

Page 1
INVERTER
Plug-in option
FR-A8AP
INSTRUCTION MANUAL
Orientation control
Encoder feedback control
Vector control
PRE-OPERATION INSTRUCTIONS
INSTALLATION AND WIRING
ENCODER SPECIFICATIONS AND
PARAMETER SETTINGS
ORIENTATION CONTROL
ENCODER FEEDBACK CONTROL
VECTOR CONTROL
1
2
3
4
5
6
Page 2
Thank you for choosing this Mitsubishi inverter plug-in option.
Warning
Caution
Caution
This Instruction Manual provides handling information and precautions for use of the equipment. Incorrect handling might cause an unexpected
fault. Before using this inverter, always read this Instruction Manual carefully to use the equipment to its optimum performance.
Please forward this Instruction Manual to the end user.
Safety instructions
Do not attempt to install, operate, maintain or inspect the product until you have read through this Instruction Manual and appended
documents carefully and can use the equipment correctly. Do not use this product until you have a full knowledge of the equipment, safety
information and instructions. In this Instruction Manual, the safety instruction levels are classified into "WARNING" and "CAUTION".
The level may even lead to a serious consequence according to conditions. Both instruction levels must be followed
because these are important to personal safety.
Electric Shock Prevention
Incorrect handling may cause hazardous conditions, resulting in death or severe injury.
Incorrect handling may cause hazardous conditions, resulting in medium or slight injury, or may cause only material
damage.
Warning
While the inverter power is ON, do not open the front cover or the wiring cover. Do not run the inverter with the front cover or the wiring cover removed. Otherwise
you may access the exposed high voltage terminals or the charging part of the circuitry and get an electric shock.
Do not remove the inverter front cover even if the power supply is disconnected. The only exception for this would be when performing wiring and periodic
inspection. You may accidentally touch the charged inverter circuits and get an electric shock.
Before wiring or inspection, LED indication of the inverter unit operation panel must be switched OFF. Any person who is involved in wiring or inspection shall wait
for at least 10 minutes after the power supply has been switched OFF and check that there is no residual voltage using a tester or the like. For a short time after the
power-OFF, a high voltage remains in the smoothing capacitor, and it is dangerous.
Any person who is involved in wiring or inspection of this equipment shall be fully competent to do the work.
The plug-in option must be installed before wiring. Otherwise you may get an electric shock or be injured.
Do not touch the plug-in option or handle the cables with wet hands. Otherwise you may get an electric shock.
Do not subject the cables to scratches, excessive stress, heavy loads or pinching. Otherwise you may get an electric shock.
Injury Prevention
Caution
The voltage applied to each terminal must be the ones specified in the Instruction Manual. Otherwise a burst, damage, etc. may occur.
The cables must be connected to the correct terminals. Otherwise a burst, damage, etc. may occur.
The polarity (+ and -) must be correct. Otherwise a burst or damage may occur.
While power is ON or for some time after power OFF, do not touch the inverter as it will be extremely hot. Touching these devices may cause a burn.
3
Page 3
Additional Instructions
The following instructions must be also followed. If the product is handled incorrectly, it may cause unexpected fault, an injury, or an electric
shock.
Caution
Transportation and mounting
Do not install or operate the plug-in option if it is damaged or has parts missing.
Do not stand or rest heavy objects on the product.
The mounting orientation must be correct.
Foreign conductive objects must be prevented from entering the inverter. That includes screws and metal fragments or other flammable substance such as oil.
If halogen-based materials (fluorine, chlorine, bromine, iodine, etc.) infiltrate into a Mitsubishi product, the product will be damaged. Halogen-based materials are
often included in fumigant, which is used to sterilize or disinfest wooden packages. When packaging, prevent residual fumigant components from being infiltrated
into Mitsubishi products, or use an alternative sterilization or disinfection method (heat disinfection, etc.) for packaging. Sterilization of disinfection of wooden
package should also be performed before packaging the product.
Trial run
Before starting operation, each parameter must be confirmed and adjusted. A failure to do so may cause some machines to make unexpected motions.
