

Page 1
Cat. N_ W352-E1-2
SYSMAC
CPM2A
Automate programmable
GUIDE D’INSTALLATION
Page 2

Automates programmables CPM2A
Guide d’installation
Réalisé en septembre 1999
Page 3

iv
Page 4
Avis :
Ó
OMRON,199
9
Les produits OMRON sont conçus pour être utilisés par un opérateur qualifié, en respectant des procédures appropriées et uniquement dans le cadre de ce qui est précisé dans ce document.
Dans ce manuel, les conventions suivantes permettent de spécifier et de classer les précautions.
Toujours faire très attention aux informations qui sont données. Le non–respect des précautions stipulées peut blesser des personnes ou endommager des biens.
DANGER Indique une situation dangereuse imminente qui, si elle n’est pas évitée peut entraîner des
!
blessures graves ou mortelles.
A VERTISSEMENT Indique une situation potentiellement dangereuse qui, si elle n’est pas évitée, peut
!
provoquer des blessures graves ou mortelles
Attention Indiqueunesituationpotentiellementdangereusequi,siellen’est pasévitée,peutprovoquer
!
des blessures moins sérieuses ou endommager des biens.
Références des produits OMRON
Dans ce manuel, tous les noms de produits OMRON sont écrits en majuscules. Le mot “ unité ” désigne une produit OMRON, que la désignation de ce produit apparaisse ou nom dans le texte.
L ’abréviation“Ch,” qui figure sur certains affichages et sur certains produits OMRON signifie souvent
“ word ” (“ mot ”) et, dans la documentation, il est souvent remplacé par l’abréviation “Wd”.
L ’abréviation“API” signifie Automate programmable industriel et n’est jamais utilisée comme abréviation d’un autre système, composant ou élément.
Aides visuelles
Les intitulés suivants apparaissent dans la colonne de gauche du manuel, pour vous aider à trouver
différents types d’informations.
1, 2, 3... 1. Indique une ou des listes de différents types, par exemple procédures,
Tous droits réservés. Aucune partie de cette publication ne peut être, stockée dans un système à mémoire ou transmise,
sous aucune forme et par aucun moyen mécanique, électronique, photocopie, enregistrement sans l’accord écrit préalable
d’OMRON.
L’utilisation des informations contenues ci–après ne peut engendrer aucune responsabilité. De plus, la mesure où
OMRON travaille constamment à l’amélioration de ses produits de haute qualité, les informations contenues dans ce manuel sont soumises à changement sans avis préalable. Toutes les précautions ont été prises dans l’élaboration de ce manuel.
Toutefois, OMRON ne peut être tenu responsable des erreurs ou omissions. Les dommages résultant de l’utilisationdes
informations contenues dans cette publication ne peuvent engendrer aucune responsabilité.
Rem. Désignedes informations particulièrementintéressantes pour utiliserle produit
de façon pratique et efficace.
checklists, etc.
v
Page 5

vi
Page 6

TABLE DES MATIERES
CONSEILS D’UTILISATION xi. . . . . . . . . . . . . . . . . . . . .
1 Public visé xii. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Conseils d’utilisation généraux xii. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Conseils d’utilisation de sécurité xii. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Conseils d’utilisation relatifs à l’environnement d’exploitation xiii. . . . . . . . . . . . . . . . . . . . . . .
5 Conseils d’utilisation xiv. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Directives communautaires xvi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CHAPITRE 1
Introduction 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-1 Caractéristiques et fonctions du CPM2A 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2 Configurations de base du système 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3 Structure et fonctionnement 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4 Fonctions énumérées par leur usage 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-5 Comparaison au CPM1A 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-6 Préparation pour le fonctionnement 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CHAPITRE 2
Caractéristiques et composants des unités 31. . . . . . . . . . . .
2-1 Caractéristiques techniques 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2 Composants 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CHAPITRE 3
Installation et câblage 45. . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1 Conseils d’élaboration 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2 Choix d’un site d’installation 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3 Installation du CPM2A 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4 Câblage et connexions 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CHAPITRE 4
Utilisation de dispositifs de programmation 85. . . . . . . . . .
4-1 Utilisation d’une Console de programmation 86. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2 Fonctionnement de la console de programmation 93. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3 Exemple de programmation 117.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CHAPITRE 5
Essais des programmes et Traitement des erreurs 125. . . . .
5-1 Contrôles initiaux du système et procédure d’essai des programmes 126. . . . . . . . . . . . . . . .
5-2 Fonctions d’auto–diagnostic 127. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-3 Erreurs de fonctionnement de la console de programmation 131. . . . . . . . . . . . . . . . . . . . . .
5-4 Erreurs de programmation 131.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-5 Organigrammes de dépannage 133. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-6 Inspections de maintenance 141. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-7 Remplacement de la batterie 142.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CHAPITRE 6
Unité d’extension de mémoire 145. . . . . . . . . . . . . . . . . . . . . .
6-1 Présentation 146. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-2 Caractéristiques techniques et nomenclature 147. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-3 Manipulation 149. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
vii
Page 7

TABLE DES MATIERES
Annexes
A Modèles standard 155. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B Dimensions 159. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Historique des révisions 165. . . . . . . . . . . . . . . . . . . . . . . . . . .
viii
Page 8
A propos de ce manuel :
LeCPM2A estunautomate programmable(API) compactetultra rapideconçu pourexécuterdes opérationsde pilotagesur dessystèmes quiexigent de10 à120 pointsd’E/S par API.Deux manuelsdécrivent
lapréparation,leparamétrageetl’exploitationdusystèmeCPM2A :LeGuided’installationduCPM2A(ce
manuel)et leManuelde programmationCPM1/CPM1A/CPM2A/CPM2C/SRM1(–V2).(Dans cemanuel,
le Manuel de programmationCPM1/CPM1A/CPM2A/CPM2C/SRM1(–V2) est désigné par une appellation simple, à savoir Manuel de programmation.)
Cemanueldécrit laconfigurationdusystème etl’installationduCPM2A. Ildonneaussiune explicationde
base des procédures opératoires des consoles de programmation. Pour faire connaissance avec le
CPM2A, vous devez d’abord lire ce manuel.
Le Manuel de programmation offre des descriptions détaillées des fonctions de programmation du
CPM2A.
Veuillez lirecemanuelattentivementet s’assurerd’avoirbiencompris lesinformationsqu’ilapporteavant
de tenter d’installer et d’utiliser le CPM2A.
Le Chapitre 1donne une brève description générale desétapes qui participent du développementd’un
systèmeCPM2A, décrit lesconfigurations possibles ainsique lesfonctions et caractéristiquesspéciales
du CPM2A.
LeChapitre 2 contient lesspécifications techniques desUnités qui, ensemble,permettent de constituer
un API CPM2A et décrit aussi les principaux éléments constitutifs et composants des Unités.
Le Chapitre 3 décrit les modalités d’installation et de câblage d’un API CPM2A.
Le Chapitre 4 décrit lesfonctionnalités du logiciel de support SYSMAC, les modalités de raccordement
de la console de programmation, et la façon de mener à bien les différentes opérations de programmation.
Le Chapitre 5 décrit l’exécution d’un essai, ce que vous devez faire pour diagnostiquer et corriger les
erreurs matérielles et logicielles qui peuvent survenir pendant que l’automate fonctionne.
LeChapitre6décritcomment utiliserl’unitéd’extensiondemémoireCPM1-EMU01-V1. Appliquerfidèlement les conseils et les procédures d’utilisation de l’unité.
L ’Annexe A contient des tableaux illustrant les Unités CPM2A et les produits connexes.
L ’Annexe B donne les dimensions des Unités CPM2A .
A VERTISSEMENT : Omettre de lire et comprendre les informations contrenues dans ce manuel
!
peut entraîner la mort, des blessures corporelles, risque d’endommager le
produit ou de le provoquer des pannes. Lire chaque chapitre, ainsi que les
chapitres auxquels il est fait référence dans leur totalité et s’assurer d’une
bonne compréhension des informations qui s’y sont contenues avant la mise
en oeuvre des procédures ou fonctionnalités décrites.
ix
Page 9
CONSEILS D’UTILISATION
Cette section expose les précautions générales que vous devez prendre pour utiliser l’automate programmable (API) et les
dispositifs associés.
Lesinformationsdonnéesdanscettepartiesont importantespourassureruneutilisationfiableetsansdanger del’automateprogrammable.Vousdevezlirecettesectionetcomprendrelesinformationsquiysontexposéesavantdetenter
de paramétrer et d’utiliser un système API.
1 Public visé xii. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Conseils d’utilisation généraux xii. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Conseils d’utilisation de sécurité xii. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Conseils d’utilisation relatifs à l’environnement d’exploitation xiii. . . . . . . . . . . . . . . . . . . . . . . . .
5 Conseils d’utilisation xiv. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Directives communautaires (CE) xvi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xi
Page 10

1 Public visé
Ce manuel estdestiné aux personnels qui doivent aussi avoir desconnaissances portant sur les systèmes électriques (ingénieur ou technicien en électricité
ou équivalent) :
· Personnel chargé d’installer des systèmes FA.
· Personnel chargé de concevoir des systèmes FA.
· Personnel chargé de la gestion de sites et de systèmes FA.
2 Conseils d’utilisation généraux
L ’utilisateur doit se servir du produit en conformité avec les spécifications de
performances exposées dans les manuels d’exploitation.
Avantd’utiliser le produit dansdes conditions non décritsdans le manuel oude
l’utiliser avec des systèmes de pilotage d’installations nucléaires, des chemins
de fer, des véhicules, systèmes à combustion, équipements médicaux,
machines et appareils pour le divertissement, équipements de sécurité ainsi
qu’avec d’autressystèmes, machines et équipementsqui peuvent exercer une
forte influence sur la vie humaine et les biens s’ils sont utilisés incorrectement,
veuillez consulter votre représentant OMRON.
Vérifier que les caractéristiques nominales et performances du produit sont
suffisantes pour les systèmes, machines et équipements. Et ne pas oublier de
munir les systèmes, machines et équipements de double mécanismes de
sécurité.
Ce manuel donne des informations sur la programmation et l’utilisation de
l’Unité. Vous devez absolumentlire ce manuel avantd’essayer d’utiliser l’unité,
et conserverce manuel à portéede la mainpour,si nécessaire, vous yreporter
pendant l’exploitation du système.
3Conseils d’utilisation de sécurité
A VERTISSEMENT Il est extrêmement important qu’un API et toutes les unités API soient
!
utiliséespourla miseenœuvre prévueetdansles conditionsspécifiées,
en particulier lorsqu’il s’agit d’applicat ions susceptibles d’affecter
directement ou indirectement la vie de l’homme. Avant d’utiliser un
système d’API dans le cadre des applications mentionnées ci–dessus,
vous devez absolument consulter votre représentant OMRON
3 Conseils d’utilisation de sécurité
A VERTISSEMENT Ne jamais tenter de démonter une Unité pendant qu’elle est sous
!
tension. Vous risqueriez une décharge électrique.
A VERTISSEMENT Ne jamais toucher des bornes ou borniers pendant que le système est
!
sous tension. Vous risqueriez une décharge électrique.
A VERTISSEMENT Ne jamais tenter de démonter, de réparer ou de modifier une Unité
!
quelconque. Toute tentative de ce type d’opération peut provoquer un
dysfonctionnement, un incendie ou être à l’origine d’une décharge
électrique.
A VERTISSEMENT Prévoir des mesures de sécurité pour les circuits extérieurs
!
(c’est–à–dire non dans l’automate programmable), y compris dans les
articles suivants, afin d’assurer la sécurité du système si une anomalie
intervient à la suite d’un dysfonctionnement de l’API ou d’un autre
facteur externe af fectant le fonctionnement de l’automate. Le
non–respect de cet avertissement peut se traduire par des accidents
graves.
xii
Page 11

· Des circuits d’arrêt d’urgence, des circuits à verrouillage réciproque,
deslimiteurs et desmesures de sécuritésimilaires doiventêtre misen
place sur tous les circuits de pilotage externes.
· L’API met toutes ses sorties à l’état OFF lorsque sa fonction de
diagnostic intégrée détecte une erreur ou bien à l’exécution d’une
instruction d’alarme de défaillance grave (FALS). Pour se protéger
contre ces erreurs, des mesures de sécurité externes doivent être
prises pour assurer la sécurité du système.
· Les sorties de l’automate peuvent rester ON ou OFF du fait de
l’encrassement ou dubrûlage des relais de sortie oude la destruction
des transistors de sortie. Pour se prémunir contre ce type de
problèmes,des mesuresde sécurité externesdoivent êtreprises pour
assurer la sécurité du système.
· Lorsque la sortie 24 V continus (alimentation électrique de service de
l’automate) est surchargée ou court–circuitée, il peut y avoir une
baissede tensionet,par suite,lessorties passentà l’étatOFF.Pour se
prémunircontre cetype deproblèmes,des mesuresde sécuritéexternes doivent être prises pour assurer la sécurité du système.
A VERTISSEMENT Lorsquevous transférezdesprogrammes àd’autres nœuds,oulorsque
!
vous modifiez la mémoire des E/S, il faut s’assurer de la sécurité du
nœud de destination avant de faire le transfert. Le non–respect de cet
avertissement peut être à l’origine d’accidents graves.
4Conseils d’utilisation relatifs à l’environnement d’exploitation
Attention Pour exécuter uneédition en ligne, ilfaut d’abord s’assurer quecette opération
!
n’aura pas d’effets néfastes par suite de l’allongement de la durée des cycles.
Autrement, il se peut que les signaux d’entrée soient illisibles.
Attention Serrer les vis du bornier de l’unité d’alimentation en courant alternatif en
!
respectantle couplespécifié dansle manueld’exploitation. Desvis malserrées
peuvent provoquer un brûlage ou un dysfonctionnement.
4 Conseils d’utilisation relatifs à l’environnement
d’exploitation
Attention Ne pas utiliser le système de pilotage dans les endroits suivants :
!
· Endroits recevant directement la lumière du soleil.
· Endroitsprésentantdestempératuresouunehumiditéàl’extérieurdelaplage
figurant dans les spécifications.
· Endroits présentantde lacondensationprovoquéeparde fortes variationsde
la température.
· Endroits soumis à des gaz corrosifs ou inflammables.
· Endroits poussiéreux (en particulier limaille de fer) ou contenant des sels.
· Endroits exposés à l’eau, à l’huile ou à des produits chimiques.
· Endroits soumis à des chocs ou à des vibrations.
Attention Vous devez prendre des mesures de protection ad hoc et suffisantes lorsque
!
vous installez des systèmes dans les endroits suivants :
· Endroits présentant de l’électricité statique ou d’autres formes de bruits.
· Endroits soumis à des champs électromagnétiques puissants.
xiii
Page 12
· Endroits susceptibles d’être soumis à de la radioactivité.
· Endroits proches d’alimentations électriques.
Attention L’environnement opératoire d’un système d’API peut affecter fortement sa
!
longévitéetsafiabilité.Un environnementopératoirehostilepeut provoquerdes
dysfonctionnements, des défaillances et d’autres problèmes imprévisibles
affectant le système d’API. Vérifier bien qu’à l’installation, l’environnement
opératoire estconforme aux conditions spécifiées et qu’il présente toujours les
mêmes conditions pendant la vie du système.
5 Conseils d’utilisation
Lors de l’utilisation du système d’API, toujours suivre les conseils d’utilisation
suivants.
A VERTISSEMENT Toujours observer ces conseils. Le non–respect des précautions
!
énumérées ci–dessous peut être à l’origine de blessures sérieuses ou
même mortelles.
· Il faut toujours connecter le système à une terre de façon que la
résistance de mise à la terre ne dépasse jamais 100 W pendant
l’installation des Unités. Si la terre choisie pour la connexion ne
convient pas, il y a risque de décharges électriques.
· Toujoursmettrel’alimentation électriquede l’API àl’étatOFF avantde
tenter defaire n’importe laquelledes opérations suivantes. Si vousne
mettez pas l’alimentation OFF, vous risquez de provoquer un
dysfonctionnement ou de subir une décharge électrique.
· Montage ou démontage d’unités d’E/S, d’unités centrales, de
· Assemblage d’unités.
· Réglage des micro–interrupteurs ou d’autres boutons.
· Opérations de raccordement ou de câblage.
· Connexion ou déconnexion de connecteurs.
5Conseils d’utilisation
mémoires à bande magnétique ou d’autres unités.
xiv
Attention Le non–respect des précautions suivantes peut entraîner un fonctionnement
!
défectueux del’API ou du système,ou bien endommager l’APIou les unités du
ou des API. Il faut toujours respecter les précautions indiquées.
· Des mesures doivent être prises par le client pourassurer la sécuritéenprésencedesignauxmanquants,incorrectsou anormauxprovoquéspar unerupture de lignes de transmission de signaux, par des coupures courtes du courant ou d’autres causes.
· Réaliseruncircuitdecommandeetdecontrôledefaçonquel’alimentationdes
circuits d’E/S ne puisse pas se mettre ON avant l’alimentation de l’unité. Si
l’alimentation des circuits d’E/S passe ON avant l’alimentation de l’unité, le
fonctionnement normaI risque d’être interrompu provisoirement.
· SivouspassezdumodeopératoireRUN ouMONITORen mode PROGRAM,
avec lebit de maintien IOM ON,la sortie va tenir lestatut le plus récent. Dans
cecas,ilfaut s’assurerquelachargeexternenedépasse pasla valeurfigurant
dans les spécifications. (Si l’exploitation est arrêtée à la suite d’une erreur
opératoire (y compris des instructions FALS), les valeurs qui sont dans la
mémoireinterne de l’UCseront conservées, maisles sortiespassent toutes à
l’état OFF).
· Toujours utiliser la tension d’alimentation spécifiée dans le manuel
d’exploitation. Une tension incorrecte peut provoquer un dysfonctionnement
ou un brûlage.
Page 13

· Prendre les mesures appropriées pour s’assurer que l’alimentation du
systèmeest assuréeàla tensionetà lafréquencenominales spécifiées.Faire
particulièrement attention si le réseau électrique est instable. Une
alimentation électrique non conforme peut provoquer des
dysfonctionnements.
· Installer des disjoncteurs externes et prendre d’autres mesures de sécurité
contre d’éventuels courts–circuits dans le câblage externe. Des mesures de
sécurité insuffisantes contre les courts–circuits peuvent provoquer un
brûlage.
· Ne jamais appliquer aux bornes d’entrée unetensionsupérieureàla tension
nominale d’entrée. Une tension excessive peut provoquer un brûlage.
· Ne jamais appliquer de tensionniconnecterdecharges aux bornes de sortie
qui soient au–delà de la capacité maximum de commutation. Une tension
excessive peut provoquer un brûlage.
· Pendant lesessaisde tension derégime, vous devezdébrancherla bornede
terre fonctionnelle.Si vous ne respectezpas cette règle, le systèmepeut être
atteint d’un brûlage.
· Installer l’unitécorrectement,conformément aux indicationsdonnéesdans le
manueld’exploitation. Une installationincorrecte de l’unitépeut provoquerun
dysfonctionnement.
· S’assurer que toutes les vis de montage, des bornes et des connecteurs de
câbles sont serrées au couple spécifié dans les manuels applicables. Un
serrage avec un couple incorrect peut provoquer un dysfonctionnement.
· Pendantlecâblage,s’assurerquelesétiquettessontbienenplaceaumoment
de l’expéditiondu CPM1ou du CPM2Apour éviter l’introductionde morceaux
de fils dans l’unité.
· Pour éviterl’introduction demorceauxde filsdansl’UC nepasoublier defixer
les étiquettes fournies sur le CPM1A pour câbler l’UC du CPM1A.
· Lorsque le câblage est terminé, enlever l’étiquette pour assurer une bonne
dissipation thermique. Le fait de ne pas enlever l’étiquette peut provoquerun
dysfonctionnement.
· S’assurer que le câblageest fait conformément aux prescriptions du manuel
d’exploitation ad hoc. Un mauvais câblage peut provoquer un brûlage.
· Pourfairelecâblage,utiliserdesbornesserties.Nepasraccorderdirectement
desfils nusàdesbornes. Leraccordementdefils torronésnuspeutprovoquer
un brûlage.
· Faireundouble contrôledetout lecâblageavantdemettre l’alimentationON.
Un câblage incorrect peut provoquer un brûlage.
· Vérifier que les borniers, les unités de mémoire, les câbles d’extension et les
autres pièces équipées de dispositifs de verrouillage sont bien fixés. Une
mauvaise fixation peut provoquer des dysfonctionnements.
· Vérifier que les borniers et les connecteurs sont connectés dans la direction
spécifiée et que les polarités sont bien conformes. Toute anomalie peut
provoquer un dysfonctionnement.
· Vérifier l’exécution du programme utilisateur avant de le faire tourner sur
l’automate. La non vérification du programme peut être à l’origine d’un
fonctionnement imprévisible.
· S’assurer que le système ne sera pas perturbé avant de lancer une des
opérations de la liste ci–dessous. Le non respect de cette règle peut être à
l’origine d’un fonctionnement imprévisible.
· Changer le mode opératoire de l’API.
· Réglage/RAZ forcé d’un bit en mémoire.
· Changer la valeur actuelle d’un mot quelconque ou de n’importe quelle
valeur fixe en mémoire.
5Conseils d’utilisation
xv
Page 14
· Reprendre l’exploitation uniquement après avoir transféré dans la nouvelle
UC lecontenu deszones DM etHR requis pourreprendre l’exploitation.Sans
cette opération, le système risque de fonctionner de façon imprévisible.
· Nepas exercerdetractions etnepasplierlescâbles au–delàdeslimitesqu’ils
peuvent naturellement supporter. Si vous ne respectez pas cette règle, il y a
risque de rupture d’un ou de plusieurs câbles.
· Ne poser aucun objet sur les câbles. La pose d’objets sur un câble peut
provoquer une rupture de ce câble.
· Lespilesnedoiventjamaisêtrecourt–circuitéesentre lesbornes positives(+)
et négatives (–), chargées, démontées, chauffées ou jetées dans un feu.
· Lorsquevousremplacezdespièces, vérifierque lescaractéristiquesnominales des pièces neuves sont correctes.Une différence de ces caractéristiques
peut provoquer un dysfonctionnement ou un brûlage.
· Avantdetoucherl’unité,toucherd’abordunobjetmétalliquereliéàlaterreafin
de décharger toute l’électricité statique qui a pu s’accumuler. Le non respect
de cette règle peut provoquer un dysfonctionnement ou des dégâts.
· Nepastouchelecâblederaccordementdel’unitéd’extensiondesE/Slorsque
le système est sous tension ; ceci permet d’éviter les dysfonctionnements
provoqués par l’électricité statique.
6Directives communautaires
6 Directives communautaires
6-1 Directives applicables
· Directives sur la CEM
· Directive sur les basses tensions
6-2 Concepts
Directives sur la CEM
Les appareils OMRON qui sont en conformité avec les directives
communautaires sont aussi conformes aux normes de la CEM connexes pour
faciliter leur intégration dans d’autres dispositifs ou dans une machine. Les
produits commercialisésont fait l’objet d’un contrôle deconformité aux normes
delaCEM (voirlanotesuivante).C’est auclientqu’ilappartientde s’assurerque
les produits sont en conformité avec les normes du système qu’il utilise.
Les performances vis–à–vis des CEM des dispositifs OMRON qui sont en
conformitéavecles directivescommunautairesvarient selonlaconfiguration, le
câblageetd’autres particularitésdel’équipement,du tableaudecommande sur
lequelsont installés lesdispositifs OMRON.Le client doitdonc faireun contrôle
final pour s’assurer que les dispositifs et l’ensemble de la machine sont en
conformité avec les normes applicables à la CEM.
Rem. Les normes CEM (Compatibilité électromagnétique) applicables sont, comme
suit :
xvi
EMS (Susceptibilité électromagnétique) : EN61 131-2
EMI (Interférences électromagnétiques) : EN50081-2
(Emission rayonnée : réglementation 10 m)
Directive sur les basses tensions
S’assurer toujours que les dispositifs fonctionnant à des tensions comprises
entre50 et1.000 Vc.a. enalternatif et75 à1.500V c.c. sonten conformitéavec
les normes de sécurité requises pour l’automate. (EN61131 -2).
Page 15

6-3 Conformités aux directives communautaires
LesAPICPM2A sontconformesauxdispositifs desdirectivescommunautaires.
Pour s’assurer que la machine ou le dispositif dans lequel est utilisé l’API
CPM2AAPI estenconformité avecles directivescommunautaires,l’installation
de l’automate doit être faite en respectant les indications suivantes :
1, 2, 3... 1. Le CPM2A API doit être installé avec un tableau de commande et de
contrôle.
2. Pour les alimentations courant continu utilisées pour les alimentations des
communications et des E/S, il faut utiliser un isolement renforcé ou un
double isolement.
3. Les API CPM2A conformes aux directives communautaires doivent aussi
être en conformité avec la Norme EN50081-2. Les caractéristiques de
l’émission rayonnée (réglementation 10-m) peuvent varier selon la
configuration du tableau de commande utilisé, des autres dispositifs
raccordés à ce tableau, du câblage et d’autres facteurs. Il faut donc
s’assurer que l’ensemble de la machine ou de l’équipement est conforme
aux dispositions des directives communautaires.
6-4 Méthodes de réduction du bruit des sorties à relais
Les API CPM2A sont en conformité avec la norme EN50081–2 des directives
surla CEM. Toutefois, lebruit générépar le basculementde l’API àl’état ON ou
OFF à l’aide de la sortie à relais n’est peut être pas en conformité avec ces
normes. Dans ce cas, un filtre anti–parasitage doit être relié au côté charge ou
bien d’autres mesures spécifiques être mises en œuvre à l’extérieur de l’API.
Les contre–mesuresprises pour êtreen conformité avec les normesvarient en
fonction des dispositifs qui sont du côté charge, du câblage de la configuration
des machines, etc. Les exemples suivants décrivent des contre–mesures
permettant de réduire le bruit généré.
6Directives communautaires
Contre–mesures
(Pour plus de détails, consulter EN50081-2).
Les contre–mesures sont inutiles si la fréquence de commutation de la charge
pour tout le système – API inclus – est inférieure à 5 fois par minute.
Des contre–mesures sont obligatoires si la fréquence de commutation de la
charge pour tout le système – API inclus – est 5 fois par minute ou plus.
xvii
Page 16
Exemples de contre–mesures
MéthodeCR
Méthodediod
e
Lors de la commutation d’une charge inductive, connecter un limiteur de tension, desdiodes, etc. en parallèle avecla charge ou le contact, comme indiqué
ci–dessous.
Circuit Courant Caractéristique Elément requis
Alt. Cont.
Alimentation
Alimentation
Méthode varistor
Alimentation
Oui Oui Si la charge est un relais ou un
Charge
inductive
Non Oui La diode connectée en parallèle avec
Charge
inductive
Oui Oui La méthode de la résistance variable
Charge
inductive
solénoïde, il y a un retard entre le
moment de l’ouverture du circuit et le
moment de la remise à zéro de la
charge.
Si la tension d’alimentation est
comprise entre 24 et 48 V, mettre le
limiteur de tension en parallèle avec la
charge. Si la tension d’alimentation est
entre 100 et 200 V, mettre le limiteur
entre les contacts.
la charge transforme l’énergie
accumulée par la bobine en un
courant, qui circule dans l’enroulement,
afin d’être converti en chaleur par la
résistance de la charge inductive.
Le retard entre l’ouverture du circuit et
la remise à zéro de la charge, qui est
provoqué par cette méthode est plus
long que celui obtenu par la méthode
CR.
empêche l’imposition d’une haute
tension entre les contacts grâce à la
caractéristique de tension constante de
la résistance variable. Il y a un retard
entre l’ouverture du circuit et la remise
à zéro de la charge i.
Si la tension d’alimentation est entre 24
et 48 V, mettre la résistance variable
en parallèle avec la charge. Si la
tension d’alimentation est entre 100 et
200 V, mettre la résistance variable
entre les contacts.
6Directives communautaires
La capacité du condensateur doit être
de 1 à 0,5 mF pour un courant de
contact de 1 A et la résistance du
composant résistif doit être de 0,5 à 1
W pour une tension de contact de 1 V.
Toutefois, ces valeurs peuvent varier
selon la charge et avec les
caractéristiques du relais Ces valeurs
doivent être choisies à partir
d’expérimentations en tenant compte
du fait que la capacité supprime la
décharge à étincelles lorsque les
contacts sont séparés et que la
résistance limite le courant qui circule
dans la charge lorsque le circuit est à
nouveau fermé.
La résistance disruptive du
condensateur doit être comprise entre
200 et 300 V. S’il s’agit d’un circuit en
courant alternatif, il faut utiliser un
condensateur sans polarité.
La valeur de la résistance disruptive
inverse de la diode doit être au moins
10 fois plus grande que la valeur de la
tension du circuit. Le courant direct de
la diode doit être supérieur ou égal au
courant de la charge.
La valeur de la résistance disruptive
inverse de la diode peut être deux ou
trois fois plus grande que la tension
d’alimentation si le limiteur de tension
travaille sur des circuits électroniques
présentant de faibles tensions de
circuits.
---
xviii
Page 17
6-5 Conformité aux directives CEM des CPM1A-MAD01
Les conditions de contrôle de l’immunité avec les E/S actuelles du CPM1AMAD01 sont, comme suit :
· Précision totale : +10%/-1%
· Mettre le noyau suivant sur chaque ligne, comme illustré ci–après.
Noyau recommandé : 2643-002402
Fabricant : Fair Rite Products Corp.
6Directives communautaires
xix
Page 18

