

Page 1
INVERTER
FR-A700
PLC FUNCTION
PROGRAMMING MANUAL
PLC FUNCTION
CC-Link
COMMUNICATION
SEQUENCE
PROGRAMMING
ERROR CODE
LIST
Chapter 1
Chapter 2
Chapter 3
Chapter 4
Page 2

CONTENTS
1. PLC FUNCTION 1
1.1 Function Block Diagram ...........................................................2
1.2 PLC Function Specifications....................................................3
1.3 System Configuration ...............................................................4
1.4 Wiring of the Inverter and Personal Computer Using
GX Developer for RS-485 Communication..............................5
1.5 Prior to Sequence Program Creation ......................................6
1.5.1 Precautions for sequence program creation .................................................6
1.5.2 Usable main GX Developer functions ...........................................................6
1.5.3 Sequence program execution key.................................................................7
1.5.4 Sequence program write............................................................................... 8
1.5.5 Setting list of built-in PLC function parameter ...............................................9
1.6 Device Map...............................................................................10
1.6.1 I/O device map............................................................................................10
1.6.2 Internal relay (M) device map......................................................................12
1.6.3 Data register (D) device map ......................................................................12
1.6.4 Special relays..............................................................................................12
1.6.5 Special registers..........................................................................................14
1.7 Inverter Status Monitoring, Special Registers for Control ..20
1.7.1 Data that can be read at all times................................................................20
1.7.2 Data that are read by controlling (OFF to ON) the read command .............23
1.7.3 How to write data by controlling (OFF to ON) the write
command....................................................................................................25
1.7.4 Inverter operation status control..................................................................31
1.7.5 Inverter parameter access error (D9150)....................................................33
1.7.6 Inverter status (D9151)................................................................................33
1.8 Inverter Parameter Read/Write Method .................................34
1.8.1 Reading the inverter parameters.................................................................34
1.8.2 Writing the inverter parameters...................................................................36
1.9 User Area Read/Write Method ................................................38
1.9.1 User parameter read/write method.............................................................. 38
1.10 Analog I/O function .................................................................39
1.10.1 Analog input ................................................................................................39
1.10.2 Analog output..............................................................................................39
1.11 Paluse train input function .....................................................40
1.12 PID control ...............................................................................41
1.13 Inverter Operation Lock Mode Setting ..................................43
CONTENTS
I
Page 3
2. CC-Link COMMUNICATION 45
2.1 System Configuration............................................................. 46
2.1.1 System configuration example.................................................................... 46
2.1.2 Function block diagram............................................................................... 47
2.2 CC-Link Parameters................................................................ 49
2.2.1 CC-Link Extended Setting (Pr. 544)............................................................ 49
2.3 CC-Link I/O Specifications ..................................................... 50
2.4 Buffer Memory......................................................................... 57
2.4.1 Remote output signals
(Master module to inverter(FR-A7NC))....................................................... 57
2.4.2 Remote input signals Pr.544=100
(Inverter(FR-A7NC) to master module)....................................................... 58
2.4.3 Remote registers Pr.544=100
(Master module to inverter(FR-A7NC))....................................................... 59
2.4.4 Remote registers Pr.544=100
(Inverter(FR-A7NC) to master module)...................................................... 60
3. SEQUENCE PROGRAMMING 61
3.1 Overview .................................................................................. 62
3.1.1 Outline of Operation Processings ............................................................... 62
3.2 RUN and STOP Operation Processings................................ 64
3.3 Program Makeup ..................................................................... 64
3.4 Programming Languages.......................................................65
3.4.1 Relay symbolic language (Ladder mode) ................................................... 65
3.4.2 Logic symbolic language (List mode).......................................................... 67
3.5 Operation Processing Method of PLC Function ..................68
3.6 I/O Processing Method ........................................................... 69
3.6.1 What is refresh system? ............................................................................. 69
3.6.2 Response delay in refresh system.............................................................. 70
3.7 Scan Time ................................................................................ 71
3.8 Numerical Values Usable in Sequence Program .................72
3.8.1 BIN (Binary Code)....................................................................................... 73
3.8.2 HEX (HEX Decimal).................................................................................... 74
3.9 Description of devices............................................................ 75
3.9.1 Device List .................................................................................................. 75
3.9.2 Inputs, Outputs X, Y.................................................................................... 76
3.9.3 Internal Relays M........................................................................................ 79
3.9.4 Timers T...................................................................................................... 80
II
Page 4

