

Page 1

SMD
Frequency Inverter: Full I/O
with CANopen 0.37 kw... 22kW
Operating Instructions
(13466183)
Page 2

Copyright © 2013 - 2005 Lenze AC Tech Corporation
All rights reserved. No part of this manual may be reproduced or transmitted in any form without written
permission from Lenze AC Tech Corporation. The information and technical data in this manual are subject
to change without notice. Lenze AC Tech Corporation makes no warranty of any kind with respect to this
material, including, but not limited to, the implied warranties of it’s merchantability and tness for a given
purpose. Lenze AC Tech Corporation assumes no responsibility for any errors that may appear in this manual.
All information given in this documentation has been carefully selected and tested for compliance with the
hardware and software described. Nevertheless, discrepancies cannot be ruled out. We do not accept any
responsibility nor liability for damages that may occur. Any necessary corrections will be implemented in
subsequent editions.
This document printed in the United States
Page 3

Contents
1 Safety Information ..............................................................................5
1.1 Pictographs used in these Instructions.......................................6
2 Technical Data ....................................................................................8
2.1 Standards and Application Conditions........................................8
2.2 Ratings .......................................................................................9
3 Installation ........................................................................................10
3.1 Mechanical Installation .............................................................10
3.1.1 Dimensions and Mounting ................................................10
3.2 Electrical Installation................................................................. 11
3.2.1 Installation according to EMC Requirements ................... 11
3.2.2 Fuses/Cable Cross-Sections ............................................ 11
3.2.3 Connection Diagram ........................................................12
3.2.4 Control Terminals .............................................................13
4 Commissioning .................................................................................14
4.1 Parameter Setting ....................................................................14
4.2 Electronic Programming Module (EPM) ...................................14
4.3 Parameter Menu.......................................................................15
4.4 CANopen Mapping Details .......................................................26
4.4.1 RPDO Mapping (h66 / h76) ..............................................26
4.4.2 TPDO Mapping (h86 / h96) ..............................................29
4.5 Quick CAN Set-up ....................................................................33
5 Troubleshooting and Fault Elimination .............................................34
Lenze 13466183 EDBSC03 v7 3
Page 4

About These Instructions
A
B
C
D
E
F
This documentation applies to the smd frequency inverter, and contains important technical data and
describes installation, operation, and commissioning.
Please read the instructions before commissioning.
Type:
ESMD223C4TXA
Id-No: 13xxxxxx
LISTED
IND. CONT. EQ.
5D81
C
Input Ratings
D
Output Ratings
After receipt of the delivery, check immediately whether the items delivered
match the accompanying papers. Lenze does not accept any liability for
deciencies claimed subsequently.
Claim
• visible transport damage immediately to the forwarder.
• visible deciencies/incompleteness immediately to your Lenze
Made in USA
Inverter
smd
CANopen: Full I/O
A
Certications
B
Type
Scope of delivery Important
• 1 smd inverter (ESMD...)
with EPM installed
(see Section 4.2)
• 1 Operating Instructions
Input: 3/PE
400/480 V
52/45 A
50-60 Hz
N10104
Z519
representative.
Output: 3/PE
0-400 / 460 V
46/40 A
22 kW
0 - 240 Hz
1341308801234567
For detailed information
refer to instruction
SN: 13xxxxxx012345678
ESMD223C4TXA000XX XX XX
E
Hardware Version
F
Software Version
Manual SC03
+
C0001
4 Lenze 13466183 EDBSC03 v7
Page 5

Safety information
1 Safety Information
General
Some parts of Lenze controllers (frequency inverters, servo inverters, DC controllers) can be live,
moving and rotating. Some surfaces can be hot.
Non-authorized removal of the required cover, inappropriate use, and incorrect installation or operation
creates the risk of severe injury to personnel or damage to equipment.
All operations concerning transport, installation, and commissioning as well as maintenance must be
carried out by qualied, skilled personnel (IEC 364 and CENELEC HD 384 or DIN VDE 0100 and IEC
report 664 or DIN VDE0110 and national regulations for the prevention of accidents must be observed).
According to this basic safety information, qualied skilled personnel are persons who are familiar with
the installation, assembly, commissioning, and operation of the product and who have the qualications
necessary for their occupation.
Application as directed
Drive controllers are components which are designed for installation in electrical systems or machinery.
They are not to be used as appliances. They are intended exclusively for professional and commercial
purposes according to EN 61000-3-2. The documentation includes information on compliance with the
EN 61000-3-2.
When installing the drive controllers in machines, commissioning (i.e. the starting of operation as
directed) is prohibited until it is proven that the machine complies with the regulations of the EC
Directive 2006/42/EC (Machinery Directive); EN 60204 must be observed.
Commissioning (i.e. starting of operation as directed) is only allowed when there is compliance with the
EMC Directive (2004/108/EC).
The drive controllers meet the requirements of the Low Voltage Directive 2006/95/EC. The harmonised
standards of the series EN 50178/DIN VDE 0160 apply to the controllers.
Note: The availability of controllers is restricted according to EN 61800-3.These products can cause
radio interference in residential areas. In this case, special measures can be necessary.
Installation
Ensure proper handling and avoid excessive mechanical stress. Do not bend any components and
do not change any insulation distances during transport or handling. Do not touch any electronic
components and contacts.
Controllers contain electrostatically sensitive components, which can easily be damaged by
inappropriate handling. Do not damage or destroy any electrical components since this might endanger
your health!
Electrical Connection
When working on live drive controllers, applicable national regulations for the prevention of accidents
(e.g. VBG 4) must be observed.
The electrical installation must be carried out according to the appropriate regulations (e.g. cable crosssections, fuses, PE connection). Additional information can be obtained from the documentation.
The documentation contains information about installation in compliance with EMC (shielding,
grounding, lters and cables). These notes must also be observed for CE-marked controllers.
The manufacturer of the system or machine is responsible for compliance with the required limit values
demanded by EMC legislation.
Lenze 13466183 EDBSC03 v7 5
Page 6

Safety information
Operation
Systems including controllers must be equipped with additional monitoring and protection devices
according to the corresponding standards (e.g. technical equipment, regulations for prevention
of accidents, etc.). You are allowed to adapt the controller to your application as described in the
documentation.
DANGER!
• After the controller has been disconnected from the supply voltage, live components
and power connection must not be touched immediately, since capacitors could be
charged. Please observe the corresponding notes on the controller.
• Do not continuously cycle input power to the controller more than once every three
minutes.
• Please close all protective covers and doors during operation.
1.1 Pictographs used in these Instructions
Pictograph Signal Word Meaning Consequences if ignored
DANGER!
WARNING!
Warning of Hazardous Electrical
Impending or possible danger for
Voltage.
persons
Reference to an imminent danger
that may result in death or serious
personal injury if the corresponding
measures are not taken.
Death or injury
STOP!
NOTE
Possible damage to equipment Damage to drive system or its
Useful tip: If observed, it will make
using the drive easier
surroundings
6 Lenze 13466183 EDBSC03 v7
Page 7

Safety Information
Note for UL approved system with integrated controllers
UL warnings are notes which apply to UL systems. The documentation contains special information
about UL.
• Integral solid state protection does not provide branch circuit protection. Branch
circuit protection must be provided in accordance with the National Electrical
Code and any additional local codes. The use of fuses or circuit breakers is the
Warnings!
only approved means for branch circuit protection.
• When protected by CC and T Class Fuses, suitable for use on a circuit capable of
delivering not more than 200,000 rms symmetrical amperes, at the maximum
voltage rating marked on the drive.
• Additionally suitable when protected by a circuit breaker having an interrupting
rating not less than 200,000 rms symmetrical amperes, at the maximum
voltage rating marked on the drive. (Excludes ESMD113_4T_, ESMD112_2Y_,
ESMD113_2T_, ESMD152_2Y_, ESMD153_2T_, ESMD222_2Y_, ESMD223_4T_,
ESMD402_2T_, ESMD552_2T_, ESMD752_2T_, ESMD153_4T_, and ESMD183_4T_).
• Use minimum 75°C copper wire only, except for control circuits.
• For control circuits, use wiring suitable for NEC Class 1 circuits only.
• Torque Requirements are listed in section 3.2.3, Connection diagram.
• Shall be installed in a pollution degree 2 macro-environment.
DANGER!
Risk of Electric Shock! Capacitors retain charge for approximately 180 seconds
after power is removed. Disconnect incoming power and wait at least 3 minutes
before touching the drive.
DANGER!
Risque de choc électrique! Les condensateurs restent sous charge pendant environ
180 secondes après une coupure de courant. Couper l’alimentation et patienter
pendant au moins 3 minutes avant de toucher l’entraînement.
WARNING!
The opening of branch-circuit protective device may be an indication that a fault
has been interrupted. To reduce the risk of re or electric shock, current carrying
parts and other components of the controller should be examined and replaced if
damaged.
AVERTISSEMENT!
Le déclenchement du dispositif de protection du circuit de dérivation peut être dû
à une coupure qui résulte d’un courant de défaut. Pour limiter le risque d’incendie
ou de choc électrique, examiner les pièces porteuses de courant et les autres
éléments du contrôleur et les remplacer s’ils sont endommagés
Lenze 13466183 EDBSC03 v7 7
Page 8