CHAPITRE 1
Introduction
Ce chapitre décritles caractéristiques et fonctions spéciales du CPM2A, indique lesconfigurations possibles du système et
donneune idée desopérations nécessaires avantla mise enmarche. Lire d’abordce chapitre lorsde l’utilisation du CPM2A
pour la première fois.
Se référer au Manuel de programmation du CPM2A pour obtenir des détails sur la programmation.
1-1 Caractéristiques et fonctions du CPM2A 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-1-1 Caractéristiques du CPM2A 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-1-2 Vue générale des fonctions du CPM2A 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2 Configurations de base du système 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2-1 Unité centrale autonome 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2-2 Unité centrale et unité d’extension 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3 Structure et fonctionnement 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-1 Structure de l’unité centrale 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-2 Modes de fonctionnement 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-3 Mode de fonctionnement à l’installation 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-4 Fonctionnement de l’API au démarrage 12.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-5 Fonctionnement cyclique et interruptions 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4 Fonctions énumérées par leur usage 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-5 Comparaison au CPM1A 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-6 Préparation pour le fonctionnement 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
Page 19
1-1 Caractéristiques et fonctions du CPM2A
1-1-1 Caractéristiques du CPM2A
Les API CPM2A présentent une diversité de caractéristiques dans une unité
compacte, comprenant le contrôle des impulsions synchronisées, les entrées
d’interruption, les sorties d’impulsions, les réglages analogiques, et une fonctiond’horloge. L ’unitécentrale duCPM2A estune unitéautonome, quipeut traiter une large gamme d’applications de contrôle par machine, et elle est idéale
comme unité de contrôle incorporée dans des équipements.
Tout le jeu de fonctions de communications fournit des communications avec
des ordinateurs personnels, d’autres API OMRON et des terminaux programmables OMRON. Ces possibilitésde communications permettent à l’utilisateur
de concevoir un système de production distribuée de faible coût.
L’unité centrale contient 20, 30, 40 ou 60 points d’entrée/sortie, et
des unités d’extension d’entrée/sortie peuvent être ajoutées pour
fournir une capacité totale de jusqu’à 120 points d’entrée/sortie.
Des unités d’entrée/sortie analogiques et des unités de liaison
entrée/sortie CompoBus/S sont également connectables.
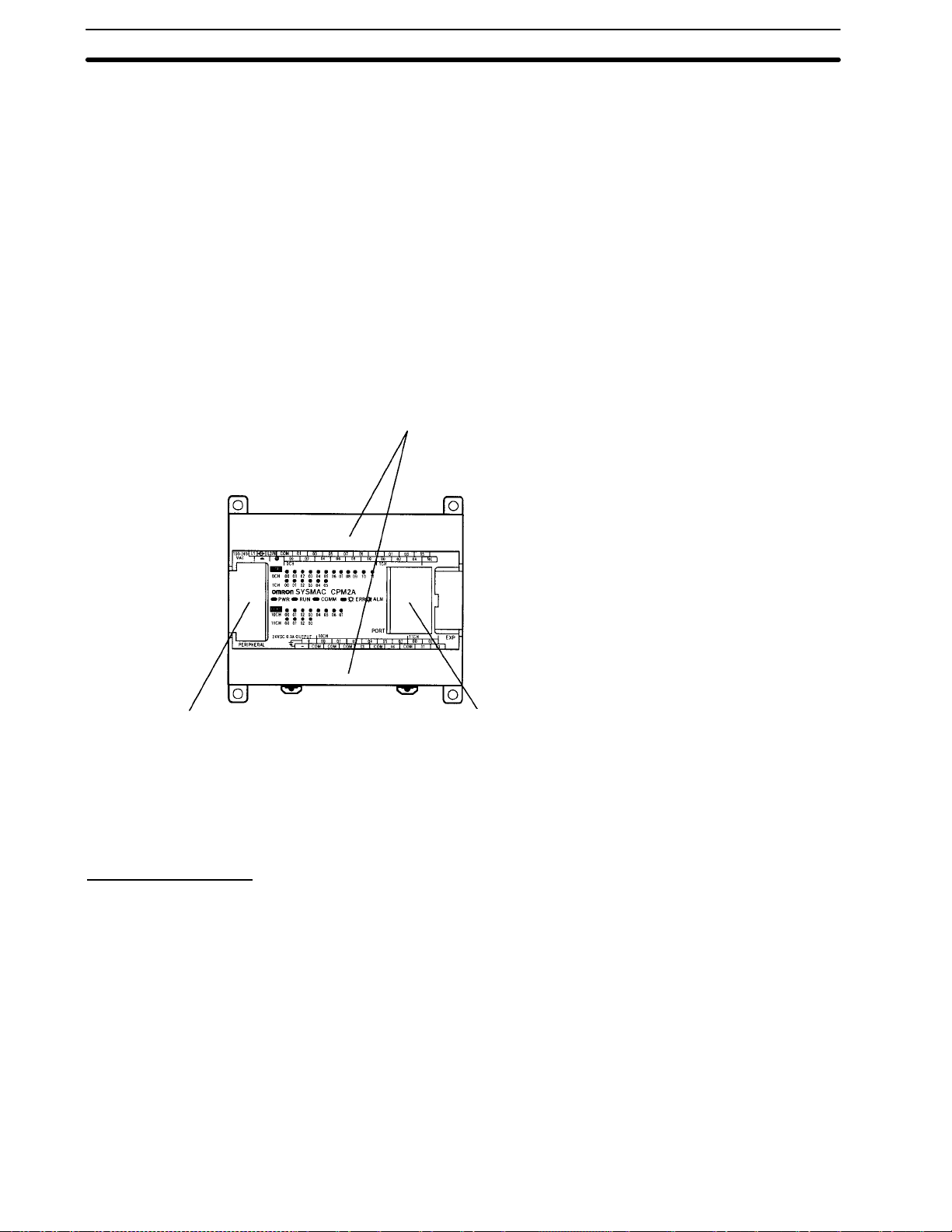
ChapitreStructure et fonctionnement
1-1
Port de périphérique
Les appareils de programmation sont
compatibles avec d’autres modèles de l’API
OMRON. Ce port peut être utilisé aussi
comme liaison à un micro–ordinateur ou
pour des communications sans protocole.
Fonctions de base
Variantes de l’unité de
base
Unités d’entrée/sortie
d’extension
Port RS–232C
Ce port peut être utilisé comme liaison à
un micro–ordinateur, communications
sans protocole, de liaison API 1:1 ou de
liaison NT 1:1.
LesAPI CPM2A sontdes APId’une pièceavec 20,30, 40ou 60bornes entrée–
sortieincorporées.Ilexiste3typesde sorties(sorties àrelais, sortiesà transistor
NPNet sortiesà transistorPNP)et 2types d’alimentations(100/240Vc.a. ou24
Vc.c.).
Jusqu’à 3 unités d’entrée/sortie d’extension se connectent à l’unité centrale,
pour porter la capacité d’entrée/sortie de l’API à un maximum de 120 points
d’entrée/sortie.Il existe 3types d’unitésd’entrée/sortie : uneunité d’entrée/sortie à20 points, une unitéd’entrée à 8 pointset une unité desortie à 8 points.La
capacitémaximale de120 pointsd’entrée/sortie estatteinte enconnectant trois
unités d’entrée/sortieà 20 points à une unité centrale avec60 bornes d’entrée/
sortie incorporées.
2
Page 20
ChapitreCaractéristiques et fonctions du CPM2A
1-1
Unités d’entrée/sortie
analogiques
Unités de liaison
entrée/sortie
CompoBus/S
Jusqu’à 3 unités d’entrée/sortie analogiques se connectent pour obtenir des
entréeset des sortiesanalogiques. Chaque unitédonne 2 entréesanalogiques
et 1 sortie analogique,de sorte que 6 entrées analogiques et 3 sortiesanalogiques sont obtenues en connectant 3 unités d’entrée/sortie analogiques. (Un
contrôleproportionnelau tempsest réalisableencombinant lespointsd’entrée/
sortie analogiques avec les instructions PID (––) et PWM (––).)
· Le domained’entrée analogiquepeut êtrerégléde 0à10 Vc.c.,de1 à5 Vc.c.
oude 4 à20 mA,avec unerésolution de1/256. (La fonctionde détectionà circuit ouvert peut être utilisée avec les réglages 1 à 5 Vc.c. et 4 à 20 mA.)
· Le domaine de sortie analogique peut être réglé de 0 à 10 Vc.c., de –10 à
+10 Vc.c. ou de 4 à 20 mA, avec une résolution de 1/256.
Des unités de liaison entrée/sortie CompoBus/S se connectent pour faire du
CPM2A un appareil esclave dans un réseau CompoBus/S. L ’unité de liaison
entrée/sortie a 8 bits à l’entrée (en interne) et 8 bits à la sortie (en interne).
Le réseau CompoBus/S fournit un contrôle réparti de l’unité centrale basé sur
uneconfiguration “API + APIcompact”, ce qui estun progrès parrapport à l’anciencontrôle entrée/sortieréparti,basé suruneconfiguration “API+ entrée/sortie distante”.Le contrôle réparti del’unité centrale rend leséquipements modulaires,cequifait queles constructionspeuventêtrestandardisées,quel’accèsà
desbesoinsspéciauxest possibleetqueencas depannelesmodulessont facilement remplaçable .
Unité maître CompoBus/S
API Maître
(ou unité maître de contrôle SRM1 CompoBus/S)
CPM2A (Esclave) Unité de liaison entrée/sortie
CompoBus/S
Contrôle réparti de l’unité centrale
Appareils de
programmation partagée
Les mêmes appareilsde programmation, comme les consoles de programmationet lelogiciel desupport, peuventêtre utiliséspour les APIC200H, C200HS,
C200HX/HG/HE,CQM1, CPM1, CPM1A,CPM2C etSRM1 (–V2),de sorteque
lesressources du programmeen échelleexistantes peuventêtre utilisées avec
succès.
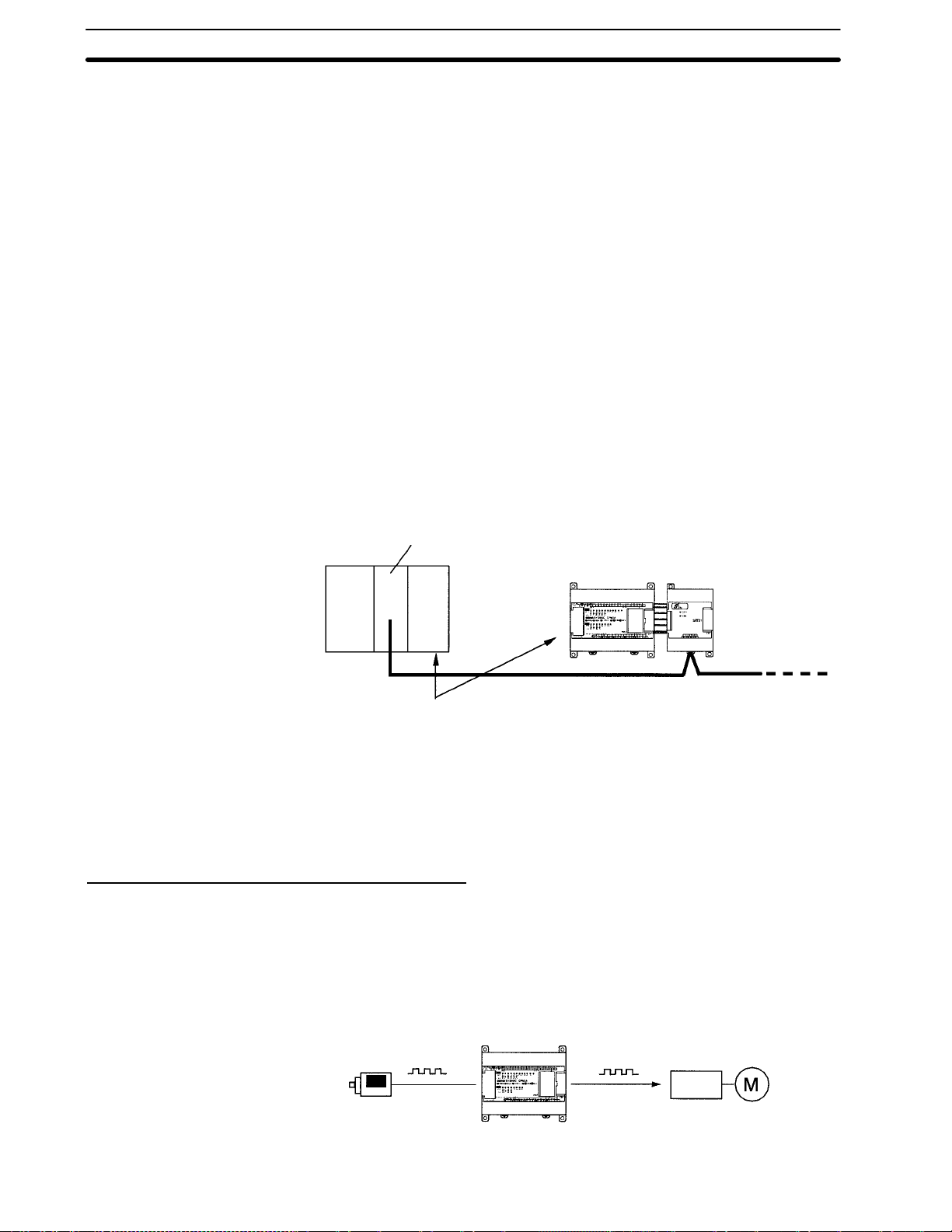
Capacité de contrôle par moteur incorporé
Contrôle par impulsions
synchronisées
(sorties à transistor
seulement)
Lecontrôle par impulsionssynchronisées fournitun moyenfacile de synchroniser le fonctionnement d’un équipement périphérique avec l’équipement principal.Lafréquencedesimpulsionsdesortiepeut êtrecontrôléesous laforme d’un
multipledela fréquencedesimpulsionsd’entrée, cequipermet desynchroniser
lavitessed’unéquipement périphérique(par exempleun convoyeurd’alimentation) sur la vitesse de l’équipement principal.
Codeur
Les impulsions sortent à un multiple fixe de la fréquence d’entrée.
CompoBus/S
CPM2A
Entraînement du moteur
Moteur
3
Page 21
ChapitreCaractéristiques et fonctions du CPM2A
1-1
Compteurs et
interruptions à grande
vitesse
Contrôle de position
facile avec des sorties à
impulsions
(Seulement sorties à
transistor)
Le CPM2A a un total de cinq entrées compteurs à grande vitesse. Une entrée
compteur à grandevitesse a une fréquence de réponse de 20 kHz/5kHz et les
quatreentréesd’interruption(enmodecompteur)ontunefréquence deréponse
de 2 kHz.
Le compteurà grande vitessepeut être utilisédans n’importelequel des quatre
modes d’entrée : le mode à phase différentielle(5 kHz), le mode d’entrée d’impulsions direction plus (20 kHz), le mode d’impulsions haut/bas (20kHz), ou le
modeà incrément(20 kHz). Lesimpulsions peuventêtre déclenchéesquand le
comptage atteint une valeur préréglée ou tombe dans une gamme spécifiée.
Les impulsions d’interruption (mode compteur) peuvent être utilisées pour
incrémenterles compteurs ou lesdécrémenter (2 kHz)et déclencher une interruption(en exécutantle programmed’interruption)quand lecomptage atteintla
valeur cible.
LesAPI CPM2A avec sortiesà transistor ontdeux sorties,qui peuvent produire
des impulsions de 10 Hz à 10 kHz (sorties à une seule phase).
Sielles sont utiliséescomme sortiesà uneseule phase,il peut yavoir deuxsortiesavec une gammede fréquence de10 Hz à10 kHz avecun rapport cyclique
fixe,ou de0,1 à 999,9Hz avecun rapportcyclique variable(rapport cycliquede
0 à 100%).
Sielles sontutilisées commesorties àdirectionplus ouà impulsionshaut/bas,il
nepeutyavoir qu’unesortieseulementavecune gammede fréquencede 10Hz
à 10 kHz.
Capacités d’entrée à grande vitesse pour commande de machines
Fonction d’entrée
d’interruption à grande
vitesse
Fonction d’entrée à
réponse rapide
Stabilisation du
fonctionnement du filtre
d’entrée
Il y a quatre entrées utilisées pour les entrées d’interruption (partagées avec
entrées à réponse rapide et entrées d’interruptionen mode compteur) avec un
signald’entrée delargeur minimalede 50ms etun tempsde réponsede 0,3 ms.
Quand une entrée d’interruptionest activée, le programme principal s’arrête et
le programme d’interruption est exécuté.
Ily a quatreentrées utiliséescomme entréesà réponse rapide(partagées avec
des entréesd’interruption et desentrées d’interruption en modecompteur), qui
peuventlire defaçon fiabledes signauxd’entrée d’unelargeur aussicourte que
50 ms.
Laconstante de tempsd’entrée pourtoutes lesentrées peutêtre régléeà 1 ms,
2 ms, 3 ms, 5 ms, 10 ms, 20 ms, 40 ms ou 80 ms. On peut réduireles effets de
parasitages en augmentant la constante de temps à l’entrée.
Autres fonctions
Interruptions de la
temporisation
Réglages analogiques
La temporisation peut être réglée entre 0,5 et 319.968 ms, et elle peut être
régléepour produire uneinterruption seulement(mode àun coup) oudes interruptions périodiques (mode à interruptions programmées).
Sur l’unité centrale, deux des commandes peuvent être tourner pour changer
lesréglagesanalogiques(0 à200BCD)dansIR 250etIR251. Cescommandes
peuvent être utiliséespour changer facilement ou faire le réglagefin des réglages de la machine, notamment le temps d’arrêt d’un convoyeur ou son débit
d’alimentation.
Calendrier/horloge
4
L ’horloge incorporée (précision de moins de1 minute par mois) peut être lue
dans le programme pour trouver l’année en cours, le mois, le jour, le jour de la
semaineetl’heure.L’horlogepeutêtreréglée parunappareilde programmation
(notammentune consolede programmation), oubien l’heurese règle enarrondissant vers le haut ou vers le bas à la minute la plus proche.
Page 22
ChapitreCaractéristiques et fonctions du CPM2A
1-1
Temporisation à long
terme
TIML (––) est une horloge à long terme qui accepte des valeurs préréglées de
jusqu’à 99.990 secondes (27 heures, 46 minutes, 30 secondes). En la combinant avec l’instruction de conversion SECONDES EN HEURES (HMS(––)),
l’horlogeà long termefournit une manièrefacile de contrôlerle programme des
équipements.
Contrôle PID analogique
L ’instructionPID(––)peut êtreutiliséeavec uneunitéd’entrée/sortieanalogique
pour contrôler l’entrée/sortie analogique.
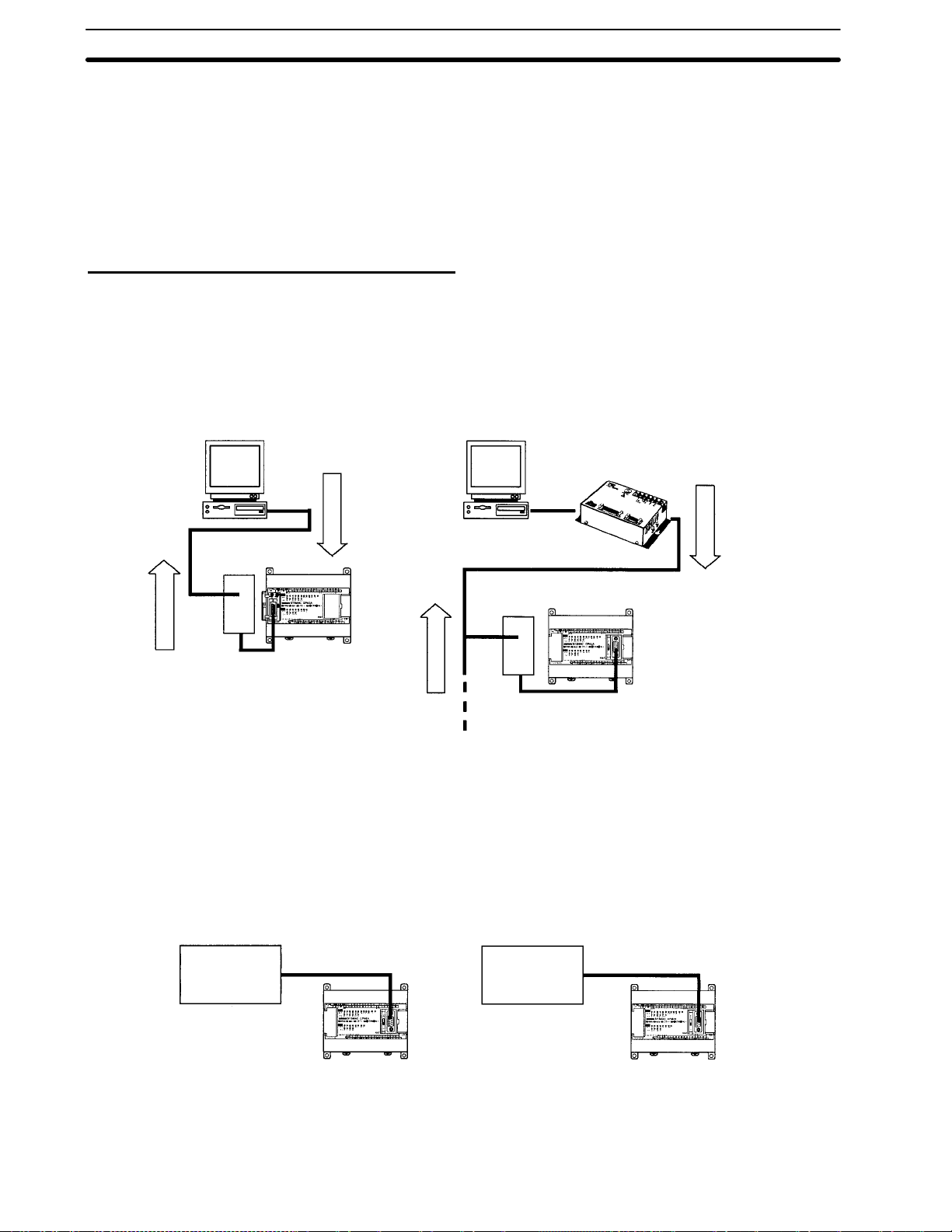
Capacités complètes de communications
Liaison à un
micro–ordinateur
Communications de liaison à un micro–ordinateur 1:1
Une liaison àun micro–ordinateur peut se faire àpartir du port RS–232C ou du
port depériphérique de l’API.Un ordinateur personnelou un terminalprogrammableconnectéenmode liaisonà unmicro–ordinateurpeutêtreutilisépour des
opérationstellesque lireouécrire desdonnéesdans lamémoired’entrée/sortie
du PC, ou bien lire ou changer le mode opératoire de l’API.
Communications de liaison à un micro–ordinateur 1:N
Liaison avec
adaptateur
RD400
CPM1-CIF01
Réponses
CPM2A (connexion à un port périphérique*)
*Il faut un adaptateur RS–232C pour se
connecter au port de périphérique RS–232C
Communications sans
protocole
Entrée de données venant
d’un lecteur de code barres
Lecteur de code
barres
Commandes
CPM2A
RD400
Réponses
Adaptateur RS-232C/RS-422A
(Jusqu’à 32 PC peuvent être connectés.)
(RS-232C port connection)
Commandes
Lesinstructions TXD (48)et RXD (47)peuvent êtreutilisées enmode sans protocole pour échanger des données avec des appareils série standard. Par
exemple, des données peuvent être reçues d’un lecteur de code barres ou
transmisesà une imprimantesérie. Les appareilssérie peuvent êtreconnectés
au port RS–232C ou au port de périphérique.
Sortie de données vers une
imprimante série
Imprimante
série
(connexion port RS-232C *)
*Il faut un adaptateur RS–232C de type CPM1–CIF01pour se connecter au port de périphérique.
CPM2A
(connexion port RS-232C *)
CPM2A
5
Page 23
ChapitreCaractéristiques et fonctions du CPM2A
1-1
Communications à
grande vitesse par
liaison NT 1:1
Liaison d’un API à un API
Lorsd’uneliaison NT1:1, unterminalprogrammable(PT) OMRONse connecte
directement au CPM2A. Le PT doit être connecté au port RS–232C ; il ne peut
pas être connecté au port de périphérique.
PT OMRON
CPM2A
(connexion port RS-232C)
Un CPM2A peut être relié directement à un autre API CPM2A, CQM1, CPM1,
CPM1A, CPM2C, SRM1(–V2) oubien un API C200HS ou C200HX/HE/HG. La
liaison API 1:1 permet des connexions en liaison de données automatique.
L ’APIdoit êtreconnectépar leportRS–232C; ilne peutpasêtreconnecté parle
port de périphérique.
Unité d’extension de
mémoire
(connexion port RS-232C)
CPM2A
(connexion port RS-232C)
CPM2A
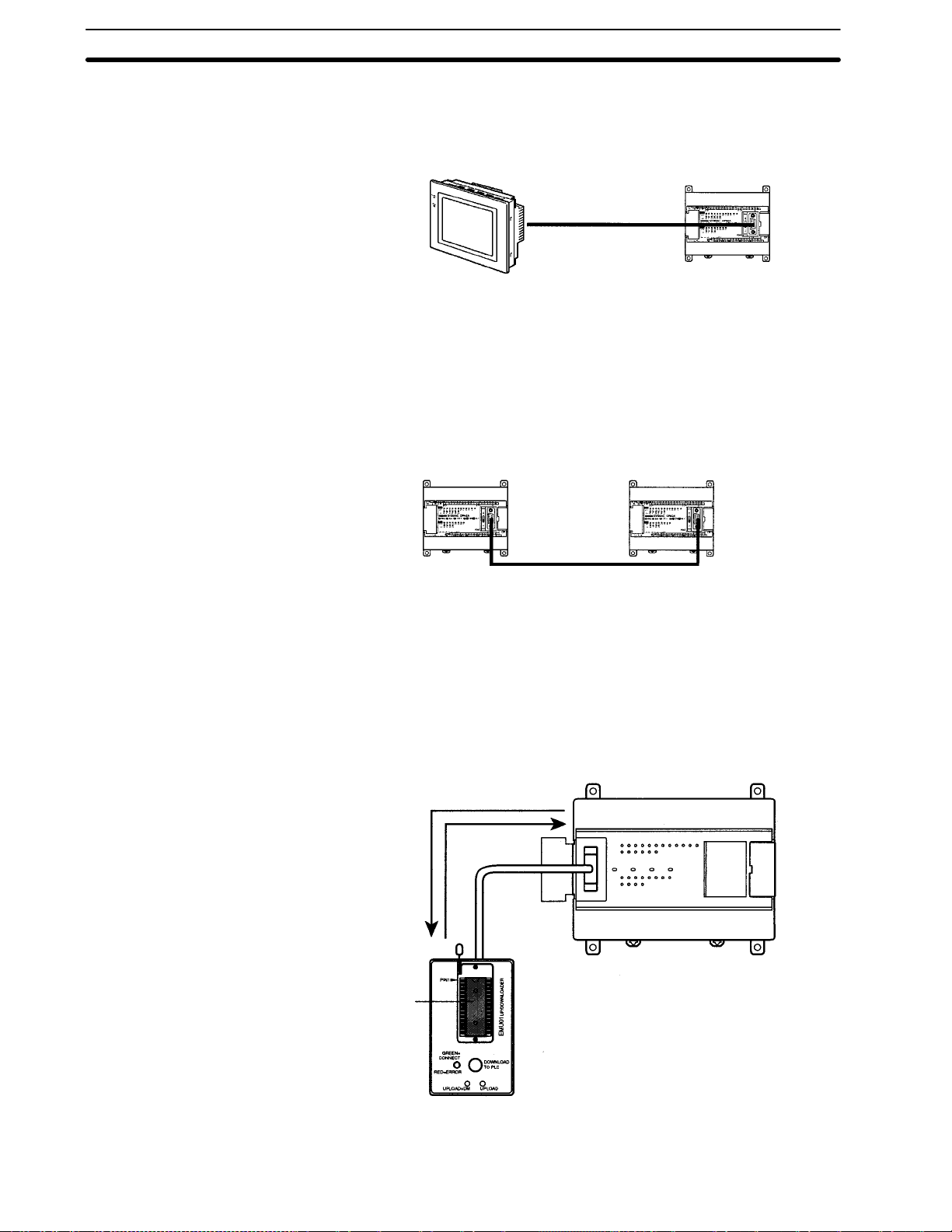
L ’unité d’extension de mémoire CPM1-EMU01-V1 est un chargeur de programme pour les PLC de taille réduite ou micro. Utiliser le CPM1-EMU01-V1
avec lesPLC pour transférer les programmes simplesde l’utilisateur sur site et
la mémoire des données.
Charger
Décharger
SYSMAC
EEPROM
6
Page 24
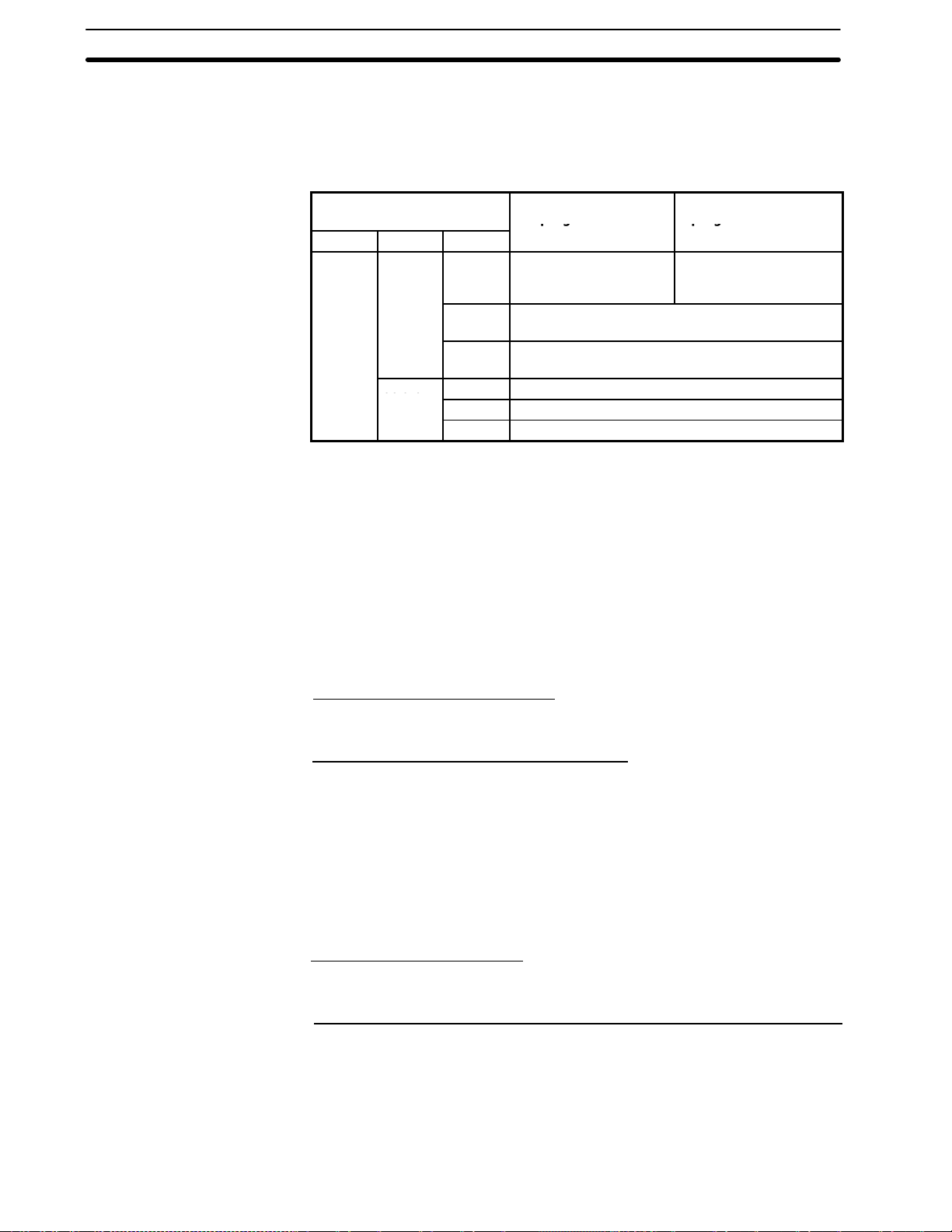
1-1-2 Vue générale des fonctions du CPM2A
1entrée
vitesse1entrée,voirRem.
2
4entrées,voirRem.
1
Fonction principale Variantes/détails
Interruptions
Compteurs à grande
Entrées d’interruption
4 entrées, voir Rem. 1
Temps de réponse : 0,3 ms
Interruptions d’horloge d’intervalles
1 entrée
valeur préréglée : 0,5 à 319.968 ms
précision : 0,1 ms
Compteur à grande vitesse
ChapitreCaractéristiques et fonctions du CPM2A
Interruptions programmées
Interruption à un coup
Pas d’interruption
1-1
Mode à phase différentielle (5 kHz)
Mode d’entrée impulsions direction plus (20
kHz)
Mode d’entrée haut/bas (20 kHz)
Mode incrémentiel (20 kHz)
Entrées d’interruption
(mode comptage)
Compteur incrémentant (2 kHz)
Compteur décrémentant (2 kHz)
Sorties d’impulsions 2 sorties :
Sortie d’impulsions à une seule phase sans accélération/décélération (voir Rem. 3)
10 Hz à 10 kHz
2 sorties :
sortie impulsions à rapport cyclique variable (voir Rem. 3)
0,1 à 999,9 Hz, rapport cyclique de 0 à 100%
1 sortie :
sortie d’impulsions à accélération/décélération trapezoïdale (voir Rem. 3)
sortie impulsions direction plus, sortie impulsions haut/bas, 10 Hz à 10 KHz
Contrôle synchronisé des
impulsions
Sortie à réponse rapide 4 entrées, voir Rem. 1.
Réglages analogiques 2 commandes (gammes de réglage : 0 à 200 BCD)
Constante de temps à
l’entrée
Calendrier/horloge Indique année en cours, mois, jour de la semaine, heure, minute et seconde.
Fonctions des unités
d’extension
1 point, voir Rem. 2 et 3
Gamme de fréquence d’entrée : 10 à 500 Hz, 20 Hz à 1 kHz ou 300 Hz à 20 kHz
Gamme de fréquence de sortie : 10 Hz à 10 kHz
Largeur minimale du signal d’entrée : 50 ms
Détermine la constante de temps à l’entrée pour toutes les entrées (réglages : 1, 2, 3, 5,
10, 20, 40 ou 80 ms)
Fonctions des unités d’entrée/sortie analogiques
Deux entrées analogiques :
gamme d’entrée 0 à 10 V, 1 à 5 V ou 4 à 20 mA
Une sortie analogique :
gamme de sortie 0 à 10 V, –10 à 10 V ou 4 à 20 mA
Fonctions esclave CompoBus/S
Echange 8 bits d’entrée et 8 bits de sortie avec l’unité maître
Interruption vérification comptage
(Une interruption peut être produite si le
comptage égale la valeur réglée ou si le
comptage se trouve dans une gamme
préréglée)
Pas d’interruption
Interruption de comptage
Rem. 1. Ces quatre entrées sont partagées en entrées d’interruption, entrées d’in-
terruption en mode comptage et entrées à réponse rapide, mais chaque
entrée ne peut être utilisée que dans un seul but.
2. Cette entréeest partagéeparle compteurà grandevitesse etdes fonctions
de contrôle synchronisé des impulsions.
3. Cette sortie est partagée par la sortie des impulsions et des fonctions de
contrôle synchronisé des impulsions. Ces fonctions ne peuvent être utilisées qu’avec des sorties à transistor.
7
Page 25
1-2 Configurations de base du système
20pointsd’entrée/sortie
24Vc.c.
30pointsd’entrée/sortie
24Vc.c.
40pointsd’entrée/sortie
24Vc.c.
60pointsd’entrée/sortie
24Vc.c.
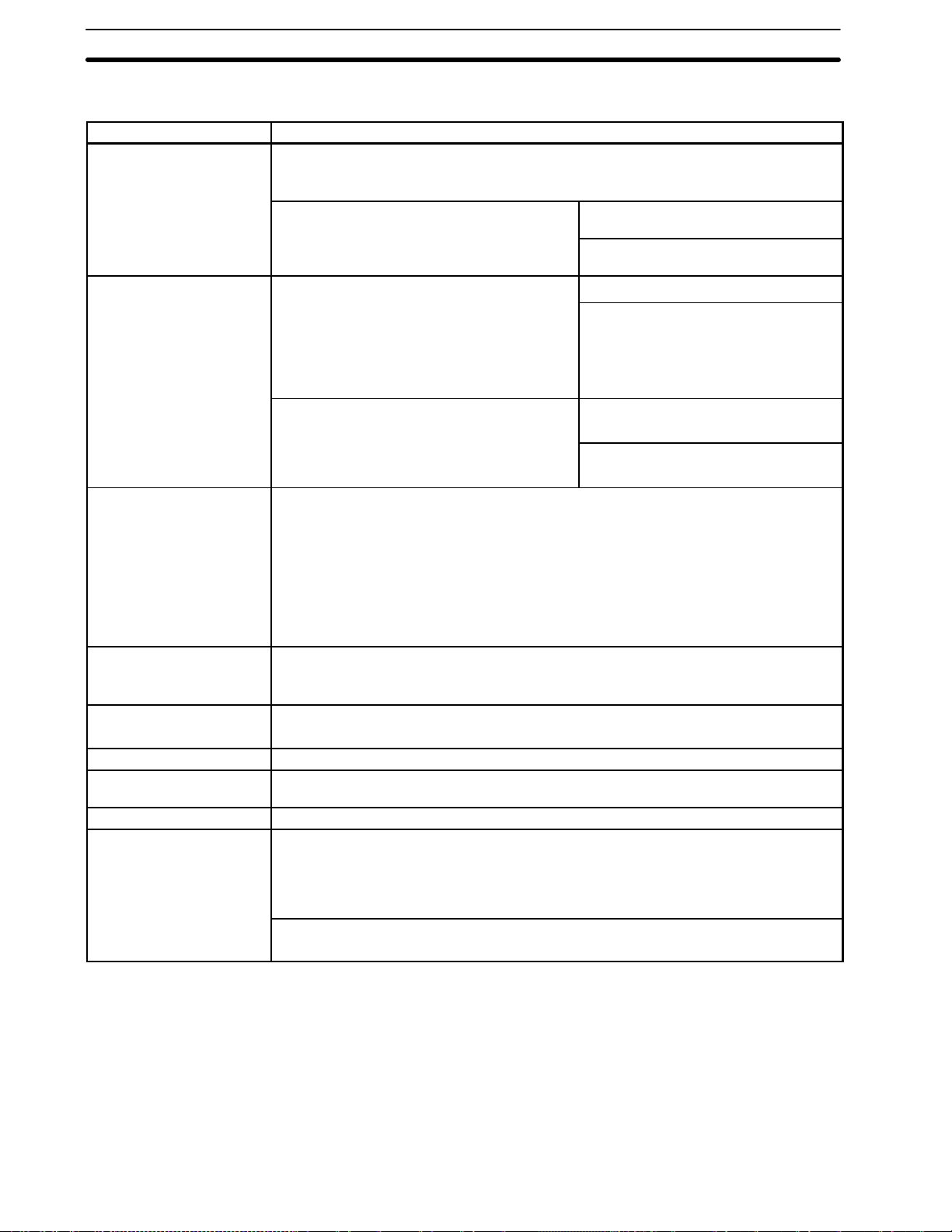
1-2-1 Unité centrale autonome
UC à 20/30 points entrée/sortie UC à 40 points d’entrée/sortie UC à 60 points d’entrée/sortie
ChapitreConfigurations de base du système
1-2
Nombre de points
d’entrée/sortie
20 points d’entrée/sortie
(12 entrées et 8 sorties)
30 points d’entrée/sortie
(18 entrées et 12 sorties)
40 points d’entrée/sortie
(24 entrées et 16 sorties)
60 points d’entrée/sortie
(36 entrées et 24 sorties)
Alimentation Entrées Sorties Modèle
100 à 240 Vc.a. 24 Vc.c. Relais CPM2A-20CDR-A
24 Vc.c.
100 à 240 Vc.a. 24 Vc.c. Relais CPM2A-30CDR-A
24 Vc.c.
100 à 240 Vc.a. 24 Vc.c. Relais CPM2A-40CDR-A
24 Vc.c.
100 à 240 Vc.a. 24 Vc.c. Relais CPM2A-60CDR-A
24 Vc.c.
24 Vc.c. Relais CPM2A-20CDR-D
24 Vc.c. Transistor NPN CPM2A-20CDT-D
24 Vc.c. Transistor PNP CPM2A-20CDT1-D
24 Vc.c. Relais CPM2A-30CDR-D
24 Vc.c. Transistor NPN CPM2A-30CDT-D
24 Vc.c. Transistor PNP CPM2A-30CDT1-D
24 Vc.c. Relais CPM2A-40CDR-D
24 Vc.c. Transistor NPN CPM2A-40CDT-D
24 Vc.c. Transistor PNP CPM2A-40CDT1-D
24 Vc.c. Relais CPM2A-60CDR-D
24 Vc.c. Transistor NPN CPM2A-60CDT-D
24 Vc.c. Transistor PNP CPM2A-60CDT1-D
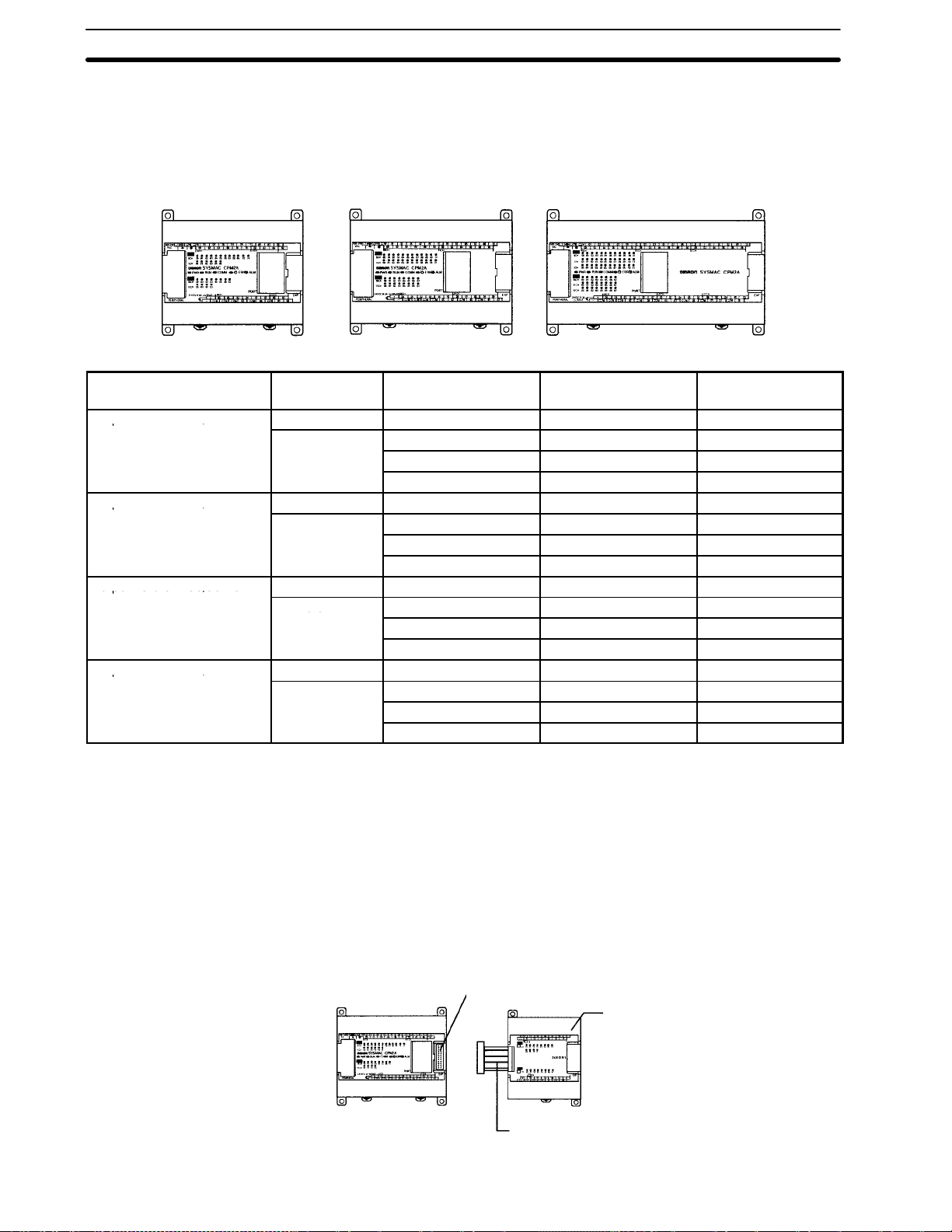
1-2-2 Unité centrale et unité d’extension
Jusqu’à3unités d’extensionpeuventêtrereliées auconnecteur d’extensionpar
des câbles de connexion entrée/sortie d’extension. (Une seule unité d’extension peut être connectée si un adaptateur NT–AL001 est connecté au port
RS–232C parce que l’alimentation 5 Vc.c. de l’unité centrale est limitée.)
Il existe trois modèles d’unités d’extension :
l’unité d’extension entrée/sortie, l’unité d’entrée/sortie analogique et l’unité
d’entrée/sortie de liaison CompoBus/S.
Connecteur d’extension
Connecteur d’extensionUnité d’extension
(unité d’extension entrée/sortie, unité
d’entrée/sortie analogique ou
unité d’entrée/sortie de liaison
CompoBus/S)
Câble de connexion entrée/sortie d’extension
8
Page 26
ChapitreConfigurations de base du système
1-2
UnAPI avec120points d’entrée/sortie(lemaximum)s’assemble enconnectant
trois unités entrée/sortie d’extension à une unité centrale avec 60 points d’entrée/sortie.
(36 entrées, 24 sorties)
Unités d’extension
CPM2A-60CDR-A
´ 1 Unité + ´ 3 Unités = 72 entrées, 48 sorties
CPM1A-20EDR1
(12 entrées, 8 sorties)
UnAPI avec 6entréesanalogiques et3 sortiesanalogiques (lemaximum) s’assembleen connectanttrois unitésd’entrée/sortieanalogiques. (Uneseule unité
d’entrée/sortieanalogique peut être connectéesi un adaptateur NT–AL001est
relié au port RS–232C de l’unité centrale.)
Desunités de liaisonentrée/sortie CompoBus/S (unitésesclaves) peuvent être
connectées à une unité centrale. Des données d’entrée/sortie (8 entrées et 8
sorties) sont transférées entre l’unité centrale et la zone affectée à l’esclave
CompoBus/S.(Les données d’entrée/sortieéchangéesavec l’esclave sontdes
données internes ; il n’y a pas de bornes externes d’entrée/sortie.)
Rem. 1. Différents types d’unités d’extension peuvent être connectés en même
temps. Par exemple, l’unité centrale peut être connectée à une unité d’extensionentrée/sortie,une unitéanalogiqueentrée/sortieet uneunitédeliaison entrée/sortie CompoBus/S.
2. Siunadaptateur NT–AL001est connectéauportRS–232C,une seuleunité
d’extension peut être connectée à l’unité centrale à cause des limitations
d’alimentation.
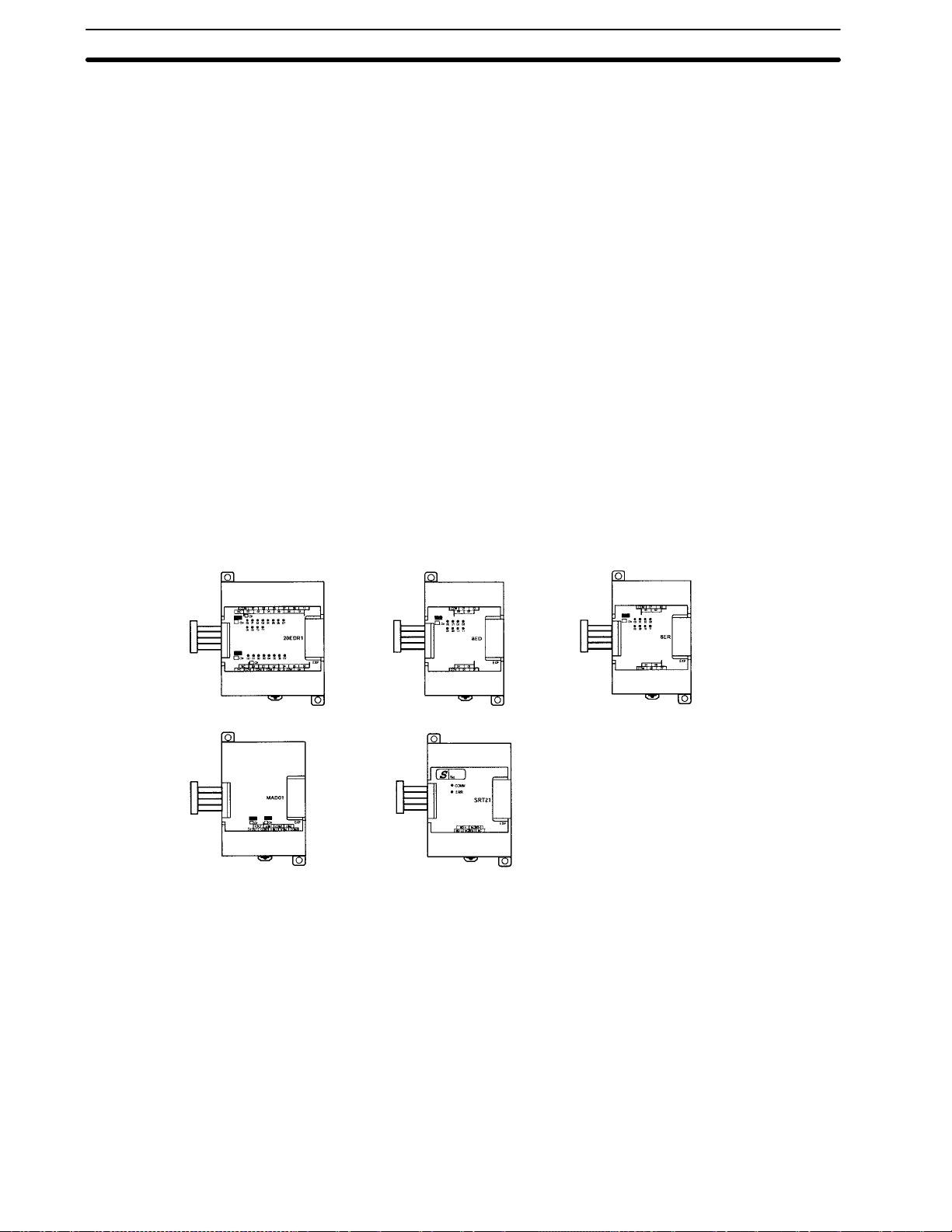
Unité d’entrée 8 points Unité d’entrée 8 pointsUnité d’entrée/sortie 20 points
Unité de liaison entrée/sortie CompoBus/SUnité d’entrée/sortie analogique
9
Page 27
ChapitreStructure et fonctionnement
d’extension
entréee/sortie(voirRem.
)
entrée/sortie12entrée
s
8sortie
s
1-3
Unité Nombre
Unités
entrée/sortie
Unité d’entrée/sortie
analogiques
2 entrées analogiques (2
mots)
1 sortie analogique (1 mot)
Unité d’entrée/sortie de liaison
CompoBus/S
8 entrées et 8 sorties
20 points
8 sorties
8 entrées 24 Vc.c. --- CPM1A-8ED
8 sorties
maxi.
d’unités
3 unités max.
Entrées Sorties Modèle
24 Vc.c. Relais CPM1A-20EDR1
24 Vc.c. Transistors NPN CPM1A-20EDT
24 Vc.c. Transistors PNP CPM1A-20EDT1
--- Relais CPM1A-8ER
--- Transistors NPN CPM1A-8ET
--- Transistors PNP CPM1A-8ET1
2 entrées
analogiques
8 bits
(entrées venant
du maître)
Rem. Uneseuleunitéd’extension entrée/sortiepeut êtreconnectéelorsqu’unadapta-
teur NT–AL001 est connecté au port RS–232C de l’unité centrale
1-3 Structure et fonctionnement
1 sortie analogique CPM1A-MAD01
8 bits
(sorties vers le maître)
CPM1A-SRT21
1-3-1 Structure de l’unité centrale
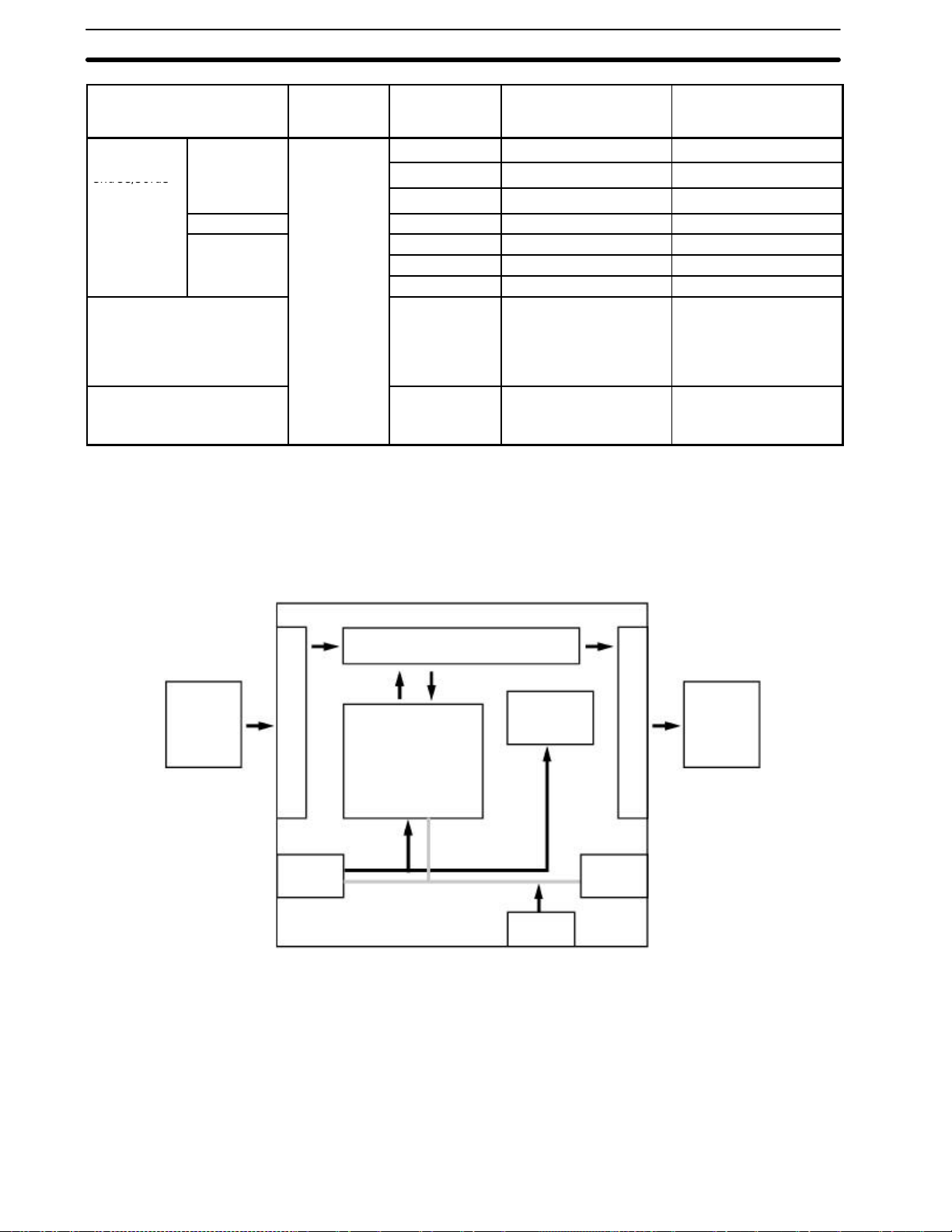
Le schéma suivant indique la structure interne de l’unité centrale.
Mémoire d’entrée/sortie
Appareils
d’entrées
extérieurs
Mémoire d’entrée/sortie
Circuits d’entrée
Port périphérique
Pendant l’exécution, le programme lit et écrit des données dans cette zone de
mémoire.Une partie dela mémoire d’entrée/sortiecontient les bitsqui reflètent
l’état des entrées et sorties de l’API. Certaines parties de la mémoire d’entrée/
sortie sont vidées à la mise sous tension et d’autres parties sont conservées.
Rem. Sereporterau chapitre3, Zonesdemémoiredans leManuelde programmation
pour plus de détails sur la mémoire d’entrée/sortie.
Programme
Réglages
Traitement des
communications
Installation
de l’API
Réglages
Réglages
commutateur de com.
Appareils
de sorties
extérieurs
Circuits de sortie
Port
RS-232C
Programme
Ceci est le programme écrit par l’utilisateur. Le CPM2A exécute le programme
de façon cyclique. (Se reporter à 1–3–5 Fonctionnement cyclique et interrup-
tions pour plus de détails.)
10
Page 28

