

Page 1
© KROHNE 7.02568.21.00
18.10.2005
Installation and
operating instructions
BATCHCONTROL 5014 C
Compact Electromagnetic
Flowmeters with CANopen bus interface
Please note!
Do not open the housing of the BATCHCONTROL 5014C.
Danger of contamination with substances likely to destroy the
moisture barrier of the electronic equipment (e.g. if CIP or SIP
cleaned from the outside).
Therefore, please contact your KROHNE Service engineer before
you open the housing.
Page 2

Contents
System description 4
Standards and approvals 4
Product liability and warranty 4
Functional description BATCHCONTROL IFM 5014C 5
Part A System installation and start-up 6 - 15
1 Installation in the pipeline 6 - 12
1.1 Important information 6
1.2 Suggestions for installation 7
1.3 Installation requirements 8
1.3.1 Position of flange 9
1.3.2 Example: centering and sealing the primary head 9
1.3.3 Grounding 9
1.4 Installation of the primary head 10
1.4.1 Device description 10
1.4.2 Installation of the IFM 5014C 10
1.5 Size of connections 11 - 12
1.5.1 Fastening with tie bolts 11
1.5.2 Fastening with bolts (option) 12
2 Electrical connection 13 - 14
2.1 Important information 13
2.2 Attachment plugs 13
2.3 Power supply and CAN bus 14
2.4 Input and output 14
2.5 Block circuit diagram 14
3 Start-up 15
3.1 Checking for availability 15
3.2 Factory settings 15
Part B IFC 014 batch controller 16 - 20
4 Description of functions 16 - 20
4.1 Contact outputs 16
4.2 Voltage input 16
4.3 Contact input 16
4.4 CAN bus and parameter 16 - 17
4.5 Temperature sensors 17
4.6 Flow sensor 17
4.7 An example for a filling process 17 - 20
Part C Service 21
5 Illustrations of printed circuit boards 21
Part D Technical Data, block diagram and measuring principle 22 - 28
6 Technical data 22 - 26
6.1 Flow during filling and fill volume 22
6.2 Flowmeters 22
6.3 Signal converter 23
6.4 Error limits at reference conditions 24
6.5 Dimensions and weights 25 - 26
6.6 Instrument nameplates 26
7 Block diagram 27
Installation and operating instructions 2 BATCHCONTROL
Page 3
8 Measuring principle 28
Part E Annex 29 - 47
E1 Index 29
E2 CAN parameter 30 - 45
E3 Form to accompany returned device 46
Please note!
Do not open the housing of the BATCHCONTROL IFM 5014C.
Danger of contamination with substances likely to destroy the moisture barrier of the electronic
equipment (e.g. if CIP or SIP cleaned from the outside).
Therefore, please contact your KROHNE Service engineer before you open the housing.
Installation and operating instructions
BATCHCONTROL
3
Page 4

System description
The BATCHCONTROL IFM 5014C compact electromagnetic flowmeter is a precision instrument
designed for the linear flow measurement of liquid products and c ontrolling the filling process.
The products need to be electrically conductive:
> 5 µS/cm (except for water)
> 20 µS/cm (for water)
The full-scale range Q
DN 2.5 – 40 and
This is equivalent to a flow velocity of 0.2 - 12 m/s.
1
/10” – 11/2” Q
can be set as a function of the meter size:
100%
= 0.0015 - 15 l/s
100%
Standards and approvals
BATCHCONTROL IFM 5014C with the IFC014 signal converter meets the EU-EMC Directives
•
and bears the CE and 3A symbol.
The 3A approval covers only the meter without adapter.
•
All factories and production sequences are ISO 9001 certified.
•
Product liability and warranty
The compact BATCHCONTROL IFM 5014C electromagnet ic flowmeter is des igned exclusivel y for
measuring the volumetric flowrate of electrically conductive, liquid process produc ts.
The compact flowmeter is not suitable for use in hazardous areas. Other flowmeter series are
available for such applications.
Responsibility as to suitability and intended use of this compact electromagnetic flowmeter rests
solely with the operator.
Improper installation and operation of the flowmeters (systems) may lead to loss of warranty.
In addition, the “General conditions of sale“ forming the basis of the purchase contract are
applicable.
If BATCHCONTROL 5014C flowmeters need to be returned to KR OHNE, please note the infor-
mation given on the last-but-one page of these instructions. KROHNE regret that they cannot
repair or check your flowmeter(s) unless these are accompanied by the completed form sheet.
Installation and operating instructions 4 BATCHCONTROL
Page 5

Functional description
BATCHCONTROL IFM 5014C
The volume to be filled into the container is measured “in line“ by means of the electromagnetic
flowmetering system. The BATCHCONTROL closes the filling valve once the pres et filling volume
has been reached. It is always the preset target volume that is filled into the container.
The signal converter converts the measured flowrate signa l into volume that are transfered to the
integrated batch controller.
The influence of valve closing times and ot her dynamic factors can be corrected by the adaptive
correction formalism of the BATCHCONTROL 5014C.
The use of state-of-the-art microprocessor electronics and the high-speed anal og/digital converter
also enables changes in the flowrate to be sensed precisely. This technology ensures high
reproducibility and long-term stability.
Installation and operating instructions
BATCHCONTROL
5
Page 6

