

TJ1-
Controlador de Motion Trajexia
Controlador de Motion autónomo (independiente de PLC) con altas prestaciones que utiliza el bus de motionMECHATROLINK-II
• Coordinación de movimiento avanzado de hasta
16 ejes sobre el robusto y rápido bus de motion:
MECHATROLINK-II
• Admite control de posición, velocidad y par
• Cada eje puede ejecutar movimientos interpolados
complejos, e-cams y e-gearboxes
• Las avanzadas herramientas de depuración incluyen
funciones de seguimiento (trace) y de osciloscopio
• Entrada de registro de hardware para cada uno de los
16 ejes
• Control de servos, convertidores de frecuencia y E/S
remotas sobre una sola red Motion
• Controlador multitarea capaz de ejecutar hasta
14 tareas simultáneamente
• Comunicaciones abiertas: Ethernet incorporado,
PROFIBUS-DP, DeviceNet y CANopen opcionales
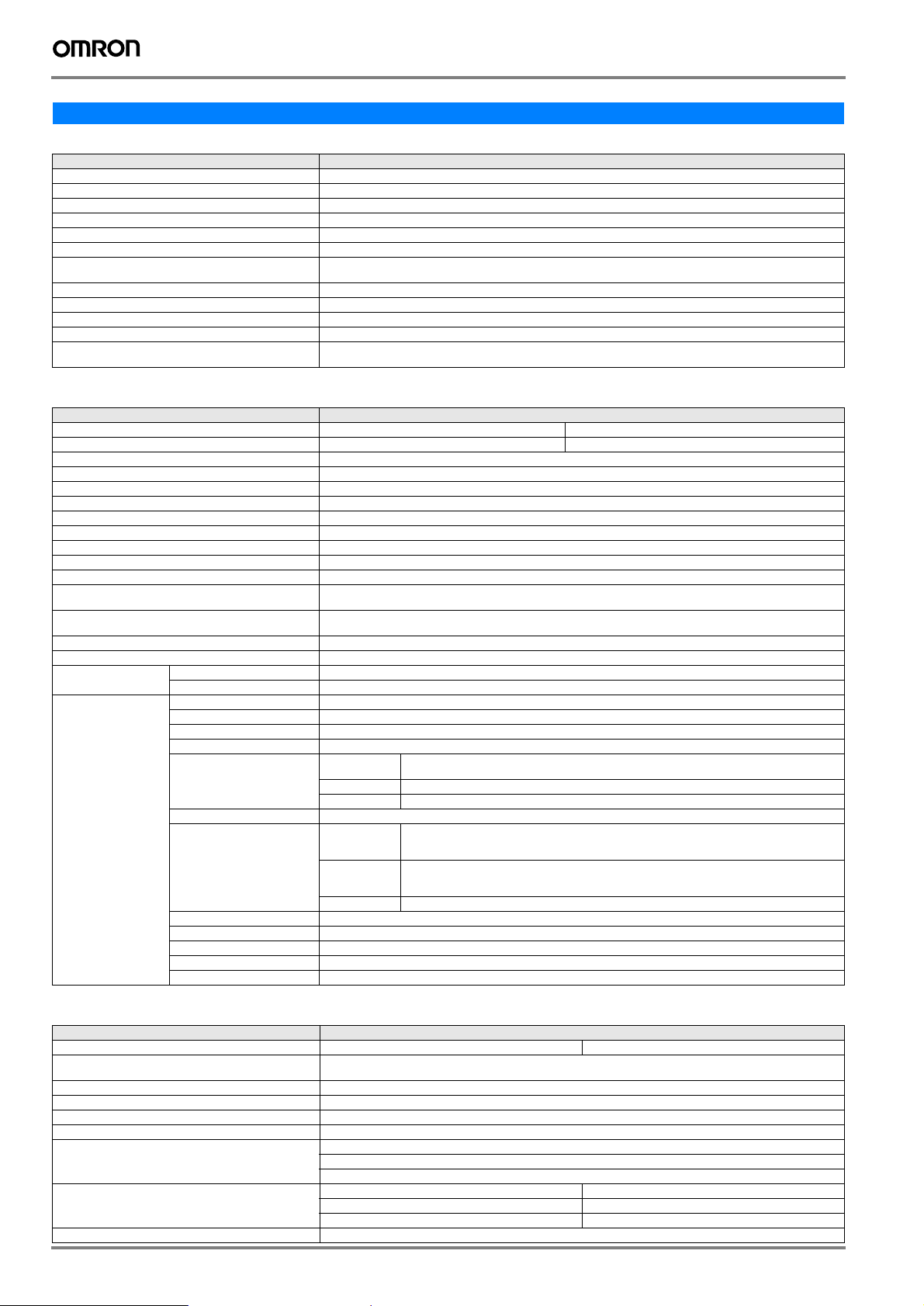
Configuración del sistema
PLC serie CJ
HMI serie
NS
E/S digitales
Host Link
Controlador de Motion
Servodrive serie
Sigma-II
Entrada
Entrada rápida de
registro, búsqueda
de Origen
Servomotores
serie
Sigma-II
JUSP-NS115
Unidad
MECHATROLINK-II
Ethernet
MECHATROLINK-II
Motores lineales
serie Sigma-II
CX-One
Trajexia tool
Bus de campo
Maestro de
PROFIBUS-DP
Convertidor de
frecuencia
Maestro de
DeviceNet
GRT1-ML2
SW1 SW2
CN2
CN1
A/B
Dispositivos
CANopen
E/S SmartSlice
1Controlador de Motion Trajexia
Especificaciones
Especificaciones generales de Trajexia
Concepto Detalles
Modelo TJ1-@
Temperatura ambiente de funcionamiento 0 a 55°C
Humedad ambiente de funcionamiento 10 a 90% HR
Temperatura ambiente de almacenamiento -20 a 70°C
Humedad ambiente de almacenamiento 90% máx. (sin condensación)
Atmósfera Sin gases corrosivos
Resistencia a vibraciones 10 a 57 Hz: (0,075 mm de amplitud)
Resistencia a golpes 143 m/s
Resistencia de aislamiento 20 MOhm
Rigidez dieléctrica 500 voltios
Estructura protectora IP20
Estándares internacionales CE, EN 61131-2, cULus, Lloyds (queda pendiente la aprobación de cULus para TJ1-MC04 y para TJ1-ML04)
57 a 100 Hz Aceleración: 9,8 m/s
2
, 3 veces en cada una de las direcciones X, Y y Z.
compatibles con RoHS
Unidades de control de motion Trajexia
Concepto Detalles
Modelo TJ1-MC16 TJ1-MC04
Número de ejes 16 4 (+1 si se utiliza la unidad TJ1-FL02)
