

Cat. No. W317-E1-4
SYSMAC
CPM1A
Automate programmable
MANUEL
DE FONCTIONNEMENT
Authorized Distributor:
Cat. No. W317-E1-4 Note: Specifications subject to change without notice.
Printed in Japan
Automates programmables CPM1A
Manuel de fonctionnement
Réalisé en Mai 2000

iv
Avis :
Les produits OMRON sont conçus pour être utilisés par un opérateur qualifié, en respectant des procédures appropriées et uniquement dans le cadre de ce qui est précisé dans ce document.
Dans ce manuel, les conventions suivantes permettent de spécifier et de classer les précautions.
Toujours faire très attention aux informations qui sont données. Le non–respect des précautions stipulées peut blesser des personnes ou endommager des biens.
DANGER
!
A VERTISSEMENT
!
Attention
!
Indique une situation dangereuse imminente qui, si elle n’est pas évitée, peut
entraîner des blessures graves ou mortelles.
Indique une situation potentiellement dangereuse qui, si elle n’est pas évitée, peut
provoquer des blessures graves ou mortelles
Indique une situation potentiellement dangereuse qui, si elle n’est pas évitée, peut
provoquer des blessures moins sérieuses ou endommager des biens.
Références des produits OMRON
Dans ce manuel, tous les noms de produits OMRON sont écrits en majuscules. Le mot “ unité ” désigne une produit OMRON, que la désignation de ce produit apparaisse ou nom dans le texte.
L’abréviation “Ch,” qui figure sur certains affichages et sur certains produits OMRON signifie souvent
“ word ” (“ mot ”) et, dans la documentation, il est souvent remplacé par l’abréviation “Wd”.
L’abréviation “API” signifie Automate programmable industriel et n’est jamais utilisée comme abréviation d’un autre système, composant ou élément.
Aides visuelles
Les intitulés suivants apparaissent dans la colonne de gauche du manuel, pour vous aider à trouver
différents types d’informations.
OMRON, 2000
Tous droits réservés. Aucune partie de cette publication ne peut être, stockée dans un système à mémoire ou transmise,
sous aucune forme et par aucun moyen mécanique, électronique, photocopie, enregistrement sans l’accord écrit préalable
d’OMRON.
L’utilisation des informations contenues ci–après ne peut engendrer aucune responsabilité. De plus, la mesure où
OMRON travaille constamment à l’amélioration de ses produits de haute qualité, les informations contenues d ans ce manuel sont soumises à changement sans avis préalable. Toutes les précautions ont été prises dans l’élaboration de ce manuel.
Toutefois, OMRON ne peut être tenu responsable des erreurs ou omissions. Les dommages résultant de l’utilisation des
informations contenues dans cette publication ne peuvent engendrer aucune responsabilité.
Rem.
1, 2, 3...
Désigne des informations particulièrement intéressantes pour utiliser le produit
de façon pratique et efficace.
1. Indique une liste, quelqu’en soit le type, comme des procédures, des
checklists, etc.
v

vi

TABLE DES MATIERES
Précautions iii.......................................................
1 Adressé au personnel iv....................................................
2 Précautions générales iv....................................................
3 Précautions de sécurité iv...................................................
4 Précautions sur le milieu de fonctionnement iv.................................
5 Précautions d’application v.................................................
6 Conformité aux normes CE viii...............................................
CHAPITRE 1
Introduction 1....................................
1-1 Caractéristiques et fonctions du CPM1A 2....................................
1-2 Configuration du système 11.................................................
CHAPITRE 2
Caractéristiques et composants des unités 19............
2-1 Caractéristiques 20.........................................................
2-2 Composants 28............................................................
CHAPITRE 3
Installation et câblage 37............................
3-1 Précautions 38.............................................................
3-2 Sélection d’un site d’installation 39...........................................
3-3 Installation du CPM1A 42...................................................
3-4 Câblage et connexions 46...................................................
CHAPITRE 4
Utilisation des périphériques 69.......................
4-1 Utilisation d’une console de programmation 70.................................
4-2 Fonctions de la console de programmation 73..................................
4-3 Exemple de programmation 95...............................................
CHAPITRE 5
Tests et traitement d’erreurs 103.......................
5-1 Vérification initiale du système et procédure de test 104..........................
5-2 Le cycle du CPM1A 106.....................................................
5-3 Fonctions d’auto- -diagnostic 107..............................................
5-4 Erreurs de fonctionnement de la console de programmation 109...................
5-5 Erreurs de programmation 109................................................
5-6 Organigrammes de localisation des pannes 111..................................
5-7 Inspections d’entretien 118...................................................
5-8 Précautions concernant la manipulation 119.....................................
CHAPITRE 6
Unité d’extension mémoire 121........................
6-1 Description générale 122.....................................................
6-2 Caractéristiques techniques et nomenclature 123................................
6 -3 M anipulation 124...........................................................
A nne x es
Modèles standard 131............................................................
Dimensions 133.................................................................
vii
A propos de ce manuel :
Le CPM1A est un automate programmable (API) compact et ultra rapide conçu pour exécuter des opérations de pilotage sur des systèmes qui exigent de 10 à 100 points d’E/S par API. Deux manuels décrivent
la préparation, le paramétrage et l’exploitation du système CPM1A : Le Guide d’installation du CPM1A
(ce manuel) et le Manuel de programmation CPM1/CPM1A/CPM2A/CPM2C/SRM1(–V2).
Ce manuel décrit la configuration du système et l’installation du CPM1A. Il donne aussi une explication de
base des procédures opératoires des consoles de programmation. Pour faire connaissance avec le
CPM1A, vous devez d’abord lire ce manuel.
Le Manuel de programmation offre des descriptions détaillées des fonctions de programmation du
CPM1A.
Veuillezlire ce manuel attentivement et s’assurer d’avoir bien compris les informations qu’il apporte avant
de tenter d’installer et d’utiliser le CPM1A.
Chapitre 1
Le
système CPM1A, décrit les configurations possibles ainsi que les fonctions et caractéristiques spéciales
du CPM2C.
Chapitre 2
Le
un API CPM1A et décrit aussi les principaux éléments constitutifs et composants des Unités.
Chapitre 3
Le
Chapitre 4
Le
de la console de programmation, et la façon de mener à bien les différentes opérations de programmation.
Chapitre 5
Le
erreurs matérielles et logicielles qui peuvent survenir pendant que l’automate fonctionne.
Chapitre 6
Le
Annexe A
L’
Annexe B
L’
donne une brève description générale des étapes qui participent du développement d’un
contient les spécifications techniques des Unités qui, ensemble, permettent de constituer
décrit les modalités d’installation et de câblage d’un API CPM1A.
décrit les fonctionnalités du logiciel de support SYSMAC, les modalités de raccordement
décrit l’exécution d’un essai, ce que vous devez faire pour diagnostiquer et corriger les
décrit comment utiliser l’Unité d’extension mémoire CPM1-EMU01-V1.
contient des tableaux illustrant les Unités CPM1A et les produits connexes.
donne les dimensions des Unités CPM1A.
A VERTISSEMENT : Omettre de lire et comprendre les informations contrenues dans ce manuel
!
peut entraîner la mort, des blessures corporelles, risque d’endommager le
produit ou de le provoquer des pannes. Lire chaque chapitre, ainsi que les
chapitres auxquels il est fait référence dans leur totalité et s’assurer d’une
bonne compréhension des informations qui y sont contenues avant la mise en
oeuvre des procédures ou fonctionnalités décrites.
ix

Précautions
Ce chapitre décrit les précautions générales à suivre pour l’emploi de l’automate programmable industriel (API) et des appareils correspondants.
Les informations contenues dans ce chapitre sont importantes pour garantir une application sûre et fiable de l’API. Il
est obligatoire de lire ce chapitre très attentivement et bien comprendre son contenu avant de chercher à configurer et
faire fonctionner le système API.
1 Adressé au personnel iv..........................................................
2 Précautions générales iv.........................................................
3 Précautions de sécurité iv........................................................
4 Précautions sur le milieu de fonctionnement iv.......................................
5 Précautions d’application v......................................................
6 Conformité aux normes CE viii.....................................................
iii

Précautions sur le milieu de fonctionnement
1 Adressé au personnel
Ce manuel est adressé au personnel, mentionné ci--dessous, ayant une bonne
connaissance des systèmes électriques (techniciens spécialisés dans les
installations techniques).
• Personnel responsable de l’installation des systèmes industriels.
• Personnel responsable de la conception des systèmes industriels.
• Personnel responsable de la gestion des systèmes et des installations indus-
triels.
2 Précautions générales
L’utilisateur doit manœuvrer le produit selon les spécifications d’exécution décrites dans le manuel de fonctionnement.
S’adresser à un agent OMRON avant d’utiliser le produit dans des conditions qui
ne sont pas énoncées dans le manuel ou d’appliquer le produit aux systèmes de
contrôlenucléaires, aux systèmes ferroviaires, aux systèmes d’aviation, aux véhicules, aux systèmes de combustion, au matériel médical, aux machines de
jeux, aux équipements de sécurité et à d’autres systèmes, machines et matériaux dont une mauvaise installation et application peuvent avoir de graves conséquences sur la vie et les équipements.
Vérifier que les évaluations et les caractéristiques de rendement du produit
soient conformes aux demandes des systèmes, des machines et des matériaux
et s’assurer de leur fournir des mécanismes à double sécurité.
Ce manuel fournit des informations concernant la programmation et le fonctionnement des API OMRON. Lire attentivement ce manuel avant de chercher à utiliser le logiciel et ne pas se séparer du manuel qui sera utile pour s’y référer pendant le fonctionnement.
!
AVIS
Il est très important d’utiliser l’API et tous ses composants pour un but spécifique
et dans les conditions prévues, en particulier avec des applications qui
pourraient nuire directement ou indirectement à la vie humaine. Il est obligatoire
de s’adresser à un agent OMRON avant d’appliquer un système API aux
installations mentionnées ci--dessus.
3 Précautions de sécurité
!
!
AVIS
AVIS
Ne jamais chercher à démonter une unité lorsque l’alimentation est en
distribution. Dans le cas contraire, les risques de subir des secouss es
électriques violentes ou l’électrocution sont très probables.
Ne jamais toucher une borne pendant que l’alimentation est en distribution.
Dans le cas contraire, les risques de subir des secousses électriques violentes
ou l’électrocution sont très probables.
4 Précautions sur le milieu de fonctionnement
Ne pas faire fonctionner le système de contrôle dans les milieux suivants:
• Milieux éclairés par les rayons solaires directs.
• Milieux exposés à des températures ou une humidité hors de la gamme des
valeurs prévues.
• Milieux exposés à la condensation causée par des changements de tempéra-
ture brusques.
iv

Précautions d’application
• Milieux exposés aux gaz corrosifs ou inflammables.
• Milieux exposés aux poussières (en particulier celles de fer) ou aux sels.
• Milieux exposés à des chocs ou vibrations.
• Milieux exposés à l’eau, à l’huile ou à des produits chimiques.
• Appliquer des mesures correctes et suffisantes lors de l’installation des
systèmes dans les milieux suivants:
• Milieux exposés à l’électricité statique ou à d’autres formes de parasites.
• Milieux exposés à des champs magnétiques intenses.
• Milieux exposés à la radioactivité.
• Milieux proches des lignes d’alimentation.
AttentionLe milieu de fonctionnement du système API peut avoir des effets importants sur la
!
durée de vie et le rendement du système. Les milieux de fonctionnement non
appropriés peuvent provoquer un dysfonctionnement, des défaillances et
d’autres inconvénients non envisageables au système API. Vérifier que les conditions ambiantes soient incluses dans la gamme des valeurs spécifiées pendant l’installation et restent telles au cours de la durée de vie du système.
5 Précautions d’application
Suivre les précautions ci--dessous pendant l’utilisation de l’API.
AVIS
!
Attention Effectuer l’édition en ligne seulement après avoir confirmé qu’aucun effet in-
!
Attention Serrer les vis sur les borniers de la carte d’alimentation c.a. au couple spécifié
!
Attention Ne pas utiliser des bits 08 à 11 de DM 6601 pour le bit de maintien IOM de la
!
Les erreurs pouvant être évitées si l’on respecte les précautions suivantes
provoquent des blessures graves ou mortelles. Suivre toujours ces précautions.
• Mettre toujours le système à la masse à 100 Ω ou à une valeur inférieure lors
de l’installation pour le protéger contre les secousses électriques.
• Passer toujours l’alimentation de l’API sur OFF avant de chercher à effectuer
une des opérations mentionnées ci--dessous. Dans le cas contraire, avec l’alimentation sur ON, les risques d’électrocution sont très probables:
• Monter ou extraire une unité.
• Monter une unité.
• Connecter ou déconnecter un câble ou un câblage.
verse ne sera causé par l’extension du temps de cycle. Dans le cas contraire,
les signaux d’entrée ne seraient pas lisibles.
dans ce manuel. Les vis déserrées risquent de provoquer des courts--circuits,
des défaillances ou incendies.
configuration de l’API ou les bits 12 à 15 de DM 6601 pour le bit de maintien de
l’état forcé de la configuration de l’API si le CPM1A est désactivé pendant une
période de temps dépassant la période de sauvegarde des données du condensateur interne (se reporter à Rem. 1 et 2).
Si le CPM1A est désactivé depuis longtemps, les données maintenues avec le
condensateur interne seront perdues même si le bit de maintien IOM et le bit de
maintien de l’état forcé de la configuration de l’API sont actifs; dans ce cas le
CPM1A peut avoir des données non définies.
Ne pas lancer le CPM1A avec des données non définies autrement un accident
pourrait être provoqué.
v
Précautions d’application
Rem.:1. Le temps de sauvegarde des données du condensateur interne varie selon
Attention Veiller à effacer la mémoire avant d’activer l’alimentation du CPM1A livré. Si la
!
Attention Appliquerle CPM1A à un système qui ne soit pas influencé par des données non
!
la température ambiante. Pour des informations détaillées, voir les Caractéristiques. Le temps de sauvegarde des données sera de 20 jours environ si
la température ambiante est de 25°C.
2. Le temps de sauvegarde des données utilisé dans ce manuel indique le
temps pendant lequel le condensateur interne peut sauvegarder les données internes du CPM1A à la condition qu’il soit complètement chargé. Il
sera nécessaire de fournir l’alimentation à l’UC pendant 15 minutes au
moins afin de charger complètement le condensateur interne.
mémoire n’est pas effacée, le contenu des zones de mémoire de données (DM),
de relais de maintien (HR), de relais de mémoire auxiliaire (AR) et du compteur
(CNT) dans l’UC peut se transformer dans des valeurs non définies.
définies dans les zones DM, HR, AR, ou CNT si le CPM1A a été désactivé pendant une période dépassant la période de sauvegarde des données du condensateur interne.
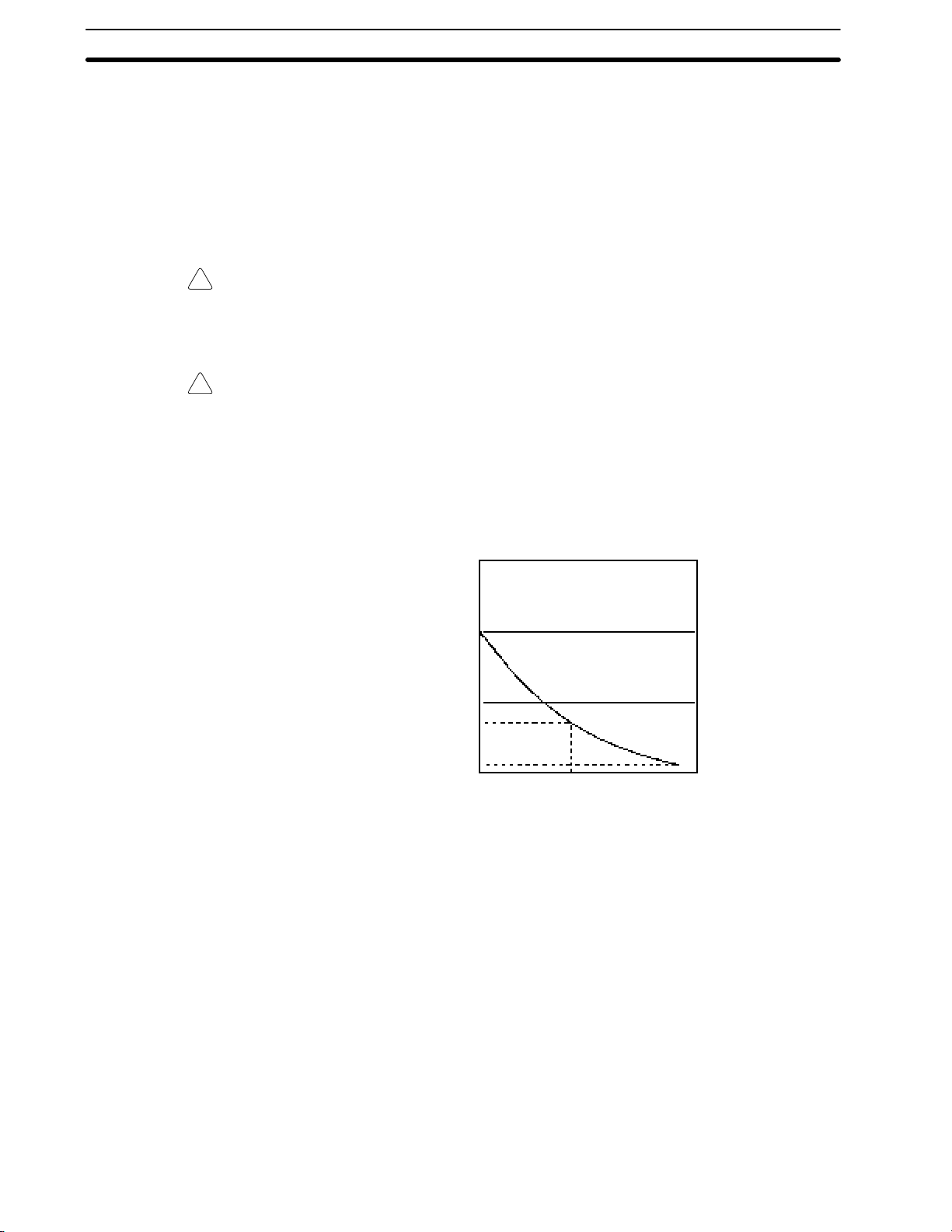
• Un condensateur situé dans l’UC est utilisé pour la sauvegarde des valeurs du
compteur et du contenu des zones DM, HR et AR. Le temps de sauvegarde du
condensateur dépend de la température ambiante, comme indiqué ci--dessous.
20
10
7
1
Temps de sauvegarde(jours)
25 40 80
Température ambiante (_C)
Si la puissance reste hors tension pendant une période dépassant la période
de sauvegarde des données, le contenu des zones de mémoire de données
(DM), de relais de maintien (HR), de relais de mémoire auxiliaire (AR) et du
compteur (CNT) dans l’UC peut être perdu et transformé dans des valeurs non
définies.
Si le contenu de la zone de programme de l’UC est perdu, le programme mémorisé dans la mémoire flash sera lu dans la zone de programme de l’UC lors
du lancement du CPM1A parce que le contenu de la zone de seule lecture (DM
6144 à DM 6599) et de la configuration de l’API (DM 6600 à DM 6655) sera
écrit dans la mémoire flash.
• Pourtant, si l’alimentation est mise hors tension sans changer le mode après
avoir effectué des changements dans la zone de seule lecture DM (DM 6144 à
DM 6599), ou dans la configuration de l’API (DM 6600 à DM 6655), le contenu
des changements ne sera pas écrit dans la mémoire flash. C’est pour cela que
si l’alimentation est mise hors tension pendant plus de 20 jours (à 25_C), le
contenu des changements (contenu de RAM) disparaîtra et les valeurs des
données deviendront des valeurs non définies.
vi

Précautions d’application
Attention Les erreurs pouvant être évitées si l’on respecte les précautions suivantes pro-
!
Les changements peuvent être sauvés en commutant le CPM1A dans le mode
RUN ou MONITOR ou bien en mettant le CPM1A sous tension juste après
avoir effectué ces changements.
voquent un dysfonctionnement de l’API du système ou des cartes de l’API.
Suivre toujours les précautions suivantes:
• Utiliser les unités seulement en présence des alimentations et des tensions
prévues dans le manuel de fonctionnement.
• Appliquer des mesures appropriées pour assurer la distribution de la puis-
sance spécifiée avec la tension et la fréquence nominales, notamment là où
l’alimentation n’est pas stable.
• Appliquer des interrupteurs de circuit avec fusibles de protection et d’autres
moyens de sécurité aptes à fournir une protection contre les courts--circuits
dans les câblages externes.
• Ne pas appliquer aux sections d’entrée des tensions supérieures à la tension
d’entrée nominale.
• Ne pas appliquer aux sections de sortie des tensions supérieures à la capacité
de commutation maximale.
• Toujours déconnecter la borne LG lors des essais de tension de tenue.
• Toujours connecter à une masse de classe 3 (à 100 Ω ou moins) lors de l’ins-
tallation des unités.
• Passer toujours l’alimentation de l’API sur OFF avant de chercher à effectuer
une des opérations mentionnées ci--dessous:
• Monter ou démonter les cartes d’E/S, l’UC, les cassettes mémoire ou n’importe quelle unité.
• Monter les unités.
• Sélectionner l’interrupteur DIP ou le commutateur circulaire.
• Connecter ou câbler les câbles.
• Connecter ou déconnecter les connecteurs.
• Ne pas chercher à isoler une unité, à la réparer ou la modifier de n’importe
quelle façon.
• Vérifier de bien serrer les vis de montage, des bornes et des connecteurs de
câbles au couple spécifié dans ce manuel.
• Vérifier de fixer les étiquettes fournies avec le CPM1A sur le CPM1A lors du
câblage afin de prévenir l’accumulation de débris de fils dans l’unité.
• Enlever les étiquettes après avoir complété le câblage afin d’assurer une dissipation de chaleur correcte.
• Utiliser des bornes à sertir ou des lignes unifilaire pour le câblage. Ne pas connecter directement aux bornes des câbles nus à âme torsadée.
• Vérifier attentivement tous les câblages avant de mettre l’alimentation sous
tension.
• Vérifier la polarité et les directions lors de la connexion des borniers ou des
connecteurs.
• Vérifier que les borniers, les cartes de mémoire, les câbles d’extension et
d’autres éléments ayant des dispositifs de blocage soient fixés de façon appropriée.
• Vérifier le programme utilisateur pour une exécution correcte avant de le
lancer sur l’unité.
• Veiller à confirmer qu’aucun effet inverse ne se produira dans l’équipement
avant de changer le mode de fonctionnement de l’API.
vii

Conformité aux normes CE
Attention Les précautions suivantes sont nécessaires afin de garantir la sécurité géné-
!
• Veiller à confirmer qu’aucun effet inverse ne se produira dans l’équipement
avant d’exécuter le forçage/reforçage.
• Veiller à confirmer qu’aucun effet inverse ne se produira dans l’équipement
avant de changer les valeurs de sélection ou les valeurs actuelles.
• Veiller à reprendre le fonctionnement seulement après avoir transféré dans
l’UC remplacée le contenu de la mémoire de données ou du relais de maintien
requis pour reprendre le fonctionnement.
• Ne jamais tirer, plier aux extrémités ou placer des objets lourds sur les câbles.
• Installer toutes les unités selon les instructions contenues dans le manuel de
fonctionnement.
rale du système. Suivre toujours ces précautions.
• Des mesures de sécurité doivent être appliquées par le client afin d’assurer la
sécurité en cas de signaux incorrects, perdus ou anormaux provoqués par des
lignes de signaux interrompues, des ruptures de courant temporaires ou
d’autres causes.
• Des circuits de verrouillage, des circuits limiteurs et d’autres mesures de sécurité appropriées doivent être appliqués par le client pour les circuits externes
(par exemple, pas dans l’API).
6 Conformité aux normes CE
• Pour l’alimentation c.c. à utiliser pour la sortie transistor, utiliser l’alimentation
avec isolement double ou renforcé afin de satisfaire les normes CE (Normes
Basse Tension).
• Le CPM1A avec sortie relais (alimentation 220 Vc.a.)n’est pas conforme aux
normes CE. Utiliser le CPM1A avec sortie relais (alimentation 220 Vc.a.) pour
satisfaire aux normes CE.
viii