3.9.5 100ms, 10ms and 100ms retentive timers ..................................................80
3.9.6 Timer processing method and accuracy .....................................................81
3.10 Counters C ...............................................................................83
3.10.1 Count processing in refresh system............................................................84
3.10.2 Maximum counting speed of counter ..........................................................85
3.11 Data Registers D......................................................................86
3.12 Special Relays, Special Registers .........................................87
3.13 Function List............................................................................89
3.14 How to RUN/STOP the Built-in PLC Function from Outside (Re-
mote RUN/STOP) .....................................................................90
3.15 Watchdog Timer (Operation clog up monitor timer)............92
3.16 Self-diagnostic Function ........................................................93
3.16.1 Error-time operation mode .......................................................................... 94
3.17 Keyword Registration .............................................................95
3.18 Setting of Output (Y) Status at Switching from STOP Status to
RUN Status...............................................................................96
3.19 Instruction Format...................................................................97
3.20 Bit Device Processing Method...............................................99
3.20.1 1-bit processing...........................................................................................99
3.20.2 Digit designation processing .......................................................................99
3.21 Handling of Numerical Value................................................101
3.22 Operation Error......................................................................102
3.23 Instructions List ....................................................................103
3.23.1 How to use the instruction list....................................................................103
3.23.2 Sequence instruction.................................................................................105
3.23.3 Basic instructions ......................................................................................107
3.23.4 Application instructions..............................................................................109
3.24 Description of the Instructions ............................................110
3.25 Sequence Instructions ..........................................................111
3.25.1 Contact Instructions :
Operation start, series connection, parallel connection ... LD, LDI, AND, ANI,
OR, ORI.....................................................................................................111
3.25.2 Contact Instructions : Ladder block series connection, parallel connection ...
ANB, ORB ................................................................................................. 113
3.25.3 Connection Instructions :
Ladder block series connection, parallel connection ... ANB, ORB...........117
3.25.4 Connection Instructions :
Operation result, push, read, pop ... MPS, MRD, MPP.............................120
3.25.5 Output Instructions : Bit device, timer, counter ... OUT.............................123
CONTENTS
III
Page 5
3.25.6 Output Instructions : Device set, reset ... SET, RST................................. 126
3.25.7 Output Instructions : Leading edge, trailing edge differential outputs ... PLS,
PLF ........................................................................................................... 129
3.25.8 Shift Instructions : Bit device shift ... SFT, SFTP...................................... 131
3.25.9 Master Control Instructions : Master control set, reset ... MC, MCR......... 133
3.25.10End Instruction : Sequence program end ... END..................................... 137
3.25.11Other Instructions : No operation ... NOP ................................................. 138
3.26 Basic Instructions ................................................................. 140
3.26.1 Comparison Operation Instructions .......................................................... 140
3.26.2 Comparison Operation Instructions :
16-bit data comparison ... =, <>, >, <=, <, >=............................................ 142
3.26.3 Arithmetic Operation Instructions.............................................................. 144
3.26.4 Arithmetic Operation Instructions :
BIN 16-bit addition, subtraction ... +, +P, -, -P .......................................... 145
3.26.5 Arithmetic Operation Instructions :
BIN 16-bit multiplication, division ... *, *P, /, /P.......................................... 149
3.26.6 Data Transfer Instructions......................................................................... 153
3.26.7 Data Transfer Instructions :
16-bit data transfer ... MOV, MOVP.......................................................... 153
3.27 Application instructions ....................................................... 155
3.27.1 Logical Operation Instructions .................................................................. 155
3.27.2 Logical Operation Instructions :
16-bit Logical Product ... WAND, WANDP................................................ 156
3.27.3 Logical Operation Instructions :
16-bit Logical Add ... WOR, WORP .......................................................... 159
3.27.4 Logical Operation Instructions :
16-bit Exclusive Logical Add ... WXOR, WXORP..................................... 162
3.27.5 Logical Operation Instructions :
16-bit NOT Exclusive Logical Add ... WXNR, WXNRP............................. 165
3.27.6 Logical Operation Instructions :
BIN 16-bit 2’s complement ... NEG, NEGP............................................... 168
4. ERROR CODE LIST 171
4.1 How to Read the Error Code ................................................ 172
APPENDIX 175
Appendix1Instruction Processing Time ....................................... 176
IV
Page 6
1. PLC FUNCTION
This manual describes the functions and devices necessary for programming.
1.1 Function Block Diagram ...................................... 2
1.2 PLC Function Specifications............................... 3
1.3 System Configuration .......................................... 4
1.4 Wiring of the Inverter and Personal Computer
Using GX Developer for RS-485 Communication
1.5 Prior to Sequence Program Creation ................. 6
1.6 Device Map............................................................ 10
1.7 Inverter Status Monitoring, Special Registers
for Control .............................................................
1.8 Inverter Parameter Read/Write Method .............. 34
1.9 User Area Read/Write Method ............................. 38
1.10 Analog I/O function .............................................. 39
1.11 Paluse train input function .................................. 40
1.12 PID control ............................................................ 41
1.13 Inverter Operation Lock Mode Setting ............... 43
... 5
20
Chapter 1
Chapter 2
Chapter 3
Chapter 4
1
Page 7
Function Block Diagram
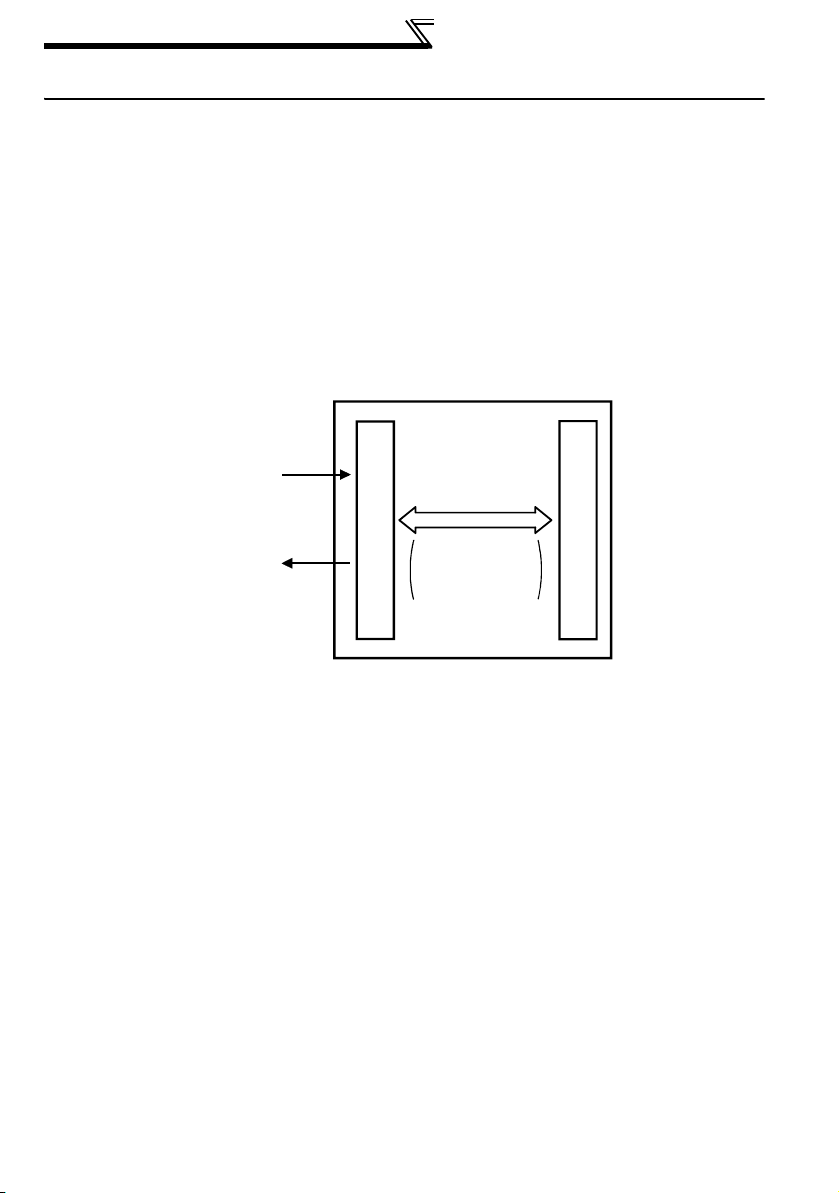
1.1 Function Block Diagram
How I/O data are transferred to/from the inverter by the built-in PLC function is
explained using function blocks.
(1) I/O data read, write, etc. can be performed by accessing the inverter in the
predetermined method using special relays, special registers, etc.
(2) Operation, parameter read/write, etc. can be performed in accordance with the
created sequence programs (built in the inverter) using input data from the control
input terminals.
With the output signals, output data can be output to outside the inverter from the
control output terminals as not only the inverter's status signals but also pilot lamp
on/off, interlock and other control signals set freely by the user.
Inverter
Input signal
I/O data
Output signal
Special relays,
special registers,
etc.
Built-in sequence program
Inverter CPU
2
Page 8
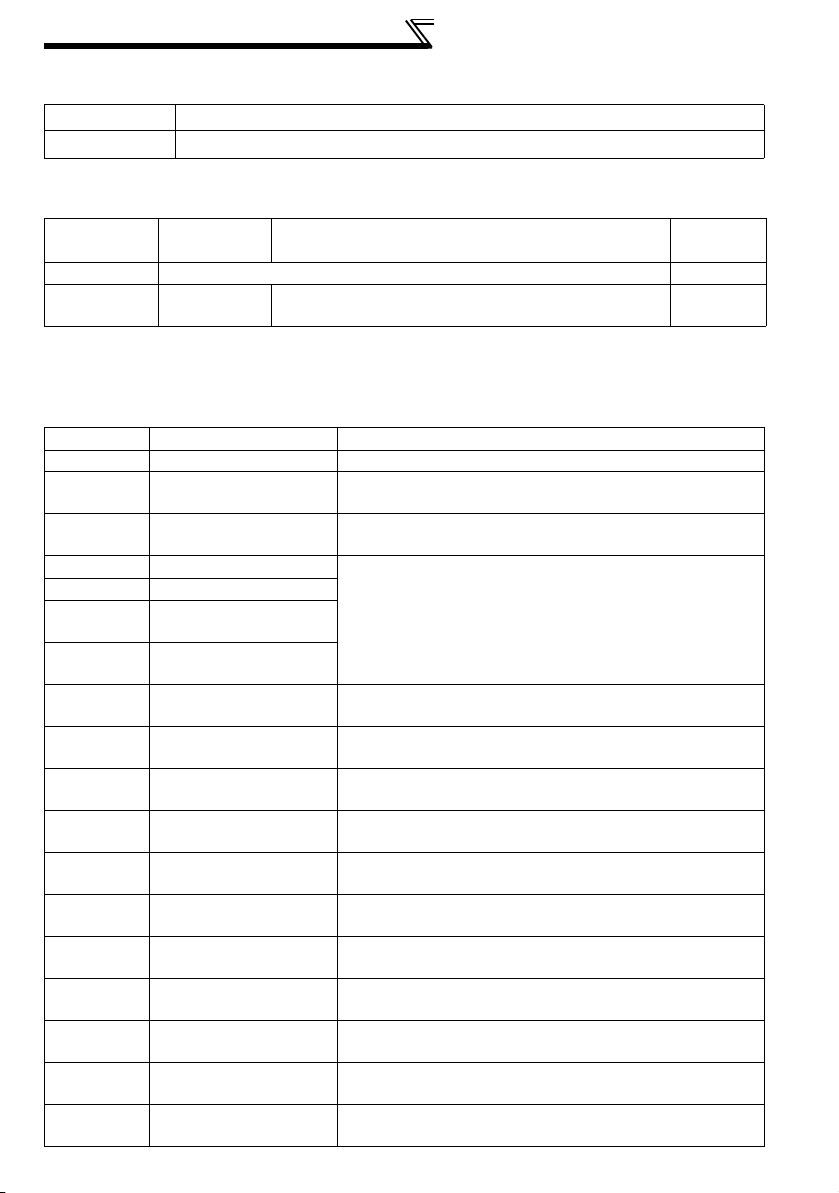
PLC Function Specifications
1.2 PLC Function Specifications
The following table indicates the program capacity and devices of the PLC function.
A700 Sequence Section
Control method Repeated operation (by stored program)
I/O control method Refresh
Programming language
PLC instructions 23
Basic instructions 32
Application instructions 18
Number of
instruction
Processing speed PLC instruction 1.9µs to 12µs/step(*2)
Number of I/O points
Number of analog I/O points
Watchdog timer 10 to 2000(ms)
Memory capacity 6k bytes used by sequence and parameters.
Program capacity 1k step
Internal relay (M) 64(M0 to M63)
Latch relay (L) None (Can be set with parameters but will not latch)
Step relay (S) None (Can be set with parameters but will operate as M)
Link relay (B) None
Timer (T)
Counter (C)
Data device (D) 120(D0 to D119)
Devices
Link register (W) None
Annunciator (F) None
File register (R) None
Accumulator (A) None
Index register (Z, V) None
Pointer (P) None
Interrupt pointer (I) None
Special relay (M) 256 (M9000 to 9255) with function limit
Special register (D) 256 (D9000 to 9255) with function limit
*1 These signals use the same terminals as used by the input and output signals given in the
common specifications of the inverter.
One point is always necessary for a sequence start (RUN/STOP).
*2 As inverter control is also performed actually, the scan time is approximately 40ms at 500 steps.
Points 16
Specifications
Points 16
Specifications
Relay symbolic language (ladder mode)
Logic symbolic language (list mode)
128 (X: 64 points, Y: 64 points)
19 points installed, X: 12 points, Y: 7 points (*1)
FR-A7AX, X: 16 points
FR-A7AY, Y: 6 points
FR-A7AR, Y: 3 points
5 points installed, Input: 3 points, Output: 2 points
FR-A7AY output: 2 points
100ms timer: Set time 0.1 to 3276.7s (T0 to T15)
10ms timer: Set time 0.01 to 327.67s
100ms retentive timer: Set time 0.1 to 3276.7s
Normal counter: Setting range 1 to 32767 (C0 to C15)
Interrupt program counter: None
1
PLC FUNCTION
3
Page 9
System Configuration
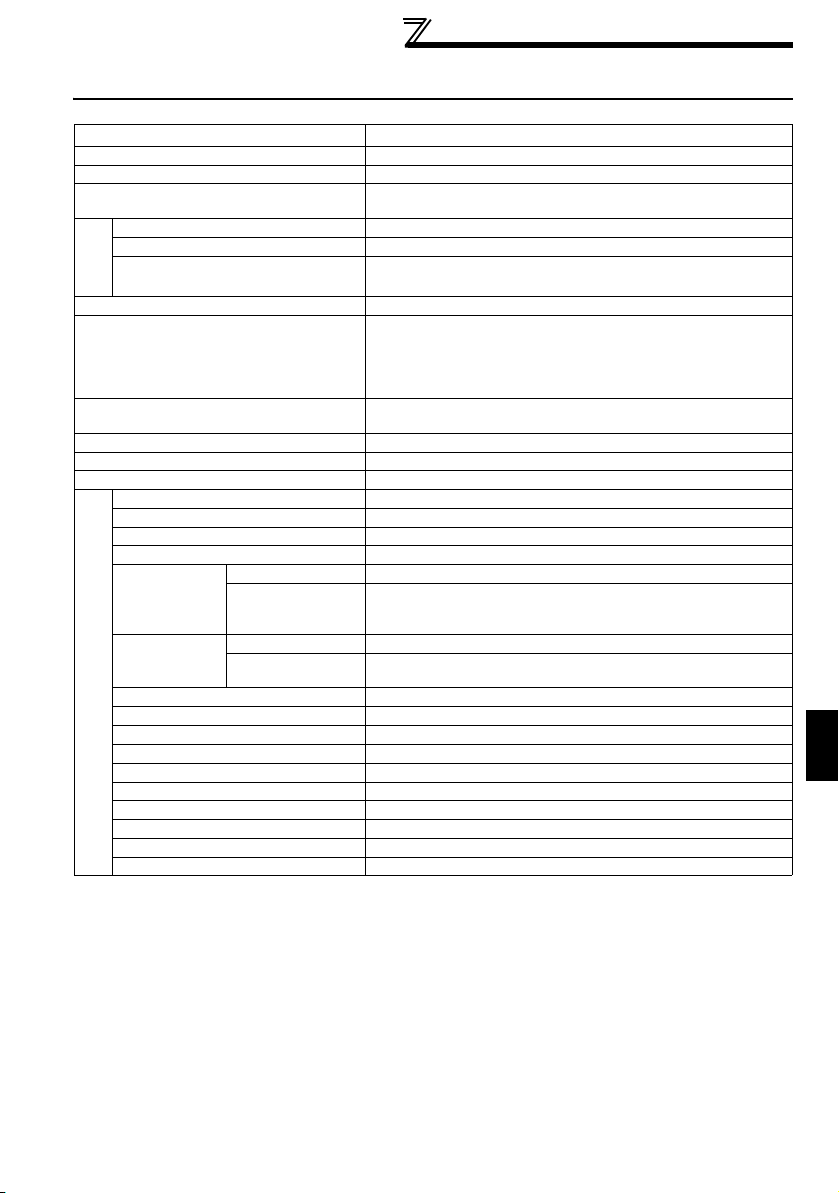
1.3 System Configuration
The following shows the system configuration for use of the PLC function.
<System configuration example>
GX Developer:
Programming tool
3-phase AC
power supply
RS-232C/
PU connector
RS-485
converter
FR-A700
Motor
Communication specifications
Set the following setting in communication parameters of the inverter.
Inverter Parameter GX Developer Setting Inverter initial setting
Pr.118 PU communication speed 96 (9600bps) 192 (19200bps)
Pr.119 PU communication stop bit length
Pr.120 PU communication parity check 1 (with odd parity check) 2 (with even parity check)
Pr.122 PU communication check time
interval
0 (data length: 8 bits, stop
bit: 1 bit)
9999 (without
communication check)
REMARKS
•For futher details, refer to the Inverter instruction manual (applied).
POINT
•Support GX Developer ver.8.0 or more
•GX Developer Setting
PLC series ACPU
PLC type A0J2H
[Project data list]→[Parameter]→[PLC parameter]→[A parameter]
→«Memory capacity» tab→"Program capacity"→"Sequence"→"main"
1 (data length: 8 bits, stop
bit: 2 bit)
9999 (without
communication check)
1k step
REMARKS
•Refer to the Inverter instruction manual (applied) for wiring.
•Refer to the GX Developer manuals for the specifications related to GX Developer and the
personal computer that uses GX Developer.
GX Developer Version xx Operating manual
GX Developer Version xx Operating manual (startup)
•The programming tool that can be used is GX Developer only. (The A6GPP, A7PHP, etc.
cannot be used.)
4
Page 10
Wiring of the Inverter and Personal Computer Using
GX Developer for RS-485 Commun ication
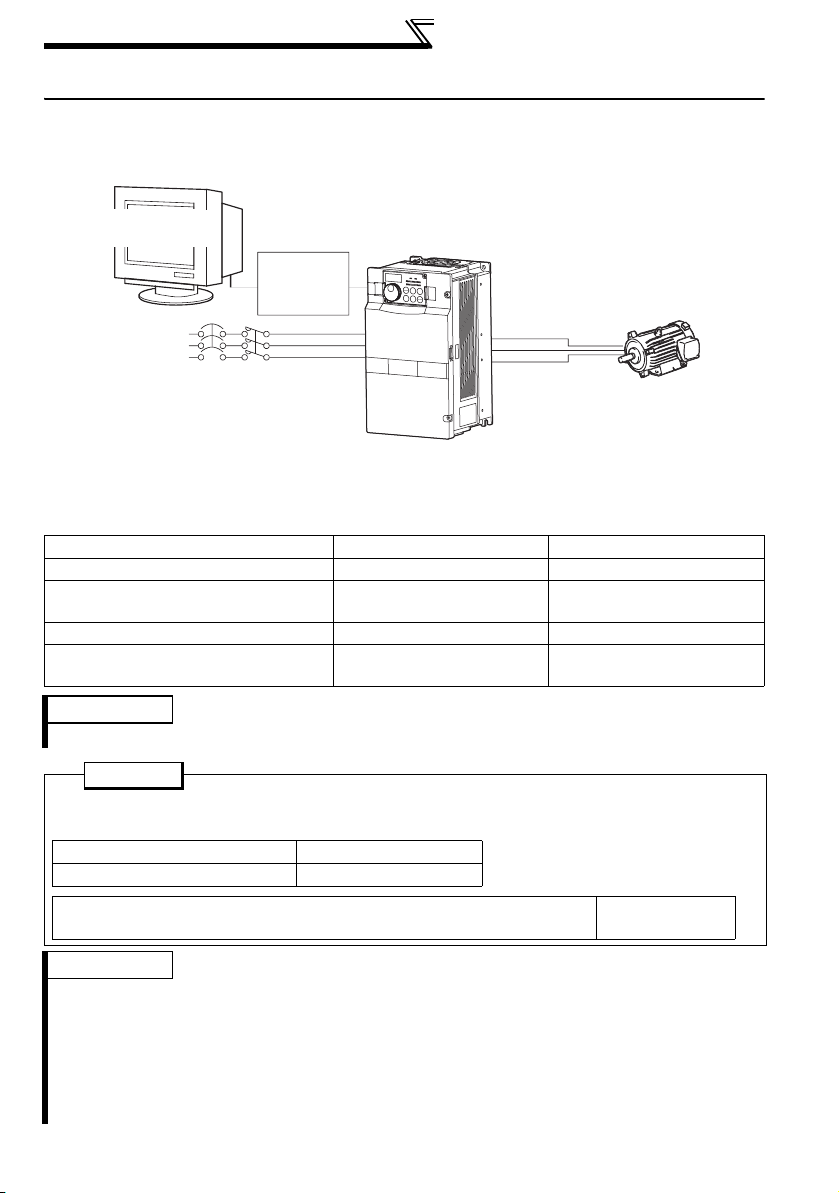
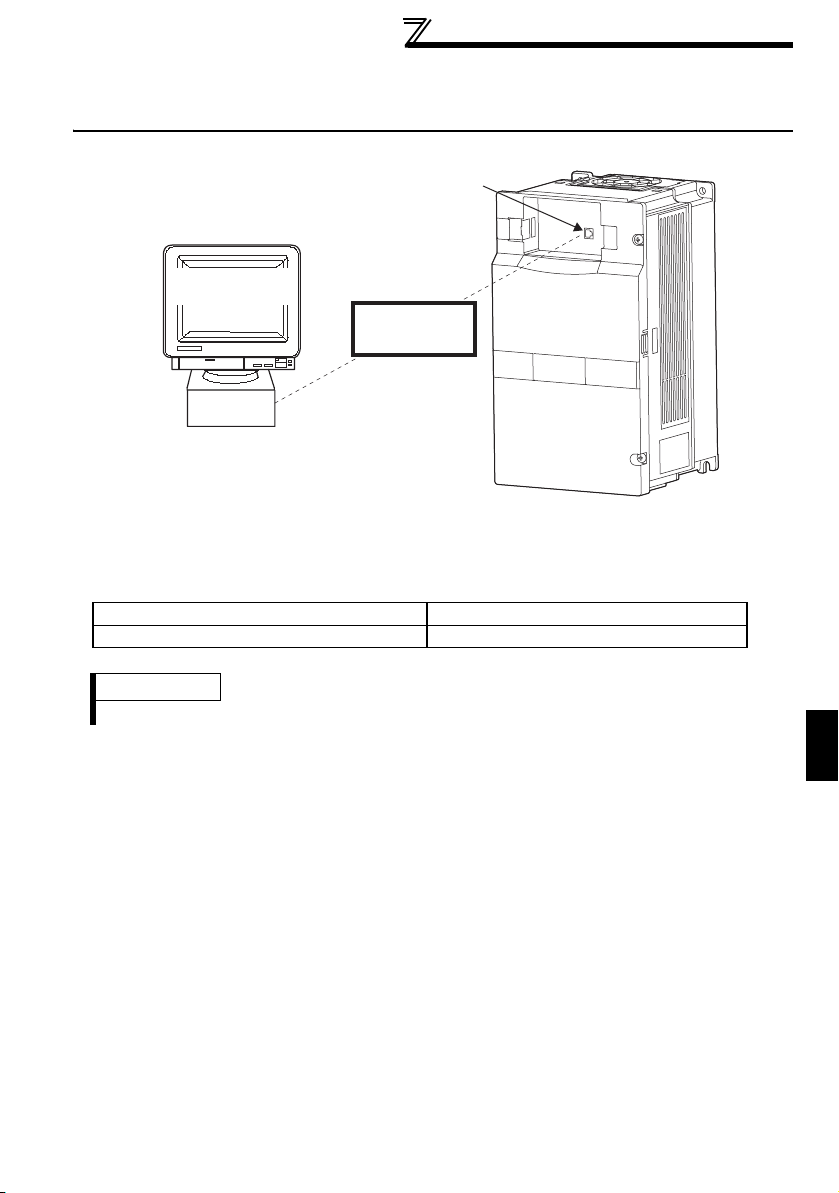
1.4 Wiring of the Inverter and Personal Computer Using GX Developer for RS-485 Communication
PU connector
Personal computer
GX Developer :
Programming tool
RS-232C-RS-485
converter
RS-232C connector
zPersonal computer - inverter connection cable
Make connection after conversion between RS-232C and RS-485.
Examples of commercially available products (as of Sep., '05)
Type Maker
SC-FRPC BEIJERS
REMARKS
When fabricating the cable on the user side, refer to the inverter instruction manual (applied).
1
PLC FUNCTION
5
Page 11
Prior to Sequence Program Creation
1.5 Prior to Sequence Program Creation
1.5.1 Precautions for sequence program creation
POINT
•Online change of the sequence program and access to other stations are not
allowed.
In addition, program read/write from other stations and all PLC memory clear
cannot be performed.
•Back up the ladder configured with the protective function of GX Developer.
If any of the instructions (refer to page 103) and devices (refer to page 3) that cannot
be used with the built-in PLC function exists in a sequence program, an instruction
code error occurs at the execution of that instruction.
Error code D9008=10
Operation error step D9010
D9011
REMARKS
•Refer to page 22 for the error codes.
1.5.2 Usable main GX Developer functions
z Parameter or sequence program read/write
z Ladder monitor
z Device monitor
z Device test
z All device memory clear
z Remote RUN/STOP
CAUTION
Device test ([Online] - [Debug] - [Device test]) of GX Developer can be performed, but if
devices corresponding to control terminal (e.g. STF, STR) signals are tested, the
devices turn on in the sequence but the inverter does not perform the corresponding
operation.
6
Page 12
Prior to Sequence Program Creation
1.5.3 Sequence program execution key
The sequence program execution key (STOP/RUN) of the PLC is switched by turning
off/on the SQ signal.
POINT
•For the terminal used for SQ signal input, set "50" in any of Pr.178 to Pr. 189 to
assign the function.
•SQ-SD must be shorted to execute the built-in PLC function.
CAUTION
If the SQ signal is not turned on, the start signal of the inverter is designed to
become valid by the factory setting of
Open (STOP) the SQ signal-SD terminals when writing a sequence program, for
example.
When executing the sequence program, short (RUN) the SQ signal-SD terminals.
Remote run/stop of the built-in PLC function can be executed in any of the following
methods:
• Setting using the built-in PLC function parameter (contact)
• Using GX Developer
• Via CC-Link communication (refer to page 49)
REMARKS
•The validity limit of the SQ signal can be controlled using Pr.415 Inverter operation lock mode
setting. (Refer to page 43.)
CAUTION
The outputs (Y) are cleared by turning the SQ signal off (STOP) after sequence program
execution (SQ signal on).
The other devices retain the device data prior to STOP. When you want to clear the
remaining device data, power off or reset (short RES-SD for 0.1s, then open) the
inverter.
Pr.415 Inverter operation lock mode setting.
1
PLC FUNCTION
7
Page 13
Prior to Sequence Program Creation
1.5.4 Sequence program write
POINT
Sequence program write can be performed in any operation mode.
When rewriting the PLC function parameters and sequence program using GX
Developer, check the following:
1)Check that the sequence program execution key is in the STOP position (SQ signal
is off) (refer to page 7).
2)Check that the inverter is at a stop.
3)Check that the communication specification setting parameters (Pr.117 to Pr.124) are
set correctly. If any of these parameters is set incorrectly, communication with GX
Developer cannot be made.
REMARKS
Check and set the communication specification parameter (Pr. 117 to Pr. 124) using
the parameter unit (FR-PU04/FR-PU07). (Refer to the FR-PU04/FR-PU07
instruction manual for the handling of the FR-PU04/FR-PU07.) GX Developer and
the FR-PU04/FR-PU07 cannot be connected and used simultaneously.
4)Check the PLC series and sequence program capacity in the GX Developer
parameters (refer to page 4).
5) Refer to the GX Developer manual and write the sequence program.
CAUTION
•A sequence program cannot be written with its steps specified. If written,
the sequence program does not run. (The program outside the specified
range is initialized.)
•Do not read the built-in PLC function parameters and sequence program
without writing them to the inverter once using GX Developer. Since the
inverter does not have normal data, always write the built-in PLC function
parameters and sequence program once.
•Since the built-in PLC function parameters and sequence program are
written to the flash ROM, there are restrictions on the number of write times.
(Approximately 100,000 times)
8
Page 14
Function Block Diagram
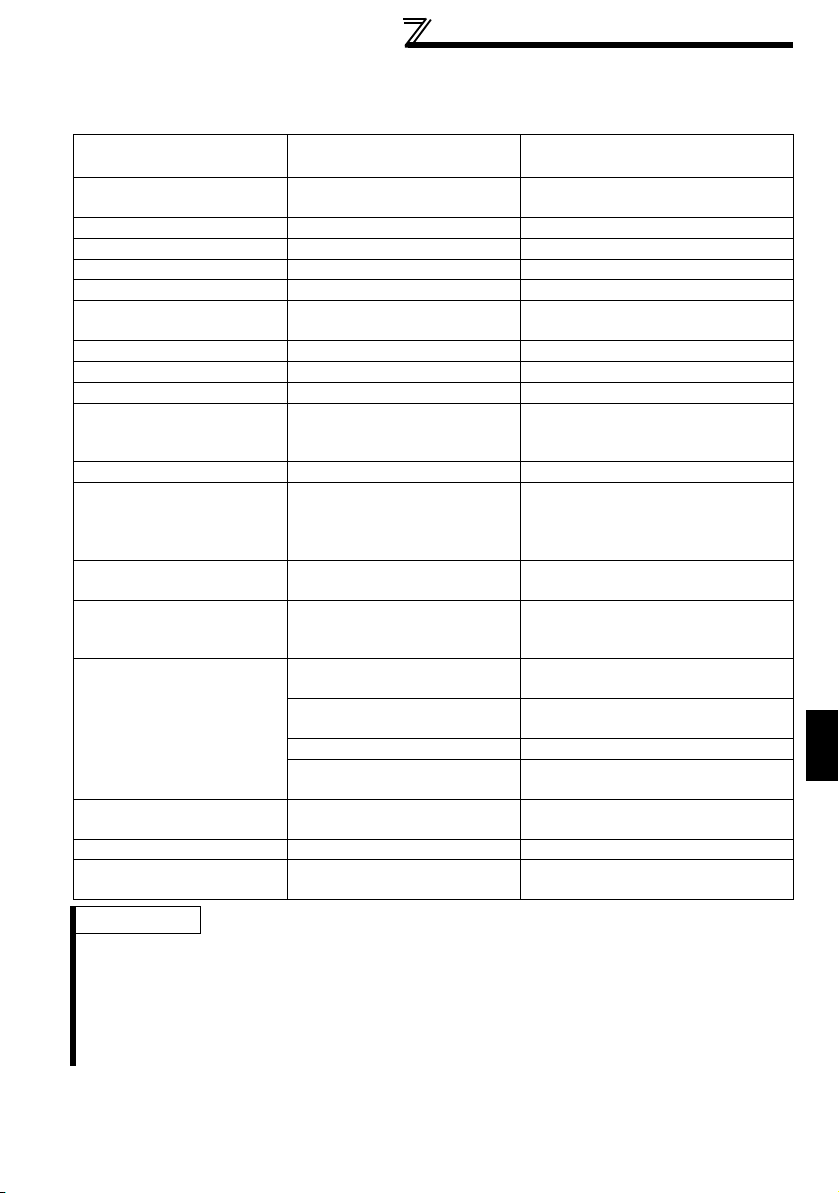
1.5.5 Setting list of built-in PLC function parameter
The built-in PLC function parameters are designed to specify the ranges of using the
PLC function, e.g. program capacity, device assignment and various functions.
Item GX Developer Default
Sequence program
capacity
File register capacity None Cannot be set (default)
Comment capacity None Cannot be set (default)
Status latch None Cannot be set (default)
Sampling trace None Cannot be set (default)
Microcomputer program
capacity
Latch range setting L1000 to L2047 Cannot be set (invalid if set)
Link range setting None Cannot be set (default)
I/O assignment None Cannot be set (default)
Internal relay, latch relay,
step relay setting
Watchdog timer setting 200ms 10 to 2000ms
Timer setting
Counter setting Without interrupt counters
Remote run/pause None
Error-time operation mode
STOP → RUN output mode
Print title registration None Cannot be set
Keyword registration None
(100ms timers since only T0 to 7
Operation error: Continued Stop/Continued
Special function module check
Operation status prior to
6k steps 1k step
None Cannot be set (default)
M0 to 999
L1000 to 2047
None for S
100ms: T0 to 199
10ms: T200 to 255
are available)
Fuse blow: Continued
I/O verify error: Stop
error: Stop
STOP is re-output.
L and S cannot be set.
(Operates as M if set)
<M0 to M63>
16 points for 100ms, 10ms and
retentive timers. Timers have
consecutive numbers.
<T0 to T15>
Cannot be set (default)
<C0 to C15>
Can be set using X0 to 1F.
Otherwise invalid. Pause does not
function.
Setting invalid (since there are no
fuses)
Setting invalid
(since there are no I/O modules)
Setting invalid (since there are no
special modules)
Prior to STOP/after operation
execution
Online setting cannot be made but
parameter setting is valid.
REMARKS
•The following functions are not supported.
1. Constant scan, 2. Latch (device data backup for power failure), 3. Pause,
4. Status latch, 5. Sampling trace, 6. Offline switch
•If parameter clear of the inverter is performed, the above built-in PLC function parameters are
not cleared.
•For the built-in PLC function parameter setting operation, refer to the GX Developer
Operating Manual.
Setting Range
<Usable device range>
1
PLC FUNCTION
9
Page 15
Device Map
1.6 Device Map
1.6.1 I/O device map
Device
No.
X00 STF terminal
X01 STR terminal Y01 SU terminal
X02 RH terminal Y02 OL terminal
X03 RM terminal Y03 IPF terminal
X04 RL terminal Y04 FU terminal
X05 JOG terminal Y05 ABC1 terminal
X06 RT terminal Y06 ABC2 terminal
X07 AU terminal Y07
X08 CS terminal Y08
X09 MRS terminal Y09
External I/O
X0A STOP terminal Y0A
X0B RES terminal Y0B
X0C
X0D Y0D
Empty
X0E Y0E
X0F Y0F
X10 X0 terminal
X11 X1 terminal Y11 DO1 terminal
X12 X2 terminal Y12 DO2 terminal
X13 X3 terminal Y13 DO3 terminal
X14 X4 terminal Y14 DO4 terminal
X15 X5 terminal Y15 DO5 terminal
X16 X6 terminal Y16 DO6 terminal
X17 X7 terminal Y17 RA1 terminal
X18 X8 terminal Y18 RA2 terminal
X19 X9 terminal Y19 RA3 terminal
X1A X10 terminal Y1A
Plug in option I/O
X1B X11 terminal Y1B
X1C X12 terminal Y1C
X1D X13 terminal Y1D
X1E X14 terminal Y1E
X1F X15 terminal Y1F
Name Remarks
External
terminal
16bit
digital
Input
FR-A7AX
Device
No.
Y00 RUN terminal
Empty
Y0C
Y10 DO0 terminal
Empty
Name Remarks
External
terminal
Dgital
output
FR-A7AY
Relay
output
FR-A7AR
10
Page 16
Device Map
Device
No.
X20
X21
X22
X23
X24
X25
X26
X27
System I/O
X28
X29
X2A
X2B
Operation mode setting
read completion
Set frequency read
completion (RAM)
Set frequency read
completion (E
Operation mode setting
write completion
Set frequency write
completion (RAM)
Set frequency write
completion (E
Alarm definition batch
clear completion
Parameter clear
completion
Parameter read
completion (RAM)
Parameter write
completion (RAM)
Parameter read
completion (EEPROM)
Parameter write
completion (EEPROM)
Name Remarks
D9140 Y20
D9141 Y21
2
PROM)
D9142 Y22
D9143 Y23
D9144 Y24
2
PROM)
D9145 Y25
D9146 Y26
D9147 Y27 Parameter clear command D9147
D9241,
D9242,
D9234
D9243,
D9244,
D9235
X2C
X2D Y2D
System area
X2E Y2E
Device
No.
Y28
Y29
Y2A
Y2B
Y2C
X2F Y2F
X30 RY0
Y30 RX0
X31 RY1 Y31 RX1
X32 RY2 Y32 RX2
X33 RY3 Y33 RX3
X34 RY4 Y34 RX4
X35 RY5 Y35 RX5
X36 RY6 Y36 RX6
X37 RY7 Y37 RX7
X38 RY8 Y38 RX8
FR-A7NC
X39 RY9 Y39 RX9
X3A RYA Y3A RXA
X3B RYB Y3B RXB
CC-Link I/O remote I/O
X3C RYC Y3C RXC
X3D RYD Y3D RXD
X3E RYE Y3E RXE
X3F RYF Y3F RXF
Name Remarks
Operation mode setting
read command
Set frequency read
command (RAM)
Set frequency read
command (E
2
PROM)
Operation mode setting
write command
Set frequency write
command (RAM)
Set frequency write
command (E
2
PROM)
Alarm definition batch
clear command
Parameter read request
(RAM)
Parameter write request
(RAM)
Parameter read request
(EEPROM)
Parameter write request
(EEPROM)
System area
D9140
D9141
D9142
D9143
D9144
D9145
D9146
D9241,
D9242,
D9234
D9243,
D9244,
D9235
FR-A7NC
Device Map
1
PLC FUNCTION
11
Page 17
Device Map
1.6.2 Internal relay (M) device map
Device No. Description
M0 to M63
Use freely on user side.
1.6.3 Data register (D) device map
Data
Register (D)
D0 to D99 Use freely on user side. —
D100 to D119
Inverter Pr.
Number
Pr.506 to
Pr.515
Parameter Name
User parameters. Use freely on user side. 38
Reference
Page
1.6.4 Special relays
The special relays are internal relays with special applications and therefore should
not be switched on-off in the program.
Number Name Description
M9008 Self-diagnostic error Turned on by self-diagnosed error.
M9010 Operation error flag
M9011 Operation error flag
M9036 Normally ON
M9037 Normally OFF
M9038
M9039
M9200
M9201
M9202
M9203
M9204
M9205
M9206
M9207
M9208
M9209
M9210
12
On only for 1 scan after
RUN
Off only for 1 scan after
RUN
Inverter operation status
control flag (STF)
Inverter operation status
control flag (STR)
Inverter operation status
control flag (RH)
Inverter operation status
control flag (RM)
Inverter operation status
control flag (RL)
Inverter operation status
control flag (JOG)
Inverter operation status
control flag (RT)
Inverter operation status
control flag (AU)
Inverter operation status
control flag (CS)
Inverter operation status
control flag (MRS)
Inverter operation status
control flag (STOP)
Turned on by an instruction execution error.
Turned off when error is removed.
Turned on by an instruction execution error.
Remains on after normal status is restored.
M9036 and M9037 are turned on and off independently
of STOP or RUN.
M9038 and M9039 change depending on the STOP or
RUN status. In other than the STOP status, M9038 is on
for one scan only and M9039 is off for one scan only.
Control the STF terminal of the inverter from PLC
function
Control the STR terminal of the inverter from PLC
function
Control the RH terminal of the inverter from PLC
function
Control the RM terminal of the inverter from PLC
function
Control the RL terminal of the inverter from PLC function
Control the JOG terminal of the inverter from PLC
function
Control the RT terminal of the inverter from PLC function
Control the AU terminal of the inverter from PLC
function
Control the CS terminal of the inverter from PLC
function
Control the MRS terminal of the inverter from PLC
function
Control the STOP terminal of the inverter from PLC
function
Page 18
Device Map
Number Name Description
M9211
M9216 Inverter status (RUN) Inverter running
M9217 Inverter status (FWD) Forward running
M9218 Inverter status (REV) Reverse running
M9219 Inverter status (SU) Up to frequency
M9220 Inverter status (OL) Overload alarm
M9221 Inverter status (IPF) Instantaneous power failure/undervoltage
M9222 Inverter status (FU) Output frequency detection
M9223 Inverter status (ALM) Alarm output
M9224 Inverter status (LF) Minor fault output
M9225 Inverter status (DO0) Status of output terminal function set in Pr. 313 is stored *1
M9226 Inverter status (DO1) Status of output terminal function set in Pr. 314 is stored *1
M9227 Inverter status (DO2) Status of output terminal function set in Pr. 315 is stored *1
M9228 Inverter status (DO3) Status of output terminal function set in Pr. 316 is stored *1
M9229 Inverter status (DO4) Status of output terminal function set in Pr. 317 is stored *1
M9230 Inverter status (DO5) Status of output terminal function set in Pr. 318 is stored *1
M9231 Inverter status (DO6) Status of output terminal function set in Pr. 319 is stored *1
M9232 Inverter status (RA1) Status of output terminal function set in Pr. 320 is stored *1
M9233 Inverter status (RA2) Status of output terminal function set in Pr. 321 is stored *1
M9234 Inverter status (RA3) Status of output terminal function set in Pr. 322 is stored *1
M9255
*1. Even if the FR-A7AY, FR-A7AR is not mounted, Pr. 313 to Pr. 322 are accessible during
Inverter operation status
control flag (RES)
Inverter operation status
control selection
PLC function operation, and status of output terminal functions are stored in each device.
(virtual output terminal)
Control the RES terminal of the inverter from PLC
function
Select the inverter status control command from M9200
to M9211 or D9148.
OFF: Special relay selection
ON : Special register selection
Device Map
13
1
PLC FUNCTION
Page 19
Device Map
1.6.5 Special registers
The special registers are data registers with special applications and therefore data
should not be written to the special registers in the program.
Number Name Description Page
D9008
D9010
D9011
D9014
Self-diagnostic
error
Operation error
step
Operation error
step
I/O control
method
Stores the self-diagnosed error number in BIN. (Refer
to page 22 for the error codes.)
22
Stores the step number in BIN, at which an instruction
execution error occurred. After that, data is updated
—
each time operation error occurs.
Stores the step number in BIN, at which an instruction
error occurred. Since data is stored into D9011 when
M9011 turns from off to on, D9011 data is not updated
—
unless M9011 is cleared by the user program.
3 (fixed): Both input and output refreshes —
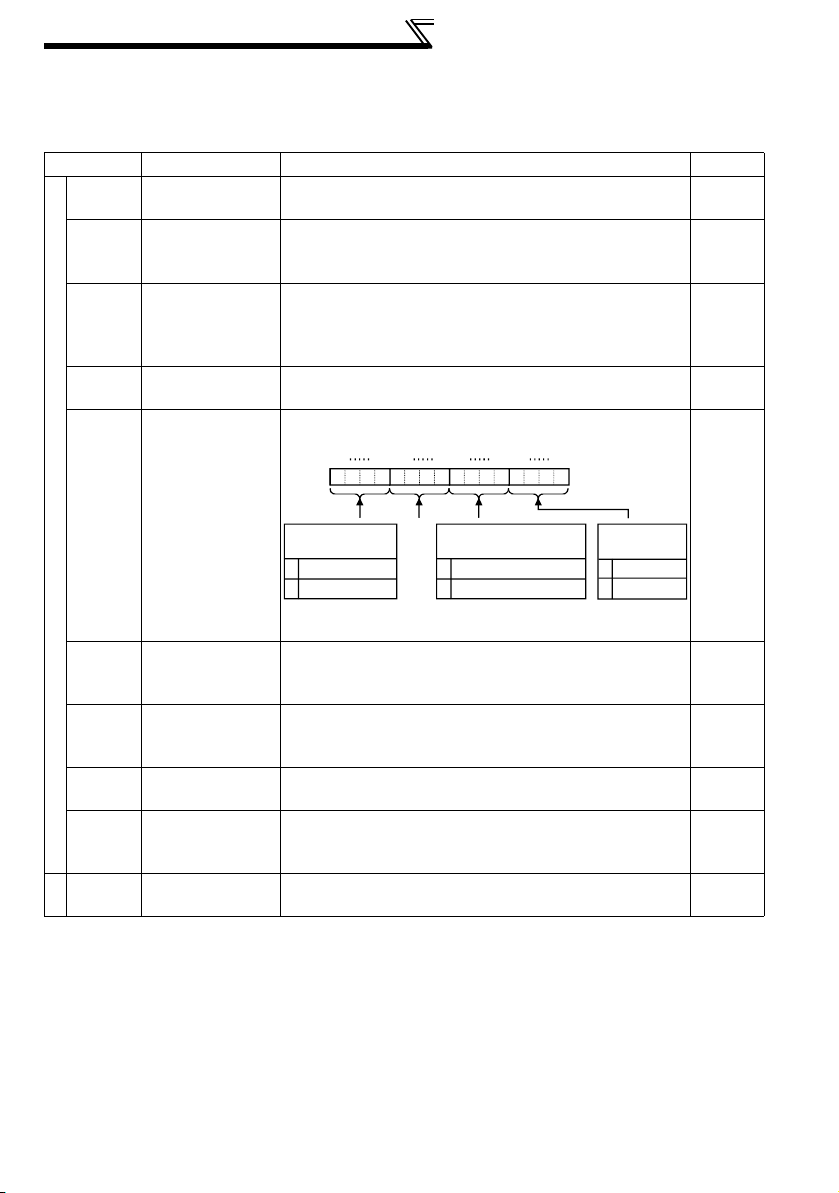
Stores the operating status of the PLC function.
B15 B12B11 B8B7 B4B3 B0
D9015
CPU operating
status
Special registers
D9016 Program number
Minimum scan
D9017
time
(10ms units)
D9018
Scan time
(10ms units)
Maximum scan
D9019
time
(10ms units)
D9062 to
D9093
Remote registers
Remote run/stop
using GX Developer
RUN
0
STOP
1
Invalid
Remote run/stop using
sequence parameter setting
RUN
0
STOP
1
Shorting/
opening SQ-SD
0
RUN
STOP
1
Stores the number that indicates which sequence
program is currently in execution.
1 (fixed): Main program (RAM)
Stores the scan time at every END that is smaller than
D9017 data, i.e. stores the minimum scan time in BIN.
Stores and updates the scan time at every END in
BIN.
Stores the scan time at every END that is greater than
D9019 data, i.e. stores the maximum scan time in
BIN.
Special registers for communication with the master
station in CC-Link.
—
—
—
—
—
50
14
Page 20
Device Map
Number Name Description Page
D9133
D9135
Output frequency
monitor
Output current
monitor
Output voltage
monitor
Stores the current output frequency.
0.01Hz units
Stores the current output current.
0.01A units
Stores the current output voltage.
0.1V units
20D9134
D9136 Error history 1, 2
D9137 Error history 3, 4
D9138 Error history 5, 6
Store the errors that occurred in the inverter in order
of occurrence.
21
D9139 Error history 7, 8
D9140
D9141
D9142
D9143
D9144
Special registers for control
D9145
D9146
Operation mode
setting read
Set frequency
read (RAM)
Set frequency
2
read (E
PROM)
Operation mode
setting write
Set frequency
write (RAM)
Set frequency
2
write (E
PROM)
Alarm definition
batch clear
Stores the current operation mode. 23
Reads and stores the set frequency (RAM). 24
Reads and stores the set frequency (EEPROM). 24
Sets a new operation mode. 26
Sets the running frequency (RAM). 27
Sets the running frequency (EEPROM). 28
Write H9696 to clear the error history. 29
H9696 write: Parameter clear
H9966 write: All clear
H5A5A write:Parameter clear except communication
D9147 Parameter clear
H55AA write:All clear except communication
parameters
30
parameters
During GX Developer communication, perform
clearing by H5A5A or H55AA.
Device Map
1
15
PLC FUNCTION
Page 21
Device Map
Number Name Description Page
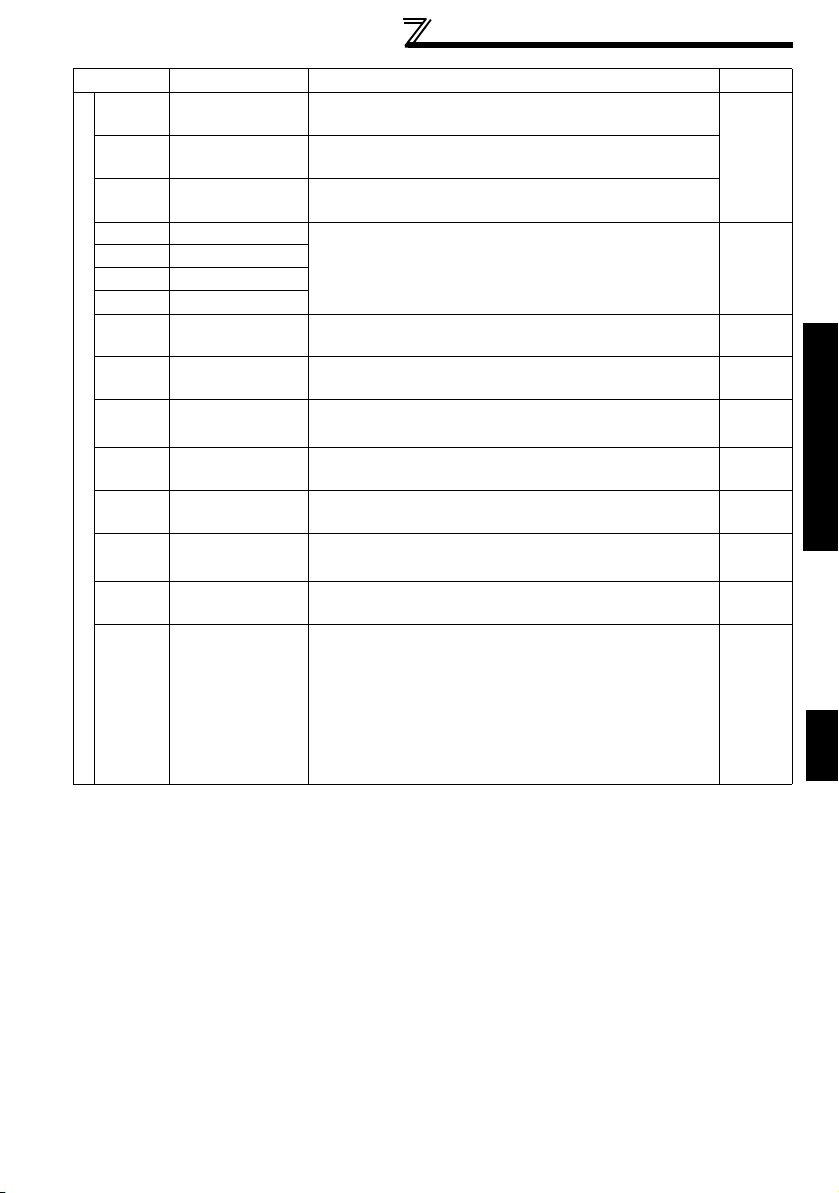
Turn on/off the corresponding bits to control the
inverter operation status.
The initial value: All "0". When M9255 is off, this
device does not function.
D9148
D9149
D9150
Inverter operation
status control
Inverter operation
status control
enable/disable
setting
Inverter
parameter
access error
B15 B12B11 B8B7 B4 B3 B0
Invalid
Enable/disable the inverter operation status control
using D9148 and M9200 to M9211 by turning on/off
the corresponding bits.
Bit image is the same as D9148.
The initial value: All "0" (invalid)
Stores the error No. when an error occurs because
the data stored in the parameter or special register is
not reflected on the inverter.
0:OFF
1:ON
STF
STR
RH
RM
RL
JOG
RT
AU
CS
MRS
STOP
RES
Stores the running status and operating status of the
inverter.
Special registers for control
D9151 Inverter status
B15 B8B7 B4 B3 B0
0:OFF
1:ON
Inverter running(RUN)
Forward running
Reverse running
Up to frequency(SU)
Overload alarm(OL)
Instantaneous power failure
/undervoltage(IPF)
Output frequency
detection(FU)
Alarm output(ALM)
Minor fault output(LF)
31
32
33
33
16
D9152
D9153
D9154
D9155
D9156
D9157
D9158
Frequency
setting
0.01Hz units —
Running speed 1(0.1)r/min unit —
Motor torque
Converter output
voltage
Regenerative
brake duty
0.1% units —
0.1V units —
0.1% units —
Electronic thermal
relay function load
0.1% units —
factor
Output current
peak value
0.01A/0.1A units —
Page 22
Device Map
Number Name Description Page
D9159
D9160
D9161
D9162
D9163
D9164
D9165
Converter output
voltage peak value
Input power
Output power
Input terminal
status
Output terminal
status
Load meter
Motor excitation
current
0.1V units —
0.01kW
/0.1kW units —
0.01kW
/0.1kW units —
Input terminal status
B15 B12B11 B8B7 B4 B3 B0
Output terminal status
B15 B7 B4B3 B0
0.1%
units —
details
details
0:OFF
1:ON
STF
STR
AU
RT
RL
RM
RH
JOG
MRS
STOP
RES
CS
0:OFF
1:ON
RUN
SU
IPF
OL
FU
ABC1
ABC2
—
—
0.01A/0.1A units *7 —
D9166 Position pulse —
Special registers for control
D9167
Cumulative
energization time
1h units —
D9169 — Always 0 —
D9170
Actual operation
time
1h unit —
D9171 Motor load factor 0.1% units —
D9172
Cumulative power
1kW
unit —
D9179 Torque command 0.1% units —
D9180
Torque current
command
0.1% units —
D9181 Motor output 0.01kW units —
D9182 Feedback pulse
D9197
D9198
Power saving
effect
Cumulative
saving power
1 unit —
—
Variable according to parameters
—
D9199 PID set point 0.1% units —
D9200
PID measured
value
0.1% units —
D9201 PID deviation 0.1% units —
Device Map
1
PLC FUNCTION
17
Page 23
Device Map
Number Name Description Page
The input status of the FR-A7AX is stored.
All off (0) when an option is not fitted.
B15
D9205
D9206
Special registers for control
D9207
Option input
terminal status 1
Option input
terminal status 2
Option output
terminal status
D9205
D9206
B12B11 B8 B7 B4 B3 B0
B15
B12B11 B8 B7 B4 B3 B0
The output status of the FR-A7AY, FR-A7AR is stored.
All off (0) when an option is not fitted.
B15 B12B11 B8B7 B4 B3 B0
0:OFF
1:ON
Y0
Y1
Y2
Y3
Y4
Y5
Y6
RA1
RA2
RA3
0:OFF
1:ON
X0
X1
X2
X3
X4
X5
X6
X7
X8
X9
X10
X11
X12
X13
X14
X15
0:OFF
1:ON
DY
—
—
—
18
Page 24
Device Map
Number Name Description Page
D9234
D9235
D9236
D9237
D9238
D9239
D9240
D9241
D9242
D9243
D9244
D9245 Terminal 1 input
Special registers for control
D9247 Terminal 4 input
D9248
D9250
D9251
D9252
D9253 AM0 output
D9254 AM1 output
D9255
Second
parameter
changing (RAM)
Second
parameter
changing
(EEPROM)
Pulse train input
sampling pulse
Pulse train input
cumulative count
value L
Pulse train input
cumulative count
value H
Reset request of
pulse train input
count
Count start of the
pulse train input
Parameter
number (RAM)
Parameter
description
(RAM)
Parameter
number
(EEPROM)
Parameter
description
(EEPROM)
PID set point /
PID deviation
PID
measurement
value
PID manipulated
variable
Ter m in a l F M
output
Ter m in a l A M
output
PID operation
control
When setting the calibration(bias/gain) parameters.
H00: Frequency(toruque)
H01: Parameter-set analog value
H02: Analog value input from terminal
The number of pulses counted in count cycle is
stored. (0 to 32767)
The cumulative value of the number of sampling
pulses is stored. (0 to 99999999)
The sampling pulses and cumulative count value are
cleared. Automatically changes to "0" after reset.
(1: count clear)
Start counting the sampling pulses and cumulative
count value. (0: count stop, 1: count start)
Set the number of parameter read or written of the
inverter.
The parameter description of the inverter (RAM value)
specified by D9241 is stored. Set the parameter
setting for parameter write.
Set the number of parameter read or written of the
inverter.
The parameter description of the inverter (EEPROM
value) specified by D9243 is stored. Set the
parameter setting for parameter write.
Analog input value of terminal 1 (0.1% increments) is
stored.
Analog input value of terminal 2 (0.1% increments) is
stored.
Analog input value of terminal 4 (0.1% increments) is
stored.
Set the PID set point or PID deviation (0.01% units)
Set the PID measurement value (0.01% units)
Stores the PID manipulated variable (0.01% units)
When Pr. 54 is set to "70", pulse train can be output
from terminal FM. High speed pulse train output can
be performed. (0.1% increments)
When Pr. 158 is set to "70", analog output can be
performed from terminal AM. (0.1% increments)
Analog output can be performed from terminal AM0
and AM1 of the FR-A7AY. (0.1% increments)
Setting 1 starts PID control. 41
34, 36
40
34, 36
39D9246 Terminal 2 input
41D9249
39
Device Map
1
PLC FUNCTION
19
Page 25
Inverter Status Monitoring, Special Registers for Control
1.7
Inverter Status Monitoring, Special Registers for Control
You can assign the data for grasping and changing the inverter's operation status to
D9133 - D9147 and read/write them from the user sequence. (Refer to page 14 for the
list.)
1.7.1 Data that can be read at all times
The following data can always be read. They are automatically refreshed every time
the END instruction is executed.
(1) Operation monitor
The following data devices are always read-enabled (write-disabled) to allow you to
monitor the output frequency, output current and output voltage of the inverter. Note
the setting units.
Device
No.
D9133
D9135
Name
Output frequency
monitor
Output current
monitor
Output voltage
monitor
CAUTION
The frequency can be set in increments of 0.01Hz but actual operation is performed in
increments of 0.1Hz.
Setting
Unit
0.01Hz Device data 6000 → 60.00Hz
0.01A Device data 200 → 2.00A
0.1V Device data 1000 → 100.0V
Data Example
Data Access Enable
Condition
AlwaysD9134
20
Page 26
Inverter Status Monitoring, Special Registers
r
for Control
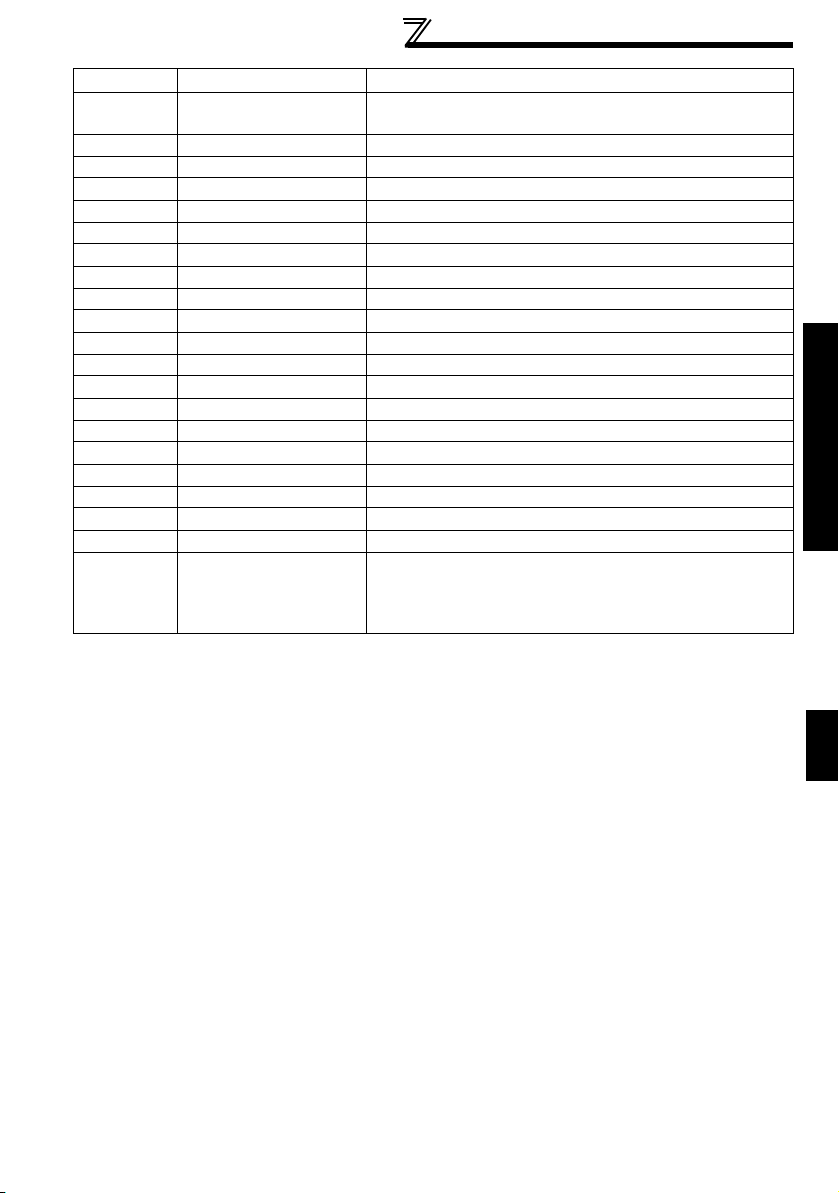
(2) Error history (error codes and error definitions)
The inverter stores the error codes of the errors that occurred.
The error codes of up to eight errors are stored in the order as shown below and are
always read-enabled (write-disabled).
<Error code storing method details>
b15 to b8 b7 to b0
D9136 Error history 2 Error history 1
D9137 Error history 4 Error history 3
D9138 Error history 6 Error history 5
D9139 Error history 8 Error history 7
Data
Description
H00 No alarm
H10 E.OC1
H11 E.OC2
H12 E.OC3
H20 E.OV1
H21 E.OV2
H22 E.OV3
H30 E.THT
H31 E.THM
H40 E.FIN
H50 E.IPF
H51 E.UVT
H52 E.ILF
H60 E.OLT
H70 E.BE
H80 E.GF
H81 E.LF
Older
Data
Description
H90 E.OHT
H91 E.PTC
HA0 E.OPT
HA3 E.OP3
HB0 E.PE
HB1 E.PUE
HB2 E.RET
HB3 E.PE2
HC0 E.CPU
HC1 E.CTE
HC2 E.P24
HC4 E.CDO
HC5 E.IOH
HC6 E.SER
HC7 E.AIE
HC8 E.USB
HD0 E.OS
HD1 E.OSD
Newe
HDA E.MB6
HDB E.MB7
HDC E.EP
HFD E.13
Data
Description
HD2 E.ECT
HD3 E.OD
HD5 E.MB1
HD6 E.MB2
HD7 E.MB3
HD8 E.MB4
HD9 E.MB5
HF1 E.1
HF2 E.2
HF3 E.3
HF6 E.6
HF7 E.7
HFB E.11
1
Refer to the Inverter instruction manual (applied) for alarm definition details.
PLC FUNCTION
21
Page 27
Inverter Status Monitoring, Special Registers
for Control
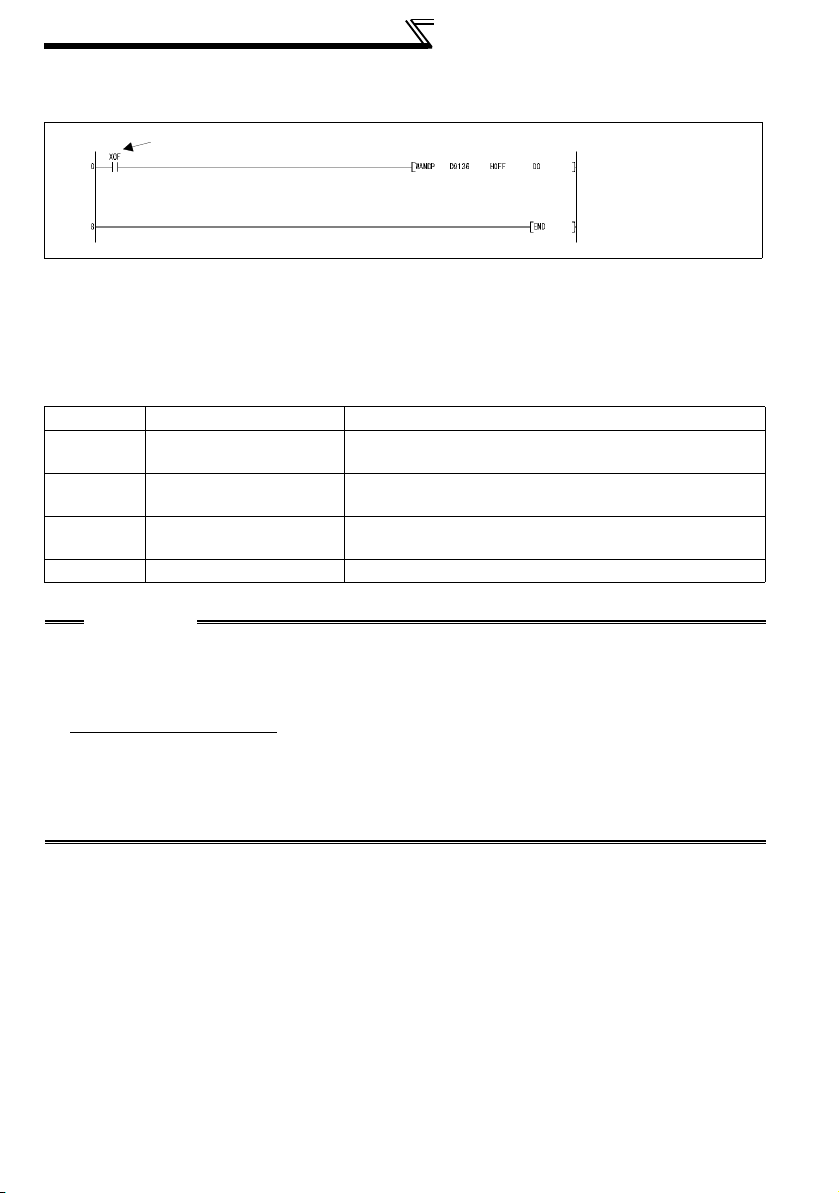
<Alarm definition read program example>
The following program reads the latest alarm definition of the inverter to D0.
Alarm definition read request
Stores only the lower 8 bits
of error history 1, 2 (D9136)
into D0.
(The latest error information
is stored into D0.)
<Regarding the error No. and details of the self-diagnostic errors>
During execution of a sequence program, any of the following error No. is stored into
D9008 due to an operation error.
At occurrence of a self-diagnostic error, the P.RUN indication (LED) flickers.
Error No. Error Name Details
10 INSTRCT CODE ERR.
11 PARAMETER ERR
22 WDT ERR
24 END NOT EXECUTE END instruction was not executed.
CAUTION
1. For the LD, AND, OR, logical comparison operation and OUT instructions,
device checks are always made. For the other instructions (SET, RST, MOV,
etc.), however, device checks are made when the execution condition holds.
2. Operation at error stop
The outputs (Y) are cleared.
The other devices hold the states prior to an error stop.
When you want to clear them, power off or reset (short RES-SD (0.1s), then
open) the inverter.
There is an instruction code that cannot be decoded.
Unusable device is specified.
Main program capacity setting is over 1k step.
Unusable function is set.
Scan time is longer than the time that can be monitored
by the watchdog timer.
22
Page 28
Inverter Status Monitoring, Special Registers
for Control
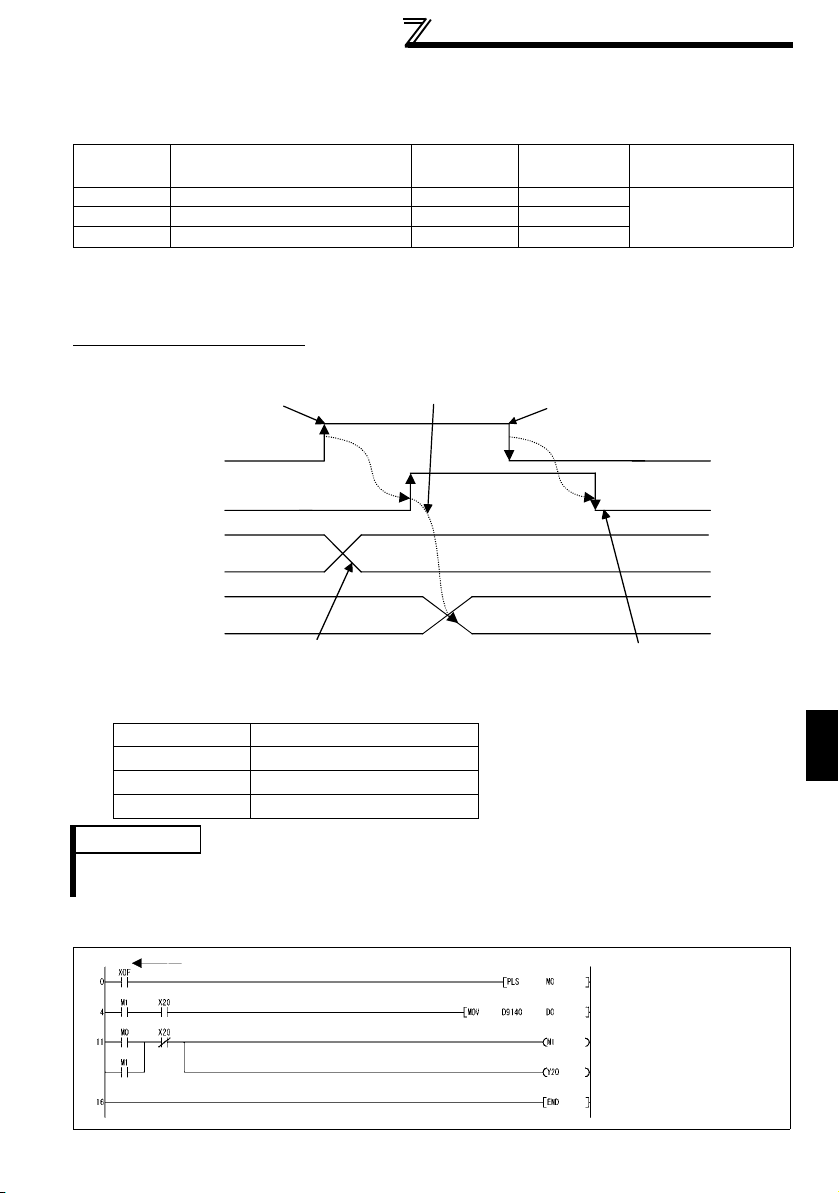
1.7.2 Data that are read by controlling (OFF to ON) the read command
You can read the operation mode and set frequency of the inverter.
Device
No.
Name
D9140 Operation mode setting read Y20 X20
D9142 Set frequency read (EEPROM) Y22 X22
Data are stored into the above data devices as soon as the read completion turns from
off to on after the read command has turned from off to on.
If the read command remains on, data is not refreshed. (Data is not updated.)
Turn the device off once, then on again to refresh data.
Data read timing chart
3) In user sequence, ON of read completion
1) Read command is turned
on in user sequence.
Y2n(n=0 to 2)
Read command
X2n(n=0 to 2)
Read completion
D914n(n=0 to 2)
Read data
is confirmed and data is read from special
register and processed.
Read
Command
Write
Completion
4) After completion of read,
read command is turned off.
Data Access
Enable Condition
AlwaysD9141 Set frequency read (RAM) Y21 X21
User sequence
processing
2) Inverter CPU stores inverter data
into special register and turns on
read completion.
5) Inverter CPU confirms that
read command is off and
turns off read completion.
(1) Operation mode setting read (D9140)
Data Setting Operation Mode
H0000
H0001
H0002
NET operation mode
External operation mode
PU operation mode
REMARKS
When the Pr. 79 "operation mode selection" setting is other than "0", the operation mode is as
set. However, when Pr. 79 = "3" or "4", the operation mode is "H0002" (PU operation mode).
<Operation mode setting read program example>
The following program reads the operation mode data to D0.
Operation mode read setting request
Turns on operation mode
read request pulse.
Stores operation mode data to D0
when operation mode setting read
completion signal turns on.
Turns on operation mode setting
read command. (Until operation
mode setting read completion
signal turns on)
1
PLC FUNCTION
23
Page 29
Inverter Status Monitoring, Special Registers
for Control
(2) Set frequency (RAM) (D9141)
The frequency set to the RAM is read to D9141. The unit is 0.01Hz.
(For example, 6000 indicates 60.00Hz.)
When the speed is set, the speed is either 1r/min or 0.1r/min.
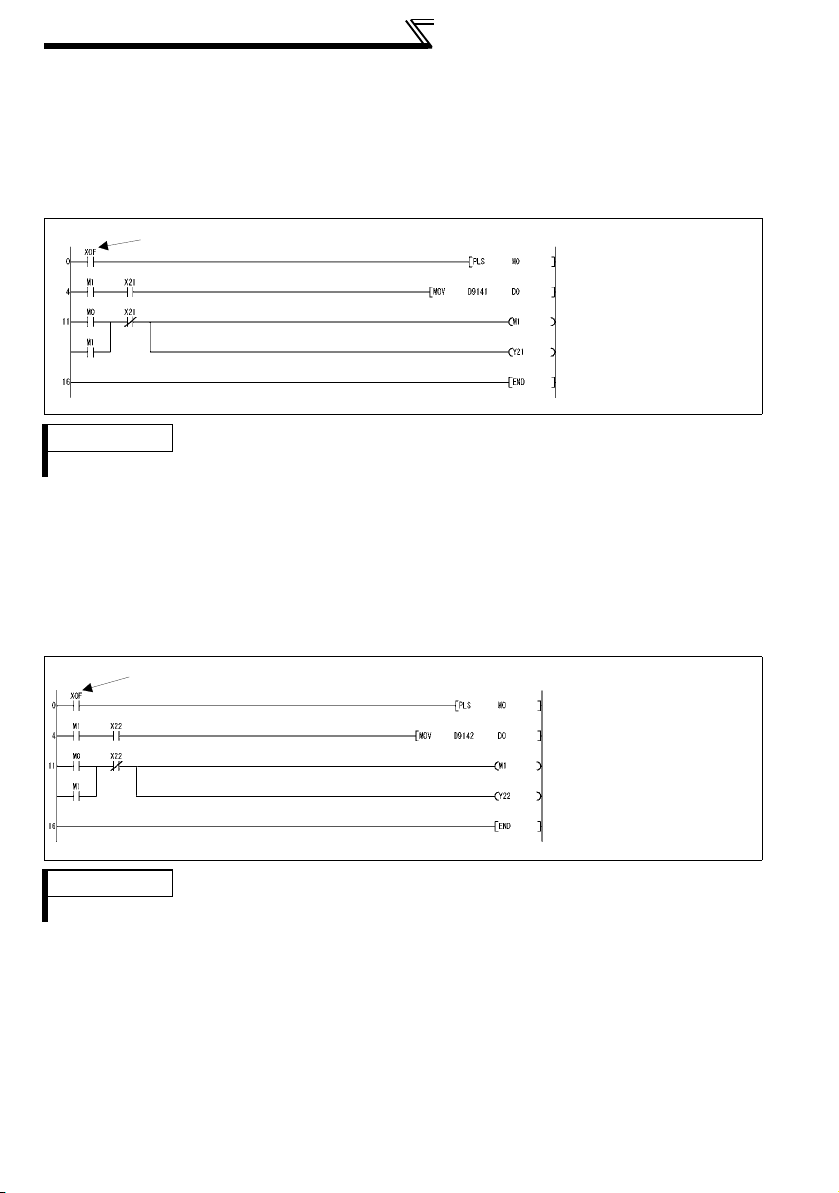
<Set frequency (RAM) read program example>
The following program reads the set frequency (RAM) to D0.
Set frequency read (RAM) setting request
Turns on set frequency
read (RAM) request pulse.
Stores data to D0 when set
frequency read (RAM)
completion signal turns on.
Turns on set frequency read (RAM)
command. (Until set frequency read
(RAM) completion signal turns on)
REMARKS
The read frequency is not the command value of the external signal.
(3) Set frequency (EEPROM) (D9142)
The frequency set to the EEPROM is read to D9142. The unit is 0.01Hz.
(For example, 6000 indicates 60.00Hz.)
When the speed is set, the speed is either 1r/min or 0.1r/min.
<Set frequency read (EEPROM) program example>
The following program reads the set frequency (E
The following program reads the set frequency (E2PROM) to D0.
2
PROM) to D0.
Set frequency read
(E
Stores data to D0 when set frequency
read (E
turns on.
Turns on set frequency read (E
command. (Until set frequency read
(E
2
PROM) setting request
2
PROM) completion signal
2
PROM) completion signal turns on)
2
PROM)
REMARKS
The read frequency is not the command value of the external signal.
24
Page 30
Inverter Status Monitoring, Special Registers
for Control
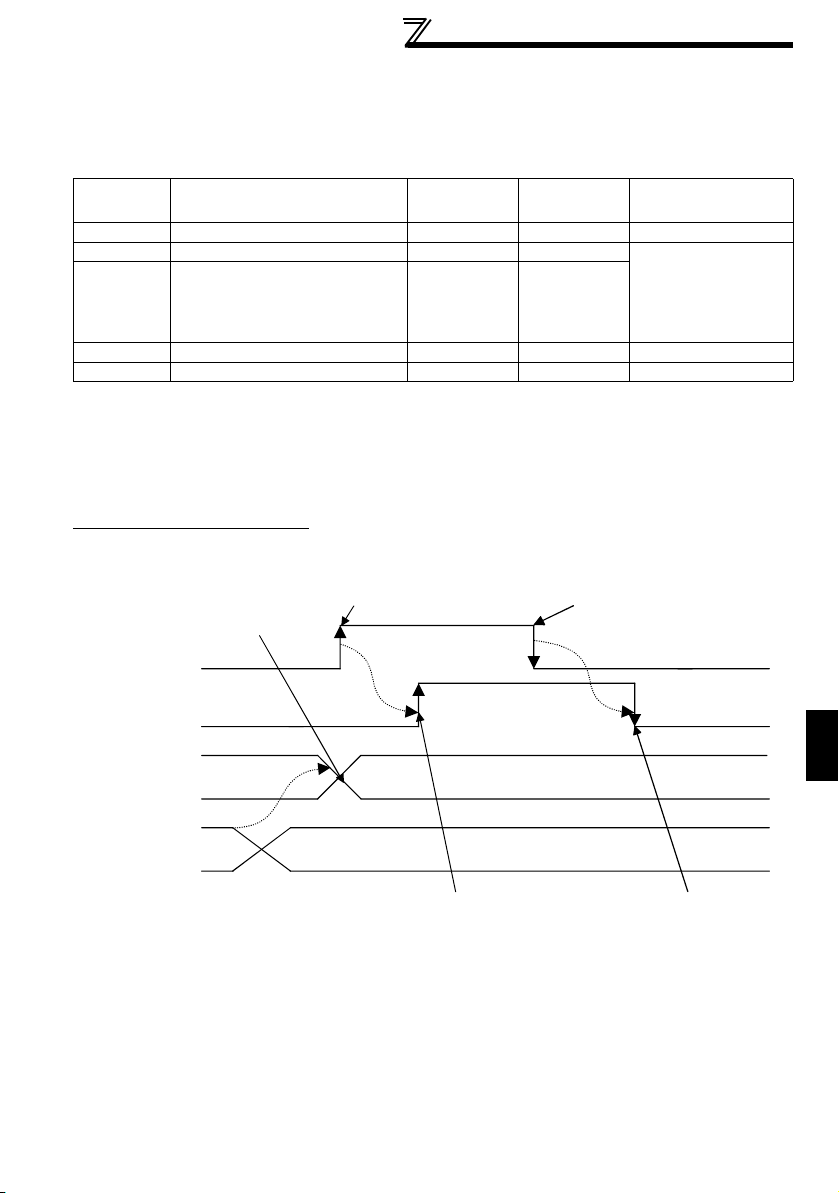
1.7.3 How to write data by controlling (OFF to ON) the write command
You can write the operation mode and set frequency to the inverter, batch-clear the
alarm definitions, and clear all parameters.
Device
No.
Name
D9143 Operation mode setting write Y23 X23 Pr.79 =0, 2
D9144 Set frequency write (RAM) Y24 X24 PU operation mode
D9145
Set frequency write
2
(E
PROM)
D9146 Alarm definition batch clear Y26 X26 Always
D9147 All parameter clear Y27 X27 As set in Pr. 77
The above data are written as soon as the write completion turns on after the write
command has turned from off to on.
(Alarm definition batch clear (D9146) and all parameter clear (D9147) turn on at
completion of clear.)
To write the data again, the write command must be turned off once, then on again.
Data write timing chart
1) In user sequence, user
data is stored into write
data area (D914n).
2) In user sequence, write
command is turned on.
Write
Command
Y25 X25
Write
Completion
Data Access
Enable Condition
(PU LED on) or CCLink operation mode
(PU and EXT LEDs
flicker slowly)
4) After confirmation of write
completion, write command
is turned off.
Y2n(n=3 to 7)
Write command
X2n(n=3 to 7)
Write completion
D914n(n=3 to 7)
Write data
User data
3) Turns on when inverter CPU completes data
write to inverter.
Alarm definition clear and parameter
clear turn on at completion of clear.
0 written to D9150 indicates normal completion.
Any value other than 0 indicates abnormal completion.
5) Inverter CPU confirms that
write command is off and
turns off write completion.
1
PLC FUNCTION
25
Page 31

