

Page 1
Gripper
&
Experimenter’s Module
Manual
version 1.2
Page 2

Gripper & Experimenter’s Module
Copyright 1997,
Under international copyright laws, this manual or any portion of it may not be copied
or in any way duplicated without the expressed written consent of
The Saphira libraries and Pioneer software on disk and on the Pioneer server EPROM
that accompany the robot and accessories and which are available for network download
by Pioneer 1 customers are solely owned and copyrighted by Kurt Konolidge and SRI
International. Pioneer 1 developers and users are authorized by revocable license to
develop and operate custom software for personal, research, and educational use
Duplication, distribution, reverse-engineering, or commercial application of the Pioneer
software and hardware without the expressed written consent of SRI International and
Media, Inc. is explicitly forbidden.
Activ
Real World Interface (RWI), Inc. manufactures the Pioneer 1 Mobile Robot and
Gripper/Experimenter’s Module accessories. The various names and logos for products
used in this manual are registered trademarks or trademarks of their respective
companies. Mention of any third-party hardware or software constitutes neither an
endorsement nor a recommendation.
Media, Inc. All rights reserved.
Activ
Activ
Media, Inc.
only
.
ii
Page 3

Pioneer Gripper & Experimenter’s Module Manual version 1.2, August 1997.
Contents
Page
1. INTRODUCTION 1
1.1 Gripper and Experimenter’s Package 1
1.1.1 Package Components 1
1.1.2 User Supplied Components 1
1.2 Basic Pioneer Platform 2
1.3 The Gripper & Experimenter’s Module 2
1.3.1 Gripper Description 2
1.3.2 Experimenter’s Module Description 4
1.4 Additional Resources 5
1.4.1 Pioneer Web Software Archive 5
1.4.2 Pioneer and Saphira Newsgroups 5
1.4.3 Support 6
2. INSTALLATION 7
2.1.1 Step 1: Remove the Console 7
2.1.2 Step 2: Remove Microcontroller from Console 7
2.1.3 Step 3: Replace the PSOS EPROM 8
2.1.4 Step 4 Reattach Microcontroller to Console 9
2.1.5 Step 5 Remove Nose 9
2.1.6 Step 6 Connect Cables 9
2.1.7 Step 7 Attach Gripper/Experimenter’s Module to Pioneer 9
2.1.8 Step 8 Re-Attach the Console Cables 10
2.1.9 Step 9 Re-Attach the Console 10
2.1.10 Step 10 Test the Assembly 10
3. GRIPPER OPERATION AND PROGRAMMING 11
3.1 Gripper Self Test 11
3.2 PSOS Server Information Packet 11
3.3 Gripper I/O 12
3.4 Gripper Programming 12
3.4.1 Direct Control via Digital Ports 13
3.4.2 State Commands 13
iii
Page 4