CHAPITRE 1
Introduction
Ce chapitre décrit les caractéristiques et fonctions spéciales du CPM1A et indique les possibles configurations du système.
1-1 Caractéristiques et fonctions du CPM1A 2.....................................
1-1-1 Caractéristiques du CPM1A 2.........................................
1-1-2 Borne d’E/S et attribution de bit IR 4....................................
1-1-3 Fonctions du CPM1A 4..............................................
1-2 Configuration du système 11..................................................
1-2-1 Configuration de l’UC et de la carte d’E/S d’extension 11....................
1-2-2 Unité centrale et Unité d’extension 12....................................
1-2-3 Communications liaisons maîtres 13.....................................
1-2-4 Liaisons 1 à 1 15.....................................................
1-2-5 Communications liaisons NT 16.........................................
1-2-6 Connexions des esclaves CompoBus/S 16.................................
1-2-7 Connexions des périphériques 16........................................
1
Caractéristiques et fonctions du CPM1A Chapitre 1-1
1-1 Caractéristiques et fonctions du CPM1A
1-1-1 Caractéristiques du CPM1A
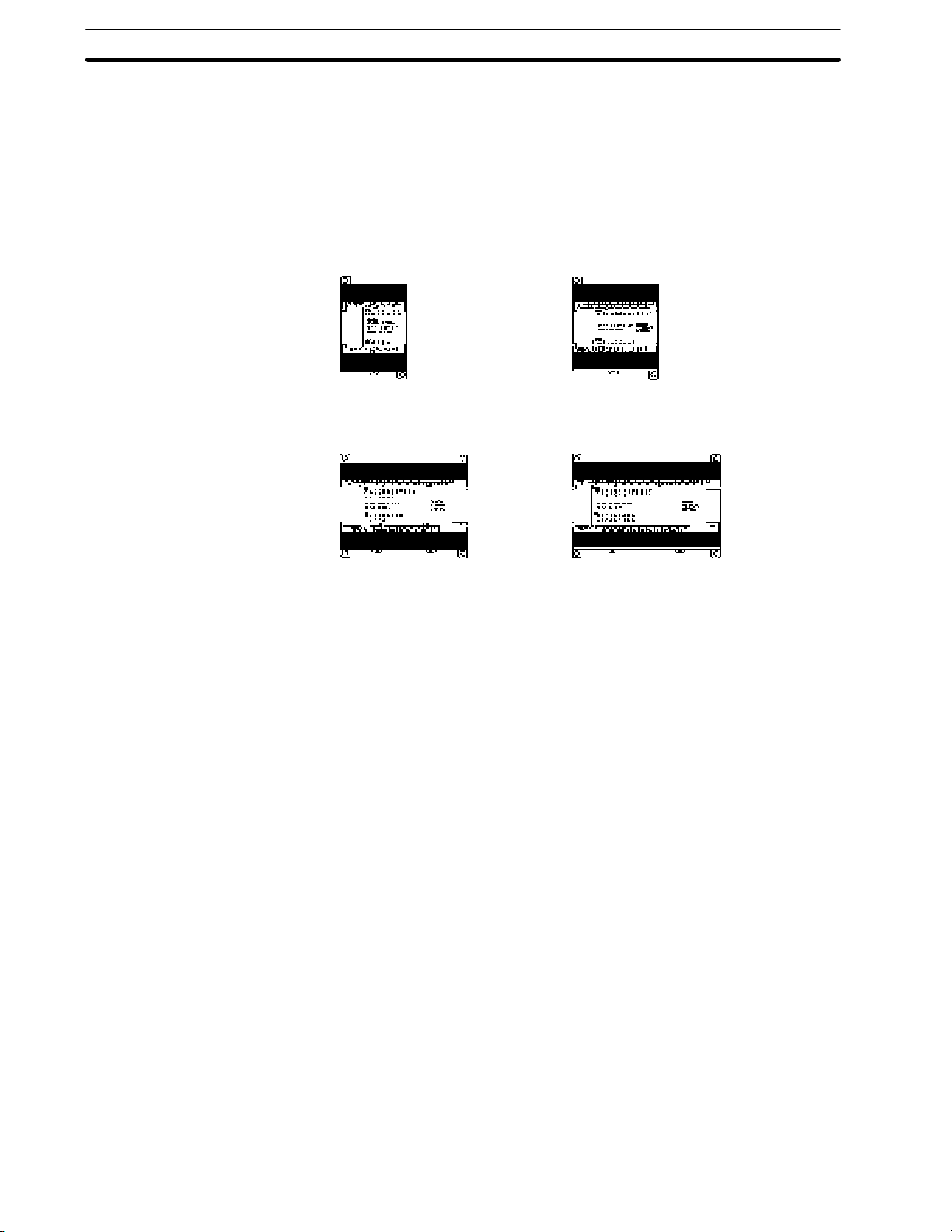
Construction monobloc Les UC du CPM1A présentent une construction monobloc comprenant 10, 20,
30, ou 40 bornes d’E/S intégrées. Il existe trois groupes de modèles disponibles:
modèles avec sortie relais, modèles avec sortie transistor de type NPN et
modèles avec sortie transistor de type PNP.
CPM1A-10CDR-j/10CDT-D/10CDT1-D
(10 bornes d’E/S)
CPM1A-20CDR-j/20CDT-D/20CDT1-D
(20 bornes d’E/S)
CPM1A-30CDR-j/30CDT-D/30CDT1-D
(30 bornes d’E/S)
CPM1A-40CDR-j/40CDT-D/40CDT1-D
(40 bornes d’E/S)
Capacité maximum d’E/S Jusqu’à trois cartes d’E/S d’extension peuvent être connectées à une UC
CPM1A-30CDR-j/30CDT-D/30CDT1-D ou CPM1A-40CDR-j/40CDTD/40CDT1-D pour ajouter 20 points d’E/S ultérieurs chacune, pour un nombre
maximum de 100 points d’E/S.
Fonction de filtre d’entrée
Le CPM1A est muni d’une fonction de filtre afin d’éviter un dysfonctionnement
dû à des bruits parasites dans le signal d’entrée. L’utilisateur peut sélectionner
une constante de temps d’entrée de 1 ms, 2 ms, 4 ms, 8 ms, 16 ms, 32 ms,
64 ms, ou 128 ms.
Maintenance minimum
Interruptions d’entrée
La mémoire flash fournit la sauvegarde de la mémoire sans piles.
Les UC du CPM1A-10CDR-j/10CDT-D/10CDT1-Dpeuvent gérer 2 entrées interruptives; les UC du CPM1A-20CDR-j/20CDT-D/20CDT1-D,
CPM1A-30CDR-j/ 30CDT-D/30CDT1-D, et CPM1A-40CDR-j/40CDTD/40CDT1-D peuvent gérer 4 entrées interruptives. En plus des interruptions
d’entrée normales, le CPM1A possède un mode de comptage pour compter les
signaux d’entrée rapides et déclencher les interruptions à des multiples de
comptage fixes.
Entrées à réponse rapide Les entrées à réponse rapide peuvent détecter les signaux d’entrée avec une
largeur d’impulsions de 0,2 ms sans tenir compte de la synchronisation pendant
le cycle de l’API. Les entrées à réponse rapide et les entrées interruptives utilisent les mêmes bornes d’entrée.
Temporisation cyclique Les API CPM1A possèdent une temporisation cyclique pouvant être réglée de
0,5 ms à 319 968 ms. Elle peut être réglée pour déclencher une interruption unique (mode monostable) ou des interruptions de répétition programmées (mode
interruption programmée).
Compteur rapide
Les API CPM1A possèdent un compteur rapide qui peut être utilisé en mode incrémental ou bidirectionnel. Le compteur rapide peut être combiné avec des interruptions d’entrée pour l’exécution de la commande valeurs cible ou
comparaison de zone non troublées par le temps de cycle de l’API.
2
Caractéristiques et fonctions du CPM1A Chapitre 1-1
Fonction de sortie
d’impulsions
Fonction de réglage
analogique
Unités d’E/S analogiques
Les modèles du CPM1A avec sortie transistor possèdent la fonction de sortie
impulsion de 20 Hz à 2 kHz.
Les API CPM1A ont 2 réglages de volume analogiques pour effectuer des réglages analogiques manuels.
Jusqu’à 3 Unités d’E/S analogiques peuvent être connectées à l’UC.
Les plages d’entrée analogique peuvent être réglées de0à10Vc.c.,de1à
5 Vc.c. ou de 4 à 20 mA avec une résolution de 1/256. (La fonction de détection
de circuit ouvert peut être utilisée avec les plages de 1 à 5 Vc.c. et de 4 à 20 mA.)
Les plages de sortie analogique peuvent être réglées de0à10Vc.c.,de--10à
10Vc.c.oude4à20mAavecunerésolutionde1/256.
Unités sonde de
température
Communications liaisons
maîtres
Plusieurs Unités sondes de température peuvent être connectées à l’UC : soit
6 entrées sondes de température, thermocouples ou Pt 100 ohms.
Les API CPM1A sont compatibles avec la liaison maître qui permet de communiquer avec les ordinateurs personnels. Le CPM1A utilisant la liaison maître
peut communiquer également avec un terminal opérateur programmable à
l’aide des commandes de liaison maître. Un adaptateur RS-232C est utilisé pour
lescommunications1à1etunadaptateur RS-422 est utilisé pour les communications 1-à-n.
Liaison 1-à-1 Une liaison de données peut être créée avec une zone des données dans un
autre API CPM1A, CQM1, CPM1, SRM1 ou C200HS ou C200HX/HE/HG. Un
adaptateur RS-232C est utilisé pour réaliser la connexion 1 à 1.
Communications liaisons NT Les fonctions rapides peuvent être obtenues en fournissant un accès direct tout
en connectant le CPM1A au terminal opérateur programmable OMRON par l’interface de la liaison NT.Un adaptateur RS-232C est utilisé pour cette connexion.
Unités de liaison d’E/S
CompoBus/S
Jusqu’à 3 Unités de liaison d’E/S CompoBus/S peuvent être connectées pour
transformer le CPM1A en esclave dans un réseau CompoBus/S. L’Unité
esclave dispose (en interne) de 8 bits d’entrée et de 8 bits de sortie.
Le réseau CompoBus/S permet une commande distribuée de l’UC basée sur
une configuration “API + API compacte”, laquelle est compatible avec la
commande d’E/S distribuée basée sur une configuration “API+ E/S déportées”.
La commande distribuée de l’UC permet un équipement modulaire et une
conception standardisée. Des besoins particuliers peuvent être réalisés et en
cas de panne, les modules peuvent être facilement remplacés.
Unité maître CompoBus/S
API maître
(ou Unité de commande maître CompoBus/S SRM1)
CPM1A Unité esclave
CompoBus/S
CompoBus/S
Commande distribuée de l’UC
Périphériques standard
La programmation est
possible à l’aide du TOP
Le CPM1A utilise les mêmes consoles de programmation et logiciel SYSWIN
que les API C200H/HS, C200HX/HE/HG, CPM1, SRM1, et CQM1.
L’opération de programmation est possible à l’aide de l’écran du Terminal
Opérateur Programmable en utilisant un TOP OMRON ayant une fonction de
console de programmation intégrée.
3
tensiondu
Caractéristiques et fonctions du CPM1A Chapitre 1-1
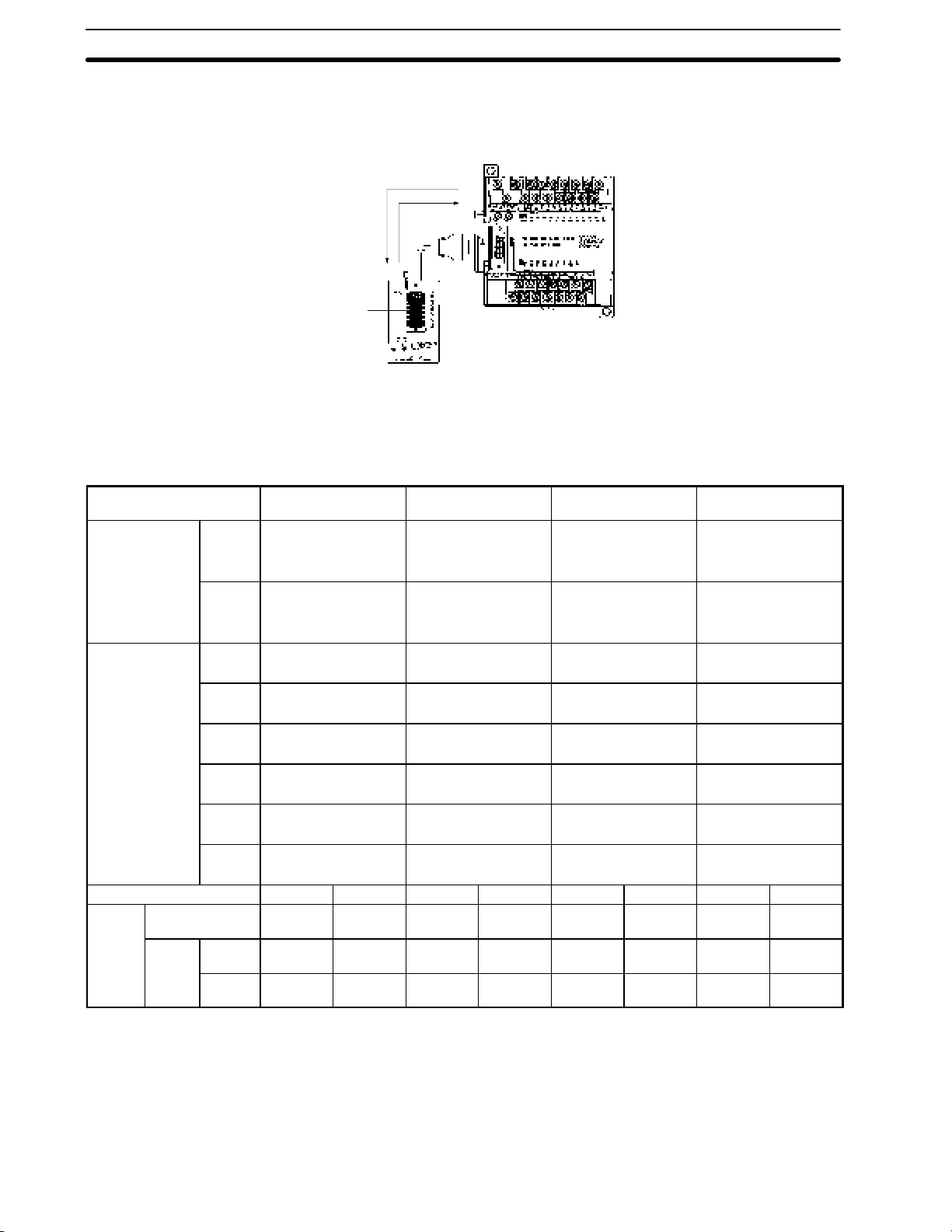
Unité d’extension
mémoire
L’Unité d’extension mémoire CPM1-EMU01-V1 est un programmateur
d’EEPROM pour API OMRON. L’utilisation du CPM1-EMU01-V1, permet le
transfert sur site de programmes utilisateur ou de données mémoire entre API.
Déchargement
Chargement
EEPROM
1-1-2 Borne d’E/S et attribution de bit IR
Le tableau ci--dessous indique les bits IR attribués aux bornes d’E/S sur les UC
et les cartes d’E/S d’extension du CPM1A.
Nombre de bornes d’E/S
sur l’UC
Bornes de l’UC
Bornes de la
carte d’E/S d’ex-
CPM1A-20EDR
Alimentation
Référ-
ence
Sortie relais
Sortie
transistor
Entrées
Sorties
Entrées
Sorties
Entrées
Sorties
Entrées
Sorties
Typ e
NPN
Typ e
PNP
10 20 30 40
6 points:
00000 à 00005
4 points:
01000 à 01003
--- --- 12 points:
--- --- 8 points:
--- --- 12 points:
--- --- 8 points:
--- --- 12 points:
--- --- 8 points:
c.a. c.c. c.a. c.c. c.a. c.c. c.a. c.c.
CPM1A10CDR-A
--- CPM1A-
--- CPM1A-
CPM1A10CDR-D
10CDT-D
10CDT1-D
12 points:
00000 à 00011
8 points:
01000 à 01007
CPM1A20CDR-A
--- CPM1A-
--- CPM1A-
CPM1A20CDR-D
20CDT-D
20CDT1-D
SYSMAC
18 points:
00000 à 00011
00100 à 00105
12 points:
01000 à 01007
01100 à 01103
00200 à 00211
01200 à 01207
00300 à 00311
01300 à 01307
00400 à 00411
01400 à 01407
CPM1A30CDR-A
--- CPM1A-
--- CPM1A-
CPM1A30CDR-D
30CDT-D
30CDT1-D
24 points:
00000 à 00011
00100 à 0011 1
16 points:
01000 à 01007
01100 à 01 107
12 points:
00200 à 00211
8 points:
01200 à 01207
12 points:
00300 à00311
8 points:
01300 à 01307
12 points:
00400 à 00411
8 points:
01400 à 01407
CPM1A40CDR-A
--- CPM1A-
--- CPM1A-
CPM1A40CDR-D
40CDT-D
40CDT1-D
1-1-3 Fonctions du CPM1A
Fonction de réglage
analogique
4
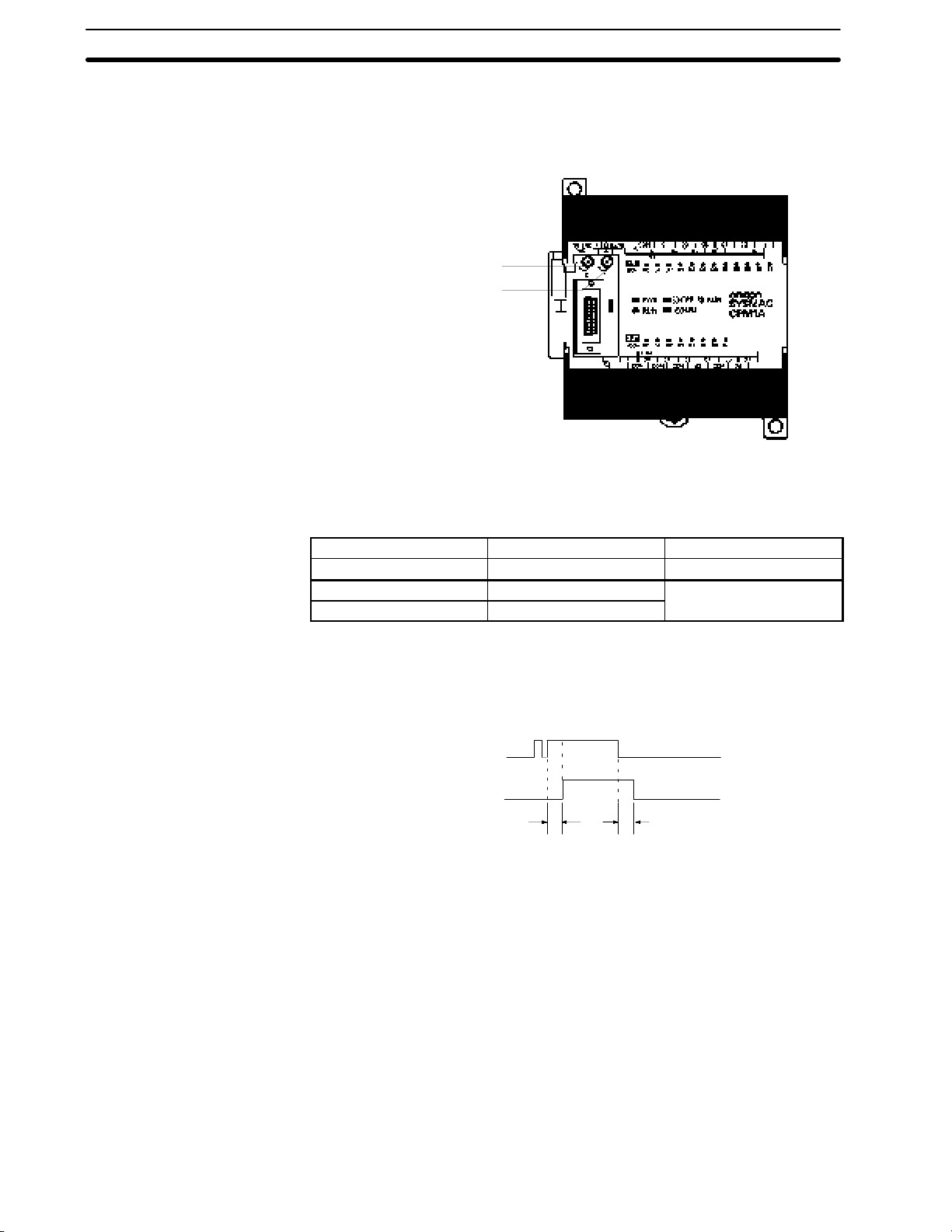
Les API CPM1A possèdent 2 potentiomètres de réglage utilisés pour contrôler
de façon manuelle le temporisateur analogique et les sélections du compteur.
Lorsque l’un des potentiomètres est tourné, le contenu du canal IR correspondant est sélectionné automatiquement entre 0 et 200 (BCD).
Caractéristiques et fonctions du CPM1A Chapitre 1-1
Tourner le potentiomètre avec un tournevis cruciforme
Réglage analogique 0
Réglage analogique 1
24 Vc.c. 0.2
AOUTPUT
Le tableau ci- -dessous indique les canaux IR attribués aux réglages analogiques sur l’UC du CPM1A.
Commande Canal IR correspondant Plage de réglage (BCD)
0000 à 0200
Fonction de filtre d’entrée
Réglage analogique 0 IR 250
Réglage analogique 1 IR 251
La constante de temps d’entrée pour les sortie externes du CPM1A peut être
sélectionnée à 1, 2, 4, 8, 16, 32, 64, ou 128 ms. L’augmentation de cette
constante peut réduire les effets de bruit parasite dans le signal d’entrée.
Entrée à partir d’un appareil d’entrée tel qu’un fin de course
Etat du bit d’entrée
t
t
Constante de temps d’entrée
Interruptions d’entrée Les API CPM1A-10CDR-j/10CDT-D/10CDT1-D possèdent 2 bornes d’entrée
interruptive et les API CPM1A-20CDR-j/20CDT-D/20CDT1-D,
CPM1A-30CDR-j/ 30CDT-D/30CDT1-D, et CPM1A-40CDR-j/40CDTD/40CDT1-D en possèdent 4. Il y a deux modes pour les interruptions d’entrée:
le mode d’interruption d’entrée et le mode de comptage.
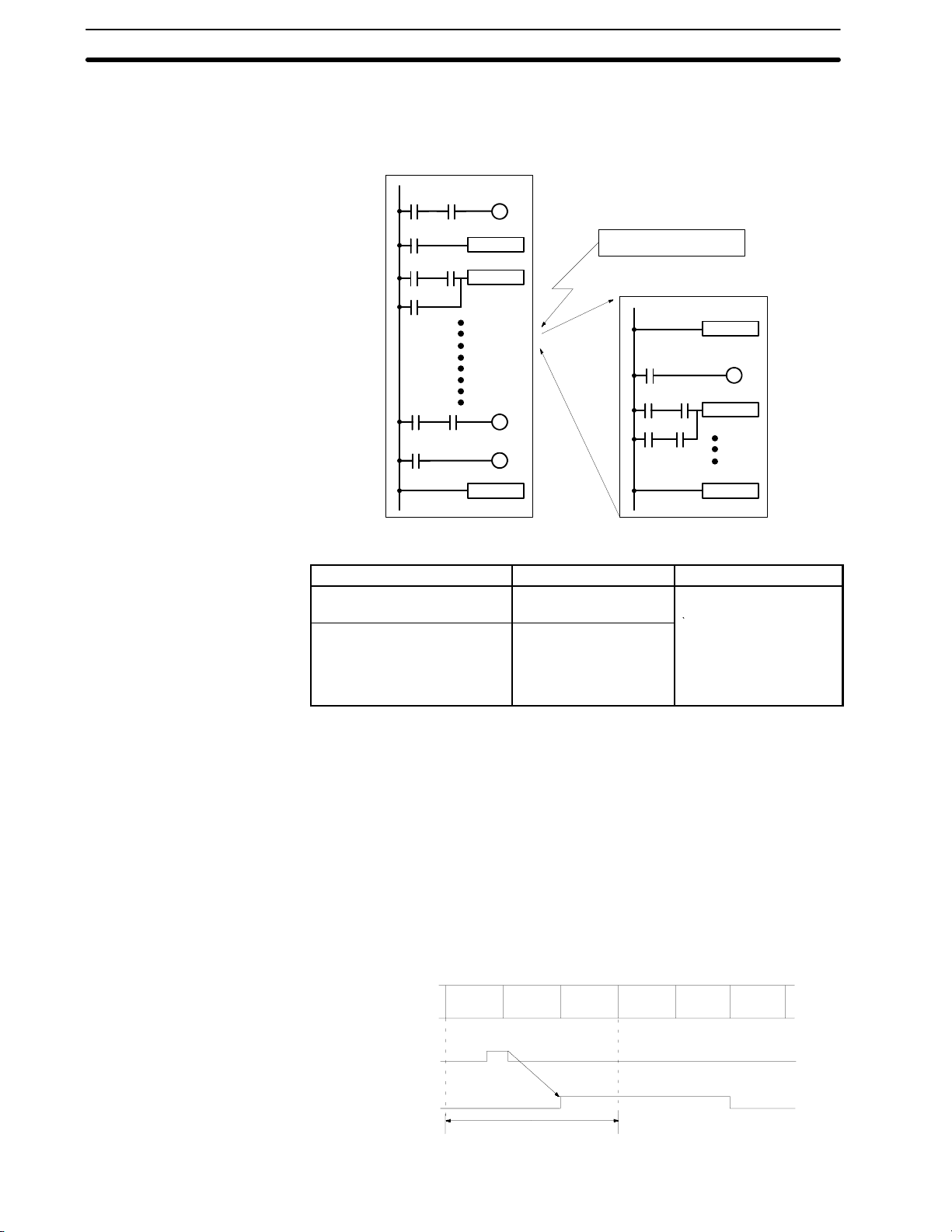
1, 2, 3... 1. Lorsqu’une interruption se produit dans le mode d’interruption d’entrée,le
programme principal est interrompu et le programme d’interruption est
exécuté immédiatement, sans tenir compte du temps de cycle.
2. Dans le mode de comptage, les signaux d’entrée externes sont comptés à
haute vitesse (jusqu’à 1 kHz) et une interruption est engendrée chaque fois
que le compte atteint la valeur de sélection. Quand une interruption se produit, le programme principal est interrompu et le programme d’interruption
est exécuté. La valeur de sélection peut être réglée de0à65535.
5
(
Caractéristiques et fonctions du CPM1A Chapitre 1-1
Le diagramme suivant indique l’exécution du programme au moment d’une interruption.
Programme principal
MOV
ADD
END
Interruption d’entrée
Programme d’interruption
SBN00
MOV
RET
Modèle de l’API Bits d’entrée Temps de réponse
CPM1A-10CDR-j/10CDT-D/
10CDT1-D
CPM1A-20CDR-j/20CDT-D/
IR 00003 à IR 00004
IR 00003 à IR 00006
0,3 ms
(1 kHz en mode de
comptage)
20CDT1-D/30CDR-j/
30CDT-D/30CDT1-D/
40CDR-j/40CDT-D/
40CDT1-D
Entrées à réponse rapide
6
Rem.:
Lorsque on ne les utilise pas comme bornes d’entrées interruptives, les bits
d’entrée IR 00003 à IR 00006 peuvent être utilisés comme bornes d’entrée normales.
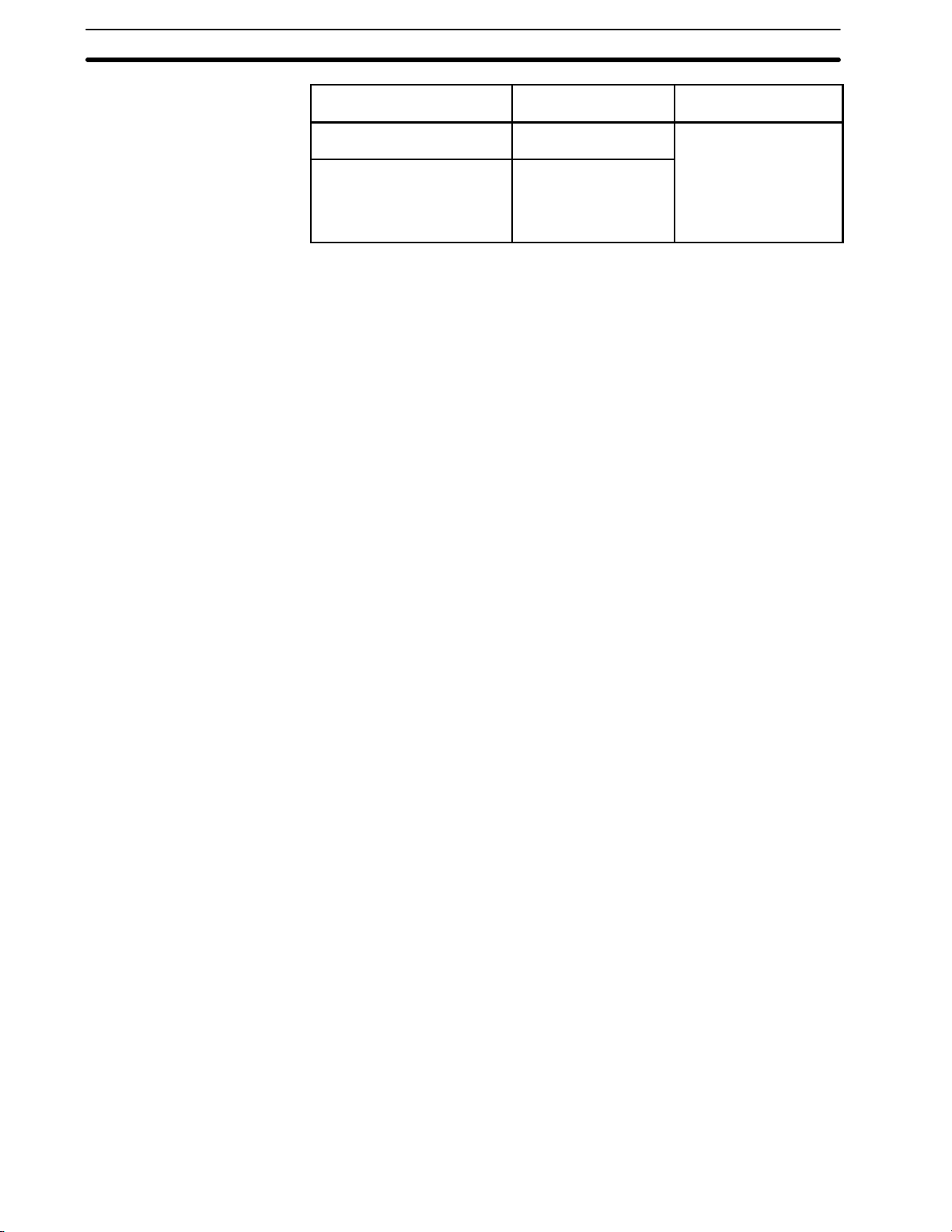
Les API CPM1A-10CDR-j/10CDT-D/10CDT1-D possèdent 2 bornes d’entrée
à réponse rapide et les API CPM1A-20CDR-j/20CDT-D/20CDT1-D, CPM1A30CDR-j/30CDT-D/30CDT1-D et CPM1A-40CDR-j/40CDT-D/40CDT1-D
en possèdent 4. (Les mêmes bornes sont utilisées pour les entrées à réponse
rapide et les entrées interruptives.)
Les entrées à réponse rapide ont une mémoire tampon interne de façon à ce
que les signaux d’entrée plus court qu’un cycle puissent être détectés.
Signal d’entrée
(00003)
IR 00003
Procédés de
surveillance
Exécution du
programme
Un cycle
Régénéra-tion d’E/S
Procédés de
surveillance
Exécution du
programme
Régénéra-tion d’E/S
Caractéristiques et fonctions du CPM1A Chapitre 1-1
Modèle de l’API Bits d’entrée Largeur d’impulsions
d’entrée min.
CPM1A-10CDR-j/10CDT-D/
10CDT1-D
CPM1A-20CDR-j/20CDT-D/
20CDT1-D/30CDR-j/
30CDT-D/30CDT1-D/
40CDR-j/40CDT-D/
40CDT1-D
IR 00003 à IR 00004
IR 00003 à IR 00006
0,2 ms
7
Caractéristiques et fonctions du CPM1A Chapitre 1-1
Fonctions de la
temporisation cyclique
(interruptions
programmées)
Les API CPM1A sont munis d’une temporisation cyclique qui peut être réglée de
0,5 ms à 319968 ms en unités de 0,1 ms. Elle peut être réglée pour déclencher
une interruption unique (mode une impulsion) ou des interruptions programmées (mode interruption programmée).
Programme principal
MOV
ADD
END
Temps de la temporisation cylique
Programme interruptif
SBN00
MOV
RET
Fonction de sortie
d’impulsions
Mode Fonction
1 impulsion Engendre une interruption unique la première fois que la
tempo. cyclique dépasse la capacité.
Interruptions
programmées
Engendre une interruption chaque fois que la tempo.cyclique
dépasse la capacité.
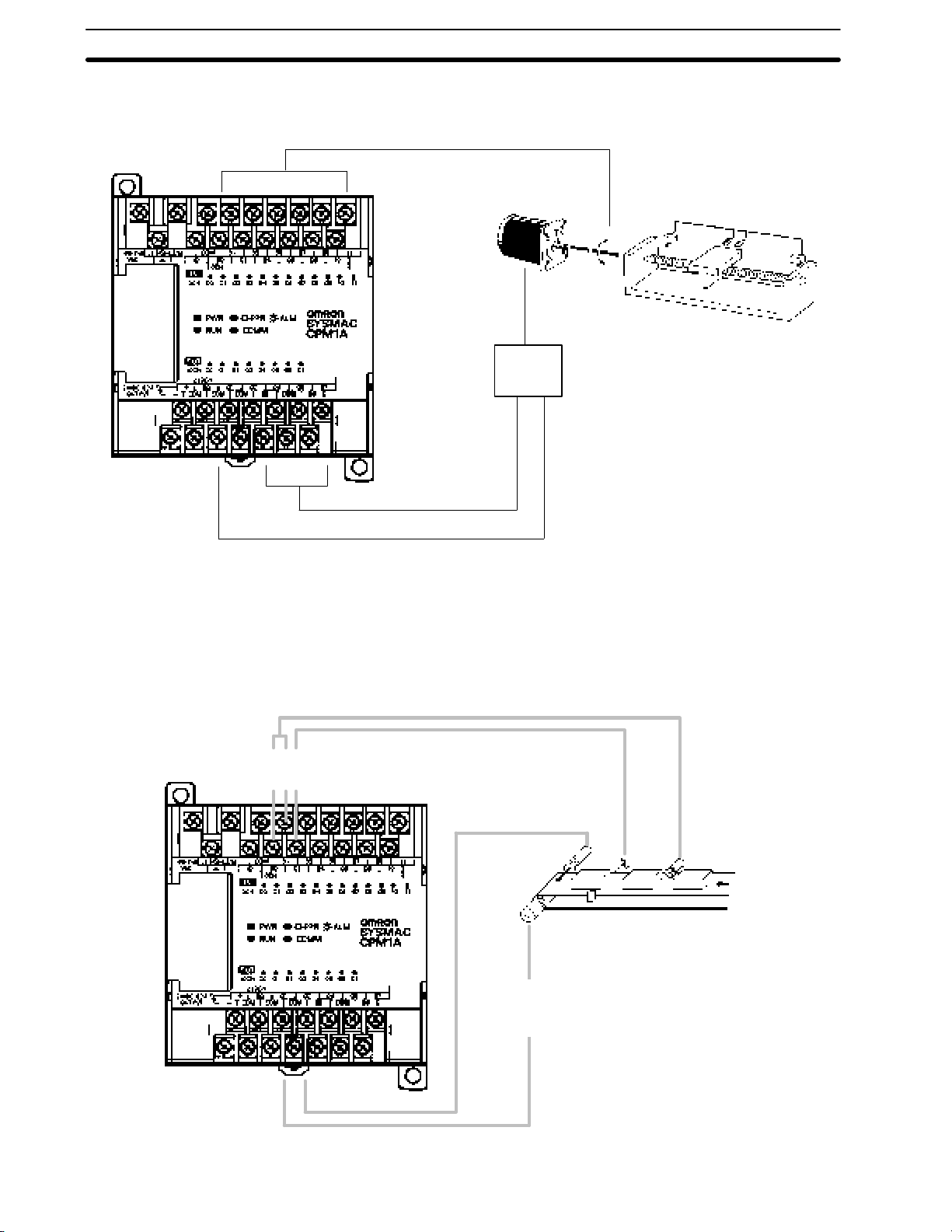
Puisque le CPM1A avec sortie transistor a une fonction de sortie d’impulsions
capable de faire sortir une impulsion de 20 Hz à 2kHz (sortie monophase), un
moteur pas à pas peut être contrôlé par l’UC. La sortie d’impulsions peut être
sélectionnée au mode continu, sous lequel la sortie peut être arrêtée par une
instruction, ou au mode simple, sous lequel la sortie peut être arrêtée par le taux
d’impulsions présélectionnées (1 à 16 777 215)
8
Caractéristiques et fonctions du CPM1A Chapitre 1-1
Moteur pas à pas
Sortie d’impulsions
(sortie monophase)
Moteur pas à pas
Comman
de du
moteur
Sortie principale CW/CCW
Entrée de commande
Compteur rapide Les API CPM1A ont un compteur rapide qui peut être utilisé en mode incrémen-
tal ou bidirectionnel. Il peut être combiné avec les interruptions d’entrée pour
exécuter la commande valeurs cible ou la commande comparaison de zone non
sollicitées par le temps de cycle de l’API.
Entrée comptage
Entrée de RAZ
00000
00001
00002
Solénoïde
Capteur Codeur rotatif
Commande
du moteur
9
pgp
Caractéristiques et fonctions du CPM1A Chapitre 1-1
Mode Fonctions d’entrée Méthode
d’introduction
Bidirectionnel 00000:entrée phase A
00001:entrée phase B
00002:entrée phase Z
Incrémental 00000:entrée de
compte
00001: cf. Rem.
00002: entrée de RAZ
Rem.:
Différence de
phase, 4×
entrées
Entrées
individuelles
Dans le mode incrémental, cette entrée (00001) peut être utilisée comme entrée
régulaire.
Fonctions des Unités
d’extension
Fonctions des Unités d’E/S analogiques (CPM1A-MAD01)
2 entrées analogiques : plage d’entrée de0à10V,de1à5V,oude4à20mA
1 sortie analogique : plage de sortie de 0 à 10 V, de --10 à 10 V, ou de 4 à 20 mA
Fonctions de l’Unité sonde de température
Entrée thermocouple (CPM1A-TS001/002 ; 2/4 points d’entrée):
K : --200° à 1300°C (--300° à 2300°F)
0,0° à 500,0°C(0,0° à 900,0°F)
J : --100° à 850°C (--100° à 1500°F)
0,0° à 400,0°C(0,0° à 750,0°F)
Entrée Pt 100 ohms (CPM1A-TS101/102 ; 2/4 points d’entrée):
Pt100 : --200,0° à 650,0°C (--300,0° à 1200,0°F)
JPt100 : --200,0° à 650,0°C (--300,0° à 1200,0°F)
Fréquence
de compte
2,5 kHz --32767
5,0 kHz 0
Plage
de
compte
à
32767
à
65535
Modes de commande
Commande valeurs cible:
On peut enregistrer jusqu’à 16
valeurs cible et nombres de
sous--programmes d’interruption.
Commande comparaison de zone:
On peut enregistrer jusqu’à 8
ensembles de valeurs de limites
haute et basse et nombres de
sous--programmes d’interruption.
Fonctions esclaves CompoBus/S (CPM1A-SRT21)
Echange de données de 8 bits en entrée et 8 bits en sortie avec l’Unité maître.
10
d’E/Sati
p
p
p
p
p
p
p
p
Configuration du système
1-2 Configuration du système
1-2-1 Configuration de l’UC et de la carte d’E/S d’extension
UC du CPM1A
Chapitre 1-2
UC du CPM1A
Nombre de
bornes
’
10 6 points 4 points
20 12 points 8 points
30 18 points 12 points
40 24 points 16 points
Entrées Sorties
Cartes d’E/S d’extension
Référence
Aliment
on
c.a. CPM1A-10CDR-A --- --c.c. CPM1A-10CDR-D CPM1A-10CDT-D CPM1A-10CDT1-D
c.a. CPM1A-20CDR-A --- --c.c. CPM1A-20CDR-D CPM1A-20CDT-D CPM1A-20CDT1-D
c.a. CPM1A-30CDR-A --- --c.c. CPM1A-30CDR-D CPM1A-30CDT-D CPM1A-30CDT1-D
c.a. CPM1A-40CDR-A --- --c.c. CPM1A-40CDR-D CPM1A-40CDT-D CPM1A-40CDT1-D
Sortie relais
Sortie transistor
Type NPN Type PNP
11
p
/
12entrées
Configuration du système
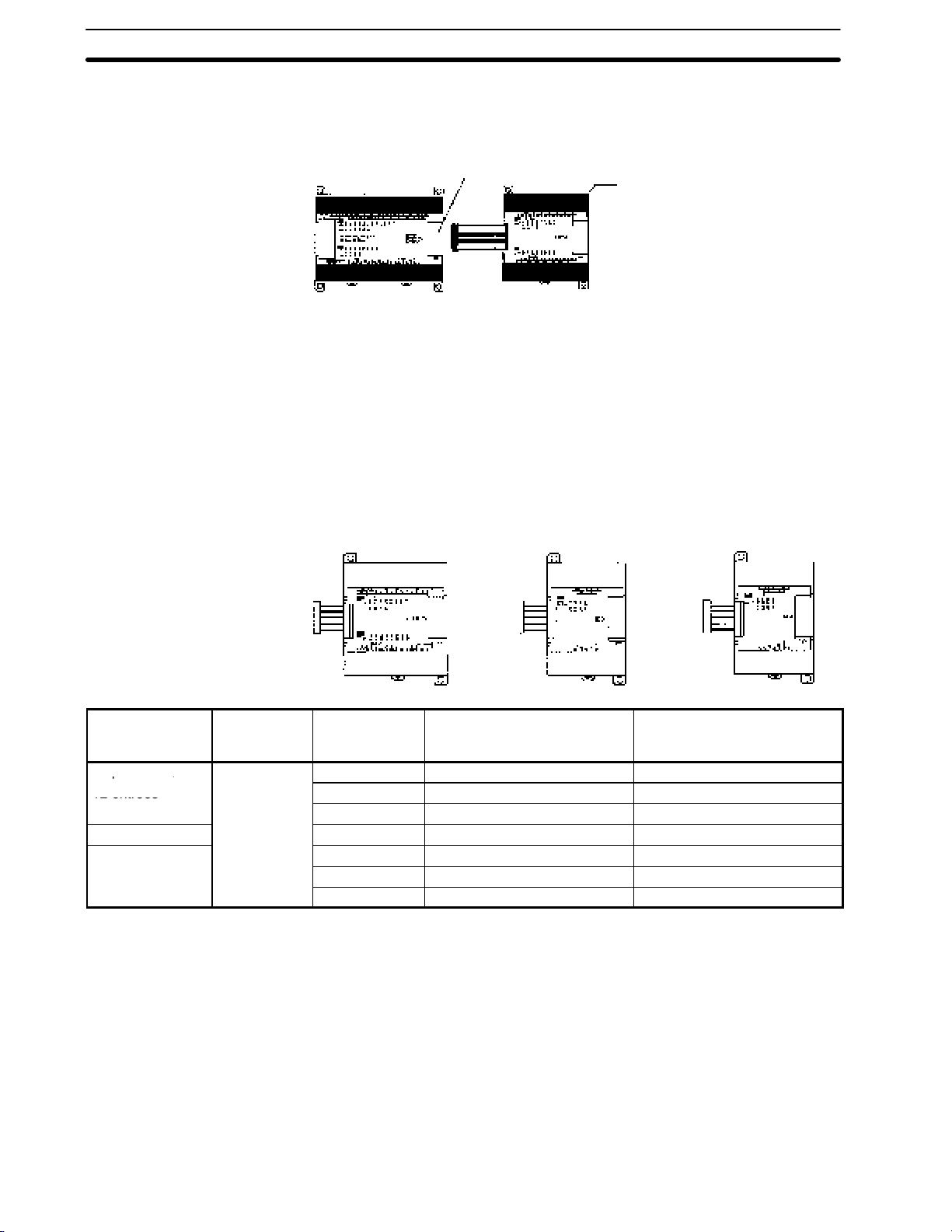
1-2-2 Unité centrale et Unité d’extension
Trois modèles d’Unités d’extension sont disponibles : l’Unité d’E/S analogiques,
l’Unité esclave d’E/S CompoBus/S et l’Unité sonde de température.
Chapitre 1-2
Unités d’E/S d’extension
Connecteur d’extension
Câble de liaison pour E/S d’extension
Unité d’E/S d’extension, Unité d’E/S
analogiques, Unité esclave d’E/S
CompoBus/S ou Unité sonde de
température
Un API à 6 entrées et 3 sorties analogiques (au maximum) peut être réalisé en
connectant 3 Unités d’E/S analogiques.
Un API à 6 entrées sondes de température peut être réalisé en connectant des
Unités sonde de température K ou Pt 100 ohms.
Des Unités esclaves d’E/S CompoBus/S peuvent être reliées à l’UC. Les
données d’E./S (8 entrées et 8 sorties) sont tranférées entre l’UC et la zone
allouée à l’esclave CompoBus/S. (Les données d’échange avec l’esclave sont
internes ; il n’existe pas d’entrée externe ou de borne de sortie.)
Unité d’entrée 8 points
Unité de sortie 8 pointsUnité d’E/S 20 points
Unité Nombre
20 points d’E/S 3 Unités maxi
12 entrées
8 sorties
8 entrées 24 Vc.c. --- CPM1A-8ED
8 sorties
maxi
d’Unités
(Voir Rem.)
Entrées Sorties Référence
24 Vc.c. Relais CPM1A-20EDR1
24 Vc.c. Transistors NPN CPM1A-20EDT
24 Vc.c. Transistors PNP CPM1A-20EDT1
--- Relais CPM1A-8ER
--- Transistors NPN CPM1A-8ET
--- Transistors PNP CPM1A-8ET1
12
p
Configuration du système
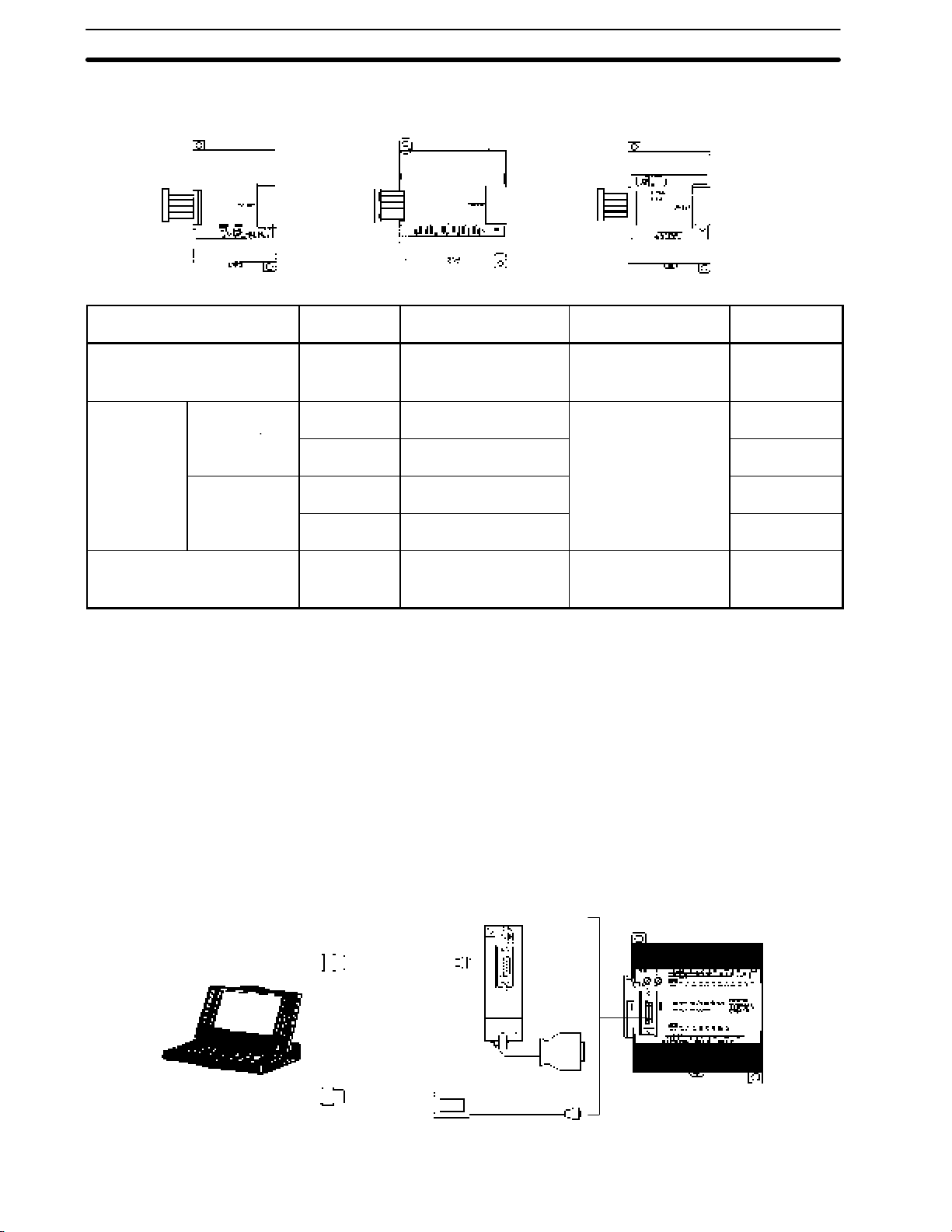
Unités d’extension
Chapitre 1-2
Unité sonde de température Unité esclave d’E/SCompoBus/SUnité d’E/S analogique
Unité Nb maxi
Unité d’E/S analogique
2 entrées analogiques (2 mots)
1 sortie analogique (1 mot)
Unité sondedeEntrées
thermocouple
température
Entrées
Pt 100 ohms
Unité esclave d’E/S
CompoBus/S
8 entrées et 8 sorties
Rem.
d’Unités
3 Unités maxi 2 entrées analogiques 1 sortie analogique CPM1A-MAD01
3 Unités maxi 2 entrées (K, J)
1Unitémaxi
(See note.)
3 Unités maxi 2 entrées
1Unitémaxi
(Voir Rem.)
3 Unités maxi 8bits
4 entrées (K, J) CPM1A-TS002
(Pt100, JPt100)
4 entrées
(Pt100, JPt100)
(Entrées issues du
maître.)
Seule une Unité sonde de température CPM1A-TS002/TS102 peut être reliée à
Entrées Sorties Référence
l’UC. Si une Unité CPM1A-TS002/102 est reliée à l’UC, une seule Unité
d’extension complémentaire (autre qu’une CPM1A-TS002/102) ou une Unité
d’E/S d’extension peut être reliée à l’UC.
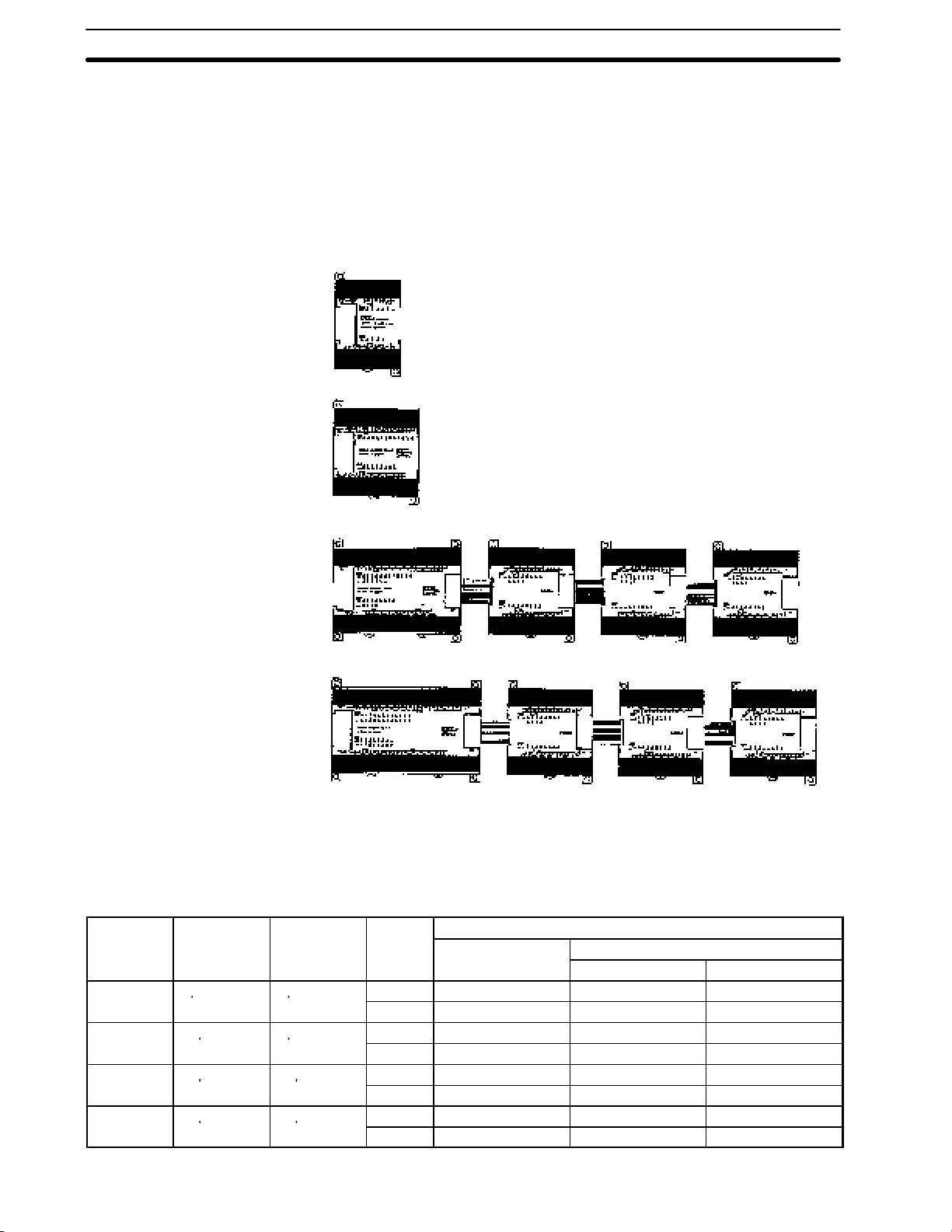
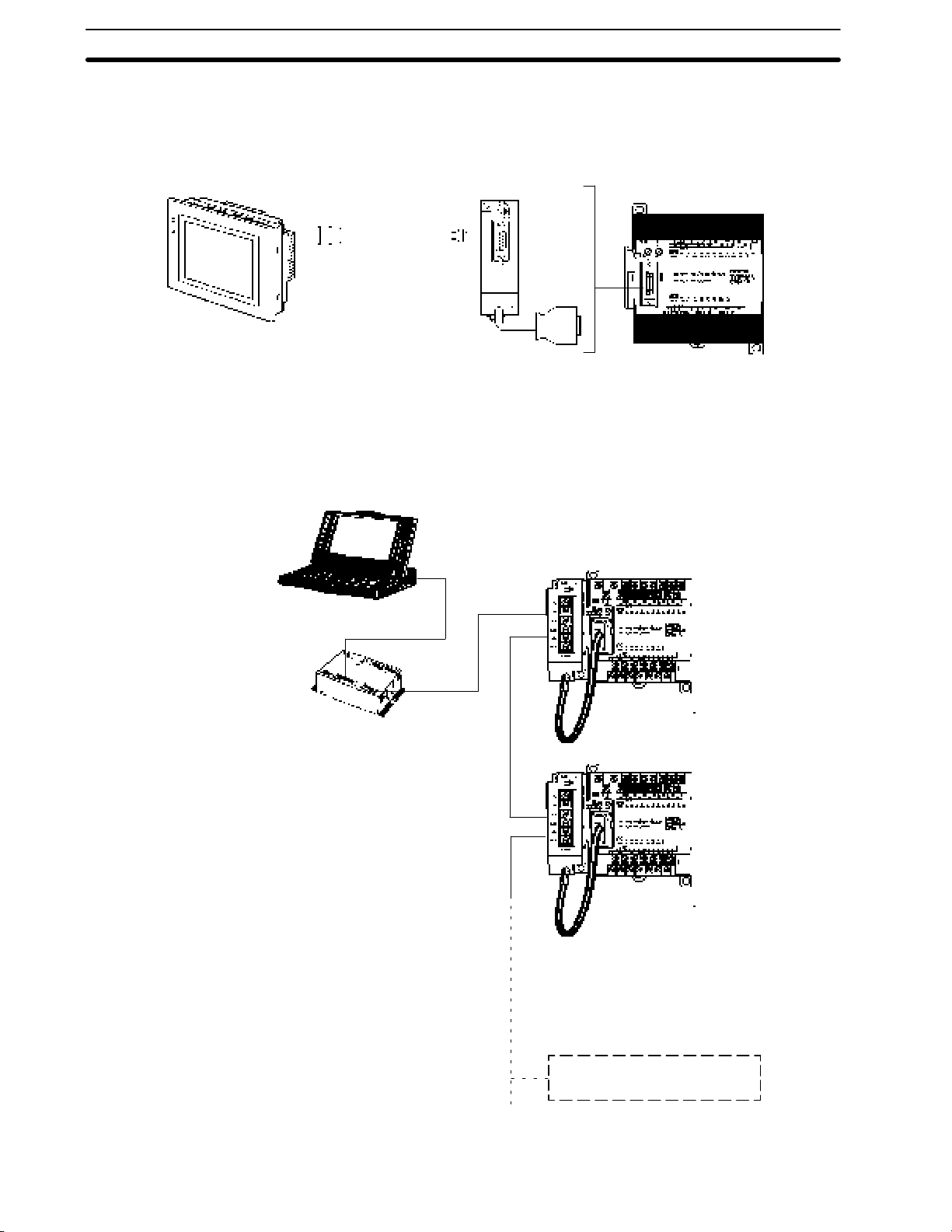
1-2-3 Communications liaisons maîtres
Les communications des liaisons maîtres permettent de contrôler jusqu’à 32
API OMRON à partir d’un ordinateur central. Les connexions ordinateur--API
peuvent être effectuées par des connecteurs tels que les adaptateurs RS-232C
et RS-422.
---
8bits
(Sorties issues du
maître.)
CPM1A-TS001
CPM1A-TS101
CPM1A-TS102
CPM1A-SRT21
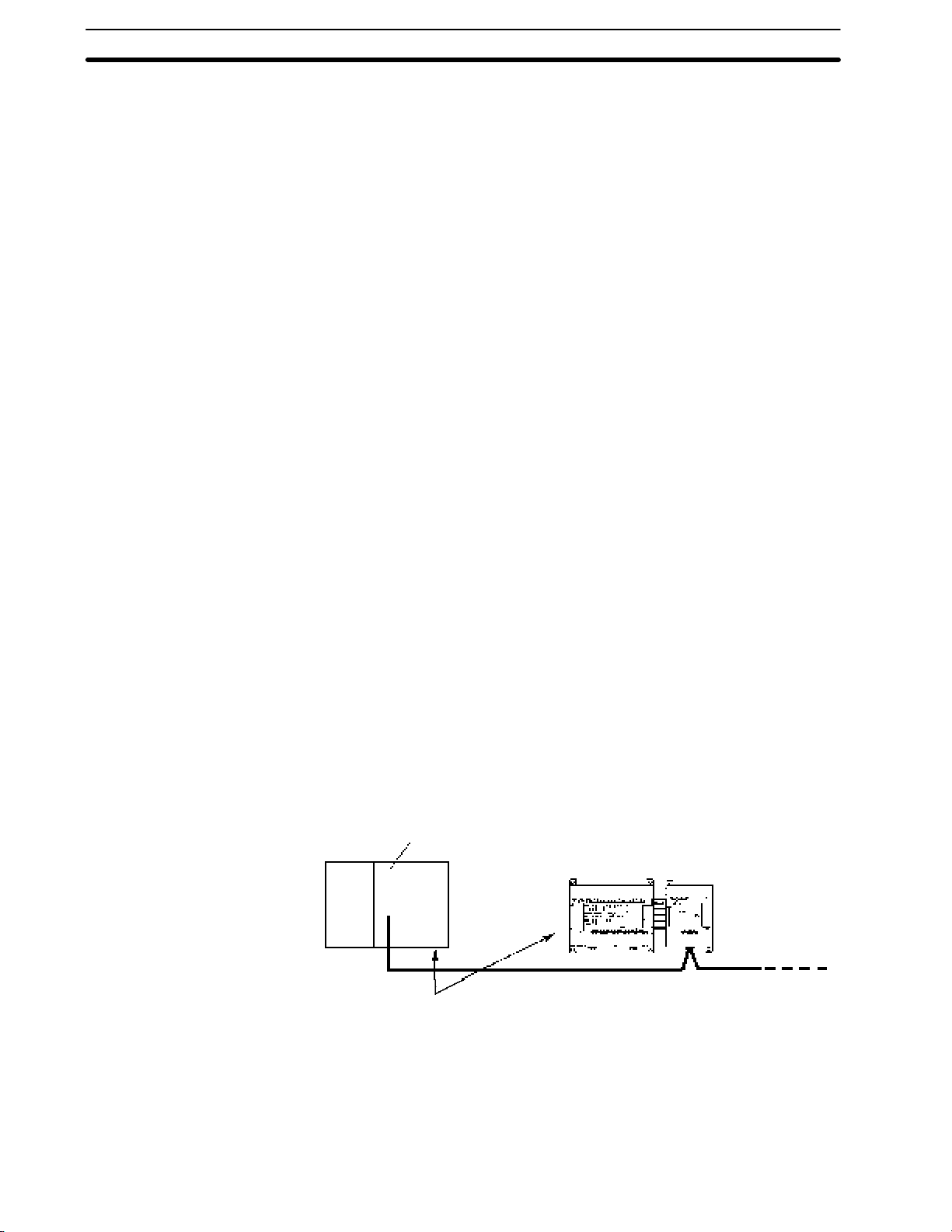
Communications1à1 Le diagramme suivant indique les méthodes possibles d’une connexion 1 à 1
entre un CPM1A et un PC/AT ou compatible.
PC/AT ou
compatible
Adaptateur RS-232C
Câble RS-232C
CQM1-CIF02
UC du CPM1A
13
Configuration du système
Chapitre 1-2
Connexion à un terminal
opérateur programmable
Terminal opérateur programmable OMRON
Communications1àn
Le diagramme suivant illustre les méthodes possibles pour une connexion entre
un API CPM1A et un terminal opérateur programmable OMRON (élément d’interface opérateur).
Adaptateur RS-232C
Câble RS-232C
UC du CPM1A
Le diagramme suivant indique la manière de connecter jusqu’à 32 API CPM1A à
un PC/AT ou compatible.
PC/AT ou compatible
Câble RS-232C
Adaptateur de liaison
RD 400
RS-422
UC du CPM1AAdaptateurs
Câble RS-422
14
La longueur de câble maximum du RS-422
doit être de 500 m.
API CPM1A OMRON
(32 API max.)
g
Configuration du système
Chapitre 1-2
Adaptateurs et câbles Le tableau suivant indique certains adaptateurs et câbles utilisés dans les liai-
sons maîtres.
Dénomination Utilisation Référence
AdaptateurRS-232C
Adaptateur RS-422
Câbles de
connexion
Adaptateur de
liaison
Changement de communication de
niveau port périphérique.
Utilisés pour connecter les PC ou
compatibles.
(Longueur de câble: 3,3 m)
Changement entre les formats RS-232C
et RS-422.
CPM1-CIF01
CPM1-CIF11
CQM1-CIF02
RD400
1-2-4 Liaisons 1 à 1
Une liaison de contrôle des données peut être créée avec une zone de données
dans un autre API CPM1A, CQM1, CPM1, SRM1 ou C200HS ou un API
C200HX/HE/HG. Un adaptateur RS-232C est utilisé pour la connexion 1 à 1.
UC du CPM1AAdaptateur RS-232C
Câble RS-232C
CQM1 CPM1 + Adaptateur RS-232C
C200HS/C200HX/HG/HE
Dénomination Utilisation Référence
Adaptateur
RS-232C
Changement dans un format de port
périphérique.
CPM1-CIF01
15
Configuration du système
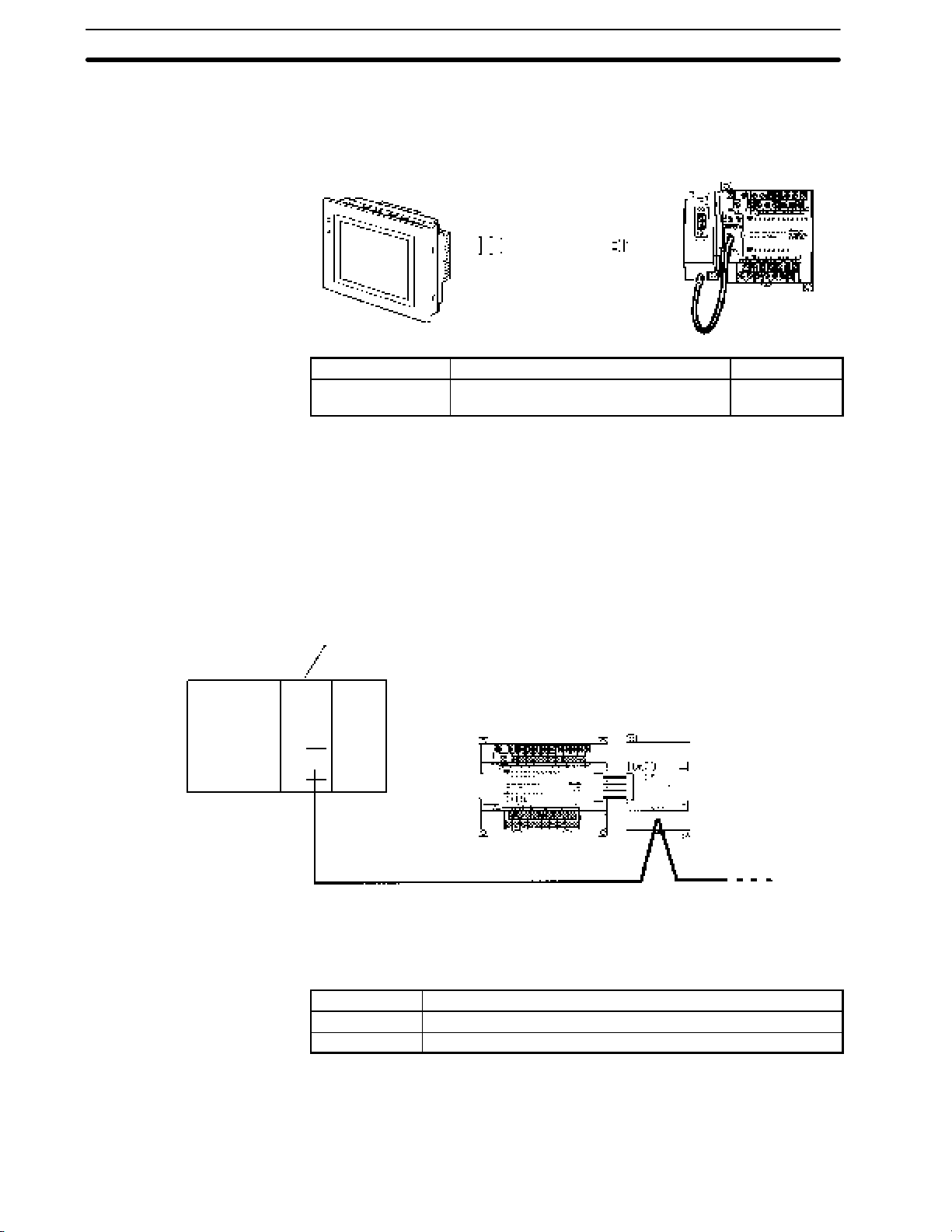
1-2-5 Communications liaisons NT
En utilisant la liaison NT, l’API CPM1A peut être connecté au terminal opérateur
programmable (interface liaison NT) par un adaptateur RS-232C.
Chapitre 1-2
Terminal opérateur programmable OMRON
Câble RS-232C
XW2Z--200T
Dénomination Utilisation Référence
Adaptateur
RS-232C
Changement dans les communications de
niveau port périphérique.
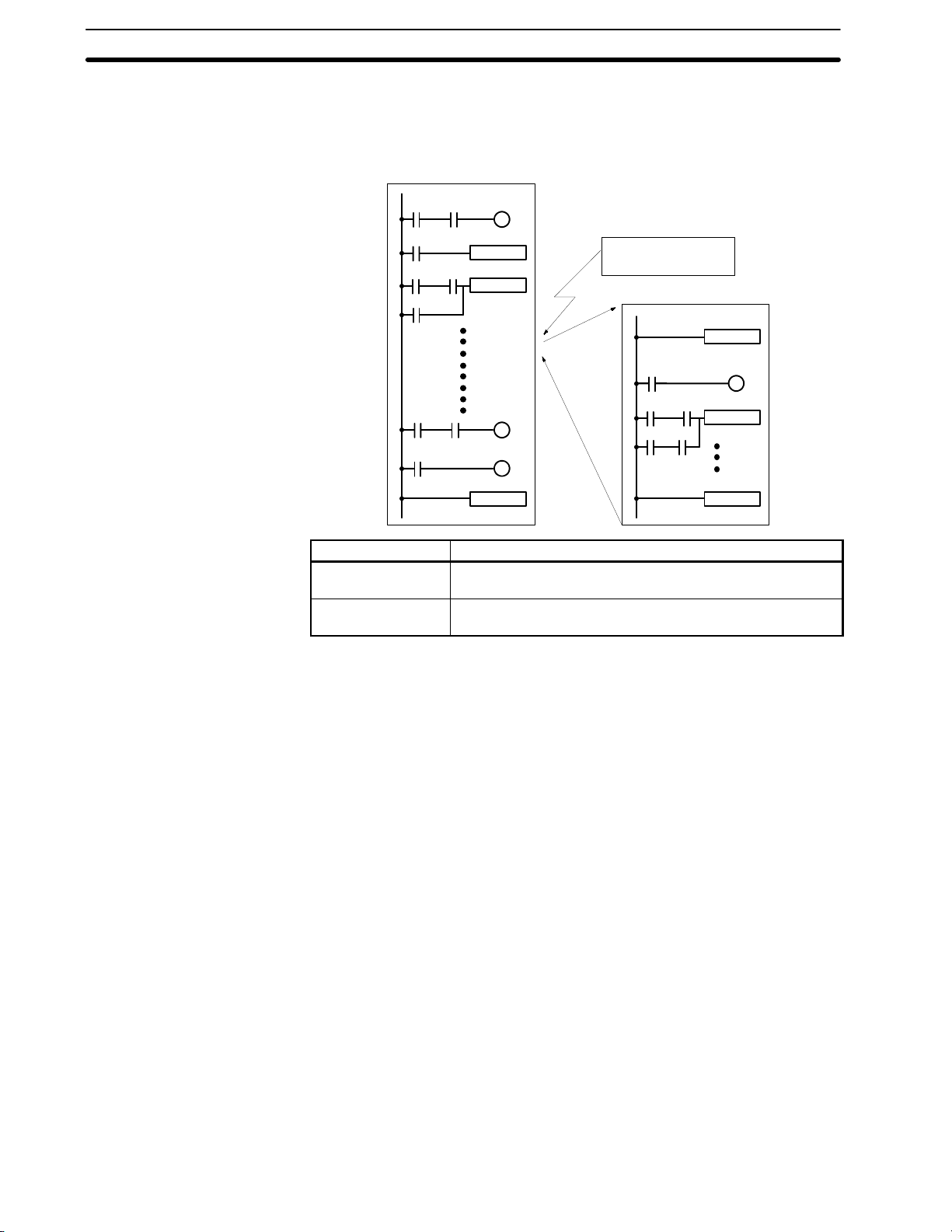
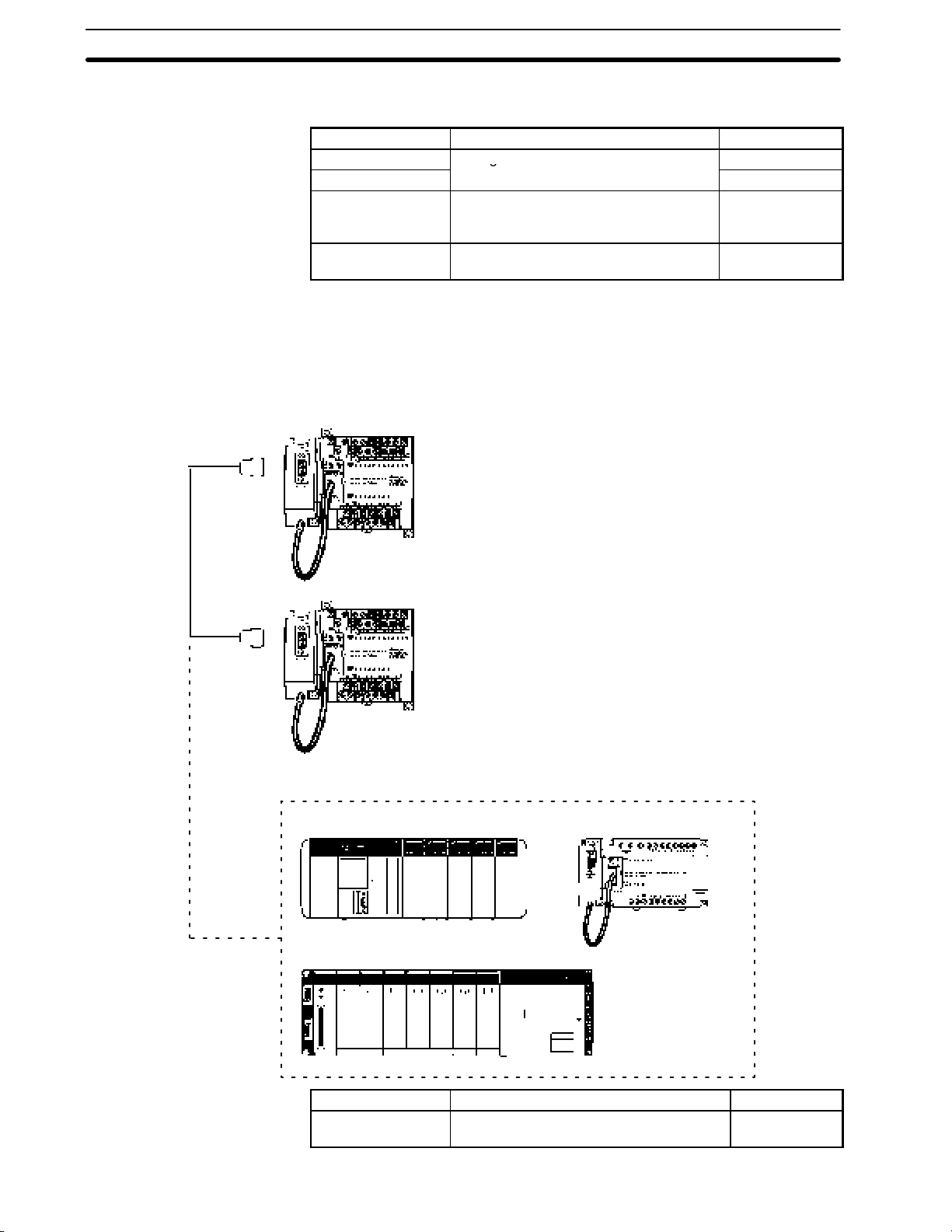
1-2-6 Connexions des esclaves CompoBus/S
Une liaison d’E/S CompoBus/S peut être utilisée pour créer une liaison d’E/S
(E/S déportées) de 8 points d’entrée et de 8 points de sortie avec une Unité
maître CompoBus/S ou un API SRM1. Les liaisons sont réalisées par
l’intermédiaire d’une Unité esclave CompoBus/S.
Du point de vue de l’Unité CPM1A, la zone allouée à l’Unité esclave
CompoBus/S peut être traitée comme une zone allouée à une Unité d’E/S
d’extension. La différence est que les bits ne sont pas des points d’E/S réels,
mais des bits d’E/S de l’Unité maître.
Adaptateur
RS-232C
UC du CPM1A
CPM1-CIF01
Unité maître CompoBus/S (ou API SRM1)
API SYSMAC série CS1
Câbles
Utiliser des câbles plats spécifiques ou des câbles VCTF pour relier les noeuds
de la liaison d’E/SCompoBus/S. (Dans le même système, ne pas utiliser à la fois
des câbles plats et des câbles VCTF.)
Nom Caractéristiques
Câble plat Câble plat 4 fils, 0,75 mm
Câble VCTF 2 fils x 0,75 mm
1-2-7 Connexions des périphériques
Les programmes du CPM1A peuvent être créés ou édités à l’aide d’une console
de programmation ou d’un Logiciel d’aide SYSWINexploitable sur un ordinateur
personnel .
UC CPM1A
2
Unité de liaison d’E/S
CompoBus/S
(Esclave)
2
16

