

Page 1

Hyke
EN - Instructions and warnings for installation and use
IT - Istruzioni ed avvertenze per l’installazione e l’uso
FR - Instructions et avertissements pour l’installation et l’utilisation
ES - Instrucciones y advertencias para la instalación y el uso
DE - Installierungs-und Gebrauchsanleitungen und Hinweise
PL - Instrukcje i ostrzeżenia do instalacji i użytkowania
NL - Aanwijzingen en aanbevelingen voor installatie en gebruik
Swing gate opener
HK7024
HK7224
Page 2

Page 3

EN
English – 1
ENGLISH
Original instructions
1.1 - Safety warnings
• IMPORTANT! – This manual contains important instructions and warn-
ings regarding safety. Incorrect installation may cause serious injury. Before
commencing work, all sections of the manual must be read carefully. If in any
doubt, suspend installation and call the Nice Support Service for clarification.
• IMPORTANT! – This manual contains important instructions. Keep it for
future maintenance work and disposal of the product.
• IMPORTANT! – Under the latest European legislation, automatic door
and gate installations must be compliant with the standards specified in
Directive 2006/42/EC (formerly 98/37/EC) (the Machinery Directive) and
the standards EN 12445, EN 12453, EN 12635 and EN 13241-1 in particular, which enable conformity of the automated functionality to be de clared. In the light of the above, all work involving installation, connection, testing and maintenance of the product must be carried out
exclusively by qualified and competent technicians!
1.2 - Warnings for installation
• Before commencing the installation, check if the product is suitable for the de sired type of use (see “Usage limitation” paragraph 3.2 and the "Product te chnical specifications”). If it is not suitable, DO NOT continue with the installation.
• The contents of this manual refer to a standard system as described in fig. 3.
• All installation and maintenance work must be carried out with the au to -
mation system disconnected from the electricity supply. If the power discon nection device cannot be seen from where the automation system is po sitioned, then before starting work a notice must be attached to the disconnection device bearing the words “CAUTION! MAINTENANCE IN PRO GRESS”.
• The Control unit must be connected to an electricity supply line equipped
with protective earthing.
• Handle the product with care during installation, taking care to avoid crushing, denting or dropping it, or contact with liquids of any kind. Keep the product away from sources of heat and naked flames. Failure to observe the
above can damage the product, and increase the risk of danger or malfunction. Should this occur, suspend installation work immediately and contact
the Nice Support Service.
• Do not modify any part of the product. Prohibited modifications can only lead
to malfunctions. The manufacturer declines all responsibility for damage re sulting from unauthorized changes made to the product.
• If the gate or door being automated has a pedestrian gate, then the system
must include a control device that will inhibit the operation of the motor when
the pedestrian gate is open.
• The product’s packaging material must be disposed of in full compliance with
local regulations.
1.3 - Warnings for use
• The product is not intended for use by persons, including children, with limited physical, sensory or mental capacities, or who lack experience or knowledge, unless supervised or trained in the use of the product by a person
responsible for their safety.
• Any children near the automation system must be kept under supervision to
ensure that they do not play with it.
• Do not allow children to play with the fixed control devices. Keep remote control devices out of the reach of children.
WARNINGS AND GENERAL PRECAUTIONS
1
Contents
1 - WARNINGS AND GENERAL PRECAUTIONS........................................ 1
1.1 - Safety warnings ..................................................................................... 1
1.2 - Installation warnings .............................................................................. 1
1.3 - Operation warnings ............................................................................... 1
2 - PRODUCT DESCRIPTION AND INTENDED USE.................................. 1
3 - INSTALLATION........................................................................................ 2
3.1 - Preliminary installation checks................................................................ 2
3.2 - Application limits:................................................................................... 2
3.3 - Preliminary installation set-up work........................................................ 2
3.4 - nstallation of gearmotor mod. HK7024 - HK7224.................................. 2
3.5 - Mechanical limit switch adjustment........................................................ 3
3.6 - Manually releasing and locking the gearmotor........................................ 4
4 - ELECTRICAL CONNECTIONS ............................................................... 4
4.1 - Electrical connections of gearmotor with control unit mod. HK7024 ...... 4
4.2 - Connection of gearmotor without control unit mod. HK7224 ................. 4
4.3 - Connection of other devices .................................................................. 4
4.4 - Routing connected devices ................................................................... 4
4.5 - Initial start-up and connection check ..................................................... 5
4.6 - Learning of the connected devices ........................................................ 5
4.7 - Mechanical limit switch positioning learning ........................................... 5
4.8 - Gate leaf movement check .................................................................... 6
5 – TESTING AND COMMISSIONING ......................................................... 6
5.1 - Testing................................................................................................... 6
5.2 - Commissioning...................................................................................... 6
6 – CONTROL PANEL PROGRAMMING..................................................... 7
6.1 - Level 1 programming (ON-OFF functions).............................................. 7
6.2 - Level 2 programming (adjustable parameters)........................................ 8
6.3 - Special functions ................................................................................... 9
6.4 - Deleting the memory.............................................................................. 9
7 – TROUBLESHOOTING... (troubleshooting guide).................................. 9
8 - FURTHER INFORMATION .................................................................... 11
8.1 - Connecting a radio receiver ................................................................. 11
8.2 - Connecting and installing the buffer battery mod. PS124..................... 11
8.3 - Connecting the Oview programmer ..................................................... 11
8.4 - Connecting the solar power system Solemyo ...................................... 11
8.5 - Connecting the external release system Kio......................................... 11
9 - PRODUCT MAINTENANCE.................................................................. 12
PRODUCT DISPOSAL ............................................................................... 12
Product lifetime.......................................................................................... 12
TECHNICAL SPECIFICATIONS OF PRODUCT......................................... 13
CE DECLARATION OF CONFORMITY ...................................................... 14
APPENDIX ..................................................................................................... I
Instructions and warnings for the user ............................................................ II
Images.......................................................................................................... IX
The devices comprising this product are designed to automate a gate or door
with one or two leaves. IMPORTANT! – Any other use apart from that
described herein, including in different environmental conditions from
those described in this manual is to be considered improper use and is
not permitted!
The principal component of the automation system comprises one or two electric gearmotors (according to the number of leaves to be automated), each
equipped with a direct current motor and epicyclic reduction gear. One of the
gearmotors (mod. HK7024) has a control unit that controls its operation. The
Control unit consists of a board with a radio receiver for receiving the commands sent by the transmitter.
The control unit is designed for connection to several devices belonging to the
Opera system, the Bluebus system and the Solemyo solar powered system,
see chapter 8 - Further information
If it is mains powered, it can house a back-up battery (mod. PS124, optional
accessory) which in the event of a power cut (electricity black-out) guarantees
that the automated device will perform certain manoeuvres in the hours that follow.
In the event of a power cut, the gate leaves can be moved by releasing the
gearmotor with the dedicated key; to perform the manoeuvre manually please
see chapter 3.6.
Other available accessories include the receivers designed with “SM” connectors (SMXI, OXI, etc.), see chapter 8 - Further information.
PRODUCT DESCRIPTION AND
INTENDED USE
2
Page 4

INSTALLATION
3
EN
3.1 - Pre-installation checks
Before going ahead with the installation, check the integrity of the product components, and ensure the model chosen is suitable for its intended use and for
the environment in which it is to be installed.
• Check that all the material to be used is in excellent condition and suitable for
its intended use.
• Check that the ground-mounted mechanical stops (not supplied), are present
both when opening and closing the automation system.
• Check that the mechanical structure of the gate is suitable for the installation
of automation and compliant with locally applicable regulations (if necessary,
refer to the label on the gate). This product cannot be used to automate a
gate which is not already in good, safe working order, neither can it fix faults
caused by incorrect installation or poor maintenance of the gate.
• Check that the operating conditions of the devices are compatible with the
usage limitation declared (see paragraph 3.2).
• Move the gate leaves manually in both directions and ensure that the resistance to movement is constant at all points of travel (there should not be any
points where more force or less is required).
• Bring the gate leaves manually into a position at random, then let go and
check that they remain stationary.
• Check that the gearmotor fixing zone is compatible with its overall dimensions (fig. 1).
• Check that the place where the gearmotor is to be installed allows enough
space for its arm to execute its full range of movement.
• Check that there is sufficient room around the gearmotor for it to be released
manually when required.
• Ensure that the surfaces on which the various devices are to be installed are
strong and capable of ensuring a firm hold.
• Ensure that each device is installed in a position which is protected and does
not expose it to accidental impacts.
• Ensure that all the electrical cables to be used are the type listed in Table 1.
3.2 - Application limits
Before installing the gearmotor, ensure that the specifications meet the
requirements in terms of application limits as stated below and within the limits
as specified in “Product Technical Specifications”.
With the LONG motor arm :
- maximum leaf width: 3.50 m (= maximum leaf weight: 200 kg)
With the SHORT motor arm :
- maximum leaf width: 3.00 m (= maximum leaf weight: 180 kg)
• Checks to perform: note on Graph 1 alongside, the weight and width of the
leaf; trace two lines from this point and check that these intersect within one of
the two grey areas of the graph. Caution! - If the lines intersect in the white
area, this product cannot be used to automate the gate.
• To enable installation of the gearmotor, the minimum column width must be
210 mm.
• The arm fixing bracket must be located in a resistant area of the leaf (for
example the frame), to guarantee a solid and safe fixture;
• Check position “E” (fig. 2):
- If position “E” is between 300 mm (minimum) and 650 mm (maximum),
the gearmotor arm must be set at the SHORT length. In these conditions,
the maximum leaf opening can reach 90°.
- If position “E” is equal to or over 650 mm, the gearmotor arm must be
set at the LONG length. In these conditions, the maximum leaf opening can
reach 110°.
GRAPH 1
350
300
250
200
WEIGHT (kg.)
150
100
1,8 2 2,5 3 3,5
WIDTH (m.)
3.3 - Preliminary installation set-up work
Fig. 3 provides an example of an automation system, produced using Nice
components (some components may not be present in the kit):
a - Gearmotor with control unit model HK7024
b - Gearmotor without control unit model HK7224
c - Flashing light
d - Pair of photocells model MOFB
e - Digital keypad (mod. MOTB) - Transponder badge reader (mod. MOMB) –
Key-operated selector switch (mod. MOSE)
f - Pair of posts for photocells
g - Mechanical stop on closing
h - Electric lock
These parts are positioned according to a typical standard layout. With reference to fig. 3, locate the approximate position for installation of each compo-
nent envisaged in the system. Important – Before installation, prepare the elec-
tric cables required for the system, with reference to fig. 4 and “Table 1 - Tech-
nical specifications of electric cables”.
Caution – When laying the ducting for routing the electrical cables, also take
into account that due to possible deposits of water in the routing ducts, the
connection pipelines must not create condensate in the control unit, with consequent damage to the electronic circuits.
3.4 - Installation of gearmotor mod. HK7024 - HK7224
WARNINGS
• Incorrect installation may cause serious physical injury to those working
on or using the system.
• Before starting automation assembly, make the preliminary checks as
described in paragraphs 3.1 and 3.2.
Before starting installation, determine the length of the gearmotor arm with reference to paragraph 3.4.1.
3.4.1 - Determining the length of the gearmotor arm
01. Assemble the components of the motor arm as shown in fig. 5.
02. Establish the position of the gearmotor in the VERTICAL direction:
on the column, trace a horizontal line at the same height as the designated
position of the fixing bracket for the arm on the leaf after installation (fig. 6).
03. Establish the position of the gearmotor in the HORIZONTAL direction
(position A):
CAUTION! – If there is a fixed obstacle (wall, tree, etc.) in the vicinity of
the installation area, measure value E
• if value E is equal to or greater than 650 mm, refer to paragraph 3.4.2
(fig. 2) and proceed as follows:
For full length arm
For shortened arm
TABLE 1 - Technical specifications of electric cables (fig. 4)
Connection Cable type Maximum admissible length
A: Cable CONTROL UNIT POWER SUPPLY 1 Cable 3 x 1,5 mm
B: ELECTRIC LOCK Cable 1 Cable 2 x 1 mm
C: BLUEBUS DEVICE cable 1 Cable 2 x 0,5 mm
2
2
2
30 m (note 1)
6 m
20 m (note 2)
D: KEY-OPERATED SELECTOR SWITCH cable 2 Cables 2 x 0,5 mm2 (note 3) 50 m
E: GEARMOTOR POWER SUPPLY Cable 1 Cable 3 x 1,5 mm
2
(note 4) 10 m
ENCODER CONNECTION cable 1 Cable 2 x 1 mm2 (note 4) 10 m
F: FLASHING LIGHT with aerial cable 1 Cable 2 x 0,5 mm
2
20 m
1 RG58 type shielded cable 20 m (less than 5 m recommended)
Note 1 – If the power cable exceeds a length of 30 m, use a cable with a larger section (3x2.5 mm2); in this case earthing is required in the vicinity of the automation.
Note 2 – If the Bluebus cable exceeds a length of 20 m, up to a maximum of 40 m, use a cable with a larger section (2 x 1 mm
Note 3 – These 2 cables may be replaced with a single cable of 4 x 0,5 mm
Note 4 – These cables may be replaced with a single cable of 5 x 1,5 mm
2
.
2
.
2
).
CAUTION! – The cables used must be suited to the type of environment of the installation site.
2 – English
Page 5

EN
English – 3
• if value E is between 300 mm (minimum) and 650 mm (maximum),
refer to paragraph 3.4.3
3.4.2 - Installing the gearmotor
with the LONG MOTOR ARM LENGTH
01. a) On the column, measure value B
(fig. 7) = distance between the leaf
rotation fulcrum and the column surface designated for fixture of the rear
gearmotor bracket.
b) Move the leaf to the required opening position (maximum 110°): value of
angle.
c) On Graph 2 note the obtained value B
and from this point, trace a hor-
izontal line until it intersects the area
covering the angle value measured in
point b.
d) At the points of intersection between the horizontal line and the area
,
trace vertical lines to determine the feasible values for value A
(fig. 8).
Then choose a value for A within this range.
e) On the column, mark the value found for value
A and trace a vertical line
at this point.
02. Fixing the bracket on the column (fig. 9)
:
f) phases 1-2: Place the bracket on the column, aligning its vertical centre-
line with the previously traced vertical line (value A), and its arm with horizontal line traced during procedure 3.4.1. In this phase, ensure that the
gearmotor is perfectly level: an offset gearmotor can cause automation
malfunctions.
g) phases 3-4: Mark the fixing points, drill the holes in the column and
insert the plugs, and then secure the bracket using suitable screws and
washers.
03. Fixing the gearmotor arm on the leaf
:
h) Move the gate leaf to the maximum closing position;
i) phase 5: Fix the gearmotor to the bracket with the two screws and nuts
supplied;
l) Release the gearmotor; see chap. 3.6;
m) phase 6: Firmly push the gearmotor arm to its maximum extension
.
Caution! - Ensure that the arm stops and locks in place at its travel
limit;
n) Move the arm towards the leaf, and position the fixing bracket on the leaf.
o) phase 7: Ensure that the gearmotor arm is perfectly level and use a pen-
cil to mark the
centre of the profile of the slots on the bracket, to enable
future fine adjustment of leaf closure (see paragraph 4.8).
p) Use one hand to keep the bracket in contact with the leaf and perform a
complete opening and closing cycle.
q) phase 8: Drill the leaf at the marked points, remove the bracket from the
arm and fix it on the gate leaf with suitable screws.
r) phase 9: Fix the arm to the bracket, inserting the pin and Benzing snap
ring. Important – Check that the bracket and arm are perfectly level. If necessary, loosen the screws and level correctly.
s) Position the mechanical limit stops with reference to chap. 3.5;
t) phase 10: Lastly, manually move the gate leaf to approx. mid-travel and
block the gearmotor with the relative key (see chap. 3.6). Then manually
move the gate leaf by a few centimetres in the opening direction.
04. If the gate to be automated is a two-leaf model, repeat the same operations
as described in this chapter 3.4 to install the second gearmotor.
3.4.3 - Installing the gearmotor with the SHORT MOTOR ARM LENGTH
Caution! – In this configuration, the maximum admissible leaf opening is 90°.
01. a) On the column, measure value B
(fig. 7) = distance between the leaf
0
150 175 200 225 250 275 300 325 350 375 400 425 450 475
50
B
A
100
150
200
250
300
350
400
450
90°-95°
95°-100°
100°-105°
105°-110°
90°-95°
95°-105°
GRAPH 2
rotation fulcrum and the column surface designated for fixture of the rear
gearmotor bracket.
b) On Graph 2 note the obtained value B
and from this point, trace a hor-
izontal line until it intersects the area
covering the range 90° - 95°.
c) At the points of intersection between the horizontal line and the area
,
trace vertical lines to determine the feasible values for value A
(graph 2).
Then choose a value for A within this range.
d) On the column, mark the value found for value A
and trace a vertical
line at this point.
02. Fixing the bracket on the column (fig. 10)
:
e) phases 1-2: Place the bracket on the column, aligning its vertical cen-
treline with the previously traced vertical line (value A), and its arm with horizontal line traced during procedure 3.4.1. In this phase, ensure that the
gearmotor is perfectly level: an offset gearmotor can cause automation
malfunctions.
f) phases 3-4: Mark the fixing points, drill the holes in the column and insert
the plugs, and then secure the bracket using suitable screws and washers.
g) Move the gate leaf to the maximum closing position;
h) phase 5: Fix the gearmotor to the bracket with the two screws and nuts
supplied;
i) Release the gearmotor; see chap. 3.6;
03. Check the length of the slotted arm with respect to the configuration
:
l) phase 6: Move the arm towards the leaf, and position the fixing bracket
on the leaf. Caution
! - manually push the curved arm against the leaf
until the arm is locked in place (maximum opening).
m) phase 7: Ensure that the gearmotor arm is perfectly level and use a
pencil to mark the
centre of the profile of the slots on the bracket, to
enable future fine adjustment of leaf closure (see paragraph 4.8).
n) Provisionally secure the bracket on the leaf and move the latter to the
maximum opening position.
04. Fixing the gearmotor arm on the leaf
:
o) phase 8: Drill the leaf at the previously marked points.
p) phases 9-10: Remove the bracket from the arm and fix it on the gate
leaf with suitable screws.
q) phase 11: Fix the arm to the bracket, inserting the pin and Benzing snap
ring. Important - Check that the bracket and arm are perfectly level. If necessary, loosen the screws and level correctly.
r) Position the mechanical limit stops with reference to chap. 3.5;
s) phase 12: Lastly, manually move the gate leaf to approx. mid-travel and
block the gearmotor with the relative key (see chap. 3.6).Then manually
move the gate leaf by a few centimetres in the opening direction.
05. If the gate to be automated is a two-leaf model, repeat the same operations
as described in this chapter 3.4 to install the second gearmotor.
3.5 - Mechanical limiter adjustment
01. Manually move the gate leafs to the maximum opening position;
02. Rotate the plastic disk on the lower section of the gearmotor, to position
the aperture under the arm as shown in fig. 11-1;
03. Insert the limiter in the first possible place: try to insert as shown in fig. 11-
2 (opening direction);
04. Rotate the disk to prevent the limiter from dropping, moving the aperture to
the position shown in fig. 11-3; for more precise adjustments, use the
adjustment screw (fig. 11-4);
05. If there is no floor-mounted stop in the system, this procedure must be
repeated from point 01 also for the closing limiter.
Page 6

EN
4 – English
06. Lastly, tighten the disk fixing nut fully down (fig. 11-5) to ensure that it does
not rotate accidentally.
3.6 - Manually releasing and locking the gearmotor
The gearmotor is equipped with a mechanical blocking system to enable manual opening and closing of the gate.
These manual operations should only be performed in the event of a power failure, malfunctions or during the installation procedures.
Release (fig. 12-A):
01. Insert the key in the relative lock;
02. Turn the key clockwise (90°);
03. The lever comes out under action of a spring: turn the lever anti-clockwise
through 90°;
04. At this point the leaf can be moved manually to the required position.
Lock (fig. 12-B):
01. Turn the lever through 90° to place the stem in a vertical position;
02. Push the lever back into its seat;
03. Turn the key anti-clockwise through 90° and remove.
The electrical connection of the various devices (photocells, digital keyboard,
transponder card readers, etc.) contained in the automation with the control
unit must be made by means of the Nice “Bluebus” system.
Description of electrical connections (fig. 13)
AERIAL input for the radio receiver aerial
FLASH output for 1 flashing light with 12V (maximum 21W) bulb. [*]
ELS output for 12Vac (maximum 15VA) electric lock. [*]
S.C.A. “Open Gate Light”: output for 1 indication lamp (24V maximum
4W). [*]
BLUEBUS input for compatible devices (MOFB, MOFOB, MOB and MOTB);
they are connected in parallel using two conductors through which
both the electricity supply and the communication signals travel;
no polarity needs to be observed. The electrical connection to be
used is of the parallel type and no polarity needs to be observed.
During the learning stage, the control unit will recognise individually
all devices connected to it thanks to a unique code. Each time a
device is added or eliminated, it will be necessary to make the
control unit perform the learning operation (see paragraph 4.6).
STOP input for devices that cause the immediate interruption of the
manoeuvre in progress (with a short reverse run); NO and NC
contacts, as well as devices with 8.2 kΩ constant resistance
output (sensitive edges) can be connected to this input. Each
device connected to this input is recognised individually by the
control unit during the learning stage (paragraph 3.4); in this stage,
if the control unit detects any variations with respect to the learned
state, it causes a STOP. One or more devices of the same or
different kinds can be connected to this input:
– connect a number of NO devices in parallel without quantity limits;
– several NC devices can be connected in series, with no limits as
to quantity;
– connect 2 devices with 8.2 kΩ constant resistance output in
parallel. If there are more than 2 devices, they must be connected in
a cascade with just one 8.2 kΩ termination resistance;
– connect 2 NO and NC devices in parallel, placing a 8.2 kΩ
resistance in series on the NC contact (this also allows for a
combination of three devices NO - NC and 8.2 kΩ)
P. P. input for devices which control Step-by-Step manoeuvres.
NO contacts can be connected to this input
OPEN input for devices which control only opening manoeuvre.
NO contacts can be connected to this input
CLOSE input for devices which control only closure manoeuvre. NO contacts
can be connected to this input
ENC1 input encoder – gearmotor 1 (terminal 1, 2); it is not necessary to
observe any polarity
ENC2 input encoder – gearmotor 2 (terminal 4, 5); it is not necessary to
observe any polarity
M1 output for gearmotor 1 (terminal 7, 8, 9)
M2 output for gearmotor 2 (terminal 10, 11, 12)
[*] The outputs FLASH, ELS and S.C.A. can be programmed with other functions (see “TABLE 3 - Level 1 functions”; or via the Oview programmer; see
paragraph 8.3).
ELECTRICAL CONNECTIONS
4
4.1 - Electrical connections of gearmotor with control unit
mod. HK7024
Caution! – Only make the electrical connections after installing the gear-
motor.
WARNINGS
– Connections must be made exclusively by qualified personnel.
– All electrical connections must be made with the unit disconnected
from the mains power supply and with the buffer battery disconnected (if
present).
– The electrical power line must be fitted with a device that enables complete
disconnection of the automation from the mains. The disconnection device
must have a gap between contacts that ensures complete disconnection in the
conditions of overvoltage category III, in compliance with installation regulations. If necessary, this device guarantees rapid and safe disconnection from
the mains, and therefore should be located in view of the automation. However,
if located in a concealed position, it must have a system that blocks against
inadvertent or unauthorised reconnection to prevent all risks. The disconnection device is not supplied with the product.
01. Open the cover (fig. 14-1);
02. Raise the control unit (fig. 14-2);
03. Pass the power cable and other cables through one of the holes on the
lower section of the gearmotor; strip the sheath on the cable (fig. 14-4);
04. Unscrew the cable clamp and route the power cable as required (fig. 14-5);
05. First connect the power cable, see fig. 14-6;
06. Secure the power cable with the cable clamp (fig. 14-7);
07. Then connect the electric cables of motors M1 and M2, observing the sym-
bols on the label (fig. A):
a) connect the motor that activates the subordinate leaf (the second
to
start the opening manoeuvre) to terminal M1 (7-8-9) and then the respective encoder to terminals 1-2;
b) connect the motor that activates the main leaf (the first to start the opening manoeuvre) to terminal M2 (10-11-12) and then the respective encoder
to terminals 4-5;
IMPORTANT! – If there is only one gearmotor in the system, connect
it to terminal M2 leaving terminal M1 free;
08. The connect the electric cables of the various devices present, with refer-
ence to fig. 17 and paragraph 4.3 Note – To facilitate cable connections,
the terminals can be removed from their seats;
09. Close the cover of the gearmotor (fig. 14-8).
4.2 - Connection of gearmotor without control unit
mod. HK7224
01. Open the cover as shown in fig. 15-1;
02. Pass the motor cable through one of the holes on the lower section of the
gearmotor; strip the sheath on the cable (fig. 15-2);
03. Unscrew the cable clamp (fig. 15-3), place the cable in the relative route
and connect the wires as shown in fig. 16-4; observe the symbols on the
label ;
03. Secure the cable with the cable clamp (fig. 15-5);
04. Close the cover of the gearmotor (fig. 15-6).
4.3 - Connection of other devices
If further devices present in the system need to be powered, for example a
transponder card reader or the key selector light, these devices can be connected to the control unit using terminals “P.P. (positive)” and “STOP (negative)”
(fig. 13). The power supply voltage is 24 Vdc, -30% ÷ +50%, with maximum
available current 200 mA.
Note – The voltage present on terminals “P.P.” and “STOP” remains connected
even when the “Stand By” function is activated on the card.
4.4 - Routing connected devices
To enable control unit recognition of the devices connected to the BlueBus system, they need to be routed. This operation must be performed by positioning
the electric jumper correctly on each device: see fig. B.
To route other devices, consult the relative instruction manuals.
At the end of the installation procedure, or after removing photocells or other
devices, the device learning procedure must be performed as described in
paragraph 4.6.
ENC1 ENC2
1245789101112
M1 M2
24V
24V
+
-
+
-
A
Page 7

EN
English – 5
4.5 - Initial start-up and electrical connections
After powering up the control unit, perform the following checks:
• After a few seconds, make sure that the “Bluebus” LED (fig. 16) flashes regu-
larly with a frequency of about one flash per second.
• Make sure that the LEDs on the photocells (fig. 16) flash (both on TX and RX).
The type of flashing is not important during this stage.
• Make sure that the flashing light connected to the FLASH output is off.
If the above conditions are not satisfied, switch off the power supply to the con-
trol unit and check the electrical connections previously made.
4.6 - Learning of the devices connected
After the initial power-up, the control unit must be able to recognise the devices
connected to the “Bluebus” and “Stop” inputs.
IMPORTANT! – The learning procedure must be performed even if no
device is connected to the control unit.
The control unit is able to recognise the various connected devices individually
through the self-learning procedure and detect possible faults. For this reason it
is necessary to perform self-learning every time a new device is added or an
existing device is removed.
To indicate when the self-learning procedure is required, LEDs L1 and L2 on
the control unit (fig. 16) emit a number of slow flashes:
01. Press and hold down and “Set” keys at the same time (fig. 16).
02. Release the keys when LEDs L1 and L2 start flashing quickly (after approx.
3 seconds).
03. Wait a few seconds for the control unit to complete the device learning
phase.
04. At the end of this phase, the “Stop” LED must be lit and LEDs “L1” and
“L2” must be turned off (LEDs L3 and L4 may start flashing).
4.7 - Mechanical limiter position learning
After learning the connected devices (paragraph 4.6), the positions of the
mechanical stops must also be learnt (maximum opening and maximum closing). There are three ways to perform this procedure: automatic, manual and
combined.
In automatic mode
, the control unit learns the positions of the mechanical stops
and calculates the most suitable offset value for the leafs (SA and SC, fig. C).
In manual mode, the eight positions of the mechanical stops (fig. C) are programmed one by one, moving the leafs to the required points. The position to
program is identifiable by the flashing status of one of the eight leds (L1-L8), see
Table 2.
In combined mode, the automatic procedure can be performed and then, using
the manual procedure, one or more positions may be modified, with the exception of positions “0” and “1” (fig. C) which coincide with the positions of the
mechanical stops.
4.7.1 - Learning in automatic mode
01. Press and hold keys “Set” and “” at the same time.
02. Release the keys when leds “L3” and “L4” start flashing quickly (after
approx. 3 seconds).
03. Ensure that the automation completes the following sequences of ma noeuvres:
a - Low speed closure of gearmotor M1 through to the mechanical stop
b - Low speed closure of gearmotor M2 through to the mechanical stop
c - low speed opening of gearmotor M2 and gearmotor M1 through to the
mechanical stop
d - High speed closure of gearmotors M1 and M2
Warnings:
– If the first manoeuvre (a) does not close the leaf controlled by motor M1 but
closes the one controlled by M2, press key “” or “” to stop the learning
phase. At this point, invert the connections of motors M1 and M2 on the terminals on the control unit and then those of the respective encoders; after
this start the procedure from point 01;
– If the first two manoeuvres (a and b) are not “closing” but are “opening”,
press key “” or “” to stop the learning phase. At this point, on the gearmotor that completed the opening manoeuvre, invert the polarity of the two
wires of gearmotor M1 (terminals 7 and 9) and of M2 (terminals 10 and 12)
and then start the procedure from point 01;
04. At the end of the Closing manoeuvre of the 2 motors (d), leds “L3” and “L4”
turn off to indicate the that the procedure has been completed correctly.
Warnings:
– During the automatic learning procedure, if a photocell trips or a device con-
nected to the “stop” input is activated, the procedure is interrupted and led
L1 starts flashing. To resume the learning process, the procedure must be
started again from point 01;
– The automatic learning procedure can be repeated at any time, also after
installation; for example following modifications to the position of the
mechanical stops.
4.7.2 - Learning in manual mode
Caution! – From step 03 onwards:
– to move from led L1 to L8, briefly press key or (the led flashes to indi-
cate the current position);
– to move the motor in one or the other direction, press and hold key or .
B
TABLE 2 - PHOTOCELL ADDRESSES
Photocell Jumpers
FOTO
External photocell h = 50 with trip on
closure (stops and inverts movement)
FOTO II
External photocell h = 100 with trip on closure
(stops and inverts movement)
FOTO 1
Internal photocell h = 50 with trip on closure
(stops and inverts movement) and opening
(stops and restarts when photocell is disengaged)
FOTO 1 II
Internal photocell h = 100 with trip on closure
(stops and inverts movement) and opening
(stops and restarts when photocell is disengaged)
FOTO 2
Internal photocell with trip on opening
(stops and inverts movement))
FOTO 2 II
Internal photocell with trip on opening
(stops and inverts movement)
FOTO 3
CONFIGURATION NOT ADMITTED
TABLE 2
Position Led Description
Position 0
(motor 1)
Position 0
(motor 2)
Position SA
(motor 2)
Position A
(motor 1)
Position A
(motor 2)
Position SC
(motor 1)
Position 1
(motor 1)
Position 1
(motor 2)
Maximum closing position: when leaf 1 reaches closing
mechanical stop
Maximum closing position: when leaf 2 reaches closing
mechanical stop
Opening offset: when leaf 2 passes this position the opening
of leaf 1 begins
Desired opening position: position at which the leaf connected
to motor 1 must stop at the end of an opening manoeuvre.
This position does not need to coincide with the opening
mechanical stop but can be chosen as desired between the
positions 0 and 1
Desired opening position: position at which the leaf connected
to motor 2 must stop at the end of an opening manoeuvre.
This position does not need to coincide with the opening
mechanical stop but can be chosen as desired between the
positions 0 and 1
Closing offset: when leaf 1 reaches this position, leaf 2 begins
to close
Maximum opening position: when leaf 1 reaches the opening
mechanical stop
Maximum opening position: when leaf 2 reaches the opening
mechanical stop
L1
L2
L3
L4
L5
L6
L7
L8
0
11
A
SC
SA
A
0
M1 M2
C
POSITIONS
Page 8

EN
6 – English
01. Press and hold keys “Set” and “” at the same time.
02. Release the keys when led “L1” starts flashing (after approx. 1 second);
Note – After 3 seconds have elapsed, if the keys “Set” and “” are not
released, the “automatic learning
” procedure is started up, and not the
manual procedure.
03. • LED
L1 flashes: position 0 of M1
To bring motor 1 to position 0 (fig. C): press and hold down
the or
keys. On reaching the position, release the key to stop the manoeuvre.
To memorise the position, press and hold down
the “Set” key for at least
3 seconds and then release it (after 2 seconds LED L1 remains on and on
releasing the “Set” key LED L2 begins flashing).
• LED
L2 flashes: position 0 of M2
To bring motor 2 to position 0 (fig. C): press and hold down the or
keys. On reaching the position, release the key to stop the manoeuvre.
To memorise the position, press and hold down the “Set” key for at least
3 seconds and then release it (after 2 seconds LED L2 remains on and on
releasing the “Set” key LED L3 begins flashing).
• LED
L3 flashes: position SA of M2
To bring motor 2 to position SA (fig. C): press and hold down the or
keys. On reaching the position, release the key to stop the manoeuvre.
To memorise the position, press and hold down the “Set” key for at least
3 seconds and then release it (after 2 seconds LED L3 remains on and on
releasing the “Set” key LED L4 begins flashing).
• LED
L4 flashes: position A of M1
To bring motor 1 to position A (fig. C): press and hold down the or
keys. On reaching the position, release the key to stop the manoeuvre.
To memorise the position, press and hold down the “Set” key for at least
3 seconds and then release it (after 2 seconds LED L4 remains on and on
releasing the “Set” key LED L5 begins flashing).
• LED
L5 flashes: position A of M2
To bring motor 2 to position A (fig. C): press and hold down the or
keys. On reaching the position, release the key to stop the manoeuvre.
To memorise the position, press and hold down the “Set” key for at least
3 seconds and then release it (after 2 seconds LED L5 remains on and on
releasing the “Set” key LED L6 begins flashing).
• LED
L6 flashes: position SC of M1
To bring motor 1 to position SA (fig. C): press and hold down the or
keys. On reaching the position, release the key to stop the manoeuvre.
To memorise the position, press and hold down the “Set” key for at least
3 seconds and then release it (after 2 seconds LED L6 remains on and on
releasing the “Set” key LED L7 begins flashing).
• LED
L7 flashes: position 1 of M1
To bring motor 1 to position 1 (fig. C): press and hold down the or
keys. On reaching the position, release the key to stop the manoeuvre.
To memorise the position, press and hold down the “Set” key for at least
3 seconds and then release it (after 2 seconds LED L7 remains on and on
releasing the “Set” key LED L8 begins flashing).
• LED
L8 flashes: position 1 of M2
To bring motor 2 to position 1 (fig. C): press and hold down the or
keys. On reaching the position, release the key to stop the manoeuvre.
To memorise the position, press and hold down the “Set” key for at least
3 seconds and then release it to exit programming (after 2 seconds LED
L8 remains on until the “Set” key is released).
Note – To perform manual programming in a system with a single gearmotor, proceed as described in paragraph 4.7.2 and at step 03 program posi-
tions “0” and then “1” of M1, ignoring the part related to keys “” and “”, and
using the “Set” key only, as described. Important! – In the manual proce-
dure, positions “SA” of M2; “A” of M1; “SC” of M1 must not be programmed.
4.7.3 - Learning in combined
mode
Perform this procedure after completing the automatic learning cycle:
01. Press and hold keys “Set” and “” at the same time.
02. Release the keys when led “L1” starts flashing (after approx. 1 second);
Note – After 3 seconds have elapsed, if the keys “Set” and “” are not
released, the “automatic learning
” procedure is started up, and not the
manual procedure.
03. Briefly press key “” or “” to move the flashing led (L1-L8) to the position
to be programmed and proceed for each position, as described in step 03
of the manual learning procedure (paragraph 4.7.2).
Repeat this operation for all other positions to be modified.
To complete the manual learning process, press key “” repeatedly to move
the led that flashing beyond position L8.
4.8 - Checking movement of gate leafs
At the end of the learning procedure, it is advisable to make the control unit perform a few opening and closing manoeuvres to ensure that the gate moves correctly and to check for installation or setting defects.
01. Press the “Open” key. Check for the correct leaf opening offset and check
that the opening manoeuvre includes the acceleration, constant speed
and deceleration phases and that the leaf limit switch is set a few centimetres from the opening mechanical stops.
02. Press the “Close” key and check that the closure manoeuvre includes the
acceleration, constant speed and deceleration phases. Check that the leaf
closure offset is correct. At the end of the manoeuvre, the leafs must be
perfectly closed on the mechanical closure stop.
These are the most important phases in the installation of the automation system, in order to guarantee maximum system safety. Testing can also be used to
check the devices in the automation system regularly. The automation system
testing and commissioning phases must be carried out by qualified experts
who must be responsible for determining the tests necessary to check the
solutions adopted vis-à-vis the risks involved, and to check the observance of
all legal and regulatory obligations: in particular all the requirements of the EN
12445 standard which sets forth the test methods for checking automated
gates.
Additional devices must undergo specific testing, both in terms of functionality
as well as their correct interaction with HYKE; please refer to the relevant individual instruction manuals.
5.1 - Testing
The sequence of steps to take to carry out testing refers to a typical system (fig. 3):
1 Ensure that everything stated in the “Installation warnings” chapter has
been observed.
2 Release the gearmotors manually and check that when you operate the
leaf, at the point designed especially for the manual manoeuvre, the leaves
can either be opened or closed with a force of less than 390 N.
3 Secure the gearmotors (see chapter 3.6).
4 Using the control devices (transmitter, command button, key selector, etc.),
perform some Gate Opening, Closing and Stop tests, making sure the
movement of the leaves corresponds with each test. It is a good idea to carry out several tests in order to evaluate the movement of the leaves and pinpoint any assembly or adjustment defects as well as to check for any particular points of friction.
5 Check one by one that all the safety devices in the system work properly
(photocells, sensitive edges, etc.). When a device is activated, the “BLUEBUS” LED on the control unit emits two quicker flashes to confirm that
recognition has taken place.
6 If the hazardous situations caused by the movement of the leaves have
been safeguarded by limiting the force of impact, the force must be measured in accordance with the EN 12445 standard and, if necessary, if the
control of the “gearmotor force” is used as an aid to the system to reduce
the force of impact, try and then find the adjustment that achieves the best
results.
5.2 - Commissioning
Commissioning can only take place once all the testing phases have been
carried out successfully.
1 Put together the automation system’s technical file, which should include
the following documents: an overall diagram of the automation system, the
diagram of the electrical connections made, the current risk analysis and
the related solutions adopted, the manufacturer’s declaration of conformity
for all the devices used and the declaration of conformity filled in by the in staller.
2 Affix a data plate onto the gate which specifies the following information, at
least: the type of automation system, the name and address of the manufacturer (responsible for the commissioning), the serial number, the year of
manufacture and the EC mark.
3 Fill in the declaration of conformity of the automation system and hand it
over to its owner.
4 Fill in and hand over to the owner of the automation system the “User’s
guide” of the automation system.
5 Fill in and hand over to the owner of the automation system the “Mainte-
nance schedule” which contains instructions on the maintenance of all the
devices in the automation system.
6 Before commissioning the automation system, inform the owner of all the
hazards and residual risks entailed.
For all the documentation mentioned, the Nice technical support service
provides the following: instruction manuals, guides and precompiled forms.
Also visit: www.nice-service.com
TESTING AND COMMISSIONING
5
03. Make sure that the flashing light flashes at intervals of 0.5 sec on, 0.5 sec
off during manoeuvres.
Page 9

EN
English – 7
The control unit has 3 keys OPEN (), STOP (SET), CLOSE () that can be
used both for controlling the unit during testing and for programming the available functions.
The programmable functions available are divided into 2 levels and their relative
operating status is displayed by means of the 8 LEDs (L1…L8) on the control
unit (LED lit
= function active; LED off = function not active).
Use the programming keys:
OPEN (): – key for controlling gate opening; – selection key during pro-
gramming.
STOP/SET: key for stopping a manoeuvre; if pressed for more than 5 seconds,
it enables entry to programming mode.
CLOSE (): – key for controlling gate closure; – selection key during programming.
6.1 - Level one programming (ON-OFF functions)
All level 1 functions are set by default to “OFF” and may be modified at any
time. To check the functions see Table 3. For the programming procedure see
Table 4.
IMPORTANT – In the programming procedure, the maximum time interval that
can elapse between activation of one key and the next is 10 seconds. When
this time elapses, the procedure terminates automatically, memorising the
modifications made up until then.
PROGRAMMING THE CONTROL UNIT
6
TABLE 3 - First level functions
LED Function Description
L1 Automatic closure
L2 Reclose after photo
L3 Always close
L4 All standby
L5 lock/Courtesy light
L6 Pre-flash
L7 “Close” becomes “Partial open 1”
L8 “Gate open light” or
“Maintenance light”
Function ACTIVE: after an opening movement, there is a pause (equal to the programmed time) after
which the control unit automatic initiates a closure movement. The factory setting for the Pause time is 30
sec.
Function NOT ACTIVE: function is “semiautomatic” type.
Function ACTIVE
: if the photocells are activated during the opening or closing manoeuvre, the pause time
is reduced to 5 seconds regardless of the programmed pause time.
With “automatic closure” disabled, if the photocells are activated during closure the “automatic closure” is
activated with the programmed “pause time”.
F
unction ACTIVE: in the event of a power failure, even of short duration, when power is restored the control unit detects gate open and automatically starts a closure manoeuvre, preceded by 5 seconds of preflashing.
Function NOT ACTIVE: when power is restored the gate remains where it is.
Function ACTIVE
: after 1 minute from the end of the manoeuvre, the control unit turns off the “BlueBus”
output (connected devices), Bus T4 (connected devices), the outputs flash, ELS and sca, some internal
circuits and all leds with the exception of the BlueBus led, which flashes at a slower interval. When the
control unit receives a command, it resumes normal operation (after a short delay). This function is used
to reduce consumption, an important aspect in the case of battery powered devices or when using photovoltaic panels.
F
unction ACTIVE: the “electric lock” output switches its operation to “courtesy light”.
Function NOT ACTIVE: the output operates as an electric lock.
F
unction ACTIVE: a 3 second pause can be added between the flashing light signal and the start of the
manoeuvre to provide advance warning of a hazard situation.
Function NOT ACTIVE: flashing light signal coincides with the start of the manoeuvre.
F
unction ACTIVE: all the commands corresponding to “Close” (“Close” input or “Close” radio control) are
replaced by the “Partial open 1” command.
F
unction ACTIVE: the “gate open light” output on the control unit switches to the “maintenance light”
function.
Function NOT ACTIVE: the output operates as “gate open light”.
TABLE 4 - Programming procedure (first level functions)
01. Press and hold down the “Set” key for approx. 3 seconds;
02. Release the key when LED “L1” starts flashing;
03. Press the “” or “” key to move the flashing LED to the LED representing the function to be modified;
04. Press “Set” to change the status of the function:
(short flash = OFF; long flash = ON);
05. Wait 10 seconds (maximum time) to exit the programming mode.
Note – During this procedure, points 03 and 04 need to be repeated when programming other functions to “ON” or “OFF” during the phase itself.
SET
SET
SET
L1
or
3 s
10 s
Page 10

EN
8 – English
TABLE 5 - Second level functions
Input LED Parameter LED Value Description
(level)
L1
L1
L2
L3
L4
L5
L6
L7
L8
5 seconds
15 seconds
30 seconds
45 seconds
60 seconds
80 seconds
120 seconds
180 seconds
Sets the pause time, namely the time
which lapses before automatic closure. This will only take effect if closing
is active.
Pause time
L2 L1
L2
L3
L4
L5
L6
L7
L8
Open – stop – close – stop
Open – stop – close – open
Open – close – open – close
Apartment block:
• In the opening
manoeuvre the “Step by Step” and “Open” commands
have no effect; the “Close” command causes the movement to be inverted,
i.e. the closure of the leaf.
• In the closure manoeuvre the “Step by Step” and “Open” commands cause the movement to be inverted, i.e. the leaf to open; the “Close” command
has no effect.
Apartment block 2:
• In the opening manoeuvre the “Step by Step” and “Open” commands
have no effect; the “Close” command causes the movement to be inverted,
i.e. the closure of the leaf. If the transmitted command persists for more
than 2 seconds, a “Stop” is performed.
• In the closure manoeuvre the “Step by Step” and “Open” commands
cause the movement to be inverted, i.e. the leaf to open; the “Close” command has no effect. If the transmitted command persists for more than
2 seconds, a “Stop” is performed.
Step-by-step 2 (less than 2 sec. generates partial opening).
Hold-to-run:
the manoeuvre is performed only if the transmitted command persists; if
the command is interrupted the manoeuvre stops.
Opening in semi-automatic mode, closing in hold-to-run mode.
Sets the sequence of commands associated with the “Step-by-Step”,
“Open”, or “Close” inputs or the radio
control.
Note – When setting L4, L5, L7 and
L8, the behaviour of the “Open” and
“Close” commands is also modified.
Step by
step
function
L3
L1
L2
L3
L4
L5
L6
L7
L8
Very slow
Slow
Medium
Fast
Very fast
Extremely fast
Fast opening, Slow Closing
Extremely fast Opening, Medium Closing
Sets the motor speed during normal
travel.
Motor
speed
L6 L1
L2
L3
L4
L5
L6
L7
L8
Pedestrian 1 (opening of leaf M2 to 1/4 of total opening)
Pedestrian 1 (opening of leaf M2 to 1/2 of total opening)
Pedestrian 3 (opening of leaf M2 to 3/4 of total opening)
Pedestrian 4 (Complete opening of leaf 2)
Partial 1 (opening of two leafs to 1/4 of “minimum” opening)
Partial 2 (opening of two leafs to 1/2 of “minimum” opening)
Partial 3 (opening of two leafs to 3/4 of “minimum” opening)
Partial 4 (opening of two leafs to “minimum” opening)
Sets type of opening associated with
“Partial open 1” command.
In levels L5, L6, L7, L8; “minimum”
opening means the smaller opening
out of M1 and M2; for example, if M1
opens to 90° and M2 opens to 110°,
the minimum opening is 90°
Pedestrian
or partial
opening
L4 L1
L2
L3
L4
L5
L6
L7
L8
No discharge
Level 1 - Minimum discharge (about 100 ms)
Level 2 - ...
Level 3 - ...
Level 4 - ...
Level 5 - ...
Level 6 - ...
Level 7 - Maximum discharge (about 800 ms)
Sets duration of “short inversion” of
bo th motors after performing Close
ma noeuvre with the aim of reducing
the final residual thrust.
Motor
discharge
after
closing
L5 L1
L2
L3
L4
L5
L6
L7
L8
Level 1 - Minimum Force
Level 2 - ...
Level 3 - ...
Level 4 - ...
Level 5 - ...
Level 6 - ...
Level 7 - ...
Level 8 - Maximum Force
Adjusts the force of both motorsMotor
force
6.2 - Level two programming (adjustable parameters)
All level 2 functions are set by default as highlighted in grey in Table 5, and may
be modified at any time as explained in Table 6.
The parameters can be set on a scale from 1 to 8. To check the value corre-
sponding to each LED see Table 8. IMPORTANT – In the programming proce-
dure, the maximum time interval that can elapse between activation of one key
and the next is 10 seconds. When this time elapses, the procedure terminates
automatically, memorising the modifications made up until then.o.
Page 11

EN
English – 9
TABLE 6 - Programming procedure (second level functions)
01. Press and hold down the “Set” key for approx. 3 seconds.;
02. Release the key when LED “L1” starts flashing;
03. Press the “” or “” key to move the flashing LED to the LED representing the “input LED” of the parameter to be modified;
04. Press and hold the “Set” key through to completion of point 06;
05. Wait approx. 3 seconds, until the LED representing the current level of the parameter to be modified illuminates;
06. Press keys “” or “” to move the LED representing the value of the parameter;
07. Release the “Set” key;
08. Wait 10 seconds (maximum time) to exit the programming mode.
Note – During this procedure, points 03 to 07 need to be repeated when programming other parameters during the phase itself.
SET
SET
SET
SET
L1
o
or
3 s
10 s
6.3 - Special functions
6.3.1 - Function: “Move anyway”
This function allows the automation to be operated even when any of the safety devices does not work correctly or is out of use.
The automation can be controlled in the “hold-to-run” mode. Proceed as follows:
01. Send a command to operate the gate using a transmitter or a key selector,
etc. If everything operates correctly, the gate will move normally, otherwise
proceed as follows;
02. within 3 seconds, activate the control again and keep it activated;
03. after approximately 2 seconds, the gate will perform the required move-
ment in “hold-to-run” mode; i.e. the gate will continue to move only as long
as the control is activated.
If the safety devices do not operate, the flashing light flashes a few times to indicate the kind of problem (see chapter 6 - Table 8).
6.3.2 - Function: “Maintenance warning”
This function serves to indicate when the automation requires maintenance.
The maintenance warning signal is given by way of a lamp connected to the
S.C.A. (open gate light) output when this output is programmed as “Maintenance light”. The various warning lamp signals are shown in Table 7.
To program the limit value of the maintenance operations, see Table 5.
Some devices are able to emit signals that serve to recognise their state of
operation or possible faults.
If a flashing light is connected to the FLASH output on the control unit, it will
flash at intervals of 1 second during a manoeuvre. If faults occur, the flashing
light will emit a sequence of two shorter flashes separated by a 1 second
pause. Table 8 shows the cause and solution for each type of signal.
The LEDs on the control unit also emit signals.
Table 9 shows the cause and solution for each type of signal.
It is possible to verify faults that have occurred during the last 8 manoeuvres.
See Table 10.
WHAT TO DO IF…
(troubleshooting guide)
7
Table 7 - “Maintenance light”
Number of manoeuvres Signal
Light on for 2 seconds at the start of the opening
manoeuvre.
Light flashing for the entire duration of the manoeuvre.
Light flashing continuously.
Below 80% of the limit
Between 81% and
100% of the limit
Beyond 100% of the limit
6.4 - Deleting the memory
To delete the control unit memory and restore all factory settings, proceed as
follows:
press and hold keys “” and “” until leds L1 and L2 start flashing.
Note – The factory settings are highlighted in grey.
L8 L1
L2
L3
L4
L5
L6
L7
L8
Manoeuvre 1 result (most recent)
Manoeuvre 2 result
Manoeuvre 3 result
Manoeuvre 4 result
Manoeuvre 5 result
Manoeuvre 6 result
Manoeuvre 7 result
Manoeuvre 8 result
The type of fault that has occurred in
the last 8 manoeuvres can be established
See TABLE 10 – Fault log.
List of
faults
L7 L1
L2
L3
L4
L5
L6
L7
L8
500
1000
1500
2500
5000
10000
15000
20000
Controls the number of manoeuvres:
when this number is exceeded, the
control unit signals an automation
maintenance request; see paragraph
6.3.2. – Maintenance warning.
Maintenance
warning
Page 12

EN
10 – English
7 short flashes
1 second pause
7 short flashes
Electric circuits fault Wait at least 30 seconds, then try sending a command and if necessary
turn off the power supply. If the condition persists, there may be a malfunction and the electronic board must be replaced.
8 short flashes
1 second pause
8 short flashes
A command is already present
that disables execution of other
commands
Check the type of command that is always present; for example, it could
be a command from a timer on the “open” input.
9 short flashes
1 second pause
9 short flashes
The automation has been blocked by
a “Block automation” command
Release the automation by giving the “Automation release” command.
10 short flashes
1 second pause
10 short flashes
“Obstacle detection” by encoder
function activated
During the movement, the motors have been blocked by higher friction;
identify the cause.
TABLE 8 - Flashing light signals (FLASH)
Flashes Problem Solution
1 short flash
1 second pause
1 short flash
Bluebus system error At the start of the manoeuvre, the devices connected to Bluebus do not
correspond to those recognized during the self-learning phase. One or
more devices may be disconnected or faulty; check and, if necessary,
replace them. In case of modifications repeat the device self-learning process (see paragraph 4.6).
2 short flashes
1 second pause
2 short flashes
Photocell activated One or more photocells do not enable movement or have caused a move-
ment inversion during travel; check to see if there are any obstructions.
3 short flashes
1 second pause
3 short flashes
Function activation
“Obstacle detection” by force limiter
During the movement, the motors encountered excessive resistance;
identify the cause and if necessary increase the level of force of the
motors.
4 short flashes
1 second pause
4 short flashes
STOP input activation At the start of the manoeuvre or during the movement, the STOP input
was activated; identify the cause.
5 short flashes
1 second pause
5 short flashes
Error on internal parameters in
control unit
Wait at least 30 seconds, then try giving a command and if necessary turn
off the power supply. If the condition persists, there may be a malfunction
and the electronic board must be replaced.
6 short flashes
1 second pause
6 short flashes
Maximum limit of consecutive manoeuvres or manoeuvres per hour exceeded.
Wait a few minutes until the manoeuvre limiting device falls to below the
maximum limit.
TABLE 9 - Signals given by LEDs on control unit (fig. 16)
LED Problem Solution
BLUEBUS
Always off
Always on
1 flash per second
2 quick flashes
Series of flashes separated by
one second pause
STOP
Always off
Always on
S.S.
Always off
Always on
OPEN
Always off
Always on
CLOSE
Always off
Always on
L1 - L2 Slow flashing
L3 - L4 Slow flashing
Fault
Serious fault
Everything normal
Input status variation
Various
Activation of the devices connected
to the STOP input
Everything normal
Everything normal
S.S. input activation
Everything normal
OPEN input activation
Everything normal
CLOSE input activation
Change in number of devices
connected to Bluebus or device
self-learning not performed
Change in self-learning of the motor
types or the positions of the mechanical stops
Check that the control unit is powered. Check that the fuses have not
blown: if they have, check the cause of the fault and replace with others
with the same value
A serious fault has occurred: try disconnecting electrical power from the
control unit. If the problem persists it will be necessary to replace the
electronic board
Control unit works correctly
Normal if one of the inputs (PP, STOP, OPEN, CLOSE) changes: photocells
activated or a command given via a transmitter
Refer to Table 8
Check the devices connected to the STOP input
STOP input active
S.S. input not active
Normal if the device connected to the S.S. input is active
OPEN input not active
Normal if the device connected to the OPEN input is active
CLOSE input not active
Normal if the device connected to the CLOSE input is active
The device self-learning process must be performed
(see paragraph 4.6)
Self-learning of the mechanical stop positions has not been performed
(see paragraph 4.7)
Page 13

EN
English – 11
TABLE 10 - Fault log
01. Press and hold down the “Set” key for approx. 3 seconds;
02. Release the key when LED “L1” starts flashing;
03. Press keys “” or “” to move from the flashing LED to L8 LED (“input LED”) for the “Fault log” parameter;
04. Press and hold the “Set” key through to completion of point 06;
05. Wait approx. 3 seconds until the LEDs representing the levels corresponding to the manoeuvres with faults illuminate.
The LED L1 indicates the result of the most recent manoeuvre while L8 indicates the eighth-to-last manoeuvre.
If the LED is on this means that a fault has occurred; if the LED is off, everything is normal;
06. Press keys “” and “” to select the required manoeuvre: the corresponding LED performs a number of flashes equal
to those normally performed by the flashing light;
07. Release the “Set” key.
SET
SET
SET
SET
L1
or
and
3 s
3 s
L8
The following accessories are envisaged for HYKE (optional): receivers in the
family SMXI, OXI, the programmer Oview, the solar power panel Solemyo and
buffer battery mod. PS124.
8.1 - Connecting a radio receiver
The control unit has a connector for connecting radio receivers (optional accesso ries) belonging to the SMXI and OXI families. To connect a receiver, disconnect power from the control unit and proceed as shown in fig. fig. 17. Table 11
and Table 12 show the commands corresponding to the outputs on the control
unit.
FURTHER DETAILS
8
8.2 - Connection and installation of the back-up battery mod.
PS124
IMPORTANT! - The battery must only be connected to the control unit
after all the phases of installation and programming have been completed, as the battery constitutes a source of emergency power.
To arrange connection to the Solemyo system, follow the stages of assembly
fig. 18.
8.3 - Connection of the Oview programmer
The control unit has a BusT4 connector to which the Oview programming unit
can be connect, and which allows the complete rapid management of the
installation and maintenance phase as well as the diagnosis of the entire
automation system. To access this connector, proceed as shown in fig. 19 and
connect the connector to the dedicated seat. The Oview can be connected to
several Control units simultaneously (up to 5 without any particular precautions,
and up to 60 observing the dedicated warnings) and can stay connected to the
control unit even during the normal operation of the automation system. In this
case, it can be used to send the commands directly tot he control unit using the
specific "user" menu. The Firmware upgrade can also be carried out. If there is
a radio receiver from the OXI family in the control unit, Oview can be used to
gain access to the parameters of the transmitters stored in the receiver itself.
For further information, please consult the relevant instruction manual and the
manual for the “Opera system book” system.
8.4 - Connecting the solar power system Solemyo
CAUTION! – When the automation is powered by the “Sole myo” system,
IT MUST NEVER BE POWERED simultaneously by the electrical mains.
For more information on the Solemyo system, refer to the relative instruction
manual.
To connect the Solemyo system, proceed as shown in fig. 20
8.5 - Connecting the external release system Kio
CAUTION! – Kio must be connected to the gearmotor controlling the leaf
that moves first (starting from the gate closed position).
01. Open the cover of the gearmotor (fig. 21-1).
02. Remove the plastic guard of the gearmotor as shown in fig. 21-2;
03. Insert the screw with nut in the hole as shown in fig. 21-3;
04. Attach the two ends of the spring as shown in fig. 22-4;
05. Insert the steel cable before the screw and then in the hole of the pin as
shown in fig. 21-5;
06. Secure the cable by tightening the relative screw (fig. 21-5);
07. Route the other end of the cable through one of the holes on the lower sec-
tion of the gearmotor as shown in fig. 21-6;
08. Refit the plastic guard and then the cover of the gearmotor (fig. 21-7);
09. At this point, connect the cable to Kio, with reference to the relative instruc-
tion manual.
No. Command Description
The Courtesy light comes on with timed turning off
The Courtesy light turns on and off in step-by-step mode
14 Courtesy light
timer on
15 Courtesy light
on-off
Table 11
SMXI / SMXIS or OXI / OXIFM / OXIT / OXITFM in mode I or Mode II
“S.S.” (Step by Step) command
“Partial opening 1” command
“Open” command
“Close” command
Output no. 1
Output no. 2
Output no. 3
Output no. 4
1 Step by step
2 Partial opening 1
3 Open
4 Close
5 Stop
6 Apartment block
Step by Step
7 Step by Step
high priority
8 Partial open 2
9 Partial open 3
10 Open and block
automation
11 Close and block
automation
12 Block automation
13 Release
automation
Table 12
OXI / OXIFM /OXIT / OXITFM in extended mode II
No. Command Description
“S.S.” (Step by Step) command
“Partial opening 1” command
“Open” command
“Close” command
Stops manoeuvre
Apartment block control
Gives command even when automation is blocked
or commands are in progress
Partial open (Opening of leaf M2 to 1/2 of normal opening)
Partial open (Opening of two leafs to 1/2 of normal opening)
It causes an opening manoeuvre, after which the automa-
tion is blocked; the control unit accepts no further commands with the exception of “Step by step high priority”,
“Release” automation and (from Oview only) the commands “Release and close” and “Release and open”
It causes a closure manoeuvre, after which the automation
is blocked; the control unit accepts no further commands
with the exception of “Step by step high priority”, “Release”
automation and (from Oview only ) the commands
“Release and close” and “Release and open”
It causes the manoeuvre to stop and the automation to
block; the control unit accepts no further commands with
the exception of “Step by step high priority”, “Release” au to mation and (from Oview only ) the commands “Release
and close” and “Release and open”.
It causes the automation to be released and normal operation to resume
Page 14

EN
12 – English
DISPOSING OF THE PRODUCT
This product is an integral part of the automation system, and should
therefore be disposed of together with it.
As for the installation operations, even at the end of this product’s life span, the
dismantling operations must be carried out by qualified experts.
This product is made up of various types of materials: some can be recycled
while others need to be disposed of. Find out about the recycling or disposal
systems envisaged by your local regulations for this product category.
Important! – Parts of the product could contain pollutants or hazardous substances which, if released into the environment, could cause harmful effects to
the environment itself as well as to human health.
As indicated by the symbol opposite, throwing away this product as domestic waste is strictly forbidden. So dispose of it as
differentiated waste, in accordance with your local regulations,
or return the product to the retailer when you purchase a new
equivalent product.
Important! – the local applicable regulations may envisage
heavy sanctions in the event of illegal disposal of this product.
Disposal of the back-up battery (where present)
Important! – The flat battery contains pollutants and should therefore not be
thrown away as common waste.
It should be disposed of as differentiated waste, as envisaged by your local
applicable regulations.
Product lifetime
The lifetime is the average economic duration of the product. The value of lifetime is strongly influenced by the intensity of the manoeuvres performed by the
automation. i.e. the sum of all factors that contribute to product wear (see
Table 13).
To establish the probable lifetime of your automation, proceed as follows:
01. Calculate the severity index
by adding all percentages of the items specified
in Table 13;
02. In Graph 3 from the value obtained above, trace vertical line until it intersects the curve; from this point trace a horizontal line until it intersects the line
of the “manoeuvre cycles”. The value obtained is the estimated lifetime
of your
product.
The estimation of lifetime is made on the basis of design calculations and the
results of tests performed on prototypes. As it is only an estimation, it does not
represent any form of guarantee on the effective lifetime of the product.
Example of calculating the lifetime of a HYKE gearmotor with LONG length arm
(refer to Table 13 and Graph 3):
- leaf length = 2,8 m (severity index: 20%); - leaf weight: 230 Kg m (severity index: 20%); solid leaf (severity index: 15%); Total severity index = 55%; Estimated lifetime = 220.000
manoeuvre cycles
GRAPH 3
manoeuvre cycles
strenuousness index %
PRODUCT MAINTENANCE
9
In order to keep the safety level constant and to guarantee the maximum life
span of the entire automation system, regular maintenance is vital.
All maintenance work must be carried out in compliance with the safety provisions of this manual and in accordance with existing laws and regulations.
The product requires frequent inspection to check for imbalances of the doors
or signs of wear or damage to the cables. Do not use the product if adjustments or repairs are required.
Important – During the product maintenance or cleaning operations, cut
off the electricity supply to the control unit and any batteries envisaged.
For the other devices in the system, follow the instructions provided in their
respective maintenance schedules.
For gearmotors HK7024, HK7224, scheduled maintenance is required at the
latest 6 months or 20,000 manoeuvres after the previous maintenance work.
Maintenance can be performed as follows:
01. Cut off any electrical power source, including any back-up batteries;
02. Check the condition and wear of brackets and fixing plugs, paying special
attention to erosion or rusting; replace all parts which do not provide sufficient guarantees;
03. Perform a trial release to ensure it is working properly – see paragraph 3.6.
04. Reconnect the electrical power sources and perform all the checks envis-
aged in chapter 5 - Testing.
TABLE 13
Severity index
LONG length arm SHORT length arm
< 1,8
1,8 - 2,5 m
2,5 - 3 m
3 - 3,5 m
< 200 kg
200 + 250 kg
> 250 kg
Leaf length
Leaf weight
Ambient temperature above 40°C or below 0°C
or humidity over 80%
Solid leaf
Installation in windy zone
Note – The data refer to a balanced sectional door in perfect maintenance conditions
0%
15%
20%
30%
0%
20%
30%
20%
15%
15%
15%
20%
30%
30%
40%
20%
20%
20%
500.000
400.000
300.000
220.000
200.000
100.000
0 102030405060708090100
Page 15

EN
English – 13
TECHNICAL SPECIFICATIONS OF PRODUCT
HK7224K
Electromechanical gearmotor for automations of gates and
automatic doors with DC motor, epicyclical gear reducer and
mechanical release.
HK7024K
Electromechanical gearmotor for automations of gates and
automatic doors with DC motor, epicyclical gear reducer and
mechanical release. Built-in control unit and OXI radio receiver.
Type
Maximum torque 500 Nm
Nominal torque 120 Nm
Speed under no load 2.25 RPM
Speed at nominal torque 2.00 RPM
Maximum cycle frequency 40 cycles/hour
Maximum continuous cycle time approx. 7 minutes
Application limits the product can be used on gates with leaf weights up to 330 kg for lengths up to 1.8m or 200 kg
for lengths up to 3.5m (see graph 1)
Lifetime estimated between 150,000 cycles and 500,000 cycles, according to the conditions stated in table 13 and graph 3
Assembly Vertical, with dedicated fixing plate
Operating temperature from -20°C to +50°C (at low temperatures, gearmotor efficiency is reduced)
se in acid, saline or
potentially explosive NO
atmospheres
Protection rating IP 54 (with container intact)
Dimensions (mm) 210 x 290 x 320 h
Weight (kg) 10.5 Kg; 9.5 Kg
Notes:
(1) - Function can be activated with Oview programmer.
[*] - The outputs Flashing Light, Electric lock and Gate Open Indicator can be programmed with other functions (see “TABLE 3 – Level 1 functions”; or via the Oview programmer; see
chapter 8.3). The electrical specifications of the output are adapted to the type of selected function: • flashing light function: lamp 12 Vdc, max. 21 W; • electric lock function: 12 Vac
max. 15 VA; • other outputs (all types): 1 lamp or relay 24Vdc (-30 to +50%), max. 4 W.
Power supply 230 Vac (120 Vac for version HK7024K/V1) 24 Vdc (±10%)
±10%; 50/60 Hz
Backup power supply Provision for buffer battery PS124
Solar power provision for SYKCE kit
Maximum absorbed power 300 W 140 W
Maximum absorbed current 1,5 A (3 A for version HK7024K/V1) 6 A for a maximum interval of 2 s
Absorbed power with
“All – Standby (1)” function
when powered by PS124 less than 100 mW
or SYKCE kit (including
OXI receiver)
Flashing light output [*] one LUCYB flashing light (12 V, 21 W bulb)
Electric lock output [*] one 12 Vac electric lock (max 15 VA)
Gate open indicator output [*] one 24 V lamp (max. 4 W) (the output voltage
may vary between -30 and +50%, the output can
also control small relays)
BLUEBUS output one output with load of maximum 15 Bluebus
units (max. 6 pairs of MOFB or MOFOB photocells plus
2 pairs of MOFB or MOFOB photocells routed
as opening devices plus max. 4 MOMB
or MOTB control devices)
STOP input for normally closed contacts, normally open
contacts or contacts with constant 8,2 kΩ resistance;
selection of the type of contact is in self-learning
mode and a modification with respect to the memorised
status will generate a “STOP”
SS input for normally open contacts (closure of the contact
generates a Step Step command)
Radio engage SM connector for receivers in the families SMXI,
OXI and OXIFM
Radio AERIAL input 50 Ω for cable type RG58 or similar
Programmable functions 8 ON-OFF type functions (Table 3) and
8 settable functions (Table 5)
Functions in self-learning • Self-learning of devices connected to the BlueBus output.
• Self-learning of the type of device connected to the “STOP”
terminal (NO, NC contact or 8,2 kΩ resistance).
• Self-learning of the gate leaf travel and automatic
calculation of deceleration points and partial opening.
• Self-learning of operation with one or two motors
WARNINGS: • All technical specifications stated in this section refer to an ambient temperature of 20°C (± 5°C). • Nice S.p.a. reserves the right to apply modifications to products at any time when deemed necessary, maintaining the same intended use and functionality.
Page 16

EN
14 – English
CE DECLARATION OF CONFORMITY
and declaration of incorporation of “quasi machine”
Declaration in accordance with the Directives: 2006/95/EC (LVD); 2004/108/CE (EMC); 2006/42/EC (MD) appendix II, part B
Note - The contents of this declaration correspond to declarations in the official document deposited at the registered offices of Nice S.p.a. and in particular to the last revision
available before printing this manual. The text herein has been re-edited for editorial purposes. A copy of the original declaration can be requested from Nice S.p.a. (TV) I.
Declaration number: 334/HYKE Revision: 0 Language: EN
Manufacturer’s Name: NICE s.p.a.
Address: Via Pezza Alta 13, Z.I. Rustignè, 31046 Oderzo (TV) Italy
Person authorised to
draw up
technical documentation: Sig. Oscar Marchetto
Type of product: “HYKE” electromechanical gearmotor with built-in control unit
Model / Type: HK7024K, HK7224K
Accessories: SMXI, OXI, PS124, Oview
The undersigned, Luigi Paro, in the role of Managing Director, declares under his sole responsibility, that the product specified above conforms to the provisions of the following directives:
• Directive 2006/95/EC OF THE EUROPEAN PARLIAMENT AND COUNCIL of 12 December 2006 regarding the approximation of member state legislation
related to electrical material destined for use within specific voltage limits, according to the following harmonised standards:
EN 60335-1:2002 + A1:2004 + A11:2004 + A12:2006 + A2:2006 + A13:2008; EN 60335-2-103:2003
• DIRECTIVE 2004/108/EC OF THE EUROPEAN PARLIAMENT AND COUNCIL of 15 December 2004 regarding the approximation of member state legislation related to electromagnetic compatibility, repealing directive 89/336/EEC, according to the following standards:
EN 61000-6-2:2005, EN 61000-6-3:2007
The product also complies with the following directives according to the requirements envisaged for “quasi machinery”:
• Directive 2006/42/EC OF THE EUROPEAN PARLIAMENT AND COUNCIL of 17 May 2006 related to machinery, and which amends the directive
95/16/EC (recast).
• It is hereby declared that the pertinent technical documentation has been compiled in compliance with appendix VII B of directive 2006/42/EC and
that the following essential requirements have been observed: 1.1.1- 1.1.2- 1.1.3- 1.1.5- 1.2.1-1.2.6- 1.3.1- 1.3.2- 1.3.3- 1.3.4- 1.3.7-1.3.9- 1.5.1-
1.5.2- 1.5.4- 1.5.5- 1.5.6- 1.5.7- 1.5.8- 1.5.10- 1.5.11- 1.5.13-1.6.1- 1.6.2-1.6.4- 1.7.2- 1.7.3- 1.7.4- 1.7.4.1- 1.7.4.2- 1.7.4.3
• The manufacturer undertakes to transmit to the national authorities, in response to a motivated request, all information regarding the “quasi-machine",
while maintaining full rights to the related intellectual property.
• Should the “quasi machine” be put into service in a European country with an official language other than that used in this declaration, the importer is
obliged to arrange for the relative translation to accompany this declaration.
• The “quasi-machine” must not be used until the final machine in which it is incorporated is in turn declared as compliant, if applicable, with the provisions of directive 2006/42/EC.
The product also complies, within the constraints of applicable parts, with the following standards:
EN 13241-1:2003, EN 12445:2002, EN 12453:2002, EN 12978:2003
Oderzo, 15.01.10 Luigi Paro (Managing Director)
Page 17

IT
Italiano – 1
ITALIANO
Istruzioni originali
Sommario
1 - AVVERTENZE E PRECAUZIONI GENERALI . . . . . . . . . . . . . . . . . . . . . 1
1.1 - Avvertenze per la sicurezza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 - Avvertenze per l’installazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.3 - Avvertenze per l’uso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 - DESCRIZIONE DEL PRODOTTO E DESTINAZIONE DUSO . . . . . . . . . 1
3 - INSTALLAZIONE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
3.1 - Verifiche preliminari all’installazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
3.2 - Limiti d’impiego . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
3.3 - Lavori di predisposizione all’installazione . . . . . . . . . . . . . . . . . . . . . . . . 2
3.4 - Installazione del motoriduttore mod. HK7024 - HK7224 . . . . . . . . . . . . 2
3.5 - Regolazione dei finecorsa meccanici . . . . . . . . . . . . . . . . . . . . . . . . . . 3
3.6 - Sbloccare e bloccare manualmente il motoriduttore . . . . . . . . . . . . . . . 4
4 - COLLEGAMENTI ELETTRICI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
4.1 - Collegamenti elettrici del motoriduttore con centrale mod. HK7024 . . . 4
4.2 - Collegamento del motoriduttore senza centrale mod. HK7224 . . . . . . . 4
4.3 - Collegamento di altri dispositivi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
4.4 - Indirizzamento dei dispositivi collegati . . . . . . . . . . . . . . . . . . . . . . . . . . 5
4.5 - Prima accensione e verifica dei collegamenti . . . . . . . . . . . . . . . . . . . . 5
4.6 - Apprendimento dei dispositivi collegati . . . . . . . . . . . . . . . . . . . . . . . . . 5
4.7 - Apprendimento delle posizioni dei finecorsa meccanici . . . . . . . . . . . . . 5
4.8 - Verifica del movimento delle ante el cancello . . . . . . . . . . . . . . . . . . . . . 6
5 - COLLAUDO E MESSA IN SERVIZIO . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
5.1 - Collaudo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
5.2 - Messa in servizio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
6 - PROGRAMMAZIONE DELLA CENTRALE DI COMANDO . . . . . . . . . . 7
6.1 - Programmazione primo livello (ON-OFF) . . . . . . . . . . . . . . . . . . . . . . . . 7
6.2 - Programmazione secondo livello (parametri regolabili) . . . . . . . . . . . . . . 8
6.3 - Funzioni speciali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
6.4 - Cancellazione della memoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
7 - COSA FARE SE... (guida alla risoluzione dei problemi) . . . . . . . . . . . . 9
8 - APPROFONDIMENTI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
8.1 - Collegamento di un ricevitore radio . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
8.2 - Collegamento e installazione della batteria tampone mod. PS124 . . . 11
8.3 - Collegamento del programmatore Oview . . . . . . . . . . . . . . . . . . . . . . 11
8.4 - Collegamento del sistema ad energia solare Solemyo . . . . . . . . . . . . . 11
8.5 - Collegamento del sistema di sblocco esterno Kio . . . . . . . . . . . . . . . . 11
9 - MANUTENZIONE DEL PRODOTTO . . . . . . . . . . . . . . . . . . . . . . . . . . 12
SMALTIMENTO DEL PRODOTTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Durabilità del prodotto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
CARATTERISTICHE TECNICHE DEL PRODOTTO . . . . . . . . . . . . . . . . . 13
DICHIARAZIONE CE DI CONFORMITÀ . . . . . . . . . . . . . . . . . . . . . . . . . . 14
APPENDICE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . I
Istruzioni ed avvertenze destinate all’utilizzatore . . . . . . . . . . . . . . . . . . . . . . III
Immagini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . IX
1.1 - Avvertenze per la sicurezza
• ATTENZIONE! – Il presente manuale contiene importanti istruzioni e
avvertenze per la sicurezza. Un’installazione errata può causare gravi ferite.
Prima di iniziare il lavoro è necessario leggere attentamente tutte le parti del
manuale. In caso di dubbi, sospendere l’installazione e richiedere chiarimenti
al Servizio Assistenza Nice.
• ATTENZIONE! – Istruzioni importanti: conservare questo manuale per
eventuali interventi di manutenzione e di smaltimento del prodotto.
• ATTENZIONE! – Secondo la più recente legislazione europea, la realizzazione di una porta o di un cancello automatico deve rispettare le norme previste dalla Direttiva
2006/42/CE (ex 98/37/CE) (Direttiva Macchine) e in particolare, le norme EN 12445; EN 12453; EN 12635 e EN
13241-1, che consentono di dichiarare la conformità dell’automazione.
In considerazione di ciò, tutte le operazioni di installazione, di collegamento, di col laudo e di manutenzione del prodotto devono es sere
effettuate es clusivamente da un tecnico qualificato e competente!
1.2 - Avvertenze per l’installazione
• Prima di iniziare l’installazione verificare se il presente prodotto è adatto al tipo
di utilizzo desiderato (vedere i “Limiti d’impiego” paragrafo 3.2 e le “Caratteristiche tecniche del prodotto”). Se non è adatto, NON procedere all’istallazione.
• Il contenuto del presente manuale è riferito ad un impianto tipico come quello
descritto in fig. 3.
• Tutte le operazioni di installazione e di manutenzione devono avvenire
con l’automazione scollegata dall’alimentazione elettrica. Se il dispositivo di sconnessione dell’alimentazione non è visibile dal luogo dove è posizionato l’automatismo, prima di iniziare il lavoro è necessario attaccare sul di spositivo di sconnessione un cartello con la scritta “ATTENZIONE! MANUTENZIONE IN CORSO”.
• La centrale deve essere collegata ad una linea di alimentazione elettrica dotata di messa a terra di sicurezza.
• Durante l’installazione maneggiare con cura il prodotto evitando schiacciamenti, urti, cadute o contatto con liquidi di qualsiasi natura. Non mettere il
pro dotto vicino a fonti di calore, né esporlo a fiamme libere. Tutte queste azioni possono danneggiarlo ed essere causa di malfunzionamenti o situazioni di
pericolo. Se questo accade, sospendere immediatamente l’installazione e
rivolgersi al Servizio Assistenza Nice.
• Non eseguire modifiche su nessuna parte del prodotto. Operazioni non permesse possono causare solo malfunzionamenti. Il costruttore declina ogni
responsabilità per danni derivanti da modifiche arbitrarie al prodotto.
• Se il cancello o il portone da automatizzare è dotato di una porta pedonale
occorre predisporre l’impianto con un sistema di controllo che inibisca il funzionamento del motore quando la porta pedonale è aperta.
• Il materiale dell’imballo del prodotto deve essere smaltito nel pieno rispetto
della normativa locale.
1.3 - Avvertenze per l’uso
• Il prodotto non è destinato ad essere usato da persone (bambini compresi) le
cui capacità fisiche, sensoriali o mentali siano ridotte, oppure con mancanza
di esperienza o di conoscenza, a meno che esse abbiano potuto beneficiare,
attraverso l’intermediazione di una persona responsabile della loro sicurezza,
di una sorveglianza o di istruzioni riguardanti l’uso del prodotto.
• I bambini che si trovano in prossimità dell’automazione, devono essere sorvegliati; verificare che non giochino con quest’ultima.
• Non permettere ai bambini di giocare con i dispositivi di comando fissi. Tenere i dispositivi di comando portatili (remoti) fuori dalla portata dei bambini.
AVVERTENZE E PRECAUZIONI GE NERALI
1
I dispositivi che compongono il presente prodotto, sono destinati ad essere utilizzati per automatizzare cancelli o portoni ad ante battenti per uso residenziale
ed industriale. AT TENZIONE! – Qualsiasi altro uso diverso da quello de -
scritto e in con dizioni am bientali diverse da quelle riportate in questo
manuale è da considerarsi improprio e vietato!
La parte principale dell’automazione è formata da uno o due motoriduttori elettromeccanici (in base al numero di ante da automatizzare), provvisti ognuno di
un motore in corrente continua e di un riduttore con ingranaggi a denti dritti.
Uno dei motoriduttori (mod. HK7024) è dotato di una centrale di comando che
ne gestisce il funzionamento. La centrale è formata da una scheda con un ricevitore radio, per la ricezione dei comandi inviati dal trasmettitore. È predisposta
per essere collegata a vari dispositivi appartenenti al Sistema Opera, al sistema
Bluebus e al sistema di alimentazione ad energia solare Solemyo, vedere capitolo 8 - Approfondimenti.
Se alimentata da rete, può ospitare una batteria tampone (mod. PS124, accessorio opzionale) che nel caso di mancanza dell’energia elettrica (black-out elettrico) garantisce all’automatismo di eseguire, nelle ore successive, alcune ma novre.
In caso d’interruzione dell’energia elettrica, è possibile muovere le ante del cancello sbloccando il motoriduttore con l’apposita chiave, vedere capitolo 3.6.
Altri accessori disponibili sono i ricevitori predisposti con innesto “SM” (SMXI,
OXI, ecc.), vedere capitolo 8 - Approfondimenti.
DESCRIZIONE DEL PRODOTTO E
DESTINAZIONE D’USO
2
Page 18

INSTALLAZIONE
3
3.1 - Verifiche preliminari all’installazione
Prima di procedere all’installazione, è necessario verificare l’integrità dei com-
IT
ponenti del prodotto, l’adeguatezza del modello scelto e l’idoneità dell’ambiente destinato all’installazione:
• Verificare che tutto il materiale da utilizzare sia in ottimo stato e adatto all’uso
previsto.
• Verificare che la struttura meccanica del cancello sia adatta ad essere automatizzata e conforme alle norme vigenti sul territorio (eventualmente fare riferimento ai dati riportati sull’etichetta del cancello). Il presente prodotto non
può automatizzare un cancello che non sia già efficiente e sicuro; inoltre, non
può risolvere difetti causati da un’installazione errata del cancello o da una
sua cattiva manutenzione.
• Verificare che le condizioni di funzionamento dei dispositivi siano compatibili
con i limiti d’impiego dichiarati (vedere paragrafo 3.2).
• Muovere manualmente le ante del cancello nelle due direzioni e accertarsi
che il movimento avvenga con un attrito costante in ogni punto della corsa
(non devono esserci punti che richiedono uno sforzo maggiore o minore).
• Portare manualmente le ante del cancello in una posizione qualsiasi; quindi
lasciarle ferme e accertarsi che non si muovano.
• Verificare che la zona di fissaggio del motoriduttore sia compatibile con l’ingombro di quest’ultimo (fig. 1).
• Nell’ambiente in cui deve essere installato il motoriduttore, accertarsi che ci
sia lo spazio sufficiente per la rotazione completa del suo braccio.
• Nelle vicinanze del motoriduttore, accertarsi che ci sia spazio sufficiente per
effettuare la manovra manuale di sblocco del motoriduttore.
• Accertarsi che le superfici scelte per installare i vari dispositivi, siano solide e
possano garantire un fissaggio stabile.
• Accertarsi che ciascun dispositivo da installare sia collocato in una posizione
protetta e al riparo da urti accidentali.
• Verificare che tutti i cavi elettrici da utilizzare siano del tipo elencato nella
Tabella 1.
3.2 - Limiti d’impiego
Prima di eseguire l’installazione del motoriduttore, verificare che i suoi dati rientrino nei limiti d’impiego riportati di seguito e nei limiti dei valori riportati nel capitolo “Caratteristiche tecniche del prodotto”:
Con il braccio del motore di lunghezza INTERA
- larghezza massima dell’anta: 3,50 m (= peso massimo dell’anta: 200 kg)
Con il braccio del motore di lunghezza RIDOTTA
- larghezza massima dell’anta: 3,00 m (= peso massimo dell’anta: 180 kg)
• Verifica da eseguire: riportare sul Grafico 1 a lato, il peso e la larghezza dell’anta;
tracciare da questi punti due linee e accertarsi che queste vadano ad incrociarsi in
una delle due aree grigie
del grafico. Attenzione! - Se le linee si incrociano nell’area
bianca, non è possibile utilizzare questo prodotto per automatizzare il cancello.
• Per consentire l’installazione del motoriduttore, la larghezza minima del pila-
stro deve essere di 210 mm.
• La staffa di fissaggio del braccio deve risultare in una zona robusta dell’anta
(ad esempio, il telaio), per garantire un fissaggio solido e sicuro;
• Verificare la quota
- Se la quota
“E” (fig. 2):
“E” è un valore compreso tra 300 mm (minimo) e 650 mm (mas-
simo), occorre regolare il braccio del motoriduttore con lunghezza RIDOTTA.
In queste condizioni, la quota dell’apertura massima dell’anta può arrivare fino
a 90°.
- Se la quota “E” è un valore uguale o superiore a 650 mm, occorre regolare
il braccio del motoriduttore con lunghezza INTERA. In queste condizioni, la
quota dell’apertura massima dell’anta può arrivare fino a 110°.
:
:
GRAFICO 1
350
300
250
200
PESO (kg.)
150
100
1,8 2 2,5 3 3,5
LARGHEZZA (m.)
3.3 - Lavori di predisposizione all’installazione
La fig. 3 mostra un esempio di impianto di automatizzazione, realizzato con
componenti Nice (alcuni componenti possono non essere
a - Motoriduttore con centrale mod. HK7024
b - Motoriduttore senza centrale mod. HK7224
c - Segnalatore lampeggiante
d - Coppia di fotocellule mod. MOFB
e - Tastiera digitale (mod. MOTB) - Lettore a transponder (mod. MOMB) - Selet-
tore a chiave (mod. MOSE)
f - Coppia di colonnine per fotocellule
g - Arresto meccanico in chiusura
h - Elettroserratura
Questi componenti sono posizionati secondo uno schema tipico e usuale.
Facendo riferimento alla fig. 3, stabilire la posizione approssimativa in cui verrà
installato ciascun componente previsto nell’impianto. Importante – Prima di
eseguire l’installazione, preparare i cavi elettrici necessari al vostro impianto,
facendo riferimento alla fig. 4 e alla “Tabella 1 - Caratteristiche tecniche dei
cavi elettrici”.
Attenzione – Durante la posa in opera dei tubi per il passaggio dei cavi elettri-
ci, considerare che a causa di possibili depositi d’acqua presenti nei pozzetti di
derivazione, i tubi di collegamento possono creare fenomeni di condensa all’interno della centrale e danneggiare i circuiti elettronici.
3.4 - Installazione del motoriduttore mod. HK7024 - HK7224
AVVERTENZE
• Un’installazione errata può causare gravi ferite alla persona che esegue
il lavoro e alle persone che utilizzeranno l’impianto.
• Prima di iniziare l’assemblaggio dell’automazione, effettuare le ve rifiche
preliminari descritte nel paragrafo 3.1 e 3.2.
Prima di iniziare l’installazione è necessario determinare la lunghezza del braccio del motoriduttore, vedere paragrafo 3.4.1.
3.4.1 - Determinare la lunghezza del braccio del motoriduttore
01. Assemblare i componenti che costituiscono il braccio del motore come
mostrato in fig.5;
02. Stabilire la posizione del motoriduttore in senso VERTICALE:
tracciare sul pilastro una linea orizzontale alla stessa altezza in cui verrà a trovarsi la staffa di fissaggio del braccio sull’anta, dopo l’installazione (fig. 6).
03. Stabilire la posizione del motoriduttore in senso ORIZZONTALE (quota A):
ATTENZIONE! – Se nelle vicinanze dell’area d’installazione è presen-
te un ostacolo fisso (muro, albero, ecc.), occorre misurare la quota E
Per braccio di
lunghezza intera
Per braccio di
lunghezza ridotta
presenti nel kit):
TABELLA 1 - Caratteristiche tecniche dei cavi elettrici (fig. 4)
Collegamento Tipo di cavo Lunghezza massima consentita
A: Cavo ALIMENTAZIONE CENTRALE DI COMANDO 1 cavo 3 x 1,5 mm
B: Cavo ELETTROSERRATURA 1 cavo 2 x 1 mm
C: Cavo DISPOSITIVI BLUEBUS 1 cavo 2 x 0,5 mm
2
2
2
30 m (nota 1)
6 m
20 m (nota 2)
D: Cavo SELETTORE A CHIAVE 2 cavi 2 x 0,5 mm2 (nota 3) 50 m
E: Cavo ALIMENTAZIONE MOTORIDUTTORE 1 cavo 3 x 1,5 mm
2
(nota 4) 10 m
Cavo COLLEGAMENTO ENCODER 1 cavo 2 x 1 mm2 (nota 4) 10 m
F: Cavo LAMPEGGIANTE con antenna 1 cavo 2 x 0,5 mm
2
20 m
1 cavo schermato tipo RG58 20 m (consigliato minore di 5 m)
Nota 1 – Se il cavo di alimentazione supera i 30 m di lunghezza, occorre utilizzare un cavo con sezione maggiore (3 x 2,5 mm2) ed è necessario installare una messa a terra di sicu-
rezza in prossimità dell’automazione.
Nota 2 – Se il cavo Bluebus supera i 20 m di lunghezza, fino ad un massimo di 40 m, occorre utilizzare un cavo con sezione maggiore (2 x 1 mm
Nota 3 – Questi 2 cavi possono essere sostituiti da 1 unico cavo da 4 x 0,5 mm
Nota 4 – Questi cavi possono essere sostituiti con 1 unico cavo da 5 x 1,5 mm
2
.
2
.
2
).
ATTENZIONE! – I cavi utilizzati devono essere adatti al tipo di ambiente in cui avviene l’installazione.
2 – Italiano
Page 19

