

1
Overview
2
Device Components
Motor Condition
Monitoring Device
User's Manual
K6CM
3
Measuring and
Monitoring System
4
Introduction of
the Motor condition
monitoring Tool
5
Installation and Wiring
6
How to Use
the Motor condition
monitoring Tool
7
Monitoring with K6CM
and Motor condition
monitoring Tool
8
Monitoring and Setting
Using the EtherNet/IP
Devices
9
Monitoring and Setting
Using the Modbus TCP
Devices
N219-E1-12
10
Trouble shooting
A
Appendices
I
Index
NOTE
All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in
any form, or by any means, mechanical, electronic, photocopying, recording, or otherwise, without the prior
written permission of OMRON.
No patent liability is assumed with respect to the use of the information contained herein. Moreover, because
OMRON is constantly striving to improve its high-quality products, the information contained in this manual is
subject to change without notice. Every precaution has been taken in the preparation of this manual. Nevertheless, OMRON assumes no responsibility for errors or omissions. Neither is any liability assumed for damages
resulting from the use of the information contained in this publication.
Trademarks
• Microsoft, Windows is either registered trademarks or trademarks of Microsoft Corporation in the United States
and other countries.
• CIP and EtherNet/IP
TM
are trademarks of ODVA.
• Modbus is a registered trademark or trademark of Schneider Electric USA, Inc. in Japan, the United States or
other countries.
Other company names and product names in this document are the trademarks or registered trademarks of their
respective companies.
Copyrights
Microsoft product screen shots reprinted with permission from Microsoft Corporation.

Preface
Thank you for purchasing K6CM Motor Condition Monitoring Devices.
This manual describes how to use the K6CM. Read this manual thoroughly and be sure you understand it before attempting to use the K6CM correctly according to the information provided. Keep this
manual in a safe place for easy reference.
PDF version of this manual can be downloaded from the OMRON website.
(http://www.omron.co.jp)
Preface
K6CM Motor Condition Monitoring Device User’s Manual (N219)
1
Terms and Conditions Agreement
Terms and Conditions Agreement
Warranty, Limitations of Liability
Warranties
Exclusive Warranty
Omron’s exclusive warranty is that the Products will be free from defects in materials and workmanship for a period of twelve months from the date of sale by Omron (or such other period expressed in
writing by Omron). Omron disclaims all other warranties, express or implied.
Limitations
OMRON MAKES NO WARRANTY OR REPRESENTATION, EXPRESS OR IMPLIED, ABOUT
NON-INFRINGEMENT, MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE OF
THE PRODUCTS. BUYER ACKNOWLEDGES THAT IT ALONE HAS DETERMINED THAT THE
PRODUCTS WILL SUITABLY MEET THE REQUIREMENTS OF THEIR INTENDED USE.
Omron further disclaims all warranties and responsibility of any type for claims or expenses based
on infringement by the Products or otherwise of any intellectual property right.
Buyer Remedy
Omron’s sole obligation hereunder shall be, at Omron’s election, to (i) replace (in the form originally
shipped with Buyer responsible for labor charges for removal or replacement thereof) the non-complying Product, (ii) repair the non-complying Product, or (iii) repay or credit Buyer an amount equal
to the purchase price of the non-complying Product; provided that in no event shall Omron be
responsible for warranty, repair, indemnity or any other claims or expenses regarding the Products
unless Omron’s analysis confirms that the Products were properly handled, stored, installed and
maintained and not subject to contamination, abuse, misuse or inappropriate modification. Return of
any Products by Buyer must be approved in writing by Omron before shipment. Omron Companies
shall not be liable for the suitability or unsuitability or the results from the use of Products in combination with any electrical or electronic components, circuits, system assemblies or any other materials or substances or environments. Any advice, recommendations or information given orally or in
writing, are not to be construed as an amendment or addition to the above warranty.
See http://www.omron.com/global/ or contact your Omron representative for published information.
Limitation on Liability; Etc
OMRON COMPANIES SHALL NOT BE LIABLE FOR SPECIAL, INDIRECT, INCIDENTAL, OR CONSEQUENTIAL DAMAGES, LOSS OF PROFITS OR PRODUCTION OR COMMERCIAL LOSS IN ANY
WAY CONNECTED WITH THE PRODUCTS, WHETHER SUCH CLAIM IS BASED IN CONTRACT,
WARRANTY, NEGLIGENCE OR STRICT LIABILITY.
Further, in no event shall liability of Omron Companies exceed the individual price of the Product on
which liability is asserted.
2
K6CM Motor Condition Monitoring Device User’s Manual (N219)
Application Considerations
Suitability of Use
Omron Companies shall not be responsible for conformity with any standards, codes or regulations
which apply to the combination of the Product in the Buyer’s application or use of the Product. At
Buyer’s request, Omron will provide applicable third party certification documents identifying ratings
and limitations of use which apply to the Product. This information by itself is not sufficient for a complete determination of the suitability of the Product in combination with the end product, machine, system, or other application or use. Buyer shall be solely responsible for determining appropriateness of
the particular Product with respect to Buyer’s application, product or system. Buyer shall take application responsibility in all cases.
NEVER USE THE PRODUCT FOR AN APPLICATION INVOLVING SERIOUS RISK TO LIFE OR
PROPERTY OR IN LARGE QUANTITIES WITHOUT ENSURING THAT THE SYSTEM AS A WHOLE
HAS BEEN DESIGNED TO ADDRESS THE RISKS, AND THAT THE OMRON PRODUCT(S) IS
PROPERLY RATED AND INSTALLED FOR THE INTENDED USE WITHIN THE OVERALL EQUIPMENT OR SYSTEM.
Terms and Conditions Agreement
Programmable Products
Omron Companies shall not be responsible for the user’s programming of a programmable Product, or
any consequence thereof.
Disclaimers
Performance Data
Data presented in Omron Company websites, catalogs and other materials is provided as a guide for
the user in determining suitability and does not constitute a warranty. It may represent the result of
Omron’s test conditions, and the user must correlate it to actual application requirements. Actual performance is subject to the Omron’s Warranty and Limitations of Liability.
Change in Specifications
Product specifications and accessories may be changed at any time based on improvements and other
reasons. It is our practice to change part numbers when published ratings or features are changed, or
when significant construction changes are made. However, some specifications of the Product may be
changed without any notice. When in doubt, special part numbers may be assigned to fix or establish
key specifications for your application. Please consult with your Omron’s representative at any time to
confirm actual specifications of purchased Product.
Errors and Omissions
Information presented by Omron Companies has been checked and is believed to be accurate; however, no responsibility is assumed for clerical, typographical or proofreading errors or omissions.
K6CM Motor Condition Monitoring Device User’s Manual (N219)
3
Safety Precautions
Safety Precautions
Definition of Precautionary Information
The following notation is used in this manual to provide precautions required to ensure safe usage of
the K6CM Motor Condition Monitoring Devices.
The safety precautions that are provided are extremely important to safety. Always read and heed the
information provided in all safety precautions.
Symbols
The following notation is used.
CAUTION
Indicates a potentially hazardous situation which, if not avoided,
may result in minor or moderate injury or in property damage.
Symbol Meaning
• General Caution
Indicates non-specific general cautions, warnings, and dangers.
Caution
Prohibition
Mandatory
Caution
• Electrical Shock Caution
Indicates possibility of electric shock under specific conditions.
• General Prohibition
Indicates non-specific general prohibitions.
• Disassembly Prohibition
Indicates prohibitions when there is a possibility of injury, such as from electric
shock, as the result of disassembly.
• General Caution
Indicates non-specific general cautions, warnings, and dangers.
CAUTION
The following are common to the Motor Condition Monitoring Devices.
Electric shock or injury may occasionally occur. Follow the instructions below to use this product.
Electrical shock may cause minor injury. Do not touch the product except for the front-panel buttons
while electricity is being supplied.
There is a risk of minor electrical shock, fire, or device failure. Do not allow any pieces of metal,
conductors, or cutting chips that occur during the installation process to enter the product.
Explosions may cause minor injuries. Do not use the product in locations with inflammable or explosive gases.
4
K6CM Motor Condition Monitoring Device User’s Manual (N219)

Safety Precautions
CAUTION
There is a risk of minor electrical shock, fire, or device failure. Do not disassemble, modify, repair, or
touch the inside of the product.
If the product fails, monitoring and alarm outputs may fail to operate. This may result in physical
damage to the facilities, equipment, or other devices that are connected to it. To reduce this risk,
inspect the product regularly. To make the product fail-safe, take alternative safety measures, such
as the installation of monitoring devices on a separate circuit.
Incorrect wiring the input and output may occasionally result in fire and may occasionally occur
resulting in property damage to connected equipment and machinery. Wire the input and output terminals correctly before power is supplied.
If installation of wiring material is shallow, material damage due to ignition may occur in rare cases.
When wiring, be sure to insert the wiring material all the way in.
The following are for K6CM-CI2 and K6CM-IS.
Electric shock may occasionally occur. Follow the instructions below to use this product.
Electric shock may occasionally occur.
Always turn OFF the power supply before connecting the special CT or special ZCT (IRT).
Electric shock may occasionally occur. As for the primary wire clamped with the special CT, be sure
to use the insulated wires at temperatures below 65°C that have rated minimum 600 V and at least
basic insulation. When clamping with conductive materials like busbar etc., use the special CT after
ensuring equal to or more than basic insulation e.g. covering with insulating objects.
Electric shock may occasionally occur. When wiring voltage input wires to the special ZCT (IRT), be
sure to wire after checking that the system power supply is in non-energized state.
Electric shock may occasionally occur. As for the wires for clamping with the special ZCT (IRT), be
sure to use the insulated wires that have rated minimum 600 V and at least basic insulation.
Keep the secondary terminal cover of the special CT and ZCT (IRT) securely closed.
Touching any of electrode may result in electric shock.
K6CM Motor Condition Monitoring Device User’s Manual (N219)
5
Safety Precautions
K6CM-VB K6CM-IS K6CM-CI2
UL certification 480 V 480 V 480 V
Not UL certification 600 V 480 V 600 V
Conformance to Safety Standards
• Reinforced insulation is provided between input power supply, output, and between other terminals.
• To install a recommended fuse for this product according to the instruction manual is necessary.
• If the equipment is used in a manner not specified by the manufacturer, the protection provided
by the equipment may be impaired.
• Connect the wiring of the special ZCT (IRT) to the terminal block corresponding to the thickness
of AWG 18 or more.
• K6CM must be installed within a control panel as an embedded device, if using as a UL certified
product.
• The motor rated voltage in regards to safety standard is as follows:
• K6CM is Over-voltage category II.
• K6CM will not conform to safety standards if attaching the vibration sensor with adhesive. In the
case of disconnection, take safety measures such as fixing the cables.
Conformance to EN/IEC Standards
This is a class A product. In residential areas it may cause radio interference, in which case the
user may be required to take adequate measures to reduce interference.
6
K6CM Motor Condition Monitoring Device User’s Manual (N219)
Precautions for Safe Use
Be sure to observe the following precautions to prevent malfunction or adverse affects on the performance or functionality of the product. Not doing so may occasionally result in unexpected events. Do
not handle the K6CM in ways that exceed the ratings.
The followings are common to the Motor Condition Monitoring Devices.:
(1) Do not use or store the product in the following locations:
• Locations subject to water or oil (for K6CM devices and K6CM-VBS1 sensor preamplifier)
• Outdoor or locations subject to direct sunlight
• Locations subject to dust or corrosive gases (particularly sulfurizing gases, ammonia, etc.)
• Locations subject to rapid temperature changes
• Locations prone to icing and dew condensation
• Locations subject to excessive vibration or shock
• Locations subject to rain and wind damage
• Locations subject to influence of static electricity and noise
• Locations subject to bugs and small animals
(2) Use and store the product in a location where the ambient temperature and humidity are within the
specified ranges. If applicable, provide forced cooling.
(3) Mount the product in the correct direction for installation.
(4) Check terminal polarity when wiring and wire all connections correctly. The power supply terminals
do not have polarity.
(5) Do not wire the input and output terminals incorrectly.
(6) Make sure the power supply voltage and loads are within the specifications and ratings for the
product.
(7) Make sure the crimp terminals for wiring are of the specified size.
(8) Do not connect anything to terminals that are not being used.
(9) Use a power supply that will reach the rated voltage within 1 second after the power is turned ON.
(10) In order to prevent inductive noise, wire the lines connected to the product separately from power
lines carrying high voltages or currents. Also, do not wire in parallel with or on the same cables as
power lines. Other measures for reducing noise are to separate from ducts including noisy lines.
(11) Do not install the product near equipment that generates high frequencies or surges.
(12) Do not use the product near radio wave receivers. Doing so may cause incoming radio wave inter-
ference.
(13) Install an external switch or a circuit breaker and label it clearly so that the operator can quickly turn
OFF the power supply.
(14) When discarding the product, properly dispose of it as industrial waste.
(15) Make sure the LCD and the LEDs for output indicators operate correctly. Depending on the appli-
cation environment, the indicators and other plastic parts may wear prematurely and become diffi-
cult to see. Check and replace these parts regularly.
(16) The maximum terminal temperature is 80°C. Use wires with a heat resistance of 80°C min to wire
the terminals.
(17) Don't use because it may be damaged inside the product when the product fall by mistake.
(18) Read this manual carefully before using the product.
(19) Install product so that the load doesn't span the product body.
(20) Be sure to use power terminals carefully, because power supply terminals have hazardous voltage.
(for K6CM devices only. Except for K6CM-VBS1 sensors input.)
(21) Only a professional with an understanding of electricity and electric devices must handle it.
(22) Confirm the wiring the input and output terminals correctly before power is supplied.
Precautions for Safe Use
K6CM Motor Condition Monitoring Device User’s Manual (N219)
7
Precautions for Safe Use
(23) Do not install the product close contact with the heating element.
(24) Do not wire anything to the release holes.
(25) Do not tilt or twist a flat-blade screwdriver while it is inserted into a release hole on the terminal
block. The terminal block may be damaged.
(26) Insert a flat-blade screwdriver into the release holes at an angle. The terminal block may be dam-
aged if you insert the screwdriver straight in.
(27) Do not allow the flat-blade screwdriver to fall out while it is inserted into a release hole.
(28) The terminal block may be damaged if you insert a flat-blade screwdriver in the release hole with
excessive force. When inserting a flat-blade screwdriver into the release holes, operate with a
force of 15·N or less.
(29) Do not bend a wire past its natural bending radius or pull on it with excessive force. Doing so may
cause the wire disconnection.
(30) Do not insert more than one wire into each terminal insertion hole.
(31) To prevent wiring materials from smoking or ignition, use the wiring materials given in the following
table.
Wire type Wiring material Recommended wires
Solid/ Stranded wire Copper
(32) Use the wire given in this manual.
(33) When wiring, wire by enough length.
(34) Follow the directions indicated in the manual for connecting EtherNet/IP
result in communications failure.
TM
(35) If EtherNet/IP
tag data links (cyclic communications) are used with a repeating hub, the communications load on the network will increase. This will increase collisions and may prevent stable
communications. Do not use repeating hubs on networks where tag data links are used. Use an
Ethernet switch instead.
(36) Do not continue to use the product if the front surface peels.
2
0.25 to 1.5 mm
AWG24 to AWG16
Stripping length
Without ferrules
8 mm
TM
or the cable. It may
The followings are for K6CM-VB and K6CM-VBS1 sensors.
(37) Protection structure of the sensor head/cable
Do not use the product in the condition that the protection structure is deteriorated, e.g., swelling or
crack of housing material or sealing material. Continued use with deteriorated protective structure
will cause cutting oil to enter inside the product, possibly destroying or burning.
(38) Use the designated communications cable with the length between the sensor and the product
within specification requirements.
(39) Connect the preamplifier and the body after the power is turned OFF.
The followings are only for K6CM-CI2.
(40) Open locking hook and clamp to each phase. After clamping, firmly engage until a sound is heard.
(41) Use the special CTs and the CT cables that are specified by OMRON' s model number.
Special CTs (The cable is included with the special CT.):
K6CM-CICB005, K6CM-CICB025, K6CM-CICB100,
K6CM-CICB200, K6CM-CICB400, K6CM-CICB600
8
K6CM Motor Condition Monitoring Device User’s Manual (N219)

Precautions for Safe Use
The followings are for K6CM-VB, K6CM-VBS1 sensors, K6CM-IS and ZCT(IRT).
(42) Do not connect or disconnect the cables between the sensor and the product while power is being
supplied. Doing so may result in malfunction or failure of the product.
(43) Do not place heavy objects on the cables between the sensor and the Product, and do not apply
excessive force to bend or pull the cables. Doing so may cause a failure.
The following is for K6CM-IS and K6CM-CI2.
(44) The product is impossible to measure correctly in the state of open phase. Use the product in the
state of non-open phase.
The following is only for K6CM-IS.
(45) Use the product within the range of specifications and the rated input voltage.
K6CM Motor Condition Monitoring Device User’s Manual (N219)
9

Precautions for Correct Use
Precautions for Correct Use
Observe the following operating methods to prevent failure and malfunction.
The followings are common to the K6CM.
(1) Use the power supply voltage, input power, and other power supplies and transformers with suit-
able capacities and rated outputs.
(2) When cleaning the product, do not use thinners or solvents. Use commercial alcohol.
(3) Confirm that wire does not stick up after wiring of stranded cable.
(4) In case of passage wiring, install these by 10 A per 1 terminal because when products are con-
nected more than one in parallel, quite many electric currents to be called off.
(5) The terminal block may be damaged if specialized tool is not used. Use a recommended flat-blade
screwdriver to inserted into a release hole on the terminal block.
(6) Do not apply excessive force to bend or pull the communications cables, and do not place heavy
objects on the cables. Doing so will damage the cables.
(7) Refer to the status information of the product on the data link communications and refer to the
received data only in case of no errors occur with the product.
The followings are for K6CM-VB and K6CM-VBS1 sensors.
(8) Wipe off the dirt on the mounting surface and screw mounting with 17 mm nominal size of wrench.
• Recommended mounting screw tightening torque: 4.4 to 5.4 N•m
• Mounting hole dimension: M6 holes (depth: 9 mm min.)
(9) The easy-positioning magnet is for the purpose of seeking the detected position. In the case of
using the product permanently, be sure to use it after it is mounted by screws.
(10) In the case of vertical mounting or reverse mounting with the easy positioning magnet, be careful
of the sensor falling.
(11) Refer to Installation of the Vibration Sensor Head on page 5-7 to install the sensor correctly. It may
be impossible to detect high frequency vibration.
(12) Do not disassemble the sensor. It may not operate correctly.
(13) Be careful of incorrect wiring or short circuit for wiring.
(14) Do not use the preamplifier connected to the other products.
(15) If there is a vibration reduction device such as dampers and rubbers between the vibration mea-
surement object and the sensor, it is difficult to detect the vibration and it will not be able to measure it correctly, so do not install as much as possible.
(16) In the case of insertion and removal of connector, be sure to do it by holding the connector with
hands.
(17) Do not remove the connector with holding the cable.
(18) Check the direction of the key groove before you use the connector.
(19) Do not wire with wet hands. It may result in operation failure or product damage when power is
being supplied to the product.
(20) When fitting the connector, be sure to do it with hands, not to use tools. It may result in damages if
the tool like plier is used.
(21) In the case of removal of the fitness of the connector between the sensor and the preamplifier, be
careful to do it not to adhere water or dirt on the fitting surface. It may result in faulty contact at the
connector.
(22) Install cables to avoid any force is applied to the connector. In case the any force is applied to the
connector, it causes that the performance of protection structure becomes incapable.
(23) Do not use the connector as a scaffold or put heavy objects on it. It may result in connector dam-
age.
10
K6CM Motor Condition Monitoring Device User’s Manual (N219)