Configuration du système
Chapitre 1-2
Consoles de programmation Une console de programmation CQM1-PRO01-E ou C200H-PRO27-E peut
être connectée au CPM1A comme indiqué ci--dessous:
UC du CPM1A
C200H-CN222
CQM1-PRO01-E C200H-PRO27-E
Dénomination Référence
Console de programmation CQM1
(Câble de connexion inclus)
Console de programmation C200H/HS et C200HX/HE/HG C200H-PRO27-E
Câbles de connexion série
C200H
Longueur de câble: 2 m C200H-CN222
Longueur de câble: 4 m C200H-CN422
CQM1-PRO01-E
Logiciel de programmation
SYSWIN
PC ou compatible
SYSWIN
Dénomination Utilisation Référence
Adaptateur RS-232C Conversion au format du port périphérique. CPM1-CIF01
Câble de connexion Utilisé pour connecter les PC/AT ou compatibles. (Longueur: 3.3 m) CQM1-CIF02
Logiciel de programmation
SYSWIN sous Windows
dédiés CPM et SRM
Logiciel de programmation
SYSWIN sous Windows
dédié pour toute la gamme
des automates Omron
Le logiciel SYSWIN est exploitable sous Windows 95 ou sur ordinateur personnel compatible connecté au CPM1A comme indiqué ci--dessous.
Adaptateur RS-232C
UC du CPM1A
Câble RS-232C
XW2Z--200 5- -V
CQM1-CIF02
Pour PC/AT ou compatibles (disquette de 3,5”, 3HD) SYSWIN
Pour PC/AT ou compatibles
(disques de 3.5” (2HD) et CD--ROM)
CPM1.V3.4
SYSWIN V3.4
17

