

Page 1
JLR-8600
NWZ-1650
GPS NAVIGATOR
INSTRUCTION
MANUAL
i
Page 2

Foreword
Thank you for purchasing the JRC GPS Navigator JLR-8600.
This equipment is a high-performance navigation equipment consisting of a GPS sensor and
navigator, can retrieve the position data using the GPS sensor to display various navigation
information on the display.
● Thoroughly read this instruction manual before operating the equipment.
● Keep this manual nearby the equipment to allow ready access to it if necessary. It may
provide valuable information on how to deal with a given situation that may arise during the
operation.
ii
Page 3
Symbols
Several symbols are used in this manual to ensure safety and proper operation of the
equipment and to avoid possible human injury or property damage. These symbols and
their meanings are shown below. Please read and understand these symbols before
proceeding to read this manual.
Before Commencing the Operation
WARNING
CAUTION
Examples of the Symbols
The symbols shown in the ∆ mark represent those that require attention
(including potential dangers and warnings).
A depiction of the type of caution is shown inside the symbol (the left symbol
indicates a general caution).
The symbols shown in the mark represent actions which are prohibited.
A depiction of the type of prohibited action is shown inside the symbol (the
left symbol indicates that disassembly is prohibited).
Instructions shown with this symbol represent what can cause
death or serious injury if not observed.
Instructions shown with this symbol represent what may cause
injury or property damage if not observed.
The symbol indicates required actions. A depiction of the type of required
action is shown inside the symbol (the left symbol indicates that the power
plug must be disconnected from the outlet).
iii
Page 4
Precautions Upon the Operation
WARNING
Do not disassemble or modify the equipment. Doing so may result in fire, electric
shock, or equipment failure.
Do not allow the display to become wet. Doing so may result in fire, electric
shock, or equipment failure.
Operate the equipment only at the indicated voltage. Failure to do so may result
in fire, electric shock, or equipment failure.
Install this unit at least 1 m away from any magnetic compasses. Installation near
a magnetic compass may result in interference with the magnetic compass, and
may result in an accident.
Do not perform internal inspections or modifications of the equipment. Inspection
or modification by unauthorized personnel may result in fire, electric shock, or
equipment failure. Please consult with JRC or an affiliate to perform internal
inspections or repair.
When disposing of the used lithium battery, place insulating tape over the battery
terminals, or otherwise insulate the battery. Failure to do so may result in heating,
explosion, or fire due to a shorted battery.
iv
Page 5
CAUTION
This equipment is not designed to automatically make judgments on the position
data. The navigation information including the position data needs to be judged by
the user himself.
Do not use the equipment in the environment other than those provided in the
specification. Doing so may result in equipment failure, malfunction, or injury.
Do not install the display unit in the location where it may come in contact with
water, oil, or chemicals. Doing so may result in equipment failure, malfunction, or
injury.
Do not install the equipment in the place subject to vibration or shock.
Doing so may result in the equipment falling or collapsing, resulting in equipment
failure or injury.
Do not place any item on the top of the equipment.
Doing so may result in equipment failure, malfunction, or injury.
Please consult with JRC or an affiliate to perform installation. Installation by
unauthorized personnel may result in malfunction.
Use only the specified battery. Failure to do so may result in battery leakage or
rupture, resulting in fire, injury, or equipment failure.
Do not use benzine, alcohol or thinner when caring this equipment.
Doing so may result in removing the paint or changing of properties.
Wipe off the grime lightly with a dry soft cloth.
Use the indicated screws when installing the display unit to a stable wooden
surface. Failure to do so may result in the display unit falling over, causing injury
or property damage.
Use only the specified fuse.
Failure to do so may result in fire or equipment failure.
Use only the specified battery.
Failure to do so may result in equipment failure or malfunction.
v
Page 6
When connecting the cable attached to the equipment, do not bend it acutely, twist
it, or impart excessive force. Doing so sometimes causes cracks or damage to the
coating, resulting in fire or electrocution.
Do not install the sensor where there is excessive vibration.
Vibration may cause sensor failure.
Do not paint the sensor.
Doing so may result in reception problems.
Do not install the sensor where temperature exceeds 55 degrees Celsius and
there is covered with exhaust gas from funnel. Doing so may result in flood and
cause sensor failure.
The junction box rubber gaskets (25 f Gland side) fit 10mm – 20mm cables.
Install the sensor where there are no obstacles, in order to ensure that GPS signals
can be directly received from satellites without interference or reflection of signals
from surrounding objects.
Whenever possible, select a place with the following characteristics.
1. An open space, which allows uniform reception of satellite signals.
2. Far away from any high power transmission antennas.
3. Outside radar beams.
4. Away from the INMARSAT antenna by at least 5 meters and outside
If it is difficult to find an ideal site, select a place temporarily and install the equipment. Conduct a test to make
sure that the proper performance can be obtained and then fix the equipment in position. If it is installed at an
improper place, reception accuracy may be impaired.
vi
the INMARSAT beam.
5. Away from the antenna of a VHF transmitter and a direction finder
by at least 3 meters.
6. Away from a Magnetic Compass by at least 1 meter.
7. 3 meters or more away from amateur radio antennas.
If occurs bad positioning of such as satellite can not be received, please execute the
master reset of sensor.
There are cases when time lags in the gps navigator and gps compass.
This is not a malfunction due to the delay in the internal processing.
There are cases when time lags in the main display unit and sub display unit.
This is not a malfunction due to the delay in the internal processing.
CAUTION
Page 7

Appearance of the Equipment
●NWZ-1650 Display Unit
●NDC-4100 Processor Unit
●JLR-4350 GPS Sensor Unit
vii
Page 8

Terminology
Term Meaning (Descriptions)
2D (2 dimension) Positioning with antenna elevation height in addition to satellite
data.
3D (3 dimension) The three dimensional position fix, 4 or more satellites required.
Active route Route that is currently used by a ship
Anchor alert This alert monitors that the own ship is the preset distance or more
away from the waypoint.
Arrival alert This alert informs that the own ship has traveled the preset distance,
approaching the waypoint.
Beacon information Beacon data which is broadcast by message type 16.
BeiDou
Boundary alert This alert informs that the own ship has got into the preset route.
CCRP Abbreviation of Consistent Common Reference Point. Reference
CDI Abbreviation of Course Deviation Indicator. This indicator shows
Checksum An error detection method to check that the data has been correctly
COG Course Over Ground.
Course Direction in which the ship is traveling, which is the bearing mainly
CURRENT Sea and ocean currents, expressed in speed and direction.
Data route Ship route data that is stored in the memory of the equipment
Default gateway Equipment connected externally from a constructed network.
DGPS Abbreviation of Differential Global Positioning System. GPS
BeiDou is a satellite positioning system that is managed by China.
position of the own ship.
information on the deviation from the scheduled route and on the
direction into which the ship should be steered.
transmitted.
displayed by the GPS.
satellite error data sent from a reference station whose position is
accurately known is received via beacon from a beacon station,
improving positioning accuracy.
DISP-DPU The main circuitry of display unit.
FRAM Nonvolatile memory using a ferroelectric substance.
Geodetic Conditions for expressing position via latitude and longitude.
GPS Satellite (GPS) Abbreviation of Global Positioning System. Refers to satellites
launched for navigational support of military vessels managed by
the United States Department of Defense.
GLONASS
HDOP Abbreviation of Horizontal Dilution of Precision. Indicates accuracy
IEC IEC is the abbreviation of International Electrotechnical
IPXX IPXX is Degrees of protection provided by enclosures (IP Code)
viii
GLONASS is a satellite positioning system that is managed by Russia.
of positioning. The smaller the number, the higher the accuracy. If
GPS satellites are unevenly distributed, this number will grow. If
GPS satellites are evenly distributed, this number will be smaller.
Commission. It is an international standard governing electrical
and electronic technologies.
Page 9

1st numeral: Against ingress of solid foreign objects (0 – 6)
2nd numeral: Against ingress of water with harmful effects (0 - 8).
(IPX4: splash-proof, IPX6: waterproof)
IP address ID number assigned to equipment on a constructed network.
LAN Abbreviation of Local Area Network. A network is constructed for
transmitting and receiving data.
LCD Unit (LCD) Liquid Crystal Display Unit.
Log Pulse Contact output signal, output in 1 pulse per nm.
Expressed in units of "p/nm". mi/h Unit of ship speed.
Loran time difference
display Method for expressing the present position with loran system time
difference. (The method is for operators who have a background in
loran navigation.)
MAC address ID number assigned to LAN IC
Multi GNSS Positioning using multiple satellite systems at the same time.
Master reset This function changes the settings of the display unit and GPS
sensor back to the factory settings. The function clears all the
data.
Multipath Wave Waves received from multiple directions due to reflection or
refraction of an initial wave by obstacles.
Mutual monitoring mode When two navigators are installed, they monitor their position fixing
status each other by using this function.
NMEA0183 (NMEA) Abbreviation of National Marine Electrical Association 0183.
International standard for naval equipment transmission
established by the National Marine Electrical Association.
QZSS QZSS is a Quasi-zenith satellite system that is managed by Japan
and complements GPS.
Positioning Use of GPS or DGPS receiving functions to determine the current
position of a ship.
RAIM Accuracy Standard
(RAIM) Abbreviation of Receiver Autonomous Integrity Monitoring. This
system automatically detects failed satellites and deselects their
positioning data from calculations. Including data from failed
satellites will result in a decrease in positioning accuracy; the RAIM
accuracy standard indicates the accuracy degradation base for
removal of failed satellites from positioning calculations.
Ranging Positioning with the use of SBAS satellite in addition to GPS
satellite.
Reception Level GPS signal reception level.
Route plan Plan registered with multiple waypoints in the navigation order
RS-232C Serial data transmission standard. It is unbalanced, and hence can
only be used for short distance transmission.
RS-422 Balanced serial transmission standard.
SBAS Abbreviation of Satellite Based Augmentation System. It is a
blanket term for wide scale GPS support systems using fixed
position satellites which send GPS error correction data over a wide
range.
SBAS Search SBAS reception mode (manual / automatic).
ix
Page 10
Shared route Function that uses the same route as other functions such as
ECDIS do. The route can be updated automatically by sharing the
active route.
Smoothing Function for averaging over a specified number of seconds.
SOG Speed Over Ground, This is the ship’s relative speed to the ground.
SPEED The speed mainly measured by the GPS.
STW Speed Through Water.
Subnet mask Value for identifying the network address
Symbol information Information of symbols displayed on the plotting screen. The
information includes symbol positions, comments, etc.
TD Abbreviation of Time Difference. Time difference from the
master-station signal of the loran system to the slave-station signal.
Message Type 0 SBAS satellite test broadcasting.
UTC Abbreviation of Coordinated Universal Time.
XTD alert This alert informs that the own ship has got out of the scheduled
route by the preset distance or more.
x
Page 11

Index
Foreword ............................................................................................................................................... ii
Before Commencing the Operation ..................................................................................................... iii
Precautions Upon the Operation ......................................................................................................... iv
Appearance of the Equipment ............................................................................................................ vii
Terminology ........................................................................................................................................ viii
1.1 Functions ............................................................................................................................... 1-1
1.2 Features ................................................................................................................................ 1-1
1.3 Configuration ......................................................................................................................... 1-2
1.3.1 Standard Configuration .................................................................................................. 1-2
1.3.2 Option ............................................................................................................................ 1-3
1.4 Construction .......................................................................................................................... 1-4
1.5 System Diagram .................................................................................................................. 1-14
Chapter 2 Name and Function of Each Unit ................................................................................... 2-1
2.1 NWZ-1650 DISPLAY UNIT .................................................................................................... 2-1
2.2 JLR-4350 GPS Sensor .......................................................................................................... 2-3
2.3 NDC-4100 Processor ............................................................................................................ 2-3
Chapter 3 Display Screens ............................................................................................................. 3-1
3.1 Display Screens .................................................................................................................... 3-1
3.1.1 Switching display ........................................................................................................... 3-1
3.1.2 Navigation information screen ....................................................................................... 3-1
3.1.3 Plotting screen 1 ............................................................................................................ 3-5
3.1.4 Plotting screen 2 ............................................................................................................ 3-5
3.1.5 Analogue screen ............................................................................................................ 3-6
3.1.6 Highway screen ............................................................................................................. 3-7
3.1.7 Satellite information screen ........................................................................................... 3-7
3.1.8 Waypoint information screen ......................................................................................... 3-8
3.1.9 Beacon text screen ........................................................................................................ 3-8
3.1.10 Navigation aid screen .................................................................................................... 3-9
Chapter 4 Operation ....................................................................................................................... 4-1
4.1 Menu List ............................................................................................................................... 4-1
4.1.1 Main Menu ..................................................................................................................... 4-1
4.1.2 Function menu ............................................................................................................... 4-7
4.2 Basic Operation ..................................................................................................................... 4-8
4.2.1 Turning on the power of the unit .................................................................................... 4-8
4.2.2 Startup ........................................................................................................................... 4-8
4.2.3 Turning off the power of the unit .................................................................................... 4-9
4.2.4 Adjusting the backlight ................................................................................................. 4-10
4.2.5 Menu operation ............................................................................................................ 4-10
4.2.6 Alert and acknowledgment (ACK) ............................................................................... 4-11
4.2.7 Screen operation ......................................................................................................... 4-13
4.2.8 Inputting numeric values .............................................................................................. 4-13
4.2.9 Inputting comments ..................................................................................................... 4-14
4.2.10 List operation ............................................................................................................... 4-15
4.2.11 Entering a password in CODE INPUT ......................................................................... 4-15
4.3 Setting Display .................................................................................................................... 4-16
4.3.1 Setting a theme ............................................................................................................ 4-16
4.3.2 Setting a beep tone ...................................................................................................... 4-16
4.3.3 Setting reverse video display ....................................................................................... 4-16
4.3.4 Selecting a display screen ........................................................................................... 4-17
4.4 Registering Waypoints ........................................................................................................ 4-18
4.4.1 Displaying a waypoint list............................................................................................. 4-18
4.4.2 Registering waypoints .................................................................................................. 4-19
4.4.3 Editing waypoints ......................................................................................................... 4-22
4.4.4 Copying waypoints ....................................................................................................... 4-22
4.4.5 Deleting waypoints ....................................................................................................... 4-23
4.5 Route Plan ........................................................................................................................... 4-24
4.5.1 Displaying a route list ................................................................................................... 4-24
4.5.2 Creating routes ............................................................................................................ 4-25
4.5.3 Editing routes ............................................................................................................... 4-27
Page 12

Copying routes ............................................................................................................. 4-28
4.5.4
4.5.5 Deleting routes ............................................................................................................. 4-29
4.5.6 Sharing a route with another piece of equipment ........................................................ 4-31
4.5.7 Setting route initial values ............................................................................................ 4-32
4.6 Executing a Route ............................................................................................................... 4-33
4.6.1 Executing a route by selecting from a route list ........................................................... 4-33
4.6.2 Selecting a waypoint/route by using the GOTO key .................................................... 4-34
4.6.3 Ending a route ............................................................................................................. 4-37
4.7 Event/Mark .......................................................................................................................... 4-38
4.7.1 Displaying an event/mark list ....................................................................................... 4-38
4.7.2 Registering events ....................................................................................................... 4-38
4.7.3 Registering marks ........................................................................................................ 4-39
4.7.4 Editing events/marks ................................................................................................... 4-40
4.7.5 Deleting events/marks ................................................................................................. 4-40
4.8 Plotting Screen .................................................................................................................... 4-42
4.8.1 Operating the cursor .................................................................................................... 4-42
4.8.2 Changing the cursor size ............................................................................................. 4-42
4.8.3 Moving a screen .......................................................................................................... 4-43
4.8.4 Moving own ship to the centre of the screen ............................................................... 4-43
4.8.5 Screen Zoom In/Out .................................................................................................... 4-44
4.8.6 Changing North Up/Course Up .................................................................................... 4-44
4.8.7 Displaying tracks .......................................................................................................... 4-45
4.8.8 Displaying an own ship vector and a distance circle ................................................... 4-46
4.8.9 Setting symbols to display/non-display ........................................................................ 4-47
4.8.10 Displaying symbol information ..................................................................................... 4-47
4.8.11 Changing a background colour .................................................................................... 4-48
4.9 Setting MOB ........................................................................................................................ 4-49
4.10 Setting Alerts ....................................................................................................................... 4-50
4.10.1 Setting alert/buzzer sounds ......................................................................................... 4-50
4.11 Alert List............................................................................................................................... 4-56
4.11.1 Displaying alert history ................................................................................................. 4-56
4.11.2 Displaying the alert that is occurring ............................................................................ 4-56
4.11.3 Displaying the alerts that occurred in LAN .................................................................. 4-57
4.12 Initial Settings of GNSS/Beacon/SBAS ............................................................................... 4-58
4.12.1 Setting a positioning system ........................................................................................ 4-58
4.12.2 Setting a position fixing mode ...................................................................................... 4-59
4.12.3 Setting an elevation mask............................................................................................ 4-59
4.12.4 Setting HDOP .............................................................................................................. 4-60
4.12.5 Setting position, speed, and course smoothing ........................................................... 4-60
4.12.6 Setting RAIM ................................................................................................................ 4-61
4.12.7 Setting a geodetic system............................................................................................ 4-61
4.12.8 Initialising sensors ....................................................................................................... 4-62
4.12.9 Setting a DGPS correction mode ................................................................................ 4-62
4.12.10 Setting a beacon ...................................................................................................... 4-64
4.12.11 Setting SBAS ........................................................................................................... 4-65
4.12.12 Displaying a beacon station list ............................................................................... 4-65
4.13 Configuring a System .......................................................................................................... 4-66
4.13.1 Setting time difference/date display ............................................................................. 4-66
4.13.2 Setting units ................................................................................................................. 4-66
4.13.3 Setting magnetic correction ......................................................................................... 4-67
4.13.4 Setting LORAN A/C ..................................................................................................... 4-67
4.13.5 Selecting a sensor ....................................................................................................... 4-68
4.14 Printing ................................................................................................................................ 4-69
4.15 Setting a Language ............................................................................................................. 4-69
4.16 Verifying Versions ................................................................................................................ 4-69
4.17 Displaying a total trip distance ............................................................................................ 4-70
4.17.1 Starting/stopping measurement of a trip distance ....................................................... 4-70
4.17.2 Resetting a trip distance .............................................................................................. 4-70
4.17.3 Resetting a total trip distance ...................................................................................... 4-70
4.18 Measuring a trip distance .................................................................................................... 4-71
4.18.1 Starting/stopping measurement ................................................................................... 4-71
4.18.2 Resetting a trip distance .............................................................................................. 4-71
4.19 Displaying external equipment information ......................................................................... 4-72
Page 13