Warning
Usage
Do not modify the equipment.
Do not perform parts removal which is not instructed in this manual. Doing so may lead to fault or damage of the product.
Caution
Usage
When parameter clear or all parameter clear is performed, the required parameters must be set again before starting operations. Because all parameters return to
their initial values.
Static electricity in your body must be discharged before you touch the product.
Maintenance, inspection and parts replacement
Do not carry out a megger (insulation resistance) test.
Disposal
The inverter must be treated as industrial waste.
Many of the diagrams and drawings in this Instruction Manual show the inverter without a cover or partially open for explanation. Never operate the inverter in this
manner. The cover must be reinstalled and the instructions in the Instruction Manual must be followed when oper ating the inverter.
4
General instruction
Page 4
— CONTENTS —
1 PRE-OPERATION INSTRUCTIONS 7
1.1 Unpacking and product confirmation ..............................................................................................7
1.2 Component names.............................................................................................................................8
2 INSTALLATION AND WIRING 9
2.1 Pre-installation instructions .............................................................................................................9
2.2 Installation procedure .......................................................................................................................9
2.3 Encoder specification / terminating resistor switch setting........................................................12
2.4 Wiring ................................................................................................................................................14
2.5 Encoder cables dedicated to Mitsubishi motors ..........................................................................17
2.6 Terminals ..........................................................................................................................................18
3 ENCODER SPECIFICATIONS AND PARAMETER SETTINGS 19
3.1 Encoder.............................................................................................................................................19
3.2 Parameter setting.............................................................................................................................21
3.2.1 Parameter for encoder.................................................................................................................................. 21
3.2.2 Parameter settings for the motor under vector control.................................................................................22
4 ORIENTATION CONTROL 23
4.1 Wiring example ................................................................................................................................23
4.2 Terminals ..........................................................................................................................................25
4.3 Specifications...................................................................................................................................26
5
Page 5
5 ENCODER FEEDBACK CONTROL 27
5.1 Wiring examples ..............................................................................................................................27
5.2 Specifications...................................................................................................................................28
6 VECTOR CONTROL 29
6.1 Wiring examples ..............................................................................................................................29
6.2 Specifications...................................................................................................................................33
6
Page 6
1 PRE-OPERATION INSTRUCTIONS
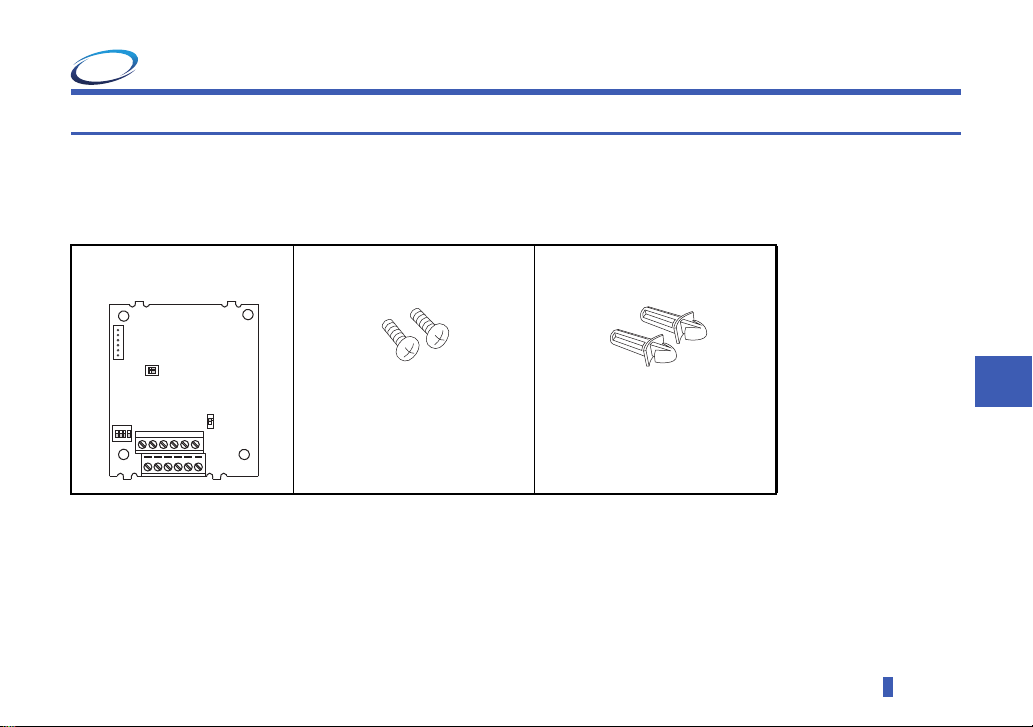
1.1 Unpacking and product confirmation
Take the plug-in option out of the package, check the product name, and confirm that the product is as you ordered and intact.
This product is a plug-in option dedicated for the FR-A800 series.
Product confirmation
Check the enclosed items.
Plug-in option
...............................................1
O
1
N
2
SW2
N
O
123
4
SW1
SW3
Mounting screw (M3 × 8 mm)
.....................2 (Refer to page 9.)
Spacer
....................2 (Refer to
PRE-OPERATION INSTRUCTIONS
page 9.)
1
7
Page 7
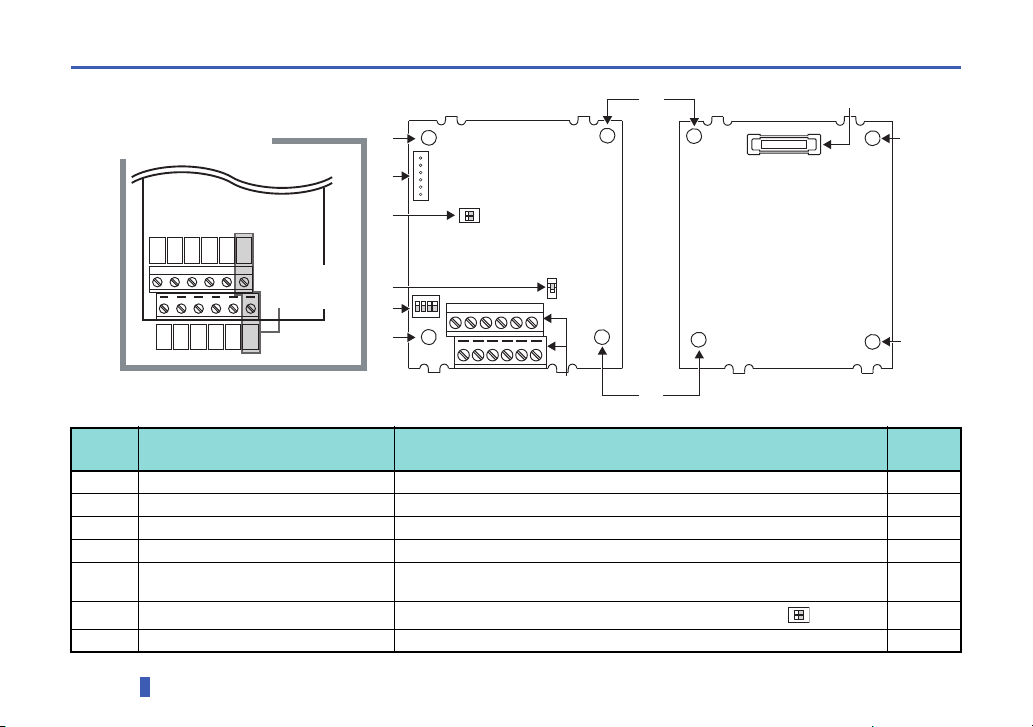