CHAPITRE 2
Caractéristiques et composants des unités
Ce chapitre décrit les caractéristiques techniques et les composants principaux des cartes utilisées pour la création d’un API
CPM1A.
2-1 Caractéristiques 20..........................................................
2-1-1 Caractéristiques générales 20...........................................
2-1-2 Caractéristiques 21...................................................
2-1-3 Caractéristiques d’E/S 23..............................................
2-1-4 Caractéristiques des interfaces de communications 27........................
2-2 Composants 28.............................................................
2-2-1 Composants de l’UC 28...............................................
2-2-2 Composants des cartes d’E/S d’extension 30...............................
2-2-3 Composants des Unités d’E/S analogiques 31..............................
2-2-4 Composants des Unités sonde de température 31............................
2-2-5 Composants des Unités de liaison d’E/S CompoBus/S 33.....................
2-2-6 Composants des adaptateurs de communication 34..........................
19

tensionde
Caractéristiques Chapitre 2-1
2-1 Caractéristiques
2-1-1 Caractéristiques générales
Elément CPM1A-10CDR-j
Tension
d’alimentation
Plage de
tension de
fonction-nement
Courant
consommé
Courant de démarrage 30 A max. 60 A max.
Alimentation
externe
(seulement le
type c.a.)
Résistance d’isolement 20 MΩ min. (à 500 Vc.c.) entre bornes c.a. externes et bornes de terre de protection
Rigidité diélectrique 2 300 Vc.a. 50/60 Hz pendant 1 min entre les bornes c.a. externes et les bornes de
Immunité aux parasites 1 500 Vp-p, largeur d’impulsions : 0,1 à 1 µs, temps de montée : 1 ns (par simulation
Résistance aux vibrations 10 à 57 Hz, amplitude de 0,075 mm , 57 à 150 Hz, accélération : 9,8 m/s2(1G)
Résistance aux chocs 147 m/s2(15G) 3 fois dans les directions X, Y, et Z respectivement
Température ambiante En fonctionnement : 0° à55°C
Humidité 10% à 90% (sans condensation)
Atmosphère Doit être exempte de gaz corrosifs
Dimensions des bornes à vis M3
Miseàlaterre Inférieure à 100 Ω
Temps de rupture de courant Type c.a. : 10 ms min.
Poids de l’UC
Poids des cartes d’E/S
d’extension
Type c.a. 100 à 240 Vc.a., 50/60 Hz
Type c.c. 24 Vc.c.
Type c.a. 85 à 264 Vc.a.
Type c.c. 20,4 à 26,4 Vc.c.
Type c.a. 30 VA max. 60 VA max.
Type c.c. 6Wmax. 20 W max.
Tension
d’alimentation
Capacité de
sortie
Type c.a. 400 g max. 500 g max. 600 g max. 700 g max.
Type c.c. 300 g max. 400 g max. 500 g max. 600 g max.
CPM1A-10CDT-D
CPM1A-10CDT1-D
24 Vc.c.
200 mA (cf. Rem.1) 300 mA (cf. Rem. 2)
terre de protection, courant de fuite : 10 mA max.
des parasites)
pendant 80 minutes dans les directions X, Y, et Z respectivement
(Coefficient de temps; 8 minutes × facteur coefficient 10 = temps total : 80 minutes)
En stockage : --20° à75°C
Type c.c. : 2 ms min.
(Une rupture de courant se produit si le courant descend au--dessous de 85% de la
tension nominale pendant une période supérieure au temps de rupture de courant.)
300 g max.
CPM1A-20CDR-j
CPM1A-20CDT-D
CPM1A-20CDT1-D
CPM1A-30CDR-j
CPM1A-30CDT-D
CPM1A-30CDT1-D
CPM1A-40CDR-j
CPM1A-40CDT-D
CPM1A-40CDT1-D
20
Rem. :
1. Si l’alimentation externe fournit une surintensité ou est court--circuitée, la
tension d’alimentation externe descendra et l’API s’arrêtera.
2. Si l’alimentation externe fournit du courant excessif ou est court--circuitée,
la tension d’alimentation externe descendra. Pourtant, l’API continuera à
fonctionner.

p
t
i
têt
til
isé
Caractéristiques Chapitre 2-1
2-1-2 Caractéristiques
Elément CPM1A-10CDR-j
CPM1A-10CDT-D
CPM1A-10CDT1-D
Mode de commande Mode du programme mémorisé
Mode de commande
d’E/S
Langage de
programmation
Longueur d’instruction
Types d’instructions
Temps d’exécution Instructions de base : 0,72 à 16,2 µs
Capacité du programme 2 048 canaux
Capacité
max.
d’E/S
Bits d’entrée 00000 à 00915
Bits de sortie 01000 à 01915
Bits de travail 512 bits : 20000 à 23115 (Canaux IR 200 à IR 231)
Bits spéciaux (zone SR) 384 bits : 23200 à 25515 (Canaux IR 232 à IR 255)
Bits temporaires (zone
TR)
Bits de maintien (zone
HR)
Bits auxiliaires (zone AR) 256 bits : AR 0000 à AR 1515 (Canaux AR 00 à AR 15)
Bits de liaison (zone LR) 256 bits : LR 0000 à LR 1515 (Canaux LR 00 à LR 15)
Temporisateurs/
Compteurs
Mémoire de données Lecture/Ecriture : 1 024 canaux (DM 0000 à DM 1023)
Traitement des
interruptions (cf. Rem. 2)
Interruptions du rythmeur 1 (0,5 à 319 968 ms en mode interruption programmée ou interruption simple)
Protection de la mémoire Contenu des zones HR, AR, DM; et valeurs du compteur maintenues pendant les ruptures
Sauvegarde de la
mémoire
Fonctions
d’auto--diagnostic
Vérifications du
programme
Seulement UC 10 points 20 points 30 points 40 points
Avec cartes
d’E/S
d’extension
Scrutation cyclique avec sortie directe; traitement de régénération immédiat
Schéma à relais
1 étape par instruction, 1 à 5 canaux par instruction
Instructions de base : 14
Instructions spéciales : 77 types, 135 instructions
Instructions spéciales : 16,3 µs (instruction MOV)
---- -- ---- -- 50, 70, ou 90 points 60, 80, ou 100 points
8 bits (TR0 à TR7)
320 bits : HR 0000 à HR 1915 (Canaux HR 00 à HR 19)
128 Temporisateurs/compteurs (TIM/CNT 000 à TIM/CNT 127)
Temporisateurs de 100 ms : TIM 000 à TIM 127
Temporisateurs de 10 ms (compteur rapide) : TIM 000 à TIM 127 (cf. Rem. 1)
(les nombres de temporisateurs utilisés sont les mêmes que pour les
temporisateurs de 100 ms)
Compteurs de decrémentation et compteurs--décompteurs
Lecture seule : 512 canaux (DM 6144 à DM 6655)
Interruptions
externes : 2
de courant.
Mémoire flash :
La zone DM du programme et de seule lecture est sauvegardée sans piles.
Sauvegarde du condensateur :
La zone DM de lecture/écriture, les zones HR, AR, et les valeurs du compteur sont
sauvegardées par un condensateur pendant 20 jours à 25_C. Le temps de sauvegarde du
condensateur dépend de la température ambiante. Pour des informations détaillées, cf. le
schéma à la page suivante.
Défaillance de l’UC (temporisation chien de garde), erreur de bus d’E/S et défaillance de la
mémoire
Sans instruction END, erreurs de p rogrammation (constamment vérifiées pendant le
fonctionnement)
CPM1A-20CDR-j
CPM1A-20CDT-D
CPM1A-20CDT1-D
Interruptions externes : 4
CPM1A-30CDR-j
CPM1A-30CDT-D
CPM1A-30CDT1-D
Les canaux non utilisés pour les bits d’entrée
oudesor
bits de travail.
e peuven
CPM1A-40CDR-j
CPM1A-40CDT-D
CPM1A-40CDT1-D
re u
s pourles
21

