

Page 1
EtherCAT Remote I/O Terminal
GX-series
EtherCAT® Slave Units
User’s Manual
GX-ID
GX-OD
GX-OC
GX-MD
GX-AD
GX-DA
GX-EC
GX-ILM
XWT-ID
XWT-OD
Digital I/O Units
Analog I/O Units
Encoder Input Units
IO-Link Master Unit
W488-E1-09
Page 2
NOTE
All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in
any form, or by any means, mechanical, electronic, photocopying, recording, or otherwise, without the prior
written permission of OMRON.
No patent liability is assumed with respect to the use of the information contained herein. Moreover, because
OMRON is constantly striving to improve its high-quality products, the information contained in this manual is
subject to change without notice. Every precaution has been taken in the preparation of this manual. Nevertheless, OMRON assumes no responsibility for errors or omissions. Neither is any liability assumed for damages
resulting from the use of the information contained in this publication.
Trademarks
• Sysmac and SYSMAC are trademarks or registered trademarks of OMRON Corporation in Japan and other
countries for OMRON factory automation products.
• Microsoft, Windows, Windows Vista, Excel, and Visual Basic are either registered trademarks or trademarks of
Microsoft Corporation in the United States and other countries.
• EtherCAT® is registered trademark and patented technology, licensed by Beckhoff Automation GmbH, Germany.
• Safety over EtherCAT® is registered trademark and patented technology, licensed by Beckhoff Automation GmbH,
Germany.
• ODVA, CIP, CompoNet, DeviceNet, and EtherNet/IP are trademarks of ODVA.
• The SD and SDHC logos are trademarks of SD-3C, LLC.
Other company names and product names in this document are the trademarks or registered trademarks of their
respective companies.
Copyrights
Microsoft product screen shots reprinted with permission from Microsoft Corporation.
Page 3

GX-series
EtherCAT Slave Units
User’s Manual
Revised October 2018
Page 4

Page 5

Introduction
Thank you for purchasing a GX-series EtherCAT Slave Unit.
This manual contains information you need to know to use the EtherCAT Slave Unit.
Before use, please make sure that you thoroughly read the manual and have a full understanding of the
products functions and performance.
After you finished reading this manual, please keep it in a convenient place.
Intended Readers
This manual is intended for the following individuals.
Those having electrical knowledge (certified electricians or individuals having equivalent knowledge)
and also being qualified for one of the following:
• Introducing FA equipment
• Designing FA systems
• Managing FA sites
GX-series EtherCAT Slave Unit User’s Manual
1
Page 6
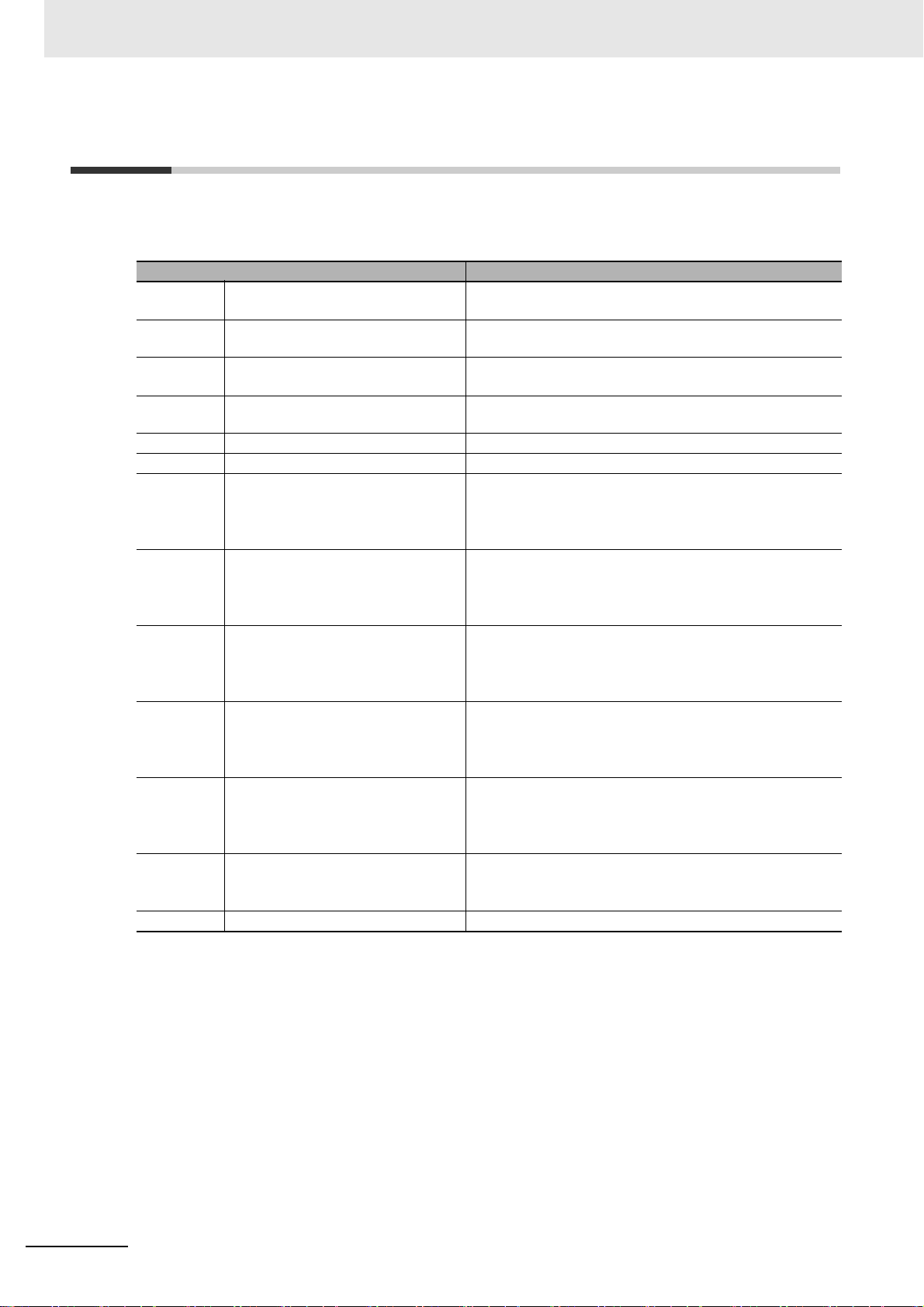
Indexes
Indicates the chapter number
of the current page.
Icon
(Refer to the following section.)
Clause title
Indicates the clause title
of the current page.
Operation
procedure number
Indicates operation procedure.
Section title
Name of manuals
Clause title
Indicates the chapter title
of the current page.
Section title
Indicates the section title
of the current page.
Chapter title
4 Installation and Wiring
4 - 10
GX-series EtherCAT Slave Unit User’s Manual
4-4 Connecting an External Device
Connect an external device to the I/O terminal of a Slave Unit.
The method of connection differs between Units with screw terminal blocks and Units with e-CON
connectors.
After mounting a crimp terminal to the cable of the external device to be connected, connect it to the
terminal block.
1
Mount the following crimp terminal to the signal line of the cable.
2
Connect the signal line to the terminal block.
Tighten the terminal block screws to the appropriate tightening torque of 0.5 N • m.
The terminal block is removable; remove the left and right screws if it is necessary to remove
the terminal block to connect the signal line.
Precautions for Correct Use
To remove the terminal block from the Slave Unit, loosen the left and right mounting screws
alternately. When mounting the terminal block as well, tighten the left and right screws
alternately.
If you tighten or loosen only one of the screws all the way without tightening or loosening the
other screw using an electric screwdriver, the terminal block will be distorted and cracked.
4-4-1 Connecting to a Screw Terminal Block
6.0 mm max.
6.0 mm max.
φ3.2 mm min.
3.2 mm min.
4 - 11
4 Installation and Wiring
GX-series EtherCAT Slave Unit User’s Manual
4-4 Connecting an External Device
4
4-4-2 Connecting to e-CON Connector Terminals
Connect the dedicated e-CON connector to the cables of the external device to be connected and then
connect it to the connector terminal.
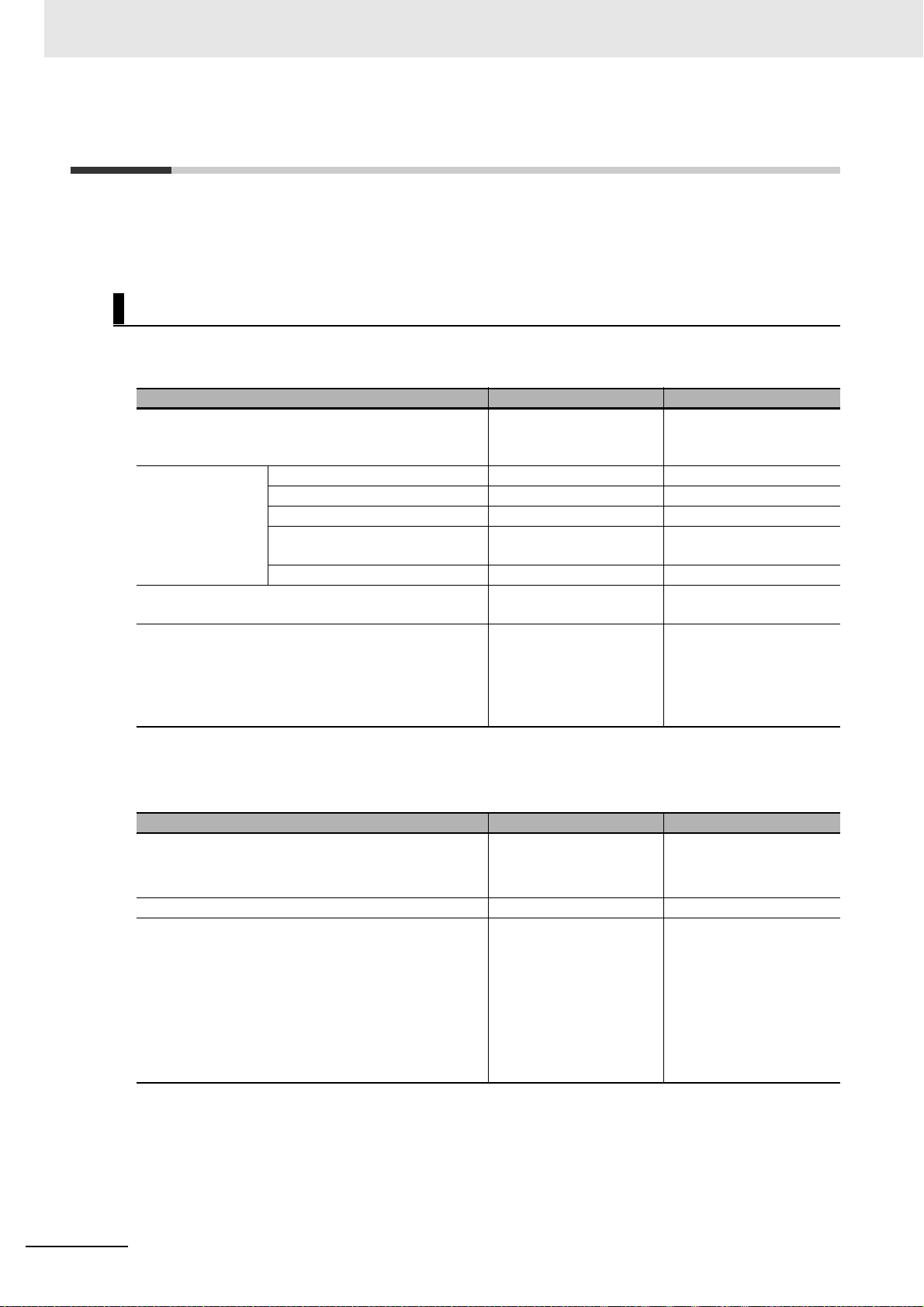
The wire size and sheath diameter of applicable cables vary by the type of e-CON connector.
Use the next table to check that the e-CON connectors to be used conform to the wire size and sheath
diameter of the cables of the connected device.
Tyco Electronics connectors
Sumitomo 3M connectors
Panasonic Electric Works connectors
OMRON connectors
4-4-2 Connecting to e-CON Connector Terminals
Checking the e-CON connector and cable wire size
Model Housing color Applicable wire range
3-1473562-4 Orange Sheath diameter: 0.6 to 0.9 mm
Cross-sectional area: 0.08 to
0.5 mm
2
1-1473562-4 Red Sheath diameter: 0.9 to 1.0 mm
1473562-4 Yellow Sheath diameter: 1.0 to 1.15 mm
2-1473562-4 Blue Sheath diameter: 1.15 to 1.35 mm
4-1473562-4 Green Sheath diameter: 1.35 to 1.60 mm
Model Housing color Applicable wire range
37104-3101-000FL Red
AWG26 (0.14mm
2
) to AWG24 (0.2mm2)
Sheath diameter: 0.8 to 1.0 mm
37104-3122-000FL Yellow
AWG26 (0.14mm
2
) to AWG24 (0.2mm2)
Sheath diameter: 1.0 to 1.2 mm
37104-3163-000FL Orange
AWG26 (0.14mm
2
) to AWG24 (0.2mm2)
Sheath diameter: 1.2 to 1.6 mm
37104-2124-000FL Green
AWG22 (0.3mm
2
) to AWG20 (0.5mm2)
Sheath diameter: 1.0 to 1.2 mm
37104-2165-000FL Blue
AWG22 (0.3mm
2
) to AWG20 (0.5mm2)
Sheath diameter: 1.2 to 1.6 mm
37104-2206-000FL Gray
AWG22 (0.3mm
2
) to AWG20 (0.5mm2)
Sheath diameter: 1.6 to 2.0 mm
Model Housing color Applicable wire range
AXF12142 Red
AWG22 (0.3mm
2
) to AWG20 (0.5mm2)
Sheath diameter: 1.2 to 2.0 mm
AXF12146 Yellow
AWG28 (0.08mm
2
) to AWG24 (0.2mm2)
Sheath diameter: 0.7 to 1.2 mm
Model Specification Applicable wire range
XN2A-1430
Spring
clamp type
AWG28 (0.08mm
2
) to AWG20 (0.5mm2)
Sheath diameter: 1.5 mm max.
How to Read the Manual
Page Structure
This manual's page structure consists of the following.
2
GX-series EtherCAT Slave Unit User’s Manual
Page 7
Icon
Precautions for Safe Use
Precautions for Correct Use
Reference
The meanings of the icons used in this manual are as follows.
Indicates precautions on what to do and what not to do to ensure using the product safely.
Indicates precautions on what to do and what not to do to ensure proper operation and performance.
This explains useful tips and reference information when using the product.
GX-series EtherCAT Slave Unit User’s Manual
3
Page 8
Structure of This Manual
This manual consists of the following chapters.
Chapters Contents
Chapter 1 EtherCAT Network Explains about the EtherCAT features and the network
configuration.
Chapter 2 EtherCAT Slave Unit Overviews the GX-series EtherCAT Slave Unit and its
various types.
Chapter 3 Basic Usage Procedures Explains the setup method and usage procedures by using
simple system setup examples.
Chapter 4 Installation and Wiring Explains how to install Slave Units, and how to connect and
wire the EtherCAT network and power supply.
Chapter 5 EtherCAT Communications Explains the details of EtherCAT communications.
Chapter 6 Basic Specifications of Slave Units Explains the common specifications for all Slave Units.
Chapter 7 Digital I/O Slave Unit Gives an overview about the Digital I/O Slave Unit and
explains names and functions of components consisting
the Slave Unit. It also contains internal circuit diagrams,
wiring diagrams and mounting dimensions.
Chapter 8 Analog I/O Slave Unit Gives an overview about the Analog I/O Slave Unit and
explains names and functions of components consisting
the Slave Unit. It also contains internal circuit diagrams,
wiring diagrams and mounting dimensions.
Chapter 9 Encoder Input Slave Unit Gives an overview about the Encoder Input Slave Unit and
explains names and functions of components consisting
the Slave Unit. It also contains internal circuit diagrams,
wiring diagrams and mounting dimensions.
Chapter 10 IO-Link Master Unit Gives an overview of the IO-Link Master Unit and explains
the names and functions of the components of the IO-Link
Master Unit. It also contains wiring diagrams, and mounting
dimensions.
Chapter 11 Expansion Unit Gives an overview about the Expansion Unit and explains
names and functions of components consisting the Expan-
sion Unit. It also contains wiring diagrams and mounting
dimensions.
Chapter 12 Troubleshooting and Maintenance This contains troubleshooting and inspection methods
intended for individuals to handle abnormalities and con-
duct regular inspections.
Appendix Appendix Contains the object overview and explains the precautions.
4
GX-series EtherCAT Slave Unit User’s Manual
Page 9
Terms and Conditions Agreement
Warranty, Limitations of Liability
Warranties
Exclusive Warranty
Omron’s exclusive warranty is that the Products will be free from defects in materials and workmanship for a period of twelve months from the date of sale by Omron (or such other period expressed in
writing by Omron). Omron disclaims all other warranties, express or implied.
Limitations
OMRON MAKES NO WARRANTY OR REPRESENTATION, EXPRESS OR IMPLIED, ABOUT
NON-INFRINGEMENT, MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE OF
THE PRODUCTS. BUYER ACKNOWLEDGES THAT IT ALONE HAS DETERMINED THAT THE
PRODUCTS WILL SUITABLY MEET THE REQUIREMENTS OF THEIR INTENDED USE.
Omron further disclaims all warranties and responsibility of any type for claims or expenses based
on infringement by the Products or otherwise of any intellectual property right.
Buyer Remedy
Omron’s sole obligation hereunder shall be, at Omron’s election, to (i) replace (in the form originally
shipped with Buyer responsible for labor charges for removal or replacement thereof) the non-complying Product, (ii) repair the non-complying Product, or (iii) repay or credit Buyer an amount equal
to the purchase price of the non-complying Product; provided that in no event shall Omron be
responsible for warranty, repair, indemnity or any other claims or expenses regarding the Products
unless Omron’s analysis confirms that the Products were properly handled, stored, installed and
maintained and not subject to contamination, abuse, misuse or inappropriate modification. Return of
any Products by Buyer must be approved in writing by Omron before shipment. Omron Companies
shall not be liable for the suitability or unsuitability or the results from the use of Products in combination with any electrical or electronic components, circuits, system assemblies or any other materials or substances or environments. Any advice, recommendations or information given orally or in
writing, are not to be construed as an amendment or addition to the above warranty.
See http://www.omron.com/global/ or contact your Omron representative for published information.
Limitation on Liability; Etc
OMRON COMPANIES SHALL NOT BE LIABLE FOR SPECIAL, INDIRECT, INCIDENTAL, OR CONSEQUENTIAL DAMAGES, LOSS OF PROFITS OR PRODUCTION OR COMMERCIAL LOSS IN ANY
WAY CONNECTED WITH THE PRODUCTS, WHETHER SUCH CLAIM IS BASED IN CONTRACT,
WARRANTY, NEGLIGENCE OR STRICT LIABILITY.
Further, in no event shall liability of Omron Companies exceed the individual price of the Product on
which liability is asserted.
GX-series EtherCAT Slave Unit User’s Manual
5
Page 10
Application Considerations
Suitability of Use
Omron Companies shall not be responsible for conformity with any standards, codes or regulations
which apply to the combination of the Product in the Buyer’s application or use of the Product. At
Buyer’s request, Omron will provide applicable third party certification documents identifying ratings
and limitations of use which apply to the Product. This information by itself is not sufficient for a complete determination of the suitability of the Product in combination with the end product, machine, system, or other application or use. Buyer shall be solely responsible for determining appropriateness of
the particular Product with respect to Buyer’s application, product or system. Buyer shall take application responsibility in all cases.
NEVER USE THE PRODUCT FOR AN APPLICATION INVOLVING SERIOUS RISK TO LIFE OR
PROPERTY OR IN LARGE QUANTITIES
HAS BEEN DESIGNED TO ADDRESS THE RISKS, AND THAT THE OMRON PRODUCT(S) IS
PROPERLY RATED AND INSTALLED FOR THE INTENDED USE WITHIN THE OVERALL EQUIPMENT OR SYSTEM.
WITHOUT ENSURING THAT THE SYSTEM AS A WHOLE
Programmable Products
Omron Companies shall not be responsible for the user’s programming of a programmable Product, or
any consequence thereof.
Disclaimers
Performance Data
Data presented in Omron Company websites, catalogs and other materials is provided as a guide for
the user in determining suitability and does not constitute a warranty. It may represent the result of
Omron’s test conditions, and the user must correlate it to actual application requirements. Actual performance is subject to the Omron’s Warranty and Limitations of Liability.
Change in Specifications
Product specifications and accessories may be changed at any time based on improvements and other
reasons. It is our practice to change part numbers when published ratings or features are changed, or
when significant construction changes are made. However, some specifications of the Product may be
changed without any notice. When in doubt, special part numbers may be assigned to fix or establish
key specifications for your application. Please consult with your Omron’s representative at any time to
confirm actual specifications of purchased Product.
Errors and Omissions
Information presented by Omron Companies has been checked and is believed to be accurate; however, no responsibility is assumed for clerical, typographical or proofreading errors or omissions.
6
GX-series EtherCAT Slave Unit User’s Manual
Page 11
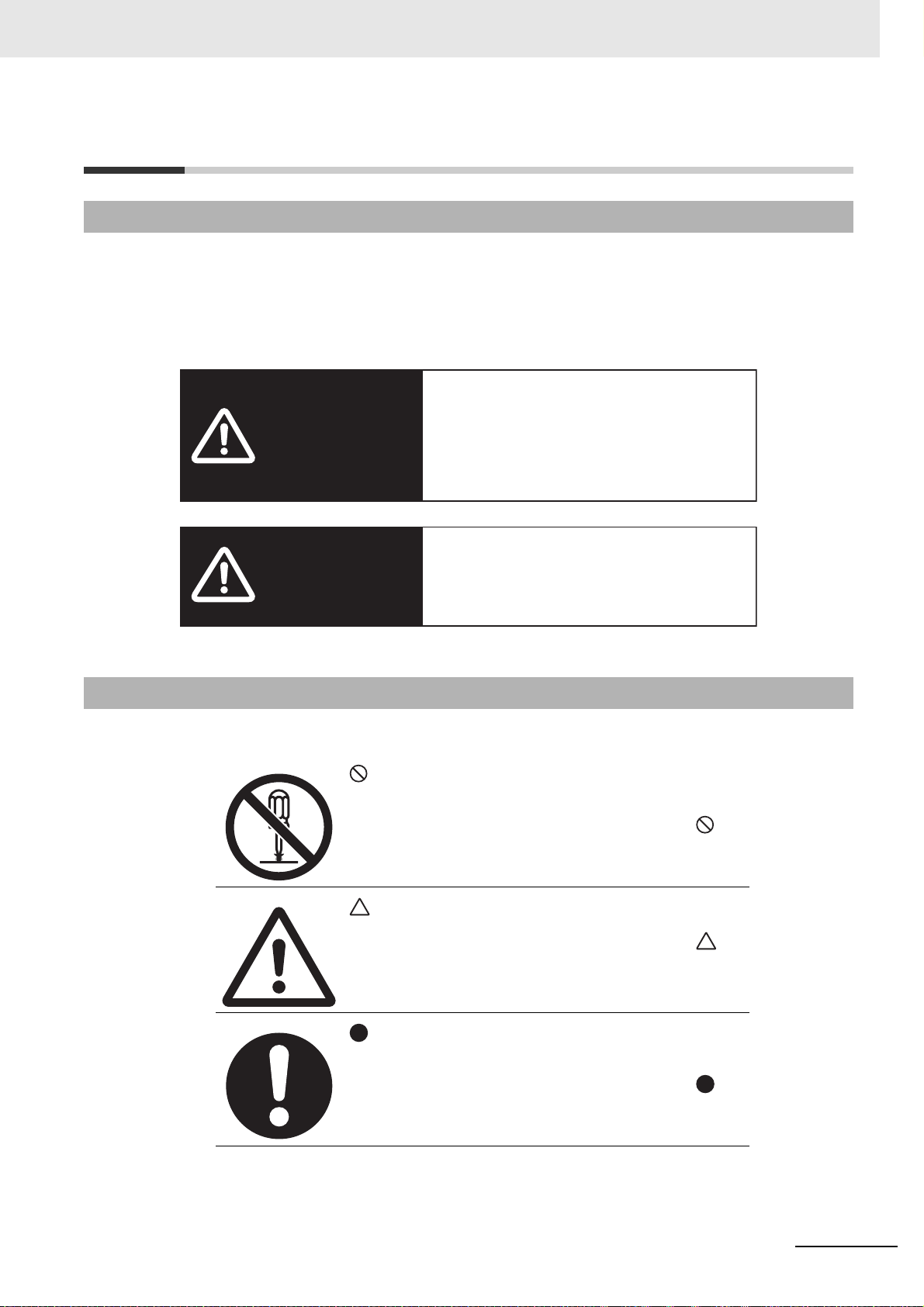
Safety Precautions
WARNING
Caution
Indicates a potentially hazardous
situation which, if not avoided, could
result in death or serious injury.
Additionally, there may be severe
property damage.
Indicates a potentially hazardous
situation which, if not avoided, may
result in minor or moderate injury, or
property damage.
Labels and Meanings to Ensure Safe Usage
To ensure safe usage of the EtherCAT Slave Unit, the precautions in this manual are displayed with the
following labels and symbols.
The precautions explained in this section describe important information regarding safety. These precautions must be followed without fail.
Symbols
This symbol indicates a prohibited item (an item you must not
do).
The specific instruction is indicated using text inside the .
The symbol shown to the left indicates "disassembly prohibited".
This symbol indicates caution (warnings included).
The specific instruction is indicated using text inside the .
The symbol shown to the left indicates "typical cautions".
This symbol means it is a compulsory item (an item that must
be done).
The specific instruction is indicated using text inside the .
The symbol shown to the left indicates "typical compulsory
items".
GX-series EtherCAT Slave Unit User’s Manual
7
Page 12
WARNING
Do not attempt to take any Unit apart and do not touch the interior of any Unit while
the power is being supplied. Also, do not turn ON the power supply while the cover
is open.
Doing any of these may result in electric shock.
Do not attempt to disassemble, repair, or modify any Units.
Doing any of these may result in electric shock.
Do not input voltages or currents exceeding the rated range to the Unit.
Using voltages or currents exceeding the rated range may cause Unit failure or fire.
Provide safety measures in external circuits (i.e., not in the Units), including the following items, to ensure safety in the system if an abnormality occurs due to malfunction of the PLC or another external factor affecting the PLC operation. ("PLC"
includes CPU Units, other Units mounted in the PLC, and Remote I/O Terminals.)
Not doing so may result in serious accidents.
Emergency stop circuits, interlock circuits, limit circuits, and similar safety measures
must be provided in external control circuits, not in the Units.
The PLC will turn OFF all outputs when its self-diagnosis function detects any error
or when a severe failure alarm (FALS) instruction is executed. As a countermeasure
for such problems, external safety measures must be provided to ensure safety in
the system.
The Slave Unit outputs may remain ON or OFF due to deposits on or burning of the
output relays, or destruction of the output transistors. As a countermeasure for such
problems, external safety measures must be provided to ensure safety in the system.
When the 24-VDC output (service power supply) is overloaded or short-circuited,
the voltage may drop and result in the outputs being turned OFF. As a countermeasure for such problems, external safety measures must be provided to ensure safety
in the system.
Implement proper measures as part of your communications system or in your program to ensure safety in the system even when a communications error or malfunction occurs during remote I/O communication.
8
GX-series EtherCAT Slave Unit User’s Manual
Page 13
The CPU Unit refreshes I/O even when the program is stopped (i.e., even in PROGRAM mode). Confirm safety thoroughly in advance before changing the status of
any part of memory allocated to I/O Units, Special I/O Units, or CPU Bus Units. Any
changes to the data allocated to any Unit specifically the Special I/O Units/CPU Bus
Units may result in unexpected operation of the loads connected to the Unit.
• Transferring I/O memory data to the CPU Unit with a Programming Device (PC
tool).
• Changing present values in memory with a Programming Device.
• Force-setting/-resetting bits with a Programming Device.
• Transferring I/O memory files from a memory card or EM file memory to the CPU
Unit.
• Transferring I/O memory from a host computer or from another PLC on a network.
Fail-safe measures must be taken by the customer to ensure safety in the event of
incorrect, missing, or abnormal signals caused by broken signal lines, momentary
power interruptions, or other causes. Not doing so may result in serious accidents.
GX-series EtherCAT Slave Unit User’s Manual
9
Page 14

