

Page 1

Cat. No. W353-E1-1
SYSMAC
CPM1/CPM1A/CPM2A/CPM2C/SRM1(-V2)
Automate programmable
MANUEL DE
PROGRAMMATION
Page 2

AUTOMATES PROGRAMMABLES
CPM1/CPM1A/CPM2A/CPM2C/SRM1(-V2)
Manuel de Programmation
Réalisé en Mai 1999
Page 3

Avis :
Les produits OMRON sont conçus pour être utilisés par un opérateur qualifié, en respectant des procédures appropriées et uniquement dans le cadre de ce qui est précisé dans ce document.
Dans ce manuel, les conventions suivantes permettent de spécifier et de classer les conseils d’utilisation. T oujours faire très attention aux informations qui sont données. Le non--respect des conseils
d’utilisation stipulés peut blesser des personnes ou endommager des biens.
DANGER
!
AVERTISSEMENT
!
Attention
!
Indique unesituation dangereuse imminente qui, si ellen’est pas évitée, peut entraîner des
blessures graves ou mortelles.
Indique une situation potentiellement dangereuse qui, si elle n’est pas évitée, peut
provoquer des blessures graves ou mortelles.
Indiqueunesituationpotentiellementdangereusequi,siellen’estpasévitée,peutprovoquer
de légères ou moyennes blessures ou endommager des biens.
Références des produits OMRON
Dans ce manuel, tous les noms de produits OMRON sont écrits en majuscules. Le mot “ unité ” désigne
un produit OMRON, que la désignation de ce produit apparaisse ou nom dans letexte.
L ’abréviation “Ch,” qui figure sur certains affichages et sur certains produits OMRON signifie souvent
“ word ” (“ mot ”) et, dans la documentation, il est souvent remplacé par l’abréviation “Wd”.
L ’abréviation “API” signifie Automate programmable industriel et n’est jamais utilisée comme abréviation d’un autre système, composant ou élément.
Aides visuelles
Les intitulés suivants apparaissent dans la colonne de gauche du manuel, pour vous aider à trouver
différents types d’informations.
! OMRON, 1999
Tous droits réservés. Aucune partiede cette publication ne peut être, stockée dans un systèmeà mémoireou transmise,
sous aucune forme et par aucun moyen mécanique, électronique, photocopie,enregistrement sansl’accord écrit préalable
d’OMRON.
L’utilisation des informations contenues ci--après ne peut engendrer aucune responsabilité. De plus, la mesure où
OMRON travaille constamment à l’amélioration de ses produits de haute qualité, les informations contenues dans ce manuel sont soumises à changement sans avis préalable. Toutes les précautions ont été prises dans l’élaboration de ce manuel.
Toutefois, OMRON ne peut être tenu responsable des erreurs ou omissions.Lesdommages résultant de l’utilisation des
informationscontenues dans cette publication ne peuvent engendrer aucune responsabilité.
Rem.
1, 2, 3...
Désignedes informations particulièrement intéressantes pour utiliser le produit
de façon pratique et efficace.
1. Indique une ou des listes de différents types, par exemple procédures,
checklists, etc
v
Page 4

TABLE DES MATIERES
CONSEILS D’UTILISATION xiii.....................
1 Personnel concerné xiv..........................................................
2 Conseils généraux d’utilisation xiv.................................................
3 Conseils de sécurité xiv..........................................................
4 Conseils relatifs à l’environnement d’exploitation xv..................................
5 Conseils d’utilisation xvi.........................................................
CHAPITRE 1
Configuration de l’API 1...........................
1-1 Le Setup de l’API 2........................................................
1-2 Fonctionnement de l’API de base et traitement des E/S 19..........................
CHAPITRE 2
Caractéristiques spécifiques 27.......................
2-1 Fonctions d’interruption des CPM2A/CPM2C 28.................................
2-2 Compteurs à grande vitesse du CPM2A/CPM2C 43...............................
2-3 Fonctions d’interruption du CPM1/CPM1A 76...................................
2-4 Fonctions d’interruption du SRM1(-V2) 96......................................
2-5 Fonctions de sortie d’impulsions du CPM2A/CPM2C 99...........................
2-6 Fonctions de la sortie d’impulsions du CPM1A 134................................
2-7 Commande d’impulsions synchronisée (CPM2A/CPM2C uniquement) 137.............
2-8 Fonctions analogiques d’E/S (CPM1/CPM1A/CPM2A uniquement) 149................
2-9 Fonctions esclave d’E/S du CompoBus/S (CPM1A/CPM2A uniquement) 149...........
2-10 Fonctions maître d’E/S du CompoBus/S (SRM1(-V2) uniquement) 149................
2-11 Commandes analogiques 151..................................................
2-12 Entrées de capture 153.......................................................
2-13 Fonction de la macro 158.....................................................
2-14 Calcul avec les données binaires signées 159......................................
2-15 Détections de fronts 161......................................................
2-16 Instructions d’expansion (CPM2A/CPM2C/SRM1(-V2) uniquement) 162...............
2-17 Utilisation de la fonction d’horloge des CPM2A/CPM2C 164........................
CHAPITRE 3
Utilisation des modules d’extension 167.................
3-1 Modules d’E/S analogiques 168................................................
3-2 Unité de liaison d’E/S CompoBus/S 177.........................................
CHAPITRE 4
Fonctions de communication 183.......................
4-1 Introduction 184............................................................
4-2 Fonctions de communication du CPM1/CPM1A 185...............................
4-3 Fonctions de communication du CPM2A/CPM2C 189..............................
4-4 Fonctions de communication SRM1(-V2) 221.....................................
4-5 Commandes de communication à l’ordinateur 236.................................
CHAPITRE 5
Zones mémoire 261..................................
5-1 Fonctions des zones mémoire des CPM1/CPM1A 262..............................
5-2 Fonctions des zones mémoire des CPM2A/CPM2C 266.............................
5-3 Fonctions de la zone mémoire du SRM1(-V2) 272.................................
5-4 Mémoire flash du SRM1(-V2) 275..............................................
vii
Page 5

TABLE DES MATIERES
CHAPITRE 6
Programmation en schéma à contacts 277...............
6-1 Procédure fondamentale 278...................................................
6-2 Terminologie des instructions 278..............................................
6-3 Les bases du schéma à contacts 279.............................................
6-4 Commande de l’état des bits 299...............................................
6-5 Bits de travail (Relais internes) 301.............................................
6-6 Conseilsd’utilisation à la programmation 303.....................................
6-7 Exécution des programmes 305................................................
CHAPITRE 7
Ensemble d’instructions 307..........................
7-1 Notation 310...............................................................
7-2 Format d’instruction 310......................................................
7-3 Zones de données, valeurs utilisées comme bits de définition et drapeaux 310...........
7-4 Instructions sur changement d’état 312..........................................
7-5 Codages des instructions à droite 313............................................
7-6 Tableaux d’instruction 316....................................................
7-7 Programmation en schémas à contacts 323.......................................
7-8 Instructions de commande de bits 324...........................................
7-9 NO OPERATION -- NOP(00) 328...............................................
7-10 END -- END(01) 328........................................................
7-11 INTERLOCK et INTERLOCK CLEAR -- IL(02) et ILC(03) 328......................
7-12 JUMP et JUMP END -- JMP(04) et JME(05) 330..................................
7-13 Instructions relatives aux erreurs d’utilisation : FAILURE ALARM AND RESET -- FAL(06)
et SEVERE FAILURE ALARM -- FALS(07) 332..................................
7-14 Instructions de définition d’étapes : STEP DEFINE et
STEP START--STEP(08)/SNXT(09) 333.........................................
7-15 Instructions de temporisation et de comptage 335..................................
7-16 Instructions de décalage 352...................................................
7-17 Instructions de transfert de données 360..........................................
7-18 Instructions de comparaison 370................................................
7-19 Instructions de conversion 377.................................................
7-20 Instructions de calcul sur les valeurs BCD 401....................................
7-21 Instructions de calcul binaire 411...............................................
7-22 Instructions mathématiques spéciales 415........................................
7-23 Instructions logiques 421.....................................................
7-24 Instructions d’incrémentation/décrémentation 424.................................
7-25 Instructions de sous-programmes 426............................................
7-26 Instructions spéciales 429.....................................................
7-27 Instructions de commande d’interruptions 452.....................................
7-28 Instructions de communication 457.............................................
CHAPITRE 8
Opérations exécutées par les API et temps de traitement 463
8-1 Temps de cycle et temps de réponse des E/S des CPM1/CPM1A 464..................
8-2 Temps de cycle des CPM2A/CPM2C et temps de réponse d’E/S 476...................
8-3 Temps de cycle et temps de réponse des E/S du SRM1(-V2) 493......................
viii
Page 6

TABLE DES MATIERES
CHAPITRE 9
Recherche de pannes 505.............................
9-1 Introduction 506............................................................
9-2 Erreurs de fonctionnement de la console de programmation 506......................
9-3 Erreurs de programmation 507.................................................
9-4 Erreurs définies par l’utilisateur 508.............................................
9-5 Erreurs de fonctionnement 509.................................................
9-6 Journal d’erreurs 511.........................................................
9-7 Erreurs de liaison à l’ordinateur 513.............................................
9-8 Organigrammes de dépannage 513..............................................
Historique des révisions 555...........................
ix
Page 7

A propos de ce manuel :
Veuillezlire cemanuelattentivementets’assurerd’avoirbiencomprislesinformationsqu’ilapporteavant
de tenter d’installer et d’utiliser l’API.
La
Chapitre 1
tionnement.
La
Chapitre 2
La
Chapitre 3
d’E/S CompoBus/S du CPM1A-SRT21.
La
Chapitre 4
La
Chapitre 5
sions sur certaines zones sont fournies dans l’Annexe C en fin de ce manuel.
La
Chapitre 6
grame d’échelle de base. Elle débute par la présentation des instructions utilisées pour construire la
structure de base du diagramme d’échelle et pour contrôler son exécution.
La
Chapitre 7
zones de données et les drapeaux utilisés pour chacun.
La
Chapitre 8
l’exécution du programme.
La
Chapitre 9
pouvant survenir au cours du fonctionnement.
Les recherches de références sont accessibles depuis certaines
matières traitant des annexes.
expliqueleSetupde l’API. LeSetupdel’API estutilisé pour définir les paramètres de fonc-
explique les caractéristiques spécifiques à l’API.
décrit comment utiliser l’Unité d’E/S analogique du CPM1A-MAD01 et l’Unité de liaison
décrit comment utiliser les fonctions de communications fournies par les API.
décrit la structure des zones mémoire de l’API et explique comment les utiliser.Les préci-
explique les étapes et concepts de base impliqués dans l’écriture du programme de dia-
explique individuellement les instructions et fournit le symbole en schéma à contacts, les
explique le traitement de l’API interne, ainsi que le temps nécessairepour le traitement et
décrit comment diagnostiquer et corriger les défauts matériels et les erreurs du logiciel
Annexes
. Se reporter à la table des
AVERTISSEMENT : Omettre de lire et comprendre les informations contenues dans ce manuel
!
peutentraînerlamort,desblessurescorporelles,l’endommagementduproduitoudes pannes.Lire chaque chapitre, ainsi queleschapitres auxquelsil
est fait référence dans leur totalité et s’assurer d’une bonne compréhension
des informations qui y sont contenues avant la mise en oeuvre des procédures ou fonctionnalités décrites.
xi
Page 8

CONSEILS D’UTILISATION
L’objetde cettepartieest deprésenterlesconseilsd’utilisation généraux del’automate programmable(API)etdesdispositifs
s’yrattachant. Les
ploitation de l’automate programmable. Ce chapitre doit être lu et les informations qu’il contient comprises avant
toute tentative de mise en oeuvre ou d’utilisation d’un système API.
1 Personnels concernés xiv..........................................................
2 Conseils généraux d’utilisation xiv..................................................
3 Conseils de sécurité xiv...........................................................
4 Conseils relatifs à l’environnement d’exploitation xv...................................
5 Conseils d’utilisation xvi.........................................................
informations contenuesdans cette partie sont très importantespour la sécurité et la fiabilitéd’ex-
xiii
Page 9

Conseils de sécurité
1 Personnel concerné
Cemanuelestdestinéauxpersonnels mentionnés ci--après,quidoiventposséder des connaissancessuffisantes dans le domaine des systèmes électriques
(niveau ingénieur électricité ou équivalent).
! Personnels responsables de l’installation des systèmes automatisés.
! Personnels responsables de la conception de systèmes automatisés.
! Personnels responsables de la gestion de systèmes automatisés et des
locaux.
2 Conseils généraux d’utilisation
Consulter votre correspondant OMRON avant toute utilisation du produit dans
desconditionsnondécritesdanscemanuelouavantdel’exploiterdanslecadre
desystèmesdecontrôlenucléaire,desystèmesferroviaires,desystèmesaéronautiques, de véhicules, de systèmes de combustion, d’équipements médicaux, de machines d’attraction ou d’équipements de sécurité ou associé à tout
autre système, machine ou équipement susceptible de mettre des vies ou la
propriété en péril en cas de mauvaise utilisation.
S’assurer que les caractéristiques et capacités du produit sont bien adaptées
aux systèmes, machines et équipements et que ces systèmes, machines et
équipements, sont assortis de mécanismes de sécurité doubles.
Lesinformations contenues dans cemanuelsontdestinéesàlaprogrammation
etàl’utilisationdel’unité. Bien lire cemanuelavant toute utilisation du logiciel et
leconserver à portée de main pour en permettre l’utilisationencoursd’exploitation.
3
DANGER
!
Il est extrêmement important d’utiliser l’API et toutes les unités API pour ce à
quoi ils sont destinés et ceci dans les conditions spécifiées, particulièrement
dans le cas d’applications pouvant provoquer la mort. Consulter votre
correspondant OMRON avant toute utilisation du système API pour des
applications mentionnées ci--dessus.
3 Conseils de sécurité
DANGER
!
DANGER
!
DANGER
!
Nejamaistenterdedémonterune Unitésoustension sous peine des’exposer à
un choc électrique sérieux ou à uneélectrocution.
Eviter tout contact avec les borniers sous tension sous peine de s’exposer à un
choc électrique sérieux ou à une électrocution.
Prévoir des mesures de sécurité pour les circuits extérieurs (c’est--à--dire en
dehors de l’automate programmable), y compris dans les articles suivants, afin
d’assurer la sécurité du système si une anomalie intervient à la suite d’un
dysfonctionnement de l’API ou d’un autre facteur externe affectant le
fonctionnement de l’automate. Le non--respect de cet avertissement peut se
traduire par des accidents graves.
xiv
! Des circuits d’arrêt d’urgence, des circuits à verrouillage réciproque, des limi-
teurs et des mesures de sécurité similaires doivent être mis en place sur tous
les circuits de pilotage externes.
Page 10

Conseils relatifs à l’environnement d’exploitation
! L’APImettoutessessortiesàl’étatOFF lorsque safonctiondediagnosticinté-
grée détecte une erreur ou bien à l’exécution d’une instruction d’alarme de
défaillance grave (FALS). Pour se protéger contre ces erreurs, des mesures
de sécurité externes doivent être prises pour assurer la sécurité du système.
! Les sorties de l’automatepeuvent rester sur ON ou OFF du fait de l’encrasse-
ment ou du brûlage des relaisde sortieou de la destruction des transistors de
sortie. Pour se prémunir contre ce type deproblèmes, des mesures de sécurité externes doivent être prises pour assurer la sécurité du système
! Lorsque la sortie 24 V continus (alimentation électrique de service de l’auto-
mate) est surchargée ou court--circuitée, il peut y avoir une baisse de tension
et, par suite, les sorties passent à l’état OFF. Pour se prémunir contre ce type
de problèmes, des mesures de sécurité externes doivent être prises pour
assurer la sécurité du système.
4
DANGER
!
Attention Pourexécuteruneéditionenligne,s’assurer d’abord quecette opérationn’aura
!
Attention Lorsdutransfert des programmes à d’autresstations ou lors de modification de
!
Attention Serrer les vis du bornier de l’unité d’alimentation en courant alternatif en
!
Lorsdelamanipulationdela piledesauvegardedelamémoire, ne paslalaisser
tomber, ni la démonter, ni la déformer, ni la recharger, ni la chauffer à une
températuresupérieureà100_C,nilajeterdanslefeu.Lapilerisqued’exploser,
de prendre feu ou de fuir si elle est malmenée de quelque manière que ce soit.
pas d’effets néfastes par suite de l’allongement de la durée des cycles. Sinon
des modifications inattendues ou inappropriées dans le fonctionnement du
système de commande risquent de survenir.
lamémoiredesE/S,s’assurerdelasécuritédelastationdedestinationavantde
faire le transfert. Autrement, cela risquerait de blesser.
respectant le couplespécifié dans le manueld’exploitation. Desvis mal serrées
risque de mettre le feu ou de provoquer un dysfonctionnement.
4 Conseils relatifs à l’environnement d’exploitation
Attention Ne pas exploiter le système de commande dans les conditions suivantes :
!
! Endroits recevant directement la lumière du soleil.
! Endroitsprésentantdestempératuresouune humiditéàl’extérieurdelaplage
figurant dans les spécifications.
! Endroits présentant de la condensation provoquée par de fortes variations de
la température.
! Endroits soumis à des gaz corrosifs ou inflammables.
! Endroits poussiéreux (en particulier limaille de fer) ou contenant des sels.
! Endroits exposés à l’eau, à l’huile ou àdes produits chimiques.
! Endroits soumis à des chocs ou à des vibrations.
Attention Prendre des contres mesures de protection ad hoc et suffisantes lors de
!
l’installation des systèmes dans les endroits suivants :
! Endroits présentant de l’électricité statique ou d’autres formes de bruits.
xv
Page 11

Conseils d’utilisation
! Endroits soumis à des champs électromagnétiques puissants.
! Endroits susceptibles d’être soumis à de la radioactivité.
! Endroits proches d’alimentations électriques.
Attention L ’environnement d’exploitation du Système API peut avoir des conséquences
!
importantes sur la durée de vie et la fiabilité du système. Des environnements
d’exploitation inadéquats peuvent provoquer des dysfonctionnements, pannes
et autres problèmes imprévisibles au niveau du Système API. S’assurer que
l’environnement d’exploitation répond aux conditions spécifiées lors de
l’installation et continueà y répondrependant toute la duréede vie dusystème.
5 Conseils d’utilisation
Respecter les conseilsd’utilisation suivants lors de l’utilisation du SystèmeAPI.
Attention Lenon respect des conseils d’utilisation suivants peut amener à provoquer des
!
erreurs de fonctionnement de l’API ou du système, ou encore à endommager
l’API ou ses unités. Toujours tenir compte de ces recommandations.
Conception des circuits ou réalisation de programmes d’échelle
! Desmesures “Fail–safe” doiventêtre prises par le client pourassurer lasécu-
rité en présence de signaux manquants, incorrects ou anormaux provoqués
par une rupturede lignes de transmission designaux, pardescoupures courtes du courant ou d’autres causes.
! Réaliser un circuit de commande et de contrôle de façon que l’alimentation
des circuits d’E/S ne puisse pas passer sur ON avant l’alimentation de l’unité.
Sil’alimentationdescircuits d’E/S passe surON avantl’alimentation del’unité,
le fonctionnement normaI risque d’être interrompu provisoirement.
! SilemodeopératoireRUNou MONITOR passeenmode PROGRAM, avec le
bit de maintien IOM sur ON, la sortie va rester dans l’état le plus récent. Dans
cecas,s’assurer quelachargeexternenedépassepasla valeur figurant dans
les spécifications. Si l’exploitation est arrêtée à la suite d’une erreur de fonctionnementgénéréspardesinstructionsFALS,lesvaleurssetrouvant dans la
mémoire interne del’UC seront conservées, mais les sorties passenttoutes à
l’état OFF.
! Pour les modèles avec un seul super condensateur,les contenus de la zone
valide READ/WRITE de la zone DM, de la zone HR, de la zone AR et de la
zone de données CNT risquent d’être endommagés si l’alimentation est désactivée pendant longtemps. Pour éviter cela, appliquer un programme
d’échellequivérifieral’AR1314s’assurant que le système estbienopérationnel.
! Laduréede vie des relais est très variableen fonctiondes conditionsdecom-
mutations. S’assurer de tester les conditions d’exploitation à l’aide des unités
proprement dites et d’utiliser le produit en respectant la quantité spécifique
des commutations définie afin de ne provoquer aucune altération des performances.Aurisque,lorsd’emploide ce produitavecdesperformancealtérées,
d’obteniruneisolationdéfectueuseentrelescircuitsoudedétériorerlesrelais.
5
Installation
xvi
! Installer les unités correctement comme indiqué dans le(s) manuel(s)
concerné(s).
! Ne pas installer l’API ou ses unités là où elles risquent d’être agressées par
trop de parasites. Sinon cela risquerait de provoquer un dysfonctionnement.
Page 12

Conseils d’utilisation
Câblage et connexion
5
! Installer les unités correctement afin qu’elles ne tombent pas.
! S’assurerquetouteslesvisdemontage,cellesdesborneset des connecteurs
de câbles soient serrées aucouple spécifiédans les manuels applicables. Un
serrage avec uncouple incorrect peut provoquer un dysfonctionnement.
! Installer le capot du connecteur de l’unité d’E/S d’expansion sur la dernière
unité d’E/S d’expansion pour la protéger de la poussière ou de substances
étrangères. Sinon cela risquerait de provoquer un dysfonctionnement.
! Vérifier queles borniers, les câbles d’extension et les autres pièces équipées
de dispositifs de verrouillage soient bien fixés. Une mauvaise fixation risquerait de provoquer des dysfonctionnements.
! S’assurer d’utiliser des câbles comme le(s) manuel(s) concerné(s) l’indi-
que(nt).
! Installer des disjoncteurs externes et recourir à d’autres mesures de sécurité
contre d’éventuels courts--circuits dans le câblage externe. Des mesures de
sécurité insuffisantes contre les courts--circuits risquent de détériorer les circuits.
! Lorsducâblagedesliaisonsdesignaux, ne jamais les placerdanslesmêmes
gaines que les lignes à haute tension ou que les lignes d’alimentation. Sinon
cela risquerait de provoquer des dysfonctionnements.
! Vérifier quelesborniers et les connecteurs soient connectés dans ladirection
spécifiée et queles polaritéssoient bien conformes. Toute anomalie peut provoquer un dysfonctionnement.
! Lorsdu câblage, laisser les étiquettes attachées aux unitésCPM1 ou CPM2A
pour éviter quedes morceaux de fils coupés pénètrent dans l’unité.
! Attacher lesétiquettesfourniesaveclesunités CPM1AouCPM2C,ouencore
tous autres types de protection, lors du câblage afin d’empêcher la poussière
ou les morceaux de fils coupés d’entrer dans les unités.
! Lorsquelecâblageestterminé,enlever les étiquettespourassurer unebonne
dissipation thermique. Laisser des étiquettes risquerait de provoquer un dysfonctionnement.
! S’assurer que toutes des vis de montage, des bornes et des connecteurs de
câblessoient serrées au couple spécifiédans les manuelsconcernés. unserrage à un couple incorrect risquerait de provoquer un dysfonctionnement.
! Utiliser les connecteurs et les matériaux de câblage indiqués dans les
manuels concernés.
! S’assurer de câbler selon les manuels concernés. Un mauvais câblage ris-
querait de détériorer les circuits.
! Toujours se connecter à la terre avec une résistance d’au plus 100 " lors de
l’installation des unités.
Connexion des E/S et démarrage du système
! Déconnecter la borne terre lors de tests de rigidité.
! Toujours utiliser les tensions d’alimentation indiquées dans le(s) manuel(s)
d’exploitation.
! Effectuer lesmesures nécessairespours’assurer que l’alimentation spécifiée
à la tension nominale et à la fréquence voulue est bien fournie. Attention tout
particulièrement làoù l’alimentation est instable.
! Nepasappliquerdestensions ou connecterdescharges auxbornes de sortie
audelàdelatensiond’entréenominale.Destensions excessivesrisqueraient
de détériorer les circuits.
xvii
Page 13

Conseils d’utilisation
! Nepasappliquerdestensions ou connecterdescharges auxbornes de sortie
au delà du maximum de la capacité des commutateurs. Des tensions ou des
charges excessives risqueraient de détériorer les circuits.
! Effectuer un double contrôle de tous les câblages et réglages de commuta-
teurs avant de mettre l’alimentation sur ON.
! Vérifier l’exécution du programme utilisateur avant de le faire tourner sur
l’unité. La nonvérificationdu programmepeut être à l’origine d’un fonctionnement imprévisible.
Conseils d’utilisation lors de manipulation
! Lors de l’utilisation, de la sauvegarde ou du transport du produit, rester
conforme aux indications listées dans le(s) manuel(s) concerné(s).
! Ne pas tenter de démonter, réparer ou changer les unités.
! Un dysfonctionnement ou un choc électrique risque de survenir si l’alimenta-
tiondel’APIn’estpassurOFF avantd’effectuer une desopérations présentée
ci--dessous :
! Montage des unités.
! Connexion ou déconnexion des unités d’E/S d’expansion.
! Connexion ou câblage des câbles.
! Connexion ou déconnexion des connecteurs.
! Réglage des commutateurs DIP.
! Changement de pile.
! S’assurerquelesystèmeneserapasperturbéavantdelancer une desopéra-
tions de la liste ci--dessous. Le non respect de cette règle peut être à l’origine
d’un fonctionnement imprévisible.
! Changer le mode opératoire de l’API.
! Réglage/RAZ forcé d’un bit en mémoire.
! Changer la valeur actuelle d’un mot quelconque ou de n’importe quelle
valeur configurée en mémoire.
! Avantdetoucheràl’unité,penser enpremieràtenirunobjetmétallique relié à
laterrepourledéchargerdetouteélectricité statique.Nepaslefairerisquerait
d’entraîner un dysfonctionnement ou des dégâts.
! Ne pas toucher le câble de connexion de l’unité d’E/S d’expansion tant que
l’alimentation est toujours active afin d’éviter tout dysfonctionnement dû à
l’électricité statique.
! Nepasexercerdetractions et nepasplier lescâblesau--delàdeslimitesqu’ils
peuvent naturellement supporter. Sinon les câbles tirés ou pliés risquent de
rompre.
! Ne poser aucun objet sur les câbles. Sinon les câbles risquent de rompre.
! Lors de l’installation des unités ou autres produits, le faire conformément aux
réglementations et lois en vigueur dans le pays.
5
Maintenance
xviii
! Lorsquedespiècessontremplacées,vérifierqueles caractéristiques nomina-
les des pièces neuves sont correctes. Une différence dans ces caractéristiques peut provoquer un dysfonctionnement ou la brûlure des circuits.
! Lorsque l’unité centrale est remplacée, ne remettre en route qu’après avoir
transféré dans la nouvelle unité centrale les contenus des zones DM et HR
nécessaires pour l’exploitation. Sinon un fonctionnement inattendurisque de
se produire.
Page 14