Caractéristiques Chapitre 2-1
Elément CPM1A-40CDR-j
Compteur rapide Un compteur rapide : monophaseà5kHzoubiphase à 2,5 kHz (mode de comptage
Entrées à réponse rapide Les mêmes entrées sont utilisées pour les entrées à réponse rapide et pour les entrées
Sortie d’impulsions Un point, 20 Hz à 2 kHz (sortie monophase)
Constante de temps
d’entrée
Commandes analogiques 2 commandes, plage de sélection : 0 à 200 BCD
CPM1A-10CDR-j
CPM1A-10CDT-D
CPM1A-10CDT1-D
linéaire)
interruptives externes
(Largeur min. d’impulsions d’entrée : 0,2 ms)
Peut présélectionner le taux d’impulsions (1 à 16 777 215).
Peut être sélectionnée à 1 ms, 2 ms, 4 ms, 8 ms, 16 ms, 32 ms, 64 ms, ou 128 ms.
Rem. :
Mode incrémental : 0 à 65 535 (16 bits)
Mode bidirectionnel : --32 767 à 32 767 (16 bits)
1.Utiliser TIM 000 à TIM 003 lors de la création d’un temporisateur à l’aide de
CPM1A-20CDR-j
CPM1A-20CDT-D
CPM1A-20CDT1-D
CPM1A-30CDR-j
CPM1A-30CDT-D
CPM1A-30CDT1-D
l’instruction du temporisateur rapide pour l’exécution du traitement d’interruptions.
2.Le temps de réponse des interruptions d’entrée est de 0,3 ms max.
T emps de sauvegarde/Température
Un condensateur dans l’UC est utilisé pour la sauvegarde des valeurs du compteur et du contenu des zones DM, HR, et AR. Le temps de sauvegarde du condensateur dépend de la température ambiante, comme indiqué ci--dessous :
CPM1A-40CDT-D
CPM1A-40CDT1-D
20
10
7
1
Temps de sauvegarde(jours)
25 40 80
Température ambiante (_C)
Si l’alimentation reste hors tension pendant une période dépassant la période
de sauvegarde des données, le contenu des zones de mémoire de données
(DM), de relais de maintien (HR), de relais de mémoire auxiliaire (AR) et de
compteur (CNT) situées dans l’UC peut être perdu et se transformer dans des
données non définies.
Si le contenu de la zone de programme de l’UC est perdu, le programme mémorisé en mémoire flash sera lu dans la zone de programme de l’UC lors du lancement du CPM1A puisque le contenu de la zone de seule lecture (DM 6144 à DM
6599) et de la configuration de l’API (DM 6600 à DM 6655) sera écrit dans la
mémoire flash.
Pourtant, si l’alimentation est mise hors tension sans changer le mode après
avoir effectué des changements dans la zone DM de seule lecture (DM 6144 à
DM 6599), ou dans la configuration de l’API (DM 6600 à DM 6655), le contenu ne
sera pas écrit dans la mémoire flash. Par conséquent, si l’alimentation est désactivée pendant plus de 20 jours (à 25_C), le contenu des changements (contenu de RAM) disparaîtra et les valeurs des données deviendront non définies.
Les changements peuvent être sauvés en commutant le CPM1A dans le mode
RUN ou MONITOR ou en activant le CPM1A juste après effectué les changements.
22

,
Caractéristiques Chapitre 2-1
2-1-3 Caractéristiques d’E/S
Caractéristiques de l’UC
Elément Caractéristique
Tension d’entrée 24 Vc.c.
Impédance d’entrée IN00000 à IN00002 : 2 kΩ; autres entrées : 4,7 kΩ
Courant d’entrée IN00000 à IN00002 : 12 mA typique; autres entrées : 5 mA typique
Tension à ON 14,4 Vc.c. min.
Tension à OFF 5,0 Vc.c. max.
Réponse ON 1 à 128 ms max. Défaut : 8 ms ()
Réponse OFF 1 à 128 ms max. Défaut : 8 ms (cf. Rem.)
Configuration du circuit
+10%
/
--15%
IN
IN
4,7 kΩ
(2 kΩ)
LED
d’entrée
Circuits
internes
COM
820 Ω
(510 Ω)
Rem. Les chiffres entre parenthèses sont pour IN00000 à
IN00002.
Rem. En utilisant la configuration de l’API, 1, 2, 4, 8, 16, 32, 64, ou 128 ms peuvent être
sélectionnées. Quand IN00000 à travers IN00002 sont utilisés comme entrées
de compteur rapide, les retards sont comme ceux du tableau ci--dessous :
Entrée Mode incrémental Mode de phase
IN00000 (phase A) 5KHz
2,5 KHz
IN00001 (phase B) Entrée normale
IN00002 (phase Z) ON : 100 µs min.; réponse OFF : 500 µsmin.
différentielle
Retard minimum :
Mode incrémental (5 KHz Max.)
200 µsmin.
90 µs
min.
ON
Phase A
OFF
90 µs
min.
Mode de phase différentielle (2,5 KHz Max.)
IN00000 (phase A), IN00001 (phase B)
400 µsmin.
ON
Phase A
OFF
ON
Phase B
OFF
T
T
T
1
2
T
3
4
T1T2T3T4:90µsmin.
23

Caractéristiques Chapitre 2-1
IN00002 (phase Z)
ON
Phase Z
OFF
Lorsqu’on utilise IN00003 à IN00006 comme entrées interruptives, le retard est
de 0,3 ms max. Le retard est mesuré à partir du moment où l’entrée passe à ON
jusqu’à l’exécution du sous--programme d’interruption.
Caractéristiques d’entrée des cartes d’E/S d’extension
Elément Caractéristique
Tension d’entrée 24 Vc.c.
Impédance d’entrée 4,7 kΩ
Courant d’entrée 5 mA typique
Tension à ON 14,4 Vc.c. min.
Tension à OFF 5,0 Vc.c. max.
Réponse ON 1 à 128 ms max. Défaut : 8 ms (cf. Rem.)
Réponse OFF 1 à 128 ms max. Défaut : 8 ms (cf. Rem.)
Configuration du circuit
+10%
/
--15%
IN
IN
COM
4,7 kΩ
820 Ω
100 µsmin.
500 µs
min.
LED
d’entrée
Circuits
internes
Rem. En utilisant la configuration de l’API, 1, 2, 4, 8, 16, 32, 64, ou 128 ms peuvent être
sélectionnées.
!
Attention Ne pas appliquer à la borne d’entrée une tension dépassant la tension nomi-
nale ; dans le cas contraire, des dommages ou incendies pourraient être provoqués.
24

Caractéristiques Chapitre 2-1
Caractéristiques de sortie de l’UC et des cartes d’E/S d’extension
Sortie relais
Elément Caractéristiques
Capacité de commutation
max.
Capacité de commutation
min.
Durée de vie du relais Electrique : 300 000 manoeuvres (charge résistive) 100 000 manoeuvres (charge
Réponse ON 15 ms max.
Réponse OFF 15 ms max.
Configuration du circuit
2 A, 250 Vc.a. (cosφ =1)
2 A, 24 Vc.c.
(4 A/commun)
10 mA, 5 Vc.c.
inductive)
Mécanique : 10 000 000 manoeuvres
LED de
sortie
OUT
Circuits
internes
OUT
COM
Maximum
250 Vc.a. : 2 A
24 Vc.c. : 2 A
Rem.
La durée de vie des contacts de sorties relais respecte les conditions extrêmes
du graphe suivant. Le graphe montre les résultats de tests OMRON en durée de
vie pour des vitesses de commutations de 1800 manoeuvres/heure.
500
4
300
200
100
50
30
Duréedevie(x10 )
20
10
5
3
2
0.1 0.2 0.3 0.5 0.7 1 2 3 5
120 Vc.a., charge résistive
24 Vc.c., τ =7ms
120 Vc.a, cosφ =0,4
240 Vc.a, cosφ =0,4
24 Vc.c./240 Vc.a, charge résistive
Vitesse de commutation :
1800 manoeuvres/heure
Courant de contact (A)
25

p
p
Caractéristiques Chapitre 2-1
Sortie transistor (de type NPN)
Elément
CPM1A-10CDT-D CPM1A-20CDT-D CPM1A-30CDT-D CPM1A-40CDT-D CPM1A-20EDT/
Capacité de
commutation max.
24 Vc.c.
0,9 A/carte 0,9 A/commun
+10%
/
, 0,3 A/point (cf. Rem.)
--5 %
1,8 A/carte
Courant de fuite 0,1 mA max.
Tension résiduelle 1,5 V max.
Réponse ON 0,1 ms max.
Réponse OFF OUT 01000/01001 : 0.2 ms max. (courant de charge : 100 à 300 mA)
0.5 ms max. (courant de charge : 5 à 100 mA)
Autre que OUT 01000/01001 : 1 ms max. (courant de charge : 5 à 300 mA)
Fusible 1,25 A/commun (ne peut pas être remplacé par l’utilisateur)
Configuration du
circuit
Caractéristiques
0,9 A/commun
2,7 A/carte
LED de sortie
0,9 A/commun
3,6 A/carte
OUT
8ET
0,9 A/commun
1,8 A/carte
Circuits
internes
OUT
COM (--)
24 Vc.c.
Rem. Lors de l’utilisation de OUT 01000 ou OUT 01001 comme sortie d’impulsions,
connecter des résistances fictives, comme requis, afin de sélectionner le courant de charge de 0,1 à 0,2 A. Si le courant de charge est inférieur à 0,1 A, le
temps de réponse ON-à-OFF deviendra plus long et l’impulsion rapide ne sortira
pas. Par contre, si le courant de charge est supérieur à 0,2 A, le transistor peut
engendrer de la chaleur, provoquant ainsi des dommages aux composants.
Sortie transistor (de type PNP)
Elément
Capacité de
commutation max.
CPM1A-
10CDT1-D
24 Vc.c.
+10%
/
--5 %
0,9 A/carte 0,9 A/commun
CPM1A-
20CDT1-D
, 0,3 A/point cf. Rem.
1,8 A/carte
Courant de fuite 0,1 mA max.
Tension résiduelle 1,5 V max.
Réponse ON 0,1 ms max.
Réponse OFF OUT 01000/01001 : 0,2 ms max. (courant de charge : 100 à 300 mA)
0,5 ms max. (courant de charge : 5 à 100 mA)
Autre que OUT 01000/01001 : 1 ms max. (courant de charge : 5 à 300 mA)
Fusible 1,25 A/commun (ne peut pas être remplacé par l’utilisateur)
Configuration du
circuit
Caractéristique
30CDT1-D
0,9 A/commun
2,7 A/carte
LED de sortie
Circuits
internes
CPM1A-
CPM1A-
40CDT1-D
0,9 A/commun
3,6 A/carte
COM (+)
OUT
24 Vc.c.
CPM1A-
20EDT1/8ET1
0,9 A/commun
1,8 A/carte
OUT
Rem.
Lors de l’utilisation de OUT 01000 ou OUT 01001 comme sortie d’impulsions,
connecter des résistances fictives, comme requis, pour sélectionner le courant
de charge de 0,1 à 0,2 A. Si le courant de charge est inférieur à 0,1 A, le temps de
26

Caractéristiques Chapitre 2-1
réponse ON-à-OFF deviendra plus long et l’impulsion rapide ne sortira pas. Par
contre, si le courant de charge est supérieur à 0,2 A, le transistor peut engendrer
de la chaleur, provoquant ainsi des dommages aux composants.
!
Attention Ne pas appliquer à une borne de sortie une tension dépassant la capacité de
commutation maximale. Dans le cas contraire, des dommages ou incendies
pourraient être provoqués.
2-1-4 Caractéristiques des interfaces de communications
Interface RS-232C
Caractéristiques
Fonction Conversion du niveau CMOS (côté UC de l’API) en niveau RS-232C (côté périphérique).
Isolement Ligne RS-232C (côté périphérique) isolée par convertisseur c.c./c.c. et photocoupleur.
Alimentation Fournie par l’UC de l’API
Consommation 0,3 A max.
Débit 38400 bps maxi
Distance de
transmission
Résistance aux
vibrations
Résistance aux chocs 147 m/s2, 3 fois sur chaque axes X, Y et Z
Température ambiante Fonctionnement : 0° à55°C
Humidité 10% à 90% (sans condensation)
Atmosphère Exempt de gaz corrosif
Poids 200 g maxi
Longueur totale :15 m max.
10 à 57 Hz : amplitude de 0,075 mm
2
57 à 150 Hz : accélération de 9,8 m/s
(coefficient de temps ; 8 minutes × coefficient de 10 = 80 minutes de temps total)
Stockage : --20° à75°C
sur les axes X et Y pendant 80 minutes chacun
Interface RS-422
Caractéristiques
Fonction Conversion du niveau CMOS (côté UC de l’API) en niveau RS-232C (côté périphérique).
Isolement Ligne RS-232C (côté périphérique) isolée par convertisseur c.c./c.c. et photocoupleur.
Alimentation Fournie par l’UC de l’API
Consommation 0,3 A max.
Débit 38400 bps max.
Distance de
transmission
Résistance aux
vibrations
Résistance aux chocs 147 m/s2, 3 fois sur chaque axes X, Y et Z
Température ambiante Fonctionnement : 0° à55°C
Humidité 10% à 90% (sans condensation)
Atmosphère Exempt de gaz corrosif
Poids 200 g maxi
Longueur totale : 500 m max.
10 à 57 Hz : amplitude de 0,075 mm
57 à 150 Hz : accélération de 9,8 m/s2sur les axes X et Y pendant 80 minutes chacun
(coefficient de temps ; 8 minutes × coefficient de 10 = 80 minutes de temps total)
Stockage : --20° à75°C
27

Composants
2-2 Composants
2-2-1 Composants de l’UC
CPM1A-10CDR-j/10CDT-D/10CDT1-D : 10 bornes d’E/S
2. Borne de terre fonctionnelle
(seulement alimentation c.a.)
1. Bornes d’entrée alimentation
3. Borne de terre de protection
Chapitre 2-2
5. Bornes d’entrée
10. Commandes analogiques
11. Port périphérique
4. Bornes de sortie alimentation
(seulement alimenation c.a.)
CPM1A-20CDR-j/20CDT-D/20CDT1-D : 20 bornes d’E/S
CPM1A-30CDR-j/30CDT-D/30CDT1-D : 30 bornes d’E/S
8. Voyants d’entrée
7. Voyants de l’état de l’API
9. Voyants de sortie
6. Bornes de sortie
CPM1A-40CDR-j/40CDT-D/40CDT1-D : 40 bornes d’E/S
28
12. Connecteur des cartes
d’E/S d’extension
12.Connecteur des cartes d’E/S
d’extension

(
)
(g)
(g)
Composants
Description des composants de l’UC
1, 2, 3... 1. Bornes d’entrée alimentation
Connecter l’alimentation (100 à 240 Vc.a. ou 24 Vc.c.) à ces bornes.
Chapitre 2-2
2. Borne de terre fonctionnelle (
)
Veiller à mettre cette borne à la terre (seulement pour API de type c.a.) pour
renforcer l’immunité aux parasites et réduire le risque de destructions électriques.
3. Borne de terre de protection (
)
Veiller à mettre cette borne à la terre pour réduire le risque de destructions
électriques et d’électrocution.
4. Bornes de sortie alimentation
Les API CPM1A sont munis de bornes de sortie alimentation à 24 Vc.c. pour
fournir l’alimentation aux dispositifs d’entrée. (seulement pour API de type
c.a.)
5. Bornes d’entrée
Connecter aux circuits d’entrée.
6. Bornes de sortie
Connecter aux circuits de sortie.
7. Voyants de l’état de l’API
Ces voyants indiquent l’état de fonctionnement de l’API, comme illustré ci-
dessous.
Voyant Etat Description
PWR (vert)
RUN (vert)
ERR/ALARM
(rouge)
COMM (orange)
ON L’alimentation arrive à l’API.
OFF L’alimentation n’arrive pas à l’API.
ON L’API est en fonctionnement en mode RUN ou
MONITOR.
OFF L’API est en mode PROGRAM ou une erreur
grave s’est produite.
ON Une erreur grave s’est produite. (Le
fonctionnement de l’API s’arrête.)
Clignote Une erreur non grave s’est produite. (Le
fonctionnement de l’API continue.)
OFF Indique le fonctionnement normal.
ON Données transférées par le port périphérique.
OFF Données non transférées par le port
périphérique.
8. Voyants d’entrée
Ces voyants sont allumés quant la borne d’entrée correspondante est à ON.
Si une erreur grave se produit, ces voyants changent comme indiqué ci--
dessous :
Erreur de l’UC ou du bus d’E/S : Voyants d’entrée en position OFF.
Erreur de mémoire ou du système : les voyants d’entrée continuent à indi-
quer l’état au moment où l’erreur s’est produite, même si l’état d’entrée a changé.
9. Voyants de sortie
Ces voyants sont allumés quant la borne d’entrée correspondante est à ON.
10. Commandes analogiques
La sélection de ces commandes règle le contenu de IR 250 et IR 251 de 0 à
200.
11. Port périphérique
Connecte l’API à un périphérique, adaptateur RS-232C ou RS-422.
29

Composants
12. Connecteur des cartes d’E/S d’extension
Connecte l’UC de l’API à une carte d’E/S d’extension pour ajouter 12 points
d’entrée et 8 points de sortie. On peut connecter jusqu’à 3 cartes d’E/S d’extension.
2-2-2 Composants des cartes d’E/S d’extension
Unité d’E/S d’extension à 20 bornes d’E/S
5. Câble de liaison de l’Unité d’E/S
d’extension
Unité d’E/S d’extension à 8 bornes d’entrée
Chapitre 2-2
1. Bornes d’entrée
3. Voyants d’entrée
6. Connecteur d’extension
4. Voyants de sortie
2. Bornes de sortie
5. Câble de liaison de l’Unité d’E/S
d’extension
Unité d’E/S d’extension à 8 bornes de sortie
5. Câble de liaison de l’Unité d’E/S
d’extension
1. Bornes d’entrée
3. Voyants d’entrée
6. Connecteur d’extension
1. Bornes d’entrée
2. Bornes de sortie
4. Voyants de sortie
6. Connecteur d’extension
2. Bornes de sortie
30
1, 2, 3... 1. Bornes d’entrée
Connecter aux circuits d’entrée.
2. Bornes de sortie
Connecter aux circuits de sortie.
3. Voyants d’entrée
Ces voyants sont allumés quand la borne d’entrée correspondante est à
ON.

Composants
4. Voyants de sortie
Ces voyants sont allumés quand la borne de sortie correspondante est à
ON.
5. Câble de connexion de la carte d’E/S d’extension
Connecte la carte d’E/S d’extension à l’UC de l’API ou au connecteur d’ex-
tension de la carte d’E/S d’extension.
6. Connecteur d’extension
Connecte des cartes d’E/S d’extension ultérieures (entrées : 12 points, sor-
tie : 8 points.) On peut connecter jusqu’à 3 cartes d’E/S d’extension.
2-2-3 Composants des Unités d’E/S analogiques
Chapitre 2-2
3. Connecteur d’extension
2. Câble de liaison de l’Unité d’E/S
d’extension
1. Bornes d’E/S analogiques
1, 2, 3... 1. Bornes d’entrée analogiques
Relient l’Unité aux appareils d’entrée et de sortie analogiques.
2. Câble de liaison de l’Unité d’E/S d’extension
Relie l’Unité d’E/S analogique au connecteur d’extension de l’UC de l’API
ou d’une autre Unité d’extension. Le câble est fixé à l’Unité d’E/S analogique
et ne peut être retiré.
!
Attention Afin de prévenir un mauvais fonctionnement dû à l’électricité statique, ne pas
toucher le câble de liaison de l’Unité d’E/S d’extension lorsque l’Unité est sous
tension.
3. Connecteur d’extension
Relie les autres Unités d’extension (d’E/S d’extension, d’E/S analogiques
ou de liaison d’E/S CompoBus/S). Jusqu’à 3 Unités d’extension peuvent
être reliées à l’UC.
2-2-4 Composants des Unités sonde de température
2. Micro--interrupteurs
4. Câble de liaison d’E/S
d’extension
3. Commutateur
5. Connecteur d’extension
1. Bornes d’entrée température
31

Composants
Chapitre 2-2
1, 2, 3... 1. Bornes entrée température
A relier à un thermocouple ou à une Pt 100 ohms.
2. Micro--interrupteurs
Règle les unités de température (°Cou°F) et le nombre de décimales
utilisées.
ON
12
Nombre de décimales utilisées
OFF : Normal (0 or 1) ; ON : 2
Unités de température
OFF : °C; ON : °F
3. Commutateur
Règle la plage de température. Régler la plage en fonction des
caractéristiques de la sonde de température utilisée.
!
Attention
CPM1A-TS001/002
Réglage Thermocouple Plage (°C) Plage (°F)
0
1 0,0 à 500,0 0,0 à 900,0
2
3 0,0 à 400,0 0,0 à 750,0
4àF --- Réglage impossible
K
J
--200 à 1300 --300 à 2300
--100 à 850 --100 à 1500
CPM1A-TS101/102
Réglage Pt100 ohms Plage (°C) Plage (°F)
0 Pt100 --200,0 à 650,0 --300,0 à 1200,0
1 JPt100 --200,0 à 650,0 --300,0 à 1200,0
2àF --- Réglage impossible
4. Câble de liaison d’E/S d’extension
Relie l’Unité sonde de température au connecteur d’extension de l’UC de
l’API, de l’Unité d’E/S d’extension ou de toute autre Unité d’extension. Le
câble est fixé à l’Unité sonde de température et ne peut être retiré.
Afin de prévenir un mauvais fonctionnement dû à l’électricité statique, ne pas
toucher le câble de liaison de l’Unité d’E/S d’extension lorsque l’Unité est sous
tension.
32
5. Connecteur d’extension
Relie les autres Unités d’E/S d’extension ou Unités d’extension.

Composants
2-2-5 Composants des Unités de liaison d’E/S CompoBus/S
2. Micro--interrupteurs
3. Voyants
5. Connecteur d’extension
Chapitre 2-2
NODE ADDRESS
124
ON
4. Câble de liaison des Unités
d’’E/S d’extension
1, 2, 3... 1. Bornes CompoBus/S
Comprend les données de communications CompoBus/S des bornes
haut/bas, des bornes +/-- d’alimentation des communications et des bornes
NC. L’alimentation est fournie en interne, ainsi les bornes d’alimentation
peuvent être utilisées comme bornes pour relais.
2. Micro--interrupteurs
Règlent l’adresse des stations, le mode des communications et déterminent
les sorties qui seront réinitialisées lors d’une erreur de communication.
No. Fonction
8
DR
HOLD
SW1
Rem.
1à4(1,
2, 4, et
8)
DR ON : Mode de communication longue distance
HOLD ON : Maintien des entrées lors d’une erreur de communication
Le mode de communication longue distance peut être utilisé uniquement pour
une liaison aux Unités maîtres suivantes : C200HW-SRM21-V1,
CQM1-SRM21-V1 ou SRM1-C0j-V2.
3. Voyants
Indiquent l’état des communications CompoBus/S.
Voyants Etat Signification
COMM
(jaune)
ERR
(rouge)
4. Câble de liaison de l’Unité d’E/S d’extension
Relie l’Unité de liaison d’E/S CompoBus/S au connecteur d’extension de
l’UC de l’API ou d’une Unité d’extension.
1.Bornes CompoBus/S
Règlent l’adresse des stations par mot binaire. (1 = ON)
0 : 0000 1 : 0001 2 : 0010 3 : 0011
4 : 0100 5 : 0101 6 : 0110 7 : 0111
8 : 1000 9 : 1001 10 : 1010 11 : 1011
12 : 1100 13 : 1101 14 : 1110 15 : 1111
OFF : Mode de communication grande vitesse
(Voir Rem.)
OFF : Réinitialise les entrées lors d’une erreur de communication
ON Communications en cours
OFF Erreur de communications ou arrêtées
ON Erreur de communications
OFF Communications normales ou aucune
communication
!
Attention Afin de prévenir un mauvais fonctionnement dû à l’électricité statique, ne pas
toucher le câble de liaison de l’Unité d’E/S d’extension lorsque l’Unité est sous
tension.
5. Connecteur d’extension
Relie les autres Unités d’extension (d’E/S d’extension, d’E/S analogiques
ou de liaison d’E/S CompoBus/S). Jusqu’à 3 Unités d’extension peuvent
être reliées à l’UC.
33

Composants
2-2-6 Composants des adaptateurs de communication
RS-232C Adaptateur
1.Commutateur de sélection du mode
3. Port RS-232C
Affectation des broches du port
RS-232C
FG
1
SD
2
RD
3
RTS
4
2. Connecteur
1, 2, 3... 1. Commutateur de sélection du mode
Sélectionner ce commutateur à “HOST” lors de l’utilisation d’un système de
liaison maître pour connecter à un ordinateur personnel. Sélectionner à
“NT” lors de la connexion à un terminal opérateur programmable ou API
pour une liaison 1 :1.
2. Connecteur
Connecte au port périphérique de l’UC.
3. Port RS-232C
Connecte au câble RS-232C à partir d’un autre appareil tel qu’un ordinateur
personnel, périphérique ou terminal opérateur programmable.
CTS
5
6
7
8
9
Chapitre 2-2
DCD
DSR
DTR
SG
34

Composants
Adaptateur RS-422
Chapitre 2-2
1. Commutateur de résistance d’extrémité de câble
3. Port RS-422
2. Connecteur
Affectation des broches du
port RS-422
FG
SG
SDB
SDA
RDB
RDA
1, 2, 3... 1. Commutateur de résistance d’extrémité de câble
Sélectionner ce commutateur à “ON” (côté haut) pour les adaptateurs de
liaison situés aux deux extrémités du système de liaison maître et pour l’adaptateur RS-422.
2. Connecteur
Connecte au port périphérique de l’UC.
3. Port RS-422
Connecte au réseau de liaison maître.
Rem. Les CPM1-CIF01/CIF11 sont utilisés uniquement avec CPM1A, CPM1, CQM1
et SRM1. Ne pas les utiliser avec un API C200HS ou d’autres API.
35

CHAPITRE 3
Installation et câblage
Ce chapitre fournit des info rmations sur l’installation et le câblage d’un API CPM1A. Il est très important de suivre les instructions et précautions contenues dans ce chapitre lors de l’installation du CPM1A dans un panneau ou une armoire, du
câblage d’alimentation ou d’E/S.
3-1 Précautions 38..............................................................
3-1-1 Câblage d’alimentation 38.............................................
3-1-2 Circuits de verrouillage et circuits lim iteurs 38.............................
3-1-3 Tension d’alimentation 38.............................................
3-1-4 Ruptures de courant du CPM1A 38......................................
3-2 Sélection d’un site d’installation 39............................................
3-2-1 Conditions du site d’installation 39......................................
3-2-2 Installation dans un panneau/armoire 41..................................
3-3 Installation du CPM1A 42....................................................
3-3-1 Orientation du CPM1A 42.............................................
3-3-2 Installation du CPM1A 42.............................................
3-3-3 Connexion d’une carte d’E/S d’extension 44...............................
3-4 Câblage et connexions 46.....................................................
3-4-1 Précautions générales sur le câblage 46...................................
3-4-2 Câblage de terre 47...................................................
3-4-3 Câblage d’alimentation 48.............................................
3-4-4 Câblage d’entrée 49..................................................
3-4-5 Câblage externe 55...................................................
3-4-6 Connexion des périphériques 63.........................................
3-4-7 Connexions de liaison maître 63.........................................
3-4-8 Connexions 1 à 1 de l’API 66...........................................
3-4-9 Connexions de liaison NT 67...........................................
37

