

Page 1

JMA-2343/2344
Page 2

Page 3

はじめに
はじめに
はじめにはじめに
このたびは、JRC船舶レーダJMA-2343/JMA-2344をお買い上げいただきま
して、まことにありがとうございます。
本装置は、レーダ信号の送受信部、ブラウン管表示部および空中線等の主要部か
らなる、船舶の安全航行を図るための船舶用レーダ装置です。
● お使いになる前に、この取扱説明書をよくお読みのうえ、正しくお使いくだ
さい。
●
取扱説明書は必要なときに参照できるよう大切に保管してください。
万一、ご使用中にわからないことや不具合が生じたときにお役立てください。
PREFACE
Thank you very much for purchasing the JRC marine radar equipment,
JMA-2343 and JMA-2344.
This equipment is a marine radar equipment designed to obtain safe
operation of marine ships. The equipment consists of a radar signal
transceiver unit, a CRT display unit and a scanner unit as its main units.
● Before operating the equipment, be sure to read this instruction manual
carefully for correct operation.
● Maintain this instruction manual so that operators can refer to it at
anytime.
Refer to this manual when any inconvenience or defect occur.
I
Page 4
●ご使用の
●ご使用のまえに●
●ご使用の●ご使用の
絵表示について
絵表示について
絵表示について絵表示について
絵表示の例
絵表示の例
絵表示の例絵表示の例
分解禁止 禁止
プラグ
を抜け
警告ラベルについて
警告ラベルについて
警告ラベルについて警告ラベルについて
本製品の上カバーには警告ラベルが貼ってあります。
警告ラベルを取り外したり、破損、改変を絶対にしないでください。
警告
警告
警告警告
注意
注意
注意注意
感電注意
指示
この取扱説明書および製品への表示では、製品を安全に正しくお
使いいただき、あなたや他の人々への危害や財産への損害を未然
に防止するために、いろいろな絵表示をしています。その表示と
意味は次のようになっています。
内容をよく理解してから本文をお読みください。
この表示を無視して、誤った取扱いをすると、人が死亡または重
傷を負う可能性が想定される内容を示しています。
この表示を無視して、誤った取扱いをすると、人が傷害を負う可
能性が想定される内容および物的損害のみの発生が想定される内
容を示しています。
△記号は注意(危険・警告を含む)を促す内容があることを告げる
ものです。
図の中に具体的な注意内容(左図の場合は感電注意)が描かれてい
ます。
記号は禁止の行為であることを告げるものです。
図の中や近傍に具体的な禁止内容(左図の場合は分解禁止)が描か
れています。
●記号は行為を強制したり指示する内容を告げるものです。
図の中に具体的な指示内容(左図の場合は電源プラグをコンセント
から抜け)が描かれています。
まえに●
まえに●まえに●
II
Page 5
●
●Before Operation●
●●
Pictorial Indication
Examples of pictorial indication
Disassembling
Disconnect the
Warning label
There is a warning label on the top cover of the equipment.
Do not try to remove, break or modify the label.
WARNING
CAUTION
Electric
Shock
Prohibited
power plug
Prohibition
instruction
Various pictorial indications are included in this manual and are shown
on these equipment so that you can operate them safely and correctly
and prevent any danger to you and / or to other persons and any damage
to your property during operation. Such indications and their meanings
are as follows.
Please understand them before you read this manual:
This indication is shown where any person is supposed to be in danger of
being killed or seriously injured if this indication is neglected and these
equipment are not operated correctly.
This indication is shown where any person is supposed to be injured or any
property damage is supposed to occur if this indication is neglected and these
equipment are not operated correctly.
The△mark represents CAUTION (including DANGER and WARNING).
Detailed contents of CAUTION ("Electric Shock" in the example on the
left.) is shown in the mark.
The mark represents prohibition.
Detailed contents of the prohibited action ("Disassembling Prohibited" in
the example on the left) is shown in the mark.
The ● mark represents instruction.
Detailed contents of the instruction ("Disconnect the power plug" in the
example on the left) is shown in the mark.
●
●●
III
Page 6
●ご使用上の注意●
●ご使用上の注意●
●ご使用上の注意●●ご使用上の注意●
空中線、送受信機及び指示機の内部には触れないでください。
空中線、送受信機及び指示機の内部には触れないでください。
空中線、送受信機及び指示機の内部には触れないでください。空中線、送受信機及び指示機の内部には触れないでください。
高電圧部により感電の原因となります。機器内部の保守、点検、調整等は当社の営
業部またはお近くの支社・支店・営業所または代理店にサービスを依頼してくださ
い。
当社の営業部・支社・支店・営業所
巻末の「事業所一覧」をご覧ください。
空中線輻射部は回転しますので、近づかないでください。
空中線輻射部は回転しますので、近づかないでください。
空中線輻射部は回転しますので、近づかないでください。空中線輻射部は回転しますので、近づかないでください。
急に空中線が回転し人体を殴打して、負傷する原因となります。
空中線輻射部は人が近づけないよう操舵室の屋根、フライングブリンジ、架台、レ
ーダーマスト等の高い場所に設置することをおすすめします。また、人の近づく恐
れのある場合は空中線ガードを設置することをおすすめします。空中線の作業をす
る場合は、空中線の安全スイッチを切ってください。
空中線は人の頭より高い位置に設置してください。
空中線は人の頭より高い位置に設置してください。
空中線は人の頭より高い位置に設置してください。空中線は人の頭より高い位置に設置してください。
至近距離で直接電波を浴びると人体に影響を及ぼす原因となります。
保守、点検で人がアンテナに接近する場合は指示機の準備
保守、点検で人がアンテナに接近する場合は指示機の準備////断スイッチを
保守、点検で人がアンテナに接近する場合は指示機の準備保守、点検で人がアンテナに接近する場合は指示機の準備
押し、指示機を準備状態にしてください。
押し、指示機を準備状態にしてください。
押し、指示機を準備状態にしてください。押し、指示機を準備状態にしてください。
至近距離で直接電波を浴びると人体に影響を及ぼす原因となります。
レーダはあくまでも航法援助装置としてご使用ください。
レーダはあくまでも航法援助装置としてご使用ください。
レーダはあくまでも航法援助装置としてご使用ください。レーダはあくまでも航法援助装置としてご使用ください。
また、操船の最終判断は必ず操船者自身で行ってください。
また、操船の最終判断は必ず操船者自身で行ってください。
また、操船の最終判断は必ず操船者自身で行ってください。また、操船の最終判断は必ず操船者自身で行ってください。
操船の最終判断を、レーダが表示する情報のみに頼った場合、衝突、座礁等の事故の
原因となることがあります。
警告
警告
警告警告
注意
注意
注意注意
断スイッチを
断スイッチを断スイッチを
IV
Page 7
●
●
Cautions to be used during operation
●●
Do not touch the insides of the scanner unit, transceiver and display
unit.
Touching any high voltage area, you will get an electric shock. For
maintenance, inspection and adjustment of internal parts of these equipment,
consult with our sales office or distributor in your district.
Since the scanner unit radiator rotates, do not approach it.
The scanner unit may start rotating suddenly, and consequently any person may
be struck and be injured. We recommend you to install the scanner unit
radiator on the roof of the wheel house, flying bridge, trestle, radar mast or any
other high position so that no person can approach it. When servicing the
scanner unit, set the scanner unit safety button to the OFF position.
Install the scanner unit at any place higher than any person.
If being exposed directly to electric wave at close range, you may suffer adverse
influence.
When approaching the antenna for maintenance or inspection, set
the power button of the display unit to the ST-BY position.
If being exposed directly to electric wave at close range, you may suffer adverse
influence.
Use these radar only as assisting devices for navigation.
Also, the officer should make the final decision for maneuvering by
himself.
If you make the final decision of maneuvering only on the information which a
radar display, it may become the cause of accidents, such as collision and
stranding.
WARNING
CAUTION
●
●
●●
V
Page 8

──
ご使用前に注意して
ご使用前に注意して
ご使用前に注意してご使用前に注意して
いただきたい
いただきたい
いただきたいいただきたい
こと
こと
ことこと
──
高電圧に対する注意
高電圧に対する注意
高電圧に対する注意高電圧に対する注意
無線装置、レーダなどの電子機器の内部には数百から数万ボルトの高電圧が使用されていま
す。通常の操作においてはまったく危険はありませんが、万一、誤って機器内部に触れた場
合非常な危険を伴います。(専門整備員以外の機器内部の保守・点検・調整は禁止)
数万ボルトの高圧では感電即死の危険が大きく、また時により数百ボルトの電圧でも感電死
することがあります。このような危険を防止するには機器の内部に手を入れるとき、必ず電
源スイッチを切って、一端を確実に接地した電源でコンデンサーなどを放電させ、電気の残
っていないことを確めた上で初めて手を内部に入れるようにしてください。この際、乾燥し
た木綿の手袋などを用いればなおいっそう危険防止となります。また左手をポケットに入れ、
両手を同時に用いないことも必要な注意の一つです。感電したときの障害は二次的に大きく
なることがあるので足場もしっかりした所を選ぶことが大切です。感電したときは火傷した
所を完全に消毒して、手当を速やかに行うことが必要です。
電撃の救出上の注意
電撃の救出上の注意
電撃の救出上の注意電撃の救出上の注意
電撃を受けた人を発見した場合、直ちに電源を切り回路を接地してください。回路が直ちに
切れないときは、感電した人をできるだけ早く乾いた板、布などの絶縁物を介して直接感電
した人に触れずに離してください。
感電したとき、頭脳の呼吸中枢に電流が流れると呼吸が急に止まります。衝撃があまりひど
くないときは人工呼吸を行うことにより呼吸を回復します。電撃を受けた人は非常に顔色が
悪くなり、脈が大変弱くなってしまうか、まったく止まってしまうことがあり、人事不省に
なり硬直します。
VI
Page 9

──
PRECAUTIONS BEFORE OPERATION
──
Cautions for high voltage
High voltages from hundreds volts to tens of thousands volts are to be applied to the
electronic equipment such radio and radar devices. You do not face any danger during
normal operation, but sufficient cares are required for maintenance, inspection and
adjustment of their internal components. (Authorized maintenance personnel alone are
permitted to implement maintenance, check-ups or adjustment of internal components.)
High voltages of tens of thousands volts are so dangerous as to bring an instantaneous
death from electric shock, but even voltages of hundreds volts may sometimes lead to a
death from electric shock. To prevent such an accident, make it a rule to turn off the
power button, discharge capacitors with a wire surely earthed on an end and make sure
that internal parts are no longer charged before you touch any parts inside these devices.
At the time, wearing dry cotton gloves ensures you further to prevent such danger. It is
also a necessary caution to put one of your hands in the pocket and not to use your both
hands at the same time.
It is also important to select a stable foothold always to prevent additional injuries once
you were shocked by electricity. If you were injured from electric shock, disinfect the
burn sufficiently and get it taken care of promptly.
What to do in case of electric shock
When finding a victim of electric shock, turn off the power source and earth the circuit
immediately. If it is impossible to turn off the circuit, move the victim away promptly
using insulators such as dry wood plate and cloth without touching the victim directly.
In case of electric shock, breathing may stop suddenly if current flows to the respiration
center in the brain. If the shock is not so strong, artificial respiration may recover
breathing. When shocked by electricity, the victim will come to look very bad with weak
pulse or without beating, resulting in unconsciousness and rigidity.
VII
Page 10
救急処置の方法
ふくこと。
救急処置の方法
救急処置の方法救急処置の方法
☆救急処置の留意点
☆救急処置の留意点
☆救急処置の留意点☆救急処置の留意点
電撃を受けた人を危険のない限り動かさずに、直ちに人工呼吸を行わなければなりません。人工呼吸
を始めたらリズムを失わないように続けて行う必要があります。
(1) 事故の発生であわてて患者に触れないこと(救助者が感電します)。
(2) あわてず確実に電源を切り患者を静かに電路より離す。
(3) 周囲の人に知らせる(診療所、病院、医師、119番通報、その他)。
(4) 患者を仰向けに寝かせネクタイ、衣類、バンドを緩める。
(5)(イ)各脈拍に触れてみる。
(ロ)心臓が動いているか否か心臓に耳を当てて確かめる。
(ハ)呼吸しているか否か患者の顔へ手の甲または顔を近づけて確かめる。
(ニ)瞳孔の大きさを調べる。
(6) 患者の口を開け入歯、煙草、ガムなどを取出し、口を開けたまま舌を伸ばしタオルなどを挿入
し舌が喉に引込まれないようにすること(歯をくいしばって口が開かない場合はドライバーな
どで開口しタオルなどをかませる)。
(7) 泡立つ粘液が貯まらないように口をふさぐこと。
VIII
Page 11