1.2 Component names
(g)
Terminal layout
(a)
Front view
(a)
Rear view
(d)
O
1
N
2
SW2
(b)
SW3
(a)
N
O
123
4
SW1
Symbol
(f)
PG
PG
PZ1
PZ2
SD
SD
PIN
PIN and PO
are not used.
PO
(c)
(e)
(a)
PA1
PB1
PA2
PB2
Name Description
a Mounting hole Fixes the option to the inverter with screws, or installs spacers. 9
b Terminal block Connects to the encoder. 14
c
Encoder type selection switch (SW3)
Switches the encoder type (differential line driver/ complementary). 12
d CON2 connector Not used. ―
e
f
Terminating resistor selection switch
(SW1)
Switch for manufacturer setting (SW2)
Switches ON or OFF the internal terminating resistor. 12
O
1
N
D
o not change the initially-set status. (Switches 1 and 2 are OFF .)
2
g Connector Connects to the option connector of the inverter. 9
(a)
(a)
Refer to
page
―
8
PRE-OPERATION INSTRUCTIONS
Page 8
2 INSTALLATION AND WIRING
2.1 Pre-installation instructions
Check that the inverter's input power and the control circuit power are both OFF.
Caution
Do not mount or remove the plug-in option while the input power is ON. Doing so may damage the inverter or plug-in option.
To avoid damage due to static electricity, static electricity in your body must be discharged before you touch the product.
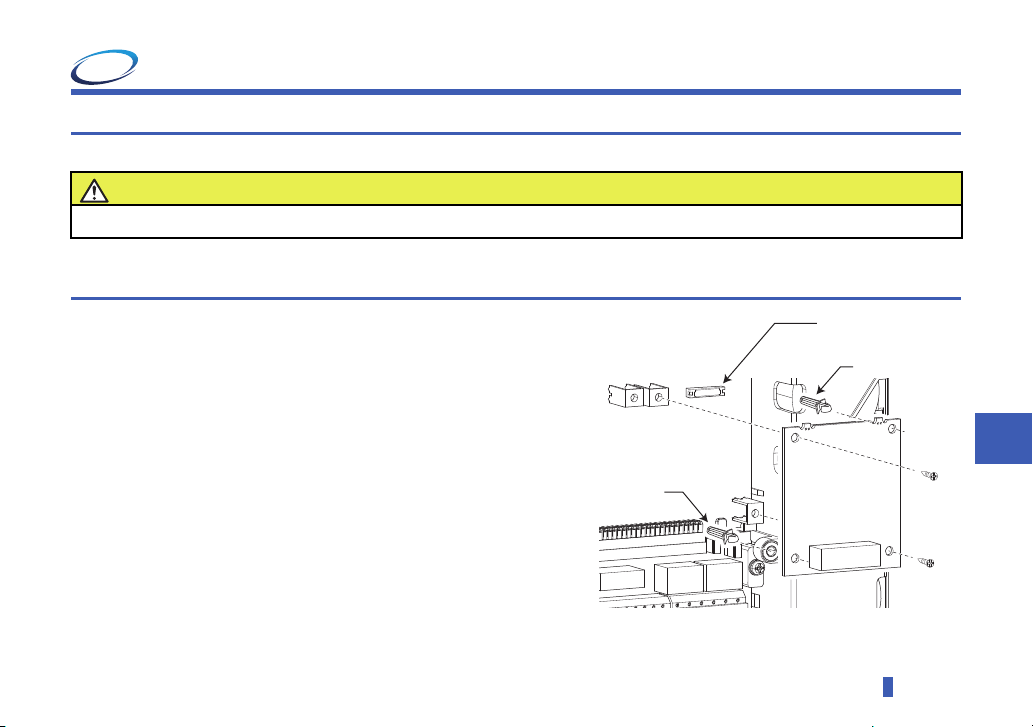
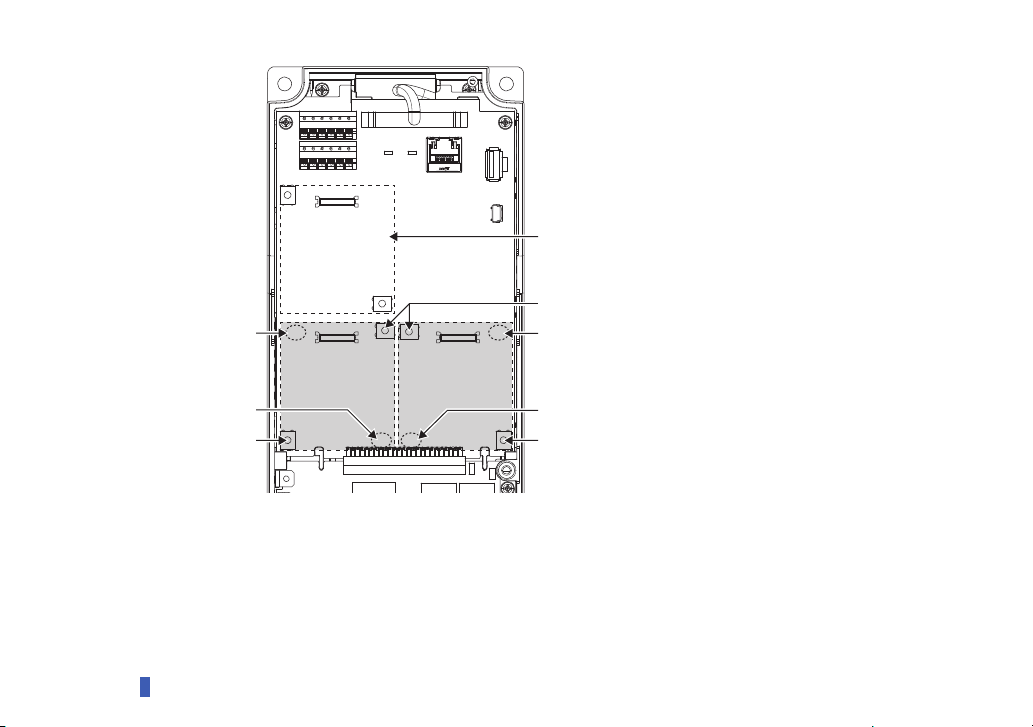
2.2 Installation procedure
(1) Remove the inverter front cover. (Refer to Chapter 2 of the
Instruction Manual (Detailed) of the inverter for details on how to
remove the front cover.)
(2) For the two mounting holes (as shown in the next page) that will not
be tightened with mounting screws, insert spacers.
(3) Fit the connector of the plug-in option along the guide of the
connector on the inverter, and insert the plug-in option as far as it
goes. (Insert it to the inverter option connector 1 or 2.)
(4) Fit the two locations, the left and right, of the plug-in option securely
to the inverter unit by screwing in the supplied mounting screws
(tightening torque 0.33 N·m to 0.40 N·m). If the screw holes do not
line up, the connector may not be inserted deep enough. Check the
connector.
Spacer
INSTALLATION AND WIRING
Inverter side
option connector
Spacer
2
9
Page 9
Spacer
Spacer
Mounting screw
Insertion positions for screws and spacers
Connector 3
Do not insert the plug-in option to the connector 3.
Mounting screw
Spacer
Connector 1Connector 2
Spacer
Mounting screw
10
INSTALLATION AND WIRING
Page 10
NOTE
• Caution must be taken of mounting screws falling off when removing and mounting the plug-in option.
• Only one type of option per inverter may be used. When multiple options are mounted, priority is given to option
connectors 1, 2 and 3 on the inverter in this order, and options having a lower priority do not function. (For the
positions of the option connectors 1 to 3, refer to page 10.)
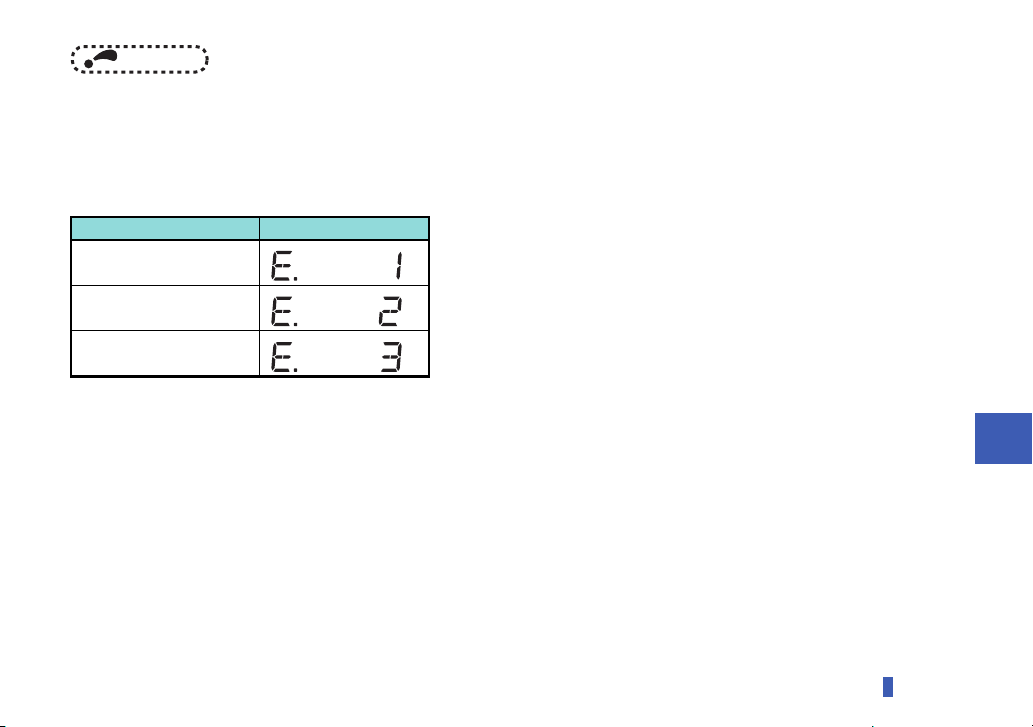
• When the inverter cannot recognize that the option unit is mounted due to improper installation, etc., the protective
function (E.1 to E.3) is displayed. A different indication will appear according to the mounted position (option connector
1 to 3).
Mounted position Fault indication
Option connector 1
Option connector 2
Option connector 3
• When removing the plug-in option, remove the two screws on the left and right, then pull it straight out. Pressure
applied to the connector and to the option board may break the option.
2
INSTALLATION AND WIRING
11
Page 11
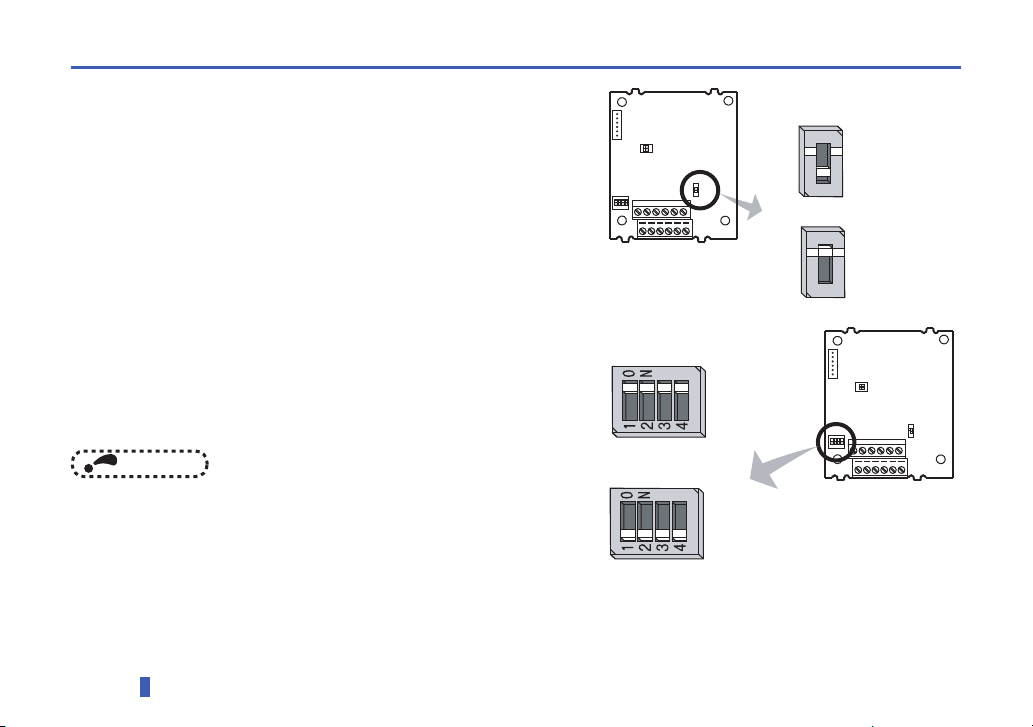
2.3 Encoder specification / terminating resistor switch setting
Internal terminating
resistor-ON
(initial status)
Internal terminating
resistor-OFF
1
2
O
N
SW2
SW3
SW1
123
4
O
N
Encoder specification selection switch (SW3)
Select either differential line driver or complementary.
It is initially set to the differential line driver. Switch its position according
to output circuit.
O
1
N
2
SW2
Differential line driver
(initial status)
Terminating resistor selection switch (SW1)
Select "ON"/"OFF" of the internal terminating resistor. Set the switch to
"ON" (initial status) when an encoder output type is differential line driver
and set to "OFF" when complementary.
ON : with internal terminating resistor (initial setting status)
OFF : without internal terminating resistor
12
NOTE
• Set all switches to the same setting ("ON"/ "OFF").
• If the encoder output type is differential line driver, set the
terminating resistor switch to the "OFF" position when
sharing the same encoder with other unit (CNC
(computerized numerical controller), etc) or a terminating
resistor is connected to other unit.
INSTALLATION AND WIRING
N
O
123
4
SW1
SW3
Complementary
Page 12