4. EXPERIMENTER’S MODULE 15
4.1 I/O Ports 15
4.1.1 Digin: Self-Test 17
4.1.2 Digout: Self-Test 17
4.2 Programming the Digital I/O Ports 18
4.3 Programming the A/D Ports 18
4.4 Programming the Speaker 18
5. MAINTENANCE & REPAIR 19
5.1 Drive Lubrication 19
5.2 Gripper Belt Adjustments 19
5.3 Factory Repairs 19
6. APPENDIX A 20
Example C Program Demonstrates Gripper and Speaker Functions
7. APPENDIX B 24
Pioneer Server Information Packet
8. INDEX 25
WARRANTY & LIABILITIES 28
iv
Page 5
Gripper & Experimenter’s Module
1. Introduction
ongratulations on your purchase and welcome to the rapidly
growing community of researchers, developers, and
C
provides the general and technical details you will need to install
and operate your new Gripper and to develop your own
attachments and enhancements for the Pioneer 1 Mobile Robot with the integrated
Experimenter’s Module.
Pioneer:
2.1 Gripper and Experimenter’s Package
enthusiasts of the Pioneer 1 Mobile Robot.
This
Pioneer 1 Gripper & Experimenter’s Module Manual
We also encourage you to use these companion resources that come with your
9
Pioneer Operation Manual
9
Saphira Software Manual
9
Pioneer Registration & Account Sheet
9
Personal account for the
9
Pioneer- and Saphira-users@rwii.com support newsgroups
http://css.activmedia.com
Internet server
Our experienced robotics manufacturing staff put your Pioneer 1 Gripper and
Experimenter’s Module through a “burn-in” period and carefully tested them before we
shipped the hardware and software to you. Our care extends beyond: Besides the
companion resources listed above that bring the whole community of Pioneer to you, we
warranty the Gripper and Experimenter’s Module against mechanical and electronic parts
and labor defects for 90 days. All of these precautions ensure that you have many years
to enjoy your new accessories for the Pioneer 1 Mobile Robot.
Even though we’ve made every effort to make your package complete, please check
the components once again after you unpack it from the shipping crate.
2.1.1 Package Components
9
Pioneer 1 Gripper & Experimenter’s Module Assembly
9
32K EPROM containing latest PSOS
9
Gripper & Experimenter’s Module Manual
2.1.2 User Supplied Components
9
Pioneer 1 Mobile Robot
9
Set of hex wrenches that accompanied original robot
9
Small, flat-bladed screwdriver
9
Optional “chip-puller” tool
1
Page 6
Overview
2.2 Basic Pioneer Platform
Pioneer 1 is a small, mobile robot developed by Kurt Konolige of SRI International
and Grinnell More of Real World Interface, Inc., and is available exclusively through
Media, Inc.
Activ
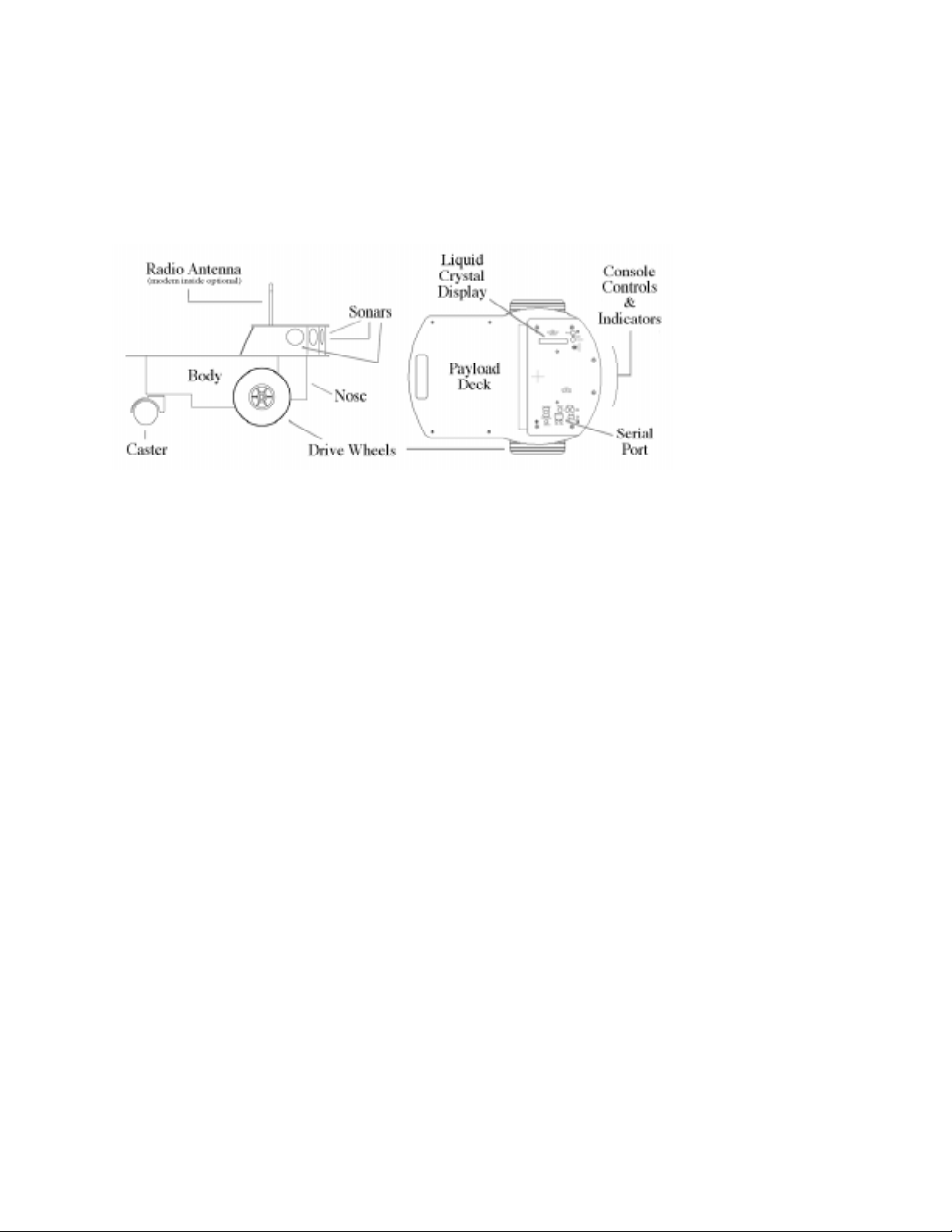
The basic Pioneer 1 Mobile platform contains all of the components for sensing and
navigation in a real-world environment, including battery power, drive motors and
wheels, position encoders, and ultrasonic sonar transducers—all managed via an
MC68HC11-based microcontroller board (Figure 1-1).
Figure 1-1. Basic components of the Pioneer 1.
The Pioneer 1 also comes with the Pioneer Server Operating System (PSOS) software
on EPROM for easy access and control of the robot’s systems, an RS232 serial port for
communication between the robot and other computers, as well as a variety of expansion
I/O ports for optional and custom attachments.
2.3 The Gripper & Experimenter’s Module
The Pioneer 1 Experimenter’s Module essentially is a circuit board and accessory
electronics that extend the capabilities of the Pioneer 1 microcontroller’s standard I/O
ports, including electrical support for the Pioneer Gripper. The Experimenter’s Module is
part of the Pioneer Gripper assembly, which together replace the nose the of basic robot
(see Figures 1-1 and 1-2 and Chapter 2,
2.3.1 Gripper Description
The Pioneer Gripper is a simple, yet powerful 2-DOF robotic manipulator and sensor
(Figure 1-2 and Figure 1-3). Driven by a single, reversible-DC servo-motor under control
of the Pioneer microcontroller, it operates between two states: down/open and up/closed.
Installation
).
2
Page 7
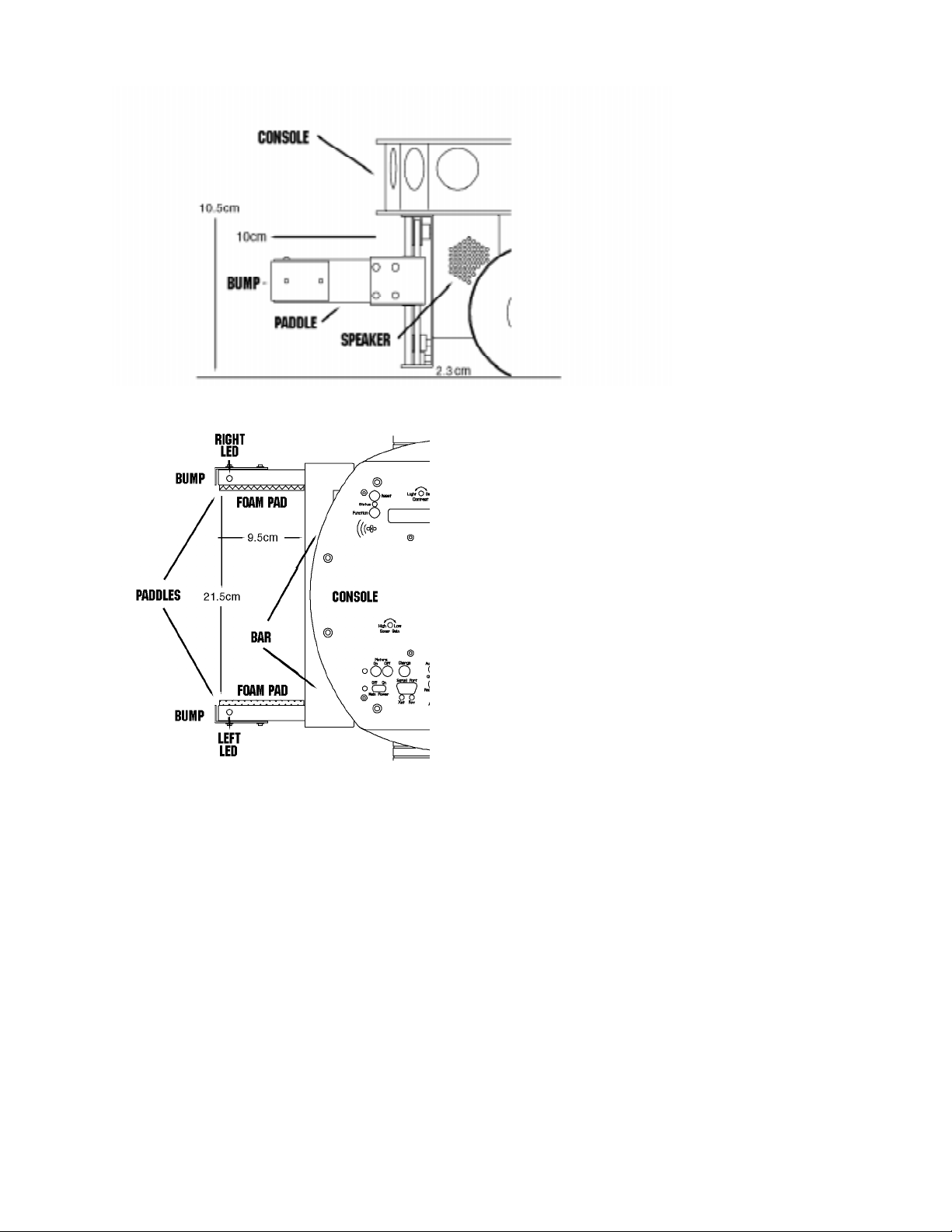
Figure 1-2 Pioneer Gripper side view.
Gripper & Experimenter’s Module
Figure 1-3. Pioneer Gripper top view
In its fully down/open state, the two 2.5 inch (5cm) tall by 3.5 inch (9.5cm) deep
Gripper paddles (each with 0.5cm foam pads on the inside) are 8.5 inches (21.5cm) apart
and ride 1 inch (2.3cm) off the floor. The paddles extend out from the front robot’s main
body 3 inches (10cm) beyond the console edge.
3
Page 8