FIRST AID TREATMENTS
wipe
☆☆☆☆
First-aid treatments
As far as the victim of electric shock is not in dangerous condition, do not move him and practice
artificial respiration on him immediately. Once started, it should be continued rhythmically.
(1) Do not touch the victim confusedly as a result of the accident, but the rescuer may also get
an electric shock.
(2) Turn off the power source calmly and certainly and move the victim away quietly from the
electric line.
(3) Call a physician or ambulance immediately or ask someone to call a doctor.
(4) Lay the victim on his back and loosen his necktie, clothes, belt, etc.
(5) a. Examine the victim's pulse.
b. Examine his heartbeat bringing your ear close to his heart.
c. Examine his breathing bringing the back of your hand or your face close
d. Check the size of the pupils of his eyes
(6) Open the victim's mouth and take out artificial teeth, cigarette or chewing gum if any.
Keep his mouth open, stretch his tongue and insert a towel or the like in his mouth to
prevent the tongue from suffocating. (If it is hard to open his mouth due to set teeth, open it
with a screwdriver and insert a towel in this mouth.)
(7) Then, close his mouth so that foaming mucus does not accumulate inside.
IX
Page 12

☆脈拍があり呼吸していない場合の処置
☆脈拍があり呼吸していない場合の処置
☆脈拍があり呼吸していない場合の処置☆脈拍があり呼吸していない場合の処置
(1)患者の顔が後を見る位に顔をそり返らせる(頸部に枕を挿入してもよい)。
(2)下顎を上方に引き上げ気道を広げる(気道拡大)。
(3)患者の鼻をつまみ、術者は深く息を吸い患者の口を完全に塞ぐようにして強く呼気を吹き込む。
再び口を離して息を大きく吸って吹き込む。
1分間に約10回から15回くり返す(鼻腔を塞ぐこと)。
(4)自然に呼吸の起きるのを注意しながら呼吸が戻ったときに止める。
(5)開口困難な場合ゴム、ビニールなどのパイプ状のものを鼻腔に挿入して片方の鼻腔と口を完全に
塞いで息を大きく吸って吹き込む。
(6)患者は気が付くといきなり立つ事がありますが静かに寝かせ、熱いコーヒー、紅茶などを与え暖
かくして安静を保つ(アルコール類は与えてはならない)。
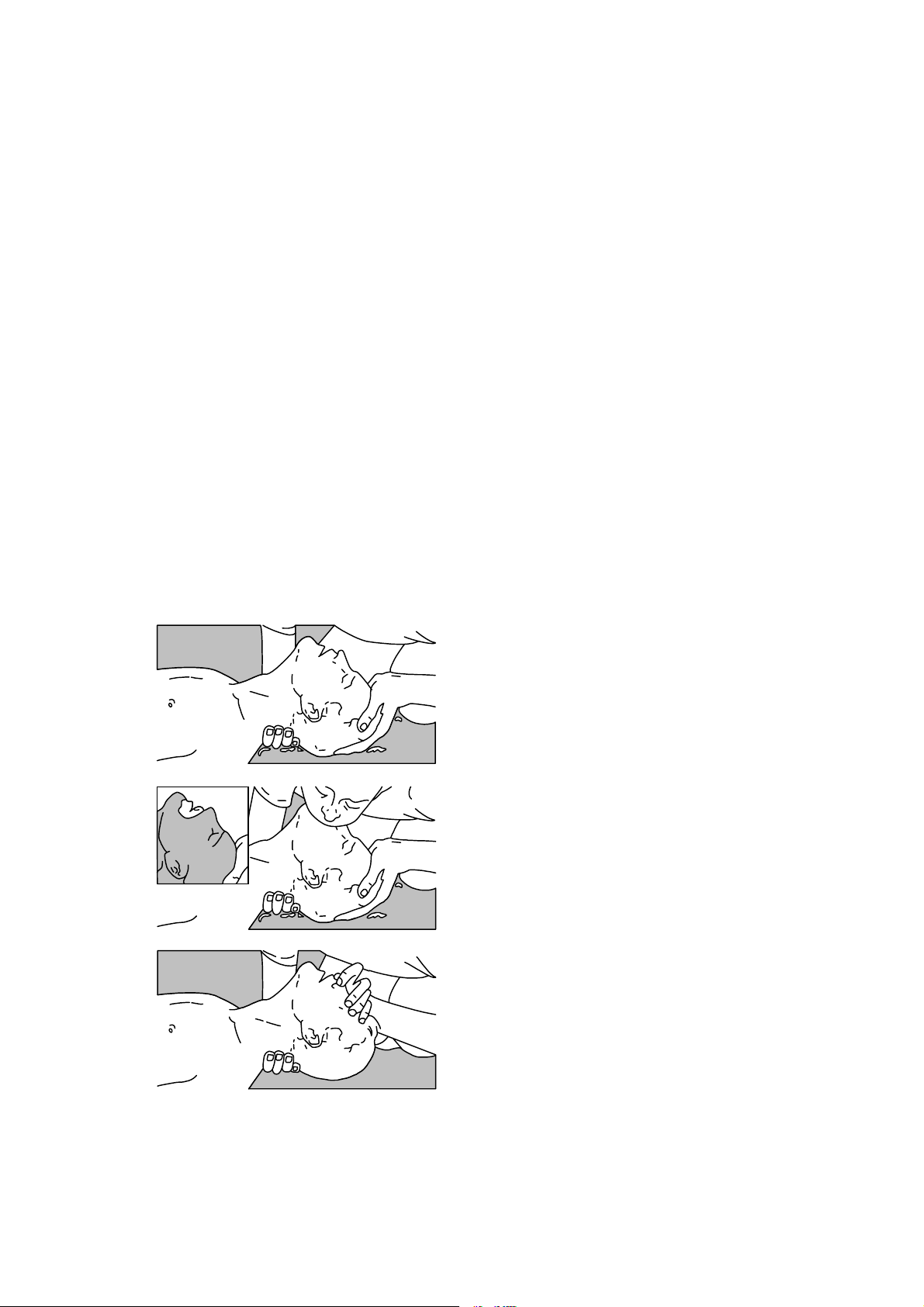
頭部をもたげて口うつし人工呼吸を行う方法
頭部をもたげて口うつし人工呼吸を行う方法
頭部をもたげて口うつし人工呼吸を行う方法頭部をもたげて口うつし人工呼吸を行う方法
①
②
③
(1) 後頭部をもたげ、片方を額に他の手を
(2) 患者の口をあなたの口で広く封じ、あ
(3) 胸があがるまで口から空気を肺内に吹
頸部の下にあてる。→ ①
多くの患者はこの頭部のもたげにより
口が開き空気が通じ、口うつしが容易
になる。
なたの頬を患者の鼻に押しあてる。→
②
または、あなたの指で患者の鼻を押さ
えて空気の漏れを防ぐ。→ ③
き込む。
最初の10回の呼気吹き込みはできるだ
図1 口うつし人工呼吸法
け急速度で行わなければならない。
X
Page 13
☆☆☆☆
When pulse is beating but breathing has stopped
(1) Tilt the victim's head back as far as this face looks back. (A pillow may be inserted under his
neck.)
(2) Push his jaw upward to open his throat wide (to spread his airway).
(3) Pinch the victim's nostrils and take a deep breath, block his mouth completely with yours
and blow into his mouth strongly. Take a deep breath again and blow into his mouth.
Continue this 10 to 15 times a minute (blocking his nostrils).
(4) Carefully watch that he has recovered his natural breathing and stop practicing artificial
respiration.
(5) If it is difficult to open the victim's mouth, insert a rubber or vinyl tube into one of his
nostrils and blow into it blocking the other nostril and his mouth completely.
(6) When the victim recovers consciousness, he may try to stand up suddenly, but let him lie
calmly and serve him with a cup of hot coffee or tea to keep him warm and quiet. (Never give
him alcoholic drinks.)
Method of mouth-to-mouth respiration by raising head
①
②
(1) Raise the victim's head. Support his
forehead with one of your hand and his
neck with the other hand. → ①
When you tilt his head backward, the
victim, in most cases, opens his mouth to
the air. This makes mouth-to-mouth
respiration easy.
(2) Cover his mouth as widely as possible
with yours and press your cheek against
his nose → ② , or, pinch his nostrils
with your fingers to prevent air from
leaking. → ③
③
(3) Blow into his lungs.
Continue blowing into his mouth until his
breast swells. Blow into his mouth as
quickly as possible for the first 10 times.
Fig.1 Mouth-to-mouth respiration
XI
Page 14
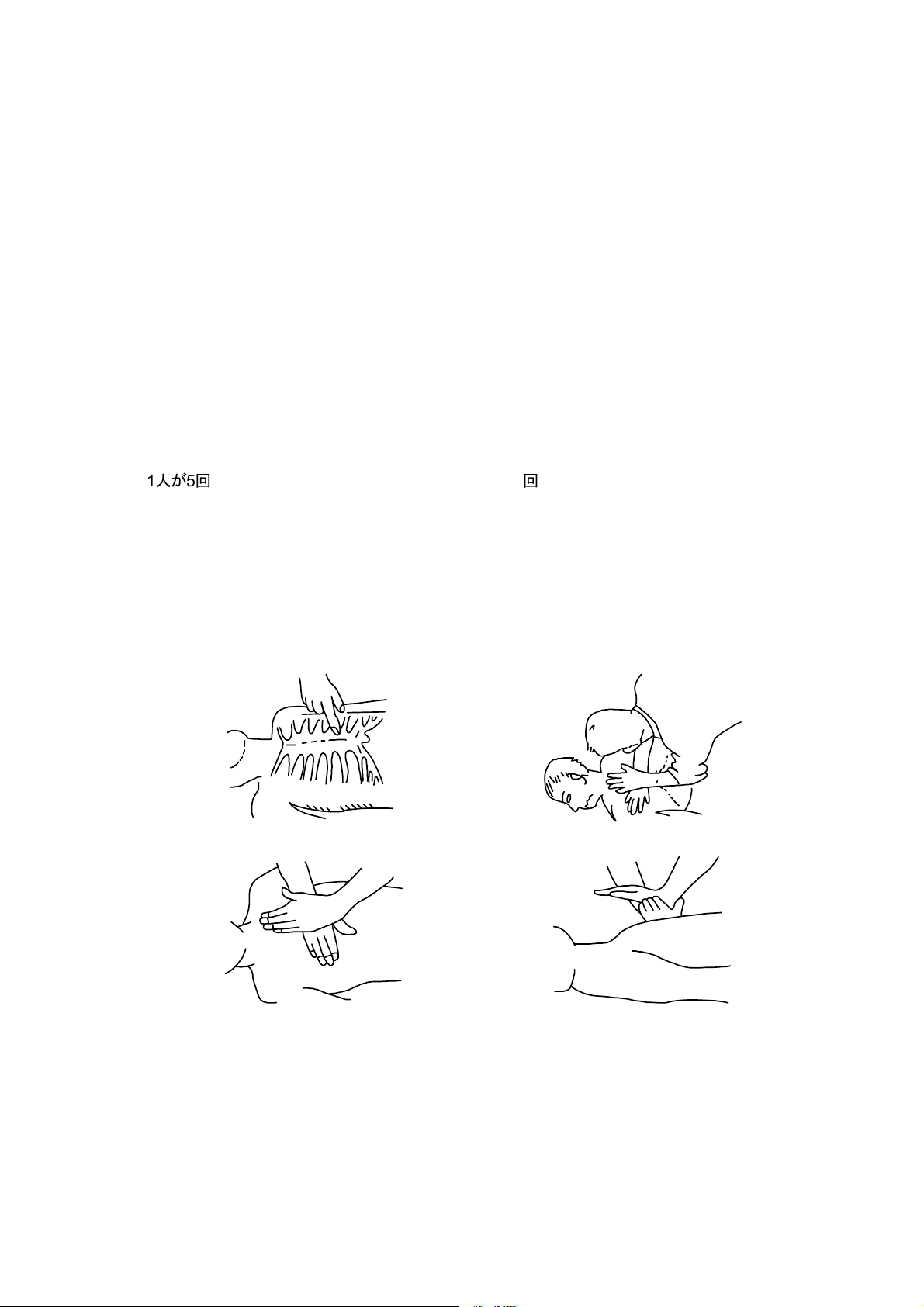
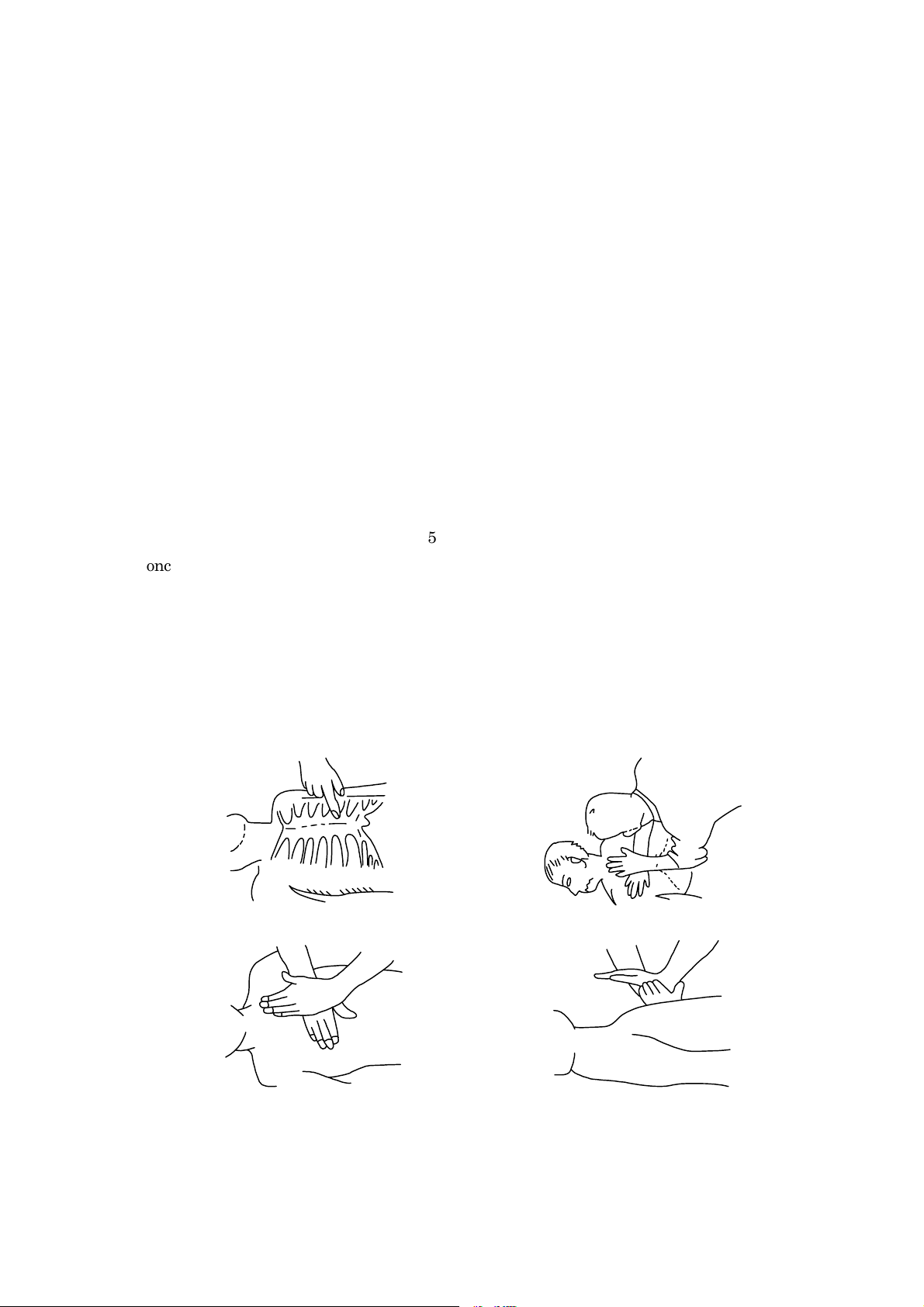
☆脈拍なく呼吸もしていない場合の処置
2回
1人が15回
☆脈拍なく呼吸もしていない場合の処置
☆脈拍なく呼吸もしていない場合の処置☆脈拍なく呼吸もしていない場合の処置
脈拍がなく、瞳孔が開き、心臓に耳を当てても鼓動が聞かれない場合は、心臓が停止しているの
で速やかに人工呼吸を行う必要があります。
(1)胸骨の下1/3の部位に両手を重ね肘を伸ばして(曲げているとくぼむほど押せません)、術者の体
重をかけ約2cm位くぼむように圧迫する(1分間に約50回位くりかえす)。
(心臓マッサージ法)
(2)1人で救急処理を行う場合は、
15回位心臓マッサージを行い速やかに2回呼気を吹き込む。これをくり返す。
2人で救急処理を行う場合は、
1人が5回心臓マッサージを行い、その間に他の1人が1回呼気を吹き込む。これをくり返す。
(心臓マッサージ法と口うつし人工呼吸法の併用)
(3)時々瞳孔を見たり、脈に触れてみる。瞳孔が正常となり脈も規則正しくなったら、各手当てを中
止して様子を見ながらコーヒー、紅茶などを飲ませ暖かくし安静を保つ。いずれにしても、経過
の判断は専門医に任せる。特に、精神的ショックより早く復帰させるように周囲の理解が必要で
す。
①②
③④
図2 心臓マッサージ法
XII
Page 15
☆☆☆☆When both pulse and breathing have stopped
15
twice
When no pulse has come not to be felt, his pupils are open and no heartbeat is heard, cardiac
arrest is supposed to have occurred and artificial respiration must be performed.
(1) Place your both hands, one hand on the other, on the lower one third area of his breastbone
and compress his breast with your elbows applying your weight on his breast so that it is
dented about 2cm (repeat compressing his breast 50 times or so a minute).
(Cardiac massage)
(2) In case of one rescuer,
Repeat cardiac massages about 15 times and blow into his mouth 2 times quickly, and repeat
this combination.
In case of two rescuers,
One person repeats cardiac massages 5 times while the other person blows into his mouth
once, and they shall repeat this combination.
(Cardiac massage and mouth-to-mouth respiration)
(3) Examine his pupils and his pulse sometimes. When the both have returned to normal, stop
the artificial respiration, serve him with a cup of coffee or tea and keep him warm and calm
while watching him carefully. Commit the victim to a medial specialist depending on his
condition. To let him recover from the mental shock, it is necessary for persons concerned to
understand his situations and the necessary treatments.
①②
③④
Fig.2 Cardiac massage
XIII
Page 16