Motor used and switch setting
Motor
Mitsubishi standard motor with
encoder
Mitsubishi high-efficiency motor
with encoder
Mitsubishi constant-torque motor
with encoder
Vector control dedicated motor SF-V5RU Complementary OFF 12 V
Other manufacturer's motor with encoder
Set according to the motor encoder used.
Choose a power supply for encoder according to the encoder used (5 V/12 V/15 V/24 V). When the encoder output is the differential line
driver type, only 5 V can be input.
SF-JR Differential ON 5 V
SF-HR Differential ON 5 V
Others
SF-JRCA Differential ON 5 V
SF-HRCA Differential ON 5 V
Others
Encoder specification
selection switch (SW3)
Terminating resistor
selection switch (SW1)
specifications
NOTE
• Switch "SW2" is for manufacturer setting. Do not change the setting.
Power
2
INSTALLATION AND WIRING
13
Page 13

2.4 Wiring
NOTE
SD
PG
G
F
D
C
B
A
R
S
Encoder
2mm
2
FR-A800
(FR-A8AP)
PZ2
PZ1
PB2
PB1
PA2
PA1
Example of parallel connection
with two cables
(with complementary encoder output)
Encoder cable
Shield
P clip
Earthing (grounding) example using a P clip
(1) Use twisted pair shield cables (0.2 mm2 or larger) to connect the FR-A8AP and position detector.
For the wiring to the terminals PG and SD, use several cables in parallel or use a
thick cable, according to the wiring length. To protect the cables from noise, run
them away from any source of noise (e.g. the main circuit and power voltage).
Wiring length
Within 10 m At least two cables in parallel
Within 20 m At least four cables in parallel
Within 100 m
At least six cables in parallel
When differential driver is set and a wiring length is 30 m or more
The wiring length can be extended to 100 m by slightly increasing the 5 V power
supply (approx. 5.5 V) and using six or more cables with gauge size of 0.2 mm
parallel or a cable with gauge size of 1.25 mm
applied should be within power supply specifications of encoder.
To reduce noise of the encoder cable, earth (ground) the encoder shielded
cable to the enclosure (as close as the inverter) with a P clip or U clip
made of metal.
14
• For details of the optional encoder dedicated cable (FR-JCBL/FR-V7CBL), refer to page 17.
• FR-V7CBL is provided with a P clip for earthing (grounding) shielded cable.
INSTALLATION AND WIRING
Parallel connection
(Cable gauge 0.2 mm2)
Larger-size cable
2
0.4 mm
or larger
2
0.75 mm
1.25 mm
or larger
2
or larger
2
or more. Note that the voltage
2
in
Page 14

