

Page 1
Ten
Garage door opener
Instructions and warnings for the fitter
Istruzioni ed avvertenze per l’installatore
Instructions et recommandations pour l’installateur
Anweisungen und Hinweise für den Installateur
Instrucciones y advertencias para el instalador
Instrukcje i uwagi dla instalatora
Aanwijzingen en aanbevelingen voor de installateur
TN2010
TN2020
Page 2
2
Ten
Index: page
1 Warnings 3
2 Product description and intended use 4
2.1 Limits of use 4
2.2 Product component check 5
2.3 Typical system 6
2.4 Wiring list 6
3 Installation 7
3.1 Preliminary checks and inspections 7
3.2 Gearmotor installation 7
3.3 Limit switch adjustment 10
3.4 Installation of various devices 10
3.5 Electrical connections 10
3.5.1 Description of electrical connections 11
3.5.2 Second motor electrical connection 12
4 Final checks and start-up 12
4.1 Power supply connection 12
4.2 Learning devices 12
4.3 Learning the door opening and closing
positions 13
4.4 Checking door movement 14
4.5 Pre-set functions 14
4.6 Radio receiver 14
5 Tests and commissioning 14
5.1 Testing 14
5.2 Commissioning 15
6 Maintenance and disposal 16
6.1 Maintenance 16
6.2 Disposal 16
7 Further information 16
7.1 Programming keys 16
7.2 Settings 16
7.2.1 Level 1 functions (ON-OFF functions) 17
7.2.2 Level 1 programming (ON-OFF functions) 17
7.2.3 LEVEL 2 functions (adjustable parameters) 18
7.2.4 Level 2 programming (adjustable parameters) 19
7.2.5 Example of Level 1 programming
(adjustable parameters) 19
7.2.6 Example of Level 2 programming
(adjustable parameters) 20
7.3 Adding or removing devices 20
7.3.1 BLUEBUS 20
7.3.2 STOP input 20
7.3.3 Photocells 21
7.3.4 MOTB digital selector and proximity
reader for MOMB transponder badges 21
7.3.5 Learning other devices 22
7.3.6 Deleting the entire memory 22
7.3.7 Programming the direction of motor rotation 22
7.3.8 Resetting the encoder position 23
7.4 Special functions 23
7.4.1 “Always open” function 23
7.4.2 “Move anyway” function 23
7.4.3 Maintenance notification 23
7.4.4 Check of number of manoeuvres performed 24
7.4.5 Manoeuvre counter reset 24
7.5 Connecting other devices 24
7.6 Troubleshooting guide 25
7.6.1 Fault log list 25
7.7 Diagnostics and indicators 25
7.7.1 Signals with flashing light 26
7.7.2 Signals on control unit 27
7.8 Accessories 28
7.8.1 Remote programming unit 28
7.8.2 Buffer battery 29
7.8.3 Pre assembly for OTA11 29
8 Technical specifications 30
Instructions and warnings for TEN gearmotor users 31
Page 3
3
GB
1) Warnings
Important instructions for installation safety
Incorrect installation may cause serious injury.
Carefully follow all installation instructions.
This instruction manual contains important information regarding the
safety of installation; read all instructions before proceeding with installation. Keep this manual in a safe place for future consultation.
In consideration of the risks that may arise during installation and use of
TEN, ensure that the installation procedure is completed in full observance of application legislation, standards and regulations. This chapter
provides general warnings; other important warnings are given in chapters “3.1 Preliminary checks”; “5 Testing and commissioning”.
According to the most recent European legislation, the
automation of a door or gate is subject to the specifications
of the Machinery directive 98/37/CE and more specifically to
the standards: EN 13241-1 (harmonised standard); EN 12445;
EN 12453 and EN 12635, which enable declaration of conformity with the machinery directive.
Further information and guidelines on the risk assessment, useful when
drawing up the Technical Documentation are available on the site
”www.niceforyou.com”. This manual is aimed exclusively at technical
personnel qualified for installation. With the exception of the specifications attached, to be detached by the installer "Instructions and warnings for the TEN gearmotor user", no other information in this documentation is intended for the final user.
• Use of TEN other than that envisaged in these instructions is strictly
prohibited; improper use can lead to hazards, physical injury or damage.
• Before starting installation, an assessment of the associated risks must
be made, including a list of the essential safety requirements as envisaged in Appendix I of the Machinery Directive, specifying the relative
solutions adopted. Note that the risk assessment is one of the documents included in the automation Technical documentation.
• Check whether other devices or materials are required to complete
automation with TEN, evaluating the specific application and associated risks; for example considering the risks of impact, crushing, shearing, dragging and other hazards in general.
• Do not make any modifications to any part unless envisaged in these
instructions; this type of operation can only cause malfunctions. NICE
declines all liability for damage resulting from modified products.
• During installation and use, take care to prevent solid parts or liquids
from entering into the control unit and other open devices; if necessary
contact the NICE assistance service; use of TEN in these situations
can constitute a hazard.
• The automation cannot be used before commissioning the installation
as specified in the chapter: “5 Testing and Commissioning”.
• The TEN product packaging material must be disposed of in full obser-
vance of current local legislation governing waste disposal.
• In the case of faults not remediable using the information in this man-
ual, contact the NICE assistance service.
• If any circuit breakers trip or fuses blow, locate and eliminate the fault
before resetting.
• Before accessing the internal terminals under the TEN cover, discon-
nect all power circuits; if the disconnect device is not in a visible location, affix a notice: “WARNING: MAINTENANCE IN PROGRESS”.
Special warnings regarding the suitability of use of this product in relation to the "Machinery" Directive 98/37/EC (ex 89/392/EEC):
• This product is issued onto the market as a “machine component” and
is therefore constructed for incorporation in a machine or to be assembled with other machinery to constitute a “machine” in accordance
with the Directive 98/37 CE only in combination with the other components and according to the methods as described in this instruction
manual. As envisaged in the directive 98/37/EC, start-up of the product specified above is not admitted unless the manufacturer of the
machine, in which the product is incorporated, has identified and
declared the product as conforming to directive 98/37/EC.
Special warnings regarding the suitability of use of this product in relation to the “Low Voltage” Directive 73/23/EEC and subsequent amendment 93/68/EEC.
• This product complies with the requirements of the "Low Voltage"
Directive if used for the application and in the configurations envisaged
in this instruction manual and in combination with the articles present
in the catalogue produced by Nice S.p.a. Requirements may not be
guaranteed if the product is used in configurations or with other products not envisaged; use of the product in these conditions is strictly
prohibited unless the personnel assigned for installation have verified
compliance with the provisions of the directive.
Special warnings regarding the suitability of use of this product in relation to the “Electromagnetic Compatibility” Directive 89/336/EEC and
subsequent amendments 92/31/EEC and 93/68/EEC.
• This product has undergone testing for electromagnetic compatibility
in the most critical conditions of use, in the configurations envisaged
in this instruction manual and in combination with the articles present
in the product catalogue of Nice S.p.a. Electromagnetic compatibility
may not be guaranteed if the product is used in configurations or with
other products not envisaged; use of the product in these conditions
is strictly prohibited unless the personnel assigned for installation have
verified compliance with the provisions of the directive.
!
!
Page 4
4
2.1) Limits of use
Data related to the performance of TEN are provided in chapter “8 Technical specifications” and are the only values that enable correct evaluation of the suitability of application. In general TEN can automate up-and-over doors within the limits stated in Table 2.
The measurements in table 2 are guideline only for general estimate purposes. The effective suitability of TEN for automation of a specific door
depends on the degree of leaf balancing, friction on tracks and other factors, also occasional, such as wind pressure or the presence of ice,
which may obstruct leaf movement. To ensure feasibility, it is absolutely indispensable to measure the force required to move the door throughout travel and to check that this never exceeds the “nominal torque” as specified in Chapter “8 Technical specifications”; it is also important to
establish the number of cycles per hour and consecutive cycles admissible, with reference to Table 3 and Table 4
Force required to move leaf (N) Maximum cycles per hour Maximum no. consecutive cycles
Up to 150 30 19
150÷250 28 16
250÷350 25 14
Table 4: Limits in relation to the force required to move the leaf with 1 TN2010 + 1 TN2020
Door type Power operated with 1 motor Power operated with 2 motors
Projecting up-and-over door Max. height 2.6 m Max. length 3m Max. height 2.6 m Max. length 5.4 m
Non-projecting up-and-over door Max. height 2.6 m Max. length 3m Max. height 2.6 m Max. length 5.4m
Table 2: Limits of use for TEN gearmotors
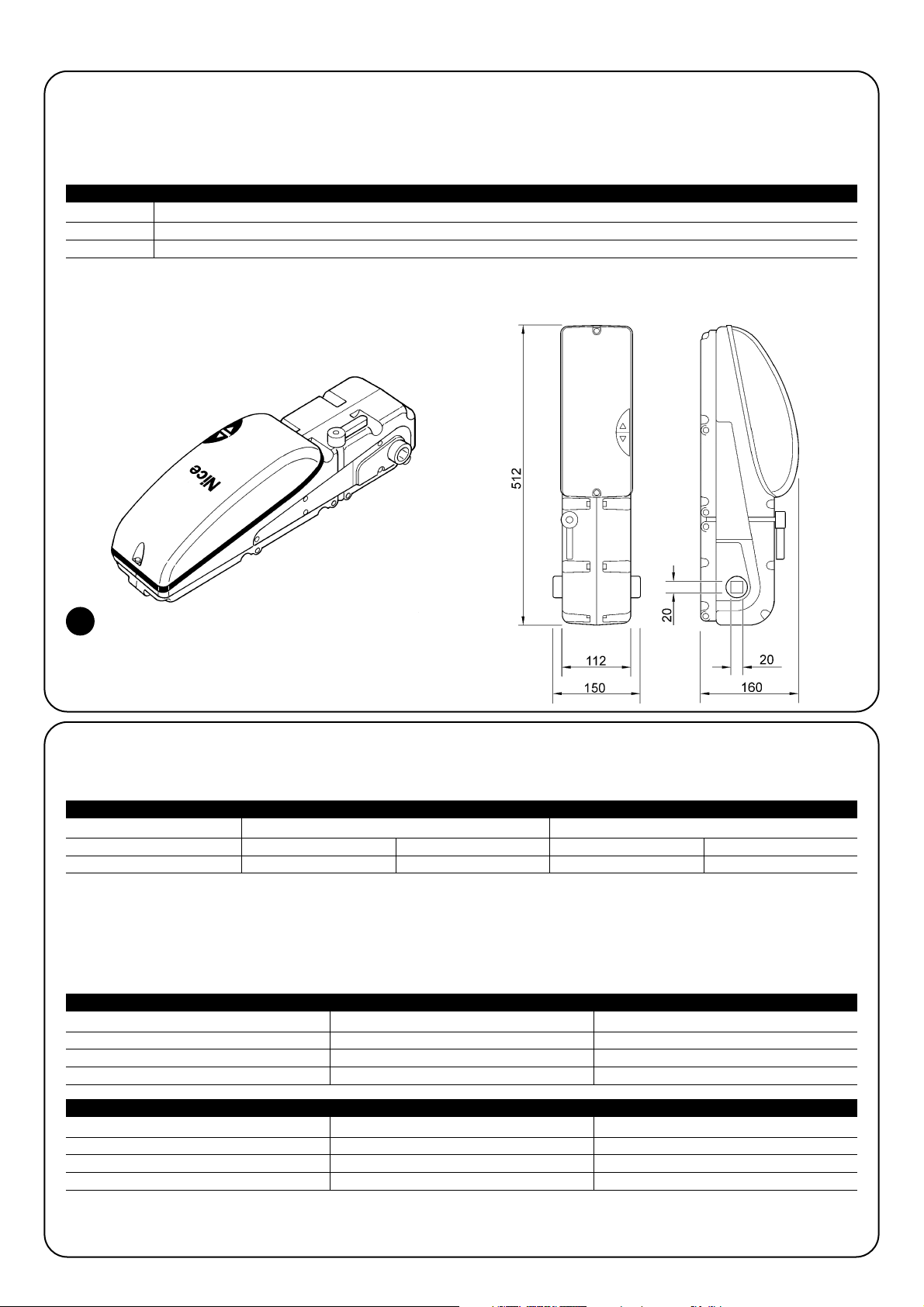
TEN (figure 1) is a gearmotor for the automation of counterweight up-and-over doors, spring up-and-over doors, projecting, non- projecting,
and articulated. TEN is fitted with an electronic limit switch system with absolute encoder to enable constant detection of the motor position,
even when the door is released for manual manoeuvres. It is able to reach the travel limit (opening and closing) through a deceleration phase.
It also ensures constant control of the force required during manoeuvres, detecting any anomalies, such as a sudden obstacle that blocks
leaf movement; in this case the automation executes a stop with brief inversion of movement.
Before proceeding with installation, check the condition of the product components, suitability of the selected model and conditions of the intended installation environment.
2) Product description and intended use
1
Model DESCRIPTION
TN2010 Irreversible gearmotor, control unit, electronic limit switch via absolute encoder and courtesy light.
TN2020 Irreversible gearmotor and courtesy light. To be used as “Slave” of TN2010 or TN2020
* If used in other configurations, ensure that the power supply is from a very low voltage safety system in which voltages never exceed the established
low voltage safety limits.
Table 1: Description of TEN composition
To avoid overheating, the control unit is equipped with a limiter based on the force and duration of the cycles, intervening when the maximum limit is exceeded.
Force required to move leaf (N) Maximum cycles per hour Maximum no. consecutive cycles
Up to 120 20 35
120÷180 18 33
180÷220 15 30
Table 3: Limits in relation to the force required to move the leaf with 1 TN2010
Page 5
5
GB
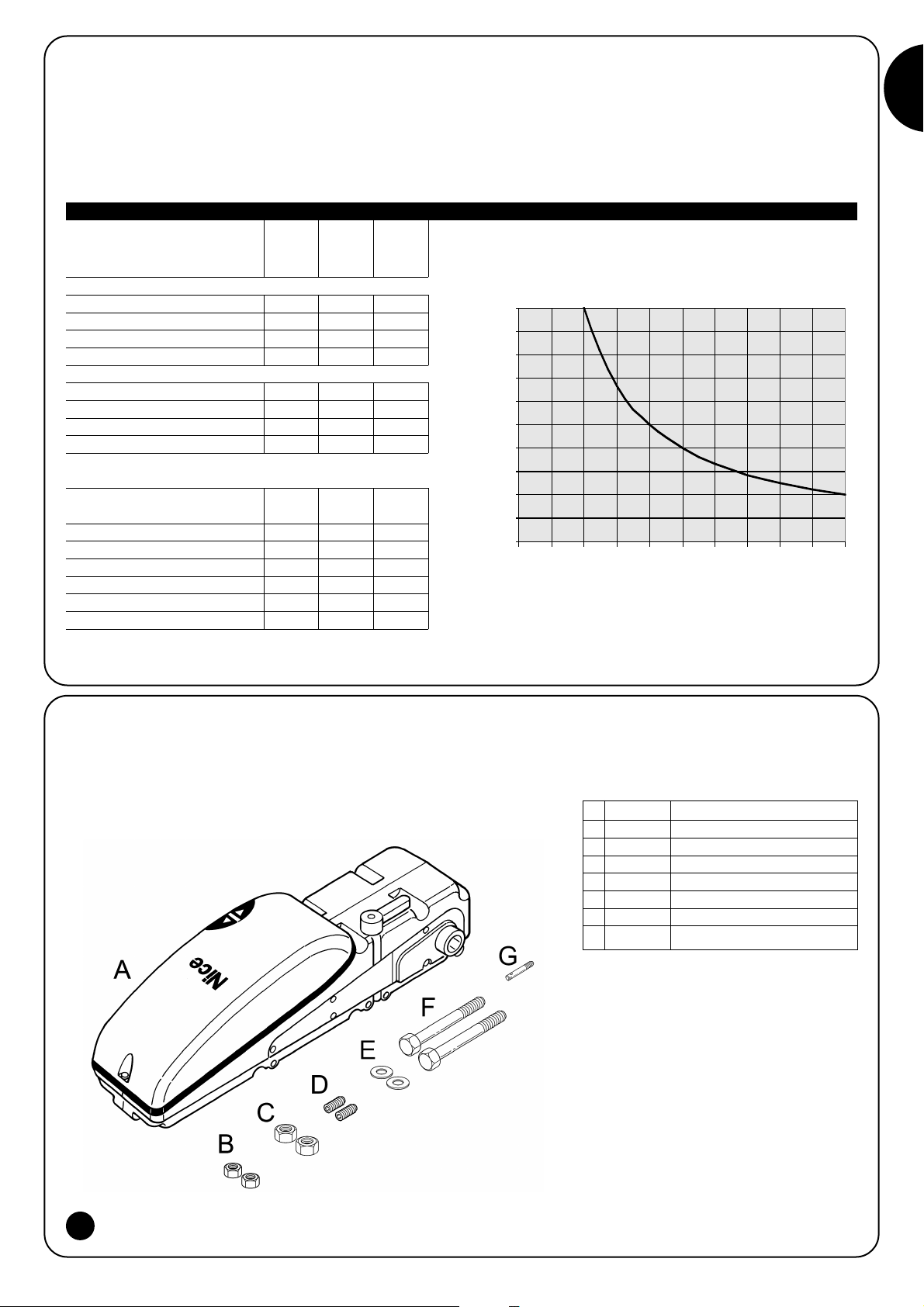
Chapter 8 “Technical specifications” also provides an estimate of “durability” i.e. average product lifetime. The value is strongly influenced by
the stress factors involved in the manoeuvre, i.e. all factors that contribute to wear. To make this estimate, the total of all the gravity ratings
in Table 5 must be calculated, for subsequent verification of the estimated feasibility in the graph. For example, TN2010 on a door of 130 Kg,
which requires a force of 180Nm to move the leaf, equipped with photocells and no other factors of fatigue, obtains a gravity rating of 60%
(30+20+10). The estimated durability on the graph is therefore 18,000 cycles.
Note that the estimate of durability is conducted on the basis of design calculations and results of tests performed on prototypes; as this is
an estimate it does not constitute any form of guarantee on the effective lifetime of the product.
Gravity rating % TN2010 TN2010
+
TN2020
Leaf weight Kg
Up to 100 20 10
100 ÷ 180 30 20
180 ÷ 230 40 30
Over 230 60 50
Force required to move leaf (N)
Up to 160 10 5
160 ÷ 240 20 15
240 ÷ 290 40 30
290 ÷ 350 - 50
Other factors of fatigue
(to be considered if the probability of occurrence exceeds 10%)
Ambient temperature over 40°C or
below 0°C or humidity over 80% 10 10
Presence of dust or sand 15 15
Presence of salt water 20 20
Interruption of manoeuvre by Photo 10 10
Interruption of manoeuvre by Stop 20 20
Speed over “L4 high” 15 15
Total gravity rating %
Table 5: Estimate of durability in relation to the manoeuvre gravity rating
Gravity rating %
Cycle durability
2.2) Product component check
• Check the condition of the packaging;
• unpack the product and ensure presence of (Figure 2):
N° PIECES TN2010
A 1 TEN Gearmotor
B 2 M6 nuts
C 2 M8 nuts
D 2 Threaded stud bolts M6x14
E 2 Ø8 washers
F 2 M8x110 screws
G 1 Release rod
2
50000
45000
40000
35000
30000
25000
20000
15000
10000
5000
0
0 102030405060708090100
Page 6
6
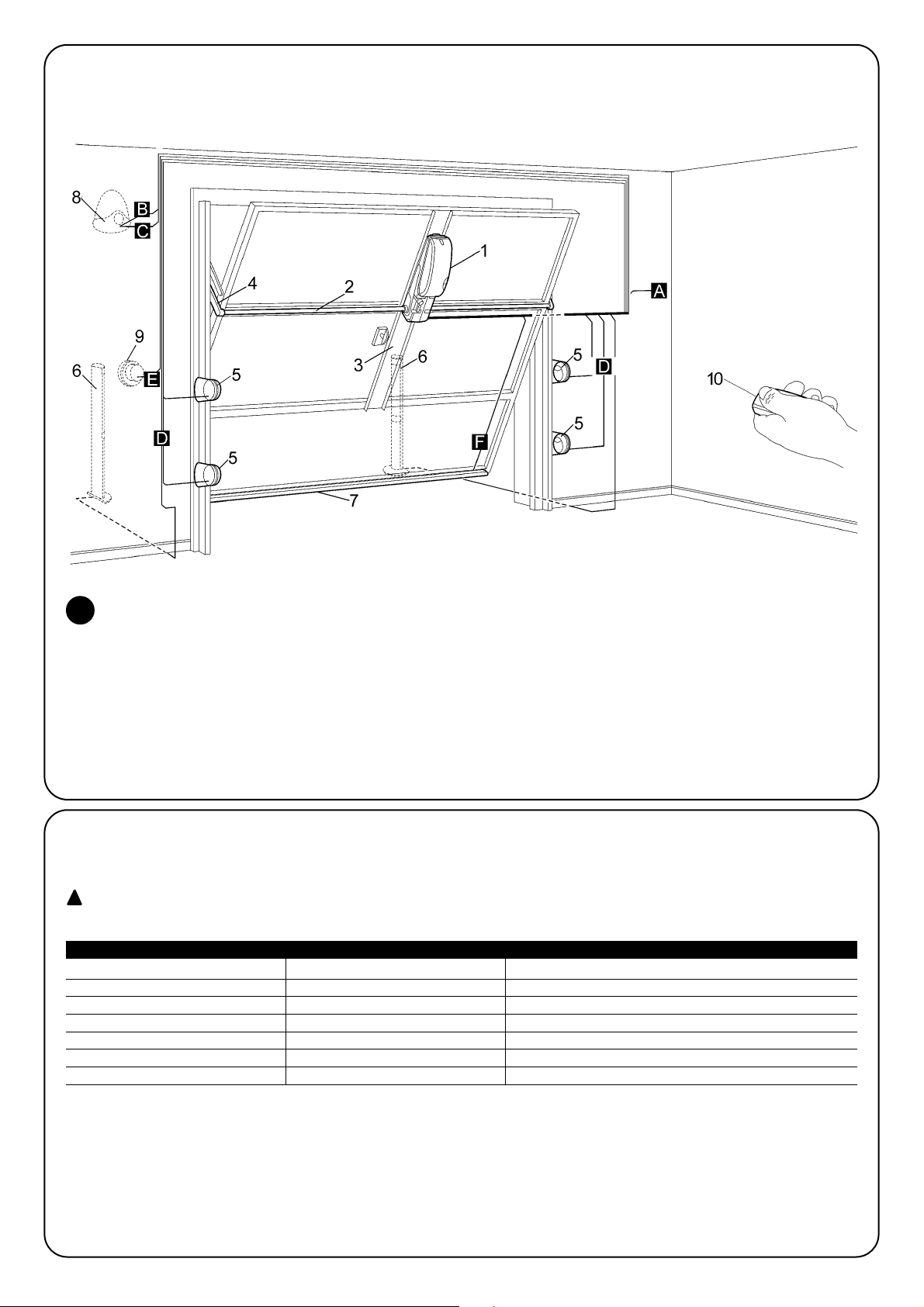
2.3) Typical system
Figure 3 shows a typical installation of an automation for up-and-over doors, using TEN.
1 TEN
2 Square tube 20x20
3 Support bracket
4 Telescopic arm
5 Photocells
6 Photocells on post
7 Sensitive edge
8 12 V Flashing light with incorporated aerial
9 Key-operated selector switch
10 Radio transmitter
2.4) Wiring list
On the typical system of figure 3 the cables are specified for connection of the various devices; table 6 specifies the relative characteristics
of the cables.
The cables used for connecting the various devices must be suitable for the type of installation: For example a cable
type H03VV-F is recommended if located indoors.
!
Note: (*) if the power cable is longer than 30 m, a cable with a larger section is required, (e.g. 3 x 2,5 mm2) and safety earthing is neces-
sary in the vicinity of the automation.
Connection Cable type Maximum admissible length
A: Electric power line 1 cable (3 x 1.5 mm²) 30 m (*)
B: 12V Flashing Light 1 cable (2 x 1 mm²) 20 m
C: Aerial 1 shielded cable (type RG58) 20 m (recommended: Less than 5 m)
D: Photocells 1 cable (2 x 0.5 mm²) 20 m
E: Key-operated selector switch 1 cable (4 x 0.25 mm²) 20 m
F: Sensitive edge 1 cable (2 x 0.25 mm²) 20 m
Table 6: Wiring list
3
Page 7
7
GB
Ten must be installed exclusively by qualified personnel in observance of current legislation, standards and regula-
tions, as well as all instructions in this manual.
!
3) Installation
3.1) Preliminary checks and inspections
Before installation of TEN, perform the following checks:
• Verify and ensure after installation that no door parts obstruct public roadways or pavements.
• Ensure that all material used is in perfect condition, suitable for use
and compliant with standards.
• Ensure that the weight and dimensions of the leaf are within the
limits of use specified in chapter “2.1 Limits of use”.
• With reference to the values specified in chapter “8 Technical
specifications”, ensure that the static friction (i.e. the force required
to move the leaf from stationary) is less than half the “Maximum
torque” and that the dynamic friction (i.e. the force required to keep
the leaf in movement) is less than half the “Nominal torque”; a margin of 50% is recommended of the force values as adverse climatic conditions can increase friction values.
• Ensure that there are no points of increased friction throughout the
travel of the up-and-over door.
• Check the strength of the mechanical stops and ensure there is no
risk of the door derailing from the tracks.
• Ensure that the door is well balanced, i.e. it must not move if left
stationary in any position.
• Ensure that the fixing points of the various devices (photocells,
pushbuttons etc.) are in area protected against impact and that fixing surfaces are sufficiently solid.
• Depending on the type of door, projecting, non-projecting or articulated, ensure that TEN can be fixed at the heights specified in figures 5, 6 or 7 respectively.
• Check and ensure that the manual release is fitted at a maximum
height of 1.8 m.
• If there is not sufficient space between the support arm and fixed
section of the door, the “curved arm” accessories should be used
to avoid crossover.
• Ensure that parts of the automation cannot come into contact with
water or other liquids.
• Never keep TEN components near heat sources or naked flames;
these actions can cause damage and malfunctions, fire or hazards.
• If the door is fitted with a pedestrian access door, ensure that this
does not obstruct normal travel and that a suitable interlock system is fitted.
• Connect the control unit to an electric power line equipped with an
earthing system.
• The electric power line must be protected by an adequate differential thermal magnetic cut-out device. The electrical mains power line must be equipped with a power disconnect device (with
overvoltage category III, i.e. minimum gap between contacts of 3.5
mm) or an equivalent system such as socket with removable plug.
If the power disconnect device is not in the vicinity of the automation, it must be fitted with a lockout facility to prevent inadvertent
or unauthorised connection.
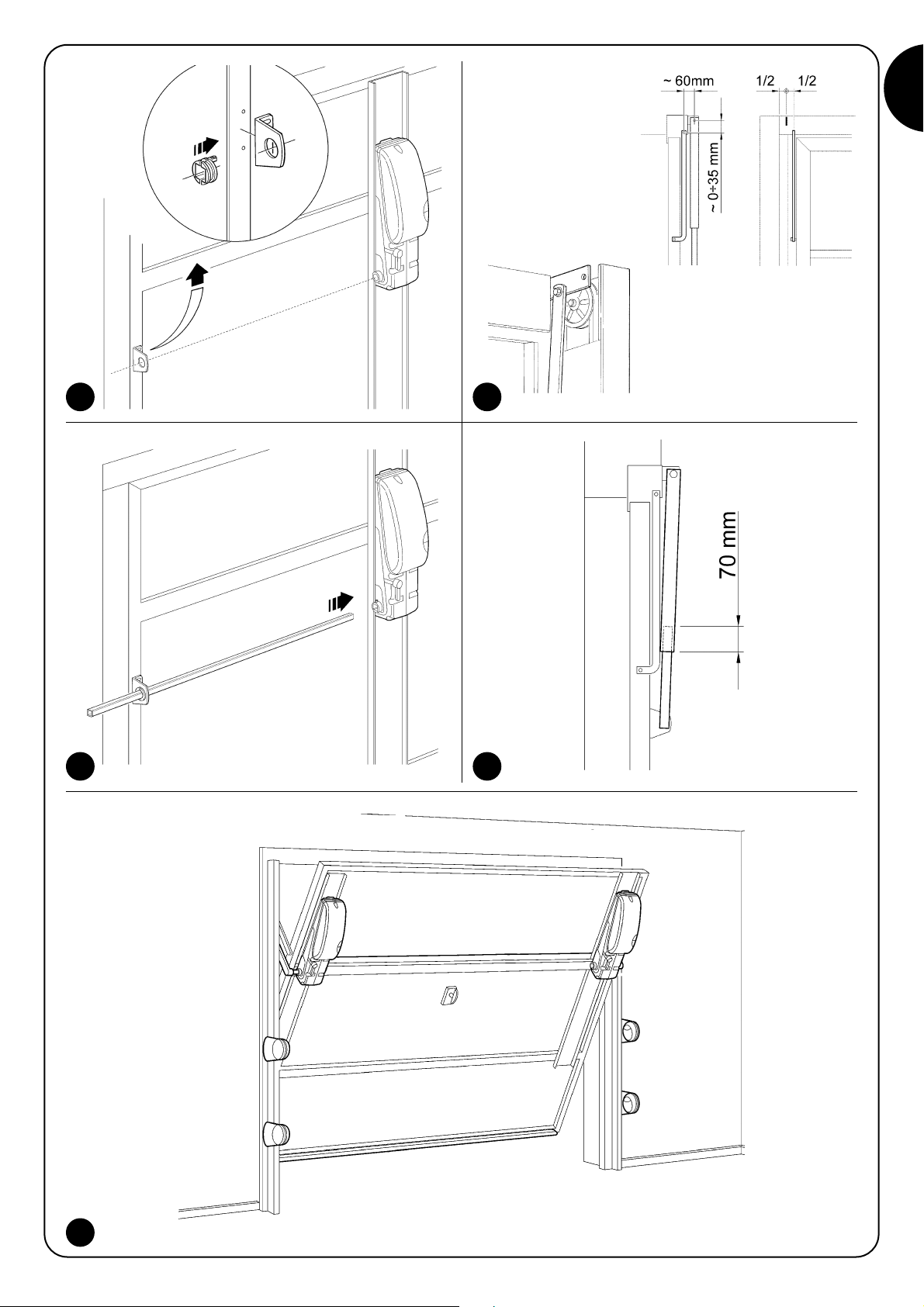
3.2) Gearmotor installation
Positioning of TEN varies according to the type of door to be automated and constrains specified in chapter “2.1 Limits of use”
TEN is equipped with an absolute encoder pre-set to
“nearly closed” operative also when the motor is released.
For this reason, step no.8 must be performed with the
DOOR CLOSED.
Note: For the installation of 2 motors follow the same procedure as
for one motor, with installation as shown in Figure 14.
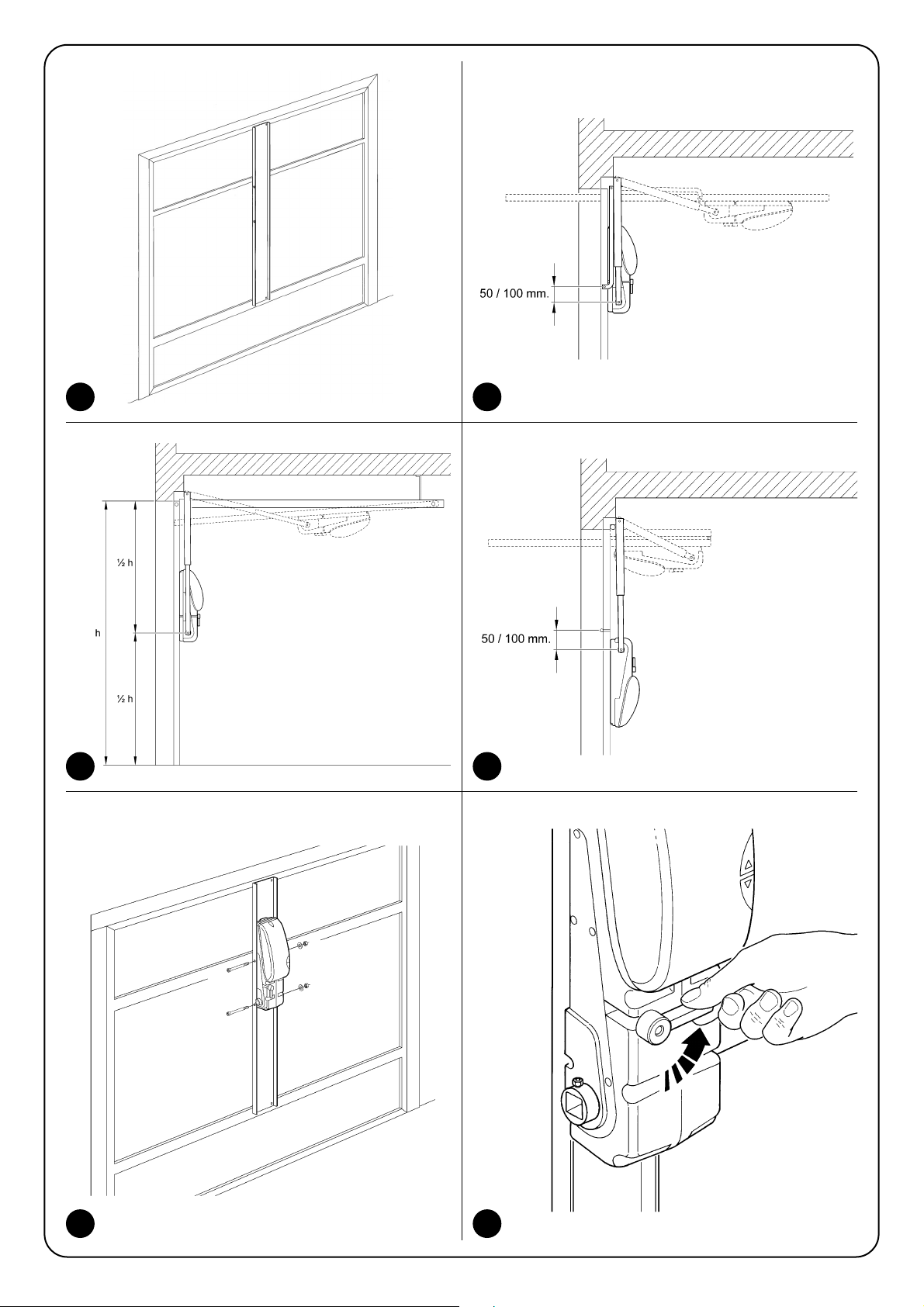
1. Once the type is defined, fix the support bracket to the door, per-
fectly vertical (Figure 4), observing the specified distances.
1.1 For projecting up-and-over doors, the axis of arm rotation
must be 50÷100 mm below the door support arm.(Figure 5)
1.2 For non-projecting up-and-over doors, the axis of arm rotation must be in perfect alignment with the door support
arm.(Figure 6)
1.3 On articulated up-and-over doors, the axis of arm rotation
must be 50÷100 mm below the hinge of door rotation (Figure 7).
If using TEN upturned, the control unit must be
programmed using the remote programming unit
OView. For further information refer to paragraph
“7.8.1 Remote programming unit”.
2. Fix the gearmotor to the bracket by means of the relative screws
(Figure 8)
3. Release the gearmotor by rotating the handle anti-clockwise (Figure 9).
4. Securely fix the lateral support brackets, perfectly aligned with the
motor rotation shaft, and insert the adaptor bushings supplied.
(Figure 10).
Depending on the space between the support arm and
fixed frame of the door, straight or curved arms must be
used.
5. Fix the upper support to the door frame (Figure 11): If already pre-
sent, ensure that it is suitable for the arms to be used. The distances specified in figure 11 are guideline only: These may vary
according to the dimensions of the door.
6. Insert the transmission tube into the bushing of the arm and the
motor shaft, and cut to size. (Figure 12)
7. Open the door completely and cut the arms to size, considering
that with the door closed they need to slide by at least 70 mm
(Figure 13). If the length is not sufficient, reposition the upper support or use longer arms
8. Close the door, insert the arms in the respective guides and
ensure that the door slides freely without jams or obstructions.
Check balancing again: The door is well-balanced when it
does not move at all from stationary in any position
throughput its travel. If necessary, adjust the balancing
systems as required..
!
!
Page 8
8
4
5
6 7
8 9
Page 9
9
GB
10
11
12 13
14
Page 10
10
3.3) Limit switch adjustment
Ten 2010 is not fitted with mechanical limiters, but is equipped with an electronic system for absolute limitswitch. For settings, refer to paragraph “4.3 Learning the door opening and closing positions.”
3.4) Installation of various devices
Install the other devices envisaged as stated in the respective instructions. Refer to paragraph”3.5 Description of electrical connections “and
figure 17 for devices that can be connected to TEN
17
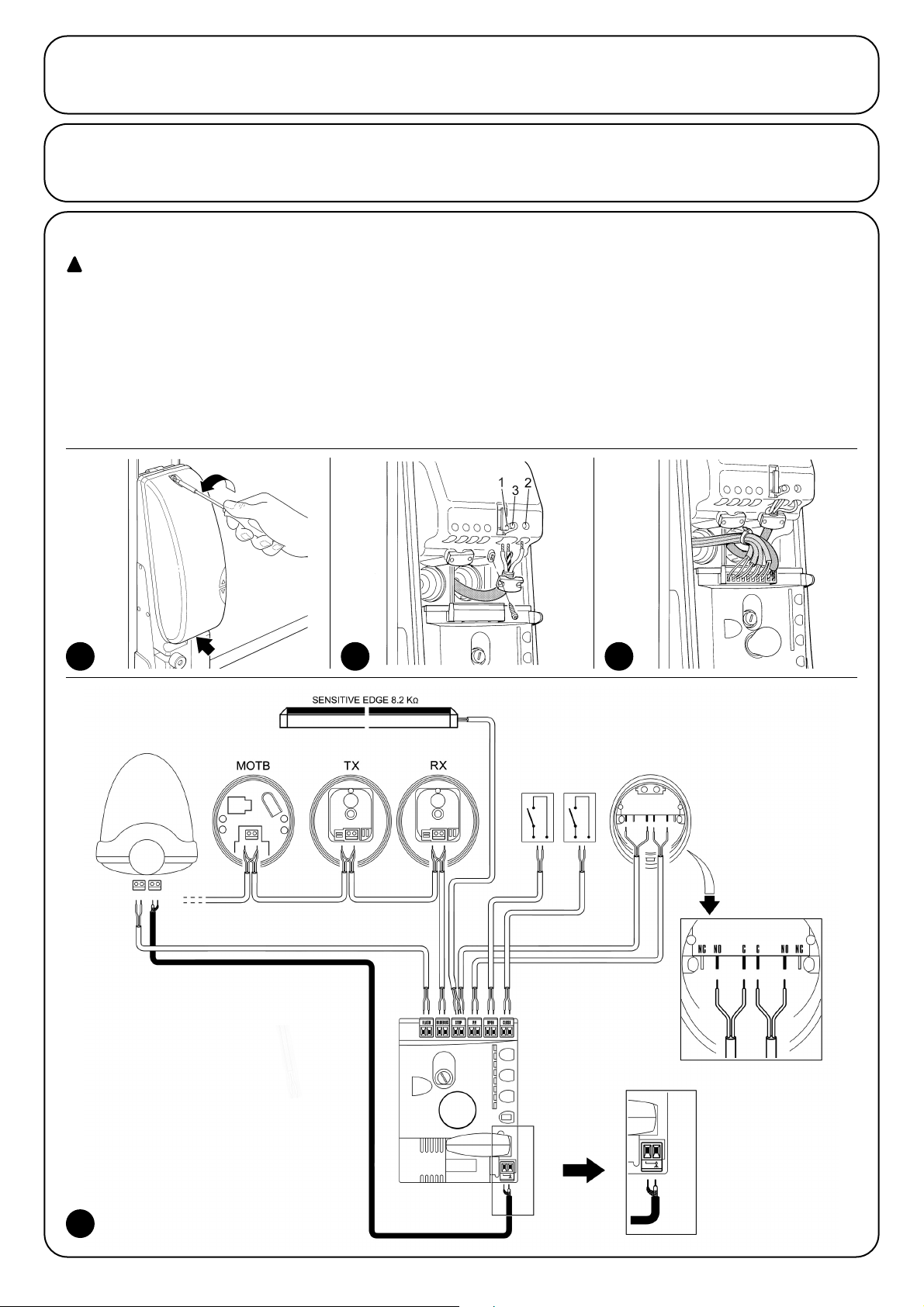
3.5) Electrical connections
All electrical connections must be made with the system disconnected from the power supply.
1. To proceed with electrical connections, loosen the screws of the cover (Figure 15)
2. Remove the two rubber membranes closing off the two cable routing holes. Cut a hole in the membrane and insert the power cable
through the membrane and right-hand hole. Cut a hole in the membrane and pass the other cables to the various devices through the
membrane and left-hand hole. Leave a cable length of 20÷30 cm longer than necessary. See table 6 for the cable types.
3. Connect the mains power cable directly to terminals 1(phase) and 2 (neutral), and 3 (earth); secure the cable with the collar as shown in
Figure 16
4. Make connections of the other cables as shown in the diagram of Figure 17. The terminals are removable to facilitate these operations.
5. On completion of connection, collect and secure the cables by means of clips (Figure 18).
!
18
15
16
Page 11
11
GB
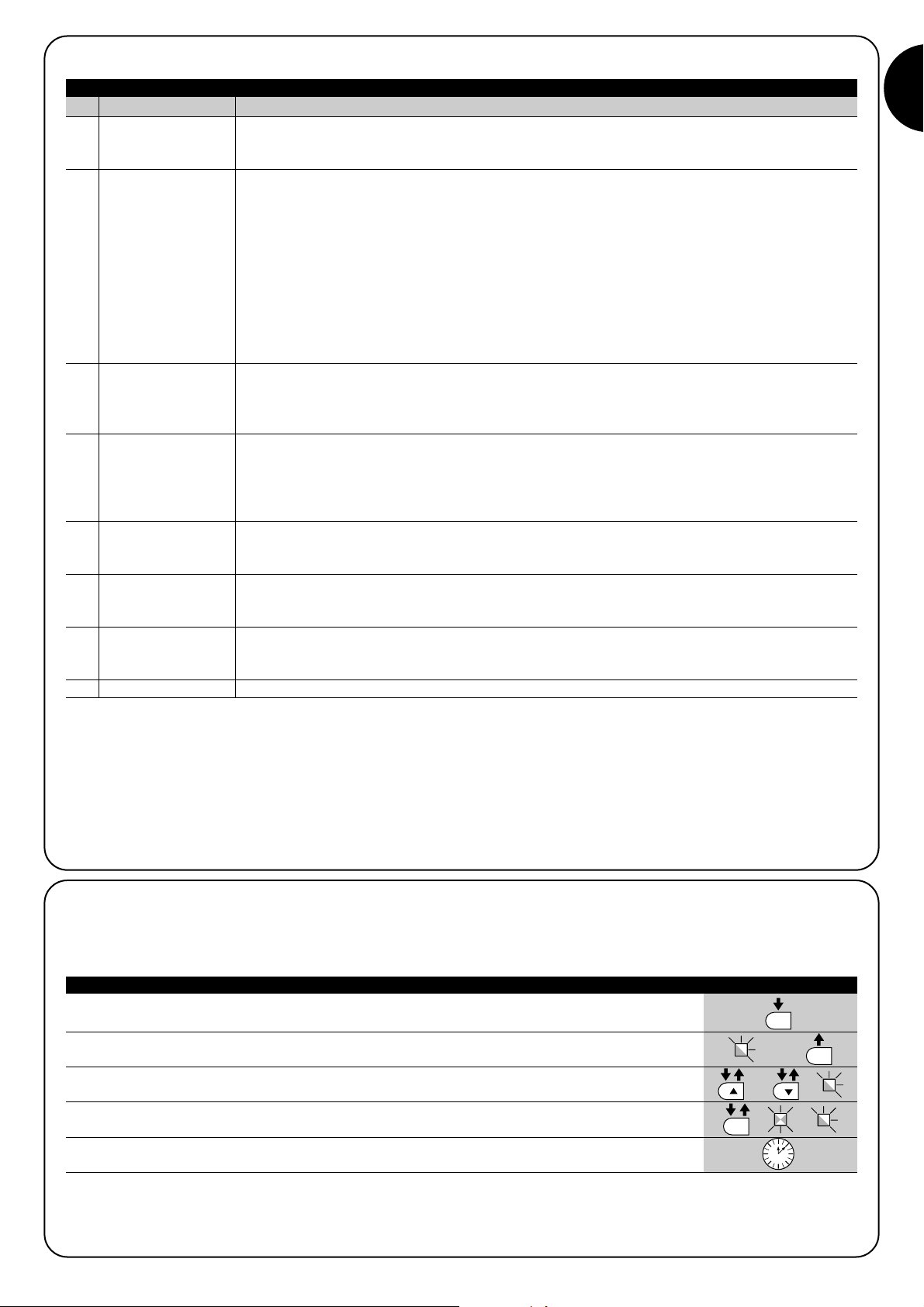
3.5.1) Description of electrical connections
This paragraph provides a brief description of the electrical connections: for further information refer also to “7.3 Adding or removing devices”
FLASH this output is programmable (see L4 in table 10) to connect one of the following devices:
Flashing light
If programmed as “flashing light” the “FLASH” output can be connected to a NICE “LUCY B” MLB or MLBT flashing light
with a 12V 21W car type lamp.
During the manoeuvre the light flashes at an interval 0.5s on and 0.5s off
Function: “door open indicator”, “active if door closed” or “active if door open”
If programmed with one of these 3 functions, the “FLASH” output can be connected to a 24V max 5W indicator light to
signal the following:
“Door open indicator” function
Off: door closed
Slow flashing: Door opening
Quick flashing: Door closing
On: Door open (not closed)
“Active if door closed” function
On: door closed
Off: All other cases
“Active if door open” function
On: Door open
Off: All other cases
It may also be programmed for other functions; in the case refer to paragraph “7.2.3 Level 2 functions (adjustable parameters)”
Suction cup*
If programmed as “suction cup” the “FLASH” output can be connected to a 24V max 10W suction cup (versions with
electromagnet only, without electronic devices).
When the door is closed, the suction cup is activated to lock the door in place. During the opening and closing manoeuvre it is deactivated
Electric block*
If programmed as “electric block” the “FLASH” output can be connected to a max. 24V electric lock with latch (versions
with electromagnet only, without electronic devices).
During the opening manoeuvre, the electric lock is activated and remains active to free the door and perform the
manoeuvre. In the closing manoeuvre ensure that the electric block re-engages mechanically.
Electric lock*
If programmed as “electric lock” the “FLASH” output can be connected to a 24V max 10W electric lock with latch (versions with electromagnet only, without electronic devices).
During the opening manoeuvre, the electric lock is activated for a brief interval to free the door and perform the manoeuvre. In the closing manoeuvre ensure that the electric block re-engages mechanically.
BLUEBUS this terminal enables the connection of compatible devices; all are connected in parallel with just two wires conveying
the electric power and communication signals. More information on BlueBUS is available in paragraph “7.3.1 - BlueBUS”.
STOP Input for devices that block or shut down the manoeuvre in progress; by setting the input accordingly, it is possible to
connect Normally Closed type contacts, Normally Open contacts, constant resistance or optical devices. More information on STOP is available in paragraph “7.3.2 –STOP input”.
PP Input for devices that control movement in Step-Step mode, enabling the connection of Normally Open contacts.
OPEN Input for devices that control opening movement only, enabling the connection of Normally Open contacts.
CLOSE Input for devices that control closing movement only, enabling the connection of Normally Open contacts.
AERIAL Input for connection of the aerial for the radio receiver (the aerial is incorporated on LUCY B)
* Only devices containing exclusively the electromagnet can be connected
Never use devices other than those specified
!
Page 12
12
4.1) Power supply connection
TEN must be connected to the power supply by skilled and qualified personnel in possession of the requisites as spe-
cified and in full compliance with legislation, standards and regulations.
As soon as TEN is powered up, a number of checks are recommended:
1. Check that the BLUEBus led flashes quickly for a few seconds and then regularly with one flash per second (Figure 31).
2. If photocells are present, check that the leds on the latter also flash (both on TX and RX elements); the type of flash is not significant as
this depends on other factors.
3. Check that the device connected to the FLASH output is off
4. Ensure that the courtesy light is switched off.
If none of these conditions occur, disconnect the power supply immediately and check the electrical connections thoroughly.
Other information regarding fault-finding procedures are provided in the chapter “7.6 Troubleshooting”
!
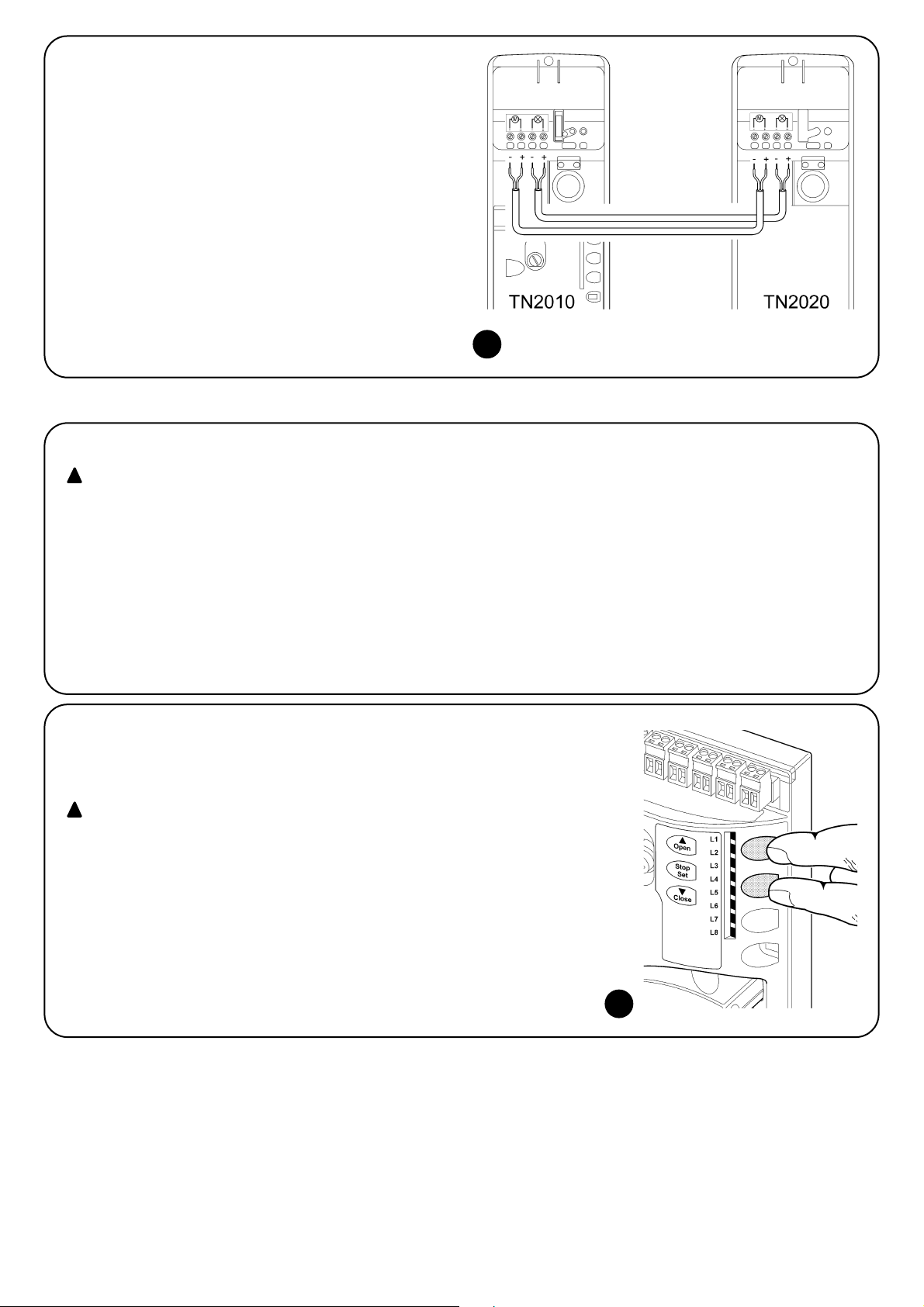
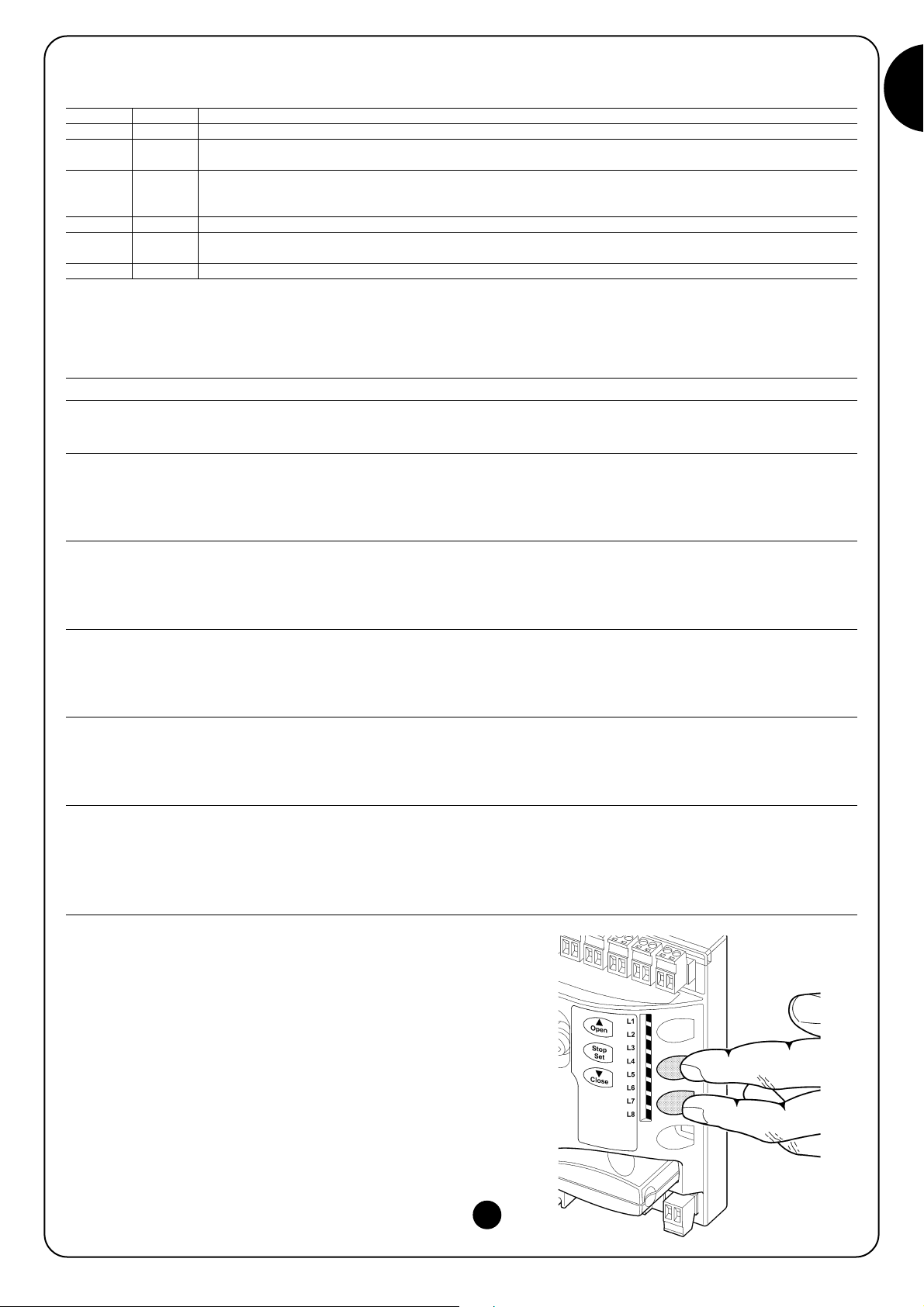
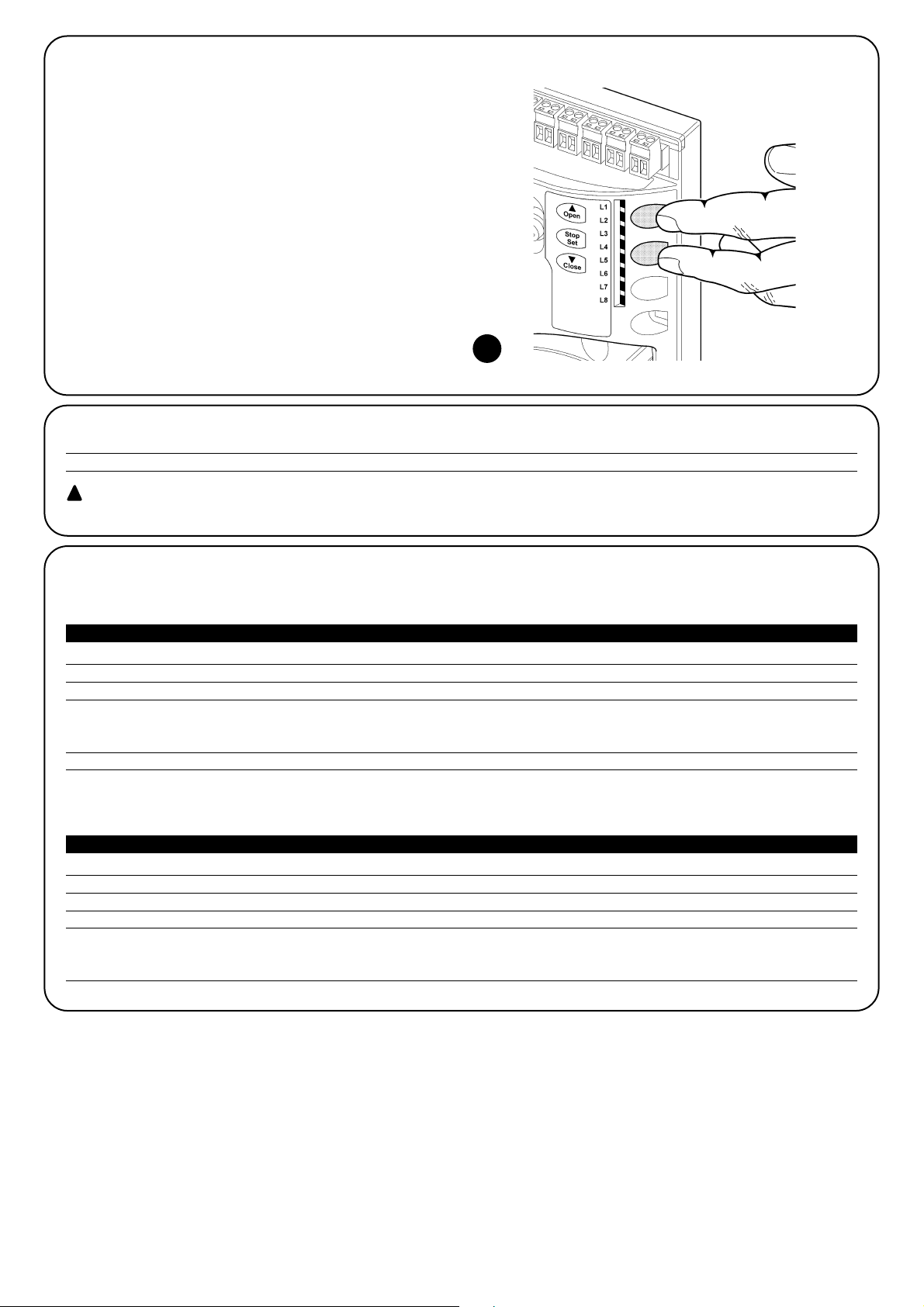
4.2) Learning devices
After connecting to the power supply, the control unit must recognise the devices connected to the inputs BlueBUS and STOP. Before this phase, leds L1 and L2 flash to indicate that
the device self-learning process must be performed.
The device self-learning phase must be performed even if no device is con-
nected
1. Press and hold keys [▲] and [Set](Figure 20)
2. Release the keys when leds L1 and L2 start to flash quickly (after around 3s)
3. Wait a few seconds for the control unit to finish device self-learning.
At the end of the self-learning process, the STOP led must remain lit, while leds L1 and L2
turn off (where relevant leds L3 and L4 start flashing).
The phase of self-learning the devices connected can be repeated at any time also after
installation, such as in the case that a device is added.
!
20
4) Final checks and start-up
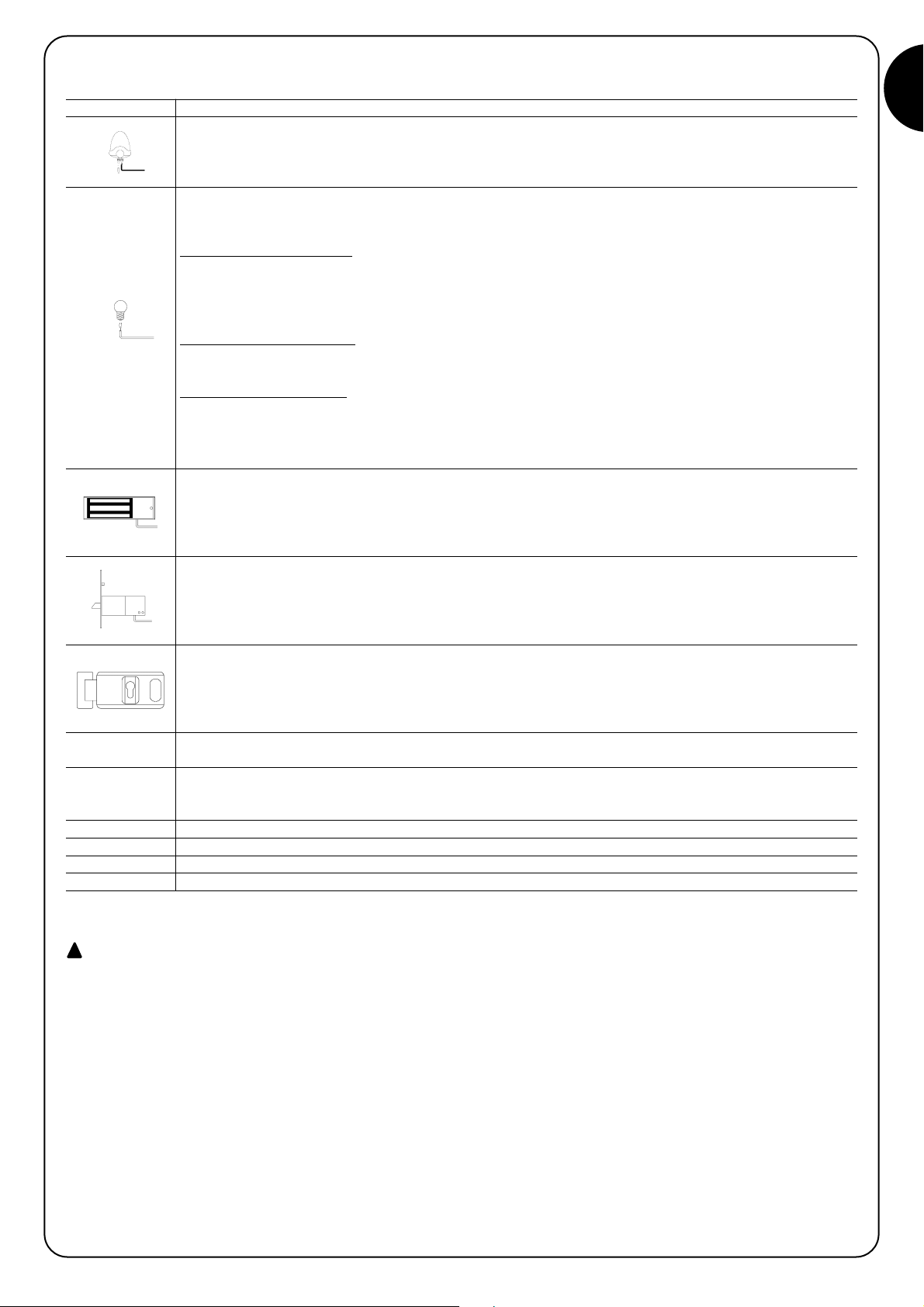
3.5.2) Second motor electrical connection;
If the installation envisages the use of 2 motors, a TN2010 and a
TN2020, make the electrical connection of the second motor as
described below.
1. Make the same connections for gearmotor TN2010 as those for
a single motor installation.
2. Between the control unit of the TN2010 and terminal board of the
TN2020 make the cable connections “second motor” and “second motor courtesy light” as shown in (Figure 19), observing
polarity as specified.
19
Page 13
13
GB
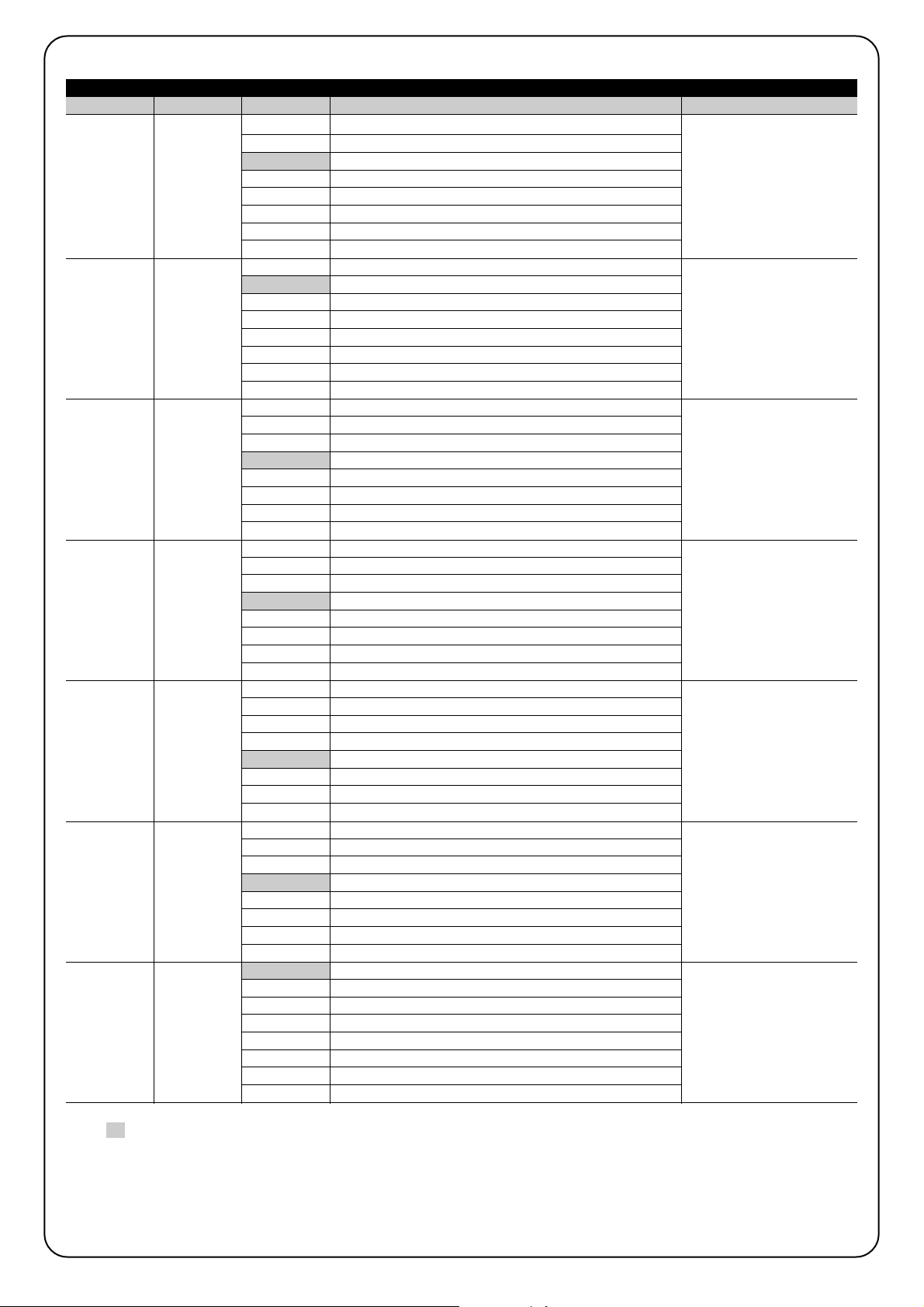
4.3) Learning the door opening and closing positions
After self-learning the devices, the control unit must recognise the door opening and closing positions, as well as a total of six other optional positions:
Position led Meaning
FCA L1 Maximum opening position. When the door reaches this position it stops
RA L2 Deceleration start position during the opening manoeuvre; when the door reaches this position the motor decelerates to
the minimum speed.
RI L4 Intermediate deceleration position in closing manoeuvre. When this point is programmed, the door starts to decelerate at
approx. 50 cm beforehand, to pass from the position RINT to minimum speed. On passing the RINT position the motor
returns to the set speed
AP L5 Partial opening position. This is the position at which the door stops after receiving a partial opening command.
RC L7 Deceleration start position during the closing manoeuvre; when the door reaches this position the motor decelerates to
the minimum speed.
FCC L8 Maximum closing position; when the door reaches this position it stops
During these manoeuvres, the control unit memorises the force
required for the opening and closing movements.
It is important that these preliminary manoeuvres are not
interrupted for example by a STOP command.
The position learning phase can be repeated at any time also after
installation, by simply repeating the procedure from point 1. However, if only one position needs to be modified, skip programming of
the positions not involved by pressing the key [Set] twice quickly for
each position to skip.
21
When the positions have not been acquired, leds L3 and L4 flash.
The position memorisation procedure is described below. Positions FCA and FCC require compulsory programming, while the others remain
optional; if not programmed the latter are calculated automatically by the control unit.
1. Press [Set] + [▼] for 3 seconds to enter position memorisation mode. (Figure 21)
Led L1 flashes: Position FCA programming
2. Use keys [▲] or [▼] to move the door to the opening position.
3. Press [Set] for 2 seconds to confirm position FCA. Led L1 remains lit
Led L2 flashes: Position RA programming
4. If the opening slowdown position programming is not required, press the key [Set] twice quickly to skip to the next programming;
led L2 remains off. Otherwise proceed with the sequence
5. Use keys [▲] or [▼] to move the door to the opening deceleration position.
6. Press [Set] for 2 seconds to confirm position RA. Led L2 remains lit
Led L4 flashes: Position RI programming
7. If the intermediate slowdown position programming is not required, press the key [Set] twice quickly to skip to the next
programming; led L4 remains off. Otherwise proceed with the sequence
8. Use keys [▲] or [▼] to move the door to the intermediate deceleration position.
9. Press [Set] for 2 seconds to confirm position RI. Led L4 remains lit
Led L5 flashes: Position AP programming
10. If the partial opening position programming is not required, press the key [Set] twice quickly to skip to the next programming; led
L5 remains off. Otherwise proceed with the sequence
11. Use keys [▲] or [▼] to move the door to the partial opening position.
12. Press [Set] for 2 seconds to confirm position AP. Led L5 remains lit
Led L7 flashes: Position RC programming
13. If the closing slowdown position programming is not required, press the key [Set] twice quickly to skip to the next programming;
led L7 remains off. Otherwise proceed with the sequence
14. Use keys [▲] or [▼] to move the door to the closing deceleration position.
15. Press [Set] for 2 seconds to confirm position RC. Led L7 remains lit
Led L8 flashes: Position FCC programming
16. Use keys [▲] or [▼] to move the door to the closing position.
17. Press [Set] for 2 seconds to confirm position FCC. Led L8 remains lit.
18. On release of [Set] all leds turn off.
19. Give an open command by pressing [Open] to execute a complete opening manoeuvre.
20. Give a close command by pressing [Close] to execute a complete closing manoeuvre.
Page 14
14
This is the most important phase of automation set-up to ensure
maximum safety. Testing can also be performed as a periodic check
of automation devices.
Testing of the entire system must be performed by
skilled and qualified personnel, who are responsible for
the tests required, according to the risk present, and for
ensuring observance of all legal provisions, standards and
regulations, and in particular all requirements of the standard EN 12445, which establishes the test methods for
checking automations for doors and gates.
!
5) Tests and commissioning
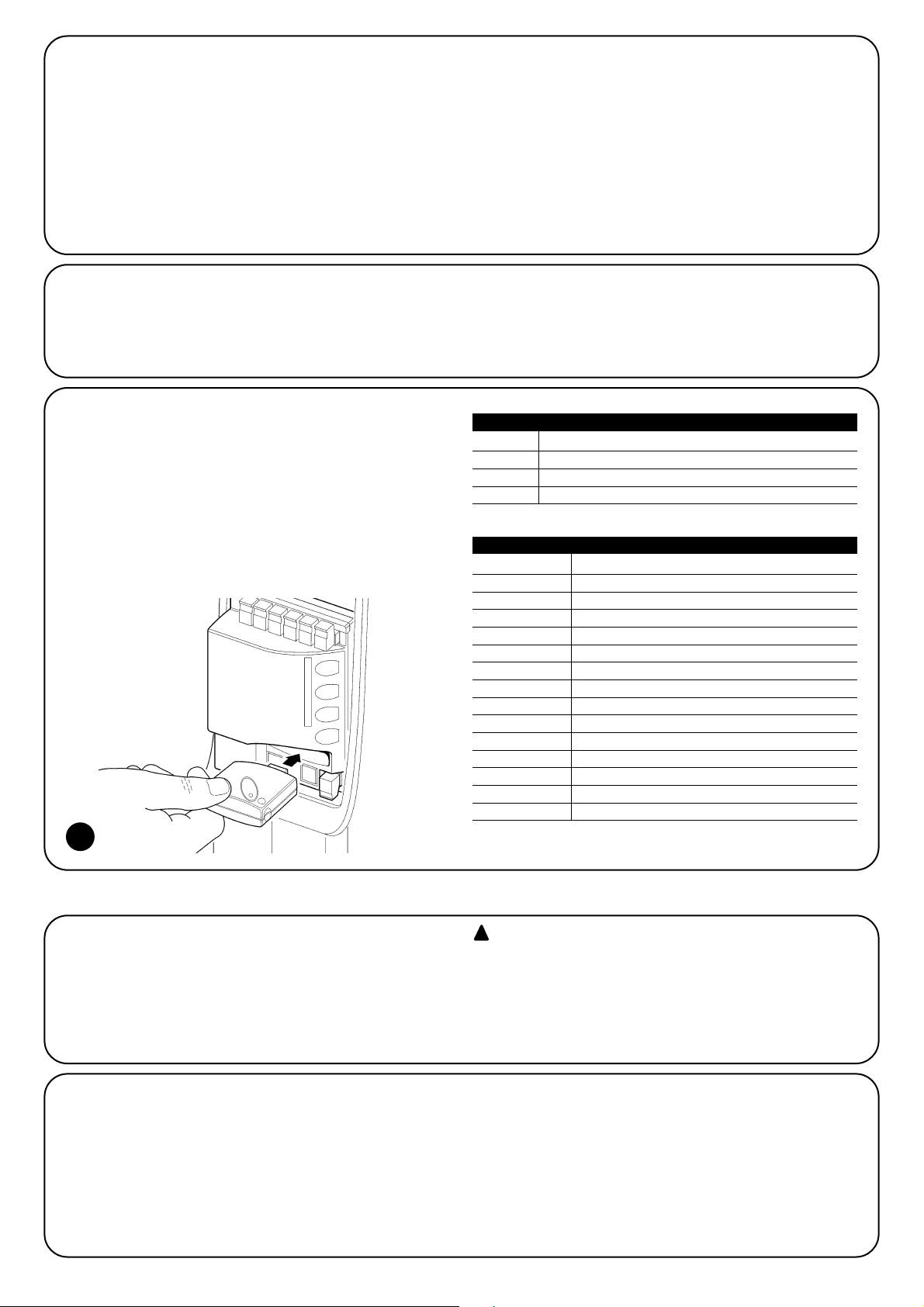
4.6) Radio receiver
For remote control of TEN, the control unit is equipped with a connector SM for optional radio receiver types SMXI, SMXIS or OXI. To
insert the radio receiver, disconnect TEN from the power supply and
follow the procedure as indicated in figure 21. Table 7 shows the
association between the output of the radio receivers SMXI and
SMXIS and the command that TEN executes:
If the radio receiver OXI of the NiceOpera range is used, EXTENDED
MODE II enables the receiver to send the following commands:
Output N°1 “SS” command (Step-by-Step)
Output N°2 “Partial open” command
Output N°3 “Open” command
Output N°4 “Close” command
Table 7: commands with receiver SMXI, SMXIS
Command n°1 Step-Step
Command n°2 Partial opening 1
Command n°3 Open
Command n°4 Close
Command n°5 STOP
Command n°6 Apartment block step-by-step
Command n°7 Step-by-step high priority
Command n°8 Partial opening 2
Command n°9 Partial opening 3
Command n°10 Open and block automation
Command n°11 Close and block automation
Command n°12 Block automation
Command n°13 Release automation
Command n°14 Courtesy Light On Timer
Command n°15 Courtesy Light On-Off
Table 8: commands with receiver OXI
22
4.4) Checking door movement
After learning the positions, run a number of manoeuvres to ensure correct movement of the door.
1. Press [OPEN] to activate an “Open” manoeuvre; ensure that door opening is correct without variations in speed; also check that the
deceleration on opening is performed at the set position.
2. Press [CLOSE] to activate a “Close” manoeuvre; ensure that the door closes with a low speed start, followed by a change in speed and
then that the door decelerates on closing at the set position.
3. During the manoeuvre, ensure that the flashing light emits flashes at the frequency 0.5s on and 0.5s off.
4. Make a number of opening and closing manoeuvres to check for possible assembly defects or faulty adjustments and other malfunctions
such as points of increased friction.
5. resistant, also during sudden accelerations or decelerations in door movement
4.5) Pre-set functions
The TEN control unit has a number of programmable functions, which are factory set with values that should suit most types of automation;
however, these functions can be modified at any time by means of the specific programming procedure, as described in paragraph “7.2 Settings”.
5.1) Testing
Each component of the automation, such as the sensitive edges,
photocells, emergency stop, etc., requires a specific testing phase;
for these devices the specific procedures in the respective instruction manuals must be performed.
To test TEN, follow the procedure below:
1. Ensure that all specifications in this manual have been observed,
with special reference to the chapter “1 Warnings”;
2. Release the door by rotating each motor release handle anticlockwise (Figure 40); ensure that the door can be moved manually in the opening and closing directions with a force of maximum
225N at the point envisaged for manual movement.
3. Lock the motors to the door by rotating the release handle clockwise (Figure 41).
Page 15
15
GB
4. Using the envisaged control and stop devices (key-operated
selector switch, control pushbuttons or radio transmitters),
perform tests of opening, closing and stopping the door and
ensure that operations correspond to specifications.
5. Test several times to assess smooth operation of the door and
check for any defects in assembly or adjustment and any possible points of friction.
6. Check operation of all system safety devices one at a time (photocells, sensitive edges, emergency stop, etc.); in particular, each
time a device is activated the “OK” led on the control unit must
flash rapidly twice to confirm acknowledgement of the event.
7. To check the photocells, and to ensure there is no interference
with other devices, pass a cylinder with diameter of 5cm and
length 30cm on the optical axis, first close to the TX, then close
to the RX and lastly at the centre between the two and ensure
that in all cases the device engages, changing from the active
status to alarm status and vice versa. Lastly ensure that the envisaged action is generated on the control unit, for example: in the
closing manoeuvre it inverts movement.
8. If hazardous situations generated by the moving barrier are protected by means of impact force limitation, measure the force as
specified in the standard EN 12445. If speed and motor force
controls are used as auxiliary functions with the system for reduction of impact force, test and identify the setting that obtains the
best results.
5.2) Commissioning
Commissioning can only be performed after positive results of all test
phases on TEN and the other devices present. Partial or “makeshift”
commissioning is strictly prohibited.
1. The prepared automation technical documentation should be
conserved for at least ten years and must contain at least the following: overall drawing of the automation, electrical wiring diagram, risk assessment and relative solutions adopted, manufacturer’s declaration of conformity for all devices used (in the case
of TEN, use the EC declaration of conformity enclosed); copy of
the operation instruction manual and maintenance schedule for
the automation.
2. Affix a dataplate on the door, specifying at least the following
data: type of automation, name and address of manufacturer
(responsible for commissioning), serial number, year of construction and CE mark
3. Permanently affix a label or plate in the vicinity of the door, indicating the operations for door release and manual manoeuvres.
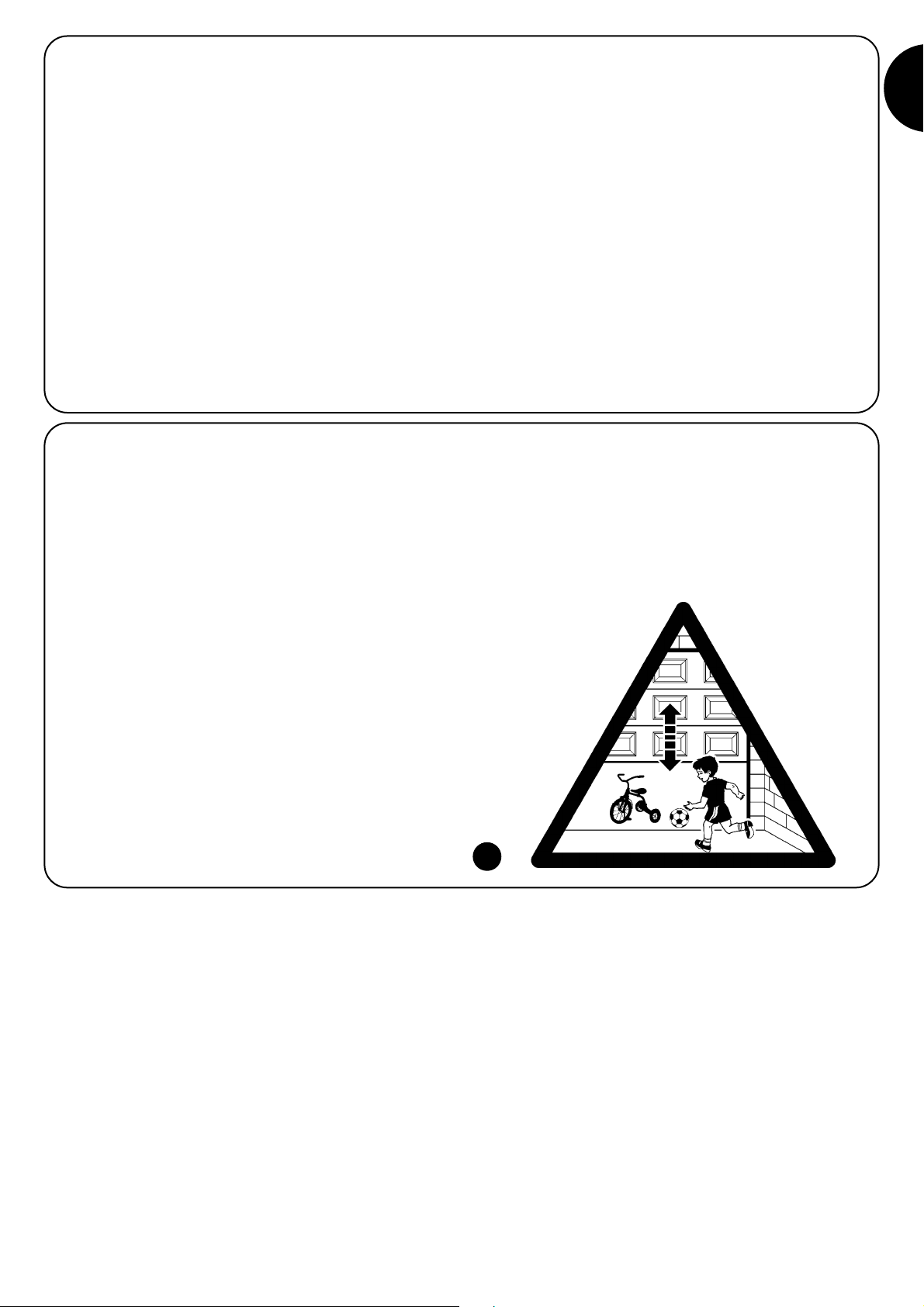
4. Permanently affix a label or plate on the door, bearing this image
(min. height 60 mm). (Figure 23)
5. Prepare and provide the owner with the declaration of conformity of the automation.
6. Prepare and provide the owner with the manual “Automation
operation instructions and warnings”.
7. Prepare and provide the owner with the automation maintenance
schedule (containing all prescriptions for maintenance of individual devices)
8. Before commissioning the automation, ensure that the owner is
adequately informed in writing (such as in the automation instruction and warning manual) of all associated risks and hazards.
23
Page 16
16
7.2) Settings
The TEN control unit is equipped with a number of programmable
functions; function settings are entered by means of the 3 keys on
the control unit: [▲][Set]and [▼] and are displayed by means of
8 leds: L1….L8.
The programmable functions available on TEN are divided into 2 levels:
Level 1: functions settable in ON-OFF mode (enabled or disabled);
in this case each led L1….L8 indicates a function, if lit the function
is enabled, if off the function is disabled; see Table 8.
Level 2: parameters settable on a scale of values (from 1 to 8); in
this case each led L1….L8 indicates a set value from the possible
8; see Table 10.
This chapter deals with the options for programming, personalisation, diagnostics and troubleshooting for the TEN gearmotor.
During the manoeuvre, whether opening or closing, all keys execute
the STOP function to shut down motor movement.
!
7) Further information
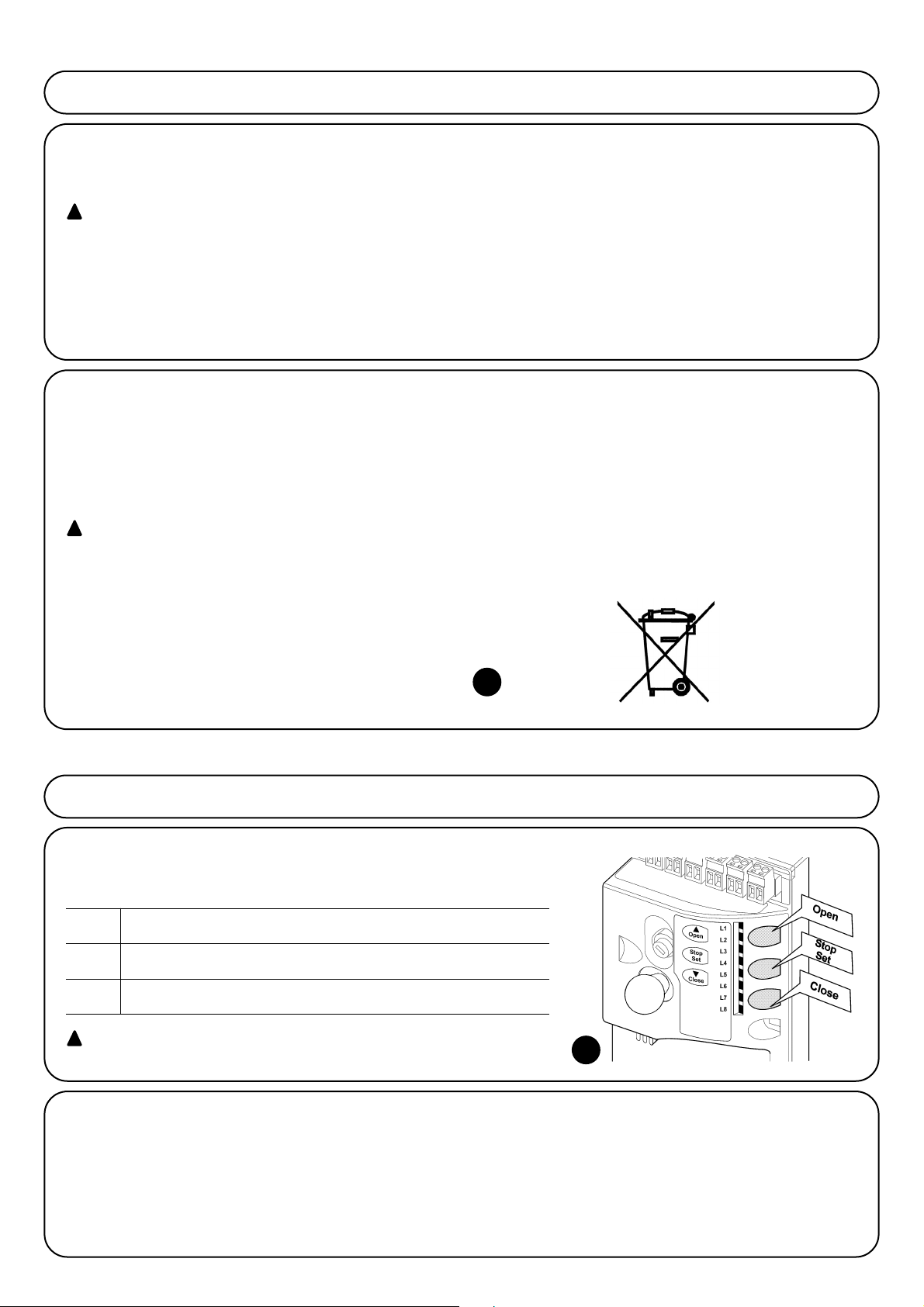
OPEN The “OPEN” key enables the user to open the door or scroll up
through the programming steps.
The STOP key stops the manoeuvre; If pressed for more than 5
seconds, it enables entry to programming mode.
The “CLOSE” key enables the user to close the door or scroll down
through the programming steps
7.1) Programming keys
The TEN control unit is fitted with 3 keys which can be used both for the control of the
unit during testing and the programming procedure (Figure 25).
25
▲
OPEN
STOP
SET
CLOSE
▼
This chapter provides the information required to draw up a maintenance schedule and for the disposal of TEN.
6) Maintenance and disposal
6.1) Maintenance
To maintain constant safety levels and guarantee maximum duration
of the entire automation, regular maintenance is required.
Maintenance must be performed in full observance of
the safety regulations specified in this manual and
according to current legislation and standards.
For other devices different from TEN follow the instructions in the
respective maintenance schedules.
1. In the case of TEN scheduled maintenance must be performed
within 6 months or 4.000 duty cycles since the previous maintenance operation.
2. Disconnect all electrical power supply sources.
3. Check the state of wear of all automation materials, with special
attention to possible erosion or oxidation of structural parts;
replace all parts that do not guarantee total efficiency.
4. Check the state of wear of all moving parts: Telescopic arms,
counterweight ropes and all parts of the leaf; replace all worn
parts.
5. Reconnect the electrical power sources and perform all tests and
inspections envisaged in the paragraph “5.1 Testing”:
!
6.2) Disposal
As in installation, also at the end of product lifetime, the disassembly
and scrapping operations must be performed by qualified personnel.
This product is made up of different types of material, some of which
can be recycled while others must be disposed of. Seek information
