidity: 80% to 31° C decreasing to 50% at
40° C non-condensing
Interface Enclosure (A12182)
Dimensions: 610mm H X 610mm W X 410mm D
Weight: 22.7 Kg (50 lbs)
Temperature: 5°C - 40° C
Communications
CAN: Controller Area Network (CAN) High-
speed serial communications to In terface Module.
RS-232C Port:
Spare auxiliary communication port.
Power Requirements: 24 VDC at 100 ma
typical – each Channel Module
Operating
Temperature: 0
o
to 55o C
Humidity: 80% to 31° C decreasing to 50% at
40° C non-condensing
LN-9400-00.9
13
DynaFlowTM User Manual - Installation
INSTALLATION
SYSTEM GUIDELINES
Prints Specic per Installation
Often times, installation prints are custom drawn
for each site. You should check those prints for
information that is specic to your installation.
Any deviations from those prints made during or
after installation should be recorded for further
reference.
Cable Assemblies
Most electrical interconnections between the DynaFlow controller and other system components
are made through cable assemblies.
NOTE
Any unused conduit holes must be blanked off
to prevent solid objects from entering the interior of the enclosure.
Equipment Locations
With the exception of the following restrictions,
the installation of the Transducers or Transducer
Panel, the Remote Operators Station and Regulator/Flow meter assemblies are application and
site dependant. Specic instructions for location
and mounting of these assemblies are covered
on the site installation drawings.
1. The maximum recommended distance from
the Control Panel to each ow meter is 100-ft.
as determined by the maximum standard available length of the ber-optic cable assemblies or
intrinsic electrical cable assemblies.
2. The maximum recommended length of air pi-
lot tubing between the electrical-to-pneumatic
(E/P) transducer and the material regulator is
largely determined by the application. In general,
the pilot lines should be kept as short as pos-
sible to achieve the best uid ow response and
regulation. See "Pilot Signal Guidelines" chart in
this section.
Equipment Grounding
C A U T I O N
!
The control panel should be grounded
in accordance with national and local
electrical codes.
The protective ground conductor must be
terminated directly to the protective conductor ground terminal located inside the Control
Enclosure which is marked with symbol -
3. The maximum distance between the optional
LBAL5001-XX Pneumatic Interface Panel to the
Control Console is 40-ft., as determined by the
interconnecting electrical cable assembly.
4. The maximum recommended 1/4-inch OD
hose length from the LBAL5003, Remote Operator Panel, and the LBAL5001, Pneumatic Interface Panel, is 50-ft., however this can be longer
depending on the application. The maximum
distance between the A12182 interface panel and
the A12233 console is 100-ft.
5. The maximum recommended length for the
E/P transducer electrical control cable is 95 ft.
However, in some cases 175-ft. has been used.
Generally, if a GUN number (not atomizers) controls a complete zone of 6 or more atomizers, do
not exceed 95-ft. of cable.
Consult Ransburg if longer distances than those
shown above are desired.
14
LN-9400-00.9
DynaFlowTM User Manual - Installation
C A U T I O N
!
Do not locate the Control Panel
near or adjacent to heat producing equipment such as ovens, high wattage lamps,
steam pipes, etc.
Equipment Mounting
Use the mounting ears supplied to mount the
control or interface enclosure on a wall or building structure. The anchor system used must be
rated to support the specied weight of the enclosure being mounted (see specications, page
13). When properly mounted, the anchor system
shall be capable of withstanding 4 times the rated
weight without causing a hazardous condition.
W A R N I N G
!
If improperly located, certain electrical
equipment can become a source of ignition
and create a risk of re or explosion.
W A R N I N G
!
The Control Enclosure must be lo-
cated in such a way that access to the On/
Off power switch and Stop switch is not
blocked.
The On/Off switch turns off AC power to the
PC and 24 VDC supply.
The Stop switch interrupts only the 24
VDC.
The AC power input FUSED DISCONNECT
must be located in an accessible area near
the Control Enclosure
The Control and Interface Enclosures must
be located outside of the Class 1, Division
1 and 2 hazardous locations which are de-
ned for spray nishing of ammable and/
or combustible materials. Denitions and
requirements for classied areas are found
in the National Electrical Code, NFPA-70,
Article 516 and the National Fire Protection
Association (NFPA-33).
PILOT SIGNAL GUIDELINES
Tubing Size ODFluid Regulator
Application
Two-component
Single-Component
1/4"
1/4"
Type
MVR
DR1
Typical
Minimum
Length
Feet Meters
15
15
4.6
4.6
Maximum
Length
Feet
50
100
Meters
15.3
30.5
LN-9400-00.9
15
DynaFlowTM User Manual - Installation
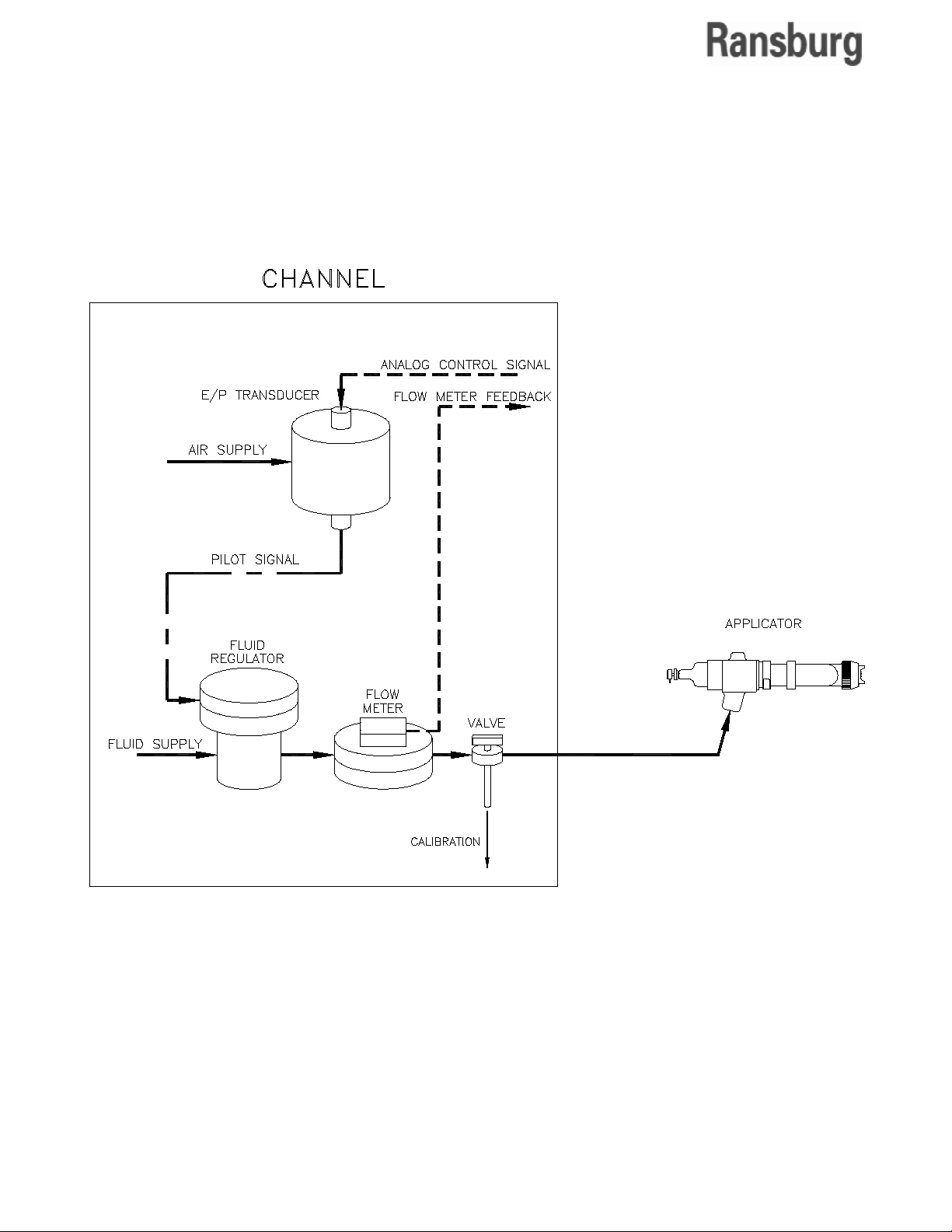
16
Figure 2: Block Diagram for a Single-Component Gun
LN-9400-00.9
DynaFlowTM User Manual - Installation
CHANNEL 1
CHANNEL 2
LN-9400-00.9
Figure 3a: Block Diagram for a Two-Component Gun
17

CHANNEL 1
CHANNEL 2
DynaFlowTM User Manual - Installation
E/P TRANSDUCER
AIR SUPPLY
FLUID SUPPLY
PILOT SIGNAL
FLUID
REGULATOR
ANALOG CONTROL SIGNAL
FLOW METER FEEDBACK
FLOW
METER
VALVE
FLOW METER FEEDBACK
CALIBRATION CALIBRATION
CHECK VALVE
Y BLOCK
MIX TUBE
ANALOG CONTROL SIGNAL
VALVE
CHECK VALVE
FLOW
METER
E/P TRANSDUCER
AIR SUPPLY
PILOT SIGNAL
FLUID
REGULATOR
FLUID SUPPLY
FLUID SUPPLY
E/P TRANSDUCER
AIR SUPPLY
PILOT SIGNAL
FLUID
REGULATOR
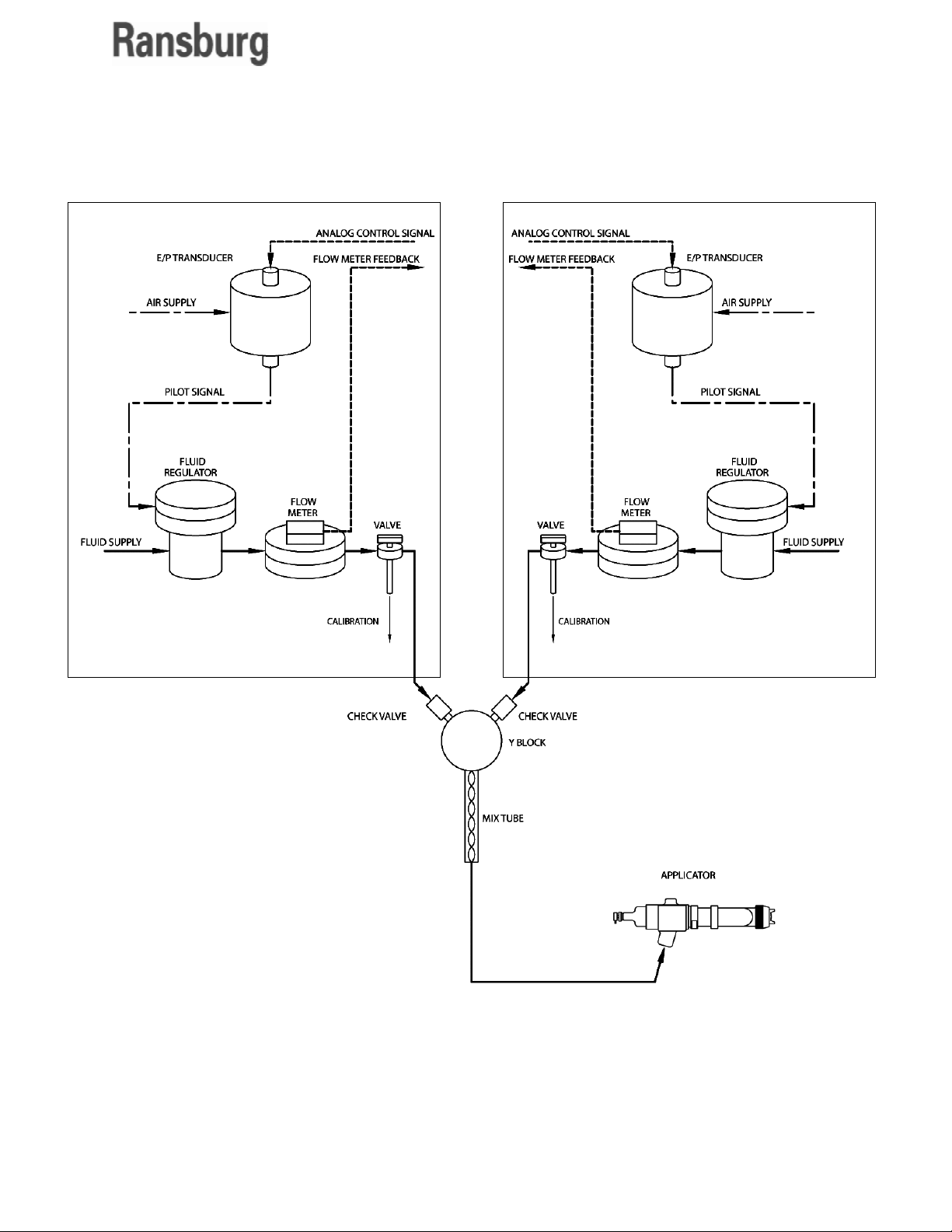
CHANNEL 3
FLOW
METER
ANALOG CONTROL SIGNAL
FLOW METER FEEDBACK
VALVE
CHANNEL 4
ANALOG CONTROL SIGNAL
FLOW METER FEEDBACK
VALVE
FLOW
METER
E/P TRANSDUCER
AIR SUPPLY
PILOT SIGNAL
FLUID
REGULATOR
FLUID SUPPLY
18
CHECK VALVE
Figure 3b: Block Diagram for a Three-Component Gun
CALIBRATIONCALIBRATION
CHECK VALVE
Y BLOCK
MIX TUBE
APPLICATOR
LN-9400-00.9
DynaFlow
TM
User Manual - Installation
INPUT POWER
Input supply voltage connections should be made
from a FUSED DISCONNECT that is located in
an accessible area near the Control Enclosure.
Electrical conduit is recommended for the input
power wiring. Use 3 cond. 14 ga. wire for incoming AC power supply.
If using SO type portable cord, a strain relief rated
for the diameter of cord being used is required for
protection against cord abrasion and damage.
The protective ground conductor must be terminated directly to the protective conductor ground
terminal located inside the Control Enclosure which
is marked with symbol -
If there are large AC line voltage uctuations or
voltage transients such as those typically produced
by heavy electric machinery or welding equipment,
then a constant voltage transformer (CVT) or an
uninterruptedly power supply (UPS) should be
used between the FUSED DISCONNECT and
the Control Panel.
C A U T I O N
!
Before applying power to the control
panel, verify that it is set to match the
source voltage. There may sometimes be
a voltage selection switch (usually located
on the DC power supplies) to select between 120 VAC and 240 VAC or different
indicator bulbs may be required.
W A R N I N G
!
Do not install or service this equip-
ment or perform installation or adjustment
procedures unless you are properly trained
and qualied.
Installing and servicing this equipment
requires access to parts which could cause
electric shock or serious injury if work is not
performed properly.
C A U T I O N
!
If a CVT or UPS is to be used on the
input to the Control Panel, use a CVT with
a Volt-Amp (VA) output rating equal to
or greater than the output voltage multiplied by the control panel fuse rating (see
specication section). Also make sure that
the device input ratings correspond with
the voltage and frequency of the source
supplied by the FUSED DISCONNECT.
The device output should be rated for 240
VAC maximum.
All work must comply with applicable local
and national regulations and codes.
LN-9400-00.9
19
DynaFlowTM User Manual - Installation
INTERFACING TO THE
FLOW CONTROLLER
System I/O
SYSTEM INPUTS
Input
Signals
JOB Select
Inputs
JOB Strobe
Input
System Ready/
Halt Input
Description
These inputs are used to select a JOB number from the external PLC or other host controller.
These inputs represent Binary Coded Decimal (BCD) that translates to 3 digits, each digit
represented as a 4-bit binary code. The JOB Select inputs are used in conjunction with the
GUN Mask inputs to determine which GUNs will accept the JOB number represented by the
total of the active JOB Select Bits. See "Operation" section of this manual for details. These
signals must be asserted prior to the JOB Strobe Input and held on slightly after the strobe
signal goes low.
JOB Strobe requires a pulsed signal of at least 0.25 seconds duration. This signal is used in
conjunction with the GUN MASK inputs and program select inputs to activate a new JOB # for
any or all GUNs. When the controller detects this input, the program select inputs and GUN
MASK inputs are read and action taken to load the new JOB # in the JOB # QUEUE. The new
program select and GUN MASK inputs must be present before the PROGRAM SET STROBE
is activated. Reference "Job Selection Timing Diagram Sample" in the "Operation" section.
System Ready/Halt is a maintained signal that permits activation of any or all GUNs. For the
controller to operate, this signal must be maintained in the high state (24 VDC). When this
signal is active, the system Ready/Halt output will be held ON.
If the signal is lost, ALL GUNs will stop and the READY output is turned OFF. The GUNs must
be restarted in the normal manner when this signal is again activated. The JOB # QUEUE for
any GUN is not effected by the state of this input.
Global GUN
Enable
The Global GUN Enable is a maintained signal that overrides all of the individual External
Fault/Enable GUN inputs. Reference "GUN INPUTS". This is most useful when using RIO,
RS-485, or RS-232C control and the discrete GUN I/O is not used through J3, J4, J5, or J6
of the mother board.
SYSTEM OUTPUTS
Output
Signals
System Pulse
Output
System Fault
System Spare
20
Description
The System Pulse output can be used as a watchdog function by a PLC or other external
controller to determine if the ow controller is operating normally. The output is a 50% duty
cycle, 0.5 HZ signal (2 pulses per second).
A high signal on this output indicates that a system, GUN or other fault has occurred. The
type of fault that causes this output to activate is selectable by the Horn Code located in the
System Conguration table.
Not used presently.
LN-9400-00.9
DynaFlow
TM
User Manual - Installation
Gun I/O
Discrete GUN I/O provides the input control and output status signals required to interface each GUN
with a PLC or similar controller, or other system control components. All GUN I/O can also be controlled
or monitored through an external host controller operating through a serial data communications link
or the state of each forced active through the local OPERATOR INTERFACE/host controller.
GUN INPUTS
Input
Signals
Trigger
Description
For automatic applicators: Starts uid ow when supplied a 24 VDC signal assuming that the
GUN has been put in run mode, is congured properly, and all other conditions are satised.
For manual GUNs: A Trigger signal is required for the LOAD mode. The Trigger signal can
be generated from an atomizing air ow switch. If a Trigger signal is received from the ow
switch but no uid ow is recorded from the catalyst (slaved) CHANNEL, then a FLOW TOO
LOW fault is generated. This ensures that both material components are present to the GUN.
If the dip switch, Pos #1 on the Channel Card is on, then this input is not used. Fluid ow
through the master channel is used to indicate a TRIGGER ON condition.
Halt/Reset
Clean
Run
Gun Mask
Halt requires a pulsed signal of at least 0.25 seconds duration. It is used to stop the JOB #
currently being executed or to stop a CLEAN/PURGE operation. GUN faults are also reset.
While in HALT mode, any new JOB # selection using the JOB # Strobe will be entered into
the Queue. The GUN will run the JOB # located in the Queue when a RUN signal is again
supplied. The faults can still be viewed in the ERROR LOG data table. Halt has no effect on
the JOB # in the Queue (Next JOB # to be run).
Clean requires a pulsed signal of at least 0.25 seconds duration. It forces the material regula-
tors controlled by the GUN parameters to the full open position. This permits the uid system
to be cleaned. The removal of the GUN Enable signal or a HALT input signal is required to
end the CLEAN operation. Actual cleaning sequencing (PURGE) such as soft air push-out is
performed by the PLC, or other external controller. For details, refer to "Clean Mode" in the
"Operation" section of this manual.
This input will activate the GUN and will allow material ow if all other requirements are met.
This is identical to pushing the GUN ON switch on the OPERATOR INTERFACE PANELS.
Run requires a pulsed signal of at least 0.25 seconds duration. If this signal is reapplied once
the JOB # has been started, then it is ignored. When this signal is supplied following a HALT,
the JOB # stored in the queue will be activated. If no new JOB # was entered during the
previous HALT, then the JOB # located in the queue will not change and will be used again.
The Gun Mask input species whether a JOB # or toggled into GUN #n queue. This signal
is used in conjunction with the system PROGRAM SELECT and PROGRAM STROBE inputs.
A 24 VDC signal selects the GUN, a 0 VDC signal masks the GUN as ‘not used for the JOB
# selected’. Multiple gun masks can be asserted simultaneously if it is desired to load more
than one gun with the same JOB #.
Total Reset
LN-9400-00.9
Total Reset requires a pulsed signal of at least 0.25 seconds duration. This signal will reset
the daily and JOB totals for the GUN. The non-resettable total will not be effected.
21
DynaFlowTM User Manual - Installation
GUN INPUTS (Continued)
Input
Signals
Total Hold
Transparent/
PID
Analog Hold
Load
Description
This signal will stop all totals for the CHANNEL as long as the signal is supplied, even if the
GUN is running and there is uid ow. The non-resettable total will not be effected. This is
most often used during ush or soft air push cycles. It can also be used to account for only
that material which is delivered onto parts.
For GUNs congured as single-component, automatic mode only. This input is only acknowledged for run and load modes. This input must be supplied before the clean input or the trigger input if in run mode. This signal will place the CHANNEL in single-component, open loop
mode and redirect the Analog Set Point Input directly to the E/P transducer control output.
MAXIMUM FLOW RATE, MINIMUM FLOW RATE, MVR HIGH and MVR LOW parameters
have no effect while in the transparent mode. The Out of Tolerance, FLOW TOO LOW and
FLOW TOO HIGH faults will also be disabled while in the Transparent condition.
This signal applies only to GUNs congured for single-component automatic mode. This
signal will suspend PID control and freeze the analog control output to the E/P transducer to
the current value. Normal PID operation will resume when this signal is removed. This would
typically be used during ushing operations or for control stability in situations where there
are extremely quick trigger cycles or equipment limitations. The Out of Tolerance, Flow Too
Low and Flow Too High faults will also be disabled while in the Analog Hold condition.
Load requires a pulsed signal of at least 0.25 seconds duration. The LOAD input places a
manual, two-component GUN into LOAD MODE. LOAD MODE is a special way to meter
both resin and catalyst to the applicator after the system has been through a CLEAN operation while assuring accurate ratios. A GUN can be placed into the LOAD MODE directly from
the RUN MODE. For details, refer to LOAD MODE in the "Operation" section of this manual.
External Fault/
Enable
Spare Digital
Input
Analog Set
Point
Spare Analog
Input
External Fault will detect a low signal of at least 0.25 seconds duration. This signal must be
maintained high for normal operation. No uid ow will occur regardless of the operat-
ing mode if the Enable input is not active. This input is supplied as an interlock for other
equipment to automatically shut down the uid ow controller. The system must be reset after
the External Fault is returned to the high state. Reference "Recovering From Faults" in the
"Operation" section of this manual. A Global Gun Enable system input will override this input.
Not used presently.
This is a 0-10 VDC or 4-20 ma input signal (hardware selectable on the Channel Card) which
can be used to command ow rate when the applicator is in AUTOMATIC mode. The scaling
for input signal vs. ow rate is determined by the GUN JOB # parameters, MAXIMUM FLOW
RATE and MINIMUM FLOW RATE. An Analog Set Point signal less than 0.25 VDC will cause
the controller to use the SET POINT parameter located in the JOB table instead.
Not used presently.
22
LN-9400-00.9
GUN OUTPUTS
DynaFlowTM User Manual - Installation
Output
Signal
Ready
Active
Fault
Pot Life Timer
Clean/Load/
Calibrate
MVR Enable
Analog Control
Output
Description
This output is 24 VDC when the GUN is congured properly, a valid JOB is loaded.
This output is 24 VDC when the GUN is RUN mode and owing uid or prepared to ow uid.
This output is 24 VDC if a GUN fault condition occurs.
This output is 24 VDC if the Pot-Life Timer has expired. This may also initiate a horn if set to
do so in the Horn Code Conguration, set in the System Conguration.
This output is 24 VDC when the GUN is placed in Clean, Load, or Calibrate Mode.
This output is 24 VDC anytime material should be owing for the GUN. It is used to control
trigger valve(s) installed at the inlet of the MVR valve(s) on fast-trigger JOBs.
This is a 0-10 VDC or 4-20 ma output signal (selectable on the Channel Module) which is
connected to the transducer for control of the material regulator for the CHANNEL. The
output signal is limited through the use of the JOB parameters, MVR HIGH and MVR LOW.
Scaling is assumed to be 0 VDC (4 ma) equals 0 PSIG at the output of the E/P transducer
and 10 VDC (20 ma) equals 100 PSIG at the output of the transducer. The MVR HIGH and
MVR LOW JOB parameters are based on a percentage of the span of 0 to 100 PSIG. This
an MVR LOW value of 10% equals 10 PSIG.
Analog Flow
Rate Output
Fluid Line
Flushed Output
User Interface
Revision
Language
This is a 0-10 VDC or 4-20 ma output signal (selectable on the Channel Module) indicating
the actual ow rate for the CHANNEL. Scaling of the output signal is accomplished through
the use of the JOB parameters MAXIMUM FLOW RATE and MINIMUM FLOW RATE, where
0 VDC (4 ma) equals the MINIMUM FLOW RATE value and 10 VDC (20 ma) equals the
MAXIMUM FLOW RATE value.
For the Master Channel, if DIP switch 2/2 on the Interface Module is off, the total ow rate for
the gun is output and if the switch is on only the ow rate for the Master Channel is output.
For the Slave Channel, only the ow rate for the Slave Channel is output.
On guns congured for dual component operation, the pot-life expired output on the slave
(B) channel indicates when the uid line has been completely ushed. Once mixed material
has entered the uid line, this output is energized and it remains energized until the unit is
completely ushed. That is, in order to turn this bit off, the amount of material programmed
in for mixed volume must be expended from the applicator while the gun is in clean mode.
Displays the current version of the user-interface software running on the user-interface PC.
This allows users to select between English and one Alternate Language. The alternate
language text is stored on the ash drive or hard drive of the PC in les named: TEXTMESS_ALT.TXT, PARAMHLP_ALT.TXT, LABELS_ALT.TXT, SOLENOIDVALVES_ALT.TXT,
and HELP_ALT.TXT.
LN-9400-00.9
23
DynaFlowTM User Manual - Installation
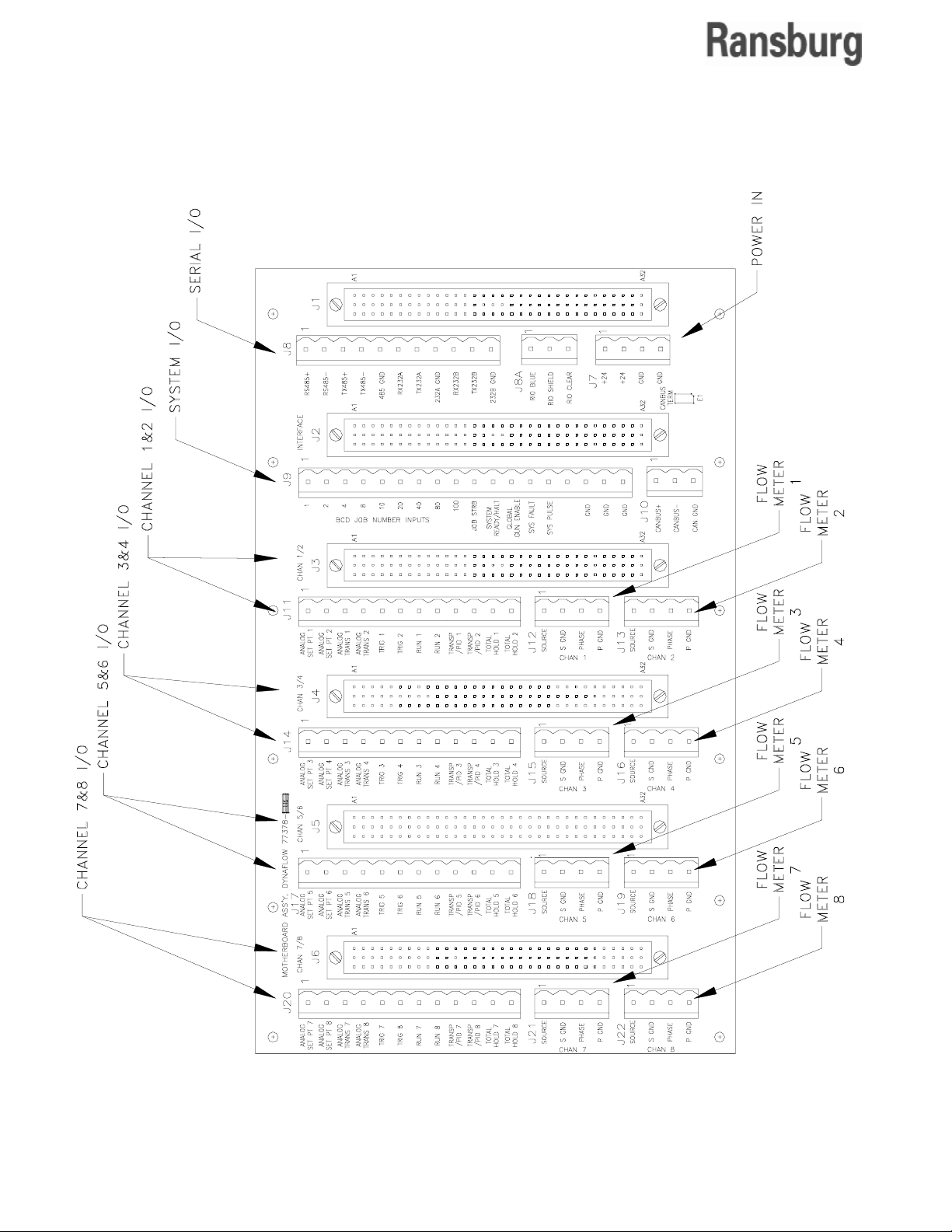
Control Rack Wiring
(Reference page 82 for terminal identication.)
24
Figure 4: Mother Board Terminals
LN-9400-00.9