Measuring a distance and an azimuth between two points ................................................ 4-73
4.20
Chapter 5 Maintenance and Inspection .......................................................................................... 5-1
5.1 General Maintenance and Inspection ................................................................................... 5-1
5.2 Alerts ..................................................................................................................................... 5-2
5.3 Troubleshooting ..................................................................................................................... 5-5
5.4 Replacement Parts ................................................................................................................ 5-7
5.4.1 Repair units .................................................................................................................... 5-7
5.4.2 Regular replacement parts ............................................................................................ 5-7
Chapter 6 After-Sales Service ........................................................................................................ 6-1
6.1 Warranty ................................................................................................................................ 6-1
6.2 Repair parts stocking Period ................................................................................................. 6-1
6.3 When Requesting Service ..................................................................................................... 6-1
6.4 Recommended Checks Inspection ....................................................................................... 6-1
Chapter 7 Disposal ......................................................................................................................... 7-1
7.1 Disposal of Equipment .......................................................................................................... 7-1
7.2 Disposal of Used Batteries .................................................................................................... 7-1
Chapter 8 Specification .................................................................................................................. 8-1
8.1 NWZ-1650 DISPLAY UNIT ................................................................................................. 8-1
8.1.1 Basic .............................................................................................................................. 8-1
8.1.2 Environment ................................................................................................................... 8-1
8.2 JLR-4350 GPS Sensor .......................................................................................................... 8-1
8.2.1 Basic .............................................................................................................................. 8-1
8.2.2 Environment ................................................................................................................... 8-2
8.3 NDC-4100 Processor Unit ..................................................................................................... 8-2
8.3.1 Basic .............................................................................................................................. 8-2
8.3.2 Environment ................................................................................................................... 8-2
8.3.3 Interface ......................................................................................................................... 8-3
Appendix .................................................................................................................................. Appendix-1
Appendix 1 List of Geodetic System ................................................................................ Appendix-1
Appendix 2 List of standard terms, units and abbreviations ............................................ Appendix-2
Appendix 3 List of Symbols .............................................................................................. Appendix-7
Appendix 4 List of Default Setting Values ........................................................................ Appendix-8
Appendix 5 Data Format ................................................................................................ Appendix-13
Appendix 6 Compass Safe Distance ............................................................................. Appendix-30
Page 14

