

Page 1

SERVICE MANUAL
DVD PLAYER & VIDEO CASSETTE RECORDER
8296920035
HR-XVS20EF,HR-XVS20EK,HR-XVS20EX
(EK model)
(other model)
For disassembling and assembling of MECHANISM ASSEMBLY, refer to the SERVICE MANUAL No.86700 (MECHANISM ASSEMBLY).
SPECIFICATION (The specifications shown pertain specifically to the model HR-XVS20EX)
GENERAL
Power requirement AC 220 V - 240 V~, 50 Hz/60 Hz
Power consumption
Temperature
Operating position Horizontal only
Dimensions (W x H x D)
Weight 4.8 kg
Format S-VHS/VHS PAL standard
Maximum recording time
VIDEO/AUDIO (S-VHS deck)
Signal system PAL-type colour signal and CCIR
Recording system DA4 (Double Azimuth) head helical scan
Signal-to-noise ratio 45 dB
Horizontal resolution
Frequency range
Normal audio 70 Hz to 10,000 Hz (Normal audio)
Hi-Fi audio 20 Hz to 20,000 Hz (Hi-Fi audio)
Input/Output 21-pin SCART connectors:
Power on 28 W
Power off 5.0 W
Operating 5°C to 40°C
Storage -20°C to 60°C
435 mm x 98 mm x 357 mm
(SP) 240 min. with E-240 video cassette
(LP) 480 min. with E-240 video cassette
(EP) 720 min. with E-240 video cassette
monochrome signal, 625 lines 50 fields
system
(SP/LP) 250 lines (VHS)/400 lines (S-VHS)
(EP) 220 lines (VHS)/350 lines (S-VHS)
IN/OUT x 1, IN/DECODER x 1
RCA connectors:
VIDEO IN x 1, AUDIO IN x 1, AUDIO OUT x 1
S-Video connector: IN x 1
VIDEO/AUDIO (DVD deck)
Signal system PAL
Applicable disc DVD (12 cm, 8 cm)
Audio characteristics DVD (4 Hz-22 KHz)
Frequency responce CD (4 Hz-20 KHz)
S/N Ratio 90 dB
Harmonic distortion 0.10%
Wow and flutter Below Measurable Level
Dynamic range 90 dB
Output
Audio (RCA) 2 Vrms, 1 Kohm
Digital Audio 0.5 Vp-p/75 ohm
Pickup
CD
Wavelength 775-805 nm
Maximum output power
DVD
Wavelength 640-660 nm
Maximum output power
TUNER/TIMER
TV channel storage capacity
Tuning system Frequency synthesized tuner
Channel coverage
VHF 47 MHz - 89 MHz/104 MHz - 300 MHz/302
UHF 470 MHz - 862 MHz
Aerial output UHF channels 22 - 69 (Adjustable)
Memory backup time Approx. 10 min.
ACCESSORIES
Provided accessories : RF cable, Infrared remote control unit,
CD (12 cm, 8 cm)
0.5 mW
1.0 mW
99 positions (+AUX position)
MHz - 470 MHz
“R6” battery x 2
HR-XVS20EF,HR-XVS20EK,HR-XVS20EX D2SP11
COPYRIGHT © 2003 VICTOR COMPANY OF JAPAN, LTD.
No.82969
2003/5
Page 2
The following table indicates main different points between models HR-XVS20EF, HR-XVS20EK and HR-XVS20EX.
ITEM
MODEL
HR-XVS20EF HR-XVS20EK HR-XVS20EX
POWER PLUG CEE 3PIN CEE
SCART CABLE PROVIDED OPTIONAL
MESECAM USED(PB ONLY) NOT USED USED(MANUAL)
BROADCASTING STANDARD L,L',B/G I B/G,D/K
STEREO DECODER NICAM(L,B/G)/A2(B/G) NICAM NICAM/A2
RF OUT NOT USED USED USED
VCR PLUS+ SHOWVIEW VIDEO PLUS+ SHOWVIEW
VPS NOT USED
← USED
OSD LANGUAGE FRENCH ENGLISH 13 LANGUAGES
NOTE:
← is same as left.
Mark
←
1-2 (No.82969)
Page 3