1
Part A System installation and start-up
1 Installation in the pipeline
1.1 Important information
The following recommendations should be observed to ensure proper functioning of the
flowmeter – PLEASE NOTE.
Measuring tube must be filled
•
completely at all times.
Direction of flow: the blue arrow on the
•
housing of the primary head must point in
the direction of flow. If for structural
reasons the flowmeter can only be installed
invers to the direction of flow, the direction
of flow measurement can be reprogrammed.
Stud bolts and nuts: to fit, make sure
•
there is sufficient room next to the pipe
flanges.
Vibration: support the pipeline on both
•
sides of the flowmeter. Vibration level to
IEC 068-2-34: below 2,2g in the
20 - 2000 Hz frequency range.
Radiant heat: avoid e.g. from hot product
•
tanks, insulate if necessary.
Avoid strong electromagnetic fields
•
in vicinity of flowmeter.
Straight Inlet run ≥ 5 x DN and straight
•
outlet run ≥ 2 x DN, measured from the
electrode axis (DN = meter size).
Vortex or corkscrew flow: increase
•
length of inlet and outlet runs or install flow
straighteners.
Mixing different process liquids: install
•
flowmeter upstream of mixing point or at an
adequate distance downstream, minimum
of 30 x DN (DN = meter size), otherwise
display may be unsteady.
Plastic pipes and internally coated metal
•
pipes: grounding rings required, see
“Grounding“, Section 1.3.3.
Heat-insulated pipelines: do not insulate
•
flowmeter.
Zero setting: not required. For checking
•
purpose, it should be possible to set “zero“
flow velocity in the completely filled
measuring tube. Shutoff valves should
therefore be provided either downstream or
upstream and downstream of the
flowmeter.
Ambient temperature
•
-25°C to +60°C
Process temperature
•
max. 140 °C
Transport and storage temperature
•
-25°C to +60°C
Limits imposed by the material used for the
measuring tube for process temperature,
thermal shock limit, pressure and vacuum, see
Section D page 22.
Please note!
The ceramic measuring tube must not contac t
metal parts (flange, pipeline). This can destroy
the flowmeter!
Installation and operating instructions 6 BATCHCONTROL
Page 7
A
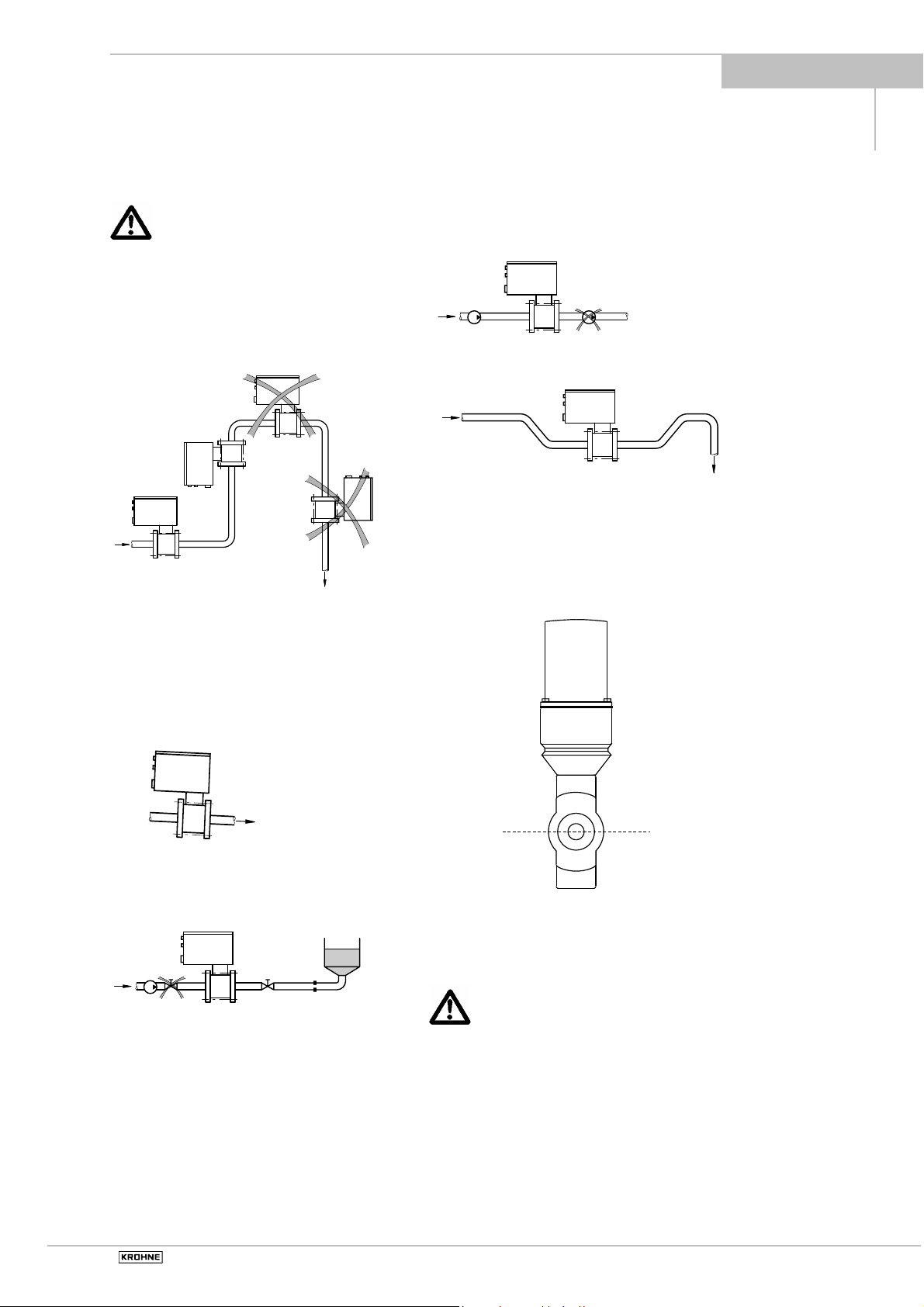
1.2 Suggestions for installation
To avoid measuring errors due to
air inclusion and vacuum, please
observe the following:
Highest point of pipe run
(Air bubbles collect in measuring
tube - faulty measurements!)
Preferred
locations
downpipe
(open discharge)
void draining or partial filling of
the measuring tube. Faulty
measurements.
1
Pumps
Do not install flowmeter on pump suction side
Open feed or discharge
Install meter in low section of pipe
open discharge
Selecting the installation location
Location and position as required, but
electrode axis (X – – – – X
must be approximately horizontal in a
horizontal pipe run.
Horizontal pipe run
Install in slightly descending pipe section to
prevent air from collecting, so avoiding faulty
measurements and that meter can drain.
Control and shutoff valves: always install
behind the flowmeter
x
Direction of flow The blue arrow on the
primary head housing must point in the flow
direction.
On high-temperature pipes and
where process temperatures
exceed 100 °C, provide facilities to
compensate for longitudinal
expansion on heat-up of the pipeline.
Use flexible pipe elements (e.g.
elbows).
x
Installation and operating instructions
BATCHCONTROL
7
Page 8
1
1.3 Installation requirements
Items supplied with flowmeter
BATCHCONTROL IFM 5014C compact
•
flowmeter in the version as ordered
Installation and operating instructions,
•
as agreed
Certificate of system calibration data
•
(as agreed)
Excluding fitting accessories. Stud bolts,
gaskets, etc., to be provided b y customer.
All operating data and function values
are factory set according to your order
specifications.
Requirements
Use in the food industry
The IFM 5014C is specifically suitable for us e
in the food and beverage industry or similar
sterile processes.
The IFM 5014C is steam-resistant.
The measuring tube can be SIP or CIP
cleaned when in installed condition. During the
cleaning the meter(s) must be switched off to
maintain the reliability of the unit(s).
• Operating pressure, type, and space
between pipe flanges: see Table.
• Tighten stud bolts uniformly down to the
metal stop in diagonally opposed
sequence. See Table for type and number
of stud bolts.
• Ins tall meter vertically or in a slope due to
its conical in/outlet.
On DN 15 (1/2”) and DN 32 (11/4” ) a
BATCHCONTROL with straight ceramic
tube is avaible.
DIN 2501
and JIS pipe flanges Nm kpm ft × lbf
DN 2.5
DN 4
DN 6 1/4" 51.8 mm (2.04") 4 x M12 10 1.0 7.2
DN 10 3/8" 51.8 mm (2.04") 4 x M12 10 1.0 7.2
DN 15 1/2" 51.8 mm (2.04") 4 x M12 10 1.0 7.2
DN 25 1" 58.0 mm (2.28") 4 x M12 10 1.0 7.2
DN 32 11/4“ 83.0 mm (3.27“) 4 xM16 43 4.3 31.0
DN 40 1 1/2" 83.0 mm (3.27") 4 x M16 43 4.3 31.0
ANSI B 16.5 Space between Bolts Max torque
1
1
/10" 51.8 mm (2.04") 4 x M12 10 1.0 7.2
/8" 51.8 mm (2.04") 4 x M12 10 1.0 7.2
Installation and operating instructions 8 BATCHCONTROL
Page 9
y
R
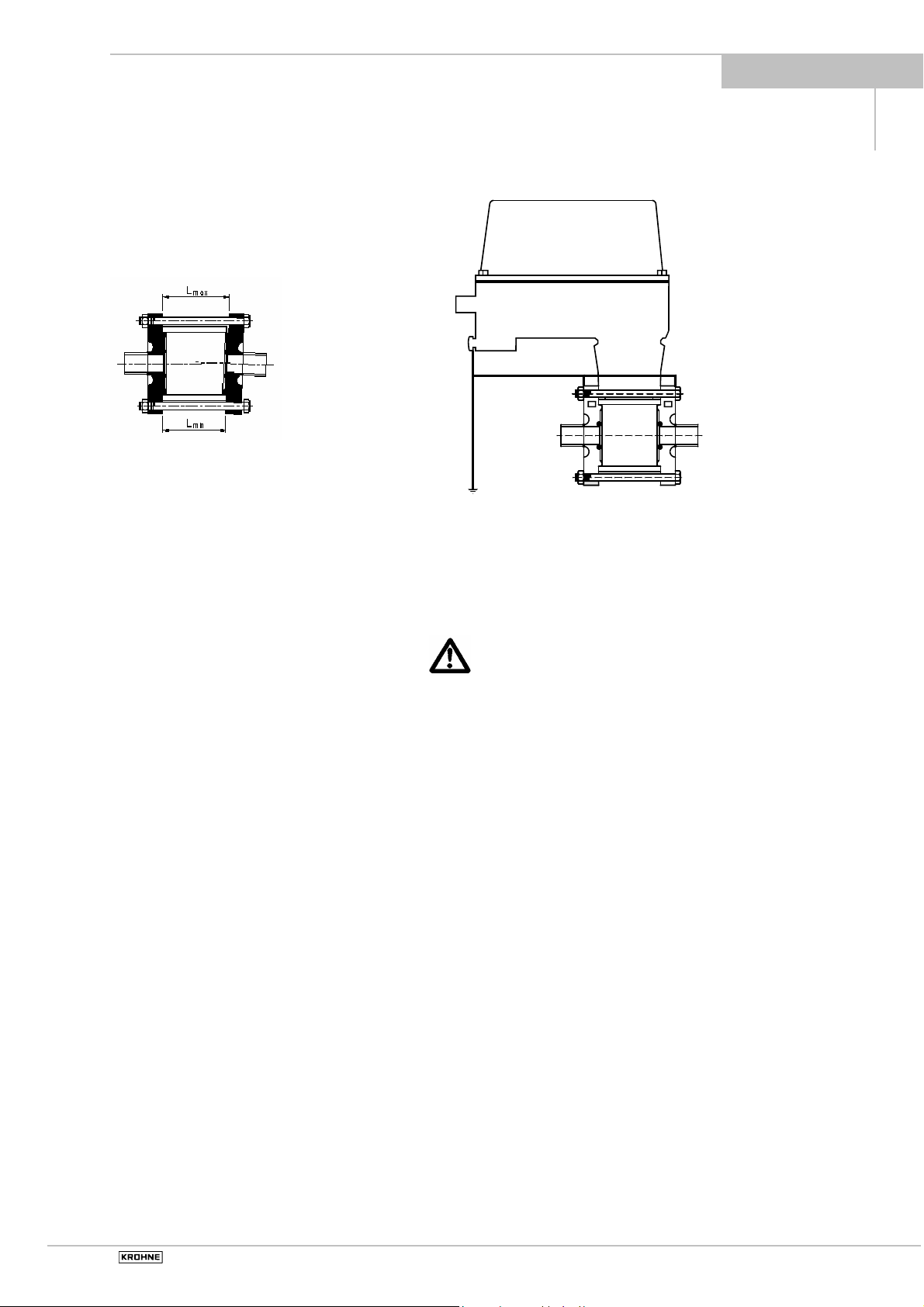
1.3.1 Position of flanges
Install flowmeter in line with the pipe axis. Pipe
flange faces must be parallel to each other,
max. allowable deviation:
L
– L
max
1.3.2 Example: centering and sealing
The primary head is centered between the pipe
flanges with the aid of the precise geometric
fitting (guide collar on primary head).
Detail drawings see Sect. 1.5.
≤ 0.5 mm ≤ 0.02"
min
the primary head
1.3.3 Grounding
V
R
FE
FE Functional ground, wire > 4 mm
R Pipeline
RF Pipe flanges
V Interconnecting wires,
bolted to the housing
Grounding is carried out via the functional
ground that is connected to the U-clamp
terminal (9). See also Section 2 “Electrical
connection“.
When connected to functional extra-low
voltages,
24V DC, protective separation (PELV)
must be ensured (VDE 0100/VDE 0106 or
IEC 364/IEC 536).
All flowmeters must be properly
•
grounded.
The grounding wire should not
•
transmit any interference voltage.
Therefore do not ground any other
electrical device simultaneousl
with this conductor.
RF RF
V
2
Cu.
1
Installation and operating instructions
BATCHCONTROL
9
Page 10
1
1.4 Installation of the primary head
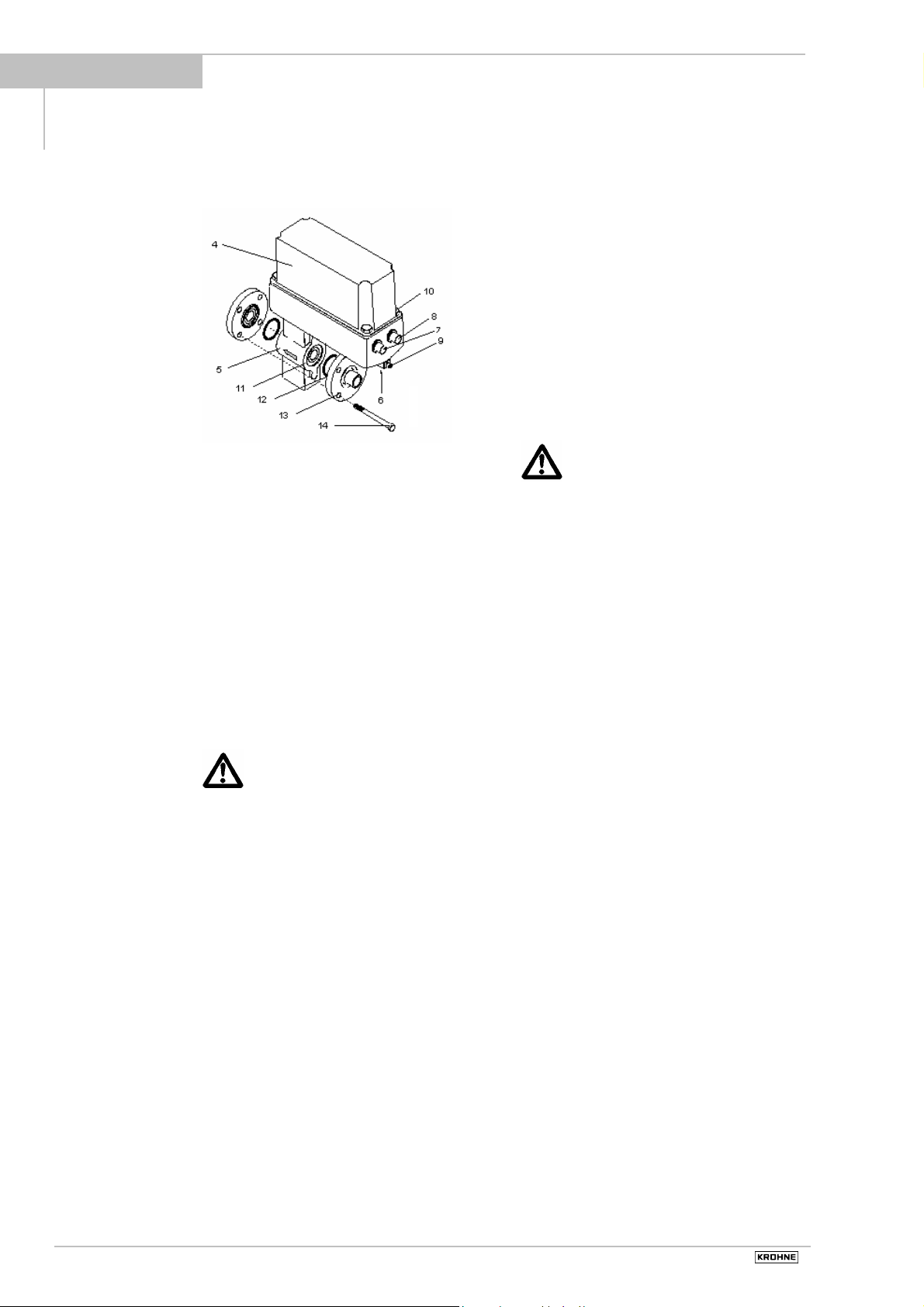
1.4.1 Device description
BATCHCONTROL IFM 5014C
•
4 Cover, signal converter
5 Primary head
7 Connector for the six in-/outputs
8 Connector for power and CAN Bus
9 U-clamp terminal for functional ground
10 Fastening screws for cover
11 Locating collar, primary head
Accessories from system manufacturer
•
12 O-ring gasket
13 Special pipe flange
14 Stud bolt with lock washer,
plain washer and nut
To facilitate servicing of the
primary head, please note the
following points:
It must be possible to shut off the flow
•
through the pipeline upsteam of the primary
head (provide shutoff valve),
Drain the pipe system before removing the
•
primary head (provide drain valve),
Support the pipeline on both sides of the
•
flowmeter when located in a long, freely
suspended section to facilitate removal of
the primary head.
1.4.2 Installation of the IFM 5014C
Position gaskets (12) in the pipe flanges.
•
Type and location of gaskets as specified
•
by the manufacturer of the filling machine
(see Sect. 1.3.2 “Centering of the primary
head”).
Insert primary head (5) between the pipe
•
flanges (13) in line with the pipe axis.
For spacing and location of the pipe
•
flanges, see Sect. 1.3 “Position of flanges”.
Press pipe flanges against flowmeter.
•
Centering ring of pipe flanges must
snap into place in the guide collar
(11) of the primary head.
Insert stud bolts (14) with washers into the
•
holes in the pipe flanges. Fit nuts to stud
bolts with lock washer.
Tighten stud bolts and nuts down to the
•
metal stop symmetrically. Check all bolts
after starting up the pipe system, and
retighten when any leaks show.
Connect ground conductor to U-clamp
•
terminal (9).
Connect power supply, CAN bus and
•
outputs to connector plugs (7, 8) on signal
converter housing (4).
See Section 2.2 and 2.3 for details of
electrical connection.
Installation and operating instructions 10 BATCHCONTROL
Page 11
A
A
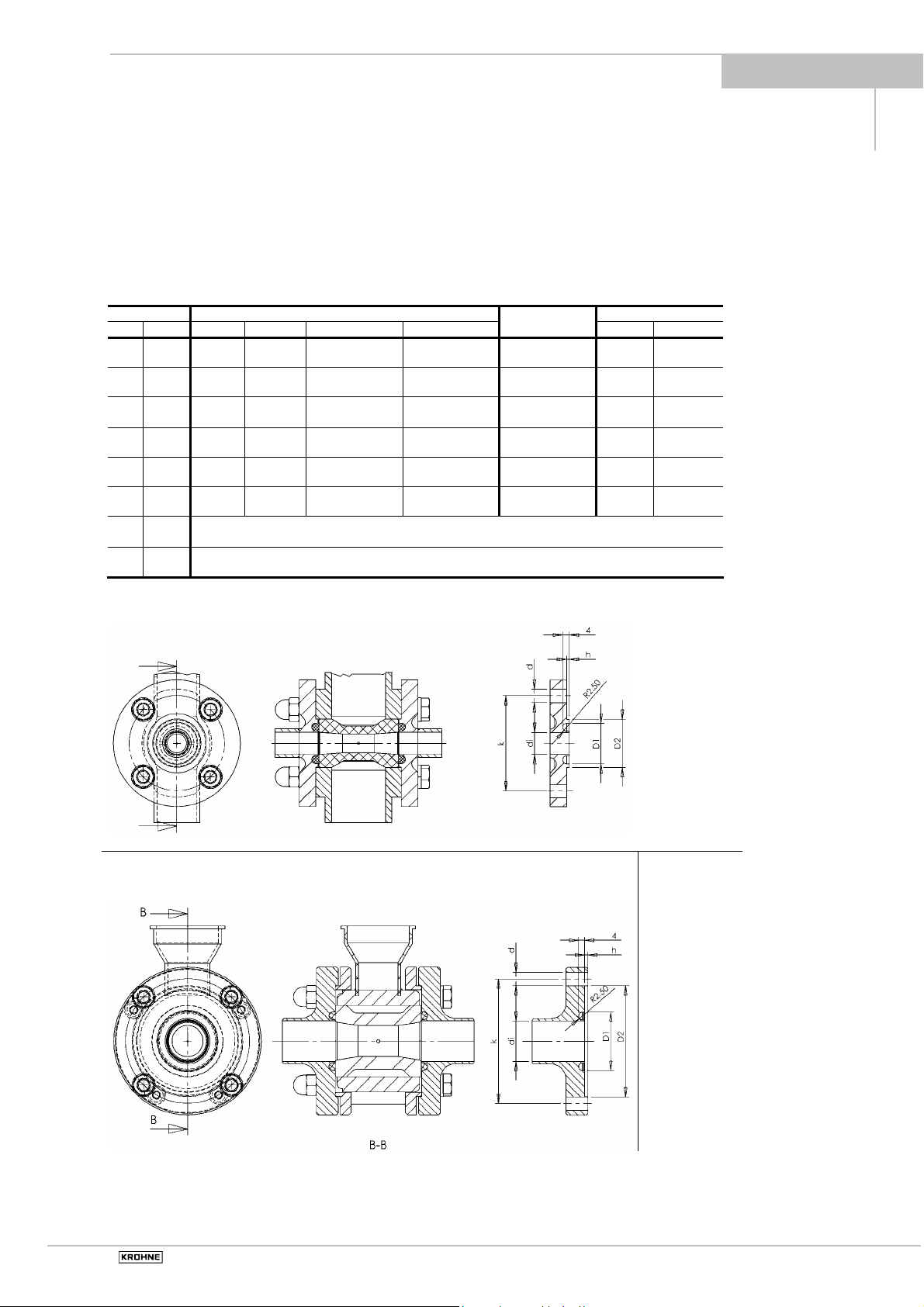
1.5 Size of connections
1.5.1 Fastening with tie bolts
All dimensions in mm (inches)
Flange-material: AISI 300 series
O-ring material: 3A standard 18-03
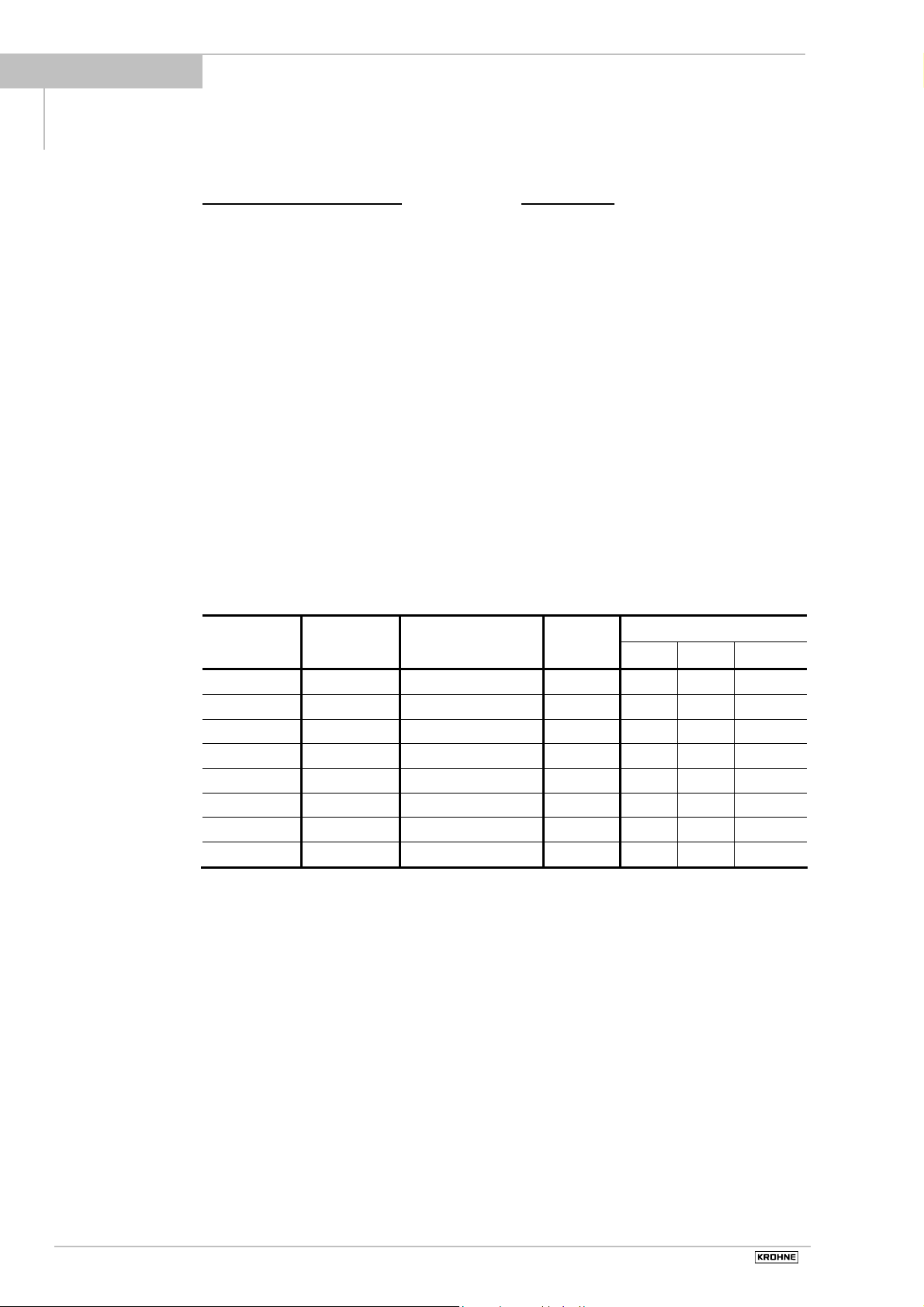
Meter size Centering device, pipe connection O-Ring Dimensions
DN inches d
1
2.5
/10 6 25.5 30
1
4
/8 7 25.5 30
1
6
/4
3
10
/8 12 25.5 30
1
15
/2 14 25.5 30
i
(0.24) (1.00) (1.18
(0.28) (1.00) (1.18
9 25.5 30
(0.35) (1.00) (1.18
(0.47) (1.00) (1.18
(0.55) (1.00) (1.18
25 1 26 37.5 71.3
(1.02) (1.48) (2.81
1
32
1
/
4
on request
40 11/2 on request
DN 2.5 - 15 / 1/10“ - 1/2“
D1 D2 h 75 Shore k d
1.5
-0.05/-0.15
-0.05/-0.15
-0.05/-0.15
-0.05/-0.15
-0.05/-0.15
) (0.06
-0.002/-0.006
1.5
) (0.06
-0.002/-0.006
1.5
) (0.06
-0.002/-0.006
1.5
) (0.06
-0.002/-0.006
1.5
) (0.06
-0.002/-0.006
2
-0.1
) (0.08
–0.004
on request 60 8.5
-0.05/-0.15
-0.05/-0.15
-0.05/-0.15
-0.05/-0.15
-0.05/-0.15
) on request (2.36) (0.33)
-0.002/-0.006
on request 60 8.5
) on request (2.36) (0.33)
-0.002/-0.006
on request 60 8.5
) on request (2.36) (0.33)
-0.002/-0.006
on request 60 8.5
) on request (2.36) (0.33)
-0.002/-0.006
Ø 16×5 60 8.5
) (Ø 0.47×0.20) (2.36) (0.33)
-0.002/-0.006
Ø 28×5 80 8.5
+0.1
) (Ø 1.10×0.20) (3.15) (0.33)
+0.04
1
DN 25 / 1“
A-A
Installation and operating instructions
DN 32-40 /
1
1
/4“-11/2“
Dimensions
on request
BATCHCONTROL
11
Page 12
1
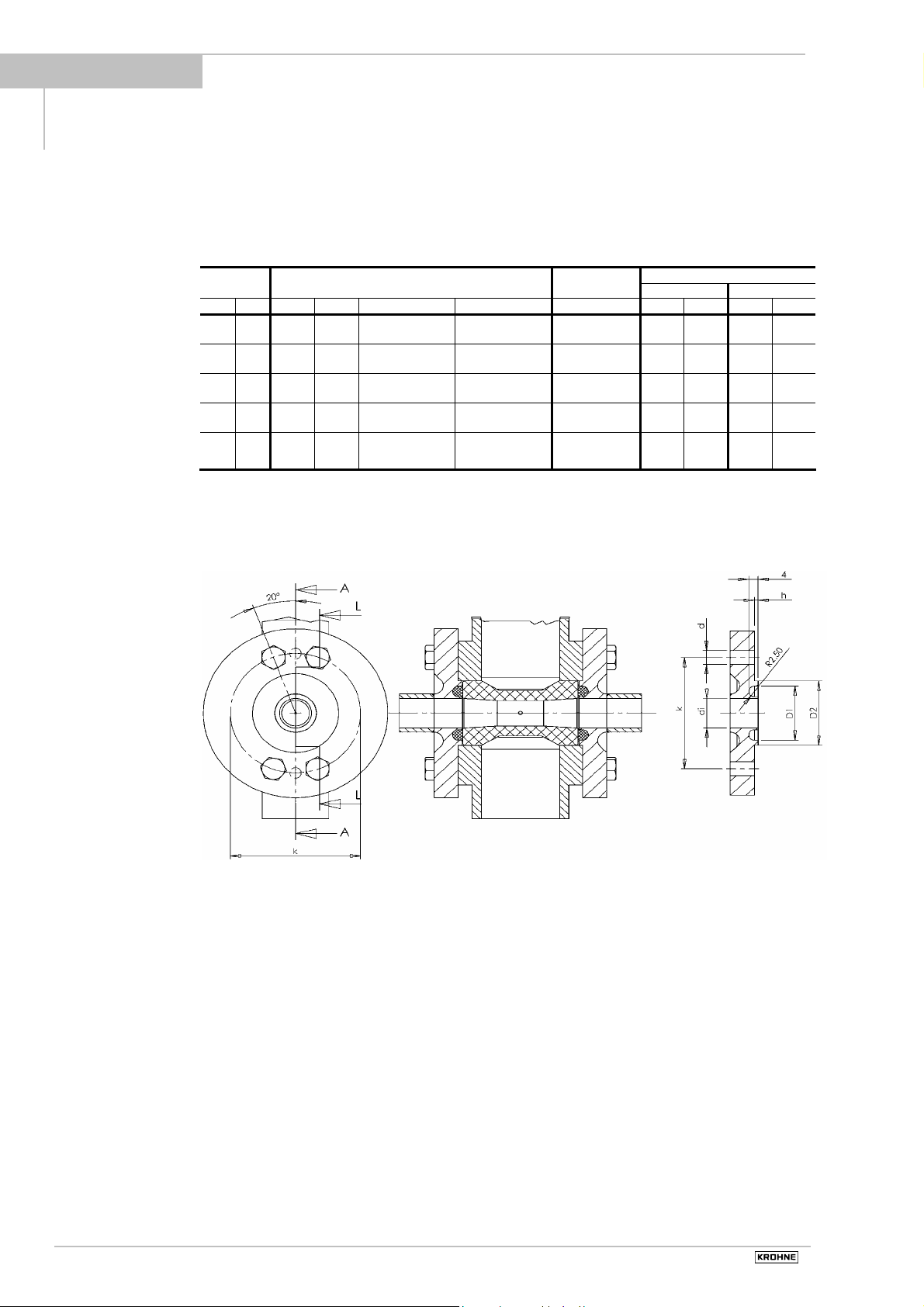
1.5.2 Fastening with bolts (option)
All dimensions in mm (inches)
* Flange-material : AISI 300 series
O-ring material : 3A standard 18-03
Meter size Centering device, pipe connection O-ring Screw thread (option)
gaskets 2× M4 4× M6
inches
DN
1
2.5
1
4
1
6
3
10
1
15
(0.55) (1.00) (1.18
d
D1 D2 h 75 Shore k d k d
/10 6 25.5 30
/8 7 25.5 30
/4 9 25.5 30
/8 12 25.5 30
/2 14 25.5 30
i
(0.24) (1.00) (1.18
(0.28) (1.00) (1.18
(0.35) (1.00) (1.18
(0.47) (1.00) (1.18
-0.05/-0.15
-0.002/-0.006
-0.05/-0.15
-0.002/-0.006
-0.05/-0.15
-0.002/-0.006
-0.05/-0.15
-0.002/-0.006
-0.05/-0.15
-0.002/-0.006
1.5
) (0.06
1.5
) (0.06
1.5
) (0.06
1.5
) (0.06
1.5
) (0.06
on request 60 8.5 56 6.4
-0.05/-0.15
-0.05/-0.15
-0.05/-0.15
-0.05/-0.15
-0.05/-0.15
) on request (2.36) (0.33) (2.20) (0.25)
-0.002/-0.006
on request 60 8.5 56 6.4
) on request (2.36) (0.33) (2.20) (0.25)
-0.002/-0.006
on request 60 8.5 56 6.4
) on request (2.36) (0.33) (2.20) (0.25)
-0.002/-0.006
on request 60 8.5 56 6.4
) on request (2.36) (0.33) (2.20) (0.25)
-0.002/-0.006
-0.002/-0.006
Ø 16×5
)
(Ø 0.47×0.20)
60 8.5 56 6.4
*
(2.36) (0.33) (2.20) (0.25)
*
Installation and operating instructions 12 BATCHCONTROL
Page 13
2 Electrical connection
2.1 Important information
Be sure to take note of the following
information in order to ensure proper
functioning of the signal converter.
Please note:
1) Ov ervolta
In conformity with VDE 0120, equivalent
to IEC 664, the compact flowmeters are
designed for overvoltage category III in
the supply circuits and overvoltage
category II in the output circuits.
2) Safety isolation:
The compact flowmeters must be
provided with an isolating facility.
Electrical connection and repairs may only
be carried out by qualified personnel.
ge class:
2.2 Attachment plugs
Manufacturer Series and type Description
Binder Series 715 Moulded plug, straight or
angle-entry form
Series 763 Integrally extruded plug
with cable in various
lengths
Hirschmann E-Series
ELKA 4012 and
ELWIKA 4012
ELKA KV 4412
and ELWIKA KV
4412
Lumberg RK-Series
RKC and RKCW Moulded plug, straight or
RKT and RKWG Integrally extruded plug
Amphenol Series C 164 P Moulded plug, straight or
Series C 164 P
compact
Coninvers Series BC Moulded plug, straight
Moulded plug, straight or
angle-entry form
Integrally extruded plug
with cable in various
lengths
angle-entry form
with cable in various
lengths
angle-entry form
Integrally extruded plug
with cable in various
lengths
form, especially suitable
for high-interference
environments (keyword:
EMC)
Protect the flowmeter from direct radiant
•
heat (e.g. hot-product tanks), insulate if
necessary.
Do not expose flowmeter to intense
•
vibration. If necessary, support the
pipeline to the right and left of the
flowmeter. Level of vibration in accordance
with IEC 068-2-34: below 2.2g in the 20 2000 Hz frequency range.
Note information given on the instrument
•
nameplate, voltage.
The FE functional ground for the supply
•
power should for measurement reasons be
connected to the separate U-clamp
terminal on the signal converter housing.
When connected to a functional extra-
•
low voltage of 24 V DC, protective
separation (PELV) must be ensured (VDE
0100 / VDE 0106 or IEC 364 / IEC 536 or
equivalent national regulations)..
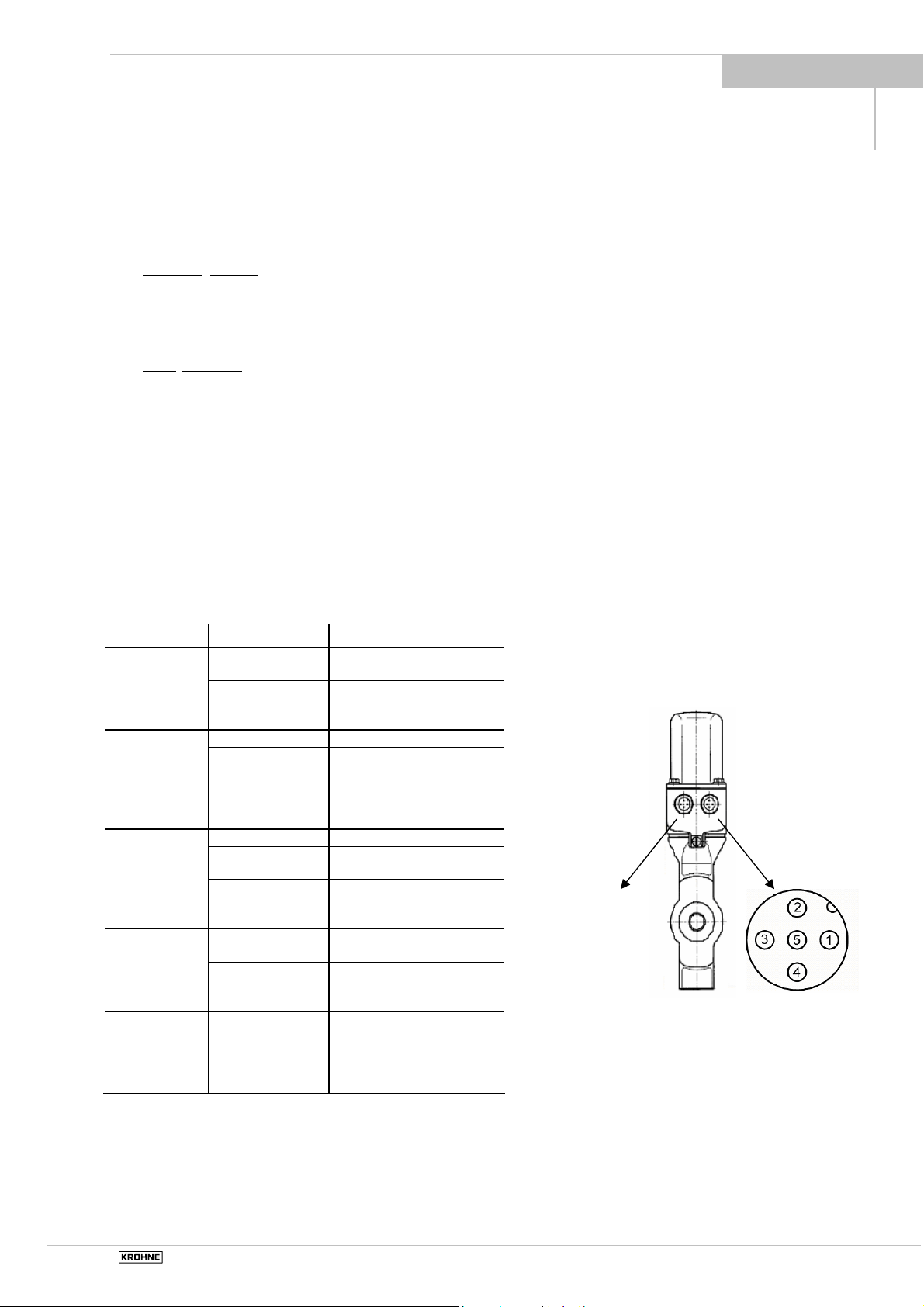
Pin-assignment and
alignment of cable entry
body
Installation and operating instructions
BATCHCONTROL
13
Page 14
2
2.3 Power supply and CAN bus
5-pin connector M12x1 for 24V DC power supply and CAN bus
Pin Description
1 ground CAN bus
2 +24 V power
3 ground
4 CAN high level
5 CAN low lev el
Pin assignment
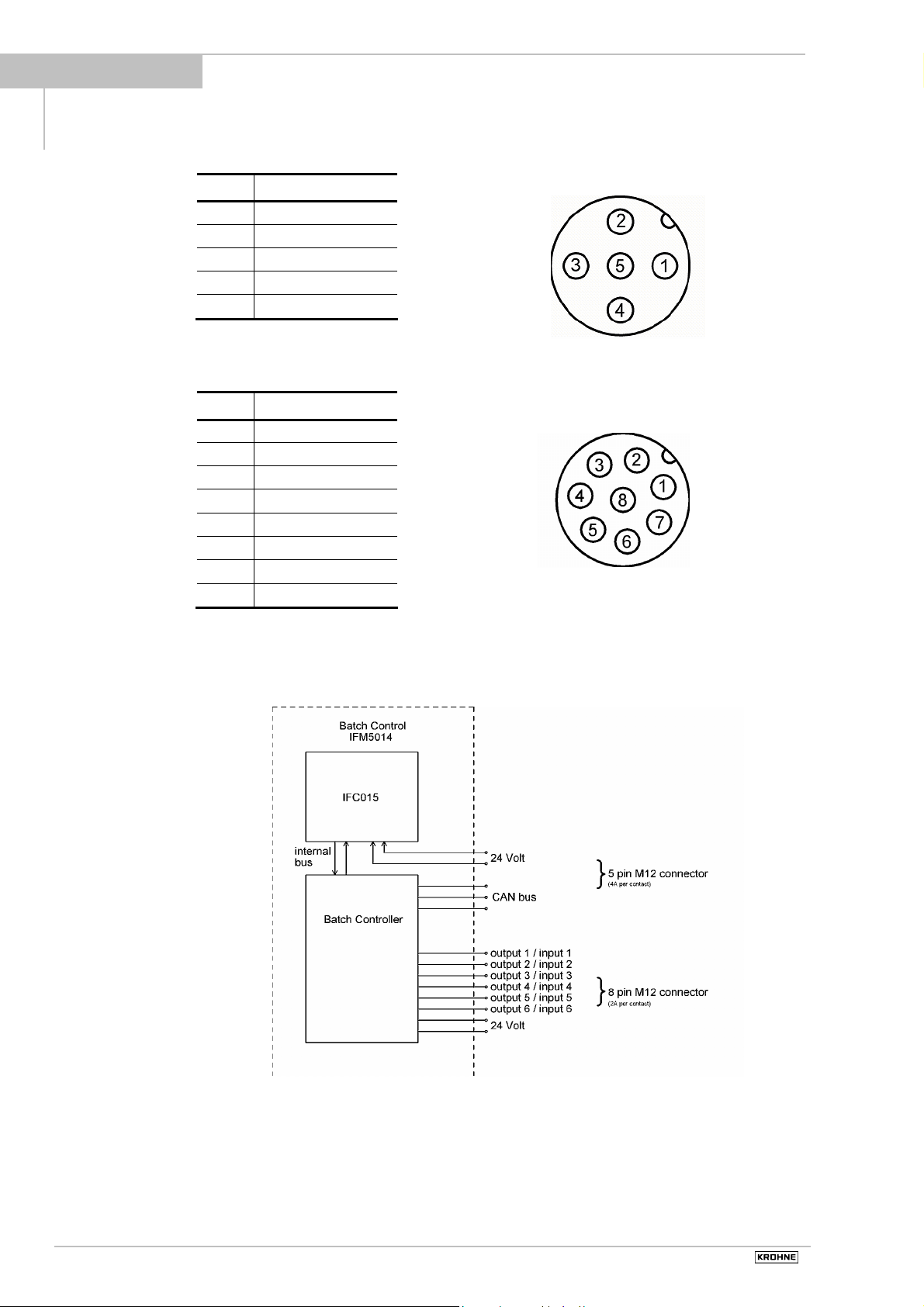
2.4 Input and output
8-pin connector M12x1 for 24V DC power supply and input / output signals
Pin Description
1 input / output 1
2 input / output 2
3 input / output 3
4 input / output 4
5 input / output 5
6 input / output 6
7 +24 V power
8 ground
Pin assignment
2.5 Block circuit diagram
The following picture shows the block circuit diagram of the BATCHCONTROL 5014C:
The individual functions of inputs and outputs are described in detail in the following chapter.
Installation and operating instructions 14 BATCHCONTROL
Page 15