Précautions Chapitre 3-1
3-1 Précautions
Observer les précautionssuivantes lors de la conception d’un système ayant un
API CPM1A.
3-1-1 Câblage d’alimentation
Séparer le câblage d’alimentation du câblage des systèmes de contrôle,du
CPM1A et du système d’E/S c.c. Séparer les circuits de contrôle qui fournissent
l’alimentation à l’unité principale des circuits principaux en utilisant des dispositifs protecteurs et fusibles dédiés.
3-1-2 Circuits de verrouillage et circuits limiteurs
Construire un circuit de verrouillage externe si les sorties du CPM1A sont utilisées pour exécuter des opérations réciproques telles que le contrôle du fonctionnement d’avance et recul d’un moteur ou si le fonctionnement incorrect de
l’API peut provoquer des accidents ou des dommages mécaniques. Construire
également un circuit limiteur afin de prévenir un déplacement à la dérive dans
les systèmes tels que le contrôle de position.
Exemple d’un circuit de verrouillage:
Circuit de verrouillage
01005
MC2
MC1
Moteur avant
Dans le circuit de verrouillage ci--dessus, MC1 et MC2 ne peuvent pas être à ON
au même temps bien que les sorties 01005 et 01006 du CPM1A soient toutes les
deux à ON (fonctionnement incorrect de l’API).
3-1-3 Tension d’alimentation
Attention Utiliser les tensions d’alimentation indiquées dans le Chapitre Caractéristiques
!
et composants de l’unité. Si l’on ne respecte pas ces indications, des incendies
pourront avoir lieu. Dans les milieux où les conditions d’alimentation sont insuffisantes, appliquer des mesures afin de garantir la distribution de l’alimentation à
la tension nominale. Veiller à respecter les précautions de sécurité, telles que
l’application de rupteurs pour prévenir des courts--circuits dans le câblage externe. Lors d’une des opérations mentionnées ci--dessous, mettre l’alimentation
de l’API hors tension; dans le cas contraire, l’électrocution, des dommages ou
un dysfonctionnement pourraient être provoqués.
• Connecter ou déconnecter les cartes d’E/S d’extension ou les UC.
• Monter des unités.
• Connecter des câbles ou des câblages.
CPM1A
01006
MC1
MC2
Moteur inverse
3-1-4 Ruptures de courant du CPM1A
Chute de la tension d’alimentation
Lorsque la tension d’alimentation descend au--dessous de 85% de la tension
nominale, l’API s’arrêtera et les sorties passeront sur OFF.
Détection de coupure d’alimentation temporaire
Une coupure d’alimentation temporaire qui dure moins de 10 ms avec une ali-
38

Sélection d’un site d’installation
mentation c.a. et de 2 ms avec une alimentation c.c. n’est pas détectée et l’UC
continue à fonctionner.
Une coupure d’alimentation temporaire qui dure plus de 10 ms avec une alimentation c.a. et de 2 ms avec une alimentation c.c. peut ou ne peut pas être
détectée dans une zone incertaine.
Lors de la détection d’une coupure d’alimentation temporaire, l’UC s’arrête et la
sortie passe sur OFF.
Reprise automatique
Quand la tension d’alimentation se rétablit à une valeur supérieure à 85% de la
valeur nominale, le fonctionnement reprend normalement.
Chapitre 3-2
Durée de la rupture de courant (au--dessous de 85% de la tension nominale)
Fonctionnement normal
Rem.:Le CPM1A peut répéter les fonctions d’arrêt/reprise si la tension d’alimentation
inférieure à 85% de la valeur nominale augmente ou diminue graduellement.
Si cela touche l’équipement, etc., appliquer un circuit de protection qui ferme la
sortie si la tension d’alimentation n’est pas supérieure à la valeur nominale.
Période de temps jusqu’au démarrage
La période de temps allant de l’activation de l’alimentation jusqu’au démarrage
varie selon les conditions de fonctionnement telles que la tension d’alimentation, la configuration, la température ambiante, etc. Le temps minimum est de
300 ms environ.
10 ms (2 ms)
3-2 Sélection d’un site d’installation
Le CPM1A résiste aux environnements hostiles et il est extrêmement fiable;
pourtant, l’installation de l’API dans un milieux favorable augmentera au maximum sa fiabilité et sa durée de vie.
Attention Veiller à installer le CPM1A de façon correcte, comme décrit dans ce manuel.
!
Dans le cas contraire, le risque d’un dysfonctionnement de l’unité est très probable.
Le fonctionnement peut s’arrêter
Toutes les sorties passent
sur OFF lors de l’arrêt.
3-2-1 Conditions du site d’installation
Rem.:Ne pas installer le CPM1A dans aucune des conditions ci--dessous:
• Milieux éclairés par les rayons solaires directs.
• Milieux exposés à une température inférieure à 0°C ou supérieure à 55°C.
• Milieux exposés à une humidité inférieure à 10% ou supérieure à 90%.
• Milieux exposés à la condensation causée par des changements de tempéra-
ture brusques.
• Milieux exposés aux gaz corrosifs ou inflammables.
• Milieux exposés aux poussières (en particulier celles de fer) ou aux sels.
• Milieux exposés à des chocs ou vibrations.
• Milieux exposés à l’eau, à l’huile ou aux produits chimiques.
Veiller à ce que les conditions du site d’installation soient conformes aux caractéristiques générales du CPM1A. Pour des informations détaillées, se reporter
aux Caractéristiques générales.
39

Sélection d’un site d’installation
Rem.:Appliquer une protection appropriée lors de l’installation dans les milieux sui-
vants:
• Milieux exposés à l’électricité statique ou à d’autres formes de parasites.
• Milieux exposés à des champs magnétiques intenses.
• Milieux exposés à la radioactivité.
• Milieux proches des lignes d’alimentation.
Chapitre 3-2
40

Sélection d’un site d’installation
Chapitre 3-2
3-2-2 Installation dans un panneau/armoire
Tenir compte du fonctionnement de l’API, de l’entretien et des conditions environnantes lors de l’installation du CPM1A dans un panneau ou une armoire.
Surchauffe La plage de température de fonctionnement pour le CPM1A est de 0_Cà 55_C.
Veiller à ce qu’il y ait une aération adéquate pour le refroidissement.
• Fournir un espace suffisant pour la circulation d’air.
• Ne pas installer le CPM1A au--dessous d’un dispositif produisant une quantité
importante de chaleur, tel que radiateurs, transformateurs ou grandes résistances.
• Installer un ventilateur ou un système de refroidissement quand la température ambiante est supérieure à 55_C.
Pupitre de
commande
Ventilateur
CPM1A
Trou d’aération
Parasitage électrique Les lignes de puissance et l’équipement à haute tension peuvent provoquer le
parasitage électrique dans l’API.
• Ne pas installer le CPM1A dans un panneau ou armoire avec un équipement à
haute tension.
• Laisser un espace d’au moins 200 mm entre le CPM1A et les lignes de puissance voisines.
200 mm min.
CPM1A
200 mm min.
Accessibilité Veiller à ce que l’on puisse avoir accès au CPM1A pour le fonctionnement nor-
mal ou l’entretien.
• Laisser un espace libre pour permettre le fonctionnement et l’entretien du
CPM1A. Des équipements haute tension ou des lignes de puissance peuvent
être dangeureux si ils encombrent l’espace libre pendant les opérations périodiques d’entretien.
• Il sera plus facile d’accéder à l’API si le panneau ou armoire sont installés à
environ1mà1,5mdusol.
41

Installation du CPM1A
3-3 Installation du CPM1A
3-3-1 Orientation du CPM1A
Le CPM1A doit être installé dans la position ci--dessous afin de garantir un refroidissement adéquat.
Ne pas installer le CPM1A dans les positions ci--dessous.
Chapitre 3-3
Position correcte
Position incorrecte
Position incorrecte
3-3-2 Installation du CPM1A
Le CPM1A peut être installé sur une surface horizontale ou sur un rail DIN.
Installation sur la surface Utiliser le schéma ci--dessous lors de l’installation du CPM1A sur une surface
horizontale.
CPM1A-10CDR-j/10CDT-D/10CDT1-D et
CPM1A-20CDR-j/20CDT-D/20CDT1-D
Deux trous M4
100 mm
Utiliser des vis de dia. M4 x 15.
La largeur (A) entre les trous de montage dépend du modèle de CPM1A.
UC CPM1A-10CDR-j/10CDT-D/10CDT1-D 56 mm
UC CPM1A-20CDR-j/20CDT-D/20CDT1-D 76 mm
UC
A8mm
Référence Largeur (A)
42

Installation du CPM1A
Chapitre 3-3
Utiliser le schéma ci--dessous lors de l’installation d’un API CPM1A et d’un
adaptateur de communication sur une surface horizontale.
21 mm
81 mm
Adaptateur de
communication
UC
10 à
15 mm
100 mm
CPM1A-30CDR-j/30CDT-D/30CDT1-D et
CPM1A-40CDR-j/40CDT-D/40CDT1-D
Quatre trous M4
100 mm
UC
A
8mm
Utiliser des vis de dia. M4 x 15.
La largeur (A) entre les trous de montage dépend du modèle de CPM1A.
Référence Largeur (A)
UC CPM1A-30CDR-j/30CDT-D/30CDT1-D 120 mm
UC CPM1A-40CDR-j/40CDT-D/40CDT1-D 140 mm
Carte d’E/S d’extension 76 mm
Utiliser le schéma ci--dessous lors de l’installation d’un API CPM1A, d’une carte
d’E/S d’extension et d’un adaptateur de communication sur une surface horizontale.
21 mm
Carte d’E/S
d’extension
10
à15
mm
Adaptateur de
communication
UC
10 à
15 mm
Installation sur rail DIN Le CPM1A peut être installé sur un rail DIN de 35 mm.
Eléments terminaux
(PFP-M)
Installation
Abaisser le CPM1A de façon que l’encoche placée derrière l’API saisisse le haut
100 mm81 mm
Rail DIN
PFP-100N (1 m)
PFP-50N (50 cm)
PFP-100N2 (1 m)
43

Installation du CPM1A
Chapitre 3-3
du rail DIN. Appuyer sur l’API vers l’avant jusqu’à l’enclenchement de la sécurité.
Démontage
Ouvrir la sécurité à l’aide d’un tournevis standard et tourner l’API vers le haut afin
de la déverrouiller.
Tournevis
3-3-3 Connexion d’une carte d’E/S d’extension
On peut connecter jusqu’à 3 cartes d’E/S d’extension aux UC des
CPM1A-30CDR-j/ 30CDT-D/30CDT1-D et CPM1A-40CDR-j/40CDTD/40CDT1-D. Suivre la procéduire ci--dessous lors de la connexion d’une carte
d’E/S d’extension.
1, 2, 3... 1. Enlever le couvercle du connecteur des cartes d’E/S d’extension de l’UC ou
de la carte d’E/S d’extension à l’aide d’un tournevis à lame plate.
Couvercle du connecteur
de la carte d’E/S
d’extension
44

Installation du CPM1A
Chapitre 3-3
2. Insérer le câble de connexion de la carte d’E/S d’extension dans le connecteur de l’UC ou de la carte d’E/S d’extension.
3. Place de nouveau le couvercle sur le connecteur d’E/S d’extension de l’UC
ou de la carte d’E/S d’extension.
45

Câblage et connexions
3-4 Câblage et connexions
Ce chapitre fournit des informations de base sur le câblage de l’alimentation et
des cartes d’E/S d’extension de même que sur la connexion des périphériques.
3-4-1 Précautions générales sur le câblage
Attention Avant le câblage, fixer l’étiquette contre les poussières ; en effet, des débris de
!
câbles accumulés dans l’unité peuvent provoquer un dysfonctionnement. Après
avoir terminé le câblage, veiller à enlever l’étiquette pour éviter une surchauffe.
Etiquette protégée contre les
poussières
Chapitre 3-4
Parasitage de la ligne d’E/S Ne pas exploiter les lignes d’E/S du CPM1A dans le même conduit ou canalisa-
tion que les lignes de puissance.
Conduites suspendues
Laisser au moins 300 mm entre les câbles d’alimentation et le câblage d’E/S ou
de commande, comme indiqué ci--dessous.
Lignes d’E/S du CPM1A
300 mm min.
Câbles de commande et lignes
d’alimentation du CPM1A
300 mm min.
Câbles d’alimentation
46

Câblage et connexions
Chapitre 3-4
Conduites de plancher
Laisser au moins 200 mm entre le câblage et le haut de la conduite, comme
indiqué ci--dessous.
Lignes d’E/S du
CPM1A
Câbles de commande et lignes de puissance du CPM1A
Câbles
d’alimentation
Plaque métallique (fer)
200 mm min.
Conduites
Séparer les lignes d’E/S, de puissance et de commande du CPM1A et les câbles
d’alimentations comme indiqué ci--dessous.
Lignes d’E/S du
CPM1A
Câbles de commande et lignes de puissance du CPM1A
Câbles
d’alimentation
3-4-2 Câblage de terre
Mise à la terre Veiller à mettre à la terre la borne de terre à moins de 100 Ω afin de protéger
!
AVIS
l’unité contre les secousses électriques et le dysfonctionnement dû au parasitage électrique. Utiliser un câble de 1,25 mm
Pendant l’installation, veiller à mettre à la masse à 100 Ω max afin de prévenir
l’électrocution.
Mettre à la masse
à100 Ω max.
Carte d’alimentation c.a.
Mettre à la masse
à100 Ω max.
Carte d’alimentation c.c.
2
au moins pour la mise à la terre.
Rem.:Toujours déconnecter la borne de terre fonctionnelle avant d’effectuer une
mesure de tension de résistance.
47

Câblage et connexions
Connecteurs à sertir
Attention Toujours utiliser des connecteurs à sertir pour les lignes de puissance et d’E/S
!
du CPM1A ou utiliser une ligne unifilaire (au lieu d’un câble multibrins). Ne pas
connecter directement aux bornes des câbles nus torsadés afin d’éviter des incendies.
Utiliser des bornes à vis de type M3 et serrer les vis fermement (0,5 N S m).
3-4-3 Câblage d’alimentation
Chapitre 3-4
Borne à fourchette Borne en anneau
6,2 mm max. 6,2 mm max.
Alimentation de 100 à 240
Vc.a.
Alimentation c.a.
Câbler un circuit séparé pour le circuit d’alimentation du CPM1A de façon à
éviter une chute de tension due au courant de démarrage circulant lorsqu’un
autre appareil est activé.
Quand on utilise plusieurs API CPM1A, l’on recommande de câbler les API sur
des circuits séparés afin de prévenir une chute de tension due au courant de
démarrage ou un fonctionnement incorrect du rupteur de circuit.
Utiliser des câbles d’alimentation torsadés pour prévenir le parasitage causé
par les lignes d’alimentation. L’application d’un transformateur d’isolement 1:1
réduit énormement le parasitage électrique.
Compte tenu de l’éventualité de chutes de tension et du courant admissible, veiller à utiliser des lignes de puissance épaisses.
Rupteur
Transforma
teur
d’isolement
Torsader les câbles. La zone de la section transversale
de chaque câble doit être de 1,25 mm
2
min.
Connecteurs à sertir
Attention Utiliser toujours des connecteurs à sertir pour les lignes de puissance et d’E/S du
!
!
48
CPM1A ou bien utiliser une ligne unifilaire (au lieu d’un câble multibrins). Ne pas
connecter directement aux bornes des câbles nus torsadés afin d’éviter des incendies.
Utiliser des bornes à vis de type M3 Connecter un connecteur à sertir avec borne
en anneau à chaque borne à vis.
Borne en anneau
6,2 mm max.
Attention Serrer fermement chaque vis utilisée pour l’alimentation c.a. avec un couple de
0,5 N • m. Dans le cas contraire, les risques de courts--circuits, dysfonctionnement ou incendie sont très probables.

Câblage et connexions
Alimentation 24Vc.c. Utiliser une alimentation c.c. Omron. Pour une alimentation c.c. utilisée pour la
sortie transistor, utiliser une alimentation Omron avec isolement double ou renforcé afin de satisfaire les normes CE (Normes basse tension).
24 Vc.c.
Attention Ne pas effectuer un essais diélectrique sur l’UC c.c. Dans le cas contraire, les
!
composants internes de l’API risquent d’être endommagés.
Connecteurs à sertir
Attention Utiliser toujours des connecteurs à sertir pour les lignes de puissance et d’E/S
!
du CPM1A ou bien utiliser une ligne unifilaire (au lieu d’un câble multibrins). Ne
pas connecter directement aux bornes des câbles nus à âme torsadée afin de
prévenir des incendies.
Chapitre 3-4
Utiliser des bornes à vis de type M3 et serrer fermement les vis (0.5 N S m).
Borne à fourchette Borne en anneau
6,2 mm max. 6,2 mm max.
3-4-4 Câblage d’entrée
Câbler les entrées à l’UC et à la carte d’E/S d’extension du CPM1A comme indiqué dans les diagrammes ci--dessous. Utiliser des connecteurs à sertir ou des
lignes unifilaires (pas de câble multibrins) pour les connecter à l’API. Les bornes
de sortie alimentation peuvent être utilisées avec des UC c.a.
Configuration d’entrée Les diagrammes ci--dessous indiquent les configurations d’entrée.
49

Câblage et connexions
CPM1A-10CDR-j/10CDT-D/10CDT1-D
Chapitre 3-4
24 Vc.c.
CPM1A-20CDR-j/20CDT-D/20CDT1-D
CPM1A-20EDR/20EDT/20EDT1
24 Vc.c.
CPM1A-30CDR-j/30CDT-D/30CDT1-D
24 Vc.c.
Appareils d’entrée
Appareils d’entrée
Appareils d’entrée
CPM1A-40CDR-j/40CDT-D/40CDT1-D
24 Vc.c.
Appareils d’entrée
50

Câblage et connexions
Chapitre 3-4
CPM1A-8ED
24 Vc.c.
COM
010203
00
COM04050607
Appareils
d’entrée
Appareils
d’entrée
Rem. Bien que les bornes COM soient connectés en interne, s’assurer de bien les
connecter en externe.
CPM1A-20EDR/20EDR1/EDT/EDT1
24 Vc.c.
COM
NC
SSSSSSSS
01
00 02
j CH
03 050807 09
04
06 10
Appareils
d’entrée
11
51

Câblage et connexions
Chapitre 3-4
Exemple de câblage d’entrée Une UC de type c.a. est représentée. Les UC de type c.c. ne disposent pas de
sortie d’alimentation.
Appareils
COM
d’entrée
24 Vc.c. à
0,2 A en
sortie
COM
00
0CH
01
03 05
02
04
10 CH 11 CH
00 01 02 0504 07 00 02
+
--
07 09
06 10
Alimentation externe :
24 Vc.c. à 200 mA/UC type E/S à 10 points et 20 points
24 VDC at 300 mA/UC type E/S à 30 points et 40 points
(Applicable aux UC à alimentation de 100 à 240 Vc.a.)
!
AVIS
Lorsque la sortie 24 Vc.c. (alimentation de service vers l’API) est en surcharge
ou court--circuitée, la tension peut chuter et entraîner la mise sur OFF des
sorties. Prévoir des dispositifs de sécurité externes pour rendre sûr le système.
Ne pas le faire peut causer de graves accidents.
11
01
03 05
08
1CH
02
00
04
03COM COM COM 03 COM 06 COM
01
52

Câblage et connexions
Chapitre 3-4
Dispositifs d’entrée Le tableau suivant indique la manière de connecter les divers dispositifs d’en-
trées.
Dispositif Diagramme du circuit
Sortie relais
Relais
IN
5 mA/12 mA CPM1A
COM (+)
Collecteur NPN
ouver t
Sortie courant NPN
Sortie courant PNP
Sortie tension
Capteur
Circuit de courant
constant
+
Sortie
0V
+
0V
+
0V
+
Sortie
0V
Alimentation
capteur
5mA/12mA
Sortie
5mA/12mA
5mA/12mA
Sortie
Alimentation
capteur
Allimentation
capteur
IN
COM (+)
Utiliser la même alimentation
pour entrée et capteur.
IN
+
COM (+)
IN
COM (--)
COM (+)
IN
CPM1A
CPM1A
CPM1A
CPM1A
53

Câblage et connexions
Chapitre 3-4
Courant de fuite (24 Vc.c.) Un courant de fuite peut causer des entrées fausses lors de l’utilisation de cap-
teurs à deux câbles (interrupteurs de proximité ou photoélectriques) ou de fins
de course avec LED.
Les entrées fausses ne se produiront pas si le courant de fuite est inférieur à
1,0 mA (2,5 mA pour IN00000 à IN00002), mais si le courant de fuite dépasse
ces valeurs, insérer une résistance de charge dans le circuit afin de réduire
l’impédance d’entrée, comme indiqué ci--dessous.
Alimentation
d’entrée
CPM1A
Capteur à 2 câbles,
etc.
Résistance de
charge
R
I: Courant de fuite du dispositif(mA)
R:Résist.decharge(kΩ)
W: Capacité de change de la résistance
de charge (W)
× 5.0
L
C
R =
I × L
Les équations ci--dessus dérivent des équations suivantes:
Tension d′entrée (24)
R ×
I ×
W ≧
Se reporter aux Caractéristiques d’E/S pour des informations détaillées sur les valeurs L
L’impédance d’entrée, le courant d’entrée et la tension à OFF peuvent varier selon
l’entrée utilisée. (IN00000 à travers IN00002ont des valeurs différentes.)
C,IC
,etEC.
Courant d′entrée (I
Tension d′entrée (24)
R +
Courant d′entrée (I
Tension d′entrée (24)
kΩ max. W =
–5.0
C
R
LC: Impédance d’entrée du CPM1A(kΩ)
: Courant d’entrée du CPM1A (mA)
I
C
EC: Tension à OFF du CPM1A (V) = 5,0 V
2.3
Wmin.
R
)
C
≦ Tensionà OFF (E
)
C
× Tension d′entrée (24) × tolérance (4)
:5.0)
C
Charges inductives Lors de la connexion d’une charge inductive à une entrée, connecter un diode
en parallèle avec la charge. Le diode doit satisfaire les conditions suivantes:
1, 2, 3... 1. La tension de rupture de pointe inverse doit être au moins 3 fois à la tension
de charge.
2. Le courant redressé moyen doit être de 1 A.
Connecteurs à sertir
Attention Utiliser toujours des connecteurs à sertir pour les lignes de puissance et d’E/S
!
54
IN
Diode
CPM1A
COM
du CPM1A ou bien utiliser une ligne unifilaire (au lieu d’un câble multibrins). Ne
pas connecter directement aux bornes des câbles nus torsadés afin de prévenir
des incendies.
Utiliser des bornes à vis de type M3 et serrer fermement les vis (0,5 N S m).
Borne à fourchette Borne en anneau
6,2 mm max. 6,2 mm max.

Câblage et connexions
3-4-5 Câblage externe
Câblagedesortierelais
Chapitre 3-4
Câbler les sorties à l’UC et à la carte d’E/S d’extension du CPM1A comme indiqué dans les diagrammes ci--dessous. Utiliser des connecteurs à sertir ou des
lignes unifilaires (pas de câble multibrins) pour les connecter à l’API. Les bornes
de sortie alimentation peuvent être utilisées avec des UC c.a.
• Utiliser toujours un câble unique ou appliquer des connecteurs à sertir si l’on
utilise un câble multibrins.
• Ne pas dépasser la capacité de sortie ou le courant commun maximum. Pour
des informations détaillées se reporter aux Caractéristiques d’E/S.
Elément Caractéristique
Capacité de sortie 2A(250Vc.a.ou24Vc.c.)
Capacité commune max. 4 A/Commun
55

Câblage et connexions
Configurations de sortie
CPM1A-10CDR-j
CPM1A-20CDR-j/CPM1A-20EDR
CPM1A-30CDR-j
Charge
Charge
Charge
Charge
Commun
Charge
Charge
Charge
Charge
Charge
Charge
Commun Commun
Chapitre 3-4
Charge
Charge
CPM1A-40CDR-j
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Commun Commun Commun
Charge
Charge
Charge
Charge
Charge
Charge
Commun Commun Commun Commun
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
56

Câblage et connexions
Chapitre 3-4
CPM1A-8ER
250 Vc.a./
24 Vc.c.
250 Vc.a./
24 Vc.c.
Charge
COM 01
COM 05
Charge
Charge
Charge
Charge
03
0200
0604
07
Charge
Charge
Charge
57

Câblage et connexions
Câblage de sortie transistor (de type NPN)
Câbler les sorties à l’UC et à la carte d’E/S d’extension du CPM1A comme indiqué ci--dessous.
• Toujours utiliser un câble unique ou appliquer des connecteurs à sertir si l’on
utilise un câble multibrins.
• Ne pas dépasser la capacité de sortie ou le courant commun maximu. Pour
des informations détaillées, se reporter aux Caractéristiques d’E/S.
Elément Caractéristique
Capacité de sortie 300 mA (24 Vc.c.)
Capacité commune max. 0,9 A/commun
Configurations de sortie
CPM1A-10CDT-D
+10%
24 Vc.c.
/
--15%
Charge
Charge
Charge
Chapitre 3-4
Charge
CPM1A-20CDT-D/CPM1A-20EDT
+10%
24 Vc.c.
CPM1A-30CDT-D
+10%
24 Vc.c.
/
--15%
CPM1A-40CDT-D
/
--15 %
Commun
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Commun Commun
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Commun Commun Commun
Charge
Charge
58
24 Vc.c.
+10%
/
--15 %
Charge
Charge
Charge
Charge
Commun Commun
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Commun Commun

Câblage et connexions
CPM1A-8ET
+10%
24 Vc.c.
/
--15%
Chapitre 3-4
Charge
Charge
Charge
Charge
COM 01
COM 05
+10%
24 Vc.c.
Attention Vérifier la polarité de l’alimentation pour la charge avant de l’activer.
!
/
--15 %
Charge
03
0200
0604
07
Charge
Charge
Charge
59

Câblage et connexions
Câblage de sortie transistor (type PNP)
Câbler les sorties à l’UC et à la carte d’E/S d’extension du CPM1A comme indiqué ci--dessous.
• Utiliser toujours un câble unique ou appliquer des connecteurs à sertir si l’on
utilise un câble multibrins.
• Ne pas dépasser la capacité de sortie ou le courant commun maximum. Pour
des informations détaillées se reporter aux Caractéristiques d’E/S.
Elément Caractéristique
Capacité de sortie 300 mA (24 Vc.c.)
Capacité de sortie 0,9 A/commun
Configurations de sortie
CPM1A-10CDT1-D
+10%
24 Vc.c.
/
--1 5 %
Charge
Charge
Charge
Charge
Chapitre 3-4
CPM1A-20CDT1-D/CPM1A-20EDT1
+10%
24 Vc.c.
/
--15%
CPM1A-30CDT1-D
+10%
24 Vc.c.
/
--1 5 %
CPM1A-40CDT1-D
Commun
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Commun
Charge
Charge
Charge
Commun
Charge
Charge
Charge
Charge
Charge
Charge
Commun Commun Commun
Charge
Charge
60
24 Vc.c.
+10%
/
--15%
Charge
Charge
Charge
Commun
Charge
Charge
Charge
Charge
Charge
Commun Commun
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Charge
Commun

Câblage et connexions
CPM1A-8ET1
+10%
24 Vc.c.
/
--15%
Chapitre 3-4
Charge
Charge
Charge
Charge
Attention Vérifier la polarité de l’alimentation pour la charge avant de l’activer.
!
Précautions sur le câblage
de sortie
24 Vc.c.
+10%
/
--1 5 %
COM 01
COM 05
Charge
03
0200
0604
07
Charge
Charge
Charge
Suivre les précautions ci--dessous pour protéger les composants internes de
l’API.
Protection contre les courts--circuits de sortie
Les circuits de sortie ou internes peuvent être endommagés quand la charge
connectée à une sortie est court--circuitée ; il est donc recommandé d’installer
des fusibles de protection dans les circuits de sortie.
Polarité d’alimentation pour la charge
Vérifier la polarité de l’alimentation c.c. pour la charge avant de câbler la sortie
transistor. Si la polarité de l’alimentation est inversement connectée, les risques
de dysfonctionnement de la charge et de dommages aux composants internes
sont très probables.
61

Câblage et connexions
Chapitre 3-4
Charges inductives
Lors de la connexion d’une charge inductive à une entrée, connecter une
protection secteur ou un diode en parallèle avec la charge.
Les composants de la protection secteur ont les caractéristiques suivantes:
Sortie relais
OUT
Sortie relais
Sortie transistor
(de type NPN)
Sortie relais
Sortie transistor
(de type PNP)
CPM1A
COM
OUT
CPM1A
COM
OUT
CPM1A
COM
Protection secteur
Diode
Diode
Connecteurs à sertir
Attention Utiliser toujours des connecteurs à sertir pour les lignes de puissance et d’E/S du
!
Le diode devrait satisfaire les conditions ci--dessous:
La tension de rupture de pointe inverse doit être 3 fois la tension de charge.
Le courant redressé moyen doit être de 1 A.
Considérations sur le courant de démarrage
Quand on commute une charge avec un courant de démarrage élevé dans la
sortie relais ou transistor du CPM1A, tels qu’une lampe à incandescence, supprimer le courant de démarrage comme indiqué ci--dessous.
Mesure 1
OUT
R
COM
Appliquer un courantd’obscuritéde
1/3 env.de la valeur nominale par
une lampe à incandenscence
Mesure 2
R
OUT
COM
Appliquer une résistance
de limitation
Insertion d’un fusible
Le CPM1A avec sortie transistor pourrait brûler si la charge est court--circuitée;
c’est pour cela qu’il faut insérer un fusible de protection en série dans la charge.
CPM1A ou bien utiliser une ligne unifilaire (au lieu d’un câble multibrins). Ne pas
connecter directement aux bornes des câbles nus à âme torsadée afin de prévenir des incendies.
62
Utiliser des bornes à vis de type M3 et serrer les vis fermement (0,5 N S m).
Borne à fourchette Borne en anneau
6,2 mm max. 6,2 mm max.