TABLE OF CONTENTS
1 PRECAUTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
1.1 SAFTY PRECAUTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
2 SPECIFIC SERVICE INSTRUCTIONS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-9
2.1 Manually removing the cassette tape . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-9
2.2 Manually removing the disk(DVD/CD). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-9
2.3 Removing the major parts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-10
2.4 DVD unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-12
2.5 Emergency display function. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-18
2.6 Service position . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-23
2.7 Jig RCU mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-23
2.8 Mechanism service mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-24
2.9 Maintenance and inspection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-24
3 ADJUSTMENT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-25
3.1 Before adjustment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-25
3.2 Mechanism compatibility adjustment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-26
3.3 Electrical adjustment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-28
CHARTS AND DIAGRAMS
BOARD INTERCONNECTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
SWITCHING REGULATOR SCHEMATIC DIAGRAM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
MAIN (VIDEO/N.AUDIO) SCHEMATIC DIAGRAM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
MAIN (S-SUB) SCHEMATIC DIAGRAM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
MAIN (FMA) SCHEMATIC DIAGRAM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
MAIN (SYSCON) SCHEMATIC DIAGRAM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-13
MAIN (TUNER) SCHEMATIC DIAGRAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-15
MAIN (FRONT), FRONT AND JACK SCHEMATIC DIAGRAMS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-17
MAIN (TERMINAL) SCHEMATIC DIAGRAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-19
MAIN (ON SCREEN) SCHEMATIC DIAGRAM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-21
MAIN (SECAM) SCHEMATIC DIAGRAM [HR-XVS20EF] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-22
CPU PIN FUNCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-23
REMOTE CONTROLLER SCHEMATIC DIAGRAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-24
FDP GRID ASSIGNMENT AND ANODE CONNECTION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-24
2D DIGITAL SCHEMATIC DIAGRAM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-25
TERMINAL SCHEMATIC DIAGRAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-27
DVD IF SCHEMATIC DIAGRAM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-29
S-P CONVERTER SCHEMATIC DIAGRAM [HR-XVS20EF] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-31
DVD SERVO CONTROL SCHEMATIC DIAGRAM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-33
DVD AV DECODER SCHEMATIC DIAGRAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-35
SWITCHING REGULATOR CIRCUIT BOARD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-37
COMPONENT PARTS LOCATION GUIDE <SWITCHING REGULATOR> LPB10184-001C . . . . . . . . . . 2-37
COMPONENT PARTS LOCATION GUIDE <MAIN> LPB10194-001C. . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-38
MAIN CIRCUIT BOARD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-39
2D DIGITAL AND TERMINAL CIRCUIT BOARDS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-41
COMPONENT PARTS LOCATION GUIDE <2D DIGITAL> LPB10162-001C . . . . . . . . . . . . . . . . . . . . . . 2-41
COMPONENT PARTS LOCATION GUIDE <TERMINAL> LPB10193-001B . . . . . . . . . . . . . . . . . . . . . . . 2-41
DVD IF CIRCUIT BOARD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-42
COMPONENT PARTS LOCATION GUIDE <DVD IF> LPB10183-001C . . . . . . . . . . . . . . . . . . . . . . . . . . 2-42
FRONT, JACK AND S-P CONVERTER CIRCUIT BOARDS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-43
COMPONENT PARTS LOCATION GUIDE <S-P CONVERTER> LPB10144-004A . . . . . . . . . . . . . . . . . 2-43
DVD SERVO CONTROL AND DVD LOADING MOTOR CIRCUIT BOARDS . . . . . . . . . . . . . . . . . . . . . . 2-44
VOLTAGE CHARTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-45
DVD BLOCK DIAGRAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-48
VIDEO BLOCK DIAGRAM (1). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-49
VIDEO BLOCK DIAGRAM (2). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-51
AUDIO BLOCK DIAGRAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-53
SYSTEM CONTROL BLOCK DIAGRAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-54
PARTS LIST
1. EXPLODED VIEW
1.1 PACKING AND ACCESSORY ASSEMBLY <M1> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
1.2 FINAL ASSEMBLY <M2>. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
1.3 MECHANISM ASSEMBLY <M4>. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
1.4 DVD TRAVERSE MECHANISM ASSEMBLY<MJ>. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-5
1.5 DVD LOADING MECHANISM ASSEMBLY<MN> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-6
2. PARTS LIST
PACKING AND ACCESSORY ASSEMBLY <M1> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-7
FINAL ASSEMBLY <M2> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-7
MECHANISM ASSEMBLY <M4> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-7
DVD TRAVERSE MECHANISM ASSEMBLY<MJ>. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-8
DVD LOADING MECHANISM ASSEMBLY<MN>. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-8
SWITCHING REGULATOR BOARD ASSEMBLY <01> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-8
MAIN BOARD ASSEMBLY <03>. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-9
2D DIGITAL BOARD ASSEMBLY <05> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-16
TERMINAL BOARD ASSEMBLY <06> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-16
A/C HEAD BOARD ASSEMBLY <12>. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-18
FRONT BOARD ASSEMBLY <28>. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-18
S JACK BOARD ASSEMBLY <36>. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-18
DVD IF BOARD ASSEMBLY <50> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-18
LOADING MOTOR BOARD ASSEMBLY <55>. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-19
S-P CONVERTER BOARD ASSEMBLY <87> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-20
DVD SERVO CONTROL BOARD ASSEMBLY <95> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-21
DVD LOADING MOTOR BOARD ASSEMBLY <96> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-23
(No.82969)1-3
Page 4
SECTION 1
r
e
PRECAUTIONS
1.1 SAFTY PRECAUTIONS
Prior to shipment from the factory, JVC products are strictly inspected to conform with the recognized product safety and electrical codes of the countries in which they are to be
sold.However,in order to maintain such compliance, it is equally
important to implement the following precautions when a set is
being serviced.
1.1.1 Precautions during Servicing
(1) Locations requiring special caution are denoted by labels
and inscriptions on the cabinet, chassis and certain parts of
the product.When performing service, be sure to read and
comply with these and other cautionary notices appearing in
the operation and service manuals.
(2) Parts identified by the symbol and shaded ( ) parts
are critical for safety.
Replace only with specified part numbers.
NOTE :
Parts in this category also include those specified to
comply with X-ray emission standards for products
using cathode ray tubes and those specified for compliance with various regulations regarding spurious
radiation emission.
(3) Fuse replacement caution notice.
Caution for continued protection against fire hazard.
Replace only with same type and rated fuse(s) as specified.
(4) Use specified internal wiring. Note especially:
• Wires covered with PVC tubing
• Double insulated wires
• High voltage leads
(5) Use specified insulating materials for hazardous live parts.
Note especially:
• Insulation Tape
• PVC tubing
• Spacers
• Insulation sheets for transistors
•Barrier
(6) When replacing AC primary side components (transformers,
power cords, noise blocking capacitors, etc.) wrap ends of
wires securely about the terminals before soldering.
quently, when servicing these products, replace the cathode
ray tubes and other parts with only the specified parts. Under
no circumstances attempt to modify these circuits.Unauthorized modification can increase the high voltage value and
cause X-ray emission from the cathode ray tube.
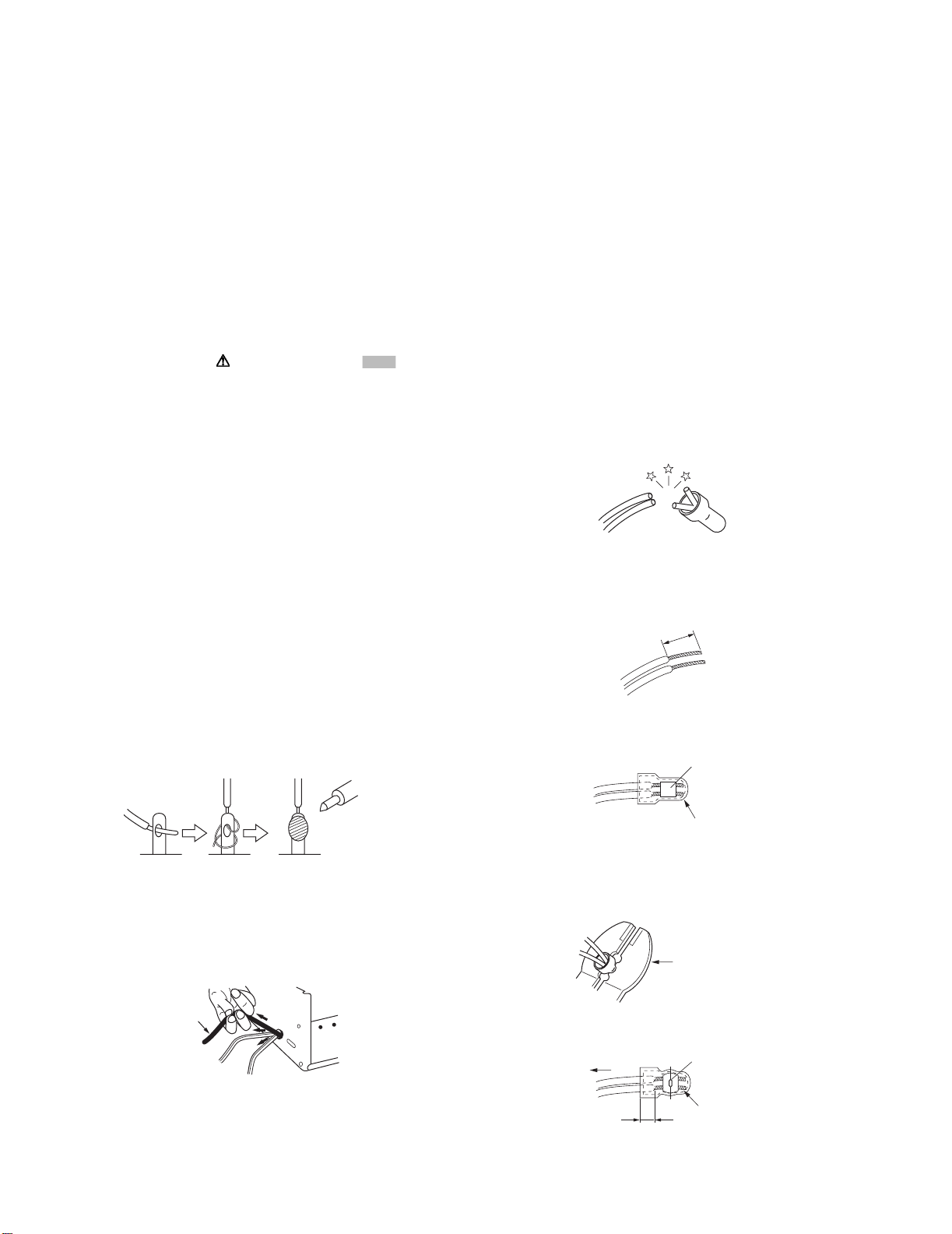
(12) Crimp type wire connector
In such cases as when replacing the power transformer in
sets where the connections between the power cord and
power trans former primary lead wires are performed using
crimp type connectors, if replacing the connectors is unavoidable, in order to prevent safety hazards, perform carefully and precisely according to the following steps.
• Connector part number :E03830-001
• Required tool : Connector crimping tool of the proper
type which will not damage insulated parts.
• Replacement procedure
a) Remove the old connector by cutting the wires at a
point close to the connector.
Important : Do not reuse a connector (discard it).
cut close to connector
Fig.1-1-3
b) Strip about 15 mm of the insulation from the ends of
the wires. If the wires are stranded, twist the strands
to avoid frayed conductors.
15 mm
Fig.1-1-4
c) Align the lengths of the wires to be connected. Insert
the wires fully into the connector.
Metal sleeve
Fig.1-1-1
(7) Observe that wires do not contact heat producing parts
(heatsinks, oxide metal film resistors, fusible resistors, etc.)
(8) Check that replaced wires do not contact sharp edged or
pointed parts.
(9) When a power cord has been replaced, check that 10-15 kg
of force in any direction will not loosen it.
Power cord
Fig.1-1-2
(10) Also check areas surrounding repaired locations.
(11) Products using cathode ray tubes (CRTs)In regard to such
products, the cathode ray tubes themselves, the high voltage circuits, and related circuits are specified for compliance
with recognized codes pertaining to X-ray emission. Conse-
1-4 (No.82969)
Connector
Fig.1-1-5
d) As shown in Fig.1-1-6, use the crimping tool to
crimp the metal sleeve at the center position. Be
sure to crimp fully to the complete closure of the
tool.
1.2
5
2
.0
5.5
Crimping tool
Fig.1-1-6
e) Check the four points noted in Fig.1-1-7.
Not easily pulled free
Wire insulation recessed
more than 4 mm
Crimped at approx. cente
of metal sleev
Conductors extended
Fig.1-1-7
Page 5
1.1.2 Safety Check after Servicing
Examine the area surrounding the repaired location for damage
or deterioration. Observe that screws, parts and wires have been
returned to original positions, Afterwards, perform the followi ng
tests and confirm the specified values in order to verify compliance with safety standards.
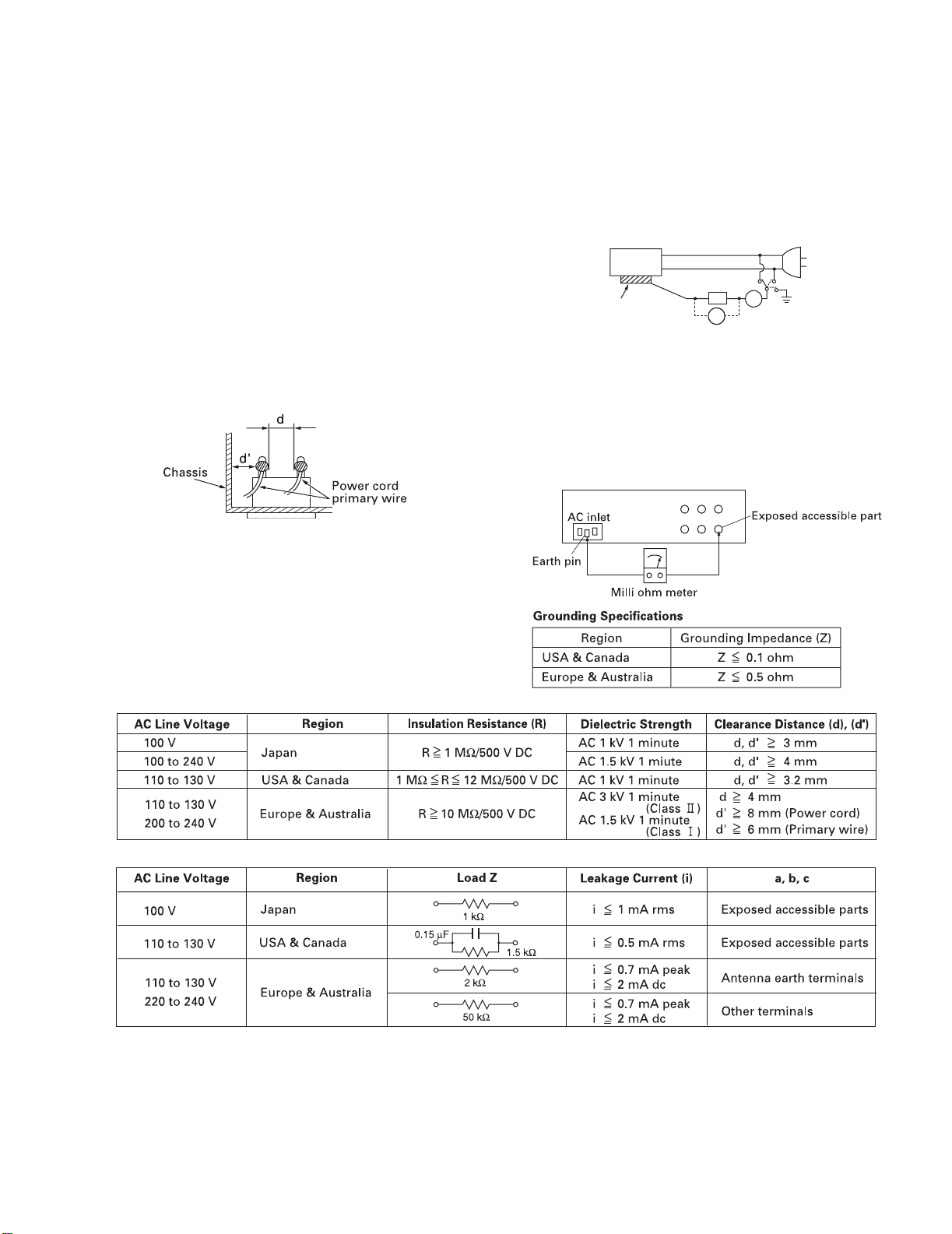
(1) Insulation resistance test
Confirm the specified insulation resistance or greater between power cord plug prongs and externally exposed
parts of the set (RF terminals, antenna terminals, video and
audio input and output terminals, microphone jacks, earphone jacks, etc.).
See table 1 below.
(2) Dielectric strength test
Confirm specified dielectric strength or greater between
power cord plug prongs and exposed accessible parts of
the set (RF terminals, antenna terminals, video and audio
input and output terminals, microphone jacks, earphone
jacks, etc.). See Fig.1-1-11 below.
(3) Clea r ance distance
When replacing primary circuit components, confirm specified clearance distance (d), (d') between soldered terminals, and between terminals and surrounding metallic
parts. See Fig.1-1-11 below.
(4) Leaka ge current test
Confirm specified or lower leakage current between earth
ground/power cord plug prongs and externally exposed accessible parts (RF terminals, antenna terminals, video and
audio input and output terminals, microphone jacks, earphone jacks, etc.).
Measuring Method : (Power ON)
Insert load Z between earth ground/power cord plug
prongs and externally exposed accessible parts. Use an
AC voltmeter to measure across both terminals of load Z.
See Fig.1-1-9 and following Fig.1-1-12.
ab
Externally
exposed
accessible part
Z
V
c
A
Fig.1-1-9
(5) Grounding (Class 1 model only)
Confirm specified or lower grounding impedance between
earth pin in AC inlet and externally exposed accessible
parts (Video in, Video out, Audio in, Audio out or Fixing
screw etc.).
Measuring Method:
Connect milli ohm meter between earth pin in AC inlet and
exposed accessible parts. See Fig.1-1-10 and groundi ng
specifications.
Fig.1-1-8
Fig.1-1-10
Fig.1-1-11
Fig.1-1-12
NOTE :
These tables are unofficial and for reference only. Be sure to confirm the precise values for your particular country and locality.
(No.82969)1-5
Page 6
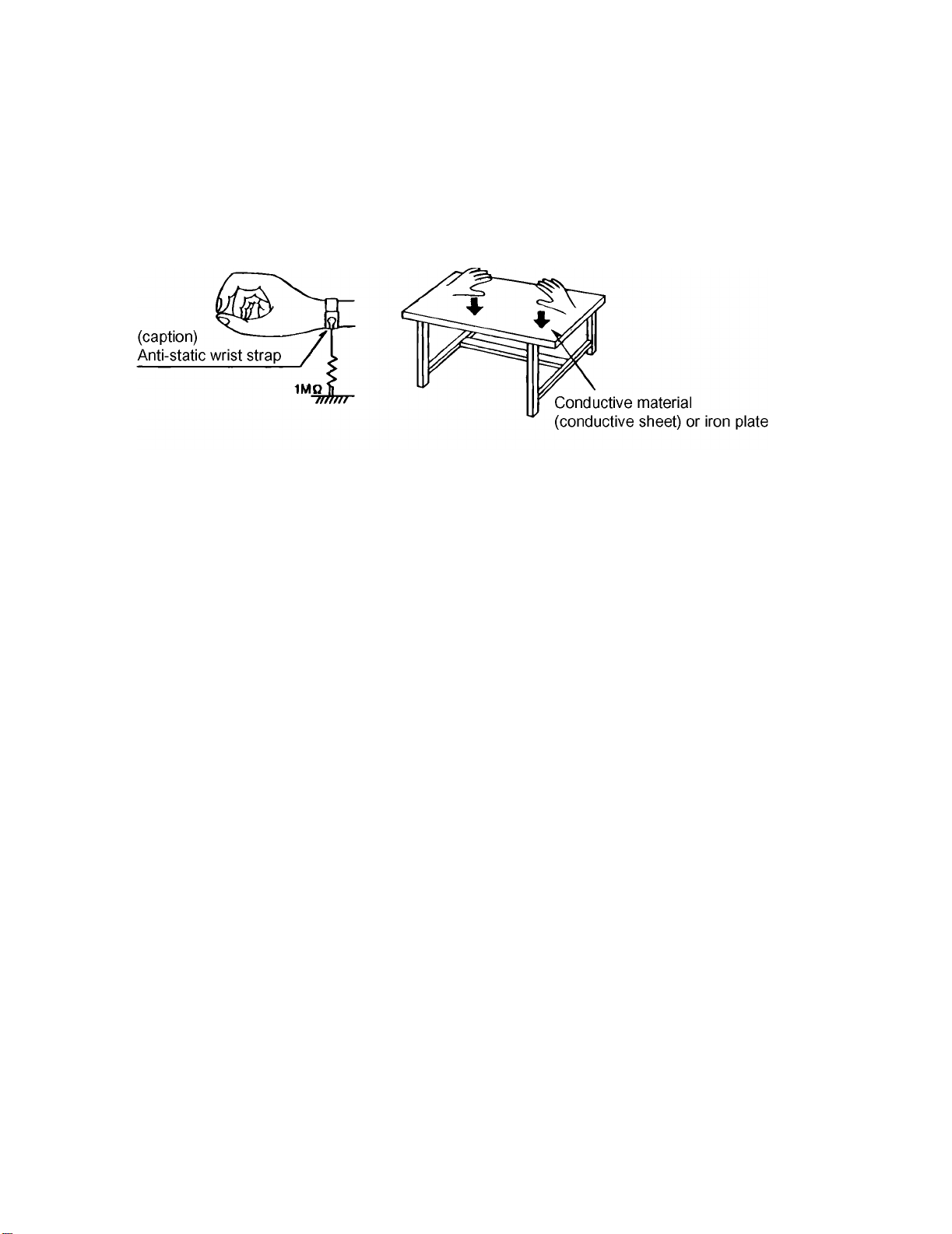
1.1.3 Preventing static electricity
Electrostatic discharge (ESD), which occurs when static electricity stored in the body, fabric, etc. is discharged, can destroy the laser
diode in the traverse unit (optical pickup). Take care to prevent this when performing repairs.
1.1.3.1 Grounding to prevent damage by static electricity
Static electricity in the work area can destroy the optical pickup (laser dio de) in devices such as DVD players.
Be careful to use proper grounding in the area where repairs are being performed.
(1) Ground the workbench
Ground the workbench by laying conductive material (such as a conductive sh eet) or an iron plate over it before placing the
traverse unit (optical pickup) on it.
(2) Ground yourself
Use an anti-static wrist strap to release any static electricity built up in your body.
(3) Handli ng the optical pickup
• In order to maintain quality during transport and before install ation, both sides of the laser diode on the replacement optical
pickup are shorted. After replacement, return the shorted parts to their original condition.
(Refer to the text.)
• Do not use a tester to check the condition of the laser diode in the optical pickup. The tester's internal power source can easily
destroy the laser diode.
1.1.4 Handling the traverse unit (optical pickup)
(1) Do not subject the tra verse unit (optical pickup) to strong shocks, as it is a sensitive, complex unit.
(2) Cut off the shorted part of the flexible cable using nippers, etc. after replacing the optical pickup. For specific details, refer to the
replacement procedure in the text. Remove the anti-static pin when replacing the traverse unit. Be careful not to take too long
a time when attaching it to the connector.
(3) Handle the flexible cable carefully as it may break when subjected to strong force.
(4) I t is not possible to adjust the semi-fixed resistor that adjusts th e laser power. Do not turn it.
1-6 (No.82969)
Page 7
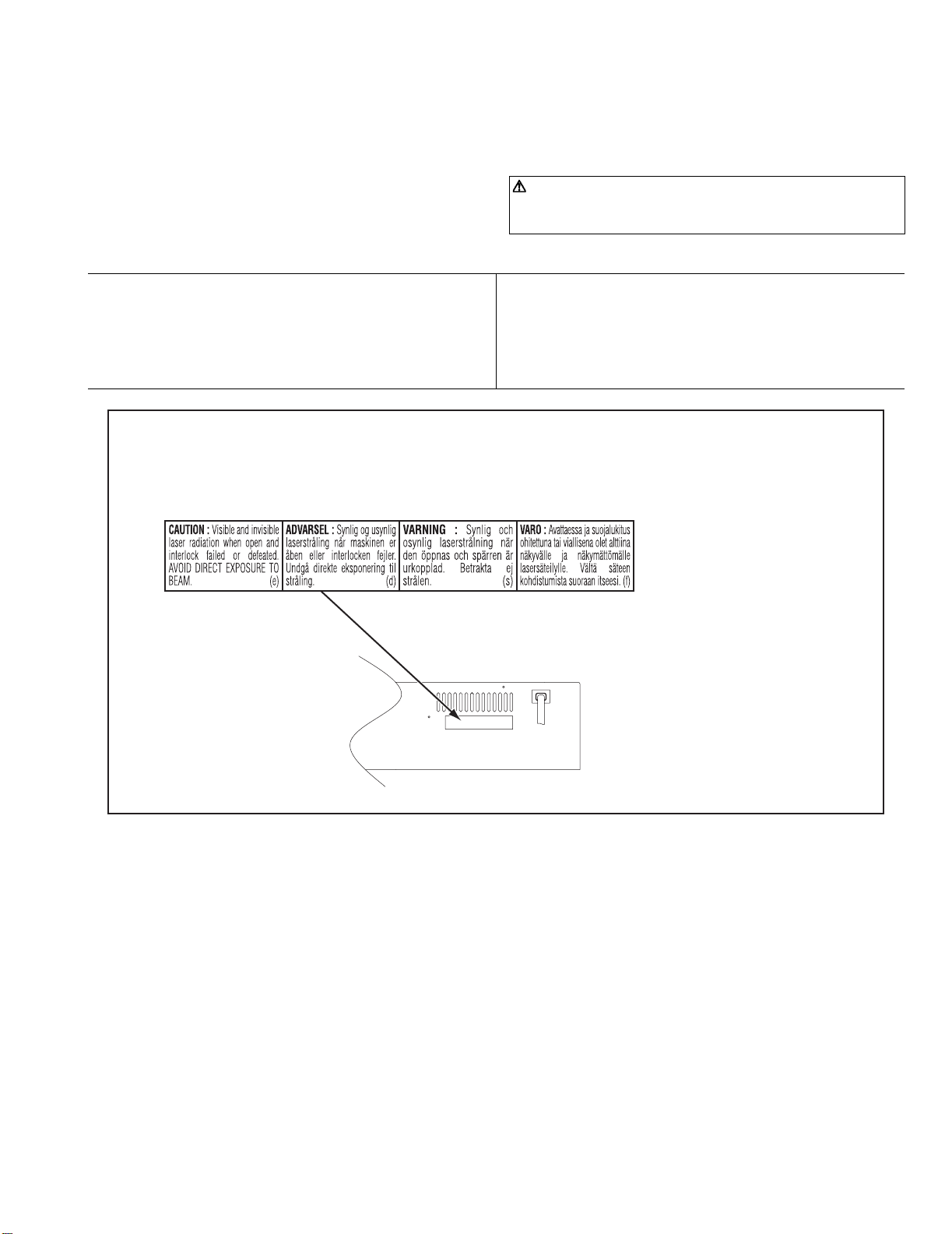
1.1.5 Important for laser products
(1) CLASS 1 LASER PRODUCT
(2) DANGER : Invisib le laser radiation when open and inter
lock failed or defeated. Avoid direct exposure to beam.
(3) CAUTION : There are no servicea ble parts inside the
Laser Unit. Do not disassemble the Laser Unit. Replace the
complete Laser Unit if it malfunctions.
(4) CAUTION : The compa ct disc player uses invisible laser
radiation and is equipped with safety switches which
prevent emission of radiation when the drawer is open and
the safety interlocks have failed or are de feated.
It is dangerous to defeat the safety switches.
VARNING
Osynlig laserstrålning är denna del är öppnad och spårren är
urkopplad. Betrakta ej strålen.
VARO
Avattaessa ja suojalukitus ohitettaessa olet alttiina näkymättömälle lasersäteilylle. Älä katso säteeseen.
ADVARSEL
Usynlig laserstråling ved åbning, når sikkerhedsafbrydere er
ude af funktion. Undgå udsasttelse for stråling.
ADVARSEL
Usynlig laserstråling ved åpning, når sikkerhetsbryteren er avslott. unngå utsettelse for stråling.
REPRODUCTION AND POSITION OF LABEL and PRINT
WARNING LABEL
(5) CAUTION : If safety switches malfunction, the laser is able
to function.
(6) CAUTION : Use of controls, adjustments or performance of
procedures other than those specified herein may result in
hazardous radiation exposure.
CAUTION
Please use enough caution not to see the beam directly
or touch it in case of anadjustment or operation check.
(No.82969)1-7
Page 8
1.1.6 Precautions for Service
1.1.6.1 Handling of Traverse Unit and Laser Pickup
(1) Do not touch any peripheral element of the pickup or the actuator.
(2) The trav erse unit and the pickup are precision devices and therefore must not be subjected to strong shock.
(3) Do not use a tester to examine the laser diode. (The diode can easily be destroyed by the internal power supply of the tester.)
(4) To replac e the traverse unit, pul l out the metal short pin for protection from charging.
(5) When replacing the pickup, after mounting a new pickup, remove the solder on the short land which is provided at the center of
the flexible wire to open the circuit.
(6) Half-fixed resistors for laser power adjustment are adjusted in pairs at shipment to match the characteristics of the optical block.
Do not change the setting of these half-fixed resistors for laser power adjustment.
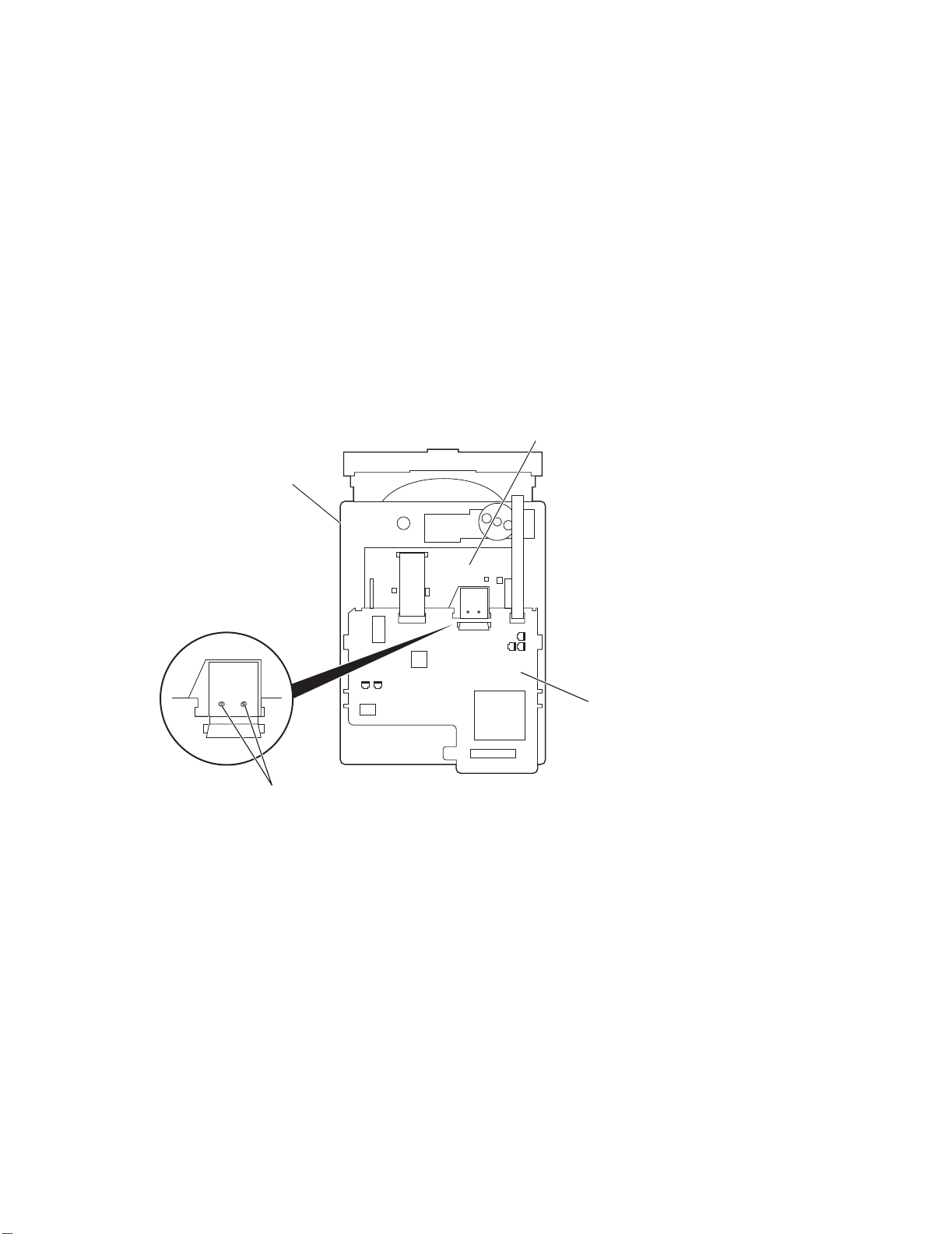
1.1.6.2 Destruction of Traverse Unit and Laser Pickup by Static Electricity
Laser diodes are easily destroyed by static electricity charged on clothingor the human body. Before repairing peripheral elements of
the traverse unit or pickup, be sure to take the following electrostatic protection:
(1) Wear an antistatic wrist wrap.
(2) With a conductive sheet or a steel plate on the workbench on which the traverse unit or the pick up is to be repaired, ground the
sheet or the plate.
(3) After removing the flexible wire from the connector (CN101), short-circuit the flexible wire by the metal clip.
(4) Short-circuit the laser diode by soldering the land which is provided at the center of the flexible wire for the pickup.
After completing the repair, remove the solder to open the circuit.
DVD TRAVERSE MECHANISM ASSEMBLY
DVD unit
SHORT CIRCUIT
CN101
DVD SERVO CONTROL
BOARD ASSEMBLY
1-8 (No.82969)
Page 9
SECTION 2
SPECIFIC SERVICE INSTRUCTIONS
2.1 Manually removing the cassette tape
If you cannot remove the cassette tape which is loaded because
of any electrical or mechanical failures, manually remove it by
taking the following steps.
(1) Unpl ug the power cord plug from the power outlet.
(2) Refer to the disassembl y procedure of the VCR and per-
form the disassembly of the major parts before removing
the mechanism assembly. (See Fig. 2-1a)
Fig.2-1a
Tension arm assembly
Pole base assembly
Pinch roller arm assembly
(3) Unlo ad the pole base assembly by manually turning the
gear of the loading motor until the pole base assembly is
hidden behind the cassette lid. In doing so, hold the tape by
the hand to keep the slack away from any grease. (See
Fig.2-1b )
In case of mechanical failures, while keeping the tension arm assembly free from tension, pull out the tape
on the pole base assembly. Take the spring(a) of the
pinch roller arm assembly off the hook, and detach it
from the tape.
(4) Remove the screw (a) of the side frame (L/R).
(5) Hold the sl ack tape and cassette cover together, lift the
cassette tape, top frame, cassette holder and side frames
(L, R) together from the rear and remove them by dis-engaging the hooks (a) and (b).
Screw(a)
Cassette tape
Hook(a)
Cassette holder
Top frame
Side frame(R)
Screw(a)
Spring(a)
Direction of unloading
Fig.2-1b
Side frame(L)
Hook(b)
Fig.2-1c
(6) Take up the slack of the tape into the cassette. This com-
pletes removal of the cassette tape.
2.2 Manually removing the disk(DVD/CD)
If you cannot remove the disk which is loaded because of any
electrical or mechanical failures, manually remove it by taking the
following steps.
(1) Unpl ug the power cord plug from the power outlet.
(2) Remove the to p cover and front panel assembly.
(Refer to the disassembly procedure and perform the disassembly of the major parts before removing)
(3) Turn the motor on DVD Loading Motor board assembly by
hand to open the disk tray.(See Fig. 2-2a)
DVD UNITPULLY GEAR
UNLOADING
Fig.2-2a
(No.82969)1-9
Page 10
2.3 Removing the major parts
2.3.1 How to read the procedure table
This table shows the steps for disassembly of the externally furnished parts and board assemblies. Reverse these steps when
re-assembling them.
Step/
Loc No.
Part Name
[1] Top cover 1-3a
Bracket 2(S1c)
Fig.
No.
Point Note
4(S1a),(S1b),3(L1a), <Note 1a>
2(SD1a),(P1a),(W1a),
CN1(WR1a),
----------------------------------------
<Note 2a>
• When reattaching the Front panel assembly, make sure that
the door opener of the Side frame (R) is lowered in position prior to the reinstallation.
• When reattaching the Front panel assembly, pay careful attention
to the switch lever of the Front panel assembly not to make it
touch the switch knob of the Main board assembly from the side.
• When reattaching the Front panel assembly, lift the Cassette
door slightly.
(1) (2) (3) (4) (5)
(1) Order of steps in Procedure
When reassembling, perform the step(s) in the reverse order.
These numbers are also used as the identification (loca-
tion) No. of parts Figures.
(2) Part name to be removed or installed.
(3) Fig. No. showing procedure or part location.
(4) Identi fication of part to be removed, unhooked, unlocked,
released, unplugged, unclamped or unsoldered.
P= Spring, W= Washer, S= Screw, L= Locking tab, SD=
Solder, CN**(WR**)= Remove the wire (WR**) from the
connector (CN**).
Note:
• The bracketed ( ) WR of the connector symbol are
assigned nos. in priority order and do not correspond to those on the spare parts list.
(5) Adj ustment information for installation
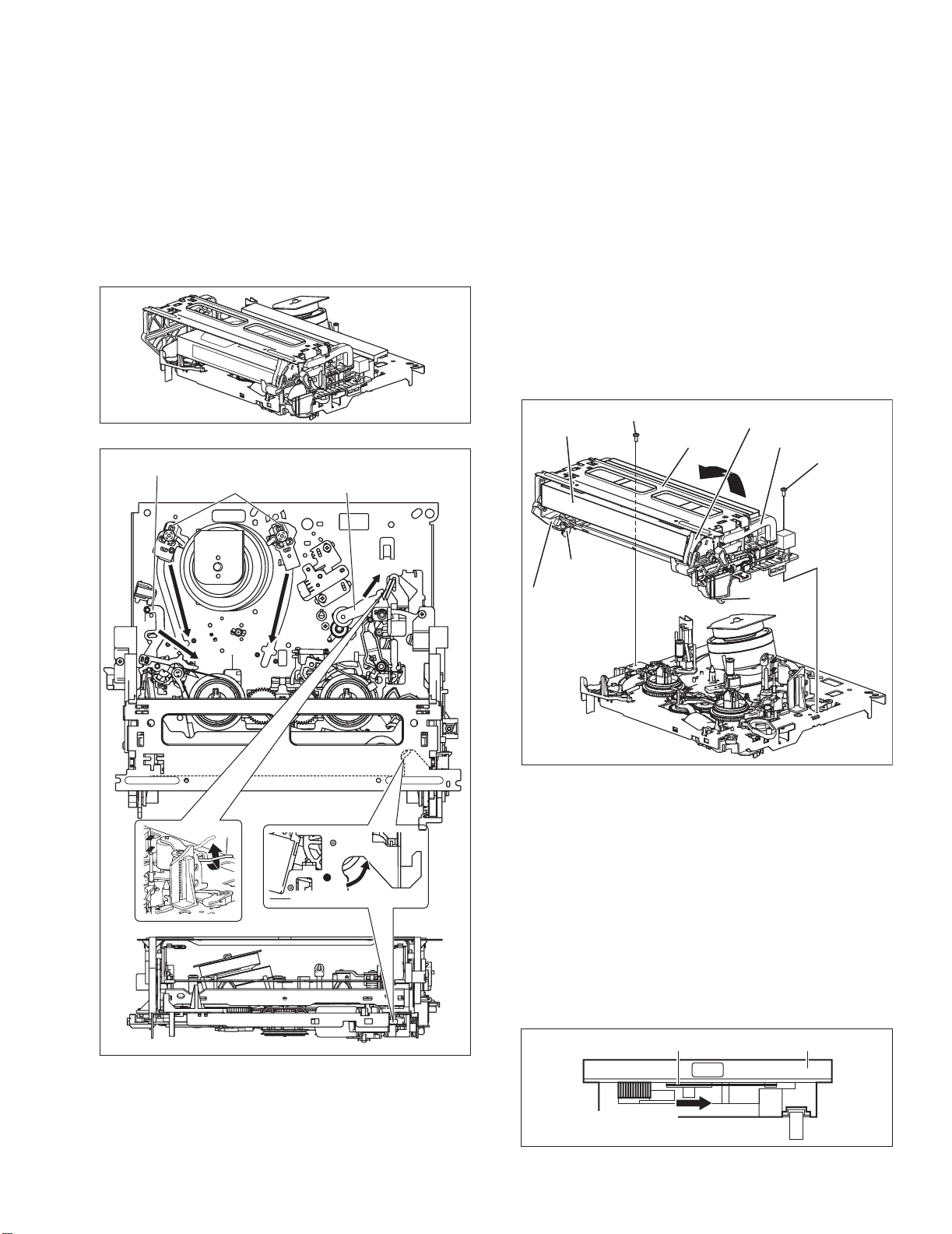
2.3.2 Disassembly procedure
Step/
Loc No.
Part Name
[1] Top cover
[2] Front panel assembly
(Front boaed assembly)
(S JACK boaed assembly)
[HR-SXVS20EF]
[3]
S-P Converter board assembly
[4]
Mechanism assembly
(Drum assembly)
(Inertia plate)
(Roller arm assembly) (P3a),(L3b)
[5]
Rear cover
[6]
Main board assembly
[7]
DVD unit
[8]
DVD IF board assembly 2-3-2d
[9]
Switching regulator
board assembly
Fig.
No.
2-3-2d
2-3-2d
2-3-2e
Point
2(S1a), 4(S1b)
3(L2a),5(L2b),
CN8006(WR2a),
CN7001(WR2b),
CN7104(WR2c)
--------------------------
5(S2b)
--------------------------
2(S2c)
2-3-2d
CN1601(WR3a)
2(S3a),(S3b)
2-3-2e
2-3-2d
CN2001(WR4a),
2(S4a), (S4b)
--------------------------
2-3-2b
CN1(WR4b),
2-3-2c
(S4c), (S4d), (S4e)
--------------------------
2-3-2e
4(L3a)
--------------------------
2-3-2d
2(S5a),6(S5b),
2-3-2d
CN7301(WR6a),
2-3-2e
CN7304(WR6b),
CN7306(WR6c),
CN5311(WR6d),
CN7303(WR6e),
CN7303(WR6e),
2(S6a)
2-3-2d
3(S7a)
CN8004(WR8a),
2-3-2e
4(S8a)
2-3-2d
4(S9a)
Note
<
Note 2a
<
Note 3a
Note 3a
<
<
Note 3b
<
Note 3c
Note 3d
<
Note 2a
<
<
Note 2a
Door
opener
Side
frame(R)
Switch
knob
Fig.2-3-2a
<Note 3a>
• Be careful not to damage the connector and wire etc. during
connection and disconnection.
• When connecting the flat wire to the connector, be careful with
the flat wire direction.
<Note 3b>
• When reattaching the Mechanism assembly, secure the
screws (S4a to S4b) in the order of a, b.
<Note 3c>
• When reattaching the Mechanism assembly, be sure to align
the phase of the Rotary encoder on the Main board assembly.
• When reattaching the Mechanism assembly, set the “Mechanism assembling mode”. [See “MECHANISM ASSEMBLY
SERVICE MANUAL (No. 86700)”.]
• When reattaching the Mechanism assembly to the Main board
>
>
assembly, take care not to damage the sensors and switch on
the Main board assembly.
<Note 3d>
• When reattaching the Drum assembly, secure the screws (S4c
to S4e) in the order of c, d, e.
(S4c)
(S4d)
Mechanism
>
assembly
(S4e)
(S4d)
>
>
>
>
Drum
assembly
<Note 3c>
Fig.2-3-2b
<NOTE>
Attach the Drum assembly appropriately,
since the installation state of the Drum assembly
influences the FM WAVEFORM LINEARITY
greatly.
(S4c)
(S4e)
HOOK
• When handling the drum assembly alone, hold it by the motor
or shaft. Be careful not to touch other parts, especially the video heads. Also take care not to damage the connectors.
>
Shaft
Motor
Video heads
Switch
lever
1-10 (No.82969)
Fig.2-3-2c
Page 11