Conseils d’utilisation
Transport et sauvegarde
5
! Lorsdutransport des unités, utiliserdesboîtes d’emballage spéciales. Ne pas
exposerlesunitésoutous autresproduits àdesvibrationsexcessivesouàdes
chocs durant le transport et surtout ne pas les faire tomber.
! Sauvegarder les unités enrespectant les plages de températures et d’humi-
dité suivantes :
Température de sauvegarde : -25 à 65#C
Humidité de sauvegarde : 25% à 85% (sans glace ni condensation)
xix
Page 15

CHAPITRE 1
Configuration de l’API
Ce chapitre décrit les caractéristiques propres au Setup de l’API dans les API CPM1, CPM1A, CPM2A, CPM2C et
SRM1(-V2).Le Setup de l’API permet de commander les paramètres de fonctionnement. Pour modifier le Setup de l’API,
se reporter au Manuel de programmation de l’APIau chapitre concernant les procédures de la Console de Programmation.
SilesAPId’OMRON ou le programme en schéma àcontactsnevoussontpas familiers, lire la Configuration API 1--1pour
obtenir une vue générale des paramètres de fonctionnement disponibles pour les CPM1/CPM1A, CPM2A/CPM2C et
SRM1(-V2). De plus, les Chapitre5--Zonesmémoire, Chapitre6 --Programmationenschémaà contacts et lesinstructions
s’y rapportant se trouvant au Chapitre7-- Configuration d’instructions qui précède ce chapitre 1 peuvent vousêtresutiles.
1-1 Le Setup de l’API 2........................................................
1-1-1 Modifier le Setup de l’API 2..........................................
1-1-2 Configurations du Setup de l’API des CPM1/CPM1A 3....................
1-1-3 Configuration du Setup de l’API des CPM2A/CPM2C 9...................
1-1-4 Configuration du Setup de l’API du SRM1(-V2) 15........................
1-2 Fonctionnement de l’API de base et traitement des E/S 19..........................
1-2-1 Mode démarrer 19...................................................
1-2-2 Etat du bit de maintien 20.............................................
1-2-3 Mémoire du programme protégé en écriture 20............................
1-2-4 Temps d’utilisation du port RS-232C (CPM2A/CPM2C/SRM1(-V2)
uniquement) 21.....................................................
1-2-5 Temps d’utilisation du port périphérique 21...............................
1-2-6 Temps de surveillance de cycle 22......................................
1-2-7 Temps de cycle minimal 23...........................................
1-2-8 Constantes de temps d’entrée (filtrage) 23................................
1-2-9 Configurations du journal d’erreurs 24...................................
1
Page 16

Le Setup de l’API
1-1Chapitre
1-1 Le Setup de l’API
Le Setup de l’API se compose de différents paramètres commandant le fonctionnement de l’API. Il est possible de personnaliser leSetup de l’API afind’utiliseraumieuxlescapacités de l’API selonlesconditionsd’exploitation, tellesque
l’utilisation des fonctions d’interruption du traitement et des fonctions de communications.
Lors de la livraison du produit, les conditions généralesde fonctionnement sont
régléespardéfautafinquel’APIsoitopérationnel sans avoir à modifier lesconfigurations. Cependant il vous est fortement recommandé devérifier ces valeurs
par défaut avant de le faire fonctionner.
Valeurs par défaut LesvaleurspardéfautduSetupdel’APIsont0000pourtouslesmots (sauf pour
la validation de l’erreur batterie faible dans les bits 12 à 15de la zone DM 6655
des unités centrales CPM2A). Les valeurs par défaut sont réinitialisables à tout
moment en activant le SR 25210 du mode PROGRAM.
Attention Lorsque tous les périphériques de programmation sont effacés de la zone
!
mémoire de données (DM), les réglages du Setup de l’API seront tous configurés à zéro.
1-1-1 Modifier le Setup de l’API
Les configurations du Setup de l’API sont accessibles à différents moments
selon les types de configurations, comme précisé ci--dessous :
! les zones de DM 6600 à DM 6614 : Accessible seulement lorsque
l’alimentation de l’API est sur ON.
! les zones de DM 6615 à DM 6644 : Accessible seulement lorsque
le lancement du programme débute.
! les zones de DM 6645 à DM 6655 :Accessible généralement lorsque
l’alimentation est sur ON.
Les modifications apportées au Setup de l’API ne devenant effectives qu’aux
momentsindiquésci--dessus, l’APIdevra être redémarrépourquelesmodificationsdansleszonesdeDM6600à DM 6614soient enregistréesetlelancement
de programme devra également être redémarré pour que les modifications
apportées aux zones de DM 6615 à DM 6644 soient enregistrées.
Lorsque les bits 00 à 03 de la zone DM 6602 sont réglés pour protéger la
mémoireduprogramme,lazoneDM6602n’estpasmodifiableàpartirdesfonctions de configuration du logiciel dans le Setup de l’API. Pour modifier la zone
DM 6602, utiliser la surveillance d’E/S ou la fonction Edition de la zone DM.
Effectuer les modifications
à partir des éléments de
programmation
2
Le Setup de l’API est en lecture seule à partir du programme utilisateur. Pour
écrire, utiliser un périphérique de programmation.
Bien que le Setup de l’API soit sauvegardé dans les zones de DM 6600 àDM
6655,les configurationsne s’effectuent et nese modifient qu’avec unpériphériquedeprogrammation (ex. : SSSouConsoledeprogrammation).Leszonesde
DM 6600 à DM 6644 ne sont configurables ou modifiables qu’en mode PROGRAM. Les zones de DM 6645 à DM 6655 sont configurables à partir des deux
modes PROGRAM ou MONITOR.
Les configurations suivantes s’effectuent en mode PROGRAM à partir des
fonctionsdumenudu SSS. Touteslesautresconfigurationsdoivents’effectuer
à l’aide de fonctions de réglage hexadécimale.
! Mode Démarrer (DM 6600)
! Etat du bit de maintien d’E/S et du bit de maintien d’état forcé (DM 6601)
! Temps réel du cycle automate (DM 6618)
Page 17

Le Setup de l’API
1-1Chapitre
! Temps de cycle (DM 6619)
! Configurations du port RS-232C (de DM 6645 à DM 6649)
Rem. Les configurations du port RS-232C (de DM 6645 à DM 6649) ne sont pas utili-
sées dans les API CPM1/CPM1A car ces API ne sont pas équipés de port
RS-232C.
ErreursdansleSetupde
l’API
Si une mauvaise configuration du Setup de l’API est identifiée, une erreur non
fatale (code d’erreur 9B) sera générée, le drapeau d’erreur correspondant (de
AR 1300 à AR 1302) sera activé et la configuration par défaut remplacera le
réglage imprécis.
1-1-2 Configurations du Setup de l’API des CPM1/CPM1A
Le Setup de l’API se divise en quatre catégories : 1) les configurations concernant le fonctionnement de base del’API et le traitement des E/S, 2) les configurationsconcernant le temps decycle, 3) les configurationsconcernant les interruptions et 4) les configurations concernant les communications ; ce chapitre
décrit les configurations selon cette classification.
Letableauci--dessous présenteles configurations pour les API CPM1/CPM1A.
Se reporter au numéro des pages de la dernière colonne pour de plus amples
informations sur le paramétrage.
Mot(s) Bit(s) Fonction Page
Traitement Démarrer (de DM 6600 à DM 6614)
Les sélections suivantes sont effectives après leur transfert vers l’API et uniquement après un redémarrage de l’API.
DM 6600
DM 6601
DM 6602
DM 6603 00à15 Inutilisés.
DM 6604
de DM 6605
à DM 6614
00à07 Mode Démarrer (enregistrélorsque les bits de 08 à 15 sont réglés sur 02).
00 : PROGRAM ; 01 : MONITOR 02 : RUN
08à15 Indication mode Démarrer
00 : Commutateur de Console de Programmation
01 : Dernier mode utilisé, poursuit son fonctionnement avant l’interruption de
l’alimentation (Voir Rem. 1.)
02 : Configuré de 00 à 07
00à07 Inutilisés.
08à11 Etat du bit de maintien IOM (SR 25212) au démarrage
0 : Réinitialiser ; 1 : Conserver (Voir Rem. 3.)
12à15 Etat du bit de maintien d’état forcé (SR 25211) au démarrage
0 : Réinitialiser ; 1 : Conserver (Voir Rem. 3.)
00à03 Protégeren écriture la mémoire du programme
0 : Mémoire du programme non protégé
1 : Mémoire du programme protégé en écriture(sauf la zone DM 6602 elle--même)
04à07 Langue d’affichage de la Console de programmation
0 : Anglais ; 1 : Japonais
08à15 Inutilisés.
00à07 00 : Si les données ne peuvent pas être enregistréesavec le condensateur intégré (AR 1314
ON), l’erreurmémoirene sera pas générée.
01 : Si les données ne peuvent pas être enregistréesavec le condensateur intégré (AR 1314
ON), l’erreurmémoiresera générée.
08à15 Inutilisés.
00à15 Inutilisés.
19
20
20
3
Page 18

Le Setup de l’API
Mot(s) Bit(s) Fonction Page
Configurations du temps de cycle (de DM 6615 à DM 6619)
Les sélections suivantes sont effectives après leur transfert vers l’API et uniquement après un redémarrage de l’API.
DM 6615,
DM 6616
DM 6617
DM 6618
DM 6619 00à15 Temps de cycle
00à15 Inutilisés.
00à07 Temps d’utilisation du port périphérique
(enregistré lorsque les bits de 08 à 15 sont réglés sur 01)
00 à 99 (BCD) : Pourcentage du temps de cycle utilisé pour la gestion du périphérique.
08à15 Validation de la configurationdu temps d’utilisation du port périphérique
00 : 5% du temps de cycle
01 : Utilise le temps de 00 à 07.
00à07 Temps de surveillance de cycle (enregistré lorsque les bits de 08 à 15 sont réglés sur
01, 02 ou 03)
00 à 99 (BCD) : Configuration (voir 08 à 15)
08à15 Valide la surveillance de cycle (configuration de 00 à 07 x unité ; 99 s max.)
00 : 120 ms (configurationen bits de 00 à 07 désactiver)
01 : Configuration de l’unité : 10 ms
02 : Configuration de l’unité : 100 ms
03 : Configuration de l’unité : 1 s
0000 : Variable (aucun minimum)
0001 à 9999 (BCD) : Temps minimal en ms
1-1Chapitre
21
22
23
4
Page 19

Le Setup de l’API
Mot(s) Bit(s) Fonction Page
Traitement d’interruption (de DM 6620 à DM 6639)
Les sélections suivantes sont effectives après leur transfert vers l’API et uniquement après un redémarrage de l’API.
DM 6620
DM 6621
DM 6622
DM 6623
DM 6624
DM 6625
DM 6626 à
DM 6627
DM 6628
DM 6629 à
DM 6641
Configurations du compteur à grande vitesse (de DM 6640 à DM 664)
Les sélections suivantes sont effectives après leur transfert vers l’API et uniquement après un redémarrage de l’API.
DM 6640 à
DM 6641
DM 6642
DM 6643,
DM 6644
00à03 Constante d’entrée pour l’IR 00000 à l’IR 00002
0:8ms;1:1ms;2:2ms;3:4ms;4:8ms;5:16ms;6:32ms;7:64ms;8:
128 ms
04à07 Constante d’entrée pour l’IR 00003 et l’IR00004
(Configuration identique à celle des bits de 00 à 03)
08à11 Constante d’entrée pour IR 00005 et l’IR 00006
(Configuration identique à celle des bits de 00 à 03)
12à15 Constante d’entrée pour IR 00007 à l’IR 00011
(Configuration identique à celle des bits de 00 à 03)
00à07 Constante d’entrée pour l’IR 001
00:8ms;01:1ms;02:2ms;03:4ms;04:8ms;05:16ms;06:32ms;07:64
ms ; 08 : 1 2 8 ms
08à15 Constante d’entrée pour l’IR 002 (Configuration identique à l’IR 001).
00à07 Constante d’entrée pour l’IR 003 (Configuration identique à l’IR 001).
08à15 Constante d’entrée pour l’IR 004 (Configuration identique à l’IR 001).
00à07 Constante d’entrée pour l’IR 005 (Configuration identique à l’IR 001).
08à15 Constante d’entrée pour l’IR 006 (Configuration identique à l’IR 001).
00à07 Constante d’entrée pour l’IR 007 (Configuration identique à l’IR 001).
08à15 Constante d’entrée pour l’IR 008 (Configuration identique à l’IR 001).
00à07 Constante d’entrée pour l’IR 009 (Configuration identique à l’IR 001).
08à15 Inutilisés.
00à15 Inutilisés.
00à03 Sélectionde l’entrée d’IR 00003 (0 : Entrée normale ; 1 : Entrée d’interruption;
2 : Capture)
04à07 Sélectionde l’entrée d’IR 00004 (0 : Entrée normale ; 1 : Entrée d’interruption;
2 : Capture)
08à11 Sélection de l’entrée d’IR 00005 (0 : Entrée normale ; 1 : Entrée d’interruption ;
2 : Capture)
12à15 Sélectionde l’entrée d’IR 00006 (0 : Entrée normale ; 1 : Entrée d’interruption;
2 : Capture)
00à15 Inutilisés.
00à15 Inutilisés.
00à03 Mode compteur à grande vitesse
0 : Mode compteur incrémental/décrémental; 4 : Mode compteur d’incrémentation
04à07 Mode réinitialisation du compteur à grande vitesse
0 : Phase Z et réinitialisation par programme ; 1 : Réinitialisation par programme uni-
quement
08à15 Valide compteur à grande vitesse
00 : N’utilise pas le compteur à grande vitesse ; 01 : Utilise le compteur à grande
vitesse avec les paramétrages de 00 à 07
00à15 Inutilisés.
1-1Chapitre
23
79
87
5
Page 20

Le Setup de l’API
Mot(s) PageFonctionBit(s)
Configurations de port périphérique
Les sélections suivantes sont effectives après leur transfert vers l’API.
DM 6645 à
DM 6649
DM 6650
DM 6651
00à15 Inutilisés.
00à07 Paramétragedu port
00 : Standard (1 bit de lancement, données en 7 bits, parité paire, 2 bits d’arrêt,
9 600 bps)
01 : Configurations dans la zone DM 6651
(Les autres configurations provoqueraient une erreurnon fatale et l’AR 1302 serait
activé).
08à11 Zone de liaison pour liaison Inter API via le port périphérique :
0 : de LR 00 à LR 15
12à15 Modes de communication
0 : Liaison à l’ordinateur(SYSMAC--WAY); 2 : 1 :1 Liaison API esclave ; 3 : 1 :1 Liai-
sonAPImaître;4:1:1LiaisonNT
(Les autres configurations provoqueraient une erreurnon fatale et l’AR 1302 serait
activé).
00à07 Débit en bauds
00 : 1,2 K, 01 : 2,4 K, 02 : 4,8 K, 03 : 9,6 K, 04 : 19,2 K, de 05 à 07 : Inutilisable (Voir
Rem. 2)
(Les autres configurations provoqueraient une erreurnon fatale et l’AR 1302 serait
activé).
08à15 Format de trame
Lancement Longueur Arrêt Parité
00 : 1 bit 7 bits 1 bit Paire
01 : 1 bit 7 bits 1 bit Impaire
02 : 1 bit 7 bits 1 bit Aucune
03 : 1 bit 7 bits 2 bits Paire
04 : 1 bit 7 bits 2 bits Impaire
05 : 1 bit 7 bits 2 bits Aucune
06 : 1 bit 8 bits 1 bit Paire
07 : 1 bit 8 bits 1 bit Impaire
08 : 1 bit 8 bits 1 bit Aucune
09 : 1 bit 8 bits 2 bits Paire
10 : 1 bit 8 bits 2 bits Impaire
11 : 1 bit 8 bits 2bits Aucune
1-1Chapitre
184
(Les autres configurations provoqueraient une erreurnon fatale et l’AR 1302 serait
activé).
DM 6652 00à15 Délais de transmission (Liaison à l’ordinateur (SYSMAC--WAY))(Voir Rem. 4.)
de 0000 à 9999 : en ms.
(Les autres configurations provoqueraient une erreurnon fatale et l’AR 1302 serait
activé).
DM 6653
DM 6654 00à15 Inutilisés.
00à07 Numéro de station (Liaison à l’ordinateur (SYSMAC--WAY))
00à31(BCD)
(Les autres configurations provoqueraient une erreurnon fatale et l’AR 1302 serait
activé).
08à15 Inutilisés.
6
Page 21

Le Setup de l’API
Mot(s) PageFonctionBit(s)
Configurations du journal d’erreur (DM 6655)
Les sélections suivantes sont affectives après leur transfert à l’API.
DM 6655
00à03 Style
0 : Décalage après 7 enregistrements d’erreurs
1 : Mémorise seulement les 7 premiers enregistrements (sans changement)
2 à F : Ne mémorise pas les enregistrements
04à07 Inutilisés.
08à11 Valide la surveillance du temps de cycle
0 : Détecte les cycles longs en tant qu’erreurs non fatales
1 : Ne détecte pas les cycles longs
12à15 Inutilisés.
Rem. 1. Lorsque le mode démarrer est réglé pour que le dernier mode de fonction-
nement utilisé avant la désactivation sepoursuive, ce mode defonctionnement sera conservéparlecondensateur intégré. Maislesdonnéesrisquent
d’être perdues, si l’alimentation reste désactivée au delà du temps de sauvegarde du condensateur. Pour plus d’informations sur le temps de maintien, se reporter au Manuel de programmation du CPM1A ou à celui du
CPM1.
2. Ne pas régler “05” à “07”, sinon les CPM1/CPM1A ne fonctionneront pas
correctement etle drapeau d’erreur du Setup de l’API RUN (AR 1302 ON)
ne sera pas activé.
3. Maintien de l’état du bit de maintien IOM (SR 25212)
Lorsquel’“Etat dubitdemaintienIOMaudémarrage”(DM6601,bitsde08à
1 1)est réglé sur “Conserve” avec le bit de maintien IOM (SR 25212) d’activé, le programme peut être lancé avec l’état de la mémoire des E/S (E/S,
IR, LR) dans l’état où il se trouvait avant d’être désactivé. La zone d’entrée
est régénérée au démarrage,cependant laplus récentemiseàjourdel’état
d’entrée écrase la précédente.
Maintien de l’état du bit de maintien d’état forcé (SR 25211)
Sil’“Etat dubitde maintiend’état forcé au démarrage” (DM 6601,bits de12
à15)estréglésur“Conserve”aveclebitdemaintien d’état forcé(SR25211)
d’activé, le programme peut être lancé avec l’état régler/réinitialiser forcé
dans l’état où il se trouvait avant d’être désactivé. Cependant lorsque le
mode RUN est lancé, l’état initialiser/réinitialiser forcé est effacé.
Même si l’“Etat du bit de maintien IOM au démarrage” ou l’“Etat du bit de
maintiend’étatforcé audémarrage” est réglé sur “Conserve”, lebit demaintien IOM (SR 25212) ou l’état dubit demaintien d’état forcé (SR 25211)est
effacé lorsque l’alimentation est désactivée pendant une durée supérieure
autempsdesauvegarde ducondensateur intégré.Pour plusd’informations
sur le temps de maintien, se reporter au Manuel de programmation du
CPM1AouàceluiduCPM1.Acemoment--là,lamémoiredesE/Sseraégalement effacée, régler donc le système afin que la suppression de la
mémoire des E/S n’entraîne aucun problème.
4. Le délai de transmission correspond au délai survenant entre la transmission précédente et la transmission suivante.
1-1Chapitre
24
Ordinateur
Contrôleur programmable
Commande
Réponse
Durée du délai de
transmission
Commande
Réponse
7
Page 22

Le Setup de l’API
1-1Chapitre
5. Lorsqu’une valeur est réglée en dehors des limites, re--régler la valeur afin
de rester dans la plage autorisée. Sinon les conditions de communications
seront les suivantes :
Modes de communication : L iaison à l’ordinateur (SYSMAC--WAY)
Format de communications : Configurations standard
(1 bit de lancement, données à 7 bits ;
parité paire, 2 bits d’arrêt, 9 600 bps)
Délai de transmission : Aucun
Numéro de station : 00
8
Page 23

Le Setup de l’API
1-1-3 Configuration du Setup de l’API des CPM2A/CPM2C
Le Setup de l’API se divise en quatre catégories : 1) les configurations concernant le fonctionnement de base del’API et le traitement des E/S, 2) les configurations concernant les fonctions de sortie d’impulsions, 3) les configurations
concernantles interruptionset4)les configurationsconcernant les communications. Ce chapitre décrit les configurations selon cette classification.
Letableauci--dessousprésentelesconfigurations selonlazonedeDM.Pourde
plus amples informations, se reporter au numéro des pages.
Mots(s) Bit(s) Fonction Page
Traitement démarrer (DM 6600 à DM 6614)
Les sélections suivantes sont effectives après leur transfert vers l’API et uniquement après un redémarrage de l’API.
DM 6600
DM 6601
DM 6602
DM 6603 00à15 Inutilisés.
DM 6604
DM 6605 à
DM 6614
00à07 Mode démarrer (enregistré lorsque les bits de 08 à 15 sont réglés sur 02).
00 : PROGRAM ; 01 : MONITOR ; 02 : RUN
08à15 Indication mode Démarrer
00 : En fonction du commutateurde configuration de port de communications et de la
connexion du port périphérique (Voirle tableau au bas de cette page)
01 : Dernier mode utilisé, poursuit son fonctionnementavant l’interruption de
l’alimentation.
02 : Configuration de 00 à 07
00à07 Inutilisés.
08à11 Etat du bit de maintien IOM (SR 25212) au démarrage
0 : Réinitialiser à 0 ; 1 : Conserver l’étatprécédent
12à15 Etat du bit de maintien d’état forcé (SR 25211)au démarrage
0 : Réinitialiser à 0 ; 1 : Conserver l’étatprécédent
00à03 Protéger en écriture la mémoire du programme
0 : Mémoire du programme non protégé
1 : Mémoire du programme protégé en écriture(sauf la zone DM 6602 elle--même)
04à07 Langue d’affichagede la Console de programmation
0 : Anglais ; 1 : Japonais
08à11 Attributionde code de fonction d’instruction d’expansion
0 : Configurationpar défaut
1 : Personnalisationde l’utilisateur
12à15 Inutilisés.
00à07 00 : Une erreurmémoirene sera pas générée lorsque la batteriene peut pas conserver les
données.
01 : Une erreur mémoire sera générée lorsque la batteriene peut pas conserver les données.
08à15 Inutilisés.
00à15 Inutilisés.
1-1Chapitre
19
20
20
163
Rem. Le mode d’exploitation Démarrer décrit dans le tableau suivant correspond aux
bits 08 à 15 de la zone DM 6600 réglés sur 00.
Port périphérique
connecté à
Aucun PROGRAM RUN
Console de
programmation
Autres
périphériquesde
programmation
Commutateurde configuration des ports de
communications
Broche 2 OFF Broche 2 ON
Mode régler sur le
commutateuren mode
Console de programmation
PROGRAM (Le CPM2C ne
pourra pas communiquer
avec un autre périphérique
de programmation)
PROGRAM (Le CPM2C ne
pourra pas communiquer
avec une console de
programmation)
PROGRAM
9
Page 24

Le Setup de l’API
Mots(s) Bit(s) Fonction Page
Configurations du temps de cycle (DM 6615 à DM 6619)
Les sélections suivantes sont effectives après leur transfert vers l’API et uniquement après un redémarrage de l’API.
DM 6615 00à15 Inutilisés.
1-1Chapitre
DM 6616
DM 6617
DM 6618
DM 6619 00à15 Temps de cycle minimal
00à07 Temps d’utilisation du port RS-232C (enregistrélorsque les bits de 08 à 15 sont réglés
sur 01)
00 à 99 (BCD) : Pourcentage du temps de cycle utilisé pour la gestion du port
RS-232C.
08à15 Valide le temps d’utilisation du port RS-232C
00 : 5% du temps de cycle
01 : Utilise le temps des bits de 00 à 07.
00à07 Temps d’utilisation pour port périphérique (enregistré lorsque les bits de 08 à 15 sont
réglés sur 01)
00 à 99 (BCD) : Pourcentage du temps de cycle utilisé pour la gestion de périphérique.
08à15 Validation de la configuration du temps d’utilisation du port périphérique
00 : 5% du temps de cycle
01 : Utilise le temps des bits 00 à 07.
00à07 Temps de surveillance de cycle (enregistré lorsque les bits de 08 à 15 sont réglés sur
01, 02 ou 03)
00 à 99 (BCD) : Configuration (Voir bits 08 à 15, en bas.)
Une erreur fatale est générée et l’exploitation de l’API s’arrête lorsque le temps de
cycle est supérieurau temps de surveillance de cycle défini ici.
08à15 Validela surveillance de cycle (configuration de 00 à 07"unités ; 99 s max.)
00 : 120 ms (configurationen bits 00 à 07 désactivés)
01 : Configuration des unités : 10 ms
02 : Configuration des unités : 100 ms
03 : Configuration des unités : 1 s
0000 : Variable (aucun minimum)
0001 à 9999 (BCD) : Temps minimal en ms
21
21
22
23
Traitement d’interruption (DM 6620 à DM 6639)
Les sélections suivantes sont effectives après leur transfert vers l’API et uniquement après un redémarrage de l’API.
DM 6620
DM 6621
DM 6622
DM 6623
DM 6624
DM 6625
00à03 Constante d’entrée pour l’IR 00000 à l’IR00002
0:10ms;1:1ms;2:2ms;3:3ms;4:5ms;5:10ms;6:20ms;7:40ms;8:
80 ms
04à07 Constante d’entréepour l’IR 00003 et l’IR 00004 (Configuration identique à celle des
bits de 00 à 03)
08à11 Constante d’entréepour l’IR 00005 et l’IR 00006 (Configuration identique à celle des
bits de 00 à 03)
12à15 Constante d’entrée pour l’IR 00007 à l’IR00011 (Configuration identique à celle des
bits de 00 à 03)
00à07 Constante d’entrée pour IR 001
00:10ms 01:1ms 02:2ms 03:3ms 04:5ms
05:10ms 06:20ms 07:40ms 08:80ms
08à15 Constante d’entréepour IR 002 (Configurationidentique à l’IR 001).
00à07 Constante d’entréepour IR 003 (Configurationidentique à l’IR 001).
08à15 Constante d’entréepour IR 004 (Configurationidentique à l’IR 001).
00à07 Constante d’entréepour IR 005 (Configurationidentique à l’IR 001).
08à15 Constante d’entréepour IR 006 (Configurationidentique à l’IR 001).
00à07 Constante d’entréepour IR 007 (Configurationidentique à l’IR 001).
08à15 Constante d’entréepour IR 008 (Configurationidentique à l’IR 001).
00à07 Constante d’entréepour IR 009 (Configurationidentique à l’IR 001).
08à15 Inutilisés.
23
DM 6626 à
DM 6627
10
00à15 Inutilisés.
Page 25