Número de variadores y módulos de E/S 8 como máximo (variadores en modo velocidad o par)
Número de unidades maestras MECHATROLINK-II Se pueden conectar hasta 4 unidades maestras MECHATROLINK-II (véase a continuación TJ1-ML16/ML04)
Tiempo de ciclo Seleccionable a 0,5 ms, 1 ms ó 2 ms
Lenguaje de programación Lenguaje de Motion tipo BASIC
Multitarea Se pueden ejecutar hasta 14 tareas simultáneamente
E/S digital integrada 16 entradas y 8 salidas para uso general
Unidades de medida Definible por el usuario
Memoria disponible para programas de usuario 500 KB
Capacidad de almacenamiento de datos Hasta 2 MB de almacenamiento de datos en memoria flash
Almacenamiento de datos de programa, controlador de
motion
Almacenamiento de datos de programa, ordenador
personal
Puertos de comunicaciones 1 puerto Ethernet y 2 puertos serie
Actualización de firmware Mediante herramienta de software de Trajexia
Puerto Ethernet Características eléctricas Conforme con IEEE 802.3 (100BaseT)
Puerto serie Características eléctricas 1 puerto compatible con RS232C y 1 puerto compatible con RS485/RS422A (seleccionable mediante interruptor)
Conector Conector Ethernet RJ45
Conector Conector SUB-D9 (complemento incluido en la caja)
Sincronización Sincronización de arranque-parada (asíncrona)
Velocidad en baudios 1200 / 2400 / 4800 / 9600 / 19200 / 38400 bps
Formato de transmisión Número de bits
Modo de transmisión Punto a multipunto (1:N)
Protocolo de transmisión RS-232C (1:1) Protocolo de maestro Host Link,
Aislamiento galvánico Puerto RS422A
Buffers de comunicaciones 254 bytes
Control de flujo Ninguno
Terminador Sí, seleccionable mediante interruptor
Longitud del cable 15 m para RS232 y 500 m para RS422/485
SRAM con batería de reserva y flash ROM
El software Trajexia Motion Perfect gestiona una copia de seguridad en el disco duro del ordenador personal.
de datos
Bit de parada 1 ó 2 bits
Bit de paridad Par/Impar/Ninguno
RS-422A (1:N) Protocolo de maestro Host Link,
RS-485 (1:N) ASCII de propósito general
7 u 8 bits
Protocolo de esclavo Host Link,
ASCII de propósito general
Protocolo de esclavo Host Link,
ASCII de propósito general
2
, en cada una de las direcciones X, Y y Z durante 80 minutos.