Overview
In transition from the fully down/open position to their up/closed state, the Gripper
paddles close together horizontally until they pinch an object or close on themselves. At
that point, the entire Bar and Gripper Assembly rises up vertically—with or without an
object in its grasp. Under software control, the Gripper then rises to a special “carry”
position or all the way to the top of the Gripper case 4 inches (10.5 cm) off the floor to its
closed/up position. It is not normally possible to open the Gripper at this state.
The reverse cycle lowers the Gripper Bar and paddles to the bottom of the assembly,
whereupon the paddles separate, dropping any contents, and open to their fully
down/open position.
Two “bump” switches—one on each paddle tip—sense contact with objects. IR-based
“break beams” embedded at the front and back of each paddle sense objects between and
within the Gripper’s grasp.
Three other switches sense the Gripper’s paddle positions. One switch inside the Bar is
on when the Gripper paddles are in their fully open position. Another at the top of the
Bar toggles on when the Gripper reaches its fully up position. A third “carry” switch,
located behind the Bar, indicates when the Gripper is between 1.5 and 2 inches (4-5cm)
off the floor.
2.3.2 Experimenter’s Module Description
The Experimenter’s Module includes several additional features that users may enable
through the Pioneer I/O controls: There are green “directional” LEDs embedded in the
tip of each paddle and at the top of each side, facing front on the Gripper’s back plate.
On the left side of the Gripper, there is a speaker, an SPST on-off slide switch, a
momentary push-button switch, and another LED (amber).
Figure 1-4. Pioneer 1 Experimenter’s Module
Inside and on the Experimenter’s Module is a bank of eight RC-servo controller ports.
Layout/solder pads with DC power and I/O port connections supplied by the Pioneer
microcontroller also are on the Module card, as well as eight multiplexed analog-to-
4
Page 9
Gripper & Experimenter’s Module
digital ports. There also is circuitry and a connector for an as-yet-implemented remotecontroller IR.
A complete list of available I/O ports and connections can be found in Chapter 4,
Experiment’s Module
.
2.4 Additional Resources
Every Pioneer 1 customer gets three additional and valuable resources: a private
account on
manuals, access to RWI’s private robotics newsgroups, and E-mail access to the Pioneer
1 support team.
2.4.1 Pioneer Web Software Archive
We have a World Wide Web server connected continuously to the Internet where
customers may obtain Pioneer 1 software and support materials. Point your favorite Web
browser to:
http://css.activmedia.com
Some access areas are restricted to licensed customers, including Pioneer owners. To
gain restricted access, use the username and password that are written on the Pioneer 1
Registration & Account Sheet
Media’s Internet server for downloading Pioneer software, updates, and
Activ
that accompanied your robot.
2.4.2 Pioneer and Saphira Newsgroups
RWI also maintains a special E-mail-based newsgroup for Pioneer 1 owners and
Saphira programmers to share ideas, software, and questions. We strongly encourage you
to sign up. For details, send E-mail:
To:
majordomo@rwii.com
From: <your return E-mail address goes here>
Subject: help (Subject: always ignored)
(body of message—choose one or more commands:)
help (returns instructions)
lists (returns list of newsgroups)
subscribe <list name here> (waddayatink?)
unsubscribe <list name here> (ditto)
end
5
Page 10

Overview
2.4.3 Support
Have a problem? Can’t find the answer in this or any of the accompanying manuals?
Know a way that we might improve Pioneer 1? Share your thoughts and questions
directly with us:
pioneer-support@rwii.com
Your message goes to our team of Pioneer developers who will help you directly or
point you to where you may find help. Because this is a support option, not a generalinterest newsgroup like Pioneer-users described above, we must reserve the option to
reply only to questions about bugs or problems with Pioneer 1 and its accessories.
6
Page 11

Gripper & Experimenter’s Module
3. Installation
lease read through this chapter carefully before you attempt to attach the Gripper
& Experimenter’s Module to your Pioneer 1 Mobile Robot. If for any reason you
P
do not wish to perform the work yourself, contact RWI and make arrangements to
have the assembly installed at the factory.
On the other hand, skip this chapter altogether if your Pioneer 1 Mobile Robot came
with the Gripper & Experimenter’s Module Assembly already attached.
Turn OFF the Pioneer robot’s Main Power before installing the
Gripper & Experimenter’s Module.
3.1.1 Step 1: Remove the Console
The Gripper & Experimenter’s Module Assembly’s various ports and accessories
connect to the Pioneer microcontroller’s power and expansion I/O. Also, software
support is provided through a special Pioneer Server Operating System (PSOS), which is
stored on a 32K EPROM mounted on the microcontroller. Accordingly, to install the
Gripper/Experimenter’s Module and new PSOS, you must first disassemble the Pioneer
Console.
With one of the hex wrenches that came with your robot, remove the six outermost
screws that secure the top plate to the Console—two on the front (including camera, if
attached) and two on each side.
If one is attached, carefully unplug and remove the Pioneer camera from the Console
and back panel. Also unscrew and remove the radio modem antenna, if attached.
Twist counter-clockwise to remove, and
twist clockwise to insert the various screws.
Gently lift the Console top plate to expose the microcontroller board, which is
mounted to its underside, and the various wire harnesses attached to it. Being careful to
not handle the attached microcontroller card, remove the wire connectors on both sides of
the card from their sockets, freeing the Console top plate with the microcontroller card
attached.
3.1.2 Step 2: Remove Microcontroller from Console
Lay the Console top plate face up, with the Pioneer 1 microcontroller card down, onto
a clean, soft surface (first section of the Sunday Times is a great pad). Locate and remove
the six hex screws—one in each side and two in the middle—which secure the
microcontroller board to the Console top plate. Separate the parts. The microcontroller
board should be exposed now, face-up on the table (Figure 2-1).
7
Page 12