(S1b)
[1]Top cover
HOLD PART OF ROLLER ARM ASS'Y
WHILE ATTACHING INERTIA PLATE.
INERTIA PLATE SHOULD BE ATTACHED
SO AS TO SER SMALL DIAMETER OF
CENTRAL ROUND HOLE ABOVE.
POSITION ROLLER'S INSTALLATION
HOLE IN THE "A" PART.
INSERT ROLLER UNTIL THE "b"
PART OF ROLLER'S HOOK IOCK
UP TO THE "B" PART.
HITCH THE "c" PART OF SPRING
TO THE "C" PART.
(L2b)
(S1a)
(L3a)
(P3a)"c"
(L3b)"b"
"C"
"A"
"B"
Roller arm assembly
[3]S-P converter
board assembly
[4]Mechanism assembly
(S4a)
[6]Main board assembly
(L2a)
(S3a)
f
f
(S6a)
[2]Front panel assembly
(S3b)
f
f
(S4c)
<Note3c>
Q3002
[3]
Inertia plate
[3]Roller arm assembly
(S4b)
b
b
(S3e)
<Note3c>
(S3d)
<Note3c>
D3001
JS3001
JS3001
Q3002
(S6a)
c
c
d
[3]Drum assembly
(S4a)
(L5b)
Terminal board assembly
c
e
d
e
(S1b)
(S1a)
(S5b)
(S5a)
(S5b)
(S5a)
a
a
[5]Rear cover
(L5b)
(L5a)
(L5b)
JS3001
JS3001
<Phase alignment>
·
Accord the position of V gap on R.ENCORDER and PWB silk
·
Accord the position of Boss on R.ENCORDER and PWB silk
(S7a)
[7]DVD unit
(S7a)
g
g
c
c
[8]DVD IF
board assembly
(S8a)
(S8a)
(S7a)
(S9a)
(S8a)
(S9a)
(S8a)
[9]Switching regulator
board assembly
Insert the bushing of POWER CORD
so as not to twist the cord.
a
a
(S9a)
CN5001
g
g
(S9a)
(L2b)
(L2b)
[2]S jack board assembly
(S2c)
CN7108
BACK SIDE
(WR2c)
<Note3a>
Fig.2-3-2d
BOTTOM SIDE
TOP SIDE
From MAIN BOARD ASSY/CN7001
BACK SIDE
(WR2b)
<Note3a>
CN7002
[2]Front board assembly
(S2a)
(S2b) (S2b)
RIGHT SIDE
CN7003
(WR2a)
<Note3a>
(No.82969)1-11
Page 12