Precautions for Safe Use
Observe the following precautions when using the Unit.
Power Supply
• Always use the power supply voltage specified in this manual. An incorrect voltage may result in
malfunction or burning.
• Take appropriate measures to ensure that the specified power with the rated voltage and frequency is supplied. Be particularly careful in places where the power supply is unstable. An incorrect power supply may result in malfunction.
• Always turn OFF the power supply to the PLC, Slave Units and other Units before attempting any
of the following. Not turning OFF the power supply may result in malfunction or electric shock.
• Assembling any Units (Expansion Units).
• Removing or attaching the terminal blocks or connectors to Slave Unit.
• Replacing parts (e.g., relays).
• Setting the DIP switch or the node address switches
• Connecting cables or wiring the system.
Installation
• Before touching a Unit, be sure to first touch a grounded metallic object in order to discharge any
static build-up. Not doing so may result in malfunction or damage.
• Make sure that the terminal blocks, communications cables, and other items with locking devices
are properly locked into place. Improver locking may result in malfunction.
• Mount the Units securely using DIN track.
• Make sure that all Slave Unit mounting screws, cable connector screws, and switch cover screws
are tightened to the torque specified in this manuals. Incorrect tightening torque may result in malfunction.
• Make sure that all terminal block screws are tightened to the torque specified in this manuals.
Incorrect tightening torque may result in fire, malfunction, or failure.
• Always use the specified communications cables and connectors.
• Do not exceed the ranges that are given in the specifications for the communications distance and
number of connected Units.
• When there are multiple systems, keep the cables unbundled and separated by at least 5 mm to
prevent unstable operation due to interference.
Wiring
• Turn the power on after checking that the wiring and switch settings are correct.
• Use the correct wire tools to wire the Unit.
• Confirm the polarity of all terminals before wiring them.
• Do not allow foreign matter to enter the Units when wiring and installing the Units.
• Observe the following precautions when wiring the communications cable.
• Separate the communications cables from the power lines or high-tension lines.
• Do not bend the communications cables past their natural bending radius.
• Do not pull on the communications cables.
• Do not place heavy objects on top of the communications cables.
• Always lay communications cable inside ducts.
• Connect both ends of communications cable shielded wires to the connector hoods.
• Turn OFF the power of PLC and all the Slave Units before wiring the communication cables.
10
GX-series EtherCAT Slave Unit User’s Manual
Page 15

• Do not apply voltages to the Input Slave Units in excess of the rated input voltage. Excess voltage
or loads may result in burning.
• Do not apply voltages or connect loads to the Outputs Slave Units in excess of the maximum
switching capacity. Excess voltage or loads may result in burning.
Handling
• When transporting the product, use special packing boxes, and protect it from being exposed to
excessive vibration or impact during transportation.
• Do not bend cables past their natural bending radius or pull on cables.
• Do not place heavy objects on top of the cables.
• After replacing Units, resume operation only after transferring to the new CPU Unit and/or Special
I/O Units the contents of the DM Area, HR Area, and other data required for resuming operation.
Not doing so may result in unexpected operation.
• Check the user program for proper execution before actually running it on the Unit. Not checking
the program may result in unexpected operation.
• When replacing relays or other parts, be sure to confirm that the ratings of the new part are correct. Not doing so may result in malfunction or burning.
• Confirm that no adverse effect will occur in the system before attempting any of the following.
• Changing the operating mode of the CPU Unit (including changing the setting of the Operating Mode at Startup)
• Changing the user program or settings
• Changing set values or present values
• Forced refreshing
• Always sufficiently check the safety at the connected devices before you change the settings of a
slave or Unit.
• Do not use thinner when cleaning. Use commercially available alcohol.
• Do not use high-pressure cleaning.
• EtherCAT communications are not always established immediately after the power supply is
turned ON. Use the system variables in the user program to confirm that communications are
established before attempting control operations.
• If you disconnect the cable from an EtherCAT slave or turn OFF the power supply of an EtherCAT
slave to disconnect it from the network, any current communications frames may be lost. If frames
are lost, slave I/O data is not communicated, and the intended operation is sometimes not
achieved. Perform the following processing for a slave that needs to be replaced.
Program the Input Data Invalid system-defined variable as an interlock condition in the user program.
Set the PDO communications consecutive timeout detection count setting in the EtherCAT master
to at least 2.
For details, refer to the user's manual for the built-in EtherCAT port on the connected CPU Unit or
Industrial PC.
• When using the cable redundancy in DC Mode, the Communications Error Setting set value for
EtherCAT Slave Units in DC Mode should be set to "1 " (default value) or higher. If the communications cable is disconnected or the power supply of the EtherCAT Slave Units is turned OFF with
the Communications Error Setting set value set to "0", communications may discontinue.
External Circuits
• Install external breakers and take other safety measures against short-circuiting in external wiring.
GX-series EtherCAT Slave Unit User’s Manual
11
Page 16

Precautions for Correct Use
• Wire all connections correctly according to instructions in this manual.
Failure to install them may result in serious accidents.
• Do not operate the control system in the following locations:
• Location subject to direct sunlight.
• Locations subject to temperatures or humidity outside the range specified in the specifications.
• Locations subject to condensation as the result of severe changes in temperature.
• Location subject to corrosive or flammable gases.
• Location subject to dust (especially iron dust) or salts.
• Location subject to exposure to water, acid, oil, chemicals, etc. (General-purpose Slaves)
• Location subject to exposure to acid, oil, chemicals, etc. (Environment-resistive Slaves)
• Locations subject to shock or vibration.
• Locations close to power lines.
• Confirm voltage specifications when wiring communications, the power supply, and I/O crossovers.
Incorrect wire may result in malfunction.
• Wire all connections correctly according to instructions in this manual.
• Use the correct wiring materials to wire the Unit.
• Take appropriate and sufficient countermeasures when installing systems in the following locations:
• Locations subject to static electricity or other forms of noise.
• Locations subject to strong electromagnetic fields.
• Locations subject to possible exposure to radioactivity.
• Locations close to power supplies.
• Do not drop any Unit or subject any Unit to excessive shock or vibration. Otherwise, Unit failure or
malfunction may occur.
• When you attach the switch cover, make sure that the packing is not twisted. Also confirm that there
is no foreign matter adhering to the case and packing.
• Do not use the Unit continuously submerged in water.
• Do not disconnect the EtherCAT communications cables during operation. The outputs will become
unstable. However, for the built-in EtherCAT port on the NJ/NX-series CPU Unit, it is OK to disconnect the communications cable from an EtherCAT Slave Terminal that has been disconnected from
communications in the software.
12
GX-series EtherCAT Slave Unit User’s Manual
Page 17

