


Controllori programmabili CPM2C
Manuale dell’operatore
Prodotto in febbraio 2000

ii
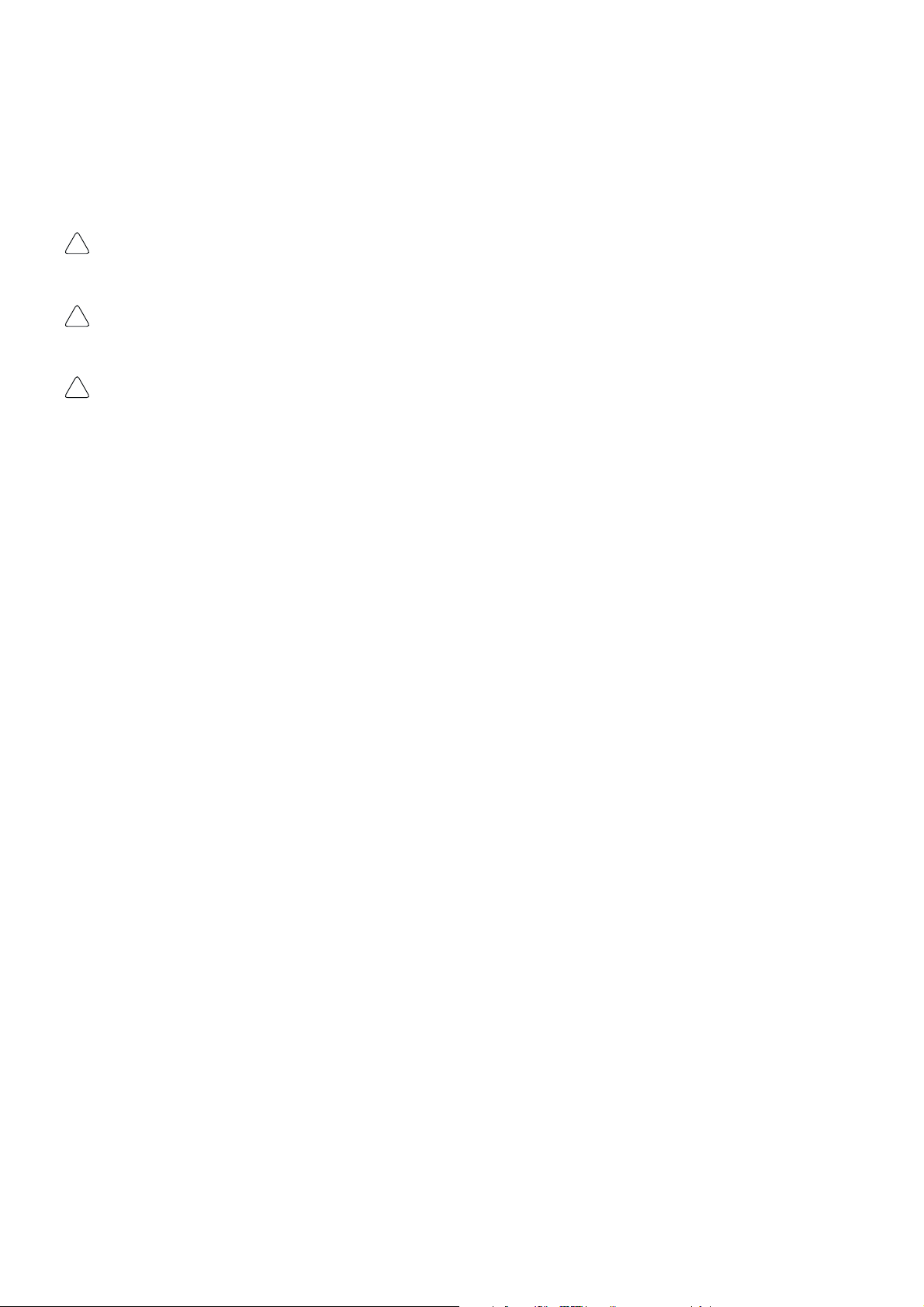
Nota:
I prodotti OMRON devono essere utilizzati da tecnici qualificati secondo le procedure indicate e soltanto per le applicazioni descritte nel presente manuale.
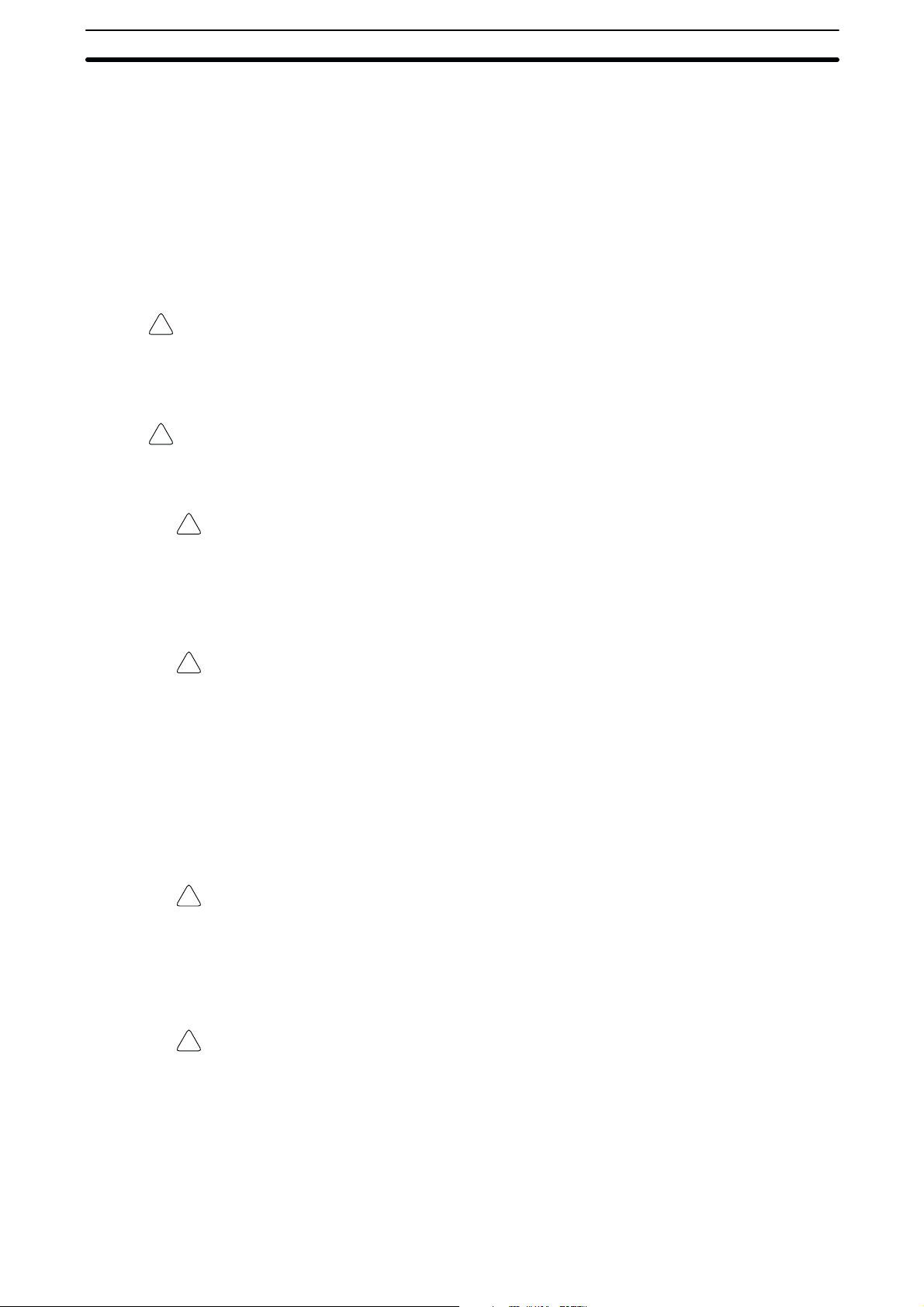
Le seguenti convenzioni distinguono le diverse note di precauzione del manuale. E’ necessario dedicare sempre attenzione alle informazioni ivi contenute. Il mancato rispetto di tali note può provocare
lesioni a persone o danni al prodotto.
PERICOLO Indica una situazione pericolosa imminente che, se non evitata, può provocare morte o gravi
!
lesioni.
AVVERTENZA Indica una situazione potenzialmente pericolosa che, se non evitata, può provocare morte o
!
gravi lesioni.
Attenzione Indica una situazione potenzialmente pericolosa che, se non evitata, può provocare danni o
!
lievi lesioni.
Riferimenti ai prodotti OMRON
Tutti i prodotti OMRON in questo manuale sono riportati in maiuscolo. Anche la parola “Modulo” è
riportata in maiuscolo quando si riferisce a un prodotto OMRON, indipendentemente dalla presenza
nel nome del prodotto.
L’abbreviazione “CH,” che appare in alcune pagine e in alcuni prodotti OMRON, indica spesso
“canale” e appare nella documentazione in questo senso.
L’abbreviazione “PLC” indica esclusivamente il Controllore Logico Programmabile.
Aiuti visivi
Le seguenti intestazioni appaiono nella colonna sinistra del manuale per poter individuare rapidamente i diversi tipi di informazione.
OMRON, 2000
Tutti i diritti riservati. Nessuna parte di questo manuale può essere riprodotta, memorizzata in un sistema di ricupero dati o
trasmessa in qualsiasi forma o mezzo meccanico o elettronico, inclusa la fotocopia, la registrazione, o altro modo, senza la
precedente autorizzazione scritta di OMRON.
Le informazioni contenute non rappresentano un impegno da parte di OMRON. Inoltre, poiché OMRON tende a migliorare costantemente i suoi prodotti, le informazioni contenute in questo manuale sono soggette a modifiche senza preavviso. La preparazione di questo manuale è stata estremamente curata. Tuttavia, OMRON non assume responsabilità in
caso di errori o omissioni. Non si assumono responsabilità per i danni risultanti dall’utilizzo delle informazioni contenute
in questo manuale.
Nota Indica le informazioni di particolare interesse per un utilizzo efficiente e conve-
niente del prodotto.
1, 2, 3... 1. Indica elenchi di vario tipo, come procedure, liste di controllo, ecc.
iii

iv

Indice
Capitolo 1
Introduzione 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-1 Caratteristiche e funzioni del CPM2C 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-1-1 Caratteristiche del CPM2C 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-1-2 Panoramica delle funzioni del CPM2C 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2 Configurazioni del sistema 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2-1 Moduli CPU 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2-2 Modulo CPU e modulo di espansione I/O 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3 Struttura e funzionamento 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-1 Struttura del modulo CPU 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-2 Modalità operative 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-3 Modalità operativa all’avvio 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-4 Funzionamento del PLC all’avvio 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-5 Funzionamento ciclico e interrupt 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4 Funzioni elencate per uso 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-5 Confronto con il CPM1A e il CPM2A 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-6 Preparazione al funzionamento 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Capitolo 2
Caratteristiche e componenti dei moduli 25. . . . . . . . . . . . .
2-1 Componenti dei moduli 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-1 Componenti dei moduli CPU 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-2 Componenti del modulo di espansione I/O 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2 Caratteristiche 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-1 Caratteristiche generali 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-2 Caratteristiche 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-3 Caratteristiche I/O 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Capitolo 3
Installazione e cablaggio 41. . . . . . . . . . . . . . . . . . . . . . . . . .
3-1 Precauzioni 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1-1 Collegamento dell’alimentazione 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1-2 Tensione di alimentazione 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1-3 Circuiti limitatori e a interblocchi 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2 Scelta del luogo di installazione 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2-1 Caratteristiche del luogo di installazione 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2-2 Installazione sul pannello/armadietto 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3 Installazione del CPM2C 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3-1 Collegamento dei moduli 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3-2 Installazione del CPM2C 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4 Cablaggio e collegamenti 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-1 Precauzioni generali per il cablaggio 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-2 Cablaggio di alimentazione 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-3 Rimozione e cablaggio dei blocchi terminali I/O 48. . . . . . . . . . . . . . . . . . . . . . . .
3-4-4 Rimozione e cablaggio di connettori I/O 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-5 Utilizzo di Terminali I/O e Terminali a relè 53. . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-6 Collegamento dei dispositivi di ingresso 53. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-7 Collegamento dei dispositivi di uscita 58. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-8 Collegamento dei dispositivi di programmazione 65. . . . . . . . . . . . . . . . . . . . . . . .
3-4-9 Comunicazioni a protocollo libero 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-10 Collegamenti del terminale programmabile OMRON 67. . . . . . . . . . . . . . . . . . . .
3-4-11 Collegamenti PC Link uno a uno 67. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
v

Indice (cont.)
Capitolo 4
Utilizzo dei dispositivi di programmazione 69. . . . . . . . . . .
4-1 Funzionamento della Console di programmazione 70. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-1-1 Collegamento della console di programmazione 70. . . . . . . . . . . . . . . . . . . . . . . .
4-1-2 Console di programmazione compatibili 71. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-1-3 Modifica della modalità del CPM2C con il selettore di modalità 73. . . . . . . . . . .
4-1-4 Preparazione al funzionamento 74. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-1-5 Inserimento della password 75. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2 Funzioni della console di programmazione 75. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-1 Panoramica 75. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-2 Cancellazione della memoria 76. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-3 Lettura/cancellazione dei messaggi di errore 77. . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-4 Segnale acustico 78. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-5 Assegnazione dei numeri di funzione delle istruzioni estese 79. . . . . . . . . . . . . . .
4-2-6 Configurazione e lettura di un indirizzo di memoria del programma 79. . . . . . . . .
4-2-7 Inserimento o modifica dei programmi 80. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-8 Ricerca dell’istruzione 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-9 Ricerca del bit dell’operando 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-10 Inserimento e cancellazione delle istruzioni 84. . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-11 Verifica del programma 85. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-12 Monitoraggio di bit, digit e canali 86. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-13 Monitoraggio della variazione di stato 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-14 Monitoraggio in binario 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-15 Monitoraggio di 3 canali consecutivi 89. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-16 Monitoraggio decimale con segno 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-17 Monitoraggio decimale senza segno 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-18 Modifica di 3 canali consecutivi 91. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-19 Modifica dell’SV dei contatori e dei temporizzatori 91. . . . . . . . . . . . . . . . . . . . . .
4-2-20 Modifica dei dati esadecimali e BCD 93. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-21 Modifica di dati binari 93. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-22 Modifica dei valori decimali con segno 94. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-23 Modifica dei valori decimali senza segno 95. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-24 Forzatura set/reset 95. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-25 Cancellazione forzatura set/reset 96. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-26 Conversione Hex–ASCII (esadecimale–ASCII) 97. . . . . . . . . . . . . . . . . . . . . . . . .
4-2-27 Visualizzazione del tempo di scansione 97. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-28 Lettura e impostazione del clock 97. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3 Esempio di programmazione 98. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-1 Operazioni preliminari 98. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-2 Esempio di programma 99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-3 Procedure di programmazione 100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-4 Verifica del programma 103. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-5 Esecuzione del test in modalità MONITOR 104. . . . . . . . . . . . . . . . . . . . . . . . . . . .
vi

Indice (cont.)
Capitolo 5
Esecuzione del test e gestione degli errori 105. . . . . . . . . . . .
5-1 Verifiche iniziali del sistema e procedura di esecuzione del test 106. . . . . . . . . . . . . . . . . . .
5-1-1 Verifiche iniziali del sistema 106. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-1-2 Precauzioni per la memoria flash 106. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-1-3 Procedura di esecuzione del test per il CPM2C 106. . . . . . . . . . . . . . . . . . . . . . . . .
5-2 Funzioni di autodiagnosi 107. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-2-1 Identificazione degli errori 107. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-2-2 Errori definiti dall’utente 108. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-2-3 Errori non fatali 109. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-2-4 Errori fatali 109. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-2-5 Errori di comunicazione 110. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-3 Errori di funzionamento della console di programmazione 110. . . . . . . . . . . . . . . . . . . . . . .
5-4 Errori di programmazione 110. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-5 Diagrammi di flusso per la gestione degli errori 112. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-6 Verifiche di manutenzione 120. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-7 Sostituzione della batteria 121. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendice A
Modelli standard 123. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendice B
Dimensioni 125. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Indice analitico 127. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Storia delle revisioni 131. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
vii

Informazioni sul manuale:
Il CPM2C è un Controllore Logico Programmabile (PLC) compatto ad alta velocità progettato per le operazioni di controllo nei sistemi che richiedono da 10 a 140 punti I/O per PLC. Due manuali descrivono la
configurazione e il funzionamento del CPM2C: Il Manuale operativo CPM2C (questo manuale) e il
Manuale di programmazione CPM1/CPM1A/CPM2A/CPM2C/SRM1(-V2) (W353) (il Manuale di programmazione CPM1/CPM1A/CPM2A/CPM2C/SRM1(-V2) viene denominato in questo manuale sempli-
cemente Manuale di programmazione).
Il presente manuale descrive la configurazione del sistema e l’installazione del CPM2C e fornisce una
spiegazione di base delle procedure operative per le Console di programmazione.
Il Manuale di Programmazione (W353) fornisce informazioni dettagliate delle funzioni di programma-
zione del CPM2C.
Leggere attentamente il presente manuale e approfondire tutte le informazioni prima di iniziare l’installa-
zione e le operazioni con il CPM2C.
Capitolo 1 offre una breve panoramica generale delle fasi di sviluppo di un sistema CPM2C, descrive le
possibili configurazioni del sistema, nonché le caratteristiche e le funzioni speciali del CPM2C.
Capitolo 2 presenta le norme tecniche dei Moduli che insieme costituiscono un PLC CPM2C, descrivendone i principali componenti.
Capitolo 3 descrive l’installazione e il cablaggio di un PLC CPM2C.
Capitolo 4 descrive il collegamento e la programmazione del PLC attraverso la console di programmazione.
Capitolo 5 descrive come eseguire un test e come diagnosticare e correggere gli errori software e har-
dware che si possono verificare durante il funzionamento del PLC.
Appendice A presenta le tabelle dei Moduli CPM2C e dei prodotti correlati.
Appendice B indica le dimensioni dei Moduli CPM2C.
!
AVVERTENZA La mancata lettura o comprensione delle informazioni presenti in questo manuale può
provocare morte, lesioni personali, danni al prodotto o il mancato funzionamento del
prodotto. Leggere con cura ogni capitolo e accertarsi di aver compreso le informazioni
fornite nel paragrafo e nelle sezioni correlate prima di iniziare qualsiasi procedura o
operazione indicata.
viii

PRECAUZIONI
Questo capitolo illustra le precauzioni generali per l’uso del Controllore Programmabile (PLC) e dei dispositivi collegati.
Le informazioni contenute in questo capitolo sono importanti per la sicurezza e l’affidabilità d’uso del PLC. Leggere
questo capitolo in modo da avere una comprensione approfondita del suo contenuto prima di tentare di configurare o
di far funzionare un sistema PLC.
1 Destinatari del manuale x. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Precauzioni generali x. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Precauzioni per la sicurezza x. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Precauzioni per l’ambiente operativo xi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Precauzioni per l’utilizzo xi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Conformità alle direttive CE xiv. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ix

Precauzioni
1 Destinatari del manuale
Questo manuale è destinato al personale indicato di seguito, che deve avere
competenze anche nel campo degli impianti elettrici (periti elettrotecnici o equivalenti).
• Personale incaricato ad installare i sistemi FA.
• Personale incaricato a proteggere i sistemi FA.
• Personale incaricato a gestire gli impianti e i sistemi FA.
2 Precauzioni generali
L’utente deve utilizzare il prodotto secondo le specifiche relative alle prestazioni
descritte in questo manuale.
Prima di utilizzare il prodotto in condizioni non descritte nel manuale o di impiegarlo in sistemi di controllo nucleari, sistemi ferroviari e aeronautici, veicoli,
sistemi di combustione, apparecchiature mediche, giochi, apparecchiatura di
sicurezza e altri sistemi, macchine e apparecchiature che possono danneggiare
gravemente persone o cose, se utilizzate impropriamente, rivolgersi al rappresentante OMRON.
Assicurarsi che i limiti di impiego e le caratteristiche delle prestazioni del prodotto siano adeguati per i sistemi, le macchine e le apparecchiature, e di dotare i
sistemi, le macchine e le apparecchiature di doppi meccanismi di sicurezza.
Questo manuale fornisce le informazioni per la programmazione e il funzionamento del modulo. Leggere questo manuale prima di tentare di utilizzare il software e tenerlo sempre a portata di mano come riferimento durante l’utilizzo.
AVVERTENZA E’ estremamente importante che un PLC e tutti i moduli del PLC siano utilizzati
!
per gli scopi e nelle condizioni specificate, soprattutto nelle applicazioni che
possono mettere a rischio, direttamente o indirettamente, la vita delle persone.
Rivolgersi al rappresentante OMRON prima di utilizzare un sistema PLC nelle
applicazioni sopra citate.
3 Precauzioni per la sicurezza
AVVERTENZA Non tentare di smontare i moduli con l’alimentazione collegata. Potrebbero
!
derivarne gravi shock elettrici.
AVVERTENZA Non toccare nessun terminale o blocco terminale con l’alimentazione collegata.
!
Potrebbero derivarne gravi shock elettrici.
AVVERTENZA Non tentare si smontare, riparare o modificare i moduli. Potrebbero derivarne
!
malfunzionamenti, combustioni e gravi shock elettrici.
AVVERTENZA Fornire le dovute misure di sicurezza nei circuiti esterni (vale a dire, non nel
!
PLC), inclusi i seguenti elementi, in modo da garantire la sicurezza nel sistema
nel caso si verifichi un’anomalia a causa di malfunzionamenti del PLC o di altri
fattori esterni che potrebbero compromettere il funzionamento del PLC. In caso
contrario potrebbero verificarsi danni seri.
x
Precauzioni
!
!
• I circuiti di arresto di emergenza, i circuiti interlock, i circuiti limitatori e altre
misure di sicurezza di questo tipo devono essere forniti nei circuiti di controllo
esterni.
• Il PLC disattiva tutte le uscite quando la funzione di autodiagnosi individua un
errore oppure quando viene eseguita un’istruzione (FALS) di errore grave. Per
garantire la sicurezza del sistema, quando si verifica questo tipo di errore, è
necessario fornire delle misure di sicurezza esterne.
• Le uscite del PLC devono restare attive o disattivate a causa di depositi o di
combustione dei relè di uscita oppure di distruzione dei transistori di uscita.
Per garantire la sicurezza del sistema, quando si verifica questo tipo di errore,
è necessario fornire delle misure di sicurezza esterne.
AVVERTENZA Evitare di lasciar cadere, di smontare, di deformare, di far entrare in corto
circuito, di riscaldare a temperatura superiore ai 100°C oppure di bruciare una
batteria di backup. In caso contrario la batteria potrebbe esplodere, prendere
fuoco o perdere liquidi.
AVVERTENZA Quando i programmi vengono trasferiti in altri nodi oppure quando si apportano
modifiche alla memoria I/O, accertarsi della sicurezza del nodo di destinazione
prima del trasferimento. In caso contrario potrebbero verificarsi danni.
Attenzione Eseguire la modifica in linea solo dopo essersi accertati che l’estensione del
!
tempo di scansione non provochi effetti indesiderati. In caso contrario, i segnali
di ingresso potrebbero non essere leggibili.
4 Precauzioni per l’ambiente operativo
Attenzione Non utilizzare il sistema di controllo in ambienti:
!
• Esposti ai raggi diretti del sole.
• Soggetti a temperatura o umidità che non rispettano l’intervallo indicato nelle
caratteristiche.
• Soggetti a condensa dovuta a notevoli sbalzi termici.
• Soggetti a gas corrosivo o infiammabile.
• Soggetti a polvere (soprattutto polvere metallica) o sali.
• Esposti ad acqua, olio o sostanze chimiche.
• Soggetti a vibrazioni o urti.
Attenzione Prendere le dovute precauzioni quando i sistemi vengono installati in ambienti:
!
• Soggetti all’elettricità statica o ad altre forme di rumore.
• Soggetti a forti campi elettromagnetici.
• Soggetti a possibili esposizioni di radioattività.
• Vicini a fonti di alimentazione.
Attenzione L’ambiente operativo del sistema PLC può condizionare notevolmente la durata
!
e l’affidabilità del sistema. Ambienti operativi non adeguati possono provocare
malfunzionamenti, guasti e altri problemi imprevedibili. Assicurarsi che l’am-
biente operativo rispetti le condizioni specificate durante l’installazione e continui a rispettarle per tutta la durata del sistema.
xi

Precauzioni
5 Precauzioni per l’utilizzo
Rispettare le seguenti precauzioni per l’utilizzo del PLC.
AVVERTENZA Il mancato rispetto delle seguenti precauzioni potrebbe provocare gravi lesioni o
!
anche la morte. Tali precauzioni vanno tassativamente rispettate.
• Mettere sempre a terra il sistema in modo che la resistenza di terra non superi i
100 Ω durante l’installazione per evitare shock elettrici.
• Scollegare sempre l’alimentazione dal PLC prima di effettuare le seguenti
operazioni. In caso contrario, possono verificarsi malfunzionamenti o shock
elettrici:
• Montaggio dei moduli.
• Collegamento o scollegamento dei moduli di espansione I/O
• Collegamento o cablaggio.
• Collegamento o scollegamento dei connettori.
• Impostazione degli interruttori DIP.
• Sostituzione della batteria
Attenzione Il mancato rispetto delle seguenti precauzioni potrebbe provocare un funziona-
!
mento non corretto del PLC o del sistema oppure danneggiare il PLC o i moduli
del PLC. Tali precauzioni vanno tassativamente rispettate.
• Predisporre meccanismi di sicurezza per la gestione di segnali scorretti, mancanti o anomali che possono essere generati da linee di segnale non continue,
da interruzioni momentanee dell’alimentazione o da altre cause.
• Predisporre circuiti di emergenza, i circuiti a interblocco, i circuiti limitatori ed
altri circuiti di sicurezza per i circuiti di controllo esterni.
• Realizzare un circuito di controllo in modo che l’alimentazione per i circuiti I/O
non venga attivata per il modulo. Se l’alimentazione per i circuiti I/O diventa
attiva prima di alimentare il modulo, il funzionamento normale potrebbe essere
temporaneamente interrotto.
• Se la modalità operativa passa da RUN o MONITOR a PROGRAM, con il bit di
mantenimento IOM attivo, l’uscita manterrà lo stato più recente. In tal caso,
accertarsi che il carico esterno non superi le caratteristiche (se il funzionamento viene interrotto a causa di un errore operativo (incluse le istruzioni
FALS), i valori nella memoria interna del modulo CPU verranno salvati, anche
se le uscite verranno tutte disattivate).
• Per i modelli con solo il condensatore di back-up installato, il contenuto
dell’area di abilitazione READ/WRITE dell’area DM, HR, AR e dell’area dati
CNT potrebbe danneggiarsi se l’alimentazione viene disattivata per molto
tempo. Per evitare tali danni, fornire un programma a relè che controlli l’AR
1314 per garantire il funzionamento adeguato del sistema.
• La durata dei relè varia ampiamente a seconda delle condizioni di commuta-
zione. Testare le condizioni operative che usano i moduli attuali e utilizzare il
prodotto all’interno del numero specificato di commutazioni in modo da non
causare problemi prestazionali. Se si utilizza un prodotto con problemi prestazionali possono l’isolamento tra i circuiti potrebbe danneggiarsi oppure i relè
potrebbero bruciarsi.
• Installare i moduli in modo adeguato in modo che non cadano.
• Accertarsi che tutte le viti di montaggio, dei terminali e dei connettori dei cavi
siano fissati alla coppia specificata. In caso contrario potrebbero verificarsi
malfunzionamenti.
xii