Le Setup de l’API
Mots(s) PageFonctionBit(s)
DM 6628
DM 6629
DM 6630 à
DM 6641
Configurations du compteur à grande vitesse (DM 6640 à DM 6644)
Les sélections suivantes sont effectives après leur transfert vers l’API et uniquement après un redémarrage de l’API.
DM 6640 à
DM 6641
DM 6642
DM 6643,
DM 6644
00à03 Sélection de l’entrée d’IR 00003 (0 : Entrée normale ; 1 : Entrée d’interruption ;
2 : Capture)
04à07 Sélection de l’entrée d’IR 00004 (0 : Entrée normale ; 1 : Entrée d’interruption ;
2 : Capture)
08à11 Sélection de l’entrée d’IR 00005 (0 : Entrée normale ; 1 : Entrée d’interruption ;
2 : Capture)
(Réglerà 0 dans les unités centrales CPM2C ayant 10 points d’E/S)
12à15 Sélection de l’entrée d’IR 00006 (0 : Entrée normale ; 1 : Entrée d’interruption ;
2 : Capture)
(Cetteentrée n’existe pas dans les unités centrales CPM2C ayant 10 points d’E/S)
00à03 Système de coordination PV pour sortie d’impulsion 0
0 : Coordonnées relatives ; 1 : Coordonnées absolues
04à07 Système de coordination PV pour sortie d’impulsion 1
0 : Coordonnées relatives ; 1 : Coordonnées absolues
08à15 Inutilisés.
00à15 Inutilisés.
00à15 Inutilisés.
00à03 Mode compteur à grande vitesse
0 : Mode bidirectionnel (5 kHz)
1 : Impulsion + mode d’entrée de direction (20 kHz)
2 : Mode d’entrée incrémental/décrémental(20 kHz)
4 : Mode incrémental (20 kHz)
04à07 Mode réinitialisation du compteur à grande vitesse
0 : Phase Z et réinitialisation par programme ; 1 : Réinitialisation par programme uni-
quement
08à15 Compteur à grande vitesse/Commanded’impulsion synchronisée pour l’IR 00000 à
l’IR 00002
00 : Utiliseaucune fonction.
01 : S’utilise comme un compteur à grande vitesse
02 : S’utilise pour synchroniser la commande d’impulsion (10 à 500 Hz).
03 : S’utilise pour synchroniser la commande d’impulsion (20 Hz à 1 kHz).
04 : S’utilise pour synchroniser la commande d’impulsion (300 Hz à 20 kHz).
00à15 Inutilisés.
1-1Chapitre
30
104
46, 55
11
Page 26

Le Setup de l’API
Mots(s) PageFonctionBit(s)
Configurations du port de communication RS-232C
Les sélections suivantes sont effectives après leur transfert vers l’API.
Lorsque le commutateurdes communications de l’unité centrale du CPM2A est sur ON, les communications transmises
par le port RS-232C du CPM2A dépendent de la configuration par défaut (tout à 0) indépendamment de la configuration
de la zone allant de DM 6645 à DM 6649.
Lorsque la broche 2 du micro--interrupteur de l’unité centrale du CPM2C est sur ON, les communications transmises
par le port RS-232C du CPM2C dépendent de la configuration par défaut (toutà 0) indépendamment de la configuration
de la zone allant de DM 6645 à DM 6649.
1-1Chapitre
DM 6645
DM 6646
00à03 Paramétrage du port
0 : Standard (1 bit de lancement,données en 7 bits, parité paire, 2 bits d’arrêt,
9 600 bps)
1 : Configurationsde la zone DM 6646
(Toute autre configuration provoqueraitune erreur non fatale et l’AR 1302 serait activé)
04à07 Paramétrage de la commande de CTS
0 : Commande CTS non valide ; 1 : Commande CTS valide
(Toute autre configuration provoqueraitune erreur non fatale et l’AR 1302 serait activé)
08à11 Mots de liaison pour 1 :1 liaison de données
0 : LR 00 à LR 15 (Toutes les autres configurations sont inopérantes)
12à15 Modes de communication
0 : Liaison à l’ordinateur(SYSMAC--WAY); 1 : Sans protocole ; 2 : 1 :1 Liaison API
esclave;3:1:1LiaisonAPImaître;4:LiaisonNT
(Toute autre configuration provoqueraitune erreur non fatale et l’AR 1302 serait activé)
00à07 Débit en bauds
00 : 1 200 bps ; 01 : 2 400 bps ; 02 : 4 800 bps ; 03 : 9 600 bps ; 04 : 19 200 bps
08à15 Format de trame
Lancement Longueur Arrêt Parité
00 : 1 bit 7 bits 1 bit Paire
01 : 1 bit 7 bits 1 bit Impaire
02 : 1 bit 7 bits 1 bit Aucune
03 : 1 bit 7 bits 2 bits Paire
04 : 1 bit 7 bits 2 bits Impaire
05 : 1 bit 7 bits 2 bits Aucune
06 : 1 bit 8 bits 1 bit Paire
07 : 1 bit 8 bits 1 bit Impaire
08 : 1 bit 8 bits 1 bit Aucune
09 : 1 bit 8 bits 2 bits Paire
10 : 1 bit 8 bits 2 bits Impaire
11 : 1 bit 8 bits 2bits Aucune
(Pour toute autre configuration préciser les configurations standard (1 bit de lancement, données en 7 bits ; parité paire, 2 bits d’arrêt,9 600 bps), et toute autre configuration provoqueraitune erreur non fatale et l’AR seraitactivé).
184
184
DM 6647 00à15 Délai de transmission (le BCD de 0000 à 9999 règle un délai de0à99990ms.)
(Pour toute autre configuration préciser un délai de 0 ms, sinon cela provoqueraitune
erreurnon fatale et l’AR 1302 serait activé)
DM 6648
00à07 Numéro de station (Liaison à l’ordinateur (SYSMAC--WAY))
00à31(BCD)
(Pour toute autre configuration préciser le numéro de station à 00, sinon cela provo-
querait une erreur non fatale et l’AR 1302 serait activé)
08à11 Sélection du code de démarrage pour les communicationssans protocole
0 : Code de démarrage désactivé ; 1 : Code de démarrage valide dans la DM 6649
(Pour toute autre configuration, désactiver le code de démarrage,sinon cela provo-
querait une erreur non fatale et l’AR 1302 serait activé)
12à15 Sélection du code de Fin pour les communications sans protocole
0 : Code de fin désactivé ; 1 : Code de fin valide dans la DM 6649 ; 2 : Code de fin de
CR, LF réglé.
(Pour toute autre configuration, désactiver le code de fin, sinon cela provoqueraitune
erreurnon fatale et l’AR 1302 serait activé)
12
184
184
Page 27

Le Setup de l’API
Mots(s) PageFonctionBit(s)
DM 6649
Configurations des communications du port de périphérique
Les configurations suivantes sont enregistréesaprès leur transfert à l’API.
Lorsque le commutateurdes communications de l’unité centrale du CPM2A est sur ON, les communications transmi-
ses par le port RS-232C du CPM2A dépendent de la configurationpar défaut (paramétrage usine) indépendamment
de la configurationde la zone allant de DM 6645 à DM 6649.
La configuration du commutateurdes communications du CPM2A n’a aucun effetsur les communications avec la
Console de programmationconnectée au port périphérique ou avec le logicielréglé pour des communications de bus
périphérique.L’unité centrale CPM2A détecteraautomatiquementl’unou l’autre des périphériques de programmation
et établira automatiquementles communications.
Le sélecteur 1 du micro--interrupteur de l’unité centrale du CPM2C doit être sur OFF et le sélecteur 2 doit être sur ON
afin que les communications transmises par le port périphérique du CPM2C dépendent bien de la configuration de la
zone de DM 6650 à DM 6654.
Lorsque le sélecteur2 est sur OFF,les communications transmises par le port périphérique du CPM2C dépendent du
protocole de la Console de programmation.Lorsque les sélecteurs 1 et 2 des micro--interrupteurs de l’unité centrale du
CPM2C sont sur ON, les communications transmises dépendent des configurations des liaisons à l’ordinateur (SYSMAC--WAY) standard (1 bit de lancement, données en 7 bits,parité paire, 2 bits d’arrêt,9 600 bps).
00à07 Code de démarrage (00 à FF)
(Cetteconfiguration est valable uniquement lorsque les bits 8 à 11 de la DM 6648 sont
réglés sur 1).
08à15 Lorsque les bits 12 à 15 de la DM 6648 sont réglés sur 0 :
Régler le nombre d’octets à recevoir(00 : 256 octets ; 01 à FF : 1 à 255 octets).
Lorsque les bits 12 à 15 de la DM 6648 sont réglés sur 1 :
Régler le code de fin (00 à FF).
184
1-1Chapitre
DM 6650
DM 6651
00à03 Paramétrage du port
00 : Standard (1 bit de lancement, données en 7 bits, parité paire, 2 bits d’arrêt,
9 600 bps)
01 : Configuration dans la DM 6651
(Pour toute autre configuration, spécifierles configurations par défaut, sinon cela provoquerait une erreur non fatale et l’AR 1302 serait activé)
04à11 Inutilisés.
12à15 Modes de communication
0 : Liaison à l’ordinateur(SYSMAC--WAY); 1 : Sans protocole (ASCII)
(Pour toute autre configuration, spécifier la liaison à l’ordinateur(SYSMAC--WAY),
sinon cela provoqueraitune erreur non fatale et l’AR 1302 serait activé)
Pour connecter un logiciel de passage de l’ordinateurà un CPM2C, désactiver le
sélecteur1 et activer le sélecteur 2 à partirdu commutateur de configuration des communications et régler les zones de DM 6650 à 0001. L’unité centrale modifiera automatiquementles modes de communication série pour le bus périphérique. Il s’avérera
impossiblede communiquer à partir du port périphérique en configuration par défaut.
00à07 Débit en bauds
00 : 1 200 bps ; 01 : 2 400 bps ; 02 : 4 800 bps ; 03 : 9 600 bps ; 04 : 19 200 bps
08à15 Format de trame
Lancement Longueur Arrêt Parité
00 : 1 bit 7 bits 1 bit Paire
01 : 1 bit 7 bits 1 bit Impaire
02 : 1 bit 7 bits 1 bit Aucune
03 : 1 bit 7 bits 2 bits Paire
04 : 1 bit 7 bits 2 bits Impaire
05 : 1 bit 7 bits 2 bits Aucune
06 : 1 bit 8 bits 1 bit Paire
07 : 1 bit 8 bits 1 bit Impaire
08 : 1 bit 8 bits 1 bit Aucune
09 : 1 bit 8 bits 2 bits Paire
10 : 1 bit 8 bits 2 bits Impaire
11 : 1 bit 8 bits 2bits Aucune
184
(Pour toute autre configuration, préciser les configurations standard (1 bit de lancement, données en 7 bits ; parité paire, 2 bits d’arrêt,9 600 bps), et toute autre configuration provoqueraitune erreur non fatale et l’AR seraitactivé).
13
Page 28

Le Setup de l’API
Mots(s) PageFonctionBit(s)
DM 6652 00à15 Délai de transmission (le BCD de 0000 à 9999 règle un délai de0à99990ms.)
(Pour toute autre configuration, préciser un délai de 0 ms, sinon cela provoquerait une
erreurnon fatale et l’AR 1302 serait activé)
DM 6653
DM 6654
Configurations du journal d’erreur (DM 6655)
Les sélections suivantes sont effectives après leur transfert vers l’API.
DM 6655
00à07 Numéro de station (Liaison à l’ordinateur (SYSMAC--WAY))
00à31(BCD)
(Pour toute autre configuration, préciser le numéro de station à 00, sinon cela provo-
querait une erreur non fatale et l’AR 1302 serait activé)
08à11 Démarrer la sélection du code pour les communications sans protocole
0 : Désactive le code de démarrage ; 1 : Valide le code de démarrage dans la
DM 6649
(Pour toute autre configuration, désactiver le code de démarrage,sinon cela provoquerait une erreur non fatale et l’AR 1302 serait activé)
12à15 Sélection du code de fin pour les communications sans protocole
0 : Désactive code de fin ; 1 : Valide code de fin dans la DM 6649 ; 2 : Règle code de
findeCR,LF.
(Pour toute autre configuration, désactiver le code de fin, sinon cela provoqueraitune
erreurnon fatale et l’AR 1302 serait activé)
00à07 Code de démarrage (00 à FF)
(Cetteconfiguration est valable uniquement lorsque les bits 8 à 11 de la DM 6648 sont
réglés sur 1).
08à15 Lorsque les bits 12 à 15 de la DM 6648 sont réglés sur 0 :
Régler le nombre d’octets à recevoir(00 : 256 octets ; 01 à FF : 1 à 255 octets).
Lorsque les bits 12 à 15 de la DM 6648 sont réglés sur 1 :
Régler le code de fin (00 à FF).
00à03 Style
0 : Décalage après 7 enregistrements d’erreurs
1 : Mémorise seulement les 7 premiers enregistrements (sans changement)
2 à F : Ne mémorise pas les enregistrements
04à07 Inutilisés.
08à11 Validela surveillance du temps de cycle
0 : Génère une erreur non fatale pour un temps de cycle trop long
1 : Ne génère pas d’erreurnon fatale
12à15 Active l’erreur batterie faible
0 : Génère une erreur non fatale pour une détection de batterie faible
1 : Ne génère pas d’erreurnon fatale
La détection d’erreur batterie faible est désactivée (ex. : régler sur 1) par défaut dans
l’unitécentralene possédant pas d’horloge. Lorsque le Setup de l’API est effacé, la
configurationpasseà0etl’erreurbatteriefaiblepeut survenir.
Les bits 12 à 15 devraient toujours être réglés sur 0 lors du montage du
CPM2C-BAT01 optionnel.
1-1Chapitre
184
184
184
24
14
Page 29

Le Setup de l’API
1-1-4 Configuration du Setup de l’API du SRM1(-V2)
Le Setup de l’API se divise en quatre catégories : 1) les configurations concernant le fonctionnement de base del’API et le traitement des E/S, 2) les configurationsconcernant le temps decycle, 3) les configurationsconcernant les interruptions et 4) les configurations concernant les communications. Ce chapitre
décrit les configurations selon cette classification.
Le tableau ci--dessousprésente les configurations pour les API SRM1(-V2). Se
reporter au numérodespages de la dernière colonnepourdeplus amples informations sur le paramétrage.
Mots(s) Bit(s) Fonction Page
Traitement démarrer (DM 6600 à DM 6614)
Les sélections suivantes sont effectives après leur transfert vers l’API et uniquement après un redémarrage de l’API.
DM 6600
DM 6601
DM 6602
DM 6603
DM 6604
DM 6605 à
DM 6614
Configurations du temps de cycle (DM 6615 à DM 6619)
Les sélections suivantes sont effectives après leur transfert vers l’API.
DM 6615 00à15 Inutilisés.
DM 6616
00à07 Mode démarrer (enregistré lorsque les bits de 08 à 15 sont réglés sur 02).
00 : PROGRAM ; 01 : MONITOR ; 02 : RUN
08à15 Indication mode Démarrer
00 : Commutateur de Console de Programmation
01 : Dernier mode utilisé, poursuit son fonctionnement avant la désactivation de
l’alimentation
02 : Paramétré de 00 à 07
00à07 Inutilisés.
08à11 Etat du bit de maintien IOM (SR 25212)
0 : Réinitialiser ; 1 : Conserver (VoirAttentionpage 20)
12à15 Etat du bit de maintien d’état forcé (SR 25211)
0 : Réinitialiser ; 1 : Conserver
00à03 Protéger en écriture la mémoire du programme
0 : Mémoire du programme non protégé
1 : Mémoire du programme protégé en écriture(sauf pour la DM 6602 elle--même)
04à07 Langue d’affichagede la Console de programmation
0 : Anglais ; 1 : Japonais
08à11 Instructions d’expansion
0 : Configuration par défaut ; 1 : Configuration d’utilisateur
12à15 Inutilisés.
00à03 Nombre maximum de périphériquesdu CompoBus/S
0:Max.32
1:Max.16
04à07 Paramétrage du mode communicationsCompoBus/S (V2 uniquement)
0 : Communications à grande vitesse
1 : Communications longue distance
08à15 Inutilisés.
00à07 00 : Si les données ne peuvent pas être sauvegardées lors d’une interruption d’alimentation
(AR 1314 ON), l’erreurmémoirene sera pas générée.
01 : Si les données ne peuvent pas être sauvegardées lors d’une interruption d’alimentation
(AR 1314 ON), l’erreurmémoiresera générée.
08à15 Inutilisés.
00à15 Inutilisés.
00à07 Temps d’utilisation du port RS-232C
(enregistré lorsque les bits de 08 à 15 sont réglés)
00 à 99 (BCD) : Pourcentage du temps de cycle utilisé pour la gestion du port RS-232C
08à15 Validation du temps d’utilisation du port RS-232C
00 : 5% du temps de cycle
01 : Utilise le temps de 00 à 07.
1-1Chapitre
19
20
20
21
15
Page 30

Le Setup de l’API
Mots(s) PageFonctionBit(s)
DM 6617
DM 6618
DM 6619 00à15 Temps de cycle
DM 6620 à
DM 6644
Configuration du port de communication RS-232C
Les sélections suivantes sont effectives après leur transfert vers l’API.
DM 6645
00à07 Temps d’utilisation du port périphérique (enregistré lorsque les bits de 08 à 15 sont
réglés sur 01)
00 à 99 (BCD) : Pourcentage du temps de cycle utilisé pour la gestion du périphérique
08à15 Validation de la configuration du temps d’utilisation du port périphérique
00 : 5% du temps de cycle
01 : Utilise le temps de 00 à 07.
00à07 Tempsde surveillance de cycle
(enregistré lorsque les bits de 08 à 15 sont réglés sur 01, 02 ou 03)
00 à 99 (BCD) : Paramétrage(voir08 à 15)
08à15 Validela surveillance de cycle (Paramétrage de 00 à 07 x unité ; 99 s max.)
00 : 120 ms (paramétrage en bits de 00 à 07 hors service)
01 : Configuration de l’unité : 10 ms
02 : Configuration de l’unité : 100 ms
03 : Configuration de l’unité : 1 s
0000 : Variable (aucun minimum)
0001 à 9999 (BCD) : Temps minimal en ms
00à15 Inutilisés.
00à03 Paramétrage du port
0 : Standard (1 bit de lancement,données en 7 bits, parité paire, 2 bits d’arrêt,
9 600 bps)
1 : Configurationsde la zone DM 6646
04à07 Paramétrage de la commande de CTS
0:Désactive;1:Valide
08à11 Pour l’utilisation de mots de liaison pour 1 :1 liaison de données : définirla zone de
liaison pour 1 :1 liaison API.
0:LR00àLR15
Non 0 : Désactive
Lors de l’utilisation d’une 1 : N liaison NT : définir le nombre maximal de station TOP.
1à7
12à15 Modes de communication
0 : Liaison à l’ordinateur(SYSMAC--WAY); 1 : Sans protocole ; 2 : 1 :1 Liaison API
esclave;3:1:1LiaisonAPImaître;4:1:1LiaisonNT;5:1:LiaisonNNT
(Toute autre configuration spécifique du mode liaison à l’ordinateur (SYSMAC--WAY),
provoqueraitune erreur non fatale et l’AR 1302 serait activé)
1 : Liaison N NT n’est supportée que par le SRM1-C02-V2.
1-1Chapitre
21
22
23
221
16
Page 31

Le Setup de l’API
Mots(s) PageFonctionBit(s)
DM 6646
DM 6647 00à15 Délai de transmission (Liaison à l’ordinateur (SYSMAC--WAY))
DM 6648
DM 6649
00à07 Débit en bauds
00 : 1,2 K, 01 : 2,4 K, 02 : 4,8 K, 03 : 9,6 K, 04 : 19,2 K
08à15 Format de trame
Lancement Longueur Arrêt Parité
00 : 1 bit 7 bits 1 bit Paire
01 : 1 bit 7 bits 1 bit Impaire
02 : 1 bit 7 bits 1 bit Aucune
03 : 1 bit 7 bits 2 bits Paire
04 : 1 bit 7 bits 2 bits Impaire
05 : 1 bit 7 bits 2 bits Aucune
06 : 1 bit 8 bits 1 bit Paire
07 : 1 bit 8 bits 1 bit Impaire
08 : 1 bit 8 bits 1 bit Aucune
09 : 1 bit 8 bits 2 bits Paire
10 : 1 bit 8 bits 2 bits Impaire
11 : 1 bit 8 bits 2bits Aucune
Autre:1bit 7bits 2bits Paire
L’AR1302 sera activé pour indiquer une erreur configuration de système non--fatale
lorsque aucune valeur n’est paramétrée entre 00 et 11.
0000 à 9999 (BCD) : défini dans les unités à 10 ms, ex. : paramétrage de 0001 égal à
10 ms
00à07 Numéro de station(Liaison à l’ordinateur (SYSMAC--WAY), enregistrélorsque les bits
de 12 à 15 de la DM 6645 sont réglés sur 0.)
00à31(BCD)
08à11 Validele code de démarrage (RS-232C, enregistrélorsque les bits de 12 à 15 de la
DM 6645 sont réglés sur 1).
0 : Désactivé; 1 : Défini
12à15 Valide le code de fin (RS-232C, enregistré lorsque les bits de 12 à 15 de la DM 6645
sont réglés sur 1).
0 : Désactivé (nombre de bits reçus)
1 : Défini (code fin spécifié)
2 : CR, LF
00à07 Code de démarrage (RS-232C)
00 à FF (binaire)
08à15 Lorsque les bits 12 à 15 de la DM 6648 sont réglés sur 0 :
Nombre de bits reçus :
00 : Configuration par défaut (256 octets)
01 à FF : 1 à 255 octets
Lorsque les bits 12 à 15 de la DM 6648 sont réglés sur 1 :
Code de fin (RS-232C)
00 à FF (binaire)
1-1Chapitre
221
17
Page 32

Le Setup de l’API
Mots(s) PageFonctionBit(s)
Configurations de port périphérique
Les sélections suivantes sont effectives après leur transfert vers l’API.
DM 6650
DM 6651
00à03 Paramétrage du port
00 : Standard (1 bit de lancement, données sur 7 bits, parité paire, 2 bits d’arrêt,
9 600 bps)
01 : Configurations de la zone DM 6651
(Les autres configurations provoqueraient une erreurnon fatale et l’AR 1302 serait
activé).
04à07 Inutilisés.
08à11 Inutilisés.
12à15 Modes de communication
0 : Liaison à l’ordinateur(SYSMAC--WAY); 1 : Sans protocole
(Les autres configurations provoqueraient une erreurnon fatale et l’AR 1302 serait
activé).
00à07 Débit en bauds
00 : 1,2K, 01 : 2,4K, 02 : 4,8K, 03 : 9,6K, 04 : 19,2K
08à15 Format de trame
Lancement Longueur Arrêt Parité
00 : 1 bit 7 bits 1 bit Paire
01 : 1 bit 7 bits 1 bit Impaire
02 : 1 bit 7 bits 1 bit Aucune
03 : 1 bit 7 bits 2 bits Paire
04 : 1 bit 7 bits 2 bits Impaire
05 : 1 bit 7 bits 2 bits Aucune
06 : 1 bit 8 bits 1 bit Paire
07 : 1 bit 8 bits 1 bit Impaire
08 : 1 bit 8 bits 1 bit Aucune
09 : 1 bit 8 bits 2 bits Paire
10 : 1 bit 8 bits 2 bits Impaire
11 : 1 bit 8 bits 2bits Aucune
Autre:1bit 7bits 2bits Paire
L’AR1302 sera sur ON pour indiquer une erreur configurationde système non fatale
lorsque la valeur n’est pas définie entre 00 et 11.
1-1Chapitre
221
DM 6652 00à15 Délai de transmission (Liaison à l’ordinateur (SYSMAC--WAY))
0000 à 9999 (BCD) : Défini dans les unités à 10 ms.
(Les autres configurations provoqueraient une erreurnon fatale et l’AR 1302 serait
activé).
DM 6653
00à07 Numéro de station (Liaison à l’ordinateur (SYSMAC--WAY))
00à31(BCD)
(Les autres configurations provoqueraient une erreurnon fatale et l’AR 1302 serait
activé).
08à11 Validele code de démarrage (RS-232C, enregistré lorsque les bits de 12 à 15 de la
DM 6650 sont réglés sur 1)
0 : Désactive
1 : Valide
12à15 Valide le code de fin (RS-232C, enregistré lorsque les bits de 12 à 15 de la DM 6650
sont réglés sur 1.)
0 : Désactive (nombre d’octets reçus)
1 : Valide (code de fin spécifié)
2 : CR, LF
221
18
Page 33

Fonctionnement de l’API de base et traitement des E/S
Mots(s) PageFonctionBit(s)
DM 6654
Configuration du journal d’erreurs (DM 6655)
Les sélections suivantes sont effectives après leur transfert vers l’API.
DM 6655
00à07 Code de démarrage (enregistrélorsque les bits de 08 à 11de la DM 6650 sont réglés
sur 1).
00 : 256 octets
01 à FF : 1 à 255 octets
08à15 Code de fin
Lorsque les bits 12 à 15 de la DM 6653 sont réglés sur 0 :
00 : 256 octets
01 à FF : 1 à 255 octets
Lorsque les bits 12 à 15 de la DM 6653 sont réglés sur 1 :
Configuration : 00 à FF (binaire)
00à03
2àF
04à07 Inutilisé.
08à11 Validela surveillance de temps de cycle
12à15 Validel’erreurbatterie faible
Style
0 : Décalage après 7 enregistrements d’erreurs
1 : Mémorise seulement les 7 premiers enregistrements
Les erreurs ne sont pas mémorisées si d’autres valeurs sont valides.
0 : Détecte les cycles longs en tant qu’erreurs non fatales
1 : Ne détecte pas les cycles longs
0 : Génère une erreur non fatale pour une détection de batterie faible
1 : Ne génère pas d’erreurnon fatale
1-2Chapitre
221
24
Rem. Lorsqu’une valeur est paramétrée en dehors des limites, réinitialiser la valeur
afin de rester dans la plage autorisée. Il enrésulte les conditions des communications suivantes :
Modes de communication : L iaison à l’ordinateur (SYSMAC--WAY)
Format des communications : Configurations standard
(1 bit de lancement, données en 7 bits ;
parité paire, 2 bits d’arrêt, 9 600 bps)
Délai de transmission : Aucun
Numéro de station : 00
1-2 Fonctionnement de l’API de base et traitement des E/S
Ce chapitre explique la configuration du Setup de l’API en ce qui concerne le
fonctionnement de base et le traitement des E/S.
1-2-1 Mode démarrer
Dans ce mode de fonctionnement, l’API démarrera dès que l’alimentation est
activée et il se paramètre comme indiqué ci--dessous :
Bit
15
DM6600
Appellation mode démarrer
00 : Sélecteur de mode console de programmation
(Si non connecté : mode RUN )
01 : Dernier mode de fonctionnement utilisé avant la désactivation de l’alimentation
02 : Mode réglé en bits 00 à 07
Mode démarrer
(Bits08à15:Validelorsquelesbits00à07sontrégléssur02)
00 : mode PROGRAM
01 : mode MONITOR
02 : mode RUN
0
Par défaut : est réglé sur le sélecteur de mode console de programmation ou le mode
RUN lorsque la console de programmation n’est pas connectée.
19
Page 34