IT
Italiano – 3
(fig. 2) e procedere come segue:
• Se la quota E è un valore uguale o superiore a 650 mm
, vedere
paragrafo 3.4.2
• Se la quota E è un valore compreso tra 300 mm (minimo) e 650 mm
(massimo), vedere paragrafo 3.4.3
3.4.2 - Installazione del motoriduttore con BRACCIO DI LUNGHEZZA INTERA
01. a) Misurare sul pilastro la quota B
(fig. 7) = distanza tra il fulcro di rotazio-
ne dell’anta e la superficie del pilastro dove verrà fissata la staffa posteriore
del motoriduttore.
b) Portare l’anta fino all’apertura desiderata (massimo 110°): valore dell’angolo.
c) Segnare sul Grafico 2 la quota B
trovata e tracciare da questo punto
una linea orizzontale fino ad intersecare l’area
che comprende il valore del-
l’angolo misurato al punto b.
d) Nei punti d’intersezione tra la linea orizzontale e l’area
, tracciare delle linee
verticali determinando i valori utilizzabili per la quo ta A
(fig. 8). Quindi, sce-
gliere in questo range un valore di A.
e) Riportare sul pilastro il valore trovato della quota A
e tracciare in corri-
spondenza una linea verticale.
02. Fissare la staffa sul pilastro (fig. 9)
:
f) fase 1-2: Appoggiare la staffa sul pilastro facendo corrispondere la sua
mezzeria verticale con la linea verticale tracciata prima (quota A), e il suo
braccio, con la linea orizzontale tracciata durante la procedura 3.4.1. In
questa fase, accertarsi che il motoriduttore sia perfettamente in bolla: un
motoriduttore fuori asse può provocare malfunzionamenti all’automazione.
g) fase 3-4: Segnare i punti di fissaggio, forare la superficie del pilastro e
inserire i tasselli; a questo punto, fissare la staffa utilizzando viti e rondelle
adeguate.
03. Fissare il braccio del motoriduttore sull’anta
:
h) Portare l’anta del cancello nella posizione di massima chiusura;
i) fase 5: Fissare il motoriduttore alla staffa con le due viti e dadi in dotazione;
l) Sbloccare il motoriduttore; vedere cap. 3.6;
m) fase 6: Spingere con forza il braccio del motoriduttore fino alla sua mas
-
sima estensione
. Attenzione! - Accertarsi che il braccio si blocchi nel
suo finecorsa;
n) Avvicinare il braccio all’anta, appoggiando su quest’ultima la staffa di fis-
saggio.
o) fase 7: Accertarsi che il braccio del motoriduttore sia in bolla e segnare
con una matita il centro
del profilo delle asole della staffa, per permettere in
futuro una regolazione fine della chiusura dell’anta (vedere il paragrafo 4.8).
p) Tenendo con una mano la staffa a contatto con l’anta, provare a effettuare una apertura e una chiusura completa.
q) fase 8: Forare l’anta nei punti segnati e staccare la staffa dal braccio e
fissarla all’anta del cancello con viti adeguate.
r) fase 9: Fissare il braccio alla staffa, inserendo il perno e il benzing di arresto. Importante - Controllare che la staffa e il braccio siano perfettamente
in bolla. Eventualmente allentare le viti della staffa e mettere in bolla.
s) Posizionare i fermi di finecorsa meccanici; vedere cap. 3.5;
t) fase 10: Infine, portare manualmente l’anta del cancello a circa metà della
sua corsa e bloccare il motoriduttore con l’apposita chiave (vedere cap. 3.6).
Quindi, spostare manualmente l’anta di pochi centimetri, in direzione dell’apertura.
04. Se il cancello da automatizzare è a due ante, per installare l’altro motoriduttore ripetere tutte le operazioni descritte in questo capitolo 3.4
0
150 175 200 225 250 275 300 325 350 375 400 425 450 475
50
B
A
100
150
200
250
300
350
400
450
90°-95°
95°-100°
100°-105°
105°-110°
90°-95°
95°-105°
GRAFICO 2
3.4.3 - Installazione del motoriduttore con BRACCIO DI LUNGHEZZA RIDOTTA
Attenzione! – Con questa configurazione, l’apertura massima dell’anta consentita è 90°.
01. a) Misurare sul pilastro la quota B
(fig. 7) = distanza tra il fulcro di rotazio-
ne dell’anta e la superficie del pilastro dove verrà fissata la staffa posteriore
del motoriduttore.
b) Segnare sul Grafico 2 la quota B
trovata e tracciare da questo punto
una linea orizzontale fino ad intersecare l’area
con range 90° - 95°.
c) Nei punti d’intersezione tra la linea orizzontale e l’area
, tracciare delle linee
verticali determinando i valori utilizzabili per la quo ta A
(grafico 2). Quindi,
scegliere in questo range un valore di A.
d) Riportare sul pilastro il valore trovato della quota A
e tracciare in corri-
spondenza una linea verticale.
02. Fissare la staffa sul pilastro (fig. 10)
:
e) fase 1-2: Appoggiare la staffa sul pilastro facendo corrispondere la sua
mezzeria verticale con la linea verticale tracciata prima (quota A), e il suo
braccio, con la linea orizzontale tracciata durante la procedura 3.4.1. In
questa fase, accertarsi che il motoriduttore sia perfettamente in bolla: un
motoriduttore fuori asse può provocare malfunzionamenti all’automazione.
f) fase 3-4: Segnare i punti di fissaggio, forare la superficie del pilastro e
inserire i tasselli; a questo punto, fissare la staffa utilizzando viti e rondelle
adeguate.
g) Portare l’anta del cancello nella posizione di massima chiusura;
h) fase 5: Fissare il motoriduttore alla staffa con le due viti e dadi in dota-
zione;
i) Sbloccare il motoriduttore; vedere cap. 3.6;
03. Verificare la lunghezza del braccio asolato rispetto al contesto
:
l) fase 6: Avvicinare il braccio all’anta, appoggiando su quest’ultima la staf-
fa di fissaggio: attenzione!
- spingere con le mani il braccio curvo con-
tro l’anta, fino al blocco del braccio (massima apertura)
.
m) fase 7: Accertarsi che il braccio del motoriduttore sia in bolla e segnare
con una matita il centro
del profilo delle asole della staffa, per permettere in
futuro una regolazione fine della chiusura dell’anta (vedere paragrafo 4.8).
n) Fissare provvisoriamente la staffa sull’anta e portare l’anta nella posizione di massima apertura.
04. Fissare il braccio del motoriduttore sull’anta
:
o) fase 8: Forare l’anta nei punti segnati precedentemente.
p) fase 9-10: Staccare la staffa dal braccio e fissarla all’anta del cancello
con viti adeguate.
q) fase 11: Fissare il braccio alla staffa, inserendo il perno e il benzing di
arresto. Importante - Controllare che la staffa e il braccio siano perfetta-
mente in bolla. Eventualmente allentare le viti della staffa e mettere in bolla.
r) Posizionare i fermi di finecorsa meccanici; vedere cap. 3.5.
s) fase 12: Infine, portare manualmente l’anta del cancello a circa metà del-
la sua corsa e bloccare il motoriduttore con l’apposita chiave (vedere cap.
3.6) Quindi, spostare manualmente l’anta di pochi centimetri, in direzione
dell’apertura.
05. Se il cancello da automatizzare è a due ante, per installare l’altro motoriduttore ripetere tutte le operazioni descritte in questo capitolo 3.4
3.5 - Regolazione dei finecorsa meccanici
01. Portare manualmente le ante del cancello in posizione di massima apertura;
02. Ruotare il disco in plastica, posto sulla parte inferiore del motoriduttore, por-
tando la feritoia sotto il braccio nella posizione mostrata nella fig. 11-1;
Page 20

IT
4 – Italiano
03. Inserire il finecorsa nella prima posizione possibile: provare ad inserirlo
come mostrato in fig. 11-2 (direzione di apertura);
04. Ruotare il disco in modo da non far cadere il finecorsa, portando la feritoia
nella posizione mostrata nella fig. 11-3; per una regolazione più precisa,
agire sulla vite di regolazione (fig. 11-4);
05. Se nell’impianto non è presente il fermo a terra di chiusura, è necessario ripetere la procedura dal punto 01 anche per la regolazione del finecorsa in chiusura;
06. Infine, avvitare a fondo il dado di fissaggio del disco (fig. 11-5) per assicu-
rarsi che non possa ruotare accidentalmente.
3.6 - Sbloccare e bloccare manualmente il motoriduttore
Il motoriduttore è dotato di un sistema di sblocco meccanico che consente di
aprire e chiudere il cancello manualmente.
Queste operazioni manuali devono essere eseguite nei casi di mancanza di corrente elettrica, anomalie di funzionamento o nelle fasi di installazione.
Sboccare (fig. 12-A):
01. Inserire la chiave nell’apposita serratura;
02. Ruotare la chiave in senso orario (90°);
03. Per effetto di una molla, esce la leva: ruotare la leva di 90° in senso antiorario;
04. A questo punto, è possibile muovere manualmente l’anta nella posizione
desiderata.
Bloccare (fig. 12-B):
01. Ruotare la leva di 90° ponendo il gambo in posizione verticale;
02. Spingere la leva fino alla sua sede;
03. Ruotare la chiave di 90° in senso antiorario ed estrarre la chiave.
Il collegamento elettrico dei vari dispositivi (fotocellule, tastiere digitali, lettori di
tessere a transponder, ecc.) presenti nell’automazione, con la centrale di co mando, deve essere effettuato tramite il sistema “Bluebus” di Nice.
Descrizione dei collegamenti elettrici (fig. 13)
ANTENNA ingresso per l’antenna di un ricevitore radio
FLASH uscita per 1 lampeggiante con lampada da 12 V (massimo 21 W). [*]
ELS uscita per elettroserratura da 12 Vac (massimo 15 VA). [*]
S.C.A. “Spia Cancello Aperto”: uscita per 1 lampada di segnalazione da
24 V e massimo 4 W. [*]
BLUEBUS ingresso per dispositivi compatibili (MOFB, MOFOB, MOB e
MOTB; collegamento dei dispositivi in parallelo tramite 2 conduttori
nel quale transita sia l’alimentazione elettrica sia i segnali di
comunicazione; nessuna polarità da rispettare. Il collegamento
elettrico da utilizzare è di tipo parallelo e non necessita di rispettare
alcuna polarità. Durante la fase di apprendimento, ogni dispositivo
collegato alla centrale verrà riconosciuto singolarmente da questa,
grazie ad un codice univoco. Ogni volta che verrà aggiunto o
eliminato un dispositivo, sarà necessario eseguire l’apprendimento
di questo da parte della centrale (vedere paragrafo 4.6).
STOP ingresso per dispositivi che con il loro intervento provocano
l’arresto immediato della manovra in atto, seguito da una breve
inversione; possibilità di collegare contatti di tipo NA, NC oppure
dispositivi con uscita a resistenza costante 8,2 kΩ (bordi sensibili).
Ogni dispositivo collegato a questo ingresso, viene riconosciuto
singolarmente dalla centrale durante la fase di apprendimento
(paragrafo 3.4); in questa fase, se la centrale rileva una qualsiasi
variazione rispetto allo stato appreso, provoca uno STOP.
È possibile collegare a questo ingresso uno o più dispositivi anche
diversi tra loro:
– collegare in parallelo più dispositivi NA, senza limiti di quantità;
– collegare in serie più dispositivi NC, senza limiti di quantità;
– collegare in parallelo 2 dispositivi con uscita a resistenza costante
8,2 kΩ. Se sono più di 2 i dispositivi è necessario collegarli a
cascata con 1 sola resistenza di terminazione da 8,2 kΩ;
– collegare in parallelo 2 dispositivi NA e NC, mettendo in serie al
contatto NC una resistenza da 8,2 kΩ (questo rende possibile
anche la combinazione tra 3 dispositivi NA - NC e 8,2 kΩ)
P. P. ingresso per dispositivi di comando che intervenendo, provocano la
manovra con modalità Passo Passo; possibilità di collegare contatti
di tipo NA
OPEN ingresso per dispositivi di comando che intervenendo, provocano
solo la manovra di apertura; possibilità di collegare contatti di tipo NA
CLOSE ingresso per dispositivi di comando che intervenendo, provocano
solo la manovra di Chiusura possibilità di collegare contatti di tipo NA
ENC1 ingresso encoder - motoriduttore 1 (morsetto 1, 2); nessuna
polarità da rispettare
ENC2 ingresso encoder - motoriduttore 2 (morsetto 4, 5); nessuna
polarità da rispettare
COLLEGAMENTI ELETTRICI
4
M1 uscita per motoriduttore 1 (morsetto 7, 8, 9)
M2 uscita per motoriduttore 2 (morsetto 10, 11, 12).
[*] Le uscite FLASH, ELS e S.C.A. possono essere programmate con altre funzioni (vedere “TABELLA 3 - Funzioni 1° livello”; oppure tramite programmatore
Oview, vedere paragrafo 8.3).
4.1 - Collegamenti elettrici del motoriduttore con centrale
mod. HK7024
Attenzione! – Effettuare i collegamenti elettrici solo dopo aver installato il
motoriduttore.
AVVERTENZE!
– Le operazioni di collegamento devono es sere eseguite esclusivamente
da personale qualificato.
– Tutti i collegamenti elettrici devono essere eseguiti in assenza di alimentazione elettrica di rete e con la batteria tampone scollegata, se presente
nell’automazione.
– Sulla linea elettrica di alimentazione, è necessario prevedere un dispositivo
che assicuri la disconnessione completa dell’automazione dalla rete. Il dispositivo di disconnessione deve avere i contatti con distanza di apertura tale da
consentire la disconnessione completa, nelle condizioni sancite dalla categoria
di sovratensione III, conformemente alle regole di installazione. In caso di
necessità, questo dispositivo garantisce una veloce e sicura sconnessione dell’alimentazione; pertanto deve essere posizionato in vista dell’automazione. Se
invece è collocato in posizione non visibile, deve avere un sistema che blocca
un’eventuale riconnessione accidentale o non autorizzata dell’alimentazione, al
fine di scongiurare qualsiasi pericolo. Il dispositivo di sconnessione non è fornito con il prodotto.
01. Aprire il coperchio (fig. 14-1);
02. Alzare la centrale (fig. 14-2);
03. Passare il cavo di alimentazione e gli altri cavi elettrici attraverso uno dei fori
presenti sulla parte inferiore del motoriduttore; è necessario tagliare la guaina presente (fig. 14-4);
04. Svitare il pressa-cavo e adagiare il cavo di alimentazione sull’apposita corsia
(fig. 14-5);
05. Collegare prima il cavo di alimentazione, vedere fig. 14-6;
06. Bloccare il cavo di alimentazione con il pressa-cavo (fig. 14-7);
07. Ora collegare i cavi elettrici dei motori M1 e M2, rispettando i simboli sul-
l’etichetta (fig. A):
a) collegare al morsetto M1
(7-8-9) il motore che aziona l’anta inferiore (la
seconda che inizia la manovra di apertura) e poi, il rispettivo encoder ai
morsetti 1-2;
b) collegare al morsetto M2 (10-11-12) il motore che aziona l’anta superiore (la prima che inizia la manovra di apertura) e poi, il rispettivo encoder ai
morsetti 4-5.
IMPORTANTE! – Se nell’impianto è presente un solo motoriduttore,
collegarlo al morsetto M2 lasciando libero il morsetto M1;
08. Ora, collegare i cavi elettrici dei vari dispositivi presenti facendo riferimento
alla fig. 17 e vedere paragrafo 4.3. Nota – Per facilitare i collegamenti dei
cavi, è possibile estrarre i morsetti dalle proprie sedi;
09. Richiudere il coperchio del motoriduttore (fig. 14-8).
4.2 - Collegamento del motoriduttore senza centrale mod.
HK7224
01. Aprire il coperchio come mostrato in fig. 15-1;
02. Passare il cavo del motore attraverso uno dei fori presenti sulla parte infe-
riore del motoriduttore; è necessario tagliare la guaina presente (fig. 15-2);
03. Svitare il pressa-cavo (fig. 15-3), adagiare il cavo sull’apposita corsia e colle-
gare i fili come mostrato in fig. 16-4; rispettare i simboli sull’etichetta;
03. Bloccare il cavo con il pressa-cavo (fig. 15-5);
04. Richiudere il coperchio del motoriduttore (fig. 15-6).
4.3 - Collegamento di altri dispositivi
Se si necessita di alimentare ulteriori dispositivi previsti nell’impianto, ad esempio un lettore di tessere a transponder oppure la luce d’illuminazione per il selettore a chiave, è possibile collegare questi dispositivi alla centrale di comando
sui morsetti “P.P. (positivo)” e “STOP (negativo)” (fig. 13). La tensione di alimentazione è 24 Vcc (-30% ÷ +50%) con corrente massima disponibile di 200 mA.
Nota – La tensione disponibile nei morsetti “P.P.” e “STOP”, rimane presente
anche quando viene attivata la funzione “Stand By” sulla scheda.
ENC1 ENC2
1245789101112
M1 M2
24V
24V
+
-
+
-
A
Page 21

IT
Italiano – 5
4.4 - Indirizzamento dei dispositivi collegati
Per permettere alla centrale di riconoscere i dispositivi collegati al sistema Bluebus, è necessario eseguire l’indirizzamento di quest’ultimi. Questa operazione,
deve essere eseguita posizionando correttamente il ponticello elettrico presente in ogni dispositivo: vedere fig. B.
Per eseguire l’indirizzamento di altri dispositivi, consultare i rispettivi manuali
istruzioni.
Alla fine della procedura d’installazione oppure in seguito alla rimozione di fotocellule o di altri dispositivi, è necessario eseguire la procedura di apprendimento di quest’ultimi; vedere il paragrafo 4.6.
4.5 - Prima accensione e verifica dei collegamenti
Dopo aver dato alimentazione elettrica alla centrale di comando, eseguire le
seguenti verifiche:
• trascorsi alcuni secondi, verificare che il Led “Bluebus” (fig. 16) lampeggi
regolarmente con frequenza di 1 lampeggio al secondo;
• verificare che i Led delle fotocellule (fig. 16), sia TX sia RX, emettano lampeg-
gi. Il tipo di lampeggio emesso, in questa fase, non è significativo;
• verificare che il lampeggiante collegato all’uscita FLASH sia spento.
Se tutto questo non avviene, è necessario togliere l’alimentazione elettrica alla
centrale e controllare i vari collegamenti elettrici precedentemente effettuati.
4.6 - Apprendimento dei dispositivi collegati
Dopo aver effettuato la prima accensione, è necessario far riconoscere alla
centrale i dispositivi collegati agli ingressi “Bluebus” e “Stop”.
ATTENZIONE! – La fase di apprendimento deve essere eseguita anche
se alla centrale non è collegato alcun dispositivo.
La centrale, è in grado di riconoscere singolarmente i vari dispositivi collegati
grazie alla procedura di apprendimento e di rilevare le possibili anomalie presenti. Per questo, è necessario eseguire l’apprendimento dei dispositivi ogni
volta che uno di questi viene aggiunto oppure viene rimosso.
I Led “L1” e “L2” presenti sulla centrale (fig. 16), emettono dei lampeggi lenti
per indicare che è necessario eseguire l’apprendimento:
01. Premere e tenere premuti contemporaneamente i tasti “” e “Set” (fig. 16).
02. Rilasciare i tasti quando i led “L1” e “L2” iniziano a lampeggiare veloce-
mente (dopo circa 3 secondi).
03. Attendere alcuni secondi che la centrale completi la fase di apprendimento
dei dispositivi.
04. Al termine di questa fase il Led “Stop” deve essere acceso e i Led “L1” e “L2”
si devono spegnere (potrebbero iniziare a lampeggiare i Led “L3” e “L4”).
4.7 - Apprendimento delle posizioni dei finecorsa meccanici
Dopo l’apprendimento dei dispositivi collegati (paragrafo 4.6), è necessario eseguire l’apprendimento delle posizioni degli arresti meccanici (massima apertura e
massima chiusura). Questa procedura può essere eseguita in tre mo dalità:
automatico, manuale e misto.
Nel modo automatico, la centrale esegue l’apprendimento degli arresti meccanici e calcola gli sfasamenti più opportuni delle ante (SA e SC, fig. C).
Nel modo manuale, le otto posizioni degli arresti meccanici (fig. C) sono pro-
grammate una ad una, spostando le ante nei punti desiderati. La posizione da
programmare è individuabile grazie al lampeggio di uno degli 8 led (L1...L8),
vedere Tabella 2.
Nel modo misto, è possibile eseguire la procedura automatica e poi, con la procedura manuale, modificare una o più posizioni ad eccezione delle posizioni “0”
e “1” (fig. C) che coincidono con le posizioni dei fermi meccanici.
4.7.1 - Apprendimento in modo automatico
01. Premere e tenere premuti contemporaneamente i tasti “Set” e “”;
02. Quando i led “L3” e “L4” iniziano a lampeggiare velocemente, (dopo circa
3 sec.) rilasciare i tasti;
03. Verificare che l’automatismo esegua le seguenti sequenze di manovre:
a - Chiusura lenta del motoriduttore M1 fino all’arresto meccanico
b - Chiusura lenta del motoriduttore M2 fino all’arresto meccanico
c - apertura lenta del motoriduttore M2 e del motoriduttore M1 fino all’ar-
resto meccanico
d - Chiusura veloce dei motoriduttori M1 e M2
Avvertenze:
– Se la prima manovra (a) non chiude l’anta comandata dal motore M1 ma quel-
la comandata da M2, premere il tasto “
” oppure “” per fermare la fase di
apprendimento. A questo punto, invertire i collegamenti dei motori M1 e M2 sui
morsetti presenti sulla centrale e poi, quelli dei rispettivi encoder; infine, iniziare la
procedura dal punto 01;
– Se le prime due manovre (a e b) non risultano come “chiusure” ma come
“aperture”, premere il tasto “” oppure “” per fermare la fase di apprendimento. A questo punto, sul motoriduttore che ha eseguito la manovra di
apertura, invertire le polarità dei due fili del motoriduttore M1 (morsetti 7 e 9)
e di M2 (morsetti 10 e 12) e poi, iniziare la procedura dal punto 01;
04. Al termine della manovra di Chiusura dei 2 motori (d), i led “L3” e “L4” si
spengono ad indicare che la procedura è stata eseguita correttamente.
Avvertenze:
– Se durante la procedura di apprendimento automatico, si verifica l’intervento
delle fotocellule oppure di un dispositivo collegato all’ingresso “stop”, la procedura si interrompe e il led L1 inizia a lampeggiare. Per riattivare l’apprendimento,
è necessario riprendere la procedura dal punto 01;
B
TABELLA 2 - INDIRIZZI DELLE FOTOCELLULE
Fotocellula Ponticelli
FOTO
Fotocellula esterna h = 50 con intervento in
chiusura (ferma ed inverte il movimento)
FOTO II
Fotocellula esterna h = 100 con intervento in
chiusura (ferma ed inverte il movimento)
FOTO 1
Fotocellula interna h = 50 con intervento sia in
chiusura (ferma ed inverte il movimento) che in
apertura (ferma e riparte al disimpegno
della fotocellula)
FOTO 1 II
Fotocellula interna h = 100 con intervento sia in
chiusura (ferma ed inverte il movimento) che in
apertura (ferma e riparte al disimpegno
della fotocellula)
FOTO 2
Fotocellula interna con intervento in apertura
(ferma ed inverte il movimento)
FOTO 2 II
Fotocellula interna con intervento in apertura
(ferma ed inverte il movimento)
FOTO 3
CONFIGURAZIONE NON PERMESSA
TABELLA 2
Posizione Led Descrizione
Posizione 0
(motore 1)
Posizione 0
(motore 2)
Posizione SA
(motore 2)
Posizione A
(motore 1)
Posizione A
(motore 2)
Posizione SC
(motore 1)
Posizione 1
(motore 1)
Posizione 1
(motore 2)
Posizione di massima chiusura: quando l’anta 1 batte sull’arresto meccanico di chiusura
Posizione di massima chiusura: quando l’anta 2 batte sull’arresto meccanico di chiusura
Sfasamento in apertura: quando l’anta 2 supera questa posizione, inizia l’apertura dell’anta 1
Posizione di apertura desiderata: posizione in cui l’anta collegata al motore 1 deve fermarsi al termine di una ma novra di
apertura. Non è necessario che questa posizione coincida con
il fermo meccanico di apertura, può essere scelta a piacere tra
la posizione “0” e “1”
Posizione di apertura desiderata: posizione in cui l’anta collegata al motore 2 deve fermarsi al termine di una ma novra di
apertura. Non è necessario che questa posizione coincida con
il fermo meccanico di apertura, può essere scelta a piacere tra
la posizione “0” e “1”
Sfasamento in chiusura: quando l’anta 1 si trova al di sotto di
questa posizione, inizia la chiusura dell’anta 2
Posizione di massima apertura: quando l’anta 1 batte sull’arresto meccanico di apertura
Posizione di massima apertura: quando l’anta 2 batte sull’arresto meccanico di apertura
L1
L2
L3
L4
L5
L6
L7
L8
0
11
A
SC
SA
A
0
M1 M2
C
POSIZIONI
Page 22

– La procedura di apprendimento automatico, può essere eseguita nuova-
mente in qualsiasi momento, anche dopo aver effettuato l’installazione; ad
esempio, a seguito della variazione della posizione degli arresti meccanici.
4.7.2 - Apprendimento in modo manuale
Attenzione! – Dal passo 03 in poi:
– per spostarsi dal led L1 a L8
, occorre una breve pressione del tasto oppu-
re (il led lampeggia, indicando l’attuale posizione);
– per far muovere il motore
in un senso o nell’altro, occorre la pressione conti-
nua
del tasto oppure .
01. Premere e tenere premuti
contemporaneamente i tasti “Set” e “”;
02. Rilasciare i tasti quando il led “L1” inizia a lampeggiare (dopo circa 1 secon-
do); Nota – Superati i 3 secondi, se i tasti “Set” e “” non vengono rilasciati,
si attiva la procedura di “apprendimento automatico
” e non quello manuale.
03. • il led
L1 lampeggia: posizione 0 di M1
Per comandare e portare il motore 1 nella posizione 0 (fig. C): p
remere e
tenere premuto il tasto “” o “”. Raggiunta la posizione, rilasciare il tasto
per fermare la manovra. Per memorizzare la posizione, premere e tenere
premuto il tasto “Set” per almeno 3 sec. e poi rilasciarlo (dopo 2 sec. il led
L1 rimane acceso e al rilascio del tasto “Set” inizia a lampeggiare il led L2).
• il led
L2 lampeggia: posizione 0 di M2
Per comandare e portare il motore 2 nella posizione 0 (fig. C): premere e
tenere premuto il tasto “” o “”. Raggiunta la posizione, rilasciare il tasto
per fermare la manovra. Per memorizzare la posizione, premere e tenere
premuto il tasto “Set” per almeno 3 sec. e poi rilasciarlo (dopo 2 sec. il led
L2 rimane acceso e al rilascio del tasto “Set” inizia a lampeggiare il led L3).
• il led
L3 lampeggia: posizione SA di M2
Per comandare e portare il motore 2 nella posizione SA (fig. C): premere e tenere premuto il tasto “” o “”. Raggiunta la posizione, rilasciare
il tasto per fermare la manovra. Per memorizzare la posizione, premere e
tenere premuto il tasto “Set” per almeno 3 sec. e poi rilasciarlo (dopo 2
sec. il led L3 rimane acceso e al rilascio del tasto “Set” inizia a lampeggiare il led L4).
• il led
L4 lampeggia: posizione A di M1
Per comandare e portare il motore 1 nella posizione A (fig. C): premere e
tenere premuto il tasto “” o “”. Raggiunta la posizione, rilasciare il tasto
per fermare la manovra. Per memorizzare la posizione, premere e tenere
premuto il tasto “Set” per almeno 3 sec. e poi rilasciarlo (dopo 2 sec. il led
L4 rimane acceso e al rilascio del tasto “Set” inizia a lampeggiare il led L5).
• il led
L5 lampeggia: posizione A di M2
Per comandare e portare il motore 2 nella posizione A (fig. C): premere e
tenere premuto il tasto “” o “”. Raggiunta la posizione, rilasciare il tasto
per fermare la manovra. Per memorizzare la posizione, premere e tenere
premuto il tasto “Set” per almeno 3 sec. e poi rilasciarlo (dopo 2 sec. il led
L5 rimane acceso e al rilascio del tasto “Set” inizia a lampeggiare il led L6).
• il led
L6 lampeggia: posizione SC di M1
Per comandare e portare il motore 1 nella posizione SC (fig. C): premere e tenere premuto il tasto “” o “”. Raggiunta la posizione, rilasciare il
tasto per fermare la manovra. Per memorizzare la posizione, premere e
tenere premuto il tasto “Set” per almeno 3 sec. e poi rilasciarlo (dopo 2
sec. il led L6 rimane acceso e al rilascio del tasto “Set” inizia a lampeggiare il led L7);
• il led
L7 lampeggia: posizione 1 di M1
Per comandare e portare il motore 1 nella posizione 1 (fig. C): premere e
tenere premuto il tasto “” o “”. Raggiunta la posizione, rilasciare il tasto
per fermare la manovra. Per memorizzare la posizione, premere e tenere
premuto il tasto “Set” per almeno 3 sec. e poi rilasciarlo (dopo 2 sec. il led
L7 rimane acceso e al rilascio del tasto “Set” inizia a lampeggiare il led L8).
• il led
L8 lampeggia: posizione 1 di M2
Per comandare e portare il motore 2 nella posizione 1 (fig. C): premere e
tenere premuto il tasto “” o “”. Raggiunta la posizione, rilasciare il
tasto per fermare la manovra. Per memorizzare la posizione, premere e
tenere premuto il tasto “Set” per almeno 3 sec. e poi rilasciarlo per uscire dalla programmazione (dopo 2 sec. il led L8 rimane acceso fino al rilascio del tasto “Set”).
Nota – Per effettuare la programmazione manuale di un impianto che presenta un solo motoriduttore, si procede come descritto al paragrafo 4.7.2 e
al passo 03 occorre eseguire la programmazione della posizione “0” e poi la “1”
di M1, ignorando la parte relativa ai tasti “” e “” ma agendo solo sul tasto
“Set” come descritto. Importante! – Nella procedura manuale non devono
essere programmate le posizioni “SA” di M2; “A” di M1; “SC” di M1.
4.7.3 - Apprendimento in modo misto
Eseguire questa procedura dopo l’esecuzione dell’apprendimento in modo
automatico:
01. Premere e tenere premuti
contemporaneamente i tasti “Set” e “”;
02. Rilasciare i tasti quando il led “L1” inizia a lampeggiare (dopo circa 1 secon-
do); Nota – Superati i 3 secondi, se i tasti “Set” e “” non vengono rilasciati,
si attiva la procedura di “apprendimento automatico
” e non quello manuale.
03. Con una breve pressione del tasto “” o “” spostare il led lampeggiante
(L1…L8) sulla posizione che si desidera programmare e procedere per
ogni singola posizione, come descritto al passo 03 dell’apprendimento in
modo manuale (paragrafo 4.7.2).
Ripetere quest’ultima operazione per tutte le altre posizioni che si desidera
modificare.
Per terminare l’apprendimento manuale, premere ripetutamente il tasto “”,
IT
6 – Italiano
Queste sono le fasi più importanti nella realizzazione dell’automazione, al fine di
garantire la massima sicurezza dell’impianto. Il collaudo può essere usato
anche per verificare periodicamente i dispositivi che compongono l’automazione. Le fasi del collaudo e della messa in servizio dell’automazione devono essere eseguite da personale qualificato ed esperto che dovrà farsi carico di stabilire le prove necessarie a verificare le soluzioni adottate nei confronti dei rischi
presenti, e di verificare il rispetto di quanto previsto da leggi, normative e regolamenti: in particolare, di tutti i requisiti della norma EN 12445 che stabilisce i
metodi di prova per la verifica degli automatismi per cancelli.
I dispositivi aggiuntivi, devono essere sottoposti ad uno specifico collaudo, sia per
quanto riguarda la funzionalità sia per quanto riguarda la loro corretta interazione
con HYKE; quindi, fare riferimento ai manuali istruzioni dei singoli dispositivi.
5.1 - Collaudo
La sequenza di operazioni da eseguire per il collaudo, descritta di seguito, si ri ferisce ad un impianto tipico (fig. 3):
1 Verificare che sia stato rispettato rigorosamente tutto quello previsto nel
capitolo “Avvertenze per l’installazione”.
2 Sbloccare i motoriduttori per la manovra manuale come descritto nel rispet-
tivo manuale di istruzioni. Agendo sull'anta, nel punto previsto per la manovra manuale, verificare che sia possibile muovere le ante in apertura e in
chiusura con una forza inferiore a 390 N.
3 Bloccare i motoriduttori (vedere capitolo 3.6).
4 Utilizzando i dispositivi di comando (trasmettitore, pulsante di comando,
selettore a chiave, ecc.), effettuare delle prove di apertura, Chiusura ed
Arresto del cancello, accertando che il movimento delle ante corrisponda a
quanto previsto. Conviene eseguire diverse prove al fine di valutare il movimento delle ante ed accertare eventuali difetti di montaggio, di regolazione,
nonché la presenza di particolari punti d’attrito.
5 Verificare uno ad uno il corretto funzionamento di tutti i dispositivi di sicurez-
za presenti nell’impianto (fotocellule, bordi sensibili ecc.). Quando un dispositivo interviene il led “BLUEBUS”, presente sulla centrale, emette 2 lampeggi più veloci come conferma dell’avvenuto riconoscimento.
6 Se le situazioni pericolose provocate dal movimento delle ante sono state
salvaguardate mediante la limitazione della forza d’impatto si deve eseguire
la misura della forza secondo quanto previsto dalla norma EN 12445 ed
eventualmente, se il controllo della “forza motoriduttore” viene usato come
ausilio al sistema per la riduzione della forza d’impatto, provare e trovare la
regolazione che dia i risultati migliori.
5.2 - Messa in servizio
La messa in servizio può avvenire solo dopo aver eseguito con esito positivo tutte le fasi di collaudo.
1 Realizzare il fascicolo tecnico dell’automazione che dovrà comprendere i se -
guenti documenti: un disegno complessivo dell’automazione, lo schema dei
collegamenti elettrici effettuati, l’analisi dei rischi presenti e le relative soluzioni
adottate, la dichiarazione di conformità del fabbricante di tutti i dispositivi utilizzati e la dichiarazione di conformità compilata dall’installatore.
2 Apporre sul cancello una targhetta contenente almeno i seguenti dati: tipo
di automazione, nome e indirizzo del costruttore (responsabile della “messa
in servizio”), numero di matricola, anno di costruzione e marchio “CE”.
3 Compilare e consegnare al proprietario dell’automazione la dichiarazione di
conformità dell'automazione.
4 Compilare e consegnare al proprietario dell’automazione il “Ma nuale per
l’uso” dell'automazione.
5 Compilare e consegnare al proprietario dell’automazione il “Piano di manu-
tenzione” che raccoglie le prescrizioni sulla manutenzione di tutti i disposi-
tivi dell’automazione.
COLLAUDO E MESSA IN SERVIZIO
5
per spostare il led che lampeggia, oltre la posizione L8.
4.8 - Verifica del movimento delle ante del cancello
Al termine della fase di apprendimento, si consiglia di far eseguire alla centrale
alcune manovre di apertura e Chiusura, in modo da verificare il corretto movimento del cancello, gli eventuali difetti di montaggio e di regolazione.
01. Premere il tasto “Open”. Verificare il corretto sfasamento delle ante in aper-
tura e verificare che durante la manovra di apertura sia presente la fase di
accelerazione, la fase a velocità costante, la fase di rallentamento e che il
finecorsa delle ante sia impostato a qualche centimetro di distanza dagli
arresti meccanici di apertura;
02. Premere il tasto “Close” e verificare che durante la manovra di Chiusura sia
presente la fase di accelerazione, la fase a velocità costante, la fase di rallentamento. Verificare il corretto sfasamento delle ante in chiusura. Al termine le ante devono essere pertettamente chiuse sull'arresto meccanico di
chiusura;
03. Verificare, durante le manovre, che il lampeggiante esegua lampeggi con
intervalli di 0,5 secondi a lampeggiante acceso e di 0,5 secondi a lampeggiante spento.
Page 23

IT
Italiano – 7
6 Prima di mettere in servizio l’automazione informare adeguatamente il pro-
prietario sui pericoli ed i rischi residui ancora presenti.
Per tutta la documentazione citata, Nice attraverso il proprio servizio di assi-
stenza tecnica, mette a disposizione: manuali d’istruzioni, guide e moduli
precompilati. Vedere anche su: www.nice-service.com
Sulla centrale sono presenti 3 tasti OPEN (), STOP (SET), CLOSE () che
possono essere utilizzati sia per comandare la centrale durante le fasi di prova
sia per la programmazione delle funzioni disponibili.
Le funzioni programmabili disponibili sono disposte su 2 livelli e il loro stato di
funzionamento viene segnalato dagli 8 led (L1 ... L8) presenti sulla centrale ( led
acceso = funzione attiva; led spento = funzione non attiva).
Utilizzare i tasti di programmazione:
OPEN (): – tasto per comandare l’apertura del cancello; – tasto di selezione in
fase di programmazione.
STOP/SET: tasto per fermare una manovra; se premuto per più di 5 secondi
permette di entrare in fase di programmazione.
CLOSE (): – tasto per comandare la Chiusura del cancello; – tasto di selezio-
ne in fase di programmazione.
6.1 - Programmazione primo livello (ON-OFF)
Tutte le funzioni del primo livello sono programmate di fabbrica su “OFF” e possono essere modificate in qualsiasi momento. Per verificare le varie funzioni
vedere Tabella 3. Per la procedura di programmazione vedere Tabella 4.
IMPORTANTE – La procedura di programmazione presenta un tempo massimo di 10 secondi tra la pressione di un tasto e l’altro. Trascorso questo tempo,
la procedura termina automaticamente memorizzando le modifiche fatte fino a
quel momento.
PROGRAMMAZIONE DELLA CENTRALE
DI COMANDO
6
TABELLA 3 - Funzioni di primo livello
Led Funzione Descrizione
L1 Chiusura automatica
L2 Richiudi dopo foto
L3 Chiudi sempre
L4 Stand by tutto
L5 Elettroserratura / Luce di cortesia
L6 Prelampeggio
L7 “Chiude” diventa “Apre parziale 1”
L8 “Spia cancello aperto” oppure
“Spia manutenzione”
Funzione ATTIVA: dopo una manovra di apertura, viene eseguita una pausa (pari al Tempo pausa programmato) trascorsa la quale, la centrale avvia automaticamnete una manovra di chiusura. Il valore di fabbrica del
Tempo pausa è pari a 30 sec.
Funzione NON ATTIVA
: il funzionamento è di tipo “semiautomatico”.
Funzione ATTIVA
: se durante la manovra di apertura o chiusura intervengono le fotocellule, il tempo di
pausa si riduce a 5 sec. indipendentemente dal “tempo pausa” programmato.
Con la “chiusura automatica” disattivata, se durante la Chiusura intervengono le fo tocellule, si attiva la
“chiusura automatica” con il “tempo pausa” programmato.
Funzione ATTIVA
: nel caso di un black-out elettrico, anche breve, al ripristino della corrente elettrica la
centrale rileva il cancello aperto e automaticamente avvia una manovra di Chiusura, preceduta da 5 sec. di
prelampeggio.
Funzione NON ATTIVA
: al ritorno della corrente elettrica il cancello rimane dov'è.
Funzione
ATTIVA: dopo 1 minuto dal termine della manovra, la centrale spegne l’uscita “BlueBus” (dispositivi collegati), il Bus T4 (dispositivi collegati), le uscite flash, ELS e sca, alcuni circuiti interni e tutti i led escluso il Led BlueBus che lampeggerà più lentamente. Quando la centrale riceve un comando ripristina il normale funzionamento (con un breve ritardo). Questa funzione ha lo scopo di ridurre i consumi; aspetto
importante con alimentazione a batterie o pannelli fotovoltaici.
Funzione ATTIVA
: l’uscita “elettroserratura” commuta il proprio funzionamento in “luce di cortesia”.
Funzione NON ATTIVA
: l'uscita funziona come elettroserratura.
Funzione ATTIVA
: è possibile aggiungere una pausa di 3 secondi tra l’accensione del lampeggiante e l’inizio
della manovra, per segnalare in anticipo una situazione di pericolo.
Funzione NON ATTIVA
: la segnalazione del lampeggiante coincide con l’inizio della manovra.
Funzione ATTIVA
: tutti i comandi che corrispondono a “Chiude” (ingresso “Close” oppure comando radio
“Chiude”) vengono sostituiti con il comando “apertura parziale 1”.
Funzione ATTIVA
: l’uscita “spia cancello aperto” della centrale, commuta il proprio funzionamento in “spia
manutenzione”.
Funzione NON ATTIVA
: l’uscita funziona come “spia cancello aperto”.
TABELLA 4 - Procedura di programmazione primo livello
01. Premere e tenere premuto il tasto “Set” per circa 3 secondi;
02. Rilasciare il tasto quando il led “L1” inizia a lampeggiare;
03. Premere il tasto “” o “” per spostare il led lampeggiante sul led che rappresenta la funzione da modificare;
04. Premere il tasto “Set” per cambiare lo stato della funzione:
(lampeggio breve = OFF - lampeggio lungo = ON);
05. Attendere 10 secondi (tempo massimo) per uscire dalla programmazione.
Nota – Per programmare altre funzioni su “ON” oppure “OFF”, durante l’esecuzione della procedura, occorre ripetere i punti 03 e 04 durante la fase stessa.
SET
SET
SET
L1
o
3 s
10 s
Page 24

IT
8 – Italiano
TABELLA 5 - Funzioni di secondo livello
Led di Parametro Led Valore Descrizione
entrata (livello)
L1
L1
L2
L3
L4
L5
L6
L7
L8
5 secondi
15 secondi
30 secondi
45 secondi
60 secondi
80 secondi
120 secondi
180 secondi
Regola il tempo di pausa, cioè il tem po prima della richiusura automatica.
Ha effetto solo se la Chiusura è attiva.
Tempo
Pausa
L2 L1
L2
L3
L4
L5
L6
L7
L8
Apre – stop – chiude – stop
Apre – stop – chiude – apre
Apre – chiude – apre – chiude
Condominiale:
• nella manovra di apertura
il comando “Passo Passo” e “Apre” non provocano nessun effetto; invece, il comando “Chiude” provoca l’inversione del
movimento, cioè la chiusura delle ante.
• nella manovra di chiusura il comando “Passo Passo” e “Apre” provocano
l’inversione del movimento, cioè l’apertura delle ante; invece, il comando
“Chiude” non provoca nessun effetto.
Condominiale 2:
• nella manovra di apertura
il comando “Passo Passo” e “Apre” non provo-
cano nessun effetto; invece, il comando “Chiude” provoca l’inversione del
movimento, cioè la chiusura delle ante. Se il comando inviato permane
per più di 2 secondi, viene eseguito uno “Stop”.
• nella manovra di chiusura
il comando “Passo Passo” e “Apre” provocano
l’inversione del movimento, cioè l’apertura delle ante; invece, il comando
“Chiude” non provoca nessun effetto. Se il comando inviato permane
per più di 2 secondi, viene eseguito uno “Stop”.
Passo-Passo 2 (meno di 2” fa apre parziale)
Uomo presente:
la manovra viene eseguita solo se permane il comando inviato; se il comando viene interrotto la manovra si ferma.
apertura in “semiautomatico”, chiusura a “uomo presente”
Regola la sequenza di comandi associati all’ingresso “Passo Passo”, “Apre”,
“Chiude” oppure al comando radio.
Nota – Impostando L4, L5, L7 e L8,
viene modificato anche il comportamento dei comandi “Apre” e “Chiude”.
Funzione
Passo
Passo
L3
L1
L2
L3
L4
L5
L6
L7
L8
Molto lenta
Lenta
Media
Veloce
Molto veloce
Velocissima
Apre veloce, Chiude lento
Apre velocissima, Chiude media
Regola la velocità dei motori durante
la corsa normale.
Velocità
motori
L4 L1
L2
L3
L4
L5
L6
L7
L8
Nessun scaricamento
Livello 1 - Scaricamento minimo (circa 100 ms)
Livello 2 - ...
Livello 3 - ...
Livello 4 - ...
Livello 5 - ...
Livello 6 - ...
Livello 7 - Scaricamento massimo (circa 800 ms)
Regola la durata della “breve inversione” di entrambi i motori, dopo l’ese cuzione della manovra di Chiusura,
con lo scopo di ridurre la spinta finale
residua.
Scaricamento
motori
dopo la
Chiusura
L6 L1
L2
L3
L4
L5
L6
L7
L8
Pedonale 1 (apertura dell’anta M2 a 1/4 dell’apertura totale)
Pedonale 2 (apertura dell’anta M2 a 1/2 dell’apertura totale)
Pedonale 3 (apertura dell’anta M2 a 3/4 dell’apertura totale)
Pedonale 4 (apertura totale dell’anta 2)
Parziale 1 (apertura delle due ante a 1/4 dell’apertura “minima”)
Parziale 2 (apertura delle due ante a 1/2 dell’apertura “minima”)
Parziale 3 (apertura delle due ante a 3/4 dell’apertura “minima”)
Parziale 4 (apertura delle due ante pari all'apertura “minima”)
Regola il tipo di apertura associato al
comando “apertura parziale 1”.
Nei livelli L5, L6, L7, L8; per apertura
"minima" si intende apertura minore
tra M1 e M2; ad esempio se M1 apre
a 90° e M2 apre a 110°; l'apertura minima è 90°
Apertura
pedonale
o parziale
L5 L1
L2
L3
L4
L5
L6
L7
L8
Livello 1 - Forza minima
Livello 2 - ...
Livello 3 - ...
Livello 4 - ...
Livello 5 - ...
Livello 6 - ...
Livello 7 - ...
Livello 8 - Forza massima
Regola la forza di entrambi i motori.Forza
motori
6.2 - Programmazione secondo livello (parametri regolabili)
Tutti i parametri del secondo livello sono programmati di fabbrica come evidenziato in colore grigio nella Tabella 5 e possono essere modificate in qualsiasi
momento, procedendo come descritto nella Tabella 6.
I parametri, sono regolabili su una scala di valori da 1 a 8; per verificare il valore
corrispondente ad ogni Led vedere Tabella 8. IMPORTANTE – La procedura
di programmazione presenta un tempo massimo di 10 secondi tra la pressione
di un tasto e l’altro. Trascorso questo tempo, la procedura termina automaticamente memorizzando le modifiche fatte fino a quel momento.
Page 25

IT
Italiano – 9
TABELLA 6 - Procedura di programmazione secondo livello
01. Premere e tenere premuto il tasto “Set” per circa 3 secondi;
02. Rilasciare il tasto quando il led “L1” inizia a lampeggiare;
03. Premere il tasto “” o “” per spostare il led lampeggiante sul led che rappresenta “led di entrata” del parametro da modificare;
04. Premere e mantenere premuto il tasto “Set” fino alla conclusione del punto 06;
05. Attendere circa 3 secondi, fino a quando si accende il led che rappresenta il livello attuale del parametro da modificare;
06. Premere il tasto “” o “” per spostare il led che rappresenta il valore del parametro;
07. Rilasciare il tasto “Set”;
08. Attendere 10 secondi (tempo massimo) per uscire dalla programmazione.
Nota – Per programmare più parametri, durante l’esecuzione della procedura, occorre ripetere le operazioni dal punto 03 al punto 07 durante la fase stessa.
SET
SET
SET
SET
L1
o
o
3 s
10 s
6.3 - Funzioni speciali
6.3.1 - Funzione: “Muovi comunque”
Questa funzione, permette di far funzionare l’automazione anche quando qualche dispositivo di sicurezza non funziona correttamente oppure è fuori uso.
È possibile comandare l’automazione in modalità “uomo presente”, procedendo nel modo seguente:
01. Inviare un comando per azionare il cancello, con un trasmettitore oppure
con un selettore a chiave, ecc. Se tutto funziona correttamente il cancello
si muoverà regolarmente, altrimenti procedere come di seguito;
02. entro 3 secondi, azionare nuovamente il comando e mantenerlo azionato;
03. dopo 2 secondi circa, il cancello effettuerà la manovra richiesta in modalità
a “uomo presente”; cioè, il cancello continuerà a muoversi solo fino a
quando verrà mantenuto azionato il comando.
Quando i dispositivi di sicurezza non funzionano, il se gnalatore lampeggiante
emette alcuni lampeggi per segnalare il tipo di problema (vedere capitolo 6 Tabella 8).
6.3.2 - Funzione: “Avviso manutenzione”
Questa funzione, serve per segnalare quando è necessario eseguire la manutenzione all’automazione. La segnalazione di avviso manutenzione, avviene tramite una lampada collegata all’Uscita S.C.A. quando questa uscita è programmata come “Spia manutenzione”. Le diverse segnalazioni della lampada spia
sono riportate in Tabella 7.
Per programmare il valore limite delle manovre di manutenzione, vedere Tabella 5.
6.4 - Cancellazione della memoria
Per cancellare la memoria della centrale e ripristinare tutte li impostazioni di fabbrica, procedere nel modo seguente:
premere e tenere premuto i tasti “” e “” fino a quando i led L1 e L2 iniziano
a lampeggiare.
Tabella 7 - Segnalazione “Spia manutenzione”
Numero di manovre Segnalazione
Spia accesa per 2 secondi, all’inizio della manovra di apertura.
Spia che lammpeggia per tutta la durata della manovra.
Spia che lampeggia di continuo.
Inferiore all’80% del limite
Tra l’81% e il 100% del
limite
Oltre il 100% del limite
Nota – Il colore grigio evidenzia i valori impostati in fabbrica.
L8 L1
L2
L3
L4
L5
L6
L7
L8
Esito 1amanovra (la più recente)
Esito 2amanovra
Esito 3amanovra
Esito 4amanovra
Esito 5amanovra
Esito 6amanovra
Esito 7amanovra
Esito 8
a
manovra
Permette di verificare il tipo di anomalia avvenuta durante l’esecuzione delle
ultime 8 manovre.
Vedere TABELLA 10 - Elenco storico
delle anomalie
Elenco
anomalie
L7 L1
L2
L3
L4
L5
L6
L7
L8
500
1000
1500
2500
5000
10000
15000
20000
Regola il numero di manovre: quando
viene superato questo numero, la
centrale segnala la richiesta di manutenzione dell’automazione; vedere
paragrafo 6.3.2. – Avviso di manu tenzione.
Avviso di
manutenzione
Alcuni dispositivi sono predisposti per emettere delle segnalazioni con il quale è
possibile riconoscere lo stato di funzionamento oppure di eventuali anomalie.
Se all’uscita FLASH presente sulla centrale viene collegato un lampeggiante,
questo durante l’esecuzione di una manovra, emette un lampeggio con cadenza di 1 secondo. Se si verificano delle anomalie, il lampeggiane emette dei lampeggi più brevi; questi vengono ripetuti due volte divisi da una pausa di 1
secondo. Nella Tabella 8 sono descritte la causa e la soluzione per ogni tipo di
segnalazione.
Anche i Led presenti sulla centrale emettono delle segnalazioni; nella Tabella 9
sono descritte la causa e la soluzione per ogni tipo di segnalazione.
È possibile controllare le eventuali anomalie verificatesi durante l’esecuzione
delle utlime 8 manovre; fare riferimento alla Tabella 10.
COSA FARE SE...
(guida alla risoluzione dei problemi)
7
Page 26

IT
10 – Italiano
7 lampeggi brevi
pausa di 1 secondo
7 lampeggi brevi
Anomalia sui circuiti elettrici Attendere almeno 30 secondi e riprovare a inviare un comando ed even-
tualmente spegnere anche l'alimentazione; se lo stato rimane potrebbe
esserci un guasto grave ed occorre sostituire la scheda elettronica.
8 lampeggi brevi
pausa di 1 secondo
8 lampeggi brevi
È già presente un comando che non
consente di eseguire altri comandi
Verificare la natura del comando sempre presente; ad esempio potrebbe
essere il comando da un orologio sull’ingresso di “apre”.
9 lampeggi brevi
pausa di 1 secondo
9 lampeggi brevi
L’automazione è stata bloccata da un
comando "Blocca l’automazione".
Sbloccare l’automazione inviando il comando “Sblocca automazione”.
10 lampeggi brevi
pausa di 1 secondo
10 lampeggi brevi
Intervento della funzione
“Rilevamento Ostacoli” da encoder
Durante il movimento i motori sono stati bloccati da un maggiore attrito;
verificare la causa.
TABELLA 8 - Segnalazioni del segnalatore lampeggiante (FLASH)
Lampeggi Problema Risoluzione
1 lampeggio breve
pausa di 1 secondo
1 lampeggio breve
Errore sul sistema Bluebus La verifica dei dispositivi collegati al sistema Bluebus, che viene eseguita
all’inizio della ma novra, non corrisponde ai dispositivi memorizzati durante
la fase di apprendimento. È possibile che ci siano dispositivi scollegati o
guasti, quindi occorre verificare e sostituire. Se sono state fatte delle modifiche occorre rifare l’apprendimento dei dispositivi (vedere paragrafo 4.6).
2 lampeggi brevi
pausa di 1 secondo
2 lampeggi brevi
Intervento di una fotocellula Una o più fotocellule non danno il consenso al movimento oppure duran-
te la corsa hanno provocato una inversione del movimento; verificare se
sono presenti ostacoli.
3 lampeggi brevi
pausa di 1 secondo
3 lampeggi brevi
Intervento della funzione
“Rilevamento Ostacoli” da limitatore di
forza
Durante il movimento i motori hanno incontrato un maggiore sforzo; verificare la causa ed eventualmente aumentare il livello di forza dei motori
4 lampeggi brevi
pausa di 1 secondo
4 lampeggi brevi
Intervento dell’ingresso di STOP All’inizio della manovra o durante il movimento c’è stato un intervento dei
dispositivi collegati all’ingresso STOP; verificare la causa.
5 lampeggi brevi
pausa di 1 secondo
5 lampeggi brevi
Errore nei parametri interni della
centrale di comando
Attendere almeno 30 secondi e poi riprovare a dare un comando ed eventualmente spegnere anche l'alimentazione; se lo stato rimane, potrebbe
esserci un guasto grave ed occorre sostituire la scheda elettronica.
6 lampeggi brevi
pausa di 1 secondo
6 lampeggi brevi
Superato il limite massimo di manovre
consecutive o di manovre per ora.
Attendere alcuni minuti in modo da far ritornare il limitatore di ma novre
sotto il limite massimo.
TABELLA 9 - Segnalazioni dei Led presenti sulla centrale di comando (fig. 16)
Led Problema Risoluzione
BLUEBUS
Sempre spento
Sempre acceso
1 lampeggio al secondo
2 lampeggi veloci
Serie di lampeggi divisi da una pausa
di 1 secondo
Anomalia
Anomalia grave
Tutto regolare
Variazione dello stato degli ingressi
Varie
Verificare se la centrale è alimentata; verificare che i fusibili non siano
intervenuti. In questo caso verificare la causa del guasto e sostituirli con
altri dello stesso valore
È presente un problema grave: provare a togliere l’alimentazione elettrica
alla centrale e se lo stato permane, occorre sostituire la scheda elettronica
Funzionamento regolare della centrale
È regolare se avviene una variazione in uno degli ingressi (PP, STOP,
OPEN, CLOSE): intervento delle fotocellule oppure viene trasmesso un comando con un trasmettitore
Fare riferimento alla Tabella 8
STOP
Sempre spento
Sempre acceso
Intervento dei dispositivi collegati
all’ingresso STOP
Tutto regolare
Verificare i dispositivi dell’ingesso STOP
Ingresso STOP attivo
P. P.
Sempre spento
Sempre acceso
Tutto regolare
Intervento dell’ingresso P.P.
Ingresso P.P. non attivo
È regolare se è attivo il dispositivo collegato all’ingresso P.P.
OPEN
Sempre spento
Sempre acceso
Tutto regolare
Intervento dell’ingresso OPEN
Ingresso OPEN non attivo.
È regolare se è attivo il dispositivo collegato all’ingresso OPEN
CLOSE
Sempre spento
Sempre acceso
Tutto regolare
Intervento dell’ingresso CLOSE
Ingresso CLOSE non attivo.
È regolare se è attivo il dispositivo collegato all’ingresso CLOSE
L1 - L2 Lampeggio lento Variazione del numero di dispositivi
collegati al Bluebus oppure apprendimento dispositivo non eseguito
È necessario eseguire l’apprendimento dei dispositivi
(vedere paragrafo 4.6)
L3 - L4 Lampeggio lento Non è mai stato eseguito l’apprendi-
mento delle posizioni degli arresti
meccanici
È necessario eseguire l’apprendimento (vedere paragrafo 4.7).
Page 27

IT
Italiano – 11
TABELLA 10 - Elenco storico delle anomalie
01. Premere e tenere premuto il tasto “Set” per circa 3 secondi;
02. Rilasciare il tasto quando il led “L1” inizia a lampeggiare;
03. Premere il tasto “” o “” per spostarsi dal led che sta lampeggiando sul led L8 (“led di entrata”) per il parametro
“Elenco anomalie”;
04. Premere e mantenere premuto il tasto “Set” fino alla conclusione del punto 06;
05. Attendere circa 3 secondi, fino a quando si accendono i led che rappresentano i livelli corrispondenti alle manovre che
hanno presentato delle anomalie. Il led L1 indica il risultato della manovra più recente mentre, il led L8 indica l’ottava
manovra. Se il led è acceso significa che si sono verificate delle anomalie, invece se il led è spento è tutto regolare;
06. Premere i tasti “” e “” per selezionare la manovra desiderata: il led corrispondente esegue un numero di lampeggi
pari a quelli normalmente eseguiti dal lampeggiante;
07. Rilasciare il tasto “Set”.
SET
SET
SET
SET
L1
o
e
3 s
3 s
L8
Per HYKE, sono previsti i seguenti accessori (opzionali): ricevitori della famiglia
SMXI, OXI, il programmatore Oview, il pannello ad energia solare Solemyo e la
batteria tampone mod. PS124.
8.1 - Collegamento di un ricevitore radio
La centrale di comando presenta un connettore per il collegamento dei ricevitori radio (accessorio opzionale) appartenenti alla famiglia SMXI, OXI. Per collegare un ricevitore, occorre togliere l’alimentazione elettrica alla centrale e procedere come mostrato in fig. 17. Nella Tabella 11 e Tabella 12 sono riportati i
comandi che corrispondono alle uscite presenti sulla centrale.
APPROFONDIMENTI
8
Tabella 11
SMXI / SMXIS oppure OXI / OXIFM / OXIT / OXITFM in modo I o Modo II
Comando “P.P.” (Passo-Passo)
Comando “apertura parziale 1”
Comando “Apre”
Comando “Chiude”
Uscita N°1
Uscita N°2
Uscita N°3
Uscita N°4
1 Passo-Passo
2 Apertura parziale 1
3Apre
4 Chiude
5 Stop
6 Passo-Passo
Condominiale
7 Passo-Passo
alta priorità
8 Apre parziale 2
9 Apre parziale 3
10 Apre e Blocca
automazione
11 Chiude e Blocca
automazione
12 Blocca automazione
13 Sblocca
automazione
Tabella 12
OXI / OXIFM /OXIT / OXITFM in modo II esteso
N° Comando Descrizione
Comando “P.P.” (Passo-Passo)
Comando “Apertura parziale 1”
Comando “Apre”
Comando “Chiude”
Arresta la manovra
Comando in modalità Condominiale
Comanda anche con automazione bloccata o comandi
attivi
Apre parziale (apertura dell’anta M2, pari a 1/2 dell’apertura totale)
Apre parziale (apertura delle due ante, pari a 1/2 dell’apertura totale)
Provoca una manovra di apertura e al termine di questa il
blocco dell’automazione; la centrale non accetta nessun
altro comando ad eccezione di “Passo passo alta priorità”,
“Sblocca” automazione oppure (solo da Oview) i comandi:
“Sblocca e chiude” e “Sblocca e apre”
Provoca una manovra di chiusura e al termine di questa il
blocco dell’automazione; la centrale non accetta nessun
altro comando ad eccezione di “Passo passo alta priorità”,
“Sblocca” automazione oppure (solo da Oview) i comandi:
“Sblocca e chiude” e “Sblocca e apre”
Provoca una fermata della manovra ed il blocco dell’automazione; la centrale non accetta nessun altro comando ad
eccezione di “Passo passo alta priorità”, “Sblocca” automazione oppure (solo da Oview) i comandi: “Sblocca e
chiude” e “Sblocca e apre”
Provoca lo sblocco dell’automazione ed il ripristino del normale funzionamento
8.2 - Collegamento e installazione della batteria tampone
mod. PS124
ATTENZIONE! - Il collegamento elettrico della batteria alla centrale deve
essere eseguito soltanto dopo aver concluso tutte le fasi di installazione e
programmazione, in quanto la batteria rappresenta un’alimentazione elettrica di emergenza.
Per installare e collegare la batteria, seguire le fasi di montaggio mostrate nella
fig. 18.
8.3 - Collegamento del programmatore Oview
Sulla centrale è presente il connettore BusT4 al quale è possibile collegare l’unità di programmazione Oview, che consente una completa e rapida gestione della fase d’installazione, di manutenzione e di diagnosi dell’intera automazione.
Per accedere al connettore è necessario procedere come mo strato in fig. 19 e
collegare il connettore nell’apposita sede. L’Oview può essere collegato a più
Centrali simultaneamente (fino a 5 senza particolari precauzioni, fino a 60
seguendo le apposite avvertenze) e, può restare collegato alla centrale anche
durante il normale funzionamento dell’automazione. In questo caso, può essere utilizzato per inviare direttamente i comandi alla centrale utilizzando lo specifico menù “utilizzatore”. È anche possibile eseguire l’aggiornamento del Firmware. Se nella centrale è presente un ricevitore radio appartenente alla famiglia OXI, utilizzando l’Oview è possibile avere accesso ai parametri dei trasmettitori memorizzati nel ricevitore stesso.
Per tutti gli approfondimenti consultare il rispettivo manuale istruzioni ed il
manuale del sistema “Opera system book”.
8.4 - Collegamento del sistema ad energia solare Solemyo
ATTENZIONE! – Quando l’automazione è alimentata dal sistema “Sole myo”, NON D EVE ESS ERE ALI MEN TATA co ntemporaneamente anche
dalla rete elettrica.
Per altre informazioni sul sistema Solemyo fare riferimento al suo manuale istruzioni.
Per eseguire il collegamento del sistema Solemyo, procedere come mostrato in
fig. 20.
8.5 - Collegamento del sistema di sblocco esterno Kio
ATTENZIONE! – Kio deve essere collegato al motoriduttore che muove
l’anta che parte per prima (partendo in posizione di cancello chiuso).
01. Aprire il coperchio del motoriduttore (fig. 21-1);
02. Togliere il carter plastico del motoriduttore come mostrato in fig. 21-2;
03. Inserire nell’apposito foro la vite econ il dado come mostrato in fig. 21-3;
04. Agganciare i due estremi dellla molla come mostrato in fig. 22-4;
05. Inserire il cavo di acciaio prima nella vite e poi nel foro del perno come
mostrato in fig. 21-5;
06. Bloccare il cavo avvitando la vite apposita (fig. 21-5);
07. Far passare l’altra estremità del cavo attraverso uno dei fori presenti sulla
parte inferiore del motoriduttore come mostrato in fig. 21-6;
08. Riposizionare il carter plastico e poi il coperchio del motoriduttore (fig.
21-7);
09. A questo punto, collegare il cavo a Kio facendo riferimento al rispettivo
manuale istruzioni.
N° Comando Descrizione
Si accende l'uscita Luce di cortesia con spegnimento temporizzato
Si accende e spegne l'uscita Luce di cortesia in modalità
passo-passo
14 On Timer
Luce di Cortesia
15 On-Off
Luce di Cortesia
Page 28

IT
12 – Italiano
SMALTIMENTO DEL PRODOTTO
Questo prodotto è parte integrante dell’automazione, e dunque, deve
essere smaltito insieme con essa.
Come per le operazioni d’installazione, anche al termine della vita di questo
prodotto, le operazioni di smantellamento devono essere eseguite da personale qualificato.
Questo prodotto è costituito da vari tipi di materiali: alcuni possono essere riciclati, altri devono essere smaltiti. Informatevi sui sistemi di riciclaggio o smaltimento previsti dai regolamenti vigenti sul vostro territorio, per questa categoria
di prodotto.
Attenzione! – Alcune parti del prodotto possono contenere sostanze inquinanti o pericolose che, se disperse nell’ambiente, potrebbero provocare effetti dannosi sull’ambiente stesso e sulla salute umana.
Come indicato dal simbolo a lato, è vietato gettare questo prodotto nei rifiuti domestici. Eseguire quindi la “raccolta separata”
per lo smaltimento, secondo i metodi previsti dai regolamenti
vigenti sul vostro territorio, oppure riconsegnare il prodotto al
venditore nel momento dell’acquisto di un nuovo prodotto equivalente.
Attenzione! – i regolamenti vigenti a livello locale possono prevedere pesanti
sanzioni in caso di smaltimento abusivo di questo prodotto.
Smaltimento della batteria tampone (se presente)
Attenzione! – La batteria scarica contiene sostanze inquinanti e quindi, non
deve essere buttata nei rifiuti comuni.
Occorre smaltirla utilizzando i metodi di raccolta ‘separata’, previsti dalle normative vigenti nel vostro territorio.
Durabilità del prodotto
La durabilità è la vita economica media del prodotto. Il valore della durabilità è
fortemente influenzato dall’indice di gravosità delle manovre eseguite dall’automatismo: cioè la somma di tutti i fattori che contribuiscono all’usura del prodotto (vedere Tabella 13).
Per stabilire la durabilità probabile del vostro automatismo procedere nel modo
seguente:
01. Calcolare l’indice di gravosità
sommando tra loro i valori in percentuale del-
le voci presenti nella Tabella 13;
02. Nel Grafico 3 dal valore appena trovato, tracciare una linea verticale fino ad
incrociare la curva; da questo punto tracciare una linea orizzontale fino ad
incrociare la linea dei “cicli di manovre”. Il valore determinato è la durabilità sti
-
mata del vostro prodotto.
La stima di durabilità viene effettuata sulla base dei calcoli progettuali e dei risultati di prove effettuate su prototipi. Infatti, essendo una stima, non rappresenta
alcuna garanzia sull’effettiva durata del prodotto.
Esempio del calcolo di durabilità di un motoriduttore HYKE con braccio con lunghezza INTERA (fare riferimento alla Tabella 13 e al Grafico 3):
- lunghezza dell’anta = 2,8 m (indice di gravosità: 20%); - peso dell’anta: 230 Kg (indice di
gravosità: 20%); - anta cieca (indice di gravosità: 15%); Indice di gravosità totale
= 55%;
Durabilità stimata
= 220.000 cicli di manovre
GRAFICO 3
cicli di manovre
indice di gravosità %
TABELLA 13
Indice di gravosità
braccio lunghezza INTERA braccio lunghezza RIDOTTA
< 1,8
1,8 - 2,5 m
2,5 - 3 m
3 - 3,5 m
< 200 kg
200 + 250 kg
> 250 kg
Lunghezza dell’anta
Peso dell’anta
Temperatura ambientale superiore a 40°C o inferiore a 0°C o umidità
superiore all’80%
Anta cieca
Installazione in zona ventosa
Nota – I dati si riferiscono ad un portone sezionale bilanciato ed in perfette condizioni di manutenzione
0%
15%
20%
30%
0%
20%
30%
20%
15%
15%
15%
20%
30%
30%
40%
20%
20%
20%
MANUTENZIONE DEL PRODOTTO
9
Per mantenere costante il livello di sicurezza e per garantire la massima durata
dell’intera automazione è necessaria una manutenzione regolare.
La manutenzione deve essere effettuata nel pieno rispetto delle prescrizioni sulla sicurezza del presente manuale e secondo quanto previsto dalle leggi e normative vigenti.
Sottoporre di frequente ad esame il prodotto, per verificare se ci sono sbilanciamenti delle ante o segni di usura o danni ai cavi. Non utilizzare il prodotto nel
caso in cui siano necessarie delle riparazioni o delle regolazioni.
Importante – Durante le fasi di manutenzione oppure di pulizia del prodotto, scollegare la centrale dall’alimentazione elettrica e dalle batterie se
previste.
Per gli altri dispositivi presenti nell’impianto, seguire quanto previsto nei rispettivi piani manutenzione.
Per i motoriduttori HK7024, HK7224 è necessaria una manutenzione programmata al massimo entro 6 mesi o 20.000 manovre dalla precedente manutenzione.
Per eseguire la manutenzione procedere nel modo seguente:
01. Scollegare qualsiasi sorgente di alimentazione elettrica, comprese le eventuali batterie tampone;
02. Verificare lo stato di deterioramento di staffe e tasselli di fissaggio con particolare attenzione a fenomeni di erosione o di ossidazione delle parti; sostituire le parti che non forniscono sufficienti garanzie;
03. Effettuare una prova di sblocco per verificarne il corretto funzionamento
vedi paragrafo 3.6.
04. Ricollegare le sorgenti di alimentazione elettrica ed eseguire tutte le prove e
le verifiche previste nel capitolo 5 - Collaudo.
500.000
400.000
300.000
220.000
200.000
100.000
0 102030405060708090100
Page 29

IT
Italiano – 13
CARATTERISTICHE TECNICHE DEL PRODOTTO
HK7224K
Motoriduttore elettromeccanico per automatismi di cancelli e
portoni automatici con motore in corrente continua, riduttore
epicicloidale, sblocco meccanico.
HK7024K
Motoriduttore elettromeccanico per automatismi di cancelli e
portoni automatici con motore in corrente continua, riduttore
epicicloidale, sblocco meccanico. Centrale di comando in corporata e ricevitore radio OXI
Tipologia
Coppia massima 500 Nm
Coppia nominale 120 Nm
Velocità a vuoto 2.25 RPM
Velocità alla coppia nominale 2.00 RPM
Frequenza massima dei cicli 40 cicli/ora
Tempo massimo ciclo continuo 7 minuti circa
Limiti d’impiego il prodotto può essere utilizzato su cancelli con anta di peso fino a 330 kg per lunghezze
fino a 1,8 m; o fino a 200 kg per lunghezze fino a 3,5 m (vedere grafico 1)
Durabilità stimata tra 150.000 cicli e 500.000 cicli, secondo le condizioni riportate nella Tabella 13 e Grafico 3
Montaggio In verticale, con una piastra di fissaggio dedicata
Temperatura di funzionamento da -20°C a +50°C (alle basse temperature l’efficienza del motoriduttore diminuisce)
Utilizzo in atmosfera
particolarmente acida o salina NO
o potenzialmente esplosiva
Grado di protezione IP 54 (con contenitore integro)
Dimensioni (mm) 210 x 290 x 320 h
Peso (kg) 10.5 Kg; 9.5 Kg
Note:
(1) - Funzione attivabile con programmatore Oview.
[*] - Le uscite Lampeggiante, Elettroserratura Spia Cancello Aperto possono essere programmate con altre funzioni (vedere “TABELLA
3 - Funzioni 1° livello”; oppure tramite program-
matore Oview, vedere capitolo
8.3). Le caratteristiche elettriche delle uscite si adeguano in base al tipo di funzione scelta: • funzione lampeggiante: lampada 12 Vdc, 21 W max; • fun-
zione elettroserratura: 12 Vac 15 VA max; • altre uscite (tutti i tipi): 1 lampada o relè 24Vdc (-30 e +50%), 4 W max.
Alimentazione 230 Vac (120 Vac per versione HK7024K/V1) 24 Vdc (±10%)
±10%; 50/60 Hz
Alimentazione d’emergenza predisposizione per batterie tampone PS124
Alimentazione a pannelli solari predisposizione per Kit SYKCE
Potenza massima assorbita 300 W 140 W
Corrente massima assorbita 1,5 A (3 A per versione HK7024K/V1) 6 A per un tempo massimo di 2 s
Potenza assorbita in
“Standby-Tutto (1)” con
alimentazione da PS124 o kit inferiore a 100 mW
SYKCE (compreso il
ricevitore OXI)
Uscita lampeggiante [*] un lampeggiante LUCYB (lampada 12 V, 21 W)
Uscita elettroserratura [*] un’elettroserratura da 12 Vac max 15 VA
Uscita spia cancello aperto [*] una lampada 24 V massimo 4 W
(la tensione d’uscita può variare tra -30 e +50%,
l’uscita può comandare anche piccoli relè)
Uscita BLUEBUS un’uscita con carico massimo di 15 unità Bluebus
(massimo 6 coppie di fotocellule MOFB o MOFOB
più 2 coppie di fotocellule MOFB o MOFOB
indirizzate come dispositivi di apertura più massimo 4
dispositivi di comando MOMB o MOTB)
Ingresso STOP per contatti normalmente chiusi, normalmente
aperti oppure a resistenza costante 8,2 kΩ; la selezione
del tipo di contatto avviene in auto-apprendimento
ed una variazione rispetto allo stato memorizzato
provoca il comando “STOP”
Ingresso PP per contatti normalmente aperti (la chiusura del
contatto provoca il comando Passo Passo)
Innesto radio connettore SM per ricevitori della famiglia SMXI, OXI e OXIFM
Ingresso ANTENNA Radio 50 Ω per cavo tipo RG58 o simili
Funzioni programmabili 8 funzioni di tipo ON-OFF (Tabella 3) e 8 funzioni
regolabili (Tabella 5)
Funzioni in auto • Auto apprendimento dei dispositivi collegati all’uscita
apprendimento BlueBus. • Auto apprendimento del tipo di
dispositivo collegato al morsetto “STOP” (contatto NA,
NC o resistenza 8,2 kΩ). • Auto apprendimento della corsa
delle ante e calcolo in automatico dei punti di
rallentamento ed apertura parziale. • Auto apprendimento
del funzionamento con uno o due motori
AVVERTENZE: • Tutte le caratteristiche tecniche riportate, sono riferite ad una temperatura ambientale di 20°C (± 5°C). • Nice S.p.a. si riserva il diritto di apportare modifiche al prodotto in qualsiasi momento lo riterrà necessario, mantenendone comunque la stessa funzionalità e destinazione d’uso.
Page 30

IT
14 – Italiano
DICHIARAZIONE CE DI CONFORMITÀ
e dichiarazione di incorporazione di “quasi macchina”
Dichiarazione in accordo alle Direttive: 2006/95/CE (LVD); 2004/108/CE (EMC); 2006/42/CE (MD) allegato II, parte B
Nota - Il contenuto di questa dichiarazione corrisponde a quanto dichiarato nell’ultima revisione disponibile, prima della stampa di questo manuale, del documento ufficiale depositato presso la sede di Nice Spa. Il presente testo è stato riadattato per motivi editoriali. Copia della dichiarazione originale può essere richiesta a Nice S.p.a. (TV) I.
Numero dichiarazione: 334/HYKE Revisione: 0 Lingua: IT
Nome produttore: NICE s.p.a.
Indirizzo: Via Pezza Alta 13, Z.I. Rustignè, 31046 Oderzo (TV) Italia
Persona autorizzata a
costituire la
documentazione tecnica: Sig. Oscar Marchetto
Tipo di prodotto: Motoriduttore elettromeccanico “HYKE” con centrale incorporata
Modello / Tipo: HK7024K, HK7224K
Accessori: SMXI, OXI, PS124, Oview
Il sottoscritto Luigi Paro in qualità di Amministratore Delegato, dichiara sotto la propria responsabilità che il prodotto sopra indicato risulta conforme alle
disposizioni imposte dalle seguenti direttive:
• Direttiva 2006/95/CE DEL PARLAMENTO EUROPEO E DEL CONSIGLIO del 12 dicembre 2006 concernente il ravvicinamento delle legislazioni degli Stati membri relative al materiale elettrico destinato ad essere adoperato entro taluni limiti di tensione, secondo le seguenti norme armonizzate:
EN 60335-1:2002 + A1:2004 + A11:2004 + A12:2006 + A2:2006 + A13:2008; EN 60335-2-103:2003
• DIRETTIVA 2004/108/CE DEL PARLAMENTO EUROPEO E DEL CONSIGLIO del 15 dicembre 2004 concernente il ravvicinamento delle legislazioni degli
Stati membri relative alla compatibilità elettromagnetica e che abroga la direttiva 89/336/CEE, secondo le seguenti norme armonizzate:
EN 61000-6-2:2005, EN 61000-6-3:2007
Inoltre il prodotto risulta essere conforme alla seguente direttiva secondo i requisiti previsti per le “quasi macchine”:
• Direttiva 2006/42/CE DEL PARLAMENTO EUROPEO E DEL CONSIGLIO del 17 maggio 2006 relativa alle macchine e che modifica la direttiva 95/16/CE
(rifusione).
• Si dichiara che la documentazione tecnica pertinente è stata compilata in conformità all’allegato VII B della direttiva 2006/42/CE e che sono stati
rispettati i seguenti requisiti essenziali: 1.1.1- 1.1.2- 1.1.3- 1.1.5- 1.2.1-1.2.6- 1.3.1- 1.3.2- 1.3.3- 1.3.4- 1.3.7-1.3.9- 1.5.1-1.5.2- 1.5.4- 1.5.5- 1.5.6-
1.5.7- 1.5.8- 1.5.10- 1.5.11- 1.5.13-1.6.1- 1.6.2-1.6.4- 1.7.2- 1.7.3- 1.7.4- 1.7.4.1- 1.7.4.2- 1.7.4.3
• Il produttore si impegna a trasmettere alle autorità nazionali, in risposta ad una motivata richiesta, le informazioni pertinenti sulla “quasi macchina”,
mantenendo impregiudicati i propri diritti di proprietà intellettuale.
• Qualora la “quasi macchina” sia messa in servizio in un paese europeo con lingua ufficiale diversa da quella usata nella presente dichiarazione, l’importatore ha l’obbligo di associare alla presente dichiarazione la relativa traduzione.
• Si avverte che la “quasi macchina” non dovrà essere messa in servizio finché la macchina finale in cui sarà incorporata non sarà a sua volta dichiarata conforme, se del caso, alle disposizioni della direttiva 2006/42/CE.
Inoltre il prodotto risulta conforme, limitatamente alle parti applicabili, alle seguenti norme:
EN 13241-1:2003, EN 12445:2002, EN 12453:2002, EN 12978:2003
Oderzo, 15 gennaio 2010 Luigi Paro (Amministratore Delegato)
Page 31