Inverter Status Monitoring, Special Registers
for Control
(1) Operation mode setting write (D9143)
Data are as follows:
Data Setting Operation Mode
H0000
H0001
H0002
NET operation mode
External operation mode
PU operation mode
The operation mode switching method is as shown below when the Pr.79
Operation mode selection value is "0".
NET mode
(CC-Link)
H0001
H0000
External
operation mode
H0002
H0000
H0002
H0001
PU operation
mode
When Pr. 79 =2, switching is performed as shown below.
NET mode External
(CC-Link)
H0001
operation mode
H0000
REMARKS
When Pr. 79 is other than 0, the mode is fixed.
There are no restrictions on operation mode switching.
On normal completion of operation mode setting, the write completion signal
(X23) turns on, and at the same time, 0 is set to D9150.
If the value written is other than H0000 to H0002 or write is performed during
inverter operation, HFFFF is set to D9150 as soon as the write completion signal
(X23) turns on, resulting in abnormal completion.
If abnormal completion occurs, the operation mode is not changed.
<Operation mode setting write program example>
The following program changes the operation mode to the NET mode.
Operation mode write setting request
Normal write
Abnormal write
Turns on operation mode
setting write request pulse.
Check whether operation mode
setting write completion signal
turned on to judge whether write
was performed normally or not.
Stores 0 (CC-Link operation mode)
to D9143 and turns on operation
mode setting write command.
(Until completion signal turns on)
26
Page 32