Precautions for Correct Use
(24) Do not mount the way that the force is directly applied to the fitting part of the connector or the root
part of the cable connection. It may result in connector damage or cable disconnection.
(25) When bending cables, use cables with a minimum bending radius of 25 mm.
(26) Use preamplifier after it is fixed on the DIN rail or with screws. In case of using unfixed one, it is in
the condition that force is easily applied to the cable, and the cable may be broken.
(27) About oil-resistance of sensor head/cable; (Not tested by UL)
Follow the procedure below in case of using the product under the condition that uses cutting oil
since the life expectancy and the performance of the product are affected.
• Use the product in the specified condition for cutting oil
• Use the product at the dilution rate of cutting oil that is recommended by the cutting oil makers.
• Do not use the product in oil or water.
There are cases that the influence on the life expectancy of the product differs depending on the
type of the use oil. Make sure in advance that there is no deterioration of the sealing material by the
cutting oil, before using the product.
(28) Do not use the alarm output function for control. This function can be used only to detect abnormal
conditions and to output the alarm.
(29) Avoid using the product in places near a radio, a television set, or a wireless device.
The product may result in radio disturbance for these devices.
The followings are only for K6CM-IS.
(30) Do not clamp directly to the lines exceeding 480 VAC. UL certification complies with 480 VAC.
(31) Use the special ZCT (IRT) after fixing it with screws. If used without fixing, a load is easily applied
on the cable, and the cable may become disconnected.
(32) ZCT (IRT) is an special product. Do not use it for any other purposes. Otherwise, failure may occur.
(33) When clamping wires with special ZCT (IRT), do it in a right direction. If clamped in the wrong
direction, correct measurement cannot be taken.
(34) The distorted ratio of the input waveform should be 30% or less. If it is used in a circuit with large
distortion of waveform, it may cause unnecessary operation.
(35) Do not use in a circuit with the waveform is distorted. The error will increase due to the influence of
the distorted waveform.
The followings are only for K6CM-CI2.
(36) Make sure that the rating of the used special CT and the special CT setting of the product agree.
(37) Do not ground the special CT. Doing so may cause instability when measuring failure.
(38) Do not clamp directly to the lines exceeding 600 VAC. UL certification complies with 480 VAC.
(39) Place the cable between the special CT and the product at a distance of 6 mm or more from other
cables.
(40) Associated leads of the special CT shall be maintained within the same overall enclosure.
(41) The special CT are intended for installation within the same enclosure as the equipment. These
may not be installed within switchgears and panel boards.
K6CM Motor Condition Monitoring Device User’s Manual (N219)
11

Manual Structure
7 - 9
7 Motor Monitoring with the K6CM Devices and the Software Tool
K6CM Motor Condition Monitoring Device User’s Manual (N219)
7-3 Motor Monitoring Using Software Tools
7
7-3-1 Monitoring Procedure with Motor Condition Monitoring Tool
7-3 Motor Monitoring Using Software
Tools
This section describes how to monitor a motor using the software tools.
It depends on the following procedure.
1 Click the [Monitoring setting] Button and set "Monitoring cycle".
2 In the upper right corner of the screen, select [Monitoring by motor category] or [Monitoring by
monitoring category] from the pulldown list.
3 Monitoring is performed on the [Monitoring by motor category] screen or [Monitoring by monitor-
ing category] screen.
Precautions for Correct Use
In order to monitor the K6CM with the software tool, the communications service of the SYSMAC Gateway communication driver between the computer and the K6CM must be in the start
status.
The status of SYSMAC Gateway's communication service can be checked on the SYSMAC
Gateway Console screen.
The SYSMAC Gateway Console screen is activated by clicking [Device setting] on the startup
screen or by clicking the [SYSMAC Gateway Console] Button on the monitoring screen.
Click the [Monitoring setting] Button.
Set Monitoring cycle on the following screen.
The settable range is 5 to 99999 seconds. The default value is 600 seconds (10 minutes).
Version Information
With software tool version 1.2.0.0 or later, the unit of monitoring cycle can be set.
7-3-1 Monitoring Procedure with Motor Condition Monitoring Tool
7-3-2 Set the Monitoring Cycle
Using this pull down list allows you to
change the unit of monitoring cycle.
Selectable units are seconds, minutes,
hours, and days.
Level 1 heading
Level 2 heading
Level 3 heading
Gives the current
headings.
Page tab
Gives the number
of the main section.
Level 2 heading
Level 3 heading
A step in a procedure
Indicates a procedure.
Manual name
Special information
Icons indicate precautions,
additional information, or
reference information.
Manual Structure
Page Structure
The following page structure is used in this manual.
12
K6CM Motor Condition Monitoring Device User’s Manual (N219)

Special Information
Special information in this manual is classified as follows:
Precautions for Safe Use
Precautions on what to do and what not to do to ensure safe usage of the product.
Precautions for Correct Use
Precautions on what to do and what not to do to ensure proper operation and performance.
Additional Information
Additional information to read as required.
This information is provided to increase understanding or make operation easier.
Version Information
Information on differences in specifications and functionality for CPU Units with different unit versions
and for different versions of the Sysmac Studio is given.
Manual Structure
Note References are provided to more detailed or related information.
K6CM Motor Condition Monitoring Device User’s Manual (N219)
13
Revision History
Revision History
A manual revision code appears as a suffix to the catalog number on the front cover of the manual.
N219-E1-12
Revision code Date Revised content
01 December 2017 Original production
02 December 2017 Added descriptions and corrected mistakes.
03 December 2017 Added descriptions and corrected mistakes.
04 April 2018 Added descriptions and corrected mistakes.
05 April 2018 Corrected mistakes.
06 June 2018 • Added descriptions about the selection function of the Transistor
07 October 2018 • Added descriptions about the following functions according to the
08 December 2018 • Deleted the descriptions of "Adhesive attachment will be released
09 December 2018 • Added descriptions on the multicast of tag data link.
10 April 2019 • Changed descriptions on multicast communications of tag data link.
11 May 2019 • Added descriptions on the degradation level in motor or load imbal-
Revision code
output method with the version upgrade of the software tool Motor
condition monitoring Tool (version 1.0.0.2 to 1.1.0.0)
• Added following functions according to the upgrade of the Eip cpu
version (version 1.00 to 1.10) of the K6CM device
• Selection function of the Transistor output method
(Not that it can be selected only when using the software tool
Motor condition monitoring Tool version 1.1.0.0 or higher.)
• Trigger function with the external input of the insulation resistance
type K6CM-ISM device
• Corrected mistakes.
upgrade version of the software tool Motor condition monitoring
Tool (version 1.1.0.0 to 1.2.0.0)
• Graph vertical axis scale setting
• Graph time axis movement
• IP address list display
• Added descriptions according to the adhesive attachment which
is sold separately for a vibration sensor.
• Corrected mistakes.
• Added descriptions.
soon"
• Corrected mistakes.
• Added a side-view dimensions of adhesive attachment.
• Corrected mistakes.
ance when the motor is driven with an inverter.
• Added description on the monitoring cycle of the motor condition
monitoring tool.
• Corrected mistakes.
14
K6CM Motor Condition Monitoring Device User’s Manual (N219)
Revision History
12 April 2020 • Changed descriptions due to upgrading the comprehensive current
diagnosis model from K6CM-CIM to K6CM-CI2M.
• Upgrade version of the software tool Motor condition monitoring
Tool.
(version 1.2.0.0 to 1.3.0.0)
• Corrected mistakes.
K6CM Motor Condition Monitoring Device User’s Manual (N219)
15

Revision History
16
K6CM Motor Condition Monitoring Device User’s Manual (N219)
1A
2
3
4
5
6
7
8
9
1A
I
4
5
6
7
8
9
Overview
Device
Components
Appendices
I
Index
Monitoring System
Introduction of the Motor condition monitoring Tool
Installation and Wiring
Monitoring with K6CM and Motor condition
monitoring Tool
How to Use the Motor condition monitoring Tool
Monitoring and Setting Using the EtherNet/IP Devices
Monitoring and Setting Using the Modbus TCP Devices
9
10
Trouble shooting
10
3
2
Sections in this Manual
Sections in this Manual
K6CM Motor Condition Monitoring Device User’s Manual (N219)
17
CONTENTS
CONTENTS
Preface ......................................................................................................................1
Terms and Conditions Agreement.......................................................................... 2
Warranty, Limitations of Liability .................................................................................................................. 2
Application Considerations .......................................................................................................................... 3
Disclaimers .................................................................................................................................................. 3
Safety Precautions ...................................................................................................4
Definition of Precautionary Information........................................................................................................ 4
Symbols....................................................................................................................................................... 4
Precautions for Safe Use......................................................................................... 7
Precautions for Correct Use..................................................................................10
Manual Structure ....................................................................................................12
Page Structure........................................................................................................................................... 12
Special Information.................................................................................................................................... 13
Revision History .....................................................................................................14
Sections in this Manual .........................................................................................17
CONTENTS..............................................................................................................18
Section 1 Overview
1-1 Overview................................................................................................................................. 1-2
1-1-1 What is the K6CM Motor Condition Monitoring Devices For?.....................................................1-2
1-2 Features.................................................................................................................................. 1-3
1-2-1 Features Common for All Models................................................................................................1-3
1-2-2 Overview and Features of the Comprehensive Current Diagnosis Type.................................... 1-4
1-2-3 Features of Vibration & Temperature Type................................................................................. 1-6
1-2-4 Features of Insulation Resistance Type......................................................................................1-6
1-2-5 Features of Software Tool...........................................................................................................1-6
1-3 List of Models ........................................................................................................................ 1-7
1-3-1 Model Number Legend................................................................................................................ 1-7
1-3-2 List of Models.............................................................................................................................. 1-8
1-4 System Configurations ......................................................................................................... 1-9
1-4-1 Overall System Configuration ..................................................................................................... 1-9
1-4-2 I/O Configuration by Monitor Type............................................................................................1-10
1-5 Procedure............................................................................................................................. 1-14
Section 2 Device Components
2-1 Overview of K6CM Device .................................................................................................... 2-2
2-1-1 K6CM Device ..............................................................................................................................2-2
2-1-2 Label of the K6CM Device ..........................................................................................................2-2
2-2 Nomenclature and Functions of the K6CM Device ............................................................ 2-3
2-2-1 K6CM Device ..............................................................................................................................2-3
2-2-2 Transition of Numeric LCD Display............................................................................................. 2-8
2-2-3 Status of Alarm Bar, Status Indication, and Transistor Output for Each Status.......................... 2-9
18
K6CM Motor Condition Monitoring Device User’s Manual (N219)
2-3 Special CT ............................................................................................................................ 2-10
2-4 Vibration & Temperature Sensor ....................................................................................... 2-11
2-5 Insulation Resistance Sensor (Special ZCT (IRT)) ........................................................... 2-13
Section 3 Measuring and monitoring System
3-1 Internal mechanism of K6CM ............................................................................................... 3-2
3-1-1 Measuring and monitoring by K6CM .......................................................................................... 3-2
3-2 Measurement System............................................................................................................ 3-3
3-2-1 Sampling of measurement values .............................................................................................. 3-3
3-2-2 Moving average .......................................................................................................................... 3-4
3-2-3 Monitoring Delay......................................................................................................................... 3-4
3-2-4 Trigger Mode .............................................................................................................................. 3-5
3-2-5 Maximum Value and Minimum Value of Measurement value................................................... 3-11
3-3 Monitoring System .............................................................................................................. 3-13
3-3-1 Types of Individual Alarms........................................................................................................ 3-13
3-3-2 What is Comprehensive Alarm? ...............................................................................................3-13
3-3-3 Relationship Between Alarm and Display/Output ..................................................................... 3-14
3-4 Guide for Setting Alarm ......................................................................................................3-19
3-4-1 Comprehensive Current Diagnosis Type (K6CM-CI2).............................................................. 3-19
3-4-2 Vibration & Temperature Type (K6CM-VB) .............................................................................. 3-23
3-5 How the Self-Diagnosis Function Works .......................................................................... 3-25
3-6 How the Replacement Timing Notification (i.e., Running Time Function) Works ......... 3-27
3-7 Initialization of Setting Value..............................................................................................3-28
CONTENTS
Section 4 Introduction of the Motor condition monitoring Tool
4-1 Overview................................................................................................................................. 4-2
4-1-1 What is the Motor condition monitoring Tool (Software Tool) for?.............................................. 4-2
4-1-2 Functions and Specifications of the Software Tool..................................................................... 4-3
4-1-3 Operating Environment of the Software tool............................................................................... 4-8
4-2 Installation and Uninstallation, Starting up ...................................................................... 4-10
4-2-1 Installation................................................................................................................................. 4-10
4-2-2 Uninstallation Procedures......................................................................................................... 4-23
4-3 IP Address Setting............................................................................................................... 4-24
4-3-1 IP Address Setting of Your PC ................................................................................................. 4-24
4-3-2 IP Address Setting of the K6CM Devices................................................................................ 4-26
Section 5 Installation and Wiring
5-1 Dimensions ............................................................................................................................ 5-2
5-1-1 K6CM device .............................................................................................................................. 5-2
5-1-2 Special CT .................................................................................................................................. 5-2
5-1-3 Vibration & temperature Sensor ................................................................................................. 5-3
5-1-4 Insulation resistance sensor (special ZCT (IRT)) ....................................................................... 5-4
5-2 Installation.............................................................................................................................. 5-5
5-2-1 Precautions at installation........................................................................................................... 5-5
5-2-2 Installing the K6CM Device......................................................................................................... 5-5
5-2-3 Installation of the Vibration & Temperature sensor..................................................................... 5-7
5-2-4 Installation of the insulation resistance sensor (special ZCT (IRT)) ......................................... 5-13
5-2-5 Installation of the special CT..................................................................................................... 5-15
K6CM Motor Condition Monitoring Device User’s Manual (N219)
19

CONTENTS
5-3 How to Connect to the Vibration & Temperature Sensor ................................................ 5-16
5-3-1 When Connecting Directly to the K6CM Device........................................................................5-16
5-3-2 When Connecting by Extending the Cable ............................................................................... 5-17
5-3-3 Recommended Ferrules and Crimp Tool..................................................................................5-18
5-4 How to Connect to the Push-In Plus Terminal Blocks ..................................................... 5-19
5-4-1 the Push-In Plus Terminal Block...............................................................................................5-20
5-4-2 How to use the Push-In Plus Terminal Block ............................................................................5-20
5-4-3 Recommended Ferrules and Crimp Tools ................................................................................5-22
5-5 Diagram of Terminal Description ....................................................................................... 5-24
5-6 I/O wiring .............................................................................................................................. 5-25
5-7 Network Wiring .................................................................................................................... 5-29
Section 6 How to Use the Motor condition monitoring Tool
6-1 Screens................................................................................................................................... 6-2
6-1-1 Start Screen ................................................................................................................................6-2
6-1-2 Monitoring Screen and Setting Screen .......................................................................................6-5
6-1-3 Common Menu and Toolbar List...............................................................................................6-11
6-1-4 Buttons on Device Setting......................................................................................................... 6-13
6-1-5 Software Tool Version Display Screen......................................................................................6-18
6-2 Setting of K6CM Devices .................................................................................................... 6-19
6-2-1 Settings for Each Monitor Type of K6CM devices.....................................................................6-19
6-2-2 Setting Parameters ...................................................................................................................6-23
6-2-3 Add a Device to an Existing Project..........................................................................................6-24
6-2-4 Motor (Device Group) Rename.................................................................................................6-25
6-2-5 Save Overwriting Project...........................................................................................................6-26
6-2-6 Exit Project................................................................................................................................ 6-26
Section 7 Monitoring with K6CM and Motor condition monitoring
Tool
7-1 Motor Monitoring and Operation Procedure ....................................................................... 7-2
7-2 Motor Monitoring Using the K6CM devices ........................................................................ 7-3
7-2-1 Start measurement...................................................................................................................... 7-3
7-2-2 Monitoring Type Switching.......................................................................................................... 7-5
7-2-3 Monitoring method ......................................................................................................................7-6
7-2-4 Monitoring Completed.................................................................................................................7-8
7-3 Motor Monitoring Using Software Tools ............................................................................. 7-9
7-3-1 Monitoring Procedure with Motor Condition Monitoring Tool ...................................................... 7-9
7-3-2 Set the Monitoring Cycle.............................................................................................................7-9
7-3-3 Start Monitoring.........................................................................................................................7-10
7-3-4 Saving Log Files........................................................................................................................ 7-11
7-3-5 Graph Vertical Axis Scale Setting .............................................................................................7-12
7-3-6 Graph Time Axis Movement......................................................................................................7-13
Section 8 Monitoring and Setting Using the EtherNet/IP Devices
8-1 Overview................................................................................................................................. 8-2
8-1-1 What is Monitoring Using EtherNet/IP?.......................................................................................8-2
8-1-2 EtherNet/IP Communications Specifications...............................................................................8-4
8-2 Monitoring Using the Tag Data Link ................................................................................... 8-5
8-2-1 Connection setting ......................................................................................................................8-5
8-2-2 Data to be Tag Data Link Target in the K6CM Device................................................................8-9
20
K6CM Motor Condition Monitoring Device User’s Manual (N219)
CONTENTS
8-3 Monitoring and Setting Using the CIP Message Communications and Examples of
Communications Instructions............................................................................................ 8-12
8-3-1 Datatype List of Variables......................................................................................................... 8-12
8-3-2 Services Supported by Objects in K6CM.................................................................................. 8-12
8-3-3 Monitor Object (Class ID: 370 hex)........................................................................................... 8-13
8-3-4 Setting Object (Class ID: 371 hex) ........................................................................................... 8-18
8-3-5 Identity Object (Class ID: 01 hex)............................................................................................. 8-24
8-3-6 TCP/IP Interface Object (Class ID: F5 hex).............................................................................. 8-26
8-3-7 Examples of CIP Message Communications Instruction.......................................................... 8-28
8-4 Sample Program for the NJ/NX-series............................................................................... 8-30
8-4-1 Sample Program Overview....................................................................................................... 8-30
8-4-2 Sample Program Processing Flow and Function Block Specifications..................................... 8-33
8-4-3 Sample Program Execution Procedures................................................................................... 8-39
8-4-4 Sample Program Code Descriptions ........................................................................................ 8-40
Section 9 Monitoring and Setting Using the Modbus TCP Devices
9-1 Outline .................................................................................................................................... 9-2
9-2 Function Codes ..................................................................................................................... 9-3
9-2-1 Function Code List...................................................................................................................... 9-3
9-2-2 03 hex: Reading of Multiple Registers........................................................................................ 9-3
9-2-3 06 hex: Operation Command...................................................................................................... 9-5
9-2-4 10 hex: Writing of Multiple Registers .......................................................................................... 9-6
9-2-5 Exception Code List.................................................................................................................... 9-7
9-3 Register Address Lists ......................................................................................................... 9-8
9-3-1 Monitoring Information................................................................................................................ 9-8
9-3-2 Setting Information.................................................................................................................... 9-12
9-3-3 Product Information .................................................................................................................. 9-18
9-3-4 IP Address ................................................................................................................................ 9-18
9-3-5 Operation Command ................................................................................................................ 9-19
9-3-6 Modbus TCP Connection Timeout Time................................................................................... 9-19
Section 10 Trouble shooting
10-1 K6CM Devices ...................................................................................................................... 10-2
10-2 Using the Software tool ...................................................................................................... 10-4
10-3 Using the Ethernet communications ................................................................................. 10-6
Appendices
A-1 Specifications ........................................................................................................................A-2
A-2 Measurement values by Each Monitor Type.......................................................................A-3
A-3 K6CM Common Specifications ............................................................................................A-4
A-4 K6CM device Individual Specifications ...............................................................................A-8
A-5 Individual Specifications of the Dedicated Sensor ..........................................................A-10
A-6 Internal Data of K6CM Devices...........................................................................................A-14
A-7 Setting Values......................................................................................................................A-15
A-8 Present Values.....................................................................................................................A-21
A-9 Tag Data Link Connection Setting Procedures ................................................................A-26
A-9-1 Using the CS/CJ-series ............................................................................................................ A-26
A-9-2 Using the NJ/NX-series ............................................................................................................A-38
K6CM Motor Condition Monitoring Device User’s Manual (N219)
21

CONTENTS
A-10 Expansion Error Code of the CIP Message Communications ........................................A-48
A-11 Version Compatibility..........................................................................................................A-51
Index
A-10-1 General Status ..........................................................................................................................A-48
A-10-2 Additional Status When General Status Is 01 hex ....................................................................A-50
A-11-1 Version Upgrades of the K6CM Series .....................................................................................A-51
A-11-2 Support Correspondence between the K6CM Device and Motor Condition Monitoring Tool ...A-51
A-11-3 Motor Condition Monitoring Tool Version Compatibility ............................................................A-52
A-11-4 BOOTP Server Connection Error State LED Lighting Differences............................................A-52
22
K6CM Motor Condition Monitoring Device User’s Manual (N219)