Unidades maestras de MECHATROLINK-II de Trajexia
Concepto Especificaciones
Modelo TJ1-ML16 TJ1-ML04
Dispositivos controlados con interfaz
MECHATROLINK-II
Características eléctricas Conforme con la norma MECHATROLINK
Puertos de comunicaciones Unidad maestra de MECHATROLINK-II
Velocidad de transmisión 10 Mbps
Ciclo de comunicaciones 0,5 ms, 1 ms ó 2 ms
Tipos de estaciones esclavas Ejes o servodrives
Número de estaciones por maestro / tiempo de ciclo Máx. 16 estaciones / 2 ms Máx. 4 estaciones / 2 ms
Distancia de transmisión Máx. 50 metros sin utilizar repetidor
Servodrives Junma MLII, Sigma-2 y Sigma-3, E/S SmartSlice, otras unidades de E/S y variadores de frecuencia V7, F7 y G7
Variadores de frecuencia
Módulos de E/S
Máx. 8 estaciones / 1 ms Máx.4 estaciones / 1 ms
Máx. 4 estaciones / 0,5 ms (sólo controladores Sigma-3) Máx.4 estaciones / 0,5 ms (sólo controladores Sigma-3)
2 Motion Control
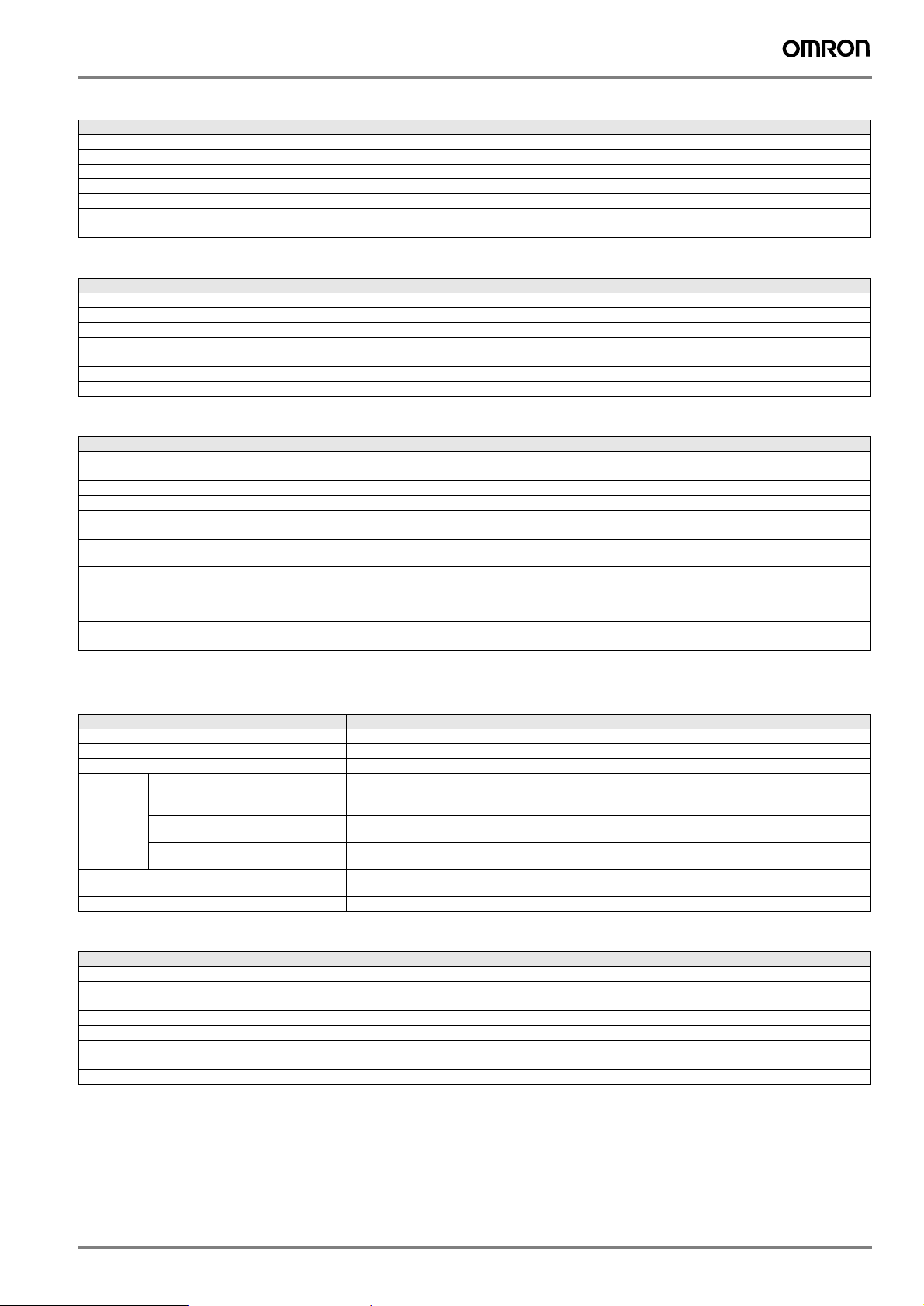
Unidad esclava de PROFIBUS de Trajexia
Conceptos Especificaciones
Modelo TJ1-PRT
Norma PROFIBUS Conforme con la norma PROFIBUS-DP EN50170 (DP-V0)
Puertos de comunicaciones 1 esclavo PROFIBUS-DP
Velocidad de transmisión 9,6, 19,2, 45,45, 93,75, 187,5, 500, 1500, 3000, 6000 y 12000 kbps
Números de nodo 0 a 99
Tamaño de E/S 0 a 120 palabras (16 bits), configurable, en ambas direcciones
Aislamiento galvánico Sí
Unidad esclava de DeviceNet de Trajexia
Conceptos Especificaciones
Modelo TJ1-DRT
Norma PROFIBUS Conforme a la norma DeviceNet de la primera edición del CIP
Puertos de comunicaciones 1 esclavo de DeviceNet
Velocidad de transmisión 125, 250 y 500 Kbps, detección automática
Números de nodo 0 a 63
Tamaño de E/S 0 a 32 palabras (16 bits), configurable, en ambas direcciones
Aislamiento galvánico Sí
Unidad CANopen de Trajexia
Conceptos Especificaciones
Modelo TJ1-CORT
Características eléctricas Compatibilidad con la norma CAN 2.0 B
Puertos de comunicaciones 1 CANopen
Velocidad de transmisión 20, 50, 125 y 500 Kbps
Estándares CiA implementados DS301, DS302