Inverter Status Monitoring, Special Registers
for Control
(2) Set frequency (RAM) (D9144)
The D9144 data is written to the RAM as a set frequency. The unit is 0.01Hz.
(For example, 6000 indicates 60.00Hz.)
When the speed is set, the speed is either 1r/min or 0.1r/min.
The range where the frequency can be set is 0 to 12000 (0 to 120.00Hz).
When the frequency setting is written normally, the write completion signal (X24)
turns on, and at the same time, 0 is set to D9150.
If any value outside the range is written, HFFFF is set to D9150 as soon as the
write completion signal (X24) turns on, resulting in abnormal completion. If
abnormal completion occurs, the set frequency is not changed.
POINT
• The frequency can be set in the PU operation mode and NET operation
mode. Refer to the inverter instruction manual (applied).
<Set frequency write (RAM) program example>
The following program changes the set frequency (RAM) to 30Hz.
Set frequency write (RAM) setting request
Normal write
Abnormal write
Turns on set frequency
write (RAM) command pulse.
Check whether set frequency
write (RAM) completion signal
turned on to judge whether write
was performed normally or not.
Stores 3000 (30Hz) into D9144,
and turns on set frequency write
(RAM) command.
(Until completion signal turns on)
1
PLC FUNCTION
27
Page 33

Inverter Status Monitoring, Special Registers
for Control
(3) Set frequency (EEPROM) (D9145)
The D9145 data is written to the EEPROM as a set frequency. The unit is 0.01Hz.
(For example, 6000 indicates 60.00Hz.)
When the speed is set, the speed is either 1r/min or 0.1r/min.
The range where the frequency can be set is 0 to 12000 (0 to 120.00Hz).
When the frequency setting is written normally, the write completion signal (X25)
turns on, and at the same time, 0 is set to D9150.
If any value outside the range is written, HFFFF is set to D9150 as soon as the
write completion signal (X25) turns on, resulting in abnormal completion. If
abnormal completion occurs, the set frequency is not changed.
POINT
• Setting is enabled in the PU operation mode and NET operation mode.
(Refer to the Inverter instruction manual (applied).)
<Set frequency write (EEPROM) program example>
The following program changes the set frequency (EEPROM) to 10Hz.
Set frequency write (E2PROM) setting request
Normal write
Abnormal write
1000
Turns on set frequency write
2
PROM) request pulse.
(E
Check whether set frequency
2
write (E
PROM) completion signal
turned on to judge whether write
was performed normally or not.
Stores 1000 (10Hz) into D9145,
and turns on set frequency write
2
(E
PROM) command.
(Until completion signal turns on)
CAUTION
When rewriting the set frequency frequently, use device D9144 "set frequency (RAM)".
There are restrictions on the number of write times of the EEPROM. (Approximately
100,000 times)
28
Page 34

Inverter Status Monitoring, Special Registers
(4) Alarm definition batch clear (D9146)
Writing H9696 to D9146 batch-clears the alarm definitions.
At completion of clear, the write completion signal (X26) turns on, and at the
same time, 0 is set to D9150. If any value outside the setting range is written or
write is performed during inverter operation, HFFFF is set to D9150 as soon as
the write completion signal (X26) turns on, resulting in abnormal completion.
If abnormal completion occurs, the alarm definitions are not cleared.
<Alarm definition batch clear program example>
The following program batch-clears the alarm history.
for Control
Alarm definition batch clear request
Normal write
Abnormal write
Turns on alarm definition
batch clear request pulse.
Check whether alarm definition
batch clear signal turned on to
judge whether write was
performed normally or not.
Stores H9696 (batch clear code)
to D9146 and turns on alarm
definition batch clea r command.
(Until completion signal turns on)
1
29
PLC FUNCTION
Page 35

Inverter Status Monitoring, Special Registers
for Control
(5) Parameter clear (D9147)
Writing H9696 or H9966 to D9147 clears all parameters. Writing H5A5A or
H55AA to D9147 clears the parameters other than the communication
parameters (Refer to the Inverter instruction manual (applied)).
Device No. Setting Description Details
Terminal functions are not
cleared.
Terminal functions are
cleared.
Terminal functions are not
cleared.
Terminal functions are
cleared.
D9147
H9696
All parameter clear
H9966
H5A5A Parameters other than
communication parameters
H55AA
are cleared.
At completion of clear, the write completion signal (X27) turns on, and at the
same time, 0 is set to D9150. If any value outside the setting range is written or
write is performed during inverter operation, HFFFF is set to D9150 as soon as
the write completion signal (X27) turns on, resulting in abnormal completion. If
abnormal completion occurs, the parameters are not cleared.
REMARKS
Check the terminal function parameters and communication-related parameters in the
parameter list (Refer to the Inverter instruction manual (applied)).
POINT
Setting is enabled in the PU operation mode and NET operation mode. Refer to
the inverter instruction manual (applied).
<All parameter clear program example>
The following program clears all parameters.
All parameter clear request
Related device
Device D9150: Parameter access error code (refer to page 33)
30
Normal write
Abnormal write
Turns on all parameter
clear request pulse.
Check whether all parameter
clear signal turned on to judge
whether write was performed
normally or not.
Stores H9696 (all parameter
clear code) to D9146 and turns
on alarm definition batch clear
command.
(Until completion signal turns on)
Page 36