Technical data
2 Technical Data
2.1 Standards and Application Conditions
Conformity
Approvals
Max. permissible motor cable
(1)
length
Input voltage phase imbalance
Humidity
Output frequency
Environmental conditions
Temperature range
Installation height
Vibration resistance
Earth leakage current
Enclosure (EN 60529)
Protection measures against
Operation in public supply networks
(Limitation of harmonic currents
according to EN 61000-3-2)
(1) For compliance with EMC regulations, the permissible cable lengths may change.
(2) The additional measures described only ensure that the controllers meet the requirements of the EN 61000-3-2.
The machine/system manufacturer is responsible for the compliance with the regulations of the machine!
CE Low Voltage Directive (2006/95/EC)
UL 508C Underwriters Laboratories - Power Conversion Equipment
shielded: 50 m (low-capacitance)
unshielded: 100 m
< 2%
< 95% non-condensing
0...240 Hz
Class 3K3 to EN 50178
Transport -25 … +70 °C
Storage -20 … +70 °C
Operation 0 … +55 °C (with 2.5 %/°C current derating above +40 °C)
0 … 4000 m a.m.s.l. (with 5 %/1000 m current derating above 1000 m a.m.s.l.)
acceleration resistant up to 0.7 g
> 3.5 mA to PE
IP 20
short circuit, earth fault, overvoltage, motor stalling, motor overload
Total power
connected to
the mains
< 0.5 kW With mains choke
0.5 … 1 kW With active lter (in preparation)
> 1 kW Without additional measures
Compliance with the requirements
(2)
8 Lenze 13466183 EDBSC03 v7
Page 9

2.2 Ratings
Type
ESMD371C2YXA
ESMD751C2YXA
ESMD112C2YXA
ESMD152C2YXA
ESMD222C2YXA
ESMD302C2TXA
ESMD402C2TXA
ESMD552C2TXA
ESMD752C2TXA
ESMD113C2TXA
ESMD153C2TXA
ESMD371C4TXA
ESMD751C4TXA
ESMD112C4TXA
ESMD152C4TXA
ESMD222C4TXA
ESMD302C4TXA
ESMD402C4TXA
ESMD552C4TXA
ESMD752C4TXA
ESMD113C4TXA
ESMD153C4TXA
ESMD183C4TXA
ESMD223C4TXA
Power
[kW]
0.37
0.75 8.4 4.8 4.0 3.7 6.0 5.6
1.1 12.0 6.9 6.0 5.5 9.0 8.3
1.5 12.9 7.9 6.8 6.3 10.2 9.5
2.2 17.1 10.8 9.6 8.8 14.4 13.2
3.0
4.0 17.1 15.2 14.0 23 21
5.5 25 22 20 33 30
7.5 32 28 26 42 39
11 48 42 39 63 58
15 59 54 50 81 75
0.37
0.75 3.0 2.5 2.5 2.1 2.3 1.9 3.8 3.2 3.5 2.9
1.1 4.3 3.6 3.6 3.0 3.3 2.8 5.4 4.5 5.0 4.2
1.5 4.8 4.0 4.1 3.4 3.8 3.1 6.2 5.1 5.7 4.7
2.2 6.4 5.4 5.8 4.8 5.3 4.4 8.7 7.2 8.0 6.6
3.0 8.3 7.0 7.6 6.3 7.0 5.8 11.4 9.5 10.5 8.7
4.0 10.6 8.8 9.4 7.8 8.6 7.2 14.1 11.7 12.9 10.8
5.5 14.2 12.4 12.6 11.0 11.6 10.1 18.9 16.5 17.4 15.2
7.5 18.1 15.8 16.1 14.0 14.8 12.9 24 21 22 19.4
11 27 24 24 21 22 19.3 36 32 34 29
15 35 31 31 27 29 25 47 41 43 37
18.5 44 38 39 34 36 31 59 51 54 47
22 52 45 46 40 42 37 69 60 64 55
Mains Output Current
Voltage, frequency
1/N/PE 230 V OR
3/PE 230 V
(180 V -0%…264 V +0%)
50/60 Hz
(48 Hz -0%…62 Hz +0%)
3/PE 230 V
(180 V -0%…264 V +0%)
50/60 Hz
(48 Hz -0%…62 Hz +0%)
3/PE 400/480 V
(320 V -0%…528 V +0%)
50/60 Hz
(48 Hz -0%…62 Hz +0%)
Technical data
(3)
Current
(3)
[A]
[A]
I
N
(1)
[A]
(2)
1~ 3~ 3~ 3~ 3~ 3~
4.7 2.7 2.2 2.0 3.3 3.0
13.5 12.0 11.0 18.0 16.5
400V 480V 400V 480V 400V 480V 400V 480V 400V 480V
1.6 1.4 1.3 1.1 1.2 1.0 2.0 1.7 1.8 1.5
[A]
I
max
(1)
for 60 s
[A]
(2)
(1) For rated mains voltage and carrier frequencies 4, 6, and 8 kHz
(2) For rated mains voltage and carrier frequency 10 kHz
(3) Maximum current is a function of setting C90 (input voltage selection)
Lenze 13466183 EDBSC03 v7 9
Page 10

Installation
3 Installation
3.1 Mechanical Installation
3.1.1 Dimensions and Mounting
A
B
C
D
4 x M4
1.2 Nm
10 lb-in
4 x M6
2.8 Nm
24 lb-in
b2
b
b1
s2s2
s1 s1
a1
a
Type
ESMD371C2YXA, ESMD371C4TXA 93 84 146 128 17 100 15 50 0.6
ESMD751C2YXA, ESMD751C4TXA 93 84 146 128 17 120 15 50 0.9
ESMD112C4TXA 93 84 146 128 17 146 15 50 1.0
ESMD112C2YXA 114 105 146 128 17 133 15 50 1.4
ESMD152C4TXA 11 4 105 146 128 17 122 15 50 1.4
ESMD222C4TXA 11 4 105 146 128 17 139 15 50 1.4
ESMD152C2YXA, ESMD222C2YXA
ESMD302C2TXA
ESMD302C4TXA
ESMD402C2TXA
ESMD402C4TXA, ESMD552C4TXA
ESMD552C2TXA, ESMD752C2TXA
ESMD752C4TXA, ESMD113C4TXA
ESMD113C2TXA, ESMD153C2TXA
ESMD153C4TXA... ESMD223C4TXA
a
[mm]
114 105 146 128 17 171 15 50 2.0
114 105 146 100 17 171 15 50 2.0
146 137 197 140 17 182 30 100 3.2
195 183 248 183 23 203 30 100 6.4
c
a1
[mm]b [mm]b1 [mm]b2 [mm]c [mm]
smd402
s1
[mm]s2 [mm]m [kg]
WARNING!
Drives must not be installed where subjected to adverse environmental conditions
such as: combustible, oily, or hazardous vapors or dust; excessive moisture;
excessive vibration or excessive temperatures. Contact Lenze for more information.
10 Lenze 13466183 EDBSC03 v7
Page 11

Installation
3.2 Electrical Installation
3.2.1 Installation according to EMC Requirements
EMC
Compliance with EN 61800-3/A11
Noise emission
Compliance with limit value class A according to EN 55011 if installed in a control
cabinet with the appropriate footprint lter and the motor cable length does not
exceed 10m
Screen clamps
A
Control cable
B
Low-capacitance motor cable
C
(core/core < 75 pF/m, core/screen < 150 pF/m)
Electrically conductive mounting plate
D
Filter
E
3.2.2 Fuses/Cable Cross-Sections
Type
Fuse Miniature
[A] [A]
ESMD371C2YXA 10 C10 10 2.5 14
ESMD751C2YXA 16 C16 15 2.5 14
1/N/PE
ESMD112C2YXA 20 C20 20 4 12
ESMD152C2YXA 25 C25 25 6 12
ESMD222C2YXA 32 C32 30 4 10
ESMD371C2YXA ... ESMD751C2YXA
ESMD371C4TXA ... ESMD222C4TXA
ESMD112C2YXA, ESMD152C2YXA
ESMD302C4TXA
ESMD222C2YXA 16 C16 15 2.5 12
ESMD402C4TXA 16 C16 15 2.5 14
ESMD302C2TXA
ESMD552C4TXA
3/PE
ESMD402C2TXA
ESMD752C4TXA
ESMD552C2TXA, ESMD113C4TXA 40 C40 35 6 8
ESMD752C2TXA, ESMD153C4TXA 50 C50 45 10 8
ESMD183C4TXA 63 C63 60 16 6
ESMD113C2TXA, ESMD223C4TXA 80 C80 70 16 6
ESMD153C2TXA 100 C100 90 16 4
(1) Observe the applicable local regulations.
(2) Pulse-current or universal-current sensitive earth leakage circuit breaker.
(3) UL Class CC or T fast-acting current-limiting type fuses, 200,000 AIC, required. Bussman KTK-R, JJN, JJS or equivalent.
(4) Connection without end ferrules or with attached pin end connectors.
(5) Installations with high fault current due to large supply mains may require a type D circuit breaker.
(6) Thermomagnetic type breakers preferred.
10 C10 10 2.5 14
16 C16 12 2.5 14
20 C20 20 4 12
25 C25 25 6 10
Recommendations
circuit
(5)
breaker
(3)
Fuse
or
Breaker
(N. America)
[A]
B
(1)
Input Power Wiring
(6)
(L1, L2/N, L3, PE)
[mm²] [AWG]
A
C
E
D
Tmd005
E.l.c.b.
> 30 mA
(2)
Lenze 13466183 EDBSC03 v7 11
Page 12