機
機 器
機機
器 外
器器
外 観
外外
観
観観
EQUIPMENT APPEARANCE
NKE-249形 空中線
Scanner unit Type NKE-249
NKE-250形 空中線
Scanner unit Type NKE-250
NCD-4170形 指示機
Display Unit Type NCD-4170
XIV
Page 17

J
J
M
M
A
A
-
2
-
2
3
3
4
4
3
3
取
取
扱
扱
2
2
説
説
3
4
3
4
明
明
4
4
書
書
[日本語版]
Page 18

目
目
次
目目
はじめに ······························································································································I
ご使用のまえに·····················································································································II
ご使用上の注意··················································································································· IV
ご使用前に注意していただきたいこと ·············································································· VI
高電圧に対する注意········································································································ VI
電撃の救出上の注意········································································································ VI
救急処置の方法················································································································· VIII
☆救急処置の留意点······································································································ VIII
☆脈拍があり呼吸していない場合の処置········································································ X
☆脈拍なく呼吸もしていない場合の処置······································································ XII
機器外観 ·························································································································XIV
用語説明 ·························································································································· 10
次
次次
第1章 装置のあらまし ······························································· 12
1.1 機能 ·················································································································································· 12
1.2 特長 ·················································································································································· 12
1.3 構成 ·················································································································································· 12
1.4 構造 ·················································································································································· 14
1.5 総合系統図·······································································································································17
第2章 操作パネル各部の名称と働きおよびメニュー構成 ········ 19
2.1 前面パネルスイッチの機能 ············································································································ 19
2.1.1 前面パネルスイッチの機能····································································································· 19
2.1.2 ソフトキースイッチの構成と機能 ························································································· 20
2.1.3 クロスキーの機能···················································································································· 21
2.2 画面表示の説明 ·······························································································································23
2.3 メニュー内の機能説明···················································································································· 25
2.3.1 メニューの構成 ·······················································································································25
2.3.2 メニュー内の機能···················································································································· 27
第3章 操作方法··········································································· 31
3.1 操作の流れ·······································································································································31
ソフトキーの操作 ·····························································································································32
3.1.1 電源の投入と起動···················································································································· 33
1. 電源を入れる································································································································33
2. 送信する········································································································································33
2
Page 19

3.1.2 同調の操作 ·······························································································································33
3.1.3 観測と映像の調整···················································································································· 34
3.1.4 データの取得と測定················································································································ 34
3.1.5 操作の終了と停止···················································································································· 34
1. 送信を中断する ····························································································································34
2. 電源を切る···································································································································· 34
3.2 観測準備···········································································································································35
3.2.1 画面輝度を変えるには ············································································································35
3.2.2 操作パネルの照明輝度を変えるには ·····················································································35
3.2.3 表示言語を切り替えるには····································································································· 35
3.2.4 ブザー音量設定 ·······················································································································35
3.3 基本操作···········································································································································36
3.3.1 送信するには ···························································································································36
3.3.2 送信を中断するには················································································································ 36
3.3.3 レンジ(距離範囲)を変更するには ·····················································································36
3.3.4 固定距離目盛を消去・表示するには ·····················································································36
3.3.5 船首輝線を消去するには ········································································································ 37
3.3.6 同調調節をするには················································································································ 38
3.3.7 感度調節をするには················································································································ 38
3.3.8 レーダ干渉を除去するには····································································································· 39
3.3.9 雨や雪が降っているときには································································································· 40
3.3.10 波が荒いときには···················································································································· 41
3.3.11 物標までの距離を測るには····································································································· 42
1.VRMを使用する ·························································································································· 42
#1VRMを用いて自船からの距離を測定する ············································································42
#2VRMを使用可能とするか否かを設定する ············································································42
#1VRM/#2VRMの操作 ·············································································································42
#1VRM/#2VRMの消去 ·············································································································43
2.VRMの中心を移動して使用する································································································ 43
3.平行線カーソルの間隔を変更する ·····························································································43
4.十字カーソルを使用する ············································································································43
3.3.12 距離の単位を変えるには ········································································································ 44
3.3.13 物標の方位を測るには ············································································································44
1.EBLを使用する···························································································································· 45
#1EBLを用いて自船を始点とした方位を測定する ··································································45
#2EBLを使用可能とするか否かを設定する·············································································· 45
#1EBL/#2EBLの操作················································································································ 45
#1EBL/#2EBLの消去················································································································ 46
2.EBLの中心を移動して使用する ·································································································46
3.平行線カーソルの方位を変更する ·····························································································46
3
Page 20