3 Start-up
Before powering the system, check that it has been installed c orrectly according to Sections 1 an d
2.
The compact flowmeter is delivered ready for operat io nal us e. All oper atin g data hav e b een fac t ory
set in accordance with your specifications.
Power the unit, and the flowmeter will start process flow measurement immediately.
3.1 Check for availability
Please note!
Do not open the housing of the BATCHCONTROL IFM 5014C.
Danger of contamination with substances likely to destroy the moisture barrier of the electronic
equipment (e.g. if CIP or SIP cleaned from the outside).
Therefore, please contact your KROHNE Service engineer before you open the housing.
3
The measurement status is signalled by the light-emitting diodes (LED) belo w the cover of the
•
converter housing (see amplifier board on right).
LED 1 LED 2 Function
flashing off in order
flashing flashing overdriving
on flashing Fatal Error
(defective operating
parameter)
off on defective hardware
off off no supply voltage
or hardware
is defective
All operating data can be set and stored by means of a personal computer via the CAN bus
interface. The digital CAN bus interface allows the complete filling procedure to be graphically
represented on the PC, thus providing visualization of system and valve properties.
LED 2
LED 1
3.2 Factory settings
All operating data are factory-set according to your order specifications.
The table of standard factory settings is shown at the end of the manual.
Installation and operating instructions
BATCHCONTROL
15
Page 16