Precauzioni
• Accertarsi che i blocchi terminali, i moduli di memoria, i cavi di espansione e
altri elementi con dispositivi di bloccaggio siano fissati correttamente in posizione. In caso contrario potrebbero verificarsi malfunzionamenti.
• Accertarsi che i blocchi terminali e i connettori siano collegati nella direzione
specificata con la corretta polarità. In caso contrario potrebbero verificarsi malfunzionamenti.
• Utilizzare il modulo con il coperchio della sede della batteria in posizione in
modo da evitare che la polvere o corpi estranei possano penetrare all’interno
del modulo. In caso contrario potrebbero verificarsi malfunzionamenti.
• Installare il coperchio del connettore del modulo di espansione I/O in modo da
evitare che la polvere o corpi estranei possano penetrare all’interno del
modulo. In caso contrario potrebbero verificarsi malfunzionamenti.
• Applicare le etichette fornite con il CPM2C oppure fornire altri coperchi di protezione durante il cablaggio in modo da evitare che la polvere o pezzi di cavo
possano entrare nel modulo.
• Rimuovere l’etichetta una volta completato il cablaggio per garantire un’ade-
guata dissipazione del calore. In caso contrario potrebbero verificarsi malfunzionamenti.
• Accertarsi di eseguire il cablaggio seguendo le istruzioni riportate all’interno
del manuale operativo del CPM2C. In caso contrario potrebbero verificarsi
combustioni.
• Utilizzare i connettori e i materiali per cablaggio specificati (modelli di connettori: C500-CE241/C500-CE242/C500-CE243).
• Non applicare ai terminali di ingresso una tensione maggiore della tensione di
ingresso nominale. Eccessiva tensione può provocare combustioni.
• Installare interruttori esterni e prendere altre misure di sicurezza contro corti
circuiti nel cablaggio esterno. In caso contrario possono verificarsi principi di
incendio.
• Utilizzare sempre la tensione di alimentazione specificata nei manuali operativi.
Una tensione non corretta può provocare malfunzionamenti o principi di incendio.
• Verificare se il programma utente può essere eseguito correttamente prima di
eseguirlo sul modulo. In caso contrario possono verificarsi funzionamenti
indesiderati.
• Controllare 2 volte tutte le impostazioni di cablaggio e di commutazione prima
di attivare l’alimentazione. In caso contrario possono verificarsi principi di
incendio.
• Accertarsi della possibilità di eseguire operazioni in condizioni di sicurezza
prima di eseguire le seguenti operazioni:
• Modifica della modalità operativa del PLC.
• Forzatura set/reset di qualsiasi bit di memoria.
• Modifica del valore attuale di un qualsiasi canale o valore impostato della
memoria.
• Prima di toccare il modulo, toccare prima un oggetto metallico collegato a terra
in modo da scaricare l’elettricità statica. In caso contrario possono verificarsi
malfunzionamenti o danni.
• Non tirare o piegare eccessivamente i cavi, altrimenti potrebbero danneggiarsi.
• Non applicare alle sezioni del connettore forze che superano i 50 Nm.
• Non posizionare oggetti sui cavi, altrimenti potrebbero danneggiarsi.
xiii
Precauzioni
• Ripristinare il funzionamento solo dopo aver trasferito al nuovo modulo CPU il
contenuto delle aree DM e HR richieste per le operazioni di ripristino. In caso
contrario possono verificarsi funzionamenti indesiderati.
• Installare il modulo in modo adeguato come specificare nel manuale operativo. In caso contrario possono verificarsi malfunzionamenti.
• Per il trasporto dei moduli, utilizzare scatole di imballaggio speciali. Evitare urti
o vibrazioni eccessive durante il trasporto ed evitare di far cadere il prodotto.
• Conservare i moduli rispettando i limiti di temperatura e umidità:
Temperatura di conservazione: da –20°C a 75°C, umidità di conservazione:
dal 10 a 90% (senza formazione di ghiaccio o condensazione)
6 Conformità alle direttive CE
6-1 Direttive applicabili
• Direttive EMC
• Direttiva di bassa tensione
6-2 Concetti
Direttive EMC
I dispositivi OMRON conformi alle direttive CE sono conformi anche agli standard EMC, quindi possono essere facilmente montati in altri dispositivi o nell’in-
tera macchina. La conformità dei prodotti agli standard EMC è stata attualmente
approvata (vedere nota successiva), anche la conformità agli standard del
sistema utilizzato dal cliente può essere verificata solo dal cliente stesso.
Le prestazioni relative all’EMC dei dispositivi OMRON conformi alle direttive CE
variano a seconda della configurazione, del cablaggio ed di altre condizioni
dell’apparecchiatura o del pannello di controllo su cui vengono installati i dispositivi OMRON. Il cliente deve quindi eseguire un controllo finale per confermare
che i dispositivi e l’intera macchina siano conformi agli standard EMC.
Nota Di seguito sono riportati gli standard EMC (Electromagnetic Compatibility) appli-
cabili:
EMS (Electromagnetic Susceptibility): EN61131-2
EMI (Electromagnetic Interference): EN50081-2
Direttiva di bassa tensione
Assicurarsi sempre che i dispositivi che funzionano ad una tensione compresa
tra 50 e 1.000 Vc.a. e tra 75 e 1.500 Vc.c. siano conformi agli standard di sicurezza per il PLC (EN61131-2).
6-3 Conformità alle Direttive CE
I PLC CPM2C sono conformi alle Direttive CE. Per assicurarsi che la macchina o
il dispositivo in cui il PLC CPM2C viene utilizzato sia conforme alle Direttive CE,
il PLC deve essere installato nel seguente modo:
1, 2, 3... 1. Il PLC CPM2C deve essere installato all’interno di un pannello di controllo.
2. Per le comunicazioni e l’alimentazione I/O deve essere utilizzato un isola-
mento rinforzato o un isolamento doppio.
3. I PLC CPM2C conformi alle direttive CE sono conformi anche agli Standard
di emissione comuni (EN50081-2). Le caratteristiche di emissione irradiata
(10-m regolazioni) possono variare a seconda della configurazione del pannello di controllo utilizzato, degli altri dispositivi collegati al pannello di con-
(Emissione irradiata: 10-m regolazioni)
xiv

Precauzioni
trollo, del cablaggio e di altre condizioni. E’ inoltre necessario accertarsi che
l’intera macchina o apparecchiatura siano conformi alle direttive CE.
6-4 Metodi di riduzione dei disturbi dell’uscita a relè
I PLC CPM2C sono conformi agli Standard di emissione comune (EN50081-2)
delle direttive EMC. Tuttavia, i disturbi generati quando il PLC viene attivato o
disattivato mediante l’uscita a relè non soddisfano questi standard. In tal caso, è
necessario collegare un filtro antirumore sul lato di carico o adottare altre contromisure adeguate esternamente al PLC.
Le contromisure adottate per rispettare gli standard variano a seconda dei
dispositivi sul lato di carico, del cablaggio, della configurazione delle macchine
ecc. Di seguito sono riportati esempi di contromisure per ridurre il disturbo generato.
Contromisure
(Per ulteriori dettagli, consultare EN50081-2).
Non sono necessarie contromisure se la frequenza della commutazione di
carico per l’intero sistema, incluso il PLC, è inferiore a 5 volte al minuto.
Le contromisure sono invece necessarie se la frequenza della commutazione di
carico per l’intero sistema, incluso il PLC, è superiore a 5 volte al minuto.
xv
Precauzioni
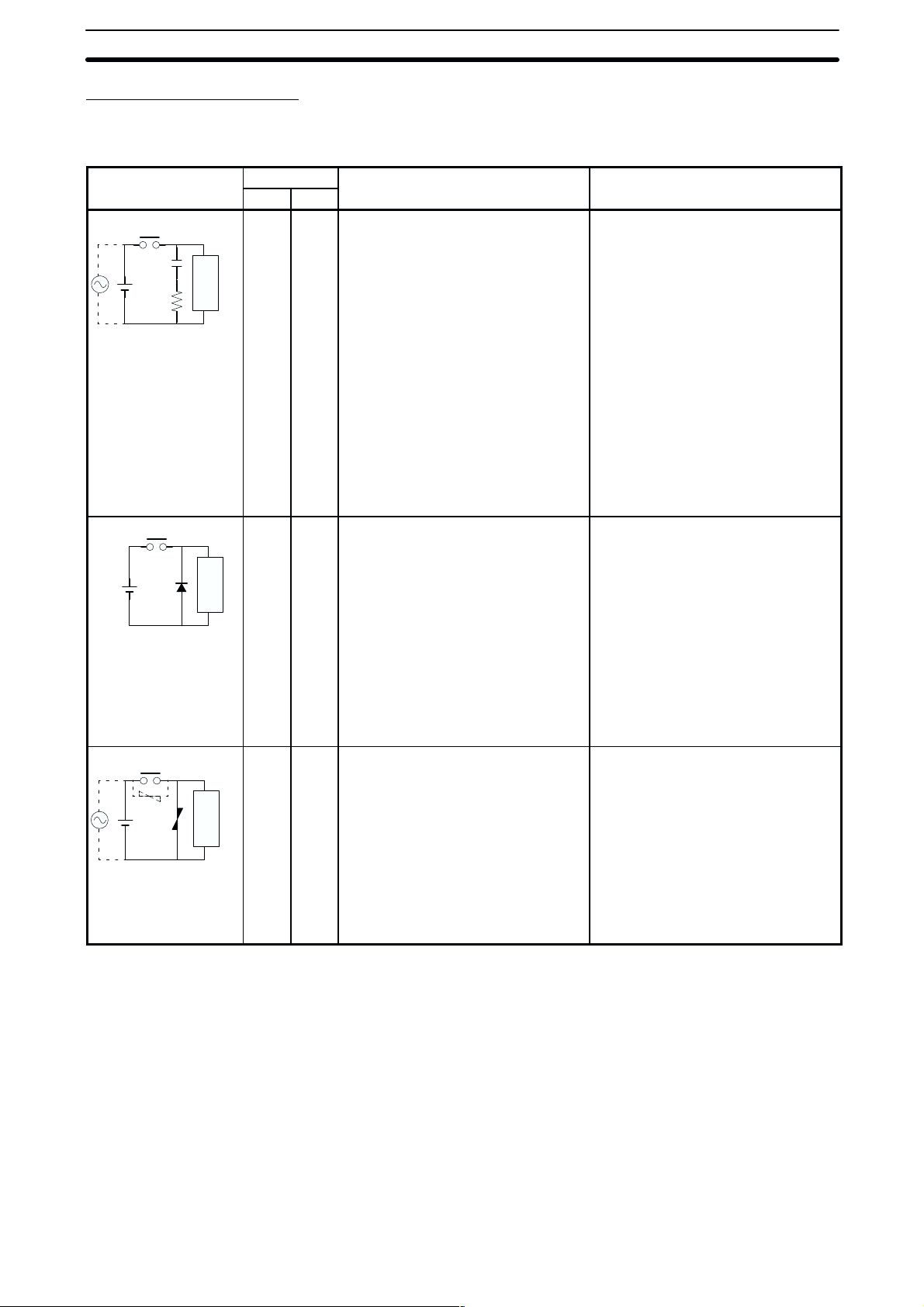
Esempi di contromisure
Circuito Corrente Caratteristica Elemento richiesto
c.a. c.c.
Metodo CR
Alimentazione
Metodo diodo
Alimentazione
Metodo varistore
Alimentazione
Sì Sì Se il carico è un relé o un solenoide,
Carico
induttivo
No Sì Il diodo collegato in parallelo con il
Carico
induttivo
Sì Sì Questo metodo impedisce
Carico
induttivo
Quando si commuta un carico induttivo, collegare una protezione contro le
sovratensioni, diodi ecc. parallelamente al carico o al contatto come indicato di
seguito.
La capacità del condensatore deve
esiste un ritardo tra il momento in cui il
circuito viene aperto e il momento in
cui il carico viene reimpostato.
Se la tensione di alimentazione è
compresa tra 24 e 48 V, inserire la
protezione contro le sovratensioni
parallelamente al carico. Se la
tensione fornita è compresa tra 100 e
200 V, inserire la protezione contro le
sovratensioni tra i contatti.
carico modifica l’energia accumulata
dalla bobina in una corrente che
scorre quindi nella bobina in modo
che la corrente viene convertita in
calore Joule dalla resistenza del
carico induttivo.
Il ritardo, causato da questo metodo,
tra il momento in cui il circuito viene
aperto e il momento in cui il carico
viene reimpostato non è maggiore di
quello causato dal metodo CR.
l’imposizione di alta tensione tra i
contatti utilizzando la tensione
costante caratteristica del varistore.
Esiste un ritardo tra il momento in cui
il circuito viene aperto e il momento in
cui il carico viene reimpostato.
Se la tensione di alimentazione è
compresa tra 24 e 48 V, inserire il
varistore in parallelo al carico. Se la
tensione è compresa tra 100 e 200 V,
inserire il varistore tra i contatti.
essere compresa tra 1 e 0,5 µF per
corrente a contatto di 1 A, mentre la
resistenza del resistore deve essere
compresa tra 0,5 e 1 Ω per tensione di
contatto di 1 V. Questi valori, tuttavia,
variano con il carico e le
caratteristiche del relé. Stabilire questi
valori dagli esperimenti e considerare
che la capacità elimina la scintilla
quando i contatti vengono separati e
la resistenza limita la corrente che
fluisce nel carico quando il circuito
viene richiuso.
La rigidità dielettrica del condensatore
deve essere compresa tra 200 e 300
V. Se il circuito è un circuito c.a.,
utilizzare un condensatore senza
polarità.
Il valore inverso della rigidità
dielettrica del diodo deve essere
maggiore di almeno 10 volte rispetto
al valore della tensione del circuito. La
corrente diretta del diodo deve essere
uguale o maggiore della corrente di
carico.
Il valore inverso della rigidità
dielettrica del diodo può essere di due
o tre volte maggiore rispetto alla
tensione di alimentazione se la
protezione contro le sovratensioni
viene applicata ai circuiti elettronici
con basse tensioni circuitali.
---
xvi

CAPITOLO 1
Introduzione
Questo capitolo descrive le funzioni e le caratteristiche speciali del CPM2C, illustra le possibili configurazioni del sistema e
delinea la procedura richiesta prima del funzionamento. Leggere questo capitolo prima di utilizzare il CPM2C per la prima
volta.
Fare riferimento al Manuale di programmazione CPM1/CPM1A/CPM2A/CPM2C/SRM1(-V2) (W353) per informazioni det-
tagliate sulle operazioni di programmazione.
1-1 Caratteristiche e funzioni del CPM2C 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-1-1 Caratteristiche del CPM2C 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-1-2 Panoramica delle funzioni del CPM2C 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2 Configurazioni del sistema 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2-1 Moduli CPU 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2-2 Modulo CPU e modulo di espansione I/O 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3 Struttura e funzionamento 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-1 Struttura del modulo CPU 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-2 Modalità operative 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-3 Modalità operativa all’avvio 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-4 Funzionamento del PLC all’avvio 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-5 Funzionamento ciclico e interrupt 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4 Funzioni elencate per uso 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-5 Confronto con il CPM1A e il CPM2A 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-6 Preparazione al funzionamento 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1-1 Caratteristiche e funzioni del CPM2C
1-1-1 Caratteristiche del CPM2C
Il CPM2C è un PLC di tipo compatto che comprende una varietà di funzioni, tra
cui il controllo a impulsi sincronizzati, gli ingressi a interrupt, le uscite impulsive e
una funzione di clock. La CPU del CPM2C è un modulo autonomo che può
gestire una vasta gamma di applicazioni di controllo della macchina ed è sufficientemente piccola da essere incorporata come modulo di controllo in una
macchina portatile.
La completezza delle funzioni di comunicazione permette comunicazioni con
PC, altri PLC OMRON e Terminali programmabili OMRON. La compatibilità di
queste comunicazioni consente all’utente di realizzare un sistema di produzione
distribuito di basso costo.
Capitolo 1Introduzione
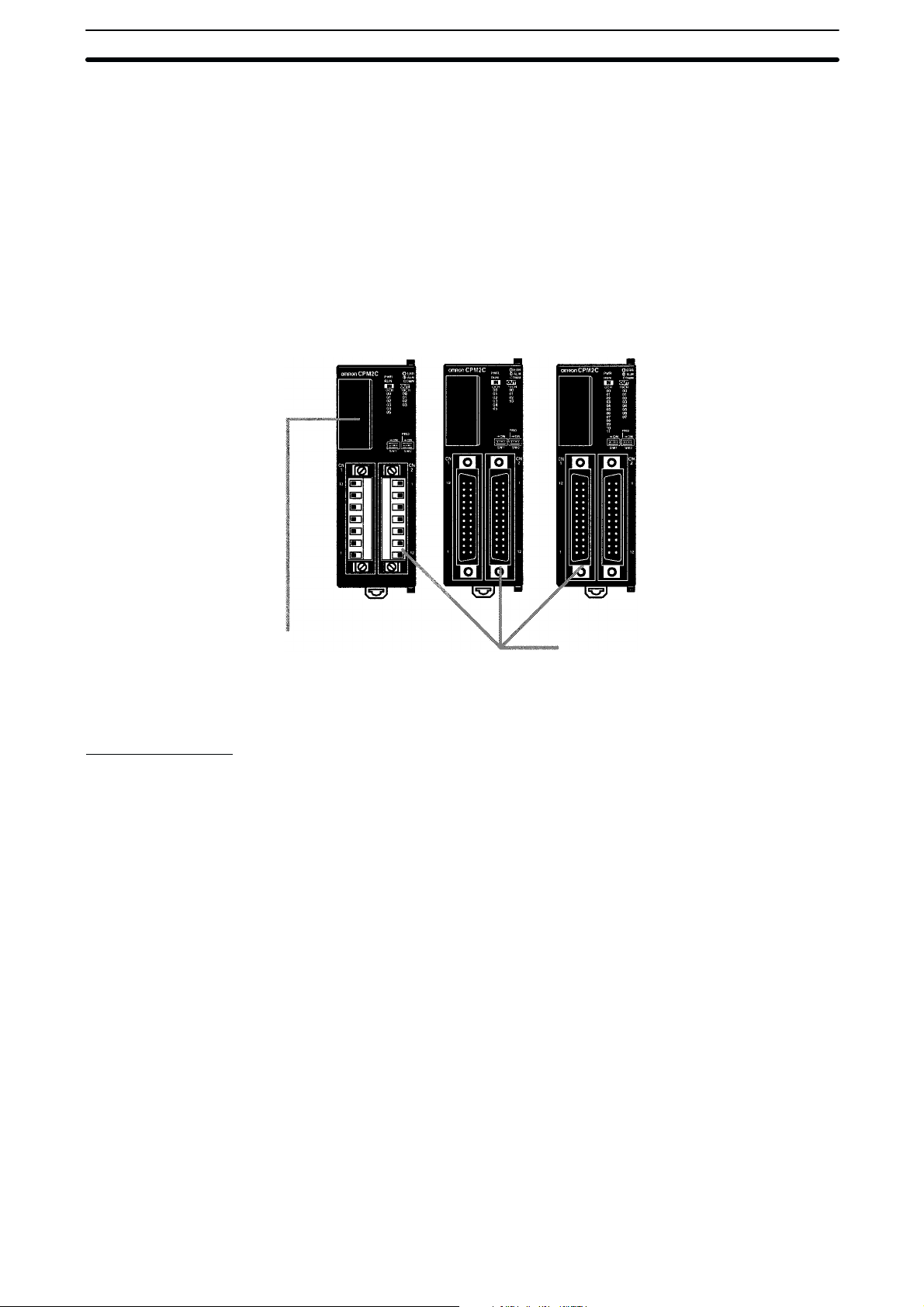
Le due porte di comunicazione (periferica e RS-232C)
possono essere utilizzate contemporaneamente.
La porta periferica supporta i dispositivi di programmazione, le comunicazioni host link e senza protocollo.
La porta RS-232C supporta le comunicazioni host link,
senza protocollo (seriali), Link 1:1 e NT Link 1:1.
Funzioni di base
Gamma delle CPU
Moduli di espansione I/O
Dispositivi di
programmazione
condivisi
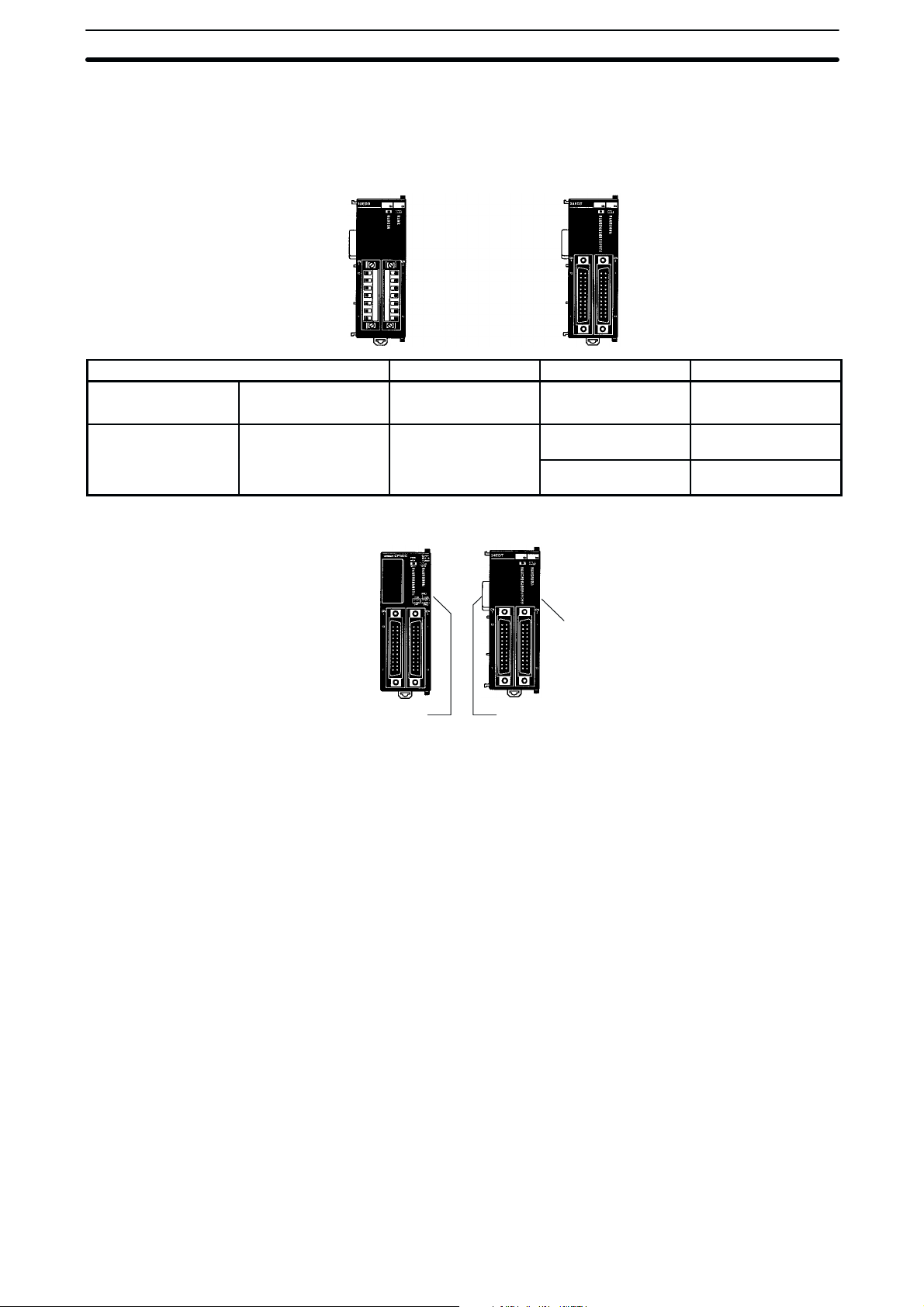
Sono disponibili moduli CPU con 10 punti I/O
(uscite a relè o a transistor) o 20 punti I/O (solo
uscite a transistor). I moduli di espansione I/O possono essere collegati per aumentare la capacità a
140 punti I/O.
I CPM2C sono PLC compatti con 10 o 20 punti I/O. Esistono tre tipi di uscite
disponibili (uscite a relè, uscite a transistor di riduzione e uscite a transistor di
origine). Tutti i PLC del CPM2C richiedono un’alimentazione di 24-Vc.c..
Al modulo CPU è possibile collegare fino a 5 moduli di espansione per aumentare la capacità di I/O del PLC fino ad un massimo di 140 piunti. Esistono due tipi
di moduli di espansione: uno con 24 I/O a transistor e l’altro con 10 I/O a relè. La
capacità massima I/O di 140 punti viene raggiunta cinque moduli di espansione
a 24 I/O ad una CPU con 20 I/O incorporati. I moduli a relè sono forniti di morsetti
a vite, mentre i moduli a transistor necessitano di connettori non forniti con la
CPU (o con i moduli di espansione).
Gli stessi dispositivi di programmazione, come ad esempio le console di programmazione e il software Syswin, possono essere utilizzati per i PLC C200H,
C200HS, C200HX/HG/HE, CQM1, CPM1, CPM1A, CPM2A e SRM1(-V2), in
modo che le risorse del programma a relè possano essere utilizzate in modo
effettivo.
2
Capacità del controllo motore incorporato
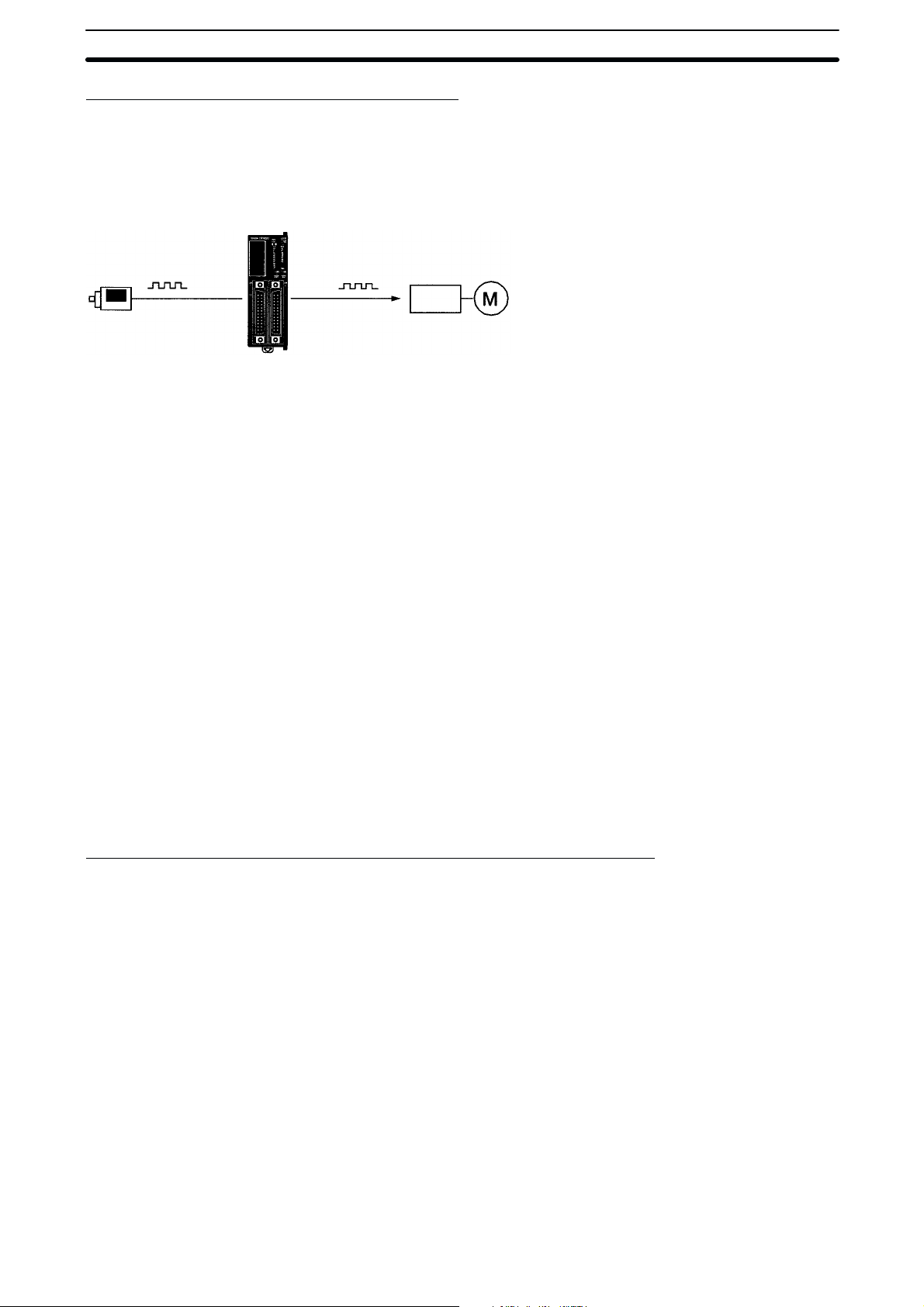
Controllo a impulsi
sincronizzati
(solo uscite a transistor)
Il controllo a impulsi sincronizzati consente di sincronizzare facilmente il funzionamento di un dispositivo periferico dell’apparecchiatura con l’apparecchiatura
principale. La frequenza a impulsi di uscita può essere controllata come multiplo
della frequenza a impulsi di ingresso, consentendo di sincronizzare la velocità di
un dispositivo periferico dell’apparecchiatura (come ad esempio un nastro trasportatore) con quella dell’apparecchiatura principale.
Capitolo 1Introduzione
CPM2C
Codificatore
Gli impulsi vengono emessi su un multiplo fisso della frequenza di ingresso.
Contatori e interrupt ad
alta velocità
Il CPM2C è dotato di due tipi di ingressi del contatore ad alta velocità. Il contatore
ad alta velocità dispone di una frequenza di azionamento di 20 kHz/5 kHz, men-
Driver del
motore
tre gli ingressi ad interrupt (nella modalità contatore) dispongono di una frequenza di 2 kHz.
Il contatore ad alta velocità singolo può essere utilizzato in una delle quattro
modalità di ingresso: modalità variazione di fase (5 kHz), modalità ingresso di
direzione + impulsi (20 kHz), modalità bidirezionale (20 kHz) modalità incre-
mento (20 kHz). Gli interrupt possono essere azionati quando il contatore corrisponde ad un valore impostato oppure rientra in un intervallo specificato.
Gli ingressi a interrupt (modalità contatore) possono essere utilizzati per incrementare o decrementare i contatori (2 kHz) e azionare un interrupt (esecuzione
del programma di interrupt) quando il contatore corrisponde al valore di destinazione. Nei moduli CPU a 20 punti possono essere utilizzati quattro ingressi a interrupt, mentre nei moduli CPU possono essere utilizzati due ingressi a interrupt.
Uscite impulsive
(solo uscite a transistor)
I PLC del CPM2C con uscite a transistor dispongono di due uscite che possono
produrre impulsi da 10 Hz a 10 kHz (uscite monofase).
Se utilizzate come uscite impulsive monofase, possono esserci due uscite con
un intervallo di frequenza di 10 Hz...10 kHz. Le uscite possono essere anche in
PWM con duty cycle da 0 a 100% e frequenza da 0,1 a 999,9 Hz.
Se utilizzate come uscite di direzione + impulsi o come uscite impulsive bidirezionali, può esserci solo un’uscita con un intervallo di frequenza di 10 Hz...10
kHz, con la possibiità di utilizzare rampe di accelerazione.
Motore
Capacità degli ingressi ad alta velocità per il controllo macchina
Funzione dell’ingresso a
interrupt ad alta velocità
Funzione dell’ingresso a
risposta rapida
Funzione del filtro di
ingresso
I moduli CPU di 20 punti sono dotati di 4 ingressi che possono essere utilizzati
come ingressi a interrupt, mentre i moduli CPU di 10 punti sono dotati di 2
ingressi anch’essi utilizzabili come ingressi a interrupt. Questi ingressi vengono
condivisi con gli ingressi a risposta rapida e gli ingressi ad interrupt nella modalità contatore e dispongono di un segnale di ingresso minimo con un’ampiezza
di 50 µs e un tempo di risposta di 0,3 ms. Quando l’ingresso a interrupt viene
attivato, il programma principale viene arrestato, mentre viene eseguito il programma ad interrupt.
Senza considerare il tempo di scansione, i moduli CPU di 20 punti sono dotati di
4 ingressi che possono essere utilizzati come ingressi a risposta rapida, mentre
i moduli CPU di 10 punti sono dotati di 2 ingressi, anch’essi utilizzabili come
ingressi a risposta rapida. Questi ingressi vengono condivisi con gli ingressi ad
interrupt e gli ingressi ad interrupt in modalità contatore; essi possono essere
letti con un segnale con ampiezza minore di 50 µs.
La costante del tempo di ingresso per tutti gli ingressi può essere impostata su 1 ms,
2 ms, 3 ms, 5 ms, 10 ms, 20 ms, 40 ms o 80 ms. Gli effetti delle vibrazioni e dei
disturbi esterni possono essere ridotti aumentando la costante del tempo di ingresso.
3