Installation
Figure 2-1. Pioneer 1 microcontroller card
3.1.3 Step 3: Replace the
PSOS EPROM
Locate the EPROM/SRAM socket
(Figure 2-2) on the microcontroller
card and note that the Pin 1 locator
notch on its case is towards the outer
edge of the board—you’ll want to
similarly position the new PSOS
EPROM.
Pry or pull out the socketed
EPROM chip. We’d prefer that you
use a special “chip-puller” tool, but
if one isn’t handy, use a thin, flatbladed screwdriver and gently pry
up each end of the chip until it lifts
out of the socket freely.
Figure 2-2. Location of the EPROM socket
EPROM chips are sensitive to static electricity. Be careful to handle
them by their case and store them on conductive foam. Don’t touch
the pins with your fingers, and be particularly careful not to bend
any of their 28 delicate connector pins.
Now carefully remove the new PSOS EPROM that came with the Gripper/
Experimenter’s Module from its protective foam and insert it into the EPROM socket. Be
sure to line up the Pin 1 notch and insert the pins in their respective socket holes. Then
8
Page 13

Gripper & Experimenter’s Module
press carefully, but firmly down on the chip with your thumb or forefinger to seat it
tightly in the socket.
3.1.4 Step 4 Reattach Microcontroller to Console
By reversing the procedures you took in Step 2 and using the same tools and screws,
reattach the Pioneer microcontroller to the Console top plate. Set the entire assembly
aside for the moment in a safe place.
3.1.5 Step 5 Remove Nose
The Gripper/Experimenter’s Module replaces the Pioneer’s nose. Use the hex
wrenches that came with your robot to remove the six screws that secure the Nose to the
Pioneer Deck and Body: four on top of the Deck and one on each side at the bottom.
Store the Nose away.
3.1.6 Step 6 Connect Cables
Place the Gripper/Experimenter’s assembly on top of a table close to and in front of
the Pioneer, with the Module card and attached flat ribbon cables facing the robot’s
Nose. Push those three cables’ free connector ends through the opening in the nose and
up into the Console. Similarly, push the Pioneer’s power cable through and out the Nose.
Plug the power cable attached to the Pioneer robot into its new 12-pin socket on the
Experimenter’s Module just below the accessory’s power cable and socket. The cable’s
yellow wires should point towards the center of the Module.
CAUTION: HOT POWER CABLE!
The Pioneer power cable is connected, unswitched, directly to the
battery. Be careful to align the connector with its socket.
Misalignment may cause damage to the Pioneer microcontroller or
to the Experimenter’s Module.
You may find that first unplugging the new power cable connector from its socket on
the Module will expose the lower socket for easier attachment of the robot’s power
connector. Do re-insert the new power cable from the Module back into its socket before
proceeding with the installation. Do not switch the connectors, plugging the robot’s
power cable into the upper socket—otherwise, no damage will occur, but the Gripper will
activate without provocation.
3.1.7 Step 7 Attach Gripper/Experimenter’s Module to Pioneer
Use the hex wrenches that came with your robot and the screws you removed from the
robot’s Nose to attach the Gripper/Experimenter’s Module to the Deck (4 screws; no
screws attach to the Pioneer Body, as they do for the Nose).
9
Page 14

Installation
3.1.8 Step 8 Re-Attach the Console Cables
Carefully handling the Console top plate with attached microcontroller by its edges,
reattach the various cables, front and back. Although the order is not critical, for
convenience we recommend attaching the front cables firstthe sonar and drive (left and
right) cables.
Then, to the sockets on the rear of the microcontroller, attach the 4-pin serial
connector, the new 16-pin Nose I/O and 26-pin General I/O connectors, and finally the
new power connector to their respective sockets.
3.1.9 Step 9 Re-Attach the Console
Align the Console top-plate with microcontroller on top the Console, and using the
tools and the screws from Step 2, reattach it to the robot body. Reattach the camera to the
front of the Console as well, if it is with your robot. Then plug the camera power and
signal cables back into their respective sockets on the Console back plate, and screw in
the antenna through the hole in the Console top plate and into the radio modem beneath.
3.1.10 Step 10 Test the Assembly
Time to switch on the Pioneer’s Main Power and sniff for blue smoke. If sparks don’t
fly and smoke is absent, the Pioneer will automatically exercise it’s new Gripper and
finish with three loud and firm beeps through the newly attached speaker—not that weak,
sniveling old “beep, beep” of the Gripper-less Pioneer, mind you, so keep sensitive
babies and weaklings clear.
You’ve completed assembly and now are ready to run your Pioneer’s brand new
gadgets. And for your troubles, you get two loose screws left over (they are the two
round headed ones that came out of the bottom of the Nose).
10
Page 15