FR
Français – 1
FRANÇAIS
Instructions originales
Sommaire
1 - RECOMMANDATIONS ET PRÉCAUTIONS GÉNÉRALES ..................... 1
1.1 - Consignes de sécurité ........................................................................... 1
1.2 - Recommandations pour l’installation ..................................................... 1
1.3 - Recommandations pour l’utilisation ....................................................... 1
2 - DESCRIPTION DU PRODUIT ET TYPE D’UTILISATION ....................... 1
3 - INSTALLATION........................................................................................ 2
3.1 - Contrôles avant l’installation .................................................................. 2
3.2 - Limites d’application.............................................................................. 2
3.3 - Travaux de préparation à l’installation .................................................... 2
3.4 - Installation de l’opérateur mod. HK7024 - HK7224................................ 2
3.5 - Réglage des fins de course mécaniques................................................ 4
3.6 - Bloquer et débrayer manuellement l’opérateur....................................... 4
4 - CONNEXIONS ÉLECTRIQUES............................................................... 4
4.1 – Connexion de l’opérateur avec logique de commande mod. HK7024... 4
4.2 - Connexion de l’opérateur sans logique de commande mod. HK7224 ... 4
4.3 - Connexion d’autres dispositifs............................................................... 5
4.4 - Adressage des dispositifs connectés..................................................... 5
4.5 - Première mise en service et vérification des connexions ........................ 5
4.6 - Reconnaissance des dispositifs connectés............................................ 5
4.7 - Reconnaissance des positions des fins de course mécaniques ............. 5
4.8 - Vérification du mouvement des vantaux du portail ................................. 6
5 - ESSAI ET MISE EN SERVICE................................................................. 6
5.1 - Essai...................................................................................................... 6
5.2 - Mise en service...................................................................................... 6
6 - PROGRAMMATION DE LA LOGIQUE DE COMMANDE ....................... 7
6.1 - Programmation du premier niveau (ON-OFF) ......................................... 7
6.2 - Programmation deuxième niveau (paramètres réglables)........................ 8
6.3 - Fonctions spéciales ............................................................................... 9
6.4 - Effacement de la mémoire ..................................................................... 9
7 - QUE FAIRE SI… (guide pour la résolution des problèmes).................. 9
8 - APPROFONDISSEMENTS ................................................................... 11
8.1 - Connexion d’un récepteur radio........................................................... 11
8.2 - Connexion et installation de la batterie tampon mod. PS124 ............... 11
8.3 - Connexion du programmateur Oview .................................................. 11
8.4 - Connexion du système à énergie solaire Solemyo................................ 11
8.5 - Connexion du système de débrayage extérieur Kio ............................. 11
9 - MAINTENANCE DU PRODUIT ............................................................. 12
MISE AU REBUT DU PRODUIT................................................................. 12
Durabilité du produit.................................................................................. 12
CARACTÉRISTIQUES TECHNIQUES DU PRODUIT................................. 13
DÉCLARATION CE DE CONFORMITÉ ...................................................... 14
APPENDICE................................................................................................... I
Instructions et recommandations destinées à l’utilisateur .............................. IV
Images.......................................................................................................... IX
1.1 - Recommandations pour la sécurité
• ATTENTION ! – Le présent manuel contient d’importantes instructions
et recommandations en matière de sécurité. Une mauvaise installation
peut causer de graves blessures. Avant de commencer le travail, lire attentivement toutes les parties du manuel. En cas de doutes, interrompre l’installation et demander des précisions au service après-vente Nice.
• ATTENTION ! – Instructions importantes : conserver ce manuel pour toute
intervention de maintenance et de mise en rebut du produit.
• ATTENTION ! – Conformément à la plus récente législation europé en ne, la réalisation d’un vantail ou d’un portail automatique doit respecter
les normes prévues par la Directive 2006/42/CE (ex 98/37/CE) (Directive
Machines) et en particulier, les normes EN 12445; EN 12453; EN 12635
et EN 13241-1 qui permettent de déclarer la conformité de l’automatisation. Pour cette raison, toutes les opérations d’installation, de branchement, d’essai et de maintenance du produit doivent être confiées
exclusivement à un technicien qualifié et compétent !
1.2 - Recommandations pour l’installation
• Avant de commencer l’installation, contrôler si le présent produit est adapté au
type d'utilisation souhaitée (voir les “Limites d’emploi” paragraphe 3.2 et les
“Caractéristiques techniques du produit”). En cas contraire, NE PAS procéder à
l'installation.
• Le contenu du présent manuel se réfère à une installation type, comme celle
décrite fig. 3.
• Toutes les opérations d'installation et de maintenance doivent être
effectuées avec l'automatisation débranchée. Si le dispositif de déconnexion de l’alimentation n’est pas visible du lieu où est positionné l’automatisme, avant de commencer le travail accrocher sur le dispositif de déconnexion un panneau avec écrit “ATTENTION ! MAINTENANCE EN COURS”.
• La centrale doit être branchée à une ligne d’alimentation électrique équipée
de mise à la terre de sécurité.
• Durant l’installation manipuler avec soin le produit afin d’éviter tout écrasement, choc, chute ou contact avec des liquides de toute nature. Ne pas mettre le produit près de sources de chaleur, ni l’exposer à des flammes libres.
Toutes ces actions peuvent l'endommager et créer des dysfonctionnements
ou des situations de danger. Au cas où, interrompre immédiatement l'installation et s'adresser au service après-vente Nice.
• Aucune modification du produit ne peut être effectuée. Opérations non
admises car celles-ci entraîneraient des dysfonctionnements. Le fabricant
décline toute responsabilité pour dommages dérivant de modifications arbitraires du produit.
• Si le portail à automatiser est équipé d’un vantail pour piétons, préparer l'installation avec un système de contrôle qui désactive le fonctionnement du
moteur lorsque le vantail pour piétons est ouvert.
• Le matériau de l’emballage du produit doit être éliminé conformément aux
normes locales.
1.3 - Recommandations pour l’utilisation
• Le produit n’est pas destiné à être utilisé par des personnes (enfants compris)
dont les capacités physiques, sensorielles ou mentales sont réduites ou man quant d'expérience ou de connaissance, à moins que celles-ci n’aient pu
bénéficier, à travers l'intermédiation d'une personne responsable de leur sé curité, d’une surveillance ou d'instructions concernant l'utilisation du produit.
• Les enfants se trouvant à proximité de l’automatisation doivent être surveillés ;
contrôler qu'ils ne jouent pas avec cette dernière.
• Ne pas laisser les enfants jouer avec les dispositifs de commande fixes. Garder
les dispositifs de commande portables (à distance) hors de la portée des
enfants.
RECOMMANDATIONS ET PRÉCAUTIONS
GÉNÉRALES
1
Les dispositifs qui composent le présent produit sont destinés à l’automatisation d’un portail à un ou deux vantaux. ATTENTION ! – Toute autre utilisation
différente de celle décrite et dans des conditions environnementales différentes de celles reportées dans ce manuel doit être considéré comme
impropre et interdite !
La partie principale de l’automatisme est composée d’un ou de deux opérateurs électromécaniques (suivant le nombre de vantaux à automatiser), équipés
chacun d’un moteur en courant continu et d’un réducteur épicycloïdal. Un des
opérateurs (mod. HK7024) est équipé d’une centrale de commande qui en
gère le fonctionnement. La centrale est formée d’une carte avec un récepteur
radio incorporé, pour la réception des commandes envoyées par l’émetteur.
La centrale est préparée pour être branchée à différents dispositifs appartenant
au Système Opera, au système Bluebus et au système d’alimentation à énergie
solaire Solemyo, voir chapitre 8 - Approfondissements.
Si alimentée depuis réseau, elle peut accueillir une batterie tampon (mod.
PS124, accessoire en option) qui en cas de coupure électrique (black-out électrique) permet à l’automatisme d’effectuer, dans les heures qui suivent, quel ques manœuvres.
En cas de coupure électrique, il est possible de déplacer les vantaux du portail
en débloquant l’opérateur avec la clé prévue à cet effet ; pour effectuer la
DESCRIPTION DU PRODUIT ET
UTILISATION PRÉVUE
2
Page 32

manœuvre manuelle voir chapitre 3.6.
Les autres accessoires disponibles sont les récepteurs prévus avec élément
“SM” (SMXI, OXI, etc.), voir chapitre 8 - Approfondissements.
INSTALLATION
3
mm (maximum), il faut régler le bras de l’opérateur avec longueur RÉDUITE.
Dans ces conditions, la mesure d’ouverture maximum du vantail peut arriver
jusqu’à 90°.
- Si la mesure « E » est une valeur égale ou supérieure à 650 mm, il faut
régler le bras de l’opérateur avec longueur TOTALE. Dans ces conditions, la
mesure d’ouverture maximum du vantail peut arriver jusqu’à 110°.
GRAPHIQUE 1
3.1 - Contrôles à effectuer avant l’installation
Avant de procéder à l’installation, il est nécessaire de vérifier l’intégrité des
FR
composants du produit, l’adaptabilité du modèle choisi et la conformité de l’environnement destiné à l’installation :
• Contrôler que tout le matériel à utiliser soit intact et adapté à l’utilisation prévue.
• Contrôler que sur l’installation soient présents les arrêts mécaniques au sol
(non fournis), aussi bien en fermeture qu’en ouverture.
• Contrôler que la structure mécanique du portail soit adaptée pour l’automatisation et conforme aux normes en vigueur sur le territoire (éventuellement se
référer aux données reportées sur l’étiquette du portail). Le présent produit
ne peut automatiser un portail que ci celui-ci est efficace et sûr ; en outre, il
ne peut pas résoudre les défauts causés par une installation erronée du portail ou par une mauvaise maintenance.
• Contrôler que les conditions de fonctionnement des dispositifs soient compatibles avec les limites d’emploi déclarées (voir paragraphe 3.2).
• Bouger manuellement les vantaux du portail dans les deux sens et s’assurer
que le mouvement se produise avec un frottement constant sur chaque point
de la course (il ne doit pas y avoir de moments demandant un effort excessif
ou moindre).
• Amener manuellement les vantaux du portail dans une quelconque position ;
puis les laisser à l’arrêt et s’assurer qu’ils ne bougent pas.
• Contrôler que la zone de fixation de l’opérateur soit compatible avec l’encombrement de ce dernier (fig. 1).
• S’assurer qu’il y ait l’espace suffisant pour la rotation complète du bras sur le
lieu d’installation de l’opérateur.
• S’assurer qu’il y ait l’espace suffisant pour effectuer la manœuvre manuelle
de déblocage de l’opérateur près de celui-ci.
• S’assurer que les surfaces choisies pour installer les différents dispositifs
soient solides et puissent garantir une fixation stable.
• S’assurer que chaque dispositif à installer soit placé dans une position protégée et à l’abri de chocs accidentels.
• Contrôler que tous les câbles électriques à utiliser correspondent au type
énuméré dans le Tableau 1.
3.2 - Limites d’application
Avant d’effectuer l’installation de l’opérateur, vérifier que ses données sont comprises dans les limites d’application indiquées ci-après et dans les limites des
valeurs indiquées dans le chapitre « Caractéristiques techniques du produit » :
Avec le bras du moteur de longueur TOTALE
- largeur maximum du vantail : 3,50 m (= poids maximum du vantail : 200 kg)
Avec le bras du moteur de longueur RÉDUITE
- largeur maximum du vantail : 3,00 m (= poids maximum du vantail : 180 kg)
• Vérification à effectuer : reporter sur le Graphique 1 ci-contre le poids et la
largeur du vantail ; tracer deux lignes à partir de ces points et vérifier que l’intersection se trouve dans l’une des deux zones grises
tion ! - Si les lignes se croisent dans la zone blanche, il n’est pas possible d’utiliser ce produit pour automatiser le portail.
• Pour permettre l’installation de l’opérateur, la largeur minimum du pilier doit
être de 210 mm.
• La patte de fixation du bras doit se trouver dans une zone robuste du vantail
(par exemple, le cadre), pour garantir une fixation solide et sûre ;
• Vérifier la mesure
- Si la mesure
« E » (fig. 2) :
« E » est une valeur comprise entre 300 mm (minimum) et 650
:
:
du graphique. Atten-
350
300
250
Pour bras de
longueur entière
200
POIDS (kg.)
150
100
1,8 2 2,5 3 3,5
Pour bras de
longueur réduite
LARGEUR (m.)
3.3 - Travaux de préparation à l’installation
La fig. 3 montre un exemple d’installation d’automatisation réalisée avec les com-
posants Nice (certains composant peuvent ne pas être compris dans le kit) :
a - Opérateur avec logique de commande mod. HK7024
b - Opérateur sans logique de commande mod. HK7224
c - Indicateur clignotant
d - Paire de photocellules mod. MOFB
e - Clavier numérique (mod. MOTB) - Lecteur à transpondeur (mod. MOMB) -
Sélecteur à clé (mod. MOSE)
f - Paire de colonnes pour photocellules
g - Butée mécanique en fermeture
h - Serrure électrique
Ces composants sont positionnés selon un schéma typique et commun. En se
référant à la fig. 3, établir la position approximative dans laquelle chaque composant prévu dans l’installation sera installé. Important - Avant de procéder à
l’installation, préparer les câbles électriques nécessaires en se référant à la fig.
4 et au « Tableau 1 - Caractéristiques techniques des câbles électriques ».
Attention – Durant la pose des gaines pour le passage des câbles électriques,
tenir compte du fait qu’à cause d’éventuels dépôts d’eau dans les puits de
dérivation, les gaines de raccordement peuvent créer des phénomènes de
condensation à l’intérieur de la logique qui risquent d’endommager les circuits
électroniques.
3.4 - Installation de l’opérateur mod. HK7024 - HK7224
AVERTISSEMENTS
• Une installation incorrecte peut causer de graves blessures aux personnes qui effectuent le travail et à celles qui utiliseront le produit.
• Avant de commencer l’assemblage de l’automatisme, faire les con trôles préliminaires décrits aux paragraphes 3.1 et 3.2.
Avant de commencer l’installation, il faut déterminer la longueur du bras de
l’opérateur, voir paragraphe 3.4.1.
3.4.1 - Déterminer la longueur du bras de l’opérateur
01. Assembler les composants qui constituent le bras du moteur, comme indi-
qué fig.5 ;
TABLEAU 1 - Caractéristiques techniques des câbles électriques (fig. 4)
Connexion Type de câble Longueur maximum admise
A: Câble ALIMENTATION LOGIQUE 1 câble 3 x 1,5 mm
B: Câble SERRURE ÉLECTRIQUE 1 câble 2 x 1 mm
C: Câble DISPOSITIFS BLUEBUS 1 câble 2 x 0,5 mm
2
2
2
30 m (note 1)
6 m
20 m (note 2)
D: Câble SÉLECTEUR À CLÉ 2 câbles 2 x 0,5 mm2 (note 3) 50 m
E: Câble ALIMENTATION OPÉRATEUR 1 câble 3 x 1,5 mm
2
(note 4) 10 m
Câble CONNEXION ENCODEUR 1 câble 2 x 1 mm2 (note 4) 10 m
F: Câble CLIGNOTANT avec antenne 1 câble 2 x 0,5 mm
2
20 m
1 câble blindé type RG58 20 m (longueur conseillée : moins de 5m)
Note 1 – Si le câble d’alimentation fait plus de 30 m de long, il faut utiliser un câble d’une section supérieure (par exemple 3 x 2,5 mm²) et il faut réaliser une mise à la terre de sécurité à proximité de l’automatisme.
Note 2 – Si le câble Bluebus fait plus de 20 m de long, jusqu’à un maximum de 40 mm, il faut utiliser un câble d’une section supérieure (2 x 1 mm²).
Note 3 – Ces deux câbles peuvent être remplacés par un unique câble 4 x 0,25 mm².
Note 4 – Ces deux câbles peuvent être remplacés par un unique câble 5 x 1,5 mm².
ATTENTION ! – Les câbles utilisés doivent être adaptés au type d’environnement où est effectuée l’installation.
2 – Français
Page 33

FR
Français – 3
02. Établir la position de l’opérateur dans le sens VERTICAL :
tracer sur le pilier une ligne horizontale à la même hauteur que celle où se
trouvera la patte de fixation du bras sur le vantail, après l’installation (fig. 6).
03. Établir la position de l’opérateur dans le sens HORIZONTAL (position A) :
ATTENTION ! – si un obstacle fixe (mur, arbre, etc.) se trouve à proxi-
mité de la zone d’installation, il faut mesurer la distance E
(fig. 2) et
procéder comme suit :
• Si la distance E est une valeur égale ou supérieure à 650 mm, voir
paragraphe 3.4.2
• Si la distance E est une valeur comprise entre 300 mm (minimum)
et 650 mm (maximum), voir paragraphe 3.4.3.
3.4.2 - Installation de l’opérateur avec BRAS DE LONGUEUR TOTALE
01. a) Mesurer sur le pilier la distance B
(fig. 7) = distance entre le pivot de
rotation du vantail et la surface du pilier où sera fixée la patte arrière de
l’opérateur.
b) Porter le vantail jusqu’à l’ouverture désirée (maximum 110°) : valeur de
l’angle.
c) Marquer sur le Graphique 2 la distance B
que l’on vient de trouver et
tracer à partir de ce point une ligne horizontale, jusqu’à l’intersection avec
la zone qui comprend la valeur de l’angle mesuré au point b.
d) Aux points d’intersection entre la ligne horizontale et la zone
, tracer des
lignes verticales déterminant les valeurs utilisables pour la distance A (fig.
8). Choisir ensuite parmi celle-ci une valeur de A.
e) Reporter sur le pilier la valeur trouvée de la distance A
et tracer à son
niveau une ligne verticale.
02. Fixer la patte sur le pilier (fig. 9)
:
f) Phase 1-2 : appuyer la patte sur le pilier en faisant correspondre son cen-
tre vertical avec la ligne verticale tracée au préalable (distance A) et son bras
avec la ligne horizontale tracée durant la procédure 3.4.1. Dans cette phase,
contrôler que l’opérateur est parfaitement de niveau : un opérateur mal
nivelé peut provoquer des problèmes de fonctionnement à l’automatisation.
g) Phase 3-4 : marquer les points de fixation, percer la surface du pilier et
introduire les chevilles ; fixer ensuite la patte en utilisant des vis et des rondelles appropriées.
03. Fixer le bras de l’opérateur sur le vantail
:
h) Porter le vantail du portail dans la position de fermeture maximum ;
i) Phase 5 : fixer l’opérateur à la patte avec les deux vis et les écrous fournis ;
l) Débrayer l’opérateur ; voir par. 3.6;
m) Phase 6 : pousser avec force le bras de l’opérateur jusqu’à son exten
-
sion maximum
. Attention ! - Contrôler que le bras se bloque dans
son fin de course ;
n) approcher le bras du vantail, en appuyant sur ce dernier la patte de fixation.
o) Phase 7 : contrôler que le bras de l’opérateur est de niveau et marquer
avec un crayon le centre
du profil des fentes de la patte, pour permettre dans
le futur un réglage précis de la fermeture du vantail (voir le paragraphe 4.8).
p) En tenant d’une main la patte en contact avec le vantail, essayer d’effectuer une ouverture et une fermeture complète.
q) Phase 8 : percer le vantail aux endroits marqués et détacher la patte du
bras puis la fixer au vantail avec des vis adéquates.
r) Phase 9 : fixer le bras à la patte en insérant le pivot et la bague d’arrêt
benzing. Important - Contrôler que la patte et le bras sont parfaitement de
niveau. Desserrer éventuellement les vis de la patte et mettre de niveau.
s) positionner les butées mécaniques de fin de course ; voir par. 3.5 ;
e) Phase 10 : mettre enfin manuellement le vantail à environ mi-course et
bloquer l’opérateur avec la clé prévue à cet effet (voir par. 3.6). Déplacer
0
150 175 200 225 250 275 300 325 350 375 400 425 450 475
50
B
A
100
150
200
250
300
350
400
450
90°-95°
95°-100°
100°-105°
105°-110°
90°-95°
95°-105°
GRAPHIQUE 2
ensuite manuellement le vantail de quelques centimètres, dans le sens
d’ouverture.
04. Si le portail à automatiser est à deux vantaux, pour installer l’autre opérateur répéter toutes les opérations décrites dans le par. 3.4.
3.4.3 - Installation de l’opérateur avec BRAS DE LONGUEUR RÉDUITE
Attention ! – Dans cette configuration, l’ouverture maximum admise
pour le vantail est de 90°.
01. a) Mesurer sur le pilier la distance B
(fig. 7) = distance entre le pivot de
rotation du vantail et la surface du pilier où sera fixée la patte arrière de
l’opérateur.
b) Marquer sur le Graphique 2 la distance B
trouvée et tracer à partir de
ce point une ligne horizontale jusqu’à l’intersection de la zone
avec plage
90°-95°.
c) Aux points d’intersection entre la ligne horizontale et la zone
, tracer des
lignes verticales déterminant les valeurs utilisables pour la distance A
(graphique 2). Choisir ensuite parmi celle-ci une valeur de A.
d) Reporter sur le pilier la valeur trouvée de la distance A
et tracer à son
niveau une ligne verticale.
02. Fixer la patte sur le pilier (fig. 10)
:
e) Phase 1-2 : appuyer la patte sur le pilier en faisant correspondre son cen-
tre vertical avec la ligne verticale tracée au préalable (distance A) et son bras
avec la ligne horizontale tracée durant la procédure 3.4.1. Dans cette phase,
contrôler que l’opérateur est parfaitement de niveau : un opérateur mal
nivelé peut provoquer des problèmes de fonctionnement à l’automatisation.
f) Phase 3-4 : marquer les points de fixation, percer la surface du pilier et
introduire les chevilles ; fixer ensuite la patte en utilisant des vis et des rondelles appropriées.
g) Porter le vantail du portail dans la position de fermeture maximum ;
h) Phase 5 : fixer l’opérateur à la patte avec les deux vis et écrous fournis ;
i) Débrayer l’opérateur ; voir par. 3.6.
03. Vérifier la longueur du bras avec perforations par rapport au contexte
:
l) Phase 6 : approcher le bras du vantail, en appuyant sur ce dernier la pat -
te de fixation : attention !
- pousser manuellement le bras courbe con -
tre le vantail jusqu’au blocage du bras (ouverture maximum)
.
m) Phase 7 : contrôler que le bras de l’opérateur est de niveau et marquer
avec un crayon le centre
du profil des fentes de la patte, pour permettre dans
le futur un réglage précis de la fermeture du vantail (voir le paragraphe 4.8).
n) Fixer provisoirement la patte sur le vantail et porter le vantail dans la position d’ouverture maximum.
04. Fixer le bras de l’opérateur sur le vantail
:
o) Phase 8 : percer le vantail aux points marqués précédemment.
p) Phase 9-10 : détacher la patte du bras et la fixer sur le vantail du portail
avec des vis appropriées.
q) Phase 11 : fixer le bras à la patte, en insérant le pivot et la bague d’arrêt
benzing. Important - Contrôler que la patte et le bras sont parfaitement de
niveau. Desserrer éventuellement les vis de la patte et mettre de niveau.
r) Positionner les butées mécaniques de fin de course ; voir par. 3.5.
s) Phase 12 : mettre enfin manuellement le vantail à environ mi-course et
bloquer l’opérateur avec la clé prévue à cet effet (voir par. 3.6). Déplacer
ensuite manuellement le vantail de quelques centimètres, dans le sens
d’ouverture.
05. Si le portail à automatiser est à deux vantaux, pour installer l’autre opérateur répéter toutes les opérations décrites dans le par. 3.4.
Page 34

FR
4 – Français
3.5 - Réglage des fins de course mécaniques
01. Porter manuellement les vantaux du portail dans la position d’ouverture
maximum ;
02. Tourner le disque en plastique, placé sur la partie inférieure de l’opérateur,
en plaçant la fente sous le bras dans la position illustrée fig. 11-1;
03. Introduire le fin de course dans la première position possible: essayer de
l’insérer comme indiqué fig. 11-2 (sens d’ouverture);
04. Tourner le disque de manière à ne pas faire tomber le fin de course, en por-
tant la fente dans la position illustrée fig. 11-3 ; pour un réglage plus précis,
agir sur la vis de réglage (fig. 11-4) ;
05. Si dans l’installation il n’y a pas de butée au sol au point de fermeture, il faut
répéter la procédure à partir du point 01 également pour le réglage du fin
de course en fermeture ;
06. Pour finir, visser à fond l’écrou de fixation du disque (fig. 11-5) pour s’assu-
rer qu’il ne peut pas tourner accidentellement.
3.6 - Débrayer et bloquer manuellement l’opérateur
L’opérateur est muni d’un système de débrayage mécanique qui permet d’ouvrir et de fermer manuellement le portail.
Ces opérations manuelles doivent être effectuées en cas de manque de courant
électrique ou d’anomalies de fonctionnement ou dans les phases d’installation.
Débrayer (fig. 12-A) :
01. Introduire la clé dans la serrure prévue à cet usage ;
02. Tourner la clé de 90° dans le sens des aiguilles d’une montre ;
03. Mû par un ressort, le levier sort : tourner le levier de 90° dans le sens
inverse des aiguilles d’une montre ;
04. Il est alors possible de bouger manuellement le vantail dans la position
désirée.
Bloquer (fig. 12-B) :
01. Tourner le levier de 90° en mettant le levier en position verticale ;
02. Pousser le levier jusqu’à son logement ;
03. Tourner la clé de 90° dans le sens inverse des aiguilles d’une montre et
retirer la clé.
La connexion électrique entre les différents dispositifs (photocellules, claviers
numériques, lecteurs de cartes à transpondeur, etc.) présents dans l’installation
et la logique de commande, doit être effectuée à travers le système « Bluebus »
de Nice.
Description des connexions électriques (fig. 13)
ANTENNE entrée pour l’antenne d’un récepteur radio
FLASH sortie pour 1 clignotant avec lampe de 12 V (maximum 21 W). [*]
ELS sortie pour serrure électrique de 12 Vca (maximum 15 VA) [*]
S.C.A. « Voyant Portail Ouvert » : sortie pour 1 lampe de signalisation de
24 V et maximum 4 W. [*]
BLUEBUS entrée pour dispositifs compatibles (MOFB, MOFOB, MOB et MOTB) ;
connexion des dispositifs en parallèle à l’aide de 2 conducteurs
dans lesquels passent aussi bien l’alimentation électrique que les
signaux de communication ; aucune polarité à respecter.
La connexion électrique à utiliser est de type parallèle et n’a besoin
de respecter aucune polarité. Durant la phase de reconnaissance,
chaque dispositif connecté à la logique de commande sera
reconnu individuellement par cette dernière, grâce à un code
univoque. Chaque fois qu’un dispositif sera ajouté ou éliminé, il
sera nécessaire d’effectuer la reconnaissance de celui-ci par la
logique (voir paragraphe 4.6).
STOP entrée pour dispositifs dont l’intervention provoque l’arrêt immédiat
de la manœuvre en cours, suivi d’une brève inversion ; possibilité
de connecter des contacts de type NO, NF ou des dispositifs avec
sortie à résistance constante 8,2 kΩ (bords sensibles). Tout dispositif
connecté à cette entrée est reconnu individuellement par la logique
durant la phase de reconnaissance (paragraphe 3.4) ; dans cette
phase, si la logique détecte une variation quelconque par rapport à
l’état appris, elle provoque un STOP. Il est possible de connecter à
cette entrée un ou plusieurs dispositifs même différents les uns
des autres :
– connecter en parallèle plusieurs dispositifs NO, sans limites de
quantité ;
– brancher en série plusieurs dispositifs NF, sans limites de quantité ;
– connecter en parallèle 2 dispositifs avec sortie à résistance
constante 8,2 kΩ. S’il y a plus de 2 dispositifs, il faut les connecter
en cascade avec 1 seule résistance terminale de 8,2 kΩ ;
- connecter en parallèle 2 dispositifs NO et NF, en mettant en série
au contact NF une résistance de 8,2 kΩ (cela rend possible aussi
la combinaison entre 3 dispositifs NO - NF et 8,2 kΩ) ;
P. P. entrée pour dispositifs de commande dont l’intervention provoque
BRANCHEMENTS ÉLECTRIQUES
4
la manœuvre en mode Pas à pas ; possibilité de connecter des
contacts de type NO
OPEN entrée pour dispositifs de commande dont l’intervention provoque
uniquement la manœuvre d’ouverture ; possibilité de connecter
des contacts de type NO
CLOSE entrée pour dispositifs de commande dont l’intervention provoque
uniquement la manœuvre de fermeture ; possibilité de connecter
des contacts de type NO
ENC1 entrée encodeur - opérateur 1 (borne 1, 2) ; aucune polarité à
respecter ;
ENC2 entrée encodeur - opérateur 2 (borne 4, 5) ; aucune polarité à
respecter ;
M1 sortie pour opérateur 1 (borne 7, 8, 9) ;
M2 sortie pour opérateur 2 (borne 10, 11, 12).
[*] Les sorties FLASH, ELS et S.C.A. peuvent être programmées avec d’autres
fonctions (voir « TABLEAU 3 - Fonctions 1
er
niveau » ; ou bien à l’aide du pro-
grammateur Oview, voir paragraphe 8.3).
4.1 - Connexion de l’opérateur avec logique de commande
mod. HK7024
Attention ! – Effectuer les connexions électriques uniquement après
avoir installé l’opérateur.
RECOMMANDATIONS !
– Les opérations de branchement doivent être effectuées exclusivement
par du personnel qualifié.
– Toutes les connexions électriques doivent être effectuées en l’absence
d’alimentation de secteur et avec la batterie tampon déconnectée si elle
est présente dans l’installation.
– Sur la ligne électrique d’alimentation, il faut prévoir un dispositif assurant la
déconnexion complète de l’automatisation par rapport au secteur. Le dispositif
doit avoir une distance d’ouverture entre les contacts permettant une déconnexion complète dans les conditions prévues par la catégorie de surtension III,
conformément aux règles d’installation. Ce dispositif, en cas de besoin, garantit une déconnexion sûre et rapide de l’alimentation ; il doit donc être placé si
possible dans une position visible depuis l’automatisme. S’il se trouve à distance, dans une position non visible, il faut prévoir un système empêchant
l’éventuelle reconnexion accidentelle ou non autorisée de l’alimentation, pour
conjurer tout danger. Le dispositif de connexion n’est pas fourni avec le produit.
01. Ouvrir le couvercle (fig. 14-1) ;
02. Soulever la logique de commande (fig. 14-2) ;
03. Passer le câble d’alimentation et les autres câbles électriques à travers l’un
des trous présents sur la partie inférieure de l’opérateur ; il faut couper la
gaine présente (fig. 14-4) ;
04. Dévisser le presse-étoupe et placer le câble d’alimentation dans le loge-
ment (fig. 14-5) ;
05. Connecter d’abord le câble d’alimentation, voir fig. 14-6 ;
06. Bloquer le câble d’alimentation avec le presse-étoupe (fig. 14-7) ;
07. Connecter ensuite les câbles électriques des moteurs M1 et M2, en res-
pectant les symboles sur l’étiquette (fig. A) :
a) connecter à la borne M1
(7-8-9) le moteur qui actionne le vantail inférieur
(le deuxième qui commence la manœuvre d’ouverture) puis l’encodeur respectif aux bornes 1-2 ;
b) connecter à la borne M2 (10-11-12) le moteur qui actionne le vantail
supérieur (le premier qui commence la manœuvre d’ouverture) puis l’encodeur respectif aux bornes 4-5.
IMPORTANT ! – Si l’installation ne comporte qu’un seul opérateur, le
connecter à la borne M2 en laissant libre la borne M1 ;
08. Connecter maintenant les câbles électriques des différents dispositifs pré-
sent en se référant à la fig. 17 et voir paragraphe 4.3. Note – Pour faciliter
les connexions des câbles, il est possible d’extraire les bornes de leurs
logements ;
09. Refermer le couvercle de l’opérateur (fig. 14-8).
4.2 - Connexion de l’opérateur sans logique de commande
mod. HK7224
01. Ouvrir le couvercle comme l’indique la fig. 15-1 ;
02. Passer le câble du moteur à travers l’un des trous présents sur la partie
inférieure de l’opérateur ; il faut couper la gaine présente (fig. 15-2) ;
03. Dévisser le presse-étoupe (fig. 15-3), placer le câble dans le logement et
connecter les fils comme indiqué fig. 16-4 ; respecter les symboles sur
l’étiquette ;
03. Bloquer le câble avec le presse-étoupe (fig. 15-5) ;
ENC1 ENC2
1245789101112
M1 M2
24V
24V
+
-
+
-
A
Page 35

FR
Français – 5
04. Refermer le couvercle de l’opérateur (fig. 15-6).
4.3 - Connexion d’autres dispositifs
S’il faut alimenter d’autres dispositifs prévus dans l’installation, par exemple un
lecteur de cartes à transpondeur ou l’éclairage du sélecteur à clé, il est possible
de connecter ces dispositifs à la logique de commande sur les bornes « P.P.
(positif) » et « STOP (négatif) » (fig. 13). La tension d’alimentation est de 24 Vcc
(-30 % ÷ +50 %) avec courant maximum disponible de 200 mA.
Note – La tension disponible aux bornes « P.P. » et « STOP » reste présente
même quand la fonction « Stand By » est activée sur la carte.
4.4 - Adressage des dispositifs connectés
Pour permettre à la logique de reconnaître les dispositifs connectés au système
Bluebus, il faut effectuer l’adressage de ces derniers. Cette opération doit être
effectuée en positionnant correctement le cavalier présent dans chaque dispositif : voir fig. B.
Pour effectuer l’adressage d’autres dispositifs, consulter les guides d’instructions respectifs.
À la fin de la procédure d’installation ou après l’enlèvement de photocellules ou
d’autres dispositifs, il faut effectuer la procédure de reconnaissance de ces derniers ; voir le paragraphe 4.6.
4.5 - Première mise en service et vérification des connexions
Après avoir alimenté électriquement la logique de commande, effectuer les
contrôles suivants :
• au bout de quelques secondes, vérifier que la led « Bluebus » (fig. 16) clignote
régulièrement à la fréquence d’1 clignotement à la seconde ;
• vérifier que les leds des photocellules (fig. 16), tant TX que RX, émettent des
clignotements. Le type de clignotement émis, dans cette phase, n’est pas
significatif ;
• vérifier que le clignotant connecté à la sortie FLASH est éteint.
Si les contrôles ne donnent pas le résultat indiqué, il faut couper l’alimentation
électrique de la logique et contrôler les différentes connexions électriques précédemment effectuées.
4.6 - Reconnaissance des dispositifs connectés
Après avoir effectué la première mise sous tension, il faut faire reconnaître par la lo gi que de commande les dispositifs connectés aux entrées « Bluebus »et « Stop ».
ATTENTION ! – La phase de reconnaissance doit être effectuée même si
aucun dispositif n’est connecté à la logique de commande.
La logique de commande est en mesure de reconnaître individuellement les différents dispositifs connectés grâce à la procédure de reconnaissance et de détecter
les éventuelles anomalies présentes. C’est aussi la raison pour laquelle il faut procéder à la reconnaissance des dispositifs à chaque ajout ou retrait de l’un d’eux.
Les leds « L1 »et « L2 » présentes sur la logique (fig. 16) émettent des cligno-
tements lents pour indiquer qu’il faut effectuer la reconnaissance :
01. Presser et maintenir enfoncées les touches « » et “Set” (fig. 16).
02. Relâcher les touches quand les leds « L1 » et « L2 » commencent à cligno-
ter très rapidement (au bout d’environ 3 s).
03. Attendre quelques secondes que la logique termine la reconnaissance des
dispositifs.
04. À la fin de cette phase la led « Stop » doit être allumée et les leds « L1 » et « L2 »
doivent s’éteindre (les leds « L3 » et « L4 » pourraient commencer à clignoter).
4.7 - Reconnaissance des positions des fins de course
mécaniques
Après la reconnaissance des dispositifs connectés (paragraphe 4.6), il faut procéder à la reconnaissance des positions des butées mécaniques (ouverture
maximum et fermeture maximum). Cette procédure peut être exécutée en trois
modalités : automatique, manuelle et mixte.
En mode automatique, la logique effectue la reconnaissance des butées mécani ques et calcule les décalages les plus appropriés pour les vantaux (SA et SC, fig. C).
En mode manuel, les huit positions des butées mécaniques (fig. C) sont programmées une par une en déplaçant les vantaux aux endroits désirés. La position à programmer est identifiable grâce au clignotement de l’une des 8 leds
(L1...L8), voir Tableau 2.
Dans le mode mixte, il est possible d’effectuer la procédure automatique puis,
avec la procédure manuelle, de modifier une ou plusieurs positions à l’exception des positions « 0 » et « 1 » (fig. C) qui coïncident avec les positions des
butées mécaniques.
4.7.1 - Reconnaissance en mode automatique
01. Presser et maintenir enfoncées simultanément les touches « Set » et « » ;
02. Relâcher les touches quand les leds « L3 » et « L4 » commencent à cli-
gnoter très rapidement (au bout d’environ 3 s) ;
03. Vérifier que l’automatisme effectue les séquences de manœuvres suivantes :
a - Fermeture lente de l’opérateur M1 jusqu’à la butée mécanique
b - Fermeture lente de l’opérateur M2 jusqu’à la butée mécanique
c - Ouverture lente de l’opérateur M2 et de l’opérateur M1 jusqu’à la butée
mécanique
d - Fermeture rapide des opérateurs M1 et M2
Avertissements :
– Si la première manœuvre (a) ne ferme pas le vantail commandé par le moteur
M1 mais celui commandé par M2, presser la touche «
» ou « » pour
arrêter la phase de reconnaissance. Inverser alors les connexions des
B
T
ABLEAU 2 - ADRESSES DES PHOTOCELLULES
Photocellule Cavaliers
FOTO
Photocellule extérieure h = 50 avec intervention en
fermeture (ferme et inverse le mouvement)
FOTO II
Photocellule extérieure h = 100 avec intervention
en fermeture (ferme et inverse le mouvement)
FOTO 1
Photocellule intérieure h = 50 avec intervention
aussi bien en fermeture (ferme et inverse le
mouvement) qu’en ouverture (ferme et repart
quand la photocellule est libérée)
FOTO 1 II
Photocellule intérieure h = 100 avec intervention
aussi bien en fermeture (ferme et inverse le
mouvement) qu’en ouverture (ferme et repart
quand la photocellule est libérée)
FOTO 2
Photocellule intérieure avec intervention en
ouverture (ferme et inverse le mouvement)
FOTO 2 II
Photocellule intérieure avec intervention en
ouverture (ferme et inverse le mouvement)
FOTO 3
CONFIGURATION NON AUTORISÉE
TABLEAU 2
Position Led Description
Position 0
(moteur 1)
Position 0
(moteur 2)
Position SA
(moteur 2)
Position A
(moteur 1)
Position A
(moteur 2)
Position SC
(moteur 1)
Position 1
(moteur 1)
Position 1
(moteur 2)
Position de fermeture maximum : quand le vantail 1 bat sur la
butée mécanique de fermeture
Position de fermeture maximum : quand le vantail 2 bat sur la
butée mécanique de fermeture
Décalage en ouverture : quand le vantail 2 dépasse cette position l’ouverture du vantail 1 commence
Position d’ouverture désirée : position dans laquelle le van tail
connecté au moteur 1 doit s’arrêter à la fin d’une man œuvre
d’ouverture. Il n’est pas nécessaire que cette position coïncide
avec la butée mécanique d’ouverture mais elle peut être choisie à volonté entre la position « 0 » et « 1 »
Position d’ouverture désirée : position dans laquelle le van tail
connecté au moteur 2 doit s’arrêter à la fin d’une man œ uvre
d’ouverture. Il n’est pas nécessaire que cette po sition coïncide
avec la butée mécanique d’ouverture mais elle peut être choisie à volonté entre la position « 0 » et « 1 »
Décalage en fermeture : quand le vantail 1 se trouve en des sous
de cette position la fermeture du vantail 2 commence
Position d’ouverture maximum : quand le vantail 1 bat sur la
butée mécanique d’ouverture
Position d’ouverture maximum : quand le vantail 2 bat sur la
butée mécanique d’ouverture
L1
L2
L3
L4
L5
L6
L7
L8
0
11
A
SC
SA
A
0
M1 M2
C
POSITIONS
Page 36

FR
6 – Français
moteurs M1 et M2 sur les bornes présentes sur la logique puis celles des
encodeurs respectifs ; commencer la procédure à partir du point 01 ;
– Si les deux premières manœuvres (a et b) ne sont pas des « fermetures » mais
des « ouvertures », presser la touche «
» ou « » pour arrêter la phase de
reconnaissance. Ensuite, sur l’opérateur qui a effectué la manœuvre d’ouverture, inverser les polarités des deux fils de l’opérateur M1 (bornes 7 et 9) et de
M2 (bornes 10 et 12) puis commencer la procédure à partir du point 01 ;
04. À la fin de la manœuvre de fermeture des 2 moteurs (d), les leds « L3 » et
« L4 » s’éteignent en indiquant que la procédure a été exécutée correctement.
Avertissements :
– Si durant la procédure de reconnaissance automatique, il y a intervention
des photocellules ou d’un dispositif connecté à l’entrée « stop », la procédure s’interrompt et la led L1 commence à clignoter. Pour réactiver la reconnaissance, il faut reprendre la procédure à partir du point 01 ;
– La procédure de reconnaissance automatique peut être effectuée de nou-
veau à tout moment, même après avoir effectué l’installation ; par exemple,
après la variation de la position des butées mécaniques.
4.7.2 - Reconnaissance en mode manuel
Attention ! – À partir du point 03 :
– pour se déplacer de la led L1 à L8
, il faut exercer une brève pression sur la
touche ou (la led clignote, en indiquant la position actuelle) ;
– pour faire bouger le moteur
dans un sens ou dans l’autre, il faut exercer une
pression continue
de la touche ou .
01. Presser et maintenir enfoncées
simultanément les touches « Set » et « » ;
02. Relâcher les touches quand la led « L1 » commence à clignoter (au bout
d’environ 1 s). Note – Passées 3 secondes, si les touches « Set » et « »
ne sont pas relâchées, la procédure d’« apprentissage automatique
» s’ac-
tive à la place de la procédure manuelle.
03. • la led
L1 clignote : position 0 de M1
Pour commander et porter le moteur 1 dans la position 0 (fig. C) : pres
-
ser et maintenir enfoncée
la touche « »ou « ». Quand la position est
atteinte, relâcher la touche pour arrêter la manœuvre. Pour mémoriser la
position, presser et maintenir enfoncée
la touche « Set » pendant au
moins 3 s puis la relâcher (au bout de 2 s la led L1 reste allumée et quand
on relâche la touche « Set » la led L2 commence à clignoter).
• la led
L2 clignote : position 0 de M2
Pour commander et porter le moteur 2 dans la position 0 (fig. C) : presser et maintenir enfoncée la touche « »ou « ». Quand la position est
atteinte, relâcher la touche pour arrêter la manœuvre. Pour mémoriser la
position, presser et maintenir enfoncée la touche « Set » pendant au
moins 3 s puis la relâcher (au bout de 2 s la led L2 reste allumée et quand
on relâche la touche « Set » la led L3 commence à clignoter).
• la led
L3 clignote : position SA de M2
Pour commander et porter le moteur 2 dans la position SA (fig. C):
presser et maintenir enfoncée la touche « »ou « ». Quand la position
est atteinte, relâcher la touche pour arrêter la manœuvre. Pour mémoriser la position, presser et maintenir enfoncée la touche « Set » pendant
au moins 3 s puis la relâcher (au bout de 2 s la led L3 reste allumée et
quand on relâche la touche « Set » la led L4 commence à clignoter).
• la led
L4 clignote : position A de M1
Pour commander et porter le moteur 1 dans la position A (fig. C): pres
-
ser et maintenir enfoncée
la touche « »ou « ». Quand la position est
atteinte, relâcher la touche pour arrêter la manœuvre. Pour mémoriser la
position, presser et maintenir enfoncée
la touche « Set » pendant au
moins 3 s puis la relâcher (au bout de 2 s la led L4 reste allumée et quand
on relâche la touche « Set » la led L5 commence à clignoter).
• la led
L5 clignote : position A de M2
Pour commander et porter le moteur 2 dans la position A (fig. C) : presser et maintenir enfoncée la touche « »ou « ». Quand la position est
atteinte, relâcher la touche pour arrêter la manœuvre. Pour mémoriser la
position, presser et maintenir enfoncée la touche « Set » pendant au
moins 3 s puis la relâcher (au bout de 2 s la led L5 reste allumée et quand
on relâche la touche « Set » la led L6 commence à clignoter).
• la led
L6 clignote : position SC de M1
Pour commander et porter le moteur 1 dans la position SC (fig. C):
presser et maintenir enfoncée la touche « »ou « ». Quand la position
est atteinte, relâcher la touche pour arrêter la manœuvre. Pour mémoriser la position, presser et maintenir enfoncée la touche « Set » pendant
au moins 3 s puis la relâcher (au bout de 2 s la led L6 reste allumée et
quand on relâche la touche « Set » la led L7 commence à clignoter).
• la led
L7 clignote : position 1 de M1
Pour commander et porter le moteur 1 dans la position 1 (fig. C) : presser et maintenir enfoncée la touche « »ou « ». Quand la position est
atteinte, relâcher la touche pour arrêter la manœuvre. Pour mémoriser la
position, presser et maintenir enfoncée la touche « Set » pendant au
moins 3 s puis la relâcher (au bout de 2 s la led L7 reste allumée et quand
on relâche la touche « Set » la led L8 commence à clignoter).
• la led
L8 clignote : position 1 de M2
Pour commander et porter le moteur 2 dans la position 1 (fig. C) : presser et maintenir enfoncée la touche « »ou « ». Quand la position est
atteinte, relâcher la touche pour arrêter la manœuvre. Pour mémoriser la
position, presser et maintenir enfoncée la touche « Set » pendant au
moins 3 s puis la relâcher pour sortir de la programmation (au bout de 2
s la led L8 reste allumée jusqu’à ce qu’on relâche la touche « Set »).
Note – Pour effectuer la programmation manuelle d’une installation con tenant un seul opérateur, on procède comme décrit au paragraphe 4.7.2 et
au point 03 : il faut effectuer la programmation de la position « 0 » puis de la
Celles-ci sont les phases les plus importantes de la réalisation de l’automatisation, afin de garantir la sécurité maximale de l’installation. L’essai peut également
être utilisé pour vérifier périodiquement les dispositifs qui composent l’automatisation. Les phases d’essai et de mise en service de l’automatisation doivent être
effectuées par un personnel qualifié et expert qui devra établir les essais nécessaires pour vérifier les solutions adoptées par rapport aux risques présents et
contrôler le respect de ce qui est prévu par les lois, normes et règlements : en
particulier, de toutes les caractéristiques requises par la norme EN 12445 qui
établit les méthodes d’essai pour le contrôle des automatismes pour portails.
Les dispositifs supplémentaires doivent être soumis à un essai spécifique, aussi
bien pour ce qui concerne la fonctionnalité que pour ce qui concerne leur correcte
interaction avec HYKE ; se référer aux manuels d’instructions de chaque dispositif.
5.1 - Essai
La séquence d’opérations à effectuer pour l’essai se réfère à une installation
typique (fig. 3) :
1 Vérifier que tout ce qui est prévu dans le chapitre « Recommandations pour
l’installation » est rigoureusement respecté.
2 Débloquer manuellement les opérateurs et contrôler que en agissant sur le
van tail, au point prévu pour la manœuvre manuelle, il soit possible de dé placer
les vantaux en ouverture et en fermeture avec une force inférieure à 390 N.
3 Bloquer les opérateurs (voir chapitre 3.6).
4 En utilisant les dispositifs de commande (émetteur, bouton de commande,
sélecteur à clé, etc.), effectuer des essais d’Ouverture, Fermeture et Arrêt
du portail, en veillant à ce que le mouvement des vantaux corresponde à ce
qui est prévu. Il convient d’effectuer différents essais afin d’évaluer le mouvement des vantaux et de contrôler d’éventuels défauts de montage, de
réglage ou la présence de points de frottement particuliers.
5 Contrôler un à un le correct fonctionnement de tous les dispositifs de sécu-
rité présents sur l’installation (photocellules, bords sensibles, etc.).
Lorsqu’un dispositif intervient, la led “BLUEBUS”, présente sur la centrale,
émet 2 clignotements plus rapides pour confirmer la reconnaissance.
6 Si les situations dangereuses provoquées par le mouvement des vantaux
ont été prévenues moyennant la limitation de la force d’impact, mesurer la
force selon ce qui est prévu par la norme EN 12445 et éventuellement si le
contrôle de la “force opérateur” est utilisé comme aide au système pour la
réduction de la force d’impact, essayer et enfin trouver le réglage fournissant les meilleurs résultats.
5.2 - Mise en service
La mise en service ne peut avoir lieu qu’après avoir effectué de manière
positive toutes les phases d’essai.
ESSAI ET MISE EN SERVICE
5
« 1 » de M1, en ignorant la partie relative aux touches « » et « » mais en
agissant seulement sur la touche « Set » comme indiqué. Important ! – Dans
la procédure manuelle, il ne faut pas programmer les positions « SA » de
M2 ; « A » de M1 ; « SC » de M1.
4.7.3 - Reconnaissance en mode mixte
Effectuer cette procédure après l’exécution de l’apprentissage en mode automatique :
01. Presser et maintenir enfoncées
simultanément les touches « Set » et
« » ;
02. Relâcher les touches quand la led « L1 » commence à clignoter (au bout
d’environ 1 s). Note – Passées 3 secondes, si les touches « Set » et « »
ne sont pas relâchées, la procédure d’« apprentissage automatique » s’active à la place de la procédure manuelle.
03. Avec une brève pression de la touche « » ou « », déplacer la led cli-
gnotante (L1…L8) sur la position que l’on souhaite programmer et procéder pour chaque position, comme décrit au point 03 de la reconnaissance
en mode manuel (paragraphe 4.7.2).
Répéter cette dernière opération pour toutes les autres positions que l’on
souhaite modifier.
Pour terminer la reconnaissance manuelle, presser plusieurs fois la touche
« », de manière à porter la led qui clignote au-delà de L8.
4.8 - Vérification du mouvement des vantaux du portail
À la fin de la phase de reconnaissance, il est conseillé de faire effectuer à la
logique quelques manœuvres d’ouverture et de fermeture, de manière à vérifier le
mouvement correct du portail, les éventuels défauts de montage et de réglage.
01. Presser la touche « Open ». Vérifier le décalage correct des vantaux en
ouverture et vérifier que durant la manœuvre d’ouverture on a bien la
phase d’accélération, la phase à vitesse constante, la phase de ralentissement et que la fin de course des vantaux à réglée à quelques centimètres
de distance des butées mécaniques d’ouverture ;
02. Presser la touche « Close » et vérifier que durant la manœuvre de ferme-
ture on a bien la phase d’accélération, la phase à vitesse constante et la
phase de ralentissement. Vérifier le décalage correct des vantaux en fermeture. À la fin, les vantaux doivent être parfaitement fermés sur la butée
mécanique de fermeture ;
03. Vérifier, durant les manœuvres, que le clignotant effectue des clignotements réguliers de 0,5 seconde.
Page 37

FR
Français – 7
1 Préparer le dossier technique de l’automatisation, celui-ci devra compren-
dre les documents suivants : un dessin général de l’automatisation, le
schéma des branchements électriques effectués, l’analyse des risques présents et les relatives solutions adoptées, la déclaration de conformité du
fabricant de tous les dispositifs utilisés et la déclaration de conformité remplie par l’installateur.
2 Accrocher sur le portail une plaquette contenant au moins les données sui-
vantes : type d’automatisation, nom et adresse du fabricant (responsable
de la “mise en service”), numéro de fabrication, année de fabrication et
marque “CE”.
3 Remplir et fournir au propriétaire de l’automatisation la déclaration de
conformité de l’automatisation.
4 Remplir et fournir au propriétaire de l’automatisation le “Manuel d’utilisa-
tion” de l’automatisation.
5 Remplir et fournir au propriétaire de l’automatisation le “Plan de mainte-
nance” qui comprend les prescriptions concernant la maintenance de tous
les dispositifs de l’automatisation.
6 Avant de mettre en service l’automatisation, informer de manière adéquate
le propriétaire sur les dangers et les risques résiduels encore présents.
Pour toute la documentation citée, Nice à travers son propre service d’as-
sistance technique met à disposition : manuels d’instructions, guides et fi ches pré-remplies. Voir aussi sur : www.nice-service.com
Sur la logique se trouvent 3 touches OPEN (), STOP (SET), CLOSE () qui
peuvent être utilisées aussi bien pour commander la logique durant les phases
d’essai que pour la programmation des fonctions disponibles.
Les fonctions programmables disponibles sont disposées sur 2 niveaux et leur
état de fonctionnement est signalé par les 8 leds (L1 ... L8) présentes sur la
logique ( led allumée
= fonction active ; led éteinte = fonction inactive).
Utiliser les touches de programmation :
OPEN () : – touche pour commander l’ouverture du portail ; – touche de
sélection en phase de programmation.
STOP/SET : touche pour arrêter une manœuvre ; si elle est pressée pendant
plus de 5 secondes, elle permet d’entrer dans la phase de programmation.
CLOSE () : – touche pour commander la fermeture du portail ; – touche de
sélection en phase de programmation.
6.1 - Programmation du premier niveau (ON-OFF)
Toutes les fonctions du premier niveau sont programmées en usine sur « OFF »
et peuvent être modifiées à tout moment. Pour vérifier les différentes fonctions
voir Tableau 3. Pour la procédure de programmation voir Tableau 4.
IMPORTANT – La procédure de programmation présente un temps maximum
de 10 secondes entre la pression d’une touche et l’autre. Une fois ce temps
écoulé, la procédure prend fin automatiquement en mémorisant les modifications faites jusqu’à ce moment-là.
PROGRAMMATION DE LA CENTRALE
DE COMMANDE
6
TABLEAU 3 - Fonctions de premier niveau
Led Fonction Description
L1 Fermeture automatique
L2 Referm. après photo
L3 Fermer toujours
L4 Stand-by total
L5 Serrure électrique / Éclairage automatique
L6 Préclignotement
L7 « Fermeture » devient
« Ouverturepartielle 1 »
L8 « Voyant portail ouvert » ou
« Voyant maintenance »
Fonction ACTIVE : après une manœuvre d’ouverture, il y a une pause (de la durée du temps de pause
programmé) après laquelle la logique de commande commence automatiquement une manœuvre de fermeture. La valeur d’usine du temps de pause est de 30 s.
Fonction INACTIVE
: le fonctionnement est de type « semi-automatique ».
F
onction ACTIVE : si les photocellules interviennent durant la manœuvre d’ouverture ou de fermeture, le
temps de pause se réduit à 5 s, indépendamment du « temps de pause » programmé.
Avec la « fermeture automatique » désactivée, si les photocellules interviennent durant la fermeture, la
« fermeture automatique » s’active avec le « temps de pause » programmé.
Fonction ACTIVE : en cas de coupure du courant, même de courte durée, au retour du courant, la logique
de commande dé tecte le portail ouvert et commence automatiquement une manœuvre de fermeture, précédée de 5 s de préclignotement.
Fonction INACTIVE
: aucune manœuvre au retour du courant électrique.
Fonction ACTIVE
: 1 minute après la fin de la manœuvre, la logique éteint la sortie « Bluebus » (dispositifs
connectés), le Bus T4 (dispositifs connectés), les sorties flash, ELS et SCA, certains circuits internes et
toutes les leds sauf la led Bluebus qui clignotera plus lentement. Quand une commande arrive, la logique
rétablit le fonctionnement normal (avec un court retard). Cette fonction a pour but de réduire les consommations ; aspect important avec alimentation par batteries ou panneaux photovoltaïques.
F
onction ACTIVE : la sortie « serrure électrique » commute son fonctionnement en « éclairage automatique ».
F
onction INACTIVE : la sortie fonctionne comme serrure électrique.
F
onction ACTIVE : il est possible d’ajouter une pause de 3 secondes entre l’allumage du clignotant et le
début de la manœuvre, pour signaler à l’avance une situation de danger.
F
onction INACTIVE : la signalisation du clignotant coïncide avec le début de la manœuvre.
F
onction ACTIVE : toutes les commandes qui correspondent à « Fermeture » (entrée « Close » ou com-
mande radio « Fermeture ») sont remplacées par la commande « Ouverture partielle 1 ».
F
onction ACTIVE : la sortie « voyant portail ouvert » de la logique commute son fonctionnement en « voyant
maintenance ».
Fonction INACTIVE
: la sortie fonctionne comme « voyant portail ouvert ».
TABLEAU 4 - Procédure de programmation premier niveau
01. Presser et maintenir enfoncée la touche « Set » pendant environ 3 s ;
02. Relâcher la touche quand la led « L1 » commence à clignoter ;
03. Presser la touche « »ou « » pour déplacer la led clignotante sur la led qui correspond à la fonction à modifier ;
04. Presser la touche « Set » pour changer l’état de la fonction :
(clignotement bref = OFF - clignotement long = ON) ;
05. Attendre 10 secondes (temps maximum) pour sortir de la programmation.
Note – Pour programmer d’autres fonctions sur « ON » ou « OFF », durant l’exécution de la procédure, il faut répéter les points 03 et 04 durant la phase proprement dite.
SET
SET
SET
L1
ou
3 s
10 s
Page 38

FR
8 – Français
TABLEAU 5 - Fonctions de deuxième niveau
Led Paramètre Led Valeur Description
d’entrée (niveau)
L1
L1
L2
L3
L4
L5
L6
L7
L8
5 secondes
15 secondes
30 secondes
45 secondes
60 secondes
80 secondes
120 secondes
180 secondes
Règle le temps de pause, à savoir le
temps qui s’écoule avant la refermetu re automatique. La fonction n’a d’effet
que si la fermeture est active.
Temps
de pause
L2 L1
L2
L3
L4
L5
L6
L7
L8
Ouverture – stop – fermeture – stop
Ouverture – stop – fermeture – ouverture
Ouverture – fermeture – ouverture – fermeture
Fonctionnement collectif :
• dans la manœuvre d’ouverture
les commandes « Pas à pas » et « Ouverture » sont sans effet ; par contre, la commande « Fermeture » provoque l’inversion du mouvement, c’est-à-dire la fermeture des vantaux.
• dans la manœuvre de fermeture
les commandes « Pas à pas » et « Ouverture » provoquent l’inversion du mouvement, c’est-à-dire l’ouverture des
vantaux ; par contre, la commande « Fermeture » ne provoque aucun effet.
Fonctionnement collectif 2 :
• dans la manœuvre d’ouverture
les commandes « Pas à pas » et « Ouver-
ture » sont sans effet ; par contre, la commande « Fermeture » provoque
l’inversion du mouvement, c’est-à-dire la fermeture des vantaux. Si la
commande envoyée persiste pendant plus de 2 secondes, un « Stop »
est exécuté.
• dans la manœuvre de fermeture les commandes « Pas à pas » et «
Ouverture » provoquent l’inversion du mouvement, c’est-à-dire l’ouverture
des vantaux ; par contre, la commande « Fermeture » ne provoque aucun
effet. Si la commande envoyée persiste pendant plus de 2 secondes,
un « Stop » est exécuté.
Pas à pas 2 (moins de 2 s provoque l’ouverture partielle)
Comm. action maintenue : la manœuvre n’est exécutée que si la commande
envoyée persiste ; si le commande est interrompue la manœuvre s’arrête.
Ouverture en « semi-automatique », fermeture avec commande « par action
maintenue »
Règle la séquence de commandes
associées à l’entrée « Pas à pas »,
« Ouverture », « Fermeture » ou bien à
la commande radio.
Note – En configurant L4, L5, L7 et
L8, le comportement des comman -
des « Ouverture » et « Fermeture » est
modifié.
Fonction
Pas à pas
L3
L1
L2
L3
L4
L5
L6
L7
L8
Très lente
Lente
Moyenne
Rapide
Très rapide
Super rapide
Ouverture rapide, fermeture lente
Ouverture super rapide, fermeture moyenne
Règle la vitesse des moteurs durant
la course normale.
Vitesse
moteurs
L6 L1
L2
L3
L4
L5
L6
L7
L8
PPiétonne 1 (ouverture du vantail M2 à un quart de l’ouverture totale)
Piétonne 2 (ouverture du vantail M2 à la moitié de l’ouverture totale)
Piétonne 3 (ouverture du vantail M2 aux trois quarts de l’ouverture totale)
Piétonne 4 (ouverture totale du vantail 2)
Partielle 1 (ouverture des deux vantaux à un quart de l’ouverture « minimum »)
Partielle 2 (ouverture des deux vantaux à la moitié de l’ouverture « minimum »)
Partielle 3 (ouverture des deux vantaux aux trois quarts de l’ouverture « minimum »)
Partielle 4 (ouverture des deux vantaux égale à l’ouverture « minimum »)
Règle le type d’ouverture associé à la
commande « Ouverture partielle 1 ».
Dans les niveaux L5, L6, L7, L8,
ouverture « minimum » correspond à
l’ouverture la plus petite entre M1 et
M2 ; par exemple si M1 ouvre à 90°
et M2 ouvre à 110°, l’ouverture minimum est 90°.
Ouverture
piétonne
ou partielle
L4 L1
L2
L3
L4
L5
L6
L7
L8
Aucune décharge
Niveau 1 - Décharge minimum (environ 100 ms)
Niveau 2 - ...
Niveau 3 - ...
Niveau 4 - ...
Niveau 5 - ...
Niveau 6 - ...
Niveau 7 - Décharge maximum (environ 800 ms)
Règle la durée de la « brève inversi on » des deux moteurs, après l’exécution de la manœuvre de fermeture,
dans le but de réduire la poussée fi nale résiduelle.
Décharge
moteurs
après la
fermeture
L5 L1
L2
L3
L4
L5
L6
L7
L8
Niveau 1 - Force minimum
Niveau 2 - ...
Niveau 3 - ...
Niveau 4 - ...
Niveau 5 - ...
Niveau 6 - ...
Niveau 7 - ...
Niveau 8 - Force maximum
Règle la force des deux moteurs.Force
moteurs
6.2 - Programmation deuxième niveau (paramètres réglables)
Tous les paramètres du deuxième niveau sont programmés en usine comme
indiqué en gris dans le Tableau 5 et peuvent être modifiés à tout moment, en
procédant comme décrit dans le Tableau 6.
Les paramètres sont réglables sur une échelle de valeurs de 1 à 8 ; pour vérifier
la valeur correspondant à chaque led voir Tableau 8. IMPORTANT – La procé-
dure de programmation présente un temps maximum de 10 secondes entre la
pression d’une touche et l’autre. Une fois ce temps écoulé, la procédure prend
fin automatiquement en mémorisant les modifications faites jusqu’à ce
moment-là.
Page 39

FR
Français – 9
TABLEAU 6 - Procédure de programmation deuxième niveau
01. Presser et maintenir enfoncée la touche « Set » pendant environ 3 s ;
02. Relâcher la touche quand la led « L1 » commence à clignoter ;
03. Presser la touche « »ou « » pour déplacer la led clignotante sur la led d’entrée qui correspond au paramètre à modifier ;
04. Presser et maintenir enfoncée la touche « Set » jusqu’à la fin du point 06 ;
05. Attendre environ 3 secondes jusqu’à ce que la led qui correspond au niveau actuel du paramètre à modifier s’allume ;
06. Presser la touche « »ou « » pour déplacer la led qui correspond à la valeur du paramètre ;
07. Relâcher la touche « Set » ;
08. Attendre 10 secondes (temps maximum) pour sortir de la programmation.
Note – Pour programmer plusieurs paramètres, durant l’exécution de la procédure, il faut répéter les opérations du point 03 au point 07 durant la phase proprement dite.
SET
SET
SET
SET
L1
ou
ou
3 s
10 s
6.3 - Fonctions spéciales
6.3.1 - Fonction : « Manœuvre dans tous les cas »
Cette fonction permet de faire fonctionner l’automatisme même quand l’un des
dispositifs de sécurité ne fonctionne pas correctement ou est hors d’usage.
Il est possible de commander l’automatisme avec « commande à action
maintenue », en procédant de la façon suivante :
01. Envoyer une commande pour actionner le portail, avec un émetteur ou
avec un sélecteur à clé, etc. Si tout fonctionne correctement, le portail
bougera régulièrement, en cas contraire procéder comme suit :
02. dans les 3 secondes qui suivent, actionner de nouveau la commande et la
maintenir ;
03. au bout de 2 secondes environ, le portail effectuera la manœuvre désirée
en mode « action maintenue » c’est-à-dire que l’actionnement du portail
ne se vérifiera que tant que la commande est maintenue.
Quand les dispositifs de sécurité ne fonctionnement pas, l’indicateur clignotant
émet quelques clignotements pour signaler le type de problème (voir chapitre 6
- Tableau 8).
6.3.2 - Fonction : « Avis de maintenance »
Cette fonction, sert à signaler quand il est nécessaire de procéder à la maintenance de l’automatisme. La signalisation d’avis de maintenance est donnée
par un voyant connecté à la sortie S.C.A. quand cette sortie est programmée
comme « Voyant maintenance ». Les différentes signalisations du voyant sont
indiquées dans le Tableau 7.
Pour programmer la valeur limite des manœuvres de maintenance, voir Ta -
bleau 5.
6.4 - Effacement de la mémoire
Pour effacer la mémoire de la logique de commande et rétablir les configurations d’usine, procéder de la façon suivante :
presser et maintenir enfoncées les touches « » et « » jusqu'à ce que les L1
et L2 commencent à clignoter.
Certains dispositifs sont prévus pour émettre des signalisations avec lesquelles
il est possible de reconnaître l’état de fonctionnement ou les éventuelles anomalies.
Si un clignotant est connecté à la sortie FLASH présente sur la logique, durant
l’exécution d’une manœuvre, il émet un clignotement toutes les secondes. Si
des anomalies se vérifient, le clignotant émet des clignotements plus rapides ;
ces clignotements sont répétés deux fois avec une pause d’1 seconde. Le
Tableau 8 décrit la cause et la solution pour chaque type de signalisation.
Les leds présentes sur la logique donnent elles aussi des signalisations ; le
Tableau 9 décrit la cause et la solution pour chaque type de signalisation.
Il est possible de contrôler les éventuelles anomalies qui se sont vérifiées durant
l’exécution des 8 dernières manœuvres ; se référer au Tableau 10.
QUE FAIRE SI…
(guide pour la résolution des problèmes)
7
Tableau 7 - Signalisation sur « Voyant maintenance »
Nombre de manœuvres Signalisation
Voyant allumé pendant 2 secondes, au début de la
manœuvre d’ouverture.
Voyant qui clignote pendant toute la durée de la
manœuvre.
Voyant qui clignote de manière continue.
Inférieur à 80 % de la limite
Entre 81 % et 100 %
de la limite
Au-delà de 100 % de la limite
L7 L1
L2
L3
L4
L5
L6
L7
L8
500
1000
1500
2500
5000
10000
15000
20000
Règle le nombre de manœuvres :
qua nd ce nombre est dépassé, la lo gique de commande signale la de mande de maintenance de l’automatisme ; voir paragraphe 6.3.2. – Avis
de maintenance.
Avis de
maintenance
Note – La couleur grise correspond aux valeurs réglées à l’usine.
L8 L1
L2
L3
L4
L5
L6
L7
L8
Résultat 1remanœuvre (la plus récente)
Résultat 2emanœuvre
Résultat 3emanœuvre
Résultat 4emanœuvre
Résultat 5emanœuvre
Résultat 6emanœuvre
Résultat 7emanœuvre
Résultat 8
e
manœuvre
Permet de vérifier le type d’anomalie
qui s’est produite durant l’exécution
des 8 dernières manœuvres.
Voir TABLEAU 10 - Liste historique
des anomalies.
Liste des
anomalies
Page 40

FR
10 – Français
7 clignotements brefs
pause de 1 seconde
7 clignotements brefs
Anomalie sur les circuits électriques Attendre au moins 30 secondes puis réessayer d’envoyer une comman-
de et éventuellement éteindre aussi l’alimentation ; si l’état persiste, il
pourrait y avoir une panne grave et il faut remplacer la carte électronique.
8 clignotements brefs
pause de 1 seconde
8 clignotements brefs
Il y a déjà une commande qui ne
permet pas d’en exécuter d’autres.
Vérifier la nature de la commande toujours présente ; par exemple, il peut
s’agir de la commande provenant d’une horloge sur l’entrée « ouverture ».
9 clignotements brefs
pause de 1 seconde
9 clignotements brefs
L’automatisme a été bloqué par une
commande « Blocage de l’automatisme ».
Débloquer l’automatisme en envoyant la commande « Déblocage de l’automatisme ».
10 clignotements brefs
pause de 1 seconde
10 clignotements brefs
Intervention de la fonction « Détection
obstacles » par encodeur
Durant le mouvement, les moteurs ont été bloqués par une friction plus
forte ; en vérifier la cause.
TABLEAU 8 - Signalisations émises par le clignotant (FLASH)
Clignotements Problème Solution
1 clignotement bref
pause de 1 seconde
1 clignotement bref
Erreur sur le système Bluebus La vérification des dispositifs connectés au système Bluebus, qui est effec-
tuée au début de la manœuvre, ne correspond pas aux dispositifs mémorisés durant la phase de reconnaissance. Certains dispositifs peuvent être
déconnectés ou en panne, il faut donc les vérifier et éventuellement les
remplacer. Si des modifications ont été faites, il faut refaire la procédure de
reconnaissance des dispositifs (voir paragraphe 4.6).
2 clignotements brefs
pause de 1 seconde
2 clignotements brefs
Intervention d’une photocellule Une ou plusieurs photocellules n’autorisent pas le mouvement ou ont pro-
voqué une inversion du mouvement durant la course ; vérifier la présence
éventuelle d’obstacles.
3 clignotements brefs
pause de 1 seconde
3 clignotements brefs
Intervention de la fonction
« Détection d’obstacles » par le
limiteur de force
Durant le mouvement les moteurs ont rencontré un moment d’effort
excessif ; vérifier la cause et éventuellement augmenter le niveau de force
des moteurs
4 clignotements brefs
pause de 1 seconde
4 clignotements brefs
Intervention de l’entrée STOP Au début de la manœuvre ou durant le mouvement, il y a eu une interven-
tion des dispositifs connectés à l’entrée STOP ; en vérifier la cause.
5 clignotements brefs
pause de 1 seconde
5 clignotements brefs
Erreur dans les paramètres internes de
la logique de commande
Attendre au moins 30 secondes puis réessayer d’envoyer une commande
et éventuellement éteindre aussi l’alimentation ; si l’état persiste, il pourrait
y avoir une panne grave et il faut remplacer la carte électronique.
6 clignotements brefs
pause de 1 seconde
6 clignotements brefs
La limite maximum du nombre de
manœuvres consécutives ou de
manœuvres à l’heure a été dépassée.
Attendre quelques minutes de manière que le limiteur de manœuvres
redescende sous la limite maximum.
TABLEAU 9 - Signalisations des leds présentes sur la logique de commande (fig. 16)
Led Problème Solution
BLUEBUS
Toujours éteinte
Toujours allumée
1 clignotement par seconde
2 clignotements rapides
Série de clignotements séparés
par une pause d’1 seconde
STOP
Toujours éteinte
Toujours allumée
P. P.
Toujours éteinte
Toujours allumée
OPEN
Toujours éteinte
Toujours allumée
CLOSE
Toujours éteinte
Toujours allumée
L1 - L2 Clignotement lent
L3 - L4 Clignotement lent
Anomalie
Anomalie grave
Tout est normal
Variation de l’état des entrées
Divers
Intervention des dispositifs connectés
à l’entrée STOP
Tout est normal
Tout est normal
Intervention de l’entrée P.P.
Tout est normal
Intervention de l’entrée OPEN
Tout est normal
Intervention de l’entrée CLOSE
Variation du nombre de dispositifs
connectés au Bluebus ou reconnaissance du dispositif non effectuée
La reconnaissance des positions des
butées mécaniques n’a jamais été effectuée.
Vérifier si la logique est alimentée ; vérifier si les fusibles sont intervenus. Si
c’est le cas, vérifier la causa de la panne et les remplacer par d’autres de
même valeur.
Il y a un problème grave : essayer de couper l’alimentation électrique de la
logique et si le problème persiste il faut remplacer la carte électronique
Fonctionnement normal de la logique
C’est normal s’il y a une variation dans l’une des entrées (PP, STOP,
OPEN, CLOSE) : intervention des photocellules ou transmission d’une
commande par un émetteur
Se référer au Tableau 8.
Vérifier les dispositifs de l’entrée STOP
Entrée STOP active
Entrée PP non active
C’est normal si le dispositif connecté à l’entrée PP est actif.
Entrée OPEN non active.
C’est normal si le dispositif connecté à l’entrée OPEN est actif.
Entrée CLOSE non active.
C’est normal si le dispositif connecté à l’entrée CLOSE est actif.
Il faut effectuer la reconnaissance des dispositifs
(voir paragraphe 4.6)
Il faut effectuer la reconnaissance (voir paragraphe 4.7).
Page 41
FR
Français – 11
HYKE peut être équipé des accessoires en option suivants : récepteurs de la
famille SMXI, OXI, le programmateur Oview, le panneau à énergie solaire Solemyo et la batterie tampon mod. PS124.
8.1 - Connexion d’un récepteur radio
La logique de commande présente un connecteur pour la connexion des
récepteurs radio (accessoire en option) appartenant à la famille SMXI ou OXI.
Pour connecter un récepteur, il faut couper l’alimentation électrique à la logique
et procéder comme illustré fig. 17. Les Tableaux 11 et Tableaux 12 indiquent
les commandes qui correspondent aux sorties présentes sur la logique.
APPROFONDISSEMENTS
8
8.2 - Branchement et installation de la batterie tampon
mod. PS124
ATTENTION ! - Le branchement électrique de la batterie à la centrale ne
doit être effectué qu’après avoir conclu toutes les phases d’installation
et de programmation, car la batterie représente une alimentation électrique d’urgence.
Pour installer et brancher la batterie, suivre les phases de montage illustrées à
la fig. 18.
8.3 - Branchement du programmateur Oview
Sur la centrale est présent le connecteur BusT4 auquel il est possible de brancher l’unité de programmation Oview, qui permet une gestion complète et
rapide de la phase d’installation, de maintenance et de diagnostic de toute l’automatisation. Pour accéder au connecteur, il est nécessaire de procéder
comme illustré à la fig. 19 et de brancher le connecteur dans le logement prévu
à cet effet. L’Oview peut être branché à plusieurs Centrales simultanément
(jusqu’à 5 sans précautions particulières, jusqu’à 60 en suivant les recommandations) et peut rester branché à la centrale durant le fonctionnement normal
de l’automatisation. Dans ce cas, il peut être utilisé pour envoyer directement
les commandes à la centrale en utilisant le menu “utilisateur” spécifique. Il est
également possible d’effectuer la mise à jour du Firmware. Si sur la centrale est
présent un récepteur radio appartenant à la famille OXI, en utilisant l’Oview il est
possible d’avoir accès aux paramètres des émetteurs mémorisés dans le
récepteur.
Pour tous les approfondissements, consulter le respectif manuel d’instructions
et le manuel du système “Opera system book”.
8.4 - Connexion du système à énergie solaire Solemyo
ATTENTION ! – Quand l’automatisme est alimenté par le système « Solemyo », il NE DOIT PAS ÊTRE ALIMENTÉ simultanément aussi par le secteur électrique.
Pour plus de détails sur le système Solemyo, se référer à la notice spécifique.
Pour effectuer la connexion du système Solemyo, procéder comme illustré fig. 20.
8.5 - Connexion du système de débrayage extérieur Kio
ATTENTION ! – Kio doit être connecté à l’opérateur qui manœuvre le van-
tail qui démarre en premier (en partant de la position de portail fermé).
01. Ouvrir le couvercle de l’opérateur (fig. 21-1) ;
02. Enlever le carter plastique de l’opérateur comme illustré fig. 21-2 ;
03. Introduire dans le trou la vis avec l’écrou comme illustré fig. 21-3 ;
04. Accrocher les deux extrémités du ressort comme illustré fig. 22-4 ;
05. Introduire le câble en acier d’abord dans la vis puis dans le trou du pivot
comme illustré fig. 21-5 ;
06. Bloquer le câble en vissant la vis prévue à cet usage (fig. 21-5) ;
07. Faire passer l’autre extrémité du câble à travers l’un des trous présents sur
la partie inférieure de l’opérateur comme illustré (fig. 21-6) ;
N° Commande Description
TABLEAU 10 - Liste historique des anomalies
01. Presser et maintenir enfoncée la touche « Set » pendant environ 3 s ;
02. Relâcher la touche quand la led « L1 » commence à clignoter ;
03. Presser la touche « » ou « » pour se déplacer de la led clignotante à la led L8 (« led d’entrée ») pour le paramètre
« Liste anomalies » ;
04. Presser et maintenir enfoncée la touche « Set » jusqu’à la fin du point 06 ;
05. Attendre environ 3 secondes, jusqu’à ce que les leds qui représentent les niveaux correspondant aux manœuvres qui ont
présenté des anomalies s’allument. La led L1 indique le résultat de la manœuvre plus récente tandis que la led L8 indique
la huitième manœuvre. Si la led est allumée, cela signifie que des anomalies se sont vérifiées, tandis que si la led est
éteinte tout est normal ;
06. Presser les touches « » et « » pour sélectionner la manœuvre désirée : la led correspondante effectue un nombre
de clignotements égal à ceux normalement effectués par le clignotant ;
07. Relâcher la touche « Set ».
SET
SET
SET
SET
L1
ou
et
3 s
3 s
L8
Tableau 11
SMXI / SMXIS ou OXI / OXIFM / OXIT / OXITFM en mode I ou Mode II
Commande « PP » (pas à pas)
Commande « Ouverture partielle 1 »
Commande « Ouverture »
Commande « Fermeture »
Sortie N°1
Sortie N°2
Sortie N°3
Sortie N°4
1 Pas à pas Commande « PP » (pas à pas)
2 Ouverture partielle 1 Commande « Ouverture partielle 1 »
3 Ouverture Commande « Ouverture »
4 Fermeture Commande « Fermeture »
5 Stop Arrête la manœuvre
6 Pas à pas collectif Commande en modalité Fonctionnement collectif
7 Pas à pas Commande aussi avec automatisme bloqué ou
haute priorité commandes actives
8 Ouverture Ouverture partielle (ouverture du vantail M2, égale à la
partielle 2 moitié de l’ouverture totale)
9 Ouverture Ouverture partielle (ouverture des deux vantaux, égale à
partielle 3 la moitié de l’ouverture totale)
10 Ouverture Provoque une manœuvre d’ouverture et à la fin de
et blocage celle-ci le blocage de l’automatisme ; la logique n’accepte
de l’automatisme aucune autre commande à l’exception de « Pas à pas
haute priorité », « Déblocage de l’automatisme » ou
(uniquement avec Oview) les commandes : « Déblocage
et fermeture » et « Déblocage et ouverture »
11 Fermeture et Provoque une manœuvre de fermeture et à la fin de
blocage de l’automatisme ; la logique n’accepte aucune autre
l’automatisme commande à l’exception de « Pas à pas haute priorité »,
« Dé blocage de l’automatisme » ou (uniquement avec
Oview) les commandes : « Déblocage et fermeture » et
« Déblocage et ouverture »
12 Blocage de Provoque un arrêt de la manœuvre et le blocage de
l’automatisme l’automa tisme ; la logique n’accepte aucune autre
commande à l’ex ception de « Pas à pas haute priorité »,
« Déblocage de l’au tomatisme » ou (uniquement avec
Oview) les commandes : « Déblocage et fermeture » et
« Déblocage et ouverture »
Tableau 12
OXI / OXIFM /OXIT / OXITFM en Mode II étendu
N° Commande Description
13 Déblocage de Provoque le déblocage de l’automatisme et le
l’automatisme rétablissement du fonctionnement normal
14 Activation Allumage de la sortie Éclairage automatique avec
temporisateur extinction temporisée
clairage automatique
15 Marche - Arrêt Allumage et extinction de la sortie Éclairage automatique
éclairage en modalité pas à pas
automatique
Page 42

FR
12 – Français
MISE AU REBUT DU PRODUIT
Ce produit est partie intégrante de l’automatisation et doit donc être éliminé avec celle-ci.
Comme pour les opérations d’installation, même à la fin de la vie de ce produit,
les opérations de démantèlement doivent être effectuées par un personnel
qualifié.
Ce produit est composé de différents types de matériaux : certains peuvent être
recyclés, d’autres doivent être éliminés. S’informer sur les systèmes de recycla ge ou de mise au rebut prévus par les règlements en vigueur sur le territoire,
pour cette catégorie de produit.
Attention ! – Certaines parties du produit peuvent contenir des substances
polluantes ou dangereuses qui, si dispersées dans l’environnement, pourraient
provoquer des effets nocifs sur l’environnement et sur la santé humaine.
Comme indiqué par le symbole ci-contre, il est interdit de jeter
ce produit dans les déchets domestiques. Effectuer une “collecte séparée” pour la mise au rebut, selon les méthodes prévues par les règlements en vigueur sur le territoire, ou amener le
produit au vendeur au moment de l’achat d’un nouveau produit
équivalent.
Attention ! – les règlements en vigueur au niveau local peuvent prévoir de
lourdes sanctions en cas de mise au rebut abusif de ce produit.
Mise au rebut de la batterie tampon (si présente)
Attention ! – La batterie déchargée contient des substances polluantes et ne
doit pas être jetée dans les déchets communs.
Il faut l’éliminer en utilisant les méthodes de collecte séparée, prévues par les
normes en vigueur dans le territoire.
08. Remettre le carter en plastique puis le couvercle de l’opérateur (fig. 21-7) ;
09. Connecter ensuite le câble à Kio en suivant les indications du guide d’ins-
tructions.
MAINTENANCE DU PRODUIT
9
Pour maintenir constant le niveau de sécurité et pour garantir la durée maximale de toute l’automatisation, une maintenance régulière est nécessaire.
La maintenance doit être effectuée dans le respect total des prescriptions sur la
sécurité du présent manuel et conformément à ce qui est prévu par les lois et
normes en vigueur.
Contrôler fréquemment sur le produit qu’il n’y ait pas de déséquilibres des vantaux ou de signes d’usure, ou de dommages aux câbles. Ne pas utiliser le produit au cas où des réparations ou des réglages seraient nécessaires.
Important – Durant les phases de maintenance ou d’entretien du produit,
débrancher la centrale de l’alimentation électrique et des batteries si elles
sont prévues.
Pour les autres dispositifs présents sur l’installation, suivre ce qui est prévu
dans les respectifs plans de maintenance.
Pour les opérateurs HK7024, HK7224 est nécessaire une maintenance programmée au maximum dans les 6 mois ou 20.000 manœuvres qui suivent la
précédente maintenance.
Pour effectuer la maintenance, procéder de la façon suivante :
01. Débrancher toute source d’alimentation électrique, éventuelles batteries
tampon comprises ;
02. Contrôler l'état de détérioration des pattes et des chevilles de fixation avec
une attention particulière pour les phénomènes d'érosion ou d'oxydation
des parties ; remplacer les parties qui ne fournissent pas de garanties suffisantes ;
03. Effectuer un essai de déblocage pour vérifier son fonctionnement correct,
voir paragraphe 3.6 ;
04. Rebrancher les sources d’alimentation électrique et effectuer tous les
essais et les contrôles prévus au chapitre 5 - Essai.
Durabilité du produit
La durabilité est la vie économique moyenne du produit. La valeur de la durabilité est fortement influencée par l’indice de charge de travail des manœuvres
effectuées par l’automatisme : c’est-à-dire la somme de tous les facteurs qui
contribuent à l’usure du produit (voir Tableau 13).
Pour établir la durabilité probable de votre automatisme procéder de la façon
suivante :
01. Calculer l’indice de charge de travail
en additionnant les valeurs en pour-
centage des données présentes dans le Tableau 13 ;
02. Dans le Graphique 3, de la valeur qui vient d’être trouvée, tracer une ligne
verticale jusqu’à l’intersection avec la courbe ; à partir de ce point tracer une
ligne horizontale jusqu’à l’intersection avec la ligne des « cycles de manœuvres ». La valeur déterminée est la durabilité estimée
de votre produit.
L’estimation de durabilité est effectuée sur la base des calculs de projet et des
résultats d’essais effectués sur les prototypes. En effet, s’agissant d’une estimation, elle ne représente aucune garantie sur la durée effective du produit.
Exemple du calcul de durabilité d’un opérateur HYKE avec bras de longueur TO TALE (se référer au Tableau 13 et au Graphique 3) :
- longueur du vantail = 2,8 m (indice de charge de travail : 20 %); - poids du vantail : 230 kg
(indice de charge de travail : 20 %) ; - vantail plein (indice de charge de travail : 15 %); Indice
de charge de travail total = 55 % ; Durabilité estimée = 220.000 cycles de manœuvres
GRAPHIQUE 3
cycles de manœuvres
indice de charge de travail %
TABLEAU 13
Indice de charge de travail
bras longueur TOTALE bras longueur RÉDUITE
< 1,8
1,8 - 2,5 m
2,5 - 3 m
3 - 3,5 m
< 200 kg
200 + 250 kg
> 250 kg
Longueur du vantail
Poids du vantail
Température ambiante supérieure à 40 °C ou inférieure à 0 °C ou humidité
supérieure à 80 %
Vantail plein
Installation dans une zone venteuse
Note – Les données se réfèrent à une porte sectionnelle équilibrée et parfaitement entretenue.
0%
15%
20%
30%
0%
20%
30%
20%
15%
15%
15%
20%
30%
30%
40%
20%
20%
20%
500.000
400.000
300.000
220.000
200.000
100.000
0 102030405060708090100
Page 43

FR
Français – 13
CARACTÉRISTIQUES TECHNIQUES DU PRODUIT
HK7224K
Opérateur électromécanique pour automatismes de portails
et portes automatiques avec moteur en courant continu,
réducteur épicycloïdal, débrayage mécanique.
HK7024K
Opérateur électromécanique pour automatismes de portails
et portes automatiques avec moteur en courant continu,
réducteur épicycloïdal, débrayage mécanique. Logique de
commande incorporée et récepteur radio OXI
Typologie
Couple maximum 500 Nm
Couple nominal 120 Nm
Vitesse à vide 2,25 tr/min
Vitesse au couple nominal 2,00 tr/min
Fréquence maximale des cycles 40 cycles/heure
Temps maximal du cycle continu 7 minutes environ
Limites d’application le produit peut être utilisé sur des portails avec vantail pesant jusqu’à 330 kg pour des longueurs jusqu’à 1,8 m
ou jusqu’à 200 kg pour des longueurs jusqu’à 3,5 m (voir graphique 1)
Durabilité estimée entre 150 000 cycles et 500 000 cycles, suivant les conditions indiquées dans le Tableau 13 et dans le Graphique 3
Montage Vertical, avec une plaque de fixation spécifique
Température de fonctionnement de –20 °C à +50 °C (aux basses températures l’efficacité de l’opérateur diminue)
Utilisation dans une atmosphère
particulièrement acide ou saline NON
ou bien potentiellement explosive
Indice de protection IP 54 (avec boîtier intact)
Dimensions (mm) 210 x 290 x h 320
Poids (kg) 10,5 kg 9,5 kg.
Notes :
(1) - Fonction activable avec le programmateur Oview.
[*] - Les sorties Clignotant, Serrure Électrique, Voyant Portail Ouvert peuvent être programmées avec d’autres fonctions (voir « TABLEAU
3 - Fonctions 1
er
niveau » ; ou à l’aide du pro-
grammateur Oview, voir paragraphe
8.3). Les caractéristiques électriques des sorties s’adaptent suivant le type de fonction choisie : • fonction clignotant : ampoule 12 Vcc, 21 W max. ;
• fonction serrure électrique : 12 Vca 15 VA max. ; • autres sorties (tous les types) : 1 ampoule ou relais 24 Vcc (-30 et +50 %), 4 W max.
Alimentation 230 Vca (120 Vca pour version HK7024K/V1) 24 Vcc (±10%)
±10%; 50/60 Hz
Alimentation de secours Prévision pour batteries tampon PS124
Alimentation par panneaux prévision pour Kit SYKCE
solaires
Puissance maximum absorbée 300 W 140 W
Courant maximum absorbé 1,5 A (3 A pour version HK7024K/V1) 6 A pour un temps maximum de 2 s
Puissance absorbée en
« Stand-by total (1) » avec inférieure à 100 mW
alimentation par PS124 ou kit
SYKCE (récepteur OXI compris)
Sortie clignotant [*] un clignotant LUCYB (ampoule 12 V, 21 W)
Sortie serrure électrique [*] une serrure électrique de 12 Vca max. 15 VA
Sortie voyant portail ouvert [*] une ampoule 24 V maximum 4 W (la tension de
sortie peut varier de -30 à +50% et la sortie
peut commander également des petits relais)
Sortie BLUEBUS une sortie avec charge maximum de 15 unités
Bluebus (maximum 6 paires de photocellules MOFB
ou MOFOB plus 2 paires de photocellules MOFB
ou MOFOB adressées comme dispositifs d’ouverture
plus maximum 4 dispositifs de commande MOMB ou MOTB)
Entrée STOP pour contacts normalement fermés, normalement
ouverts ou à résistance constante 8,2 kΩ ; la sélection du
type de contact s’effectue en auto-apprentissage et
une variation par rapport à l’état mémorisé
provoque la commande « STOP ».
Entrée PP pour contacts normalement ouverts (la fermeture
du contact provoque la commande Pas à pas)
Connecteur radio connecteur « SM » pour récepteurs de
la famille SMXI, OXI et OXIFM
Entrée ANTENNE radio 50 Ω pour câble type RG58 ou similaires
Fonctions programmables 8 fonctions de type ON-OFF (Tableau 3)
et 8 fonctions réglables (Tableau 5)
Fonctions en • Auto-apprentissage des dispositifs connectés
auto-apprentissage à la sortie BlueBUS. • Auto-apprentissage du type
de dispositif connecté à la borne « STOP » (contact NO, NF
ou résistance 8,2 kΩ). • Auto-apprentissage de la course
des vantaux et calcul en automatique des points de
ralentissement et d’ouverture partielle. • Auto-apprentissage
du fonctionnement à un ou deux moteurs
AVERTISSEMENTS : • Toutes les caractéristiques techniques indiquées se réfèrent à une température ambiante de 20 °C (± 5 °C). • Nice S.p.a. se réserve le
droit d’apporter des modifications au produit à tout moment si elle le jugera nécessaire, en garantissant dans tous les cas les mêmes fonctions et le même type
d’utilisation prévu.
Page 44