Altre funzioni
Interrupt temporizzato
Capitolo 1Introduzione
Il temporizzatore di intervallo può essere impostato tra 0,5 e 319.968 ms e per
generare un interrupt (modalità monodirezionale) o interrupt periodici (modalità
interrupt a tempo).
Calendario/Clock
Temporizzatore a lungo
termine
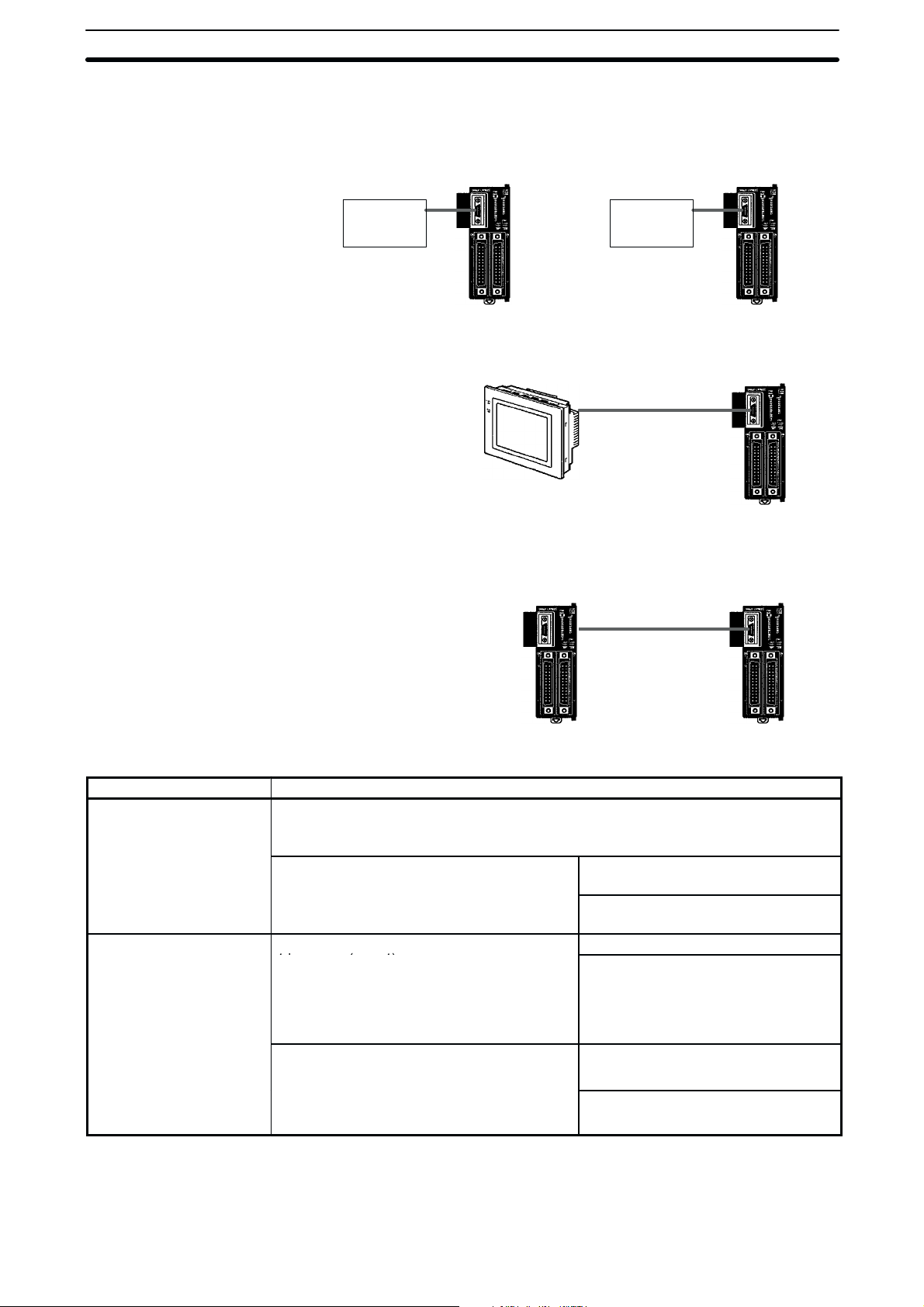
Capacità di comunicazione
Host Link
Comunicazioni Host Link 1:1
PC PC
Nei moduli CPU dotati di clock incorporato, il clock (precisione in 1 minuto/mese) può
essere letto dal programma per indicare l’anno corrente, il mese, il giorno, il giorno
della settimana e l’ora. Il clock può essere impostato dal dispositivo di programma-
zione (come ad esempio, la Console di programmazione), mentre l’ora può essere
regolata con arrotondamento per difetto o per eccesso sull’ora più vicina.
TIML(––) è un temporizzatore a lungo termine che ordina i valori impostati fino a
99.990 secondi (27 ore, 46 minuti, 30 secondi). Se combinato con l’istruzione di
conversione SECONDS TO HOURS (HMS(––)), il temporizzatore a lungo ter-
mine fornisce un metodo semplice per controllare la programmazione dell’apparecchiatura.
Una connessione Host Link può essere effettuata attraverso la porta RS-232C o
la porta periferica del PLC. Un PC o un terminale programmabile collegato in
modalità Host Link può essere utilizzato per operazioni come ad esempio la lettura/scrittura dei dati nella memoria I/O del PLC o la lettura/modifica della modalità operativa del PLC.
Comunicazioni Host Link 1:N
Adattatore di collegamento B500-AL004
Comandi
Comandi
Risposte
CPM2C
NT-AL001
Risposte
(Possono essere collegati fino a 32 PC).
CPM2C
4
Capitolo 1Introduzione
g
/O
4 ingressi nei moduli CPU con 20 unti I/O
Comunicazioni senza
protocollo
Comunicazioni NT Link
1:1
Comunicazioni PC Link
uno a uno
Le istruzioni TXD(48) e RXD(47) possono essere utilizzate in modalità senza
protocollo per lo scambio dei dati con i dispositivi seriali standard. Ad esempio, i
dati possono essere ricevuti da un lettore di codice a barre oppure trasmessi ad
una stampante seriale. I dispositivi seriali possono essere collegati alla porta
RS-232C o alla porta periferica.
Lettore
di codice
a barre
Inserimento dei dati da un
lettore di codice a barre
CPM2C
Stampante
seriale
Emissione dei dati a
una stampante seriale
CPM2C
Nelle comunicazioni NT Link 1:1, un Terminale programmabile (PT) OMRON
può essere collegato direttamente al CPM2C. Il collegamento avviene solo
attraverso la porta RS-232C e non attraverso la porta periferica.
Terminale programmabile
OMRON
CPM2C
Il CPM2C può essere collegato direttamente ad un altro PLC CPM2C, CQM1,
CPM1, CPM1A, CPM2A, SRM1(-V2) oppure ad un PLC C200HS o C200HX/
HE/HG. Il PC Link 1:1 consente la connessione automatica dei data link. Il PLC deve
essere collegato attraverso la porta RS-232C e non attraverso la porta periferica.
CPM2C CPM2C
1-1-2 Panoramica delle funzioni del CPM2C
Funzioni principali Variazioni/Dettagli
Interrupt
Contatori ad alta velocità Contatore ad alta velocità
Ingressi ad interrupt
2 ingressi nei moduli CPU con 10 punti I/O, 4 ingressi nei moduli CPU con 20 punti I/O
Tempo di risposta: 0,3 ms
Interrupt del temporizzatore di intervallo
1 ingresso
Valore impostato: da 0,5 a 319.968 ms
Precisione: 0,1 ms
1 ingresso, (nota 1).
Modalità variazione di fase (5 kHz)
Modalità ingresso direzione + impulsi (20 kHz)
Modalità bidirezionale (20 kHz)
Modalità incremento (20 kHz)
Ingressi ad interrupt (modalità contatore)
2 ingressi nei moduli CPU con 10 punti I/O,
ressi nei moduli CPU con 20 punti I
4 in
Incremento contatore (2 kHz)
Decremento contatore (2 kHz)
Interrupt a tempo
Interrupt monodirezionale
Nessun interrupt
Interrupt di controllo conteggi
(un interrupt può essere generato
quando il conteggio equivale al valore
impostato oppure rientra in un intervallo
preimpostato).
Nessun interrupt
Interrupt di conteggio
5
Capitolo 1Introduzione
4 uscite)
8 uscite)
Funzioni principali Variazioni/Dettagli
Uscite impulsive 2 uscite:
Uscita impulsiva monofase senza accelerazione/decelerazione (nota 2).
Da 10 Hz a 10 kHz
2 uscite:
Uscita impulsiva con duty cycle impostabile (PWM) (nota 2).
Frequenza da 0,1 a 999,9 Hz, duty cycle da 0 a 100%
1 uscita:
Uscita impulsiva con accelerazione/decelerazione trapezoidale (nota 2).
Uscita di direzione + impulsi, uscita impulsiva bidirezionale, da 10 Hz a 10 kHz
Controllo ad impulsi
sincronizzati
Ingresso a risposta rapida 2 ingressi nei moduli CPU con 10 punti I/O, 4 ingressi nei moduli CPU con 20 punti I/O
Costante del tempo di
ingresso
Calendario/Clock Mostra l’anno corrente, il mese, il giorno della settimana, il giorno del mese, l’ora, i minuti
1 punto, vedere note 1 e 2.
Intervallo frequenza di ingresso: da 10 a 500 Hz, da 20 Hz a 1 kHz o da 300 Hz a 20 kHz
Intervallo della frequenza di uscita: da 10 Hz a 10 kHz
Ampiezza minima del segnale di ingresso: 50 µs
Determina la costante del tempo di ingresso per tutti gli ingressi. (Impostazioni: 1, 2, 3, 5,
10, 20, 40 o 80 ms)
e i secondi.
Note 1. Questo ingresso è condiviso dalle funzioni del contatore ad alta velocità e
del controllo ad impulsi sincronizzati.
2. Questa uscita è condivisa dalle funzioni dell’uscita impulsiva e del controllo
ad impulsi sincronizzati. Queste funzioni possono essere utilizzate solo con
le uscite a transistor.
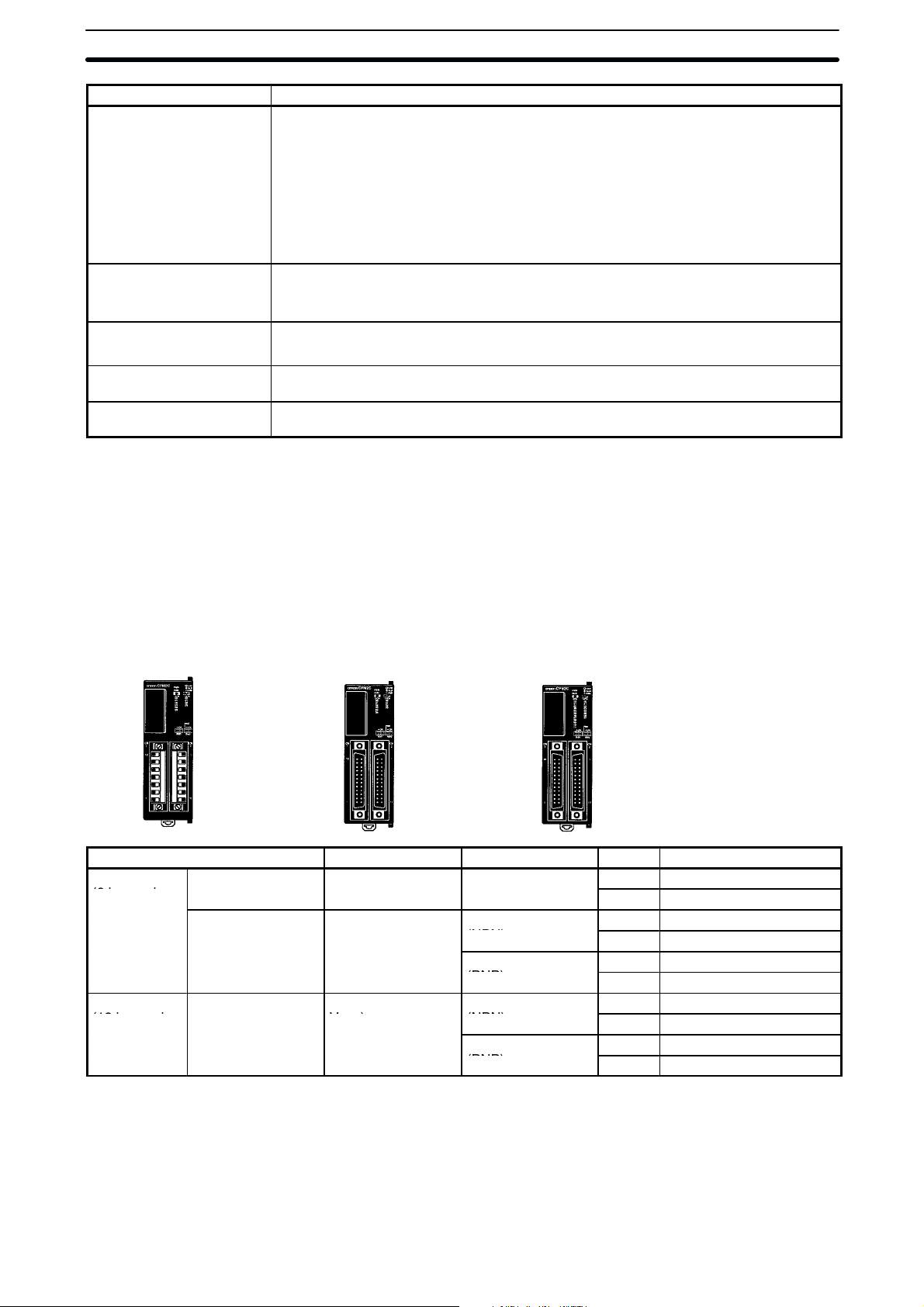
1-2 Configurazioni del sistema
1-2-1 Moduli CPU
Modulo CPU con 10 punti I/O
(uscite a relè)
Modulo CPU Ingressi Uscite Clock Modello
10 punti I/O
(6 ingressi,
20 punti I/O
(12 ingressi,
Morsettiera I/O 6 ingressi (24 Vc.c.) 4 uscite a relè
Connettore I/O 6 ingressi (24 Vc.c.) 4 uscite a transistor
Connettore I/O 12 ingressi (24
Modulo CPU con 10 punti I/O
(uscite a transistor)
Vc.c.) (NPN)
Modulo CPU con 20 punti I/O
(uscite a transistor)
(NPN)
4 uscite a transistor
(PNP)
8 uscite a transistor
8 uscite a transistor
(PNP)
No CPM2C-10CDR-D
Sì CPM2C-10C1DR-D
No CPM2C-10CDTC-D
Sì CPM2C-10C1DTC-D
No CPM2C-10CDT1C-D
Sì CPM2C-10C1DT1C-D
No CPM2C-20CDTC-D
Sì CPM2C-20C1DTC-D
No CPM2C-20CDT1C-D
Sì CPM2C-20C1DT1C-D
6
1-2-2 Modulo CPU e modulo di espansione I/O
16 ingressi, 8 uscite
Al connettore di espansione è possibile collegare fino a 5 moduli di espansione I/O.
Moduli di espansione I/O
10 punti I/O
6 ingressi, 4 uscite
24 punti I/O
Modulo di espansione I/O
di 10 punti (uscite a relè)
Modulo Ingressi Uscite Modello
Morsettiera I/O 6 ingressi (24 Vc.c.) 4 uscite a relè CPM2C-10EDR
Connettore I/O 16 ingressi (24 Vc.c.)
Modulo di espansione I/O
di 24 punti (uscite a transistor)
8 uscite a transistor
(NPN)
8 uscite a transistor
(PNP)
Capitolo 1Introduzione
CPM2C-24EDTC
CPM2C-24EDT1C
CPM2C-20CDTC-D
(12 ingressi, 8 uscite)
Esempio di configurazione.
Modulo CPU
Connettore di espansione
(con coperchio)
Modulo di espansione I/O
Connettore di espansione (lato uscita,
senza coperchio)
Connettore di espansione
(lato ingresso)
La configurazione massima (140 punti I/O a transistor) viene realizzata assemblando cinque moduli di espansione I/O ad un modulo CPU con 20 punti I/O.
× 1 modulo + × 5 moduli = 92 ingressi, 48 uscite
CPM2C-24EDTC
(16 ingressi, 8 uscite)
Nota Accertarsi che i requisiti di alimentazione del modulo CPU e del moduli di espan-
sione I/O non superino la capacità disponibile, considerando l’eventule converti-
tore sulla porta seriale.
7
1-3 Struttura e funzionamento
1-3-1 Struttura del modulo CPU
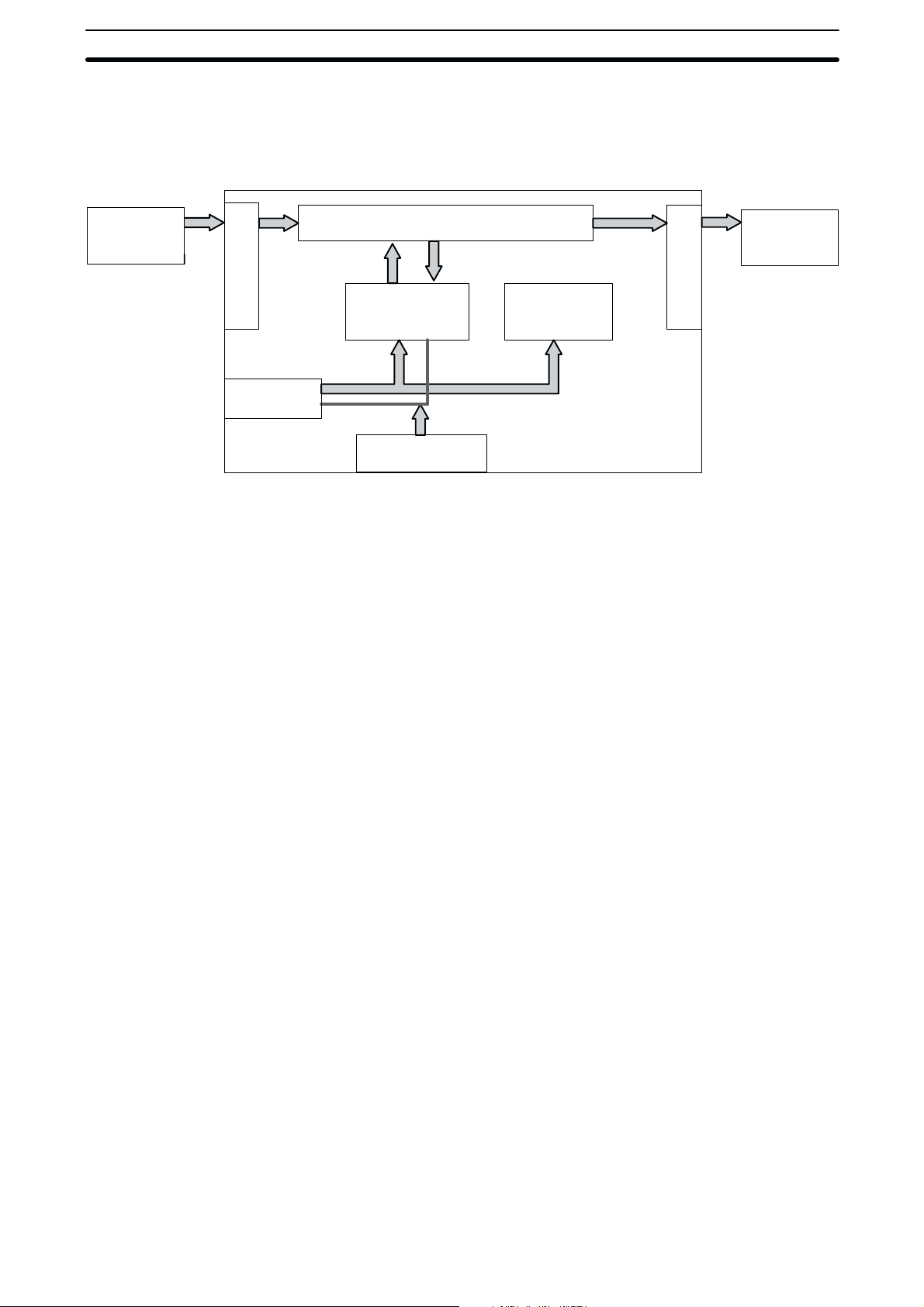
Il seguente diagramma mostra la struttura interna del modulo CPU.
Capitolo 1Introduzione
Dispositivi
di ingresso
esterni
Memoria I/O
Programma
Circuiti di ingresso
Porta di
comunicazione
Impostazioni
Interruttori di
comunicazione
Memoria I/O
Programma
Impostazioni
Impostazioni
Setup del PLC
Circuiti di uscita
Dispositivi di
uscita esterni
Il programma legge e scrive i dati nell’area di memoria durante l’esecuzione.
Parte della memoria I/O contiene i bit che riflettono lo stato degli ingressi e delle
uscite del PLC. Alcune aree della memoria I/O vengono cancellate quando cade
l’alimentazione, mentre altre parti vengono mantenute.
Nota Fare riferimento al Capitolo 3 Aree di memoria del Manuale di programmazione
(W353) per ulteriori dettagli sulla memoria I/O.
Si tratta del programma scritto dall’utente. Il CPM2C esegue il programma ciclicamente (fare riferimento a 1-3-5 Funzionamento ciclico e interrupt per maggiori
dettagli).
Il programma si suddivide in due parti: il “programma principale” che viene ese-
guito ciclicamente e i “programmi di interrupt” che vengono eseguiti solo quando
viene generato l’interrupt corrispondente.
Setup del PLC
Il Setup del PLC contiene vari parametri di avvio e operativi. Tali parametri possono essere modificati solo dal dispositivo di programmazione; non possono
essere modificati dal programma.
Alcuni parametri sono attivi solo alla successiva accensione del PLC, mentre
altri al cambio della modalità operativa.
Nota Fare riferimento al Capitolo 1 Setup del PLC del Manuale di programmazione
(W353) per maggiori dettagli.
Interruttori di
comunicazione
Gli interruttori di comunicazione determinano se la porta periferica e la porta
RS-232C funzionano con le impostazioni di comunicazione standard o con le
impostazioni di comunicazione del setup del PLC.
1-3-2 Modalità operative
I moduli CPU del CPM2C sono dotati di 3 modalità operative: PROGRAM,
MONITOR e RUN.
Modalità PROGRAM
Il programma non può essere eseguito in modalità PROGRAM. Questa modalità viene utilizzata per eseguire le seguenti operazioni in preparazione dell’esecuzione del programma.
• Modifica dei parametri iniziali/operativi come quelli nel setup del PLC
• Scrittura, trasferimento o controllo del programma
• Controllo del cablaggio mediante la forzatura set e reset dei bit I/O
8

Capitolo 1Introduzione
Attenzione Il PLC agisce sui bite di I/O anche in modalità PROGRAM, per cui i dispositivi
!
collegati ai punti di uscita sul modulo CPU o sui moduli di espansione I/O possono funzionare inaspettatamente se il bit di uscita corrispondente viene attivato modificando il contenuto della memoria I/O.
Modalità MONITOR
Il programma viene eseguito in modalità MONITOR, mentre le seguenti operazioni possono essere eseguite dal dispositivo di programmazione. In generale,
la modalità MONITOR viene utilizzata per il debug del programma, per testarne
il funzionamento e per effettuare le regolazioni.
• Modifica in linea
• Monitoraggio della memoria I/O durante il funzionamento
• Forzatura set/reset dei bit I/O, modifica dei valori impostati e modifica dei valori
attuali durante il funzionamento
Modalità RUN
Il programma viene eseguito a velocità normale in modalità RUN. Le operazioni,
come la modifica in linea, i bit di forzatura set/reset e la modifica dei valori impostati/attuali non possono essere eseguiti in modalità RUN, anche se lo stato dei
bit I/O può essere monitorato.
1-3-3 Modalità operativa all’avvio
La modalità operativa del CPM2C quando l’alimentazione viene attivata
dipende dalle impostazioni del setup del PLC e dall’impostazione del selettore di
modalità della Console di programmazione, se collegata.
Impostazione
del setup del PLC
Canale Bit Impostazione
DM 6600 Da 08 a
15
Da 00 a
07
Modalità operativa
00 Vedere nota.
01 La modalità di avvio corrisponde alla
modalità operativa prima dell’interruzione
dell’alimentazione.
02 La modalità di avvio è determinata dai bit
00... 07.
00 Modalità PROGRAM
01 Modalità MONITOR
02 Modalità RUN
Nota La modalità di avvio dipende dall’impostazione dell’interruttore di comunica-
zione 2 e del dispositivo di programmazione collegato alla porta periferica.
Dispositivo di
programmazione
Nessuno Modalità PROGRAM Modalità RUN
Console di
programmazione
Altro dispositivo Modalità PROGRAM
Interruttore 2 OFF Interruttore 2 ON
(vedere nota 2)
Modalità operativa impostata
sul selettore di modalità della
Console di programmazione
(vedere nota 1)
Modalità
PROGRAM (vedere
nota 1)
Modalità
PROGRAM
Note 1. Il CPM2C non potrà comunicare con il Dispositivo di programmazione in
questi casi.
2. Quando l’alimentazione viene attivata, il CPM2C verrà avviato in modalità
RUN solo quando il cavo RS-232C viene collegato alla porta di comunicazione con l’interruttore 2 impostato su ON.
9

1-3-4 Funzionamento del PLC all’avvio
Capitolo 1Introduzione
Tempo richiesto per
l’inizializzazione
Funzionamento in
condizioni di caduta di
alimentazione
1, 2, 3... 1. Tempo minimo di individuazione dell’interruzione di alimentazione
Il tempo richiesto per l’inizializzazione di avvio dipende da molti fattori, come ad
esempio le condizioni operative (inclusa la tensione di alimentazione, la configurazione del sistema e la temperatura dell’ambiente) e il contenuto del pro-
gramma.
Tensione di alimentazione minima
Il PLC verrà arrestato e tutte le uscite disattivate se la tensione di alimentazione
scende dell’85% al di sotto del valore nominale.
Interruzione momentanea dell’alimentazione
L’interruzione di alimentazione non verrà rilevata e il funzionamento del Modulo
CPU continuerà se l’interruzione di alimentazione dura meno di 2 ms.
Quando viene rilevata l’interruzione di alimentazione, il modulo CPU smette di
funzionare e tutte le uscite vengono disattivate.
Reset automatico
Il funzionamento viene riavviato automaticamente quando la tensione di alimentazione viene ripristinata più dell’85% della tensione nominale.
Le interruzioni di alimentazione di durata minore di 2 ms non verranno individuate.
2. Tempo aggiuntivo indeterminato
Le interruzioni di alimentazione di durata leggermente maggiore del tempo
minimo dell’interruzione di alimentazione non possono essere individuate.
85% della tensione
nominale
Individuazione dell’interru-
zione di alimentazione
1. Tempo minimo 2. Tempo
In esecuzione Arrestato
Esecuzione programma
Segnale di reset CPU
Il funzionamento del modulo
CPU continua se la tensione
viene ripristinata in quest’area.
aggiuntivo
Il funzionamento del modulo CPU
può continuare se la tensione
viene ripristinata in quest’area.
Nota Se la tensione di alimentazione fluttua intorno all’85% della tensione nominale
del PLC, il funzionamento del PLC può arrestarsi e riavviare ripetutamente.
Quando arresti e avvii ripetuti causano problemi con il sistema controllato,
installare un circuito di protezione, come ad esempio un circuito che disattiva
l’alimentazione all’apparecchiatura sensibile finché la tensione di alimentazione
non ritorna al valore nominale.
10