Installation
WARNING!
Per UL requirements, use a FUSE (not a circuit breaker) for 240VAC drives requiring
>40A protection and for 480VAC & 600VAC drives requiring >32A protection.
Observe the following when using E.l.c.b:
• Installation of E.l.c.b only between supplying mains and controller.
• The E.l.c.b can be activated by:
− capacitive leakage currents between the cable screens during operation (especially with
long, screened motor cables)
− connecting several controllers to the mains at the same time
− RFI lters
3.2.3 Connection Diagram
0.2 Nm/ 2 lb-in
6 mm /0.24 in
< 1mm2 /AWG 26…16
_
L2/N
+12V
E1
E3 7
E2
E1 E2
+
+12 VDC - 0 %
…
+30 VDC + 0 %
3/PE 180V - 0% … 264V + 0 %
48 Hz … 62 Hz
L1
L2
L3
N
PE
L1
COM
K14
K12
62
AOUT
728
E3
-
3/PE 320V - 0 % … 528V + 0 %
48 Hz … 62 Hz
L1
L2
L3
N
PE
L3
L2
PE
PE
L1 L2 L3
U V W
M
3~
0.5 Nm/ 4.5 lb-in
PES
PES
PES
PES
6 mm /0.24 in
1.2 Nm/ 10 lb-in
9 mm /0.35 in
1/N/PE 180V - 0% … 264V + 0 %
48 Hz … 62 Hz
L1
L2
L3
N
PE
L1
L2/N
CAN
GND
LH
7
0 … 20 mA
4 … 20 mA
8
2/PE 180V - 0% … 264V + 0 %
48 Hz … 62 Hz
L1
L2
L3
N
PE
L1
+10V
AIN
COM
2098728
DANGER!
• Hazard of electrical shock! Circuit potentials are up to 240 VAC above earth
ground. Capacitors retain charge after power is removed. Disconnect power and
wait until the voltage between B+ and B- is 0 VDC before servicing the drive.
• Do not connect mains power to the output terminals (U,V,W)! Severe damage to
the drive will result.
• Do not cycle mains power more than once every three minutes. Damage to the
drive will result.
2.0 Nm/ 18 lb-in
13 mm /0.5 in
C0002
12 Lenze 13466183 EDBSC03 v7
Page 13

3.2.4 Control Terminals
Terminal Data for control connections (printed in bold = Lenze setting)
For reliable communication make sure terminal
CAN_GND is connected to CAN network
CAN_GND
CAN_L
CAN_H
28
7
8
9
20
E1
E2
E3
7
62
K14
K12
CAN earth ground
CAN low If controller is located at either end of the network,
CAN high
Digital input Start/Stop
Reference potential
Analog input
0 … 10 V (changeable under C34)
Internal DC supply for setpoint potentiometer +10 V, max. 10 mA
Internal DC supply for digital inputs +12 V, max. 20 mA
Digital input congurable with CE1
Activate fixed setpoint 1 (JOG1)
Digital input congurable with CE2
Direction of rotation
Digital input/output congurable with CE3
Activate DC injection brake (DCB)
Reference potential
Analog output congurable with c08 & c11
Relay output (normally-open contact)
Congurable with C08
Fault (TRIP)
GND/common. If only two wires are used (CAN_H
and CAN_L) in the network, connect CAN_GND to
chassis/earth ground.
a terminating resistor (120Ω typical) should be
connected across CAN_L and CAN_H
LOW = Stop (OFF)
HIGH = Run Enable
input resistance: >50 kΩ
(with current signal: 250Ω)
HIGH = JOG1 active
LOW = CW rotation
HIGH = CCW rotation
HIGH = DCB active
AC 250 V / 3 A
DC 24 V / 2 A … 240 V / 0.22 A
Installation
Ri = 3.3 kΩ
Ri = 3.3 kΩ
LOW = 0 … +3 V, HIGH = +12 … +30 V
Protection against contact
• All terminals have basic isolation (single insulating distance)
• Protection against contact can only be ensured by additional measures (i.e. double insulation)
Lenze 13466183 EDBSC03 v7 13
Page 14

Commissioning
4 Commissioning
4.1 Parameter Setting
Status/ fault messages Change parameters
NOTE
If the password function is enabled, the password must be entered into C00 to
access the parameters. C00 will not appear unless the password function is enabled.
See C94.
C0003
4.2 Electronic Programming Module (EPM)
The EPM contains the controller’s memory. Whenever parameter settings are changed,
the values are stored in the EPM. It can be removed, but must be installed for the
controller to operate (a missing EPM will trigger an F1 fault). The controller ships with
Tmd007
An optional EPM Programmer (model EEPM1RA ) is available that allows: the controller to be
programmed without power; OEM settings to be default settings; fast copying of EPMs when multiple
controllers require identical settings. It can also store up to 60 custom parameter les for even faster
controller programming.
14 Lenze 13466183 EDBSC03 v7
protective tape over the EPM that can be removed after installation.
Page 15

Commissioning
4.3 Parameter Menu
Code Possible Settings
No. Name
Password entry 0 0 999 Visible only when password is active
C00
Setpoint and control
C01
source
Load Lenze setting 0 No action/loading complete • C02 = 1...4 only possible with
C02
Lenze
Selection
(see C94)
0 Setpoint source: Control conguration:
0 Analog input (terminal 8; see C34) Control = terminals
1 Code c40
2 CANopen Control = terminals
3 CANopen Control = CANopen
1 Load 50 Hz Lenze settings
2 Load 60 Hz Lenze settings
3 Load OEM settings (if present)
4 Translate
WARNING!
C02 = 1...3 overwrites all settings! TRIP circuitry may be disabled! Check codes
CE1...CE3.
NOTE
If an EPM that contains compatible data from a previous software version is
installed, C02 = 4 converts the data to the current version.
Programming = keypad/limited CANopen
Monitoring = CANopen
Note: RPDOs not processed in these
modes
Programming = CANopen/keypad
Monitoring = CANopen
Note: Only frequency setpoint part of
RPDOs are processed in this mode
Programming = CANopen/keypad
Monitoring = CANopen
OFF or 1nh
• C02 = 2 : C11, C15 = 60 Hz
IMPORTANT
Lenze 13466183 EDBSC03 v7 15
Page 16

Commissioning
Code Possible Settings
No. Name
Conguration -
CE1
Digital input E1
Conguration -
CE2
Digital input E2
Conguration -
CE3
Digital input/output
E3
Conguration -
C08
Relay output
(terminals K14 and
K12)
Minimum output
C10
frequency
Lenze
Selection
1 1 Activate xed setpoint 1 (JOG1)
2 Activate xed setpoint 2 (JOG2)
3 DC braking (DCB) See also C36
4 Direction of rotation LOW = CW rotation
5 Quick stop Controlled deceleration to standstill, active
6 CW rotation CW rotation = LOW and CCW rotation =
4 7 CCW rotation
8 UP (setpoint ramp-up)
9 DOWN (setpoint ramp-down)
10 TRIP set
11 TRIP reset See also c70
12 No action can be used if Ex inputs are used only as
3 1...12 (same as above)
13...19 (reserved)
20 Ready
21 Fault
22 Motor is running
23 Motor is running - CW rotation
24 Motor is running - CCW rotation
25 Output frequency = 0 Hz
26 Frequency setpoint reached
27 Threshold (C17) exceeded
28 Current limit reached • in either motor or generator mode
29 Dynamic Braking
30 CANopen Control • output controlled by RPDO (h66,h76 = 4)
NOTE
A CFG fault will occur under the following conditions:
• E1...E3 settings are duplicated (each setting can only be used once)
• One input is set to UP and another is not set to DOWN, or vice-versa
1 Relay is energized if
0 Ready
1 Fault
2 Motor is running
3 Motor is running - CW rotation
4 Motor is running - CCW rotation
5 Output frequency = 0 Hz
6 Frequency setpoint reached
7 Threshold (C17) exceeded
8 Current limit reached in either motor or generator mode
9 CANopen Control Output controlled by RPDO (h66,h76 = 4)
0.0 0.0 {Hz} 240 • Output frequency at 0% analog setpoint
IMPORTANT
• Use C37...C39 to adjust xed setpoints
• Activate JOG3: Both terminals = HIGH
HIGH = CCW rotation
LOW; Set decel rate in C13
LOW: Quick stop; Open-circuit protected
UP = LOW and DOWN = LOW: Quick
stop; Use momentary NC contacts
Active LOW, triggers EEr (motor coasts
to standstill)
NOTE: NC thermal contact from the motor
can be used to trigger this input
CANopen digital inputs
• 1...11 congures terminal E3 as an input
• 20...30 congures terminal E3 as a
current-sourcing (PNP) output rated 12
VDC / 50 mA
• C10 not active for xed setpoints or
setpoint selection via c40
16 Lenze 13466183 EDBSC03 v7
Page 17