4
Part B IFC 014 batch controller
4 Description of functions
Six contacts are available for the different functions. Every contact can be switched over as a
switching output, switching input or analogous by software. In addition, the d evice has one CAN
bus interface for communication, two internal temperature sensors and one flo w s ensor .
4.1 Contact outputs
Up to six power outputs (24V / I < 200mA), switch over to ground (low side driver) or to the 2 4V
supply voltage (high side driver), can be pr ogrammed by software. The drivers communicate via
the internal data bus with the logic and the other c ontrol and monitoring functions: undervoltage,
overvoltage, overtemperature and failure detection. When commutating inductive loads, the
dissipated power peak is be significantly reduced by the internal freewheeling diode. All power
drivers are connected to the supply voltage. These are monitored by overvoltage and underv oltage
comparators with hysteresis, so that the correct function can be checked in the applicat ion at any
time. They are short-circuit resistant (I
Consumer are controlled for disconnections (cable break) by the outputs, indication by the Bus
interface.
All valve outputs are on equal basis. The following functions can be adjusted:
• Without use (off)
• Permanentl y on (breakdown identification)
• Binary output controlled by the bus
• Switch on after time or after reaching target volume or after reaching a defined volume flow
• Turn off after time or reaching target volume or after reaching a defined volume flow
• Automatically, regulation for target filling volume
• Customers specific programming
2A). Overcharge is indicated by the bus interface.
max
4
4.2 Voltage input
Up to six voltage inputs with common ground for 24V supply voltage are available. The voltage
range is from 0 volts up to 11 volts with a res olution of 8 bits . The input impedanc e of the i nputs ‘1’
and ‘2’ is 220kOhm, for the inputs ‘3’ up to ‘ 6’ is 22kOhm. T he update rate is 8ms . For every input
scaling factors and offsets can be defined. To us e this functionality the corresponding output has to
be switched off. Each voltage input can be programmed for the following functions:
• Without use (off)
• Voltage input for the bus
• Start of filling process
• Emergency off
• Customers specific programming
4.3 Contact inputs
Up to six inputs with common ground for 24V supply voltage. To use this functionality the
corresponding output has to be switched off. Each control input can be programmed for the
following functions:
• Without use (off)
• Binary input for the bus
• Starting of filling process
• Emergency off
• Customers specific programming
4.4 CAN bus and parameter
For the interface the CAN bus is used. Baud rates within the range 20k up to 1M Baud are
possible. For the protocol CANopen is appli ed. The interfac e has a galvanic c onnection to the 24V
supply! The possible functions are described in one of the following chapter.
Default Baud rate is 20k Baud.
Installation and operating instructions 16 BATCHCONTROL
Page 17

The object dictionary for the parameters is subdivided into the following groups:
Object number range Description
10xxH CAN open parameter
300xH Flow sensor parameter
301xH Electronic temperature sensor
302xH Liquid temperature sensor
303xH Function block 1
304xH Function block 2
305xH Function block 3
306xH Function block 4
307xH Function block 5
308xH Function block 6
309xH Batching
30AxH CAN parameter
32xxH Customer specific 1 bit memory
33xxH Customer specific 8 bit memory
34xxH Customer specific 16 bit memory
35xxH Customer specific 32 bit memory
The complete list of all parameters can be found at the end of the manual.
To be able to represent the variety of all possible messages on the bus , the CANopen definition
hasn't been used at the definition of the TPDOs and RPDOs. If this function is programmed, then
the device sends at every message in the firs t data byte a description and in the following bytes
the data. This shall be explained at an example:
The user needs every flow measurement for the anal ysis of the valve. With the parameter
3002.02 the PDO is defined. After this parameter was stored in the BATCHCONTROL
5014C, it sends the actual volume flow every 20 ms. The Telegramm starts in the first byte
with the descriptor (in this case 01H) followed by the meas urement value in float format.
Many parameters can use the same PDO. The distinction of the data is made by the first
byte (called descriptor in the parameter list at the end of the manual).
This function shouldn't be used in CANopen nets.
4
4.5 Temperature sensors
Two temperature sensors are installed inside the BATCHCONTROL 5014C. The first one is
mounted on the BATCHCONTROL print board. This one measures the electronic temperature.
The information can be important during the CIP process or in hot filling application. If the
temperature is higher then 70°C the life time of the electronic compone nts are reduced. An upper
and lower setpoint can be programmed. If one of this po ints are reached, an alarm message is
send via the CAN bus. Alternativly this information can be programmed for an output, which is
used as an alarm output.
The second sensor is mounted on the outside of the c eramic pipe. It has the same functionalit y as
the electronic temperature sensor. Since the temperature s ensor doesn' t have direct contact to the
liquid, the temperature measurement is delayed. The delay time depends on the temperature
gradient and the temperature difference between outside housing and liquid. The delay time can
be a few seconds.
Each sensor can be programmed for the following functions:
• Without use (off)
• Temperature value for the bus
• Temparature alarm for the bus
• Customers specific programming
4.6 Flow Sensor
The integrated flow sensor measures precisely the flow velocity. From this signal the device
generates the information for the internal electronic volume counter. Furthermore the flow values
and the counter are actualized every 20ms. It can be programmed for the following functions:
• Without use (off)
• Volume flow value for the bus
• Totalized Volume value for the bus
4.7 An example for a filling process
The function of the device shall be represented at the example of a t wo-stage filling device. The
following order is used:
Output ‘1’ is for the low speed fluid valve. This valve is opene d during the complete filling
time. The target volume is 1000ml.
Output ‘2’ is for the high speed fluid valve. This valve switch off 50ml before the target
Installation and operating instructions
BATCHCONTROL
17
Page 18

A
4
volume.
Output ‘3’ is used for the carbonizing of the bottle. This valve is t used at the beginning of
the filling process. It opens for 0,6 second.
Output ‘4’ is used for unpreasurizing the bottle at the end of the filling process. It opens for
1 second.
Output ‘5’ an ‘6’ are not used.
CAN PARAMETER
Letter Object No. Description
output 1 3031.01 Function of the block
3034.01 Output hardware function
output 2 3041.01 Function of the block
3044.01 Output hardware function
output 3 3051.01 Function of the block
3054.01 Output hardware function
output 4 3061.01 Function of the block
3064.01 Output hardware function
output 5 3071.01 Function of the block
output 6 3081.01 Function of the block
The following graphic shows the timing diagram of the filling process.
time parameter
0,16
output 4
output 3
output 2
output 1
0,14
0,12
0,10
0,08
Q[l/s]
0,06
0,04
0,02
0,00
0,00 2,00 4,00 6,00 8,00 10,00 12,00 14,00 16,00 18,00
-0,02
B
C D E F G H I J
t[s]
At the time of ‘A’ the filling starts. The bottle gets pressurized with CO2 (‘B’ – ‘C’). After this both
product valves opens at the time of 'D'. The high speed valve is clos ed after 950ml (‘E’) is filled.
The low speed valve is closed at the time of 'F' and the filling is completed to 'G'. The las t step is to
depressurize the bottle ('H' – ‘I’). The next filling starts after 'J'.
CAN PARAMETER
Letter Object No. Description
A 3091.05 Controlling batching process
B 3054.02 Output 3 on function definitio n
3054.03 On value (output 3)
C 3054.05 Output 3 off function definition
3054.06 Off value (output 3)
D 3091.02 Forward run time
3034.02 Output 1 on function definition
3044.02 Output 2 on function definition
E 3044.05 Output 2 off function definition
3044.06 Off value (output 2)
F 3034.05 Output 1 off function definition
G 3091.07 Function select ‘switch off calculation’
3091.08 Function data 1
3091.0A Volume flow value for switch off
3091.0B Number of measurements
3091.0C Definition for shut-down
Installation and operating instructions 18 BATCHCONTROL
Page 19