on the recycling and disposal systems envisaged by the local regulations in your area for this product category.
Some parts of the product may contain pollutant or
hazardous substances which, if disposed of into the environment, may cause serious damage to the environment
or physical health.
As indicated by the symbol in figure 24, disposal of this product in
domestic waste is strictly prohibited. Separate the waste into categories for disposal, according to the methods envisaged by current
legislation in your area, or return the product to the retailer when purchasing a new version. Local legislation may envisage serious fines
in the event of abusive disposal of this product.
1. Disconnect the automation from the electrical power supply,
including the buffer battery.
2. Disassemble all devices and accessories, following the procedure
described in chapter “3 Installation” in reverse order
3. Where possible, separate all parts that can be recycled or disposed of as classified waste, such as metal and plastic parts,
electronic boards, batteries etc.
4. Sort all groups and deliver separated waste to an authorised disposal firm in compliance with local regulations.
!
24
Page 17
17
GB
Led Function Description
L1 Automatic closure This function enables automatic closure of the door after a programmed pause; the default Pause Time is
set at 30 seconds but may be modified to 10, 20, 40, 60, 80, 120, 160 or 200 seconds.
If the function is not enabled, operation is set to “semi-automatic”
L2 Re-close After Photo This function enables the door to remain open only for the time required for transit; in fact activation of
“Photo” always activates automatic re-closure with a pause time of 5 seconds (regardless of the set value)
Operation depends on whether the “Automatic Closure" function is enabled or not.
With “Automatic closure” not active: The door always reaches the total opening position (even if
Photo is disengaged beforehand). On disengagement of Photo, automatic re-closure is activated with a
pause of 5 seconds.
With “Automatic closure” active: The opening manoeuvre is stopped immediately after the photocells
are disengaged and automatic re-closure is activated with a pause of 5 seconds.
The function "Re-close After Photo " is always disabled in manoeuvres interrupted by a Stop command.
If the function " Re-close After Photo " is not active, the pause time is as programmed and there is not
automatic re-closure if the function is not active.
L3 Always Close The function “Always Close” is activated, activating closure, when power is restored and the door is
detected as open.
For safety reasons, the manoeuvre is preceded by a 3-second pre-flashing interval.
If the function is not active, on power restoral the door remains stationary.
L4 Stand-By This function enables a reduction of consumption to a minimum. If this function is active, after 1 minute
from the end of the manoeuvre, the control unit turns off the BlueBUS output (and therefore all connected
devices) and all leds, except for the BlueBUS led, which flashes at a slower interval. When the control unit
receives a command it restores normal operating conditions. If the function is not active there is no
reduction in consumption.
L5 Long inversion This function enables the user to select the type of inversion that the door performs on receipt of command
from STOP or the force limiter. If the function is not active, inversion is short (approx. 15 cm). If the function
is active, inversion is activated through to the maximum opening or closing position.
L6 Pre-flash When the pre-flash function is active, a pause of 3 seconds is added between start-up of the flashing light
and the start of the manoeuvre, to give advance warning of a hazardous situation. If pre-flash is not active
the flashing light is started at the same time as the manoeuvre.
L7 Sensitivity This function enables a significant increase in motor sensitivity in obstacle detection. If used as an aid for
reading impact force, the parameters “Speed” and “Motor Force” in the level 2 menu should also be set
accordingly.
L8 2 motors This function must be enabled when the installation is with 2 motors.
During normal operation of TEN, i.e. when no manoeuvre is in progress, leds L1….L8 are lit or off depending on the status of the associated
function, for example L1 is lit if the function “Automatic closure” is enabled.
During the manoeuvre, leds L1…L8 flash, indicating the force required to move the door at that time. If L8 flashes, the force required is
minimal, and so on through to L1 which indicates the maximum force level.
Note that there is no relation between the force level indicated by the leds during movement (an absolute value) and the level indicated by
the leds during force programming (a relative value). See L5 and L6 in table 10.
Table 8: List of programmable functions: Level 1
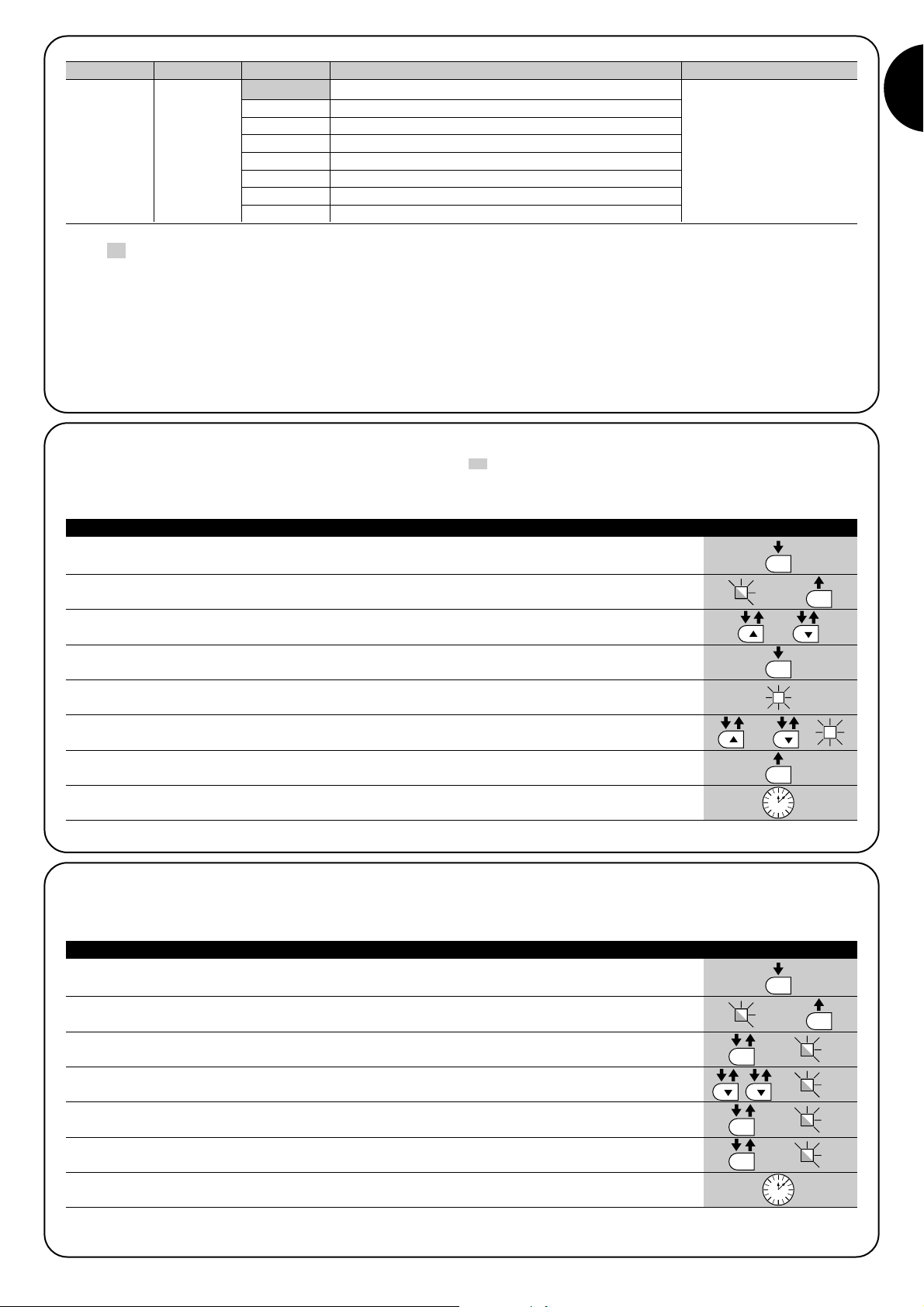
7.2.1) Level 1 programming (ON-OFF functions)
7.2.2) Level 1 programming (ON-OFF functions)
By default level 1 function are all set to OFF, but can be modified at any time as described below. Take care during modification procedures,
as there is a maximum time interval of 10 seconds between pressing one key and another; otherwise the system exits the procedure automatically memorising the changes made up to that time.
1. Press and hold [Set] for approx. 3s
3s
2. Release the key [Set] when led L1 starts to flash
3. Press keys [▲] or [▼] to move the flashing led to the led associated with the function to be modified
4. Press [Set] to change the status of the function (short flash = OFF; long flash = ON)
5. Wait 10s to exit the programming mode automatically after the maximum time interval
10s
Note: points 3 and 4 can be repeated during the same programming phase to set other functions to ON or OFF
Table 9: To change the ON-OFF functions Example
L1
or
SET
SET
SET
Page 18
18
7.2.3) LEVEL 2 functions (adjustable parameters)
Table 10: List of programmable functions: Level 2
Pause Time
SS function
Motor speed
FLASH
Output
Motor force
on opening
Motor force
on closure
Maintenance
notification
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
10 seconds
20 seconds
40 seconds
60 seconds
80 seconds
120 seconds
160 seconds
200 seconds
Open - Stop - Close - Stop
Open - Stop - Close - Open
Open - Close - Open - Close
Apartment block
Apartment block 2 (more than 2” causes stop)
Step-by-Step 2 (less than 2” causes partial open)
Hold-to-run
Opening in “semiautomatic”, closure in “hold-to-run” mode
Speed 1 (30% - low)
Speed 2 (44%)
Speed 3 (58%)
Speed 4 (72%)
Speed 5 (86%)
Speed 6 (100% - high)
Open V4, close V2
Open V6, close V4
Door open indicator” function
Active if door closed
Active if door open
Flashing light
Electric block*
Electric lock
Suction cup
Maintenance indicator
Force 1 (low
Force 2
Force 3
Force 4
Force 5
Force 6
Force 7
Force 8 (high)
Force 1(low)
Force 2
Force 3
Force 4
Force 5
Force 6
Force 7
Force 8 (high)
Automatic (based on the gravity of the manoeuvres)
1.000
2.000
4.000
6.000
8.000
10.000
12.000
entryled Parameter Led (level) Value Description
Adjusts the pause time, i.e.
time before automatic closure.
Is effective only if automatic
closure is enabled
Adjusts the sequence of commands associated with the SS
input or the radio command.
Sets the motor speed during
normal travel.
Selects the device connected
to the FLASH output. Before
changing settings, take care
to ensure that the device connected to the FLASH terminal
is as described in paragraph
3..4.1 “Description of electrical
connections”.
Sets the motor force control
system to adapt it to the
weight of the door during the
opening manoeuvre and consequently the obstacle detection sensitivity.
Sets the motor force control
system to adapt it to the
weight of the door during the
closing manoeuvre and consequently the obstacle detection sensitivity.
Sets the number of manoeuvres after which the maintenance request signal can be
enabled (see paragraph “7.4.3
Maintenance notification”.
L1
L2
L3
L4
L5
L6
L7
Note: “ ” represents factory settings SEGUE
Page 19
19
GB
Fault log list
L1
L2
L3
L4
L5
L6
L7
L8
Result of 1stmanoeuvre (the most recent)
Result of 2ndmanoeuvre
Result of 3rdmanoeuvre
Result of 4thmanoeuvre
Result of 5thmanoeuvre
Result of 6thmanoeuvre
Result of 7thmanoeuvre
Result of 8
th
manoeuvre
entryled Parameter Led (level) Value Description
Enables the user to check the
type of fault occurring in the
last 8 manoeuvres (see paragraph “7.6.1 Fault log list”).
L8
Note: “ ” represents factory settings
All parameters can be adjusted as required without any contraindications, only the “Motor force on opening” and “Motor force in closing”
may require special attention:
• Use of high force values are not recommended to compensate for the fact that the leaf has anomalous points of friction; excessive force
may impair the safety system and damage the leaf.
• If the “Motor force control” is used in support of the system for impact force reduction, after each adjustment the force measurement pro-
cedure must be performed, as envisaged by standard EN 12445.
• Wear and atmospheric conditions influence movement of the gate; force settings should be checked periodically
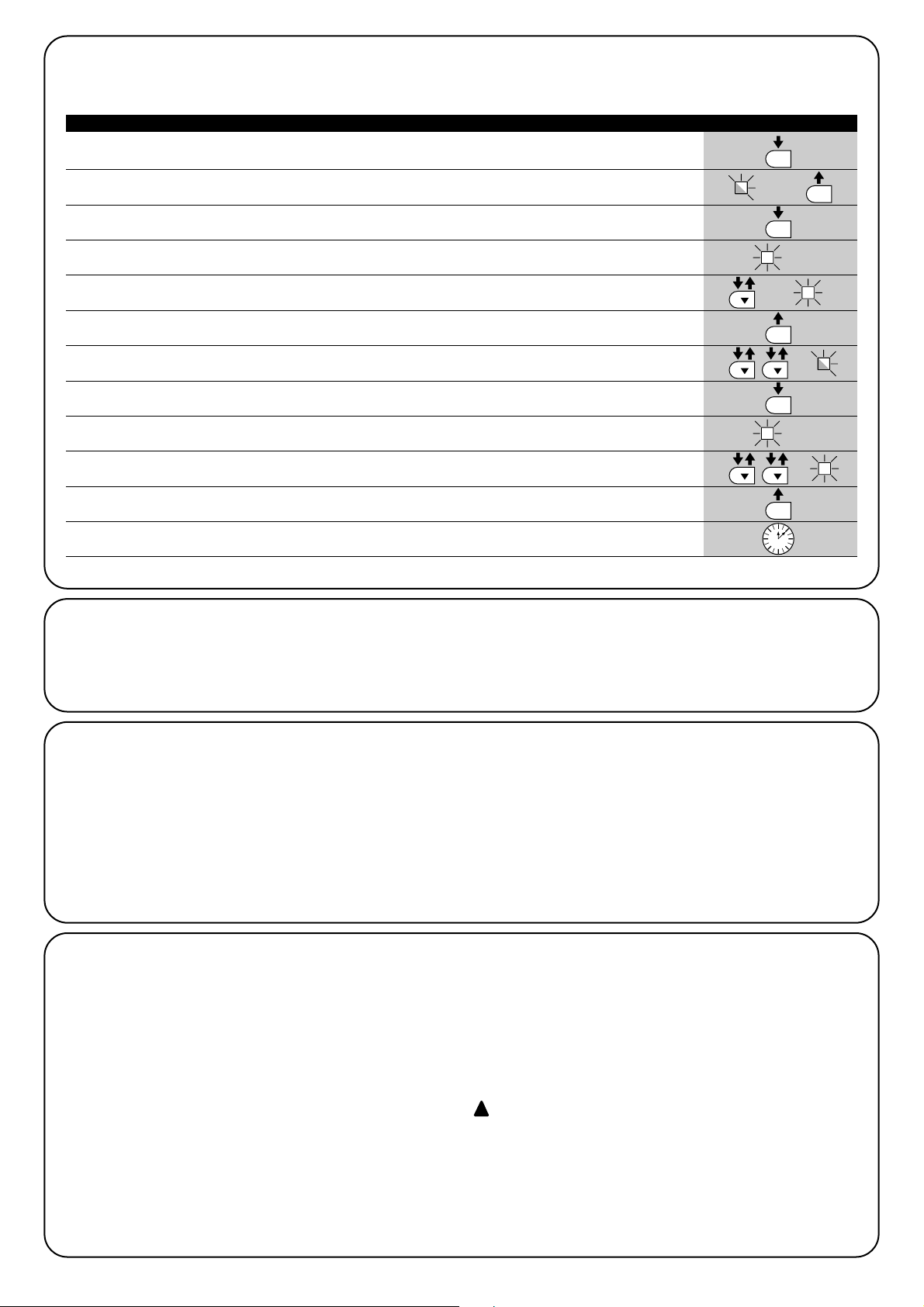
7.2.4) Level 2 programming (adjustable parameters)
By default the settable parameters are set as shown in Table 10 with: “ “ but can be modified at any time as described below. Take care
during modification procedures, as there is a maximum time interval of 10 seconds between pressing one key and another; otherwise the
system exits the procedure automatically memorising the changes made up to that time.
1. Press and hold [Set] for approx. 3s
3s
2. Release the key [Set] when led L1 starts to flash
3. Press keys [▲] or [▼] to move the flashing led to the “input led” associated with the parameter to
be modified
4. Press and hold [Set] during steps 5 and 6
5. Wait approx. 3s after which the led associated with the current level of the parameter to be modified
will light up.
6. Press keys [▲] or [▼] to move the led associated with the parameter value
7. Release [Set]
8. Wait 10s to exit the programming mode automatically after the maximum time interval
10s
Note: Points 3 to 7 can be repeated during the same programming phase to modify other parameters
Table 11: To change adjustable parameters Example
L1
or
or
7.2.5) Level 1 programming examples (ON-OFF functions)
This example shows the sequence of operations required to change the factory setting of the functions “Automatic Closure” (L1) and “Always
Close” (L3).
1. Press and hold [Set] for approx. 3s
3s
2. Release the key [Set] when led L1 starts to flash
3. Press [Set] once to change the status of the function associated with L1
(Automatic closure) led L1 now emits long flashes
4. Press [▼] twice to move the flashing led onto led L3
5. Press [Set] once to change the status of the function associated with L3 (Always close) led L3 now
emits long flashes
6. Press [Set] once to change the status of the function associated with L3 (Automatic closure) led L3 now
emits long flashes
7. Wait 10s to exit the programming mode automatically after the maximum time interval
10s
At the end of these operations leds L1 and L3 must remain lit to indicate that the functions “Automatic closure” and “Always Close” are enabled.
Table 12: Example of Level 1 programming Example
L1
L1
L3
L3
L3
SET
SET
SET
SET
SET
SET
SET
SET
SET
Page 20
20
7.2.6) Example of Level 2 programming (adjustable parameters)
This example shows the sequence of operations required to change the factory setting of the parameters and set the functions of the “Pause
Time” to 60s (input on L1 and level on L4) and “Speed” to L6 (input on L4 and level on L6).
1. Press and hold [Set] for approx. 3s
3s
2. Release the key [Set] when led L1 starts to flash
3. Press and hold [Set] during steps 4 and 5.
4. Wait approx. 3s until led L3 lights up, indicating the current level of “Pause Time”
3s
5. Press the key [▼] once to move the illuminated led onto L3, indicating the new value of “Pause Time”
6. Release [Set]
7. Press [▼] twice to move the flashing led onto led L3
L3
8. Press and hold [Set] during steps 9 and 10.
9. Wait approx. 3s until led L4 lights up, indicating the current level of “Motor speed”
3s
10. Press the key [▼] twice to move the illuminated led onto L6, indicating the new value of “Motor speed”
L3
11. Release [Set]
12. Wait 10s to exit the programming mode automatically after the maximum time interval
10s
Table 13: Example of LEVEL 2 programming Example
7.3) Adding or removing devices
Devices can be added or removed at any time on an automation using TEN. In particular the inputs “BlueBUS” and “STOP” can be connected to various types of device as indicated in the paragraphs below.
After adding or removing devices, the device learning procedure must be repeated, as described in the paragraph “7.3.5 Learning other
devices”.
7.3.1) BLUEBUS
BlueBUS is a technology that enables the connection of compatible devices with just two wires conveying the electric power and communication signals. All devices are connected in parallel on the same 2 BlueBUS wires, without the need to observe polarity; each devices is recognised individually as it is assigned with an exclusive address during installation. BlueBUS can be used, for example, to connect the following:
photocells, safety devices, control pushbuttons, indicator lamps, etc. The TEN control unit recognises each one of the devices connected by
means of a specific self-learning phase and is able to detect all possible faults in maximum safety. For this reason each time a device is connected to or removed from BlueBUS the self-learning phase must be repeated, as described in paragraph “7.3.5 Learning other devices”.
L1
L3
L3
L4
7.3.2) STOP input
STOP is the input that causes immediate shutdown of movement
followed by a brief inversion of the manoeuvre This input can be connected to devices with an output with NO normally open contacts,
NC normally closed contacts, OPTO SENSOR contacts or devices
with constant resistance 8.2KΩ output, such as sensitive edges. As
in the case of BlueBUS, the control unit recognises the type of
device connected to the STOP input during the self-learning phase
(see paragraph “7.3.5 Learning other devices”); after which a STOP
command is activated whenever a variation with respect to the
learned status is detected.
When set accordingly, more than one device can be connected to
the STOP input, also different from one another:
• Several NO devices can be connected in parallel with no limit to
number.
• Several NC devices can be connected in parallel with no limit to
number.
• Two devices with constant resistance 8.2KΩ can be connected in
parallel; if there are more than 2 devices then all must be connected in cascade, with a single terminating resistance of 8.2KΩ.
• NO and NC combinations are possible by placing the 2 contacts
in parallel, taking care to place a 8,2KΩ resistance in parallel to the
NC contact (thus enabling the combination of 3 devices: NO, NC
and 8,2KΩ).
If the STOP input is used to connect devices with safety functions, only the devices with a constant resistance
of 8,2KΩ or OPTO SENSOR optical devices guarantee
safety category 3 against faults in accordance with the
standard EN 954-1.
!
SET
SET
SET
SET
SET
SET
Page 21
21
GB
For connection of an optical device type OPTO SENSOR make the
connections as shown in Figure 26. The maximum current supplied
on the 12Vdc line is 40mA.
26
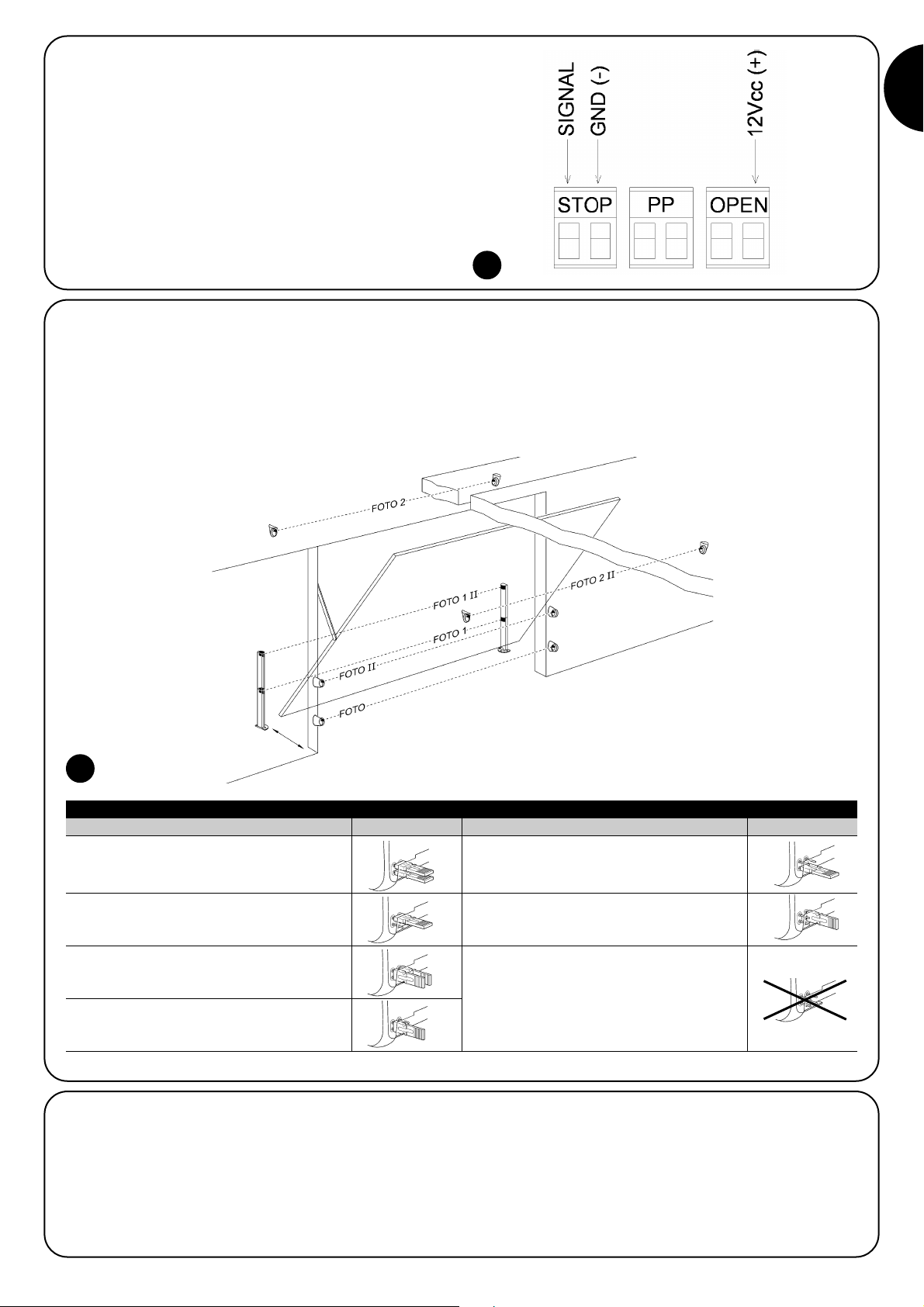
7.3.3) Photocells
The “BlueBUS” system enables, by means of address assignment using the specific jumpers, recognition of the photocells by the control unit
and assignment of the correct detection function. The address assignment procedure is performed both on the TX and RX (setting the
jumpers in the same way) and ensuring that there are no other pairs of photocells with the same address.
In an automation for up-and-over doors with TEN photocells can be installed as shown in Figure 27. After installing or removing photocells
the learning phase must be repeated on the control unit as described in the paragraph “4.2 Learning devices”.
27
PHOTO
Photocell h = 50
With activation on closure
PHOTO II
Photocell h = 100
With activation on closure
PHOTO 1
Photocell h = 50
With activation on closure and opening
PHOTO 1 II
Photocell h = 100
With activation on closure and opening
PHOTO 2
Photocell
With activation on opening
PHOTO 2 II
Photocell
With activation on opening
PHOTO 3
CONFIGURATION NOT ADMITTED
Table 14: Photocell addresses
Photocell Jumpers Photocell Jumpers
7.3.4) MOTB digital selector and proximity reader for MOMB transponder badges
BlueBUS can be connected to up to 4 digital MOTB selectors or MOMB type transponder badge readers.
MOTB enables control of the automation after entering a valid numerical code that has been previously memorised.
MOMB enables control of the automation by moving a valid transponder badge that has been previously memorised.
These devices are equipped with an individual ID code and are recognised by the control unit only after being memorised, which is performed
during the device acquisition phase. This prevents any unauthorised attempt to replace the device and inhibits control of the automation. For
further information see the specific instruction manuals for MOTB and MOMB.
Page 22
22
7.3.5) Learning other devices
Normally the operation for learning devices connected to BlueBUS
and the STOP input is performed during the installation phase; however if other devices are added or removed, the learning procedure
can be repeated as described below.
1. Press and hold keys [▲] and [Set] (Figure 28)
2. Release the keys when leds L1 and L2 start to flash quickly (after
around 3s)
3. Wait a few seconds for the control unit to finish device self-learning.
4. At the end of the self-learning process, the STOP led must
remain lit, while leds L1 and L2 turn off (where relevant leds L3
and L4 start flashing).
After adding or removing devices, the automation test
cycle must be repeated as described in paragraph “5.1
Testing”.
28
7.3.6) Deleting the entire memory
7.3.7) Programming the direction of motor rotation
When total deletion is required, to restore factory settings, proceed as follows with the motor stationary.
1. Press [▲]+[▼] for 3 seconds; release the keys when all leds illuminate simultaneously.
Leds L1 and L2 start flashing at the end of the procedure.
This procedure does not modify the parameter for the direction of Ten rotation or the encoder position.
!
Ten is factory set to execute the opening manoeuvre as shown in figure 5. The direction of rotation can be inverted by programming the opening manoeuvre as shown in figure 7.
Procedure for programming the direction of motor rotation
1. Press and hold [Set] for approx. 3s
2 Release [Set] when led L1 starts flashing
3. Press keys [▲]and[▼] at the same time to modify the motor direction
4. Release keys [▲]and[▼]
• If the courtesy light is lit, the inverted direction of motor rotation has been programmed
• If the courtesy light is off, the standard direction of motor rotation has been programmed
5. Wait 10s to exit programming mode in timeout.
Note: Points 3 and 4 can be repeated during the same programming phase to change the direction of motor rotation.
When the direction of motor rotation is changed, the “Position memorisation” procedure must be repeated.
Checking the programmed direction of motor rotation
To check the set direction of motor rotation, proceed as follows:
1. Disconnect Ten from the power supply (removing the plug or fuse)
2. Power up Ten
3. After the initial flash of leds L1 to L8 a single led illuminates to indicate the encoder position.
4. On the signal indicating the encoder position, check the courtesy light:
• If the courtesy light is lit, the inverted direction of motor rotation has been programmed
• If the courtesy light is off, the standard direction of motor rotation has been programmed
Page 23
23
GB
7.4) Special functions
7.4.1) “Always open” function
The “always open” function is a feature of the control unit that enables continuous activation of an opening manoeuvre when the “Step-bystep” command lasts more than 3 seconds; this can be useful for example to connect the SS terminal with the contact of a programme clock
to keep the gate open during a specific time band. This feature is valid regardless of the setting of the input SS (see “Function SS” in Table
10).
7.4.2) “Move anyway” function
In the event that a safety device malfunctions or is out of service, the door may still be moved in “hold-to-run” mode. For details, refer to the
paragraph “Control with safety devices out of service” in the enclosure “Instructions and warnings for the TEN gearmotor user”.
7.4.3) Maintenance notification
TEN enables the user to be notified when a maintenance
check needs to be performed on the automation. The
number of manoeuvres after which the signal can be
enabled is selectable from 8 levels, by means of the modifiable parameter “Maintenance notification” (see Table
10).
Adjustment level 1 is “automatic” and takes into account manoeuvre
stress, i.e. force and duration of the manoeuvre, while the other adjustments are set on the basis on the number of manoeuvres. The maintenance requirement notification is via the flashing light or the maintenance
indicator, depending on the relative settings (see Table 10). On the basis
of the number of manoeuvres performed with respect to the programmed limit, the Flash flashing light and maintenance indicator activate
the signals as described in Table 15.
Number of manoeuvre Signalling on Flash Signalling on maintenance indicator
Below 80% of limit Normal (0.5s on, 0.5s off) On for 2s at start of opening
Between 81 and 100% of limit Remains lit for 2s at start of manoeuvre then proceeds normally Flashes throughout manoeuvre
Over 100% of limit Remains lit for 2s at start and end of manoeuvre then proceeds Always flashes.
normally
Table 15: Maintenance notification with Flash and maintenance indicator
7.3.8) Resetting the encoder position
This procedure enables return of the encoder to the factory-set position to enable the assembly of Ten with the door closed.
If the direction of motor rotation needs to be changed, first complete the “Programming the direction of motor rotation” procedure and then
“Resetting the encoder position”.
CAUTION! THE PROCEDURE DESCRIBED BELOW MUST BE PERFORMED EXCLUSIVELY ON A WORKBENCH.
NEVER PERFORM THIS PROCEDURE WITH THE MOTOR INSTALLED ON THE DOOR.
1. Press and hold keys [▲]and[▼] until all leds from L1 to L8 illuminate.
2. Release the keys when the leds turn off.
After all leds turn off, a single led from L1 to L8 lights up again to indicate the encoder position.
3. At this time, press and hold [Set] until the motor starts up.
Release the key as ten as the motor starts up.
The control unit activates motor movement to bring the encoder position to led L6.
4. After the motor has stopped, all leds turn on and then off, after which check that the led that lights up again is L6. If this does not
occur, repeat the procedure from point 1.
5. At the end of the sequence leds L1 and L2 continue to flash.
!
Page 24
24
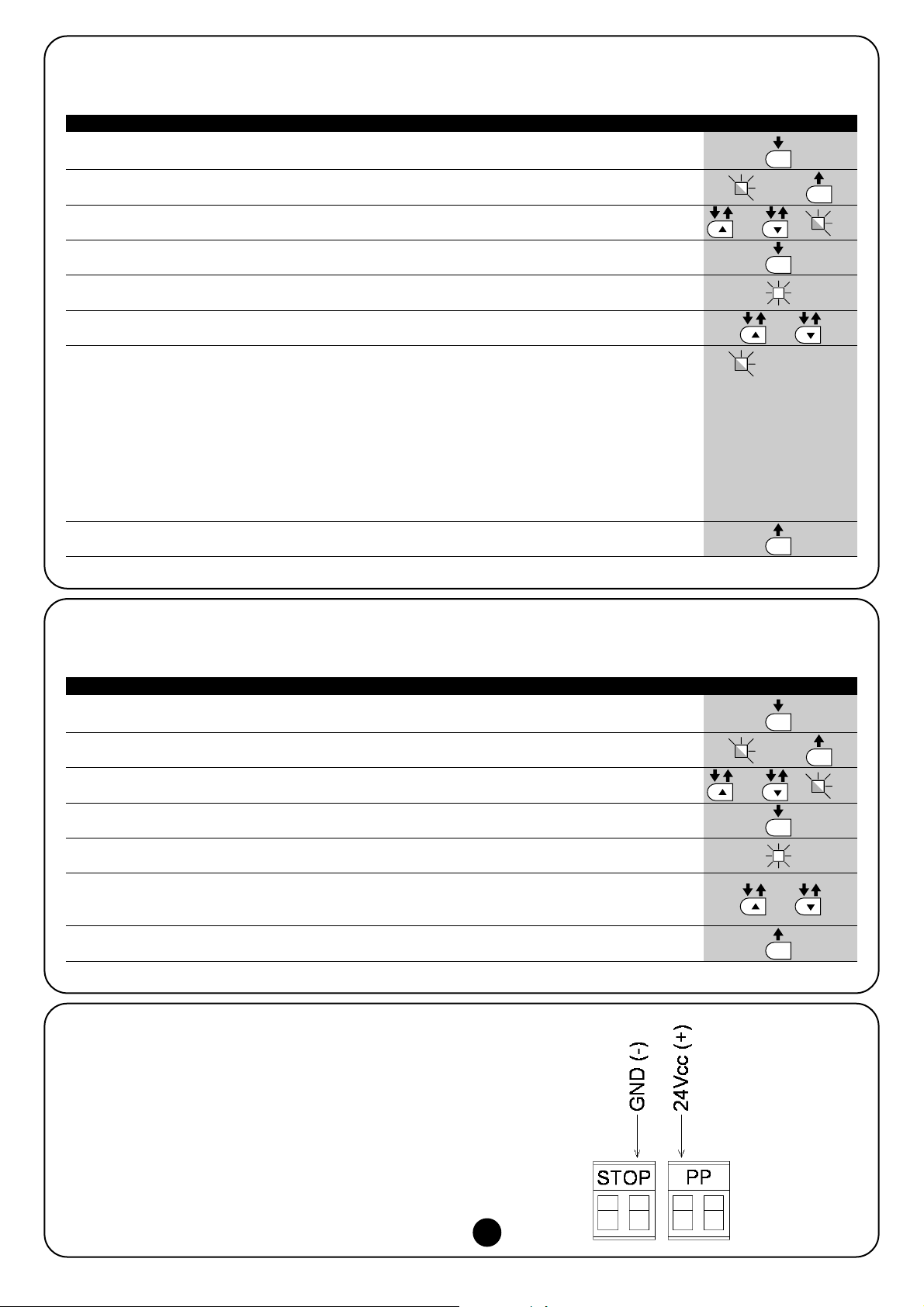
7.5) Connecting other devices
If external devices need to be powered, such as a proximity reader
for transponder badges or the lighting of a key-operated selector
switch, power can be supplied as shown in figure 29. The supply
voltage is 24Vcc -30% ÷ +50% with maximum available current of
100mA.
29
7.4.4) Check of number of manoeuvres performed
The function “Maintenance notification” enables the user to check the number of manoeuvres performed as a percentage of the set limit. To
check, proceed as follows:
1. Press and hold [Set] for approx. 3s
3s
2. Release the key [Set] when led L1 starts to flash
3. Press keys [▲] or [▼] to move the flashing led to L7, i.e. the “input led” associated with the
parameter “Maintenance notification”
4. Press and hold [Set] during steps 5, 6 and 7
5. Wait approx. 3s after which the led associated with the current level of the parameter
“Maintenance notification” will light up. 3s
6. Briefly press keys [▲] and [▼]
7. The led corresponding to the selected level flashes a few times. The number of flashes indicates the
percentage of manoeuvres performed (in multiples of 10%) with respect to the set limit.
For example: when the maintenance notification is set on L7 i.e. 10000, 10% corresponds to 1000
manoeuvres; if the indicator led flashes 4 times, this means that 40% of the maximum number of
manoeuvres has been reached (i.e. between 4000 and 4999 manoeuvres).
If 10% has not yet been reached, the led does not flash at all.
8. Release [Set]
Table 16: Check of number of manoeuvres performed
Example
L1
X1 = 10%
X2 = 20%
X3 = 30%
X4 = 40%
X5 = 50%
X6 = 60%
X7 = 70%
X8 = 80%
X9 = 90%
X10 = 100%
L7
or
and
7.4.5) Manoeuvre counter reset
After performing system maintenance the manoeuvre counter must be reset.
Proceed as described in table 17
1. Press and hold [Set] for approx. 3s
3s
2. Release the key [Set] when led L1 starts to flash
3. Press keys [▲] o [▼]to move the flashing led to L7, i.e. the “input led” associated with the parameter
“Maintenance notification”
4. Press and hold [Set] during steps 5 and 6
5. Wait approx. 3s after which the led associated with the current level of the parameter
“Maintenance notification” will light up. 3s
6. Press and hold keys [▲] and [▼] for at least 5 seconds, then release. The led corresponding to the
selected level shows a series of quick flashes to indicate that the manoeuvre counter has been reset.
7. Release [Set]
Table 17: Manoeuvre counter reset
Example
L1
L7
or
and
SET
SET
SET
SET
SET
SET
SET
SET
Page 25
25
GB
7.7) Diagnostics and indicators
Some devices offer special direct indicators to display the relative operating status or malfunctions..
7.6) Troubleshooting guide
Table 18 provides some useful information to deal with any malfunctions that may occur during installation, or in the event of faults.
30
Table 18: troubleshooting
Symptom Probable cause and possible remedy
The radio transmitter does not control the door
and the transmitter led does not illuminate
The radio transmitter does not control the door
but transmitter led illuminates
…no manoeuvre is activated and the OK led
does not flash
…no manoeuvre is activated and the flashing
light is off
…the manoeuvre does not start and the courtesy
light flashes a few times
The manoeuvre starts but immediately afterwards
a brief inversion is activated
Check that the transmitter batteries are not discharged; replace if necessary.
Check that the transmitter is correctly memorised on the radio receiver.
Ensure correct emission of the radio signal of the transmitter with the following empirical
test: Press a key and place the led against the aerial of a standard radio (the cheaper the
better) switched on and tuned to FM at the frequency of 108.5Mhz or as close to this
value as possible; a slight noise with a scratching pulse noise should be heard.
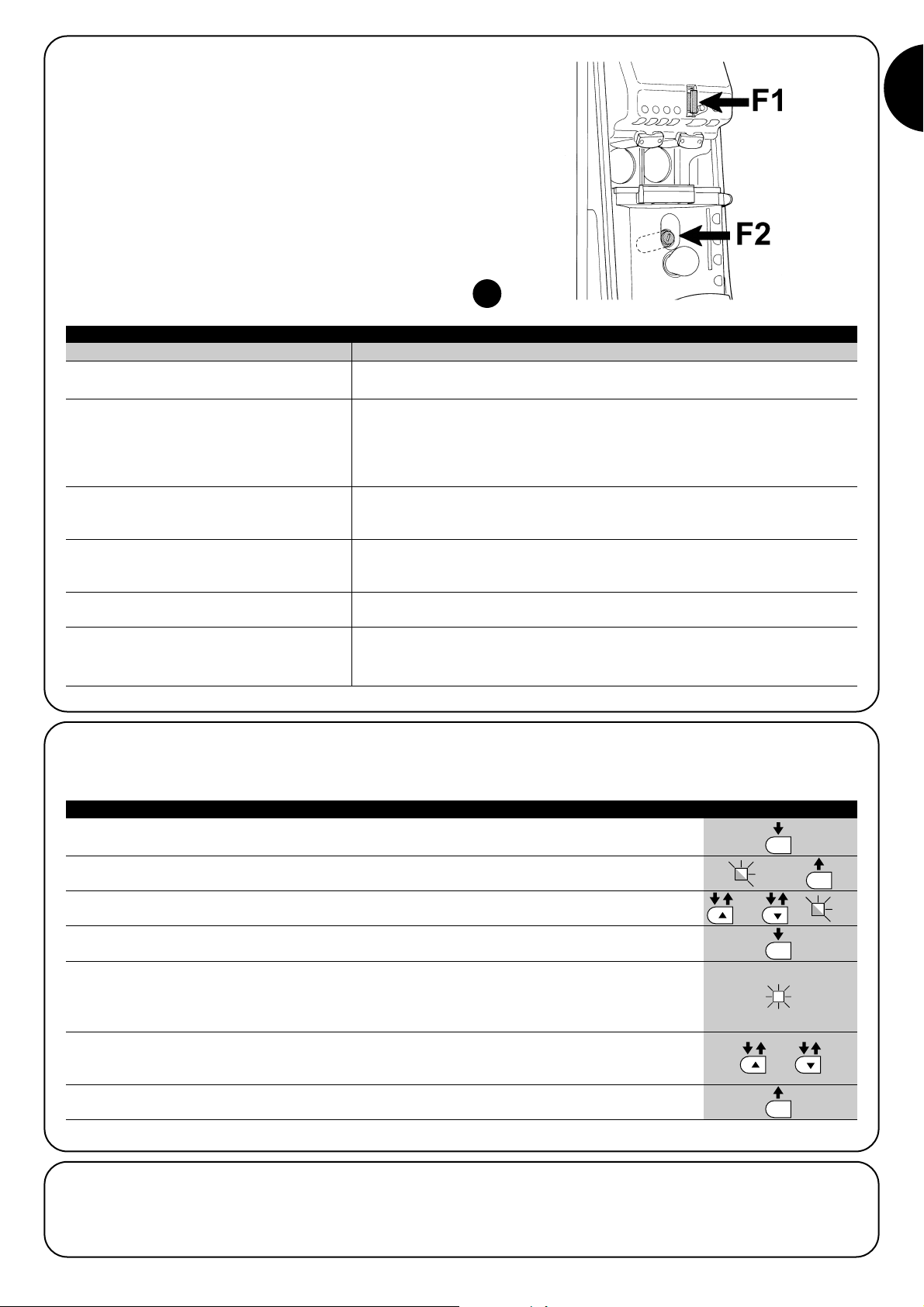
Ensure that TEN is powered from a 230V mains. Check that fuses F1 and F2 are not
blown; in this case, identify the cause of the fault and then replace with versions of the
same current value and specifications (Figure 30).
Check that the command is effectively received. If the command reaches the SS input
and the led OK emits a double flash to indicate that the command has been received.
Count the number of flashes and check with reference to the data in Table 20.
The selected force may be too low to move the door. Check whether there are any
obstacles, and if necessary select a higher force
7.6.1) Fault log list
TEN enables the display of any faults that have occurred in the last 8 manoeuvres, for example interruption of a manoeuvre due to activation
of a photocell or sensitive edge. To check the fault list, proceed as shown in table 19.
1. Press and hold [Set] for approx. 3s
3s
2. Release the key [Set] when led L1 starts to flash
3. Press keys [▲] or [▼] to move the flashing led to L8, i.e. the “input led” associated with the
parameter “Fault log”
4. Press and hold [Set] during steps 5 and 6
5. Wait approx. 3s after which the leds corresponding to the manoeuvres subject to faults will light up.
Led L1 indicates the result of the most recent manoeuvre, while led L8 indicates the result of the
eighth manoeuvre. If the led is lit this means that faults have occurred during the manoeuvre; if off this
means that the manoeuvre was completed without faults. 3s
6. Press the keys [▲] and [▼] to select the required manoeuvre:
The corresponding led emits a number of flashes equal to those normally emitted by the flashing light
after a fault (see table 20).
7. Release [Set]
Table 19: Fault log list Example
L1
L8
or
and
SET
SET
SET
SET
Page 26
26
At the start of the manoeuvre, the check on devices connected to BlueBUS does
not correspond to those memorised during the learning phase. There may be
faulty devices; check and replace as necessary. If modifications are made, repeat
the learning procedure (7.3.4 Learning other devices).
7.7.1) Signals with flashing light
If a flashing light is connected it emits one flash per second during the manoeuvre; in the event of faults, the flashing frequency increases
with flashes repeated twice, separated by a pause of a second. The same conditions apply to the courtesy light.
Table 20: Signals on FLASH flashing light
Quick flashes Cause ACTION
1 flash
Pause of 1 second
1 flash
Error on BlueBUS
3 flashes
Pause of 1 second
3 flashes
4 flashes
Pause of 1 second
4 flashes
5 flashes
Pause of 1 second
2 flashes
6 flashes
Pause of 1 second
6 flashes
7 flashes
Pause of 1 second
7 flashes
Activation of Motor Force limiter
During movement, the door is subject to points of increased friction; check cause
2 flashes
Pause of 1 second
2 flashes
Activation of a Photocell
At the start of the manoeuvre one or more photocells do not enable the movement; check for the presence of obstacles
During movement this is normal if an obstacle is effectively present
Stop input activation
At the start of or during movement, the STOP input is activated; check cause
Error in internal parameters of
the electronic control unit
Wait at least 30 seconds and retry a command; if the condition persists, this may
indicate a serious fault and the electronic board needs to be replaced
Maximum number of
manoeuvres per hour
exceeded
Wait a few minutes for the manoeuvre limiter to return within the maximum limit
Error in internal electric circuits
Disconnect all power circuits for a few seconds and then retry a command; if the
condition persists this may indicate a serious fault with the board or motor wiring.
Check and make replacements as necessary
8 flashes
Pause of 1 second
8 flashes
Overcurrent on motor circuits
Disconnect all power circuits for a few seconds and then retry a command; if the
condition persists this may indicate a serious fault with the board or motor wiring.
Check and make replacements as necessary
Page 27
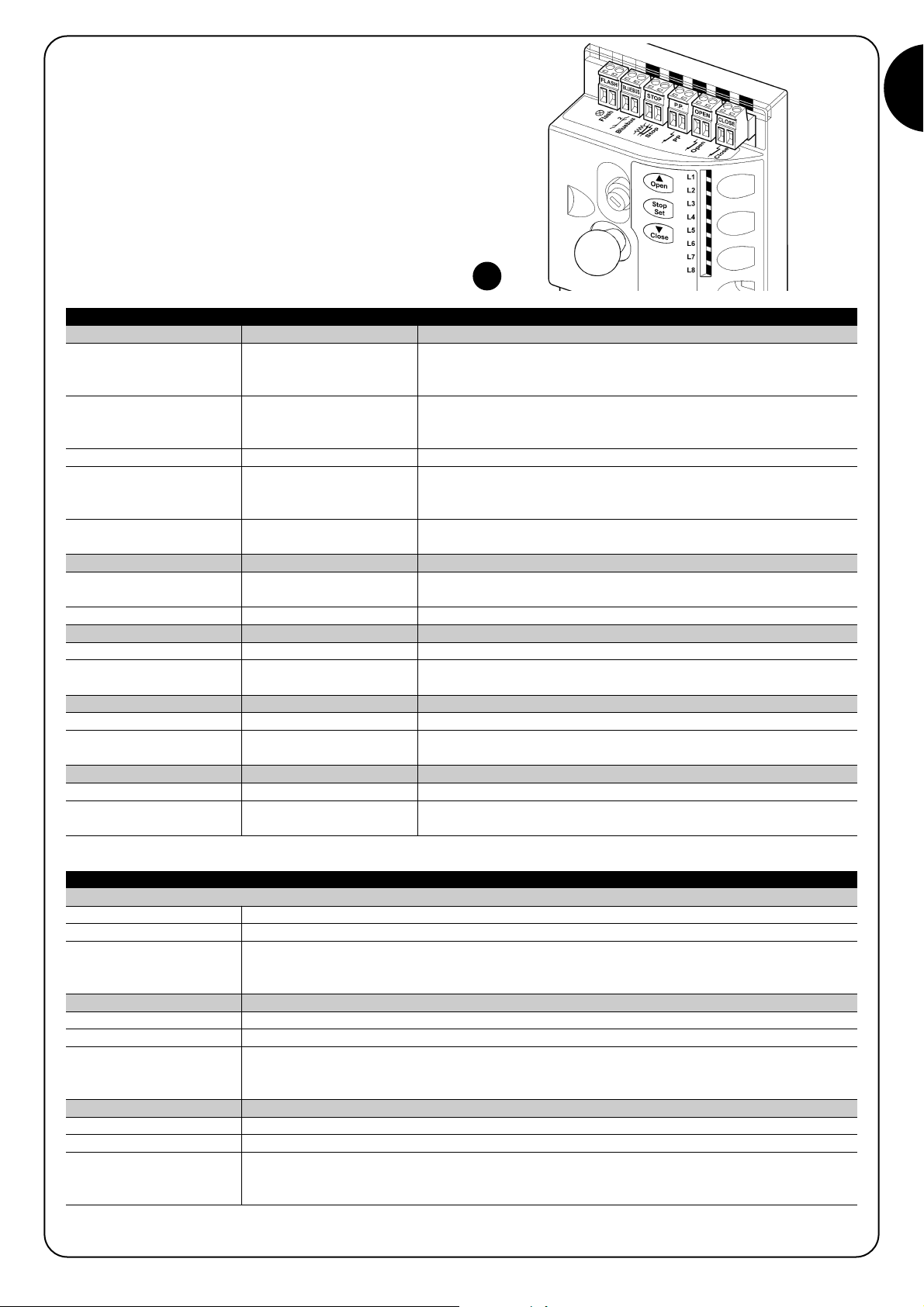
27
GB
Led CLOSE Causa AZIONE
OPEN led Cause ACTION
SS led Cause ACTION
31
BLUEBUS led Cause ACTION
STOP led Cause ACTION
Off
7.7.2) Signals on control unit
The TEN control unit is equipped with a series of LEDs, each of
which provide specific signals, both during normal operation and in
the event of faults (Figure 31).
Table 21: Leds on control unit terminals
Malfunction
Check for presence of the power supply; check that the fuses are not blown;
in this case, identify the cause of the fault and then replace with versions with
the same specifications.
On Serious Malfunction
This indicates a serious fault; try switching off the control unit for a few seconds; if the condition persists there is a fault and the electronic board needs
to be replaced
One flash per second All Ok Normal operation of control unit
2 quick flashes An input status has varied
A variation to the status of the inputs SS, STOP, OPEN, CLOSE, activation of
the photocells, or when the radio transmitter is used, is normal.
Series of flashes separated by
a pause of one second
Various This is the same signal as on the flashing light See table 20
Off Stop input activation Check the devices connected to the STOP input
On All Ok STOP input active
Off All Ok SS input not active
On SS input activation Normal if the device connected to the SS input is effectively active.
Off All Ok OPEN input not active
On OPEN input activation Normal if the device connected to the OPEN input is effectively active.
Off All Ok CLOSE input not active
On CLOSE input activation Normal if the device connected to the CLOSE input is effectively active.
Led L1 Description
• Function programming in progress
• If flashing together with L4, indicates that the door opening and closing acquisition procedure must be performed (see paragraph “4.3 – Learning the door opening and closing positions”).
Led L3 Description
Led L2 Description
Off
Table 22: leds on control unit keys
During normal operation, indicates “Automatic closure” not active.
During normal operation, indicates “Automatic closure” active.
• Function programming in progress
• If this flashes together with L2 this indicates that the device learning phase must be performed (see
paragraph “4.2 Learning devices”).
On
Flashing
Off During normal operation, indicates “Re-close after photo” not active.
During normal operation, indicates “Re-close after photo” active.
• Function programming in progress
• If this flashes together with L1 this indicates that the device learning phase must be performed (see paragraph “4.2 Learning devices”).
On
Flashing
Off During normal operation, indicates “Always close” not active.
During normal operation, indicates “Always close” active.On
Flashing
Page 28
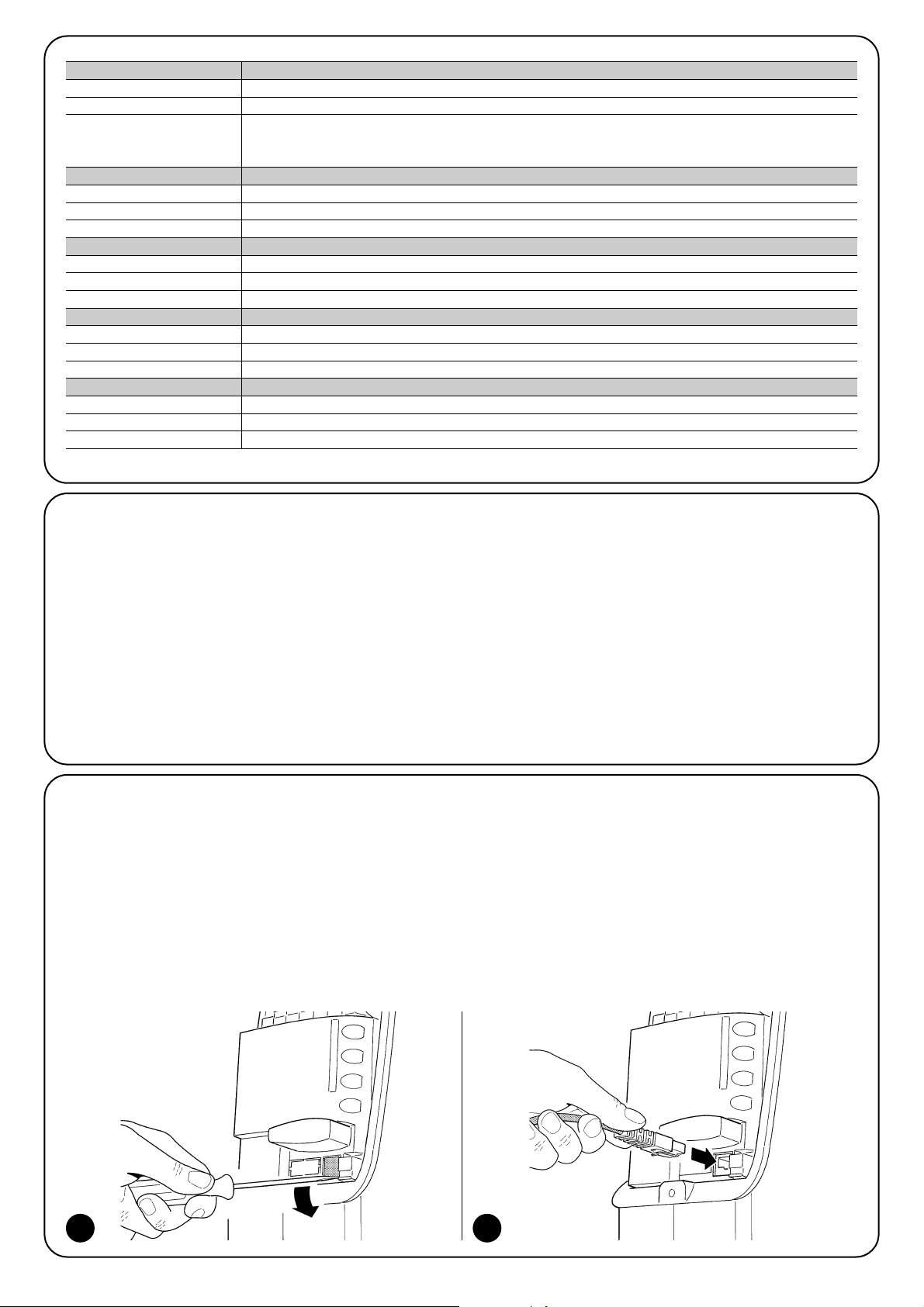
28
• Function programming in progress
Led L5 Description
Off During normal operation, indicates “Long inversion” not active.
During normal operation, indicates “Long inversion” active.
On
Flashing
• Function programming in progress
• If flashing together with L3, indicates that the door opening and closing acquisition procedure must be performed (see paragraph “4.3 – Learning the door opening and closing positions”).
Led L4 Description
• Function programming in progress
Led L6 Description
Off During normal operation, indicates “Pre-flash” not active.
During normal operation, indicates “Pre-flash” active.
On
Flashing
• Function programming in progress
Led L7 Description
Off During normal operation, indicates “Current sensitivity control” not active.
During normal operation, indicates “Current sensitivity control” active.
On
Flashing
• Function programming in progress
Led L8 Description
Off During normal operation indicates that the installation is with 1 motor.
During normal operation indicates that the installation is with 2 motors.
On
Flashing
Off During normal operation, indicates “Stand-By” not active.
During normal operation, indicates “Stand-By” active.
On
Flashing
7.8) Accessories
he following accessories are available with TEN. Refer to the Nice S.p.A. product catalogue for a complete and updated list of the accessories.
SMXI / SMXIS Radio receiver, 433.92MHz with digital Rolling
Code
OXI Radio receiver 433.92MHz with digital Rolling
Code; equipped with extended Mode II to send
15 types of command to control unit
OView Remote control and programming unit with
graphic display
TNA2 Spare control unit for TN2010
OTA2 Support bracket for motor length 1250mm
OTA3 Support bracket for motor length 2000mm
TNA4 Pair of transmission shaft lengths 1500mm
TNA5 Pair of standard straight telescopic arms
TNA6 Pair of standard curved telescopic arms
TNA8 Pair of transmission shaft lengths 200 mm
OTA11 Kit for external release by means of metal cord
OTA12 Kit for external release by means key operated
catch
TNA38 Gear device for 1 pair of transmission shafts
TS Warning sign table
PS324 Buffer battery
7.8.1) Remote programming unit
In the specific case of connector BusT4 (see figure 32) the OView
remote programming unit can be connected, to enable a comprehensive and rapid management of the installation, maintenance and
fault-finding procedures. To access this connector, remove the
membrane as shown in Figure 32 and connect the connector in the
relative seat (Figure 33). The remote programming unit can be set at
a distance from the control unit, up to 100 m of cable; it can be connected simultaneously to several control units. Up to a maximum of
16, and can remain connected also during normal operating of TEN;
in this case a special "user menu" enables delivery of commands to
the control unit.
If an OXI type radio receiver is inserted in the control unit, the remote
programming unit enables access to parameters of memorised
transmitters.
These functions require a 4-core connection cable (BusT4) which
also enables updates to the TEN control unit firmware. Further information is provided in the Oview programmer instruction manual; or
in the specific addendum on “Additional TEN functions with Oview”
available also at the website www.niceforyou.com.
32 33
Page 29
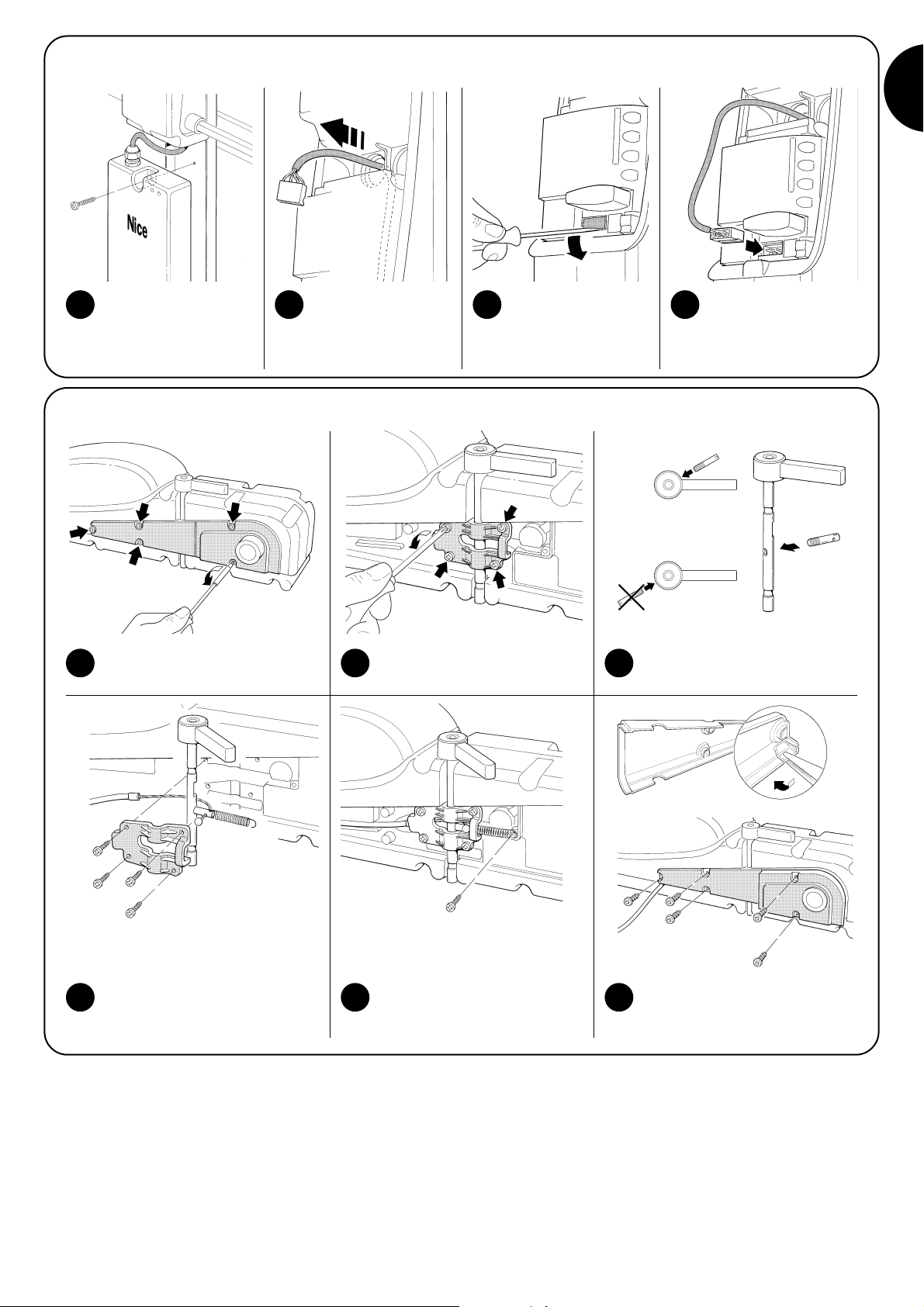
29
GB
7.8.3) Pre-assembly for OTA11
7.8.2) Buffer battery
Loosen the screws and remove the
lateral covers
Fit the PS334 below the
TN2010
Pass the battery cable through
the TEN cable inlet.
Remove the membrane on the
control unit box
Connect the cable to the battery connector
Loosen the screws and remove
the sleeve
38 39
Tighten the pin supplied, taking
care to ensure the correct position
with respect to the handle
40
Insert the cord and spring, as
shown
Fix the spring with the 4.2x13
screw supplied, re-tighten the
sleeve and insert the sheath.
41 42
Pierce the pre-cut element on the
cover and re-close the assembly,
taking care not to crush the seal
43
34 35 36 37
Page 30
30
IP 44
No
For purposes of product improvements, Nice S.p.a. reserves the right to apply modifications to technical specifications at any time when
deemed necessary, while maintaining the same functionalities and intended use.
All technical specifications stated in this section refer to an ambient temperature of 20°C (± 5°C).
8) Technical specifications
Technical specifications: TEN
Model TN2020 TN2010 TN2010+TN2020
TN2010 TN2020 TN2010+TN2020
* At 50°C the maximum operating frequency is (cycles/hour) 4 6 4
** At 50°C the maximum continuous operating time is (minutes) 12 6 7
Emergency Power supply
Flashing light Output
Courtesy light 12V/10W fitting BA15S
Ty pe
Electromechanical gearmotor for the automatic movement of
projecting and non-projecting up-and-over doors for residential
use, complete with electronic control unit
Maximum start-up torque 320 Nm 350 Nm 500 Nm
25 cycles per hour 15 cycles per hour 25 cycles per hour
14 minutes 22 minutes 14 minutes
220Nm 240 Nm 330 Nm
III I I
/Yes
Nominal torque
Speed under no-load 1.7rpm; the control unit enables programming of 6 speeds1.4 (24Vcc)
/
For 1 flashing light model
LUCYB;MLB or MLBT (lamp
12V, 21W)
/
//
/
1.2rpm0.9 (24Vcc)Speed at nominal torque
Maximum operating cycle frequency at nominal
torque (the control unit restricts the maximum
number of cycles as specified in tables 3 and 4) *
Maximum continuous operating time at nominal
torque (the control unit restricts the maximum
number of cycles as specified in tables 3 and 4) **
Limits of use
In general TEN is able to automate balanced doors with surface areas up to 8m
2
with 1 motor and
up to 14 m2with 2 motors, within the limits specified in table 2.
Maximum power absorbed on start-up
[corresponding to Amperes]
130W (5.5A) 240W (1A) 350W (1.4A)
[2A version V1] [3A version V1]
Insulation class
BlueBUS Output
An output with maximum load
of 12 BlueBUS units
/
/
STOP input
For normally closed and normally open contacts or with
constant resistance of
8,2Kohm; in self-learning mode
(a status variation generates
the “STOP” command)
//SS input
For normally open contacts
(closure of the contact generates the SS command)
//Open input
For normally open contacts
(closure of the contact generates the OPEN command)
//CLOSE input
For normally open contacts
(closure of the contact generates the CLOSE command)
//Radio AERIAL input
52 ohm for cable type RG58 or
similar
//Radio connection
SM connector for receiver
types SMXI, SMXIS or OXI
TEN Power supply 230Vac (-10% +15%) 50/60Hz.24 Vcc (-30% +50%)
Durability Estimated at between 10000 and 50000 cycles, according to the conditions specified in table 5
TEN/V1 Power supply 120Vac (-10% +15%) 50/60Hz.
//Programmable functions
8 ON-OFF type functions and 8
adjustable functions (see tables
8 and 10)
//Functions in self-learning mode
Self-learning of devices connected to BlueBUS output.
Self-learning of "STOP" type
devices (contacts NO, NC or
8,2K resistance) Learning of
door opening and closing positions and calculation of the
points of deceleration and partial
opening.
Operating temperature -20°C ÷ +50°C
Protection rating
Dimensions 512 x 150 h 158
Use in particularly acid, saline or potentially
explosive environments
Weight 7.2 Kg 10 Kg
Page 31