Fonctionnement de l’API de base et traitement des E/S
Rem. Lorsque “l’indication mode démarrer” est réglé sur 00 et que le sélecteur 2 du
micro--interrupteur de l’unité centrale du CPM2C est sur ON, le CPM2C entre
automatiquement en modeRUNindépendamment de laconfigurationdescommutateurs du mode Console de programmation.
1-2-2 Etat du bit de maintien
Effectuer les sélections ci-dessous afin de déterminer si les bits de maintien
d’état forcé (SR25211)et/ou les bits demaintien IOM (SR 25212) doivent retenir l’état effectif des bits à la coupure de tension ou si cet état doit être effacé.
Bit
15 0
DM6601
1-2Chapitre
00
Configuration
SR 25211
0 : Etat supprimé
1 : Etat conservé
Configuration SR 25212
0 : Etat supprimé
1 : Etat conservé
Par défaut : Supprimés tous lesdeux
Toujours 00
Lebitdemaintiend’étatforcé(SR25211)détermine si l’état deréglage/réinitialisation forcé est ounon conservé lors du changement du mode PROGRAM au
mode MONITOR.
Le bit de maintien IOM (SR 25212) détermine si l’état des bits IR et des bits LR
est ou non conservé lorsque l’API démarre puis est arrêté.
!
Attention Ne pas utiliser les bits d’état (DM 6601) (bit de maintien E/S et bit de maintien
d’état forcé) si la coupure de l’alimentation du micro API excède le temps de
sauvegarde de la mémoire alimentée par l’intermédiaire d’un condensateur
interne. Si ce temps est dépassé, l’état de la mémoire est instable, même si les
états bit de maintien E/S et bit de maintien d’état forcé sont utilisés. Si un fonctionnement en état de mémoire instable est tenté, des résultats imprévisibles
peuvent apparaître.
Rem. 1. La durée desauvegarde dela mémoire du condensateurinternevarieselon
la température ambiante, mais est de 20 jours à 25_C. Se reporter aux
caractéristiques techniques du matériel pour plus d’informations.
2. La durée de sauvegarde de la mémoire suppose que le condensateur
interne soit entièrement chargé avant la coupure del’alimentation. Le chargement total du condensateur nécessite qu’il soit alimenté par l’unité centrale pendant au moins 15 minutes.
1-2-3 Mémoire du programme protégé en écriture
DanslesAPICPM1, CPM1A, CPM2Aet CPM2C la mémoire du programmeest
protégée en paramétrant les bits 00à03deszones de DM 6602à0.Lesbits 04
20
Page 35

Fonctionnement de l’API de base et traitement des E/S
à07déterminent silesmessages de la Consoledeprogrammation doivent s’afficher en anglais ou en japonais.
Bit
DM6602
1-2Chapitre
15 0
00
Messages de la Console
de programmation
0 : Anglais
1 : Japonais
Mémoire du programme
0 : Non protégé en écriture
1 : Protégé en écriture
Par défaut : Affiche l’anglais, non protégé en écriture
Toujours 00
Rem. La zone DM 6602 peut toujours être modifiée après que la mémoire de pro-
gramme soit protégée en écriture en paramétrant les bits 04 à 07 des zones
DM 6602 à 1.
1-2-4 Temps d’utilisation du port RS-232C (CPM2A/CPM2C/SRM1(-V2)
uniquement)
Les configurations suivantes sont utilisées pour déterminer le pourcentage de
temps de cycle consacré à l’utilisation du port RS-232C.
Bit
15 0
DM6616
Valide paramétrage temps d’utilisation
00 : Désactivé (5% utilisé)
01 : Valide (configuration en bits 00 à 07 utilisés)
Tempsd’utilisation
(%, valide avec les bits 08 à 15 sur 01)
00 à 99 (BCD, deux digits)
Par défaut : 5% dutemps de cycle
Exemple : SilaDM6616est réglée sur 0110,leportRS-232C interviendrapour
10% du temps de cycle.
Le temps d’utilisation sera de 0,34 ms minimum.
Latotalité du temps d’utilisationnesera pas utilisée àmoins quele traitement le
nécessitant existe.
1-2-5 Temps d’utilisation du port périphérique
Les configurations suivantes servent à déterminer le pourcentage de temps de
cycle consacré à l’utilisation du port périphérique.
Valide paramétrage du temps d’utilisation
00 : Désactive (5% utilisé)
01 : Valide (configuration en bits 00 à 07 utilisés)
Tempsd’utilisation
(%, valide avec les bits 08 à 15 sur 01)
00 à 99 (BCD, deux digits)
Par défaut : 5% dutemps de cycle
Bit
DM6617
15 0
21
Page 36

Fonctionnement de l’API de base et traitement des E/S
Exemple : Si la DM 6617 est réglée sur 01 15, le port périphérique interviendra
pour 15% du temps de cycle.
Le temps d’utilisation sera de 0,34 ms minimum.
Latotalité du temps d’utilisationnesera pas utilisée àmoins quele traitement le
nécessitant existe.
1-2-6 Temps de surveillance de cycle
Valide temps de surveillance de cycle
00 : Désactive la configuration (temps fixé à 120 ms)
01 : Valide paramétrage en 00 à 07 ; unités :10 ms
02 : Valide paramétrage en 00 à 07 ; unités :100 ms
03 : Valide paramétrage en 00 à 07 ; unités :1 s
Configuration temps de surveillance de cycle
(Lorsque les bits 08 à 15 ne sont pas 00)
00à99(2digitsBCD;unitésdéfiniesenbits08à15).
Par défaut : 120 ms.
Le temps de surveillance de cycle est utilisé pour vérifier les temps de cycle
extrêmement longs qui peuvent survenir lorsque le programme effectue une
boucleininterrompue. Lorsque letemps de cycle dépassela valeur paramétrée
de surveillance de cycle, une erreur fatale (FALS 9F) est générée.
Bit
DM6618
1-2Chapitre
15 0
Rem. 1. Les unités utilisées pour les temps de cycle maximaux et actuels enregis-
trésdanslazoneAR(AR14et AR 15)sontdéterminées par la configuration
dutempsdesurveillancede cycledanslaDM 6618,commeindiquéci--dessous :
Bits08à15régléssur01: 0,1ms
Bits08à15régléssur02: 1ms
Bits 08 à 15 réglés sur 03 : 10 ms
2. Letemps de cycle est d’1 s ou plus, la lecturedu temps de cycle provenant
despériphériques de programmation sera de 999,9ms. Lesbons tempsde
cycle maximaux et actuels seront enregistrés dans la zone AR.
Exemple
Si 0230 est réglé dans la DM 6618, une erreur FALS 9F nesurviendra pas tant
que le temps de cycle ne dépasse pas 3 s. Si le temps de cycle actuel est de
2,59 s, le temps de cycle actuel mémorisé dans la zone AR sera de 2590 (ms),
mais la lecture du temps de cycle provenant des périphériques de programmation sera de 999,9 ms.
Uneerreur “finde temps de cycle” (non fatale) est générée lorsque le temps de
cycle dépasse 100 ms à moins que la détection des temps de cycle long soit
désactivée depuis la configuration de la DM 6655.
22
Page 37

Fonctionnement de l’API de base et traitement des E/S
1-2-7 Temps de cycle minimal
Effectuer les configurations décrites ci--dessous pour standardiser le temps de
cycle et pour éliminer les variations detemps de réponse des E/S en paramétrant le temps de cycle au minimum
Temps de cycle
(4 digits BCD)
0000 : Temps de cycle variable
0001 à 9999 : Temps de cycle minimal
(Unité : 1 ms)
Par défaut : Temps de cycle variable
Lorsqueletempsdecycleréelestpluscourtqueletempsdecycleminimum,le
déroulement attendra jusqu’à l’expiration du temps de cycle minimal. Par
contre, lorsque le temps de cycle réel est plus long que le temps de cycle minimum, le déroulement poursuivra selon le temps decycle réel. L’AR 2405 sera
activé si le temps de cycle minimum est dépassé.
Bit
15 0
DM6619
1-2Chapitre
1-2-8 Constantes de temps d’entrée (filtrage)
Effectuer la configuration présentée ci--dessous afin de régler le temps à partir
dumomentoùlesentréesréellesprovenantdel’unitéd’entréec.c.sontactivées
ou non jusqu’au moment où les bits d’entrée correspondant sont miss à jour.
En augmentant la constante detemps d’entrée cela réduit leseffets desperturbations et parasites externes.
Entrée telle qu’un fin de
course
Etatdubit d’entrée
t
La configuration du SRM1(-V2) est différente.
Les API CPM1/CPM1A Régler les constantes de temps d’entrée pour les entrées des CPM1/CPM1A
provenant de périphérique de programmation.
Constantes de temps d’entrée pour IR 000
t
Constante de temps d’entrée
Bit
15 0
DM 6620
Constante de temps pour IR 00007 à IR 00011(1digit BCD ; voir ci--dessous)
Constante de temps pour IR 00005 à IR 00006 (1 digit BCD ; voir ci--dessous)
Constante de temps pour IR 00003 à IR 00004 (1 digit BCD ; voir ci--dessous)
Constante de temps pour IR 00000 à IR 00002 (1 digit BCD ; voir ci--dessous)
Par défaut : 0000 (8 ms pour chacun)
23
Page 38

Fonctionnement de l’API de base et traitement des E/S
Constantes de temps d’entrée pour IR 001 à IR 009
DM 6621 : IR 001 et IR 002
DM 6622 : IR 003 et IR 004
DM 6623 : IR 005 et IR 006
DM 6624 : IR 007 et IR 008
DM 6625 : IR 009
Constante de temps pour IR 002, IR 004, IR 006, et IR 008
Constante de temps pour IR 001, IR 003, IR 005, IR 007, et IR 009
Par défaut : 0000 (8 ms pour chacun)
Lesneuf configurationspossibles pour laconstante de tempsd’entrée sont présentées ci--dessous. Régler seulement au digit le plus proche pour chaque
paramétrage du IR 000.
00 : 8 ms 01 : 1 ms 02 : 2 ms 03 : 4 ms 04 : 8 ms
05 : 16 ms 06 : 32 ms 07 : 64 ms 08 : 128 ms
Le temps de réponse d’E/S des CPM1/CPM1A est la constante de temps d’entrée (de 1 ms à 128 ms ; par défaut à 8 ms) + le temps de cycle.
Pour plus d’informations se reporter au paragraphe 8-1 Temps de cycle des
CPM1/CPM1A et temps de réponse d’E/S.
Bit
DM 6621 à DM 6625
1-2Chapitre
15 0
Les API CPM2A/CPM2C Régler les constantes de temps d’entrée pour les entrées des CPM2A/CPM2C
provenant des périphériques de programmation.
Constantes de temps d’entrée pour IR 000
Bit
15 0
DM 6620
Constante de temps pour IR 00007 à IR 00011(1digit BCD ; voir ci--dessous)
Constante de temps pour IR 00005 à IR 00006 (1 digit BCD ; voir ci--dessous)
Constante de temps pour IR 00003 à IR 00004 (1 digit BCD ; voir ci--dessous)
Constante de temps pour IR 00000 à IR 00002 (1 digit BCD ; voir ci--dessous)
Par défaut : 0000 (10 ms pour chacun)
Constantes de temps d’entrée pour IR 001 à IR 009
Bit
DM 6621 : IR 001 et IR 002
DM 6622 : IR 003 et IR 004
DM 6623 : IR 005 et IR 006
DM 6624 : IR 007 et IR 008
DM 6625 : IR 009
Constante de temps pour IR 002, IR 004, IR 006, et IR 008
Constante de temps pour IR 001, IR 003, IR 005, IR 007, et IR 009
Par défaut : 0000 (10 ms pour chacun)
DM 6621 à DM 6625
15 0
Lesneuf configurationspossibles pour laconstante de tempsd’entrée sont présentées ci--dessous. Régler seulement au digit le plus proche pour chaque
paramétrage du IR 000.
00:10ms 01:1ms 02:2ms 03:3ms 04:5ms
05:10ms 06:20ms 07:40ms 08:80ms
1-2-9 Configurations du journal d’erreurs
Détection d’erreur et fonctionnement du journal d’erreurs (DM 6655)
Effectuer la configuration présentée ci--dessous pour déterminer si uneerreur
non fatale a ou non été générée lorsque le temps de cycle dépasse 100 ms ou
24
Page 39

Fonctionnement de l’API de base et traitement des E/S
lorsque la tension de la batterie intégrée chute (CPM2A/CPM2C uniquement),
et régler le moyen de mémoriser les enregistrements dans le journal d’erreurs
lorsque des erreurs surviennent.
Bit
DM6655
1-2Chapitre
15 0
0
Détection de tension batterie faible
0:Détecte
1 : Ne détecte pas
Détection de fin de temps de cycle
0:Détecte
1 : Ne détecte pas
Méthode de mémorisation du journal d’erreurs
0 : Enregistrement d’erreurs concerne toujours la mémorisation des 7 dernières
erreurs (anciennes erreurs détectées).
1 : Seulement les 7 premiers enregistrements d’erreurs mémorisés (aucune erreur
mémorisée au--delà de ce point).
2 à F : Enregistrement d’erreurs non mémorisé.
Par défaut : Tension de batterie faibleettemps decycle concernant la détection d’erreurs et l’enregistrement d’erreurs mémorisés pour les 7 erreurs les plus récentes.
Toujours
0
Erreurs de batterie et erreurs de dépassement de temps de cycle sont des
erreurs non fatales.
Pour plus d’informations sur le journal d’erreurs, se reporter au Chapitre 9
Dépannage.
Rem. L’erreur batteriefaible concerneuniquement les CPM2A/CPM2C. Ce digit n’est
pas utilisé dans les API CPM1/CPM1A/SRM1(-V2) qui ne sont pas équipés
d’une batterie.
25
Page 40

CHAPITRE 2
Caractéristiques spécifiques
Ce chapitre explique les caractéristiques spécifiques aux CPM1, CPM1A, CPM2A, CPM2C et SRM1(-V2).
2-1 Fonctions d’interruption des CPM2A/CPM2C 28.................................
2-1-1 Entrées d’interruption 30.............................................
2-1-2 Interruptions par temporisation cyclique 37...............................
2-2 Compteurs à grande vitesse du CPM2A/CPM2C 43...............................
2-2-1 Utilisation des compteurs à grande vitesse 46.............................
2-2-2 Entrées d’interruption en mode compteur 67..............................
2-3 Fonctions d’interruption du CPM1/CPM1A 76...................................
2-3-1 Types d’interruptions 76..............................................
2-3-2 Entrées d’interruption 79.............................................
2-3-3 Masquage de toutes les interruptions 84..................................
2-3-4 Interruptions par temporisation cyclique 85...............................
2-3-5 Interruptions du compteur à grande vitesse 87.............................
2-4 Fonctions d’interruption du SRM1(-V2) 96......................................
2-4-1 Types d’interruptions 96..............................................
2-4-2 Interruptions par temporisation cyclique 96...............................
2-5 Fonctions de sortie d’impulsions du CPM2A/CPM2C 99...........................
2-5-1 Utilisation des sorties d’impulsions monophasées sans accélération
ni décélération (Rapport cyclique fixe) 104................................
2-5-2 Utilisation des sorties d’impulsions avec rapport cyclique variable (PWM) 115...
2-5-3 Utilisation des sorties d’impulsions avec accélération et décélération
2-6 Fonctions de la sortie d’impulsions du CPM1A 134................................
2-6-1 Exemple de programmation en mode continu 135...........................
2-6-2 Exemple de programmation en mode indépendant 135.......................
2-6-3 Utilisation des instructions de la sortie d’impulsions 135.....................
2-6-4 Modification de la fréquence 136........................................
2-6-5 Interruption de la sortie d’impulsions 136.................................
2-7 Commande d’impulsions synchronisée (CPM2A/CPM2C uniquement) 137.............
2-8 Fonctions analogiques d’E/S (CPM1/CPM1A/CPM2A uniquement) 149................
2-9 Fonctions esclave d’E/S du CompoBus/S (CPM1A/CPM2A uniquement) 149...........
2-10 Fonctions maître d’E/S du CompoBus/S (SRM1(-V2) uniquement) 149................
2-11 Commandes analogiques 151..................................................
2-11-1 Commandes analogiques CPM1/CPM1A 151..............................
2-11-2 Commandes analogiques du CPM2A 152.................................
2-12 Entrées de capture 153.......................................................
2-12-1 Entrées de capture des CPM1/CPM1A 153................................
2-12-2 Entrées de capture des CPM2A/CPM2C 155...............................
2-13 Fonction de la macro 158.....................................................
2-14 Calcul avec les données binaires signées 159......................................
2-14-1 Définition de données binaires signées 160................................
2-14-2 Drapeaux arithmétiques 160............................................
2-14-3 Réception des données binaires signées en utilisant les valeurs décimales 160....
2-15 Détections de fronts 161......................................................
2-16 Instructions d’expansion (CPM2A/CPM2C/SRM1(-V2) uniquement) 162...............
2-16-1 Les instructions d’expansion du CPM2A/CPM2C 163.......................
2-16-2 Instruction d’expansion du SRM1(-V2) 164...............................
2-17 Utilisation de la fonction d’horloge des CPM2A/CPM2C 164........................
2-17-1 Mots de zone de données 164...........................................
2-17-2 Configuration du temps 165............................................
trapézoïdales 120....................................................
27
Page 41

2-1 Fonctions d’interruption des CPM2A/CPM2C
2-1ChapitreFonctions d’interruption des CPM2A/CPM2C
Types d’interruptions
Des interruptions peuvent être désactivées temporairement lorsque l’édition en
ligneest effectuéependantle fonctionnement, ou lorsque leSTUP(- ---) estexécutépourmodifierdesconfigurations. Les CPM2A et lesCPM2Cpermettent les
types de traitement d’interruption suivants :
Entrées
Lesprogrammes d’interruptionsontexécutés lorsquelesentréesde l’unité centrale(00003à00006*)passentdel’étatOFF àON.Lesnuméros 000à 003*des
sous--programmes d’interruption sont attribués aux points d’entrée 00003 à
00006*.
*Les points d’entrée 00005et 00006n’existent pasdans les unités centralesde
Rem.
CPM2Cne comportantque10 points d’entrée/sortie. Dansces unités centrales
lesnuméros 000 et 001dessous--programmes d’interruption sont attribués aux
points d’entrée 00003 et 00004.
Interruption par temporisation cyclique
Les programmes d’interruption par temporisation cyclique sont exécutés avec
uneprécisionde0,1ms. Lesnuméros 000 à 049des sous--programmesd’interruption sont attribués par instructions.
Nombre d’interruptions en utilisant les entrées d’interruption
compteur)
Les signaux d’entrée de l’unité centrale (00003 à 00006*) sont comptés à
grandevitesse(2kHz).Dèsladétection ducomptage, leprogrammenormalest
arrêté et un programme d’interruptionest exécuté. Les numéros 000à003*des
sous--programmes d’interruption sont attribués pour entrer les points 00003 à
00006*.
d’interruption
(mode
Programmes
d’interruptions d’écriture
*Les points d’entrée 00005et 00006n’existent pasdans les unités centralesde
Rem.
CPM2Cne comportantque10 points d’entrée/sortie. Dansces unités centrales
lesnuméros 000 et001 des sous--programme d’interruption sont attribuéspour
entrer les points 00003 et 00004.
Vérification du nombre des interruptions en utilisant le compteur
grande
Les entrées d’impulsion aux points d’entrée del’unité centrale (00000 à00002)
sont comptées àgrandevitesse (20 kHz/5kHz), et un programmed’interruption
estexécutélorsquelavaleurencoursatteint la valeur recherchée(consigne)ou
se situe dans un intervalle fixé. Les numéros 000 à 049 des sous--programmes
d’interruption sont attribués par des instructions.
Les programmes d’interruption sont définis comme sous--programmes d’interruption dans le programme utilisateur. Un sous--programme d’interruption est
vitesse
à
28
Page 42

2-1ChapitreFonctions d’interruption des CPM2A/CPM2C
défini par SBN(92) et RET(93), simplement comme un sous--programme ordinaire. Il est écrit à la fin du programme normal.
Programme
normal
Programme
d’interruption
FIN
Sous--programme
1, 2, 3... Une nouvelle interruption peut être définie dans un sous--programme d’in-
terruption, et une interruption existante peut être annulée.
Pour tout sous--programme d’interruption donné, il est impossible d’écrire
un autre sous--programme pour traiter une autre interruption. Ne pasimbriquer un autre sous--programme d’interruption entre les instructions
SBN(92) et RET(93).
Il est impossible d’écrire un sous- -programme dans un sous--programme
d’interruption. Ne pas imbriquer un sous--programme normalentre les instructions SBN(92) et RET(93).
Il est impossible d’écrire un sous--programme d’interruption dans un sous-programme normal. Ne pas imbriquer un sous--programme d’interruption
entre les instructions SBN(92) et RET(93).
Lorsqu’un sous--programmed’interruption est défini, une erreur SBS UNDEFD
se produit pendant le contrôle de programme mais l’exécution sera normale.
Attention
!
Bien que l’IORF (97) puisse être ut ilisé dans des sous --programmes
d’interruption, faire attention à l’intervalle entre les exécutions de l’IORF(97).
Lorsque l’IORF(97) est exécuté trop fréquemment, une erreur fatale du
système peut se produire (FALS 9F), arrêtant le fonctionnement. L’intervalle
entre les exécutions de l’IORF(97) devrait être au moins de 1,3 ms + le temps
d’exécution total du sous--programme d’interruption.
Ordredeprioritédes
interruptions
Entrées d’interruption
L’ordre de priorité pour des interruptions est le suivant :
=>=
Numéro d’interruptions
Interruption par temporisation cyclique
Compteur à grande
vitessevérifiantle
nombre d’interruptions
Lorsqu’une interruption avec une priorité plus élevée se produit pendant l’exécution du programme d’interruption, l’interruption actuellement traitée s’arrête
et la nouvelle interruption est traitée en priorité. L’interruption initiale sera alors
reprise après le traitement d’interruption de haute--priorité.
Lorsque des interruptions de la même priorité sont produites simultanément,
elles sont traitées dans l’ordre suivant :
Entrée 0 d’interruption ! Entrée 1 d’interruption ! Entrée 2 d’interruption !
Entrée 3 d’interruption (incluant le mode nombre d’interruptions)
29
Page 43
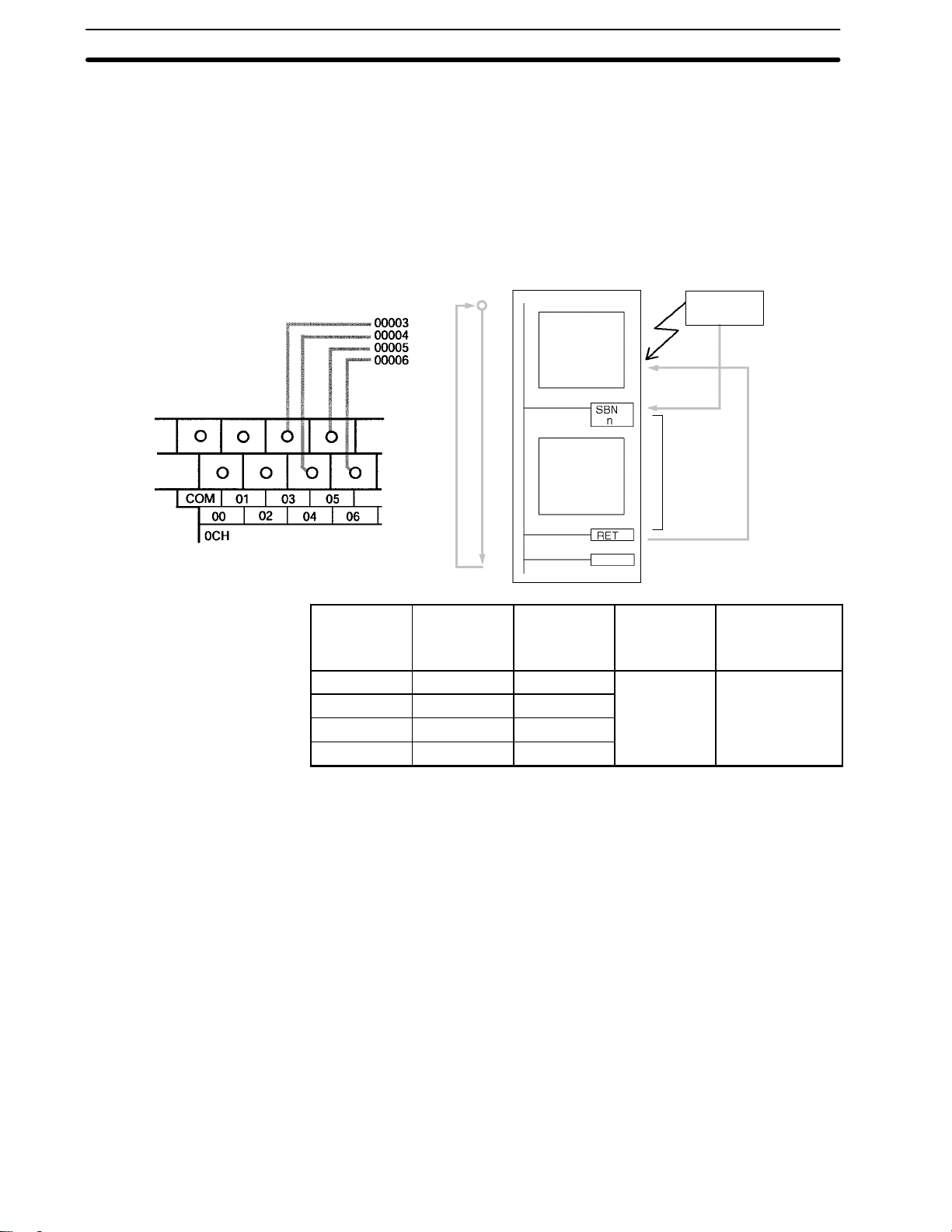
Interruption par temporisation cyclique ! interruptions compteur à grande
p
lentréepasseà
vitesse
2-1-1 Entrées d’interruption
Enbasculantlespointsd’entréeintégrésdel’unitécentraledel’étatOFF en ON,
le programme normal s’arrête et le programme d’interruption est exécuté. Les
entrées d’interruption sont attribuées à quatre points (00003 à 00006*).
*Lespointsd’entrée 00005 et 00006 n’existent pasdansdesunités centralesde
Rem.
CPM2C ne comportant que 10 points d’entrée/sortie.
2-1ChapitreFonctions d’interruption des CPM2A/CPM2C
Entrée
d’interruption
Programme
normal
Rem.
Numéros
d’entrées
(Rem. 1)
00003 0 000
00004 1 001
00005 2 002
00006 3 003
Numéro
d’inter--
ruptions
Numéro de
programme
Programme
d’interruption
sous--
(Rem. 2)
FIN
minimale du
50"s 0,3 ms (à partir du
Sous--programme
Largeur
signal
d’entrée
Temps de
réponse
d’interruption
moment où
l’entrée
ON jusqu’ à
’
l’exécution du
programme)
asse à
1. Les numéros d’entrée de 00003 à 00006 peuvent être utilisés pour n’importe laquelle des
fonctions suivantes : entrées d’interruption, entrées d’interruption (mode compteur), ou
interruption de capture. Ces numéros peuvent être également utilisées en tant qu’entrées
normales, s’ils ne sont pas déjà utilisés pour ces entrées d’interruption.
2. Les sous--programme de 000 à 003 sont les numéros de sous- -programmes des entrées
d’interruption qui ont été générés. Ces numéros peuvent être également utilisées en tant
qu’entrées normales, s’ils ne sont pas utilisés pour ces entrées d’interruption.
30
Page 44
2-1ChapitreFonctions d’interruption des CPM2A/CPM2C
Le tableau suivant montre les liens entre les entrées d’interruption et d’autres
fonctions des API CPM2A/CPM2C.
Fonction Entrées d’interruptions
(mode compteur)
Commande d’impulsion synchronisée
Entrées d’interruptions
Interruptions par temporisation
cyclique
Compteurs à grande vitesse
Entrées d’interruptions (mode
compteur)
Sorties d’impulsion
Entrée de capture
Constante de temps de sortie
Horloge
Peut être utilisé simultanément
Voir Rem. 1.
Peut être utilisé simultanément
Peut être utilisé simultanément
Voir Rem. 1.
Peut être utilisé simultanément
Voir Rem. 1.
Voir Rem. 2.
Peut être utilisé simultanément
Rem.
1. Le même numéro d’entrée (de 00003 à 00006) ne peut pas être utilisé pour
plusd’unedes fonctionssuivantes : entrées d’interruption, entréesd’interruption (mode compteur) ou interruption de capture.
2. Lorsque les entrées de 00003 à 00006sont définies comme entrées d’interruption (mode compteur), les constantes de temps d’entrée pour les entrées
appropriées sont désactivées. Les constantes de temps d’entrée persistent
cependant, pour les valeurs afin de rafraîchir la zone appropriée de relais
d’entrée.
Procédure pour l’utilisation des entrées d’interruption
Définir le numéro
d’entrée d’interruption
Câblage des entrées
Numéro d’entrées : 00003 à 00006
Lancer le Setup de l’API (DM 6628)
Créer un programme en
schéma à contacts
Utiliser comme entrées d’interruption (mode d’entrée
d’interruption ou mode compteur)
INT(89) : Pour les entrées d’interruption masquées et non masquées.
SBN(92) et RET(93) : Pour la création de sous--programmes d’inter-
ruption.
31
Page 45