Page 15
Chapter 1 Equipment Overview
1.1 Functions
This equipment (JLR-8600) is a GPS navigator with a JLR-4350GPS sensor that is connected to
the NWZ-1650 display unit and the NDC-4100 processing unit.
JLR-4350, which is a multi-GNSS receiver that is capable of receiving data from GPS as well as
GLONASS or BeiDou, operates around-the-clock to measure positions with high accuracy anywhere in
the world and in all weather conditions by using the GPS satellite and the GLONASS satellite, or the
BeiDou satellite, and produces highly reliable positioning results. In addition, the GPS navigator can
increase the accuracy of position fixing by receiving correction data from the DGPS beacon station and
SBAS satellites.
1.2 Features
Registration of up to 100 routes and 10000 waypoints
Many output ports installed with the built-in buffer unit
Enables sharing of a route with ECDIS by the mounted LAN
High visibility 6.5-inchi large colour LCD
Provided with many graphic display modes
Mutual acknowledgment through a contact or ALR
Improved operability by touch panel and abundant menus
High reliability by the multi-GNSS receivers (GPS/GLONASS/BeiDou/QZSS/SBAS)
Built-in RAIM function
1-1
Page 16
1.3 Configuration
1.3.1 Standard Configuration
JLR-8600
No Name Model Q'ty Note
1 GPS Sensor Unit JLR-4350 1
1-1 Screw Adapter MTV302007A 1
1-2 Mounting Band MPBP02520 1 Include 2 bands
1-3 Instruction manual 7ZPNA4695 1 English
1-4 Cable guard rubber MPPK31462 1
2 Processor Unit NDC-4100 1
2-1 Fuse
3 Display Unit NWZ-1650 1
Model
3-1
Identification
Plate
3-2 Clamp Filter 5MBIR00009 1
3-3 Flush mount kit MPBX50891 1
4 Display cable CFQ-7540 1 LAN 15m for DISPLAY
5 Instruction manual 7ZPNA4699 1 7ZPNA4698(Japanese)/7ZPNA4699(English)
MF51NR 250V 5
MF51NR 250V 2
MPNN50903 1
NWZ-1650
No Name Model Q'ty Note
1 Display Unit NWZ-1650 1 Refer to JLR-8600(3~3-3)
2 Instruction manual 7ZPNA4699 1 7ZPNA4698(Japanese)/7ZPNA4699(English)
MF51NR 250V 5 :4 Fuses
1
MF51NR 250V 2 :1 Fuses
1-2
Page 17
1.3.2 Option
No Name Model Q'ty Note
AC/DC Power supply
1
unit
AC/DC Power supply
2
unit
AC/DC Power supply
3
unit
4 Data Power Cable CFQ-7539 1 For Remote Display/ 8 cores 15m
5 Data power Cable CFQ-7539-5 1 For Remote Display/ 8 cores 5m
6 Printer DPU-414 1
7 Printer NKG-104 1
8 Printer Cable 7ZCNA4109 1 Single end D-Sub/ 3m For DPU-414
9 Printer Cable 7ZCNA4112 1 Single end D-Sub9/ 10m For DPU-414
10 Printer Paper 6ZCAF00252A 1 For DPU-414
11 Printer Paper 7ZPJD0384 1 For NKG-104
12 Extension Cable CFQ-9002 1 Dual end 6 cores connecter 15m/ For Sensor
13 Extension Cable CFQ-9000 1 Single end 6 cores 5m
14 Junction Box NQE-7700A 1 6 terminals
15 Pole Mounting Kit MPBP30608 1 For NQE-7700A
16 Coaxial Cable Kit NQD-4414 1 Outdoor NQD-4410, Indoor NQD-4411
17 Select Switch NCZ-777 1 Manual
18 Select Switch NCZ-1537B 1 Automatic
19 Junction Box CQD-10 1 16 terminals
20 Screw Adapter MTV302007A 1 For Sensor
21 Mounting Band MPBP02520 1 For Sensor
22 Output Buffer NQA-4351 1
23 Select Switch NCZ-1663 1 For NQA-4351
24 External Dimmer unit NCM-227 1
25 Printer RP-D10 1 Network printer
26 Power supply NBG-980 Power supply unit for Network printer
27 Base kits MPBX50347 1 with Tapping screws
NBG-320 1
NBD-577C 1
NBD-904 1
100/220VAC,24VDC Input
12VDC Output
100/220VAC,24VDC Input
24VDC Output
100/220VAC,24VDC Input
24VDC Output
1-3
Page 18
1.4 Construction
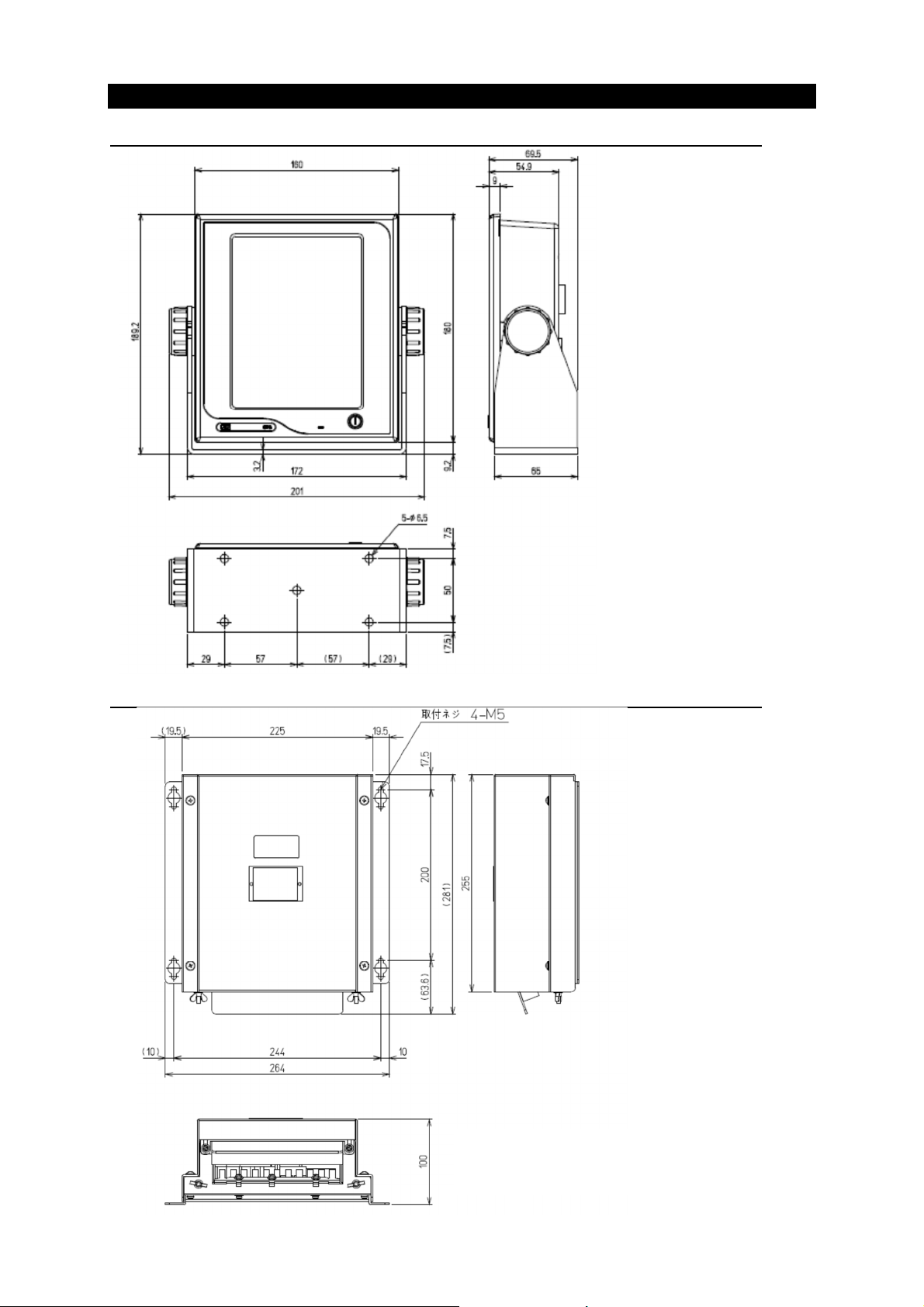
NWZ-1650 Display Unit
NDC-4100 Processor Unit
1-4
Unit: mm
Mass: Approximately 2kg
Color: Munsell N2.5
IP Grade: IP56
Unit: mm
Mass: Approximately 2.2kg
Color: Munsell N2.5
IP Grade: IP22
Page 19
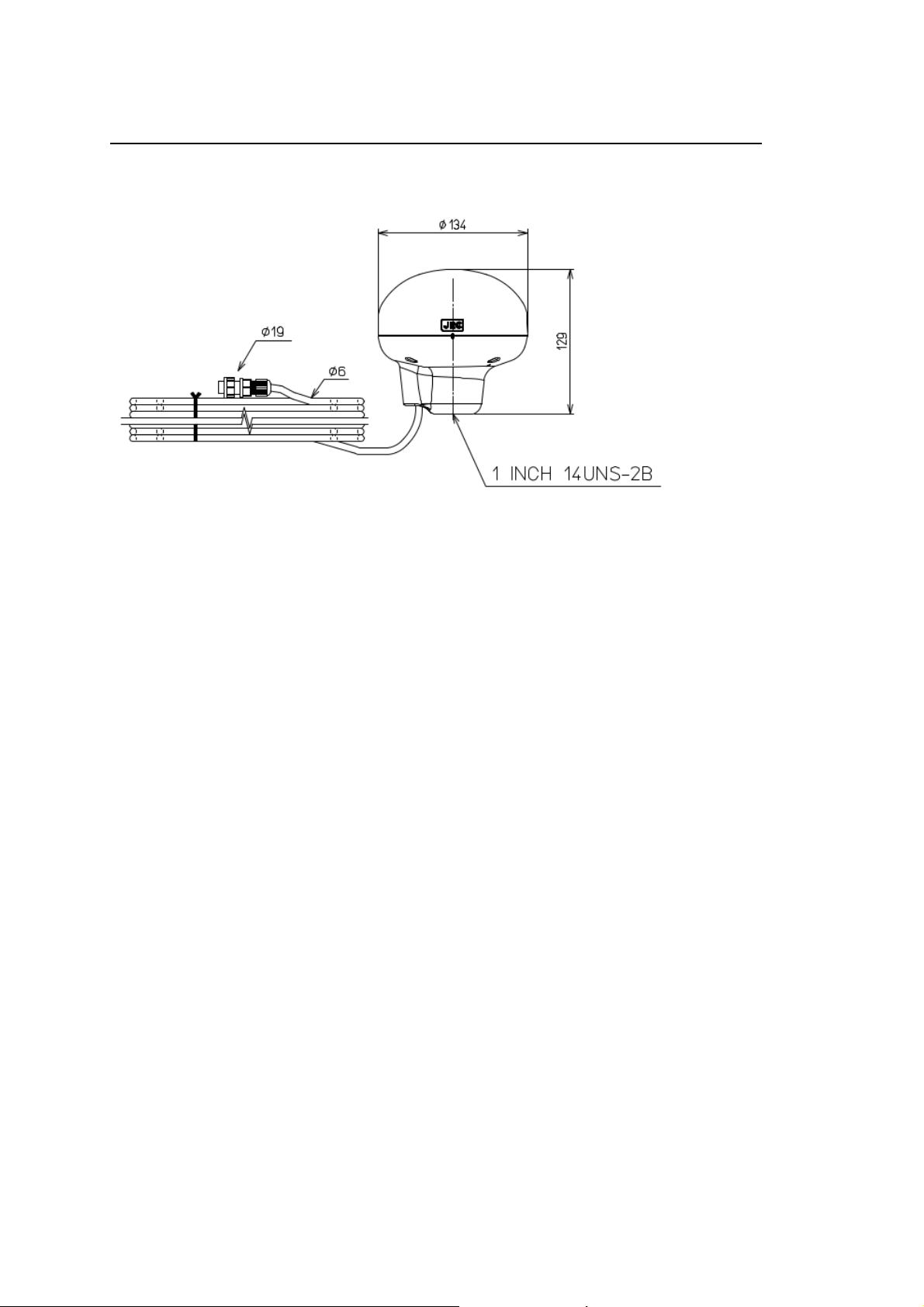
JLR-4350 GPS Sensor Unit
Unit: mm
Mass: Approximately 1.5kg (include 15m cable)
Color: Munsell N9
IP Grade: IP56 (IEC60945)
1-5
Page 20
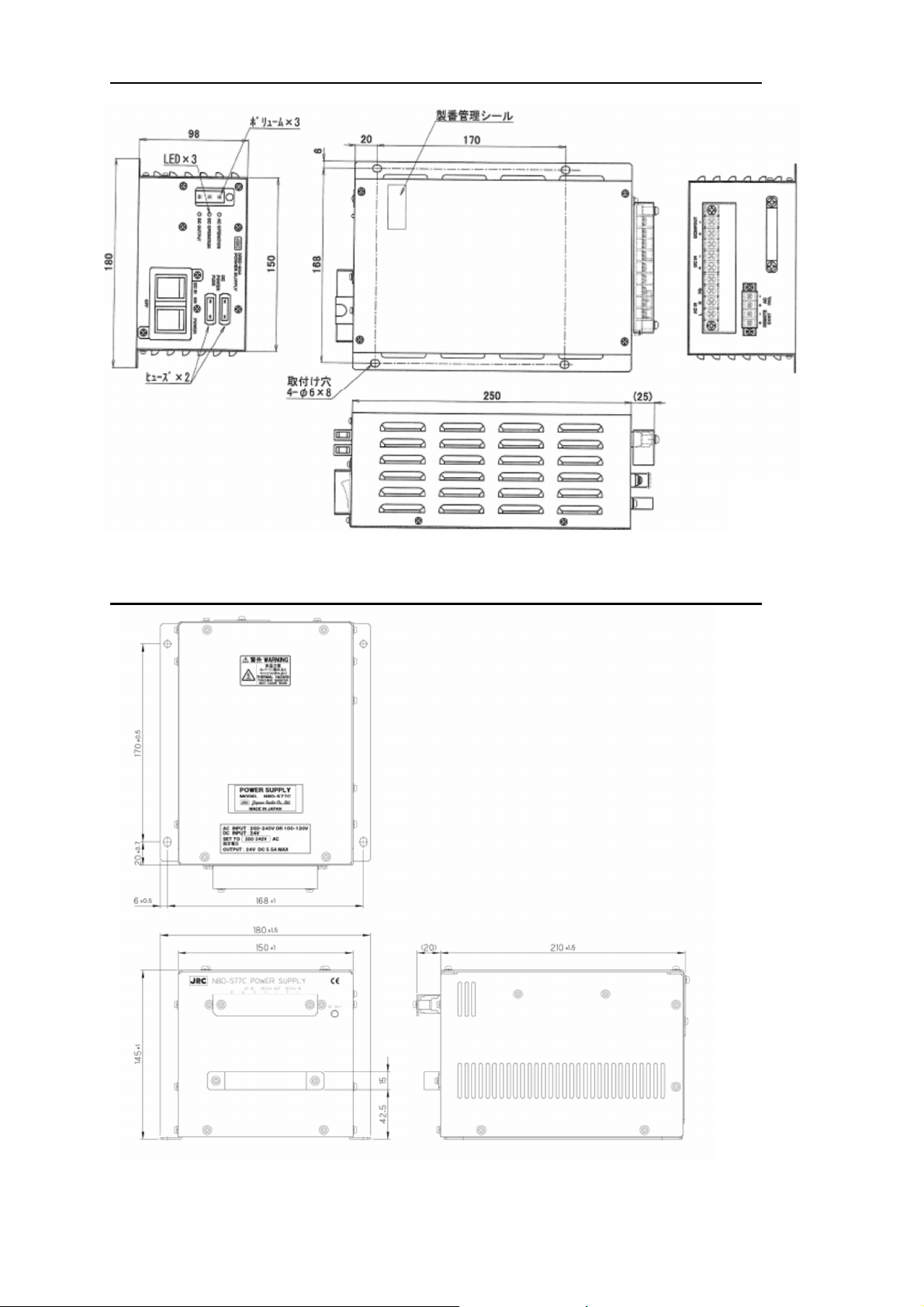
NBD-904 Power Supply
Unit: mm
Mass:Approximately 2.6 kg
NBD-577C Power Supply
Unit: mm
Mass: Approximately 5.4 kg
1-6
Page 21
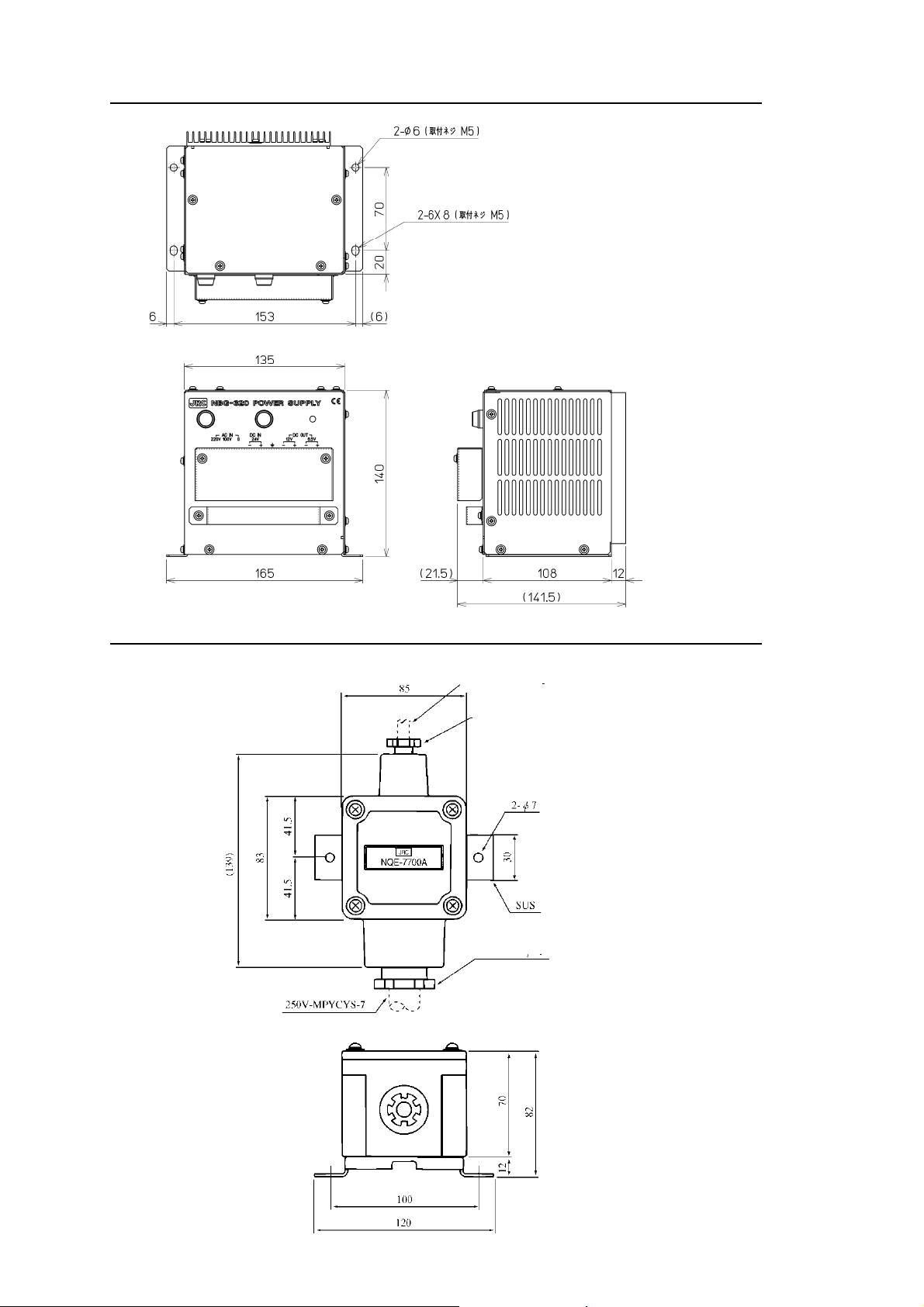
NBG-320 Power Supply
Unit: mm
Mass: Approximately 3.5 kg
NQE-7700A Junction Box
GPS cable
Glandφ15
Unit: mm
Mass: Approximately 0.6 kg
1-7
Page 22
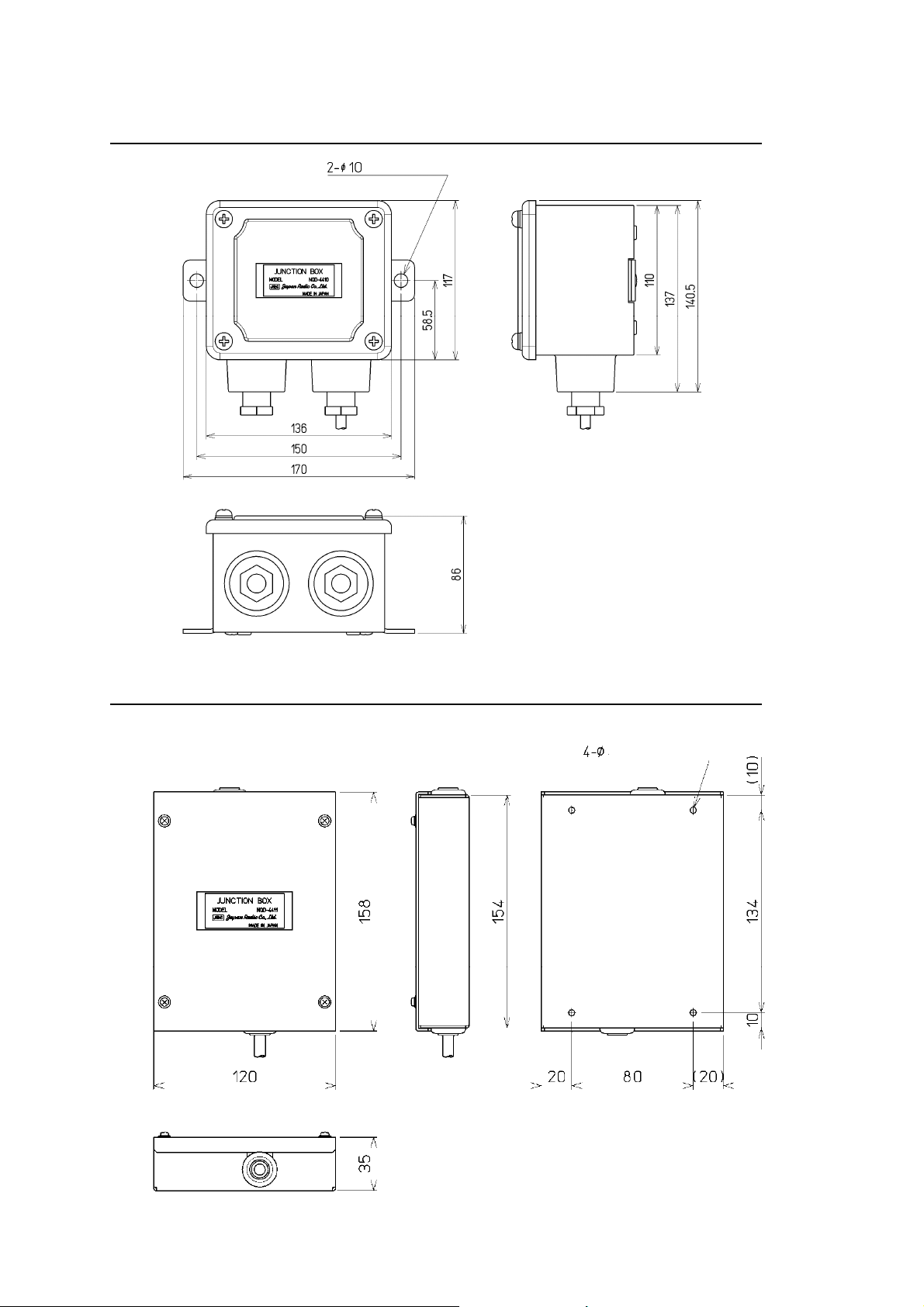
NQD-4414 Coaxial Cable Kit (NQD-4410)
Unit: mm
Mass: Approximately 1.5 kg
NQD-4414 Coaxial Cable Kit (NQD-4411)
(Screw M3)
Unit: mm
Mass: Approximately 0.7 kg
1-8
Page 23
g
NQA-4351A Output Buffer
Select si
DC Input Data Output
(IEC61162-1 or NMEA) (IEC61162-1 or NMEA)