Inverter Status Monitoring, Special Registers
for Control
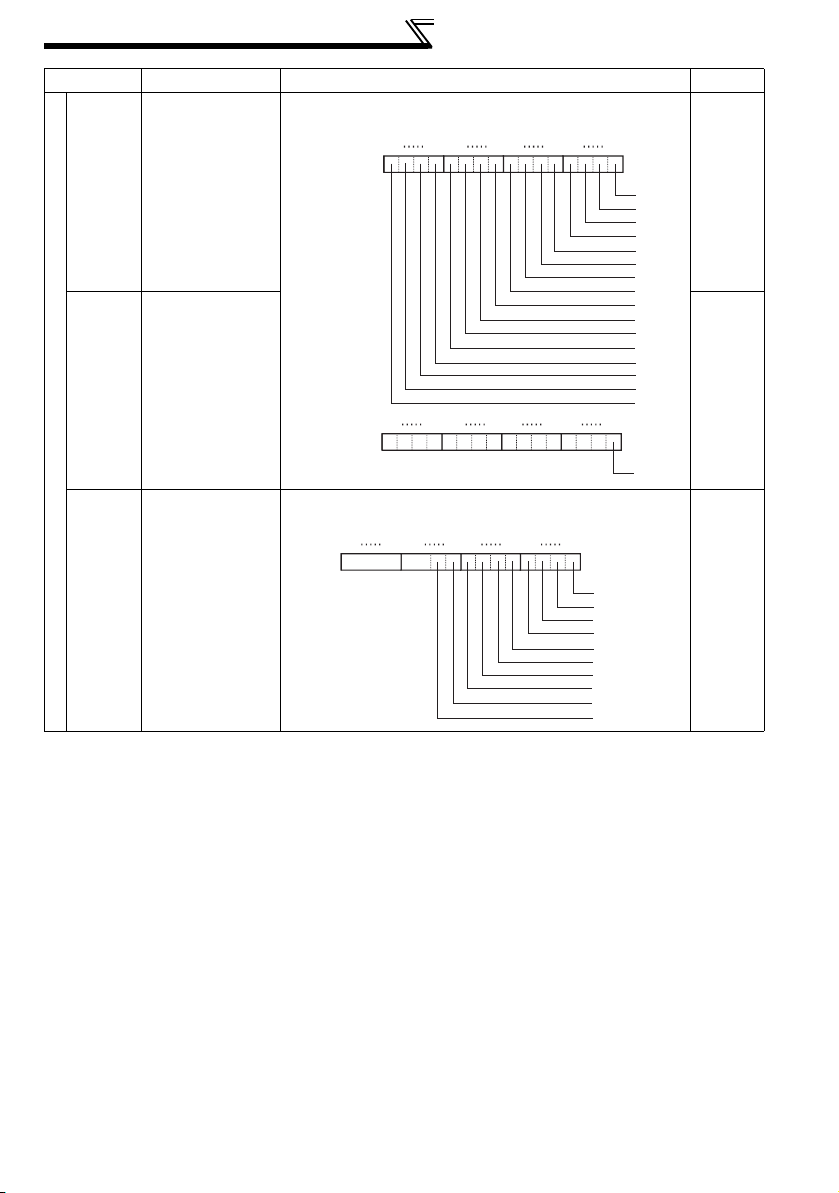
1.7.4 Inverter operation status control
Device No. Name Data Access Enable Condition
D9148 Inverter operation status control
D9149
Inverter operation status control
enable/disable
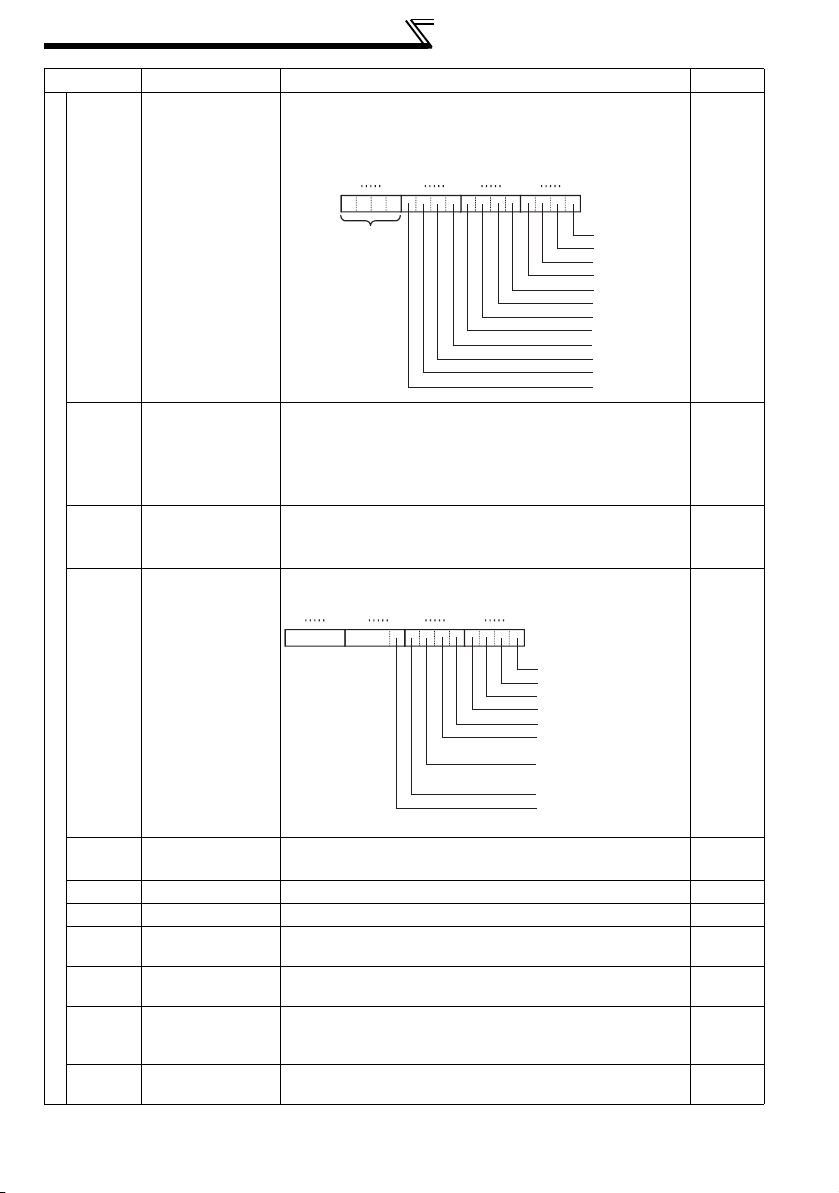
(1) Inverter operation status control (D9148)
Device for inverter operation status control. The operation of the inverter can be
controlled by turning on/off (1, 0) bits b0 to b11 of D9148.
All bits are factory-set to "0".
Example: When 5 is set to D9148, bits b0 and b2 are 1 (ON), and STF and RH
therefore turn on to give a high-speed forward rotation command.
Always
Note that this function is enabled in
the external/NET operation mode.
(Not enabled in the PU
operation mode.)
B15 B12B11 B8B7 B4 B3 B0
Invalid
0:OFF
101000000000
1:ON
STF (Pr.178)
STR (Pr.179)
RH (Pr.182)
RM (Pr.181)
RL (Pr.180)
JOG (Pr.185)
RT (Pr.183)
AU (Pr.184)
CS (Pr.186)
MRS (Pr.187)
STOP (Pr.188)
RES (Pr.189)
CAUTION
As in the external input terminals, functions can be assigned to the bits of
D9148 using Pr.178 to Pr.189. However, no function can be assigned to SQ
(sequence RUN setting: 50).
1
PLC FUNCTION
31
Page 37

Inverter Status Monitoring, Special Registers
r
for Control
(2) Inverter operation status control enable/disable setting (D9149)
You can enable or disable D9148 "inverter operation status control". The controls
of the corresponding bits of D9148 are enabled by turning on/off (1, 0) bits b0 to
b11 of D9149. All bits are factory-set to "0".
Example: When H1F is set to D9149, bits b0 to b11 are 1 (ON), the external terminal
inputs are therefore all disabled, and operation control using the inverter
operation status control (D9148) can be performed.
B15 B12B11 B8B7 B4 B3 B0
Invalid
0:OFF
111111111111
1:ON
STF (Pr.178)
STR (Pr.179)
RH (Pr.182)
RM (Pr.181)
RL (Pr.180)
JOG (Pr.185)
RT (Pr.183)
AU (Pr.184)
CS (Pr.186)
MRS (Pr.187)
STOP (Pr.188)
RES (Pr.189)
CAUTION
•When D9148 "inverter operation status control" is enabled using D9149,
the control performed by external terminal inputs and the control
performed by CC-Link remote inputs are disabled for the enabled bits.
(Same as when "No functions" are set to Pr.178 to Pr.189.)
•When the terminal is made valid from PLC function, control from external
terminal is made invalid.
<Operation command setting program example>
The following program example runs the inverter at high speed in forward rotation
direction.
Operation start
Turns on operation start pulse.
HFFF
Operation stop
Enables all inverter operation status
control enable/disable bits, and
disables external terminal inputs.
Self-holds operation start, and turns
on bits 0 (STF) and 2 (RH) of inverte
operation status control, D9148.
At input of stop signal, clears inverter
operation status control, D9148,
to 0 and decelerates inverter to stop.
32
Page 38

Inverter Status Monitoring, Special Registers
for Control
1.7.5 Inverter parameter access error (D9150)
Device No. Name
D9150 Inverter parameter access error Always
If any value outside the setting range is written during parameter write, set frequency
write, parameter clear, etc. from the sequence program of the inverter, or if write is
performed when write is disabled, a write alarm occurs and the corresponding alarm
code is stored into D9150.
<Parameter>
The parameter No. + H8000 is stored into D9150.
Example: If an error occurs during write of Pr.0 Torque boost, H8000 (H0 + H8000) is
stored into D9150.
If an error occurs during write of Pr.10 DC injection brake operation frequency,
H800A is stored into D9150.
<Operation mode, set frequency, alarm definition batch clear, all parameter
clear>
HFFFF is stored into D9150. (Normal 0)
POINT
If write is completed normally after error occurrence, D9150 is not cleared
(D9150 data is held at error occurrence). When using D9150 to stop operation,
etc., the user must clear it.
Data Access Enable
Condition
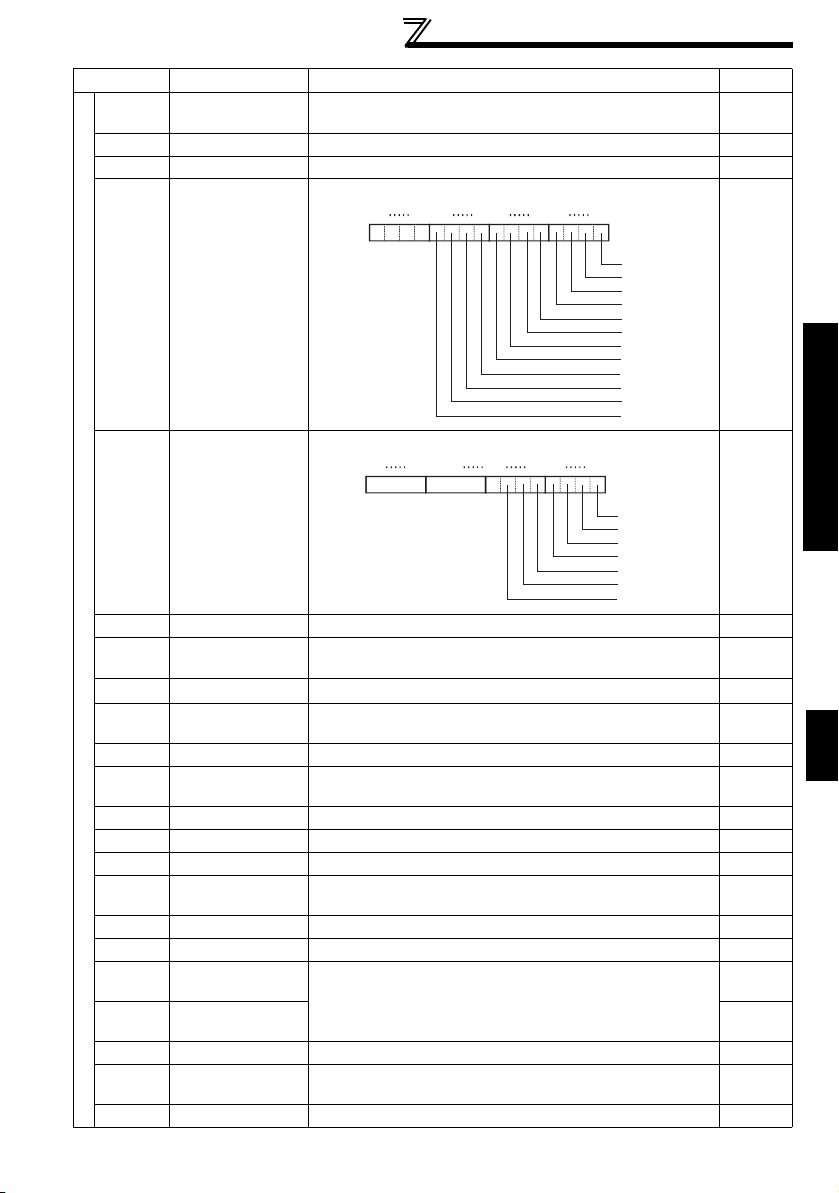
1.7.6 Inverter status (D9151)
Device No. Name
D9151 Inverter status Always
The running status and operating status of the inverter are stored.
The corresponding bits are set according to the inverter status.
B15 B8B7 B4 B3 B0
0:OFF
1:ON
Inverter running(RUN)
Forward running
Reverse running
Up to frequency(SU)
Overload alarm(OL)
Instantaneous power failure
/undervoltage(IPF)
Output frequency
detection(FU)
Alarm output(ALM)
Minor fault output(LF)
Data Access Enable
Condition
1
PLC FUNCTION
33
Page 39

Inverter Parameter Read/Write Method
1.8 Inverter Parameter Read/Write Method
1.8.1 Reading the inverter parameters
Data Access Enable
Device No. Name Command
D9241 Parameter number (RAM)
D9242 Parameter description (RAM)
D9234
D9243 Parameter number (EEPROM)
D9244
D9235
Second parameter changing
(RAM)
Parameter description
(EEPROM)
Second parameter changing
(EEPROM
Y28 X28 Always
Y2A X2A
Completion
When reading the parameter, the parameter description is stored to D9242(D9244) by
storing the parameter number to D9241(D9243) and turning Y28 (Y2A) on. When
reading is completed, X28 (X2A) turns ON to notify the completion. (The device
number within parentheses is used to read the parameter setting value from
EEPROM.)
When reading the calibration parameter (Pr. 902 to Pr. 939), set the following value to
D9234 (D9235) to read each calibration parameter value.
0: Setting value (Frequency/Toruque)
1: Parameter-set analog value
2: Analog value input from terminal
When access error occurs such as "parameter does not exist", value obtained by adding the
parameter number and 8000H is stored to D9150. (Refer to page 33)
Condition
(Operation mode)
PU, NET operation mode
(as in Pr.77)
34
Page 40

Inverter parameter data read timing chart
3) In user sequence, ON of read completion
is confirmed and data are read from data
registers D9242(D9243) and processed.
1) Read command is turned
on in user sequence.
Y28(Y2A)
Parameter read
command
X28(X2A)
Parameter read
completion
Inverter
parameter
D9242(D9243)
Parameter
read data
User sequence
processing
2) Inverter CPU stores inverter parameter
data into data registers D9242(D9243),
and turns on read completion.
Inverter Parameter Read/Write Method
4) After completion of read,
read command is turned off.
5) Inverter CPU confirms that read
command is off and turns off
read completion.
35
1
PLC FUNCTION
Page 41

Inverter Parameter Read/Write Method
1.8.2 Writing the inverter parameters
Data Access Enable
Device No. Name Command
D9241 Parameter number (RAM)
D9242 Parameter description (RAM)
D9234
D9243 Parameter number (EEPROM)
D9244
D9235
Second parameter changing
(RAM)
Parameter description
(EEPROM)
Second parameter changing
(EEPROM
Y29
Y2B X2B
Completion
X29 Always
Parameter writing is performed when the parameter number is stored to D9241
(D9243) and parameter writing value to D9242 (D9244), and turns ON the Y29 (Y2B).
When writing is completed, X29 (X2B) turns ON to notify the completion. (The device
number within parentheses is used to write the parameter setting value to EEPROM.)
When writing the calibration parameter (Pr. 902 to Pr. 939), set the following value to
D9234 (D9235) to write each calibration parameter value.
0: Setting value (Frequency/Toruque)
1: Parameter-set analog value
2: Analog value input from terminal
As soon as the inverter parameter write completion (X29 (RAM) or X2B (EEPROM))
turns on, 0 is set to D9150 on normal completion.
If an error occurs during access to the parameters, e.g. if any value outside the setting
range is written or write is performed during inverter operation, the value of parameter
No. + H8000 is set to D9150 as soon as the write completion signal (X29 (RAM) or
X2B (EEPROM)) turns on, resulting in abnormal completion. If abnormal completion
occurs, the parameters are not written. (For example, if an error occurs in the torque
boost, H8000 is written to D9150.)
For whether inverter parameter write can be performed or not, refer to Pr.77 Parameter
write selection .
Condition
(Operation mode)
PU, NET operation mode
(as in Pr.77)
POINT
Inverter parameter write must be performed in the PU operation mode or NET
operation mode. (Refer to the inverter instruction manual (applied).)
36
Page 42

Inverter parameter data write timing chart
Inverter Parameter Read/Write Method
1) In user sequence, user data
are stored into parameter write
data area (D9242(D9244)).
Y29(Y2B)
Parameter
write command
X29(X2B)
Parameter
write completion
Inverter parameter
D9242(D9244)
Parameter write
data
User sequence
data
3) Turns on when inverter CPU completes inverter
parameter data write.
0 written to D9150 indicates normal completion.
Any value other than 0 indicates abnormal completion.
2) Write command is turned
on in user sequence.
4) After confirmation of write
completion, write command
is turned off.
5) Inverter CPU confirms
that write command is
off and turns off write
completion.
37
1
PLC FUNCTION
Page 43

User Area Read/Write Method
1.9 User Area Read/Write Method
Inverter parameters Pr.506 to Pr.515 can be used as user parameters.
Since this parameter area and the devices used with the PLC function, D110 to D119,
are accessible to each other, the values set in Pr.506 to Pr.515 can be used in a
sequence program. The result of operation performed in the sequence program can
also be monitored using Pr.506 to Pr.515.
Device
No.
D110 to
D119
Inverter
Parameter
No.
506 to 515
Name
User
parameters
Initial
Value
0
Setting
Range
0 to
65535
Minimum Setting
Unit
1
Data Access
Always
enabled
Inverter parameters
Pr.506 to Pr.515
PLC function devices
D110 to D119
POINT
Example of using the user parameter area
When the timing is to be changed for machine adjustment using D110 that
stores the timer setting, setting Pr. 506 without modifying the program enters
the set data into D110, enabling adjustment.
1.9.1 User parameter read/write method
User parameter (Pr.506 to Pr.515) and device (D110 to D119) data can be read/written
freely. Data transfer between Pr.506 to Pr.515 and D110 to D119 is executed
automatically.
1)User parameter write processing
When values are written to Pr.506 to Pr.515 using the FR-PU04 or computer link
communication, they are written to the parameter storing RAM area and EEPROM
area, and further to D110 to D119 simultaneously.
2)User parameter read processing
When values are written to D110 to D119 from the PLC function side, they are
written to the parameter storing RAM area (Pr.506 to Pr.515) and read using the FR-
PU04/FR-PU07 or communication(RS-485 or communication option). (Since data
are not written to the EEPROM, making power-on reset returns the data to the
original values.)
3)Processing performed at inverter reset or power restoration
When the inverter is reset, the Pr.506 to Pr.515 values stored in the EEPROM are
transferred to the RAM area and D110 to D119.
FR-PU04 or RS-485
communication
38
1)
2)
1)
Pr.506 to Pr.515
(RAM)
3)
Pr.506 to Pr.515
(EEPROM)
1)
D110 to D119
2)
3)
1)
Page 44

Analog I/O function
1.10 Analog I/O function
1.10.1 Analog input
Analog input value of termianl 1, 2, 4 can be read from D9245 to D9247.
Device
No.
D9245 Terminal 1 input 0.1%
D9247 Terminal 4 input 0.1%
Terminal Name
Actual read processing is performed at the END processing of the sequence.
REMARKS
Full-scale value of analog input is determined by the setting of Pr. 73 Analog input selection, Pr.
267 Terminal 4 input selection. Refer to the inverter instruction manual (applied).
1.10.2 Analog output
Analog output from each terminal can be performed by setting value on D9251 to
D9254.
Output from PLC function can be performed by setting "7" in output signal selection
parameters of each terminal (terminal FM: Pr. 54, terminal AM: Pr. 158, terminal AMO,
AM1: Pr. 306, Pr. 310).
Device
No.
D9251 Terminal FM 0.1%
D9252 Terminal AM 0.1%
D9253
D9254
Actual read processing is performed at the END processing of the sequence.
Terminal Name
Ter m in a l A M 0
(FR-A7AY)
Ter m in a l A M 1
(FR-A7AY)
Setting
Unit
Setting
Unit
0.1%
0.1%
Data Access Enable
Condition
AlwaysD9246 Terminal 2 input 0.1%
Data Access Enable
Condition
Always
1
REMARKS
High speed pulse train output (Pr. 291) from terminal FM can be performed. (Refer to the
inverter instruction manual (applied).)
PLC FUNCTION
39
Page 45

Paluse train input function
1.11 Paluse train input function
Pulse train (the number of sampling pulses) from terminal JOG is stored to D9236.
When the sampling pulses overflow, make adjustment with the setting of Pr. 416 and
Pr. 417.
The number of sampling pulses
= the number of input pulses per count cycle x Pre-scale setting value (Pr. 417) x
increments scaling factor (Pr. 416)
Parameter Name
291
416
417
Pulse train input
selection
Pre-scale function
selection
Pre-scale setting
value
Initial
Value
0
00 to 5
1 0 to 32767
Setting
Range
0, 10,20 Terminal JOG
1,11,21,100 Pulse train input
Pre-scale function selection
(increments scaling factor)
0: No function
1: ×1
2: ×0.1
3: ×0.01
4: ×0.001
5: ×0.0001
Set the pre-scale value to calcute the
number of sampling pulse when
inputting the pulse train.
Description
Device No. Name
D9236
D9237
D9238
D9239
D9240
40
Pulse train input sampling
pulse
Pulse train input cumulative
count value L 0 to
Pulse train input cumulative
count value H
Reset request of pulse train
input count
Count start of the pulse train
input
Setting
Range
0 to 32767
99999999
The number of pulses counted in
count cycle is stored.
The cumulative value of the number
of sampling pulses is stored.
0 Not clear
1 Count clear
0 Stop counting
1 Start counting
Description
Page 46