1-3-5 Funzionamento ciclico e interrupt
Capitolo 1Introduzione
Funzionamento della
CPU
Il processo di inizializzazione viene eseguito all’accensione del modulo. Se non
esiste alcun errore di inizializzazione, l’esecuzione dei processi di supervisione,
l’esecuzione del programma, l’aggiornamento I/O e la manutenzione della porta
di comunicazione vengono eseguiti ripetutamente (ciclicamente).
Inizializzazione
all’avvio
Processi di
supervisione
Esecuzione del
programma
Calcolo del tempo
di scansione
Aggiornamento
I/O
Tempo di scansione del PLC
Manutenzione della
porta RS-232C
Verificare l’hardware.
Verificare la memoria.
Leggere i dati dalla memoria flash (programma, dati
DM di sola lettura e impostazioni del setup del PLC).
Verifica dell’errore di batteria.
Preimpostazione del tempo di scansione
(massimo) watch.
Verifica della memoria del programma.
Bit di aggiornamento per le funzioni di espansione.
Eseguire il programma
(Fare riferimento al Manuale di programmazione
(W353) per dettagli sul tempo di scansione e sul
tempo di risposta I/O).
Attendere il tempo di scansione minimo se questo è
stato impostato nel Setup del PLC (DM 6619).
Calcolare il tempo di scansione.
Leggere i dati di ingresso dai bit di ingresso.
Leggere i dati di uscita verso i bit di uscita.
Eseguire il processo di comunicazione della porta
RS-232C (può essere modificato in DM 6616.)
Esecuzione del
programma nel
funzionamento ciclico
Manutenzione della
porta periferica
Eseguire il processo di comunicazione della porta
periferica (può essere modificato in DM 6617.)
Il tempo di scansione può essere letto da un dispositivo di programmazione.
AR 14 contiene il tempo di scansione massimo, mentre AR 15 contiene il tempo
di scansione attuale in multipli di 0,1 ms.
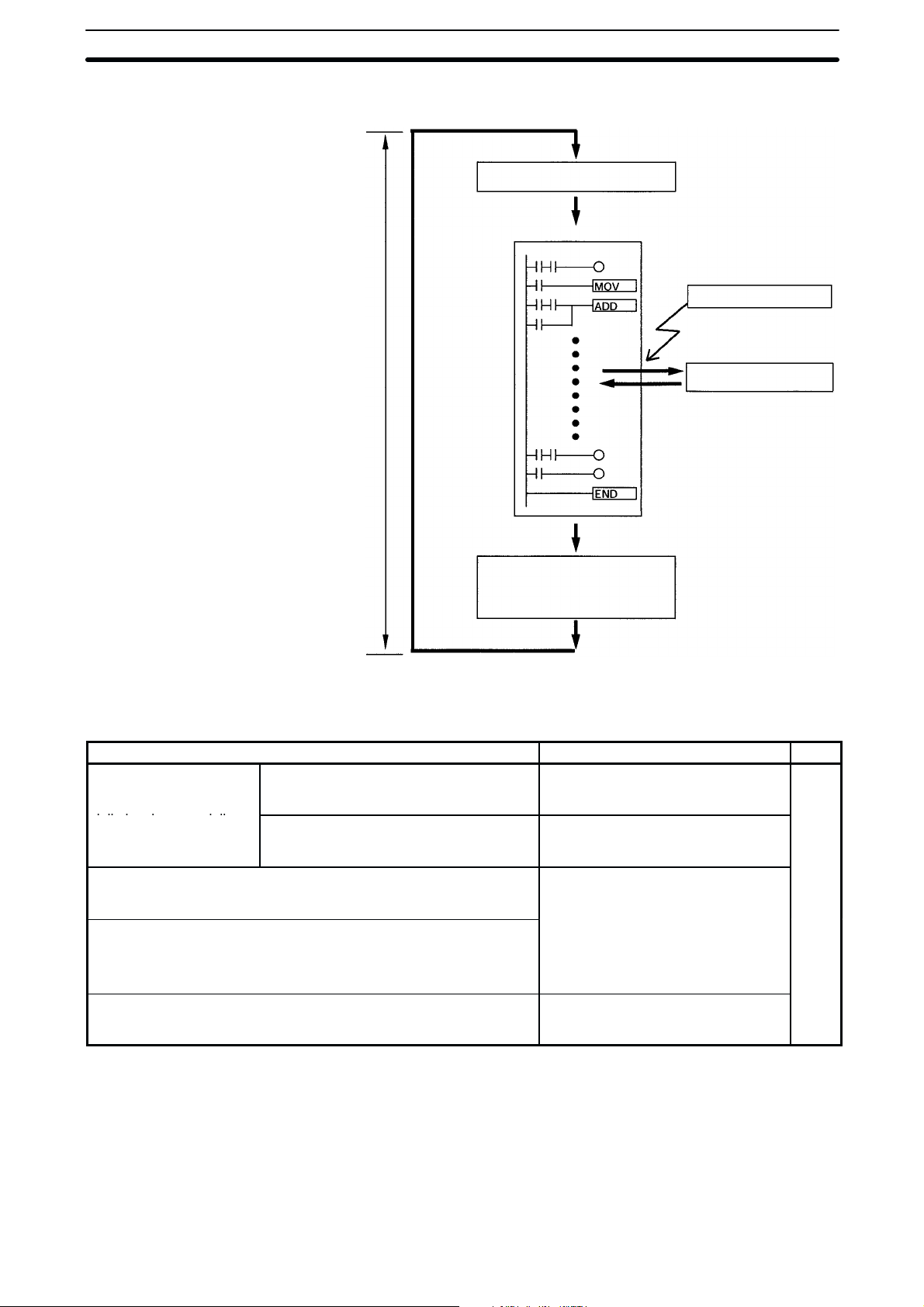
La seguente figura mostra il funzionamento ciclico del CPM2C quando il pro-
gramma viene normalmente eseguito.
Generalmente, i risultati dell’esecuzione del programma vengono trasferiti nella
memoria I/O subito dopo l’esecuzione del programma (durante l’aggiornamento
I/O); tuttavia l’istruzione IORF(97) può essere utilizzata per aggiornare un intervallo specificato di canali I/O durante l’esecuzione del programma. L’intervallo
specificato dei canali I/O verrà trasferito quando viene eseguita l’istruzione
IORF(97).
Il tempo di scansione è la somma del tempo richiesto per l’esecuzione del programma, l’aggiornamento I/O e la manutenzione della porta di comunicazione.
Nel setup del PLC può essere impostato un tempo di scansione minimo (da 1 a
9.999 ms) (DM 6619). Una volta impostato il tempo di scansione minimo, il funzionamento della CPU viene messo in pausa dopo l’esecuzione del programma
finché non viene raggiunto il tempo di scansione minimo. Il funzionamento della
CPU non verrà messo in pausa se il tempo di scansione attuale sarà maggiore
del tempo di scansione minimo impostato in DM 6619.
Nota Si verificherà un errore fatale e il funzionamento del PLC verrà arrestato se nel
setup del PLC è stato impostato un tempo di scansione massimo (DM 6618) e il
tempo di scansione attuale supera quell’impostazione.
L’impostazione predefinita per la manutenzione della porta RS-232C e della
porta periferica è il 5% del tempo di scansione, tuttavia queste impostazioni pos-
sono essere modificate (tra 0% e 99%) nel setup del PLC. L’impostazione della
11

Tempo di
scansione
Capitolo 1Introduzione
porta RS-232C è in DM 6616 e l’impostazione della porta periferica è in
DM 6617.
Fare riferimento al Capitolo 7 Operazioni del PLC e tempo di elaborazione del
Manuale di programmazione (W353) per maggiori dettagli e precauzioni sul
tempo di scansione.
Processi di supervisione
Programma principale
Esecuzione del
programma di interrupt
Se il tempo di scansione minimo è stato
impostato in DM 6619, la CPU viene
messa in pausa finchè non si raggiunge
il tempo di scansione minimo.
Aggiornamento I/O
Manutenzione porta RS-232C
Manutenzione porta periferica
Il tempo di utilizzo può essere impo-
stato in DM 6616.
Il tempo di utilizzo può essere impostato
in DM 6617.
Quando un interrupt viene generato durante l’esecuzione del programma principale, tale esecuzione viene immediatamente interrotta e il programma di interrupt viene eseguito. La seguente figura mostra il funzionamento ciclico del
CPM2C quando viene eseguito un programma di interrupt.
Generalmente, i risultati di esecuzione del programma di interrupt vengono trasferiti nella memoria I/O subito dopo l’esecuzione del programma (durante l’aggiornamento I/O), mentre l’istruzione IORF(97) può essere utilizzata per aggiornare l’intervallo specificato dei canali I/O durante l’esecuzione del programma di
interrupt. L’intervallo specificato dei canali I/O verrà aggiornato quando viene
eseguita l’istruzione IORF(97).
12

Capitolo 1Introduzione
Il tempo di scansione normale viene esteso dal tempo richiesto per l’esecuzione
del programma di interrupt.
Processi di supervisione
Programma principale
Interrupt generato.
Programma di interrupt
Tempo di
scansione
Aggiornamento
immediato
Aggiornamento I/O
Manutenzione porta RS-232C
Manutenzione porta periferica
L’istruzione IORF(97) può essere eseguita nel programma per aggiornare un
intervallo specificato dei canali I/O. I canali specificati I/O verranno aggiornati
quando l’istruzione IORF(97) viene eseguita.
L’istruzione IORF(97) può essere utilizzata per aggiornare l’I/O dal programma
principale o dal programma di interrupt.
13
Capitolo 1Introduzione
Quando viene utilizzata l’istruzione IORF(97), il tempo di scansione viene
esteso dal tempo richiesto per aggiornare i canali I/O specificati.
Processi di supervisione
Programma principale
IORF(97) eseguita.
Tempo di
scansione
1-4 Funzioni elencate per uso
Funzioni di controllo macchina
Uso Funzione Rif.
Ricevere gli ingressi del
contatore ad alta velocità
(ad esempio, calcolo
della lunghezza o della
posizione con un
codificatore).
Generare un’uscita impulsiva proporzionale ad un segnale a treno di
impulsi di ingresso per sincronizzare il controllo di un processo
periferico con il processo principale.
Il fattore moltiplicativo può essere modificato durante l’esecuzione del
programma.
Questo metodo può essere utilizzato per modificare il processo per
prodotti differenti o modelli senza arrestare l’attrezzatura.
Ricevere in modo affidabile gli impulsi di ingresso con un tempo ON
minore del tempo di scansione (come gli ingressi da un
fotomicrosensore).
Frequenza di conteggio max. di 2 kHz
(monofase)
Frequenza di conteggio max. di 5 kHz
(variazione di fase) o di 20 kHz (monofase)
Aggiornamento I/O
Manutenzione porta RS-232C
Manutenzione porta periferica
Uso dell’ingresso a interrupt (modalità
contatore) per leggere il valore attuale
senza interrupt.
Uso del contatore ad alta velocità per
leggere il valore attuale senza
interrupt.
Sincronizzazione impulsi
Funzione ingresso a risposta rapida
Aggiornamento immediato
Aggiornamento I/O
W353
14

Uso Rif.Funzione
Funzioni di interrupt
Eseguire il posizionamento emettendo gli impulsi al driver del motore
che accetta gli ingressi a treno di impulsi.
Eseguire rapidamente un processo
speciale quando un ingresso diventa attivo
(ad esempio, funzionamento di un
dispositivo di taglio quando da un
interruttore di prossimità o un interruttore
fotoelettrico viene ricevuto un ingresso ad
interrupt).
Contare gli impulsi ON di ingresso ed
eseguire rapidamente un processo
speciale quando si raggiunge il valore
preimpostato
(ad esempio, arresto dell’alimentazione
quando il valore preimpostato dei pezzi di
lavoro passa attraverso il sistema).
Eseguire un processo speciale ad un
valore di conteggio preimpostato
(ad esempio, materiale da tagliare con
precisione ad una lunghezza data).
Eseguire un processo speciale quando il
conteggio rientra in un intervallo
preimpostato
(ad esempio, sistemazione rapida del
materiale quando rientra in un intervallo di
lunghezza dato).
Eseguire un processo speciale quando si
verifica il timeout del temporizzatore
(ad esempio, arresto di un trasportatore ad
un’ora precisa (indipendente dal tempo di
scansione) dopo aver individuato il pezzo
di lavoro).
Ripetere un processo speciale a intervalli
regolari
(ad esempio, la velocità di un alimentatore
carta può essere monitorata misurando il
segnale di ingresso da un codificatore ad
intervalli regolari e calcolando la velocità).
Capitolo 1Introduzione
Ingresso ad interrupt (modalità
ingresso ad interrupt)
Ingresso ad interrupt (modaltà
contatore)
Interrupt del contatore ad alta velocità
generato quando il conteggio
corrisponde al valore impostato.
Interrupt del contatore ad alta velocità
generato quando il conteggio rientra
nell’intervallo impostato.
Interrupt del temporizzatore di
intervallo
(modalità monodirezionale)
Interrupt del temporizzatore di
intervallo
(modalità interrupt a tempo)
Funzione di uscita impulsiva
W353
Funzioni di base
Uso Funzione Rif.
Impostare il tempo di scansione ad un intervallo fisso. Impostare un tempo di scansione (fisso) minimo nel
setup del PLC.
Arrestare il funzionamento del PLC quando il tempo di
scansione supera l’impostazione massima.
Mantenere tutte le uscite ON quando il funzionamento
del PLC viene arrestato.
Conservare il contenuto della memoria I/O all’avvio. Attivare il bit di mantenimento IOM (SR 25212).
Conservare il contenuto della memoria I/O
all’accensione del PLC.
Eliminare gli effetti del rumore esterno sui segnali di
ingresso.
Impostare un tempo di scansione (watch) minimo nel
setup del PLC.
Attivare il bit di mantenimento IOM (SR 25212).
Attivare il bit di mantenimento IOM (SR 25212) e
impostare il setup del PLC (DM 6601) in modo da
mantenere lo stato del bit di mantenimento all’avvio.
Impostare una costante del tempo di ingresso nel
setup del PLC.
W353
15

Capitolo 1Introduzione
esecuzione
Funzioni di manutenzione
Uso Funzione Rif.
Registrazione dei dati con memorizzazione dell’ora e
dei minuti.
Stabilire gli errori definiti dall’utente per le condizioni di
ingresso desiderate (è possibile definire gli errori fatali
e non fatali).
Leggere il numero delle interruzioni di alimentazioni. Il numero delle interruzioni di alimentazione viene
Impostare la modalità operativa di avvio. Impostare la modalità operativa all’avvio nel setup del
Funzioni di comunicazione
Uso Funzione Rif.
Leggere/scrivere i dati della memoria I/O e modificare
la modalità operativa da un computer host.
Collegare un dispositivo seriale come un lettore di
codice a barre o stampante seriale.
Effettuare una connessione ad alta velocità con un
terminale programmabile OMRON.
Effettuare una connessione data link PLC–PLC con un
altro PLC CPM2C o un PLC CPM1A, CPM2A, SRM1,
CQM1 o C200HX/HG/HE.
Collegare una Console di programmazione. Collegare la Console di programmazione alla porta
Collegare un PC con un software di programmazione. Il computer può essere collegato alla porta periferica o
Monitorare l’attrezzatura con un terminale
programmabile e programmare il PLC con un
dispositivo di programmazione.
Funzione clock/calendario
FAL(06) definisce gli errori non fatali (il funzionamento
del PLC continua).
FALS(07) definisce gli errori fatali (il funzionamento del
PLC viene arrestato).
memorizzato in AR 23.
PLC (DM 6600).
Comunicazioni Host Link (impostare la modalità di
comunicazione su Host Link nel Setup del PLC.)
Comunicazioni senza protocollo (impostare la modalità
di comunicazione su No-protocol nel Setup del PLC.)
Comunicazioni NT Link 1:1 (impostare la modalità di
comunicazione su 1:1 NT Link nel Setup del PLC).
Comunicazioni PC Link 1:1 (impostare la modalità di
comunicazione su 1:1 PC Link nel Setup del PLC).
periferica (spegnere l’interruttore di comunicazione 2).
alla porta RS-232C
(Spegnere l’interruttore di comunicazione 2).
La porta RS-232C e la porta periferica possono essere
utilizzate contemporaneamente.
W353
W353
Pag.
70
W353
Pag. ,
70
1-5 Confronto con il CPM1A e il CPM2A
Elemento CPM2C CPM2A CPM1A
Set di istruzioni
Tempo di
dell’istruzione
Capacità del programma 4.096 canali Come per il CPM2C. 2.048 canali
Numero
massimo di
punti I/O
Moduli di
espansione
Istruzioni di base 14 Come per il CPM2C. Come per il CPM2C.
Istruzioni speciali 105 istruzioni,
185 variazioni
Istruzioni di base LD: 0,64 µs Come per il CPM2C. LD: 1,72 µs
Istruzioni speciali MOV(21): 7,8 µs Come per il CPM2C. MOV(21): 16,3 µs
Modulo CPU autonomo 10 o 20 punti 30, 40 o 60 punti 10, 20, 30 o 40 punti
Modulo CPU con moduli di
espansione I/O
Numero massimo di moduli Ai moduli CPU è
Modelli disponibili Moduli di espansione
130 o 140 punti max. 90, 100 o 120 punti
possibile collegare un
massimo di 5 moduli.
I/O
Come per il CPM2C. 79 istruzioni, 139
variazioni
90 o 100 punti max.
max.
Ai moduli CPU è
possibile collegare
un massimo di 3
moduli.
Moduli di espansione
I/O, modulo
analogico I/O e
modulo di
collegamento
CompoBus/S I/O
Ai moduli CPU di 30
punti e di 40 punti è
possibile collegare
un massimo di 3
moduli.
Come per il CPM2A.
16

Elemento CPM1ACPM2ACPM2C
Memoria I/O
Backup della
memoria
Ingressi ad interrupt (modalità ingresso ad
interrupt)
Ingressi ad
interrupt
(modalità
contatore)
Temporizzatore
di intervallo
Bit di ingresso Da IR 00000 a IR
Bit di uscita Da IR 01000 a IR
Bit di lavoro 928 bit:
Area SR (Special Relay) 448 bit:
Area TR (Temporary Relay) 8 bit: da TR0 a TR7 Come per il CPM2C. Come per il CPM2C.
Area HR (Holding Relay) 320 bit:
Area AR (Auxiliary Relay) 384 bit:
Area LR (Link Relay) 256 bit:
Area
temporizzatore/contatore
Area DM
(Data
Memory)
Area del programma, area
DM di sola lettura
Lettura/scrittura area DM,
area HR, area AR e
contatori
Modalità contatore Incremento contatore
Limite superiore del
contatore
Da SR 244 a SR 247 Contiene il PV del
Metodi per la lettura del PV
del contatore
Metodo per la modifica del
PV del contatore
Modalità monodirezionale Sì Come per il CPM2C. Come per il CPM2C.
Modalità interrupt a tempo Sì Come per il CPM2C. Come per il CPM2C.
Area di
lettura/
scrittura
Area di sola
lettura
Setup del
PLC
Capitolo 1Introduzione
Come per il CPM2C. Come per il CPM2C.
00915
Come per il CPM2C. Come per il CPM2C.
01915
Come per il CPM2C. 512 bit:
da IR 02000 a IR
04915,
da IR 20000 a IR 22715
Come per il CPM2C. 384 bit:
da SR 22800 a SR
25515
da HR 0000 a HR 1915
Come per il CPM2C. 256 bit:
da AR 0000 a AR 2315
Come per il CPM2C. Come per il CPM2C.
da LR 0000 a LR 1515
256 bit:
da TIM/CNT 000 a
TIM/CNT 255
2.048 canali
(da DM 0000 a
DM 2047)
456 canali
(da DM 6144 a
DM 6599)
56 canali
(da DM 6600 a
DM 6655)
Backup della memoria
flash
Modulo CPU con clock:
Backup della batteria
interna (durata di 2 anni
a 25°C, sostituibile)
Modulo CPU senza
clock: Backup del
condensatore (backup
di 10 giorni a 25°C) o
backup della batteria
opzionale (5 anni a
25°C, sostituibile)
4 (Modulo CPU di 20
punti),
2 (Modulo CPU di 10
punti)
Decremento contatore
2 kHz Come per il CPM2C. 1 kHz
contatore.
Lettura da SR 244 a
SR 247.
Esecuzione PRV(62).
Esecuzione INI(61). Come per il CPM2C. Non supportato.
Come per il CPM2C. 128 bit:
Come per il CPM2C. 1.024 canali
Come per il CPM2C. Come per il CPM2C.
Come per il CPM2C. Come per il CPM2C.
Come per il CPM2C. Come per il CPM2C.
Backup della batteria
interna
(durata di 5 anni a
25°C, sostituibile)
4 4
Come per il CPM2C. Decremento
Come per il CPM2C. Contiene il PV–1 del
Come per il CPM2C. Lettura da SR 244 a
da IR 20000 a IR
23115
da SR 23200 a SR
25515
Come per il CPM2C.
da AR 0000 a AR
1515
da TIM/CNT 0 a
TIM/CNT 127
(da DM 0000 a
DM 1023)
Backup del
condensatore
(backup di 20 giorni
a 25°C)
contatore
contatore.
SR 247.
(PV – 1 del
contatore)
17

Capitolo 1Introduzione
Elemento CPM2C/CPM2A CPM1A
Ingressi a
risposta rapida
Contatore ad
alta velocità
Sincronizzazione impulsi Supportato. Non supportato.
Controllo uscita
impulsiva
Impostazione della funzione a
risposta rapida
INT(89) (Maschera) Non supportato (ignorato) Supportato.
INT(89) (Lettura maschera) Legge lo stato della maschera. Legge i risultati di
INT(89) (Cancellazione) Non supportato (ignorato) Supportato.
Ampiezza impulsi minima 50 µs min. 200 µs min.
Modalità contatore Modalità variazione di fase
Frequenza max. del contatore 5 kHz nella modalità variazione di fase
Intervallo del PV del contatore –8.388.608...8.388.607 nella modalità
Controllo durante la
registrazione della tabella di
comparazione dei valori di
destinazione
Metodo utilizzato per il
riferimento alla tabella di
interrupt di comparazione dei
valori di destinazione
Lettura dei risultati di
confronto intervallo
Lettura dello stato Controllo di AR 1108 (confronto in
Accelerazione/decelerazione
trapezoidale
Uscita PWM(––) Supportato. Non supportato.
Numero di uscite impulsive
contemporanee
Frequenza massima 10 kHz max. 2 kHz max.
Frequenza minima 10 Hz 20 Hz
Quantità uscite impulsive Da –16.777.215 a 16.777.215 Da 0 a 16.777.215
Controllo direzione Supportato. Non supportato.
Posizionamento nelle
posizioni assolute
Stato dei bit mentre gli impulsi
vengono emessi
Lettura del PV Lettura da SR 228 a SR 231 o
Reimpostazione del PV Supportato. Non supportato.
Uscite di stato Accelerazione/decelerazione
Setup del PC Setup del PLC e INT(89)
(ingresso ad interrupt
senza maschera).
impostazione maschera.
Modalità variazione di fase
(bidirezionale)
Modalità direzione + impulsi
Modalità impulsi bidirezionali
Modalità incremento
(bidirezionale)
20 kHz nella modalità direzione +
impulsi, modalità impulsi bidirezionale e
modalità incremento
variazione di fase (bidirezionale),
modalità direzione + impulsi e modalità
impulsi bidirezionali
Da 0 a 16.777.215 nella modalità
incremento
Stessa direzione, stesso SV non
possibile
Confronto di tutti i valori della tabella,
senza considerare l’ordine di
apparizione
Controllo di AR 1100...AR 1107 o
esecuzione di PRV(62).
esecuzione), controllo di AR 1109
(overflow/underflow del PV del
contatore ad alta velocità) o esecuzione
di PRV(62).
Supportato con ACC(––). Può essere
impostata la frequenza iniziale.
2 max. 1 max.
Supportato. Non supportato.
Nessun effetto Attivato/disattivato
esecuzione di PRV(62).
Overflow/underflow del PV
Set quantità impulsi
Uscita impulsiva completata
Stato dell’uscita impulsiva
(bidirezionale)
Modalità incremento
2,5 kHz nella modalità
variazione di fase
(bidirezionale),
5 kHz nella modalità
incremento
Da –32.768 a 32.767 nella
modalità variazione di fase
(bidirezionale)
Da 0 a 65,535 nella
modalità incremento
Stessa direzione, stesso
SV possibile
Confronto in ordine di
apparizione nella tabella
Controllo di AR
1100...AR 1107.
---
Non supportato.
mediante uscita impulsiva
Non supportato.
Stato dell’uscita impulsiva
18

Elemento CPM2C CPM2A CPM1A
Controlli analogici Nessuno 2 2
Funzione del
clock
Interruttore di comunicazione Questo interruttore
Batteria
Comunicazioni
(nel modulo
CPU)
Costante del tempo di ingresso Può essere impostata su 1,
Canali contenenti
le informazioni
temporali.
Batteria Modulo CPU con:
Sostituzione della
batteria
Durata prevista/
Tempo di backup
Individuazione
dell’errore batteria
Porta periferica Console di programmazione
Porta RS-232C Bus periferiche (impostato
Interno o nessuno Interno Nessuno
Da AR 17 a AR 21 Da AR 17 a AR 21 ---
Questo interruttore
determina se le
comunicazioni sono
regolate dalle impostazioni
standard o dalle
impostazioni del setup del
PLC. Inoltre imposta il
collegamento del
dispositivo di
programmazione.
Backup della batteria al litio
Modulo CPU senza clock:
Backup del condensatore o
della batteria al litio
opzionale
Possibile Possibile ---
Modulo CPU con clock:
durata di 2 anni a 25°C
Modulo CPU senza clock
(condensatore): backup di
10 giorni a 25°C
Modulo CPU senza clock
(batteria al litio): durata di 5
anni a 25°C
Supportato. Come per il CPM2C. ---
(impostata con l’interruttore
di comunicazione).
Bus periferiche (impostato
con l’interruttore di comuni-
cazione).
Host Link (con comunicazioni secondarie avviate)
Senza protocollo
con l’interruttore di
comunicazione).
Host Link
Senza protocollo
PC LInk 1:1
NT Link 1:1
2, 3, 5, 10, 20, 40 o 80 ms.
(Valore predefinito: 10 ms)
determina se le
comunicazioni sono
regolate dalle
impostazioni standard
o dalle impostazioni
del setup del PLC.
Litio Nessuna (solo backup
Durata di 5 anni a
25°C
Console di programma-
zione (individuazione
automatica)
Bus periferiche (indivi-
duazione automatica)
Host Link (con comuni-
cazioni secondarie
avviate)
Senza protocollo
Bus periferiche
(individuazione
automatica)
Host Link
Senza protocollo
PC LInk 1:1
NT Link 1:1
Come per il CPM2C. Può essere impostata
Capitolo 1Introduzione
Nessuno
del condensatore)
Backup di 20 giorni a
25°C
Console di programmazione (individuazione
automatica)
Bus periferico (individuazione automatica)
Host Link
PC LInk 1:1
NT Link 1:1
Nessuna
su 1, 2, 4, 8, 16, 32, 64
o 128 ms. (Valore
predefinito: 8 ms)
Nota La batteria opzionale (CPM2C-BAT01) può essere montata ai moduli CPU
senza clock.
19

Differenze nei set di istruzioni
Istruzioni aggiunte al
CPM2C
Mnemonico Nome
TXD(48) TRANSMIT
RXD(47) RECEIVE
SCL(66) SCALING
SCL2(––) SIGNED BINARY TO BCD SCALING
SCL3(––) BCD TO SIGNED BINARY SCALING
SRCH(––) DATA SEARCH
MAX(––) FIND MAXIMUM
MIN(––) FIND MINIMUM
SUM(––) SUM CALCULATION
FCS(––) FCS CALCULATE
HEX(––) ASCII-TO-HEXADECIMAL
AVG(––) AVERAGE VALUE
PWM(––) PULSE WITH VARIABLE DUTY RATIO
PID(––) PID CONTROL
ZCP(––) AREA RANGE COMPARE
ZCPL(––) DOUBLE AREA RANGE COMPARE
NEG(––) 2’S COMPLEMENT
ACC(––) ACCELERATION CONTROL
STUP(––) CHANGE RS-232C SETUP
SYNC(––) SYNCHRONIZED PULSE CONTROL
BINL(58) DOUBLE BCD TO DOUBLE BINARY
BCDL(59) DOUBLE BINARY TO DOUBLE BCD
TMHH(––) VERY HIGH-SPEED TIMER
TIML(––) LONG TIMER
SEC(––) HOURS-TO-SECONDS
HMS(––) SECONDS-TO-HOURS
Capitolo 1Introduzione
Istruzioni con caratteristiche modificate
Mnemonico Nome CPM2C CPM1A
INI(61) MODE CONTROL Supporta l’operazione di modifica del PV
dell’ingresso a interrupt (modalità contatore).
Supporta l’operazione di modifica del PV dell’uscita
impulsiva.
Supporta l’operazione di arresto del controllo
sincronizzazione impulsi.
PRV(62) HIGH-SPEED
COUNTER PV READ
CTBL(63) COMPARISON TABLE
LOAD
PULS(65) SET PULSES Supporta le caratteristiche degli impulsi assoluti,
INT(89) INTERRUPT CONTROL Supporta l’interrupt di conteggio per l’incremento dei
Supporta l’operazione di modifica del PV
dell’ingresso ad interrupt (modalità contatore).
Supporta l’operazione di modifica del PV dell’uscita
impulsiva.
Il conteggio viene confrontato con tutti i valori di
destinazione della tabella di comparazione dei valori
di destinazione.
mentre il sistema di coordinate deve essere
impostato su coordinate assolute.
contatori.
Non supporta queste
operazioni.
Non supporta queste
operazioni.
Il conteggio viene confrontato con ciascun
valore di destinazione
nell’ordine in cui essi
appaiono nella tabella
di comparazione dei
valori di destinazione.
Non supporta le
caratteristiche degli
impulsi assoluti.
Non supporta questa
funzione di interrupt.
20

Capitolo 1Introduzione
Attenzione Prima di utilizzare un programma del CPM1A contenente una o più istruzioni
!
della tabella sopra riportata, verificare il programma per accertarsi che questo
funzioni correttamente. Il CPM2C non può funzionare correttamente se il pro-
gramma del CPM1A con queste istruzioni viene trasferito ed eseguito senza
modificare i parametri delle funzioni sopra descritte.
Allocazione dei numeri di
funzione aggiunti
Le seguenti tre istruzioni sono numeri di funzione allocati non utilizzati nel
CPM1A.
RXD(47) RECEIVE
TXD(48) TRANSMIT
SCL(66) SCALING
Differenze nella memoria I/O
Differenze nell’area SR
La seguente tabella mostra le differenze nell’area SR (PV è l’abbreviazione di
valore presente).
PV dell’uscita impulsiva 0 Da SR 228 a SR 229
PV dell’uscita impulsiva 1 Da SR 230 a SR 231
Bit di reset del PV dell’uscita impulsiva 0 SR 25204
Bit di reset del PV dell’uscita impulsiva 1 SR 25205
Bit di reset della porta RS-232C SR 25209
Flag di errore batteria SR 25308
Modifica del flag di setup della porta
RS-232C
Istruzione CPM2C CPM1A
Non allocato. (NOP(00))
Funzione CPM2C CPM1A
Non
supportato.
SR 25312
21

Capitolo 1Introduzione
Differenze nell’area AR
La seguente tabella mostra le differenze nell’area AR.
Funzione CPM2C CPM1A
Dati del clock/calendario Da AR 17 a AR 21
Codice di errore di comunicazione RS-232C Da AR 0800 a AR
0803
Flag di errore RS-232 AR 0804
Flag di trasmissione RS-232C abilitata AR 0805
Flag di ricezione RS-232C completata AR 0806
Flag di overflow di ricezione RS-232C AR 0807
Flag di ricezione della porta periferica
completata
Flag di overflow di ricezione della porta
periferica
Contatore di ricezione RS-232C AR 09
Flag di comparazione del contatore ad alta
velocità
Flag di overflow/underflow del contatore ad
alta velocità
Condizione dell’uscita impulsiva 0 AR 1111
Flag di overflow/underflow del PV dell’uscita
impulsiva 0
Flag di impostazione della quantità di impulsi
dell’uscita impulsiva 0
Flag di uscita completata dell’uscita impulsiva0AR 1114
AR 0814
AR 0815
AR 1108
AR 1109
AR 1112
AR 1113
Non
supportato.
Differenze nell’area DM
Flag di overflow/underflow del PV dell’uscita
impulsiva 1
Flag di impostazione della quantità di impulsi
dell’uscita impulsiva 1
Flag di uscita completata dell’uscita impulsiva1AR 1214
Stato dell’uscita impulsiva 1 AR 1215
Contatore OFF AR 23 (vedere nota). AR 10
AR 1212
AR 1213
Nota I programmi del CPM1A che utilizzano AR 10 (Contatore OFF) non possono
essere utilizzati nel CPM2C senza modificare il programma. Nel CPM2C, il Contatore OFF è in AR 23.
La seguente tabella mostra le differenze nell’area DM diverse dal Setup del
PLC.
Funzione CPM2C CPM1A
Area di registrazione dell’errore Da DM 2000 a DM
2021
Da DM 1000 a DM
1021
Nota I programmi del CPM1A che utilizzano l’Area di registrazione dell’errore non
possono essere utilizzati nel CPM2C senza modificare il programma per cambiare l’ubicazione dell’area di registrazione dell’errore.
22