Overview
This section describes an overview, the features, the models, the system configurations, and the procedures of the K6CM Motor Condition Monitoring Device.
1-1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1-2 Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
1-3 List of Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
1-4 System Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-9
1-5 Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-14
1
1-1-1 What is the K6CM Motor Condition Monitoring Devices For? . . . . . . . . . . . . . . 1-2
1-2-1 Features Common for All Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
1-2-2 Overview and Features of the Comprehensive Current Diagnosis Type . . . . . 1-4
1-2-3 Features of Vibration & Temperature Type . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
1-2-4 Features of Insulation Resistance Type . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
1-2-5 Features of Software Tool . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
1-3-1 Model Number Legend . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
1-3-2 List of Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-8
1-4-1 Overall System Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-9
1-4-2 I/O Configuration by Monitor Type . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-10
K6CM Motor Condition Monitoring Device User’s Manual (N219)
1 - 1
1 Overview
Setting and
monitoring
Discrete outputs
software tool
(standard
accessory)
K6CM Motor Condition
Monitoring Device
Monitor
EtherNet/IP or Modbus TCP
PLC
PCs
Supporting EtherNet/
IP or Modbus TCP
Sensors
Three-phase induction motor
1-1 Overview
This section describes an overview and features of the K6CM.
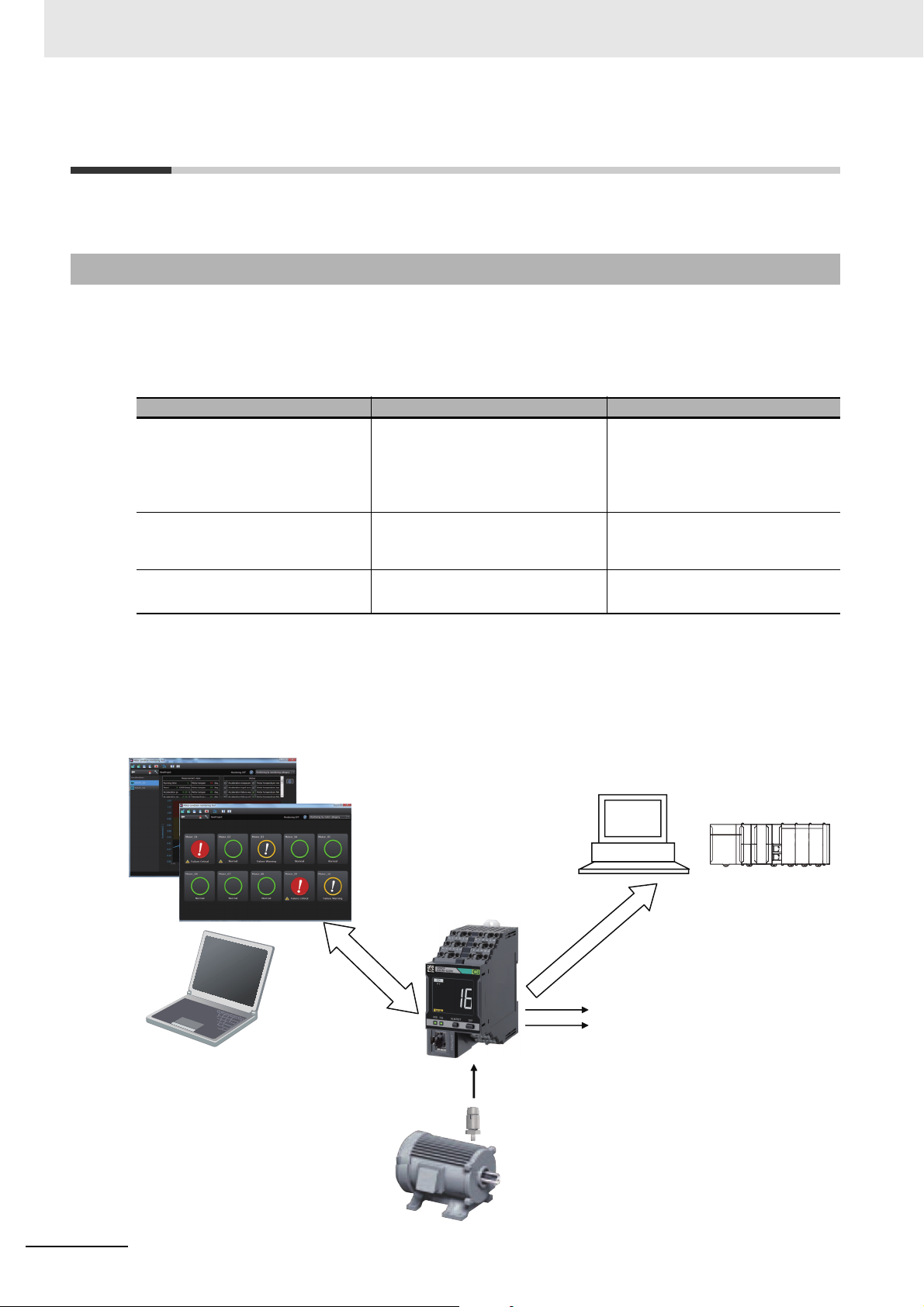
1-1-1 What is the K6CM Motor Condition Monitoring Devices For?
K6CM Motor Condition Monitoring Device is a device that visualizes and monitors the state of the motor
by measuring the feature quantity of the three-phase induction motor. Motors other than three-phase
induction motors (e.g., synchronous motor, single phase motor, servo motor, stepping motor) are
excluded.
Depending on the feature quantity to be measured, you can select from the following three types.
Type Outline Feature quantity measured
Comprehensive current diagnosis
type
K6CM-CIM
K6CM-CI2M
Vibration & temperature type
K6CM-VBM
Insulation resistance type
K6CM-ISM
*1. Two degradation levels, degradation level 1 and degradation level 2, are measured by using different algo-
rithms.
The K6CM-CIM measures only degradation level 1, so it is referred to as the degradation level in the software
tool.
Measures the current waveform of a
motor and the current waveform of an
inverter driving motor and monitors
the distortion of the current waveforms as the degradation levels.
Monitors motor bearing abnormalities from the vibration and temperature.
Monitors the motor insulation resistance.
Measures the degradation levels*1
and current of the motor.
Measures the motor vibration
(acceleration and velocity) and
motor temperature.
Measures the insulation resistance.
By properly using these three types as necessary, you can catch the state of the induction motor and
decide the appropriate maintenance time.
1 - 2
K6CM Motor Condition Monitoring Device User’s Manual (N219)

1-2 Features
1-2-1 Features Common for All Models
• Multiple K6CM devices can be connected to one PLC or one PC, and multiple motor statuses can be
monitored at one time.
• Status monitoring can be confirmed on site easily from the alarm bar display and numeric LCD display on the front of the K6CM device.
• Two levels of warning failure and critical failure are prepared as alarm monitoring levels. Two outputs
of the transistor are possible when the alarm occurs.
• A self-diagnosis function and replacement timing notification are incorporated. With these functions,
errors of the K6CM device and when to be replaced can be determined.
• Trigger functions using an external input or internal set value comparison enable monitoring only
when specified conditions such as startup of the motor are met. In addition, the maximum and minimum values can be automatically calculated and output during the period that those conditions are
met. (*1)
• EtherNet/IP (i.e., tag data link, CIP message communications) is supported. Measurement values
and internal data can be read, and alarm setpoints and other set values can be written from the PLC
or PC. (*2)
*1. For the insulation resistance type K6CM device, the trigger function using the external input can be supported
for the Eip cpu version 1.10 or higher.
*2. Tag data link can be read only. Write not possible.
1 Overview
1-2 Features
1
1-2-1 Features Common for All Models
Features of Main CPU Version 1.2 or Later
• Measurement is possible in a stable state even after starting up the motor using the trigger function
following a monitoring delay time.
• Modbus TCP is supported. Measurement values and internal data can be read, and alarm setpoints
and other set values can be written from the PLC or PC by using message communications.
• The indication for the unit of measurement value (monitoring type) on the K6CM device numeric LCD
display can be switched automatically at a 5-second interval. This allows you to confirm status monitoring without touching the operation keys of the K6CM device.
K6CM Motor Condition Monitoring Device User’s Manual (N219)
1 - 3
1 Overview
1-2-2 Overview and Features of the Comprehensive Current Diagnosis
Type
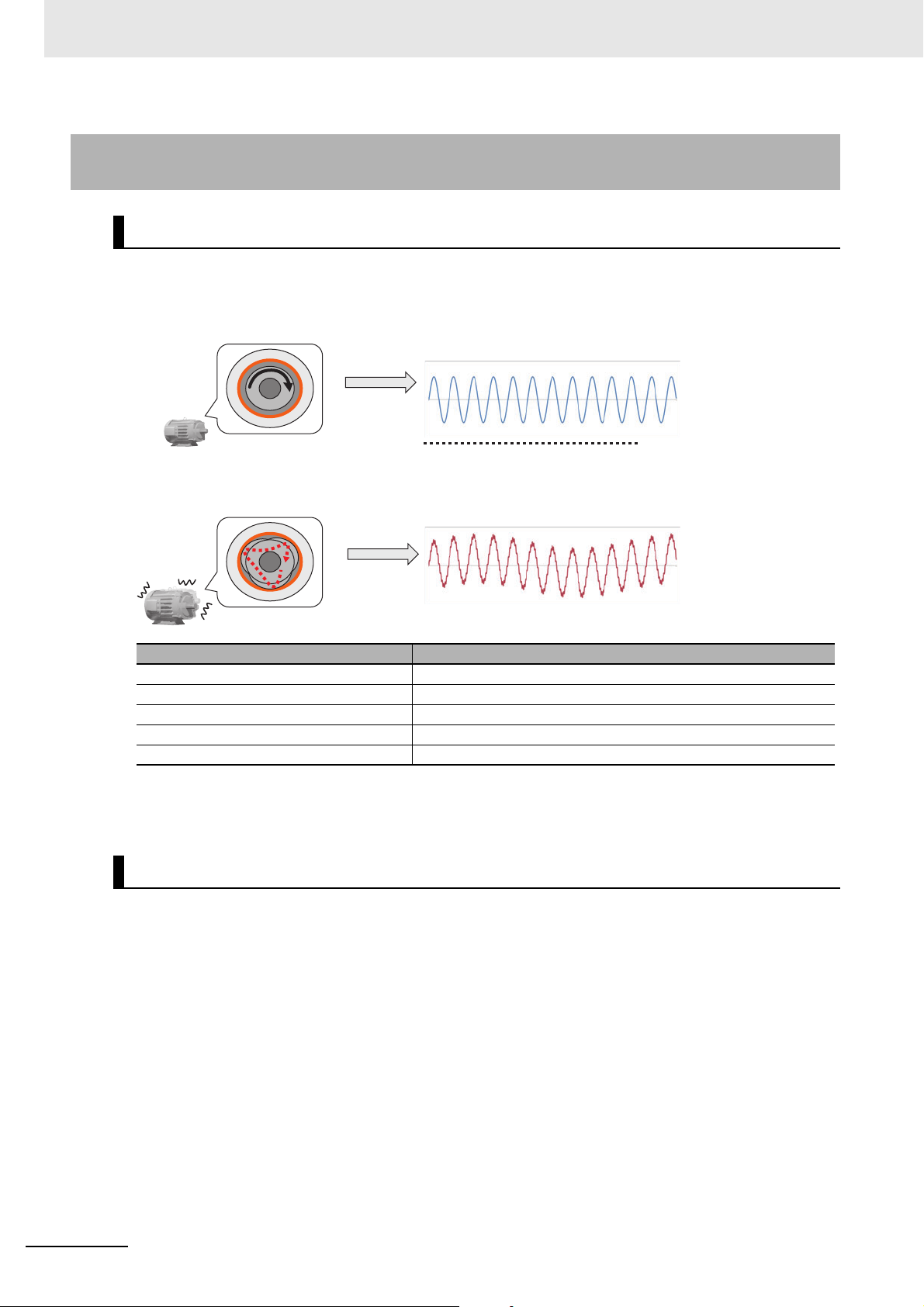
Overview
The current waveform of the motor is a smooth sine wave if the motor and load are in the normal ideal
states. If the motor or load are abnormal, noise appears in the current waveform as shown below.
(1) Motor and load are normal.
Cross-sectional view of the motor
The current is a smooth "sine wave".
Smooth rotation
(2) An abnormality is occurring.
Cross-sectional view of the motor
Abnormal vibration
Abnormality affecting degradation level Major factors
Misalignment Coupling abnormal, centering shortage, etc.
Load imbalance Unbalance of rotating objects such as fans
Rotor abnormality Breakage inside the motor
Cavitation, air contamination Vacuum bubbles in water stream, pipe internal pressure drop, etc.
Overload Excessive rotational load
Note The degradation level may appear differently depending on the failure condition of the motor or load, or
depending on the installation condition.
"Noise" may come up in the current.
Features
• A motor error can be detected by representing the degree of deviation of the current waveform
between a normal motor and an abnormal motor in numerical values (as degradation level 1).
• A motor error can be detected by analyzing the frequency components affecting the rotating shaft of
the motor and representing them in numerical values. It is suitable for monitoring of inverter drive (as
degradation level 2).
• Degradation levels 1 and 2 can be monitored simultaneously. (The K6CM-CIM can only monitor degradation level 1.)
• The K6CM can also detect motor peripheral malfunctions affecting the rotating shaft of the motor.
1 - 4
K6CM Motor Condition Monitoring Device User’s Manual (N219)

Mechanism of degradation level 1
Frequency components of abnormality
1 Overview
For degradation level 1, the K6CM device compares the current waveform of the motor with the
smooth sine wave of the ideal state, and represents the degree of deviation from the smooth sine
wave in numerical values. If the motor or load is abnormal, that degree of deviation will be large, and
the value of degradation level 1 will be large.
Motor and load are normal Motor and load are abnormal
Equivalent to smooth sine wave Deviated from smooth sine wave
If the current waveform of the motor contains many noise components such as with inverter driving,
the value of degradation level 1 will be large because there will be deviation from the ideal state
even if the motor and load are normal. Therefore, the difference between the normal state and
abnormal state will be small.
1-2 Features
1
1-2-2 Overview and Features of the Comprehensive Current Diagnosis Type
Mechanism of degradation level 2
For degradation level 2, the K6CM device determines what percentages of the frequency components affecting the rotating shaft of the motor were included in the drive frequency components
when frequency analysis was performed on the current waveform of the motor, and represents them
in numerical values. If the motor or load is abnormal, the frequency components affecting the rotating shaft of the motor will be large, and the value of degradation level 2 will be large.
Since the frequency components affecting the rotating shaft of the motor are clearly captured and
represented as numerical values, even in environment with many noise components such as
inverter driving, a motor or load abnormality is captured with excellent sensitivity and the variations
in the numerical values tend to be also small compared with degradation level 1. Therefore, it is suitable for monitoring an inverter-driven three-phase induction motor.
Motor and load are normal Motor and load are abnormal
Frequency components affecting the rotating shaft
are small
K6CM Motor Condition Monitoring Device User’s Manual (N219)
Frequency components affecting the rotating shaft
are large
1 - 5

1 Overview
1-2-3 Features of Vibration & Temperature Type
• Simultaneous monitoring of motor vibration (i.e., acceleration and velocity) and motor temperature
are possible.
• Mainly bearing wears can be detected by the acceleration.
• Mainly load imbalance and misalignment can be detected by the velocity.
• The acceleration and velocity alarm threshold values of K6CM-VBM vibration & temperature type can
be set automatically with the software tool (software tool version 1.3.0.0 or later).
1-2-4 Features of Insulation Resistance Type
• Insulation resistance can be monitored.
• Resistance leakage current (I0r) can be measured. (*1)
• Capacitive leakage current (I0c) can also be measured. (*2)
*1. Alarm output cannot be performed.
*2. Can be read via EtherNet/IP or Modbus TCP. Unit display and alarm output cannot be performed.
1-2-5 Features of Software Tool
• Software tool "Motor condition monitoring Tool" that is provided with the K6CM device enables K6CM
device setup and simple status monitoring.
• It enables reading of measurement values at specified intervals and automatic data storage (with the
CSV format).
• The acceleration and velocity threshold values can be set automatically (software tool version 1.3.0.0
or later).
1 - 6
K6CM Motor Condition Monitoring Device User’s Manual (N219)

1 Overview
K6CM-
-EIPM
(1) (2)
*1
(3) (4) (5) (6) (7)
*1. For other than detection type CI2, this is 2 digits so read it with the 3rd digit truncated.
*2. The detection type CI2 is an upward compatible model of CI, so CI is planned to be integrated into CI2.
In the following description, the model name CI is referred to as CI2.
(1) (2) (3) (4) (5) (6) (7)
Function
Base
model
Detec-
tion type
Product
classifi-
cation
Power
specifi-
cation
Options
Special
specifica-
tions
Commu-
nications
K6CM Motor Condition Monitoring Device
CI
*2
Comprehensive current diagnosis type
CI2
Comprehensive current diagnosis type 2
VB Vibration & temperature type
IS Insulation resistance type
M K6CM device
A 100 to 240 VAC
D 24 VAC/VDC
Not used Not used
Not used Not used
EIP EtherNet/IP and Modbus TCP
1-3 List of Models
This section shows the model number legend of the K6CM devices, and models of the K6CM devices
and the dedicated sensors.
1-3-1 Model Number Legend
1-3 List of Models
1
1-3-1 Model Number Legend
K6CM Motor Condition Monitoring Device User’s Manual (N219)
1 - 7

1 Overview
1-3-2 List of Models
Comprehensive Current Diagnosis Type
K6CM device K6CM-CIMA-EIP 100 to 240 VAC
Sensor (special CT) K6CM-CICB005 Rated primary current: 5 A, rated voltage: 480 VAC
Vibration & Temperature Type
Model Specifications such as power supply voltage
K6CM-CIMD-EIP 24 VAC/VDC
K6CM-CI2MA-EIP 100 to 240 VAC
K6CM-CI2MD-EIP 24 VAC/VDC
K6CM-CICB025 Rated primary current: 25 A, rated voltage: 480 VAC
K6CM-CICB100 Rated primary current: 100 A, rated voltage: 480 VAC
K6CM-CICB200 Rated primary current: 200 A, rated voltage: 480 VAC
K6CM-CICB400 Rated primary current: 400 A, rated voltage: 480 VAC
K6CM-CICB600 Rated primary current: 600 A, rated voltage: 480 VAC
Model Specifications such as power supply voltage
K6CM device K6CM-VBMA-EIP 100 to 240 VAC
K6CM-VBMD-EIP 24 V AC/DC
Sensor (sensor head and pre-amplifier)*1
Adhesive attachment K6CM-VBSAT1 Material: Stainless steel
*1. The sensor head and the pre-amplifier are calibrated and inspected as a set at the factory shipment. Be sure
to use them with the combination shipped.
K6CM-VBS1 Mounting: M6 screw
Insulation Resistance Type
Model Specifications such as power supply voltage
K6CM device K6CM-ISMA-EIP 100 to 240 VAC
K6CM-ISMD-EIP 24 V AC/DC
Sensor (special ZCT (IRT)) *1
*1. ZCT (IRT) stands for Zero Current Transformer (Insulation Resistance Transformer).
K6CM-ISZBI52 Rated voltage: 200 to 480 VAC, through hole diameter
52 mm
1 - 8
K6CM Motor Condition Monitoring Device User’s Manual (N219)

1-4 System Configurations
Three-phase AC power
Industrial switching hub
(e.g., W4S1)
(*1)
Dedicated
cable
S-phase
ground
*1. When making initial settings,
connect this tool to each
motor status monitoring
device one to one using an
Ethernet cable.
Transistor Output
Alarm × 2 points, self-diagnosis × 1 point
Vibration & temperature
sensor pre-amplifier
Special ZCT (IRT)
Comprehensive
current diagnosis
type
• Settings
Insulation
resistance
type
Vibration &
temperature
type
K6CM
Motor Condition Monitoring Device
• Monitoring
General-purpose Inverter
Example: RX2 series
Special CT
(connected to secondary side)
• Monitoring
• Initial setting (*1)
Software tool
Ethernet cable
EtherNet/IP or Modbus TCP
PLC
PC
Three-phase induction
motor
Vibration &
temperature
sensor head
This section describes the overall system configurations of the K6CM and the I/O configuration for each
monitor type of K6CM devices.
1 Overview
1-4 System Configurations
1-4-1 Overall System Configuration
1
1-4-1 Overall System Configuration
K6CM Motor Condition Monitoring Device User’s Manual (N219)
1 - 9