ChapitreStructure et fonctionnement
Le programme peut être divisé en gros en deux parties : le “programme principal” qui est exécuté de façon cyclique et les “programmes d’interruptions” qui
sont exécutés seulement quand l’interruption correspondante est produite.
1-3
Installation de l’API
Commutateur de
communications
L ’installationde l’API contient divers paramètres de démarrage et de fonctionnement.Lesparamètres d’installationdel’API peuventseulementêtre changés
àpartirdu logicieldeprogrammation:ils nepeuventpas êtrechangésàpartirdu
programme.
Certains paramètres sont accessibles seulement à la mise en marche de l’alimentationde l’APIet d’autressont accessibles régulièrementquandl’alimentationest en marche.Il faudra couperl’alimentation etpuis la remettreen marche
pourpermettreunnouveau réglagesileparamètre estaccessibleseulementau
moment où l’alimentation est mise en marche.
Rem. Sereporter auchapitre 1Installationde l’APIdans leManuel deprogrammation
pour plus de détails.
Le commutateur de communications détermine si le port de périphérique et le
port RS–232C fonctionnent avec les réglages de communicationsnormaux ou
les réglages de communications à l’installation de l’API.
1-3-2 Modes de fonctionnement
Lesunités centralesCPM2Aont 3modesde fonctionnement: PROGRAM(programme), MONITOR (surveillance) et RUN (marche).
Mode PROGRAM
Leprogramme nepeut pasêtre exécutéen modePROGRAM. Cemode estutilisépoureffectuerlesopérationssuivantes enpréparationde l’exécutionduprogramme :
· changer lesparamètres initiauxetde fonctionnement,telsque ceuxdansl’installation de l’API
· écrire, transférer ou vérifier le programme
· vérifierlecâblageen imposantle réglageoulenouveauréglagedesbits d’en-
trée/sortie
Mode MONITOR
Mode RUN
En général, le mode MONITORest utilisé pour déboguer le programme, tester
lefonctionnementetfaire desajustements.Leprogramme estexécutéenmode
MONITOR et les opérations suivantes peuvent être effectuées à partir d’un
appareil de programmation :
· “éditer” en ligne
· surveiller la mémoire d’entrée/sortie en fonctionnement
· imposerleréglage oulenouveauréglage desbitsd’entrée/sortie, changerles
valeurs réglées et changer les valeurs actuelles pendant le fonctionnement.
Le programme est exécuté à vitesse normale en mode RUN. Les opérations
comme l’”édition” en ligne, l’imposition du réglage ou du nouveau réglage des
bitsd’entrée/sortie, etle changementdes valeursréglées etdes valeursactuelles, ne peuvent s’effectuer en mode RUN, mais l’état des bits d’entrée/sortie
peut être surveillé.
11
Page 29
1-3-3 Mode de fonctionnement à l’installation
programmation
programmationno
n
00à07
Le mode opératoire du CPM2A quand l’alimentation est mise en marche
dépend des réglages d’installation de l’API et du réglage du commutateur de
mode de la console de programmation si une console de programmation y est
connectée.
Réglage de l’installation de
l’API
Mot Bits Réglage
DM6600 08 à 15
00 à 07
00 Mode d’état déterminé
01 Le mode d’installation est le même que le mode
02 Le mode d’installation est déterminé par les bits 00
00 Mode PROGRAM
01 Mode MONITOR
02 Mode RUN
Rem. Leréglage pardéfaut est 00.Avec ceréglage pardéfaut, le modeopératoire de
démarrageestdéterminé parleréglage ducommutateurde modedela console
de programmation si une console de programmationest connectée au port de
périphérique. Si une console de programmation n’est pas connectée, l’API se
mettra automatiquement en mode RUN.
programmation
par le réglage du
commutateur de mode.
opératoire avant que l’alimentation soit interrompue
à 07
Console de
connectée
ChapitreStructure et fonctionnement
Console de
programmation non
connectée
Le mode d’état est le
mode RUN (voir Rem.)
1-3
1-3-4 Fonctionnement de l’API au démarrage
Temps nécessaire à
l’initialisation
Fonctionnement en cas de coupure de l’alimentation
1, 2, 3... 1. Temps de détection minimum d’une interruption d’alimentation
Le temps nécessaire à l’initialisation du démarrage dépend de plusieurs facteurs, tels que les conditions de fonctionnement (comprenant la tension d’alimentation, la configuration du système et la température ambiante) et le
contenu du programme.
Tension minimum d’alimentation
LeAPIs’arrêtera ettouteslessorties serontcoupéessila tensiond’alimentation
tombe à moins de 85% de sa valeur nominale.
Interruption momentanée de l’alimentation
Une interruption d’alimentation ne sera pas détectée et le fonctionnement de
l’unitécentrale continuerasil’interruption del’alimentationdure moinsde 10ms
pour une alimentation alternative (CA) ou 2 ms pour une alimentationcontinue
(CC).
Uneinterruptiond’alimentation peutêtredétectée ounonpour desinterruptions
légèrement plus longues que 10 ms pour une alimentation alternative ou 2 ms
pour une alimentation continue.
Si uneinterruption d’alimentationest détectée,l’unité centralecessera de fonctionner et toutes les sorties seront coupées.
Rétablissement automatique
Le fonctionnement redémarrera automatiquement si la tension d’alimentation
revient à plus de 85% de la tension nominale.
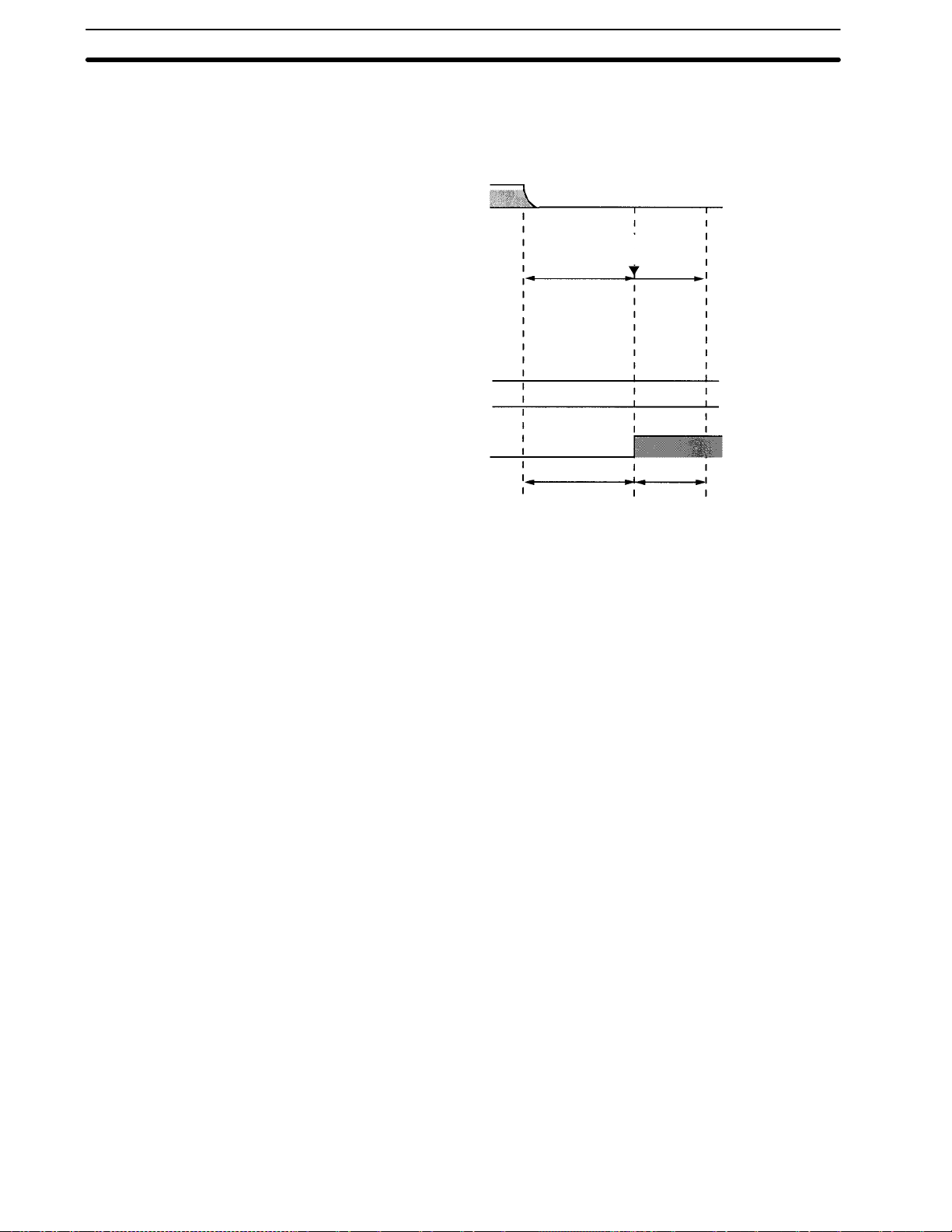
Chronogramme du fonctionnement en cas de coupure de l’alimentation
Letemps de détectionde l’interruption d’alimentationest letemps nécessaireà
détecter une interruptiond’alimentation après que la tension d’alimentation est
tombée à moins de 85% de sa valeur nominale.
Les interruptions d’alimentation qui sont inférieures à 10 ms (alimentation
alternative) ou à 2 ms (alimentation continue) ne seront pas détectées.
12
Page 30
ChapitreStructure et fonctionnement
2. Temps additionnel indéterminé
Les interruptions d’alimentation qui sont seulement un peu plus longues
que le temps d’interruption d’alimentation minimum peuvent ne pas être
détectées.
85% de tension nominale
Détection d’interruption
d’alimentation
1-3
Execution du programme
Signal de
rétablissement
de l’UC
1. Temps minimum 2. temps
En exécution Arrêté
Le fonctionnement de
l’UC continuera si la
tension est rétablie
dans cette zone.
additionnel
Le fonctionnement de
l’UC peut continuer si la
tension est rétablie dans
cette zone.
Rem. Lorsque latension d’alimentation fluctueautour de 85%de la tension nominale
de l’API, le fonctionnement de celui–ci peut s’arrêter et redémarrer de façon
répétée. Si l’arrêt et le démarrage répétés risquent de provoquent des problèmes pour le système contrôlé, installer un circuit de protection tel qu’un circuit
quicoupel’alimentation del’équipementsensiblejusqu’àce quelatensiond’alimentation revienne à la valeur nominale.
13
Page 31