2-1ChapitreFonctions d’interruption des CPM2A/CPM2C
Entrée
d’interruption
Entrée 0
d’interruption
Entrée 1
d’interruption
Entrée 2
d’interruption
Entrée 3
d’interruption
Setup de l’API
DM 6628
Programme en schéma à contacts
InstructionINT(89)
Autorisation d’utiliser
l’entréed’interruption
Génération de
l’interruption
Exécution de sous--programme
spécifé
(92)
(93)
Configuration du numéro
d’entrée d’interruption
Câblage des entrées
Pour les entrées d’interruption (mode entrée d’interruption), le numéro des
sous--programmes exécutés pour les numéros d’entrée sont fixés.
Numéro d’entrées Numéro d’interruption Numéro de
sous--programmes
00003 0 000
00004 1 001
00005 2 002
00006 3 003
Lemême numéro d’entrée(de00003à 00006) ne peut pas être utilisé pour plus
d’une des fonctions suivantes : entrées d’interruption, entrées d’interruption
(mode compteur) ou interruption de capture.
Avec un CPM2A, câbler les bornes d’entrée comme montré dans l’illustration
suivante.
Numéro d’entrée 00003 : Entrée 0 d’interruption
Numéro d’entrée 00004 : Entrée 1 d’interruption
Numéro d’entrée 00005 : Entrée 2 d’interruption
Numéro d’entrée 00006 : Entrée 3 d’interruption
32
Page 46

2-1ChapitreFonctions d’interruption des CPM2A/CPM2C
(moded’interruptionou
Avec un CPM2C, câbler les bornes d’entrée comme montré dans l’illustration
suivante :
Setup de l’API
Numéros de bornes du
bornier des entrées
00006
00005
00004
00003
Se reporter au manuel de programmation devotre unité centralepour plus d’in-
Rem.
Numéros de broches du
connecteur des entrées
formations sur le câblage.
Le tableau ci--après présente la configuration des zones du Setup de l’API,
concernant l’utilisation des entrées d’interruption.
00006
00005
00004
00003
Programmation en
schéma à contacts
Mots Bits Fonction Para--
DM 6628
*Les points d’entrée de 00005 et 00006 existent pour les unités centrales du
Rem.
00à03 Configuration
d’interruption pour
l’entrée00003
04à07 Configuration
d’interruption pour
l’entrée00004
08à11 Configuration
d’interruption pour
l’entrée00005*
12à15 Configuration
d’interruption pour
l’entrée00006*
0 : Entrée normale
1 : Entrée d’interruption
’
mode compteur)
2 : Entrée capture
CPM2C ne comportant que 10 points d’entrée/sortie.
Les configurations seront effectives au changement de mode (passage du
mode PROGRAM au mode MONITOR/RUN) ou lorsque l’alimentation du
CPM2A/CPM2C est sur ON.
Le tableau suivant montre le fonctionnement des instructions par rapport à la
commande d’entrée d’interruption.
métrage
1
33
Page 47

2-1ChapitreFonctions d’interruption des CPM2A/CPM2C
Instruction Commande Fonctionnement
(@)INT(89)
Masquage ou non masquage des entrées d’interruptions
Cette fonction est utilisée pour masquer ou ne pas masquer les numéros d’entrée de 00003 à 00006 (l’entrée d’interruption de0à3).
Masquage / non
masquage des entrées
d’interruption
Suppression des
entrées d’interruption
Lecture de l’étatdu
masque en cours
Masquage de toutes les
interruptions
Non masquage de
toutes les interruptions
Interdit ou autorise des interruptions
spécifiques.
Supprime la cause d’une entrée
d’interruption interdite.
Lit l’état d’autorisation/interdiction d’une
entrée d’interruption.
Interdit toutes les interruptions,y compris
les entrées d’interruption,les interruptions
par temporisationscycliques, les
compteurs à grande vitesse, etc.
Autorise toutes les interruptions,y compris
les entrées d’interruption,les interruptions
par temporisationscycliques, les
compteurs à grande vitesse, etc.
(@)INT(89)
Personnalise l’entrée 00006 (entrée 3 d’interruption)
Personnalise l’entrée 00005 (entrée 2 d’interruption)
Personnalise l’entrée 00004 (entrée 1 d’interruption)
Personnalise l’entrée 00003 (entrée 0 d’interruption)
Appellation de commande d’interruption
000
(000 : Masquage / non masquage des entrées d’interruption)
000
Fixé à 000.
C
Vérification des mots de données
2
Personnalise/mémorise 0
0 : Suppression du masque (entrée d’interruption autorisée)
1 : Définition du masque (entrée d’interruption interdite)
Toutesles entrées d’interruption sont interdites audébutdu fonctionnement (en
mode de PROGRAM ou en mode RUN/MONITOR). Pour utiliser des entrées
d’interruption, utiliser INT(89) l’autorisant.
34
Suppression des entrées
d’interruption
Cette fonction est utilisée pour supprimer les nombres d’entrée de 00003 à
00006 (entrées d’interruption entre0à3).Puisquedesentréesd’interruption
sont enregistrées, les interruptions masquées sont traitées après que le masque soit enlevé, à moins qu’elles soient d’abord supprimées. Utiliser INT(89)
pour supprimer la cause des entrées d’interruption afin qu’elles ne soient pas
Page 48

2-1ChapitreFonctions d’interruption des CPM2A/CPM2C
exécutéeslorsquedesentréesd’interruptionsontautorisées(c.--à--d. lorsquele
masque est enlevé).
(@)INT(89)
Personnalise l’entrée 00006 (entrée 3 d’interruption)
Personnalise l’entrée 00005 (entrée 2 d’interruption)
Personnalise l’entrée 00004 (entrée 1 d’interruption)
Personnalise l’entrée 00003 (entrée 0 d’interruption)
Appellation de commande d’interruption
001
(001 : Suppression des entrées d’interruption)
000
Fixé à 000.
C
2
Vérification des mots de données
Personnalise/mémorise 0
0 : Conserve la cause de l’entrée d’interruption
1 : Supprime la cause de l’entrée d’interruption
Une cause est enregistrée pour chaque entrée d’interruption, à chaque entrée
d’interruption masquées.
Lecture de l’état du masque en cours
Cette fonction est utilisée pour lire l’état du masque en cours pour les numéros
d’entrée de 00003 à 00006 (entrées d’interruption de0à3).
(@)INT(89)
Personnalise l’entrée 00006 (entrée 3 d’interruption)
Personnalise l’entrée 00005 (entrée 2 d’interruption)
Personnalise l’entrée 00004 (entrée 1 d’interruption)
Personnalise l’entrée 00003 (entrée 0 d’interruption)
Appellation de commande d’interruption
002
(002 : Lecture de l’état du masque en cours)
000
Fixé à 000
C
Vérification des mots de données
2
Personnalise/mémorise 0
0 : Masque supprimé (entrée d’interruption autorisée)
1 : Masque défini (entrée d’interruption interdite)
Masquage ou non masquage de toutes les interruptions
Cette fonctionest utiliséepourmasquer ou ne pas masquertout traitementd’interruption, y compris les entrées d’interruption (mode entrée d’interruption et
mode compteur), les interruptions par temporisations cycliques et les compteurs à grande vitesse. Des entrées masquées sont enregistrées, mais ignorées.
35
Page 49

Masquage de toutes les interruptions
2-1ChapitreFonctions d’interruption des CPM2A/CPM2C
(@)INT(89)
Appellation de commande d’interruption
1,0
(1,0 : Masquage de toutes les interruptions)
000
Fixé à 000.
Fixé à 000.
000
Non masquage de toutes les interruptions
(@)INT(89)
Appellation de commande d’interruption
200
(200 : Non masquage de toutes les interruptions)
000
Fixé à 000.
Fixé à 000.
000
Le masquage ou le non masquage de toutes les interruptions peut ne pas être
exécuté dans un sous--programme d’interruption.
Silescausespourdesinterruptionsseproduisenttandisquetouteslesinterruptions sont masquées, les causes seront enregistrées pour chaque interruption
mais le traitement d’interruption ne sera pas exécuté. Lorsque le “non masquagedetoutes les interruptions” estexécuté, letraitement estalors suivi selon
l’état du masque d’interruption du moment.
Lesmasques d’interruption ne peuvent pas être supprimés simplement enexécutant le “non masquage de toutes les interruptions”. L’exécution du “non masquage de toutes les interruptions” restaure simplement l’état qui était effectif
avant l’exécution du “masquage de toutes les interruptions”.
INT(89) doit être utilisé d’abord avec le “masquage de toutes les interruptions”
Rem.
puis avec le “non masquage de toutes les interruptions”.
Exemple de fonctionnement
Explication
Câblage
Danscetexemple, un sous--programmed’interruptionest exécuté enbasculant
l’entrée 00003 de l’état OFF à l’état ON. Le sous- -programme d’interruption
ajoute1àDM0000.
Le schéma suivant montre le câblage d’entrée dans le CPM2A.
Périphérique
d’entrée
36
Page 50

Bornier d’entrée Connecteur d’entrée
Setup de l’API
2-1ChapitreFonctions d’interruption des CPM2A/CPM2C
Le schéma suivant montre le câblage d’entrée dans le CPM2C.
Périphérique
d’entrée
Périphérique
d’entrée
Programmation
15 0
DM 6628
SurONpour1 cycle audébut
du fonctionnement
Toujours ON
0 0 0 1
L’entrée 00003 est utilisée comme entrée d’interruption
(les entrées 00004à 00006sont utilisées en tant qu’entrées normales).
(89)
Efface la zone de l’incrément (DM 0000).
Autorise les interruptions pour l’entrée 0 d’interruption
(entrée 00003).
Exécuté lorsque l’entrée 00003 passe de l’état
OFF à ON.
2-1-2 Interruptions par temporisation cyclique
Une temporisation cyclique (précision : 0,1 ms.) est maintenue et peut être
réglée de 0,5 ms à 319 968 ms. Il existe deux modes d’interruption : le mode à
une impulsion, pour lequel une interruption simple est exécutée lorsque la
37
Page 51

2-1ChapitreFonctions d’interruption des CPM2A/CPM2C
période de temps est révolue, et le mode interruption planifiée pour lequel des
interruptions sont exécutées à intervalles réguliers.
Interruption par temporisation cyclique
Programme
normal
Programme
d’interruption
FIN
Sous--programme
Mode à une impulsion Mode interruption planifiée
Fonctionnement L’interruption est exécutée
lorsque le temps s’est écoulé.
L’interruption est exécutée à
intervalles réguliers.
Installation 0,5 à 316 968 ms (Unité : 0,1 ms)
Temps de
réponse de
0,3 ms (à partir du temps écoulé jusqu’ à l’exécutiondu
programme)
l’interruption
Le tableau suivant montre les liens entre les interruptions par temporisations
cycliques et les autres fonctions des API CPM2A/CPM2C.
Fonction Interruptions par temporisations
cycliques
Commande d’impulsion synchronisée
Entrées d’interruptions
Interruptions par temporisations
cycliques
Compteur à grande vitesse
Entrées d’interruptions (mode
compteur)
Sorties d’impulsion
Entrée de capture
Constante de temps de sortie
Horloge
Peut être utilisé simultanément
Peut être utilisé simultanément
---
Peut être utilisé simultanément
Peut être utilisé simultanément
Peut être utilisé simultanément
Peut être utilisé simultanément
Peut être utilisé simultanément
Peut être utilisé simultanément
38
Page 52

Procédure pour l’emploi des interruptions par temporisations cycliques
2-1ChapitreFonctions d’interruption des CPM2A/CPM2C
Programmation en schéma à contacts
Sélectiondumode
Sélectionner le mode L’unou l’autre mode : mode à une impulsion ou mode à interruption
Temporisation
cyclique
Programme en schéma à contacts
STIM(69)
Instructions de
l’INTERVAL TIMER
Début du temporisation
Mode à 1 impulsion
Mode interruption planifiée
Lecture du temps écoulé
planifiée
STIM(69)
L’interruption est
exécutée
Le sous--programme indiqué
est exécuté.
SBN(92)
RET(93)
Sélectionner l’un ou l’autre des modes, à une impulsion ou à interruption
planifiée.
Mode à une impulsion
Programme normal
Programme d’interruption
Interruption par temporisation cyclique
Fonction temporisation cyclique
Début de la temporisation
Mode interruption planifiée
Programme normal
Programme d’interruption
Interruption par temporisation cyclique
Fonction temporisation cyclique
Début de la temporisation
Dans le mode interruption planifiée, la temporisation est remise à zéro chaque
fois que le programme d’interruption est appelé à la fin du temps écoulé et la
temporisation refonctionne.
programme normal
39
Page 53

2-1ChapitreFonctions d’interruption des CPM2A/CPM2C
Faireattention autemps d’exécution duprogramme d’interruptionetàl’interruption par temporisation cyclique planifiée. Lorsque le temps d’exécution du programme d’interruption excède la temporisation cyclique de l’installation, les
interruptions planifiées ne peuvent pas être correctement exécutées.
Programmation en
schéma à contacts
Le tableau suivant montre les fonctions d’instruction liées à la commande d’entrée d’interruption :
Instruction Commande Fonctionnement
(@)STIM(69)
Début de la
temporisation d’une
Commence la temporisation en mode à
une impulsion
impulsion
Début de la
temporisation d’une
Commence la temporisation cyclique en
mode interruptionplanifiée
interruption planifiée
Lecture de la
Lit la temporisation de la PV
temporisationdelaPV
Arrêt de la temporisation Arrête le fonctionnementde
temporisations
(@)INT(89)
Masquage de toutes les
interruptions
Interdit toutes les interruptions,y compris
les entrées d’interruption,les
interruptions par temporisation cyclique,
les compteurs à grande vitesse, etc.
Non masquage de
toutes les interruptions
Autorise toutes les interruptions,y
compris les entrées d’interruption, les
interruptions par temporisation cyclique,
les compteurs à grande vitesse, etc.
Début des temporisations
Cette fonction définit le mode (à une impulsion ou à interruption planifiée) et la
SV du temporisateur, et lance la temporisation cyclique.
Mode à une impulsion
(@)STIM(69)
Désignation de la commande
000
(000 : Début de la temporisation d’une impulsion)
C
Premier mot de la temporisation SV
2
C
Numéro de sous--programme (4 digits BCD : 0000 à 0049)
3
Mode interruption planifiée
C
2
C2+1
(@)STIM(69)
Décrémentation d’après la valeur initiale (4 digits Hex) : 0000 à 9999
Décrémentation de la temporisation cyclique
(4 digits BCD ; unité : 0,1 ms) : 0005 à 0320 (0,5 à 32 ms)
Désignation de la commande
003
(003 : Début de la temporisation d’interruption planifiée)
C
Premier mot de la temporisation SV
2
Numéro de sous--programme (4 digits de BCD) : 0000 à 0049
C
3
L’intervalle à compter de l’exécution de STIM(69) jusqu’à l’écoulement de la
durée définie est calculé comme suit :
(Contenu de mot C
) x (Contenu des mots C2+1)x0,1ms
2
(0,5 à 319 968 ms)
Lorsqu’uneconstante est définie pourleC2,cettevaleurestprisecommevaleur
initiale pour la décrémentation, et la temporisation cyclique décrémentée commence à 10 (1 ms). La SV est simplement indiquée telle quelle, en unité ms).
40
Page 54

LecturedelaPVdelatemporisation
Cette fonction lit les temporisations cycliques de la PV.
2-1ChapitreFonctions d’interruption des CPM2A/CPM2C
(@)STIM(69)
Désignation de la commande
006
(006 : Lecture de la temporisation de la PV)
C
2
C
3
C
2
C2+1
C
3
Le nombre de décrémentation de la temporisation
(4 digits Hex)
Intervalle de temps décrémenté
(4 digits BCD ; unité : 0,1 ms)
Temps écoulédepuisla dernièredécrémentation
(4 digits BCD ; unité : 0,1 ms)
Arrêt de la temporisation
Cette fonction arrête la temporisation cyclique.
(@)STIM(69)
010
Désignation de la commande (010 : Arrêt temporisation)
000
Fixé : 000
000
Fixé : 000
Masquage ou non masquage de toutes les interruptions
Pour plus d’informations sur maquage / non masquage de toutes les interruptions, se reporter aux paragraphes 2-1-1 Entrées d’interruption et 7-12 Instruc-
tions commande d’interruption.
41
Page 55

Exemple de fonctionnement
Mode à une impulsion
Explication
Dans cet exemple, la temporisation commence lorsque l’état d’exécution
(00005) passe de OFF à ON. Lorsque le temps (approx. 1 s) s’est écoulé, le
sous--programme d’interruption est exécuté une fois. Lorsque le sous--programme d’interruption est exécuté, 1 est ajouté à DM 0000.
Temps écoulé : 100 x 100 x 0,1 = 1 000 ms
Programme
ON pour 1 cycle audébutdu
fonctionnement
(Conditions
d’exécution)
(69)
2-1ChapitreFonctions d’interruption des CPM2A/CPM2C
Efface la zone de l’incrément (DM 0000).
Configuration de la décrémentation du
compteur
Compteur : 100 (0000 à 9999 BCD)
Configuration de l’intervalle de comptage
Configuration de l’intervalle de
comptage : 10 ms (0005 à 0320
BCD)
Commence la temporisation cyclique en mode
à une impulsion.
Toujours ON
Exécute l’interruption qu’une
fois le temps écoulé.
42
Page 56

Mode interruption planifiée
2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Explication
Dans cet exemple, la temporisation commence lorsque l’état d’exécution
(00005) passe de OFF à ON. Lesous- -programme d’interruption est exécuté à
chaque fois que le temps défini (approx. 1 s) est écoulé. A chaque fois que le
sous--programme d’interruption est exécuté, 1 est ajouté à DM 0000.
Temps écoulé : 100 x 100 x 0,1 = 1 000 ms
Programme
ON pour 1 cycle au début du
fonctionnement
Efface la zone de l’incrément (DM 0000).
Configuration de la décrémentation du compteur
Compteur : 100 (0000 à 9999 BCD)
Configuration de l’intervalle de comptage
Configuration intervalle de
comptage :
10 ms (0005 à 0320 BCD)
Commence la temporisation cyclique
(69)
(Conditions
d’exécution)
en mode interruption planifiée
Toujours ON
Exécute l’interruption à chaque fois
que le temps est écoulé
2-2 Compteurs à grande vitesse du CPM2A/CPM2C
Les unités centrales CPM2A et la plupart des unités centrales CPM2C ont cinq
pointspourlescompteursàgrandevitesse:unpointpouruncompteuràgrande
vitesse avec une fréquence de réponse maximale de 20 kHz, et quatre points
pour des entrées d’interruption (mode compteur).
Les unités centrales des CPM2C avec 10 points d’entrée--sortie ont quatre
pointspourlescompteursàgrandevitesse:unpointpouruncompteuràgrande
vitesseavecunefréquencederéponsemaximale de 20kHz, et troispointspour
des entrées d’interruption (mode compteur).
Compteurs à grande
vitesse
Compteur à
grande vitesse
1 point
Pas
d’interruptions
Interruptions de
vérification de
décompte
Interruptions de
comparaison de
valeurà atteindre
Interruptions de
comparaison de
plage.
Entréesd’interruptions
(mode compteur)
4 points
(2 dans l’UC du CPM2C avec 10
points d’E/S)
Pas
d’interruptions
Décompte des
interruptions
43
Page 57

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
p
p
p
Types de compteurs à
grande vitesse
Le CPM2A/CPM2C fournit un compteur à grande vitesse intégré et les entrées
d’interruption intégrées.
Compteur à grande
vitesse
Lecompteur à grande vitesseintégré est un compteurbasésurles entrées intégrées aux points 00000 à 00002 de l’unité centrale. Le compteur à grande
vitesse possède lui- -mêmeunpoint, et il peut fournir une incrémentation/décrémentation ou simplement un décompte d’incrémentation selon le paramétrage
du mode.
Numéro
d’entrée.
(Voir Rem.)
00000
00001
00002
Lespointsd’entréenonutiliséspourdesentréesdedécompte peuvent êtreutili-
Rem.
Fréquence
de réponse
5kHz Mode entrée bidirectionnelle
(-8388608 à 8388607)
20 kHz Mode entrée d’impulsion et de
sens
(-8388608 à 8388607)
Mode entrée d’impulsion
avance/retour
(-8388608 à 8388607)
Mode incrément
(0 à 16777215)
Mode entrée
(valeur de décompte)
Méthode de
commande
Interruptions de
comparaison de
valeur à atteindre
Interruptions de
comparaison de plage
sés en tant qu’entrées normales.
Entrées d’interruption (Mode
Les entrées d’interruption (mode compteur) sont des compteurs basés sur des
entrées aux points intégrées 00003 à 00006 de l’unité centrale (00003 à 00005
dans les unités centrales de CPM2C avec 10 points d’entrée--sortie). Ces
compteurs ont quatre points, et ils peuvent fournir un décompte d’incrémentation ou de décrémentation selon le paramétrage du mode. Puisque cette fonction utilise des entrées d’interruption pour le comptage, il est impossible d’utiliser les mêmes entrées pour d’autres entrées d’interruption.
Numéro
d’entrée
(Voir Rem.)
00003
00004
00005
00006
Rem.
1. Les points d’entrée non utilisés pour des entrées de décompte sont utilisés en
tant qu’entrées normales.
2. Lespoints d’entrée 00005 et00006n’existent pasdans les UCde CPM2C avec
10 points d’E/S.
Interruptions de compteur à grande vitesse
Interruptions par le compteur à grande vitesse (Interruptions de
tion de
décompte)
compteur)
Fréquence
de réponse
2kHz Compteur incrémental
Mode d’entrée
(valeur de décompte)
(0000 à FFFF)
Compteur décrémental
(0000àFFFF)
Méthode de
commande
Décompte des
interruptions
vérifica-
Interruptions de comparaison de valeur à atteindre
Ledécompteactuelestcomparéàchaquevaleuràatteindredansl’ordredeleur
enregistrement dans le tableau. Lorsque le décompte est identique à la valeur
courante à atteindre, un sous--programme d’interruption est exécuté. Jusqu’à
44
Page 58