4.十字カーソルを使用する ············································································································46
3.3.14 EBLとVRMを移動して使用するには·····················································································47
#1EBLおよび#1VRMを移動可能に設定する ·················································································· 47
始点・中心位置の設定 ······················································································································ 47
EBL、VRMの操作·····························································································································47
始点・中心位置の解除 ······················································································································ 47
3.3.15 平行線カーソルを使用するには ····························································································· 48
#1EBL、#1VRMを平行線カーソル機能に設定する······································································· 48
平行線カーソルを操作する ·············································································································· 48
平行線カーソルを解除する ·············································································································· 48
3.3.16 EBLおよびカーソルの方位表示を「相対」と「真」および「磁気」とで
切り替えるには ························································································································48
方位基準(磁気方位、ジャイロコンパス方位)の選択································································· 50
方位基準の選択 ·································································································································50
3.3.17 PPI画面の方位表示方法を変えるには ···················································································50
コースアップモードにおけるコースの設定····················································································52
3.3.18 物標の方位・距離、物標までの所要時間を同時に測るには ··············································· 52
カーソルの表示 ·································································································································53
カーソルの移動 ·································································································································53
カーソルの消去 ·································································································································53
3.3.19 カーソルのL/L表示をするには ·························································································54
3.3.20 PPI画面のエコーの映像を大きく表示するには···································································· 54
1.映像拡大機能を使用する ············································································································54
2.送信パルス幅を変更する ············································································································55
3.ズーム機能を使用する ················································································································ 56
ズーム位置の設定························································································································ 56
ズームの解除 ·······························································································································57
3.3.21 不要なノイズを減少させ、物標を強調するには ··································································57
映像処理を設定する··························································································································57
映像処理を解除する··························································································································58
3.3.22 PPI画面中心位置を移動するには··························································································· 58
中心移動の位置設定··························································································································58
中心移動の解除 ·································································································································59
3.3.23 レーダの消費電力を抑えるには ····························································································· 59
送信時間の設定 ·································································································································59
準備時間の設定 ·································································································································59
断続送信の開始 ·································································································································59
断続送信の解除 ·································································································································60
準備中に断続送信を解除する··········································································································· 60
3.3.24 自船が航行中にレーダPPI画面上の固定物標を固定したいとき ········································· 61
4
Page 21

真運動表示の開始 ·····························································································································61
真運動表示の解除 ·····························································································································62
3.3.25 他船(物標)の動きを監視するとき ····················································································· 64
1.レーダ航跡表示をする ················································································································ 64
レーダ航跡表示の開始 ················································································································64
レーダ航跡表示の終了 ················································································································64
2.見張りアラームを使用する ········································································································ 64
ガードゾーンの設定···················································································································· 64
アラームモードの変更 ················································································································66
ガードゾーンの終了···················································································································· 66
ガードゾーンの呼び出し ············································································································66
アラーム感度の変更···················································································································· 66
3.4 その他便利な機能····························································································································67
3.4.1 自船速力を指示機に表示するには ························································································· 67
3.4.2 船首方位を指示機に表示するには ························································································· 67
3.4.3 自船の位置情報(緯度/経度、ロランC時間差)や目的地の位置情報 (緯度/経度)
を表示するには ························································································································68
位置情報の表示 ··························································································································· 68
位置情報の消去 ··························································································································· 68
3.4.4 目的地を表示するには ············································································································69
目的地の表示 ·······························································································································69
目的地の消去 ·······························································································································69
3.5 知っておきたいこと························································································································ 70
3.5.1 電池(BT1)の交換 ················································································································70
3.5.2 使用中に不可解な現象が起きたとき ·····················································································71
3.6 外部航法装置について···················································································································· 72
3.6.1 方位情報を得るには················································································································ 72
3.6.2 速力情報を得るには················································································································ 72
3.6.3 位置情報を得るには················································································································ 72
3.6.4 目的値までの距離情報を得るには ························································································· 73
第4章 画面の見方 ······································································· 74
4.1 物標の高さと物標までの距離········································································································· 74
4.2 物標からの反射 ·······························································································································75
4.3 電波の伝搬路の状況························································································································ 75
4.3.1 海面反射···································································································································76
4.3.2 偽 像···································································································································76
4.4 レーダトランスポンダ(SART)の画面表示 ··············································································· 78
5
Page 22

第5章 保守・点検 ······································································· 79
5.1 一般的保守·······································································································································79
5.2 空中線··············································································································································· 80
5.3 指示機··············································································································································· 80
5.4 特殊部品···········································································································································81
5.5 修理ブロック ··································································································································· 81
5.6 異常・故障への対処方法 ················································································································83
第6章 アフターサービス···························································· 85
第7章 廃棄について ··································································· 87
7.1 本装置の廃棄について···················································································································· 87
7.2 使用済み電池の処理について········································································································· 87
7.3 使用済みマグネトロンの処置について·························································································· 87
第8章 仕様 ·················································································· 88
8.1 総合仕様···········································································································································88
8.2 空中線(NKE-249/250) ·············································································································89
8.3 指示機(NCD-4170)····················································································································· 91
8.4 整流器(NBA-797)·····················································································································94
8.5 機器間ケーブル長····························································································································94
第9章 設置要領··········································································· 95
9.1 概要 ·················································································································································· 95
9.2 空中線の設置 ··································································································································· 96
9.2.1 設置位置の選定 ·······················································································································96
9.2.2 設置方法···································································································································96
9.2.3 装備ケーブルの接続················································································································ 99
9.3 指示機の設置 ································································································································· 102
9.3.1 設置位置の選定 ·····················································································································102
9.3.2 設置方法·································································································································102
9.3.3 電源ケーブルの接続·············································································································· 102
9.3.4 指示機背面図 ·························································································································103
9.3.5 外部ブザーの接続·················································································································· 104
9.3.6 電子磁気コンパスの接続方法·······························································································106
9.4 船内電源に対する変更·················································································································· 107
1. 指示機 ·······································································································································107
2. 空中線 ·······································································································································107
9.5 装備ケーブル ································································································································· 108
6
Page 23

9.5.1 機器間ケーブル(CFQ6774-10/15/20、CFQ6882-10/15/20)·········································108
9.5.2 電源ケーブル(CFQ-6776)································································································109
9.5.3 長い電源ケーブルが必要なときのケーブル選定 ································································109
9.6 設置後の点検調整··························································································································110
9.6.1 設置の点検 ·····························································································································110
9.6.2 動作の点検 ·····························································································································110
9.6.3 各種調整·································································································································110
9.6.4 整流器·····································································································································111
9.7 調 整·········································································································································112
9.7.1 一般調整·································································································································112
1. 部品交換の調整 ························································································································112
2. CRTモニタ画面の中心位置の調整··························································································112
3. CRTモニタ画面の輝度の調整 ·································································································112
4. CRTモニタ画面の焦点の調整 ·································································································112
9.7.2 空中線の調整 ·························································································································113
1. 変調部のAVR出力電圧調整 ·····································································································113
2. 受信部の同調指示レベルの調整······························································································ 113
9.7.3 指示機の調整 ·························································································································113
1. コントラストの調整·················································································································113
2. 焦点の調整 ································································································································113
3. 画面位置角度調整·····················································································································114
4. CRTディスプレイ調整·············································································································114
5. AVR出力電圧調整 ····················································································································114
9.8 初期設定について··························································································································115
9.8.1 受信機の調整 ·························································································································116
1. 同調プリセット ························································································································116
2. 中心周波数調整 ························································································································117
3. 同調インジケータレベル調整··································································································117
9.8.2 ノイズレベル調整·················································································································· 118
9.8.3 方位調整·································································································································118
9.8.4 0マイル調整(距離の初期設定)·························································································119
9.8.5 アンテナ高の設定·················································································································· 120
9.8.6 感度プリセット ·····················································································································121
9.8.7 海面反射プリセット·············································································································· 121
9.8.8 メインバングの抑圧·············································································································· 122
9.8.9 シミュレータ映像表示 ··········································································································123
9.8.10 TD受信番号の設定 ················································································································124
9.8.11 GPS/DGPS ·························································································································124
1. GPS初期設定····························································································································124
2. DGPS初期設定·························································································································125
7
Page 24
3. GPSおよびDGPSの受信状態··································································································126
9.9 初期調整状態に戻すには ··············································································································129
9.10 保 守·········································································································································130
9.10.1 一般的保守 ·····························································································································130
1. 機器の清掃 ································································································································130
2. ネジの締め付け点検·················································································································130
3. 結線の点検 ································································································································130
9.10.2 空中線·····································································································································131
1. 輻射部 ·······································································································································131
2. 回転駆動部(JMA-2344)·······································································································132
9.10.3 指示機·····································································································································133
表示面の清掃 ···································································································································133
8
Page 25

付
付
図
付付
【図 101 JMA-2343機器間接続図】
【図 102 JMA-2344機器間接続図】
【図 103 JMA-2343一次電源系統図】
【図 104 JMA-2344一次電源系統図】
【図 105 NKE-249空中線機内接続図】
【図 106 NKE-250空中線機内接続図】
【図 107 CME-307変調部接続図】
【図 108-1 CAE-457受信部接続図(1/2)】
【図 108-2 CAE-457受信部接続図(2/2)】
【図 109 CME-308変調部接続図】
【図 110-1 CAE-457-1受信部接続図(1/2)】
【図 110-2 CAE-457-1受信部接続図(2/2)】
【図 111 NCD-4170指示機機内接続図】
【図 112-1 CMC-1156主制御回路接続図(1/4)】
図
図図
【図 112-2 CMC-1156主制御回路接続図(2/4)】
【図 112-3 CMC-1156主制御回路接続図(3/4)】
【図 112-4 CMC-1156主制御回路接続図(4/4)】
【図 113 CCK-872ソフトキーパネル回路接続図】
【図 114 CCK-873主操作パネル回路接続図】
【図 115 CBD-1596電源回路接続図】
【図 116 CRTモニタ部接続図】
【図 117 空中線回路ブロック図】
【図 118 指示機回路ブロック図】
9
Page 26

用語説
用語説明明明明
用語説用語説
A/D アナログ・ディジタル変換[Analog to Digital conversion]
ACQ 捕捉[Acquisition]
A-SEA 自動海面反射抑制制御[Automatic Sea surface clutter suppression]
A-RAIN 自動雨雪反射抑制制御[Automatic Rain and snow clutter suppression]
A-TUNE 自動同調[Automatic Tuning]
CPU 中央演算処理装置[Central Processing Unit]
CRT ブラウン管[Cathode-ray Tube]
CUP 自船の予定進路が真上になるPPI表示モード[Course-Up]
EBL 電子カーソル[Electronic Bearing Line]
EXP 物標拡大[Expansion]
FTC 雨雪反射抑制制御[Fast Time Constant, also known as Rain and snow clutter
suppression]
GUARD ZONE 侵入警報環
GPS 世界測位衛星システム[Global Positioning System]
HUP 船首輝線が真上になるPPI表示モード[Head-Up]
IR 干渉除去[Interference Rejection]
L/L 緯度/経度[Latitude/Longitude]
MARPA 簡易衝突予防装置[Mini Automatic Radar Plotting Aid]
MH 変調高電圧[Modulator High Voltage]
MOB 位置記憶[Man Over Board]
NM 海里[Nautical Mile]
NUP 真北が真上になるPPI表示モード[North-Up]
PCB プリント回路基板[Printed Circuit Board]
PPI 方位・距離極座標表示[Plan Position Indicator]
PROCESS 映像処理[Process]
PW パルス幅[Pulse Width]
RR 距離目盛(固定)[Range Rings (Fixed)]
RM 相対運動表示[Relative Motion]
SHM 船首線[Ship’s Heading Marker]
STBY 準備[Standby]
STC 海面反射抑制制御[Sensitivity time control, also known as Sea surface clutter
suppression]
TD 時間差[Time Difference]
TM 真運動表示[True Motion]
TI トリガ[Trigger]
10
Page 27