1-3-5 Fonctionnement cyclique et interruptions
ChapitreStructure et fonctionnement
1-3
Fonctionnement de
base de l’unité centrale
L ’opération d’initialisation se fait quand l’alimentation est mise en marche. S’il
n’y apas d’erreurs d’initialisation,les opérations de surveillance,l’exécution du
programme, le rafraîchissement des entrées/sorties et l’entretien des ports de
communications sont effectués de façon répétée (cycliquement).
S vérifier le matériel
Initialisation
du démarrage
Surveillance
des opérations
Exécution du
programme
S vérifier la mémoire
S lire les données de la mémoire flash
(programme, données mémoire morte de
gestion de données et réglage de la
configuration de l’API).
S vérifier s’il y a erreur de batterie
S prérégler le cycle d’horloge (maximum)
S vérifier la mémoire de programme
S rafraîchir les bits pour fonction d’extension
S exécuter le programme
(se reporter au Manuel de programmation
pour détails sur la durée du cycle et les temps
de réponse des entrées/sorties)
S attendre la durée du cycle minimum si une
Calcul de la
Durée du cycle du PC
durée du
Rafraîchissement
entrées/sorties
Entretien des
ports RS–232C
Entretien des ports
de périphériques
cycle
durée du cycle a été réglée à l’installation de
l’API (DM 6619).
S calculer la durée du cycle
S lire les données d’entrée sur les bits d’entrée
S écrire les données de sortie sur les bits de
sortie
S effectuer le traitement des communications du
port RS–232C (peut être changé dans DM
6616)
S effectuer le traitement des communications
du port de périphérique (peut être changé
dans DM 6617)
La durée du cycle peut être lue à partir d’un appareil de programmation.
AR 14 contient la durée du cycle maximum et AR 15 contient la durée du cycle
actuelle par multiples de 0,1 ms.
14
Page 32

ChapitreStructure et fonctionnement
Laduréedu cyclevarieralégèrement suivantl’opérationeffectuéedans chaque
cycle, de sorte que la durée du cycle calculée ne serapas toujoursla durée du
cycle réelle.
1-3
Exécution du programme
en fonctionnement
cyclique
Leschéma suivant montrele fonctionnementcyclique duCPM2A quandle programme est exécuté normalement
Normalement, les résultats de l’exécution du programme sont transférés à la
mémoire d’entrée/sortie juste après l’exécution du programme (pendant le
rafraîchissement des entrées/sorties), mais IORF(97) peut être utilisé pour
rafraîchirune gammespécifique demotsd’entrée/sortie pendantl’exécution du
programme.La gamme spécifiéede mots d’entrée/sortiesera rafraîchie quand
IORF(97) aura été exécuté.
La durée du cycle est la somme du temps nécessaire pour l’exécution du programme, le rafraîchissement des entrées/sorties et l’entretien du port de communications.
Unedurée ducycleminimum (1à 9.999ms) peutêtre régléeàl’installation
de l’API. Quand une durée du cycle minimum a été réglée, le fonctionnement de l’unité centrale est suspendu après l’exécution du programme
jusqu’àcequela duréedu cycleminimumsoitatteinte. Lefonctionnement
del’unitécentraleneserapas suspendusila duréedu cycleréelle est plus
longue que la durée du cycle minimum réglée dans DM 6619.
Rem. Uneerreurfatalese produiraet lefonctionnementdel’APIsera arrêtésiladurée
ducyclemaximum aétéréglée àl’installationdel’API (DM6618)et queladurée
réelle du cycle dépasse ce réglage.
Les réglages par défaut pour l’entretien du port RS–232C et l’entretien du port
depériphériquesontde5%deladurée ducycle, maisces réglagespeuvent être
changés(entre 1%et 99%)àl’installation del’API. Leréglage duportRS–232C
setrouvedansDM 6616et leréglageduportdepériphériquesetrouve dansDM
6617.
15
Page 33

Durée
du
cycle
ChapitreStructure et fonctionnement
1-3
Sereporter à laSection 7Fonctionnement et tempsde traitementde l’API dans
le Manuel de programmation pour plus de détails et les précautions à prendre
pour la durée du cycle.
Opération de surveillance
Programme principal
DEPLAC.
AJOUT.
Exécution d’un
programme
d’interruption
FIN
Si une durée minimum ducycle a
été réglée dans DM 6619,le fonctionnement de l’unité centrale est
suspendu jusqu’à ce que la durée
minimum du cycle soit atteinte.
rafraîchissement des E/S
entretien du port RS-232C
entretien du port de périphérique
Le temps d’entretien peut être
réglé dans DM 6616.
Le temps d’entretien peut être
réglé dans DM 6617.
Si une interruption est produite pendant l’exécution du programme principal,
l’exécution du programme principal est interrompue immédiatement et le programme d’interruption est exécuté. Le schéma suivant montre le fonctionnement cyclique du CPM2A quand un programme d’interruption est exécuté.
Normalement, les résultats de l’exécution du programme d’interruption sont
transférés à la mémoire d’entrée/sortie juste après l’exécution du programme
(pendantle rafraîchissement des entrées/sorties),mais IORF(97) peut être utilisé pourrafraîchir une gamme spécifiéede mots d’entrée/sortie pendantl’exécution duprogramme d’interruption. Lagamme spécifiée de motsd’entrée/sortie sera rafraîchie quand IORF(97) sera exécuté.
16
La durée normale de cycle est étendue du temps nécessaire à l’exécution du
programme d’interruption.
Page 34

ChapitreStructure et fonctionnement
1-3
Sereporter à laSection 7Fonctionnement et tempsde traitementde l’API dans
le Manuel de programmation pour plus de détails et les précautions à prendre
pour la durée du cycle.
Opérations de surveillance
Programme principal
Rafraîchissement
immédiat
DEPLAC.
AJOUT .
Durée
du
cycle
FIN
rafraîchissement des E/S
entretien du port RS-232C
entretien du port de périphérique
interruption produite
Programme d’interruption
DEPLAC.
IORF(97)peutêtre exécutédansle programmepour rafraîchirunegammespécifiée de mots d’entrée/sortie. Les mots d’entrée/sortie seront rafraîchis quand
IORF(97) sera exécuté.
IORF(97) peut être utilisé pour rafraîchir les entrées/sorties à partir du programme principal ou du programme d’interruption.
17
Page 35

ChapitreStructure et fonctionnement
1-3
QuandIORF(97) est utilisé, ladurée du cycleest étendue dutemps nécessaire
à rafraîchir les mots d’entrée/sortie spécifiés.
Opérations de surveillance
Programme principal
DEPLAC.
AJOUT .
Durée
du
cycle
FIN
rafraîchissement des E/S
entretien du port RS-232C
entretien du port de périphérique
Attention Bien que l’IORF (97) puisse être employé dans des sous--programmesd’inter-
!
IORF(97) exécuté
Rafraîchissement immédiat
rafraîchissement des E/S
ruption,s’assurer del’intervalleentre lesexécutionsd’IORF (97). Si l’IORF(97)
est exécuté trop fréquemment, une erreur fatale du système peut se produire
(FALS 9F), arrêtant l’opération. L ’intervalle entre les exécutions d’IORF (97)
devrait êtreau moins de 1,3 ms + temps d’exécutiontotal du sous--programme
d’interruption.
18
Page 36

1-4 Fonctions énumérées par leur usage
vitesse
Fonctions de contrôle des machines
Usage Fonction Se
Recevoir des entrées de
comptage à grande
vitesse
(par exemple, calculer
une longueur ou position
avec un codeur).
Produire une impulsion basée sur un multiple d’une impulsion d’entrée
pour synchroniser le contrôle d’une opération périphérique avec
l’opération principale.
Le multiple pour l’opération périphérique (mettons la vitesse
d’alimentation d’un outil) peut être changé pendant la marche en
calculant le multiple d’une autre valeur d’entrée (mettons un codeur)
dans l’opération périphérique.
Cette méthode peut être utilisée pour changer l’opération pour
différents produits ou modèles sans arrêter les équipements.
Multiplier la fréquence des impulsions d’entrée d’un compteur à grande
vitesse par un multiplicateur fixe, convertir la valeur en une valeur
analogique et la sortir sous forme d’une valeur analogique.
(Par exemple, synchroniser la vitesse d’un convoyeur d’alimentation
avec la position de rotation de la pièce principale (mettons un poseur
d’étiquettes) mesurée par une entrée analogique.
Recevoir de façon fiable des impulsions d’entrée avec un temps actif
plus court que la durée du cycle (mettons les entrées d’un
photomicrosenseur).
Fréquence maximum de comptage de
2 kHz (phase unique)
Fréquence maximum de comptage de
5 kHz (phase différentielle) ou 20 Hz
(phase unique)
Utiliser entrée d’interruption (mode
compteur) pour lire la valeur actuelle
sans interruptions
Utiliser compteur grande vitesse pour
lire la valeur actuelle sans
interruptions.
Synchronisation des impulsions
Synchronisation des impulsions et
fonction de sortie analogique
Fonction d’entrée à réponse rapide
ChapitreFonctions énumérées par leur usage
1-4
repor
ter à
*
* Manuel de programmation.
19
Page 37

ChapitreFonctions énumérées par leur usage
Usage Fonction Se
1-4
repor
ter à
Fonctions d’interruption
Réaliser un positionnement simple en envoyant des impulsions à un
entraîneur à moteur qui accepte des entrées formées de trains
d’impulsions.
Utiliser un rapport cyclique variable pour réaliser un contrôle de
température à affectation du temps.
Réglages faciles à faire et réglages fins comme pour le rythme
d’alimentation à faible vitesse si un convoyeur est temporairement
arrêté.
Recevoir une entrée analogique et donner une sortie analogique. Unité d’entrée/sortie analogique
Réduire le câblage, l’espace et la charge de l’API nécessaires en
contrôlant les équipements avec quelques API à faible capacité
dispersés près des équipements plutôt qu’un API unique, grand et
centralisé.
(Créer une liaison entrée/sortie distante avec un maître CompoBus/S
et des esclaves CompoBus/S.)
Exécuter une opération spéciale très vite
quand une entrée est activée.
(Par exemple, actionner un couteau quand
une entrée d’interruption est reçue d’un
interrupteur de proximité ou d’un
interrupteur photoélectrique.)
Compter les impulsions actives à l’entrée
et exécuter une opération spéciale très vite
quand le compteur atteint une valeur
préréglée.
(Par exemple, arrêter l’alimentation quand
un nombre préréglé de pièces ont passé à
travers le système.)
Exécuter une opération spéciale à une
valeur de comptage préréglée.
(Par exemple, couper une matière très
précisément à une longueur donnée.)
Exécuter une opération spéciale quand le
comptage est dans une gamme préréglée.
(Par exemple, trier une matière très vite
quand elle est dans une gamme de
longueur donnée.)
Exécuter une opération spéciale quand
une temporisation déclenche.
(Par exemple, arrêter un convoyeur à un
moment très précis (indépendant de la
durée du cycle) après avoir détecté la
pièce.)
Répéter une opération spéciale à des
intervalles réguliers.
(Par exemple, on peut surveiller la vitesse
d’un chargeur de tôles en mesurant le
signal d’entrée d’un codeur à des
intervalles réguliers et en calculant la
vitesse.)
Entrée d’interruption (mode entrée
d’interruption)
Entrée d’interruption (mode
comptage)
Interruption sur le compteur à grande
vitesse, produite quand le comptage
atteint la valeur préréglée.
Interruption sur le compteur à grande
vitesse produite quand le comptage
est dans la gamme réglée.
Interruption d’une temporisation
d’intervalle
(mode à un coup)
Interruption d’une temporisation
d’intervalle (mode à interruptions
programmées)
Fonction de sortie d’impulsions
Fonction de sortie d’impulsions à
entrée analogique + rapport cyclique
variable (PWM(––))
Contrôles analogiques
(Connecter l’unité entrée/sortie
analogique de l’unité centrale.)
Unité de liaison entrée/sortie
analogique
(Connecter la liaison entrée/sortie
CompoBus/S à l’unité centrale.)
*
* Manuel de programmation.
20
Page 38

ChapitreFonctions énumérées par leur usage
*
Fonctions de base
Usage Fonction Se
Régler la durée du cycle à un intervalle fixe. Régler une durée du cycle minimum (fixe) à
l’installation de l’API.
Arrêter le fonctionnement de l’API si la durée du cycle
dépasse un réglage minimum.
Maintenir toutes les sorties activées si le
fonctionnement de l’API s’arrête.
Garder le contenu de la mémoire d’entrée/sortie quand
on démarre le fonctionnement
Garder le contenu de la mémoire d’entrée/sortie quand
on met l’API en marche.
Eliminer l’effet du parasite et du bruit externe. Régler une constante de temps d’entrée plus longue à
* Manuel de programmation.
Régler une durée du cycle maximum (d’observation) à
l’installation de l’API.
Activer le bit de maintien de l’IOM (SR 25212).
Activer le bit de maintien de l’IOM (SR 25212).
Activer le bit de maintien de l’IOM (SR 25212). et
régler l’installation de l’API (DM 6601) de façon que
l’état du bit de maintien de l’IOM soit conservé au
démarrage.
l’installation de l’API.
1-4
repor
ter à
*
Fonctions de maintenance
Usage Fonction Se
Enregistrer les données avec tampon horaire. Fonction horloge/calendrier
Etablir erreurs définies par l’utilisateur pour conditions
d’entrée désirées. (On peut définir des erreurs fatales
et non fatales)
Lire le nombre d’interruptions de l’alimentation. Le nombre d’interruptions de l’alimentation est mis en
Régler le mode de fonctionnement au démarrage. Régler le mode de fonctionnement au démarrage dans
FAL(06) définit les erreurs non fatales. (Le
fonctionnement de l’API continue).
FALS(07) définit les erreurs fatales. (le fonctionnement
de l’API s’arrête)
mémoire dans AR 23.
l’installation de l’API (DM 6600).
* Manuel de programmation.
Fonctions de communications
Usage Fonction Se
Lire et écrire les données de la mémoire
d’entrée–sortie et changer le mode opératoire à partir
d’un micro–ordinateur.
Connecter à un appareil série comme un lecteur de
code barres ou une imprimante série.
Effectuer une connexion à grande vitesse avec un
terminal programmable OMRON.
Effectuer une connexion de liaison de données API à
API avec un autre CPM2A ou un CPM1A, un SRM1,
un CQM1, ou un API C200HX/HG/HE.
Communications de liaison à un micro–ordinateur
(Régler le mode de communications liaison à un
micro–ordinateur à l’installation de l’API.)
Communications sans protocole (Régler le mode de
communications sans protocole à l’installation de
l’API.)
Liaison NT 1:1 (Régler le mode de communications
liaison NT 1:1 à l’installation de l’API.)
Liaison API 1:1 (Régler le mode de communications
liaison API 1:1 à l’installation de l’API.)
repor
ter à
*
repor
ter à
*
* Manuel de programmation.
21
Page 39