A
H 3064.02 Output 4 on function definition
3064.03 On value (output 4)
I 3064.05 Output 4 off function definition
3064.06 Off value (output 4)
G – J 3091.03 Time out
There are parameters similar as in the cas e of the time representation, for the supervision of the
volume flow.
volume flow parameter
0,16
0,15
B
0,14
C
0,13
0,12
0,11
0,10
0,09
0,08
0,07
Q[l/s]
0,06
0,05
0,04
0,03
0,02
0,01
0,00
0,00 2,00 4,00 6,00 8,00 10,00 12,00 14,00 16,00 18,00
-0,01
-0,02
flow max. limit flow max. flow Q100%
t[s]
‘A’ is the full scale range of the flow meter. An overload of +50% is permitted. If the flow should get
even bigger, then the value is limited to150%. The v alue 'B' is an emergency switch off value for
the valve. The value 'C' corresponds to the maximum volume flow during the filling process.
CAN PARAMETER
Letter Object No. Description
A 3001.01 Full scale range
B 3003.01 Maximum volume flow
C 3094.06 Maximum flow velocity
The internal volume counter adds up the measurement values. As in the case of the two prev ious
representations the counter has own parameters.
volume parameter
1,20
1,00
F
G
H
I
(internal counter)
4
0,80
0,60
volume [ml]
0,40
0,20
0,00
0,00 2,00 4,00 6,00 8,00 10,00 12,00 14,00 16,00 18,00
A
B
C D E
t[s]
At the time of ‘A’ the filling starts. The bottle gets pres surized with C O2. After this both val v es open
for the product at the time of 'B'. The valve reduces the flow speed at the position of 'C' and the
Installation and operating instructions
BATCHCONTROL
19
Page 20

A
4
filling is completed to 'D'. The parameter ‘I’ is the s witch point for lower speed and ‘H’ is the target
volume. ‘E’, ‘F’ and ‘G’ are alarm and emergency shutoff values.
CAN PARAMETER
Letter Object No. Description
B 3091.02 Forward run time
E 3093.04 Maximum batching time
F 3003.05 Maximum volume
G 3093.01 Maximum tail volume
H 3091.01 Target volume
I 3044.06 Off value
As a rule, valves don't close directly and completel y. It comes to vibrations if the liquid i s suddenl y
stopped. The vibrating amount of liquid is measured. If the oscillation amplitude is in a
programmable area for a predefined number of meas uring, then the filling is regarded as ended.
The following picture shows this process:
end of filling
0,009
0,007
0,005
flow min. value max. value
0,003
Q[l/s]
0,001
12,10 12,20 12,30 12,40 12,50
-0,001
B
-0,003
-0,005
counter : 0 1 0 1 2 0 1 2 3 4 5
start againstart start again filling process finished
C
t[s]
CAN PARAMETER
Letter Object No. Description
A + B 3091.0A Volume flow value for switch off
C 3091.0B Number of measurements
In addition to the described functions alarm and emergency off functions can be progra mmed. The
individual phases of the filling process, changes of state and the filling results can be sent by the
device automatically. The Krohne configuration program represents a good summary of the
possibilities for the BATCHCONTROL 5014C.
If the possibilities shouldn't suffice, then customer specific functions can be down loaded in the
device.
Installation and operating instructions 20 BATCHCONTROL
Page 21

5
Part C Service
5 Illustration of printed circuit board
Please note!
Do not open the housing of the
BATCHCONTROL IFM 5014C.
Danger of contamination with substances likely
to destroy the moisture barrier of the electronic
equipment (e.g. if CIP or SIP cleaned from the
outside).
Therefore, please contact your KROHNE
Service engineer before you open the housing.
1
2
3
4
5
11
12
13
14
6
10
7
8
9
1 Cover, signal converter
2 Gasket
3 Electronic unit, signal converter
4 Housing, signal converter
5 Primary head
7 Printed circuit board
8 Plug connector power supply and
pulse output
9 U-clamp terminal for functional ground
10 Fastening screws for cover
11 Guide collar, primary head
12 O-ring gasket
13 Special pipe flange
14 Stud bolt with lock washer,
plain washer and nut
LED 2
LED 1
5
Installation and operating instructions
BATCHCONTROL
21
Page 22

6
Part D Technical Data, block diagram
and measuring principle
6 Technical data
6.1 Flow during filling, and fill volume
Meter size Optimum flowrate for filling
DN mm inches ml/s US Gal/min ml US Gal
2.5
4
6
10
15
1
/10 3 - 10 0.048 - 0.159
1
/8 10 - 30 0.159 - 0.476
1
/4 20 - 60 0.317 - 0.951
3
/8 60 - 200 0.951 - 3.170
1
/2 150 - 500 2.378 - 7.925
25 1 400 - 1200 6.340 - 19.020
32 11/4 650 - 2250 10.300 - 35.663
40 11/2 1000 - 3000 15.850 - 47.551
6.2 Flowmeter
Meter sizes
with venturi measuring tube DN 2.5, 4, 6, 10, 15, 25, 40 and 1/10", 1/8", 1/4", 3/8", 1/2", 1",11/2"
with straight tube (option) DN 15, 32 and 1/2", 11/4"
Connection sandwich (flangeless) type with precisely defined sealing faces,
centering devices and metallic stop face
Electrical conductivity ≥ 5 µS/cm (≥ 20 µS/cm for demineralized cold water)
Ambient temperature Process temperature
-25 to +40 °C / -13 to +104 °F -60 to +140 °C / -76 to +284 °F
-25 to +60 °C / -13 to +140 °F -60 to + 60 °C / -76 to +140 °F
(information on higher provided on request)
steam cleaning up to +150 °C / +302 °F (max. 1 hour)
Temperature shock resistance Temperature rising Temperature falling
sudden change ∆T = 120 °C = 216 °F ∆T = 90 °C = 162 °F
Temperature gradient 1 K/s = 1.8 °F/s
Operating pressure 40 bar / 580 psig
(10 bar / 145 psig for DN 15, 32 and 1/2", 11/4"
with straight measuring tube)
Electrode design fused-in-place electrodes
Protection category IP 67, equivalent to NEMA 6
(EN 60 529/IEC 529) (overall device, incl. signal converter)
Materials of construction
Housing stainless steel 1.4408 or 1.4404
Measuring tube fine-grain-stabilized, high-density HiTec ceramics,
Electrodes Cermet
purity 88 % Al2O3 + 12%ZrO2, CIP- and SIP-proof
Cover seal EPDM
Filling times > 1.5 s,
filling volume .....
≥
≥
≥
≥
≥
≥
≥
≥
10
20
40
100
200
600
975
1500
0.003
≥
0.005
≥
0.011
≥
0.026
≥
0.053
≥
0.159
≥
0.257
≥
0.396
≥
Installation and operating instructions 22 BATCHCONTROL
Page 23

6.3 Signal converter
Power supply
Voltage 24 V DC, ± 20%
Power consumption ≤ 5 W excl. external loads
Electrical connection two M12 plug-in connector
Operator control All operating data factory-set to your specifications.
Available as option for change of operating data:
- KROHNE software for operator control via PC.
Options connected to the CAN bus interface
6 Valve outputs low or high side activ
Function programmable to control valves,
short and cable broken detect
Voltage 24 V DC, ± 20%
Load rating I
Load short I
6 Analogue inputs alternative to the outputs
Function programmable for alarm messages,
to control the filling process
Voltage 0 – 11 V DC, resolution of 8 bit
Impedance input 1 and 2: 220 kOhm
Input 3 to 6: 22 kOhm
Electronic temperature sensor
Function programmable for alarm messages
Range -20°C … +100°C
Error ± 3 K
Fluid temperature sensor
Function programmable for alarm messages
Range -20°C … +140°C
Error ± 3 K
CAN bus
Baud rate 20k … 1M baud
max
short
≤ 200 mA
≤ 2 A
6
Installation and operating instructions
BATCHCONTROL
23
Page 24

6
6.4 Error limits at reference conditions
F = Error in % of MV
MV = measured value
Pulse output DN 2.5 – 6 /
1
/10“ – 1/
“ DN 10 – 40 /
4
at flow velocity of ...
v ≥ 1 m/s ≥ 3.3 ft/s F < ± 0.5 % of MV F < ± 0.3 % of MV
v < 1 m/s < 3.3 ft/s F < ± 0.4 % of MV + 1 mm/s F < ± 0.2 % of MV + 1 mm/s
< ± 0.4 % of MV + 0.04 inch/s < ± 0.2 % of MV + 0.04 inch/s
Repeatability Filling time TF Standard deviation σ
1.5 s < TF ≤ 3 s ≤ 0.4 %
3.0 s < T
5.0 s < T
≤ 5 s ≤ 0.2 %
F
≤ 0.1 %
F
Reference conditions (similar to EN 29 104)
Liquid product water +20 °C / +68 °F
Straight inlet/outlet runs 10× DN / 5 × DN (DN = meter size)
Valve closing time variation < 1 ms
Flow velocity 1 m/s = 3.3 ft/s
Volumetrically wet calibration on EN 17025 accredited calibration rigs.
3
/8“ – 11/2“
Installation and operating instructions 24 BATCHCONTROL
Page 25

6.5 Dimensions and weights
in mm (inches)
DN 2.5 –15 /
1
/10“ – ½“
flow direction
M12
connector
series 713,
5 and 8-pin
6
X2
M6
option: 4 x M6 bolt hole on both sides
(section M-M)
Meter size Diameter d
DN inches mm (inches) kg lb
2.5
4
6
10
15
1
/10 6 (0.24) 1.6 (3.6)
1
/6 7 (0.28) 1.6 (3.6)
1
/4 9 (0.35) 1.6 (3.6)
3
/8 12 (0.47) 1.6 (3.6)
1
/2 14.3 (0.56) 1.6 (3.6)
Weight
1
Installation and operating instructions
BATCHCONTROL
25
Page 26

6
DN 25 – 40 / 1“ – 1½“
Meter size Dimensions in mm (inches) Weight
DN inches a b f g kg (lb)
25 1 58 (2.28) 200 (7.87) 66 (2.68) 34 (1.34) 1.6 (3.6)
32 1 1/4 83 (3.27) 215 (8.46) 81 (3.19) 42 (1.65) 2.3 (5.1)
40 11/2 83 (3.27) 215 (8.46) 81 (3.19) 42 (1.65) 2.3 (5.1)
6.6 Instrument nameplates
Type designation
Serial No.
Insulation class of field coils
Protection category to IEC529/EN60529
M12
connector
series 713,
5 and 8-pin
IFM 5014 K /B /2
Pressure rating/flange class
Electrode material: platinum
Measuring tube material: Al
Meter size: DN mm and inches
Measuring range Primary constant
l
Installation and operating instructions 26 BATCHCONTROL
28-03
aluminium oxide
2O3
Page 27

7 Block diagram
The IFC 014 signal converter consists of 2 functional groups.
Functional group 1 contains an input amplifier, and a high-resolution analog/digital conv erter that
is controlled and monitored by microprocessor CPU 1. It controlled also the direct current for the
field coils of the primary head.
Functional group 2 is the batch controller board. It is supdevided in the six IO-function blocks, the
CAN bus interface and the temperature sensors. All functions are controlled by the CPU 2.
Block diagram IFC 014
7
Installation and operating instructions
BATCHCONTROL
27
Page 28

8
8 Measuring principle
Flowmeter for electrically conductive
liquids.
Measurement is based on Faraday’s law
of induction, according to which a voltage
is induced in an electrically conductive
body passing through a magnetic field.
The following expression applies:
U = K × B × v × D
K an instrument constant
B magnetic field strength
v mean velocity
D tube diameter
U
B
v
D
U
Thus, the induced voltage is proportional to the
mean flow velocity, when the field strength is
constant. Inside the electromagnetic flowmeter,
the liquid passes through a magnetic field
applied perpendicular to the direction of flow.
An electric voltage is induced by the movement
of the liquid (which must have a minimum
electrical conductivity), which is proportional to
the mean flow velocity and thus to the volume
of flow.
The induced voltage signal is picked up by two
electrodes that are in conductive contact with
the liquid, and transmitted to a signal converter
for a standardized output signal.
Installation and operating instructions 28 BATCHCONTROL
Page 29

E E
E 1 Index
Part E Annex
Keyword Section-No. Fct-No.
A
Ambient temperature 1.1, 6.2
B
Block diagram IFC 014 C 6, 7
C
Cleaning 1.3, 6.2
Connection diagrams
– outputs 2.4
– power supply 2.3
Connection points
– grounding 1.3.3
D
Data, Technical 6
Device description 1.4.1
DN = meter size in mm 6.1, 6.2
E
Electrical connection
– outputs 2.4
– power supply 2.3
– status output 2.5
– current output 2.5
– pulse output 2.5
Electrodes 6.2, 8
Errors 1.2
Error (messages) 4.5
F
Factory settings 3.2
Fatal Error 3.1
FE = functional ground 5
Flanges 1.3
Flanges, Position of 1.3.1
Flow (Q) 1.1, 1.4.1, 4,
Flow velocity v 4.4, 6.4, 8
Flow, direction of 1.2
Frequency output S
– pulse output P 2.3.3, 4.4, 5.7 1.6
4.6, 6
Functional description page 5
Function(s) 4.4
Functional ground FE 1.3.2, 2.1
– measuring range 6.6
H
Hardware info 4
I
Impulse output =
pulse output P
(frequency output) 5.6
Instrument nameplates 6.6
L
Limits 1.1, 6.4
M
Measuring principle 6, 8
Measuring tube 1.1, 1.3
Meter size (DN) = nominal dia.
of measuring tube in mm or 1.1, 1.5, 6.1, 3.2
inches 1.5, 6.1, 6.5
Keyword Section-No. Fct-No.
O
Operating pressure 11.3, 6.2
Option 1.5.2, 6.2,
P
P = pulse output 6.4
Power supply (= line voltage) 1.4.1, 2.3,
– frequency 2.2, 10.5
– power consumption 6.3
– voltage 6.3
Primary constant, see GKL 6.6 3.2
Primary head
– installation 1.1 - 1.4
Process temperature 1.1, 6.2
Pulse output P / pulse width 5.6 1.6
Q
Q = flowrate 6.1 1.1, 3.2
R
Removal of
– device (total) 1.4.1
S
Signal converter IFC 015
– operator control 6.3
– error limits 6.4
Software 4, 6.3
Start-up 3
Straight outlet run 1.1
Straight inlet run 1.1
Storage 1.1
Standards
– ANSI . . . 1.3,
– DIN . . . 1.3,
– EN . . 2.2
– EMC page 4
– IEC . . . 1.1,1.3.3,
2.1, 6.2
– VDE . . . 1.3.3, 2.1,
T
Technical data 6
– dimensions + weights 1.5.1, 6.5
– error limits 6.4
– limits for
– signal converter IFC 015 K 6.3, 8
– primary head 1.1, 1.3.2,
Temperatures
– ambient 1.1, 6.2
Totalizer (internal electronic) 4.6, 5.7 1.6
Transport 1.1
V
v = flow velocity 4.6, 4.7 3.2
6.2, 6.5
6.3
6.3
1.4
Installation and operating instructions
BATCHCONTROL
Page 30