La seguente tabella mostra le differenze nel Setup del PLC.
Funzione CPM2C CPM1A
Impostazione del tempo di manutenzione
della porta RS-232C
Abilitazione del tempo di manutenzione della
porta RS-232C
Sistema di coordinate dell’uscita impulsiva 0 Bit di DM 6629 da 00
Sistema di coordinate dell’uscita impulsiva 1 Bit di DM 6629 da 04
Selettore delle impostazioni di comunicazione
RS-232C
Impostazioni di controllo CTS della porta
RS-232C
Canali di collegamento della porta RS-232C
per PC Link 1:1
Modalità di comunicazione della porta
RS-232C
Velocità di baud della porta RS-232C Bit di DM 6646 da 00
Formato frame della porta RS-232C Bit di DM 6646 da 08
Ritardo di trasmissione della porta RS-232C DM 6647
Numero di nodo host link della porta
RS-232C
Abilitazione del codice di inizio in modalità
senza protocollo della porta RS-232C
Abilitazione del codice di fine in modalità
senza protocollo della porta RS-232C
Impostazione del codice di inizio in modalità
senza protocollo della porta RS-232C
Impostazione del codice di inizio in modalità
senza protocollo della porta RS-232C o
numero di byte ricevuti
Abilitazione del codice di inizio in modalità
senza protocollo della porta periferica
Abilitazione del codice di fine in modalità
senza protocollo della porta periferica
Impostazione del codice di inizio in modalità
senza protocollo della porta periferica
Impostazione del codice di fine in modalità
senza protocollo della porta periferica o
numero di byte ricevuti
Impostazione per l’individuazione dell’errore
di batteria
Bit di DM 6616 da 00
a 07
Bit di DM 6616 da 08
a 15
a 03
a 07
Bit di DM 6645 da 00
a 03
Bit di DM 6645 da 04
a 07
Bit di DM 6645 da 08
a 11
Bit di DM 6645 da 12
a 15
a 07
a 15
Bit di DM 6648 da 00
a 07
Bit di DM 6648 da 08
a 11
Bit di DM 6648 da 12
a 15
Bit di DM 6649 da 00
a 07
Bit di DM 6649 da 08
a 15
Bit di DM 6653 da 08
a 11
Bit di DM 6653 da 12
a 15
Bit di DM 6654 da 00
a 07
Bit di DM 6654 da 08
a 15
Bit di DM 6655 da 12
a 15
Capitolo 1Introduzione
Non
supportato
1-6 Preparazione al funzionamento
Seguire i passi riportati di seguito quando si installa un sistema CPM2C.
1, 2, 3... 1. Struttura del sistema
• Selezionare un modulo CPU e moduli di espansione del CPM2C con le
caratteristiche richieste nel sistema controllato.
• Struttura dei circuiti di sicurezza esterni come ad esempio i circuiti di interblocco e i circuiti limitatori.
Per ulteriori dettagli, fare riferimento a 2-2 Caratteristiche e 3-1 Precauzioni.
2. Installazione
• Collegare il modulo di espansione.
• Installare il modulo CPU (installazione della guida DIN)
Per ulteriori dettagli fare riferimento a 3-3 Installazione del CPM2C e 3-4
Cablaggio e collegamenti.
23

Capitolo 1Introduzione
3. Cablaggio
• Collegare l’alimentazione e i dispositivi I/O.
• Collegare i dispositivi di comunicazione, se necessario.
• Collegare la Console di programmazione.
Per ulteriori dettagli fare riferimento a 3-4 Cablaggio e collegamenti, 4-1 Utilizzo della Console di programmazione.
4. Impostazioni iniziali
• Impostare l’interruttore di comunicazione sulla parte anteriore del modulo
CPU, se necessario (gli interruttori devono essere impostati quando viene
collegato un dispositivo diverso dalla Console di programmazione oppure
le impostazioni di comunicazione standard non vengono utilizzate).
• Collegare la Console di programmazione, impostare il selettore di modalità su PROGRAM e accendere il PLC.
• Controllare gli indicatori LED del modulo CPU e il display della Console di
programmazione.
• Eliminare i dati dalla memoria del PLC (Cancellazione totale)
• Eseguire le impostazioni del Setup del PLC.
Per ulteriori dettagli fare riferimento a 3-3 Installazione del CPM2C e 4-1-4
Preparazione al funzionamento.
5. Creare un programma a relè
• Creare un programma a relè per controllare il sistema.
Per ulteriori dettagli fare riferimento al Capitolo 4 Utilizzo dei dispositivi di
programmazione e al Manuale di programmazione.
6. Scrivere il programma a relè nel PLC
• Scrivere il programma a relè nel PLC con la Console di programmazione
oppure trasferire il programma nel PLC dal Support Software.
Per ulteriori dettagli fare riferimento a Capitolo 4 Utilizzo dei dispositivi di
programmazione, SYSMAC Support Software Operation Manuals e CPT
User Manual.
7. Esecuzione del test
• Controllo del cablaggio I/O nella modalità PROGRAM.
• Controllo e debug dell’esecuzione del programma nella modalità MONITOR.
Per ulteriori dettagli fare riferimento al Capitolo 5 Esecuzione del test e
gestione degli errori.
24

CAPITOLO 2
Caratteristiche e componenti dei moduli
Questo capitolo illustra i componenti principali dei moduli che costituiscono un PLC CPM2C PC e ne descrive le caratteristiche tecniche.
2-1 Componenti dei moduli 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-1 Componenti dei moduli CPU 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-2 Componenti del modulo di espansione I/O 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2 Caratteristiche 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-1 Caratteristiche generali 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-2 Caratteristiche 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-3 Caratteristiche I/O 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25

Caratteristiche e componenti dei moduli Capitolo 2
2-1 Componenti dei moduli
2-1-1 Componenti dei moduli CPU
Nomi dei componenti del modulo CPU
Vista frontale (Modulo CPU con uscite a relè)
4. Indicatori di stato
del PLC
7. Porta di comunicazione
6. Indicatori di uscita
5. Indicatori di ingresso
8. Interruttori di comunicazione
2. Terminali di ingresso
3. Terminali di uscita
Vista frontale (Modulo CPU con uscite a transistor)
4. Indicatori di
7. Porta di comunicazione
2. Connettore di ingresso
Vista superiore
9. Batteria
stato del PLC
6. Indicatori di uscita
5. Indicatori di ingresso
8. Interruttoti di comunicazione
3. Connettore di uscita
Vista inferiore
1. Connettore
alimentatore
26
10. Interruttore di individuzione batteria scarica
Lato destro
(Modulo CPU con uscite a relè)
11. Connettore di
espansione I/O
(connettore di
uscita)
Lato destro
(Modulo CPU con uscite a transistor)
11. Connettore di
espansione I/O
(connettore di
uscita)

Caratteristiche e componenti dei moduli Capitolo 2
Descrizione dei componenti del modulo CPU
1, 2, 3... 1. Connettore dell’alimentatore
Collega l’alimentatore (24 Vc.c.) a questo connettore.
2. Terminali/Connettore di ingresso
Collega il Modulo CPU ai dispositivi di ingresso esterni.
3. Terminali/Connettore di uscita
Collega il Modulo CPU ai dispositivi di ingresso esterni.
4. Indicatori di stato del PLC
Questi indicatori indicano lo stato operativo del PLC, come riportato nella
seguente tabella.
Indicatore Stato Funzione
PWR
(verde)
RUN
(verde)
COMM
(giallo)
ERR/ALARM
(rosso)
PRO
(verde)
5. Indicatori di ingresso
Questi indicatori si accendono quando il corrispondente terminale di ingresso
è ON. Lo stato di un indicatore di ingresso riflette lo stato dell’ingresso anche
quando quest’ultimo viene utilizzato per un contatore ad alta velocità.
ON Viene fornita alimentazione al PLC.
OFF Non viene fornita alimentazione al PLC.
ON Il PLC è in modalità RUN o MONITOR.
OFF Il PLC è in modalità PROGRAM o si è
verificato un errore fatale.
Lampeggiante I dati vengono trasferiti attraverso la porta
periferica o la porta RS-232C.
OFF I dati non vengono trasferiti attraverso la porta
periferica o la porta RS-232C.
ON Si è verificato un errore fatale (il
funzionamento del PLC si interrompe).
Lampeggiante Si è verificato un errore non fatale (il PLC
continua a funzionare).
OFF Indica il funzionamento normale.
ON Il Modulo CPU è impostato per il collegamento
della Console di programmazione.
OFF Il Modulo CPU non è impostato per il
collegamento della console di programmazione.
Note a) Quando gli ingressi ad interrupt vengono utilizzati nella modalità inter-
rupt, l’indicatore potrebbe non accendersi anche durante la condizione di interrupt se l’ingresso non è attivo per un tempo sufficiente.
b) Gli indicatori di ingresso riflettono lo stato degli ingressi corrispon-
denti anche quando il PLC è in modalità STOP/PROGRAM. Tuttavia i bit di ingresso corrispondenti non verranno aggiornati.
6. Indicatori di uscita
Questi indicatori si accendono quando il corrispondente terminale di uscita
è ON, durante l’aggiornamento I/O. Lo stato dell’indicatore di uscita riflette
anche lo stato dell’uscita corrispondente quando quest’ultima viene utiliz-
zata come uscita impulsiva.
7. Porta di comunicazione
Collega il PLC ad un dispositivo di programmazione (incluse le console di
programmazione), un computer o un dispositivo esterno standard. Utilizzare un cavo di collegamento adeguato (CPM2C-CN111, CS1W-CN114 o
CS1W-CN118).
Note a) La console di programmazione C200H-PRO27-E può essere col-
legata direttamente al PLC con un cavo di collegamento
CS1W-CN224/CN624.
b) Utilizzare un cavo CPM2C-CN111 o CS1W-CN114 per il collega-
mento alla porta periferica. La porta periferica e la porta RS-232C
27

Caratteristiche e componenti dei moduli Capitolo 2
possono essere utilizzate contemporaneamente con il
CPM2C-CN111.
c) Utilizzare un cavo CPM2C-CN111 o CS1W-CN118 per il collega-
mento alla porta RS-232C. La porta periferica e la porta RS-232C
possono essere utilizzate contemporaneamente con il
CPM2C-CN111.
8. Interruttori di comunicazione
Questi interruttori controllano le impostazioni di comunicazione per la porta
periferica e la porta RS-232C (le impostazioni standard sono 1 bit di avvio, 7
bit di dati, 2 bit di arresto, parità pari e velocità in baud a 9.600 bps).
Impostazioni
interruttore
SW1 SW2
OFF OFF Connessione della Console di program-
OFF ON Altro dispositivo periferico:
ON OFF Connessione della Console di program-
ON ON Altro dispositivo periferico:
Comunicazione delle porte
periferiche
mazione
Vengono usate le impostazioni del setup
del PLC (da DM 6650 a DM 6654).
mazione
Vengono usate le impostazioni standard.
Comunicazione
della porta
RS-232C
Vengono usate le
impostazioni del
setup del PLC (da
DM 6645 a
DM 6649).
Vengono usate le
impostazioni standard.
Accertarsi che l’interruttore di comunicazione 2 sia OFF durante il collegamento
ad una Console di programmazione. L’indicatore PRO verde sulla parte anteriore del Modulo CPU si accende.
9. Batteria
Questa batteria esegue il backup della memoria nei moduli CPU con un
clock interno. La batteria viene collegata dopo aver acquistato il modulo.
Nota La batteria non è inclusa nei moduli CPU senza un clock interno. Tut-
tavia la batteria CPM2C-BAT01 può essere acquistata separata-
mente e collegata alla memoria di backup.
10. Interruttore di individuazione batteria scarica
Questo interruttore consente di abilitare o disabilitare l’individuazione di un
errore di batteria scarica. Quando la batteria non è collegata, disabilitare
l’individuazione di batteria scarica facendo scorrere l’interruttore indietro
(verso la batteria).
28
Disabilitato
Abilitato
Posizione interruttore Individuazione batteria scarica
In avanti (allontanandosi
dalla batteria)
Indietro (verso la batteria) Individuazione errore disabilitata
Individuazione errore abilitata
11. Connettore di espansione I/O
Collega il Modulo CPU del PLC ad un Modulo di espansione (massimo 5). Il
coperchio per il connettore di espansione I/O è incluso con il Modulo CPU.

Caratteristiche e componenti dei moduli Capitolo 2
Assegnazione dei terminali I/O e dei pin del connettore
Modulo CPU con 10 punti I/O (uscite a relè)
Ingressi Uscite
Comune condiviso
Modulo CPU con 10 punti I/O (uscite a transistor)
Ingressi Uscite
Di riduzione Di origine
29

Caratteristiche e componenti dei moduli Capitolo 2
Modulo CPU con 20 punti I/O
Ingressi Uscite
NPN PNP
2-1-2 Componenti del modulo di espansione I/O
Modulo di espansione I/O con uscite a relè
Vista frontale Lato destro
3. Indicatori di ingresso 4. Indicatori di uscita
5. Connettore di
espansione I/O
(ingresso)
1. Terminali di ingresso
2. Terminali
di uscita
6. Connettore di
espansione I/O
(uscita)
30

Caratteristiche e componenti dei moduli Capitolo 2
Modulo di espansione I/O con uscite a transistor
Vista frontale Lato destro
3. Indicatori di
ingresso
5. Connettore di
espansione I/O
(ingresso)
1. Connettore di ingresso
1, 2, 3... 1. Terminali/Connettore di ingresso
4. Indicatori di uscita
6. Connettore di
espansione I/O
(uscita)
2. Connettore di
uscita
Collega il Modulo CPU ai dispositivi di ingresso esterni.
2. Terminali/Connettore di uscita
Collega il Modulo CPU ai dispositivi di uscita esterni.
3. Indicatori di ingresso
Questi indicatori si accendono quando il corrispondente terminale di
ingresso è ON.
Nota Gli indicatori di ingresso riflettono lo stato degli ingressi corrispon-
denti anche quando il PLC è in modalità STOP/PROGRAM. Tuttavia i
bit di ingresso corrispondenti non vengono aggiornati.
4. Indicatori di uscita
Questi indicatori si accendono quando il terminale di uscita corrispondente
è ON.
5. Connettore di espansione I/O (ingresso)
Collega il Modulo di espansione I/O al Modulo CPU Unit o all’ultimo Modulo
di espansione I/O collegato.
Nota Gli indicatori si accendono durante l’aggiornamento I/O. Lo stato di
un indicatore di uscita riflette lo stato dell’uscita corrispondente
anche quando quest’ultima viene utilizzata come uscita impulsiva.
6. Connettore di espansione I/O (uscita)
Collega il Modulo di espansione I/O a quello successivo, se necessario. Al
Modulo CPU è possibile collegare fino a 5 Moduli di espansione I/O.
Il coperchio per il connettore di espansione I/O non è incluso con il Modulo di
espansione I/O. Utilizzare il coperchio incluso con il Modulo CPU per coprire
il connettore di espansione I/O non utilizzato, situato sul Modulo di espansione I/O del PLC.
31

Caratteristiche e componenti dei moduli Capitolo 2
Assegnazione dei terminali I/O e dei pin del connettore
Modulo di espansione I/O con 10 punti I/O
Ingressi Uscite
Comune condiviso
Modulo di espansione I/O con 24 punti I/O
Ingressi Uscite
Di riduzione Di origine
32

Caratteristiche e componenti dei moduli Capitolo 2
2-2 Caratteristiche
2-2-1 Caratteristiche generali
Elemento
Alimentazione 24 Vc.c.
Campo della
tensione di
funzionamento
Consumo energia 4 W 1 W
Corrente di picco 25 A max.
Isolamento 20 MΩ min. (a 500 Vc.c.) tra i terminali esterni c.a. e i terminali di terra di protezione
Rigidità dielettrica 1.500 Vc.a. per 1 min (tra circuiti isolati)
Immunità ai disturbi 1,500 Vp-p, durata impulso: da 0,1 a 1 µs, tempo di salita: impulso 1 ns (mediante simulatore
Resistenza alle
vibrazioni
Resistenza agli urti 147 m/s2 per tre volte nelle direzioni X, Y e Z
Temperatura
ambiente
Umidità dal 10% al 90% (senza condensa)
Atmosfera Libera da gas corrosivi
Interfaccia I/O Blocco terminale Connettore Blocco terminale Connettore
Risposta di interrupt
di alimentazione
Peso 200 g max. 200 g max. 200 g max. 150 g max. 150 g max.
Moduli CPU con 10 punti I/O
Uscite a relè Uscite a transistor
da 20,4 a 26,4 Vc.c.
disturbi)
da 10 a 57 Hz, doppia ampiezza di 0,075 mm, da 57 a 150 Hz, accelerazione: 9,8 m/s2 nelle
direzioni X, Y e Z per 80 minuti ciascuna (coefficiente di tempo; 8 minuti × coefficiente 10 = tempo
totale 80 minuti)
Operativa: da 0° a 55°C
Di stoccaggio: da –20° a 75°C (ad eccezione della batteria)
2 ms min.
Moduli CPU
con
20 punti I/O
Uscite a
transistor
Moduli di espansione I/O
10 punti I/O
(Uscite a relè)
(Uscite a transistor)
24 punti I/O
2-2-2 Caratteristiche
Elemento
10 punti I/O
(uscite a relè)
Metodo di controllo Metodo di programma memorizzato
Metodo di controllo I/O Scansione ciclica con uscita diretta (l’aggiornamento immediato può essere eseguito con
IORF(97).)
Linguaggio di
programmazione
Lunghezza istruzione
Istruzioni
Tempo di esecuzione Istruzioni di base: 0.64 µs (istruzione LD)
Capacità di
programmazione
Capacità
massima
I/O
Bit di ingresso Da IR 00000 a IR 00915 (i canali non utilizzati per i bit di ingresso possono essere utilizzati
Bit di uscita Da IR 01000 a IR 01915 (i canali non utilizzati per i bit di uscita possono essere utilizzati
Bit di lavoro 928 bit: da IR 02000 a IR 04915 e da IR 20000 a IR 22715
Bit speciali (area SR) 448 bit: da SR 22800 a SR 25515
Solo modulo
CPU
Con moduli di
espansione
I/O
Diagramma a relè
1 step per istruzione, da 1 a 5 canali per istruzione
Istruzioni di base: 14
Istruzioni speciali:105 istruzioni, 185 variazioni
Istruzioni speciali:7.8 µs (istruzione MOV)
4.096 canali
10 punti 20 punti
130 punti max. 140 punti max.
per i bit di lavoro).
per i bit di lavoro).
Caratteristiche del modulo CPU
10 punti I/O
(uscite a transistor)
20 punti I/O
(uscite a transistor)
33

Caratteristiche e componenti dei moduli Capitolo 2
Elemento Caratteristiche del modulo CPUElemento
10 punti I/O
(uscite a relè)
Bit temporanei (area TR) 8 bit (da TR0 a TR7)
Bit di mantenimento
(area HR)
Bit secondari (area AR) 384 bit: da AR 0000 a AR 2315 (Canali da AR 00 a AR 23)
Bit di collegamento
(area LR)
Temporizzatori/Contatori 256 temporizzatori/contatori (da TIM/CNT 000 a TIM/CNT 255)
Memoria dati Lettura/Scrittura: 2.048 canali (da DM 0000 a DM 2047)*
Gestione degli interrupt
Interrupt del
temporizzatore
Contatore ad alta velocità Un contatore ad alta velocità: 20 kHz a monofase o 5 kHz bifase (conteggio lineare)
Ingressi a interrupt
(Modalità contatore)
Uscita impulsiva Due punti senza accelerazione/decelerazione, da 10 Hz a 10 kHz ciascuno e senza
Controllo degli impulsi
sincronizzato
Ingressi a risposta rapida
Costante del tempo di
ingresso
(Tempo di risposta ON =
Tempo di risposta OFF)
Funzione clock Indica l’anno, il mese, il giorno della settimana, il giorno, l’ora, i minuti e i secondi (Backup
320 bit da HR 0000 a HR 1915 (Canali da HR 00 a HR 19)
256 bit: da LR 0000 a LR 1515 (Canali da LR 00 a LR 15)
Temporizzatori1 ms: TMHH(––)
Temporizzatori10 ms: TIMH(15)
Temporizzatori100 ms: TIM
Temporizzatori1 s/10 s: TIML(––)
Contatori sottraenti: CNT
Contatori reversibili: CNTR(12)
Sola lettura: 456 canali (da DM 6144 a DM 6599)
Setup del PLC: 56 canali (da DM 6600 a DM 6655)
*Il registro degli errori è contenuto in DM 2000...DM 2021.
2 interrupt 2 interrupt 4 interrupt
Condiviso dagli ingressi ad interrupt esterni (modalità contatore) e dagli ingressi a risposta
rapida.
1 (Modalità interrupt programmato o Modalità interrupt singolo)
Interrupt contatore: 1 (comparazione valore impostato o comparazione intervallo del valore
impostato)
2 ingressi 2 ingressi 4 ingressi
Condiviso dagli ingressi ad interrupt esterni e dagli ingressi a risposta rapida.
controllo di direzione.
Un punto con accelerazione/decelerazione trapezoidale, da 10 Hz a 10 kHz e con controllo
di direzione.
Due punti con uscite con duty cycle impostabile (PWM).
(Le uscite impulsive possono essere utilizzate solo con le uscite a transistor, non possono
essere utilizzate con le uscite a relè).
Un punto:
Un’uscita impulsiva può essere creata combinando il contatore ad alta velocità con le
uscite impulsive e moltiplicando la frequenza degli impulsi di ingresso dal contatore ad alta
velocità per un fattore fisso.
(Questa uscita è possibile solo con le uscite a transistor, non può essere utilizzata con le
uscite a relè).
2 ingressi 2 ingressi 4 ingressi
Condiviso dagli ingressi ad interrupt esterni e dagli ingressi ad interrupt (modalità
contatore).
Durata dell’impulso di ingresso min.: 50 µs max.
Può essere impostata per tutti i punti di ingresso.
(1 ms, 2 ms, 3 ms, 5 ms, 10 ms, 20 ms, 40 ms, or 80 ms)
batteria). I seguenti moduli CPU sono dotati di clock incorporato: CPM2C-10C1DR-D,
CPM2C-10C1DTC-D, CPM2C-10C1DT1C-D, CPM2C-20C1DTC-D e
CPM2C-20C1DT1C-D.
10 punti I/O
(uscite a transistor)
20 punti I/O
(uscite a transistor)
34

Caratteristiche e componenti dei moduli Capitolo 2
Elemento Caratteristiche del modulo CPUElemento
10 punti I/O
(uscite a relè)
Funzioni di comunicazione Il cavo CPM2C-CN111, CS1W-CN114 o CS1W-CN118 è necessario per il collegamento
alla porta di comunicazione del CPM2C.
Porta periferica:
Supporta i collegamenti Host Link, del bus periferico, senza protocollo o della Console di
programmazione.
Porta RS-232C:
Supporta i collegamenti Host Link, senza protocollo, Slave Unit Link 1:1, Master Unit Link
1:1 o NT Link 1:1.
Protezione della memoria
(vedere note 1 e 2).
Backup della memoria
(vedere note 1 e 2).
Funzioni di autodiagnosi Malfunzionamento del modulo CPU (watchdog timer), errore del bus I/O e della batteria e
Controllo del programma istruzione END mancante, errori di programmazione (verificati all’avvio funzionamento)
Il contenuto dell’area HR, AR e del programma, il contenuto dell’area DM in lettura/scrittura
e i valori contatore mantenuti durante l’interruzione dell’alimentazione.
Memoria flash:
Programma, area DM di sola lettura e setup del PLC
Backup memoria:
Backup dell’area DM di sola lettura, dell’area HR, dell’area AR e dei valori contatore.
Modulo CPU con clock (batteria): durata di 2 anni a 25°C
Modulo CPU senza clock (condensatore): durata di 10 anni a 25°C
Modulo CPU senza clock (batteria al litio): durata di 5 anni a 25°C
malfunzionamento della memoria
10 punti I/O
(uscite a transistor)
20 punti I/O
(uscite a transistor)
Note 1. L’area DM area, HR e AR e i valori del contatore vengono memorizzati (bac-
kup). Se la batteria di backup o il condensatore si scaricano, il contenuto di
queste aree andrà perduto e i dati assumeranno i valori predefiniti.
2. Il contenuto dell’area del programma, dell’area DM di sola lettura (da
DM 6144 a DM 6599) e del Setup del PLC (da DM 6600 a DM 6655) verrà
memorizzato nella memoria flash. Il contenuto di queste aree verrà letto
dalla memoria flash la volta successiva che viene attivata l’alimentazione,
anche se la batteria di backup o il condensatore sono scarichi.
Quando i dati vengono modificati in una di queste aree, scrivere i nuovi
valori nella memoria flash facendo passare il CPM2C in modalità MONITOR
o RUN oppure spegnendo e riaccendendo il sistema.
2-2-3 Caratteristiche I/O
Caratteristiche di ingresso del modulo CPU
Elemento Ingressi Caratteristiche
Tensione di ingresso Tutti 24 Vc.c.
Impedenza di
ingresso
Corrente di ingresso
Tensione/correnteONDa IN00000 a IN00001 17 Vc.c. min., 5 mA
Da IN00000 a IN00001 2,7 kΩ
Da IN00002 a IN00006 3,9 kΩ (da IN00002 a IN00004 per i moduli CPU con 10 punti I/O)
IN00007 e successivi 4,7 kΩ (IN00005 per i moduli CPU con 10 punti I/O)
Da IN00000 a IN00001 8 mA tipico
Da IN00002 a IN00006 6 mA tipico (da IN00002 a IN00004 per moduli CPU con 10 punti I/O)
IN00007 e successivi 5 mA tipico (IN00005 per Moduli CPU con 10 punti I/O)
+10%
/
–15%
Tensione/correnteONIN00002 e successivi 14.4 Vc.c. min., 3,5 mA
Tensione/corrente
OFF
Ritardo
all’eccitazione
Ritardo alla
diseccitazione
Tutti 5.0 Vc.c. max., 1,1 mA
Tutti Da 1 a 80 ms max. Valore predefinito: 10 ms (nota).
Tutti Da 1 a 80 ms max. Valore predefinito: 10 ms (nota).
35

Caratteristiche e componenti dei moduli Capitolo 2
Elemento CaratteristicheIngressi
Configurazione
circuito
Da IN00000 a IN00001
Da IN00002 a IN00006
(da IN00002 a IN0004 per
i moduli CPU con 10 punti
I/O)
IN00007 e successivi
(IN00005 per Moduli
CPU con 10 punti I/O)
IN
COM
IN
COM
IN
COM
2,7kΩ
3,9 kΩ
4,7 kΩ
820 Ω
750 Ω
1kΩ
0,01 µF
Nota La costante del tempo di ingresso può essere impostata su 1, 2, 3, 5, 10, 20, 40 o
80 ms nel setup del PLC.
Ingressi del contatore ad alta velocità
I seguenti bit di ingresso del modulo CPU possono essere utilizzati come
ingressi del contatore ad alta velocità. La frequenza dei conteggi è di 5 kHz nella
modalità di variazione di fase e di 20 kHz nelle altre modalità.
LED di
ingresso
Circuiti interni
LED di
ingresso
Circuiti interni
LED di
ingresso
Circuiti interni
Ingresso
Modalità variazione di
fase
IN00000 Ingresso impulsivo di
fase A
IN00001 Ingresso impulsivo di
fase B
Modalità ingresso di
direzione + impulsi
Ingresso impulsivo Ingresso impulsivo
Ingresso direzione Ingresso impulsivo
Funzione
incremento
decremento
Modalità ingresso
bidirezionale
Modalità incremento
Ingresso impulsivo
incremento
Ingresso normale
IN00002 Ingresso impulsivo di fase Z o ingresso di reset hardware (IN00002 può essere utilizzato come un ingresso
normale quando non viene utilizzato come ingresso del contatore ad alta velocità).
La durata minima dell’impulso per gli ingressi IN00000 (ingresso di fase A) e
IN00001 (ingresso di fase B) è la seguente:
Modalità ingresso di direzione impulso positivo,
modalità bidirezionale, modalità incremento
50 µs min.
12,5 µs
min.
12,5 µs
min.
Fase A
Fase B
Modalità variazione di fase
100 µs min.
T1T2T3T
T
1
4
T
T
T
: 12,5 µs min.
2
3
4
La durata minima dell’impulso per l’ingresso IN00002 (ingresso di fase Z) è:
50 µs min.
Fase Z
500 µs min.
36

Caratteristiche e componenti dei moduli Capitolo 2
Ingressi a interrupt
I PLC CPM2C sono dotati di ingressi che possono essere utilizzati come ingressi
a interrupt (modalità ingresso a interrupt o modalità contatore) e ingressi a risposta rapida. La durata minima dell’impulso per questi ingressi è 50 µs.
Nei moduli CPU con 10 punti I/O, gli ingressi IN00003 e IN00004 possono essere
utilizzati come ingressi a interrupt. Nei moduli CPU con 20 punti I/O, gli ingressi da
IN00003 a IN00006 possono essere utilizzati con ingressi a interrupt.
Caratteristiche di ingresso del modulo di espansione I/O
Elemento Caratteristiche
Tensione di ingresso 24 Vc.c.
Impedenza di ingresso 4,7 kΩ
Corrente di ingresso 5 mA tipico
Tensione/corrente ON 14.4 Vc.c. min., 3,5 mA
Tensione/corrente OFF 5.0 Vc.c. max., 1,1 mA
Ritardo all’eccitazione Da 1 a 80 ms max. Valore predefinito: 10 ms (nota).
Ritardo alla diseccitazione Da 1 a 80 ms max. Valore predefinito: 10 ms (nota).
Configurazione circuito
+10%
/
–15%
IN
COM
4,7 kΩ
750 Ω
LED di
ingresso
Circuiti interni
Nota La costante del tempo di ingresso può essere impostata su 1, 2, 3, 5, 10, 20, 40 o
80 ms nel setup del PLC.
Caratteristiche di uscita del modulo CPU e del modulo di espansione I/O
Uscite a relè
Elemento Caratteristiche
Capacità di commutazione
max.
Capacità di commutazione
min.
Durata del relè
(nota).
Ritardo all’eccitazione 15 ms max.
Ritardo alla diseccitazione 15 ms max.
Configurazione circuito
2 A, 250 Vc.a. (cosφ = 1)
2 A, 24 Vc.c.
(4 A/comune)
10 mA, 5 Vc.c.
Elettrica:150.000 operazioni (24-Vc.c. carico resistivo)
100.000 operazioni (240-Vc.a. carico induttivo, cosφ = 0.4)
Meccanica: 20.000.000 operazioni
OUT
COM
OUT
COM
OUT
Circuiti interni
LED di
uscita
OUT
COM
37