Gripper & Experimenter’s Module
4. Gripper Operation and Programming
he Pioneer Gripper comes fully integrated with the robot’s systems and software.
The latest versions of PSOS (4.2+) contains support for direct control of the
T
software control routines that manage the Gripper functions for you. In turn, these PSOS
functions are supported in Saphira (version 5.3+), the Pioneer Application Interface
(PAI), and Pioneer-LOGO. Consult the various Pioneer-related Operation and Software
Manuals for more details about PSOS, Saphira, PAI, and P-LOGO.
4.1 Gripper Self Test
of the robot. This section describes the Gripper’s self-test. Consult
Operations and Software Manual
of the various Console function buttons and switches and for how to test the drive and
I/O systems, sonars, and processor.
button. The exercise first drives the Gripper Bar and paddles to their fully down and open
state, and then back up to their fully up and closed state.
Pioneer’s onboard I/O that run the Gripper functions, as well as state-based
Gripper-enabled versions of PSOS come with test routines for all the main functions
the Pioneer 1
for a detailed description of the location and operation
Make sure the Pioneer motors are disengaged,
if you perform the Gripper self-test on a table top.
The Gripper self-test happens whenever you turn the Main Power on or press the Reset
Always place Pioneer 1 on the floor and have everyone step back
before engaging the motors.
You may also test the Gripper’s open, up, and carry state switches. See the
Experimenter’s Module, Digin I/O test mode section in Chapter 4 for details.
4.2 PSOS Server Information Packet
PSOS regularly sends Pioneer server information to a connected client over the serial
communication line. Included in that Server Information Packet are the various states and
readings from the Gripper and the Experimenter’s Module I/O. A summary of the PSOS
Server Information Packet is in the Appendix B. These various readings may be captured
and individually read by the client, or you may use the various Saphira, PAI, or P-LOGO
functions to manage the packet and read the values for you.
11
Page 16

Gripper Operation and Programming
4.3 Gripper I/O
The Gripper’s single drive motor is controlled through two digital output lines and
under control of the microcontroller CPU: Output port OD0 controls the direction of
rotation and OD1 enables/disables the motor.
The act of gripping and raising objects is mechanical and dependent on the Gripper’s
position—you cannot independently operate the gripper paddles. Rather, you drive the
motor in one direction or the other. The paddles automatically open when the Gripper is
being lowered and reaches the bottom of the assembly. In reverse, the paddles
automatically close upon themselves or an object and then rise.
Switches on top (“up”), inside at one end of the Bar (“open”), and behind the Bar
(“carry”) indicate the various Gripper (G) positions (Table 3-1). In addition, bump
switches on the tips of each paddle indicate collisions, and break beams (b-b) inside the
paddles indicate the position of an object within the grasp. We identify the various I/O
ports and connections by name in Table 3-1. Consult the Tables in Chapter 5 for their pin
locations on the General and Nose I/O connectors.
Table 3-1. Gripper motor controls and state switches
Name I/O port Meanings
G.motor OD0 rotate 1=down; 0=up
G.motor OD1 1=enable
top ID0 0= G at top
carry ID1 0=paddles closed, G 4-5cm above floor
open ID2 0=paddles fully open
inner b-b ID3 1=object inside
outer b-b ID4 1=object inside
bumps ID5 0=paddle tip touching object
4.4 Gripper Programming
You can directly control the Gripper motor through the PSOS sfCOMDIGOUT
command and byte parameters. PSOS also will accept a new state command,
sfCOMGRIPPER, to achieve a gripper state, and sets the gripper motor bits
appropriately. There also are some Saphira convenience functions defined for getting
and setting the gripper state. For details on programming PSOS directly and through
Saphira, consult the Saphira Software and Pioneer Operations and Software Manuals.
sfCOMDIGOUT control of Pioneer digital output ports has been
changed in PSOS version 4.2 and later.
4.4.1 Direct Control via Digital Ports
12
Page 17

Gripper & Experimenter’s Module
The revised PSOS 4.2 (and later) sfCOMDIGOUT command has a two-byte
argument: The high byte is a mask of those output bits you want to change, and the low
byte is the bit pattern for the bits to change. This way, you don’t need to know the state
of the port(s) you want to change; just the state in which you want them to be, and you
won’t change the state of any of the other ports.
The Saphira function, sfRobotCom2Bytes, packages the sfCOMDIGOUT command
and values for you. For example:
sfRobotCom2Bytes(sfCOMDIGOUT, 0x20, 0x00)
resets bit 5 (OD0=0), and leaves everything else alone.
Accordingly, make the Gripper go up:
sfRobotCom2Bytes(sfCOMDIGOUT, 0x3, 0x3)
Go down:
sfRobotCom2Bytes(sfCOMDIGOUT, 0x3, 0x2)
And stop:
sfRobotCom2Bytes(sfCOMDIGOUT, 0x2, 0x00)
You have to monitor the various Gripper state switches to determine if and when it
achieves a particular state—fully down with paddles open, for instance—when setting the
Gripper’s control I/O ports directly (see below).
4.4.2 State Commands
A more intelligent means of controlling the Gripper is through PSOS
sfCOMGRIPPER command and state parameters. These automatically manage the
Gripper so to achieve some pre-defined state. PSOS also monitors and reports the
Gripper’s progress towards that state, saving you some coding time and effort. And the
state commands use a timeout feature to protect against unfortunate stalls or hang-ups.
To operate the Gripper this way, you simply issue a state command to the robot. You
don’t need to, but you may monitor the Gripper’s progress towards the state via bits 0
and 2 of the digout part of the server information packet (“sfROBOT.digoutput”). During
transitions, the state returned by the robot is set to sfGRIPMOVING. After successfully
achieving a state, the state returned is that state. If there is a time-out (6 seconds) without
achieving the state, the return state is set to sfGRIPOFF.
The various states and values are included in the script at the end of this chapter and
that you may including in your own C programs.
There also are several Saphira convenience functions defined for gripper states:
int sfGripperGetState (void)
Returns the robot gripper state setpoint
void sfGripperSetState (int state)
Sets the robot gripper state setpoint
13
Page 18

Gripper Operation and Programming
Table 3-2. Gripper functions
/*************************************************************
* Gripper functions --- For setting and retrieving gripper states
* States are sfGRIPUP, sfGRIPDOWN, sfGRIPMIDDLE, sfGRIPOFF,
* and sfGRIPMOVING
* sfGRIPMOVING occurs only during transitions between states
* sfGRIPOFF can be set by the user, which means no state control
* sfGRIPOFF is set by the robot to indicate a timeout (6
* seconds) if a state is not achieved
*
**************************************************************/
/* states */
#define sfGRIPOFF 0
#define sfGRIPUP 1
#define sfGRIPMOVING 2
#define sfGRIPMIDDLE 4
#define sfGRIPDOWN 5
#define sfCOMGRIPPER 33
/* gripper control bits (DIGOUTPUT) */
#define sfGRIPSTATEMASK 0x05 /* picks out state bits in DIGOUTPUT */
#define sfGRIPMOTORBIT 0x02 /* motor bit, 0 is off, 1 is on */
#define sfGRIPDIRBIT 0x01 /* direction bit, 0 is down, 1 is up */
#define sfSPEAKERBIT 0x04
#define sfRIGHTLEDBIT 0x08 /* 0 is off, 1 is on */
#define sfLEFTLEDBIT 0x10
/* gripper sense bits (DIGINPUT) */
#define sfGRIPTOPBIT 0x01 /* top limit switch, 0 if hit */
#define sfGRIPMIDBIT 0x02 /* carry switch, 0 if hit */
#define sfGRIPBOTBIT 0x04 /*open limit switch, 0 if hit */
#define sfGRIPINIRBIT 0x08 /* inner break beam, 1 is beam break */
#define sfGRIPOUTIRBIT 0x10 /* outer break beam, 1 is beam break */
#define sfGRIPBUMPBIT 0x20 /* gripper bumpers, 0 is bump */
#define sfGRIPMOMBIT 0x40 /* momentary switch, 0 is pressed */
#define sfGRIPSPSTBIT 0x80 /* SPST switch, 0 is up */
14
Page 19