Regulations and Standards
Conformance to EU Directives
Applicable Directives
• EMC Directives
• Low Voltage Directive
Concepts
EMC Directives
The OMRON products described in this manual are designed so that they individually comply with
the related EMC Directives so that they can be more easily built into other devices or the overall
machine. The actual products have been checked for conformity to EMC Directives (See note)*.
Whether the products conform to the standards in the system used by the customer, however, cannot be checked by OMRON and must be checked by the customer. EMC-related performance of the
OMRON devices that comply with EU Directives will vary depending on the configuration, wiring,
and other conditions of the equipment or control panel on which the OMRON devices are installed.
The customer must, therefore, perform the final check to confirm that devices and the overall
machine conform to EMC standards.
* Note: Applicable EMC (Electromagnetic Compatibility) standards are as follows:
EMS (Electromagnetic Susceptibility): EN 61131-2 and EN 61000-6-2
EMI (Electromagnetic Interference): EN 61131-2 and EN61000-6-4
(Radiated emission: 10-m regulations)
Low Voltage Directive
Always ensure that devices operating at voltages of 50 to 1,000 VAC and 75 to 1,500 VDC meet the
required safety standards.
Applicable standard: EN 61131-2
Conformance to EU Directives
The OMRON products described in this manual comply with the related EU Directives. To ensure that
the machine or device in which the products are used complies with EU Directives, the products must
be installed as follows:
• The products must be installed within a control panel.
• A DC power supply with reinforced insulation or double insulation that can maintain a stable output
even if the input is interrupted for 10 ms must be used for communications power, internal power, and
I/O power. The OMRON S8JX-series Power Supply is recommended. (See note.)*
• Products complying with EU Directives also conform to the Emission Standards (EN 61131-2 and EN
61000-6-4). Radiated emission characteristics (10-m regulations) may vary depending on the configuration of the control panel used, other devices connected to the control panel, wiring, and other conditions. You must therefore confirm that the overall machine or equipment complies with EU
Directives.
• Conformance with the EU Directives was confirmed with a system configuration using I/O wiring
lengths of less than 30 m.
* Note: Conformance with the EMC Directive was confirmed when using the recommended power supply.
GX-series EtherCAT Slave Unit User’s Manual
13
Page 18
Conformance to UL and CSA Standards
Some GX-series products comply with UL and CSA standards. If you use an GX-series product that
complies with UL or CSA standards and the machinery or system in which you use the GX-series product must also comply with the standards, refer to the Instruction Sheet that is provided with the product.
The Instruction Sheet provides the application conditions for complying with the standards.
Conformance to Shipbuilding Standards
Some GX-series products comply with shipbuilding standards. If you use an GX-series product that
complies with shipbuilding standards and the machinery or system in which you use the GX-series
product must also comply with the standards, consult with your OMRON representative. Application
conditions are defined according to the installation location. Application may not be possible for some
installation locations.
Conformance to KC Certification
Some GX-series products comply with KC standards.
Observe the following precaution if you use GX-series products in Korea.
Class A Device (Broadcasting Communications Device for Office Use)
This device obtained EMC registration for office use (Class A), and it is intended to be used in places
other than homes. Sellers and/or users need to take note of this.
14
GX-series EtherCAT Slave Unit User’s Manual
Page 19
Related Manuals
The following manuals also deal with EtherCAT. Refer to them for details.
Man No. Name of manuals Contents
W488 GX-series EtherCAT Slave Units
User’s Manual
W505 NJ/NX-series CPU Unit Built-in
EtherCAT
W562 NY-series IPC Machine Controller
Industrial Panel PC / Industrial
Box PC Built-in EtherCAT® Port
User’s Manual
W503 NJ/NX-series Troubleshooting
Manual
W564 NY-series Troubleshooting Man-
ual
W504 Sysmac Studio Version 1 Opera-
tion Manual
W570 IO-Link System User’s Manual Provides an overview of IO-Link Systems and explains the
W567 NX-series IO-Link Master Unit
User’s Manual
® Port User’s Manual
Describes part names, functions, installation, and wiring
and also provides tables of specifications and objects for
the GX-series IO-Link Master Unit (W488-E1-05 or later).
Also describes the hardware, setup methods, and functions of the EtherCAT Remote I/O Terminals.
Explains the built-in EtherCAT port.
An overview is provided and the configuration, functions,
and setup are described.
Information on the built-in EtherCAT port is provided.
This manual provides an introduction and provides information on the configuration, features, and setup.
Concepts on managing errors that may be detected in an
NJ/NX-series Controller and information on individual
errors are described.
Concepts on managing errors that may be detected in an
NY-series Controller and information on individual errors
are described.
Explains the operating procedures of the Sysmac Studio.
system configuration, communications specifications, communications methods, I/O data, parameters, models, Support Software, and troubleshooting.
Refer to the following manuals for the individual IO-Link
Master Units for hardware information and specifications
specific to each Master Unit and a list of the objects for
each Master Unit.
NX-series IO-Link Master Unit: W568
GX-series IO-Link Master Unit:W488-E1-05 or later
Describes part names, functions, installation, and wiring
and also provides tables of specifications and NX objects
for the NX-series IO-Link Master Unit.
GX-series EtherCAT Slave Unit User’s Manual
15
Page 20
Version Upgrade Information
This section explains the functions that have been added or changed due to the unit version upgrade of
the GX-series EtherCAT Slave Units.
For the compatible versions of Support Software for the EtherCAT Slave Units, refer to A-7 Version
Information on page A-83.
Details of Upgrade from Unit Version 1.0 to 1.1
The following changes have been made in the upgrade from unit version 1.0 to 1.1 of the GX-series
Digital I/O Slaves, Analog I/O Slaves, and Encoder Input Slaves.
Item Unit version 1.0 Unit version 1.1
Emergency message setting when the Slave Unit’s
power supply is turned ON
Sysmac device
functions
Data attribute for Input Time Constant (3000 hex) for
Digital I/O Slave Unit
Bit objects
• Digital I/O bit objects for Digital I/O Slave Units (3020
hex and 3220 hex)
• Soft switches (bits) and status (bits) objects for
Encoder Input Slave Units (4021 hex and 4031 hex)
Sysmac error status Not supported. Supported.
Saving node address settings Not supported. Supported.
Displaying the serial number Not supported. Supported.
Conformance to ESI specifica-
tions (ETG.2000 S (R) V1.0.1)
SII data checking Not supported. Supported.
Emergency message notification is enabled at
startup.
Supported. Supported.
Attribute: R Attribute: D
Not supported. Supported.
Emergency message notification is not enabled at
startup.
The following changes have been made in the upgrade from unit version 1.0 to 1.1 of the GX-series
IO-Link Master Unit.
Item Unit version 1.0 Unit version 1.1
The following data that can be allocated to the I/O data
• Digital Input Data
• Digital Output Data
Digital input collection Not supported. Supported.
The following objects are added to the manufacturer
specific objects.
• Vendor Name of the Last Connected IO-Link Device
(80n2 hex *1)
• Product Name of the Last Connected IO-Link Device
(80n3 hex *1)
• Vendor Name (90n2 hex *1)
• Product Name (90n3 hex *1)
*1. n = 0 to 7 ("n" represents the port number.)
Not allocated by default. Allocated by default.
Not supported. Supported.
16
GX-series EtherCAT Slave Unit User’s Manual
Page 21
Details of Upgrade from Unit Version 1.1 to 1.2
The following changes have been made in the upgrade from unit version 1.1 to 1.2 of the GX-series
Digital I/O Slave Units, Analog I/O Slave Units, and Encoder Input Slave Units.
Item Unit version 1.1 Unit version 1.2
Support for the cable redundancy
(Minimum value of the communications cycle: 125 μs)
Communications objects
• The Newest Acknowleged Message (subindex 3) of
the Diagnosis History (10F3 hex) and the New Messages Available (subindex 4)
• CoE time distribution object (10F9 hex)
PDO mapping objects
• 511th transmit PDO mapping (1BFE hex)
*1. The cable redundancy can be realized by configuring a ring topology. It depends on the specifications of the
EtherCAT master to be used whether a ring topology can be configured or not. Confirm the specifications of
the EtherCAT master to be used.
*2. If the slave device is operated at a cycle shorter than the minimum value of the communications cycle, the
EtherCAT frame may be lost or the communications may be disabled.
*1
Not supported. Supported.
*2
Not supported. Supported.
Not supported. Supported.
The following changes have been made in the upgrade from unit version 1.1 to 1.2 of the GX-series
IO-Link Master Unit.
Item Unit version 1.1 Unit version 1.2
Support for the cable redundancy
(Minimum value of the communications cycle: 125 μs)
*1. The cable redundancy can be realized by configuring a ring topology. It depends on the specifications of the
EtherCAT master to be used whether a ring topology can be configured or not. Confirm the specifications of
the EtherCAT master to be used.
*2. If the slave device is operated at a cycle shorter than the minimum value of the communications cycle, the
EtherCAT frame may be lost or the communications may be disabled.
*1
Not supported. Supported.
*2
GX-series EtherCAT Slave Unit User’s Manual
17
Page 22
CONTENTS
Contents
Introduction ..............................................................................................................1
Intended Readers ........................................................................................................................................ 1
How to Read the Manual..........................................................................................2
Page Structure............................................................................................................................................. 2
Icon.............................................................................................................................................................. 3
Structure of This Manual .........................................................................................4
Terms and Conditions Agreement .......................................................................... 5
Warranty, Limitations of Liability .................................................................................................................. 5
Application Considerations .......................................................................................................................... 6
Disclaimers .................................................................................................................................................. 6
Safety Precautions ...................................................................................................7
Labels and Meanings to Ensure Safe Usage .............................................................................................. 7
Symbols.......................................................................................................................................................7
Precautions for Safe Use....................................................................................... 10
Precautions for Correct Use.................................................................................. 12
Regulations and Standards...................................................................................13
Conformance to EU Directives .................................................................................................................. 13
Concepts.................................................................................................................................................... 13
Conformance to UL and CSA Standards ...................................................................................................14
Conformance to Shipbuilding Standards ................................................................................................... 14
Conformance to KC Certification ............................................................................................................... 14
Related Manuals .....................................................................................................15
Version Upgrade Information ................................................................................16
Section 1 EtherCAT Network
1-1 Overview of EtherCAT Networks.......................................................................................... 1-2
1-1-1 Features of EtherCAT .................................................................................................................1-2
1-1-2 Structure of EtherCAT ................................................................................................................. 1-2
1-1-3 Communications types of EtherCAT ...........................................................................................1-4
1-1-4 Connection Examples of EtherCAT............................................................................................. 1-5
1-2 Configuration Elements of EtherCAT Network ................................................................... 1-6
1-2-1 Configuration Devices of EtherCAT Network ..............................................................................1-6
1-2-2 Overview of Configuration Devices .............................................................................................1-7
Section 2 EtherCAT Slave Unit
2-1 Overview of EtherCAT Slave Unit......................................................................................... 2-2
2-1-1 Slave Units Usage.......................................................................................................................2-2
2-1-2 Features of GX-series EtherCAT Slave Units ............................................................................. 2-2
2-2 Types of EtherCAT Slave Units ............................................................................................ 2-3
2-2-1 Slave Units List ........................................................................................................................... 2-3
2-2-2 Installation, I/O Connection, and Power Supply Methods for Each Slave Unit ...........................2-6
18
GX-series EtherCAT Slave Unit User’s Manual
Page 23
Section 3 Basic Usage Procedures
3-1 Setup Examples and Basic Procedure ................................................................................ 3-2
3-1-1 System Setting Examples........................................................................................................... 3-2
3-1-2 Basic Procedure ......................................................................................................................... 3-3
3-2 Setting and Wiring Hardware ............................................................................................... 3-4
3-2-1 Mounting and Setting EtherCAT Master Unit.............................................................................. 3-4
3-2-2 Mounting and Setting Slave Units............................................................................................... 3-4
3-2-3 Wiring Communications Cables.................................................................................................. 3-4
3-2-4 Connecting Power Supplies........................................................................................................ 3-4
3-2-5 Wiring I/O Devices...................................................................................................................... 3-4
3-3 Starting Communications ..................................................................................................... 3-5
3-3-1 Starting a System ....................................................................................................................... 3-5
3-3-2 Setting EtherCAT Communications ............................................................................................3-5
3-3-3 Starting EtherCAT Communications ...........................................................................................3-5
3-4 Checking Operations ............................................................................................................ 3-6
3-4-1 Checking Unit Displays............................................................................................................... 3-6
3-4-2 Confirming Data Read and Write................................................................................................ 3-6
3-4-3 Setting Slave Unit Parameter ..................................................................................................... 3-6
CONTENTS
Section 4 Installation and Wiring
4-1 Mounting Slave Units ............................................................................................................ 4-2
4-1-1 Mounting Preparation ................................................................................................................. 4-2
4-1-2 Mounting Direction...................................................................................................................... 4-2
4-1-3 Mounting Method........................................................................................................................ 4-2
4-1-4 Removal Method......................................................................................................................... 4-3
4-2 Connecting to EtherCAT Network........................................................................................ 4-4
4-2-1 Precautions for Network Connection .......................................................................................... 4-4
4-2-2 Preparation for Connecting Network........................................................................................... 4-5
4-2-3 Connecting Communications Cables and Connectors ............................................................... 4-6
4-2-4 Connecting to Communications Cables...................................................................................... 4-7
4-3 Connecting to Unit Power Supply and I/O Power Supply.................................................. 4-8
4-3-1 Precautions at Supplying Unit Power and I/O Power ................................................................. 4-8
4-3-2 Unit Power Supply Specifications............................................................................................... 4-9
4-3-3 Connecting the Unit Power Supply ............................................................................................. 4-9
4-3-4 Connecting the I/O Power Supply..............................................................................................4-11
4-4 Connecting an External Device .......................................................................................... 4-13
4-4-1 Connecting to a Screw Terminal Block ..................................................................................... 4-13
4-4-2 Connecting to e-CON Connector Terminals ............................................................................. 4-14
4-4-3 Connecting the M12 Connector ................................................................................................ 4-17
Section 5 EtherCAT Communications
5-1 Structure of CAN application protocol over EtherCAT (CoE)............................................ 5-2
5-2 EtherCAT Slave Information File (ESI File) ......................................................................... 5-3
5-3 Communications State Transitions ..................................................................................... 5-4
5-4 Process Data Objects (PDO) ................................................................................................ 5-5
5-4-1 Overview..................................................................................................................................... 5-5
5-4-2 PDO Mapping Settings ............................................................................................................... 5-5
5-4-3 Sync Manager PDO Assignment Settings.................................................................................. 5-6
5-4-4 Fixed PDO Mapping ................................................................................................................... 5-7
5-5 Service Data Object (SDO).................................................................................................. 5-10
5-5-1 Overview................................................................................................................................... 5-10
5-5-2 Abort Codes.............................................................................................................................. 5-10
GX-series EtherCAT Slave Unit User’s Manual
19
Page 24
CONTENTS
5-6 EtherCAT Master Unit - Slave Unit Communications....................................................... 5-11
5-6-1 FREE RUN Mode...................................................................................................................... 5-11
5-6-2 DC Mode................................................................................................................................... 5-11
5-7 Emergency Messages ......................................................................................................... 5-13
5-7-1 Emergency Message Notification..............................................................................................5-13
5-7-2 Diagnosis History ......................................................................................................................5-14
5-8 Sysmac Device Functions .................................................................................................. 5-15
Section 6 Basic Specifications of Slave Units
6-1 EtherCAT Communications Specifications......................................................................... 6-2
6-2 General Specifications .......................................................................................................... 6-3
6-3 Specifications of Common Areas ........................................................................................ 6-4
6-3-1 Status Indicators ......................................................................................................................... 6-4
6-3-2 Node Address Setting Switches.................................................................................................. 6-6
6-3-3 Communications Connectors......................................................................................................6-8
6-3-4 Unit Power Supply Connector................................................................................................... 6-11
6-3-5 I/O Power Supply Connector..................................................................................................... 6-13
Section 7 Digital I/O Slave Unit
7-1 Digital I/O Slave Unit ............................................................................................................. 7-2
7-2 I/O Data Allocation (PDO Mapping) ...................................................................................... 7-3
7-2-1 Input Data Allocation ................................................................................................................... 7-3
7-2-2 Output Data Allocation ................................................................................................................ 7-5
7-3 Functions of Digital I/O Slave Units ..................................................................................... 7-7
7-3-1 Input Filter ...................................................................................................................................7-7
7-3-2 Error Mode Output ......................................................................................................................7-8
7-4 Specifications for Each Slave Unit ...................................................................................... 7-9
7-4-1 2-tier Terminal Block Type 16-point Input Slave Unit GX-ID1611/ID1621 .................................7-10
7-4-2 2-tier Terminal Block Type 16-point Output Slave Unit GX-OD1611/OD1621........................... 7-14
7-4-3 2-tier Terminal Block Relay Type 16-point Output Slave Unit GX-OC1601...............................7-18
7-4-4 2-tier Terminal Block Type 8-point Input and 8-point Output Slave Unit GX-MD1611/MD1621 ... 7-22
7-4-5 3-tier Terminal Block Type 16-point Input Slave Unit GX-ID1612/ID1622.................................7-28
7-4-6 3-tier Terminal Block Type 16-point Output Slave Unit GX-OD1612/OD1622 ..........................7-33
7-4-7 3-tier Terminal Block Type 8-point Input and 8-point Output Slave Unit GX-MD1612/MD1622 ... 7-38
7-4-8 e-CON Connector Type 16-point Input Slave Unit GX-ID1618/ID1628.....................................7-44
7-4-9 e-CON Connector Type 16-point Output Slave Unit GX-OD1618/OD1628 ..............................7-48
7-4-10 e-CON Connector Type 8-point Input and 8-point Output Slave Unit GX-MD1618/MD1628.... 7-53
7-4-11 e-CON Connector Type 32-point Input Slave Unit GX-ID3218/ID3228.....................................7-59
7-4-12 e-CON Connector Type 32-point Output Slave Unit GX-OD3218/OD3228 .............................. 7-64
7-4-13 e-CON Connector Type 16-point Input and 16-point Output Slave Unit GX-MD3218/MD3228... 7-69
7-5 Mounting Dimensions ......................................................................................................... 7-75
7-5-1 2-tier Terminal Block Type.........................................................................................................7-75
7-5-2 3-tier Terminal Block Type.........................................................................................................7-76
7-5-3 e-CON Connector Type.............................................................................................................7-77
Section 8 Analog I/O Slave Unit
8-1 Analog I/O Slave Unit ............................................................................................................ 8-2
8-2 Overview of the Analog Input Slave Unit............................................................................. 8-3
8-2-1 Input Range and Converted Data ...............................................................................................8-3
8-2-2 I/O Data Allocation (PDO Mapping) ............................................................................................ 8-6
8-3 Function of the Analog Input Slave Unit ............................................................................. 8-7
20
GX-series EtherCAT Slave Unit User’s Manual
Page 25
8-3-1 AD Conversion Available Point Setting....................................................................................... 8-7
8-3-2 Moving Average.......................................................................................................................... 8-8
8-3-3 Disconnected Line Detection .................................................................................................... 8-10
8-3-4 User adjustment........................................................................................................................ 8-10
8-4 Overview of the Analog Output Slave Unit........................................................................ 8-12
8-4-1 Output Range and Converted Data .......................................................................................... 8-12
8-4-2 I/O Data Allocation (PDO Mapping) ..........................................................................................8-14
8-5 Function of the Analog Output Slave Unit ........................................................................ 8-15
8-5-1 DA Conversion Available Point Setting ..................................................................................... 8-15
8-5-2 Analog Output Fault Action ....................................................................................................... 8-16
8-5-3 User Adjustment ....................................................................................................................... 8-17
8-6 Overview of Each Slave Unit Type..................................................................................... 8-18
8-6-1 4-point Input Slave Unit GX-AD0471........................................................................................ 8-19
8-6-2 2-point Output Slave Unit GX-DA0271 ..................................................................................... 8-23
8-7 Mounting Dimensions ......................................................................................................... 8-27
Section 9 Encoder Input Slave Unit
CONTENTS
9-1 Encoder Input Slave Unit ...................................................................................................... 9-2
9-2 I/O Data Allocation................................................................................................................. 9-3
9-2-1 Input Data Allocation................................................................................................................... 9-3
9-2-2 Output Data Allocation................................................................................................................ 9-6
9-3 Function of the Encoder Input Slave Units ......................................................................... 9-8
9-3-1 Count Mode ................................................................................................................................ 9-8
9-3-2 Circular Counter.......................................................................................................................... 9-8
9-3-3 Input Signal Types ...................................................................................................................... 9-9
9-3-4 Encoder Direction Setting ..........................................................................................................9-11
9-3-5 Counter Reset........................................................................................................................... 9-12
9-3-6 Counter Preset.......................................................................................................................... 9-13
9-3-7 Counter value latch................................................................................................................... 9-13
9-4 Specifications for Each Slave Unit .................................................................................... 9-14
9-4-1 Open collector input type GX-EC0211...................................................................................... 9-15
9-4-2 Line Driver Input Type GX-EC0241 .......................................................................................... 9-23
9-5 Mounting Dimensions ......................................................................................................... 9-30
Section 10 IO-Link Master Unit
10-1 What Is an IO-Link Master Unit? ........................................................................................ 10-2
10-1-1 Introduction ............................................................................................................................... 10-2
10-1-2 Connection Configuration for EtherCAT Communications Master Unit and IO-Link Devices ... 10-2
10-1-3 Support Software to Be Used ................................................................................................... 10-3
10-2 I/O Data Allocations: PDO Mapping................................................................................... 10-4
10-2-1 Allocating Input Data................................................................................................................. 10-4
10-2-2 Allocating Output Data.............................................................................................................. 10-6
10-3 Functions of the IO-Link Master Unit................................................................................. 10-7
10-4 Specifications ...................................................................................................................... 10-9
10-4-1 Specifications............................................................................................................................ 10-9
10-4-2 Part Names and Functions..................................................................................................... 10-13
10-5 Mounting Dimensions ....................................................................................................... 10-17
10-6 Communications Performance ........................................................................................ 10-18
10-6-1 Maximum I/O Response Time ................................................................................................ 10-18
10-6-2 Determining the IO-Link Communications Cycle.................................................................... 10-20
10-7 Connected Device Specifications and Models ............................................................... 10-21
GX-series EtherCAT Slave Unit User’s Manual
21
Page 26

CONTENTS
Section 11 Expansion Unit
11-1 Overview of the Expansion Unit......................................................................................... 11-2
11-1-1 Connecting Expansion Units ..................................................................................................... 11-2
11-1-2 I/O Power Supply ...................................................................................................................... 11-3
11-2 Specifications of Expansion Unit....................................................................................... 11-4
11-2-1 8-point Input Expansion Unit XWT-ID08/ID08-1........................................................................ 11-5
11-2-2 8-point Output Expansion Unit XWT-OD08/OD08-1 ................................................................. 11-8
11-2-3 16-point Input Expansion Unit XWT-ID16/ID16-1.....................................................................11-11
11-2-4 16-point Output Expansion Unit XWT-OD16/OD16-1 ............................................................. 11-15
11-3 Mounting Dimensions ....................................................................................................... 11-19
Section 12 Troubleshooting and Maintenance
12-1 Troubleshooting .................................................................................................................. 12-2
12-1-1 Errors that Can be Checked with Status Indicator and Actions to Take .................................... 12-2
12-1-2 Errors Unique to Each Slave Unit .............................................................................................12-7
12-1-3 Error Notification Methods and Types.....................................................................................12-13
12-1-4 Sysmac Error Status Codes....................................................................................................12-14
12-1-5 Emergency Error Code ........................................................................................................... 12-19
12-1-6 Application Layer Status Codes .............................................................................................. 12-21
12-2 Equipment Maintenance ................................................................................................... 12-23
12-2-1 Cleaning.................................................................................................................................. 12-23
12-2-2 Inspections.............................................................................................................................. 12-23
12-2-3 Handling when Replacing Units .............................................................................................. 12-24
12-2-4 Replacing the IO-Link Master Unit or IO-Link Devices............................................................ 12-24
Section A Appendix
A-1 Object Dictionary...................................................................................................................A-2
A-1-1 Object Dictionary Area ................................................................................................................A-2
A-1-2 Data Types ..................................................................................................................................A-2
A-1-3 Object Description Format ..........................................................................................................A-3
A-1-4 Communication Objects..............................................................................................................A-4
A-1-5 PDO Mapping Object ................................................................................................................A-10
A-1-6 Sync Manager Communication Object......................................................................................A-26
A-1-7 Manufacturer Specific Objects ..................................................................................................A-32
A-2 Current Consumption Summary ........................................................................................A-74
A-2-1 Digital I/O Slave Unit.................................................................................................................A-74
A-2-2 Analog I/O Slave Unit................................................................................................................A-74
A-2-3 Encoder Input Slave Unit ..........................................................................................................A-74
A-2-4 IO-Link Master Unit...................................................................................................................A-75
A-2-5 Expansion Unit..........................................................................................................................A-75
A-3 Precautions with Connecting Two-wire DC Sensors .......................................................A-76
A-3-1 Relation between ON Voltage of a Unit with DC Inputs and Sensor Residual Voltage.............A-76
A-3-2 Relation between ON Current of a Unit with DC Inputs and Sensor Control Output ................A-76
A-3-3 Relation between OFF Current of a Unit with DC Inputs and Sensor Leakage Current ...........A-77
A-4 Wiring External Output Signal Lines .................................................................................A-78
A-5 I/O Power Supply Current ...................................................................................................A-79
A-6 Glossary ...............................................................................................................................A-81
INDEX 1
22
A-7 Version Information.............................................................................................................A-83
GX-series EtherCAT Slave Unit User’s Manual
Page 27