Décompte actuel
Valeurs à atteindre dans le
sens incrémental
2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
16valeurs à atteindreet sous--programmesd’interruption peuvent êtreenregistrés dans le tableau dans le sens incrémental ou décrémental.
Valeurs à atteindre dans le
sens décrémental
DécomptedePV
Limite 1 supérieure
Limite 1 inférieure
Limite 2 supérieure
Correspond à la valeur à
atteindre pendant l’incrémentation du décompte
Le traitement d’interruption peut être exécuté lorsque le décompte actuel atteint
une valeur à atteindre dans le sens incrémental ou décrémental.
Correspond à la valeur à
atteindre pendant la décrémentation du décompte
Temps
Interruptions de comparaison de plage
Le tableau de comparaison de plage contient jusqu’à huit plages dont chacune
est définie par une limite inférieure et une limite supérieure, ainsique par leurs
nombres correspondants de sous--programme. Le sous--programme correspondantest appelé et est exécutélorsquele décompte courant (la PV ducompteur) est inclus dans la plage indiquée.
Limite 2 inférieure
Letraitementd’interruptions’exécute lorsqu’uneconditiondecomparaisondeplage estsatisfaite. En outre, lorsque laPVducompteurestdans la plage entreunelimitesupérieureetune
limite inférieure, les bits correspondants (de0à7)dans l’AR 11 seront activés.
Remplit la
condition 2 de
comparaison
de plage.
Remplit la
condition 1 de
comparaison
de plage.
Remplit la
condition 1 de
comparaison
de plage.
Remplit la
condition 2 de
comparaison
de plage.
Décomptedesd’interruptionsparlesentréesd’interruption(modecompteur)
Un sous--programmed’interruption est exécuté chaque fois que la condition de
décompte de PV égale à la SV du compteur est remplie (en mode incrémental
mode) ou 0 (en mode décrémental).
45
Page 59

2-2-1 Utilisation des compteurs à grande vitesse
L’unitécentraledeCPM2A/CPM2Cpossède uncanalintégré pour uncompteur
à grande vitesse qui peut compter des entrées à une vitesse maximale de
20 kHz. Utiliser celui--cien même tempsquelafonctiond’interruption permet de
lancer la commande de comparaison de valeur à atteindre ou decomparaison
de plage à exécuter sans déviation de la durée de cycle.
Entrées compteur
Entrée des mise à zéro
2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Capteur Codeur rotatif
Mode entrée
Bidirectionnelle Impulsion et sens Entrée
incrémental/décré
mental
Numéro
d’entrées
Méthode d’entrée Entrée
Fréquence de réponse 5kHz 20 kHz 20 kHz 20 kHz
Valeur du compteur --8388608 to 8388607 0 à 16777215
Destinationde stockage de PV de
décompte (VoirRem. 2.)
Interruptions
Méthode de mise à zéro du
compteur
00000 Entrée Phase-A Entrées
d’impulsions
00001 Entrée Phase-B Entrées de
direction
00002 Entrée Phase-Z (Entrée des mise à zéro) (VoirRem. 1)
Entrée des phases Entrée des phases Entrée des phases
bidirectionnelles
(4X)
Mots de SR 248 (digit à l’extrême droite)et de SR 249 (digit à l’extrême gauche)
Comparaison de la
valeur à atteindre
Comparaison de
plages
Jusqu’à 16 valeurs à atteindre et nombres de sous--programme d’interruption
peuvent être enregistrés dans le sens incrémental ou décrémental
Jusqu’à huit plages (avec des limites supérieures et inférieures) et nombres de
sous--programmepeuvent être enregistrés.
Signal Phase--Z + remise à zéro par programme : Le compteur est remis à zéro s i
l’IR 00002 est activé alors que le SR 25200 est déjà sur ON.
Remise à zéro par programme : Le compteur est remis à zéro lorsque le SR 25200
est activé.
Entrées CW Entrée des
Entrées CCW Voir Rem. 1.
Incrément
impulsions
46
Rem.
1. Lespointsd’entréenonutiliséspourdesentréesdedécompte peuvent êtreutilisés en tant qu’entrées normales.
2. S’ils ne sont pas utilisés pour la destination de stockage de PV de décomptes,
ces mots peuvent être utilisés en tant que mots IR normaux.
3. LeSR25200estluunefois pour chaque cycle. Jusqu’àun cycle peut êtreexigé
pour qu’une remise à zéro se produise sur le bord de la phase Z.
Le tableau suivant montre les liens existant entre le compteur à grande vitesse
et les autres fonctions du CPM2A/CPM2C.
Page 60

Commande d’impulsion synchronisée
Entrées d’interruptions
Interruptions par temporisations
cycliques
Compteur à grande vitesse
Entrées d’interruptions (mode
compteur)
Sorties d’impulsion
Entrée de capture
Constante de temps d’entrée
Horloge
Lorsqueles entrées de00000à00002 sont définies commecompteur àgrande
Rem.
vitesse, les constantes de temps d’entrée pour les entrées appropriées sont
désactivées.
Exemple de fonctionnement
2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Fonction Interruptions par temporisations
cycliques
inutilisable simultanément
utilisable simultanément
utilisable simultanément
-----utilisable simultanément
utilisable simultanément
utilisable simultanément
Voir Rem.
utilisable simultanément
Définir le mode d’entrée et la
méthode de réinitialisation
Définir les interruptions à utiliser
Câblage des entrées
Lancer le Setup de l’API (DM 6642)
Créer un programme en
schéma à contacts
Mode d’entrée:Entréebidirectionnelle, impulsion + entrée de direction, entrée
incrémental/décrémental, ou incrémentale
Méthode de réinitialisation : Phase--Z + réinitialisation par programme,
ou réinitialisation par programme
Aucune interruption (lecture de la PV du compteur à grande vitesse, ou
lecture des résultats de comparaison de plage)
Interruptions de comparaison de valeur à atteindre
Interruptions de comparaison de plage
Numéros d’entrées : 00000, 00001, 00002
Configuration du compteur à grande vitesse
Mode d’entrée : Entrée bidirectionnelle, impulsion + entrée de direction, entrée
incrémental/décrémental, ou incrémentale
Méthode de réinitialisation : Phase--Z + réinitialisation par programme,
ou réinitialisation par programme
CTBL(63) : Enregistrer le tableau de comparaison, démarrage de la
comparaison
INI(61) : Changer la PV, démarrage de la comparaison
PRV(62) : LirelaPVducompteur àgrandevitesse, lire la condition decomparaison du compteur à grande vitesse, lire les résultats de comparaison de plage.
SBN(92) etRET(93):Créer leprogrammedesous--programme
d’interruption (lorsque les interruptions de vérification de
décompte sont utilisées).
47
Page 61

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Entrées
codeur
*E = entrée
Fonction compteur
grande vitesse
Mode entrée
E* phase bidirectionnelle
Impulsion et direction E*
Entréeincré./décré.
Entrée incrémentale
Setup de l’API
DM 6642, bits
00à03
Chaque balayage
PV du compteur
SR 249 SR 248
Setup de l’API
DM 6642, bits 08 à 15
Compteur
Programmation en schéma àcontacts
CTBL(63)
INI(61)
Chaque fois
PRV(62)
Instruction REGISTER
COMPARISON TABLE
Tableau de comparai-
sonderegistre
Comparaison de
démarrage
Instruction MODE
COMMANDE
Changer la PV
Démarrage/arrêtde
comparaison
Instruction LECTURE DE
LA PV DU COMPTEUR À
GRANDE VITESSE
Lire la PV
Lire l’condition de comparaison
Lireles résultats de comparaisonde
plage
Génération des interruptions de vérification de décompte
Sous--programme indiqué exécuté
(lorsque les interruptions de vérification dedécompte sontutilisés).
SBN(92)
RET(93)
Résultats de comparaison deplage
AR 1100à AR 1107
Sélection du mode Entrée et de la méthode de réinitialisation
Mode entrée
Choisirlemodeentréepourlecompteuràgrandevitesseselonletypedesignal.
Mode entrée bidirectionnelle
En mode entrée bidirectionnelle, le décompte est incrémenté ou décrémenté
selon deux signaux bidirectionnels avec une multiplication par 4 (phase A et
phase B).
Fréquence maximale : 5 kHz
ON
Phase A
OFF
ON
Phase B
OFF
Compteur
Nms!Fréquence =
1 000
Nx4
48
Page 62

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Mode implusion+signal d’entrée de direction
En mode implusion+signal d’entrée de direction, des signaux d’impulsion et les
signaux de sens sont enregistrés, et le décompte est incrémenté ou décrémenté selon l’état du signal de direction.
Fréquence maximale : 20 kHz
Entrées
d’impulsions
Entrées de
sens
ON
OFF
ON
OFF
Compteur
Nms!Fréquence =
1 000
N
Mode entrée d’impulsion avance/retour
Enmodeentréed’impulsionavance/retour,lessignauxCW (impulsions hautes)
et les signaux CCW (impulsions basses) sont enregistrés, et le décompte est
incrémenté ou décrémenté en conséquence.
Fréquence maximale : 20 kHz
ON
Entrées CW
OFF
Entrées
CCW
ON
OFF
Compteur
Incrémental Décrémental
Nms!Fréquence =
1 000
N
Mode incrémental
En mode incrémental, des signaux d’impulsion sont enregistrés et le décompte
est incrémentéavec chaque impulsion. L’IR00001peuts’utiliser commeentrée
normale.
Fréquence maximale : 20 kHz
Entrées d’impulsions
ON
OFF
Compteur
Nms!Fréquence =
1 000
N
Lorsque le mode entrée bidirectionnelle est utilisé, les entrées doivent être les
entréesbidirectionnelles 4X. Lorsqu’un codeur est relié àcemode,lenombrede
décomptes par révolution seraquatre fois la résolution du codeur incrémental.
Choisir un codeur en fonction du nombre de décomptes possibles.
Valeurs de
décompte
La plage des nombres décomptés par le compteur à grande vitesse est seule-
49
Page 63

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
ment en mode linéaire. Lorsque le décompte esten dehors de la plage permise,
un dépassement ou un dépassement négatif en résultera. La PV deviendra
0FFFFFFF si un dépassement se produit, ou FFFFFFFF si un dépassement
négatif se produit, et la comparaison sera arrêtée.
Mode entrée
bidirectionnelle
Mode impulsion+signal
d’entrée de direction
Mode entrée
d’impulsion
avance/retour
Mode incrémental
Dépassement négatif
(FFFFFFFF)
Pour re--activer le décompte suivant un dépassement ou un dépassement
négatif, remettre à zérola PV.LaPV est automatiquement remise à zéro toutes
les fois que l’opération est commencée ou arrêtée.
Méthode de remise à
zéro
L’uneoul’autre des deux méthodes suivantes peut être choisie pour remettreà
zéro la PV du compteur.
Signal de Phase-Z (Entrée de remise à zéro) + remise à zéro par programme
La PV est remise à zéro lorsqu’un signal de phase--Z (c.--à--d. une entrée de
remise à zéro) est activé tandis que le drapeau de remise à zéro du compteur à
grande vitesse (25200) est activé.
Dépassement
(0FFFFFFF)
Dépassement (0FFFFFFF)
Phase Z
1 balayage
Remise à zéro Remise à zéro Remise à zéroPas de remise à zéro Pas de remise à zéro
Remise à zéro par programme
La PV est remise à zéro lorsque le drapeau de remise à zéro du compteur à
grande vitesse (25200) est activé.
1 balayage
Remise à zéro Pas de
remise
àzéro
Pas de
remise
àzéro
Pas de
remise
àzéro
Ledrapeauderemise àzéro ducompteur à grande vitesse(25200) est réactualisé à chaque balayage, ainsi il doit rester sur ON pendant aumoins une durée
de cycle pour être certain qu’il soit lu.
Mêmelorsque la PV est remise à zéro, l’état répertorié au tableau de comparaison, l’état d’exécution de comparaison, et les résultats des comparaisons de
plage sont maintenus comme ils étaient avant la remise à zéro de laPV.Si une
comparaison était en cours avant la remise à zéro de la PV, cette comparaison
est poursuivie sans le changement après la remise à zéro.
Aprèslaremiseàzéro, le drapeau de remiseàzéroducompteuràgrandevitesse (25200) doit être arrêté afin depouvoir exécuter la prochaine remise à zéro.
50
Page 64

Pourêtre certain qu’il soit arrêté, ildoit être restésurOFF pendant au moinsune
durée de cycle.
Sélection des interruptions à utiliser
2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Interruption du compteur
de grande vitesse
Tableau de comparaison
Valeurà atteindre : 5 000
Sens du décompte :
Incrémental
Nombre de sous-programme :10
Valeurà atteindre : 1 000
Sens du décompte :
Incrémental
Nombre de sous-programme :8
Valeurà atteindre : 3 000
Sens du décompte :
Décrémental
Nombre de sous-programme :9
Lesinterruptions ducompteur àgrande vitesseemploientuntableaudecomparaison et exécutent un contrôle de décompte par l’une ou l’autre des méthodes
décrites ci--dessous (c.--à--d. comparaison de valeur à atteindre oucomparaison de plage). Si les conditions sont remplies, alors une interruption se produit.
Pour plus d’informations concernant les priorités d’interruption, se reporter à
l’ordredes prioritéspourles interruptions dans leparagraphe 2--1Interruptions.
Lorsqu’uneinterruptionseproduit pendant l’exécution d’unedes instructionsdu
compteur, c.--à--d. C TBL(63), INI(61) ou PRV(62), ces instructions ne s’éxécutent pas dans le programme d’interruption.
Interruptions de comparaison de valeur à
atteindre
Jusqu’à 16 combinaisons des états de comparaison (valeur àatteindre et sens
de décompte) et des nombres de sous--programmed’interruption peuvent être
répertoriées dans le tableau de comparaison. Le sous--programme indiqué est
exécuté lorsque la PV du compteur atteint une valeur du tableau de comparaison.
PV
Sens
incrémental
Sens
incrémental
Interruption
8 Sous--programmes
exécutés
Interruption
10 Sous--programmes
exécutés
Sens
décrémental
Interruption
9 Sous--programmes
exécutés
Temps
Lelienentre la vérification du décomptedelacomparaison de lavaleur à atteindre et le tableau de comparaison est différent pour le CPM1/CPM1A. Se reporter aux différents manuels pour plus de détails.
Ilest impossibled’indiquerplus d’un état de sensdecomparaisonpourlamême
valeur à atteindre dans le tableau de comparaison.
La comparaison de valeur à atteindre ou celle de laplage peut l’une ou l’autre
être utilisée pour des interruptions de compteurs à grande vitesse.
Interruptions de comparaison de
plage
Jusqu’à 8 combinaisons des états de comparaison (limites supérieures et inférieures)etdenombresdesous--programme d’interruptionpeuventêtre répertoriéesdans le tableau de comparaison.Lesous--programme indiqué est exécuté
51
Page 65

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
une fois que la PV du compteur est supérieur ou égal à la limite inférieure, et
inférieur ou égal à la limite supérieure dans le tableau de comparaison.
Tableau de comparaison
Limite inférieure : 1000
Limite supérieure : 4000
Nombre de sous-programmes : 10
Limite inférieure : 3000
Limite supérieure : 5000
Nombre de sous-programmes : 9
Si deux états ou plus de comparaison sont satisfaits simultanément (dans le
même cycle), l’interruption pour l’état le plus proche du début du tableau de
comparaison sera exécutée.
Lacomparaison de valeur à atteindreoucelledelaplagepeuts’utiliser pourdes
interruptions de compteurs à grande vitesse.
Lorsqu’une interruption s’est produite pendant l’exécution d’une des instructions du compteur, c.--à--d. C TBL(63), INI(61) ou PRV(62), ces instructions ne
sont pas exécutées dans le programme d’interruption.
Siuneinterruptions’estproduitependantl’exécution d’une instructioncommandantlecompteur àgrandevitesse dans lazonede programme normale, lesinstructions des CTBL(63), INI(61) et PRV(62), ne seront pas exécutées dans le
programme d’interruption. Cettesituation peut êtreévitéeparlaprogrammation
suivante.
PV
Interruption
10 Sous-programmes
exécutés
Interruption
9 Sous--
programmes
exécutés
Interruption
9 Sous--
programmes
exécutés
Interruption
10 Sous-programmes
exécutés
Temps
1ère méthode
Interdire les interruptions
dans la zone de programme normale tout en
exécutant l’instruction.
Les sous--programmes de traitement d’interruption sont définis par SBN(92) et
RET(93), simplement comme des sous--programmes normaux.
Une erreur de SBS UNDEFD se produira pendant le contrôle de programme
lorsqu’un sous--programme de traitement d’interruption sera défini, mais l’exécution sera normale.
2ème méthode
Dans la zone de programme
normale, exécuter de nouveau l’instruction qui n’a pas
pu être exécutée.
Zone de programme normale
Zone de programme
d’interruption
52
Page 66

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Câblage des entrées
Mode entrée bidirectionnelle
Mode entrée d’impulsion et de sens Mode incrémental
Câbler les entrées selon la représentation des illustrations suivantes, en fonction du mode d’entrée et de la méthode de remise à zéro.
Entrées CPM2A
Mode entrée impulsion avance/retour
00000 : Entrée Phase-A
00001 : Entrée Phase-B
00002 : Entrée Phase-Z
00000 : Entrée d’impulsion
00001 : Entrée de sens
00002 : Entrée de remise à zéro
00000 : Entrée CW
00001 : Entrée CCW
00002 : Entrée de remise à zéro
00000 : Entrée d’impulsion
00002 : Entrée de remise à zéro
Entrée CPM2C
Mode entrée bidirectionnelle
Bornier d’entrée
00002 : Entrée phase-Z
00001 : Entrée phase-B
00000 : Entrée phase-A
Connecteur d’entrées
00002 : Entrée phase-Z
00001 : Entrée phase-B
00000 : Entrée phase-A
53
Page 67

Mode entrée impulsion avance/retour
Bornier d’entrée
00002 : Entrée de remise à zéro
00001 : Entrée CCW
00000 : Entrée CW
Mode entrée d’impulsion et de sens
Bornier d’entrée
Connecteur d’entrées
2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
00002 : Entrée de remise à zéro
00001 : Entrée CCW
00000 : Entrée CW
Connecteur d’entrées
Mode incrémental
Bornier d’entrée
00002 : Entrée de remise à zéro
00001 : Entrée de sens
00000 : Entrée d’impulsion
00002 : Entrée de remise à zéro
00001 : Entrée de sens
00000 : Entrée d’impulsion
Connecteur d’entrées
00002 : Entrée de remise à zéro
00000 : Entrée d’impulsion
00002 : Entrée de remise à zéro
54
00000 : Entrée d’impulsion
Lorsque les entrées phase--Z et de remise à zéro ne sont pas utilisées, 00002
peut être utilisé comme entrée normale.
Page 68

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Setup de l’API
Définir les zones du Setup de l’API liées au compteur à grande vitesse comme
suit :
Utilisation du compteur
à grande vitesse
Mode entrée DM 6642, bits 00 à 03
Méthode de remise à zéro
(utilisation ou non de 00002
comme entrée normale)
Mots Bits Fonction Paramé--
DM 6642
00à03 Configuration du mode d’entrée compteur à
grande vitesse
0 : Entrée bidirectionnelle 5 kHz
1 : Impulsion+signald’entrée de direction
2 : Point incrémental/décrémental
4 : Incrémental 20 kHz
04à07 Configuration de la méthode de remise à
zéro du compteur à grande vitesse
0 : Signal phase Z + remise à zéro par
programme
1 : Remise à zéro par programme
08à15 Configuration de l’utilisation du compteur à
grande vitesse
00 : Ne pas utiliser
01 : Utiliser comme compteur à grande
vitesse
02 : Utiliser comme commande de
synchronisation d’impulsion
(10 Hz à 500 Hz)
03 : Utiliser comme commande de
synchronisation d’impulsion
(20Hzà1kHz)
04 : Utiliser comme commande de
synchronisation d’impulsion
(300Hzà20kHz)
DM 6642, bits 08 à 15
DM 6642, bits 04 à 07
trage
0, 1, 2 ou 4
20 kHz
20 kHz
0ou1
01
Les nouvelles configurations pour le Setup du système sont effectifs lorsque le
fonctionnement débute (lorsque le mode PROGRAM est changé en mode
MONITOR ou RUN), ou lorsque l’alimentation de CPM2A/CPM2C est rétablie.
55
Page 69

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
(@)()
p
g
p
Programmation en
schéma à contacts
Le tableau suivant montre les instructions liées au compteur à grande vitesse :
Instruction Comman d e Fonctionnement
(@)CTBL(63)
(@)INI(61)
(@)PRV(62)
(@)INT(89)
Répertorier le tableau
de comparaison de la
valeur à atteindre
Répertorier le tableau
de comparaison de
plage
Répertorier le tableau
de comparaison des
valeurs à atteindre et
démarrage de la
comparaison
Répertorier le tableau
de comparaison de
plage et démarrage de
la comparaison
Début de comparaison Commence la comparaison avec le
Arrêtde comparaison Arrêtela comparaison
Modifierla PV Modifie la PV du compteur à grande
Lire la PV Lit la PV du compteur à grande vitesse
Lire le status Lit l’état du compteur à grande vitesse
Lire les résultats de
comparaison de plage
Masquer toutes les
interruptions
Ne pas masquer toutes
les interruptions
Répertorie le tableau de comparaison de
la valeur à atteindre
Répertorie le tableau de comparaison de
plage
Répertorie le tableau de comparaison
des valeurs à atteindre et démarre la
comparaison
Répertorie le tableau de comparaison de
plage et démarre la comparaison
tableau de comparaisons répertoriées
vitesse
Lit les résultats de comparaison de plage
Interdit toutes les interruptions,y compris
les entrées d’interruption,les
interruptions par temporisation cyclique,
les compteurs à grande vitesse, etc.
Autorise toutes les interruptions,y
compris les entrées d’interruption, les
interruptions par temporisation cyclique,
les compteurs à grande vitesse, etc.
Letableausuivant montre les zones de donnéesliéesà la commande de compteur à grande vitesse :
Mots Bits Dénomination Contenu
248
249
252 00 Remise à zéro du compteur
AR11
00à15
00à15
00à07 Résultat de la comparaison
08 Comparaison du compteur à
09 PV dépassement/
PV du compteur à grande
vitesse
à grande vitesse
du compteur à grande
vitesse
grande vitesse
dépassement négatif du
compteur à grande vitesse
Lit la PV du compteur à
grande vitesse
Quand ce bit est activé, une
remise à zéro par
programme est déclenchée
pour le compteur à grande
vitesse.
ON : Condition satisfaite
OFF : Condition non
satisfaite
ON : Comparaison en cours
OFF : Comparaison arrêtée
ON : Dépassement/
dépassement négatif
OFF : Normal
Répertorier le tableau de comparaison de la valeur à atteindre
Répertorier le tableau de comparaison de la valeur à ateindre et démarre
comparaison
la
Cesfonctions répertorient un tableaude comparaisondu CPM2A/CPM2C pour
vérifier le décompte de lacomparaison de lavaleur à atteindre. Il est également
56
Page 70

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
possible de commencer lacomparaison en même temps que l’enregistrement
au répertoire.
Répertorier le tableau de comparaison de la valeur à atteindre
Nombre de comparaisons
Valeurà atteindre 1
(extrême droite)
Valeurà atteindre 1
(extrême gauche)
N_de sous--programme
Valeurà atteindre 2
(extrême droite)
Valeurà atteindre 2
(extrême gauche)
N_de sous--programme
(@)CTBL(63)
Répertorier letableau de comparaison de la valeuràatteindre et démarrer
la comparaison
(@)CTBL(63)
Tableau de comparison de la valeur à atteindre
Arrangement de la comparaison 1
Arrangement de la comparaison 2
Spécificateur de port (000 : Compteur à grande vitesse)
000
Désignation de mode (002 : Répertorie le tableau de
002
comparaison de la valeur à atteindre uniquement)
S
Début du mot du tableau de comparaison
Spécificateur de port (000 : Compteur à grande vitesse)
000
Désignation de mode(000:Répertoriele tabeau de comparaison de
000
la valeur à atteindre et démarre la comparaison)
S
Début du mot de la table de comparaison
Nombre de comparaisons
0001 à 0016 BCD
Valeur à atteindre (extrême droite, extrême gauche)
Enregistrer la valeur du compteur à comparer.
Le digit à l’extrême gauche montre le signe (+/--).
Mode entrée bidirectionnelle
Mode impulsion+signal d’entrée de direction
Mode entrée d’impulsions avance/retour
F8388608 à 08388607
Mode incrément
00000000 à 16777215
Nombre de sous--programme
Enregistrer le sens de la comparaison et du nombre de sous-programme à exécuter quand il y a une correspondance.
(@)CTBL(63)
Sens d’incrément : 0000 à 0049
Sens de décrementation : F000 à F049
Ilest impossibled’indiquerplus d’un état de sensdecomparaisonpourlamême
valeur à atteindre dans le tableau de comparaison.
Une fois qu’un tableau de comparaison est enregistré, il sera répertorié dans le
CPM2A/CPM2C tant qu’aucunautretableaudecomparaison ne soient répertoririéet le mode n’estpas modifié en modePROGRAM (et cela tant quel’alimentation n’est pas coupée).
Répertorier le tableau de comparaison de
plage
Répertorier le tableau de comparaison de plage et démarrer la
son
Ces fonctions répertorient un tableau de comparaison du CPM2A/CPM2C afin
vérifier le calcul dans la comparaison de plage. Il est également possible de
démarrer la comparaison par l’enregistrement du registre.
Répertorier le tableau de comparaison de plage
000
Spécificateur de port (000 : Compteur à grande vitessse)
003
Mode appellation (003 : Répertorie seulement le tableau de comparaison de plage).
Premier mot du tableau de comparaison
S
comparai-
57
Page 71