5. Experimenter’s Module
esides hosting the Gripper, the Experimenter’s Module brings several new
features to the Pioneer 1 Mobile Robot, and provides you with a platform for
B
adding your own robotics options and features (Figure 4-1):
Easy access to Pioneer digital I/O, A/D, and timer functions
9
Speaker with new PSOS “say” command
9
User-controlled LEDs and switches
9
8 RC-servo ports (RC0-7)
9
8 Analog-to-Digital Input Ports (AN0-7)
9
Range-finding IR connector
9
Figure 4-1. Experimenter’s Module.
Gripper & Experimenter’s Module
5.1 I/O Ports
By cables connected to the Pioneer microcontroller, the Experimenter’s Module brings
both the Nose and General I/O expansion ports onto a single, open platform. All of ports
now appear as solderable connections alongside a components pad, complete with power
connections (Figure 4-1).
The I/O ports and their uses are summarized in Table 4-1. The Vcc ports supply logic
power, so use them for that purpose only. The Pioneer microcontroller has a single A/D
port that appears on both the General I/O connector and Nose I/O connector. This port is
multiplexed into eight A/D ports on the Experimenter’s platform. And special circuitry
on the Experimenter’s board lets you control up to eight separate RC servos.
15
Page 20

Experimenter’s Module
Note also that the Nose (N) 16-pin and the General (G) 26-pin I/O connectors are
numbered odd pins on top and even pins on the bottom; not top, left to right, then bottom
left to right. The pinouts for the Nose connector, for example, are:
1 3 5 7 9 11 13 15
246810121416
Table 4-1. Pioneer I/O ports and connections
Label Connector/Pin Use
Digital Inputs
ID0 G7 Gripper top switch
ID1 G9 Gripper carry switch
ID2 G11 Gripper open switch
ID3 G13 Paddle inner break beam
ID4 G15 Paddle outer break beam
ID5 N5 Paddle bump switches
ID6 N3 User push-button switch
ID7 N1 User slide switch
Digital Outputs
OD0 G17 Gripper motor rotation direction
OD1 G19 Gripper motor enable
OD2 G21 User LED (amber)
OD3 G23 Right paddle and front LEDs
OD4 G25 Left paddle and front LEDs
OD5 N13 Speaker
OD6 N11 User servo motor logic
OD7 N9 User servo motor logic
Miscellaneous
A/D N7,G1 Analog-to-digital input
IDT G3 Timer input
ODT N15 Timer output
Logic Power
Ground N2,4,6,8,14,16; G2,4,10,12,14,16,18,20,22,24,26
+5 VDC N10,12; G6,8
16
Page 21

Gripper & Experimenter’s Module
5.1.1 Digin: Self-Test
You may investigate the operation of the digital input and output ports through their
PSOS self-test modes.
After starting up your Pioneer, press the black Function button once to enable self-test
mode. The LCD message should now display:
BREAK, Boot to r
eturn vv.vV*
indicating that Pioneer has entered self-test mode. (Note that the voltage V reading will
vary.) You may press the Reset button at any time to disable the self-test, and you may
press the Function button to skip any of the self-tests.
Skip to the digital input test by pressing the Function button 3 more times. The LCD
should now read:
Digin: E6 BOOT
to skip vv.vV*
The E6 may vary—it is the hexadecimal representation of the various digital input
ports, described in Table 4-1 and in the Gripper Chapter 4. Decode that indicator
according to the bit rule in Table 4-2.
For example, if you press the user push-button switch, the E6 value would change to
A6. See why?
Table 4-2. Bits and meanings of Digin: self-test value:
bit 7 6 5 4 3 2 1 0
1=
0=
user
slide-sw
up
user
slide-sw
down
user
pushbutton
released
user
pushbutton
pressed
paddles
bump
free
paddles
bump
pressed
outer b-b
clear
outer b-b
obstructed
inner b-b
clear
inner b-b
obstructed
paddles
not
open
wide
paddles
wide
open
gripper
below/
above
4-5cm
gripper
up 45cm
gripper
at top
gripper
not at
top
gripper
at top
5.1.2 Digout: Self-Test
Press the black Function button on the Console once more to set the Pioneer into a
self-test of its digital outputs. The test is pretty braindead: It simply toggles the odd and
even output ports alternately off and on: AA, 55, AA, 55, and so on. Watch the LEDs
flash on and off, the speaker click, and the Gripper twitch.
17
Page 22

Experimenter’s Module
5.2 Programming the Digital I/O Ports
Use the sfCOMDIGOUT PSOS command and the related Saphira convenience
command to manage the various digital output ports. They are described in detail in the
previous chapter. (PAI and P-LOGO support similar commands, too.)
For example, to turn the right LED on, use:
sfRobotCom2Bytes(sfCOMDIGOUT, sfRIGHTLEDBIT,
sfRIGHTLEDBIT)
Or alternatively, specify the state of an LED:
void sfGripperSetLed(int which, int state)
for which=sfLEFT or sfRIGHT, and state=sfON or sfOFF.
5.3 Programming the A/D Ports
The eight analog-to-digital (A/D) ports on the Experimenter’s Module (AN0-7) are
multiplexed from a single A/D port on the Pioneer 1 microcontroller. Hence, only one
port may be read at a time, although all eight ports may connect to individual sources.
Each AN port accepts a 0-5VDC analog input and outputs a proportionally related,
single byte value 0-255. Use the digital output ports OD5-7 to address which port PSOS
will read and return as the A/D value in the Server Information Packet (section 3.2,
Server Information Packet
For example, the following Saphira command addresses the AN4 port by masking the
OD5-7 ports, setting OD7, and resetting OD5 and OD6: (remaining output ports remain
untouched:
sfRobotCom2Bytes(sfCOMDIGOUT, 0xE0, 0x80)
).
PSOS
5.4 Programming the Speaker
The latest PSOS implements a new command called SAY, which plays a sequence of
up to 20 notes through the Experimenter’s Module speaker. Now your Pioneer will be
humming a different tune!
The SAY command (number 15) has two arguments: a string up to 40 bytes long, and
the integer number of actual bytes in the string:
sfRobotComStrn(sfCOMSAY, str, n)
The string is comprised of duration and tone pairs; the duration byte is the number of
20 millisecond increments the following tone value half-cycle times—in 150
microsecond increments—should be played through the speaker.
For example, to play two short, high beeps using the Saphira equivalent command:
void sfPlayToneString ("\010\002\010\000\010\002", 6)
18
Page 23