DynaFlowTM User Manual - Installation
Hardware Conguration
Reference "Addendum A" in the "Appendix" section for board level hardware settings. For new
system installations, all hardware settings should
already be in the correct positions. However, if
replacing any electronic board assembly, verify
that the settings of the new board are identical to
those of the board being replaced. In the event
that the replacement board is a newer revision
and does not appear identical, refer to any documentation that was supplied with the board, or
contact your Ransburg representative or contact
Ransburg service.
Transducers
The transducers convert electrical control signals
from the uid ow controller to the air pressure
signals used to operate the material regulators.
The transducers can be either current controlled
(4-20 ma) or voltage controlled (0-10 VDC). The
transducers can be mounted separately or collectively depending on the installation requirements.
Make sure that the Channel Module jumper settings match the type of transducer being used
(refer to "Channel Module Mother Board Jumper
Settings Channel 1 I/O and Channel 2 I/O" in the
"Appendix" section).
The electrical-to-pneumatic (E/P) transducers are
supplied as separate sub-assemblies or as part
of a standard transducer panel. The transducer
panel offers a convenient way to mount transducers for 2K applications. There are typically two
transducers located in each panel with electrical
terminals and an air supply input.
The transducers may also be mounted individually
on any air drop outside of the Class 1, Division 1
hazardous location if:
1. Tubing and cable lengths do not violate the
minimum and maximum lengths specied in the
"Installation" section of this manual under
Equipment Locations".
2. The air supply meets the specications as
listed in the "Introduction" section of this manual
under "Pneumatic Specications" or those pub-
lished with the transducer.
A 1:1 volume booster may also be connected
directly to the transducer output when; operating
a DR-1
longer than recommended, or of a larger tubing
diameter is used other than that recommended.
Keep the distance between the transducer to the
material regulator as short as possible, without
violating the minimum lengths specied, to avoid
system response delays and to achieve the op-
timum uid ow characteristics for the system.
TM
Fluid Regulator, if pilot line lengths are
Material Regulators and
Flow Meters
The location and mounting of the material regulators and ow meters is specic to each installation. The information presented here is intended
as a guideline only. Reference should be made
to the supplied documentation specic to your
installation.
Fluid Supply Requirements
• The uid supply must be free of pulsation
and surges.
• A uid strainer/lter must be installed im-
mediately before the material regulators. The
elment size of the strainer should be 100
mesh or per the recommendation of your
Ransburg representative.
• For Two-Component (2K) Systems: Selector
valves are required for calibration or verify-
ing of the ow meters and should be mount ed close to the mixing block. These are sup plied as part of the standard uid panel.
Drawings created specically for your sys-
tem will provide detailed information about
valve type and location. Mount the calibra tion valves in an easily accessible area close
to the mixing block. For most applications
the ow meter and material regulator are
mounted as an assembly as close as possible
to the mixing block and calibration valves.
• For systems with fast trigger cycles that
utilize weepless MVR valves, or where
dynamic control of uid ow rates (different
ow rate during a JOB), consider installing
trigger valves (typically color control valves)
immediately upstream of the MVR valves so
that the CHANNELs may be placed in
LN-9400-00.9
25
DynaFlowTM User Manual - Installation
Analog Hold mode without causing the uid
tubes to pressurize to the material supply
pressure while the GUN is not triggered.
• For systems with fast trigger cycles or where
dynamic control of uid ow rates (different
ow rates during a JOB), mount the E/P
transducer as close to the material regulator
as possible. Remember that the transducers
MUST be mounted outside of the hazardous
location (refer to NFPA-70, NEC). For appli-
cations where the requested uid ow is for
the most part consistent, and transitional re sponse time of the system is not as critical,
then the E/P transducers may be located in
the main control panel.
• Be sure that stainless steel tubing or piping
and stainless steel ttings are used for all
uid lines and connections where metal is
desired.
• Always mount the ow meter and regula-
tor as close as feasible to the applicator. This
reduces paint line pulsation due to applicator
reciprocators and reduces the possibility of a
paint leak effecting paint delivered to the
part.
NOTES
26
LN-9400-00.9

NOTES
DynaFlowTM User Manual - Installation
LN-9400-00.9
27

DynaFlowTM User Manual - Operation
OPERATION
OVERVIEW
This section will acquaint you with the general
operation of the DynaFlow Fluid Flow Controller.
The following information describing CHANNELs,
GUNs and PARAMETERS summarize the three
main features that form the basis of the uid ow
controller.
CHANNELs
A CHANNEL consists of an electrical-to-pneumatic
(E/P) transducer, a material regulator and a uid
ow meter combination through which a single
material is controlled. One or two CHANNELs
may be congured for each GUN. Two-component
systems (sometimes referred to as 2K systems)
have two CHANNELs assigned to a single GUN.
Single-component systems (sometimes referred
to as 1K systems) have only one CHANNEL assigned to a single GUN.
Each DynaFlow control system has up to 8
CHANNELs available that can be congured to
suit the application. For example, you can use 4
CHANNELs assigned to 2 GUNs to spray 2 dual
component paints on automatic machines, and 2
CHANNELs assigned to 1 GUN to spray one dual
component paint with a manual hand spray GUN.
Please note that most GUN parameters also
apply to single-component control as well. The
CHANNEL that has the greatest ow rate in two-
component systems is typically called the Master
CHANNEL. A CHANNEL cannot be assigned to
more than one GUN.
GUNs
A GUN represents a single applicator through
which one or two materials are delivered.
If you are using single-component coatings, the
DynaFlow controller can support 8 separate single
CHANNEL GUNs operating simultaneously. If
you are using two-component materials, then 4
separate 2-CHANNEL GUNs operating
simultaneously can be supported. Adjacent
CHANNELs (1 & 2, 3 & 4, 5 & 6, and 7 & 8) can
be linked together, using 1 of 8 GUNs, to control
the ow and mixing regulation of two-component
materials. A GUN congured for two-component
operation can also operate in single-component
control mode by setting the ratio to 99, or higher.
Three Component (3-K) Operation
DynaFlow was designed for either single or twocomponent operation. Three-component operation
is possible by conguring two, two-component,
guns. The rst Gun is set up as follows:
Gun 1 =
Master Channel =
Material = Resin
Flow Controller = Color Change Value
(CCV)
Flow Meter = Standard Gear-Type
Slave Channel =
Material = 2nd Component
Flow Controller = MVR, with appropriate
size needle
Flow Meter = Piston or Gear-Type,
depending on min/max
ow rates (see Notes 4 and 5)
Operating Mode = Manual
The output of the rst Gun is then fed into the
Master Channel input of the second Gun. The
second Gun is setup as follows:
Gun 2 =
Master Channel =
Material = Output of Gun 1 (Resin + 2nd
Component)
Flow Controller = Color Change Value (CCV)
(see Notes 1, 2, and 3)
Flow Meter = Gear-Type
28
LN-9400-00.9

DynaFlowTM User Manual - Operation
Slave Channel =
Material = 3
Flow Controller = MVR, with appropriate
size needle
Flow Meter = Piston or Gear-Type,
depending on
min/max ow rates
(see Notes 4 and 5)
Operating Mode = Manual or Auto
(see Notes 1, 2, and 3)
NOTES:
1. If the output of Gun 2 supplies one or more
hand guns, then Gun 2 should be operated in
Manual mode using a CCV for the Master Chan-
nel ow controller.
2. If the output of Gun 2 supplies a single applicator, then an MVR should be used for the Mas-
ter Channel ow controller and Gun 2 should be
operated in Auto mode.
3. If the output of Gun 2 supplies multiple applicators other then hand guns, then Gun 2 should
be operated in Manual mode using a CCV for
the Master Channel ow controller. Additional
Guns should be congured for each applicator
as shown below to provide automatic ow
control for each applicator.
rd
Component
Parameters
The controlling parameters for each GUN, and for
the CHANNELs assigned to that GUN, are called
JOBs (also commonly referred to as PSETs, Color
Tables or Recipes). The JOB values dene ow
characteristics such as TARGET FLOW RATE,
MIX RATIO, FLOW TOLERANCE, etc. JOBs
include all of the parameters that may be dependent on the material used. This offers the ability
to optimize system control as needed per material
and then recall the settings each time that material is requested. There are up to 100 JOB #s for
each GUN. By saving frequently used JOB #s to
memory you can later recall them by loading the
number representing that JOB #. The parameters
are viewed and edited through the local Operator
Interface or through a remote host computer.
A set of initial parameter values is included in the
controller. The initial (default) values determine the
operating conditions of the controller when started
for the rst time. Some of these will need to be
edited during initial setup based on the installation.
Gun 3 through 6 =
Master Channel =
Material = Output of Gun 2 (Resin + 2nd + 3rd
Components)
Flow Controller = DR1
Flow Meter = Gear-Type
Operating Mode = Auto
4. Minimum ow rate for the DynaFlow is deter-
mined for each channel based on the number
of pulses/liter for the ow meter for the channel.
(Refer to "Addendum C" for ow limitations.)
LN-9400-00.9
29

DynaFlowTM User Manual - Operation
PARAMETER DESCRIPTIONS
CONFIG SYSTEM (F1)
All system parameters are password protected,
unless disabled by setting the password to zero
(0). Any time an operator wishes to change any
of these parameters, they are prompted for the
password. The password only needs to be entered
once as long as the time between keystrokes does
not exceed the Password Timer as described
below. System parameters may be edited at any
time regardless of the operating mode if no sys-
tem errors exist. Any active system errors must
be cleared.
NOTE
Any modications to the System Pa-
rameters screen data are saved only when
the operator presses the "Store Data" key
(F5), otherwise the modications will be
lost when the screen is exited with the es-
cape (ESC) key.
applications, painters will only trigger the spray
GUN enough to get atomization air to ow without
material. They use this air to blow off or feather
the part. The software would normally sense this
air ow without material ow and then fault the
GUN. This parameter allows the painter a preset
number of seconds of blow off time before faulting.
This parameter is specied in seconds, and the
default is 5 seconds. A setting of zero (0) disables
the no master ow fault.
Change Password (F3)
Used in conjunction with the Password Timer parameter. The operator can change the password
if the previous password is known. The password
is required for editing or setting all data tables and
conguration parameters. A password of '0' will
disable password operation.
Password Timeout
Once a valid password has been entered, this
parameter sets the amount of time (in min) which
is allowed from the last keystroke until password
operation is stopped. Once the timer has expired,
the user will be prompted for the password again
if password protected settings are to be edited.
Horn Code
This is a coded number that represents when the
supervisor would like the System Fault output relay
to energize. This output is normally connected to
a horn. The options desired are selected.
0 = No horn
1 = Horn when controller faults
2 = Horn when pot-life timer has expired
4 = Horn when external fault is detected
Blow Off Time
This parameter is used only if the GUN is congured as a manual GUN. The software monitors
the trigger signal to identify when the spray GUN
is triggered. (Typically this signal comes from an
air ow switch located in the atomization air line.)
If the software ever detects a GUN trigger signal
without pulses from the master channel ow meter
after the ‘Blow Off’ time has elapsed, a No Master
Flow fault is issued. This prevents a painter from
painting if the ow meter sticks. In some manual
RIO Rack Address, Rack Size,
Starting Quarter, and Baud Rate
Displays the RIO communication parameters,
as decoded from the Interface Module DIP SW1
and SW2 settings.
SIO Baud Rate and COM Port
Displays the SIO communication baud rate, as
decoded from the Interface Module DIP SW1
and SW2 settings, and the COM port (COM1 or
COM2), as dened in the GO.INI le.
Channel Module Firmware Revision(s)
Displays the rmware revision for the installed
Channel Modules.
Interface Module Firmware Revision
Displays the rmware revision for the Interface
Module.
User Interface Revision
Displays the current version of the user-interface
software running on the user-interface PC.
30
LN-9400-00.9

DynaFlowTM User Manual - Operation
System Time and Date
Displays the current date and time and permits
changing the same.
Language
This allows users to select between English and
one Alternate Language. The alternate language
text is stored on the ash drive or hard drive of
the PC in les named: TEXTMESS_ALT.TXT,
PARAMHLP_ALT.TXT, LABELS_ALT.TXT, SOLENOIDVALVES_ALT.TXT, and
HELP_ALT.TXT.
Channel Module DIP SW1 Settings
Displays the DIP SW1 settings for each installed
Channel Module.
Interface Module DIP SW1 and SW2 Settings
Displays the DIP SW1 and SW2 settings for the
Interface Module.
MANUAL - This setting is used when the user
wishes only to control the ratio of the material.
Users can 'demand' as much material as they wish
and the controller will deliver as much as possible
while keeping the ratio on target.
- Number of Channels
This parameter has three possible settings: 0,
1, and 2.
0 - This, effectively, disables the gun.
1 - This indicates that the gun is to be a single
channel, ow control only applicator.
2 - This indicates that the gun is to be congured
as a dual-channel, ratio controlled applicator.
- Master Channel
This parameter has eight possible settings: 1-8.
For single channel guns, it simply indicates which
channel will be controlling the ow control valve
and reading the owmeter for this applicator.
CONFIG GUN (F2)
GUN Conguration Parameters should not be
edited while the GUN is running. This includes
all operational modes.
NOTE
Any modications to the GUN Cong-
uration Parameters screen data are saved
only when the operator presses the "Store
Data" key (F5), otherwise the modications will be lost when the screen is exited
with the escape (ESC) key.
- Mode
This parameter has three possible settings: OFF,
AUTO, and MANUAL.
OFF - This setting completely disables the gun,
removes its data from the main screen, and places
the channels tied to the gun available for use by
another gun.
For dual-channel guns, this indicates (normally)
which channel will be controlling the resin part of
the mixed material. It is always desirable for the
master channel to have the higher ow rate of the
two materials.
- Slave Channel
This parameter has four possible values: 2, 4,
6, or 8.
It indicates which channel will be the slave (typically the catalyst) to the master channel (selected
above) for ratio control.
- Clean Channels
This parameter has four possible values: NONE,
MASTER, SLAVE, or BOTH.
This setting determines which of the uid regulators (or MVR valves) are opened to full when the
unit is put in 'Clean Mode' for ushing and lling
operations.
Default JOB#
Sets the JOB# which is loaded at power ON.
AUTO - This setting is used when the user wants
to control both the ow rate and the ratio (if it is
a plural component material) of the applicator.
LN-9400-00.9
31