31
GB
Congratulations on your purchase of a Nice automa-
tion. Nice S.p.a. produces components for the automation
of gates, doors, shutters, rolling shutters and sun
awnings: gearmotors, control units, radio controls, flashing lights, photocells and accessories. Nice uses exclusively top quality materials and processes, and by vocation researches into the most innovative solutions to
ensure the utmost simplicity of equipment use, with special attention to technical solutions, aesthetics and
ergonomics: given the vast range of Nice products, your
installer will certainly find the ideal product for your requirements. However, Nice is not the manufacturer of your
automation, which is the result of careful analysis, assessment, choice of materials and the set-up of a system by
your entrusted installer. Each automation is unique, and
only your installer has the experience and professional
skills needed to obtain the system that meets your requirements, is safe and reliable over time, and is above all to
professional standards, i.e. compliant with all relevant current standards. An automated system is a real commodity, as well as a valid safety system and, with just a little
attention, can last for years. Even if the automation in your
possession meets the safety levels established by standards, this does not exclude possible residual risks, i.e.
the possibility that hazardous situations may be generated, usually due to inadvertent or incorrect use, and for this
reason we provide some advice on procedures to avoid
any inconvenience.
• Before using the automation for the first time,
ensure that the installer explains the sources of residual
risks, and take care to read the instruction manual
and safety warnings for the user provided by the
installer. Keep the manual for consultation when in doubt
and ensure supply to new owners of the automation.
• Photocells do not constitute actual safety
devices, but safety aids. They are designed using
highly reliable technology, but in extreme conditions may
be subject to malfunctions or potential faults, and in certain cases these faults are not immediately evident.
For this reason, it is good practice to observe the following:
- Transit is admitted only if the gate or door is completely open with the leafs stationary
- Transit while the gate or door is closing is STRICTLY
PROHIBITED!
Periodically check correct operation of the photocells
and perform the scheduled maintenance at least every
six months.
• Your automation is a machine that performs
commands imparted by the user; negligent or
improper use may constitute a hazard: never activate
automation controls if persons, animals or objects are
present in the operating range
• Children: an automation system guarantees a high
level of safety, using special detection devices to prevent movement in the presence of persons or objects,
thereby guaranteeing constant foreseeable and safe
activation. However, it is advisable to ensure that children do not play in the vicinity of the automation to
avoid inadvertent activation, and remote controls
should always be kept out of reach. it is not a toy!
• Check the system frequently, in particular all
cables, springs and supports to detect possible imbalance, signs of wear or damage. Check monthly that the
drive motor inverts when the door touches an object
with a height of 50 mm from the ground. Do not use the
automation if repairs or adjustments are required; any
fault with the installation or an incorrectly balanced door
may lead to physical injury.
• Malfunctions: If any anomalous condition is noted on
the automation, disconnect the power supply from the
system immediately and activate the manual release.
Never attempt to repair the automation alone; contact
your local installer for assistance: in the meantime the
system can be used in manual mode, after releasing the
gearmotor as described below.
• Maintenance: As with all machinery, the automation
requires periodic maintenance to ensure optimal operation, extended lifetime and complete safety. Arrange
with your local installer to draw up a periodic maintenance schedule; Nice recommends maintenance every
6 months in the case of normal domestic use, but this
interval may vary according to the intensity of use.
Checks, maintenance and repairs must be performed
exclusively by qualified personnel.
• Even if you possess the skills, never modify the system
or automation programming and adjustment parameters: your installer is exclusively responsible for these
operations.
• Testing, periodic maintenance and any repairs must be
documented by the person performing the operations
and the relative documents must be kept by the system
owner.
The only operations that can be performed by the
user, and recommended by the manufacturer, are
cleaning of the photocell lenses and removal of any
leaves or stones that may obstruct the automation. To
prevent persons from activating the door, before proceeding, remember to release the automation (as
described below), disconnect all power sources
(including the buffer batteries if fitted) and use exclusively a cloth slightly dampened with water for cleaning
• Disposal: At the end of the automation’s lifetime,
ensure that it is disposed by qualified personnel and
that the materials are recycled or scrapped according
to current standards in the place of use.
• In the event of breakage or power supply fail-
ure: While awaiting arrival of your installer, or the return
of power, the automation can be activated like a normal
manual door. To enable this, the manual release must
be operated: this operation has been specifically
researched by Nice to ensure optimal and simple use at
all times, without the need for special tools or physical
strength.
Instructions and warnings for TEN gearmotor users
Important safety instructions
Warning: for personal safety it is important to observe these instructions
Keep these instructions in a safe place
These instructions can integrate the “Automation use instructions and warnings” to be delivered by the installer to the automation owner, and in any event must be integrated with this document.
!
Page 32