1 Overview
Three-phase induction motor
(When necessary)
External trigger input
Special CT *1
K6CM-CI2M
Comprehensive current
diagnosis Type Device
Transistor Output
EtherNet/IP or Modbus TCP
(Ethernet cable)
To the software tool,
PC software and/or PLC
Self-diagnosis output
Comprehensive alarm (failure warning) output
Comprehensive alarm (failure critical) output
1-4-2 I/O Configuration by Monitor Type
K6CM-CI2 Comprehensive Current Diagnosis Type
Three-phase induction motor connection example
*1. The dedicated cable between the special CT and the K6CM device is 2.9 m long. It cannot be extended. Also,
there is no designation in the phase to be installed. Be careful of the installation direction stated on the CT
label and mount it to any one phase.
1 - 10
K6CM Motor Condition Monitoring Device User’s Manual (N219)

Inverter driving three-phase induction motor connection example
Precautions for Correct Use
(When necessary)
External trigger input
General-purpose Inverter
Example: RX2 series
Special CT *1
Inverter driving three-phase
induction motor
K6CM-CI2M
Comprehensive current
diagnosis Type Device
Transistor Output
To the software tool,
PC software and/or PLC
EtherNet/IP or Modbus TCP
(Ethernet cable)
Self-diagnosis output
Comprehensive alarm (failure warning) output
Comprehensive alarm (failure critical) output
1 Overview
1-4 System Configurations
1
1-4-2 I/O Configuration by Monitor Type
*1. The dedicated cable between the special CT and the K6CM device is 2.9 m long. It cannot be extended. Also,
there is no designation in the phase to be installed. Be careful of the installation direction stated on the CT
Using a K6CM-CIM
• When the motor is driven by an inverter, it may not be possible to monitor the motor or load
abnormalities. Refer to 3-4-1 Comprehensive Current Diagnosis Type (K6CM-CI2) on
page 3-19 in 3-4 Guide for Setting Alarm on page 3-19 for details.
Using a K6CM-CI2M
• In an environment where the motor is driven by an inverter, if the degradation level 1 is
used as the measurement value, it may not be possible to monitor the motor or load abnormalities. Therefore, it is recommended to use the degradation level 2. Refer to 3-4-1 Com-
prehensive Current Diagnosis Type (K6CM-CI2) on page 3-19 in 3-4 Guide for Setting
Alarm on page 3-19 for details.
• Since the frequency band of the harmonics of the drive frequency and the frequency band
in which errors such as load imbalance and misalignment appear are the same frequency
band for a 2-pole meter, sensitivity may be reduced with degradation level 2.
K6CM Motor Condition Monitoring Device User’s Manual (N219)
1 - 11

1 Overview
Vibration & temperature
sensor pre-amplifier
Three-phase induction motor
Vibration &
temperature
sensor head
K6CM-VBM
Vibration &
temperature type device
(When necessary)
External trigger input
Transistor Output
Self-diagnosis output
EtherNet/IP or Modbus TCP (Ethernet cable)
*2
*1
To the software tool,
PC software and/or PLC
Comprehensive alarm (failure warning) output
Comprehensive alarm (failure critical) output
K6CM-VB Vibration & Temperature Type
*1. The dedicated cable between the sensor head and the pre-amplifier is 2.9 m long. It cannot be extended.The
sensor head and the pre-amplifier are calibrated and inspected as a set at the factory shipment. Be sure to
use them with the combination shipped. For details, refer to Installation of the Vibration Sensor Head on page
5-7.
*2. The dedicated attached cable between the pre-amplifier and the K6CM device is 1 m. It can be extended up
to a maximum length of 100 m. Refer to A-5 Individual Specifications of the Dedicated Sensor on page A-10
for recommended cables.
Note When you use an inverter to drive the motor, you may not be able to check the degradation tendency of
the motor. However, under the following conditions, changes in acceleration are more likely to be confirmed.
• When the inverter driving frequency is 50 Hz or more and the frequency is stable
• When the carrier frequency of the inverter is 12.5 kHz or more and the frequency is stable
Use an inverter after trying according to your installation environment.
1 - 12
K6CM Motor Condition Monitoring Device User’s Manual (N219)

K6CM-IS Insulation Resistance Type
FG
K6CM-ISM
Insulation
Resistance
Type Device
Transistor Output
EtherNet/IP or Modbus TCP
(Ethernet cable)
Inverters
(When necessary)
External trigger input
Insulation resistance
sensor (special ZCT (IRT))
S-phase ground
Wiring length between
special ZCT (IRT) and
the motor is 40 m
Earth
*3
Three-phase induction motor *2
Voltage input
(Attached cable
is 1 m) It can
be extended
up to 100 m.
*1
To the software tool,
PC software and/or PLC
Self-diagnosis output
Comprehensive alarm (failure warning) output
Comprehensive alarm (failure critical) output
Note: Measurement may not be possible depending on the
drive frequency of an inverter. Refer to Wiring Dia-
gram of the Insulation Resistance Type (K6CM-IS) on
page 5-27 under 5-6 I/O wiring on page 5-25.
1 Overview
1-4 System Configurations
1
1-4-2 I/O Configuration by Monitor Type
*1. The distance between the insulation resistance sensor (special ZCT (IRT)) and K6CM device is 1 m with the
dedicated attached cable.
*2. Motor capacity of 7.5 kW or less (Measurement error will increase if exceeding this value.)
*3. According to IEC 60364 TT method
K6CM Motor Condition Monitoring Device User’s Manual (N219)
1 - 13

1 Overview
1-5 Procedure
The K6CMs can be used in the following procedure.
Step Procedures Reference
1. Initial setting
on desk
2. Installation
and Wiring
3. Setting with
actual system configuration (via
hub)
Prepare a PC with Windows 7 or higher and Ethernet
cables.
Install the software tool.
↓
Start the software tool.
↓
Connect the software tool directly to the
K6CM device via Ethernet cable.
Turn ON the power to the K6CM device.
↓
Select [Create Project],
• Set the IP address of each K6CM device
• Set default parameters
• Set other parameters (when necessary)
• Download IP address and (when necessary) parameters
to K6CM device.
• (When necessary) Set the motor name (K6CM group
name) of each K6CM.
▼
Install.
↓
Wire.
▼
Connect the software tool to the K6CM device (s) via hub.
↓
(When necessary) Change the parameters and download to
each K6CM device.
↓
Turn ON the power of the K6CM again and activate the
parameters.
▼
Either order is
acceptable.
Section 4 Introduction
of the Motor condition
monitoring Tool
Section 2 Device Components
Section 5 Installation
and Wiring
Section 6 How to Use
the Motor condition
monitoring Tool
1 - 14
K6CM Motor Condition Monitoring Device User’s Manual (N219)

1 Overview
Start measuring using the K6CMs.
↓
Record measurement values from the host system (i.e., the
software tool, PC, or PLC) to estimate an alarm threshold
value to be used as the monitoring standard.
Do one of the following:
• With the software tool, set the "Monitoring cycle" by press-
ing the [Option] Button, before monitor via EtherNet/IP
and log the measurement values.
• With PC or PLC, monitor via EtherNet/IP or Modbus TCP
and log the measurement values.
4. Monitoring
and operation
5. Troubleshoot Troubleshoot
• Estimate an alarm threshold values to be used as monitoring standard, considering the relationship between the
change in each measurement value and the fatal state of
the motor.
• The alarm threshold values of vibration & temperature
type can be calculated automatically with the software
tool.
Determine the alarm threshold values as the monitoring
standard based on the monitoring and operation results.
Change the setting of the alarm threshold values and make
main monitoring and operation.
↓
↓
↓
▼
Section 3 Measuring
and monitoring System
Section 7 Monitoring
with K6CM and Motor
condition monitoring
Tool
Section 8 Monitoring
and Setting Using the
EtherNet/IP Devices
Section 9 Monitoring
and Setting Using the
Modbus TCP Devices
Section 10 Trouble
shooting
1-5 Procedure
1
K6CM Motor Condition Monitoring Device User’s Manual (N219)
1 - 15

1 Overview
1 - 16
K6CM Motor Condition Monitoring Device User’s Manual (N219)

Device Components
This section describes the nomenclature and functions of the K6CM devices, the special CT, the vibration and temperature sensor, and the insulation resistance sensor.
2-1 Overview of K6CM Device . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2-1-1 K6CM Device . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2-1-2 Label of the K6CM Device . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2-2 Nomenclature and Functions of the K6CM Device . . . . . . . . . . . . . . . . . . . 2-3
2-2-1 K6CM Device . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
2-2-2 Transition of Numeric LCD Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
2-2-3 Status of Alarm Bar, Status Indication, and Transistor Output for Each
Status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
2-3 Special CT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
2-4 Vibration & Temperature Sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
2-5 Insulation Resistance Sensor (Special ZCT (IRT)) . . . . . . . . . . . . . . . . . . 2-13
2
K6CM Motor Condition Monitoring Device User’s Manual (N219)
2 - 1

2 Device Components
Measurement value
LCD display
Sensor
Example) Special CT
Three-phase induction motor
Push-In Plus terminal
IP address label
(Used to write down the IP address)
(When necessary)
External trigger input
Alarm bar display
EtherNet/IP or Modbus TCP
(Ethernet cable)
Operation keys
To the software tool, PC
software and/or PLC
Transistor Output
Comprehensive alarm (failure warning) output
Comprehensive alarm (failure critical) output
Self-diagnosis error output
LAN port
2D code
The serial number can be read.
It is the same as the 2D code on
the front of this device.
Serial number
MAC address
Represents the version of the
K6CM device.
MAIN: Main cpu version
EIP: Eip cpu version
MES: Mes cpu version
You can also check the version
from the software tool (detailed
screen of each device type).
2-1 Overview of K6CM Device
The appearances of the K6CM device and the nomenclature and functions are as follows.
2-1-1 K6CM Device
2-1-2 Label of the K6CM Device
2 - 2
K6CM Motor Condition Monitoring Device User’s Manual (N219)

2 Device Components
2-2 Nomenclature and Functions of the
K6CM Device
2-2-1 K6CM Device
(G)
2-2 Nomenclature and Functions of the
K6CM Device
Symbol
(A) Upper
(B) Alarm bar dis-
(C) Unit of mea-
Name Function
terminal
play
surement
value (monitoring type)
(A)
(B)
(C)
(K)
(J)
(I)
(H)
Connect Push-in Plus terminals.
Refer to Push-In Plus Terminals Layout on page 2-5 later in this document for details.
During monitoring, the following colors are displayed.
• Green: Alarm status (normal)
• Yellow: Alarm status (warning)
• Red: Alarm status (critical)
Turns OFF when one of the following occurs.
When the power is OFF, when measuring is not started yet, when self-diagnosis error
occurs
The unit of measurement value (monitoring type) is indicated by the LCD characters.
(D)
(E)
(F)
(G)
*1
2
2-2-1 K6CM Device
*2
K6CM Motor Condition Monitoring Device User’s Manual (N219)
2 - 3

2 Device Components
Symbol
(D) Each type of
Name Function
When the K6CM device is monitoring, a numerical value is displayed.
current value,
minimum
value, maximum value of
measurement value
An LCD character indicates whether the measurement value displayed on the LCD is
the present value, minimum value, or maximum value.
• "PV": present value
• "MIN": minimum value
• "MAX": maximum value
*3
The minimum and maximum values indicate the current minimum and maximum val-
ues in one monitoring period.
The display is updated each time the minimum and maximum values are updated.
Both are retained at the end of monitoring, but will be reset the next time the power is
turned ON again.
(E) Operation
keys
[ALM RST] key
Release the alarm latch (cancellation by communication is impossible).
[DISP] key Switch the unit of measurement value (monitoring type).
"Display fixed mode"
Press the [DISP] key to switch the display in the following order.
• Comprehensive current diagnosis type:
"Ci1" → "Ci2" → "A"
(→ "Ci1")
• Vibration & temperature type:
"G" → "mm/s" → "T" →
"ΔT" (→ "G")
• Insulation resistance type: "MΩ" → "mA" (→ "MΩ")
"Display auto switching mode"
Press and hold the [DISP] key for 3 seconds to switch the display
automatically at 5-second intervals in the following order.
• Comprehensive current diagnosis type:
"Ci1" → "Ci2" → "A"
(→ "Ci1")
• Vibration & temperature type: "G" → "mm/s" → "T" →
"ΔT" (→ "G")
• Insulation resistance type: "MΩ" → "mA" (→ "MΩ")
Simultaneously
press the [ALM
When pressed at the same time for 5 seconds or more, initialize all
settings of the K6CM device and restore the Factory default.
RST] key and
the [DISP] key
(F) Lower
terminal
(G) DIN Track
Connect Push-in Plus terminals.
Refer to Push-In Plus Terminals Layout on page 2-5 later in this document for details.
Used for mounting to the DIN Track.
mounting
hook
(H) LAN port Port for connecting Ethernet cable for communications with the software tool, PLC, and
PC.
It is with straight/cross cable automatic discrimination function.
(I) Indicators Indicates the product status or network status by LEDs.
• "MS": Module Status. Displays the status of the K6CM device. It is green when it is
normal.
• "NS": Network Status. Displays the state of the communications. It lights or flashes
green when it is normal.
Refer to Indicator specifications on page 2-7 later in this document for details.
(J) Status display K6CM device status is indicated one of monitoring in progress, self-diagnosis error,
*5
Running Time status
• "MON": Monitoring in progress
, with the LCD character below.
*6
• "ERR": Self-diagnosis error occurrence
• "AGE":
Running Time notification (recommendation for exchange of product body)
*4
2 - 4
K6CM Motor Condition Monitoring Device User’s Manual (N219)

2 Device Components
(D)
(A)
(B)
(C)
12798
1034
13 14
16
18
15
17
(E)
(F)
(G)
2-2 Nomenclature and Functions of the
Symbol
(K) Numeric LCD
Name Function
• When monitoring is started, the measurement value is displayed.
display
• Comprehensive current diagnosis type 2: Degradation level 1, degradation level 2,
current
• Vibration & temperature type: Acceleration, velocity, motor temperature, difference between motor temperature and room temperature
• Insulation resistance type: Insulation resistance, leakage current
• Switching display of the monitor type can be performed by [DISP] key.
• Press the [DISP] key to switch the display in the following order.
• Comprehensive current diagnosis type: "Ci1" → "Ci2" → "A" (→ "Ci1")
• Vibration & temperature type: "G" → "mm/s" → "T" → "ΔT" (→ "G")
• Insulation resistance type: "MΩ" → "mA" (→ "MΩ")
• With trigger (external trigger or internal trigger), "- - - -" is displayed if monitoring is not
started yet. When the monitoring is completed, the measurement value just before the
end is retained and displayed. For details, refer to Transition of Numeric LCD Display
on page 2-8.
*1. The above LCD color is retained after monitoring.
*2. Switching display of present value (PV), minimum value, and maximum value can be set by changing "Display
value type" from the software tool. (It is not switchable by front operation.)
*3. When the vibration & temperature sensor or the insulation resistance sensor (special ZCT (IRT)) is not con-
nected,
"- - - -" is displayed and the "MS" flashes.
When the input range is over, 7 segments will flash with the maximum value of the input range.
*4. Setting the alarm latch to "L" will latch the alarm condition of comprehensive alarm (warning or critical) (alarm
bar, transistor outputs 1 and 2). Release this latched state.
If you press the [ALM RST] key during monitoring, it returns to the comprehensive alarm state at that point (both
the alarm bar and transistor outputs 1 and 2).
*5. Running Time is a function to inform you when to replace the K6CM device. It is calculated from the internal
temperature and the operation time of the device.
*6. "MON" always lights up when the trigger mode is "Free run" (no trigger). When there is a trigger, it lights up
during monitoring. It turns off after monitoring is not started yet, and after monitoring is completed (only when
using the trigger function).
K6CM Device
2
2-2-1 K6CM Device
Push-In Plus Terminals Layout
Upper terminal Lower terminal
Symbol
(A) Power voltage
K6CM Motor Condition Monitoring Device User’s Manual (N219)
(B) Sensor input K6CM-CI2M: CT input (7: CTK, 8: CTL)
(C) Not used
Name Function
100 to 240 VAC
input
24 VAC/VDC
K6CM-VB: VB input
K6CM-IS: ZCT (IRT) input
---
2 - 5

2 Device Components
Symbol
(D) External trig-
Name Function
Trigger input by external input that sets the K6CM device status during monitoring
ger input
(status display "MON"). Monitoring can be started during the rise from OFF → ON
or the fall from ON → OFF, and monitoring up to the monitoring time, or monitoring
*1
• Normally Close output type
ON: Comprehensive alarm is normal
OFF: Comprehensive alarm is warning or critical
• Normally open output type
*3
ON: Comprehensive alarm is warning or critical
(E) Transistor
output 1
in the ON state can be selected.
Warning output of compre-
hensive alarm.
*2
Transistor output method
can be set to Normally
Close or Normally Open.
OFF: Comprehensive alarm is normal
It turns OFF regardless of the output type in either of
the following cases.
• Monitoring is not started yet (only when using the
trigger function)
• Self-diagnosis error
(F) Transistor
output 2
Critical output of compre-
hensive alarm.
*2
Transistor output method
can be set to Normally
Close or Normally Open.
• Normally Close output type
ON: Comprehensive alarm is normal or warning
OFF: Comprehensive alarm is critical
• Normally open output type
ON: Comprehensive alarm is critical
OFF: Comprehensive alarm is normal or warning
It turns OFF regardless of the output type in either of
the following cases.
• Monitoring is not started yet (only when using the
trigger function)
• Self-diagnosis error
(G) Transistor
output 3
Self-diagnosis error output.
Transistor output method
can be set to Normally
Close only.
In the following cases, ON
• When Self-diagnosis error does not occur
In the following cases, OFF
• Self-diagnosis error occurrence
* Self-diagnosis error is a
function to detect errors
of the K6CM device itself.
*1. "MON" always lights up when the trigger mode is "Free run" (no trigger). When there is a trigger, it lights up
during monitoring. It turns off if monitoring is not started yet and after monitoring is completed. (only when
using the trigger function)
*2. The output state (ON/OFF) of the transistor is held at the end of monitoring. (only when using the trigger
function)
*3. The setting function of transistor output method can be used with Eip cpu version 1.10 or later. It is fixed to
Normally Close with Eip cpu version less than 1.10.
2 - 6
K6CM Motor Condition Monitoring Device User’s Manual (N219)

Indicator specifications
2 Device Components
2-2 Nomenclature and Functions of the
Symbol
MS Module
NS Network
Name Color Status Operating condition
status
indication
(Module
Status)
status
indication
(Network
Status)
Green Lit. Normal status
Flashes at 1-s
intervals.
Red Lit. One of the following fatal errors
Flashes at 1-s
intervals.
--- Not lit. No power supply
Green Lit. Tag data link or message connection established
Flashes at 1-s
intervals.
Red Lit. IP address duplication status
Flashes at 1-s
intervals.
--- Not lit. No power supply or IP address is not set
BOOTP server connection error state
• Mes cpu data flash error
• Main cpu data flash error
One of the following conditions
• Vibration & temperature sensor is not connected
• Insulation resistance sensor (ZCT (IRT)) is not connected
• Mes cpu error
• Main cpu error
• Present value input error
• MAX value input error
• MIN value input error
No tag data link or message connection established
The connection has timed out
K6CM Device
2
2-2-1 K6CM Device
K6CM Motor Condition Monitoring Device User’s Manual (N219)
2 - 7

2 Device Components
Power OFF
No lit.
10 seconds or less
7 segment blinking
Measurement value displayed
"MON" goes on
"MON" goes on
"MON" goes off
"MON" goes off
"ERR" goes on when the sensor
is not connected.
Monitoring conditions were met.
"- - - -" displayed
All lit
After monitoring (only when
using the trigger)
When the power
supply is turned ON
or the software reset
*1
is done.
Input range over occurs.
Monitoring is not started yet
Maintains the measurement
value at the end of measuring
and monitoring
When monitoring condition
is met
2-2-2 Transition of Numeric LCD Display
The numerical LCD display will transition as follows after turning ON the power supply or after soft-
*1
ware reset
.
*1. It depends on the Device reset button operation from the software tool or software reset command from Eth-
erNet/IP.
2 - 8
K6CM Motor Condition Monitoring Device User’s Manual (N219)