Commissioning
Code Possible Settings
No. Name
Maximum output
C11
frequency
Acceleration time 5.0 0.0 {s} 999 • C12 = frequency change 0 Hz...C11
C12
Deceleration time 5.0 0.0 {s} 999
C13
Operating Mode 2 0 Linear characteristic with
C14
V/f reference point 50.0 25.0 {Hz} 999
C15
V
boost
min
C16
(optimization of
torque behavior)
Frequency threshold
C17
(Q
)
min
Chopper frequency 2 0 4 kHz • As chopper frequency is increased,
C18
Slip compensation 0.0 0.0 {%} 40.0 Change C21 until the motor speed no
C21
Current limit 150 30 {%} 150
C22
Accel boost 0.0 0.0 {%} 20.0 Accel boost is only active during
C24
Conguration -
C34
analog input
Lenze
Selection
50.0 7.5 {Hz} 240 • Output frequency at 100% analog
WARNING!
Consult motor/machine manufacturer before operating above rated frequency.
Overspeeding the motor/machine may cause damage to equipment and injury
to personnel!
Auto-Boost
1 Square-law characteristic with
Auto-Boost
2 Linear characteristic with constant
V
boost
min
3 Square-law characteristic with
constant V
Set the rated motor frequency
(nameplate) for standard applications
min
boost
setpoint
• C11 is never exceeded
• C13 = frequency change C11...0 Hz
• For S-ramp accel/decel, adjust c82
• Linear characteristic: for standard
applications
• Square-law characteristic: for fans
and pumps with square-law load
characteristic
• Auto boost: load-dependent output
voltage for low-loss operation
4.0 0.0 {%} 40.0
Set after commissioning: The unloaded
motor should run at slip frequency
(approx. 5 Hz), increase C16 until
motor current (C54) = 0.8 x rated motor
current
0.0 0.0 {Hz} 240 See C08, selection 7
1 6 kHz
2 8 kHz
3 10 kHz
Reference: smd rated output current
0 0 0...10 V
Reference: setpoint
motor noise is decreased
• Observe derating in Section 2.2
• Automatic derating to 4 kHz at 1.2 x I
longer changes between no load and
maximum load
• When the limit value is reached, either
the acceleration time increases or the
output frequency decreases
• When C90 = 2, max setting is 180%
acceleration
1 0...5 V
IMPORTANT
2 0...20 mA
3 4...20 mA
Voltage - DC
C36
injection brake
(DCB)
4.0 0.0 {%} 50.0 • See CE1...CE3 and c06
• Conrm motor suitability for use with DC
braking
smd006
r
Lenze 13466183 EDBSC03 v7 17
Page 18

Commissioning
Code Possible Settings
No. Name
Fixed setpoint 1
C37
(JOG 1)
Fixed setpoint 2
C38
(JOG 2)
Fixed setpoint 3
C39
(JOG 3)
Frequency setpoint 0.0 {Hz} 240 Display: Setpoint via CANopen, analog
C46
Output frequency 0.0 {Hz} 240 Display
C50
DC bus voltage 0.0 {%} 255 Display
C53
Motor current 0.0 {%} 255 Display
C54
Motor rated speed 1390 300 {RPM} 32000 Set to motor nameplate speed
C87
Motor rated
C89
frequency
Input voltage
C90
selection
User password 0 0 999
C94
Software version Display, format: x.yz
C99
Holding time -
c06
automatic DC
injection brake
(Auto-DCB)
Analog output
c08
scaling
Conguration -
c11
Analog output (62)
Lenze
Selection
20.0 0.0 {Hz} 240
30.0 0.0 {Hz} 240
40.0 0.0 {Hz} 240
input, or function UP/DOWN
50 10 {Hz} 1000 Set to motor nameplate frequency
0 Auto Automatically sets to Low (1) or High (2)
1 Low For 200 V or 400 V input
2 High For 240 V or 480 V input
NOTE
• To simplify commissioning, the Lenze setting is preset at the factory, depending on
model:
C90 = 1 for 400/480 V models
C90 = 2 for 230/240 V models
• Upon reset (C02 = 1, 2), C90 = 0. Conrm correct setting after next power-up.
Changing from “0” (no password), value
will start at 763
0.0 0.0 {s} 999
0.0 = not active
999 = continuous brake
100 1.0 999 When 10 VDC is output at terminal 62, it
0 0 None
1 Output frequency 0-10 VDC Use c08 to scale signal
2 Output frequency 2-10 VDC
3 Load 0-10 VDC
4 Load 2-10 VDC
5 CANopen Control Value set by RPDO (h66,h76 = 4)
upon next power-up, depending on input
voltage
When set to a value other than 0,
must enter password at C00 to access
parameters
• Automatic motor braking below 0.1 Hz
by means of motor DC current for the
entire holding time (afterwards: U, V, W
inhibited)
• Conrm motor suitability for use with DC
braking
will equal this value (see c11)
Example: c11 = 1 and c08 = 100:
At 50 Hz, terminal 62 = 5 VDC
At 100 Hz, terminal 62 = 10 VDC
(c08 not used for scaling)
IMPORTANT
18 Lenze 13466183 EDBSC03 v7
Page 19
Commissioning
100%
30 f
1
Code Possible Settings
No. Name
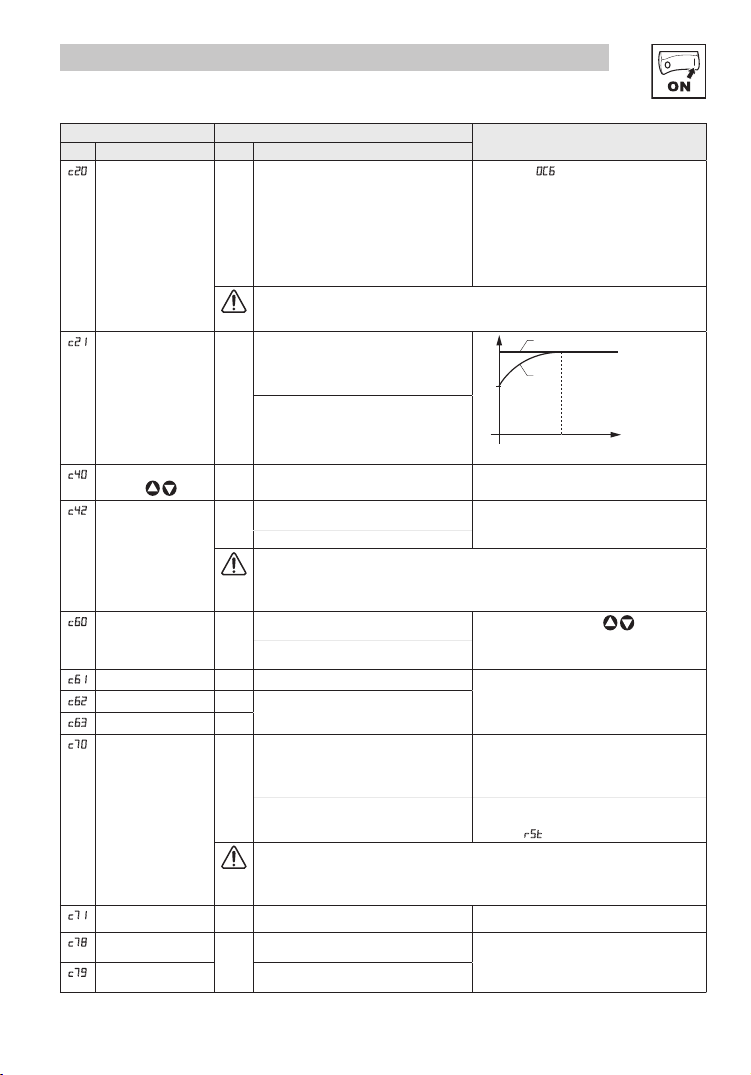
I2t switch-off (thermal
c20
motor monitoring)
Motor Overload Type 00 00 Speed Compensation
c21
Frequency setpoint
c40
via keys
Start condition
c42
(with mains on)
Mode selection
c60
for c61
Present status/error status/error message • Display
c61
Last error error message
c62
Last error but one
c63
Conguration TRIP
c70
reset (error reset)
Lenze
Selection
100 30 {%} 100
100% = smd rated output current
WARNING!
Maximum setting is rated motor current (see nameplate). Does not provide full
motor protection!
Reduces the allowable continuous
current when operating below
30Hz.
01 No Speed Compensation
Example: Motor is cooled by forced
ventilation as apposed to shaft
mounted, self cooling fans.
0.0 0.0 {Hz} 240 Only active if C01 = 1
1 0 Start after LOW-HIGH change at
terminal 28
1 Auto start if terminal 28 = HIGH
WARNING!
Automatic starting/restarting may cause damage to equipment and/or injury to
personnel! Automatic starting/restarting should only be used on equipment that is
inaccessible to personnel.
0 0 Monitoring only
1 Monitoring and editing
0 0 TRIP reset after LOW-HIGH change
at terminal 28, mains switching, or
after LOW-HIGH change at digital
input “TRIP reset”
1 Auto-TRIP reset • Auto-TRIP reset after the time set in c71
WARNING!
Automatic starting/restarting may cause damage to equipment and/or injury to
personnel! Automatic starting/restarting should only be used on equipment that is
Auto-TRIP reset delay 0.0 0.0 {s} 60.0 See c70
c71
Operating time
c78
counter
Mains connection
c79
time counter
inaccessible to personnel.
Display: Total time in status “Start” 0...999 h: format xxx
Display: Total time of mains = on
IMPORTANT
• Triggers 0C6 fault when motor current
exceeds c20 for too long
• Correct setting = (motor nameplate
current) / (smd output current rating) X
100%
• Example: motor = 6.4 amps and smd =
7.0 amps; correct setting = 91%
(6.4 / 7.0 = 0.91 x 100% = 91%)
Ir
0
60%
Ir: rated current (%), f: motor frequency (Hz)
See also c70
c60 = 1 allows the keys to adjust
speed setpoint (c40) while monitoring c61
• Refer to Section 5 for explanation of
status and error messages
• More than 8 errors in 10 minutes will
trigger rSt fault
1000...9999 h: format x.xx (x1000)
10000...99999 h: format xx.x (x1000)
Lenze 13466183 EDBSC03 v7 19
Page 20