nal
JUMPER SETTING for DC Input
DC Input JUMPER Terminal
DC 12V TB1-IN
DC 24V TB1-IN
1
2 JUMPER ON 9-16V
JUMPER Cable 0.25~2.5mm
1
2 JUMPER ON 9-16V
Not connect
3
Data Output Data Output
(IEC61162-1 or NMEA) (IEC61162-1 or NMEA)
Unit: mm
Mass: 0.8 kg
1-9
Page 24
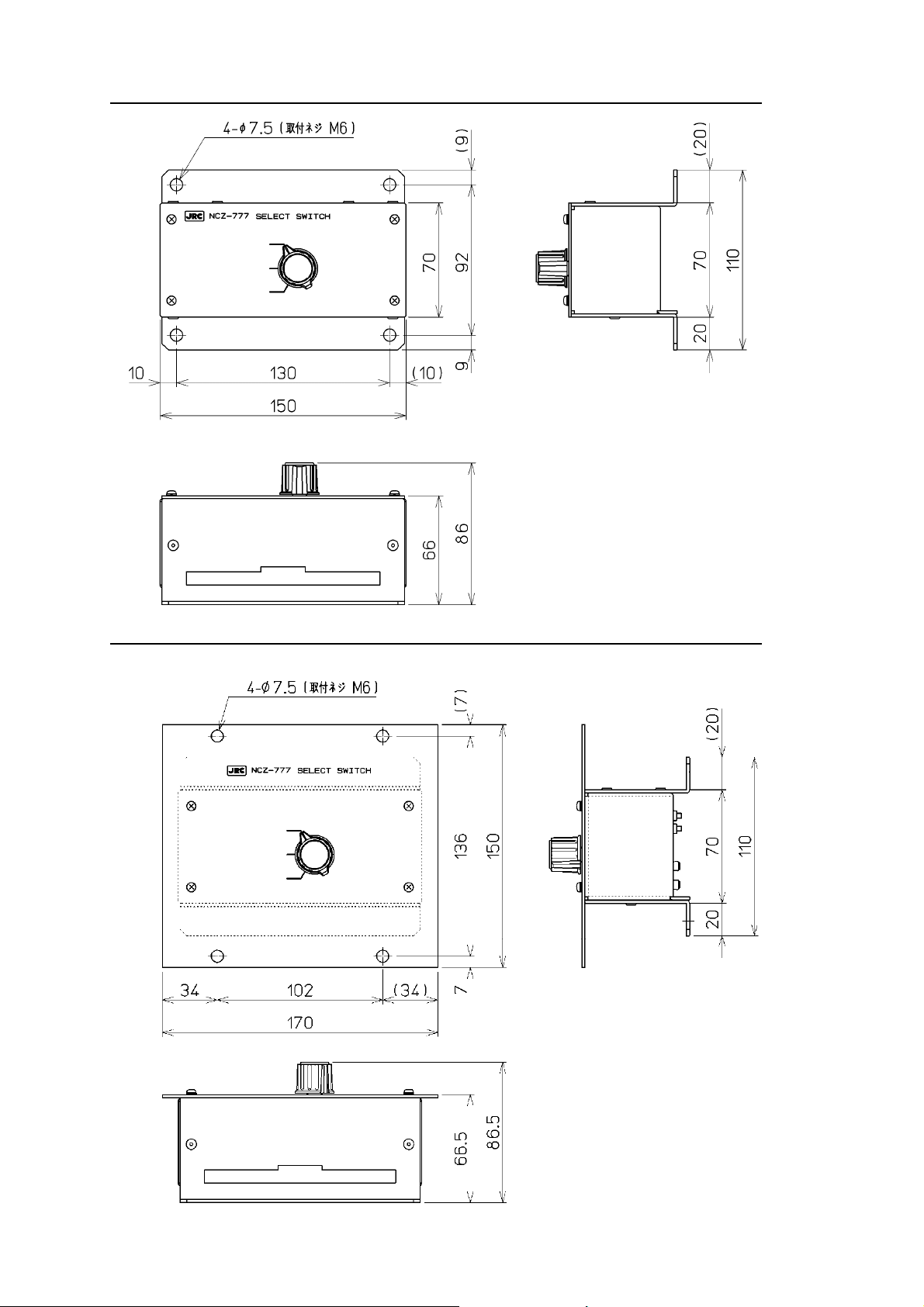
NCZ-777 Select Switch
Unit: mm
Mass: Approximately 0.5 kg
NCZ-777 Select Switch (Flush Mounting)
Unit: mm
Mass: Approximately 0.7 kg
1-10
Page 25
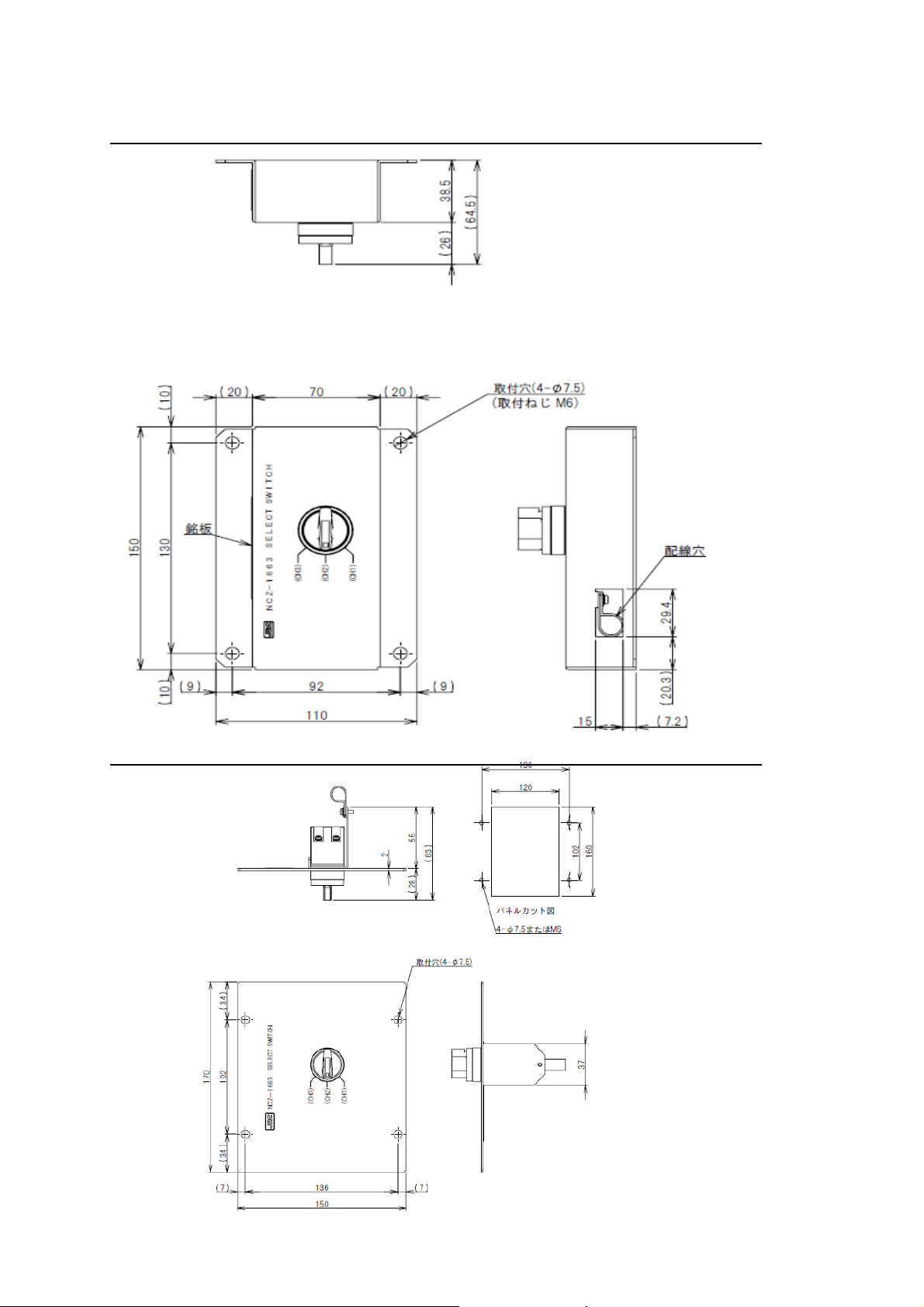
NCZ-1663 Select Switch
Unit: mm
Mass: 0.2 kg
NCZ-1663 Select Switch (Flush Mounting)
1-11
Page 26
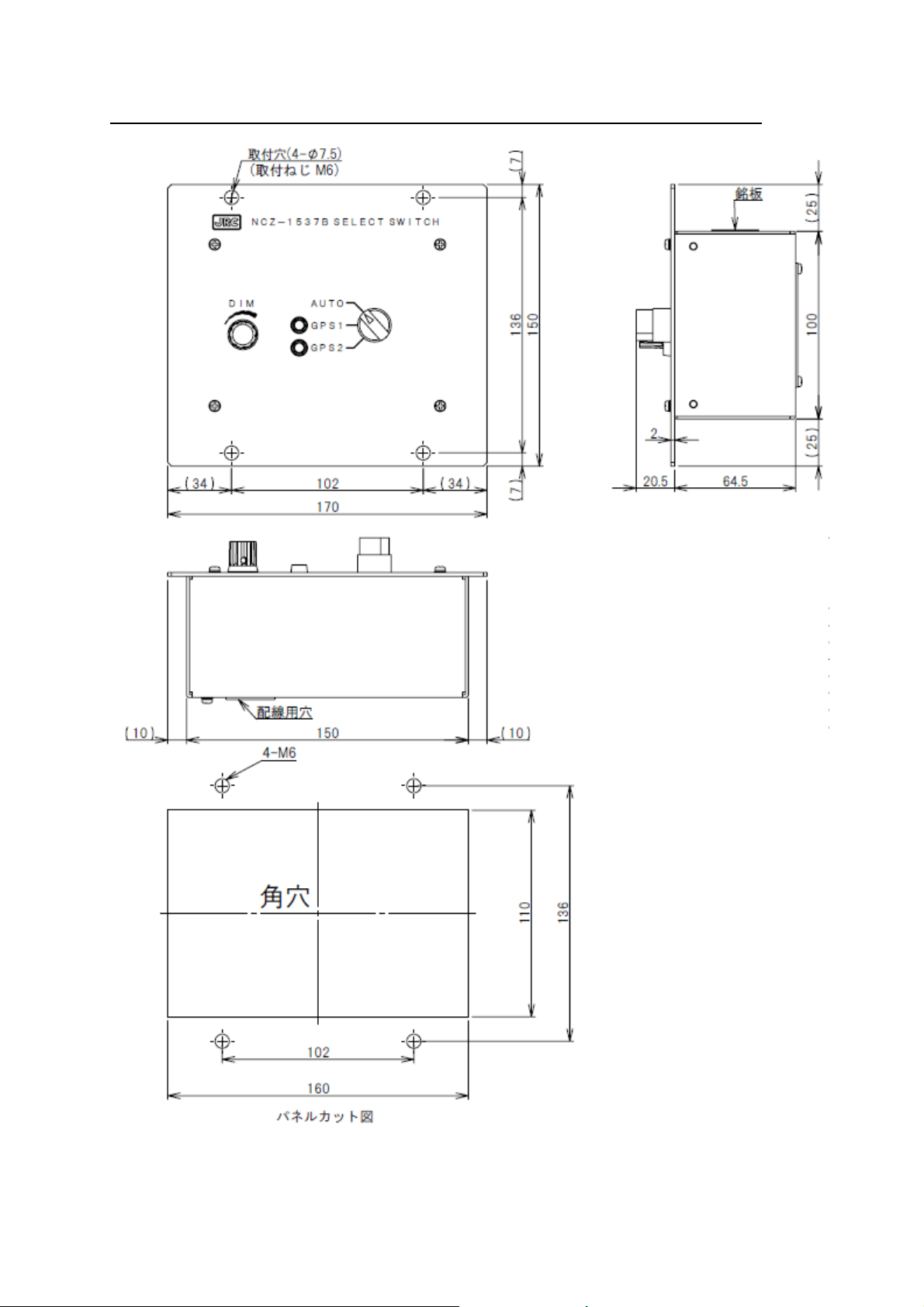
NCZ-1537A/B Select Switch (Flush Mounting)
Unit: mm
Mass: 0.2 kg
Unit: mm
Mass: 0.55 kg
1-12
Page 27
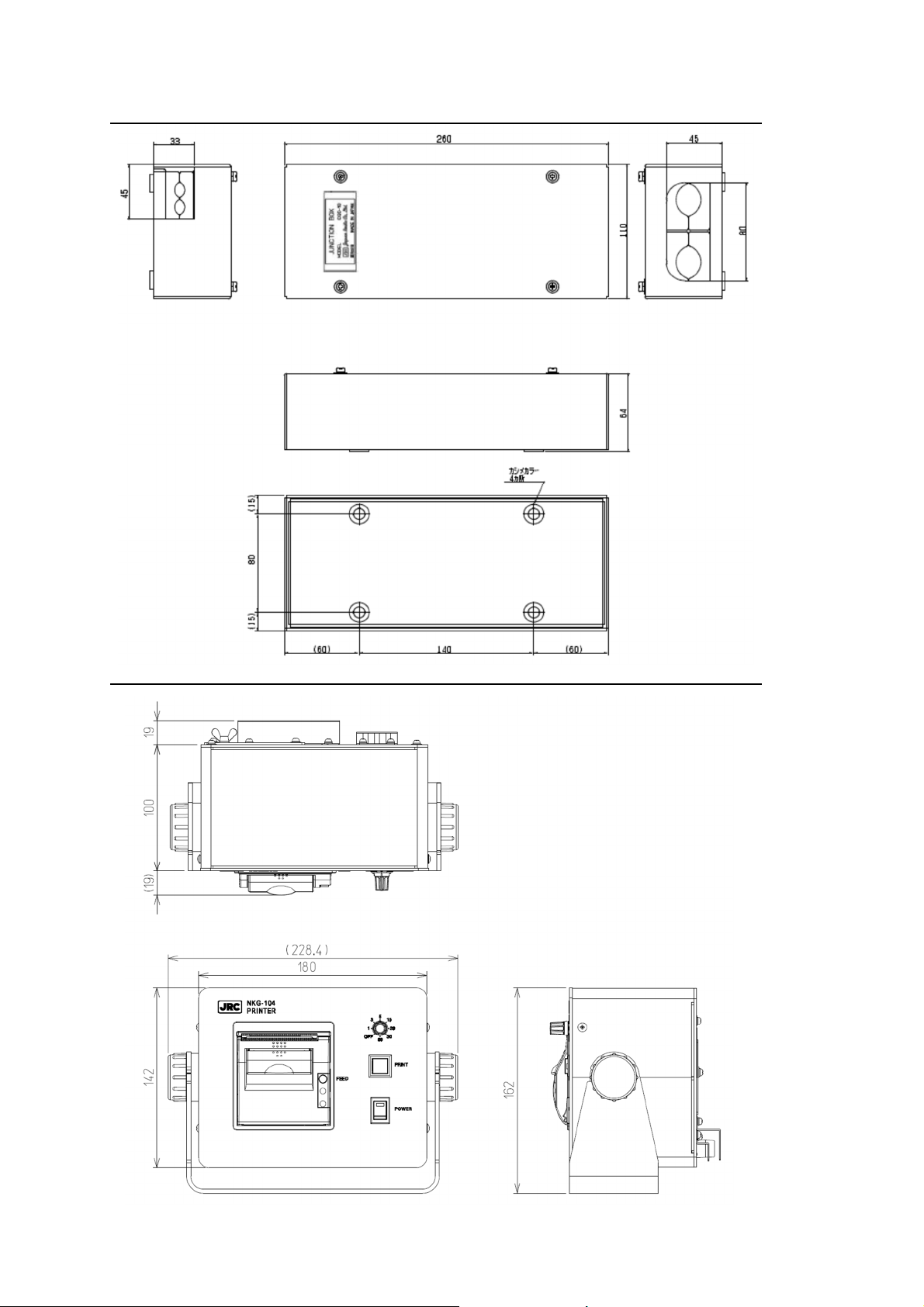
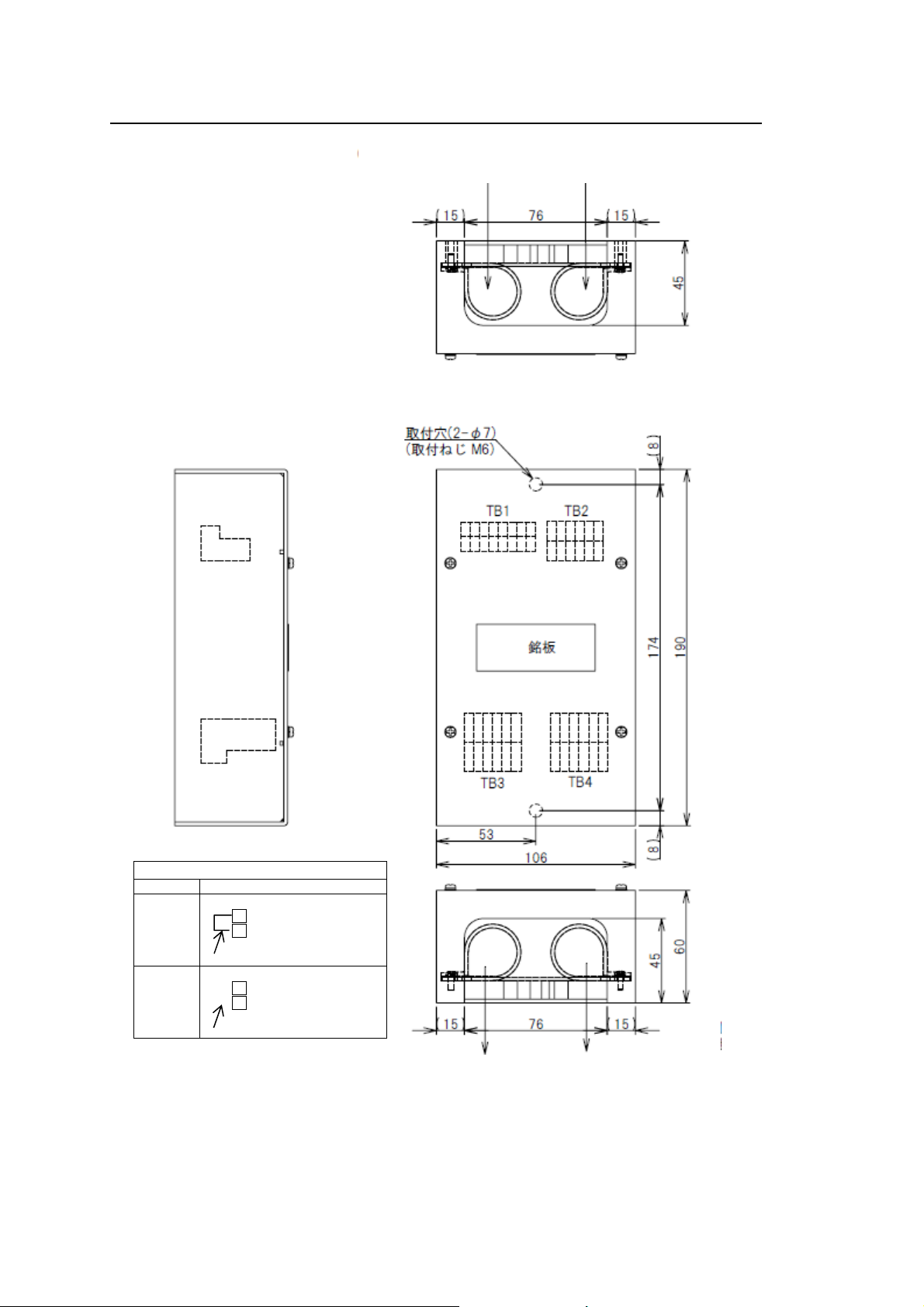
CQD-10 Junction Box
Unit: mm
Mass: Approximately 1.1 kg
NKG-104 Printer
Unit: mm
Mass: Approximately 2.1 kg
1-13
Page 28
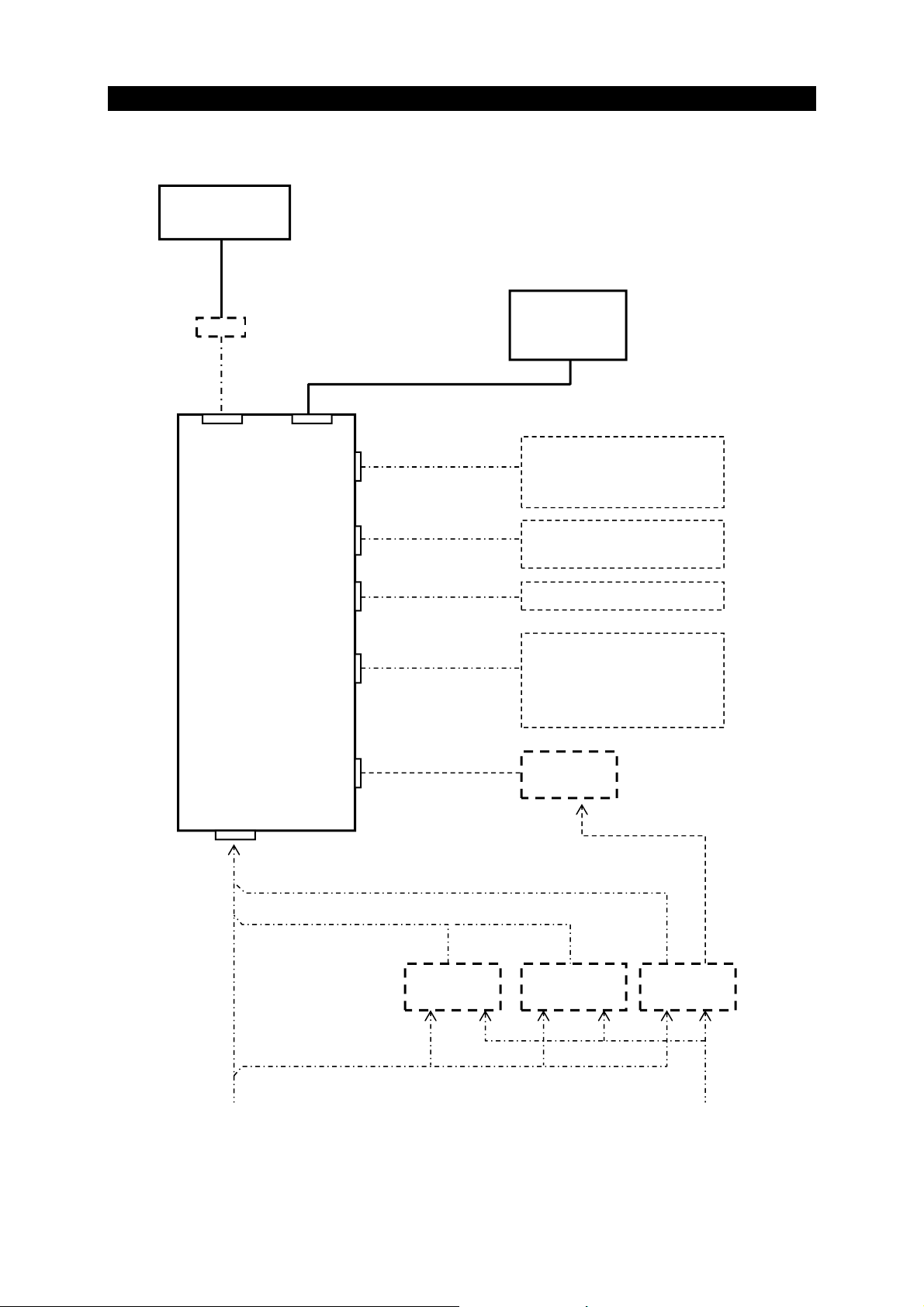
1.5 System Diagram
JLR-4350
GPS Sensor
NQE-7700A Junction Box
250V-MPYCYS-7
Sensor Display Unit
LAN
RS-422
NDC-4100
Processor Unit
Contact
RS-422
(Internal Buffer)
RS-232C
Power Supply
0.6/1kV-DPYC-1.5
DC24V
DC12/24V
DC24V
LAN
CFQ-7540
Ethernet×2
250V-TTYCS-1
IN×2 OUT×5
250V-TTYCS-1
IN×1 OUT×4
250V-TTYCS-1
OUT×8
7CNA4109 or
7ZCNA4112
DC12V
NBD-904
PowerSupply
NWZ-1650
Display Unit
ECDIS
Remote Maintenance
MFD
External equipment
Alarm System
Radar
ECDIS/Plotter
Tide Current Calculator
Printer NKG-104
DPU-414
Printer
7ZCJD0257B
NBD-577C
PowerSupply
NBG-320
PowerSupply
AC110/22012/24V
1-14
Page 29
y
Chapter 2
Name and Function of Each Unit
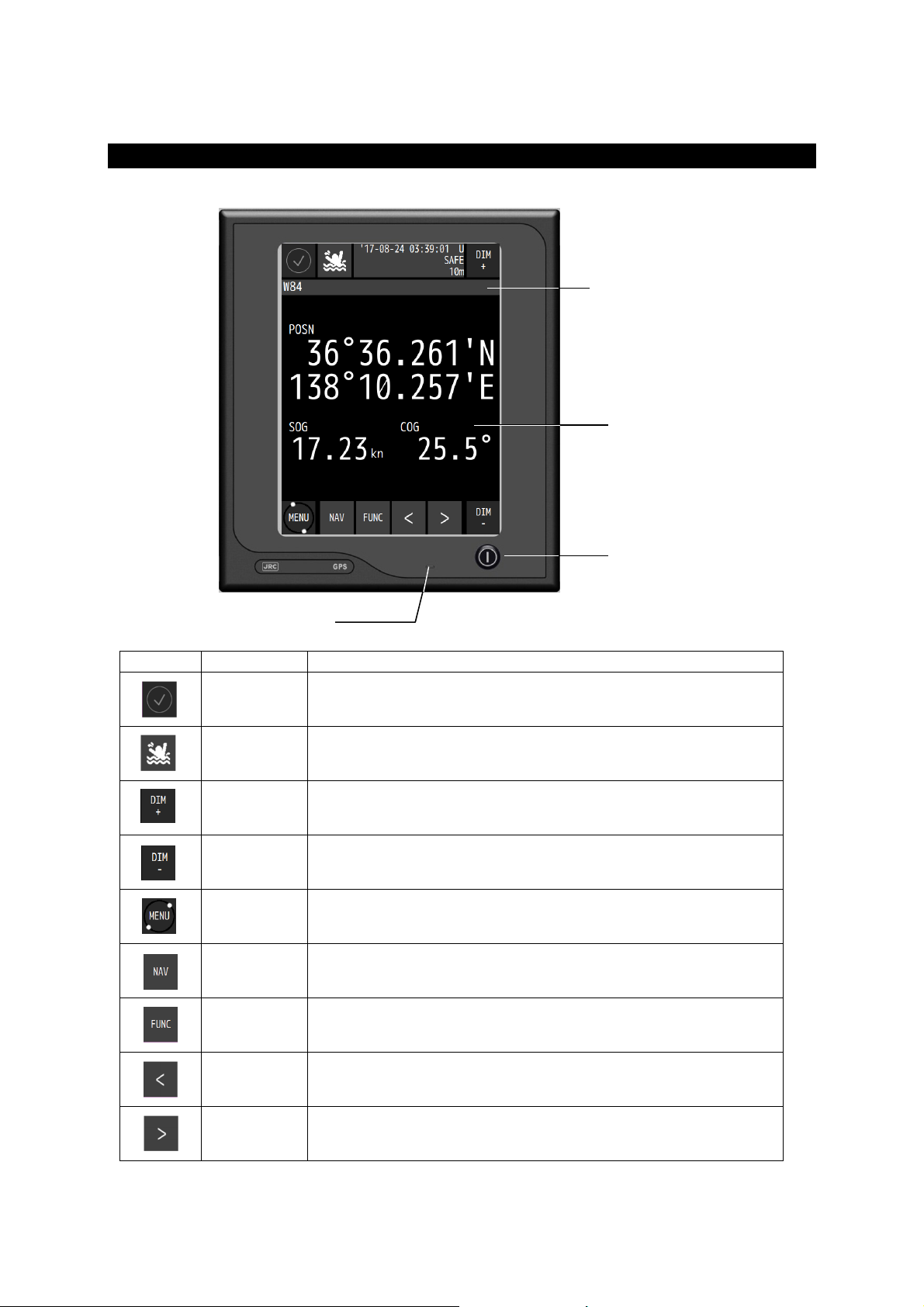
2.1 NWZ-1650 DISPLAY UNIT
Touch panel
Key Name Function
Alert Displays the icon when an alert is issued.
MOB Displays a plotting screen and stores the Man OverBoard position.
DIM UP Increases the brightness.
DIM DOWN Reduces the brightness.
Menu Displays a menu.
Screen Switches a main screen. Select from a main screen list.
Function Displays the operation menu on the main screen.
Screen
switch
Screen
switch
Buzzer
The icon changes according to the alert state.
Displays a freeze indicator.
Switches to a sub screen.
Switches to a sub screen.
Status area
Displays the status of the
equipment or system with
the icon.
DISPLAY
Displays the information of
own ship and equipment
setting screen.
Operated by the touch panel.
Power suppl
key
2-1
Page 30
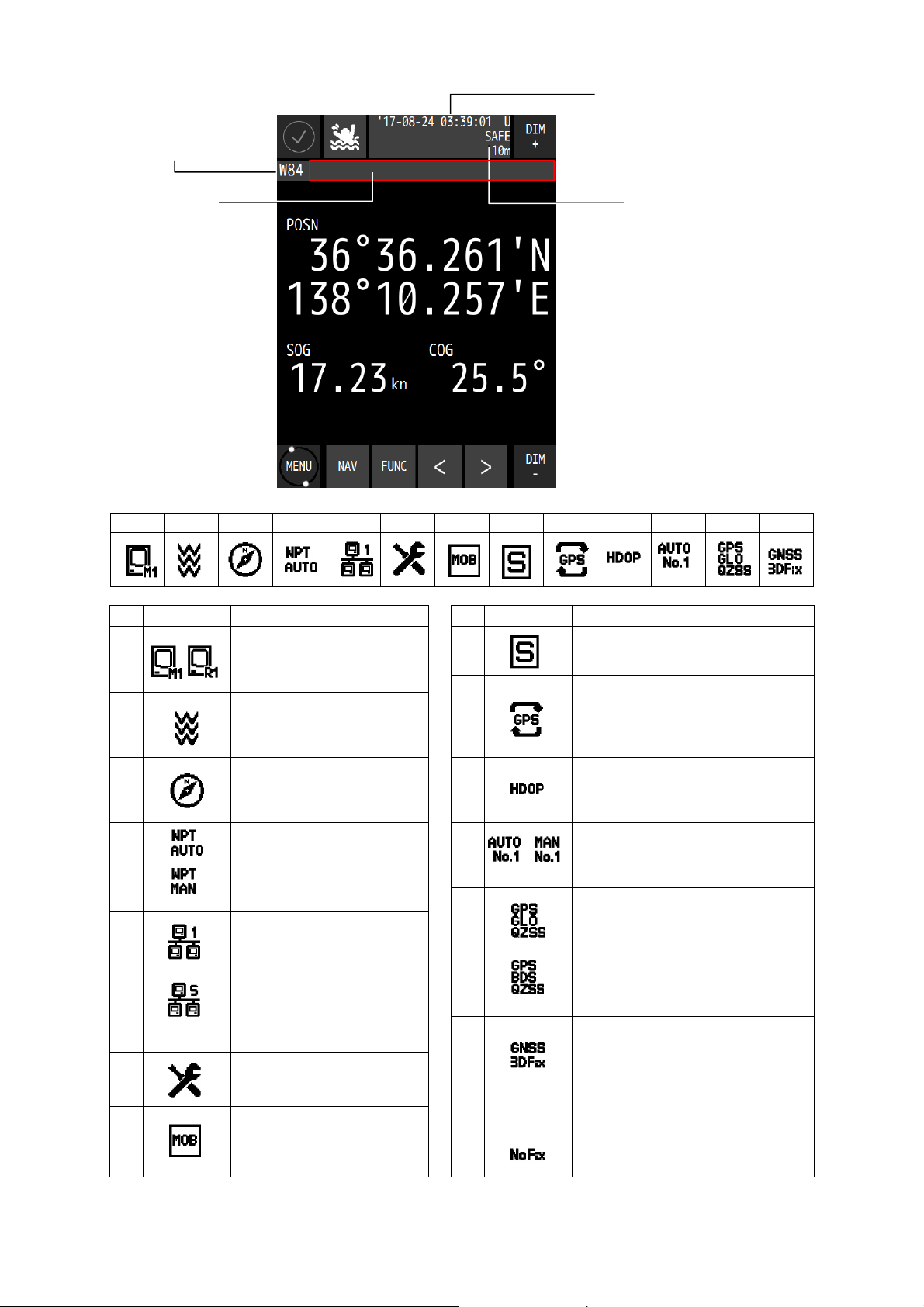
How to read the information on the display
Geodetic
positioning system
Date and time display (note1
U: UTC
L: Local
In the 12-hour display, AM/PM
is displayed.
Status
See the status list
for the contents of
the status.
RAIM
Displays the currently set
accuracy level.
RAIM operating: 10m, 30m,
50m,100m
RAIM OFF:OFF
No faulty satellite: SAFE
RAIM disabled: CAUTION
Faulty satellite: UNSAFE
note1
Although the displayed time may
be out of sync with other display
devices, it is because the data
output timing is different and it is
not a malfunction.
Status list
1 2 3 4 5 6 7 8 9 10 11 12 13
No Icon Description No Icon Description
1
2
3
4
5
6
7 MOB
Display unit number
M: Main display unit
R: Remote display unit
Received beacon
information.
Displayed when beacon
information is received.
Magnetic correction
Displayed when magnetic
correction is set.
Waypoint update state
Displays the waypoint update
mode during route execution.
AUTO: Automatic
MAN: Manual
Route sharing
Displayed when an Active
route is shared.
1: Share 1, 2: Share 2,
3: Share 3, 4: Share 4,
5: Share 5
Installation mode
Displayed in the installation
setting mode.
Displays when MOB is active.
8
9
10
11
12
13
Demo mode
Displayed in demo mode.
DGPS switched.
Indicates that the mode has just
changed from GPS to DGPS.
This icon is cleared automatically
five minutes after the switch.
HDOP alert
Displayed when the value exceeded
the setting value.
Sensor number using display
AUTO: A sensor is selected
automatically.
MAN: A sensor is selected manually.
Positioning system
Indicates the currently set
positioning system.
The positioning system that is set
but cannot be used is displayed in
yellow.
GPS: GPS GLO: GLONASS
QZSS: QZSS BDS: BeiDou
Position fixing status
GNSS: GNSS position fixing
GPS: GPS position fixing
DGPS: Beacon DGPS position fixing
SBAS: SBAS position fixing
2D: 2 dimensional position fixing
3D: 3 dimensional position fixing
No Fix: Non position fixing
2-2
Page 31