Gripper & Experimenter’s Module
6. Maintenance & Repair
he Pioneer Gripper is built to last a lifetime and requires little maintenance.
T
6.1 Drive Lubrication
An occasional drop or two of oil on the guide rails is a very good idea. Place some
thin, household oil on a Q-Tip or similar applicator, and rub along the rails. Then start up
the Pioneer to exercise the Gripper and spread the lubricant.
6.2 Gripper Belt Adjustments
The Gripper’s drive belts will stretch with use and may need to be tightened
occasionally. We designed them to make that process easy.
Put the Gripper into its fully up position—its position after completing the self test. At
the bottom of the Gripper assembly, you can see an aluminum gear with a vertical belt
wrapped around it. Notice that it is fastened through a curved slot in the Gripper casing,
and that it has a flat-bladed screwdriver slot?
Do not remove the screw, but loosen it enough so that it will slide in that slot. (You
may need to hold the fastening bolt behind the slot with pliers or a nut-driver so you can
loosen the gear.) With your thumb, press down on the gear inside the belt until the belt is
fairly taut, but not “high strung”, then tighten the screw to hold the gear in place. Look
inside the Gripper Bar. On the left side facing you (right side of the robot) is another belt
and gear, similar to the up/down belt. This gear, too, has a screwdriver slot, which you
loosen to tighten the belt.
6.3 Factory Repairs
If you are having
manual, you are satisfied that it needs repair, here’s who to contact:
In the body of your E-mail or fax message, describe the problem in as much detail as
possible. Also include your name, E-mail and mail addresses, as well as phone and fax
numbers, and when and how we can best contact you (we will assume E-mail is the best
manner, unless otherwise notified).
We will try and resolve the problem through communication. If the robot must be
returned to the factory for repair, obtain a shipping and repair authorization code and
shipping details from us first. We are not responsible for shipping damage or loss.
hardware
problems with your Pioneer 1 and, after reading this
pioneer-support@rwii.com
(603) 532-6901 fax
19
Page 24

7. Appendix A
Example C Program Demonstrates Gripper
and Speaker Functions
/* ################################################################
* gripper.c --- Saphira-based functions for controlling the gripper and speaker
*#################################################################
** Copyright 1997 by Kurt Konolige
**
** The author hereby grants to SRI permission to use this software.
** The author also grants to SRI permission to distribute this software
** to schools for non-commercial educational use only.
**
** The author hereby grants to other individuals or organizations
** permission to use this software for non-commercial
** educational use only. This software may not be distributed to others
** except by SRI, under the conditions above.
**
** Other than these cases, no part of this software may be used or
** distributed without written permission of the author.
**
** Neither the author nor SRI make any representations about the
** suitability of this software for any purpose. It is provided
** "as is" without express or implied warranty.
**
** Kurt Konolige
** Senior Computer Scientist
** SRI International
** 333 Ravenswood Avenue
** Menlo Park, CA 94025
** E-mail: konolige@ai.sri.com
**
**/
#include "saphira.h"
/*
* New comm function --- writes two bytes as argument
*/
(continued)
20
Page 25

Gripper & Experimenter’s Module
void
sfRobotCom2Bytes(int com, int high, int low)
{
sfRobotComInt(com, ((high & 0xff)<<8) + (low & 0xff));
}
/*************************************************************
* Speaker functions -- play a tone string
*
* Format of string is L1 T1 L2 T2 .... Ln Tn
* where Li is length of tone i in 20ms increments
* and Ti is tone half-cycle time in 150us increments
*
* Max length of string is 40 bytes (20 tones)
*
**************************************************************/
void
sfPlayToneString(char *str, int n)
{
if (n > 40) n = 40;
sfRobotComStrn(sfCOMSAY, str, n);
}
/*************************************************************
* Gripper functions --- set and retrieve gripper state
*
* States are sfUP, sfDOWN, sfMIDDLE, sfOFF, and sfMOVING
* sfMOVING occurs only during transitions between states
* sfOFF can be set by the user, which means no state control
* sfOFF can be set by the robot to indicate a timeout
*
**************************************************************/
/* states */
#define sfGRIPOFF 0
#define sfGRIPUP 1
#define sfGRIPMOVING 2
#define sfGRIPMIDDLE 4
#define sfGRIPDOWN 5
#define sfCOMGRIPPER 33
(
continued
)
21
Page 26

/* gripper control bits (DIGOUTPUT) */
#define sfGRIPSTATEMASK 0x05 /* picks out state bits in DIGOUTPUT */
#define sfGRIPMOTORBIT 0x02 /* motor bit, 0 is off, 1 is on */
#define sfGRIPDIRBIT 0x01 /* direction bit, 0 is down, 1 is up */
#define sfSPEAKERBIT 0x04
#define sfRIGHTLEDBIT 0x08 /* 0 is off, 1 is on */
#define sfLEFTLEDBIT 0x10
/* gripper sense bits (DIGINPUT) */
#define sfGRIPTOPBIT 0x01 /* top limit, 0 if hit */
#define sfGRIPMIDBIT 0x02 /* mid-level, 0 if hit */
#define sfGRIPBOTBIT 0x04 /* bottom limit, 0 if hit */
#define sfGRIPINIRBIT 0x08 /* inner IR, 0 is beam break */
#define sfGRIPOUTIRBIT 0x10 /* outer IR */
#define sfGRIPBUMPBIT 0x20 /* gripper bumpers, 0 is bump */
#define sfGRIPMOMBIT 0x40 /* momentary switch, 0 is pressed */
#define sfGRIPSPSTBIT 0x80 /* SPST switch, 0 is up */
int /* returns the robot gripper state setpoint */
sfGripperGetState(void)
{
if (flakey.digoutput & sfGRIPMOTORBIT)
return sfMOVING;
else
return flakey.digoutput & sfGRIPSTATEMASK;
}
void /* sets robot gripper state setpoint */
sfGripperSetState(int state)
{
sfRobotComInt(sfCOMGRIPPER, state & sfGRIPSTATEMASK);
}
void /* sfLEFT, sfRIGHT, sfON, sfOFF */
sfGripperSetLed(int which, int state)
{
switch(which)
{
case sfLEFT:
which = sfLEFTLEDBIT;
break;
(continued)
22
Page 27

case sfRIGHT:
which = sfRIGHTLEDBIT;
break;
default:
which = 0;
}
switch(state)
{
case sfOFF:
sfRobotCom2Bytes(sfCOMDIGOUT, which, 0);
break;
case sfON:
sfRobotCom2Bytes(sfCOMDIGOUT, which, which);
break;
}
}
Gripper & Experimenter’s Module
23
Page 28