A
A
(WR2c)
<Note3a>
CN1601
CN7104
(WR3a)
CN511
(WR3b)
<Note3a>
<Note3a>
MOVING OF MECHA
(SIDE PLATE,DRIVE LEVER)
Bend the Wire by the root.
Wire is not coming to Top Side.
CN7303
DRAWING FROM DIRECTION
FIG.2
CN7104
(WR2c)
CN7108
After Assembling FRONT PANEL
(WR6b)
2.4 DVD unit
2.4.1 Loading assembly section
2.4.1.1 Removing the clamper assembly
(See Fig.2-4-1a)
(1) Remov e the four screws A attaching the clamper assem-
bly.
(2) Move the clamper in the direction of the arrow to release
the two joints a on both sides.
ATTENTION:
When reattaching, fit the clamper to the two joints a.
(WR6a)
<Note3a>
(WR6e)
<Note3a>
CN2001
(WR6d)
<Note3a>
(WR4a)
(WR6b)
<Note3a>
(WR2b)
<Note3a>
Fig.2-3-2e
(WR6c)
CN5311
CN7304
<Note3a>
CN5301
CN8004
2cm
CN5302
CN8002
CN8005
C8015
CN8010
CN5001
(WR8a)
C
CN8001
CN8008
C8002
C8004
CN8007
CN8006
CN7306
CN7301
CN7303
B
(WR6a)
CN7301
CN7303
(WR6e)
DRAWING FROM DIRECTION
(WR8a)
CN8004
DRAWING FROM DIRECTION
NOTE) FJ CONN should be insert as follows.
FIG.3
OK
CN
CN5311
FIG.4
CN8006
(WR6d)
B
CN5302
C
NG
CN
(WR2a)
A
CN7001
50mm
(WR2a)
<Note3a>
CN7003
After Assembling FRONT PANEL
1-12 (No.82969)
Joint a
A
Joint a
A
Clamper
assembly
A
Fig.2-4-1a
Page 13

2.4.1.2 Removing the tray
r
(See Fig2-4-1b. and 2-4-1c)
• Prior to performing the following procedure, remove the
clamper assembly.
(1) Push b of the slide cam into the slot on the left side of the
loading base until it stops.
(2) Draw out the tray toward the fro nt.
ATTENTION:
Before reattaching the tray, slide the part c of the
slide cam to the right as shown in Fig.2-4-1c.
2.4.1.3 Removing the traverse mechanism assembly
(See Fig.2-4-1d and 2-4-1e)
• Prior to performing the following procedure, remove the
clamper assembly and the tray.
(1) Remove the four scre ws B atta ching the trave rse mecha-
nism assembly.
ATTENTION:
Before reattaching the traverse mechanism assembly, pass the card wire extending from the spindl e
motor board through the notch d of the elevator.
Loading base
Push
b
Fig.2-4-1b
Slide cam
Fig.2-4-1c
Tray
Part c
B
Traverse mechanism
assembly
B
B
B
B
Fig.2-4-1d
Traverse mechanism assembly
B
Elevato
Notch d
Fig.2-4-1e
(No.82969)1-13
Page 14

2.4.1.4 Removing the elevator
r
(See Fig.2-4-1f)
• Prior to performing the following procedure, remove the clamper assembly, the tray and the traverse mechanism assembly.
(1) Extend each bar e inside of the loadin g baseoutward and detach the elevator shaft.
ATTENTION:
When reattaching, first fit the two shafts on thefront of the elevator to the slots f of the slide cam.
Elevator
e
Elevator
Shafts
Slide cam
Slots f
Fig.2-4-1f
2.4.1.5 Removing the motor assembly
(See Fig.2-4-1g and 2-4-1h)
• Prior to performing the following procedure, remove the
clamper assembly, the tray.the traverse mechanism assembly
and the elevator.
(1) Remove the belt from the pulley.
(2) Remove the screw C attaching the motor assembly.
(3) Turn over the body and remove the screw Dattaching the
motor assembly.
(4) Release the two tabs g retaining the motor board.
Elevator
Elevato
Loading base
e
Belt
C
1-14 (No.82969)
Motor assembly
Tabs g
Motor assembly
Fig.2-4-1g
D
Loading base
Fig.2-4-1h
Page 15

2.4.1.6 Removing the Idle gear/pully gear/middle gear/slitecam
r
(See Fig.2-4-1i to 2-4-1k)
• Prior to performing the followong procedure,remove the clamper assembly,the tray,the traverse mechanism assembly,the elevator
and the motor assembly.
(1) Press the two tabs h inward and pull out idle gear.
(2) Remove the screw E attaching the pulley gear bracket.
Slide the pulley gear bracket in the direction of the arrow and pull out the pulley gear.
(3) Slide the side cam in the direction of the arrow to release the two joints i and remove upward.
(4) Remove the middle gear.
Pulley gear
Pulley gear bracket
E
Idle gear
Pulley gear bracket
Idle gear
Pulley gea
Tads h
Pulley gear
Joint i
Slide cam
Middle gear
Fig.2-4-1j
Motor assembly
Joint i
Fig.2-4-1i
Slide cam
Middle gear
Loading base
Fig.2-4-1k
(No.82969)1-15
Page 16

2.4.2 Traverse mechanism assembly section
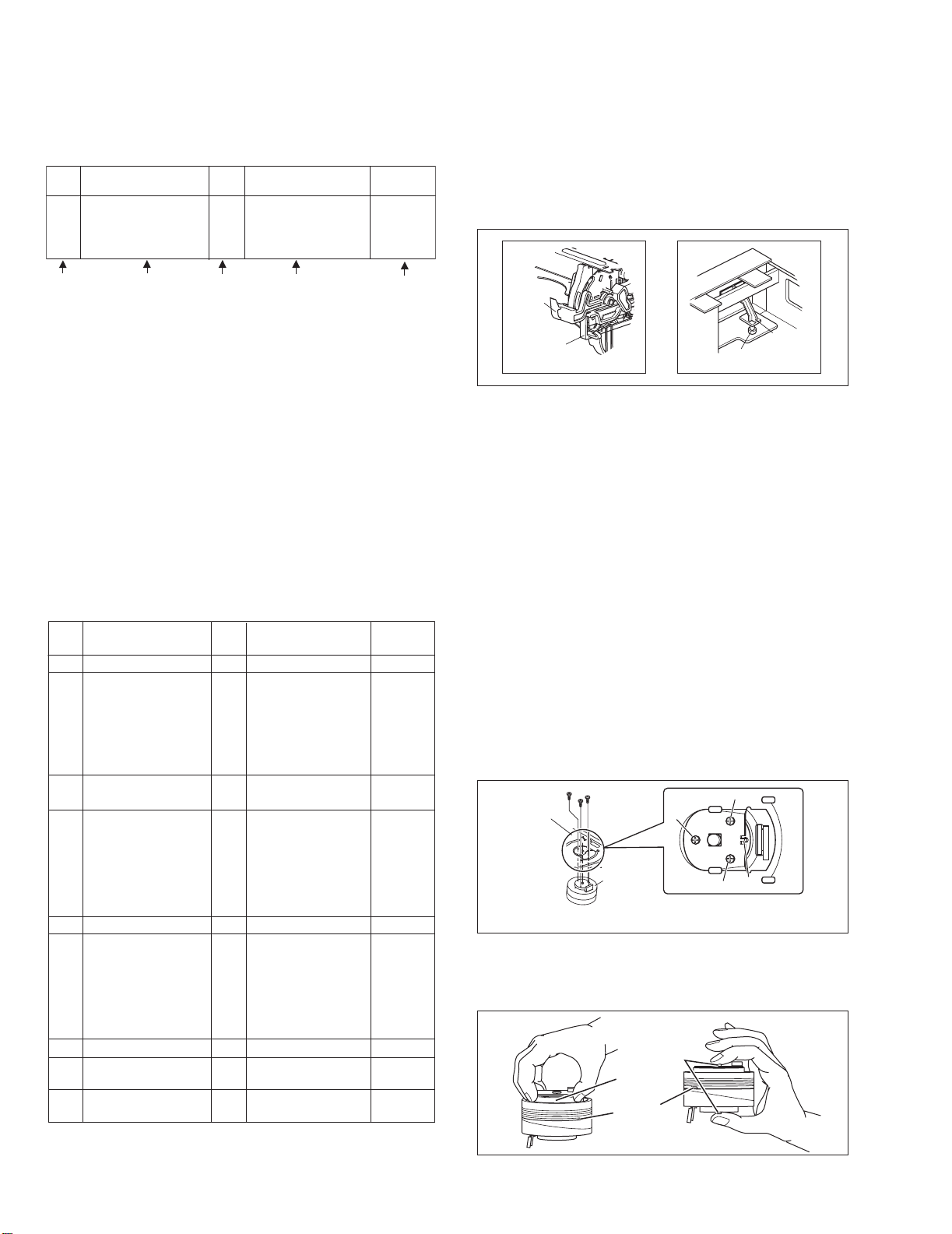
2.4.2.1 Removing the feed motor assembly
(See Fig.2-4-2a)
(1) Unsolde r the two soldering j on the spindle motor board.
(2) Remove the four screws F attaching the feed motor assem-
bly.
Feed motor assembly
F
Feed motor
F
Notch k
Soldering j
Spindle motor board
2.4.2.2 Removing the feed motor
(See Fig.2-4-2a to 2-4-2c)
• Prior to performing the following procedure, remove the feed
motor assembly.
(1) Remove the screw G attaching the thrust spring.
ATTENTION:
When reattaching the thrust spring, make sure th at
the thrust spring presses the feed gear (M) and the
feed gear (E) reasonably.
(2) Remove the feed gear (M).
(3) Pull out the feed gear (E) and the lead screw.
(4) Remove the two screws H attaching the feed motor.
ATTENTION:
When reattaching, pass the two cables extending
from the feed motor through the notch k of the feed
holder as shown in Fig2-4-2b.
Spindle motor
Fig.2-4-2a
Feed gear (M)
Thrust spring
Pickup
Feed holder
H
Fig.2-4-2c
2.4.2.3 Removing the pickup
(See Fig.2-4-2e and 2-4-2g)
(1) Remove the screw I attachi ng the T spring (S) and the
shaft holder. Remove also the plate.
ATTENTION:
When reattaching,make sure that the T spring (S)
presses the shaft.
(2) Pull out the p art l of the shaft upward. Move th e part m in
the direction of the arrow and detach from the spindle base.
(3) Disenga ge the joint n of the pickup and the shaft in th e di-
rection of the arrow.
(4) Pull out the shaft from the pickup.
(5) Remove the two screws J attaching the actuator.
(6) Disengage the joint of the actuator and the lead spring. Pull
out the lead spring.
Pick-up
Shaft
Spring
Fig.2-4-2d
The spring must be under the shaft when you install
pick-up.
Lead screw
1-16 (No.82969)
G
Feed gear (E)
Fig.2-4-2b
Page 17