Caratteristiche e componenti dei moduli Capitolo 2
Nota La durata dei contatti di uscita del relè indicata nella tabella è stata valutata per le
condizioni peggiori. La seguente figura mostra i risultati dei test di durata della
OMRON ad una velocità di commutazione di 1.800 volte/ora.
120 Vc.a., carico resistivo
Durata
(x 104)
300
200
100
50
30
20
10
24 Vc.c., τ = 7 ms
120 Vc.a., cosϕ = 0,4
240 Vc.a., cosϕ = 0,4
24 Vc.c./240 Vc.a., carico resistivo
5
Velocità di commutazione:
1800 volte/ora
3
2
0,1 0,2 0,3 0,5 0,7 1 2 3 5
Corrente contatto (A)
Uscite a transistor (NPN o PNP)
Elemento Caratteristiche
Capacità di
commutazione max.
Capacità di
commutazione min.
Corrente di picco max. 0,9 A per 10 ms (caricando e scaricando la forma d’onda)
Perdita di corrente 0,1 mA max.
Tensione residua 0,8 V max.
Ritardo all’eccitazione OUT01000 e OUT01001: 20 µs max.
Ritardo alla
diseccitazione
Fusibile 1 fusibile per ciascuna delle due uscite (non può essere sostituito dall’utente)
Da 40 mA/4.5 Vc.c. a 300 mA/20.4 Vc.c.,
300 mA (da 20.4 Vc.c.a 26.4 Vc.c.)
Quando si utilizza OUT01000 o OUT01001 come uscita impulsiva, collegare un resistore
fittizio, se richiesto, per portare la corrente di carico tra 10 e 150 mA. Se la corrente di carico
è inferiore a 10 mA, il tempo di risposta ON/OFF sarà maggiore e gli impulsi ad alta velocità
non verranno emessi.
Il transistor si riscalderà se utilizzato a 150 mA o maggiore, danneggiando possibilmente gli
elementi.
0,5 mA
OUT01002 e successivo: 0,1 ms max.
OUT01000 e OUT01001: 40 µs max. da 10 a 300 mA
0,1 ms max. da 0,5 a 10 mA
OUT01002 e successivo: 1 ms max.
38

Caratteristiche e componenti dei moduli Capitolo 2
Elemento Caratteristiche
Configurazione circuito
Uscite NPN
LED di
uscita
24 Vc.c.
OUT
Carico
OUT
Carico
1 A
OUT
Carico
Circuiti interni
OUT
Carico
1 A
Uscite PNP
LED di
uscita
Circuiti interni
COM (–)
COM (+)
1 A
OUT
OUT
1 A
OUT
OUT
0 Vc.c.
Nota La seguente figura mostra la capacità di commutazione massima.
Carico
Carico
Carico
Carico
300
Corrente di
uscita (mA)
40
4.5 20.4 26.4
Attenzione Non applicare una tensione superiore alla capacità di commutazione massima
!
Tensione di
uscita (V)
ad un terminale di uscita. Possono verificarsi danni al prodotto.
39

Caratteristiche e componenti dei moduli Capitolo 2
40

CAPITOLO 3
Installazione e cablaggio
Questo capitolo contiene informazioni sull’installazione e il cablaggio di un PLC CPM2C. Seguire attentamente le norme e le
precauzioni presenti in questo capitolo durante l’installazione del CPM2C in un pannello o armadietto, per collegare l’ali-
mentazione o per il cablaggio I/O.
3-1 Precauzioni 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1-1 Collegamento dell’alimentazione 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1-2 Tensione di alimentazione 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1-3 Circuiti limitatori e a interblocchi 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2 Scelta del luogo di installazione 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2-1 Caratteristiche del luogo di installazione 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2-2 Installazione sul pannello/armadietto 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3 Installazione del CPM2C 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3-1 Collegamento dei moduli 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3-2 Installazione del CPM2C 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4 Cablaggio e collegamenti 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-1 Precauzioni generali per il cablaggio 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-2 Cablaggio di alimentazione 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-3 Rimozione e cablaggio dei blocchi terminali I/O 48. . . . . . . . . . . . . . . . . . . . . . . . .
3-4-4 Rimozione e cablaggio di connettori I/O 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-5 Utilizzo di Terminali I/O e Terminali a relè 53. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-6 Collegamento dei dispositivi di ingresso 53. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-7 Collegamento dei dispositivi di uscita 58. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-8 Collegamento dei dispositivi di programmazione 65. . . . . . . . . . . . . . . . . . . . . . . . .
3-4-9 Comunicazioni a protocollo libero 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-10 Collegamenti del terminale programmabile OMRON 67. . . . . . . . . . . . . . . . . . . . .
3-4-11 Collegamenti PC Link uno a uno 67. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41

Installazione e cablaggio Capitolo 3
3-1 Precauzioni
Nella progettazione di un sistema comprendente un PLC CPM2C, occorre
osservare le seguenti precauzioni.
3-1-1 Collegamento dell’alimentazione
Tenere separati i cavi di alimentazione dal sistema di controllo, dal sistema
CPM2C e dal cablaggio del sistema I/O. Separare i circuiti di controllo che alimentano l’unità centrale dai circuiti principali utilizzando gli appositi circuiti di
protezione e fusibili.
3-1-2 Tensione di alimentazione
Attenzione Applicare le tensioni di alimentazione indicate nel Capitolo 2 Caratteristiche e
!
componenti dei moduli. Se non vengono rispettate le caratteristiche indicate si
potrebbe verificare un danneggiamento del prodotto.
Se la tensione di alimentazione scende al di sotto dell’85% rispetto alla tensione
nominale, il CPM2C si arresterà e tutte le uscite verranno disattivate. Se la
bassa tensione influenza l’apparecchiatura ed altro, fornire un circuito di prote-
zione che disattiva l’uscita finché la tensione non ritorna al valore nominale.
In luoghi dove le condizioni di alimentazione non sono adeguate, prendere provvedimenti per assicurarsi che la tensione fornita corrisponda alla tensione nominale. Attenersi alle precauzioni per la sicurezza, come ad esempio fornire interruttori per evitare corti circuiti nel cablaggio esterno.
Quando si esegue una delle seguenti operazioni, spegnere il PLC. In caso contrario possono verificarsi scariche elettriche, danni al prodotto e malfunzionamenti.
• Connessione e disconnessione dei Moduli di espansione I/O e i Moduli CPU.
• Assemblaggio dei moduli.
• Connessione di cavi e cablaggio.
• Connessione e disconnessione dei connettori.
• Sostituzione della batteria.
3-1-3 Circuiti limitatori e a interblocchi
AVVERTENZA I circuiti di emergenza, i circuiti a interblocchi, i circuiti limitatori e altre misure di
!
sicurezza di questo tipo devono essere forniti nei circuiti di controllo esterni (vale
a dire, non nel Controllore programmabile) per garantire la sicurezza del
sistema nel caso si verifichi un’anomalia a causa del malfunzionemento del PLC
o di altri fattori esterni che possono influenzarne il funzionamento. Se non
vengono fornite misure di sicurezza adeguate possono verificarsi danni di grave
entità.
La seguente figura mostra un esempio di circuito a interblocchi.
CPM2C
Circuito a interblocco
01005
MC2
01006
MC1
MC1
Motore diretto
MC2
Motore inverso
42
In questo circuito a interblocchi, MC1 e MC2 non possono essere attivati contemporaneamente anche se le uscite 01005 e 01006 del CPM2C sono attive
(funzionamento del PLC non corretto).

Installazione e cablaggio Capitolo 3
3-2 Scelta del luogo di installazione
Il CPM2C è altamente affidabile ed è in grado di funzionare in condizioni difficili;
l’installazione del PLC in un luogo favorevole, tuttavia, ne aumenterà le prestazioni e la durata operativa.
Attenzione Assicurarsi che il CPM2C venga installato correttamente come indicato in que-
!
sto manuale. Errori durante l’installazione possono causare malfunzionamenti
del modulo.
3-2-1 Caratteristiche del luogo di installazione
Nota Non installare il CPM2C nelle seguenti condizioni.
• Luoghi con esposizione diretta a raggi solari.
• Luoghi con una temperatura inferiore a 0 e superiore a 55C.
• Luoghi con umidità inferiore al 10% e superiore al 90%.
• Luoghi con condensa generata da improvvisi sbalzi di temperatura.
• Luoghi con gas corrosivi o gas infiammabili.
• Luoghi sottoposti a polveri (in particolare polvere di ferro) o sali.
• Luoghi sottoposti a urti o vibrazioni.
• Luoghi esposti ad acqua, olio o prodotti chimici.
Accertarsi che le condizioni del luogo di installazione siano conformi alle caratteristiche generali del CPM2C. Per ulteriori dettagli, fare riferimento a 2-2-1
Caratteristiche generali.
Nota Fornire apposita schermatura quando l’installazione viene eseguita in uno dei
seguenti luoghi:
• Luoghi interessati da elettricità statica o da altri disturbi.
• Luoghi interessati da forti campi magnetici.
• Luoghi esposti a radiazioni.
• Luoghi vicini a linee di alimentazione elettrica.
3-2-2 Installazione sul pannello/armadietto
Quando il CPM2C viene installato su un pannello o armadietto, verranno considerate le condizioni di funzionamento, di manutenzione e le condizioni ambientali del PLC.
Surriscaldamento
La temperatura operativa del CPM2C è compresa tra 0C e 55C. Verificare
che vi sia una ventilazione adeguata in modo da consentirne il raffreddamento.
• Lasciare uno spazio sufficiente per la circolazione dell’aria.
• Non installare il CPM2C su apparecchiature che generano grandi quantità di
calore, come riscaldatori, trasformatori o resistori.
• Installare una ventola o un sistema di raffreddamento quando la temperatura
dell’ambiente supera i 55C.
Pannello di
controllo
Ventola
CPM2C
Apertura per l’aria
43

Installazione e cablaggio Capitolo 3
• Durante l’installazione, orientare il CPM2C come mostrato di seguito.
Parte superiore
Parte inferiore
Disturbi elettriciDisturbi elettrici
Accessibilità
Altro
dispositivo
Le linee elettriche e le apparecchiature ad alta tensione possono produrre
disturbi elettrici nel PLC.
• Non installare il CPM2C in un pannello o un armadietto con apparecchiature
ad alta tensione.
• Lasciare almeno 200 mm tra il CPM2C e le linee elettriche.
200 mm min.
CPM2C
200 mm min.
Accertarsi che il CPM2C sia accessibile per le normali operazioni e la manutenzione.
• Lasciare spazio sufficiente per garantire l’accessibilità al CPM2C. Le apparec-
chiature ad alta tensione o le linee elettriche potrebbero essere pericolose se
rappresentano un ostacolo durante le operazioni abituali.
• Per accedere facilmente al PLC, installare il pannello o l’armadietto a circa
1–1,6 m dal pavimento.
• Mantenere tra il CPM2C e altri dispositivi una distanza di almeno 100 mm.
Altro
dispositivo
100 mm min.
3-3 Installazione del CPM2C
Questo capitolo descrive come installare il CPM2C e collegare i Moduli di
espansione. Fare riferimento all’Appendice B per informazioni sulle dimensioni
dei moduli mediante figure.
3-3-1 Collegamento dei moduli
Al Modulo CPU CPM2C è possibile collegare fino a 5 Moduli di espansione I/O.
Per collegare un Modulo di espansione I/O attenersi alla seguente procedura.
44
100 mm min.

Installazione e cablaggio Capitolo 3
1, 2, 3... 1. Rimuovere il coperchio dal connettore di espansione I/O del Modulo CPU o
del Modulo di espansione I/O. Utilizzare un cacciavite a punta piatta per
rimuovere il coperchio dal connettore di espansione I/O, in caso di difficoltà.
Coperchio del
connettore di
espansione I/O
2. Allineare il Modulo di espansione I/O e il Modulo CPU (o Modulo di espansione I/O precedente) in modo che i fermi (superiore e inferiore) sul Modulo
di espansione I/O si aggancino ai connettori. Esercitare una pressione da
entrambi i moduli in modo da collegarli.
Far scorrere il
fermo per bloccare i moduli
collegati.
3. Bloccare i moduli chiudendo i fermi (superiore e inferiore) sul Modulo CPU
(o Modulo di espansione I/O precedente). Posizionare il coperchio (incluso
con il Modulo CPU) sull’ultimo connettore di espansione I/O del Modulo di
espansione I/O.
Coperchio del
connettore di
espansione I/O
45

Installazione e cablaggio Capitolo 3
3-3-2 Installazione del CPM2C
Il CPM2C può essere installato su una guida DIN di 35 mm.
Guida DIN
PFP-100N (1 m)
Piastre
(PFP-M)
Installazione
Abbassare il CPM2C in modo che la fessura sul retro del PLC si agganci alla
parte superiore della guida DIN. Spingere il PLC finché il fermo non si fissa in
posizione.
PFP-50N (50 cm)
PFP-100N2 (1 m)
2) Inserire
nella guida.
3) Spingere
sul modulo.
1) Tirare.
Attenzione Accertarsi che la guida DIN sia installata orizzontalmente. L’installazione verti-
!
4) Fermo
cale può impedire il passaggio dell’aria per il raffreddamento del CPM2C e
quindi può provocare surriscaldamento.
Rimozione
Per la rimozione, tirare il fermo con un cacciavite a punta piatta e capovolgere il PLC.
46
Cacciavite
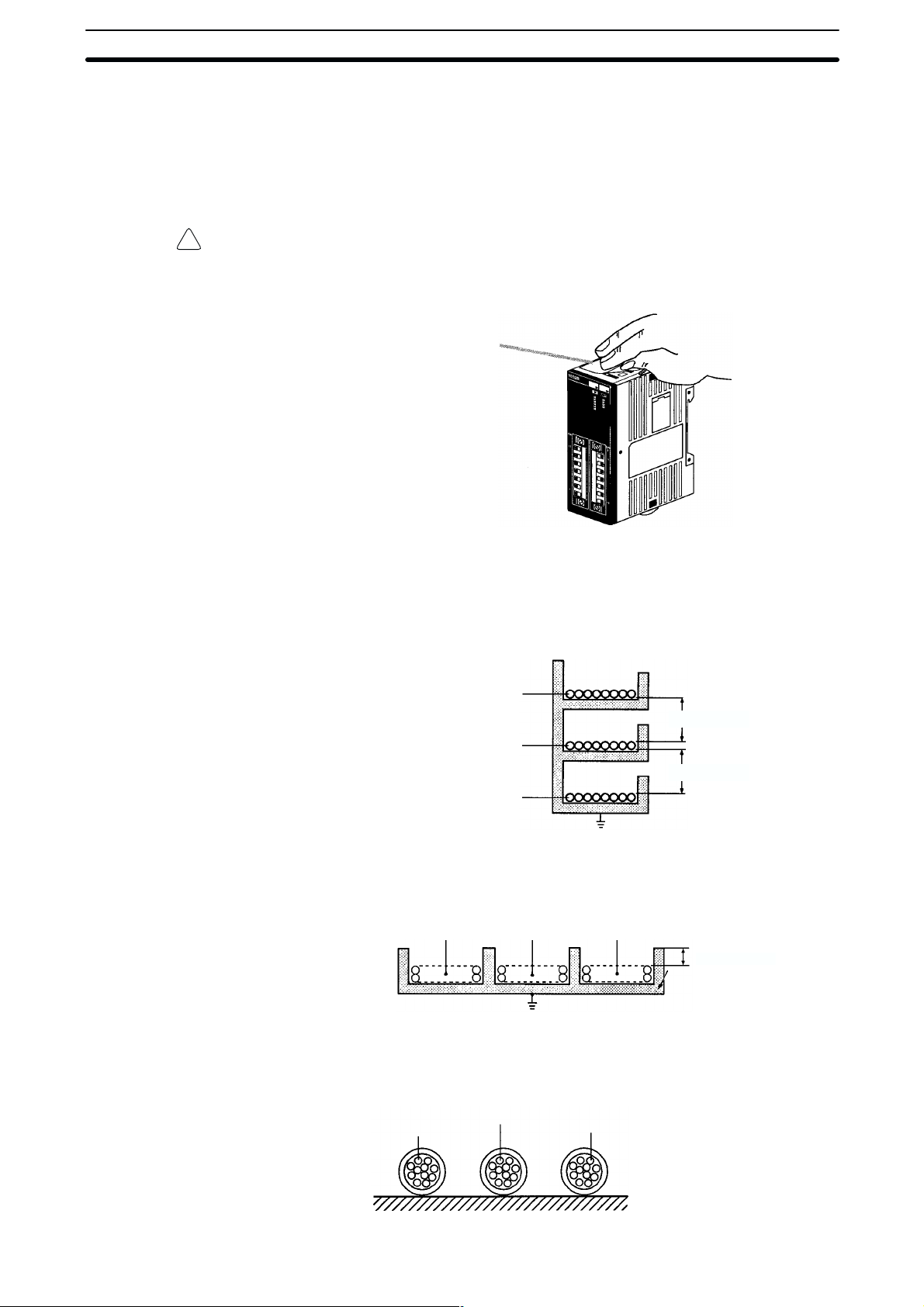
Installazione e cablaggio Capitolo 3
3-4 Cablaggio e collegamenti
Questo capitolo contiene le informazioni di base per il cablaggio del Modulo di
alimentazione e dei Moduli di espansione e il collegamento dei dispositivi di programmazione.
3-4-1 Precauzioni generali per il cablaggio
Attenzione Prima del cablaggio applicare l’etichetta di protezione per evitare che frammenti di
!
cavi cadano all’interno del modulo provocando malfunzionamenti. Una volta completato il cablaggio rimuovere l’etichetta per evitare di provocare surriscaldamento.
Etichetta di protezione
Disturbi sulle linee I/O
Le linee I/O e le linee elettriche del CPM2C non possono essere poste nella
stessa canalina.
Canaline verticali
Lasciare almeno 300 mm tra i cavi di alimentazione e il cablaggio I/O o di controllo, come riportato nella seguente figura.
Linee I/O di CPM2C
300 mm min.
Cavi di controllo e
linee di alimentazione
del CPM2C
Cavi di alimentazione
300 mm min.
Canaline orizzontali
Lasciare almeno 200 mm tra il cablaggio e la parte superiore della canalina,
come riportato nella seguente figura.
Cavi di controllo e linee
Linee I/O CPM2C
elettriche CPM2C
Cavi di alimentazione
200 mm min.
Piastrina metallica
Canaline
Tenere separate le linee I/O, le linee di controllo ed elettriche e i cavi di alimentazione del CPM2C, come riportato nella seguente figura.
Cavi di controllo e
linee elettriche CPM2C
Linee I/O CPM2C
Cavi di alimentazione
47

Installazione e cablaggio Capitolo 3
3-4-2 Cablaggio di alimentazione
La seguente procedura spiega come collegare il Modulo CPU ad un’alimenta-
tore a 24 Vc.c. con il connettore di alimentazione (incluso). Utilizzare un alimentatore con capacità sufficiente e stabilizzato.
Connettore di alimentazione
Cavo rosso:
+24 Vc.c.
Cavo nero:
0 Vc.c.
Lunghezza cavo:
1 m
1, 2, 3... 1. Allineare il connettore di alimentazione allo zoccolo sulla parte inferiore del
CPM2C e inserire il connettore.
(incluso nella confezione del
modulo CPU)
2. Per rimuovere il connettore di alimentazione, afferrare il connettore (non i
cavi), rilasciare la relativa leva di bloccaggio e rimuovere il connettore.
Note 1. Non eseguire test di resistenza alla tensione su terminali di alimentazione
c.c. del Modulo CPU. Il test potrebbe danneggiare i componenti interni del
PLC.
2. Se l’attrezzatura deve essere conforme alle norme CE (Norme di bassa ten-
sione), utilizzare un alimentatore con doppio isolamento o con isolamento
rinforzato.
3. Quando si costruisce un cavo di alimentazione utilizzare quanto segue.
Scatola: 51103-02 (Molex)
Terminali: 50351 (due richiesti) (Molex)
3-4-3 Rimozione e cablaggio dei blocchi terminali I/O
Le seguenti tabelle forniscono le caratteristiche del blocchi terminali I/O.
Blocchi terminali I/O
48

Installazione e cablaggio Capitolo 3
Caratteristiche dei
blocchi terminali
Cavi e terminali
consigliati
Rimozione e cablaggio di
un blocco terminale
1, 2, 3... 1. Allentare le viti sulla parte superiore e inferiore del blocco terminale come
Elementi Caratteristiche
Dimensione vite M2
Coppia di serraggio consigliata Da 0,22 a 0,25 N-m
Elementi Caratteristiche
Filo unico Da 0,14 a 1,5 mm (da AWG 28 a AWG 16) (Guaina
7 mm.)
Fili intrecciati (vedere note). Da 0,14 a 1,5 mm (da AWG 28 a AWG 16) (Guaina
7 mm.)
Terminale a pin Da 0,25 a 1,5 mm, lunghezza terminale 7 mm
Note 1. Quando si utilizzano i fili intrecciati, evitare che i fili di terminali adiacenti
entrino in contatto tra di loro in quanto potrebbero produrre corti circuiti.
2. Non saldare le estremità dei fili intrecciati. La saldatura può provocare pro-
blemi di cablaggio ed inoltre corrosione sulla superficie di contatto.
Per cablare un blocco terminale attenersi alla seguente procedura.
riportato nella seguente figura.
2. Estrarre il blocco terminale dal modulo.
3. Inserire il cavo conduttore nel blocco terminale e serrare la vite del terminale.
49

Installazione e cablaggio Capitolo 3
4. Una volta cablato il blocco terminale, inserire il blocco nel modulo e serrare
le viti sulla parte inferiore e superiore di esso.
3-4-4 Rimozione e cablaggio di connettori I/O
Le seguenti tabelle forniscono le caratteristiche dei connettori I/O compatibili.
Caratteristiche dei connettori compatibili (OMRON)
Connettore Caratteristiche Numero modello
Connettore saldato
a 24 pin e coperchio
Connettore a
crimpare a 24 pin e
coperchio
Connettore a
pressione a 24 pin
Connettore: Fujitsu FCN-361J024-AU equivalente
Coperchio: Fujitsu FCN-360C024-J2 equivalente
Scatola: Fujitsu FCN-363J024 equivalente
Contatti: Fujitsu FCN-363J-AU equivalente
Coperchio: Fujitsu FCN-360C024-J2 equivalente
Connettore: Fujitsu FCN-367J024-AU/F equivalente C500-CE243
Connettori I/O
C500-CE241
C500-CE242
50

Installazione e cablaggio Capitolo 3
ressione
Caratteristiche del connettore (Fujitsu)
Elemento Caratteristiche Numero modello
Presa jack saldata Terminali placcati in oro a 24 pin FCN-361J024-AU
Connettore
a crimpare
Connettore Presa jack a pressione con
a
p
Coperchio del connettore
(non compatibile con la presa jack a
pressione con coperchio chiuso).
Scatola per prese jack a
crimpare
Contatti a crimpare Per cavi con calibro da 24 AWG a 28 AWG FCN-363J-AU
Strumento per crimpatura
manuale
Strumento per rimozione
contatti
coperchio chiuso
Presa jack a pressione con
coperchio aperto
Strumenti
per
pressione
Pressa
manuale
Tronchese Scopo generale FCN-707T-T001/H
Piastra locatrice Per connettori serie 360 FCN-367T-T012/H
24 pin FCN-363J024
--- FCN-363T-T005/H
--- FCN-360T-T001/H
Terminali placcati in oro a 24 pin FCN-367J024-AU/F
Terminali placcati in argento a 24 pin FCN-367J024-AG/F
Terminali placcati in oro a 24 pin FCN-367J024-AU/H
Terminali placcati in argento a 24 pin FCN-367J024-AG/H
Scopo generale FCN-707T-T101/H
Coperchio inclinato sottile per connettore a 24 pin FCN-360C024-J2
Con viti a intaglio per connettore a 24 pin
(possono essere ruotate a mano).
Con viti Phillips per connettore a 24 pin FCN-360C024B
Con viti Phillips intermedie per connettore a 24 pin FCN-360C024C
FCN-360C024E
Collegamento dei
connettori I/O
(Connettori a pressione)
1, 2, 3... 1. Allineare il connettore ed inserirlo nel modulo.
Per collegare un connettore a pressione attenersi alla seguente procedura.
2. Utilizzare un cacciavite a punta piatta per serrare le viti di fissaggio del connettore.
Cacciavite a punta piatta
51

Installazione e cablaggio Capitolo 3
Collegamento dei
connettori I/O
(Connettori saldati)
Assemblaggio dei
connettori saldati
Per collegare un connettore saldato attenersi alla seguente procedura.
1, 2, 3... 1. Allineare il connettore ed inserirlo nel modulo.
2. Utilizzare un cacciavite per serrare le viti di bloccaggio del connettore.
Cacciavite Phillips
Per cablare e assemblare un connettore saldato attenersi alla seguente procedura (OMRON C500-CE241).
1, 2, 3... 1. Far scorrere il tubo restringibile al calore sui cavi di alimentazione e saldare i
cavi ai pin appropriati sullo zoccolo.
Tubo restringibile al calore
Cavi di alimentazione
Connettore
2. Dopo aver saldato tutti i pin, far scorrere il tubo restringibile al calore sui pin
di alimentazione saldati e restringere il tubo riscaldandolo con una pistola a
calore.
Tubo restringibile al calore
3. Assemblare lo zoccolo e il connettore come riportato nella seguente figura.
Coperchio del
connettore
Viti piccole (3)
52
Zoccolo
Dadi (3)
Viti piccole (2)
Morsetto del cavo
Viti del connettore
Dadi (2)

Installazione e cablaggio Capitolo 3
3-4-5 Utilizzo di Terminali I/O e Terminali a relè
Per cablare i dispositivi al connettore I/O del CPM2C, sarebbe opportuno utilizzare i seguenti Terminali I/O e Terminali a relé.
Nota La corrente consentita per XW2Z-A è
1 A. Evitare che la corrente sul terminale
comune superi 1 A.
Uscite Ingressi
Cavi (vedere nota)
XW2Z-100A (1 m)
XW2Z-200A (2 m)
XW2Z-500A (5 m)
Cavi
XW2Z-100A (1 m)
XW2Z-200A (2 m)
XW2Z-500A (5 m)
Blocchi terminali
XW2B-20G4 (viti vM3)
XW2B-20G5 (viti M3.5)
Blocchi terminali
XW2B-20G4 (viti M3)
XW2B-20G5 (viti M3.5)
3-4-6 Collegamento dei dispositivi di ingresso
Cablare gli ingressi al Modulo CPU e ai Moduli di espansione I/O del CPM2C
come riportato nella seguente figura.
Nota Se l’attrezzatura deve essere conforme alle norme CE (Norme di bassa ten-
sione), utilizzare un alimentatore con doppio isolamento o con isolamento rinforzato.
Configurazione di
ingresso
La seguente figura mostra le configurazioni di ingresso.
Moduli CPU con 10 punti I/O, uscite a relè
(CPM2C-10CDR-D/10C1DR-D)
Numero di terminali non utilizzati
Modulo CPU a 10 punti: 13 punti
Modulo CPU a 20 punti: 6 punti
Modulo di espansione I/O a 10 punti: 13 punti
Modulo di espansione I/O a 24 punti: 2 punti
Numero di terminali non utilizzati
Modulo CPU a 10 punti: 15 punti
Modulo CPU a 20 punti: 11 punti
Modulo di espansione I/O a 10 punti: 15 punti
Modulo di espansione I/O a 24 punti: 11 punti
Termin. ingresso
24 Vc.c.
Dispositivi di ingresso
53

Installazione e cablaggio Capitolo 3
Moduli CPU con 10 punti I/O, uscite a transistor
(CPM2C-10CDTC-D/10CDT1C-D/10C1DTC-D/10C1DT1C-D)
Connet. ingresso
24 Vc.c.
Dispositivi di ingresso
Moduli CPU con 20 punti I/O, uscite a transistor
(CPM2C-20CDTC-D/20C1DTC-D/20C1DTC-D/20C1DT1C-D)
Connet. ingresso
24 Vc.c.
COM COM
00007
00006
00005
00004
00011
00010
00009
00008
Dispositivi di ingresso
00003
00002
00001
00000
Dispositivi di ingresso
Modulo di espansione I/O con 10 punti I/O, uscite a relè (CPM2C-10EDR)
Termin. ingresso
24 Vc.c.
54
Dispositivi di ingresso

Installazione e cablaggio Capitolo 3
Moduli di espansione I/O con 24 punti I/O, uscite a transistor
(CPM2C-24EDTC/24EDT1C)
Connet. ingresso
24 Vc.c.
COM COM
00015
00014
00013
00012
00011
00010
00009
00008
Dispositivi di ingresso
00007
00006
00005
00004
00003
00002
00001
00000
Dispositivi di ingresso
Dispositivi di ingresso
La seguente tabella mostra come collegare i vari dispositivi di ingresso.
Dispositivo Circuito
Uscita a relè
5 mA/6 mA/8 mA
Collettore aperto
NPN
Uscita
5 mA/6 mA/8 mA
0 V
Uscita in corrente
NPN
Circuito
corrente
costante
Uscita
5 mA/6 mA/8 mA
0 V
Uscita in corrente
PNP
5 mA/6 mA/8 mA
Uscita
0 V
Uscita in tensione
Uscita
0 V
Alimentatore
del sensore
Alimentatore
del sensore
Alimentatore
del sensore
IN
COM (+)
IN
COM (+)
Per l’ingresso e il sensore
usare lo stesso alimentatore.
IN
+
COM (+)
IN
COM (–)
COM (+)
IN
CPM2C
CPM2C
CPM2C
CPM2C
CPM2C
55

Installazione e cablaggio Capitolo 3
Nota Non utilizzare il seguente cablaggio con i dispositivi di uscita in tensione:
Cablaggio non corretto
Alimentatore
del sensore
Uscita
0 V
Ingressi di contatori ad alta velocità
Uso di IR 00000...IR 00002 come ingressi di contatori ad alta velocità
Di seguito sono riportati esempi di collegamento dei codificatori con un’uscita a
collettore aperto a 24 Vc.c..
Modalità variazione di fase
(frequenza conteggi: 5 kHz)
IN
COM(+)
Modalità ingresso di direzione + impulsi
(frequenza conteggi: 20 kHz)
CPM2C CPM2C
CPM2C
Codificatore
(frequenza conteggi: 20 kHz)
Sensore
Sensore
Sensore o interrut.
24 Vc.c.
Modalità bidirezionale
24 Vc.c.
Nota *CW significa senso orario, mentre CCW senso antiorario.
Ingresso fase A 00000
Ingresso fase B 00001
Ingresso fase Z 00002
COM
CPM2C
Ingresso CW* 00000
Ingresso CCW* 00001
Ingresso reset 00002
COM
Codificatore
Sensore o interrut.
Sensore o interrut.
(frequenza conteggi: 20 kHz)
Codificatore
Ingresso impulsivo 00000
Ingresso direzione 00001
Ingresso reset 00002
COM
24 Vc.c.
Modalità incremento
CPM2C
Ingresso impulsivo 00000
Ingresso normale 00001
Ingresso normale 00002
COM
24 Vc.c.
Impostazioni del setup del
PLC
56
Uso di IR 00003...IR 00006 come ingressi a interrupt (Modalità contatore)
Di seguito sono riportati esempi di collegamento di un codificatore con un’uscita
a collettore aperto a 24 Vc.c..
Incremento o decremento
(frequenza conteggi: 2 kHz)
Codificatore
24 Vc.c.
CPM2C
Ingresso (00003...00006)
COM
I bit di ingresso riportati nella seguente tabella possono funzionare come
ingressi normali oppure possono essere assegnati a funzioni speciali nel setup
del PLC.

