

Omron TRAJEXIA DATASHEET [no]
TJ1-
Trajexia Motion Controller
Frittstående avansert bevegelseskontroller
som bruker MECHATROLINK-II motion bus
• 16-aksers avansert bevegelseskoordinering via en
robust og rask bevegelseskobling:
MECHATROLINK-II
• Støtter posisjons-, hastighets- og momentkontroll
• Hver akse kan kjøre komplekse
interpoleringsbevegelser, elektroniske kamverk og
elektroniske girkasser
• Avanserte feilsøkingsverktøy inkludert sporings- og
oscilloskopfunksjoner
• Avbruddsinnganger for hver servoakse
• Kontroll av servoer, omformere og I/O-er over et
enkelt motion-nettverk
• Multitaskingkontroller for opptil 14 oppgaver samtidig
• Åpen kommunikasjon – innebygd Ethernet,
PROFIBUS-DP, DeviceNet og CANopen som
alternativer
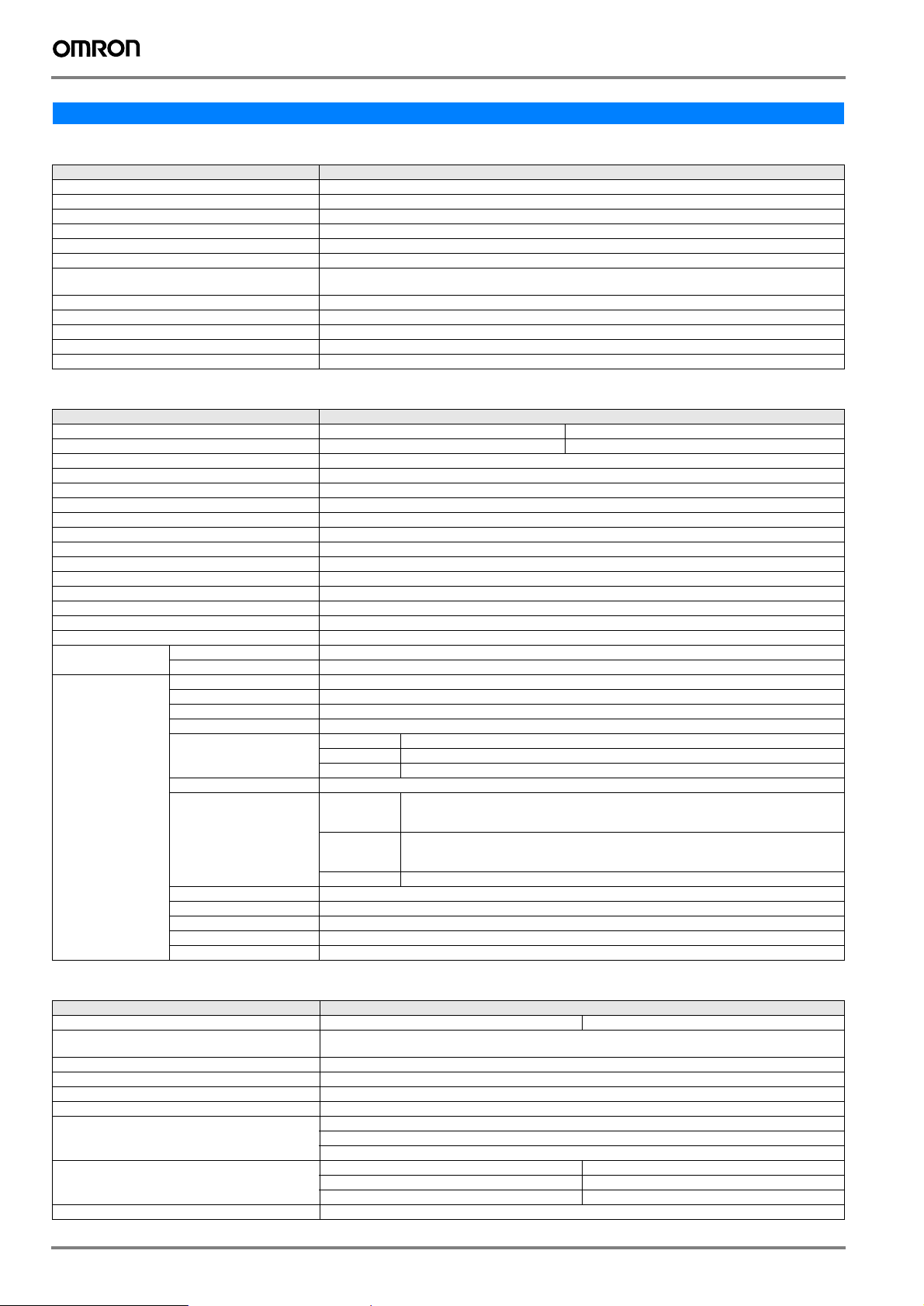
Systemkonfigurasjon
NS-serie
HMI
Digitale I/O
Host-link
Inngang
Avbruddsinngang
i posisjon
Sigma-II-serie
servomotorer
CJ-serie PLS
Motion controller
Sigma-II-serie
servodrift
JUSP-NS115
MECHATROLINK-IIenhet
Ethernet
MECHATROLINK-II
Sigma-II-serie
lineærmotorer
CX-One
Trajexiaverktøy
Feltbuss
PROFIBUS-DP-
Frekvensomformer
enhet
DeviceNet-
GRT1-ML2
SW1 SW2
CN2
CN1
A/B
enhet
CANopen-
SmartSlice-IO-enheter
enheter
1Trajexia Motion Controller
Spesifikasjoner
Trajexia – generelle spesifikasjoner
Post Detaljer
Modell TJ1-@
Omgivelsestemperatur, drift 0 til 55 °C
Luftfuktighet, drift 10 til 90 ×RF
Omgivelsestemperatur, oppbevaring –20 til 70 °C
Luftfuktighet, oppbevaring 90 % maks. (uten kondensering)
Atmosfære Ingen etsende gasser
Vibrasjonsbestandighet 10 til 57 Hz (0,075 mm amplitude)
Støtbestandighet 143 m/s
Isolasjonsbestandighet 20 MOhm
Dielektrisk styrke 500 V
Beskyttelsesstruktur IP20
Internasjonale standarder CE, EN 61131-2, cULus, Lloyds (cULus-godkjenning kommer for TJ1-MC04 og TJ1-ML04) RoHS-kompatibel
Akselerasjon 57–100 Hz: 9,8 m/s
2
, 3 ganger hver i X-, Y- og Z-retningene.