32
Manual release and movement: before performing this operation, take care that the release is activated only
when the leaf is stationary.
Control with safety devices disabled: in the event of
a malfunction of the safety devices on the door, movement
is still possible.
• Activate the door command (by means of the remote
control, key-operated selector switch, etc.); if all is in
working order the door opens and closes normally; otherwise the flashing light flashes several times and the
manoeuvre is disabled (the number of flashes depends
on the reason for which the manoeuvre is inhibited).
• In this case, press and hold the command again
within three seconds.
• After approx. 2s door movement is started in “hold-torun” mode, i.e. as long as the command is pressed the
door continues to move; and stops immediately on
release of the control.
In the event of safety device malfunction, arrange
for repairs to the automation immediately.
Remote control battery replacement: after a certain
period of time, if you notice a deterioration in performance
of the remote control, or if it stops working completely, it
may simply be due to a flat battery (depending on the use,
the battery can last from several months to over a year).
This is indicated by the fact that the transmission indicator
does not light up, is faded, or only lights up briefly. Before
contacting the installer, change the battery with one from
another operative transmitter: if this is the cause of the
fault, simply replace the battery with one of the same type.
Caution: Batteries contain pollutant substances: never
dispose of in common waste disposal units, and observe
all local regulations for the procedures required.
Lamp replacement: before performing this operation, disconnect the power supply from TEN.
Satisfied? Should you wish to add a new automation system to your home, contact both your local installer and Nice
to guarantee specialist consultancy and state-of-the art products on the market, for optimal operation and maximum
compatibility of automations.
Thank you for reading this information. We wish you total satisfaction with your system. For all present and future requirements contact your local installer.
To release, rotate the handle anti-clockwise and
manually move the leaf (Figure 44)
To reset, return the handle to the vertical position
by turning it clockwise, and manually move the leaf
until it engages (Figure 45)
44 45
1. Loosen the screws to open the cover as shown
in Figure 46.
2. Unscrew the lamp and replace with a new version of 12V/10 W fitting BA15S (Figure 47).
46 47
Page 33

Page 34

34
Ten
Indice: pag.
1 Avvertenze 35
2 Descrizione del prodotto e destinazione d'uso 36
2.1 Limiti d’impiego 36
2.2 Verificare i componenti del prodotto 37
2.3 Impianto tipico 38
2.4 Elenco cavi 38
3 Installazione 39
3.1 Verifiche preliminari 39
3.2 Installazione del motoriduttore 39
3.3 Regolazione dei finecorsa 42
3.4 Installazione dei vari dispositivi 42
3.5 Collegamenti elettrici 42
3.5.1 Descrizione dei collegamenti elettrici 43
3.5.2 Collegamento elettrico secondo motore 44
4 Verifiche finali ed avviamento 44
4.1 Allacciamento dell'alimentazione 44
4.2 Apprendimento dei dispositivi 44
4.3 Apprendimento delle posizioni di apertura
e chiusura del portone 45
4.4 Verifica del movimento del portone 46
4.5 Funzioni preimpostate 46
4.6 Ricevitore radio 46
5 Collaudo e messa in servizio 46
5.1 Collaudo 46
5.2 Messa in servizio 47
6 Manutenzione e smaltimento 48
6.1 Manutenzione 48
6.2 Smaltimento 48
7 Approfondimenti 48
7.1 Tasti di programmazione 48
7.2 Programmazioni 48
7.2.1 Funzioni primo livello (funzioni ON-OFF) 49
7.2.2 Programmazione primo livello (funzioni ON-OFF) 49
7.2.3 Funzioni secondo livello (parametri regolabili) 50
7.2.4 Programmazione secondo livello
(parametri regolabili) 51
7.2.5 Esempio di programmazione primo livello
(funzioni ON-OFF) 51
7.2.6 Esempio di programmazione secondo livello
(parametri regolabili) 52
7.3 Aggiunta o rimozione dispositivi 52
7.3.1 BlueBus 52
7.3.2 Ingresso STOP 53
7.3.3 Fotocellule 53
7.3.4 Selettore digitale MOTB e lettore di prossimità
per tessere a transponder MOMB 53
7.3.5 Apprendimento altri dispositivi 54
7.3.6 Cancellazione totale memoria 54
7.3.7 Programmazione della direzione di rotazione
del motore 54
7.3.8 Ripristino posizione encoder 55
7.4 Funzioni particolari 55
7.4.1 Funzione “Apri sempre” 55
7.4.2 Funzione “Muovi comunque” 55
7.4.3 Avviso di manutenzione 55
7.4.4 Verifica del numero di manovre effettuate 56
7.4.5 Azzeramento contatore manovre 56
7.5 Collegamento altri dispositivi 56
7.6 Risoluzione dei problemi 57
7.6.1 Elenco storico anomalie 57
7.7 Diagnostica e segnalazioni 57
7.7.1 Segnalazione con lampeggiante 58
7.7.2 Segnalazioni sulla centrale 59
7.8 Accessori 60
7.8.1 Unità di programmazione remota 60
7.8.2 Batteria tampone 61
7.8.3 Pre montaggio per OTA11 61
8 Caratteristiche tecniche 62
Istruzioni ed avvertenze destinate all’utilizzatore del
motoriduttore TEN 63
Page 35

35
I
1) Avvertenze
Istruzioni importanti di sicurezza per l'installazione.
L'installazione non corretta può causare gravi danni.
Seguire tutte le istruzioni di installazione.
Questo manuale di istruzioni contiene importanti informazioni riguardanti la sicurezza per l'installazione, è necessario leggere tutte le istruzioni
prima di procedere all'installazione. Conservare con cura questo manuale anche per utilizzi futuri.
Considerando i pericoli che si possono verificare durante l'installazione e
l'uso di TEN, per la massima sicurezza è necessario che l'installazione
avvenga nel pieno rispetto di leggi, norme e regolamenti. In questo capitolo verranno riportate avvertenze di tipo generico; altre importanti avvertenze sono presenti nei capitoli “3.1 Verifiche preliminari”; “5 Collaudo e
messa in servizio”.
Secondo la più recente legislazione europea, l'automazione di una porta o cancello ricade in quanto previsto dalla
Direttiva Macchine 98/37/CE e nel particolare, alle norme: EN
13241-1 (norma armonizzata); EN 12445; EN 12453 ed EN
12635, che consentono di dichiarare la conformità alla direttiva macchine.
Ulteriori informazioni, linee guida all'analisi dei rischi ed alla realizzazione
del Fascicolo Tecnico, sono disponibili su: “www.niceforyou.com”. Il presente manuale è destinato solamente al personale tecnico qualificato per
l'installazione. Salvo lo specifico allegato da staccare a cura dell'installatore “Istruzioni ed avvertenze destinate all' utilizzatore del motoriduttore
TEN” nessuna altra informazione contenuta nel presente fascicolo può
essere considerata d'interesse per l'utilizzatore finale!
• L'uso di TEN diverso da quanto previsto in queste istruzioni è vietato;
usi impropri possono essere causa di pericoli o danni a persone e
cose.
• Prima di iniziare l'installazione è necessario eseguire l'analisi dei rischi
che comprende l'elenco dei requisiti essenziali di sicurezza previsti nell'allegato I della Direttiva Macchine, indicando le relative soluzioni adottate. Si ricorda che l'analisi dei rischi è uno dei documenti che costituiscono il fascicolo tecnico dell'automazione.
• Verificare la necessità di ulteriori dispositivi per completare l'automa-
zione con TEN in base alla specifica situazione d'impiego ed ai pericoli
presenti; devono essere considerati ad esempio i rischi di impatto,
schiacciamento, cesoiamento, convogliamento, ecc., ed altri pericoli in
genere.
• Non eseguire modifiche su nessuna parte se non previste nelle pre-
senti istruzioni; operazioni di questo tipo possono solo causare malfunzionamenti; NICE declina ogni responsabilità per danni derivati da
prodotti modificati.
• Durante l'installazione e l'uso evitare che parti solide o liquidi possano
penetrare all'interno della centrale e di altri dispositivi aperti; eventualmente rivolgersi al servizio di assistenza NICE; l'uso di TEN in queste
situazioni può causare situazioni di pericolo
• L'automatismo non può essere utilizzato prima di aver effettuato la
messa in servizio come specificato nel capitolo: “5 Collaudo e messa
in servizio”.
• Il materiale dell'imballaggio di TEN deve essere smaltito nel pieno
rispetto della normativa locale.
• Nel caso di guasto non risolvibile facendo uso delle informazioni ripor-
tate nel presente manuale, interpellare il servizio di assistenza NICE.
• Qualora si verifichino interventi di interruttori automatici o di fusibili, pri-
ma di ripristinarli è necessario individuare ed eliminare il guasto.
• Prima di accedere ai morsetti interni al coperchio di TEN scollegare tut-
ti i circuiti di alimentazione; se il dispositivo di sconnessione non è a
vista apporvi un cartello: “ATTENZIONE MANUTENZIONE IN CORSO”.
Avvertenze particolari sull'idoneità all'uso di questo prodotto in relazione
alla Direttiva “Macchine” 98/37/CE (ex 89/392/CEE):
• Questo prodotto viene immesso sul mercato come “componente di
macchina” e quindi costruito per essere incorporato in una macchina
o per essere assemblato con altri macchinari al fine di realizzare “una
macchina” ai sensi della Direttiva 98/37 CE solo in abbinamento agli
altri componenti e nei modi così come descritto nel presente manuale
di istruzioni. Come previsto dalla direttiva 98/37 CE si avverte che non
è consentita la messa in servizio di questo prodotto finché il costruttore della macchina, in cui questo prodotto è incorporato, non l'ha identificata e dichiarata conforme alla direttiva 98/37/CE.
Avvertenze particolari sull'idoneità all'uso di questo prodotto in relazione
alla Direttiva “Bassa Tensione” 73/23/CEE e successiva modifica
93/68/CEE.
• Questo prodotto risponde ai requisiti previsti dalla Direttiva “Bassa Tensione” se impiegato per l'uso e nelle configurazioni previste in questo
manuale di istruzioni ed in abbinamento con gli articoli presenti nel
catalogo prodotti di Nice S.p.a. Potrebbero non essere garantiti i requisiti se il prodotto è usato in configurazioni o con altri prodotti non previsti; è vietato l'uso del prodotto in queste situazioni finché chi esegue
l'installazione non abbia verificato la rispondenza ai requisiti previsti
dalla direttiva.
Avvertenze particolari sull'idoneità all'uso di questo prodotto in relazione
alla Direttiva “Compatibilità Elettromagnetica” 89/336/CEE e successiva
modifiche 92/31/CEE e 93/68/CEE:
• Questo prodotto è stato sottoposto alle prove relative alla compatibilità elettromagnetica nelle situazioni d'uso più critiche, nelle configurazioni previste in questo manuale di istruzioni ed in abbinamento con gli
articoli presenti nel catalogo prodotti di Nice S.p.a. Potrebbe non essere garantita la compatibilità elettromagnetica se il prodotto è usato in
configurazioni o con altri prodotti non previsti; è vietato l'uso del prodotto in queste situazioni finché chi esegue l'installazione non abbia
verificato la rispondenza ai requisiti previsti dalla direttiva.
!
!
Page 36

36
2.1) Limiti d’impiego
I dati relativi alle prestazioni di TEN sono riportati nel capitolo “8 Caratteristiche tecniche” e sono gli unici valori che consentono la corretta
valutazione dell'idoneità all'uso. Generalmente TEN è in grado di automatizzare basculanti secondo i limiti riportati in tabella 2.
Le misure in tabella 2 sono indicative e servono solo per una stima di massima. La reale idoneità di TEN ad automatizzare un determinato portone dipendono dal grado di bilanciamento dell'anta, dagli attriti delle guide e da altri fenomeni, anche occasionali, come la pressione del vento o la presenza di ghiaccio che potrebbero ostacolare il movimento dell'anta. Per una verifica reale è assolutamente indispensabile misurare
la forza necessaria per muovere l'anta in tutta la sua corsa e controllare che questa non superi la “coppia nominale” riportata nel capitolo “8
Caratteristiche tecniche”; inoltre per stabilire il numero di cicli/ora e cicli consecutivi occorre considerare quanto riportato nelle tabelle 3 e 4.
Forza per muovere l'anta (N) Cicli/ora massimi Cicli consecutivi massimi
Fino a 150 30 19
150÷250 28 16
250÷350 25 14
Tabella 4: limiti in relazione alla forza necessaria per muovere l'anta con 1 TN2010 + 1 TN2020
Tipologia portone Motorizzato con 1 motore Motorizzato con 2 motori
Basculante debordante Altezza max 2.6m Lunghezza max 3m Altezza max 2.6m Lunghezza max 5.4m
Basculante non debordante Altezza max 2.6m Lunghezza max 3m Altezza max 2.6m Lunghezza max 5.4m
Tabella 2: limiti d'impiego motoriduttori TEN
TEN (Figura 1) è un motoriduttore (tabella 1) per l'automazione di porte basculanti a contrappesi; basculanti a molle; debordanti e non, e snodati. TEN è dotato di un sistema di finecorsa elettronico con encoder assoluto che è in grado di rilevare sempre la posizione del motore,
anche quando il portone viene sbloccato per la manovra manuale. E' in grado di raggiungere il limite della corsa (in apertura e chiusura) attraverso una fase di rallentamento. Inoltre controlla costantemente lo sforzo a cui è sottoposto durante le manovre, rilevando eventuali anomalie come, ad esempio, un ostacolo improvviso che blocca il movimento dell'anta; in questo caso l'automazione esegue uno stop ed una breve inversione del moto.
Prima di procedere all'installazione, verificare l'integrità dei componenti del
prodotto, l'adeguatezza del modello scelto e l'idoneità dell'ambiente destinato all'installazione
2) Descrizione del prodotto e destinazione d’uso
1
Modello tipo Descrizione
TN2010 Motoriduttore irreversibile, centrale di comando, finecorsa elettronico tramite encoder assoluto e luce di cortesia.
TN2020* Motoriduttore irreversibile e luce di cortesia. Da utilizzare come “Slave”di TN2010 o TN2020
* Se viene utilizzato diversamente assicurarsi che l'alimentazione provenga da un sistema a bassissima tensione di sicurezza e nel quale non si
generano tensioni superiori alla bassissima tensione di sicurezza.
Tabella 1: descrizione composizione TEN
Per evitare surriscaldamenti la centrale prevede un limitatore che si basa sullo sforzo e sulla durata dei cicli, intervenendo quando viene superato il limite massimo.
Forza per muovere l'anta (N) Cicli/ora massimi Cicli consecutivi massimi
Fino a 120 20 35
120÷180 18 33
180÷220 15 30
Tabella 3: limiti in relazione alla forza necessaria per muovere l'anta con 1 TN2010
Page 37

37
I
Nel capitolo “8 Caratteristiche tecniche” è riportata la stima di “durabilità” cioè di vita economica media del prodotto. Il valore è fortemente
influenzato dall'indice di gravosità delle manovre, cioè la somma di tutti i fattori che concorrono all'usura. Per effettuare la stima occorre sommare tutti gli indici di gravosità della tabella 5, poi con il risultato totale verificare nel grafico la durabilità stimata. Ad esempio TN2010 su un
portone di 130 Kg, che necessita di una forza per muoverlo di 180Nm, dotato di fotocellule e senza altri elementi di affaticamento, ottiene
un indice di gravosità pari al 60% (30+20+10). Dal grafico la durabilità stimata è 18.000 cicli.
Si precisa che la stima di durabilità viene fatta sulla base dei calcoli progettuali e dei risultati di prove effettuate sui prototipi; essendo una stima non rappresenta alcuna garanzia sulla effettiva durata del prodotto.
Indice di gravosità % TN2010 TN2010
+
TN2020
Peso dell'anta Kg
Fino a 100 20 10
100 ÷ 180 30 20
180 ÷ 230 40 30
Oltre 230 60 50
Forza per muovere l'anta N
Fino a 160 10 5
160 ÷ 240 20 15
240 ÷ 290 40 30
290 ÷ 350 - 50
Altri elementi di affaticamento
(da considerare se la probabilità che accadano è superiore al 10%)
Temperatura ambientale superiore
a 40°C o inferiore a 0°C o umidità
superiore all'80% 10 10
Presenza si polvere o sabbia 15 15
Presenza di salsedine 20 20
Interruzione manovra da Foto 10 10
Interruzione manovra da Alt 20 20
Velocità superiore a “L4 veloce” 15 15
Totale indice di gravosità %:
Tabella 5: stima della durabilità in relazione all'indice di gravosità della manovra
Indice di gravosità %
Durata in cicli
2.2) Verificare i componenti del prodotto
• Verificare l'integrità della confezione;
• Disimballare il prodotto e accertare la presenza di quanto sotto descritto (Figura 2):
N° PZ. TN2010
A 1 Motoriduttore TEN
B 2 Dadi M6
C 2 Dadi M8
D 2 Grani filettati M6x14
E 2 Rondelle Ø8
F 2 Viti M8x110
G 1 Astina di sblocco
2
50000
45000
40000
35000
30000
25000
20000
15000
10000
5000
0
0 102030405060708090100
Page 38

38
2.3) Impianto tipico
La figura 3 mostra l'installazione tipica di un'automazione per porte basculanti, realizzata con TEN.
1 TEN
2 Tubo quadro 20x20
3 Staffa di supporto
4 Braccio telescopico
5 Fotocellule
6 Fotocellule su colonnina
7 Bordo sensibile
8 Lampeggiante 12V con antenna incorporata
9 Selettore a chiave
10 Trasmettitore radio
2.4) Elenco cavi
Nell'impianto tipico di figura3 sono indicati i cavi necessari per i collegamenti dei vari dispositivi; in tabella 6 sono indicate le caratteristiche
dei cavi.
I cavi utilizzati per i collegamenti dei vari dispositivi devono essere adatti al tipo di installazione: ad esempio si con-
siglia un cavo tipo H03VV-F se posto all'interno.
!
Nota: (*) Se il cavo di alimentazione è più lungo di 30 m, occorre usare un cavo con sezione maggiore (esempio: 3 x 2,5 mm2) ed è neces-
saria una messa a terra di sicurezza in prossimità dell'automazione
Collegamento Tipo di cavo Lunghezza massima consentita
A: Linea elettrica di alimentazione n° 1 cavo (3 x 1,5 mm2) 30 m (*)
B: Lampeggiante 12V n° 1 cavo (2 x 1 mm2) 20 m
C: Antenna n° 1 cavo schermato (tipo RG58) 20 m (si consiglia: minore di 5 m)
D: Fotocellule n° 1 cavo (2 x 0,5 mm2) 20 m
E: Selettore a chiave n° 1 cavo (4 x 0,25 mm2) 20 m
F: Bordo sensibile n° 1 cavo (2 x 0,25 mm2) 20 m
Tabella 6: elenco cavi
3
Page 39

39
I
L'installazione di Ten deve essere effettuata unicamente da personale qualificato, nel rispetto di leggi, norme e rego-
lamenti e di quanto riportato nelle presenti istruzioni.
!
3) Installazione
3.1) Verifiche preliminari
Prima di procedere con l'installazione di TEN è necessario eseguire
questi controlli:
• Verificare ed assicurarsi che dopo l'installazione le parti della porta
non ingombrino strade o marciapiedi pubblici.
• Verificare che tutto il materiale da utilizzare sia in ottimo stato, adatto all'uso e conforme alle norme.
• Verificare che peso e dimensioni dell'anta rientrino nei limiti di
impiego riportati nel paragrafo “2.1 Limiti d'impiego”
• Verificare, confrontando con i valori riportati nel capitolo “8 Caratteristiche tecniche”, che l'attrito statico (cioè la forza necessaria
per mettere in movimento l'anta) sia inferiore a metà della “Coppia
massima” e che l'attrito dinamico (cioè la forza necessaria per
mantenere in movimento l'anta) sia inferiore a metà della “Coppia
nominale”; viene consigliato un margine del 50% sulle forze perché
le condizioni climatiche avverse possono far aumentare gli attriti.
• Verificare che in tutta la corsa del basculante, sia in chiusura che
in apertura, non ci siano punti con maggiore attrito.
• Verificare la robustezza degli arresti meccanici e controllare che
non vi sia pericolo di uscita dalle guide del portone.
• Verificare che il portone sia ben bilanciato, cioè non deve muoversi se lasciato fermo in una qualsiasi posizione.
• Verificare che i punti di fissaggio dei vari dispositivi (fotocellule, pulsanti, ecc…) siano in zone protette da urti e le superfici di fissaggio siano sufficientemente solide.
• A seconda del tipo di portone, debordante, non debordante o snodato, verificare che sia possibile fissare TEN alle quote riportate
nelle figure 5, 6 o 7 rispettivamente.
• Verificare e prevedere che lo sblocco manuale sia ad un'altezza
inferiore a 1.8 m.
• Qualora non ci sia spazio sufficiente tra braccio di supporto e parte fissa della porta, sarà necessario, al fine di evitare l'incrocio, utilizzare l'accessorio “bracci curvi”.
• Evitare che le parti dell'automatismo possano venir immerse in
acqua o in altre sostanze liquide.
• Non tenere i componenti di TEN vicino a fonti di calore né esporlo
a fiamme; tali azioni possono danneggiarlo ed essere causa di
malfunzionamenti, incendio o situazioni di pericolo.
• Nel caso sia presente un porta di passaggio interna al portone,
assicurarsi che non intralci la normale corsa, e provvedere con un
sistema di interblocco opportuno.
• Collegare la centrale ad una linea di alimentazione elettrica dotata
di messa a terra di sicurezza.
• La linea di alimentazione elettrica deve essere protetta da un adeguato dispositivo magneto-termico e differenziale. Sulla linea di alimentazione dalla rete elettrica è necessario inserire un dispositivo
di sconnessione dell'alimentazione (con categoria di sovratensione
III cioè distanza fa i contatti di almeno 3,5mm) oppure altro sistema equivalente ad esempio una presa e relativa spina. Se il dispositivo di sconnessione dell'alimentazione non è in prossimità dell'automazione deve disporre di un sistema di blocco contro la connessione non intenzionale o non autorizzata.
3.2) Installazione del motoriduttore
Il posizionamento di TEN varia in base alla tipologia della porta da
automatizzare e dalle limitazioni riportate nel paragrafo “2.1 Limiti
d'impiego”.
TEN dispone di un finecorsa con encoder assoluto preregolato in posizione di “quasi chiuso” funzionante anche
quando il motore è sbloccato. Per questo motivo il passo
N°8 deve essere fatto a PORTONE CHIUSO.
Nota: Per l'installazione di 2 motori seguire la stessa procedura per
un motore, eseguendo l'installazione come indicato in Figura 14.
1. Definita la tipologia, fissare la staffa di supporto alla porta, perfet-
tamente in verticale (Figura 4), rispettando le quote indicate.
1.1 Per porte basculanti debordanti, l'asse di rotazione dei bracci, dovrà essere 50÷100 mm sotto il braccio di supporto della porta.(Figura 5).
1.2 Su porte basculanti non debordanti, l'asse di rotazione dei
bracci, dovrà essere esattamente in asse con il braccio di
supporto della porta.(Figura 6).
1.3 Su porte basculanti snodate, l'asse di rotazione dei bracci,
dovrà essere 50÷100 mm sotto la cerniera di rotazione della porta (Figura 7).
Nel caso si utilizzi TEN capovolto è necessario
programmare la centrale di comando, utilizzando
l'unità di programmazione remota OView. Per ulteriori informazioni consultare il paragrafo “7.8.1
Unità di programmazione remota”.
2. Fissare il motoriduttore alla staffa con le apposite viti (Figura 8).
3. Sbloccare il motoriduttore ruotando la maniglia in senso antiora-
rio (Figura 9).
4. Fissare saldamente, le staffe di supporto laterale, perfettamente
in asse con l'albero di rotazione del motore, ed inserire le boccole di adattamento in dotazione. (Figura 10).
A seconda dello spazio presente tra braccio di supporto e
telaio fisso della porta si dovranno utilizzare bracci dritti
oppure bracci curvi.
5. Fissare il supporto superiore al telaio della porta (Figura 11): se già
presente verificare che sia adatto ai bracci che si intendono utilizzare. Le quote riportate figura 11 sono indicative: possono variare a seconda degli ingombri della porta.
6. Inserire il tubo di trasmissione nella boccola del braccio e nell'albero del motore; tagliare il tubo a misura. (Figura 12)
7. Aprire completamente il portone e tagliare i bracci a misura considerando che a portone chiuso siano guidati per almeno 70 mm
(Figura 13). Se la lunghezza non fosse sufficiente, riposizionare il
supporto superiore o scegliere bracci più lunghi.
8. Chiudere il portone e inserire i bracci nelle rispettive guide e verificare che la porta scorra liberamente senza inceppamenti o
impedimenti.
Verificare nuovamente il bilanciamento: sarà ben bilanciata quando fermata in qualsiasi posizione della corsa non si
muoverà. Se necessario agire adeguatamente sui sistemi
di bilanciamento.
!
!
Page 40

40
4
5
6 7
8 9
Page 41

41
I
10
11
12 13
14
Page 42

42
3.3) Regolazione dei finecorsa
Ten 2010 non dispone di finecorsa meccanici, ma di un sistema elettronico con finecorsa assoluto. Per la regolazione vedere paragrafo “4.3
Apprendimento delle posioni di apertura e chiusura del portone”.
3.4) Installazione dei vari dispositivi
Effettuare l'installazione degli altri dispositivi previsti seguendo le rispettive istruzioni. Verificare nel paragrafo “3.5 Descrizione dei collegamenti
elettrici” ed in Figura 17 i dispositivi che possono essere collegati a TEN.
17
3.5) Collegamenti elettrici
Tutti i collegamenti elettrici devono essere eseguiti in assenza di tensione dell'impianto.
1. Per procedere ai collegamenti elettrici, svitare le viti del coperchio (Figura 15).
2. Rimuovere le due membrane di gomma che chiudono i due fori per il passaggio dei cavi. Ritagliare un foro sulla membrana ed infilare il
cavo di alimentazione nella membrana e foro di destra. Ritagliare un foro sulla membrana e far passare gli altri cavi verso i vari dispositivi
nella membrana e foro di sinistra. Lasciare i cavi 20÷30 cm più lunghi del necessario. Vedere tabella 6 per il tipo di cavi.
3. Collegare il cavo di alimentazione da rete direttamente ai morsetti 1 (fase) e 2 (neutro), e 3 (terra); bloccare il cavo con il collarino come
indicato in Figura 16.
4. Eseguire i collegamenti degli altri cavi secondo lo schema di Figura 17. Per maggiore comodità i morsetti sono estraibili.
5. Terminati i collegamenti, raccogliere e bloccare con delle fascette i cavi (Figura 18).
!
18
15
16
Page 43

43
I
3.5.1) Descrizione dei collegamenti elettrici
In questo paragrafo c'è una breve descrizione dei collegamenti elettrici: per ulteriori dettagli vedere anche “7.3 Aggiunta o rimozione dispositivi”
FLASH questa uscita è programmabile (vedere la SECONDA PARTE del manuale) per collegare uno fra i seguenti dispositivi:
Lampeggiante
Se programmata come “lampeggiante” sull'uscita “FLASH” è possibile collegare un lampeggiante NICE “LUCY B, o MLB
o MLBT” con una lampadina a 12V 21W tipo auto. Durante la manovra lampeggia con periodo 0.5s acceso e 0.5s
spento.
Funzione: “spia portone aperto”, “attiva se portone chiuso” o “attiva se portone aperto”
Se programmata con una di queste 3 funzioni all'uscita “FLASH” è possibile collegare una spia 24V max 5W per le
seguenti segnalazione:
Funzione “spia portone aperto”
Spenta: a portone chiuso
Lampeggiante lento: portone in apertura
Lampeggiante veloce: portone in chiusura
Accesa: portone aperto (non chiuso)
Funzione “attiva se portone chiuso”
Accesa: portone chiuso
Spenta: in tutti gli altri casi
Funzione “attiva se portone aperto”
Accesa: portone aperto
Spenta: in tutti gli altri casi
Può essere programmata anche per altre funzioni; vedere il paragrafo “7.2.3 Funzioni secondo livello (parametri regolabili)“
Ventosa*
Se programmata come “ventosa” sull'uscita “FLASH” è possibile collegare una ventosa 24V max 10W (versioni con solo
elettromagnete, senza dispositivi elettronici).
Quando il portone è chiuso la ventosa viene attivata bloccando il portone. Durante la manovra di apertura o chiusura viene disattivata.
Elettroblocco*
Se programmata come “elettroblocco” sull'uscita “FLASH” è possibile collegare un'elettroblocco con scrocco 24V max
10W (versioni con solo elettromagnete, senza dispositivi elettronici).
Durante la manovra di apertura l'elettroblocco viene attivato e rimane attivo per liberare il portone ed eseguire la manovra. Nella manovra di chiusura occorre accertarsi che l'elettroblocco si riagganci meccanicamente.
Elettroserratura*
Se programmata come “elettroserratura” sull'uscita “FLASH” è possibile collegare una elettroserratura con scrocco 24V
max 10W (versioni con solo elettromagnete, senza dispositivi elettronici).
Durante la manovra di apertura l'elettroserratura viene attivato per un breve periodo per liberare il portone ed eseguire la
manovra.
Nella manovra di chiusura occorre accertarsi che l'elettroserratura si riagganci meccanicamente.
BLUEBUS Su questo morsetto si possono collegare i dispositivi compatibili; tutti vengono collegati in parallelo con soli due con-
duttori sui quali transita sia l'alimentazione elettrica che i segnali di comunicazione.
Altre informazioni su BlueBUS sono presenti nel paragrafo “7.3.1 BlueBUS”.
STOP Ingresso per dispositivi che bloccano o eventualmente arrestano la manovra in corso; con opportuni accorgimenti sull'
ingresso è possibile collegare contatti tipo “Normalmente Chiuso”, tipo “Normalmente Aperto”, dispositivi a resistenza
costante o di tipo ottico.
Altre informazioni su STOP sono presenti nel paragrafo “7.3.2 Ingresso STOP”.
PP Ingresso per dispositivi che comandano il movimento in modalità Passo-Passo; è possibile collegare contatti di tipo “Nor-
malmente Aperto”.
OPEN Ingresso per dispositivi che comandano il movimento di sola apertura; è possibile collegare contatti di tipo “Normalmente
Aperto”.
CLOSE Ingresso per dispositivi che comandano il movimento di sola chiusura; è possibile collegare contatti di tipo “Normalmente
Aperto”.
ANTENNA Ingresso di collegamento dell'antenna per ricevitore radio (l'antenna è incorporata su LUCY B).
* Possono essere collegati solo dispositivi contenenti il solo elettromagnete.
Non impiegare dispositivi diversi da quelli previsti
Page 44

44
4.1) Allacciamento dell’alimentazione
L'allacciamento dell'alimentazione a TEN deve essere eseguito da personale esperto, qualificato, in possesso dei
requisiti richiesti e nel pieno rispetto di leggi, norme e regolamenti.
Non appena viene fornita tensione a TEN è consigliabile fare alcune semplici verifiche:
1. Verificare che il led BLUEBus lampeggi velocemente per qualche secondo e poi lampeggi regolarmente alla frequenza di un lampeggio al
secondo (figura 31).
2. Se presenti le fotocellule, verificare che lampeggino anche i led sulle fotocellule (sia su TX che su RX); non è significativo il tipo di lampeggio, dipende da altri fattori.
3. Verificare che il dispositivo collegato all'uscita FLASH sia spento
4. Verificare che la luce di cortesia sia spenta.
Se tutto questo non avviene occorre spegnere immediatamente l'alimentazione alla centrale e controllare con maggiore attenzione i collegamenti elettrici.
Altre informazioni utili per la ricerca e la diagnosi dei guasti sono presenti nel paragrafo “7.6 Risoluzione dei problemi”.
!
4.2) Apprendimento dei dispositivi
Dopo l'allacciamento dell'alimentazione occorre far riconoscere alla centrale i dispositivi collegati sugli ingressi BlueBUS e STOP. Prima di questa fase i led L1 ed L2 lampeggiano per
indicare che occorre eseguire l'apprendimento dei dispositivi.
La fase di apprendimento dei dispositivi deve essere eseguita anche se non
c'è nessun dispositivo collegato.
1. Premere e tenere premuti i tasti [▲] e [Set] (Figura 20).
2. Rilasciare i tasti quando i led L1 e L2 iniziano a lampeggiare molto velocemente (dopo
circa 3s).
3. Attendere alcuni secondi che la centrale finisca l'apprendimento dei dispositivi.
Al termine dell'apprendimento il led STOP deve rimanere acceso, i led L1 e L2 si spegneranno (eventualmente inizieranno a lampeggiare i led L3 e L4).
La fase di apprendimento dispositivi collegati può essere rifatta in qualsiasi momento anche
dopo l'installazione per esempio se venisse aggiunto un dispositivo.
!
20
4) Verifiche finali ed avviamento
3.5.2) Collegamento elettrico secondo motore
Se l'installazione prevede l'uso di 2 motori, un TN2010 e un TN2020,
è necessario eseguire il collegamento elettrico al secondo motore
come descritto di seguito.
1. Al motoriduttore TN2010 eseguire gli stessi collegamenti previsti
per installazione a singolo motore.
2. Tra la centrale di comando dell' TN2010 e la morsettiera dell'
TN2020 eseguire il collegamento dei cavi “secondo motore” e
“luce di cortesia secondo motore” come illustrato in (Figura 19),
rispettando le polarità indicate.
19
Page 45