(2) Wire the shielded twisted pair cable after stripping its sheath to make its cables loose.
Sheath
Shield
(perform protective treatment)
Twisted pair shielded cable
5 mm
Wire
Sleeve
0 to 0.5mm
Also, protect the shielded cable of the shielded twisted pair cable to ensure that it will
not make contact with the conductive area.
Strip off the sheath for the below length. If the length of the sheath peeled is too long, a
short circuit may occur with neighboring wires. If the length is too short, wires might
come off.
Wire the stripped cable after twisting it to prevent it from becoming loose. In addition,
do not solder it.
Cable stripping length
Use a blade terminal as necessary.
When using the blade terminal, use care so that the twisted wires do not come
Sleeve
0 to 0.5mm
NOTE
• Blade terminals commercially available (as of February 2012. The product may be changed without notice.)
Ter mina l
Screw Size
M2
Wire Size (mm2)
0.3 to 0.5 Al 0,5-6WH A 0,5-6
0.75 (for two wires) Al-TWIN 2 0,75-10GY ―
Wire
Damaged
Crumpled tip
Wires are not inserted
into the sleeve
Blade Terminal Model
with insulation sleeve without insulation sleeve
Unstranded
wires
Manufacturer
Phoenix Contact
Co.,Ltd.
2
Blade terminal
crimping tool
CRIMPFOX 6
INSTALLATION AND WIRING
15
Page 15

(3) Loosen the terminal screw and insert the cable into the terminal.
Screw Size Tightening Torque Cable Size Screwdriver
M2
0.22 N
m to 0.25 Nm
0.3 mm
2
to 0.75 mm
Small flat-blade screwdriver
2
(Tip thickness: 0.4 mm/tip width: 2.5 mm )
NOTE
• Undertightening can cause cable disconnection or malfunction. Overtightening can cause a short circuit or malfunction
due to damage to the screw or unit.
• When wiring cables to the inverter's RS-485 terminals while a plug-in option is mounted, take caution not to let the
cables touch the circuit board of the option or of the inverter. Otherwise, electromagnetic noises may cause
malfunctions.
• When one position detector is shared between FR-A8AP and CNC (computerized numerical controller), its output
signal should be connected as shown below. In this case, the wiring length between FR-A8AP and CNC should be as
short as possible, within 5 m.
Inverter
(FR-A8AP)
Position detector
Encoder
Maximum 5 m
CNC
(two parallel cables)
CAUTION
Do not use empty terminals as junction terminals because they are used in the option unit. If they are used as the junction terminals, the option unit
may be damaged.
After wiring, wire offcuts must not be left in the inverter. They may cause a fault, failure or malfunction.
16
INSTALLATION AND WIRING
Page 16

2.5 Encoder cables dedicated to Mitsubishi motors
F-DPEVSB 12P 0.2mm
2
Earth cable
Approx. 140 mm
60mm
L
D/MS3057-12A
D/MS3106B20-29S
11m m
Typ e
Length
L (m)
FR-JCBL5 5
FR-JCBL15 15
FR-JCBL30 30
Earth cable
F-DPEVSB 12P 0.2 mm
2
L
D/MS3106B20-29S
D/MS3057-12A
11m m
60mm
Approx. 140 mm
Typ e
Length
L (m)
FR-V7CBL5 5
FR-V7CBL15 15
FR-V7CBL30 30
• A P clip for earthing (grounding) a
shielded cable is provided.
Use dedicated encoder cables to connect with Mitsubishi encoder-equipped motors.
FR-JCBL FR-V7CBL
For SF-JR/HR/JRCA/HRCA (with encoder)
For SF-V5RU and SF-THY
FR-A800
(FR-A8AP)
PA1
PA2
PB1
PB2
PZ1
PZ2
PG
SD
2mm
As the terminal block of the FR-A8AP is an insertion type, earth (ground) cables need to be modified. (Refer to page 15.)
Encoder
C
R
A
N
B
P
H
K
2
Positioning keyway
A
B
M
N
C
L
K
D
P
T
E
S
R
J
F
H
G
D/MS3106B20-29S
(As viewed from wiring side)
FR-A800
(FR-A8AP)
PA1
PA2
PB1
PB2
PZ1
PZ2
PG
SD
Encoder
A
B
C
D
F
Positioning keyway
G
M
S
L
2mm
R
2
T
K
S
J
D/MS3106B20-29S
(As viewed from wiring side)
INSTALLATION AND WIRING
2
A
B
N
C
D
P
E
R
F
H
G
17
Page 17

Connection terminal compatibility table
Motor SF-JR/HR/JRCA/HRCA (with Encoder) SF-V5RU, SF-THY
Encoder cable FR-JCBL FR-V7CBL
PA1 PA PA
PA2 PAR Keep this open.
PB1 PB PB
FR-A8AP terminal
PB2 PBR Keep this open.
PZ1 PZ PZ
PZ2 PZR Keep this open.
PG 5E PG
SD AG2 SD
2.6 Terminals
Ter mina l
Symbol
PA1 Encoder A-phase signal input terminal
PA2 Encoder A-phase inverse signal input terminal
PB1 Encoder B-phase signal input terminal
PB2 Encoder B-phase inverse signal input terminal
PZ1 Encoder Z-phase signal input terminal
PZ2 Encoder Z-phase inverse signal input terminal
PG
SD Encoder power supply ground terminal
18
Encoder power supply (positive side) input
terminal
INSTALLATION AND WIRING
Ter m ina l Nam e Description
A-phase signal is input from the encoder.
B-phase signal is input from the encoder.
Z-phase signal is input from the encoder.
(Not used for the encoder feedback control.)
Input power for the encoder power supply.
Connect the external power supply (5 V, 12 V, 15 V, 24 V) and the encoder
power cable. When the encoder output is the differential line driver type, only 5
V can be input. Make sure the voltage of the external power supply the same
as the encoder output voltage. (Check the encoder specification.)
For details of pulse signal,
refer to page 19.
Page 18

3 ENCODER SPECIFICATIONS AND PARAMETER SETTINGS
3.1 Encoder
Position detection (pulse encoder)
Output pulse specifications
Differential line driver Complementary
A/A signal 1000 P/R to 4096 P/R
B/B signal 1000 P/R to 4096 P/R
Z/Z signal 1 P/R
A
A
B
B
Z
Z
P
abcd
H
L
A signal 1000 P/R to 4096 P/R
B signal 1000 P/R to 4096 P/R
Z signal 1 P/R
P
abcd
A
B
Z
Position detector
Encoder
A
When rotation is clockwise
as viewed from the shaft
end (A) of the encoder.
a, b, c, d should be (1/4
1/8)P
NOTE
• When orientation control, encoder feedback control, vector control are used together, the encoder is shared between
these controls.
Use an encoder which has a pulse count of 1000 to 4096 ppr (pulse per revolution).
• The encoder should be coupled with the motor shaft or the spindle oriented with a speed ratio of 1 to 1 without any
mechanical looseness.
• To ensure correct operation, the encoder must be set in the proper rotation direction and the A and B phases
connected correctly.
ENCODER SPECIFICATIONS AND PARAMETER SETTINGS
3
19
Page 19