Plate
Shaft holder
I
Joint n
Pickup
Part m
2.4.2.5 Removing the spindle motor assembly
(See Fig.2-4-2h to 2-4-2j)
(1) Remove the three screws L attaching the spindle motor on
the bottom of the mechanism base.
ATTENTION:
When reattaching, pass the card wire extending from
the spindle motor board through the notch of the
spindle base.
(2) Remove the th ree screws M attaching the spindle base.
L
Spindle motor
T spring (S)
Part l
Fig.2-4-2e
J
Actuator
Lead spring
Pickup
Shaft
Fig.2-4-2f
2.4.2.4 Removing the shaft holder / shaft
(See Fig.2-4-2g)
(1) Remove the screw K attaching the shaft hol der.
(2) Remove the shaft.
K
Shaft holder
Shaft
Actuator
L
Fig.2-4-2h
Spindle motor assembly
Lead spring
Spindle base
L
Fig.2-4-2i
M
M
Fig.2-4-2g
Spindle base
Mechanism base
Fig.2-4-2j
(No.82969)1-17
Page 18

2.5 Emergency display function
This unit saves details of the last two emergencies as the EMG
history and allows the status of the VCR and the mechanism of
each emergency to be shown both on the display and as OSD information.
When using the emergency function, it is required to set the VCR
to the Jig RCU mode (Refer to 2.7 Jig RCU mode).
Jig RCU
[Data transmitting method]
Depress the " " ( 3 ) button
after the data code is set.
CUSTOM CODE
43: A CODE
DATA CODE
INITIAL MODE
Fig.2-5a Jig RCU [PTU94023B]
2.5.1 Displaying the EMG information
The EMG detail of information can be displayed by transmitting
the code "59" from the Jig RCU.
Note:
• The EMG detail information <1><2> show the informa-
tion on the latest EMG.
It becomes “ – – : – – : – –” when there is no latest EMG
record.
0: 00
E: **
1E: **
1: *1
2: *2
3: 34
4: *5
5: *6
6: *7
7: *8
8: *9
9: *10
Normal display
EMG content display (Latest) See 2.5.4
EMG content display (Previous) See 2.5.4
EMG detail information <1> See 2.5.5
[Deck operation mode]
EMG detail information <1> See 2.5.5
[Mechanism operation mode]
EMG detail information <1> See 2.5.5
[Mechanism sensor information and Mechanism mode position]
EMG detail information <2> See 2.5.6
[Type of the cassette tape in use <1>]
EMG detail information <2> See 2.5.6
[Winding position of the cassette tape in use]
EMG detail information <2> See 2.5.6
[Type of the cassette tape in use <2> (Winding area)]
EMG detail information <3> See 2.5.7
[Previous deck operation mode]
EMG detail information <3> See 2.5.7
[The deck operation mode of the one before the last]
EMG detail information <3> See 2.5.7
[The deck operation mode of the one prior to one above]
EMG display of 7segment LED display model
Fig.2-5-1b
<Reference> EMG display of FDP display mode
(1) Transmit the code “59” from the Jig RCU.
The FDP shows the EMG content in the form of “E:**:**”.
<Example 1> E : 01 : 03
Previous EMG
Latest EMG
<Example 2> E : - - : - -
No EMG record
(2) Transmit the code “59” from the Jig RCU again.
The FDP shows the EMG detail information <1> in the form
of “ *1: *2 : 34 ”.
*1 : Deck operation mode at the moment of EMG
*2 : Mechanism operation mode at the moment of EMG
3– : Mechanism sensor information at the moment of EMG
–4 : Mechanism mode position at the moment of EMG
(3) Transmit the code “59” from the Jig RCU once again.
The FDP shows the EMG detail information <2> in the form
of “ *5 : *6 : *7 ”.
*5 : Type of the cassette tape in use <1> .
*6 : Winding position of the cassette tape in use
*7 : Type of the cassette tape in use <2> (Winding area)
(4) Transmit the code “59” from the Jig RCU once again.
The FDP shows the EMG detail information <3> in the form
of “*8 : *9 : *10”.
*8 : Previous deck operation mode at the moment of EMG
*9 : The deck operation mode of the one before the last at
the moment of EMG
*10: The deck operation mode of the one prior to one
above at the moment of EMG
(5) Transmit the code “59” from the Jig RCU once again to re-
set the display.
0: 00 : 00
E:**:**
*1: *2 :34
*5: *6 : *7
*8: *9 : *10
1-18 (No.82969)
Normal display (Counter or clock)
EMG content display (E:Latest:Previous) See 2.5.4
[EMG code display mode]
EMG detail information <1> display See 2.5.5
[Deck and other mode display mode]
EMG detail information <2> display See 2.5.6
[Cassette display mode]
EMG detail information <3> display See 2.5.7
[Deck mode history dispaly mode]
EMG display of FDP display model
Fig.2-5-1c
Page 19

2.5.2 Clearing the EMG history
(1) Display the EMG history.
(2) Trans mit the code “36” from the Jig RCU.
(3) Reset the EMG display.
2.5.3 Details of the OSD display in the EMG display mode
During the EMG display, the OSD shows the data on the deck
mode, etc. The details of the display contents are as follows.
Notes:
• The display is variable de pending on the part No. of the
System Control microcomputer (IC3001) built into the
VCR. In the following, refer to the figure carrying the
same two characters as the top two character s of the
part number of your IC.
• The sensor information in the OSD display contents is
partially different from the mechanism sensor information in EMG detail information <1>.
[For MN* only]
AA BB CC DD EE
FF GG HH I I JJ
KK LL MM NN OO
PP QQ RR SS TT
UU VV WW XX YY
AA : Deck operation mode (See EMG detail information <1>.)
BB : Mechanism operation mode
(See EMG detail of information <1>.)
CC : Mechanism transition flag
DD : Capstan motor control status
EE : Loading motor control status
FF : Sensor information (See sensor information details.)
GG : Capstan motor speed
HH : Key code (JVC code)
I I : Supply reel winding diameter data, higher 8 bits.
JJ : Supply reel winding diameter data, lower 8 bits.
KK : Mechanism sensor information & mechanism mode posi-
tion(See EMG detail of information <1>.)
LL : Tape speed data, higher 8 bits.
MM : Tape speed data, lower 8 bits.
NN : Cassette tape type <2>, higher 8 bits.
(See EMG detail of information <2>.)
OO : Cassette tape type <2>, lower 8 bits.
(See EMG detail of information <2>.)
PP : General data display area
YY: General data display area
*FF:Sensor information details
<Display>
** h
********
Encoder data
(See Mechanism mode sequence.)
Cassette tab present = 1
Cassette tab broken = 0
Cassette absent = 1
Cassette present = 0
Start sensor
End sensor
[For *HD only]
AA BB CC
DD EE FF
GGGG HHHH
I I JJJJ
KKKK LLLL MMMM
ROM No.
AA : Key code (JVC code)
BB : Deck operation mode(See EMG detail information
<1>.)
CC : Mechanism operation mode (See EMG detail informa-
tion <1>.)
DD : Sensor information (See sensor information details.)
EE : Capstan motor spe ed (Search, double speed)
FF : Tracking value
GGGG : Cassette tape type <2>, 16 bits.
(See EMG detail information <2>.)
HHHH : Supply reel winding diameter data
I I : Capstan motor speed (FF/REW, double speed)
JJJJ : Tape speed data, lower 8 bits.
KKKK : General data display area
LLLL : General data display area
MMMM : General data display area
*DD:Sensor information details
<Display>
** h
********
Encoder data
(See Mechanism mode sequence.)
Remote pause
End sensor
Start sensor
Cassette tab present = 1
Cassette tab broken = 0
[For both MN*/HD*]
Mechanism mode sequence
Mechanism mode - Encoder data
LSA
12345
1110
GND
LSA
LSB
LSC
LSD
21
Encoder output = Low
or
Trerminal - GND = SHORT
No. Position Encoder data
1
2
3
4
5
6
7
8
9
10
11
12
EJECT 0 h = 0000
EJECT1 1 h = 0001
EJECT2 2 h = 0010
ULSTOP 3 h = 0011
UPPER 4 h = 0100
ONSTOP(PLAY) 5 h = 0101
FWD/SS 6 h = 0110
REV/SS 7 h = 0111
OFFSTOP 8 h = 1000
FFREW-BRAKE 9 h = 1001
FFREW A h = 1010
MIDDLE F h = 1111
543
Encoder output = High
or
Trerminal - GND = OPEN
LSD
9876
LSC
LSB
(No.82969)1-19
Page 20