2 Device Components
2-2-3 Status of Alarm Bar, Status Indication, and Transistor Output for
Each Status
2-2 Nomenclature and Functions of the
Status Description
Monitoring Not yet
Comprehensive
alarm:
normal
CompreDuring
monitoring
After monitoring
(only when using the
trigger function)
When the self-diagnosis error occurs
When the power is OFF
hensive
alarm:
Warning
Compre-
hensive
alarm:
Critical
Monitoring is not completed until
the measurement value is set
after the power is turned ON.
All measurement values are in
normal condition.
There is no "Critical" in the measurement value, and even one of
them has "Warning".
There is "Critical" in at least one
measurement value.
When using the trigger function
(external trigger or internal trigger), the monitoring is completed.
Self-diagnosis error is occurring
regardless of monitoring status.
----
Alarm
bar
Not lit. Not lit. OFF OFF ON
Green “MON”
Yellow
Red
The sta-
tus at the
end is
kept.
Not lit. “ERR” OFF OFF OFF
Not lit. Not lit. OFF OFF OFF
Status
display
Not lit. The sta-
Transistor
output 1
ON
OFF
OFF
tus at the
end is
kept.
*1
*1
*1
Transistor
output 2
*1
ON
*1
ON
*1
OFF
The sta-
tus at the
end is
kept.
Transistor
output 3
*1. This is the case when the transistor output type is set to Normally Close. In the case of Normally Open,
ON/OFF is opposite to the above.
K6CM Device
ON
2
ON
2-2-3 Status of Alarm Bar, Status Indication, and Transistor Output for Each Status
ON
ON
K6CM Motor Condition Monitoring Device User’s Manual (N219)
2 - 9

2 Device Components
K6CM-CI2M
Comprehensive current
diagnosis type device
The special CT has the mounting direction.
Mount a special CT to any one phase according
to the mounting direction stated on the CT label
when you mount it.
Ferrules
Load side (L)
Split/fastening
hook
Cable for Special CT (included)
Cable length 2.9 m
Terminal cover on
the secondary side
of the CT
For fixing of
binding band
etc.
Power supply
side (K)
Special CT
Split-type
Terminal number of
the K6CM device
Special CT
side
7CTK
8CTL
2-3 Special CT
The appearance of the special CT and the name and functions of each part are as follows.
Nomenclature and functions of the special CT
2 - 10
K6CM Motor Condition Monitoring Device User’s Manual (N219)

2 Device Components
To the K6CM-VBM
Vibration &
temperature type
device
K6CM-VB
Sensor head
Connector
connection
Cable length:
0.3 m
Cable length:
2.6 m
Cable length:
1 m
K6CM-VBS
Pre-amplifier
PWR LED
ERR LED
COM LED
To the sensor head
To the K6CM-VBM
Vibration &
temperature type
device
LED Name Color Status Operating condition
PWR Pre-amplifier power
supply
Green Lit. Normal status
---- Not lit. Power not supplied
ERR Pre-amplifier fault Red Lit. Self-diagnosis error
occurred
COM Communications
between pre-amplifier
and K6CM
Yellow Lit. STX transmission, lit
at reception 50 ms
Terminal number of
the K6CM device
Vibration & temperature sensor
side
Line color
7 VBS 0: Sensor input (+) Red and white
8 VBS 1: Sensor input (-) Red
9 VBS 2: Supply to sensor 10 V (+) Black
10 VBS 3: Supply to sensor 10 V (-) Black and white
2-4 Vibration & Temperature Sensor
The appearance of the vibration and temperature sensor and the name and functions of each part are
as follows.
Overview
2-4 Vibration & Temperature Sensor
2
Nomenclature and functions of the pre-amplifier
K6CM Motor Condition Monitoring Device User’s Manual (N219)
2 - 11

2 Device Components
Nomenclature and functions of the sensor head
To the pre-amplifier
Cable part
Detection direction (Z axis direction)
M6 screw
Mount the vibration sensor head on the shaft side exterior of the induction motor.
There are two ways to mount the vibration sensor head to the motor.
Method Description
Method 1: Screw Mounting (recommended) At the top of the armor of the motor, cut the tap into which the M6
screw vertically enters, and screw the vibration sensor head into
it.
Method 2: Adhesive Mounting (
*1. K6CM will not conform to safety standards if attaching the vibration sensor with adhesive. In the case of dis-
connection, take safety measures such as fixing the cables.
*1
)
Secure the attachment which is sold separately to the exterior of
the motor using adhesive. Screw the vibration sensor head into
the fixed attachment.
We recommend method 1 with high absolute accuracy, but if you cannot tap off the motor, use method
2.
An easy-mounting magnet (called "Sensor Easy mounting magnet") is included. It can be used to determine the position to be measured. Note that measurement accuracy is not guaranteed in the case of
magnet mounting.
The shapes of the easy-mounting magnet and the adhesive attachment are as follows.
These two shapes are similar. Be careful not to handle them by mistake.
Sensor Easy mounting magnet Adhesive attachment
2 - 12
K6CM Motor Condition Monitoring Device User’s Manual (N219)

2 Device Components
Voltage input
L1: R (black)
L2: S (red)
L3: T (white)
Cable length:
1 m
Through-hole
diameter: 52 mm
Insulation resistance sensor (special ZCT (IRT))
Split-type
Cable length: 1 m
To the K6CM-ISM
Insulation
Resistance Type
Device
Terminal number of
the K6CM device
Insulation resistance sensor
(ZCT (IRT)) side
Line color
7 IRT0: Sensor input (+) Red and white
8 IRT1: Sensor input (-) Red
9 IRT2: Supply to sensor 10 V (+) Black
10 IRT3: Supply to sensor 10 V (-) Black and white
2-5 Insulation Resistance Sensor (Spe-
cial ZCT (IRT))
2-5 Insulation Resistance Sensor (Special
The appearance of the insulation resistance sensor (special ZCT (IRT))
of each part are as follows.
*1. ZCT (IRT) stands for Zero Current Transformer (Insulation Resistance Transformer).
(*1)
and the name and functions
Nomenclature and functions of the Insulation resistance sensor
(special ZCT (IRT))
ZCT (IRT))
2
K6CM Motor Condition Monitoring Device User’s Manual (N219)
2 - 13

2 Device Components
2 - 14
K6CM Motor Condition Monitoring Device User’s Manual (N219)

Measuring and monitoring
System
This section describes the measuring and monitoring system and other features of the
K6CM devices.
3-1 Internal mechanism of K6CM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
3-1-1 Measuring and monitoring by K6CM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
3-2 Measurement System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
3-2-1 Sampling of measurement values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
3-2-2 Moving average . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
3-2-3 Monitoring Delay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
3-2-4 Trigger Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-5
3-2-5 Maximum Value and Minimum Value of Measurement value . . . . . . . . . . . . . 3-11
3-3 Monitoring System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-13
3-3-1 Types of Individual Alarms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-13
3-3-2 What is Comprehensive Alarm? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-13
3-3-3 Relationship Between Alarm and Display/Output . . . . . . . . . . . . . . . . . . . . . . 3-14
3-4 Guide for Setting Alarm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-19
3-4-1 Comprehensive Current Diagnosis Type (K6CM-CI2) . . . . . . . . . . . . . . . . . . 3-19
3-4-2 Vibration & Temperature Type (K6CM-VB) . . . . . . . . . . . . . . . . . . . . . . . . . . 3-23
3-5 How the Self-Diagnosis Function Works . . . . . . . . . . . . . . . . . . . . . . . . . . 3-25
3-6 How the Replacement Timing Notification (i.e., Running Time Function)
Works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-27
3-7 Initialization of Setting Value . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-28
3
K6CM Motor Condition Monitoring Device User’s Manual (N219)
3 - 1

3 Measuring and monitoring System
Measurement
value B
Update
measurement
display
Capture
measurement value
Sensor
Warning result
Transistor Output
Red
OFF
OFF
Yellow
OFF
ON
Green
Normal
ON
ON
Self-diagnosis
error output
OFF
OFF
ON
External trigger input
Internal setting value
Software tool
Ethernet
(EtherNet/IP or
Modbus TCP)
Sensor
PLC etc.
and/or
Alarm bar
Output 1 Output 2 Output 3
LCD (Not lit.)
Latch selection
available
N.O. is
selectable *1
OFF
Critical failure
occurrence
Warning failure
occurrence
Critical result
Warning result
Critical result
K6CM
Measurement
value A
Free run,
external trigger,
or internal trigger
Individual alarm for each
measurement value
Comprehensive
alarm output
as a device
OR logic of each
measurement
value
Critical
Warning
Critical
Warning
3-1 Internal mechanism of K6CM
3-1-1 Measuring and monitoring by K6CM
What is Measuring?
After the power is turned ON, K6CM calculates measurement values every sampling period based on
the input from the sensor.
The calculation of the measurement value is executed inside the K6CM even before the trigger start,
and the measurement display is updated when the trigger is established.
This is called measuring.
What is Monitoring?
According to the trigger setting, K6CM performs threshold value judgment of the Warning/Critical level
for a measurement value, and then determines whether the measurement value is within the Warning/Critical level as an "individual alarm". Next, the OR logic is obtained for each "individual alarm" and
Normal/Warning/Critical is judged for each monitor target as the "Comprehensive alarm".
This is called monitoring. It displays the front LCD alarm bar of the K6CM device and performs transistor output.
As shown in the figure, it is as follows.
3 - 2
K6CM Motor Condition Monitoring Device User’s Manual (N219)
*1. It can be set to Normally open
for Eip cpu version 1.10 or later
of the K6CM device and the
software tool version 1.1.0 or
higher.

3 Measuring and monitoring System
Measurement value 1 is the PV until
sampling of measurement value 2 is
completed.
Sampling period
Measurement value 2
Measurement value 1
Measurement value 2 is the PV when
sampling of measurement value 2 is
completed.
3-2 Measurement System
3-2-1 Sampling of measurement values
The input from the sensor is given to the K6CM device as a measurement value in every sampling
period. The sampling period depends on the measured target as follows.
Monitor type Measured target Sampling period
Comprehensive current diagnosis type
Vibration & temperature type
Insulation resistance type
Also, until the next sampling is completed, the present measurement value is held as the PV.
When the power is turned OFF, the held measurement value is reset.
Degradation level 1 5 s
Degradation level 2 5 s
Current 5 s
Acceleration 50 ms
Velocity 0.5 s
Temperature 0.5 s
Insulation resistance 10 s (Normal mode)
60 s (Inverter special measurement
mode)
3-2 Measurement System
3
3-2-1 Sampling of measurement values
Note The sampling of the measurement value is performed internally even in the case of the unmeasured state
before the trigger start.
K6CM Motor Condition Monitoring Device User’s Manual (N219)
3 - 3

3 Measuring and monitoring System
Measurement value
of past 4 times
Current measurement value
Current measurement value (after moving average)
Calculate the average value of measurement values
3-2-2 Moving average
The moving average is the process of assuming the average value of past n times of measurement
value which includes the measurement value of that time to be a current measurement value each time
the sampling of the measurement value is performed. The moving average makes it possible to suppress the instantaneous fluctuation of the measurement value and make the tendency of the measurement value easier to see. The image of moving average is shown below.
Measurement result before moving average
(a)
Note The sampling of the measurement value is performed internally even in the case of the unmeasured state
before the trigger start.
3-2-3 Monitoring Delay
The monitoring delay is a function to delay the start of monitoring, and is used to wait for the measurement values to stabilize. The monitoring delay operates when the trigger mode is the external trigger or
the internal trigger, and monitoring starts once the monitoring delay time has elapsed after the trigger
start.
(b)
After moving average of (a) (moving average times n = 4)
Monitoring delay time settings
Free run Disable Disable
External trigger Rising Disable: 0.0 seconds
Internal trigger Rising
Trigger mode Trigger type Monitoring delay time
Falling
Level
Falling
Level
Enable: 0.1 to 600.0 seconds
3 - 4
K6CM Motor Condition Monitoring Device User’s Manual (N219)

3-2-4 Trigger Mode
ON
OFF
Monitoring time
Measuring and
monitoring
ON
OFF
Monitoring time
Measuring and
monitoring
ON
OFF
Measuring and
monitoring
Monitoring time
Measuring and
monitoring
Set
value
Monitoring time
Measuring and
monitoring
Set
value
Set
value
Measuring and
monitoring
Trigger is a function of updating and monitoring the measurement values when certain conditions are
met. To observe the aging of the motor, it is necessary to set the installation state, load, and rotation
speed of the motor during measurement to the same condition, and to measure the motor rotating at a
constant speed avoiding the state where the motor is stopped or accelerating or decelerating. Depending on the application, select the trigger mode from Free run (while power is ON), External Trigger, or
Internal Trigger. The operation of each trigger mode is shown in the table below.
3 Measuring and monitoring System
3-2 Measurement System
Trigger
mode
Free run
(while power
is ON)
Start condition
of measuring
and monitoring
All times after
turning ON the
power of the
K6CM device
Depends on external conditions
Rising edge Falling edge Level
Trigger type
Always measuring
External trigger
Internal trig-
*1
ger
• Start condition
• End condition
Depends on the
relationship
between the measurement value
and the set value
(trigger level)
• Start condition
• End condition
When the external trigger
input changes from OFF to
ON
After the monitoring time
has elapsed
When the measurement
value exceeds the set
value (trigger level)
After the monitoring time
has elapsed
When the external trigger
input changes from ON to
OFF
After the monitoring time
has elapsed
When the measurement
value falls below the set
value (trigger level)
After the monitoring time
has elapsed
While the external input is in
the ON state
While the measurement
value exceeds the set value
(trigger level)
Note : For the insulation
resistance, this is
while present value
falls below the set
value.
*1. The measurement values which can be set the trigger level are as follows.
• Comprehensive current diagnosis type: Current
• Vibration & temperature type: Acceleration
• Insulation resistance type: Insulation resistance
When you select the trigger mode from External trigger or Internal trigger, set the measurement start condition and end condition by selecting the trigger type.
3
3-2-4 Trigger Mode
K6CM Motor Condition Monitoring Device User’s Manual (N219)
3 - 5

3 Measuring and monitoring System
Detailed information on trigger mode and behavior by status
The operation of the K6CM device and operation results from the software tool or message communications for each trigger mode and state are as follows.
K6CM device Operation
Trigger
mode
Free run Measuring and
External
trigger Or
Internal trigger
Status
monitoring Not yet
(immediately after
turning ON the
power)
While the power is ONMeasuring and
Measuring and
monitoring Not yet
During measuring
and monitoring
After measuring
and monitoring
*1. The monitoring status can be confirmed in "Main body status" from message communications.
*2. The front LCD number can display either the present value, the minimum value, or the maximum value depending on the
setting.
Measuring and
monitoring sta-
No measuring and
monitoring
monitoring
No measuring and
monitoring
Measuring and
monitoring
No measuring and
monitoring
tus
*1
Front Numeric LCD Dis-
"- - - -" is displayed Not lit. The read value is 0
Display measurement
value (
"- - - -" is displayed Not lit. The read value is 0
Display measurement
value (
Holding and displaying
values at the end of monitoring
play
*2
)
*2
)
Status dis-
play
"MON" The present value, the minimum
"MON" The present value, the minimum
Not lit. The held values are read out at the
Value read by software tool or
message communications
value, and the maximum value of
the measurement value can be read
out individually
value, and the maximum value of
the measurement value can be read
out individually
end of the measuring and monitoring
3 - 6
K6CM Motor Condition Monitoring Device User’s Manual (N219)

3 Measuring and monitoring System
Alarm bar
Status display
ON
OFF
ON
OFF
ON
OFF
Numeric LCD display
Transistor Output 1
Transistor Output 2
Transistor Output 3
Self-diagnosis: Normal: ON
Error: OFF
No lit.
"----"
Monitoring, Not yet (*1)
At the start of power
No lit.
LCDAll lit.
LCDAll lit.
Approx. 2 seconds
Power ON
(*1)
Time
During monitoring
One sampling period
Note: Sampling period depends on
measurement value and setting
When the trigger type is Free run: "MON"
When the trigger type is internal or
external trigger: Not lit.
Status display
Measuring and monitoring
Time
Power ON
(*1)
Measuring and monitoring period
Measurement value
Numeric LCD display
“MON” “MON”
During measuring and monitoring
Power ON the next time
Either the PV, the minimum value,
or the maximum value of the measurement value
Either the PV, the
minimum value,
or the maximum value of
the measurement value
During measuring
and monitoring
Measuring
and monitoring
Example of Operation When the Trigger Mode Is "Free run"
• Measuring and Monitoring Not yet
The following is an example of the operation from the time the power is turned ON until the measurement value is calculated. In any case, Free run (no trigger) and external trigger and internal trigger, the same operation occurs.
3-2 Measurement System
3
3-2-4 Trigger Mode
*1. PV of the measurement status is unmeasured status.
*2. Even if setting the transistor output method of outputs 1 and 2 to "Normally Open" or "Normally Close",
the above operation will be performed from immediately after turning ON the power supply until measurement starts. The operation according to the setting is started at the start of measurement.
• During Measuring and Monitoring
K6CM Motor Condition Monitoring Device User’s Manual (N219)
*1. In the above figure, the power-ON state and the unmeasured state (i.e., the state until
the measurement value is calculated) that exist immediately after turning ON the power
as shown below are omitted.
3 - 7

3 Measuring and monitoring System
Time
Measurement value
Power ON
Trigger
start
(*1)
Numeric LCD
display
Status display “MON”Not lit. Not lit.Not lit.
Measuring and
monitoring Not yet
Measuring and
monitoring period
Measuring and
monitoring
Measuring and
monitoring Not yet
During measuring
and monitoring
After measuring
and monitoring
Either the PV, the
minimum value, or the
maximum value of the
measurement value
The status at
the end keeps.
“- - - -“ “- - - -“
Power ON the next time
Example of Operation When the Trigger Mode Is "External trigger" or "Inter-
nal trigger"
• Measuring and Monitoring Not yet
The operation is the same as the operation example when the trigger mode is "Free run".
Refer to P. 3-7.
During and After Measuring and Monitoring
3 - 8
*1. In the above figure, the power-ON state and the unmeasured state (i.e., the state
until the measurement value is calculated) that exist immediately after turning ON
the power as shown on page 3-7 are omitted.
K6CM Motor Condition Monitoring Device User’s Manual (N219)

3 Measuring and monitoring System
Monitoring Delay Settings
To observe the aging of the motor, it is necessary to set the condition of the motor at measurement to
the same condition, and to measure the motor in a stable state avoiding the state where the motor is
stopped or accelerating or decelerating. Start measurement at the appropriate timing by setting the
monitoring delay time in reference to the following.
1 Determination of trigger mode
Refer to 3-2-4 Trigger Mode on page 3-5 and decide the trigger mode and trigger type according
to the application.
2 Determination of moving average times
Reducing the moving average times can help capture instantaneous fluctuations.
Increasing the moving average times can suppress the steep fluctuation of measurement values and capture the overall trend.
Determine the moving average times of measurement values according to the state of measurement value.
3 Determination of monitoring delay time (when trigger mode is external trigger or internal trigger)
To obtain the measurement value when the state of the motor is stable, set the monitoring delay
time using the following calculation formula.
3-2 Measurement System
3
3-2-4 Trigger Mode
*1
Time to wait for motor to stabilize
*1 Time until the rotation speed stabilizes after the motor rotation speed is increased or
decreased (during startup or changing of rotation speed).
*2 The sampling period differs for each measured target. For details, refer to 3-2-1 Sampling of
measurement values on page 3-3.
*3 Set this as 1 when the moving average times setting is OFF.
× sampling period*2 × (moving average times*3 + 1)
K6CM Motor Condition Monitoring Device User’s Manual (N219)
3 - 9