EtherCAT Network
This chapter explains the overview of EtherCAT network.
1-1 Overview of EtherCAT Networks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1-1-1 Features of EtherCAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1-1-2 Structure of EtherCAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1-1-3 Communications types of EtherCAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
1-1-4 Connection Examples of EtherCAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
1-2 Configuration Elements of EtherCAT Network . . . . . . . . . . . . . . . . . . . . . . 1-6
1-2-1 Configuration Devices of EtherCAT Network . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
1-2-2 Overview of Configuration Devices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
1
GX-series EtherCAT Slave Unit User’s Manual
1 - 1
Page 28
1 EtherCAT Network
EtherCAT
Master Unit
Slave Unit Slave Unit
Slave Unit
Ethernet frame
IN
OUT
Data
•
Reading output data addressed to the local Slave Units
• Writing input data
1-1 Overview of EtherCAT Networks
EtherCAT (Ethernet Control Automation Technology) is a high-performance industrial network system
based on Ethernet system and can realize faster and more efficient communications.
Each node achieves a short communications cycle time by transmitting Ethernet frames at high speed.
Furthermore, even though EtherCAT is a unique protocol, it offers excellent general-purpose
applicability. For example, you can use Ethernet cables because EtherCAT utilizes standard Ethernet
technology for the physical layer. And the effectiveness of EtherCAT can be fully utilized not only in
large control systems that require high processing speeds and system integrity, but also in small and
medium control systems.
1-1-1 Features of EtherCAT
EtherCAT has the following features.
Extremely high-speed communications with speed of 100 Mbps
It dramatically shortens the I/O response time from generation of input signals to transmission of
output signals. By fully utilizing the optimized Ethernet frame bandwidth to transfer data using a
high-speed repeat method, it is possible to efficiently transmit a wide variety of data.
Extremely High Compatibility with Ethernet
EtherCAT is an open network with extremely high compatibility with conventional Ethernet systems.
1-1-2 Structure of EtherCAT
EtherCAT does not send data to individual slave nodes on the network, instead, it passes Ethernet
frames through all of the slave nodes.
When frame passes through a slave node, the slave node reads and writes data in the areas allocated
to it in the frames in a few nanoseconds.
Ethernet frames sent from the EtherCAT Master Unit go through all the EtherCAT Slave Units without
stopping on the way. Once they reach the final Slave Unit, they are sent back from the final Slave Unit,
pass through all Slave Units again, and return to the EtherCAT Master Unit.
With this structure, EtherCAT secures high-speed and real-time data transmission.
1 - 2
GX-series EtherCAT Slave Unit User’s Manual
Page 29
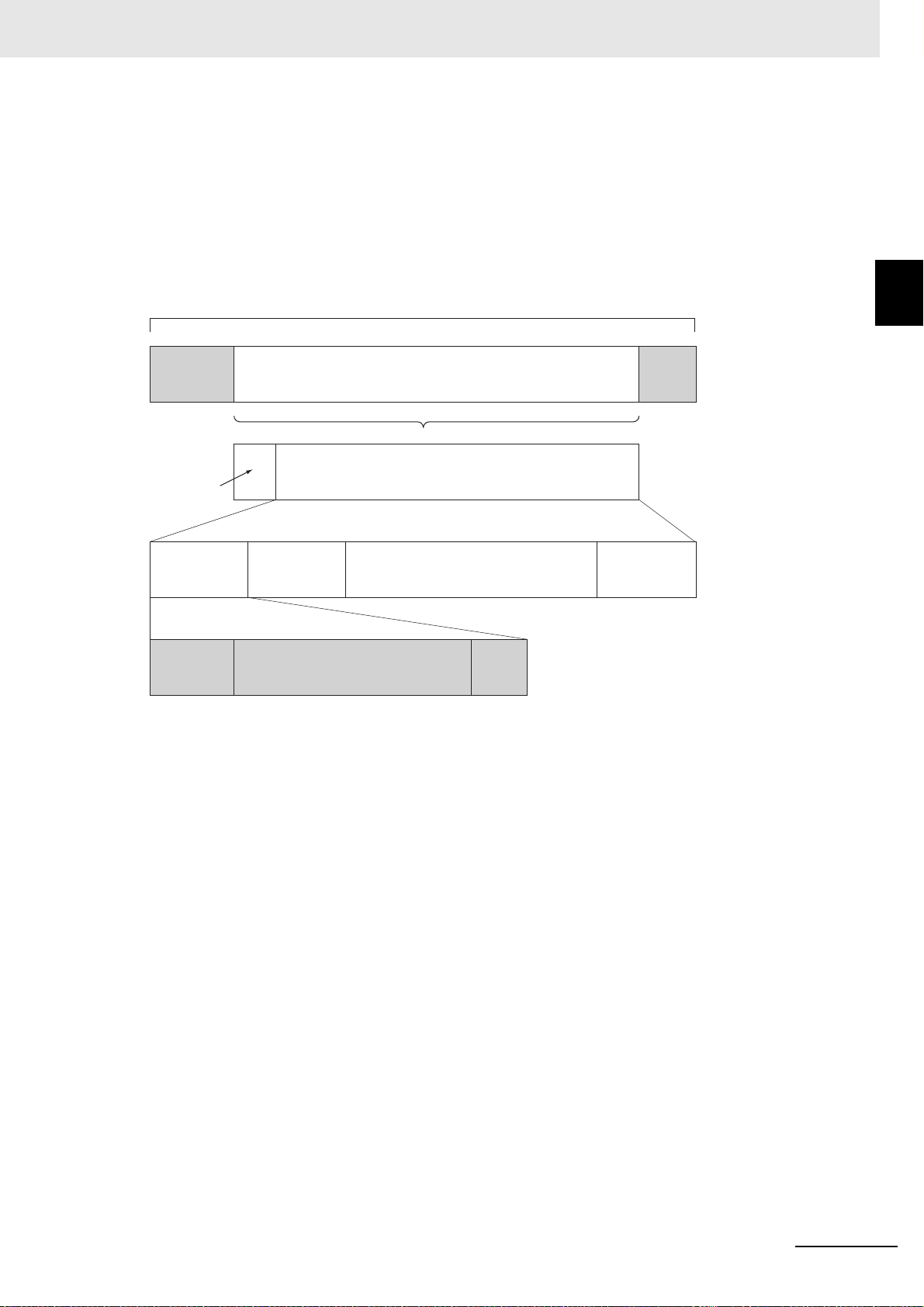
1 EtherCAT Network
Ethernet
header
CRC
Ethernet data (Maximum 1498 bytes)
Data
Header
WKC
1...n EtherCAT datagram
EtherCAT
header
1st EtherCAT
datagram
2nd EtherCAT
datagram
n th EtherCAT
datagram
. . . . .
EtherCAT frame
Ethernet frame
WKC : Working counter
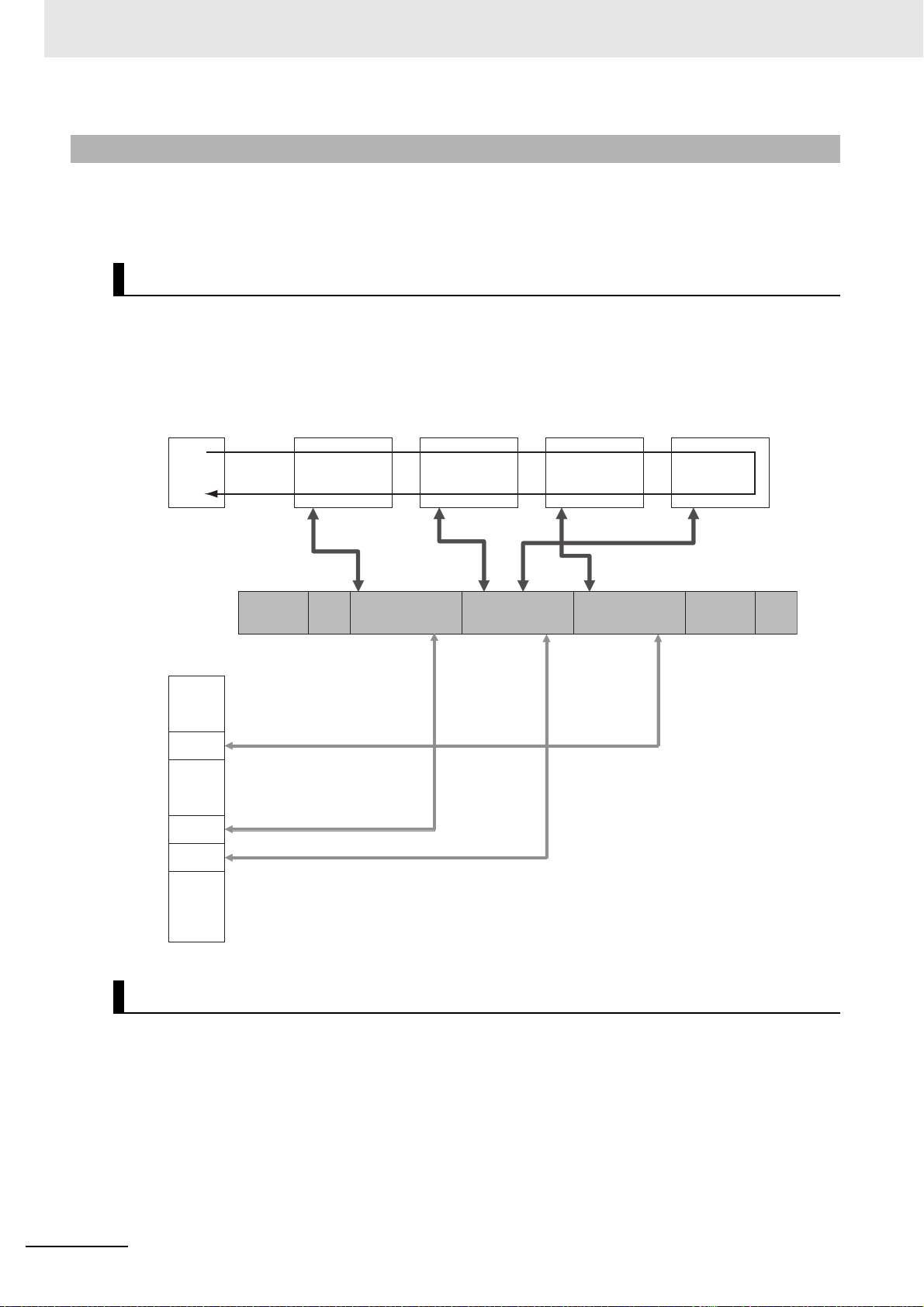
It is the "EtherCAT datagram" stored directly in an Ethernet frame that exchanges data regularly
between the EtherCAT Master Unit and Slave Units.
Each "EtherCAT datagram" is configured with header (data length, including address of one or more
Slave Units, etc.), data, working counter (check bit).
When an Ethernet frame is compared to a "train", an EtherCAT datagram can be considered as "railway
car."
1-1 Overview of EtherCAT
Networks
1
1-1-2 Structure of EtherCAT
GX-series EtherCAT Slave Unit User’s Manual
1 - 3
Page 30
1 EtherCAT Network
EtherCAT Master Unit
Slave Unit
Ethernet frame
Slave Unit Slave Unit
Slave Unit
Logic process data
.
.
.
.
.
.
.
.
.
Data a
Data b
Data c
Ethernet
header
EtherCAT
header
1st EtherCAT
datagram
2nd EtherCAT
datagram
3rd EtherCAT
datagram
CRC
. . .
1-1-3 Communications types of EtherCAT
EtherCAT provides the following two types of communication functions.
PDO communications are always updating data per communication cycle on EtherCAT, while SDO
communications are processed in between those updates.
Process data communications functions (PDO communications)
This communication function is used to transfer process data in real time in a fixed-cycle.
By mapping logical process data space to each node by the EtherCAT Master Unit, it achieves
fixed-cycle communications among the EtherCAT Master Unit and Slave Units.
Mailbox communications functions (SDO communications)
It refers to message communications.
At any timing, the EtherCAT Master Unit transmits commands to Slave Units and the Slave Units return
responses to the EtherCAT Master Unit.
It performs the following data communications:
• Read and write process data
• Make Slave Unit setting
• Monitor Slave Unit state
1 - 4
GX-series EtherCAT Slave Unit User’s Manual
Page 31

1-1-4 Connection Examples of EtherCAT
ID211
0
1
3
2
4
5
7
6
8
9
11
10
12
13
14
15
DC24V
7mA
COM
MAC
H
No
.
AD042
RUN
ERC
ERH
B1 A1
x10
1
x10
0
0
9
8
7
6
5
4
3
2
1
0
9
8
7
6
5
4
3
2
1
01234567
8
9
10 11 12 13 14 15
ADR
ADR
ADR
Digital I/O Slave Unit
EtherCAT Master Unit
Servo Drive
Servomotor
Inverter
IO-Link device
IO-Link
IO-Link Master Unit
1 EtherCAT Network
1-1 Overview of EtherCAT
This section explains the connection examples of EtherCAT network.
Networks
1
1-1-4 Connection Examples of EtherCAT
GX-series EtherCAT Slave Unit User’s Manual
1 - 5
Page 32

1 EtherCAT Network
1-2 Configuration Elements of EtherCAT
Network
This section explains the configuration devices and usages of EtherCAT network.
1-2-1 Configuration Devices of EtherCAT Network
The devices composing an EtherCAT network are shown in the figure below.
EtherCAT Master Unit
ID211
PC
(Configuration Tool)
RS-232C port connection
01234567
9
8
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
COM
DC24V
7mA
10 11 12 13 14 15
AD042
RUN
ERC
ERH
B1 A1
MACH
8
7
9
6
0
No
.
5
1
4
2
3
1
x10
8
7
9
6
0
5
1
4
2
3
0
x10
ESI file
Unit power supply
Peripheral port connection
Communications cable
Digital I/O Slave Unit
ADR
ADR
I/O power supply
Analog I/O Slave Unit
ADR
IO-Link Master Unit
1 - 6
Servo Drive
Communications Unit
Inverter
GX-series EtherCAT Slave Unit User’s Manual
IO-Link
IO-Link
device
Page 33

1 EtherCAT Network
1-2 Configuration Elements of
1-2-2 Overview of Configuration Devices
The overview of each configuration device is as follows:
EtherCAT Master Unit
Administers the EtherCAT network, monitors the state of Slave Units, exchanges I/O data with Slave
Units.
EtherCAT Slave Unit
Outputs data received from the EtherCAT Master Unit through the EtherCAT network, or sends input
data to the EtherCAT Slave Unit through the EtherCAT network.
There are Digital I/O Slave Units, Analog I/O Slave Units, and an IO-Link Master Unit.
Communications Unit
By mounting to an inverter and other devices, it is possible to serve as a Slave Unit in the EtherCAT
network.
EtherCAT Network
1
1-2-2 Overview of Configuration Devices
Configuration Tool
It is a PC software for making setting of the EtherCAT network and each Slave Unit.
It can be used either by connecting to the EtherCAT Master Unit or as a substitute of the EtherCAT
Master Unit.
When using an OMRON EtherCAT master, the Sysmac Studio is used to configure the settings of the
EtherCAT network and each Slave Unit. For details on the versions of the Sysmac Studio that support
the GX-series EtherCAT Slave Units, refer to A-7 Version Information on page A-83.
Communications cable
Uses cables of Ethernet category 5 (100BASE-TX) or higher, with double-shield (aluminum tape and
braided shielding), which are connected straight.
ESI (EtherCAT Slave Information) file
Describes information specific to EtherCAT Slave Units in XML format.
By reading this file into the Configuration Tool, it is possible to perform various settings such as
mapping of Slave Units to I/O memory easily.
Unit power supply
Provides power for communications of each Slave Unit and internal operations.
Separate them from the I/O power supply when wiring.
I/O power supply
Provides power for input/output operations of external devices connected to Slave Units.
GX-series EtherCAT Slave Unit User’s Manual
1 - 7
Page 34

1 EtherCAT Network
Separate from Unit power supply when wiring.
1 - 8
GX-series EtherCAT Slave Unit User’s Manual
Page 35

EtherCAT Slave Unit
This chapter explains the overview of EtherCAT Slave Unit.
2-1 Overview of EtherCAT Slave Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2-1-1 Slave Units Usage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2-1-2 Features of GX-series EtherCAT Slave Units . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2-2 Types of EtherCAT Slave Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
2-2-1 Slave Units List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
2-2-2 Installation, I/O Connection, and Power Supply Methods for Each Slave Unit . 2-6
2
GX-series EtherCAT Slave Unit User’s Manual
2 - 1
Page 36

2 EtherCAT Slave Unit
2-1 Overview of EtherCAT Slave Unit
This section explains the overview of EtherCAT Slave Unit.
2-1-1 Slave Units Usage
Slave Units supported by this manual are largely classified into the following types by the their intended
purposes.
Digital I/O Slave Unit
Inputs and outputs digital ON/OFF signals.
Analog I/O Slave Unit
Performs AD or DA conversion for analog signals of 0 to 5 V, 4 to 20 mA, and so on and inputs or
outputs them.
Encoder Input Slave Unit
Performs conversion for pulse input signals from an encoder.
IO-Link Master Unit
An IO-Link Master Unit connects to IO-Link devices and general-purpose (i.e., non-IO-Link) devices
and it performs IO-Link communications, and input and output of digital ON/OFF signals.
Expansion Unit
Mounted on a Digital I/O Slave Unit in order to expand the number of I/O points.
Note, however, Expansion Units can only be mounted on Digital I/O Slave Units with 2-tier terminal
block and 16 points.
2-1-2 Features of GX-series EtherCAT Slave Units
The GX-series EtherCAT Slave Units have the following features.
Optimum Functionality and Ease of Operation Based on Unified
Specifications
You can use GX-series EtherCAT Slave Units together with NJ/NX-series Machine Automation
Controllers and the Sysmac Studio Automation Software to achieve optimum functionality and ease of
operation. A GX-series EtherCAT Slave Unit is classified as a Sysmac device.*
* “Sysmac devices” is a generic name for EtherCAT Slave Units and other OMRON control components that were
designed with the same communications and user interface specifications.
2 - 2
GX-series EtherCAT Slave Unit User’s Manual
Page 37