2.2 JLR-4350 GPS Sensor
Radome
6 pins Connector
Approx. φ19mm
Base
Data Cable 15m
Approx. φ6mm
Mounting Screw
1 inch 14 UNS-2B
2.3 NDC-4100 Processor
Cover
Earth terminal
2-3
Mounting Screw hole
Cable Inlet
Page 32

2-4
Page 33

Chapter 3 Display Screens
3.1 Display Screens
3.1.1 Switching display
When the screen key is tapped, a display screen list is displayed. Select a screen to be
displayed from the list. The screen name is displayed on the screen key.
On the navigation information screen, the analogue screen, and the navigation support screen, a
sub screen can be displayed by using or .
3.1.2 Navigation information screen
The navigation information screen displays the position, speed, and course of own ship. When a
waypoint is available, the waypoint number and estimated time of arrival are also displayed.
Display screen list
A sub screen can be displayed by using or . The sub screen varies depending on the
presence or absence of the waypoint.
Own ship's position
(latitude and longitude)
3-1
Speed
Course
Page 34

Sub screen
a) If there are no waypoints
Own ship's position
(latitude and longitude)
Speed Course
Own ship's position
(latitude and longitude)
Speed
3-2
Sub Screen 1 (4 digit position screen)
Sub Screen 2 (SOG and COG screen)
Course
Page 35

b) If there are waypoints
A
Number of the waypoint
for which the ship is
heading
Sub Screen 1 (4 digit position screen)
Route number
Speed
Own ship's position
(latitude and longitude)
Distance from the own
ship's position to the
waypoint
Course
Bearing from the own ship's
position to the waypoint
Estimated arrival time at
the waypoint
Estimated arrival time
at the final waypoint
Number of the waypoint
for which the ship is
heading
Distance from the own
ship's position to the
waypoint
Speed of the
destination component
(See Memo.)
Deviation from the route
and the steering direction
L: Steered to the left
R: Steered to the right
Speed
Sub Screen 2 (Detail screen)
Own ship's position
(latitude and longitude)
Course
Bearing from the present
position to the waypoint
Speed of the COG component
(See Memo.)
verage bearing
(See Memo.)
Estimated arrival time at the
waypoint
Number of the waypoint
for which the ship is
heading
Sub Screen 3 (SOG and COG screen)
Own ship's position
(latitude and longitude)
Speed
Course
Estimated arrival time at
the waypoint
3-3
Page 36

Memo
VTD (Speed of the destination component)
VTD (An acronym of "Velocity Toward Destination)
This in an index that shows how fast the boat is approaching toward the destination in the
unit of knot when it is navigation at a given bearing angle and speed.
VEAR(Speed of the COG component)
VEAR(An acronym of "Velocity Along Route")
This in an index that shows how fast the vessel is approaching along the planned route in
the unit of knot when it is navigating at a given course and speed.
CMG(Average bearing)
CMG(An acronym of "Course Made Good")
The bearing angle to the current position when viewed from the starting point.
VEAR
3-4
VTD = V cos a°
VEAR = V cos b°
CMG = c°
Page 37

3.1.3 Plotting screen 1
A
Plotting screen 1 displays the course, speed, bearing, and distance at the bottom of the screen.
The screen can be enhanced and reduced by using and .
Northerly directions
Width of the
starboard-side route
Distance from the own ship's
position to the waypoint
Own ship
symbol
Width of the
port-side route
Speed
Event symbol
Date and Time
Own ship's position
(latitude and longitude)
Waypoint
symbol
Route
rrival circle
Mark symbol
Scale bar
Course
Bearing from the own
ship's position to the
waypoint
3.1.4 Plotting screen 2
Plotting screen 2 displays a plotting screen in full screen mode.
The display contents and the operation are the same as for the plotting screen 1.
Northerly directions
Own ship
symbol
3-5
Page 38

3.1.5 Analogue screen
The analogue screen displays the course, waypoint bearing, and CDI in graphic format. During
route execution, the screen displays the off-course and distance to the waypoint.
The ship speed meter can be displayed by using or .
Course indicator bar
Course
Deviation from the route
Distance from the
own ship's position
to the waypoint
Speed
Main screen
▼Bearing from the
own ship's position
to the waypoint
Route deviation indicator bar
Center of the route
Sub screen (Speed)
3-6
Page 39

3.1.6 Highway screen
A
The highway screen displays the CDI, course, speed, bearing, and distance.
The screen can be enhanced or reduced by using and respectively.
Deviation from the route
and the steering direction
Next waypoint
Own ship Speed
Distance from the own
ship's position to the
waypoint
Route
Waypoint direction
Waypoint
LEG
Scale bar
Course
Bearing from the own
ship's position to the
waypoint
3.1.7 Satellite information screen
The satellite information screen displays the GNSS satellite and the beacon reception state.
The GNSS system can be switched by using or .
GNSS satellite location
and the receiving status
Unframed: Search
: Completion of
demodulation
: Use of position fixing
Beacon frequency
Beacon SNR
Beacon error rate
GNSS HDOP
ntenna height
GNSS satellite number
Unframed: Search
□ : Completion of
demodulation
■ : Use of position fixing
GNSS signal intensity bar
45 to 55 under normal
conditions
Beacon signal intensity
Beacon bit rate
3-7
Page 40

t
A
3.1.8 Waypoint information screen
The waypoint information screen displays waypoint information on the route.
The information can be switched to the next waypoint information by using or .
Waypoint number
Comment on
the waypoint
Waypoint position
Distance from the
own ship's position
to the displayed
waypoint
rrival-circle radius
Planned ship speed
n-th waypoin
Total number of waypoints
Bearing from the own
ship's position to the
displayed waypoint
Expected arrival time at
the displayed waypoint
Time required for reaching
the displayed waypoint
Width of the port and starboard-side
route
3.1.9 Beacon text screen
The beacon text screen displays the beacon text information (Type 16) that is received by the
beacon receiver.
Beacon information
3-8
Page 41

3.1.10 Navigation aid screen
The navigation aid screen calculates and displays navigation information including a 4-split screen,
navigation measurement, trip distance, external equipment information, and distance between two
points.
The screen can be switched by using or .
Deviation from the route
measurement start time
Course
CTS
Own ship position
Speed
Total time
Trip
Navigation assistance screen 1
Speed
Distance from the own
ship's position to the
waypoint
Time required for reaching
the waypoint
Navigation assistance screen 2 (measurement for navigation)
RUNNING:
Measurement in
progress
END:
Measurement
complete
Course
measurement end
time
Total distance
3-9
Page 42

A
A
t
Navigation assistance screen 3 (measurement for navigation)
RUNNING: Measurement in
progress
END: Measurement complete
measurement start time
Total time
verage speed
measurement start time
measurement end time
Total time
verage speed
measurement end time
trip
RUNNING: Measurement in
progress
END: Measurement complete
trip
Forward/backward speed
through water
▲:Forward
▼:Backward
Navigation assistance screen 4 (External equipment screen)
Baw speed through water
Leftward
Rightward
Water depth
Current direction, speed
and depth.
Layer A
Layer B
Layer C
Layer D
Layer E
Water
temperature
Navigation assistance screen 5 (Calculation of a distance/bearing between two points)
(Latitude and longitude) Terminal point
Starting poin
(Latitude and longitude)
Distance calculation method
Distance
Bearing
3-10
Stern speed through
water
Leftward
Rightward
GC: Great circle sailing
RL: Rhumb line sailing
Page 43

Chapter 4 Operation
4.1 Menu List
4.1.1 Main Menu
MENU Sub Menu Sub Menu Sub Menu Range Reference
THEME DAY/DUSK/NIGHT
BEEP OFF / ON
DAY SCREEN OFF / ON
NAV OFF / ON
PLOT OFF / ON
DISPLAY
VOYAGE
ALERT
4-1
ANALOG OFF / ON
HIGHWAY OFF / ON
SAT INFO OFF / ON
WPT INFO OFF / ON
BEACON TEXT OFF / ON
NAV ASSIST OFF / ON
WPT WPT LIST
ROUTE ROUTE LIST
RUN
EVENTMARK
WPT COPY
ROUTE COPY
WPT DELETE
ROUTE
DELETE
EVENT DELETE
SHARED
DEFAULT
SETTINGS
SYSTEM
ARRIVAL/
ANCHOR
XTD/
BOUNDARY
HDOP
SPD
TRIP
EARLY
COURSE
CHANGE
END OF TRACK
ARRIVED
AT W O L
EVENTMARK
LIST
ROUTE SEND
ROUTE RECEIVE SOURCE IP
WIDTH
PORT(NM)
WIDTH
STBD(NM)
ARRIVAL
RADIUS(NM)
SPEED(kn) 00.00~99.99
SAIL GC/RL
SOG
SMOOTHING(s)
SET OFF / ON
SOUND OFF / ON
SET
SOUND OFF / ON
SET
SOUND OFF / ON
SET
SOUND OFF / ON
SET
SOUND OFF / ON
SET
SOUND OFF / ON
SET
SOUND OFF / ON
SET
SOUND OFF / ON
SET OFF / ON
SOUND OFF / ON
0.00~9.99
0.00~9.99
0.00~9.99
0~99
OFF / ARRIVAL /
ANCHOR
OFF / XTD /
BOUNDARY
Page 44

MENU Sub Menu Sub Menu Sub Menu Range Reference
ALERT
GNSS
SETTING
ACTUAL
COURSE
CHANGE
TEMP
DPTH
DGPS
BUFFER
POWER
SENSOR1
SET OFF / ON
SOUND OFF / ON
SET
SOUND OFF / ON
SET
SOUND OFF / ON
OFF
SET
SOUND OFF / ON
SET OFF / ON
SOUND OFF / ON
SET OFF / ON
SOUND OFF / ON
GNSS GPS MODE GPS
FIX MODE 2D / 3D / AUTO
ELV MASK 5~89 deg
HDOP 4/10/20
POSN
SMOOTHING(s)
SMOOTH
RAIM
DATUM
INIT
DGPS
BEACON
SBAS
STN LIST
SPEED
SMOOTHING(s)
COURSE
SMOOTHING(s)
RAIM
ACCURACY
LEVEL(m)
QUADRANT
LAT
LON
ANT HEIGHT(m)
YEAR
MONTH
DAY
HOUR(hr)
MINUTE(min)
AUTO
MANUAL
SEMI AUTO
MONITOR
SAT SEARCH
TYPE0 OFF / ON
RANGING OFF / ON
GPS→DGPS
DGPS→GPS
GPS⇔DGPS
0~99
0~99
0~99
OFF/10/30/50/100
OFF / AUTO
BEACON / SBAS
FREQUENCY/
BITRATE
AUTO / MANUAL
(SBAS SETTING)
4-2
Page 45

MENU Sub Menu Sub Menu Sub Menu Range
GNSS GPS MODE GPS
FIX MODE 2D / 3D / AUTO
ELV MASK 5~89 deg
HDOP 4/10/20
POSN
SMOOTHING(s)
SMOOTH
RAIM
DATUM
GNSS
SETTING
SYSTEM
LANGUAGE
VERSION
ALERT LIST
SENSOR2
DATE / TIME
UNIT
MAG CORR
LORAN OFF / LORAN A,C
SENSOR
SELECT
DISPLAY
PROCESSOR
SENSOR1
SENSOR2
ALERT
HISTORY
ACTIVE ALERT
LAN1
LAN2
INIT
DGPS
BEACON
SBAS
STN LIST
TIME DIFF +00:00~+13:30
DATE DISP
TIME DISP(hr) 12hr / 24hr
DIST / SPEED
HIGHT / DPTH m / ft / fm
TEMP
AUTO/ SENSOR1,2
SPEED
SMOOTHING(s)
COURSE
SMOOTHING(s)
RAIM
ACCURACY
LEVEL(m)
QUADRANT
LAT
LON
ANT HEIGHT(m)
YEAR
MONTH
DAY
HOUR(hr)
MINUTE(min)
AUTO
MANUAL
SEMI AUTO
MONITOR
SAT SEARCH
TYPE0 OFF / ON
RANGING OFF / ON
0~99
0~99
0~99
OFF/10/30/50/100
OFF / AUTO
BEACON / SBAS
FREQUENCY/
BITRATE
AUTO / MANUAL
(SBAS SETTING)
‘YY-MM-DD
DD MMM,’YY
MMM DD,’YY
NM,kn
km,km/h
mi,mi/h
℃ / F
JAPANESE/
ENGLISH
Reference
4-3
Page 46