2.5.4 EMG content description
Note:
EMG contents “E08/E09” are for the model with Dynamic Drum (DD).
FDP CONTENT CAUSE
E01: Loading EMG
E02:
Unloading EMG
E03: Take Up Reel
Pulse EMG
E04: Drum FG EMG
E05: Cassette Eject
EMG
E06: Capstan FG
EMG
E07: SW Power
Short-Circuit
EMG
E08:
DD Initialized
(Absolute
Position
Sensor) EMG
E09: DD FG EMG
E0A: Supply Reel
Pulse EMG
EU1:
Head clog warning
history
If the mechanism mode does not change to the next mode within 4 seconds after the loading motor starts rotating in the loading direction, while
the mechanism is in the after-loading position (with the tape up against
the pole base), [E:01] is identified and the power is switched OFF.
However, if the tape loading is not completed within 4 seconds after
the loading motor starts rotating in the loading direction, the tape is
simply unloaded and ejected. No EMG data is recorded in this case.
When the mechanism mode cannot be changed to another mode
even when the loading motor has rotated for more than 4 seconds in the unloading direction, [E:02] is identified and the power
is turned off.
When the falling edje of the take-up reel pulse has not been generated for more than 4 seconds in the capstan rotating mode,
[E:03] is identified, the pinch rollers are turned off and stopped,
and the power is turned off. In this case, however, the mechanism should be in position after tape loading. Note that the reel
EMG is not detected during Slow/Frame advance operations.
When the drum FG pulse has not been input for more than 3 seconds in the drum rotating mode, [E:04] is identified, the pinch rollers are turned off and stopped, and the power is turned off.
If the cassette does not reach the eject position within about 0.7
seconds after the cassette housing has started the cassette ejection operation, [E:05] is identified, the drive direction is reversed
to load the tape, the mode is switched to STOP mode with the
pinch roller OFF, and the power is switched OFF.
During the cassette insertion process, the drive direction is reversed
and the cassette is ejected if the tape is not up against the pole
base within about 3 seconds after the start of the cassette pullingin operation. If the cassette does not reach the eject position within
about 0.7 seconds after the drive mode reversal operation, [E:05]
is identified and the power is switched OFF immediately.
When the capstan FG pulse has not been generated for more
than 1 second in the capstan rotating mode, [E:06] is identified,
the pinch rollers are turned off and stopped, and the power is
turned off.However, the capstan EMG is not detected in SLOW/
STILL modes.
Note that, if the part number of the System Control IC begins with
"MN" or "M3", the capstan EMG is not detected even during the
FF/REW operation.
When short-circuiting of the SW power supply with GND has lasted
for 0.5 second or more, [E:07] is identified, all the motors are
stopped and the power is turned off.
When DD tilting does not complete in 4 seconds, [E:08] is identified, the tilt motor is stopped and the power is turned off.
When the DD FG pulse is not generated within 2.5 seconds, [E:09]
is identified, the tilt motor is stopped and the power is turned off.
When the falling edge of the supply reel pulse has not been generated for more than 10 seconds in the capstan rotating mode,
[E:0A] is identified and the cassette is ejected (but the power is
not turned off). In this case, however, the mechanism should be
in the position after tape loading (with the tape up against the pole
base). Also note that the reel EMG is not detected during Slow/
Frame advance operations.
Presupposing the presence of the control pulse output in the PLAY mode, when the value obtained by mixing the two V.FM output channels (without regard
to the A.FM output) has remained below a certain threshold level for more than 10 seconds, [E:U1] is identified and recorded in the emergency history.
During the period in which the head clog is detected, the FDP shows "U:01" and the OSD repeats the "3 seconds of warning display" and the "7 seconds of
noise picture display" alternately.
EMG code : "E:C1" or "E:U1" / FDP : "U:01" / OSD : "Try cleaning tape." or "Use cleaning cassette."
The head clog warning is reset when the above-mentioned threshold has been exceeded for more than 2 seconds or the mode is changed to another mode
than PLAY.
1. The mechanism is locked in the middle of the mode transition during a tape loading operation.
2.
The mechanism overruns during the tape loading operation because the SYSCON cannot recognize
the mechanism mode normally. This problem is due to a cause such as a rotary encoder failure.
3.
Power is not supplied to the loading MDA. (M12V/Vcc/Vref/ICP are disconnected in the middle.)
1.
The mechanism is locked in the middle of mode transition.
2.
Without an eject signal being sent from the SYSCON, unloading is attempted (i.e. Ejection is attempted
while the tape is still inside the mechanism.) because the SYSCON cannot recognize the mechanism
mode normally. This is due to a cause such as a rotary encoder failure. (Mechanism position:
UPPER)
3.
Power is not supplied to the loading MDA. (M12V/Vcc/Vref/ICP are disconnected in the middle.)
1.
The take-up reel pulse is not generated in the FWD transport modes (PLAY/FWD SEARCH/FF,
etc.) because;
1) The idler gear is not meshed with the take-up reel gear because the mechanism mal-functions for
some reason.
2)
The idler gear is meshed with the take-up reel gear, but incapable of winding due to too large
mechanical load (abnormal tension);
3) The reel is rotating normally but an FG pulse is not generated due to the take-up reel sensor failure.
2.
The supply reel pulse is not generated in the REV transport modes (REV SEARCH/REW, etc.)
because;
1) The idler gear is not meshed with the supply reel gear because the mechanism mal-functions for
some reason.
2) The idler gear is meshed with the supply reel gear, but incapable of winding due to too large a
mechanical load (abnormal tension);
3) The reel rotates normally but the FG pulse is not generated due to a supply reel sensor failure.
3.
Power(SW5V) is not supplied to the reel sensor on the tape winding side.
1.
The drum could not start or the drum rotation has stopped due to too large a load on the tape,
because;
1) The tape tension is abnormally high;
2) The tape is damaged or a foreign object (grease, etc.) adheres to the tape.
2.
The drum FG pulse did not reach the System controller CPU because;
1) The signal circuit is disconnected in the middle;
2) The FG pulse generator (hall device) of the drum is faulty.
3.
The drum control voltage (DRUM CTL V) is not supplied to the MDA.
4.
Power (M12V) is not supplied to the drum MDA.
1.
The cassette cannot be ejected due to a failure in the drive mechanism of the housing.
2.
When the housing load increases during ejection, the loading motor is stopped because of lack of
headroom in its drive torque.
Housing load increasing factors: Temperature environment (low temperature, etc.), mechanism
wear or failure.
3.
The sensor/switch for detecting the end of ejection are not functioning normally.
4.
The loading motor drive voltage is lower than specified or power (M12V) is not supplied to the
motor (MDA).
5.
When the user attempted to eject a cassette, a foreign object (or perhaps the user's hand) was
caught in the opening of the housing.
1.
The capstan could not start or the capstan rotation has stopped due to too large a load on the tape,
because;
1) The tape tension is abnormally high (mechanical lock);
2) The tape is damaged or a foreign object (grease, etc.) is adhered to the tape (occurrence of tape
entangling, etc.).
2.
The capstan FG pulse did not reach the System controller CPU because;
1) The signal circuit is disconnected in the middle;
2) The FG pulse generator (MR device) of the capstans is faulty.
3.
The capstan control voltage (CAPSTAN CTL V) is not supplied to the MDA.
4.
Power (M12V, SW5V) are not supplied to the capstan MDA.
1.
The SW 5 V power supply circuit is shorted with GND.
2.
The SW 12 V power supply circuit is shorted with GND.
1. The absolute value sensor is defective. (The soldered parts have separated.)
2. The pull-up resistor at the absolute sensor output is defective. (The soldered parts have separated.)
3. Contact failure or soldering failure of the pins of the connector (board-to-board) to the absolute value
sensor.
4.
The absolute value sensor data is not sent to the System Controller CPU.
1. The FG sensor is defective. (The soldered parts have separated.)
2. The pull-up resistor at the FG sensor output is defective. (The soldered parts have separated.)
3. Contact failure or soldering failure of the pins of the connector (board-to-board) to the FG sensor.
4. The power (5V) to the sensor is not supplied. (Connection failure/soldering failure)
5. The FG pulse is not sent to the System Controller CPU.
6.
The tilt motor is defective. (The soldered parts have separated.)
7. The drive power to the tilt motor is not supplied. (Connection failure/soldering failure)
8. The tilt motor drive MDA - IC is defective.
9. Auto-recovery of the DD tilting cannot take place due to overrun.
The supply reel pulse is not generated in the FWD transport mode (PLAY/FWD SEARCH/FF,
1.
etc.) because;
1) PLAY/FWD or SEARCH/FF is started while the tape in the inserted cassette is cut in the middle;
2) A mechanical factor caused tape slack inside and outside the supply reel side of the cassette shell.
In this case, the supply reel will not rotate until the tape slack is removed by the FWD transport,
so the pulse is not generated until then;
3) The reel is rotating normally but the FG pulse is not generated due to a supply reel sensor failure.
2.
The take-up reel pulse is not generated in the REV transport mode (REV SEARCH/REW, etc.).
1) REV SEARCH/REW is started when the tape in the inserted cassette has been cut in the middle;
2) A mechanical factor caused tape slack inside and outside the take-up reel side of the cassette
shell. In this case, the take up will not rotate until the tape slack is removed by the REV transport,
so the pulse will not be generated until that time;
3) The reel is rotating normally but the FG pulse is not generated due to a take-up reel sensor failure.
3.
The power (SW 5V) to a reel sensor is not supplied.
1-20 (No.82969)
Page 21

2.5.5 EMG detail information <1>
The status (electrical operation mode) of the VCR and the status
(mechanism operation mode/sensor information) of the mechanism in the latest EMG can be confirmed based on the figure in
EMG detail information <1> .
[FDP/OSD display] *1 : *2 : 34
*1 : Deck operation mode at the moment of EMG
*2 : Mechanism operation mode at the moment of EMG
3– : Mechanism sensor information at the moment of EMG
–4 : Mechanism mode position at the moment of EMG
Note:
• For EMG detailed information <1>, the content of the
code that is shown on the display (or OSD) differs depending on the parts number of the system control microprocessor (IC3001) of the VCR. The system control
microprocessor parts number starts with two letters, refer these to the corresponding table.
*1 : Deck operation mode
[Common table of MN* and HD]
Display
MN* HD*
00 - Mechanism being initialized
01 00 STOP with pinch roller pressure off (or tape present with P.OFF)
02 01 STOP with pinch roller pressure on
03 - POWER OFF as a result of EMG
04 04 PLAY (Normal playback)
0C 0E REC
10 11 Cassette ejected
20 22 FF
21 - Tape fully loaded, START sensor ON, short FF
22 -
24 26 FWD SEARCH (variable speed) including x2-speed
2C 2E INSERT REC
40 43 REW
42 - Cassette identification REV SEARCH before transition to REW
44 47 REV SEARCH (variable speed)
4C 4C AUDIO DUB
6C 6E INSERT REC (VIDEO + AUDIO)
84 84 FWD STILL / SLOW
85 85 REV STILL / SLOW
8C 8F REC PAUSE
8D - Back spacing
8E - Forward spacing (FWD transport mode with BEST function)
AC AF INSERT REC PAUSE
AD - INSERT REC back spacing
CC CD AUDIO DUB PAUSE
CD - AUDIO DUB back spacing
EC EF INSERT REC (VIDEO + AUDIO) PAUSE
ED - INSERT REC (VIDEO + AUDIO) back spacing
Cassette identification FWD SEARCH before transition to FF
(SPx7-speed)
(SPx7-speed)
Deck operation mode
*2 : Mechanism operation mode
[Table of MN*]
Display
00 Command standby (No command to be executed)
01 Immediate Power OFF after EMG occurrence
02 Loading from an intermediate position during mechanism initialization
03 Unloading due to EMG occurrence during mechanism initialization
04 Ejecting cassette (ULSTOP to EJECT)
05 Inserting cassette (EJECT to ULSTOP)
06 Loading tape (ULSTOP to PLAY)
07 Unloading tape (PLAY to ULSTOP)
08 Transition from pinch roller ON to STOP
09 Transition from pinch roller OFF to STOP (PLAY to OFFSTOP)
0A Transition from pinch roller OFF to STOP at power OFF
0B Transition from pinch roller ON to STOP at power ON
0C Transition to PLAY
0D Transition to Search FF
0E Transition to REC
0F Transition to FWD STILL/SLOW
10 Transition to REV STILL/SLOW
11 Transition to Search REV
12 Transition from FF/REW to STOP
13 Transition to FF
14 Transition to REW
15 Tape end detection processing during loading
16 Short FWD/REV at tape sensor ON during unloading
17 Transition to FF/REW brake mode
Mechanism operation mode
[Table of HD*]
Display
00 STOP with pinch roller pressure off
01 STOP with pinch roller pressure on
02 U/L STOP (or tape being loaded)
04 PLAY (Normal playback)
05 PLAY (x1-speed playback using JOG)
0E REC
11 Cassette ejected
22 FF
26 FWD SEARCH (variable speed) including x2-speed
2E INSERT REC
43 REW
47 REV SEARCH
4C AUDIO DUB
6E INSERT REC (VIDEO + AUDIO)
84 FWD STILL/SLOW
85 REV STILL/SLOW
8F REC PAUSE
AF INSERT REC PAUSE
C7 REV SEARCH (x1-speed reverse playback using JOG)
CD AUDIO DUB PAUSE
EF INSERT REC (VIDEO + AUDIO) PAUSE
F0 Mechanism being initialized
F1 POWER OFF as a result of EMG
F2 Cassette being inserted
F3 Cassette being ejected
F4 Transition from STOP with pinch roller pressure on to STOP with pinch
roller pressure off
F5 Transition from STOP with pinch roller pressure on to PLAY
F6 Transition from STOP with pinch roller pressure on to REC
F7 Cassette type detection SEARCH before FF/REW is being executed
F8 Tape being unloaded
F9 Transition from STOP with pinch roller pressure off to STOP with pinch
roller pressure on
FA Transition from STOP with pinch roller pressure off to FF/REW
FB Transition from STOP with pinch roller pressure off to REC.P (T.REC,etc.)
FC Transition from STOP with pinch roller pressure off to cassette type
detection SEARCH
FD Short REV being executed after END sensor on during unloading
FE Tension loosening being executed after tape loading (STOP with pinch
roller pressure on)
FF Tape being unloaded
Mechanism operation mode
(No.82969)1-21
Page 22

3- : Mechanism sensor information
[Common table of MN* and HD*]
Display
REC safety SW
0- Tab broken ON ON ON
1- Tab broken ON
2- Tab broken ON
3- Tab broken ON OFF
4- Tab present ON
5- Tab present
6- Tab present OFF
7- Tab present OFF
8- Tab broken ON ON
9- Tab broken ON
A- Tab broken
B- Tab broken OFF
C- Tab present ON
D- Tab present
E- Tab present OFF
F- Tab present OFF
Tab broken = 0 Sensor ON = 0 Sensor ON = 0
Tab present = 1 sensor OFF = 1 Sensor OFF = 1
Mechanism sensor informatio n
Start sensor End sensor
ON
OFF
OFF
OFF
ON
ON
OFF
OFF
ON
OFF
OFF
ON
OFF
ON
OFF
OFF OFF
Mechansim
position sensor
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
-4 : Mechanism mode position
[Common table of MN* and HD*]
Mechanism
sensor
information
Dis-
play
Deck operation mode
-0 Not established
-1 EJECT EJECT position
-2 EJECT-EJECT1 Intermodal position
-3 EJECT1 EJECT1 position
-4 EJECT1-EJECT2 Intermodal position
-5 EJECT2 EJECT2 position
-6 EJECT2-ULSTOP Intermodal position
Even number
(0, 2, 4, 6, 8,
A, C, E)
-7 ULSTOP ULSTOP position
-8 ULSTOP-UPPER Intermodal position
-9 UPPER Loading (unloading) tape
-A UPPER-ONSTOP Intermodal position
-B ONSTOP PLAY position
-C PLAY-FWD/SS Intermodal position
-D FWD/SS
FWD (FWD Still/Slow) position
-E FWD/SS-REV Intermodal position
-F REV
REV (REV Still/Slow) position
-0 REV-OFFSTOP Intermodal position
-1 OFFSTOP Pinch roller OFF position
Odd number
(1, 3, 5, 7, 9,
B, D, F)
-2
OFFSTOP-FFREWB
Intermodal position
-3 FFREWB FF/REW Brake position
-4 FFREWB-FFREW Intermodal position
-5 FFREW FF/REW position
2.5.6 EMG detail information <2>
The type of the cassette tape and the cassette tape winding position can be confirmed based on the figure in EMG detail information <2> .
Note:
• EMG detail information <2> is the reference information
stored using the remaining tape detection function of
the cassette tape. As a result, it may not identify ca ssette correctly when a special cassette tape is used or
when the tape has variable thickness.
*5 : Cassette tape type <1>
Display Cassette tape type <1>
00 Cassette type not identified
16
Large reel/small reel (T-0 to T-15/T-130 to T-210) not classified
82 Small reel, thick tape (T-120) identified/thin tape (T-140) identified
84 Large reel (T-0 to T-60) identified
92
Small reel, thick tape (T-130) identified/thin tape (T-160 to T-210) identified
93
Small reel, thick tape/C cassette (T-0 to T-100/C cassette) not classified
C3
Small reel, thick tape/C cassette (T-0 to T-100/C cassette) being classified
D3
Small reel, thick tape/C cassette (T-0 to T-100/C cassette) being classified
E1 C cassette, thick tape (TC-10 to TC-20) identified
E2 Small reel, thick tape (T-0 to T-100) identified
E9 C cassette, thin tape (TC-30 to TC-40) identified
F1
C cassette, thick tape/thin tape (TC-10 to TC-40) not classified
Notes:
• Cassette tape type <1> is identified a few times during
mode transition and the identification count is variable
depending on the cassette tape type . If an EMG occ urs
in the middle of identification, the cassette tape type
may not be able to be identified.
• If other value than those listed in the above table is dis-
played, the cassette tape type is not identified.
*6 : Cassette tape winding position
The cassette tape winding position at the moment of EMG is displayed by dividing the entire tape (from the beginning to the end)
in 21 sections using a hex number from “00” to “14”.
“00” :End of winding
“14” :Beginning of winding
“FF” :Tape position not identified
*7 : Cassette tape type <2> (Winding area)
Display
00
04 - 08
05 - 06
05 - 0C
06 - 0C
06 - 0C
07 - 08
09 - 0B
0C - 0D
0D - 0F
0E - 10
10 - 12
10 - 13
11 - 14
12 - 14
13 - 14
13 - 14
13 - 14
13 - 14
15 - 16
16 - 17
17 - 18
19 - 1B
Cassette tape type <2>
Cassette type not identified
C cassette, thick tape TC-10
Small reel, thick tape T-20
C cassette, thick tape TC-20P
C cassette, thin tape TC-40
C cassette, thin tape TC-30
Small reel, thick tape T-40
Small reel, thick tape T-60
Small reel, thick tape T-80(DF-160)
Small reel, thick tape T-90(DF-180)
Small reel, thick tape T-100
Small reel, thin tape T-140
Small reel, thick tape T-120(DF-240)
Small reel, thick tape T-130
Small reel, thin tape T-160
Small reel, thin tape T-210(DF-420)
Small reel, thin tape T-180(DF-360)
Small reel, thin tape T-168
Small reel, thick tape DF-300
Large reel T-20
Large reel T-30
Large reel T-40
Large reel T-60
(Reference) Word data
(Beginning) (End)
(0497 - 0506)(0732 - 0858)
(05A9 - 0661)
(0599 - 05FF)(0AA1 - 0C07)
(0623 - 063D) (0C41 - 0CC3)
(0611 - 0638)(0C0C - 0CB2)
(07CC - 08E5)
(09FD - 0B78)
(0C20 - 0DFC)
(0D31 - 0F3E)
(0E43 - 107F)
(10E1 - 120C)
(1073 - 1313)
(1185 - 1429)
(12D3 - 141F)
(1373 - 14C3)
(1357 - 14C0)
(1395 - 14EE)
(13A8 - 14CE)
(1536 - 1618)
(1647 - 175A)
(1759 - 189C)
(1989 - 1B2F)
Note:
• The values of cassette tape type <2> in the above table
are typical values with representative cassette tapes.
2.5.7 EMG detail information <3>
Three deck operation modes preceding the deck operation mode
in which the EMG occurs may be confirmed based on the figures
in the EMG information detail <3>. For the contents of the displayed information, see the table "Deck operation mode" in section "2.5.6 EMG detail information <1>".
1-22 (No.82969)
Page 23