Trajexia Motion Control-enheter
Post Detaljer
Modell TJ1-MC16 TJ1-MC04
Antall akser 16 4 (+1 med TJ1-FL02-enhet)
Antall omformere og I/O-moduler 8 maksimum (omformere i hastighets- eller momentmodus)
Antall MECHATROLINK-II-masterenheter Opptil 4 MECHATROLINK-II-masterenheter (TJ1-ML16/ML04, se nedenfor) kan kobles til
Syklustid 0,5 ms, 1 ms eller 2 ms kan velges
Programmeringsspråk BASIC-lignende Motion-språk
Fleroppgavekjøring Opptil 14 oppgaver kan kjøres samtidig
Innebygd digital I/O 16 innganger og 8 utganger, for generelle formål
Målenheter Brukerdefinerbart
Tilgjengelig minne for brukerprogrammer 500KB
Datalagringskapasitet Opptil 2 MB flash-datalagring
Lagring av programdata, motion controller SRAM med batteri-backup og flash-ROM
Lagring av programdata, PC Trajexia Motion Perfect-programvaren administrerer en sikkerhetskopi av PC-ens harddisk.
Kommunikasjonsporter 1 Ethernet-port og 2 serieporter
Hardware oppdatering Via Trajexia programvaren
Ethernet-port Elektriske egenskaper Samsvarer med IEEE 802.3 (100BaseT)
Serieport Elektriske egenskaper Samsvarer 1 port til RS232C og 1 port til RS485/RS422A (velges med bryter)
Kontakt RJ45 Ethernet-kontakt
Kontakt SUB-D9-kontakt (motpart følger med)
Synkronisering Start-stoppsynkronisering (asynkron)
Baudhastighet 1200 / 2400 / 4800 / 9600 / 19 200 / 38 400 bps
Overføringsformat Databitlengde 7 eller 8 biter
Stoppbit 1 eller 2 biter
Paritetsbit lik/ulik/ingen
Overføringsmodus Punkt-til-multipunkt (1:N)
Overføringsprotokoll RS-232C (1:1) Host Link hovedprotokoll,
Host Link slaveprotokoll,
ASCII generell
RS-422A (1:N) Host Link hovedprotokoll,
Host Link slaveprotokoll,
ASCII generell
RS-485 (1:N) ASCII generell
Galvanisk isolasjon RS422A-port
Kommunikasjonsbuffere 254 byte
Flytkontroll Ingen
Terminator Ja, kan velges med bryter
Kabellengde 15 m for RS232 og 500 m for RS422/485
2
i X-, Y- og Z-retningene i 80 minutter.