VCT ベクトル[Vector]
VD ビデオ[Video]
VRM 可変距離目盛[Variable Range Marker]
WAKES 他船の航跡表示[Wakes]
WPT 目的地[Waypoint]
X-MIT 送信[Transmit]
11
Page 28
第 1 章 装置のあらまし
1.1 機能
本装置は送受信部を含む空中線と 10 インチモノクロブラウン管を使用した、小型ラスタース
キャン方式による全半導体化(特殊電子管を除く)の船舶用レーダです。
本装置は電波法の規定によるレーダです。
1.2 特長
レーダ基本性能の向上
レンジスケールに応じた 4 段階のパルス幅/繰返周波数切り替えと、3 段階の受信機帯域幅切
り替えによりレーダの基本性能向上を計り、鮮明で高品質な映像表示を実現しています。さら
に、最新のディジタル信号処理の搭載により、悪天候での物標検出性能を向上しています。
自船位置と目的地を一目で把握
GPS 等の航法装置と接続することにより、自船の位置(数値)や目的地マークを画面上に表
示でき、これにより目的地の方位と自船針路の差が一目瞭然に把握できます。
高い操作性
使用頻度の高い EBL および VRM などは専用スイッチを搭載しています。その他、4 個のソ
フトキースイッチを搭載し、比較的使用することの多い機能も簡単に操作することができます。
さらに、使用頻度が低い機能についてはメニューによる選択方式を採用しています。
1.3 構成
レーダの構成と船内電源
総合型名
JMA-2343
JMA-2344
整流器型名(オプション)
(注)AC電源使用の場合は、オプションの整流器が必要です。
空中線
NKE-249
NKE-250
指示機
NCD-4170
NBA-797
12
DC (12V/24V/32V)
または
(注)
AC
(100V/110V/115V/
船内電源
200V/220V/230V)
50/60Hz 単相
Page 29
各機器銘板の名称は次のように英文で表示されています。
空中線 : SCANNER UNIT
指示機 : DISPLAY UNIT
整流器 : RECTIFIER UNIT
付属品
品名 個数 JRC コード 備考
取扱説明書 1 7ZPRD0558 本書
空中線-指示機間ケーブル
電源ケーブル 1 CFQ-6776 2m
プラグ側コネクタ(J3用) 1 5JCDX00014 −
プラグ側コネクタ(J4用) 1 5JCDX00015 −
サンシールド 1 MTV303344 -
CFQ6774-15
(JMA-2343)
1
CFQ6882-20
(JMA-2344)
10 芯複合ケーブル
15m
14 芯複合ケーブル
20m
予備品(7ZXRD0008)
品名(形名) 個数 JRCコード 備考
ヒューズ(SB3.15) 2 5ZFAD00382 (24/32V 用)3.15A
ヒューズ(SB6.3) 3 5ZFAD00540 (12V 用)6.3A
ヒューズ(SB5) 2 5ZFAD00364 (24/32V 用)5A
ヒューズ(SB10) 3 5ZFAD00539 (12V 用)10A
オプション
品名 個数 JRC コード 備考
空中線-指示機間ケーブル
CFQ6774-10
(JMA-2343)
CFQ6774-20
(JMA-2343)
1
CFQ6882-10
(JMA-2344)
CFQ6882-15
(JMA-2344)
10 芯複合ケーブル
10m
10 芯複合ケーブル
20m
14 芯複合ケーブル
10m
14 芯複合ケーブル
15m
13
Page 30
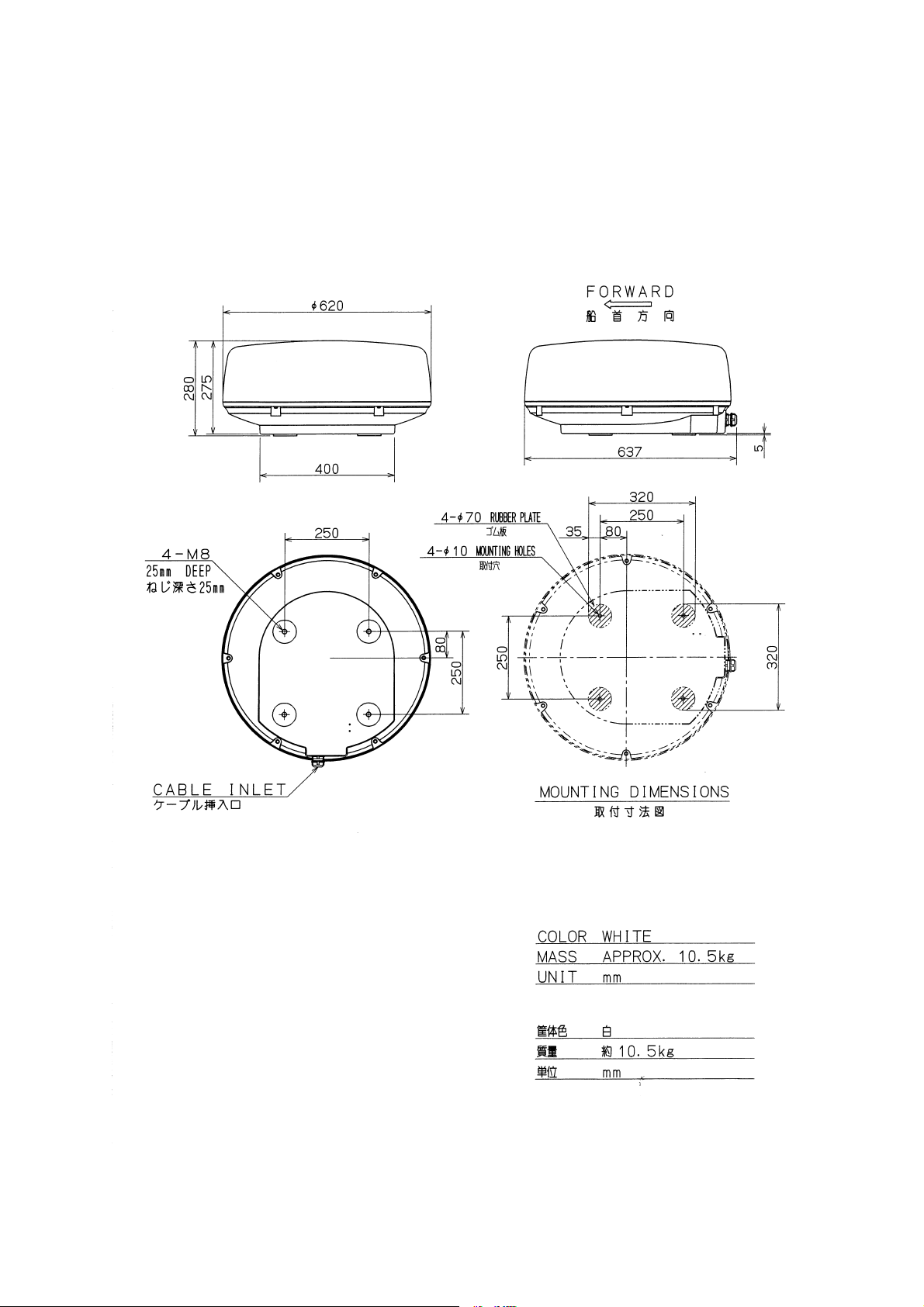
1.4 構造
14
第
1.1図 NKE-249
空中線外形図
Page 31

15
第
1.2図 NKE-250
空中線外形図
Page 32

16
第
1.3図 NCD-4170
指示機外形図
Page 33

1.5
総合系統図
SCANNER UNIT NKE-249
空中線 NKE-249
10-CORES COMPOSITE CABLE
10 芯シールド付複合ケーブル
JRC SUPPLY:CFQ6774-15 12.0φ(max)
CFQ6774-15 最大 12.0φ(JRC 支給)
DISPLAY UNIT NCD-4170
指示機 NCD-4170
CFQ-6776(2m) 8.0φ(max) (JRC SUPPLY)
CFQ-6776(2m) 最大 8.0φ (JRC 支給)
NOTES
AND NAVIGATION DUE TO OPERATION OF THE RADAR.
ALL CABLES OF THE RADAR ARE TO BE RUN AWAY FROM THE CABLES OF RADIO EQUIPMENT.
(EX. RADIOTELEPHONE.COMMUNICAITONS RECEIVER AND DIRRECTION FINDER.ETC.)
ESPECIALLY INTER-WIRING CABLES BETWEEN SCANNER UNIT AND DISPLAY UNIT OF THE
RADAR
:
ELIMINATING THE INTERFERENCE ON FREQUENCIES USED FOR MARINE COMMUNICATIONS
SHOULD NOT BE RUN PARALLEL WITH THE CABLES OF RADIO EQUIPMENT.
ご注意
特に空中線ケーブルを他の無線装置のケーブルと平行に設置しないでください。
レーダの動作が他の無線装置に、雑音妨害を与えることを防止するために、レーダケーブル、
GPS
COMPASS
NMEA
REMOTE MONITOR
SHIP'S MAIN(船内電源)
DC 10.8~42V
17
第
1.4図 JMA-2343
総合系統図
Page 34

SCANNER UNIT NKE-250
空中線 NKE-250
14-CORES COMPOSITE CABLE
14 芯シールド付複合ケーブル
JRC SUPPLY:CFQ6882-20 12.0φ(max)
CFQ6882-20 最大 12.0φ(JRC支給)
DISPLAY UNIT NCD-4170
指示機 NCD-4170
GPS
COMPASS
NMEA
REMOTE MONITOR
NOTES
CFQ-6776(2m) 8.0φ(max) (JRC SUPPLY)
CFQ-6776(2m) 最大 8.0φ (JRC 支給)
:
SHIP'S MAIN(船内電源)
DC 10.8~42V
ELIMINATING THE INTERFERENCE ON FREQUENCIES USED FOR MARINE COMMUNICATIONS
AND NAVIGATION DUE TO OPERATION OF THE RADAR.
ALL CABLES OF THE RADAR ARE TO BE RUN AWAY FROM THE CABLES OF RADIO EQUIPMENT.
(EX. RADIOTELEPHONE.COMMUNICAITONS RECEIVER AND DIRRECTION FINDER.ETC.)
ESPECIALLY INTER-WIRING CABLES BETWEEN SCANNER UNIT AND DISPLAY UNIT OF THE
RADAR
ご注意
SHOULD NOT BE RUN PARALLEL WITH THE CABLES OF RADIO EQUIPMENT.
レーダの動作が他の無線装置に、雑音妨害を与えることを防止するために、レーダケーブル、
特に空中線ケーブルを他の無線装置のケーブルと平行に設置しないでください。
18
第
1.5図 JMA-2344
総合系統図
Page 35