Commissioning
Code Possible Settings
No. Name
Guard time 0 0 {ms} 65535 • h42 x h43 = node life time
h42
Life time factor 0 0 255
h43
Guard time event
h44
reaction
Error behavior 1 0 Transition to pre-operational (only if
h45
Message monitoring
h46
time
Message monitoring
h47
time out reaction
Monitoring timeout
h48
status
CAN controller
h49
status value (8-bit
value)
(1)
CAN address
h50
(Node ID)
Lenze
Selection
CANopen / System bus parameters
• If RTR frame with ID = 0x700 + Node ID
0 0 Not active
1 Inhibit
2 Quick stop
3 Trip fault FC3
current state is operational)
1 No state change
2 Transition to stopped
0 0 {ms} 65535 • h46 and h47 can be used to monitor
0 0 Not active
1 Inhibit
2 Quick stop
3 Trip fault FC3
Bits: • Read-only
0 Guard time timeout
1 No valid message received
2 RPD01 timeout
3 RPD02 timeout
4 CAN initialization fault
5 reserved Bits 5…7 create a binary number from 0 to
6 reserved
7 reserved
0 Receive/transmit error warning ag
(96 or more errors)
1 Receive error warning ag (96 or
more receive errors)
2 Transmit error warning ag (96 or
more transmit errors)
3 Receive error passive ag (128 or
more receive errors)
4 Transmit error passive ag (128 or
more transmit errors)
5 Bus-off error ag
6 Receive buffer 0 overow ag
7 Receive buffer 1 overow ag
1 1 127 If h53 = 0, 1: maximum setting = 63
(h50) is not received during the node life
time, the controller will react according
to h44
• If heart beat message is enabled, the
guard function is disabled
• h44 is only active when C01 = 3 and
h42 x h43 > 0
Species action taken by the drive when it
encounters a communication error
(ex. Node guarding event or Bus Off)
all valid messages (e.g. SDO, SYNC,
PDO...)
• h46 = 0 or h47 = 0 disables message
monitoring function
• h47 is only active when C01 = 3
• Indicates cause of FC3 fault, inhibit, or
quick stop (depending on the settings of
h44, h47, h65, h75)
7 indicating the number of overows in the
receive buffers (h49 bits 6 and 7)
• Read-only
• CAN warnings and errors
IMPORTANT
20 Lenze 13466183 EDBSC03 v7
Page 21

Commissioning
Code Possible Settings
No. Name
(1)
CAN baud rate 5 0 10 kbps (max distance = 5000m)
h51
Lenze
Selection
IMPORTANT
1 20 kbps (max distance = 2500m)
2 50 kbps (max distance = 1000m)
3 125 kbps (max distance = 500m)
4 250 kbps (max distance = 250m)
5 500 kbps (max distance = 100m)
(1)
CAN Boot-up mode 0 0 Pre-operational • h52 = 0: Controller enters pre-
h52
1 Operational
2 Pseudo master
(1)
Parameter channel 2
h53
(SDO#2 support for
Lenze Systembus)
(1)
SYNC COB ID 128 0 2047
h54
(1)
Boot up time 3000 0 {ms} 65535 Controller sends “NMT start all nodes”
h55
Heartbeat time 2000 0 {ms} 65535 • Producer heartbeat time
h56
Reset CAN node 0 0 No action On transition from 0 to 1, re-initializes
h58
0 0 Enable: Node ID range (1...63) with
default COB ID for SYNC, RPDO,
and TPDO
1 Enable: Node ID range (1...63) with
programmable COB ID using h54,
h60, h70, h80, h90
2 Disable: Node ID range (1...127)
with default COB ID for SYNC,
RPDO, and TPDO
3 Disable: Node ID range (1...127)
with programmable COB ID using
h54, h60, h70, h80, h90
1 Reset CAN communication
WARNING!
CAN re-initialization may activate new RPDO congurations, which can result in
changes to present controller state, including starting.
CANopen status 0 Not initialized • Read-only
h59
1 Initializing
2 Stopped
operational state
• h52 = 1: Controller enters operational
state automatically (Slave with autostart
enabled 0x1F80 NMT bootup - bit 2)
• h52 = 2: Controller sends “NMT start
all nodes” after boot-up time (h55)
and enters operational state (not NMT
master)
• h53 = 0, 1: CAN address 1...63;
64...127 used for SDO2
• SDO#1 COB ID = 1536 + Node ID
• SDO#2 COB ID = 1600 + Node ID (if
enabled)
Note: Controller does not generate SYNC
object
message after this delay (active only when
h52 = 2)
• h56 = 0 disables heartbeat transmission
CAN controller and activates changes
made to parameters marked with
• Note: RPDOs and TPDOs are only
active in operational state (h59 = 5)
3 Pre-operational
4 reserved
5 Operational
(1)
(1)
These parameters take effect only after power-up, h58 reset, “NMT reset node”, or “NMT reset communication services”
Lenze 13466183 EDBSC03 v7 21
Page 22

Commissioning
Code Possible Settings
No. Name
Lenze
Selection
IMPORTANT
RPDO#1 configuration parameters
(1)
RPDO#1 COB ID 513 0 2047 If h53 = 0, 2: Setting will change to
h60
(1)
RPDO#1 enable/
h61
disable
RPDO#1
h62
transmission type
RPDO#1 event
h64
monitoring timer
RPDO#1 time out
h65
reaction
1 0 Disable
1 Enable
255 0 255 • h62 = 0...240: transfer on every SYNC
0 0 {ms} 65535 h64 = 0: monitoring disabled
0 0 Not active Only active when C01 = 3
1 Inhibit
512 + Node ID during power-up or h58
reset.
received.
• h62 = 254, 255: immediate transfer
2 Quick stop
3 Trip fault FC3
(1)
RPDO#1 mapping
h66
(see RPDO mapping
details)
RPDO#1 status 0 255 • Read-only
h69
0 0 C0135 control word + C46 signed C46 scaling: + 50 = + 1.0 Hz
1 C0135 control word + C46 unsigned C46 scaling: 10 = 1.0 Hz
2 402 Drives and Motion Control:
PDO Controlword 0x6040
3 402 Drives and Motion Control:
PDO Controlword 0x6040 +
vl target velocity 0x6042
4 C0135 Controlword +
C46 signed and scaled +
Digital output + analog output
• vl target velocity units = signed RPM
• RPM calculation based on C87 and C89
C46 scaling: +/- 16384 = C11
• Number of received RPDO#1 messages
• Above 255, starts over at 0
(1)
These parameters take effect only after power-up, h58 reset, “NMT reset node”, or “NMT reset communication services”
22 Lenze 13466183 EDBSC03 v7
Page 23

Commissioning
Code Possible Settings
No. Name
Lenze
Selection
IMPORTANT
RPDO#2 configuration parameters
(1)
RPDO#2 COB ID 769 0 2047 If h53 = 0, 2: Setting will change to
h70
(1)
RPDO#2 enable/
h71
disable
RPDO#2
h72
transmission type
RPDO#2 event
h74
monitoring timer
RPDO#2 time out
h75
reaction
0 0 Disable
1 Enable
255 0 255 • h72 = 0...240: transfer on every SYNC
0 0 {ms} 65535 h74 = 0: monitoring disabled
0 0 Not active Only active when C01 = 3
1 Inhibit
768 + Node ID during power-up or h58
reset.
received
• h72 = 254, 255: immediate transfer
2 Quick stop
3 Trip fault FC3
(1)
RPDO#2 mapping
h76
(see RPDO mapping
details)
RPDO#2 status 0 255 • Read-only
h79
0 0 C0135 control word + C46 signed C46 scaling: + 50 = + 1.0 Hz
1 C0135 control word + C46 unsigned C46 scaling: 10 = 1.0 Hz
2 402 Drives and Motion Control:
PDO Controlword 0x6040
3 402 Drives and Motion Control:
PDO Controlword 0x6040 +
vl target velocity 0x6042
4 C0135 Controlword +
C46 signed and scaled +
Digital output + analog output
• vl target velocity units = signed RPM
• RPM calculation based on C87 and C89
C46 scaling: +/- 16384 = C11
• Number of received RPDO#2 messages
• Above 255, starts over at 0
(1)
These parameters take effect only after power-up, h58 reset, “NMT reset node”, or “NMT reset communication services”
Lenze 13466183 EDBSC03 v7 23
Page 24