ChapitreComparaison au CPM1A
Jeud’instructions
Tempsd’exécutio
n
Nombremaximum
Usage Fonction Se
Connecter une console de programmation. Connecter la console de programmation au port de
périphérique. (La position du commutateur de
communications de l’unité centrale n’a pas d’effet sur
cette connexion.)
Utilisation du logiciel de programmation SYSWIN. L’ordinateur peut être connecté au port de
périphérique ou au port RS–232C.
(Les réglages de liaison à l’installation de l’API sont
utlisés quand le commutateur est en position OFF ; les
réglages normaux des communications de liaison à un
micro–ordinateur sont utilisés quand le commutateur
de l’unité centrale est sur MARCHE.)
Surveiller les équipements avec un terminal
programmable et programmer l’API par un appareil de
programmation.
Le port RS–232C et le port de périphérique peuvent
être utilisés simultanément.
* Manuel de programmation.
1-5 Comparaison au CPM1A
CPM2A CPM1A
Jeu d’instructions
Temps d’exécution
des instructions
Capacité du programme 4.096 mots 2.048 mots
Nombre maximum
de points
d’entrée/sortie
Unités d’extension
Instructions de base 14 Same as CPM2A.
Instructions spéciales 105 instructions, 185 variantes 79 instructions, 139 variantes
Instructions de base LD: 0,64 ms LD: 1,72 ms
Instructions spéciales MOV(21): 7,8 ms MOV(21): 16,3 ms
Unité centrale autonome 30, 40, ou 60 points 10, 20, 30, ou 40 points
UC avec unités d’entrée/sortie
d’extension
Nombre maximum d’unités Un maximum de 3 unités
Modèles disponibles Unités d’E/S d’extension,
90, 100, ou 120 points max. 90 ou 100 points max.
Un maximum de 3 unités
peuvent être connectées à
n’importe laquelle des unités
centrales
unité d’E/S analogique et unité
de liaison d’E/S CompoBus/S
peuvent être connectées aux
unités centrales à 30 points et
à 40 points.
Id. que CPM2A.
1-5
repor
ter à
Page
101
Page
92
*
Page
101
22
Page 40

ChapitreComparaison au CPM1A
Mémoire
données
)
mémoire
d’interruptio
n
Temporisation
CPM1ACPM2A
Mémoire
d’entrée/sortie
Sauvegarde de
mémoire
Entrées d’interruption (mode entrées d’interruption) 4 Id. que CPM2A
Entrées
d’interruption
(mode compteur)
Temporisation
d’intervalle
Entrées à réponse
rapide
Bits d’entrée IR 00000 à IR 00915 Id. que CPM2A.
Bits de sortie IR 01000 à IR 01915 Id. que CPM2A.
Bits de travail 928 bits:
IR 02000 à IR 04915,
IR 20000 à IR 22715
Zone SR (relais spécial) 448 bits:
SR 22800 à SR 25515
Zone TR (relais temporaire) 8 bits: TR0 à TR7 Id. que CPM2A.
Zone HR (relais de maintien) 320 bits:
HR 0000 à HR 1915
Zone AR (relais auxiliaire) 384 bits:
AR 0000 à AR 2315
Zone LR (relais de liaison) 256 bits:
LR 0000 à LR 1515
Zone temporisation/compteur 256 bits:
TIM/CNT 0 à TIM/CNT 256
Zone DM
(Mémoire de
Zone de programme, zone DM
mémoire morte
Zone DM lecture/écriture, zone
HR, zone AR et compteurs
Mode compteurs Compteur d’incrémentation,
Limite supérieure compteurs 2 kHz 1 kHz
SR 244 à SR 247 Contient compteur PV. Contient compteur PV –1.
Méthode(s) pour lire compteur
PV (present value, valeur
actuelle)
Méthode(s) pour changer
compteur PV
Mode à un coup Oui Oui
Mode interruption programmée Oui Oui
Régler la fonction réponse
rapide
INT(89) (masquer) Pas pris en charge (ignoré) Pris en charge.
INT(89) (lire masque) Lit l’état du masque Lit le résultat du réglage du
INT(89) (effacer) Pas pris en charge (ignoré) Pris en charge.
Largeur minimum des
impulsions
Zone lecture/
écriture
Zone
mémoire
morte
ConfigurationPC56 mots
2.048 mots
(DM 0000 à DM 2047)
456 mots
(DM 6144 à DM 6599)
(DM 6600 à DM 6655)
Sauvegarde mémoire flash Id. que CPM2A.
Sauvegarde interne de la
batterie (5 ans de vie,
remplaçable)
Compteur de décrémentation
Lire SR 244 à SR 247,
Exécuter PRV(62).
(Compteur PV)
Exécuter INI(61). Pas pris en charge.
Installation API Installation API et INT(89)
50 ms min. 200 ms min.
512 bits:
IR 20000 à IR 23115
384 bits:
SR 23200 à SR 25515
Id. que CPM2A.
256 bits:
AR 0000 to AR 1515
Id. que CPM2A.
128 bits:
TIM/CNT 0 à TIM/CNT 127
1.024 mots
(DM 0000 à DM 1023)
Id. que CPM2A.
Id. que CPM2A.
Sauvegarde condensateur
(sauvegarde de 20 jours à
25°C)
Compteur de décrémentation
Lire SR 244 à SR 247;
(Compteur PV–1)
(Démasquer entrée
interruption.)
masque.
1-5
23
Page 41

ChapitreComparaison au CPM1A
CPM1ACPM2A
Compteur à
grande vitesse
Synchronisation des impulsions Prise en charge. Non pris en charge.
Contrôle sortie
des impulsions
Contrôles analogiques 2 2
Mode comptage Mode phase différentielle
(haut/bas)
Mode impulsions direction plus
Mode impulsions haut/bas
Mode incrémentiel
Fréquence maximum du
compteur
Gamme PV des compteurs –8.388.608 à 8.388.607 en
Vérifier quand la valeur cible
d’enregistrement est égale à
celle du tableau
Méthode utilisée pour indiquer
que la valeur cible est égale à
celle du tableau d’interruption
Lire les résultats de la
comparaison des gammes
Lire les états Vérifier AR 1108 (comparaison
Accélération/décélération
trapézoïdale
Sortie PWM(––) Prise en charge. Non pris en charge.
Nombre de sorties d’impulsions
simultanées
Fréquence maximum 10 kHz max. 2 kHz max.
Fréquence minimum 10 Hz 20 Hz
Quantité de sorties d’impulsions –16.777.215 à 16.777.215 0 à 16.777.215
Contrôle de direction Pris en charge. Non pris en charge.
Position par rapport à positions
absolues
Etat des bits pendant que des
impulsions sont envoyées à la
sortie
Lire PV Lire SR 228 à SR 231 ou
Rétablir PV Pris en charge. Non pris en charge.
Sorties d’état Accélérant/ décélérant
5 kHz en mode phase
différentielle (haut/bas)
20 kHz en mode direction plus
des impulsions,
mode impulsions haut/bas et
mode incrémentiel
phase différentielle (haut/bas) ,
mode impulsions direction plus
et mode impulsions haut/bas
0 à 16.777.215 en mode
incrémentiel
Même direction, même SV pas
possible
Comparaison de toutes les
valeurs dans la table, quel que
soit leur ordre d’apparition
dans le tableau
Vérifier AR 1100 à AR 1107 ou
exécuter PRV(62).
en cours), vérifier AR 1109
(compteur grande vitesse PV
dépassement de capacité ou
capacité non atteinte), ou
exécuter PRV(62).
Pris en charge avec ACC(––).
La fréquence initiale peut être
réglée.
2 max. 1 max.
Pris en charge. Non pris en charge.
Pas d’effet Mis ON/OFF par sortie
exécuter PRV(62)
capacité PV dépassée/
capacité non atteinte
Régler quantité d’impulsions
Sortie impulsions terminée
Etat de la sortie des impulsions
Mode phase différentielle
(haut/bas)
Mode incrémentiel
2,5 kHz en mode phase
différentielle (haut/bas),
5 KHz en mode incrémentiel
–32.768 à 32.767 en mode
phase différentielle (haut/bas)
0 à 65.535 en mode
incrémentiel
Même direction, même SV pas
possible
Comparaison dans l’ordre
d’apparition dans le tableau
Vérifier AR 1100 à AR 1107.
---
Non pris en charge.
d’impulsions
Non pris en charge.
Etat de la sortie des impulsions
1-5
24
Page 42

Fonction d’horloge
Fonctiond’horloge
Mots contenant des
informations sur l’heure
Entrée/sortie analogique Des unités entrée/sortie
Communications CompoBus/S Une unité de liaison E/S
Commutateur de communications Ce commutateur détermine si
Batterie
Communications
(dans l’unité
centrale)
Constante de temps d’entrée Peut être réglée à 1, 2, 3, 5,
Batterie Lithium Néant (sauvegarde
Remplacement de la batterie Possible --Espérance de vie / durée de
sauvegarde
Détection des erreurs de la
batterie
Port de périphérique Console de programmation
Port RS-232C Liaison à un micro–ordinateur
Interne Néant
AR 17 à AR 21 ---
analogiques peuvent être
connectées.
CompoBus/S peut être
connectée pour fournir des
fonctions esclave
CompoBus/S.
les communications sont
commandées par les réglages
normaux ou par les réglages
d’installation d’un API.
Durée de vie de 5 ans à 25°C Sauvegarde de 20 jours à
Prise en charge ---
(auto–détection)
Bus de périphériques
(auto–détection)
Liaison à un micro–ordinateur
(avec communications initiées
par un esclave)
Pas de protocole.
Pas de protocole
Liaison API 1:1
Liaison NT 1:1
10, 20, 40, ou 80 ms (Par
défaut : 10 ms)
ChapitreComparaison au CPM1A
CPM1ACPM2A
Id. que CPM2A
Id. que CPM2A
Néant
condensateur seulement)
25°C
Console de programmation
(auto–détection)
Bus de périphériques
(auto–détection)
Liaison à un micro–ordinateur
Liaison API 1:1
Liaison NT 1:1
Néant
Peut être réglée à 1, 2, 4, 8,
16, 32, 64 ou 128 ms (Par
défaut : 8 ms)
1-5
25
Page 43

Différences dans les jeux d’instructions
Instructions ajoutées au CPM2A
Mnémonique Nom
TXD(48) TRANSMISSION
RXD(47) RECEPTION
SCL(66) MISE A L’ECHELLE
SCL2(––) MISE A L’ECHELLE BINAIRE SIGNE EN BCD
SCL3(––) MISE A L’ECHELLE BCD EN BINAIRE SIGNE
SRCH(––) RECHERCHE DES DONNEES
MAX(––) TROUVER LE MAXIMUM
MIN(––) TROUVER LE MINIMUM
SUM(––) CALCUL DE SOMME
FCS(––) CALCULER FCS (séquence de vérification des trames)
HEX(––) ASCII VERS HEXADECIMAL
AVG(––) CALCUL DE SOMME
PWM(––) IMPULSION AVEC RAPPORT CYCLIQUE VARIABLE
PID(––) CONTROLE PID
ZCP(––) COMPARER DOMAINES DE SURFACE
ZCPL(––) COMPARER DOMAINES DE DOUBLE SURFACE
NEG(––) COMPLEMENT A 2
ACC(––) CONTROLE D’ACCELERATION
STUP(––) CHANGER INSTALLATION RS–232C
SYNC(––) CONTROLE SYNCHRONISE DES IMPULSIONS
BINL(58) DOUBLE BCD VERS DOUBLE BINAIRE
BCDL(59) DOUBLE BINAIRE VERS DOUBLE BCD
TMHH(––) TEMPORISATION A TRES GRANDE VITESSE
TIML(––) LONGUE TEMPORISATION
SEC(––) HEURES EN SECONDES
HMS(––) SECONDES EN HEURES
ChapitreComparaison au CPM1A
1-5
26
Page 44

ChapitreComparaison au CPM1A
Nonaffectée.(NOP(00))
Nonprisen
Instructions avec spécifications changées
Mnémonique Nom CPM2A CPM1A
INI(61) CONTROLE MODE Prend en charge le changement de la PV (present
value, valeur actuelle) de l’entrée des interruptions
(mode comptage).
Prend en charge le changement de la PV de sortie
des impulsions.
Prend en charge le fonctionnement de l’arrêt du
contrôle de synchronisation des impulsions.
PRV(62) LECTURE PV
COMPTEUR A
GRANDE VITESSE
CTBL(63) CHARGE DU TABLEAU
DE COMPARAISON
PULS(65) REGLER LES
IMPULSIONS
INT(89) CONTROLE
D’INTERRUPTION
Prend en charge la lecture de la PV d’entrée des
interruptions (mode comptage).
Prend en charge la lecture de la PV de sortie des
impulsions.
Le comptage est comparé à toutes les valeurs
cibles dans le tableau de comparaison des valeurs
cibles.
Prend en charge les spécifications absolues des
impulsions, mais le système de coordonnées doit
être réglé en coordonnées absolues.
Prend en charge une interruption de comptage pour
incrémenter les compteurs.
Ne prend pas en
charge ces
fonctionnements.
Ne prend pas ces
opérations en charge.
Le comptage est
comparé à chaque
valeur cible dans
l’ordre où elles
apparaissent dans le
tableau de
comparaison des
valeurs cibles.
Ne prend pas en
charge la spécification
absolue des
impulsions.
Ne prend pas en
charge cette fonction
d’interruption.
1-5
Attention Avantd’utiliser un programme CPM1A contenant une ou plusieurs instructions
!
du tableau ci–dessus, vérifier le programme pour être sûr qu’il fonctionnera
convenablementetmettrele programmeen formesinécesaire.LeCPM2A peut
nepas fonctionnerconvenablementsi unprogramme CPM1Aavec cesinstructions est transféré et exécuté sans changement.
Affectations des codes
de fonction ajoutés
Lestrois instructionssuivantes sontdescodes defonction affectésquin’étaient
pas utilisés dans le CPM1A.
Instruction CPM2A CPM1A
RXD(47) RECEPTION
TXD(48) TRANSMISSION
SCL(66) MISE A L’ECHELLE
Différences dans la mémoire d’entrée/sortie
Différences en zone SR
Le tableausuivant montre lesdifférences dansla zone SR (PVest l’abréviation
de valeur actuelle.)
Fonction CPM2A CPM1A
PV 0 de sortie des impulsions SR 228 à SR 229
Bit de restauration de la PV 0 de sortie des
impulsions
Pulse output 0 PV Reset Bit SR 25204
Bit de restauration de la PV 1 de sortie des
impulsions
Bit de restauration du port RS–232C SR 25209
Drapeau d’erreur batterie SR 25308
Changer réglage installation port RS–232C SR 25312
Non affectée. (NOP(00))
SR 230 à SR 231
SR 25205
Non pris en
charge.
27
Page 45

ChapitreComparaison au CPM1A
Nonprisen
Nonpris
1-5
Différences dans la zone
AR
Letableau suivantindique lesdifférences dansla zoneAR (registred’adresse).
Fonction CPM2A CPM1A
Données d’horloge et de calendrier AR 17 à AR 21
Code d’erreur communications RS–232C AR 0800 à AR 0803
Drapeau d’erreur RS–232C AR 0804
Drapeau validation transmission RS–232C AR 0805
Drapeau réception terminée RS–232C AR 0806
Drapeau dépassement réception RS–232C AR 0807
Drapeau réception terminée port de
périphérique
Drapeau dépassement réception port de
périphérique
Compteur de réception RS–232C AR 09
Drapeau comparaison compteur à grande
vitesse
Drapeau capacité dépassée / non atteinte
compteur à grande vitesse
Etat de la sortie des impulsions 0 AR 1111
Drapeau capacité dépassée / non atteinte PV
sortie des impulsions 0
Drapeau réglage quantité impulsions sortie
des impulsions 0
Drapeau sortie terminée sortie des impulsions0AR 1114
AR 0814
AR 0815
AR 1108
AR 1109
AR 1112
AR 1113
Non pris en
charge.
Différences dans la zone
DM
Drapeau capacité dépassée / non atteinte PV
sortie des impulsions 1
Drapeau réglage quantité impulsions sortie
des impulsions 1
Drapeau sortie terminée sortie des
impulsions 1
Etat sortie sortie des impulsions 1 AR 1215
Compteur alimentation coupée AR 23 (voir Rem.) AR 10
AR 1212
AR 1213
AR 1214
Rem. Les programmes du CPM1A quiutilisent AR 10 (le compteur alimentation cou-
pée) nepeuvent pas êtreutilisés dans le CPM2Asans mettre le programmeen
forme. Dans le CPM2A, le compteur alimentation coupée est en AR 23.
Letableausuivantmontrelesdifférencesdanslazone DM(gestion dedonnées)
autres que l’installation de l’API.
Fonction CPM2A CPM1A
Zone d’enregistrement des erreurs DM 2000 à DM 2021 DM 1000 à DM 1021
Rem. Les programmes du CPM1A qui utilisent la zone d’enregistrement des erreurs
nepeuventpas êtreutilisésdansle CPM2Asansmettre leprogrammeen forme
pour changer l’emplacement de la zone d’enregistrement des erreurs.
Le tableau suivant présente les différences existant dans le Setup de l’API.
28
Fonction CPM2A CPM1A
Régler temps d’entretien du port RS–232C DM 6616 bits 00 à 07
Activer temps d’entretien du port RS–232C DM 6616 bits 08 à 15
Système de coordonnées sortie impulsions 0 DM 6629 bits 00 à 03
Système de coordonnées sortie impulsions 1 DM 6629 bits 04 à 07
Non pris
en charge
Page 46

ChapitreComparaison au CPM1A
encharg
e
Fonction CPM1ACPM2A
Sélecteur de réglages de communications
RS–232C
Réglages du contrôle CTS du port RS–232C DM 6645 bits 04 à 07
Liaison API 1:1 des mots de liaison du port
RS–232C
Mode de communications du port RS–232C DM 6645 bits 12 à 15
Vitesse en bauds du port RS–232C DM 6646 bits 00 à 07
Format de trame du port RS–232C DM 6646 bits 08 à 15
Retard de transmission du port RS–232C DM 6647
Nombre de noeuds de la liaison à
l’micro–ordinateur du port RS–232C
Activation code de démarrage sans protocole
du port RS–232C
Activation code de fin sans protocole du port
RS–232C
Réglage code de démarrage sans protocole
du port RS–232C
Réglage code de démarrage sans protocole
du port RS–232C ou nombre d’octets reçus
Activation code de démarrage sans protocole
du port de périphérique
Activation code de fin sans protocole du port
de périphérique
Réglage code de démarrage sans protocole
du port de périphérique
Réglage code de fin sans protocole du port de
périphérique ou nombre d’octets reçus
Réglage détection d’erreurs de la batterie DM 6655 bits 12 à 15
DM 6645 bits 00 à 03
DM 6645 bits 08 à 11
DM 6648 bits 00 à 07
DM 6648 bits 08 à 11
DM 6648 bits 12 à 15
DM 6649 bits 00 à 07
DM 6649 bits 08 à 15
DM 6653 bits 08 à 11
DM 6653 bits 12 à 15
DM 6654 bits 00 à 07
DM 6654 bits 08 à 15
1-6
Non pris
en charge
1-6 Préparation pour le fonctionnement
Pour installer un système CPM2A suivre les étapes énumérées ci–dessous.
1, 2, 3... 1. Conception du système
· Choisirune unitécentrale CPM2Aet desunités d’extensionavecles spécifications nécessaires dans le système contrôlé.
· Construire des circuits externes à sécurité intégrée, notamment des circuits de verrouillage et des circuits de limitation.
Se reporter à 2–1 Spécifications et 3–1 Précautions dans la construction
pour les détails.
2. Installation
· Installer l’unitécentrale. (Montage en surface ou installationsur rail DIN)
· Installer l’unité (les unités) d’extension.
Se reporter à 3–3 Installation du CPM2A et à 3–4 Câblage et connexions
pour les détails.
3. Câblage
· Câbler l’alimentation et les appareils d’entrée/sortie.
· Connecter les appareils de communications si nécessaire.
· Connecter la console de programmation.
Se reporter à 3–4 Câblage et connexions pour les détails.
4. Réglages initiaux
· Couper le commutateur decommunications de l’unitécentrale, si nécessaire. (Quand ce commutateur est coupé, les communications avec des
29
Page 47

ChapitreComparaison au CPM1A
appareilsautres quela consolede programmationsont commandéespar
les réglages à l’installation de l’API.)
· Connecterlaconsolede programmation,mettrelecommutateurde mode
sur le mode PROGRAMME et allumer l’API.
· Vérifier les indicateurs LED (à diodes électroluminescentes) de l’unité
centrale et l’affichage de la console de programmation.
· Vider la mémoire de l’API. (tout remis à zéro)
· Faire les réglages d’installation de l’API.
Se reporter à 3–3 Installation du CPM2A pour les détails.
5. Créer un programme en échelle
· Créer un programme en échelle pour contrôler le système.
Se reporter au Manuel de programmation pour les détails.
6. Ecrire le programme en échelle dans l’API
· Ecrire le programme en échelle dans l’API avec la console de programmation ou transférer le programme à l’API à partir du logiciel de support.
Se reporter à la Section 4 Utilisation des appareilsde programmation,aux
Manuels de fonctionnement du logiciel de support SYSMAC et au Manuel
de l’utilisateur du CPT pour les détails.
7. Marche d’essai
· Vérifier le câblage entrée/sortie en mode PROGRAMME.
· Vérifier et mettre au pointl’exécution du programmeen mode SURVEIL-
LANCE (monitor).
Se reporter à la Section 5 Marches d’essai et Traitement des erreurs pour
les détails.
1-6
30
Page 48

CHAPITRE 2
Caractéristiques et composants des unités
Cechapitreénumère lescaractéristiquestechniques qui,ensemble,permettent deconstituer unAPICPM2A etdécritaussi
les principaux éléments constitutifs et composants des unités.
2-1 Caractéristiques techniques 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-1 Caractéristiques générales des unités centrales 32. . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-2 Caractéristiques 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-3 Caractéristiques des E/S 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2 Composants 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-1 Composants de l’UC 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-2 Composants des unités d’extension des E/S 42. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-3 Composants de l’unité des E/S analogiques 43. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2-4 Composants de la liaison CompoBus/S 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
Page 49

Tension
tensionde
Puissance
Courantde
externe
Caractéristiques techniques Chapitre 2-1
2-1 Caractéristiques techniques
2-1-1 Caractéristiques générales des unités centrales
Unités centrales
avec 20 points
d’E/S
Tension
d’alimentation
Plage de
travail
Puissance
consommée
Courant de
démarrage
Alimentation
externe
(alimentations
alternatives
seulement)
Résistance d’isolement 20 MW min (à 500 V continus) entre les bornes alternatives externes et les bornes de
Résistance disruptive 2.300 V alternatifs S50/60 Hz pendant une minute entre les bornes alternatives
Immunité aux bruits 1,500 V crête à crête, largeur d’impulsionsnelles : 0,1 à 1 ms, temps de montée :
Résistance aux vibrations 10 à 57 Hz, amplitude 0,075 mm, 57 à 150 Hz, accélération : 9,8 m/s2dans les
Résistance aux chocs 147 m/s2trois fois, dans chacune des trois directions X, Y et Z
Température ambiante Travail : 0° à 55°C
Humidité 10% à 90% (sans condensation)
Atmosphère Sans aucun gaz corrosif
Taille des vis des bornes M3
Durée des interruptions Alimentation alternative : 10 ms min.
Poids de l’UC
Poids des unités d’extension des
E/S
Alternative 100 à 240 V alternatifs, 50/60 Hz
Continue 24 V continus
Alternatif 85 à 264 V alternatifs
Continu 20,4 à 26,4 V continus
Alternatif 60 VA max.
Continu 20 W max.
Alternatif 60 A max.
Continu 20 A max.
Tension
d’alimentation
Capacité en
sortie
Courant
alternatif
Courant
continu
24 V continus
300 mA : Utiliser seulement pour les dispositifs d’entrée. Ne pas utiliser pour des
sorties.
(Lorsque l’alimentation externe délivre une surintensité ou bien est en court circuit, la
tension de l’alimentation externe faiblit et l’API s’arrête).
protection par la terre
externes et les bornes de protection par la terre.
Courant de fuite : 10 mA max.
1 ns (via une simulation de bruits)
directions X, Y et Z, pendant 80 minutes pour chacune
(Coefficient de temps 8 minutes ´ facteur 10 = durée totale 80 minutes)
Stockage : –20° à 75°C
Alimentation continue : 2 ms min.
(Une coupure du courant intervient lorsque la tension tombe en dessous de 85 % de
sa valeur nominale pendant plus longtemps que la durée de l’interruption de
courant).
650 g max. 700 g max. 800 g max. 1.000 g max.
550 g max. 600 g max. 700 g max. 900 g max.
Unités comportant 20 points d’E/S : 300 g max.
Unités comportant 8 points de sortie : 250 g max.
Unités comportant 8 points d’entrée : 200 g max.
Unités d’E/S analogiques : 150 g max.
Unités de liaison des E/S CompoBus/S : 200 g max.
Unités centrales
avec 30 points
d’E/S
Unités centrales
avec 40 points
d’E/S
Unités centrales
avec
60 points d’E/S
32
Page 50

Capacit
é
Caractéristiques techniques Chapitre 2-1
2-1-2 Caractéristiques
Caractéristiques techniques
Méthode de contrôle Méthode à programme mémorisé
Méthode de contrôle des
E/S
Langage de
programmation
Longueur des instructions
Instructions
Durée d’exécution Instructions de base : 0,64 ms (instruction LD)
Capacité programme 4 096 mots
Capacité
maximale
E/S
Bits en entrée IR 00000 à IR 00915 (Les bits non utilisés comme bits d’entrée peuvent être utilisés comme
Bits en sortie IR 01000 à IR 01915 (Les mots non utilisés comme bits de sortie peuvent être utilisés
Bits de travail 928 bits : IR 02000 à IR 04915 et IR 20000 à IR 22715
Bits spéciaux (zone SR) 448 bits : SR 22800 à SR 25515
Bits temporaires
(zone TR)
Bits de maintien
(zone HR)
Bits auxiliaires (zone AR) 384 bits : AR 0000 à AR 2315 (Mots AR 00 à AR 23)
Bits de liaison (zone LR) 256 bits : LR 0000 à LR 1515 (Mots LR 00 à LR 15)
Minuteries/Compteurs 256 minuteries/compteurs (TIM/CNT 000 à TIM/CNT 255)
Mémoire des données Lecture/écriture : 2,048 mots (DM 0000 à DM 2047)*
Gestion des interruptions Interruptions externes : 4
Interruptions de la
minuterie des intervalles
Compteur ultra rapide Un compteur ultra rapide : 20 kHz, monophasé ou 5 kHz biphasé (méthode de comptage
Entrées d’interruptions
(mode Compteur)
UC seulement 20 points 30 points 40 points 60 points
Avec des
unités
d’extension
des E/S
Balayage cyclique avec sortie directe (Utiliser IORF(97) pour faire un rafraîchissement
immédiat).
Diagramme à contact
1 pas par instruction, 1 à 5 mots par instruction
Instructions de base : 14
Instructions spéciales : 105 instructions, 185 variations
Instructions spéciales : 7,8 ms (instruction MOV)
80 points max. 90 points max. 100 points max. 120 points max.
bits de travail) .
comme bits de travail).
8 bits (TR0 à TR7)
320 bits : HR 0000 à HR 1915 (Mots HR 00 à HR 19)
Minuteries 1-ms : TMHH(––)
Minuteries 10-ms : TIMH(15)
Minuteries 100-ms : TIM
Minuteries 1-s/10-s : TIML(––)
Compteurs décrémentiels : CNT
Compteurs inversables : CNTR(12)
Lecture seulement : 456 mots (DM 6144 à DM 6599)
PC Setup : 56 mots (DM 6600 à DM 6655)
*Le journal des erreurs est dans les positions DM 2000 à DM 2021.
(Partagées par les entrées d’interruptions externes (mode compteur) et les entrées à
réponse rapide).
1 (Mode interruptions programmées ou mode interruption unique)
linéaire)
Interruption compteur : 1 (comparaison valeur fixe ou comparaison intervalle fixe)
Quatre entrées (partagées par les entrées des interruptions externes (mode compteur) et les
entrées à réponse rapide)
Interruptions compteur : 4 (partagées par les entrées des interruptions externes et les
entrées à réponse rapide)
33
Page 51