第 2 章 操作パネル各部の名称と働きおよび
メニュー構成
2.1 前面パネルスイッチの機能
本レーダ装置の通常操作は、指示機の前面パネルで行えるようになっています。さらに、メニュ
ーから設定できる機能を使用することにより、本レーダの持つ機能をフルに利用することができ
ます。
操作は簡単ですが、ブラウン管上に必要とする情報を出すためには、各操作箇所の機能を十分
理解することが大切です。
2.1.1 前面パネルスイッチの機能
感度調節
海面反射抑制
雨雪反射抑制
メニュー画面を開く
各種設定
クロスキー
同調調節
距離範囲
EBL
VRM
輝度/
船首輝線消去
ソフトキー1 スイッチ ソフトキー4 スイッチ
ソフトキー2 スイッチ
ソフトキー3 スイッチ
19
送信/断
準備/断
Page 36

2.1.2 ソフトキースイッチの構成と機能
本レーダには簡単に操作ができるように、前面パネルに 4 個のソフトキースイッチを搭載して
います。画面最下部には各ソフトキーに対応する選択項目が表示され、対応するキーを押すこと
で機能を実行することができます。
ソフトキーメニューは次のように構成されています。
キー1
表示 キー1: 映像拡大 断 映像拡大 接
キー2: 中心移動 断 中心移動 接
キー3:固定距離環 断 固定距離環 接
キー4: カーソル 断 カーソル 接
キー2
処理 キー1: 自動処理 断 自動海面 接 自動雨雪 接
キー2: 干渉除去 断 干渉除去1 干渉除去2
キー3: 手動同調 自動同調
キー4: 航跡表示 断 航跡15秒 航跡30秒
航跡連続
航跡30分
航跡15分
キー3
見張りアラーム
キー2: アラーム 断 アラーム 接
キー3: 感度1 感度2
キー1: 領域作成
感度3 感度4
航跡 1 分
航跡3分
航跡6分
感度7
キー4: 侵入アラーム 離脱アラーム
20
感度6 感度5
Page 37

2.1.3 クロスキーの機能
クロスキーは、十字カーソルの移動、EBL の回転、VRM の大きさの変更、メニュー内の項目
選択等の際に使用します。クロスキーを押すことにより、その方向にカーソルの移動、EBL の
回転等ができます。
クロスキーは下記の機能を動作させる場合に使用します。
専用キー操作
VRM 、 EBL 、 MENU
ソフトキー操作
中心移動 接 、 カーソル 接 、 見張りアラーム-領域設定
メニュー操作
MENU-機能-ズーム 接
クロスキーを押す。
EBL は で反時計回りに、 で時計回りに回転
します。
VRM は で距離が大きくなり、 で距離が小さ
くなります。
12
12
1212
2222
V
クロスキーの現在のモードは、画面の
右下に表示されます。
21
Page 38

用途 モード名 画面右下に現れる文字
EBL 設定 EBL モード E
VRM 設定 VRM モード V
移動 EBL・VRM 設定 移動 EBL・VRM モード F
平行線設定 平行線モード P
カーソル設定 カーソルモード C
中心移動設定 中心移動モード O
ズーム設定 ズームモード Z
見張りアラーム設定 見張りアラームモード G
メニュー設定 MENU モード M
22
Page 39

2.2 画面表示の説明
場
EBL 選択番号
#1EBL の方位表示
#2 EBL の方位表示
映像拡大機能作動
干渉除去機能作動
映像処理機能動作
目的地表示
ズーム中心位置
#2 EBL
固定距離目盛
方位目盛
ズーム機能作動
AS(自動海面反射抑制)
AR(自動雨雪反射抑制)
固定距離目盛間隔
同調インジケータ
(インジケータ右横に’A’ が表示
されている場合は、自動同調機
能作動
距離範囲
)
EBL 方位表示方法
EBL1R
1111045°
045°
045°045°
2222315°
315°
315°315°
映像拡大
IR
P
X2
AS
12
12
1212
2222
A
表示
PPI 画面の方位表示方法
方位基準
運動表示
RM H-UP T006°M
目的地
方位 340°
距離 09.3
00:54
処理
自船
N 35°15.01
E139°47.05
速力 10.2
見張りアラーム
ソフトキー項目
(階層最上位)
船首方位
船首方位データ採用端子
VRM 選択番号
入
NM
44444
E
#1VRM の距離表示
#2VRM の距離表示
見張りアラーム作動
アラーム感度
アラームモード
物標によるエコー
ガードゾーン
#1EBL
#1 VRM
#2VRM
画面輝度レベル
BRIL キーが押された
合、一時的に表示
(レベル 6)
クロスキーモード
(EBL モード)
PPI 映像の中心
(ズーム機能が作動して
いるので、中心が移動し
ている状態)
VRM1
11111.75
1.75
1.751.75
22222.25
2.25
2.252.25
アラーム
23
Page 40

X2
12
12
1212
2222
目的地の方位
目的地までの所要時間
目的地
方位 340°
距離 09.3
A
自船
N 35°15.01
00:54
目的地データ表示
E139°47.05
目的地の距離
速力 10.2
位置(L/L)データ表示
(自船位置表示モード)
自船、カーソルまたは目的地
位置表示をメニューから選択
C
カーソル
346°
4.96
0:29
自船速力
クロスキーモード
(カーソルモード)
カーソル機能作動
カーソル位置の方位
自船位置からカーソルまでの距離
カーソル位置までの所要時間
24
Page 41

2.3
メニュー内の機能説明
本レーダ装置には、前面パネルスイッチ(ソフトキー含む)を使用して操作する機能のほかに、
メニュー上から操作する機能があります。以下、メニューの構成、機能、設定方法を説明します。
2.3.1
メニューの構成
本レーダ装置では、画面の表示を和文・英文およびその他の言語(中国語、フランス語、スペ
イン語、イタリア語、ノルウェー語、ドイツ語、韓国語)に切り替えることができます。
● 表示言語の切り替えについては、
「3.2.3 表示言語を切り替えるには」を参照してください。
表示設定
メニュー
メニュー
メニューメニュー
MENU
MENU
MENUMENU
機能設定
EBL1/VRM1
EBL2
VRM2
EBLの読み
ズーム表示
TM/RM
方位表示
映像処理
クロスキーの で項目を選択し
ENTERキーを押して下さい
MENUキーを押すと終了します。
始点移動
固定
平行線/半周 平行線/全周
使用しない
使用しない
相対
しない
RM
H-UP
しない 処理1 処理2
使用する
使用する
真
設定
TM
N-UP C-UP
、
。
位置表示
目的地表示
距離単位
断続送信
送信時間
準備時間
クロスキーの で項目を選択し
ENTERキーを押して下さい
MENUキーを押すと終了します。
L/L TD
しない
カーソルのL/L
目的地のL/L
する
しない
KY KM
NM
しない する
20
30 回転
10
5 10
15 分
3
。
、
機能設定
画面表示設定
セットアップ1
セットアップ2
クロスキーの で項目を選択し
を押して下さい。
MENUキーを押すと終了します。
メニュー
次頁
次頁
次頁
次頁
、
ブザー音量
パネル照明
送信パルス幅
(1.5NM)
(3NM
(6NM
方位基準
表示言語
セットアップ1
)
)
クロスキーの で項目を選択し
ENTERキーを押して下さい
MENUキーを押すと終了します。
クロスキーの で項目を選択し
ENTERキーを押して下さい
MENUキーを押すと終了します。
0 1 2 3 4 5 6 7
0 1 2 3 4
0.08
0.25 μs
0.5 μs
0.25
0.5 1.0 μs
ジャイロ方位
。
セットアップ2
ENGLISH 日本語
中文
ESPANYOL ITALIANO
NORSK DEUTSCH
。
5 6
7
磁気方位
、
FRANCAIS
、
25
Page 42

装備時の設定メニュー
++++
メニュー
メニュー
メニューメニュー
ENTER
ENTER
MENU
MENU
MENUMENU
装備時の設定1
受信機調整 次項
方位調整
0マイル調整
メインバング抑圧レベル
メインバング抑圧範囲
感度プリセット
コンパレータプリセット
海面反射プリセット
アンテナ高設定
GPS設定
装備時の設定2
クロスキーの で項目を選択し
ENTERキーを押して下さい
MENUキーを押すと終了します。
ENTERENTER
1024
128
128
128
128
128
128
5m以下
次項
次項
、
。
入力
入力
入力入力
同時に押す。
モータ
ON OFF
同調プリセット
中心周波数調整
同調インジケータレベル
GPS
DGPS
受信状態
128
GPS設定
次項
50
50
次項
次項
GPS
自船位置
アンテナ高
測地系
測位モード
DOPレベル
位置平均化
使用禁止衛星
設定値送信
クロスキーの で項目を選択し
ENTERキーを押して下さい
MENUキーを押すと終了します。
モード
周波数
ボーレート
設定値送信
N
35°00.00’
W
135°00.00’
15
43
2次元 3次元 自動
5以下 10以下
20以下
長い 通常 なし
00 01 02 03 04 05
DGPS
自動
手動
200.0kHz
50
100 200
、
。
クロスキーの で項目を選択し
を押して下さい
MENUキーを押すと終了します。
TD受信番号の設定
シミュレータ映像表示
。
装備時の設定2
1
しない する
、
2
クロスキーの で項目を選択し
ENTERキーを押して下さい
MENUキーを押すと終了します。
受信状態
GPS
衛星番号
方位角
仰角
信号強度
衛星番号
方位角
仰角
信号強度
衛星番号
方位角
仰角
信号強度
バージョン:
DOP:
高度:
RSSI[ビーコン]:
日付/時刻:21 1月 2002
(世界基準) 11:14
、
。
クロスキーの で項目を選択し
ENTERキーを押して下さい
MENUキーを押すと終了します。
。
26
、
Page 43

2.3.2
メニュー内の機能
「****」印がついた機能を使用するには、外部航法機器との接続が必要です。
機能設定
EBL1 および VRM1 の動作機能
を選択する。
EBL2 の使用を選択する。
機能設定
VRM2 の使用を選択する。
EBL の方位数値の読みを選択
する。
PPI 映像の任意の箇所を 2 倍に
拡大表示する。
*「相対」または「真」運動表
示を選択する。
*PPI 映像の方位表示方法を選
択する。
EBL1/VRM1
EBL2
VRM2
EBLの読み
ズーム表示
TM/RM
方位表示
映像処理
クロスキーの で項目を選択し、
ENTERキーを押して下さい。
MENUキーを押すと終了します。
固定 始点移動
平行線/半周 平行線/全周
使用しない 使用する
使用しない 使用する
相対 真
しない 設定
RM TM
H-UP N-UP C-UP
しない 処理1 処理2
レーダエコーの相関処理方法を
選択する。
27
Page 44

表示設定
*自船の位置情報(緯度/経
度;L/L または時間差;TD)、
カーソルまたは目的地の位置
情報のうち、画面に表示する
ものを選択する。
*目的地を PPI 画面上に表示す
る。
VRM またはカーソルで測定し
た距離の単位を選択する。
NM : 海里
KY : キロヤード
KM : キロメートル
節電のため、送信状態と準備状
態を自動的に繰り返す。
送信状態の時間を空中線の回転
数で設定する。
準備状態の時間を設定する。
位置表示
目的地表示
距離単位
断続送信
送信時間
準備時間
クロスキーの で項目を選択し、
ENTERキーを押して下さい。
MENUキーを押すと終了します。
表示設定
しない L/L TD
カーソルのL/L
目的地のL/L
しない する
NM KY KM
しない する
20
10
5 10
3
30 回転
15 分
28
Page 45