Power supply
Choose a power supply for encoder according to the encoder used (5 V/12 V/15 V/24 V). When the encoder output is the
differential line driver type, only 5 V can be input. Make sure the voltage of the external power supply the same as the encoder
output voltage. (Check the encoder specification.)
When an encoder is used under orientation control, encoder feedback control, and vector control, the power supply is shared
between the inverter and encoder.
• Specifications of the encoders equipped in the motors with encoders and the vector-control dedicated motors
Item Encoder for SF-JR/HR/JRCA/HRCA Encoder for SF-V5RU, SF-THY
Resolution 1024 pulses/rev 2048 pulses/rev
Power supply voltage 5 VDC±10% 12 VDC±10%
Current consumption 150 mA
Output signal form
Output circuit Differential line driver 74LS113 equivalent Complementary
Output voltage
A, B phases (90° phase shift)
Z phase: 1 pulse/rev
H level: 2.4 V or more
L level: 0.5 V or less
H level: "Power supply for encoder-3 V" or more
L level: 3 V or less
NOTE
• When the input power supply voltage to the encoder and its output voltage differ, the protective function (E.ECT) may
be activated.
20
ENCODER SPECIFICATIONS AND PARAMETER SETTINGS
Page 20

3.2 Parameter setting
NOTE
3.2.1 Parameter for encoder
Parameter
Number
359 C141
369 C140
• If operating at a frequency higher than 120 Hz with Pr.359 = "0 or 1", the motor rotation will be unstable.
Pr.
group
Name
Encoder rotation
direction
Number of
encoder pulses
Initial
Value
1
1024 0 to 4096
Setting
Range
0
100
1
101
Description
Set when using a motor for which
forward rotation is clockwise viewed
from the motor load shaft.
Set when using a motor for which
forward rotation is counterclockwise
viewed from the motor load shaft.
Set the number of encoder pulses output.
Set the number of pulses before it is multiplied by 4.
ENCODER SPECIFICATIONS AND PARAMETER SETTINGS
Set for the operation
at 120 Hz or less.
Set for the operation
at a frequency
higher than 120 Hz.
Set for the operation
at 120 Hz or less.
Set for the operation
at a frequency
higher than 120 Hz.
3
21
Page 21

3.2.2 Parameter settings for the motor under vector control
Motor Name
Mitsubishi standard motor
Mitsubishi constant-torque
motor
Mitsubishi vector control
dedicated motor
Other manufacturer's standard
motor
Other manufacturer's constanttorque motor
Set this parameter according to the motor (encoder) used.
Pr.359 Encoder rotation
direction
SF-JR 1 (Initial value) 1024 (Initial value)
SF-JR 4P 1.5 kW or less 1 (Initial value) 1024 (Initial value)
SF-HR 1 (Initial value) 1024 (Initial value)
Others
SF-JRCA 4P 1 (Initial value) 1024 (Initial value)
SF-HRCA 4P 1 (Initial value) 1024 (Initial value)
Others
SF-V5RU 1 (Initial value) 2048
SF-THY 1 (Initial value) 2048
—
—
Pr.369 Number of
encoder pulses
22
ENCODER SPECIFICATIONS AND PARAMETER SETTINGS
Page 22

4 ORIENTATION CONTROL
This function is used with a position detector (encoder) installed to the spindle of a machine tool, etc. to allow a rotary shaft to
be stopped at the specified position (oriented).
For the details of the parameters used for orientation control, refer to the Instruction Manual (Detailed) of the inverter.
4.1 Wiring example
SF-JR motor with encoder
U
Earth
(Ground)
V
W
E
C
IM
∗2
R
A
N
Encoder
B
P
∗5
H
K
∗6
(-)
(+)
5 VDC power
supply ∗9
For complementary type (SF-V5RU)
MCCB MC OCR
∗1
Three-phase
AC power
supply
Inverter
External
thermal relay
∗11
input
FR-A8AP
Differential
Complementary
Terminating
resistor ON
OFF
RH(OH)
PA1
PA2
PB1
PB2
PZ1
PZ2
∗7
U
V
W
PC
SD
PG
SD
PG
SD
∗8
Earth
(Ground)
2 W1 kΩ
∗6
(+)
U
V
W
E
G1
G2
A
B
C
D
F
G
S
R
SF-V5RU
Thermal
relay
protector
∗2
(-)
12 VDC power
FAN
IM
Encoder
∗5
supply
∗9
Three-phase
AC power
supply
Forward rotation start
Reverse rotation start
Orientation command
Contact input common
MCCB
MC
R/L1
S/L2
T/L3
STF
STR
X22∗3
SD
ORA∗4
ORM
∗4
SE
SD
FR-A8AX
∗10
X15
X14
X1
X0
DY
Inverter
FR-A8AP
Differential
Complementary
Terminating
resistor ON
OFF
U
V
W
PA1
PA2
PB1
PB2
PZ1
PZ2
PG
SD
PG
SD
∗8
∗7
4
ORIENTATION CONTROL
23
Page 23

For the fan of the 7.5 kW or less dedicated motor, the power supply is single phase (200 V/50 Hz, 200 to 230 V/ 60 Hz).
The pin number differs according to the encoder used.
Use Pr. 178 to Pr. 189 (input terminal function selection) to assign the function to any of terminal.
Refer to the Instruction Manual (Detailed) for details of Pr. 178 to Pr. 189 (input terminal function selection).
Use Pr. 190 to Pr. 196 (output terminal function selection) to assign the function to any of terminal.
Refer to the Instruction Manual (Detailed) for details of Pr. 190 to Pr. 196 (output terminal function selection).
Connect the encoder so that there is no looseness between the motor and motor shaft. Speed ratio should be 1:1.
Earth (Ground) the shielded cable of the encoder cable to the enclosure with a P clip, etc. (Refer to pag e 14.)
For the differential line driver, set the terminating resistor selection switch to on position (initial status) to use. (Refer to page 12.)
Note that the terminating resistor switch should be set to off position when sharing the same encoder with other unit (CNC, etc.) and a
terminating resistor is connected to other unit. For the complementary, set the switch to off position.
For terminal compatibility of the FR-JCBL, FR-V7CBL and FR-A8AP, refer to page 1 8.
A separate power supply of 5 V/12 V/15 V/24 V is necessary according to the encoder power specification. When the encoder output is
the differential line driver type, only 5 V can be input.
Make the voltage of the external power supply the same as the encoder output voltage, and connect the external power supply between
PG and SD.
When performing encoder feedback control and vector control together, an encoder and power can be shared.
When a stop position command is input from outside, a plug-in option FR-A8AX is necessary. Refer to the Instruction Manual (Detailed)
for details of external stop position command.
Connect the recommended 2W1k resistor between the terminal PC and OH. (Recommended product: MOS2C102J 2W1k by KOA
Corporation)
Insert the input line and the resistor to a 2-wire blade terminal, and connect the blade terminal to the terminal OH. (For the recommended
2-wire blade terminals, refer to page 1 5.)
Insulate the lead wire of the resistor, for example by applying a contraction tube, and shape the wires so that the resistor and its lead wire
will not touch other cables. Caulk the lead wire securely together with the thermal protector input line using a 2-wire blade terminal. (Do
not subject the lead wire's bottom area to an excessive pressure.)
To use a terminal as the terminal OH, assign the OH (external thermal O/L relay input) signal to an input terminal. (Set "7" in any of Pr.178
to Pr.189. For details, refer to the Instruction Manual (Detailed) of the inverter.)
When OH signal is assigned to terminal RH
(Pr.182 = “7”)
PC
RH (OH)
2-wire blade terminal
24
Resistor (2 W1kΩ)
ORIENTATION CONTROL
Insulate
Insulate
To thermal protector
Page 24