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Répertorier le tableau de comparaison de plage et démarrer la comparaison
Limite inférieure 1 (droite)
Limite inférieure 1 (gauche)
Limite supérieure 1 (droite)
Limite supérieure 1 (gauche)
No de sous programme
Limite inférieure 8 (droite)
Limite inférieure 8 (gauche)
Limite supérieure 8 (droite)
Limite supérieure 8 (gauche)
(@)CTBL(63)
Spécificateur de port (000 : Compteur à grande vitesse)
000
Désignation de mode (001 : Répertorie letableau decomparai-
001
son de plage et démarrer la comparaison)
S
Premier mot du tableau de comparaison
Tableau de comparaison de plage
Huitétatsdecomparaisonde plagesecomposantdes limites supérieures
et inférieures, et les nombres de sous--programmes doivent être définis.
État 1 de comparaisondeplage
État 8 de comparaisondeplage
Limites supérieures et inférieures (extrême droite, extrême gauche)
Répertorier les limites supérieures et inférieures.
Le digit à l’extrême gauche affiche le signe (+/--).
Mode entrée bidirectionnelle
Mode impulsion+signal d’entrée de direction
Mode entrée d’impulsion avance/retour
Mode incrémentation
Nombre de sous--programme
Répertorier le numéro de sous--programme à exécuter
quand l’condition de comparaison de plage est satisfaite.
0000 à 0049
Si les valeurs d’ensemble n’atteignent pas 8, définir FFFF.
F8388608 à 08388607
00000000 à 16777215
No de sous programme
Si deux états ou plus de comparaison sont satisfaits simultanément (dans le
même cycle), l’interruption pour l’état le plus proche du début du tableau de
comparaison sera exécutée.
Dès qu’un tableau de comparaison est enregistré, il est sauvegardé dans le
CPM2A/CPM2C tant qu’aucun autre tableau de comparaison ne sera enregistréetlemoden’estpasmodifiéenmodePROGRAM (et celatantquel’alimentation n’est pas coupée).
La comparaison de
démarrage/d’arrêt
La comparaison peut être démarrée ou arrêtée selon le tableau qui a été déjà
répertorié au CPM2A/CPM2C par CTBL(63).
Commencer la comparaison
(@)INI(61)
000
Spécificateur de port (000 : Compteur à grande vitesse)
000
Désignation de la commande (000 : Commencer la comparaison)
000
Fixé : 000
Arrêter la comparaison
(@)INI(61)
000
Spécificateur de port (000 : Compteur à grande vitesse)
001
Désignation de la commande (001 : Arrêter la comparaison)
000
Fixé : 000
58
Page 72

(@)INI(61)
Changer la PV
Cette fonction modifie la PV du compteur à grande vitesse.
000
Spécificateur de port (000 : Compteur à grande vitesse)
002
Désignation de commande (002 : Changer la Pv)
C
Premier mot des données de la PV à changer
2
2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
C
2
C2+1
(@)PRV(62)
4 digits
à l’extrême droite
4 digits
à l’extrême gauche
Aucuneinterruption neseproduirapendantunecomparaisondevaleuràatteindremêmesilavaleuràatteindrerépertoriée dansletableaudecomparaisonest
changée par INI(61).
Lire la
Cette fonction lit la PV du compteur à grande vitesse.
Utilisation d’une instruction
Spécificateur de port (000 : Compteur à grande vitesse)
000
000
Désignation de commande (000 : Lire la Pv)
Premier mot pour la mémorisation de la PV
C
2
D
D+1
4 digits
à l’extrême droite
4 digits
à l’extrême gauche
Données de PV à changer (extrême droite et extrême gauche)
Répertorier les données de PV à changer.
Le digit à l’extrême gauche affiche le signe (+/--).
Mode entrée bidirectionnelle
Mode impulsion+signal d’entrée de direction
Mode entrée d’impulsion avance/retour
F8388608 à 08388607
Mode incrémentation
00000000 à 16777215
PV
PV (extrême droite et extrême gauche)
La PV lue sera mémorisée ici.
Le digit à l’extrême gauche affiche le signe (+/--).
Mode entrée bidirectionnelle
Mode impulsion+signal d’entrée de direction
Mode entrée d’impulsion avance/retour
F8388608 à 08388607
Mode incrémentation
00000000 à 16777215
Utilisation des régions de données
LaPVdu compteur à grandevitesse est sauvegardée dansles mots 248 et 249
comme montré ci--dessous.
SR 248
SR 249
Pv (mot à l’extrême droite)
Pv (mot à l’extrême gauche)
Les mots 248 et 249 sont rafraîchis avec chaque balayage, il peut donc y avoir
un écart avec la PV exacte à un moment donné.
Quand le compteur à grande vitesse n’est pas utilisé, les mots 248 et 249 peuvent être utilisés comme mots de travail.
Quand la PV est lue en exécutant PRV(62), les mots 248 et 249 sont rafraîchis
en même temps.
59
Page 73

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Etat de lecture
Cettefonction lit l’état du compteur à grandevitesse, commesiuneopérationde
comparaison est en cours ou si un dépassement positif / négatif s’est produit
Utilisation d’une instruction
(@)PRV(62)
Spécificateur de port (000 : Compteur à grande vitesse)
000
001
Désignation de commande (001 : Etat lu)
D
Mot pour la mémorisation de l’état
Dépassement positif/négatif
0:Normal
1 : Dépassement positif/négatif
Comparaison
0 : Arrêté
1:Enmarche
Utilisation des zones de données
L’état est sauvegardé dans l’AR 1108et l’AR 1109 comme montré ci--dessous.
Dépassement positif/négatif
0:Normal
1 : Dépassement positif/négatif
Comparaison
0 : Arrêté
1:Enmarche
L’AR1108etl’AR1 109sont rafraîchis à chaque balayage, il peut donc y avoirun
écart avec l’état exact à un moment donné.
Lorsque l’état est lu en exécutant PRV(62), l’AR 1108 et l’AR 1109 sont rafraîchis en même temps.
Lire le résultat de comparaison de
plage
Cettefonction lit lerésultat d’unecomparaison deplagemontrant silaPVest,ou
non, dans la plage.
60
Utilisation d’une instruction
(@)PRV(62)
Spécificateur de port (000 : Compteur à grande vitesse)
000
Désignation de commande (002 : Lire le résultat de comparaison de
002
plage)
D
Premier mot pour mémoriser le résultat de comparaison de la plage
Atteint, avec la 1ère condition (0 : Non atteint ; 1 : Atteint)
Atteint, avec la 2ème condition (0 : Non atteint ; 1 : Atteint)
Atteint, avec la 3ème condition (0 : Non atteint ; 1 : Atteint)
Atteint, avec la 4ème condition (0 : Non atteint ; 1 : Atteint)
Atteint, avec la 5ème condition (0 : Non atteint ; 1 : Atteint)
Atteint, avec la 6ème condition (0 : Non atteint ; 1 : Atteint)
Atteint, avec la 7ème condition (0 : Non atteint ; 1 : Atteint)
Atteint, avec la 8ème condition (0 : Non atteint ; 1 : Atteint)
Page 74

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Utilisant des régions de données
Le résultat de comparaison de plage est sauvegardé dans l’AR 1100 jusqu’à
l’AR 1107, comme montré ci--dessous :
Atteint, avec la 1ère condition (0 : Non atteint ; 1 : Atteint)
Atteint, avec la 2ème condition (0 : Non atteint ; 1 : Atteint)
Atteint, avec la 3ème condition (0 : Non atteint ; 1 : Atteint)
Atteint, avec la 4ème condition (0 : Non atteint ; 1 : Atteint)
Atteint, avec la 5ème condition (0 : Non atteint ; 1 : Atteint)
Atteint, avec la 6ème condition (0 : Non atteint ; 1 : Atteint)
Atteint, avec la 7ème condition (0 : Non atteint ; 1 : Atteint)
Atteint, avec la 8ème condition (0 : Non atteint ; 1 : Atteint)
L’AR 1100 jusqu’à l’AR 1107 sont rafraîchis à chaque balayage, il peut donc y
avoir un écart avec le résultat exact de comparaison de plage de la PV à un
moment donné.
Lorsque le résultat de comparaison de plage est lu en exécutant PRV(62),
l’AR 1100 à l’AR 1 107 sont rafraîchis en même temps.
Masquage/Non masquage de toutes les
Pour plus de détails concernant le masquage et le non masquage de toutes les
interruptions, se reporter au paragraphe 2--1--1 Entrées d’interruption.
interruptions
Exemples d’applications
Comparaison de valeur à atteindre
Explication
Dans cet exemple, des sous--programmes spécifiques d’interruption sont exécutés en confrontant la PV du compteur à grande vitesse avec cinq valeurs de
consigne comme tableau de comparaison de valeur à atteindre. Pour chaque
interruption, les données en DM 0000 à DM 0004 sont incrémentées par un.
Câblage
(CPM2A)
E6B2-CWZ6C
Codeur rotatif
Orange
Blanc
Noir
Bleu
Marron
61
Page 75

Câblage (CPM2C)
Bornes d’entrée
Connecteur d’entrée
2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Bleu
Codeur rotatif
Marron
Orange
Blanc
Noir
Bleu
Codeur rotatif
Marron
Setup de l’API
15 0
DM 6642 0
Orange
Blanc
Noir
1 0 0
0 : Entrée bidirectionnelle
0 : Remise à zéro par le signal de phase Z
+ remise à zéro par programme
01 : Utilisation comme compteur à grande vitesse
62
Page 76

Sur ON pour 1 cycle au début
de l’opération
Toujours ON
(92)
Toujours ON
(92)
(38)
Programmation
(71)
Repertorier le tableau de comparaison de valeur à atteindre et commencer
la comparaison
(63)
Compteur à grande vitesse
Répertorier le tableau de comparaison de valeur à atteindre et commencer la comparaison
Premier mot du tableau de comparaison
Nombre de comparaisons : 5
Val. à atteindre :
0001,000
(38)
(93)
(93)
Comparaison 2
Comparaison 4
Increment, sous--programme 049
Val. à atteindre :
00003000
Increment, sous programme040
Val. à atteindre :
00000000
Décrément,sous programme010
Val. à atteindre :
00003000
Décrément,sous programme041
Val. à atteindre :
00010000
Deécrément, sous programme048
2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Comparaison 1
Comparaison 2
Comparaison 3
Comparaison 4
Comparaison 5
Toujours ON
Toujours ON
Toujours ON
(92)
(92)
(92)
(38)
(93)
(38)
(93)
(38)
(93)
(01)
Comparaison 5
Comparaison 1
Comparaison 3
63
Page 77

Comparaison de plage
2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Explication
Dans cet exemple, des sous--programmes d’interruption spécifiques sont exécutésenconfrontant laPVducompteur àgrandevitesseavec uneplage decinq
valeurs de consigne comme un tableau de comparaison de plage. A chaque
interruption, les données de DM 0000 à DM 0004 sont incrémentées par un.
Câblage
(CPM2A)
E6B2-CWZ6C
Codeur rotatif
Orange
Blanc
Noir
Bleu
Marron
64
Page 78

Câblage (CPM2C)
Bornes d’entrée
Connecteur d’entrée
2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Blue
Codeur rotatif
Marron
Orange
Blanc
Noir
Bleu
Codeur rotatif
Marron
Setup de l’API
15 0
DM 6642 0
Orange
Blanc
Noir
1 0 0
0 : Entrée bidirectionnelle
0 : Remise à zéro par le signal de phaseZ
+ remise à zéro par programme
01 : Utilisation en tant que compteur à grande vitesse
65
Page 79

SurONpour 1cycleaudébut
de l’opération
Programmation
(71)
(63)
Répertorier le tableau de comparaison de plage et commencer la comparaison
Compteur à grande vitesse
Répertorier le tableau de comparaison de plage et commencer la comparaison
Premier mot du tableau de comparaison
2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Toujours ON
Toujours ON
Toujours ON
Toujours ON
(92)
(92)
(92)
(92)
(38)
(93)
(38)
(93)
(38)
(93)
(38)
Comparaison 1
Comparaison 2
Comparaison 3
Comparaison 4
Limite inf : 9 000
Limite sup: 10 000
Sous programme 040
Limiteinf:7000
Limite sup : 8 000
Sous programme 041
Limite inf : 3 000
Limite sup : -3000
Sous programme 010
Limite inf : -8000
Limite sup : 7 000
Sous programme 042
Limite inf : -10000
Limite sup : 9 000
Sous programme 043
Comparaison 6
Comparaison 1
Comparaison 2
Comparaison 3
Comparaison 4
Comparaison 5
Non utilisée.
66
Toujours ON
(92)
(93)
(38)
(93)
(01)
Comparaison 7 Non utilisée.
Comparaison 5
Comparaison 8 Non utilisée
Page 80

2-2-2 Entrées d’interruption en mode compteur
Les quatre entrées intégrées d’interruption de l’unité centrale du
CPM2A/CPM2C peuvent être utilisées en mode compteur comme entrées
jusqu’à 2 kHz. Ces entrées peuvent être utilisées pour incrémenter ou décrémenter des compteurs, déclenchant une interruption (c.--à--d. exécutant un
sous--programme d’interruption) lorsque le comptage atteint la valeur deconsigne.
2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Entrée du
compteur
E* du compteur
Programme
normal
Programme
d’interruption
Numéro
d’entrée
(Rem. 2)
00003
00004
00005 2 002
00006 3 003
Compte Numéro
0 à 65535
(0000 à FFFF)
Sous-programme
d’interrup
tion
0 000
1 001
sous--program
Numéro de
me (Note 3)
*E = Entrée
Frequence de
résponse
2kHz
Rem.
1. Les numéro d’entrée 00005 et 0006 ne peuvent pas être utilisés dans l’unité centrale du
CPM2C avec 10 points d’entrée--sortie.
2. Les numéros d’entrée 00003 à 0006 peuvent être utilisés pour n’importe laquelle des fonctions suivantes :lesentrées d’interruption, les entrées d’interruption(enmode compteur)ou
les entrées de capture. Lorsqu’elles ne sont pas utilisées dans ces cas précis, elles peuvent
être utilisées en tant qu’entrées ordinaires.
3. Les numéros de sous--programme 000 à 003 sont les numéros de sous--programme pour
desprogrammes d’interruption commencéslorsque des entrées d’interruption ou lenombre
d’interruptions pour les entrées d’interruption (en mode compteur) sont générés. S’ils ne
sont pas utilisés à cette fin, ils peuvent être utilisés en tant qu’entrées ordinaires.
67
Page 81

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Attention
!
Bien que l’IORF(97) puisse être utilisé dans des sous--programmes d’interruption, faire attention à l’intervalle entre les exécutions d’IORF(97). Sil’IORF(97)
est exécuté trop fréquemment, une erreur fatale du système peut se produire
(FALS 9F), arrêtant l’opération. L’intervalle entre les exécutions d’IORF(97)
devrait être d’aumoins1,3 ms + le tempsd’exécutiontotal du sous--programme
d’interruption.
Letableausuivant montre lesrapports entrelesentrées d’interruption(enmode
compteur) et d’autres fonctions des CPM2A/CPM2C :
Fonction Entrées d’interruption (mode
compteur)
Commande d’impulsions
synchronisée
Entrées d’interruption
Interruptions par temporisation
cyclique
Compteurs à grande vitesse
Entrées d’interruption (mode
compteur)
Sorties d’impulsions
Entrées à capture
Constante de temps d’entrée
Horloge
Utilisable simultanément.
Voir Rem. 1.
Utilisable simultanément.
Utilisable simultanément.
Voir Rem. 1.
Utilisable simultanément.
Voir Rem. 1.
Voir Rem. 2.
Utilisable simultanément.
Rem.
1. Le même nombre d’entrée (de 00003 à 00006) ne peut pas être utilisé pour plus d’une des
fonctions suivantes : les entrées d’interruption, les entrées d’interruption (en mode compteur) ou les entrées de capture.
2. Lorsque les entrées 00003 à 00006 ne sont pas définies pour être utilisées comme entrées
d’interruption (enmodecompteur), les constantesdetempsd’entrée pour les entréesappropriées sont désactivées. Cependant, les constantes de temps d’entrée demeurent actives
pour rafraîchir les valeurs de la zone de relais d’entrée appropriée.
68
Page 82

Procédure pour l’utilisation des entrées d’interruption en mode compteur
Définir le numéro d’entrée
d’interruption.
Selectionner un compte àincrémentation ouàdécrémentation.
2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Câbler les entrées.
Setup de l’API (DM 6628)
Créer un programme
en schéma à contacts
Numéro d’entrées : 00003 à 00006 (00003 ou 00004 pour les unités
centrales CPM2C avec 10 points d’entrée/sortie)
1 : Utiliser comme entrée d’interruption
(mode entrée d’interruption ou mode compteur)
INI(61) : Change la PV du compteur
INT(89) : Rafraichit la SV du compteur*
PRV(62) : Lit la PV du compteur
SBN(92) et RET(93) : Pour créer des sous--programmesd’interruption.*
*Utilisé seulement pour le nombre d’interruptions.
69
Page 83

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Compteur (2kHz) 0
Compteur (2kHz) 1
Compteur (2kHz) 2
Compteur (2kHz) 3
Setup de l’API
DM 6628
E* d’interrupt. (mode compteur)
Programme en schéma à contacts
INT(89)
INI(61)
Chaque balayage
InstructionCOMMANDE
D’INTERRUPTION
Change la SV (incrémente/
décrémente)
SV Compteur
Compteur 0
Compteur 1
Compteur 2
Compteur 3
Compteur 0
Compteur 1
Compteur 2
Compteur 3
SR 240
SR 241
SR 242
SR 243
Instruction COMMANDE DE MODE
Change la PV
SV Compteur
SR 244
SR 245
SR 246
SR 247
Interruption générée
Sous--programme spécifié éxécuté (utilisé
seulement pour le nbd’interruptions)
SBN(92)
RET(93)
Immédiatement
Instruction
LECTUREDE LA PV
PRV(62)
DU COMPTEUR À
GRANDE VITESSE
Lit la PV du compteur
Configuration du numéro
d’entrée d’interruption
Choix de compteur à
incrémentation ou à
décrémentation
70
Avec des entrées d’interruption en mode compteur, lesous- -programme à exécuter est déterminé par l’interruption correspondant au numéro d’entrée.
Numéro d’entrée Numéro d’interruption Numéro de
sous--programme
00003 0 000
00004 1 001
00005* 2 002
00006* 3 003
*Les numéros d’entrées 00005 et 00006 ne peuvent pas être utilisés pour des
Rem.
unités centrales CPM2C avec 10 points d’entrée--sortie.
Lemême numéro d’entrée(de00003à 00006) ne peut pas être utilisé pour plus
d’unedesfonctionssuivantes :lesentréesd’interruption,lesentréesd’interruption (en mode compteur), ou les entrées de capture.
Un compteur à incrémentation ou à décrémentation peut être utilisé avec des
entrées d’interruption en mode compteur.
Mode compteur à incrémentation
Lorsque la valeur de consigne (SV) est rafraîchie, le comptage est incrémenté
Page 84

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
depuis 0 et le sous--programme d’interruption est exécuté lorsque la valeur en
cours (PV) correspond à la SV.
PV
Lesous--programme estexécutélorsquele compte
est croissant et que la PV est remise à 0.
SV
Incrémentation Incrémentation
Interruption
Sous--programme éxécuté.
Retour
Interruption
Sous--programme éxécuté.
Temps
Mode compteur à décrémentation
Lorsque la valeur de consigne (SV) est rafraîchie, le compte est décrémenté
vers 0, et le sous--programme d’interruption est exécuté lorsque la valeur en
cours (PV) atteint 0.
PV
SV
Décrémentation
Interruption
Sous--programme éxécuté
Lesous--programme estexécutélorsquele compte
est croissant et que la PV est réinitialisée à SV.
Décrémentation
Retour
Sous--programme éxécuté
Interruption
Temps
Câblage des entrées
Avec le CPM2A, câbler les bornes d’entrée comme montré dans l’illustration
suivante :
Entrée 00003 : Entrée d’interruption (Mode compteur) 0
Entrée 00004 : Entrée d’interruption (Mode compteur) 1
Entrée 00005 : Entrée d’interruption (Mode compteur) 2
Entrée 00006 : Entrée d’interruption (Mode compteur) 3
71
Page 85

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
)
Avec le CPM2C, câbler les bornes d’entrée comme montré dans l’illustration
suivante :
Bornes d’entrée
00004 :Entréed’interruption(Modecompteur) 1
00003 :Entréed’interruption(Modecompteur) 0
Connecteur d’entrée
00006 :Entrée d’interruption(Modecompteur)3
00005 :Entréed’interruption(Modecompteur) 2
00004:Entrée d’interruption (Modecompteur)1
00003:Entrée d’interruption (Modecompteur)0
Setup de l’API
Les entrées00006et00005ne
Rem.
peuvent pas être utiliséesavec
les unités centrales ayant
seulement 10 points d’entrée-sortie.
Letableausuivant montre les configurations dans la zone de Setup de l’API liée
à l’utilisation d’entrée d’interruption :
Mot Bits Fonction Paramé-
trage
DM 6628
00à03 Configuration de
l’entrée
d’interruption
00003
04à07 Configuration de
l’entrée
d’interruption
00004
08à11 Configuration de
l’entrée
d’interruption
00005*
12à15 Configuration de
l’entrée
d’interruption
00006*
0 : Entrée normale
1 : Entrée d’interruption
(Mode entrée d’interruption
ou modecompteur
2 : Entrée à capture
1
Rem.
*Lesnuméros d’entrées 00005 et 00006 ne peut pas être utilisés dans lesunité
centrale CPM2C avec 10 points d’entrée--sortie.
La configuration sera effective lorsque le mode sera changé (de PROGRAM à
MONITOR/RUN) ou lorsque l’alimentation des CPM2A/CPM2C passera sur
ON.
72
Page 86

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Programmation en
schéma à contacts
Le tableau suivant montre les opérations d’instruction liées à la commande
d’entrée d’interruption (mode compteur) :
Instruction Commande Fonctionnement
(@)INT(89)
(@)INI(61) Changementde la PV Change la PV du compteur.
(@)PRV(62) Lecture de la PV Lit la PV du compteur.
Rafraîchir la SV du
compteur à
incrémentation
Rafraîchir la SV du
compteur à
décrémentation
Masquer toutes les
interruptions
Démasquer toutes les
interruptions
Régénère la SV du compteur et
commence le comptage incrémental.
Régénère la SV du compteur et
commence le comptage décrémental.
Interdit toutes les interruptions,dont les
entrées d’interruption, les interruptions par
temporisation cyclique, les compteurs à
grande vitesse, etc.
Autorise toutes les interruptions,dont les
entrées d’interruption, les interruptions de
temporisateur cyclique, les compteurs à
grande vitesse, etc.
Les fonctions liées aux entrées d’interruption (en mode compteur) sont exécutées selon les zones de données montrées dans le tableau suivant :
Mot Bits Dénomination Contenu
240 00à15 Zone SV pour l’entréed’interruption
(Compteurmode) 0
241 00à15 Zone SV pour l’entréed’interruption
(Compteurmode) 1
242 00à15 Zone SV pour l’entréed’interruption
(Compteurmode) 2
243 00à15 Zone SV pour l’entréed’interruption
(Compteurmode) 3
244 00à15 Zone PV pour l’entréed’interruption
(Compteurmode) 0
245 00à15 Zone PV pour l’entréed’interruption
(Compteurmode) 1
246 00à15 Zone PV pour l’entréed’interruption
(Compteurmode) 2
247 00à15 Zone PV pour l’entréed’interruption
(Compteurmode) 3
Mémorise la
valeur de
consigne du
compteur (SV).
Mémorise la
valeur en cours
du compteur
(PV).
Rafraîchissement de la SV du compteur à incrémentation / Rafraîchissement de la SV du compteur à
décrémentation
Cesfonctionsmémorisent les valeurs de consigne du compteurdansdeszones
de données et les régénèrent au moyen d’INT(89). De cette façon, elles commencent l’opération decompte pour des entrées d’interruption (en modecompteur) et elles permettent des interruptions.
Mémorisation des valeurs de consigne dans des zones de données
Lesvaleursdeconsignedu compteur sont mémorisées dans les mots 240,241,
242 et 243.
SR 240
SR 241
SR 242
SR 243
SVpourles entrées d’interruption (modecompteur)0:0000àFFFF
SVpourles entrées d’interruption (modecompteur)1:0000àFFFF
SVpourles entrées d’interruption (modecompteur)2:0000àFFFF
SVpourles entrées d’interruption (modecompteur)3:0000àFFFF
73
Page 87

2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Démarrage de la fonction de comptage et autorisation d’interruptions
Compteur à incrémentation
(@)INT(89)
Compteur à décrémentation
(@)INT(89)
Intitulé de la commande d’interruption
004
(004 : Rafraîchit la SV du compteur à incrémentation)
000
Fixe : 000
C
2
Mot de donnée de commande
Intitulé de la commande d’interruption
003
(003 : Rafraîchit la SV du compteur à décrémentation)
000
Fixe : 000
C
2
Mot de donnée de commande
Spécifier l’entrée d’interruption (Compteur mode) 3
Spécifier l’entrée d’interruption (Compteur mode) 2
Spécifier l’entrée d’interruption (Compteur mode) 1
Spécifier l’entrée d’interruption (Compteur mode) 0
Spécifier et mémoriser 0
0 : Rafraîchit la SV
1 : Ne rafraîchit pas la SV
(@)INT(89)
Lorsque l’INT(89) est exécuté pour masquer des interruptions pendant l’opéra-
Rem.
tion de comptage (intitulé de la commande d’interruption 000), l’opération de
comptage est arrêtée et la PV du compteur est remise à zéro. Pour utiliser le
compteur à nouveau, recommencer l’opération de comptage comme décrit ci-dessus.
Changement de la
PV
Cette fonction rafraîchit la valeur en cours du compteur (PV).
P
Spécificateur de port (100. 102, 102, 103 : Entrées d’interruption (Mode compteur 0 à 3)
002
Intitulé de la commande (002 : Change la PV)
C
Changer le mot de donnée de la PV
2
C
2
Changer la donnée de la PV
Enregistre la donnée de la PV à changer.
0000 à FFFF
LecturedelaPV
Cette fonction lit la valeur en cours du compteur (PV).
74
Page 88

(@)PRV(62)
Utilisation d’une instruction
P
Spécificateur de port (100. 102, 102, 103 : Entrées d’interruption (Mode compteur 0 à 3)
000
Intitulé de la commande (000 : Lire la PV)
Mot pour mémoriser la PV
D
D
Lire la donnée de la PV
La PV lueestmémorisée ici.
0000 à FFFF
Utilisation des zones de données
La valeur en cours du compteur à grande vitesse (PV) est mémorisée dans les
mots SR 244 à SR 247 comme montré ci--dessous :
2-2ChapitreCompteurs à grande vitesse du CPM2A/CPM2C
Exemple d’application
Explication
SR 244
SR 245
SR 246
SR 247
PV
PV
PV
PV
Entrée d’interruption (Mode compteur) 0
Entrée d’interruption (Mode compteur) 1
Entrée d’interruption (Mode compteur) 2
Entrée d’interruption (Mode compteur) 3
Les mots SR 244 à SR 247 sont rafraîchis à chaque balayage, il peut donc y
avoir une anomalie par rapport à la PV exacte à un moment donné.
Les mots SR 244 à SR 247 ne peuvent pas être utilisés comme mots de travail
même lorsque les entrées d’interruption (en mode compteur) ne sont pas utilisées.
Lorsque la PV est lue en exécutant PRV(62), les mots 244 à247 sont rafraîchis
en même temps.
Masquage/démasquage de toutes les
interruptions
Pour plus d’information concernant le masquage et démasquage de toutes les
interruptions, se reporter au paragraphe 2-1-1 Entrées d’interruption.
Danscetexemple,laPVestdécrémentéechaquefoisquel’entrée00003passe
sur ON et DM 0000 est incrémenté de 1 par un sous--programme d’interruption
toutes les 100 fois (64 Hex) que cette entrée 00003 passe sur ON.
Câblage
Le schéma suivant montre le câblage d’entrée dans le CPM2A.
Périphérique d’entrée
75
Page 89