セットアップ
1
ブザー音量を設定する。
数値が大きいほど音量高い。
セットアップ1
操作部パネルの照明を設定する。
数値が大きいほど明るい。
送信パルス幅を設定する。
1.5NM、3NM および 6NM にお
ける設定が可能。
・幅が狭いほど分解能が良い。
・幅が広いほど感度が良い。
採用する方位データを選択する。
セットアップ
2
ブザー音量
パネル照明
送信パルス幅
(1.5NM)
(3NM
(6NM
方位基準
)
)
クロスキーの で項目を選択し、
ENTERキーを押して下さい。
MENUキーを押すと終了します。
0 1 2 3 4 5 6 7
0 1 2 3 4 5 6 7
0.08 0.25 μs
0.25 0.5 μs
1.0 μs
0.5
ジャイロ方位 磁気方位
画面上の文字の言語を設定する。
英語、日本語、
中国語、フランス語、
スペイン語、イタリア語
ノルウェー語、ドイツ語
韓国語から選択可能。
29
セットアップ2
表示言語
クロスキーの で項目を選択し、
ENTERキーを押して下さい。
MENUキーを押すと終了します。
ENGLISH 日本語
中文
ESPANYOL ITALIANO
NORSK
FRANCAIS
DEUTSCH
Page 46

装備時の設定 1
U
このメニューは、
受信機の各種調整をおこなう。
(同調の粗調整を含む)
MEN
PPI 画面上の映像の方位を合わ
せる。
PPI 画面上の映像の距離を合わ
せる。
メインバングの抑圧の強さを合
わせる。
メインバングの抑圧範囲を合わ
せる。
感度ツマミ右一杯(感度最大)の
時の最大感度を調整する。
通常、最大の 255 に設定する。
スイッチと
ENTER
スイッチを同時に押すことにより現れます。
装備時の設定1
受信機調整 次項
方位調整
0マイル調整
メインバング抑圧レベル
メインバング抑圧範囲
感度プリセット
コンパレータプリセット
海面反射プリセット
アンテナ高設定
GPS設定 次項
装備時の設定2 次項
クロスキーの で項目を選択し、
ENTERキーを押して下さい。
MENUキーを押すと終了します。
1024
128
128
128
128
128
128
5m以下
レーダ映像信号の A/D 時の基
準レベルを調整する。
海面反射抑制の強さを調整する。
空中線までの高さを
5m 以下/5-10m/10m 以上
から選択する。
この設定により海面反射抑制の
特性を最適化する。
外部 GPS と接続した場合、GPS
への初期値を設定する。
装備時の設定 2 を表示する。
タイムディファレンシャル受信
番号を設定する。
デモンストレーション用の PPI
画面を表示する。
装備時の設定2
装備時の設定2
TD受信番号の設定 1 2
シミュレータ映像表示
クロスキーの で項目を選択し、
ENTERキーを押して下さい。
MENUキーを押すと終了します。
しない する
30
Page 47

3.1 操作の流れ
電源の投入と起動
電源の投入と起動
電源の投入と起動電源の投入と起動
同調の操作
観測と映像の調整
観測と映像の調整
観測と映像の調整観測と映像の調整
第 3 章 操作方法
同調の操作
同調の操作同調の操作
データ取得と測定
データ取得と測定
データ取得と測定データ取得と測定
操作の終了と停止
操作の終了と停止
操作の終了と停止操作の終了と停止
次に各基本操作について説明します。
31
Page 48

ソフトキーの操作
ソフトキーの操作
ソフトキーの操作ソフトキーの操作
ソフトキーを用いた基本操作は以下のとおりです。
画面下に配置された 4 つのスイッチの中から、所定の機能に対応するスイッチを押してくだ
さい。画面の下辺に項目が表示され、希望の項目に対応するスイッチを押すことで、所定の設
定ができます。
最上位の項目に戻すには
X2
12
12
1212
2222
表示
A
目的地
方位 340°
距離 09.3
00:54
処理
キーを押してください。
自船
N 35°15.01
E139°47.05
速力 10.2
見張りアラーム
E
カーソル
346°
4.96
0:29
ソフトキースイッチ
32
Page 49

3.1.1
電源の投入と起動
1.
1. 電源を入れる
電源を入れる
1. 1.
電源を入れる電源を入れる
電源を入れるには、STBY/OFF
電源が入ると、画面にカウントダウンタイマーが表示され、1分30秒後に準備状態となります。
また、通電積算時間と送信積算時間が表示されます。保守を行う時期の目安としてください。
なお、時間表示には多少の誤差があります。
STBY/OFF スイッチを押してください。
STBY/OFFSTBY/OFF
2.
2. 送信する
送信する
2. 2.
送信する送信する
X-MIT/OFF
準備状態から送信するには、
なお、送信状態から準備状態に戻すには、
X-MIT/OFF
X-MIT/OFFX-MIT/OFF
スイッチを押してください。
STBY/OFF
STBY/OFF
STBY/OFFSTBY/OFF
スイッチを押してください。
3.1.2
同調の操作
本レーダの同調操作には、手動で行う場合と、自動で行う場合があります。手動と自動の切り替
えは、ソフトキー操作によって行います。自動同調の場合、画面左下の同調インジケータ右横に“A”
が表示されます。
(a) 同調モードの切り替え
ソフトキー 処理
処理 を押す。
処理処理
キー3 を押すたびに、 自動同調
手動同調
手動同調 となるようにキー3 を押す。
手動同調手動同調
自動同調 、 手動同調
自動同調自動同調
手動同調 が切り替わるので、手動の場合は
手動同調手動同調
(b) [同調]ツマミを回す
手動同調の場合、操作パネルの[同調]ツマミを回転させ、映像が最も大きくなるように
調節してください。同調インジケータは手動で同調をとるときの目安になりますので、イン
ジケータの振れが最大となるように調節します。
自動同調の場合は、[同調]ツマミを回す必要はありません。
映像が出ない場合は、操作パネルの[感度]ツマミを右一杯に、[海面反射]ツマミおよび
[雨雪反射]ツマミを左一杯に回して設定してみてください。
33
Page 50

3.1.3 観測と映像の調整
操作パネルの[同調]ツマミ(手動同調の場合)、[感度]ツマミ、[海面反射]ツマミおよび
[雨雪反射]ツマミを調節して最適な映像を表示してください。
RANGE
RANGE スイッチの“▲(上側)”、“▼(下側)”を押すことで、映像の観測距離範囲
RANGERANGE
を切り替えることができます。
現在選択されている距離範囲は、画面左下に表示されます(「2.2 画面表示の説明」参照)。
3.1.4 データの取得と測定
それぞれの操作については、「3.3 基本操作」および「4 画面の見方」を参照してくださ
い。
3.1.5 操作の終了と停止
1.
1. 送信を中断する
送信を中断する
1. 1.
送信を中断する送信を中断する
(a) STBY/OFF
STBY/OFF スイッチを押す。
STBY/OFFSTBY/OFF
送信が中断され、画面が準備状態となります。
2.
2. 電源を切る
電源を切る
2. 2.
電源を切る電源を切る
(a) X-MIT
X-MIT スイッチと STBY/OFF
X-MITX-MIT
レーダは停止状態となり、すべての機能は停止します。
保守等の作業をするときは、電源を切り、整流器と指示機の電源コネクター
を抜いて、電源供給を断ってください。
電源スイッチを切っていても、各機械の内部には通電している部分があり、
そのまま保守・点検作業をすると感電や故障、事故の原因になります。
STBY/OFF スイッチを同時に押す。
STBY/OFFSTBY/OFF
警告
警告
警告警告
34
Page 51

3.2 観測準備
3.2.1 画面輝度を変えるには
(a) BRIL/HL
BRIL/HL OFF
BRIL/HLBRIL/HL
スイッチを押すたびに、画面の輝度が一段階ずつ上がります。
輝度が 8 段目(最大)になり、さらにスイッチを押すと画面の輝度が一段階ずつ下がります。
電源投入時、輝度レベルは「7」に設定されます。
3.2.2 操作パネルの照明輝度を変えるには
(a) メニュー「セットアップ1」-「パネル照明」でレベル「0」~「7」を選択する。
選択する数値が大きいほど照明は明るくなります。
OFF スイッチを押す。
OFFOFF
(b) MMMMENU
ENU スイッチを押す。
ENUENU
メニュー設定を終了します。
3.2.3 表示言語を切り替えるには
画面の表示言語を、和文・英文およびその他の言語(中国語、フランス語、スペイン語、
イタリア語、ノルウェー語、ドイツ語、韓国語)に切り替えることができます。
(a) メニュー「セットアップ 2」-「LANGUAGE」で希望の言語を選択する。
(b) MENU
MENU スイッチを押す。
MENUMENU
メニュー設定を終了します。
3.2.4 ブザー音量設定
(a) メニュー「セットアップ 1」―「ブザー音量」でレベル「0」~「7」を選択する。
選択する数値が大きいほどブザー音量は大きくなります。
(b) MENU
MENU スイッチを押す。
MENUMENU
メニュー設定を終了します。
35
Page 52

3.3 基本操作
3.3.1 送信するには
(a) X-MIT/OFF
X-MIT/OFF スイッチを押す。
X-MIT/OFFX-MIT/OFF
準備状態から送信状態になります。
3.3.2 送信を中断するには
(a) STBY/OFF
STBY/OFF スイッチを押す。
STBY/OFFSTBY/OFF
送信状態から準備状態になり、画面に“準備中”の表示が出ます。
3.3.3 レンジ(距離範囲)を変更するには
(a) RANGE
RANGE スイッチを押す。
RANGERANGE
“▲(上側)”スイッチで距離範囲が拡大します。
“▼(下側)”スイッチで距離範囲が縮小します。
3.3.4 固定距離目盛を消去・表示するには
(a) ソフトキー 表示
(b) ソフトキー3 を押して、消去する場合は 固定距離環
固定距離環
固定距離環 接接接接 とする。
固定距離環固定距離環
(c) MENU
MENU スイッチを押す。
MENUMENU
ソフトキーメニューが最上位に戻ります。
表示 押す。
表示表示
固定距離環 断断断断 、表示する場合は
固定距離環固定距離環
36
Page 53

距離範囲
距離目盛間隔
3.3.5 船首輝線を消去するには
(a) BRIL/HL
BRIL/HL OFF
BRIL/HLBRIL/HL
船首輝線は自船の船首方向を示しています。
BRIL/HL
BRIL/HL OFF
BRIL/HLBRIL/HL
を離すと再び表示されます。
船首輝線
OFF スイッチを約 2 秒以上押し続ける。
OFFOFF
OFF スイッチを押し続けている間は船首輝線が消え、スイッチ
OFFOFF
37
Page 54

3.3.6 同調調節をするには
ご注意
ご
意ご
意
ご注意
「3.1.2 同調の操作」を参照してください。
3.3.7 感度調節をするには
注
感度調整を常に最良の状態に調整して観測を行ってください。
感度が低すぎると危険物や船舶等の物標が表示しないことがあります。
感度が高すぎると PPI 画面上の受信機ノイズが増えて観測の妨げになることがあ
ります。
注
(a) [感度]ツマミを回転させる。
・ツマミを左に回すと感度は低く、右に回すと感度は高くなります。
・最良の感度調整とは一般的には、
目標とする物標によるエコーの映像の大きさが最大で、
かつ、他の物標によるエコーの映像に触れない程度のもの
です。
感度が低いため、エコーの
感度がちょうど良い
感度が高すぎるため、映像
映像が小さい
がふれあっている
38
Page 55

3.3.8 レーダ干渉を除去するには
ご注意
ご
意ご
意
ご注意
注
干渉除去機能の使用時には船舶等の危険物による弱いエコー映像も消去されるこ
とがあります。
レーダビーコンや SART 信号を見るときは、干渉除去機能を停止してください。
レーダ干渉とは、他のレーダから送信されたマイクロ波が直接自船のレーダ空中線に飛び
込み、PPI 画面に映し出されたものです。
注
(a) ソフトキー 処理
(b) ソフトキー2 を押して、 干渉除去1
(c) 干渉除去1
干渉除去1 で除去できない場合は、さらにソフトキー2 を押して、 干渉除去2
干渉除去1干渉除去1
とする。
干渉除去を行わない場合は、ソフトキー2 を押して、 干渉除去
(d) MENU
MENU スイッチを押す。
MENUMENU
ソフトキーメニューが最上位に戻ります。
処理 を押す。
処理処理
干渉除去1 とする。
干渉除去1干渉除去1
干渉除去作動
干渉除去2
干渉除去2干渉除去2
干渉除去 断断断断 とする。
干渉除去干渉除去
レーダ干渉の例
干渉除去前
39
干渉除去後
Page 56