Installazione e cablaggio Capitolo 3
ingressi normale
ingressi di contatori
er il controllo degli
interrut (inclus
raid
l mod lit
Le funzioni speciali per i bit di ingresso da IR 00000 a IR 00002 sono impostate in
DM 6642:
Indirizzo
bit
IR 00000
IR 00001
Impostazione del setup del PLC (bit DM 6642 da 08 a 15)
00 01 02, 03 o 04
Utilizzati come
Utilizzati come
.
ad alta velocità.
IR 00002 Utilizzato come ingresso
Le funzioni speciali per i bit di ingresso da IR 00003 a IR 00006 sono impostati in
DM 6628:
Indirizzo
Bit in
bit DM 6628
IR 00003 00...03
IR 00004 04...07
IR 00005 08...11*
IR 00006 12...15*
Impostazione del setup del PLC (in DM 6628)
0 1 2
Utilizzati come
ingressi normali. ingressi ad
Nota *Questi ingressi devono essere impostati come ingressi normali (impostazione:
0) quando viene utilizzato un Modulo CPU con 10 punti I/O.
Esempi di collegamenti degli ingressi di contatori ad alta velocità
Modalità variazione di fase
(frequenza conteggi: 5 kHz)
Codificatore
E6B2-CWZ6C
(Uscita collettore
aperto NPN)
Nero
Bianco
CPM2C CPM2C
Ingresso fase A 00000
Ingresso fase B 00001
Modalità ingresso direzione impulso
(frequenza conteggi: 20 kHz)
Codificatore
E6A2-CS5C
Utilizzati come
p
la modalità
contatore).
Utilizzati come ingressi
p
impulsi sincronizzati.
normale.
Utilizzati come
ingressi a risposta
p
a
Ingresso impulsivo 00000
Ingresso direzione 00001
a.
Corrente di fuga
Arancione
Marrone
Blu
24 Vc.c.
Ingresso fase Z 00002
COM
Sensore o
interruttore
Sensore o
interruttore
Aliment.
sensore
24 Vc.c.
Ingresso reset 00002
COM
La corrente di fuga può provocare falsi ingressi quando si utilizzano sensori a 2
fili (interruttori di prossimità o fotocellule) o interruttori di fine corsa con LED. Non
si verificheranno falsi ingressi se la corrente di fuga è inferiore a 1,0 mA. Se la
57

Installazione e cablaggio Capitolo 3
corrente di fuga supera tali valori, inserire nel circuito una resistenza di dispersione per ridurre l’impedenza di ingresso, come mostrato nella seguente figura.
Alimentazione
ingressi
Carichi induttivi
Resistenza di
dispersione
Sensore a due fili, ecc.
I: Corrente di fuga del dispositivo (mA)
R: Resistenza di dispersione (kΩ)
W: Potenza nominale della resistenza di
dispersione (W)
Le equazioni sopra riportate derivano dalle seguenti equazioni:
I
W y
Per ulteriori dettagli sui valori L
L’indipendenza di ingresso, la corrente di ingresso e la tensione OFF possono variare
a seconda dell’ingresso usato (gli ingressi IN00000...IN00002 hanno valori diversi).
L
5, 0
C
R +
R
R )
Tensione ingresso (24)
–5, 0
I L
C
Tensione ingresso (24)
Corrente ingresso (I
Tensione ingresso (24)
Corrente ingresso (I
R
C
R
kW max. W +
C
C
ITensione ingresso (24) tolleranza (4)
, I
e EC, vedere 2-2-3 Caratteristiche I/O.
C
CPM2C
LC: Indipendenza di ingresso CPM2C (kΩ)
: Corrente di ingresso CPM2C (mA)
I
C
: Tensione OFF CPM2C (V) = 5,0 V
E
C
2, 3
Wmin.
R
)
x Tensione OFF (EC:5.0)
)
Collegando un carico induttivo a un ingresso, collegare un diodo in parallelo al
carico. Il diodo deve rispettare i seguenti requisiti:
1, 2, 3... 1. La tensione inversa di breakdown deve essere almeno 3 volte la tensione
del carico induttivo.
2. La corrente raddrizzata media deve essere 1 A.
3-4-7 Collegamento dei dispositivi di uscita
Cablare le uscite al Modulo CPU e al Modulo di espansione I/O del CPM2C
come indicato nelle seguenti figure.
Non superare la capacità di uscita o la corrente massima comune riportati nella
seguente tabella.
AVVERTENZA Le uscite del PLC possono restare ON o OFF a causa di depositi sui relè di
!
uscita o di danneggiamento degli stessi. E’ necessario fornire misure di
sicurezza esterne per garantire la protezione del sistema. Se non vengono
fornite misure di sicurezza adeguate possono verificarsi danni di grave entità.
Diodo
IN
CPM2C
COM
58

Installazione e cablaggio Capitolo 3
Configurazioni di uscita
Moduli CPU con 10 punti I/O, uscite a relè
(CPM2C-10CDR-D/10C1DR-D)
Capacità di uscita Capacità comune max.
2 A (250 Vc.a. o 24 Vc.c.) 4 A/comune
Caric.
Caric.
Caric.
Caric.
Terminali di uscita
Moduli CPU con 10 punti I/O, uscite a transistor NPN
(CPM2C-10CDTC-D/10C1DTC-D)
Capacità di uscita Capacità comune max.
300 mA (24 Vc.c.) 1,2 A/comune
Connettore di uscita
Caric.
Caric.
Caric.
Caric.
24 Vc.c.
59

Installazione e cablaggio Capitolo 3
Moduli CPU con 10 punti I/O, uscite a transistor PNP
(CPM2C-10CDT1C-D/10C1DT1C-D)
Capacità di uscita Capacità comune max.
300 mA (24 Vc.c.) 1,2 A/comune
Connettore di uscita
Caric.
Caric.
Caric.
Caric.
24 Vc.c.
Moduli CPU con 20 punti I/O, uscite a transistor NPN
(CPM2C-20CDTC-D/20C1DTC-D)
Capacità di uscita Capacità comune max.
300 mA (24 Vc.c.) 2.4 A/comune
Connettore di uscita
Caric.
Caric.
Caric.
Caric.
Caric.
Caric.
Caric.
Caric.
24 Vc.c.
60

Installazione e cablaggio Capitolo 3
Moduli CPU con 20 punti I/O, uscite a transistor PNP
(CPM2C-20CDT1C-D/20C1DT1C-D)
Capacità di uscita Capacità comune max.
300 mA (24 Vc.c.) 2.4 A/comune
Connettore di uscita
Caric.
Caric.
Caric.
Caric.
Caric.
Caric.
Caric.
Caric.
24 Vc.c.
Modulo di espansione I/O con 10 punti I/O, uscite a relè
(CPM2C-10EDR)
Capacità di uscita Capacità comune max.
2 A (250 Vc.a. or 24 Vc.c.) 4 A/comune
Caric.
Caric.
Caric.
Caric.
Terminali di uscita
61

Installazione e cablaggio Capitolo 3
Modulo di espansione I/O con 24 punti I/O, uscite a transistor NPN
(CPM2C-24EDTC)
Capacità di uscita Capacità comune max.
300 mA (24 Vc.c.) 2.4 A/comune
Connettore di uscita
Caric.
Caric.
Caric.
Caric.
Caric.
Caric.
Caric.
Caric.
24 Vc.c.
Modulo di espansione I/O con 24 punti I/O, uscite a transistor PNP
(CPM2C-24EDT1C)
Capacità di uscita Capacità comune max.
300 mA (24 Vc.c.) 2.4 A/comune
Connettore di uscita
Caric.
Caric.
Caric.
Caric.
Caric.
Caric.
Caric.
Caric.
24 Vc.c.
62

Installazione e cablaggio Capitolo 3
Utilizzo delle uscite
impulsive
Uscita impulsiva 0:
Uscita impulsiva 1:
Uscita impulsiva 0:
Nelle seguenti figure sono riportati esempi di applicazioni di uscite a transistor
NPN mediante l’uso di bit di uscita IR 01000 e IR 01001. Utilizzare le istruzioni
PULS(65), SPED(––), ACC(––), PWM(––) e SYNC(––) per produrre uscite
impulsive (non uscite normali) dai bit di uscita IR 01000 e IR 01001.
Uscita impulsiva monofase
(duty cycle fisso)
CPM2C
01000
01001
COM
24 V
Uscita direzione + impulsi
CPM2C
01000
Driver motore
Driver motore
Driver motore
CPM2C
Uscita impulsiva 0:
01000
Uscita impulsiva 1:
01001
COM
24 V
CPM2C
Uscita impulsiva
CW*: 01000
Uscita impulsiva monofase
(duty cycle variabile)
Relè
Relè
Uscita impulsiva incremento
Driver motore
Ingresso CW
Uscita direzione:
Precauzioni per
cablaggio di uscita
01001
COM
24 V 24 V
Ingresso
direzione
Uscita impulsiva
CCW*: 01001
COM
Nota *CW significa in senso orario, mentre CCW in senso antiorario.
Attenersi alle seguenti precauzioni per proteggere i componenti interni del PLC.
Protezione da corto circuito di uscita
Il circuito di uscita o interno potrebbe danneggiarsi quando il carico collegato ad
un’uscita è cortocircuitato, per cui si consiglia di installare un fusibile di protezione in ciascun circuito di uscita.
Ingresso
CCW
63

Installazione e cablaggio Capitolo 3
Carichi induttivi
Quando si collega un carico induttivo a un ingresso, collegare una protezione
contro le sovratensioni o un diodo in parallelo al carico.
I componenti della protezione contro le sovratensioni devono essere i seguenti:
Uscita a relè
CPM2C
Relay Output
Transistor Output
(NPN)
Uscita a relè
Uscita a transistor
(PNP)
CPM2C
CPM2C
OUT
Protez. sovratensioni
COM
OUT
COM
OUT
COM
Diodo
Diodo
Il diodo deve soddisfare i seguenti requisiti:
La tensione inversa di breakdown deve essere almeno 3 volte la tensione di
carico.
La corrente raddrizzata media deve essere 1 A.
Considerazioni sulla corrente di picco
Quando si commuta un carico con una alta corrente di picco sulle uscite a relè o
sulle uscite a transistor del CPM2C, come ad esempio lampade ad incandescenza, sopprimere la corrente di picco come illustrato di seguito.
Contromisura 1 Contromisura 2
OUT
COM
OUT
R
COM
R
Inserimento fusibile
Il CPM2C con uscita a transistor può bruciare se il carico viene cortocircuitato, di
conseguenza occorre inserire un fusibile di protezione in serie al carico.
64

Installazione e cablaggio Capitolo 3
3-4-8 Collegamento dei dispositivi di programmazione
Console di
programmazione
CQM1-PRO01
(con cavo di 2 m collegato)
C200H-PRO27
Collegamento uno a uno
del computer
PC/AT IBM o
compatibile
Utilizzare uno dei cavi di collegamento riportati nella seguente figura per collegare la Console di programmazione al CPM2C.
Porta periferica
CPM2C-CN111 (0,1 m)
Modulo CPU CPM2C
Cavo principale
(2 m)
CS1W-CN114 (0,05 m)
C200H-CN222 (2 m)
C200H-CN422 (4 m)
CS1W-CN224 (2 m)
CS1W-CN624 (6 m)
Utilizzare uno dei cavi di collegamento riportati nella seguente figura per collegare un PC con Support Software alla porta RS-232C del CPM2C per le comunicazioni Host Link 1:1 o le comunicazioni (seriali) a protocollo libero.
Cavo di collegamento
RS2322CN221
Porta RS-232C (sub-D a 9 pin)
Modulo CPU CPM2C
IBM PC/AT o
compatibile
CPM2C-CN111 (0,1 m)
CS1W-CN118 (0,05 m)
Collegamento della porta periferica
Un PC può essere collegato alla porta periferica del Modulo CPU attraverso un
adattatore RS-232C CQM1-CIF02 o CPM1-CIF01.
Porta periferica
Cavo di collegamento
RS2322CN221
CQM1-CIF02 (3,3 m)
CPM2C-CN111 (0,1 m)
CS1W-CN114 (0,05 m)
CPM1-CIF01
Modulo CPU CPM2C
Note 1. E’ possibile utilizzare i cavi di collegamento CS1W-CN226/626 e non quelli
CS1W-CN225/625 e CS1W-CN227/627.
2. Fare riferimento al Capitolo 4 Utilizzo dei dispositivi di programmazione per
dettagli sul Support Software che può essere utilizzato con il CPM2C.
65

Installazione e cablaggio Capitolo 3
Collegamento host link 1:N
PC/AT IBM o
compatibile
Convertitore RS232–RS442/485
RS-422A/485 (Lunghezza totale: 500 m max.)
Convertitore
RS232/485
Porta RS-232C
CPM2C-CN111
(0,1 m)
Modulo CPU
CPM2C
E’ possibile collegare ad un host fino a 32 PLC OMRON, inclusi i PLC CPM2C.
Cavo di collegamento
CPM1-CIF11
(nota 2).
Porta periferica
CPM2C-CN111
(0,1 m)
Modulo CPU
CPM2C
Convertitore
RS232/485
Cavo RS-232C
Porta RS-232C
CPM2C-CN111
(0,1 m)
Modulo CPU
CPM2C
CPM1-CIF11
(nota 2).
Porta periferica
Porta RS-232C
CS1W-CN118
(0,05 m)
Modulo CPU
CPM2C
Fino a 32 PLC
CS1W-CN114
(0,05 m)
Modulo CPU
CPM2C
Note 1. Il CPM1-CIF11 riceve +5 Vc.c. dalla porta periferica, in modo che sia neces-
sario un alimentatore esterno.
2. Accertarsi che i requisiti dell’alimentatore del Modulo CPU e dei Moduli di
espansione I/O non superino la capacità disponibile.
3-4-9 Comunicazioni a protocollo libero
Le istruzioni TXD(48) e RXD(47) possono essere utilizzate in modalità a protocollo libero per lo scambio dei dati con i dispositivi seriali standard. Ad esempio, i
dati possono essere ricevuti da un lettore di codice a barre o trasmessi ad una
stampante seriale. I dispositivi seriali possono essere collegati alla porta
RS-232C o alla porta periferica, come riportato nella seguente figura.
Dispositivi RS-232C
Lettore codice a barre
Stampante seriale
Altro dispositivo seriale
Cavo RS-232C
Porta RS-232C
CS1W-CN118
(0,05 m)
Modulo CPU
CPM2C
Modulo CPU CPM2C
66
Nota Consultare Collegamenti con il computer a pagina 65 per dettagli sulle configu-
razioni di sistema che possono essere assemblate per le comunicazioni seriali.

Installazione e cablaggio Capitolo 3
3-4-10 Collegamenti del terminale programmabile OMRON
In un collegamento NT Link 1:1, il CPM2C può essere collegato direttamente ad
un terminale programmabile. Il collegamento diretto è possibile solo attraverso
la porta RS-232C; un terminale programmabile non può essere collegato direttamente alla porta periferica.
Il terminale programmabile può essere anche collegato mediante un collegamento con protocollo host link. Per l’host link è possibile utilizzare sia la porta
RS-232C che la porta periferica.
Cavo di collegamento
RS232–2CN221
Porta RS-232C
(sub-D a 9 pin)
CPM2C-CN111 (0,1 m)
Modulo CPU CPM2C
Terminale
programmabile OMRON
Adattatore RS-422
CPM1-CIF11
Cavo di collegamento
RS232–2CN221
Adattatore RS-232C
CPM1-CIF01
Nota Il terminale programmabile non può essere collegato direttamente attraverso la
porta periferica.
3-4-11 Collegamenti PC Link uno a uno
Un CPM2C può essere collegato ad un altro CPM2C, un PLC CQM1, CPM1,
CPM1A, CPM2A, SRM1(-V2), C200HS o C200HX/HE/HG PC. Il PLC deve
essere collegato attraverso la porta RS-232C, e non attraverso la porta periferica.
Link Master 1:1
Modulo CPU CPM2C
Porta RS-232C (sub-D a 9 pin)
CS1W-CN118 (0,05 m)
CPM2C-CN111 (0,1 m)
CS1W-CN114 (0,05 m)
Porta RS-232C (sub-D a 9 pin) Link Slave 1:1
Modulo CPU CPM2C
CPM2C-CN111
(0,1 m)
CS1W-CN118
(0,05 m)
PLC OMRON (CQM1, CPM1, CPM1A,
CPM2A, SRM1(-V2), C200HS,
C200HX/HE/HG o CS1)
CPM2C-CN111 (0,1 m)
Cavo di collegamento
CS1W-CN118 (0,05 m)
PLC OMRON (CQM1, CPM1, CPM1A,
CPM2A, SRM1(-V2), C200HS,
C200HX/HE/HG o CS1)
67

Installazione e cablaggio Capitolo 3
68

CAPITOLO 4
Utilizzo dei dispositivi di programmazione
Questo capitolo descrive le operazioni effettuabili con la Console di programmazione.
Fare riferimento a 3-4-8 Collegamento del dispositivo di programmazione e 4-1-1 Collegamento della Console di program-
mazione per dettagli su come collegare la Console di programmazione o il PC al CPM2C.
4-1 Funzionamento della Console di programmazione 70. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-1-1 Collegamento della console di programmazione 70. . . . . . . . . . . . . . . . . . . . . . . . . .
4-1-2 Console di programmazione compatibili 71. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-1-3 Modifica della modalità del CPM2C con il selettore di modalità 73. . . . . . . . . . . . .
4-1-4 Preparazione al funzionamento 74. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-1-5 Inserimento della password 75. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2 Funzioni della console di programmazione 75. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-1 Panoramica 75. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-2 Cancellazione della memoria 76. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-3 Lettura/cancellazione dei messaggi di errore 77. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-4 Segnale acustico 78. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-5 Assegnazione dei numeri di funzione delle istruzioni estese 79. . . . . . . . . . . . . . . .
4-2-6 Configurazione e lettura di un indirizzo di memoria del programma 79. . . . . . . . . .
4-2-7 Inserimento o modifica dei programmi 80. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-8 Ricerca dell’istruzione 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-9 Ricerca del bit dell’operando 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-10 Inserimento e cancellazione delle istruzioni 84. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-11 Verifica del programma 85. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-12 Monitoraggio di bit, digit e canali 86. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-13 Monitoraggio della variazione di stato 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-14 Monitoraggio in binario 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-15 Monitoraggio di 3 canali consecutivi 89. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-16 Monitoraggio decimale con segno 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-17 Monitoraggio decimale senza segno 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-18 Modifica di 3 canali consecutivi 91. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-19 Modifica dell’SV dei contatori e dei temporizzatori 91. . . . . . . . . . . . . . . . . . . . . . .
4-2-20 Modifica dei dati esadecimali e BCD 93. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-21 Modifica di dati binari 93. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-22 Modifica dei valori decimali con segno 94. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-23 Modifica dei valori decimali senza segno 95. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-24 Forzatura set/reset 95. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-25 Cancellazione forzatura set/reset 96. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-26 Conversione Hex–ASCII (esadecimale–ASCII) 97. . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-27 Visualizzazione del tempo di scansione 97. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2-28 Lettura e impostazione del clock 97. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3 Esempio di programmazione 98. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-1 Operazioni preliminari 98. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-2 Esempio di programma 99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-3 Procedure di programmazione 100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-4 Verifica del programma 103. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-5 Esecuzione del test in modalità MONITOR 104. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
69

Utilizzo dei dispositivi di programmazione Capitolo 4
4-1 Funzionamento della Console di programmazione
Questo capitolo fornisce informazioni su come collegare e utilizzare una Console di programmazione. Per ulteriori dettagli sugli errori che possono verificarsi
durante le operazioni della Console di programmazione, fare riferimento a 5-3
Errori di funzionamento della Console di programmazione.
4-1-1 Collegamento della console di programmazione
La Console di programmazione può essere collegata alla porta di comunicazione del CPM2C o alla porta periferica su un cavo di collegamento
CPM2C-CN111; non può essere invece collegata alla porta RS-232C del cavo di
collegamento CPM2C-CN111.
Prima di effettuare il collegamento alla Console di programmazione, mettere a
OFF l’interruttore di comunicazione 2 sulla parte anteriore del modulo CPU del
CPM2C. L’indicatore luminoso verde “PRO” sul modulo CPU si accenderà.
Interruttore di comunicazione 2
Collegamento di un
CQM1-PRO01-E
Note 1. Quando l’interruttore di comunicazione 2 è spento, le funzioni della Console
di programmazione di un Terminale programmabile OMRON collegato alla
porta RS-232C non possono essere utilizzate. Accendere l’interruttore di
comunicazione 2 per utilizzare le funzioni della Console di programmazione
del Terminale programmabile.
2. Non modificare l’impostazione dell’interruttore di comunicazione 2 se viene
collegata una Console di programmazione o un altro dispositivo, come ad
esempio un CPM1-CIF01/11 o CQM1-CIF02. La modifica dell’impostazione
interromperà le comunicazioni e provocherà un errore di comunicazione. Se
viene collegata una Console di programmazione, questa non risponderà, gli
ingressi chiave non verranno ricevuti e la visualizzazione non verrà modificata.
3. Se il cavo della Console di programmazione viene disconnesso e quindi
riconnesso entro 2 secondi, non sarà necessario reinserire la password e
verrà conservato lo stato di visualizzazione precedente. In alcuni casi, non è
necessario reinserire la password se il cavo della Console di programmazione viene disconnesso durante l’esecuzione di un’operazione di rispar-
mio di tempo (come ad esempio la verifica del programma).
Collegare la Console di programmazione al CPM2C, come riportato di seguito.
Porta periferica
Modulo CPU CPM2C
70
Cavo di collegamento
CPM2C-CN111
Cavo di collegamento
CS1W-CN114

Utilizzo dei dispositivi di programmazione Capitolo 4
Collegamento di un
C200H-PRO27-E
Collegare la Console di programmazione al CPM2C, come riportato di seguito.
Porta periferica
Cavo di
collegamento
C200H-CN222 o
C200H-CN422
Cavo di collegamento
CS1W-CN224 o
CS1W-CN624
Cavo di collegamento
CPM2C-CN111
Cavo di collegamento
CS1W-CN114
Modulo CPU CPM2C
4-1-2 Console di programmazione compatibili
Con il CPM2C è possibile usare due diversi tipi di console di programmazione: il
CQM1-PRO01-E e il C200H-PRO27-E. I tasti funzione di queste due console di
programmazione sono identici.
Premere e mantenere premuto il tasto SHIFT per inserire la lettera posta nell’angolo in alto a sinistra del tasto o per inserire la funzione superiore di un tasto
dotato di due funzioni. Per esempio, il tasto AR/HR di CQM1-PRO01-E può specificare l’area AR o HR; premere e rilasciare il tasto SHIFT e quindi premere il
tasto AR/HR per specificare l’area AR.
CQM1-PRO01-E
Cavo di collegamento
fissato (2 m)
Modulo CPU CPM2C
Display LCD
Selettore di
modalità
Tasti operativi
71

Utilizzo dei dispositivi di programmazione Capitolo 4
C200H-PRO27-E
Display LCD
Selettore di
modalità
Tasti operativi
Presa jack per lettore di cassette
(non può essere utilizzato con il
CPM2C).
La seguente tabella riporta i cavi di collegamento che possono essere utilizzati
per collegare il C200H-PRO27-E al CPM2C.
Tasti differenti
Numero
Collegamento Lunghezza
modello
C200H-CN222
C200H-CN422
CS1W-CN224
CS1W-CN624
Da collegare alla porta periferica di un cavo di
collegamento CPM2C-CN111 o CS1W-CN114.
DA collegare direttamente alla porta di
comunicazione del CPM2C.
2 m
4 m
2 m
6 m
I seguenti tasti sono etichettati differentemente sul CQM1-PRO01-E e sul
C200H-PRO27-E, anche se il rispettivo funzionamento è identico.
Tasti CQM1-PRO01-E Tasti C200H-PRO27-E
*EM
LR
AR
HR
SET
RESET
LR
HR
PLAY
SET
REC
RESET
Nota Per specificare l’area AR, utilizzare i tasti SHIFT + HR per C200H-PRO27-E e
SHIFT + AR/HR per CQM1-PRO01-E.
Quando viene premuto il tasto SHIFT, il relativo simbolo verrà visualizzato
nell’angolo in basso a destra della schermata. Premendo di nuovo tale tasto la
funzione dello stesso verrà disabilitata.
Selettore di modalità
72
SHIFT
^
Simbolo di
attivazione
Shift
Il selettore di modalità controlla la modalità operativa del CPM2C. Il tasto può
essere rimosso quando l’interruttore è impostato su RUN o MONITOR e non
quando è impostato su PROGRAM.