Le schéma suivant montre le câblage d’entrée dans le CPM2C.
2-3ChapitreFonctions d’interruption du CPM1/CPM1A
Bornes d’entrée
Setup de l’API
Programmation
SurONpour1 cycleaudébut
du fonctionnement
Connecteur d’entrée
Périphérique d’entrée
DM 6628 0
Périphérique d’entrée
15 0
0 0 1
Indique lebit00003commeentréed’interruption (en mode compteur). Les entrées 00004 à 00006 sont utilisées comme entrées
ordinaires.
Efface la zone d’incrément (DM 0000).
Configuration du compteur à décrémentation
SV du compteur : 64 Hex (100 fois)
Mémorise la SV dans le mot 240.
(89)
Démarre le compteur avec le bit 00003 comme
entrée d’interruption (Mode compteur).
Rafraîchit la SV du compteur (Compteur à décrémentation).
Toujours 000.
Indique le bit 00003 (les autres sont masqués).
Exécuté une fois lorsque la valeur de consigne est atteinte.
2-3 Fonctions d’interruption du CPM1/CPM1A
Ce chapitre explique les configurations et les méthodes pour l’utilisation des
fonctions d’interruption du CMP1/CPM1A.
2-3-1 Types d’nterruptions
Le CPM1/CPM1A a trois types de traitement d’interruptions décrits ci-dessous.
76
Page 90

2-3ChapitreFonctions d’interruption du CPM1/CPM1A
Entrée d’interruption
Les API du CPM1/CPM1A ont deux ou quatre entrées d’interruption. Le traitement d’interruption est exécuté quand l’une de ces entrées est passée sur ON
depuis une source extérieure.
Interruptions par temporisation cyclique
Le traitement d’interruption est exécuté par une temporisation cyclique avec
une précision de 0,1 ms.
Interruptions des compteurs à grande vitesse
Lecompteuràgrandevitessecomptedesentrées d’impulsion dans l’un des bits
00000 à 00002 de l’unité centrale. Le traitement d’interruption est exécuté
quandlecomptageatteint la valeurdeconsigned’uncompteuràgrandevitesse
intégré.
Priorité d’interruption
Conseils d’utilisation des
programmes d’interruption
1, 2, 3... Une nouvelle interruption peut être définie dans un programme d’interrup-
Lorsqu’une interruption se produit, le programme de traitement d’interruption
indiqué est exécuté. Les interruptions ont le niveau de priorité suivant :
Entrées d’interruption > Interruptions cycliques =Interruptionsdecompteur
à grande vitesse
Lorsqu’uneinterruption avec une prioritéplusélevéeestreçuependant letraitement d’interruption, les traitements courants sont arrêtés et l’interruption nouvellement reçue est traitée à la place. Dès que le programme a été complètement exécuté, le traitement de l’interruption précédente est repris.
Lorsqu’une interruption avec une priorité inférieure ou égale est reçue pendant
le traitement d’interruption, elle est traitée dès que l’interruption actuellement
traitée est complètement exécutée.
Lorsquedeuxinterruptions avecuneprioritéégalesont reçues en même temps,
elles sont exécutées dans l’ordre suivant :
Entrée d’interruption 0 > Entrée d’interruption 1 > Entrée d’interruption 2 >
Entrée d’interruption 3
Interruption cyclique > Interruption de compteur à grande vitesse
Observer les conseils d’utilisation suivants lors de l’utilisation de programmes
d’interruption :
tion. En outre, une interruption peut être effacée dans un programme d’interruption.
Instructions et
interruptions de compteur
à grande vitesse
Un autre programme d’interruption ne peut pas être écrit dans un programme d’interruption.
Un sous-programme ne peut pas être écrit dans un programme d’interruption. Ne pas écrire une instruction SUBROUTINE DEFINE, SBN(92), dans
un programme d’interruption.
Un programme d’interruption ne peut pas être écrit dans un sous-programme. Ne pas écrire un programme d’interruption entre une instruction
SUBROUTINE DEFINE (SBN(92)) et une instruction RETURN (RET(93)).
Les entrées utilisées comme interruption ne peuvent pas être utilisées comme
entrées normales.
Les instructions suivantes ne peuvent pas être exécutées dans un sous-programme d’interruption quand une instruction qui commande les compteurs à
grande vitesse est exécutée dans le programme principal :
INI(61), PRV(62) ou CTBL(63)
77
Page 91

2-3ChapitreFonctions d’interruption du CPM1/CPM1A
Les méthodes suivantes peuvent être utilisées pour éviter cette limitation :
Méthode 1
Tout traitement d’interruption peut être masqué lorsque l’instruction est exécutée.
@INT(89)
1,0
000
000
INI(61)
000
000
000
@INT(89)
200
000
000
Méthode 2
Exécuter l’instruction de nouveau dans le programme principal.
1, 2, 3... Voici la section de programme du programme principal :
@PRV(62)
000
002
DM 0000
LR 0000
CTBL(63)
000
000
DM 0000
RSET LR 0000
Voici la section de programme du sous-programme d’interruption :
SBN(92) 000
25313
@CTBL(63)
000
000
DM 0000
78
Rem.
25503
LR
0000
1. Définir les programmes d’interruption à la fin du programme principal avec les instructions
SBN(92) et RET(93), comme des sous-programmes normaux.
2. Lors de la définition d’un programme d’interruption, une erreur de “SBS UNDEFD” se produira pendant l’opération de contrôle du programme, mais le programme sera exécuté normalement.
Page 92

2-3-2 Entrées d’interruption
,
(Tempsjusqu
à
d
’exécut
iond
CPM
CDR
j
(-V1)
p
g
CPM1A30CD
j
j
Les unités centrales à 10 points (CPM1-10CDR-jet CPM1A-10CDR-j) ont
deux entrées d’interruption (00003 et 00004).
Les unités centrales à 20, 30 et 40 points (CPM1-20CDR-j, CPM1A-20CDR-
j
,CPM1-30CDR-j(-V1), CPM1A-30CDR-jetCPM1A-40CDR-j) ont qua-
tre entrées d’interruption (00003 à 00006).
Il existe deux modes pour des entrées d’interruption : lemode d’entrée d’inter-
ruption et mode compteur.
Les API de CPM1
2-3ChapitreFonctions d’interruption du CPM1/CPM1A
Les API de CPM1A
UC 10 points
(CPM1-10CDR-j)
24VDC
UC 10 points
(CPM1A-10CDR-j)
UC 20 et30points (CPM1-20CDR-jet
CPM1-30CDR-j(-V1))
00003
00004
00005
00003
00004
NC
UC 20n 30 et 40 points
(CPM1A-20CDR-j,CPM1A-30CDR-jet
CPM1A-40CDR-j)
00006
UC Entrée Numéro
d’interrup
tion
CPM1-10CDRCPM1A-10CDj-
CPM1-20CDRCPM1A-20CDj-
1-30
CPM1A-30CDjCPM1A-40CDj-
Si des entrées d’interruption ne sont pas utilisées, utiliser les entrées 00003 à
Rem.
j
j
-
j
j
j
j
00003 00
00004 01
00003 00
00004 01
00003 02
00004 03
d’interruption
0,3 ms max. 1kHz
(Temps jusqu’à
la fn
’
programme
d’interruption)
Temps de réponse
Mode
u
Mode compteur
00006 en tant qu’entrées courantes.
Configuration de l’entrée
d’interruption
Les entrées 00003 à 00006 doivent être définies comme entrées d’interruption
en DM 6628 lorsqu’elles doivent être utilisées pour des entrées d’interruption
dansleCPM1/CPM1.Définir le digit correspondant à 1 lorsquel’entrée doit être
utilisée comme entrée d’interruption (entrée d’interruption oumode compteur) ;
la définir à 0 lorsqu’elle doit être utilisée comme entrée courante.
79
Page 93

Mot Paramétrage
(
p
DM66280:Entréenormale(paramètrepa
r
)
défaut)
1:Entréedinterruption
DM 6628 0 : Entrée normale
défaut
1 : Entrée d’interruption
2 : Entrée à capture
Configuration pour l’entrée 00006 : Défini à 1
Configuration pour l’entrée 00005 : Défini à 1
Configuration pour l’entrée 00004 : Défini à 1
Configuration pour l’entrée 00003 : Défini à 1
aramètrepar
DM 6628
Bit
15 0
2-3ChapitreFonctions d’interruption du CPM1/CPM1A
Sous-programmes
d’interruption
Rafraîchissement d’entrée
Mode entrée d’interruption
00003 à 0006 sont les numéros d’interruption assignés 000 à 003 et appellent
les sous-programmes 000 à 003. Si les entrées d’interruption ne sont pas utilisées, les sous-programmes 000 à 003 peuvent être utilisés comme sous-programmes normaux.
Numéro d’entrées Numéro
d’interruption
00003 0 000
00004 1 001
00005 2 002
00006 3 003
Numéro de
sous-programme
Si le rafraîchissement d’entrée n’est pas utilisé, l’état du signal d’entrée dans le
programme d’interruption nesera pas fiable. Selon la constante de temps d’entrée, les signaux d’entrée pourraient ne pas continuer même si le rafraîchissement d’entrée est utilisé. Ceci inclut l’état du bit d’entrée d’interruption ayant
activé l’interruption.
Par exemple, IR 00000 ne serait pas sur ON dans un programme d’interruption
pourl’entrée d’interruption0àmoinsqu’elleaitétérafraîchie.Danscecas,utiliser le drapeau T oujours ON, SR 25313 dans programme d’interruption au lieu
d’IR 00000.
Lorsqu’un signal d’entrée d’interruption est reçu, le programme principal est
interrompu et le programme d’interruption est exécuté immédiatement, indépendammentdupointdanslecycle oùl’interruptionestreçue.Lesignaldoitêtre
sur ON pour 200 " ou plus pour être détecté.
Programme principal
Programme d’interruption
Entrée d’interruption
Programme principal
Utiliser les instructions suivantes pour programmer des entrées d’interruption
en utilisant le mode entrée d’interruption.
80
Page 94

2-3ChapitreFonctions d’interruption du CPM1/CPM1A
Masquage/démasquage des interruptions
Avecl’instruction INT(89), définirou effacer les masques d’entréed’interruption
comme requis.
(@)INT(89)
000
000
Configurer avec le mot D des bits 0 à 3, correspondant aux
entréesd’interruption0à3.
0 : Masque effacé (entrée d’interruption activée).
D
1 : Masque défini (entrée d’interruption désactivée).
Toutes les entrées d’interruption sont masquées quand le fonctionnement de
l’API commence. Si le moded’entrée d’interruption est utilisé, s’assurer de permettre les entrées en exécutant INT(89) comme montré ci-dessus.
Effacement des interruptions masquées
Si le bit correspondant à une entrée d’interruption passe sur ON alors qu’il est
masqué, cetteentrée d’interruptionsera enregistrée dans lamémoire et exécutée dès que le masque sera effacé. Afin que cette entrée d’interruption ne soit
pas exécutée quand le masque est effacé, l’interruption doit être effacée de la
mémoire.
Seul un signal d’interruption sera sauvé dans la mémoire pour chaque numéro
d’interruption.
Avec l’instruction INT(89), effacer l’entrée d’interruption de la mémoire.
(@)INT(89)
001
000
Si les bits D 0 à 3, correspondant aux entrées d’interruption 0 à
3, sont définis à “1”, alors les entrées d’interruption seront effacées de la mémoire.
D
0 : Entrée d’interruption conservée.
1 : Entrée d’interruption effacée.
Lecture de l’état du masque
Avec l’instruction INT(89), lire l’état du masque de l’entrée d’interruption.
(@)INT(89)
002
000
L’étatdudigitàl’extrêmedroite des données enregistrées dans
le mot D (bits 0 à 3) indique l’état du masque.
0 : Masque effacé (entrée d’interruption activée).
D
1 : Masque défini (entrée d’interruption désactivée).
Exemple de programme
Lorsque l’entrée 00003 (interruption numéro 0) est sur ON, le traitement se
déplace immédiatement au programme d’interruption avec le sous-programme
numéro 000. Les entrées pour DM 6628 ont été définies à 0001.
25315 Premier drapeaude cycle
Sur ON pour 1 cycle
@INT(89)
Masquage/démasquage des entrées d’interruption.
000
000
#000E
SBN(92) 000
RET(93)
Démasque 00003 (entrée d’interruption 0), masque
les autres.
Programme d’interruption
Mode compteur
Les entrées de signal externes sont comptées à grande vitesse et une interruption est produite quand le comptage atteint la valeur de consigne. Quand une
81
Page 95

2-3ChapitreFonctions d’interruption du CPM1/CPM1A
interruption est générée, le programme principal est interrompu et le programme d’interruption est exécuté. Des signaux jusqu’à 1 kHz peuvent être
comptés.
Programme principal
Programme d’interruption
Entrée d’interruption
Valeur de consigne
Programme principal
Utiliser les étapes suivantespour programmerdes entréesd’interruption en utilisant le mode compteur.
1, 2, 3... Ecrire les valeurs de consigne pour le fonctionnement du compteur aux
mots SR montrés dans le tableau suivant. Les valeurs de consigne sont
écrites entre 0000 et FFFF (0 à 65 535). Une valeur de 0000 neutralise
l’opération de comptage jusqu’à ce qu’une nouvelle valeur soit définie et
l’étape 2, ci-dessous, est répétée.
Interruption Mot
Entrée d’interruption 0 SR 240
Entrée d’interruption 1 SR 241
Entrée d’interruption 2 SR 242
Entrée d’interruption 3 SR 243
Les mots SR utilisés dans le mode compteur (SR 240 à SR 243) contiennentdes données hexadécimales, pas BCD. Silemodecompteur n’est pas
utilisé, ces mots peuvent être utilisés comme bits de travail.
Rem.
Ces mots SR sont effacés au début de l’opération et doivent être
Rem.
écrits par le programme.
Avec l’instruction INT(89), rafraîchir la valeur de consigne du mode compteur et permettre les interruptions.
(@)INT(89)
003
000
Silesbits D 0à3, correspondant aux entréesd’interruption
0 à 3, sont définis à “0”, alors la valeur de consigne sera
rafraîchie et les interruptions seront autorisées.
0 : Valeur de consigne du mode compteur rafraîchie et
D
masque effacé.
1 : Non rafraîchie.
S’assurer de placer le bit correspondant à 1, si une entrée d’interruption
n’est pas commandée.
L’entrée d’interruption pour laquelle la valeur de consigne est rafraîchie sera
permise en mode compteur. Quand le compteur atteint la valeur de consigne,
une interruption se produira, le compteur sera remis à zéro et comptage/interruptions continueront jusqu’à ce que le compteur soit arrêté.
1. Si l’instruction INT(89) est utilisée pendant le comptage, la valeur en cours (PV) reviendra à
la valeur de consigne (SV). La forme différenciée de l’instruction doit être utilisée ou une
interruption ne peut jamais se produire.
2. Lavaleurdeconsigneseradéfinielorsdel’exécutiondel’instructionINT(89).Sidesinterruptions sont déjà en fonction, alors la valeur de consigne ne sera pas changée juste en changeantlecontenudeSR240à SR243,c.- -à--d. silecontenuestchangé,lavaleurdeconsigne
doit être rafraîchie en exécutant de nouveau l’instruction INT(89).
82
Page 96

2-3ChapitreFonctions d’interruption du CPM1/CPM1A
Des interruptions peuvent être masquées en utilisant le même processus
qu’avec le mode d’entrée d’interruption, maissi les interruptions masquées son
effacées en utilisant le même processus, les interruptions fonctionneront en
mode d’entrée d’interruption et non en mode compteur.
Lessignaux d’interruptionreçus pour des interruptions masquéespeuvent également être effacés en utilisant le même processus que pour le moded’entrée
d’interruption.
PV du compteur en mode compteur
Quand des entrées d’interruption sont utilisées en mode compteur, la PV du
compteur sera mémorisée dans le mot SR correspondant aux entrées d’interruption0à3.Lesvaleurssont0000 à FFFE (0 à 65 534) et égaleront la PV du
compteur moins un.
Interruption Mot
Entrée d’interruption 0 SR 244
Entrée d’interruption 1 SR 245
Entrée d’interruption 2 SR 246
Entrée d’interruption 3 SR 247
Exemple :
est 000A sera enregistrée en tant que 0009 juste après qu’INT(89) soit exécutée.
La valeur en cours pour une interruption dont la valeur de consigne
Mêmesidesentréesd’interruptionnesontpasutiliséesdanslemodecompteur,
Rem.
ces bits SR ne peuvent pas être utilisés comme bits de travail.
83
Page 97

2-3ChapitreFonctions d’interruption du CPM1/CPM1A
Exemple de programme
Lorsque l’entrée 00003 (numéro d’interruption 0) passe 10 fois à l’état ON, le
fonctionnement se déplace immédiatement au programme d’interruption avec
le sous-programme numéro 000. Le tableau suivant montre où les valeurs de
consigneet les valeursencours du compteur --1sontmémorisées. Les entrées
pour DM 6628 sont définies à 0001.
Interruption Mot contenant SV Mot contenant
PV--1
Entrée 00003
(entréed’interruption 0)
Entrée 00004
(entréed’interruption 1)
Entrée 00005
(entréed’interruption 2)
Entrée 00006
(entréed’interruption 3)
25315 Premier drapeaude cycle
Sur ON pour 1 cycle
MOV(21)
SR 240 SR 244
SR 241 SR 245
SR 242 SR 246
SR 243 SR 247
#000A
Définit la SV à 10 (0000 à FFFF)
240
Mot contenant la SV (SR 240)
@INT(89)
003
000
#000E
SBN(92) 000
RET(93)
2-3-3 Masquage de toutes les interruptions
Toutes les interruptions, y compris les entrées d’interruption, les interruptions
par temporisation cyclique et les interruptions de compteur à grande vitesse,
peuvent être masquées ou non en tant que groupe au moyen de l’instruction
INT(89). Ce masquage est en supplément de tous les masques sur les différents types d’interruptions individuelles. Enoutre,effacer les masques pourque
toutes les interruptions n’efface pas les masques pour les types d’interruptions
individuelles,mais lesréactualiseauxconditions masquées qui existaientavant
qu’INT(89) soit exécutée pour les masquer en tant que groupe.
Ne pas utiliser INT(89) pour masquer des interruptions à moinsqu’il soit necessairede masquer temporairement toutes les interruptions et toujours utiliser les
instructions INT(89) par paires pour le faire, en utilisant la première instruction
INT(89) pour masquer la seconde pour démasquer les interruptions.
INT(89) ne peut pas être utilisée pour masquer et démasquer toutes les interruptions dans des programmes d’interruptions.
Rafraîchir les SV du compteur.
Rafraîchit la SV de 00003 (entrée d’interruption 0)
seulement.
Programme d’interruption
Interruptions de masquage
84
Utiliser l’instruction INT(89) pour désactiver toutes les interruptions.
(@)INT(89)
1,0
000
000
Page 98

2-3ChapitreFonctions d’interruption du CPM1/CPM1A
Si une interruption est générée tandis que des interruptions sont masquées, le
traitement d’interruption ne sera pas exécuté mais l’interruption sera entregistrée pour l’entrée, la temporisation cyclique et les interruptions de compteur à
grandevitesse. Lesinterruptionsseront alors activées dès que lesinterruptions
seront démasquées.
Interruptions de démasquage
Utiliser l’instruction INT(89) pour démasquer les interruptions comme suit :
(@)INT(89)
200
000
000
2-3-4 Interruptions par temporisation cyclique
LeCPM1/CPM1Aestéquipéd’unetemporisationcyclique. Durant un délaid’attente de la temporisation cyclique, le programme principal est interrompu et le
programme d’interruption est exécuté immédiatement, indépendamment du
point dans le cycle.
Deuxmodesdefonctionnementdelatemporisationcycliqueexistent,lemodeà
une impulsion pour lequel seulement une interruption sera exécutée àl’expirationdutempsetlemoded’interruptionprogramméepourlequell’interruptionest
répétée à intervalle fixe.
Lavaleurdeconsignedela temporisationcycliquepeutêtreplacéen’importeoù
de 0,5 à 319968 ms, par unités de 0,1 ms.
Fonctionnement
Utiliser l’instruction suivante pour activer et commander la temporisation cyclique.
Démarrage en mode à une impulsion
Utiliser l’instruction STIM(69) pour commencer la temporisation cyclique en
mode à une impulsion.
(@)STIM(69)
C1: Tempor. cyclique, mode à une impulsion (000)
C
1
:Val. deconsignedetempor.(adressedu 1ermot)
C
C
2
2
C
: Nº du sous-prog. (4 digits BCD) : 0000 à 0049
C
3
3
1, 2, 3... Lorsque C2est écrit comme une adresse de mots :
C
:Valeurdeconsigneducompteuràdécrémentation (4 digits BCD) : 0000
2
à 9999
+ 1 : Intervalle de temps de décrémentation (4 digits BCD ; unité :
C
2
0,1 ms) : 0005 à 0320 (0,5 ms à 32 ms)
Chaquefoisquel’intervalleindiquédanslemotC
+1s’écoule, lecompteur
2
àdécrémentationdécroît la valeur encoursdeun.LorsquelaPVatteint0,le
sous-programme indiqué n’est appelé qu’une fois et la temporisation
s’arrête.
Le temps depuis l’instruction STIM(69) jusqu’à écoulement du temps est
calculé comme suit :
(Contenu de C
Lorsque C
) # (Contenu de C2+1)# 0,1 ms = (0,5 à 319 968 ms)
2
est entré comme constante :
2
Lavaleurdeconsigneducompteuràdécrémentationégaliseralaconstante
indiquée (en ms) et l’intervalle de temps de décrémentation vaut 10 (1 ms).
85
Page 99

Démarrage en mode d’interruption programmée
Utiliser l’instruction STIM(69) pour commencer la temporisation cyclique en
mode d’interruption programmée.
(@)STIM(69)
C1: Horloge, mode interruption programmée (003)
C
1
C
C
: Val.de consignedetemporisation(Nº demotdetête)
C
2
2
: Nº de sous-prog. (4 digits BCD) : 0000 à 0049
C
3
3
1, 2, 3... Lorsque C2est écrit comme une adresse de mot :
: V aleur de consigne du compteur à décrémentation (4 digits BCD) :
C
2
0000 à 9999
+ 1 : Intervalle de temps de décrémentation (4 digits BCD ; unité :
C
2
0,1 ms) : 0005 à 0320 (0,5 ms à 32 ms)
Les significations de la configurations sont les mêmes que pour le mode à
uneimpulsion, mais en modeàinterruption programméelaPVdelatemporisation sera réinitialisée à la valeur de consigne et la décrémentation
recommencera dès quelesous-programme auraété appelé. En moded’interruption programmée, les interruptions continueront à être répétées à
intervalles fixes jusqu’à ce que l’opération soit arrêtée.
Lorsque C
est entré comme constante :
2
La configuration est la même que pour le mode à une impulsion, mais les
interruptions continueront à être répétées à intervalles fixes jusqu’à ce que
le fonctionnement soit arrêté.
Lecture du temps écoulé de la temporisation
Utiliser l’instruction STIM(69) pour lire le temps écoulé de la temporisation.
2-3ChapitreFonctions d’interruption du CPM1/CPM1A
Arrêt de la temporisation
(@)STIM(69)
C1: Lecture du temps écoulé (006)
C
1
C
2
C
3
: Mot de tête du paramètre 1
C
2
: Paramètre 2
C
3
C2: Nombre de fois où le compteur à décrémentation a été dérémenté (4 digits
BCD)
+1 : Intervalle detemps du compteur àdécrémentation (4 digits BCD;unité:
C
2
0,1 ms)
: Temps écoulé depuis la décrémentation précédente (4 digits BCD ; unité :
C
3
0,1 ms)
Letempsentre le départ de la temporisation cyclique et l’exécution de cetteins-
truction est calculé comme suit :
{(Contenu de C2) # (Contenu de C2+1) + (Contenu de C3)} # 0,1 ms
Si la temporisation cyclique indiquée est arrêtée, alors “0000” sera mémorisé.
Utiliser l’instruction STIM(69) pour arrêter la temporisation cyclique.
(@)STIM(69)
C
1
C1: Arrêt de l’horloge (010)
000
000
86
Page 100

2-3ChapitreFonctions d’interruption du CPM1/CPM1A
Exemple d’application
(Mode à une impulsion)
Dans cet exemple, une interruption est produite 2,4ms (0,6 ms # 4) après que
l’entrée 00005 est surON ; l’interruption exécutelesous-programmed’interruption numéro 23.
25315 Premier drapeaude cycle
Sur ON pour 1 cycle
00005
MOV(21)
#0004
DM 0010
MOV(21)
#0006
DM 0011
@STIM(69)
000
DM 0010
#0023
SBN(92) 023
RET(93)
Définit la valeur de consigne du compteur à
décrémentationà4(BCD:0000 à 9999)
Définit l’intervalle de temps de décrémentation
à 0,6 ms (BCD : 0005 à 0320)
Démarre l’horloge en mode à une impulsion.
Indique le premier contenant la valeur de
consigne.
Indique le numéro de sous-programme (23).
Programme d’interruption
Exemple d’application
(Mode d’interruption
programmée)
Dans cet exemple, une interruption est produite toutes les 4,0 ms (1,0 ms # 4)
aprèsquel’entrée00005passesurON;lesinterruptionsexécutent lesous-programme d’interruption numéro 23.
25315 Premier drapeaude cycle
Sur ON pour 1 cycle
MOV(21)
#0004
DM 0010
MOV(21)
#0010
DM 0011
00005
@STIM(69)
DM 0010
#0023
SBN(92) 023
RET(93)
Définit la valeur de consigne du compteur à
décrémentationà4(BCD:0000 à 9999)
Définit l’intervalle detempsdedécrémentation
à 1,0 ms. (BCD : 0005 à 0320)
Démarre l’horloge en mode d’interruption program-
003
mée.
Indique le premier contenant la valeur de
consigne.
Indique le numéro de sous-programme (23).
Programme d’interruption
2-3-5 Interruptions du compteur à grande vitesse
Les API du CPM1/CPM1A ont une fonction compteur à grande vitesse qui peut
être utilisée en mode incrémentation ou en mode incrémental/décrémental. Le
compteur à grande vitesse peut être combiné avec des entrées d’interruption
pour effectuer le contrôle de valeur à atteindre ou de zone de comparaison qui
n’est pas affectée par la durée du cycle de l’API.
87
 Loading...
Loading...