45
I
4.3) Apprendimento delle posizioni di apertura e chiusura del portone
Dopo l'apprendimento dei dispositivi è necessario far riconoscere alla centrale le posizioni di apertura e chiusura del portone; oltre ad alcune posizioni opzionali, complessivamente vi sono 6 posizioni:
Posizione Led Significato
FCA L1 Quota di massima apertura. Quando il portone arriva in questa posizione si ferma.
RA L2 Quota di inizio rallentamento durante la manovra di apertura; quando il portone arriva in questa posizione il motore decelera
portandosi alla velocità minima.
RI L4 Quota di rallentamento intermedio nella manovra di chiusura. Programmando questo punto il portone decelera circa 50cm
prima, in modo da passare la posizione RINT a velocità minima. Superata la quota RI il motore si riporta alla velocità
programmata.
AP L5 Quota di apertura parziale. È la posizione in cui il portone si arresta dopo aver dato un comando di apertura parziale.
RC L7 Quota di inizio rallentamento durante la manovra di chiusura; quando il portone arriva in questa posizione il motore decelera
portandosi alla velocità minima.
FCC L8 Quota di massima chiusura; quando il portone arriva in questa posizione si ferma.
Durante queste manovre la centrale memorizza la forza necessaria
nei movimenti di apertura e chiusura.
E' importante che queste prime manovre non vengano
interrotte, es. da un comando di STOP.
La fase di apprendimento delle posizioni può essere rifatta in qualsiasi momento anche dopo l'installazione; basta ripeterla dal punto
1. Se fosse è necessario modificare una sola quota basta saltare la
programmazione delle quote non interessate premendo 2 volte velocemente il tasto [Set] per ogni posizione da saltare.
21
Quando le quote non sono state acquisite lampeggiano i led L3 e L4.
Di seguito è descritta la procedura per la memorizzazione delle posizioni. Le quote FCA e FCC devono essere programmate obbligatoriamente mentre le altre quote sono opzionali; in quest'ultimo caso verranno calcolate automaticamente dalla centrale.
1. Premere [Set] + [▼] per 3 secondi per entrare in memorizzazione quote. (Figura 21)
Lampeggia il led L1: programmazione quota FCA
2. Con i tasti [▲] o [▼] spostare il portone nella posizione di apertura.
3. Premere il tasto [Set] per 2 secondi per confermare la quota FCA. Il led L1 rimane acceso.
Lampeggia il led L2: programmazione quota RA
4. Se non si vuole programmare la quota di rallentamento apertura, premere 2 volte velocemente il tasto [Set] per saltare alla
prossima programmazione, il led L2 rimane spento. Altrimenti proseguire con la sequenza.
5. Con i tasti [▲] o [▼] spostare il portone nella posizione di rallentamento apertura.
6. Premere il tasto [Set] per 2 secondi per confermare la quota RA. Il led L2 rimane acceso.
Lampeggia il led L4: programmazione quota RI
7. Se non si vuole programmare la quota di rallentamento intermedio, premere 2 volte velocemente il tasto [Set] per saltare alla
prossima programmazione, il led L4 rimane spento. Altrimenti proseguire con la sequenza.
8. Con i tasti [▲] o [▼] spostare il portone nella posizione di rallentamento intermedio.
9. Premere il tasto [Set] per 2 secondi per confermare la quota RI. Il led L4 rimane acceso.
Lampeggia il led L5: programmazione quota AP
10. Se non si vuole programmare la quota di apertura parziale, premere 2 volte velocemente il tasto [Set] per saltare alla prossima
programmazione, il led L5 rimane spento. Altrimenti proseguire con la sequenza.
11. Con i tasti [▲] o [▼] spostare il portone nella posizione di apertura parziale.
12. Premere il tasto [Set] per 2 secondi per confermare la quota AP. Il led L5 rimane acceso.
Lampeggia il led L7: programmazione quota RC
13. Se non si vuole programmare la quota di rallentamento chiusura, premere 2 volte velocemente il tasto [Set] per saltare alla
prossima programmazione, il led L7 rimane spento. Altrimenti proseguire con la sequenza.
14. Con i tasti [▲] o [▼] spostare il portone nella posizione di rallentamento chiusura.
15. Premere il tasto [Set] per 2 secondi per confermare la quota RC. Il led L7 rimane acceso.
Lampeggia il led L8: programmazione quota FCC
16. Con i tasti [▲] o [▼] spostare il portone nella posizione di chiusura.
17. Premere il tasto [Set] per 2 secondi per confermare la quota FCC. led L8 rimane acceso.
18. Rilasciando il tasto [Set] si spengono tutti il led.
19. Dare un comando di apertura premendo il tasto [Open] per eseguire una manovra completa di apertura.
20. Dare un comando di chiusura premendo il tasto [Close] per eseguire una manovra completa di chiusura.
Page 46

46
Questa è la fase più importante nella realizzazione dell'automazione
al fine di garantire la massima sicurezza. Il collaudo può essere usato anche come verifica periodica dei dispositivi che compongono
l'automatismo.
Il collaudo dell'intero impianto deve essere eseguito da
personale esperto e qualificato che deve farsi carico delle prove richieste, in funzione del rischio presente e di
verificare il rispetto di quanto previsto da leggi, normative
e regolamenti, ed in particolare tutti i requisiti della norma EN12445 che stabilisce i metodi di prova per la verifica degli automatismi per cancelli e porte
!
5) Collaudo e messa in servizio
4.6) Ricevitore radio
Per il comando a distanza di TEN, sulla centrale di controllo è previsto l'innesto SM per ricevitori radio opzionali tipo SMXI, SMXIS o
OXI. Per inserire il ricevitore radio occorre spegnere l'alimentazione a
TEN ed eseguire l'operazione indicata in figura 22. In tabella 7 è
descritta l'associazione tra l'uscita dei ricevitori radio SMXI e SMXIS
ed il comando che TEN eseguirà:
Nel caso venga utilizzato il ricevitore radio OXI della linea NiceOpera,
con il MODO II ESTESO il ricevitore potrà inviare i seguenti comandi:
Uscita N°1 Comando “P.P.” (Passo-Passo)
Uscita N°2 Comando “Apertura parziale”
Uscita N°3 Comando “Apre”
Uscita N°4 Comando “Chiude”
Tabella 7: comandi con ricevitore SMXI, SMXIS
Comando n°1 Passo-Passo
Comando n°2 Apre parziale 1
Comando n°3 Apre
Comando n°4 Chiude
Comando n°5 Stop
Comando n°6 Passo-Passo Condominiale
Comando n°7 Passo-Passo Alta priorità
Comando n°8 Apre parziale 2
Comando n°9 Apre parziale 3
Comando n°10 Apre e Blocca automazione
Comando n°11 Chiudee Blocca automazione
Comando n°12 Blocca automazione
Comando n°13 Sblocca automazione
Comando n°14 On Timer Luce di Cortesia
Comando n°15 On-Off Luce di Cortesia
Tabella 8: comandi con ricevitore OXI
22
4.4) Verifica del movimento del portone
Dopo l'apprendimento delle posizioni è consigliabile effettuare alcune manovre per verificare il corretto movimento del portone.
1. Premere il tasto [OPEN] per comandare una manovra di “Apre”; verificare che l'apertura del portone avvenga regolarmente senza variazioni di velocità; verificare che venga eseguito il rallentamento in apertura nella posizione programmata.
2. Premere il tasto [CLOSE] per comandare una manovra di “Chiude”; verificare che la chiusura del portone avvenga con una partenza lenta, quindi ci sia il cambio di velocità ed infine venga eseguito il rallentamento in chiusura nella posizione programmata.
3. Durante le manovra verificare che il lampeggiante effettui i lampeggi con periodi di 0,5s acceso e 0,5s spento.
4. Effettuare varie manovre di apertura e chiusura con lo scopo di evidenziare eventuali difetti di montaggio e regolazione o altre anomalie
come ad esempio punti con maggior attrito.
5. resistente anche durante le brusche accelerazioni o decelerazioni del movimento del portone.
4.5) Funzioni preimpostate
La centrale di controllo di TEN dispone di alcune funzioni programmabili, di fabbrica queste funzioni vengono regolate in una configurazione
che dovrebbe soddisfare la maggior parte delle automazioni; comunque le funzioni possono essere cambiate in qualsiasi momento attraverso una opportuna procedura di programmazione, a questo scopo vedere paragrafo “7.2 Programmazioni”.
5.1) Collaudo
Ogni singolo componente dell'automatismo, ad esempio bordi sensibili, fotocellule, arresto di emergenza, ecc. richiede una specifica
fase di collaudo; per questi dispositivi si dovranno eseguire le procedure riportate nei rispettivi manuali istruzioni.
Per il collaudo di TEN eseguire la seguente sequenza di operazioni:
1. Verificare che sia stato rispettato rigorosamente tutto quanto previsto nel presente manuale ed in particolare nel capitolo “1 Avvertenze”.
2. Sbloccare il portone ruotando la maniglia i senso antiorario (Figura 40) di sblocco di ogni motore; verificare che sia possibile muovere manualmente il portone in apertura e in chiusura con una forza non superiore a 225N agendo nel punto previsto per la manovra manuale.
3. Bloccare i motori al portone ruotando la maniglia di sblocco in
senso orario (Figura 41).
Page 47

47
I
4. Utilizzando i dispositivi di comando o arresto previsti (selettore a
chiave, pulsanti di comando o trasmettitori radio), effettuare delle
prove di apertura, chiusura ed arresto del portone e verificare che
il comportamento corrisponda a quanto previsto.
5. Conviene eseguire diverse prove al fine di valutare la scorrevolezza del portone ed eventuali difetti di montaggio o regolazione
nonché la presenza di particolari punti d'attrito.
6. Verificare uno ad uno il corretto funzionamento di tutti i dispositivi di sicurezza presenti nell'impianto (fotocellule, bordi sensibili,
arresto di emergenza, ecc.); in particolare, ogni volta che un
dispositivo interviene il led OK sulla centrale deve eseguire 2 lampeggi più veloci a conferma che la centrale riconosce l'evento.
7. Per la verifica delle fotocellule ed in particolare che non vi siano
interferenze con altri dispositivi, passare un cilindro di diametro
5cm e lunghezza 30cm sull'asse ottico prima vicino al TX, poi
vicino all'RX e infine al centro tra i due e verificare che in tutti i casi
il dispositivo intervenga passando dallo stato di attivo a quello di
allarme e viceversa. Infine verificare che provochi nella centrale
l'azione prevista; esempio: nella manovra di chiusura provoca l'inversione di movimento.
8. Se le situazioni pericolose provocate dal movimento dell'anta
sono state salvaguardate mediante la limitazione della forza d'impatto si deve eseguire la misura della forza secondo quanto previsto dalla norma EN 12445. Se la regolazione della “Velocità” ed
il controllo della “Forza Motore” vengono usati come ausilio al
sistema per la riduzione della forza d'impatto, provare e trovare le
regolazione che offrono i migliori risultati.
5.2) Messa in servizio
La messa in servizio può avvenire solo dopo aver eseguito con esito positivo tutte le fasi di collaudo di TEN e degli altri dispositivi presenti. E' vietata la messa in servizio parziale o in situazioni “provvisorie”.
1. Realizzare e conservare per almeno 10 anni il fascicolo tecnico dell'automazione che dovrà comprendere almeno: disegno complessivo dell'automazione, schema dei collegamenti elettrici, analisi dei
rischi e relative soluzioni adottate, dichiarazione di conformità del
fabbricante di tutti i dispositivi utilizzati (per TEN utilizzare la Dichiarazione CE di conformità allegata); copia del manuale di istruzioni
per l'uso e del piano di manutenzione dell'automazione.
2. Apporre sul portone una targhetta contenente almeno i seguenti
dati: tipo di automazione, nome e indirizzo del costruttore (responsabile della “messa in servizio”), numero di matricola, anno di
costruzione e marchio “CE”.
3. Fissare in maniera permanente in prossimità del portone un'etichetta o una targa con indicate le operazioni per lo sblocco e la
manovra manuale
4. Fissare in maniera permanente sul portone una etichetta o targa
con questa immagine (altezza minima 60mm). (Figura 23)
5. Realizzare e consegnare al proprietario la dichiarazione di conformità dell'automazione.
6. Realizzare e consegnare al proprietario il manuale di “Istruzioni ed
avvertenze per l'uso dell'automazione”.
7. Realizzare e consegnare al proprietario il piano di manutenzione
dell'automazione (che deve raccogliere tutte le prescrizioni sulla
manutenzione dei singoli dispositivi).
8. Prima di mettere in servizio l'automatismo informare adeguatamente ed in forma scritta il proprietario (ad esempio sul manuale di
istruzioni ed avvertenze per l'uso dell'automazione) sui pericoli ed i
rischi ancora presenti.
23
Page 48

48
7.2) Programmazioni
Sulla centrale di controllo di TEN sono disponibili alcune funzioni programmabili; la regolazione delle funzioni avviene attraverso 3 tasti
presenti sulla centrale: [▲] [Set] [▼] e vengono visualizzate attraverso 8 led: L1….L8.
Le funzioni programmabili disponibili su TEN sono disposte su 2 livelli:
Primo livello: funzioni regolabili in modo ON-OFF (attivo oppure
non attivo); in questo caso ogni led L1….L8 indica una funzione, se
acceso la funzione è attiva, se spento la funzione non è attiva; vedere Tab. 8.
Secondo livello: parametri regolabili su una scala di valori (valori
da 1 a 8); in questo caso ogni led L1….L8 indica il valore regolato
tra i 8 possibili; vedere Tab. 10.
In questo capitolo verranno trattate le possibilità di programmazione, personalizzazione, diagnostica e ricerca guasti su TEN.
Durante la manovra, indipendentemente da apertura o chiusura, tutti
i tasti eseguono la funzione di STOP arrestando la corsa del motore.
!
7) Approfondimenti
Il tasto “OPEN” permette di comandare l'apertura del portone; oppure di
spostare verso l'alto il punto di programmazione.
Il tasto “STOP” permette di fermare la manovra;
se premuto per più di 5 secondi permette di entrare in programmazione.
Il tasto “CLOSE” permette di comandare la chiusura del portone; oppure
di spostare verso il basso il punto di programmazione.
7.1) Tasti di programmazione
Sulla centrale di controllo di TEN sono presenti 3 tasti che possono essere usati sia
per il comando della centrale durante le prove sia per le programmazioni (Figura 25).
25
▲
OPEN
STOP
SET
CLOSE
▼
In questo capitolo sono riportate le informazioni per la realizzazione del piano di manutenzione e lo smaltimento di TEN.
6) Manutenzione e smaltimento
6.1) Manutenzione
Per mantenere costante il livello di sicurezza e per garantire la massima
durata dell'intera automazione è necessaria una manutenzione regolare.
La manutenzione deve essere effettuata nel pieno rispetto delle prescrizioni sulla sicurezza del presente manuale e
secondo quanto previsto dalle leggi e normative vigenti.
Per gli altri dispositivi diversi da TEN seguire quanto previsto nei
rispettivi piani manutenzione.
1. Per TEN è necessaria una manutenzione programmata al massimo
entro 6 mesi o 4.000 manovre dalla precedente manutenzione:
2. Scollegare qualsiasi sorgente di alimentazione elettrica.
3. Verificare lo stato di deterioramento di tutti i materiali che compon-
gono l'automazione con particolare attenzione a fenomeni di erosione o di ossidazione delle parti strutturali; sostituire le parti che
non forniscono sufficienti garanzie.
4. Verificare lo stato di usura delle parti in movimento: bracci telescopici, funi dei contrappesi e tutte le parti dell'anta, sostituire la parti
usurate.
5. Ricollegare le sorgenti di alimentazione elettrica ed eseguire tutte le
prove e le verifiche previste nel paragrafo “5.1 Collaudo”.
!
6.2) Smaltimento
Come per l'installazione, anche al termine della vita di questo prodotto, le operazioni di smantellamento devono essere eseguite da
personale qualificato. Questo prodotto è costituito da vari tipi di
materiali, alcuni possono essere riciclati altri devono essere smaltiti;
informatevi sui sistemi di riciclaggio o smaltimento previsti dai regolamenti locali per questa categoria di prodotto.
Alcune parti del prodotto possono contenere sostanze
inquinanti o pericolose, se disperse potrebbero provocare
effetti dannosi sull'ambiente e sulla salute umana.
Come indicato dal simbolo di Figura 24 è vietato gettare questo prodotto nei rifiuti domestici. Eseguire la “raccolta separata” per lo smaltimento secondo i metodi previsti dai regolamenti locali; oppure
riconsegnare il prodotto al venditore nel momento dell'acquisto di un
nuovo prodotto equivalente.
Regolamenti locali possono prevedere pesanti sanzioni in caso di
smaltimento abusivo di questo prodotto.
1. Scollegare l'alimentazione elettrica dall'automatismo, compresa
la batteria tampone
2. Smontare tutti i dispositivi ed accessori, seguendo il procedimento inverso a quello descritto nel capitolo “3 Installazione”
3. Separare per quanto possibile le parti che possono o devono
essere riciclate o smaltite in modo diverso, ad esempio le parti
metalliche da quelle plastiche, le schede elettroniche, le batterie
ecc.
4. Smistare ed affidare i vari materiali così separati ai centri abilitati
al recupero ed allo smaltimento previsti a livello locale
!
24
Page 49

49
I
Led Funzione Descrizione
L1 Chiusura Automatica Questa funzione permette una chiusura automatica del portone dopo il tempo pausa programmato, di
fabbrica il Tempo Pausa è posto a 30 secondi ma può essere modificato a 10, 20, 40, 60, 80, 120, 160 e
200 secondi.
Se la funzione non è attivata, il funzionamento è “semiautomatico”.
L2 Richiudi Dopo Foto Questa funzione permette di tenere il portone aperto solo per il tempo necessario al transito, infatti
l'intervento di “Foto” provoca sempre una richiusura automatica con un tempo pausa di 5s
(indipendentemente dal valore programmato). Il comportamento cambia a seconda che sia attiva o meno la
funzione di “Chiusura Automatica”.
Con “Chiusura Automatica” non attiva: Il portone raggiunge sempre la posizione di totale apertura
(anche se il disimpegno di Foto avviene prima). Al disimpegno di Foto si provoca la richiusura automatica
con una pausa di 5s.
Con “Chiusura Automatica” attiva: la manovra di apertura si arresta subito dopo il disimpegno delle
fotocellule e si provoca la richiusura automatica con una pausa di 5s.
La funzione di “Richiudi Dopo Foto” viene sempre disabilitata nelle manovre interrotte con un comando di
Stop. Se la funzione “Richiudi Dopo Foto” non è attiva il tempo di pausa sarà quello programmato o non ci
sarà richiusura automatica se la funzione non è attiva.
L3 Chiude Sempre La funzione “Chiude Sempre” interviene, provocando una chiusura, quando al ritorno dell'alimentazione
viene rilevato il portone aperto.
Per questioni di sicurezza la manovra viene preceduta da 3s di prelampeggio.
Se la funzione non è attiva, al ritorno dell'alimentazione il portone rimarrà fermo.
L4 Stand-By Questa funzione permette di ridurre al massimo i consumi. Se questa funzione è attiva, dopo 1 minuto dal
termine della manovra, la centrale spegne l'uscita BlueBUS (e quindi i dispositivi) e tutti i led ad esclusione
del led BlueBUS che lampeggerà più lentamente. Quando la centrale riceve un comando ripristina il pieno
funzionamento. Se la funzione non è attiva non ci sarà riduzione dei consumi.
L5 Inversione lunga Questa funzione permette di selezione il tipo inversione che il portone esegue a causa dell'intervento di
STOP o del limitatore di forza. Se la funzione non è attiva l'inversione è breve (15cm circa). Se la funzione è
attiva l'inversione avviene fino alla quota di apertura o chiusura massima.
L6 Prelampeggio Con la funzione di prelampeggio viene aggiunta una pausa di 3s tra l'accensione del lampeggiante e l'inizio
della manovra per avvertire in anticipo della situazione di pericolo. Se il prelampeggio non è attivo
l'accensione del lampeggiante coincide con l'inizio manovra.
L7 Sensibilità Questa funzione permette di aumentare notevolmente la sensibilità del motore nella rilevazione ostacoli.
Se viene utilizzata come ausilio per la rilevazione della forza d'impatto regolare anche i parametri “Velocità” e
“Forza motore” nel menù di secondo livello.
L8 2 motori Questa funzione deve essere attivata quando l'installazione viene eseguita con 2 motori.
Durante il funzionamento normale di TEN, cioè quando non è in corso nessuna manovra, i led L1….L8 sono accesi o spenti in base allo
stato della funzione che rappresentano, ad esempio L1 è acceso se è attiva la “Chiusura automatica”.
Durante la manovra L1…L8 lampeggiano indicando la forza necessaria per muovere il portone in quel momento. Se lampeggia L8 la forza
necessaria è bassa e così via fino al lampeggio di L1 che indica la forza massima.
Si fa notare che non vi è alcuna relazione tra il livello di forza indicato dai led durante il movimento (che è un valore assoluto) ed il livello indicato
dai led durante la programmazione della forza (che è un valore relativo). Vedere L5 e L6 in tabella 10.
Tabella 8: elenco funzioni programmabili: primo livello
7.2.1) Funzioni primo livello (funzioni ON-OFF)
7.2.2) Programmazione primo livello (funzioni ON-OFF)
Di fabbrica le funzioni del primo livello sono poste tutte “OFF” ma si possono cambiare in qualsiasi momento come descritto di seguito. Fare
attenzione nell'eseguire la procedura perché c'è un tempo massimo di 10s tra la pressione di un tasto e l'altro, altrimenti la procedura finisce automaticamente memorizzando le modifiche fatte fino a quel momento.
1. Premere e tener premuto il tasto [Set] per circa 3s
3s
2. Rilasciare il tasto [Set] quando il led L1 inizia a lampeggiare
3. Premere i tasti [▲] o [▼] per spostare il led lampeggiante sul led che rappresenta la funzione
da modificare
4. Premere il tasto [Set] per cambiare lo stato della funzione (lampeggio breve = OFF;
lampeggio lungo = ON)
5. Attendere 10s per uscire dalla programmazione per fine tempo massimo
10s
Nota: i punti 3 e 4 possono essere ripetuti durante le stessa fase di programmazione per porre ON o OFF altre funzioni.
Tabella 9: per cambiare le funzioni ON-OFF Esempio
L1
o
SET
SET
SET
Page 50

50
7.2.3) Funzioni secondo livello (parametri regolabili)
Tabella 10: elenco funzioni programmabili: secondo livello
Tempo
Pausa
Funzione P.P.
Velocità
Motore
Uscita
FLASH
Forza motore
in apertura
Forza motore
in chiusura
Avviso di
manutenzione
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
10 secondi
20 secondi
40 secondi
60 secondi
80 secondi
120 secondi
160 secondi
200 secondi
Apre - stop - chiude - stop
Apre - stop - chiude- apre
Apre - chiude - apre - chiude
Condominiale
Condominiale 2 (più di 2” fa stop)
Passo-Passo 2 (meno di 2” fa apre parziale)
Uomo presente
Apertura in “semiautomatico”, chiusura a “uomo presente”
Velocità 1 (30% - lenta)
Velocità 2 (44%)
Velocità 3 (58%)
Velocità 4 (72%)
Velocità 5 (86%)
Velocità 6 (100% - veloce)
Apre V4, chiude V2
Apre V6, chiude V4
Funzione Spia Portone Aperto
Attiva se portone chiuso
Attiva se portone aperto
Lampeggiante
Elettroblocco
Elettroserratura
Ventosa
Spia Manutenzione
Forza 1 (bassa)
Forza 2
Forza 3
Forza 4
Forza 5
Forza 6
Forza 7
Forza8 (alta)
Forza 1 (bassa)
Forza 2
Forza 3
Forza 4
Forza 5
Forza 6
Forza 7
Forza8 (alta)
Automatico (in base alla gravosità delle manovre)
1.000
2.000
4.000
6.000
8.000
10.000
12.000
Led di entrata
Parametro Led (livello) Valore Descrizione
Regola il tempo di pausa cioè
il tempo prima della richiusura
automatica. Ha effetto solo se
la chiusura automatica è attiva.
Regola la sequenza di comandi associati all'ingresso “Passo - Passo” oppure al comando radio.
Regola la velocità del motore
durante la corsa normale.
Seleziona il dispositivo collegato all'uscita FLASH. Prima di
cambiare programmazione
porre attenzione che il dispositivo collegato al morsetto FLASH
corrisponda a quanto descritto
nel paragrafo 3.4.1 “Descrizione dei collegamenti elettrici”.
Regola il sistema di controllo
della forza del motore per adeguarlo al peso del portone
durante la manovra di apertura e di conseguenza la sensibilità alla rilevazione ostacoli.
Regola il sistema di controllo
della forza del motore per adeguarlo al peso del portone
durante la manovra di chiusura e di conseguenza la sensibilità alla rilevazione ostacoli.
Regola il numero di manovre
dopo il quale segnalare la
richiesta di manutenzione dell'automazione (vedere paragrafo “7.4.3 Avviso di manutenzione”).
L1
L2
L3
L4
L5
L6
L7
Nota: “ ” rappresenta la regolazione di fabbrica SEGUE
Page 51

51
I
Elenco
anomalie
L1
L2
L3
L4
L5
L6
L7
L8
Esito 1amanovra (la più recente)
Esito 2amanovra
Esito 3amanovra
Esito 4amanovra
Esito 5amanovra
Esito 6amanovra
Esito 7amanovra
Esito 8
a
manovra
Led di entrata
Parametro Led (livello) Valore Descrizione
Permette di verificare il tipo di
anomalia intervenuta nelle ultime 8 manovre (vedere paragrafo “7.6.1 Elenco storico
anomalie”).
L8
Nota: “ ” rappresenta la regolazione di fabbrica
Tutti i parametri possono essere regolati a piacere senza nessuna controindicazione; solo le regolazioni di “Forza motore in apertura” “Forza
motore in chiusura” potrebbero richiedere una attenzione particolare:
• E' sconsigliato utilizzare valori alti di forza per compensare il fatto che l'anta abbia dei punti di attrito anomali; una forza eccessiva può pre-
giudicare il funzionamento del sistema di sicurezza o danneggiare l'anta.
• Se il controllo della “Forza motore” viene usato come ausilio al sistema per la riduzione della forza di impatto, dopo ogni regolazione ripe-
tere la misura della forza, come previsto dalla norma EN 12445.
• L'usura e le condizioni atmosferiche influiscono sul movimento del portone, periodicamente e necessario ricontrollare la regolazione della
forza.
7.2.4) Programmazione secondo livello (parametri regolabili)
Di fabbrica i parametri regolabili sono posti come evidenziato in Tab. 10 con: “ ” ma si possono cambiare in qualsiasi momento come
descritto di seguito. Fare attenzione nell'eseguire la procedura perché c'è un tempo massimo di 10s tra la pressione di un tasto e l'altro, altrimenti la procedura finisce automaticamente memorizzando le modifiche fatte fino a quel momento.
1. Premere e tener premuto il tasto [Set] per circa 3s
3s
2. Rilasciare il tasto [Set] quando il led L1 inizia a lampeggiare
3. Premere i tasti [▲] o [▼] per spostare il led lampeggiante sul “led di entrata” che rappresenta il
parametro da modificare
4. Premere e mantenere premuto il tasto [Set], il tasto [Set] va mantenuto premuto
durante tutti i passi 5 e 6
5. Attendere circa 3s dopodiché si accenderà il led che rappresenta il livello attuale del parametro da
modificare
6. Premere i tasti [▲] o [▼] per spostare il led che rappresenta il valore del parametro.
7. Rilasciare il tasto [Set]
8. Attendere 10s per uscire dalla programmazione per fine tempo massimo
10s
Nota: i punti da 3 a 7 possono essere ripetuti durante le stessa fase di programmazione per regolare più parametri
Tabella 11: per cambiare i parametri regolabili Esempio
L1
o
o
7.2.5) Esempio di programmazione primo livello (funzioni ON-OFF)
Come esempio viene riportata la sequenza di operazioni per cambiare l'impostazione di fabbrica delle funzioni di “Chiusura Automatica” (L1)
e “Chiude Sempre” (L3).
1. Premere e tener premuto il tasto [Set] per circa 3s
3s
2. Rilasciare il tasto [Set] quando il led L1 inizia a lampeggiare
3. Premere una volta il tasto [Set] per cambiare lo stato della funzione associata ad L1
(Chiusura Automatica) ora il led L1 lampeggia con lampeggio lungo
4. Premere 2 volte il tasto [▼] per spostare il led lampeggiante sul led L3
5. Premere 1 volta il tasto [Set] per cambiare lo stato della funzione associala ad L3
(Chiude Sempre) ora il led L3 lampeggia con lampeggio lungo
6. Premere 1 volta il tasto [Set] per cambiare lo stato della funzione associata ad L3 (Chiusura Automatica)
ora il led L3 lampeggia con lampeggio lungo
7. Attendere 10s per uscire dalla programmazione per fine tempo massimo
10s
Al termine di queste operazioni i led L1 ed L3 devono rimanere accesi ad indicare che sono attive le funzioni di “Chiusura Automatica” e
“Chiude Sempre”.
Tabella 12: esempio di programmazione primo livello Esempio
L1
L1
L3
L3
L3
SET
SET
SET
SET
SET
SET
SET
SET
SET
Page 52

52
7.2.6) Esempio di programmazione secondo livello (parametri regolabili)
Come esempio viene riportata la sequenza di operazioni per cambiare l'impostazione di fabbrica dei parametri e regolare il “Tempo Pausa”
a 60 secondi (entrata su L1 e livello su L4) e portare la “Velocità” a L6 (entrata su L4 e livello su L6).
1. Premere e tener premuto il tasto [Set] per circa 3s
3s
2. Rilasciare il tasto [Set] quando il led L1 inizia a lampeggiare
3. Premere e mantenere premuto il tasto [Set]; il tasto [Set] va mantenuto premuto durante tutti
i passi 4 e 5
4. Attendere circa 3s fino a che si accenderà il led L3 che rappresenta il livello attuale del “Tempo Pausa”
3s
5. Premere 1 volta il tasto [▼] per spostare il led acceso su L3 che rappresenta il nuovo valore del
“Tempo Pausa”
6. Rilasciare il tasto [Set]
7. Premere 2 volte il tasto [▼] per spostare il led lampeggiante sul led L3
L3
8. Premere e mantenere premuto il tasto [Set]; il tasto [Set] va mantenuto premuto durante tutti i
passi 9 e 10
9. Attendere circa 3s fino a che si accenderà il led L4 che rappresenta il livello attuale della
“Velocità motore”. 3s
10. Premere 2 volte il tasto [▼] per spostare il led acceso su L6 che rappresenta il nuovo valore della
“Velocità motore”. L3
11. Rilasciare il tasto [Set]
12. Attendere 10s per uscire dalla programmazione per fine tempo massimo.
10s
Tabella 13: esempio di programmazione secondo livello Esempio
7.3) Aggiunta o rimozione dispositivi
Ad una automazione con TEN è possibile aggiungere o rimuovere dispositivi in qualsiasi momento. In particolare a “BlueBUS” ed all'ingresso “STOP” possono essere collegati vari tipi di dispositivi come indicato nei paragrafi seguenti. Dopo aver aggiunto o rimosso dei dispositivi è necessario rifare l'apprendimento dei dispositivi come descritto nel paragrafo “7.3.5 Apprendimento altri dispositivi”.
7.3.1) BlueBUS
BlueBUS è una tecnica che permette di effettuare i collegamenti dei dispositivi compatibili con soli due conduttori sui quali transita sia l'alimentazione elettrica che i segnali di comunicazione. Tutti i dispositivi vengono collegati in parallelo sugli stessi 2 conduttori di BlueBUS e senza necessità di rispettare alcuna polarità; ogni dispositivo viene riconosciuto singolarmente poiché durante l'installazione gli viene assegnato
un indirizzo univoco. A BlueBUS si possono collegare ad esempio: fotocellule, dispositivi di sicurezza, pulsanti di comando, spie di segnalazione ecc. La centrale di controllo di TEN riconosce uno ad uno tutti i dispositivi collegati attraverso un'opportuna fase di apprendimento ed
è in grado di rilevare con estrema sicurezza tutte le possibili anomalie. Per questo motivo ogni volta che viene aggiunto o tolto un dispositivo collegato a BlueBUS occorrerà eseguire, nella centrale, la fase di apprendimento come descritto nel paragrafo “7.3.5 Apprendimento altri
dispositivi”.
L1
L3
L3
L4
7.3.2) Ingresso STOP
STOP è l'ingresso che provoca l'arresto immediato della manovra
seguito da una breve inversione. A questo ingresso possono essere
collegati dispositivi con uscita a contatto normalmente aperto “NA”,
normalmente chiuso “NC”, OPTO SENSOR oppure dispositivi con
uscita a resistenza costante 8,2KΩ, ad esempio bordi sensibili.
Come per BlueBUS, la centrale riconosce il tipo di dispositivo collegato all'ingresso STOP durante la fase di apprendimento (vedere
paragrafo “7.3.5 Apprendimento altri dispositivi”); successivamente
viene provocato uno STOP quando si verifica una qualsiasi variazione rispetto allo stato appreso.
Con opportuni accorgimenti è possibile collegare all'ingresso STOP
più di un dispositivo, anche di tipo diverso:
• Più dispositivi NA si possono collegare in parallelo tra di loro sen-
za alcun limite di quantità.
• Più dispositivi NC si possono collegare in serie tra di loro senza
alcun limite di quantità.
• Due dispositivi con uscita a resistenza costante 8,2KΩ si possono collegare in parallelo; se vi sono più di 2 dispositivi allora tutti
devono essere collegati “in cascata” con una sola resistenza di
terminazione da 8,2KΩ.
• E' possibile la combinazione di NA ed NC ponendo i 2 contatti in
parallelo con l'avvertenza di porre in serie al contatto NC una resistenza da 8,2KΩ (ciò rende possibile anche la combinazione di 3
dispositivi: NA, NC e 8,2KΩ).
Se l'ingresso STOP è usato per collegare dispositivi con
funzioni di sicurezza; solo i dispositivi con uscita a resistenza costante 8,2KΩ o dispositivi ottici OPTO SENSOR
garantiscono la categoria 3 di sicurezza ai guasti secondo
la norma EN 954-1.
!
SET
SET
SET
SET
SET
SET
Page 53

53
I
Per il collegamento di un dispositivo ottico tipo OPTO SENSOR eseguire, le connessioni come indicato in Figura 26. La corrente massima fornita sulla linea 12Vcc è di 40mA.
26
7.3.3) Fotocellule
Il sistema “BlueBUS” consente, tramite l'indirizzamento con gli appositi ponticelli, il riconoscimento delle fotocellule da parte della centrale e
di assegnare la corretta funzione di rilevazione. L'operazione di indirizzamento va fatta sia sul TX che sul RX (ponendo i ponticelli nello stesso modo) verificando che non vi siano altre coppie di fotocellule con lo stesso indirizzo.
In un automatismo per portoni basculanti automatizzato con TEN è possibile installare le fotocellule secondo quanto rappresentato in Figura 27. Dopo l'installazione o la rimozione di fotocellule occorrerà eseguire nella centrale la fase di apprendimento come descritto nel paragrafo “4.2 Apprendimento dei dispositivi”.
27
FOTO
Fotocellula esterna h = 50
con intervento in chiusura
FOTO II
Fotocellula esterna h = 100
con intervento in chiusura
FOTO 1
Fotocellula interna h = 50
con intervento sia in chiusura che in apertura
FOTO 1 II
Fotocellula interna h = 100
con intervento sia in chiusura che in apertura
FOTO 2
Fotocellula esterna
con intervento in apertura
FOTO 2 II
Fotocellula interna
con intervento in apertura
FOTO 3
CONFIGURAZIONE NON PERMESSA
Tabella 14: indirizzi delle fotocellule
Fotocellula Ponticelli Fotocellula Ponticelli
7.3.4) Selettore digitaleMOTB e lettore di prossimità per tessere a transponder MOMB
A BlueBUS è possibile collegare fino a 4 selettori digitale MOTB o lettori di tessere transponder MOMB.
Con MOTB è possibile comandare l'automazione dopo aver digitato una delle combinazioni numeriche valide e registrate in precedenza.
Con MOMB è possibile comandare l'automazione avvicinando una delle tessere a transponder valide e registrate in precedenza.
Questi dispositivi sono dotati di un codice di identificazione univoco e vengono riconosciuti dalla centrale solo dopo la sua memorizzazione
che avviene durante la fase di acquisizione dispositivi. In questo modo un eventuale tentativo fraudolento di sostituzione del dispositivo non
consentirà di comandare l'automazione.
Per ulteriori informazioni vedere il manuale di istruzioni di MOTB e MOMB.
Page 54

54
7.3.5) Apprendimento altri dispositivi
Normalmente l'operazione di apprendimento dei dispositivi collegati
a BlueBUS ed all'ingresso STOP viene eseguita durante la fase di
installazione; tuttavia se vengono aggiunti o rimossi dispositivi è possibile rifare l'apprendimento come riportato di seguito.
1. Premere e tenere premuti i tasti [▲] e [Set] (Figura 28)
2. Rilasciare i tasti quando i led L1 e L2 iniziano a lampeggiare molto velocemente (dopo circa 3s).
3. Attendere alcuni secondi che la centrale finisca l'apprendimento
dei dispositivi.
4. Al termine dell'apprendimento il led STOP deve rimanere acceso, i led L1 e L2 si spegneranno (eventualmente inizieranno a
lampeggiare i led L3 e L4).
Dopo aver aggiunto o rimosso dei dispositivi è necessario
eseguire nuovamente il collaudo dell'automazione secondo quanto indicato nel paragrafo “5.1 Collaudo”.
28
7.3.6) Cancellazione totale memoria
7.3.7) Programmazione della direzione di rotazione del motore
Quando è necessario eseguire una cancellazione totale e riportare i valori di fabbrica eseguire la seguente procedura quando il motore è fermo.
1. Premere [▲]+[▼] per 3 secondi, rilasciare i tasti quando si accendono contemporaneamente tutti i led.
Terminata la procedura i led L1 e L2 lampeggiano.
Questa procedura non modifica il parametro relativo alla direzione di rotazione di Ten né la posizione encoder.
Di fabbrica Ten è impostato per eseguire la manovra di apertura come in figura 5. E’ possibile invertire il verso di rotazione tramite programmazione per eseguire la manovra di apertura come in figura 7.
Procedura di programmazione della direzione di rotazione del motore
1. Premere e tener premuto il tasto [Set] per circa 3s
2 Rilasciare il tasto [Set] quando il led L1 inizia a lampeggiare
3. Premere contemporaneamente i tasti [▲]e[▼] per modificare la direzione del motore
4. Rilasciare i tasti [▲]e[▼]
• se la luce di cortesia è accesa è stata programmata la direzione di rotazione del motore invertita;
• se la luce di cortesia è spenta è stata programmata la direzione di rotazione del motore standard.
5. Attendere 10s per uscire dalla programmazione per fine tempo massimo
Nota: i punti 3 e 4 possono essere ripetuti durante le stessa fase di programmazione cambiando la direzione di rotazione del motore.
Quando viene modificata la direzione di rotazione del motore è necessario eseguire nuovamente la procedura di
“Memorizzazione delle posizioni”.
Verifica della direzione di rotazione del motore programmata
Per verificare quale direzione di rotazione del motore è stata programmata eseguire la seguente procedura.
1. Togliere alimentazione a Ten (staccando la spina o togliendo il fusibile)
2. Dare alimentazione a Ten
3. Dopo il lampeggio iniziale dei led L1 … L8 si accende per qualche secondo un solo led che segnala la posizione encoder.
4. Nello stesso momento in cui viene segnalata la posizione encoder controllare la luce di cortesia:
• se la luce di cortesia si accende è stata programmata la direzione di rotazione del motore invertita;
• se la luce di cortesia è spenta è stata programmata la direzione di rotazione del motore standard.
Page 55

55
I
7.4) Funzioni particolari
7.4.1) Funzione “Apri sempre”
La funzione “Apri sempre” è una proprietà della centrale di controllo che permette di comandare sempre una manovra di apertura quando il
comando di “Passo-Passo” ha una durata superiore a 3 secondi; ciò è utile ad esempio per collegare al morsetto PP il contatto di un orologio programmatore per mantenere aperto il portone per una certa fascia oraria. Questa proprietà è valida qualunque sia la programmazione
dell'ingresso di PP, (vedere “Funzione PP” in tabella 10).
7.4.2) Funzione “Muovi comunque”
Nel caso qualche dispositivo di sicurezza non dovesse funzionare correttamente o fosse fuori uso, è possibile comunque comandare e muovere il portone in modalità “Uomo presente”. Per i dettagli vedere il paragrafo “Comando con sicurezze fuori uso” presente nell'allegato “Istruzioni ed avvertenze destinate all'utilizzatore del motoriduttore TEN”.
7.4.3) Avviso di manutenzione
TEN consente di avvisare l'utente che è neccessario eseguire un controllo di manutenzione dell'automazione.
Il numero di manovre dopo il quale avviene la segnalazione è selezionabile tra 8 livelli, mediante il parametro regolabile “Avviso di manutenzione” (vedere Tab. 10).
Il livello 1 di regolazione è “automatico” e tiene conto della gravosità
delle manovre, cioè dello sforzo e della durata della manovra, mentre le altre regolazioni sono fissate in base al numero delle manovre.
La segnalazione di richiesta di manutenzione avviene attraverso il
lampeggiante o la Spia di manutenzione a seconda della programmazione (vedere Tab. 10). In base al numero di manovre eseguite
rispetto al limite programmato il lampeggiante Flash e la spia manutenzione danno le segnalazioni riportate in Tab. 15.
Numero manovre Segnalazione su Flash Segnalazione su spia manutenzione
Inferiore a 80% del limite Normale (0.5s acceso, 0.5s spento) Accesa per 2s ad inizio apertura
Tra 81 e 100% del limite A inizio manovra rimane acceso per 2s poi prosegue Lampeggia durante tutta la manovra
normalmente
Oltre il 100% del limite Ad inizio e fine manovra rimane acceso per 2s poi Lampeggia sempre.
prosegue normalmente
Tabella 15: avviso di manutenzione con Flash e spia manutenzione
7.3.8) Ripristino posizione encoder
Questa procedura permette di riportare l’encoder nella posizione di fabbrica per poter eseguire il montaggio di Ten a portone chiuso.
Se è necessario cambiare la direzione di rotazione del motore eseguire prima la “Programmazione della direzione di rotazione del motore” e
poi il “Ripristino della posizione encoder”.
ATTENZIONE: LA PROCEDURA DESCRITTA DI SEGUITO DEVE ESSERE ESEGUITA SOLO A BANCO.
NON ESEGUIRE LA PROCEDURA CON IL MOTORE INSTALLATO AL PORTONE.
1. Premere e tenere premuti i tasti [▲]e[▼] finché si accendano tutti i led da L1 a L8.
2. Rilasciare i tasti quando i led si spengono.
Dopo che tutti i led si sono spenti se ne riaccende uno solo da L1 a L8 che segnala la posizione encoder.
3. In questo momento premere e mantenere premuto il tasto [Set] finché parte il motore.
Appena il motore si avvia rilasciare il tasto
.
La centrale comanda il movimento del motore per portare la posizione dell’encoder nel led L6.
4. Dopo che il motore si è fermato si accendono tutti i led e poi si spengono, quindi verificare che il led che si riaccende sia L6.
Se ciò non si verifica rieseguire la procedura dal punto 1.
5. Terminata la sequenza rimangono lampeggianti i led L1 ed L2.
!
Page 56

56
7.5) Collegamento altri dispositivi
Se vi fosse l'esigenza di alimentare dispositivi esterni ad esempio un
lettore di prossimità per tessere a transponder oppure la luce d'illuminazione del selettore a chiave è possibile prelevare l'alimentazione
come indicato in (Figura 29). La tensione di alimentazione è 24Vcc
-30% +50% con corrente massima disponibile di 100mA.
29
7.4.4) Verifica del numero di manovre effettuate
Con la funzione di “Avviso di manutenzione” è possibile verificare il numero di manovre eseguite in percentuale sul limite impostato. Per la
verifica procedere come descritto di seguito.
1. Premere e tener premuto il tasto [Set] per circa 3s
3s
2. Rilasciare il tasto [Set] quando il led L1 inizia a lampeggiare
3. Premere i tasti [▲] o [▼] per spostare il led lampeggiante sul L7, cioè il “led di entrata” per il
parametro “Avviso si manutenzione”
4. Premere e mantenere premuto il tasto [Set], il tasto [Set] va mantenuto premuto durante tutti i
passi 5, 6 e 7
5. Attendere circa 3s dopodiché si accenderà il led che rappresenta il livello attuale del parametro
“Avviso si manutenzione” 3s
6. Premere e subito rilasciare i tasti [▲] e [▼]
7. Il led corrispondente al livello selezionato farà alcuni lampeggi. Il numero di lampeggi identifica
la percentuale di manovre effettuate (in multipli di 10%) rispetto al limite impostato. Ad esempio: con
impostato l'avviso di manutenzione su L7 cioè 10000, il 10% corrisponde a 1000 manovre; se il led di
visualizzazione fa 4 lampeggi, significa che è stato raggiunto il 40% delle manovre (cioè tra 4000
e 4999 manovre). Se non è stato raggiunto il 10% delle manovre non ci sarà nessun lampeggio.
8. Rilasciare il tasto [Set].
Tabella 16: Verifica del numero di manovre effettuate Esempio
L1
X1 = 10%
X2 = 20%
X3 = 30%
X4 = 40%
X5 = 50%
X6 = 60%
X7 = 70%
X8 = 80%
X9 = 90%
X10 = 100%
L7
o
e
7.4.5) Azzeramento contatore manovre
Dopo aver eseguito la manutenzione dell'impianto è necessario azzerare il contatore delle manovre.
Procedere come descritto in tabella 17.
1. Premere e tener premuto il tasto [Set] per circa 3s
3s
2. Rilasciare il tasto [Set] quando il led L1 inizia a lampeggiare
3. Premere i tasti [▲] o [▼] per spostare il led lampeggiante sul L7, cioè il “led di entrata” per il
parametro “Avviso si manutenzione”
4. Premere e mantenere premuto il tasto [Set], il tasto [Set] va mantenuto premuto durante tutti i
passi 5, 6 e 7
5. Attendere circa 3s dopodiché si accenderà il led che rappresenta il livello attuale del parametro
“Avviso si manutenzione” 3s
6. Premere e tenere premuto per almeno 5 secondi i tasti [▲] e [▼], quindi rilasciare i 2 tasti.
Il led corrispondente al livello selezionato eseguirà una serie di lampeggi veloci per segnalare che il
contatore delle manovre è stato azzerato.
7. Rilasciare il tasto [Set].
Tabella 17: Azzeramento contatore manovre Esempio
L1
L7
o
e
SET
SET
SET
SET
SET
SET
SET
SET
Page 57

57
I
7.7) Diagnostica e segnalazioni
Alcuni dispositivi offrono direttamente delle segnalazioni particolari attraverso le quali è possibile riconoscere lo stato di funzionamento o dell'eventuale malfunzionamento.
7.6) Risoluzione dei problemi
Nella tabella 18 è possibile trovare utili indicazioni per affrontare gli
eventuali casi di malfunzionamento in cui è possibile incorrere durante l'installazione o in caso di guasto.
30
Tabella 18: ricerca guasti
Sintomi Probabile causa e possibile rimedio
Il trasmettitore radio non comanda il portone ed il
led sul trasmettitore non si accende.
Il trasmettitore radio non comanda il portone ma
il led sul trasmettitore si accende.
Non si comanda nessuna manovra ed il led OK
non lampeggia.
Non si comanda nessuna manovra ed il lampeggiante è spento.
La manovra non parte e il lampeggiante fa alcuni
lampeggi.
La manovra ha inizio ma subito dopo avviene la
breve inversione.
Verificare se le pile del trasmettitore sono scariche, eventualmente sostituirle.
Verificare se il trasmettitore è correttamente memorizzato nel ricevitore radio.
Verificare la corretta emissione del segnale radio del trasmettitore con questa prova
empirica: premere un tasto ed appoggiare il led all'antenna di un comune apparecchio
radio (meglio se di tipo economico) acceso e sintonizzato sulla banda FM alla frequenza
di 108,5Mhz o quanto più prossima; si dovrebbe ascoltare un leggero rumore con pulsazione gracchiante.
Verificare che TEN sia alimentato con la tensione di rete 230V. Verificare che i fusibili F1
e F2 non siano interrotti; in questo caso, verificare la causa del guasto e poi sostituirli con
altri dello stesso valore di corrente e caratteristiche (Figura 30).
Verificare che il comando venga effettivamente ricevuto. Se il comando giunge sull'ingresso PP il led OK esegue un doppio lampeggio per segnalare che il comando è stato
ricevuto.
Contare il numero di lampeggi e verificare secondo quanto riportato in tabella 20.
La forza selezionata potrebbe essere troppo bassa per muovere il portone. Verificare se
ci sono degli ostacoli ed eventualmente selezionare una forza superiore.
7.6.1) Elenco storico anomalie
TEN permette di visualizzare le eventuali anomalie che si sono verificate nelle ultime 8 manovre, ad esempio l'interruzione di una manovra
per l'intervento di una fotocellula o di un bordo sensibile. Per verificare l'elenco delle anomalie precedere come in tabella 19.
1. Premere e tener premuto il tasto [Set] per circa 3s
3s
2. Rilasciare il tasto [Set] quando il led L1 inizia a lampeggiare
3. Premere i tasti [▲] o [▼] per spostare il led lampeggiante sul L8, cioè il “led di entrata” per il
parametro “Elenco anomalie”
4. Premere e mantenere premuto il tasto [Set], il tasto [Set] va mantenuto premuto durante tutti i
passi 5 e 6.
5. Attendere circa 3s dopodiché si accenderanno i led corrispondenti alle manovre che hanno avuto delle
anomalie. Il led L1 indica l'esito della manovra più recente, il led L8 indica l'esito dell'ottava.
Se il led è acceso significa che durante la manovra si sono verificate delle anomalie; se il led è spento
significa che la manovra è terminata senza anomalie. 3s
6. Premere i tasti i tasti [▲] e [▼] per selezionare la manovra desiderata:
Il led corrispondente farà un numero di lampeggi pari a quelli normalmente eseguiti dal lampeggiante
dopo un'anomalia (vedere tabella 20).
7. Rilasciare il tasto [Set].
Tabella 19: storico anomalie Esempio
L1
L8
o
e
SET
SET
SET
SET
Page 58