Utilizzo dei dispositivi di programmazione Capitolo 4
Controllo del contrasto
Volume del segnale
acustico
Il contrasto della visualizzazione può essere regolato con il controllo posto sul
lato destro della Console di programmazione.
Controllo del
contrasto
Il volume del segnale acustico del C200H-PRO27-E può essere regolato con
una leva posta sul lato destro della Console di programmazione. Il volume del
segnale acustico del CQM1-PRO01-E non può essere regolato.
Volume basso
Volume alto
C200H-PRO27-E
Nota Il volume del segnale acustico può essere attivato e disattivato con l’uso dei tasti
operativi. Per maggiori dettagli, consultare 4-2-4 Segnale acustico.
4-1-3 Modifica della modalità del CPM2C con il selettore di modalità
Una volta collegata la Console di programmazione, il relativo selettore di modalità può essere utilizzato per modificare la modalità operativa del CPM2C. Il
display della modalità (<PROGRAM>, <MONITOR> o <RUN>) verrà visualiz-
zato sul pannello della Console di programmazione.
• Quando il display della modalità viene visualizzato sulla schermata della Con-
sole di programmazione non è possibile eseguire alcun tasto operativo. Pre-
mere CLR per annullare la visualizzazione in modo da abilitare i tasti.
• Se il tasto SHIFT viene premuto durante la modifica del selettore di modalità,
sulla schermata della Console di programmazione verrà mantenuta la visua-
lizzazione originale e il display di modalità non verrà visualizzato.
• Il CPM2C entrerà automaticamente nella modalità RUN se la Console di pro-
grammazione non è collegata quando il CPM2C è ON.
MONITOR
RUN
PROGRAM RUN
MONITOR
PROGRAM
MONITOR
PROGRAMRUN
Display modalità
<PROGRAM> BZ
<MONITOR> BZ <RUN> BZ
Operation Operation
Display iniziale
CLR SHIFT CLR
00000
73

Utilizzo dei dispositivi di programmazione Capitolo 4
Modalità operative
Modalità PROGRAM
In modalità PROGRAM il programma del CPM2C non viene eseguito. Utilizzare
la modalità PROGRAM per creare e modificare il programma, eliminare i dati
dalla memoria o verificare la presenza di eventuali errori nel programma.
Modalità MONITOR
In modalità MONITOR il programma del CPM2C viene eseguito, mentre l’I/O
viene eseguito come se fosse in modalità RUN. Utilizzare la modalità MONITOR
per testare le operazioni del sistema, come ad esempio il controllo dello stato operativo del CPM2C, la la forzatura set e reset dei bit I/O, la modifica dell’SV/PV dei
temporizzatori e dei contatori, la modifica dei dati del canale e la modifica in linea.
Modalità RUN
Questa è la modalità operativa normale del CPM2C. Lo stato operativo del
CPM2C può essere monitorato da un dispositivo di programmazione; tuttavia i
bit non possono subire la forzatura set/reset e l’SV/PV dei temporizzatori e dei
contatori non può essere modificato.
Attenzione Controllare l’intero sistema prima di modificare la modalità operativa del PLC in
!
modo da evitare danni che potrebbero verificarsi quando il programma viene
avviato per la prima volta.
Attenzione Non modificare la modalità mentre si premono i tasti.
!
Modalità operativa
all’avvio
La modalità operativa del CPM2C quando l’alimentazione è attiva dipende dalle
impostazioni del setup del PLC e da quelle del selettore di modalità della Con-
sole di programmazione, se collegata. Per ulteriori dettagli, consultare 1-3-3
Modalità operativa all’avvio.
4-1-4 Preparazione al funzionamento
Questo capitolo descrive le procedure necessarie per avviare il funzionamento della
Console di programmazione, quando questa viene utilizzata per la prima volta.
Attenzione Accertarsi sempre che la Console di programmazione sia in modalità PRO-
!
GRAM quando si accende il PLC con la Console di programmazione collegata,
tranne che non sia richiesta un’altra modalità per scopi specifici. Se la Console
di programmazione è in modalità RUN quando il PLC è acceso, qualsiasi programma contenuto in memoria verrà eseguito, avviando possibilmente il funzionamento di un sistema controllato dal PLC.
La sequenza di operazioni di seguito riportata deve essere eseguita prima di
avviare il programma iniziale.
1, 2, 3... 1. Accertarsi che il PLC sia spento.
2. Collegare la Console di programmazione alla porta periferica del Modulo
CPU. Per maggiori dettagli, consultare 4-1-1 Collegamento della Console di
programmazione
(l’impostazione dell’interruttore di comunicazione del modulo CPU non
influenza in alcun modo la comunicazione con la Console di programmazione).
3. Impostare il selettore di modalità su PROGRAM.
4. Accendere il PLC.
5. Inserire la password. Per maggiori dettagli, consultare 4-1-5 Inserimento
della password.
6. Eliminare i dati (Cancellazione totale) dalla memoria del PLC. Per maggiori
dettagli, consultare 4-2-2 Cancellazione della memoria.
7. Leggere e cancellare tutti gli errori e messaggi. Per maggiori dettagli, consultare 4-2-3 Lettura/cancellazione dei messaggi di errore.
8. Avviare la programmazione.
74

Utilizzo dei dispositivi di programmazione Capitolo 4
4-1-5 Inserimento della password
Per poter accedere alle funzioni di programmazione del PLC, è necessario
innanzitutto inserire la password. La password evita accessi al programma non
autorizzati.
La password viene richiesta quando il PLC viene acceso oppure, se il PLC è già
acceso, dopo il collegamento della Console di programmazione al PLC. Per
poter accedere al sistema quando viene visualizzato il messaggio “Password!”,
premere CLR e quindi MONTR. Premere CLR per eliminare i dati dal display.
Se la Console di programmazione viene collegata al PLC quando il PLC è già
acceso, il primo display posto sulla parte inferiore indicherà la modalità in cui si
trovava il PLC prima del collegamento della Console di programmazione.
Accertarsi che il PLC sia in modalità PROGRAM prima di inserire la pas-
sword. Una volta inserita la password, il PLC passa alla modalità impostata sul
selettore di modalità, consentendo l’avvio del PLC, se la modalità è impostata su
RUN o MONITOR. Dopo l’inserimento della password, la modalità può essere
modificata in RUN o MONITOR con il selettore di modalità.
<PROGRAM>
PASSWORD!
<PROGRAM> BZ
Indica la modalità impostata dal selettore di modalità.
4-2 Funzioni della console di programmazione
4-2-1 Panoramica
La tabella seguente riporta le funzioni di programmazione e di monitoraggio che
possono essere eseguite con la Console di programmazione. Fare riferimento
alla parte restante di questo capitolo per i dettagli sulle procedure operative.
Nome Funzione Pag.
Cancellazione della memoria Cancella parzialmente oppure completamente la memoria di programma e
tutte le aree dati che non siano di sola lettura, nonché i contenuti della
memoria della console di programmazione.
Lettura/cancellazione dei
messaggi di errore
Segnale acustico Abilita e disabilita il segnale acustico che si avverte premendo i tasti della
Assegnazione dei numeri di
funzione delle istruzioni
estese
Configurazione di un indirizzo
di memoria del programma
Lettura di un indirizzo di
memoria del programma
Ricerca dell’istruzione Trova le ricorrenze dell’istruzione specificata nel programma. 83
Ricerca del bit dell’operando Trova le ricorrenze del bit dell’operando specificato nel programma. 83
Inserimento o cancellazione
di istruzioni
Inserimento o modifica dei
programmi
Verifica del programma Verifica gli errori di programmazione e visualizza l’indirizzo di programma
Monitoraggio di bit, digit e
canali
Visualizza e cancella i messaggi di errore e visualizza i messaggi
dell’istruzione MESSAGE.
console di programmazione.
Legge o modifica i numeri di funzione assegnati alle istruzioni estese 79
Imposta l’indirizzo specificato della memoria di programma quando i
programmi vengono letti, scritti, inseriti e cancellati.
Legge i contenuti della memoria di programma. Visualizza lo stato del bit
visualizzato nelle modalità PROGRAM e MONITOR.
Inserisce o cancella istruzioni dal programma. 84
Sovrascrive il contenuto della memoria di programma corrente per inserire
un programma per la prima volta oppure per modificare un programma già
esistente.
e l’errore quando questo viene individuato.
Controlla lo stato di massimo 16 bit e canali, anche se sul display è
possibile visualizzarne solo 3 alla volta.
76
77
78
79
79
80
85
86
75

Utilizzo dei dispositivi di programmazione Capitolo 4
Nome Pag.Funzione
Monitoraggio di indirizzi
multipli
Monitoraggio della variazione
di stato
Monitoraggio in binario Controlla lo stato ON/OFF di 16 bit di qualsiasi canale. 88
Monitoraggio di 3 canali
consecutivi
Monitoraggio decimale con
segno
Monitoraggio decimale senza
segno
Modifica di 3 canali
consecutivi
Modifica dell’SV 1 dei
contatori e dei temporizzatori
Modifica dell’SV 2 dei
contatori e dei temporizzatori
Modifica dei dati esadecimali
o BCD
Modifica dei dati binari Modifica lo stato dei bit di un canale quando il canale viene monitorato. 93
Modifica dei valori decimali
con segno
Modifica dei valori decimali
senza segno
Forzatura set/reset Forza i bit ON (set forzato) o OFF (reset forzato). 95
Cancellazione forzatura
set/reset
Conversione Hex-ASCII Converte in formato ASCII i dati DM visualizzati in formato a 4 digit
Visualizzazione del tempo di
scansione
Lettura e impostazione del
clock
Controlla lo stato di massimo 6 bit e canali contemporaneamente. 87
Controlla la variazione di stato di un bit particolare. 88
Controlla lo stato di 3 canali consecutivi. 89
Converte il contenuto di un canale specificato dal valore esadecimale con
segno (in complemento a due) ad un valore decimale con segno per la
visualizzazione.
Converte i dati esadecimali presenti in un canale in un valore decimale
senza segno per la visualizzazione.
Modifica il contentuto di uno o più dei 3 canali consecutivi visualizzati con
l’operazione di monitoraggio di 3 canali consecutivi.
Modifica l’SV di un temporizzatore o di un contatore. 91
Modifica in modo fine l’SV del temporizzatore o del contatore. 92
Modifica il valore esadecimale o BCD di un canale monitorato. 93
Modifica il valore decimale di un canale monitorato come valore decimale
con segno compreso fra –32.768... 32.767. Il contenuto del canale
specificato viene convertito automaticamente in un valore esadecimale
con segno (con complemento a 2).
Modifica il valore decimale di un canale monitorato come valore decimale
senza segno compreso 0... 65.535. La modifica in dati esadecimali
avviene automaticamente.
Ripristina lo stato di tutti i bit che sono stati forzati. 96
esadecimali.
Visualizza il tempo medio di scansione. 97
Legge o imposta il clock interno. 97
90
90
91
94
95
97
4-2-2 Cancellazione della memoria
Questa operazione viene utilizzata per cancellare completamente o in parte la
memoria di programma e qualsiasi area dati, nonché il contenuto della memoria
della Console di programmazione. E’ effettuabile soltanto in modalità PRO-
GRAM.
RUN MONITOR PROGRAM
No No OK
Prima di iniziare per la prima volta la programmazione oppure quando si installa
un nuovo programma, cancellare tutte le aree.
Cancellazione totale
1, 2, 3... 1. Tornare al display iniziale premendo ripetutamente il tasto CLR.
La seguente procedura viene utilizzata per cancellare completamente la memoria, tra cui il programma, tutte le aree dati, i PV dei contatori, la memoria dati e il
Setup del PLC (da DM 6600 a DM 6655).
2. Premere i tasti SET, NOT e quindi RESET per iniziare l’operazione.
SET
NOT
00000MEMORY CLR?
RESET
HR CNT DM
76

Utilizzo dei dispositivi di programmazione Capitolo 4
3. Premere il tasto MONTR per cancellare completamente la memoria.
00000MEMORY CLR
MONTR
END HR CNT DM
Attenzione Il setup del PLC (da DM 6600 a DM 6655) verrà cancellato quando questa ope-
!
razione verrà eseguita.
Cancellazione parziale
È possibile conservare i dati contenuti in aree specificate o una parte della
memoria di programma. Per conservare i dati contenuti nelle aree HR, TC o DM,
premere il tasto appropriato dopo avere premuto i tasti SET, NOT e RESET.
Tutte le aree dati che appaiono ancora sul display verranno cancellate premendo il tasto MONTR.
Il tasto HR viene utilizzato per indicare sia l’area AR che l’area HR, il tasto CNT
per indicare tutta l’area temporizzatori/contatori e il tasto DM per indicare l’area
DM.
È inoltre possibile conservare una parte della memoria di programma partendo dal primo indirizzo di memoria fino a un indirizzo specificato. Dopo
avere indicato le aree dati da conservare, specificare il primo indirizzo della
memoria di programma da cancellare. Per esempio, per lasciare inalterati gli
indirizzi da 000 a 029 e cancellare gli indirizzi da 030 fino alla fine della
memoria di programma, inserire 030.
A scopo dimostrativo, attenersi alla seguente procedura per conservare l’area
temporizzatori/contatori e gli indirizzi della memoria di programma da 000 a 122:
1, 2, 3... 1. Premere il tasto CLR per tornare al display iniziale.
2. Premere i tasti SET, NOT e RESET per iniziare l’operazione.
3. Premere il tasto CNT per rimuovere l’area temporizzatori/contatori dalle
aree dati visualizzate (i PV dei contatori non verranno cancellati.)
00000MEMORY CLR?
CNT
HR DM
4. Premere 123 per specificare 123 come indirizzo iniziale del programma.
B
1C2
00123MEMORY CLR?
D
3
HR DM
5. Premere il tasto MONTR per specificare i campi di memoria specificati.
00000MEMORY CLR
MONTR
END HR DM
4-2-3 Lettura/cancellazione dei messaggi di errore
Questa operazione viene utilizzata per visualizzare e cancellare i messaggi di
errore. Gli errori non fatali e i messaggi di istruzione MESSAGE possono essere
visualizzati e cancellati in qualsiasi modalità, mentre gli errori fatali possono
essere cancellati soltanto in modalità PROGRAM.
RUN MONITOR PROGRAM
OK OK OK
Prima di inserire un nuovo programma, tutti i messaggi di errore registrati in
memoria dovrebbero essere cancellati. In questo contesto si presume che le
cause di errore per ciascun messaggio siano già state rimosse. Se il segnale
acustico si attiva quando si tenta di cancellare un messaggio di errore,
occorre prima eliminare la causa dell’errore e quindi cancellare il messaggio
di errore (Per informazioni sulla risoluzione dei problemi vedere il Capitolo 5
Esecuzione del test ed elaborazione degli errori).
77

Utilizzo dei dispositivi di programmazione Capitolo 4
Sequenza di tasti
Attenersi alla seguente procedura per visualizzare e cancellare i messaggi.
1, 2, 3... 1. Premere il tasto CLR per tornare al display iniziale.
2. Premere il tasto FUN e quindi il tasto MONTR per avviare l’operazione. Se
non ci sono messaggi, verrà visualizzato quanto segue:
ERR/MSG CHK OK
MONTR
FUN
Se ci sono messaggi, dopo aver premuto il tasto MONTR apparirà il mes-
saggio più importante. Premendo di nuovo MONTR verrà cancellato il messaggio corrente e verrà visualizzato il messaggio successivo in ordine di
importanza. Continuare a premere MONTR fino a quando tutti i messaggi
non verranno cancellati. Seguono alcuni esempi di messaggi di errore:
Errore di memoria:
MEMORY ERR
MONTR
Errore di sistema:
SYS FAIL FAL01
MONTR
Messaggio (visualizzato con MSG(46)):
MATERIAL USED UP
MONTR
4-2-4 Segnale acustico
Questa operazione viene utilizzata per attivare e disattivare il segnale acustico
che si avverte quando vengono premuti i tasti della Console di programmazione. Questo segnale acustico viene attivato anche quando si verifica un errore
durante funzionamento del PLC. Eventuali errori del segnale acustico non sono
influenzati da questa impostazione.
Questa operazione è possibile in qualsiasi modalità.
Sequenza di tasti
1, 2, 3... 1. Premere i tasti CLR, SHIFT e quindi il tasto CLR per tornare al display della
Attenersi alla seguente procedura per attivare o disattivare il segnale acustico
relativo ai tasti.
Tutti i messaggi cancellati:
ERR/MSG CHK OK
MONTR
RUN MONITOR PROGRAM
OK OK OK
modalità. In questo esempio il PLC si trova in modalità PROGRAM e il
segnale acustico è attivato.
CLR SHIFT CLR
<MONITOR> BZ
78
2. Premere SHIFT e quindi il tasto 1 per disattivare il segnale acustico.
SHIFT
1
<MONITOR>
B
3. Premere di nuovo SHIFT e quindi il tasto 1 per riattivare il segnale acustico.
<MONITOR> BZ
B
SHIFT
1

Utilizzo dei dispositivi di programmazione Capitolo 4
4-2-5 Assegnazione dei numeri di funzione delle istruzioni estese
Questa operazione viene utilizzata per visualizzare o modificare le istruzioni
estese assegnate ai numeri di funzione delle istruzioni estese. Le assegnazioni
possono essere visualizzate in qualsiasi modalità, anche se possono essere
modificate solo in modalità PROGRAM.
Operazione RUN MONITOR PROGRAM
Assegnazione lettura OK OK OK
Assegnazione
modifica
Assegnare i numeri di funzione delle istruzioni estese prima di inserire il programma. Il CPM2C non funzionerà in modo adeguato se le istruzioni estese
non vengono assegnate correttamente. Un’istruzione estesa può essere
assegnata solo ad un numero di funzione.
Il setup del PLC deve essere impostato per le assegnazioni delle istruzioni
estese definite dall’utente. Impostare i bit da 8 a 11 di DM 6602 ... 1, spegnere e quindi riaccendere il PLC per abilitare la nuova impostazione.
La tabella a pagina SENZA CODICE mostra le assegnazioni dei numeri di
funzione predefinite nel CPM2C.
No No OK
1, 2, 3... 1. Premere il tasto CLR per tornare al display iniziale.
2. Premere il tasto EXT per visualizzare l’assegnazione per il primo numero di
funzione (17).
INST TBL READ
EXT
FUN017:ASFT
3. Premere i tasti di scorrimento verso l’alto e verso il basso per effettuare uno
scorrimento attraverso i numeri di funzione delle istruzioni estese.
INST TBL READ
↓
FUN018:FUN
4. Premere il tasto CHG per assegnare un’istruzione estesa differente al
numero di funzione selezionato.
INST TBL CHG?
CHG
FUN018:FUN ~????
5. Premere i tasti di scorrimento verso l’alto e verso il basso per effettuare uno
scorrimento attraverso le istruzioni estese che possono essere assegnate
al numero di funzione selezionato.
INST TBL CHG?
↓
FUN018:FUN ~HEX
6. Premere il tasto WRITE per assegnare l’istruzione visualizzata al numero di
funzione.
INST TBL READ
WRITE
FUN018:HEX
4-2-6 Configurazione e lettura di un indirizzo di memoria del programma
Questa operazione viene utilizzata per visualizzare l’indirizzo della memoria di
programma specificato e può essere eseguita in qualsiasi modalità.
RUN MONITOR PROGRAM
OK OK OK
Quando viene inserito un programma per la prima volta, esso viene scritto
generalmente nella memoria di programma iniziando dall’indirizzo 000.
Poiché questo indirizzo appare quando viene cancellata la visualizzazione,
non è necessario specificarlo.
79
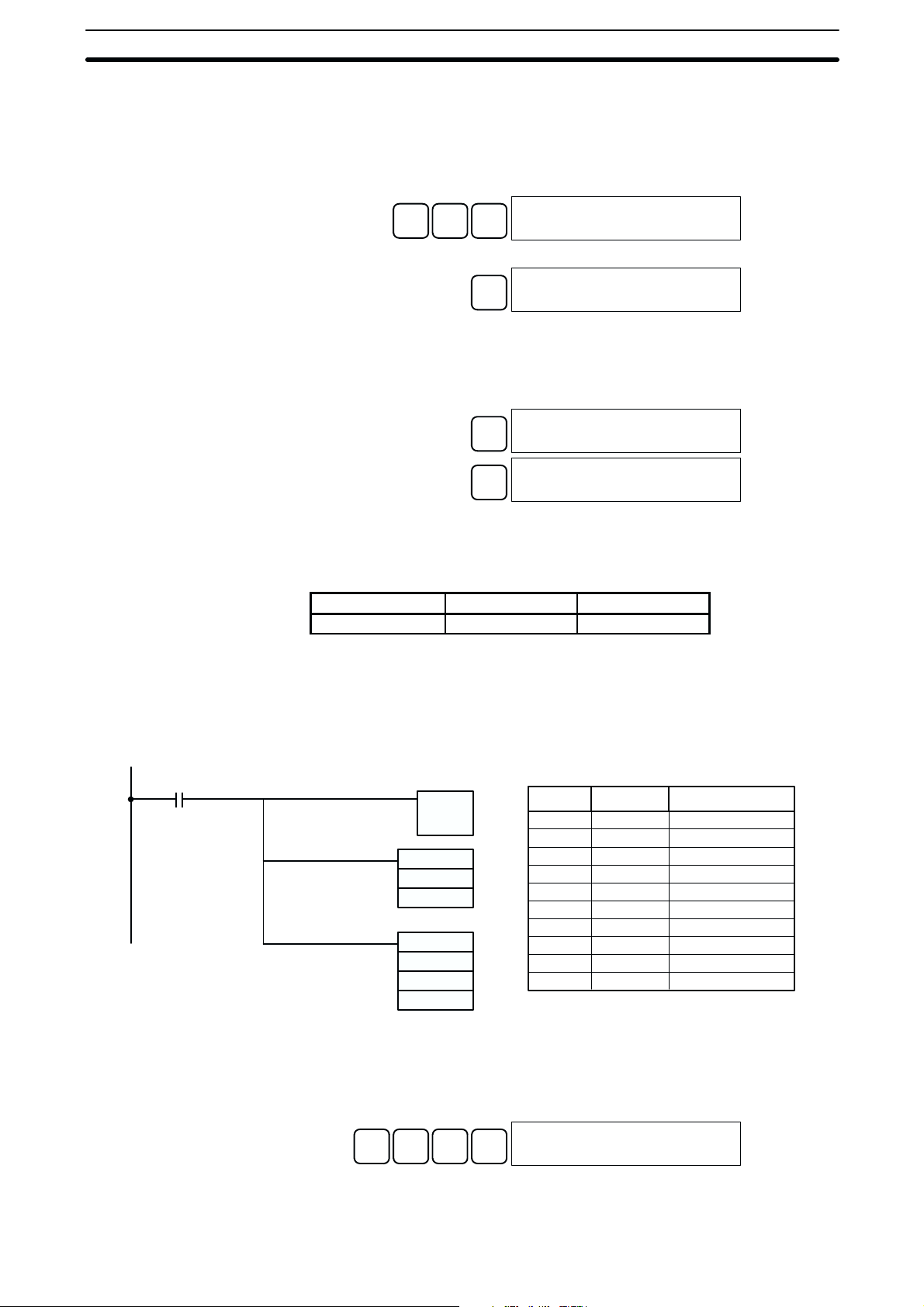
Utilizzo dei dispositivi di programmazione Capitolo 4
Quando viene inserito un programma iniziando da un numero diverso da
000, o per leggere o modificare un programma già esistente in memoria,
deve essere indicato l’indirizzo desiderato.
1, 2, 3... 1. Premere il tasto CLR per tornare al display iniziale.
2. Inserire l’indirizzo desiderato. Non è necessario inserire zeri iniziali.
C
2A0
00200
A
0
3. Premere il tasto di scorrimento verso il basso.
00200READ
↓
LD 00000
Nota Lo stato ON/OFF di ogni bit visualizzato verrà indicato se il PLC è in
modalità RUN o MONITOR.
4. Premere i tasti di scorrimento verso l’alto e verso il basso per scorrere attra-
verso il programma.
00201READ
↓
AND 00001
00200READ
↑
LD 00000
4-2-7 Inserimento o modifica dei programmi
Questa operazione viene utilizzata per inserire o modificare programmi. Può
essere eseguita solo in modalità PROGRAM.
RUN MONITOR PROGRAM
No No OK
La stessa procedura viene usata sia per inserire un programma per la prima
volta che per modificare un programma già esistente. In entrambi i casi, il
contenuto della memoria di programma viene sovrascritto.
00002
Per una dimostrazione di questa operazione verrà inserito il programma
riportato nella seguente figura.
TIM 000
#0123
MOV(021)
#0100
LR 10
ADB(050)
#0100
#FFF6
DM 0000
12.3 s
Indirizzo Istruzione Operandi
00200 LD IR 00002
00201 TIM 000
00202 MOV(021)
00203 ADB(050)
1, 2, 3... 1. Premere il tasto CLR per tornare al display iniziale.
2. Specificare l’indirizzo da cui deve avviare il programma.
3. Inserire l’indirizzo da cui avviare il programma e premere il tasto di scorrimento verso il basso. Non è necessario inserire zeri iniziali.
C
A
2
0A0
00200 READ
↓
NOP (000)
#0123
#0100
LR 10
#0100
#FFF6
DM 0000
80

Utilizzo dei dispositivi di programmazione Capitolo 4
4. Inserire la prima istruzione e il primo operando.
00200
C
LD
2
LD 00002
5. Premere il tasto WRITE per scrivere l’istruzione nella memoria di programma. Verrà visualizzato l’indirizzo di programma successivo.
00201READ
WRITE
NOP (000)
Se nell’inserire l’istruzione è stato commesso un errore, premere il tasto di
scorrimento verso alto per tornare all’indirizzo di programma precedente e
inserire di nuovo l’istruzione. L’istruzione non corretta verrà sovrascritta.
6. Inserire la seconda istruzione e l’operando (in questo caso non è necessario
inserire il numero del temporizzatore perché è 000). Premere il tasto WRITE
per scrivere l’istruzione nella memoria di programma.
00201 TIM DATA
TIM
Numero timer
7. Inserire il secondo operando (123 per specificare 12, 3 secondi) e premere il
tasto WRITE. Sul display apparirà l’indirizzo del programma successivo.
WRITE
#0000
B
C
1
2D3
WRITE
00202READ
NOP (000)
Se nell’inserire l’operando è stato commesso un errore, premere il tasto di
scorrimento verso l’alto per rivisualizzare l’operando non corretto e inserire
di nuovo l’operando.
Note a) Le operazioni sui contatori sono analoghe alle operazioni sui
timer, con la differenza che viene premuto il tasto CNT invece del
tasto TIM.
b) Gli SV dei temporizzatori e dei contatori vengono inseriti in BCD,
in modo da non dover premere il tasto CONT/#.
8. Inserire la terza istruzione e i suoi operandi. Inserire prima l’istruzione pre-
mendo il tasto FUN e poi il numero di funzione (in questo caso 21).
00202
B
C
FUN
2
1
MOV (021)
Per inserire un’istruzione differenziale, premere il tasto NOT dopo avere
inserito il numero di funzione (FUN 2 1 NOT). Accanto all’istruzione diffe-
renziale apparirà il simbolo “@”. Premere di nuovo il tasto NOT per rendere
di nuovo l’istruzione non differenziale. Il simbolo “@” sparirà.
Per modificare l’istruzione dopo averla inserita, scorrere semplicemente
attraverso il programma finché non viene visualizzata l’istruzione deside-
rata, quindi premere il tasto NOT. Accanto all’istruzione deve apparire il simbolo “@”.
9. Premere il tasto WRITE per scrivere l’istruzione nella memoria di programma. Verrà visualizzato il display di inserimento per il primo operando.
00202 MOV DATA A
WRITE
000
• Scrittura di una costante esadecimale o BCD
10. Inserire il primo operando.
00202 MOV DATA A
CONT
#
B
1A0
A
0
#0100
Premere il tasto WRITE per scrivere l’istruzione nella memoria di programma. Verrà visualizzato il display di inserimento del secondo operando.
00202 MOV DATA B
WRITE
000
81

Utilizzo dei dispositivi di programmazione Capitolo 4
Nota Gli operandi di MOV(21) possono essere indirizzi del canale, quindi
premere il tasto CONT/# per inserire una costante.
• Scrittura di un indirizzo del canale
11. Inserire il secondo operando.
B
LR
1
00202 MOV DATA B
A
0
LR 10
Premere il tasto WRITE per scrivere l’istruzione nella memoria di programma. Verrà visualizzato il successivo indirizzo del programma.
00203READ
WRITE
NOP (000)
Nota Non è necessario premere i tasti Shift + CONT/# o Shift + CH/#
quando viene inserito un bit dell’area IR o un indirizzo del canale.
12. Inserire la successiva istruzione.
FUN
F
5
A
0
00203
ADB (050)
Premere il tasto WRITE per scrivere l’istruzione nella memoria di programma.
00203 ADB DATA A
WRITE
000
• Scrittura di un numero decimale senza segno
13. Il primo operando viene inserito come un intero senza segno.
CONT
#
SHIFT
TR
00203 ADB DATA A
NOT
#00000
Inserire il valore dell’operando da 0 a 65535.
C
2F5 6
00203 ADB DATA A
#00256
Nota Se si commette un errore, premere il tasto CLR per ripristinare lo
stato precedente all’inserimento. Quindi inserire il valore corretto.
14. Ripristinare il display esadecimale.
SHIFT TR
00203 ADB DATA A
#0100
Nota Se viene inserito un valore che non rientra nell’intervallo consentito,
si avvertirà un segnale acustico e il display esadecimale non verrà
visualizzato.
00203 ADB DATA B
WRITE
000
15. Il secondo operando viene inserito come intero con segno.
CONT
#
SHIFT
00203 ADB DATA B
TR
#+00000
Inserire il valore dell’operando da –32.768 a 32.767. Usare il tasto SET per
inserire un numero positivo e il tasto RESET per inserire un numero negativo.
RESET
B
1
00203 ADB DATA B
A
0
#-00010
82
Nota Se si commette un errore, premere il tasto CLR per ripristinare lo
stato precedente all’inserimento. Quindi inserire il valore corretto.

Utilizzo dei dispositivi di programmazione Capitolo 4
16. Ripristinare il display esadecimale.
• Scrittura di un indirizzo del canale (DM 0000)
17. Inserire l’operando finale e quindi premere il tasto WRITE (non è necessario
inserire zeri iniziali).
4-2-8 Ricerca dell’istruzione
Questa operazione viene utilizzata per trovare le ricorrenze dell’istruzione spe-
cificata nel programma e può essere eseguita in qualsiasi modalità.
RUN MONITOR PROGRAM
OK OK OK
Se il PLC si trova nelle modalità RUN o MONITOR, apparirà anche lo stato
ON/OFF di tutti i bit visualizzati.
1, 2, 3... 1. Premere il tasto CLR per tornare al display iniziale.
2. Inserire l’indirizzo da cui iniziare la ricerca e premere il tasto di scorrimento
verso il basso. Non è necessario inserire zeri iniziali.
SHIFT TR
WRITE
WRITE
00203 ADB DATA B
00203 ADB DATA C
00203 ADB DATA C
EM
DM
00204READ
NOP (000)
#FFF6
000
DM 0000
B
A
1
0A0
3. Inserire l’istruzione da trovare e premere il tasto SRCH. In tal caso viene
ricercato OUT 01000.
In questo esempio, la successiva istruzione OUT 01000 si trova nell’indi-
rizzo 200, come riportato di seguito.
B
A
A
OUT
1
0
A
0
4. Premere il tasto di scorrimento verso basso per visualizzare gli operandi
dell’istruzione oppure il tasto SRCH per ricercare la ricorrenza successiva
dell’istruzione.
5. La ricerca continuerà finché non viene raggiunta l’istruzione END oppure la
fine della memoria di programma. Nell’esempio è stata raggiunta un’istruzione END nell’indirizzo 397.
4-2-9 Ricerca del bit dell’operando
Questa operazione viene utilizzata per trovare le ricorrenze del bit dell’operando
specificato nel programma e può essere eseguita in qualsiasi modalità.
RUN MONITOR PROGRAM
OK OK OK
00100READ
↓
TIM 001
00200SRCH
SRCH
0
OUT 01000
00397SRCH
SRCH
END (001)00.4KW
Lo stato ON/OFF di qualsiasi bit visualizzato verrà visualizzato se il PLC è in
modalità RUN o MONITOR.
83

Utilizzo dei dispositivi di programmazione Capitolo 4
1, 2, 3... 1. Premere il tasto CLR per tornare al display iniziale.
2. Inserire l’indirizzo dell’operando. Non è necessario inserire zeri iniziali.
SHIFT
5
#
LD 00005
00000CONT SRCH
F
CONT
3. Premere il tasto SRCH per iniziare la ricerca.
00123CONT SRCH
SRCH
LD 00005
4. Premere il tasto SRCH per ricercare la ricorrenza successiva del bit
dell’operando.
00255CONT SRCH
SRCH
AND NOT 00005
5. La ricerca continuerà finché non viene raggiunta l’istruzione END oppure la
fine della memoria di programma. Nell’esempio è stata raggiunta un’istruzione END.
00397CONT SRCH
SRCH
END (001)00.4KW
4-2-10 Inserimento e cancellazione delle istruzioni
Programma originale
00100 00103
00101
00201
00102
Inserimento
Questa operazione viene utilizzata per inserire o cancellare le istruzioni dal programma. Può essere eseguita solo in modalità PROGRAM.
RUN MONITOR PROGRAM
No No OK
Per dimostrare questa operazione, sarà inserita una condizione IR 00105 NO
nell’indirizzo di programma 00206 e verrà cancellata una condizione IR
00103 NO dall’indirizzo 00205, come riportato nella seguente figura.
Indirizzo Istruzione Operandi
00205 AND 00103
00206 AND NOT 00104
00207 OUT 01000
00208 END(01) -
Cancellazione
00104
00105
Inserimento
01000
Cancellazione
END(01)
Seguire la procedura di seguito indicata per inserire la condizione IR 00105 NO
all’indirizzo 00206.
1, 2, 3... 1. Premere il tasto CLR per tornare al display iniziale.
2. Inserire l’indirizzo in cui la condizione NO verrà inserita e premere il tasto di
scorrimento verso il basso. Non è necessario inserire zeri iniziali.
Inserimento
84
C
A
2
0 6
00206READ
↓
AND NOT 00104
3. Inserire la nuova istruzione e premere il tasto INS.
AND
A
B
1
0F5
00206INSERT?
INS
AND 00105
4. Premere il tasto di scorrimento verso il basso per inserire la nuova istruzione.
00207INSERT END
↓
AND NOT 00104
 Loading...
Loading...