3 Measuring and monitoring System
Motor
Measurement
value after
moving average
Trigger timing
Measuring and monitoring
are possible.
Monitoring time
3
Sampling
period
4
Sampling
period × 3
During
startup
of the
motor
Changing
motor
rotation
speed
Before
operation
of the
motor
During stable
motor operation
During stable motor operation
Rotation
speed
Measurement
value
Trigger start
1
Measuring and monitoring are not possible.
2
Trigger start
Time to wait
to stabilize
Monitoring delay time
Sampling
period × 3
Time to wait
to stabilize
Monitoring delay time
If monitoring are started during the calculation of "Measurement value 4",
"Measurement value 2" measured during the wait to stabilize will be
included because the moving average times will be twice. To exclude this
measurement value, time to wait to stabilize + sampling period x 3 needs
to be considered for the monitoring delay time.
Measuring and monitoring
are not possible.
Measurement value
Measuring
and
monitoring
are possible.
The following is an example of when moving average times = 2.
Example of moving average times = 2
In the example in the figure above, when the time to wait for motor to stabilize is 10 seconds and the
measurement value is the velocity of vibration & temperature type (sampling period: 0.5 seconds), the
value for the monitoring delay time will be the following value.
Monitoring delay time
= time to wait for motor to stabilize + sampling period × (moving average times + 1)
= 10 s + 0.5 s x (2+1)
= 11.5 s
Also, determine a monitoring time that will fit within the motor stable operation.
3 - 10
K6CM Motor Condition Monitoring Device User’s Manual (N219)

3 Measuring and monitoring System
B
A
B
A
Measurement value
Minimum value
Maximum value
Present value Updated
Updated
Updated
Updated
Updated
Updated
Maximum value
Minimum value
Time
Measuring
and monitoring
During measuring and
monitoring
Measuring
and monitoring
Power ON
(*1)
Power ON the next time
During
measuring and
monitoring
3-2-5 Maximum Value and Minimum Value of Measurement value
The K6CM retains the Max./min. measurement value during measuring and monitoring period as internal data. They can be read by the software tool or by message communications.
With this function, by reading the maximum or minimum value of the measurement value for a certain
period and comparing it with another period, it is possible to detect signs of Criticality of the motor.
Also, changing the setting allows you to set the display value of the front LCD of the K6CM device to
the maximum value or the minimum value.
The software tool or message communications can be used to reset the retained Max./min. values after
monitoring by operating the "Max./min. reset" setting.
The measuring and monitoring period depends on the trigger mode. The maximum value and the minimum value also operate according to each trigger mode as follows.
3-2 Measurement System
When resetting the maximum and min-
Trigger mode Status Max./min. measurement values
Free run While the power is ONUpdate the Max./min. values of each
measurement value after power-on.
External trigger
Or
Internal trigger
Measuring and monitoring Not yet
During measuring
and monitoring
After measuring and
monitoring
"- - - -" is displayed and 0 is retained.
Update the Max./min. values of each
measurement value from the measuring
and monitoring start.
Max./min. values are retained. Reset to 0.
imum values with the software tool or
the message communications
The PV at that time is updated and then
will be updated.
The PV at that time is updated and then
will be updated.
Example of Operation When the Trigger Mode Is "Free run"
3
3-2-5 Maximum Value and Minimum Value of Measurement value
K6CM Motor Condition Monitoring Device User’s Manual (N219)
*1. In the above figure, the power-ON state and the unmeasured state (i.e., the state
until the measurement value is calculated) that exist immediately after turning ON
the power as shown on page 3-7 are omitted.
3 - 11

3 Measuring and monitoring System
Measurement value
Maximum
value
Minimum
value
A
B
C
Time
Maximum value
Minimum value
Present value
Updated
Updated
A
B
C
“- - - -”
“- - - -”
“- - - -”
“- - - -”
“- - - -”
“- - - -”
Updated
Power ON Trigger start
(*1)
Power ON the next time
Measuring and
monitoring Not yet
Measuring and
monitoring Not yet
After measuring
and monitoring
During measuring
and monitoring
Measuring
and monitoring
Updated
Example of Operation When the Trigger Mode Is "External trigger" or "Inter-
nal trigger"
*1. In the above figure, the power-ON state and the unmeasured state (i.e., the state
until the measurement value is calculated) that exist immediately after turning ON
the power as shown on page 3-7 are omitted.
3 - 12
K6CM Motor Condition Monitoring Device User’s Manual (N219)

3-3 Monitoring System
3-3-1 Types of Individual Alarms
K6CM's individual alarm type and threshold setting range are as follows.
For individual alarms, it is possible to set the level of Warning and Critical, respectively.
For the K6CM-VBM, the threshold values can be set automatically with the software tool by using the
threshold automatic setting function. For details, refer to 6-1-4 Buttons on Device Setting on page 6-13.
3 Measuring and monitoring System
3-3 Monitoring System
Monitor types Model Individual alarm type
Comprehensive current diagnosis type
Vibration & temperature type
Insulation resistance
type
K6CM-CI2M
K6CM-VBM Acceleration failure Upper 0.00 to 99.99 G Yes Yes
K6CM-ISM Insulation resistance fail-
Degradation level 1 alarm Upper 0 to 9999 Yes Yes
Degradation level 2 alarm Upper 0 to 9999 Yes Yes
Current Failure Upper Rating 5 A: 00.00 to
Velocity failure Upper 0.00 to 99.99 ms Yes Yes
Motor temperature failure Upper 0 to 9999 deg Yes Yes
Temperature gap failure Upper 0 to 9999 deg Yes Yes
ure
*1. In the case of the upper limit alarm, it is necessary that the threshold of Critical > Warning is satisfied. If Critical
threshold ≤ Warning threshold, the Warning threshold is ignored and only the Critical threshold exists.
In the case of the lower limit alarm, it is necessary that the threshold of Critical <Warning is set. If Critical threshold ≥ Warning threshold, the Warning threshold is ignored and only the Critical threshold exists.
3-3-2 What is Comprehensive Alarm?
Comprehensive alarms are judged as integrated OR logic with the priority order as "Critical" > "Warning" > "Normal" for each individual alarm.
Upper or
lower
limit
Lower 0.000 to 9.999 MΩ Yes Yes
Threshold setting
*1
99.99 A
Rating 25 A / 100 A /
200 A / 400 A / 600 A:
0.0 to 999.9 A
range
Warning Critical
Yes Yes
Level
*1
3
3-3-1 Types of Individual Alarms
It is as follows.
Types of comprehensive alarm Status
Normal
Warning
Critical
When there is neither "Critical" nor "Warning" in the individual alarm.
When there is not even one "Critical" level in the individual alarm, and at least one "Warning" level.
When there is at least one "Critical" level in the individual alarm.
Example: When the measurement value is two:
Individual alarm Comprehensive alarm
Normal and Normal Normal
Warning and Normal Warning
Warning and Warning Warning
Critical and Normal Critical
Critical and Warning Critical
Critical and Critical Critical
Note To specify the type of individual alarm that exceeds the alarm threshold, operate the DISP key in the front of
the K6CM device to check the measurement value by monitoring type.
K6CM Motor Condition Monitoring Device User’s Manual (N219)
3 - 13

3 Measuring and monitoring System
3-3-3 Relationship Between Alarm and Display/Output
The relationship between the state of comprehensive alarm (Warning, Critical), alarm bar, numeric LCD
display, and transistor output 1, 2 is shown below.
Described below is the case where the alarm latch is disabled and the case where it is enabled.
When the Alarm Latch is Disabled
If you set the alarm latch to "Disable (no latch)" using the software tool or message communications,
the alarm condition of the comprehensive alarm (warning or critical) will not be latched.
After the comprehensive alarm (Warning or Critical) occurs, if the measurement value falls below the
hysteresis (i.e., 10% of the threshold setting value) of the Warning or Critical threshold (for the upper
limit alarm) or higher (for the lower limit alarm), the state of the comprehensive alarm (alarm bar and
transistor outputs 1 and 2) is canceled.
When the Trigger Mode Is "Free run (no trigger)"
When power is turned ON, measuring and monitoring are started.
Measurement value
Critical level
Warning level
Power ON
(*1)
Alarm bar
Numeric LCD
display
Status display
Transistor Output 1
(At the normally closed * 2)
Green Yellow Red Yellow Green
Measurement value displayed
“MON”
ON
OFF
10%
10%
Time
3 - 14
Transistor Output 2
(At the normally closed * 2)
*1. In the above figure, the power-ON state and the unmeasured state (i.e., the state
until the measurement value is calculated) that exist immediately after turning ON
the power as shown on page 3-7 are omitted.
*2. The transistor output method of output 1 and output 2 can also be set to "Normally
Open". In the case of Normally Open, ON/OFF is opposite to the above.
ON
OFF
K6CM Motor Condition Monitoring Device User’s Manual (N219)

3 Measuring and monitoring System
No lit.
Time
Measurement value
Power ON
Alarm bar
Green Yellow
Red
Yellow
ON
OFF
ON
OFF
No lit.
Start measuring and monitoring
End measuring and monitoring
During measuring
and monitoring
Yellow (keep)
Measuring and
monitoring Not yet
A
Status display
No lit.
After measuring
and monitoring are
completed, the
state at the end of
measuring and
monitoring is
maintained.
A (keep)
Transistor Output 2
(At the normally
closed * 2)
Transistor Output 1
(At the normally
closed * 2)
Numeric LCD display
“- - - -“
Critical level
Warning level
After measuring
and monitoring
Keep ON
Keep OFF
“MON”
(*1)
10%
Measurement value displayed
When There Is a Trigger (external trigger or internal trigger)
The alarm bar turns off, the numeric LCD display shows "- - - -", and the transistor outputs 1 and 2
are both OFF until measuring and monitoring are started (when measuring and monitoring are not
started yet).
During measuring and monitoring, the state is the same as when the trigger mode is Free run (no
trigger).
After measuring and monitoring, the state at the time of measuring and monitoring end is maintained
for alarm bar, numeric LCD display, transistor output 1 and 2.
3-3 Monitoring System
3
3-3-3 Relationship Between Alarm and Display/Output
K6CM Motor Condition Monitoring Device User’s Manual (N219)
*1. In the above figure, the power-ON state and the unmeasured state (i.e., the state until the mea-
surement value is calculated) that exist immediately after turning ON the power as shown on
page 3-7 are omitted.
*2. The transistor output method of output 1 and output 2 can also be set to "Normally Open". In
the case of Normally Open, ON/OFF is opposite to the above.
3 - 15

3 Measuring and monitoring System
Precautions for Correct Use
In the upper limit alarm, if Critical threshold ≤ Warning threshold, lower critical alarm, Critical
threshold
performed when only the value exists. It is as follows.
≥ Warning threshold, Warning threshold is ignored and Critical threshold operation is
Measurement value
Warning level
Critical level
Power ON
(*1)
Since Warning level ≥ Critical level,
it is the same operation as when
Warning level does not exist.
Time
Alarm bar
Numeric LCD display
Status display
Transistor Output 1
(At the normally
closed * 2)
Transistor Output 2
(At the normally
closed * 2)
Green
Measurement value displayed
ON
OFF
ON
OFF
Red Green
“MON”
The above is an example in which the alarm latch is disabled and the trigger mode is Free run
(without trigger), but in other cases the threshold of Warning is ignored.
*1. In the above figure, the power-ON state and the unmeasured state (i.e., the state
until the measurement value is calculated) that exist immediately after turning ON
the power as shown on page 3-7 are omitted.
*2. The transistor output type of output 1 and output 2 can also be set to "Normally
Open". In the case of Normally Open, ON/OFF is opposite to the above.
3 - 16
K6CM Motor Condition Monitoring Device User’s Manual (N219)

3 Measuring and monitoring System
Measurement value
Alarm bar
Green
(*1)
Yellow Red Green
ON
OFF
ON
OFF
Status display
Critical level
Warning level
Numeric LCD display
Transistor Output 1
(At the normally
closed * 2)
Transistor Output 2
(At the normally
closed * 2)
Remains
OFF
Remains OFF [ALM RST] key is pressed
It returns to the
alarm state
("normal" in this
case) when the
[ALM RST] key is
pressed.
Time
Power ON
Remains
red
“MON”
Measurement value displayed
When Alarm Latch is Enabled
Using the software tool or the message communications, setting the alarm latch to "Enabled" will latch
the alarm condition of comprehensive alarm (warning or critical).
After the occurrence of comprehensive alarm (Warning or Critical), even if the measurement value falls
below the threshold of Warning or Critical by hysteresis (10% of the threshold setting value) (upper limit
alarm) or higher (lower limit alarm), Hold (alarm latch) the state of comprehensive alarm (alarm bar and
transistor outputs 1 and 2).
The alarm latch is released for the first time by pressing the [ALM RST] key on the front of the K6CM
device.
The operation when pressing the [ALM RST] key varies depending on the push timing as follows.
3-3 Monitoring System
When [ALM RST] Key Is Pressed during Measuring and Monitoring
If you press the [ALM RST] key during measuring and monitoring, both the alarm bar and transistor
outputs 1 and 2 return to the comprehensive alarm state at that time.
3
3-3-3 Relationship Between Alarm and Display/Output
K6CM Motor Condition Monitoring Device User’s Manual (N219)
*1. In the above figure, the power-ON state and the unmeasured state (i.e., the state
until the measurement value is calculated) that exist immediately after turning ON
the power as shown on page 3-7 are omitted.
*2. The transistor output method of output 1 and output 2 can also be set to "Normally
Open". In the case of Normally Open, ON/OFF is opposite to the above.
3 - 17

3 Measuring and monitoring System
Measuring and
monitoring Not yet
No lit.
Measurement value
Alarm bar
(*1)
Green Yellow
Red
ON
OFF
ON
OFF
No lit. Green
Status display
No lit.
Transistor Output 1
(At the normally
closed * 2)
Transistor Output 2
(At the normally
closed * 2)
Numeric LCD display
Critical level
Warning level
Remains OFF [ALM RST] key is pressed
(ON)
(ON)
“MON”
Measurement value displayed
at the end of measurement
“- - - -“
Time
Power ON
Remains OFF
Remains red
Measurement value displayed
Start measuring and monitoring
End measuring and monitoring
After measuring
and monitoring
During measuring and monitoring
When [ALM RST] Key Is Pressed After Measuring and Monitoring
When using the trigger function (i.e., external trigger or internal trigger), if you press the [ALM RST]
key after measuring and monitoring, the alarm bar turns green and the transistor output turns on.
3 - 18
*1. In the above figure, the power-ON state and the unmeasured state (i.e., the state
until the measurement value is calculated) that exist immediately after turning ON
the power as shown on page 3-7 are omitted.
*2. The transistor output method of output 1 and output 2 can also be set to "Nor-
mally Open". In the case of Normally Open, ON/OFF is opposite to the above.
K6CM Motor Condition Monitoring Device User’s Manual (N219)

3 Measuring and monitoring System
0 20 50 100
NormalNormal
Maintenance requiredMaintenance required
CriticalCriticalNormal
Maintenance required
Critical
Example of actual measurement:
Initially measurement value of the degradation level 1 is “51”.
Example: The degradation level 1 measured at the begging of
use is 51 due to the influence of inverter control.
However, it is not abnormal.
Set the initial measurement value to 71 (51 + 20) for
the degradation level 1 alarm threshold value
(warning) and set the initially measurement value to
101 (51 + 50) for the degradation level 1 threshold
value (critical), and then perform trend monitoring.
The sensitivity of the degradation level differs
depending on the equipment to be monitored, so
adjust the values of 20 and 50 according to the
equipment.
Inverter Operation: 100%
3-4 Guide for Setting Alarm
3-4-1 Comprehensive Current Diagnosis Type (K6CM-CI2)
Refer to the following guideline to set the alarm threshold value of the monitored degradation level in
the comprehensive current diagnosis type (K6CM-CI2).
Monitoring by Degradation Level 1
When driving the motor by direct connection to commercial power supply
When driving the motor without an inverter, use the following setting values at first.
• Degradation level 1 alarm threshold value (Warning): 20
• Degradation level 1 alarm threshold value (Critical): 50
Note The default value of alarm threshold (Warning) is set to 30, which is the above 20 plus 10.
Since the value of degradation level 1 differs depending on the equipment status and motor driving
conditions, set alarm threshold values suitable for the equipment using the above alarm threshold
values as a guide.
Refer to the K6CM Motor Condition Monitoring Device STARTUP GUIDE (N221-E1) for details.
3-4 Guide for Setting Alarm
3
3-4-1 Comprehensive Current Diagnosis Type (K6CM-CI2)
When driving the motor with an inverter
With an inverter, the influence of the inverter control appears in the current waveform. The degradation level 1 will be measured to be larger than the actual value.
Therefore, shift the above initial setting value in the degradation level 1 measured in a new product
or the normal condition after overhauling before use.
K6CM Motor Condition Monitoring Device User’s Manual (N219)
3 - 19

3 Measuring and monitoring System
A small
foreign matter
is attached.
Zoom up
[sec]
Ideal sine wave
Low-level
degradation
Zoom up
Ideal sine wave
[sec]
High-level
degradation
Ideal sine wave
Normal
Zoom up
[sec]
[sec]
Zoom up
Ideal sine wave
High-level
degradation
Note 1. When you use an inverter to drive the motor, you may not be able to monitor the abnormality of the
motor or load using degradation level 1. If that happens, monitor it using degradation level 2.
Normal Low-level degradation High-level degradation
Motor
condition
The load balance is stable.
The load balance is lost,
and the force is applied
unevenly to the motor shaft.
The load balance is significantly lost, and the large
force is applied unevenly to
the motor shaft.
A large
foreign matter
is attached.
Direct
connection to
commercial
power
supply
With
inverter
Example: Small amount of a
foreign matter attached to
the propeller fan
Example: Adhesion of a foreign matter, or damage of
propeller fan
Degradation level 1: 8 Degradation level 1: 24 Degradation level 1: 56
Normal
Ideal sine wave
[sec]
Zoom up
Since the current waveform is
almost matches the ideal sine
wave, the value of degradation level 1 will small.
Even in Low-level degradation,
since the current waveform
deviates from the ideal sine
wave, so the value of degradation level 1 will higher than that
In High-level degradation,
since the current waveform
deviates largely from the ideal
sine wave, the value of degradation level 1 will large.
in the normal condition.
Degradation level 1: 50 Degradation level 1: 51 Degradation level 1: 61
Ideal sine wave
Normal
3 - 20
2. Degradation level 1 may vary when the motor is driven by the inverter. In that case, slightly shift the
[sec]
Zoom up
An inverter control causes the
current waveform to deviate
from the ideal sine wave.
Even when the motor drive is
in normal condition, the value
of degradation level 1 will
large.
An inverter control causes the
current waveform to deviate
largely from the ideal sine
wave. Therefore Low-level
degradation is not shown, and
the value of degradation level
1 will not be changed largely.
An inverter control causes the current waveform to deviate largely
from the ideal sine wave. Also, the
deviation from the ideal sine wave
is large due to the Hi-level degradation. Therefore the value of
degradation level 1 will large.
The above is an example and degradation level 1 is reference value. Degradation level 1 and the current
wave may vary depends on the motor.
inverter drive frequency.
Also always measure and monitor degradation level 1 at the same inverter drive frequency.
K6CM Motor Condition Monitoring Device User’s Manual (N219)
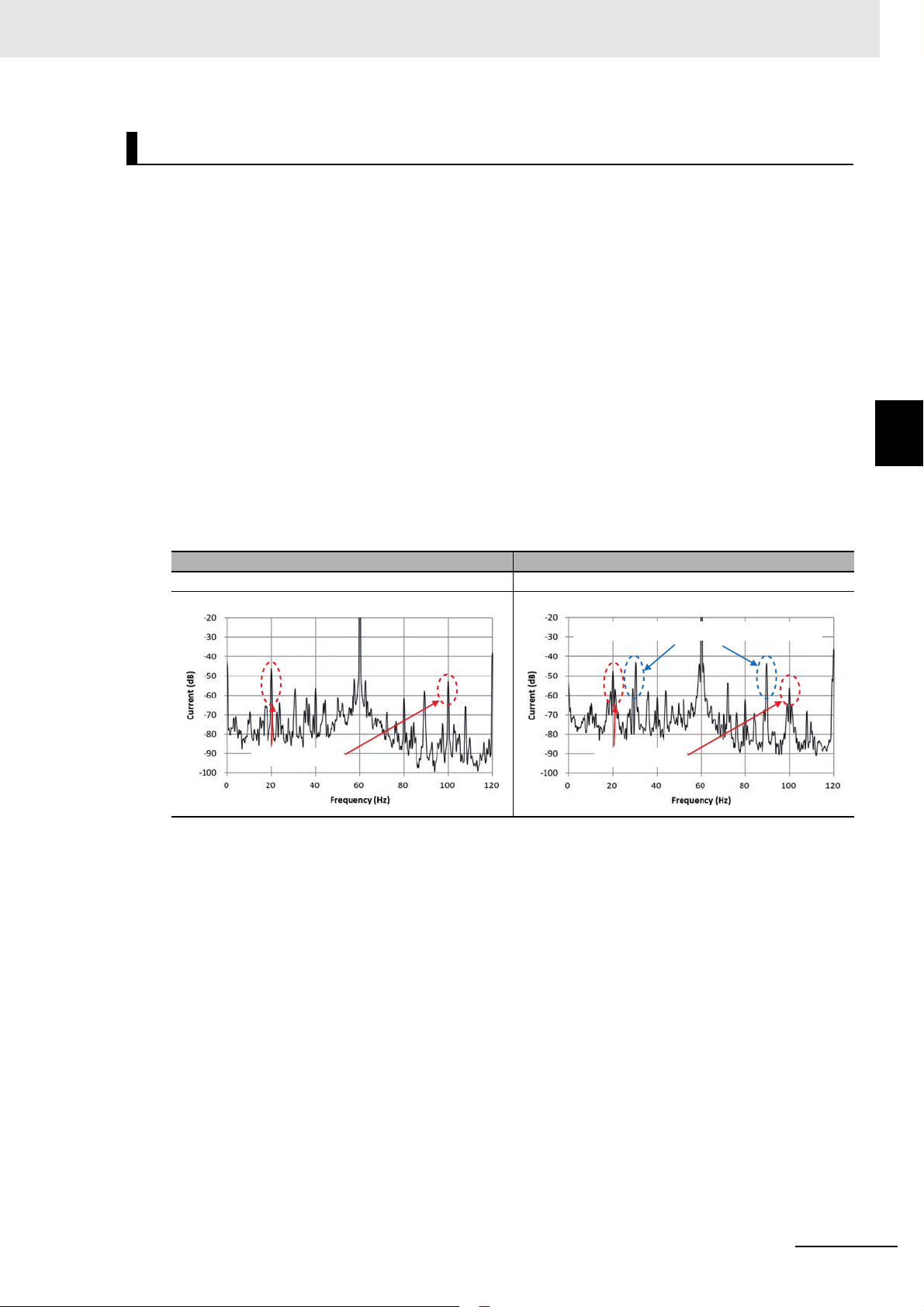
Monitoring by Degradation Level 2
Inverter noise
Use the following setting values at first.
3 Measuring and monitoring System
Degradation level 2 alarm threshold value (Warning): 20
Degradation level 2 alarm threshold value (Critical): 50
Since the value of degradation level 2 differs depending on the equipment status and motor driving conditions, set alarm threshold values suitable for the equipment using the above alarm threshold values
as a guide.
Refer to the K6CM Motor Condition Monitoring Device STARTUP GUIDE (N221-E1) for details.
When driving the motor with an inverter
Degradation level 2 clearly captures not only the noise caused by inverter driving but also other factors such as the frequency components affecting the rotating shaft of the motor, and represents
them as numerical values. Since a motor or load abnormality is captured with excellent sensitivity
and the variations in the numerical values are also small compared with degradation level 1, degradation level 2 is suited to monitoring an inverter-driven three-phase induction motor.
Choose whether to use degradation level 1 or degradation level 2 depending on the equipment to be
monitored.
Driving the motor with an inverter (normal) Driving the motor with an inverter (warning)
Degradation level 2: 15 Degradation level 2: 30
Components affecting the rotating shaft
3-4 Guide for Setting Alarm
3
3-4-1 Comprehensive Current Diagnosis Type (K6CM-CI2)
Inverter noise
Inverter noise
K6CM Motor Condition Monitoring Device User’s Manual (N219)
3 - 21