2.6 Service position
This unit has been designed so that the Mechanism an d Main
board assemblies can be removed together from the chassis assembly. Before diagnosing or servicing the circuit boards, take
out the major parts from the chassis assembly.
2.6.1 How to set the “Service position”
(1) Refer to the disassembly procedure and perform the disas-
sembly of the major parts before removing the Mechanism
assembly.
(2) Remove the screws tha t fix the Mechanism assembly to
the Chassis assembly. If any other screws are used to fix
the boards, remove them also.
(3) Remove the combined Mechanism and Main board assem-
blies.
(4) If any other major parts are used, remove th em also.
(5) Conn ect the wires and connectors of the major parts that
have been removed in steps (1) to (4). (Refer to Fig. 2-6-
1a.)
(6) Place the combined Mechanism, Main board and other
board assemblies upside down.
(7) Inse rt the power cord plug into the power outlet and then
proceed with the diagnostics and servicing of the board as-
sembly.
Notes:
• Before inserting the power cord plug into the power out-
let, make sure that none of the electrical parts are able
to short-circuit between the workbench and the board
assembly.
• For the disassembly procedure of the major parts and
details of the precautions to be taken, see “2 .3 Removing the major parts”.
• If there are wire connections from the Main board and
Mechanism assemblies to the other major parts, be sure
to remove them (including wires connected to the major
parts) first before performing step (2).
• When carrying out diagnosis and repair of the Main
board assembly in the “Service position”, be sure to
ground both the Main board and Mechanism assemblies. If they are improperly grounded, there may be
noise on the playback picture or FDP counter display
may move even when the mechanism is kept in an inoperative status.
• In order to diagnose the playback or recording of the
cassette tape, set the Mechanism assembly to the required mode before placing it upside do wn. If the mechanism mode is changed (including ejection) while it is in
an upside down position the tape inside may be damaged.
• For some models, the mechanism and board assem-
blies are attached by connectors only. When carrying
out a diagnosis or repair of the bo ards in the “Service
position”, make sure that the connectors are not disconnected.
Switching regulator
DVD IF
board assembly
Front board assembly
board assembly
Main board assembly
TP106 PB.FM
TP4001 CTL.P
TP111 D.FF
VR2251
REC FM ADJ.
TP2254
A.REC FM
S jack board assembly
TP2253
A.PB FM
Fig.2-6-1a
2.7 Jig RCU mode
This unit uses the following two modes for receiving remote control codes.
(1) User RCU mode:Ordinary mode for use by the user.
(2) Jig RCU mode: Mode for use in production and servicing.
When using the Jig RCU, it is required to set th e VCR to the Jig
RCU mode (the mode in which codes from the Jig RCU can be
received). As both of the above two modes are stored in the EEPROM, it is required to set the VCR back to the User RCU mode
each time that an adjustment is made or to check that the necessary operations have been completed.These modes can be set
by the operations described below.
Note:
• Confirm the RCU mode when exchanged parts. Since
some SERVICE PARTS sets the VCR to the Jig RCU
mode as initial setting.
User RCU mode
S-VHS
Jig RCU mode
S-VHS
( not displayed)
Fig.2-7-1a User/Jig RCU mode
2.7.1 Setting the Jig RCU mode
(1) Turn on the power.
(2) Press the following remocon keys continuously within 2
seconds “ SET UP MENU ” --> ” 2 ” --> ” 8 ” --> ” OK ”.
When the VCR is set to the Jig RCU mode, the symbols
( “ : ” ) in the time display of the FDP are turned off.
(Refer to Fig.2-7-1a)
(No.82969)1-23
Page 24

2.7.2 Setting the User RCU mode
(1) Turn off the pow er.
(2) Press the “REC” and “PAUSE” buttons of the VCR simulta-
neously. Alternatively, transmit the code “80” from the Jig
RCU.
2.8 Mechanism service mode
This model has a unique function to enter the mechanism into every operation mode without loading of any cassette tape. This
function is called the “Mechanism service mode”.
2.8.1 How to set the “Mechanism service mode”
(1) Set the VCR to the Jig RCU mode (the mode in which
codes from the Jig RCU can be received)
(2) Transmit the code “E5” from the Jig RCU.
(3) Release the lug of the Cassette holder and then slide the
Cassette holder toward the direction where the Cassette
holder is loaded by manually.
(4) The cassette holder lowers and, when the loading has
completed, the mechanism enters the desired mode.
When the VCR is set to the Mechanism service mode, the
symbols (“Timer”) in the FDP (LED) are blinked.
2.8.2 How to exit from the "Mechanism service mode"
(1) Unplug the power cord plu g from the power outlet.
2.9 Maintenance and inspection
2.9.1 Cleaning
out cleaning of the tape transport system whenever the machine
is serviced.
When the video head, tape guide and/or brush get soiled, the
playback picture may appear inferior or at worst disappear, resulting in possible tape damage.
Note:
• Absolutely avoid sweeping the upper drum vertically as
this will cause damage to the video head.
(1) When cleaning the upper drum (especially the video head),
soak a piece of closely woven cloth with alcohol and while
holding the cloth onto the upper drum by the fingers, turn
the upper drum counterclockwise.
(2) To clean the parts of the tap e transport system other than
the upper drum, use a piece of closely woven cloth or a cot-
ton swab soaked with alcohol.
(3) After cleani ng, make sure that the cleaned parts are com-
pletely dry before using the cassette tape.
2.9.3 Suggested servicing schedule for main components
The following table indicates the suggested perio d for such service measures as cleaning, lubrication and replacement. In practice, the indicated periods will vary widely according to
environmental and usage conditions. However, the indicated
components should be inspected when a set is b rought for service and the maintenance work performed if necessary. Also
note that rubber parts may deform in time, even if the set is not
used.
System Parts name
Operation hours
1000H
2000H
Drum assembly C,X X
A/C head C,X C,X
Pinch roller arm assembly C C
Tape
transport
Full erase head C C
Tension arm assembly C C
Capstan motor (Shaft) C C
Guide arm assembly C C
Capstan motor X
Capstan brake assembly X
Main brake assembly X
Drive
Belt (Capstan) X X
Loading motor X
Clutch unit X
Worm gear X
Control plate X
Other Rotary encoder X
C : Cleaning
X : Inspection or Replacement if necessary
For disassembling and assembling of MECHANISM ASSEMBLY, refer to the SERVICE MANUAL No.86700 (MECHANISM
ASSEMBLY).
A/C head
Video heads
Fig.2-9-1a
2.9.2 Lubrication
With no need for periodical lubrication, you have only to lubricate
new parts after replacement. If any oil or grease on contact parts
is soiled, wipe it off and newly lubricate the parts.
Note:
• See the “mechanism assembly” diagram of the “parts
list” for the lubricating or greasing spots, and for the
types of oil or grease to be used.
1-24 (No.82969)
MECHANISM ASSEMBLY
Page 25

SECTION 3
ADJUSTMENT
3.1 Before adjustment
3.1.1 Precaution
• The adjustments of this unit include the mechanism com-
patibility and electrical adjustments. During the performance of this work, be sure to observe the precautions for
each type of adjustment.
• If there is a reference to a signal input method in the signal
column of the adjustment chart, “Ext. S-input” means the
Y/C separated video signal and “Ext. input” means the
composite video signal input.
• Unless otherwise specified, all measuring points and
adjustment parts are located on the Main board.
3.1.2 Required test equipments
• Color (colour) television or monitor
• Oscilloscope: wide-band, dual-trace, triggered delayed sweep
• Signal generator: RF / IF sweep / marker
• Signal generator: stairstep, color (colour) bar [PAL/SECAM]
• Recording tape
• Digit-key remote controller(provided)
3.1.3 Required adjustment tools
: Used --- : Not used
Mechanism
compatibility
adjustment
Roller driver
Jig RCU ---
Back tension cassette gauge ---
Alignment tape(MHPE) ---
Alignment tape(MHPE-L)
Alignment tape(MHP-L)
Roller driver
PTU94002
Alignment tape
(SP, stairstep, PAL)
MHPE
Jig RCU
PTU94023B
Alignment tape
(LP, stairstep, PAL)
MHPE-L
---
Back tension cassette gauge
Electrical
adjustment
---
PUJ48076-2
Alignment tape
(EP, stairstep, NTSC)
MHP-L
3.1.4 Color (colour) bar signal,Color (colour) bar pattern
Colour bar signal [PAL]
White(100%)
White(75%)
0.7 V
1V
0.3 V
Horizontal sync
Yellow
Cyan
Green
Magenta
Red
VU
V(R-Y)
U(B-Y)
Blue
Colour bar signal [SECAM]
Yellow
White
(100%)
0.7 Vp-p
0.3 Vp-p
R-Y
Carrier(4.406 MHz)
R-Y colour BAR
B-Y
R-Y
Carrier(4.250 MHz)
B-Y colour BAR
Cyan
Burst
White
(100%)
Green
B-Y
Horizontal sync
Colour bar pattern [PAL]
(75%)
Cyan
0.3 V
White
U Black
V
Yellow
White
100%
Green
Colour bar pattern [SECAM]
Magenta
Red
Blue
RÐY
White
Yellow
White
100%
Cyan
Green
Red
Magenta
Red
Magenta
BÐY Black
Blue
Blue
3.1.5 Switch settings
When adjusting this unit, set the VCR mode and switches
as described below.
• When using the Jig RCU, it is required to set the VCR to the
Jig RCU mode. (Refer to 2.7 Jig RCU mode.)
Jig RCU
[Data transmitting method]
Depress the " "( 3 ) button
after the data code is set.
CUSTOM CODE
43: A CODE
DATA CODE
INITIAL MODE
Fig.3-1-5a Jig RCU [PTU94023B]
• Set the switches as shown below unless otherwise specified
on the relevant adjustment chart. The switches that are not listed below can be set as desired.
If the VCR is not equipped with the functions detailed below ,
setup is not required.
AUTO PICTURE/VIDEO CALIBRATION/
B.E.S.T./D.S.P.C.
PICTURE CONTROL/SMART PICTURE NORMAL/NATURAL
VIDEO STABILIZER OFF
TBC ON
Digital 3R ON
VIDEO NAVIGATION/TAPE MANAGER OFF
BLUE BACK OFF
OFF
3.1.6 Manual tracking mode (Auto tracking ON/OFF) set-
ting
(1) In order to set to the manu al tracking mode during tape
playback, press the “SP/EP(LP)”button on the remote control unit.
• Each press of the button switches the auto tracking ON
or OFF.
• When the manual tracking mode is set, the tracking is
placed at the center position.
(2) Press “channel +/-” to adjust the tracking manually.
(No.82969)1-25
Page 26

3.1.7 EVR Adjustment
Some of the electrical adjustments require the adjustment performed by the EVR system. The main unit have EEPROMs for
storing the EVR adjustment data and user setups.
Notes:
• In the EVR adjustment mode, the value is varied with the
channel buttons (+, –). The adjusted data is stored when
the setting mode changes (from PB to STOP, when the
tape speed is changed, etc.). Take care to identify the
current mode of each adjustment item when making an
adjustment.
• When changing the address setting in the EVR adjust-
ment mode, use the Jig RCU or the remote controller
having numeric keypad with which a numeric code can
be directly input.
The remote control code of the Jig RCU corresponds to
each of the digit keys on the remote controller as follows.
Digit-key0123456789
Code 20 21 22 23 24 25 26 27 28 29
• As the counter indication and remaining tape indication
are not displayed FDP during the EVR adjustment
mode, check them on the TV monitor screen.
• When performing the EVR adjustment, confirm that the
FDP indication is changed to the EVR mode, as shown
below.
FDP
Fig.3-1-7a EVR mode
3.2 Mechanism compatibility adjustment Notes:
• Although compatibility adjustment is very important, it
is not necessary to perform this as part of the normal
servicing work. It will be required when you have replaced the A/C head, drum assembly or any pa rt of the
tape transport system.
• To prevent damaging the alignment tape in the compatibil-
ity adjustment, prepare a cassette tape (for self-recording/
playback), perform a test on it by transporting it and making sure that the tape is not bent by the tape transport
mechanisms such as in the guide rollers.(See Fig.3-2-2a.)
3.2.1 Tension pole position
Notes:
• This adjustment must be performed every time the ten-
sion band is replaced.
Signal (A) • Back tension cassette gauge [PUJ48076-2]
Mode (B1)
Adjustment part (F) • Adjust pin [Mechansim assembly]
Specified value (G) • 25 - 51 gfcm (2.45 - 5 x 10
(B2)
•PB
• Eject end
-
3
Nm)
(1) Play back the back tension cassette gauge (A).
(2) Check that the ind icated value on the left side gauge is
within the specified value (G).
(3) If the indicated value is not within the specified value (G),
perform the adjustment in a following procedure.(See
Fig.3-2-1a.)
a) Remove the top frame, cassette holder and side
frames (L/R) all together. (refer to the SERVICE
MANUAL No.86700 [MECHANISM ASSEMBLY].)
b) Rota te the loading motor gear to move the control
plate so that the triangular stamping to the left of the
“P”stamping is aligned with the stamping (a) on the
main deck. This positioning is mode (B1).
c) Adjust by turning the adjustment pin so that the ti p of
the tension arm is aligned with the stamping (b) on
the main deck.
d) Rota te the reel disk (S) by about one turn clockwise
and make sure that the round hole of the adjustment
pin is located in the “OK” range. If it is outside this
range, restart the adjustment from the beginning.
After completion of the adjustment, rotate the loading gear
motor to return it to the mode (B2) position.
1-26 (No.82969)
TENSION ARM
Stamping(b)
OK
ADJUST PIN
CONTROL PLATE
Stamping(a)
NG
Fig.3-2-1a
Page 27