2 EtherCAT Slave Unit
2-2 Types of EtherCAT Slave Units
This section explains the types of EtherCAT Slave Units and mounting, connection and power supply
methods.
2-2-1 Slave Units List
2-2 Types of EtherCAT Slave Units
Digital I/O Slave Unit
Typ e Appearance I/O points Model Features
Models with
2-tier
terminal
block
Models with
3-tier
terminal
block
16 inputs (NPN) GX-ID1611
16 inputs (PNP) GX-ID1621
16 outputs (NPN) GX-OD1611
16 outputs (PNP) GX-OD1621
Relay 16 outputs GX-OC1601
8 inputs and 8 outputs
(NPN)
8 inputs and 8 outputs
(PNP)
16 inputs (NPN) GX-ID1612
16 inputs (PNP) GX -ID1622
16 outputs (NPN) GX-OD1612
16 outputs (PNP) GX-OD1622
8 inputs and 8 outputs
(NPN)
8 inputs and 8 outputs
(PNP)
GX-MD1611 • Equipped with a
GX-MD1621
GX-MD1612
GX-MD1622
• Equipped with a
removable screw
terminal block
• Possible to mount an
Expansion Unit
removable screw
terminal block
• Expansion Unit cannot
be mounted
2
2-2-1 Slave Units List
GX-series EtherCAT Slave Unit User’s Manual
2 - 3
Page 38

2 EtherCAT Slave Unit
Type Appearance I/O points Model Features
e-CON
Connectors
16 inputs (NPN) GX-ID1618 • Equipped with an
e-CON connector
16 inputs (PNP) GX-ID1628
16 outputs (NPN) GX-OD1618
16 outputs (PNP) GX-OD1628
8 inputs and 8 outputs
(NPN)
8 inputs and 8 outputs
(PNP)
32 inputs (NPN) GX-ID3218
32 inputs (PNP) GX-ID3228
32 outputs (NPN) GX-OD3218
GX-MD1618
GX-MD1628
• Expansion Unit cannot
be mounted
32 outputs (PNP) GX-OD3228
16 inputs and 16 outputs
(NPN)
16 inputs and 16 outputs
(PNP)
GX-MD3218
GX-MD3228
Analog I/O Slave Unit
Type Appearance I/O points Model Features
Models with
screw
terminal
blocks
4 inputs GX-AD0471 • Equipped with a
removable screw
terminal block
2 outputs GX-DA0271
• Possible to switch
input and output range
(voltage and current)
Encoder Input Slave Unit
2 - 4
Type Appearance I/O points Model Features
Models with
screw
terminal
blocks
2 inputs (5 V and 24 V
voltage input)
2 inputs (Line driver input) GX-EC0241
GX-EC0211 • Equipped with a
removable screw
terminal block
• With 2 latch inputs/1
reset input
GX-series EtherCAT Slave Unit User’s Manual
Page 39

2 EtherCAT Slave Unit
IO-Link Master Unit
Typ e Appearance Number of ports Model Features
GX-type
IO-Link
Master Unit
8 GX-ILM08C High environmental
resistance (IP67)
2-2 Types of EtherCAT Slave Units
2
Expansion Unit
Typ e Appearance I/O points Model Features
Models with
2-tier
terminal
block
8 inputs (NPN) XWT-ID08 • Can be connected to
8 inputs (PNP) XWT-ID08-1
8 outputs (NPN) XWT-OD08
8 outputs (PNP) XWT-OD08-1
16 inputs (NPN) XWT-ID16
16 inputs (PNP) XWT-ID16-1
16 outputs (NPN) XWT-OD16
16 outputs (PNP) XWT-OD16-1
the following Digital I/O
Slave Unit
GX-ID1611/ID1621/O
D1611/OD1621/OC16
01
• Can connect only 1
Expansion Unit per
Slave Unit
2-2-1 Slave Units List
GX-series EtherCAT Slave Unit User’s Manual
2 - 5
Page 40

2 EtherCAT Slave Unit
2-2-2 Installation, I/O Connection, and Power Supply Methods for Each
Slave Unit
Digital I/O Slave Unit
Type Model
GX-ID1611
GX-ID1621
Models with 2-tier
terminal block
Models with 3-tier
terminal block
e-CON connectors
GX-OD1611
GX-OD1621
GX-OC1601
GX-MD1611
GX-MD1621
GX-ID1612
GX-ID1622
GX-OD1612
GX-OD1622
GX-MD1612
GX-MD1622
GX-ID1618
GX-ID1628
GX-OD1618
GX-OD1628
GX-MD1618
GX-MD1628
GX-ID3218
GX-ID3228
GX-OD3218
GX-OD3228
GX-MD3218
GX-MD3228
Slave Unit
installation
method
DIN track
I/O
connection
method
M3 screw
terminal
block
e-CON
Connectors
Internal
power
supply
Shared with
unit power
supply
External power
supply
I/O power supply
must be supplied
externally for
connected devices.
Shared with unit
power supply*
I/O power supply
must be supplied
externally for
connected devices.
Only inputs are
shared with unit
power supply.*
Shared with unit
power supply*
I/O power supply
must be supplied
externally for
connected devices.
Only inputs are
shared with unit
power supply.*
2 - 6
* Power for external I/O (sensors and actuators) is also supplied from the unit power supply.
For this reason, make sure to add current consumption of external I/O when examining output current of the unit
power supply.
Analog I/O Slave Unit
Type Model
Models with screw
terminal blocks
GX-AD0471
GX-DA0271
Slave Unit
installation
method
DIN track
I/O
connection
method
M3 screw
terminal
block
GX-series EtherCAT Slave Unit User’s Manual
Internal
power
supply
Shared with
unit power
supply
External power
supply
Not necessary
Page 41

Encoder Input Slave Unit
2 EtherCAT Slave Unit
2-2 Types of EtherCAT Slave Units
Type Model
Models with screw
terminal blocks
GX-EC0211
GX-EC0241
IO-Link Master Unit
Type Model
GX-type IO-Link
Master Unit
GX-ILM08C
Expansion Unit
Slave Unit
installation
method
DIN track
Slave Unit
installation
method
Screw
mounting
I/O
connection
method
M3 screw
terminal
block
I/O
connection
method
M12
Smartclick
connectors
Internal
power
supply
Shared with
unit power
supply
Internal
power
supply
Shared with
unit power
supply
External power
supply
I/O power supply
must be supplied
externally for
connected devices.
External power
supply
I/O power must be
supplied externally
for connected
devices.
2
2-2-2 Installation, I/O Connection, and Power Supply
Methods for Each Slave Unit
Type Model
XWT-ID08 (−1)
XWT-OD08 (−1)
Models with 2-tier
terminal block
XWT-ID16 (−1)
XWT-OD16 (−1)
Slave Unit
installation
method
DIN track
I/O
connection
method
M3 screw
terminal
block
Internal
power
supply
Shared with
unit power
supply
External power
supply
Varies depending
on the type of
mounted Digital I/O
Slave Unit
(Refer to "11-1-2
I/O Power Supply"
in Page 11 - 3.)
GX-series EtherCAT Slave Unit User’s Manual
2 - 7
Page 42

2 EtherCAT Slave Unit
2 - 8
GX-series EtherCAT Slave Unit User’s Manual
Page 43

Basic Usage Procedures
This chapter explains the procedure of using EtherCAT Slave Units based on specific
setting examples.
3-1 Setup Examples and Basic Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
3-1-1 System Setting Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
3-1-2 Basic Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
3-2 Setting and Wiring Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
3-2-1 Mounting and Setting EtherCAT Master Unit . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
3-2-2 Mounting and Setting Slave Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
3-2-3 Wiring Communications Cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
3-2-4 Connecting Power Supplies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
3-2-5 Wiring I/O Devices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
3-3 Starting Communications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-5
3-3-1 Starting a System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-5
3-3-2 Setting EtherCAT Communications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-5
3-3-3 Starting EtherCAT Communications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-5
3-4 Checking Operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-6
3-4-1 Checking Unit Displays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-6
3-4-2 Confirming Data Read and Write . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-6
3-4-3 Setting Slave Unit Parameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-6
3
GX-series EtherCAT Slave Unit User’s Manual
3 - 1
Page 44

3 Basic Usage Procedures
Digital I/O Slave Unit
GX-ID1611 (16 inputs)
+
Expansion Unit
XWT-ID16 (16 inputs)
Set the node address to 1.
Digital I/O Slave Unit
GX-OD1611 (16 outputs)
+
Expansion Unit
XWT-OD16 (16 outputs)
Set the node address to 2.
Analog I/O Slave Unit
GX-AD0471 (4 inputs)
Set the node address to 5.
Encoder Input Slave
GX-EC0211 (2 inputs)
Set the node address to 6.
IO-Link Master Unit
GX-ILM08C
Set the node address to 7.
EtherCAT Master Unit
3-1 Setup Examples and Basic
Procedure
This section explains the setup method by using simple system setting examples.
3-1-1 System Setting Examples
Connect each of the following Slave Units to the EtherCAT Master Unit and make the settings.
3 - 2
Although it is not shown in the figure above, supply the unit power and the I/O power separately.
GX-series EtherCAT Slave Unit User’s Manual
Page 45

Reference
The setting example explained here is the basic setting of GX-series EtherCAT Slave Units.
Start
Setting and Wiring HardwareStarting CommunicationsChecking Operations
Section 3-2-2
Section 3-2-3
Section 3-2-4
Section 3-2-5
Section 3-3-1
Section 3-3-3
Section 3-3-2
Section 3-2-1
Section 3-4-1
Section 3-4-2
End
Section 3-4-3
Mounting and Setting Slave Units
Wiring Communications Cables
Wiring I/O Devices
Starting a System
Starting EtherCAT Communications
Mounting and Setting EtherCAT Master Unit
Checking Unit Displays
Connecting Power Supplies
Setting an EtherCAT Communications
Confirming Data Read and Write
Setting Slave Unit Parameter
*1
If more detailed settings are required in actual operation, refer to the manual of the EtherCAT
Master Unit or pages on this manual explaining the detail for each Slave Unit (Chapter 7 to
Chapter 11).
Moreover, if your system configuration includes Slave Units other than our products, make the
setting upon referring to the manual of the relevant Slave Units.
3-1-2 Basic Procedure
This is the flow of the procedures explained in the following sections.
3 Basic Usage Procedures
3-1 Setup Examples and Basic Procedure
3
3-1-2 Basic Procedure
*1 If you use an IO-Link Master Unit, refer to the IO-Link System User’s Manual (W570) for IO-Link communications settings
and for information on starting IO-Link communications.
GX-series EtherCAT Slave Unit User’s Manual
3 - 3
Page 46

3 Basic Usage Procedures
3-2 Setting and Wiring Hardware
Make settings and wiring of the EtherCAT Master Unit and Slave Units, and power supply.
3-2-1 Mounting and Setting EtherCAT Master Unit
Mount the EtherCAT Master Unit at the prescribed location and make settings of Unit No. and so on.
For the detailed explanation, refer to the manual of the EtherCAT Master Unit to be used.
3-2-2 Mounting and Setting Slave Units
Mount each Slave Unit at the prescribed location and make settings of node address and so on.
For details, refer to each item below.
Mounting
"4-1 Mounting Slave Units" in page 4 - 2
Setting
Pages in Chapter 6 to Chapter 11 which explain the general specification and details of each type of
Slave Units.
3-2-3 Wiring Communications Cables
Wire communications cables to the EtherCAT Master Unit and each Slave Unit.
For wiring method, refer to "4-2 Connecting to EtherCAT Network" in page 4 - 4.
3-2-4 Connecting Power Supplies
Connect the unit power supply to the EtherCAT Master Unit and Slave Units.
In addition, connect the I/O power supply to each Slave Unit as required.
For the connection method, refer to "4-3 Connecting to Unit Power Supply and I/O Power Supply" in
page 4 - 8 or the wiring diagram of each Slave Unit (in pages explaining the details).
3-2-5 Wiring I/O Devices
3 - 4
Connect input and output devices to each Slave Unit as required.
For the connection method, refer to "4-4 Connecting an External Device" in page 4 - 13 or the wiring
diagram of each Slave Unit (in pages explaining the details).
GX-series EtherCAT Slave Unit User’s Manual
Page 47

3 Basic Usage Procedures
3-3 Starting Communications
Start the system, allocate I/O data of Slave Units, and then start the EtherCAT communications.
For operational state and details of it, refer to "5-3 Communications State Transitions" in page 5 - 4.
If you use an IO-Link Master Unit, refer to the IO-Link System User’s Manual (W570) for IO-Link
communications settings and for information on starting IO-Link communications.
3-3-1 Starting a System
Turn ON the power supply to each Unit.
(1) Unit power supply of EtherCAT Master Units
(2) Unit power supply of Slave Units (When the power is supplied, Slave Unit's [PWR] indicator is lit.)
(3) I/O power supply of Slave Units
Note that there are no restrictions on the order of turning ON the power supplies.
3-3-2 Setting EtherCAT Communications
The following communications are performed in EtherCAT.
PDO communications (remote I/O communications)
Allocate I/O data of Slave Units to the EtherCAT Master Unit (PDO mapping) and perform PDO
communication (remote I/O communications).
For the detailed explanation of I/O data of each Slave Unit, refer to "I/O Data Allocation (PDO
Mapping)” in Chapter 7 to Chapter 9.
Note that the ESI file are used to allocate I/O data.
For the detailed explanation of the procedure, refer to the manual of the EtherCAT Master Unit to be
used and the manual of the Configuration Tool.
3-3 Starting Communications
3
3-3-1 Starting a System
SDO communications (message communications)
For the method of using, refer to the manual of the EtherCAT Master Unit to be used.
Refer to "Appendix A - 1 Object Dictionary" for the detailed explanation of objects implemented on
GX-series EtherCAT Slave Units.
Note that the SDO communications can be used in the pre-operational state or more.
3-3-3 Starting EtherCAT Communications
Shift to the operational state (EtherCAT communications possible) to start the EtherCAT
communications.
For how to shift to the operational state, refer to the manual of the EtherCAT Master Unit to be used.
GX-series EtherCAT Slave Unit User’s Manual
3 - 5
Page 48

3 Basic Usage Procedures
3-4 Checking Operations
Confirm that the LED indicators of the EtherCAT Master Unit and Slave Units are normal status and that
I/O data is correctly read and written.
Moreover, make parameter settings for Slave Units as required.
If you use an IO-Link Master Unit, refer to the IO-Link System User’s Manual (W570) for the method to
confirm the operation of IO-Link communications.
3-4-1 Checking Unit Displays
EtherCAT Master Unit
Refer to the manual of the EtherCAT Master Unit to be used.
EtherCAT Slave Units
Check that the status indicator of each Slave Unit is as follows.
LED State
PWR ON
L/A IN Flickering
L/A OUT Flickering (turned OFF for the terminal Slave Unit only)
RUN ON
ERR OFF
3-4-2 Confirming Data Read and Write
Use the Configuration Tool to read IN data and OUT data of the EtherCAT Master Unit in order to
check that the I/O data is correctly read and written.
3-4-3 Setting Slave Unit Parameter
Make parameter settings for each Slave Unit as required via the SDO communications.
For the details of parameters that can be set, refer to the pages explaining details of each Slave Unit in
Chapter 7 to Chapter 9.
3 - 6
GX-series EtherCAT Slave Unit User’s Manual
Page 49

Installation and Wiring
This chapter explains the mounting and wiring methods of the EtherCAT Slave Unit.
4-1 Mounting Slave Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
4-1-1 Mounting Preparation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
4-1-2 Mounting Direction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
4-1-3 Mounting Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
4-1-4 Removal Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3
4-2 Connecting to EtherCAT Network . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-4
4-2-1 Precautions for Network Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-4
4-2-2 Preparation for Connecting Network . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-5
4-2-3 Connecting Communications Cables and Connectors . . . . . . . . . . . . . . . . . . . 4-6
4-2-4 Connecting to Communications Cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-7
4-3 Connecting to Unit Power Supply and I/O Power Supply . . . . . . . . . . . . . 4-8
4-3-1 Precautions at Supplying Unit Power and I/O Power . . . . . . . . . . . . . . . . . . . . 4-8
4-3-2 Unit Power Supply Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-9
4-3-3 Connecting the Unit Power Supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-9
4-3-4 Connecting the I/O Power Supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-11
4-4 Connecting an External Device . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-13
4-4-1 Connecting to a Screw Terminal Block . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-13
4-4-2 Connecting to e-CON Connector Terminals . . . . . . . . . . . . . . . . . . . . . . . . . . 4-14
4-4-3 Connecting the M12 Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-17
4
GX-series EtherCAT Slave Unit User’s Manual
4 - 1
Page 50

4 Installation and Wiring
Vertical direction
4-1 Mounting Slave Units
This section describes the DIN Track mounting method for GX-series Digital I/O Slave Units, Analog I/O
Slave Units, and Encoder Input Slave Units.
4-1-1 Mounting Preparation
Prepare the following devices.
Product name Model Comment
PFP-50N Length 50 cm
35-mm DIN track
End plate PFP-M 2 end plates are required for each Slave Unit.
PFP-100N Length 100 cm
PFP-100N2 Length 100 cm
4-1-2 Mounting Direction
There are no restrictions in the orientation unless otherwise specified in the instruction pages for the
Slave Unit.
Mounting is possible in any of the following 6 orientations.
4-1-3 Mounting Method
1
Hook the top side of groove on backside of the Slave Unit to the top side of the DIN
track, lower the DIN track mounting hook, engage the Slave Unit to the track, and press
up the mounting hook to fix it.
4 - 2
GX-series EtherCAT Slave Unit User’s Manual
Page 51

4 Installation and Wiring
Precautions for Safe Use
DIN track
DIN track mounting hook
(2)
(1)
End plate
(2)
(1)
4-1 Mounting Slave Units
2
Hook the bottom side of the end plate to the bottom side of the DIN track and then hook
the top side.
Attach an end plate on each side of the Unit.
4
4-1-4 Removal Method
After the operation, make sure to check that the Slave Unit is securely mounted.
4-1-4 Removal Method
Loosen the screws on the end plate and remove the end plate from the DIN track. Then pull down the
DIN track mounting hook to release the lock. Pull out the Slave Unit straight toward you.
GX-series EtherCAT Slave Unit User’s Manual
4 - 3
Page 52

4 Installation and Wiring
4-2 Connecting to EtherCAT Network
This section explains how to lay down EtherCAT network.
4-2-1 Precautions for Network Connection
Observe the precautions below when laying down the EtherCAT network.
Precautions at laying down network
• When laying down an EtherCAT network, take sufficient safety measures and construct the network
according to the standards. We recommend to request specialized constructors familiar with the
safety measures and standards to perform the laying operation.
• Do not lay down EtherCAT network devices near any devices generating noise.
If there is no choice but to lay them down in a noisy environment, make sure to take noise measures
such as housing each device in metal cases.
Precautions at laying down communications cables
• Check the following items for communications cables to be used.
• Are there any disconnected cables?
• Are any cables short-circuited?
• Are there any problems in connector connections?
• To connect a cable to communications connector of each device, insert it securely until the connector
of the communications cable is locked.
• Lay down and wire the communications cables separately from high-voltage electrical power lines.
• Do not lay down the cables near devices generating noise.
• Do not lay down the cables in high-temperature and high-humidity environment.
• Use the cables in locations without powder dust and oil mist.
• There is a limit to the bending radius of communications cables. Check the specification of
communications cables to be used for the information on bending radius.
4 - 4
GX-series EtherCAT Slave Unit User’s Manual
Page 53

Precautions for Correct Use
Reference
4-2-2 Preparation for Connecting Network
The following accessories are available for GX-series Digital I/O Slave Units, Analog I/O Slave Units,
and Encoder Input Slave Units.
4 Installation and Wiring
Product name Comment
Twisted-pair cable
(Cables with connectors
below are also allowed.)
RJ45 connector
100BASE-TX (Category 5 or higher)
Double-shield (aluminum tape + braided shielding)
Category 5 or higher
Shielded
Refer to "6-3-3 Communications Connectors" in Page 6 - 8 for information on the communications
cables for an IO-Link Master Unit.
• The maximum cable length between connected nodes is 100 m. Note that some cables do not
guarantee 100 m. In general, if the conductors are strand wire, the transmission performance
will be lower than solid wire and the operation at 100-m distance cannot be guaranteed.
Confirm details with the cable manufacturer.
• When selecting connectors, check that the cables to be used conform to connectors. Items to
be checked include conductor size, conductor wire type (solid wire/twisted wire, 2/4 pairs), and
outer diameter.
4-2 Connecting to EtherCAT Network
4
4-2-2 Preparation for Connecting Network
We recommend cables with double, aluminum tape and braided shielding, taking noise
resistance into consideration.
GX-series EtherCAT Slave Unit User’s Manual
4 - 5
Page 54