8. Appendix B
Pioneer Server Information Packet
Name Data Type Description
Header
Byte Count
Status
Xpos
Ypos
Th pos
L vel
R vel
Battery
Bumpers
Bumpers
Control
PTU
Say
Sonar
readings
Sonar num
Sonar range
Input timer
User Analog
User Input
User Output
Checksum
int Exactly 0xFA, 0xFB
byte Number of data bytes + 2; must be less than 201
(0xC9)
byte = 0x3S; where S = Motors status
sfSTATUSNOPOWER
sfSTATUSSTOPPED
sfSTATUSMOVING
unsigned int (15 ls-bits) Wheel-encoder integrated coordinates; platform-
unsigned int (15 ls-bits)
signed int Orientation in platform-dependent units—multiply
signed int Wheel velocities (respective Left and Right) in
signed int multiply by
byte Battery charge in tenths of volts
2 bytes - L and R Motor stall indicators
unsigned int
signed int Setpoint of the server’s angular position servo—
unsigned int Pulse width of position servo
byte verbal/sound clues
byte Number of new sonar readings included in
byte Sonar number
unsigned int Sonar reading—multiply by
unsigned int User input timer reading
byte User analog input reading
byte User digital input pins
byte User digital output pins
int Checksum (see previous section)
Motors power off
Motors stopped
Robot moving
dependent units—multiply by
DistConvFactor
mm; roll-over ~ 3 m
AngleConvFactor
by
platform-dependent units—
VelConvFactor
multiply by
information packet; readings follow:
mm
AngleConvFactor
in the parameter file to convert to
for radians
to convert to mm/sec.
for radians
RangeConvFactor
for
24
Page 29

9. Index
Gripper & Experimenter’s Module
A
A/D, 18
A/D port, 15
Activ
Media, Inc., 2
Additional Resources, 5
B
break beams, 4
C
carry switch, 4
COMDIGOUT, 12, 13
COMGRIPPER, 12
components
package, 1
Pioneer 1
user-supplied, 1
COMSAY, 18
, 2
D
Digin, 17
digital-to-analog ports, 18
Digout, 17
E
EPROM location, 7
Experimenter’s Module
Description, 4
speaker, 18
Experimenter's Module, 15
components, 15
I/O ports, 15
self-test, 17
F
FTP archives, 5
G
General I/O, 16
GRIPMOVING, 13
GRIPOFF, 13
Gripper
Bar, 4
belt adjustments, 19
carry switch, 4
Description, 2
direct control, 13
I/O, 12
installation.
lubrication, 19
maintenance, 19
motor controls, 12
OD0, 12
OD1, 12
operating range, 3
operation, 11
paddles, 3
self-test, 11
state commands, 13
state switches, 12
states, 2
switches, 4
transition cycle, 4
Gripper Bar, 4
Gripper I/O, 12
Gripper maintenance, 19
Gripper motor controls, 12
Gripper switches, 12
GripperGetState, 13
See
installation
I
I/O
General, 16
Nose, 16
ports and connections, 16
programming, 18
I/O ports, 15
installation, 7
cables, 9
25
Page 30

console removal, 7
EPROM location, 7
EPROM replacement, 7
microcontroller removal, 7
K
Konolige, Kurt, 2
L
LEDs, 18
M
majordomo
microcontroller, 8
More, Grinnell, 2
, 5
N
newsgroups, 5
Nose I/O, 16
pinouts, 16
O
OD0, 12
OD1, 12
P
paddles
break beams, 4
positions, 4
paddles positions, 4
PAI, 11
Pioneer 1, 2
Pioneer Application Interface, 11
Pioneer Operations and Software Manual, 1
Pioneer Server Operating System.
PSOS
Pioneer-LOGO, 11
PlayToneString, 18
P-LOGO, 11
PSOS, 11.
PSOS EPROM, 7
See
EPROM, 7
PSOS
See
R
RC-servo controllers, 4
Real World Interface, ii
Real World Interface, Inc., 2
RobotCom2Bytes, 13
RWI, ii.
See
Real World Interface, Inc.
S
Saphira, 11
sfCOMDIGOUT, 12, 13
sfCOMGRIPPER, 12
sfCOMSAY, 18
sfGRIPMOVING, 13
sfGRIPOFF, 13
sfGripperGetState, 13
sfGripperSetState, 13
sfPlayToneString, 18
sfROBOT.digoutput, 13
sfRobotCom2Bytes, 13
Saphira Software Manual, 1
SAY, 18
self-test, 11
Digin, 17
Digout, 17
Server Information Packet, 11
sfGripperSetState, 13
speaker, 18
SRI International, 2
state commands, 13
state switches, 12
support, 6
W
warranty, 28
26
Page 31

Gripper & Experimenter’s Module
27
Page 32

Warranty & Liabilities
Your Pioneer 1 Mobile Robot and its accessories are fully warranted against defective
parts or assembly for 90 days after it is shipped to you from the factory. This warranty
explicitly
operation, such as if the robot is allowed to tumble or fall off a ledge, or if it is
overloaded with heavy objects.
operation and use of the robot or any accompanying software except that covered by the
warranty and period. The developers, marketers, or manufacturers shall not be held
responsible for any injury to persons or property involving the Pioneer 1 Mobile Robot in
any way. They shall bear no responsibilities or liabilities for any operation or application
of the robot, or for support of any of those activities. And under no circumstances will
the developers, marketers, or manufacturers of Pioneer 1 take responsibility for or
support any special or custom modification to Pioneer 1.
does not include
The developers, marketers, and manufacturers of Pioneer 1 shall bear no liabilities for
damage from shipping or from abuse or inappropriate
Pioneer 1 Gripper & Experimenter’s Manual version 1.2, August 1997.
28
 Loading...
Loading...