E
E 2 C AN parameter
Object No
Index
Value (default)
10xxH CANopen parameter
1000H 00H Device type without long 0 r - - 0x00000014 (const. value)
1008H 00H Manufacturer Device Name without string - - r - - “IFC “
1009H 00H
1010H Parameter save
1010H 00H 1 Number of entries without byte - - r - -
1010H 01H
1011H Parameter recall
1011H 00H 1 Number of entries without byte - - r - -
1011H 01H 1
1017H 00H 250 Consumer heartbeat time ms word 0 65535 r/w - d
1018H Identity Object
1018H 00H 4 Number of entries without byte - - r - -
1018H 01H Vendor Id without long - - r - -
1018H 02H Product code without long - - r - -
1018H 03H Revisionsnumber without long - - r - -
1018H 04H Serialnumber without long - - r - -
300xH Flow sensor parameter
3001H Sensor parameter
3001H 00H 7 Number of entries without byte - - r - 3001H 01H 1 Full scale range l/s float 0,0015 15,1 r/w - d
3001H 02H 1 Time constant S float 0,1 99 r/w - as
3001H 03H 15 Meter size mm float 2,5 40 r/w - as Meter size of tube
3001H 04H 3,3 Sensor constant without float 0,5 9,9 r/w - as Calibration constant of Sensor
3001H 05H 0 Zero point l/s float -1,0 +1,0 r/w - as Zero point of Sensor
3001H 06H 0 Flow direction without byte 0 1 r/w - as
3001H 07H 0 Auto zero function - byte 0 1 r/w - d Zero point calculation
Bit 0: Activation of function
3002H M easurement values and PDO definition
3002H 00H 6 Number of entries without byte - - r - 3002H 01H 0,0
3002H 02H 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: Activation of function
Manufacturer Hardware
Version
Save all parameters in
EEPROM
Recall all parameters from
EEPROM to RAM
Volume flow without time
constant
Sending function for Index
01H
Description
Dimension
without string - - r - - “014 “
without long - - r/w - d
without long - - r/w - d
l/s float -15,1 15,1 r 01H -
without byte 0 4 r/w - d
Format
min
max
access
Descriptor
transfer
Save databytes: 65H 76H 61H 73H
Read: 00H 00H 00H 01H
Recall databytes: 64H 61H 6FH
6CH
Read: 00H 00H 00H 01H
Full scale value, basis for values
given as percentage values
Time constant for output value, of
no significance for
BATCHCONTROL
Actual measurement flow value
without time constant
Sending function measurement
value without time constant
Description
0 = as printed on
instrument
1 = contrary to
imprint
1 = function
active
0 = function
switched off
Installation and operating instructions 30 BATCHCONTROL
Page 31

Object No
Index
Value (default)
3002H 03H 0,0
3002H 04H 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
3002H 05H 0,0 Currently measured volume l float -1000 1000 r 03H d Currently totalized volume
3002H 06H 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
3003H Alarm values and PDO definition
3003H 00H 8 Number of entries without byte - - r - -
3003H 01H 1 Maximum volume flow l/s float 0,0001 15,1 r/w - d
3003H 02H 0 Definition for shut-down without byte 0 63 r/w - d
3003H 03H - Actual status without byte 0 1 r 04H 3003H 04H 4
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
3003H 05H 1,0 Maximum volume l float 0,0001 100,0 r/w - d
3003H 06H 0 Definition for shut-down without byte 0 63 r/w - d Bit 0: 1 = output 1 switch off if
Volume flow with time
constant
Sending function for Index
03H
Sending function for Index
05H
Sending function for Index
03H
Description
Dimension
l/s float -15,1 15,1 r 02H -
without byte 0 4 r/w - d
without byte 0 4 r/w - d
without byte 0 4 r/w - d Bit 1-0: Priority
Format
min
max
access
Descriptor
transfer
actual measurement flow value with
time constant
Sending function Measurement
value with time constant
Bit 2-0: Sending function volume
counter
Limit value for volume flow (without
time constant) with emergency
shut-down
Bit 0: 1 = output 1 switch off if
volume flow is to high, 0 = no
influencing of t he output
Bit 1: 1 = output 2 switch off if
volume flow is to high, 0 = no
influencing of t he output
Bit 2: 1 = output 3 switch off if
volume flow is to high, 0 = no
influencing of t he output
Bit 3: 1 = output 4 switch off if
volume flow is to high, 0 = no
influencing of t he output
Bit 4: 1 = output 5 switch off if
volume flow is to high, 0 = no
influencing of t he output
Bit 5: 1 = output 6 switch off if
volume flow is to high, 0 = no
influencing of t he output
Bit 0: 1 = Limit value exceeded, 0 =
okay
Limit value for counted volume with
emergency shut-down
Description
1 = no message
output
0 = activation of
message output
1 = no message
output
0 = activation of
message output
1 = no message
output
0 = activation of
message output
1 = no message
output
0 = activation of
message output
Installation and operating instructions
BATCHCONTROL
Page 32

Object No
Index
Value (default)
3003H 07H - Actual status without byte 0 1 r 05H 3003H 08H 4
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
Sending function for Index
07H
Description
Dimension
without byte 0 4 r/w - d Bit 1-0: Priority
Format
min
max
access
Descriptor
transfer
volume is to high, 0 = no
influencing of t he output
Bit 1: 1 = output 2 switch off if
volume is to high, 0 = no
influencing of t he output
Bit 2: 1 = output 3 switch off if
volume is to high, 0 = no
influencing of t he output
Bit 3: 1 = output 4 switch off if
volume is to high, 0 = no
influencing of t he output
Bit 4: 1 = output 5 switch off if
volume is to high, 0 = no
influencing of t he output
Bit 5: 1 = output 6 switch off if
volume is to high, 0 = no
influencing of t he output
Bit 0: 1 = Limit value exceeded, 0 =
okay
Description
1 = no message
output
0 = activation of
message output
301xH Electronic temperature sensor
3011H Sensor parameter
3011H 00H 2 Number of entries without byte - - r - -
1000,
3011H 01H 1.0 Factor for scaling without float 0,001
3011H 02H 0.0 Offset for scaling °C float -100,0 100,0 r/w - d
3012H M easurement values and PDO definition
3012H 00H 3 Number of entries without byte - - r - 3012H 01H 0,0 Measuring value °C float -10 +100 r 11H - actual measured temperature
3012H 02H 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
3012H 03H 250 Repeat time ms word 50 5000 r/w - d Repeat time for the value
3013H Alarm values and PDO definition
3013H 00H 4 Number of entries without byte - - r - 3013H 01H 20 Lower limit value °C float -10 +80 r/w - d
3013H 02H 70 Upper limit value °C float 0 +100 r/w - d
3013H 03H 0 Status of measuring input without byte 0 15 r 12H -
Bit 2: 1 = sensor cable break
Bit 3: 1 = sensor short circuit
3013H 04H 4
Sending function for index
01H
Sending function for index
03H
without byte 0 4 r/w - d
without byte 0 4 r/w - d Sending function change of status
r/w - d
0
Sending function of temperature
output (repeat time depends on
index 3)
1 = no message
output
0 = activation of
message output
Warning message when value
remains below limit
Warning message when value
exceeds limit
Bit 0: 1 = lower limit value is
exceeded
Bit 1: 1 = upper limit value is
exceeded
Installation and operating instructions 32 BATCHCONTROL
Page 33

Object No
Index
Value (default)
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
302xH Liquid temperature sensor
3021H Sensor parameter
3021H 00H 2 Number of entries without byte - - r - 3021H 01H 1.0 Factor for scaling without float 0,001 1000 r/w - d
3021H 02H 0.0 Offset for scaling °C float -100,0 100,0 r/w - d
3022H M easurement values and PDO definition
3022H 00H 3 Number of entries without byte - - r - 3022H 01H 0,0 Measuring value °C float -10 +150 r 21H - actual measured temperature
3022H 02H 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
3022H 03H 250 Repeat time ms word 50 5000 r/w - d Repeat time for the value
3023H Alarm values and PDO definition
3023H 00H 4 Number of entries without byte - - r - 3023H 01H 20 Lower limit value °C float -10 +140 r/w - d
3023H 02H 70 Upper limit value °C float 0 +150 r/w - d
3023H 03H 0 Status of measuring input without byte 0 15 r 22H -
Bit 2: 1 = sensor cable break
Bit 3: 1 = sensor short circuit
3023H 04H 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
30yxH Functi on bl ocks (3 <= y <= 8)
30y1H Functi on block definition
30y1H 00H 1 Number of entries without byte - - r - 30y1H 01H 0 Function of the block without byte 0 5 r/w - D Bit 3 - 0: function definition
Sending function for index
01H
Sending function for index
03H
Description
Dimension
without byte 0 4 r/w - d
without byte 0 4 r/w - d Sending function change of status
Format
min
max
access
Descriptor
transfer
Sending function of temperature
output (repeat time depends on
index 3)
Warning message when value
remains below limit
Warning message when value
exceeds limit
Bit 0: 1 = lower limit value is
exceeded
Bit 1: 1 = upper limit value is
exceeded
Description
0 = activation of
message output
1 = no message
output
1 = no message
output
0 = activation of
message output
0 = activation of
message output
1 = no message
output
Installation and operating instructions
BATCHCONTROL
Page 34

Object No
Index
Value (default)
0000 = off
30y2H Bi nary input parameter and PDO definition (only valid if 30y1.1 = 01H)
30y2H 00H 4 Number of entries without byte - - r - 30y2H 01H 0 Function of Input without byte 0 20 r/w - D Bit 3 - 0: Function of Input
Bit 4: Polarity of Input
0 = high active
1 = low active
30y2H 02H 0 Definition for shut-down without byte 0 63 r/w - d
30y2H 03H 0 Status of Input without byte 0 1 r y1H - Bit 0: actual status of Input
0 = Input is off
1 = Input is on
30y2H 04H 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
30y3H Analog ue i nput and PDO definition (only valid if 30y1.1 = 02H)
30y3H 00H 10 Number of entries without byte - - r - 30y3H 01H 0 Function of Input without byte 0 20 r/w - d Bit 3 - 0: Function of Input
Sending function for Index
03H
Description
Dimension
without byte 0 4 r/w - d
Format
min
max
access
Descriptor
transfer
Description
0001 = binary
input
0010 = analogue
input
0011 = binary
output
0100 = pulse
width modulated
output
0101 = customer
program
0000 = without
function (off)
0001 = Start of
batching
0010 = Stop of
batching
(emergency shutdown)
0011 = Input for
Bus
0100 = customer
program
Bit 0: 1 = output 1 switch off if input
is high, 0 = no influencing of the
output
Bit 1: 1 = output 2 switch off if input
is high, 0 = no influencing of the
output
Bit 2: 1 = output 3 switch off if input
is high, 0 = no influencing of the
output
Bit 3: 1 = output 4 switch off if input
is high, 0 = no influencing of the
output
Bit 4: 1 = output 5 switch off if input
is high, 0 = no influencing of the
output
Bit 5: 1 = output 6 switch off if input
is high, 0 = no influencing of the
output
Bit 3-0: Sending function change of
status
1 = no message
output
0 = activation of
message output
0000 = without
function (off)
0001 = input for
bus
Installation and operating instructions 34 BATCHCONTROL
Page 35

Object No
Index
Value (default)
Bit 4: Calculation function
30y3H 02H 1,0
30y3H 03H 0,0
30y3H 04H 0,0
30y3H 05H 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
30y3H 06H 250 Repeat time ms word 50 5000 r/w - d Repeat time for the value
30y3H 07H 10 Maximum voltage V float 0,0001 12,0 r/w - d
30y3H 08H 0 Definition for shut-down without byte 0 63 r/w - d
30y3H 09H 0 Actual status without byte 0 1 r y3H 30y3H 0AH 4
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
30y4H Bi nary output parameter and PDO definition (only valid if 30y1.1 = 03H)
30y4H 00H 9 Number of entries without byte - - r - -
30y4H 01H 0 Output hardware function without byte 0 3 r/w - d
Scaling factor for analogue
input
Scaling offset for analogue
input
Measured voltage (with
scaling)
Sending function for Index
04H
Sending function for Index
09H
Description
Dimension
without float 0,0001 1000 r/w - as
V float -1000 1000 r/w - as
V float 0,0 1000 r y2H - actual measured voltage
without byte 0 4 r/w - d
without byte 0 4 r/w - d Bit 1-0: Priority
Format
min
max
access
Descriptor
transfer
The measured analogue voltage [V]
is multiplied with this factor
The offset is added to the
measured analogue voltage [V]
(voltage = offset + factor*real
voltage)
Sending function of analogue value
(repeat time depends on index 6)
Limit value for voltage with
emergency shut-down
Bit 0: 1 = output 1 switch off if
voltage is to high, 0 = no
influencing of t he output
Bit 1: 1 = output 2 switch off if
voltage is to high, 0 = no
influencing of t he output
Bit 2: 1 = output 3 switch off if
voltage is to high, 0 = no
influencing of t he output
Bit 3: 1 = output 4 switch off if
voltage is to high, 0 = no
influencing of t he output
Bit 4: 1 = output 5 switch off if
voltage is to high, 0 = no
influencing of t he output
Bit 5: 1 = output 6 switch off if
voltage is to high, 0 = no
influencing of t he output
Bit 0: 1 = Limit value exceeded, 0 =
okay
Bit 0: definition for high or low side
driver
Description
0010 = start of
batching
0011 = stop of
batching
(emergency shutdown)
0100 = customer
program
0 = input >
parameter
1 = input <
parameter
1 = no message
output
0 = activation of
message output
1 = no message
output
0 = activation of
message output
0 = output
switching to
Installation and operating instructions
BATCHCONTROL
Page 36