FR
14 – Français
DÉCLARATION CE DE CONFORMITÉ
et déclaration d’incorporation de « quasi-machine »
Déclaration conformément aux Directives : 2006/95/CE (LVD) ; 2004/108/CE (EMC) ; 2006/42/CE (MD) annexe II, partie B
Note - Le contenu de cette déclaration correspond à ce qui est déclaré dans la dernière révision disponible - avant l’impression de la présente notice technique – du document
officiel déposé au siège de Nice S.p.a. Le présent texte a été réélaboré pour des raisons d’édition. Une copie de la déclaration originale peut être demandée à Nice S.p.a. (TV) I.
Numéro déclaration : 334/HYKE Révision : 0 Langue : FR
Nom producteur : NICE s.p.a.
Adresse : Via Pezza Alta 13, Z.I. Rustignè, 31046 Oderzo (TV) Italie
Personne autorisée à
constituer la
documentation technique M. Oscar Marchetto
Type de produit : Opérateur électromécanique « HYKE » avec logique de commande incorporée
Modèle / Type : HK7024K, HK7224K
Accessoires : SMXI, OXI, PS124, Oview
Je soussigné Luigi Paro en qualité d’Administrateur Délégué, déclare sous mon entière responsabilité que le produit susmentionné est conforme aux dispositions imposées par les directives suivantes :
• DIRECTIVE 2006/95/CEE DU PARLEMENT EUROPÉEN ET DU CONSEIL du 12 décembre 2006 concernant le rapprochement des législations des États
membres relatives au matériel électrique destiné à être employé dans certaines limites de tension, selon les normes harmonisées suivantes :
EN 60335-1:2002 + A1:2004 + A11:2004 + A12:2006 + A2:2006 + A13:2008; EN 60335-2-103:2003
• DIRECTIVE 2004/108/CE DU PARLEMENT EUROPÉEN ET DU CONSEIL du 15 décembre 2004 concernant le rapprochement des législations des États
membres relatives à la compatibilité électromagnétique et qui abroge la directive 89/336/CEE, selon les normes harmonisées suivantes :
EN 61000-6-2:2005, EN 61000-6-3:2007
De plus, le produit est conforme à la directive suivante, selon les exigences prévues pour les « quasi-machines » :
• Directive 2006/42/CE DU PARLEMENT EUROPÉEN ET DU CONSEIL du 17 mai 2006 relative aux machines et qui modifie la directive 95/16/CE (refonte).
• Nous déclarons que la documentation technique pertinente a été remplie conformément à l’annexe VII B de la directive 2006/42/CE et que les conditions essentielles suivantes ont été respectées : 1.1.1- 1.1.2- 1.1.3- 1.1.5- 1.2.1-1.2.6- 1.3.1- 1.3.2- 1.3.3- 1.3.4- 1.3.7-1.3.9- 1.5.1-1.5.2- 1.5.4-
1.5.5- 1.5.6- 1.5.7- 1.5.8- 1.5.10- 1.5.11- 1.5.13-1.6.1- 1.6.2-1.6.4- 1.7.2- 1.7.3- 1.7.4- 1.7.4.1- 1.7.4.2- 1.7.4.3
• Le producteur s’engage à transmettre aux autorités nationales, suite à une demande dûment motivée, les informations pertinentes sur la « quasimachine », sans que cela porte préjudice à ses droits de propriété intellectuelle.
• Si la « quasi-machine » est mise en service dans un pays européen avec une langue officielle différente utilisée dans la présente déclaration, l’importateur a l’obligation d’associer à la présente déclaration la traduction correspondante.
• Il est précisé que la « quasi-machine » ne doit pas être mise en service tant que la machine finale dans laquelle elle doit être incorporée n’a pas été
elle-même déclarée conforme aux dispositions pertinentes de la directive 2006/42/CE.
De plus, le produit est conforme, pour ce qui est des seules parties applicables, aux normes suivantes :
EN 13241-1:2003, EN 12445:2002, EN 12453:2002, EN 12978:2003
Oderzo, le 15 janvier 2010 Luigi Paro (Administrateur Délégué)
Page 45
ES
Español – 1
ESPAÑOL
Instrucciones originales
Índice
1 - ADVERTENCIAS Y PRECAUCIONES GENERALES.............................. 1
1.1 - Advertencias de seguridad .................................................................... 1
1.2 - Advertencias para la instalación............................................................. 1
1.3 - Advertencias para el uso ....................................................................... 1
2 - DESCRIPCIÓN DEL PRODUCTO Y USO PREVISTO............................ 1
3 - INSTALACIÓN ......................................................................................... 2
3.1 - Controles preliminares a la instalación.................................................... 2
3.2 - Límites de utilización.............................................................................. 2
3.3 - Trabajos de predisposición para la instalación ....................................... 2
3.4 - Instalación del motorreductor mod. HK7024 - HK7224 ......................... 2
3.5 - Regulación de los fines de carrera mecánicos ....................................... 3
3.6 - Desbloqueo y bloqueo manual del motorreductor.................................. 4
4 - CONEXIONES ELÉCTRICAS.................................................................. 4
4.1 - Conexiones eléctricas del motorreductor con la central mod. HK7024 .. 4
4.2 - Conexión del motorreductor sin la central mod. HK7224....................... 4
4.3 - Conexión de otros dispositivos.............................................................. 4
4.4 - Direccionamiento de los dispositivos conectados .................................. 5
4.5 - Primer encendido y control de las conexiones ....................................... 5
4.6 - Aprendizaje de los dispositivos conectados........................................... 5
4.7 - Aprendizaje de las posiciones de los fines de carrera mecánicos........... 5
4.8 - Control del movimiento de las hojas de la cancela................................. 6
5 - ENSAYO Y PUESTA EN SERVICIO ........................................................ 6
5.1 - Ensayo .................................................................................................. 6
5.2 - Puesta en servicio ................................................................................. 6
6 - PROGRAMACIÓN DE LA CENTRAL DE MANDO ................................. 7
6.1 - Programación del primer nivel (ON-OFF)................................................ 7
6.2 - Programación del segundo nivel (parámetros regulables)....................... 8
6.3 - Funciones especiales............................................................................. 9
6.4 - Borrado de la memoria.......................................................................... 9
7 - QUÉ HACER SI… (guía para solucionar los problemas) ...................... 9
8 - OTRAS INFORMACIONES ................................................................... 11
8.1 - Conexión de un receptor ..................................................................... 11
8.2 - Conexión e instalación de la batería compensadora mod. PS124........ 11
8.3 - Conexión del programador Oview........................................................ 11
8.4 - Conexión del sistema de energía solar Solemyo .................................. 11
8.5 - Conexión del sistema de desbloqueo exterior Kio................................ 11
9 - MANTENIMIENTO DEL PRODUCTO ................................................... 12
ELIMINACIÓN DEL PRODUCTO ............................................................... 12
Durabilidad del producto........................................................................... 12
CARACTERÍSTICAS TÉCNICAS DEL PRODUCTO .................................. 13
DECLARACIÓN DE CONFORMIDAD CE .................................................. 14
ANEXO........................................................................................................... I
Instrucciones y advertencias destinadas al usuario ........................................ V
Imágenes ...................................................................................................... IX
1.1 - Advertencias de seguridad
• ¡ATENCIÓN! – Este manual contiene importantes instrucciones y ad -
ver tencias acerca de la seguridad. Una instalación incorrecta puede causar graves lesiones. Antes de iniciar los trabajos, es necesario leer detenidamente todas las partes del manual. En caso de dudas, interrumpa la instalación y solicite información al Servicio de Asistencia Nice.
• ¡ATENCIÓN! – Instrucciones importantes: conserve este manual para
posibles intervenciones de mantenimiento y eliminación del producto.
• ¡ATENCIÓN! – Según la más reciente legislación europea, la ejecución
de un portón o puerta automática debe cumplir las normas previstas
por la Directiva 2006/42/CE (ex 98/37/CE) (Directiva de Máquinas) y, e n
con creto, las normas EN 12445; EN 12453; EN 12635 y EN 13241-1, que
per miten declarar la conformidad del automatismo. Considerando lo
anterior, todas las operaciones de instalación, conexión, ensayo y
mant enimiento del producto deberán ser realizadas únicamente por un
técnico cualificado y competente.
1.2 - Advertencias de instalación
• Antes de comenzar la instalación, compruebe si el producto es apto para el
tipo de uso deseado (véanse los “Límites de uso” en el párrafo 3.2 y las “Características técnicas del producto”). Si no es apto, NO continúe con la instalación.
• El contenido de este manual se refiere a un sistema típico como aquel que se
muestra en la fig. 3.
• Todas las operaciones de instalación y mantenimiento deben efectuar-
se con el automatismo desconectado de la alimentación eléctrica. Si el
dispositivo de desconexión de la alimentación no resulta visible desde el
lugar en el que está situado el automatismo, antes de comenzar los trabajos
es necesario fijar al dispositivo de desconexión un cartel con el mensaje
“¡ATENCIÓN! MANTENIMIENTO EN CURSO”.
• La central debe ser conectada a una línea de alimentación eléctrica dotada
de puesta a tierra de seguridad.
• Durante la instalación, maneje con cuidado el producto, evitando aplastamientos, golpes, caídas o el contacto con líquidos de cualquier tipo. No coloque el producto cerca de fuentes de calor ni lo exponga a llamas libres.
Todas estas acciones pueden dañarlo y provocar funcionamientos defectuosos o situaciones de peligro. Si ocurriese esto, interrumpa inmediatamente la
instalación y acuda al Servicio de Asistencia Nice.
• No efectúe modificaciones en ninguna parte del producto. Las operaciones
no permitidas no pueden causar más que funcionamientos defectuosos. El
fabricante declina toda responsabilidad por daños derivados de modificaciones arbitrarias del producto.
• Si la puerta o portón que se desea automatizar incluye una puerta peatonal,
es necesario preparar la instalación con un sistema de control que deshabilite el funcionamiento del motor cuando la puerta peatonal esté abierta.
• El material del embalaje del producto debe eliminarse cumpliendo plenamente la normativa local.
1.3 - Advertencias de uso
• El producto no está destinado a su uso por parte de personas (niños incluidos) cuyas capacidades físicas, sensoriales o mentales se hallen disminuidas, o que carezcan de la experiencia o conocimientos necesarios, a no ser
que una persona responsable de su seguridad les proporcione supervisión o
instrucciones acerca del uso del producto.
• Es necesario mantener vigilados a los niños que se encuentren cerca de la
automatismo; asegúrese de que no jueguen con él.
• No permita que los niños jueguen con los dispositivos de mando fijos. Mantenga los dispositivos de mando portátiles (remotos) fuera del alcance de los niños.
ADVERTENCIAS Y PRECAUCIONES
GENERALES
1
Los dispositivos que componen este producto están destinados a la automatización de una puerta o portón de una o dos hojas. ¡ATENCIÓN! - Cualquier
uso distinto del descrito y en condiciones ambientales diferentes de las
descritas en este manual se considerará impropio y queda prohibido.
La parte principal del automatismo consta de uno o dos motorreductores electromecánicos (dependiendo del número de hojas que se vaya a automatizar),
cada uno de ellos dotado de un motor de corriente continua y un reductor planetario. Uno de los motorreductores (mod. HK7024) incluye una central de
mando que gestiona su funcionamiento. La central se compone de una tarjeta
con radiorreceptor, para la recepción de mandos enviados desde el transmisor.
La central está preparada para su conexión a diversos dispositivos pertenecientes al Sistema Opera, al sistema Bluebus y al sistema de alimentación por
energía solar Solemyo, véase el capítulo 8 - Otras informaciones.
Si se alimenta mediante la red eléctrica, puede alojar una batería compensadora (mod. PS124, accesorio opcional), que en caso de interrupción de la energía
eléctrica (apagón eléctrico) permite que el automatismo efectúe algunas ma niobras durante las horas que siguen.
En caso de interrupción de la energía eléctrica, es posible mover las hojas de la
puerta desbloqueando el motorreductor con la llave correspondiente; para
efectuar la maniobra manual, véase el capítulo 3.6.
Otros accesorios disponibles son los receptores preparados con conexión
“SM” (SMXI, OXI, etc.), véase el capítulo 8 - Otras informaciones.
DESCRIPCIÓN DEL PRODUCTO Y USO
PREVISTO
2
Page 46

INSTALACIÓN
3
3.1 - Comprobaciones previas a la instalación
Antes de comenzar la instalación, es necesario comprobar la integridad de los
componentes del producto, la adecuación del modelo elegido y la idoneidad
del ambiente destinado a su instalación:
• Compruebe que todo el material que se vaya a utilizar esté en perfecto estado y que sea apto para el uso previsto.
• Compruebe que la instalación incluya los topes mecánicos de suelo (no
incluidos), tanto de cierre como de apertura.
• Compruebe que la estructura mecánica de la puerta sea apta para su automatización y conforme a las normas vigentes en el territorio (en caso necesario consulte los datos indicados en la etiqueta de la puerta). Este producto no
puede automatizar una puerta que no sea eficiente y segura de por sí; además, no puede resolver defectos causados por una instalación incorrecta de
ES
la puerta o por un mantenimiento deficiente de esta.
• Compruebe que las condiciones de funcionamiento de los dispositivos sean
compatibles con los límites de uso declarados (véase el párrafo 3.2).
• Mueva manualmente las hojas de la puerta en ambas direcciones y asegúrese de
que el movimiento se produzca con una fricción constante en todos los puntos
de la carrera (no debe haber puntos que requieran un esfuerzo mayor o menor).
• Ponga manualmente las hojas de la puerta en una posición cualquiera; luego
déjelas detenidas y asegúrese de que no se muevan.
• Compruebe que la zona de fijación del motorreductor sea compatible con las
medidas totales de este (fig. 1).
• Asegúrese de que en el ambiente en el que se debe instalar el motorreductor
haya espacio suficiente para la rotación completa de su brazo.
• Asegúrese de que en la zona cercana al motorreductor haya espacio suficiente para efectuar la maniobra manual de desbloqueo del motorreductor.
• Asegúrese de que las superficies elegidas para instalar los diversos dispositivos sean sólidas y capaces de garantizar una fijación estable.
• Asegúrese de que cada uno de los dispositivos a instalar sea colocado en
una posición protegida y resguardada contra golpes accidentales.
• Compruebe que todos los cables eléctricos utilizados sean del tipo indicado
en la Tabla 1.
3.2 - Límites de utilización
Antes de instalar el motorreductor, controle que los datos respectivos estén dentro de los límites de utilización indicados a continuación y dentro de los límites de
los valores indicados en el capítulo “Características técnicas del producto”:
Con el brazo del motor de longitud ENTERA:
- anchura máxima de la hoja: 3,50 m (peso máximo de la hoja: 200 kg)
Con el brazo del motor de longitud CORTA:
- anchura máxima de la hoja: 3,00 m (peso máximo de la hoja: 180 kg)
• Control que se debe efectuar: indique en el Gráfico 1 de aquí al lado el peso
y la anchura de la hoja; a partir de estos puntos, trace dos líneas y controle que
éstas se crucen en una de las dos áreas grises del gráfico. ¡Atención! - Si las
líneas se cruzaran en el área blanca, este producto no se podrá utilizar para
automatizar la cancela.
• Para poder instalar el motorreductor, la anchura mínima del pilar debe ser de
210 mm.
• El estribo de fijación del brazo debe estar en una zona robusta de la hoja (por
ejemplo el bastidor), a fin de garantizar una fijación sólida y segura;
• Controle la medida “E” (fig. 2):
- Si la medida “E” es un valor comprendido entre 300 mm (mínimo) y 650
mm (máximo), habrá que regular el brazo del motorreductor con la longitud
CORTA. En dichas condiciones, la medida de la apertura máxima de la hoja
podrá llegar hasta 90°.
- Si la medida “E” es un valor igual o mayor que 650 mm, habrá que regular
el brazo del motorreductor con la longitud ENTERA. En dichas condiciones,
la medida de la apertura máxima de la hoja podrá llegar hasta 110°.
GRÁFICO 1
350
300
250
200
PESO (kg.)
150
100
1,8 2 2,5 3 3,5
ANCHURA (m.)
3.3 - Trabajos de predisposición para la instalación
En la fig. 3 se muestra un ejemplo de un sistema de automatización realizado con
componentes Nice (algunos componentes podrían no estar
a - Motorreductor con central mod. HK7024
b - Motorreductor sin central mod. HK7224
c - Luz intermitente
d - Par de fotocélulas mod. MOFB
e - Botonera digital (mod. MOTB) – Lector por transponder (mod. MOMB) -
Selector de llave (mod. MOSE)
f - Par de columnas para fotocélulas
g - Tope mecánico de cierre
h - Electrocerradura
Estos componentes están colocados según un esquema típico y habitual.
Tomando como referencia la fig. 3, establezca la posición aproximada donde
será instalado cada uno de los componentes previstos en el sistema. Impor-
tante - Antes de realizar la instalación, prepare los cables eléctricos necesarios
para el sistema, tomando como referencia la fig. 4 y la “Tabla 1 - Característi-
cas técnicas de los cables eléctricos”.
Atención – Durante el montaje de los tubos para el paso de los cables eléctri-
cos, tenga en cuenta que, por motivos de posibles depósitos de agua en las
arquetas de derivación, los tubos de conexión podrían crear condensados
dentro de la central y dañar los circuitos electrónicos.
3.4 - Instalación del motorreductor mod. HK7024 - HK7224
ADVERTENCIAS
• Una instalación incorrecta podría provocar heridas graves a la persona
que realice el trabajo y a las personas que utilicen el sistema.
• Antes de ensamblar el automatismo, realice los controles preliminares
descritos en los párrafos 3.1 y 3.2.
Antes de comenzar la instalación, determine la longitud del brazo del motorreductor, véase el párrafo 3.4.1.
3.4.1 - Determinación de la longitud del brazo del motorreductor
01. Ensamble los componentes que constituyen el brazo del motor, tal como
se muestra en la fig. 5;
02. Establezca la posición del motorreductor en sentido VERTICAL:
trace una línea horizontal en el pilar, a la misma altura en que deberá estar
el estribo de fijación del brazo en la hoja, después de la instalación (fig. 6).
03. Establezca la posición del motorreductor en sentido HORIZONTAL
(medida A):
¡ATENCIÓN! – Si en las cercanías de la zona de instalación hubiera
un obstáculo fijo (muro, árbol, etc.), habrá que medir la medida E
2) y proceder de la siguiente manera:
• Si la medida E es un valor igual o mayor que 650 mm
párrafo 3.4.2
Para brazo de
longitud entera
Para brazo de
longitud reducida
presentes en el kit):
(fig.
, véase el
TABLA 1 - Características técnicas de los cables eléctricos (fig. 4)
Conexión Tipo de cable Longitud máxima admitida
A: Cable ALIMENTACIÓN CENTRAL DE MANDO 1 cable 3 x 1,5 mm
B: Cable ELECTROCERRADURA 1 cable 2 x 1 mm
C: Cable DISPOSITIVOS BLUEBUS 1 cable 2 x 0,5 mm
2
2
2
30 m (nota 1)
6 m
20 m (nota 2)
D: Cable SELECTOR DE LLAVE 2 cables 2 x 0,5 mm2 (nota 3) 50 m
E: Cable ALIMENTACIÓN MOTORREDUCTOR 1 cable 3 x 1,5 mm
2
(nota 4) 10 m
Cable CONEXIÓN ENCODER 1 cable 2 x 1 mm2 (nota 4) 10 m
F: Cable LUZ INTERMITENTE con antena 1 cable 2 x 0,5 mm
2
20 m
1 cable blindado tipo RG58 20 m (aconsejado menos de 5 m)
Nota 1 – Si el cable de alimentación midiera más de 30 m, tendrá que utilizar un cable de sección más grande (3 x 2,5 mm2) y habrá que instalar una puesta a tierra de seguridad
cerca del automatismo.
Nota 2 – Si el cable Bluebus midiera más de 20 m hasta un máximo de 40 m, tendrá que utilizar un cable de sección más grande (2 x 1 mm
Nota 3 – Estos 2 cables pueden sustituirse por un único cable de 4 x 0,5 mm
Nota 4 – Estos cables pueden sustituirse por un único cable de 5 x 1,5 mm
2
.
2
.
2
).
¡ATENCIÓN! – Los cables utilizados deben ser adecuados para el tipo de entorno donde serán instalados.
2 – Español
Page 47

ES
Español – 3
• Si la medida E es un valor comprendido entre 300 mm (mínimo) y
650 mm (máximo), véase el párrafo 3.4.3
3.4.2 - Instalación del motorreductor con BRAZO DE LONGITUD
ENTERA
01. a) Mida en el pilar la medida B
(fig. 7) = distancia entre el eje de rotación de la
ho ja y la superficie del pilar donde se fijará el estribo posterior del motorreductor.
b) Coloque la hoja en la posición de apertura deseada (máximo 110°): valor
del ángulo.
c) Marque en el Gráfico 2 la medida B
encontrada y trace desde este
punto una línea horizontal hasta interceptar el área
que comprende el valor
del ángulo medido en el punto b.
d) En los puntos de intercepción, entre la línea horizontal y el área
, trace líne-
as verticales determinando los valores que se pueden utilizar para la medi
-
da A
(fig. 8). Posteriormente, seleccione en este rango un valor de A.
e) Marque en el pilar el valor encontrado de la medida A
y trace una línea
vertical en correspondencia.
02. Fije el estribo en el pilar (fig. 9)
:
f) etapas 1-2: apoye el estribo sobre el pilar, haciendo coincidir su línea
central vertical con la línea vertical trazada anteriormente (medida A), y su
brazo con la línea horizontal trazada en el procedimiento indicado en el
párrafo 3.4.1. En esta etapa, controle que el motorreductor esté perfectamente nivelado: un motorreductor descentrado podría provocar problemas
de funcionamiento en el automatismo.
g) etapas 3-4: marque los puntos de fijación, taladre la superficie del pilar
e introduzca los tacos; entonces, fije el estribo utilizando los tornillos y las
arandelas adecuados.
03. Fije el brazo del motorreductor en la hoja
:
h) Coloque la hoja de la cancela en la posición de cierre máximo;
i) etapa 5: fije el motorreductor al estribo con los dos tornillos y las tuercas
suministrados;
l) Desbloquee el motorreductor; véase el cap. 3.6;
m) etapa 6: empuje con fuerza el brazo del motorreductor hasta su máxi
-
ma extensión
. ¡Atención! - Controle que el brazo se bloquee en su fin
de carrera;
n) Acerque el brazo a la hoja, apoyando en esta última el estribo de fijación.
o) etapa 7: controle que el brazo del motorreductor esté nivelado y marque
con un lápiz el centro
del perfil de los agujeros alargados del estribo, a fin
de poder, posteriormente, regular de manera precisa el cierre de la hoja
(véase el párrafo 4.8).
p) Sujetando con una mano el estribo contra la hoja, pruebe a realizar un
movimiento de apertura y de cierre completos.
q) etapa 8: taladre la hoja en los puntos marcados y separe el estribo del
brazo para fijarlo a la hoja de la cancela con los tornillos correspondientes.
r) etapa 9: fije el brazo al estribo, introduciendo el perno y el anillo elástico
de seguridad. Importante – Controle que el estribo y el brazo estén perfectamente nivelados. De ser necesario, afloje los tornillos del estribo y
nivele de nuevo.
s) Coloque los topes de fin de carrera mecánicos; véase el cap. 3.5;
t) etapa 10: por último, coloque manualmente la hoja de la cancela en la
mi tad de su carrera y bloquee el motorreductor con la llave correspondiente (véase el cap. 3.6). Posteriormente, desplace con la mano la hoja algunos centímetros en dirección de la apertura.
04. Si la cancela que se debe automatizar es de dos hojas, para instalar el otro
motorreductor, repita todas las operaciones descritas en este capítulo 3.4
3.4.3 - Instalación del motorreductor con BRAZO DE LONGITUD
CORTA
¡Atención! – Con esta configuración, la apertura máxima de la hoja
0
150 175 200 225 250 275 300 325 350 375 400 425 450 475
50
B
A
100
150
200
250
300
350
400
450
90°-95°
95°-100°
100°-105°
105°-110°
90°-95°
95°-105°
GRÁFICO 2
admitida es de 90°.
01. a) Mida en el pilar la medida B
(fig. 7) = distancia entre el eje de rotación
de la hoja y la superficie del pilar donde se fijará el estribo posterior del mo torreductor.
b) Marque en el Gráfico 2 la medida B
encontrada y trace desde este
punto una línea horizontal hasta interceptar el área
con un rango compren-
dido entre 90° y 95°.
c) En los puntos de intercepción, entre la línea horizontal y el área
, trace líne-
as verticales determinando los valores que se pueden utilizar para la medida
A (gráfico 2). Posteriormente, seleccione en este rango un valor de A.
d) Marque en el pilar el valor encontrado de la medida A
y trace una línea
vertical en correspondencia.
02. Fije el estribo en el pilar (fig. 10)
:
e) etapas 1-2: apoye el estribo sobre el pilar, haciendo coincidir su línea
central vertical con la línea vertical trazada anteriormente (medida A), y su
brazo con la línea horizontal trazada en el procedimiento indicado en el
párrafo 3.4.1. En esta etapa, controle que el motorreductor esté perfectamente nivelado: un motorreductor descentrado podría provocar problemas
de funcionamiento en el automatismo.
f) etapas 3-4: marque los puntos de fijación, taladre la superficie del pilar e
introduzca los tacos; entonces, fije el estribo utilizando los tornillos y las
arandelas adecuados.
g) Coloque la hoja de la cancela en la posición de cierre máximo;
h) etapa 5: fije el motorreductor al estribo con los dos tornillos y las tuercas
suministrados;
i) Desbloquee el motorreductor; véase el cap. 3.6;
03. Control de la longitud del brazo con agujeros alargados respecto del
entorno:
l) etapa 6: acerque el brazo a la hoja, apoyando en esta última el estribo de
fijación: ¡atención!
- empuje con las manos el brazo curvo contra la
hoja, hasta bloquear el brazo (apertura máxima).
m) etapa 7: controle que el brazo del motorreductor esté nivelado y mar-
que con un lápiz el centro
del perfil de los agujeros alargados del estribo,
a fin de poder, posteriormente, regular de manera precisa el cierre de la
hoja (véase el párrafo 4.8).
n) Fije provisoriamente el estribo en la hoja y coloque esta última en la posición de apertura máxima.
04. Fije el brazo del motorreductor en la hoja
:
o) etapa 8: taladre la hoja en los puntos marcados.
p) etapas 9-10: quite el estribo del brazo para fijarlo a la hoja de la cance-
la con los tornillos correspondientes.
q) etapa 11: fije el brazo al estribo, introduciendo el perno y el anillo elástico de seguridad. Importante - Controle que el estribo y el brazo estén per-
fectamente nivelados. De ser necesario, afloje los tornillos del estribo y
nivele de nuevo.
r) Coloque los topes de fin de carrera mecánicos; véase el cap. 3.5.
s) etapa 12: por último, coloque manualmente la hoja de la cancela en la
mitad de su carrera y bloquee el motorreductor con la llave correspondiente (véase el cap. 3.6). Posteriormente, desplace con la mano la hoja algunos centímetros en dirección de la apertura.
05. Si la cancela que se debe automatizar es de dos hojas, para instalar el otro
motorreductor, repita todas las operaciones descritas en este capítulo 3.4
3.5 - Regulación de los fines de carrera mecánicos
01. Coloque manualmente las hojas de la cancela en la posición de apertura
máxima;
02. Gire el disco de plástico, situado en la parte inferior del motorreductor, colocando la ranura debajo del brazo en la posición que se muestra en la fig. 11-1;
Page 48

ES
4 – Español
03. Monte el fin de carrera en la primera posición posible: pruebe a colocarlo
como se muestra en la fig. 11-2 (dirección de apertura);
04. Gire el disco para que el fin de carrera no se caiga, colocando la ranura en
la posición que se muestra en la fig. 11-3; para una regulación más precia,
utilice el tornillo de regulación (fig. 11-4);
05. Si el sistema no incorpora el tope de cierre del suelo, habrá que repetir el
procedimiento a partir del punto 01, incluso para la regulación del fin de
carrera de cierre;
06. Por último, enrosque hasta el fondo la tuerca de fijación del disco (fig. 11-
5) para asegurarse de que no pueda girar accidentalmente.
3.6 - Desbloqueo y bloqueo manual del motorreductor
El motorreductor está equipado con un sistema de desbloqueo mecánico que
permite abrir y cerrar la cancela manualmente.
Estas operaciones manuales deben llevarse a cabo si se cortara la corriente
eléctrica, si se produjeran desperfectos en el funcionamiento o durante las etapas de instalación.
Desbloqueo (fig. 12-A):
01. Coloque la llave en la cerradura respectiva;
02. Gire la llave en el sentido horario (90°);
03. La palanca sale por efecto de un muelle: gire la palanca 90° en el sentido
antihorario;
04. Entonces, la hoja se podrá mover manualmente hacia la posición deseada.
Bloqueo (fig. 12-B):
01. Gire la palanca 90° colocando el mango en la posición vertical;
02. Empuje la palanca hasta su alojamiento;
03. Gire la llave 90° en el sentido antihorario y extraiga la llave.
La conexión eléctrica de los distintos dispositivos (fotocélulas, botoneras digitales, lectores de tarjetas por transponder, etc.), presentes en el automatismo
con la central de mando, debe hacerse mediante el sistema “Bluebus” de Nice.
Descripción de las conexiones eléctricas (fig. 13)
ANTENA entrada para la antena de un receptor
FLASH salida para una luz intermitente con bombilla de 12 V (máximo 21 W). [*]
ELS salida para electrocerradura de 12 Vac (máximo 15 VA). [*]
S.C.A. “Indicador Cancela Abierta”: salida para una bombilla de
señalización de 24V y 4W como máximo. [*]
BLUEBUS entrada para dispositivos compatibles (MOFB, MOFOB, MOB y
MOTB); conexión en paralelo de los dispositivos mediante 2
conductores por los cuales pasa la alimentación eléctrica y las
señales de comunicación; no hay que respetar ninguna polaridad.
La conexión eléctrica a utilizar es paralela y no necesita respetar la
polaridad. Durante la etapa de aprendizaje, cada dispositivo
conectado a la central será reconocido individualmente por ésta
gracias a un código unívoco. Cada vez que se añada o elimine un
dispositivo, habrá que hacer que la central memorice dicho
dispositivo (véase el párrafo 4.6).
STOP entrada para los dispositivos que al accionarse provocan la parada
inmediata del movimiento que se está ejecutando en ese momento,
seguido de una breve inversión; posibilidad de conectar contactos
NA, NC o bien dispositivos con salida con resistencia constante
8,2 kΩ (bandas sensibles). Cada dispositivo conectado a esta
entrada será reconocido individualmente por la central durante el
aprendizaje (párrafo 3.4); en esta etapa, si la central detectara una
variación respecto del estado memorizado, provocará una PARADA.
A esta entrada se le pueden conectar uno o varios dispositivos
incluso diferentes entre sí:
– conecte en paralelo varios dispositivos NA, sin límites de cantidad;
– conexión en serie de varios dispositivos NC, sin límite de cantidad;
– conecte en paralelo dos dispositivos con salida de resistencia
constante 8,2 kΩ. Si hubiera más de dos dispositivos, habrá que
conectarlos en cascada a una sola resistencia de terminación de
8,2 kΩ;
– conecte en paralelo dos dispositivos NA y NC, colocando una
resistencia de 8,2 kΩ en serie al contacto NC (esto permite la
combinación entre tres dispositivos NA - NC y 8,2 kΩ).
P. P. entrada para los dispositivos de mando que al activarse provocan el
movimiento con modalidad Paso a Paso; posibilidad de conectar
contactos tipo NA.
OPEN entrada para los dispositivos de mando que al activarse provocan
sólo el movimiento de apertura; posibilidad de conectar contactos
tipo NA
CLOSE entrada para los dispositivos de mando que al activarse provocan
sólo el movimiento de cierre; posibilidad de conectar contactos tipo NA
ENC1 entrada encoder - motorreductor 1 (bornes 1, 2); no hay que
respetar ninguna polaridad
CONEXIONES ELÉCTRICAS
4
ENC2 entrada encoder - motorreductor 2 (bornes 4, 5); no hay que
respetar ninguna polaridad
M1 salida para motorreductor 1 (bornes 7, 8, 9)
M2 salida para motorreductor 2 (bornes 10, 11, 12).
[*] Las salidas FLASH, ELS y S.C.A. pueden programarse con otras funciones
(véase la “TABLA 3 - Funciones de 1° nivel”; o bien mediante el programador
Oview, véase el capítulo 8.3).
4.1 - Conexiones eléctricas del motorreductor con la
central mod. HK7024
¡Atención! – Realice las conexiones eléctricas únicamente después de
haber instalado el motorreductor.
¡ADVERTENCIAS!
– Las operaciones de conexión deben ser realizadas exclusivamente por
personal cualificado.
– Todas las conexiones eléctricas deben hacerse con la corriente eléctrica de red desactivada y con la batería compensadora desconectada, si
estuviera presente en el automatismo.
– En la línea eléctrica de alimentación es necesario montar un dispositivo que
asegure la desconexión completa del automatismo de la red. El dispositivo de
desconexión deberá tener una distancia de apertura entre los contactos que
permita una desconexión completa en las condiciones previstas por la categoría de sobretensión III, de conformidad con las reglas de instalación. Si fuera
necesario, este dispositivo deberá garantizar una desconexión rápida y segura
de la alimentación; por dicho motivo, debe estar a la vista del automatismo. Por
el contrario, si se montara en una posición no visible, deberá tener un sistema
que bloquee una reconexión accidental o no autorizada de la alimentación, a fin
de evitar cualquier tipo de peligro. El dispositivo de desconexión no se entrega
junto con el producto.
01. Abra la tapa (fig. 14-1);
02. Levante la central (fig. 14-2);
03. Pase el cable de alimentación y los demás cables eléctricos a través de
uno de los agujeros presentes en la parte inferior del motorreductor; es
necesario cortar el revestimiento presente (fig. 14-4);
04. Desenrosque el prensaestopas y acomode el cable de alimentación en el
carril correspondiente (fig. 14-5);
05. Conecte primero el cable de alimentación, véase la fig. 14-6;
06. Bloquee el cable de alimentación con el prensaestopas (fig. 14-7);
07. Entonces, conecte los cables eléctricos de los motores M1 y M2, respe-
tando los símbolos de la etiqueta (fig. A):
a) conecte al borne M1
(7-8-9) el motor que acciona la hoja inferior (la
segunda que comienza el movimiento de apertura) y, posteriormente,
conecte el encoder respectivo a los bornes 1-2;
b) conecte al borne M2 (10-11-12) el motor que acciona la hoja superior (la
primera que comienza el movimiento de apertura) y, posteriormente,
conecte el encoder respectivo a los bornes 4-5;
¡IMPORTANTE! – Si en el sistema hubiera un solo motorreductor,
conéctelo al borne M2 dejando libre el borne M1;
08. Entonces, conecte los cables eléctricos de los demás dispositivos presen-
tes, tomando como referencia la fig. 17 y véase el párrafo 4.3. Nota – Para
facilitar las conexiones de los cables es posible quitar los bornes de sus
alojamientos.
09. Cierre la tapa del motorreductor (fig. 14-8).
4.2 - Conexión del motorreductor sin la central mod. HK7224
01. Abra la tapa tal como se muestra en la fig. 15-1;
02. Pase el cable del motor a través de uno de los agujeros presentes en la
parte inferior del motorreductor; es necesario cortar el revestimiento presente (fig. 15-2);
03. Desenrosque el prensaestopas (fig. 15-3), acomode el cable en el carril
correspondiente y conecte los cables tal como se muestra en la fig. 16-4;
respete los símbolos de la etiqueta;
03. Bloquee el cable con el prensaestopas (fig. 15-5);
04. Cierre la tapa del motorreductor (fig. 15-6).
4.3 - Conexión de otros dispositivos
Si fuera necesario alimentar otros dispositivos montados en la instalación, por
ej emplo un lector de tarjetas de transponder o la luz de iluminación para el se lector de llave, es posible conectar estos dispositivos a la central de mando en
los bornes “P.P. (positivo)” y “STOP (negativo)” (fig. 13). La tensión de alimentación es de 24 Vcc (-30% ÷ +50%) con corriente máxima disponible de 200 mA.
Nota – La tensión disponible en los bornes “P.P.” y “STOP” siempre está presente cuando en la tarjeta se activa la función “Stand By”.
ENC1 ENC2
1245789101112
M1 M2
24V
24V
+
-
+
-
A
Page 49

ES
Español – 5
4.4 - Direccionamiento de los dispositivos conectados
Para que la central pueda reconocer los dispositivos conectados al sistema
Bluebus, es necesario asignarles una dirección. Esta operación debe hacerse
colocando correctamente el puente eléctrico presente en todos los dispositivos: véase la fig. B.
Para asignar una dirección a los demás dispositivos, consulte los manuales de
instrucciones respectivos.
Al concluir la instalación o después de haber desmontado las fotocélulas o
cualquier otro dispositivo, habrá que realizar el aprendizaje de estos últimos;
véase el párrafo 4.6.
4.5 - Primer encendido y control de las conexiones
Después de haber conectado la energía eléctrica de la Central de mando, lleve
a cabo los siguientes controles:
• transcurridos algunos segundos, compruebe que el Led “Bluebus” (fig. 16)
destelle regularmente con una frecuencia de 1 destello por segundo;
• controle que destellen los Leds de las fotocélulas (fig. 16), tanto TX (transmi-
sor) como RX (receptor). En esta etapa, el tipo de destello no es importante;
• controle que la luz intermitente conectada a la salida FLASH esté apagada.
Si así no fuera, habrá que cortar la energía eléctrica de la central y controlar las
conexiones eléctricas hechas.
4.6 - Aprendizaje de los dispositivos conectados a MC824H
Después de haber realizado el primer encendido, es necesario que la central
reconozca los dispositivos conectados en las entradas “Bluebus” y “Stop”.
¡ATENCIÓN! – El aprendizaje debe hacerse incluso si no hubiera ningún
dispositivo conectado a la central.
La central reconoce individualmente los dispositivos conectados gracias al procedimiento de aprendizaje y detecta con mucha precisión los posibles desperfectos presentes. Por dicho motivo, es necesario realizar el aprendizaje de los
dispositivos cada vez que uno de estos es añadido o eliminado.
Los Leds “L1” y “L2” presentes en la central (fig. 16) emiten algunos destellos
lentos que indican que es necesario llevar a cabo el aprendizaje:
01. Pulse y mantenga pulsados simultáneamente los pulsadores “” y “Set”
(fig. 16).
02. Suelte los pulsadores cuando los leds “L1” y “L2” comiencen a destellar
rápidamente (después de unos 3 segundos).
03. Espere algunos segundos para que la central complete el aprendizaje de
los dispositivos.
04. Al concluir esta etapa, el Led “Stop” deberá estar encendido y los Leds “L1”
y “L2” se deberán apagar (podrían comenzar a destellar los Leds “L3” y “L4”).
4.7 - Aprendizaje de las posiciones de los fines de carrera
mecánicos
Después del aprendizaje de los dispositivos conectados (párrafo 4.6) habrá
que realizar el aprendizaje de las posiciones de los topes mecánicos (apertura
máxima y cierre máximo). Este procedimiento se puede realizar en tres modos:
automático, manual y mixto.
En el modo automático, la central ejecuta el aprendizaje de los topes mecánicos y calcula la sincronización más oportuna de las hojas (SA y SC, fig. C).
En el modo manual, las ocho posiciones de los topes mecánicos (fig. C) se
programan una por una, desplazando las hojas hacia los puntos deseados. La
posición que se debe programar está identificada por el destello de uno de los
8 leds (L1...L8), véase la Tabla 2.
En el modo mixto, es posible llevar a cabo el procedimiento automático y, posteriormente, con el procedimiento manual, modificar una o varias posiciones
salvo las posiciones “0” y “1” (fig. C) que coinciden con las posiciones de los
topes mecánicos.
4.7.1 - Aprendizaje en modo automático
01. Pulse y mantenga pulsados simultáneamente los pulsadores “Set” y “”;
02. Suelte los pulsadores cuando los leds “L3” y “L4” comiencen a destellar
rápidamente (después de unos 3 segundos);
03. Controle que el automatismo realice las siguientes secuencias de movimientos:
a - Cierre lento del motorreductor M1 hasta el tope mecánico
b - Cierre lento del motorreductor M2 hasta el tope mecánico
c - Apertura lenta del motorreductor M2 y del motorreductor M1 hasta el
tope mecánico
d - Cierre rápido de los motorreductores M1 y M2
Advertencias:
– Si el primer movimiento (a) no cerrara la hoja accionada por el motor M1 sino
aquella accionada por el motor M2, pulse el pulsador “
” o bien “” para
detener el aprendizaje. Entonces, invierta las conexiones de los motores M1
y M2 en los bornes presentes en la central y después aquellos de los encoders respectivos y reanude el procedimiento a partir del punto 01;
– Si los primeros dos movimientos (a y b) no fueran de “cierre” sino de “aper-
tura”, pulse el pulsador “” o “” para detener el aprendizaje. Entonces, en
el motorreductor que ha hecho el movimiento de apertura, invierta las polaridades de los dos cables del motorreductor M1 (bornes 7 y 9) y M2 (bornes
10 y 12) y reanude el procedimiento a partir del punto 01;
04. Al concluir el movimiento de cierre de los 2 motores (d), los leds “L3” y “L4” se
apagarán indicando que el procedimiento se ha ejecutado correctamente.
B
TABLA 2 - DIRECCIONES DE LAS FOTOCÉLULAS
Fotocélula Puentes de conexión
FOTO
Fotocélula exterior h = 50 con activación
durante el cierre (detiene e invierte el movimiento)
FOTO II
Fotocélula exterior h = 100 con activación
durante el cierre (detiene e invierte el movimiento)
FOTO 1
Fotocélula interior h = 50 con activación durante
el cierre (detiene e invierte el movimiento) y
durante la apertura (detiene y reanuda el
movimiento al descubrirse la fotocélula)
FOTO 1 II
Fotocélula interior h = 100 con activación durante
el cierre (detiene e invierte el movimiento) y
durante la apertura (detiene y reanuda el
movimiento aldescubrirse la fotocélula)
FOTO 2
Fotocélula interior con activación durante la
apertura (detiene e invierte el movimiento)
FOTO 2 II
Fotocélula interior con activación durante la
apertura (detiene e invierte el movimiento)
FOTO 3
CONFIGURACIÓN NO ADMITIDA
TABLA 2
Posición Led Descripción
Posición 0
(motor 1)
Posición 0
(motor 2)
Posición SA
(motor 2)
Posición A
(motor 1)
Posición A
(motor 2)
Posición SC
(motor 1)
Posición 1
(motor 1)
Posición 1
(motor 2)
Posición de cierre máximo: cuando la hoja 1 choca contra el
tope mecánico de cierre
Posición de cierre máximo: cuando la hoja 2 choca contra el
tope mecánico de cierre
Sincronización en la apertura: cuando la hoja 2 supera esta
posición, la hoja 1 comienza a abrirse
Posición de apertura deseada: posición en que la hoja conectada al motor 1 debe detenerse al concluir un movimiento de
apertura. No es necesario que esta posición coincida con el
tope mecánico de apertura sino que puede seleccionarse a
placer entre la posición “0” y “1”
Posición de apertura deseada: posición en que la hoja conectada al motor 2 debe detenerse al concluir un movimiento de
apertura. No es necesario que esta posición coincida con el
tope mecánico de apertura sino que puede seleccionarse a
placer entre la posición “0” y “1”
Sincronización en el cierre: cuando la hoja 1 se encuentra por
debajo de esta posición, la hoja 2 comienza a cerrarse
Posición de apertura máxima: cuando la hoja 1 choca contra
el tope mecánico de apertura
Posición de apertura máxima: cuando la hoja 2 choca contra
el tope mecánico de apertura
L1
L2
L3
L4
L5
L6
L7
L8
0
11
A
SC
SA
A
0
M1 M2
C
POSICIONES
Page 50

ES
6 – Español
Advertencias:
– Si durante el aprendizaje automático se activaran las fotocélulas o un dispo-
sitivo conectado a la entrada “stop”, el procedimiento se interrumpirá y el led
L1 comenzará a destellar. Para reactivar el aprendizaje, reanude el procedimiento a partir del punto 01;
– El aprendizaje automático puede ejecutarse nuevamente en cualquier
momento, incluso después de haber hecho la instalación; por ejemplo, después de modificar la posición de los topes mecánicos.
4.7.2 - Aprendizaje en modo manual
¡Atención! – Desde el paso 03 en adelante:
– para pasar del led L1 al L8
es necesario pulsar brevemente el pulsador o
(el led destellará indicando la posición actual);
– para hacer mover el motor
hacia un sentido o hacia el otro, pulse continua-
mente
el pulsador o .
01. Pulse y mantenga pulsados
simultáneamente los pulsadores “Set” y “”;
02. Suelte los pulsadores cuando el led “L1” comience a destellar (después de
1 segundo aproximadamente); Nota – superados los 3 segundos, si no se
soltaran los pulsadores “Set” y “”, se activará el procedimiento de
“aprendizaje automático
” y no aquel manual.
03. • el led
L1 destella: posición 0 de M1
Para accionar y colocar el motor 1 en la posición 0 (fig. C): pulse y man
-
tenga pulsado
el pulsador “” o “”. Al alcanzar dicha posición, suelte el
pulsador para detener el movimiento. Para memorizar la posición, pulse
y mantenga pulsado el pulsador “Set” durante al menos 3 s y después
suéltelo (después de 2 s el led L1 quedará encendido y, al soltar el pulsador “Set”, comenzará a destellar el led L2).
• el led
L2 destella: posición 0 de M2
Para accionar y colocar el motor 2 en la posición 0 (fig. C): pulse y mantenga pulsado el pulsador “” o “”. Al alcanzar dicha posición, suelte el
pulsador para detener el movimiento. Para memorizar la posición, pulse
y mantenga pulsado el pulsador “Set” durante al menos 3 s y después
suéltelo (después de 2 s el led L2 quedará encendido y, al soltar el pulsador “Set”, comenzará a destellar el led L3).
• el led
L3 destella: posición SA de M2
Para accionar y colocar el motor 2 en la posición SA (fig. C): pulse y
mantenga pulsado el pulsador “” o “”. Al alcanzar dicha posición,
suelte el pulsador para detener el movimiento. Para memorizar la posición, pulse y mantenga pulsado el pulsador “Set” durante al menos 3 s y
después suéltelo (después de 2 s el led L3 quedará encendido y, al soltar el pulsador “Set”, comenzará a destellar el led L4).
• el led
L4 destella: posición A de M1
Para accionar y colocar el motor 1 en la posición A (fig. C): pulse y man-
tenga pulsado el pulsador “” o “”. Al alcanzar dicha posición, suelte el
pulsador para detener el movimiento. Para memorizar la posición, pulse
y mantenga pulsado el pulsador “Set” durante al menos 3 s y después
suéltelo (después de 2 s el led L4 quedará encendido y, al soltar el pulsador “Set”, comenzará a destellar el led L5).
• el led
L5 destella: posición A de M2
Para accionar y colocar el motor 2 en la posición A (fig. C): pulse y man-
tenga pulsado el pulsador “” o “”. Al alcanzar dicha posición, suelte el
pulsador para detener el movimiento. Para memorizar la posición, pulse
y mantenga pulsado el pulsador “Set” durante al menos 3 s y después
suéltelo (después de 2 s el led L5 quedará encendido y, al soltar el pulsador “Set”, comenzará a destellar el led L6).
• el led
L6 destella: posición SC de M1
Para accionar y colocar el motor 1 en la posición SC (fig. C): pulse y
mantenga pulsado el pulsador “” o “”. Al alcanzar dicha posición,
suelte el pulsador para detener el movimiento. Para memorizar la posición, pulse y mantenga pulsado el pulsador “Set” durante al menos 3 s y
después suéltelo (después de 2 s el led L6 quedará encendido y, al soltar el pulsador “Set”, comenzará a destellar el led L7).
• el led
L7 destella: posición 1 de M1
Para accionar y colocar el motor 1 en la posición 1 (fig. C): pulse y mantenga pulsado el pulsador “” o “”. Al alcanzar dicha posición, suelte el
pulsador para detener el movimiento. Para memorizar la posición, pulse
y mantenga pulsado el pulsador “Set” durante al menos 3 s y después
suéltelo (después de 2 s el led L7 quedará encendido y, al soltar el pulsador “Set”, comenzará a destellar el led L8).
• el led
L8 destella: posición 1 de M2
Para accionar y colocar el motor 2 en la posición 1 (fig. C): pulse y mantenga pulsado el pulsador “” o “”. Al alcanzar dicha posición, suelte el
pulsador para detener el movimiento. Para memorizar la posición, pulse
y mantenga pulsado el pulsador “Set” durante al menos 3 s y después
suéltelo para salir de la programación (después de 2 s el led L8 quedará
encendido hasta soltar el pulsador “Set”).
Nota – Para realizar la programación manual de un sistema que tiene un
solo motorreductor, proceda como descrito en el párrafo 4.7.2; en el paso 03
habrá que programar la posición “0” y después la “1” de M1, ignorando la parte relativa a los pulsadores “” y “” pero utilizando sólo el pulsador “Set” tal
como descrito. ¡Importante! – En el procedimiento manual no se deben
programar las posiciones “SA” de M2; “A” de M1; “SC” de M1.
4.7.3 - Aprendizaje en modo mixto
Lleve a cabo este procedimiento después de haber hecho el aprendizaje en
modo automático:
Estas son las fases más importantes en la preparación del automatismo, ya
que su objetivo es garantizar la máxima seguridad de la instalación. El ensayo
también se puede usar para comprobar periódicamente los dispositivos que
conforman el automatismo. Las fases de ensayo y puesta en servicio del automatismo deben ser realizadas por personal cualificado y experto, que deberá
llevar a cabo las pruebas necesarias para comprobar las soluciones adoptadas
respecto a los riesgos existentes y verificar el cumplimiento de lo previsto por
las leyes, normativas y reglamentos, con especial atención a todos los requisitos de la norma EN 12445, que establece los métodos de prueba para la verificación de los automatismos para puertas.
Los dispositivos adicionales deben ser sometidos a un ensayo específico, tanto en lo referente a su funcionamiento como a su correcta interacción con
HYKE; para ello consulte el manual de instrucciones de cada dispositivo.
5.1 - Ensayo
La secuencia de operaciones necesarias para el ensayo se refiere a una instalación típica (fig. 3):
1 Controle que se hayan respetado estrictamente todas las indicaciones del
capítulo “Advertencias para la instalación”.
2 Desbloquee manualmente los motorreductores y compruebe que, al inter-
venir sobre la hoja en el punto previsto para la maniobra manual, se pueda
mover las hojas en apertura y cierre con una fuerza inferior a 390 N.
3 Bloquee los motorreductores (véase el capítulo 3.6).
4 Utilizando los dispositivos de mando (trasmisor, botón de mando, selector
de llave, etc.), haga las pruebas de apertura, cierre y parada de la puerta,
comprobando que el movimiento de las hojas sea el previsto. Conviene llevar a cabo diversas pruebas para evaluar el movimiento de las hojas y verificar si hay errores de montaje, de regulación o puntos de especial fricción.
5 Compruebe el correcto funcionamiento de todos los dispositivos de seguri-
dad de la instalación, uno por uno (fotocélulas, bandas sensibles, etc.).
Cuando se dispara un dispositivo, el led “BLUEBUS”, situado en la central,
emite 2 parpadeos más rápidos para confirmar que se ha efectuado el
reconocimiento.
6 Si las situaciones peligrosas provocadas por el movimiento de las hojas han
sido prevenidas limitando la fuerza de impacto, se deberá efectuar una
medición de la fuerza conforme a lo previsto por la norma EN 12445 y, en
caso necesario, si se utiliza la “fuerza del motorreductor” como ayuda al
sistema para la reducción de la fuerza de impacto, probar hasta hallar la
regulación que dé los mejores resultados.
5.2 - Puesta en servicio
La puesta en servicio solo es posible tras llevar a cabo con éxito todas las
fases de ensayo.
1 Elabore el expediente técnico del automatismo, que deberá incluir los
siguientes documentos: un dibujo general del automatismo, el esquema de
las conexiones eléctricas realizadas, el análisis de los riesgos existentes y
las soluciones adoptadas al respecto, la declaración de conformidad del
ENSAYO Y PUESTA EN SERVICIO
5
01. Pulse y mantenga pulsados simultáneamente los pulsadores “Set” y “”;
02. Suelte los pulsadores cuando el led “L1” comience a destellar (después de
1 segundo aproximadamente); Nota – superados los 3 segundos, si no se
soltaran los pulsadores “Set” y “”, se activará el procedimiento de
“aprendizaje automático” y no aquel manual.
03. Pulsando brevemente el pulsador “” o “”, desplace el led intermitente
(L1…L8) hacia la posición en que se desea programar y proceda así para
cada posición, tal como descrito en el paso 03 del aprendizaje en modo
manual (párrafo 4.7.2).
Repita esta última operación para las demás posiciones que desea modificar.
Para concluir el aprendizaje manual, pulse varias veces el pulsador “” hasta
que el led que destella supere la posición L8.
4.8 - Control del movimiento de las hojas de la cancela
Al concluir el aprendizaje, se aconseja hacer que la central realice algunos
movimientos de Apertura y Cierre para comprobar el movimiento correcto de la
cancela, los posibles defectos de montaje y de regulación.
01. Pulse el pulsador “Open”. Controle la sincronización correcta de las hojas
durante la apertura y controle que durante la apertura esté presente la etapa de aceleración, la etapa de velocidad constante, la etapa de desaceleración y que el fin de carrera de las hojas esté configurado algunos centímetros de distancia de los topes mecánicos de apertura;
02. Pulse el pulsador “Close” y controle que durante el Cierre esté presente la
etapa de aceleración, la etapa de velocidad constante y la etapa de desaceleración. Controle que la hojas estén bien sincronizadas durante el cierre. Al concluir, las hojas deben estar bien cerradas sobre el tope mecánico de cierre;
03. Controle que durante los movimientos la luz intermitente destelle con intervalos de 0,5 segundos encendida y 0,5 segundos apagada.
Page 51

ES
Español – 7
fabricante de todos los dispositivos utilizados y la declaración de conformidad redactada por el instalador .
2 Aplique a la puerta una placa que contenga al menos los siguientes datos:
tipo de automatismo, nombre y dirección del fabricante (responsable de la
“puesta en servicio”), número de serie, año de fabricación y marcado “CE”.
3 Redacte y entregue al propietario del automatismo la declaración de con-
formidad del automatismo.
4 Redacte y entregue al propietario del automatismo el “Manual de uso” del
automatismo.
5 Redacte y entregue al propietario del automatismo el “Plan de manteni-
miento” que reúne las instrucciones de mantenimiento para todos los dis-
positivos del automatismo.
6 Antes de poner en servicio el automatismo, informe adecuadamente al
propietario acerca de los peligros y riesgos residuales todavía existentes.
Para toda la documentación citada, Nice pone a su disposición, a través
de su servicio de asistencia: manuales de instrucciones, guías y formularios ya cumplimentados. Visite también el sitio web: www.nice-service.com
En la central hay 3 pulsadores OPEN (), STOP (SET), CLOSE () que se
pueden utilizar para accionar la central durante las etapas de prueba y para la
programación de las funciones disponibles.
Las funciones programables disponibles están dispuestas en 2 niveles y su
estado de funcionamiento es señalado por los 8 leds (L1 ... L8) presentes en la
central (led encendido
= función activa; led apagado = función desactivada).
Utilice los pulsadores de programación:
OPEN (): – pulsador para accionar la apertura de la cancela; – pulsador de
selección durante la programación.
STOP/SET: pulsador que permite detener un movimiento; al pulsarlo durante
más de 5 segundos, permite entrar en programación.
CLOSE (): – pulsador para accionar el Cierre de la cancela; – pulsador de
selección durante la programación.
6.1 - Programación del primer nivel (ON-OFF)
Todas las funciones del primer nivel se programan en fábrica en “OFF” y pueden
ser modificadas en cualquier momento. Para comprobar las distintas funciones,
véase la Tabla 5. Para el procedimiento de programación, véase la Tabla 6.
IMPORTANTE – El procedimiento de programación dura 10 segundos como
máximo que transcurre entre la presión de un pulsador y el otro. Concluido
dicho tiempo, el procedimiento finaliza automáticamente memorizando las
modificaciones hechas hasta ese momento.
PROGRAMACIÓN DE LA CENTRAL
DE MANDO
6
TABLA 3 - Funciones de primer nivel
Led Función Descripción
L1 Cierre automático
L2 Volver a cerrar después fotocélula
L3 Cerrar siempre
L4 Stand by todo
L5 Electrocerradura / Luz de cortesía
L6 Destello previo
L7 “Cerrar” se convierte en “Abrir parcial 1”
L8 “Indicador cancela abierta” o
“Indicador mantenimiento”
Función ACTIVA: después de un movimiento de apertura se ejecuta una pausa (equivalente al Tiempo de
pausa programado), transcurrida la cual, la central inicia automáticamente un movimiento de cierre. El
valor de fábrica del Tiempo de pausa equivale a 30 segundos.
Función DESACTIVADA: el funcionamiento es “semiautomático”.
F
unción ACTIVA: si durante el movimiento de Apertura o cierre intervienen las fotocélulas, el tiempo de
pausa disminuye a 5 seg. independientemente del “tiempo pausa” programado.
Con el “cierre automático” desactivado, si durante el Cierre se activarán las fotocélulas, se activará el “cierre automático” con el “tiempo pausa” programado.
Función ACTIVA
: si se produjera un corte de energía, incluso breve, al volver la corriente eléctrica la central detectará la cancela abierta y, automáticamente, activará un movimiento de Cierre, antecedido de 5
seg. de destello previo.
Función DESACTIVADA: al volver la corriente eléctrica la cancela no se moverá.
F
unción ACTIVA: tras un minuto a partir del final del movimiento, la central apagará la salida “BlueBus”
(dispositivos conectados), el Bus T4 (dispositivos conectados), las salidas flash, ELS y SCA, algunos circuitos internos y todos los leds, excluido el Led BlueBus que destellará más lento. Cuando la central recibe un mando, restablece el funcionamiento normal (con un breve retardo). Esta función tiene la finalidad
de reducir los consumos que es muy importante con la alimentación con baterías o paneles fotovoltaicos.
Función ACTIVA
: la salida “electrocerradura” conmuta su funcionamiento en “luz de cortesía”.
Función DESACTIVADA: la salida funciona como electrocerradura.
F
unción ACTIVA: es posible añadir una pausa de 3 segundos entre el encendido de la luz intermitente y el
inicio del movimiento para advertir anticipadamente una situación peligrosa.
Función DESACTIVADA: la señal de la luz intermitente coincide con el inicio del movimiento.
F
unción ACTIVA: todos los mandos que corresponden a “Cerrar” (entrada “Close” o bien mando radio
“Cerrar”) son reemplazados por el mando “apertura parcial 1”.
F
unción ACTIVA: la salida “indicador cancela abierta” de la central conmuta su funcionamiento en “indicador
mantenimiento”.
Función DESACTIVADA: la salida funciona como “indicador cancela abierta”
TABLA 4 - Procedimiento de programación del primer nivel
01. Pulse y mantenga pulsado el pulsador “Set” durante unos 3 segundos;
02. Suelte el pulsador cuando el led “L1” comience a destellar;
03. Pulse el pulsador “” o “” para pasar del led intermitente al led que representa la función a modificar;
04. Pulse el pulsador “Set” para modificar el estado de la función:
(destello breve = OFF - destello largo = ON);
05. Espere 10 segundos (tiempo máximo) para salir de la programación.
Nota – Para programar otras funciones en “ON” u “OFF”, durante la ejecución del procedimiento hay que repetir los puntos 03 y 04 durante la misma etapa.
SET
SET
SET
L1
o
3 s
10 s
Page 52

ES
8 – Español
TABLA 5 - Funciones de segundo nivel
Led de Parámetro Led Valor Descripción
entrada (nivel)
L1
L1
L2
L3
L4
L5
L6
L7
L8
5 segundos
15 segundos
30 segundos
45 segundos
60 segundos
80 segundos
120 segundos
180 segundos
Regula el tiempo de pausa, es decir
el tiempo antes del cierre automático.
Es válido sólo si el Cierre está activo.
Tiempo de
pausa
L2 L1
L2
L3
L4
L5
L6
L7
L8
Abrir – stop – cerrar – stop
Abrir – stop – cerrar – abrir
Abrir – cerrar – abrir – cerrar
Comunitaria:
• en el movimiento de apertura
el mando “Paso a Paso” y “Abrir” no provocan efecto; por el contrario, el mando “Cerrar” provoca la inversión del movimiento, es decir el cierre de las hojas.
• en el movimiento de cierre el mando “Paso a Paso” y “Abrir” provocan la
inversión del movimiento, es decir la apertura de las hojas; por el contrario,
el mando “Cerrar” no provoca ningún efecto.
Comunitaria 2:
• en el movimiento de apertura el mando “Paso a Paso” y “Abrir” no provocan efecto; por el contrario, el mando “Cerrar” provoca la inversión del
movimiento, es decir el cierre de las hojas. Si el mando enviado dura
más de 2 segundos, se ejecuta un “Stop”.
• en el movimiento de cierre el mando “Paso a Paso” y “Abrir” provocan la
inversión del movimiento, es decir la apertura de las hojas; por el contrario,
el mando “Cerrar” no provoca ningún efecto. Si el mando enviado dura
más de 2 segundos, se ejecuta un “Stop”.
Paso a Paso 2 (menos de 2” provoca una apertura parcial)
Hombre presente:
el movimiento se ejecuta sólo si se mantiene el mando enviado; si el mando se interrumpe, el movimiento se detiene.
Apertura en “semiautomático”, cierre modo “hombre presente”.
Regula la secuencia de mandos asociados a la entrada “Paso a Paso”,
“Abrir”, “Cerrar” o al mando radio.
Nota – Configurando L4, L5, L7 e L8,
también se modifica el comportamiento de los mandos “Abrir” y “Cerrar”.
Función
Paso a
Paso
L3
L1
L2
L3
L4
L5
L6
L7
L8
Muy lenta
Lenta
Media
Rápida
Muy rápida
Rapidísima
Abrir rápido, Cerrar lento
Abrir rapidísimo, Cerrar medio
Regula la velocidad de los motores
durante la carrera normal.
Velocidad
motores
L6 L1
L2
L3
L4
L5
L6
L7
L8
Peatones 1 (apertura de la hoja M2 a 1/4 de la apertura total)
Peatones 2 (apertura de la hoja M2 a 1/2 de la apertura total)
Peatones 3 (apertura de la hoja M2 a 3/4 de la apertura total)
Peatones 4 (apertura total de la hoja 2)
Parcial 1 (apertura de las dos hojas a 1/4 de la apertura “mínima”)
Parcial 2 (apertura de las dos hojas a 1/2 de la apertura “mínima”)
Parcial 3 (apertura de las dos hojas a 3/4 de la apertura “mínima”)
Parcial 4 (apertura de las dos hojas equivalente a la apertura "mínima")
Regula el tipo de apertura asociado al
mando “apertura parcial 1”.
En los niveles L5, L6, L7, L8, la apertura "mínima" es la apertura menor
entre M1 y M2; por ejemplo, si M1
abre a 90° y M2 abre a 110°, la apertura mínima es 90°
Apertura
paso de
peatones
o parcial
L4 L1
L2
L3
L4
L5
L6
L7
L8
Ninguna descarga
Nivel 1 - Descarga mínima (100 ms aprox.)
Nivel 2 - ...
Nivel 3 - ...
Nivel 4 - ...
Nivel 5 - ...
Nivel 6 - ...
Nivel 7 - Descarga máxima (800 ms aprox.)
Regula la duración de la “breve inversión” de ambos motores, después de
la ejecución del movimiento de Cierre,
con la finalidad de reducir el empuje
final residual.
Descarga
motores
después
del Cierre
L5 L1
L2
L3
L4
L5
L6
L7
L8
Nivel 1 - Fuerza mínima
Nivel 2 - ...
Nivel 3 - ...
Nivel 4 - ...
Nivel 5 - ...
Nivel 6 - ...
Nivel 7 - ...
Nivel 8 - Fuerza máxima
Regula la fuerza de ambos motores.Fuerza
motores
6.2 - Programación del segundo nivel (parámetros regulables)
Todos los parámetros del segundo nivel son programados en fábrica, como
indicado en gris en la Tabla 5, y pueden ser modificados en cualquier momen-
to procediendo tal como descrito en la Tabla 6.
Los parámetros se pueden regular en una escala de valores de 1 a 8; para
comprobar el valor que corresponde a cada Led, véase la Tabla 8. IMPOR-
TANTE – El procedimiento de programación dura 10 segundos como máximo
que transcurren entre la presión de un pulsador y el otro. Concluido dicho tiempo, el procedimiento finaliza automáticamente memorizando las modificaciones hechas hasta ese momento.
Page 53

ES
Español – 9
TABLA 6 - Procedimiento de programación del segundo nivel
01. Pulse y mantenga pulsado el pulsador “Set” durante unos 3 segundos;
02. Suelte el pulsador cuando el led “L1” comience a destellar;
03. Pulse el pulsador “” o “” para pasar del led intermitente al led que representa “led de entrada” del parámetro a modificar;
04. Pulse y mantenga pulsado el pulsador “Set” hasta concluir el punto 06;
05. Espere unos 3 segundos hasta que se encienda el led que representa el nivel actual del parámetro a modificar;
06. Pulse el pulsador “” o “” para desplazar el led que representa el valor del parámetro;
07. Suelte el pulsador “Set”;
08. Espere 10 segundos (tiempo máximo) para salir de la programación.
Nota – Para programar varios parámetros, durante la ejecución del procedimiento hay que repetir las operaciones desde el punto 03 al punto 07 durante
la misma etapa.
SET
SET
SET
SET
L1
o
o
3 s
10 s
6.3 - Funciones especiales
6.3.1 - Función: “Mover igualmente”
Esta función permite hacer funcionar el automatismo incluso cuando algún dispositivo de seguridad no funciona correctamente o está fuera de uso.
Es posible accionar el automatismo en modalidad “hombre presente”, proce-
diendo de la siguiente manera:
01. Envíe un mando para accionar la cancela con un transmisor o con un
selector de llave, etc.. Si todo funciona correctamente, la cancela se
moverá regularmente, en caso contrario, siga estos pasos;
02. antes de 3 segundos, accione nuevamente el mando y manténgalo accionado;
03. después de 2 segundos aprox. la cancela realizará el movimiento requerido
en modalidad “hombre presente”; es decir que la cancela seguirá moviéndose sólo hasta que se mantenga accionado el mando.
Cuando los dispositivos de mando no funcionan, la luz intermitente emite algunos destellos para señalar el tipo de problema (véase capítulo 6 - Tabla 8).
6.3.2 - Función: “Aviso de mantenimiento”
Esta función sirve para señalar cuando es necesario realizar el mantenimiento
al automatismo. La señal de aviso de mantenimiento funiona mediante una luz
conectada a la Salida S.C.A. cuando dicha salida está programada como “Indicador mantenimiento”. Las señales de la luz indicadora están mencionadas en
la Tabla 7.
Para programar el valor límite de los operaciones de mantenimiento, véase la
Tabla 5.
Algunos dispositivos están preparados para emitir señales con las cuales se
puede reconocer el estado de funcionamiento o posibles desperfectos.
Si en la salida FLASH, presente en la Central, se conectara una luz intermitente, durante la ejecución de un movimiento, ésta destellará una vez por segundo. Si se produjera algún desperfecto, la luz intermitente emitirá destellos más
cortos que se repetirán dos veces, divididos por una pausa de 1 segundo. En
la Tabla 8 se describe la causa y la solución para cada tipo de señal.
También los Leds presentes en la Central emiten señales; en la Tabla 9 se des-
cribe la causa y la solución para cada tipo de señal.
Se pueden controlar los desperfectos que se hubieran producido durante la
ejecución de los últimos 8 movimientos; consulte la Tabla 10.
QUÉ HACER SI…
(guía para solucionar los problemas)
7
Tabla 7 - Señalización “Indicador mantenimiento”
Número de movimientos Señalización
Indicador encendido durante 2 segundos al inicio del movimiento de apertura.
Indicador que destella durante toda la duración del movimiento.
Indicador que destella continuamente.
Inferior al 80% del límite
Entre el 81% y el 100%
del límite
Superior al 100% del límite
6.4 - Borrado de la memoria
Para borrar la memoria de la central y restablecer todas las configuraciones de
fábrica, proceda de la siguiente manera:
pulse y mantenga pulsado los pulsadores “” y “” hasta que los leds L1 y L2
comiencen a destellar.
Nota – El color gris indica los valores configurados en fábrica.
L8 L1
L2
L3
L4
L5
L6
L7
L8
Resultado 1° movimiento (el más reciente)
Resultado 2° movimiento
Resultado 3° movimiento
Resultado 4° movimiento
Resultado 5° movimiento
Resultado 6° movimiento
Resultado 7° movimiento
Resultado 8° movimiento
Permite comprobar el tipo de desperfecto producido durante la ejecución
de los últimos 8 movimientos.
Véase la TABLA 10 - Lista historial de
los desperfectos.
Listado de
desperfectos
L7 L1
L2
L3
L4
L5
L6
L7
L8
500
1000
1500
2500
5000
10000
15000
20000
Regula el número de movimientos:
cuando se supera este número, la
central señala la necesidad de mantenimiento del automatismo; véase el
párrafo 6.3.2. – Aviso de mantenimiento.
Aviso de
mantenimiento
Page 54

ES
10 – Español
7 destellos cortos
pausa de 1 segundo
7 destellos cortos
Desperfecto en los circuitos eléctricos Espere al menos 30 segundos y pruebe a accionar de nuevo un mando y,
de ser necesario, apague también la alimentación; si el estado persiste,
podría haber una avería grave y habrá que sustituir la tarjeta electrónica.
8 destellos cortos
pausa de 1 segundo
8 destellos cortos
Hay un mando accionado que no permite ejecutar otros mandos
Controle el tipo de mando siempre activo; por ejemplo, podría ser el mando de un reloj en la entrada “abrir”.
9 destellos cortos
pausa de 1 segundo
9 destellos cortos
El automatismo se ha bloqueado por
un mando “Bloquear automatización"
Desbloquee la automatización enviando el mando “Desbloquear automatización”.
10 destellos cortos
pausa de 1 segundo
10 destellos cortos
Activación de la función “Detección
Obstáculos” desde encoder
Durante el movimiento, los motores se han bloqueado por una fricción;
controle el motivo.
TABLA 8 - Señales de la luz intermitente (FLASH)
Destellos Problema Resolución
1 destello corto
pausa de 1 segundo
1 destello corto
Error en el sistema Bluebus Al comienzo del movimiento, el control de los dispositivos conectados al
sistema Bluebus no corresponde a los dispositivos memorizados durante
el aprendizaje. Es posible que haya dispositivos desconectados o averiados; controle y sustituya. Si se realizaran modificaciones, habrá que rehacer el aprendizaje de los dispositivos (véase el párrafo 4.6).
2 destellos cortos
pausa de 1 segundo
2 destellos cortos
Activación de una fotocélula Una o varias fotocélulas no dan la autorización del movimiento o durante
la carrera han provocado una inversión del movimiento; controle que no
haya obstáculos.
3 destellos cortos
pausa de 1 segundo
3 destellos cortos
Activación de la función
“Detección Obstáculos” de limitador
de fuerza
Durante el movimiento, los motores han encontrado un esfuerzo superior;
controle el motivo y, de ser necesario, aumente el nivel de fuerza de los
motores.
4 destellos cortos
pausa de 1 segundo
4 destellos cortos
Activación de la entrada de STOP Al comienzo de la maniobra, o durante el movimiento, se han activado los
dispositivos conectados a la entrada STOP; controle el motivo.
5 destellos cortos
pausa de 1 segundo
5 destellos cortos
Error en los parámetros internos de la
Central de mando
Espere al menos 30 segundos y pruebe a accionar de nuevo un mando y,
de ser necesario, apague también la alimentación; si el estado persiste,
podría haber una avería grave y habrá que sustituir la tarjeta electrónica.
6 destellos cortos
pausa de 1 segundo
6 destellos cortos
Se ha superado el límite máximo de
movimientos consecutivos o de movimientos por hora.
Espere algunos minutos para que el limitador de maniobras retorne por
debajo del límite máximo.
TABLA 9 - Señales de los Leds presentes en la central de mando (fig. 16)
Led Problema Resolución
BLUEBUS
Siempre apagado
Siempre encendido
1 destello por segundo
2 destellos rápidos
Serie de destellos separados por
una pausa de 1 segundo
STOP
Siempre apagado
Siempre encendido
P. P.
Siempre apagado
Siempre encendido
OPEN
Siempre apagado
Siempre encendido
CLOSE
Siempre apagado
Siempre encendido
L1 - L2 Parpadeo lento
L3 - L4 Parpadeo lento
Desperfecto
Desperfecto grave
Todo regular
Variación de la condición de las entradas
Varios
Activación de los dispositivos
conectados a la entrada STOP
Todo regular
Todo regular
Activación de la entrada P.P.
Todo regular
Activación de la entrada OPEN
Todo regular
Activación de la entrada CLOSE
Variación del número de dispositivos co nectados al Bluebus, o bien el aprendizaje del dispositivo no se ha ejecutado
Variación del aprendizaje del tipo de los
motores, o bien de las posiciones de
los topes mecánicos
Controle que la Central esté conectada; controle que los fusibles no estén
quemados. En este caso, controle la causa de la avería y sustitúyalos con
otros con el mismo valor
Hay un problema grave: pruebe a cortar la alimentación eléctrica de la
central y, si el estado persiste, sustituya la tarjeta electrónica
Funcionamiento regular de la central
Es regular si se produce una variación en una de las entradas (PP, STOP,
OPEN, CLOSE): activación de las fotocélulas, o si se utiliza un transmisor
Consulte la Tabla 10
Controle los dispositivos de la entrada STOP
Entrada STOP activa
Entrada P.P. desactivada
Es regular si está activo el dispositivo conectado a la entrada P.P.
Entrada OPEN desactivada
Es regular si está activo el dispositivo conectado a la entrada OPEN
Entrada CLOSE desactivada
Es regular si está activo el dispositivo conectado a la entrada CLOSE
Es necesario ejecutar el aprendizaje de los dispositivos (véase el párrafo 4.6)
No se ha ejecutado jamás el aprendizaje de las posiciones de los topes mecánicos (vedere paragrafo 4.7).
Page 55

ES
Español – 11
OTRAS INFORMACIONES
8
1 Paso a Paso
2 Apertura parcial 1
3 Abrir
4 Cerrar
5 Stop
6 Paso a Paso
Comunitario
7 Paso a Paso
prioridad alta
8 Abrir parcial 2
9 Abrir parcial 3
10 Abrir y Bloquear
automatización
11 Cerrar y Bloquear
automatización
12 Bloquear
automatización
13 Desbloquear
automatización
Tabla 14
OXI / OXIFM /OXIT / OXITFM en modo II amplio
N° Mando Descripción
Mando “P.P.” (Paso a Paso)
Mando "Apertura parcial 1"
Mando “Abrir”
Mando “Cerrar”
Detiene el movimiento
Mando en modalidad Comunitaria
Acciona incluso con la automatización bloqueada o con los
mandos activos
Apertura parcial (Apertura de la hoja M2, equivalente a la
1/2 de la apertura total)
Abrir parcial (apertura de las dos hojas, equivalente a la 1/2
de la apertura total)
Provoca un movimiento de apertura y al final de éste provoca el bloqueo del automatismo; la central no acepta ningún otro mando salvo “Paso a paso prioridad alta”,
“Desbloquear” automación o bien (sólo desde Oview) los
mandos: “Desbloquear y cerrar” y “Desbloquear y abrir”
Provoca un movimiento de cierre y al final de éste provoca
el bloqueo del automatismo; la central no acepta ningún
otro mando salvo “Paso a paso prioridad alta”, “Desbloquear” automación o bien (sólo desde Oview) los mandos:
“Desbloquear y cerrar” y “Desbloquear y abrir”
Provoca una parada del movimiento y el bloqueo del automatismo; la central no acepta ningún otro mando salvo
“Paso a paso prioridad alta”, “Desbloquear” automación o
bien (sólo desde Oview) los mandos: “Desbloquear y cerrar” y “Desbloquear y abrir”.
Provoca el desbloqueo del automatismo y el restablecimiento del funcionamiento normal
8.2 - Conexión e instalación de la batería compensadora
mod. PS124
¡ATENCIÓN! - La conexión eléctrica de la batería a la central debe realizarse solo tras concluir todas las fases de instalación y programación, ya
que la batería constituye una alimentación eléctrica de emergencia.
Para instalar y conectar la batería, siga las fases de montaje mostradas en la
fig. 18.
8.3 - Conexión del programador Oview
La central incluye el conector BusT4, al que se puede conectar la unidad de
programación Oview, que permite una gestión rápida y completa de las fases
de instalación, mantenimiento y diagnóstico de todo el automatismo. Para
acceder al conector es necesario seguir las indicaciones de la fig. 19 y conectar el conector en el alojamiento correspondiente. El Oview puede conectarse a
varias Centrales simultáneamente (hasta 5 sin precauciones especiales, o hasta 60 respetando las advertencias oportunas) y puede permanecer conectado
a la central durante el funcionamiento normal del automatismo. En este caso se
puede utilizar para enviar directamente los mandos a la central mediante el
menú específico “usuario”. También se puede realizar la actualización del Firmware. Si la central incluye un radiorreceptor perteneciente a la familia OXI, utilizando el Oview se puede acceder a los parámetros de los transmisores memorizados en el receptor.
8.4 - Conexión del sistema de energía solar Solemyo
¡ATENCIÓN! – Cuando el automatismo esté alimentado por el sistema
“Solemyo”, NO DEBE ESTAR ALIMENTADO simultáneamente por la red
eléctrica.
Para más informaciones sobre el sistema Solemyo, consulte el manual de instrucciones respectivo.
Para conectar el sistema Solemyo, proceda como se muestra en la fig. 20.
8.5 - Conexión del sistema de desbloqueo exterior Kio
¡ATENCIÓN! – Kio debe conectarse al motorreductor que mueve la hoja
que arranca primero (comenzando desde la posición de cancela cerrada)
01. Abra la tapa del motorreductor (fig. 21-1);
02. Quite el cárter de plástico del motorreductor tal como se muestra en la fig.
21-2;
03. Introduzca en el orificio el tornillo con la tuerca como se muestra en la fig.
21-3;
04. Enganche los dos extremos del muelle como se muestra en la fig. 22-4;
05. Introduzca el cable de acero, primero en el tornillo y después en el orificio
del perno, como se muestra en la fig. 21-5;
06. Bloquee el cable enroscando el tornillo correspondiente (fig. 21-5);
07. Pase el otro extremo del cable por uno de los orificios presentes en la par-
te inferior del motorreductor, tal como se muestra en la fig. 21-6;
08. Coloque de nuevo el cárter de plástico y después la tapa del motorreduc-
tor (fig. 21-7);
09. Entonces, conecte el cable a Kio tomando como referencia el manual de
instrucciones correspondiente.
N° MANDO Descripción
Se enciende la salida Luz de cortesía con apagado temporizado
Se enciende y apaga la salida Luz de cortesía en modalidad paso a paso
14 On Timer
Luz de cortesía
15 On-Off
Luz de cortesía
TABLA 10 - Lista historial de los desperfectos
01. Pulse y mantenga pulsado el pulsador “Set” durante unos 3 segundos;
02. Suelte el pulsador cuando el led “L1” comience a destellar;
03. Pulse el pulsador “” o “” para desplazarse desde el led que está destellando al led L8 (“led de entrada”) para el
parámetro “Lista desperfectos”;
04. Pulse y mantenga pulsado el pulsador “Set” hasta concluir el punto 06;
05. Espere alrededor de 3 segundos hasta que se enciendan los leds que representan los niveles que corresponden a los
movimientos que tienen problemas. El led L1 indica el resultado del movimiento más reciente, mientras que el led L8 indica
el octavo movimiento. Si el led estuviera encendido significa que se han producido desperfectos, mientras que si el led
estuviera apagado significa que todo está bien;
06. Pulse los pulsadores “” y “” para seleccionar el movimiento deseado: el led correspondiente destellará la misma
cantidad de veces que la luz intermitente;
07. Suelte el pulsador “Set”.
SET
SET
SET
SET
L1
o
y
3 s
3 s
L8
Para HYKE están previstos los siguientes accesorios opcionales: receptores de
la familia SMXI, OXI y el programador Oview, el panel de energía solar Solemyo
y la batería compensadora mod. PS124.
8.1 - Conexión de un receptor
La central de mando incorpora un conector para la conexión de los receptores
(accesorios opcionales) que pertenecen a la familia SMXI y OXI Para conectar
un receptor, corte la corriente eléctrica de la central y proceda como se muestra en la fig. 17. En la Tabla 11 y Tabla 12 se mencionan los mandos que
corresponden a las salidas incorporadas en la central.
Tabla 11
SMXI / SMXIS o bien OXI / OXIFM / OXIT / OXITFM en modo I o Modo II
Mando “P.P.” (Paso a Paso)
Mando “apertura parcial 1”
Mando “Abrir”
Mando “Cerrar”
Salida N°1
Salida N°2
Salida N°3
Salida N°4
Page 56