Flow Tolerance Percentage
This is a number (in percent) that indicates how
much deviation above and below the set point is
acceptable. Increasing this number will reduce
nuisance faults, but may lead to inaccurate uid
metering if set too high.
3.
Measure total hose length and inside diameter.
4. Use the following formula to calculate hose
volume.
5. Add 10% to calculated value.
This number is a percent of the specied mix ratio
for each of the 2 materials that is allowed to occur
before the system faults with an OUT OF TOLERANCE fault. This is only updated after the volume
of material, as set by the Tolerance Volume, has
passed through the GUN. The accumulated ow
volume is reset to 0 upon the application of each
RUN command.
Tolerance Volume
This parameter has no effect on single-component
GUNs and only effects GUNs congured for two-
component operation.
This is the volume over which the ratio accuracy
is checked. Every time the volume of Master
CHANNEL uid specied in this parameter has
owed, the ratio is checked. The default value is
150 cc’s of the Master CHANNEL. This parameter should never be set so low that less than 10
cc’s of the slave channel has owed. If this value
is set too low, nuisance OUT OF TOLERANCE
faults will occur.
The rst time a gun is triggered after being placed
in Run mode, the Tolerance Volume is 150% of
the value entered in the job.
Mixed Volume
The amount of mixed material present in the mix
tube, uid lines, and spray GUN combined. The
uid in the spray GUN is always the material
that has been mixed the longest. The processor
keeps track of how long this material has been
mixed (Pot-Life Timer), and therefore needs to
know the volume from the mix tube to the spray
GUN. To determine the amount of mixed material
in the system:
Volume = d2 x L x 12.87
Volume = Volume in cc’s
d = Inside diameter of hose
L = Length of the uid line from the ow
meter to the spray GUN in inches
It is best to over-estimate the amount of mixed
material rather than to under-estimate it!
T
he DynaFlow system uses the Mixed Volume and
the Pot-Life Time when it monitors the ow rate of
the Gun. Pot-Life is monitored by dividing the Mixed
Volume into 40 equal sized 'buckets' of material.
When an amount of material has owed that equals
the 'bucket' volume, the 40 'buckets' are time-shifted
so the oldest 'bucket' is eliminated, representing
the material that has vacated the Mixed Volume
tubing at the GUN, and a new 'bucket' is added.
If the GUN is in either Run or Load mode, a time
value of 1 second is placed in the new 'bucket' to
represent mixed material. If the GUN is in Clean
mode, a time value of zero is placed in the new
'bucket' representing solvent. Every second, the
time values stored in the 'buckets' are incremented
if they are non-zero (i.e. contain mixed material vs.
solvent). A Pot-Life alarm condition
exists if any of the 40 'buckets' contains a time
value greater than the Pot-Life Time (see JOB
parameters). A Pot-Life alarm may be cleared by
entering a Pot-Life Time of zero seconds.
Flush Volume
This parameter is programmed in cc's. It is the
volume of ush solvent or ush solvent/air mixture
required to give an adequate ush of the uid lines
for the gun. It is used by the software to determine
when an adequate ush has occurred.
1. Measure the volume of the mixing block.
2. Measure the volume of the spray GUN.
32
LN-9400-00.9

Trigger OFF Delay
For automatic GUNs only. This parameter has two
uses, depending on the position of DIP SW1-2 (or
SW1-6) on the Channel Module.
In applications where the trigger off pneumatic
action is slow, DIP switch SW1-2 (or SW1-6) on
the Channel Module should be turned off so that
when the GUN trigger signal is removed, the PID
loop for the CHANNEL will continue to control the
output of the MVR valve for the CHANNEL based
on the measured ow rate until the end of the
Trigger OFF Delay.
In applications where the trigger off pneumatic
action is fast, DIP switch SW1-2 (or SW-1-6) on
the Channel Card should be turned on so that
when the GUN trigger signal is removed, the PID
loop for the CHANNEL holds at the last output
value until the end of the Trigger OFF Delay. In
this case, it is recommended that a trigger valve
(color control valve) be installed at the inlet of
the MVR valve. This valve should be driven by a
solenoid controlled by the MVR Enable signal for
the CHANNEL. In this way, the uid line will not
pressurize to the material supply pressure while
the GUN is not triggered and there will be no
delay in initiating ow when the trigger is turned
on again, since the MVR valve is already at the
position last commanded by the PID loop for the
CHANNEL. If a triger valve is not installed at
the inlet of the MVR valve, then the Trigger OFF
Delay should not be set greater than perhaps 0.5
seconds to avoid pressurization of the uid line
during the Trigger OFF Delay. If the delay is too
long in this situation, excessive material may be
released when the trigger is turned on again due
to the higher pressure in the uid line.
In either case, the CHANNEL output returns to
the MVR LOW value at the end of the Trigger
OFF Delay.
Trigger ON Delay
For automatic GUNs only. This parameter allows
the user to create a delay between the time when
the controller receives a trigger ON signal from a
remote device to when it actually starts the ow
of material. This parameter should be used only
in special situations where pneumatic delays
present a problem.
Master and Slave Regulator Type
The channel hardware conguration is stored as
this parameter. It is necessary for the controller
to know which uid regulator type is being used
so that the proper default PID control parameters
can be loaded (Kp, Ki, Kd).
Reverse Flow Volume
The amount of uid which is allowed to ow backwards in the GUN before the controller faults.
Reverse ow could cause catalyzed material to
backup into either uid line if a check valve fails.
Keep this value small to minimize that possibil-
ity. If the GUN is congured for two-component
operation, than the Reverse Flow value will apply
to each of the CHANNELs assigned to the GUN.
Reverse ow rate is displayed on the main screen
of the Local Operator Interface as a ow rate bar
colored red, instead of green for normal ow rate.
Bar Chart Maximum Flow Rate
This parameter determines what ow rate is indicated at the top of the bar-graphs on the main
screen and determines the maximum values displayed on the plot graph screens.
Flow Rate Tolerance Time
This parameter allows the user to program how
long the ow rate can continue to operate outside
of the programmed ow tolerance percentage before the unit fualts and stops ow. It is expressed
in seconds. If this number is too small, nuisance
ow out of tolerance faults may occur and if too
large, improper lm builds could result.
Master Pot Volume
This is the volume of material that a pressure pot
will be lled with each time it is relled. There is a
pot-volume reset button on the Job Totals screen
that allows the user to preset these volumes when
the pots are lled. This value is incremented
downwardly as material in the pot is consumed
and pot empty fault will occur if the volume ever
reaches the value of 0, warning the operator to
rell the pot(s).
Slave Pot Volume
See "Master Pot Volume" information.
LN-9400-00.9
33

Display Mode
This parameter has three possible values: RATIO
TOLERANCE, MIXED VOLUME, and POT LIFE. It
indicates what type of bar-graph will be displayed
on the main screen immediately to the left of the
ow rate bar-graph for each gun.
- Ratio Tolerance
This indicates the instantaneous ratio of the mate-
rial being fed into the static mix tube at any instant
in time.
- Mixed Volume
This indicates how much of the mixed volume
(the material between the static mix tube and the
applicator) has ratio material in it.
When a GUN is congured for two-component
operation and the Ratio is 99.0:1, or greater, the
GUN is said to be operating in pseudo singlecomponent mode. In this case, the slave (catalyst)
CHANNEL is NOT set to MVR LOW when the
GUN is placed in either Run or Load modes. How-
ever, if the slave (catalyst) CHANNEL is specied
as a clean CHANNEL, it will be turned on to MVR
HIGH in Clean mode.
When a 2K manual GUN is placed in single-component operation, the master (resin) CHANNEL
simply turns on to the MVR HIGH output pressure
when the GUN is placed in Run mode. All uid
ow is accounted for in the JOB totals.
- Pot Life
This bar-graph indicates how old the oldest mixed
material is. (This is the material in the applicator.)
EDIT JOB (F4)
JOB parameters may be edited at any time. However, if a JOB is edited while active, the changes
made to CHANNEL related parameters will not
take effect until the GUN has been halted and
requested to be active again. Changes made to
GUN related parameters take effect immediately
after being saved to the Interface Module.
NOTE
Any modications to the JOB Param-
eters screen data are saved only when
the operator presses the "Store Data" key
(F5), otherwise the modications will be
lost when the screen is exited with the es-
cape (ESC) key.
Mix Ratio
Ratio is expressed as parts of Master CHANNEL
to parts of Slaved CHANNEL in the form of XX:1.
The Master CHANNEL is typically the resin and
the slave CHANNEL is typically the catalyst. If
the desired mix ratio is supplied as a percentage
of catalyst to the total volume. Use the Master
and Slave Percentage boxes instead.
When a 2K automatic GUN is placed in singlecomponent operation, the master (resin) CHAN-
NEL will control uid per the set point parameter
in the JOB when the GUN is placed in Run mode
and a trigger signal is supplied. All uid ow is
accounted for in the JOB totals.
Master Percentage
Refer to "Mix Ratio" information.
Slave Percentage
Refer to "Mix Ratio" information.
Flow Rate Set Point
This parameter has several functions depending
on the mode in which the GUN is congured.
- Manual Mode
If the GUN is congured as a manual GUN, this
value is the total desired ow rate (cc’s/min) when
the GUN is put in Load Mode (See "Load Mode"
in the "Operation" section of this manual).
- Automatic Mode without Analog Control
If the GUN is congured as an automatic GUN
and external analog control of the ow rate is not
being used, this is the total ow rate of the mixed
material desired at the spray GUN.
34
LN-9400-00.9

- Automatic Mode with Analog Control (Dynamic Control)
If the GUN is congured as an automatic GUN
and external analog control of the ow rate is
being used, the setpoint value is only active if
there is no analog signal. Analog control is active anytime that the input signal is greater than
0.25 VDC (4.63 ma).
- Manual GUN
This parameter is an alarm set point. If the total
ow rate of the mixed material to the spray GUN
falls below the amount specied by this parameter,
the GUN will shut OFF as the result of a FLOW
OUT OF RANGE FAULT. If no alarm is desired,
set this parameter to zero (0) and the feature will
be disabled.
- Automatic Mode with RIO Control
(Dynamic Control)
If the GUN is congured as an automatic GUN and
RIO control of the ow rate is being used, the set
point value has no meaning unless the RIO commanded set point is zero. In that case, the JOB
set point is used as the GUN ow rate set point.
NOTE
When operating in 2K mode, this pa-
rameter relates to the total mixed material
delivered through the GUN.
Maximum Flow Rate
This parameter has 2 possible meanings, depen-
dent upon how the GUN is congured.
- Automatic GUN
This parameter is used to scale the ow rate
output for the GUN's CHANNEL(s) to specify the
desired ow rate when a 0 VDC (or 4.0ma) signal
is applied to the analog set point input.
Pot-Life Time
The time, in seconds, required for the mixed
material being used to set up or harden. This information is obtainable from the manufacturer of
the material. The controller will determine if any
mixed material is in the paint lines for longer than
the Pot-Life Time setting. It is recommended that
this time be somewhat less than the actual set up
time to allow time to clean the system in the event
that the Pot-Life timer expires. If the specied time
expires, a Pot-Life alarm is issued, warning the
operator that this problem exists. The Pot-Life
alarm does not shut off the GUN, as this would
prevent the operator from triggering and expelling
the mixed uid. The Pot-Life alarm status will remain until the expired material has been purged.
- Manual Gun
This parameter is an alarm set point. If the total
ow rate of the mixed material to the spray GUN
exceeds the amount specied by this parameter,
the GUN will shut OFF as the result of a FLOW
OUT OF RANGE FAULT.
- Automatic Gun
This parameter is used to scale the ow rate output
for the GUN's CHANNEL(s) to specify the desired
ow rate when a 10 VDC (or 20 ma) signal is applied to the analog set point input.
Minimum Flow Rate
This parameter has 2 possible meanings, depen-
dent upon how the GUN is congured.
LN-9400-00.9
Pot-Life checking may be disabled by entering a
value of zero seconds. Since previous versions
of the DynaFlow rmware and software used the
value 999 minutes to disable Pot-Life checking,
the value of 999 seconds is not permitted and will
automatically be changed to zero seconds. When
upgrading DynaFlow rmware and software, JOBs
that specied any value other than 999 minutes
must be manually converted to seconds after
the upgrade is performed. A Pot-Life alarm may
be cleared by entering a Pot-Life Time of zero
seconds.
MVR High Pressure (Master and Slave)
This parameter allows the operator to limit the
maximum pressure that the transducer is allowed
to output to the uid regulator in any mode.
35

DynaFlowTM User Manual - Operation
MVR Low Pressure (Master and Slave)
This parameter allows the operator to set the low
limit on the pressure sent to the uid regulator
while in the Run or Load modes. It can be used
to cause a faster response by the transducer/
regulator system. It should be adjusted so that
the regulator valve is just short of opening. With
a standard MVR valve, this value should never
exceed 30 psi. If this value is too high, continuous
FLOW TOO HIGH faults will occur.
When a GUN is congured for two-component
operation and the Ratio is 99.0:1, or greater, the
GUN is said to be operating in pseudo singlecomponent mode. In this case, the slave (catalyst)
CHANNEL is NOT set to MVR LOW when the GUN
is placed in either Run or Load modes. However,
if the slave (catalyst) CHANNEL is specied as
a clean CHANNEL, it will be turned on to MVR
HIGH in Clean mode.
MVR High and MVR Low Effect On PID
Operation
The PID will only output transducer pressures
between MVR LOW and MVR HIGH.
Pulses/Liter (Master and Slave)
The number of pulses sent from the ow meter to
the controller for each unit of uid ow. Each pulse
represents a volume of uid and is dependent
on ow meter size. This value can be veried or
adjusted during a calibration process to achieve
the best accuracy (See "Calibration Mode" in
the "Operation" section of this manual). The cali-
bration of all ow meters should be periodically
checked. The rheology of some uids may effect
the calibration values, therefore a different value
for pulses per liter may be used for each material
and is entered into the JOB data tables.
Deadband would be between 95 and 105 cc/min.
The PID controller would therefore be suspended
whenever the actual ow rate is within this range.
This parameter should normally be set to 1 cc/min.
Proportional Gain (Kp) (Master and
Slave)
The proportional PID controller gain mainly affects
the response of the DynaFlow system to disturbances. The DynaFlow system may operate with
Kp at zero, however response to material supply
and delivery pressure disturbances will be poor.
The value of Kp is divided internally by a factor
of 1,000 and is used as a multiplier for the ow
rate error term. The ow rate error term is the
difference between the set point and actual ow
rate for the CHANNEL.
Integral Gain (Ki) (Master and Slave)
The integral PID controller gain mainly affects the
steady-state (non-transitional) response of the
DynaFlow system. The DynaFlow system must
have a non-zero value for Ki to operate properly.
The valve of Ki is divided internally by a factor of
100,000 and is used as a multiplier, along with a
factor of 3, for the sum of the error term over the
time the trigger has been turned on.
Derivative Gain (Kd) (Master and Slave)
The differential PID controller gain mainly affects
the response of the DynaFlow system to disturbances caused by disturbances that are slow in
nature. Normally, the DynaFlow system may operate with a Kd value of zero. The value of Kd is
divided internally by a factor of 1,000 and is used
as a multiplier, along with a factor of 1/3, for the
rate of change in the error term.
Deadband (Master and Slave)
This represents a ow rate range divided equally
above and below the set point ow rate in which the
PID controll is suspended. This keeps the control
output from continually changing and produces
stability when close to the requested value. For
example, if the Deadband is set for 5 cc/min and
ow rate set point is set for 100 cc/min, the
36
LN-9400-00.9

NOTES
DynaFlowTM User Manual - Operation
LN-9400-00.9
37

DynaFlowTM User Manual - Operation
Diagnostic Parameters (F5)
The following parameters are available in the
Local Operator Interface program as diagnostic
parameters.
Force CHANNEL Digital Inputs
Forcing inputs permits debugging and troubleshooting to determine proper operation of the
hardware. Each CHANNEL input can be forced
ON therefore not requiring a hardware signal for
that input to become active. If an external hardware
input is present, a forced OFF command will have
no effect unless the hardware input is removed.
Force CHANNEL Digital Outputs
Forcing outputs permits debugging and troubleshooting to determine proper operation of the
hardware.
Force CHANNEL Analog Outputs
Forcing analog outputs permits debugging and
troubleshooting to determine proper operation of
the hardware.
PLOT DATA (F6)
This feature allows the operator to generate a
real-time graph of many of the process variables
to monitor the response of the system as it relates to time. Up to four variables from any of
the congured guns can be graphed at any one
time. All four variable do not have to be from the
same gun. (e.g. The triggers from 4 guns can be
monitored at the same time.)
The following variables can be graphed:
be selected.) Pushing the F3 button removes all
items from the selection list and allows the operator to make a new selection. Pushing F2 will start
the data acquisition graph running. Each of the 4
graphed values will be plotted in a different color.
A legend at the top left and top right of each of the
two graphs indicate which value is which color.
(F1) Time Base – This button allows the user to
switch the time base (resolution) of the graph. In
fast mode, the full screen width is graphed in 45
seconds. In slow mode, the full screen width is
90 seconds.
(F2) Single Plot – This button allows the user to
record one full screen of data (45 or 90 seconds)
at which point the graphing stops to allow the
user to examine the data. In continuous data
mode, when the cursor reaches the right end of
the screen, it automatically jumps back to the left
and over writes the old data.
(F3) Stop Plot – This button allows the user to
stop the data acquisition process temporarily and
freezes the display for analysis or to save the plot
to disk or memory stick.
(F5) Start Stop ß - This button allows the user
to move both the start-time cursor and the stoptime cursor at the same time to the left.
(F6) Start Time ß - This button allows the user
to move the start-time cursor to the left.
(F7) Stop Time ß - This button allows the user
to move the stop-time cursor to the left.
- Trigger
- Requested Ratio
- Actual Ratio
- Requested Flow (both channels)
- Actual Flow (both channels)
- Requested Flow (Chan. A & B)
- Actual Flow (Chan. A & B)
- Control Pressure (Chan. A & B)
To select the data to be graphed, simply touch the
Plot Data button (F6) then touch the items you
wish to plot one at a time followed by touching the
Select Variable button (F1). (Up to four items can
38
(F8) Stop Time à - This button allows the user
to move the stop-time cursor to the right.
(F10) Save Plot – This button allows the user to
save the displayed pot to either the ash drive or
hard drive of the touchscreen or to a USB memory
stick. It is saved in a bitmap format (.bmp) so it
can be printed on any standard P.C. with a printer
attached. The le is saved based on the date and
time it is saved in the following format…
File Name: AABBCCDD.bmp where…
AA = Month, BB = Day of Month, CC = Number of
hours since midnight, DD = Minutes since last hour.
LN-9400-00.9

DynaFlowTM User Manual - Operation
Data Displays – At the top of the graphing screen
there may be as many as six white boxes with data
in them. The center two boxes indicate the time
of the start and stop cursors (start on top, stop
on the bottom). The other four boxes indicate the
value of the graphed variable at the point where
the cursors are currently positioned.
JOB TOTALS (F7)
Calendar date/time data is not available from the
Interface Module and must be supplied by the
Operator Interface or host computer.
Daily Total
(For each JOB per CHANNEL)
Records accumulated total of all material through
a CHANNEL since last reset. Any time period associated with this total is based on when it is reset.
For example, if it is reset after each rack or part,
at the end of a shift, end of the day, or end of day.
Daily Total
(For all JOBs per CHANNEL)
Records the accumulated total of all material for all
JOBs through a CHANNEL since last reset. Any
time period associated with this total is based on
when it is reset. For example, if it is reset at the
end of a shift, end of the day, or end of the year.
Yearly Total
(For all JOBs per CHANNEL)
Records the accumulated total of all material for
all JOBs through a CHANNEL sincle last reset.
Any time perior associated with this total is based
on when it is reset. for example, if it is reset at the
end of a shift, end of the day, or end of the year.
Calibration Total
(For all JOBs per CHANNEL)
Records the accumulated total of all material
for all JOBs through a CHANNEL while in CALIBRATION MODE of operation since last reset.
Yearly Total
(For each JOB per CHANNEL)
Records the accumulated total of all material
through a CHANNEL since last reset. Any time
period associated with this total is based on when
it is reset. For example, if it is reset at the end of
a shift, end of the day, or end of the year.
Calibration Total
(For each JOB per CHANNEL)
Records the accumulated total of all material
through a CHANNEL while in CALIBRATION
MODE of operation since last reset.
Grand Total
(For each JOB per CHANNEL)
Records the accumulated total of all material
through a CHANNEL, including while in CALIBRATION MODE of operation, since last reset.
Any time period associated with this total is based
on when it is reset. For example, if it is reset at the
end of a shift, end of the day, or end of the year.
Grand Total
(For all JOBs per CHANNEL)
Records the accumulated total of all material for
all JOBs through a CHANNEL, including while
in CALIBRATION MODE of operation, since last
reset. Any time period associated with this total
is based on when it is reset. For example, if it is
reset at the end of a shift, end of the day, or end
of the year.
Clean Total
(For all JOBs per CHANNEL)
Records the accumulated total of all material for
all JOBs through a CHANNEL, while in CLEAN
MODE of operation, since last reset. Any time
period associated with this total is based on when
it is reset. For example, if it is reset at the end of
a shift, end of the day, or dend of the year.
CALIB PROC
CHANNEL #
CHANNEL to be calibrated (1-8). Each CHANNEL
must be calibrated separately.
LN-9400-00.9
Calibration Mode
Sets open-loop manual or closed-loop automatic
calibration mode.
39

DynaFlowTM User Manual - Operation
- Open-Loop or Manual Calibration Mode
This mode attempts to ow material at the highest
ow rate possible by setting the output to the E/P
transducer at the MVR HIGH parameter, located
in the JOB table, for the selected CHANNEL. No
less than 200 cc of material should be dispensed
during calibration. Otherwise, the error in calibration will be too large. With 200 cc of material
dispensed into a beaker, the error in calibration
will be limited to+/- 0.5%, since the measured
volume can be determined to only the nearest cc.
The operator must open and close the calibration
valve, or supply a GUN TRIGGER. The material
volume is entered by the operator and a new
Pulses/Liter is calculated.
- Closed-Loop or Automatic Calibration Mode
This mode sets the ow rate set point for the selected CHANNEL based on the Total Flow Rate
and Ratio for the selected GUN, as stored in the
JOB, since calibration should always be performed
at the normal ow rate for the CHANNEL. The
Calibration Time is also set based on the ow rate
so that no less than 200 cc of material will be dispensed during calibration. Otherwise, the error in
calibration will be too large. With 200 cc of material
dispensed into a beaker, the error in calibration will
be limited to +/- 0.5%, since the measured volume
can be determined to only the nearest cc. The
operator may override both the Calibration Time
and Calibration Set Point, if desired. The operator must open and close the calibration valve, or
supply a GUN TRIGGER. The material volume
that passed through the GUN is recorded. The
measured volume is entered by the operator and
a new Pulses/Liter value is calculated.
Actual Flow Rate
Displays the actual ow rate during calibration.
This value is based on the Current Pulses/Liter
parameter, so it will be inaccurate if that parameter
is inaccurate.
Number of Pulses
Displays the actual number of pulses received
from the ow meter during calibration.
Calculated Volume
Displays the calculated volume of material that
should be in the beaker when the calibration
is stopped. This value is based on the Current
Pulses/Liter parameter and the Number of Pulses
received, so it will be inaccurate if the Current
Pulses/Liter parameter is inaccurate.
Measured Volume
The measured volume (cc’s) of material in the
calibration beaker. This value is entered by the
operator. Once a non-zero value is entered, the
operator may not enter a Measured Weight and
Specic Gravity.
Measured Weight
The measured weight of material (grams) in the
calibration beaker (less the tare weight of the
beaker). This value is entered by the operator.
The scales used should be accurate to 0.10 gram.
This value is entered by the operator. The Mea-
sured Weight, along with the Specic Gravity, is
used to calculated the Measured Volume. Once
a non-zero value is entered, the operator may not
enter a Measured Volume.
Automatic calibration mode may not be selected
for the Master channel of a Manual Gun since it
normally has no MVR to control ow rate.
Calibration Time
Sets the time duration for calibration.
Flow Rate Set Point
Sets to actual ow rate during calibration. This
value is based on the Current Pulses/Liter parameter, so it will be inaccurate if that parameter
is inaccurate.
40
Specic Gravity
Specic gravity is the ratio of a material’s density
to the density of water. This can be obtained from
the material safety data sheet (MSDS), or directly
from the material supplier. This value is entered
by the operator. The Specic Gravity, along with
the Measured Weight, is used to calculated the
Measured Volume. Once a non-zero value is
entered, the operator may not enter a Measured
Volume.
LN-9400-00.9