Caractéristiques techniques Chapitre 2-1
Caractéristiques techniques
Sortie impulsionnelle Deux points sans accélération/décélération, 10 Hz à 10 kHz chacun, et pas de contrôle de
la direction.
Un point avec accélération/décélération trapézoïdale, 10 Hz à 10 kHz et contrôle de la
direction.
Deux points avec sorties PWM.
(Les sorties impulsionnelles peuvent s’utiliser uniquement avec des sorties transistorisées
mais ne peuvent pas s’utiliser avec des sorties à relais).
Contrôle des impulsions
synchronisées
Entrées réponse rapide Quatre points (Largeur d’impulsion min : 50 ms max.)
Commandes
analogiques
Constante de temps
d’entrée (temps de
réponse ON = temps de
réponse OFF)
Fonction de l’horloge Afficher l’année, le mois, le jour de la semaine, le jour, l’heure, la minute et la seconde.
Fonctions de
communication
Fonctions assurées par
les unités d’extension
Protection de la mémoire
(Voir les Rem. 1 et 2).
Sauvegarde de la
mémoire
(Voir les Rem. 1 et 2).
Fonctions
d’auto–diagnostic
Vérifications du
programme
Un point :
On peut créer une sortie impulsionnelle en combinant le compteur ultra rapide et des sorties
impulsionnelles et en multipliant par un facteur fixe la fréquence des impulsions d’entrée
provenant du compteur ultra rapide.
(Cette sortie peut seulement s’utiliser avec des sorties transistorisées mais elle ne peut pas
s’utiliser avec des sorties à relais).
2 commandes, plage de réglage : 0 à 200
Peut être réglée pour tous les points d’entrée.
(1 ms, 2 ms, 3 ms, 5 ms, 10 ms, 20 ms, 40 ms, ou 80 ms)
(Le cas échéant, alimentée par la pile).
Port de périphérique incorporé :
Prend en charge les connexions de la console de programmation, la liaison
micro–ordinateur, le bus des périphériques, pas de protocole.
Port RS–232C incorporé :
Prend en charge la liaison micro–ordinateur, pas de protocole, liaison unité asservie 1:1,
liaison unité maître 1:1 liaison unité maître ou connexions liaison 1 : 1 NT
L’unité d’E/S analogiques offre 2 entrées analogiques et une sortie analogique.
L’unité de liaison E/S CompoBus/S offre 8 entrées et 8 sorties en esclave de CompoBus/S.
Les zones HR et AR, le contenu du programme, la zone DM (lecture/écriture) et les valeurs
des compteurs sont préservés pendant les coupures de courant.
Mémoire flash :
Programme, zone DM en lecture seulement et Setup de l’API
Sauvegarde assurée par la pile :
La zone DM (lecture/écriture), les zones HR et AR ainsi que les valeurs des compteurs sont
sauvegardées par une pile. (A 25 °C, la pile a une durée de vie d’environ 5 ans).
Défaillance UC (chien de garde), erreur bus des E/S, erreur pile et défaillance mémoire.
Pas d’instruction END, erreurs de programmation (vérifiées au démarrage d’une séquence
d’exploitation)
34
Rem. 1. Les zones DM, HR, AR et les valeurs des compteurs sont sauvegardées
par lapile incorporée dans l’unitécentrale. Si lapile est épuisée,le contenu
de ces zones disparaît et les données reprennent leurs valeurs pardéfaut.
2. Le contenu dela zone du programme, de lazone DM en lecture seulement
(DM 6144 à DM 6599) et du Setup de l’API (DM 6600 à DM 6655) est
conservé en mémoire flash. Le contenu de ces zones sera lu dans la
mémoire flash à la misesous tension suivante du système, même si lapile
de sauvegarde est épuisée.
Lorsque des données ont été modifiées dans une ou plusieurs de ces
zones, ilfaut enregistrer les nouvellesvaleurs en mémoireflash enmettant
le système CPM2A en mode MONITOR ou en mode RUN ou bien en mettant le système hors tension puis à nouveau sous tension.
Page 52

Impédanced’entrée
Courantd’entrée
Tension/courant
Caractéristiques techniques Chapitre 2-1
2-1-3 Caractéristiques des E/S
Caractéristiques des entrées de l’UC
Entrées Caractéristiques techniques
Tension d’entrée Toutes 24 V continus
Impédance d’entrée
IN00000 à IN00001 2,7 kW
IN00002 à IN00006 3,9 kW
IN00007 et au–delà 4,7 kW
Courant d’entrée
IN00000 à IN00001 8 mA, typique
IN00002 à IN00006 6 mA, typique
IN00007 et au–delà 5 mA, typique
Tension/courant
ON
Tension/courant
IN00000 à IN00001 17 V continus min., 5 mA
IN00002 et au–delà 14,4 V continus min., 3 mA
Toutes 5,0 V continus max., 1 mA
OFF
Retard ON Toutes 1 à 80 ms max. Par défaut : 10 ms (Voir la Rem.).
Retard OFF Toutes 1 à 80 ms max. Par défaut : 10 ms (Voir la Rem.).
Configuration du
IN00000 à IN00001
circuit
+10%
/
COM
–15%
IN
IN
2,7 kW
10 000 pF
680 W
LED d’entrée
Circuits
internes
IN00002 à IN00006
IN00007 et au–delà
COM
COM
IN
IN
750 W
3,9 kW
IN
IN
750 W
4,7 kW
LED d’entrée
LED d’entrée
Circuits
internes
Circuits
internes
Rem. Dansle Setupde l’API,la constantede tempsen entréepeut êtremise à1, 2, 3,
5, 10, 20, 40, ou 80 ms.
Entrées de compteur ultra rapide
Commeil apparaîtdans letableau suivant,les entréesIN00000 àIN00002peuvent être utilisées comme entrées de compteur ultra rapide. La fréquence de
comptage maximum est de 5 kHz en mode phase différentielle et de 20 kHz
dans les autres modes.
35
Page 53

Entré
e
Caractéristiques techniques Chapitre 2-1
Entrée
Fonction
Mode phase différentiel Mode Entrée impulsion
plus direction
IN00000 Entrée impulsionnelle
Entrée impulsionnelle Incrémente l’entrée
phase A
IN00001 Entrée impulsionnelle
Entrée direction Décrémente l’entrée
phase B
IN00002 Entrée impulsionnelle phase Z ou entrée RAZ externe
(IN00002 peut s’utiliser comme entrée normale lorsqu’elle n’est pas utilisée comme entrée de compteur ultra
rapide.)
Les largeurs d’impulsions minimum des entrées IN00000 (Entrée phase A) et
IN00001 (entrée phase B) sont, comme suit :
Mode entrée impulsion plus direction,
mode entrée -/¯, mode incrémentiel
50 ms min.
Phase A
12,5 ms
min.
12,5 ms
min.
Phase B
La largeur d’impulsion minimum de l’entrée IN00002 (entrée phase Z) est :
Mode entrée
croissant/décroissant
impulsionnelle
impulsionnelle
Mode phase différentiel
100 ms min.
T1T2T3T4: 12,5 ms min.
50 ms min.
Mode incrémentiel
Incrémente l’entrée
impulsionnelle
Entrée normale
Phase Z
OFF
ON
500 ms
min.
Entrées des interruptions
Les entrées IN00003 à IN00006 peuvent être utilisées comme entrées
d’interruptions (mode entrée des interruptions ou mode compteur) et comme
entréesàréponse rapide.Lalargeurd’impulsion minimumdecesentrées estde
50 ms.
Caractéristiques des entrées des unités d’extension des E/S
Caractéristiques techniques
Tension d’entrée 24 V continus
Impédance d’entrée 4,7 kW
Courant d’entrée 5 mA typique
Tension ON 14,4 V continus min.
Tension OFF 5.0 V continus max.
Retard ON 1 à 80 ms max. Par défaut : 10 ms (Voir la Rem.).
Retard OFF 1 à 80 ms max. Par défaut : 10 ms (Voir la Rem.).
Configuration du circuit
+10%
/
–15%
COM
IN
IN
750 W
4,7 kW
LED d’entrée
Circuits
internes
Rem. DansleSetup del’API,laconstante detempsd’entréepeut êtremiseà1,2,3,5,
10, 20, 40 ou 80 ms.
36
Page 54

Caractéristiques techniques Chapitre 2-1
Attention Ne pas appliquer aux bornes d’entrée une tension supérieure à la tension
!
nominale spécifiée. Le non respect de cette règle peut endommager le produit
ou provoquer un incendie.
Caractéristiques des sorties de l’UC et des unités d’extension des E/S
Sorties à relais
Caractéristiques techniques
20CDR-j 30CDR-j 40CDR-j 60CDR-j 8ER 20EDR1
Capacité maximum de
commutation
Capacité minimum de
commutation
Durée de vie utile du relais
(Voir la Rem.).
Retard ON 15 ms max.
Retard OFF 15 ms max.
Configuration du circuit
2 A, 250 V alternatifs (cosf = 1)
2 A, 24 V continus
(4 A/commun)
10 mA, 5 V c.c.
Electrique : 150.000 opérations (24 V continus, charge résistive)
100.000 opérations (240 V alternatifs charge inductive, cosf = 0,4)
Mécanique : 20.000.000 opérations
LED de sortie
Vie (x 104)
Circuits
internes
Maximum
250 V c.a. : 2 A
24 V c.c. : 2 A
Rem. La durée de vie utile des contacts de sortie du relais données dans le tableau
correspondaux conditionslesplus défavorables.Le graphiquesuivantdonne le
résultat des essais de durée de vie (OMRON) effectués à une vitesse de
commutation de 1.800 fois/heure.
120 V c.a., charge résistive
24 V c.c. , t = 7 ms
120 V c.a., cosf = 0,4
240 V c.a., cosf = 0,4
24 V c.c./240 V c.a., charge résistive
Courant de contact (A)
Vitesse de commutation :
1.800 fois/heure
37
Page 55

Article
commuta
SortiesNP
N
SortiesPN
P
Caractéristiques techniques Chapitre 2-1
Sorties transistorisées (NPN ou PNP)
Article
Capacité
maximu
m de
20CDT-D
20CDT1-D
30CDT-D
30CDT1-D
OUT01000 et OUT01001 : 4,5 à 30 V continus, sortie/0,2 A (Voir Rem. 1.)
OUT01002 et au–delà : 4,5 à 30 V continus, sortie/0,3 A
Caractéristiques techniques
40CDT-D
40CDT1-D
60CDT-D
60CDT1-D
8ET
8ET1
20EDT
20EDT1
24 V continus
+10%
/
,
–5%
sortie/0,3 A
tion
Courant
Commun/0,8 A
Unité/1,6 A
(Voir Rem. 2.)
0,1 mA max.
Commun/0,8 A
Unité/3,2 A
(Voir Rem. 2.)
Commun/0,8 A
Unité/3,2 A
(Voir Rem. 2.)
Commun/0,8 A
Unité/4,8 A
(Voir Rem. 2.)
Commun/0,9 A
Unité/1,8 A
(Voir Rem. 2.)
Commun/0,9 A
Unité/1,8 A
de fuite
Tension
1,5 V max.
résiduel- le
RetardONOUT01000 et OUT01001: 20 ms max.
0,1 ms max.
OUT01002 et au–delà : 0,1 ms max.
Retard
OFF
OUT01000 et OUT01001: 40 ms max. pour 4,5 à 26,4 V, 10 à 100 mA
0,1 ms max. pour 4,5 à 30 V, 10 à 200 mA
OUT01002 et au–delà : 1 ms max.
1 ms max.
(24 V
continus
+10%
5 à 300 mA)
/
–5%
Fusible 1 fusible en sortie (non remplaçable par l’utilisateur) 1 fusible/commun
(non remplaçable
par l’utilisateur)
Configur
ation du
circuit
LED de sortie
Circuits
internes
OUT
OUT
COM (–)
24 V c.c.
LED de sortie
Circuits
internes
COM (+)
OUT
OUT
24 V c.c.
,
Rem. 1. Lorsqu’on utiliseOUT01000 ouOUT01001 commeentréeimpulsionnelle, il
faut connecter une résistance choisie pour que le courant de charge soit
comprisentre 0,01and 0,1A.Si lecourant dechargeest inférieurà0,1 A,le
temps de réponse ON – à – OFF sera plus bref et les impulsions ultra
rapides (sorties transistorisées type source) ne seront pas fournies en
sortie.Si lecourantde chargeest supérieurà0,1 A,letransistor vadégager
plus de chaleur et certains composants risquent d’être endommagés.
2. Le total pour OUT01000 à OUT01003 doit être de 0,8 A maximum.
Toutefois, si la température ambiante est maintenue inférieure à 50 °C, le
système peut accepter une valeur de 0,9 A/commun.
Attention Ne jamais appliquer à une borne d’entrée une tension supérieure à la capacité
!
decommutationmaximum. Vous risqueriezd’endommagerle produitoude provoquer un incendie.
38
Page 56

Composants
2-2 Composants
2-2-1 Composants de l’UC
UC avec 20 ou 30 bornes d’E/S
Chapitre 2-2
2. Borne terre fonctionnelle
(uniquement sur unités Tension V.c.a.)
1. Bornes d’entrée de l’alimentation
10. Commandes analogiques
11. Port de périphérique
7. Voyants de statut de l’API
14. Logement pile
4. Bornes de l’alimentation externe
(uniquement sur unités Tension V.c.a.)
3. Borne terre de protection
5. Bornes d’entrée
8. Voyants d’entrée
(seulement 0CH
pour les UC à 20
points)
12. Port RS-232C
15. Couvercle du
connecteur
d’extension
13. Sélecteur de
communications
9. Voyants de sortie
(seulement 10CH
pour les UC à 20
points)
6. Bornes de sortie
UC avec 40 bornes d’E/S
UC avec 60 bornes d’E/S
39
Page 57

PWR
(vert
)
(jaune)
ERR/ALARM
Composants
Descriptions des composants de l’UC
1, 2, 3... 1. Bornes d’entrée de l’alimentation électrique
L’alimentation(100à 240V alternatifsou 24 Vcontinus) doit êtreraccordée
à ces bornes.
2. Borne terre fonctionnelle ( )
Mettre cette borne à la terre pour améliorer l’immunité aux bruits (unique-
ment pour les API de type CA) et diminuer le risque de chocs électriques.
3. Borne terre de protection ( )
Cette borne doit être mise à la terre pour diminuer le risque de chocs
électriques.
4. Bornes de l’alimentation électrique externe
Les API CPM2A sont équipés de ces bornes de sortie 24 V (courant
continu)quileur permettentd’assurerl’alimentationélectrique dedispositifs
d’entrée (Uniquement pour les API de type CA).
5. Bornes d’entrée
Elles connectent l’UC à des dispositifs d’entrée externes.
6. Elles connectent l’UC à des dispositifs de sortie externes.
7. Voyants de statut de l’API
Comme il apparaît dans le tableau suivant, les voyants précisent le statut
opératoire de l’API.
Chapitre 2-2
Indicateur Statut Signification
PWR
(vert)
RUN
(vert)
COMM
(jaune)
ERR/ALARM
(rouge)
ON L’API est alimenté.
OFF L’API n’est pas alimenté.
ON L’API travaille en mode RUN ou en mode
MONITOR.
OFF L’API est en mode PROGRAM ou une erreur fatale
est intervenue.
Cligno-teDes données sont transférées par le port de
périphérique ou par le port RS-232C.
OFF Pas de transfert de données par le port périphérique
ou par le port RS-232C.
ON Une erreur fatale est intervenue. (L’API s’arrête).
Cligno-teUne erreur non fatale est intervenue. (L’API continue
à travailler).
OFF Fonctionnement normal.
8. Voyants d’entrée
Les voyants d’entrée sont allumés lorsque la borne d’entrée
correspondante est ON. Les voyants sont allumés pendant le
rafraîchissement des E/S.
Lorsqu’une erreur fatale intervient, les voyants d’entrée sont modifiés,
comme indiqué ci–dessous :
Erreur fatale Voyants d’entrée
Erreur UC, erreur bus d’E/S ou
bien trop d’unités d’E/S
Erreur mémoire ou erreur
FALS (erreur fatale système)
Se mettent OFF.
Les voyants changent selon le statut du
signal d’entrée, mais le statut de l’entrée n’est
pas actualisé en mémoire.
Rem. a) Lorsque des entrées d’interruption sont utilisées en mode entrée
d’interruption, l’indicateur peut rester éteint même lorsque la
condition d’entrée est satisfaite si l’entrée ne reste pas ON
pendant assez longtemps.
40
Page 58

Composants
Chapitre 2-2
b) Lorsque descompteursultrarapides sontutilisés,il sepeutque le
voyant d’entrée ne s’allume pas si l’impulsion d’entrée est trop
rapide.
9. Voyants de sortie
Les voyantsde sortie s’allument lorsque la bornede sortie correspondante
est ON. Les voyants restent allumés pendant le rafraîchissement des E/S.
Avecde sorties impulsionnelles, le voyant reste alluméen continu pendant
la sortie des impulsions.
10. Commandes analogiques
Agir sur ces commandes pour changer les réglages analogiques (0 à 200)
de IR 250 et de IR 251.
1 1. Port de périphérique
Connectel’API àun dispositifde programmation(y comprislesconsoles de
programmation),à unmicro–ordinateur ouà undispositif externe standard.
12. Port RS-232C
Connecte l’API à un dispositif de programmation (sauf une console de
programmation), àun micro–ordinateur ; à unterminal programmable ouà
un dispositif externe standard.
Attribution des broches
du port RS-232C
13. Sélecteur de communications
(Réglage usine : OFF)
14. Pile électrique
15. Connecteur d’extension
1
FG
SD
RD
RTS
CTS
2
3
4
5
6
7
8
9
DCD
DSR
DTR
SG
Cette commande permet de spécifier si le port de périphérique et le port
RS-232Cdoiventutiliser lesréglagesdecommunication duPCSetupoules
réglages par défaut.
OFF Le port de périphérique et le port RS–232C fonctionnent selon les
réglages de communication définis dans le Setup de l’API. Ceci ne
s’applique pas aux consoles de programmation connectées au port de
périphérique.
ON Le port de périphérique et le port RS-232C fonctionnent selon les
réglages de communication standard. Ceci ne s’applique pas aux
consoles de programmation connectées au port de périphérique.
Rem. Le réglage de ce sélecteur est sans effet sur les communications
lorsqu’une console de programmation est connectée au port de
périphérique. En revanche, il affecte le port RS-232C.
Cette pileassure la sauvegarde dela mémoire de l’UC ; elle estdéjà active
lors de la livraison du système.
Connecte l’UC de l’API à une extension (Extension des E/S, unité d’E/S
analogiquesou liaisonE/S CompoBus/S).Troisunités d’extensionpeuvent
être raccordées à l’UC.
Rem. Si un NT-AL001est connecté au port RS-232C du CPM2A, vous ne
pouvez pas connecter plusd’une unité d’extension à l’UC parce que
le NT-AL001 tire son alimentation 5 V continus de l’UC.
41
Page 59

Composants
2-2-2 Composants des unités d’extension des E/S
Unité d’extension des E/S avec 20 bornes d’E/S
5. Câble de raccordement de l’unité
d’extension des E/S
Unité d’extension des E/S avec 8 bornes d’entrée
Chapitre 2-2
1. Bornes d’entrée
3. Voyants d’entrée
6. Connecteur d’extension
4. Voyants de sortie
2. Bornes de sortie
1. Bornes d’entrée
3. Voyants d’entrée
5. Câble de raccordement de l’unité
d’extension des E/S
Unité d’extension des E/S avec 8 bornes de sortie
5. Câble de raccordement de l’unité
d’extension des E/S
1, 2, 3... 1. Bornes d’entrée
Connectent l’UC à des dispositifs d’entrée externes.
2. Bornes de sortie
Connectent l’UC à des dispositifs de sortie externes.
3. Voyants d’entrée
Les voyants d’entrée sont allumés lorsque la borne d’entrée
correspondante est ON.
4. Voyants de sortie
Les voyantsde sortie s’allument lorsque la bornede sortie correspondante
est ON.
5. Câble de raccordement des unités d’extension des E/S
Connecte l’unitéd’extension des E/S auconnecteur d’extensionde l’UC de
l’API ou à une autre unité d’extension.
6. Connecteur d’extension
1. Bornes d’entrée
2. Bornes de sortie
4. Voyants de sortie
6. Connecteur d’extension
2. Bornes de sortie
42
Page 60

Composants
Attention Ne pas toucher un câble de raccordement de l’unité d’extension des E/S
!
pendant qu’il est sous tension. Ainsi tout risque d’un dysfonctionnement
provoqué par la présence d’électricité statique est évité.
6. Connecteur d’extension
Se connectes à une autre unité d’extension (unité d’extension des E/S,
unité des E/S analogiques ou unité de liaison CompoBus/S). Trois unités
d’extension peuvent être connectées à une unité centrale.
2-2-3 Composants de l’unité des E/S analogiques
Chapitre 2-2
3. Connecteur d’extension
2. Câble de raccordement de l’unité
d’extension des E/S
1, 2, 3... 1. Bornes des E/S analogique
Connecte l’unité à des dispositifs d’entrée analogiques et à des dispositifs
de sortie analogiques.
2. Câble de raccordement de l’unité des d’extension des E/S
Connectel’unitédes E/Sanalogiques auconnecteurd’extension del’UCde
l’API ou à une autre unité d’extension. Le câble est connecté à l’unité des
E/S analogiques et ne peut pas être enlevé.
Attention Ne pas toucher un câble de raccordement de l’unité d’extension des E/S
!
pendant qu’il est sous tension. Ainsi tout risque d’un dysfonctionnement
provoqué par la présence d’électricité statique est évité.
3. Connecteur d’extension
Seconnecte àune autre unitéd’extension (unité d’extensiondes E/S,unité
des E/S analogiques ou unité de liaison CompoBus/S). Trois unités
d’extension peuvent être connectées à l’unité centrale.
2-2-4 Composants de la liaison CompoBus/S
1. Bornes d’E/S analogique
4. Câble de raccordement de l’unité
d’extension des E/S
2. Boîtier DIP
3. Voyants à LED
5. Connecteur d’extension
1. Bornes du CompoBus/S
43
Page 61

COM
M
ERR
Composants
Chapitre 2-2
1, 2, 3... 1. Bornes de CompoBus/S
Ce sont la borne haute/basse de transmission de données de
CompoBus/S, lesbornes +/– de l’alimentationdu système de transmission
dedonnées etles bornes NC.L’unitéétant alimentée eninterne, lesbornes
d’alimentation peuvent être utilisées comme des bornes de relayage.
2. Boîtier DIP
Le boîtier DIP spécifie l’adresse du nœud de l’unité, spécifie le mode de
communication et spécifie aussi si les sorties seront ou ne seront pas
réarmées à la suite d’une erreur de communication.
ADRESSE DES STATIONS
124
8
ON
Broche
DR
HOLD
SW1
s
1 à 4
(légendé
es 1, 2,
4 et 8)
DR ON : Mode communication longue distance
HOLD ON : Conserve les sorties lorsqu’une erreur de communication
Ces broches spécifient l’adresse du nœud de l’unité en utilisant les
broches du boîtier DIP comme des chiffres binaires. (1 = ON)
0: 0000 1: 0001 2: 0010 3: 0011
4: 0100 5: 0101 6: 0110 7: 0111
8: 1000 9: 1001 10: 1010 11: 1011
12: 1100 13: 1101 14: 1110 15: 1111
OFF : Mode communication ultra rapide
(Voir la rem.).
intervient.
OFF : Réarme les sorties lorsqu’une erreur de communication
intervient .
Fonction
Rem. Le mode longue distance peut uniquement être utilisé quand le système est
connecté à l’une des unités maître suivantes : C200HW-SRM21-V1,
CQM1-SRM21-V1 ou SRM1-C01-V2.
3. Voyants LED
Ces voyants donnent le statut des communications CompoBus/S.
Voyant Statut Signification
COMM
(jaune)
ERR
(rouge)
ON Communication en cours.
OFF Erreur de communication ou système arrêté .
ON Une erreur de communication est intervenue.
OFF Etat normal ou pas de communication.
4. Câble de raccordement de l’unité d’extension des E/S
Connecte l’unité de liaison CompoBus/S au connecteur d’extension de
l’unité centrale de l’API ou d’une autre unité d’extension.
Attention Ne pas toucher un câble de raccordement de l’unité d’extension des E/S
!
pendant qu’il est sous tension. Vous éviterez ainsi tout risque d’un
dysfonctionnement provoqué par la présence d’électricité statique.
5. Connecteur d’extension
Seconnecte àune autre unitéd’extension (unité d’extensiondes E/S,unité
d’E/S analogiques ou unité de liaison CompoBus/S). Trois unités
d’extension peuvent être connectées à l’unité centrale.
44
Page 62

CHAPITRE 3
Installation et câblage
Cechapitre donnedes informationssur l’installationet lecâblage d’un APICPM2A. Veiller àsuivre lesinstructions et les
précautions de ce chapitre en installant le CPM2A sur un panneau ou dans une armoire, en câblant l’alimentation ou en
câblant les entrées/sorties.
3-1 Conseils d’élaboration 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1-1 Câblage de l’alimentation 46.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1-2 Tension d’alimentation 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1-3 Circuits de verrouillage et de limitation 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2 Choix d’un site d’installation 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2-1 Conditions pour le site d’installation 47.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2-2 Installation sur un panneau ou dans une armoire 47. . . . . . . . . . . . . . . . . . . . . . . .
3-3 Installation du CPM2A 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3-1 Orientation du CPM2A 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3-2 Installation du CPM2A 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3-3 Connexion d’une unité entrée/sortie d’extension 51.. . . . . . . . . . . . . . . . . . . . . . .
3-4 Câblage et connexions 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-1 Conseils généraux pour le câblage 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-2 Enlèvement du bornier 53. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-3 Câblage de la terre 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-4 Câblage de l’alimentation 54.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-5 Câblage d’entrée 55. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-6 Câblage de sortie 64. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-7 Connexions d’un appareil de programmation 78. . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-8 Connexions de liaison à un micro–ordinateur 80. . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-9 Communications sans protocole 82. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-10 Connexions NT 82. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-11 Connexions INTER API 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-4-12 Connexions CompoBus/S 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
45
Page 63