ES
12 – Español
ELIMINACIÓN DEL PRODUCTO
Este producto constituye parte integrante del automatismo, por lo que se
debe eliminar junto con él.
Al igual que para las operaciones de instalación, al final de la vida útil de este
producto, las operaciones de desguace también deben ser llevadas a cabo por
personal cualificado.
Este producto está formado por diversos tipos de materiales: algunos de ellos
se pueden reciclar, pero otros deben eliminarse. Infórmese acerca de los sistemas de reciclaje o eliminación previstos por los reglamentos vigentes en su
territorio para esta categoría de producto.
¡Atención! – Algunos componentes del producto pueden contener sustancias
con taminantes o peligrosas que, si se liberan al medio ambiente, podrían tener
efectos nocivos sobre el medio ambiente y sobre la salud de las personas.
Como indica el símbolo de al lado, se prohíbe desechar este
producto junto con los residuos domésticos. Así pues, lleve a
cabo la separación de los residuos según los métodos previstos por los reglamentos vigentes en su territorio, o entregue el
producto al vendedor cuando adquiera uno nuevo equivalente.
¡Atención! – los reglamentos vigentes a nivel local pueden prever graves sanciones en caso de eliminación incorrecta de este producto.
Eliminación de la batería compensadora (si está instalada)
¡Atención! – La batería descargada contiene sustancias contaminantes y por
tanto no se debe desechar junto con los residuos normales.
Es necesario eliminarla aplicando los métodos de separación de residuos previstos por las normativas vigentes en su territorio.
Durabilidad del producto
La durabilidad es la vida útil media del producto. El valor de la durabilidad
depende mucho del índice de dificultad de los movimientos ejecutados por el
automatismo: es decir la suma de todos los factores que contribuyen al desgaste del producto (véase la Tabla 13).
Para establecer la probable durabilidad de su automatismo, proceda de la
siguiente manera:
01. Calcule el índice de dificultad
sumando entre sí los valores en porcentaje de
los elementos presentes en la Tabla 13;
02. En el Gráfico 3, del valor apenas encontrado, trace una línea vertical hasta
cruzar la curva; desde este punto, trace una línea horizontal hasta cruzar la
línea de los “ciclos de movimientos”. El valor determinado es la durabilidad estimada de su producto.
El valor estimado de durabilidad se obtiene sobre la base de los cálculos de
proyecto y de los resultados de los ensayos efectuados con los prototipos. En
efecto, siendo un valor estimado, no representa ninguna garantía sobre la
duración efectiva del producto.
Ejemplo del cálculo de durabilidad de un motorreductor HYKE con brazo de longitud ENTERA (tome como referencia la Tabla 13 y el Gráfico 3):
- longitud de la hoja = 2,8 m (índice de dificultad: 20%); - peso de la hoja: 230 kg (índice de
dificultad: 20%); - hoja ciega (índice de dificultad: 15%); Índice de dificultad total
= 55%;
Durabilidad estimada
= 220.000 ciclos de movimientos
GRÁFICO 3
ciclos de maniobras
coeficiente de desgaste %
MANTENIMIENTO DEL PRODUCTO
9
Para mantener constante el nivel de seguridad y garantizar una máxima durabilidad de todo el automatismo, es necesario llevar a cabo un mantenimiento
regular.
El mantenimiento debe realizarse cumpliendo plenamente las prescripciones
de seguridad contenidas en este manual y lo previsto por las leyes y normativas
vigentes.
Someta el producto a revisiones frecuentes, para comprobar si hay desequilibrios de las hojas o signos de desgaste o daños en los cables. No utilice el producto si es necesario efectuar reparaciones o ajustes.
Importante – Durante las fases de mantenimiento o limpieza del producto, desconecte la central de la alimentación eléctrica y de las baterías, si
están previstas.
Para los demás dispositivos incluidos en la instalación, aténgase a lo previsto
en los respectivos planes de mantenimiento.
Para los motorreductores HK7024, HK7224 es necesario efectuar un mantenimiento programado antes de que transcurran 6 meses o se realicen 20.000
maniobras desde el mantenimiento anterior.
Para realizar el mantenimiento siga estas instrucciones:
01. Desconecte cualquier fuente de alimentación eléctrica, incluidas las posibles baterías compensadoras;
02. Compruebe el estado de deterioro de soportes y tacos de fijación con
especial atención a fenómenos de erosión u oxidación de las piezas; sustituya las piezas que no ofrezcan garantías suficientes;
03. Haga una prueba de desbloqueo para comprobar su correcto funcionamiento (véase el párrafo 3.6).
04. Vuelva a conectar las fuentes de alimentación eléctrica y realice todas las
pruebas y comprobaciones previstas en el capítulo 5 - Ensayo.
Nota – Los datos se refieren a un portón seccional equilibrado y en perfectas condiciones de mantenimiento
TABLA 13
Índice de dificultad
brazo longitud ENTERA brazo longitud CORTA
< 1,8
1,8 - 2,5 m
2,5 - 3 m
3 - 3,5 m
< 200 kg
200 + 250 kg
> 250 kg
Longitud de la hoja
Peso de la hoja
Temperatura ambiente superior a 40°C o inferior a 0°C o humedad
superior al 80%
Hoja ciega
Instalación en zona ventosa
0%
15%
20%
30%
0%
20%
30%
20%
15%
15%
15%
20%
30%
30%
40%
20%
20%
20%
500.000
400.000
300.000
220.000
200.000
100.000
0 102030405060708090100
Page 57

ES
Español – 13
CARACTERÍSTICAS TÉCNICAS DEL PRODUCTO
HK7224K
Motorreductor electromecánico para automatismos de cancelas y portones automáticos con motor de corriente continua, reductor epicicloidal, desbloqueo mecánico.
HK7024K
Motorreductor electromecánico para automatismos de cancelas y portones automáticos con motor de corriente continua, reductor epicicloidal, desbloqueo mecánico. Central de
mando incorporada y radiorreceptor OXI
Tipo
Par máximo 500 Nm
Par nominal 120 Nm
Velocidad en vacío 2.25 RPM
Velocidad al par nominal 2.00 RPM
Frecuencia máxima de los ciclos 40 ciclos/hora
Tiempo máximo ciclo continuo 7 minutos aprox.
Límites de utilización el producto se puede utilizar en cancelas con hojas de hasta 330 kg de peso con una longitud máxima de 1,80 m,
o bien de hasta 200 kg con una longitud máxima de 3,50 m (véase el gráfico 1)
Durabilidad estimada entre 150.000 y 500.000 ciclos, de acuerdo con las condiciones indicadas en la Tabla 13 y el Gráfico 3
Montaje en posición vertical, con una placa de fijación específica
Temperatura de funcionamiento de -20°C a +50°C (con temperaturas bajas disminuye la eficiencia del motorreductor)
Empleo en atmósfera ácida,
salobre o con riesgo NO
de explosión
Grado de protección IP 54 (con caja íntegra)
Dimensiones (mm) 210 x 290 x 320 h
Peso (kg) 10.5 Kg; 9.5 Kg
Notas:
(1) - Función activable con el programador Oview.
[*] - Las salidas Luz Intermitente, Electrocerradura, Indicador Cancela Abierta pueden programarse con otras funciones (véase la “TABLA
3 - Funciones de 1° nivel”; o bien mediante el
programador Oview, véase el capítulo
8.3). Las características eléctricas de las salidas se adecuan al tipo de función seleccionada:
• función luz intermitente: bombilla de 12 Vdc, 21 W máx.;
• función electrocerradura: 12 Vac, 15 VA máx.;
• otras salidas (todos los tipos): 1 bombilla o relé 24Vdc (-30 y +50%), 4 W máx.
Alimentación 230 Vac (120 Vac para la versión HK7024K/V1) 24 Vdc (±10%)
±10%; 50/60 Hz
Alimentación de emergencia predisposición para baterías compensadoras PS124
Alimentación con paneles solares predisposición para Kit SYKCE
Potencia máxima absorbida 300 W 140 W
Corriente máxima absorbida 1,5 A (3 A para versión HK7024K/V1) 6 A durante un tiempo máximo de 2 s
Potencia absorbida en
“Standby-Todo (1)”
con alimentación de PS124 menos de 100 mW
o kit SYKCE (incluido el
receptor OXI)
Salida luz intermitente [*] una luz intermitente LUCYB (bombilla 12 V, 21 W)
Salida electrocerradura [*] una electrocerradura de 12 Vac máx. 15 VA
Salida indicador cancela una bombilla de 24 V máximo 4 W (la tensión de salida
abierta [*] puede variar entre -30% y +50%, la salida puede
accionar también pequeños relés)
Salida BLUEBUS una salida con carga máxima de 15 unidades Bluebus
(máximo 6 pares de fotocélulas MOFB o MOFOB
más 2 pares de fotocélulas MOFB o MOFOB direccionadas
como dispositivos de apertura más un máximo de
4 dispositivos de mando MOMB o MOTB)
Entrada STOP para contactos normalmente cerrados, normalmente
abiertos o para resistencia constante 8,2 kΩ;
el tipo de contacto se selecciona en autoaprendizaje
y una variación respecto del estado memorizado
provoca el mando “STOP”
Entrada PP para contactos normalmente abiertos (el cierre
del contacto provoca el mando Paso a Paso)
Conexión radio: conector SM para receptores de la familia SMXI, OXI y OXIFM
Entrada ANTENA Radio 50 Ω para cable tipo RG58 o similar
Funciones programables 8 funciones tipo ON-OFF (Tabla 3)
y 8 funciones regulables (Tabla 5)
Funciones en autoaprendizaje • Autoaprendizaje de los dispositivos conectados a
la salida BlueBus. • Autoaprendizaje del tipo de
dispositivo conectado al borne “STOP” (contacto NA, NC
o resistencia 8,2 kΩ). • Autoaprendizaje de la carrera de
las hojas y cálculo automático de los puntos de
desaceleración y apertura parcial. • Autoaprendizaje del
funcionamiento con uno o dos motores.
ADVERTENCIAS: • Todas las características técnicas indicadas se refieren a una temperatura de 20°C (± 5°C). • Nice S.p.a. se reserva el derecho de modificar
el producto en cualquier momento que lo considere necesario, manteniendo las mismas funcionalidades y el mismo uso previsto.
Page 58

ES
14 – Español
DECLARACIÓN DE CONFORMIDAD CE
y declaración de incorporación de “cuasi máquina”
Declaración de conformidad con las Directivas: 2006/95/CE (LVD); 2004/108/CE (CEM); 2006/42/CE (MD) anexo II, parte B
Nota - El contenido de esta declaración corresponde a aquello declarado en la última revisión disponible, antes de la impresión de este manual, del documento oficial depositado en la sede de Nice Spa. El presente texto ha sido readaptado por motivos de impresión. La copia de la declaración original puede solicitarse a Nice S.p.a. (TV) I.
Número de declaración: 334/HYKE Revisión: 0 idioma: ES
Nombre del fabricante: NICE s.p.a.
Dirección: Via Pezza Alta 13, Z.I. Rustignè, 31046 Oderzo (TV) Italia
Persona autorizada para
constituir la
documentación técnica: Sr. Oscar Marchetto
Tipo de producto: Motorreductor electromecánico “HYKE” con central incorporada
Modelo / Tipo: HK7024K, HK7224K
Accesorios: SMXI, OXI, PS124, Oview
El suscrito, Luigi Paro, en su carácter de Administrador Delegado, declara bajo su responsabilidad que el producto antedicho es conforme con las disposiciones establecidas por las siguientes directivas:
• Directiva 2006/95/CE DEL PARLAMENTO EUROPEO Y DEL CONSEJO del 12 de diciembre de 206 sobre de la aproximación de las legislaciones de los
Estados miembros relativas al material eléctrico destinado a ser utilizado dentro de dichos límites de tensión, según las siguientes normas armonizadas:
EN 60335-1:2002 + A1:2004 + A11:2004 + A12:2006 + A2:2006 + A13:2008; EN 60335-2-103:2003
• DIRECTIVA 2004/108/CE DEL PARLAMENTO EUROPEO Y DEL CONSEJO del 15 de diciembre de 2004 sobre la aproximación de las legislaciones de
los Estados miembros relativas a la compatibilidad electromagnética y que abroga la Directiva 89/336/CEE, según las siguientes normas:
EN 61000-6-2:2005, EN 61000-6-3:2007
El producto también es conforme con la siguiente directiva según los requisitos previstos por las “cuasi máquinas”:
• Directiva 2006/42/CE DEL PARLAMENTO EUROPEO Y DEL CONSEJO del 17 de mayo de 2006 relativa a las máquinas y que modifica la Directiva
95/16/CE (refusión).
• Se declara que la documentación técnica correspondiente ha sido realizada de conformidad con el anexo VII B de la Directiva 2006/42/CE y que se
han respetado los siguientes requisitos esenciales: 1.1.1- 1.1.2- 1.1.3- 1.1.5- 1.2.1-1.2.6- 1.3.1- 1.3.2- 1.3.3- 1.3.4- 1.3.7-1.3.9- 1.5.1-1.5.2- 1.5.4-
1.5.5- 1.5.6- 1.5.7- 1.5.8- 1.5.10- 1.5.11- 1.5.13-1.6.1- 1.6.2-1.6.4- 1.7.2- 1.7.3- 1.7.4- 1.7.4.1- 1.7.4.2- 1.7.4.3
• El fabricante se obliga a transmitir a las autoridades nacionales, como respuesta a una solicitud motivada, las informaciones pertinentes sobre la
“cuasi máquina”, sin perjuicio de imprejuzgar los propios derechos de propiedad intelectual.
• Si la “cuasi máquina” fuera puesta en servicio en un País europeo con un idioma oficial diferente de aquel utilizado en esta declaración, el importador
tendrá la obligación de anexar a la presente declaración la traducción correspondiente.
• Se advierte que la “cuasi máquina” no deberá ponerse en servicio hasta que la máquina final donde será incorporada no sea declarada conforme, en
su caso, a las disposiciones de la Directiva 2006/42/CE..
El producto también es conforme, sólo para las piezas aplicables, a las siguientes normas:
EN 13241-1:2003, EN 12445:2002, EN 12453:2002, EN 12978:2003
Oderzo, 15 de enero 2010 Luigi Paro (Administrador Delegado)
Page 59

DE
Deutsch – 1
DEUTSCH
Originalanleitungen
Inhaltsverzeichnis
1 - ALLGEMEINE SICHERHEITSHINWEISE UND MASSNAHMEN . . . . . . 1
1.1 - Sicherheitshinweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 - Hinweise zur Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.3 - Hinweise zur Bedienung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 - PRODUKTBESCHREIBUNG UND EINSATZ . . . . . . . . . . . . . . . . . . . . . 1
3 - INSTALLATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
3.1 - Überprüfungen vor der Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
3.2 - Einsatzgrenzen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
3.3 - Vorbereitungen für die Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
3.4 - Installation des Torantriebs Mod. HK7024 - HK7224 . . . . . . . . . . . . . . 2
3.5 - Einstellung der mechanischen Endanschläge . . . . . . . . . . . . . . . . . . . . 4
3.6 - Manuelles Blockieren und Entriegeln des Antriebs . . . . . . . . . . . . . . . . 4
4 - ELEKTRISCHE ANSCHLÜSSE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
4.1 - Elektrische Anschlüsse des Torantriebs mit Steuerung Mod. HK7024 . . 4
4.2 - Elektrische Anschlüsse des Torantriebs ohne Steuerung Mod. HK7224 4
4.3 - Verbindung sonstiger Vorrichtungen . . . . . . . . . . . . . . . . . . . . . . . . . . 5
4.4 - Adressierung der angeschlossenen Vorrichtungen . . . . . . . . . . . . . . . . 5
4.5 - Erstes Einschalten und Überprüfung der Anschlüsse . . . . . . . . . . . . . . 5
4.6 - Erlernung der verbundenen Vorrichtungen
4.7 - Erlernung der Positionen der mechanischen Endanschläge. . . . . . . . . . 5
4.8 - Überprüfung der Torflügelbewegung . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
5 - ABNAHME UND INBETRIEBSETZUNG . . . . . . . . . . . . . . . . . . . . . . . . 6
5.1 - Abnahme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
5.2 - Inbetriebsetzung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
6 - PROGRAMMIERUNG DER STEUERUNG . . . . . . . . . . . . . . . . . . . . . . . 7
6.1 - Programmierung erstes Niveau (ON-OFF) . . . . . . . . . . . . . . . . . . . . . . . 7
6.2 - Zweites Niveau: Programmierung (einstellbare Parameter) . . . . . . . . . . 8
6.3 - Spezielle Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
6.4 - Löschen des Speichers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
7 - WAS TUN, WENN… (Leitfaden zum Lösen von Problemen) . . . . . . . . 9
8 - WEITERE AUSKÜNFTE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
8.1 - Anschluss eines Funkempfängers . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
8.2 - Anschluss und Installation der Pufferbatterie Mod. PS124 . . . . . . . . . 11
8.3 - Anschluss des Oview-Programmierers . . . . . . . . . . . . . . . . . . . . . . . . 11
8.4 - Anschluss des Systems an die Solemyo-Solarenergie . . . . . . . . . . . . 11
8.5 - Anschluss des externen Entriegelungssystems Kio . . . . . . . . . . . . . . . 11
9 - WARTUNG DES PRODUKTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
ENTSORGUNG DES PRODUKTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Produktlebensdauer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
TECHNISCHE MERKMALE DES PRODUKTS . . . . . . . . . . . . . . . . . . . . . 13
CE-KONFORMITÄTSERKLÄRUNG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
ANHANG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . I
Anweisungen und Hinweise für den Benutzer . . . . . . . . . . . . . . . . . . . . . . . VI
Darstellungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . IX
1.1 - Sicherheitshinweise
• ACHTUNG! – Das vorliegende Handbuch enthält wichtige Anweisungen
und Hinweise zur Sicherheit. Eine falsche Installation kann zu schweren
Verletzungen führen. Vor Arbeitsbeginn muss die ganze Gebrauchsanleitung
aufmerksam durchgelesen werden. Bei Zweifeln, die Installation unterbrechen und den Kundendienst Nice um Klärung bitten.
• ACHTUNG! – Wichtige Anweisungen: für Wartungseingriffe und die Entsorgung des Produkts ist diese Gebrauchsanweisung sorgfältig aufzubewahren.
• ACHTUNG! – Nach der neusten Europäischen Gesetzgebung muss die
Ausführung einer Automatiktür oder eines ebensolchen Tors den Normen der Richtlinie
2006/42/CE (vorher 98/37/EG) (Maschinenrichtlinie)
und im Besonderen den Normen EN 12445; EN 12453; EN 12635 und EN
13241-1entsprechen, durch sie wird die vorausgesetzte Konformität der
Automation erklärt. In Anbetracht dessen, müssen alle Installationsund Anschlussarbeiten, die Endabnahme und Wartung des Produkts
ausschließlich von zuständigen und qualifizierten Technikern durchgeführt werden!
1.2 - Installationshinweise
• Vor Installationsbeginn prüfen, ob sich das Produkt für den gewünschten Einsatz eignet (siehe “Einsatzgrenzen” Absatz 3.2 und “Technische Merkmale des
Produkts”). Erweist es sich als ungeeignet, die Installation NICHT vornehmen.
• Der Inhalt dieses Handbuchs bezieht sich auf eine typische Anlage, wie in Abb.
3 beschrieben wird.
• Bei allen Installations- und Wartungsarbeiten muss die Automation vom
Stromnetz abgetrennt sein. Wenn die Abtrennvorrichtung vom Unterbringungsort der Automatisierung nicht zu sehen ist, muss vor Beginn der Arbeiten auf der Abtrennvorrichtung ein Schild mit der Schrift “ACHTUNG! LAUFENDE WARTUNG” angebracht werden.
• Das Steuergerät muss an eine Stromleitung mit einer sicheren Erdung angeschlossen werden.
• Das Produkt während der Installation vorsichtig handhaben, um Quetschungen,Schläge, Herunterfallen oder Berührung mit Flüssigkeiten gleich welcher
Natur zu vermeiden. Das Produkt keiner Wärmequelle oder einer offenen
Flamme aussetzen. All dies kann zu Beschädigungen führen und Betriebsstörungen oder gefährliche Situationen hervorrufen. Sollte dies der Fall sein,
die Installation sofort abbrechen und den Kundendienst Nice verständigen.
• An keinem Teil des Produkts Änderungen vornehmen. Nicht zulässige Eingriffe verursachen nur Störungen. Für willkürliche Änderungen des Produkts
übernimmt der Hersteller keine Haftung.
• Falls das zu automatisierende Tor eine Gehtür hat, muss mit einem Kontrollsystem dafür gesorgt werden, dass der Motorbetrieb bei offener Gehtür
unterdrückt ist.
• Das Verpackungsmaterial des Produkts muss unter Beachtung der örtlichen
Bestimmungen entsorgt werden.
1.3 - Gebrauchshinweise
• Das Produkt darf nicht von Personen (einschließlich Kinder) mit eingeschränkten körperlichen, geistigen oder wahrnehmlich gestörten Fähigkeiten
oder fehlender Erfahrung oder Kenntnis benutzt werden, es sei denn, eine für
ihre Sicherheit verantwortliche Person überwacht sie oder unterweist sie im
Gebrauch des Produkts.
• Kinder, die sich in der Nähe der Automatisierung aufhalten, müssen beaufsichtigt werden, damit sie nicht mit der letzteren spielen.
• Kinder dürfen nicht mit den befestigten Bedienvorrichtungen spielen. Die
tragbaren Bedienvorrichtungen (Fernbedienungen) gehören nicht in Kinderhände.
HINWEISE UND ALLGEMEINE
SICHERHEITSMASSNAHMEN
1
Die Vorrichtungen, aus denen sich dieses Produkt zusammensetzt, sind zur
Automatisierung eines Tors oder einer Tür mit einem oder Flügeln bestimmt.
ACHTUNG! – Jeder andere Gebrauch als der in dieser Gebrauchsanweisung beschriebene in abweichenden Umfeldbedingungen ist als unsachgemäß anzusehen und verboten!
Der Hauptteil der Automatisierung besteht aus einem oder zwei elektromechanischen Getrieben (nach der Anzahl der Flügel, die zu automatisieren sind), ein
jedes verfügt über einen Gleichstrommotor und ein Planetengetriebe. Eines der
Getriebe (Mod. HK7024) ist mit einem Steuergerät ausgerüstet, das den
Betrieb regelt. Das Steuergerät besteht aus einer Karte mit eingebautem Funkempfänger für den Empfang der Befehle, die vom Sender übertragen werden.
Das Steuergerät ist für den Anschluss an verschiedene Vorrichtungen der Systeme Opera, Bluebus und an das Solarenergiesystem Solemyo vorgerüstet,
siehe Kapitel 8 - Vertiefungen.
Wenn es vom Stromnetz gespeist wird, kann es eine Pufferbatterie aufnehmen
(Mod. PS124, optionales Zubehör), die bei Stromausfall (elektrischer Blackout)
dafür sorgt, dass die Automatik in den nächsten Stunden einige Manöver ausführen kann.
Bei einem Stromausfall können die Torflügel durch Entriegelung des Getriebes
mit dem entsprechenden Schlüssel bewegt werden; für das Manöver von Hand
siehe Kapitel 3.6.
Ein weiteres lieferbares Zubehör sind die Empfänger, die mit der Steckverbindung “SM” (SMXI, OXI, usw.) vorgerüstet sind, siehe Kapitel 8 - Vertiefungen.
PRODUKTBESCHREIBUNG UND
BESTIMMUNGSZWECK
2
Page 60
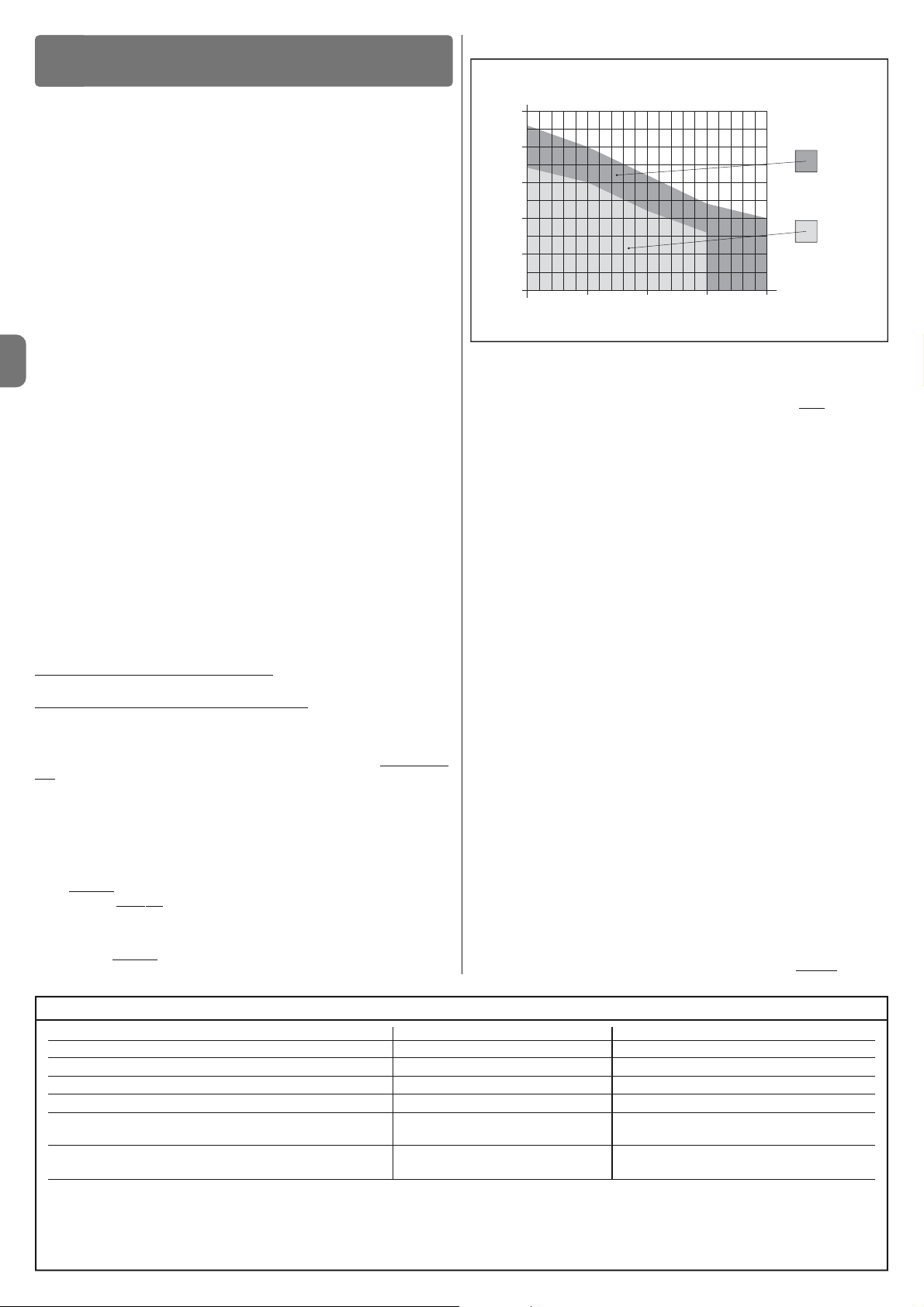
INSTALLATION
3
gungen kann das Maß der Höchstöffnung des Flügels bis zu 110° erreichen.
GRAFIK 1
3.1 - Überprüfungen vor der Installation
Vor der Installation ist die Unversehrtheit der Produktbauteile, die Eignung des
gewählten Modells und des Installationsortes zu prüfen.
• Prüfen, dass das gesamte zu verwendende Material in einem optimalen
Zustand ist und sich für den vorgesehenen Zweck eignet.
• Prüfen, dass in der Anlage die mechanischen Arretierungen sowohl bei der
Schließung als auch bei der Öffnung am Boden (gehören nicht zum Lieferumfang) vorhanden sind.
• Prüfen, ob sich der mechanische Aufbau des Tors für eine Automatisierung
eignet und den gesetzlichen Bestimmungen des betreffenden Landes entspricht (ggf. die Daten des Toraufklebers zu Hilfe nehmen). Ein nicht bereits
effizientes und sicheres Tor kann mit diesem Produkt nicht automatisiert werden. Darüber hinaus kann es keine Mängel beseitigen, die durch eine falsche
Installation des Tors oder seine vernachlässigte Wartung verursacht wurden.
• Prüfen, ob die Betriebsbedingungen der Vorrichtungen mit den erklärten Einsatzgrenzen kompatibel sind (siehe Absatz 3.2).
• Von Hand die Torflügel in beide Richtungen bewegen, sich dabei vergewissern, dass die Bewegung mit einer konstanten Reibung über den gesamten
Torlauf erfolgt (es dürfen keine Stellen vorhanden sein, die einen geringeren
DE
oder stärkeren Kraftaufwand verlangen).
• Von Hand die Torflügel in eine beliebige Stellung bringen, sie anhalten und
sicher stellen, dass sie sich nicht bewegen.
• Prüfen, ob der Befestigungsbereich des Getriebes für den Platzbedarf des
letzteren ausreicht (Abb. 1).
• Im Umfeld, in dem das Getriebe installiert wird, muss ausreichend Platz für
die komplette Rotation seines Auslegers sein (siehe Abb. 7).
• Sich vergewissern, dass in Getriebenähe ausreichend Platz für die Entriegelung des Getriebes von Hand vorhanden ist.
• Sich vergewissern, dass die Oberflächen, die für die Installation der einzelnen
Vorrichtungen gewählt wurden, solide sind und eine stabile Befestigung
gewährleisten.
• Prüfen, ob jede Vorrichtung, die installiert wird, sich in einer geschützten Stellung befindet und vor Schlägen sicher ist.
• Prüfen, dass alle Elektrokabel, die benutzt werden, den Angaben der Tabelle
1 entsprechen.
3.2 - Einsatzgrenzen
Vor der Installation des Torantriebs muss geprüft werden, ob seine Daten innerhalb der folgenden Einsatzgrenzen und den Werten liegen, die im Kapitel “Technische Produkteigenschaften“ aufgeführt sind:
Mit dem Arm des Motors bei VOLLER Länge
- Höchstbreite des Flügels: 3,50 m (= Höchstgewicht des Flügels: 200 kg)
Mit dem Arm des Motors bei REDUZIERTER Länge
- Höchstbreite des Flügels: 3,00 m (= Höchstgewicht des Flügels: 180 kg)
• Auszuführende Prüfung: Auf der nebenstehenden Graphik 1 das Gewicht
und die Breite des Flügels vermerken; von diesen Punkten aus zwei Linien
zeichnen und sicherstellen, dass sich diese in einem der beiden grauen Berei
der Graphik überkreuzen. Achtung! - Wenn sich die Linien im weißen
che
Bereich überkreuzen ist es nicht möglich, dieses Produkt zur Automatisierung
des Tors zu verwenden.
• Um die Installation des Torantriebs zu ermöglichen, muss die Mindestbreite
des Pfeilers 210 mm betragen.
• Der Befestigungsbügel des Arms muss in einem robusten Bereich des Flügels
sein (zum Beispiel der Rahmen), um eine solide und sichere Befestigung zu
gewährleisten.
• Das Maß
- Wenn das Maß
“E” prüfen (Abb. 2):
“E” einen Wert zwischen 300 mm (mindestens) und 650
mm (höchstens) aufweist, muss der Arm des Torantriebs mit REDUZIERTER
Länge eingestellt werden. Unter diesen Bedingungen kann das Maß der
Höchstöffnung des Flügels bis zu 90° erreichen.
- Wenn das Maß
“E” einen Wert gleich oder über 650 mm aufweist, muss der
Arm des Torantriebs mit VOLLER Länge eingestellt werden. Unter diesen Bedin-
:
:
350
300
250
Für Ausleger mit
voller Länge
200
GEWICHT (kg.)
150
100
1,8 2 2,5 3 3,5
Für Ausleger mit
gekürzter Länge
BREITE (m.)
3.3 - Vorbereitungen für die Installation
Die Abb. 3 zeigt ein Beispiel einer Automatisierungsanlage, die mit Nice-
Bestandteilen ausgeführt wurde (einige Bestandteile könnten nicht
im Bausatz
inbegriffen sein):
a - Torantrieb mit Steuerung Mod. HK7024
b - Torantrieb ohne Steuerung Mod. HK7224
c - Blinkmeldeleuchte
d - Lichtschrankenpaar Mod. MOFB
e - Digitaltastatur (Mod. MOTB) – Transponder-Lesegerät (Mod. MOMB) –
Schlüsseltaster (Mod. MOSE)
f - Säulenpaar für Lichtschranken
g - Mechanischer Stopp während des Schließens
h - Elektroschloss
Diese Bestandteile werden gemäß einem typischen und gewöhnlich angewendeten Schema angeordnet. In Bezug auf Abb. 3, wird die ungefähre Position
festgesetzt, in der jedes in der Anlage vorgesehene Teil installiert wird. Wichtig
– Vor der Ausführung der Installation werden die für Ihre Anlage notwendigen
Stromkabel vorbereitet, wofür man sich auf Abb. 4 und die “Tabelle 1 - Tech-
nische Eigenschaften der Stromkabel” bezieht.
Achtung – Während des Verlegens der Rohre für die Stromkabel muss beach-
tet werden, dass aufgrund möglicher Wasserablagerungen in den Abzweigschächten die Verbindungsrohre Kondenswasser in der Steuerung verursachen können und somit die elektronischen Kreise beschädige könnten.
3.4 - Installation des Torantriebs Mod. HK7024 - HK7224
HINWEISE
• Eine falsche Installation kann schwerwiegende Verletzungen der die Ar beit ausführenden und die Anlage verwendenden Personen hervorrufen.
-
• Vor dem Zusammenbau der Automatisierung müssen die Vorprüfungen
laut Abschnitt 3.1 und 3.2 ausgeführt werden.
Vor der Installation muss die Länge des Arms des Torantriebs bestimmt werden
– siehe Abschnitt 3.4.1.
3.4.1 - Die Länge des Arms des Torantriebs bestimmen
01. Die Bestandteile zusammensetzen, die den Arm des Motors wie in Abb. 5
gezeigt zusammensetzen;
02. Die Position des Torantriebs VERTIKAL festsetzen:
Auf dem Pfeiler eine waagrechte Linie auf derselben Höhe anzeichnen, auf
der sich der Befestigungsbügel des Arms am Flügel nach der Installation
befinden wird (Abb. 6).
03. Die Position des Torantriebs HORIZONTAL festsetzen (Maß A):
ACHTUNG! - Wenn in der Nähe des Installationsbereichs ein festes
Hindernis vorliegt (Mauer, Baum, usw.), muss das Maß E
(Abb. 2)
TABELLE 1 - Technische Eigenschaften der Stromkabel (Abb. 4)
Anschluss Kabelart Zugelassene Höchstlänge
A: Kabel SPEISUNG STEUERUNG 1 Kabel 3 x 1,5 mm
B: Kabel ELEKTROSCHLOSS 1 Kabel 2 x 1 mm
C: Kabel BLUEBUS-VORRICHTUNGEN 1 Kabel 2 x 0,5 mm
2
2
2
30 m (Anmerkung 1)
6 m
20 m (Anmerkung 2)
D: Kabel SCHLÜSSELTASTER 2 Kabel 2 x 0,5 mm2 (Anmerkung 3) 50 m
E: Kabel SPEISUNG TORANTRIEB 1 Kabel 3 x 1,5 mm
2
(Anmerkung 4) 10 m
Kabel ANSCHLUSS ENCODER 1 Kabel 2 x 1 mm2 (Anmerkung 4) 10 m
F: Kabel BLINKLEUCHTE mit Antenne 1 Kabel 2 x 0,5 mm
2
20 m
1 geschütztes Kabel Typ RG58 20 m (unter 5 m empfohlen)
Anmerkung 1 – Wenn das Speisungskabel 30 m Länge überschreitet, muss ein Kabel mit einem größeren Schnitt verwendet werden (3 x 2,5 mm2) und es ist notwendig, eine
Erdung in der Nähe der Automatisierung zu installieren.
Anmerkung 2 – Wenn das Kabel Bluebus 20 m Länge überschreitet und bis zu max. 40 m erreicht, muss ein Kabel mit einem höheren Schnitt verwendet werden (2 x 1 mm
Anmerkung 3 – Diese 2 Kabel können von einem einzigen Kabel 4 x 0,5 mm
Anmerkung 4 – Diese Kabel können von einem einzigen Kabel 5 x 1,5 mm
2
ersetzt werden.
2
ersetzt werden.
ACHTUNG! – Die verwendeten Kabel müssen für die Umgebung geeignet sein, in der die Installation erfolgt.
2 – Deutsch
2
).
Page 61

DE
Deutsch – 3
gemessen und wie folgt vorgegangen werden:
• Wenn das Maß E ein Wert gleich oder über 650 mm
ist, siehe
Abschnitt 3.4.2
• Wenn das Maß E ein Wert zwischen 300 mm (mindestens) und 650
mm (höchstens) ist, siehe Abschnitt 3.4.3
3.4.2 - Installation des Torantriebs mit ARM AUF GANZER LÄNGE
01. a) Auf dem Pfeiler das Maß B
messen (Abb. 7) = Distanz zwischen Dreh-
punkt des Flügels und Oberfläche des Pfeilers, wo der interne Bügel des
Torantriebs befestigt wird.
b) Den Flügel bis zur gewünschten Öffnung bringen (höchstens 110°): Winkelwert.
c) Auf der Graphik 2 das gefundene Maß B
anzeichnen und von diesem
Punkt aus eine waagrechte Linie zeichnen, bis der Bereich
berührt wird,
der den Wert des unter Punkt b gemessenen Werts einschließt.
d) An den Schnittpunkten zwischen der waagrechten Linie und dem
Bereich vertikale Linien zeichnen und die Werte bestimmen, die für das
Maß A
genützt werden können (Abb. 8). Dann in dieser Spannweite den
Wert A wählen.
e) Auf dem Pfeiler den gefundenen Wert des Maßes A
aufzeichnen und
eine vertikale Linie zeichnen.
02. Den Bügel am Pfeiler befestigen (Abb.
9):
f) Phase 1-2: Den Bügel auf den Pfeiler legen und seine vertikale Mittellinie
mit der zuvor gezeichneten vertikalen Linie (Maß A) übereinstimmen, und
seinen Arm mit der während des Verfahrens 3.4.1 gezeichneten waagrechten Linie übereinstimmen. In dieser Phase sicherstellen, dass der Torantrieb
perfekt nivelliert ist: Ein achsversetzter Torantrieb kann mangelhafte Funktionen der Automatisierung hervorrufen.
g) Phase 3-4: Die Befestigungspunkte anzeichnen, die Oberfläche des
Pfeilers durchbohren und die Dübel einsetzen; nun wird der Bügel mit passenden Schrauben und Scheiben befestigt.
03. Den Arm des Torantriebs auf dem Flügel befestigen
:
h) Den Flügel des Tors in die maximale Öffnungsstellung bringen;
i) Phase 5: Den Torantrieb mit den zwei mitgelieferten Schrauben und Mut-
tern an den Bügel befestigen;
l) Den Torantrieb lösen, siehe Kap. 3.6;
m) Phase 6: Den Arm des Torantriebs bis zu seiner höchsten Auswei
-
tung
fest aufdrücken. Achtung! - Sicherstellen, dass der Arm an sei-
nem Endanschlag blockiert wird;
n) Den Arm dem Flügel näher und auf diesen den Befestigungsbügel legen.
o) Phase 7: Sicherstellen, dass der Arm des Torantriebs nivelliert ist und
mit einem Bleistift die Mitte
des Profils der Bügellanglöcher zeichnen, um
in Zukunft eine Feineinstellung des Flügelverschlusses zu ermöglichen (siehe Abschnitt 4.8).
p) Mit einer Hand wird der Bügel in Berührung mit dem Flügel gehalten,
dann eine vollständige Öffnung und Schließung ausgeführt.
q) Phase 8: Den Flügel in den angezeigten Punkten durchbohren und den
Bügel vom Arm nehmen und an den Flügel des Tors mit den geeigneten
Schrauben befestigen.
r) Phase 9: Den Arm am Bügel befestigen, hierzu den Stift und die mitgelieferte Benzing-Sicherungsscheibe einfügen. Wichtig – Prüfen, ob der
Bügel und der Arm einwandfrei nivelliert sind. Eventuell die Schrauben des
Bügels lockern und nivellieren.
s) Die Befestigungen der mechanischen Endanschläge platzieren; siehe
Kap. 3.5;
t) Phase 10: Dann den Torflügel von Hand auf ca. Laufhälfte verschieben
und den Torantrieb mit dem passenden Schlüssel blockieren (siehe Kap.
3.6). Dann von Hand den Flügel um wenige Zentimeter in Öffnungsrichtung
versetzen.
04. Falls das zu automatisierende Tor zweiteilig ist, wiederholen Sie die im
0
150 175 200 225 250 275 300 325 350 375 400 425 450 475
50
B
A
100
150
200
250
300
350
400
450
90°-95°
95°-100°
100°-105°
105°-110°
90°-95°
95°-105°
GRAFIK 2
Abschnitt 3.4 beschriebenen Vorgänge für die Installation des zweiten Torantriebs.
3.4.3 - Installation des Torantriebs mit ARM AUF REDUZIERTER LÄNGE
ACHTUNG! – Mit dieser Konfiguration beträgt die max. Öffnung des
Flügels 90°.
01. a) Auf dem Pfeiler das Maß B
messen (Abb. 7) = Distanz zwischen Dreh-
punkt des Flügels und Oberfläche des Pfeilers, wo der interne Bügel des
Torantriebs befestigt wird.
b) Auf der Graphik 2 das gefundene Maß B
anzeichnen und von diesem
Punkt aus eine waagrechte Linie zeichnen, bis der Bereich
90-95° berührt wird.
c) An den Schnittpunkten zwischen der waagrechten Linie und dem
Bereich vertikale Linien zeichnen und die Werte bestimmen, die für das
Maß A
genützt werden können(Graphik 2). Dann in dieser Spannweite
den Wert A wählen.
d) Auf dem Pfeiler den gefundenen Wert des Maßes A
aufzeichnen und
eine vertikale Linie zeichnen.
02. Den Bügel am Pfeiler befestigen
(Abb. 10):
e) Phase 1-2: Den Bügel auf den Pfeiler legen und seine vertikale Mittellinie
mit der zuvor gezeichneten vertikalen Linie (Maß A) übereinstimmen, und
seinen Arm mit der während des Verfahrens 3.4.1 gezeichneten waagrechten Linie übereinstimmen. In dieser Phase sicherstellen, dass der Torantrieb
perfekt nivelliert ist: Ein achsversetzter Torantrieb kann mangelhafte Funktionen der Automatisierung hervorrufen.
f) Phase 3-4: Die Befestigungspunkte anzeichnen, die Oberfläche des
Pfeilers durchbohren und die Dübel einsetzen; nun wird der Bügel mit passenden Schrauben und Scheiben befestigt.
g) Den Flügel des Tors in die maximale Schließstellung bringen;
h) Phase 5: Den Torantrieb mit den zwei mitgelieferten Schrauben und
Muttern an den Bügel befestigen;
i) Den Torantrieb lösen, siehe Kap. 3.6.
03. Die Länge des gelochten Arms gegenüber dem Kontext prüfen
:
l) Phase 6: Den Arm dem Flügel näher und auf diesen den Befestigungs-
bü gel legen: Achtung
! - Mit den Händen den gebogenen Arm gegen
den Flügel drücken, bis der Arm blockiert ist (Höchstöffnung).
m) Phase 7: Sicherstellen, dass der Arm des Torantriebs nivelliert ist und
mit einem Bleistift die Mitte
des Profils der Bügellanglöcher zeichnen, um
in Zukunft eine Feineinstellung des Flügelverschlusses zu ermöglichen (siehe Abschnitt 4.8).
n) Provisorisch den Bügel am Flügel befestigen und den Flügel in die
Höchstöffnungsstellung bringen.
04. Den Arm des Torantriebs am Flügel befestigen
:
o) Phase 8: Den Flügel an den zuvor angezeichneten Punkten durchbohren.
p) Phase 9-10: Den Bügel vom Arm nehmen und an dem Flügel des Tors
mit den geeigneten Schrauben befestigen.
q) Phase 11: Den Arm am Bügel befestigen, hierzu den Stift und die mitgelieferte Benzing-Sicherungsscheibe einfügen. Wichtig – Prüfen, ob der
Bügel und der Arm einwandfrei nivelliert sind. Eventuell die Schrauben des
Bügels lockern und nivellieren.
r) Die Befestigungen der mechanischen Endanschläge platzieren; siehe
Kap. 3.5.
s) Phase 12: Dann den Torflügel von Hand auf ca. Laufhälfte verschieben
und den Torantrieb mit dem passenden Schlüssel blockieren (siehe Kap.
3.6). Dann von Hand den Flügel um wenige Zentimeter in Öffnungsrichtung
versetzen.
05. Falls das zu automatisierende Tor zweiteilig ist, wiederholen Sie die im
Abschnitt 3.4 beschriebenen Vorgänge für die Installation des zweiten Torantriebs.
Page 62

DE
4 – Deutsch
3.5 - Einstellung der mechanischen Endanschläge
01. Die Flügel des Tors von Hand in die Höchstöffnungsstellung bringen;
02. Die Kunststoffscheibe am unteren Teil des Torantriebs drehen, indem der
Spalt unter dem Arm in die Position laut Abb. 11-1 gebracht wird;
03. Den Endanschlag in die erste mögliche Stellung bringen: Wie in Abb. 11-2
gezeigt einfügen (Öffnungsrichtung);
04. Die Scheibe so drehen, dass der Endanschlag nicht herunter fällt, wobei
der Spalt in die Stellung laut Abb. 11-3 platziert wird; für eine präzisere Einstellung auf die Einstellschraube einwirken (Abb. 11-4);
05. Wenn in der Anlage kein Bodenverschluss vorliegt, muss der Vorgang ab
Punkt 01 auch zur Einstellung des Endanschlags für das Schließen wiederholt werden;
06. Dann die Befestigungsmutter der Scheibe gut anziehen (Abb. 11-5), um
sicherzustellen, dass sie sich nicht plötzlich dreht.
3.6 - Manuelles Blockieren und Entriegeln des Antriebs
Der Antrieb ist mit einem mechanischen Entriegelungssystem ausgestattet, das
die manuelle Öffnung und Schließung ermöglicht.
Diese manuellen Verfahren müssen bei Stromausfall oder Betriebsstörungen
und während der Installation ausgeführt werden.
Entriegeln (Abb. 12-A):
01. Den Schlüssel in das Schloss stecken;
02. Den Schlüssel um 90° im Uhrzeigersinn drehen;
03. Durch den Federeffekt kommt der Hebel heraus: Den Hebel um 90° gegen
den Uhrzeigersinn drehen;
04. Der Torflügel kann nun von Hand in die gewünschte Stellung verschoben
werden.
Sperren (Abb. 12-B):
01. Den Hebel um 90° drehen, wobei der Schaft senkrecht gestellt wird;
02. Den Hebel bis zu seinem Sitz drücken;
03. Den Schlüssel um 90° gegen den Uhrzeigersinn drehen und den Schlüssel
herausziehen.
Der Stromanschluss der verschiedenen Vorrichtungen (Lichtschranken, Digitaltastaturen, Transponder-Kartenlesegeräte usw.) in der Automatisierung mit Ste uerung muss über das Nice-Bluebus-System ausgeführt werden.
Beschreibung der elektrischen Anschlüsse (fig. 13)
ANTENNE Eingang für die Antenne eines Funkempfängers
FLASH Ausgang für 1 Blinkleuchte mit 12V-Lampe (höchstens 21 W). [*]
ELS Ausgang für Elektroschloss 12 Vac (höchstens 15 VA). [*]
S.C.A. “Kontrolllampe Tor Auf”: Ausgang für 1 Blinkleuchte mit
24V-Lampe (höchstens 4 W).[*]
BLUEBUS Eingang für kompatible Vorrichtungen (MOFB, MOFOB, MOB und
MOTB; Anschluss der Vorrichtungen parallel auf 2 Leitern, auf
denen die Stromversorgung wie die Kommunikationssignale
verlaufen; keine einzuhaltende Polarität. Der zu verwendende
Stromanschluss erfolgt parallel, wobei keine Polaritäten eingehalten
werden müssen. Während der Erlernungsphase wird jede an der
Steuerung angeschlossene Vorrichtung dank eines unverwechselbaren
Codes einzeln von dieser erkannt. Wenn eine Vorrichtung zugefügt
oder beseitigt wird, muss die Erlernung dieser durch die Steuerung
ausgeführt werden (siehe Ab schnitt 4.6).
STOP Eingang für Vorrichtungen, die mit ihrem Eingriff den sofortigen
Stopp der vorliegenden Bewegung hervorrufen, der eine kurze
Umkehrung folgt; die Möglichkeit, NA-, NC- Kontakte anzuschließen
oder Vorrichtungen mit einem Ausgang mit einem konstanten
Widerstand 8,2 kΩ (Schaltleisten). Jede an diesem Eingang
angeschlossene Vorrichtung wird während der Erlernung durch die
Steuerung einzeln erkannt (Abschnitt 3.4); in dieser Phase wird ein
STOPP hervorgerufen, wenn die Steuerung eine Änderung
gegenüber dem erlernten Zustand erfasst. Es ist möglich, an
diesen Eingang eine oder mehrere, auch unterschiedliche
Vorrichtungen anzuschließen:
– Mehrere NA-Vorrichtungen können miteinander in unbegrenzter
Menge parallel angeschlossen werden;
– mehrere NC-Vorrichtungen ohne Mengenbegrenzung
serienmäßig anschließen);
– 2 Vorrichtungen mit Ausgang mit konstantem Widerstand 8,2 kΩ
parallel anschließen. Wenn mehr als 2 Vorrichtungen vorliegen,
müssen sie mit nur einem 1 Endwiderstand mit 8,2 kΩ
kaskadengeschaltet werden;
– 2 NA- und NC-Vorrichtungen parallel anschließen, an den NCKontakt einen Widerstand mit 8,2kΩ serienmäßig anschließen (das
ermöglicht auch die Kombination zwischen den 3 NA - NCVorrichtungen und 8,2 kΩ)
P. P. Eingang für Steuervorrichtungen, die nach ihrem Eingriff die
Bewegung im Schrittbetrieb hervorrufen; es besteht die Möglichkeit,
NA-Kontakte anzuschließen
OPEN Eingang für Steuervorrichtungen, die nach ihrem Eingriff nur die
ELEKTRISCHE ANSCHLÜSSE
4
Öffnungsbewegung hervorrufen; es besteht die Möglichkeit,
NA-Kontakte anzuschließen
CLOSE Eingang für Steuervorrichtungen, die nach ihrem Eingriff nur die
Schließbewegung hervorrufen; es besteht die Möglichkeit,
NA-Kontakte anzuschließen
ENC1 Eingang Encoder - Torantrieb 1 (Klemme 1, 2), keine einzuhaltende
Polarität
ENC2 Eingang Encoder - Torantrieb 2 (Klemme 4, 5), keine
einzuhaltende Polarität
M1 Ausgang für Torantrieb 1 (Klemme 7, 8, 9)
M2 Ausgang für Torantrieb 2 (Klemme 10, 11, 12).
[*] Die Ausgänge FLASH, ELS und S.C.A. können mit anderen Funktionen programmiert werden (siehe “TABELLE 3 - Funktionen 1. Niveau“; oder durch den
Oview-Programmierer, siehe Kapitel 8.3).
4.1 - Elektrische Anschlüsse des Torantriebs mit Steuerung
Mod. HK7024
ACHTUNG! – Die Stromanschlüsse erst nach der Installation des Toran-
triebs ausführen.
WICHTIGE HINWEISE!
– Die Anschlussarbeiten dürfen nur von qualifiziertem Personal ausgeführt werden.
- Alle elektrischen Anschlüsse müssen ohne Netzspannung und bei
getrennter Pufferbatterie (wenn diese in der Automatisierung vorliegt)
ausgeführt werden.
- An der Netzstromleitung muss eine Vorrichtung vorgesehen werden, die die
vollständige Trennung der Automatisierung vom Netz sichert. Die Trennungsvorrichtung muss Kontakte mit einer Öffnungsdistanz aufweisen, die eine vollständige Trennung unter den von der Überspannungskategorie III vorgesehenen Bedingungen ermöglicht sowie den Installationsregeln entsprechen. Bei
Bedarf garantiert diese Vorrichtung ein schnelles und sicheres Abtrennen der
Spannungsversorgung. Sie muss daher in Sichtweite der Automatisierung
angebracht sein. Falls sie in nicht sichtbarer Stellung angebracht ist, muss sie –
um Gefahren zu vermeiden - über ein System verfügen, das eine unbeabsichtigte oder nicht autorisierte Einschaltung der Spannungsversorgung blockiert.
Die Abtrennvorrichtung wird nicht mit dem Produkt geliefert.
01. Den Deckel öffnen (Abb. 14-1);
02. Die Steuerung anheben (Abb. 14-2);
03. Das Speisekabel und die anderen Stromkabel durch eine der im unteren
Bereich des Torantriebs vorliegenden Bohrungen ziehen; die vorliegende
Hülle muss durchschnitten werden (Abb. 14-4);
04. Die Kabelverschraubung abschrauben und das Speisekabel auf die hierfür
vorgesehene Bahn legen (Abb. 14-5);
05. Zuerst das Speisekabel anschließen, siehe Abb. 14-6;
06. Das Speisekabel mit der Kabelverschrauben befestigen (Abb. 14-7);
07. Nun die Stromkabel der Motoren M1 und M2 anschließen, wobei die Sym-
bole auf der Etikette eingehalten werden (Abb. A):
a) An die Klemme M1
(7-8-9) den Motor anschließen, der den unteren Flü-
gel antreibt (der zweite
, der die Öffnungsbewegung beginnt) und dann den
jeweiligen Encoder an die Klemmen 1-2;
b) An die Klemme M2
(10-11-12) den Motor anschließen, der den oberen
Flügel antreibt (der erste
, der die Öffnungsbewegung beginnt) und dann
den jeweiligen Encoder an die Klemmen 4-5;
WICHTIG! – Wenn in der Anlage nur ein Torantrieb vorliegt, muss er an
die Klemme M2 angeschlossen und die Klemme M1 freigelassen werden;
08. Nun die Stromkabel der verschiedenen vorhandenen Stromkabel anschlie-
ßen, wobei man sich auf Abb. 17 bezieht (siehe Abschn. 4.3). Anmerkung
– Zur Erleichterung der Kabelanschlüsse können die Klemmen aus ihren
Einsätzen gezogen werden;
09. Den Deckel des Torantriebs wieder schließen (Abb. 14-8).
4.2 - Elektrische Anschlüsse des Torantriebs ohne
Steuerung Mod. HK7224
01. Den Deckel öffnen, wie in Abb. 15-1 gezeigt wird;
02. Das Motorenkabel durch eine der im unteren Bereich des Torantriebs vor-
liegenden Bohrungen ziehen; die vorliegende Hülle muss durchschnitten
werden (Abb. 15-2);
03. Die Kabelverschraubung abschrauben (Abb. 15-3), das Kabel auf die ent-
sprechende Bahn legen und die Kabel anschließen, siehe Abb. 16-4; die
Symbole auf der Etikette einhalten;
03. Das Kabel mit der Kabelverschrauben befestigen (Abb. 15-5);
04. Den Deckel des Torantriebs wieder schließen (Abb. 15-6).
4.3 - Verbindung sonstiger Vorrichtungen
Wenn weitere in der Anlage vorliegende Vorrichtungen, wie zum Beispiel ein
ENC1 ENC2
1245789101112
M1 M2
24V
24V
+
-
+
-
A
Page 63

DE
Deutsch – 5
Transponder-Kartenlesegerät oder die Beleuchtung für den Schlüsselwahlschalter gespeist werden müssen, können diese Vorrichtungen an die Steuerung über die Klemmen P.P. (Plus) und STOP (Minus) angeschlossen werden
(Abb. 13). Die Stromspannung beträgt 24 Vcc (-30% ÷ +50%) mit einem maximal erhältlichen Strom von 200 mA.
Anmerkung – Die verfügbare Spannung in den Klemmen “P.P.” und “STOP”
verbleibt auch, wenn die Funktion “Stand By” in der Karte aktiviert wird.
4.4 - Adressierung der mit angeschlossenen Vorrichtungen
Um der Steuerung zu ermöglichen, die am System Bluebus angeschlossenen
Vorrichtungen zu erkennen, muss die Adressierung dieser ausgeführt werden.
Dieser Vorgang muss durch die korrekte Positionierung der in jeder Vorrichtung
vorliegenden Brücke vorgenommen werden. Siehe Abb. B.
Um die Adressierung anderer Vorrichtungen auszuführen, müssen die jeweiligen Gebrauchsanleitungen gelesen werden.
Am Ende der Installation oder nach der Entfernung der Lichtschranken oder
anderer Vorrichtungen ist es notwendig, das Erlernungsverfahren dieser vorzunehmen, siehe Abschnitt 4.6.
4.5 - Ersteinschaltung und Prüfung der Anschlüsse
Nachdem die Steuerung mit Strom gespeist wurde, die folgenden Prüfungen
vornehmen:
• Nach einigen Sekunden prüfen, ob die Led “Bluebus” (Abb. 16) regelmäßig
mit 1 Blinken pro Sekunde blinkt;
• prüfen, ob die Leds der Lichtschranken (Abb. 16) – TX und RX – blinken. Die
in dieser Phase abgegebene Blinkart ist unbedeutend;
• Prüfen, ob die am Ausgang FLASH angeschlossene Blinkleuchte ausgeschaltet ist.
Wenn all dies nicht erfolgt, muss der Steuerung die Stromspeisung genommen
und die verschiedenen zuvor ausgeführten Stromanschlüsse kontrolliert werden.
4.6 - Erlernung der verbundenen Vorrichtungen
Nachdem die Ersteinschaltung ausgeführt wurde, müssen der Steuerung die
an den Eingängen “Bluebus” und “Stop” angeschlossenen Vorrichtungen zur
Erkennung gegeben werden.
ACHTUNG! – Die Erlernungsphase muss auch ausgeführt werden, wenn
mit der Steuerung keine Vorrichtung verbunden ist.
Die Steuerung ist in der Lage, die einzelnen angeschlossenen Vorrichtungen
dank der Erlernung zu erkennen und die möglichen vorliegenden Störungen zu
erfassen. Hierzu ist es notwendig, die Erlernung der Vorrichtungen jedes Mal
dann auszuführen, wenn eine dieser zugefügt oder entfernt wird.
Die Led “L1” und “L2” in der Steuerung (Abb. 16), blinken langsam, um anzuzeigen, dass es notwendig ist, die Erfassung auszuführen:
01. Die Tasten “” und “Set” (Abb. 16).
02. Die Tasten loslassen, wenn die Leds “L1” und “L2” sehr schnell zu blinken
beginnen (nach ca. 3 Sekunden).
03. Einige Sekunden abwarten, bis die Steuerung die Erlernungsphase der
Vorrichtungen abgeschlossen hat.
04. Am Ende dieser Phase muss die Led “Stop” eingeschaltet und die Leds “L1”
und “L2” müssen ausgeschaltet sein (die Leds “L3” und “L4” könnten zu
blinken beginnen).
4.7 - Erlernung der Positionen der mechanischen Endanschläge
Nach der Erlernung der angeschlossenen Vorrichtungen (Abschnitt 4.6) ist es
notwendig, die Erlernung der Positionen der mechanischen Anschläge vorzunehmen (Höchstöffnung und -schließung). Dieses Verfahren kann auf 3 Arten
vorgenommen werden: Automatisch, manuell und gemischt.
Im Automatikmodus
führt die Steuerung die Erfassung der mechanischen Anschlä-
ge aus und kalkuliert die besten Versetzungen der Flügel (SA und SC, Abb. C).
Im manuellen Modus
werden die acht Positionen der mechanischen Stopps
(Abb. C) jeweils programmiert, indem die Flügel auf die gewünschten Stellen
versetzt werden. Die zu programmierende Position kann durch das Blinken
einer der 8 Leds herausgestellt werden (L1...L8), siehe Tabelle 2.
Im gemischten Modus
ist es möglich, das automatische Verfahren auszuführen
und dann mit dem manuellen Verfahren eine oder mehrere Positionen zu
ändern, außer der Positionen “0” und “1” (Abb. C) die mit den Positionen der
mechanischen Stopps übereinstimmen.
4.7.1 - Erlernung im Automatikmodus
01. Die Tasten “” und “Set” drücken und gleichzeitig gedrückt halten;
02. Die Tasten loslassen, wenn die Leds “L3” und “L4” sehr schnell zu blinken
beginnen (nach ca. 3 Sekunden).
03. Prüfen, ob die Automatisierung die folgenden Bewegungsfolgen ausführt:
a-Langsames Schließen des Torantriebs M1 bis zum mechanischen Endanschlag
b-Langsames Schließen des Torantriebs M2 bis zum mechanischen Endanschlag
c - Langsames Öffnen des Torantriebs M2 und des Torantriebs M1 bis zum
mechanischen Endanschlag
d - Schnelles vollständiges Schließen des Torantriebs M1 und M2
HINWEISE:
– Wenn die erste Bewegung (a) den durch Motor M1 gesteuerten Flügel nicht
schließt, sondern den durch M2 gesteuert, muss die Taste “
” oder “”
gedrückt werden, um die Erlernungsphase zu stoppen. Nun werden die
Anschlüsse der Motoren M1 und M2 an den Klemmen der Steuerung umgekehrt und dann die der jeweiligen Encoder; schließlich das Verfahren ab
Punkt 01 beginnen;
– Wenn die ersten 2 Bewegungen (a und b) nicht als “Schließungen”, sondern
als “Öffnungen” erfolgen, die Taste “
“ oder ““ drücken, um die Erler-
B
TABELLE 2
Position Led Beschreibung
Position 0
(Motor 1)
Position 0
(Motor 2)
Position SA
(Motor 2)
Position A
(Motor 1)
Position A
(Motor 2)
Position SC
(Motor 1)
Position 1
(Motor 1)
Position 1
(Motor 2)
Position der maximalen Schließung: Wenn der Flügel 1 auf
den mechanischen Schließanschlag stößt
Position der maximalen Schließung: Wenn der Flügel 2 auf
den mechanischen Schließanschlag stößt
Verschiebung bei Öffnung: wenn der Flügel 2 diese Position
überschreitet, beginnt die Öffnung des Flügels 1
Gewünschte Öffnungsposition Position, in der der mit dem Motor 1
verbundene Flügel am Ende einer Öffnungsbewegung anhalten
muss. Es ist nicht notwendig, dass diese Position mit der
mechanischen Öffnungsbefestigung übereinstimmt, sie kann
nach Wahl zwischen “0” und “1” gewählt werden.
Gewünschte Öffnungsposition Position, in der der mit dem Mo tor 2
verbundene Flügel am Ende einer Öffnungsbewegung anhalten
muss. Es ist nicht notwendig, dass diese Position mit der mechanischen Öffnungsbefestigung übereinstimmt, sie kann nach Wahl
zwischen “0” und “1” gewählt werden.
Verschiebung bei Schließung: Wenn der Flügel 1 unter dieser
Position ist, beginnt das Schließen des Flügels 2
Position der maximalen Schließung: Wenn der Flügel 1 auf
den mechanischen Öffnungsanschlag stößt
Position der maximalen Schließung: Wenn der Flügel 2 auf
den mechanischen Öffnungsanschlag stößt
L1
L2
L3
L4
L5
L6
L7
L8
0
11
A
SC
SA
A
0
M1 M2
C
POSITIONEN
TABELLE 2 - ADRESSEN DER LICHTSCHRANKEN
Lichtschranke Überbrückungen
FOTO
Lichtschranke außen h = 50 mit Auslösung während
Schließung (stoppt und kehrt die Bewegung um)
FOTO II
Lichtschranke außen h = 100 mit Auslösung während
Schließung (stoppt und kehrt die Bewegung um)
FOTO 1
Lichtschranke innen h = 50 mit Eingriff während
Schließung (stoppt und kehrt die Bewegung um),
wie auch während der Öffnung (stoppt und geht
weiter, wenn die Lichtschranke frei ist)
FOTO 1 II
Lichtschranke innen h = 100 mit Eingriff während
Schließung (stoppt und kehrt die Bewegung um),
wie auch während der Öffnung (stoppt und geht
weiter, wenn die Lichtschranke frei ist)
FOTO 2
Lichtschranke innen mit Auslösung während
Öffnung (stoppt und kehrt die Bewegung um)
FOTO 2 II
Lichtschranke innen mit Auslösung während
Öffnung (stoppt und kehrt die Bewegung um)
FOTO 3
UNERLAUBTE KONFIGURATION
Page 64

DE
6 – Deutsch
nungsphase zu stoppen. Dann am Torantrieb, der die Öffnungsbewegung
ausgeführt hat, die Polaritäten der beiden Kabel des Torantriebs M1 umkehren (Klemmen 7 und 9), ebenso bei M2 (Klemmen 10 und 12), dann das Verfahren ab Punkt 01 beginnen.
04. Am Ende der Schließbewegung der 2 Motoren (d), schalten die Leds “L3“ und
“L4“ ab und zeigen somit an, dass das Verfahren korrekt ausgeführt wurde.
Hinweise:
– Wenn während der automatischen Erlernungsphase der Eingriff der Licht-
schranken oder einer am Eingang „Stopp“ angeschlossenen Vorrichtung
erfolgt, wird das Verfahren unterbrochen und die Led L1 beginnt zu blinken.
Um die Erlernung wieder zu aktivieren, muss das Verfahren ab Punkt 01 wie-
der aufgenommen werden.
– Das automatische Erlernungsverfahren kann erneut in jedem Moment vorge-
nommen werden, auch der Ausführung der Installation; zum Beispiel infolge
der Änderung der Position der mechanischen Stopps.
4.7.2 - Manuelles
Erlernungsverfahren
ACHTUNG! - Ab Schritt 03 gilt:
– Um von Led L1 auf L8 zu gehen
, muss ein kurzes Drücken der Taste oder
erfolgen (die Led blinkt und zeigt die aktuelle Position an);
– Um den Motor
in eine oder die andere Richtung zu bewegen, muss ein stän-
diger Druck
der Taste oder erfolgen.
01. Die Tasten “” und “Set” drücken und
gleichzeitig gedrückt halten;
02. Die Tasten freigeben, wenn die “L1” zu blinken beginnt (nach zirka 1
Sekunde); Anmerkung – Nach 3 Sekunden und wenn die Tasten “Set”
und “” nicht freigegeben werden, wird das Verfahren der “automatischen
Erlernung” und nicht das manuelle aktiviert.
03. • die Led
L1 blinkt: Position 0 des M1
Um den Motor 1 zu steuern und in die Position 0 (Abb. C) zu bringen:
Die Taste “” oder “” drücken und gedrückt halten
. Nach Erreichen der
Position, die Taste freigeben, um die Bewegung zu stoppen. Um die
Position zu speichern, die Taste “Set” mindestens 3 Sek. drücken und
gedrückt halten, dann freigeben (nach 2 Sek. bleibt die L1 eingeschaltet
und nach Freigabe der Taste “Set” beginnt die Led L2 zu blinken).
• die Led
L2 blinkt: Position 0 des M2
Um den Motor 2 zu steuern und in die Position 0 (Abb. C) zu bringen:
Die Taste “” oder “” drücken und gedrückt halten. Nach Erreichen der
Position, die Taste freigeben, um die Bewegung zu stoppen. Um die
Position zu speichern, die Taste “Set” mindestens 3 Sek. drücken und
gedrückt halten, dann freigeben (nach 2 Sek. bleibt die L2 eingeschaltet
und nach Freigabe der Taste “Set” beginnt die Led L3 zu blinken).
• die Led
L3 blinkt: Position SA des M2
Um den Motor 2 zu steuern und in die Position SA (Abb. C) zu bringen:
Die Taste “” oder “” drücken und gedrückt halten. Nach Erreichen der
Position, die Taste freigeben, um die Bewegung zu stoppen. Um die
Position zu speichern, die Taste “Set” mindestens 3 Sek. drücken und
gedrückt halten, dann freigeben (nach 2 Sek. bleibt die L3 eingeschaltet
und nach Freigabe der Taste “Set” beginnt die Led L4 zu blinken).
• die Led
L4 blinkt: Position A des M1
Um den Motor 1 zu steuern und in die Position A (Abb. C) zu bringen:
Die Taste “” oder “” drücken und gedrückt halten. Nach Erreichen der
Position, die Taste freigeben, um die Bewegung zu stoppen. Um die
Position zu speichern, die Taste “Set” mindestens 3 Sek. drücken und
gedrückt halten, dann freigeben (nach 2 Sek. bleibt die L4 eingeschaltet
und nach Freigabe der Taste “Set” beginnt die Led L5 zu blinken).
• die Led
L5 blinkt: Position A des M2
Um den Motor 2 zu steuern und in die Position A (Abb. C) zu bringen:
Die Taste “” oder “” drücken und gedrückt halten. Nach Erreichen der
Position, die Taste freigeben, um die Bewegung zu stoppen. Um die
Position zu speichern, die Taste “Set” mindestens 3 Sek. drücken und
gedrückt halten, dann freigeben (nach 2 Sek. bleibt die L5 eingeschaltet
und nach Freigabe der Taste “Set” beginnt die Led L6 zu blinken).
• die Led
L6 blinkt: Position SC des M1
Um den Motor 1 zu steuern und in die Position SC (Abb. C) zu bringen:
Die Taste “” oder “” drücken und gedrückt halten. Nach Erreichen der
Position, die Taste freigeben, um die Bewegung zu stoppen. Um die
Position zu speichern, die Taste “Set” mindestens 3 Sek. drücken und
gedrückt halten, dann freigeben (nach 2 Sek. bleibt die L6 eingeschaltet
und nach Freigabe der Taste “Set” beginnt die Led L7 zu blinken).
• die Led
L7 blinkt: Position 1 des M1
Um den Motor 1 zu steuern und in die Position 1 (Abb. C) zu bringen:
Die Taste “” oder “” drücken und gedrückt halten. Nach Erreichen der
Position, die Taste freigeben, um die Bewegung zu stoppen. Um die
Position zu speichern, die Taste “Set” mindestens 3 Sek. drücken und
gedrückt halten, dann freigeben (nach 2 Sek. bleibt die L7 eingeschaltet
und nach Freigabe der Taste “Set” beginnt die Led L8 zu blinken).
• die Led
L8 blinkt: Position 1 des M2
Um den Motor 2 zu steuern und in die Position 1 (Abb. C) zu bringen: Die
Taste “” order “” drücken und gedrückt halten. Nach Erreichen der
Position, die Taste freigeben, um die Bewegung zu stoppen. Um die Position zu speichern, die Taste “Set” mindestens 3 Sek. drücken und gedrückt
halten, dann freigeben, um aus der Programmierung zu gehen (nach 2 Sek.
bleibt die Led L8 bis zur Freigabe der Taste “Set” eingeschaltet).
Anmerkung – Zur Ausführung der manuellen Programmierung einer
Anlage, die nur einen Torantrieb aufweist, geht man wie in Abschnitt 4.7.2
vor und unter Schritt 03 muss die Programmierung der Position “0” und dann
“1” des M1 erfolgen, wobei der Teil bezüglich der Tasten “” und “” unbeachtet bleibt, sondern nur die Taste “Set” wie beschrieben betätigt wird. Wich-
tig! – Im manuellen Verfahren dürfen die Positionen “SA” des M2, “A” des
M1, “SC“ des M1 nicht programmiert werden.
Dies sind die wichtigsten Phasen bei der Ausführung der Automatisierung, sie
gewährleisten die maximale Anlagensicherheit. Die Endabnahme kann auch zur
regelmäßigen Kontrolle der Vorrichtungen, aus denen sich die Automatisierung
zusammensetzt, benutzt werden. Die Endabnahme und die Inbetriebnahme
der Automatisierung müssen durch qualifiziertes und erfahrenes Personal erfolgen, das die erforderlichen Tests zur Überprüfung der angewandten Lösungen
zum Schutz gegen die vorhandenen Gefahren bestimmt und die Einhaltung der
gesetzlichen Bestimmungen, Richtlinien und Regelungen prüft: dies sind im
Besonderen alle Anforderungen der Norm EN 12445, die die Testverfahren für
die Überprüfung der Automatisierungen für Tore festlegt.
Die zusätzlichen Vorrichtungen müssen sowohl bezüglich der Funktionstüchtigkeit als auch der Ansprechfähigkeit mit HYKE einer eigenen Endabnahme
unterzogen werden; zu diesem Zweck in den Gebrauchsanweisungen der einzelnen Vorrichtungen nachlesen.
5.1 - Endabnahme
Die Reihenfolge der Vorgänge für die Endabnahme bezieht sich auf eine Standardanlage (Abb. 3):
1 Prüfen, ob alles im Kapitel “Hinweise für die Installation” angegebene
genauestens eingehalten ist.
2 Die Getriebe von Hand entriegeln und an der Stelle am Flügel, die für das
manuelle Manöver vorgesehen ist, prüfen, ob sich die Flügel mit einer Kraft
unter 390 N öffnen und schließen lassen.
3 Die Getriebe blockieren (siehe Kapitel 3.6).
4 Mit den Bedienvorrichtungen (Sender, Bedientaste, Schlüsselwählschalter,
usw.), die Öffnung, Schließung und das Anhalten des Tors prüfen, sich vergewissern, dass die Flügelbewegung vorschriftsmäßig abläuft. Einige Proben durchführen, im die Flügelbewegung zu beurteilen und eventuelle Montage- oder Einstellfehler oder starke Reibungen herauszufinden.
5 Nacheinander alle Sicherheitsvorrichtungen der Anlage auf ihren sachge-
mäßen Betrieb hin prüfen (Fotozellen, Kontaktleisten, usw.). Beim Eingreifen
einer Vorrichtung blinkt die Led “BLUEBUS” auf dem Steuergerät zur
Bestätigung der Erkennung zweimal schnell.
6 Wenn die Gefahrensituationen, die durch die Flügelbewegung entstanden
sind, durch die Herabsetzung der Aufprallkraft beseitigt wurden, muss die
Kraft entsprechend der Norm EN 12445 gemessen werden und ggf. wenn
die Kontrolle der “Getriebekraft” als Hilfsmittel zur Herabsetzung der Aufprallkraft benutzt wird, versuchen die Einstellung mit den besten Ergebnissen herauszufinden.
5.2 - Inbetriebnahme
Die Inbetriebnahme kann erst dann erfolgen, wenn alle Phasen der Endabnahme mit einem positiven Ergebnis abgeschlossen wurden.
1 Die technischen Unterlagen der Automatisierung ausstellen: eine Gesamt-
zeichnung der Automatisierung, den Schaltplan der durchgeführten elektrischen Anschlüsse, die Analyse der vorhandenen Gefahren und die hierfür
angewandten Lösungen und die Konformitätserklärung des Herstellers, die
vom Installateur ausgefüllt wurde.
2 Am Tor ein Schild anbringen, auf dem mindestens die folgenden Daten zu
ENDABNAHME UND INBETRIEBNAHME
5
4.7.3 - Gemischtes Erlernungsverfahren
Dieses Verfahren nach der Ausführung der automatischen Erlernung ausführen:
01. Die Tasten “” und “Set” drücken und
gleichzeitig gedrückt halten;
02. Die Tasten freigeben, wenn die “L1” zu blinken beginnt (nach zirka 1
Sekunde); Anmerkung – Nach 3 Sekunden und wenn die Tasten “Set”
und “” nicht freigegeben werden, wird das Verfahren der “automatischen
Erlernung” und nicht das manuelle aktiviert.
03. Durch ein kurzes Drücken der Taste “” oder “” die blinkende Led
(L1…L8) auf die Position verschieben, die programmiert werden soll und
für jede einzelne Position vorgehen, wie im Schritt 03 der manuellen Erlernung beschrieben wird (Abschnitt 4.7.2).
Diesen letzten Vorgang bei allen anderen Positionen wiederholen, die
geändert werden sollen.
Um die manuelle Erlernung zu beenden, wiederholt die Taste “” drücken, bis
die blinkende Led nach L8 gebracht wird.
4.8 - Überprüfung der Bewegung der Torflügel
Am Ende der Erfassungsphase empfehlen wir, die Steuerung einige Öffnungsund Schließbewegungen ausführen zu lassen, um die korrekte Bewegung des
Tors, die eventuellen Montage- und Einstellmängel zu prüfen.
01. Die Taste “Open” drücken. Die korrekte Verschiebung der Flügel während
der Öffnung prüfen und kontrollieren, ob während der Öffnungsbewegung
die Beschleunigungsphase, die Phase mit konstanter Geschwindigkeit, die
Verzögerungsphase vorliegen und der Endschalter der Flügel wenige Zentimeter von den mechanischen Öffnungsendanschlägen eingestellt ist.
02. Die Taste “Close” drücken und prüfen, ob während der Schließbewegung
die Beschleunigungsphase, die Phase mit konstanter Geschwindigkeit
und die Verlangsamungsphase vorliegen. Die korrekte Verschiebung der
Flügel während der Schließung prüfen. Am Ende müssen die Flügel perfekt
am mechanischen Schließendanschlag geschlossen sein.
03. Während den Bewegungen prüfen, ob die Blinkleuchte alle 0.5 Sekunden
bei eingeschalteter Blinkleuchte blinkt und alle 0.5 Sekunden bei abgeschalteter Blinkleuchte ausführt.
Page 65

DE
Deutsch – 7
finden sind: Art der Automatisierung, Name und Adresse des Herstellers
(für die “Inbetriebnahme” verantwortlich), Seriennummer, Baujahr und “CE”Kennzeichen.
3 Die Konformitätserklärung der Automatisierung ausfüllen und sie dem
Besitzer des Tors aushändigen.
4 Das “Gebrauchshandbuch” der Automatisierung ausfüllen und es dem
Besitzer des Tors aushändigen.
5 Den “Wartungsplan”, der die Vorschriften zur Wartung aller Vorrichtungen
der Automatisierung zusammenfasst, ausfüllen und dem Besitzer des Tors
aushändigen.
6 Vor der Inbetriebnahme der Automatisierung muss der Besitzer über die
noch vorhandenen Restgefahren informiert werden.
Für alle genannten Unterlagen stellt Nice über den eigenen technischen
Kundendienst folgendes zur Verfügung: Gebrauchsanweisungen, Leitfäden
und vorgedruckte Formulare. Siehe auch unter: www.nice-service.com
In der Steuerung befinden sich 3 Tasten OPEN (), STOP (SET), CLOSE (),
die verwendet werden können, um die Steuerung während den Prüfungen zu
steuern und um die Programmierung der verfügbaren Funktionen auszuführen.
Die verfügbaren programmierbaren Funktionen befinden sich auf 2 Niveaus und
ihr Betriebszustand wird durch 8 Leds (L1 ... L8) in der Steuerung angezeigt (
eingeschaltete Led
= aktive Funktion; abgeschaltete Led = Funktion nicht aktiv).
Die Programmierungstasten verwenden:
OPEN (): – Taste zur Steuerung der Toröffnung; – Taste zur Auswahl in der
Pro grammierungsphase.
STOP/SET: Taste, um eine Bewegung anzuhalten; falls länger als 5 Sekunden
gedrückt, ermöglicht sie den Zugriff auf die Programmierung.
CLOSE (): – Taste zur Steuerung der Torschließung; – Taste zur Auswahl in
der Programmierungsphase.
6.1 - Programmierung erstes Niveau (ON-OFF)
Alle Funktionen des ersten Niveaus sind werkseitig auf “OFF” programmiert
und können in jedem Moment geändert werden. Um die verschiedenen Funktion zu prüfen, siehe Tabelle 3. Programmierungsverfahren: siehe Tabelle 4.
WICHTIG – Das Programmierungsverfahren weist eine Höchstzeit von 10 Se kunden zwischen dem Druck einer Taste und dem nächsten auf. Nach dieser
Zeitspanne endet das Verfahren automatisch und speichert die bisher ausgeführten Änderungen.
PROGRAMMIERUNG DES STEUERGERÄTES
6
TABELLE 3 - Funktionen erstes Niveau
LED Funktion Beschreibung
L1 Automatische Schließung
L2 Schließen nach Durchfahrt
der Lichtschranke
L3 Schließt immer
L4 Stand by alles
L5 Elektroschloss / zusätzliches Licht
L6 Vorwarnen
L7 “Schließt” wird “teilweise öffnen 1”
L8 “Meldeleuchte Tor geöffnet”
oder “Meldeleuchte Wartung”
AKTIVE Funktion: Nach einer Öffnungsbewegung erfolgt eine Pause (gleich der programmierten Pausenzeit), danach startet die Steuerung automatisch eine Schließbewegung. Der werkseitig eingestellte Pausenwert beträgt 30 Sek.
NICHT AKTIVE Funktion: Die Funktion ist “halbautomatisch”.
A
KTIVE Funktion: Wenn die Lichtschranken während der Öffnungs- oder Schließbewegung eingreifen,
wird die Pausenzeit auf 5 Sek. reduziert, unabhängig von der programmierten “Pausenzeit”.
Bei deaktivierte “automatischer Schließung” und wenn während der Schließung die Lichtschranken eingreifen, wird die “automatische Schließung” bei programmierter “Pausenzeit” aktiviert.
AKTIVE Funktion
: Im Falle eines auch kurzen Stromausfalls erfasst die Steuerung nach der erneuten Einschaltung des Stroms das geöffnete Tor und startet automatisch eine Schließbewegung, die einer 5 Sek.
andauernden Vorwarnung folgt.
NICHT AKTIVE Funktion: Nach Rückkehr des Stroms bleibt das Tor, wo es ist.
AKTIVE Funktion
: 1 Minute nach Beendigung der Bewegung schaltet die Steuerung den Ausgang BlueBUS (angeschlossene Vorrichtungen), den Bus T4 (angeschlossene Vorrichtungen), die Ausgänge flash,
ELS und sca, einige interne Kreise sowie alle LEDs mit Ausnahme der BlueBUS-LED aus, die langsamer
blinken wird. Wenn die Steuerung einen Befehl erhält, geht sie wieder auf den Normalbetrieb über (mit
einer kurzen Verzögerung). Diese Funktion hat das Ziel, den Verbrauch zu reduzieren; ein wichtiger Aspekt
mit Batterie- oder Kollektorspeisung.
AKTIVE Funktion
: Der Ausgang “Elektroschloss” schaltet seine Funktion auf “zusätzliche Beleuchtung” um.
NICHT AKTIVE Funktion: Der Ausgang funktioniert als Elektroschloss.
AKTIVE Funktion
: Es kann eine 3 Sekunden lange Pause zwischen dem Einschalten der Blinkleuchte und
dem Bewegungsbeginn erfolgen, um die Gefahr vorab bekannt zu geben.
NICHT AKTIVE Funktion
: Die Anzeige der Blinkleuchte stimmt mit dem Beginn der Bewegung überein.
AKTIVE Funktion
: Alle Steuerungen, die “Schließen” entsprechen (Eingang “Close” oder Funksteuerung
“Schließen”) werden mit der Steuerung “Teilöffnung 1” ersetzt.
AKTIVE Funktion
: Der Ausgang “Meldeleuchte Tor geöffnet” der Steuerung schaltet seine Funktion auf “Meldeleuchte Wartung” um.
NICHT AKTIVE Funktion: Der Ausgang funktioniert als “Meldeleuchte Tor geöffnet”.
TABELLE 4 - Programmierung erstes Niveau
01. Mindestens 3 Sekunden lang auf die Taste “Set” drücken und gedrückt halten;
02. Die Taste freigeben, wenn die Led “L1” zu blinken beginnt;
03. Auf Taste “” oder “” drücken, um das Blinken auf die LED zu verschieben, welche die zu ändernde Funktion darstellt;
04. Auf Taste “Set” drücken, um den Zustand der Funktion zu ändern:
(kurzes Blinken = OFF - langes Blinken = ON);
05. 10 Sekunden warten (Höchstzeit), um aus der Programmierung zu treten.
Anmerkung – Zur Programmierung anderer Funktionen auf “ON” oder “OFF” müssen während der Ausführung des Verfahrens Punkt 03 und 04 während
dieses Vorgangs wiederholt werden.
SET
SET
SET
L1
oder
3 s
10 s
Page 66