4 Installation and Wiring
Reference
White-Green
Green
White-Orange
Blue
White-Blue
Orange
White-Brown
Brown
Connector
hood
1
2
3
4
5
6
7
8
Shielded cable *
Wire color
Pin No.
White-Green
Green
White-Orange
Blue
White-Blue
Orange
White-Brown
Brown
Connector
hood
1
2
3
4
5
6
7
8
Shielded cable*
Wire color
Pin No.
4-2-3 Connecting Communications Cables and Connectors
Connect a communications cable and a connector by wiring them straight as shown below.
* Connect both ends of cable shielded wires to the connector hoods.
There are 2 types of wiring standards for Ethernet cables : "T568A" and "T568B."
The figure above shows a wiring method conforming to the standard "T568A". The wiring
method conforming to the standard "T568B" can also be used.
4 - 6
GX-series EtherCAT Slave Unit User’s Manual
Page 55

Precautions for Correct Use
4-2-4 Connecting to Communications Cables
[CN IN] connector
[CN OUT] connector
EtherCAT Master Unit
Slave Unit
L1
L2
Ln
Communications cable
Do not connect anything.
Terminal Slave Unit
EtherCAT networks allow free wiring in any connection forms. Connection before and after the
GX-series EtherCAT Slave Units shall be made in daisy chain connection.
4 Installation and Wiring
Connect the communications cable from the EtherCAT Master Unit to the [CN IN] connector of the
Slave Units. Connect another the communications cable from the [CN OUT] connector of the first Slave
Unit to the [CN IN] connector of the next Slave Unit.
Note that nothing should be connected to the [CN OUT] connector of the Slave Unit at the terminal end
of the network.
4-2 Connecting to EtherCAT Network
4
4-2-4 Connecting to Communications Cables
• The cable length between each Slave Unit (L1, L2, ... Ln) must be within 100 m.
• Connect cables securely until communications cable connectors click and are fixed in place.
• When you wire the communications cables, observe their specifications (bending radius and
so on) defined by the cable manufacturer.
GX-series EtherCAT Slave Unit User’s Manual
4 - 7
Page 56

4 Installation and Wiring
4-3 Connecting to Unit Power Supply
and I/O Power Supply
The following power supplies are required to operate the EtherCAT network.
• Unit power supply: For communication and internal operation of Slave Units.
• I/O power supply: For input/output operation of external I/O devices of each Slave Unit.
This section explains how to supply the unit power supply and I/O power supply.
4-3-1 Precautions at Supplying Unit Power and I/O Power
When supplying the unit power supply and I/O power supply, take the followings into consideration for
allowable current of cables and connectors, voltage drop, and layout of power supplies.
Consideration to cable voltage drop
The power supply voltage of a Slave Unit farthest to the power supply must be within the allowable
variation range.
Supplying unit power supply and I/O power supply from multiple sources
When the unit power and I/O power are supplied from multiple power supplies instead of from one power
supply, the line current,
safety of the system at power supply errors.
voltage drop, and cable size can be reduced.
Moreover, it is effective to secure
If power supply errors occur
Consideration on layout and grouping of power supplies differ by whether you want to stop the entire
system or not when a power supply error occurs.
If you want to avoid stopping the entire system, we recommend to set power supplies at several
locations and supply power to groups of Slave Units, or take similar measures.
This has also the effects of reducing voltage drop and cable size and so on.
4 - 8
GX-series EtherCAT Slave Unit User’s Manual
Page 57

Precautions for Correct Use
4-3-2 Unit Power Supply Specifications
To 24-VDC unit
power supply
+V
terminal
−V
terminal
Unit power
supply cable
Pin terminal
Use a general purpose power supply that satisfies the following specifications.
Item Specification
Output voltage 24 VDC ± 10%
Output ripple 600 mVp-p
Output current
Isolation
We recommend S8JX series power supplies made by OMRON for the unit power supply for Slave
Units.
Has the capacity to supply power more than the total current
consumption of each Slave Unit
Between output and AC power supply as well as between output and
chassis ground
4 Installation and Wiring
4-3 Connecting to Unit Power Supply and I/O Power Supply
• The I/O power supply for the input section of the e-CON connector type Slave Units is shared
with the unit power supply. To calculate the output current of the unit power supply, be sure to
use "unit power supply current consumption" to which "input current" and "input connection
device supply current" have been added.
• Use a power supply with sufficient capacity considering the inrush current at startup.
4-3-3 Connecting the Unit Power Supply
Connect a cable from the 24-VDC unit power supply to the unit power supply connector on each Slave
Unit, and supply power to individual Slave Units.
Digital I/O Slave Units, Analog I/O Slave Units, and Encoder Input
Slave Units
4
4-3-2 Unit Power Supply Specifications
Mount a pin terminal, or equivalent to the unit power supply cable so that it will not be displaced.
GX-series EtherCAT Slave Unit User’s Manual
4 - 9
Page 58

4 Installation and Wiring
Power supply connector
GX-ILM08C
Recommended product
The following pin terminals are recommended for the unit power supply cables.
Model Applicable wire size Crimping tool Manufacturer
AI0,5-10WH 0.5 mm/AWG20
H0.5/16 orange 0.5 mm/AWG20
Also, the following screwdriver is recommended for removing pin terminals.
Model Manufacturer
XW4Z-00C OMRON
IO-Link Master Unit
CRIMPFOX UD6
(Product No. 1204436)
or CRIMPFOX ZA3
series
Crimper PZ1.5
(Product No. 900599)
Phoenix Contact
Co., Ltd.
Weidmueller Japan Co., Ltd.
Supply the Unit power supply and the I/O power supply through the same power supply connector.
(Notes) Supply the Unit power supply and the I/O power supply from separate sources.
An M12 connector (A-coding, male) is used for the power supply connector.
The Unit power supply specifications are given below.
Item Specification
Unit power supply voltage 20.4 to 26.4 VDC (24 VDC −15%/+10%)
Power Supply Connector
4 - 10
Pin No. Signal Description
1 UNT_P+ Unit power supply +
2 UNT_P− Unit power supply −
3 IO_P+ I/O power supply +
4IO_P− I/O power supply −
GX-series EtherCAT Slave Unit User’s Manual
Page 59

4-3-4 Connecting the I/O Power Supply
V terminal
G terminal
24-VDC
power supply
+
−
Digital I/O Slave Units, Analog I/O Slave Units, and Encoder Input
Slave Units
Units with screw terminal blocks
It supplies the 24-VDC I/O power to the I/O power supply terminal on each Slave Unit.
For the locations of I/O power supply terminals, see the terminal layout diagrams for each Slave Unit
or wiring diagrams in Chapter 7 to Chapter 10.
Moreover, for how to connect power supplies to terminals, refer to "4-4-1 Connecting to a Screw
Terminal Block" in Page 4 - 13.
Units with e-CON connectors
The following e-CON connector type Slave Units (Output Slave Units and output sections of
Input/Output Slave Units) are equipped with I/O power supply connectors to supply I/O power to
external devices.
• GX-OD1618/OD1628/MD1618 (output section only)/MD1628 (output section only)
• GX-OD3218/OD3228/MD3218 (output section only)/MD3228 (output section only)
4 Installation and Wiring
4-3 Connecting to Unit Power Supply and I/O Power Supply
4
4-3-4 Connecting the I/O Power Supply
To connect external devices to these Slave Units, supply the 24-VDC I/O power to the I/O power
supply connector.
Mount a pin terminal, or equivalent to the power supply cable so that it will not be displaced.
GX-series EtherCAT Slave Unit User’s Manual
4 - 11
Page 60

4 Installation and Wiring
Recommended product
The following pin terminals are recommended for the unit power supply cables.
Model
AI0,5-10WH 0.5 mm/AWG20
H0.5/16 orange 0.5 mm/AWG20
Applicable wire
size
Crimping tool Manufacturer
CRIMPFOX UD6
(Product No. 1204436)
or CRIMPFOX ZA3
series
Crimper PZ1.5
(Product No. 900599)
Phoenix Contact
Co., Ltd.
Weidmueller Japan Co., Ltd.
Also, the following screwdriver is recommended for removing pin terminals.
Model Manufacturer
XW4Z-00C OMRON
IO-Link Master Unit
Supply the Unit power supply and the I/O power supply through the same power supply connector.
(Notes) Supply the Unit power supply and the I/O power supply from separate sources.
An M12 connector (A-coding, male) is used for the power supply connector.
The I/O power supply specifications are given below.
Item Specification
I/O power supply 20.4 to 26.4 VDC (24 VDC −15%/+10%)
GX-ILM08C
Power supply connector
Power Supply Connector
Pin No. Signal Description
1 UNT_P+ Unit power supply +
2 UNT_P− Unit power supply −
3 IO_P+ I/O power supply +
4IO_P− I/O power supply −
4 - 12
GX-series EtherCAT Slave Unit User’s Manual
Page 61

4 Installation and Wiring
Precautions for Correct Use
6.0 mm max.
6.0 mm max.
φ3.2 mm min.
3.2 mm min.
4-4 Connecting an External Device
Connect an external device to the I/O terminal of a Slave Unit.
The method of connection differs between Units with screw terminal blocks and Units with e-CON
connectors.
4-4-1 Connecting to a Screw Terminal Block
After mounting a crimp terminal to the cable of the external device to be connected, connect it to the
terminal block.
1
Mount the following crimp terminal to the signal line of the cable.
4-4 Connecting an External Device
2
Connect the signal line to the terminal block.
Tighten the terminal block screws to the appropriate tightening torque of 0.5 N • m.
The terminal block is removable; remove the left and right screws if it is necessary to remove
the terminal block to connect the signal line.
To remove the terminal block from the Slave Unit, loosen the left and right mounting screws
alternately. When mounting the terminal block as well, tighten the left and right screws
alternately.
If you tighten or loosen only one of the screws all the way without tightening or loosening the
other screw using an electric screwdriver, the terminal block will be distorted and cracked.
4
4-4-1 Connecting to a Screw Terminal Block
GX-series EtherCAT Slave Unit User’s Manual
4 - 13
Page 62

4 Installation and Wiring
4-4-2 Connecting to e-CON Connector Terminals
Connect the dedicated e-CON connector to the cables of the external device to be connected and then
connect it to the connector terminal.
Checking the e-CON connector and cable wire size
The wire size and sheath diameter of applicable cables vary by the type of e-CON connector.
Use the next table to check that the e-CON connectors to be used conform to the wire size and sheath
diameter of the cables of the connected device.
Tyco Electronics connectors
Model Housing color Applicable wire range
3-1473562-4 Orange Sheath diameter: 0.6 to 0.9 mm
1-1473562-4 Red Sheath diameter: 0.9 to 1.0 mm
1473562-4 Yellow Sheath diameter: 1.0 to 1.15 mm
2-1473562-4 Blue Sheath diameter: 1.15 to 1.35 mm
4-1473562-4 Green Sheath diameter: 1.35 to 1.60 mm
Cross-sectional area: 0.08 to
2
0.5 mm
Sumitomo 3M connectors
Model Housing color Applicable wire range
2
37104-3101-000FL Red
37104-3122-000FL Yellow
37104-3163-000FL Orange
37104-2124-000FL Green
37104-2165-000FL Blue
37104-2206-000FL Gray
AWG26 (0.14mm
Sheath diameter: 0.8 to 1.0 mm
AWG26 (0.14mm2) to AWG24 (0.2mm2)
Sheath diameter: 1.0 to 1.2 mm
AWG26 (0.14mm
Sheath diameter: 1.2 to 1.6 mm
AWG22 (0.3mm
Sheath diameter: 1.0 to 1.2 mm
AWG22 (0.3mm2) to AWG20 (0.5mm2)
Sheath diameter: 1.2 to 1.6 mm
AWG22 (0.3mm
Sheath diameter: 1.6 to 2.0 mm
) to AWG24 (0.2mm2)
2
) to AWG24 (0.2mm2)
2
) to AWG20 (0.5mm2)
2
) to AWG20 (0.5mm2)
Panasonic Electric Works connectors
Model Housing color Applicable wire range
2
AXF12142 Red
AXF12146 Yellow
AWG22 (0.3mm
Sheath diameter: 1.2 to 2.0 mm
AWG28 (0.08mm2) to AWG24 (0.2mm2)
Sheath diameter: 0.7 to 1.2 mm
) to AWG20 (0.5mm2)
4 - 14
OMRON connectors
Model Specification Applicable wire range
XN2A-1470
Spring
clamp type
AWG28 (0.08mm
Sheath diameter: 1.5 mm max.
2
) to AWG20 (0.5mm2)
GX-series EtherCAT Slave Unit User’s Manual
Page 63

4 Installation and Wiring
Semi-strip specification Strip specification
20 mm min.
Core wires
Strip sheaths of core wires
7 to 8 mm
Processing external devices cables
Using Tyco Electronics, Sumitomo 3M or Panasonic Electric Works
connectors
Cables of connected devices are normally cut in semi-strip or strip specification as shown in the next
figures.
When the cables are prepared this way, an e-CON connector cannot be attached. First cut the end
and remove the cable sheath as shown in the following diagram. (Do not strip the sheaths of the
core wires.)
4-4 Connecting an External Device
Using OMRON connectors
Align the cable with the STRIP GAUGE described on the side of the connector. Remove 7 to 8 mm
of the wiring sheath, and twist the exposed wires several times.
4
4-4-2 Connecting to e-CON Connector Terminals
GX-series EtherCAT Slave Unit User’s Manual
4 - 15
Page 64

4 Installation and Wiring
Flat-blade
Screwdriver
Operation opening
Inserting wires into the cable connector
Insert the cable wire of the extend device to the cable connector.
Make sure that the terminal numbers printed on the connector cover matches the colors of wires as
shown in the next table.
Terminal
number
1 Brown (red) − Brown (red) Brown (white)
2 −−−−
3 Blue (black) Blue (black) Blue (black) −
4 Black (white) Brown (white) Black (white) Blue (black)
Notes Wire colors have been changed according to revisions in the JIS standards for photoelectric sensors and
proximity sensors.
The colors in parentheses are the wire colors prior to the revisions.
3-wire sensor 2-wire sensor 3-wire sensor 2-wire sensor
NPN Slave Unit PNP Slave Unit
Using Tyco Electronics, Sumitomo 3M or Panasonic Electric Works
connectors
1
Insert the wire all the way to the wire insertion opening on the cover of the cable
connector.
2
Use a pliers, or equivalent to press the cover into the body. At this point, press the cover
straight in such that the cover is horizontal to the body.
Using OMRON connectors
1
Use a flat-blade screwdriver to push the operation lever inside the connector's operation
opening until it locks, as shown in the following diagram.
4 - 16
GX-series EtherCAT Slave Unit User’s Manual
Page 65

4 Installation and Wiring
Precautions for Correct Use
Wire insertion opening
Wire sheath part
Connection part
Reset opening
Operation lever (white)
2
Insert the wire all the way to the back of the wire insertion opening.
Check that the sheath of the wire is inserted into the wire insertion opening, and that the end of
the conductor has passed through the connection part.
3
Insert a screwdriver into the reset opening and pull back the operation lever lightly.
A click will be heard and the operation lever will return to its normal position.
4-4 Connecting an External Device
4
4
Lightly pull the wire to confirm that it is connected properly.
To remove a wire, push in the operation lever, check that the operation lever has locked, and
then pull out the wire. Also, after removing the wire, always return the operation lever to its
normal position.
4-4-3 Connecting the M12 Connector
4-4-3 Connecting the M12 Connector
GX-series EtherCAT Slave Unit User’s Manual
For SmartClick Connectors, insert the Connector all the way and turn it approx. 1/8 of a turn. Torque
management is not required.
For screw connections to M12 connectors, tighten the lock on the M12 connection sufficiently with your
hands (tightening torque: 0.39 to 0.49 N·m).
If the lock is not tightened sufficiently, the degree of protection may not be achieved and the connector
may become loose due to vibration. Never use pliers or other tools to tighten the lock. Doing so may
damage the connector.
4 - 17
Page 66

4 Installation and Wiring
4 - 18
GX-series EtherCAT Slave Unit User’s Manual
Page 67

EtherCAT Communications
This chapter explains the overview of EtherCAT communications.
5-1 Structure of CAN application protocol over EtherCAT (CoE) . . . . . . . . . . 5-2
5-2 EtherCAT Slave Information File (ESI File) . . . . . . . . . . . . . . . . . . . . . . . . . 5-3
5-3 Communications State Transitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-4
5-4 Process Data Objects (PDO) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-5
5-4-1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-5
5-4-2 PDO Mapping Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-5
5-4-3 Sync Manager PDO Assignment Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-6
5-4-4 Fixed PDO Mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-7
5-5 Service Data Object (SDO) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-10
5-5-1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-10
5-5-2 Abort Codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-10
5-6 EtherCAT Master Unit - Slave Unit Communications . . . . . . . . . . . . . . . . 5-11
5-6-1 FREE RUN Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-11
5-6-2 DC Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-11
5-7 Emergency Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-13
5-7-1 Emergency Message Notification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-13
5-7-2 Diagnosis History . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-14
5-8 Sysmac Device Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-15
5
GX-series EtherCAT Slave Unit User’s Manual
5 - 1
Page 68

5 EtherCAT Communications
GX-series EtherCAT Slave Units
EtherCAT physical layer
Communications
status transitions
SDO (mailbox)
Slave application
Object dictionary
PDO mapping
PDO (cyclic)
EtherCAT data link layer
Registers Mailbox
Process data
FMMUSyncManager
Application layer
5-1 Structure of CAN application
protocol over EtherCAT (CoE)
Normally, multiple protocols can be transferred by EtherCAT. But GX-series EtherCAT Slave Units use
"CAN application protocol over EtherCAT (CoE)", a communication interface to be applied for EtherCAT
devices, as the device profile of the open network standard "CAN application protocol."
The figure below shows the structure of CoE in GX-series EtherCAT Slave Units.
CAN application protocol has two types of object dictionaries, PDO (Process Data Object) and SDO
(Service Data Object) .
PDO is composed of object dictionaries that can be mapped. The process data is defined by PDO
5 - 2
mapping.
PDO is primarily used in PDO communications for regularly exchanging process data.
Moreover, SDO is able to read and write all object dictionaries and is used in non-fixed-cycle type SDO
(event type messages) communications.
By using the CoE interface to set object SDO and PDO dictionaries, EtherCAT can provide EtherCAT
devices with the same device profile as CAN application protocol.
GX-series EtherCAT Slave Unit User’s Manual
Page 69

5 EtherCAT Communications
ESI
files
Network
configuration
information
EtherCAT Master Unit
EtherCAT Slave Units
Configuration tool
Communications are started according to the
communications settings and the network
configuration in the ESI files that are installed.
5-2 EtherCAT Slave Information File
(ESI File)
An EtherCAT Slave Information (ESI) file contains the setting information of an EtherCAT Slave Unit.
Various EtherCAT communications setting can be defined from the ESI files of connected Slave Units
and the network connection information.
ESI files are installed in the configuration tool to create network configuration information.
You can download the network configuration information to the EtherCAT Master Unit to configure the
EtherCAT network.
5-2 EtherCAT Slave Information File (ESI File)
5
GX-series EtherCAT Slave Unit User’s Manual
5 - 3
Page 70