Compatibilidad con PDO 8 TPDO y 8 RPDO
Asignación PDO Es posible asignar cada PDO a un TJ1-MC16/04 VR, una tabla, o a una E/S digital o analógica.
Configuración del esclavo CANopen Es posible enviar cualquier mensaje SDO mediante BASIC durante el arranque-- y mientras esté en
Estados de red de CANopen Es posible configurar la red CANopen en los estados de funcionamiento y puesta en macha mediante el uso
Emergencias del esclavo CANopen Disponible mediante un comando BASIC
Aislamiento galvánico Sí
Los comandos BASIC generan la asignación y la dirección de inicio (*)
funcionamiento
de BASIC
Nota: (*) Las CPU TJ1-MC16/04 admiten hasta un total de 256 puntos de E/S digitales y 36 puntos de E/S analógicos.
Unidad Flexible Axis de Trajexia
Conceptos Especificaciones
Modelo TJ1-FL02
Número de ejes 2
Método de control Salida analógica de ±10 V en lazo cerrado o salida de tren de pulsos en lazo abierto
Encoder Realimentación de posición/velocidad 2 encoders incrementales y/o absolutos
E/S auxiliares 2 entradas de registro rápido, 2 entradas definibles, 2 salidas de activación, 4 salidas de conmutación de
Aislamiento galvánico Sí
Estándares de encoder absoluto
compatibles
Máxima frecuencia de entrada del
encoder
Máxima frecuencia de salida del
encoder/pulsos
SSI 200 kHz, EnDat 1 MHz y Tamagawa
6 MHz
2 MHz
posición o reset de ejes
Unidad de interfaz SmartSlice MECHATROLINK-II
Elemento Especificaciones
Modelo GRT1-ML2
Características eléctricas Conforme con la norma MECHATROLINK
Ciclo de comunicaciones 0,5, 1 ó 2 ms
Fuente de alimentación 24 V CC
Número de slices conectables Hasta 64 slices con una cantidad máxima de 128 bytes (*)
Asignación de E/S Asignación automática de E/S digital y analógica en la CPU TJ1-MC16/04
Configuración de la unidad slice No soportado
Unidades slice compatibles Consulte el apartado con información sobre pedidos
Nota: (*) Las CPU TJ1-MC16/04 admiten hasta un total de 256 puntos de E/S digitales y 36 puntos de E/S analógicos.
Controlador de Motion Trajexia 3
 Loading...
Loading...