Object No
Index
Value (default)
Bit1: output polarity
0 = high active
1 = low active
30y4H 02H 0
30y4H 03H
30y4H 04H 0 Input channel for on signal without byte 0 31 r/w - d
0000 = function 1
0001 = function 2
0010 = function 3
0011 = function 4
0100 = function 5
0101 = function 6
Bit 4: Calculation function
30y4H 05H 0
Output on funct ion
definition
0,001
On value
s
Output off function
definition
Description
Dimension
without byte 0 11 r/w - d
l or s or V or
°C
without byte 0 11 r/w - d
float
Format
0s
0l
0l/s
0V
-20°C
min
max
100s
100l
15l/s
r/w - d
11V
120°C
access
Descriptor
transfer
Bit 0-3: definition for switching the
output on
According to selected function: on
time or volume or volume flow or
temperature or voltage
Bit 0-3: input channel for output on
function
Bit 0-3: definition for switching the
output off
Description
ground
1 = output
switching to +24V
0000 = without
function (off)
0001 = switch on
by input
0010 = switch on
by bus
0011 = switch on
by time
0100 = switch on
by volume
0101 = switch on
by volume flow
0110 = switch on
by fluid
temperature
0111 = switch on
by electronic
temperature
1000 = switch on
by analogue
voltage
1001 = switch on
by batch program
1010 = switch on
by error detected
1011 = switch on
by customer
program
0 = input >
parameter
1 = input <
parameter
0000 = without
function (off)
0001 = switch off
by input
0010 = switch off
by bus
0011 = switch off
by time
0100 = switch off
by volume
0101 = switch off
by volume flow
0110 = switch off
by fluid
temperature
0111 = switch off
by electronic
temperature
Installation and operating instructions 36 BATCHCONTROL
Page 37

Object No
Index
Value (default)
30y4H 06H
30y4H 07H 0 Input channel for off signal without byte 0 21 r/w - d
0000 = function 1
0001 = function 2
0010 = function 3
0011 = function 4
0100 = function 5
0101 = function 6
Bit 4: Calculation function
30y4H 08H 0 Status of output without byte 0 7 r/w y4H - Bit 0: actual status of output
0 = output is off
1 = output is on
Bit 2-1: error status of output
00 = no error
30y4H 09H 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
0,001
Off value
s
Sending function for Index
08H
Description
Dimension
l or s or l/s
or V or °C
without byte 0 4 r/w - d
float
Format
min
0s
0l
0l/s
0V
-20°C
max
100s
100l
15l/s
r/w - d
11V
120°C
access
Descriptor
transfer
According to selected function: off
time or volume or volume flow or
temperature or voltage
Bit 0-3: input channel for output off
function
Bit 3-0: Sending function change of
status
Description
1000 = switch off
by analogue
voltage
1001 = switch off
by batch program
1010 = switch off
by error detected
1011 = switch off
by customer
program
0 = input >
parameter
1 = input <
parameter
01 = short circuit
(only detected if
output is on)
10 = interruption
(only detected if
output is on)
11 = chip
temperature to
high
1 = no message
output
0 = activation of
message output
309xH Batching
3091H Filling parameter
3091H 00H 15 Number of entries without byte - - r - d
3091H 01H 0,5 Target volume l float 0,0001 200 r/w - d
3091H 02H 0,02 Forward run time s float 0.01 10 r/w - d
3091H 03H 0,5 Time out s float 0.01 10 r/w - d
3091H 04H 1 Counter control without byte 0 3 w - d
Bit 0: Start/Stop Counter
0 = stop counter
Automatic output controls on this
parameter
Time after starting, before opening
of valve
Time after filling, before a new run
instruction is accepted
Counter control (only active on
manual control output))
Installation and operating instructions
BATCHCONTROL
Page 38

Object No
Index
Value (default)
Bit 1: Counter reset
0 = no function
3091H 05H 0
3091H 06H 0 Learning function - byte 0 3 r/w - d Self learning function
Bit 1-0: Activation of function
0 = function off
1 = not allowed
3091H 07H 0
3091H 08H 0 Function data 1 - byte 0 5 r/w - d
3091H 09H 0 Function data 2 - byte 0 255 r/w - d
3091H 0AH 0,001
3091H 0BH 10 Number of measurements byte 1 100 r/w - d Parameter for the function 3091.10
3091H 0CH 0 Definition for shut-down without byte 0 63 r/w - d
3091H 0DH 100 Fixed tail volume 1 ml byte 0 255 r/w - d
3091H 0EH 100 Fixed tail volume 2 ml byte 0 255 r/w - d
3091H 0FH 10
3092H Status values and PDO definition
3092H 00H 2 Number of entries without byte - - r - d
3092H 01H 0 Actual status of batching without byte 0 5 r 91H -
Bit 0-3: actual status of batching
0 = stop
Controlling batching
process
Function select for ‘switch
off calculation’
Volume flow value for
switch off
Percentage of target
volume
Description
Dimension
without byte 0 3 w - d
- byte 0 1 r/w - d
l/s float 0 15,1 r/w - d
% byte 0 50 r/w - d
Format
min
max
access
Descriptor
transfer
Description
1 = counter
operates
1 = reset the
counter
Bit 0: 1 = Start filling through bus,
only at batching process = CAN
Bus (0 = without function)
Bit 1: 1 = Stop filling through bus,
independent from other inputs (0 =
without function)
2 = function on,
no other action
3 = function on
and the next
filling starts the
self learning cycle
Programm select for switch off
calculation
0 = switch off point depends from
the last 1 to 5 tail volumes
1 = switch off point depends from
the actual flow and the last 1 to 5
tail volumes
First data for the function ‘switch off
calculation’
Fct = 0: number of tail volumes for
switch off calculation (1 to 5)
Fct = 1: number of tail volumes for
switch off calculation (1 to 5)
Second data for the function ‘switch
off calculation’
(for future use)
If the volume flow is lower then this
value, the filling will stop after
number of measurements
Bit 0: 1 = output 1 switch off if
3091_05 Bit 1 = 1 , 0 = no
influencing of t he output
Bit 1: 1 = output 2 switch off if
3091_05 Bit 1 = 1, 0 = no
influencing of t he output
Bit 2: 1 = output 3 switch off if
3091_05 Bit 1 = 1 , 0 = no
influencing of t he output
Bit 3: 1 = output 4 switch off if
3091_05 Bit 1 = 1, 0 = no
influencing of t he output
Bit 4: 1 = output 5 switch off if
3091_05 Bit 1 = 1, 0 = no
influencing of t he output
Bit 5: 1 = output 6 switch off if
3091_05 Bit 1 = 1, 0 = no
influencing of t he output
this tail volume is used for the next
filling (if the bit 4 is set in RPDO1)
and after power on
this tail volume is used for the next
filling (if the bit 5 is set in RPDO1)
this tail volume is used for the next
filling (if the bit 6 is set in RPDO1)
Installation and operating instructions 38 BATCHCONTROL
Page 39

Object No
Index
Value (default)
1 = wait
2 = fill
3 = tail
4 = pause
5 = break
Bit 4 - 7: not used
3092H 02H 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: Activation of function
3093H Alarm values and PDO definition
3093H 00H 20 Number of entries without r
3093H 01H 0,05 Maximum tail volume l float 0,0001 1,0 r/w - d
3093H 02H 0 Actual status without byte 0 1 r 92H 3093H 03H 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: Activation of function
3093H 04H 10 Maximum batching time s float 0,01 100 r/w - d
3093H 05H 0 Definition for shut-down without byte 0 63 r/w - d
3093H 06H 0 Actual status without byte 0 1 r 93H 3093H 07H 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: Activation of function
1 = no message
Sending function for Index
01H
Sending function for Index
02H
Sending function for Index
06H
Description
Dimension
without byte 0 4 r/w - D
without byte 0 4 r/w - d
without byte 0 4 r/w - d
Format
min
max
access
Descriptor
transfer
Description
Sending function at change of
status
1 = no message
output
0 = activation of
message output
Limit value tail volume, status info
only
Bit 0: 1 = Limit value overstepped,
0 = okay
Sending function at change of
status
1 = no message
output
0 = activation of
message output
Limit value for batching time with
emergency shut-down
Bit 0: 1 = output 1 switch off if
batching time is to high, 0 = no
influencing of t he output
Bit 1: 1 = output 2 switch off if
batching time is to high, 0 = no
influencing of t he output
Bit 2: 1 = output 3 switch off if
batching time is to high, 0 = no
influencing of t he output
Bit 3: 1 = output 4 switch off if
batching time is to high, 0 = no
influencing of t he output
Bit 4: 1 = output 5 switch off if
batching time is to high, 0 = no
influencing of t he output
Bit 5: 1 = output 6 switch off if
batching time is to high, 0 = no
influencing of t he output
Bit 0: 1 = Limit value overstepped,
0 = okay
Sending function at change of
status
Installation and operating instructions
BATCHCONTROL
Page 40

Object No
Index
Value (default)
3093H 08H 0,3 Maximum tail time s float 0,005 10 r/w - d
3093H 09H 0 Actual status without byte 0 1 r 94H 3093H 0AH 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: Activation of function
3093H 0BH 0,01 Maximum leakage volume l float 0,001 0,1 r/w - d
3093H 0CH 0 Actual status without byte 0 1 r 95H 3093H 0DH 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: Activation of function
3093H 0EH 0.002 Lower limit for volume flow l/s float -100 +100 r/w - d lower deviation of the set point
3093H 0FH 0 Actual status without byte 0 1 r A0H -
3093H 10H 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
3093H 11H 0.002 Upper limit for volume flow l/s float -100 +100 r/w - d upper deviation of the set point
3093H 12H 0 Actual status without byte 0 1 r A1H -
3093H 13H 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
3093H 14H 0 Reset emergency shut off without byte 0 1 w - d 0 = no action
Sending function for Index
09H
Sending function for Index
0CH
Sending function for Index
0FH
Sending function for Index
12H
Description
Dimension
without byte 0 4 r/w - d
without byte 0 4 r/w - d
without byte 0 4 r/w - d
without byte 0 4 r/w - d
Format
min
max
access
Descriptor
transfer
Description
output
0 = activation of
message output
Limit value for the tail time, status
info only
Bit 0: 1 = Limit value overstepped,
0 = okay
Sending function at change of
status
1 = no message
output
0 = activation of
message output
Leakage volume between two
batches, status info only
Bit 0: 1 = limit value overstepped, 0
= okay
Sending function at change of
status
1 = no message
output
0 = activation of
message output
Bit 0: 1 = limit value understepped,
0 = okay
Sending function at change of
status
1 = no message
output
0 = activation of
message output
Bit 0: 1 = limit value overstepped, 0
= okay
Sending function at change of
status
1 = no message
output
0 = activation of
message output
Installation and operating instructions 40 BATCHCONTROL
Page 41

Object No
Index
Value (default)
3094H Result of last batching and PDO definition
3094H 00H 15 Number of entries without byte - - r - -
3094H 01H 4 Sending function without byte 0 4 r/w - d Sending function batching results
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
3094H 02H 0 Batching time s float 0 100 r 96H - Time for complete batch process
3094H 03H 0 Tail time s float 0 10 r 97H - Closure time of valve
3094H 04H 0 Batching volume l float 0 100 r 98H - Volume filled
3094H 05H 0 Tail volume l float 0 1 r 99H - Volume during closure time
3094H 06H 0 Max. flow velocity l/s float 0 15,1 r 9AH - Highest volume flow during filling
3094H 07H 0 Leakage volume l float 0 0,1 r 9BH - Volume between two fillings
3094H 08H 0.002 Lower limit for filling l float 0 10 r/w - d lower deviation of the set point
3094H 09H 0 Actual status without byte 0 1 r 9CH 3094H 0AH 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
3094H 0BH 0.002 Upper limit for filling l float 0 10 r/w - d upper deviation of the set point
3094H 0CH 0 Actual status without byte 0 1 r 9DH -
3094H 0DH 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
3094H 0EH 0 Actual status without byte 0 1 r 9EH - Bit 0: 1 = filling finished
3094H 0FH 4
Bit 1-0: Priority
00 = PDO 0
01 = PDO 1
10 = PDO 2
11 = PDO 3
Bit 2: activation of function
Sending function for Index
09H
Sending function for Index
0CH
Sending function for index
0EH
Description
Dimension
without byte 0 4 r/w - d
without byte 0 4 r/w - d
without byte 0 4 r/w - d
Format
min
max
access
Descriptor
transfer
Description
1 = all emergency flags will be
reset
1 = no message
output
0 = activation of
message output
Bit 0: 1 = limit value understepped,
0 = okay
Sending function at change of
status
1 = no message
output
0 = activation of
message output
Bit 0: 1 = limit value overstepped, 0
= okay
Sending function at change of
status
1 = no message
output
0 = activation of
message output
Sending function at change of
status
1 = no message
output
Installation and operating instructions
BATCHCONTROL
Page 42

Object No
Index
Value (default)
3095H Statistic
3095H 00H 15 Number of entries without byte - - r - -
3095H 01H -3000 Range 1 µl Word -32700 32700 r/w - d First limit
3095H 02H -1500 Range 2 µl Word -32700 32700 r/w - d Second limit
3095H 03H -500 Range 3 µl Word -32700 32700 r/w - d Third limit
3095H 04H +500 Range 4 µl Word -32700 32700 r/w - d Fourth limit
3095H 05H +1500 Range 5 µl Word -32700 32700 r/w - d Fifth limit
3095H 06H +3000 Range 6 µl word -32700 32700 r/w - d Sixth limit
3095H 07H 0 Total number of fillings without word 0 65535 r/w - d
3095H 08H 0 Number of fillings 1 without word 0 65535 r/w - d
3095H 09H 0 Number of fillings 2 without word 0 65535 r/w - d
3095H 0AH 0 Number of fillings 3 without word 0 65535 r/w - d
3095H 0BH 0 Number of fillings 4 without word 0 65535 r/w - d
3095H 0CH 0 Number of fillings 5 without word 0 65535 r/w - d
3095H 0DH 0 Number of fillings 6 without word 0 65535 r/w - d
3095H 0EH 0 Number of fillings 7 without word 0 65535 r/w - d
3095H 0FH 0 Reset statistic without byte 0 1 r - d Bit 0: 1 = reset all statistic results
30AxH CAN parameter
30A1H 00H 7 Baudrate without byte 0 7 r/w - as Bit 0 – 3:
0000 = 1MBaud
0001 = 800kBaud
0010 = 500kBaud
0011 = 250kBaud
0100 = 125kBaud
0101 = 100kBaud
0110 = 50kBaud
0111 = 20kBaud
30A2H 00H 127 Node ID without byte 1 127 r/w - as
30A3H 00H 0 Customer TPDO activation without byte 0 15 r/w - d
30A4H 00H 0 Customer RPDO activation without byte 0 15 r/w - d
32yxH Customer specific 1 bit memory (3 <= y <= 8)
32y1H 00H 8 Number of entries without byte - - r - -
32y1H 01H 0 Bit no 1 without byte 0 1 r/w - d
32y1H 02H 0 Bit no 2 without byte 0 1 r/w - d
32y1H 03H 0 Bit no 3 without byte 0 1 r/w - d
32y1H 04H 0 Bit no 4 without byte 0 1 r/w - d
32y1H 05H 0 Bit no 5 without byte 0 1 r/w - d
Description
Dimension
Format
min
max
access
Descriptor
transfer
Total number of fillings since the
last reset
Number of fillings with a volume
lower than range 1
Number of fillings with a volume
between range 1 and range 2
Number of fillings with a volume
between range 2 and range 3
Number of fillings with a volume
between range 3 and range 4
Number of fillings with a volume
between range 4 and range 5
Number of fillings with a volume
between range 5 and range 6
Number of fillings with a volume
higher than range 6
Bit 0: 1 = customer TPDO1 activ
(description see below)
Bit 1: 1 = customer TPDO2 activ
(description see below)
Bit 2: 1 = customer TPDO3 activ
(description see below)
Bit 3: 1 = customer TPDO4 activ
(description see below)
Bit 0: 1 = customer RPDO1 activ
(description see below)
Bit 1: 1 = customer RPDO2 activ
(description see below)
Bit 2: 1 = customer RPDO3 activ
(description see below)
Bit 3: 1 = customer RPDO4 activ
(description see below)
1. bit variable (this parameter use
the same memory cell as 30y2.04)
2. bit variable (this parameter use
the same memory cell as 30y2.04)
3. bit variable (this parameter use
the same memory cell as 30y2.04)
4. bit variable (this parameter use
the same memory cell as 30y2.04)
5. bit variable (this parameter use
the same memory cell as 30y2.04)
Description
0 = activation of
message output
Installation and operating instructions 42 BATCHCONTROL
Page 43