58
All'inizio della manovra, la verifica dei dispositivi collegati a BlueBUS non corrisponde a quelli memorizzati durante la fase di apprendimento. E' possibile vi siano dispositivi guasti, verificare e sostituire; se sono state fatte delle modifiche
occorre rifare l'apprendimento (7.3.4 Apprendimento altri dispositivi).
7.7.1) Segnalazioni con il lampeggiante
Se viene collegato un lampeggiante, durante la manovra esegue un lampeggio ogni secondo; quando accadono delle anomalie, vengono
emessi dei lampeggi più brevi; i lampeggi si ripetono due volte, separati da una pausa di un secondo. Le stesse segnalazioni sono eseguite
anche con la luce di cortesia.
Tabella 20: segnalazioni sul lampeggiante FLASH
Lampeggi veloci Causa AZIONE
1 lampeggio
pausa di 1 secondo
1 lampeggio
Errore sul BlueBUS
3 lampeggi
pausa di 1 secondo
3 lampegg
4 lampeggi
pausa di 1 secondo
4 lampeggi
5 lampeggi
pausa di 1 secondo
5 lampeggi
6 lampeggi
pausa di 1 secondo
6 lampeggi
7 lampeggi
pausa di 1 secondo
7 lampeggi
Intervento del limitatore della
“Forza Motore”
Durante il movimento il portone ha incontrato un maggiore attrito; verificare la
causa.
2 lampeggi
pausa di 1 secondo
2 lampeggi
Intervento di una fotocellula
All'inizio della manovra una o più fotocellule non danno il consenso al movimento, verificare se ci sono ostacoli. Durante il movimento è normale se effettivamente
è presente un ostacolo.
Intervento dell'ingresso di
STOP
All'inizio della manovra o durante il movimento c'è stato un intervento dell'ingresso di STOP; verificare la causa.
Errore nei parametri interni
della centrale elettronica
Attendere almeno 30 secondi e riprovare a dare un comando; se lo stato rimane
potrebbe esserci un guasto grave ed occorre sostituire la scheda elettronica.
Superato il limite massimo di
manovre per ora.
Attendere alcuni minuti che il limitatore di manovre ritorni sotto il limite massimo.
Errore nei circuiti elettrici
interni
Scollegare tutti i circuiti di alimentazione per qualche secondo poi riprovare a dare
un comando; se lo stato rimane potrebbe esserci un guasto grave sulla scheda
oppure sul cablaggio del motore. Fare le verifiche e le eventuali sostituzioni.
8 lampeggi
pausa di 1 secondo
8 lampeggi
Sovracorrente nei circuiti
motore
Scollegare tutti i circuiti di alimentazione per qualche secondo poi riprovare a dare
un comando; se lo stato rimane potrebbe esserci un guasto grave sulla scheda
oppure sul cablaggio del motore. Fare le verifiche e le eventuali sostituzioni.
Page 59

Led CLOSE Causa AZIONE
Led OPEN Causa AZIONE
Led PP Causa AZIONE
59
I
31
Led BLUEBUS Causa AZIONE
Led STOP Causa AZIONE
Spento
7.7.2) Segnalazioni sulla centrale
Nella centrale di TEN ci sono una serie di LED ognuno dei quali può
dare delle segnalazioni particolari, sia nel funzionamento normale
che in caso di anomalia (Figura 31).
Tabella 21: led sui morsetti della centrale
Anomalia
Verificare se c'è alimentazione; verificare che i fusibili non siano intervenuti;
nel caso, verificare la causa del guasto e poi sostituirli con altri dello stesso
valore.
Acceso Anomalia grave
C'è una anomalia grave; provare a spegnere per qualche secondo la centrale; se lo stato permane c'è un guasto e occorre sostituire la scheda elettronica.
Un lampeggio al secondo Tutto OK Funzionamento normale della centrale
2 lampeggi veloci
E' avvenuta una variazione
dello stato degli ingressi
E' normale quando avviene un cambiamento di uno degli ingressi: PP, STOP,
OPEN, CLOSE, intervento delle fotocellule o viene utilizzato il trasmettitore
radio.
Serie di lampeggi separati da
una pausa di un secondo
Varie E' la stessa segnalazione che c'è sul lampeggiante. Vedere tabella 20
Spento
Intervento dell’ingresso di
STOP
Verificare i dispositivi collegati all'ingresso di STOP
Acceso Tutto OK Ingresso STOP attivo
Spento Tutto OK Ingresso PP non attivo
Acceso Intervento dell'ingresso di PP E' normale se è effettivamente attivo il dispositivo collegato all'ingresso di PP
Spento Tutto OK Ingresso OPEN non attivo
Acceso
Intervento dell'ingresso di
OPEN
E' normale se è effettivamente attivo il dispositivo collegato all'ingresso di OPEN
Spento Tutto OK Ingresso CLOSE non attivo
Acceso
Intervento dell'ingresso di
CLOSE
E' normale se è effettivamente attivo il dispositivo collegato all'ingresso di
CLOSE
Led 1 Descrizione
• Programmazione delle funzioni in corso
• Se lampeggia assieme ad L4 indica che è necessario eseguire la fase di apprendimento delle posizioni di
apertura e chiusura del portone (vedere paragrafo “4.3 Apprendimento delle posizioni di apertura e chiusura del portone”).
Led L3 Descrizione
Led L2 Descrizione
Spento
Tabella 22: led sui tasti della centrale
Durante il funzionamento normale indica “Chiusura automatica” non attiva.
Durante il funzionamento normale indica “Chiusura automatica” attiva.
• Programmazione delle funzioni in corso.
• Se lampeggia assieme a L2 indica che è necessario eseguire la fase di apprendimento dei dispositivi
(vedere paragrafo “4.2 Apprendimento dei dispositivi”).
Acceso
Lampeggia
Spento Durante il funzionamento normale indica “Richiudi dopo foto” non attivo.
Durante il funzionamento normale indica “Richiudi dopo foto” attivo.
• Programmazione delle funzioni in corso
• Se lampeggia assieme ad L! indica che è necessario eseguire la fase di apprendimento dei dispositivi
(vedere paragrafo “4.2 Apprendimento dei dispositivi”).
Acceso
Lampeggia
Spento Durante il funzionamento normale indica “Chiudi sempre” non attivo.
Durante il funzionamento normale indica “Chiudi sempre” attivo.Acceso
Lampeggia
Page 60

60
• Programmazione delle funzioni in corso.
Led L5 Descrizione
Spento Durante il funzionamento normale indica “Inversione lunga” non attiva.
Durante il funzionamento normale indica “Inversione lunga” attiva.
Acceso
Lampeggia
• Programmazione delle funzioni in corso
• Se lampeggia assieme ad L3 indica che è necessario eseguire la fase di apprendimento delle posizioni di
apertura e chiusura del portone (vedere paragrafo “4.3 Apprendimento delle posizioni di apertura e chiusura del portone”).
Led L4 Descrizione
• Programmazione delle funzioni in corso.
Led L6 Descrizione
Spento Durante il funzionamento normale indica “Prelampeggio” non attivo.
Durante il funzionamento normale indica “Prelampeggio” attivo.
Acceso
Lampeggia
• Programmazione delle funzioni in corso.
Led L7 Descrizione
Spento Durante il funzionamento normale indica la “Sensibilità amperometrica” non attiva.
Durante il funzionamento normale indica la “Sensibilità amperometrica” attiva.
Acceso
Lampeggia
• Programmazione delle funzioni in corso.
Led L8 Descrizione
Spento Durante il funzionamento normale indica che l'installazione è con 1 motore.
Durante il funzionamento normale indica che l'installazione è con 2 motori.
Acceso
Lampeggia
Spento Durante il funzionamento normale indica “Stand-By” non attivo.
Durante il funzionamento normale indica “Stand-By” attivo.
Acceso
Lampeggia
7.8) Accessori
Per TEN sono disponibili i seguenti accessori. Consultare il catalogo prodotti di Nice S.p.A. per l'elenco completo ed aggiornato degli
accessori.
SMXI / SMXIS Ricevitore radio a 433.92MHz con codifica digi-
tale Rolling Code
OXI Ricevitore radio a 433.92MHz con codifica digi-
tale Rolling Code; dotato di Modo II esteso per
inviare 15 tipi di comandi alla centrale
OView Unità di comando e programmazione remota
con display grafico
TNA2 Centrale di ricambio per TN2010
OTA2 Staffa supporto motore di lunghezza 1250mm
OTA3 Staffa supporto motore di lunghezza 2000mm
TNA4 Coppia alberi di trasmissione di lunghezza 1500mm
TNA5 Coppia bracci dritti telescopici standard
TNA6 Coppia bracci curvi telescopici standard
TNA8 Coppia alberi di trasmissione di lunghezza 200 mm
OTA11 Kit per sblocco dall'esterno con cordino metallico
OTA12 Kit per sblocco dall'esterno con nottolino a chiave
TNA38 Dispositivo di rinvio per 1 coppia di alberi di trasmissione
TS Tabella segnaletica
PS324 Batteria tampone
7.8.1) Unità di programmazione remota
Nello specifico connettore BusT4 è possibile collegare l'unità di programmazione remota OView che consente una completa e rapida
gestione dell'installazione, della manutenzione e della diagnosi di
eventuali malfunzionamenti. Per accedere al connettore è necessario togliere la membrana come indicato in Figura 32 ed collegare il
connettore nell'apposita sede (Figura 33). L'unità di programmazione remota può essere posta a distanza dalla centrale, fino a 100m di
cavo; può essere collegata simultaneamente a più centrali, fino a 16
e può rimanere collegata anche durante il normale funzionamento di
TEN; in questo caso, uno specifico menù “utilizzatore” permette di
inviare i comandi alla centrale.
Se nella centrale è inserito un ricevitore radio tipo OXI, attraverso l'unità di programmazione remota è possibile avere accesso ai parametri dei trasmettitori memorizzati.
Per queste funzioni è necessario un cavo di collegamento a 4 conduttori (BusT4) con il quale è possibile anche effettuare l'aggiornamento del firmware della centrale di TEN. Ulteriori informazioni sono
contenute nel manuale di istruzioni del programmatore OView;
oppure nello specifico addendum sulle “Funzioni aggiuntive di TEN
con OView” disponibile anche sul sito www.niceforyou.com.
32 33
Page 61

61
I
7.8.3) Pre montaggio per OTA11
7.8.2) Batteria tampone
Svitare le viti e togliere i coperchi
laterali
Montare il PS324 sotto al
TN2010
Far passare il cavo batteria
attraverso l'entrata cavi di Ten
Togliere la membrana sul box
della centrale
Collegare il cavo al connettore
batteria
Svitare le viti e togliere il collarino
38 39
Avvitare il perno in dotazione,
facendo attenzione alla posizione
rispetto alla maniglia
40
Infilare il cordino e la molla, come
indicato
Fissare la molla con la vite in dotazione 4.2x13, ri-avvitare il collarino
ed infine inserire la guaina.
41 42
Tagliare il pre-stacco presente sul
coperchietto e richiudere il tutto,
facendo attenzione a non schiacciare le guarnizione
43
34 35 36 37
Page 62

62
IP 44
No
Con lo scopo di migliorare i propri prodotti, Nice S.p.a si riserva il diritto modifiche le caratteristiche tecniche in qualsiasi momento e senza
preavviso pur mantenendo funzionalità e destinazione d'uso.
Tutte le caratteristiche tecniche riportate si riferiscono alla temperatura ambientale di 20°C (±5°C).
8) Caratteristiche tecniche
Caratteristiche tecniche: TEN
Modello tipo TN2020 TN2010 TN2010+TN2020
TN2010 TN2020 TN2010+TN2020
* A 50°C la frequenza massima di funzionamento è (cicli/ora): 4 6 4
** A 50°C il tempo massimo di funzionamento continuo è (minuti): 12 6 7
Alimentazione di emergenza
Uscita lampeggiante
Luce di cortesia 12V/10W attacco BA15S
Tipologia
Motoriduttore elettromeccanico per il movimento automatico di
portoni tipo basculante debordante e non debordante per uso
residenziale completo di centrale elettronica di controllo
Coppia massima allo spunto 320 Nm 350 Nm 500 Nm
25 cicli/ora 15 cicli/ora 25 cicli/ora
14 minuti 22 minuti 14 minuti
220Nm 240 Nm 330 Nm
III I I
/Si
Coppia nominale
Velocità a vuoto 1.7rpm; la centrale consente di programmare 6 velocità1.4 (24Vcc)
/
Per 1 lampeggiante LUCYB;
MLB o MLBT (lampada 12V,
21W)
/
//
/
1.2rpm0.9 (24Vcc)Velocità alla coppia nominale
Frequenza massima cicli di funzionamento alla
coppia nominale (la centrale limita i cicli al massimo previsto nelle tabelle 3 e 4) *
Tempo massimo funzionamento continuo alla
coppia nominale (la centrale limita i cicli al massimo previsto nelle tabelle 3 e 4) **
Limiti d’impiego
Generalmente TEN è in grado di automatizzare portoni bilanciati con superficie fino a 8m
2
con 1
motore e fino a 14 m2con 2 motori, secondo i limiti previsti in tabella 2.
Potenza massima assorbita allo spunto
[corrispondenti ad Ampere]
130W (5.5A) 240W (1A) 350W (1.4A)
[2A versione V1] [3A versione V1]
Classe di isolamento
Uscita BlueBUS
Una uscita con carico massimo
di 12 unità BlueBUS
/
/
Ingresso STOP
Per contatti normalmente chiusi, normalmente aperti oppure
a resistenza costante 8,2KΩ; in
autoapprendimento (una variazione rispetto allo stato memorizzato provoca il comando
“STOP”)
//Ingresso PP
Per contatti normalmente aperti (la chiusura del contatto provoca il comando PP)
//Ingresso APRE
Per contatti normalmente aperti (la chiusura del contatto provoca il comando APRE)
//Ingresso CHIUDE
Per contatti normalmente aperti
(la chiusura del contatto provoca
il comando CHIUDE)
//Ingresso ANTENNA Radio
52 ohm per cavo tipo RG58 o
simili
//Innesto radio
Connettore SM per ricevitori
SMXI, SMXIS o OXI
Alimentazione TEN 230Vac (-10% +15%) 50/60Hz.24 Vcc (-30% +50%)
Durabilità Stimata tra 10000 e 50000 cicli, secondo le condizioni riportate in tebella 5
Alimentazione TEN/V1 120Vac (-10% +15%) 50/60Hz.
//Funzioni programmabili
8 funzioni di tipo ON-OFF e 8
funzioni regolabili (vedere tabelle 8 e 10)
//Funzioni in autoapprendimento
Autoapprendimento dei dispositivi collegati all'uscita BlueBUS.
Autoapprendimento del tipo di
dispositivo di “STOP” (contatto
NA, NC o resistenza 8,2KΩ)
Apprendimento delle posizioni di
apertura e chiusura del portone
e calcolo dei punti di rallentamento ed apertura parziale
Temperatura di funzionamento -20°C ÷ +50°C
Grado di protezione
Dimensioni 512 x 150 h 158
Utilizzo in atmosfera particolarmente acida o
salina o potenzialmente esplosiva
Peso 7.2 Kg 10 Kg
Page 63

63
I
Complimenti per aver scelto per la vostra automazione
un prodotto Nice! Nice S.p.a. produce componenti per
l'automazione di cancelli, porte,serrande, tapparelle e tende da sole: motoriduttori, centrali di comando,radiocomandi, lampeggianti, fotocellule e accessori. Nice utilizza
solo materiali e lavorazioni di qualità, e per vocazione ricerca soluzioni innovative che semplifichino al massimo l'utilizzo delle sue apparecchiature, curate nelle soluzioni tecniche, estetiche, ergonomiche: nella grande gamma Nice
il vostro installatore avrà senz'altro scelto il prodotto più
adatto alle vostre esigenze. Nice non è però il produttore
della vostra automazione, che è invece il risultato di un'opera di analisi, valutazione, scelta dei materiali, e realizzazione dell'impianto eseguita dal vostro installatore di fiducia. Ogni automazione è unica e solo il vostro installatore
possiede l'esperienza e la professionalità necessarie ad
eseguire un impianto secondo le vostre esigenze, sicuro
ed affidabile nel tempo, e soprattutto a regola d'arte,
rispondente cioè alle normative in vigore. Un impianto di
automazione è una bella comodità, oltre che un valido
sistema di sicurezza e, con poche, semplici attenzioni, è
destinato a durare negli anni. Anche se l'automazione in
vostro possesso soddisfa il livello di sicurezza richiesto
dalle normative, questo non esclude l'esistenza di un
“rischio residuo”, cioè la possibilità che si possano generare situazioni di pericolo, solitamente dovute ad un utilizzo incosciente o addirittura errato, per questo motivo
desideriamo darvi alcuni consigli sui comportamenti da
seguire per evitare ogni inconveniente:
• Prima di usare per la prima volta l’automazio-
ne, fatevi spiegare dall'installatore l'origine dei rischi
residui, e dedicate qualche minuto alla lettura del
manuale di istruzioni ed avvertenze per l'utiliz-
zatore consegnatovi dall'installatore. Conservate il
manuale per ogni dubbio futuro e consegnatelo ad un
eventuale nuovo proprietario dell'automazione.
• Le fotocellule non sono un dispositivo di sicu-
rezza ma soltanto un dispositivo ausiliario alla
sicurezza. Sono costruite con tecnologia ad altissima
affidabilità ma possono, in situazioni estreme, subire
malfunzionamenti o addirittura guastarsi ed in certi casi
il guasto potrebbe non essere subito evidente.
Per questi motivi, e comunque per buona regola:
- Il transito è consentito solo se il cancello o portone è
completamente aperto e con ante ferme.
- E' ASSOLUTAMENTE VIETATO transitare mentre il cancello o portone si sta chiudendo!
Verificare periodicamente il corretto funzionamento delle fotocellule e far eseguire i controlli di manutenzione
previsti, almeno ogni 6 mesi.
• La vostra automazione è un macchinario che
esegue fedelmente i vostri comandi; un uso incosciente ed improprio può farlo diventare pericoloso: non
comandate il movimento dell'automazione se nel suo
raggio di azione si trovano persone, animali o cose.
• Bambini: un impianto di automazione garantisce un
alto grado di sicurezza, impedendo con i suoi sistemi di
rilevazione il movimento in presenza di persone o cose,
e garantendo un'attivazione sempre prevedibile e sicura. È comunque prudente vietare ai bambini di giocare
in prossimità dell'automazione e per evitare attivazioni
involontarie non lasciare i telecomandi alla loro portata:
non è un gioco!
• Controllare spesso l'impianto, in particolare i cavi,
le molle e i supporti per scoprire eventuali sbilanciamenti e segni di usura o danni.
Verificare mensilmente che il motore di movimentazione
si inverta quando la porta tocca un oggetto alto 50 mm
posto al suolo. Non usare l'automazione, se è necessaria una riparazione o regolazione, dal momento che
un guasto all'installazione o una porta non correttamente bilanciata può provocare ferite.
• Anomalie: Non appena notate qualunque comportamento anomalo da parte dell'automazione, togliete alimentazione elettrica all'impianto ed eseguite lo sblocco
manuale. Non tentate da soli alcuna riparazione, ma
richiedete l'intervento del vostro installatore di fiducia:
nel frattempo l'impianto può funzionare come un'apertura non automatizzata, una volta sbloccato il moto
riduttore come descritto più avanti.
• Manutenzione: Come ogni macchinario la vostra
automazione ha bisogno di una manutenzione periodica affinché possa funzionare più a lungo possibile ed in
completa sicurezza. Concordate con il vostro installatore un piano di manutenzione con frequenza periodica;
Nice consiglia un intervento ogni 6 mesi per un normale utilizzo domestico, ma questo periodo può variare in
funzione dell'intensità d'uso. Qualunque intervento di
controllo, manutenzione o riparazione deve essere eseguito solo da personale qualificato.
• Anche se ritenete di saperlo fare, non modificate l'impianto ed i parametri di programmazione e di regolazione dell'automazione: la responsabilità è del vostro
installatore.
• Il collaudo, le manutenzioni periodiche e le eventuali
riparazioni devono essere documentate da chi le esegue e i documenti conservati dal proprietario dell'impianto.
Gli unici interventi che vi sono possibili e vi consigliamo di effettuare periodicamente sono la pulizia dei
vetrini delle fotocellule e la rimozione di eventuali foglie
o sassi che potrebbero ostacolare l'automatismo. Per
impedire che qualcuno possa azionare il portone, prima
di procedere, ricordatevi di sbloccare l'automati-
smo (come descritto più avanti), scollegare tutte le
sorgenti di alimentazione (anche le batterie tampo-
ne se presenti) e di utilizzare per la pulizia solamente un
panno leggermente inumidito con acqua.
• Smaltimento: Al termine della vita dell'automazione,
assicuratevi che lo smantellamento sia eseguito da personale qualificato e che i materiali vengano riciclati o
smaltiti secondo le norme valide a livello locale.
• In caso di rotture o assenza di alimentazione:
Attendendo l'intervento del vostro installatore, o il ritorno dell'energia elettrica, l'automazione può essere azionata come una qualunque apertura non automatizzata.
Per fare ciò è necessario eseguire lo sblocco manuale:
tale operazione è stata particolarmente studiata da Nice
per assicurarvi sempre la massima facilità di utilizzo,
senza uso di attrezzi particolari o necessità di sforzo fisico.
Istruzioni ed avvertenze destinate all'utilizzatore del motoriduttore TEN
Istruzioni importanti di sicurezza
Per la sicurezza delle persone è importante seguire queste istruzioni
Conservare queste istruzioni
Queste istruzioni possono integrare le “Istruzioni ed avvertenze per l'uso dell'automazione” che l'installatore deve consegnare al proprietario dell'automazione e comunque devono essere integrate da esse.
!
Page 64

64
Sblocco e movimento manuale: prima di eseguire questa operazione porre attenzione che lo sblocco può avveni-
re solo quando l'anta è ferma.
Comando con sicurezze fuori uso: nel caso i dispositivi di sicurezza presenti nel portone non dovessero funzionare correttamente è possibile comunque comandare il
cancello.
• Azionare il comando del portone (col telecomando, col
selettore a chiave, ecc.); se tutto è a posto il portone si
aprirà o chiuderà normalmente, altrimenti il lampeggiante farà alcuni lampeggi e la manovra non partirà (il
numero di lampeggi dipende dal motivo per cui la
manovra non può partire).
• In questo caso, entro tre secondi si deve azionare
nuovamente e tenere azionato il comando.
• Dopo circa 2s inizierà il movimento del portone in
modalità a “uomo presente”, cioè finché si mantiene il
comando, il portone continuerà a muoversi; appena il
comando viene rilasciato, il portone si ferma.
Con le sicurezze fuori uso è necessario far riparare quanto prima l’automatismo.
Sostituzione pila del telecomando: se il vostro radio-
comando dopo qualche tempo vi sembra funzionare peggio, oppure non funzionare affatto, potrebbe semplicemente dipendere dall'esaurimento della pila (a seconda
dell'uso, possono trascorrere da diversi mesi fino ad oltre
un anno). Ve ne potete accorgere dal fatto che la spia di
conferma della trasmissione non si accende, è fioca,
oppure si accende solo per un breve istante. Prima di
rivolgervi all'installatore provate a scambiare la pila con
quella di un altro trasmettitore eventualmente funzionante:
se questa fosse la causa dell'anomalia, sarà sufficiente
sostituire la pila con altra dello stesso tipo.
Attenzione: Le pile contengono sostanze inquinanti: non
gettarle nei rifiuti comuni ma utilizzare i metodi previsti dai
regolamenti locali.
Sostituzione lampada: prima di eseguire questa operazione togliere alimentazione a TEN.
Siete soddisfatti? Nel caso voleste aggiungere nella vostra casa un nuovo impianto di automazione, rivolgendovi allo
stesso installatore e a Nice vi garantirete, oltre che la consulenza di uno specialista e i prodotti più evoluti del mercato,
il migliore funzionamento e la massima compatibilità delle automazioni.
Vi ringraziamo per aver letto queste raccomandazioni, e vi auguriamo la massima soddisfazione dal vostro nuovo
impianto: per ogni esigenza presente o futura rivolgetevi con fiducia al vostro installatore.
Per sbloccare ruotare la maniglia in senso antiorario, e muovere manualmente l'anta (Figura 44)
Per riarmare, riportare la maniglia in posizione verticale ruotandola in senso orario, agire manualmente sull'anta fino all'aggancio (Figura 45)
44 45
1. Aprire il coperchio svitando le viti come indi-
cato (Figura 46).
2. Svitare la lampadina e sostituirla con una nuova lampadina da 12V/10 W attacco BA15S
(Figura 47).
46 47
Page 65

Page 66

66
Ten
Table des matières: page
1 Recommandations 67
2 Description du produit et application 68
2.1 Limites d’application 68
2.2 Vérifier les composants du produit 69
2.3 Installation typique 70
2.4 Liste des câbles 70
3 Installation 71
3.1 Contrôles préliminaires 71
3.2 Installation de l’opérateur 71
3.3 Réglage des fins de course 74
3.4 Installation des différents dispositifs 74
3.5 Branchements électriques 74
3.5.1 Description des branchements électriques 75
3.5.2 Branchement électrique du second moteur 76
4 Contrôles finaux et mise en service 76
4.1 Branchement au secteur 76
4.2 Reconnaissance des dispositifs 76
4.3 Reconnaissance des positions d’ouverture
et de fermeture de la porte 77
4.4 Vérification du mouvement de la porte 78
4.5 Fonctions préprogrammées 78
4.6 Récepteur radio 78
5 Essai et mise en service 78
5.1 Essai 78
5.2 Mise en service 79
6 Maintenance et mise au rebut 80
6.1 Maintenance 80
6.2 Mise au rebut 80
7 Approfondissements 80
7.1 Touches de programmation 80
7.2 Programmations 80
7.2.1 Fonctions du premier niveau (fonctions ON-OFF) 81
7.2.2 Programmation du premier niveau
(fonctions ON-OFF) 81
7.2.3 Fonctions du deuxième niveau
(paramètres réglables) 82
7.2.4 Programmation du deuxième niveau
(paramètres réglables) 83
7.2.5 Exemple de programmation premier niveau
(fonctions ON-OFF) 83
7.2.6 Exemple de programmation deuxième
niveau (paramètres réglables) 84
7.3 Ajout ou retrait de dispositifs 84
7.3.1 BlueBus 84
7.3.2 Entrée STOP 85
7.3.3 Photocellules 85
7.3.4 Sélecteur numérique MOTB et lecteur de
proximité pour cartes transpondeurs MOMB 85
7.3.5 Reconnaissance d’autres dispositifs 86
7.3.6 Effacement total de la mémoire 86
7.3.7 Programmation du sens de rotation du moteur 86
7.3.8 Rétablissement de la position de l’encodeur 87
7.4 Fonctions particulières 87
7.4.1
Fonction « ouvre toujours » 87
7.4.2 Fonction « manœuvre dans tous les cas » 87
7.4.3 Avis de maintenance 87
7.4.4 Vérification du nombre de manœuvres effectuées 88
7.4.5 Mise à zéro du compteur des manœuvres 88
7.5 Connexion d’autres dispositifs 88
7.6 Résolution des problèmes 89
7.6.1 Historique des anomalies 89
7.7 Diagnostic et signalisations 89
7.7.1 Signalisations avec le clignotant 90
7.7.2 Signalisations sur la logique de commande 91
7.8 Accessoires 92
7.8.1 Unité de programmation à distance 92
7.8.2 Batterie tampon 93
7.8.3 Prémontage pour OTA11 93
8 Caractéristiques techniques 94
Instructions et avertissements destinés à l’utilisateur
de l’opérateur TEN 95
Page 67

67
F
1) Recommandations
Consignes importantes de sécurité pour l'installation
Une installation incorrecte peut causer de graves dommages.
Suivre toutes les instructions d’installation
Ce guide technique contient des informations importantes concernant la
sécurité pour l'installation, il faut lire toutes les instructions avant de procéder à l’installation. Conserver soigneusement ce guide pour d’éventuelles consultations futures.
Compte tenu des dangers qui peuvent apparaître durant l'installation et
l’utilisation de TEN, il faut, pour garantir une sécurité optimale, que l’installation soit réalisée en totale conformité avec les lois, normes et règlements.
Dans ce chapitre, nous donnons des recommandations d’ordre général;
d’autres recommandations importantes se trouvent dans les chapitres «
3.1 Contrôles préliminaires » et « 5 Essai et mise en service ».
D'après la législation européenne la plus récente, la réalisation d’une porte ou d’un portail automatique possède les
caractéristiques prévues par la directive 98/37/CE (directive
« Machines ») et en particulier par les normes: EN 12445, EN
12453 et EN 12635 qui permettent de déclarer la conformité
à la directive « Machines ».
D'autres informations et les conseils pour l’analyse des risques et la réalisation du dossier technique sont disponibles sur le site: www.niceforyou.com. Ce guide est exclusivement destiné au personnel technique
qualifié pour l'installation. À part l'annexe spécifique « Instructions et
recommandations destinées à l’utilisateur de l’opérateur TEN » qui sera
détaché par l’installateur, aucune autre information contenue dans ce guide ne peut être considérée comme intéressante pour l’utilisateur final!
• Toute utilisation de TEN différente de celle qui est prévue dans ce gui-
de est interdite; les utilisations impropres peuvent être source de dangers ou de dommages aux personnes et aux choses.
• Avant de commencer l'installation, il faut effectuer l’analyse des
risques comprenant la liste des exigences essentielles de sécurité par
l’annexe I de la directive Machines, en indiquant les solutions adoptées. Nous rappelons que l'analyse des risques est l’un des documents qui constituent le « dossier technique » de l’automatisation.
• Vérifier la nécessité d'autres dispositifs pour compléter l’automatisation
avec TEN suivant les conditions spécifiques de l’application et les risques
présents; il faut considérer par exemple les risques d’impact, écrasement, cisaillement, coincement, etc., et d’autres dangers en général.
• N’effectuer de modifications sur aucune des parties si elles ne sont
pas prévues dans la présente notice technique. Des opérations de ce
type entraîneront obligatoirement des problèmes de fonctionnement.
NICE décline toute responsabilité en cas de dommages dérivant de
produits modifiés.
• Pendant l'installation et l’utilisation, éviter que des parties solides ou
liquides puissent pénétrer à l’intérieur de la logique de commande ou
d’autres composants ouverts; s’adresser éventuellement au service
d’assistance NICE; l’utilisation de TEN dans de telles circonstances
peut créer des situations de danger.
• L'automatisme ne peut pas être utilisé tant que la mise en service n’a
pas été effectuée comme l’explique le chapitre: « 5 Essai et mise en
service ».
• Les matériaux d'emballage de TEN doivent être éliminés conformé-
ment aux normes locales en vigueur.
• En cas de pannes qui ne peuvent pas être résolues avec les informa-
tions fournies dans ce guide, contacter le service après-vente NICE.
• Si des interrupteurs automatiques ou des fusibles interviennent, avant
de les réarmer il faut identifier la cause de leur déclenchement et l’éliminer.
• Avant d’accéder aux bornes situées sous le carter de TEN, décon-
necter tous les circuits d’alimentation; si le dispositif de déconnexion
n’est pas visible, accrocher une pancarte: « ATTENTION ! MAINTENANCE EN COURS ».
Avertissements particuliers sur l'appropriation à l’utilisation de ce produit
par rapport à la directive « Machines » 98/37/CE (ex 89/392/CEE):
• Ce produit est mis sur le marché comme « composant de machine »
et est donc construit pour être incorporé dans une machine ou pour
être assemblé avec d’autres appareillages afin de réaliser « une machine » selon les termes de la directive 98/37 seulement en association
avec les autres composants et dans les modes décrits dans ce guide
technique. Comme le prévoit la directive 98/37 nous rappelons que la
mise en service de ce produit n'est pas autorisée tant que le constructeur de la machine dans laquelle ce produit est incorporé ne l’a pas
identifié et déclaré conforme à la directive 98/37/CE.
Avertissements particuliers sur l'appropriation à l’utilisation de ce produit
par rapport à la directive « Basse tension » 73/23/CEE et à sa modification ultérieure 93/68/CEE:
• Ce produit est conforme aux exigences prévues par la directive « Basse tension » s'il est utilisé dans le but et les configurations prévues
dans ce guide technique et en liaison avec les articles présents dans
le catalogue des produits de Nice S.p.A. Les exigences pourraient ne
pas être garanties si le produit est utilisé dans des configurations ou
avec d'autres produits non prévus; l’utilisation du produit dans ces
situations est interdite tant que l’installateur n’a pas vérifié la conformité aux critères prévus par la directive.
Avertissements particuliers sur l'appropriation à l’utilisation de ce produit
par rapport à la directive «Compatibilité électromagnétique» 89/336/CEE
et à ses modifications ultérieures 92/31/CEE et 93/68/CEE:
• Ce produit a été soumis aux essais relatifs à la compatibilité électromagnétique dans les situations d'utilisation les plus critiques, dans les
configurations prévues dans ce guide technique et en liaison avec les
articles présents dans le catalogue des produits de Nice S.p.A. La
compatibilité électromagnétique pourrait ne pas être garantie si le produit est utilisé dans des configurations ou avec d'autres produits non
prévus; l’utilisation du produit dans ces situations est interdite tant que
l’installateur n’a pas vérifié la conformité aux critères requis par la
directive.
!
!
Page 68

68
2.1) Limites d’application
Les données relatives aux performances de TEN figurent dans le chapitre « 8 Caractéristiques techniques » et sont les seules valeurs qui permettent d’évaluer correctement l’appropriation à l’utilisation. TEN est normalement en mesure d’automatiser des portes basculantes suivant
les limites indiquées dans le tableau 2.
Les mesures indiquées dans le tableau 2 sont indicatives et servent uniquement à une évaluation de principe. La capacité réelle de TEN à automatiser telle ou telle porte dépend du degré d’équilibrage du tablier, des frictions des rails et d’autres phénomènes, parfois occasionnels, comme la pression du vent ou la présence de glace qui pourraient bloquer le mouvement du tablier. Pour une vérification réelle, il est absolument
indispensable de mesurer la force nécessaire pour manœuvrer le tablier sur toute sa course et contrôler que celle-ci ne dépasse pas le « couple
nominal » indiqué au chapitre 8 « Caractéristiques techniques »; par ailleurs, pour établir le nombre de cycles/heure et de cycles consécutifs,
il faut prendre en compte les données des tableaux 3 et 4.
Force pour manœuvrer le tablier (N) Cycles/heure maximums Cycles consécutifs maximums
Jusqu’à 150 30 19
150÷250 28 16
250÷350 25 14
Tableau 4: limites en fonction de la force nécessaire pour manœuvrer le tablier avec 1 TN2010 + 1 TN2020
Type de porte Motorisée avec 1 moteur Motorisée avec 2 moteurs
Porte basculante débordante Hauteur max. 2,6 m Longueur max. 3 m Hauteur max. 2,6 m Longueur max. 5,4 m
Porte basculante non débordante Hauteur max. 2,6 m Longueur max. 3 m Hauteur max. 2,6 m Longueur max. 5,4 m
Tableau 2: limites d’application des opérateurs TEN.
TEN (figure 1) est un opérateur conçu pour l’automatisation de portes basculantes à contrepoids, de portes basculantes à ressorts, de portes
débordantes et non débordantes et de portes pliantes. TEN est équipé d’un système de fin de course électronique à encodeur absolu qui
est toujours en mesure de détecter la position du moteur, même quand la porte est débloquée pour la manœuvre manuelle. Il est en mesure d’atteindre la limite de la course (en ouverture et en fermeture) avec une phase de ralentissement. De plus, il contrôle constamment l’effort auquel il est soumis durant les manœuvres et détecte les éventuelles anomalies, telles qu’un obstacle imprévu qui bloque le mouvement
du tablier; dans ce cas, l’automatisme commande l’arrêt et exécute une brève inversion du mouvement.
Avant d'effectuer l'installation, vérifier l’intégrité des composants du produit,
l’adéquation du modèle choisi et son adaptation au lieu prévu pour son installation.
2) Description du produit et application
1
Modèle type Description
TN2010 Opérateur irréversible, logique de commande, fin de course électronique à encodeur absolu et éclairage automatique.
TN2020* Opérateur irréversible et éclairage automatique. À utiliser comme « esclave » de TN2010 ou TN2020.
* S'il est utilisé différemment, s'assurer que l'alimentation provient d'un système à très basse tension de sécurité, dans lequel n'est générée aucune
tension supérieure à la très basse tension de sécurité.
Tableau 1: description de la composition de TEN
Pour éviter les surchauffes, la logique de commande comprend un limiteur qui se base sur l’effort du moteur et sur la
durée des cycles en intervenant quand la limite maximum est dépassée.
Force pour manœuvrer le tablier (N) Cycles/heure maximums Cycles consécutifs maximums
Jusqu’à 120 20 35
120÷180 18 33
180÷220 15 30
Tableau 3: limites en fonction de la force nécessaire pour manœuvrer le tablier avec 1 TN2010
Page 69

69
F
Le chapitre « 8 Caractéristiques techniques » donne une estimation de la « durabilité » c’est-à-dire de la vie économique moyenne du produit. La valeur est fortement influencée par l’indice de charge de travail des manœuvres, c’est-à-dire la somme de tous les facteurs qui
concourent à l’usure. Pour effectuer l’estimation, il faut additionner tous les indices de charge de travail du tableau 5, puis avec le résultat
total, vérifier dans le graphique la durabilité estimée. Par exemple, le TN2010 sur une porte de 130 kg qui requiert une force, pour la
manœuvre, de 180 Nm, équipé de photocellules et sans autres éléments de fatigue, obtient un indice de charge de travail égal à 60 % (30
+ 20 + 10). D’après le graphique, la durabilité est estimée à 18 000 cycles.
Il faut préciser que l’estimation de durabilité s’effectue sur la base des calculs de projet et des résultats des essais pratiqués sur les prototypes; s’agissant d’une estimation, elle ne constitue en aucun cas une garantie de la durée effective du produit.
Indice de charge de travail % TN2010 TN2010
+
TN2020
Poids du tablier (kg)
Jusqu’à 100 20 10
100 ÷ 180 30 20
180 ÷ 230 40 30
Plus de 230 60 50
Force pour manœuvrer le tablier N
Jusqu’à 160 10 5
160 ÷ 240 20 15
240 ÷ 290 40 30
290 ÷ 350 - 50
Autres éléments de fatigue
(à prendre en compte si la probabilité qu’ils se produisent est
supérieure à 10 %)
Température ambiante supérieure
à 40 °C ou inférieure à 0 °C ou
humidité supérieure à 80 % 10 10
Présence de poussière ou de sable 15 15
Présence de sel 20 20
Interruption de la manœuvre par
photocellule 10 10
Interruption de la manœuvre par «Halte»
20 20
Vitesse supérieure à « L4 rapide » 15 15
Total indice de charge de travail en %:
Tableau 5: estimation de la durabilité en fonction de l’indice de charge de travail de la manœuvre
Indice de charge de travail %
Durabilité en cycles
2.2) Vérifier les composants du produit
• Vérifier l’intégrité de l’emballage;
• Déballer le produit et s’assurer que les pièces suivantes sont bien présentes (figure 2):
NBR. PCS TN2010
A 1 Opérateur TEN
B 2 Écrous M6
C 2 Écrous M8
D 2 Goujons filetés M6 x 14
E 2 Rondelles Ø 8
F 2 Vis M8 x 110
G 1 Manivelle de débrayage
2
50000
45000
40000
35000
30000
25000
20000
15000
10000
5000
0
0 102030405060708090100
Page 70

70
2.3) Installation typique
La figure 3 montre l’installation typique d’un automatisme pour portes basculantes réalisée avec TEN.
1 TEN
2 Tube carré 20 x 20
3 Patte de support
4 Bras télescopique
5 Photocellules
6 Photocellules sur colonnette
7 Bord sensible
8 Clignotant 12 V avec antenne incorporée
9 Sélecteur à clé
10 Émetteur radio
2.4) Liste des câbles
Dans l’installation typique de la figure 3, sont également indiqués les câbles nécessaires pour les connexions des différents dispositifs; le
tableau 6 indique les caractéristiques des câbles.
Les câbles utilisés pour la connexion des divers dispositifs doivent être adaptés au type d’installation; par exemple,
on conseille un câble type H03VV-F pour la pose à l’intérieur.
!
Note: (*) Si le câble d’alimentation fait plus de 30 m de long, il faut utiliser un câble d’une section supérieure (par exemple 3 x 2,5 mm²) et
il faut réaliser une mise à la terre de sécurité à proximité de l’automatisme.
Connexion Type de câble Longueur maximum admise
A: Ligne électrique d’alimentation 1 câble (3 x 1,5 mm²) 30 m (*)
B: Clignotant 12 V 1 câble (2 x 1 mm²) 20 m
C: Antenne 1 câble blindé (type RG58) 20 m (conseillé: inférieur à 5 m)
D: Photocellules 1 câble (2 x 0,5 mm²) 20 m
E: Sélecteur à clé 1 câble (4 x 0,25 mm²) 20 m
F: Bord sensible 1 câble (2 x 0,25 mm²) 20 m
Tableau 6: liste des câbles
3
Page 71

71
F
L’installation de TEN doit être effectuée exclusivement par du personnel qualifié, dans le respect des lois, des
normes et des règlements ainsi que de toutes les instructions de ce guide
!
3) Installation
3.1) Contrôles préliminaires
Avant d’effectuer l’installation de TEN, il faut effectuer les contrôles
suivants:
• Vérifier et s'assurer qu’après l'installation aucune partie de la porte n’encombre la rue ou le trottoir.
• Vérifier que tout le matériel à utiliser est en excellent état, adapté à
l’utilisation et conforme aux normes;
• Vérifier que le poids et les dimensions du tablier rentrent dans les
limites d’utilisation indiquées au paragraphe 2.1 « Limites d’utilisation »;
• Vérifier, en comparant avec les valeurs figurant dans le chapitre «
8 Caractéristiques techniques », que la friction statique (c’est-àdire la force nécessaire pour mettre le tablier en mouvement) est
inférieure à la moitié du « couple maximal » et que la friction dynamique (c’est-à-dire la force nécessaire pour maintenir le tablier en
mouvement) est inférieure à la moitié du « couple nominal »; on
conseille une marge de 50 % sur les forces car les conditions climatiques adverses peuvent faire augmenter les frictions;
• Vérifier que, sur la course de la porte basculante, aussi bien en fermeture qu’en ouverture, il n’y a pas de points présentant une plus
grande friction;
• Vérifier la robustesse des butées mécaniques et contrôler qu’il n’y
a pas de risque de sortie des rails de la porte;
• Vérifier que la porte est bien équilibrée, à savoir qu’elle ne doit pas
bouger si on l’arrête dans une position quelconque;
• Vérifier que les points de fixation des différents dispositifs (photocellules, boutons, etc.) se trouvent dans des zones protégées contre
les chocs et que les surfaces de fixation sont suffisamment solides;
• En fonction du type de porte, débordante, non débordante ou articulée, vérifier qu’il est possible de fixer TEN aux mesures indiquées
respectivement sur les figures 5, 6 ou 7.
• Vérifier et veiller à ce que le débrayage manuel se situe à moins de
1,8 m de hauteur.
• S’il n’y a pas assez de place entre le bras de support et la partie
fixe de la porte, il est nécessaire, pour éviter le croisement, d’utiliser l’accessoire « bras courbes ».
• Éviter que les parties de l’automatisme puissent être immergées
dans l’eau ou dans d’autres substances liquides;
• Ne pas conserver les composants de TEN à proximité de sources
de chaleur ni l’exposer à des flammes; ces actions peuvent l’endommager et causer des problèmes de fonctionnement, un incendie ou des situations de danger;
• Si la porte est munie d’un portillon de passage incorporé, s'assurer qu’il ne gêne pas la course normale et installer un système d’interverrouillage adéquat;
• Connecter la logique de commande à une ligne d’alimentation
électrique avec mise à la terre;
• La ligne d’alimentation électrique doit être protégée par un disjoncteur magnétothermique associé à un déclencheur différentiel;
Sur la ligne d’alimentation du secteur électrique, il faut monter un
dispositif de déconnexion de l’alimentation (avec catégorie de surtension III, c’est-à-dire avec une distance entre les contacts d’au
moins 3,5 mm) ou bien un autre système équivalent, par exemple
une prise et une fiche. Si le dispositif de déconnexion de l’alimentation ne se trouve pas à proximité de l’automatisme, il faut disposer d’un système de blocage contre la connexion accidentelle ou
non autorisée.
3.2) Installation de l’opérateur
Le positionnement de TEN varie selon le type de porte à automatiser et les limitations indiquées dans le paragraphe « 2.1 Limites
d’application ».
TEN dispose d’un fin de course à encodeur absolu préréglé en position « presque fermée », qui fonctionne même
quand le moteur est débrayé. C’est pourquoi le point n° 8
doit s’effectuer avec la porte FERMÉE.
Note: pour l’installation de 2 moteurs, suivre la même procédure
que celle indiquée pour un moteur en réalisant l’installation selon les
indications de la figure 14.
1. Une fois la typologie définie, fixer la patte de support à la porte,
parfaitement à la verticale (figure 4), en respectant les mesures
indiquées.
1.1 Pour les portes basculantes débordantes, l’axe de rotation
des bras devra être de 50 ÷ 100 mm sous le bras de support de la porte (figure 5).
1.2 Pour les portes basculantes non débordantes, l’axe de rotation des bras devra être exactement dans l’axe du bras de
support de la porte (figure 6).
1.3 Sur les portes basculantes pliantes, l’axe de rotation des
bras devra être 50 ÷ 100 mm au-dessous de la charnière de
rotation de la porte (figure 7).
Si TEN est utilisé renversé, il est nécessaire de
programmer la logique de commande en utilisant
l’unité de programmation distante OView. Pour plus
d’informations, consulter le paragraphe « 7.8.1 Unité de programmation distante ».
2. Fixer l’opérateur à la patte avec les vis prévues (figure 8).
3. Débrayer l’opérateur en tournant la poignée dans le sens antiho-
raire (figure 9).
4. Fixer solidement les pattes de support latéral parfaitement dans
l’axe de l’arbre de rotation du moteur et insérer les douilles
d’adaptation fournies (figure 10).
En fonction de l’espace présent entre le bras de support
et le cadre fixe de la porte, il faudra utiliser des bras droits
ou des bras courbes.
5. Fixer le support supérieur au cadre de la porte (figure 11): s’il est
déjà présent, vérifier qu’il est adapté aux bras que l’on veut utiliser. Les mesures indiquées sur la figure 11 sont indicatives: elles
peuvent différer en fonction des mesures d’encombrement de la
porte.
6. Insérer le tube de transmission dans la douille du bras et dans
l’arbre du moteur; couper le tube à la mesure adéquate (figure 12).
7. Ouvrir complètement la porte et couper les bras à la mesure adéquate en veillant à ce qu’ils soient guidés sur au moins 70 mm
avec la porte fermée (figure 13). Si la longueur est insuffisante,
repositionner le support supérieur ou choisir des bras plus longs.
8. Fermer la porte et positionner les bras dans leurs rails et vérifier
que la porte coulisse librement sans se coincer ni se bloquer.
Revérifier l’équilibrage: la porte est bien équilibrée quand,
une fois arrêtée dans n’importe quelle position de la course, elle reste immobile. Si nécessaire, agir sur les systèmes d’équilibrage.
!
!
Page 72

72
4
5
6 7
8 9
Page 73

73
F
10
11
12 13
14
Page 74

74
3.3) Réglage des fins de course
Ten 2010 ne dispose pas de fins de course mécaniques mais d’un système électronique avec fin de course absolu. Pour le réglage, voir le
paragraphe « 4.3 Reconnaissance des positions d’ouverture et de fermeture de la porte ».
3.4) Installation des différents dispositifs
Installer les autres dispositifs prévus en suivant les instructions correspondantes. Vérifier dans le paragraphe 3.5 « Description des branchements électriques » et sur la figure 17 les dispositifs qui peuvent être connectés à TEN.
17
3.5) Branchements électriques
Tous les branchements électriques doivent être réalisés avec l’installation hors tension.
1. Pour effectuer les branchements électriques, dévisser les vis du couvercle (figure 15).
2. Enlever les deux membranes en caoutchouc qui ferment les deux trous pour le passage des câbles; Découper un trou sur la membrane
et enfiler le câble d'alimentation dans la membrane et le trou de droite. Découper un trou dans la membrane et faire passer les autres
câbles vers les différents dispositifs dans la membrane et le trou de gauche. Laisser aux câbles une longueur de 20 à 30 cm supplémentaire. Voir le tableau 6 pour le type de câbles.
3. Connecter le câble d’alimentation du secteur directement sur les bornes 1 (phase), 2 (neutre) et 3 (terre); bloquer le câble avec le collier,
comme indiqué sur la figure 16.
4. Effectuer les connexions des autres câbles suivant le schéma de la figure 17. Pour plus de commodité, les bornes peuvent être extraites.
5. Quand les branchements sont terminés, rassembler et bloquer les câbles avec des colliers (figure 18).
!
18
15
16
Page 75