5 EtherCAT Communications
Initialization
Pre-Operational
Safe-Operational
Operational
Power ON
5-3 Communications State Transitions
The EtherCAT State Machine (ESM) indicates the state transition model of EtherCAT Slave Unit
communications control. It is controlled by EtherCAT Master Unit.
The following figure shows the communications state transitions from power ON.
SDO
State
Initialization (Init)
Pre-Operational
(Pre-Op)
Safe-Operational
(Safe-Op)
Operational (Op) Possible Possible Possible
communi
cations
Not
possible.
Possible
Possible Possible
PDO
transmiss
ion
Not
possible.
Not
possible.
PDO
reception
Not
possible.
Not
possible.
Not
possible.
Contents
Communications are being initialized.
Communications are not possible.
SDO (message) communications are
possible in this state.
This state is entered after initialization has
been completed. It is used to initialize
network settings.
In this state, PDO transmissions are possible
in addition to SDO (message)
communications.
PDO sendings can be used to send
information such as status from the Slave
Unit.
Normal communication state
PDO communications can be used to control
the I/O data.
5 - 4
GX-series EtherCAT Slave Unit User’s Manual
Page 71

5 EtherCAT Communications
RxPDO
output data, operation command, and so on
TxPDO
input data, status, and so on
EtherCAT
Master
Unit
EtherCAT
Slave
Unit
5-4 Process Data Objects (PDO)
5-4-1 Overview
The process data objects (PDO) are used for real-time data transfer via cyclic communications.
There are two types in PDO: RxPDO that receives data from the EtherCAT Master Unit and TxPDO that
sends the present value from a EtherCAT Slave Unit to the EtherCAT Master Unit.
5-4 Process Data Objects (PDO)
It is possible to hold multiple objects in the EtherCAT application layer so that various process data of
EtherCAT Slave Units can be transferred. The details of process data are described in PDO Mapping
Objects and Sync Manager PDO Assignment Objects.
GX-series EtherCAT Slave Units support PDO mapping for I/O control.
5-4-2 PDO Mapping Settings
The PDO mapping indicates the mapping for application objects (realtime process data) between the
object dictionary and PDO.
The number of mapped objects is described in sub-index 0 of the mapping table. In this mapping table,
indexes 1600 hex to 17FF hex are used for RxPDO and 1A00 hex to 1BFF hex are used for TxPDO.
5
5-4-1 Overview
GX-series EtherCAT Slave Unit User’s Manual
5 - 5
Page 72

5 EtherCAT Communications
1ZZZ hex
1ZZZ hex
1ZZZ hex
6TTT hex
6UUU hex
6VVV hex
6YYY hex
6ZZZ hex
02 hex
03 hex
01 hex
TT hex
UU hex
VV hex
YY hex
ZZ hex
6UUU hex UU hex
6TTT hex TT hex
6YYY hex YY hex
8
16
8
Object B
Object C
Object A
Object E
Object D
Object A
Object B
Object D
PDO-Length : 32 Bit
PDO_1
Index
Sub
Object contents
Mapping objects
Application objects
Object dictionary
1C1Z hex
1C1Z hex
1C1Z hex
2
3
1
PDO B
PDO C
PDO A
PDO E
PDO D
PDO A
PDO B
PDO D
Index
Sub
Object contents
Sync manager PDO
assignment objects
Mapping objects
1A00 hex
1A01 hex
1A02 hex
1A03 hex
1A04 hex
PDO G
PDO F
1A05 hex
1A06 hex
1A00 hex
1A01 hex
1A03 hex
Sync manager entity Z
The figure below shows an example of PDO mapping.
5-4-3 Sync Manager PDO Assignment Settings
A sync manager channel consists of several PDOs. The sync manager PDO assignment objects
describe how these PDOs are related to the Sync Manager.
The number of PDOs is given in sub-index 0 of the sync manager PDO assignment table.
In this table, index 1C12 hex is for RxPDOs and 1C13 hex is for TxPDOs.
The figure below shows an example of sync manager PDO mapping.
5 - 6
GX-series EtherCAT Slave Unit User’s Manual
Page 73

5-4-4 Fixed PDO Mapping
The tables below show the details of fixed PDO mapping for GX-series EtherCAT Slave Units.
Note that it is not possible to change fixed PDO details.
PDO mapping for Digital I/O Slave Unit
Fixed PDO mapping of a Digital I/O Slave Unit is determined by the number of inputs and/or outputs
per Unit and whether or not Expansion Units are connected.
5 EtherCAT Communications
257th receive
PDO Mapping
(1700 hex)
258th receive
PDO Mapping
(1701 hex)
257th transmit
PDO Mapping
(1B00 hex)
258th transmit
PDO Mapping
(1B01 hex)
8 outputs of Slave Unit
8 outputs of Expansion Unit only
16 outputs of Slave Unit only
16 outputs of Expansion Unit only
16 outputs of Slave Unit and 8
outputs of Expansion Unit (24
outputs in total)
16 outputs of Slave Unit and 16
outputs of Expansion Unit (32
outputs in total)
8 outputs of Slave Unit
8 outputs of Expansion Unit only
16 outputs of Slave Unit only
16 outputs of Expansion Unit only
16 outputs of Slave Unit and 8
outputs of Expansion Unit (24
inputs in total)
32 outputs of Slave Unit only
16 outputs of Slave Unit and 16
outputs of Expansion Unit (32
inputs in total)
8 inputs of Slave Unit
8 inputs of Expansion Unit only
16 inputs of Slave Unit only
16 inputs of Expansion Unit only
16 inputs of Slave Unit and 8
inputs of Expansion Unit (24
inputs in total)
16 inputs of Slave Unit and 16
inputs of Expansion Unit (32
inputs in total)
8 inputs of Slave Unit
8 inputs of Expansion Unit only
16 inputs of Slave Unit only
16 inputs of Expansion Unit only
16 inputs of Slave Unit and 8
inputs of Expansion Unit (24
inputs in total)
32 inputs of Slave Unit only
16 inputs of Slave Unit and 16
inputs of Expansion Unit (32
inputs in total)
5-4 Process Data Objects (PDO)
Write output 16-bit (6300 hex)
Write output 32-bit (6320 hex)32 outputs of Slave Unit only
5
5-4-4 Fixed PDO Mapping
Write output bits (3220 hex)
Write output 16-bit (6100 hex)
Write output 32-bit (6120 hex)32 inputs of Slave Unit only
Read input bits (3020 hex)
GX-series EtherCAT Slave Unit User’s Manual
5 - 7
Page 74

5 EtherCAT Communications
Reference
Reference
512th transmit
PDO Mapping
(1BFF hex)
Sysmac errors Sysmac Error (2002 hex)
You cannot assign 1700 hex and 1701 hex or 1B00 hex and 1B01 hex at the same time.
Analog I/O Slave Unit PDO Mappings
257th receive
PDO Mapping
(1700 hex)
257th transmit
PDO Mapping
(1B00 hex)
512th transmit
PDO Mapping
(1BFF hex)
Write analog output 16-bit (6411 hex) *1
Read analog input 16-bit (6401 hex) *2
Sysmac Error (2002 hex)
*1 Analog Output Slave Unit only.
*2 Analog Input Slave Unit only.
Encoder Input Slave Unit PDO Mappings
257th receive
PDO Mapping
(1700 hex)
258th receive
PDO Mapping
(1701 hex)
259th receive
PDO Mapping
(1702 hex)
257th transmit
PDO Mapping
(1B00 hex)
258th transmit
PDO Mapping
(1B01 hex)
259th transmit
PDO Mapping
(1B02 hex)
260th transmit
PDO Mapping
(1B03 hex)
261th transmit
PDO Mapping
(1B04 hex)
512th transmit
PDO Mapping
(1BFF hex)
Instruction Bits (4020 hex)
Preset Value (4011 hex)
Instruction Flag (4021 hex)
Position Value (4010 hex)
Latch Value A (4012 hex)
Latch Value B (4013 hex)
Status Bits (4030 hex)
Status Flag (4031 hex)
Sysmac Error (2002 hex)
5 - 8
You cannot assign 1700 hex and 1702 hex or 1B03 hex and 1B04 hex at the same time.
GX-series EtherCAT Slave Unit User’s Manual
Page 75

IO-Link Master Unit
5 EtherCAT Communications
1st receive PDO
Mapping (1600 hex)
2nd receive PDO
Mapping (1601 hex)
3rd receive PDO
Mapping (1602 hex)
4th receive PDO
Mapping (1603 hex)
5th receive PDO
Mapping (1604 hex)
6th receive PDO
Mapping (1605 hex)
7th receive PDO
Mapping (1606 hex)
8th receive PDO
Mapping (1607 hex)
257th receive PDO
Mapping (1700 hex)
1st transmit PDO
Mapping (1A00 hex)
2nd transmit PDO
Mapping (1A01 hex)
3rd transmit PDO
Mapping (1A02 hex)
4th transmit PDO
Mapping (1A03 hex)
5th transmit PDO
Mapping (1A04 hex)
6th transmit PDO
Mapping (1A05 hex)
7th transmit PDO
Mapping (1A06 hex)
8th transmit PDO
Mapping (1A07 hex)
257th transmit PDO
Mapping (1B00 hex)
258th transmit PDO
Mapping (1B01 hex)
259th transmit PDO
Mapping (1B02 hex)
260th transmit PDO
Mapping (1B03 hex)
261th transmit PDO
Mapping (1B04 hex)
262th transmit PDO
Mapping (1B05 hex)
511th transmit PDO
Mapping (1BFE hex)
512th transmit PDO
Mapping (1BFF hex)
Port1 Output Data (7000 hex)
Port2 Output Data (7010 hex)
Port3 Output Data (7020 hex)
Port4 Output Data (7030 hex)
Port5 Output Data (7040 hex)
Port6 Output Data (7050 hex)
Port7 Output Data (7060 hex)
Port8 Output Data (7070 hex)
Digital Output Data (3100 hex)
Port1 Input Data (6000 hex)
Port2 Input Data (6010 hex)
Port3 Input Data (6020 hex)
Port4 Input Data (6030 hex)
Port5 Input Data (6040H hex)
Port6 Input Data (6050 hex)
Port7 Input Data (6060 hex)
Port8 Input Data (6070 hex)
I/O Port Status (3000 hex)
Port1_2 I/O Port Error Status (3001 hex)
Port3_4 I/O Port Error Status (3002 hex)
Port5_6 I/O Port Error Status (3003 hex)
Port7_8 I/O Port Error Status (3004 hex)
Digital Input Data (3005 hex)
Diagnosis History (10F3 hex)
Sysmac Error Status (2002 hex)
5-4 Process Data Objects (PDO)
5
5-4-4 Fixed PDO Mapping
GX-series EtherCAT Slave Unit User’s Manual
5 - 9
Page 76

5 EtherCAT Communications
5-5 Service Data Object (SDO)
5-5-1 Overview
GX-series EtherCAT Slave Units support the SDO communications.
The EtherCAT Master Unit is able to make parameter settings and monitor status by reading and writing
data from and to entries in object dictionaries via the SDO communications.
5-5-2 Abort Codes
The table below shows abort codes of SDO communications errors.
Code Meaning
05030000 hex Toggle bit not changed
05040000 hex SDO protocol timeout
05040001 hex Client/Server command specifier not valid or unknown
05040005 hex Out of memory
06010000 hex Unsupported access to an object
06010001 hex Attempt to read a write only object
06010002 hex Attempt to write to a read only object
06020000 hex The object does not exist in the object directory.
06040041 hex The object cannot be mapped into the PDO.
06040042 hex The number and length of the objects to be mapped would exceed the PDO length.
06040043 hex General parameter incompatibility reason
06040047 hex General internal incompatibility in the device.
06060000 hex Access failed due to a hardware error.
06070010 hex Data type does not match, length of service parameter does not match.
06070012 hex Data type does not match, length of service parameter too high.
06070013 hex Data type does not match, length of service parameter too low.
06090011 hex Sub-index does not exist.
06090030 hex Value range of parameter exceeded (only for write access)
06090031 hex Value of parameter written too high
06090032 hex Value of parameter written too low
06090036 hex Maximum value is less than minimum value.
08000000 hex General error
08000020 hex Data cannot be transferred or stored to the application.
08000021 hex
08000022 hex
08000023 hex Object dictionary dynamic generation fails or no object dictionary is present.
Data cannot be transferred or stored to the application because of local control.
Data cannot be transferred or stored to the application because of the present device
state.
*1
5 - 10
*1 In this status, the Slave Unit operates locally and the EtherCAT Master Unit is unable to control it.
GX-series EtherCAT Slave Unit User’s Manual
Page 77

5 EtherCAT Communications
Set common clock information among the EtherCAT Master Unit and Slave Units
to match the time mutually.
EtherCAT
Master Unit
Slave Unit
5-6 EtherCAT Master Unit - Slave Unit
Communications
This section explains the communication modes between the Master Unit and GX-series EtherCAT
Slave Unit.
5-6-1 FREE RUN Mode
In the FREE RUN mode, a Slave Unit operates asynchronously with the EtherCAT Master Unit.
The Digital I/O Slave Units and Analog I/O Slave Units operate in the FREE RUN mode.
Note that Slave Unit's internal processing time varies by the Slave Unit type, refer to the explanation on
each Slave Unit in Chapter 7 to Chapter 8.
(Digital I/O Slave Units: ON delay, OFF delay, Analog I/O Slave Units: Cycle time)
5-6 EtherCAT Master Unit - Slave Unit Communications
To calculate the input and output response time* of the entire system, refer to the relevant values in the
manual of the host system (EtherCAT Master or CPU Unit) to be used.
* This is the time which takes for an input signal from an Input Slave Unit to be processed by the PLC of the Master
Unit and output to an Output Slave Unit.
5-6-2 DC Mode
In the DC mode, a Slave Unit operates synchronously with the EtherCAT Master Unit.
A mechanism called distributed clock (DC), where the EtherCAT Master Unit and Slave Units share the
same clock, is used for synchronization.
Each of DC mode-ready Slave Units connected to EtherCAT shares the clock information.
By generating interrupt signals and executing input/output processing inside each Slave Unit according
to the clock, it becomes possible to synchronize the input/output timing with other Slave Units.
The DC mode supported by Encoder Input Slave Units is DC mode 1.
5
5-6-1 FREE RUN Mode
GX-series EtherCAT Slave Unit User’s Manual
5 - 11
Page 78

5 EtherCAT Communications
Communications cycle
The communications cycle is determined by setting output frequency of Sync0 signal (interrupt
signal in DC mode 1).
125 μs, 250 μs, 500 μs, 1 ms, 2 ms, 4 ms
The settings are performed on the EtherCAT Master Unit side. For the setting method, refer to the
manual of the EtherCAT Master Unit to be used.
5 - 12
GX-series EtherCAT Slave Unit User’s Manual
Page 79

5-7 Emergency Messages
Precautions for Correct Use
GX-series EtherCAT Slave Units are able to notify emergency messages to the EtherCAT Master Unit
by using the SDO communications if they detect errors.
5-7-1 Emergency Message Notification
It is possible to set whether or not to notify emergency messages via the SDO communications.
Target indexes are sub-index 05 hex: (Flags) in 10F3 hex (Diagnostic History).
The setting values are shown in the table below.
Set value Emergency message notification
0000 hex Not notify.
0001 hex Notify.
5 EtherCAT Communications
5-7 Emergency Messages
When the power to it is turned on, a Slave Unit always starts up in the "Not notify" setting. If you want to
use a Slave Unit in the "Notify" setting, set it to "Notify" each time you turn on the power.
Note that an emergency message cannot be sent during an EtherCAT communications errors are
occurring.
For unit version 1.0 of the GX-series Digital I/O Slaves, Analog I/O Slaves, and Encoder Input
Slaves, the slaves will start when the slave power supply is turned ON and notification is
enabled.
An emergency message is composed of 8-byte data as shown below.
Byte 0 1 2 3 4 5 6 7
Contents
For contents of emergency message, refer to "12-1-5 Emergency Error Code" in page 12 - 19.
For contents of Sysmac error status codes, refer to "12-1-4 Sysmac Error Status Codes" in page 12 -
14.
Emergency
error code
Error register
(Object 1001 hex)
Reserved. Sysmac error status code
5
5-7-1 Emergency Message Notification
GX-series EtherCAT Slave Unit User’s Manual
5 - 13
Page 80

5 EtherCAT Communications
5-7-2 Diagnosis History
Any GX-series EtherCAT Slave Unit other than the GX-ILM08C can save up to eight emergency
messages in non-volatile memory inside the Slave Unit. The saved messages can be read with SDO
communications.
Indexes to be read are sub-indexes 06 hex to 0D hex (Diagnosis messages 1 to 8) among 10F3 hex
(Diagnosis History).
Diagnosis history is stored from Diagnosis message 1. If 8 errors are stored in order up to Diagnosis
message 8, the 9th error onward are saved from Diagnosis message 1 again.
The GX-ILM08C can save a maximum of 64 error records in the error history. For details, refer to the
IO-Link System User’s Manual (Cat. No. W570).
History is saved even if emergency messages cannot be sent to the EtherCAT Master Unit due to
EtherCAT communications errors or emergency messages are set to "Not notify."
Errors that occur for non-volatile memory are not saved in the diagnosis history.
5 - 14
GX-series EtherCAT Slave Unit User’s Manual
Page 81

5 EtherCAT Communications
Reference
5-8 Sysmac Device Functions
“Sysmac devices” is the generic name of control component products that were designed with
communications and user interface specifications that are unified for OMRON control components.
This functions of these procedures are called Sysmac device functions.
This section describes functions that are available when you combine NJ/NX-series or other Machine
Automation Controllers with the Automation Software.
Starting with unit version 1.1, the GX-series Digital I/O Slaves, Analog I/O Slaves, and Encoder Input
Slaves are Sysmac devices and support Sysmac device functions.
Starting with unit version 1.0, the GX-series IO-Link Master Unit is a Sysmac device and supports
Sysmac device functions.
Sysmac error status
Slaves Units that are Sysmac devices systematically handle errors that occur in the Slave Unit. You
can therefore use the Sysmac Studio to check errors and confirm corrections by using the same
procedures for all Sysmac devices.
Errors are reported in 2002 hex-01 hex (Sysmac Error Status). To display errors that are detected by
a Slave Unit on the Sysmac Studio, you must map 2002 hex-01 hex (Sysmac Error Status) to a
PDO. In the Sysmac Studio default settings, 2002 hex-01 hex (Sysmac Error Status) is automatically
mapped to a PDO in the 512th Transmit PDO Mapping (1BFF hex) assignments.
5-8 Sysmac Device Functions
5
• Refer to "A-1-7 Manufacturer Specific Objects" in page A - 32 for information on 2002 hex-01
hex (Sysmac Error Status).
• Refer to "12-1-4 Sysmac Error Status Codes" in page 12 - 14 for errors that are displayed on
the Sysmac Studio.
GX-series EtherCAT Slave Unit User’s Manual
5 - 15
Page 82

5 EtherCAT Communications
(1)
(2)
(3)
(4) (5)
Node address
switches
EtherCAT Slave Unit
Register: 0010 hex
Register: 0012 hex
EtherCAT
slave controller
EtherCAT Master Unit
Non-volatile memory
SII
(1) When the power supply is OFF, set the node
address switches to 00.
(2) From the master, write the node address to the
SII in the Slave Unit.
(3) When the power supply to the Slave Unit is
turned ON, the software writes the node
address setting to register address 0012 hex.
(4) The EtherCAT Master Unit reads the setting in
register address 0012 hex.
(5) The EtherCAT Master Unit writes the value of
address 0012 hex to address 0010 hex.
(1)
(2)
(3) (4)
Node address
switches
EtherCAT Slave Unit
Register: 0010 hex
Register: 0012 hex
EtherCAT
slave controller
EtherCAT Master Unit
Non-volatile memory
SII
(1) When the power supply is OFF, set the node
address switches.
(2) When the power supply to the Slave Unit is
turned ON, the value that is set on the node
address switches is saved in register address
0012 hex.
(3) The EtherCAT Master Unit reads the setting in
register address 0012 hex.
(4) The EtherCAT Master Unit writes the value of
address 0012 hex to address 0010 hex.
Saving node address settings
If the node address switches are set to 00, the software setting is enabled and the node address that
is set on the Sysmac Studio is used.
To use the software setting, execute the Write Slave Node Address menu command on the Edit
Network Configuration Tab Page for EtherCAT. The software setting will be saved in non-volatile
memory in the Slave Unit.
• Software setting
The software setting that is set in the SII (slave information interface) in non-volatile memory in the
Slave Unit is used as the node address.
• Node address switch setting
The value that is set on the node address switches on the Slave Unit is used as the node address.
5 - 16
GX-series EtherCAT Slave Unit User’s Manual
Page 83