4.2 Terminals
Option FR-A8AX terminal
Ter mina l
Symbol
X0 to X15 Digital signal input terminal
DY
Terminal Name Description
Data read timing input signal
terminal
Inverter terminal
Ter mina l
(Signal)
Input X22 Orientation command
ORA Orientation complete
Output
ORM Orientation fault
Refer to the Instruction Manual (Detailed) for details of Pr.178 to Pr.189 (input terminal function selection) and Pr.190 to Pr.196
Terminal (Signal) Name Application Explanation
(output terminal function selection).
Input the digital signal at the relay contact or open collector terminal.
Using Pr. 360, speed or position command is selected as the command signal entered.
Used when a digital signal read timing signal is necessary. Data is read only during the DY
signal is on.
By switching the DY signal off, the X0 to X15 data before signal-off is retained.
Used to enter an orientation signal for orientation.
For the terminal used for X22 signal input, set "22" in any of Pr. 178 to Pr. 189 to assign
the function.
Switched LOW if the orientation has stopped within the in-position zone while the start
and X22 signals are input.
For the terminal used for the ORA signal output, assign the function by setting "27
(positive logic) or 127 (negative logic)" in any of Pr. 190 to Pr. 196.
Switched LOW if the orientation has not completed within the in-position zone while the
start and X22 signals are input.
For the terminal used for the ORA signal output, assign the function by setting "28
(positive logic) or 128 (negative logic)" in any of Pr. 190 to Pr. 196.
ORIENTATION CONTROL
4
25
Page 25

4.3 Specifications
Repeated positioning
accuracy
Permissible speed
Functions
Holding force after
positioning
Input signal
(contact input)
Output signal
(open collector output)
26
ORIENTATION CONTROL
±1.5°
Depends on the load torque, moment of inertia of the load or orientaion, creep speed, position loop switching
position, etc.
Encoder-mounted shaft speed (6000 r/min with 1024 pulse encoder).
The drive shaft and encoder-mounted shaft must be coupled directly or via a belt without any slip.
Gear changing shafts cannot be applied.
Orientation, creep speed setting, stop position command selection, DC injection brake start position setting,
creep speed and position loop switch position setting, position shift, orientation in-position, position pulse
monitor, etc.
Under V/F control, Advanced magnetic flux vector control...without servo lock function
Under vector control...with servo lock function
Orientation command, forward and reverse rotation commands, stop position command (open collector signal
input (complementary) is enabled)
Binary signal of maximum 16 bit (when used with the FR-A8AX)
Orientation completion signal, orientation fault signal
Page 26

5 ENCODER FEEDBACK CONTROL
A
Mount FR-A8AP to an FR-A800 series inverter to perform encoder feedback control under V/F control or Advanced magnetic
flux vector control.
This controls the inverter output frequency so that the motor speed is constant to the load variation by detecting the motor
speed with the speed detector (encoder) to feed back to the inverter.
For the details of the parameters used for encoder feedback control, refer to the Instruction Manual (Detailed) of the inverter.
5.1 Wiring examples
MCCB MC
Three-phase
C power supply
Forward rotation start
Reverse rotation start
Contact input common
Frequency setting
potentiometer
R/L1
S/L2
T/L3
STF
STR
SD
10
2
5
Inverter
FR-A8AP
Differential
Complementary
Terminating
resistor ON
∗4
OFF
PA1
PA2
PB1
PB2
SF-JR motor with encoder
W
Earth
(Ground)
∗3
(+)
U
V
E
C
∗1
R
A
N
H
K
(-)
IM
Encoder
∗2
5 VDC power
supply
U
V
W
PG
SD
PG
SD
∗5
ENCODER FEEDBACK CONTROL
∗6
5
27
Page 27

The pin number differs according to the encoder used.
Connect the encoder so that there is no looseness between the motor and motor shaft. Speed ratio should be 1:1.
Earth (Ground) the shielded cable of the encoder cable to the enclosure with a P clip, etc. (Refer to pag e 14.)
For the differential line driver, set the terminating resistor selection switch to on position (initial status) to use. (Refer to page 12) Note that
the terminating resistor switch should be set to off position when sharing the same encoder with other unit (CNC, etc) and a terminating
resistor is connected to other unit.
For the complementary, set the switch to off position.
For terminal compatibility of the FR-JCBL, FR-V7CBL and FR-A8AP, refer to page 1 8.
A separate power supply of 5 V/12 V/15 V/24 V is necessary according to the encoder power specification. When the encoder output is
the differential line driver type, only 5 V can be input.
Make the voltage of the external power supply the same as the encoder output voltage, and connect the external
power supply between PG and SD.
To perform orientation control together, an encoder and power supply can be shared.
5.2 Specifications
Speed variation ratio
Function
Maximum speed
28
ENCODER FEEDBACK CONTROL
0.1% (100% means 3600 r/min)
• Setting of speed feedback range
• Setting of feedback gain
• Setting of encoder rotation direction
V/F control: 590 Hz, Advanced magnetic flux vector control: 400 Hz (102400 pulse/s or less encoder pulses)
Page 28

6 VECTOR CONTROL
When FR-A8AP is mounterd on the FR-A800 series, full-scale vector control operation can be performed using a motor with
encoder.
Speed control, torque control and position control by vector control can be performed. (Refer to the Instruction Manual
(Detailed) for details.)
6.1 Wiring examples
Speed control
Standard motor with encoder (SF-JR), 5 V differential line driver
SF-JR motor with encoder
U
V
W
Earth
(Ground)
PA1
PA2
PB1
PB2
PZ1
PZ2
PG
SD
PG
∗3
SD
(+)
∗6
U
V
W
E
∗1
C
R
A
N
B
P
H
K
(-)
5 VDC power supply
Three-phase
AC power supply
Forward rotation start
Reverse rotation start
Contact input common
Frequency command
Frequency setting
potentiometer
1/2 W1 kΩ
Torque limit
command
(10 V)
MCCB MC
3
2
1
(+)
(-)
R/L1
S/L2
T/L3
STF
STR
SD
10
2
5
1
Inverter
FR-A8AP
Differential
Complementary
Terminating
resistor ON
OFF
∗4
IM
Encoder
∗2
∗5
Vector control dedicated motor
(SF-V5RU, SF-THY), 12 V complementary
∗7
Three-phase
AC power
supply
Inverter
External
thermal
relay input
FR-A8AP
Differential
Complementary
Terminating
resistor
OFF
MCCB MC
PC
CS(OH)
∗8
SD
PA1
PA1
PA2
PA2
PB1
PB1
PB2
PB2
PZ1
PZ1
PZ2
PZ2
PG
PG
SD
SD
PG
PG
ON
SD
SD
∗4 ∗6
U
V
W
2W1kΩ
OCR
Earth
(Ground)
∗3
(+)
SF-V5RU, SF-THY
A
B
C
U
V
W
E
G1
G2
∗1
A
B
C
D
F
G
S
R
12VDC power
(-)
supply
FAN
IM
Thermal relay
protector
Encoder
∗5
∗2
VECTOR CONTROL
29
6
Page 29