Object No
Index
Value (default)
32y1H 06H 0 Bit no 6 without byte 0 1 r/w - d
32y1H 07H 0 Bit no 7 without byte 0 1 r/w - d
32y1H 08H 0 Bit no 8 without byte 0 1 r/w - d
32y2H 00H 8 Number of entries without byte - - r - -
32y2H 01H 0 Bit no 9 without byte 0 1 r/w - d
32y2H 02H 0 Bit no 10 without byte 0 1 r/w - d
32y2H 03H 0 Bit no 11 without byte 0 1 r/w - d
32y2H 04H 0 Bit no 12 without byte 0 1 r/w - d
32y2H 05H 0 Bit no 13 without byte 0 1 r/w - d
32y2H 06H 0 Bit no 14 without byte 0 1 r/w - d
32y2H 07H 0 Bit no 15 without byte 0 1 r/w - d
32y2H 08H 0 Bit no 16 without byte 0 1 r/w - d
33yxH Customer specific 8 bit memory (3 <= y <= 8)
33y1H 00h 9 Number of entries without byte - - r - -
33y1H 01H 0 Data format without byte 0 255 r - -
33y1H 02H 0 Byte no 1 without byte
33y1H 03H 0 Byte no 2 without byte
33y1H 04H 0 Byte no 3 without byte
33y1H 05H 0 Byte no 4 without byte
33y1H 06H 0 Byte no 5 without byte
33y1H 07H 0 Byte no 6 without byte
33y1H 08H 0 Byte no 7 without byte
33y1H 09H 0 Byte no 8 without byte
33y2H 00h 9 Number of entries without byte - - r - -
33y2H 01H 0 Data format without byte 0 255 r - -
33y2H 02H 0 Byte no 9 without byte
Description
Dimension
Format
-128 0 +127
-128 0 +127
-128 0 +127
-128 0 +127
-128 0 +127
-128 0 +127
-128 0 +127
-128 0 +127
-128 0 +127
min
max
access
r/w - -
255
r/w - -
255
r/w - -
255
r/w - -
255
r/w - -
255
r/w - -
255
r/w - -
255
r/w - -
255
r/w - -
255
Descriptor
transfer
6. bit variable (this parameter use
the same memory cell as 30y2.04)
7. bit variable (this parameter use
the same memory cell as 30y2.04)
8. bit variable (this parameter use
the same memory cell as 30y2.04)
9. bit variable (this parameter use
the same memory cell as 30y3.01)
10. bit variable (this parameter use
the same memory cell as 30y3.01)
11. bit variable (this parameter use
the same memory cell as 30y3.01)
12. bit variable (this parameter use
the same memory cell as 30y3.01)
13. bit variable (this parameter use
the same memory cell as 30y3.01)
14. bit variable (this parameter use
the same memory cell as 30y3.01)
15. bit variable (this parameter use
the same memory cell as 30y3.01)
16. bit variable (this parameter use
the same memory cell as 30y3.01)
descriptor for data format bit n = 0:
byte n = signed char, bit n = 1: byte
n = unsigned char
1. byte (33y1.01) bit 0 = 0:
signed char (this parameter use the
same memory cell as 30y3.05)
(33y1.01) bit 0 = 1:
unsigned char
2. byte (33y1.01) bit 1 = 0:
signed char (this parameter use the
same memory cell as 30y3.08)
(33y1.01) bit 1 = 1:
unsigned char
3. byte (33y1.01) bit 2 = 0:
signed char (this parameter use the
same memory cell as 30y3.0A)
(33y1.01) bit 2 = 1:
unsigned char
4. byte (33y1.01) bit 3 = 0:
signed char (this parameter use the
same memory cell as 30y4.01)
(33y1.01) bit 3 = 1:
unsigned char
5. byte (33y1.01) bit 4 = 0:
signed char (this parameter use the
same memory cell as 30y4.02)
(33y1.01) bit 4 = 1:
unsigned char
6. byte (33y1.01) bit 5 = 0:
signed char (this parameter use the
same memory cell as 30y4.04)
(33y1.01) bit 5 = 1:
unsigned char
7. byte (33y1.01) bit 6 = 0:
signed char (this parameter use the
same memory cell as 30y4.05)
(33y1.01) bit 6 = 1:
unsigned char
8. byte (33y1.01) bit 7 = 0:
signed char (this parameter use the
same memory cell as 30y4.07)
(33y1.01) bit 7 = 1:
unsigned char
descriptor for data format bit n = 0:
byte n = signed char, bit n = 1: byte
n = unsigned char
9. byte (33y2.01) bit 0 = 0:
signed char (this parameter use the
same memory cell as 30y4.09)
(33y2.01) bit 0 = 1:
unsigned char
Description
Installation and operating instructions
BATCHCONTROL
Page 44

Object No
Index
Value (default)
33y2H 03H 0 Byte no 10 without byte
33y2H 04H 0 Byte no 11 without byte
33y2H 05H 0 Byte no 12 without byte
33y2H 06H 0 Byte no 13 without byte
33y2H 07H 0 Byte no 14 without byte
33y2H 08H 0 Byte no 15 without byte
33y2H 09H 0 Byte no 16 without byte
34yxH Customer specific 16 bit memory (3 <= y <= 8)
34y1H 00h 9 Number of entries without byte - - r - -
34y1H 01H 0 Data format without byte 0 255 r - -
34y1H 02H 0 Word no 1 without word
34y1H 03H 0 Word no 2 without word
34y1H 04H 0 Word no 3 without word
34y1H 05H 0 Word no 4 without word
34y1H 06H 0 Word no 5 without word
34y1H 07H 0 Word no 6 without word
34y1H 08H 0 Word no 7 without word
34y1H 09H 0 Word no 8 without word
Description
Dimension
Format
-128 0 +127
-128 0 +127
-128 0 +127
-128 0 +127
-128 0 +127
-128 0 +127
-127 0 +127
-32768 0 32767
-32768 0 32767
-32768 0 32767
-32768 0 32767
-32768 0 32767
-32768 0 32767
-32768 0 32767
-32768 0 32767
min
max
r/w - -
255
r/w - -
255
r/w - -
255
r/w - -
255
r/w - -
255
r/w - -
255
r/w - -
255
r/w - -
65535
r/w - -
65535
r/w - -
65535
r/w - -
65535
r/w - -
65535
r/w - -
65535
r/w - -
65535
r/w - -
65535
access
Descriptor
transfer
Description
10. byte (33y2.01) bit 1 = 0:
signed char (this parameter use the
same memory cell as 30y5.01)
(33y2.01) bit 1 = 1:
unsigned char
11. byte (33y2.01) bit 2 = 0:
signed char (this parameter use the
same memory cell as 30y5.02)
(33y2.01) bit 2 = 1:
unsigned char
12. byte (33y2.01) bit 3 = 0:
signed char (this parameter use the
same memory cell as 30y5.03)
(33y2.01) bit 3 = 1:
unsigned char
13. byte (33y2.01) bit 4 = 0:
signed char (this parameter use the
same memory cell as 30y5.04)
(33y2.01) bit 4 = 1:
unsigned char
14. byte (33y2.01) bit 5 = 0:
signed char
(33y2.01) bit 5 = 1:
unsigned char
15. byte (33y2.01) bit 6 = 0:
signed char
(33y2.01) bit 6 = 1:
unsigned char
16. byte (33y2.01) bit 7 = 0:
signed char
(33y2.01) bit 7 = 1:
unsigned char
descriptor for data format bit n = 0:
byte n = signed int, bit n = 1: byte n
= unsigned int
1. word (34y1.01) bit 0 = 0:
signed int (this parameter use the
same memory cell as 30y3.06)
(34y1.01) bit 0 = 1:
unsigned int
2. word (34y1.01) bit 1 = 0:
signed int (this parameter use the
same memory cell as 30y5.05)
(34y1.01) bit 1 = 1:
unsigned int
3. word (34y1.01) bit 2 = 0:
signed int (this parameter use the
same memory cell as 30y3.02)
(34y1.01) bit 2 = 1:
unsigned int
4. word (34y1.01) bit 3 = 0:
signed int (this parameter use the
same memory cell as 30y3.02)
(34y1.01) bit 3 = 1:
unsigned int
5. word (34y1.01) bit 4 = 0:
signed int (this parameter use the
same memory cell as 30y3.03)
(34y1.01) bit 4 = 1:
unsigned int
6. word (34y1.01) bit 5 = 0:
signed int (this parameter use the
same memory cell as 30y3.03)
(34y1.01) bit 5 = 1:
unsigned int
7. word (34y1.01) bit 6 = 0:
signed int (this parameter use the
same memory cell as 30y3.07)
(34y1.01) bit 6 = 1:
unsigned int
8. word (34y1.01) bit 7 = 0:
signed int (this parameter use the
same memory cell as 30y3.07)
(34y1.01) bit 7 = 1:
unsigned int
Installation and operating instructions 44 BATCHCONTROL
Page 45

Object No
Index
Value (default)
35yxH Customer specific 32 bit memory (3 <= y <= 8)
35y1H 00h 6 Number of entries without byte - - r - -
35y1H 01H 0 Data format without byte 0 255 r - -
35y1H 02H 0 Long no 1 without long
35y1H 03H 0 Long no 2 without long
35y1H 04H 0 Long no 3 without long
35y1H 05H 0 Long no 4 without long
35y1H 06H 0 Long no 5 without long
3900H Software download
3900H 00H 1 Number of entries without byte - - r - -
3900H 01H 0 Software download without - - - w - -
Description
Dimension
Format
min
max
2.1e9
-2.1e9
-3.4e38
-2.1e9
-3.4e38
-2.1e9
-3.4e38
-2.1e9
-3.4e38
-2.1e9
-3.4e38
r/w - -
3.4e3
8
2.1e9
3.4e38 r/w - -
2.1e9
3.4e38 r/w - -
2.1e9
3.4e38 r/w - -
2.1e9
3.4e38 r/w - -
access
Descriptor
transfer
descriptor for data format bit n = 0:
byte n = long, bit n = 1: byte n =
float
1. long (35y1.01) bit 0 = 0: long
(this paramet er use the same
memory cell as 30y4.03)
(35y1.01) bit 0 = 1: float
2. long (35y1.01) bit 1 = 0: long
(this paramet er use the same
memory cell as 30y4.06)
(35y1.01) bit 1 = 1: float
3. long (35y1.01) bit 2 = 0: long
(35y1.01) bit 2 = 1: float
4. long (35y1.01) bit 3 = 0: long
(35y1.01) bit 3 = 1: float
5. long (35y1.01) bit 4 = 0: long
(35y1.01) bit 4 = 1: float
Firmware download (only in
preoperation mode)
Download time (128kbyte):
20 kBaud: 149s
100 kBaud: 65.2s
250 kBaud: 47.0s
500 kBaud: 47.0s
1 Mbaud: 47.0s
Description
Installation and operating instructions
BATCHCONTROL
Page 46

E 3 Form to accompany returned device
If you need to return flowmeters for testing
or repair to KROHNE
Your electromagnetic flowmeter
• has been carefully manufactured and
tested
• and volumetrically calibrated in one of the
world’s most accurate test rigs.
If installed and operated in accordance with
these operating instructions, your flowmeter
will rarely present any problems.
Should you nevertheless need to return a
flowmeter for checkout or repair, please pay
strict attention to the following points:
Due to statutory regulations concerning
protection of the environment and
safeguarding the health and safety of our
personnel, Krohne may only handle, test and
repair returned flowmeters that have been in
contact with liquids if it is possible to do so
without risk to personnel and environment.
Printed Form sheet (suitable for copying)
Company: ............................................................................ Address: ...........................................
Department:......................................................................... Name:...............................................
Tel. No.:...............................................................................
The enclosed electromagnetic flowmeter
Type: .......................... KROHNE Order No. or Series No.: .............................................................
has been operated with the following process liquid............................................................................
Because this process liquid is
water-endangering * / toxic * / caustic * / flammable *
we have
– checked that all cavities in the flowmeter are free from such substances *
– flushed out and neutralized all cavities in the flowmeter *
(* delete where not applicable)
We confirm that there is no risk to man or environment through any residual liquid contained in the
flowmeter.
Date: ........................................................ Signature: ...................................................................
Company stamp:
This means that KROHNE can only service
your flowmeter if it is accompanied by a
certificate in line with the following model
confirming that the flowmeter is safe to handle.
If the flowmeter has been operated with toxic,
caustic, flammable or water-endangering
liquids, you are kindly requested
• to check and ensure, if necessary by
rinsing or neutralizing, that all cavities in
the flowmeter are free from such
dangerous substances.
(Directions on how you can find out
whether the primary head has to be
opened and flushed out or neutralized are
obtainable from KROHNE on request.)
• to enclose a certificate with the flowmeter
confirming that the flowmeter is safe to
handle and stating the liquid used.
KROHNE regret that they cannot service your
flowmeter unless it is accompanied by such a
certificate.
Installation and operating instructions 46 BATCHCONTROL
 Loading...
Loading...