Commissioning
Code Possible Settings
No. Name
Lenze
Selection
IMPORTANT
TPDO#1 configuration parameters
(1)
TPDO#1 COB ID 385 0 2047 If h53 = 0, 2: Setting will change to
h80
(1)
TPDO#1 enable/
h81
disable
1 0 Disable
1 Enable (no RTR)
384 + Node ID during power-up or h58
reset.
2 Enable (with RTR) Enable individual polling of TPDO#1
TPDO#1
h82
transmission type
(1)
TPDO#1 inhibit time 50 0 {0.1 ms} 65535 Sets minimum time between TPDO#1
h83
TPDO#1 event timer 0 0 {ms} 65535 • Sets the xed interval for TPDO#1
h84
(1)
TPDO#1 mapping
h86
(see TPDO mapping
details)
TPDO#1 WORD0
h87
bit mask
TPDO#1 status 0 255 • Read-only
h89
255 0 255 • h82 = 0...240: Transmit TPDO#1 after
every nth SYNC received + Event + RTR
(if enabled)
• h82 = 253: Event + RTR (if enabled)
• h82 = 254: COS triggered (WORD0 of
TPDO#1) + Event + RTR (if enabled)
• h82 = 255: Event + RTR (if enabled)
transmissions (h83 = 50 = 5.0 ms)
transmission
• h84 = 0: disables event timer
0 0 C0150 + C50 signed C50 scaling: + 50 = + 1.0 Hz
1 C0150 + C50 unsigned C50 scaling: 10 = 1.0 Hz
2 Controller status in C0135 format +
frequency setpoint signed
3 Controller status in C0135 format +
frequency setpoint unsigned
4 402 Device prole: Statusword
0x6041
5 402 Device prole: Statusword
0x6041 + vl control effort 0x6044
6 C0150 + C50 signed and scaled +
digital input + analog input
65535
0 65535 • COS (change of state) bit mask applied
Can be used to control other controllers
(see example in section 4.5)
• vl control effort units = signed RPM
• RPM calculation based on C87 and C89
C50 scaling: +/- 16384 = C11
to WORD0 of TPDO selected by h86.
• h87 = 65535: activates all bits of
WORD0 for COS triggering
• h87 = 0: disables COS triggering
• Number of transmitted TPDO#1
messages
• Above 255, starts over at 0
(1)
These parameters take effect only after power-up, h58 reset, “NMT reset node”, or “NMT reset communication services”
24 Lenze 13466183 EDBSC03 v7
Page 25

Commissioning
Code Possible Settings
No. Name
Lenze
Selection
IMPORTANT
TPDO#2 configuration parameters
(1)
TPDO#2 COB ID 641 0 2047 If h53 = 0, 2: Setting will change to
h90
(1)
TPDO#2 enable/
h91
disable
0 0 Disable
1 Enable (no RTR)
640 + Node ID during power-up or h58
reset.
2 Enable (with RTR) Enable individual polling of TPDO#2
TPDO#2
h92
transmission type
(1)
TPDO#2 inhibit time 50 0 {0.1 ms} 65535 Sets minimum time between TPDO#2
h93
TPDO#2 event timer 0 0 {ms} 65535 • Sets the xed interval for TPDO#2
h94
(1)
TPDO#2 mapping
h96
(see TPDO mapping
details)
TPDO#2 WORD0
h97
bit mask
TPDO#2 status 0 255 • Read-only
h99
255 0 255 • h92 = 0...240: Transmit TPDO#2 after
every nth SYNC received + Event + RTR
(if enabled)
• h92 = 253: Event + RTR (if enabled)
• h92 = 254: COS triggered (WORD0 of
TPDO#2) + Event + RTR (if enabled)
• h92 = 255: Event + RTR (if enabled)
transmissions (h93 = 50 = 5.0 ms)
transmission
• h94 = 0: disables event timer
0 0 C0150 + C50 signed C50 scaling: + 50 = + 1.0 Hz
1 C0150 + C50 unsigned C50 scaling: 10 = 1.0 Hz
2 Controller status in C0135 format +
frequency setpoint signed
3 Controller status in C0135 format +
frequency setpoint unsigned
4 402 Device prole: Statusword
0x6041
5 402 Device prole: Statusword
0x6041 + vl control effort 0x6044
6 C0150 + C50 signed and scaled +
digital input + analog input
65535
0 65535 • COS (change of state) bit mask applied
Can be used to control other controllers
(see example in section 4.5)
• vl control effort units = signed RPM
• RPM calculation based on C87 and C89
C50 scaling: +/- 16384 = C11
to WORD0 of TPDO selected by h96.
• h97 = 65535: activates all bits of
WORD0 for COS triggering
• h97 = 0: disables COS triggering
• Number of transmitted TPDO#2
messages
• Above 255, starts over at 0
Power up state 0 0 Quick stop Selects controller power up state when
n20
(1)
These parameters take effect only after power-up, h58 reset, “NMT reset node”, or “NMT reset communication services”
1 Inhibit
C01 = 3 (CANopen control)
Lenze 13466183 EDBSC03 v7 25
Page 26
Commissioning
4.4 CANopen Mapping Details
4.4.1 RPDO Mapping (h66 / h76)
Bit h66 / h76 setting = 0
JOG1, JOG2, JOG3
0
0 = C46 active
1 = JOG1 (C37) active
2 = JOG2 (C38) active
1 1
3 = JOG3 (C39) active
Direction of rotation
2
0 = CW (forward)
1 = CCW (reverse)
Quick stop
3
0 = Quick stop not active
1 = Quick stop active
4 reserved 4 reserved
5 reserved 5 reserved
6 reserved 6 reserved
7 reserved 7 reserved
8 reserved 8 reserved
Controller inhibit
9
0 = No controller inhibit
WORD0 - C0135 control word
1 = Controller inhibit
10 reserved 10 reserved
TRIP reset
11
TRIP reset on transition from 0 to 1
12 reserved 12 reserved
13 reserved 13 reserved
DC brake
14
0 = DC brake not active
1 = DC brake active
15 reserved 15 reserved
• Signed frequency setpoint written to C46
• Frequency setpoint [Hz] = WORD1 value / 50
• Example 1: Requested setpoint = CW at 34.5 Hz
= 34.5 x 50 = 1725 = 0x06BD
• Example 2: Requested setpoint = CCW at 44.5
WORD1
Hz = - (44.5 x 50) = -2225 = 0xF74F
Note: Setpoint sign overrides Bit 2 in WORD0
Bit h66 / h76 setting = 1
0
2
3
9
WORD0 - C0135 control word
11
14
• Unsigned frequency setpoint written to C46
• Frequency setpoint [Hz] = WORD1 value / 10
• Example: Requested setpoint = CW at 34.5 Hz =
34.5 x 10 = 0x0159
• Direction is set by bit 2 in WORD0
WORD1
JOG1, JOG2, JOG3
0 = C46 active
1 = JOG1 (C37) active
2 = JOG2 (C38) active
3 = JOG3 (C39) active
Direction of rotation
0 = CW (forward)
1 = CCW (reverse)
Quick stop
0 = Quick stop not active
1 = Quick stop active
Controller inhibit
0 = No controller inhibit
1 = Controller inhibit
TRIP reset
TRIP reset on transition from 0 to 1
DC brake
0 = DC brake not active
1 = DC brake active
reserved (not evaluated)
WORD2
reserved (not evaluated)
WORD3
26 Lenze 13466183 EDBSC03 v7
Page 27