Conseils d’élaboration Chapitre 3-1
3-1 Conseils d’élaboration
Pour élaborer un système comprenant un CPM2A, il faut prendre les
précautions suivantes.
3-1-1 Câblage de l’alimentation
Séparer le câblage de l’alimentation du câblage du système de contrôle, du
système CPM2A et du système CC d’entrée/sortie. Séparer les circuits de
contrôle qui alimentent l’unité centrale des circuits principaux qui utilisent des
protecteurs de circuits et des fusibles spéciaux.
3-1-2 Tension d’alimentation
Attention Utiliser les tensions d’alimentation indiquées à la Section 2 Spécifications et
!
Composantsdes Unités.Ne pasrespecter lesspécificationspourrait provoquer
un incendie.
Si la tension d’alimentation tombeau–dessous de 85% de la tension nominale,
le CPM2A s’arrêtera et toutes les sorties seront coupées. Si une tension trop
basse affecte les équipements, etc., prévoir un circuit de protection qui coupe
les sorties jusqu’à ce que la tension d’alimentation revienne à sa valeur
nominale.
Aux endroits où les conditions d’alimentation sont médiocres, prendre des
mesures pour assurer que le courant soit fourni à la tension nominale. Bien
respecterles précautionsde sécurité,notamment prévoirdes disjoncteurspour
empêcher les courts–circuits dans le câblage extérieur.
Pour faire l’une des opérations suivantes, couper l’alimentation de l’API. Il
pourrait en résulter sinon une électrocution, des dégâts aux appareils ou un
fonctionnement défectueux.
· Connecter les unités entrée/sortie d’extension et les unités centrales.
· Assembler les unités.
· Connecter les câbles et le câblage.
3-1-3 Circuits de verrouillage et de limitation
A VERTISSEMENT Des circuits d’arrêt d’urgence, des circuits de verrouillage, des circuits
!
delimitation etdes mesuresde sécuritésanaloguesdoivent êtreprévus
dans les circuits de contrôle externes (c’est–à–dire, pas dans le
contrôleur programmable) pour assurer la sécurité dans le système si
une anomalie se produit à cause d’un défaut de l’API ou d’un autre
facteur externe qui affecte le fonctionnement de l’API. Ne pas prendre
les mesures de sécurité qui conviennent pourrait conduire à des
accidents graves.
Le schéma suivant montre un exemple de circuit de verrouillage.
Circuit de verrouillage
01005
CPM2A
01006
MC2
MC1
MC1
Moteur en avant
MC2
Moteur en marche arrière
46
Dans le circuit de verrouillage ci–dessus, MC1 et MC2 ne peuvent pas être
activés en même temps, même si les sorties 01005 et 01006 du CPM2A sont
activées toutes les deux (fonctionnement incorrect de l’API).
Page 64

Choix d’un site d’installation
3-2 Choix d’un site d’installation
Le CPM2Arésiste à des conditionsdifficiles et ilest très fiable, mais si l’API est
installé en un endroit favorable, sa sécuriité et sa durée de vie seront
optimisées.
Attention S’assurer que le CPM2A est correctement installé, comme indiqué dans ce
!
manuel. Ne pas le faire risque d’entraîner un fonctionnement défectueux de
l’unité.
3-2-1 Conditions pour le site d’installation
Rem. Ne jamais installer le CPM2A dans une des conditions suivantes.
· Endroits directement exposés au soleil.
· Endroits exposés à une température inférieure à 0°C ou supérieure à 55°C.
· Endroitsexposés àunehumiditéau–dessousde10%ou au–dessusde90%.
Chapitre 3-2
· Endroits exposés à la condensation à la suite de changements brutaux de la
température.
· Endroits exposés à des gaz corrosifs ou inflammables.
· Endroitsexposésaux poussières(spécialement lespoussièresde fer)ouaux
sels.
· Endroits exposés à des chocs ou des vibrations.
· Endroits exposés à l’eau, l’huile ou des produits chimiques.
S’assurer que les conditions d’installation sont conformes aux spécifications
générales du CPM2A. Se reporter à 2–1–1 Spécifications générales pour plus
de détails.
Rem. Si on installe dans les endroits suivants, il faut prévoir un blindage adéquat :
· Endroits exposés à l’électricité statique ou d’autres sources de bruit.
· Endroits exposés à des champs électromagnétiques élevés.
· Endroits susceptibles d’être exposés à des radiations.
· Endroits au voisinage de lignes électriques.
3-2-2 Installation sur un panneau ou dans une armoire
Quand le CPM2A s’installe sur un panneau ou dans une armoire, il faut tenir
compte du fonctionnement de l’API, de sa maintenance et des conditions
ambiantes.
Surchauffe Le domaine detempérature pour leCPM2A estde 0°C à55°C. S’assurer qu’ily
a une ventilation adéquate pour le refroidissement.
· Prévoir assez de place pour la circulation de l’air.
· Ne pas installer le CPM2A au–dessus d’équipements qui produisent une
grande quantité de chaleur, radiateurs, transformateurs ou grandes
résistances.
47
Page 65

Installation du CPM2A
Chapitre 3-3
· Installer un ventilateur ou un système de refroidissement si la température
ambiante dépasse 55 °C.
Panneau de
contrôle
Ventilateur
CPM2A
Ouverture d’entrée d’air
Bruit électrique Les lignes électriques et les équipements à haute tension peuvent provoquer
des parasites électriques dans l’API.
· Ne pas installer le CPM2A sur un panneau ou dans une armoire avec des
équipements à haute tension.
· Prévoir au moins 200 mm entre le CPM2A et les lignes électriques les plus
proches.
200 mm min.
CPM2A
200 mm min.
Accessibilité S’assurer que le CPM2A est accessible pour le service normal et la
maintenance.
· Prévoir un chemin dégagévers le CPM2A pour le service et lamaintenance.
Les équipements à haute tension et les lignes électriques peuvent être
dangereux s’ils sont dans le chemin pendant les opérations normales.
· Pourmieuxaccéderàl’API,installerlepanneauou l’armoireàune hauteurde
3 à 5 pieds au–dessus du plancher.
3-3 Installation du CPM2A
Ce chapitre décrit comment le CPM2A s’installe et comment les unités
d’extension se connectent. Se reporter à l’Annexe B pour les dimensions des
unités données dans les schémas.
3-3-1 Orientation du CPM2A
Le CPM2A doit être installé dans la position indiquée ci–dessous pour assurer
un refroidissement adéquat.
48
Correcte
Page 66

Installation du CPM2A
Chapitre 3-3
Ne pas installer le CPMP2A dans l’une des deux positions suivantes.
Incorrecte Incorrecte
3-3-2 Installation du CPM2A
Le CPM2A peut être installé sur une surface horizontale ou un rail DIN.
Installation sur une surface Utiliserle modèle suivantpour installer une unité centrale ou une unitéd’exten-
sion CPM2A sur une surface verticale. (Utiliser des vis de Æ M4 x 15).
Quatre trous M4
100 mm
Unité
8 mmA
La largeur (A) entre les trous de montage dépend de l’unité.
Unité Largeur (A)
(tolérance: ± 0,2 mm)
Unité centrale à 20/30 bornes d’entrée/sortie 120 mm
Unité centrale à 40 bornes d’entrée/sortie 140 mm
Unité centrale à 60 bornes d’entrée/sortie 185 mm
Unité entrée/sortie d’extension à 20 bornes d’entrée/sortie 76 mm
Unité entrée/sortie d’extension à 8 bornes d’entrée 56 mm
Unité entrée/sortie d’extension à 8 bornes d’entrée 56 mm
Unité d’entrée/sortie analogique 56 mm
Unité d’entrée/sortie analogique 56 mm
Adaptateur RS-232C 21 mm
Adaptateur RS-422 21 mm
Si oninstalle une unité d’extensionou unadaptateur de communicationsà côté
de l’unité centrale, compter 10 à 15 mm entre les unités.
Adaptateur de
communications
Unité
centrale
Unité
d’expansion
49
Page 67

Installation du CPM2A
Installation sur un rail DIN Le CPM2A peut être installé sur un rail DIN de 35 mm.
Borniers
(PFP–M)
Installation
Abaisser le CPM2A de façon que le cran à l’arrière de l’API s’accroche
au–dessus du rail DIN. Pousser l’API en avant jusqu’à ce que le verrouillage
s’enclenche.
Chapitre 3-3
Rail DIN
PFP–100N (1 m)
PFP–50N (50 cm)
PFP–100N2 (1 m)
Retrait
Abaisserle verrouillageavec untournevis àlame plateet fairepivoter l’API vers
le haut pour l’enlever.
Tournevis
50
Page 68

Installation du CPM2A
3-3-3 Connexion d’une unité entrée/sortie d’extension
Jusqu’à 3unités entrée/sortie d’extension peuventêtre connectées à une unité
centrale CPM2A. Procéder de la façon suivante pour connecter une unité
entrée/sortie d’extension.
1, 2, 3... 1. Enleverle capotdu connecteurde l’unitécentrale oude l’unitéentrée/sortie
d’extension. Utiliser un tournevis à lame plate pour enlever le capot du
connecteur entrée/sortie d’extension.
Chapitre 3-3
capot du
connecteur
entrée/sortie
d’extension
2. Insérer le câble de connexion de l’unité entrée/sortie d’extension dans le
connecteur de l’unité centrale ou de l’unité entrée/sortie d’extension.
3. Replacer le capot sur le connecteur de l’unité centrale ou de l’unité entrée/
sortie d’extension.
51
Page 69

Câblage et connexions
3-4 Câblage et connexions
Cechapitredonne desinformationsdebase surle câblagedel’unité d’alimentation etdes unités entrée/sortie d’extensionet sur la connexiondes appareils de
programmation.
3-4-1 Conseils généraux pour le câblage
Attention Laisser l’étiquette protective en place pendant qu’on câble. L ’unité peut mal
!
fonctionner si des brins de fil tombent à l’intérieur. Après avoir achevé le
câblage, ne pas oublier d’enlever l’étiquette pour éviter la surchauffe.
Etiquette de
protection
Chapitre 3-4
Parasite de ligne à l’E/S Ne pas tirer les lignes d’entrée/sortie du CPM2A dans les mêmes chemins de
câbles ou conduites que les lignes électriques.
Chemins de câbles suspendus
Laisser au moins 300 mm entre les câbles électriques et le câblage
d’entrée/sortie ou de contrôle, comme indiqué sur le schéma suivant.
Lignes d’E/S CPM2A
300 mm min.
Câblesde commande
et lignes d’alimentation CPM2A
Câbles d’alimentation
300 mm min.
Chemins de câbles dans le plancher
Laisser au moins 200 mm entre le câblage et le dessus du chemin, comme
indiqué sur le schéma suivant.
Câbles de contrôle
Lignes d’entrée/
sortie du CPM2A
et lignes d’alimenta-
tion du CPM2A
Câbles
électriques
Tôle (fer)
200 mm min.
52
Page 70

Câblage et connexions
Conduites
Séparer les lignes d’entrée/sortie du CPM2A, les lignes d’alimentation et de
contrôle et les câbles électriques, comme indiqué sur le schéma suivant.
3-4-2 Enlèvement du bornier
On peut enlever les deux borniers de l’unité centrale CPM2A. Utiliser la
procédure suivante.
Les deux borniers sur les unités entrée/sortie d’extension, les unités
d’entrée/sortie analogiques et l’unité de liaison CompoBus/S ne peuvent pas
être enlevées.
1, 2, 3... 4. Détacher les vis noires aux extrémités du bornier comme indiqué sur le
schéma suivant.
Lignes d’entrée/
sortie
du CPM2A
Câbles de contrôle
et lignes
d’alimentation
du CPM2A
Chapitre 3-4
Câbles
électriques
Vis noires
5. Détacher les borniers de l’unité centrale.
Vis noires
53
Page 71

Câblage et connexions
Chapitre 3-4
3-4-3 Câblage de la terre
Mise à la terre Prendre garde de mettre la borne de masse à la terre par 100 W au maximum
pour protéger contreles chocs électriques et le fonctionnement incorrect dûau
bruitélectrique. Prendregarde d’utiliser unfil d’au moins1,25 mm2pour lamise
à la terre.
Mettre à la terre
par 100 W ou
moins
Unité d’alimentation
alternative (AC)
Mettre à la terre
par 100 W ou
moins
Unité d’alimentation
continue (DC)
Rem. Toujoursdéconnecterla bornefonctionnelledemasse avantde faireun essaide
résistance à la tension.
Bornes serties
Attention Toujours employer des bornes serties pour les lignes de mise à la terre du
!
CPM2A ouutiliser du fil rigide(au lieu de filmultibrins). Ne pas connecterde fils
multibrins nus directement aux bornes. Des brins de fil détachés peuvent faire
un court–circuit et provoquer un incendie.
Utiliser des bornes serties M3 et serrer les vis des bornes avec un couple de
0,5 N.m.
6,2 mm max. 6,2 mm max.
Le calibrede filrecommandé pour lesfils rigides estde 0,4à 1,2 mm(AWG26à
AWG18).
3-4-4 Câblage de l’alimentation
Alimentation 100 à
240 V c.a.
Câbler uncircuit séparé pour l’alimentation duCPM2A de façon qu’il n’y ait pas
de chute de tension à cause du surcourant qui passe quand d’autres
équipements sont allumés.
Si onutilise plusieurs API CPM2A,il est recommandé decâbler les APIsur des
circuitsséparés pouréviter unechutede tensionprovenant dusurcourantou du
fonctionnement incorrect du disjoncteur.
Utiliser des fils d’alimentation torsadés pour éviterle bruit provenant des lignes
d’alimentation. Si on ajoute un transformateur d’isolement 1:1, cela réduit
encore le bruit électrique.
Borne en fourche Borne en anneau
54
Page 72

Câblage et connexions
Chapitre 3-4
Etant donné la possibilité de chutes de tension et le courant autorisé, prendre
garde d’utiliser des lignes d’alimentation à gros fils.
Torsader les fils. La section de chaque fil doit
être de 1,25 mm2min.
Transformateur
d’isolement
Alimentation
alternative
Disjoncteur
Rem. 1. Avant de connecter l’alimentation, s’assurer que l’unité centrale demande
une alimentation alternative et non une alimentation continue. Les circuits
internes de l’unité centrale seront endommagés si du courant alternatif est
appliqué par erreur à une unité centrale qui demande une alimentation
continue.
2. Les bornes d’entrée de l’alimentation sont au–dessus de l’unité centrale ;
les bornes au bas de l’unité centrale donnent une alimentation 24 V c.c.
pourdesappareils extérieurs.Les circuitsinternesde l’unitécentraleseront
endommagés sidu courant alternatif estappliqué par erreur aux bornesde
sortie de l’alimentation d’une unité centrale.
Attention Serrer les visde la plaque àbornes de l’alimentation alternativeavec un couple
!
de 0,5 N.m. Les visnon serrées peuvent provoquer un incendie ou unmauvais
fonctionnement.
Bornes serties
Attention Toujoursutiliser desbornessertiespour leslignesd’alimentationdu CPM2A.Ne
!
pas connecter des fils multibrins directement aux bornes. Des brins de fil
détachés peuvent faire un court–circuit et provoquer un incendie.
Utiliser des bornes serties M3 et serrer les vis des bornes avec un couple de
0,5 N.m.
Connecter une borne en anneau à chaque vis de borne.
3-4-5 Câblage d’entrée
Câbler les entrées à l’unité centrale CPM2A et de l’unité entrée/sortie
d’extension comme indiqué sur les schémas suivants. Utiliser des bornes
serties ou des fils rigides (pas de fils multibrins) pour se connecter à l’API. Les
bornes de sortie de l’alimentation peuvent être utilisées avec des unités
centrales à alimentation alternative.
Rem. Si les équipements doivent être conformes aux directives des CE (directives
basse tension), utiliser une alimentation avec double isolation ou isolation renforcée.
Borne en anneau
6,2 mm max.
55
Page 73

Câblage et connexions
Configuration d’entrée Les schémas suivants indiquent les configurations d’entrée.
Rem. Sereporter auChapitre 3Zones demémoire dansle Manueldeprogrammation
pour détails sur l’affectation des bits d’entrée dans les API CPM2A.
CPM2A-20CDR-j, CPM2A-20CDT-D, et CPM2A-20CDT1-D
Les bornes 00 à 1 1 de “0CH” correspondent aux bits IR 00000 à IR 00011.
Chapitre 3-4
24 V c.c.
24 V c.c.
Appareils
d’entrée
CPM2A-30CDR-j, CPM2A-30CDT-j, et CPM2A-30CDT1-j
Les bornes 00 à 1 1 de “0CH” correspondent aux bits IR 00000 à IR 00011,
les bornes 00 à 05 de “1CH” correspondent aux bits IR 00100 à IR 00105.
Appareils
d’entrée
56
24 V c.c.
CPM2A-40CDR-j, CPM2A-40CDT-j, et CPM2A-40CDT1-j
Les bornes 00 à 1 1 de “0CH” correspondent aux bits IR 00000 à IR 00011,
les bornes 00 à 1 1 de “1CH” correspondent aux bits IR 00100 à IR 00111.
Appareils
d’entrée
Page 74

Câblage et connexions
Chapitre 3-4
CPM2A-60CDR-j, CPM2A-60CDT-j, and CPM2A-60CDT1-j
Les bornes 00 à 1 1 de “0CH” correspondent aux bits IR 00000 à IR 00011,
les bornes 00 à 1 1 de “1CH” correspondent aux bits IR 00100 à IR 00111,
les bornes 00 à 1 1 de “2CH” correspondent aux bits IR 00200 à IR 00211.
Appareils
d’entrée
24 V c.c.
57
Page 75

Câblage et connexions
Chapitre 3-4
CPM1A-20EDR1, CPM1A-20EDT, et CPM1A-20EDT1
Les bornes 00 à 1 1 de “mCH” correspondent aux bits 00 à 11 du mot IR m.
24 V c .c.
Appareils
d’entrée
CPM1A-8ED
Les bornes 00 à 07 de “mCH” correspondent aux bits 00 à 07 du mot IR m.
24 V c.c.
Appareils
d’entrée
58
040506
07
Rem. Bien que les multiplessoient connectés en interne, ils doivent tous êtrecâblés.
Page 76

Câblage et connexions
Chapitre 3-4
Exemple de câblage
d’entrée
Une unité centrale à alimentation alternative est représentée. Les unités
centrales à alimentation continue n’ont pas de sorties d’alimentation.
Appareils
d’entrée
Sortie externe d’alimentation :
A VERTISSEMENT Sila sortie 24 V c.c. (alimentation de service de l’API) est surchargée
!
300 mA à 24 V c.c. pour unités centrales à 20, 30, 40 ou 60 points d’entrée/sortie
(unités centrales à entrée d’alimentation alternative seulement).
oucourt–circuitée, latension peut tomberet provoquerla coupure des
sorties. Il faut prévoir des mesures de sécurité extérieures pour
assurer la sécurité dans le système. Ne pas prendre les mesures de
sécurité adéquates pourrait provoquer des accidents graves.
59
Page 77

Câblage et connexions
Chapitre 3-4
Appareils d’entrée Le tableau suivant indique comment connecter différents appareils d’entrée.
Appareil Schéma du circuit
Sortie sur relais
Collecteur ouvert
NPN
Sortie courant NPN
Sortie courant PNP
Circuit à
courant
constant
5 mA/12 mA
5 mA/12 mA
0 V
Sortie
5 mA/12 mA
0 V
5 mA/12 mA
Sortie
0 V
capteur
alimentation
capteur
alimentation
IN
COM (+)
IN
COM (+)
Utiliser la même alimentation
pour l’entrée et le capteur.
+
COM (+)
IN
COM (–)
CPM2A
CPM2A
CPM2AIN
CPM2A
Sortie tension
COM (+)
Sortie
CPM2A
0 V
capteur
alimentation
IN
Rem. Ne pas utiliser le câblage suivant avec des appareils à sortie tension :
capteur
alimentation
Câblage
Sortie
0 V
incorrect
IN
COM(+)
CPM2A
60
Page 78

Câblage et connexions
Entrées compteurs à grande vitesse
UtiliserIR00000 àIR00002comme entréesdecompteursà grandevitesse
Dans ces exemples sont connectés des codeurs avec une sortie externe à
collecteur ouvert à 24 V c.c.
Chapitre 3-4
Mode phase différentielle
(fréquence de comptage : 5 kHz)
Codeur
24 V c.c.
Mode haut/bas
(fréquence de comptage : 20 kHz)
Capteur
Capteur
Capteur ou
commutateur
CPM2A
00000 entrée
phase A
00001 entrée
phase B
00002 entrée
phase Z
COM
CPM2A
00000 entrée CW*
00001 entrée CCW*
00002 entrée rétablissement
Capteur ou commutateur
Capteur ou commutateur
Mode entrée direction plus des impulsions
(fréquence de comptage : 20 kHz)
CPM2A
Codeur
24 V c.c.
Mode incrémentiel
(Fréquence de comptage : 20 kHz)
Codeur
00000 Entrée d’impulsion
00001 Entrée de direction
00002 Entrée d’initialisation
COM
CPM2A
00000 Entrée d’impulsion
00001 Entrée normale
00002 Entrée normale
COM
24 V c.c.
COM
24 V c.c.
Rem. *CW veutdire dansle sens desaiguilles d’une montreet CCWen sens inverse.
Utilisation de IR 00003 à IR 00006 comme entrées d’interruptions (mode
comptage)
Danscesexemples estconnectéun codeuravecune sortieexterne àcollecteur
ouvert à 24 V c.c.
Incrémenter ou décrémenter
(Fréquence de comptage : 2 kHz)
Codeur
24 V c.c.
CPM2A
Entrée (00003 à 00006)
COM
61
Page 79

Adresse
entréesnormales.entréesàgrand
e
pourcontrôlesynchronisé
vitesse
.
desbitsdans
Utiliséscomme
Utiliséscomme
Utiliséscomme
d’interruption.rapide
.
Câblage et connexions
Chapitre 3-4
Réglages d’installation de
l’API
Les bits d’entrée indiqués dans les tableaux suivants peuvent fonctionner
comme entrées normales ou on peut leur assigner des fonctions spéciales à
l’installation de l’API.
Les fonctionsspéciales pour les bitsd’entrée IR 00000 àIR 00002 sontréglées
dans DM 6642 :
Adresse
des bits
IR 00000
IR 00001
IR 00002
Utilisés comme
Réglage d’installation de l’API (DM 6642 bits 08 à 15)
00 01 02, 03, ou 04
Utilisés comme
vitesse.
Desfonctions spécialespour lesbits d’entrée IR00003 à IR00006 sontréglées
dans DM 6628 :
Adresse
Bits
DM 6628
IR 00003 00 à 03
IR 00004 04 à 07
IR 00005 08 à 11
IR 00006 12 à 15
Réglage d’installation de l’API (dans DM 6628)
0 1 2
Utilisés comme
entrées normales.
Exemples de connexion d’entrée du compteur à grande vitesse
Mode phase différentielle
(Fréquence de comptage : 5 kHz)
Codeur
E6B2-CWZ6C
(sortie collecteur
ouvert NPN)
Noir
Blanc
CPM2A CPM2A
00000 entrée phase A
00001 entrée phase B
Mode entrée d’impulsions plus direction
(Fréquence de comptage : 20 kHz)
E6A2-CS5C
Codeur
Utilisés comme entrées
des impulsions.
Utilisé comme une entrée
normale.
Utilisés comme
entrées
00000 Entrée d’impulsion
00001 Entrée de direction
Utilisés comme
entrée à réponse
Orange
Brun
Bleu
24 V c.c.
00002 entrée phase Z
COM
Capteur
ou
commutateur
Capteur
ou
commutateur
Capteur
alim.
00002 Entrée d’initialisation
COM
24 V c.c.
62
Page 80

Câblage et connexions
Chapitre 3-4
Courant de fuite Uncourant defuite peurprovoquer defausses entréession utilisedescapteurs
à 2 fils (contacteurs de proximité ou contacteurs photoélectriques) ou des
contacteurs de limite avec des LED (diodes électroluminescentes). Il ne se
produira pas de fausses entrées si le courant de fuite est moindre que 1,0 mA
(2,5 mA pour IN00000 à IN00002). Si le courant de fuite dépasse ces valeurs,
insérer une résistance de drainage dans le circuit pour réduire l’impédance
d’entrée,comme indiqué au schéma suivant.
Alimentation
d’entrée
Résistance de
drainage
Capteur 2 fils, etc.
I : Courant de fuite de l’appareil (mA)
R : Résistance de drainage (kW)
W : Puissance nominale de la résistance
de drainage (W)
LC× 5, 0
R =
I × LC 5, 0
Les équations ci–dessus ont été tirées des équations suivantes :
Tension dentrée (24)
R ×
I ×
W
Se reporter aux spécifications d’entrée/sortie 2-1-3I/O pour détails sur les valeurs de
LC, IC, et EC.
L’impédanced’entrée,le courantd’entréeet latensionà videpeuventvarier enfonction
de l’entrée utilisée (IN00000 à IN00002 ont des valeurs différentes).
Courant dentrée (IC)
Tension dentrée (24)
R +
Courant dentrée (IC)
Tension dentrée (24)
R
R
LC: Impédance d’entrée du CPM2A(kW)
IC: Courant d’entrée du CPM2A (mA)
EC: Tension à vide du CPM2A (V) = 5,0 V
k max.
× Tension dentrée (24) × tolérance (4)
CPM2A
2,3
W =
Tension OFF (EC: 5.0)
R
W min.
Charges inductives Sionconnecte unecharge inductiveàune entrée,ilfaut connecterune diodeen
parallèle avec la charge. La diode doit satisfaire aux conditions suivantes :
1, 2, 3... 1. Le claquage en crête inversée doit être d’au moins 3 fois la tension de
charge.
2. Le courant redressé moyen doit être de 1 A.
Diode
IN
CPM2A
COM
63
Page 81

Câblage et connexions
Bornes serties
Attention Toujours employerdes bornesserties pourles lignesd’entrée/sortie du CPM2A
!
ou utiliser du fil rigide (au lieu de fil multibrins). Ne pas connecter de fils multibrins nus directement aux bornes. Des brins de fil détachés peuvent faire un
court–circuit et provoquer un incendie.
Utiliser des bornes serties M3 et serrer les vis des bornes avec un couple de
0,5 N.m.
Le calibrede filrecommandé pour lesfils rigides estde 0,4à 1,2 mm(AWG26à
AWG18).
3-4-6 Câblage de sortie
Câblage de sortie relais
Câblerles sorties surl’unité centraleet l’unité entrée/sortied’extension CPM2A
comme indiquésur les schémas suivants.Utiliser desbornes serties oudes fils
rigides (pas de fil multibrins) pour se connecterà l’API. Les bornes de sortie de
l’alimentation peuvent être utilisées avec une unité centrale avec une
alimentation alternative.
· Toujoursutiliserunfilsimpleoufixerdesbornessertiessionutilisedufilmulti-
· Ne pas dépasser la capacité de sortie ou le courant commun maximum. Se
Chapitre 3-4
Borne en fourche Borne en anneau
6,2 mm max. 6,2 mm max.
brins.
reporter aux Spécifications d’entrée/sortie 2-1-3 pour les détails.
Poste Sorties à relais Sorties à transistor
Capacité de sortie 2 A (250 VAC ou 24 VDC) 01000 et 01001 : 200 mA (30 V c.c.)
01002 et plus : 300 mA (30 V c.c.)
Capacité commune
maximum
Rem. Sereporter àla Section3 Zonesde mémoiredans leManuel deprogrammation
pour les détails sur l’affectation des bits de sortie dans le CPM2A.
A VERTISSEMENT Les sorties de l’API peuvent rester activées ou coupées à cause de
!
4 A/commune 0,8 A/commune
dépôts ou de brûlages aux relais de sortie ou de destruction des
transistors de sortie. Il faut prendre des mesures de sécurité
extérieures pour assurer la sécurité dans le système. Ne pas prendre
de mesures de sécurité pourrait provoquer des accidents graves.
64
Page 82