Calculated Pulses/Liter
This is the new Pulses/Liter value based on the
Number of Pulses received from the ow meter
during calibration and either the Measured Volume,
or the Measured Weight and Specic Gravity. The
operator may override the Calculated Pulses/Liter
value by entering a Calculated Pulses/Liter value.
Current Pulses/Liter
Displays the current Pulses/Liter value used by
the Channel Module during calibration. If this
value is inaccurate at the time, which is why calibration is being performed, the Actual Flow Rate
and Calculated Beaker Volume values will also
be inaccurate.
Operational Parameters
Flow Rate
• Indicates total ow rate through a GUN.
• If in 2K, sums the total of each CHANNEL
attached to the GUN.
• If in 1K, simply indicates the CHANNEL
ow rate.
DynaFlowTM User Manual - Operation
GUN Status
Indicates the current status of the GUN. This can
be one of the following:
GUN Active (in run mode)
GUN Halted
CLEAN mode active
LOAD mode active
CALIBRATION mode active
GUN faulted
Transparent mode active
Analog Hold mode active
Pot Life Time Exceeded
JOB Queue
Stores the next JOB to be run. A RUN command
following a HALT will load the next JOB # from
the Queue. If more than one JOB # is toggled into
the Queue before the next RUN command, then
the newest JOB # is placed into the Queue and
the previous JOB # is lost.
LN-9400-00.9
41

DynaFlowTM User Manual - Operation
Color Change Sequencer
The redesigned DynaFlow includes an optional
color change sequencer that controls the ush,
load, and color change sequences for each gun.
Each time a job number is loaded into a gun, the
ush and load sequences are downloaded to this
controller. (A color change sequence is simply
a ush sequence followed by a load sequence.)
F9: COLOR CHANGE
An optional color change sequencer may have
been included with the controller. If it was included,
the F9 key will indiacte as such. If the F9 key is
blank, your system does not have this option.
When this function is selected, the operator is rst
prompted for the gun mumber they wish to view
or edit the sequence for, they are then prompted
for which Job Number they wish to view and/or
edit the sequences of, and last, they are asked if
they want to view/edit the sequence for ushing or
lling. (There is a separate ush sequence and
load sequence stored for every Job Number and
for every gun.)
Once the operator responds to the previous
prompts, a screen similar to the one on the previous oage appears.
This chart displays a simple 6 step sequencer
where the user denes how long they wish each
step to take and which valves or signals should
be energized at each one of those steps. There
are 6 steps for the ush cycle and 6 steps for the
load cycle. When a color change is desired, the
sequencer automatically runs the ush sequence
followed by the load sequence.
42
LN-9400-00.9

DynaFlowTM User Manual - Operation
The following solenoid valves can be controlled
by the sequencer:
Resin/Solvent Air Chop
Resin Solvent
Resin Air
Paint
Dump Valve
Resin Fluid Override
Trigger Solenoid
Catalyst #1
Catalyst #2
Catalyst #3
Catalyst Solvent
Catalyst Override
The following DynaFlow inputs can be controlled
by the sequencer:
DynaFlow Run
DynaFlow Halt
DynaFlow Trigger
DynaFlow Load
DynaFlow Clean
Catalyst Disable
Note that there are too many valves and signals to
be displayed on one screen. Therefore, the opera-
tor must scroll down to see the bottom ve items.
Program the time for each step by touching the
step duration box under the step to be modied
and then push F1 (Modify) to change it. Then
toggle any of the signal or valve boxes at each
step that you wish to have on during that step
and then push the Modify button. The steps will
toggle between Off and On as you continuously
hit the Modify button.
The Hold step is the nal step in the sequence
(for both ush and ll). When the sequence com-
pletes, the signals and valves will be held in the
condition selected in the hold step. Keep in mind
that when changing from one color to another, the
system performs a ush sequence followed by a ll
sequence so the hold step in the ush sequence
will only occur momentarily.
There are 8 function keys dened while editing
ush, load, and color change sequences:
F1: Modify – This button brings up a numeric
keypad if cursor is on one of the step duration
cells. If cursor is on one of the valve condition
cells, that cell is toggled from off to on or on to off.
F2: Chop Air Time – This button allows the user
to program how long the air valve remains on for
each step of the solvent/air chop timer.
F3: Chop Solvent Time - This button allows the
user to program how long the solvent valve remains
on for each step of the solvent/air chop timer.
F4: Edit Fill/Flush – This button opens the screen
that allows viewing and editing of the ush or the
ll sequences (the button changes to ll if the
ush sequence is displayed and to ush if the ll
sequence is displayed).
F5: Send to PLC – This button allows the operator
to immediately send the edited sequence to the
sequencer (located in the motor amplier panel).
Note that the sequences are automatically sent
to the sequencer every time a new Job Number
is loaded.
F8: Copy Sequence – This button allows the operator to copy sequences from one job to another.
F9: Read In File – This button allows the operator
to load ush and load sequences from the ash
drive of the touchscreen, a USB memory stick, or
to a oppy diskette.
F10: Save To File – This button allows the operator
to save ush and load sequences to the ash drive
of the touchscreen, a USB memory stick, or to a
oppy diskette. All ush and load sequences for
all guns are saved in a le named: ColorChg.par.
LN-9400-00.9
43

DynaFlowTM User Manual - Operation
ERROR LOG (F11)
- Also See Section on Error Codes
Each ERROR CODE can represent a CHANNEL,
GUN or system error. See the Troubleshooting
section for list of error codes. It is possible for
more than one code to be issued at the same time.
The Interface Module stores ten (10) previous
error codes until they are read by the Local
Operator Interface program at which time they
are automatically purged from its log. The Local
Operator Interface program stores one hundred
(100) previous error codes until they are manually cleared by the operator. The operator may
also save the error codes to a oppy diskette for
later analysis.
A PLC may obtain the current error conditions via
RIO at any time, but it must maintain its own log.
AUTOMATIC GUN APPLICATIONS
Automatic applicators use automatic means to
vary the uid ow through the use of transducers
and material regulators. When used with singlecomponent materials and an automatic spray
applicator, the DynaFlow controller regulates total
material ow.
to the MVR LOW setting (default = 0 VDC). On the
rst receipt of a trigger signal, the master channel
immediately starts its closed loop (PID) control
and updates the information to the transducer at
a rate determined by the PID Update Time (default
= 30ms) to adjust the actual ow rate to match
the target ow.
At the same time, in a two-component system, the
slave channel (catalyst) also closes its PID control
loop and matches the actual ow rate to the target
ow rate as determined by the requested ow rate
ratio of the Master CHANNEL (resin) and slaved
CHANNEL (catalyst).
Both channels run closed loop, independently
of each other. If either CHANNEL is not able to
achieve the required target ow rate, a FLOW TOO
LOW or FLOW TOO HIGH fault will be issued by
the controller for the offending channel.
After an amount of material has passed through
the Master CHANNEL (set by the TOLERANCE
VOLUME parameter), the DynaFlow controller
compares that volume with the volume of the
catalyst that owed during that volume interval. If
the ratio is outside of the tolerance as set by the
FLOW TOLERANCE parameter, the DynaFlow
controller will issue an OUT OF TOLERANCE
fault for the offending GUN.
When used with two-component materials, the
DynaFlow controller regulates both the total uid
ow rates to the applicator and the mixing ratios.
Each CHANNEL of the two-component material
is programmed with predetermined values.
The following conditions must be met in order for
the GUN to allow uid ow:
1. There must be no system faults or GUN
faults active.
2. There must be valid GUN congurations.
3. The proper inputs must be supplied.
When a GUN is placed in the RUN MODE, the
controller sends a signal to the transducer to open
44
Dynamic Flow Rate Set Point Control
Dynamic Flow Rate Set Point Control is useful
for changing ow rates of a material to achieve
different coating thickness over different areas of
the same part. Several examples are shown in
the "Analog Control Settings chart" in this section.
In automatic GUN applications, the total ow rate
set point for the GUN may be varied in real time
using either of two methods; Remote I/O (RIO)
or Analog Input. If the RIO Set Point is zero and
Analog Input Set Point is less than 0.25 volts, the
Total Flow Rate set point comes from the JOB.
LN-9400-00.9

ANALOG CONTROL SETTINGS
DynaFlowTM User Manual - Operation
Minimum
Flow Rate
CC's/Min
0
100
Maximum
Flow Rate
CC's/Min
100
300
Minimum
Voltage or
Current
0 volts or 4 ma
0 volts or 4 ma
RIO Set Point
The Total Flow Rate set point for a GUN may
also be input via Remote I/O (RIO). No scaling is
required, since the Total Flow Rate value is sent
in cc's/minute. RIO control is initiated when the
value sent is non-zero, regardless if an Analog
Input Set Point greater than 0.25 volts is presented
to the Master CHANNEL.
Analog Input Set Point
The Total Flow Rate set point for a GUN may be
input via an external analog signal (0-10 VDC or
4-20 ma) presented to the Master CHANNEL via
the Channel Module. The Maximum Flow Rate
and Minimum Flow Rate for the JOB determine
the scaling applied to this analog input. Analog
control is initiated when the input signal is greater
than 0.25 volts and the RIO Set Point is zero.
Note: When congured for current loop input,
the minimum 0.25 volts is achieved since 4 ma
produces 2.00 volts at the input due to the 500
ohm shunt resistor used in current loop mode.
Maximum
Voltage or
Current
10 volts or 20 ma
10 volts or 20 ma
CC's/Volt
10.00
20.00
CC's/Ma
6.25
12.50
To Place A GUN In LOAD MODE:
1. The external GUN enable input must be supplied to the Master CHANNEL. No system or GUN
faults can be active and the GUN conguration
and JOB tables should be properly set.
2. A signal must be supplied to the Master CHANNEL LOAD input or a LOAD command issued from
the Operator Interface Panel or the host controller.
3. Flow will begin when the Trigger signal is supplied.
To Exit LOAD MODE:
1. Simply remove the LOAD input and apply the
HALT input or issue a command from the Operator Interface Panel.
MANUAL HAND GUN APPLICATIONS
Load Mode
LOAD MODE is similar to RUN MODE. However,
in LOAD MODE, up to 10 faults are permitted before the gun will leave LOAD MODE and enter the
FAULT MODE. All eleven (11) faults will appear
in the Error Log screen. The GUN will automatically leave LOAD MODE and return to the READY
MODE after a volume greater than or equal to
the Mixed Volume has owed since the last fault.
LN-9400-00.9
The DynaFlow controller can provide closed loop
regulation for manual hand GUN application of
two-component materials. When used with hand
spray GUNs, the painter regulates the total uid
ow with the spray GUN or an inline uid regulator.
Regulation of two-component materials is based
on pre-set ratios located in the JOB tables.
When the GUN is placed in RUN MODE, the
master channel (resin) goes full open, or to the
setting specied for that channel as MVR HIGH,
and stays at that value. The slave channel goes
to the pressure setting specied for that channel
by MVR LOW. The controller determines the ow
45

DynaFlowTM User Manual - Operation
rate of the master channel based on owmeter
feedback and calculates the set point of the slaved
(catalyst) CHANNEL based on the ratio setting for
the GUN. The detection of a Trigger OFF signal
or the lack of Master CHANNEL ow meter pulses
will cause the controller to output the MVR LOW
setting to the Slave CHANNEL. In addition, the PID
control loop is frozen and the last control output
stored. Upon reapplication of a Trigger signal,
or the detection of Master CHANNEL ow meter
pulses depending on the dip switch setting on the
Channel Module, the stored Slave
CHANNEL control signal is output for a short delay
time and then the PID control loop is again initiated. This results in stable control loop operation
regardless of the duration or quickness of trigger
signals.
The ow rate of the master CHANNEL will be
continuously monitored during operation and the
slaved CHANNEL set point adjusted accordingly.
To Place A GUN In LOAD MODE:
1. The external GUN Enable input must be sup-
plied to the Master CHANNEL. No system or GUN
faults can be active and the GUN conguration
and JOB tables should be properly
set.
2. The GUN Trigger input is not required for
manual GUNS.
3. A signal must be supplied to the Master CHANNEL LOAD input or a LOAD command issued
from the Operator Interface Panel or other host
controller.
4. Flow will begin immediately.
To Exit LOAD MODE:
1. Simply remove the LOAD input and apply the
HALT input, or issue a command from the Operator Interface Panel (host controller).
If the slaved CHANNEL cannot achieve the proper
ow rate, the software issues a FLOW TOO LOW
or FLOW TOO HIGH fault.
Additionally, the software veries ratio after each
TOLERANCE VOLUME has owed through the
master channel ow meter by comparing the two
volumes that owed during that time period and
calculates a "ratio error". If that error is greater than
the FLOW TOLERANCE parameter, the software
issues an OUT OF TOLERANCE fault.
When the GUN is given a HALT command, both
uid regulators are set to 0 psi.
Load Mode
LOAD MODE is similar to RUN MODE. However,
in LOAD MODE, up to 10 faults are permitted before the gun will leave LOAD MODE and enter the
FAULT MODE. All eleven (11) faults will appear
in the Error Log screen. The GUN will automatically leave LOAD MODE and return to the READY
MODE after a volume greater than or equal to
the Mixed Volume has owed since the last fault.
GENERAL
The following are common to both AUTOMATIC
and MANUAL GUN operation.
Pulsed and Maintained Inputs
Pulsed inputs detect the transition in voltage, either up or down. This form of input is comparable
to a momentary push-button. Pulsed inputs are
timing sensitive, e.g. the pulse MUST be present
at the input at the proper time in relation to other
input signals. The duration of the pulse is also
critical. Pulsed inputs should be supplied for at
least 0.25 seconds in duration. The input signal
is ignored after detection by the controller and
can be removed at any time after the minimum
0.25 seconds.
Maintained inputs require the voltage to be held
at a level, either low or high in order to perform
the intended function.
System Inputs and Outputs
System I/O applies to all GUNs in the system.
They provide system status, input for JOB
numbers, and all system commands.
46
LN-9400-00.9

JOB SELECT INPUTS
DynaFlowTM User Manual - Operation
Discrete System
Inputs
JOB Select #1
JOB Select #2
JOB Select #4
JOB Select #8
JOB Select #10
JOB Select #20
JOB Select #40
JOB Select #80
JOB Select #100
Selects BCD Bit #1
Selects BCD Bit #2
Selects BCD Bit #4
Selects BCD Bit #8
Selects BCD Bit #10
Selects BCD Bit #20
Selects BCD Bit #40
Selects BCD Bit #80
Selects BCD Bit #100
JOB Select Inputs
These inputs are used to select a JOB number
from the external PLC or other host controller if
serial communication is not being used. These
inputs represent Binary Coded Decimal (BCD)
that translates to 3 digits, each digit represented
as a 4-bit binary code. The system inputs shown
in Figure 6 are used to select and enter a JOB
number. The JOB Select inputs are used in con-
junction with the GUN Mask inputs to determine
which GUNs will accept the JOB number represented by the total of the active JOB Select Bits.
Example: JOB #25 is Requested
Toggles (enters) the
Selected Values
JOB numbers can be entered into the JOB Queue
at any time regardless of the operating mode.
These signals are used in conjunction with the
GUN MASK inputs to determine which GUN(S)
will receive the JOB # as input by the program
select inputs. The JOB SELECT inputs must be
present at the time that the JOB SELECT STROBE
signal is activated.
The basic sequence for selecting and entering
JOB numbers is:
1. Select and hold high the appropriate JOB
SELECT input bits.
Value
1
2
4
8
10
20
40
80
100
Decimal Number = 25
Most Signicant Digit (100's) = 0 = binary 0000
Most Signicant Digit (10's) = 2 = binary 0010
Least Signicant Digit (1's) = 5 = binary 0101
LN-9400-00.9
2. Select and hold high the appropriate GUN
MASK input(s). This can be performed simutaneously with the JOB SELECT input bits.
3. Pulse the STROBE input.
4. Return all inputs to the low state (0 VDC).
47

DynaFlowTM User Manual - Operation
Figure 5 gives a graphic representation of the
timing required for selecting a JOB #. Normally,
the JOB SELECT inputs and GUN MASK inputs
are held high for a slightly longer duration than
the STROBE. This ensures that the new JOB
SELECT and GUN MASK inputs are correct before
strobing the information into the controller.
Figure 5: JOB Select Timing Diagram
48
LN-9400-00.9

DynaFlowTM User Manual - Operation
Figure 6 shows 4 Toggle Signals. By following the dashed line down you can determine the states of
the various signals for each example. Maintained inputs that are high are “active”. Pulsed signals that
go high at that instance are also active. The list below will help explain what JOB number is selected,
and to which of the 8 GUN queues the JOB is entered into.
Toggle 1
JOB number selected: 69
GUNs Masked to accept JOB #69: 1,3
Toggle 2
JOB number selected: 26
GUNs Masked to accept JOB #26: 2,5,8
Toggle 3
JOB number selected: 63
GUNs Masked to accept JOB #63: NONE
Toggle 4
JOB number selected: 22
GUNs Masked to accept JOB #22: 4
LN-9400-00.9
49
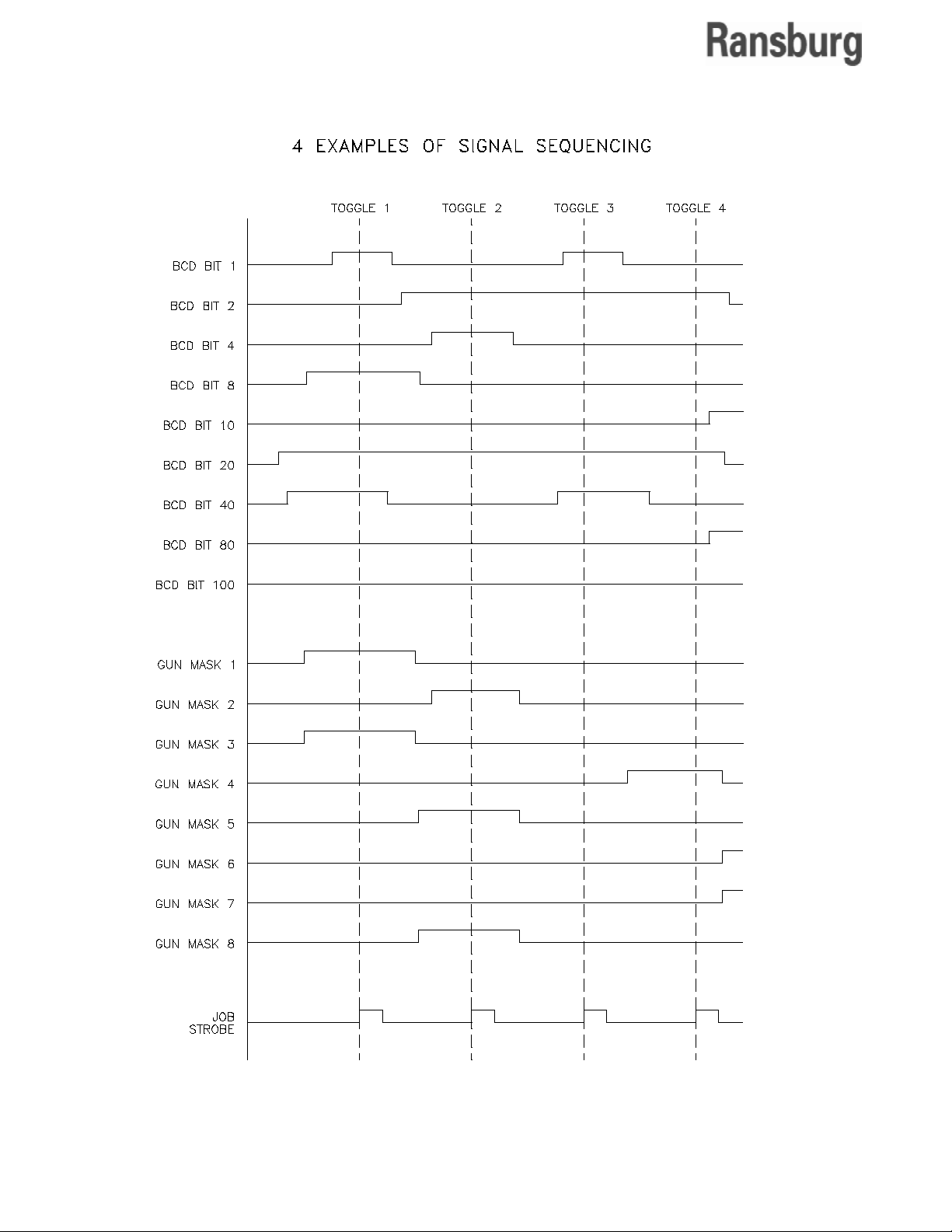
DynaFlowTM User Manual - Operation
50
Figure 6: JOB Selection Timing Diagram Sample
LN-9400-00.9