PID control
1.12 PID control
With PLC function, PID set point/PID deviation value, PID process value can be set by
setting Pr. 128.
Performing the PID operation using the value of D9248 and D9249 as PID set point/
PID deviation value, PID process value, manipulated variable is stored to D9250.
When performing PID control with PLC function, "1" is set on D9255 instead of X14
signal.
PID set point /
PID deviation
PID measurement
value
D9248
D9249
Parameter Name
128
PID action
selection
Initial
Value
10
PID manipulated variable D9250
PID control
Setting
Range
10 PID reverse action Deviation value
11 PID forward action
20 PID reverse action Measured value
21 PID forward action
50 PID reverse action Deviation value
51 PID forward action
60 PID reverse action Measured value,
61 PID forward action
70 PID reverse action Deviation value
71 PID forward action
80 PID reverse action Measured value,
81 PID forward action
90 PID reverse action Deviation value
91 PID forward action
100 PID reverse action Measured value,
101 PID forward action
or
Inverter frequency setting
Description
signal input
(terminal 1)
(terminal 4)
Set point (terminal
2 or Pr. 133)
signal input
(LONW
communication)
set point input
(LONW
communication)
signal input
(PLC function)
Set point
(PLC function)
signal input
(
PLC function
Set point input
(
PLC function
ORKS
CC-Link
ORKS
CC-Link
,
1
,
PLC FUNCTION
)
)
41
Page 47

PID control
Device No. Name
D9248 PID set point / PID deviation -100 to 100%
D9249 PID measurement value 0 to 100%
D9250 PID manipulated variable -100 to 100%
D9255
PID operation control
Setting
Range
Set the PID set point or PID
deviation (0.01% units)
Set the PID measurement value
(0.01% units)
Stores the PID manipulated
variable (0.01% units)
0 PID operation stop
1 PID operation start
Description
CAUTION
• The PID set point/PID deviation value of D9248 automatically switches over
by Pr. 128 setting.
• If Pr. 128 is set to deviation input (70, 71, 90, 91), setting value of PID process
value (D9249) is made invalid.
• Operates in the maximum value (the minimum value) of the setting range if
the value outside the range is set.
42
Page 48

Inverter Operation Lock Mode Setting
1.13 Inverter Operation Lock Mode Setting
You can disable a sequence program from being executed until the sequence program
execution key is set to RUN (SQ signal is turned on).
POINT
When you want to perform only inverter operation without using the PLC function,
set "0" (inverter start signal enable) in this parameter.
Parameter Name
415
Setting Description
Inverter operation
lock mode setting
0
1
The inverter start signal is made valid regardless of the sequence program
execution key.
The inverter start signal is made valid only when the sequence program
execution key is set to RUN (SQ signal is turned on).
When the sequence program execution key is in the STOP position (SQ
signal is off), the inverter does not start if the inverter start signal STF or STR
is turned on. (If the key is switched from RUN to STOP during inverter
operation, the inverter is decelerated to a stop.)
initial
Setting
00, 1 1
Setting
Range
Minimum Setting
Unit
CAUTION
•Independently of the Pr. 77 setting, this parameter value cannot be rewritten
during inverter operation.
•During automatic operation performed using D9148(or M9200 to M9211) in the
sequence program, the inverter comes to a stop when the sequence is set to a
STOP status with "1" set in Pr.415. However, when "0" is set in Pr.415, the
device data are held and the operation status does not change if the sequence
is set to a STOP status. (Inverter operation is continued.)
REMARKS
This parameter setting is also valid for the start signal from the operation panel or FRPU04/FR-PU07.
1
PLC FUNCTION
43
Page 49

MEMO
44
Page 50

2. CC-Link COMMUNICATION
2.1 System Configuration .......................................... 46
2.2 CC-Link Parameters ............................................. 49
2.3 CC-Link I/O Specifications................................... 50
2.4 Buffer Memory ...................................................... 57
Chapter 1
Chapter 2
Chapter 3
Chapter 4
45
Page 51

System Configuration
2.1 System Configuration
2.1.1 System configuration example
(1) PLC side
Mount the "Control & Communication Link system master/local module" on the
main base unit or extension base unit of the PLC CPU that will act as the master
station.
(2) Connect the PLC CC-Link module master station and inverters by CC-Link
dedicated cables.
Master station
AJ61
CPU
BT11
Power supply
module
Terminating
resistor
CC-Link dedicated cable
Power supply
Inverter
Up to 42 inverters
can be connected
when only inverters
are connected.
Motor Motor
Power
supply
Inverter
REMARKS
Refer to the FR-A7NC indtruction manual for the CC-Link communication wiring and CC-Link
cables.
46
Page 52

System Configuration
2.1.2 Function block diagram
How I/O data are transferred to/from the inverter in CC-Link will be described using
function blocks.
(1) Between the master station and inverter in the CC-Link system, link refresh is
always made at 3.5 to 18ms (512 points).
(2) I/O refresh and master station's sequence program are executed asynchronously.
(3) Data read from the inverter are read from the buffer memory of the CC-Link
system master/local module using the FROM instruction.
(4) Data to be written to the inverter are written to the buffer memory of the CC-Link
system master/local module using the TO instruction.
CC-Link module
Inverter
1) CC-Link modul e
I/O signals
2) Buffer me mory
PLC CPU
read/write
Interface with PLC
CPU
Buffer
memory
CC-Link interface
3) CC-Link
dedicated
cable
5)
4)
CC-Link interface
I/O
data
Built-in sequence program
Inverter CPU
Input signal
Output signal
1) I/O signals assigned to the CC-Link system master/local module. These signals
are used to make communication between the PLC CPU and CC-Link system
master/local module.
2) Input data from the inverter can be read, and output data from the inverter can be
written. Buffer memory read/write is performed using the FROM/TO instruction of
the sequence program. Refer to page 57 for details of the buffer memory.
3) PLC link start is commanded from the sequence program. After PLC link has
started, link refresh is always made asynchronously with the sequence program
execution.
4) I/O data are transferred between the CC-Link system master/local module and
inverter CPU via the sequence program.
5) I/O data are transferred between the inverter CPU and sequence program. (5)
indicates the operation performed when CC-Link is not used, and is irrelevant to
1) to 4).)
REMARKS
Programs cannot be read/written via CC-Link communication.
2
47
CC-Link COMMUNICATION
Page 53

System Configuration
POINT
The difference between CC-Link communication (Pr. 544 = 100, 112, 114, 118)
with PLC function and normal CC-Link communication (Pr. 544 =1, 2, 12, 14, 18)
is indicated below.
PLC CPU
PLC CPU
CC-Link master module
CC-Link master module
Pr.544=0,1,12,14,18
Pr.544=100,112,114,118
Built-in CC-Link module
Inverter
I/O (RX, RY)
RWw RWr
Parameter read/write, monitor, operation commands,
etc. have been assigned in advance.
I/O (RX, RY)
RWw RWr
Inverter
Inverter CPU
Built-in
sequence
program
User
assignment
Using built-in sequence program, parameters,
monitor, etc. must be assigned.
Other data read/write, etc. can be assigned
freely as user areas.
*Operation and speed commands have
been assigned in advance.
Inverter CPU
48
Page 54

2.2 CC-Link Parameters
2.2.1 CC-Link Extended Setting (Pr. 544)
Remote register function can be extended.
CC-Link Parameters
Parameter
Number
544
*1 The program used for conventional series inverter (FR-A5NC) can be used.
*2 When using double, quadruple and octuple settings of the CC-Link Ver.2, station data of
the master station must be set to double, quadruple and octuple also.
(If the master station is CC-Link Ver.1 compatible station, the above setting can not be
made.)
Name
CC-Link extended
setting
Initial
Value
0
Setting
Range
12
14 *2
18
100 1
112
114
118
CC-Link
Description
Ver.
0
1 Occupies one station
*2
*2 Occupies one station octuple
*2
*2
*2
Occupies one station
(FR-A5NC compatible)
1
Occupies one station double
Occupies one station
2
quadrople
Occupies one station
(PLC function)
Occupies one station double
(PLC function)
Occupies one station
2
quadrople (PLC function)
Occupies one station octuple
(PLC function)
*1
REMARKS
The setting change is reflected after an inverter reset.
49
2
CC-Link COMMUNICATION
Page 55

CC-Link I/O Specifications
2.3 CC-Link I/O Specifications
2.3.1 I/O signal when CC-Link Ver.1 one station is occupied
(Pr. 544 = 100)
The device points usable in CC-Link communication are 32 input (RX) points (16
points are available for PLC function), 32 output (RY) points (16 points are available
for PLC function), 4 remote register (RWr) points and 4 remote register (RWw) points.
(1) Remote I/O
Remote
PLC
function
device
output
device
No.
X30
No.
RYn0 Forward rotation command
Signal
function
X31 RYn1 Reverse rotation command X31 RXn1 Reverse running
RYn2
X32
RYn3
X33
X34 RYn4
RYn5
X35
RYn6
X36
X37 RYn7
RYn8
X38
High-speed operation
command
(terminal RH function) *1
Middle-speed operation
command
(terminal RM function) *1
Low-speed operation
command
(terminal RL function) *1
Jog operation command
(terminal JOG function) *1
Second function selection
(terminal RT function) *1
Current input selection
(terminal AU function) *1
Selection of automatic restart after
instantaneous power failure
(terminal CS function) *1
X39 RYn9 Output stop X39 RXn9
X3A RYnA
RYnB
X3B
RYnC
X3C
RYnD
X3D
RYnE
X3E
RYnF
X3F
RY(n+1)0
RY(n+1)7
RY(n+1)8
RY(n+1)9
RY(n+1)A
Start self-holding selection
(terminal STOP function) *1
Reset
(terminal RES function) *1
General-purpose remote input
available in PLC function
to
Reserved
Not used
(initial data process
completion flag)
Not used
(initial data process request
flag)
Error reset request flag
Remote
PLC
device
X30
X32
X33
input
device
No.
No.
RXn0 Forward running
RXn2
RXn3
X34 RXn4
X35
X36
RXn5
RXn6
X37 RXn7
X38
RXn8 (terminal ABC2 function) *2
X3A RXnA
RXnB
X3B
RXnC
X3C
RXnD
X3D
RXnE
X3E
RXnF
X3F
RX(n+1)0
to
RX(n+1)7
RX(n+1)8
RX(n+1)9
RX(n+1)A
Signal
Running
(terminal RUN function) *2
Up to frequency
(terminal SU function) *2
Overload alarm
(terminal OL function) *2
Instantaneous power failure
(terminal IPF function) *2
Frequency detection
(terminal FU function) *2
Error
(terminal ABC1 function) *2
Pr. 313 assignment function
(DO0)
Pr. 314 assignment function
(DO1)
Pr. 315 assignment function
(DO2)
General-purpose remote input
available in PLC function
Reserved
Not used
(initial data process request
flag)
Not used
(initial data process
completion flag)
Error status flag
50
Page 56

CC-Link I/O Specifications
PLC
function
device
No.
Remote
output
device
No.
RY(n+1)B
to
RY(n+1)F
Signal
function
Reserved
PLC
device
No.
Remote
input
device
No.
RX(n+1)B
RX(n+1)C
to
RX(n+1)F
Signal
Remote station Ready
Reserved
("n" indicates a value determined according to the station number setting.)
*1 Signal names are initial values. Using Pr. 180 to Pr. 186, Pr. 188, and Pr .189, you can
change input signal functions.
Signals of the RYn0, RYn1, and RYn9 can not be changed. Even when changed using Pr.
178, Pr. 179, and Pr. 187, the settings are invalid.
Refer to the inverter manual (applied) for details of Pr. 178 to Pr.189.
*2 Signal names are initial values. Using Pr. 190 to Pr .196, you can change output signal
functions.
Refer to the inverter manual (applied) for details of Pr. 190 to Pr.196.
(2) Remote resister
PLC funct ion
device No.
D9062 RWwn
D9063 RWwn+1 D9079 RWrn+1
D9064 RWwn+2 D9080 RWrn+2
D9065 RWwn+3 D9081 RWrn+3
Address Description
Registers designed to
read data received
from the master
station
("n" indicates a value determined according to the station number setting.)
PLC functi on
device No.
Address Description
D9078 RWrn Registers designed to
write data to be sent
to the master station.
(3) Data I/O image
FR-A700 series
Devices in built-in sequence
X30 to 3F
Y30 to 3F
D9062
D9063
D9064
D9065
D9078
D9079
D9080
D9081
Master station
Devices in CC-Link (station No. 1)
RY00 to 0F
RX00 to 0F
RWw0
RWw1
RWw2
RWw3
RWr0
RWr1
RWr2
RWr3
Automatically refreshed at every END.
REMARKS
Use the remote registers freely since they are all user areas.
2
CC-Link COMMUNICATION
51
Page 57

CC-Link I/O Specifications
2.3.2 I/O signal when CC-Link Ver.2 double setting is selected
(Pr. 544 = 112)
The device points usable in CC-Link communication are 32 input (RX) points (12
points are available for PLC function), 32 output (RY) points (12 points are available
for PLC function), 4 remote register (RWr) points and 4 remote register (RWw) points.
(1) Remote I/O
Remote
PLC
function
device
output
device
No.
X30
X31
X32
No.
RYn0 Forward rotation command
RYn1 Reverse rotation command
RYn2
High-speed operation
command
(terminal RH function) *1
Signal
function
Middle-speed operation
X33
RYn3
command
(terminal RM function) *1
Low-speed operation
RYn4
X34
RYn5
X35
X36 RYn6
X37 RYn7
RYn8
X38
command
(terminal RL function) *1
Jog operation command
(terminal JOG function) *1
Second function selection
(terminal RT function) *1
Current input selection
(terminal AU function) *1
Selection of automatic restart after
instantaneous power failure
(terminal CS function) *1
X39 RYn9 Output stop X39 RXn9
X3A
X3B
RYnA
RYnB
Start self-holding selection
(terminal STOP function) *1
Reset
(terminal RES function) *1
RYnC Monitor command RXnC Monitoring
RYnD
RYnE
RYnF
RY(n+1)0
RY(n+1)7
RY(n+1)8
Frequency setting command
(RAM)
Frequency setting command
(RAM, EEPROM)
Instruction code execution
request
to
Reserved
Not used
(initial data process
completion flag)
RY(n+1)9
Not used
(initial data process request
flag)
RY(n+1)A
RY(n+1)B
RY(n+1)F
Error reset request flag
to
Reserved
52
Remote
PLC
device
X30
X31
X32
X33
X34
X35
input
device
No.
No.
RXn0 Forward running
RXn1 Reverse running
RXn2
RXn3
RXn4
RXn5
X36 RXn6
X37 RXn7
X38
X3A
X3B
RXn8 (terminal ABC2 function) *2
RXnA
RXnB
RXnD
RXnE
RXnF
RX(n+1)0
to
RX(n+1)7
RX(n+1)8
RX(n+1)9
RX(n+1)A
RX(n+1)B
RX(n+1)C
to
RX(n+1)F
Signal
Running
(terminal RUN function) *2
Up to frequency
(terminal SU function) *2
Overload alarm
(terminal OL function) *2
Instantaneous power failure
(terminal IPF function) *2
Frequency detection
(terminal FU function) *2
Error
(terminal ABC1 function) *2
Pr. 313 assignment function
(DO0)
Pr. 314 assignment function
(DO1)
Pr. 315 assignment function
(DO2)
Frequency setting completion
(RAM)
Frequency setting completion
(RAM, EEPROM)
Instruction code execution
completion
Reserved
Not used
(initial data process request
flag)
Not used
(initial data process
completion flag)
Error status flag
Remote station Ready
Reserved
Page 58

CC-Link I/O Specifications
("n" indicates a value determined according to the station number setting.)
*1 Signal names are initial values. Using Pr. 180 to Pr. 186, Pr. 188, and Pr .189, you can
change input signal functions.
Signals of the RYn0, RYn1, and RYn9 can not be changed. Even when changed using Pr.
178, Pr. 179, and Pr. 187, the settings are invalid.
Refer to the inverter manual (applied) for details of Pr. 178 to Pr.189.
*2 Signal names are initial values. Using Pr. 190 to Pr .196, you can change output signal
functions.
Refer to the inverter manual (applied) for details of Pr. 190 to Pr.196.
(2) Remote resister
PLC funct ion
device No.
RWwn
RWwn+1
RWwn+3 Write data RWrn+3 Read data
Address
RWwn+2
D9062 RWwn+4
D9063 RWwn+5 D9079 RWrn+5
D9064 RWwn+6 D9080 RWrn+6
D9065 RWwn+7 D9081 RWrn+7
("n" indicates a value determined according to the station number setting.)
Description
Upper 8
Bits
Monitor
code 2
Lower 8
Bits
Monitor
code 1
Set frequency (0.01Hz
increments)
Link
parameter
expansion
setting
Instruction
code
Registers designed to
read data received
from the master
station
PLC function
device No.
RWrn First monitor value
RWrn+1
Address Description
Second monitor
value
RWrn+2
Reply
code2
Reply
code1
D9078 RWrn+4 Registers designed
to write data to be
sent to the master
station.
53
2
CC-Link COMMUNICATION
Page 59

CC-Link I/O Specifications
2.3.3 I/O signal when CC-Link Ver.2 quadruple setting is selected
(Pr. 544 = 114)
The device points usable in CC-Link communication are 32 input (RX) points (12
points are available for PLC function), 32 output (RY) points (12 points are available
for PLC function), 8 remote register (RWr) points and 8 remote register (RWw) points.
(1) Remote I/O
Same as when Pr. 544 = 112 ( Refer to page 52)
(2) Remote resister
PLC funct ion
device No.
RWwn+2
D9062 RWwn+8
D9063 RWwn+9 D9079 RWrn+9
D9064 RWwn+A D9080 RWrn+A
D9065 RWwn+B D9081 RWrn+B
D9066 RWwn+C D9082 RWrn+C
D9067 RWwn+D D9083 RWrn+D
D9068 RWwn+E D9084 RWrn+E
D9069 RWwn+F D9085 RWrn+F
("n" indicates a value determined according to the station number setting.)
Address
RWwn
RWwn+1
RWwn+3 Write data
RWwn+4
RWwn+5
RWwn+6
RWwn+7
Description
Upper 8
Bits
Monitor
code 2
Set frequency (0.01Hz
Link
parameter
expansion
setting
Monitor code 3
Monitor code 4
Monitor code 5
Monitor code 6
Registers designed to
read data received
from the master
station
Lower 8
Bits
Monitor
code 1
increments)
Instruction
code
PLC function
device No.
RWrn+2
D9078 RWrn+8
Address Description
RWrn First monitor value
RWrn+1
RWrn+3 Read data
RWrn+4
RWrn+5
RWrn+6
RWrn+7
Second monitor
value
Reply
code2
Third monitor value
Fourth monitor value
Fifth monitor value
Sixth monitor value
Registers designed
to write data to be
sent to the master
station.
Reply
code1
54
Page 60

CC-Link I/O Specifications
2.3.4 I/O signal when CC-Link Ver.2 octuple setting is selected
(Pr. 544 = 118)
The device points usable in CC-Link communication are 32 input (RX) points (12
points are available for PLC function), 32 output (RY) points (12 points are available
for PLC function), 16 remote register (RWr) points and 16 remote register (RWw)
points.
(1) Remote I/O
Same as when Pr. 544 = 112 ( Refer to page 52)
(2) Remote resister
PLC funct ion
device No.
RWwn+2
RWwn+8
RWwn+C
Address
RWwn
RWwn+1
RWwn+3 Write data
RWwn+4
RWwn+5
RWwn+6
RWwn+7
RWwn+9
RWwn+A
RWwn+B
RWwn+D
RWwn+F
*1 When Pr. 128 = "50, 51, 60, 61", they are valid.
Description
Upper 8
Bits
Monitor
code 2
Lower 8
Bits
Monitor
code 1
Set frequency
(0.01Hz increments)
Link
parameter
expansion
setting
Alarm
definition
No.
(0.01% increments) *1
PID measured value
(0.01% increments) *1
(0.01% increments) *1
toruqe command / limit
(0.01% increments)
Instruction
code
Monitor code 3
Monitor code 4
Monitor code 5
Monitor code 6
H00 RWrn+8
PID set point
PID deviation
H00 (Free)
PLC function
device No.
RWrn+2
RWrn+C
Address Description
RWrn First monitor value
RWrn+1
Second monitor
value
Reply
code2
Reply
code1
RWrn+3 Read data
RWrn+4
RWrn+5
RWrn+6
RWrn+7
RWrn+9
RWrn+A
RWrn+B
Third monitor value
Fourth monitor value
Fifth monitor value
Sixth monitor value
Alarm
definition
No.
Alarm definition
(output frequency)
Alarm definition
(output current)
Alarm definition
(output voltage)
Alarm definition
(energization time)
Alarm
definition
data
RWrn+D
H00 (Free) RWwn+E RWrn+E
RWrn+F
2
55
CC-Link COMMUNICATION
Page 61

CC-Link I/O Specifications
PLC funct ion
device No.
Address
D9062 RWwn+10
Description
Upper 8
Bits
Lower 8
Bits
PLC function
device No.
Address Description
D9078 RWrn+10
D9063 RWwn+11 D9079 RWrn+11
D9064 RWwn+12 D9080 RWrn+12
D9065 RWwn+13 D9081 RWrn+13
D9066 RWwn+14 D9082 RWrn+14
D9067 RWwn+15 D9083 RWrn+15
D9068 RWwn+16 D9084 RWrn+16
D9069 RWwn+17 D9085 RWrn+17
D9070 RWwn+18 D9086 RWrn+18
D9071 RWwn+19 D9087 RWrn+19
Registers designed to
read data received
from the master
station
D9072 RWwn+1A D9088 RWrn+1A
D9073 RWwn+1B D9089 RWrn+1B
D9074 RWwn+1C D9090 RWrn+1C
D9075 RWwn+1D D9091 RWrn+1D
D9076 RWwn+1E D9092 RWrn+1E
D9077 RWwn+1F D9093 RWrn+1F
("n" indicates a value determined according to the station number setting.)
Registers designed
to write data to be
sent to the master
station.
56
Page 62