MENU Sub Menu Sub Menu Sub Menu Sub Menu
EQUIP
TYPE
DATA I/O
SWITCH
TYPE1 / 2
DISPLAY
TYPE2/2
PROCESSOR
IN/OUT1
IN/OUT2
IN/OUT3
OUT4
OUT5
OUT6
LAN
CONTACT1
CONTACT2
CONTACT3
CONTACT4
BUFFER
SENSOR
RS-232C
CONTROLL
METHOD
SWITCH
SELECTION
DISPLAY
TYPE
SFI GP0000
DEVICE No. No1.~No3.
SFI GP0000
SENSOR1
SENSOR2
LAN1
LAN2
COMMON
CONTACT
OUT
CONTACT
OUT
CONTACT
OUT
CONTACT
OUT
FORMAT
BITRATE(bps)
VERSION
TALKER
SENSOR1
PORT2(bps)
SENSOR2
PORT2(bps)
FORMAT
BITRATE(bps)
VERSION
TALKER
DATA OUT
RMS
SEND
PRINTER
DATA OUT
RMS
SEND
PRINTER
ACTIVE
ROUTE
DATA
ROUTE
MUTUAL
4-4
Range Reference
MAIN
REMOTE(LAN)
REMOTE
(SERIAL)
OFF
GPS
COMPASS
OTHER EQUIP
OFF
GPS
COMPASS
OTHER EQUIP
4800 / 9600
19200 / 38400
4800 / 9600
19200 / 38400
OFF
MFD
FIX/NOFIX
FIX/NOFIX
+ DOP
PROCESSOR
No1.
PROCESSOR
No2.
Page 47

MENU Sub Menu Sub Menu Sub Menu Sub Menu
EQUIP
DIMMER
IP
CCRP
CTS
LOW
SPEED
COG
DIMMER
GROUP
DISPLAY OFF/ON
SETTINGS
DIMMER CAL MIN/MAX
DISPLAY
PROCESSOR
LAN 0
PROCESSOR
LAN 1
PROCESSOR
LAN 2
BEAM (m)
LENGTH(m)
CCRP(m)
SENSOR1
(m)
SENSOR2
(m)
CLASS
TRACKING
GAIN
TRACKING
HIGH
TORACING
MIDDLE
TRACKING
LOW
TRACKING
MULTIPLE
TRACKING
COUNT A
TRACKING
D GAIN
OUTPUT
NCM-227 OFF/ON
DDC OFF/ON
GPS OFF/ON
GP DDC OFF/ON
IP ADDRESS
MAC
ADDRESS
SUBNET
MASK
DEFAULT
GATEWAY
IP ADDRESS
MAC
ADDRESS
SUBNET
MASK
DEFAULT
GATEWAY
IP ADDRESS
MAC
ADDRESS
SUBNET
MASK
DEFAULT
GATEWAY
IP ADDRESS
MAC
ADDRESS
SUBNET
MASK
DEFAULT
GATEWAY
1~10
Range Reference
OFF/ON
4-5
Page 48

MENU Sub Menu Sub Menu Sub Menu Sub Menu
EQUIP
MAINTENA
NCE
DIAGNOSIS
MONITOR
OPERATING
TIME
RESET
DEMO TYPE
START/ STOP
YEAR
MONTH
DAY
HOUR(hr)
MINUTE(min)
DEMO
ALL
SETTING
VAL UE
SECOND(s)
QUADRANT
LAT
LON
SPEED(kn)
COURSE(°)
RADIUS(NM)
ROUTE
BACKUP INFO
IMPORT/
EXPORT
DISPLAY
PROCESSOR
SENSOR1
SENSOR2
DATA IN1
DATA IN2
DATA IN3
RS-232C
SWITCH
LAN1
LAN2
SENSOR1
SENSOR2
OPERATING
TIME(hr)
LCD TIME(hr)
MPORT/
EXPORT
PROCESS
Range Reference
PROCESSOR →
DISPLAY
DISPLAY →
PROCESSOR
BACKUP/
OVERWRITE
4-6
Page 49

4.1.2 Function menu
r
DISPLAY FUNC
PRINT
COMMON
PLOT1/PLOT2
ANALOG SPEED METER Sets the maximum value of the ship speed meter.
HIGHWAY BACK GROUND COLOUR Changes the background colour of the HIGHWAY screen.
SAT INFO NEAREST STN
BEACON TEXT
NAV ASSIST
GOTO
EVENT
DIMMER DEFAULT
MARK
CURSOR MODE
HOME
PLOT
BACK GROUND COLOUR
BEACON DELETE
BUZZER Sets whether to sound a buzzer when TYPE16 is received.
CALC START Starts distance calculation.
TRIP RESET Stops trip distance calculation.
TOTAL TRIP RESET Resets the total trip distance.
TRIP 1 CAL START/END Starts/Stops distance calculation of TRIP1.
TRIP 2 CAL START/END Starts/Stops distance calculation of TRIP2.
TRIP 1 RESET Resets distance calculation of TRIP1.
TRIP 2 RESET Resets distance calculation of TRIP2.
CURRENT SETTING Sets the layer of the current to be displayed.
CALC SETTING Sets the position of two points between which the distance
Outputs data to a printer.
Sets a waypoint.
Registers the own ship’s position in the event mark list.
Resets the dimme
Displays a mark at the cursor position.
Displays a cursor.
Moves own ship to the centre of the screen.
Sets display/non-display on the plotting screen.
Changes the background colour of the plotting screen.
Displays the nearest beacon station.
JLR-8600 does not support this function.
Deletes the received data.
JLR-8600 does not support this function.
is to be calculated.
setting to the default value.
4-7
Page 50

4.2 Basic Operation
4.2.1 Turning on the power of the unit
When the power of the equipment is turned on by pressing the Power key, the startup screen
appears.
When installation is completed, self-diagnosis starts and the setting value confirmation screen is
changed to the normal screen.
Startup screen
Attention
If the power for the equipment is not turned on, check the main power supply of the power
board, power cable connection to the processor, or cable connection to the display unit.
Self diagnosis
4.2.2 Startup
1) Normal startup
If all the self-diagnosis results are ‘OK’ and all the settings of the processor and sensor
settings match, the screen is switched to the normal screen automatically.
Setting value
confirmation
4-8
Page 51

2) Error startup 1
The message that is shown below may be displayed in the receiver diagnosis.
This message is displayed when the setting values do not match between the processor and
the receiver due to the equipment replacement or other reason.
In this case, select one of the following items.
[USE SENSOR CONFIG.]: The setting value of the processor is rewritten so as to
match the setting value of the receiver.
[USE PROCESSOR CONFIG.]: The setting value of the receiver is rewritten so as to match
the setting value of the processor.
3) Error startup 2
If any one of the diagnosis results is ‘NG’, the result will be displayed continuously.
The screen is not switched to the normal screen unless “SKIP” is tapped.
Attention
When there is any error (NG), contact Nippon Signal or your distributor.
4.2.3 Turning off the power of the unit
When the Power key is pressed, the following message is displayed. When “YES” is selected, the
power is turned off.
Memo
Even if the message is displayed, the power of the display is turned off forcibly if the
Power key is held down for about 8 seconds. In this case, the power of the display is
turned off, but the processor operates continuously.
When the display unit is energised even if the power is Off, the LED of the Power key
is lit.
POWER OFF
ARE YOU SURE
4-9
Page 52

4.2.4 Adjusting the backlight
The brightness can be adjusted to 17 levels/OFF by using the DIM key.
Even if the brightness is set to OFF, the DIM key alone remains lit.
To reset the brightness to the default value, tap from .
1. Whenever “DIM+” at the top right corner of the screen is pressed, the screen brightness
increases.
2. Whenever “DIM-” at the bottom of the screen is pressed, the screen brightness decreases and
finally is set to OFF.
4.2.5 Menu operation
When the MENU key is pressed, a menu is displayed.
When the MAIN key is pressed while a menu is displayed, the screen returns to the normal
screen.
For the details of the menu, refer to “4.1 Menu List”.
4-10
Page 53

4.2.6 Alert and acknowledgment (ACK)
1. Notifying the occurrence of an alert
When an alert occurs, an alert icon is displayed at the top left corner of the screen and the
occurrence of an alert is notified by a buzzer sound. The alert target value is displayed with
blinking.
Icon list
Icon Priority Status
When any icon is tapped, an alert display bar is displayed at the centre of the screen.
2. Alert acknowledgment (ACK)
1) Tap the alert detail bar at the centre of the screen.
2) The alert icon changes to the acknowledged state and the buzzer sound stops. When a NOFIX
alert occurs, the alert target value that is displayed is lit in yellow.
Alarm Active-Unacknowledged
Active-Silenced
Active-Acknowledged
Rectified- Unacknowledged
Warning Active-Unacknowledged
Active-Silenced
Active-Acknowledged
Rectified- Unacknowledged
Caution Active
Memo
When multiple alerts occur simultaneously, the alert with the highest priority is
displayed first and all the alerts must be acknowledged.
Even if the alert is rectified before being acknowledged, the “Unacknowledged” state
icon is displayed. All the alerts that have occurred must be acknowledged.
4-11
Page 54

Screen transition at the occurrence of an alert
An alert
occurrence icon is
displayed.
Alert occurred
1. Operating normally
Tap the alert
occurrence icon.
The icon indicating
an acknowledged
state is displayed.
Acknowledge by
tapping the alert
contents.
3. Alert is occurring
The alert contents are displayed.
Tap the icon indicating
an acknowledged
state.
Rectified.
5. The alert contents are cleared.
4-12
2. Alert occurred (Non ACK)
4. Alert occurred (acknowledged)
6. Rectified
Page 55

4.2.7 Screen operation
See below for the screen operation.
Setting item
Menu level
Page
Setting value
Page feed (< >)
Move to the next page
+/- setting
value switching
Blue underline
Indicates that
numeric key input is
enabled.
Return to the main
screen
Returns to the
previous screen by
discarding the editing
on this screen.
Maintains the screen
by discarding the
editing on this screen.
Returns to the full
screen by confirming
the editing on this
screen.
Returns to the top menu
by discarding the
editing on this screen.
4.2.8 Inputting numeric values
Numeric value input by numeric keys is allowed for the setting values with blue underline.
Tap the blue underline of the numeric item to be input.
Enter a numeric value and confirm with .
Deletes 1 character.
Confirm
4-13
Page 56

4.2.9 Inputting comments
Input of characters by using numeric keys is allowed for the setting items with blue underline.
Tap the blue underline of the setting item to be input.
Change the input mode by tapping ABC (characters), #&$ (symbols), or 123 (numeric values).
Display the character or numeric value that is assigned to the key by tapping it.
When entering the same character or symbol consecutively, take a small interval between them.
Enter a character and confirm it with .
ABC #&$
123
4-14
Page 57

4.2.10 List operation
This section shows the list operation method.
The same operation method is applied for a waypoint list, a route list, and an event mark list.
Menu level
Page
Page feed (< >)
Move to the next page.
No. of waypoints registered/total
number of waypoints that can be
registered
List content display area
The number input screen is
displayed and control jumps
to the input number.
Jumps to the
previous free
number
Jumps to the next
free number
When the list is empty, the following message is displayed.
4.2.11 Entering a password in CODE INPUT
Some setting items are protected by a password to prevent them being changed easily.
If the power is turned off or no operation is performed for five minutes after a password is set, the
password is reset.
To set a password, enter a password again in CODE INPUT.
Procedure
1.
2. Enter a password and confirm it with .
Entered password
Indicated by ****.
4-15
Page 58

4.3 Setting Display
Set a screen.
Set a THEME, a beep tone, and background colour.
4.3.1 Setting a theme
Screen brightness can be adjusted according to the time zone for using this equipment.
Procedure
1
.
THEME
THEME Description
DAY Specify this when using the equipment during daytime.
DUSK Specify this when using the equipment at dusk.
NIGHT Specify this when using the equipment at night.
4.3.2 Setting a beep tone
Set a beep tone ON/OFF when the screen is tapped.
Procedure
1. BEEP
BEEP Description
ON Sets the beep tone to ON.
OFF Sets the beep tone to OFF.
4.3.3 Setting reverse video display
Set the background colour to white/black.
Procedure
1. DAY SCREEN
DAY SCREEN Description
ON Sets the background colour to white.
OFF Sets the background colour to black.
4-16
Page 59

4.3.4 Selecting a display screen
A screen to be displayed can be selected.
It is not possible to set all the screens to non-display.
Procedure
1. Select a display.
DISPLAY Description
NAV
PLOT1
PLOT2
ANALOG
HIGH WAY
SAT INFO
WPT INFO
BEACON TEXT
NAV ASSIST
ON: Set to Display.
OFF: Set to Non-display.
4-17
Page 60

4.4 Registering Waypoints
To execute a route, a waypoint must be registered in a waypoint list.
This equipment allows registration of 10000 waypoints.
A waypoint list is divided into three areas and it is managed by numbers from 1 to 11024.
1 to 10000: Waypoints that are registered in this equipment are registered.
10001 to 10512: Waypoints of the shared active routes that are sent from ECDIS are registered.
10513 to 11024: Waypoints that were used by a temporary route are registered.
While waypoints from number 1 to number 10512 are saved and are not cleared even if the
power is turned off, waypoints from number 10513 to number 11024 are cleared if the power is
turned off.
Waypoints can be set up to North latitude/South Latitude 89 degrees.
4.4.1 Displaying a waypoint list
Registered waypoints (waypoint numbers from 1 to 10000) can be displayed.
Waypoint number 00001 is registered as “HOME PORT”.
Waypoint number
Procedure
Symbol
Position
Comment
1. A waypoint list is displayed.
4-18
Memo
The position that is registered in HOME in a waypoint list can be set easily as a
waypoint by the GOTO function.
It is useful to register a point that is set as a waypoint frequently (such as home port).
The GOTO function can be set from on each screen.
Page 61

4.4.2 Registering waypoints
The following five positions can be registered in a waypoint list.
(1) Own ship’s position
(2) Any latitude and longitude
(3) Cursor position
(4) Position measured by the bearing and distance from any position
(5) Position that is registered in an event/mark list
Up to 10000 points can be registered.
Procedure
1. A waypoint list is displayed.
2. Tap the number you want to register.
Item Description
WPT No. Enter a waypoint number.
COMMENT Enter a comment.
POSN Enter a waypoint position.
SYMBOL Select a symbol.
COLOUR Select a symbol colour.
3. Tap "POSN".
4. A registration method selection screen is displayed.
The registration method submenu is outlined below.
(1) OWN SHIP: Register an own ship’s position.
(2) MANUAL: Register any latitude and longitude.
(3) PLOT: Register a cursor position from the plotting screen.
(4) BEG/DIST: Register based on the bearing/distance from any position.
(5) EVENT LIST: Register from an event mark list.
4-19
Page 62

g
(1) When selecting OWN SHIP
a) Tap .
b) Set a comment, a symbol, and a colour, and tap .
(2) When selecting MANUAL
a) Tap .
Item Description
QUADRANT Select North latitude/South latitude/East latitude/West latitude
of the latitude/lon
NE North latitude/East latitude
NW North latitude/West latitude
SE South latitude/East latitude
SW South latitude/West latitude
LAT Enter a latitude.
LON Enter a longitude.
itude.
b) Set a comment, a symbol, and a colour, and tap .
(3) Selecting PLOT
a) Tap .
b) A plotting screen is displayed.
c) Move the cursor to the position you want to register by using the Up/Down/Left/Right
arrows.
d) Tap "SET".
e) The cursor position is registered.
Cursor position
Bearing/distance from own ship to the cursor position
Registered waypoint
f) Set a comment, a symbol, and a colour and tap .
4-20
Page 63

(4) Selecting BRG/DIST
a) Tap .
b) When a waypoint position screen is displayed, tap WPT POSN.
c) Set a starting position, a bearing, and a distance.
The submenu for setting a starting position is outlined below.
(1) OWN SHIP: Set an own ship’s position.
(2) MANUAL: Set any latitude and longitude.
(3) PLOT: Set a cursor position from the plotting screen.
(4) WP LIST: Select from a waypoint list.
(5) EVENT LIST: Select from an event mark list.
(6) PRE WPT: Set the previous waypoint as the starting position.
Item Description
STARTING POINT Enter a starting point.
BRG Enter a bearing.
DIST Enter a distance.
d) Confirm the setting by tapping .
Enter a starting
position, a bearing,
and a distance.
e) Set a comment, a symbol, and a colour and tap .
(5) Selecting EVENT LIST
a) Tap .
b) An event mark list is displayed.
c) Select a number of the event mark you want to register.
When you want to register number 001,
tap 001.
d) Set a comment, a symbol, and a colour and tap .
4-21
Page 64

4.4.3 Editing waypoints
Registered waypoint information (symbol shape, comment, and waypoint position) can be
edited.
The waypoint on the route that is currently being executed cannot be edited.
Procedure
1. A waypoint list is displayed.
2. Tap the number you want to edit.
3. Tap the item you want to edit and edit the item.
4. After editing, tap .
To edit a position, refer to “4.4.2 Registering waypoints”.
A symbol, a colour, and a comment can be edited from the plotting screen. For the editing method,
refer to “4.9.10 Displaying symbol information”.
4.4.4 Copying waypoints
Waypoint information can be copied on to another waypoint number. Information on an event
and a mark can be copied on to a waypoint list. Number 1 in a waypoint list is handled as
HOME.
Waypoints that are saved under numbers from 10001 to 10512 and are used by the shared
active route that is sent from ECDIS are automatically overwritten when next route is sent.
Waypoints to be kept must be copied under numbers between 1 and 10000.
Waypoints of a temporary route that are saved under numbers from 10513 to 11024 are cleared
when another temporary route is created or the power is turned off. Waypoints to be kept must
be copied under numbers between 1 and 10000.
When no free area is available, waypoints can be overwritten. However, waypoints cannot be
overwritten to those that are used by the route.
Procedure
1.
2. Enter a starting point and an ending point of the copy source.
When only one point is to be copied, enter the same number for a starting point and an ending
point.
3. Tap a copy destination. The copy destination submenu is outlined below.
(1) Any input: Enter an input number.
(2) Waypoint list: Specify from a waypoint list.
(1) Any input
Enter a starting point of the copy destination.
(2) Waypoint list
When a waypoint list is displayed, tap a number of the copy destination.
4-22
Page 65