DE
8 – Deutsch
TABELLE 5 - Funktionen zweites Niveau
Eingangsled
Parameter Led Wert Beschreibung
(Niveau)
L1
L1
L2
L3
L4
L5
L6
L7
L8
5 Sekunden
15 Sekunden
30 Sekunden
45 Sekunden
60 Sekunden
80 Sekunden
120 Sekunden
180 Sekunden
Stellt die Pausezeit ein bzw. die Zeit
vor dem automatischen Schließen.
Wirkt nur, falls die Schließung aktiviert
ist.
Pausezeit
L2 L1
L2
L3
L4
L5
L6
L7
L8
Öffnet - Stopp – Schließt - Stopp
Öffnet - Stopp – Schließt - Öffnet
Öffnet - Schließt – Öffnet - Schließt
Wohnblockbetrieb:
• Bei der Öffnungsbewegung
haben der Schrittbetrieb und “Öffnen” keine
Auswirkungen; die Steuerung “Schließen” ruft dagegen die Umkehrung der
Bewegung hervor, d.h. das Schließen der Flügel.
• Bei der Schließbewegung rufen der Schrittbetrieb und “Öffnen” keine Be wegungsumkehrung hervor; die Steuerung “Schließen” hat dagegen keine
Auswirkung.
Wohnblockbetrieb 2:
• Bei der Öffnungsbewegung
rufen der Schrittbetrieb und “Öffnen” keine Au -
swirkungen hervor; die Steuerung “Schließen” ruft dagegen die Umkehrung
der Bewegung hervor, d.h. das Schließen der Flügel. Wenn die über sendete
Steuerung länger als 2 Sekunden anhält, wird ein “Stopp” ausgeführt.
• Bei der Schließbewegung rufen der Schrittbetrieb und “öffnen” keine Bewegungsumkehrung hervor; die Steuerung “Schließen” hat dagegen keine
Auswirkung. Wenn die übersendete Steuerung länger als 2 Sekunden
anhält, wird ein “Stopp” ausgeführt.
Schrittbetrieb 2 (weniger als 2 bewirkt eine teilweise Öffnung).
Todmannfunktion:
Die Bewegung wird nur ausgeführt, wenn die übersendete Steuerung verbleibt; wenn die Steuerung unterbrochen wird, stoppt die Bewegung.
Öffnung “halbautomatisch”, Schließung mit “Todmannfunktion”.
Stellt die Sequenz der Steuerbefehle
ein, die dem Eingang “Schrittbetrieb”,
“Öffnen”, “Schließen” oder dem Funkbefehl zugeteilt sind.
Anmerkung – Bei der Einstellung der
L4, L5, L7 und L8, wird auch das Ver-
halten der Steuerungen “Öffnen” und
“Schließen” geändert.
Schrittbetrieb
L3
L1
L2
L3
L4
L5
L6
L7
L8
Sehr langsam
Langsam
durchschnittlich
Schnell
Sehr schnell
Äußerst schnell
Öffnet schnell, schließt langsam
Öffnet äußerst schnell, schließt durchschnittlich
Stellt die Motorengeschwindigkeit während des normalen Laufs ein.
Motorengeschwindigkeit
L6 L1
L2
L3
L4
L5
L6
L7
L8
Fußgänger 1 (Öffnung des Flügels M2 zu 1/4 der Gesamtöffnung)
Fußgänger 2 (Öffnung des Flügels M2 zu 1/2 der Gesamtöffnung)
Fußgänger 3 (Öffnung des Flügels M2 zu 3/4 der Gesamtöffnung)
Fußgänger 4 (Gesamtöffnung des Flügels 2)
Teilöffnung 1 (Öffnung der beiden Flügel zu 1/4 der Mindestöffnung)
Teilöffnung 2 (Öffnung der beiden Flügel zu 1/2 der Mindestöffnung)
Teilöffnung 3 (Öffnung der beiden Flügel zu 3/4 der Mindestöffnung)
Teilöffnung 4 (Öffnung der beiden Flügel gleich der Mindestöffnung)
Regelt die Öffnungsweise, die der Steuerung “Teilöffnung 1” zugewiesen ist.
In den Stufen L5, L6, L7, L8; unter Min destöffnung versteht man die geringere Öffnung zwischen M1 und M2;
wenn M1 zum Beispiel zu 90° und M2
zu 110° öffnet, beträgt die Mindestöf fnung 90°
Fußgängeröffnung
oder Teilöffnung
L4 L1
L2
L3
L4
L5
L6
L7
L8
Keine Entladung
Stufe 1 - Minimale Entladung (zirka 100 ms)
Stufe 2 - …
Stufe 3 - …
Stufe 4 - …
Stufe 5 - …
Stufe 6 - …
Stufe 7 - Maximale Entladung (zirka 800 ms)
Regelt die Dauer der “kurzen Umkehrung” beider Motoren nach der Ausführung der Schließbewegung, um
den restlichen Endschub zu reduzieren.
Entladung
der Motoren nach
dem
Schließen
L5 L1
L2
L3
L4
L5
L6
L7
L8
Stufe 1 - Mindestkraft
Stufe 2 - …
Stufe 3 - …
Stufe 4 - …
Stufe 5 - …
Stufe 6 - …
Stufe 7 - …
Stufe 8 - Höchstkraft
Regelt die Kraft beider Motoren.Motorkraft
6.2 - Zweites Niveau: Programmierung (einstellbare Parameter)
Alle Parameter des zweiten Niveaus sind werkseitig programmiert, wie grau in
der Tabelle 5 angegeben ist, und können jederzeit geändert werden, indem wie
in Tabelle 6 beschrieben vorgegangen wird.
Die Parameter sind auf einer Wertskala von 1 bis 8 einstellbar, zur Prüfung des
jeder Led entsprechenden Werts siehe Tabelle 8. WICHTIG – Das Programmie-
rungsverfahren weist eine Höchstzeit von 10 Sekunden zwischen dem Druck
einer Taste und dem Druck der nächsten auf. Nach dieser Zeitspanne endet das
Verfahren automatisch und speichert die bisher ausgeführten Änderungen.
Page 67

DE
Deutsch – 9
6.3 - Spezielle Funktionen
6.3.1 - Funktion: “Bewegt sich auf jeden Fall”
Diese Funktion ermöglicht die Inbetriebsetzung der Automatisierung, auch we nn eine Sicherheitsvorrichtung nicht korrekt funktioniert oder außer Betrieb ist.
Es ist möglich, die Automatisierung im Modus “Todmannfunktion”, zu steuern,
indem wie folgt vorgegangen wird:
01. Mit einem Sender oder einem Schlüsseltaster eine Steuerung übersenden,
um das Tor zu betätigen. Wenn alles korrekt funktioniert, bewegt sich das
Tor regulär, ansonsten wie folgt vorgehen;
02. die Schaltung innerhalb von 3 Sekunden erneut betätigen und weiter betätigen;
03. Nach zirka 2 Sekunden führt das Tor die gewünschte Bewegung im Modus
“Todmannfunktion” aus; d.h. das Tor bewegt sich so lange, wie die Schal-
tung betätigt wird.
Wenn die Sicherheitsvorrichtungen nicht funktionieren, gibt die Anzeige einige Bli n ksignale ab, um das erfasste Problem anzuzeigen (siehe Kapitel 6 - Tabelle 8).
6.3.2 - Funktion: “Wartungsanzeige”
Diese Funktion zeigt an, dass die Wartung der Automatisierung auszuführen ist.
Die Wartungsmeldung erfolgt über eine mit dem Ausgang S.C.A. verbundene
Lampe, wenn dieser Ausgang als “Wartungsmeldeleuchte” programmiert ist.
Die verschiedenen Anzeigen der Meldeleuchte sind in Tabelle 7 aufgeführt.
Um den Grenzwert der Wartungsbewegungen zu programmieren, siehe Ta -
belle 5.
Einige Vorrichtungen sind vorgerüstet, um Meldungen abzugeben, mit denen
die Erkennung des Betriebszustands oder eventueller Störungen möglich ist.
Wenn am Ausgang FLASH in der Steuerung eine Blinkleuchte angeschlossen
wird, blinkt diese während einer Bewegung mit Abständen von 1 Sekunde.
Wenn Störungen auftreten, blinkt die Blinkleuchte mit kürzeren Abständen, diese werden zweimal wiederholt und sind von einer 1 Sekunden langen Pause
ge trennt. In der Tabelle 8 sind die Ursache und die Lösung für jede Anzeigeart
beschrieben.
Auch die Leds in der Steuerung geben Meldungen ab; in de Tabelle 9 sind die
Ursache und die Lösung für jede Anzeigeart beschrieben.
Es ist möglich, die eventuell aufgetretenen Störungen während der Ausführung
der letzten 8 Bewegungen zu kontrollieren, Bezugnahme: Tabelle 10.
WAS TUN, WENN ...
(Leitfaden zum Lösen von Problemen)
7
TABELLE 6 - Programmierungsverfahren zweites Niveau
01. Mindestens 3 Sekunden lang auf die Taste “Set” drücken und gedrückt halten;
02. Die Taste freigeben, wenn die Led “L1” zu blinken beginnt;
03. Auf Taste “” oder “” drücken, um das Blinken auf die “Eingangs-LED” zu verschieben, die den zu ändernden Parameter darstellt;
04. Die Taste “Set” drücken und gedrückt halten, bis Punkt 06 abgeschlossen ist;
05. Ca. 3 Sekunden warten, danach wird die LED aufleuchten, die das aktuelle Niveau des zu ändernden Parameters darstellt;
06. Auf Taste “” oder “” drücken, um die LED zu verschieben, die den Wert des Parameters darstellt;
07. Die Taste “Set” loslassen;
08. 10 Sekunden warten (Höchstzeit), um aus der Programmierung zu treten.
Anmerkung – Zur Programmierung mehrerer Parameter müssen während der Ausführung des Verfahrens Punkt 03 und 07 während dieses Vorgangs wiederholt werden.
SET
SET
SET
SET
L1
oder
oder
3 s
10 s
Tabelle 7 - Meldung der “Wartungsmeldeleuchte”
Bewegungsanzahl Meldung
2 Sekunden lang eingeschaltete Meldeleuchte, zu Beginn
der Öffnungsbewegung
Meldeleuchte, die über die ganze Dauer der Bewegung
blinkt
Meldeleuchte, die ständig blinkt.
Unter 80% des Grenzwertes
Zwischen 81% und 100%
des Grenzwertes
Über 100% des Grenzwertes
6.4 - Löschen des Speichers
Um das Archiv der Steuerung zu löschen und alle Werkseinstellungen erneut zu
erhalten, wie folgt vorgehen:
Die Tasten “” und “” drücken und gedrückt halten, bis die Leds L1 und L2
zu blinken beginnen.
Anmerkung – Die werkseitig eingestellten Werte sind in grau angegeben.
L8 L1
L2
L3
L4
L5
L6
L7
L8
Ergebnis 1. Bewegung (die letzte)
Ergebnis 2. Bewegung
Ergebnis 3. Bewegung
Ergebnis 4. Bewegung
Ergebnis 5. Bewegung
Ergebnis 6. Bewegung
Ergebnis 7. Bewegung
Ergebnis 8. Bewegung
Ermöglicht die Prüfung der erfolgten
Störungsart während der Ausführung
der letzten 8 Bewegungen.
Siehe TABELLE 10 - Archiv der aufgetretenen Störungen.
Liste der
Störungen
L7 L1
L2
L3
L4
L5
L6
L7
L8
500
1000
1500
2500
5000
10000
15000
20000
Regelt die Bewegungsanzahl Wenn
diese Nummer überschritten wird,
ze i gt die Steuerung die Anforderung
zur Wartung der Automatisierung an,
siehe Abschnitt 6.3.2. - Wartungsanzeige.
Wartungsanzeige
Page 68

DE
10 – Deutsch
7-Mal kurzes Blinken
1 Sekunde Pause
7-Mal kurzes Blinken
Störung in den Stromkreisen Mindestens 30 Sekunden warten und den Befehl erneut erteilen und
eventuell die Speisung ausschalten; sollte dieser Status bleiben, könnte
ein schwerer Defekt vorhanden sein, und die elektronische Steuerkarte
muss ausgewechselt werden.
8-Mal kurzes Blinken
1 Sekunde Pause
8-Mal kurzes Blinken
Es wurde bereits ein Befehl erteilt, so
dass andere Befehle nicht ausgeführt
werden können.
Die Art des vorhandenen Befehls überprüfen. Es könnte sich zum Beispiel
um einen Befehl durch eine Uhr am Eingang “Öffnet” handeln.
9-Mal kurzes Blinken
1 Sekunde Pause
9-Mal kurzes Blinken
Die Automatisierung wurde durch eine
Steuerung “Sperre Automatisierung”
blockiert.
Die Automatisierung lösen, indem eine Steuerung “Lösen Automatisierung” übersendet wird.
10-Mal kurzes Blinken
1 Sekunde Pause
10-Mal kurzes Blinken
Eingriff der Funktion “Hinderniserfassung” durch Encoder
Während der Bewegung wurde die Motoren durch eine höhere Reibung
blockiert, die Ursache prüfen.
TABELLE 8 - Meldungen der Blinkleuchte (FLASH)
Blinken Problem Lösung
1-Mal kurzes Blinken
1 Sekunde Pause
1-Mal kurzes Blinken
Fehler im System Bluebus Die Überprüfung der an BlueBUS angeschlossenen Vorrichtungen, die zu
Beginn der Bewegung ausgeführt wird, entspricht nicht den während der
Erlernung gespeicherten Vorrichtungen. Es ist möglich, dass getrennte
oder gestörte Vorrichtungen vorliegen, somit prüfen und ersetzen. Wenn
Änderungen vorgenommen wurden, muss die Erlernung der Vorrichtungen erneut ausgeführt werden (siehe Abschnitt 4.6).
2-Mal kurzes Blinken
1 Sekunde Pause
2-Mal Schnellblinken
Auslösung einer Lichtschranke Eine oder mehrere Lichtschranken geben keine Zustimmung zur Bewe-
gung oder haben während des Laufs eine Bewegungsumkehrung hervorgerufen; prüfen, ob Hindernisse vorliegen.
3-Mal kurzes Blinken
1 Sekunde Pause
3-Mal kurzes Blinken
Eingriff der Funktion “Hinderniserfassung” durch Kraftbegrenzer
Während der Bewegung haben die Motoren eine höhere Kraft angetroffen;
die Ursache prüfen und eventuell das Kraftniveau der Motoren erhöhen
4-Mal kurzes Blinken
1 Sekunde Pause
4-Mal kurzes Blinken
Auslösung des Eingangs STOPP Am Anfang oder während der Bewegung erfolgte eine Auslösung der mit
dem Eingang STOP verbundenen Vorrichtungen; Ursache überprüfen.
5-Mal kurzes Blinken
1 Sekunde Pause
5-Mal kurzes Blinken
Fehler in den internen Parametern der
Steuerung
Mindestens 30 Sekunden warten und den Befehl erneut erteilen und
eventuell die Speisung ausschalten; sollte dieser Status bleiben, könnte
ein schwerer Defekt vorhanden sein, und die elektronische Steuerkarte
muss ausgewechselt werden.
6-Mal kurzes Blinken
1 Sekunde Pause
6-Mal kurzes Blinken
Die Höchstgrenze an aufeinander folgenden Bewegungen pro Stunde wurde überschritten.
Ein paar Minuten warten, bis der Bewegungsbegrenzer wieder unter die
Höchstgrenze zurückkehrt.
TABELLE 9 - Meldungen der Leds in der Steuerung (Abb. 16)
Led Problem Lösung
BLUEBUS
Immer aus
Immer ein
1 Mal Blinken pro Sekunde
2 Mal kurzes Blinken
Mehrmaliges Blinken mit Pause
von 1 Sekunde
Störung
Schwere Störung
Alle regulär
Statusvariation der Eingänge
Verschiedenes
Prüfen, ob die Steuerung gespeist ist; prüfen, ob die Sicherungen eingegriffen haben. In diesem Fall die Ursache des Defekts überprüfen, dann die
Sicherungen mit anderen mit demselben Stromwert auswechseln
Es liegt ein schwerwiegendes Problem vor: Versuchen, die Steuerung von
der Stromspeisung zu trennen und wenn der Zustand verbleibt, muss die
elektronische Karte ersetzt werden
Regulärer Funktion der Steuerung
Regulär, wenn eine Änderung in einem der Eingänge erfolgt (PP, STOP,
OPEN, CLOSE): Eingriff der Lichtschranken oder Übertragung einer Steuerung mit einem Sender
Bezugnahme: Tabelle 10
STOP
Immer aus
Immer ein
Die am Eingang STOPP angeschlossenen Vorrichtungen greifen ein
Alle regulär
Die Vorrichtungen des Eingangs STOPP prüfen
Eingang STOPP aktiv
P. P.
Immer aus
Immer ein
Alle regulär
Eingriff des Eingangs PP
Eingang P.P. nicht aktiv
Regulär, wenn die am Eingang PP angeschlossene Vorrichtung aktiv ist
OPEN
Immer aus
Immer ein
Alle regulär
Eingriff des Eingangs OPEN
Eingang OPEN nicht aktiv
Regulär, wenn die am Eingang OPEN angeschlossene Vorrichtung aktiv ist
CLOSE
Immer aus
Immer ein
Alle regulär
Eingriff des Eingangs CLOSE
Eingang CLOSE nicht aktiv
Regulär, wenn die am Eingang CLOSE angeschlossene Vorrichtung aktiv ist
L1 - L2 blinkt langsam Änderung der Anzahl der mit Bluebus
verbundenen Vorrichtungen oder Erlernung Vorrichtung nicht ausgeführt
Es ist notwendig, die Erlernung der Vorrichtungen auszuführen
(siehe Abschn. 3.5)
L3 - L4 blinkt langsam Änderung der Erlernung der Motorenar-
ten oder der Positionen der mechanischen Anschläge
Die Erlernung der Positionen der mechanischen Anschläge wurde nie ausgeführt.
Page 69

DE
Deutsch – 11
Für HYKE ist folgendes Sonderzubehör vorgesehen: Empfänger der Gruppe
SMXI, OXI, Oview-Programmierer, Solarenergie-Kollektor Solemyo und Pufferbatterie Mod. PS124.
8.1 - Anschluss eines Funkempfängers
Die Steuerung weist einen Stecker zum Anschluss der Funkempfänger auf
(Sonderzubehör), die zur Gruppe SMXI, OXI gehören. Zum Anschluss eines
Empfängers muss die Steuerung von der Stromspeisung getrennt werden und
wie in Abb. 17 gezeigt vorgegangen werden. In Tabelle 11 und 12 sind die
Befehle aufgeführt, die den Ausgängen in der Steuerung entsprechen.
WEITERE AUSKÜNFTE
8
Tabelle 11
SMXI / SMXIS oder OXI / OXIFM / OXIT / OXITFM im Modus I oder Modus II
Befehl “P.P.” (Schrittbetrieb)
Befehl “Teilöffnung 1”
Befehl “Öffnet”
Befehl “Schließt”
Ausgang Nr. 1
Ausgang Nr. 2
Ausgang Nr. 3
Ausgang Nr. 4
1 Schrittbetrieb
2 Teilöffnung 1
3 Öffnen
4 Schließt
5 Stopp
6 Schrittbetrieb
Wohnblock
7 Schrittbetrieb
Hohe Priorität
8 Teilöffnung 2
9 Teilöffnung 3
10 Öffnen und sperren
Automatisierung
11 Schließt und
Blockiert die
Automatisierung
12 Blockiert die
Automatisierung
13 Löst die
Automatisierung
Tabelle 12
OXI / OXIFM /OXIT / OXITFM im erweiterten Modus II
NR. Steuerung Beschreibung
Befehl “P.P.” (Schrittbetrieb)
Steuerung “Teilöffnung 1”
Befehl “Öffnet”
Befehl “Schließt”
Stoppt die Bewegung
Steuerung im Wohnblockmodus
Steuert auch bei blockierter Automatisierung oder aktive
Steuerungen
Öffnet teilweise (Öffnung des Flügels M2, gleich 1/2 der
Gesamtöffnung)
Öffnet teilweise (Öffnung der beiden Flügel, gleich 1/2 der
Gesamtöffnung)
Ruft eine Öffnungsbewegung hervor und am Ende dieser
die Blockierung der Automatisierung; die Steuerung akzeptiert keine andere Steuerung, außer “Schrittbetrieb hohe
Priorität”, “Lösen” Automatisierung oder (nur aus Oview)
der Steuerungen: “Löst und schließt” und “Löst und öffnet”
Ruft eine Schließbewegung hervor und am Ende dieser die
Blockierung der Automatisierung; die Steuerung akzeptiert
keine andere Steuerung, außer “Schrittbetrieb hohe Priorität”, “Lösen” Automatisierung oder (nur aus Oview) der
Steuerungen: “Löst und schließt” und “Löst und öffnet”
Ruft einen Bewegungsstopp hervor und am Ende dieser
die Blockierung der Automatisierung; die Steuerung ak zeptiert keine andere Steuerung, außer “Schrittbetrieb ho he
Priorität”, “Lösen” Automatisierung oder (nur aus Ovi ew)
der Steuerungen: “Löst und schließt” und “Löst und öffnet”
Ruft die Blockierung der Automatisierung und die Wiederherstellung des normalen Betriebs hervor
8.2 - Anschluss und Installation der Pufferbatterie
Mod. PS124
ACHTUNG! - Der Stromanschluss der Batterie an das Steuergerät darf
erst nach Abschluss aller Installations - und Programmierungsarbeiten
erfolgen, da die Batterie eine Notstromversorgung bildet.
Zur Installation und zum Anschluss der Batterie, den in Abb. 18 gezeigten
Montagephasen folgen.
8.3 - Anschluss des Programmierers Oview
Am Steuergerät befindet sich die Steckverbindung BusT4, an der die Programmierungseinheit Oview angeschlossen werden kann. Sie ermöglicht eine vollständige und schnelle Regelung der Installation, Wartung und Diagnose der
gesamten Automatisierung. Für den Zugriff auf die Steckverbindung muss wie
in Abb. 19 gezeigt, vorgegangen werden und der Stecker in der entsprechenden Aufnahme angeschlossen werden. Der Oview kann gleichzeitig an mehrere Steuergeräte gleichzeitig angeschlossen werden (bis zu 5 ohne besondere
Vorsichtsmaßnahmen, bis zu 60 unter Befolgung entsprechenden Sicherheitshinweise). Er kann auch während des normalen Betriebs der Automatisierung
am Steuergerät angeschlossen bleiben. In diesem Fall kann er benutzt werden,
um die Bedienungen mit dem spezifischen "Benutzer"-Menü direkt an das
Steuergerät zu senden. Auch die Firmware kann aktualisiert werden. Wenn im
Steuergerät ein Funkempfänger der Gruppe OXI vorhanden ist, kann man mit
dem Oview auf die Parameter der im Empfänger gespeicherten Sender zu greifen.
Für weitere Erklärungen die entsprechende Gebrauchsanweisung und das
Handbuch des “Opera system book” - Systems zu Rate ziehen.
8.4 - Anschluss des Systems an die Solarenergie Solemyo
ACHTUNG! – Wenn die Automatisierung durch das System “Solemyo”
gespeist wird, darf diese AUF KEINEN FALL gleichzeitig mit Strom ge speist werden.
Für weitere Auskünfte über das System Solemyo wird auf die entsprechende
Gebrauchsanleitung verwiesen.
Den Anschluss des Systems Solemyo wie in Abb. 20 gezeigt, ausführen.
8.5 - Anschluss des externen Entriegelungssystems Kio
ACHTUNG! – Kio kann an den Motorantrieb mit oder ohne Steuerung
angeschlossen werden, wenn aber eine der beiden Flügel den anderen
überschreitet (die zuerst startet).
01.
Den Deckel des Torantriebs öffnen (Abb. 21-1);
02. Das Kunststoffgehäuse des Torantriebs wie in Abb. 21-2 gezeigt, entfernen;
03. In die hierfür vorgesehene Bohrung die Schraube mit der Mutter einfügen,
wie in Abb. 21-3 gezeigt wird;
04. Die beiden Enden der Feder einhaken, wie in Abb. 22-4 gezeigt wird ;
05. Das Stahlkabel zuerst in die Schraube einfügen und dann in die Bohrung
des Bolzens, wie in Abb. 21-5 gezeigt wird ;
06. Das Kabel durch die entsprechende Schraube befestigen (Abb. 21-5);
07. Das andere Ende des Kabels durch eine der Bohrungen am unteren Teil
des Torantriebs ziehen, siehe Abb. 21-6;
NR. Steuerung Beschreibung
Der Ausgang zusätzliche Beleuchtung mit zeitgeregelter
Abschaltung wird erleuchtet
Der Ausgang zusätzliche Beleuchtung im Schrittbetrieb
wird erleuchtet und ausgeschaltet
14 On Timer zusätzliche
Beleuchtung
15 On-Off zusätzliche
Beleuchtung
TABELLE 10 - Archiv der aufgetretenen Störungen
01. Mindestens 3 Sekunden lang auf die Taste “Set” drücken und gedrückt halten
02. Die Taste loslassen, wenn die LED “L1” zu blinken beginnt;
03. Die Taste “” oder “” drücken, um das Blinken auf die LED L8, die “Eingangs-LED” des Parameters
“Alarmhistorik“ zu verschieben”;
04. Die Taste “Set” drücken und gedrückt halten, bis Punkt 06 abgeschlossen ist;
05. Zirka 3 Sekunden abwarten, bis die Leds aufleuchten, die die Niveaus der Bewegungen darstellen, die Störungen aufgewiesen
haben Die Led L1 zeigt das Ergebnis der letzten Bewegung auf, während die Led L8 die achte Bewegung angibt.
Wenn die Led eingeschaltet ist, bedeutet das, dass Störungen aufgetreten sind, wenn die Led dagegen ausgeschaltet ist,
ist alles regulär.
06. Auf die Tasten “” und “” drücken, um die gewünschte Bewegung auszuwählen: die entsprechende LED wird so
oft blinken, wie die Blinkleuchte gewöhnlich nach einer Störung blinkt;
07. Die Taste “Set” loslassen.
SET
SET
SET
SET
L1
oder
und
3 s
3 s
L8
Page 70

DE
12 – Deutsch
ENTSORGUNG DES PRODUKTS
Dieses Produkt ist integrierender Teil der Automatisierung und muss mit
ihr zusammen entsorgt werden.
Auch die Entsorgung, wenn das Produkt nicht mehr gebrauchsfähig ist, muss
genau wie die Installation von qualifiziertem Personal durchgeführt werden.
Dieses Produkt besteht aus unterschiedlichen Materialien: einige sind wiederverwertbar, andere müssen entsorgt werden. Informieren Sie sich über das
Recycling- oder Entsorgungssystem, das von den geltenden Vorschriften in
Ihrem Land vorgesehen ist.
Achtung! – Einige Teile des Produkts können umweltverschmutzende oder
gefährliche Substanzen enthalten, deren Freisetzung eine schädigenden Wirkung auf die Umwelt und die Gesundheit des Menschen haben könnten.
Wie das seitliche Symbol anzeigt, darf dieses Produkt nicht mit
dem Hausmüll beseitigt werden. Daher müssen zur Entsorgung
die Komponenten getrennt werden, wie von den landeseigenen
gesetzlichen Regelungen vorgesehen ist oder man übergibt das
Produkt beim Neukauf eines gleichwertigen Produkt dem
Händler.
Achtung! – die örtlichen gesetzlichen Regelungen können bei einer gesetzeswidrigen Entsorgung diese Produkts schwere Strafen vorsehen.
Entsorgung der Pufferbatterie (falls vorhanden)
Achtung! – Die leere Batterie enthält umweltverschmutzende Substanzen und
darf nicht in den Hausmüll geworfen werden.
Sie muss nach der Mülltrennungsmethode entsorgt werden, die von den geltenden Bestimmungen Ihres Landes vorgesehen ist.
GRAFIK 3
Manöverzyklen
Schweregrad %
WARTUNG DES PRODUKTS
9
Um das Sicherheitsniveau immer beizubehalten und die maximale Haltbarkeit
zu gewährleisten, ist eine regelmäßige Wartung notwendig.
Bei der Wartung müssen die Sicherheitsvorschriften dieser Gebrauchsanweisung und die diesbezüglich geltenden gesetzlichen Bestimmungen beachtet
werden.
Zum Feststellen von Verlagerungen der Flügel, Abnutzung oder Schäden an
Kabeln und Federn ist die Automatisierung häufigen Überprüfungen zu unterziehen.
Wichtig – Während der Wartung oder Reinigung der Automatisierung das
Steuergerät von der Stromversorgung abtrennen und falls vorhanden, von
den Batterien.
Für die anderen Vorrichtungen der Anlage, den Angaben der betreffenden Wartungspläne folgen.
Für die Getriebe HK7024, HK7224 muss maximal innerhalb 6 Monaten oder
nach 20.000 Manövern seit der letzten Instandsetzung eine programmierte
Wartung vorgenommen werden.
Für die Wartung wie folgt vorgehen:
01. Jede Versorgungsquelle, auch eventuell vorhandene Pufferbatterien ab trennen;
02. Den Abnutzungszustand der Befestigungsbügel und Dübel besonders
gründlich auf Erosion und Oxidation überprüfen; die Teile, die nicht ausreichend sicher sind, austauschen;
03. Zur Überprüfung des ordnungsgemäßen Betriebs, einen Entriegelungstest
durchführen, siehe Absatz 3.6;
04. Die elektrischen Versorgungsquellen wieder anschließen und alle im Kapitel
5 - Endabnahme vorgesehenen Tests und Überprüfungen vornehmen.
08. Das Kunststoffgehäuse wieder platzieren und dann den Deckel des Torantriebs (Abb. 21-7);
09. Nun das Kabel mit Kio verbinden, wofür man sich auf die jeweilige
Gebrauchsanleitung bezieht.
Produktlebensdauer
Die Lebensdauer ist die durchschnittliche Betriebsdauer des Produkts. Der
Wert der Lebensdauer wird stark durch den Index der durch die Automatisierung ausgeführten Bewegungen beeinflusst: d.h. die Summe aller Faktoren, die
zum Verschleiß des Produkts beitragen (siehe Tabelle 13).
Gehen Sie wie folgend vor, um die wahrscheinliche Dauer Ihrer Automatisierung
zu bestimmen:
01. Der Verschleißindex
wird durch Summierung der Prozentwerte der Punkte
der Tabelle 13 kalkuliert;
02. In der Graphik 3 wird ab dem soeben gefundenen Wert eine vertikale Linie
gezogen, bis die Kurve überkreuzt wird; von diesem Punkt aus wird eine waagrechte Linie gezogen, bis die Linie der “Bewegungszyklen” überkreuzt wird. Der
bestimmte Wert ist die geschätzte Lebensdauer
Ihres Produkts.
Die Schätzung der Lebensdauer wird aufgrund der Projektkalkulationen und
der Ergebnisse der an Prototypen ausgeführten Tests getätigt. Da es sich um
eine Schätzung handelt, stellt sie keine Garantie für die effektive Dauer des Produkts dar.
Beispiel einer Lebensdauerkalkulierung eines Torantriebs HYKE mit Arm auf GANZER Länge (Bezugnahme Tabelle 13 und Graphik 3):
- Länge des Flügels = 2,8 m (Verschleißindex: 20%); - Gewicht des Torflügels: 230 Kg (Ver-
schleißindex: 20%); - Blinder Flügel (Verschleißindex: 15%); Gesamtverschleißindex
= 55%;
Geschätzte Lebensdauer
= 220.000 Bewegungszyklen.
TABELLE 13
Verschleißindex
Arm GANZE Länge Arm REDUZIERTE Länge
< 1,8
1,8 - 2,5 m
2,5 - 3 m
3 - 3,5 m
< 200 kg
200 + 250 kg
> 250 kg
Länge des Torflügels
Gewicht des Torflügels
Umgebungstemperatur über 40°C oder unter 0°C oder Feuchtigkeit
über 80%
Blinder Flügel
Installation in windigen Gegenden
Anmerkung – Die Daten beziehen sich auf ein nivelliertes Sektionaltor in perfektem Zustand
0%
15%
20%
30%
0%
20%
30%
20%
15%
15%
15%
20%
30%
30%
40%
20%
20%
20%
500.000
400.000
300.000
200.000
100.000
0 102030405060708090100
220.000
Page 71

DE
Deutsch – 13
TECHNISCHE MERKMALE DES PRODUKTS
HK7224K
Elektromechanischer Torantrieb für Automatisierungen von
Toren und automatischen Türen mit Gleichstrommotor, Planetenuntersetzungsgetriebe, mechanische Entriegelung.
HK7024K
Elektromechanischer Torantrieb für Automatisierungen von
Toren und automatischen Türen mit Gleichstrommotor, Planetenuntersetzungsgetriebe, mechanische Entriegelung. mit
eingebauter Steuerung und Funkempfänger OXI
Typologie
Coppia massima 500 Nm
Coppia nominale 120 Nm
Velocità a vuoto 2.25 RPM
Velocità alla coppia nominale 2.00 RPM
Maximale Zyklenhäufigkeit 40 Zyklen/Stunde
Max. Dauerbetriebszeit Ca. 7 Minuten
Einsatzlimits Das Produkt kann für Tore mit einem Flügelgewicht bis 330 kg und Längen bis 1,8m m oder bis zu 200kg kg
und einer Länge bis 3,5 m verwendet werden (siehe Graphik 1)
Lebensdauer zwischen ca. 150.000 und 500.000 Zyklen je nach den in Tabelle 13 und Graphik 3 angegebenen Bedingungen
Montage Vertikal, mit einer diesbezüglichen Befestigungsplatte
Betriebstemperatur -20°C bis +50°C (bei niedrigen Temperaturen verringert sich die Effizienz des Torantriebs).
Benutzung in besonders säure-
und salzhaltiger oder NEIN
explosionsgefährdeter Umgebung
Schutzart IP 54 (bei unversehrtem Gehäuse)
Abmessungen (mm) 210 x 290 x 320 h
Gewicht (kg) 10.5 Kg; 9.5 Kg
Anmerkungen:
(1) - Funktion mit Oview-Programmierer aktivierbar..
[*] - Die Ausgänge Blinkleuchte, Elektroschloss, Meldeleuchte Tor geöffnet können mit anderen Funktionen programmiert werden (siehe “TABELLE 3 – Funktionen 1. Stufe oder durch
den Oview-Programmierer, siehe Kapitel 8.3). Die elektrischen Eigenschaften der Ausgänge passen sich der gewählten Funktion an: • Funktion BLINKLEUCHTE: Lampe 12 Vdc, max.
21 W; • Elektroschlossfunktion: 12 Vac max. 15 VA; • Andere Ausgänge (alle Arten): 1 Lampe oder Relais 24 Vdc (-30 und +50%), max. 4 W.
Stromversorgung 230 Vac (120 Vac bei Ausführung HK7024K/V1) 24 Vdc (±10%)
±10%; 50/60 Hz
Notversorgung Vorrüstung für Pufferbatterien PS124
Speisung mit Sonnenkollektoren für Kit SYKCE vorgerüstet
Max. Leistungsaufnahme 300 W 140 W
Aufgenommener Höchststrom 1,5 A (3 A bei Ausführung HK7024K/V1) 6 A bei einer Höchstzeit von 2 Sek.
Aufgenommene Leistung in
“Standby-Alles (1)” bei
Speisung aaus PS124 oder unter 100 mW
Bausatz SYKCE (einschließlich
Empfänger OXI)
Ausgang Blinkleuchte [*] für Blinkleuchte LUCYB (Glühbirne 12 V, 21 W)
Ausgang Elektroschloss [*] Elektroschloss mit 12 Vac Max. 15 VA
Ausgang Kontrolllampe 24 V-Glühbirne max. 4 W (die Ausgangsspannung kann
Tor geöffnet [*] zwischen -30 und 50% variieren, der Ausgang kann
auch kleine Relais steuern)
BlueBUS Ausgang Ausgang mit einer Höchstbelastung von 15
Bluebus-Einheiten (höchstens 6 Lichtschrankenpaare
MOFB oder MOFOB + 2 Lichtschrankenpaare MOFB
oder MOFOB, die als Öffnungsvorrichtungen adressiert
werden + max. 4 Steuervorrichtungen MOMB oder MOTB)
Eingang STOPP Für gewöhnlich geschlossene, gewöhnlich geöffnete
Kontakte oder Kontakte mit konstantem 8,2KΩ; die Wahl
der Kontaktart wird in Selbsterlernung getroffen und eine
Variation im Vergleich zum gespeicherten Status ruft den
Steuerbefehl “STOP” hervor
Eingang PP Für gewöhnlich geöffnete Kontakte (das Schließen des
Kontaktes verursacht den Schritt-Steuerbefehl)
Steckverbinder für Funkempfänger SM-Stecker für Empfänger der Gruppe SMXI, OXI und OXIFM
Eingang Funkantenne 50 ΩO für Kabel Typ RG58 oder ähnliche
Programmierbare Funktionen 8 ON-OFF-Funktionen (Tablle 3) und 8
einstellbare Funktionen (Tabelle 5)
Funktionen in • Selbsterlernung der am BlueBUS Ausgang
Selbsterlernung angeschlossenen Vorrichtungen • Selbsterlernung der an
der Klemme “STOP” angeschlossenen Vorrichtung (Kontakt
NO, NC oder Widerstand 8,2 kΩ) • Selbsterlernung des
Laufs der Flügel und automatische Kalkulierung der
Verlangsamungspunkte und Teilöffnung • Selbsterlernung
des Betriebs mit einem oder zwei Motoren
HINWEISE: • Alle angegebenen technischen Merkmale beziehen sich auf eine Temperatur von 20°C (± 5°C). • Nice S.p.a. behält sich das Recht vor, jederzeit als
nötig betrachtete Änderungen am Produkt vorzunehmen, wobei Funktionalitäten und Einsatzzweck beibehalten werden.
Page 72

DE
14 – Deutsch
CE-KONFORMITÄTSERKLÄRUNG
und Integrierungserklärung einer “Fastmaschine”
Erklärung in Übereinstimmung mit den folgenden Richtlinien: 2006/95/CE (LVD); 2004/108/CE (EMC); 2006/42/CE (MD) Anlage II, Teil B
Anmerkun - Der Inhalt dieser Erklärung entspricht den Erklärungen der letzten verfügbaren Revision vor dem Druck dieses Handbuchs des offiziellen Dokuments, das im Sitz Nice
Spa hinterlegt ist. Dieser Text wurde aus Herausgebergründen angepasst: Eine Kopie der ursprünglichen Erklärung jedes Produkts kann bei Nice S.p.a. angefordert werden. (TV) I.
Erklärungsnummer: 334/HYKE Revision: 0 Sprache: DE
Herstellername: NICE s.p.a.
Adresse: Via Pezza Alta 13, Z.I. Rustignè, 31046 Oderzo (TV) Italien
Autorisierte Person
zur Ausstellung
der technischen: Herr Oscar Marchetto
Produkttyp: Elektromechanischer Torantrieb “HYKE” mit eingebauter Steuerung
Modell / Typ: HK7024K, HK7224K
Zubehör: SMXI, OXI, PS124, Oview
Der Unterzeichnende Luigi Paro, Geschäftsführer, erklärt unter seiner Verantwortung, dass das oben angegebene Produkt den Anweisungen der folgenden
Richtlinien entspricht:
• 2006/95/CE RICHTLINIE DES EUROPÄISCHEN PARLAMENTS UND DES RATS vom 12. Dezember 2006 bezüglich der Annäherung der Gesetze der
Mitgliedsstaaten hinsichtlich elektrischen Materials, das innerhalb bestimmter Spannungslimits verwendet wird und zwar gemäß den folgenden übereinstimmenden Normen:
EN 60335-1:2002 + A1:2004 + A11:2004 + A12:2006 + A2:2006 + A13:2008; EN 60335-2-103:2003
• 2004/108/EWG RICHTLINIE DES EUROPÄISCHEN PARLAMENTS UND RATS vom 15. Dezember 2004 bezüglich der Annäherung der Gesetzgebungen der Mitgliedsstaaten, was die elektromagnetische Verträglichkeit betrifft und die Richtlinie 89/336/CEE aufhebt und zwar gemäß den folgenden übereinstimmenden Normen:
EN 61000-6-2:2005, EN 61000-6-3:2007
Außerdem entspricht das Produkt der folgenden Richtlinie, gemäß den Anforderungen hinsichtlich “Fastmaschinen”:
• DireRICHTLINIE 2006/42/CE DES EUROPAPARLAMENTS UND DES RATES vom 17. Mai 2006, was Maschinen betrifft und die Richtlinie 95/16/CE
(Neufassung).
• Wir erklären, dass die zugehörige technische Dokumentation in Übereinstimmung mit Anlage VIII B der Richtlinie 2006/42/CE ausgestellt wurde und
die folgenden grundsätzlichen Anforderungen eingehalten wurden: 1.1.1- 1.1.2- 1.1.3- 1.1.5- 1.2.1-1.2.6- 1.3.1- 1.3.2- 1.3.3- 1.3.4- 1.3.7-1.3.9-
1.5.1-1.5.2- 1.5.4- 1.5.5- 1.5.6- 1.5.7- 1.5.8- 1.5.10- 1.5.11- 1.5.13-1.6.1- 1.6.2-1.6.4- 1.7.2- 1.7.3- 1.7.4- 1.7.4.1- 1.7.4.2- 1.7.4.3
• Der Hersteller verpflichtet sich, den nationalen Behörden infolge einer begründeten Anforderung die zugehörigen Informationen über die „Fastmaschine“ zukommen zu lassen, wobei unsere intellektuellen Eigentumsrechte unberührt bleiben.
• Falls die “Fastmaschine” in einem europäischen Land in Betrieb genommen wird, in dem die offizielle Sprache nicht der Sprache dieser Erklärung entspricht, hat der Importeur die Pflicht, dieser Erklärung die zugehörige Übersetzung zuzufügen.
• Wir weisen darauf hin, dass die “Fastmaschine” nicht in Betrieb genommen werden darf, solange die abschließende Maschine, in die sie integriert
wird, nicht ebenso als konform erklärt wurde, ebenso gemäß den Anweisungen der Richtlinie 2006/42/CE.
Das Produkt ist außerdem, nur was die anwendbaren Teile betrifft, mit folgenden Normen konform:
EN 13241-1:2003, EN 12445:2002, EN 12453:2002, EN 12978:2003
Oderzo, den 15. Januar 2010 Luigi Paro (Geschäftsführer)
Page 73

PL
Polski – 1
POLSKI
Instrukcje oryginalne
Spis treści
1 – INSTRUKCJE I OGÓLNE ZALECENIA................................................... 1
1.1 - Zalecenia dotyczące bezpieczeństwa .................................................... 1
1.2 - Zalecenia dotyczące montażu................................................................ 1
1.3 - Zalecenia dotyczące obsługi.................................................................. 1
2 - OPIS URZĄDZENIA I JEGO PRZEZNACZENIE..................................... 1
3 - MONTAŻ.................................................................................................. 2
3.1 - Weryfikacje wstępne do wykonania przed montażem ............................ 2
3.2 - Ograniczenia zastosowania ................................................................... 2
3.3 - Czynności przygotowujące do montażu................................................. 2
3.4 - Instalacja motoreduktora mod. HK7024 - HK7224 ................................ 2
3.5 - Regulacja mechanicznych ograniczników położenia .............................. 4
3.6 - Blokowanie i odblokowywanie motoreduktora w trybie ręcznym............ 4
4 - PODŁĄCZENIA ELEKTRYCZNE ............................................................ 4
4.1 - Podłączenia elektryczne motoreduktora z centralą mod. HK7024.......... 4
4.2 - Podłączanie motoreduktora bez centrali mod. HK7224 ......................... 4
4.3 - Podłączanie innych urządzeń ................................................................ 4
4.4 - Adresowanie podłączonych urządzeń ................................................... 5
4.5 - Pierwsze włączenie i weryfikacja połączeń ............................................. 5
4.6 - Programowanie podłączonych urządzeń ............................................... 5
4.7 - Programowanie pozycji mechanicznych ograniczników położenia.......... 5
4.8 - Zapamiętanie pozycji mech. ograniczników położenia............................ 6
5 - ODBIÓR I WPROWADZENIE DO UŻYTKU............................................ 6
5.1 - Odbiór techniczny.................................................................................. 6
5.2 - Wprowadzenie do użytku ...................................................................... 6
6 - PROGRAMOWANIE CENTRALI STERUJĄCEJ..................................... 7
6.1 - Programowanie na pierwszym poziomie (ON-OFF) ................................ 7
6.2 - Programowanie na drugim poziomie (parametry regulowane) ................ 8
6.3 - Funkcje szczególne ............................................................................... 9
6.4 - Kasowanie pamięci................................................................................ 9
7 - CO ZROBIĆ JEŚLI... (przewodnik do rozwiązywania problemów) ...... 9
8 - ROZSZERZENIE WIADOMOŚCI ......................................................... 11
8.1 - Podłączanie odbiornika radiowego ...................................................... 11
8.2 - Podłączanie i montaż akumulatora awaryjnego mod. PS124 ............... 11
8.3 - Podłączanie programatora Oview ........................................................ 11
8.4 - Podłączanie systemu zasilania energią słoneczną Solemyo.................. 11
8.5 - Podłączanie zewnętrznego systemu odblokowującego Kio.................. 11
9 - KONSERWACJA URZĄDZENIA........................................................... 12
UTYLIZACJA URZĄDZENIA ...................................................................... 12
Trwałość urządzenia .................................................................................. 12
PARAMETRY TECHNICZNE URZĄDZENIA .............................................. 13
DEKLARACJA ZGODNOŚCI CE................................................................ 14
ZAŁĄCZNIK ................................................................................................... I
Instrukcje i zalecenia przeznaczone dla użytkownika .................................... VII
Zdjęcia .......................................................................................................... IX
1.1 - Zalecenia dotyczące bezpieczeństwa
• UWAGA! – Niniejsza instrukcja zawiera wskazówki i zalecenia ważne dla
bezpieczeństwa. Nieprawidłowa instalacja urządzenia może doprowadzić do
poważnych obrażeń. Przed rozpoczęciem pracy należy dokładnie przeczytać
całą instrukcję obsługi. W przypadku jakichkolwiek wątpliwości, należy zaprzestać instalacji i zwrócić się o wyjaśnienie do Serwisu Technicznego Nice.
• UWAGA! – Ważne instrukcje: starannie przechowywać tę instrukcję, w
celu ułatwienia ewentualnych operacji dotyczących konserwacji i utylizacji urządzenia.
• UWAGA! – Zgodnie z obowiązującymi przepisami europejskimi, wykona -
nie automatycznych drzwi garażowych lub bram garażowych musi być
zgodne z normami przewidzianymi przez Dyrektywę 2006/42/WE (ex
98/37/WE) (Dyrektywa Maszynowa) i w szczególności, normami EN 12445;
EN 12453; EN 12635 i EN 13241-1, które pozalają na zadeklarowanie zgodności automatu. W związku z tym, wszelkie operacje instalacji, podłączania, odbioru technicznego czy konserwacji urządzenia muszą być wykonane wyłącznie przez wykwalifikowanego i kompetentnego technika!
1.2 - Zalecenia dotyczące montażu
• Przed rozpoczęciem montażu należy sprawdzić, czy niniejsze urządzenie jest
odpowiednie do zamierzonego zastosowania (zob. “Zakres zastosowania”
pa ragraf 3.2 oraz “Charakterystyka techniczna produktu”). Jeśli urządzenie
nie jest odpowiednie, NIE rozpoczynać montażu.
• Zawartość niniejszej instrukcji obsługi dotyczy typowej instalacji urządzenia,
pokazanej na rys. 3.
• Wszelkie czynności montażowe i konserwacyjne urządzenia muszą być
wykonywane po odłączeniu automatyki od zasilania elektrycznego. Jeśli
urządzenie wyłączające nie jest widoczne z miejsca, w którym umieszczono
siłownik, przez rozpoczęciem pracy należy zawiesić na urządzeniu wyłączającym tablicę z napisem “UWAGA! KONSERWACJA W TOKU”.
• Centrala musi zostać podłączona do lini zasilania elektrycznego wyposażonej
w uziemienie zabezpieczające.
• Podczas montażu należy delikatnie obchodzić się z urządzeniem, chroniąc je
przed zgnieceniem, uderzeniem, upadkiem lub kontaktem z jakiegokolwiek
rodzaju płynami. Nie umieszczać urządzenia w pobliżu źródeł ciepła i nie wy stawiać go na działanie otwartego ognia. Opisane powyżej sytuacje mogą
doprowadzić do uszkodzenia urządzenia, być przyczyną nieprawidłowego
działania lub spowodować zagrożenia. Jeśli doszłoby do którejś z powyżej
opisanych sytuacji, należy natychmiast przerwać montaż i zwrócić się o po moc do Serwisu Technicznego Nice.
• Nie wolno modyfikować żadnej części urządzenia. Operacje tego rodzaju mo gą
jedynie spowodować niewłaściwe działanie. Producent uchyla się od wszelkiej
odpowiedzialności za szkody spowodowane przez zmodyfikowany produkt.
• Jeśli brama lub drzwi garażowe do zautomatyzowania posiadają również
drzwi dla pieszych należy przygotować instalację do podłączenia systemu
kontrolnego, który uniemożliwi działanie siłownika, gdy drzwi dla pieszych
będą otwarte.
• Opakowanie urządzenia musi być zlikwidowane, zgodnie z odpowiednimi
przepisami obowiązującymi na danym terytorium.
1.3 - Zalecenia dotyczące obsługi
• Produkt nie może być użytkowany przez osoby (w tym dzieci) o ograniczeniach fizycznych lub umysłowych, a także przez tych, którzy nie posiadają
stosownego doświadczenia lub wiedzy, o ile nie maja możliwości skorzystania z nadzoru lub instrukcji dotyczących użytkowania produktu, za pośrednictwem osób odpowiedzialnych za ich bezpieczeństwo.
• Dzieci znajdujące się w pobliżu automatyki powinny znajdować się pod nadzorem, aby mieć pewność, iż nie będą bawić się produktem.
• Nie pozwalaj dzieciom bawić się ze stałymi urządzeniami sterującymi. Urządzenia sterujące przenośne (zdalne) należy przechowywać z dala od dzieci.
INSTRUKCJE I OGÓLNE ZALECENIA
1
Urządzenia tworzące niniejszy produkt są przeznaczone do automatyzowania bramy lub drzwi garażowych jedno- lub dwuskrzydłowych. UWAGA! – Każde inne
użycie niż te opisane oraz warunki otoczeniowe odmienne od tych określonych w niniejszej instrukcji obsługi są uważane za niewłaściwe i zabronione!
Główna część automatyki składa się z jednego lub dwóch siłowników elektromechanicznych (ze względu na liczbę skrzydeł do automatyzowania), z których
każdy wyposażony jest w silnik zasilany przez prąd stały i reduktor epicykloidalny. Jeden z siłowników (mod. HK7024) jest wyposażony w centralę sterowania,
która zarządza jej działaniem. Centrala składa się z karty z odbiornikiem radiowym, do odbioru poleceń wysyłanych z nadajnika.
Centrala została przygotowana do współpracy z różnymi urządzeniami należącymi do Systemu Opera, do systemu Bluebus oraz do systemu zasilania energią słoneczną Solemyo, przeczytaj rozdział 8 - Rozszerzenie wiadomości.
Jeśli zasilana z sieci, może być użyty również akumulatorek rezerwowy (mod.
PS124, urządzenie dodatkowe), który w przypadku braku energii elektrycznej
(black-out) gwarantuje wykonanie przez automat, w najbliższych godzinach,
niektórych manewrów.
W przypadku braku energii elektrycznej możliwe jest przesuwanie skrzydeł bramy, odblokowując siłownik za pomocą odpowiedniego klucza; w celu wykonania tego manewru ręcznie, zobacz rozdział 3.6.
Inne akcesoria, które można zastosować, to odbiorniki wyposażone w złącze
“SM” (SMXI, OXI, itd.), przeczytaj rozdział 8 - Rozszerzenie wiadomości.
OPIS URZĄDZENIA I JEGO PRZEZNACZENIE
2
Page 74

3
MONTAŻ
ramię motoreduktora na CAŁĄ długość. W tych warunkach kąt maksymalnego otwarcia skrzydła może dochodzić do 110°.
WYKRES 1
3.1 - Weryfikacje wstępne przy montażu
Przed przystąpieniem do montażu urządzenia należy sprawdzić stan jego komponentów, upewnić się, czy wybrany model jest odpowiedni do zastosowania i
czy warunki otoczenia, w którym przeprowadzona zostanie instalacja, są sprzyjające:
• Sprawdzić, czy cały materiał do użytkowania jest w idealnym stanie, odpowiedni do użycia.
• Sprawdzić, czy ograniczniki mechaniczne (nie zawarte w zestawie), występują w układzie zarówno przy zamykaniu jak i otwieraniu.
• Sprawdzić, czy struktura mechaniczna bramy jest odpowiednia do zautomatyzowania i czy jest zgodna z normami obowiązującymi na danym terytorium
(ewentualnie odwołać się do danych znajdujących się na etykietce bramy).
Niniejsze urządzenie nie może zautomatyzować bramy, która nie jest skuteczna i bezpieczna; ponadto, nie jest w stanie rozwiązać problemów spowodowanych błędną instalacją bramy lub z powodu jej nieprawidłowej konserwacji.
• Sprawdzić, czy warunki robocze urządzeń są kompatybilne z zakresem
zastosowania podanym w instrukcji (zob. paragraf 3.2).
• Ręcznie poruszyć skrzydłami bramy w obie strony i upewnić się, czy na każdym etapie ruch przebiega przy jednakowym tarciu (nie powinno być punktów o zwiększonym tarciu, wymagających zwiększonego lub zmniejszonego
wysiłku).
• Ręcznie doprowadzić skrzydła bramy do dowolnej pozycji; pozostawić je w
wybranym położeniu i sprawdzić, czy pozostaną w bezruchu.
• Sprawdzić, czy strefa zamocowania siłownika jest kompatybilna z wymiarami
PL
bramy (rys. 1).
• Należy upewnić się, czy w otoczeniu, w którym ma zostać zainstalowany
siłownik jest wystarczająco dużo miejsca, by jego ramię mogło wykonać
wymagany obrót.
• Należy upewnić się, czy w pobliżu siłownika jest wystarczająco dużo miejsca
do wykonania manewru ręcznego odblokowania siłownika.
• Upewnić się, czy powierzchnie wybrane do zainstalowania poszczególnych
urządzeń są solidne i czy mogą zagwarantować stabilne mocowanie.
• Upewnić się, czy każde instalowane urządzenie jest umieszczone w pozycji
zabezpieczonej przed przypadkowymi uderzeniami.
• Sprawdzić, czy wszystkie typy kabli elektrycznych przeznaczonych do użycia, są zgodne z rodzajami podanymi w Tabeli 1.
3.2 - Ograniczenia zastosowania
Przed zainstalowaniem motoreduktora sprawdź, czy jego parametry wchodzą
w zakres ograniczeń zastosowania, zamieszczonych w dalszej części tej
instrukcji obsługi oraz w zakres wartości podanych w rozdziale “Parametry
techniczne urządzenia”:
Z ramieniem siłownika
- maksymalna szerokość skrzydła: 3,50 m (= maksymalny ciężar skrzydła:
200 kg)
Z ramieniem siłownika
- maksymalna szerokość skrzydła: 3,00 m (= maksymalny ciężar skrzydła:
180 kg)
• Sprawdzenie, którego należy dokonać: zaznacz ciężar i szerokość skrzydła
na zamieszczonym obok Wykresie 1; wykreśl dwie linie od tych punktów i
upewnij się, że punkt przecięcia tych linii znajdzie się w jednej z dwóch szarych
stref na wykresie. Uwaga! - Jeżeli punkt przecięcia linii znajduje się w białej
strefie, nie jest możliwe używanie tego urządzenia do automatyzacji tej bramy.
• Aby umożliwić zainstalowanie siłownika minimalna szerokość słupka musi
wynosić 210 mm.
• Uchwyt mocujący ramię musi zostać zamocowany w solidnej części skrzydła
(na przykład rama), aby zagwarantować trwałe i pewne jego przymocowanie;
• Sprawdź wartość
- Jeżeli wartość
ramię motoreduktora na ZREDUKOWANĄ długość. W tych warunkach kąt
maksymalnego otwarcia skrzydła może dochodzić do 90°.
- Jeżeli wartość “E
o CAŁEJ długości:
o ZREDUKOWANEJ długości:
“E” (rys. 2):
“E” jest z zakresu od 300 mm do 650 mm, należy ustawić
” jest równa lub większa od 650 mm, należy ustawić
350
300
250
Dla ramienia o
pełnej długości
200
CIĘŻAR (kg.)
150
100
1,8 2 2,5 3 3,5
Dla ramienia o
zredukowanej
długości
SZEROKOŚĆ (m.)
3.3 - Czynności przygotowujące do montażu
Na rys. 3 przedstawiona jest przykładowa instalacja automatyki, wykonana z
zastosowaniem komponentów firmy Nice, (niektóre komponenty mogą nie
znajdować się w zestawie):
a - Siłownik z centralą mod. HK7024
b - Siłownik bez centrali mod. HK7224
c - Sygnalizator migający
d - Dwie fotokomórki mod. MOFB
e - Klawiatura cyfrowa (mod. MOTB) – Czytnik kart zbliżeniowych (mod.
MOMB) – Przełącznik kluczowy (mod. MOSE)
f - Dwa słupki do fotokomórek
g - Ograniczniki mechaniczne zamykania
h - Zamek elektryczny
Te komponenty są rozmieszczone zgodnie z typowym i powszechnie stosowanym schematem. Nawiązując do rys. 3, ustal przybliżone położenie, w którym
zostanie zainstalowane każde urządzenie przewidziane w tej instalacji. Ważne
– Przed przeprowadzeniem montażu przygotuj odpowiednie przewody elektryczne, niezbędne dla Twojej instalacji, nawiązując do rys. 4 oraz do “Tabeli 1
- Parametry techniczne przewodów elektrycznych”.
Uwaga – Podczas układania osłon umożliwiających przeprowadzenie przewo-
dów elektrycznych, uwzględnij, że w wyniku możliwego gromadzenia się w nich
wody, może powstawać zjawisko kondensatu wewnątrz centrali, co może być
przyczyną uszkodzenia obwodów elektronicznych.
3.4 - Instalacja motoreduktora mod. HK7024 - HK7224
ZALECENIA
• Nieprawidłowo wykonana instalacja może być przyczyną poważnych
zagrożeń dla osoby wykonującej operacje oraz dla tych osób, które
będą używać urządzenie.
• Przed rozpoczęciem montażu automatyki przeprowadź kontrole wstępne opisane w paragrafie 3.1 i 3.2.
Przed rozpoczęciem instalacji wyznacz długość ramienia siłownika, patrz paragraf 3.4.1.
3.4.1 - Wyznaczanie długości ramienia siłownika
01. Połącz komponenty, które stanowią ramię siłownika, jak pokazano na rys.5;
02. Ustal położenie motoreduktora w kierunku PIONOWYM:
zaznacz na słupku linię poziomą, na tej samej wysokości, na której zostanie zamontowany uchwyt mocujący ramię na skrzydle bramy (rys. 6).
03. Ustal położenie motoreduktora w kierunku POZIOMYM (położenie A):
UWAGA! – Jeżeli w pobliżu obszaru instalacji urządzenia znajduje się
stała przeszkoda (ściana, drzewo, itp.) należy zmierzyć wartość E
(rys. 2) i postępować jak następuje:
TABELA 1 - Parametry techniczne przewodów elektrycznych (rys. 4)
Podłączenie Rodzaj przewodu Maksymalna dozwolona długość
A: Przewód ZASILANIA CENTRALI STERUJĄCEJ 1 przewód 3 x 1,5 mm
B: Przewód ZAMKA ELEKTRYCZNEGO 1 przewód 2 x 1 mm
C: Przewód URZĄDZEŃ BLUEBUS 1 przewód 2 x 0,5 mm
2
2
2
30 m (uwaga 1)
6 m
20 m (uwaga 2)
D: Przewód PRZEŁĄCZNIKA KLUCZOWEGO 2 przewody 2 x 0,5 mm2 (uwaga 3) 50 m
E: Przewód ZASILANIA MOTOREDUKTORA 1 przewód 3 x 1,5 mm
2
(uwaga 4) 10 m
Przewód do PODŁĄCZENIA ENKODERA 1 przewód 2 x 1 mm2 (uwaga4) 10 m
F: Przewód LAMPY OSTRZEGAWCZEJ z anteną 1 przewód 2 x 0,5 mm
2
20 m
1 przewód ekranowany typu RG58 20 m (zalecany jest przewód krótszy niż 5 m)
Uwaga 1 – Jeśli długość przewodu zasilania przekracza 30 m, należy zastosować przewód o większym przekroju (3 x 2,5 mm2) oraz uziemienie ochronne w pobliżu automatyki.
Uwaga 2 – Jeśli długość przewodu Bluebus przekracza 20 m, do maksimum 40 m, należy wykorzystać przewód o większym przekroju (2 x 1 mm
Uwaga 3 – Te dwa przewody mogą zostać zastąpione jednym przewodem 4 x 0,5 mm
Uwaga 4 – Te przewody mogą zostać zastąpione jednym przewodem 5 x 1,5 mm2.
2.
2
).
UWAGA! – Zastosowane przewody muszą być przeznaczone dla rodzaju otoczenia, w którym odbywa się ich montaż.
2 – Polski
Page 75

PL
Polski – 3
• Jeżeli wartość E jest wartością równa lub większa od 650 mm,
przeczytaj paragraf 3.4.2
• Jeżeli wartość E jest w zakresie od 300 mm (minimum) do 650 mm
(maksimum), przeczytaj paragraf 3.4.3
3.4.2 - Montaż motoreduktora z RAMIENIEM O CAŁEJ DŁUGOŚCI
01. a) Zmierz na słupku wartość B
(rys. 7) = odległość pomiędzy osią obrotu
skrzydła bramy a powierzchnią słupka, na którym zostanie przymocowany
tylny uchwyt motoreduktora.
b) Przesuń skrzydło bramy do wybranego stopnia otwarcia (maksymalnie
110°): wartość kątowa.
c) Zaznacz na Wykresie 2 obliczoną wartość B
i wykreśl od tego punktu
linię poziomą, która będzie przecinać się z obszarem
obejmującym wartość
kątową, zmierzoną w punkcie b.
d) W punktach przecięcia się linii poziomej
z tym obszarem zaznacz linie
pionowe wyznaczając wartości, które mogą być wykorzystywane dla war
-
tości A
(rys. 8). Następnie wybierz wartość A z tego zakresu.
e) Nanieś na słupku znalezioną wartość A
i przeprowadź przez ten punkt
linię pionową.
02. Przymocowanie uchwytu do słupka (rys.
9):
f) faza 1-2: Umieść uchwyt na słupku w taki sposób, aby jego pionowa
linia środkowa pokrywała się z zaznaczoną wcześniej pionową linią (wartość A), a jego ramię z linią poziomą, zaznaczoną podczas procedury
3.4.1. W tej fazie upewnij się, że motoreduktor jest perfekcyjnie wypoziomowany: motoreduktor przekręcony lub przesunięty może powodować
nieprawidłowe funkcjonowanie automatyki.
g) faza 3-4: Zaznacz punkty montażu, wywierć otwory w słupku i włóż kołki; teraz przymocuj uchwyt wykorzystując odpowiednie śruby i podkładki.
03. Przymocowanie ramienia motoreduktora do skrzydła
:
h) Doprowadź skrzydło bramy do położenia maksymalnego zamknięcia;
i) faza 5: Przymocuj motoreduktor do uchwytu, wykorzystując dwie śruby i
nakrętki znajdujące się wyposażeniu;
l) Odblokuj motoreduktor; patrz rozdz. 3.6;
m) faza 6: Mocno naciśnij ramię motoreduktora, aż do jego maksymalne
-
go wydłużenia (wyprostowania)
. Uwaga! - Upewnij się, że ramię
zablokuje się na ograniczniku położenia w swoim przegubie;
n) Dosuń ramię do skrzydła bramy, umieszczając na nim uchwyt mocujący.
o) faza 7: Upewnij się, że ramię motoreduktora jest wypoziomowane i
zaznacz ołówkiem środek
otworów uchwytu, aby umożliwić w przyszłości
dokładne wyregulowanie podczas zamykania skrzydła bramy (przeczytaj
paragraf 4.8).
p) Trzymając jedną ręką uchwyt umieszczony na skrzydle bramy, spróbuj
wykonać jedno całkowite otwarcie i zamknięcie.
q) faza 8: Wywierć otwory na skrzydle bramy, w zaznaczonych na nim
miejscach i zdejmij uchwyt z ramienia, następnie przymocuj do skrzydła
przeznaczonymi do tego celu śrubami.
r) faza 9: Przymocuj ramię do uchwytu wkładając sworzeń oraz pierścień
zabezpieczający typu benzing. Ważne – Sprawdź, czy uchwyt i ramię są
prawidłowo wypoziomowane. Ewentualnie poluzuj śruby mocujące uchwyt
i ponownie wypoziomuj.
s) Wyreguluj mechaniczne ograniczniki położenia; patrz rozdz. 3.5;
t) faza 10: Teraz uchyl ręcznie skrzydło bramy do około połowy otwarcia i
zablokuj motoreduktor specjalnym kluczem (patrz rozdz. 3.6). Następnie,
aby zasprzęglić siłownik, przesuń ręcznie skrzydło bramy o kilka centymetrów w kierunku otwarcia.
04. Jeżeli przeznaczona do zautomatyzowania brama jest dwuskrzydłowa, aby
zainstalować drugi motoreduktor musisz powtórzyć wszystkie operacje
opisane w rozdziale 3.4
0
150 175 200 225 250 275 300 325 350 375 400 425 450 475
50
B
A
100
150
200
250
300
350
400
450
90°-95°
95°-100°
100°-105°
105°-110°
90°-95°
95°-105°
WYKRES 2
3.4.3 - Montaż motoreduktora z RAMIENIEM O ZREDUKOWANEJ
DŁUGOŚCI
Uwaga! – W przypadku tej konfiguracji maksymalne dozwolone otwarcie skrzydła bramy wynosi 90°.
01. a) Zmierz na słupku wartość B
(rys. 7) = odległość pomiędzy osią obrotu
skrzydła bramy a powierzchnią słupka, na którym zostanie przymocowany
tylny uchwyt motoreduktora.
b) Zaznacz na Wykresie 2 wyznaczoną wartość B
i następnie wykreśl od
tego punktu linię poziomą, która będzie przecinać obszar
o zakresie 90° - 95°.
c) W punktach przecięcia się, znajdujących się pomiędzy linią poziomą a
tym obszarem, zaznacz linie pionowe, wyznaczając w ten sposób wartości,
które mogą być wykorzystywane dla wartości A
(wykres 2). Następnie
wybierz wartość A z tego zakresu.
d) Nanieś na słupku znalezioną wartość A
i przeprowadź przez ten punkt
linię pionową.
02. Przymocuj uchwyt do słupka (rys.
10):
e) faza 1-2: Umieść uchwyt na słupku, w taki sposób, aby jego pionowa
linia środkowa pokrywała się z linią pionową zaznaczoną wcześniej (wartość A), a jego ramię z linią poziomą, zaznaczoną podczas wykonywania
procedury 3.4.1. W tej fazie upewnij się, że motoreduktor jest perfekcyjnie
wypoziomowany: motoreduktor przekręcony lub przesunięty może powodować nieprawidłowe funkcjonowanie automatyki.
f) faza 3-4: Zaznacz punkty montażu, wywierć otwory w słupku i włóż kołki; teraz przymocuj uchwyt wykorzystując odpowiednie śruby i podkładki.
g) Doprowadź skrzydło bramy do położenia maksymalnego zamknięcia;
h) faza 5: Przymocuj motoreduktor do uchwytu, wykorzystując dwie śruby
i nakrętki znajdujące się wyposażeniu;
i) Odblokuj motoreduktor ; patrz rozdz. 3.6;
03. Sprawdzanie długości ramienia perforowanego w zale
żności od miej-
sca montażu
urządzenia:
l) faza 6: Dosuń ramię do skrzydła bramy, umieszczając na nim uchwyt mocu-
jący: uwaga!
- dociśnij rękami krzywe ramię do skrzydła bramy, aż do
jego zablokowania w przegubie (maksymalne rozwarcie obu ramion).
m) faza 7: Upewnij się, że ramię motoreduktora jest prawidłowo wypozio-
mowane i zaznacz ołówkiem środek
otworów uchwytu, aby umożliwić w
przyszłości dokładne wyregulowanie zamknięcia skrzydła bramy (przeczytaj paragraf 4.8).
n) Przymocuj prowizorycznie uchwyt na skrzydle bramy i doprowadź je do
położenia maksymalnego otwarcia.
04. Przymocowanie ramienia motoreduktora do skrzydła bramy
:
o) faza 8: Wywierć otwory w skrzydle bramy, w miejscach zaznaczonych
wcześniej.
p) faza 9-10: Zdejmij uchwyt z ramienia i przykręć odpowiednimi śrubami
do skrzydła bramy.
q) faza 11: Przymocuj ramię do uchwytu, wkładając sworzeń oraz pier-
ścień zabezpieczający typu benzing. Ważne – Sprawdź, czy uchwyt i ramię
są prawidłowo wypoziomowane. Ewentualnie poluzuj śruby mocujące
uchwyt i prawidłowo wypoziomuj.
r) Wyreguluj mechaniczne ograniczniki położenia; patrz rozdz. 3.5.
s) faza 12: Teraz ustaw ręcznie skrzydło bramy na około połowę otwarcia i
zablokuj motoreduktor specjalnym kluczem (patrz rozdz. 3.6) Następnie
przesuń ręcznie skrzydło bramy kilka centymetrów w kierunku otwarcia,
aby zasprzęglić siłownik.
05. Jeżeli przeznaczona do zautomatyzowania brama jest dwuskrzydłowa, aby
zainstalować drugi motoreduktor musisz powtórzyć wszystkie operacje
opisane w rozdziale 3.4
3.5 - Regulacja mechanicznych ograniczników położenia
01. Ustaw ręcznie skrzydło bramy w położeniu maksymalnego otwarcia;
Page 76

PL
4 – Polski
02. Obróć plastikową tarczę, znajdującą się w dolnej części motoreduktora,
doprowadzając szczelinę pod ramię, do położenia pokazanego na rys. 11-1;
03. Włóż ogranicznik położenia do pierwszego możliwego położenia: spróbuj
włożyć go jak pokazano na rys. 11-2 (kierunek otwierania);
04. Obróć tarczę w taki sposób, aby zapobiec wypadnięciu ogranicznika,
doprowadzając szczelinę do położenia pokazanego na rys. 11-3; wykonaj
bardziej dokładną regulację z pomocą śruby regulacyjnej (rys. 11-4);
05. Jeżeli w instalacji brak ogranicznika zamykania zamontowanego na ziemi,
należy powtórzyć procedurę od punktu 01, również podczas regulacji
ogranicznika zamykania;
06. Teraz dokręć do końca nakrętkę mocującą tarczę (rys. 11-5), aby zapobiec
przypadkowemu jej obróceniu.
3.6 - Blokowanie i odblokowywanie siłownika w trybie ręcznym
Motoreduktor jest wyposażony w mechaniczny system odblokowujący, który
umożliwia otwieranie i zamykanie bramy w trybie ręcznym.
Te operacje wykonywane trybie ręcznym są niezbędne w przypadku braku prądu elektrycznego, nieprawidłowego funkcjonowania bramy lub podczas faz
montażu.
Odblokowywanie (rys. 12-A):
01. Włóż klucz do odpowiedniego zamka;
02. Obróć klucz w kierunku zgodnym z ruchem wskazówek zegara (90°);
03. W wyniku działania sprężyny wysuwa się dźwignia: obróć dźwignię o 90° w
kierunku przeciwnym do ruchu wskazówek zegara;
04. Teraz będzie możliwe ręczne przesunięcie skrzydła bramy do wybranego
położenia.
Blokowanie (rys. 12-B):
01. Obróć dźwignię o 90°, ustawiając drążek w pozycji pionowej;
02. Naciśnij dźwignię wprowadzając ją do gniazda;
03. Obróć klucz o 90° w kierunku przeciwnym do ruchu wskazówek zegara i
wyjmij.
Podłączenie elektryczne różnych urządzeń (fotokomórki, klawiatury cyfrowe,
czytniki kart zbliżeniowych (transpondery), itp., występujących w automatyce z
centralą sterującą, musi być wykonane z zastosowaniem systemu “Bluebus”
firmy Nice.
Opis połączeń elektrycznych (rys. 13)
ANTENA wejście dla anteny odbiornika radiowego
FLASH wyjście dla 1 lampy ostrzegawczej z żarówką 12 V (maksymalnie
21 W). [*]
ELS wyjście dla zamka elektrycznego 12 Vpp (maksymalnie 15 VA). [*]
S.C.A. “Kontrolka Stanu Bramy”: wyjście dla 1 lampy sygnalizującej 24 V,
maksymalnie 4 W. [*]
BLUEBUS wejście dla urządzeń kompatybilnych (MOFB, MOFOB, MOB i
MOTB; równoległe podłączenie urządzeń z zastosowaniem 2
przewodów, przez które przepływa zarówno zasilanie elektryczne
jak i sygnały komunikacji; nie jest konieczne przestrzeganie
biegunowości. Połączenie elektryczne, które należy zastosować
jest połączeniem równoległym, które nie wymaga przestrzegania
żadnej biegunowości. Podczas fazy rozpoznawania każde
urządzenie podłączone do centrali zostanie przez nią rozpoznane
pojedynczo, dzięki jednoznacznemu kodowi. Za każdym razem,
kiedy zostanie dodane lub usunięte jakieś urządzenie, musisz
ponownie przeprowadzić procedurę rozpoznawania (przeczytaj
paragraf 4.6).
STOP wejście dla urządzeń, które swoim działaniem powodują
natychmiastowe zatrzymanie wykonywanego manewru, po nim
następuje krótka zmiana ruchu; możliwość połączenia styków typu
NO, NC lub urządzeń z wyjściem o stałej oporności 8,2 kΩ (listwy
rezystancyjne). Każde urządzenie podłączone do tego wejścia jest
rozpoznawane przez centralę podczas fazy rozpoznawania
(paragraf 3.4). Jeżeli w czasie pracy centrala odczyta na tym
wejściu jakąkolwiek zmianę w stosunku do stanu zapamiętanego
przy programowaniu, natychmiast zatrzyma siłowniki (STOP).
Możesz podłączyć do tego wejścia jedno lub kilka urządzeń,
mogą to być również różne urządzenia:
– podłącz równolegle kilka urządzeń typu NO, bez ograniczenia ilości;
– podłączenie seryjne dowolnej ilości urządzeń NC;
– podłącz równolegle 2 urządzenia z wyjściem o stałej oporności
8,2 kΩ. W przypadku podłączenia więcej jak dwóch urządzeń
musisz podłączyć je kaskadowo, stosując tylko jedną oporność
końcową 8,2 kΩ;
– podłącz równolegle 2 urządzenia typu NO i NC, łącząc szeregowo
styk NC z opornością 8,2 kΩ (umożliwia to również kombinację
pomiędzy 3 urządzeniami NO - NC i 8,2 kΩ)
P. P. wejście dla urządzeń sterujących, które poprzez swoje zadziałanie
powodują wykonanie manewru w trybie Krok po Kroku; możliwość
podłączenia styków typu NO
OPEN wejście dla urządzeń sterujących, które poprzez swoje zadziałanie
PODŁĄCZENIA ELEKTRYCZNE
4
powodują wykonanie manewru otwierania; możliwość podłączenia
styków typu NO
CLOSE wejście dla urządzeń sterujących, które poprzez swoje zadziałanie
powodują wykonanie tylko manewru zamykania; możliwość
podłączenia styków typu NO
ENC1 wejście dla enkodera - motoreduktora 1 (zacisk 1, 2); nie należy
przestrzegać żadnej biegunowości
ENC2 wejście dla enkodera - motoreduktora 2 (zacisk 4, 5); nie należy
przestrzegać żadnej biegunowości
M1 wyjście dla motoreduktora 1 (zacisk 7, 8, 9)
M2 wyjście dla motoreduktora 2 (zacisk 10, 11, 12).
[*] Wyjścia FLASH, ELS i S.C.A. mogą być programowane z innymi funkcjami
(patrz “TABELA 3 - Funkcje 1-go poziomu”; lub z zastosowaniem programatora Oview, przeczytaj rozdział 8.3).
4.1 - Podłączenia elektryczne motoreduktora do centrali
mod. HK7024
Uwaga! – Wykonaj podłączenia elektryczne dopiero po zainstalowaniu
motoreduktora.
ZALECENIA!
– Operacje podłączania muszą być wykonywane wyłącznie przez personel wykwalifikowany.
– Wszystkie podłączenia elektryczne muszą być wykonane po odcięciu
zasilania elektrycznego i odłączeniu akumulatora awaryjnego, jeśli znajduje się w automatyce.
– Na elektrycznej linii zasilania przygotuj urządzenie, które zagwarantuje całko-
wite odłączenie automatyki od sieci. Urządzenie rozłączające zasilanie musi
gwarantować odległość pomiędzy stykami, umożliwiającą całkowite rozłączenie w warunkach zatwierdzonej III kategorii przepięcia, zgodnie z zasadami
montażu. W przypadku, kiedy jest to konieczne, urządzenie to gwarantuje
szybkie i pewne rozłączenie zasilania; dlatego też musi znajdować się w
widocznym miejscu automatyki. Jeżeli natomiast znajduje się w pozycji niewidocznej, musi posiadać system, który zablokuje ewentualne ponowne, przypadkowe lub nieautoryzowane podłączenie zasilania, w celu uniknięcia jakiegokolwiek niebezpieczeństwa. Urządzenie rozłączające nie jest dostarczone
razem z urządzeniem.
01. Otwórz pokrywę (rys. 14-1);
02. Podnieś centralę (rys. 14-2);
03. Włóż przewód zasilający i inne przewody elektryczne przez jeden z otwo-
rów, znajdujących się w dolnej części motoreduktora; ściągnij znajdującą
się na nich izolację (rys. 14-4);
04. Odkręć zacisk i włóż przewód zasilający do specjalnego rowka (rys. 14-5);
05. Podłącz najpierw przewód zasilający, patrz rys. 14-6;
06. Zablokuj przewód zasilający z pomocą zacisku (rys. 14-7);
07. Teraz podłącz przewody elektryczne silników M1 i M2, przestrzegając sym-
boli znajdujących się na tabliczkach (rys. A):
a) podłącz silnik, który uruchamia spodnie skrzydło bramy (drugie
, które
rozpoczyna manewr otwierania) do zacisku M1
(7-8-9), następnie podłącz
odpowiedni enkoder do zacisków 1-2;
b) podłącz silnik, który uruchamia wierzchnie skrzydło bramy (pierwsze
,
które rozpoczyna manewr otwierania) do zacisku
M2 (10-11-12), następnie
podłącz odpowiedni enkoder do zacisków 4-5.
WAŻNE! – Jeżeli w instalacji znajduje się tylko jeden motoreduktor,
podłącz go do zacisku M2, pozostawiając wolny zacisk M1;
08. Teraz podłącz przewody elektryczne pozostałych urządzeń nawiązując do
rys. 17 i przeczytaj paragraf 4.3. Uwaga – Aby ułatwić podłączenie prze-
wodów możesz wyjąć zaciski z gniazd;
09. Zamknij pokrywę motoreduktora (fig. 14-8).
4.2 - Podłączanie motoreduktora bez centrali mod. HK7224
01. Otwórz pokrywę jak pokazano na rys. 15-1;
02. Włóż przewód silnika przez jeden z otworów, znajdujących się w dolnej
części motoreduktora; ściągnij znajdującą się na nich izolację (rys. 15-2);
03. Odkręć zacisk kabla (rys. 15-3), ułóż kabel w specjalnym rowku i podłącz
przewody jak pokazano na rys. 16-4; przestrzegaj symboli zamieszczonych na tabliczce;
03. Zablokuj przewód z pomocą zacisku (rys. 15-5);
04. Zamknij pokrywę motoreduktora (fig. 15-6).
4.3 - Podłączenie innych urządzeń
Jeżeli wymagane jest zastosowanie dodatkowych urządzeń przewidzianych w
instalacji, na przykład czytnika kart zbliżeniowych lub oświetlenia przełącznika
kluczowego, jest możliwe podłączenie tych dwóch urządzeń do centrali sterującej, wykorzystując zaciski “P.P. (dodatni)” i “STOP (ujemny)” (rys. 13). Napię-
ENC1 ENC2
1245789101112
M1 M2
24V
24V
+
-
+
-
A
Page 77

cie zasilania wynosi 24 Vcc (-30% ÷ +50%), maksymalny prąd do dyspozycji
wynosi 200 mA.
Uwaga – Napięcie dostępne w zaciskach “P.P.” i “STOP” pozostaje obecne ró w nież w przypadku włączenia funkcji "Stand By" w centrali.
4.4 - Adresowanie podłączonych urządzeń
Aby umożliwić centrali rozpoznawanie urządzeń podłączonych do systemu
Bluebus należy najpierw zaadresować te urządzenia. Ta operacja musi być
wykonana poprzez prawidłowe ustawienie mostków elektrycznych, znajdujących się w każdym urządzeniu: patrz rys. B.
Aby zaadresować inne urządzenia przeczytaj odpowiednie instrukcje obsługi.
Po wykonaniu procedury instalacji lub w następstwie demontażu fotokomórek
lub innych urządzeń, należy wykonać procedurę rozpoznawania tych urządzeń;
patrz paragraf 4.6.
4.5 - Pierwsze włączenie i weryfikacja połączeń
Po podłączeniu zasilania elektrycznego do centrali sterującej wykonaj następujące czynności:
• odczekaj kilka sekund i sprawdź, czy dioda “Bluebus” (rys. 16) miga prawi-
dłowo, z częstotliwością 1 błysku na sekundę;
• sprawdź, czy diody fotokomórek (rys. 16), zarówno TX jak i RX, wykonują bły-
ski. Rodzaj błysku podczas tej fazy nie jest ważny;
• Sprawdź, czy lampa ostrzegawcza podłączona do wyjścia FLASH jest wyłą-
czona (nie świeci).
Jeżeli jest inaczej odłącz zasilanie centrali i sprawdź połączenia elektryczne.
4.6 - Rozpoznawanie urządzeń podłączonych
Po pierwszym włączeniu urządzenia rozpoznaj z pomocą centrali urządzenia
podłączone do wejść “Bluebus” i “Stop”.
UWAGA! – Faza rozpoznawania musi być wykonana również, jeśli do tych
wejść nie są podłączone żadne urządzenia.
Centrala jest w stanie rozpoznawać różne urządzenia podłączone do niej, dzięki
zastosowaniu procedury rozpoznawania, może również wykrywać możliwe nieprawidłowości w nich występujące. Dlatego też rozpoznawanie urządzeń należy wykonywać zawsze w przypadku dodania lub usunięcia któregokolwiek z urządzeń.
Diody “L1” i “L2” znajdujące się w centrali (rys. 16), wolno migają, wskazując,
że należy uruchomić proces rozpoznawania:
01. Wciśnij równocześnie i przytrzymaj przyciski “” i “Set” (rys. 16).
02. Zwolnij przyciski, kiedy diody “L1” i “L2” zaczną migać szybciej, (po około
PL
Polski – 5
3 sekundach).
03. Odczekaj kilka sekund, aż do zakończenia fazy rozpoznawania urządzeń
przez centralę.
04. Po zakończeniu tej fazy dioda “Stop” musi się zaświecić a diody “L1” i “L2”
muszą zgasnąć, (mogą zacząć migotać diody “L3” i “L4”).
4.7 - Zapamiętanie pozycji mechanicznych ograniczników
położenia
Po zaprogramowaniu podłączonych urządzeń (paragraf 4.6) należy zaprogramować pozycje ograniczników mechanicznych (maksymalne otwarcie i maksymalne zamknięcie). Ta procedura może być wykonywana w trzech trybach:
automatyczny, ręczny i mieszany.
W trybie automatycznym
centrala wykonuje programowanie ograniczników
mechanicznych i oblicza przesunięcia fazowe najbardziej odpowiednie dla
skrzydeł bramy (SA i SC, rys. C).
W trybie ręcznym
następuje pojedynczo zaprogramowanie ośmiu charaktery-
stycznych pozycji skrzydeł bramy (rys. C) poprzez przesuwanie skrzydła bramy
do wybranych miejsc i zapamiętanie go. Programowane położenie jest rozpoznawane dzięki migotaniu jednej z 8 diod (L1...L8), patrz Tabela 2.
W trybie mieszanym
jest możliwe wykonanie procedury automatycznej i
następnie modyfikowanie jednej lub kilku pozycji w trybie ręcznym, za wyjątkiem pozycji “0” i “1” (rys. C), które pokrywają się z pozycjami mechanicznych
ograniczników położenia.
4.7.1 - Programowanie w trybie automatycznym
01. Wciśnij i przytrzymaj wciśnięte jednocześnie przyciski “Set” i “u”;
02. Zwolnij przyciski kiedy diody “L3“ i “L4“ zaczną bardzo szybko migotać (po
około 3 sekundach) ;
03. Sprawdź, czy automatyka wykona następujące manewry:
a - Wolne zamknięcie motoreduktora M1 aż do ogranicznika mechanicznego
b - Wolne zamknięcie motoreduktora M2 aż do ogranicznika mechanicznego
c - Wolne otwarcie motoreduktora M2 a potem motoreduktora M1 aż do
ogranicznika mechanicznego
d - Szybkie całkowite zamknięcie motoreduktora M1 i M2
Zalecenia:
– Jeżeli pierwszy manewr (a) nie powoduje zamknięcia skrzydła bramy, stero-
wanego przez silnik M1 i powoduje natomiast zamknięcie skrzydła sterowanego przez silnik M2, wciśnij przycisk “
” lub “”, aby przerwać fazę programowania. Teraz zamień połączenia silników M1 i M2 na zaciskach znajdujących się w centrali oraz połączenia odpowiednich enkoderów, następnie rozpocznij procedurę od punktu 01;
– Jeżeli pierwsze dwa manewry (a i b) nie są “zamknięciem” ale “otwarciem”,
wciśnij przycisk “
” lub “”, aby zatrzymać fazę programowania. Następnie
w motoreduktorze, który wykonał manewr otwierania zamień biegunowość
B
TABELA 2
Położenie dioda Opis
Położenie 0
(siłownik 1)
Położenie 0
(siłownik 2)
Położenie SA
(siłownik 2)
Położenie A
(siłownik 1)
Położenie A
(siłownik 2)
Położenie SC
(siłownik 1)
Położenie 1
(siłownik 1)
Położenie 1
(siłownik 2)
Położenie maksymalnego zamknięcia: kiedy skrzydło 1 opiera
się o ogranicznik mechaniczny zamykania
Położenie maksymalnego zamknięcia: kiedy skrzydło 2 opiera
się o ogranicznik mechaniczny zamykania
Przesunięcie fazowe podczas otwierania: kiedy skrzydło 2
osiąga to położenie rozpoczyna się otwieranie skrzydła 1
Wybrane położenie otwierania: położenie, w którym skr zy dło
podłączone do siłownika 1 musi zatrzymać się po zakończeniu manewru otwierania. Nie jest konieczne, aby to położenie
pokrywało się z ogranicznikiem mechanicznym otwierania,
może ono być wybierane w zależności od upodobania
pomiędzy położeniami “0” i “1”
Wybrane położenie otwierania: położenie, w którym skrzy dło
podłączone do siłownika 2 musi zatrzymać się po zakończeniu manewru otwierania. Nie jest konieczne, aby to położenie
pokrywało się z ogranicznikiem mechanicznym otwierania,
może ono być wybierane w zależności od upodobania
pomiędzy położeniami “0” i “1”
Przesunięcie fazowe podczas zamykania: kiedy skrzydło 1
osiąga to położenie, rozpoczyna się zamykanie skrzydła 2
Położenie maksymalnego otwarcia: kiedy skrzydło 1 opiera się
o ogranicznik mechaniczny otwierania
Położenie maksymalnego otwarcia: kiedy skrzydło 2 opiera się
o ogranicznik mechaniczny otwierania
L1
L2
L3
L4
L5
L6
L7
L8
0
11
A
SC
SA
A
0
M1 M2
C
POŁOŻENIA
TABELA 2 -
ADRESY FOTOKOMÓREK
Fotokomórka Mostki
FOTO
F
otokomórka zewnętrzna wys. = 50 aktywna podczas
zamykania (zatrzymuje i zmienia kierunek ruchu)
FOTO II
F
otokomórka zewnętrzna wys. = 100 aktywna podczas
zamykania (zatrzymuje i zmienia kierunek ruchu)
FOTO 1
F
otokomórka wewnętrzna wys. = 50 aktywna
zarówno podczas zamykania (zatrzymuje i zmienia
kierunek ruchu) jak i podczas otwierania (zatrzymuje
i wznawia ruch po zwolnieniu fotokomórki)
FOTO 1 II
F
otokomórka wewnętrzna wys. = 100 aktywna
zarówno podczas zamykania (zatrzymuje i zmienia
kierunek ruchu) jak i podczas otwierania (zatrzymuje
i wznawia ruch po zwolnieniu fotokomórki)
FOTO 2
F
otokomórka wewnętrzna aktywna podczas
zamykania (zatrzymuje i zmienia kierunek ruchu)
FOTO 2 II
F
otokomórka wewnętrzna aktywna podczas
otwierania (zatrzymuje i zmienia kierunek ruchu)
FOTO 3
KONFIGURACJA NIEDOZWOLONA
Page 78