Commissioning
Bit h66 / h76 setting = 2
0 = switch off
0
1 = switch on
0 = disable voltage
1
1 = enable voltage
0 = execute quick stop
2
1 = not quick stop
0 = inhibit
3
1 = enable
(2)
(2)
(2)
Bit h66 / h76 setting = 3
0 = switch off
0
1 = switch on
0 = disable voltage
1
1 = enable voltage
0 = execute quick stop
2
1 = not quick stop
0 = inhibit
3
1 = enable
(2)
(2)
(2)
4 reserved 4 reserved
5 reserved 5 reserved
6 reserved 6 reserved
7 fault reset on transition from 0 to 1 7 fault reset on transition from 0 to 1
0 = execute motion
8
1 = halt
(2)
0 = execute motion
8
1 = halt
(2)
9 reserved 9 reserved
10 reserved 10 reserved
WORD0 - Controlword 0x6040
Direction of rotation
11
0 = CW (forward)
1 = CCW (reverse)
JOG1, JOG2, JOG3
12
0 = C46 active
1 = JOG1 (C37) active
2 = JOG2 (C38) active
13 13
3 = JOG3 (C39) active
DC brake
14
0 = DC brake not active
1 = DC brake active
WORD0 - Controlword 0x6040
Direction of rotation
11
0 = CW (forward)
1 = CCW (reverse)
JOG1, JOG2, JOG3
12
0 = C46 active
1 = JOG1 (C37) active
2 = JOG2 (C38) active
3 = JOG3 (C39) active
DC brake
14
0 = DC brake not active
1 = DC brake active
15 reserved 15 reserved
• Signed vl target velocity 0x6042 (RPM)
• RPM is calculated based on C87 and C89
• Example 1 (C87 = 1390 RPM, C89 = 50 Hz):
Requested setpoint CW at 25.0 Hz =
25.0 x 1390/50 = 695 = 0x02B7
WORD1
• Example 2 (C87 = 1390 RPM, C89 = 50 Hz):
Requested setpoint CCW 44.5 Hz =
- (44.5 x 1390/50) = - 1237 = 0xFB2B
(2)
Implemented as inhibit; all indicated bits must be in opposite state for controller to be enabled.
Lenze 13466183 EDBSC03 v7 27
Page 28

Commissioning
Bit h66 / h76 setting = 4
JOG1, JOG2, JOG3
0
0 = C46 active
1 = JOG1 (C37) active
2 = JOG2 (C38) active
1
3 = JOG3 (C39) active
Direction of rotation
2
0 = CW (forward)
1 = CCW (reverse)
Quick stop
3
0 = Quick stop not active
1 = Quick stop active
4 reserved
5 reserved
6 reserved
7 reserved
8 reserved
Controller inhibit
WORD0 - C0135 control word
9
0 = No controller inhibit
1 = Controller inhibit
10 reserved
TRIP reset
11
TRIP reset on transition from 0 to 1
12 reserved
13 reserved
DC brake
14
0 = DC brake not active
1 = DC brake active
15 reserved
• Speed signed scaled +/- 16384 == C11
(max frequency)
• Example 1: Requested setpoint = CW at
34.5 Hz and C11 = 50.0Hz:
Setpoint = roundup(34.5 * 16384/50) = 11305
= 0x2C29
WORD1
• Example 2: Requested setpoint = CCW at
44.5 Hz and C11 = 50.0Hz:
= - roundup(44.5 * 16384/50) = -14582 = 0xC70A
Note: Setpoint sign overrides Bit 2 in WORD0
Digital outputs (RELAY + E3)
• Bit 0 - RELAY - (if C08 set to selection 9)
• Bit 1 - E3 (if CE3 set to selection 30)
WORD2
Analog output 0-1000 -- corresponds to 0-10V
ex. 600 -> 6.0V (if c11 set to selection 5)
WORD3
28 Lenze 13466183 EDBSC03 v7
Page 29

4.4.2 TPDO Mapping (h86 / h96)
Commissioning
Bit h86 / h96 setting = 0
0 reserved 0 reserved
0 = Pulses to power stage enabled
1
1 = Pulses to power stage Inhibited
0 = Current limit not reached
2
1 = Current limit reached
3 reserved 3 reserved
0 = Actual frequency < > setpoint
4
1 = Actual frequency = setpoint
0 = Not above threshold (C17)
5
1 = Above threshold (C17)
0 = Actual frequency < > 0 Hz
6
1 = Actual frequency = 0 Hz
0 = No controller inhibit
7
1 = Controller inhibit
8
Controller status
9 9
0 = no fault
WORD0 - C0150 Status word
10 10
8 = fault present
11 11
0 = No overtemperature warning
12
1 = Overtemperature warning
0 = No DC bus overvoltage
13
1 = DC bus overvoltage
Direction of rotation
14
0 = CW (forward)
1 = CCW (reverse)
0 = Not ready
15
1 = Ready (no faults)
• Signed output frequency read from C50
• Scaling = C50 x 50
• Example 1: CW at 34.5 Hz = 34.5 x 50 = 1725 =
0x06BD
WORD1
• Example 2: CCW at 44.5 Hz = - (44.5 x 50) = -
2225 = 0xF74F
Bit h86 / h96 setting = 1
1
2
4
5
6
7
8
WORD0 - C0150 Status word
12
13
14
15
• Unsigned output frequency read from C50
• Scaling = C50 x 10
• Example: CW at 34.5 Hz = 34.5 x 10 = 345 =
0x0159
WORD1
• Direction is indicated by bit 14 in WORD0
0 = Pulses to power stage enabled
1 = Pulses to power stage Inhibited
0 = Current limit not reached
1 = Current limit reached
0 = Actual frequency < > setpoint
1 = Actual frequency = setpoint
0 = Not above threshold (C17)
1 = Above threshold (C17)
0 = Actual frequency < > 0 Hz
1 = Actual frequency = 0 Hz
0 = No controller inhibit
1 = Controller inhibit
Controller status
0 = no fault
8 = fault present
0 = No overtemperature warning
1 = Overtemperature warning
0 = No DC bus overvoltage
1 = DC bus overvoltage
Direction of rotation
0 = CW (forward)
1 = CCW (reverse)
0 = Not ready
1 = Ready (no faults)
reserved
WORD2
reserved
WORD3
Lenze 13466183 EDBSC03 v7 29
Page 30

Commissioning
Bit h86 / h96 setting = 2
JOG1, JOG2, JOG3
0
0 = C46 active
1 = JOG1 (C37) active
2 = JOG2 (C38) active
1 1
3 = JOG3 (C39) active
Direction of rotation
2
0 = CW (forward)
1 = CCW (reverse)
Quick stop
3
0 = Quick stop not active
1 = Quick stop active
4 reserved 4 reserved
5 reserved 5 reserved
6 reserved 6 reserved
7 reserved 7 reserved
8 reserved 8 reserved
Controller inhibit
9
0 = No controller inhibit
1 = Controller inhibit
WORD0 - Controller status in C0135 format
10 reserved 10 reserved
TRIP reset
11
0 = No TRIP reset
1 = TRIP reset
12 reserved 12 reserved
13 reserved 13 reserved
DC brake
14
0 = DC brake not active
1 = DC brake active
15 reserved 15 reserved
• Signed frequency setpoint [Hz]
• Scaling = frequency setpoint [Hz] x 50
• Example 1: CW at 34.5 Hz = 34.5 x 50 = 1725 =
0x06BD
WORD1
• Example 2: CCW at 44.5 Hz = - (44.5 x 50) = -
2225 = 0xF74F
Bit h86 / h96 setting = 3
0
2
3
9
WORD0 - Controller status in C0135 format
11
14
• Unsigned frequency setpoint [Hz]
• Scaling = frequency setpoint [Hz] x 10
• Example: CW at 34.5 Hz = 34.5 x 10 = 345 =
0x0159
WORD1
• Direction is indicated by bit 2 in WORD0
JOG1, JOG2, JOG3
0 = C46 active
1 = JOG1 (C37) active
2 = JOG2 (C38) active
3 = JOG3 (C39) active
Direction of rotation
0 = CW (forward)
1 = CCW (reverse)
Quick stop
0 = Quick stop not active
1 = Quick stop active
Controller inhibit
0 = No controller inhibit
1 = Controller inhibit
TRIP reset
0 = No TRIP reset
1 = TRIP reset
DC brake
0 = DC brake not active
1 = DC brake active
reserved
WORD2
reserved
WORD3
30 Lenze 13466183 EDBSC03 v7
Page 31

Commissioning
Bit h86 / h96 setting = 4
0 = Not ready to switch on
0
1 = Ready to switch on
0 = Not switched on
1
1 = Switched on
0 = operation disabled
2
1 = operation enabled
0 = No fault
3
1 = Fault
0 = Voltage disabled
1 = Voltage enabled
4
Note: On smd controller, this is always
enabled
0 = Quick stop active
5
1 = Quick stop not active
Switch on disabled
6
On smd controller this is always 0 (switch
on enabled)
0 = No warning
7
1= Warning
8 Manufacturer specic 8 Manufacturer specic
WORD0 - Statusword 0x6041
Remote
9
0 = C01 < > 2 and 3
1 = C01 = 2 or 3
Target reached
10
0 = Setpoint not reached
1 = Setpoint reached
Internal limit
11
0 = Internal limit not active
1 = Internal limit active
12 reserved 12 reserved
13 reserved 13 reserved
14 reserved 14 reserved
15 reserved 15 reserved
Bit h86 / h96 setting = 5
0 = Not ready to switch on
0
1 = Ready to switch on
0 = Not switched on
1
1 = Switched on
0 = operation disabled
2
1 = operation enabled
0 = No fault
3
1 = Fault
0 = Voltage disabled
1 = Voltage enabled
4
Note: On smd controller, this is always
enabled
0 = Quick stop active
5
1 = Quick stop not active
Switch on disabled
6
On smd controller this is always 0 (switch
on enabled)
0 = No warning
7
1= Warning
WORD0- Statusword 0x6041
Remote
9
0 = C01 < > 2 and 3
1 = C01 = 2 or 3
Target reached
10
0 = Setpoint not reached
1 = Setpoint reached
Internal limit
11
0 = Internal limit not active
1 = Internal limit active
• Signed output frequency read from C50
• RPM is calculated based on C50, C87, and C89
• Example 1 (C87 = 1390 RPM, C89 = 50 Hz):
CW at 25.0 Hz = 25.0 x 1390/50 = 695 = 0x02B7
• Example 2 (C87 = 1390 RPM, C89 = 50 Hz):
WORD1
CCW at 44.5 Hz = - (44.5 x 1390/50) = - 1237 =
0xFB2B
Lenze 13466183 EDBSC03 v7 31
Page 32