4. Confirm the operation by tapping .
Memo
When selecting copy sources with consecutive numbers, numbers that cross over a
boundary such as 10000 or 10512 cannot be selected.
Example) Numbers from 9999 to 10001 or numbers from 10511 to 10513 cannot be
selected.
4.4.5 Deleting waypoints
Waypoints registered from numbers 1 to 10000 can be deleted.
Waypoints on the route that is currently executed cannot be deleted.
If a waypoint is on the route that is not being executed is deleted, the waypoint is deleted from
the route also.
Procedure
1.
2. Tap a deletion source. A deletion source submenu is outlined below.
(1) Any input: Enter a waypoint number to be deleted.
(2) Waypoint list: Specify from a waypoint list.
(3) ALL: All the waypoints are deleted.
(1) Any input
Enter a starting point and an ending point of the number of the waypoint to be deleted.
When deleting one point only, enter the same number for a starting point and an ending point.
(2) Waypoint list
When a waypoint list is displayed, select a starting point and an editing point of the waypoints
to be deleted.
When deleting one point only, enter the same number for a starting point and an ending point.
(3) All
All the waypoints are deleted.
3. The range to be deleted and the number of waypoints to be deleted are displayed.
4. Confirm the selection by tapping .
Waypoints can be deleted from a plotting screen. For the editing method, refer to “4.9.10
Displaying symbol information”.
4-23
Page 66

r
4.5 Route Plan
A route can be created by using registered waypoints.
Up to 100 routes can be created in this equipment and up to 512 waypoints can be specified
per route. Waypoint information can be set for each LEG such as a route width, an arrival
radius, and GC/RL.
For the waypoint information that can be set, refer to “4.5.1 Displaying a route list”.
A created route can be shared with external equipment such as ECDIS.
A created route is registered in a route list.
A route list is divided into three areas and is managed by numbers from 1 to 102.
Numbers from 1 to 100: The route that was created in this equipment is registered.
Number 101: The shared active route that is sent from ECDIS is registered.
Number 102: A temporary route is registered.
Since routes from numbers 1 to 101 are saved, they are not cleared even if the power is turned
off. However, route number 102 is cleared if the power is turned off since it is not saved.
4.5.1 Displaying a route list
Routes that were created can be displayed in a route list. Information on each LEG of the route
and waypoint information of each LEG can be displayed.
The required time cannot be calculated for the route that contains the LEG without planned ship
speed.
Number of waypoints
on the route
Total route distance
Total time required for
the routes
Procedure
Comment
Number of pages of
the route list
Number of
registered
outes
1. A route list is displayed.
When a registered route is tapped, the LEG information can be displayed.
4-24
Page 67

A
4.5.2 Creating routes
To create a route, determine a route number and sequentially select the waypoints, which are
turn points.
The same waypoint cannot be selected continuously.
Up to 100 routes can be created.
Up to 512 waypoints can be set per route.
Either a TCS route or a normal route can be selected.
Procedure
1. A route list is displayed.
2. Tap a number to be registered.
3. Tap .
Item Description
ROUTE
COMMENT Enter a comment.
RRIVAL CIRCLE Creates a normal route.
WHEEL-OVER LINE(WOL) Creates a TCS route.
4. Tap .
When a waypoint input screen is displayed, tap 001.
4-25
Route number currently
being created
Number of the
displayed waypoint
Page 68

Item Description
y
y
y
y
A
y
y
POSN When "POSN" is tapped, a waypoint list is displayed.
Select a wa
point position from the waypoint list.
COMMENT A comment cannot be set for a waypoint.
It can be edited from the wa
point list.
SYMBOL A waypoint symbol cannot be set.
It can be edited from the wa
point list.
COLOUR A colour of a waypoint cannot be set.
It can be edited from the wa
point list.
RRIVAL RADIUS Set an arrival radius.
WIDTH PORT Set a port route width.
WIDTH STBD Set a starboard route width.
SPEED Set a planned ship speed.
SAIL Route distance calculation method for LEG
GC: Calculated by the great circle sailing.
RL: Calculated b
the Meridional part sailing (Rhumb Line).
STATE Set whether to use the waypoint.
USE: Use the waypoint.
SKIP: Although the waypoint is kept on the route, it is skipped.
DELETE: The waypoint is deleted from the route. It is kept in the waypoint
list.
Wa
points of the route that is currently being executed cannot be deleted.
ROT This item can be set for a TCS route only.
Set a Rate Of Turn.
TURN RADIUS This item can be set for a TCS route only.
Set a turn radius.
TIME ZONE This item can be set for a TCS route only.
Set a time zone.
5. Set each item and tap .
First waypoint is set. To set two or more waypoints, repeat from Step 4.
GC/RL
Waypoint SKIP
Bearing from the
previous waypoint
LEG distance
6. Set a waypoint and tap .
4-26
Page 69

4.5.3 Editing routes
A
A
Waypoint addition, change, and deletion are allowed for routes.
Procedure
1. A route list is displayed.
2. Tap a route you want to edit.
3. Tap
4. Tap a waypoint you want to edit.
Tap a route you want to edit
Item Description
END ADD
INSERT
EDIT Edits the waypoint that was tapped.
DELETE Deletes the waypoint that was tapped from the route.
5. Set a waypoint and tap .
Route list
Display of waypoints on the
route
dds the final waypoint.
dds a waypoint before the waypoint that is tapped.
Headers can also be edited in the same way.
4-27
Page 70

4.5.4 Copying routes
The route that was created can be copied on to a different route number.
The waypoint that is used by the shared active route and is sent from ECDIS and is saved in
number 101 is overwritten automatically when the next route is sent. Routes that are to be saved
must be copied on to numbers between 1 and 100.
The waypoint of a temporary route that is saved under number 102 is cleared when another
temporary route is created or the power is turned off. To save the route, the route must be copied
on to a number between 1 and 100.
Routes of consecutive numbers can be copied in bulk.
When no free area is available, a route can be overwritten. However, the route that is being
executed cannot be overwritten.
Select a copy source and specify a copy destination number.
When a temporary route or a shared route is to be copied, the waypoints must also be copied.
Procedure
1.
2. Tap "COPY ORG" and enter a number of a starting point and an ending point of the copy
(1) MANUAL input
Copy source
Total number of routes
Copy destination
source.
The input method is outlined below.
(1) MANUAL: Enter an ending point and a starting point.
(2) ROUTE LIST: Select from the route list.
When copying one point only, enter the same number for a starting point and an ending point.
a) Tap .
Item Description
FROM Set a starting number.
TO Set an ending number.
(2) Selecting from a ROUTE LIST
a) Tap .
b) Tap a starting point and an ending point on the route list.
4-28
Page 71

c) Confirm the setting by tapping .
3. Tap "COPY DEST" and enter a starting point of the copy destination.
The input method is outlined below.
(1) MANUAL: Enter an ending point.
(2) ROUTE LIST: Select from the route list.
(1) MANUAL input
a) Tap .
Item Description
INSART Set a copy destination number.
b) Confirm the setting by tapping .
(2) Select from a ROUTE LIST
a) Tap .
b) Tap a copy destination on the route list.
c) Confirm the setting by tapping .
4. Execute by tapping .
4.5.5 Deleting routes
Registered routes from numbers 1 to 100 can be deleted.
The waypoints of the route to be deleted can be deleted concurrently.
When deleting waypoints also, the waypoints that are used by another route cannot be deleted.
An Active route cannot be deleted.
Procedure
1.
Numbers to be deleted
Deletion method
4-29
Total numbers selected
Page 72

2. Tap "DELETE" and enter a number of a starting point and an ending point of the deletion
source.
The input method is outlined below.
(1) MANUAL: Enter an ending point and a starting point.
(2) ROUTE LIST: Select from the route list.
(3) ALL: All the routes are deleted.
When copying one point only, enter the same number for a starting point and an ending point.
(1) MANUAL input
a) Tap .
Item Description
FROM Set a starting number.
TO Set an ending number.
(2) Selecting from a ROUTE LIST
a) Tap .
b) Tap a starting point and an ending point on the route list.
c) Confirm the selection by tapping .
(3) Selecting ALL
a) Tap .
All the routes are selected.
3. Tap "DELETE METHOD" and select a deletion method.
DELETE METHOD Description
ROUTE Only the selected route is deleted. The waypoint is not deleted.
ROUTE+WPT The selected route and the waypoint on the route are deleted.
4. Tap and execute the deletion.
4-30
Page 73

A
y
4.5.6 Sharing a route with another piece of equipment
The route that was created by this equipment can be sent to EDCIS or a radar and also the route
that was created by ECDIS can be shared by receiving it (Data route sharing).
To use the route sharing function, equipment (ECDIS or radar) corresponding to the sharing must
be connected to LAN.
Procedure
1.
Item Descriptions
ROUTE SEND Sends a route.
ROUTE RECEIVE Sets route reception.
(1) Sending a route
a) Tap .
b) Set each item.
Item Description
CONNECT Select multicast, unicast, or broadcast.
IP Set a destination ID when selecting unicast.
PORT Set a destination port when selecting unicast.
OUTPUT Set a LAN port for output.
FORMAT NMEA VER1.5 Sends under the RTE/WPL sentence of NMEA Ver 1.5.
NMEA VER2.1 Sends under the RTE/WPL sentence of NMEA Ver 2.1.
NMEA VER2.3 Sends under the RTE/WPL sentence of NMEA Ver 2.3
NMEA VER4.0 Sends under the RTE/WPL sentence of NMEA Ver 4.0.
IEC Sends under the RTE/WPL sentence of IEC.
JRC Sends the route in the JRC format.
SHARE ROUTE Use ROUTE to set the route to be sent.
DATA Select the data to be sent.
ALL WPT Sends all the waypoints.
ALL WPT+ROUTE Sends all the waypoints and routes.
SELECT WPT+ROUTE Sends the selected route and the waypoint.
LL ROUTE Sends all the routes.
SELECT ROUTE Sends the selected route.
ROUTE This item can be set when SHARE ROUTE is selected.
Select a route to be sent.
TOTAL This item can be set when SHARE ROUTE is selected.
Displa
s the number of selected routes.
4-31
Page 74

A ROUTE can be selected manually or from a route list.
A
y
g
c) When is tapped, the route is sent.
(2) Receiving a route
a) Tap .
Item Description
SOURCE IP Set a sending source IP.
b) Tap to set the sending source.
4.5.7 Setting route initial values
Set an initial value of each parameter of the route.
The values are applied to the route that was created by GOTO.
Procedure
1.
2. Set each item.
Item Description
WIDTH PORT Set a port route width.
WIDTH STBD Set a starboard route width.
RRIVAL RADIUS Set an arrival radius.
SPEED Set a planned ship speed.
SAIL Route distance calculation method for LEG
GC: Calculated by the great circle sailing.
RL: Calculated b
SOG SMOOTHING Set a SOG smoothing constant.
Smoothing is applied to the ship speed for calculating the estimated time of
arrival and the estimated time required. Smoothing can be applied up to 99
seconds. When the estimated time of arrival fluctuates significantly, increase
the smoothin
the Meridional part sailing (Rhumb Line).
value.
3. Confirm the setting by tapping .
4-32
Page 75

y
y
g
4.6 Executing a Route
A registered route or a temporary route can be executed.
The following route selection methods are available.
(1) Select a route from a route list.
(2) Select a waypoint by using the GOTO key.
(3) Select a route by using the GOTO key.
(4) Select a temporary route by using the GOTO key.
A route cannot be executed at the position exceeding North latitude/South latitude 89 degrees.
For the route width, arrival radius, planned ship speed of the temporary route that was created
by GOTO, the initial values of the route are used. For the setting of route initial values, refer to
“4.5.7 Setting route initial values”.
The waypoint is updated when the ship arrives at the arrival circle.
4.6.1 Executing a route by selecting from a route list
A route can be executed by selecting from a route list.
Procedure
1.
2. Set each item.
Item Description
ROUTE Displays the route number to be executed.
LEG CHANGR Select a waypoint update method.
AUTO: When the ship arrives at the arrival circle (normal route) or WOL
(TSC route), the waypoint is updated automatically.
is displayed.
"WPT CHANGE" is displa
MANUAL: When the ship arrives at the arrival circle (normal route) or
WOL (TSC route), the effect is notified to the user. The waypoint is to be
updated manually.
is displayed.
"PLEASE PUSH "OK" AND CHANGE A ROUTE is displayed. Tap “OK”.
The wa
DIRECTION Set an order of the waypoints to be executed.
ORDER: Executes the route in the order of waypoints.
REVERSE: Executes the route startin
NAVIGATION Executes the route.
START: Executes the route.
END: Ends the route.
4-33
point is updated.
ed for 5 seconds.
from the last waypoint.
Page 76

3. Select “START” in "NAVIGATION".
4. Execute the route by tapping .
4.6.2 Selecting a waypoint/route by using the GOTO key
When a waypoint or a route is selected by using GOTO that is assigned to “FUNC” of each screen,
the route is executed towards the waypoint.
When a waypoint on the route that is being executed is selected by using the GOTO key, the route
restarts from the waypoint.
The route that was created by GOTO is registered under route number 102 as a temporary route.
Procedure
1. Each screen
The GOTO submenu is outlined below.
(1) HOME: Sets HOME in the waypoint list as the waypoint.
(2) WPT No.: Enter a waypoint number.
(3) ROUTE No.: Enter a route number.
(4) EVENT No.: Enter an event number.
(5) CURSOR POSN: The cursor position is specified as the waypoint (a temporary route can be
created by setting up to 512 waypoints).
(6) WPT LIST: Select from a waypoint list.
(7) ROUTE LIST: Select from a route list.
(8) EVENT LIST: Select from an event list.
(9) ROUTE END: The route can be ended during the execution of the route.
(1) Entering "HOME"
a) Tap .
(2) Entering a waypoint number
a) Tap and enter a waypoint number.
b) Execute by tapping .
4-34
Page 77

(3) Entering a route number
a) Tap and enter a waypoint number.
b) Execute by tapping .
(4) Entering an event number
a) Tap and enter an event number.
b) Execute by tapping .
(5) Specifying the cursor position as the waypoint
a) When is tapped, a plotting screen is displayed.
b) Move the cursor to the waypoint and tap "WPT SET".
To create a route, repeat the operation b).
To delete a waypoint, tap “CLR”.
c) Tap "ROUTE SET".
Cancels GOTO processing
4-35
Page 78

d) The following popup window is displayed.
y
A
y
y
g
Item Description
YES Registers the route in the route list.
When a route list is displa
NO Stores the route as a temporary route.
temporary route is cleared when the power is turned off.
ed, set a route number.
(6) Selecting a waypoint from a waypoint list
a) When is tapped, a waypoint list is displayed.
b) Tap the number to be set as for the waypoint.
(7) Selecting from a route list
a) When is tapped, a waypoint list is displayed.
b) Tap the route number to be executed.
c) Select a waypoint update method and an execution sequence.
Item Description
LEG CHANGE Select a waypoint update method.
AUTO: When the ship arrives at the arrival circle (normal route) or WOL
(TSC route), the waypoint is updated automatically.
is displayed.
"WPT CHANGE" is displa
MANUAL: When the ship arrives at the arrival circle (normal route) or
WOL (TSC route), the effect is notified to the user. The waypoint is to be
updated manually.
is displayed.
"PLEASE PUSH "OK" AND CHANGE A ROUTE" is displayed. Tap
“OK”. The wa
DIRECTION Set a direction of the waypoints to be executed.
ORDER: Executes the route in the order of waypoints.
REVERSE: Executes the route startin
point is updated.
ed for 5 seconds.
from the last waypoint.
d) Select “START” in "NAVIGATION".
(8) Selecting from an event list
a) Tap to display an event list.
b) Tap the number to be set as the waypoint.
4-36
Page 79

(9) Ending the route that is currently being executed
a) Tap .
b) The following popup window is displayed.
ROUTE IN USE IS CANCELED
ARE YOU SURE
YES NO
c) Tapping YES will end the route.
4.6.3 Ending a route
End a route.
Procedure
1.
3. Select “END” in “NAVIGATION”.
4. Execute by tapping .
Ending by using GOTO
1.
2. Tap .
3. The following popup window is displayed.
4. Tapping YES will end the route.
ROUTE IN USE IS CANCELED
ARE YOU SURE
YES NO
4-37
Page 80

4.7 Event/Mark
Events, marks, MOB, and lines are registered in an event mark list.
4.7.1 Displaying an event/mark list
All the registered events and marks can be displayed in a list.
MOB is registered under event number 000.
Event/mark number
Procedure
Symbol
Comment
Position
E: Event
M: Mark
Registration date
and time
U: UTC
L: Local
1.
4.7.2 Registering events
Register an own ship’s position as an event.
Procedure
1.
Registering from a screen
1. Tap the position display section at the top of the screen.
4-38
Page 81

4.7.3 Registering marks
Register a cursor position as a mark.
Procedure
1. Display the PLOT1 or PLOT2 screen.
2. Display a cursor and move the cursor to the position to be marked.
3.
4-39
Page 82

4.7.4 Editing events/marks
Symbols, colours, and comments of events/marks can be edited.
Procedure
1.
2. Tap an event or a mark to be edited.
3. Edit the symbol, colour, or comment and tap .
4.7.5 Deleting events/marks
Events/marks can be deleted.
Procedure
1.
The event/mark deletion submenu is outlined below.
(1) EVENT MARK LIST: Select a deletion range from the event mark list.
(2) ALL EVENT: Deletes all the events.
(3) ALL MARK: Deletes all the marks.
(4) ALL EVENT MARK: Deletes all the events/marks.
(1) EVENT MARK LIST
a) When is tapped, an event mark list is displayed.
b) Tap a starting point and an ending point of the event marks to be deleted.
When deleting only one point, specify the same number for a starting point and an ending
point.
c) Confirm by using .
4-40
Page 83

(2) ALL EVENT
a) Tap .
(3) ALL MARK
a) Tap .
(4) ALL EVENT MARK
a) Tap .
2. When a deletion confirmation popup window is displayed, tap “YES”.
4-41
Page 84

p
4.8 Plotting Screen
4.8.1 Operating the cursor
Procedure
1. Display the PLOT1 or PLOT2 screen.
2.
3. Move the cursor by using the Up/Down/Left/Right arrow keys.
4.8.2 Changing the cursor size
A cursor size can be selected from LARGE/MIDDLE/SMALL.
Procedure
1. Display the PLOT1 or PLOT2 screen.
Cursor position
Bearing/distance from own
shi
to the cursor position
Cursor
2.
3. Select a size and confirm it with .
4-42
Page 85

4.8.3 Moving a screen
The mouse can be used to move the tapped position to the centre of the screen.
To the centre
4.8.4 Moving own ship to the centre of the screen
When own ship is within the screen range, the own ship’s position can be moved to the centre of
the screen by tapping it.
When own ship is moved to the position outside of the screen range, disabling its display, tap
“HOME” at the bottom left corner of the screen.
Memo
When own ship is moved to the end of the screen, own ship is returned to the centre
of the screen automatically.
Own ship can also be moved to the centre of the screen by selecting "FUNC"
"HOME".
4-43
Page 86

4.8.5 Screen Zoom In/Out
The plotting screen horizontal width is set in the following scale.
0.2, 0.5, 1.0, 2.0, 5.0, 10.0, 20.0, 50.0, 100.0, 200.0, and 300.0 [NM]
ZOOM OUT ZOOM IN
4.8.6 Changing North Up/Course Up
The screen mode can be changed to North Up, Course Up, or Relative North Up.
North Up: Own ship moves on the screen with North Up.
Course Up: The course of own ship is constantly set to the up position on the screen and the
surrounding image moves.
Relative North Up: The top of the screen faces North and own ship’s position is fixed and the
surrounding image moves.
Whenever screen mode switching is tapped, the screen mode changes.
Switch
screen mode
4-44
Page 87