Câblage et connexions
3-4-6 Connexion des périphériques
L’UC du CPM1A peut être connectée à une console de programmation
C200H-PRO27-E avec un câble de connexion C200H-CN222 (2 m) ou
C200H-CN422 (4 m) standard. L’UC du CPM1A peut également être connectée
au CQM1-PRO01-E. Le CQM1-PRO01-E est muni d’un câble de connexion de
2m.
Chapitre 3-4
3-4-7 Connexions de liaison maître
La liaison maître est un système de communication de commande/réponse
dans lequel les commandes sont transmises à partir de l’ordinateur central et les
réponses correspondantes sont renvoyées à partir des API de destination. Les
commandes de liaison maître peuvent être utilisés pour lire/écrire les données
dans les zones de l’API et lire/écrire les sélections de l’API.
Connexion 1:1 de liaison maître L’UC du CPM1A peut être connectée à un compatible PC/AT ou à un terminal
opérateur programmable avec un adaptateurcompatible RS-232C, comme indiqué ci--dessous.
Top OM R O N
Commande
Commande
Adaptateur
RS-232C
UC du CPM1A
Adaptateur
RS-232C
UC du CPM1A
63

Câblage et connexions
Chapitre 3-4
Le diagramme suivant indique le câblage dans le câble RS-232C utilisé pour
connecter un CPM1A à un ordinateur central ou à un terminal programmable.
Compatible PC ou terminal opérateur
programmable (à 9 broches)
CD
RD
SD
ER
SG
DR
RS
CS
CI
Nº de
broche
1
2
3
4
5
6
7
8
9
Signal
Adaptateur RS-232C
Nº de
broche
1/Couvercle
2
3
4
5
6
7
8
9
9
Signal
FG
SD
RD
RS
CS
--
--
--
SG
Le type de connecteur utilisé variera selon le Top. Vérifier le Top de façon
manuelle afin d’assurer l’utilisation du connecteur correct.
Rem.:Quand le CPM1A est connecté à un ordinateur central ou un Top OMRON,
sélectionner le mode de l’adaptateur RS-232C à “HOST.”
Connexion 1:n de liaison maîtreOn peut connecter jusqu’à 32 UC à un compatible PC ou un Top avec un adap-
tateur de liaison 3G2A9-AL004-E et les adaptateurs RS-422, comme indiqué
ci--dessous.
Adaptateur
RS-422
UC du
CPM1A
Adaptateur de
liaison
3G2A9-AL004-E
Adaptateur
RS-422
UC du
CPM1A
Adaptateur
RS-422
UC du
CPM1A
64

Câblage et connexions
Adaptateur de liaison 3G2A9-AL004-E
Connecteur D-sub
à25broches
Utiliser un câble droit
RS-232C pourla connexion au port
RS-232C de l’ordinateur
central.
Chapitre 3-4
Le diagramme suivant indique le câblage dans les câbles RS-422 utilisés pour
connecter les API CPM1A à un adaptateur de liaison 3G2A9-AL004-E. Dans les
connexions adaptateur de liaison/adaptateur RS-422 et dans les connexions
adaptateur RS-422/RS-422, connecter les bornes SG, RDA, RDB, SDA, et SDB
aux mêmes bornes situées dans l’autre adaptateur.
Connecteurs D-sub à 9 broches
Signal
RDB
--
SG
-SDB
RDA
FG
-SDA
Nº de
broche
1
2
3
4
5
6
7
8
9
Adaptateur RS-422 A
UC du CPM1A
SG
RDA
RDB
SDA
SDB
Rem.:1. La longueur maximum du câble RS-422 devrait être de 500 m.
2. Sélectionner l’interrupteur de la résistance d’extrémité de câble à “ON”
(côté supérieur) pour les adaptateurs sur les deux extrémités du système de
liaison maître.
Toujours utiliser des connecteurs à sertir lors du câblage des adaptateurs
RS-422. Utiliser des bornes à vis M3 et serrer les vis fermement au couple de
0,5 N S m.
6,2 mm max.
Borne à fourchette
6,2 mm max.
Borne en anneau
65

Câblage et connexions
3-4-8 Connexions1à1del’API
Un CPM1A peut être connecté à un CPM1A, CQM1, CPM1, SRM1 ou à un API
C200HS ou C200HX/HE/HG à l’aide d’un adaptateur RS-232C. Un API agit
comme le maître et l’autre comme l’esclave pour connecter jusqu’à 256 bits
dans la zone LR (LR 0000 à LR 1515).
Câble RS-232C
Chapitre 3-4
Adaptateur
RS-232C (cf.
Rem.)
ECRIRE
LIRE
Adaptateur
RS-232C (cf.
LR 00
LR 07
LR 08
LR 15
UC du CPM1A
Bits de liaison
Zone
d’ECRITURE
Zone de
LECTURE
Rem.)
Bits de liaison
Zone de
LECTURE
Zone
d’ECRITURE
UC du CPM1A
LR 00
LIRE
LR 07
LR 08
ECRIRE
LR 15
Rem.:Les connexions 1à1del’APIpeuvent être utilisées seulement quand l’adapta-
teur RS-232C (CPM1-CIF01) est connecté.
66
Sélectionner l’interrupteur DIP de l’adaptateur RS-232C (CPM1-CIF01) au côté
NT (bas).
Le diagramme suivant illustre le câblage dans le câble RS-232C utilisé pour
connecter un CPM1A à un autre API.
Adaptateur RS-232C
Signal
FG
SD
RD
RS
CS
--
--
--
SG
Nº de
broche
1/Couvercle
2
3
4
5
6
7
8
9
Adaptateur RS-232C
Nº de
broche
1/Couvercle
2
3
4
5
6
7
8
9
9
Signal
FG
SD
RD
RS
CS
--
--
--
SG

Câblage et connexions
3-4-9 Connexions de liaison NT
Le communications rapides peuvent être obtenues en fournissant un accès direct par l’utilisation d’une liaison NT entre le CPM1A et le TOP.
Chapitre 3-4
Terminal opérateur programmable OMRON
Câble RS-232C
Adaptateur
RS-232C
UC du CPM1A
Rem.:La liaison NT peut être utilisée seulement quand l’adaptateur RS-232C (CPM1-
CIF01) est connecté.
Sélectionner l’interrupteur DIP de l’adaptateur RS-232C (CPM1-CIF01) au côté
NT (bas).
Le diagramme suivant illustre le câblage dans le câble RS-232C utilisé pour
connecter un CPM1A à un TOP.
Signal
--
SD
RD
RS
CS
--
--
--
SG
Top
Nº de
broche
1
2
3
4
5
6
7
8
9
Adaptateur RS-232C
Nº de
broche
1/Couvercle
2
3
4
5
6
7
8
9
9
Signal
FG
SD
RD
RS
CS
--
--
--
SG
67

CHAPITRE 4
Utilisation des périphériques
Ce chapitre décrit les opérations possibles avec les consoles de programmation. La connexion et les procédures de fonctionnement des consoles de programmation sont décrites dans ce chapitre.
4-1 Utilisation d’une console de programmation 70..................................
4-1-1 Consoles de programmation compatibles 70...............................
4-1-2 Connexion de la console de programmation 71.............................
4-1-3 Changement du mode du CPM1A 71.....................................
4-2 Fonctions de la console de programmation 73...................................
4-2-1 Description générale 73...............................................
4-2-2 Effacement de la mémoire 74...........................................
4-2-3 Lecture/effacement d e messages d’erreurs 76..............................
4-2-4 Fonctionnement de la sonnerie 76.......................................
4-2-5 Sélection et lecture d’une adresse de mémoire 77...........................
4-2-6 Recherche des instructions 77...........................................
4-2-7 Recherche des opérandes de bits 78......................................
4-2-8 Insertion et effacement des instructions 78.................................
4-2-9 Enregistrement ou édition des programmes 80.............................
4-2-10 Vérification du programme 83..........................................
4-2-11 Surveillance de bits, digits, canaux 83....................................
4-2-12 Moniteur de différentiation 85..........................................
4-2-13 Moniteur binaire 86..................................................
4-2-14 Moniteur à 3 canaux 87...............................................
4-2-15 Moniteur décimal avec signe 87.........................................
4-2-16 Moniteur décimale sans signe 88........................................
4-2-17 Modification de données à 3 canaux 88...................................
4-2-18 Changement de la SV de temporisateurs, compteurs 89......................
4-2-19 Modification de données hexadécimales, BCD 90...........................
4-2-20 Modification de données binaires 91.....................................
4-2-21 Modification de données décimales avec signe 91...........................
4-2-22 Modification de données décimales sans signe 92...........................
4-2-23 Activation/désactivation forcées 93......................................
4-2-24 Effacement d’activation et d ésactivation forcées 93.........................
4-2-25 Changement d’affichage Hex-ASCII 94...................................
4-2-26 Affichage du temps de cycle 94.........................................
4-3 Exemple de programmation 95................................................
4-3-1 Opérations de préparation 95...........................................
4-3-2 Exemple de programme 96.............................................
4-3-3 Procédures de programmation 97........................................
4-3-4 Vérification du programme 100..........................................
4-3-5 Test en mode MONITOR 100............................................
69

Utilisation d’une console de programmation
4-1 Utilisation d’une console de programmation
Ce chapitre fournit des informations sur la connexion et l’utilisation d’une console de programmation. Se reporter aux Erreurs de fonctionnement de la con-
sole de programmation pour des informations détaillées sur les erreurs éventuelles lors du fonctionnement de la console de programmation.
4-1-1 Consoles de programmation compatibles
Il existe deux consoles de programmation pouvant être utilisées avec le
CPM1A: les modèles CQM1-PRO01-E et C200H-PRO27-E. Les fonctions des
touches pour ces consoles de programmation sont identiques.
Appuyer et maintenir la touche SHIFT pour introduire une lettre indiquée dans le
coin supérieur gauche de la touche ou la fonction supérieure d’une touche ayant
deux fonctions. Par exemple, la touche AR/HR de la console de programmation
CQM1-PRO01-E peut spécifier soit la zone AR soit la zone HR; appuyer sur la
touche SHIFT et relâcher ; ensuite appuyer sur la touche AR/HR pour spécifier
la zone AR.
C200H-PRO27-E
CQM1-PRO01-E
(Un câble de connexion A (2 m) est attaché.)
(Utiliser un câble de connexion
C200H-CN222 (2 m) ou C200HCN422 (4 m) .)
Chapitre 4-1
Affichage
LCD
Mode
selecteur
Mode de fonctionnement des CPM1A
Touches
d’instructions
Touches numériques
Touches de
fonction
Les touches ci--dessous sont étiquetées de façon différente sur les modèles
CQM1-PRO01-E et C200H-PRO27-E mais leur fonctionnement dans chaque
paire est identique.
Touches CQM1-PRO01-E Touches C200H-PRO27-E
AR
HR
SET
HR
PLAY
SET
70
RESET
REC
RESET

Utilisation d’une console de programmation
Chapitre 4-1
4-1-2 Connexion de la console de programmation
Connecter le câble de connexion de la console de programmation au port périphérique du CPM1A comme indiqué ci--dessous.
Installation du pupitre La console de programmation C200H-PRO27-E peut être installée dans un pu-
pitre de commande comme indiqué ci--dessous. (L’étrier de montage
C200H-ATT01 est vendu séparément.)
Dimensions des trous de montage
Etrier de montage
(standards DIN43700 )
Deux vis
+1.1
186
--0
+0.8
92
Epaisseur du panneau: 1.0 à 3.2 mm
--0
Laisser au moins 80 mm pour le connecteur de câble au--dessus de la console
de programmation.
37
15
80 mm min. requis.
On peut utiliser l’un des
deux connecteurs.
70 mm env. requis.
4-1-3 Changement du mode du CPM1A
Une fois la console de programmation connectée, son commutateur de mode
peut être utilisé pour changer le mode du CPM1A. L’affichage du mode (<PROGRAM>, <MONITOR>, ou <RUN>) apparaîtra sur l’écran de la console de
programmation.
• Aucune fonction de touche ne peut être effectuée pendant que l’affichage du
mode est affiché sur l’écran de la console de programmation. Appuyer sur
71

Utilisation d’une console de programmation
CLR pour effacer l’affichage de façon que les fonctions de touches puissent
être effectuées.
• Si la touche SHIFT est sollicitée pendant que le commutateur de mode est acti-
vé, l’affichage original restera sur l’écran de la console de programmation et
l’affichage du mode n’apparaîtra pas.
• Le CPM1A entrera automatiquement dans le mode RUN si un périphérique tel
qu’une console de programmation n’est pas connecté lorsque le CPM1A est
activé.
Chapitre 4-1
MONITOR
RUN
Affichage du mode
<PROGRAM> BZ
PROGRAM RUN
MONITOR
PROGRAM
<MONITOR> BZ <RUN> BZ
Fonction Fonction
Affichage
initial
CLR SHIFT CLR
00000
MONITOR
PROGRAMRUN
Mode PROGRAM Le programme du CPM1A n’est pas exécuté en mode PROGRAM. Utiliser ce
mode pour créer et éditer le programme, effacer la mémoire ou vérifier les erreurs éventuelles du programme.
Mode MONITOR Le programme du CPM1A est exécuté en mode MONITOR et les E/S sont trai-
tées exactement comme dans le mode RUN. Utiliser le mode MONITOR lors de
l’essai du système en surveillant l’état de fonctionnement du CPM1A, le forçage
et reforçage des bits d’E/S, le changement de la SV/PV des temporisateurs et
compteurs, etc.
Mode RUN C’est le mode de fonctionnement normal du CPM1A. L’état de fonctionnement
du CPM1A peut être surveillé à partir d’un périphérique, mais les bits ne peuvent
pas être activés/désactivés et la SV/PV de temporisateurs et compteurs ne
peuvent pas être changées.
Attention Veillerà vérifier le système avec attention avant de changer le mode de fonction-
!
nement de l’API afin de prévenir des défaillances lors du lancement du programme.
72

Fonctions de la console de programmation
4-2 Fonctions de la console de programmation
4-2-1 Description générale
Le tableau suivant illustre les fonctions de programmation et surveillance pouvant être effectuées à partir d’une console de programmation. Se reporter au
reste du chapitre pour des détails sur les procédures de fonctionnement.
Dénomination Fonction
Effacement de la
mémoire
Lecture/effac. des
messages d’erreurs
Fonct. de la sonnerie Active et désactive la sonnerie des touches de la console de programmation.
Sél. d’adresse de
mémoire de prog.
Lecture d’adresse de
mémoire de prog.
Recherche des instr. Trouve les occurrences de l’instruction spécifiée dans le programme.
Recherc. d’opér. de bit Trouve les occurrences du bit d’opérande spécifié dans le programme.
Insert. et effac. instruc. Insère et efface les instructions du programme.
Enregistrement ou
édition du programme
Vérification du
programme
Surveillance de bits,
digits, canaux
Moniteur multiadresse Surveille l’état d’un nombre max. de 6 bits et canaux au même temps.
Moniteur de différent. Surveille l’état de différentiation bidirectionnelle d’un bit en particulier.
Moniteur binaire Surveille l’état ON/OFF des 16 bits de canaux.
Moniteur à 3 canaux Surveille l’état de 3 canaux consécutifs.
Moniteur décimal avec
signe
Moniteur décimal sans
signe
Modification de
données à 3 canaux
Chang. de tempor.,
compteur SV1
Chang. de tempor.,
compteur SV 2
Modification données
hexadécimales, BCD
Modification de
données binaires
Modification de
données décimales
signées
Modif. de donnée
décimale non signée
Activation/désactiva-tion forcées
Effacement
activation/désact.
forcées
Efface tout ou partie de la mémoire du programme et toutes les zones de données qui ne
sont pas en lecture seule de même que le contenu de la mémoire de la console de prog.
Affiche et efface les messages d’erreurs et affiche les messages de l’instruction MESSAGE.
Sélectionne l’adresse de mémoire du programme spécifié lors de la lecture, écriture,
insertion et effacement des programmes.
Lit le contenu de la mémoire de programme. Affiche l’état du bit actuellement affiché dans
les modes PROGRAM et MONITOR.
Ecrase par ré--écriture le contenu de la mémoire de programme actuelle soit pour enregistrer
un programme pour la première fois soit pour changer un programme déjà existant.
Vérifie les erreurs de programmation et affiche l’adresse du programme et l’erreur quand des
erreurs sont détectées.
Surveille l’état d’un nombre max. de 16 bits et canaux, même si seulement 3 peuvent être
indiqués à la fois sur l’écran.
Change le contenu du canal spécifié d’hexadécimal avec signe (format c omplémentaire de
2) au décimal avec signe pour l’affichage.
Change les données hexadécimales contenues dans un canal en décimales sans signe pour
l’affichage.
Change le contenu d’un ou plus de 3 canaux consécutifs affichés dans la fonction Moniteur
de 3 canaux.
Change la SV d’un temporisateur ou compteur.
Change le réglage de SV du temporisateur ou compteur.
Change la valeur BCD ou hexadécimale d’un canal en cours de surveillance.
Change l’état des bits d’un canal en cours de surveillance.
Change la valeur décimale d’un c anal surveillé comme donnée décimale avec signe, situé
dans une gamme de -- 32 768 à 32 767. Le contenu du canal spécifié est automatiquement
transformé en hexadécimal avec signe (format complémentaire de 2.)
Change la valeur décimale d’un c anal surveillé comme donnée décimale sans signe, situé
dans une gamme de 0 à 65 535. Le changement en donnée hexa. est automatique.
Force les bits à ON (forçage) ou à OFF (reforçage.)
Rétablit l’état de tous les bits ayant été forcés à l’activation/désactivation.
Chapitre 4-2
73

Fonctions de la console de programmation
Dénomination Fonction
Chang. affichage
Hex-ASCII
Affichage du temps de
cycle
Change les affichages des données des canaux entre les données hexadécimales à 4 digits
et ASCII.
Affiche le temps de cycle moyen actuel (temps de scrutation.)
Chapitre 4-2
4-2-2 Effacement de la mémoire
Cette fonction est utilisée pour effacer tout ou partie de la mémoire du programme et toutes les zones de données qui ne sont pas de seule lecture, de
même que le contenu de la mémoire de la console de programmation. Cette
fonction est possible seulement en mode PROGRAM.
RUN MONITOR PROGRAM
Non Non OK
Avant de commencer pour la première fois la programmation ou lors de l’installation d’un nouveau programme, effacer toutes les zones.
Effacement total La procédure suivante est utilisée pour effacer complètement la mémoire:
1, 2, 3... 1. Mettre en valeur l’affichage initial en appuyant la touche sur CLR plusieurs
fois.
2. Appuyer sur les touches SET, NOT et puis RESET pour commencer l’opération.
NOT
SET
3. Appuyer sur la touche MONTR pour effacer complètement la mémoire.
00000 MEM CLR ?
RESET
MONTR
HR CNT DM
00000 MEM CLR
END HR CNT DM
Attention La configuration de l’API (DM 6600 à DM 6655) sera effacée quand cette opéra-
!
tion est exécutée.
Effacement partiel Il est possible de sauvegarder les données dans les zones spécifiées ou une
partie de la mémoire du programme. Afin de sauvegarder les données conte-nues dans les zones HR, TC, ou DM, appuyer sur la touche appropriée après
avoir appuyé sur SET, NOT, et RESET. N’importe quelle zone de donnée qui apparaît encore sur l’affichage sera effacée lorsque l’on appuie sur la touche
MONTR.
La touche HR est utilisée pour spécifier les zones AR et HR, la touche CNT pour
spécifier la zone entière du temporisateur/compteur et la touche DM pour spécifier la zone DM.
Il est également possible de sauvegarder une portion de la mémoire de programme de la première adresse de mémoire à une adresse spécifiée. Après
la désignation des zones de données à sauvegarder, spécifier la première
adresse de la mémoire de programme à effacer. Par exemple, introduire 030
pour ignorer les adresses 000 à 029 mais pour effacer les adresses de 030
jusqu’à la fin de la mémoire de programme.
Par exemple, suivre la procédure suivante pour sauvegarder la zone du temporisateur/compteur et les adresses 000 à 122 de la mémoire de programme:
1, 2, 3... 1. Appuyer sur la touche CLR pour mettre en valeur l’affichage initial.
2. Appuyer sur les touches SET, NOT, puis RESET pour commencer l’opération.
3. Appuyer sur la touche CNT pour enlever la zone du temporisateur/compteur
des zones de données indiquées sur l’écran.
00000 MEM CLR ?
CNT
HR DM
74

Fonctions de la console de programmation
4. Appuyer sur 123 pour spécifier 123 comme adresse de lancement du programme.
Chapitre 4-2
B
C
1
2D3
00123 MEM CLR ?
HR DM
5. Appuyer sur la touche MONTR pour effacer les zone spécifiées de mémoire.
00000 MEM CLR
MONTR
END HR DM
75

Fonctions de la console de programmation
Chapitre 4-2
4-2-3 Lecture/effacement de messages d’erreurs
Cette fonction est utilisée pour afficher et effacer les messages d’erreurs. Il est
possible d’afficher et effacer des erreurs non majeures et les messages de l’instruction MESSAGE dans n’importe quel mode, mais les erreurs majeures
peuvent être effacées uniquement dans le mode PROGRAM.
RUN MONITOR PROGRAM
OK OK OK
Avant d’introduire un nouveau programme, tout message d’erreurs enregistré
dans la mémoire doit être effacé. On suppose avoir déjà pris en considération les causes des erreurs pour lesquelles les messages apparaissent. Si la
sonnerie sonne quand on cherche à effacer un message d’erreurs, éliminer
la cause de l’erreur et ensuite effacer le message d’erreurs. (Se repor--ter au
Chapitre 5 Test et traitement d’erreurs pour des informations sur la recherche
des pannes.)
Séquence des touches Suivre la procédure ci--dessous pour afficher et effacer les messages:
1, 2, 3... 1. Appuyer sur la touche CLR pour mettre en valeur l’affichage initial.
2. Appuyer sur les touches FUN et puis MONTR pour commencer l’opération.
S’il n’y a aucun message, l’affichage suivant apparaîtra:
FUN
OK
00000ERR CHK
MONTR
S’il y a des messages, le message le plus grave sera affiché quand on appuie sur la touche MONTR. En appuyant sur MONTR de nouveau, le message actuel sera effacé et le message le plus grave suivant sera affiché.
Continuer à appuyer sur MONTR jusqu’à ce que tous les messages soient
effacés. Exemples de messages d’erreurs:
Erreur de mémoire:
MEMORY ERR
MONTR
Erreur de système:
SYS FAIL FAL01
MONTR
Message:
MATERIAL USED UP
MONTR
Tous les messages effacés:
00000ERR CHK
MONTR
OK
4-2-4 Fonctionnement de la sonnerie
Cette fonction est utilisée pour activer et désactiver la sonnerie qui des touches
de la console de programmation sollicitées. Cette sonnerie sonnera également
chaque fois qu’une erreur se produit pendant le fonctionnement de l’API. Le
fonctionnement de la sonnerie pour les erreurs n’est pas troublé par cette sélection.
Cette fonction est possible dans tous les modes.
RUN MONITOR PROGRAM
OK OK OK
76

Fonctions de la console de programmation
Chapitre 4-2
Séquence des touches Suivre la procédure ci--dessous pour activer et désactiver la sonnerie d’entrée--
touche.
1, 2, 3... 1. Appuyer sur les touches CLR, SHIFT, puis CLR pour mettre en valeur l’affi-
chage du mode. Dans ce cas, l’API est en mode PROGRAM et la sonnerie
est activée.
<MONITOR> BZ
2. Appuyer sur SHIFT et puis la touche 1 pour désactiver la sonnerie.
SHIFT
1
<MONITOR>
B
3. Appuyer sur SHIFT et puis la touche 1 pour activer de nouveau la sonnerie.
SHIFT
1
<MONITOR> BZ
B
4-2-5 Sélection et lecture d’une adresse de mémoire
Cette fonction est utilisée pour afficher l’adresse de mémoire de programme et
elle est possible dans tous les modes.
RUN MONITOR PROGRAM
OK OK OK
Lors de l’introduction d’un programme pour la première fois, il est généralement écrit sur la mémoire de programme à partir de l’adresse 000. Comme
cette adresse apparaît quand l’affichage est effacé, il n’est pas nécessaire de
la spécifier.
Lors de l’introduction d’un programme à partir d’une adresse autre que 000
ou pour lire ou modifier un programme déjà existant dans la mémoire, l’adresse désirée doit être désignée.
1, 2, 3... 1. Appuyer sur la touche CLR pour mettre en valeur l’affichage initial.
2. Introduire l’adresse désirée. Il n’est pas nécessaire d’introduire les premiers zéros.
C
A
2
0A0
00200
3. Appuyer sur la touche Flèche bas.
00200READ OFF
↓
LD 00000
Rem.:L’état ON/OFF de tout bit affiché sera indiqué si l’API est dans le mo-
de RUN ou MONITOR.
4. Appuyer sur les touches Flèche haut et Flèche bas pour faire défiler l’écran
à travers le programme.
00201READ ON
↓
AND 00001
4-2-6 Recherche des instructions
Cette fonction est utilisée pour trouver les occurrences de l’instruction spécifiée
dans le programme et elle est possible dans tout mode.
RUN MONITOR PROGRAM
OK OK OK
00200READ OFF
↑
LD 00000
77