DynaFlowTM User Manual - Operation
JOB Queue
The JOB Queue is an input buffer for each of the
8 possible GUNs in the system. JOBs are loaded
into the Queue only if the GUN is already operating
a JOB in the RUN, LOAD, CLEAN, CALIBRATE
modes. Each of the 8 GUNs has a JOB Queue
with a xed length of 1 (JOB). This permits the
next JOB number for GUN #n to be stored before
the current JOB has been halted. After the current
JOB has been halted the next RUN input signal will
initiate the next JOB number located in the queue.
NOTE
If another JOB number is loaded into
the Queue before it is emptied, the queue
contents will be replaced with the second
entry. See the following examples.
JOB Number is Loaded into the Queue
Before it is Emptied
1. GUN #3 is running JOB #32 and has NOT
been halted.
2. JOB #47 is in the Queue for GUN #3.
3. JOB #54 is now entered into GUN #3’s
Queue.
4. This will result in JOB #54 replacing JOB
#47 for GUN #3.
JOB #47 became "lost" and was not processed by GUN #3.
5. JOB #47 moves up and the Queue empties.
JOB #47 becomes the current JOB #.
6. JOB #54 is entered into GUN #3’s Queue.
JOB #54 is now the next JOB for GUN #3.
JOB Queue Defaults
If no JOB is entered into the Queue (the Queue
is empty) the current JOB number reverts to the
last JOB number entered if the GUN Run signal
is made active.
1. A Halt signal input will halt the current JOB.
2. Pressing Run will restart the GUN with the
old JOB number.
3. Entering a new JOB number and selecting
Run will restart the GUN with the new JOB
number.
Reverse Flow Detection
For two-component systems, both forward and
reverse uid ow is detected through the ow
meter if non-ber optic owmeters are being utilized. Reverse ow detection can help prevent
mixed two-component material from backing up
into the uid supply system due to check valve
failure. When the controller detects reverse uid
ow in excess of the programmed REVERSE
FLOW LIMIT, it will immediately shut OFF the uid
regulator valves and prohibit mixed material from
contaminating the uid supply.
Reverse ow rate is displayed on the main screen
of the Local Operator Interface as a ow rate bar
colored red, instead of green for normal ow rate.
The Correct Sequencing Should Be:
1. GUN #3 is running JOB #32 and has NOT
nished. (Current JOB #)
2. JOB #47 is in the Queue for GUN #3. (Next
JOB #)
3. GUN #3 is halted.
4. The Run input signal is pulsed. (The Trigger
input does not effect the JOB queue)
LN-9400-00.9
Pot-Life Fault
Each of the GUNs congured as two-component
has an associated Pot Life Time located in the JOB
Parameters. These timers are used for materials
that can harden or setup after a specic time. Hardening material in uid lines or the spray applicator
can cause costly downtime and maintenance to
correct. The output of the POT-LIFE TIMER alarm
can be connected directly to an external PLC for
automatic initiation of the cleaning cycle, or to an
alarm to alert the operator. The Horn
51

DynaFlowTM User Manual - Operation
Code, located in the System conguration table,
determines if a Pot-Life Fault activates the horn. A
Pot-Life Fault can only be reset by eliminating the
expired material from the uid lines, or by setting
the Pot Life Time to zero in the JOB Parameters.
The horn will be turned off, however by issuing a
Clear Faults command. A Pot-Life Fault does not
turn off the GUN.
The DynaFlow system uses the Mixed Volume
and the Pot-Life Time when it monitors the ow
rate of the Gun. Pot-Life is monitored by dividing
the Mixed Volume into 40 equal sized "buckets"
of material. When an amount of material has
owed that equals the "bucket" volume, the 40
"'buckets" are time-shifted so the oldest "bucket"
is eliminated, representing the material that has
vacated the Mixed Volume tubing at the GUN, and
a new 'bucket' is added. If the GUN is in either
Run or Load mode, a time value of 1 second is
placed in the new "bucket" to represent mixed
material. If the GUN is in Clean mode, a time
value of zero is placed in the new "bucket" representing solvent. Every second, the time values
stored in the "buckets" are incremented if they are
nonzero (i.e. contain mixed material vs. solvent).
A Pot-Life alarm condition exists if any of the 40
"buckets" contains a time value greater than the
Pot-Life Time (see JOB parameters). A Pot-Life
alarm may be cleared by entering a Pot-Life Time
of zero seconds.
Calibration Mode
The rst time that the system is operated after
installation or when using new uids, calibration is
recommended for the ow meters (CHANNELs).
There are several procedures that can be used
for calibration (see the Calibration Mode Section).
Flow meters can be calibrated by uid weight or
by uid volume. All calibration measurements are
metric, such as weight is measured in grams and
volume in cubic centimeters (cc).
3. Start uid ow. Open the calibration valve or
trigger the GUN.
4. Collect uid manually into the graduated container for a specic time.
5. Stop uid ow.
6. Select "Stop Cal".
7. Measure the amount of uid collected.
8. Enter the measured volume of uid.
9. Accept or reject the new Pulses Per Liter
number that the controller calculated. The ow
meter calibration will automatically be updated.
Required:
- Specic gravity of material
- Digital scale, accurate to 0.10 grams
1. Weigh the empty beaker and record the tare
weight for later calculations.
2. Enter the calibration mode for the desired
CHANNEL.
3. Perform the desired collection procedure
above.
4. Weigh the uid in the beaker and subtract the
beaker tare weight to get the net weight of the
uid collected.
5. Entered the measured weight.
Procedure 1 (Manual)
1. Place the controller in Calibration Mode - select manual procedure.
2. Place a graduated container beneath the calibration valve or applicator paint feed tube/
nozzle.
52
LN-9400-00.9

DynaFlowTM User Manual - Operation
Procedure 2 (Automatic)
1. Place the controller in Calibration Mode - select automatic procedure.
2. Set the desired ow rate. The pre-set ow
rate set point for the selected CHANNEL is
based on the Total Flow Rate and Ratio for the
GUN, as stored in the JOB, since calibration
should always be performed at the normal ow
rate for the CHANNEL. The operator may override this value, if desired.
3. Set the desired time to collect uid. The pre-
set time for the selected CHANNEL is based on
the desired ow rate for the CHANNEL so that
200 cc of material will be dispensed. The operator may override this value, if desired.
4. Make sure that the applicator is triggered
OFF and any calibration valves are closed. Also
make sure that the uid has been loaded up to
the point at which the uid sample is to be taken
(GUN output or calibration valve).
5. Place a graduated container at the place of
uid collection (GUN or calibration valve).
9. Enter the measured amount.
10. Accept or reject the new Pulses Per Liter
number that the controller calculated. The ow
meter calibration will automatically be updated.
Calibration by Weight
If calibrated by volume, it is not necessary to
calibrate by weight.
Required:
- Specic gravity of material
- Digital scale, accurate to 0.10 grams
1. Weigh the empty beaker and record the tare
weight for later calculations.
2. Enter the calibration mode for the desired
CHANNEL.
3. Perform the desired collection procedure
above.
4. Weigh the uid in the beaker and subtract
the
beaker tare weight to get the net weight of the
uid collected.
6. Trigger the GUN ON (manually or automatic)
or open the calibration valve.
7. Select "Start Cal".
8. Collect and measure the uid. Fluid ow will
stop once the timer has expired.
NOTE
It is not important that uid be owing,
or triggered ON, for the entire calibration
time. The calibration procedure is based
only on the volume of uid that was registered. Automatic mode simply supplies
a convenient means to calibrate close to
specic ow rate and for an approximate
amount of time.
5. Entered the measured weight.
NOTE
An unassigned CHANNEL cannot
be calibrated. The CHANNEL must be
assigned to a Gun and the Gun must be
congured.
If the weight method is used, the
specic gravity of the material must be entered.
The new value for pulses per liter will
be automatically calculated and updated.
Repeating the calibration procedure
is highly recommended to ensure it was
performed satisfactorily.
LN-9400-00.9
53

DynaFlowTM User Manual - Operation
Clean
Any CHANNEL or Gun can be placed into a CLEAN
mode by an external command or through the Host
controller. The Clean mode forces the material
regulator fully open until turned OFF. The GUN
Enable and CLEAN inputs must be active and all
system or GUN faults cleared. To properly exit
the CLEAN MODE, the GUN Clean input should
be removed followed by a GUN Halt signal, or
a command issued from the Operator Interface
Panel (host controller). Each CHANNEL must be
set as a "clean" CHANNEL in the Clean CHANNEL
parameter located in the Gun Conguration table.
NOTE
Make sure the proper channels are
congured to "clean" on the Gun Parameters screen.
Full Error Detection
The DynaFlow controller will detect certain error
conditions and indicate the cause of the error
with a code. The code indicates the faulted Gun
and CHANNEL, as well as giving you a text error
message. All errors are categorized by CHANNEL,
Gun or System depending on the type of error.
The error codes and conditions are listed in the
appendix and include:
• Tolerance errors in uid ow rates for each
material
• Tolerance errors in uid ow ratios for each
material
• Reverse uid ow
• Low material ow
• High material ow
• Pot-life timers expired
• Memory errors
• Backup disk errors
• Conguration errors
• System errors
PROCEDURES
First-Time System Start-Up
This section is intended for skilled trades personnel. Always be aware of safety guidelines while
operating equipment.
Before power is supplied to the DynaFlow Fluid
Flow Control, take time to familiarize yourself
with the controls. Unexpected actions can occur
during initial power-up sequences and you should
know which controls shut down the controller. The
following information serves as a guide for initial
system testing and start-up. Operational problems
will be avoided if time is taken to follow the steps
outlined below. Read through the entire sequence
rst before performing any actions.
• Verify that the Interface and Channel Mod-
ule dip switch settings are correct. Refer ence the HARDWARE SETTINGS section.
• Visually inspect the entire system. Review
the "Installation" section of this manual and
any related manuals such as the ow meter
and material regulator. Verify that all air and
uid lines are routed properly and ttings
are secure.
• Make sure that the required uid ltration is
installed. Fluid lines should be ushed out
manually before installation of the ow
meters to ensure that any large particles or
contamination located from the uid lter to
the ow meter connection are removed.
• Make sure that the required air ltration for
the E/P transducer(s) is installed.
• If rotary applicators are used, remove the
front shroud and bell cup to expose the
paint feed tube. If GUNs are being used,
point the applicator(s) downward if pos sible. This will prevent the possibility of
material from contaminating the applicator
and provide additional safety for any per sonnel working near the system.
• Turn ON the main power disconnect to the
uid ow control panel.
• Turn ON the power switch located on the
ow control panel.
54
LN-9400-00.9

DynaFlowTM User Manual - Operation
• Verify that the local Operator Interface is
working properly and that no errors are be ing reported. Refer to the "Operator Inter face" manual for additional information.
• Turn ON the system host controller (PLC
or PC) and verify proper operation. Con-
gure the ow controller. This is usually
performed at the local Operator Interface
panel, but can be through the system con troller depending on the installation. Refer
to the "Operator Interface" manual for addi tional information.
• Turn ON the factory air supply to the E/P
transducer(s) and adjust the regulator to
90 psi minimum, 110 psi maximum.
• Turn ON the uid supply pressure to the
material regulator or color change valves.
• Inspect the air and uid system for any
leaks and x before continuing. Fluid
should
NOT be owing through the system at this
point.
• Perform a system ush, one GUN at a
time.
• Load paint.
• Perform a calibration check of each CHAN-
NEL.
• Verify operation of any safety or system
interlocks.
• Perform and verify remaining system oper-
ation. This includes any automatic opera tions such as a color change sequence.
• Observe the uid ow response of each
GUN. Refer to "Operator Interface" manual
and related sections of this manual.
Normal Start-Up Procedure
Before attempting start-up:
• Inspect the entire system and make sure
that all air and uid hoses are in place and
secure, and that all other system compo nents are in good condition.
• Review and perform any required preven-
tive maintenance procedures.
• Inform personnel in the immediate area
that the system is being started.
• Observe the operation of the system as it
is started and be ready to shut it down in
the event of a problem.
The following procedure assumes that the system
was running normally when previously operating.
This is only a recommended procedure. Variance
from this procedure is dependent on the installation, operation and protocols.
1. Turn on the main power disconnect to the
uid control panel.
2. Turn ON the panel power switch.
3. Verify that the Operator Interface is operating
normally and that there are no errors.
4. Turn ON the factory air supply to the E/P
transducers and any other pneumatic control
circuits.
5. Supply uid pressure to the system.
6. Turn ON any auxiliary equipment that may
be interlocked with the uid ow controller such
as the booth exhaust.
7. Perform a system ush of each GUN.
8. LOAD the material to be sprayed. This may
be controlled automatically or manually depending on the system.
9. A "dummy" JOB can be run to verify the operation of the entire coating system before
spraying production parts. In general, the longer
a system is shutdown, the more importance
should be placed on the start-up procedure.
Normal Shutdown Procedure
The shutdown procedure should be basically opposite of the start-up procedure. The degree or
level to which the system is shutdown depends on
how long the shutdown is to last. The following are
considerations when shutting down the system.
1. Place the system in a safe mode when per-
sonnel will not be present for extended periods
of time.
2. It is recommended to keep uid loaded in the
ow meters to prevent the gears from sticking
during start-up. Generally this is the ushing
solvent.
LN-9400-00.9
55

DynaFlowTM User Manual - Operation
3. Total system shutdown, including AC power,
air and uid pressure is recommended if the
system is to be shutdown for more than one
shift.
Clean Mode
CLEAN mode can only be initiated if the GUN has
been given a Halt input and is enabled and no faults
are active. Each CHANNEL can be independently
congured to accept the CLEAN command. For
two-component GUNs, it may not
be desirable to clean both the resin and catalyst at
the same time, therefore each CHANNEL can be
congured as a “clean” CHANNEL independently
by setting the Clean CHANNELs parameter in the
GUN conguration table.
The CLEAN operation can be started one of several
ways. The rst method is to simply supply the GUN
CLEAN input. The second method is to initiate the
CLEAN mode through the OPERATOR INTERFACE or host controller (refer to the appropriate
manual). Actual cleaning time and sequences,
including soft air push-out (purge) is performed by
the system controller or the pneumatic interface
panel, and not directly by the uid ow controller.
PID CONTROL
The ransburg DynaFlow Fluid Flow Controller
incorporates a form of a Proportional-IntegralDerivative (PID) algorithm with additional func-
tions or modications which are specic to the
efcient control and delivery of materials in paint
spray applications. PID is the most widely used
method for closed loop controllers in all areas of
industrial control.
The PID control algorithm develops a control signal
composed of three elements. The proportional
element is simply proportional to the difference
between the current uid ow and the desired uid
ow, referred to as the error. The integral element
of the control output is proportional to the integral
of the error signal, and the derivative element is
proportional to the derivative of the error signal.
These are explained in more detail below. A general
understanding of how a PID controller works will
be benecial in producing the best overall uid ow
response from the uid delivery system. This can
lead directly to reduced paint usage and higher
quality of nish.
The CLEAN mode is terminated when deactivated
from the Operator Interface or when a HALT signal
is supplied.
Calibrate Mode
CALIBRATE mode can only be initiated if the
GUN is enabled and no faults are active. The
CALIBRATE operation is initiated and controlled
through the OPERATOR INTERFACE or host controller (refer to the appropriate Operator Interface
or Programming manual).
The CALIBRATE mode is terminated when deactivated from the Operator Interface or if the Enable
input is removed.
Recovering From Faults
This section:
• Identify and record the fault
• Evaluate action(s) to be taken
• Perform corrective action(s)
• Reset and run
Largely the air and uid control components and
their placement with respect to each other deter-
mine limitations on general uid ow response.
This includes the following:
• Type of uid regulator and needle or dia-
phragm ratio (pilot pressure vs. uid pres-
sure).
• Rheology of the uid(s) such as viscosity,
and shear.
• Length and diameter (volume) of the air pi-
lot lines from the V/P or I/P transducer to
the uid regulator.
• Back pressures created by uid control
devices such as the applicator uid pas-
sage restrictions.
Error
The difference between the requested (set point)
value and the actual process being controlled.
56
LN-9400-00.9

DynaFlowTM User Manual - Operation
Deadband
This represents a ow range above and below
the set point value in which the PID control is
suspended. This keeps the control output from
continually changing and produces stability when
close to the requested value.
Proportional Action (Kp)
Proportional action simply means that the controller output changes in proportion to the error
between the set point and the actual ow. It is
also commonly referred to as gain, proportional
gain and proportional band to name a few. If the
proportional gain is set too high, the system will
oscillate. If set too low, the uid ow will "wonder"
due to a lack of responsiveness.
Integral Action (Ki)
The Integral element of the PID controller forces
the actual output (ow) to match the desired by
utilizing the sum of the error in ow rate.
Integral action is proportional to the sum of the
error. This term is needed to remove long term,
or steady-state error that cannot be removed by
the proportional term.
Integral action is the most important factor governing control near the set point. The integral
term changes the control output as a result of a
continuing error between set point and actual. The
integral term will continue to shift the output until
the actual ow rate falls within the Deadband value.
Integral action will also effect transition response
times. The greater the change in requested ow
rate, the more the integral action will effect the
response time.
The integral gain, Ki, must be chosen such that
oscillations do not occur. Increased integral gain
will cause faster response times, but can lead to
process instability and uncontrolled oscillations.
Derivative Action (Kd)
Derivative action is proportional to the rate of
change of the error. The derivative term dampens,
or slows down process overshoot and improves
the response to changes in the process being
controlled. Another way to view this term is that
it "anticipates" or leads what is happening with
the actual ow.
Derivative action provides a sudden shift in the
control output as a result of a quick change in the
actual ow (transient) or set point. If the actual ow
drops quickly, the derivative term will provide a
large change in the output in an attempt to correct
the perturbation before it goes too far.
Derivative action should be associated more with
transient response control and less with overshoot
inhibition such as during start-up, or trigger ON.
Oscillation due to derivative action is typically a
cyclic "wander" away from the set point.
Putting It All Together
The optimum PID controller settings are determined based on the application. Types of applications that will effect PID considerations are:
• Dynamic control of ow rate while spraying
parts - robot mounted,
• Short GUN trigger times
• Long trigger times - constant ow rate re-
quested during entire part
• Precise 2K mixing ratio required at all times
• Low ow rate applications
• Applicators mounted on oscillators or re-
ciprocators that may produce cyclic back
pressures within the uid lines
• Systems with piston pump type supplies
• Long pilot line lengths from uid regulator
to transducer
General Guidelines
1. The type of uid regulator represents the
larg-est overall impact on system response. The
following table lists control settings for various
uid regulators that should result in stable control. The determination of these parameters was
based upon worst case conditions and therefore
constitutes "conservative" control response. It is
LN-9400-00.9
57

DynaFlowTM User Manual - Operation
Recommended to start with these values and
conrm stable response before trying to achieve
faster response from the system. Generally,
when adjusting the Proportional (Kp) and Integral
(Ki) gain parameters, adjust both up or down pro-
portional to themselves. In other words, if faster
response is desired and the system is currently
operating stable, assume the starting Kp value is
500 and the starting Ki value is 2000. You would
adjust the Kp value to 550 (10% increase) and
the Ki value to 2200 (also a 10% increase). The
deadband parameter should be kept to 1 and the
differential gain (Kd) at 0.
Quick triggering applications: For applications
requiring multiple, short trigger cycles, more
stable response can typically be obtained by
adjusting the Kp down to approximately 75-100,
while adjusting the Ki to approximately 1000-2500.
2. The Integral gain is probably the most important setting and has the greatest overall impact
on response behavior associated with the uid
ow control system. This parameter can also be
adjusted through a relatively large range without
creating instability.
3. The Proportional gain can improve system
response, especially for large set point changes,
but care should be taken not to increase by more
than approximately 25% of the default setting. The
system can easily become unstable and go into
oscillation if adjusted to high.
DEFAULT CONTROL
PARAMETERS
Fluid
Regulator
MVR #2
MVR #3
MVR #4
DR1, 1:1
DR1, 1:2
DR1, 1:3
DR1, 1:4
DR1, 1:6
DR1, 1:8
DR1, 1:10
Kp Ki
10
15
20
50
45
40
35
30
25
20
1200
1000
800
1000
1200
1400
1600
1800
2000
2200
TYPICAL RANGES FOR
CONTROL PARAMETERS
Fluid
Regulator
MVR #2
MVR #3
MVR #4
DR1, 1:1
DR1, 1:2
DR1, 1:3
DR1, 1:4
DR1, 1:6
DR1, 1:8
DR1, 1:10
4. The differential gain has the least effect on
system performance and should be left at the
default setting of zero (0).
5. Response times will be limited by changes in
the uid mechanics of the system. It will take
longer to achieve requested ow rate as uid
viscosity increases or uid supply pressure de-
creases. In other words, the same response cannot
be achieved for a 50 sec, Zahn #2 material as for
a 20 sec, Zahn #2 material given the same uid
supply pressure and uid control components.
This is important to understand, especially for 2K
systems. It may be an advantage to purposely
slow down the response of the quicker reacting
(thinner) uid such that it will remain closer to that
of the thicker uid in 2K systems during triggers
or changes in the set point. Other options are to
decrease the supply pressure for the thinner uid
or increase pressure for the thicker uid.
6. "Reset Windup" condition. Reference "Troubleshooting" in the "Maintenance" section. Reset
windup is a condition when the controller does not
have enough strength to reduce the error back to
zero. This occurs due to unusual restrictions in
the uid control devices or uid lines and indicates
that the system is not tuned properly or there is
a problem. If the actual uid ow is less than the
requested ow (minus the dead band value), the
controller will continue to increase the output until
it reaches the maximum allowable uid regulator
Kp Typical
Range
0-500
0-500
0-500
0-500
0-500
0-500
0-500
0-500
0-500
0-500
Ki Typical
Range
600-2400
500-2000
400-1600
500-2000
600-2400
700-2800
800-3200
900-3600
1000-4000
1100-4400
58
LN-9400-00.9