A
4.8.7 Displaying tracks
Tracks can be displayed.
A track storage interval can be set by time or distance.
Procedure
1. Display the PLOT1 or PLOT2 screen.
2.
Item Description
TRACK LINE Select a track drawing line.
A track is drawn with a dotted line.
TRACK PERIOD Set a track storage interval.
TIME Up to 60 minutes can be set in second units by MIN/SEC.
DIST Up to 99.99NM can be set in 0.01NM units.
OFF Not stored
3. Set a storage interval and confirm with .
A track is drawn with dots.
track is drawn with a line.
Deleting a track
1. Display the PLOT1 or PLOT2 screen.
2.
When the following popup window is displayed, select “YES”.
When “YES” is selected, the entire track is deleted. Partial deletion is not allowed.
4-45
Page 88

r
4.8.8 Displaying an own ship vector and a distance circle
When a radius is specified, a circle is displayed positioning own ship at the centre. The range that
can be set is from 0.1NM to 9.9NM.
By setting a time, a vector line up to the position where the ship reaches within the set time can be
displayed. The time can be set within the range from 0.1 to 9.9 minutes.
Distance circle
Procedure
1. Display the PLOT1 or PLOT2 screen.
Own ship vecto
2.
Item Description
OWN CIRCLE Set a distance circle from own ship.
RADIUS(NM) Displayed when OWN CIRCLE is set to ON.
Input a radius of the distance circle.
OWN VECTOR Set an own ship’s vector.
TIME(min) Displayed when OWN VECTOR is set to ON.
Displays the vector line up to the position that is reached within the time
that is set.
3. Set a radius and a time and confirm the setting with .
4-46
Page 89

4.8.9 Setting symbols to display/non-display
Symbols that are displayed on a plotting screen can be set to non-display individually.
Set the symbols that are not to be displayed to "OFF".
Set the symbols that are to be displayed to "ON".
The following symbols can be set to display/non-display.
Waypoint, waypoint number, mark, event, event/mark number, track, arrival circle, route width,
scale bar, symbol information, cursor position information, grid line, grid latitude, and grid
longitude
Procedure
1. Display the PLOT1 or PLOT2 screen.
2.
3. Set the items to be displayed to “ON”.
4. Confirm the setting with .
4.8.10 Displaying symbol information
When the cursor is moved to a waypoint, an event, or mark symbol, the contents of each symbol
are displayed.
Procedure
1. Display the PLOT1 or PLOT2 screen.
2. A cursor is displayed...
3. Move the cursor to symbol whose information is to be displayed.
When a water temperature, a depth, and a current are received from external equipment, the
water temperature, depth, and current at the storing of EVENT can be displayed. However, the
external equipment must be connected.
To clear symbol information, move the cursor from the symbol.
To edit the information, tap “EDIT” and to clear the information, tap “CLR”.
4-47
Page 90

4.8.11 Changing a background colour
A background colour of a plotting screen can be changed.
The colors that can be set are DARK BLUE and WHITE.
Procedure
1. Display the PLOT1 or PLOT2 screen.
2.
3. Select a background colour.
4. Confirm the selection with .
DARK BLUE WHITE
4-48
Page 91

4.9 Setting MOB
MOB (Man-overboard) stores the position when a person or a material item fell overboard, by
executing the MOB function. This function enables the ship to return to the position quickly.
The MOB function is available on all the screens.
When MOB is executed, a plotting screen is displayed automatically, the MOB mark is
displayed, indicating the bearing and distance from the current position to the man-overboard
position.
Procedure
1. Tap .
Countdown for 5 seconds starts at the bottom right corner of the screen. When is tapped
again within 5 seconds, the MOB function is cancelled.
Ending MOB
After 5
seconds
Countdown
Bearing and
distance up to the
man-overboard
position
1. Tap again.
Executing MOB
Manoverboard
position
2. When the following popup window is displayed, select “YES”.
4-49
Page 92

4.10 Setting Alerts
Fifteen types of alerts can be set. ON/OFF setting and buzzer ON/OFF can be set individually.
The alerts that can be set are outlined below.
(1) SYSTEM: The alert is issued at the occurrence of non-position fixing.
(2) ARRIVAL/ANCHOR: The alert is issued when the ship arrives at or crosses the track of the
arrival circle radius.
Arrival and cross-track cannot be set concurrently.
(3) XTD/BOUNDARY: The alert is issued when the ship crosses from or approached the route
width.
Cross-track and approach cannot be set concurrently.
(4) HDOP: The alert is issued when the HDOP value exceeds the setting value.
(5) SPEED: When the speed reaches within the setting range, the alert is issued.
(6) TRIP: The alert is issued when the trip exceeds the setting value.
(7) EARLY COURSE CHANGE:
The alert is issued when the time for reaching the wheel over point
becomes below the setting value.
(8) END OF TRACK: The alert is issued when the time for reaching the final waypoint is below
the setting value.
(9) ARRIVED AT WOL: The alert is issued when the ship reaches the wheel over point.
(10) ACTUAL COURSE CHANGE:
The alert is issued 30 seconds before the ship reaches the wheel over
point.
(11) TEMP: The alert is issued when the water temperature comes within the setting
range.
(12) DEPTH: The alert is issued when the water depth comes within the setting range.
(13) DGPS: The alert is issued when position fixing is changed from GPS to DGPS
or from DGPS or GPS.
(14) BUFFER: The alert is issued at the occurrence of a built-in buffer unit error.
(15 )POWER: The alert is issued at the occurrence of an external power supply error.
External equipment is required for water temperature and water depth
alerts.
4.10.1 Setting alert/buzzer sounds
To set an alert, a password is necessary. For the input method, refer to “4.2.11 Entering a
password with CODE INPUT”.
Procedure
1. Enter a password by referencing “4.2.11. Entering a password with CODE INPUT”.
Password: 1650
2. An alert list is displayed.
4-50
Page 93

(1) Setting the SYSTEM alert
a) Tap .
Item Description
SET Sets alert notification to ON/OFF.
ON: Notifies the occurrence of an alert.
OFF: Sets alert to OFF.
SOUND Sets the buzzer sound upon the issuance of an alert to ON/OFF.
ON: When an alert is issued, the alert is notified with a buzzer sound.
OFF: Even if an alert is issued, a buzzer sound is not emitted.
(2) Setting ARRIVAL/ANCHOR alerts
The alert is issued when the ship arrives at or crossed the arrival circle radius that was set in the
route. If the arrival circle radius is not set in the route, the alert is issued when the ship reaches the
arrival circle radius that is set as the route initial value.
Arrival and cross-track cannot be set concurrently.
a) Tap .
Item Description
SET Sets alert notification to ON/OFF.
ARRIVAL: Notifies the waypoint arrival alert.
ANCHOR: Notifies the waypoint cross-track alert.
OFF: Sets the alert to OFF.
SOUND Sets the buzzer sound upon the issuance of an alert to ON/OFF.
ON: When an alert is issued, the alert is notified with a buzzer sound.
OFF: Even if an alert is issued, a buzzer sound is not emitted.
(3) Setting XTD/BOUNDARY alerts
The alert is issued when the ship cross-tracks from or approaches the route width that was set in
the route. When the route width is not set in the route, an alert is issued when the ship cross-tracks
from or enters in the route width that is set as the initial value in the route.
Cross-track and approach cannot be set concurrently.
a) Tap .
4-51
Page 94

(
y
Item Description
SET Sets alert notification to ON/OFF.
XTD: Notifies a cross-track distance alert.
BOUNDARY: Notifies a route approach alert.
OFF: Sets the alert to OFF.
SOUND Sets the buzzer sound upon the issuance of an alert to ON/OFF.
ON: When an alert is issued, the alert is notified with a buzzer sound.
OFF: Even if an alert is issued, a buzzer sound is not emitted.
(4) Setting the HDOP alert
a) Tap .
Item Description
SET Sets alert notification to ON/OFF.
THRESHOLD: The alert is issued when HDOP exceeded the threshold value.
OFF: Sets the alert to OFF.
THRESHOLD Sets a HDOP threshold value.
This item is not displayed when SET is OFF.
SOUND Sets the buzzer sound upon the issuance of an alert to ON/OFF.
ON: When an alert is issued, the alert is notified with a buzzer sound.
OFF: Even if an alert is issued, a buzzer sound is not emitted.
(5) Setting the SPEED alert
a) Tap .
Item Description
SET
THRESHOLD
THRESHOLD(OVER)
THRESHOLD
SOUND Sets the buzzer sound upon the issuance of an alert to ON/OFF.
UNDER)
Sets alert notification to ON/OFF.
OVER: The alert is issued when the ship speed exceeds the set speed.
UNDER: The alert is issued when the ship speed is below the set speed.
IN RANGE: The alert is issued when the ship speed is within the set speed
range.
OUT RANGE: The alert is issued when the ship speed is outside of the set
ship speed range.
OFF: Sets the alert to OFF.
Set a ship speed threshold value when selecting "OVER"/"UNDER" in “SET”.
Set an upper limit and a lower limit of the ship speed range when selecting
“IN RANGE”/”OUT RANGE” in “SET”.
ON: When an alert is issued, the alert is notified with a buzzer sound.
OFF: Even if an alert is issued, a buzzer sound is not emitted.
(6) Setting the TRIP alert
a) Tap .
Item Description
SET
THRESHOLD Set a threshold value of the trip.
SOUND Sets the buzzer sound upon the issuance of an alert to ON/OFF.
Sets alert notification to ON/OFF.
THRESHOLD: The alert is issued when the trip exceeds the set trip.
OFF: Sets the alert to OFF.
This item is not displa
ON: When an alert is issued, the alert is notified with a buzzer sound.
OFF: Even if an alert is issued, a buzzer sound is not emitted.
ed when SET is OFF.
4-52
Page 95

(7) Setting the EARLY COURSE CHANGE alert
y
y
a) Tap .
Item Description
SET
THRESHOLD Set a threshold value of EARLY COURSE CHANGE.
SOUND Sets the buzzer sound upon the issuance of an alert to ON/OFF.
Sets alert notification to ON/OFF.
THRESHOLD: The alert is issued when the time to reach the Wheel Over Point is
less than the threshold value.
OFF: Sets the alert to OFF.
A value from 3 minutes to 6 minutes can be set.
This item is not displa
ON: When an alert is issued, the alert is notified with a buzzer sound.
OFF: Even if an alert is issued, a buzzer sound is not emitted.
ed when SET is OFF.
(8) Setting the END OF TRACK alert
a) Tap .
Item Description
SET
THRESHOLD Set a threshold value of END OF TRACK.
SOUND Sets the buzzer sound upon the issuance of an alert to ON/OFF.
Sets alert notification to ON/OFF.
THRESHOLD: The alert is issued when the time to reach the final waypoint is less
than the threshold value.
OFF: Sets the alert to OFF.
A value from 3 minutes to 6 minutes can be set.
This item is not displa
ON: When an alert is issued, the alert is notified with a buzzer sound.
OFF: Even if an alert is issued, a buzzer sound is not emitted.
ed when SET is OFF.
(9) Setting the ARRIVED AT WOL alert
a) Tap .
Item Description
SET Sets alert notification to ON/OFF.
ON: Notifies the alert.
OFF: Sets the alert to OFF.
SOUND Sets the buzzer sound upon the issuance of an alert to ON/OFF.
ON: When an alert is issued, the alert is notified with a buzzer sound.
OFF: Even if an alert is issued, a buzzer sound is not emitted.
(10) Setting the ACTUAL COURSE CHANGE alert
a) Tap .
Item Description
SET Sets alert notification to ON/OFF.
ON: Notifies the alert.
OFF: Sets the alert to OFF.
SOUND Sets the buzzer sound upon the issuance of an alert to ON/OFF.
ON: When an alert is issued, the alert is notified with a buzzer sound.
OFF: Even if an alert is issued, a buzzer sound is not emitted.
4-53
Page 96

g
(11) Setting the water temperature alert
a) Tap .
Item Description
SET
THRESHOLD
THRESHOLD(OVER)
THRESHOLD(UNDER)
SOUND Sets the buzzer sound upon the issuance of an alert to ON/OFF.
Sets alert notification to ON/OFF.
OVER: The alert is issued when the water temperature exceeds the set
temperature.
UNDER: The alert is issued when the water temperature is below the set
temperature.
IN RANGE: The alert is issued when the water temperature is within the set
temperature range.
OUT RANGE: The alert is issued when the water temperature is outside of
the set water temperature range.
OFF: Sets the alert to OFF.
Set a water temperature threshold value when selecting “OVER”/UNDER” in
“SET”.
Set an upper limit and a lower limit of the water temperature range when
selectin
ON: When an alert is issued, the alert is notified with a buzzer sound.
OFF: Even if an alert is issued, a buzzer sound is not emitted.
The water temperature alert requires external equipment.
“IN RANGE”/”OUT RANGE” in “SET”.
(12) Setting the water depth alert
a) Tap .
Item Description
SET
THRESHOLD
THRESHOLD(OVER)
THRESHOLD(UNDER)
SOUND Sets the buzzer sound upon the issuance of an alert to ON/OFF.
Sets alert notification to ON/OFF.
OVER: The alert is issued when the water depth exceeds the set depth.
UNDER: The alert is issued when the water depth is below the set depth.
IN RANGE: The alert is issued when the water depth is within the set water
depth range.
OUT RANGE: The alert is issued when the water depth is outside of the set
water depth range.
OFF: Sets the alert to OFF.
Set a water depth threshold value when selecting “OVER”/”UNDER” in
“SET”.
Set an upper limit and a lower limit of the water depth range when selecting
“IN RANGE”/”OUT RANGE” in “SET”.
ON: When an alert is issued, the alert is notified with a buzzer sound.
OFF: Even if an alert is issued, a buzzer sound is not emitted.
The water depth alert requires external equipment.
4-54
Page 97

(13) Setting the DGPS alert
a) Tap .
Item Description
SET
SOUND Sets the buzzer sound upon the issuance of an alert to ON/OFF.
Sets alert notification to ON/OFF.
GPS→DGPS: The alert is issued when the positioning system is changed
from GPS to DGPS.
DGPS→GPS: The alert is issued when the positioning system is changed
from DGPS to GPS.
GPS⇔DGPS: The alert is issued when the positioning system is changed
from GPS to DGPS or DGPS to GPS.
OFF: Sets the alert to OFF.
ON: When an alert is issued, the alert is notified with a buzzer sound.
OFF: Even if an alert is issued, a buzzer sound is not emitted.
The DGPS alert is not notified to external equipment.
(14) Setting the BUFFER alert
a) Tap .
Item Description
SET Sets alert notification to ON/OFF.
ON: Notifies the alert.
OFF: Sets the alert to OFF.
SOUND Sets the buzzer sound upon the issuance of an alert to ON/OFF.
ON: When an alert is issued, the alert is notified with a buzzer sound.
OFF: Even if an alert is issued, a buzzer sound is not emitted.
(15) Setting the POWER alert
a) Tap .
Item Description
SET Sets alert notification to ON/OFF.
ON: Notifies the alert.
OFF: Sets the alert to OFF.
SOUND Sets the buzzer sound upon the issuance of an alert to ON/OFF.
ON: When an alert is issued, the alert is notified with a buzzer sound.
OFF: Even if an alert is issued, a buzzer sound is not emitted.
3. Confirm the settings with .
4-55
Page 98

4.11 Alert List
The alerts that have occurred so far and the alert that is occurring, and the alerts that occurred in
LAN can be displayed.
4.11.1 Displaying alert history
The alerts that have occurred so far can be displayed.
Up to 100 alerts can be displayed. If the number of alerts exceeds 100, the existing alerts are
overwritten from the oldest one.
Procedure
1.
4.11.2 Displaying the alert that is occurring
The alert that is occurring can be displayed.
After the alert is resolved, the alert is deleted from the alert list.
Procedure
Rad :Alarm
Orange :Warning
Yellow :Caution
Green :Recovery
1.
4-56
Page 99

4.11.3 Displaying the alerts that occurred in LAN
The number of errors that occurred in LAN1/LAN2 is displayed.
The error court is cleared when the power is turned off.
Procedure
1.
(1) Displaying the error count of LAN1
a) Tap .
(2) Displays the error count of LAN2
a) Tap .
Clearing an alert
1. Enter a password by referencing “4.2.11 Entering a password in CODE INPUT”.
Password: 1650
2.
To clear the LAN2 alert list, select .
4-57
Page 100

y
y
y
y
y
4.12 Initial Settings of GNSS/Beacon/SBAS
Set the GNSS sensor.
JLR-4350 supports multi-GNSS.
The available GNSS system combinations are as follows.
(1) GPS mode
a) GPS
(2) Multi-GNSS mode
a) GPS+QZSS
b) GPS+GLONASS
c) GPS+QZSS
d) GPS+QZSS+GLONASS
e) GPS+QZSS+BeiDou
Even in multi-GNSS mode also, GLONASS and BeiDou cannot be used concurrently.
DGLONASS and DBeiDou are not supported. When using DGPS by SBAS/beacon, use it in GPS
mode.
In multi-GNSS mode also, position fixing is performed without using the systems that cannot be
received by the satellites.
4.12.1 Setting a positioning system
Select a GNSS system to be used.
In the processor with two sensors installed, the sensors must be set individually.
In this example, sensor 1 is connected. The same procedure is applied for setting sensor 2.
Procedure
1. Enter a password by referencing "4.2.11. Entering a password with CODE INPUT”.
Memo
GPS: Global Positioning System. Positioning system that is operated by the U.S.A.
QZSS: Quasi-Zenith Satellite System (Michibiki). Positioning system that is operated by
Japan.
GLONASS: Global Navigation Satellite System. Positioning system that is operated by Russia.
DeiDou: Positioning system that is operated by China.
In JLR-4350, only QZSS No.1 can be used. Correction data cannot be received from QZSS.
Password: 1650
2.
GPS MODE Description
GPS Operates in GPS mode. Only GPS is used.
To perform DGPS b
GPS+QZSS Operates in multi-GNSS mode.
GPS and QZSS are used concurrentl
GPS+GLONASS Operates in multi-GNSS mode.
GPS and GLONASS are used concurrentl
GPS+BDS Operates in multi-GNSS mode. GPS and BeiDou are used concurrently.
GPS+QZSS+GLONASS Operates in multi-GNSS mode.
GPS, QZSS, and GLONASS are used concurrentl
GPS+QZSS+BDS Operates in multi-GNSS mode.
GPS, QZSS, and BeiDou are used concurrentl
4-58
SBAS/beacon, set “GPS”.
.
.
.
.
 Loading...
Loading...