PL
6 – Polski
dwóch przewodów: w motoreduktorze M1 (zaciski 7 i 9) a w motoreduktorze
M2 (zaciski 10 i 12), i rozpocznij procedurę od punktu 01;
04. Po zakończeniu manewru zamykania obu siłowników (d), diody “L3” i “L4”
zgasną, wskazując, że procedura została wykonana prawidłowo.
Zalecenia:
– Jeżeli podczas procedury programowania w trybie automatycznym zostanie
stwierdzone zadziałanie fotokomórek lub urządzenia podłączonego do wejścia
“stop”, procedura zostanie przerwana a dioda L1 zacznie migotać. Aby
ponownie uaktywnić programowanie należy wznowić procedurę od punktu 01;
– Procedura programowania w trybie automatycznym może zostać wznowio-
na w dowolnej chwili, również po dokonaniu montażu; na przykład w następstwie zmiany pozycji ograniczników mechanicznych.
4.7.2 - Programowanie w trybie ręcznym
Uwaga! – Poczynając od kroku 03:
– aby przejść z diody L1 do L8
należy krótko wcisnąć przycisk lub (dioda
będzie migotać wskazując aktualne położenie);
– aby umożliwić przemieszczanie się silnika
w danym kierunku należy wcisnąć
i przytrzymać przycisk lub .
01. Wciśnij i przytrzymaj
jednocześnie przyciski “Set” i “”;
02. Zwolnij je, kiedy dioda “L1” zaczyna migotać (po około 1 sekundzie); Uwa-
ga – Po upłynięciu 3 sekund, jeżeli przyciski “Set” i “” nie zostaną w tym
czasie zwolnione, uaktywni się procedura “programowanie w trybie auto
-
matycznym
” w zastępstwie programowania w trybie ręcznym.
03. • dioda
L1 miga: położenie 0 M1
Aby ustawić siłownik 1 w położeniu 0 (rys. C): wciśnij i przytrzymaj
przycisk “” lub “”. Po uzyskaniu wymaganego położenia zwolnij przycisk,
aby za trzymać wykonywany manewr. Aby wczytać położenie wciśnij i
przytrzymaj przycisk “Set” przez co najmniej 3 sek. i następnie zwolnij,
(po 2 sek. dioda L1 zapali się na stałe a po zwolnieniu przycisku “Set”
zaczyna migać dioda L2).
• dioda
L2 miga: położenie 0 M2
Aby ustawić siłownik 2w położeniu 0 (rys. C): wciśnij i przytrzymaj przy-
cisk “” lub “”. Po uzyskaniu wymaganego położenia zwolnij przycisk,
aby za trzymać wykonywany manewr. Aby wczytać położenie wciśnij i
przytrzymaj przycisk “Set” przez co najmniej 3 sek. i następnie zwolnij,
(po 2 sek. dioda L2 zapali się na stałe a po zwolnieniu przycisku “Set”
zaczyna migać dioda L3).
• dioda
L3 miga: położenie SA M2
Aby stawić siłownik 2 w położeniu SA (rys. C): wciśnij i przytrzymaj przycisk “” lub “”. Po uzyskaniu wymaganego położenia zwolnij przycisk,
aby za trzymać wykonywany manewr. Aby wczytać położenie wciśnij i
przytrzymaj przycisk “Set” przez co najmniej 3 sek. i następnie zwolnij,
(po 2 sek. dioda L3 zapali się na stałe a po zwolnieniu przycisku “Set”
zaczyna migać dioda L4).
• dioda
L4 miga: położenie A M1
Aby ustawić siłownik 1 w położeniu A (rys. C): wciśnij i przytrzymaj przycisk “” lub “”. Po uzyskaniu wymaganego położenia zwolnij przycisk,
aby za trzymać wykonywany manewr. Aby wczytać położenie wciśnij i
przytrzymaj przycisk “Set” przez co najmniej 3 sek. i następnie zwolnij,
(po 2 sek. dioda L4 zapali się na stałe a po zwolnieniu przycisku “Set”
zaczyna migać dioda L5).
• dioda
L5 miga: położenie A M2
Aby ustawić siłownik 2 w położeniu A (rys. C): wciśnij i przytrzymaj przycisk “” lub “”. Po uzyskaniu wymaganego położenia zwolnij przycisk,
aby za trzymać wykonywany manewr. Aby wczytać położenie wciśnij i
przytrzymaj przycisk “Set” przez co najmniej 3 sek. i następnie zwolnij,
(po 2 sek. dioda L5 zapali się na stałe a po zwolnieniu przycisku “Set”
zaczyna migać dioda L6).
• dioda
L6 miga: położenie SC M1
Aby ustawić siłownik 1 w położeniu SC (rys. C): wciśnij i przytrzymaj
przycisk “” lub “”. Po uzyskaniu wymaganego położenia zwolnij przycisk, aby za trzymać wykonywany manewr. Aby wczytać położenie wciśnij i przytrzymaj przycisk “Set” przez co najmniej 3 sek. i następnie zwolnij, (po 2 sek. dioda L6 zapali się na stałe a po zwolnieniu przycisku “Set”
zaczyna migać dioda L7).
• dioda
L7 miga: położenie 1 M1
Aby ustawić siłownik 1w położeniu 1 (rys. C): wciśnij i przytrzymaj przy-
cisk “” lub “”. Po uzyskaniu wymaganego położenia zwolnij przycisk,
aby za trzymać wykonywany manewr. Aby wczytać położenie wciśnij i
przytrzymaj przycisk “Set” przez co najmniej 3 sek. i następnie zwolnij,
(po 2 sek. dioda L7 zapali się na stałe a po zwolnieniu przycisku “Set”
zaczyna migać dioda L8).
• dioda
L8 miga położenie 1 M2
Aby ustawić siłownik 2 w położeniu 1 (rys. C): wciśnij i przytrzymaj przy-
cisk “” lub “”. Po uzyskaniu wymaganego położenia zwolnij przycisk,
aby za trzymać wykonywany manewr. Aby wczytać położenie wciśnij i
przytrzymaj przycisk “Set” przez co najmniej 3 sek. i następnie zwolnij,
aby wyjść z programowania, (po upływie 2 sek. dioda L8 zapali się na
stałe - aż do zwolnienia przycisku “Set”).
Uwaga – Aby zaprogramować w trybie ręcznym instalację, w której znajduje się tylko jeden motoreduktor, należy postępować jak opisano w para-
grafie 4.7.2 oraz w kroku 03. Należy zaprogramować najpierw pozycję “0” i
następnie “1” motoreduktora M1, pomijając część dotyczącą przycisków “” i
“”, wciskając zgodnie z opisem tylko przycisk “Set”. Ważne! – W procedu-
rze wykonywanej w trybie ręcznym nie mogą być programowane pozycje
“SA” motoreduktora M2, pozycje “A” motoreduktora M1 oraz pozycje
“SC” motoreduktora M1.
4.7.3 - Programowanie w trybie mieszanym
Wykonaj tę procedurę po wcześniejszym zaprogramowaniu urządzenia w trybie automatycznym:
Oto najważniejsze czynności wybrane tak, by zagwarantować maksimum bezpieczeństwa i niezawodność automatyki. Procedura testowania może być również zastosowana przy okresowej kontroli poszczególnych urządzeń automatyki. Procedura testowania i odbioru musi być przeprowadzona przez wykwalifikowany i doświadczony personel, który musi ocenić jakie testy przeprowadzić,
oceniając wymagany poziom bezpieczeństwa i zgodność instalacji z obowiązującymi przepisami i normami, a szczególnie z postanowieniami EN 12445, która określa metody testów dla systemów automatyki bram.
Urządzenia dodatkowe muszą zostać poddane specjalnej procedurze testowej, zarówno ze względu na ich funkcjonalność jak i odnośnie prawidłowego
współdziałania z HYKE; należy postępować zgodnie z instrukcjami zawartymi w
instrukcjach obsługi poszczególnych urządzeń.
5.1 - Odbiór
Sekwencja czynności do wykonania podczas procedury testowania odnosi się
do typowej instalacji (rys. 3):
1 Sprawdź, czy są ściśle przestrzegane wszelkie zalecenia przewidziane w
rozdziale “Zalecenia dotyczące instalacji”.
2 Odblokować ręcznie siłowniki i sprawdzić, czy naciskając na skrzydło bra-
my, w miejscu przewidzianym do manewrów ręcznych, możliwe jest przesunięcie skrzydeł bramy podczas otwarcia lub zamknięcia, przy użyciu siły
mniejszej od 390 N.
3 Zablokować siłowniki (zob. rozdział 3.6).
4 Używając urządzeń sterujących (nadajnika, przycisku sterowania, przełącz-
nika kluczykowego, itd.), wykonać próby Otwarcia, Zamknięcia i Zatrzymania bramy, upewniając się, czy ruch skrzydeł bramy odpowiada temu przewidzianemu. Zaleca się przeprowadzenie wielu, aby następnie móc określić
ruch skrzydeł bramy i upewnić się, czy zostały wyeliminowane ewentualne
błędy w montażu, błedy regulacyjne lub występowanie punktów tarcia
5 Sprawdzić działanie wszystkich urządzeń zabezpieczających wchodzących
w skład instalacji: (fotokomórki, listwy ochronne itd.). Gdy urządzenie uruchomi się, spowoduje 2 szybkie mignięcia diody led “BLUEBUS”, znajdującej się
na centrali, jako potwierdzenie przeprowadzonej procedury rozpoznania.
6 Jeśli niebezpieczne sytuacje powodowane przez ruch skrzydeł bramy
zostały wyeliminowane poprzez ograniczenie uderzenia, należy zmierzyć
siłę uderzenia wg normy EN 12445 i ewentualnie, by pomóc systemowi w
ograniczeniu uderzenia, należy spróbować znaleźć regulację dającą najlepsze rezultaty.
5.2 - Uruchamianie
Uruchomienie powinno nastąpić dopiero po pomyślnym zakończeniu
wszystkich testów.
1 Sporządzić dokumentację techniczną automatyki, która powinna zawierać
następujące dokumenty: rysunek zestawieniowy automatyki, schemat
połączeń elektrycznych, analizę ryzyka wraz z opisem wdrożonych środków zapobiegawczych, deklarację zgodności producenta wszystkich użytych urządzeń oraz deklarację zgodności wypełnioną przez osobę, która
dokonała montażu.
ODBIÓR TECHNICZNY I URUCHAMIANIE
5
01. Wciśnij i przytrzymaj jednocześnie wciśnięte przyciski “Set” i “”;
02. Zwolnij je, kiedy dioda “L1” zaczyna migotać (po około 1 sekundzie); Uwa-
ga – Po upłynięciu 3 sekund, jeżeli przyciski “Set” i “
” nie zostaną zwol-
nione, uaktywni się procedura “programowanie w trybie automatycznym
”
w zastępstwie programowania w trybie ręcznym.
03. Krótko wciskając przycisk “” lub “” zmień pozycję migającej diody
(L1…L8) na tę, którą zamierzasz zaprogramować i kontynuuj w ten sam
sposób dla każdej pojedynczej pozycji, jak opisano w kroku 03 programowania w trybie ręcznym (paragraf 4.7.2).
Powtórz tę ostatnią operację dla wszystkich pozostałych pozycji, które
zamierzasz zmienić.
Aby zakończyć programowanie w trybie ręcznym wciśnij kilkakrotnie przycisk
“”, aby zmienić pozycje migającej diody i przesunąć ją powyżej L8.
4.8 - Kontrola ruchu skrzydeł bramy
Po zakończeniu fazy rozpoznawania zaleca się wykonanie kilku manewrów
otwierania i zamykania, sterowanych przez centralę, aby w ten sposób sprawdzić poprawność ruchu bramy i wychwycić ewentualne usterki montażowe i
regulacyjne.
01. Wciśnij przycisk “Open”. Sprawdź prawidłowe przesunięcie fazowe skrzy-
deł bramy podczas otwierania, sprawdź również, czy podczas manewru
otwierania występuje faza przyspieszania, faza ruchu ze stałą prędkością, i
faza zwalniania oraz czy skrzydła zatrzymują się w odległości kilku centymetrów od ograniczników mechanicznych otwierania;
02. Wciśnij przycisk “Close” i sprawdź, czy podczas manewru zamykania
występuje faza przyspieszania, faza ruchu ze stałą prędkością i faza zwalniania. Sprawdź prawidłowe przesunięcie fazowe skrzydeł bramy podczas
zamykania. Po zakończeniu operacji skrzydła bramy muszą być perfekcyjnie zamknięte, opierając się na ograniczniku mechanicznym zamykania;
03. Sprawdź, czy podczas wykonywania manewru lampa ostrzegawcza miga
regularnie z częstotliwością - raz na sekundę (0,5s włączona i 0,5s wyłączona).
Page 79

PL
Polski – 7
2 Na bramie umieścić tabliczkę zawierającą przynajmniej następujące dane:
typ automatu, nazwę i adres producenta (osoby odpowiedzialnej za “rozruch”), numer fabryczny, rok produkcji i znak “CE”.
3 Wypełnić Deklarację Zgodności i przekazać ją właścicielowi systemu auto-
matyki.
4 Wypełnić i zwrócić właścicielowi automatyki “Instrukcję obsługi” automatyki.
5 Wypełnić i oddać właścicielowi automatyki “Program przeglądów”, który
powinien zawierać dane dotyczące konserwacji wszystkich urządzeń składowych automatyki.
6 Przed przekazaniem instalacji należy poinformować użytkownika o zagro-
żeniach i niebezpieczeństwach związanych z automatyką.
Odnośnie powyższej dokumentacji, firma Nice dzięki serwisowi obsługi
technicznej oddaje do dyspozycji Klientów: instrukcje obsługi, przewodniki i
wstępnie wypełnione formularze. Odwiedź także: www.nice-service.com
Na centrali znajdują się 3 przyciski OPEN (), STOP (SET), CLOSE (), które
mogą być wykorzystywane zarówno do sterowania centrali podczas faz próbnych, jak również podczas programowania dostępnych funkcji.
Funkcje programowalne będące do dyspozycji użytkownika, są rozmieszczone
na 2 poziomach, ich stan jest sygnalizowany przez 8 diod (L1 ... L8) na centrali, (dioda świeci się
= funkcja jest aktywna; dioda nie świeci się = funkcja jest
nieaktywna).
Używanie przycisków programowania:
OPEN (): – przycisk umożliwiający sterowanie otwieraniem bramy; – przycisk
wyboru podczas fazy programowania.
STOP/SET: przycisk umożliwiający zatrzymanie wykonywanego manewru;
jeżeli pozostanie wciśnięty przez dłużej niż 5 sekund umożliwia wejście do fazy
programowania.
CLOSE (): – przycisk umożliwiający sterowanie zamykaniem bramy; – przy-
cisk wyboru podczas fazy programowania.
6.1 - Programowanie pierwszego poziomu (ON-OFF)
Wszystkie funkcje pierwszego poziomu są ustawione fabrycznie na “OFF” i
mogą być zmieniane w każdej chwili. Aby sprawdzić różne funkcje przejrzyj
Tabelę 3. Procedura programowania funkcji jest przedstawiona w Tabeli 4.
WAŻNE – Podczas wykonywania procedury programowania maksymalny czas
trwania przerwy pomiędzy wciśnięciem kolejnych przycisków wynosi 10
sekund. Po upływie tego czasu procedura kończy się automatycznie, zostaną
zapamiętane funkcje ustawione do tej chwili.
PROGRAMOWANIE CENTRALI STERUJĄCEJ
6
TABELA 3 - Funkcje pierwszego poziomu
Dioda Funkcja Opis
L1 Automatyczne zamykanie
L2 Zamknij po FOTO
L3 Zamknij zawsze
L4 Stan czuwania całego urządzenia
L5 Zamek elektryczny/ Światełko nocne
L6 Miganie wstępne
L7 “Zamknięcie” zmienia się na
“Otwarcie częściowe 1”
L8 “Kontrolka stanu bramy” lub
“Kontrolka konserwacji”
Funkcja AKTYWNA: po wykonaniu manewru otwierania następuje przerwa, (równa zaprogramowanemu
czasowi trwania przerwy), po której centrala automatycznie uruchamia manewr zamykania. Ustawiona
fabrycznie wartość czasu przerwy wynosi 30 sek.
Funkcja NIEAKTYWNA: funkcjonowanie “półautomatyczne”.
Funkcja AKTYWNA
: jeżeli podczas manewru otwierania lub zamykania zadziałają fotokomórki, czas trwa-
nia przerwy zostaje skrócony do 5 sek., niezależnie od zaprogramowanego "czasu trwania przerwy”.
W przypadku, kiedy “automatyczne zamykanie” jest nieaktywne, jeśli podczas zamykania zadziałają fotokomórki, następuje uaktywnienie “automatycznego zamykania”, z zaprogramowanym “czasem trwania przerwy”.
Funkcja AKTYWNA
: w przypadku przerwy w dopływie energii elektrycznej, również krótkiej, po ponownym podłączeniu prądu centrala rozpoznaje, że brama jest otwarta i automatycznie uruchamia manewr
zamykania, poprzedzony przez trwające 5 sek. miganie lampy ostrzegawczej.
Funkcja NIEAKTYWNA: po ponownym podłączeniu prądu elektrycznego brama pozostaje w spoczynku.
F
unkcja AKTYWNA: po upłynięciu 1 minuty od zakończenia manewru centrala wyłączy wyjście “Bluebus”
(podłączone urządzenia), magistralę T4 (podłączone urządzenia), wyjścia flash, ELS i sca, niektóre obwody wewnętrzne oraz wszystkie diody, oprócz diody Bluebus, która będzie wolniej migotać. Kiedy centrala
otrzyma polecenie, przywróci prawidłowe funkcjonowanie urządzenia (z krótkim opóźnieniem). Celem tej
funkcji jest ograniczenie zużycia energii elektrycznej, ważny aspekt w przypadku zasilania z akumulatora
lub z zastosowaniem paneli fotoelektrycznych.
F
unkcja AKTYWNA: wyjście “zamek elektryczny” realizuje funkcję “światełko nocne”.
Funkcja NIEAKTYWNA: wyjście funkcjonuje jako obsługa zamka elektrycznego.
F
unkcja AKTYWNA: lampa ostrzegawcza zacznie migać 3sekundy przed rozpoczęciem manewru (otwierania i zamykania), w celu zasygnalizowania z wyprzedzeniem sytuacji niebezpiecznej.
Funkcja NIEAKTYWNA: sygnalizacja lampy ostrzegawczej pokrywa się z rozpoczęciem manewru.
F
unkcja AKTYWNA: sygnał sterujący, podany na wejście “Zamykanie” (lub aktywacja 4 kanału odbiornika
radiowego wywoła “częściowe otwarcie 1”.
F
unkcja AKTYWNA: wyjście “kontrolka stanu bramy” przełączy się na funkcję “kontrolka konserwacji”.
Funkcja NIEAKTYWNA: wyjście funkcjonuje jako “kontrolka stanu bramy”.
TABELA 4 - Procedura programowania pierwszego poziomu
01. Wciśnij i przytrzymaj przycisk “Set” przez około 3 sekundy;
02. Zwolnij przycisk, kiedy dioda “L1” zacznie migać;
03. Wciskając przycisk “” lub “” przesuń migającą diodę na pozycję odpowiadającą funkcji, którą należy zmienić;
04. Wciśnij na krótki przycisk “Set” aby zmienić stan funkcji:
(krótki błysk = OFF - długi błysk = ON);
05. Odczekaj 10 sekund (maksymalny czas), aby wyjść z programowania.
Uwaga – Aby zaprogramować inne funkcje na “ON” lub “OFF”, podczas wykonywania tej procedury można powtórzyć punkty 03 i 04 nie wychodząc z programowania.
SET
SET
SET
L1
lub
3 s
10 s
Page 80

PL
8 – Polski
TABELA 5 - Funkcje drugiego poziomu
Dioda Parametr Dioda Wartość Opis
wejścia (poziom)
L1
L1
L2
L3
L4
L5
L6
L7
L8
5 sekund
15 sekund
30 sekund
45 sekund
60 sekund
80 sekund
120 sekund
180 sekund
Reguluje czas trwania przerwy, czyli
zwłokę przed zamknięciem automatycznym. Działa wyłącznie, jeśli “automatyczne zamknięcie” jest aktywne.
Czas
trwania
przerwy
L2 L1
L2
L3
L4
L5
L6
L7
L8
Otwarcie – stop – zamknięcie – stop
Otwarcie – stop – zamknięcie – otwarcie
Otwarcie – zamknięcie – otwarcie – zamknięcie
Zespół mieszkalny:
• podczas manewru otwierania
polecenie “Krok po kroku” i “Otwieranie” nie
działają; natomiast polecenie “Zamykanie” powoduje zmianę ruchu, czyli
zamknięcie bramy.
• podczas manewru zamykania polecenie “Krok po kroku” i “Otwieranie”
powodują zmianę ruchu, czyli otwarcie bramy; natomiast polecenie “Zamykanie” nie wywiera żadnego skutku.
Cspół mieszkalny 2:
• podczas manewru otwierania
polecenie “Krok po kroku” i “Otwieranie”
nie działają; natomiast polecenie “Zamykanie” powoduje zmianę ruchu,
czyli zamknięcie bramy. Jeżeli wysyłane polecenie trwa więcej niż 2
sekundy, brama przejdzie do stanu “Stop”.
• podczas manewru zamykania polecenie “Krok po kroku” i “Otwieranie”
powodują zmianę ruchu, czyli otwarcie bramy; natomiast polecenie “Zamykanie” nie działa. Jeżeli wysyłane polecenie trwa więcej niż 2 sekundy,
brama przejdzie do stanu “Stop”.
Krok po kroku 2 (sygnał krótszy niż 2s daje otwarcie częściowe)
W obecności użytkownika: manewr zostanie wykonany wyłącznie, jeśli
wysłane polecenie nadal trwa; jeżeli natomiast zostanie ono przerwane
manewr zostanie zatrzymany.
otwieranie w trybie “półautomatycznym”, zamykanie “w obecności użytkownika”
Reguluje sekwencję poleceń połączonych z wejściem “Krok po Kroku”, “Ot-
wieranie”, “Zamykani” lub z poleceniem
radiowym.
Uwaga – Ustawiając L4, L5, L7 i L8,
ulega zmianie również zachowanie poleceń “Otwieranie” i “Zamykanie”.
Funkcja
Krok po
Kroku
L3
L1
L2
L3
L4
L5
L6
L7
L8
Bardzo niska
Niska
Średnia
Duża
Bardzo duża
Maksymalna
Otwieranie szybkie (L4), Zamykanie wolne (L2)
Otwieranie maksymalnie szybkie (L6), Zamykanie ze średnią prędkością (L3)
Reguluje prędkość silników podczas
ruchu głównego.
Prędkość
siłowników
L6 L1
L2
L3
L4
L5
L6
L7
L8
Furtka 1 (otwarcie skrzydła 2 na 1/4 pełnego otwarcia)
Furtka 2 (otwarcie skrzydła 2 na 1/2 pełnego otwarcia)
Furtka 3 (otwarcie skrzydła 2 na 3/4 pełnego otwarcia)
Furtka 4 (całkowite otwarcie skrzydła 2)
Częściowe 1 (otwarcie obu skrzydeł na 1/4 otwarcia “minimalnego”)
Częściowe 2 (otwarcie obu skrzydeł na 1/2 otwarcia “minimalnego”)
Częściowe 3 (otwarcie obu skrzydeł na 3/4 otwarcia “minimalnego”)
Częściowe 4 (pełne otwarcie obu skrzydeł równe otwarciu “minimalnemu”)
Reguluje rodzaj otwarcia połączonego
z poleceniem “otwarcie częściowe 1”.
Na poziomach L5, L6, L7, L8; przez ot warcie “minimalne” przyjmowane jest
mniejsze otwarcie spośród M1 i M2;
na przykład, jeżeli M1 otwiera się na
90° a M2 na 110°; otwarcie minimalne
wynosi 90°
Furtka dla
pieszych
lub
częściowe
otwarcie
L4 L1
L2
L3
L4
L5
L6
L7
L8
Brak odprężenia
Poziom 1 - Odprężenie minimalne (około 100 ms)
Poziom 2 - ...
Poziom 3 - ...
Poziom 4 - ...
Poziom 5 - ...
Poziom 6 - ...
Poziom 7 - Rozładowanie maksymalne (około 800 ms)
Reguluje czas trwania “krótkiego rewersu” w obu silnikach, po wykonaniu
Zamknięcia, w celu zredukowania na prę żenia w zamkniętej bramie.
Odprężenie
siłowników
po zamknięciu
L5 L1
L2
L3
L4
L5
L6
L7
L8
Poziom 1 - Siła minimalna
Poziom 2 - ...
Poziom 3 - ...
Poziom 4 - ...
Poziom 5 - ...
Poziom 6 - ...
Poziom 7 - ...
Poziom 8 - Siła maksymalna
Reguluje siłę obu silników.Siła
siłowników
6.2 - Programowanie drugiego poziomu (parametry regulowane)
Wszystkie parametry drugiego poziomu są wstępnie ustawione fabrycznie; są
one zaznaczone szarym kolorem w Tabeli 5 i mogą być modyfikowane w każ-
dej chwili, zgodnie z opisem zamieszczonym w Tabeli 6.
Parametry są regulowane w skali od 1do 8; aby sprawdzić wartość odpowia-
dającą każdej diodzie przejrzyj Tabelę 8. WAŻNE – Podczas wykonywania
procedury programowania maksymalny czas trwania przerwy pomiędzy wciśnięciem kolejnych przycisków wynosi 10 sekund. Po upływie tego czasu procedura kończy się automatycznie i zostaną zapamiętane funkcje, ustawione do
tej chwili.
Page 81

PL
Polski – 9
6.3 - Funkcje szczególne
6.3.1 - Funkcja: “Uruchom zawsze”
Ta funkcja umożliwia funkcjonowanie automatyki również w przypadku, kiedy
jakieś urządzenie zabezpieczające nie funkcjonuje prawidłowo lub jest niezdatne do użytku.
Jest wtedy możliwe sterowanie automatyką w trybie ręcznym (“w obecności
użytkownika”), postępując w następujący sposób:
01. Wyślij z pomocą nadajnika lub przełącznika kluczowego, itp. polecenie,
aby uruchomić bramę. Jeżeli wszystkie urządzenia funkcjonują prawidłowo brama będzie działać prawidłowo, w przeciwnym przypadku należy
postępować jak opisano niżej:
02. w ciągu 3 sekund ponownie uaktywnij polecenie i przytrzymaj sygnał (przy-
cisk, przekręcony kluczyk itp.);
03. po upływie około 2 sekund brama wykona żądany manewr w trybie ręcz-
nym (“w obecności użytkownika”), czyli będzie się poruszać wyłącznie
dopóki sygnał będzie aktywny.
Jeżeli urządzenia zabezpieczające nie funkcjonują prawidłowo, lampa ostrzegawcza wykona kilka krótkich błysków, umożliwiających rozpoznanie rodzaju
problemu (przeczytaj rozdział 6 - Tabela 8).
6.3.2 - Funkcja: “Zawiadomienie o konserwacji”
Ta funkcja służy do sygnalizowania, kiedy należy wykonać przegląd automatyki. Zawiadomienia o konserwacji następuje przy pomocy lampki podłączonej
do wyjścia S.C.A., w przypadku, kiedy to wyjście jest zaprogramowane, jako
“Kontrolka konserwacji”. Różne sygnały kontrolki są podane w Tabeli 7.
Aby zaprogramować ilość manewrów do przeglądu przejrzyj Tabelę 5.
Niektóre urządzenia mogą wysyłać sygnały, z pomocą których jest możliwe rozpoznanie stanu funkcjonowania lub ewentualnych anomalii.
Jeżeli do wyjścia FLASH, znajdującego się w centrali, zostanie podłączona lampa ostrzegawcza, będzie ona migać podczas wykonywania manewru w odstępach 1- sekundowych. W przypadku wystąpienia anomalii, lampa ostrzegawcza wykona serię krótkich błysków, która zostanie powtórzona dwa razy, z 1sekundową pauzą. W Tabeli 8 opisana jest przyczyna i rozwiązanie, odpowia-
dające różnym komunikatom.
Również diody znajdujące się na centrali wysyłają różne sygnały; w Tabeli 9 jest
opisana przyczyna i rozwiązanie odpowiadające różnym komunikatom.
Jest możliwe odczytanie ewentualnych anomalii, które wystąpiły w czasie
ostatnich 8 manewrów; odwołaj się do Tabeli 10.
CO ZROBIC JEŚLI...
(przewodnik do rozwiązywania problemów)
7
TABELA 6 - Procedura programowania drugiego poziomu
01. Wciśnij i przytrzymaj przycisk “Set” przez około 3 sekundy;
02. Zwolnij przycisk, kiedy dioda “L1” zacznie migać;
03. Wciskając przycisk “” lub “” przesuń migającą diodę na pozycję odpowiadającą parametrowi, który chcesz modyfikować;
04. Wciśnij i przytrzymaj przycisk “Set” aż do zakończenia punktu 06;
05. Odczekaj około 3 sekundy, aż do zaświecenia się diody, która reprezentuje aktualny poziom modyfikowanego parametru;
06. Naciskaj przycisk “” lub “” aby zmienić diodę, która reprezentuje wartość parametru;
07. Zwolnij przycisk “Set”;
08. Odczekaj 10 sekund (maksymalny czas), aby wyjść z programowania.
Uwaga – Aby zaprogramować kilka parametrów podczas wykonywania tej procedury, powtórz operacje od punktu 03 do punktu 07, nie wychodząc z programowania.
SET
SET
SET
SET
L1
lub
lub
3 s
10 s
Tabela 7 - Sygnalizacja “Kontrolka konserwacji”
Ilość manewrów Sygnalizacja
Kontrolka świeci się przez 2 sekundy na początku każdego
manewru.
Kontrolka miga przez cały czas trwania manewru.
Kontrolka miga stale.
Poniżej 80% limitu
Od 81% do 100% limitu
Powyżej 100% limitu
6.4 - Kasowanie pamięci
Aby skasować pamięć centrali i zresetować wszystkie ustawienia fabryczne
postępuj w następujący sposób:
wciśnij i przytrzymaj przyciski “” i “” , dopóki diody led L1 i L2 nie zaczną
migotać.
Uwaga – Kolorem szarym oznaczone są wartości ustawione fabrycznie.
L8 L1
L2
L3
L4
L5
L6
L7
L8
Wynik 1-go manewru (ostatniego)
Wynik 2-go manewru
Wynik 3-go manewru
Wynik 4-go manewru
Wynik 5-go manewru
Wynik 6-go manewru
Wynik 7-go manewru
Wynik 8-go manewru
Umożliwia sprawdzenie typu anomalii,
która nastąpiła podczas wykonywania
ostatnich 8 manewrów.
Patrz TABELA 10 - Wykaz historii ano malii.
Wykaz
anomalii
L7 L1
L2
L3
L4
L5
L6
L7
L8
500
1000
1500
2500
5000
10000
15000
20000
Ustala ilość manewrów, po przekroczeniu której centrala zasygnalizuje ko nieczność wykonania przeglądu au tomatyki; przeczytaj paragraf 6.3.2. –
Zawiadomienie o konserwacji.
Zawiadomienie o
konserwacji
Page 82

PL
10 – Polski
TABELA 8 - Sygnalizacja lampy ostrzegawczej (FLASH)
Błyski Problem Rozwiązanie
krótki błysk
1- sekundowa przerwa
1 krótki błysk
2 krótkie błyski
1 - sekundowa przerwa
2 krótkie błyski
3 krótkie błyski
1 - sekundowa przerwa
3 krótkie błyski
4 krótkie błyski
1 - sekundowa przerwa
4 krótkie błyski
5 krótkich błysków
1 - sekundowa przerwa
5 krótkich błysków
6 krótkich błysków
1 - sekundowa przerwa
6 krótkich błysków
7 krótkich błysków
1 - sekundowa przerwa
7 krótkich błysków
8 krótkich błysków
1 - sekundowa przerwa
8 krótkich błysków
9 krótkich błysków
1 - sekundowa przerwa
9 krótkich błysków
10 krótkich błysków
1 - sekundowa przerwa
10 krótkich błysków
Kompletacja urządzeń podłączonych do Bluebus, sprawdzana na poc zątku manewru, nie odpowiada tej - zapamiętanej podczas fazy rozpoznawania. podejrzenie urządzeń odłączonych lub uszkodzonych, sprawdź
je lub wymień, jeśli jest to konieczne. Jeżeli zostały wprowadzone zmiany
ponownie rozpoznaj urządzenia, (przeczytaj paragraf 4.6).
Brak przyzwolenia na ruch z jednej lub kilku linii FOTO lub zmiana ruchu
spowodowana przez fotokomórki; sprawdź i usuń przeszkodę.
Siłowniki napotkały podczas ruchu większe obciążenie; sprawdź przyczynę i ewentualnie zwiększ poziom siły siłowników
Na początku manewru lub podczas ruchu zadziałało jedno z urządzeń
podłączonych do wejścia STOP; sprawdź przyczynę.
Odczekaj co najmniej 30 sekund i następnie ponownie spróbuj wysłać
polecenie, ewentualnie wyłącz i po chwili włącz zasilanie; jeżeli ten stan
utrzymuje się nadal, możliwe, że nastąpiło poważne uszkodzenie i należy
wymienić centralę.
Odczekaj kilka minut, aby w ten sposób ponownie ustawić ogranicznik
manewrów poniżej maksymalnej granicy.
Odczekaj co najmniej 30 sekund i następnie ponownie spróbuj wysłać
polecenie, ewentualnie wyłącz i po chwili włącz zasilanie; jeżeli ten stan
utrzyma się nadal, jest możliwe, że nastąpiło poważne uszkodzenie i
należy wymienić centralę.
Sprawdź charakter sygnału; np. sygnał z timera na wejściu “otwarcie”.
Odblokuj automatykę wysyłając polecenie “Odblokuj automatykę”.
Siłowniki zostały podczas ruchu przeciążone przez większe tarcie;
sprawdź przyczynę.
Błąd w systemie Bluebus
Zadziałanie fotokomórki
Zadziałanie funkcji “Wykrywanie
przeszkód”
Zadziałanie wejścia STOP
Błąd w parametrach wewnętrznych
centrali sterującej
Została przekroczona maksymalna do puszczalna ilość kolejnych manewrów lub ilość
manewrów wykonanych w ciągu godziny
Anomalia w obwodach elektrycznych
Sygnał sterujący nie został wyłączony i blokuje to wykonanie innych poleceń
Automatyka została zablokowana pr zez
polecenie "Zablokuj automatykę"
Zadziałanie funkcji “Wykrywanie przeszkód”
z enkodera
TABELA 9 - Sygnalizacje diod w centrali sterującej (rys. 16)
Dioda Problem Rozwiązanie
BLUEBUS
Zgaszona
Świeci
1 błysk na sekundę
2 szybkie błyski
Seria błysków z przerwą
1 - sekundową
STOP
Zgaszona
Świeci
P. P.
Zgaszona
Świeci
OPEN
Zgaszona
Świeci
CLOSE
Zgaszona
Świeci
L1 - L2 Wolne miganie
L3 - L4 Wolne miganie
Anomalia
Poważna anomalia
Wszystko prawidłowe
Zmiana stanu wejść
Różne
Zadziałanie urządzeń podłączonych
do wejścia STOP
Wszystko prawidłowo
Wszystko prawidłowo
Zadziałanie wejścia P.P.
Wszystko prawidłowo
Zadziałanie wejścia OPEN
Wszystko prawidłowo
Zadziałanie wejścia CLOSE
Zmiana ilości urządzeń odłączonych
do Bluebus lub rozpoznawanie
urządzenia nie wykonane
Zmiana podczas rozpoznawania typu
siłowników lub pozycji ograniczników
mechanicznych
Sprawdź, czy centrala jest zasilana; sprawdź bezpieczniki. Jeśli są przepalone, sprawdź przyczynę uszkodzenia i wymień bezpieczniki na inne, o tej
samej wartości
Nastąpił poważny problem: spróbuj odłączyć i po chwili włączyć zasilanie
centrali. Jeżeli nie pomoże - wymień centralę
Prawidłowe funkcjonowanie centrali
Stan prawidłowy, jeżeli na jednym z wejść (P.P., STOP, OPEN, CLOSE)
nastąpi zmiana lub zadziałanie fotokomórek lub wysłanie polecenia z
nadajnika
Odwołaj się do Tabeli 10
Sprawdź urządzenia podłączone do wejścia STOP
Wejście STOP w stanie czuwania
Wejście P.P. nieaktywne
Stan prawidłowy, jeśli urządzenie podłączone do wejścia P.P. wysyła właśnie
sygnał
Wejście OPEN nieaktywne
Stan prawidłowy, jeśli urządzenie podłączone do wejścia OPEN wysyła
właśnie sygnał
Wejście CLOSE nieaktywne
Stan prawidłowy, jeśli urządzenie podłączone do wejścia CLOSE wysyła
właśnie sygnał
Wykonaj rozpoznawanie urządzeń (przeczytaj paragraf 3.5)
Rozpoznawanie pozycji ograniczników mechanicznych nie zostało
wykonane
Page 83

PL
Polski – 11
Dla motoreduktora HYKE są przewidziane następujące akcesoria (opcjonalne):
odbiorniki z rodziny SMXI, OXI, programator Oview, panel słoneczny Solemyo i
akumulator awaryjny mod. PS124.
8.1 - Podłączenie odbiornika radiowego
Centrala sterująca zawiera złącze umożliwiające podłączenie odbiorników
radiowych (urządzenie opcjonalne), należących do rodziny SMXI, OXI. Aby podłączyć odbiornik odłącz zasilanie elektryczne od centrali i postępuj jak pokazano na rys. 17. W Tabeli 11 i Tabeli 12 są zamieszczone polecenia odpowiada-
jącym kolejnym wyjściom odbiornika radiowego.
ROZSZERZENIE WIADOMOŚCI
8
Tabela 11
SMXI / SMXIS lub OXI / OXIFM / OXIT / OXITFM w trybie I lub II
Polecenie “K.K.” (Krok po kroku)
Polecenie "otwarcie częściowe 1"
Polecenie “Otwarcie”
Polecenie “Zamknięcie”
Wyjście Nr.1
Wyjście Nr.2
Wyjście Nr.3
Wyjście Nr.4
1 Krok po Kroku
2 Otwarcie częściowe 1
3 Otwarcie
4 Zamknięcie
5 Stop
6 Krok po kroku w
bloku mieszkalnym
7 Krok po kroku z
dużym priorytetem
8 Otwarcie
częściowe 2
9 Otwarcie
częściowe 3
10 Otwarcie i
Zablokowanie
automatyki
11 Zamknięcie i
Zablokowanie
automatyki
12 Zablokowanie
automatyki
13 Odblokowanie
automatyki
Tabela 14
OXI / OXIFM /OXIT / OXITFM w trybie II poszerzonym
Nr Polecenie Opis
Polecenie “K.K.” (Krok po kroku)
Polecenie “Otwarcie częściowe 12
Polecenie “Otwarcie”
Polecenie “Zamknięcie”
Zatrzymanie manewru
Działanie w trybie 2bloku mieszkalnego2
Działa również w przypadku zablokowania automatyki lub
przy innym, podtrzymanym sygnale sterującym
Otwieranie częściowe (otwarcie skrzydła 2, równe 1/2
całkowitego otwarcia)
Otwieranie częściowe (otwarcie dwóch skrzydeł, równe
1/2 całkowitego otwarcia)
Powoduje wykonanie manewru otwarcia a po jego za koń c zeniu zablokowanie automatyki; centrala nie akceptuje żadne go innego polecenia za wyjątkiem “Krok po kroku z du żym pri orytetem”, “Odblokuj” lub (tylko z Oview) nastę pujące po le ce nia: “Odblokowanie i zamknięcie” i “Odblokowanie i otwarcie”
Powoduje wykonanie manewru zamknięcia a po jego za kończeniu zablokowanie automatyki; centrala nie akceptuje żadnego innego polecenia za wyjątkiem “Krok po kroku z dużym priorytetem”, “Odblokuj” lub (tylko z Oview)
na stępujące polecenia: “Odblokowanie i zamknięcie” i
“Od blo kowanie i otwarcie”
Powoduje zatrzymanie manewru i zablokowanie automatyki; centrala nie akceptuje żadnego innego polecenia za
wyjątkiem “Krok po kroku z dużym priorytetem”, “Odblokuj” lub (tylko z Oview) następujące polecenia: “Odblokowanie i zamknięcie” i “Odblokowanie i otwarcie”
Powoduje odblokowanie automatu i przywrócenie zwy kłego funkcjonowania
8.2 - Podłączenie i instalacja akumulatorka rezerwowego
mod. PS124
UWAGA! - Podłączenie elektryczne akumulatorka do centrali musi być
wykonane tylko po zakończeniu wszystkich etapów montażu i programowania, ponieważ akumualtorek spełnia funkcję zasilania awaryjnego.
Aby zainstalować i podłączyć akumulatorek, należy postępować zgodnie z
fazami montażowymi pokazanymi na rys. 18.
8.3 - Podłączenie programatora Oview
Na centrali umieszczona jest wtyczka BusT4, do której można podłączyć jednostkę programującą Oview, która pozwala na całkowite i szybkie kierowanie
fazą instalacyjną, konserwacyjną i diagnostyczną całej automatyki. Aby uzyskać
dostęp do wtyczki należy koniecznie postępować zgodnie z wskazówkami
zamieszczonymi na rys. 19 i podłączyć wtyczkę do odpowiedniego gniazda.
Oview może zostać podłączony do kilku Centrali jednocześnie (aż do 5 bez
szczególnych zaleceń, aż do 60 - przestrzegając stosownych zaleceń) i może
pozostać podłączony do centrali, także podczas normalnego działania automatyki. W takim przypadku można użyć, w celu bezpośredniego wysłania poleceń
do centrali, specjalnego menu “użytkownik”. Możliwe jest również dokonanie
uaktualnienia Firmware. Jeśli w centrali znajduje się odbiornik radiowy należący
do rodziny OXI, używając Oview można uzyskać dostęp do parametrów nadajników zapisanych przez odbiornik.
8.4 - Podłączenie systemu zasilania energią słoneczną
Solemyo
UWAGA! – W przypadku, kiedy automatyka jest zasilana przez system
“Solemyo”, NIE MOŻE BYĆ ZASILANA jednocześnie z sieci elektrycznej.
Aby uzyskać więcej informacji dotyczących systemu Solemyo odwołaj się do
odpowiedniej instrukcji obsługi.
Aby podłączyć system Solemyo postępuj jak pokazano na rys. 20.
8.5 - Podłączenie zewnętrznego systemu odblokowującego
Kio
UWAGA! – System Kio musi zostać podłączony do motoreduktora, który
rusza jako pierwszy do otwierania (startując z położenia brama zamknięta).
01. Otwórz pokrywę motoreduktora (fig. 21-1);
02. Wyjmij plastikową obudowę, jak pokazano na rys. 21-2;
03. Włóż do odpowiedniego otworu śrubę z nakrętką, jak pokazano na rys.
21-3;
04. Zaczep dwa końce sprężyny, jak pokazano na rys. 22-4;
05. Włóż stalowy przewód najpierw do śruby a następnie do otworu sworznia,
jak pokazano na rys. 21-5;
06. Zablokuj przewód dokręcając specjalną śrubę (rys. 21-5);
07. Włóż drugi koniec przewodu do jednego z dwóch otworów, znajdujących
się w dolnej części motoreduktora, jak pokazano na rys. 21-6;
08. Załóż wcześniej zdjętą plastikową osłonę i następnie pokrywę motoreduk-
tora (rys. 21-7);
09. Teraz podłącz przewód do Kio nawiązując do odpowiednich instrukcji
obsługi.
Nr Polecenie Opis
Włącza się wyjście “światełko nocne”, którego wyłączanie
jest regulowane timerem
Wyjście “światełko nocne” włącza się i wyłącza w trybie
2krok po kroku”
14 Włączenie timera
światełka nocnego
15 Włączenie-Wyłączenie
światełka nocnego
TABELA 10 - Historia anomalii
01. Wciśnij i przytrzymaj przycisk “Set” przez około 3 sekundy;
02. Zwolnij przycisk, kiedy dioda “L1” zacznie migać;
03. Wciśnij przycisk “” lub “” aby przesunąć się z migającej diody L1 na diodę L8
(Wykaz anomalii);
04. Wciśnij i przytrzymaj przycisk “Set” aż do zakończenia punktu 06;
05. Odczekaj około 3 sekundy, dopóki nie zaświecą się diody, które reprezentują manewry, w czasie których nastąpiły anomalie. Dioda
L1 wskazuje wynik ostatniego wykonanego manewru a dioda L8 wskazuje ósmy (najdawniejszy) manewr. Jeżeli dioda świeci
się oznacza to, że wystąpiły anomalie, jeśli natomiast dioda nie świeci się wszystkie operacje zostały wykonane prawidłowo;
06. Wciśnij przyciski “” i “” aby wybrać dany manewr: dioda odpowiadająca temu manewrowi wykona ilość błysków
równą ilości błysków wykonywanych zwykle przez lampę ostrzegawczą - przy danej usterce;
07. Zwolnij przycisk “Set”.
SET
SET
SET
SET
L1
lub
i
3 s
3 s
L8
Page 84
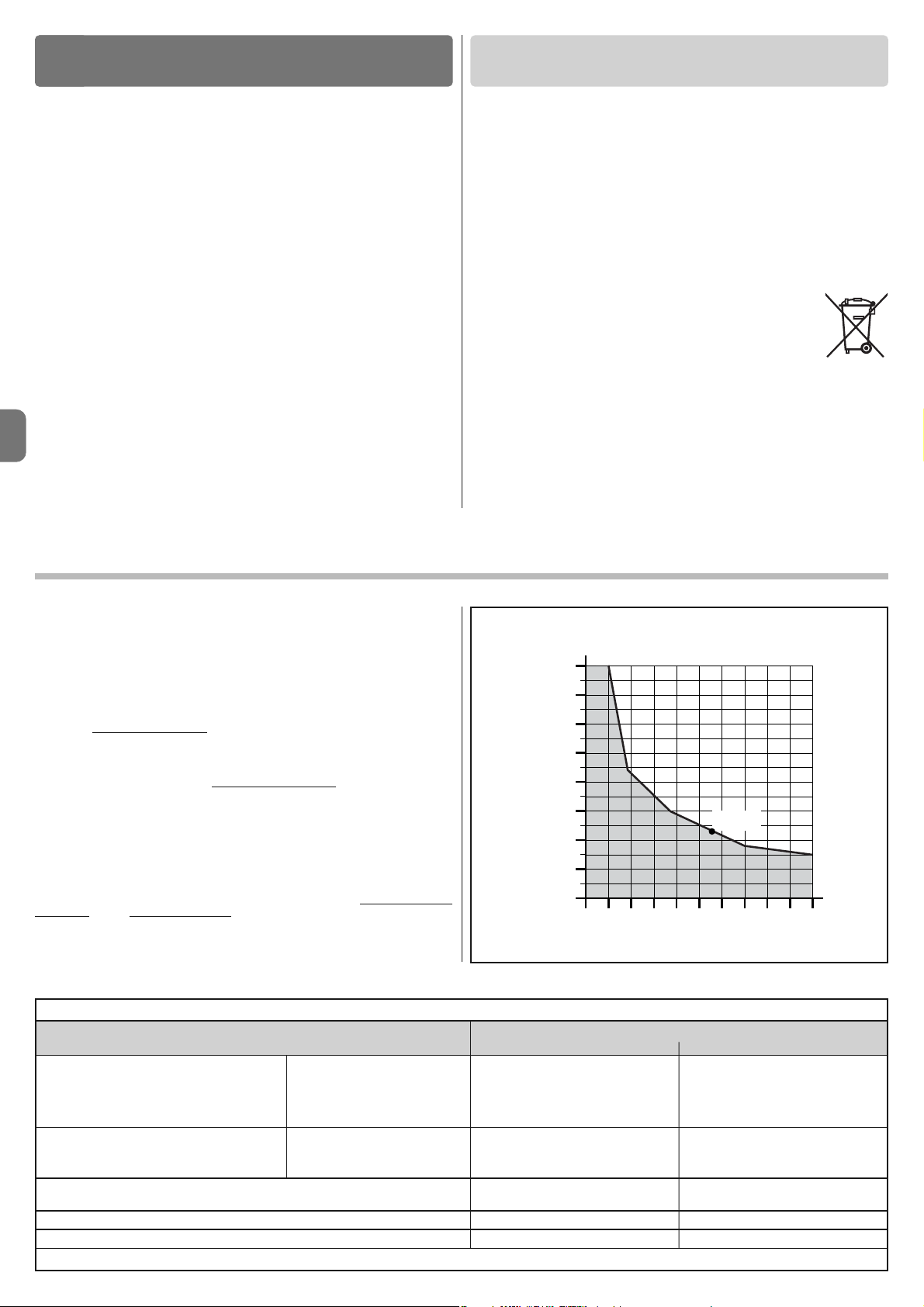
PL
12 – Polski
UTYLIZACJA PRODUKTU
Produkt ten jest integralną częscią automatyki i w związku z tym musi być
poddany utylizacji razem z nią.
Podobnie jak przy instalacji, także przy zakończeniu użytkowania niniejszego
produktu czynności utylizacji powinny być wykonane przez personel wykwalifikowany.
Niniejszt produkt składa się z różnego rodzaju materiałów: niektóre z nich mogą
być powtórnie użyte, inne muszą zostać poddane utylizacji. Należy zasięgnąć
informacji o systemach wtórnego przerobu i utylizacji, przewidzianych przez
lokalne przepisy dla tej kategorii produktu.
Uwaga! – Niektóre elementy produktu mogą zawierać substancje szkodliwe
lub niebezpieczne, które pozostawione w otoczeniu mogłyby zaszkodzić środowisku lub zdrowiu ludzkiemu.
Zgodnie ze wskazaniem symbolu na rysunku obok, zabronione
jest wyrzucanie tego produktu razem z odpadami domowymi. W
celu utylizacji produktu należy przeprowadzić “se gre gacje odpadów” na potrzeby utylizacji, według metod pr zewidzianych przez
lokalne przepisy, lub zwrócić produkt sprzedawcy podczas zakupu nowego, równorzędnego produktu.
Uwaga! – lokalne przepisy moga przewidywać poważne sankcje w przypadku
samodzielnej likwidacji tego produktu.
Utylizacja akumulatorka rezerwowego (jeśli występuje)
Uwaga! – Rozładowany akumulatorek zawiera substancje zanieczyszczające i
dlatego nie można wyrzucać go do odpadów miejskich.
Należy poddać go utylizacji, używając metod “sortowania” odpadów. zgodnie z
obowiązującymi normami na danym terytorium.
WYKRES 3
cykle manewrów
wskaźnik trudności %
KONSERWACJA PRODUKTU
9
W celu utrzymania stałego poziomu bezpieczeństwa i zagwarantowania maksymalnej trwałości całego systemu automatyki, konieczna jest regularna konserwacja.
Konserwacja powinna zostać przeprowadzona, zgodnie z zaleceniami dotyczącymi bezpieczeństwa, opisanymi w niniejszej instrukcji obsługi oraz obowiązującymi przepisami i normami.
System należy poddawać częstym testom, w celu sprawdzenia, czy występują
braki równowagi skrzydeł, oznaki zużycia lub uszkodzenia przewodów. Nie
używać automatyki, jeśli wymaga ona regulacji lub naprawy.
Ważne – Podczas konserwacji lub czyszczenia produktu, należy odłączyć
centralę od zasilania elektrycznego i od baterii, o ile występują.
Odnośnie innych urządzeń znajdujących się w systemie, należy postępować
zgodnie z odpowiednimi planami konserwacji.
Dla siłowników HK7024, HK7224 konieczna jest konserwacja planowa, maksymalnie co 6 miesięcy lub 20 000 manewrów od poprzedniej konserwacji.
Aby przeprowadzić konserwację należy postępować w sposób następujący:
01. Odłączyć wszystkie źródła zasilania elektrycznego, wraz z ewentualnymi
akumulatorkami rezerwowymi;
02. Sprawdzić stan zużycia uchwytów i kołków rozporowych ze szczególnym
zwróceniem uwagi na erozję i utlenianie części; wymienić te części, których
stan nie daje wystarczającej gwarancji użytkowej;
03. Wykonać próbę odblokowania, aby sprawdzić ich prawidłową pracę,
zobacz paragraf 3.6.
04. Podłączyć ponownie źródła zasilania elektrycznego i przeprowadzić
wszystkie testy i kontrole przewidziane w rozdziale 5 - Odbiór techniczny.
Trwałość urządzenia
Trwałość urządzenia to jego średni, ekonomicznie uzasadniony okres eksploatacji. Okres trwałości urządzenia jest silnie uzależniony od wskaźnika uciążliwości manewrów wykonywanych przez automatykę: czyli od sumy wszystkich
czynników, które wpływają na zużycie urządzenia (patrz Tabela 13).
Aby ustalić prawdopodobny okres trwałości Twojej automatyki postępuj w
następujący sposób:
01. Oblicz wskaźnik uciążliwości
sumując wartości procentowe pozycji znajdu-
jących się w Tabeli 13;
02. Na Wykresie 3 wyznacz linię pionową od właśnie obliczonej wartości do
przecięcia z krzywą wykresu; od tego punktu wyznacz linię poziomą do linii “ilości cykli”. Obliczona wartość jest oszacowaną trwałością
Twojego urządzenia.
Szacowanie trwałości urządzenia jest wykonywane na podstawie obliczeń projektowych oraz wyników prób wykonywanych na prototypach. Ponieważ jest to
tylko szacowanie nie daje ono żadnej gwarancji rzeczywistej trwałości urządzenia.
Przykład obliczeń trwałości motoreduktora HYKE z ramieniem o CAŁEJ długości
(odwołaj się do Tabeli 13 oraz do Wykresu 3):
- długość skrzydła = 2,8 m (wskaźnik uciążliwości: 20%); - ciężar skrzydła: 230 Kg (wskaźnik uciążliwości: 20%); - pełne skrzydło (wskaźnik uciążliwości: 15%); Wskaźnik całkowitej
uciążliwości = 55%; Trwałość oszacowana = 220.000 cykli
TABELA 13
Wskaźnik uciążliwości
ramię z CAŁĄ długością ramię ze ZREDUKOWANĄ długością
< 1,8
1,8 - 2,5 m
2,5 - 3 m
3 - 3,5 m
< 200 kg
200 + 250 kg
> 250 kg
Długość skrzydła
Ciężar skrzydła
Temperatura środowiskowa powyżej 40°C lub poniżej 0°C lub wilgotność
większa od 80%
Pełne skrzydło
Instalowanie urządzenia w strefie wietrznej
0%
15%
20%
30%
0%
20%
30%
20%
15%
15%
15%
20%
30%
30%
40%
20%
20%
20%
Uwaga – Podane dane dotyczą równoważonej bramy dwuskrzydłowej, podlegającej prawidłowej eksploatacji i konserwacji
500.000
400.000
300.000
200.000
100.000
220.000
0 102030405060708090100
Page 85

PL
Polski – 13
PARAMETRY TECHNICZNE URZĄDZENIA
HK7224K
Motoreduktor elektromechaniczny do automatyk do bram i
drzwi automatycznych z silnikiem na prąd stały, przekładnią
planetarną i odblokowaniem mechanicznym.
HK7024K
Motoreduktor elektromechaniczny do automatyk do bram i
drzwi automatycznych z silnikiem na prąd stały, przekładnią
planetarną i odblokowaniem mechanicznym. Wbudowana
centrala sterująca i odbiornik radiowy OXI
Typologia
Maksymalny moment obrotowy 500 Nm
Znamionowy moment obrotowy 120 Nm
Prędkość bez obciążenia 2.25 RPM
Prędkość przy znamionowym
2.00 RPM
momencie obrotowym
Maksymalna częstotliwość cykli 40 cykli/godzinę
Maksymalny czas pracy bez przerw około 7 minut
Ograniczenia zastosowania urządzenie może być stosowane w bramach o ciężarze skrzydła do 330 kg i długości do 1,8m m
lub o ciężarze skrzydła do 200kg i długości do 3,5m (patrz wykres 1)
Trwałość oszacowana od 150.000 do 500.000 cykli, zgodnie z warunkami zamieszczonymi w tabeli 13 i na Wykresie 3
Montaż W pozycji pionowej, z zastosowaniem odpowiedniej płytki mocującej
Temperatura funkcjonowania od -20°C do +50°C (w niskich temperaturach skuteczność motoreduktora zmniejsza się
Użytkowanie w atmosferze
szczególnie kwaśnej, słonej lub NIE
potencjalnie wybuchowej
Stopień zabezpieczenia IP 54 (z nienaruszoną obudową)
Wymiary (mm) 210 x 290 x 320 wys.
Waga (kg) 10.5 Kg; 9.5 Kg
Uwagi:
(1) - Funkcja uaktywniana wyłącznie przez programator Oview.
[*] - Wyjścia Lampa ostrzegawcza, Zamek elektryczny i Kontrolka Bramy Otwartej mogą być programowane na inne funkcje (patrz “TABELA
3 - Funkcje 1-go poziomu”; lub z zastoso-
waniem programatora Oview, przeczytaj rozdział
8.3). Parametry elektryczne wyjść dostosowują się w zależności od rodzaju wybranej funkcji: • funkcja lampa ostrzegawcza: żarówka
12 Vps, 21 W max; • funkcja zamka elektrycznego: 12 Vpp 15 VA max; • inne wyjścia (wszystkie rodzaje): 1 żarówka lub przekaźnik 24Vps (-30 i +50%), 4 W max.
Zasilanie 230 Vac (120 Vpp dla wersji HK7024K/V1) 24 Vdc (±10%)
±10%; 50/60 Hz
Zasilanie awaryjne Przystosowanie dla akumulatora awaryjnego PS124
Zasilanie dostarczane przez przystosowanie dla zestawu SYKCE
panele słoneczne
Maksymalna moc pobierana 300 W 140 W
Maksymalny prąd pobierany 1,5 A (3 A dla wersji HK7024K/V1) 6 A przez maksymalny czas 2 s
Moc pobierana w “Stanie
czuwania całego urządzenia (1)”
z zasilaniem dostarczanym poniżej 100 mW
przez PS124 lub zestaw SYKCE
(włącznie z odbiornikiem OXI)
Wyjście z lampą ostrzegawczą [*] jedna lampa ostrzegawcza LUCYB (żarówka 12 V, 21W)
Wyjście zamka elektrycznego[*] jeden zamek elektryczny 12 Vpp max 15VA
Wyjście kontrolki bramy jedna żarówka 24 V maksymalnie 4 W
otwartej [*] (napięcie wyjściowe może zmieniać się od -30 do +50%,
wyjście może sterować również małymi przekaźnikami))
Wejście BLUEBUS wyjście z maksymalnym obciążeniem 15 urządzeń
Bluebus, (maksymalnie 6 par fotokomórek MOFB lub
MOFOB + 2 pary fotokomórek MOFB lub MOFOB,
adresowanych jako urządzenia otwierające + maksymalnie
4 urządzenia sterujące MOMB lub MOTB)
Wejście STOP przeznaczone dla styków normalnie zamkniętych, normalnie
otwartych lub o stałej oporności 8,2 kΩ; wybór typu styku
następuje w trybie automatycznego rozpoznawania, zmiana
w stosunku do stanu wczytanego powoduje wysłanie
polecenia “STOP”
Wejście P.P. przeznaczone dla styków zwykle otwartych (zamknięcie
styku powoduje wydanie polecenia Krok po Kroku)
Złącze radiowe złącze typu SM przeznaczone dla odbiorników z rodziny
SMXI, OXI i OXIFM
Wejście ANTENY Radiowej 50 Ω dla kabla typu RG58 lub podobnych
Funkcje programowalne 8 funkcji typu ON-OFF (Tabela 3) i 8 funkcji
regulowanych (Tabela 5))
Funkcje rozpoznawane • Automatyczne rozpoznawanie urządzeń podłączonych do
automatycznie wyjścia BlueBus. • Automatyczne rozpoznawanie typu
urządzenia podłączonego do zacisku “STOP” (styk NO, NC
lub o stałej oporności 8,2 kΩ). • Automatyczne
rozpoznawanie drogi skrzydeł bramy oraz automatyczne
obliczanie punktów zwalniania i otwierania częściowego.
• Automatyczne rozpoznawanie działania z jednym
lub dwoma silnikami.
ZALECENIA: • Wszystkie podane parametry techniczne dotyczą temperatury środowiskowej 20°C (± 5°C). • Firma Nice S.p.a. zastrzega sobie prawo do wprowadzenia zmian do urządzenia w każdej chwili, kiedy uzna je za konieczne, zachowując te same funkcje i przeznaczenie.
Page 86

PL
14 – Polski
DEKLARACJA ZGODNOŚCI CE
i deklaracja włączenia “maszyny nieukończonej”
Deklaracja zgodna z następującymi Dyrektywami: 2006/95/WE (LVD); 2004/108/WE (EMC); 2006/42/WE (MD) załącznik II, część B
Uwaga - Zawartość niniejszej deklaracji odpowiada oświadczeniom znajdującym się w dokumencie urzędowym, złożonym w siedzibie firmy Nice S.p.a., a w szczególności w
ostatniej korekcie dostępnej przed wydrukowaniem tej instrukcji. Tekst w niej zawarty został dostosowany w celach wydawniczych. Kopia oryginalnej deklaracji może być zamawiana w firmie Nice S.p.a. (TV) I.
Numer deklaracji: 334/HYKE Wydanie: 0 Język: PL
Nazwa producenta: NICE s.p.a.
Adres: Via Pezza Alta 13, Z.I. Rustignè, 31046 Oderzo (TV), Włochy
Osoba autoryzowana do
przygotowania
dokumentacji technicznej: Pan Oscar Marchetto
Typ urządzenia: Siłownik elektromechaniczny „HYKE” z wbudowaną centralą
Model / Typ: HK7024K, HK7224K
Akcesoria: SMXI, OXI, PS124, Oview
Niżej podpisany Luigi Paro, w charakterze Członka Zarządu Spółki oświadcza na własną odpowiedzialność, że urządzenie wyżej wymienione jest zgodne
z rozporządzeniami ustalonymi w następujących dyrektywach:
• Dyrektywa 2006/95/WE PARLAMENTU EUROPEJSKIEGO I RADY z dnia 12 grudnia 2006 roku, dotycząca zbliżenia legislacyjnego krajów członkowskich, w odniesieniu do materiałów elektrycznych przeznaczonych do pracy w niektórych ograniczeniach napięciowych, zgodnie z następującymi normami zharmonizowanymi:
EN 60335-1:2002 + A1:2004 + A11:2004 + A12:2006 + A2:2006 + A13:2008; EN 60335-2-103:2003
• DYREKTYWA 2004/108/WE PARLAMENTU EUROPEJSKIEGO I RADY z dnia 15 grudnia 2004, dotycząca zbliżenia legislacyjnego krajów członkowskich
w odniesieniu do kompatybilności elektromagnetycznej, która uchyla dyrektywę , 89/336/EWG zgodnie z następującymi normami zharmonizowanymi:
EN 61000-6-2:2005, EN 61000-6-3:2007
Ponadto urządzenie jest zgodne z następującą dyrektywą, zgodnie z wymogami przewidzianymi dla “maszyn nieukończonych”:
• Dyrektywa 2006/42/WE PARLAMENTU EUROPEJSKIEGO I RADY z dnia maja 2006 roku, dotycząca maszyn, która modyfikuje dyrektywę 95/16/WE
(przekształcenie), zgodnie z następującymi normami zharmonizowanymi:
EN 13849-1:2008, EN 13849-2:2008.
• Oświadcza się, że omawiana wyżej dokumentacja techniczna została przygotowana zgodnie z załącznikiem VII B dyrektywy 2006/42/WE oraz że jest
ona zgodna z następującymi wymogami podstawowymi: 1.1.1- 1.1.2- 1.1.3- 1.1.5- 1.2.1-1.2.6- 1.3.1- 1.3.2- 1.3.3- 1.3.4- 1.3.7-1.3.9- 1.5.1-1.5.2-
1.5.4- 1.5.5- 1.5.6- 1.5.7- 1.5.8- 1.5.10- 1.5.11- 1.5.13-1.6.1- 1.6.2-1.6.4- 1.7.2- 1.7.3- 1.7.4- 1.7.4.1- 1.7.4.2- 1.7.4.3
• Producent zobowiązuje się do przekazania władzom krajowym, w odpowiedzi na umotywowane żądanie, informacji dotyczących “maszyny nieukończonej”, zachowując nienaruszone prawa własności intelektualnej.
• W przypadku, kiedy “maszyna nieukończona” została wprowadzona do użytku w kraju europejskim, w którym język obowiązujący jest inny od języka
używanego w tej deklaracji, obowiązkiem importera jest załączenie tłumaczenia do niniejszej deklaracji.
• Ostrzega się, że “maszyna nieukończona” nie może zostać wprowadzona do użytku, dopóki nie zostanie wcześniej zadeklarowana zgodność maszyny końcowej, do której zostanie włączona, z zaleceniami dyrektywy 2006/42/WE (o ile dotyczy).
Ponadto urządzenie jest zgodne, w sposób ograniczony dla zastosowanych elementów, z następującymi normami:
EN 13241-1:2003, EN 12445:2002, EN 12453:2002, EN 12978:2003
Oderzo, dnia 15 stycznia 2010 roku Luigi Paro (Członek Zarządu Spółki)
Page 87

NL
Nederlands – 1
NEDERLANDS
Originele instructies
Inhoudsopgave
1 - ALGEMENE AANBEVELINGEN EN VOORZORGSMAATREGELEN ..... 1
1.1 - Aanbevelingen voor de veiligheid ........................................................... 1
1.2 - Aanbevelingen voor de installatie ........................................................... 1
1.3 - Aanbevelingen voor het gebruik............................................................. 1
2 - BESCHRIJVING VAN HET PRODUCT EN GEBRUIKSBESTEMMING.. 1
3 - INSTALLATIE........................................................................................... 2
3.1 - Controles voorafgaand aan de installatie................................................ 2
3.2 - Gebruikslimieten .................................................................................... 2
3.3 - Werkzaamheden ter voorbereiding van de installatie.............................. 2
3.4 - Installatie van de reductiemotor mod. HK7024 - HK7224 ...................... 2
3.5 - Instelling van de mechanische eindaanslagen ........................................ 4
3.6 - Handmatig ontgrendelen en vergrendelen van de reductiemotor ........... 4
4 - ELEKTRISCHE AANSLUITINGEN .......................................................... 4
4.1 - Elektrische aansluitingen tussen de reductiemotor en de besturingseen-
heid mod. HK7024 ........................................................................................ 4
4.2 - Aansluiting van de reductiemotor zonder besturingseenheid mod. HK7224.. 4
4.3 - Aansluiting van andere inrichtingen........................................................ 5
4.4 - Adressering van de aangesloten inrichtingen ......................................... 5
4.5 - Eerste inschakeling en controle van de aansluitingen............................. 5
4.6 - Zelflering van de aangesloten inrichtingen.............................................. 5
4.7 - Zelflering van de posities van de mechanische eindaanslagen ............... 5
4.8 - Controle van de beweging van de vleugels van de poort ....................... 6
5 - EINDTEST EN INBEDRIJFSTELLING .................................................... 6
5.1 - Eindtest ................................................................................................. 6
5.2 - Inbedrijfstelling....................................................................................... 6
6 - PROGRAMMERING VAN DE BESTURINGSEENHEID.......................... 7
6.1 - Programmering eerste niveau (ON-OFF) ................................................ 7
6.2 - Programmering tweede niveau (instelbare parameters).......................... 8
6.3 - Speciale functies.................................................................................... 9
6.4 - Wissen van het geheugen...................................................................... 9
7 - WAT TE DOEN ALS...(handleiding voor het oplossen van problemen) 9
8 - VERDERE DETAILS .............................................................................. 11
8.1 - Aansluiting van een radio-ontvanger .................................................... 11
8.2 - Aansluiting en installatie van de bufferbatterij mod. PS124................... 11
8.3 - Aansluiting van de Oview programmeereenheid................................... 11
8.4 - Aansluiting van het zonne-energiesysteem Solemyo............................ 11
8.5 - Aansluiting voor het systeem voor externe ontgrendeling Kio............... 11
9 - ONDERHOUD VAN HET PRODUCT..................................................... 12
AFDANKEN VAN HET PRODUCT.............................................................. 12
Duur van het product................................................................................. 12
TECHNISCHE GEGEVENS VAN HET PRODUCT...................................... 13
EG-VERKLARING VAN OVEREENSTEMMING ......................................... 14
BIJLAGE ........................................................................................................ I
Instructies en aanbevelingen voor de gebruiker ........................................... VIII
Afbeeldingen................................................................................................. IX
1.1 - Veiligheidswaarschuwingen
• LET OP! – Deze handleiding bevat belangrijke instructies en waarschu-
wingen voor de veiligheid. Een verkeerde installatie kan ernstig letsel veroorzaken. Voordat u met het werk begint, moet de handleiding aandachtig
helemaal worden doorgelezen. In geval van twijfel stopt u met installeren en
vraagt u de servicedienst van Nice om uitleg.
• LET OP! – Belangrijke aanwijzing: bewaar deze instructies voor eventuele onderhoudswerkzaamheden en om het product af te danken.
• LET OP! – Volgens de meest recente Europese wetgeving moet een
automatische deur of hek de voorschriften van de richtlijn
2006/42/EG
(ex 98/37/EG) (Machinerichtlijn) in acht nemen en in het bijzonder de
voorschriften EN 12445; EN 12453; EN 12635 en EN 13241-1, waarmee
de conformiteit van de automatisering kan worden verklaard. Met het
oog hierop mogen alle werkzaamheden betreffende de installatie, de
aansluiting, het testen en het onderhoud van het product uitsluitend
door een erkende vakman worden verricht!
1.2 - Waarschuwingen voor de installatie
• Voordat u met de installatie begint, controleert u of het aanwezige product
geschikt is voor het gewenste gebruik (zie "Gebruiksbeperkingen" paragraaf
3.2 en de “Technische kenmerken van het product”). Ga NIET over tot de
installatie, als het niet geschikt is.
• De inhoud van deze handleiding heeft betrekking op een typische installatie
zoals beschreven in afb. 3.
• Alle installatie- en onderhoudswerkzaamheden moeten worden verricht
bij van het elektriciteitsnet gekoppelde automatisering. Als de ontkoppelinrichting van de voeding niet zichtbaar is vanaf de plaats waar het automatische systeem is geplaatst, moet er voordat met het werk begonnen
wordt een bord op de ontkoppelinrichting worden bevestigd met het
opschrift "LET OP! ONDERHOUD IN UITVOERING”.
• De besturingseenheid moet op een elektrische voedingslijn voorzien van aarding worden aangesloten.
• Behandel het product tijdens de installatie met zorg en voorkom dat het wordt
geplet, er tegen wordt gestoten, dat het valt, of in aanraking komt met welke
vloeistoffen dan ook. Zet het product niet in de buurt van warmtebronnen en
stel het niet bloot aan open vuur. Hierdoor kan het beschadigd worden, waardoor storingen of gevaarlijke situaties kunnen ontstaan. Als dit mocht gebeuren,
stopt u de installatie onmiddellijk en wendt u zich tot de Servicedienst van Nice.
• Wijzig geen enkel deel van het product. Niet toegestane werkzaamheden kunnen alleen storingen veroorzaken. De fabrikant wijst elke vorm van aansprakelijkheid af voor schade veroorzaakt door willekeurige wijzigingen aan het product.
• Als het hek of de poort, die moet worden geautomatiseerd, van een voetgangersdeur is voorzien, moet de installatie een controlesysteem krijgen, dat de
werking van de motor blokkeert als de voetgangersdeur open is.
• Het verpakkingsmateriaal van het product moet met inachtneming van de
plaatselijke voorschriften worden weggegooid.
1.3 - Waarschuwingen voor het gebruik
• Het is niet de bedoeling dat dit product wordt gebruikt door personen (kinderen hierbij inbegrepen) met verminderde lichamelijke, sensorische of geestelijke
vermogens, of zonder voldoende ervaring en kennis, tenzij het onder toezi cht
van een voor hun veiligheid verantwoordelijke persoon wordt gebruikt, of hen
door hem goede instructies zijn gegeven over het gebruik van het product.
• Er moet toezicht worden gehouden op kinderen, die zich in de buurt van de
automatisering bevinden. Controleer of ze er niet mee spelen.
• Laat kinderen niet met vaste bedieningsinrichtingen spelen. Houd draagbare
bedieningen (afstandsbedieningen) buiten het bereik van kinderen.
WAARSCHUWINGEN EN ALGEMENE
VOORZORGSMAATREGELEN
1
De inrichtingen waar dit product uit bestaat, zijn bestemd voor de automatisering van een hek of een poort met één of twee deuren. LET OP! - Ieder ander
ge bruik dan wat beschreven wordt en onder andere omgevingsomstandigheden dan die in deze handleiding staan, moeten als verkeerd en verboden wor den beschouwd!
Het hoofdonderdeel van de automatisering bestaat uit één of twee elektromechanische reductiemotoren (afhankelijk van het aantal deuren dat moet worden
geautomatiseerd), elk voorzien van een gelijkstroommotor en een epicycloïdale
reductor. Eén van de reductiemotoren (mod. HK7024) is voorzien van een be sturingseenheid, die de werking ervan bestuurt. De besturingseenheid be staat
uit een printplaat met radio-ontvanger om de opdrachten te ontvangen, die
door de zender zijn verzonden.
De besturingseenheid is ervoor gemaakt om op verschillende inrichtingen te
worden aangesloten, die deel uitmaken van het Opera Systeem, het Bluebus
systeem en het Solemyo voedingssysteem met zonne-energie, zie hoofdstuk 8
- Verdere details.
Als ze door het elektriciteitsnet wordt gevoed, kan ze een bufferbatterij (mod.
PS124, optioneel accessoire) bevatten, die bij stroomuitval (elektrische blackout) garandeert dat het automatische systeem in de erop volgende uren enkele
handelingen kan verrichten.
Als de stroom uitvalt, kunnen de hekdeuren worden bewogen door de reductiemotor met de hiervoor bestemde sleutel te deblokkeren.Om de handmatige
manoeuvre te verrichten, raadpleegt u hoofdstuk 3.6.
Andere beschikbare accessoires zijn de ontvangers voorzien van koppeling
“SM” (SMXI, OXI, enz.), zie hoofdstuk 8 - Verdere details.
BESCHRIJVING VAN HET PRODUCT EN
GEBRUIKSBESTEMMING
2
Page 88

INSTALLATIE
3
3.1 - Aan de installatie voorafgaande werkzaamheden
Voordat op de installatie wordt overgegaan, moet worden gecontroleerd of de
onderdelen van het product heel zijn en of het gekozen model en installatiegebied geschikt zijn:
• Controleer of alle materiaal dat gebruikt moet worden zich in zeer goede staat
bevindt en geschikt is voor het voorziene gebruik.
• Controleer of de mechanische aanslagen op de grond (niet bijgeleverd),
zowel bij het sluiten als bij het openen in de installatie aanwezig zijn.
• Controleer of het frame van het hek geschikt is om te worden geautomatiseerd en voldoet aan de in het gebied geldende voorschriften (raadpleeg
eventueel de gegevens op het etiket van het hek). Dit product kan geen hek
automatiseren dat niet al efficiënt en veilig is. Bovendien kan het geen storingen opheffen, veroorzaakt door een verkeerde installatie van het hek of door
slecht onderhoud ervan.
• Controleer of de werkomstandigheden van de inrichtingen compatibel zijn
met de verklaarde gebruiksbeperkingen (zie paragraaf 3.2).
• Beweeg de hekdeuren handmatig in de twee richtingen en verzeker u ervan
dat de beweging op elk punt van de slag met constante wrijving plaatsvindt
(er mogen geen punten zijn waarvoor meer of minder kracht nodig is).
• Zet de hekdeuren handmatig op een willekeurige stand. Laat ze los en verzeker u ervan dat ze zich niet verplaatsen.
• Controleer of het bevestigingsgebied van de reductiemotor compatibel is met
de afmetingen van deze laatste (fig. 1).
• Verzeker u ervan dat er in het gebied waarin de reductiemotor moet worden
ge ïnstalleerd voldoende ruimte is om de arm ervan helemaal te kunnen draaien.
• Verzeker u ervan dat er in de buurt van de reductiemotor voldoende ruimte is
om de reductiemotor handmatig te deblokkeren.
• Verzeker u ervan dat de oppervlakken die gekozen zijn om de verschillende
inrichtingen te installeren stevig zijn en een stevige bevestiging kunnen
garanderen.
NL
• Verzeker u ervan dat elke inrichting die moet worden geïnstalleerd zich op
een beschermde plek bevindt, beschermd tegen per ongeluk stoten.
• Controleer of alle elektrische kabels, die gebruikt moeten worden van het
type zijn, dat in tabel 1 staat.
3.2 - Gebruikslimieten
Alvorens de reductiemotor te gaan installeren, controleren of de gegevens van
de reductiemotor overeenstemmen met de hierna beschreven gebruikslimieten
en de limietwaarden die zijn vermeld in het hoofdstuk “Technische kenmerken
van het product”:
Met de arm van de motor van HELE lengte
- maximumbreedte van de vleugel: 3,50 m (= maximumgewicht van de
vleugel: 200 kg)
Met de arm van de motor van GEREDUCEERDE lengte
- maximumbreedte van de vleugel: 3,00 m (= maximumgewicht van de
vleugel: 180 kg)
• Controle die gedaan moet worden: zet in Grafiek 1 (hiernaast) het gewicht en
de breedte van de vleugel uit; trek vanuit deze twee punten twee lijnen en ga na
of deze elkaar kruisen in één van de twee grijze gebieden
op! - Als de lijnen elkaar in het witte gebied kruisen, is het niet mogelijk dit product te gebruiken om de poort te automatiseren.
• Om installatie van de reductiemotor toe te laten, moet de minimumbreedte
van de kolom 210 mm bedragen.
• De bevestigingsbeugel van de arm moet zich in een robuust gedeelte van de
vleugel bevinden (bijvoorbeeld het frame), om een stevige en veilige bevestiging
te garanderen;
• Controleer de afstandswaarde “E” (afb. 2):
- Indien de afstandswaarde
“E” tussen 300 mm (minimum) en 650 mm
(maximum) ligt, dient de arm van de reductiemotor te worden ingesteld met
GEREDUCEERDE lengte. In dergelijke condities zal de maximale openingshoek van de vleugel 90° bedragen.
- Als de afstandswaarde
“E” gelijk aan of groter dan 650 mm is, dient de
:
:
van de grafiek. Let
arm van de reductiemotor te worden ingesteld met HELE lengte. In dergelijke condities zal de maximale openingshoek van de vleugel 110° bedragen.
GRAFIEK 1
350
300
250
200
GEWICHT (kg.)
150
100
1,8 2 2,5 3 3,5
BREEDTE (m.)
3.3 - Werkzaamheden ter voorbereiding van de installatie
Op afb. 3 ziet u een voorbeeld van een automatiseringsinstallatie die gereali-
seerd is met componenten van Nice (sommige componenten zijn mogelijk niet
aanwezig in de set):
a - Reductiemotor met besturingseenheid mod. HK7024
b - Reductiemotor zonder besturingseenheid mod. HK7224
c - Knipperlicht
d - Stel fotocellen mod. MOFB
e - Digitaal toetsenbord (mod. MOTB) - Transponder-lezer (mod. MOMB) -
Sleutelschakelaar (mod. MOSE)
f - Stel zuilen voor fotocellen
g - Mechanische stop sluitbeweging
h - Elektrisch slot
Deze onderdelen zijn geplaatst volgens een gebruikelijk standaardschema. Zie
afb. 3 om bij benadering de plaats van installatie van elk onderdeel van het systeem te bepalen. Belangrijk – Prepareer, voordat u het product gaat installeren,
de elektriciteitskabels die nodig zijn voor de installatie, zie afb. 4 en “Tabel 1 -
Technische gegevens van de elektriciteitskabels”.
Let op – Gedurende het plaatsen van de buizen voor het doorvoeren van de
elektriciteitskabels, dient u er rekening mee te houden dat als gevolg van water
dat zich verzamelt in de putjes, in de verbindingsleidingen condens kan ontstaan die in het binnenste van de besturingseenheid terecht kan komen en daar
schade aan de elektronische circuits kan veroorzaken.
3.4 - Installatie van de reductiemotor mod. HK7024 - HK7224
AANBEVELINGEN
• Een onjuiste installatie kan ernstig letsel toebrengen aan de personen die
het werk verrichten en aan de personen die de installatie zullen gebruiken.
• Alvorens met de montage van de automatisering te beginnen, dient u de
controles voorafgaand aan de installatie, beschreven in paragraaf 3.1
en 3.2, uit te voeren.
Voordat u met de installatie begint, dient u de lengte van de arm van de reductiemotor te bepalen, zie paragraaf 3.4.1.
3.4.1 - Bepalen van de lengte van de arm van de reductiemotor
01. Assembleer de componenten waaruit de arm van de motor bestaat, zoals
aangegeven op afb. 5;
02. Bepaal de positie van de reductiemotor in VERTICALE richting:
trek op de kolom een horizontale lijn op dezelfde hoogte als waarop na de
installatie de bevestigingsbeugel van de arm op de vleugel zal worden aangebracht (afb. 6).
03. Bepaal de positie van de reductiemotor in HORIZONTALE richting
Voor arm met volle lengte
Voor ingekorte
arm
TABEL 1 - Technische gegevens van de elektriciteitskabels (afb. 4)
Aansluiting Type kabel Maximaal toegestane lengte
A: Kabel voor STROOMTOEVOER BESTURINGSEENHEID 1 kabel 3 x 1,5 mm
B: Kabel ELEKTRISCH SLOT 1 kabel 2 x 1 mm
C: Kabel BLUEBUS INRICHTINGEN 1 kabel 2 x 0,5 mm
2
2
2
30 m (opmerking 1)
6 m
20 m (opmerking 2)
D: Kabel SLEUTELSCHAKELAAR 2 cavi 2 x 0,5 mm2 (opmerking 3) 50 m
E: Kabel voor STROOMTOEVOER REDUCTIEMOTOR 1 kabel 3 x 1,5 mm
2
(opmerking 4) 10 m
Kabel voor AANSLUITING ENCODER 1 kabel 2 x 1 mm2 (opmerking 4) 10 m
F: Kabel KNIPPERLICHT met antenne 1 kabel 2 x 0,5 mm
2
20 m
1 afgeschermde kabel type RG58 20 m (aanbevolen: minder dan 5 m)
Opmerking 1 – Als de voedingskabel langer dan 30 m is, dient een kabel met grotere doorsnede te worden gebruikt (3 x 2,5 mm2) en is het noodzakelijk in de nabijheid van de
automatisering een veiligheidsaarding aan te brengen.
Opmerking 2 – Als de Bluebus kabel langer dan 20 m is, tot een lengte van maximaal 40 m, dient een kabel met een grotere doorsnede te worden gebruikt (2 x 1 mm2
Opmerking 3 – Deze 2 kabels kunnen vervangen worden door 1 enkele kabel van 4 x 0,5 mm
Opmerking 4 – Deze kabels kunnen vervangen worden door 1 enkele kabel van 5 x 1,5 mm2
2
.
2
.
2
).
LET OP! – De gebruikte kabels moeten geschikt zijn voor het type omgeving waar de automatisering geïnstalleerd wordt.
2 – Nederlands
Page 89