DynaFlowTM User Manual - Operation
pressure. This is due to the Integral term of the
PID control. If the restriction causing the low
ow condition is removed suddenly while a large
control output signal exist, then a relatively long
amount of time is required for the Integral term
of the PID to reduce the control output back to a
normal range since the Integral term is proportional
to time and also due to the inherent response of
the system. If uid ow response has changed
signicantly with the same setup that previously
produced good response, then inspect the system
for component failure, blockages, and check the
uid type and viscosity.
Alternate PID Equation
The normal PID equation is based on the error
between the desired set point and the actual ow
rate for the CHANNEL. If the set point is varied
dynamically by a PLC via RIO or by a robot via
Analog Input, it may be desirable to implement
an alternate form of the equation. The alternate
form of the equation uses the set point for the
proportional term of the equation. The Integral
and Derivative terms are the same, but slightly
different scale factors are used.
6. Trigger the GUN. If the ow rate does not
oscillate, or the oscillations decrease in amplitude
in a few seconds, increase Ki by 100 and repeat
from step 5. If the ow rate oscillates with increasing amplitude, decrease Ki by 50 and repeat from
step 5. 8If the ow rate oscillates with a constant
amplitude, proceed to step 7.
7. Set Ki to one-half the present value.
8. Set Kp to the default value shown in the "Default
Control Parameters chart" and Typical Ranges for
Control Parameters chart" in this section.
9. Cycle the GUN from READY to RUN so the
new parameters are sent to the Channel Module(s).
10. Trigger the GUN. If the ow rate does not
oscillate, or the oscillations decrease in amplitude
in a few seconds, increase Kp by 30 and repeat
from step 9. If the ow rate oscillates with increasing amplitude, decrease Kp by 15 and repeat from
step 9. If the ow rate oscillates with a constant
amplitude, proceed to step 11.
To enable the alternate PID equation, turn on DIP
SW1-4 (or SW1-8) on the Channel Module for
each CHANNEL of the GUN.
PID Tuning Methods - Standard
PID
1. Select the nominal ow rate for the GUN.
2. Set Kp and Kd parameters to zero. Do this
for both CHANNELS if this is a two-component
GUN.
3. Set Ki for the Slave CHANNEL to zero (assuming this is a two-component GUN).
4. Set Ki for the Master CHANNEL to the default value shown in "Default Control Parameters"
chart and "Typical Ranges for Control Parameters"
chart in this section.
5. Cycle the GUN from READY to RUN so the
new parameters are sent to the Channel
Module(s).
11. Set Kp to one-third the present value.
12. Cycle the GUN from READY to RUN so the
new parameters are sent to the Channel
Module(s).
13. Trigger the GUN. If the ow rate does not
oscillate, proceed to step 14. If the ow rate is
oscillating, reduce Ki by 50 and/or reduce Kp by
15 and repeat from step 12.
14. At this point, the tuning procedure is completed
for most ow control applications. However, if
there is a great amount of lag time from
the point of sensing the ow rate to where the
material volume regulator is located, the derivative
term of the PID equation may be required. In that
case, set Kd to the default value shown in "Default
Control Parameters" chart and "Typical Ranges
for Control Parameters" chart in this section.
15. Cycle the GUN from READY to RUN so the
new parameters are sent to the Channel
Module(s).
LN-9400-00.9
59

DynaFlowTM User Manual - Operation
16. Trigger the GUN. If the ow rate does not
oscillate, or the oscillations decrease in amplitude
in a few seconds, increase Kd by 30 and repeat
from step 15. If the ow rate oscillates with increasing amplitude, decrease Kd by 15 and repeat from
step 15. If the ow rate oscillates with a constant
amplitude, proceed to step 17.
17. Set Kd to one-eighth the present value.
18. Cycle the GUN from READY to RUN so the
new parameters are sent to the Channel Module(s).
19. At this point, the tuning procedure is completed. The resulting Kp, Ki, and Kd parameters
should produce the fastest response with minimal
over-shoot and/or oscillation. If oscillation does
occur with these PID parameters,consider reducing each value by the same percentage. This
will lower the overall gain resulting in a slightly
longer time to achieve the desired set point and
a slow- er response to disturbances, such as paint
pumps.
20. For two-component GUNs, repeat steps 4
through 19 for the Slave CHANNEL.
PID Tuning Methods - Alternate PID
1. Set the maximum set point for the GUN.
2. Set Ki and Kd parameters to zero. Do this for
both CHANNELS if this is a two-component GUN.
3. Set Kp for the Master CHANNEL based on the
following formula:
(8.0 - MVR LOW) * 25,500
Kp = 10
(Max. Gun Set Point * Ratio)
(Ratio + 1)
For example:
Max. Gun Set Point = 400 cc/min.
MVR LOW = 15 PSIG
Ratio = 3:1
(8.0 - 15) * 25,500
Kp = 10
(400 * 3)
( 4 )
= 6.5 * 25,500
300
= 552.5
= 550
4. Set Kp for the Slave CHANNEL based on the
following formula:
(8.0 - MVR LOW) * 25,500
Kp = 10
(Max. Gun Set Point)
(Ratio +1)
For example:
Max. Gun Set Point = 400 cc/min.
MVR LOW = 15 PSIG
Ratio = 3:1
(8.0 - 15) * 25,500
Kp = 10
(400)
( 4 )
= 6.5 * 25,500
100
= 1657.5
= 1660
5. Cycle the GUN from READY to RUN so the new
parameters are sent to the Channel Module(s).
6. Trigger the GUN. If the ow rates do not achieve
their individual CHANNEL set points, adjust the
upstream uid pressures until they both are on
target.
60
NOTE: This may require repeated triggers and
fault resetting. Once the proper uid pressures
are set, the maximum set point for the gun will be
owing, ratioed properly between the CHANNELS,
with the MVR pressures at 80 PSIG.
LN-9400-00.9

DynaFlowTM User Manual - Operation
7. Set the Ki parameters for both channels to a
value between 50 and 500 in order to bring each
CHANNEL to its exact set point. Be sure to cycle
the GUN between READY and RUN to send the
Ki values to the Channel Modules.
8. Normally, Kd may remain at zero. Set Kd to a
value between 50 and 500 if there appears to be
a delay in the response.
NOTES
LN-9400-00.9
61

DynaFlowTM User Manual - Maintenance
MAINTENANCE
TROUBLESHOOTING
Error Codes
The following is a complete list of error codes.
Some of these codes may not apply depending
on the specic control system conguration.
The corrective actions listed in the table are
discussed in more detail later in this section and
also included in the "HELP" screens located on
the operator interface.
ERROR CODES
Code
2021
2022
2023
2024
2025
2026
2027
2028
Displayed Text Fault Cause Corrective Action
Pot-Life Timer Expired GUN #<>
Pot-Life Timer has expired for GUN
indicated.
Last digit indicates CHANNEL #.
Example Error Code: XXXX
1st Digit:
2 = GUN Alert
4 = DISK Error
9 = CHANNEL Fault
A = GUN Fault
B = SYSTEM Alert or Fault
2nd and 3rd Digit:
No specic meaning
4th Digit:
- If a GUN error, the number
indicates which GUN (1-8)
- If a CHANNEL error, the num ber indicates which CHANNEL
(1-8)
Verify the following:
1. Correct value for Pot-Life time.
2. Correct value for Mixed Volume.
If the above values are correct, then
uid must be ushed from the GUN
immediately.
62
2061
2062
2063
2064
2065
2066
2067
2068
9011
9012
9013
9014
9015
9016
9017
9018
Gun Not Ready GUN #<>
Out Of Tolerance CHANNEL #<>
Indicated GUN # is not ready. This
means that the GUN # has been
given a RUN command without being enabled, or the GUN has faulted.
Last digit indicates CHANNEL #.
The indicated CHANNEL is outside
it’s maximum tolerance limit as specied by the FLOW
TOLERANCE parameter.
Last digit indicates CHANNEL #.
Verify that the GUN is enabled and not
faulted. Each GUN must have the Ext.
Fault/Enable Input active, or the Global
Gun Enable active.
Check the following:
1. Kp, Ki, and Kd gains set wrong which
may cause unstable uid regulation.
2. Running the wrong JOB # which
may include the wrong Kp, Ki, and Kd
values.
LN-9400-00.9

ERROR CODES (Cont.)
DynaFlowTM User Manual - Maintenance
Code
9021
9022
9023
9024
9025
9026
9027
9028
9031
9032
9033
9034
9035
9036
9037
9038
Displayed Text Fault Cause Corrective Action
Reverse Flow Limit
CHANNEL #<>
Flow Too Low CHANNEL #<>
The amount of reverse ow for the
indicated CHANNEL has ex-ceeded
the maximum allowable amount as
dened in the CHANNEL parameter
set.
Last digit indicates CHANNEL #.
The flow rate for the indicated
CHANNEL # is too low. Based on
the transducer output. Not issued
for a manual GUN, master
CHANNEL.
Last digit indicates CHANNEL #.
Check the following:
1. That the Reverse Flow value entered
in the JOB # is correct.
2. Flow meter ber-optic cables are
properly connected and not reversed.
3. Fluid pressures are properly set and
stable.
4. All check valves are operating correctly.
5. All uid lines lled and all valves
open.
6. Flow meter is operating properly.
Check the following:
1. There is uid in the uid lines for the
indicated CHANNEL.
2. Fluid pressures are properly set and
stable.
3. The pilot air line to the uid regulator
is not damaged or leaking.
4. Fluid viscosity is correct for the
CHANNEL pressure and pipe size.
5. The pressure transducer and regulator are operating properly.
6. Transducer air supply is at least 90
psi.
7. Kp, Ki, and Kd Gains are set correctly
for the indicated CHANNEL.
9041
9042
9043
9044
9045
9046
9047
9048
9071
9072
9073
9074
9075
9076
9077
9078
LN-9400-00.9
Flow Too High
No Master Flow Manual mode only. A trigger signal
The flow rate for the indicated
CHANNEL # is too high. Based on
the transducer output. Not issued
for a manual GUN, master
CHANNEL.
Last digit indicates CHANNEL #.
was received and no fluid flow
was detected through the master
chan-nel after the Blowoff timer had
elapsed (if used).
Check the following:
1. Fluid regulators - sticking or faulty.
2. Control parameters - gains possibly
set too high.
3. MVR low setting too high.
Check the following:
1. There is uid in the uid lines for the
indicated CHANNEL.
2. Fluid pressure is OK.
3. The ow meter, pressure trans-ducer,
and regulator are operating properly.
63

DynaFlowTM User Manual - Maintenance
ERROR CODES (Cont.)
Code
9081
9082
9083
9084
9085
9086
9087
9088
9091
9093
9095
9097
9111
9112
9113
9114
9115
9116
9117
9118
Displayed Text Fault Cause Corrective Action
External GUN ENABLE Input Not
Detected
Channels Not
Present
Out of Tolerance
-Catalyst Too High
CHANNEL #<>
24 VDC must be supplied to the
external GUN ENABLE input before
the GUN can be placed in an active
state. This is typically used as an
interlock with other equipment or
hard-wired directly to 24 VDC.
Channel Module is not installed or
has failed.
The indicated slave (catalyst) CHAN-
NEL is above it's maximum tolerance limit as specied by the FLOW
TOLERANCE parameter.
Check for 24 VDC on the external
GUN ENABLE input.
1. Insert Channel Module or change
GUN conguration.
2. Reboot system and check again.
3. Replace Channel Module.
Check the following:
1. Kp or Ki gains set too high.
2. Running the wrong JOB #, which may
include the wrong gain values.
3. Fluid pressures. Either reduce the
catalyst supply pressure or increase the
resin pressure. Try to maintain normal
operating pilot pressures to the uid
regulators, between 30-60 psi.
4. The MVR LOW JOB parameter for
the catalyst is set too high (above the
regulator cracking pressure).
5. Air bubbles or cavitation.
64
9211
9212
9213
9214
9215
9216
9217
9218
Out of Tolerance
-Catalyst Too Low
CHANNEL #<>
The indicated slave (catalyst) CHANNEL is below it's minimum tolerance
limit as specied by the FLOW TOLERANCE parameter.
Last digit indicates CHANNEL #.
Check the following:
1. Kp or Ki gains set too low.
2. Running the wrong JOB #, which
may include the wrong gain values.
3. Fluid pressures. Either increase the
catalyst supply pressure or decrease the
resin pressure. Try to maintain normal
operating pilot pressures to the uid
regulators, between 30-60 psi.
4. Requested ow rate exceeds capability of the catalyst channel at the given
uid supply pressure. Reduce total ow
rate or increase catalyst supply pressure.
5. Air bubbles or cavitation.
Last digit indicates CHANNEL #.
LN-9400-00.9

ERROR CODES (Cont.)
DynaFlowTM User Manual - Maintenance
Code
A011
A012
A013
A014
A015
A016
A017
A018
A021
A022
A023
A024
A025
A026
A027
A028
B001
Displayed Text Fault Cause Corrective Action
Non-Existent
Program GUN #<>
GUN Flow Out of
Range
System Halted
JOB # number entered for the indi-
cated GUN does not exist. JOB #
number defaulted to 00.
Last digit indicates CHANNEL #.
The total ow rate for GUN # has
exceeded the MAXIMUM FLOW
RATE JOB parameter or fallen below
the MINIMUM FLOW RATE JOB
parameter. For Manual GUNs only.
System Ready/Halt input is
inactive.
Verify the following:
1. The JOB # has been saved in memory
for the indicated GUN.
2. The correct JOB # is being re-quested.
3. For discrete hard-wired JOB # select,
PROGRAM TOGGLE and JOB # inputs
have been asserted correctly by the PLC
or host computer.
See "Flow Too Low" and "Flow Too
High" faults.
This input is typically used as an interlock
to other control equipment or it is simply
hard-wired to 24 VDC. Supply 24 VDC
to the System Ready/Halt input.
B010
RIO - Communications Error
PLC and DynaFlow are not set to
the same:
- baud rate
- rack address
- rack size
- rack starting quarter
RIO cable is not connected to the
proper terminals at either end.
Check with the PLC programmer to determine the correct values for baud rate,
rack address, rack size, and rack starting quarter and then set the DynaFlow
Interface Module DIP SW1 and SW2 to
the appropriate settings per "Interface
Module DIP SW2 Settings" and "Mother
Board Signal ID (J3, J4, J5, J6 Channel
Cards" respect-ively in this section.
Check cable connections per Figure 25
LN-9400-00.9
65

DynaFlowTM User Manual - Maintenance
ERROR CODES (Cont.)
Displayed Text Fault Cause Corrective ActionCode
B010
(Cont.)
B020
B030
RIO - Communications Error
(Cont.)
RIO - Invalid
BTW Type
RIO - Invalid
BTR Type
RIO cable is not properly
terminated at each end.
The PLC has issured a BTW with
an invalid BTW data type in the rst
word offset.
The PLC has issued a BTW with an
invalid BTR data type in the second
word offset.
Check cable connections per Figure 25
of this manual.
Check each end of the cable to determine if the terminating resistor is
installed at each end. The DynaFlow
system may not be the last rack on the
RIO cable. The value of the terminating
resistor is based on cable length, baud
rate, and if Extended Node Capability is
enabled at the PLC. If Extended Node
Capability is enabled, the terminating
resistors should always be 82 ohms.
Otherwise, the term-inating resistors
should be 150 ohms for 57.6 and 115.2
Kbaud and 82 ohms for 230.4 Kbaud.
In any case, use
1/2 watt resistors.
Have the PLC programmer reference
the "DynaFlow Programmer" manual
for the correct BTW data types.
Have the PLC programmer reference
the "DynaFlow Programmer" manual
for the correct BTR data types.
66
B040
B050
B060
Gun/Channel
Number
RIO - Invalid
BTR Job
Number
RIO - Invalid
BTW Length
The PLC has issued a BTW with
an invalid gun or channel number
in the third word offset.
The PLC has issued a BTW with
an invalid job number in the fourth
word offset.
The PLC has issued a BTW with an
invalid message length (word count).
Have the PLC programmer ensure gun
and channel numbers are between 1 and
8, or 0 if not required for the particular
data type.
Have the PLC programmer ensure job
numbers are between 1 and 100, or 0 if
not required for the particular data type.
Have the PLC programmer reference
the "DynaFlow Programmer" manual
for the correct BTW message lengths.
LN-9400-00.9

DynaFlowTM User Manual - Maintenance
Flow Too Low -or- Flow Too High
Explanation: These are CHANNEL specic faults.
FLOW TOO HIGH and FLOW TOO LOW faults
are issued if the requested uid ow cannot be
obtained. This typically means that there is a setup
problem, maintenance issue, or mechanical failure.
These types of faults can be caused by numerous problems. Most of the more common causes
are listed below. Keep in mind that the controller
senses that either too little or too much material is
getting to the applicator and that this is based on
JOB parameter settings and uid ow feedback
from the ow meters. This troubleshooting section
assumes that the system was previously operating successfully and then a problem developed.
The following is not meant for initial system setup,
however, many of the troubleshooting procedures
described can be used in either case.
1. Material Supply Pressure
- Has the material supply pressure changed?
- What was the supply pressure when the
system was operating properly?
- Is the pressure gauge accurate or reliable?
- Has the uid delivery system been
changed?
- Are there any air leaks in the uid regulator
pilot line?
- Are there any leaks in the uid lines?
The controller can compensate for small changes
in supply pressure, but changes such as seen with
piston pumps without surge chambers or pressure
drop regulators can be a denite problem.
2. Material Viscosity
- Has the material properties such as
viscosity or temperature changed?
Changes in viscosity alter the way in which it
passes through the uid metering and control
components (regulator, ow meter, check valves,
Y-Block, spiral mix tube, etc.). Typically, an in-
creased viscosity will require more pressure to
achieve the same ow rate. However, in some
cases, as with thixotropic materials, the viscosity
will actually change as the pressure varies or as
the material passes through the uid regulator
or ow meter. Additionally, the material may be
broken down into smaller particles as it passes
through the uid delivery system which can also
cause some materials to change their properties
as they ow.
The temperature of the uid can also greatly impact the ow properties. Make sure that the uid
heaters are functioning correctly if temperature
control is being used. If temperature control is not
being used, then evaluate how ambient tempera-
ture may effect the uid, as it is stored including
the paint kitchen. Also, consider the length of the
recalculating system and how long the material
takes to travel to the applicators.
The amount in which the control response is
effected by changes in uid properties is also
determined by how aggressive the control param-
eters are set (Kp, Ki, Kd). The uid ow response
can be observed as discussed in the "Operator
Interface" manual. Also, refer to the "PID Control"
in the "Operation" section of this manual under
3. Fluid Line Restriction
- Has a restriction formed somewhere in
the uid line?
This could be a pinched paint tube, contamination
in the uid regulator, spiral mix tube blockage,
a sticking check valve, or a Y block blockage to
name a few.
Corrective Action:
An easy way to verify that the system is capable
of owing at the desired rate is to place the GUN
in CLEAN MODE and trigger the applicator. The
CLEAN MODE supplies maximum control pressure
to the uid regulator. Watch the ow rate. If the
desired ow rate cannot be achieved or surpassed
in CLEAN MODE, it is obvious that it will not be
achievable in control mode. This tests all uid
lines from the material supply to the applicator.
If calibration ports (valves) are available, such
as on 2K uid panels, try operating the controller
with the calibration valves open. Place containers
under the calibration ports and put the controller in
RUN mode. If operating in AUTO-MATIC MODE,
the TRIGGER signal has to be
LN-9400-00.9
67

DynaFlowTM User Manual - Maintenance
forced ON. If the desired ow is achieved while
in this mode of operation, the uid restriction is
located further downstream to the applicator.
4. Flow Meter Feedback
- Is ow being indicated on the controller?
If it is obvious that material is owing through
the system (from the GUN or calibration ports if
used), but the controller indicates no ow, then
this indicates that the controller is not detecting
ow meter pulses. This could be caused by one
of the following:
• Flow meter gear stuck
• Bad ow meter sensor
• Disconnected or damaged ber-optic
cable
• Bad ber-optic receiver
• Bad input on the CHANNEL MODULE
• Fiber-optic ow meter transmitter battery
has expired. Life expectancy is two years
minimum.
Corrective Action:
Flow Meter: Disassemble, clean, and inspect
the ow meter. Refer to instructions supplied with
the meter.
played, replace the CHANNEL MODULE. Make
sure that the hardware settings located on the
module are congured identically to the one being replaced.
5. Transducer Failure
Corrective Action:
Perform the following with the GUN OFF and
calibration valves closed. Place a pressure gage
(if one does not already exist) in the pilot line between the transducer and the uid regulator. Make
sure that the air supply pressure to the
is at least 100 psi. Go to the FORCE I/O
transducer
menu for the
CHANNEL in question. Force Control Output voltage (or 4-20 ma) to several different values and
observe the pressure gauge. Reference "Analog
Sealing" chart in this section for correct values.
If the transducer does not produce the proper
pressures, check for air leaks in the air pilot tube,
transducer and uid regulator. The transducers
are very low volume devices and are designed
for non-ow, or dead-headed operation. Also,
observe the pressure gauge for oscillation and
listen to the transducer for uttering sounds. These
are other indications that there may be air leaks
in the system.
Try connecting the ow meter in question to a ber-
optic cable from a properly functioning CHANNEL.
If uid ow is now observed, then the ow meter
and pickup sensor are functioning properly.
Fiber-Optic Cable: Simply shine a light into one
end of the cable and have someone observe the
opposite end. If light is visible through the cable
then it is probably good, although it is possible
that the cable is damaged and will not conduct
enough light to operate properly.
Fiber-Optic Detector: With uid owing, observe
the LED located on the ber-optic receiver. The
LED is an indication that uid is owing and pulses
are being received from the ow meter. If the LED
is not ON, then replace or swap the ber-optic
receiver and try again.
If everything checks good but no uid ow is dis-
Another method for isolating small air leaks is to
spray or dab a small amount of a soap and water
solution around the ttings or valves and look for
the continuous formation of air bubbles.
68
LN-9400-00.9

DynaFlowTM User Manual - Maintenance
Control Output
ANALOG SEALING
Pressure
0 - 10 VDC
0
1
2
3
4
5
6
7
8
9
10
4-20 mA
4
5.6
7.2
8.8
10.4
12.0
13.6
15.2
16.8
18.4
20.0
(PSIG)
0
10
20
30
40
50
60
70
80
90
100
Gun Flow Out of Range
Explanation: (Manual Guns Only) This fault indicates that the total ow rate through a GUN
has exceeded the MAXIMUM FLOW RATE JOB
parameter value or dropped below the MINIMUM
FLOW RATE JOB parameter.
Out of Tolerance Faults
Explanation: "OUT OF TOLERANCE" faults are
generated in the following manner. Every time a
specic volume of uid passes through the GUN
(specied by the TOLERANCE VOLUME param-
eter), the controller determines the amount of resin
and catalyst material that owed. The controller
then calculates the actual ratio and determines if
it is within the limits as set by the FLOW TOLERANCE setting.
Reference the "Error Codes" table (Figure 16).
Typical causes for OUT OF TOLERANCE faults
are:
6. The MVR LOW JOB parameter set too high
(above the regulator cracking pressure).
7. Air bubbles or cavitation in the uid.
8. Unstable uid supply pressures to the uid
regulators. This can be seen with pump supply
systems.
Corrective Action:
The cause is the material supply pressure in almost
every case when this fault is observed. Obviously,
if FLOW TOO LOW or FLOW TOO HIGH faults are
not occurring, the ow rates are operating within
the range of the uid regulators. Over an extended
period of time, however, the volumes used are not
within the appropriate tolerance band. Observe
the ratio for both the resin and catalyst channels
that are producing faults while they are operating
or immediately after the controller faults (before
resetting it). If the actual ratio of the catalyst is
below target, adjust the supply pressure to the
catalyst regulator up approximately 5 psi, or adjust
the resin supply down by approximately 5 psi and
try to run again. Keep adjusting these pressures
until the actual ratio locks in on the target. Keep
in mind that higher is not always better. Many
times it is better to lower the pressure of the opposite channel, rather than raise a channel that
is operating low in ratio.
The Kp and Ki gain settings located in the JOB
tables may also be used to eliminate OUT OF
TOLERANCE faults. For example, if an OUT OF
TOLERANCE - CATALYST TOO HIGH fault occurs,
adjust the gain settings for the catalyst channel
down and vice-versa for a OUT OF TOLERANCE
- CATALYST TOO LOW fault. The resin channel
also needs to be taken into account for GUNs
congured as automatic.
1. Kp, Ki, or Kd gains not set correctly.
2. Sticking or faulty uid regulator.
3. Sticking or faulty ow meter.
4. Running the wrong JOB #, which may include the wrong gain values.
5. Fluid supply pressures not adjusted properly.
LN-9400-00.9
Gun Not Ready
Explanation: This is not a fault condition and does
not prevent the GUN from operating. This error
occurs if a GUN has not been congured, is not
enabled, or no JOB #s have yet been saved and
the GUN is placed in the RUN mode. This can be
caused by trying to place a GUN in RUN mode
either from local display/interface or from an external control device such as a PLC or host PC.
69