75
F
3.5.1) Description des branchements électriques
Ce paragraphe contient une brève description des branchements électriques: pour plus d’informations, voir aussi le paragraphe 7.3 « Ajout ou
retrait de dispositifs ».
FLASH Cette sortie est programmable (voir L4 sur le tableau 10) pour connecter l’un des dispositifs suivants:
Clignotant
Si elle est programmée comme « clignotant », il est possible de connecter sur la sortie FLASH un clignotant NICE LUCY
B, MLB ou MLBT avec une ampoule à 12 V 21W type auto.
Durant la manœuvre, elle clignote selon la fréquence: 0,5 s allumée et 0,5 s éteinte.
Fonction: « voyant porte ouverte », « active si la porte est fermée » ou « active si la porte est ouverte ».
Si elle est programmée avec une de ces 3 fonctions, il est possible de connecter à la sortie FLASH un voyant de 24 V
max. 5 W pour les signalisations suivantes
Fonction « voyant porte ouverte ».
Éteint: avec la porte fermée.
Clignotement lent: porte en phase d’ouverture.
Clignotement rapide: porte en phase de fermeture.
Allumé: porte ouverte (non fermée).
Fonction « active si la porte est fermée ».
Allumé: porte fermée.
Éteint: dans tous les autres cas.
Fonction « active si la porte est ouverte ».
Allumé: porte ouverte.
Éteint: dans tous les autres cas.
Elle peut également être programmée pour d’autres fonctions; voir le paragraphe 7.2.3 « Fonctions de deuxième niveau
(paramètres réglables) ».
Ventouse*
Si elle est programmée comme « ventouse », il est possible de connecter à la sortie FLASH une ventouse de 24 V max.
10 W (versions à électroaimant uniquement, sans dispositifs électroniques).
Quand la porte est fermée, la ventouse est activée en bloquant la porte. Durant la manœuvre d’ouverture ou de fermeture, elle est désactivée.
Verrou électrique*
Si elle est programmée comme « verrou électrique », il est possible de connecter à la sortie FLASH un verrou électrique
de 24 V max. 10 W (versions à électroaimant uniquement, sans dispositifs électroniques). Durant la manœuvre d’ouverture, le verrou électrique se déclenche et reste déclenché pour libérer la porte et pouvoir exécuter la manœuvre. Durant
la manœuvre de fermeture, il faut s’assurer que le verrou électrique se réenclenche mécaniquement.
Serrure électrique*
Si elle est programmée comme « serrure électrique », il est possible de connecter à la sortie FLASH une serrure électrique de 24 V max. 10 W (versions à électroaimant uniquement, sans dispositifs électroniques).
Durant la manœuvre d’ouverture, la serrure électrique se déclenche pendant un court laps de temps pour libérer la porte et pouvoir exécuter la manœuvre. Durant la manœuvre de fermeture, il faut s’assurer que la serrure électrique se réenclenche mécaniquement.
BLUEBUS Sur cette borne, il est possible de connecter les dispositifs compatibles; ils sont tous connectés en parallèle avec seu-
lement deux conducteurs sur lesquels transitent aussi bien l’alimentation électrique que les signaux de communication.
D’autres informations sur BlueBUS sont fournies dans le paragraphe 7.3.1 « BlueBUS ».
STOP Entrée pour dispositifs qui bloquent ou éventuellement arrêtent la manœuvre en cours; en adoptant certaines solutions
sur l’entrée, il est possible de connecter des contacts type « normalement fermé » ou « normalement ouvert » ou bien
des dispositifs à résistance constante ou de type optique. D’autres informations sur STOP sont fournies dans le paragraphe 7.3.2 « Entrée STOP ».
PP Entrée pour dispositifs qui commandent le mouvement en mode Pas à Pas; on peut y connecter des contacts de type
« normalement ouvert ».
OPEN Entrée pour dispositifs qui commandent le mouvement d’ouverture uniquement; on peut y connecter des contacts de
type « normalement ouvert ».
CLOSE Entrée pour dispositifs qui commandent le mouvement de fermeture uniquement; on peut y connecter des contacts de
type « normalement ouvert ».
ANTENNE Entrée pour la connexion de l’antenne pour récepteur radio (l’antenne est incorporée sur LUCY B).
* Seuls les dispositifs contenant uniquement l’électroaimant peuvent être connectés.
Ne pas utiliser de dispositifs différents de ceux qui sont prévus.
Page 76

76
4.1) Branchement au secteur
le branchement de TEN au secteur doit être effectué par du personnel expert et qualifié en possession des caracté-
ristiques requises et en conformité avec les lois, normes et réglementations.
Dès que TEN est sous tension, il est conseillé de faire quelques vérifications élémentaires:
1. Vérifier que la LED BlueBUS clignote rapidement pendant quelques secondes puis régulièrement à raison d’un clignotement par seconde (figure 31).
2. Si les photocellules sont présentes, vérifier que les LED sur les photocellules clignotent elles aussi (aussi bien sur TX que sur RX); le type
de clignotement n’est pas significatif car il est lié à d’autres facteurs.
3. Vérifier que le dispositif connecté à la sortie FLASH est éteint.
4. Vérifier que l’éclairage automatique est éteint.
Si tout cela ne se vérifie pas, il faut immédiatement mettre la logique de commande hors tension et contrôler plus attentivement les
connexions électriques.
D’autres informations utiles pour la recherche et le diagnostic des pannes sont fournies dans le paragraphe 7.6 « Résolution des problèmes ».
!
4.2) Reconnaissance des dispositifs
Après le branchement au secteur il faut faire reconnaître par la logique de commande les
dispositifs connectés aux entrées BlueBUS et STOP. Avant cette phase, les LED L1 et L2
clignotent pour indiquer qu’il faut effectuer la reconnaissance des dispositifs.
lLa phase de reconnaissance des dispositifs doit être exécutée même si
aucun dispositif n’est connecté.
1. Presser et maintenir enfoncées les touches [▲] et [Set] (figure 20).
2. Relâcher les touches quand les LED L1 et L2 commencent à clignoter très rapidement
(au bout d’environ 3 s);
3. Attendre quelques secondes que la logique de commande termine la reconnaissance
des dispositifs;
À la fin de la reconnaissance, la LED STOP doit rester allumée; les LED L1 et L2 s’éteindront
(les LED L3 et L4 commenceront éventuellement à clignoter).
La phase de reconnaissance des dispositifs connectés peut être refaite à tout moment,
même après l’installation, par exemple en cas d’ajout d’un dispositif.
!
20
4) Contrôles finaux et mise en service
3.5.2) Branchement électrique du second moteur
Si l’utilisation de deux moteurs est prévue sur l’installation, un
TN2010 et un TN2020, il est nécessaire d’effectuer la connexion
électrique du second moteur comme cela est décrit ci-dessous.
1. Sur l’opérateur TN2010, effectuer les mêmes branchements que
ceux qui sont prévus en cas d’installation d’un seul moteur.
2. Entre la logique de commande du TN2010 et le bornier du
TN2020, effectuer la connexion des câbles du second moteur et
de l’éclairage automatique du second moteur » comme indiqué
sur la figure 19, en respectant les polarités indiquées.
19
Page 77

77
F
4.3) Reconnaissance des positions d’ouverture et de fermeture de la porte
Après la reconnaissance des dispositifs, il est nécessaire de faire reconnaître par la logique de commande les positions d’ouverture et de fermeture de la porte ainsi que d’autres positions optionnelles; il y a 6 positions en tout:
Position LED Signification
FCA L1 Position d’ouverture maximale. Quand la porte atteint cette position, elle s’arrête.
RA L2 Position de début du ralentissement durant la manœuvre d’ouverture; quand la porte atteint cette position, le moteur
décélère pour atteindre la vitesse minimale.
RI L4 Position de ralentissement intermédiaire dans la manœuvre de fermeture. Quand ce point est programmé, la porte décélère
environ 50 cm avant, de manière à passer la position RINT à la vitesse minimale. Quand la position RI est dépassée, le
moteur reprend la vitesse programmée.
AP L5 Position d’ouverture partielle. C’est la position à laquelle la porte s’arrête après une commande d’ouverture partielle.
RC L7 Position de début du ralentissement durant la manœuvre de fermeture; quand la porte atteint cette position, le moteur
décélère pour atteindre la vitesse minimale.
FCC L8 Position de fermeture maximale; quand la porte atteint cette position, elle s’arrête.
Durant ces manœuvres, la logique de commande mémorise la force
nécessaire dans les mouvements d’ouverture et de fermeture..
Il est important que ces premières manœuvres ne soient
pas interrompues, par exemple par une commande d’arrêt
(STOP).
La phase de reconnaissance des positions peut être répétée à tout
moment, même après l’installation; il suffit de reprendre à partir du
point 1. S’il est nécessaire de modifier une seule position, il suffit de
passer la programmation des positions non concernées en pressant
2 fois rapidement la touche [Set] pour chaque position à omettre.
21
Quand les positions n’ont pas été reconnues, les LED L3 et L4 clignotent.
La procédure pour la mémorisation des positions est décrite ci-dessous. Les positions FCA et FCC doivent impérativement être programmées
alors que les autres positions sont optionnelles; dans ce dernier cas, elles seront automatiquement calculées par la logique de commande.
1. Presser [Set] + [▼] pendant 3 secondes pour entrer en phase de mémorisation des positions. (figure 21)
La LED L1 clignote: programmation de la position FCA.
2. Avec les touches [▲] ou [▼], manœuvrer la porte jusqu'à la position d’ouverture.
3. Presser la touche [Set] pendant 2 secondes pour confirmer la position FCA. La LED L1 reste allumée.
La LED L2 clignote: programmation de la position RA.
4. Si l’on ne veut pas programmer la position de ralentissement en ouverture, presser 2 fois rapidement la touche [Set] pour passer
à la programmation suivante; la LED L2 reste éteinte. Sinon, poursuivre la séquence.
5. Avec les touches [▲] ou [▼], manœuvrer la porte jusqu'à la position de ralentissement en ouverture.
6. Presser la touche [Set] pendant 2 secondes pour confirmer la position RA. La LED L2 reste allumée.
La LED L4 clignote: programmation de la position RI.
7. Si l’on ne veut pas programmer la position de ralentissement intermédiaire, presser 2 fois rapidement la touche [Set] pour passer
à la programmation suivante; la LED L4 reste éteinte. Sinon, poursuivre la séquence.
8. Avec les touches [▲] ou [▼], manœuvrer la porte jusqu'à la position de ralentissement intermédiaire.
9. Presser la touche [Set] pendant 2 secondes pour confirmer la position RI. La LED L4 reste allumée.
La LED L5 clignote: programmation de la position AP.
10. Si l’on ne veut pas programmer la position d’ouverture partielle, presser 2 fois rapidement la touche [Set] pour passer à la
programmation suivante; la LED L5 reste éteinte. Sinon, poursuivre la séquence.
11. Avec les touches [▲] ou [▼], manœuvrer la porte jusqu'à la position d’ouverture partielle.
12. Presser la touche [Set] pendant 2 secondes pour confirmer la position AP. La LED L5 reste allumée.
La LED L7 clignote: programmation de la position RC.
13. Si l’on ne veut pas programmer la position de ralentissement en fermeture, presser 2 fois rapidement la touche [Set] pour passer
à la programmation suivante; la LED L7 reste éteinte. Sinon, poursuivre la séquence..
14. Avec les touches [▲] ou [▼], manœuvrer la porte jusqu'à la position de ralentissement en fermeture.
15. Presser la touche [Set] pendant 2 secondes pour confirmer la position RC. La LED L7 reste allumée.
La LED L8 clignote: programmation de la position FCC.
16. Avec les touches [▲] ou [▼], manœuvrer la porte jusqu'à la position de fermeture.
17. Presser la touche [Set] pendant 2 secondes pour confirmer la position FCC. La LED L8 reste allumée.
18. Quand on relâche la touche [Set], toutes les LED s’éteignent.
19. Commander l’ouverture en pressant la touche [OPEN] pour effectuer une manœuvre complète d’ouverture.
20. Commander la fermeture en pressant la touche [CLOSE] pour effectuer une manœuvre complète de fermeture.
Page 78

78
Il s’agit de la phase la plus importante dans la réalisation de l’automatisation afin de garantir une sécurité maximum. L’essai peut également être utilisé comme vérification périodique des dispositifs qui
composent l’automatisme.
L’essai de toute l’installation doit être effectué par du
personnel qualifié et expérimenté qui devra se charger
d’établir les essais prévus en fonction des risques présents et de vérifier le respect de ce qui est prévu par les
lois, les normes et réglementations et en particulier,
toutes les conditions de la norme EN 12445 qui détermine les méthodes d’essai pour la vérification des automatismes pour portails et portes.
!
5) Essai et mise en service
4.6) Récepteur radio
Pour la commande à distance de TEN, la logique de commande est
munie d’un connecteur SM pour récepteurs radio type SMXI, SMXIS
ou OXI. Pour embrocher le récepteur radio, il faut couper l’alimentation de TEN et effectuer l’opération indiquée sur la figure 21.
Dans le tableau 7, est décrite l’association entre la sortie des récepteurs radio SMXI et SMXIS et la commande que TEN exécutera:
En cas d’utilisation du récepteur radio OXI de la ligne NiceOpera,
avec le MODE II ÉTENDU, le récepteur pourra envoyer les commandes suivantes:
Uscita N°1 Comando “P.P.” (Passo-Passo)
Uscita N°2 Comando “Apertura parziale”
Uscita N°3 Comando “Apre”
Uscita N°4 Comando “Chiude”
Tabella 7: comandi con ricevitore SMXI, SMXIS
Commande n° 1 Pas à pas
Commande n° 2 Ouverture partielle 1
Commande n° 3 Ouverture
Commande n° 4 Fermeture
Commande n° 5 Arrêt
Commande n° 6 Pas à pas collectif
Commande n° 7 Pas à pas haute priorité
Commande n° 8 Ouverture partielle 2
Commande n° 9 Ouverture partielle 3
Commande n° 10 Ouverture et blocage de l’automatisme
Commande n° 11 Fermeture et blocage de l’automatisme
Commande n° 12 Blocage de l’automatisme
Commande n° 13 Débrayage de l’automatisme
Commande n° 14 Activation temporisateur éclairage automatique
Commande n° 15 Marche – Arrêt éclairage automatique
Tableau 8: commandes avec récepteur OXI.
22
4.4) Vérification du mouvement de la porte
Après la reconnaissance des positions, il est conseillé d’effectuer quelques manœuvres pour vérifier que le mouvement de la porte est correct.
1. Presser la touche [OPEN] pour commander une manœuvre d’ouverture; vérifier que l’ouverture de la porte s’effectue régulièrement sans
variation de vitesse; vérifier que le ralentissement en ouverture se produit dans la position programmée.
2. Presser la touche [CLOSE] pour commander une manœuvre de fermeture; vérifier que la fermeture de la porte commence avec un départ
lent puis qu’un changement de vitesse se produit et enfin que le ralentissement en fermeture s’effectue dans la position programmée.
3. Durant la manœuvre, vérifier que le clignotant clignote à une fréquence régulière de 0,5 s.
4. Effectuer différentes manœuvres d’ouverture et de fermeture pour mettre en évidence les éventuels défauts de montage et de réglage ou
d’autres anomalies comme par exemple les points de plus grande friction.
5. Vérifier que la fixation de l’opérateur TEN est solide et suffisamment résistante même en cas de brusques accélérations ou décélérations
du mouvement de la porte.
4.5) Fonctions préprogrammées
La logique de commande de TEN dispose de certaines fonctions programmables; par défaut, ces fonctions sont réglées suivant une configuration qui devrait satisfaire la plupart des automatisations; quoiqu’il en soit, les fonctions peuvent être modifiées à tout moment à l’aide
d’une procédure de programmation particulière, voir pour cela le paragraphe 7.2 « Programmations ».
5.1) Essai
Chaque élément de l’automatisme comme par exemple les bords
sensibles, les photocellules, l’arrêt d’urgence, etc. demande une
phase spécifique d’essai; pour ces dispositifs, il faudra effectuer les
procédures figurant dans les guides techniques correspondants.
Pour l’essai de TEN, effectuer la séquence d’opérations suivante:
1. Vérifier que tout ce qui est prévu dans ce guide technique est
rigoureusement respecté, en particulier dans le chapitre 1 « Avertissements ».
2. Débloquer la porte en tournant la poignée de débrayage dans le
sens antihoraire (figure 40) de chaque moteur; vérifier qu’il est
possible de manœuvrer manuellement la porte en ouverture et en
fermeture avec une force maximale de 225 N, en agissant sur le
point prévu pour la manœuvre manuelle.
3. Bloquer les moteurs à la porte en tournant la poignée de
débrayage dans le sens horaire (figure 41).
Page 79

79
F
4. En utilisant les dispositifs de commande ou d’arrêt prévus (sélec-
teur à clé, boutons de commande ou émetteurs radio), effectuer
des essais d’ouverture, de fermeture et d’arrêt de la porte et vérifier que le comportement de la porte correspond à ce qui est prévu.
5. Il convient d’effectuer différentes manœuvres pour contrôler le
bon coulissement de la porte et détecter les éventuels défauts de
montage et de réglage ainsi que la présence de points de frottement.
6. Vérifier un par un le fonctionnement correct de tous les dispositifs de sécurité présents dans l’installation (photocellules, bords
sensibles, arrêt d’urgence, etc.); en particulier, à chaque fois
qu’un dispositif intervient, la LED « OK » sur la logique de commande doit effectuer 2 clignotements plus rapides qui confirment
que la logique de commande reconnaît l’événement.
7. Pour le contrôle des photocellules et en particulier pour contrôler
qu’il n’y a pas d’interférences avec d’autres dispositifs, passer un
cylindre d'un diamètre de 5 cm et d’une longueur de 30 cm sur
l’axe optique, d’abord à proximité de TX, puis de RX, et enfin au
centre entre les deux et vérifier que dans tous les cas le disposi-
tif intervient en passant de l’état d’actif à l’état d’alarme et vice
versa. Pour finir, vérifier que cela provoque dans la logique de
commande l’action prévue; exemple: dans la manœuvre de fermeture, vérifier que cette action provoque l’inversion du mouvement.
8. Si la protection contre les situations dangereuses provoquées par
le mouvement du tablier a été assurée à travers la limitation de la
force d’impact, il faut effectuer la mesure de la force conformément à ce qui est prévu par la norme EN 12445. Si le réglage de
la « vitesse » ou le contrôle de la « force moteur » sont utilisés
comme auxiliaire du système pour la réduction de la force d’impact, essayer et trouver le réglage qui donne les meilleurs résultats.
5.2) Mise en service
La mise en service ne peut être faite que si toutes les phases d’essai de TEN et des autres dispositifs présents ont été exécutées avec
résultat positif. La mise en service partielle ou dans des situations «
provisoires » est interdite.
1. Réaliser et conserver au moins 10 ans le dossier technique de
l’automatisation qui devra comprendre au moins: dessin d’ensemble de l’automatisation, schéma des connexions électriques,
analyse des risques et solutions adoptées, déclaration de conformité du fabricant de tous les dispositifs utilisés (pour TEN, utiliser
la déclaration CE de conformité ci-jointe), exemplaire du mode
d’emploi et du plan de maintenance de l’automatisme.
2. Appliquer sur la porte une plaquette contenant au moins les données suivantes: type d’automatisme, nom et adresse du
constructeur (responsable de la « mise en service »), numéro de
série, année de construction et marque « CE ».
3. Fixer de manière permanente à proximité de la porte une étiquette ou une plaque indiquant les opérations à effectuer pour le
débrayage et la manœuvre manuelle.
4. Fixer de manière permanente sur la porte une étiquette ou une
plaque avec cette image (hauteur minimale: 60 mm) (figure 23).
5. Rédiger et remettre au propriétaire la déclaration de conformité
de l’automatisme.
6. Rédiger et remettre au propriétaire de l’automatisme le guide « Instructions et avertissements pour l’utilisation de l’automatisme ».
7. Rédiger et remettre au propriétaire le plan de maintenance de
l’automatisme (qui doit regrouper toutes les prescriptions pour la
maintenance de chaque dispositif).
8. Avant de mettre en service l’automatisme, informer le propriétaire,
de manière adéquate et par écrit (par exemple dans le guide « Instructions et avertissements pour l’utilisation de l’automatisme »),
sur les risques encore présents.
23
Page 80

80
7.2) Programmations
Sur la logique de commande de TEN plusieurs fonctions programmables sont disponibles; le paramétrage des fonctions s’effectue au
moyen de 3 touches présentes sur la logique de commande: [▲]
[Set] [▼]; elles sont visualisées au moyen de 8 LED: L1….L8.
Les fonctions programmables disponibles sur TEN sont disposées
sur 2 niveaux:
Premier niveau: fonctions réglables en mode ON-OFF (actif ou
non actif); dans ce cas, chaque LED L1….L8 indique une fonction,
si elle est allumée la fonction est active, si elle est éteinte la fonction
n’est pas active; voir tableau 8.
Deuxième niveau: paramètres réglables sur une échelle de
valeurs (valeurs de 1 à 8); dans ce cas, chaque LED L1…L8 indique
la valeur réglée parmi les 8 possibles; voir tableau 10.
Ce chapitre explique les possibilités de programmation et de personnalisation, ainsi que le diagnostic et la recherche des pannes sur TEN.
Durant la manœuvre, qu’il s’agisse de l’ouverture ou de la fermeture, toutes
les touches exécutent la fonction STOP en arrêtant la course du moteur.
!
7) Approfondissements
OPEN La touche «OPEN» permet de commander l’ouverture de la porte
ou de déplacer vers le haut le point de programmation.
La touche «STOP» permet d’arrêter la manœuvre; si elle est pressée pendant
plus de 5 secondes, elle permet de rentrer dans la programmation.
La touche « CLOSE » permet de commander la fermeture de la porte ou
de déplacer vers le bas le point de programmation.
7.1) Touches de programmation
La logique de commande de TEN présente 3 touches qui peuvent être utilisées aussi
bien pour la commande de la logique de commande durant les essais que pour les
programmations (figure 25).
25
▲
OPEN
STOP
SET
CLOSE
▼
Ce chapitre contient les informations pour l’élaboration du plan de maintenance et la mise au rebut de TEN.
6) Maintenance et mise au rebut
6.1) Maintenance
Pour maintenir un niveau de sécurité constant et pour garantir la
durée maximum de tout l’automatisme, il faut effectuer une maintenance régulière.
La maintenance doit être effectuée dans le plein respect des consignes de sécurité du présent manuel et suivant les prescriptions des lois et normes en vigueur.
Si d’autres dispositifs sont présents, suivre ce qui est prévu dans les
plans de maintenance respectifs.
1. Pour TEN, il faut effectuer une maintenance programmée au plus
tard dans les 6 mois ou quand 4 000 manœuvres ont été
effectuées depuis la dernière intervention de maintenance.
2. Débrancher toutes les sources d’alimentation électrique.
3. Vérifier l’état de détérioration de tous les matériaux qui compo-
sent l’automatisme avec une attention particulière pour les phénomènes d’érosion ou d’oxydation des parties structurelles; remplacer les parties qui ne donnent pas de garanties suffisantes.
4. Vérifier l’état d’usure des parties en mouvement: bras télescopiques, câbles des contrepoids et toutes les parties du tablier et
remplacer les parties usées.
5. Reconnecter les sources d’alimentation électrique et effectuer tous
les essais et les contrôles prévus dans le paragraphe 5.1 « Essai ».
!
6.2) Mise au rebut
Comme pour l'installation, à la fin de la durée de vie de ce produit, les
opérations de démantèlement doivent être effectuées par du personnel
qualifié. Ce produit est constitué de différents types de matériaux dont
certains peuvent être recyclés et d’autres devront être mis au rebut;
informez-vous sur les systèmes de recyclage ou d’élimination prévus
par les normes locales en vigueur pour cette catégorie de produit.
Certains composants du produit peuvent contenir des
substances polluantes ou dangereuses qui pourraient avoir
des effets nuisibles sur l'environnement et sur la santé des
personnes s’ils n’étaient pas adéquatement éliminés.
Comme l’indique le symbole sur la figure 24, il est interdit de jeter ce
produit avec les ordures ménagères. Procéder par conséquent à la
«collecte différenciée» des composants pour leur traitement conformément aux méthodes prescrites par les normes locales en vigueur
ou restituer le produit au vendeur lors de l'achat d’un nouveau produit équivalent.
Certaines règlementations locales peuvent prévoir de lourdes sanctions en cas d’élimination incorrecte de ce produit.
1. Mettre l’automatisme, y compris la batterie tampon, hors tension.
2. Démonter tous les dispositifs et accessoires, suivant la procédu-
re inverse à celle qui est décrite dans le chapitre 3 « Installation ».
3. Séparer le plus possible les parties qui peuvent ou doivent être
recyclées ou éliminées de manière différente, par exemple séparer les parties métalliques des parties en plastique, les cartes
électroniques, les batteries, etc.
4. Trier et confier les différents matériaux ainsi séparés et recyclables
à des sociétés spécialisées dans la récupération et le recyclage
suivant les réglementations locales.
!
24
Page 81

81
F
LED Fonction Description
L1 Fermeture automatique Cette fonction permet une fermeture automatique de la porte après le temps de pause programmé; le
temps de pause est réglé en usine sur 30 secondes mais peut être modifié et réglé sur 10, 20, 40, 60, 80,
120, 160 et 200 secondes.
Si la fonction n’est pas activée, le fonctionnement est semi-automatique.
L2 Refermeture après Cette fonction permet de ne garder la porte ouverte que durant le temps nécessaire au transit; en effet,
passage devant la l'intervention de « Photo » provoque toujours une refermeture automatique avec un temps de pause de 5 s
photocellule (indépendamment de la valeur programmée).
Le comportement change selon que la fonction de « fermeture automatique » est active ou pas.
Si la « fermeture automatique » n’est pas active: la porte atteint toujours la position d’ouverture
totale (même si la libération de la photocellule a lieu avant). La libération de la photocellule provoque la
refermeture automatique au bout de 5 s.
Avec la « fermeture automatique » active: la manœuvre d’ouverture s’arrête juste après que les
photocellules ont été libérées et 5 s plus tard la refermeture automatique commence.
La fonction de « refermeture après passage devant la photocellule » est toujours désactivée dans les
manœuvres interrompues avec une commande d’arrêt.
Si la fonction « refermeture après passage devant la photocellule » n’est pas active, le temps de pause sera
celui qui est programmé ou bien il n’y aura pas de refermeture automatique si la fonction n’est pas active.
L3 Ferme toujours La fonction « ferme toujours » intervient, en provoquant une fermeture, quand au retour de l’alimentation la
logique de commande détecte la porte ouverte.
Pour des questions de sécurité, la manœuvre est précédée par 3 s de préclignotement.
Si la fonction n’est pas active au retour de l’alimentation, la porte restera immobile.
L4 Attente Cette fonction permet de réduire au maximum la consommation d’énergie. Si cette fonction est active, 1
minute après la fin de la manœuvre, la logique de commande éteint BlueBUS (et donc les dispositifs) et
toutes les LED sauf la LED BlueBUS qui clignotera plus lentement. Quand une commande arrive, la logique
de commande rétablit le plein fonctionnement. Si la fonction n’est pas active, il n’y aura pas de réduction
de la consommation.
L5 Inversion longue Cette fonction permet de sélectionner le type d’inversion que la porte exécute à cause de l’intervention de
STOP ou du limiteur de force. Si la fonction n’est pas activée, l’inversion est brève (15 cm environ). Si la
fonction est activée, l’inversion se produit jusqu'à la position d’ouverture ou de fermeture maximale.
L6 Préclignotement Avec la fonction de préclignotement, une pause de 3 s est ajoutée entre l’allumage du clignotant et le début
de la manœuvre pour avertir l’utilisateur de la situation de danger. Si la fonction n’est pas active, l’allumage
du clignotant coïncide avec le début de la manœuvre.
L7 Sensibilité Cette fonction permet d’accroître considérablement la sensibilité du moteur dans la détection des
obstacles. Si elle est utilisée comme auxiliaire pour la détection de la force d’impact, il faut aussi régler les
paramètres « vitesse » et « force moteur » dans le menu de deuxième niveau.
L8 2 moteurs Cette fonction doit être activée quand l’installation comprend 2 moteurs
Durant le fonctionnement normal de TEN, c’est-à-dire quand aucune manœuvre n’est en cours, les LED L1….L8 sont allumées ou éteintes
suivant l’état de la fonction à laquelle elles correspondent: par exemple, L1 est allumée si la « fermeture automatique » est activée.
Durant la manœuvre, L1…L8 clignotent en indiquant la force nécessaire pour déplacer la porte à ce moment-là. Si L8 clignote, la force
nécessaire est basse et ainsi de suite jusqu'au clignotement de L1 qui indique la force maximale.
Il faut souligner qu’il n’y a aucune relation entre le niveau de force indiqué par les LED durant le mouvement (qui est une valeur absolue) et
le niveau indiqué par les LED durant la programmation de la force (qui est une valeur relative). Voir L5 et L6 dans le tableau 10.
Tableau 8: liste des fonctions programmables: premier niveau
7.2.1) Fonctions du premier niveau (fonctions ON-OFF)
7.2.2) Programmation du premier niveau (fonctions ON-OFF)
En usine, les fonctions du premier niveau sont toutes mises sur « OFF » mais on peut les modifier à tout moment comme cela est décrit cidessous. Faire attention dans l’exécution de la procédure car il y a un temps maximum de 10 s entre la pression d’une touche et l’autre,
autrement la procédure se termine automatiquement en mémorisant les modifications faites jusqu’à ce moment-là.
1. Presser et maintenir enfoncée la touche [Set] pendant environ 3 s.
3s
2. Relâcher la touche [Set] quand la LED L0 commence à clignoter.
3. Presser les touches [▲] ou [▼] pour déplacer la LED clignotante sur la LED qui correspond à la
fonction à modifier.
4. Presser la touche [Set] pour changer l’état de la fonction (clignotement bref = OFF;
clignotement long = ON).
5. Attendre 10 s pour sortir de la programmation pour cause de temps maximum écoulé.
10s
Note: les points 3 et 4 peuvent être répétés au cours de la même phase de programmation pour mettre d’autres fonctions en mode ON ou
OFF.
Tableau 9: pour changer les fonctions ON-OFF Exemple
L1
ou
SET
SET
SET
Page 82

82
7.2.3) Fonctions du deuxième niveau (paramètres réglables)
Tableau 10: liste des fonctions programmables: deuxième niveau
Temps de
pause
Fonction P.P.
Vitesse
moteur
Sortie FLASH
Force moteur
en ouverture
Force moteur
en fermeture
Avis de
maintenance
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
10 secondes
20 secondes
40 secondes
60 secondes
80 secondes
120 secondes
160 secondes
200 secondes
Ouverture - stop - fermeture - stop
Ouverture - stop - fermeture - ouverture
Ouverture - fermeture - ouverture - fermeture
Fonctionnement collectif
Fonctionnement collectif 2 (plus de 2 s entraîne un arrêt)
Pas à pas 2 (moins de 2 s entraîne une ouverture partielle)
Commande « par action maintenue »
Ouverture en « semi-automatique », fermeture avec commande « par action maintenue »
Vitesse 1 (30 % - lente)
Vitesse 2 (44 %)
Vitesse 3 (58 %)
Vitesse 4 (72 %)
Vitesse 5 (86 %)
Vitesse 6 (100 % - rapide)
Ouvre V4, ferme V2
Ouvre V6, ferme V4
Fonction « voyant porte ouverte ».
Active si la porte est fermée.
Active si la porte est ouverte.
Clignotant
Verrou électrique
Serrure électrique
Ventouse
Voyant de la maintenance
Force 1 (basse)
Force 2
Force 3
Force 4
Force 5
Force 6
Force 7
Force 8 (élevée)
Force 1 (basse)
Force 2
Force 3
Force 4
Force 5
Force 6
Force 7
Force 8 (élevée)
Automatique (suivant la charge de travail des manœuvres)
1.000
2.000
4.000
6.000
8.000
10.000
12.000
LED de saisie
Paramètre Led (niveau) valeur Description
Règle le temps de pause, à
savoir le temps qui s’écoule
avant la refermeture automatique. La fonction n’a d’effet
que si la fermeture automatique est active.
Règle la séquence de commandes associées à l’entrée
P.P. ou bien à la première
commande radio.
Règle la vitesse du moteur
durant la course normale.
Sélectionne le dispositif connecté
à la sortie FLASH. Avant de
changer de programmation,
s’assurer que le dispositif
connecté à la borne FLASH correspond à ce qui est décrit dans
le paragraphe 3.4.1 « Description
des branchements électriques ».
Règle le système de contrôle
de la force du moteur pour
l’adapter au poids de la porte
durant la manœuvre d’ouverture et donc la sensibilité de
détection des obstacles.
Règle le système de contrôle
de la force du moteur pour
l’adapter au poids de la porte
durant la manœuvre de fermeture et donc la sensibilité de
détection des obstacles.
Règle le nombre de manœuvres
au bout duquel il faut signaler la
demande de maintenance de
l’automatisme (voir paragraphe
7.4.3 «Avis de maintenance»).
L1
L2
L3
L4
L5
L6
L7
Note: “ ” représente le réglage d’usine. SEGUE
Page 83

83
F
Liste des
anomalies
L1
L2
L3
L4
L5
L6
L7
L8
Résultat 1remanœuvre (la plus récente)
Résultat 2emanœuvre
Résultat 3emanœuvre
Résultat 4emanœuvre
Résultat 5emanœuvre
Résultat 6emanœuvre
Résultat 7emanœuvre
Résultat 8
e
manœuvre
LED de saisie
Paramètre Led (niveau) valeur Description
Permet de vérifier le type d’anomalie qui s’est vérifiée au cours
des 8 dernières manœuvres
(voir paragraphe 7.6.1 «Historique des anomalies»).
L8
Note: “ ” représente le réglage d’usine.
Tous les paramètres peuvent être réglés librement sans aucune contre-indication; seuls les réglages « force moteur en ouverture » et « force
moteur en fermeture » pourraient requérir une attention particulière:
• Il est déconseillé d’utiliser des valeurs de force élevées pour compenser le fait que le tablier a des points de friction anormaux; une force
excessive peut compromettre le fonctionnement du système de sécurité ou endommager le tablier.
• Si le contrôle de la « force moteur » est utilisé comme auxiliaire du système pour la réduction de la force d’impact, après chaque réglage,
répéter la mesure de la force, comme le prévoit la norme EN 12445.
• L’usure et les conditions atmosphériques peuvent influencer le mouvement de la porte, périodiquement il faut recontrôler le réglage de la
force.
7.2.4) Programmation du deuxième niveau (paramètres réglables)
En usine, les paramètres réglables sont réglés comme indiqué dans le tableau 10 avec: « » mais ils peuvent être modifiés à tout moment
comme cela est décrit ci-dessous. Faire attention dans l’exécution de la procédure car il y a un temps maximum de 10 s entre la pression
d’une touche et l’autre, autrement la procédure se termine automatiquement en mémorisant les modifications faites jusqu’à ce moment-là.
1. Presser et maintenir enfoncée la touche [Set] pendant environ 3 s.
3s
2. Relâcher la touche [Set] quand la LED L1 commence à clignoter.
3. Presser les touches [▲] ou [▼] pour déplacer la LED clignotante sur la « LED d’entrée » qui
correspond au paramètre à modifier.
4. Presser et maintenir enfoncée la touche [Set], la pression doit être maintenue sur la touche [Set]
pendant toute la durée des phases 5 et 6.
5. Attendre environ 3 s puis la LED qui correspond au niveau actuel du paramètre à modifier s’allumera.
6. Presser les touches [▲] ou [▼] pour déplacer la LED qui correspond à la valeur du paramètre.
7. Relâcher la touche [Set]
8. Attendre 10 s pour sortir de la programmation pour cause de temps maximum écoulé.
10s
Note: les points de 3 à 7 peuvent être répétés au cours de la même phase de programmation pour régler plusieurs paramètres.
Tableau 11: pour changer les paramètres réglables Exemple
L1
ou
ou
7.2.5) Exemple de programmation premier niveau (fonctions ON-OFF)
Comme exemple nous indiquons les diverses opérations à effectuer pour modifier le réglage des fonctions fait en usine pour activer les fonctions de « fermeture automatique » (L1) et « ferme toujours » (L3).
1. Presser et maintenir enfoncée la touche [Set] pendant 3 s environ.
3s
2. Relâcher la touche [Set] quand la LED L1 commence à clignoter.
3. Presser une fois la touche [Set] pour changer l’état de la fonction associée à L1.
(fermeture automatique); à présent, la LED L1 clignote avec un clignotement long.
4. Presser 2 fois la touche [▼] pour déplacer la LED clignotante sur la LED
5. Presser une fois la touche [Set] pour changer l’état de la fonction associée à 1 (Ferme toujours),
maintenant la LED L3 clignote avec un clignotement long.
6. Presser une fois la touche [Set] pour changer l’état de la fonction associée à 1 (fermeture automatique),
maintenant la LED L3 clignote avec un clignotement long.
7. Attendre 10 s pour sortir de la programmation pour cause de temps maximum écoulé.
10s
À la fin de ces opérations, les LED L1 et L3 doivent rester allumées pour indiquer que les fonctions de « fermeture automatique » et « ferme
toujours » sont actives.
Tableau 12: exemple de programmation du premier niveau
Exemple
L1
L1
L3
L3
L3
SET
SET
SET
SET
SET
SET
SET
SET
SET
Page 84

84
7.2.6) Exemple de programmation deuxième niveau (paramètres réglables)
Comme exemple, nous indiquons la séquence d’opérations à effectuer pour modifier le réglage des paramètres par défaut et régler le « temps
de pause » sur 60 secondes (entrée sur L1 et niveau sur L4) et porter la vitesse à L6 (entrée sur L4 et niveau sur L6).
1. Presser et maintenir enfoncée la touche [Set] pendant 3 s environ.
3s
2. Relâcher la touche [Set] quand la LED L1 commence à clignoter.
3. Presser et maintenir enfoncée la touche [Set]; la pression sur la touche [Set] doit être maintenue
pendant toute la durée des phases 4 et 5.
4. Attendre environ 3 s jusqu’à l’allumage de la LED L3 qui correspond au niveau actuel du
« temps de pause ». 3s
5. Presser 1 fois la touche [▼] pour déplacer la LED allumée sur L3 qui représente la nouvelle valeur
du « temps de pause ».
6. Relâcher la touche [Set].
7. Presser 2 fois la touche [▼] pour déplacer la LED clignotante sur la LED L3.
L3
8. Presser et maintenir enfoncée la touche [Set]; la pression sur la touche [Set] doit être maintenue
pendant toute la durée des phases 9 et 10.
9. Attendre environ 3 s jusqu’à ce que la LED L4, qui correspond au niveau actuel de la «vitesse moteur»,
s’allume. 3s
10. Presser 2 fois la touche [▼] pour déplacer la LED allumée sur L6 qui représente la nouvelle valeur de
la « vitesse moteur ». L3
11. Relâcher la touche [Set].
12. Attendre 10 s pour sortir de la programmation pour cause de temps maximum écoulé.
10s
Tableau 13: exemple de programmation du deuxième niveau Exemple
7.3) Ajout ou retrait de dispositifs
Il est possible d’ajouter ou d’enlever, à tout moment, des dispositifs à toute automatisation réalisée avec TEN. En particulier, il est possible
de connecter à « BlueBUS » et à l'entrée « STOP » différents types de dispositifs comme l’indiquent les paragraphes suivants.
Après avoir ajouté ou enlevé des dispositifs, il faut procéder de nouveau à la reconnaissance des dispositifs suivant les indications du paragraphe 7.3.5 « Reconnaissance d'autres dispositifs ».
7.3.1) BlueBUS
BlueBUS est une technique qui permet d'effectuer les connexions des dispositifs compatibles avec seulement deux conducteurs sur lesquels transitent aussi bien l’alimentation électrique que les signaux de communication. Tous les dispositifs sont connectés en parallèle sur
les 2 mêmes conducteurs de BlueBUS sans devoir respecter une polarité quelconque; chaque dispositif est reconnu individuellement car au
cours de l'installation le système lui attribue une adresse univoque. À BlueBUS, on peut connecter par exemple: des photocellules, des dispositifs de sécurité, des boutons de commande, des voyants de signalisation, etc. La logique de commande de TEN reconnaît un par un
tous les dispositifs connectés à travers une procédure de reconnaissance ad hoc et est en mesure de détecter de manière extrêmement sûre
toutes les éventuelles anomalies. Pour cette raison, chaque fois qu’un dispositif connecté à BlueBUS est ajouté ou enlevé, il faut effectuer dans
la logique de commande la procédure de reconnaissance décrite dans le paragraphe 7.3.5 « Reconnaissance d’autres dispositifs ».
L1
L3
L3
L4
7.3.2) Entrée STOP
STOP est l'entrée qui provoque l’arrêt immédiat de la manœuvre suivi d’une brève inversion. On peut connecter à cette entrée des dispositifs avec sortie à contact normalement ouvert « NO », normalement fermé « NF », OPTO SENSOR ou des dispositifs avec sortie à
résistance constante 8,2kΩ, par exemple des bords sensibles.
Comme pour BlueBUS, la logique de commande reconnaît le type
de dispositif connecté à l'entrée STOP durant la phase de reconnaissance (voir paragraphe 7.3.5 « Reconnaissance d’autres dispositifs »); ensuite on a un arrêt quand une variation quelconque se
vérifie par rapport à l’état reconnu. En adoptant certaines solutions,
on peut connecter à l'entrée STOP plusieurs dispositifs, même de
type différent:
• Plusieurs dispositifs NO peuvent être connectés en parallèle entre
eux sans aucune limite de quantité.
• Plusieurs dispositifs NF peuvent être connectés en série entre eux
sans aucune limite de quantité.
• Deux dispositifs avec sortie à résistance constante 8,2kΩ peuvent
être connectés en parallèle; s’il y a plus de 2 dispositifs, ils doivent
tous être connectés en « cascade » avec une seule résistance terminale de 8,2kΩ.
• est possible de combiner les contacts NO et NF en mettant les
deux contacts en parallèle, en prenant la précaution de mettre en
série au contact NF une résistance de 8,2kΩ (cela donne aussi la
possibilité de combiner 3 dispositifs: NO, NF et 8,2kΩ).
Si l’entrée STOP est utilisée pour connecter des dispositifs ayant des fonctions de sécurité, seuls les dispositifs
avec sortie à résistance constante 8,2 kilohms ou des dispositifs optiques OPTO SENSOR garantissent la catégorie
3 de sécurité aux pannes selon la norme EN 954-1.
!
SET
SET
SET
SET
SET
SET
Page 85

85
F
Pour la connexion d’un dispositif optique type OPTO SENSOR,
effectuer les connexions comme indiqué sur la figure 26. Le courant
maximal fourni sur la ligne 12 Vcc est de 40 mA.
26
7.3.3) Photocellules
Le système « BlueBUS » permet, à travers l’adressage avec les cavaliers prévus à cet effet, la reconnaissance des photocellules de la part
de la logique de commande et d’attribuer la fonction de détection correcte. L’opération d’adressage doit être faite aussi bien sur TX que sur
RX (en plaçant les cavaliers de la même manière) en vérifiant qu’il n’y a pas d’autres paires de photocellules ayant la même adresse.
Dans un automatisme pour portes basculantes équipé avec TEN, il est possible d’installer les photocellules suivant les indications de la figure 27. Après l’installation ou le retrait de photocellules, il faudra effectuer dans la logique de commande la phase de reconnaissance comme
le décrit le paragraphe 4.2 « Reconnaissance des dispositifs ».
27
PHOTO
Photocellule h = 50
avec intervention en fermeture
PHOTO II
Photocellule h = 100
avec intervention en fermeture
PHOTO 1
Photocellule h = 50
avec intervention en fermeture et en ouverture
PHOTO 1 II
Photocellule h = 100
avec intervention en fermeture et en ouverture
PHOTO 2
Photocellule
avec intervention en ouverture
PHOTO 2 II
Photocellule
avec intervention en ouverture
PHOTO 3
CONFIGURATION NON AUTORISÉE
Tableau 14: adresses des photocellules
Photocellule Cavaliers Photocellule Cavaliers
7.3.4) Sélecteur numérique MOTB et lecteur de proximité pour cartes transpondeurs MOMB
Il est possible de connecter à BlueBUS jusqu'à 4 sélecteurs numériques MOTB ou lecteurs de cartes transpondeurs MOMB.
Avec MOTB, il est possible de commander l’automatisme après avoir tapé l’une des combinaisons numériques valables et enregistrées précédemment. Avec MOMB, il est possible de commander l’automatisme en approchant une des cartes transpondeurs valables et enregistrées précédemment. Ces dispositifs sont munis d’un code d’identification univoque et ne sont reconnus par la logique de commande qu’une
fois qu’ils ont été mémorisés durant la phase de reconnaissance des dispositifs. Ainsi, en cas d’éventuelle tentative frauduleuse de remplacement du dispositif, il ne sera pas possible de commander l’automatisme.
Pour plus d’informations, consulter le guide technique de MOTB et MOMB.
Page 86

86
7.3.5) Reconnaissance d’autres dispositifs
Normalement la procédure de reconnaissance des dispositifs
connectés à BlueBUS et à l'entrée STOP est effectuée durant la
phase d’installation; toutefois si des dispositifs sont ajoutés ou enlevés, il est possible de refaire la reconnaissance en procédant de la
manière suivante.
1. Presser et maintenir enfoncées les touches [▲] et [Set] (figure 28).
2. Relâcher les touches quand les LED L1 et L2 commencent à clignoter très rapidement (au bout d’environ 3 s).
3. Attendre quelques secondes que la logique de commande termine la reconnaissance des dispositifs.
4. À la fin de la reconnaissance, la LED STOP doit rester allumée;
les LED L1 et L2 s’éteindront (les LED L3 et L4 commenceront
éventuellement à clignoter).
Après avoir ajouté ou enlevé des dispositifs, il faut effectuer de nouveau l'essai de l’automatisme suivant les indications du paragraphe 5.1 « Essai ».
28
7.3.6) Effacement total de la mémoire
7.3.7) Programmation du sens de rotation du moteur
Quand il est nécessaire d’effectuer un effacement total et de retourner aux valeurs d’usine, exécuter la procédure suivante quand le moteur
est arrêté.
1. Presser [▲]+[▼] pendant 3 secondes, relâcher les touches quand toutes les LED s’allument simultanément.
Quand la procédure est terminée, les LED L1 et L2 clignotent.
Cette procédure ne modifie pas le paramètre relatif au sens de rotation de Ten ni la position de l’encodeur.
!
Ten est paramétré par défaut pour exécuter la manœuvre d’ouverture comme indiqué sur la figure 5. Il est possible d’inverser le sens de rotation grâce à la programmation afin d’exécuter la manœuvre d’ouverture comme indiqué sur la figure 7.
Procédure de programmation du sens de rotation du moteur
1. Presser la touche [Set] pendant 3 s environ ;
2. Relâcher la touche [Set] quand la LED L1 commence à clignoter ;
3. Presser simultanément les touches [▲]et[▼] pour modifier le sens de rotation du moteur ;
4. Relâcher les touches [▲]et[▼]
• si l’éclairage automatique est allumé, c’est le sens de rotation du moteur inversé qui a été programmé ;
• si l’éclairage automatique est éteint, c’est le sens de rotation du moteur standard qui a été programmé ;
5. Pour quitter la programmation, attendre 10 s (durée maximum écoulée).
Note : les points 3 et 4 peuvent être répétés durant la même phase de programmation en changeant le sens de rotation du moteur.
Si le sens de rotation du moteur a été modifié, il est nécessaire de répéter la procédure de « Mémorisation des posi-
tions ».
Vérification du sens de rotation du moteur programmé
Pour vérifier quel sens de rotation du moteur a été programmé, exécuter la procédure suivante.
1. Mettre Ten hors tension (en débranchant la fiche ou en enlevant le fusible) ;
2. Remettre Ten sous tension ;
3. Après le clignotement initial des LED L1… L8, une seule LED, qui signale la position de l’encodeur, s’allume pendant quelques secondes ;
4. Au moment où la position de l’encodeur est signalée, contrôler l’éclairage automatique :
• si l’éclairage automatique s’allume, c’est le sens de rotation du moteur inversé qui a été programmé ;
• si l’éclairage automatique est éteint, c’est le sens de rotation du moteur standard qui a été programmé ;
Page 87

87
F
7.4) Fonctions particulières
7.4.1) Fonction « ouvre toujours »
La fonction « ouvre toujours » est une propriété de la logique de commande qui permet de toujours commander une manœuvre d’ouverture quand la commande « pas à pas » dure plus de 3 secondes; c’est utile par exemple pour connecter à la borne P.P. le contact d’une horloge de programmation pour maintenir la porte ouverte pendant une certaine plage horaire. Cette propriété est valable quelle que soit la programmation de l’entrée P.P. (voir « Fonction P.P. » dans le tableau 10).
7.4.2) Fonction « manœuvre dans tous les cas »
Si un dispositif de sécurité quelconque devait mal fonctionner ou tomber en panne, il est possible dans tous les cas de commander et de
manœuvrer la porte en mode « à action maintenue ». Pour les détails, voir le paragraphe « Commande avec les dispositifs de sécurité hors
d’usage » présent dans les « Instructions et avertissements destinées à l’utilisateur de l’opérateur TEN » ci-jointes.
7.4.3) Avis de maintenance
TEN permet d’alerter l’utilisateur quand il est nécessaire
d’effectuer une opération de maintenance sur l’automatisme. Le nombre de manœuvres au bout duquel s’effectue la signalisation est sélectionnable parmi 8 niveaux,
avec le paramètre réglable « Avis de maintenance » (voir
tableau 10).
Le niveau 1 de réglage est « automatique » et tient compte de l’intensité
et des conditions des manœuvres, c’est-à-dire de l’effort et de la durée
de la manœuvre, tandis que les autres réglages sont fixés en fonction du
nombre de manœuvres. La signalisation de demande de maintenance
s’effectue au moyen du clignotant ou du voyant de maintenance selon la
programmation (voir tab. 10). Suivant le nombre de manœuvres effectuées par rapport à la limite programmée, le clignotant Flash et le voyant
de maintenance donnent les signalisations indiquées dans le tableau 15.
Nombre de manœuvres Signalisation sur Flash Signalisation sur voyant de maintenance
Inférieur à 80 % de la limite Normal (0,5 s allumé, 0,5 s éteint) Allumé pendant 2 s au début de l’ouverture.
Entre 81 et 100 % de la limite Au début de la manœuvre, il reste allumé pendant 2 s puis Clignote pendant toute la manœuvre.
continue normalement.
Au-delà de 100 % de la limite Au début et à la fin de la manœuvre, il reste allumé pendant 2 s Clignote constamment.
puis continue normalement.
Tableau 15: avis de maintenance avec Flash et voyant de maintenance
7.3.8) Rétablissement de la position de l’encodeur
Cette procédure permet de rétablit la position par défaut de l’encodeur afin de pouvoir exécuter le montage de Ten avec la porte fermée.
S’il est nécessaire de changer le sens de rotation du moteur, effectuer d’abord la « Programmation du sens de rotation du moteur » puis le
« Rétablissement de la position de l’encodeur ».
ATTENTION : LA PROCÉDURE DÉCRITE CI-DESSOUS DOIT ÊTRE EXÉCUTÉE UNIQUEMENT EN ATELIER.
NE PAS EXÉCUTER LA PROCÉDURE AVEC LE MOTEUR INSTALLÉ SUR LA PORTE.
1. Presser les touches [▲]et[▼] jusqu'à ce que toutes les LED, de L1 à L8, s’allument ;
2. Une fois que toutes les LED se sont éteintes, une seule, parmi les LED L1 à L8, se rallume pour signaler la position de l’encodeur ;
3. Presser alors la touche [Set] jusqu'à ce que le moteur démarre.
Dès que le moteur démarre, relâcher la touche
.
La logique de commande actionne le mouvement du moteur de sorte que la position de l’encodeur soit signalée par la LED L6 ;
4. Quand le moteur s’est arrêté, toutes les LED s’allument puis s‘éteignent ; vérifier que la LED qui se rallume est la L6.
Si ce n’est pas le cas, refaire la procédure depuis le point 1 ;
5. Quand la séquence est terminée, les LED L1 et L2 continuent à clignoter.
!
Page 88