3 Measuring and monitoring System
Additional Information
Additional Information
Concept for Choosing Whether to Use Degradation Level 1 or Degradation Level 2
The following describes the concept for deciding whether to use degradation level 1 or degradation
level 2 for an abnormality that influences the degradation level.
Abnormality affecting
degradation level
Misalignment Degradation level 2 Degradation level 2 is suited to monitoring abnormaliLoad imbalance
Rotor abnormality
Cavitation, air contamination
*1. The K6CM-CIM measures only degradation level 1, so it is referred to as the degradation level in the software
tool.
Recommended degrada-
tion level
Degradation level 1
Description
ties for which certain frequency components increase
because certain frequency components among the frequency components affecting the rotating shaft of the
motor are clearly captured and represented as numerical values.
*1
Degradation level 1 represents the degree of deviation
between the whole current waveform obtained during
the sampling period and the smooth sine wave of the
ideal state as numerical values. Therefore, this is
suited for monitoring abnormalities that have an irregular effect on the shaft of the motor.
Choose whether to use degradation level 1 or degradation level 2 based on the trends of the measured
data because the degradation level appears differently depending on the failure condition of the motor
or load or depending on the installation conditions.
Degradation level 1 and degradation level 2 are both measured at the same time. Therefore, you can
also monitor using both of them or just one of them depending on the abnormality you wish to monitor.
When measuring a 2-pole motor with degradation level 2
Since the frequency band of the harmonics of the drive frequency and the frequency band in
which errors such as load imbalance and misalignment appear are the same frequency band
for a 2-pole motor, sensitivity may be reduced with degradation level 2. If that happens, monitor
it using degradation level 1.
If you want to monitor using only degradation level 1 or degradation level 2
If you want to monitor using only degradation level 1, set the alarm threshold of degradation
level 2 to the maximum value (9999) so that the alarm of degradation level 2 is not output. Likewise, if you want to monitor using only degradation level 2, set the alarm threshold of degradation level 1 to the maximum value.
3 - 22
K6CM Motor Condition Monitoring Device User’s Manual (N219)

3 Measuring and monitoring System
3-4-2 Vibration & Temperature Type (K6CM-VB)
For the Vibration & temperature type (K6CM-VB), the threshold setting method differs depending on the
monitored object (i.e., acceleration, velocity) as follows.
Monitoring by Acceleration
In acceleration monitoring, you can generally monitor the bearing wears.
There are two threshold setting methods in accordance with the state of the motor.
Monitoring by relative value
Monitor by relative value is used when it can be determined that there is no abnormality in the motor
(new or overhauled).
Set the alarm threshold value referring to the table below based on the initial value that is set after
installation.
Alarm Criteria
Warning 3 to 5 times the initial value after installation
Critical More than 5 times the initial value after installation
3-4 Guide for Setting Alarm
3
3-4-2 Vibration & Temperature Type (K6CM-VB)
Monitoring by absolute value
Monitor by absolute value is used when the motor status is unknown.
The threshold guide value is determined from the shaft diameter D [mm] of the motor to be monitored and the rotation speed N [rpm].
Refer to the figure below and set the alarm threshold.
100
10
1
Acceleration [G]
0.1
0.01
0 2 4 6 8 101214161820
Shaft diameter D [mm] X Rotation speed N [rpm]
The default value of the alarm threshold is set as follows.
• Alarm threshold (Warning): 0.5 G
• Alarm threshold (Critical): 1.0 G
When the motor capacity is set to 11 kW, the shaft diameter is 42 mm, and when the 4 pole motors
are directly put in the power supply (60 Hz), the rotation number is 1800 rpm. 42 mm × 1800 rpm =
4
7.56 × 10
. Based on this result of the formula, the figures are set as rounded values.
C Area: Critical
B Area: Warning
A Area: Normal
×10
4
Warning
Critical
K6CM Motor Condition Monitoring Device User’s Manual (N219)
3 - 23

3 Measuring and monitoring System
Additional Information
Rmsvalue of
vibration velocity
Class I
A
B
C
D
A
B
C
D
A
B
C
D
A
B
C
D
Normal
Warning
Critical
Class II Class III JudgmentClass IV
0.71 mm/s
1.12 mm/s
1.80 mm/s
2.80 mm/s
4.50 mm/s
7.10 mm/s
11.20 mm/s
18.00 mm/s
Monitoring by Velocity
In monitoring on monitoring, you can generally monitor the load imbalance, misalignment etc.
Set the alarm threshold from the class (i.e., capacity and installation status) of the motor to be monitored. Refer to the figure below and set the threshold value. (It will be set according to ISO 2372.)
The target motor class follows the table below.
Equipment class Definition
I Small-sized machines (typical example: motor with output less than 15 kW)
II Medium-sized machine (typical example: motor with output of 15 kW to 75 kW or less
and machine with 300 kW or less)
III Large-sized machines: machine installed on a heavy foundation with high rigidity.
IV Large-sized machines: machine installed on a foundation with soft rigidity.
The default value of the alarm threshold is set as follows.
• Alarm threshold (Warning): 40 mm / s
• Alarm threshold (Critical): 45 mm / s
Velocity reacts not only to vibrations but also to things like shocks. An alarm may be output due to
unnecessary vibration or shock when mounting a vibration and temperature sensor. Therefore, the
default value of the alarm threshold is set to a higher value. In actual use, set the alarm threshold to
an appropriate value according to the monitor target.
If you want to monitor using only acceleration or speed
If you only want to monitor using acceleration, set the alarm threshold of speed to the maximum
value (9999) so that the speed alarm is not output. Likewise, if you only want to monitor using
speed, set the alarm threshold of acceleration to the maximum value.
3 - 24
K6CM Motor Condition Monitoring Device User’s Manual (N219)

3 Measuring and monitoring System
3-5 How the Self-Diagnosis Function
Works
The K6CM has a self-diagnostic function that detects its own error.
How to Notify Self-Diagnosis Error
If the self-diagnosis function determines a hardware error or a communications error between the
K6CM device and the sensor, it notifies the error using display, communications and output.
Display
3-5 How the Self-Diagnosis Function Works
When an error occurs, an error will be notified by displaying the following (1) to (4).
The display change varies depending on the type of error.
K6CM Device
(1) Numeric
LCD display
(2) State display
(3) Module Status
display
(MS indicator)
Vibration & Temperature Sensor
Communications
3
(4) Pre-amplifier fault
The Main body status notifies the occurrence of an error to the users. It changes depending on the
type of error.
Output
Turning transistor output 3 (Tr3) OFF notifies the occurrence of an error to the users.
K6CM Motor Condition Monitoring Device User’s Manual (N219)
3 - 25

3 Measuring and monitoring System
Behavior When Self-Diagnosis Error Occurs
K6CM Device
Error status
Hardware
errors
Communications error
with Vibration & Temperature
sensor or
Insulation
Resistance
sensor
Hardware
error for running time
function
Numeric
LCD dis-
play
---- lit Or
8888
flashing
---- lit Flash-
There is
no state
change
due to
error
occurrence.
MS
indica-
tor
Lit red Lit OFF Since the
ing red
Flashing red
ERR
indi-
cator
Lit OFF Mes cpu
Lit OFF Main CPU
Tr3
output
Main body
status
message
communications cannot
be performed, the
Main body
status cannot be read.
error turns
ON.
error turns
ON.
Corrective action
Turn ON the power again. If it returns to
normal, the influence of noise is possible. Then, check whether noise is being
generated.
If the condition does not restore, contact
your OMRON representative.
• Make sure that wiring is correct.
• Turn ON the power again. If it returns
to normal, the influence of noise is
possible. Then, check whether noise
is being generated.
If the condition does not restore, contact
your OMRON representative.
• Make sure that the ambient temperature of the K6CM device does not
exceed the operating ambient temperature.
• Turn ON the power again. If it returns
to normal, the influence of noise is
possible. Then, check whether noise
is being generated.
If the condition does not restore, contact
your OMRON representative.
3 - 26
Vibration & Temperature Sensor
Error status Pre-amplifier fault indicator Corrective action
Hardware errors Lit Turn ON the power again. If it returns to normal,
the influence of noise is possible. Then, check
whether noise is being generated.
If the condition does not restore, contact your
OMRON representative.
K6CM Motor Condition Monitoring Device User’s Manual (N219)

3 Measuring and monitoring System
3-6 How the Replacement Timing Notifi-
cation (i.e., Running Time Function)
3-6 How the Replacement Timing Notification (i.e., Run-
Works
An electrolytic capacitor is built in the K6CM device. From the manufacturing point of time, the electrolytic solution permeates through the sealing rubber and the evaporation of the electrolyte in the electrolytic solution progresses with time. As a result, deterioration of characteristics such as decrease in
capacitance occurs. Due to that, the K6CM device can not exhibit sufficient performance over time.
The replacement timing announcement function indicates a guideline period until the K6CM device is
unable to achieve sufficient performance due to the deterioration of electrolytic capacitor characteristics. Also, when reaching the guideline value, K6CM device front display and communications status
will change. You can use this function as a guideline to know when to replace the K6CM device.
Note The replacement timing announcement indicates a guideline that the K6CM device cannot achieve suffi-
cient performance due to deterioration of the electrolytic capacitor. The guideline does not include failures
caused by other factors.
How to Notify When to Replace
When the K6CM device reaches the guideline of the replacement time, it will be notified by display and
communications.
Display
ning Time Function) Works
3
AGE indicator lit to notify users when to replace.
Note Turn ON the Use Running Time, so that the AGE LED lights up when the guideline for the replacement
time is reached. The default setting of the Use Running Time is OFF.
State display
Communications
The Running Time bit ON in the Main body status notifies users when to replace.
Also, you can see the percentage of achievement to the expected life using Running Time parameter. Running Time parameter sets the expected life to 100% and increases from 0% in 10% increments. We recommend replacing the K6CM device if the parameter reaches 100%.
K6CM Motor Condition Monitoring Device User’s Manual (N219)
3 - 27

3 Measuring and monitoring System
Press the keys at the same time for 5 seconds
or more.
While the keys are pressed at the same time,
the numeric display LCD flashes.
After 5 seconds or more, K6CM is reset, and
initialization of the setting value is completed.
3-7 Initialization of Setting Value
This section describes how to initialize the setting values of the K6CM devices.
To initialize the setting value, press the [ALM RST] key and the [DISP] key at the same time for 5 seconds or more.
3 - 28
K6CM Motor Condition Monitoring Device User’s Manual (N219)

Introduction of the Motor condition
monitoring Tool
This section describes the overview of the Motor condition monitoring Tool (Software
Tool), and how to install it.
4-1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
4-1-1 What is the Motor condition monitoring Tool (Software Tool) for? . . . . . . . . . . 4-2
4-1-2 Functions and Specifications of the Software Tool . . . . . . . . . . . . . . . . . . . . . . 4-3
4-1-3 Operating Environment of the Software tool . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-8
4-2 Installation and Uninstallation, Starting up . . . . . . . . . . . . . . . . . . . . . . . . 4-10
4-2-1 Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-10
4-2-2 Uninstallation Procedures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-23
4-3 IP Address Setting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-24
4-3-1 IP Address Setting of Your PC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-24
4-3-2 IP Address Setting of the K6CM Devices . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-26
4
K6CM Motor Condition Monitoring Device User’s Manual (N219)
4 - 1

4 Introduction of the Motor condition monitoring Tool
Software tool
• IP address
• Alarm settings, other device settings
Download after creating project
Or
Download after device setup
Motor condition monitoring equipment
K6CM device
4-1 Overview
The software tool can display the setting of K6CM devices and the present value (PV) display, and
automatic logging and history display.
4-1-1 What is the Motor condition monitoring Tool (Software Tool) for?
Overview
Connect the Motor condition monitoring Tool (hereinafter referred to as software tool) to the K6CM
device with an Ethernet cable, and then you can execute the following.
Setting up the K6CM devices
IP address, alarm setting, and other K6CM device settings are available.
Monitor present value (PV) of measurement value and alarm result
You can monitor the measurement values and the present value (PV) of the alarm results for each
motor, K6CM device, and monitoring category.
Automatic logging and history display
Automatically logs the measurement value and alarm result to the computer.
At the time the project saved, the logging result is automatically output to a log file (CSV file).
Based on automatically logged data and log file (CSV file), history of measurement value and alarm
result is displayed.
* The project is saved along with the log file.
Setting up the K6CM Device
The following settings of the K6CM device are possible.
Setting type Screen for setting
IP address Create project screen or Device setting screen
Alarm setting, and other K6CM device settings Create project screen or Device setting screen
4 - 2
K6CM Motor Condition Monitoring Device User’s Manual (N219)

4 Introduction of the Motor condition monitoring Tool
Motor condition monitoring equipment
K6CM device
Software tool
Logging
Read at specified * The software tool obtains the clock information from the PC.
Therefore, do not change the time setting of the PC during
logging and between the logging interruption and the logging restart.
At the time the project saved
CSV files
(referred to as
"log file")
Measurement
value, alarm result
History
display
Present
value (PV)
Automatic
Present value (PV) Display and Automatic Logging and History Display
Present value (PV) display and automatic logging of the following data of the K6CM device are possible.
* The project is saved along with the log file.
Target data Present value (PV) display Automatic logging / history display
• Measurement
value
• Alarm result
Display present value (PV) at
specified cycle
• Automatic logging at the same designated cycle as the left, history
display possible
• At the end of project Save to CSV file called "log file" (For details,
refer to "Log file" of Details of the file to be created on page 4-4.)
4-1 Overview
4-1-2 Functions and Specifications of the Software Tool
Item Specifications
Project Number of files that can be created No limit
Logging
1 Number that can
be registered in
the project
Graph display
Files to create
Supported format CSV data format
Monitoring cycle 5 seconds to 366 days*1
Number of motors 10
Number of devices per motor 3
Device type per motor
Types of graphs Polygonal line
Display period *2 1 hour, 1 day, 1 month, 1 year
Only one type is possible.
The same device type cannot be registered in the same
motor name.
The following is created in the folder of the project file name.
• Project file (binary format)
• Parameter file (binary format)
• Log file (CSV format)
For details, refer to Details of the file to be created on the
next page.
4
4-1-2 Functions and Specifications of the Software Tool
K6CM Motor Condition Monitoring Device User’s Manual (N219)
4 - 3

4 Introduction of the Motor condition monitoring Tool
Precautions for Correct Use
*1. Around 1 day for the monitoring cycle is recommended.
If you set the monitoring cycle short, the memory capacity of the PC may run short.
In that case, move the log file to another location and reopen the project.
Guideline number of days to move log files is as follows.
Days = 50 * Measurement interval [seconds] / Number of connected K6CMs
For example, if the monitoring cycle setting = 5 seconds, and the number of connected K6CM = 10, Move the
log file to another location every 25 days and reopen the project.
*2. In the software tool version 2.0.0 and earlier, the graph display period can be set by selecting the tabs (1 hour,
1 day, 3 months, 6 months, 1 year, 2 years, 5 years, 10 years, 20 years).
In the software tool version 1.2.0.0 and later, you can move the graph in the time axis direction using the graph
time axis movement.
Details of the file to be created
Do not use project files which are created with the software tool with the new version if you use
the software tool with the older version. The software tool may not operate correctly.
File type
Project file .k6cm Binary file including
Parameter data
file
Exten-
sion
• Device configuration information including motor group
• Device setting value
• Event log information
• Related log file information
.k6pa Binary file of parameter values for each device Same as above
Description Save position by default
C: \ OMRON \ Motor condition monitoring Tool
4 - 4
K6CM Motor Condition Monitoring Device User’s Manual (N219)

4 Introduction of the Motor condition monitoring Tool
File type
Log file .csv Automatic log file of monitored information.
Log file .csv Save timing:
Exten-
sion
Description Save position by default
It is used for graph display inside the tool.
It is CSV format, so it can be used by other applications.
File name: Project name _IIIIII_TT_YYYYMMDD_NNNN.csv
IIIIII: Device ID (000000 to 999999)
TT: Monitor type (00 to 06)
00: acceleration, 01: velocity, 02: motor temperature,
03: temperature gap, 04: insulation resistance, 05: degradation level 1,
06: current, 07: degradation level 2
YYYY: Year
MM: Month (01 - 12)
DD: days (01 to 31)
NNNN: Serial number (the above-mentioned device ID, monitoring cate-
gory, number for identifying the same date year / month / date)
The contents of the file are as follows. One record consists of the following
two lines.
Line 1: [Device name], [Monitor type name]
From the second line: [Date and time], [Present value (PV)], [Threshold
(Warning)], [Threshold (Critical)], [Main body status], [Measurement status]
• Device name:
Any one of "K6CM_VB", "K6CM_IS", "K6CM_CI"
• Monitor type name:
Any one of "acceleration", "velocity", "motor temperature", "temperature
gap", "insulation resistance", "current", "degradation level 1", "degradation
level 2"
• Date and time:
A character string representing the date and time on the computer system
when monitoring
• Present value (PV), threshold (Warning), threshold (Critical):
Monitoring form Character string expressing the present value (PV),
threshold value (Warning), threshold value (Critical) of K6CM device in
decimal number with decimal point
• Main body status, measurement status:
Monitoring form Character string in hexadecimal representation of each of
the 16 bits of the Main body status and measurement status of the K6CM
device (Refer to the next page for details on the CSV file content and status)
• When saving the project.
• Every hour during monitoring
• When monitoring is completed
• When you select to save log files and project files at the end of the software tool
*1 The project is saved along with the log file. When log file is open, data is
not saved. If you want to open the log file during monitoring, we recommend copying it to another folder.
*2 The maximum number of lines of the log file is 10,000 lines. If it exceeds
the maximum number of lines, create a new log file and save the log.
Directly under the folder of
the project file name | folder
of the motor name
4-1 Overview
4
4-1-2 Functions and Specifications of the Software Tool
Directly under the folder of
the project file name | folder
of the motor name
K6CM Motor Condition Monitoring Device User’s Manual (N219)
4 - 5