Torque control
Standard motor with encoder (SF-JR), 5 V differential line driver
Vector control dedicated motor
(SF-V5RU, SF-THY), 12 V complementary
Three-phase
AC power
supply
Forward rotation start
Reverse rotation start
Contact input common
Speed limit command
Frequency setting
potentiometer
1/2W1kΩ
Torque command
(±10V)
30
MCCB MC
Inverter
R/L1
S/L2
T/L3
STF
STR
SD
3
2
1
(+)
(-)
10
2
5
1
VECTOR CONTROL
FR-A8AP
Differential
Complementary
Terminating
resistor ON
OFF
∗4
PA1
PA2
PB1
PB2
PZ1
PZ2
MCCB MC
SF-JR motor
W
Earth
(Ground)
with encoder
U
V
E
∗1
C
IM
U
V
W
R
A
N
Encoder
B
P
∗2
∗3
(-)
(+)
H
K
5VDC power supply
∗5
PG
SD
PG
SD
∗6
∗7
Three-phase
AC power
supply
Inverter
External
thermal
relay input
FR-A8AP
Differential
Complementary
Terminating
resistor
OFF
∗8
ON
CS(OH)
∗4 ∗6
PA1
PA1
PA2
PA2
PB1
PB1
PB2
PB2
PZ1
PZ1
PZ2
PZ2
U
V
W
PC
2W1kΩ
SD
PG
PG
SD
SD
PG
PG
SD
SD
OCR
Earth
(Ground)
∗3
(+)
SF-V5RU, SF-THY
A
B
C
U
V
W
E
G1
G2
∗1
A
B
C
D
F
G
S
R
12VDC power
(-)
supply
FAN
IM
Thermal relay
protector
Encoder
∗5
∗2
Page 30

Position control
Positioning unit
MELSEQ-Q QD75P1
STOP
CLEAR
PULSE F
PULSE R
CLEAR COM
PULSE COM
RDY COM
COM
READY
Torque limit command
Vector control dedicated motor (SF-V5RU, SF-THY), 12 V complementary
MCCB MC OCR
∗7
Three-phase
AC power supply
FLS
RLS
DOG
Three-phase
AC power
supply
Forward stroke end
Reverse stroke end
Pre-excitation/servo on
Clear signal
Pulse train
Sign signal
24VDC power supply
Preparation ready signal
(+)
(-)
(±10V)
MCCB
MC
R/L1
S/L2
T/L3
External thermal protector
relay input
STF
STR
LX
CLR ∗9
JOG
NP ∗9
PC
SE
RDY ∗11
5
1
Inverter
∗8
FR-A8AP
∗9
∗10
Differential
line driver
Complementary
Terminating
CS(OH)
resistor
ON
OFF
PA1
PA2
PB1
PB2
PZ1
PZ2
∗4 ∗6
PC
SD
PG
SD
PG
SD
W
U
V
2W1kΩ
Earth
(ground)
∗3
SF-V5RU, SF-THY
A
B
C
FAN
U
V
W
IM
E
Thermal
protector
G1
G2
∗1
A
B
C
D
F
Encoder
G
S
R
12VDC
(-)
(+)
power supply
VECTOR CONTROL
∗2
∗5
6
31
Page 31

The pin number differs according to the encoder used.
Speed, control, torque control, and position control by pulse train input are available with or without the Z-phase being connected.
Connect the encoder so that there is no looseness between the motor and motor shaft. Speed ratio must be 1:1.
Earth (ground) the shield of the encoder cable to the enclosure using a tool such as a P-clip. (Refer to pag e 14.)
For the complementary, set the terminating resistor selection switch to OFF position. (Refer to page 12.)
A separate power supply of 5 V/12 V/15 V/24 V is necessary according to the encoder power specification.
When the encoder output is the differential line driver type, only 5 V can be input.
Make the voltage of the external power supply the same as the encoder output voltage, and connect the external power supply across PG
and SD.
When performing orientation control together, an encoder and power supply can be shared.
For terminal compatibility of the FR-JCBL, FR-V7CBL, and FR-A8AP, refer to page 1 8.
For the fan of the 7.5 kW or lower dedicated motor, the power supply is single phase. (200 V/50 Hz, 200 to 230 V/60 Hz)
Connect the recommended 2W1k resistor between the terminal PC and OH. (Recommended product: MOS2C102J 2W1k by KOA
Corporation)
Insert the input line and the resistor to a 2-wire blade terminal, and connect the blade terminal to the terminal OH. (For the recommended
2-wire blade terminals, refer to page 1 5.)
Insulate the lead wire of the resistor, for example by applying a contraction tube, and shape the wires so that the resistor and its lead wire
will not touch other cables. Caulk the lead wire securely together with the thermal protector input line using a 2-wire blade terminal.
(Do not subject the lead wire's bottom area to an excessive pressure.)
To use a terminal as the terminal OH, assign the OH (external thermal O/L relay input) signal to an input terminal. (Set "7" in any of Pr.178
to Pr.189. For details, refer to the Instruction Manual (Detailed) of the inverter.)
When OH signal is assigned to terminal RH
(Pr.182 = “7”)
PC
RH (OH)
2-wire blade terminal
32
Insulate
To thermal protector
Resistor (2 W1kΩ)
Insulate
Assign the function using Pr.178 to Pr.184, Pr.187 to Pr.189 (input terminal function selection).
When position control is selected, terminal JOG function is invalid and simple position pulse train input terminal becomes valid.
Assign the function using Pr.190 to Pr.194 (output terminal function selection).
VECTOR CONTROL
Page 32

6.2 Specifications
Speed control range 1:1500 (both driving/regeneration )
Speed control
Tor q u e c o n tr o l
Position control
Function
Regeneration unit (option) is necessary for regeneration
With online auto tuning (adaptive magnetic flux observer), dedicated motor, rated load
Speed variation ratio ±0.01% (100% means 3000 r/min)
Speed response 130 Hz
Maximum speed 120 Hz (102400 pulse/s or less encoder pulses)
Torque control range 1:50
Absolute torque accuracy ±10%
Repeated torque accuracy ±5%
Repeated positioning
accuracy
Maximum input pulse
frequency
Positioning feedback
pulse
Electronic gear setting 1/50 to 20
In-position width 0 to 32767 pulses
Error excess 0 to 400k pulses
±1.5° (at motor shaft end)
100 kpps (Terminal JOG)
Number of encoder pulses per motor rotation (Pr.369) 4
• Setting of speed feedback range
• Setting of feedback gain
• Setting of encoder rotation direction
VECTOR CONTROL
33
6
Page 33

REVISIONS
*The manual number is given on the bottom left of the back cover.
Print Date *Manual Number Revision
Aug. 2013 IB(NA)-0600505ENG-A First edition
34
IB(NA)-0600505ENG-A
Page 34

INVERTER
HEAD OFFICE: TOKYO BUILDING 2-7-3, MARUNOUCHI, CHIYODA-KU, TOKYO 100-8310, JAPAN
Printed in Japan Specifications subject to change without notice.IB(NA)-0600505ENG-A(1308) MEE
 Loading...
Loading...