Fonctions de la console de programmation
L’état actif/désactif de tout bit affiché sera indiqué si l’API est dans le mode
RUN ou MONITOR.
1, 2, 3... 1. Appuyer sur la touche CLR pour mettre en valeur l’affichage initial.
2. Introduire l’adresse dès laquelle la recherche commencera et appuyer sur
la touche Flèche bas. Il n’est pas nécessaire d’introduire les premiers zéros.
B
1A0
3. Introduire l’instruction à trouver et appuyer sur la touche SRCH. Dans ce
cas, la recherche est pour les instructions LD.
Dans ce cas, la successive instruction LD est à l’adresse 200, comme indiqué ci--dessous.
4. Appuyer sur la touche Flèche bas pour afficher les opérandes d’instruction
ou appuyer sur la touche SRCH pour chercher la prochaine occurrence de
l’instruction.
5. La recherche continuera jusqu’à ce qu’une instruction END ou la fin de la
mémoire de programme soient atteintes. Dans ce cas, une instruction END
a été atteinte à l’adresse 397.
Chapitre 4-2
A
0
LD
00100
↓
TIM 001
00200SRCH
SRCH
LD 00000
00397SRCH
SRCH
END(001)(00.4KW)
4-2-7 Recherche des opérandes de bits
Cette fonction est utilisée pour trouver les occurrences du bit d’opérande spécifié dans le programme et elle est possible dans tout mode.
RUN MONITOR PROGRAM
OK OK OK
L’état activé/désactivé de tout bit affiché sera indiqué si l’API est dans le
mode RUN ou MONITOR.
1, 2, 3... 1. Appuyer sur la touche CLR pour mettre en valeur l’affichage initial.
2. Introduire l’adresse d’opérande. Il n’est pas nécessaire d’introduire les premiers zéros.
F
CONT
SHIFT
3. Appuyer sur la touche SRCH pour commencer la recherche.
4. Appuyer sur la touche SRCH pour chercher la prochaine occurrence du bit
d’opérande.
5. La recherche continuera jusqu’à ce qu’une instruction END ou la fin de la
mémoire de programme soient atteintes. Dans ce cas, une instruction END
a été atteinte.
5
#
SRCH
SRCH
00000CONT SRCH
CONT 00005
00200CONT SRCH
LD 00005
00397SRCH
END(001)(00.4KW)
4-2-8 Insertion et effacement des instructions
Cette fonction est utilisée pour insérer ou effacer les instructions du programme.
Elle n’est possible que dans le mode PROGRAM.
RUN MONITOR PROGRAM
Non Non OK
78

Fonctions de la console de programmation
Afin de démontrer cette fonction, une condition IR 00105 NO sera insérée à
l’adresse de programme 00206 et une condition IR 00103 NO sera effacée
de l’adresse 00205, comme indiqué ci--dessous.
Programme original
Chapitre 4-2
Insertion
00100 00103
00101
00201
00102
Effacer
1, 2, 3... 1. Appuyer sur la touche CLR pour mettre en valeur l’affichage initial.
Instruction
Opérandes
Insérer
00105
Insérer
00104
01000
END(001)
Effacer
Adresse
00205 AND 00103
00206 AND NOT 00104
00207 OUT 01000
00208 END(001) -
Suivre la procédure ci--dessous pour insérer la condition IR 00105 NO à l’adresse 00206.
2. Introduire l’adresse où la condition NO sera insérée et appuyer sur la touche
Flèche bas. Il n’est pas nécessaire d’introduire les premiers zéros.
C
2A0 6
00206READ
↓
AND NOT 00104
3. Introduire la nouvelle instruction et appuyer sur la touche INS.
AND
B
1A0
F
5
00206INSERT?
INS
AND 00105
4. Appuyer sur la touche Flèche bas pour insérer la nouvelle instruction.
00207INSERT END
↓
AND NOT 00104
Rem.:Pour les instruction nécessitant plus d’opérandes (telles que les vale-
urs de sélection), introduire les opérandes et ensuite appuyer sur la
touche WRITE.
Effacement Suivre la procédure ci--dessous pour effacer la condition IR 00103 NO à l’adres-
se 00205.
1, 2, 3... 1. Appuyer sur la touche CLR pour mettre en valeur l’affichage initial.
2. Introduire l’adresse où la condition NO sera effacée et appuyer sur la touche
Flèche bas. Il n’est pas nécessaire d’introduire les premiers zéros.
C
2A0
F
5
00205READ
↓
AND 00103
3. Appuyer sur la touche DEL.
00205DELETE?
DEL
AND 00103
4. Appuyer sur la touche Flèche haut pour effacer l’instruction spécifiée.
Si l’instruction a plus d’opérandes, celles--ci seront automatiquement effa-
cées avec l’instruction.
00205DELETE END
↑
AND 00105
Après avoir complété les procédures d’insertion et effacement, utiliser les
touches Flèche haut et bas pour faire défiler l’écran à travers le programme
et vérifier qu’il a été correctement changé, comme indiqué ci--dessous.
79

Fonctions de la console de programmation
Programme corrigé
Chapitre 4-2
00100 0010500101
00201
00102
00104
01000
END(001)
Adresse
00205 AND 00105
00206 AND NOT 00104
00207 OUT 01000
00208 END(001) -
4-2-9 Enregistrement ou édition des programmes
Cette fonction est utilisée pour enregistrer ou éditer des programmes. Elle est
possible exclusivement dans le mode PROGRAM.
RUN MONITOR PROGRAM
Non Non OK
La même procédure est utilisée soit pour enregistrer une programme pour la
première fois soit pour changer une programme déjà existant. Dans les deux
cas, le contenu actuel de la mémoire de programme est écrasé par ré--écriture.
Le programme indiqué dans le diagramme suivant sera enregistrer pour démontrer cette fonction.
00002
TIM 000
#0123
MOV(021)
#0100
LR 10
ADB(050)
#0100
#FFF6
DM 0000
12.3 s
Adresse
00200 LD IR 00002
00201 TIM 000
00202 MOV(021)
00203 ADB(050)
Instruction
Instruction
Opérandes
Opérandes
#0123
#0100
LR 10
#0100
#FFF6
DM 0000
80
1, 2, 3... 1. Appuyer sur la touche CLR pour mettre en valeur l’affichage initial.
2. Spécifier l’adresse où le programme commencera.
3. Introduire l’adresse où le programme commencera et appuyer sur la touche
Flèche bas. Il n’est pas nécessaire d’introduire les premiers zéros.
C
2A0
A
0
00200
↓
4. Introduire la première instruction et opérande.
00200
C
LD
2
LD 00002
5. Appuyer sur la touche WRITE pour écrire l’instruction dans la mémoire de
programme. L’adresse de programme successive sera affichée.
00201READ
WRITE
NOP(000)
Si l’on fait une erreur en introduisant l’instruction, appuyer sur la touche
Flèche haut pour retourner à l’adresse de programme précédente et

Fonctions de la console de programmation
introduire de nouveau l’instruction. L’instruction erronée sera écrasée par
réécriture.
6. Introduire la seconde instruction et opérande. (Dans ce cas, il n’est pas nécessaire d’introduire le nombre de temporisateur parce qu’il est 000.)
Appuyer sur la touche WRITE pour écrire l’instruction dans la mémoire de
programme.
Chapitre 4-2
Nombre de
TIM
temporisateur
00201 TIM DATA
WRITE
#0000
7. Introduire la seconde opérande (123 pour spécifier 12,3 secondes) et
appuyer sur la touche WRITE. L’adresse de programme suivante sera affichée.
B
1C2
D
3
WRITE
00202READ
NOP(000)
Si l’on fait une erreur en introduisant l’opérande, appuyer sur la touche
Flèche haut pour retourner à l’affichage de l’opérande erronée, appuyer sur
la touche CONT/# et de nouveau123. L’opérande erronée sera écrasée par
réécriture.
Rem.:
Les compteurs sont introduits de la même manière de base que les
temporisateurs, à l’exception de la touche CNT qui est sollicitée au
lieudelatoucheTIM.
8. Introduire la troisième instruction et ses opérandes. D’abord introduire
l’instruction en appuyant la touche FUN et ensuite le code de fonction (21
dans ce cas).
FUN
C
2B1
00202
MOV(021)
Rem.:
Pour introduire une instruction impulsionnelle, appuyer sur la touche
NOT après l’introduction du code de fonction. Le symbole “@” sera
affiché près des instructions impulsionnelles. Appuyer sur la touche
NOT de nouveau pour changer l’instruction dans une instruction non
impulsionnelle . Le symbole “@” disparaîtra. Pour changer une instruction après son introduction, faire défiler l’écran à travers le programme jusqu’à afficher l’instruction désirée et appuyer sur la touche
NOT. Le symbole “@” doit être affiché près de l’instruction.
9. Appuyer sur la touche WRITE pour écrire l’instruction dans la mémoire de
programme. L’affichage d’entrée pour la première opérande sera affiché.
00202 MOV DATA A
WRITE
000
• Ecriture de la constante hexadécimale, BCD
10. Introduire la première opérande.
CONT
#
B
A
1
0A0
00202 MOV DATA A
#0100
Appuyer sur la touche WRITE pour écrire l’instruction dans la mémoire de
programme. L’affichage d’entrée pour la seconde opérande apparaîtra.
WRITE
00202 MOV DATA B
#0000
81

Fonctions de la console de programmation
• Ecriture d’une adresse de canal
11. Introduire la seconde opérande.
Appuyer sur la touche WRITE pour écrire l’instruction dans la mémoire de
programme. L’adresse de programme successive sera affichée.
Rem.:Lorsqu’une opérande d’instruction est introduite, la désignation de bit
ou canal peut être omise.
12. Introduire la prochaine instruction.
FUN
Appuyer sur la touche WRITE pour écrire l’instruction dans la mémoire de
programme.
• Ecriture d’un nombre décimal non signé
13. La première opérande est introduite comme nombre entier sans signe.
CONT
SHIFT TR
#
Introduire la valeur de l’opérande de 0 à 65535.
C
Chapitre 4-2
B
LR
1A0
F
5A0
F
2
5 6
00202 MOV DATA B
00203READ
WRITE
NOP(000)
00203
ADB(050)
00203 ADB DATA A
WRITE
00203 ADB DATA A
NOT
00203 ADB DATA A
LR 10
#0000
#00000
#00256
Rem.:Si l’on fait une introduction erronée, appuyer sur la touche CLR pour
rétablir l’état précédant l’introduction. Ensuite, introduire l’entrée correcte.
14. Rétablir l’affichage hexadécimal.
SHIFT TR
Rem.:
Si une entrée est effectuée au dehors de la gamme admissible, une
00203 ADB DATA A
#0100
sonnerie sonnera et l’affichage hexadécimal ne sera pas affiché.
00203 ADB DATA B
WRITE
000
15. La seconde opérande est introduite comme un nombre entier avec signe.
CONT
#
SHIFT TR
00203 ADB DATA B
#+00000
Introduire la valeur de l’opérande de --32 768 à 32 767. Utiliser la touche
SET pour introduire un nombre positif, et la touche RESET pour un nombre
négatif.
B
REC
RESET
Rem.:
Si l’on effectue une entrée erronée, appuyer sur la touche CLR pour
1A0
00203 ADB DATA B
#--00010
rétablir l’état précédant l’entrée. Introduire ensuite l’entrée correcte.
16. Rétablir l’affichage hexadécimal.
SHIFT TR
00203 ADB DATA B
#FFF6
82

Fonctions de la console de programmation
Rem.:Si une introduction est effectuée au dehors de la gamme admissible,
une sonnerie sonnera et l’affichage hexadécimal ne sera pas affiché.
Chapitre 4-2
WRITE
17. Introduire l’opérande finale et ensuite appuyer sur la touche WRITE.
4-2-10 Vérification du programme
Cette fonction vérifie les erreurs de programmation et affiche l’adresse de
programme et l’erreur au cas où des erreurs soient détectées. Elle est possible uniquement dans le mode PROGRAM.
RUN MONITOR PROGRAM
Non Non OK
1, 2, 3... 1. Appuyer sur la touche CLR pour mettre en valeur l’affichage initial.
2. Appuyer sur la touche SRCH. Un message d’entrée apparaîtra en demandant le niveau de vérification désiré.
3. Introduire le niveau de vérification désiré (0, 1, ou 2). Le contrôle du programme commencera lorsque l’on introduit le niveau de vérification, et la
première erreur trouvée sera affichée.
00203 ADB DATA C
00203 ADB DATA C
DM
00204READ
WRITE
NOP(000)
00000PROG CHK
SRCH
CHKLEVEL (0--2)?
000
DM 0000
A
0
Rem.:Se reporter aux Erreurs de programmation pour des détails sur les
niveaux de vérification.
4. Appuyer sur la touche SRCH pour continuer la recherche. L’erreur successive sera affichée. Continuer à appuyer sur la touche SRCH pour continuer
la recherche.
La recherche continuera jusqu’à ce qu’une instruction END ou la fin de la
mémoire de programme soient atteintes. Un affichage comme celui ci--dessous apparaîtra si la fin de la mémoire de programme est atteinte:
SRCH
Un affichage comme celui ci--dessous apparaîtra si une instruction END est
atteinte:
SRCH
Si des erreurs sont affichées, éditer le programme pour corriger les erreurs et
vérifier le programme encore une fois. Continuer à vérifier le programme jusqu’à
corriger toutes les erreurs.
4-2-11 Surveillance de bits, digits, canaux
Cette fonction est utilisée pour surveiller l’état d’un nombre max. de 16 bits et
canaux, bien que seulement 3 à la fois puissent être indiqués sur l’affichage.
Elle est possible dans tout mode.
00178CIRCUIT ERR
OUT 00200
00300NO END INST
END
00310PROG CHK
END(001)(00.3KW)
83

Fonctions de la console de programmation
RUN MONITOR PROGRAM
OK OK OK
Chapitre 4-2
Lecture et surveillance du
programme
1, 2, 3... 1. Appuyer sur la touche CLR pour mettre en valeur l’affichage initial.
Quand une adresse de programme est en cours d’affichage, l’état du bit ou du
canal situé dans cette adresse peut être surveillé en appuyant la touche
MONTR.
2. Introduire l’adresse de programme désirée et appuyer sur la touche Flèche
bas.
C
A
2
A
0
0
00200READ
↓
TIM 000
3. Appuyer sur la touche MONTR pour commencer la surveillance.
T000
MONTR
1234
Si l’état d’un bit est en cours d’affichage, il peut être changé en utilisant la
fonction Activation/désactivation forcées. Faire référence à 4-2-23 For-
çage, reforçage pour les détails.
Si l’état d’un mot est en cours de surveillance, la valeur de ce mot peut être
changée en utilisant la fonction Modification de données hexadécimales/
BCD. Faire référence à 4-2-20 Modification de données binaires pour les
détails.
4. Appuyer sur la touche CLR pour terminer la surveillance.
00200
CLR
TIM 000
Surveillance de bits
Suivre la procédure ci--dessous pour surveiller l’état d’un bit en particulier.
1, 2, 3... 1. Appuyer sur la touche CLR pour mettre en valeur l’affichage initial.
2. Introduire l’adresse de bit du bit désiré et appuyer sur la touche MONTR.
SHIFT
CONT
#
B
1
MONTR
00001
^ON
La touche Flèche haut ou bas peut être sollicitée pour afficher l’état du bit
précédent ou successif.
L’état du bit affiché peut être changé en utilisant la fonction Activation/
désactivation forcées. Se reporter à 4-2-23 Activation/désactivation forcées
pour les détails.
3. Appuyer sur la touche CLR pour terminer la surveillance.
00000
CLR
CONT 00001
Surveillance de canaux Suivre la procédure ci--dessous pour surveiller l’état d’un canal en particulier.
1, 2, 3... 1. Appuyer sur la touche CLR pour mettre en valeur l’affichage initial.
2. Introduire l’adresse du canal désiré.
00000
SHIFT
CH
*
B
LR
1
CHANNEL LR 01
3. Appuyer sur la touche MONTR pour commencer la surveillance.
cL01
MONTR
FFFF
La touche Flèche haut ou bas peut être sollicitée pour afficher l’état du canal
précédent ou suivant.
84

Fonctions de la console de programmation
L’état du canal affiché peut être changé en utilisant la fonction Modification
de données hexadécimales/BCD. Se reporter à 4-2-20 Modification de
données binaires pour les détails.
4. Appuyer sur la touche CLR pour terminer la surveillance.
00000
CLR
CHANNEL LR 01
Chapitre 4-2
Surveillance de
multi--adresse
L’état d’un nombre maximum de 6 bits et canaux peut être surveillé au même
temps, bien que seulement 3 à la fois puissent être affichés sur l’écran.
1, 2, 3... 1. Appuyer sur la touche CLR pour mettre en valeur l’affichage initial.
2. Introduire l’adresse du premier bit ou canal et appuyer sur la touche
MONTR.
TIM
0100
T000
MONTR
3. Répéter l’étape de 2 à 6 fois pour afficher les adresses successives à surveiller.
SHIFT
CONT
#
B
1
DM
00001 T000
MONTR
^ OFF 0100
D0000 00001 T000
MONTR
0000 ^ 0FF 0100
Si 4 ou plus bits et canaux sont surveillés, ceux qui n’apparaissent pas sur
l’écran peuvent être affichés en appuyant la touche MONTR. Si cette touche
est sollicitée seule, l’affichage décalera à droite.
Si plus de 6 bits et canaux sont introduits, la surveillance des bits et canaux
introduits par les premiers sera annulée.
4. Appuyer sur la touche CLR pour arrêter la surveillance du bit ou canal de
gauche et l’effacer de l’écran.
5. Appuyer sur les touches SHIFT+CLR pour terminer la surveillance
complètement.
Rem.:
Appuyer sur les touches SHIFT + CLR pour retourner à l’affichage avec l’état de
surveillance de multi--adresse. Appuyer sur sur les touches SHIFT + MONTR
pour afficher l’état de surveillance de multi--adresse sauvegardé. Les états de
surveillance peuvent être sauvegardés pour 6 bits et canaux.
4-2-12 Moniteur de différentiation
Cette fonction est utilisée pour surveiller l’état de différentiation bidirectionnelle d’un bit particulier. Un fois détectée, la différentiation bidirectionnelle
sera affichée et la sonnerie se met en marche. Elle est possible dans tous les
modes.
RUN MONITOR PROGRAM
OK OK OK
1, 2, 3... 1. Surveiller l’état du bit désiré selon la procédure décrite en 4-2-11 Surveil-
lance de bits, digits, canaux. Si 2 ou plus bits sont surveillés, le bit désiré
devrait être à l’extrême gauche de l’affichage.
CLR
SHIFT CLR
00001 T000
^ 0FF 0100
00000
CHANNEL DM 0000
85

Fonctions de la console de programmation
Dans ce cas, l’état de différentiation de LR 00 sera surveillé.
2. Pour spécifier la surveillance de différentiation d’incrémentation, appuyer
sur la touche SHIFT et puis Flèche haut. Les symboles “U@” apparaîtront.
Chapitre 4-2
L000000001H0000
^OFF ^OFF ^OFF
4-2-13 Moniteur binaire
Cette fonction est utilisée pour surveiller l’état activé/désactivé des 16 bits de
n’importe quel canal. Elle est possible dans tout mode.
SHIFT
L000000001H0000
↑
U@OFF ^OFF ^OFF
Pour spécifier la surveillance de différentiation de décrémentation, appuyer
sur la touche SHIFT et puis Flèche bas. Les symboles “D@” apparaîtront.
SHIFT
L000000001H0000
↓
D@OFF ^OFF ^OFF
3. La sonnerie sonnera quand le bit spécifié passe de OFF sur ON (pour différentiation d’incrémentation) ou de ON sur OFF (pour différentiation de décrémentation).
L000000001H0000
^ON ^OFF ^OFF
4. Appuyer sur la touche CLR pour terminer la surveillance de différentiation et
retourner à l’affichage de surveillance normal.
L000000001H0000
CLR
^OFF ^OFF ^OFF
RUN MONITOR PROGRAM
OK OK OK
1, 2, 3... 1. Surveiller l’état du canal désiré selon la procédure décrite dans 4-2-11 Sur-
veillance de bits, digits, canaux. Le canal désiré devrait être à l’extrême
gauche de l’affichage si 2 ou plus canaux sont surveillés.
C000
(Moniteur de canaux)
0000
2. Appuyer sur la touche SHIFT et puis MONTR pour commencer la surveillance binaire. L’état activé/désactivé des 16 bits du canal sélectionné sera
indiqué sur le bas de l’affichage. 1 indique que le bit est activé et 0 qu’il est
désactivé.
SHIFT MONTR
C000 MONTR
0000000000000000
L’étatde bits forcés est indiqué par “S,” et l’état de bits forcés est indiqué par
“R,” comme indiqué ci--dessous.
C000 MONTR
000S0000000R0000
Bit forcé
Bit reforcé
Rem.:a) Maintenant, l’état des bits affichés peut être changé. Se reporter à
4-2-20 Modification de données binaires pour les détails.
b) La touche Flèche haut ou bas peut être sollicitée pour afficher l’é-
tat des bits des canaux précédents ou successifs.
86

Fonctions de la console de programmation
3. Appuyer sur la touche CLR pour terminer la surveillance binaire et retourner
à l’affichage de surveillance normal.
4-2-14 Moniteur à 3 canaux
Cette fonction est utilisée pour surveiller l’état de 3 canaux consécutifs. Elle
est possible dans tout mode.
RUN MONITOR PROGRAM
OK OK OK
1, 2, 3... 1. Surveiller l’état du premier des trois canaux selon la procédure décrite dans
4-2-11 Surveillance de bits, digits, canaux.
Si 2 ou plus canaux sont surveillés, le premier canaux désiré devrait être à
l’extrême gauche de l’affichage.
(Moniteur de canaux)
2. Appuyer sur la touche EXT pour commencer la surveillance de 3 canaux.
L’état du canal sélectionné et les 2 canaux suivants sera affiché, comme indiqué ci--dessous. Dans ce cas, DM 0000 a été sélectionnée.
Les touches Flèche haut et bas peuvent être utilisées pour décaler vers le
haut ou le bas une adresse.
Maintenant, l’état des canaux affichés peut être changé. Se reporter à
4-2-17 Modification de données à 3 canaux.
3. Appuyer sur la touche CLR pour terminer la surveillance de 3 canaux et retourner à l’affichage de surveillance normal. Le canal à l’extrême droite sur
l’affichage du moniteur à 3 canaux sera surveillé.
C000
CLR
0000
C000
89AB
C002 C001 C000
EXT
0123 4567 89AB
C000
CLR
89AB
Chapitre 4-2
4-2-15 Moniteur décimal avec signe
Cette fonction change le contenu du canal spécifié de hexadécimal (format
complémentaire de 2) à décimal avec signe pour l’affichage. Elle peut être
exécutée tout en utilisant la surveillance d’E/S, de multiadresse ou de 3 canaux.
RUN MONITOR PROGRAM
OK OK OK
1, 2, 3... 1. Surveiller le canal à utiliser pour le moniteur décimal avec signe. Pendant la
surveillance de multiadresse, le canal d’extrême gauche sera changé.
(Moniteur de multiadresse)
2. Appuyer sur les touches SHIFT+TR pour afficher le canal d’extrême
gauche comme décimal avec signe.
A ce point, le contenu du mot affiché peut être changé avec une entrée décimale avec signe. Se reporter à 4-2-21 Modification de données décimales
signées.
SHIFT TR
c000 cL00 20000
FFF0 0000 ^OFF
c000
--00016
87

Fonctions de la console de programmation
3. Appuyer sur la touche CLR ou SHIFT+TR pour terminer l’affichage décimal
sans signe et retourner à la surveillance normale.
4-2-16 Moniteur décimale sans signe
Cette fonction est utilisée pour changer les données hexadécimales contenues dans un canal en décimales sans signe pour l’affichage. Elle peut être
effectuée tout en utilisant la surveillance d’E/S, de multiadresse ouà3canaux.
RUN MONITOR PROGRAM
OK OK OK
1, 2, 3... 1. Surveiller le canal à utiliser pour le moniteur décimal sans signe. Pendant la
surveillance de multiadresse, le canal d’extrême gauche sera changé.
Surveillance de multiadresse
2. Appuyer sur les touches SHIFT+TR+NOT pour afficher le canal d’extrême
gauche comme décimal sans signe.
SHIFT TR
A ce point, le contenu du canal affiché peut être changé avec une entrée
décimale avec signe. Se reporter à 4-2-22 Modification de données déci-
males sans signe.
3. Appuyer sur les touches CLR ou SHIFT+TR pour terminer l’affichage décimal sans signe et retourner à la surveillance normale.
c000 cL00 20000
CLR
FFF0 0000 ^OFF
c000 cL00 20000
FFF0 0000 ^OFF
c000
NOT
65520
Chapitre 4-2
CLR
4-2-17 Modification de données à 3 canaux
Cette fonction est utilisée pour changer le contenu d’un ou plus des 3 canaux
affichés dans la fonction Moniteur à 3 canaux. Elle est possible seulement
dans le mode MONITOR ou PROGRAM.
RUN MONITOR PROGRAM
No OK OK
1, 2, 3... 1. Surveiller l’état des canaux désirés selon la procédure décrite dans 4-2-14
Moniteur à 3 canaux.
(Moniteur à 3 canaux)
2. Appuyer sur la touche CHG pour commencer la modification de données à 3
canaux. Le curseur apparaîtra près du contenu du canal d’extrême gauche.
CHG
3. Introduire la nouvelle valeur pour le canal d’extrême gauche sur l’écran et
appuyer sur la touche CHG si l’on effectue d’autres changements.
(Introduire la nouvelle valeur et appuyer sur la touche WRITE pour écrire les
changements dans la mémoire si l’on n’effectue aucun autre changement.)
c000 cL00 20000
FFF0 0000 ^OFF
D0002D0001D0000
0123 4567 89AB
D0002 3CHCHANG?
0123 4567 89AB
88
B
1
D0002 3CHCHANG?
CHG
0001 4567 89AB

Fonctions de la console de programmation
4. Introduire la nouvelle valeur pour le canal au centre de l’écran et appuyer
sur la touche CHG si le canal d’extrême droite a changé. Introduire la nouvelle valeur et appuyer sur la touche WRITE pour écrire les changements
dans la mémoire si le canal d’extrême droite n’a pas changé. (Dans ce cas, il
ne changera pas.)
Chapitre 4-2
C
2D3
Rem.:
Si la touche CLR est sollicitée avant la touche WRITE, la fonction sera annulée
E
4
D0002D0001D0000
WRITE
0001 0234 89AB
et l’affichage de moniteur à 3 canaux retournera sans aucun changement dans
la mémoire de données.
4-2-18 Changement de la SV de temporisateurs, compteurs
Il existe deux fonctions pouvant être utilisées pour changer la SV d’un temporisateur ou compteur. Elles sont possibles uniquement dans le mode
MONITOR ou PROGRAM. Dans le mode MONITOR, la SV peut être changée pendant l’exécution du programme.
RUN MONITOR PROGRAM
Non OK OK
La SV du temporisateur ou compteur ne peut pas être changée soit en
introduisant une nouvelle valeur soit en incrémentant ou décrémentant la SV
actuelle.
Attention Vérifier qu’il n’y ait aucun effect sur l’équipement avant de changer les valeurs
!
de sélection.
Introduction d’une nouvelle
constante SV
Cette fonction peut être utilisée pour introduire une nouvelle constante SV de
même que pour changer une SV d’une constante à une désignation d’adresse
de canal et vice versa. Les exemples suivants indiquent la manière d’introduire
une nouvelle constante SV et de changer la SV d’une constante à une adresse.
Incrémentation et
décrémentation d’une
constante
1, 2, 3... 1. Appuyer sur la touche CLR pour mettre en valeur l’affichage initial.
2. Afficher le temporisateur ou compteur désiré.
TIM
B
1
SRCH
00201SRCH
TIM 001
3. Appuyer sur la touche Flèche bas et puis la touche CHG.
↓
T001 #0123 #????
00201DATA?
CHG
4. A ce point, une nouvelle constante SV peut être introduite ou la constante
SV peut être changée dans une désignation d’adresse de canal.
a) Pour introduire une nouvelle constante SV, introduire la constante et
appuyer sur la touche WRITE.
B
1C2
E
4
00201 TIM DATA
WRITE
#0124
b) Pour changer dans une désignation d’adresse de canal, introduire l’a-
dresse de canal et appuyer sur la touche WRITE.
SHIFT
CH
B
A
1
*
0
00201 TIM DATA
WRITE
010
Cette fonction peut être utilisée pour incrémenter et décrémenter une constante SV. Elle est possible seulement quand la SV a été introduite comme
constante.
89
 Loading...
Loading...