4 Introduction of the Motor condition monitoring Tool
The status changes depending
on the status of input/output and
measurement values.
If the motor degrades
The alarm values which
are set in the K6CM device
are displayed.
Data is saved
every day.
Log file example
The display example of the log file concerning the degradation level 1 with the comprehensive current
diagnosis type is shown below.
When the monitoring cycle setting of the software tool is set to 86,400 seconds (= 1 day) …
The degradation level 1 pv exceeded the degradation level 1 failure warning and an alarm was output.
The Main body status and the degradation level status have changed according to those states.
For the Main body status and the individual monitoring status, refer to the table below.
Main body status
Bit posi-
tion
0 Mes cpu error Not occurred Occurrence
1 Mes cpu data flash error Not occurred Occurrence
2 Main CPU error Not occurred Occurrence
3 Main CPU data flash error Not occurred Occurrence
4
5 Reserved area
6 Reserved area
7 Reserved area
8 Running Time status Unreached Reached
9 Monitoring condition Monitoring
10
11 Reserved area
12 Trigger input (ON/OFF state of the exter-
13 Tr1 (transistor 1output state) OFF ON
14 Tr2 (transistor 2output state) OFF ON
15 Tr3 (transistor 3output state) OFF ON
Reserved area
Reserved area
nal trigger input)
Status
stopped
OFF ON
Bit contents
0 1
During monitoring
4 - 6
K6CM Motor Condition Monitoring Device User’s Manual (N219)

4 Introduction of the Motor condition monitoring Tool
Individual monitoring status (common form of individual measurement value)
Bit posi-
tion
00 Present value unmeasured state Measured status Unmeasured sta-
01 Present value input error Not occurred Occurrence
02
03 Reserved area
04 Maximum value unmeasured state Measured status Unmeasured sta-
05 Maximum value input error Not occurred Occurrence
06 Reserved area
07 Reserved area
08 Minimum value unmeasured state Measured status Unmeasured sta-
09 Minimum value input error Not occurred Occurrence
10 Reserved area
11 Reserved area
12 Individual alarm result (Warning) No alarm Alarm occurrence
13 Individual alarm result (Critical) No alarm Alarm occurrence
14
15 Reserved area
Reserved area
Reserved area
Status
Bit contents
0 1
tus
tus
tus
4-1 Overview
4
4-1-2 Functions and Specifications of the Software Tool
In the example of the status of [2018/3/5 7:25] in the log file example on the previous page, the character string of the Main body status is "C200" and that of the individual monitoring status is "1000".
"C200" and "1000" are hexadecimal numbers, so convert them to binary numbers.
Main body status Individual monitoring status
Hexadeci
mal
C 2 0 0 Hexadeci
mal
1000
Binary 1100 0010 0000 0000 Binary 0001 0000 0000 0000
The bit positions are 15, 14, … , 1, and 0 from the left.
In the above case, the Main body status 15th, 14th and 9th bits are all "1", so the measurement state is
"During monitoring" and Tr1 is "OFF" and both Tr2 and Tr3 are "ON".
Likewise for the individual monitoring status, the12th bit is "1", so the individual alarm result (Warning)
is "Alarm occurrence".
Note When the above status is "0001" or "0110" for example, the value displayed in the CSV file is like
"1" or "110" without the last "0".
K6CM Motor Condition Monitoring Device User’s Manual (N219)
4 - 7

4 Introduction of the Motor condition monitoring Tool
4-1-3 Operating Environment of the Software tool
Item Description
OS Windows 7, Windows 8.1, Windows 10 (32 bit / 64 bit) (JP / EN)
CPU 1 GHz or more, 32 bit or 64 bit processor
Memory 1 GB or more, or 2 GB or more (in the case of 64 bits)
Disk reserved area capacity 16 GB or more, or 20 GB or more (in the case of 64 bits)
Monitor resolution 1024 × 768 (XGA), High Color 16 bit or more
.NET Framework .NET Framework 4 and .NET Framework 3.5
Communications driver SYSMAC Gateway Ver.1.7.1.0 or higher (included) *1
Others CD-ROM drive: For installation
LAN port: For network connection
*1. The operation requires .NET Framework 3.5 SP1.
Software tools can be installed on the CD-ROM included with the K6CM device.
The following data is stored on the CD-ROM.
Contents Description Location
Software tool This is a computer software that sets K6CM
SYSMAC Gateway This is the communications driver used by the
CX-Compolet CD drive\CX-Compolet
Communications
Middleware
K6CM Motor Condition Monitoring
Device User's Manual
CX-Compolet
Installation Guide
Startup Guide This is a guide that describes the simple proce-
.Net Framework3.5
SP1
EDS file This file contains information on the device.
devices, displays the present value (PV) of
K6CM devices, and implements automatic logging and history display.
Motor condition monitoring Tool. *1
This is a middleware necessary for automatic
connection with the K6CM devices when using
the Motor condition monitoring Tool.
This is the user's manual of the K6CM device. Japanese manual
This is the installation guide for the CX-Compolet.
dures and operation method on the startup of
the K6CM devices.
This is an installer for application development
and execution environment provided by Microsoft Corporation.
Required when using the Motor condition monitoring Tool.
Install the EDS file in the configuration tool and
use it.
CD drive\setup.exe
CD drive\SGW
CD drive\middleware
CD drive\Manual\K6CM_Manual_J.pdf
English manual
CD drive\Manual\K6CM_Manual_E.pdf
Japanese guide
CD drive\Manual\CX-Compolet_SGW_InstallationGuide_J.pdf
English guide
CD drive\Manual\CX-Compolet_SGW_InstallationGuide_E.pdf
Japanese guide
CD drive\StartupGuide\SGTE-721□.pdf
English guide
CD drive\StartupGuide\N221-E1-□□.pdf
* The part of □ is a revision symbol.
.Net Framework 3.5 SP1 Installer
CD drive\Framework\dotnetfx35.exe
Japanese 32 BitOS language pack
CD drive\Framework\dotnetfx35langpack_x64ja.exe
Japanese 64 BitOS language pack
CD drive\Framework\dotnetfx35langpack_x86ja.exe
Comprehensive current diagnosis Type
CD drive\EDS\K6CM_CI2M_EIP_R3.eds*2
Vibration & Temperature Type
CD drive\EDS\K6CM_VBM_EIP_R3.eds*2
Insulation Resistance Type
CD drive\EDS\K6CM_ISM_EIP_R3.eds*2
4 - 8
K6CM Motor Condition Monitoring Device User’s Manual (N219)

4 Introduction of the Motor condition monitoring Tool
Contents Description Location
Sample program for
NJ/NX-series*2
*1. If you use the SYSMAC Gateway and the CX-Compolet for purposes other than using the Motor condition monitoring Tool, please pur-
chase those licenses.
*2. It is added from the software tool version 1.1.0.0. For the version of the software tool, check the printing of CD-ROM. With the update
program of our I-Web, you can update the software tool of the old version to the latest version.
This is a sample program for monitoring the motor
condition using the NJ/NX-series Controller.
Sample program:
Japanese edition:
CD drive \ SampleProgram \ Program \ SampleProgram_V1_2_0.smc2
English edition:
CD drive \ SampleProgram \ Program \ SampleProgram_E_V1_2_0.smc2
Function block (sample):
CD drive \ SampleProgram \ FunctionBlock \ SampleFB_EN_K6CM_Read_V1_2_0.slr
4-1 Overview
4
4-1-3 Operating Environment of the Software tool
K6CM Motor Condition Monitoring Device User’s Manual (N219)
4 - 9

4 Introduction of the Motor condition monitoring Tool
4-2 Installation and Uninstallation, Start-
ing up
This section describes how to install and uninstall the software tool and how to start it.
4-2-1 Installation
Installing .NET Framework 3.5 SP1
The software tool requires Microsoft .NET Framework 3.5 SP1 to run the program.
If .NET Framework 3.5 SP1 is not installed on your computer, install it manually.
It is installed as a standard on Windows 7 computer. Follow steps 2 to 4 below.
It is not installed as a standard on Windows 8.1 and Windows 10 computer.
When using on a computer with Windows 8.1 or Windows 10, perform the steps 2 to 4 after installing
the .NET Framework 3.5 SP1 shown in the following step 1.
1 Install .NET Framework 3.5 SP1.
Installing by connecting the computer to the network
(1) Install it by "dotnetfx35.exe" in the Framework folder on the CD.
(2) Install the language pack with the following files in the Framework folder in the CD.
Japanese 32bit OS: "dotnetfx35langpack_x86ja.exe"
Japanese 64 Bit OS: "dotnetfx35langpack_x64ja.exe"
Installing without connecting the computer to the network
This procedure shows how to install the software tool (and attached software) on PCs (Windows 8.1
or Windows 10 OS) that cannot connect to the network.
What are required to prepare:
• Network connected computer
• Empty recording medium (USB memory of 8GB or more, HDD or DVD)
This procedure also details the resolution technique published on the following Microsoft official
website.
Microsoft official website URL:https://msdn.microsoft.com/en-US/library/windows/hardware/dn898529(v=vs.85).aspx#nointerent
4 - 10
Note In Windows version 8.1 or later OS version, the "Microsoft .NET Framework 3.5" required for installing
the above mentioned attached software is not installed in advance. Therefore, if you are using a computer with the above OS version and cannot connect to the network, you cannot acquire the above.
NET and you cannot install the software included with the software tool.
K6CM Motor Condition Monitoring Device User’s Manual (N219)

4 Introduction of the Motor condition monitoring Tool
Outline of this procedure
(Install the software tool after [3])
Network
[1] Obtaining OS
media creation
[3] . NET Framework 3.5
Offline installation
[2] Preparation of OS media
Or
USB memory, HDD
DVD
Computer
Computer
Win 8.1/10
K6CM
(1) Acquire OS media creation tool
To create the OS media that matches the Windows version of the computer you want to
install the software tool, download the OS media creation tool "MediaCreationTool.exe"
from the official Microsoft page at the following URL.
Windows 8.1
https://www.microsoft.com/en-us/software-download/windows8
Windows 10:
https://www.microsoft.com/en-us/software-download/windows10
4-2 Installation and Uninstallation, Starting up
4
4-2-1 Installation
Note If you do not know the Windows version of your computer, perform the following procedure.
1) Hold down the Windows key and press the R key.
Alternatively, click [Run] from the [Start] menu.
2) Enter “winver”and click [OK].Button.
3) The Windows version is displayed, so confirm.
K6CM Motor Condition Monitoring Device User’s Manual (N219)
4 - 11

4 Introduction of the Motor condition monitoring Tool
(2) OS media creation
Run the downloaded OS media creation tool.
Be sure to select "Create installation media of another PC" for the option after agreeing to
the license terms.
In the selection screen of language, architecture, and edition, uncheck the check box at the
bottom and select the same one as the computer you want to install the software tool.
Note If you do not know the architecture of your computer, perform the following procedure.
1) On the personal computer where you want to install the software tool, hold down the
Windows key and press the R key.
Alternatively, click [Run] from the [Start] menu.
2) Enter “cmd” and click OK. A command prompt is launched.
3) Enter “echo %processor_architecture%”and press Enter key.
4) 32 bits are displayed as x86, 64 bits are displayed as x64, and so on.
4 - 12
K6CM Motor Condition Monitoring Device User’s Manual (N219)

4 Introduction of the Motor condition monitoring Tool
Select the media type to use.
When selecting "USB flash drive", be sure to prepare an empty recording medium (USB
memory of 8 GB or more, HDD or DVD) without data.
At this point, connect the USB memory to your computer and select "Next" on the installation screen. Confirm that the USB memory is normally recognized by the computer and displayed as a removable drive as below and proceed with creating OS media.
4-2 Installation and Uninstallation, Starting up
(3) .NET Framework 3.5 Offline installation
Make the software tool recognize the created OS media on the PC you want to install (If
you are using a USB memory or HDD, connect it to a PC, mount it on a PC if it is a DVD).
When the OS media is recognized correctly, the following popup will be displayed. In this
example, you can see that the USB memory as the OS media has been assigned to D drive
(D :).
As we will use the drive information we have confirmed in the later operation, be sure to
check which drive the OS media is assigned to.
Note It is possible to check the media with other methods. Click the Explorer icon located at the bot-
tom of the desktop screen.(If there is no icon, hold down the Windows key and press the E key
to start the explorer screen)
4
4-2-1 Installation
K6CM Motor Condition Monitoring Device User’s Manual (N219)
4 - 13
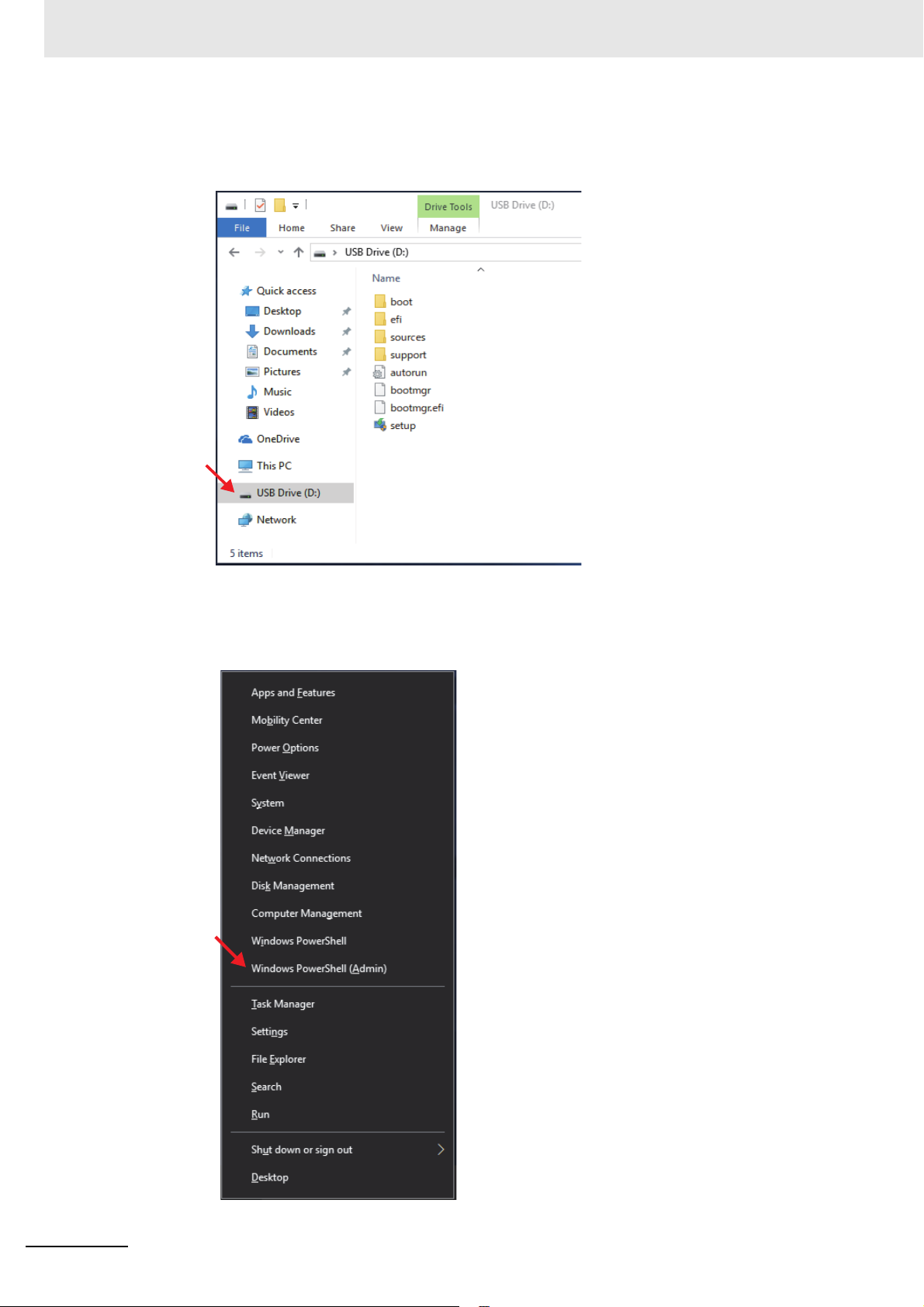
4 Introduction of the Motor condition monitoring Tool
Since the Explorer screen starts, click the drive icon displayed on the left side of the screen
that started up.If the OS media is recognized correctly, the drive containing the following
data will be displayed.
Execute the command prompt (shell script) with administrator privileges after confirming
that the OS media was recognized correctly.
Hold down the Windows key while pressing the X key, the following screen will be displayed, so select Windows PowerShell (Administrator).
4 - 14
K6CM Motor Condition Monitoring Device User’s Manual (N219)

4 Introduction of the Motor condition monitoring Tool
After that, confirm that the following command prompt screen is displayed.
Enter the following command and press Enter to execute. In the command, "D:" is the drive
to which the OS media checked earlier was assigned. Depending on the user environment
used.
As you can see, be sure to modify the command according to the drive information you
have confirmed.
Command:
Dism /Online /Enable-Feature /FeatureName:NetFX3 /All/Source:D:
\Sources\SxS /LimitAccess
4-2 Installation and Uninstallation, Starting up
Note Enter the command on one line without line break. Insert a space between Dism and the set of
words (/ ***) that compose the command.
Wait for a while until the completion screen as shown below. If this screen can be confirmed,
the installation of .NET Framework 3.5 will be completed, continue installing the software tool.
4
4-2-1 Installation
K6CM Motor Condition Monitoring Device User’s Manual (N219)
4 - 15

4 Introduction of the Motor condition monitoring Tool
2 Select "Program" from the Control Panel.
3 Turn on or off Windows functions.
4 Check the check box of "Microsoft .NET Framework 3.5.1" and click "OK".
4 - 16
K6CM Motor Condition Monitoring Device User’s Manual (N219)

4 Introduction of the Motor condition monitoring Tool
Precautions for Correct Use
Precautions for Correct Use
Installing the Software Tool
This section shows the procedure for installing a new software tool.
"User account control" may be displayed depending on computer settings during installation
procedure. In that case, click "yes" if there is no problem.
1 Insert the attached CD in the computer and select "setup.exe" from the autoplay screen.
If automatic playback was not done, double-click the "setup.exe" file under the CD drive.
The following [Select language setting] Dialog Box will be displayed.
4-2 Installation and Uninstallation, Starting up
4
4-2-1 Installation
If the following message is displayed, the old version of CX-Compolet/SYSMAC Gateway has
already been installed on the computer. In order to use software tool, upgrade of CX-Compolet/SYSMAC Gateway is necessary.
Please read "3.5. Upgrade installation" of "CX-Compolet_SGW_InstallationGuide_E.pdf" in the
Manual folder on the CD and uninstall the CX-Compolet/SYSMAC Gateway after backing up the
data. Then re-perform step 1.
K6CM Motor Condition Monitoring Device User’s Manual (N219)
4 - 17

4 Introduction of the Motor condition monitoring Tool
Precautions for Correct Use
Precautions for Correct Use
If the following message is displayed, a newer version of the software tool than the launched
installer has already been installed on your PC. Therefore, installation is unnecessary.
If the following message is displayed, a software tool of the same version as the launched
installer has already been installed in your PC.
[Modify] is used to change the function to be installed. Do not use it now for future expansion.
[Repair] is used to reinstall the software tool.
[Remove] is used to uninstall the software tool.
4 - 18
K6CM Motor Condition Monitoring Device User’s Manual (N219)
 Loading...
Loading...