DynaFlowTM User Manual - Maintenance
Corrective Action:
Simply save a JOB # for the indicated GUN making
sure the parameters are correct. The Gun can be
placed in RUN mode without generating the GUN
NOT READY error.
System Errors
System errors are not associated with any CHANNEL or GUN. System errors are typically related
to the disk drive, le I/O operations or communications.
Reverse Flow Limits
Explanation: The controller has sensed that material has owed backwards through a ow meter
and exceeded the preset REVERSE FLOW LIMIT
value for that CHANNEL. There are several possible causes for this.
1. The check valve for one of the CHANNELs
has failed in the open condition and the oppo
site CHANNEL material is at a higher pressure
causing the material to back up into the other
paint line.
Corrective Action:
The system must be ushed immediately and the
faulty check valve replaced.
2. Sometimes this error can be generated after
a GUN has been ushed and left unused for
a period of time, such as at the end of the day or
end of a shift. This is probably due to pressure
trapped in the line between the uid regulator
and the applicator. This pressure could eventually
back up through the ow meter and through the
weep port if using a weeping type MVR valve, or
through a small leak in the system.
Corrective Action:
Make sure that the applicator stays triggered ON
for several seconds after it has been taken out of
a CLEAN mode in order to relieve the pressure.
3. If operating the GUN for the rst time, the feedback signals could be reversed from the ow meter.
Corrective Action:
Verify that the source and gate signals are routed
correctly. This includes the ber-optic cable connections at both the ow meter and receiver and
wiring connections from the receiver to the control
rack mother board.
4. If using a single phase ow meter that is not
capable of reverse ow detection, then the "phase"
signal input must be connected to +24 VDC. Ref-
erence the "Mother Board Signal Identication" in
the "Appendix" section of this Manual.
No Master Flow
Explanation: This fault will only occur on GUNs
congured for MANUAL operation. For a GUN
congured for MANUAL operation, as soon as the
GUN is placed in RUN mode, the master CHAN-
NEL uid regulator opens to the MVR HIGH set
point (usually 100 psi). This is typically full open. In
this way, operators can demand as much uid as
they wish with only the slaved (typically catalyst)
CHANNEL being controlled to the desired ratio.
It is possible, however, for the master CHANNEL
ow meter gears to stick, and still allow uid to
pass through the ow meter. When this happens,
the applicator continues to ow resin (master
CHANNEL) but the controller is unaware that
material is owing and therefore does not command any catalyst (slaved CHANNEL) material
to ow. To prevent this from happening, an air
ow switch placed in the atomizing air line can
send a trigger signal to the controller. When the
controller receives a trigger signal, it immediately
determines if the master CHANNEL ow meter is
sending pulses. If it is not, the controller issues a
NO MASTER FLOW fault.
In many cases, however, operators use their GUNs
to blow dust and water off of the parts before
spraying. They do this by pulling the trigger on
the GUN back just far enough to get atomization
air but no paint. When this happens, the controller
receives a trigger signal and no paint ow, which
would cause a fault. To allow for this "blow off"
, a parameter called BLOW OFF TIME is used
(system conguration parameter). The default
value of 32 seconds. With the default value of 32
seconds the operator is allowed to blow off parts
70
LN-9400-00.9

DynaFlowTM User Manual - Maintenance
for a total of 32 seconds without faulting. As soon
as the controller senses ow from the master
CHANNEL, the timer is reset and will start once
again the next time a trigger signal is received
with no master CHANNEL ow.
Corrective Action:
In most cases, this fault is generated by the master
CHANNEL ow meter gears not turning (usually
stuck). Try ushing the system and watch the ow
rate or ow volume on the operator interface. If
there still is no ow, disassemble and clean the
ow meter. If this still does not correct the prob-
lem, see the section in this manual on FLOW
TOO LOW FAULTS. If this fault occurs while the
operator was not trying to spray, then the air ow
switch may be defective. This can be veried by
the GUN status on the operator interface.
SYSTEM PREVENTIVE
MAINTENANCE
Fluid Control Components
It is recommended to record system settings such
as uid supply and air supply pressures, etc.
Reference the appropriate service literature for
maintenance instructions.
INSTRUCTIONS
Control Panels
There is no maintenance schedule for control
panels other than good housekeeping practices.
These include.
• Keeping the door closed at all times. This
will maintain the dust-tight environment
required by the electronic printed circuit
boards.
• Plug all unused access holes into the cabinet
in order to keep contamination out.
• Use the following guidelines for cleaning
the Operator Interface:
Use cleaning solution specically formu-
lated for computer monitors, a mild win dow cleaner, or isopropyl alcohol. DO
NOT use solvents. Most importantly,
use a clean, soft paper towel or tissue
and use very light force.
LN-9400-00.9
71

DynaFlowTM User Manual - Maintenance
SYSTEM COMPONENTS AND PARTS IDENTIFICATION
Figure 7: Card Rack Assembly
DYNAFLOW SYSTEM COMPONENTS AND PARTS IDENTIFICATION
(Figure 7)
Item #
1 77383-01 Rack Assembly, Empty, 1/2 Rack, 1 Mother Board
77383-02 Rack Assembly, Empty, Full Rack, 1 Mother Board
77383-03 Rack Assembly, Empty, Full Rack, 2 Mother Boards
2 77377-02 Interface Module Assembly, With RIO
3 A10946-01 Channel Module for use with 0-10VDC transducers and for the ow rate
indication output
A10946-02 Channel Module for use with 0-10VDC or 4-20mA transducers and for the
ow rate indication output
77378-00 Mother Board Assembly
LBAL0021-00 Interface Cable Assembly, Interface Panel to Control Panel, 40 ft.
LBAL5001-00 Interface Panel, Standard Two Component
LBAL5001-01 Interface Panel, GUN 1
LBAL5001-02 Interface Panel, GUN 2
A12182 Interface Panel W/Color Change
LPNE5002-00 Pneumatic Color Change Panel
LBAL5003-00 Pneumatic Operator Panel
Note: Refer to the "DynaFlow Operator Interface" manual for parts that are specic to the 77376
and A12233 Stand-Alone Control Panel.
Part # Description
72
LN-9400-00.9

DynaFlowTM User Manual - Maintenance
RECOMMENDED SPARE PARTS
Recommended spare parts list for the DynaFlow rack components only.
SPARE PARTS FOR DYNAFLOW RACK COMPONENTS
Total # of Interface Modules
in System
Part # Description
77377-02
DynaFlow Interface Module
1-4 4-10 >10
1
2
3
Notes
77377-02 RIO Compatible
77378-00
DynaFlow Mother Board
Part # Description
A10946-01/-02 DynaFlow Channel Module
0
1
1
Total # of Channel
Cards in System
1-8 9-16 >16
1 2 3
Notes
LN-9400-00.9
73

DynaFlowTM User Manual - Maintenance
The following DynaFlow recommended spare parts lists do not include auxiliary uid control/monitor-
ing equipment such as pneumatic interface panels, uid panels, transducer panels, etc. The recommended spare parts list for the auxiliary equipment should be derived from previous uid control lists
since their usage and requirements are the same.
SPARE PARTS FOR 77376 AND A12233 CONSOLE UNIT
Total # of
Consoles
Part # Description
1-2 3-4 5+
Notes
77377-02
A10946-01/-
02
77378-00
A11224-00
73837-08
77454-00 or
A12720-00
77382-00
74300-00
4131- 11
77384-00
A11375-00
DynaFlow Interface Module
DynaFlow Channel Module
Mother Board
Power Supply Assy., 24 VDC
Intrinsic Safety Barrier
Fiber-Optic Flow Meter Receiver
Ribbon Cable Adaptor
Bulb, 130 VAC
Fuse, 3 AG, 3 AMP
Stop Switch, Red Mushroom Head
Stop Switch, Yellow Mushroom
Head
1
1
0
1
1
1
0
1
1
1
1
2
2
0
1
1
1
1
2
2
1
1
2
3
1
1
For 77376-XXX1X Only
2
For 77376-XXX0X Only
2
1
2
2
Included with all stand-alone
1
systems
Alternate stop switch, available
1
special order only, for integrated
systems when only one red
stop switch is permitted in the
control room area.
74
A10577-00
A10577-01
Power Line Filter (115 VAC)
Power Line Filter (230 VAC)
1
1
1
1
For 77376-XXXX0 Only
1
For 77376-XXXX1 Only
1
LN-9400-00.9

DynaFlowTM User Manual - Maintenance
HARDWARE SETTINGS
Channel Module Settings
CHANNEL MODULE P/N: 77206-XX (Obsolete)
MOTHER BOARD JUMPER BOARD SETTINGS (CHANNEL 1 I/O)
Jumper
E1
E5
E6
E8
Default Setting
512K
1024K
0-10 VDC
0-10 VDC
Source
2-3
2-3
2-3
2-3
Description Comments
ROM size select.
1-2 = 256K, 27256 device
2-3 = 512K or 1024K, 27512 or
27010 devices
Selects 0-10 VDC or 4-20 ma operation for
the analog control output #1.
2-3 = 0-10 VDC
1-2 = 4-20 mA
Selects 0-10 VDC or 4-20 ma operation for
the spare analog output #1.
2-3 = 0-10 VDC
1-2 = 4-20 mA
Selects 24 VDC source control or grounded
sink control for digital inputs 8-11.
2-3 = 24 VDC source
1-2 = grounded sink
Factory set. Do not change
unless instructed to do so.
To the E/P transducer #1
Actual ow rate for
CHANNEL #2, scaled by
Maximum and Minimum Flow
Rate parameters
Inputs effected:
Load Mode #1
Analog Hold #1
External Fault #1
MVR Enable #1
E10
E9
E4
E3
LN-9400-00.9
Source
Source
0-10 VDC
0-10 VDC
Selects 24 VDC source control or grounded
2-3
sink control for digital inputs 4-7.
2-3 = 24 VDC source
1-2 = grounded sink
Selects 24 VDC source control or grounded
2-3
sink control for digital inputs 0-3.
2-3 = 24 VDC source
1-2 = grounded sink
Selects 0-10 VDC or 4-20 ma operation for
2-3
the analog set point input #1.
2-3 = 0-10 VDC
1-2 = 4-20 mA
Selects 0-10 VDC or 4-20 ma operation for
2-3
the spare analog input #1.
2-3 = 0-10 VDC
1-2 = 4-20 mA
Inputs effected:
Run #1
Halt #1
Total Reset #1
Clean #1
Inputs effected:
Trigger #1
Gun Mask #1
Transparent/PID #1
Total Hold #1
Scaled by Maximum and
Minimum Flow Rate
parameters
75

DynaFlowTM User Manual - Maintenance
CHANNEL MODULE P/N: 77206-XX (Obsolete)
DAUGHTER BOARD JUMPER SETTINGS (CHANNEL 2 I/O)
Jumper
E3
E1
E2
E6
Default Setting
Source
Source
Source
0-10 VDC
2-3
2-3
2-3
2-3
Description Comments
Selects 24 VDC source control or grounded
sink control for digital inputs 12-15.
2-3 = 24 VDC source
1-2 = grounded sink
Selects 24 VDC source control or grounded
sink control for digital inputs 20-23.
2-3 = 24 VDC source
1-2 = grounded sink
Selects 24 VDC source control or grounded
sink control for digital inputs 16-19.
2-3 = 24 VDC source
1-2 = grounded sink
Selects 0-10 VDC or 4-20 ma operation for
the analog control output #2.
2-3 = 0-10 VDC
1-2 = 4-20 mA
Inputs effected:
Trigger #2
Gun Mask #2
Transparent/PID #2
Total Hold #1
Inputs effected:
Load Mode #2
Analog Hold #2
External Fault #2
MVR Enable #2
Inputs effected:
Run #2
Halt #2
Total Reset #2
Clean #2
To the E/P transducer #2
E7
E5
E4
0-10 VDC
0-10 VDC
0-10 VDC
Selects 0-10 VDC or 4-20 ma operation for
2-3
the analog output #2.
2-3 = 0-10 VDC
1-2 = 4-20 mA
Selects 0-10 VDC or 4-20 ma operation for
2-3
the analog set point input #2.
2-3 = 0-10 VDC
1-2 = 4-20 mA
Selects 0-10 VDC or 4-20 ma operation for
2-3
the spare analog input #2.
2-3 = 0-10 VDC
1-2 = 4-20 mA
Actual ow rate for
CHANNEL #2, scaled by
Maximum and Minimum Flow
Rate parameters
Scaled by Maximum and
Minimum Flow Rate
parameters
76
LN-9400-00.9

DynaFlowTM User Manual - Maintenance
CHANNEL MODULE P/N: 77206-XX or A10946-XX
DIP SWITCH SW1 SETTINGS
Position
1 / 5 Trigger Detection Method
2 / 6 Analog Hold Mode
3 / 7 OFF Lookup Table Enabled (This feature has been obsoleted in current revisions of the
Default
Setting
OFF
OFF
Description
This switch setting effects only GUNs congured as dual-component, Manual mode.
OFF = GUN trigger input signal required.
ON = GUN trigger input signal not required. Fluid ow through Master CHANNEL
initiates PID on Slave CHANNEL. Master CHANNEL ow rate is determined by a
manual ow rate adjustment located on the GUN.
OFF = When the GUN trigger is removed, the E/P transducer pressure immediately
returns to MVR LOW.
ON = If the Trigger OFF Delay is zero, when the GUN trigger is removed, the E/P
transducer pressure immediately returns to MVR LOW. If the Trigger OFF Delay is
non-zero, the E/P transducer pressure remains at the last output value from the PID
loop until the Trigger OFF Delay expires.
software.)
This switch setting applies only to single-component GUNS.
OFF = The Lookup Table is updated while in Run mode, but it is not used to deter-
mine the ow rate set point when the GUN is triggered.
ON = The Lookup Table is updated while in Run mode and is used to determine
the ow rate set point when the GUN is triggered, or when the ow rate set point is
changed by more than 10% of the range in ow rate (Maximum Flow Rate minus
Minimum Flow Rate). In addition, if the GUN has been placed in Transparent mode
and a PLC or robot sends a ow rate set point via RIO or Analog Input, the value
is assumed to be a ow rate, rather than a pressure value.
4 / 8 OFF Alternate PID Equation
The Alternate PID Equation should be used whenever the set point for the ow rate
is dynamically changed during Run mode.
OFF = The PID Proportional term is based on the error term, which is the difference
between the desired ow rate (set point) and actual ow rate.
ON = The PID Proportional term is based on the setpoint.
LN-9400-00.9
77

DynaFlowTM User Manual - Maintenance
Interface Module Settings
INTERFACE MODULE JUMPER SETTINGS
Jumper
E4
E5
E10
E2
E3
E6
E7
Default Setting
512K
1024K
RS-232C
*
**
Source
Source
Source
2-3
2-3
Out
In
In
2-3
2-3
Description Comments
ROM size select.
1-2 = 256K, 27256 device
2-3 = 512K or 1024K, 27512 or
27010 devices
RS-232C/RS-485 select
RS-485 termination resistor
CAN Bus termination resistor
Circuit common to earth ground connection.
Selects 24 VDC source control or grounded
sink control for digital inputs
12-15.
2-3 = 24 VDC source
1-2 = grounded sink
Selects 24 VDC source control or grounded
sink control for digital inputs
8-11.
2-3 = 24 VDC source
1-2 = grounded sink
Factory set. Do not change
unless instructed to do so.
E8
E9
* Inserting this jumper adds a 120 Ohm termination resistor across the RS-485 RX+ and
RX- lines.
** Inserting this jumper adds a 120 Ohm termination resistor across the CAN Bus.
Source
Selects 24 VDC source control or grounded
2-3
sink control for digital inputs 4-7.
2-3 = 24 VDC source
1-2 = grounded sink
Selects 24 VDC source control or grounded
2-3
sink control for digital inputs 0-3.
2-3 = 24 VDC source
1-2 = grounded sink
78
LN-9400-00.9

DynaFlowTM User Manual - Maintenance
The new 12-bit Channel Card for the DynaFlow (P/N: A10946) has a different jumper conguration
than the now obsoleted 8-bit module (P/N: 77206-11). Please refer to the table below when setting
the jumpers on the new channel cards.
Analog Inputs:
Jumper
JMP1
JMP2
JMP3
JMP4
Description
Flow Rate Setpoint, Ch. A
Spare Input, Ch. A
Flow Rate Setpoint, Ch. B
Spare Input, Ch. B
Analog Outputs:
Jumper
JMP5
JMP6
JMP7
JMP8
Description
Control Pressure, Ch. A
Actual Flow, Ch. A
Control Pressure, Ch. B
Actual Flow, Ch. B
Discrete (Digital) Inputs:
Jumper
Description
Type
0-10 VDC
4-20 mA
0-10 VDC
4-20 mA
0-10 VDC
4-20 mA
0-10 VDC
4-20 mA
Type
0-10 VDC
4-20 mA
0-10 VDC
4-20 mA
0-10 VDC
4-20 mA
0-10 VDC
4-20 mA
Type
Pin 1-2
Open
Closed
Open
Closed
Open
Closed
Open
Closed
Pin 1-2
Open
Closed
Open
Closed
Open
Closed
Open
Closed
Pin 1-2
Pin 2-3
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Pin 2-3
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Pin 2-3
FactorySetting
X
X
X
X
FactorySetting
X
X
X
X
FactorySetting
JMP9
JMP10
JMP11
JMP12
JMP13
JMP14
Trigger, Ch. A
Run Mode, Ch. A
Transparent Mode, Ch. A
Total Hold, Ch. A
Gun Mask, Ch. A
Halt, Ch. A
Total Reset, Ch. A
Clean Mode, Ch. A
Load Mode, Ch. A
Analog Hold, Ch. A
External Fault, Ch. A
Spare Input, Ch. A
Trigger, Ch. B
Run Mode, Ch. B
Transparent Mode, Ch. B
Total Hold, Ch. B
Gun Mask, Ch. B
Halt, Ch. B
Total Reset, Ch. B
Clean Mode, Ch. B
Load Mode, Ch. B
Analog Hold, Ch. B
External Fault, Ch. B
Spare Input, Ch. B
Source
Sink
Source
Sink
Source
Sink
Source
Sink
Source
Sink
Source
Sink
Open
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Closed
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Closed
Open
X
X
X
X
X
X
LN-9400-00.9
79

DynaFlowTM User Manual - Maintenance
Flowmeter Inputs:
Jumper
Description
Type
Pin 1-2
Pin 2-3
FactorySetting
JMP15 Flow Rate Freq. Input,
Channels A and B
Memory and Processor Settings:
Jumper
JMP16
JMP17
JMP18
Description
UVEPROM
RAM
Processor Pin EA
Ransburg CAN Bus Address
Communication between the Interface Module
and Channel Cards.
The Control Area Network (CAN) address of the
Interface is automatically determined by hardware
based on the physical slot location in the rack.
Source
Sink
Type
256KB
512 KB
1024 KB
8Kx8
16Kx8
32Kx8
Run
Prog.
Open
Closed
Pin 1-2
Closed
Open
Open
Open
Closed
Closed
Open
Closed
Closed
Open
Pin 2-3
Open
Closed
Closed
Closed
Open
Open
Closed
Open
X
FactorySetting
X
X
X
INTERFACE MODULE DIP SW1 SETTINGS
Position
1-6
7-8
Default Setting
OFF
Address = 00
OFF
Description Comments
RIO Rack address
position 1 = most signicant bit (MSB)
position 6 = least signicant bit (LSB)
RIO Starting Quarter position
7 8 Quarters
OFF OFF = 0
OFF ON = 1/4
ON OFF = 1/2
ON ON = 3/4
0 - 63 Decimal
0 - 77 Octal
0 - 3F Hex
Number of Channel
Cards:
1 to 4
1 to 4
1 to 3
1
80
LN-9400-00.9

DynaFlowTM User Manual - Maintenance
INTERFACE MODULE DIP SW2 SETTINGS
Position
1
2
3-4
5-6
Default Setting
OFF
OFF
OFF
OFF
Description Comments
ON = NVRAM Erased & Reset
OFF = NVRAM Maintained
ON = Master Channel outputs Master
Chanel ow rate on secondary
analog output.
OFF = Master Channel outputs GUN ow
rate on secondary analog output.
RIO Baud rate position
3 4 Baud Rate
OFF OFF = 57.6 KB
OFF ON = 115.2 KB
ON OFF = 230.4 KB
ON ON = 230.4 KB
SIO Baud rate position
5 6 Baud Rate
OFF OFF = 19.2 KB
OFF ON = 4.8 KB
ON OFF = 9.6 KB
ON ON = 38.4 KB
All data will be lost when
set to ON position.
7-8
* Inserting this jumper adds a 120 Ohm termination resistor across the RS-485 RX+ and
RX- lines.
** Inserting this jumper adds a 120 Ohm termination resistor across the Ransburg CAN Bus.
OFF
RIO Rack Size position
7 8 Size
OFF OFF = 1/4 Rack
OFF ON = 1/2 Rack
ON OFF = 3/4 Rack
ON ON = Full Rack
Number Of Channel
Modules:
1
1 to 3
1 to 4
1 to 4
LN-9400-00.9
81