Commissioning
Bit h86 / h96 setting = 6
0 reserved
0 = Pulses to power stage enabled
1
1 = Pulses to power stage Inhibited
0 = Current limit not reached
2
1 = Current limit reached
3 reserved
0 = Actual frequency < > setpoint
4
1 = Actual frequency = setpoint
0 = Not above threshold
5
1 = Above threshold (C17)
0 = Actual frequency < > 0 Hz
6
1 = Actual frequency = 0 Hz
0 = No controller inhibit
7
1 = Controller inhibit
8
Controller status
9
0 = no fault
WORD0 - C0150 Status word
10
8 = fault present
11
0 = No overtemperature warning
12
1 = Overtemperature warning
0 = No DC bus overvoltage
13
1 = DC bus overvoltage
Direction of rotation
14
0 = CW (forward)
1 = CCW (reverse)
0 = Not ready
15
1 = Ready (no faults)
• Signed output frequency read from C50
signed scaled +/- 16384 = C11 (max frequency)
• Scaling = C50*16384/C11
• Example 1: WORD1 = 0x2C29, C11 = 50.0Hz
Direction = Sign(0x2C29) = CW
Frequency = ABS(0x2C29) * C11 /16384
= 11305*50/16384 = 34.5 Hz CW
WORD1
• Example 2: WORD1 = 0xC70A, C11 = 50.0Hz
Direction = Sign(0xC70A) = CCW
Frequency = ABS(0xC70A) * C11 /16384
= 14582*50/16384 = 44.5 Hz CCW
Digital inputs status (TB28,E1,E2,E3)
• Bit 0 - TB28 state (1 - asserted)
• Bit 1 - E1 state (1 - asserted)
• Bit 2 - E2 state (1 - asserted)
WORD2
• Bit 3 - E3 state (1 - asserted)
Analog input value 0-1000 -- corresponds to 0-10V
ex. 400 -> 4.00V
WORD3
32 Lenze 13466183 EDBSC03 v7
Page 33

Commissioning
4.5 Quick CAN Set-up
1. Power up the controller and set h50 (CAN address) and h51 (CAN baud rate) to appropriate values.
2. Power down the controller and connect the communication cable. For reliable communication make
sure terminal CAN_GND is connected to CAN network GND/common. If only two wires are used
(CAN_H and CAN_L) in the network, connect CAN_GND to chassis/earth ground.
3. Power up the controller.
4. Use Global Drive Control Software to congure the required operation of the controller.
Example: Controller #2 needs to follow the operation of controller #1 (start/stop, speed, etc). Controller
#1 can be controlled by CANopen or traditional control elements (relays, etc).
Controller #1 configuration Controller #2 configuration
No. Name Setting No. Name Setting
CAN address (Node ID) 1
h50
CAN baud rate 5 500 kbps
h51
System bus participant
h52
Parameter channel 2
h53
(SDO#2)
TPDO#1 event timer 10 ms
h84
TPDO#1 mapping
h86
1 Slave with
autostart enabled
0 Enable with default
COB ID
3 Controller status
in C0135 format +
frequency setpoint
unsigned
Setpoint source 3 CANopen control
C01
Error behavior 1 No state change
h45
CAN address (Node ID) 2
h50
CAN baud rate 5 500 kbps
h51
System bus participant
h52
Parameter channel 2
h53
(SDO#2)
RPDO#1 COB ID
h60
RPDO#1 event
h64
monitoring timer
RPDO#1 time out
h65
reaction
RPDO#1 mapping
h66
1 Slave with
autostart enabled
1 Enable with prog.
COB ID
385
(h80 from controller #1)
50 ms
1 Inhibit
1 C0135 control word
+ C46 frequency
setpoint unsigned
After setting the parameters, perform Node reset using parameter h58 or cycle the power.
After these controllers are congured as above, controller #2 will follow the operation of controller
#1 including: Inhibit state, Quick Stop, DC brake, JOG speed selections, direction, and speed. For
additional safety, controller #2 will transition to inhibit state if valid PDO is not received from controller
#1 within 50ms.
Lenze 13466183 EDBSC03 v7 33
Page 34

Troubleshooting and fault elimination
5 Troubleshooting and Fault Elimination
e.g.
50.0
OFF
1nh
stP
br
CL
LU
dEC
nEd
Status Cause Remedy
Present output frequency Trouble free operation
Stop
(outputs U, V, W inhibited)
Inhibit
(outputs U, V, W inhibited)
Output frequency = 0 Hz
(outputs U, V, W inhibited)
DC-injection brake active DC-injection brake activated
Current limit reached Controllable overload Automatically (see C22)
Undervoltage on DC bus Mains voltage too low Check mains voltage
Overvoltage on DC bus during
deceleration (warning)
No access to code Can only be changed when the
LOW signal at terminal 28 Set terminal 28 to HIGH
Controller is set up for CANopen
operation (see C01)
Setpoint = 0 Hz (C31 = 0) Setpoint selection
Quick stop activated through digital
input
• via digital input
• automatically
Excessively short deceleration time
(C13)
controller is in OFF or 1nh
Start the controller via CANopen
Deactivate Quick stop
Deactivate DC-injection brake
• digital input = LOW
• automatically after holding time
c06 has expired
Automatically if overvoltage
< 1 s, OU, if overvoltage > 1 s
Set terminal 28 to LOW or inhibit
through CANopen
Error Cause Remedy
cF
Data on EPM not valid
CF
GF
EPM error EPM missing or defective Power down and replace EPM
F1
Digital inputs not
CFG
uniquely assigned
Dynamic braking fault Dynamic braking resistors are
dF
External error Digital input “TRIP set” is active Remove external error
EEr
Internal fault Please contact Lenze
F2...F0,
Data not valid for controller
Data error
OEM data not valid
E1...E3 assigned with the same
digital signals
Either just “UP” or “DOWN” used Assign the missing digital signal to
overheating
• Use EPM providing valid data
• Load Lenze setting
Each digital signal can only be
used once
a second terminal
Increase deceleration time (C13)
(1)
JF
CAN communication timeout Monitored CAN messages not
FC3
CAN initialization failed CAN controller failure • Perform CAN reset (h58)
FC5
Automatic start inhibited c42 = 0 LOW-H IGH signal change at
LC
(1) The drive can only be restarted if the error message has been reset; see c70
received
• Check h48 for cause
• Increase timeout settings
• Check CAN wiring
• Cycle power
terminal 28
34 Lenze 13466183 EDBSC03 v7
Page 35

Troubleshooting and fault elimination
Error Cause Remedy
Short-circuit or overload Short-circuit Find reason for short-circuit; check
0C1
Excessive capacitive charging
current of the motor cable
Acceleration time (C12) too short • Increase acceleration time
Defective motor cable Check wiring
Internal fault in motor Check motor
Frequent and long overload Check controller selection
Earth fault Grounded motor phase Check motor/motor cable
0C2
Motor overload (I2t overload) Motor is thermally overloaded,
0C6
Controller overtemperature Controller too hot inside • Reduce controller load
0H
Overvoltage on DC bus Mains voltage too high Check mains voltage
OU
Faulty auto-TRIP reset More than 8 errors in 10 minutes Depends on the error
rSt
Single phase fault A mains phase has been lost Check mains voltage
SF
(1) The drive can only be restarted if the error message has been reset; see c70
NOTE
In the event of an “OC6” (Motor Overload) failure there is a 3-minute delay before resetting is possible.
This is a requirement of UL508C. This delay is intended to allow time for the motor to cool.
If power is removed when the drive is in an “OC6” fault state, when the power is restored the “OC6” fault
will still be present and the delay will still be active even if power was removed for longer than 3 minutes.
Excessive capacitive charging
current of the motor cable
due to:
• impermissable continuous current
• frequent or too long acceleration
processes
Excessively short deceleration time
or motor in generator mode
Earth leakage on the motor side Check motor/motor cable
motor cable
Use shorter motor cables with lower
charging current
• Check controller selection
Use shorter motor cables with lower
charging current
• Check controller selection
• Check setting of c20
• Improve cooling
Increase deceleration time or use
dynamic braking option
(separate motor from controller)
(1)
Lenze 13466183 EDBSC03 v7 35
Page 36

Lenze 13466183 EDBSC03 v7
Lenze Americas Corporation
630 Douglas Street
Uxbridge, MA 01569
USA
800 217-9100
508 278-7873
marketing@lenzeamericas.com
www.Lenze.com
Service
Lenze AC Tech Corporation
630 Douglas Street
Uxbridge, MA 01569
USA
508 278-9100
508 278-6620
repair@lenzeamericas.com
 Loading...
Loading...