Trajexia MECHATROLINK-II-masterenheter
Post Spesifikasjoner
Modell TJ1-ML16 TJ1-ML04
Kontrollerte enheter med
MECHATROLINK-II-grensesnitt
Elektriske egenskaper Samsvarer med MECHATROLINK-standarden
Kommunikasjonsporter MECHATROLINK-II-masterenhet
Overføringshastighet 10 Mbps
Kommunikasjonssyklus 0,5 ms, 1 ms eller 2 ms
Slavetyper Akser eller servodrifter
Antall stasjoner per enhet / syklustid Maks. 16 stasjoner / 2 ms Maks. 4 stasjoner / 2 ms
Overføringshastighet Maks. 50 m uten bruk av forsterker
Junma MLII, Sigma-2 og Sigma-3 servodrifter, SmartSlice IO-enheter, andre I/O-enheter og V7, F7 og
G7 frekvensomformere
Frekvensomformere
I/O-moduler
Maks. 8 stasjoner / 1 ms Maks. 4 stasjoner / 1 ms
Maks. 4 stasjoner / 0,5 ms (bare Sigma-3 servodrifter) Maks. 4 stasjoner / 0,5 ms (bare Sigma-3 servodrifter)
2 Motion Control
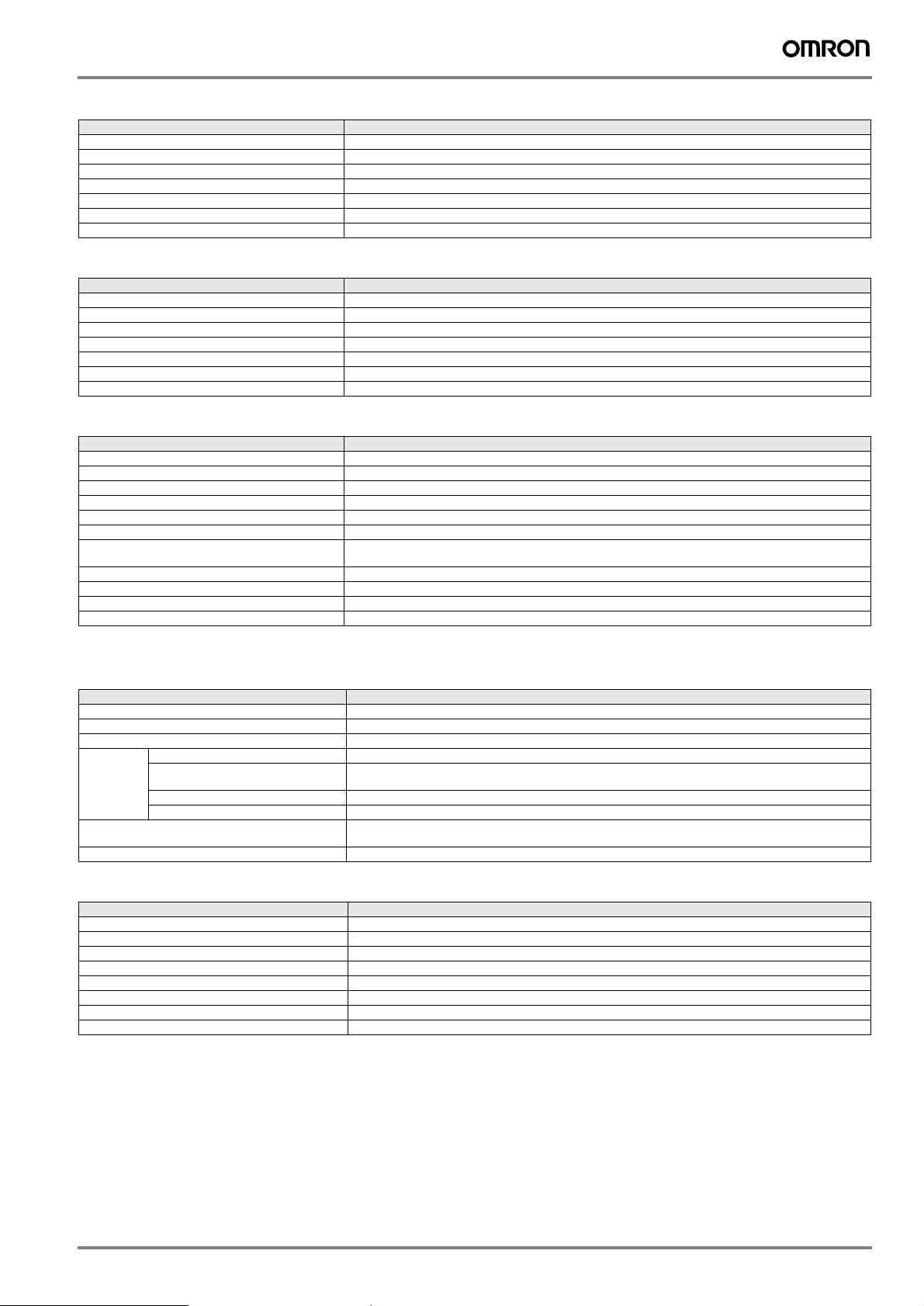
Trajexia PROFIBUS-slaveenhet
Post Spesifikasjoner
Modell TJ1-PRT
PROFIBUS-standard Samsvarer med PROFIBUS-DP-standarden EN50170 (DP-V0)
Kommunikasjonsporter 1 PROFIBUS-DP--slave
Overføringshastighet 9,6, 19,2, 45,45, 93,75, 187,5, 500, 1500, 3000, 6000 og 12 000 kbps
Nodeantall 0 til 99
I/O-størrelse 0 til 120 ord (16-bit), konfigurerbar, for begge retninger
Galvanisk isolasjon Ja
Trajexia DeviceNet-slave
Post Spesifikasjoner
Modell TJ1-DRT
PROFIBUS-standard Samsvarer med DeviceNet-standarden i CIP-utgave 1
Kommunikasjonsporter 1 DeviceNet-slave
Overføringshastighet 125, 250 og 500 kbps, auto-detekt
Nodeantall 0 til 63
I/O-størrelse 0 til 32 ord (16-bit), konfigurerbar, for begge retninger
Galvanisk isolasjon Ja
Trajexia CANopen-enhet
Post Spesifikasjoner
Modell TJ1-CORT
Elektriske egenskaper Samsvarer med CAN 2.0 B
Kommunikasjonsporter 1 CANopen
Overføringshastighet 20, 50, 125 og 500 kbps