DynaFlowTM User Manual - Maintenance
CONTROL RACK TERMINAL IDENTIFICATION
MOTHER BOARD SIGNAL IDENTIFICATION
J3, 4, 5, 6
CHANNEL MODULES
Pin #
10A
11A
12A
13A
14A
15A
16A
17A
18A
19A
20A
21A
22A
23A
24A
25A
26A
27A
28A
29A
30A
31A
32A
Description
1A
Analog Set Point Input #1
2A
Spare Analog Input #1
3A
Analog Input GND
4A
Analog Transducer Control #1
5A
Analog Flow Rate Output #1
6A
Analog Output GND
7A
Trigger Input #1
8A
Run Input #1
9A
Transparent/PID Input #1
Total Hold Input #1
Digital Input GND
Gun Mask Input #1
Halt Input #1
Total Reset Input #1
Clean Input #1
Digital Input GND
Load Input #1
Analog Hold Input #1
External Fault Input #1
Spare Input #1
Digital Input GND
Ready Output #1
Active Output #1
Fault Output #1
Pot Life Timer Output #1
Clean/Load/Calibrate Output #1
MVR Enable Output #1
Digital Output GND
Console Rx232
Console GND
+24 VDC
PWR GND
J3, 4, 5, 6
CHANNEL MODULES
Pin #
10B
11B
12B
13B
14B
15B
16B
17B
18B
19B
20B
21B
22B
23B
24B
25B
26B
27B
28B
29B
30B
31B
32B
Description
1B
2B
3B
4B
5B
6B
7B
8B
9B
Flow Meter Input #1A
Flow Meter #1A GND
Flow Meter Input #1B
Flow Meter #1B GND
Flow Meter Input #2A
Flow Meter #2A GND
Flow Meter Input #2B
Flow Meter #2B GND
CAN BUS+
CAN BUSCAN BUS GND
+24 VDC
PWR GND
82
LN-9400-00.9

DynaFlowTM User Manual - Maintenance
Mother Board Signal Identication
(Continued)
MOTHER BOARD SIGNAL IDENTIFICATION
J3, 4, 5, 6
CHANNEL MODULES
Pin #
10C
11C
12C
13C
14C
15C
16C
17C
18C
19C
20C
21C
22C
23C
24C
25C
26C
27C
28C
29C
30C
31C
32C
Description
1C
Analog Set Point Input #2
2C
Spare Analog Input #2
3C
Analog Input GND
4C
Analog Transducer Control #2
5C
Analog Flow Rate Output #2
6C
Analog Output GND
7C
Trigger Input #2
8C
Run Input #2
9C
Transparent/PID Input #2
Total Hold Input #2
Digital Input GND
Gun Mask Input #2
Halt Input #2
Total Reset Input #2
Clean Input #2
Digital Input GND
Load Input #2
Analog Hold Input #2
External Fault Input #2
Spare Input #2
Digital Input GND
Ready Output #2
Active Output #2
Fault Output #2
Fluid Line Flushed
Clean/Load/Calibrate Output #2
MVR Enable Output #2
Digital Output GND
Console Tx232
Console GND
+24 VDC
PWR GND
J2 INTERFACE MODULE
Pin #
10A
11A
12A
13A
14A
15A
16A
17A
18A
19A
20A
21A
22A
23A
24A
25A
26A
27A
28A
29A
30A
31A
32A
Description
1A
Digital Input GND
2A
Digital Input GND
3A
Digital Input GND
4A
Digital Input GND
5A
Digital Input GND
6A
Digital Input GND
7A
Digital Input GND
8A
Digital Input GND
9A
Digital Input GND
Digital Input GND
Digital Input GND
Digital Input GND
Digital Input GND
Digital Input GND
Digital Input GND
Digital Input GND
Digital Input GND
Digital Input GND
Digital Input GND
Digital Input GND
Digital Input GND
Digital Input GND
+24 VDC
PWR GND
LN-9400-00.9
83

DynaFlowTM User Manual - Maintenance
MOTHER BOARD SIGNAL IDENTIFICATION
J2 INTERFACE MODULE
Pin #
10B
11B
12B
13B
14B
15B
16B
17B
18B
19B
20B
21B
22B
23B
24B
25B
26B
27B
28B
29B
30B
31B
32B
Description
1B
SIO Rx485+
2B
SIO Rx485-
3B
SIO Tx485+
4B
SIO Tx485-
5B
SIO 485 GND
6B
7B
Console Rx232A
8B
9B
Console Tx232A
Console GND
SIO Rx232B
SIO Tx232B
SIO GND
CAN BUS+CAN BUS-
CAN BUS-
CAN BUS GND
+24 VDC
PWR GND
J2 INTERFACE MODULE
Pin #
10C
11C
12C
13C
14C
15C
16C
17C
18C
19C
20C
21C
22C
23C
24C
25C
26C
27C
28C
29C
30C
31C
32C
Description
1C
JOB Select Bit 1, LSD
2C
JOB Select Bit 2, LSD
3C
JOB Select Bit 4, LSD
4C
JOB Select Bit 8, LSD
5C
JOB Select Bit 1, MSD
6C
JOB Select Bit 2, MSD
7C
JOB Select Bit 4, MSD
8C
JOB Select Bit 8, MSD
9C
Spare Digital Input
JOB Select Strobe Input
System Ready/Halt Input
Spare Input
Spare Input
Spare Input
Spare Input
Spare Input
System Fault Output
System Pulse Output
Spare Output
Spare Output
Spare Output
Spare Output
+24 VDC
PWR GND
84
LN-9400-00.9

DynaFlowTM User Manual - Maintenance
MOTHER BOARD SIGNAL IDENTIFICATION
J7 POWER INPUT
Terminal
J7-1
J7-2
J7-3
J7-4
Description
+24 VDC
+24 VDC
PWR GND
PWR GND
J8 SERIAL I/O
Terminal
J8-1
J8-2
J8-3
J8-4
J8-5
J8-6
J8-7
J8-8
J8-9
J8-10
J8-11
J8-12 or J8A-1
J8-13 or J8A-2
J8-14 or J8A-3
J9 SYSTEM I/O
Terminal
J9-1
J9-2
J9-3
J9-4
J9-5
J9-6
J9-7
J9-8
J9-9
J9-10
J9-11
J9-12
J9-13
J9-14
J9-15
J9-16
J9-17
J9-18
LN-9400-00.9
Description
JOB Select BCD, Units 1 Input
JOB Select BCD, Units 2 Input
JOB Select BCD, Units 4 Input
JOB Select BCD, Units 8 Input
JOB Select BCD, Tens 1 Input
JOB Select BCD, Tens 2 Input
JOB Select BCD, Tens 4 Input
JOB Select BCD, Tens 8 Input
JOB Select BCD, Hundreds 1 Input
JOB Select Strobe Input
System Ready/Halt Input
Spare Input
System Fault Output
System Pulse Output
Spare Output
GND
GND
GND
Description
SIO Rx485+
SIO Rx485SIO Tx485+
SIO Tx485-
SIO 485 GND
Console Rx232A
Console Tx232A
Console GND
SIO Rx232B
SIO Tx232B
SIO GND
RIO Blue
RIO Shield
RIO Clear
J10 AUXILIARY CAN
BUS PORT
Terminal
J10-1
J10-2
J10-3
Description
CAN BUS+
CAN BUSCAN BUS GND
J11 = Channels 1 & 2
J14 = Channels 3 & 4
J17 = Channels 5 & 6
J20 = Channels 7 & 8
J11, 14, 17, 20
CHANNEL I/O
Terminal
Jn-1
Jn-2
Jn-3
Jn-4
Jn-5
Jn-6
Jn-7
Jn-8
Jn-9
Jn-10
Jn-11
Jn-12
J12 = Channel #1 Flow Meter
J13 = Channel #2 Flow Meter
J15 = Channel #3 Flow Meter
J16 = Channel #4 Flow Meter
J18 = Channel #5 Flow Meter
J19 = Channel #6 Flow Meter
J21 = Channel #7 Flow Meter
J22 = Channel #8 Flow Meter
Description
Analog Set Point #1
Analog Set Point #2
Analog Transducer Signal #1
Analog Transducer Signal #2
Trigger Input #1
Trigger Input #2
Run #1
Run #2
Transparent/PID Input #1
Transparent/PID Input #2
Total Hold #1
Total Hold #2
J12, 13, 15, 16, 18, 19, 21, 22
FLOW METER INPUTS
Terminal
Jn-1
Jn-2
*Jn-3
Jn-4
* Used for ow meters with reverse ow detection
capabilities only. This input must be connected to
+24 VDC if a single direction ow meter is used.
Description
Source Signal
Source GND
Phase Signal
Phase GND
85
DynaFlowTM User Manual - Maintenance
SERIAL COMMUNICATION PROTOCOLS
NOTE
Reference the "DynaFlow Program-
mers's Manual" for more information.
Allen-Bradley RIO
The Interface Module allows for direct communication from an Allen-Bradley PLC Remote Input/
Output (RIO) port to the DynaFlow Fluid Flow
Control system. The RIO interface portion of the
Interface Module contains some Allen-Bradley
components that are licensed to Ransburg. These
are designed specically to communicate with the
proprietary protocol of the RIO serial link. The
central component being an application specic
IC (ASIC) which is capable of formatting the RIO
information for use by the central processor (CPU).
NOTES
Up to four Channel Modules (8 ow control CHANNELs) can be controlled with the Interface Module.
The Interface Module and four Channel Modules
constitute half of a standard 19" rack. In terms of
RIO rack size, a full rack consists of 8
I/O groups. The Interface Module is one I/O
group, but only uses the high byte of the group.
Each Channel Module is one I/O group with the
rst CHANNEL in the low byte and the second
CHANNEL in the high byte. A RIO 1/4 rack is 2
I/O groups, which consists of the Interface Module and only one (1) Channel Module. A RIO 1/2
rack is 4 I/O groups, which may consist of the
Interface Module and from one (1) to three (3)
Channel Modules. A RIO 3/4 rack is 6 I/O groups,
which may consist of the Interface Module and
from one (1) to four (4) Channel Modules. A RIO
full rack is 8 I/O groups, which may consist of
the Interface Module and from one (1) to four (4)
Channel Modules.
The Interface Module accepts both hard-wired
discrete I/O and RIO discrete and RIO block
transfers from a PLC.
86
LN-9400-00.9

RATIO CONVERSION CHART
DynaFlowTM User Manual - Maintenance
% of Catalyst to Total
Volume
1
2
3
4
4.76
5
6.25
9.09
10
11. 11
12.5
14.28
15
16.67
20
25
30
33.33
35
40
45
50
Parts of Resin to
1 Part Catalyst
99
49
32.33
24
20
19
15
10
9
8
7
6
5.67
5
4
3
2.33
2
1.86
1.5
1.22
1
Formula for converting percentage of catalyst to parts of resin:
100%
- 1 = Parts Resin to 1 Part Catalyst
% of Catalyst
Example: 5% catalyst is specied
100%
- 1 = 19 Parts Resin to 1 Part Catalyst
5%
Formula for converting "parts" to percentage:
100%
= % of Catalyst
(Parts Resin + 1)
Example: If a ratio setting is 13 (13 parts resin to 1 part catalyst), and I want to know
what percentage of the total mixed material is resin and what percentage is catalyst.
100%
= 7.14% Catalyst
(13 + 1)
100% - 7.14% = 92.86% Resin
LN-9400-00.9
87

DynaFlowTM User Manual - Warranty Policies
WARRANTY POLICIES
LIMITED WARRANTY
Ransburg will replace or repair without charge any
part and/or equipment that falls within the specied
time (see below) because of faulty workmanship
or material, provided that the equipment has been
used and maintained in accordance with Ransburg's written safety and operating instructions,
and has been used under normal operating condi-
tions. Normal wear items are excluded.
THE USE OF OTHER THAN RANSBURG APPROVED PARTS, VOID ALL WARRANTIES.
SPARE PARTS: One hundred and eighty (180)
days from date of purchase, except for rebuilt
parts (any part number ending in "R") for which
the warranty period is ninety (90) days.
EQUIPMENT: When purchased as a complete unit,
(i.e., GUNs, power supplies, control units, etc.), is
one (1) year from date of purchase. WRAPPING
THE APPLICATOR, ASSOCI-ATED VALVES
AND TUBING, AND SUPPORTING HARDWARE
IN PLASTIC, SHRINK-WRAP, OR ANY OTHER
NON-APPROVED COVERING, WILL VOID THIS
WARRANTY.
RANSBURG'S ONLY OBLIGATION UNDER
THIS WARRANTY IS TO REPLACE PARTS THAT
HAVE FAILED BECAUSE OF FAULTY WORK-
MANSHIP OR MATER-IALS. THERE ARE NO
IMPLIED WARRAN-TIES NOR WARRANTIES
OF EITHER MERCHANTABILITY OR FITNESS
FOR A PARTICULAR PURPOSE. RANSBURG
ASSUMES NO LIABILITY FOR INJURY, DAMAGE TO PROPERTY OR FOR CONSEQUENTIAL DAMAGES FOR LOSS OF GOODWILL OR
PRODUCTION OR INCOME, WHICH RESULT
FROM USE OR MISUSE OF THE EQUIPMENT
BY PURCHASER OR OTHERS.
EXCLUSIONS:
If, in Ransburg's opinion the warranty item in
question, or other items damaged by this part
was improperly installed, operated or maintained,
Ransburg will assume no responsibility for repair or
replacement of the item or items. The purchaser,
therefore will assume all responsibility for any
cost of repair or replacement and service related
costs if applicable.
88
LN-9400-00.9

DynaFlowTM User Manual - Appendix
APPENDIX
ADDENDUM A:
Obsolescence of the 77206-01 8-bit Channel Card, the 77206-12
10-bit Channel Card and the A10946-00 12-bit Channel Card.
In 2004, the 77206-01 DynaFlow 8-bit Channel Card was replaced by the 77206-12 10-bit Channel
Card to improve the resolution of the analog outputs on this card. Then in 2006, the 77206-12 10-bit
Channel Card was replaced by a totally redesigned 12-bit Channel Card and it was assigned a part
number of A10946-00. Lastly, in 2007, the A10946-00 board was obsoleted and replaced by 2 boards,
the A10946-01 and the A10946-02. The reasons for this nal change are explained below: (This
information is also contained in Service Note AF-111307.)
The IC chip used on the A10946-00 DynaFlow Channel Card that produces the 4-20 mA output for
ow rate and pressure control is becoming extremely expensive and is currently experiencing very
long lead times. We have decided to produce two versions of the DynaFlow Channel Card. One
version will be built as the boards are now. The other version will not have the 4-20 mA converter IC
on the board, which will effectively eliminate the capability of the board to output 4-20 mA signals for
these two outputs. (Our sales history shows very few users make use of these two output signals.)
The 0-10 VDC outputs for these two signals will still function normally.
In order to ensure that the proper boards are selected, the following changes have been made to
the part numbers: The A10946-00 part number has been obsoleted. The A10946-01 board is the
new board without the 4-20 mA IC’s and is the board that will be used in all future builds unless the
customer specically requests 4-20 mA outputs for these two signals. The A10946-01 board can
be modied by our manufacturing facility to become an A10946-02, when necessary, if this option is
required. (Because of the high cost and limited availability of these IC’s, there will be an additional
cost for this option.)
If you currently use the obsoleted A10946-00 boards, our technical support personnel will need to know
if you are using the 4-20 mA option for either the ow rate output or the pressure control output to be
able to determine which of the two new boards to send. This can be done by examining the jumpers on
the boards you are now using. If jumpers any of the following jumpers: JMP5, JMP6, JMP7, or JMP8
are connected between pins 1 to 2, this most likely indicates that you are using the 4-20 mA option
and will require the A10946-02 board. (Unless that channel or output signal is not being used and the
jumpers were changed from the factory defaults for some reason.) In all other cases, the A10946-01
board should be used. (See picture on next page. Note that pin #1 is toward the top of the board.)
Since this is a totally redesigned board from that of the 77206 series boards, we have also included
jumper and dip switch setting information with this addendum. The dip switch settings for SW1 have
not changed. Refer to "Hardware Settings" in current DynaFlow User Manual for these settings.
LN-9400-00.9
89

DynaFlowTM User Manual - Appendix
ADDENDUM A (Cont.):
90
LN-9400-00.9

ADDENDUM B:
Remote Operator's Panel
DynaFlowTM User Manual - Appendix
If the Model A12233 control console and Model A12182 Interface Panel is used, the optional Remote
Operator Panel (P/N: A11095) can be used. this Remote Operator's Panel (shown above) operates
in the following manner:
Color Select - This is an eleven position selector switch that allows the operator to select the next
color to be loaded. If the most counter-clockwise position is selected (Solv) and the Paint (Solvent)
Fill button is pushed, the normal load sequence occurs and solvent is loaded into the uid sytem as
if it was a color.
Paint (Solvent) Fill/Filled - This is a green illuminated push-button. When pushed, the paint load
sequence runs (as programmed from the "Load" user interface screen). The green indicator lamp
ashes as the sequence is occurring and stays lit solid when the sequence has completed, indicating
to the operator that the system is ready.
If there is already a color loaded (i.e., one of the color valve outputs is already on) when this button is
pushed, the system will execute a ush sequence, followed by a load sequence.
Purge/Purged - This is an amber illuminated push-button. When pushed, a purge sequence is initi-
ated (as programmed from the "Purge" user interface screen). While the purge sequence is occurring,
this indicator lamp ashes. It remains on solid when the purge sequence is complete, indicating to the
operator that the purge is complete. This indicator will be turned off if a "Paint (Solvent) Fill" sequence
has been initiated or a color is loaded.
LN-9400-00.9
91

DynaFlowTM User Manual - Appendix
NOTE: If both the green Paint (Solvent) Fill/Filled lamp and the amber Purge/Purged lamps are ashing
simultaneously, this indicates that no sequence has been downloaded to the color change sequencer
since the last time power was applied to the system. This can be corrected by loading a job from the
user interface screen and executing at least one ll or purge sequence.
Horn - In the top center of the panel is a horn that indicates when the controller has turned on the
"Fault" output from the gun.
Total Flow - This is an LCD display that indictes the current ow rate out of the applicator (or appli-
cators, if multiple applicators are fed from one uid panel). It operates from an analog output signal
from the controller with 0 VDC being 0 cc'min. and 10 VDC scaled to 2000 cc/min.
Flow Control - This is a potentiometer that varies the analog ow control voltage into the channel
card from 0 volts DC to 10 volts DC. Users can program what ow rate they want for both extremes
by using the Minimum Flow and Maximum Flow parameters under the edit gun screen.
Faulted/Fault Reset - This is a red illuminated push-button. The lamp will be illuminated anytime a
fault occurs. Pushing this button resets any fault that has caused the fault. After resetting a fault, the
user must then push the Ready Run push-button to put the gun back into run mode to resume spraying.
Ready/Run - This is a green illuminated push-button. Pushing this button puts a gun into run mode.
When in run mode, the green lamp is illuminated. It is extinguished in either a halted or faulted state.
Guns in Flush Box - These are two LED's that indicate when up to two spray guns are in their re-
spective ush boxes. A ush or load sequence will not be allowed to start until both of these indicators
are illuminated. These LED's are connected to four pressure switches, which are actuated by the two
ush boxes. The signal from these pressure switches also feed the Paint Fill and Purge push-buttons
to prevent color changes and purges from occurring unless the guns are in their ush boxes and the
boxes are closed. These pressure switches should be jumpered if gun ush boxes are not to be used.
There are jumpers on the PC board inside the panel to bypass these pressure switches.
Feather Reset - This push-button is not functional when used in a DynaFlow system.
Spray Test - This is a simple push-button that sends a trigger signal back to the controller and also
turns on the trigger solenoid to allow operators to verify and test ow, etc. Note that this button is only
functional if uid has been loaded (i.e., the green Paint Filled indicator lamp is illuminated).
92
LN-9400-00.9

DynaFlowTM User Manual - Appendix
ADDENDUM C:
FLOW LIMITATIONS
Because of the way the DynaFlow determines ow rate from a owmeter, it has limitations where it
can no longer detect ow at the low end and at the high end. (It uses a software timer to determine
the time between pulses rather than a high speed counter card.) The low end limitation is because
the timer overows between pulses and at the high end, the scan time of the program cannot keep
up with the speed of the incoming pulses.
Because of this fact, the DynaFlow cannot see ow at the low end when the pulses fall below 1 Hz
(one pulse every second).
- With a gear-type owmeter calibrated to 4,500 pulses/liter, the DynaFlow will not detect ow
below 13.3 cc/min.
- With a gear-type owmeter calibrated to 8,000 pulses/liter, the DynaFlow will not detect ow
below 7.5 cc/min.
- With a gear-type owmeter calibrated to 40,000 pulses/liter, the DynaFlow will not detect ow
below 1.5 cc/min.
- With a piston owmeter calibrated to 60,000 pulse/liter, the DynaFlow will not detect ow below
1 cc/min.
At the high end, the DynaFlow cannot see ow when the pulses exceed 435 Hz.
- With gear-type owmeter calibrated to 4,500 pulses/liter, the DynaFlow will not detect ow
above 5,800 cc/min.
- With gear-type owmeter calibrated to 8,000 pulses per liter, the DynaFlow will not detect ow
above 3,275 cc/min.
- With a gear-type owmeter calibrated t 40,000 pulses/liter, the DynaFlow will not detect ow
above 655 cc/min.
- With a piston owmeter calibrated to 60,000 pulses/liter, the DynaFlow will not detect ow
above 435 cc/min.
LN-9400-00.9
93

DynaFlowTM User Manual - Appendix
NOTES
94
LN-9400-00.9

MANUAL CHANGE SUMMARY
This manual was published to supercede Service
Manual LN-9400-00.8, DynaFlow User Manual,
to make the following changes:
1. Added Interface Enclosure (A12182) specs in
Introduction / Specications section
2. Revised Installation section with additional
instructions related to Equipment Locations and
Equipment Mounting; assembly, location, and
mounting requirements, including anchor system
ratings.
3. Revised Installation section with additional
instructions related to Equipment Grounding and
Input Power; protective earthing requirements,
input power supply connections, wiring size, and
external switch, circuit breaker, and external over-
current protection requirements.
4. Revised Back Cover - Technical Service As-
sistance - Telephone and Fax Number.
LN-9400-00.9

Manufacturing
1910 North Wayne Street
Angola, Indiana 46703-9100
Telephone: 260-665-8800
Fax: 260-665-8516
Technical Service - Assistance
320 Phillips Ave.
Toledo, Ohio 43612-1493
Telephone (toll free): 800-233-3366
Fax: 419-470-2233
Technical Support Representative will direct you to the appropriate telephone
number for ordering Spare Parts.
© 2012 Ransburg. All rights reserved.
Models and specications subject to change without notice.
Form No. LN-9400-00.9
Litho in U.S.A.
12/12
 Loading...
Loading...