2.4 Buffer Memory
2.4.1 Remote output signals (Master module to inverter(FR-A7NC))
•Input states to the remote device station are stored.
•Two words are used for each station.
(Do not use address 16n (n = 2(X - 1) + 1, X = station No.))
FR-A700 series
Remote device station
(Station No. 1: 1 station occupie d)
RY 0F to RY 00
Addresses
For station
No.1
For station
No.2
For station
No.3
For station
No.4
For station
No.5
For station
No.6
For station
No.7
For station
No.8
For station
No.9
For station
No.63
For station
No.64
Master Station
Remote inputs (RY)
H
160
RY F to RY 0
H
161
RY 1F to RY 10
H
162
RY 2F to RY 20
H
163
RY 3F to RY 30
H
164
RY 4F to RY 40
H
165
RY 5F to RY 50
H
166
RY 6F to RY 60
H
167
RY 7F to RY 70
H
168
RY 8F to RY 80
H
169
RY 9F to RY 90
H
16A
RY AF to RY A0
H
16B
RY BF to RY B0
H
16C
RY CF to RY C0
H
16D
RY DF to RY D0
H
16E
RY EF to RY E0
H
16F
RY FF to RY F0
H
170
RY10F to RY100
H
171
RY11F to RY110
H
172
to
H
1DB
RY7CF to RY7C0
H
1DC
RY7DF to RY7D0
H
1DD
RY7EF to RY7E0
H
1DE
RY7FF to RY7F0
H
1DF
to
Buffer Memory
Inverter
X3F to X30
Correspondences between Master Station Buffer Memory Addresses and Station
Numbers
Station
No.
Buffer
Memory
Address
Station
No.
Buffer
Memory
Address
Station
No.
Buffer
Memory
Address
Station
No.
1 160H 17 180H 33 1A0H 49 1C0H
2 162H 18 182H 34 1A2H 50 1C2H
3 164H 19 184H 35 1A4H 51 1C4H
4 166H 20 186H 36 1A6H 52 1C6H
5 168H 21 188H 37 1A8H 53 1C8H
6 16AH 22 18AH 38 1AAH 54 1CAH
7 16CH 23 18CH 39 1ACH 55 1CCH
8 16EH 24 18EH 40 1AEH 56 1CEH
9 170H 25 190H 41 1B0H 57 1D0H
10 172H 26 192H 42 1B2H 58 1D2H
11 174H 27 194H 43 1B4H 59 1D4H
12 176H 28 196H 44 1B6H 60 1D6H
13 178H 29 198H 45 1B8H 61 1D8H
14 17AH 30 19AH 46 1BAH 62 1DAH
15 17CH 31 19CH 47 1BCH 63 1DCH
16 17EH 32 19EH 48 1BEH 64 1DEH
Buffer
Memory
Address
2
CC-Link COMMUNICATION
57
Page 63

Buffer Memory
2.4.2 Remote input signals Pr.544=100 (Inverter(FR-A7NC) to master module)
• Input states from the remote device station are stored.
• Two words are used for each station.
(Do not use address En (n = 2(X - 1) + 1, X = station No.))
FR-A700 series
Remote device station
(Station No. 1: 1 station occupie d)
RX 0F to RX 00
Addresses
For station
No.1
For station
No.2
For station
No.3
For station
No.4
For station
No.5
For station
No.6
For station
No.7
For station
No.8
For station
No.9
For station
No.63
For station
No.64
Master station
Remote inputs (RX)
RX F to RX 0
H
E0
H
RX 1F to RX 10
E1
H
RX 2F to RX 20
E2
H
E3
RX 3F to RX 30
H
RX 4F to RX 40
E4
H
RX 5F to RX 50
E5
H
RX 6F to RX 60
E6
H
E7
RX 7F to RX 70
H
RX 8F to RX 80
E8
H
E9
RX 9F to RX 90
H
EA
RX AF to RX A0
H
EB
RX BF to RX B0
H
RX CF to RX C0
EC
H
ED
RX DF to RX D0
H
EE
RX EF to RX E0
H
RX FF to RX F0
EF
RX10F to RX100
H
F0
RX11F to RX110
H
F1
H
F2
to
H
15B
H
RX7CF to RX7C0
15C
H
15D
RX7DF to RX7D0
H
RX7EF to RX7E0
15E
H
15F
RX7FF to RX7F0
to
Inverter
Y3F to Y30
Correspondences between Master Station Buffer Memory Addresses and Station
Numbers
Station
No.
Buffer
Memory
Address
Station
No.
Buffer
Memory
Address
Station
No.
Buffer
Memory
Address
Station
No.
1E0H 17 100H 33 120H 49 140H
2E2H 18 102H 34 122H 50 142H
3E4H 19 104H 35 124H 51 144H
4E6H 20 106H 36 126H 52 146H
5E8H 21 108H 37 128H 53 148H
6EAH 22 10AH 38 12AH 54 14AH
7ECH 23 10CH 39 12CH 55 14CH
8EEH 24 10EH 40 12EH 56 14EH
9F0H 25 110H 41 130H 57 150H
10 F2H 26 112H 42 132H 58 152H
11 F4 H 27 114H 43 134H 59 154H
12 F6H 28 116H 44 136H 60 156H
13 F8H 29 118H 45 138H 61 158H
14 FAH 30 11AH 46 13AH 62 15AH
15 FCH 31 11CH 47 13CH 63 15CH
16 FEH 32 11EH 48 13EH 64 15EH
58
Buffer
Memory
Address
Page 64

Buffer Memory
2.4.3 Remote registers Pr.544=100
(Master module to inverter(FR-A7NC))
• Data to be sent to the remote registers (RWW) of the remote device station are
stored.
• Four words are used for each station.
FR-A700 series
Remote device station
(Station No. 1: 1 station occupie d)
RWW 0
W
RW
1
W
2
RW
W
3
RW
Inverter
D9062
D9063
D9064
D9065
Addresses
For station
No.1
For station
No.2
For station
No.3
For station
No.4
For station
No.64
Master station
Remote registers (RWw)
RWW 0
H
1E0
1E1
1E2
1E3
1E4
1E5
1E6
1E7
1E8
1E9
1EA
1EB
1EC
1ED
1EE
1EF
1F0
2DB
2DC
2DD
2DE
2DF
to
W
RW
1
H
W
2
RW
H
H
W
3
RW
W
H
RW
4
W
H
5
RW
W
RW
6
H
H
W
RW
7
W
H
8
RW
W
H
9
RW
H
W
RW
A
H
W
RW
B
W
C
RW
H
H
W
D
RW
W
H
E
RW
W
H
RW
F
H
to
H
W
FC
RW
H
RWW FD
H
W
H
RW
FE
W
FF
RW
H
Correspondences between Master Station Buffer Memory Addresses and Station
Numbers
Station
No.
Buffer
Memory
Address
Station
No.
Buffer
Memory
Address
Station
No.
11E0H to 1E3H 17 220H to 223H 33 260H to 263H 49 2A0H to 2A3H
21E4H to 1E7H 18 224H to 227H 34 264H to 267H 50 2A4H to 2A7H
31E8H to 1EBH 19 228H to 22BH 35 268H to 26BH 51 2A8H to 2ABH
41ECH to 1EFH 20 22CH to 22FH 36 26CH to 26FH 52 2ACH to 2AFH
51F0H to 1F3H 21 230H to 233H 37 270H to 273H 53 2B0H to 2B3H
61F4H to 1F7H 22 234H to 237H 38 274H to 277H 54 2B4H to 2B7H
71F8H to 1FBH 23 238H to 23BH 39 278H to 27BH 55 2B8H to 2BBH
81FCH to 1FFH 24 23CH to 23FH 40 27CH to 27FH 56 2BCH to 2BFH
9200H to 203H 25 240H to 243H 41 280H to 283H 57 2C0H to 2C3H
10 204H to 207H 26 244H to 247H 42 284H to 287H 58 2C4H to 2C7H
11 2 08H to 20BH 27 248H to 24BH 43 288H to 28BH 59 2C8H to 2CBH
12 20CH to 20FH 28 24CH to 24FH 44 28CH to 28FH 60 2CCH to 2CFH
13 210H to 213H 29 250H to 253H 45 290H to 293H 61 2D0H to 2D3H
14 214H to 217H 30 254H to 257H 46 294H to 297H 62 2D4H to 2D7H
15 218H to 21BH 31 258H to 25BH 47 298H to 29BH 63 2D8H to 2DBH
16 21CH to 21FH 32 25CH to 25FH 48 29CH to 29FH 64 2DCH to 2DFH
Buffer
Memory
Address
Station
No.
Buffer
Memory
Address
2
CC-Link COMMUNICATION
59
Page 65

Buffer Memory
2.4.4 Remote registers Pr.544=100 (Inverter(FR-A7NC) to master module)
• Data sent from the remote registers (RWR) of the remote device station are stored.
• Four words are used for each station.
FR-A700 series
RWR 0
R
1
RW
R
2
RW
R
RW
3
Inverter
D9078
D9079
D9080
D9081
Addresses
For station
No.1
For station
No.2
For station
No.3
For station
No.4
For station
No.64
Master station
Remote registers (RWr)
RWR 0
H
2E0
2E1
2E2
2E3
2E4
2E5
2E6
2E7
2E8
2E9
2EA
2EB
2EC
2ED
2EE
2EF
2F0
3DB
3DC
3DD
3DE
3DF
to
R
RW
1
H
R
2
RW
H
H
R
3
RW
R
H
4
RW
R
H
5
RW
R
6
RW
H
H
R
RW
7
R
H
8
RW
R
H
9
RW
H
R
RW
A
H
R
RW
B
R
C
RW
H
H
R
D
RW
R
H
E
RW
R
H
RW
F
H
to
H
R
FC
RW
H
RWR FD
H
R
H
RW
FE
R
RW
FF
H
Remote device station
(Station No. 1: 1 station occupie d)
Correspondences between Master Station Buffer Memory Addresses and Station
Numbers
Station
No.
Buffer
Memory
Address
Station
No.
12E0H to 2E3H 17 320H to 323H 33 360H to 363H 49 3A0H to 3A3H
22E4H to 2E7H 18 324H to 327H 34 364H to 367H 50 3A4H to 3A7H
32E8H to 2EBH 19 328H to 32BH 35 368H to 36BH 51 3A8H to 3ABH
42ECH to 2EFH 20 32CH to 32FH 36 36CH to 36FH 52 3ACH to 3AFH
52F0H to 2F3H 21 330H to 333H 37 370H to 373H 53 3B0H to 3B3H
62F4H to 2F7H 22 334H to 337H 38 374H to 377H 54 3B4H to 3B7H
72F8H to 2FBH 23 338H to 33BH 39 378H to 37BH 55 3B8H to 3BBH
82FCH to 2FFH 24 33CH to 33FH 40 37CH to 37FH 56 3BCH to 3BFH
9300H to 303H 25 340H to 343H 41 380H to 383H 57 3C0H to 3C3H
10 304H to 307H 26 344H to 347H 42 384H to 387H 58 3C4H to 3C7H
11 3 08H to 30BH 27 348H to 34BH 43 388H to 38BH 59 3C8H to 3CBH
12 30CH to 30FH 28 34CH to 34FH 44 38CH to 38FH 60 3CCH to 3CFH
13 310H to 313H 29 350H to 353H 45 390H to 393H 61 3D0H to 3D3H
14 314H to 317H 30 354H to 357H 46 394H to 397H 62 3D4H to 3D7H
15 318H to 31BH 31 358H to 35BH 47 398H to 39BH 63 3D8H to 3DBH
16 31CH to 31FH 32 35CH to 35FH 48 39CH to 39FH 64 3DCH to 3DFH
60
Buffer
Memory
Address
Station
No.
Buffer
Memory
Address
Station
No.
Buffer
Memory
Address
Page 66

3. SEQUENCE PROGRAMMING
3.1 Overview ............................................................... 62
3.2 RUN and STOP Operation Processings ............. 64
3.3 Program Makeup .................................................. 64
3.4 Programming Languages .................................... 65
3.5 Operation Processing Method of PLC Function... 68
3.6 I/O Processing Method ........................................ 69
3.7 Scan Time.............................................................. 71
3.8 Numerical Values Usable in Sequence Program .. 72
3.9 Description of devices ......................................... 75
3.10 Counters C ............................................................ 83
3.11 Data Registers D................................................... 86
3.12 Special Relays, Special Registers ...................... 87
3.13 Function List......................................................... 89
3.14 How to RUN/STOP the Built-in PLC Function
from Outside (Remote RUN/STOP).....................
3.15 Watchdog Timer (Operation clog up monitor
timer) .....................................................................
3.16 Self-diagnostic Function ..................................... 93
3.17 Keyword Registration .......................................... 95
3.18 Setting of Output (Y) Status at Switching from
STOP Status to RUN Status.................................
3.19 Instruction Format................................................ 97
3.20 Bit Device Processing Method............................ 99
3.21 Handling of Numerical Value ............................... 101
3.22 Operation Error..................................................... 102
3.23 Instructions List ................................................... 103
3.24 Description of the Instructions ........................... 110
3.25 Sequence Instructions ......................................... 111
3.26 Basic Instructions ................................................ 140
3.27 Application instructions ...................................... 155
90
92
96
Chapter 1
Chapter 2
Chapter 3
Chapter 4
61
Page 67

Overview
3.1 Overview
3.1.1 Outline of Operation Processings
This section outlines processings performed from when the inverter is powered on
until a sequence program is executed.
The built-in PLC function processings are roughly classified into the following three
types.
(1) Initial processing
Pre-processing for executing sequence operation. This processing is executed
only once when power is switched on or a reset is performed.
(a) The inputs/outputs are reset and initialized.
(b) The data memories are initialized (the bit devices are turned off and the word
devices are cleared to 0).
(c) Self-diagnostic checks are made on the built-in PLC function parameter
setting, operation circuit, etc.
REMARKS
The built-in PLC function parameters can be confirmed from GX Developer. (Refer
to the GX Developer Operating Manual.)
(2) Sequence program operation processing
The sequence program written to the built-in PLC function is executed from step 0
to an END instruction.
(3) END processing
Post-processing for terminating one sequence program operation processing and
return the sequence program execution to step 0.
(a) Self-diagnostic checks are performed.
(b) The present values of the timers are updated and their contacts are turned
on/off, and the present values of the counters are updated and their contacts
are turned on.
62
Page 68

Power on
Initial processing
I/O initialization
Data memory initialization
Self-diagnostic checks
I/O refresh processing
Sequence program operation processing
Step 0
to
Until execution of END instruction
Overview
END processing
Self-diagnostic checks
Updating of timer and counter present values
and on/off of their contacts
Fig 3.1 Operation Processings of Built-in PLC function
SEQUENCE PROGRAMMING
3
63
Page 69

RUN and STOP Operation Processings
3.2 RUN and STOP Operation Processings
The built-in PLC function has two different operation statuses: RUN status and STOP
status.
This section explains the operation processings of the built-in PLC function in each
operating status.
(1) Operation processing in RUN status
A RUN status indicates that a sequence program repeats its operation in order of
step 0 to END (FEND) instruction to step 0 when SQ-SD are shorted. (P.RUN is on)
When entering the RUN status, the function outputs the output status saved at STOP
according to the "STOP to (RUN-time output mode setting" (refer to page 96).
(2) Operation processing in STOP status
A STOP status indicates that a sequence program stops its operation when SQSD are opened or remote STOP is commanded. (P.RUN is off)
When entering the STOP status, the function saves the output status and turns off
all outputs. The contents of the data memories other than the outputs (Y) are
maintained.
POINT
In either the RUN or STOP status, the built-in PLC function is performing I/O refresh
processings. In the STOP status, therefore, I/O monitoring and test operation can be
performed from the peripheral device.
3.3 Program Makeup
(1) Program classification
The program that can be used by the built-in PLC function is a main sequence
program only. Microcomputer, interrupt and SFC programs cannot be used.
(2) Program capacity
A program capacity indicates the capacity of the program storage memory, and it
is 1k steps. Set the program capacity in the built-in PLC function parameter.
64
Page 70

Programming Languages
3.4 Programming Languages
The built-in PLC function has two different programming methods: one that uses
ladders and the other that uses dedicated instructions.
• Programming that uses ladders is performed in the relay symbolic language. *1
• Programming that uses dedicated instructions is performed in the logic symbolic
language. *2
Whether the relay symbolic language or logic symbolic language is used, the same
program is created.
REMARKS
*1. When using GX Developer for programming, perform programming in the "ladder mode".
*2. When using GX Developer for programming, perform programming in the "list mode".
3.4.1 Relay symbolic language (Ladder mode)
The relay symbolic language is based on the concept of a relay control circuit.
You can perform programming in the representation close to the sequence circuit of
relay control.
(1) Ladder block
A ladder block is the minimum unit for performing sequence program operation. It
starts with the left hand side vertical bus and ends with the right hand side vertical
bus.
Left hand side vertical bus
Step number
* X0 to X5: Indicate inputs.
Y10 to Y14: Indicate outputs.
Fig 3.2 Ladder Blocks
Right hand
side vertical
bus
Ladder
blocks
SEQUENCE PROGRAMMING
3
65
Page 71

Programming Languages
s
*
(2) Sequence program operation method
Sequence program operation repeats execution from a ladder block at step 0 to
an END instruction.
In a single ladder block, operation is performed from the left hand side vertical
bus to the right, and from the top to the bottom.
Beginning of one
ladder block
Operation
from top
to bottom
Operation from left to right
1)
3) 4)
6)
2)
5)
7) 8) 9)
Beginning of
Execution
returns to
tep 0 when
END
instruction is
executed.
one ladder block
Operation
from top
to bottom
11) 13) 14)
12)
END
1) to 17) indicate the sequence of program operation.
Fig 3.3 Operation Processing Sequence
Operation from left to right
10)
15)
16)
17)
End of one
ladder block
End of one
ladder block
66
Page 72

Programming Languages
3.4.2 Logic symbolic language (List mode)
The logic symbolic language uses dedicated instructions for programming contacts,
coils, etc. instead of their symbols used by the relay symbolic language.
(1) Program operation method
Sequence program operation is executed from an instruction at step 0 to an END
instruction in due order. When the END instruction is executed, operation is
executed from the instruction at step 0 again.
Logic symbolic language Relay symbolic language
Step number
n
e
o
c
i
t
n
a
e
r
u
e
q
p
e
O
s
Execution returns to step 0
when END instruction is executed.
Fig 3.4 Operation Processing Sequence
1)
2)
3)
4)
5)
6)
7)
8)
9)
10)
11)
1) 2) 7) 8) 9)
3) 4)
6)
5)
10)
11)
67
SEQUENCE PROGRAMMING
3
Page 73

Operation Processing Method of PLC Function
3.5 Operation Processing Method of PLC Function
The operation processing method is the repeated operation of a stored program.
(1) Stored program system
1) In a stored program system, a sequence program to be operated is stored in
the internal memory beforehand.
2) When sequence program operation is executed, the sequence program stored
in the built-in PLC function is read to the CPU instruction by instruction to
execute the operation, and the corresponding devices are controlled according
to the results.
(2) Repeated operation system
In a repeated operation system, a sequence of operations is repeated.
The built-in PLC function repeats the following processings.
1) The built-in PLC function executes the sequence program stored in the
internal memory from step 0 in due order.
2) When the END instruction is executed, internal processings, such as timer/
counter present value updating and self-diagnostic checks, are performed, and
the execution returns to step 0 of the sequence program again.
Step 0
Step 1
Step 2
Built-in sequence function repeats
this operation.
END
Timer/counter present
value updating
Self-diagnostic
checks, etc.
Fig 3.5 Operation Processing Method of Built-in PLC Function
REMARKS
A processing from step 0 to next step 0 or from END to next END is called one scan.
Therefore, one scan is the sum of the processing time of a user-created program (step 0 to
END) and the internal processing time of the built-in PLC function.
68
Page 74

I/O Processing Method
3.6 I/O Processing Method
The control system is a refresh system.
3.6.1 What is refresh system?
In the refresh system, control input terminal changes are batch-imported into the input
data memory of the CPU before execution of each scan, and the data of this input data
memory are used as the input data for operation execution.
Each program operation result of the output (Y) is output to the output data memory,
and after the END instruction is executed, the contents of the output data memory are
batch-output from the control output terminal.
PLC
CPU
(Central Processing Unit)
At input refresh
1)
Control input
terminal
X0
3)
Input (X) data
memory
Y22
Y20
4)
5)
Output (Y)
data memory
At output refresh
2)
Control output
terminal
• Input refresh
Before execution of step 0, input data are batch-read from the input module (1))
and stored into the input (X) data memory.
• Output refresh
Before execution of step 0, the data of the output (Y) data memory (2)) are batchoutput to the output module.
• When input contact instruction is executed
Input data are read from the input (X) data memory (3)) and the sequence
program is executed.
• When output contact instruction is executed
Output data are read from the output (Y) data memory (4)) and the sequence
program is executed.
• When output OUT instruction is executed
The operation result (5) of the sequence program is stored into the output (Y) data
memory.
Fig 3.6 I/O Data Flows in Refresh System
SEQUENCE PROGRAMMING
3
69
Page 75

I/O Processing Method
(
)
3.6.2 Response delay in refresh system
This section describes a delay of an output change in response to an input change.
An output change in response to an input change has a delay of up to two scans as
shown in Fig. 2.6.
Ladder example
In this ladder, output Y1E turns on when input
X5 turns on.
When Y1E turns on earliest
Input refresh Input refresh Output refresh
0
X5
Y1E
OFF
OFF
OFF
OFF
Control input
terminal
Control output
terminal
The Y1E output turns on earliest when the control input terminal turns from OFF to
ON immediately before a refresh. X5 turns on at an input refresh, Y1E turns on at
step 0, and the control output terminal turns on at an output refresh after execution of
the END instruction.
In this case, therefore, a delay of a control output terminal change in response to a
control input terminal change is one scan.
056 0
END END
ON
ON
ON
Delay
Minimum 1 scan
ON
When Y1E turns on latest
Input refresh Input refresh Output refresh
Control input
terminal
X5
Y1E
Control output
terminal
0
ON
OFF
OFF
OFF
OFF
056 0
END
ON
ON
Delay
(Maximum 2 scans)
END
ON
The Y1E output turns on latest when the control input terminal turns from OFF to ON
immediately after a refresh. X5 turns on at the next input refresh, Y1E turns on at
step 0, and the control output terminal turns on at an output refresh after execution of
the END instruction.
In this case, therefore, a delay of a control output terminal change in response to a
control input terminal change is two scans.
Fig 3.7 Output Y Change in Response to Input X Change
70
Page 76

3.7 Scan Time
(1) Scan time
A scan time is a time from when sequence program operation is executed from
step 0 until step 0 is executed again.
The scan time of each scan is not equal, and changes depending on whether the
used instructions are executed or not.
Scan time
END END00
Sequence program
END processing
Timer/counter count processing
Self-diagnostic checks
Fig 3.8 Scan Time
(2) Scan time confirmation
(a)The scan time from the END instruction to the next END instruction is timed in
the PLC, and stored into the special registers D9017 to D9019 in units of
10ms.
1) Data stored into special registers D9017 to D9019
• D9017 ........... Minimum value of scan time
• D9018 ........... Present value of scan time
• D9019 ........... Maximum value of scan time
Scan Time
2) Scan time accuracy
The accuracy of the scan time observed in the PLC is 10ms.
For example, when the D9018 data is 5, the actual scan time is 40ms to
60ms.
SEQUENCE PROGRAMMING
3
71
Page 77

Numerical Values Usable in Sequence Program
3.8 Numerical Values Usable in Sequence Program
The built-in PLC function represents numerical values, alphabets and other data in two
statuses: 0 (OFF) and 1 (ON).
The data represented by these 0s and 1s are called BIN (binary code).
The built-in PLC function can also use HEX (hexadecimal code) that represents BIN
data in blocks of four bits.
Table 2.1 indicates the numerical representations of BIN, HEX and decimal code.
Table 3.1 Numerical Representations of BIN,
HEX and Decimal Code
DEC
(Decimal Code)
0
1
2
3
•
•
•
•
•
•
9
10
11
12
13
14
15
16
17
•
•
•
•
•
•
47
HEX
(Hexadecimal Code)
0
1
2
3
•
•
•
•
•
•
9
A
B
C
D
E
F
10
11
•
•
•
•
•
•
2F
BIN
(Binary Code)
0
1
10
11
•
•
•
•
•
•
1001
1010
1011
110 0
110 1
1110
1111
10000
10001
•
•
•
•
•
•
101111
72
Page 78