Câblage et connexions
Configurations de sortie
Chapitre 3-4
CPM2A-20CDR-j
Les bornes 00 à 07 de “10CH” correspondent à IR 01000 à IR 01007.
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
250 Vc.a./
24 Vc.c.
250 Vc.a./
24 Vc.c.
250 Vc.a./
24 Vc.c.
250 Vc.a./
24 Vc.c.
CPM2A-30CDR-j
Les bornes 00 à 07 de “10CH” correspondent à IR 01000 à IR 01007.
Les bornes 00 à 03 de “1 1CH” correspondent à IR 01100 à IR 01103.
Charge
Charge
Charge
250 V c.a./
24 V c.c.
Charge
250 V c.a./
24 V c.c.
Charge
250 V c.a./
24 V c.c.
Charge
Charge
Charge
250 V c.a./
24 V c.c.
Charge
Charge
Charge
250 V c.a./
24 V c.c.
Charge
CPM2A-40CDR-j
Les bornes 00 à 07 de “10CH” correspondent à IR 01000 à IR 01007.
Les bornes 00 à 03 de “1 1CH” correspondent à IR 01100 à IR 01103.
Charge
250 V c.a./
24 V c.c.
Charge
250 V c.a./
24 V c.c.
Charge
250 V c.a./
24 V c.c.
Charge
250 V c.a./
24 V c.c.
Charge
Charge
Charge
Charge
Charge
250 V c.a./
24 V c.c.
Charge
Charge
Charge
Charge
250 V c.a./
24 V c.c.
Charge
Charge
Charge
65
Page 83

Câblage et connexions
Chapitre 3-4
CPM2A-60CDR-j
Les bornes 00 à 07 de “10CH” correspondent à IR 01000 à IR 01007.
Les bornes 00 à 07 de “1 1CH” correspondent à IR 01100 à IR 01107.
Les bornes 00 à 07 de “12CH” correspondent à IR 01200 à IR 01207.
Charge
Charge
Charge
250 V c.a./
24 V c.c.
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
250 V c.a./
24 V c.c.
250 V c.a./
24 V c.c.
250 V c.a./
24 V c.c.
250 V c.a./
24 V c.c.
250 V c.a./
24 V c.c.
250 V c.a./
24 V c.c.
66
250 V c.a./
24 VD c.c.
Page 84

Câblage et connexions
Chapitre 3-4
CPM1A-20EDR1
Les bornes 00 à 07 de “1nCH” correspondent aux bits 00 à 07 du mot IR 1n.
250 V c.a./
24 V c.c.
Charge
250 V c.a./
24 V c.c.
Charge
250 V c.a./
24 V c.c.
Charge
Charge
Charge
Charge
Charge
Charge
250 V c.a./
24 V c.c.
CPM1A-8ER
Les bornes 00 à 07 de “1nCH” correspondent aux bits 00 à 07 du mot IR 1n.
250 V c.a./
24 V c.c.
Charge
Charge
040506
Charge
Charge
07
250 V c.a./
24 V c.c.
Charge
Charge
Charge
Charge
67
Page 85

Câblage et connexions
Câblage du transistor NPN
Câbler les sorties vers l’unité centrale et l’unité entrée/sortie d’extension
CPM2A comme indiqué sur les schémas suivants.
· Toujoursutiliserunfilsimpleoufixer desbornessertiessionutilise dufilmulti-
· Ne pas dépasser la capacité de sortie ou le courant commun maximum. Se
Rem. Sereporter àla Section3 Zonesde mémoiredans leManuel deprogrammation
pour détails sur l’affectation des bits de sortie dans les API CPM2A.
Attention Contrôler lapolarité del’alimentation pourlacharge avantdemettre enmarche.
!
Si la polarité est inversée, la charge peut mal fonctionner ou des composants
internes peuvent être endommagés.
Configurations de sortie
CPM2A-20CDT-D
Les bornes 00 à 07 de “10CH” correspondent à IR 01000 à IR 01007.
Chapitre 3-4
brins.
reporter aux Spécifications d’entrée/sortie 2-1-3 pour les détails
Poste Spécification
Capacité de sortie OUT01000 et OUT01001 : 200 mA (30 V c.c.)
OUT01002 et au–delà : 300 mA (30 V c.c.)
Capacité commune
maximum
0,8 A/commune
68
Charge
Charge
Charge
Charge
Charge
Charge
Charge
4,5 à
30 V c.c.
4,5 à
30 V c.c.
4,5 à
30 V c.c.
Charge
4,5 à 30 V c.c.
CPM2A-30CDT-D
Les bornes 00 à 07 de “10CH” correspondent à IR 01000 à IR 01007.
Les bornes 00 à 03 de “1 1CH” correspondent à IR 01100 à IR 01103.
4,5 à
30 V c.c.
Charge
Charge
4,5 à
30 V c.c.
Charge
4,5 à
30 V c.c.
Charge
Charge
4,5 à 30 V c.c. 4,5à 30 V c.c.
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Page 86

Câblage et connexions
Charge
CPM2A-40CDT-D
Les bornes 00 à 07 de “10CH” correspondent à IR 01000 à IR 01007.
Les bornes 00 à 07 de “1 1CH” correspondent à IR 01100 à IR 01107.
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Chapitre 3-4
4,5 à
30 V c.c.
4,5 à
30 V c.c.
4,5 à
30 V c.c.
4,5 à 30 V c.c.
4,5 à 30 V c.c. 4,5 à 30 V c.c.
69
Page 87

Câblage et connexions
Chapitre 3-4
CPM2A-60CDT-D
Les bornes 00 à 07 de “10CH” correspondent à IR 01000 à IR 01007.
Les bornes 00 à 07 de “1 1CH” correspondent à IR 01100 à IR 01107.
Les bornes 00 à 07 de “12CH” correspondent à IR 01200 à IR 01207.
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
4,5 à 30 V c.c.
4,5 à 30 V c.c.
4,5 à 30 V c.c.
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
4,5 à 30 V c.c.
4,5 à 30 V c.c.
4,5 à 30 V c.c.
4,5 à 30 V c.c.
4,5 à 30 V c.c.
70
Page 88

Câblage et connexions
Chapitre 3-4
CPM1A-20EDT
Les bornes 00 à 07 de “1nCH” correspondent aux bits 00 à 07 du mot IR 1n.
24 V c.c. +10%/–15%
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
CPM1A-8ET
Les bornes 00 à 07 de “1nCH” correspondent aux bits 00 à 07 du mot IR 1n.
4,5 à 30 V c.c.
Charge
Charge
040506
Charge
Charge
07
4,5 à 30 V c.c.
Charge
Charge
Charge
Charge
71
Page 89

Câblage et connexions
Câblage du transistor PNP
Câbler les sorties vers l’unité centrale et l’unité entrée/sortie d’extension du
CPM2A comme indiqué sur les schémas suivants.
· Toujoursutiliserunfilsimpleoufixer desbornessertiessionutilise dufilmulti-
· Ne pas dépasser la capacité de sortie ou le courant commun maximum. Se
Rem. Sereporter àla Section3 Zonesde mémoiredans leManuel deprogrammation
pour détails sur l’affectation des bits de sortie dans les API CPM2A.
Attention Contrôlerdeux foislapolaritéde l’alimentationpourlachargeavantde mettreen
!
marche. Si la polarité est inversée, lacharge peut mal fonctionner ou des composants internes peuvent être endommagés.
Configurations de sortie
CPM2A-20CDT-D
Les bornes 00 à 07 de “10CH” correspondent à IR 01000 à IR 01007.
Chapitre 3-4
brins.
reporter aux Spécifications d’entrée/sortie 2-1-3 pour les détails.
Poste Spécification
Capacité de sortie OUT01000 et OUT01001 : 200 mA (30 V c.c.)
OUT01002 et au–delà : 300 mA (30 V c.c.)
Capacité commune
maximum
0,8 A/commune
72
Charge
Charge
Charge
Charge
Charge
Charge
Charge
4,5 à
30 V c.c.
4,5 à
30 V c.c.
4,5 à
30 V c.c.
Charge
4,5 à 30 V c.c.
CPM2A-30CDT1-D
Les bornes 00 à 07 de “10CH” correspondent à IR 01000 à IR 01007.
Les bornes 00 à 03 de “1 1CH” correspondent à IR 01100 à IR 01103.
4,5 à
30 V c.c.
Charge
Charge
4,5 à
30 V c.c.
Charge
4,5 à
30 V c.c.
Charge
Charge
Charge
4,5 à 30 V c.c. 4,5 à 30 V c.c.
Charge
Charge
Charge
Charge
Charge
Charge
Page 90

Câblage et connexions
Chapitre 3-4
CPM2A-40CDT1-D
Les bornes 00 à 07 de “10CH” correspondent à IR 01000 à IR 01007.
Les bornes 00 à 07 de “1 1CH” correspondent à IR 01100 à IR 01107.
Charge
4,5 à
30 V c.c.
Charge
4,5 à
30 V c.c.
Charge
4,5 à
30 V c.c.
Charge
Charge
Charge
4,5 à 30 V c.c. 4,5 à 30 V c.c. 4,5 à 30 V c.c.
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
73
Page 91

Câblage et connexions
Chapitre 3-4
CPM2A-60CDT1-D
Les bornes 00 à 07 de “10CH” correspondent à IR 01000 à IR 01007.
Les bornes 00 à 07 de “1 1CH” correspondent à IR 01100 à IR 01107.
Les bornes 00 à 07 de “12CH” correspondent à IR 01200 à IR 01207.
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
4,5 à 30 Vc.c.
4,5 à 30 Vc.c.
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
4,5 à 30 Vc.c.
4,5 à 30 Vc.c.
4,5 à 30 Vc.c.
4,5 à 30 Vc.c.
4,5 à 30 Vc.c.
4,5 à 30 Vc.c.
74
Page 92

Câblage et connexions
Chapitre 3-4
CPM1A-20EDT1
Les bornes 00 à 07 de “1nCH” correspondent aux bits 00 à 07 du mot IR 1n.
24 Vc.c +10%/–15%
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
CPM1A-8ET1
Les bornes 00 à 07 de “1nCH” correspondent aux bits 00 à 07 du mot IR 1n.
4,5 à 30 Vc.c.
Charge
Charge
040506
Charge
Charge
07
4,5 à 30 Vc.c.
Charge
Charge
Charge
Charge
75
Page 93

Câblage et connexions
Chapitre 3-4
Utiliser des sorties
d’impulsions
Sortie d’impulsion à phase unique
CPM2A
Sortie d’impulsion
0: 01000
Sortie d’impulsion
1: 01001
Sortie d’impulsion plus en direction
CPM2A
Sortie d’impulsion
0: 01000
Sortie d’impulsion :
Leschémasci–dessous présentedesexempled’applicationsde sortiestransistoriséesdetype NPNutillisantlesbits desortieIR 01000et IR01001.Utiliser les
instructions PULS(65), SPED(––), ACC(––), PWM(––), et SYNC(––) pour
obtenirdes sortiesd’impulsions (àla place desorties normales) àpartir desbits
de sortie IR 01000 et IR 01001.
(rapport cyclique fixe)
COM
COM
COM
01001
Entraînement moteur
Entraînement moteur
Entraînement moteur
Entrée
en
direction
Sortie d’impulsion à phase unique
CPM2A
Sortie d’impulsion
0: 01000
COM
Sortie d’impulsion
1: 01001
COM
Sortie d’impulsion en incrémentation
CPM2A
Sortie d’impulsion CW* :
01000
COM
Sortie d’impulsion CCW*
: 01001
(rapport cyclique variable)
Entraînement moteur
Relais
Relais
Entrée
CW
Entrée
CCW
COM
Rem. *CW veutdire dansle sens desaiguilles d’une montreet CCWen sens inverse.
Conseils pour câblage de sortie
Respecter lesprécautions suivantes pour protégerles composants internes de
l’API.
Protection contre courts–circuits en sortie
Les circuits de sortie ou internes pourraient être endommagés si la charge
connectée à une sortie était court–circuitée. C’est pourquoi il est recommandé
d’installer un fusible de protection dans chaque circuit de sortie.
COM
76
Page 94

Câblage et connexions
Chapitre 3-4
Charges inductives
Lorsqu’une charge inductive est connectée à une entrée, il faut connecter une
protection contre les surtensions ou une diode en parallèle avec la charge.
Lescomposantsde laprotectioncontreles surtensionsdoiventavoir lesvaleurs
suivantes :
Sortie sur relais
Sortie sur relais
Sortie sur transistor
(NPN)
Sortie sur relais
Sortie sur transistor
(PNP)
CPM2A
CPM2A
CPM2A
SORTIE
COM
OUT
COM
SORTIE
COM
Protection contre
les surtensions
Diode
Diode
La diode doit satisfaire aux conditions suivantes :
La tension de claquage en crête inversée doit être d’au moins 3 fois la tension de charge.
Le courant redressé moyen doit être de 1 A.
Considérations sur les à–coups de courant
Lorsque un circuit doit avoir une charge avec un fort à–coup de courant sur le
modèledesortie àrelais oudesortie àtransistor,tellequ’une lampeàincandescence,amortir l’à–coup de courant comme indiqué ci–dessous.
Contremesure 1
SORTIE
R
COM
Prévoir un courant d’obscurité
d’environ un tiers de la valeur
nominale d’une lampe à incandescence
Contremesure 2
SORTIE
COM
R
Prévoir une résistance de limitation
Insertion d’un fusible
Le CPM2A à sortie à transistor peut brûler si la charge est court–circuitée ; par
conséquent, insérer un fusible de protection en série avec la charge.
77
Page 95

Câblage et connexions
Bornes serties
Attention Toujours employerdes bornesserties pourles lignesd’entrée/sortie du CPM2A
!
ou utiliser du fil rigide (au lieu de fil multibrins). Ne pas connecter de fils multibrins nus directement aux bornes. Des brins de fil détachés peuvent faire un
court–circuit et provoquer un incendie.
Utiliser des bornes serties M3 et serrer les vis des bornes avec un couple de
0,5 N S m.
Borne à fourche Borne en anneau
6.2 mm max. 6.2 mm max.
Le calibrede filrecommandé pour lesfils rigides estde 0,4à 1,2 mm(AWG26à
AWG18).
3-4-7 Connexions d’un appareil de programmation
L’unité centrale CPM2A peut être connectée à une console de programmation
ou un micro–ordinateur exécutant un logiciel de programmation SYSWIN.
Chapitre 3-4
Console de programmation
Connexion CQM1-PRO01-E
CQM1-PRO01-E
L’unité centrale CPM2A peut être connectée à une console de programmation
C200H–PRO27–E avec un câble de connexion standard C200H–CN222 (2m)
ou C200H–CN422(4 m). L’unitécentrale CPM2A peut également être connectée à un CQM1–PRO01–E. Un câble de connexion est fixé au
CQM1–PRO01–E.
Connexion C200H-PRO27-E
Unité centrale CPM2A
Port de périphérique
C200H-PRO27-E
Unité centrale CPM2A
Port de
périphérique
Câble de connexion
C200H-CN222 (2 m)
C200H-CN422 (4 m)
Connecter laconsole de programmation au port de périphériquede l’unité centrale ; une console de programmation ne peut pas être connectée au port
RS–232C. Le API va communiquer automatiquement avec la console de programmationen modeconsole deprogrammation, quelleque soit laméthode de
communications choisiesur le commutateur decommunications de l’unitécentrale.
Logiciel de support
78
Un ordinateurpersonnel compatible peutêtre connecté auport depériphérique
del’unitécentrale ouauportRS–232C. Leportde périphériquepeutfonctionner
en modede bus de périphériquesou en mode deliaison avec un micro–ordinateur.Le portRS–232Cfonctionne seulementen modedeliaison avecunmicro–
ordinateur.
Le réglagedu commutateur de communicationsde l’unitécentrale détermine si
leport RS–232Cva fonctionner avecles réglages decommunications àl’instal-
Page 96

des
des
d
e
pourunportséried’ordinateur
RS-232C
pourunportséried’ordinateur
pourunportséried’ordinateur
Câblage et connexions
Chapitre 3-4
lation de l’API ou avec les réglages standard, comme indiqué au tableau suivant.
Utilise un CQM1-CIF02
CQM1-CIF02
Réglage
interrup
teurs
ON Réglages standard (Les réglages standard et les réglages par défaut de
OFF Réglages d’installation de l’API
Port de périphérique Port RS-232C
l’API sont des communications de liaison avec un micro–ordinateur à
9.600 bits/sec, avec1 bit de start, 7 bits de données, 2 bits de stop et
parité paire).
dans DM 6650 et DM 6651
Réglages de communications
Réglages d’installation de l’API
dans DM 6645 et DM 6646
Se connecter au port de périphérique lors de la connexion au bus de périphériques de l’API. Le mode de communications sera Communications de liaison à
unmicro–ordinateur,mais leCPM2A passeraautomatiquement àCommunicationsavecun busdepériphériquessi lebusdepériphériques aétéchoisidansle
logiciel de support.
Connexion du port de périphérique
Un ordinateur personnel peut être connecté au port de périphérique de l’unité
centrale par un adaptateur CQM1–CIF01 ou CPM1–CIF01RS–232C .
Utilise un CPM1-CIF01
CPM2A
CPM1-CIF01
CPM2A
PC/AT IBM ou
compatible
Utilise un câble XW2Z-j00S
XW2Z-j00S
PC/AT IBM ou
compatible
Rem. Les câbles XW2Z-j00S ont un connecteur à 25 broches D–Sub et les câbles
Port de périphérique
PC/AT IBM ou
compatible
XW2Z-j00S
Port de périphérique
RS-232C Port Connection
Unordinateurpersonnel peutêtreconnecté auport RS–232Cdel’unité centrale
par un câble de connexion XW2Z-j00S ou XW2Z-j00S-V.
Utilise un câble XW2Z-j00S-V
CPM2A
Port RS-232C
XW2Z-j00S-V
PC/AT IBM ou
compatible
CPM2A
Port RS-232C
XW2Z-j00S-V ont un connecteur à 9 broches D–Sub.
Câbles et adaptateurs
PortCPM2A Longueur du
câble
de
périphérique
RS-232C
3,3 m CQM1-CIF01
3,3 m +
0,15 m
2 m XW2Z-200S
5 m XW2Z-500S
2 m XW2Z-200S-V
5 m XW2Z-500S-V
Numéro de
modèle
CPM1-CIF01 +
XW2Z-S001
Commentaires
pour un port série d’ordinateur
à 25 broches
pour un port série d’ordinateur
à 25 broches
pour un port série d’ordinateur
à 9 broches
79
Page 97

D
e
pourunportséried’ordinateur
RS-232C
pourunportséried’ordinateur
pourunportséried’ordinateur
Câblage et connexions
3-4-8 Connexions de liaison à un micro–ordinateur
Host Link (liaison à un micro–ordinateur) est un système de comunications
commande/réponse danslequel les commandes sont transmises dumicro–ordinateur et les réponses correspondantes sont renvoyées des API de destination.Lescommandes HostLinkpeuventêtre utiliséespourlire etécriredes données dans les zones de données de l’API et pour lire et écrire les réglages de
l’API.
Connexion : RS–232C
L’unitécentraleCPM2A peutêtre connectéeà unordinateur compatibleou àun
terminalprogrammablepar leportdepériphérique ouleportRS–232C del’unité
centrale,comme indiqué dans les schémas suivants.
Connexion par le port de périphérique
Connecter au port de périphérique de l’unité centrale par un adaptateur
RS–232C CQM1–CIF01 ou CPM1–CIF01.
Chapitre 3-4
Utilise un CQM1-CIFjj
CQM1-CIF02
PC/AT IBM ou
compatible
Utilise un XW2Z-j00S
XW2Z-j00S
PC/AT IBM ou
compatible
Rem. Les câbles XW2Z-j00S ont un connecteur à 25 broches D–Sub et les câbles
CPM2A
Port de périphérique
Utilise un CPM1-CIF01
CPM1-CIF01
PC/AT IBM ou
compatible
CPM2A
XW2Z-j00S
Port de périphérique
Connexion par le port RS–232C
Connecter au port RS–232C de l’unité centrale par un câble de connexion
XW2Z-j00S ou XW2Z-j00S-V.
Utilise un XW2Z-j00S-V
CPM2A
Port RS-232C
XW2Z-j00S-V
PC/AT IBM ou
compatible
CPM2A
Port RS-232C
XW2Z-j00S-V ont un connecteur à 9 broches D–Sub.
Câbles et Adaptateurs
Port CPM2A Longueur du
câble
De
périphérique
RS-232C
3,3 m CQM1-CIF02
3,3 m +
0,15 m
2 m XW2Z-200S
5 m XW2Z-500S
2 m XW2Z-200S-V
5 m XW2Z-500S-V
Numéro de
modèle
CPM1-CIF01 +
XW2Z-S001
Commentaires
pour un port série d’ordinateur
à 25 broches
pour un port série d’ordinateur
à 25 broches
pour un port série d’ordinateur
à 9 broches
Communications
Quand les réglages de communications standard1sont utilisés, mettre le commutateur de communications de l’unité centrale sur ON (marche). Mettre le
commutateur sur OFF (arrêt) pour utiliser les réglages d’installation de l’API.
Rem. Les réglagesstandard sont : Host Link,9.600 bits/s, données de 7 bits, 1 bitde
start,2 bitsde stopet paritépaire. Sereporter auChapitre 1Installation de l’API
dans le Manuel de Programmation pour les détails sur les réglages.
80
Page 98

Câblage et connexions
Chapitre 3-4
Connexion :
RS–422/RS–485
PC/AT IBM ou
compatible
PC/AT IBM ou
compatible
XW2Z-j00S
câble RS-232C
CPM2A
XW2Z-j00S
câble RS-232C
Jusqu’à 32 API OMRON, y compris les API CPM2A, peuvent être contrôlés à
partir d’un micro–ordinateur. Les schémas suivants indiquent des configurations séparées pour le port RS–232C et pour le port de périphérique, mais les
deux ports peuvent être utilisés simultanément.
Connexionpar le port RS-232C
RD400 ou NT-AL001 (pour +5 V)
(voir Rem. 1.)
RS-422A/485 (Longueur total : 500 m max.)
NT-AL001/RD400
RS-232C
CPM2A
port
RS-232C
2
NT-AL001/RD400
RS-232C
Jusqu’à 32 API
CPM2A
port
RS-232C
2
NT-AL001/RD400
RS-232C
port
RS-232C
2
Connexion par le port de périphérique
RD400 ou NT-AL001 (pour +5 V)
(voir Rem. 1.)
RS-422A/485 (Longueur total : 500 m max.)
CPM2A
CPM1-CIF11
CPM2A CPM2A
CPM1-CIF11 CPM1-CIF11
Port de périphérique
Port de périphérique
Jusqu’à 32 API
Port de périphérique
Rem. 1. Le NT–AL0001 doit être alimenté extérieurement par 5 Vc.c..
Quand un NT–AL001 est connecté à un API CPM2A, la broche 6 du port
RS–232C duCPM2A fournit +5 Vc.c.et une alimentation externe n’estpas
nécessaire.Quand leNT–AL001 estconnecté àunmicro–ordinateur,il faut
fournir 5 Vc.c. d’une alimentationextérieure.Si un NT–AL001 est connecté
auportRS–232C duCPM2A,une seuleunité d’extensionpeutêtre connectée àl’unité centrale parce quele NT–AL001 tire son alimentation à 5Vc.c.
de l’unité centrale.Le NT–AL0001 doit être alimenté extérieurement par 5
Vc.c..
2. Utiliser un câble XW2Z–070T–1 (0,70 m) ou XW2Z–200T–1 (2 m) pour
connecter le NT–AL001 au port RS–232C du CPM2A.
Câbles et adaptateurs
Dénomin
ation
Adaptat
eur de
liaison
Adaptat
eur
RS–422
onversion
RS-232C/RS-422
Fonction
Pour connexion à
micro–ordinateur (peut être
connecté au CPM2A)
pour connexion au CPM2A
(peut être connecté à un
micro–ordinateur, mais
demande une alimentation
5 Vc.c. externe.)
Numéro de
modèle
RD400
NT-AL001 ou
RD 400
81
Page 99

Câblage et connexions
3-4-9 Communications sans protocole
LesinstructionsTXD(48) etRXD(47)peuventêtre utiliséesenmodesansprotocole pouréchanger des données avecdes appareils série standard.Par exemple,desdonnées peuventêtrereçuesd’un lecteurdecodebarresoutransmises
à une imprimante série. Les appareils série peuvent être connectés au port
RS–232C ou au port de périphérique, comme indiqué aux schémas suivants.
Appareils RS-232C
S lecteur de code barres
S Imprimante série
S Autres appareils série
Chapitre 3-4
Unité centrale
CPM2A CPU
Port RS-232C
Rem. Mettre le commutateur de communications de l’unité centrale sur OFF (arrêt)
3-4-10 Connexions NT
Interface
RS-232C
CPM1-CIF11
Appareils RS-232C
S lecteur de code barres
S Imprimante série
S Autres appareils série
Unité centrale
CPM2A CPU
Port de périphérique
pour utiliserles réglages à l’installation de l’API etmettre le mode de communications en mode sans protocole pour le port utilisé. Se reporter au Chapitre 1
Installation de l’API dans le Manuel de programmation pour plus de détails sur
les réglages.
Dansun liaisonNT 1:1un CPM2Apeut êtreconnecté directementà unterminal
programmable. Le terminal programmable doit être connecté au port
RS–232C ; il ne peut pas être connecté au port de périphérique.
Terminale programmable OMRON
Unité centrale CPM2A
82
Câble RS-232C
(comme le
XW2Z-200T (2 m) ou
le XW2Z-500T (5 m)
d’OMRON)
Port RS-232C
Rem. Mettre le commutateur de communications de l’unité centrale sur OFF (arrêt)
pour utiliserles réglages à l’installation de l’API etmettre le mode de communicationsenmode LiaisonNT1:1pour leportRS–232C.Se reporterau Chapitre1
Installation de l’API dans le Manuel de programmation pour plus de détails sur
les réglages.
Page 100

Câblage et connexions
3-4-1 1 Connexions INTER API
Un CPM2A peut être relié à un autre CPM2A, un CQM1, CPM1, CPM1A,
CPM2C, SRM1 ou un API C200HS ou C200HX/HE/HG. L’API doit être
connecté par le port RS–232C ; il nepeut pas être connecté par le port depériphérique.
Dansune connexion 1:1,l’un des APIest considéréà son installationcomme le
maître et l’autre comme l’esclave.
Chapitre 3-4
Liaison
API
maître
1:1
Rem. Mettre le commutateur de communications de l’unité centrale sur OFF (arrêt)
pour utiliserles réglages à l’installation de l’API etmettre le mode de communications du port RS–232C en mode Liaison API 1:1 maître dans l’un des API et
Liaison API 1:1 esclave dans l’autre API. Se reporter au Chapitre 1 Installation
del’API dansle Manuelde programmationpour plusde détailssur lesréglages.
3-4-12 Connexions CompoBus/S
Une liaison entrée/sortie CompoBus/S peut être utilisée pour créer une liaison
entrée/sortie(entrées/sortiesdistantes) de8pointsd’entrée et8pointsde sortie
avec une unité maître CompoBus/S ou un API SRM1 La connexion se fait par
une unité de liaison d’entrée/sortie CompoBus/S.
Du point de vue de l’unité centrale de CPM2A, la zone affectée à l’unité de liaison entrée/sortie CompoBus/S peut être traitée exactement comme la zone
affectée à une unitéd’entré/sortie d’extension. La différence est queles bits ne
sont pas des points d’entrée/sortie réels, mais des bits d’entrée/sortie dans
l’unité maître.
Unité centrale
CPM2
Port RS-232C
Unité centrale
CPM2A
Liaison
API
esclave
1:1
Port RS-232C
Câble RS-232C
(comme le
XW2Z-200T (2 m) ou
le XW2Z-500T (5 m)
d’OMRON)
Unité maître CompoBus/S (ou API SRM1)
API C200HX/HG/HE / CQM1
Unité centrale CPM2A
Unité liaison d’E/S
CompoBus/S (Esclave)
83
 Loading...
Loading...