CiA-standarder oppfylt DS301, DS302
PDO-støtte 8 TPDO og 8 RPDO
PDO-tilordning Hver PDO kan tilordnes TJ1-MC16/04 VR, tabell, analog og digital IO.
Konfigurering av CANopen-slave Alle SDO-meldinger kan sendes med BASIC under oppstart og drift
CANopen-nettverkstilstander CANopen-nettverket kan settes til føroperasjonell og operasjonell med BASIC
Nødstopp for CANopen-slave Tilgjengelig med BASIC-kommando
Galvanisk isolasjon Ja
BASIC-kommandoer for tilordning og startadresse (*)
Merk: (*) TJ1-MC16/04 CPU-er støtter totalt 256 digitale IO-punkter og 36 analoge IO-punkter.
Trajexia fleksibel akseenhet
Post Spesifikasjoner
Modell TJ1-FL02
Antall akser 2
Kontrollmetode ±10 V analog utgang i lukket loop eller pulstogutgang i åpen loop
Enkoder Tilbakemelding om posisjon/hastighet 2 inkrementelle og absolutte encodere
Hjelpe-I/O-er 2 raske avbruddsinnganger, 2 definerbare innganger, 2 aktiverbare utganger, 4 posisjonsbryterutganger eller
Galvanisk isolasjon Ja
Absolutte encoderstandarder som
støttes
Maksimal frekvens enkoderinngang 6 MHz
Maksimal frekvens enkoder-/pulsutgang 2 MHz
SSI 200 kHz, EnDat 1 MHz og Tamagawa
aksetilbakestillinger
SmartSlice MECHATROLINK-II-grensesnittenhet
Post Spesifikasjoner
Modell GRT1-ML2
Elektriske egenskaper Samsvarer med MECHATROLINK-standarden
Kommunikasjonssyklus 0,5, 1 eller 2 ms
Strømforsyning 24 VDC
Antall enheter som kan kobles sammen Opptil 64 enheter med maksimalt 128 byte (*)
IO-tilordning Automatisk analog og digital IO-tilordning til TJ1-MC16/04 CPU
Slice-enhetskonfigurasjon Ikke støttet
Støttede Slice-enheter Se delen om bestillingsinformasjon
Merk: (*) TJ1-MC16/04 CPU-er støtter totalt 256 digitale IO-punkter og 36 analoge IO-punkter.
Trajexia Motion Controller 3
 Loading...
Loading...