Numerical Values Usable in Sequence Program
3.8.1 BIN (Binary Code)
(1) Binary code
BIN is a numerical value represented by 0s (OFF) and 1s (ON).
In the decimal code, a number is incremented from 0 to 9, and at this point, a
carry occurs and the number is incremented to 10.
In BIN, 0, 1 are followed by a carry, and the number is incremented to 10 (2 in
decimal).
Table 2.2 indicates the numerical representations of BIN and decimal code.
Table 3.2 Differences between Numerical
Representations of BIN and Decimal Code
DEC (Decimal Code) BIN (Binary Code)
00000
10001
20010
3 0011
40100
50101
60110
70111
81000
91001
10 1010
11 1011
(2) Numerical representation of BIN
1) Each register (e.g. data register) of the built-in PLC function consist of 16 bits.
Each bit of the register is assigned a 2
However, the most significant bit is used to judge whether the value is positive
or negative.
• Most significant bit is 0 ..... Positive
• Most significant bit is 1 ..... Negative
The numerical representation of each register of the built-in PLC function is
shown in Fig. 2.8.
Most significant bit (for judgment of positive/negative)
Bit name
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
n
value.
Carry
Carry
Carry
SEQUENCE PROGRAMMING
1421321221121029282726252423222120
15
2
Decimal value
-32768
2
=
=
=
=
=
=
8192
16384
4096 2048 1024
Value is negative if most significant bit is 1.
=
512 256 128 64 32 16 8 4 2 1
=
=
=
=
=
=
=
=
=
Fig 3.9 Numerical Representation of Each Register of Built-in PLC Function
2) Numerical data usable with the built-in PLC function
In the numerical representation shown in Fig. 2.8, values can be represented in
3
73
Page 79

Numerical Values Usable in Sequence Program
the range -32768 to 32767.
Therefore, each register of the built-in PLC function can store any value
between -32768 and 32767.
3.8.2 HEX (HEX Decimal)
(1) HEX
HEX represents four bits of BIN data as one digit.
Using four bits in BIN, you can represent 16 values from 0 to 15.
Since HEX represents any of 0 to 15 in a single digit, 9 is followed by alphabets A
(instead of 10), B (11)..., and F (15) is followed by a carry.
Refer to page 72 for the correspondences between BIN, HEX and decimal code.
(2) Numerical representation of HEX
Each register (e.g. data register) of the built-in PLC function consist of 16 bits.
Therefore, the value that can be stored into each register is represented as any of
0 to HFFFF in HEX.
74
Page 80

Description of devices
3.9 Description of devices
3.9.1 Device List
The following table indicates the device names usable with the built-in PLC function
and their ranges of use.
Table 3.3 Device List
Input (X) 64 (X0 to X3F) <12 points installed>
Output (Y) 64 (Y0 to Y3F) <7 points installed>
Internal relay (M) 64 (M0 to M63)
Latch relay (L)
Step relay (S)
Link relay (B) None
Points 16(T0 to T15)
Timer (T)
Counter (C)
Data device (D) 120(D0 to D119)
Link register (W) None
Annunciator (F) None
File register (R) None
Accumulator (A) None
Index register (Z, V) None
Pointer (P) None
Interrupt pointer (I) None
Special relay (M) 256 (M9000 to 9255) with function limit
Special register (D) 256 (D9000 to 9255) with function limit
Specifications
Points 16(C0 to T15)
Specifications
None (Can be set with built-in PLC function parameters
but will not latch)
None (Can be set with built-in PLC function parameters
but will operate as M)
100ms timer: Set time 0.1 to 3276.7s
10ms timer: Set time 0.01 to 327.67s
100ms retentive timer: Set time 0.1 to 3276.7s
Normal counter: Setting range 1 to 32767
Interrupt program counter: None
75
SEQUENCE PROGRAMMING
3
Page 81

Description of devices
3.9.2 Inputs, Outputs X, Y
Inputs and outputs are devices designed to transfer data between the inverter and
external devices.
Inputs provide ON/OFF data given to the corresponding control input terminals from
outside the inverter. In a program, they are used as contacts (normally open, normally
closed contacts) and the source data of basic instructions. Outputs are used when the
operation results of a program are output from the control output terminals to outside
the inverter.
Pushbutton switch
Select switch
Digital switch
1
Inverter
Inputs (X)
Sequence
operation
Outputs (Y)
Fig 3.10 Inputs (X), Outputs (Y)
Signal lamp
Contactor
76
Page 82

Description of devices
(1) Inputs X
(a) Inputs are designed to give commands and data from external devices, such
as pushbuttons, select switches, limit switches and digital switches, to the
inverter (built-in PLC function).
(b) On the assumption that the PLC function contains a virtual relay Xn for one
input point, the normally open (N/O) or normally closed (N/C) contact of that
Xn is used in the program.
Virtual relay
PB1
X0
LS2
X1
X0
X1
Sequence
function
Input circuit (external devices)
Program
Fig 3.11 Concept of Inputs (X)
(c) There are no restrictions on the number of N/O and N/C contacts of Xn used
in the program.
No restrictions
on the number
of used contacts.
Fig 3.12 Use of Contacts in Input (X) Program
When no external devices are connected to the control input terminals, "X" can be
used as the internal relay "M".
SEQUENCE PROGRAMMING
3
77
Page 83

Description of devices
)
(2) Outputs Y
(a) Outputs are designed to output the control results of a program to outside the
inverter (signal lamps, digital indicators, magnetic switches (contactors),
solenoids, etc.).
(b) An output can be exported to outside the inverter as equivalent to one N/O
contact.
(c) There are no restrictions on the number of N/O and N/C contacts of output
Yn used in the program, if they are used within the program capacity range.
Sequence
function
No restrictions on the number of used contacts.
Program
Load
M11
Output circuit (external devices
Fig 3.13 Concept of Outputs (Y)
When no external devices are connected to the control output terminals, "Y" can
be used as the internal relay "M".
78
Page 84

Description of devices
3.9.3 Internal Relays M
Internal relays are auxiliary relays that are used in the PLC function and cannot latch
data (backup for power failure).
All internal relays are turned off when:
• Power is switched from off to on; or
• Reset is performed.
There are no restrictions on the number of contacts (N/O and N/C contacts) used in
the program.
Use outputs (Y) when outputting the operation results of the sequence program to
outside the inverter.
No restrictions on the number of
used contacts.
Fig 3.14 Internal Relay
When X0 turns from OFF to ON, M0
(internal relay) is set (turned on).
M0 may only be turned on in
sequence function and cannot be
output to outside.
ON/OFF data of M0 is output to
outside.
SEQUENCE PROGRAMMING
79
3
Page 85

Description of devices
v
X
3.9.4 Timers T
The timers of the PLC function are count up timers.
The count up timer starts timing the present value when its coil turns on, and the
contact of that timer turns on when the present value reaches the setting (time-out).
3.9.5 100ms, 10ms and 100ms retentive timers
(1) 100ms and 10ms timers
The timer starts timing the present value when its coil turns on, and the present
value is reset to 0 and the contact turns off when the coil turns off.
Ladder example
When input X5 turns on, T2 coil turns on
and timer times 5s. (T2 is 100ms timer.)
Timing chart
5
T2 coil
Timer present
alue
OFF
OFF
OFFT2 contact
ON
OFF
ON
OFF OFF
ON
OFF
ON
5s
ON
OFF
Fig 3.15 Timing Chart
REMARKS
100ms, 10ms and 100ms retentive timers can be changed using the built-in PLC function
parameter. (The default is a 100ms timer.)
Since the FR-C500 has 8 timers (T0 to T7), it can use only any one type of 100ms, 10ms and
100ms retentive timers.
Setting
80
Page 86

Description of devices
(2) 100ms retentive timers
1) A 100ms retentive timer is designed to time the ON period of the timer coil.
When its coil turns on, the timer starts timing the present value and maintains
the present value and contact ON/OFF state if the coil turns off.
When the coil turns on again, the timer resumes timing from the maintained
present value.
2) Use the RST T instruction to clear the present value and turn off the contact.
Ladder example
Times ON of X5 for 20s.
Resets T5 contact and clears
present value when X6 turns on.
Timing chart
X5
T5 coil
Timer present
value
T5 contact
OFF
OFF
OFF
ON
OFF
ON
15s
ON
OFF
ON
OFF OFF
Setting
5s
ON
OFF
Fig 3.16 Timing Chart
3.9.6 Timer processing method and accuracy
(1) Timer processing method
The coil of the timer is turned on/off at execution of the OUT T instruction, and
the timer's present value is updated and its contact turned on/off at execution of
the END instruction.
1) When the coil of the timer turns on, the present value of that timer is updated
after execution of the END instruction, and when the timer times out, its contact
turns on.
(a) When the coil of the 10ms or 100ms timer turns off, the present value of
that timer is reset to 0 and the contact is also turned off after execution of
the END instruction.
(b) If its coil turns off, the 100ms retentive timer maintains the prevent value
and contact ON/OFF state.
2) When the timer is reset by the RST instruction, the present value of the timer is
reset to 0 and the contact turns off too at execution of the RST T instruction.
POINT
If the timer setting is "0", the setting becomes infinite and the timer does not time out.
SEQUENCE PROGRAMMING
3
81
Page 87

Description of devices
(2) Present value update timing and accuracy in refresh system
1) The timer accuracy is +2 scan times independently of the used timer and scan
time.
2) The following shows the present value update timing and accuracy when the
10ms timer is used in a program where the scan time is 10ms or more.
Ladder example
T3 contact turns on 6s after X0 turns
on. (T3 is 10ms timer.)
Timer timing method
Scan time 25ms
When external
input turns on
in hatched
range
X0
T3 coil
T3 contact
10ms timer
timing
Timing set
at END
T3 present
value
OUT
END
T3
25ms 25ms 25ms 25ms
OFF
OFF
OFF
121 2
*2
1 scan
0
OUT
T3
END END END END END
ON
ON
2
OUT
T3
31212123
3
0 3 3 3 2 5 597 2 599 599 3 602
2 2
6000ms
OUT
T3
ON
*1
1 scan
0
3
600 appears when monitored
on peripheral device.
Fig 3.17 Timer Timing Method
In Fig. 3.8, the time-out period of the 10ms timer T3 has the following errors.
*1 .......... 10ms timer error (+1 scan time)
*2 .......... Error produced by timer's input condition ON timing and OUT
T instruction's program position (+1 scan time)
The accuracy is +2 scan time (+0.05s in Fig. 3.8)
3) When the timer times out, its contact remains on until END even if the coil turns
off, and turns off at execution of the END instruction.
82
Page 88

Counters C
3.10 Counters C
The counters of the built-in PLC function are up counters.
An up counter stops counting and its contact turns on when the count value reaches
the setting.
(1) Count processing
1) The coil of the counter is turned on/off at execution of the OUT C instruction,
and its present value is updated and its contact turns on after execution of the
END instruction.
2) The counter counts on detection of the leading edge (OFF to ON) of the coil. It
does not count if the coil remains on.
(2) Counter resetting
1) The count value is not cleared even if the coil turns off. Use the RST C
instruction to clear the count value and turn off the contact.
2) When the counter is reset by the RST instruction, the present value and
contact of the counter are cleared at execution of the RST instruction.
Ladder example
Input condition
C0 counts on leading edge (OFF to ON)
of input X5.
Resets C0 when input X6 turns on.
Fig 3.18 Count Ladder
SEQUENCE PROGRAMMING
3
83
Page 89

Counters C
X
X
v
3.10.1 Count processing in refresh system
The counter counts on the leading edge of the input condition of the counter imported
at an input refresh.
Ladder example
When OFF to ON of X5 is counted
twice, C3 contact turns on.
Counting method
5
5
(Image)
C3 coil
C3 present
alue
C3 contact
Input (X) refresh
END END
OFF
OFF
OFF
0
OFF
OUT
C3
ON
ON
ON
Does not count since X5 remains on.
OUT
C3
END
OUT
C3
END
Fig 3.19 Counter Counting Method
REMARKS
Refer to page 85 for the maximum counting speed of the counter.
OUT
C3
END
OUT
C3
END
21
ON
84
Page 90

Counters C
3.10.2 Maximum counting speed of counter
The maximum counting speed of the counter is determined by the scan time, and the
counter can count only when the ON/OFF period of the input condition is longer than
the scan time.
n
Maximum counting speed Cmax
100
1
[times/s]
ts
REMARKS
The duty n is a percent (%) ratio of ON/OFF period to (ON + OFF period) of the count input
signal.
n: Duty (%)
ts: Scan time [s]
When T1 T2
When T1 T2
Count input signal
T1
T1 T2
n
T2
T1 T2
OFF
100[%]n
100[%]
T1 T2
ON
SEQUENCE PROGRAMMING
85
3
Page 91

Data Registers D
3.11 Data Registers D
(1) Data registers are memories that can store numerical data (-32768 to 32767 or
H0000 to HFFFF) in the built-in PLC function.
One point of data register consists of 16 bits and allows data to be read/written in
units of 16 bits.
D
Data register No.
b15 b0to
16 bits
Fig 3.20 Data Register Structure
(2) The data stored once by the sequence program is maintained until other data is
stored.
(3) If more data registers are needed, the unused timers (T) and counters (C) can be
used as data registers.
86
Page 92

Special Relays, Special Registers
3.12 Special Relays, Special Registers
Special relays and special registers are internal relays and data registers, respectively,
whose applications are predetermined by the built-in PLC functions.
They have the following main applications.
(1) Sequence operation check
The special relays and special registers can be used to:
(a)Check the operating status (RUN/STOP)
(b)Detect a fault by the self-diagnostic function
(c)Detect an operation error
(d)Check the scan time
(2) Timing contact
There are special relays that can be used in a sequence program and differ in
operating status.
(a)Normally ON/OFF flag
(b)RUN flag (OFF for 1 scan)
(c)Initial processing flag (ON for 1 scan)
REMARKS
For the special relays and special registers usable with the built-in PLC function,
refer to page 10.
87
SEQUENCE PROGRAMMING
3
Page 93

Special Relays, Special Registers
Table3.4 Special Relay Application List
Item
Initial
processing
flag
(1 scan ON)
Normal OFF
flag
Normally ON
flag
Special
Relay
M9038
M9037
M9036
Application/Description
(1)This relay turns on for one scan when the built-in PLC function
switches from STOP to RUN.
0
Sequence
program
M9038
END/0 END/0 END/0 END/0
1 scan
ON
OFF
Switching from STOP to RUN
(2)Using M9038, you can create a sequence program to be
executed only once without using the PLS instruction at
switching from STOP to RUN.
M9038
Initial processing program
This relay remains off while power is on.
Can be used to temporarily disable execution for debugging, etc.
This relay is on while power is on.
Can be used to create a program to be executed only once after
power-on.
RUN flag M9039
88
This relay turns on at the second scan of the sequence program
when SQ-SD are shorted.
END/0
M9039
0
ON
OFF
RUN
Sequence
program
Page 94

Function List
3.13 Function List
Function Description
Remote RUN/STOP
Watchdog timer variable
(10 to 2000ms)
Self-diagnostic function
STOP to RUN-time output
setting
Keyword registration
CAUTION
The following functions are unavailable.
Constant scan, latch (backup for power failure), PAUSE, status latch, sampling trace,
step run, clock, interrupt processing, comment, microcomputer mode, print title
registration, annunciator display mode, ERROR LED priority setting
•This function performs remote RUN/STOP from outside the
inverter when SQ-SD are shorted (PLC function in RUN
status (P.RUN lit)).
•The watchdog timer is an internal timer of the sequence
function designed to detect hardware or program faults and
can be changed in setting.
•The built-in PLC function itself diagnoses faults and performs
fault detection, indication, built-in sequence
function stop, etc.
•This setting is made to determine the output (Y) state when
the function has switched from the STOP status to the RUN
status.
•This setting is made to inhibit read/interrupt of a program
(parameters and main/sub program) and comments.
89
SEQUENCE PROGRAMMING
3
Page 95

How to RUN/STOP the Built-in PLC Function
from Outside (Remote RUN/STOP)
3.14 How to RUN/STOP the Built-in PLC Function from Outside (Remote RUN/STOP)
The built-in PLC function is RUN/STOPped by shorting/opening SQ-SD.
Remote RUN/STOP is to RUN/STOP the built-in PLC function from outside the
inverter with SQ-SD shorted (RUN status).
(1) Applications of remote RUN/STOP
In the following cases, the function can be RUN/STOPped by remote operation
using remote RUN/STOP.
1) When the inverter is out of reach.
2) When the inverter in a control box is RUN/STOPped from outside the control box.
(2) Operation performed at remote RUN/STOP
The operation of the sequence program for performing remote RUN/STOP is as
described below.
• Remote STOP.......The function enters the STOP status after the sequence
program is executed up to the END instruction.
• Remote RUN ........When remote RUN is performed after the function has been
put in the "STOP status" by remote STOP, the function
enters the RUN status again and executes the sequence
program from step 0.
(3) Remote RUN/STOP method
There are the following remote RUN/STOP methods.
1) Setting using built-in PLC function parameter (using contact)
Remote RUN/STOP can be performed by turning the remote RUN contact off/on.
For example, this method can be used to STOP the PLC function with the
emergency stop contact.
• When the remote RUN contact turns off, the function enters the "RUN" status.
• When the remote RUN contact turns on, the function enters the "STOP"
status.
Step 0 END Step 0
SQ terminal
Remote RUN contact
(External input terminal)
Built-in sequence
function:
RUN/STOP status
OFF
RUN
ON
STOP
STOP status
Fig 3.21 Timing Chart for RUN/STOP Using Remote RUN Contact
POINT
Setting of remote RUN contact built-in PLC function parameter
X0 to X1F can be set as the remote RUN contacts.
(Refer to the GX Developer manual for details.)
90
END
0
Page 96

How to RUN/STOP the Built-in PLC Function
from Outside (Remote RUN/STOP)
2) Method using GX Developer
RUN/STOP can be performed by remote RUN/STOP operation from GX
Developer.
For example, this method can be used to STOP the function for sequence
program write in a place where the inverter is out of reach.
Step 0 END Step 0 END
0
GX Developer
Remote STOP
command
Remote RUN
command
RUN/STOP
status
OFF
OFF
RUN
ON
ON
STOP
STOP status
Fig 3.22 Timing Chart for RUN/STOP Using GX Developer
(4) Instructions
Note the following points since the built-in PLC function gives priority to STOP.
• The built-in PLC function enters the STOP status when remote STOP is
performed from any of the remote RUN contact, GX Developer, etc.
• To place the built-in PLC function in the RUN status again after it has been put
in the STOP status by remote STOP, all external factors (remote RUN contact,
GX Developer, etc.) for remote STOP must be set to RUN.
REMARKS
What are RUN and STOP statuses?
•RUN status.............Status where a sequence program is repeating operation from step 0 to
END instruction.
•STOP status ..........Status where sequence program operation is at a stop and the outputs
(Y) are all off.
SEQUENCE PROGRAMMING
3
91
Page 97

Watchdog Timer (Operation clog up monitor timer)
3.15 Watchdog Timer (Operation clog up monitor timer)
(1) Watchdog timer
A watchdog timer is the internal timer of the built-in PLC function designed to
detect hardware or sequence program faults.
Its default value is set to 200ms.
(2) Watchdog timer resetting
The built-in PLC function resets the watchdog timer before execution of step 0
(after execution of END processing).
When the built-in PLC function operates properly and the END instruction is
executed within the setting in the sequence program, the watchdog timer does
not time out.
If the hardware fault of the built-in PLC function occurs or the scan time of the
sequence program is too long to execute the END instruction within the setting,
the watchdog timer times out.
Sequence program
Internal
processing time
END 00
WDT resetting
(Internal processing)
Excess of scan time over setting
results in watchdog timer error.
Fig 3.23 Watchdog Timer Resetting
(3) Processing performed when watchdog timer times out
If the scan time exceeds the watchdog timer setting, a watchdog timer error
occurs and:
1) The built-in PLC function turns off all outputs.
2) The P.RUN LED goes off or flickers.
3) M9008 turns on and the error code is stored into D9008.
REMARKS
The watchdog timer setting can be changed by built-in PLC function parameter setting of GX
Developer. (Refer to the GX Developer manual for details.)
92
Page 98

Self-diagnostic Function
3.16 Self-diagnostic Function
The self-diagnostic function diagnoses faults by the built-in PLC function itself.
(1) Self-diagnostic timing
The self-diagnostic function is performed at power-on, at reset, at execution of
any instruction, or at execution of the END instruction.
1) At power-on, at reset
Whether operation can be executed or not is diagnosed.
2) At execution of any instruction
An error occurs if the operation of any instruction in the sequence program is
not executed properly.
CAUTION
For the LD, AND, OR, logical comparison operation, and OUT instructions, the set
devices are always checked. For the other instructions (SET, RST, MOV, etc.), a
check is made as soon as the execution condition holds and the instruction is
ready to be executed.
3) At execution of END instruction
Operation clog up monitor timer
(2) Operation mode at fault detection
There are two different PLC operation modes at detection of a fault by the selfdiagnostic: operation stop mode and operation continuation mode.
The operation continuation mode includes a fault that enables operation to be
stopped by built-in PLC function parameter setting.
1) If an operation stop error is detected by the self-diagnostic, operation is
stopped and outputs (Y) are all turned off as soon as the error is detected. The
other devices maintain their states at occurrence of the error.
(Refer to page 94)
2) If an operation continuation error is detected, only the faulty program part is not
executed and the program at the next step is executed.
(3) Error definition checking
When M9008 (self-diagnostic error) turns on at detection of an error, the error
code is stored into D9008 (self-diagnostic error). Especially in the continuation
mode, use it in the program to prevent a mechanical system malfunction.
For the errors detected by the self-diagnostic, refer to the error code list on
172
.
page
SEQUENCE PROGRAMMING
3
93
Page 99

Self-diagnostic Function
3.16.1 Error-time operation mode
The built-in PLC function allows you to set whether the sequence program operation
will be stopped or continued at occurrence of an operation error.
Use the built-in PLC function parameter to set whether operation will be stopped or
continued.
z Default value of error-time operation mode
The following table indicates the default value (initial value) of the error-time
operation mode and the status of the built-in PLC function.
Table 3.5 Error-time Operation Mode
CPU Status
Error Definition
Operation
error
An error occurred in
the sequence
program, e.g. an
attempt was made to
make BCD
conversion of any
value outside the
range 0 to 9999 (or 0
to 99999999).
Operation
Default val ue
P.RUN
LED
Continuation Flicker
Special
relays
turned on
M9010
M9011
Specia l
registers
for data
storage
D9010
D9011
Self-
diagnostic
error No.
(D9008)
50
94
Page 100

Keyword Registration
3.17 Keyword Registration
The keyword is designed to inhibit the read and rewrite of the program and comments
in the built-in PLC function using GX Developer.
(1) Read/write from built-in PLC function where keyword has been registered
When the keyword has been registered, the built-in PLC function parameters,
main program and comments cannot be read/written from the built-in PLC
function to the GX Developer device unless the keyword registered to the built-in
PLC function is entered.
(2) Registration and cancel of keyword
A keyword of up to six digits can be set in hexadecimal (0 to 9, A to F).
Make built-in PLC function parameter setting to register or cancel the keyword.
95
SEQUENCE PROGRAMMING
3
 Loading...
Loading...