3.2.2 FM waveform linearity
Signal (A1)
Mode (B) • PB
Equipment (C) • Oscilloscope
Measuring point (D) • TP106 (PB. FM)
External trigger (E) • TP111 (D.FF)
Adjustment part (F) • Guide roller [Mechanism assembly]
Specified value (G) • Flat V.PB FM waveform
Adjustment tool (H) • Roller driver [PTU94002]
• Alignment tape(SP, stairstep, PAL) [MHPE]
(A2)
• Alignment tape(LP, stairstep, PAL) [MHPE-L]
(1) Play back th e alignment tape (A1).
(2) Apply the external trigger signal to D.FF (E), to observe
the V.PB FM waveform at the measuring point (D).
(3) Set the VCR to the manual tracking mode.
(4) Make sure that there is no significant level drop of the V.PB
FM waveform caused by the tracking operation, with its
generally parallel and linear variation ensured. Perform the
following adjustments when required. (See Fig. 3-2-2b.)
(5) Reduce the V.PB FM waveform by th e tracking operation.
If a drop in level is found on the left side, turn the guide roll-
er of the pole base assembly (supply side) with the roller
driver to make the V.PB FM waveform linear.
If a drop in level is on the right side, likewise turn the guide
roller of the pole base assembly (take-up side) with the
roller driver to make it linear. (See Fig. 3-2-2b.)
(6) Make sure that the V.PB FM waveform varies in parallel
and linearly with the tracking operation again. When re-
quired,
perform fine-adjustment of the guide roller of the
pole base assembly (supply or take-up side).
(7) Unload the cassette tape once, play back the alignment
tape (A1) again and confirm the V.PB FM waveform.
(8) After adjustment, confirm that the tape wrinkling does no t
occur at the roller upper or lower limits. (See Fig. 3-2-2a.)
[Perform adjustment step (9) only for the models equipped
with SP mode and EP (or LP) mode.]
[Perform adjustment step (9) only for the models
equipped with SP mode and EP (or LP) mode.]
(9) Repeat steps (1) to (8) by using the alignment tape (A2).
Improper
(a)
GUIDE ROLLER
(b)
GUIDE POLE
Proper
Fig.3-2-2a
Proper waveform variation
Improper waveform variation
A
C
Up Down
B
D
Roller driver
Guide roller
(supply side)
Fig.3-2-2b
3.2.3 Height and tilt of the A/C head
Note:
• Set a temporary level of the height of the A/C head in ad-
vance to make the adjustment easier after the A/C head
has been replaced. (Refer to the SERVICE MANUAL
No.86700 [MECHANISM ASSEMBLY].)
Signal (A) • Alignment tape(SP, stairstep, PAL) [MHPE]
Mode (B) • PB
Equipment (C) • Oscilloscope
Measuring point (D1)
External trigger (E) • TP111 (D.FF)
Adjustment part (F) • A/C head [Mechanism assembly]
Specified value (G) • Maximum waveform
• AUDIO OUT terminal
(D2)
• TP4001 (CTL. P)
(1) Play back the alignment tape (A).
(2) Apply the external trigger signal to D.FF (E), to observe the
AUDIO OUT waveform and Control pulse waveform at the
measuring points (D1) and (D2) in the ALT mode.
(3) Set the VCR to the manual tracking mode.
(4) Adjust the AUDIO OUT waveform and Control pulse wave-
form by turning the screws (1), (2) and (3) little by little until
both waveforms reach maximum. The screw (1)
and (3) are for adjustment of tilt and the screw (2) for azi-
muth.
Head base
(2)
(1)
AUDIO OUT
A/C head
CTL. P
(3)
Fig.3-2-3a
(No.82969)1-27
Page 28

3.2.4 A/C head phase (X-value)
Signal (A1)
Mode (B) • PB
Equipment (C) • Oscilloscope
Measuring point (D) • TP106 (PB. FM)
External trigger (E) • TP111 (D.FF)
Adjustment part (F) • A/C head base [Mechanism assembly]
Specified value (G) • Flat V.PB FM waveform
Adjustment tool (H) • Roller driver [PTU94002]
• Alignment tape(SP, stairstep, PAL) [MHPE]
(A2)
• Alignment tape(LP,stairstep,PAL) [MHPE-L]
(1) Play back the alignment tape (A1).
(2) Apply the external trigger signal to D.FF (E), to observe the
V.PB FM waveform at the measuring point (D).
(3) Set the VCR to the manual tracking mode.
(4) Loosen the screws (4) and (5), then set the Roller driver to
the innermost projected part of the A/C head. (See Fig. 3-
2-4a.)
(5) Rotate the roller driver so that the A/C head comes closest
to the capstan. From there, move the A/C head back grad-
ually toward the drum until the point where the FM wave-
form is maximized for the second time, and then
tighten the screws (4) and (5) temporarily.
(6) Play an alignment tape (A2) and set to the manual-tracking
mode.
(7) Fine-a djust A/C head base position to maximize the FM
waveform, and then tighten the screws (4) and (5) firmly.
(8) Play alignment tapes (A1) and (A2) and confirm that the FM
waveforms are maximized when the tracking is at the cen-
ter position.
To the drum
Toward the capstan
Toward the drum
A/C head
Screw (5)
Roller driver
Screw (4)
Head base
To the capstan
Fig.3-2-4a
Alignment tape
[SP, stairstep]
played with the
SP head
Waveform output
X-value adjustment point
Drum side Control head position Capstan side
Alignment tape
[EP(LP), stairstep]
played with the
EP(LP) head
Maximum
Fig.3-2-4b
3.3 Electrical adjustment Note:
The following adjustment procedures are not only necessary
after replacement of consumable mechanical parts or board
assemblies, but are also provided as references to be referred
to when servicing the electrical circuitry.
In case of trouble with the electrical circuitry, always begin a
service by identifying the defective points by using the measuring instruments as described in the following electrical adjustment procedures. After this, proceed to the repair,
replacement and/or adjustment. If the required measuring instruments are not available in the field, do not change the adjustment parts (variable resistor, etc.) carelessly.
3.3.1 Servo circuit
3.3.1.1 Switching point
Signal (A1)
Mode (B) • PB
Equipment (C) • Oscilloscope
Measuring point (D) • VIDEO OUT terminal (75 ohm terminated)
External trigger (E) • TP111 (D.FF)
Adjustment part (F) • Jig RCU: Code ”5A”
Specified value (G) • 7.5 ± 0.5H
Adjustment tool (H) • Jig RCU [PTU94023B]
• Stairstep signal
(A2)
• Alignment tape(LP,stairstep,PAL) [MHPE-L]
• TP106 (PB. FM)
(1) Play back the signal (A1) of the alignment tape (A2).
(2) Apply the external trigger signal to D.FF (E) to observe the
VIDEO OUT waveform and V.PB FM waveform at the mea-
suring points (D1) and (D2).
(3) Set the VCR to the manual tracking mode.
(4) Adjust tracking so that the V.PB FM waveform becomes
maximum.
(5) Set the VCR to the Auto adjust mode by transmitting the
code (F) from the Jig RCU. When the VCR enters the stop
mode, the adjustment is completed.
(6) If the VCR enters the eject mode, repeat steps (1) to (5)
again.
(7) Play back the alignment tape (A2) again, confirm that the
switching point is the specified value (G).
Trigger point
Switching point
V.sync
V. rate
Fig.3-3-1a Switching point
3.3.1.2 Slow tracking preset
Signal (A1)
Mode (B1)
Measuring point (D) • TV-Monitor
Adjustment part (F) • Jig RCU: Code “71”or “72”
Specified value (G) • minimum noise
Adjustment tool (H) • Jig RCU [PTU94023B]
• Ext. input
(A2)
• Color (colour) bar signal [PAL]
• S-VHS SP
(B2)
•S-VHS LP
1-28 (No.82969)
Page 29

(1) Record the sign al (A2) in the mode (B1), and play back
the recorded signal.
(2) Set the VCR to the manual tracking mode.
(3) Set the VCR to the FWD slow (+1/6x) mode.
(4) Transmit the code (F) from the Jig RCU to adjust so that the
noise bar becomes the specified value (G) on the TV
monitor in the slow mode.
(5) Set the VCR to the Stop mode.
(6) Confirm that the noise bar is (G) on the TV monitor in the
slow mode.
(7) Repeat steps (3) to (6) in the REV slow (-1/6x) mode.
(8) Repeat steps (1) to (7) in the mode (B2).
Note:
• For FWD slow (+1/6x) playback, transmit the code “08”
from the Jig RCU to enter the slow playback mode, and
transmit the code “D0”for REV slow (-1/6x) mode.
3.3.2 Video circuit
3.3.2.1 EE Y/PB Y (S-VHS/VHS) level
Signal (A1)
Mode (B1)
Equipment (C) • Oscilloscope
Measuring point (D) • Y OUT terminal
EVR mode
EVR address
Specified value (G) • 1.00 ± 0.05 Vp-p (75 ohm terminated)
Adjustment tool (H) • Jig RCU [PTU94023B]
• Ext. S-input
(A2)
• Ext. input
(A3)
• Color (colour) bar signal [PAL]
• EE SP
(B2)
•S-VHS SP
(B3)
•VHS SP
(F1)
• Jig code “57”
(F2)
• A : 11
(F3)
• Jig code “21” twice
(F4)
• Jig code “18” or “19” (Channel +/-)
(1) Input the signal (A3) from the input point (A1).
(2) Set the VCR to the mode (B1).
(3) Observe the Y OUT waveform at the measuring point (D).
(4) Set the VCR to the EVR mode by transmitting the code (F1)
from the Jig RCU.
(5) Set the EVR add ress to (F2) by transmitting the code (F3)
from the Jig RCU.
(6) Trans mit the code (F4) from the Jig RCU to adjust so tha t
the Y level of the Y OUT waveform becomes the specified
value (G).
(7) Release the EVR mode of the VCR by transmitting the
code (F1) from the Jig RCU again. (When the EVR mode
is released, the adjusted data is memorized.)
(8) Input the signal (A3) from the input point (A2).
(9) Repeat steps (3) to (7) in the mode (B1).
(10) Record the signal (A3) in the mode (B2), and play back the
recorded signal.
(11) Set the VCR to the manual tracking mode.
(12) Repeat steps (3) to (7) in the mode (B2).
(13) Record the signal (A3) in the mode (B3), and play back the
recorded signal.
(14) Set the VCR to the manual tracking mode.
(15) Repeat steps (3) to (7) in the mode (B3).
3.3.3 Syscon circuit [EK/EX MODEL]
Notes:
• When perform this adjustment, remove the Mechanism
assembly.
3.3.3.1 Timer clock
Signal (A1) • No signal
Mode (B) • EE
Equipment (C) • Frequency counter
Measuring point (D1)
Adjustment part (F) • C3025 (TIMER CLOCK)
Specified value (G1) • 1024.008 ± 0.001 Hz
• IC3001 pin 44
• IC3001 pin 103
(D2)
• C3054 + and -
(D3)
(976.5549 ± 0.0010 usec)
(1) Conn ect the frequency counter to the measuring point
(D1).
(2) Conn ect the short wire between the short point (D2) and
Vcc (5V).
(3) Short the leads of capacitor (D3) once in order to reset
the microprocessor of the Syscon.
(4) Disconn ect the short wire between th e short point (D2)
and Vcc then connect it again.
(5) Adjust the Adjustment part (F) so that the output frequency
becomes the specified value (G).
3.3.4 Audio circuit
Notes:
• GND (Ground) should be taken from the Tuner shield
case.
3.3.4.1 Audio REC FM
Signal (A1)
Mode (B) • S-VHS LP
Equipment (C) • Oscilloscope
Measuring point (D) • TP2253 (A. PB. FM)
External trigger (E) • TP111 (D.FF)
Adjustment part (H) • VR2251
Specified value (G1)
• Ext. input
• Audio: No signal
(A2)
• Video: Color (colour) bar signal [PAL]
(A3)
• 600 ± 100 mVp-p
(G2)
• More than 400 mVp-p
(1) Apply the external trigger signal to D.FF (E) to observe the
Audio PB FM waveform at the measuring point (D).
(2) Record the signal (A3) with no audio signal input in the
mode (B), and play back the recorded signal.
(3) Set the VCR to the manual tracking mode.
(4) If the A.PB FM leve l is not within the specified value (G1),
perform the adjustment in a following procedure.
(5) Adjust the adjustment part(F) so that the A. PB FM level of
the higher channel level becomes the specified value(G1).
(Adjust before recording, then confirm it by playing back.)
(6) If specifie d value(G1) is not obtained, adjust the Adjust-
ment part(F) so that the waveform level of the lower chan-
nel level becomes the specified value(G2).(Adjust before
recording, then confirm it by playing back.)
H. rate
Fig.3-3-2a EE Y/PB Y lebel
Y level
Specified
value (G2)
Specified
value (G1)
V. rate
Fig.3-3-4a Audio REC FM
(No.82969)1-29
Page 30

3.3.5 PAL/SECAM converter circuit [EF MODEL]
Notes:
• Unless otherwise specified in this P/S Converter circuit
adjustments, all measuring points and adjustment parts
are located on the S-P Converter board.
3.3.5.1 Colour difference level
Signal (A) • Color (colour) bar signal [SECAM]
Mode (B) • EE
Equipment (C) • Oscilloscope
Measuring point (D) • CN1601 Pin 7
Adjustment part (F1)
Specified value (G1)
• VR1602 (B-Y ADJ)
(F2)
• VR1601 (R-Y ADJ)
• 460 ± 20 mVp-p : VR1602 (B-Y)
(G2)
• 620 ± 20 mVp-p : VR1601 (R-Y)
(1) Observe the C (converted colour) waveform at the measur-
ing point (D).
(2) Adjust the adj ustment part (F1) so that the higher level of
the Yellow and Blue of the C waveform becomes the specified value (G1).
(3) Adjust the adj ustment part (F2) so that the higher level of
the Green and Magenta of the C waveform becomes the
specified value (G2).
GREEN
Specified
Specified
value (G1)
value (G2)
YELLOW
BLUE
MAGENTA
H.rate
Fig.3-3-5a Colour difference level
3.3.5.2 SECAM burst position
Signal (A1)
Mode (B) • EE
Equipment (C) • Oscilloscope
Measuring point (D1)
Adjustment part (F1) • VR1603 (SECAM BURST POSITION)
Specified value (G) • Tr = 5.6 ± 0.1 µsec
• Ext. input
(A2)
• Color (colour) bar signal [SECAM]
• CN1601 Pin 7
(D2)
• CN1601 Pin 3
(1) Observe the waveforms appeared at the measuring points
(D1) and (D2).
(2) Adjust the adjustment part (F) so that the waveforms timing
width between the H-SYNC and the colour burst signal becomes the specified value (G).
Colour burst signal
C
(Converted colour)
Y
H-SYNC
Specified value (G)
H.rate
Fig.3-3-5b SECAM burst position
1-30 (No.82969)
Page 31

Page 32

VICTOR COMPANY OF JAPAN, LIMITED
AV & MULTIMEDIA COMPANY VIDEO RECORDER CATEGORY 12, 3-chome, Moriya-cho, kanagawa-ku, Yokohama, kanagawa-prefecture, 221-8528, Japan
(No.82969)
Printed in Japan
20035WPC
 Loading...
Loading...