5 EtherCAT Communications
Reference
Precautions for Correct Use
Displaying serial numbers
The serial number that is stored in non-volatile memory in the Slave Unit is given in 1018 hex-04 hex
(Serial number). Controllers that support Sysmac device functions can use serial numbers to verify
the network configuration.
To verify the configuration, set the Serial Number Check Method parameter to Setting = Actual
device on the Edit Network Configuration Tab Page for EtherCAT on the Sysmac Studio.
A Network Configuration Verification Error will occur if verification fails for the specified method.
This helps prevent forgetting to set the parameters because a slave device that was replaced is
detected.
Conformance to ESI specifications (ETG.2000 S (R) V1.0.1)
The ESI specifications define the contents of the EtherCAT slave information (ESI) files.
Controllers that support Sysmac device functions can use an optional function that is defined in the
ESI specifications to specify backup parameters in the Slave Units.
You can back up and restore the backup parameters that are defined in the Slave Units from the
Sysmac Studio.
5-8 Sysmac Device Functions
SII data checking
The SII (slave information interface) contains specific configuration information on the EtherCAT
slave that is written in non-volatile memory in the EtherCAT Slave Unit.
EtherCAT Slave Units that are Sysmac devices check the information in the SII at the Slave Units.
Do not change the SII information with setting software that is produced by other companies.
5
GX-series EtherCAT Slave Unit User’s Manual
5 - 17
Page 84

5 EtherCAT Communications
5 - 18
GX-series EtherCAT Slave Unit User’s Manual
Page 85

Basic Specifications of Slave
Units
This chapter explains EtherCAT communication specifications, Slave Units
performance specifications, and the specifications of common areas.
6-1 EtherCAT Communications Specifications . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
6-2 General Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-3
6-3 Specifications of Common Areas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-4
6-3-1 Status Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-4
6-3-2 Node Address Setting Switches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-6
6-3-3 Communications Connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-8
6-3-4 Unit Power Supply Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-11
6-3-5 I/O Power Supply Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-13
6
GX-series EtherCAT Slave Unit User’s Manual
6 - 1
Page 86

6 Basic Specifications of Slave Units
6-1 EtherCAT Communications
Specifications
This section provides the communications specifications of GX-series Digital I/O Slave Units, Analog
I/O Slave Units, and Encoder Input Slave Units.
Refer to "10-4-1 Specifications" in page 10 - 9 for the EtherCAT communications specifications for the
GX-ILM08C.
Item Specification
Communication protocol Dedicated protocol for EtherCAT
Modulation Base band
Baud rate 100 Mbps
Physical layer 100BASE-TX (IEEE802.3)
RJ45 × 2 (Shielded)
Connectors
Topology
Communications media
Communications distance Distance between nodes (Slave Units): 100 m max.
Noise immunity Conforms to IEC 61000-4-4, 1 kV or higher
Node address setting
method
Node address range
Indicator
Process data Fixed PDO mapping
PDO size/node 2 to 256 bytes
Mailbox Emergency messages, SDO requests, SDO responses, and SDO information
SYNCHRONIZATION
mode
CN IN: EtherCAT input
CN OUT: EtherCAT output
Depends on the specifications of the EtherCAT master
Category 5 or higher (cable with double, aluminum tape and braided shielding is
recommended.)
Set on decimal node address switches or with a Configuration Tool.
1 to 99: Node address switch setting
1 to 65535: Set with Configuration Tool
PWR × 1
L/A IN (Link/Activity IN) × 1
L/A OUT (Link/Activity OUT) × 1
RUN × 1
ERR × 1
Digital I/O Slave Unit and Analog I/O Slave Unit: Free Run mode (asynchronous)
Encoder Input Slave Unit: DC mode 1
*1
6 - 2
*1 The EtherCAT Remote I/O Terminal conforms to EtherCAT standards. Confirm the specifications of the
connected EtherCAT master for the support topology. The EtherCAT Remote I/O Terminal with unit version 1.2
or later supports a ring topology.
GX-series EtherCAT Slave Unit User’s Manual
Page 87

6 Basic Specifications of Slave Units
6-2 General Specifications
This section provides the general specifications of GX-series Digital I/O Slave Units, Analog I/O Slave
Units, and Encoder Input Slave Units.
Refer to "10-4-1 Specifications" in page 10 - 9 for the general specifications for the GX-ILM08C.
Item Specification
Unit power supply voltage 20.4 to 26.4 VDC (24 VDC −15% to +10%)
I/O power supply voltage 20.4 to 26.4 VDC (24 VDC −15% to +10%)
Noise immunity Conforms to IEC 61000-4-4, 2 kV (power line).
Malfunction 10 to 60 Hz with amplitude of 0.7 mm, 60 to 150Hz and 50 m/s
of X, Y, and Z directions for 80 minutes
Vibration resistance
Shock resistance
Dielectric strength 600 VAC (between isolated circuits)
Insulation resistance 20 MΩ or more (between isolated circuits)
Ambient operating
temperature
Ambient operating
humidity
Ambient operating
atmosphere
Storage temperature −25 to 65 °C
Storage humidity 25% to 85% (with no condensation)
Terminal block screws
tightening torque*
Mounting method 35-mm DIN track mounting
* Applicable only to 2-tier terminal block and 3-tier terminal block type Slave Units.
<GX-OC1601 Relay Output Unit only>
10 to 55 Hz with double-amplitude of 0.7 mm in each of X, Y, and Z directions for 80
minutes
150 m/s
<GX-OC1601 Relay Output Unit only>
100 m/s
−10 to 55 °C
25% to 85% (with no condensation)
No corrosive gases
M3 wiring screws: 0.5 N • m
M3 terminal block mounting screws: 0.5 N • m
2
with amplitude of 0.7 mm
2
(3 times each in 6 directions on 3 axes)
2
in each
6-2 General Specifications
6
GX-series EtherCAT Slave Unit User’s Manual
6 - 3
Page 88

6 Basic Specifications of Slave Units
L/A IN
L/A OUT
RUN
ERR
PWR
6-3 Specifications of Common Areas
This section explains the specifications of indicator, switches, and connectors commonly mounted in
each Slave Unit.
6-3-1 Status Indicators
It indicates the current state of an EtherCAT Slave Unit.
[PWR] indicator
Indicates the unit power supply state.
Color State Contents
Green
OFF Unit power OFF state
ON The unit power (24 VDC) is supplied to the Slave Unit.
[L/A IN] indicator
Indicates the communication state (input side).
Color State Contents
OFF Link not established in physical layer
Green
Flickering In operation after establishing link
ON Link established in physical layer
[L/A OUT] indicator
Indicates the communication state (output side).
6 - 4
Color State Contents
OFF Link not established in physical layer
Green
Flickering In operation after establishing link
ON Link established in physical layer
GX-series EtherCAT Slave Unit User’s Manual
Page 89

6 Basic Specifications of Slave Units
Reference
on
off
on
off
on
off
on
off
Flickering
Blinking
Single flash
Double flash
50 ms
200 ms 200 ms
200 ms 200 ms
1000 ms
200 ms 200 ms 200 ms
1000 ms
[RUN] indicator
It indicates the operation state.
Color State Contents
OFF Init state
Green
Blinking Pre-Operational state
Single flash Safe-Operational state
ON Operational state
For details on each state, refer to "5-3 Communications State Transitions" in page 5 - 4.
[ERR] indicator
It indicates the information of an error.
Color State Contents
OFF No error
Blinking Communications setting error
Red
Single flash Synchronization error or communications data error
Double flash Application WDT timeout
Flickering Boot error
ON PDI WDT timeout
6-3 Specifications of Common Areas
The timing of each flashing state of indicator is as follows.
6
6-3-1 Status Indicators
GX-series EtherCAT Slave Unit User’s Manual
6 - 5
Page 90

6 Basic Specifications of Slave Units
Precautions for Correct Use
Setting the node address (× 10)
Setting the node address (× 1)
0
1
2
3
4
5
6
7
8
9
0
1
2
3
4
5
6
7
8
9
6-3-2 Node Address Setting Switches
Digital I/O Slave Units, Analog I/O Slave Units, and Encoder Input
Slave Units
These switches are used to set node addresses of Slave Units in the EtherCAT network (decimal).
Set the tens digit of the node address on the left switch and the ones digit on the right switch.
Setting range is 00 to 99. (Default setting: 00)
Note that the node address set values vary as shown below when the EtherCAT Master Unit is made by
OMRON or by other manufacturers.
Node address
switch setting
00
OMRON EtherCAT Master Unit
NJ501-1@00 or CJ1W-NC@82
Set value according to Configuration Tool
(Default setting: 0, Setting range: 1 to 65,535)
01 to 99 Setting on node address switches
Set value for node address
EtherCAT Master Unit from another
manufacturer
Set value according to Configuration
Tool (settings by these switches are
irrelevant)
• The setting on the node address switches is read only once when the power is turned ON.
Even if the settings are changed after turning the power supply ON, they are not reflected in
the control. They become effective when the power supply is turned ON the next time.
• If node addresses overlap, an error occurs and the operation stops.
• If you set the node address switches to 00, the Slave Unit will not operate if the node address
setting made from the Configuration Tool is not changed from 0 to another value. If the node
address switches are set to 00, always use the Configuration Tool to change the node address
to a value between 1 and 65,535.
• The code printed above the node address setting switches differs according to the unit version
of the Digital I/O Slave Unit, Analog I/O Slave Unit, or Encoder Input Slave Unit, as shown
below.
Unit version Code
Version 1.1 ADR
Version 1.2 or later ID
6 - 6
GX-series EtherCAT Slave Unit User’s Manual
Page 91

6 Basic Specifications of Slave Units
Precautions for Correct Use
GX-ILM08C
0
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
0
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
0
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
Node address setting, ×1
Node address setting, ×16
Node address setting, ×256
IO-Link Master Unit
The node address setting switches are used to set node address of the Slave Unit in the EtherCAT
network as a hexadecimal value.
Set the hexadecimal value of the EtherCAT node address of the IO-Link Master Unit on the rotary
switches in the following order starting from the rightmost switch: rightmost digit (x1), middle digit (x16),
and leftmost digit (x256).
The setting range is from 000 to FFF hex (0 to 4,095 decimal). (Default setting: 000)
6-3 Specifications of Common Areas
The valid node address set value varies as shown below when the EtherCAT Master Unit is made by
OMRON or by another manufacturer.
Node address
switch setting
000
001 to FFF
• The setting on the node address switches is read only once when the power is turned ON. If
OMRON EtherCAT Master Unit
Value set with Configuration Tool (Default
setting: 0, Setting range: 1 to 65,535)
Setting on node address switches on the
Unit
Valid set value for node address
EtherCAT Master Unit from another
manufacturer
Value set with Configuration Tool (The
setting on these switches is ignored.)
the setting is changed after turning ON the power supply, it is not reflected in control. It
becomes effective the next time the power supply is turned ON.
• If the same node address is allocated to more than one node, an error occurs and operation
stops (for an OMRON EtherCAT Master Unit).
• If you set the node address switches to 000, the Slave Unit will not operate if the node address
setting made from the Configuration Tool is not changed from 000 to another value. If the node
address switches are set to 000, always use the Configuration Tool to change the node
address to a value between 1 and 65,535. (This applies when an OMRON NJ/NX-series
EtherCAT Master Unit is used. If a master manufactured by another company is used, the set
value can be used as an ID.)
6
6-3-2 Node Address Setting Switches
GX-series EtherCAT Slave Unit User’s Manual
6 - 7
Page 92

6 Basic Specifications of Slave Units
CN1
CN2
1
8
• The code printed above the node address setting switches differs according to the unit version
of the IO-Link Master Unit, as shown below.
Unit version Code
Version 1.0 NODE ADDRESS
Version 1.1 or later ID
6-3-3 Communications Connectors
The Connectors are used to connect the communications cables.
Digital I/O Slave Units, Analog I/O Slave Units, and Encoder Input
Slave Units
RJ45 connectors are used for the communications connectors as shown below.
The specifications are shown below.
• Electrical characteristics: Conforms to the IEEE 802.3 standard.
• Connector structure: RJ45 8-pin modular connector (conforms to ISO 8877)
• Terminal arrangement
Pin No. Signal name Abbreviation
1 Send data + TD +
2 Send data − TD −
3 Receive data + RD +
4 Not used −
5 Not used −
6 Receive data − RD −
7 Not used −
8 Not used −
Hood Frame ground FG
6 - 8
GX-series EtherCAT Slave Unit User’s Manual
Page 93

6 Basic Specifications of Slave Units
GX-ILM08C
EtherCAT communications connector, OUT
EtherCAT communications connector, IN
IO-Link Master Unit
M12 connectors (D-coding, female) are used for the communications connectors as shown below.
6-3 Specifications of Common Areas
The specifications are given below.
• Electrical specifications: Conform to IEEE 802.3 standards.
• Connector structure: M12 connectors (D-coding, female) x 2 (Both are shielded.)
• Terminal Arrangement
Pin No. Signal Abbreviation
1 Transmission data + TD+
2 Reception data + RD+
3 Transmission data − TD−
4 Reception data − RD−
Shield --- FG
6
6-3-3 Communications Connectors
GX-series EtherCAT Slave Unit User’s Manual
6 - 9
Page 94

6 Basic Specifications of Slave Units
XS5 -T 4 2 - M -
―
―――
―― ―
―
(1) (2) (3) (4) (5) (6) (7) (8)
• Recommended Cables with Connectors
(1) Connector Model
H: Cable with Connector on One End
W: Cable with Connectors on Both Ends
(2) Type
T: Ethernet (mating section: M12, D coding)
(3) Number of Pins
4: 4 pins
(4) Contact Plating
2: Gold-plated, 0.4 μm
(5) Cable Connection Direction (M12 Connector)
1: Straight
2: Right-angle
(6) Cable Length
A: 0.3 m
B: 0.5 m
C: 1 m
D: 2 m
E: 3 m
G: 5 m
J: 10 m
K: 15 m
(7) Connectors
0: M12 plug on one end
1: M12 socket on one end and M12 plug on the other end
2: M12 plugs on both ends
C: M12 plug on one end and RJ45 plug on the other end
D: RJ45 plugs on both ends
E: M12 socket on one end and RJ45 plug on the other end
(8) Cable
K: Standard cable
KR: Flexible cable
6 - 10
GX-series EtherCAT Slave Unit User’s Manual
Page 95

6-3-4 Unit Power Supply Connector
Name
+V
−V
24 VDC
0 VDC
Fixing screw
+V
terminal
−V
terminal
Specification
The Connector is used to connect the unit power supply (24 VDC).
Digital I/O Slave Units, Analog I/O Slave Units, and Encoder Input
Slave Units
6 Basic Specifications of Slave Units
6-3 Specifications of Common Areas
• Connector type: Spring connection connector with fixing screw (2-pin)
2
• Supported pin terminal diameter: 0.25 mm
to 0.5 mm2/AWG24 to AWG20
(Pin terminal with isolation sleeve used)
For types of recommended pin terminals, refer to "4-3-3 Connecting the Unit Power Supply" in page 4 -
9.
6
6-3-4 Unit Power Supply Connector
GX-series EtherCAT Slave Unit User’s Manual
6 - 11
Page 96

6 Basic Specifications of Slave Units
Power supply connector
GX-ILM08C
IO-Link Master Unit
Supply the Unit power supply and the I/O power supply through the same power supply connector.
(Notes) Supply the Unit power supply and the I/O power supply from separate sources.
An M12 connector (A-coding, male) is used for the power supply connector.
Power Supply Connector
Pin No. Signal Description
1 UNT_P+ Unit power supply +
2 UNT_P− Unit power supply −
3 IO_P+ I/O power supply +
4IO_P− I/O power supply −
6 - 12
GX-series EtherCAT Slave Unit User’s Manual
Page 97

6-3-5 I/O Power Supply Connector
Name
V
G
24 VDC
0 VDC
Specification
V terminal
G terminal
Connect I/O power supply for external device operation (24 VDC).
Digital I/O Slave Units, Analog I/O Slave Units, and Encoder Input
Slave Units
The I/O power supply connector is mounted on the following type of Slave Unit with e-CON connector
and output contacts.
6 Basic Specifications of Slave Units
GX-OD1618/OD1628/MD1618/MD1628/OD3218/OD3228/MD3218/MD3228
• Connector type: Spring connection connector with fixing screw (4-pin)
2
• Supported pin terminal diameter: 0.25 mm
(Pin terminal with isolation sleeve used)
For types of recommended pin terminals, refer to "4-3-4 Connecting the I/O Power Supply" in page 4 -
11.
to 0.5 mm2/AWG24 to AWG20
IO-Link Master Units
6-3 Specifications of Common Areas
6
6-3-5 I/O Power Supply Connector
I/O power is supplied through the power supply connector. Refer to "6-3-4 Unit Power Supply
Connector" in page 6 - 11.
GX-series EtherCAT Slave Unit User’s Manual
6 - 13
Page 98

6 Basic Specifications of Slave Units
6 - 14
GX-series EtherCAT Slave Unit User’s Manual
Page 99

Digital I/O Slave Unit
This chapter explains the overview of the Digital I/O Slave Unit.
7-1 Digital I/O Slave Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-2
7-2 I/O Data Allocation (PDO Mapping) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-3
7-2-1 Input Data Allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-3
7-2-2 Output Data Allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-5
7-3 Functions of Digital I/O Slave Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-7
7-3-1 Input Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-7
7-3-2 Error Mode Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-8
7-4 Specifications for Each Slave Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-9
7-4-1 2-tier Terminal Block Type 16-point Input Slave Unit GX-ID1611/ID1621 . . . 7-10
7-4-2 2-tier Terminal Block Type 16-point Output Slave Unit GX-OD1611/OD1621 7-14
7-4-3 2-tier Terminal Block Relay Type 16-point Output Slave Unit GX-OC1601 . . 7-18
7-4-4 2-tier Terminal Block Type 8-point Input and 8-point Output Slave Unit
GX-MD1611/MD1621 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-22
7-4-5 3-tier Terminal Block Type 16-point Input Slave Unit GX-ID1612/ID1622 . . . . 7-28
7-4-6 3-tier Terminal Block Type 16-point Output Slave Unit GX-OD1612/OD1622 7-33
7-4-7 3-tier Terminal Block Type 8-point Input and 8-point Output Slave Unit
GX-MD1612/MD1622 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-38
7-4-8 e-CON Connector Type 16-point Input Slave Unit GX-ID1618/ID1628 . . . . . 7-44
7-4-9 e-CON Connector Type 16-point Output Slave Unit GX-OD1618/OD1628 . . 7-48
7-4-10 e-CON Connector Type 8-point Input and 8-point Output Slave Unit
GX-MD1618/MD1628 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-53
7-4-11 e-CON Connector Type 32-point Input Slave Unit GX-ID3218/ID3228 . . . . . 7-59
7-4-12 e-CON Connector Type 32-point Output Slave Unit GX-OD3218/OD3228 . . 7-64
7-4-13 e-CON Connector Type 16-point Input and 16-point Output Slave Unit
GX-MD3218/MD3228 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-69
7-5 Mounting Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-75
7-5-1 2-tier Terminal Block Type . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-75
7-5-2 3-tier Terminal Block Type . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-76
7-5-3 e-CON Connector Type . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-77
7
GX-series EtherCAT Slave Unit User’s Manual
7 - 1
Page 100

7 Digital I/O Slave Unit
7-1 Digital I/O Slave Unit
Digital I/O Slave Units refer to slaves with processing functions for digital I/O data (ON/OFF signals).
Moreover, this Slave Unit has the input filter function (input only) and the output setting function at
communications error (output only).
7 - 2
GX-series EtherCAT Slave Unit User’s Manual
 Loading...
Loading...