NL
Nederlands – 3
(afstandswaarde A):
LET OP! – Indien er zich in de nabijheid van het installatiegebied een
vast obstakel bevindt (muur, boom etc.), dient u de afstandswaarde
E te nemen (afb. 2) en als volgt te werk te gaan:
• Indien de afstandswaarde E gelijk aan of groter dan 650 mm
is, zie
paragraaf 3.4.2
• Als de afstandswaarde E tussen de 300 mm (minimum) en 650 mm
(maximum) ligt, zie paragraaf 3.4.3
3.4.2 - Installatie van de reductiemotor met ARM VAN GEHELE LENGTE
01. a) Meet op de kolom de afstandswaarde B
(afb. 7) = afstand tussen het
draaipunt van de vleugel en het oppervlak van de kolom waar de achterste
beugel van de reductiemotor zal worden bevestigd.
b) Zet de vleugel op het gewenste openingspunt (maximaal 110°): hoekwaarde
c) Teken in de Grafiek 2 de gevonden afstandswaarde B
af en trek van-
uit dit punt een horizontale lijn, tot op het punt dat deze het gebied
snijdt
dat de waarde van de bij punt b gemeten hoek bevat.
d) In de snijpunten tussen de horizontale lijn en het gebied
trekt u verticale
lijnen om de waarden te bepalen die gebruikt kunnen worden voor de
afstandswaarde A
(afb. 8). Kies in dit bereik (range) vervolgens een
waarde voor A.
e) Teken de gevonden afstandswaarde A
af op de kolom en trek ter
hoogte hiervan een verticale lijn.
02. Bevestig de beugel op de kolom (afb. 9)
:
f) fase 1-2: Plaats de beugel op de kolom en laat de verticale middenlijn
hiervan samenvallen met de verticale lijn die u eerder heeft getrokken
(afstandswaarde A), en de arm met de horizontale lijn die u getrokken heeft
gedurende de procedure 3.4.1. Controleer in deze fase of de reductiemotor perfect waterpas is: een reductiemotor die niet recht staat kan tot storingen in de werking van de automatisering leiden.
g) fase 3-4: teken de bevestigingspunten af, boor gaten in de kolom en
monteer de pluggen; bevestig op dit punt de beugel met behulp van
geschikte schroeven en onderlegschijven.
03. Bevestig de arm van de reductiemotor op de vleugel
:
h) Zet de vleugel van de poort in de maximale sluitstand;
i) fase 5: bevestig de reductiemotor met behulp van de twee bijgeleverde
schroeven en moeren aan de beugel;
l) Ontgrendel de reductiemotor, zie hoofdstuk 3.6;
m) fase 6: druk de arm van de reductiemotor met kracht tot aan het punt
waarop de arm maximaal is uitgeschoven. Let op! - Controleer of de
arm op zijn eindaanslag blokkeert;
n) Breng de arm naar de vleugel toe en laat de bevestigingsbeugel op de
vleugel rusten.
o) fase 7: verzeker u ervan dat de arm van de reductiemotor waterpas is en
teken met een potlood het midden
van het profiel van de sleuven van de
beugel af, om een latere fijnafstelling van de sluiting van de vleugel toe te
laten (zie paragraaf 4.8).
p) Houd met één hand de beugel in contact met de poort en probeer een
complete openings- en sluitmanoeuvre uit te voeren.
q) fase 8: boor op de afgetekende punten gaten in de vleugel en maak de
beugel los van de arm en bevestig hem met behulp van geschikte schroeven aan de vleugel van de poort.
r) fase 9: bevestig de arm aan de beugel door de pen en de stop-benzing te
installeren. Belangrijk - Controleer of de beugel en de arm perfect waterpas
zijn. Draai eventueel de schroeven van de beugel los en zet hem waterpas.
s) Plaats de mechanische eindstops, zie hoofdstuk 3.5;
t) fase 10: zet de vleugel tot slot met de hand op ongeveer de helft van het
bewegingstraject en vergrendel de reductiemotor met de hiervoor bestem-
0
150 175 200 225 250 275 300 325 350 375 400 425 450 475
50
B
A
100
150
200
250
300
350
400
450
90°-95°
95°-100°
100°-105°
105°-110°
90°-95°
95°-105°
GRAFIEK 2
de sleutel (zie hoofdstuk 3.6). Verplaats de poort vervolgens met de hand
enkele centimeters, in de richting van de openingsbeweging.
04. Als de te installeren poort twee vleugels heeft, dient u, om de andere re ductiemotor te installeren, alle in dit hoofdstuk 3.4 beschreven handelingen
te herhalen.
3.4.3 - Installatie van de reductiemotor met ARM VAN GEREDUCEER-
DE LENGTE
Let op! – Met deze configuratie bedraagt de maximaal toegestane
openingshoek van de vleugel 90°.
01. a) Meet op de kolom de afstandswaarde B
(afb. 7) = afstand tussen het
draaipunt van de vleugel en het oppervlak van de kolom waar de achterste
beugel van de reductiemotor zal worden bevestigd.
b) Teken in de Grafiek 2 de gevonden afstandswaarde B
en trek vanuit dit
punt een horizontale lijn, totdat deze het gebied
met range 90° - 95° snijdt.
c) In de snijpunten tussen de horizontale lijn en het gebied
trekt u verticale
lijnen om de waarden te bepalen die gebruikt kunnen worden voor de
afstandswaarde A
(grafiek 2). Kies in dit bereik (range) vervolgens
een waarde voor A.
d) Teken de gevonden afstandswaarde A
af op de kolom en trek ter
hoogte hiervan een verticale lijn.
02. Bevestig de beugel op de kolom (afb. 10)
:
e) fase 1-2: Plaats de beugel op de kolom en laat de verticale middenlijn
hiervan samenvallen met de verticale lijn die u eerder heeft getrokken
(afstandswaarde A), en de arm met de horizontale lijn die u getrokken heeft
gedurende de procedure 3.4.1. Controleer in deze fase of de reductiemotor perfect waterpas is: een reductiemotor die niet recht staat kan tot storingen in de werking van de automatisering leiden.
f) fase 3-4: teken de bevestigingspunten af, boor gaten in de kolom en
monteer de pluggen; bevestig op dit punt de beugel met behulp van
geschikte schroeven en onderlegschijven.
g) Zet de vleugel van de poort in de maximale sluitstand;
h) fase 5: bevestig de reductiemotor met behulp van de twee bijgeleverde
schroeven en moeren aan de beugel;
i) Ontgrendel de reductiemotor, zie hoofdstuk 3.6;
03. Controleer de lengte van de arm met sleuven in de context
:
l) fase 6: breng de arm naar de vleugel toe en laat de bevestigingsbeugel
op de vleugel rusten: let op!
- duw met uw handen de gebogen arm
tegen de vleugel, totdat de arm blokkeert (maximale opening).
m) fase 7: verzeker u ervan dat de arm van de reductiemotor waterpas is
en teken met een potlood het midden
van het profiel van de sleuven van
de beugel af, om een latere fijnafstelling van de sluiting van de vleugel toe te
laten (zie paragraaf 4.8).
n) Bevestig de beugel provisorisch op de vleugel en zet de vleugel in de
stand voor maximale opening.
04. Bevestig de arm van de reductiemotor op de vleugel
:
o) fase 8: Boor gaten in de vleugel op de eerder afgetekende punten.
p) fase 9-10: Maak de beugel los van de arm en bevestig hem met ge -
schikte schroeven aan de vleugel van de poort.
q) fase 11: bevestig de arm aan de beugel door de pen en de stop-benzing te
installeren. Belangrijk - Controleer of de beugel en de arm perfect waterpas
zijn. Draai eventueel de schroeven van de beugel los en zet hem waterpas.
r) Plaats de mechanische eindstops, zie hoofdstuk 3.5.
s) fase 12: zet de vleugel tot slot met de hand op ongeveer de helft van het
bewegingstraject en vergrendel de reductiemotor met de hiervoor bestemde sleutel (zie hoofdstuk 3.6) Verplaats de poort vervolgens met de hand
enkele centimeters, in de richting van de openingsbeweging.
05. Als de te installeren poort twee vleugels heeft, dient u, om de andere
reductiemotor te installeren, alle in dit hoofdstuk 3.4 beschreven handelingen te herhalen.
Page 90

NL
4 – Nederlands
3.5 - Instelling van de mechanische eindaanslagen
01. Zet de vleugels van de poort met de hand in de maximale openingsstand;
02. Draai aan de plastic schijf op de onderkant van de reductiemotor en breng
de sleuf onder de arm in de positie die te zien is op afb. 11-1;
03. Zet de eindaanslag in de eerst mogelijke stand: probeer hem te plaatsen
zoals op afb. 11-2 getoond is (openingsrichting);
04. Draai de schijf zodanig dat de eindaanslag niet valt en breng de sleuf in de
positie die te zien is op afb. 11-3; voor een meer nauwkeurige afstelling,
draait u aan de stelschroef (afb. 11-4);
05. Als de installatie niet is uitgerust met een sluitstop op de grond, is het
noodzakelijk te procedure te herhalen vanaf punt 01 om ook de eindaanslagen van de sluitmanoeuvre af te stellen;
06. Tot slot schroeft u de bevestigingsmoer van de schijf (afb. 11-5) volledig
vast om te verzekeren dat de schijf niet per ongeluk kan draaien.
3.6 - Handmatig ontgrendelen en vergrendelen van de
reductiemotor
De reductiemotor is uitgerust met een mechanisch ontgrendelingsysteem dat
het mogelijk maakt de poort handmatig te openen en te sluiten.
Deze handmatige handelingen moeten worden uitgevoerd in het geval dat de
stroom uitvalt, bij storingen in de werking of gedurende de installatie.
Ontgrendelen (afb. 12-A):
01. Steek de sleutel in het slot;
02. Draai de sleutel met de klok mee (90°);
03. Door de werking van een veer, komt de hendel naar buiten: draai de hen-
del 90° tegen de klok in;
04. Op dit punt is het mogelijk de vleugel met de hand in de gewenste positie
te zetten.
Vergrendelen (afb. 12-B):
01. Draai de hendel 90° door de poot in verticale stand te zetten;
02. Duw tegen de hendel tot hij in zijn behuizing zit;
03. Draai de sleutel 90° met de klok mee en trek hem eruit.
De elektrische aansluiting van de verschillende inrichtingen (fotocellen, digitale
toetsenborden, lezers voor transpondercards etc.) van de automatisering op de
besturingseenheid moet tot stand worden gebracht via het “Bluebus” systeem
van Nice.
Beschrijving van de elektrische aansluitingen (fig. 13)
ANTENNE ingang voor de antenne van een radio-ontvanger
FLASH uitgang voor 1 knipperlicht met lampje van 12 V (maximaal 21 W). [*]
ELS uitgang voor elektrisch slot van 12 Vac (maximaal 15 VA). [*]
S.C.A. “Lampje Poort Open”: uitgang voor 1 signaleringslampje van 24 V
en maximaal 4 W. [*]
BLUEBUS ingang voor compatibele inrichtingen (MOFB, MOFOB, MOB en
MOTB; parallelle aansluiting van de inrichtingen door middel van 2
draden die zowel voor de stroomtoevoer als voor de
communicatiesignalen dienen, er hoeft geen bepaalde polariteit te
worden aangehouden. De elektrische aansluiting moet van het
parallelle type zijn en het is niet nodig om een bepaalde polariteit
aan te houden. Gedurende de zelfleringfase zal elke op de
besturingseenheid verbonden inrichting dankzij zijn eenduidige
code apart door de besturingseenheid worden herkend. Iedere
keer dat er een inrichting wordt verwijderd of toegevoegd, moet de
deze inrichting eerst door de besturingseenheid worden ‘herkend’
(zelflering, paragraaf 4.6).
STOP ingang voor inrichtingen die met hun interventie een onmiddellijke
onderbreking van de aan de gang zijnde manoeuvre gevolgd door
een korte omkering, veroorzaken; mogelijkheid tot het aansluiten
van contacten van het type NO (normaal open), NC (normaal
gesloten) of van inrichtingen met uitgang met constante weerstand
8,2 kΩ (contactlijsten). Iedere met deze ingang verbonden
inrichting wordt gedurende de zelfleringfase apart door de
besturingseenheid ‘herkend’ (paragraaf 3.4); in deze fase
veroorzaakt hij, als de besturingseenheid een willekeurige afwijking
ten opzichte van de geleerde status detecteert, een STOP. Het is
mogelijk op deze ingang één of meer, ook onderling van elkaar
verschillende inrichtingen aan te sluiten:
– parallelle aansluiting van meerdere NO inrichtingen, zonder
beperkingen van het aantal;
– sluit meerdere in serie geschakelde NC inrichtingen aan, zonder
beperking van aantal;
– parallelle aansluiting van 2 inrichtingen met uitgang met
constante weerstand 8,2 kΩ. Als er meer dan 2 inrichtingen zijn,
dienen deze in cascade te worden aangesloten, met slechts 1
afsluitweerstand van 8,2 kΩ;
– sluit 2 inrichtingen NO en NC parallel aan, en sluit een weerstand
van 8,2 kΩ in serie aan met het contact NC (dit maakt ook de
combinatie tussen 3 inrichtingen NO - NC en 8,2 kΩ mogelijk)
P. P. ingang voor bedieningsinrichtingen die bij activering de manoeuvre
in modus Stap-voor-stap aansturen; mogelijkheid tot aansluiting
ELEKTRISCHE AANSLUITINGEN
4
van contacten van het type NO
OPEN ingang voor bedieningsinrichtingen die bij activering alleen de
openingsmanoeuvre aansturen; mogelijkheid tot aansluiting van
contacten van het type NO
CLOSE ingang voor bedieningsinrichtingen die bij activering alleen de
sluitmanoeuvre aansturen; mogelijkheid tot aansluiting van
contacten van het type NO
ENC1 ingang encoder - reductiemotor 1 (klem 1, 2); er hoeft geen
bepaalde polariteit te worden aangehouden
ENC2 ingang encoder - reductiemotor 2 (klem 4, 5); er hoeft geen
bepaalde polariteit te worden aangehouden
M1 uitgang voor reductiemotor 1 (klem 7, 8, 9)
M2 uitgang voor reductiemotor 2 (klem 10, 11, 12).
[*] De uitgangen FLASH, ELS en S.C.A. kunnen met andere functies geprogrammeerd worden (zie “TABEL 3 - Functies 1° niveau; of via Oview programmeereenheid, zie paragraaf 8.3).
4.1 - Elektrische aansluitingen tussen de reductiemotor en de
besturingseenheid mod. HK7024
Let op! – Breng de elektrische aansluitingen pas tot stand nadat u de
reductiemotor hebt geïnstalleerd.
AANBEVELINGEN!
– De aansluitwerkzaamheden mogen uitsluitend door gekwalificeerd personeel worden uitgevoerd.
– Bij het uitvoeren van elektrische aansluitingen mag de installatie absoluut niet op de netspanning zijn aangesloten en moet de bufferbatterij van
de automatisering, indien aanwezig, zijn afgekoppeld.
– Op de elektrische voedingsleiding dient een inrichting te worden aangebracht
dat volledige afkoppeling van de automatisering van het elektriciteitsnet verzekert. Deze afkoppelinrichting moet een dusdanige openingsafstand tussen de
contacten hebben dat complete afkoppeling wordt verzekerd in de condities
die worden voorgeschreven door de overspanningcategorie III, in overeenstemming met de installatievoorschriften. Indien nodig garandeert deze inrichting
een snelle en veilige afkoppeling van de voeding; de inrichting moet dan ook in
het zicht van de automatisering worden geïnstalleerd. Als de inrichting op een
niet-zichtbare plaats zit, moet hij een systeem hebben dat een eventuele ongewilde of niet-geautoriseerde heraansluiting van de voeding tegenhoudt, om
iedere kans op gevaarlijke situaties uit te sluiten. De afkoppelinrichting wordt
niet bij het product geleverd.
01. Open het deksel (afb. 14-1);
02. Licht de besturingseenheid (afb. 14-2) op;
03. Voer de voedingskabel en de andere elektriciteitskabels door één van de
gaten op de onderkant van de reductiemotor; u dient de aanwezige kabelmantel hierbij door te snijden (afb. 14-4);
04. Schroef de kabelklem los en plaats de voedingskabel in het hiervoor
bestemde kabelkanaal (afb. 14-5);
05. Sluit eerst de voedingskabel aan, zie afb. 14-6;
06. Blokkeer de voedingskabel met de kabelklem (afb. 14-7);
07. Sluit nu de elektriciteitskabels van de motoren M1 en M2 aan, en volg hier-
bij de symbolen op het etiket (afb. A):
a) sluit op de klem M1
(7-8-9) de motor aan die de onderste vleugel aan-
drijft (de tweede
die de openingsmanoeuvre begint ) en vervolgens de bij-
behorende encoder op de klemmen 1-2;
b) sluit op de klem M2
(10-11-12) de motor aan die de bovenste vleugel
aandrijft (de eerste
die de openingsmanoeuvre begint) en vervolgens de bij-
behorende encoder op de klemmen 4-5.
BELANGRIJK! – Indien er slechts één reductiemotor in de installatie
aanwezig is, sluit u deze aan op de klem M2 en laat u de klem M1 vrij;
08. Sluit nu de elektriciteitskabels van de verschillende inrichtingen aan, zie hier-
voor afb. 17 en paragraaf 4.3. Opmerking – Om het aansluiten van de kabels
te vergemakkelijken, is het mogelijk de klemmen uit hun behuizingen te halen;
09. Sluit het deksel van de reductiemotor (afb. 14-8).
4.2 - Aansluiting van de reductiemotor zonder besturings-
eenheid mod. HK7224
01. Open het deksel zoals getoond in afb. 15-1;
02. Voer de motorkabel door één van de gaten op de onderkant van de reductie-
motor; u dient de aanwezige kabelmantel hierbij door te snijden (afb. 15-2);
03. Schroef de kabelklem (afb. 15-3) los, plaats de kabel in het hiervoor
bestemde kabelkanaal en sluit de draden aan zoals weergegeven op afb.
16-4; volg hierbij de symbolen op het etiket;
03. Blokkeer de kabel met de kabelklem (afb. 15-5);
04. Sluit het deksel van de reductiemotor (afb. 15-6).
ENC1 ENC2
1245789101112
M1 M2
24V
24V
+
-
+
-
A
Page 91

NL
Nederlands – 5
4.3 - Aansluiting van andere inrichtingen
Als er nog andere inrichtingen in de installatie van stroom moet voorzien, bijvoorbeeld een lezer voor transpondercards of het lampje voor de verlichting van
de sleutelschakelaar, is het mogelijk deze inrichtingen aan te sluiten op de
besturingseenheid, op de klemmen “P.P. (positief)” en “STOP (negatief)” (afb.
13). De voedingsspanning is 24 Vcc (-30% ÷ +50%) met een maximaal
beschikbare stroom van 200 mA.
Opmerking – De spanning die beschikbaar is op de klemmen “P.P.” en “STOP”,
blijft ook aanwezig wanneer de functie “Stand By” op de kaart geactiveerd wordt.
4.4 - Adressering van de aangesloten inrichtingen
Om de besturingseenheid in staat te stellen om de op het Bluebus systeem
aangesloten inrichtingen te herkennen, dient u een adres aan deze inrichtingen
te geven. Hiervoor dient de elektrische geleidebrug die in elke inrichting aanwezig is in de correcte positie te worden gebracht, zie afb. B.
Raadpleeg voor de adressering van de andere inrichtingen de betreffende
instructiehandleidingen.
Na afloop van de installatieprocedure of na het verwijderen van fotocellen of
andere inrichtingen, dient de zelfleringprocedure voor deze inrichtingen te worden uitgevoerd, zie de paragraaf 4.6.
4.5 - Eerste inschakeling en controle van de aansluitingen
Na de besturingseenheid onder spanning te hebben gezet, dient u de volgende
controles uit te voeren:
• na enkele seconden, controleren of de led “Bluebus” (afb. 16) regelmatig
knippert, met een frequentie van 1 maal per seconde;
• controleer of de led’s van de fotocellen (afb. 16), zowel TX als RX, knipperen.
De manier waarop de led’s knipperen is in deze fase niet van belang;
• controleer of het knipperlicht dat is aangesloten op de uitgang FLASH uit is.
Als dit allemaal niet gebeurt, dient de stroomtoevoer naar de besturingseenheid
te worden uitgeschakeld en dient u de verschillende, eerder tot stand gebrachte, elektrische aansluitingen te controleren.
4.6 - Zelflering van de aangesloten inrichtingen
Na de eerste inschakeling dient u de besturingseenheid de procedure voor herkenning van de met de ingangen “Bluebus” en “Stop” verbonden inrichtingen
uit te voeren.
LET OP! – De zelfleringfase moet ook worden uitgevoerd als er geen
enkele inrichting met de besturingseenheid is verbonden.
Dankzij de zelfleringprocedure is de besturingseenheid in staat de verschillende
aangesloten inrichtingen apart te herkennen en de mogelijke aanwezige storingen te detecteren. Om deze reden dient de zelfleringprocedure iedere keer dat
er een inrichting wordt toegevoegd of verwijderd te worden uitgevoerd.
De led’s “L1” en “L2” op de besturingseenheid (afb. 16) zullen langzaam knipperen, om aan te geven dat de zelfleringprocedure moet worden uitgevoerd:
01. Druk de toetsen “” en “Set” (afb. 16) tegelijkertijd in en houd ze ingedrukt.
02. Laat de toetsen los wanneer de led’s “L1” en “L2” snel beginnen te knip-
peren (na circa 3 seconden).
03. Wacht enkele seconden tot de besturingseenheid de fase voor zelflering
van de inrichtingen voltooid heeft.
04. Na afloop van deze fase moet de led “Stop” branden en moeten de led’s
“L1” en “L2” uitgaan (het is mogelijk dat de led’s “L3” en “L4” beginnen te
knipperen).
4.7 - Zelflering van de posities van de mechanische
eindaanslagen
Na de zelflering van de aangesloten inrichtingen (paragraaf 4.6), dienen de
posities van de mechanische stops (maximale openingsstand en maximale sluitingsstand) te worden aangeleerd. Deze procedure kan in drie modi worden uitgevoerd: automatisch, handmatig en gemengd.
In de automatische modus
, voert de besturingseenheid de procedure voor zel-
flering van de mechanische stops uit en berekent wat de beste faseverschillen
van de vleugels zijn (SA en SC, afb. C).
In de handmatige modus
worden de acht posities van de mechanische stops
(afb. C) één voor één geprogrammeerd door de vleugels op de gewenste punten te zetten. De te programmeren positie kan gevonden worden aan de hand
van het knipperen van één de 8 led’s (L1...L8), zie Tabel 2.
In de gemengde modus
is het mogelijke de automatische procedure uit te voe-
ren en vervolgens met de handmatige procedure één of meer posities te wijzigen, met uitzondering van de posities “0” en “1” (afb. C) die gelijk zijn aan de
posities van de mechanische stops.
4.7.1 - Zelflering in automatische modus
01. Druk de toetsen “Set” en “” tegelijk in en houd ze ingedrukt;
02. Wanneer de led’s “L3” en “L4” snel beginnen te knipperen, (na circa 3 sec.)
de toetsen weer loslaten;
03. Controleer of de automatisering de volgende reeksen van manoeuvres uitvoert:
a - Langzaam sluiten van de reductiemotor M1 tot aan de mechanische stop
b - Langzaam sluiten van de reductiemotor M2 tot aan de mechanische stop
c - Langzaam openen van de reductiemotor M2 en de reductiemotor M1
tot aan de mechanische stop
d - Snel sluiten van de reductiemotors M1 en M2
Aanbevelingen:
– Als de eerste manoeuvre (a) niet de door de motor M1 aangedreven vleugel
sluit, maar de door M2 aangedreven vleugel, drukt u op de toets “
” of “”
TABEL 2
Positie Led Beschrijving
Positie 0
(motor 1)
Positie 0
(motor 2)
Positie SA
(motor 2)
Positie A
(motor 1)
Positie A
(motor 2)
Positie SC
(motor 1)
Positie 1
(motor 1)
Positie 1
(motor 2)
Positie voor maximale sluiting: wanneer de vleugel 1 de me chanische stop voor de sluitbeweging raakt
Positie voor maximale sluiting: wanneer de vleugel 2 de me chanische stop voor de sluitbeweging raakt
Faseverschil in openingsbeweging: wanneer de vleugel 2 deze
positie overschrijdt, begint de opening van de vleugel 1
Gewenste openingspositie: positie waarin de met motor 1 verbonden vleugel moet stoppen na afloop van een openingsmanoeuvre. Het is niet noodzakelijk dat deze positie samenvalt
met de mechanische stop van de openingsbeweging, er kan
naar believen gekozen worden tussen positie “0” en “1”
Gewenste openingspositie: positie waarin de met motor 2 verbonden vleugel moet stoppen na afloop van een openingsmanoeuvre. Het is niet noodzakelijk dat deze positie samenvalt
met de mechanische stop van de openingsbeweging, er kan
naar believen gekozen worden tussen positie “0” en “1”
Faseverschil in sluitbeweging: wanneer de vleugel 1 zich on der
deze positie bevindt, begint de sluiting van de vleugel 2
Positie voor maximale opening: wanneer de vleugel 1 de me chanische stop voor de openingsbeweging raakt
Positie voor maximale opening: wanneer de vleugel 2 de me chanische stop voor de openingsbeweging raakt
L1
L2
L3
L4
L5
L6
L7
L8
0
11
A
SC
SA
A
0
M1 M2
C
POSITIES
B
TABEL 2 - ADRESSEN VAN DE FOTOCELLEN
Fotocel Bruggen
FOTO
Externe fotocel h = 50 met activering in sluitbeweging
(onderbreking en omkering van de beweging)
FOTO II
Externe fotocel h = 100 met activering in sluitbeweging
(onderbreking en omkering van de beweging)
FOTO 1
Interne fotocel h = 50 met activering zowel in sluitbeweging
(onderbreking en omkering van de beweging) als in
openingsbeweging (onderbreking en hervatting van de
beweging op het moment dat de fotocel weer vrij wordt
gegeven)
FOTO 1 II
Interne fotocel h = 100 met activering zowel in sluitbeweging
(onderbreking en omkering van de beweging) als in
openingsbeweging (onderbreking en hervatting van de
beweging op het moment dat de fotocel weer vrij wordt
gegeven)
FOTO 2
Interne fotocel met activering in openingsbeweging
(onderbreking en omkering van de beweging)
FOTO 2 II
Interne fotocel met activering in openingsbeweging
(onderbreking en omkering van de beweging)
FOTO 3
CONFIGURATIE NIET TOEGESTAAN
Page 92

NL
6 – Nederlands
om de zelfleringfase te stoppen. Draai op dit punt de aansluitingen van de
motoren M1 en M2 op de klemmen op de besturingseenheid om en vervolgens die van de bijbehorende decoders; start de procedure vervolgens
opnieuw vanaf punt 01;
– Als de eerste twee manoeuvres (a en b) geen “sluitbewegingen” blijken te
zijn, maar “openingsbewegingen”, drukt u op de toets “
” of “” om de zelfleringfase te stoppen. Op dit punt dient u, op de reductiemotor die de openingsmanoeuvre heeft uitgevoerd, de polariteit van de twee draden van de
reductiemotor M1 (klemmen 7 en 9) en van M2 (klemmen 10 en 12) om te
draaien en de procedure te beginnen vanaf punt 01;
04. Na afloop van de sluitmanoeuvre van de 2 motoren (d) gaan de led’s “L3”
en “L4” uit ten teken dat de procedure correct werd uitgevoerd.
Aanbevelingen:
– Indien gedurende de automatische zelfleringprocedure de fotocellen of een
met de ingang “stop” verbonden inrichting in werking treden, wordt de procedure onderbroken en begint de led L1 te knipperen. Om de zelflering weer
te activeren, dient u te procedure te hervatten vanaf punt 01;
– De automatische zelfleringprocedure kan ook na de installatie op elk gewenst
moment opnieuw worden uitgevoerd; bijvoorbeeld na een verandering van
de positie van de mechanische stops.
4.7.2 - Zelflering in handmatige modus
:
Let op! – Vanaf stap 03:
– om van led L1 naar L8 te gaan
, dient u de toetst of kort in te drukken (de
led knippert, om de actuele positie aan te geven);
– om de motor
in één van beide richtingen te laten bewegen houd u de toets
of ingedrukt
.
01. Druk
de toetsen “Set” en “” tegelijk in en houd ze ingedrukt;
02. Laat de toetsen los wanneer del led “L1” begint te knipperen (na ongeveer
1 seconde); Opmerking – Als de toetsen “Set” en “” na 3 seconden niet
worden losgelaten, wordt de procedure voor “automatische zelflering
”
geactiveerd, en niet de handmatige procedure.
03. • de led
L1 knippert: positie 0 van M1
Om de motor 1 aan te sturen en in de positie 0 (afb. C) te brengen: houd
de toets “” of “” ingedrukt. Nadat de positie bereikt is, de toets loslaten om de manoeuvre te stoppen. Om de positie in het geheugen op te
slaan, de toets “Set” minstens 3 sec. ingedrukt houden
en vervolgens
weer loslaten (na 2 sec. blijft de led L1 branden en bij het loslaten van de
toets “Set” begint de led L2 te knipperen).
• de led
L2 knippert: positie 0 van M2
Om de motor 2 aan te sturen en in de positie 0 (afb. C) te brengen: de
toets “” of “” indrukken en vasthouden. Nadat de positie bereikt is, de
toets loslaten om de manoeuvre te stoppen. Om de positie in het geheugen op te slaan, de toets “Set” minstens 3 sec. ingedrukt houden en vervolgens weer loslaten (na 2 sec. blijft de led L2 branden en bij het loslaten van de toets “Set” begint de led L3 te knipperen).
• de led
L3 knippert: positie SA van M2
Om de motor 2 aan te sturen en in de positie SA (afb. C) te brengen: de
toets “” of “” indrukken en vasthouden. Nadat de positie bereikt is, de
toets loslaten om de manoeuvre te stoppen. Om de positie in het geheugen op te slaan, de toets “Set” minstens 3 sec. ingedrukt houden en vervolgens weer loslaten (na 2 sec. blijft de led L3 branden en bij het loslaten van de toets “Set” begint de led L4 te knipperen).
• de led
L4 knippert: positie A van M1
Om de motor 1 aan te sturen en in de positie A (afb. C) te brengen: de
toets “” of “” indrukken en vasthouden. Nadat de positie bereikt is, de
toets loslaten om de manoeuvre te stoppen. Om de positie in het geheugen op te slaan, de toets “Set” minstens 3 sec. ingedrukt houden en vervolgens weer loslaten (na 2 sec. blijft de led L4 branden en bij het loslaten van de toets “Set” begint de led L5 te knipperen).
• de led
L5 knippert: positie A van M2
Om de motor 2 aan te sturen en in de positie A (afb. C) te brengen: de
toets “” of “” indrukken en vasthouden. Nadat de positie bereikt is, de
toets loslaten om de manoeuvre te stoppen. Om de positie in het geheugen op te slaan, de toets “Set” minstens 3 sec. ingedrukt houden en vervolgens weer loslaten (na 2 sec. blijft de led L5 branden en bij het loslaten van de toets “Set” begint de led L6 te knipperen).
• de led
L6 knippert: positie SC van M1
Om de motor 1 aan te sturen en in de positie SC (afb. C) te brengen: de
toets “” of “” indrukken en vasthouden. Nadat de positie bereikt is, de
toets loslaten om de manoeuvre te stoppen. Om de positie in het geheugen op te slaan, de toets “Set” minstens 3 sec. ingedrukt houden en vervolgens weer loslaten (na 2 sec. blijft de led L6 branden en bij het loslaten van de toets “Set” begint de led L7 te knipperen).
• de led
L7 knippert: positie 1 van M1
Om de motor 1 aan te sturen en in de positie 1 (afb. C) te brengen: de
toets “” of “” indrukken en vasthouden. Nadat de positie bereikt is, de
toets loslaten om de manoeuvre te stoppen. Om de positie in het geheugen op te slaan, de toets “Set” minstens 3 sec. ingedrukt houden en vervolgens weer loslaten (na 2 sec. blijft de led L7 branden en bij het loslaten van de toets “Set” begint de led L8 te knipperen).
• de led
L8 knippert: positie 1 van M2
Om de motor 2 in de positie 1 (afb. C) te brengen: de toets “” of “”
indrukken en vasthouden. Nadat de positie bereikt is, de toets loslaten
om de manoeuvre te stoppen. Om de positie in het geheugen op te
slaan, de toets “Set” minstens 3 sec. ingedrukt houden en vervolgens
loslaten om de programmering te verlaten (na 2 sec. blijft de led L8 branden tot u de toets “Set” loslaat).
Opmerking – Voor de handmatige programmering van een installatie met
slechts één reductiemotor, gaat u te werk zoals beschreven in paragraaf 4.7.2
en dient u bij stap 03 de programmering van de positie “0” en vervolgens van
de positie “1” van M1 uit te voeren,en het gedeelte met betrekking tot de toet-
Dit zijn de belangrijkste fasen bij de verwezenlijking van de automatisering, om
een maximale veiligheid van de installatie te garanderen. De test kan ook worden gebruikt om de inrichtingen waar de automatisering uit bestaat, periodiek
te controleren. De test- en inbedrijfstellingsfasen van de automatisering moeten
door vakmensen worden verricht, die het op zich moeten nemen de tests te
bepalen, die nodig zijn om de aangenomen oplossingen ten opzichte van de
aanwezige gevaren te controleren en de inachtneming te controleren van wat
door wetten, voorschriften en wettelijke regels wordt voorgeschreven: in het bijzonder van alle vereisten van de norm EN 12445, die de testmethoden bepaalt
om de automatische systemen van hekken te controleren.
De bijkomende inrichtingen moeten een specifieke test ondergaan, zowel wat
betreft de functionaliteit, als hun goede interactie met HYKE; raadpleeg dus de
handleidingen van de afzonderlijke inrichtingen.
5.1 - Testen
De volgorde van de voor de test te verrichten handelingen heeft betrekking op
een standaardinstallatie (fig. 3):
1 Controleer of alle aanwijzingen uit het hoofdstuk ”Aanbevelingen voor de
installatie” strikt in acht zijn genomen.
2 Deblokkeer de reductiemotoren handmatig en controleer of het op het punt
dat voor de handmatige manoeuvre bestemd is mogelijk is de hekdeur openend of sluitend te bewegen met minder kracht dan 390 N.
3 Blokkeer de reductiemotoren (zie hoofdstuk 3.6).
4 Terwijl u de besturingsinrichtingen (zender, bedieningsknop, sleutelschake-
laar, enz.) gebruikt, verricht u openings-, sluitings- en stoptests van het hek
en verzekert u zich ervan dat de beweging van de hekdeuren overeenkomt
met wat voorzien is. Het is raadzaam verschillende tests te verrichten om
de beweging van de deuren te beoordelen en eventuele montage- en
afstelfouten en ook bijzondere wrijvingspunten vast te stellen.
5 Controleer de werking van alle veiligheidsinrichtingen van de installatie (foto-
cellen, veiligheidslijst, enz.) één voor één. Als een inrichting ingrijpt, knippert
de led “BLUEBUS” op de besturingseenheid 2 keer sneller ter bevestiging
van de plaatsgevonden herkenning.
6 Als de gevaarlijke situaties veroorzaakt door de beweging van de hekdeu-
ren beschermd zijn door de beperking van de botskracht moet de kracht
worden gemeten volgens norm EN 12445. Als de controle van de “kracht
van de reductiemotor” wordt gebruikt als hulpmiddel van het systeem om
de botskracht te verminderen, probeert en zoekt u tenslotte de afstelling,
die voor de beste resultaten zorgt.
5.2 - Inbedrijfstelling
De inbedrijfstelling kan uitsluitend plaatsvinden na alle testfasen met
positief resultaat te hebben verricht.
1 Stel een technisch dossier van de automatisering samen, dat de volgende
TESTEN EN INBEDRIJFSTELLING
5
sen “” en “” te negeren maar alleen de toets “Set” te gebruiken, zoals
beschreven. Belangrijk! – In de handmatige procedure moeten de posities
“SA” van M2; “A” van M1; “SC” van M1 niet geprogrammeerd worden.
4.7.3 - Zelflering in gemengde
modus
Voer deze procedure uit nadat u de automatische zelfleringprocedure heeft uitgevoerd:
01. Druk
de toetsen “Set” en “” tegelijk in en houd ze ingedrukt;
02. Laat de toetsen los wanneer del led “L1” begint te knipperen (na ongeveer
1 seconde); Opmerking – Als de toetsen “Set” en “” na 3 seconden niet
worden losgelaten, wordt de procedure voor “automatische zelflering
”
geactiveerd, en niet de handmatige procedure.
03. Door kort indrukken van de toets “” of “” verplaatst u de knipperende
led (L1…L8) naar de positie die u wilt programmeren; ga voor iedere afzonderlijke positie te werk zoals beschreven bij stap 03 van de handmatige
zelflering (paragraaf 4.7.2).
Herhaal deze handeling voor alle andere posities die u wilt veranderen.
Om de handmatige zelflering af te sluiten, drukt u meerdere malen op de toets
“”, om de knipperende led tot voorbij de positie L8 te verplaatsen.
4.8 - Controle van de beweging van de vleugels van de poort
Het wordt aangeraden om de besturingseenheid na afloop van de zelfleringfase enkele openings- en sluitmanoeuvres uit te laten voeren, om te controleren
of de beweging van de poort correct is en om eventuele montage- en afstelfouten te corrigeren.
01. Druk op de toets “Open”. Controleer of het faseverschil van de vleugels in
de openingsbeweging correct is en controleer of er gedurende de openingsmanoeuvre een versnellingsfase, een fase met constante snelheid,
een vertragingsfase is en of de eindaanslag van de vleugels zich op een
paar centimeter afstand van de mechanische stops van de openingsbeweging bevindt;
02. Druk op de toets “Close” en controleer of er gedurende de sluitmanoeuvre
een versnellingsfase, en fase met constante snelheid en een vertragingsfase is. Controleer of het faseverschil van de vleugels in de sluitbeweging
cor rect is. Na afloop moeten de vleugels perfect gesloten zijn op de
mechanische sluitstop;
03. Controleer gedurende de manoeuvres of het knipperlicht knippert met tussenpozen van 0,5 seconde bij brandend knipperlicht en van 0,5 seconden
bij gedoofd knipperlicht.
Page 93

NL
Nederlands – 7
documenten moet bevatten: een allesomvattende tekening van de automatisering, het schema van de verrichte elektrische aansluitingen, het on derzoek van de aanwezige gevaren en de bijbehorende aangenomen oplos singen, de verklaring van overeenstemming van de fabrikant van alle gebruikte
inrichtingen en de verklaring van overeenstemming die door de installateur
is opgemaakt.
2 Breng een plaatje op het hek aan met ten minste de volgende gegevens:
soort automatisering, naam en adres van de fabrikant (verantwoordelijke
van de “inbedrijfstelling”), serienummer, bouwjaar en “CE” markering.
3 Stel de verklaring van overeenstemming op en geef ze aan de eigenaar van
de automatisering.
4 Stel de “Gebruikshandleiding” van de automatisering op en geef ze aan
de eigenaar van de automatisering.
5 Stel het “Onderhoudsprogramma” op, met de onderhoudsvoorschriften
van alle inrichtingen van de automatisering en geeft het aan de eigenaar van
de automatisering.
6 Voordat u de automatisering in bedrijft stelt, informeert u de eigenaar goed
over de gevaren en restrisico’s die er nog zijn.
Voor de geciteerde documentatie stelt Nice via haar technische servicedienst het volgende ter beschikking: handleidingen, leidraden en reeds
ingevulde formulieren. Zie ook: www.nice-service.com
Op de besturingseenheid zitten 3 toetsen: OPEN (), STOP (SET), CLOSE ().
Deze toetsen kunnen zowel gebruikt worden om de besturingseenheid te bedienen gedurende de testfasen, als om de beschikbare functies te programmeren.
De beschikbare programmeerbare functies kennen 2 niveaus en de werkingsstatus ervan wordt aangegeven door de 8 led’s (L1 ... L8) op de besturingseenheid ( led aan
= functie actief; led uit = functie niet actief).
De programmeertoetsen gebruiken:
OPEN (): – toets voor het aansturen van de openingsbeweging van de poort;
– selectietoets in programmeerfase.
STOP/SET: toets voor het onderbreken van een manoeuvre; als hij meer dan 5
seconden ingedrukt wordt gehouden, activeert hij de programmeerfase.
CLOSE (): – toets voor het aansturen van de sluitbeweging van de poort; –
selectietoets in programmeerfase.
6.1 - Programmering eerste niveau (ON-OFF)
Alle functies van het eerste niveau zijn in de fabriek ingesteld op “OFF” en kunnen op elk gewenst moment gewijzigd worden. Om de verschillende functies te
controleren, zie Tabel 3. Voor de programmeerprocedure, zie Tabel 4.
BELANGRIJK – De programmeerprocedure kent een tijd van maximaal 10
seconden tussen het indrukken van de ene en de andere toets. Nadat deze tijd
verstreken is, wordt de procedure automatisch afgesloten, waarbij de tot op
dat moment aangebrachte wijzigingen worden opgeslagen.
PROGRAMMERING VAN DE
BESTURINGSEENHEID
6
TABEL 3 - Functies eerste niveau
Led Functie Beschrijving
L1 Automatische sluiting
L2 Sluit na foto
L3 Sluit altijd
L4 Stand-by alles
L5 Elektrisch slot / Gebruikerslicht
L6 Voorwaarschuwing
L7 “Sluit” wordt “Open gedeeltelijk 1”
L8 “Lampje poort open" of
“Lampje onderhoud”
Functie ACTIEF: na een openingsmanoeuvre wordt een pauze ingelast (waarvan de duur gelijk is aan de
geprogrammeerde Pauzetijd) nadat deze tijd is verstreken, start de besturingseenheid automatisch een sluitmanoeuvre. De fabriekswaarde van de Pauzetijd is 30 sec.
Functie NIET ACTIEF: de werking is van het “semi-automatische” type.
Functie ACTIEF
: indien gedurende de openings- of sluitmanoeuvre de fotocellen in werking treden, wordt
de pauzetijd gereduceerd tot 5 sec. onafhankelijk van de geprogrammeerde pauzetijd.
Met gedeactiveerde “automatische sluiting” wordt, indien gedurende het sluiten de fotocellen in werking
treden, de “automatische sluiting” met de geprogrammeerde “pauzetijd” geactiveerd.
Functie ACTIEF
: in het geval van een stroomuitval, ook indien deze van korte duur is, zal de besturingseenheid bij het terugkeren van de stroom een geopende poort detecteren en automatisch een sluitmanoeuvre starten, voorafgegaan door 5 sec. voorwaarschuwing.
Functie NIET ACTIEF: bij het terugkeren van de stroom blijft de poort waar hij is.
F
unctie ACTIEF: 1 minuut na afloop van de manoeuvre zal de besturingseenheid de uitgang “BlueBus”
(inrichtingen aangesloten), de Bus T4 (inrichtingen aangesloten), de uitgangen flash, ELS en sca, enkele
interne circuits en alle led’s, met uitzondering van de Led BlueBus, die langzamer gaat knipperen, uitschakelen. Wanneer de besturingseenheid een instructie ontvangt, wordt de normale werking hersteld
(met een korte vertraging). Deze functie heeft het doel het stroomverbruik te verminderen; dit is belangrijk
bij voeding op batterijen of zonnepanelen.
F
unctie ACTIEF: de uitgang “elektrisch slot2 schakelt zijn functie om naar “gebruikerslicht”.
Functie NIET ACTIEF: de uitgang werkt als elektrisch slot.
F
unctie ACTIEF: het is mogelijk een pauze van 3 seconden in te lassen tussen de inschakeling van het knipperlicht en het begin van de manoeuvre, om op tijd te waarschuwen voor een gevarensituatie.
F
unctie NIET ACTIEF: de signalering van het knipperlicht valt samen met het begin van de manoeuvre.
F
unctie ACTIEF: alle instructies die overeenstemmen met “Sluit” (ingang “Close” of radio-instructie “Sluit”)
worden vervangen door de instructie “gedeeltelijke opening 12.
F
unctie ACTIEF: de uitgang 2lampje poort open” van de besturingseenheid schakelt zijn werking om naar
“lampje onderhoud”.
Functie NIET ACTIEF: de uitgang werkt als “lampje poort open”
TABEL 4 - Procedure voor programmering eerste niveau
01. Houd de toets “Set” circa 3 seconden ingedrukt;
02. Laat de toets los wanneer de led “L1” begint te knipperen;
03. Druk op de toets “” of “” om de knipperende led te verplaatsen naar de led die de te wijzigen functie vertegenwoordigt;
04. Druk op de toets “Set” om de status van de functie te veranderen:
(kort knipperen = OFF - lang knipperen = ON);
05. Wacht 10 seconden (maximumtijd) om de programmering af te sluiten.
Opmerking – Om andere functie op “ON” of “OFF” te programmeren dient u, gedurende het uitvoeren van de procedure de punten 03 en 04 gedurende de
fase zelf te herhalen.
SET
SET
SET
L1
of
3 s
10 s
Page 94

NL
8 – Nederlands
TABEL 5 - Functies tweede niveau
Ingangsled Parameter Led Waarde Beschrijving
(niveau)
L1
L1
L2
L3
L4
L5
L6
L7
L8
5 seconden
15 seconden
30 seconden
45 seconden
60 seconden
80 seconden
120 seconden
180 seconden
Stelt de pauzetijd in, d.w.z. de tijd voordat de poort automatisch weer gesloten wordt. Heeft alleen uitwerking
als de functie Sluiting actief is.
Pauzetijd
L2 L1
L2
L3
L4
L5
L6
L7
L8
Open – stop – sluit – stop
Open – stop – sluit – open
Open – sluit – open – sluit
Woonblok:
• in de openingsmanoeuvre
hebben de instructies “Stap-voor-stap” en
“Open” geen enkele uitwerking; de instructie “Sluit” daarentegen veroorzaakt de omkering van de beweging, d.w.z. de poort wordt gesloten.
• in de sluitmanoeuvre veroorzaken de instructies “Stap-voor-stap” en
“Open” de omkering van de beweging, d.w.z. de vleugels worden geopend;
de instructie “Sluit” heeft daarentegen geen enkele uitwerking.
Woonblok 2:
• in de openingsmanoeuvre
hebben de instructies “Stap-voor-stap” en “Open”
geen enkele uitwerking; de instructie “Sluit” daarentegen veroorzaakt de omkering van de beweging, d.w.z. de poort wordt gesloten. Als de verstuurde in -
structie langer dan 2 seconden aanhoudt, wordt een “Stop” uitgevoerd.
• in de sluitmanoeuvre veroorzaken de instructies “Stap-voor-stap” en “Open”
de omkering van de beweging, d.w.z. de vleugels worden geopend; de instructie “Sluit” heeft daarentegen geen enkele uitwerking. Als de verstuurde
instructie langer dan 2 seconden aanhoudt, wordt een “Stop” uitgevoerd.
Stap-voor-stap 2 (minder dan 2” leidt tot open gedeeltelijk)
Persoon aanwezig:
de manoeuvre wordt alleen uitgevoerd als de verstuurder instructie aanhoudt, als de instructie wordt onderbroken, stopt de manoeuvre.
opening in “semi-automatisch”, sluiting bij “persoon aanwezig”
Regelt de reeks van instructies horend
bij de ingang “Stap-voor-stap”, “Open”,
“Sluit” of de radio-instructie.
Opmerking – Door L4, L5, L7 en L8
in te stellen wordt ook het gedrag van
de instructies “Open” en “Sluit” gewijzigd.
Functie
Stap-voorstap
L3
L1
L2
L3
L4
L5
L6
L7
L8
Heel langzaam
Langzaam
Gemiddeld
Snel
Zeer snel
Hoogste snelheid
Open snel, Sluit langzaam
Open op hoogste snelheid, Sluit op gemiddelde snelheid
Regelt de snelheid van de motoren
gedurende het normale traject.
Snelheid
motoren
L6 L1
L2
L3
L4
L5
L6
L7
L8
Voetganger 1 (opening van de vleugel M2 op 1/4 van de totale opening)
Voetganger 2 (opening van de vleugel M2 op 1/2 van de totale opening)
Voetganger 3 (opening van de vleugel M2 op 3/4 van de totale opening)
Voetganger 4 (totale opening van de vleugel 2)
Gedeeltelijk 1 (opening van de twee vleugels op 1/4 van de “minimum” opening)
Gedeeltelijk 2 (opening van de twee vleugels op 1/2 van de “minimum” opening)
Gedeeltelijk 3 (opening van de twee vleugels op 3/4 van de “minimum” opening)
Gedeeltelijk 4 (opening van de twee vleugels gelijk aan de “minimum” opening)
Regelt het type opening dat wordt
toe gekend aan de instructie “gedeeltelijke opening 1”.
Op de niveaus L5, L6, L7, L8; onder
“mi nimum” opening verstaat men kle inste opening van M1 en M2; als M1
bijvoorbeeld op 90° opent en M2 op
110°, is de minimumopening 90°.
opening
voetganger
of gedeeltelijke opening
L4 L1
L2
L3
L4
L5
L6
L7
L8
Geen drukafvoer
Niveau 1 - Minimum drukafvoer (circa 100 ms)
Niveau 2 - ...
Niveau 3 - ...
Niveau 4 - ...
Niveau 5 - ...
Niveau 6 - ...
Niveau 7 - Maximum drukafvoer (circa 800 ms)
Regelt de duur van de “korte omkering” van beide motoren na het uitvoeren van de sluitmanoeuvre, met het
doel de resterende eindstootkracht te
reduceren.
Drukafvoer
motoren
gedurende
de Sluiting
L5 L1
L2
L3
L4
L5
L6
L7
L8
Niveau 1 - Minimumkracht
Niveau 2 - ...
Niveau 3 - ...
Niveau 4 - ...
Niveau 5 - ...
Niveau 6 - ...
Niveau 7 - ...
Niveau 8 - Maximumkracht
Regelt de kracht van beide motoren.Kracht
motoren
6.2 - Programmering tweede niveau (instelbare parameters)
Alle parameters van het tweede niveau zijn in de fabriek ingesteld zoals in de
kleur grijs is aangegeven in Tabel 5 en kunnen op elk gewenst moment worden gewijzigd door te werk te gaan zoals beschreven in Tabel 6.
De parameters kunnen worden ingesteld op een waarde tussen 1 en 8; om te
controleren welke waarde bij elk van de led’s hoort, raadpleegt u de Tabel 8.
BELANGRIJK – De programmeerprocedure kent een tijd van maximaal 10
seconden tussen het indrukken van de ene en de andere toets. Nadat deze tijd
verstreken is, wordt de procedure automatisch afgesloten, waarbij de tot op
dat moment aangebrachte wijzigingen worden opgeslagen.
Page 95

NL
Nederlands – 9
6.3 - Funzioni speciali
6.3.1 - Functie: “Functioneer in elk geval”
Deze functie maakt het mogelijk de automatisering ook te laten werken wanneer er een veiligheidsinrichting niet correct werkt of buiten gebruik is.
De automatisering kan worden bediend in de modus “persoon aanwezig”, ga
hiervoor als volgt te werk:
01. Stuur een instructie om de poort in werking te stellen, met een zender of
een sleutelschakelaar etc. Als alles goed is zal de poort normaal bewegen,
als dit niet zo is gaat u als volgt te werk:
02. binnen 3 seconden de instructie opnieuw activeren en actief houden;
03. na ongeveer 2 seconden zal de poort de vereiste manoeuvre uitvoeren in
de modus met “persoon aanwezig”; d.w.z. de poort zal alleen blijven
bewegen zo lang de instructie gegeven wordt.
Wanneer de veiligheidsinrichtingen niet werken, zal het knipperlicht knipperen
om aan te geven wat voor probleem er is (zie hoofdstuk 6 - Tabel 8).
6.3.2 - Functie: “Onderhoudswaarschuwing”
Deze functie signaleert wanneer er onderhoud aan de automatisering moet
worden verricht. De signalering van de onderhoudswaarschuwing geschiedt
via een lamp die verbonden is met de uitgang S.C.A. wanneer deze uitgang
geprogrammeerd is als “Lampje onderhoud”. De verschillende signaleringen
van het verklikkerlampje zijn vermeld in Tabel 7.
Om de limietwaarde voor het aantal manoeuvres tussen onderhoudsbeurten te
programmeren, zie Tabel 5.
Bepaalde inrichtingen geven signaleringen af aan de hand waarvan de werkingsstatus of eventuele storingen herkend kunnen worden.
Als op de uitgang FLASH op de besturingseenheid een knipperlicht wordt aangesloten, zal dit gedurende het uitvoeren van een manoeuvre knipperen met
tussenpozen van 1 seconde. Als er zich een storing voordoet, zal het knipperlicht korter knipperen, en het licht knippert tweemaal, waarna er een pauze van
1 seconde is. In Tabel 8 vindt u een beschrijving van de oorzaak en oplossing
voor de verschillende signaleringen.
Ook de led’s op de besturingseenheid geven signaleringen; in Tabel 9 vindt u een
beschrijving van de oorzaak en oplossing voor de verschillende signaleringen.
Het is mogelijk te controleren welke storingen zich eventueel hebben voorgedaan gedurende de laatste 8 manoeuvres, zie hiervoor Tabel 10.
WAT TE DOEN ALS...
(handleiding voor het oplossen van problemen)
7
TABEL 6 - Procedure voor programmering tweede niveau
01. Houd de toets “Set” circa 3 seconden ingedrukt;
02. Laat de toets los wanneer de led “L1” begint te knipperen;
03. Druk op de toets “” of “” om de knipperende led te verplaatsen op de led die de “ingangsled" is van de te wijzigen parameter;
04. Houd de toets “Set” ingedrukt tot punt 06 is afgewerkt;
05. Wacht circa 3 seconden totdat de led gaat branden die het actuele niveau van de te wijzigen parameter vertegenwoordigt;
06. Druk op de toets “” of “” om de led, die de parameterwaarde vertegenwoordigt, te verplaatsen;
07. Laat de toets “Set” los;
08. Wacht 10 seconden (maximumtijd) om de programmering af te sluiten.
Opmerking – Om meerdere parameters te programmeren dient u gedurende de procedure de handelingen van punt 03 tot punt 07 gedurende de fase zelf
te herhalen.
SET
SET
SET
SET
L1
of
of
3 s
10 s
Tabel 7 - Signalering “Lampje onderhoud”
Aantal manoeuvres Signalering
Lampje brandt 2 seconden, aan het begin van de openingsmanoeuvre.
Lampje brandt voor de hele duur van de manoeuvre.
Lampje brandt voortdurend.
Minder dan 80%
van de limiet
Tussen ’81% en 100%
van de limiet
Meer dan 100% van de limiet
6.4 - Wissen van het geheugen
Om het geheugen van de besturingseenheid te wissen en alle fabrieksinstellingen te herstellen, gaat u als volgt te werk:
de toetsen “” en “” indrukken en vasthouden totdat de led's L1 en L2 be ginnen te knipperen.
Opmerking – De kleur grijs geeft de in de fabriek ingestelde waarden aan.
L8 L1
L2
L3
L4
L5
L6
L7
L8
Resultaat 1emanoeuvre (de meest recente)
Resultaat 2emanoeuvre
Resultaat 3emanoeuvre
Resultaat 4emanoeuvre
Resultaat 5emanoeuvre
Resultaat 6emanoeuvre
Resultaat 7emanoeuvre
Resultaat 8
e
manoeuvre
Stelt u in staat na te gaan wat voor
soort fout zich heeft voorgedaan ge durende het uitvoeren van de laatste
8 manoeuvres.
Zie TABEL 10 - Historisch foutenoverzicht
Lijst fouten
L7 L1
L2
L3
L4
L5
L6
L7
L8
500
1000
1500
2500
5000
10000
15000
20000
Regelt het aantal manoeuvres: wanneer dit aantal wordt overschreden,
signaleert de besturingseenheid dat
de automatisering onderhouden mo et worden, zie paragraaf 6.3.2. – On derhoudswaarschuwing.
Onderhoudswaarschuwing
Page 96

NL
10 – Nederlands
7 korte knipperingen
pauze van 1 seconde
7 korte knipperingen
Storing elektrische circuits Wacht minstens 30 seconden en probeer vervolgens opnieuw een in -
structie te versturen en schakel eventueel ook de stroomtoevoer uit; als
de status niet verandert, is er mogelijk een ernstige storing en moet de
elektronische kaart worden vervangen.
8 korte knipperingen
pauze van 1 seconde
8 korte knipperingen
Er is reeds een instructie aanwezig die
het uitvoeren van instructies niet toelaat.
Controleer de aard van de instructie die altijd aanwezig is; dit kan bijvoorbeeld de instructie vanaf een klok op de ingang "open" zijn.
9 korte knipperingen
pauze van 1 seconde
9 korte knipperingen
De automatisering werd geblokkeerd
door een instructie "Blokkeer de automatisering".
Deblokkeer de automatisering door de instructie “Deblokkeer automatisering” te versturen.
10 korte knipperingen
pauze van 1 seconde
10 korte knipperingen
Activering van de functie “Obstakeldetectie” door encoder
Gedurende de beweging werden de motoren geblokkeerd door wrijving,
controleer de oorzaak.
TABEL 8 - Signaleringen van het knipperlicht (FLASH)
Aantal knipperingen Probleem Oplossing
1 korte knippering
pauze van 1 seconde
1 korte knippering
Fout Bluebus systeem De controle van de inrichtingen die zijn aangesloten op het Bluebus syste-
em, die aan het begin van de manoeuvre wordt uitgevoerd, stemt niet overeen met de inrichtingen die gedurende de zelfleringfase werden opgeslagen. Mogelijk zijn er inrichtingen afgekoppeld of defect, controleer en voer
eventueel vervangingen uit. Als er wijzigingen zijn aangebracht, dient de
zelflering van de inrichtingen te worden herhaald (zie paragraaf 4.6).
2 korte knipperingen
pauze van 1 seconde
2 korte knipperingen
Er is een fotocel in werking getreden Eén of meer fotocellen geven geen toestemming voor de beweging of
hebben gedurende het traject een omkering van de beweging veroorzaakt, controleer of er obstakels aanwezig zijn.
3 korte knipperingen
pauze van 1 seconde
3 korte knipperingen
Activering van de functie
“Obstakeldetectie” door krachtbegrenzer
Gedurende de beweging hebben de motoren meer kracht moeten leveren; controleer de oorzaak en verhoog eventueel het krachtniveau van de
motoren.
4 korte knipperingen
pauze van 1 seconde
4 korte knipperingen
Activering van de ingang STOP Aan het begin van de manoeuvre of gedurende de beweging is er een
activering geweest van de met de ingang STOP verbonden inrichtingen;
ga na wat hiervan de oorzaak is.
5 korte knipperingen
pauze van 1 seconde
5 korte knipperingen
Fout in de interne parameters van de
besturingseenheid
Wacht minstens 30 seconden en probeer vervolgens opnieuw een
instructie te geven en schakel eventueel ook de stroomtoevoer uit; als de
status niet verandert, is er mogelijk een ernstige storing en moet de elektronische kaart worden vervangen.
6 korte knipperingen
pauze van 1 seconde
6 korte knipperingen
Overschrijding van de maximumlimiet
voor de achtereenvolgende manoeuvres of het aantal manoeuvres per uur.
Wacht enkele minuten om de inrichting voor begrenzing van de manoeuvres tot onder de maximumlimiet terug te laten keren.
TABEL 9 - Signaleringen van de led’s op de besturingseenheid (afb. 16)
Led Probleem Oplossing
BLUEBUS
Altijd uit
Altijd aan
1 knippering per seconde
2 snelle knipperingen
Serie knipperingen, onderbroken
door een pauze van 1 seconde
Storing
Ernstige storing
Alles normaal
Variatie van de status van de ingangen
Diversen
Controleer of de besturingseenheid voeding krijgt; controleer of de zekeringen niet zijn doorgebrand. Ga in dit geval na wat de oorzaak van de storing is en vervang de zekeringen door zekeringen van dezelfde
stroomwaarde
Het betreft een ernstig probleem: probeer de elektrische voeding naar de
besturingseenheid af te koppelen, als de status gelijk blijft, dient de elektronische kaart te worden vervangen.
Normale werking van de besturingseenheid
Is normaal als er een variatie optreedt in één van de ingangen (PP, STOP,
OPEN, CLOSE): activering van de fotocellen of verzending van een instructie met een zender
Zie Tabel 10
STOP
Altijd uit
Altijd aan
Activering van de met de ingang STOP
verbonden inrichtingen
Alles normaal
Controleer de inrichtingen van de ingang STOP
Ingang STOP actief
P. P.
Altijd uit
Altijd aan
Alles normaal
Activering van de ingang P.P.
Ingang P.P. niet actief
Is normaal als de met de ingang P.P. verbonden inrichting actief is
OPEN
Altijd uit
Altijd aan
Alles normaal
Activering van de ingang OPEN
Ingang OPEN niet actief.
Is normaal als de met de ingang OPEN verbonden inrichting actief is
CLOSE
Altijd uit
Altijd aan
Alles normaal
Activering van de ingang CLOSE
Ingang CLOSE niet actief.
Is normaal als de met de ingang CLOSE verbonden inrichting actief is
L1 - L2 Langzaam knipperen Variatie van het aantal
met Bluebus verbonden inrichtingen of
zelflering inrichting niet uitgevoerd
De zelfleringprocedure van de inrichtingen moet worden uitgevoerd
(zie paragraaf 3.5)
L3 - L4 Langzaam knipperen De zelflering van de posities van de me-
chanische stops werd nooit uitgevoerd
De zelflering van de posities van de mechanische stops werd nooit uitgevoerd.
Page 97

NL
Nederlands – 11
Voor HYKE zijn de volgende (optionele) accessoires voorzien: ontvangers van
de familie SMXI, OXI, de programmeereenheid Oview, het zonnepaneel Solemyo en de bufferbatterij mod. PS124.
8.1 - Aansluiting van een radio-ontvanger
De besturingseenheid is voorzien van een connector voor de aansluiting van ra dio
(optioneel accessoire) die behoren tot de familie SMXI, OXI. Om een ontvan ger
aan te sluiten, de elektrische voeding naar de besturingseenheid afkoppe len en te
werk gaan zoals te zien is op afb. 17. In de Tabel 11 en Tabel 12 zijn de in struc-
ties vermeld die overeenkomen met de uitgangen op de besturingseenheid.
VERDERE DETAILS
8
Tabel 11
SMXI / SMXIS of OXI / OXIFM / OXIT / OXITFM in modus I of modus II
Instructie “P.P.” (Stap-voor-stap)
Instructie “gedeeltelijke opening 1”
Instructie “Open”
Instructie “Sluit”
Uitgang Nr. 1
Uitgang Nr. 2
Uitgang Nr. 3
Uitgang Nr. 4
1 Stap-voor-stap
2 Gedeeltelijke opening 1
3 Open
4 Sluit
5 Stop
6 Stap-voor-stap
woonblok
7 Stap-voor-stap
hoge prioriteit
8 Open gedeeltelijk 2
9 Open gedeeltelijk 3
10 Open en blokkeer
11 Sluit en blokkeer
automatisering
12 Blokeer
automatisering
Tabel 14
OXI / OXIFM /OXIT / OXITFM in modus II uitgebreid
Nr. Instructie Beschrijving
Instructie “P.P.” (Stap-voor-stap)
Instructie “Gedeeltelijke opening 1”
Instructie “Open”
Instructie “Sluit”
Stop de manoeuvre
instructie in modus Woonblok
Stuurt ook aan bij geblokkeerde automatisering of actieve
instructies
Open gedeeltelijk (opening van de vleugel M2 op 1/2 van
de totale opening)
Open gedeeltelijk (opening van de twee vleugels gelijk aan
1/2 van de totale opening)
Veroorzaakt een openingsmanoeuvre en na afloop daarvan de blokkering van de automatisering; de besturingseenheid accepteert geen enkele andere instructie met uitzondering van “Stap-voor-stap hoge prioriteit2, “Deblokkeer automatisering” of (alleen vanaf Oview) de instructies:
“Deblokkeer en sluit” en “Deblokkeer en open”
Veroorzaakt een sluitmanoeuvre en na afloop daarvan de
blokkering van de automatisering; de besturingseenheid
accepteert geen enkele andere instructie met uitzondering
van “Stap-voor-stap hoge prioriteit”, “Deblokkeer automatisering” of (alleen vanaf Oview) de instructies: “Deblokkeer
en sluit” en “Deblokkeer en open”
Veroorzaakt een stop van de manoeuvre en de blokkering
van de automatisering; de besturingseenheid accepteert
geen enkele andere instructie met uitzondering van “Stapvoor-stap hoge prioriteit”, “Deblokkeer automatisering2 of
(alleen vanaf Oview) de instructies: “Deblokkeer en sluit”
en 2Deblokkeer en open2.
8.2 - Aansluiting en installatie van de bufferbatterij
mod. PS124
LET OP! - De batterij mag alleen elektrisch op de besturingseenheid worden aangesloten na alle installatie- en programmeringsfasen te hebben
voltooid, omdat de batterij een elektrische noodvoeding is.
Om de batterij te installeren en aan te sluiten, volgt u de montagefasen, die in
fig. 18 worden getoond.
8.3 - Aansluiting van het programmeertoestel Oview
Op de besturingseenheid bevindt zich de connector BusT4, waarop de programmeringseenheid Oview kan worden aangesloten, die een volledige en
snelle besturing van de installatie,- onderhouds-, en diagnosefase mogelijk
maakt van de hele automatisering. Om toegang te krijgen tot de connector
moet worden gehandeld als in fig. 19 en de connector op zijn plaats worden
aangesloten. Oview kan op meerdere besturingseenheden tegelijk worden aangesloten (tot 5 zonder bijzondere voorzorgsmaatregelen, tot 60 door de speciale waarschuwingen te volgen) en kan ook tijdens de normale werking van de
automatisering op de besturingseenheid aangesloten blijven. In dat geval kan
ze worden gebruikt om opdrachten direct naar de besturingseenheid te sturen,
door het speciale “gebruikersmenu” te gebruiken. Het is ook mogelijk de firmware te updaten. Als er een radio-ontvanger in de besturingseenheid zit, die
deel uitmaakt van de OXI-groep, is het m.b.v. Oview mogelijk toegang te krijgen
tot de parameters van de zenders, die in de ontvanger zelf zijn opgeslagen.
Raadpleeg voor diepgaandere informatie de bijbehorende handleiding en de
systeemhandleiding “Opera system book”.
8.4 - Aansluiting van het zonne-energiesysteem Solemyo
LET OP! – Wanneer de automatisering van stroom wordt voorzien door
het systeem “Solemyo”, mag deze NIET TEGELIJKERTIJD OOK GEVOED
worden door het elektriciteitsnet.
Zie voor meer informatie over het Solemyo-systeem de betreffende instructiehandleiding.
Voor de aansluiting van het Solemyo-systeem gaat u te werk zoals te zien is op
afb. 20.
8.5 - Aansluiting voor het systeem voor externe ontgrendeling Kio
LET OP! – Kio moet worden aangesloten op de reductiemotor die de
vleugel aandrijft die als eerste begint te bewegen (uitgaande van de poort
in gesloten stand).
01. Open het deksel van de reductiemotor (afb. 21-1);
02. Verwijder het plastic carter van de reductiemotor zoals te zien is op afb. 21-2;
03. Steek de schroef met moer in het hiervoor bestemde gat zoals weergege-
ven op de afb. 21-3;
04. Maak de twee uiteinden van de veer vast zoals weergegeven op afb. 22-4;
05. Steek de staalkabel eerst in de schroef en vervolgens in het gat van de pen
zoals te zien is op afb. 21-5);
06. Blokkeer de kabel door de hiervoor bestemde schroef (afb. 21-5) vast te
draaien;
Nr. Instructie Beschrijving
Veroorzaakt de deblokkering van de automatisering en de
hervatting van de normale werking
De uitgang Gebruikerslicht gaat aan, met tijdgeprogrammeerde uitschakeling
De uitgang Gebruikerslicht gaat aan en uit, in de modus
Stap-voor-stap
13 Deblokkeer
automatisering
14 On Timer
gebruikerslicht
15 On-Off
gebruikerslicht
TABEL 10 - Historisch foutenoverzicht
01. Houd de toets “Set” circa 3 seconden ingedrukt;
02. Laat de toets los wanneer de led “L1” begint te knipperen;
03. Druk op de toets “” of “” om van de knipperende led naar de led L8 (“ingangsled”) voor de parameter te gaan
“Lijst fouten”;
04. Houd de toets “Set” ingedrukt tot punt 06 is afgewerkt;
05. Wacht circa 3 seconden totdat de led's aangaan die de niveaus vertegenwoordigen die overeenstemmen met de manoeuvres
die fouten hebben vertoond. De led L1 geeft het resultaat van de meest recente manoeuvre aan en L8 dat van de achtste
manoeuvre. Als de led brandt, betekent dit dat er zich problemen hebben voorgedaan, als de led uit is, is alles normaal.
06. Druk op de toetsen “” en “” om de gewenste manoeuvre te selecteren: de bijbehorende led laat een aantal knipperingen
zien het aantal knipperingen is gelijk aan het aantal dat normaal door het knipperlicht wordt getoond;
07. Laat de toets “Set” los.
SET
SET
SET
SET
L1
of
en
3 s
3 s
L8
Page 98

NL
12 – Nederlands
HET PRODUCT AFDANKEN
Dit product maakt integrerend deel uit van de automatisering en moet er
dus samen mee worden afgedankt.
Net als bij de installatie moeten de ontmantelingswerkzaamheden aan het eind
van het leven van het product door vakmensen worden verricht.
Dit product bestaat uit verschillende materialen: sommige kunnen worden
gerecycled, andere moeten worden afgedankt. Win informatie in over de recyclage- of afvoersystemen voorzien door de wettelijke regels, die in uw land voor
deze productcategorie gelden.
Let op! – Sommige delen van het product kunnen vervuilende of gevaarlijke
stoffen bevatten, die als ze in het milieu worden achtergelaten schadelijke effecten op het milieu en de gezond kunnen hebben.
Zoals door het symbool aan de zijkant wordt aangeduid, is het
verboden dit product bij het huishoudelijk afval weg te gooien.
Zamel de afval dus gescheiden in, volgens de wettelijke regels
die in uw land gelden, of lever het product bij aankoop van een
nieuw gelijkwaardig product bij de dealer in.
Let op! – de lokaal geldende wettelijke regels kunnen zware sancties opleggen
als dit product verkeerd wordt afgedankt.
De bufferbatterij afdanken (indien aanwezig)
Let op! – De lege batterij bevat vervuilende stoffen en mag dus niet bij het
gewone afval worden gedaan.
Ze moet via de gescheiden afvalinzameling worden weggegooid, volgens de
voorschriften die in uw land gelden.
Duur van het product
De levensduur is de gemiddelde economische levensduur van het product.
Hoe lang een product meegaat, is sterk afhankelijk van de zwaarte-index van
de door de automatisering uitgevoerde manoeuvres: d.w.z., de som van alle
factoren die aan de slijtage van het product bijdragen (zie Tabel 13).
Om de waarschijnlijke levensduur van uw automatisering te bepalen, gaat u als
volgt te werk:
01. Bereken de zwaarte-index door de percentages die vermeld zijn onder de
verschillende punten van de Tabel 13 bij elkaar op te tellen;
02. In de Grafiek 3 trekt u een verticale lijn van de zo juist gevonden waarde tot
aan het snijpunt met de kromme; vanaf dit punt trekt u een horizontale lijn totdat u de lijn van de “manoeuvreercycli” kruist. De zo gevonden waarde is de
geschatte levensduur van uw product.
De schatting van de levensduur wordt gemaakt op grond van ontwerpberekeningen en de resultaten van op de prototypes uitgevoerde tests. Aangezien het
een schatting betreft, kan deze waarde geen enkele garantie bieden voor de
effectieve levensduur van het product.
Voorbeeld van berekening van de duur van een reductiemotor HYKE met arm met
GEHELE lengte (zie Tabel 13 en Grafiek 3):
- lengte van de vleugel = 2,8 m (zwaarte-index: 20%); - gewicht van de vleugel: 230 kg
(zwaarte-index: 20%); - blinde vleugel (zwaarte-index: 15%); Totale zwaarte-index
= 55%;
Geschatte levensduur
= 220.000 manoeuvreercycli
GRAFIEK 3
manoeuvrecycli
belastingsgraad %
ONDERHOUD VAN HET PRODUCT
9
Om het veiligheidsniveau constant te houden en een maximale levensduur van
de hele automatisering te garanderen, is regelmatig onderhoud nodig.
Het onderhoud moet met volledige inachtneming van de veiligheidsvoorschriften van deze handleiding worden verricht en volgens wat door de geldende
wetten en voorschriften wordt voorgeschreven.
Controleer het product vaak om na te gaan of sprake is van onbalans van de
hekdeuren, tekenen van slijtage, schade aan de elektrische kabels en veren.
Belangrijk – Tijdens de onderhoudsfase of de reiniging van het product
koppelt u de besturingseenheid van de elektrische voeding en van de
batterijen, indien aanwezig.
Voor de andere inrichtingen in de installatie volgt u wat in de respectievelijke
onderhoudsprogramma’s staat.
Bij de reductiemotoren HK7024, HK7224 is maximaal binnen 6 maanden of
20.000 manoeuvres na het vorige onderhoud een geprogrammeerd onderhoud
nodig.
Handel als volgt om het onderhoud te verrichten.
01. Koppel alle elektrische voedingsbronnen los, inclusief eventuele bufferbatterijen.
02. Controleer de slijtagestaat van de beugels en bevestigingspluggen, met bijzondere aandacht voor afslijting en oxidatie van de delen. Vervang de
delen, die niet voldoende garantie bieden;
03. Verricht een ontgrendelingstest om de goede werking te controleren, zie
paragraaf 3.6.
07. Voer het andere uiteinde van de kabel door één van de gaten op de onder-
kant van de reductiemotor, zoals te zien is op afb. 21-6;
08. Plaats het plastic carter en vervolgens het deksel van de reductiemotor
(afb. 21-7) terug;
09. Sluit op dit punt de kabel aan op de Kio, zie de betreffende instructiehand-
leiding.
04. Sluit de elektrische voedingsbronnen weer aan en verricht alle tests en controles die staan in hoofdstuk 5 - Testen.
Opmerkin – De gegevens hebben betrekking op een gebalanceerde sectionaalpoort in perfecte staat van onderhoud
TABEL 13
Zwaarte-index
arm GEHELE lengte arm GEREDUCEERDE lengte
< 1,8
1,8 - 2,5 m
2,5 - 3 m
3 - 3,5 m
< 200 kg
200 + 250 kg
> 250 kg
Lengte van de vleugel
Gewicht van de vleugel
Omgevingstemperatuur hoger dan 40°C of lager dan 0°C of vochtigheidsgraad boven de 80%
Blinde vleugel
Installatie in winderig gebied
0%
15%
20%
30%
0%
20%
30%
20%
15%
15%
15%
20%
30%
30%
40%
20%
20%
20%
500.000
400.000
300.000
200.000
100.000
0 102030405060708090100
220.000
Page 99

Nederlands – 13
HK7224K
Elektromechanische reductiemotor voor automatiseringen
van automatische poorten en hekken met gelijkstroommotor,
planeetwielvertraging, mechanische ontgrendeling.
HK7024K
Elektromechanische reductiemotor voor automatiseringen
van automatische poorten en hekken met gelijkstroommotor, planeetwielvertraging, mechanische ontgrendeling. Ingebouwde besturingseenheid en radio-ontvanger OXI
Typologie
Maximumkoppel 500 Nm
Nominaal koppel 120 Nm
Snelheid bij nullast 2.25 RPM
Snelheid bij nominaal koppel 2.00 RPM
Maximumfrequentie van de cycli 40 cycli/uur
Maximale ononderbroken
ongeveer 7 minuten
cyclustijd
Gebruikslimieten het product kan gebruikt worden op poorten met een vleugel met een gewicht tot 330 kg
voor lengtes tot 1,8 m of tot 200 kg voor lengtes tot 3,5m (zie grafiek 1)
Duur geschat tussen 150.000 cycli en 500.000 cycli, volgens de condities die vermeld zijn in Tabel 13 en Grafiek 3
Montage In verticale stand, met een speciale bevestigingsplaat
Bedrijfstemperatuur van -20°C tot +50°C (bij lage temperaturen zal de efficiëntie van de reductiemotor afnemen)
Gebruik in bijzonder zure,
zoute of potentieel NEE
explosieve omgeving
Beschermingsklasse IP 54 (met intacte kast)
Afmetingen (mm) 210 x 290 x 320 h
Gewicht (kg) 10.5 Kg; 9.5 Kg
Opmerkingen:
(1) - Functie die geactiveerd kan worden met de programmeereenheid Oview.
[*] - De uitgangen Knipperlicht, Elektrisch slot Lampje Poort Open kunnen met andere functies geprogrammeerd worden (zie “TABEL
3 - Functies 1° niveau of via Oview programmee-
reenheid, zie hoofdstuk
8.3). De elektrische kenmerken van de uitgangen passen zich aan het gekozen functietype aan: • functie knipperlicht: lampje 12 Vdc, 21 W max; • functie elek-
trisch slot: 12 Vac 15 VA max; • andere uitgangen (alle types): 1 lampje of relais 24Vdc (-30 en +50%), 4 W max.
Voeding 230 Vac (120 Vac voor uitvoering HK7024K/V1) 24 Vdc (±10%)
±10%; 50/60 Hz
Noodvoeding aansluitmogelijkheid voor bufferbatterijen PS124
Voeding met zonnepanelen aansluitmogelijkheid voor set SYKCE
Maximaal opgenomen vermogen 300 W 140 W
Maximaal opgenomen stroom 1,5 A (3 A voor uitvoering HK7024K/V1) 6 A gedurende maximaal 2 s
Opgenomen vermogen in de
modus “Standby-Alles (1)”
met voeding via PS124 of set minder dan 100 mW
SYKCE (inclusief de
ontvanger OXI)
TECHNISCHE GEGEVENS VAN HET PRODUCT
WAARSCHUWINGEN: • Alle vermelde technische kenmerken hebben betrekking op een omgevingstemperatuur van 20°C (± 5°C). • Nice S.p.a. behoudt zich
het recht voor om, op elk moment dat dit noodzakelijk geacht wordt, wijzigingen aan het product aan te brengen, waarbij hoe dan ook de functionaliteit en de
gebruiksbestemming ervan gelijk blijven.
Uitgang knipperlicht [*] 1 knipperlicht LUCYB (lamp 12 V, 21 W)
Uitgang elektrisch slot [*] 1 elektrisch slot van 12 Vac max 15 VA
Uitgang lamp poort open [*] 1 lamp 24 V maximaal 4 W (de uitgangsspanning kan
schommelen tussen-30 en +50%, de uitgang kan ook
kleine relais aansturen)
Uscita BLUEBUS 1 uitgang met maximale belasting van 15 Bluebus
units (maximaal 6 stellen fotocellen MOFB of MOFOB
plus 2 stellen fotocellen MOFB of MOFOB geadresseerd
als openingsinrichtingen plus maximaal 4
bedieningsinrichtingen MOMB of MOTB)
Ingang STOP voor normaal gesloten contacten, normaal geopende
contacten of contacten met constante weerstand 8,2 kΩ;
de selectie van het contacttype geschiedt in zelflering
en een verandering ten opzichte van de opgeslagen
status veroorzaakt de bedieningsinstructie “STOP”
Ingang PP voor normaal open contacten (sluiting van het
contact veroorzaakt de instructie Stap-voor-stap)
Aansluiting radio connector SM voor ontvangers van de familie
SMXI, OXI en OXIFM
Ingang ANTENNE radio 50 Ω voor kabel type RG58 of soortgelijk
Programmeerbare functies 8 functies van het type ON-OFF (Tabel 3) en
8 instelbare functies (Tabel 5)
Functies in zelflering • Zelflering van de inrichtingen die zijn verbonden met
de BlueBus uitgang. • Zelflering van het type inrichting dat
verbonden is met de klem “STOP” (contact NA, NC
of weerstand 8,2 kΩ). • Zelflering van de beweging van
de vleugels en automatische berekening van de
vertragingspunten en de gedeeltelijke opening.
• Zelflering van de werking met één of twee motoren
Page 100

NL
14 – Nederlands
EG-VERKLARING VAN OVEREENSTEMMING
en verklaring van inbouw van “niet-voltooide machine” (een samenstel dat bijna een machine vormt)
Verklaring in overeenstemming met de Richtlijnen: 2006/95/CE (LVD); 2004/108/CE (EMC); 2006/42/CE (MD) bijlage II, deel B
Opmerking - De inhoud van deze verklaring stemt overeen met hetgeen verklaard is in de laatste revisie die beschikbaar was voor het ter perse gaan van deze handleiding, van
het officiële document dat is neergelegd bij de vestiging van Nice Spa. Deze tekst werd om uitgeversredenen heraangepast. U kunt voor een exemplaar van de originele verklaring aanvragen bij Nice S.p.a. (TV) I.
Nummer verklaring: 334/HYKE Revisie: 0 Taal: NL
Naam fabrikant: NICE s.p.a.
Adres: Via Pezza Alta 13, Z.I. Rustignè, 31046 Oderzo (TV) Italië
Persoon die gemachtigd
is om de technische
documentatie samen te
stellen: Dhr. Oscar Marchetto
Producttype: Elektromechanische reductiemotor “HYKE” met ingebouwde besturingseenheid
Model / type: HK7024K, HK7224K
Accessoires: SMXI, OXI, PS124, Oview
Ondergetekende Luigi Paro in de hoedanigheid van Gedelegeerd Bestuurder, verklaart onder zijn eigen verantwoordelijkheid dat het hierboven beschreven
product voldoet aan de bepalingen uit de volgende richtlijnen:
• Richtlijn 2006/95/EG VAN HET EUROPESE PARLEMENT EN DE RAAD van 12 december 2006 met betrekking tot de onderlinge aanpassing van de wetgevingen van de Lidstaten met betrekking tot elektrisch materiaal dat bestemd is om binnen bepaalde spanningslimieten gebruikt te worden, volgens de
volgende geharmoniseerde normen:
EN 60335-1:2002 + A1:2004 + A11:2004 + A12:2006 + A2:2006 + A13:2008; EN 60335-2-103:2003
• RICHTLIJN 2004/108/EG VAN HET EUROPESE PARLEMENT EN DE RAAD van 15 december 2004 met betrekking tot de onderlinge aanpassing van de
wetgevingen van de Lidstaten met betrekking tot de elektromagnetische compatibiliteit waarmee de richtlijn 89/336/EEG wordt afgeschaft, volgens de
volgende geharmoniseerde normen:
EN 61000-6-2:2005, EN 61000-6-3:2007
Daarnaast voldoet het product aan de volgende richtlijn volgens de vereisten die voorzien zijn voor “niet-voltooide machines” (samenstellen die bijna ee
machine vormen):
• Richtlijn 2006/42/EG VAN HET EUROPESE PARLEMENT EN VAN DE RAAD van 17 mei 2006 met betrekking tot machines, die de richtlijn 95/16/EG wijzigt (herschikking), volgens de volgende geharmoniseerde normen:
EN 13849-1:2008, EN 13849-2:2008.
• Wij verklaren dat de relevante technische documentatie werd opgesteld in overeenstemming met de bijlage VII B van de richtlijn 2006/42/EG en dat
aan de volgende fundamentele vereisten werd voldaan: 1.1.1- 1.1.2- 1.1.3- 1.1.5- 1.2.1-1.2.6- 1.3.1- 1.3.2- 1.3.3- 1.3.4- 1.3.7-1.3.9- 1.5.1-1.5.2-
1.5.4- 1.5.5- 1.5.6- 1.5.7- 1.5.8- 1.5.10- 1.5.11- 1.5.13-1.6.1- 1.6.2-1.6.4- 1.7.2- 1.7.3- 1.7.4- 1.7.4.1- 1.7.4.2- 1.7.4.3
• De fabrikant zal aan de landelijke autoriteiten, in antwoord op een gemotiveerd verzoek, de informatie doorgegeven die betrekking heeft op de “nietvoltooide machine”, met volledig behoud van de eigen rechten van intellectueel eigendom.
• Wanneer de “niet-voltooide machine” in bedrijf wordt gesteld in een Europees land waar de officiële voertaal anders is dan de taal die in deze verklaring wordt gebruikt, is de importeur verplicht om bij deze verklaring een vertaling ervan te voegen.
• De “niet-voltooide machine” mag pas in werking worden gesteld wanneer de uiteindelijke machine waarin hij zal worden opgenomen op zijn beurt
conform de voorschriften van de richtlijn 2006/42/EG is verklaard.
Het product voldoet bovendien, beperkt tot de van toepassing zijnde delen, aan de volgende normen:
EN 13241-1:2003, EN 12445:2002, EN 12453:2002, EN 12978:2003
Oderzo, 15 januari 2010 Luigi Paro (Gedelegeerd Bestuurder)
 Loading...
Loading...