88
7.5) Connexion d’autres dispositifs
S’il est nécessaire d’alimenter des dispositifs extérieurs, par exemple
un lecteur de proximité pour cartes transpondeurs ou bien l’éclairage du sélecteur à clé, il est possible de prélever l’alimentation comme l’indique la figure 29. La tension d’alimentation est de 24 Vcc –
30 % + 50 % avec un courant maximum disponible de 100 mA.
29
7.4.4) Vérification du nombre de manœuvres effectuées
Avec la fonction d’« Avis de maintenance », il est possible de vérifier le nombre de manœuvres effectuées en pourcentage sur la limite fixée.
Pour la vérification, procéder comme cela est décrit ci-dessous.
1. Presser et maintenir enfoncée la touche [Set] pendant 3 s environ.
3s
2. Relâcher la touche [Set] quand la LED L1 commence à clignoter.
3. Presser les touches [▲] ou [▼] pour déplacer la LED clignotante sur L7, c’est-à-dire la
« LED d’entrée » qui correspond au paramètre « Avis de maintenance ».
4. Presser et maintenir enfoncée la touche [Set], la pression doit être maintenue sur la touche [Set]
pendant toute la durée des phases 5, 6 et 7.
5. Attendre environ 3 s puis la LED qui représente le niveau actuel du paramètre « Avis de maintenance »
s’allumera. 3s
6. Presser puis relâcher immédiatement les touches [▲] et [▼]
7. La LED correspondant au niveau sélectionné émettra quelques clignotements.
Le nombre de clignotements identifie le pourcentage de manœuvres effectuées (en multiples de 10 %)
par rapport à la limite programmée. Par exemple: avec l’avis de maintenance programmé sur L7,
c’est-à-dire 10 000, 10 % correspondent à 1 000 manœuvres; si la LED de signalisation émet 4
clignotements, cela signifie que l’on a atteint 40 % des manœuvres (c’est-à-dire entre 4 000 et 4 999
manœuvres). Si l’on n’a pas atteint 10 % des manœuvres, il n’y aura aucun clignotement.
8. Relâcher la touche [Set].
Tableau 16: vérification du nombre de manœuvres effectuées Exemple
L1
X1 = 10%
X2 = 20%
X3 = 30%
X4 = 40%
X5 = 50%
X6 = 60%
X7 = 70%
X8 = 80%
X9 = 90%
X10 = 100%
L7
ou
et
7.4.5) Mise à zéro du compteur des manœuvres
Après avoir effectué la maintenance de l’installation, il faut mettre à zéro le compteur des manœuvres. Procéder suivant les indications du
tableau 17.
1. Presser et maintenir enfoncée la touche [Set] pendant 3 s environ.
3s
2. Relâcher la touche [Set] quand la LED L1 commence à clignoter.
3. Presser les touches [▲] ou [▼] pour déplacer la LED clignotante sur L7, c’est-à-dire la
« LED d’entrée » qui correspond au paramètre « Avis de maintenance ».
4. Presser et maintenir enfoncée la touche [Set], la pression doit être maintenue sur la touche [Set]
pendant toute la durée des phases 5 et 6.
5. Attendre environ 3 s puis la LED qui représente le niveau actuel du paramètre « Avis de maintenance »
s’allumera. 3s
6. Presser et maintenir enfoncées les touches [▲] et [▼] pendant au moins 5 s puis relâcher les 2 touches.
La LED correspondant au niveau sélectionné effectuera une série de clignotements rapides pour signaler
que le compteur des manœuvres a été mis à zéro.
7. Relâcher la touche [Set].
Tableau 17: mise à zéro du compteur des manœuvres Exemple
L1
L7
ou
et
SET
SET
SET
SET
SET
SET
SET
SET
Page 89

89
F
7.7) Diagnostic et signalisations
Certains dispositifs offrent directement des signalisations particulières à travers lesquelles il est possible de reconnaître l’état de fonctionnement ou l’éventuel problème.
7.6) Résolution des problèmes
Dans le tableau 18, on peut trouver des indications utiles pour affronter les éventuels problèmes de fonctionnement pouvant se vérifier
durant l’installation ou en cas de panne.
30
Tableau 18: recherche des pannes.
Symptômes Cause probable et solution possible
L’émetteur radio ne commande pas la porte et la
LED sur l’émetteur ne s’allume pas.
L’émetteur radio ne commande pas la porte mais
la LED sur l’émetteur s’allume.
Aucune manœuvre n’est commandée et la LED
OK ne clignote pas.
Aucune manœuvre n’est commandée et le clignotant est éteint.
La manœuvre ne démarre pas et le clignotant
émet quelques clignotements.
La manœuvre commence mais juste après on a
une brève inversion.
Vérifier si les piles de l’émetteur sont usagées et éventuellement les remplacer.
Vérifier si l’émetteur est correctement mémorisé dans le récepteur radio.
Vérifier l’émission correcte du signal radio de l’émetteur avec cet essai empirique: presser une touche et appuyer la LED à l’antenne d’un appareil radio quelconque (de préférence de type économique) allumé et réglé sur la bande FM à la fréquence de 108,5 Mhz
ou la plus proche possible; on devrait entendre un léger bruit avec pulsation grésillante.
Vérifier que TEN est alimenté à la tension de secteur à 230 V. Vérifier que les fusibles F1
et F2 ne sont pas grillés; si c’est le cas, identifier la cause de la panne et les remplacer
par d’autres fusibles ayant les mêmes valeurs de courant et les mêmes caractéristiques
(figure 30).
Vérifier que la commande est effectivement reçue. Si la commande arrive à l’entrée PP,
la LED OK émet deux clignotements pour signaler que la commande a été reçue.
Compter le nombre de clignotements et vérifier suivant les indications du tableau 20.
La force sélectionnée pourrait être trop basse pour manœuvrer la porte. Vérifier s’il y a
des obstacles et sélectionner éventuellement une force supérieure.
7.6.1) Historique des anomalies
TEN permet d’afficher les éventuelles anomalies qui se sont vérifiées lors des 8 dernières manœuvres, par exemple, l’interruption d’une
manœuvre due à l’intervention d’une photocellule ou d’un bord sensible. Pour vérifier la liste des anomalies, procéder suivant les indications
du tableau 19.
1. Presser et maintenir enfoncée la touche [Set] pendant 3 s environ.
3s
2. Relâcher la touche [Set] quand la LED L1 commence à clignoter.
3. Presser les touches [▲] ou [▼] pour déplacer la LED clignotante sur L8, c’est-à-dire la « LED d’entrée »
pour le paramètre « Liste des anomalies ».
4. Presser et maintenir enfoncée la touche [Set], la pression doit être maintenue sur la touche [Set]
pendant toute la durée des phases 5 et 6
5. Attendre environ 3 s puis les LED correspondant aux manœuvres qui ont eu des anomalies s’allumeront.
La LED L1 indique le résultat de la manœuvre la plus récente, la LED L8 indique le résultat de la huitième.
Si la LED est allumée, cela signifie que des anomalies se sont vérifiées durant la manœuvre; si la LED
est éteinte, cela signifie que la manœuvre s’est terminée sans anomalies. 3s
6. Presser les touches [▲] et [▼] pour sélectionner la manœuvre désirée.
La LED correspondante émettra un nombre de clignotements égal à ceux qui sont exécutés
normalement par le clignotant après une anomalie (voir tableau 20).
7. Relâcher la touche [Set].
Tableau 19: historique des anomalies Exemple
L1
L8
ou
et
SET
SET
SET
SET
Page 90

90
Au début de la manœuvre, la vérification des dispositifs connectés à BlueBUS ne
correspond pas à ceux qui sont mémorisés durant la phase de reconnaissance.
Il peut y avoir des dispositifs en panne, vérifier et remplacer; si des modifications
ont été faites, il faut refaire la reconnaissance (7.3.4 Reconnaissance d'autres dispositifs).
7.7.1) Signalisations avec le clignotant
Si un clignotant est connecté, durant la manœuvre, il émet un clignotement toutes les secondes; quand des anomalies se vérifient, les clignotements sont plus brefs; les clignotements sont répétés deux fois, avec un intervalle d’une seconde. Les mêmes signalisations se produisent également avec l’éclairage automatique.
Tableau 20: signalisations sur le clignotant FLASH
Clignotements rapides Cause ACTION
1 clignotement
pause de 1 seconde
1 clignotement
Erreur sur le BlueBUS
3 clignotements
pause de 1 seconde
3 clignotements
4 clignotements
pause de 1 seconde
4 clignotements
5 clignotements
pause de 1 seconde
5 clignotements
6 clignotements
pause de 1 seconde
6 clignotements
7 clignotements
pause de 1 seconde
7 clignotements
Intervention du limiteur de la
« force moteur ».
Durant la manœuvre, la porte a rencontré une friction plus forte; en vérifier la cause.
2 clignotements
pause de 1 seconde
2 clignotements
Intervention d’une photocellule
Au début de la manœuvre, une ou plusieurs photocellules n’autorisent pas la
manœuvre: vérifier s’il y a des obstacles.
Durant le mouvement il est normal qu’un obstacle soit présent.
Intervention de l’entrée STOP
Au début de la manœuvre ou durant le mouvement, il y a eu une intervention de
l’entrée STOP; en vérifier la cause.
Erreur dans les paramètres
internes de la logique de
commande électronique
Attendre au moins 30 secondes et réessayer de lancer une commande; si l’état
persiste, il pourrait y avoir une panne grave nécessitant le remplacement de la
carte électronique.
La limite maximum du
nombre de manœuvres à
l’heure a été dépassée.
Attendre quelques minutes que le limiteur de manœuvres redescende en-dessous de la limite maximum.
Erreur dans les circuits
électriques internes
Déconnecter tous les circuits d’alimentation pendant quelques secondes puis
tenter de réexécuter une commande; si l’état persiste, il pourrait y avoir une panne grave de la carte électronique ou dans le câblage du moteur. Effectuer les
contrôles et procéder aux éventuels remplacements.
8 clignotements
pause de 1 seconde
8 clignotements
Surintensité dans les circuits
du moteur
Déconnecter tous les circuits d’alimentation pendant quelques secondes puis
tenter de réexécuter une commande; si l’état persiste, il pourrait y avoir une panne grave de la carte électronique ou dans le câblage du moteur. Effectuer les
contrôles et procéder aux éventuels remplacements.
Page 91

91
F
LED CLOSE Cause ACTION
LED OPEN Cause ACTION
LED PP Cause ACTION
31
LED BLUEBUS Cause ACTION
LED STOP Cause ACTION
Éteinte
7.7.2) Signalisations sur la logique de commande
Dans la logique de commande de TEN il y a une série de LED qui
peuvent donner chacune des signalisations particulières aussi bien
durant le fonctionnement normal qu’en cas d’anomalie (figure 31).
Tableau 21: LED sur les bornes de la logique de commande
Anomalie
Vérifier si la tension arrive; vérifier si les fusibles sont intervenus; si c’est le
cas, vérifier la cause de la panne puis les remplacer par des fusibles ayant
les mêmes caractéristiques.
Allumée Anomalie grave
Il y a une anomalie grave; essayer d’éteindre la logique de commande pendant quelques secondes; si l’état persiste, il y a une panne et il faut remplacer la carte électronique.
Un clignotement par seconde Tout est OK Fonctionnement normal de la logique de commande
2 clignotements rapides
Il y a eu une variation de
l’état des entrées.
C’est normal quand il y a un changement de l’une des entrées: PP, STOP,
OPEN, CLOSE, intervention des photocellules ou quand on utilise l’émetteur
radio.
Série de clignotements séparés
par une pause d’une seconde
Diverses C’est la même signalisation que celle du clignotant. Voir le tableau 20.
Éteinte
Intervention de l’entrée
STOP
Vérifier les dispositifs connectés à l’entrée STOP.
Allumée Tout est OK Entrée STOP active
Éteinte Tutto OK Entrée PP non active
Allumée Intervention de l’entrée PP C’est normal si le dispositif connecté à l’entrée PP est effectivement actif.
Éteinte Tout est OK Entrée OPEN non active
Allumée
Intervention de l’entrée
OPEN
C’est normal si le dispositif connecté à l’entrée OPEN est effectivement actif.
Éteinte Tout est OK Ingresso CLOSE non attivo
Allumée
Intervention de l’entrée
CLOSE
C’est normal si le dispositif connecté à l’entrée CLOSE est effectivement actif.
LED L1 Description
• Programmation des fonctions en cours
• Si elle clignote en même temps que L4, cela signifie qu’il faut effectuer la reconnaissance des positions d’ouverture et
de fermeture de la porte (voir paragraphe 4.2 « Reconnaissance des positions d’ouverture et de fermeture de la porte »).
LED L3 Description
LED L2 Description
Éteinte
Tableau 22: LED sur les touches de la logique de commande
Durant le fonctionnement normal, elle indique: fonction « fermeture automatique » non active.
Durant le fonctionnement normal, elle indique: fonction « fermeture automatique » active.
• Programmation des fonctions en cours
• Si elle clignote en même temps que L2 cela signifie qu’il faut effectuer la reconnaissance des dispositifs (voir paragraphe 4.2 « Reconnaissance des dispositifs »).
Allumée
Lampeggia
Éteinte Durant le fonctionnement normal, elle indique: fonction « refermeture après passage devant la photocellule » non active.
Durant le fonctionnement normal elle indique: fonction « refermeture après passage devant la photocellule » active.
• Programmation des fonctions en cours
• Si elle clignote en même temps que L1, cela signifie qu’il faut effectuer la reconnaissance des dispositifs (voir paragraphe 4.2 « Reconnaissance des dispositifs »).
Allumée
Clignote
Éteinte Durant le fonctionnement normal, elle indique: fonction « ferme toujours » non active.
Durant le fonctionnement normal, elle indique: fonction « ferme toujours » active.Allumée
Clignote
Page 92

92
• Programmation des fonctions en cours
Led L5 Description
Éteinte Durant le fonctionnement normal, elle indique: fonction « inversion longue » non active.
Durant le fonctionnement normal, elle indique: fonction « inversion longue » active.
Allumée
Clignote
• Programmation des fonctions en cours
• Si elle clignote en même temps que L3, cela signifie qu’il faut effectuer la reconnaissance des positions
d’ouverture et de fermeture de la porte (voir paragraphe 4.3 « Reconnaissance des positions d’ouverture
et de fermeture de la porte »).
LED L4 Description
• Programmation des fonctions en cours
Led L6 Description
Éteinte Durant le fonctionnement normal, elle indique: fonction « préclignotement » non active.
Durant le fonctionnement normal, elle indique: fonction « préclignotement » active.
Allumée
Clignote
• Programmation des fonctions en cours
Led L7 Description
Éteinte Durant le fonctionnement normal, elle indique: fonction « sensibilité ampèremétrique » non active.
Durant le fonctionnement normal, elle indique: fonction « sensibilité ampèremétrique » active.
Allumée
Clignote
• Programmation des fonctions en cours
Led L8 Description
Éteinte Durant le fonctionnement normal, elle indique que l’installation comprend un moteur.
Durant le fonctionnement normal, elle indique que l’installation comprend deux moteurs.
Allumée
Clignote
Éteinte Durant le fonctionnement normal, elle indique: fonction « stand-by » non active.
Durant le fonctionnement normal, elle indique: fonction « stand-by » active.
Allumée
Clignote
7.8) Accessoires
TEN est disponible avec les accessoires suivants. Consulter le catalogue des produits Nice S.p.A. pour la liste complète et à jour des
accessoires.
SMXI/SMXIS Récepteur radio à 433,92 MHz avec codage
numérique à code variable.
OXI Récepteur radio à 433,92 MHz avec codage
numérique à code variable; dispose du mode II
étendu pour envoyer 15 types de commandes à la
logique de commande.
OView Unité de commande et de programmation distan-
te avec écran graphique.
TNA2 Logique de commande de rechange pour TN2010
OTA2 Patte de support du moteur de 1 250 mm de longueur
OTA3 Patte de support du moteur de 2 000 mm de longueur
TNA4 Paire d’arbres de transmission de 1 500 mm de longueur
TNA5 Paire de bras droits télescopiques standard
TNA6 Paire de bras courbes télescopiques standard
TNA8 Paire d’arbres de transmission de 200 mm de longueur
OTA11 Kit pour le débrayage de l’extérieur avec câble métallique
OTA12 Kit pour le débrayage de l’extérieur avec loquet à clé
TNA38 Dispositif de renvoi pour 1 paire d’arbres de transmission
7.8.1) Unité de programmation distante
Il est possible de connecter au connecteur BusT4 spécifique (voir
figure 32) l'unité de programmation distante OView qui garantit une
gestion rapide et complète de l'installation, de la maintenance et du
diagnostic des éventuels problèmes de fonctionnement. Pour accéder au connecteur, il faut découper la membrane comme indiqué sur
la figure 32; brancher le connecteur comme indiqué sur la figure 33.
L'unité de programmation distante peut être placée à distance de la
logique de commande (jusqu'à 100 m de câble); elle peut être
connectée à plusieurs logiques de commande en même temps (jusqu'à 16) et rester connectée durant le fonctionnement normal de
TEN; dans ce cas, un menu spécifique « utilisateur » permet d’en-
voyer les commandes à la logique de commande.
Si, dans la logique de commande, est installé un récepteur radio
type OXI, il est possible, à travers l'unité de programmation distante
d’accéder aux paramètres des émetteurs mémorisés.
Ces fonctions requièrent un câble de connexion à 4 conducteurs
(BusT4) avec lequel il est également possible d’effectuer la mise à
jour du micrologiciel de la logique de commande de TEN. De plus
amples informations sont fournies dans le guide technique du programmateur OView ou dans l’addenda sur les « fonctions supplémentaires de TEN avec OView » également disponible sur le site
www.niceforyou.com.
32 33
Page 93

93
F
7.8.3) Prémontage pour OTA11
7.8.2) Batterie tampon
Ddévisser les vis et enlever les couvercles latéraux.
Monter le PS334 sous le
TN2010.
Faire passer le câble de la batterie
par l’entrée des câbles de Ten.
Retirer la membrane sur le boîtier de la logique de commande.
Connecter le câble au connecteur de la batterie.
Dévisser les vis et enlever le collier.
38 39
Vsser le pivot fourni en faisant
attention à la position par rapport à
la poignée.
40
Enfiler le câble et le ressort, comme
cela est indiqué.
Fixer le ressort avec la vis fournie
4,2 x 13, revisser le collier et enfin
placer la gaine
41 42
Retirer la partie prédécoupée présente sur le couvercle et refermer le
tout en faisant attention à ne pas
écraser le joint.
43
34 35 36 37
Page 94

94
IP 44
Non
Dans le but d’améliorer ses produits, Nice S.p.A. se réserve le droit de modifier les caractéristiques techniques à tout moment et sans préavis, en garantissant dans tous les cas le bon fonctionnement et le type d’application prévus.
N.B.: toutes les caractéristiques techniques se réfèrent à une température de 20 °C (± 5 °C).
8) Caractéristiques techniques
Caractéristiques techniques: TEN
Modèle type TN2020 TN2010 TN2010+TN2020
TN2010 TN2020 TN2010+TN2020
* À 50 °C, la fréquence maximum de fonctionnement est (cycles/heure): 4 6 4
** À 50 °C, le temps maximum de fonctionnement continu est (minutes): 12 6 7
Alimentation de secours
Sortie clignotant
Éclairage automatique 12 V/10 W culot BA15S
Typologie
Opérateur électromécanique pour le mouvement automatique de
portes basculantes débordantes et non débordantes à usage
résidentiel avec logique électronique de commande incorporée.
Couple maximum au démarrage 320 Nm 350 Nm 500 Nm
25 cycles/heure 15 cycles/heure 25 cycles/heure
14 minutes 22 minutes 14 minutes
220Nm 240 Nm 330 Nm
III I I
/Si
Couple nominal
Vitesse à vide
1,7r/min; la logique de commande permet de programmer 6 vitesses.
1.4 (24Vcc)
/
Pour 1 clignotant LUCYB, MLB
ou MLBT (ampoule 12 V, 21 W).
/
//
/
1.2rpm0.9 (24Vcc)Vitesse au couple nominal
Fréquence maximale des cycles de fonctionnement au couple nominal (la logique de commande limite les cycles au maximum prévu dans
les tableaux 3 et 4)*.
Temps maximal de fonctionnement continu au
couple nominal (la logique de commande limite
les cycles au maximum prévu dans les tableaux
3 et 4)**.
Limites d’application
Généralement TEN est en mesure d’automatiser des portes équilibrées d’une surface jusqu'à 8
m² avec 1 moteur et jusqu'à 14 m² avec 2 moteurs, selon les limites prévues dans le tableau 2.
Puissance maximum absorbée au démarrage
[correspondant à ampères]
130W (5.5A) 240W (1A) 350W (1.4A)
[2 A version/V1] [3 A version/V1]
Classe d’isolation
Sortie BlueBUS
Une sortie avec charge maximum de 12 unités BlueBUS.
/
/
Entrée STOP
Pour contacts normalement
fermés, normalement ouverts
ou à résistance constante 8,2
kilohms; en autoapprentissage
(une variation par rapport à
l’état mémorisé provoque la
commande « STOP »).
//Entrée PP
Pour contacts normalement
ouverts (la fermeture du contact
provoque la commande P.P.).
//Entrée OUVERTURE
Pour contacts normalement ouverts
(la fermeture du contact provoque la
commande OUVERTURE
//Entrée FERMETURE
Pour contacts normalement ouverts
(la fermeture du contact provoque la
commande FERMETURE)
//Entrée ANTENNE radio
52 ohms pour câble type RG58
ou similaires
//Connecteur radio
Connecteur SM pour récepteurs SMXI, SMXIS ou OXI.
Alimentation TEN 230Vac (-10% +15%) 50/60Hz.24 Vcc (-30% +50%)
Durabilité Estimée entre 10 000 et 50 000 cycles, suivant les conditions indiquées dans le tableau 5.
Alimentation TEN/V1 120Vac (-10% +15%) 50/60Hz.
//Fonctions programmables
8 fonctions de type ON-OFF et
8 fonctions réglables (voir
tableaux 8 et 10)
//Fonctions en autoapprentissage
Autoapprentissage des dispositifs
connectés à la sortie BlueBUS.
Autoapprentissage du type de dispositif de «STOP» (contact NO, NF
ou résistance 8,2KΩ). Reconnaissance des positions d’ouverture et
de fermeture de la porte et calcul
des points de ralentissement et
d’ouverture partielle.
Température de fonctionnement -20°C ÷ +50°C
Indice de protection
Dimensions et poids 512 x 150 h 158
Utilisation dans une atmosphère particulièrement
acide ou saline ou bien potentiellement explosive.
Poids 7.2 Kg 10 Kg
Page 95

95
F
Nous vous félicitons d’avoir choisi un produit Nice pour
votre automatisation! Nice S.p.A. produit des composants
pour l’automatisation de portails, portes, rideaux métalliques,
volets roulants et stores: opérateurs, logiques de commande,
radiocommandes, clignotants, photocellules et accessoires.
Nice n’utilise que des matériaux et des usinages de qualité et
par vocation, elle recherche des solutions innovantes qui simplifient au maximum l’utilisation de ses appareils, très soignés
sur le plan de la technique, de l’esthétique et de l’ergonomie:
dans la vaste gamme Nice, votre installateur aura choisi sans
aucun doute le produit le plus adapté à vos exigences. Nice
n’est toutefois pas le producteur de votre automatisme qui est
en effet le résultat d’un travail d’analyse, évaluation, choix des
matériaux et réalisation de l’installation, exécuté par votre installateur de confiance. Chaque automatisme est unique et seul
votre installateur possède l’expérience et la compétence professionnelle nécessaires pour réaliser une installation répondant à vos exigences, sûre et fiable dans le temps et surtout,
exécutée dans les règles de l’art et conforme par conséquent
aux normes en vigueur. Une installation d’automatisation est
une belle commodité ainsi qu’un système de sécurité valable;
avec quelques attentions très simples, elle est destinée à durer
dans le temps. Même si l’automatisme en votre possession
satisfait le niveau de sécurité requis par les normes, cela n’exclut pas la persistance d’un «risque résiduel», c’est-à-dire la
possibilité de situations de danger dues généralement à une
utilisation inconsciente, voire erronée. C’est la raison pour
laquelle nous désirons vous donner quelques conseils sur les
comportements à adopter pour éviter tout inconvénient:
• Avant d’utiliser pour la première fois l’automatis-
me, faites-vous expliquer par l’installateur l’origine des
risques résiduels et consacrez quelques minutes à la lecture du guide «Instructions et avertissements pour
l’utilisateur» qui vous est remis par l’installateur. Conservez le guide pour pouvoir le consulter dans le futur, en cas
de doute, et remettez-le, le cas échéant, au nouveau propriétaire de l’automatisme.
• Les photocellules ne sont pas un dispositif de
sécurité mais uniquement un dispositif auxiliaire
de sécurité. Elles sont construites selon une technologie
extrêmement fiable mais peuvent, dans des situations
extrêmes, connaître des problèmes de fonctionnement ou
même tomber en panne; dans certains cas, la panne peut
ne pas être immédiatement évidente.
C’est pourquoi il est conseillé dans tous les cas ce qui suit:
- Le transit n’est autorisé que si le portail ou la porte sont
complètement ouverts et avec les vantaux ou le tablier
immobiles.
- IL EST ABSOLUMENT INTERDIT de transiter pendant que
le portail ou la porte sont en phase de fermeture!
Vérifier régulièrement le fonctionnement correct des photocellules et faire exécuter les contrôles de maintenance prévus, au minimum tous les 6 mois.
• Votre automatisme est un équipement qui exécute
fidèlement vos commandes; une utilisation inconsciente et incorrecte peut le rendre dangereux: ne commandez
pas le mouvement de l’automatisme si des personnes, des
animaux ou des objets se trouvent dans son rayon d’action.
• Enfants: une installation d’automatisation garantit un
degré de sécurité élevé en empêchant avec ses systèmes
de détection le mouvement en présence de personnes ou
d’objets et en garantissant une activation toujours prévisible
et sûre. Il est toutefois prudent de ne pas laisser jouer les
enfants à proximité de l’automatisme et, pour éviter les activations involontaires, de ne pas laisser à leur portée les
émetteurs qui commandent la manœuvre: ce n’est pas
un jeu!
• Contrôler souvent l'installation, en particulier les
câbles, les ressorts et les supports pour déceler les éventuels déséquilibrages, signes d’usure ou dommages. Vérifier
chaque mois que la motorisation inverse le mouvement
quand la porte rencontre un objet de 50 mm de haut posé
sur le sol. Ne pas utiliser l'automatisme si une réparation ou
un réglage est nécessaire car une panne de l'installation ou
une porte mal équilibrée peut causer des blessures.
• Anomalies: si vous notez une anomalie quelconque dans
le fonctionnement de l’automatisme, mettez l’installation
hors tension et effectuez un débrayage manuel; Ne tentez
jamais de le réparer vous-même mais demandez l’intervention de votre installateur de confiance: dans l’intervalle, l’installation peut fonctionner comme un système non automatisé, après avoir débrayé l’opérateur suivant les indications
fournies plus loin.
• Maintenance: comme toutes les machines, votre automatisme a besoin d’une maintenance périodique pour pouvoir
fonctionner le plus longtemps possible et en toute sécurité.
Établissez avec votre installateur un plan de maintenance
périodique programmée; Nice conseille une intervention tous
les 6 mois pour une utilisation domestique normale mais cette période peut varier en fonction de l’intensité d’utilisation.
Toute intervention de contrôle, maintenance ou réparation
doit être exécutée exclusivement par du personnel qualifié.
• Même si vous estimez en être capable, ne modifiez pas
l’installation et les paramètres de programmation et de
réglage de l’automatisme: la responsabilité en incombe à
votre installateur.
• L’essai de fonctionnement, les opérations de maintenance
périodique et les éventuelles réparations doivent être documentés par la personne qui s’en charge et les documents
doivent être conservés par le propriétaire de l’installation.
Les seules interventions que l’utilisateur peut et doit
effectuer périodiquement sont le nettoyage des verres des
photocellules et l’élimination des feuilles et des cailloux qui
pourraient bloquer l’automatisme. Pour empêcher que quelqu’un puisse actionner la porte, avant d’intervenir, n’oubliez
pas de débrayer l’automatisme (comme cela est décrit
plus loin), de débrancher toutes les sources d’ali-
mentation (y compris les batteries tampon si elles sont
présentes) et d’utiliser pour le nettoyage uniquement un
chiffon légèrement imbibé d’eau.
• Mise au rebut: à la fin de la vie utile de l’automatisme,
assurez-vous que le démantèlement est effectué par du
personnel qualifié et que les matériaux sont recyclés ou mis
au rebut en respectant les normes locales en vigueur.
• En cas de ruptures ou de coupure de courant: en
attendant l’intervention de votre installateur (ou le retour du
courant si l’installation n’est pas équipée d’une batterie tampon), l’installation peut être actionnée comme n’importe
quel autre système non automatisé. Pour cela, il faut effectuer le débrayage manuel: cette opération a fait l’objet d’une
étude particulière de la part de Nice pour vous assurer une
utilisation toujours extrêmement simple, sans aucun outil ni
effort physique.
Instructions et avertissements destinés à l’utilisateur de l’opérateur TEN
Consignes importantes de sécurité
Pour la sécurité des personnes, il est important de respecter ces consignes.
Conserver ces consignes.
Ces instructions peuvent compléter les «Instructions et avertissements pour l’utilisation de l’automatisme» que l’installateur doit remettre au propriétaire de l’automatisme et doivent dans tous les cas être complétées par celles-ci.
!
Page 96

96
Débrayage et mouvement manuel: avant d’effectuer cette opération, faire attention au fait que le débrayage ne
peut avoir lieu que lorsque la porte est arrêtée.
Commande avec les sécurités hors service: si les
dispositifs de sécurité ne fonctionnent pas correctement
ou sont hors service, il est quand même possible de commander la porte.
• Actionner la commande de la porte (avec l’émetteur, le
sélecteur à clé, etc.): si tout fonctionne bien, la porte
s’ouvrira ou se fermera normalement; sinon le clignotant émettra quelques clignotements mais la manœuvre
ne démarrera pas (le nombre de clignotements dépend
du motif pour lequel la manœuvre ne démarre pas);
• Dans ce cas, dans les trois secondes qui suivent, il faut
actionner de nouveau la commande et maintenir
l’action sur la commande;
• Au bout d’environ 2s, le mouvement de la porte commencera en mode «à action maintenue»: tant que la
commande est maintenue, la porte continue sa course;
dès que la commande est interrompue, la porte s’arrête.
Avec les dispositifs de sécurité hors service, il
faut faire réparer au plus tôt l’automatisme.
Remplacement de la pile de l’émetteur: si votre ins-
tallation est munie d’une radiocommande qui au bout
d’une certaine période présente des problèmes de fonctionnement ou ne fonctionne plus du tout, cela pourrait
dépendre tout simplement du fait que la pile est usagée
(suivant l’intensité d’utilisation, il peut s’écouler plusieurs
mois jusqu’à plus d’un an). Vous pouvez vérifier cet état
de chose si le voyant de confirmation de la transmission
est faible, s’il ne s’allume plus du tout ou s’il ne s’allume
qu’un bref instant. Avant de vous adresser à l’installateur,
essayez de remplacer la pile en utilisant celle d’un autre
émetteur qui fonctionne encore: si cette intervention remédie au problème, il vous suffit de remplacer la pile usagée
par une neuve du même type.
Attention: les piles contiennent des substances polluantes: ne pas les jeter à la poubelle mais suivre les règles
de tri sélectif prévues par les réglementations locales.
Remplacer l’ampoule: avant d’effectuer cette opération, mettre TEN hors tension.
Êtes-vous satisfait? Si vous souhaitez équiper votre maison d’un nouvel automatisme, adressez-vous au même instal-
lateur et à Nice. Vous serez sûr de bénéficier ainsi, en plus du conseil d’un spécialiste et des produits les plus évolués du
marché, également du meilleur fonctionnement et de la compatibilité parfaite des différents automatismes installés.
Nous vous remercions d’avoir lu ces recommandations et nous espérons que votre nouvelle installation vous donnera
entière satisfaction: pour tout besoin présent ou futur, adressez-vous en toute confiance à votre installateur.
Pour débrayer, tourner la poignée dans le sens
antihoraire et déplacer manuellement le tablier
(figure 44).
Pour le réenclencher, remettre la poignée en position verticale en la tournant dans le sens horaire
puis agir manuellement sur le tablier jusqu’à l’accrochage (figure 45).
44 45
1. Ouvrir le couvercle en dévissant les vis comme
l’indique la figure 46.
2. Dévisser l’ampoule et la remplacer par une
ampoule neuve de 12 V/10 W culot BA15S
(figure 47).
46 47
Page 97

Page 98

98
Ten
Inhaltsverzeichnis S.
1 Hinweise 99
2 Produktbeschreibung und Einsatz 100
2.1 Einsatzgrenzen 100
2.2 Überprüfung der Bestandteile des Produktes 101
2.3 Typische Anlage 102
2.4 Kabelliste 102
3 Installation 103
3.1 Überprüfungen und Vorbereitungen 103
3.2 Installation des Antriebs 103
3.3 Einstellung der Endschalter 106
3.4 Installation der verschiedenen Vorrichtungen 106
3.5 Elektrische Anschlüsse 106
3.5.1 Beschreibung der elektrischen Anschlüsse 107
3.5.2 Elektrischer Anschluss des zweiten Antriebs 108
4 Endprüfungen und Anlassen 108
4.1 Anschluss der Versorgung 108
4.2 Erlernung der Vorrichtungen 108
4.3 Erlernung der Positionen Öffnung
und Schließung des Tors 109
4.4 Überprüfung der Torbewegung 110
4.5 Bereits programmierte Funktionen 110
4.6 Funkempfänger 110
5 Abnahme und Inbetriebsetzung 110
5.1 Abnahme 110
5.2 Inbetriebsetzung 111
6 Wartung und Entsorgung 112
6.1 Wartung 112
6.2 Entsorgung 112
7 Weitere Auskünfte 112
7.1 Programmierungstasten 112
7.2 Programmierungen 112
7.2.1 Funktionen des ersten Niveaus
(ON-OFF-Funktionen) 113
7.2.2 Erstes Niveau – Programmierungen
(ON-OFF-Funktionen) 113
7.2.3 Funktionen des zweiten Niveaus
(einstellbare Parameter) 114
7.2.4 Zweites Niveau - Programmierungen
(einstellbare Parameter) 115
7.2.5 Erstes Niveau - Programmierungsbeispiel
(ON-OFF-Funktionen) 115
7.2.6 Zweites Niveau - Programmierungsbeispiel
(einstellbare Parameter) 116
7.3 Hinzufügen oder Entfernen von Vorrichtungen 116
7.3.1 BlueBus 116
7.3.2 Eingang STOPP 117
7.3.3 Photozellen 117
7.3.4 Codeschloss MOTB und Proximity-Leser für
Transponder-Cards MOMB 117
7.3.5 Erlernung sonstiger Vorrichtungen 118
7.3.6 Vollständiges löschen des speichers 118
7.3.7 Programmierung des drehsinns des antriebs 118
7.3.8 Reset der impulsgeberposition 119
7.4 Sonderfunktionen 119
7.4.1 Funktion “Öffnet Immer” 119
7.4.2 Funktion “Todmann” 119
7.4.3 Wartungsanzeige 119
7.4.4 Überprüfung der Anzahl an ausgeführten
Bewegungen 120
7.4.5 Nullstellung des Bewegungszählers 120
7.5 Verbindung sonstiger Vorrichtungen 120
7.6 Probleme und deren Lösungen 121
7.6.1 Liste der Alarmhistorik 121
7.7 Diagnose und Anzeigen 121
7.7.1 Anzeigen durch die Blinkleuchte 122
7.7.2 Anzeigen durch die Steuerung 123
7.8 Zubehör 124
7.8.1 Fernprogrammierungseinheit 124
7.8.2 Pufferbatterie 125
7.8.3 Vormontage von OTA11 125
8 Technische Merkmale 126
Anweisungen und Hinweise für den Benutzer des
Antriebs TEN 127
Page 99

99
D
1) Hinweise
Wichtige Sicherheitsanweisungen für die Installation
eine unkorrekte Installation kann schwere Schäden verursachen.
Alle Installationsanweisungen befolgen.
Die vorliegenden Anweisungen enthalten wichtige Sicherheitsinformationen für die Installation; vor der Installation alle Anweisungen lesen. Dieses Handbuch auch für die Zukunft sorgfältig aufbewahren
Unter Berücksichtigung der Gefahren, die bei Installation und Bedienung
von TEN auftreten können, muss die Installation für größte Sicherheit
unter voller Einhaltung von Gesetzen, Vorschriften und Verordnungen
erfolgen. In diesem Kapitel sind Hinweise allgemeiner Art gegeben; weitere wichtige Hinweise befinden sich in den Kapiteln “3.1 Vorprüfungen”;
“5 Abnahme und Inbetriebsetzung”.
Nach der neuesten europäischen Gesetzgebung gehört die
Automatisierung einer Tür oder eines Tors zu den Verordnungen der Richtlinie 98/37/CE (Maschinenrichtlinie) und insbesondere zu den Vorschriften: EN 13241-1 (harmonisierte
Norm); EN 12445; EN 12453 und EN 12635, die es erlauben,
die Konformität mit der Maschinenrichtlinie zu erklären.
Weitere Auskünfte und Hinweise zur Analyse der Risiken und der Realisierung der Technischen Unterlagen stehen im Internet unter “www.niceforyou.com” zur Verfügung. Die vorliegende Anleitung ist nur für technisches
Personal bestimmt, das für die Installation qualifiziert ist. Mit Ausnahme der
Anlage "Anweisungen und Hinweise für den Benutzer des Toröffners TEN“,
die der Installateur abtrennen muss, ist keine im vorliegenden Heft enthaltene Information als interessant für den Endbenutzer zu betrachten!
• Ein Gebrauch von TEN, der anders ist als in diesen Anweisungen vor-
gesehen, ist verboten. Ein unsachgemäßer Gebrauch kann Gefahren
und Personen- oder Sachschäden verursachen.
• Vor der Installation ist die Risikoanalyse auszuführen, welche die Liste
der wesentlichen Sicherheitsanforderungen, vorgesehen in Anlage I
der Maschinenrichtlinie einschließen und die jeweiligen, angewendeten
Lösungen angeben muss. Es wird daran erinnert, dass die Risikoanalyse eine der Unterlagen ist, die Bestandteil der "Technischen Dokumentation“ der Automatisierung sind.
• Je nach Einsatzbedingungen und vorhandenen Gefahren prüfen, ob
weitere Vorrichtungen und Materialien erforderlich sind, um die Automatisierung mit TEN zu vervollständigen; berücksichtigt werden müssen zum Beispiel Aufprallgefahr, Quetsch-, Schnitt- und Mitnehmgefahr usw. und sonstige Gefahren allgemein.
• Keine Änderungen an keinem Teil ausführen, falls nicht im vorliegenden
Handbuch vorgesehen. Vorgänge dieser Art können nur Betriebsstörungen verursachen. NICE lehnt jegliche Haftung für Schäden aufgrund geänderter Produkte ab.
• Während Installation und Bedienung vermeiden, dass Festteile oder
Flüssigkeiten in die Steuerung und sonstige geöffnete Vorrichtungen eindringen können; wenden Sie sich ggf. an den NICE Kundendienst; der
Gebrauch von TEN in solchen Situationen kann Gefahren verursachen.
• Der Automatismus darf erst verwendet werden, nachdem die Inbe-
triebsetzung ausgeführt wurde, wie in Punkt “5 Abnahme und Inbetriebsetzung” vorgesehen.
• Das Verpackungsmaterial von TEN muss unter voller Einhaltung der
örtlichen Vorschriften entsorgt werden.
• Wenn ein Defekt mit den im vorliegenden Handbuch gegebenen Infos
nicht beseitigt werden kann, wenden Sie sich bitte an den NICE Kundendienst.
• Wenn Automatikschalter oder Sicherungen ausgelöst werden, muss
vor ihrer Rückstellung der Defekt festgestellt und beseitigt werden.
• Vor dem Zugriff auf die Klemmen im Deckel von TEN, alle Kreisläufe
der Versorgung abtrennen; falls die Abtrennvorrichtung nicht sichtbar
ist, ein Schild mit der Aufschrift:“ACHTUNG - WARTUNG IM GANG”
anbringen.
Besondere Hinweise über die Eignung dieses Produktes mit Bezugnahme auf die Maschinenrichtlinie 98/37/CE (ex 89/392/CEE):
• Dieses Produkt wird als "Bestandteil einer Maschine" auf den Markt
gegeben und daher hergestellt, um in eine Maschine eingegliedert oder
mit anderen Maschinen zusammengebaut zu werden, mit dem Zweck,
"eine Maschine" gemäß der Richtlinie 98/37/CE nur in Kombination mit
anderen Bestandteilen und auf die im vorliegenden Handbuch
beschriebenen Arten und Weisen zu realisieren. Wie von der Richtlinie
98/37/CE vorgesehen, wird darauf hingewiesen, dass die Inbetriebsetzung des oben genannten Produktes erst gestattet ist, nachdem die
Maschine, in die dieses Produkt eingegliedert ist, als konform mit der
Richtlinie 98/37/CE gekennzeichnet und erklärt worden ist.
Besondere Hinweise über die Eignung dieses Produktes mit Bezugnahme auf die Niederspannungsrichtlinie 73/23/CEE und die spätere Änderung 93/68/CEE:
• Dieses Produkt, falls für seinen Zweck eingesetzt und in den in der vorliegenden Anleitung vorgesehenen Konfigurationen und in Kombination
mit den von Nice S.p.A. hergestellten Artikeln im Katalog entspricht den
Anforderungen der Niederspannungsrichtlinie. Die Übereinstimmung
mit den Anforderungen könnte nicht garantiert sein, wenn das Produkt
in nicht vorgesehenen Konfigurationen oder mit anderen Produkten
benutzt wird; der Gebrauch des Produktes in solchen Situationen ist
untersagt, bis der die Installation Ausführende die Übereinstimmung mit
den laut Richtlinie vorgesehenen Anforderungen überprüft hat.
Besondere Hinweise über die Eignung dieses Produktes mit Bezugnahme auf die Richtlinie 89/336/CEE "Elektromagnetische Verträglichkeit“
und spätere Änderungen 92/31/CEE und 93/68/CE:
• Dieses Produkt in den in der vorliegenden Anleitung vorgesehenen
Konfigurationen und in Kombination mit den von Nice S.p.A. hergestellten Artikeln im Katalog wurde unter den schwierigsten Einsatzbedingungen Tests der elektromagnetischen Verträglichkeit unterzogen.
Die elektromagnetische Verträglichkeit könnte nicht garantiert sein,
wenn das Produkt in nicht vorgesehenen Konfigurationen oder mit
anderen Produkten benutzt wird; der Gebrauch des Produktes in solchen Situationen ist untersagt, bis der die Installation Ausführende die
Übereinstimmung mit den laut Richtlinie vorgesehenen Anforderungen
überprüft hat
!
!
Page 100

100
2.1) Einsatzgrenzen
Die Leistungsdaten von TEN sind in Kapitel “8 Technische Merkmale” angegeben; sie ermöglichen als einzige Werte eine korrekte Bewertung
der Eignung von TEN. Gewöhnlich können mit TEN Kipptore nach den in Tabelle 2 angegebenen Grenzen automatisiert werden.
Die Maße in Tabelle 2 sind nicht bindend und dienen nur für eine ungefähre Schätzung. Die effektive Eignung von TEN zur Automatisierung
eines bestimmten Tors hängt vom Gleichgewicht des Tors, von den Reibungswerten der Führungen und anderen, auch gelegentlichen Behinderungen der Torbewegung ab, wie Windstärke oder Vorhandensein von Eis. Für eine effektive Überprüfung muss die Kraft gemessen werden, die notwendig ist, um das Tor auf der gesamten Lauflänge zu bewegen; dann muss kontrolliert werden, dass dieselbe das “Nenndrehmoment“ nicht überschreitet, das in Kapitel “8 Technische Merkmale” angegeben ist; weiterhin sind die Angaben in den Tabellen 3 und 4
zu berücksichtigen, um die Anzahl an Zyklen/Stunde und die aufeinander folgenden Zyklen festzulegen.
Kraft zur Bewegung des Tors (N) max. Zyklen/Stunde max. aufeinander folgende Zyklen
bis zu 150 30 19
150÷250 28 16
250÷350 25 14
Tabelle 4: Grenzen mit Bezug auf die Kraft, die notwendig ist, um das Tor mit 1 TN2010 + 1 TN2020 Antrieben zu bewegen
Tortyp mit 1 Antrieb motorisiert mit 2 Antrieben motorisiert
Ausfahrendes Kipptor Max. Höhe 2.6 m Max. Länge 3m Max. Höhe 2.6 m Max. Länge 5.4m
Nicht ausfahrendes Kipptor Max. Höhe 2.6 m Max. Länge 3m Max. Höhe 2.6 m Max. Länge 5.4m
Tabelle 2: Einsatzgrenzen der Antriebe TEN
TEN (Abbildung 1) ist ein Antrieb für die Automation von Kipptoren mit Gegengewichten, von Kipptoren mit Federn, die ausfahrend und nicht
sein können, sowie von Gelenktoren. TEN ist mit einem elektronischen Endschaltersystem mit Absolutimpulsgeber ausgestattet, das die
Position des Antriebs immer, auch wenn das Tor für die manuelle Bewegung entriegelt ist, wahrnehmen kann. TEN erreicht die Laufgrenze
(in Öffnung und Schließung) nach einer Verlangsamung. Weiterhin kontrolliert TEN ständig den Kraftaufwand während der Bewegungen und
nimmt Ungewöhnliches wie zum Beispiel ein plötzliches Hindernis war, das die Torbewegung blockiert; in diesem Fall wird die Automation
ein kurzes Stopp, gefolgt von einer kurzen Umkehrung der Bewegung ausführen.
Vor Installationsbeginn muss geprüft werden, ob die Bestandteile des Produktes beschädigt sind und ob das gewählte Modell und die Umgebung für die
jeweilige Installation geeignet sind.
2) Produktbeschreibung und Einsatz
1
Modell Typ Beschreibung
TN2010 Selbsthemmender Antrieb, Steuerung, elektronischer Endschalter über Absolutimpulsgeber und zusätzliche Beleuchtung
TN2020 Selbsthemmender Antrieb und zusätzliche Beleuchtung. Als “Slave” von TN2010 oder TN2020 zu verwenden
* Falls anders verwendet, ist sicher zu stellen, dass die Versorgung von einem Niedrigstspannungs-Sicherheitssystem zugeleitet ist, in dem keine
Spannungen über dem Niedrigstspannungs-Sicherheitswert entstehen.
Tabelle 1: Beschreibung der Bestandteile von TEN
Um Überhitzungen zu vermeiden, sieht die Steuerung einen Begrenzer vor, der sich auf dem Kraftaufwand des Antriebs
und der Dauer der Zyklen beruht und bei der Überschreitung der Höchstgrenze anspricht.
Kraft zur Bewegung des Tors (N) max. Zyklen/Stunde max. aufeinander folgende Zyklen
bis zu 120 20 35
120÷180 18 33
180÷220 15 30
Tabelle 3: Grenzen mit Bezug auf die Kraft, die notwendig ist, um das Tor mit 1 TN2010 zu bewegen
 Loading...
Loading...