3.3.9 雨や雪が降っているときには
雨雪反射抑制機能を過剰に設定しないでください。
雨や雪のエコーだけでなく、船舶や危険物などの物標も抑制され、検出を妨
げる原因となることがあります。
雨雪反射抑制機能使用時は、常に最良の抑制設定を行ってください。
雨や雪が降ると、雨や雪によるエコー(レインクラッタ)が PPI 画面に映し出され、船舶
等によるエコーの映像が見にくくなります。
[雨雪反射]ツマミ機能または[自動雨雪]機能を使用することにより、レインクラッタ
が抑制され、物標の観測が容易になります。
[自動雨雪]機能が作動中は[雨雪反射]ツマミ機能を使用することはできません。
手動操作による雨雪反射抑制
手動操作による雨雪反射抑制
手動操作による雨雪反射抑制手動操作による雨雪反射抑制
注意
注意
注意注意
(a) [雨雪反射]ツマミを回転させる。
ツマミを右に回転させるほど、強く雨雪反射抑制機能が働きます。
自動操作による雨雪反射抑制
自動操作による雨雪反射抑制
自動操作による雨雪反射抑制自動操作による雨雪反射抑制
(a) ソフトキー 処理
(b) ソフトキー1を押して、 自動雨雪
映像の状態に応じて雨雪の抑制ができます。
(c) MENU
MENU スイッチを押す。
MENUMENU
ソフトキーメニューが最上位に戻ります。
処理 を押す。
処理処理
自動雨雪 接接接接 とする。
自動雨雪自動雨雪
レインクラッタが映し出されてい
る状態
レインクラッタが抑制されている状態
(物標によるエコーの映像も抑制されて
いる)
40
Page 57

3.3.10 波が荒いときには
注意
注意
注意注意
近距離レンジにおいて、すべての海面反射を消すまで海面反射抑制機能を設
定しないでください。
波などからのエコーだけでなく、船舶や危険物などの物標も抑制され、検出
を妨げる原因となることがあります。
海面反射抑制機能使用時は常に最良の抑制設定を行ってください。
波が荒くなると、波によるエコー(シークラッタ)が PPI 画面に映し出され、船舶等によ
るエコーの映像が見にくくなります。シークラッタは近距離ほど強く現れます。
[海面反射]ツマミの機能または[自動海面]機能を使用することにより、シークラッタ
が抑制され、物標の観測が容易になります。
手動操作による海面反射抑制
手動操作による海面反射抑制
手動操作による海面反射抑制手動操作による海面反射抑制
(a) [海面反射]ツマミを右に回転させる。
ツマミを右に回転させるほど、強く海面反射抑制機能が働きます。
自動操作による海面反射抑制
自動操作による海面反射抑制
自動操作による海面反射抑制自動操作による海面反射抑制
(a) ソフトキー 処理
(b) ソフトキー1を押して、 自動海面
海面反射の強さに応じた海面反射抑制ができます。
(c) MENU
MENU スイッチを押す。
MENUMENU
ソフトキーメニューが最上位に戻ります。
処理 を押す。
処理処理
自動海面 接接接接 とする。
自動海面自動海面
波が荒いためシークラッタが映し
出されている状態
シークラッタが抑制された状態
(物標によるエコーの映像も抑制されて
いる。)
41
Page 58

3.3.11 物標までの距離を測るには
物標までの距離を測るには、
・ VRM(可変距離目盛り)を使用する
・ VRM の中心を移動して使用する(移動 EBL)
・ 平行線カーソルを使用する
・ カーソルを使用する
方法があります。
1111....VRM
VRM を使用する
を使用する
VRMVRM
を使用するを使用する
・ VRM とは、PPI 画面上に表示される円です。
・ VRM は、その円の大きさをクロスキーの上側または下側で自由に変更することができ
るので、任意の物標の距離を測ることができます。
・ 本レーダ装置では、同時に 2 本の VRM が表示可能です(#1VRM、#2VRM)
・ #1VRM/#2VRM の表示、選択、消去は VRM
・ #2VRM を使用可能とするか否かはメニュー設定で行います。
・ VRM には、次の状態があります。
VRM が表示されていない。
VRM が表示されている。
クロスキーが VRM モードでない。
クロスキーが VRM のモードである。
使用する VRM(#1VRM または#2VRM)が選択されていない。
使用する VRM(#1VRM または#2VRM)が選択されている。
#1VRM
#1VRM を用いて自船からの距離を測定する
#1VRM#1VRM
#2VRM
#2VRM を使用可能とするか否かを設定する
#2VRM#2VRM
を用いて自船からの距離を測定する
を用いて自船からの距離を測定するを用いて自船からの距離を測定する
(a) メニュー「機能設定」―「EBL1/VRM1」―「固定」に設定する。
#1VRM の数値は自船からの距離を示します。
#2VRM の中心は常に自船位置に固定です。
を使用可能とするか否かを設定する
を使用可能とするか否かを設定するを使用可能とするか否かを設定する
(a) メニュー「機能設定」―「VRM2」行の「使用する」を選択する。
VRM スイッチで行います。
VRMVRM
#VRM2 が使用可能になります。
「使用しない
#1VRM
#1VRM////#2VRM
#1VRM#1VRM
(a) VRM
#2VRM の操作
#2VRM#2VRM
VRM スイッチを押す。
VRMVRM
VRM スイッチを押すたびにクロスキーで操作可能な VRM が#1VRM/#2VRM の
間で切り替わります。
現在操作可能な#1VRM/#2VRM は、画面左上の VRM 数値が破線で囲まれている
」を選択
の操作
の操作の操作
した場合#VRM2 を使用
42
することはできません。
Page 59

側です。
(b) クロスキーの左側または右側を押す。
(a)で指定された VRM を操作することが可能です。
・クロスキーの下側で VRM の縮小ができます。
・クロスキーの上側で VRM の拡大ができます。
#1VRM
#1VRM////#2VRM
#1VRM#1VRM
(a) VRM
(b) VRM
#2VRM の消去
#2VRM#2VRM
VRM スイッチを押す。
VRMVRM
・#1VRM/#2VRM が共に表示されているとき
VRM スイッチを押し、画面上に残したい#1VRM/#2VRM の数値部分を破線で
囲みます。
・#1VRM/#2VRM の一方のみが画面上に表示されているとき
VRM スイッチにより表示されている#1VRM/#2VRM を破線で囲みます。
VRM スイッチを長押しする。
VRMVRM
(a)での選択に応じた#1VRM/#2VRM が消去されます。
の消去
の消去の消去
2222....VRM
VRM の中心を移動して使用する
の中心を移動して使用する
VRMVRM
の中心を移動して使用するの中心を移動して使用する
移動 EBL 機能の使用方法は、
「3.3.14 EBL と VRM を移動して使用するには」
を参照してください。
3333.平行線カーソルの間隔を変更する
.平行線カーソルの間隔を変更する
.平行線カーソルの間隔を変更する.平行線カーソルの間隔を変更する
平行線カーソル機能の使用方法は、
「3.3.15 平行線カーソルを使用するには」
を参照してください。
4444.十字カーソルを使用する
.十字カーソルを使用する
.十字カーソルを使用する.十字カーソルを使用する
十字カーソルの使用方法は、
「3.3.18 物標の方位・距離、物標までの所要時間を同時に測るには」
を参照してください。
43
Page 60

3.3.12 距離の単位を変えるには
本レーダ装置では、VRM および十字カーソルで測定した距離の単位を
NM(ノーチカルマイル:海里)
KM(キロメートル)
KY(キロヤード)
の中から選択できます。
(a) メニュー「表示設定」―「距離単位」行の「NM」「KY」「KM」の中から選択する。
(b) MENU
MENU
MENUMENU
メニュー設定を終了します。
スイッチ
を押す。
3.3.13 物標の方位を測るには
物標の方位を測るには、
・ EBL(電子カーソル)を使用する
・ EBL を移動して使用する(移動 EBL)
・ 平行線カーソルを使用する
・ カーソルを使用する
方法があります。
EBL の方位表示には、
・ 相対方位表示 :R
・ 真方位表示 :T
・ 磁気方位表示 :M
の3つのモードがあります。
方位表示についての詳細は、
「3.3.16 EBL およびカーソルの方位表示を「相対」と「真」および「磁気」
とで切り替えるには」
を参照してください。
44
Page 61

1111....EBL
EBL を使用する
を使用する
EBLEBL
を使用するを使用する
・ EBL とは PPI 画面上に表示される直線です。
・ EBL は、その方位をクロスキー左側、右側で自由に変更することができるので、任意
の物標の方位を測ることができます。
・ 本レーダ装置では、同時に2本の EBL が表示可能です。(#1EBL、#2EBL)
・ #1EBL/#2EBL の表示、選択、消去は EBL スイッチで行います。
・ #2EBL を使用可能とするか否かはメニュー設定で行います。
・ EBL には、次の状態があります。
EBL が表示されていない。
EBL が表示されている。
クロスキーが EBL モードでない。
クロスキーが EBL のモードである。
使用する EBL(#1EBL または#2EBL)が選択されていない。
使用する EBL(#1EBL または#2EBL)が選択されている。
#1EBL
#1EBL を用いて自船を始点
#1EBL#1EBL
を用いて自船を始点とした方位を測定する
を用いて自船を始点を用いて自船を始点
とした方位を測定する
とした方位を測定するとした方位を測定する
(a) メニュー「機能設定」―「EBL1/VRM1」―「固定」に設定する。
#1EBL の数値
は自船を始点とした方位を示します。
#2EBL の始点は常に自船固定です。
#2EBL
#2EBL を使用可能とするか否かを設定する
#2EBL#2EBL
を使用可能とするか否かを設定する
を使用可能とするか否かを設定するを使用可能とするか否かを設定する
(a) メニュー「機能設定」―「EBL2」行の「使用する」を選択する。
#2EBL が
「使用しない
使用可能になります。
」を選択した場合#2EBL を使用することはできません。
#1EBL
#1EBL////#2EBL
#1EBL#1EBL
(a) EBL
#2EBL の操作
#2EBL#2EBL
EBL スイッチを押す。
EBLEBL
EBL
り替わります。
現在操作可能な
の操作
の操作の操作
スイッチを押すたびにクロスキーで操作可能な
#1EBL/#2EBL
は画面左上の
EBLが#1EBL/#2EBL
EBL
数値が破線で囲まれている側です
(b) クロスキーの左側または右側を押す。
(a)で指定された EBL を操作することが可能です。
EBL
・クロスキーの左側で
の左回転ができます。
の間で切
。
・クロスキーの右側で
EBL
の右回転ができます。
45
Page 62

#1EBL
#1EBL////#2EBL
#1EBL#1EBL
(a) EBL
#2EBL の消去
#2EBL#2EBL
EBL スイッチを押す。
EBLEBL
の消去
の消去の消去
・#1EBL/#2EBL
EBL スイッチを押し、画面上に残したい#1EBL/#2EBL の数値部分を破線で囲
みます。
・#1EBL
#2EBL
/
EBL スイッチにより表示されている#1EBL/#2EBL を破線で囲みます。
(b) EBL
EBL スイッチを長押しする。
EBLEBL
(a)での選択に応じた#1EBL/#2EBL が消去されます。
2222....EBL
EBL の中心を移動して使用する
の中心を移動して使用する
EBLEBL
の中心を移動して使用するの中心を移動して使用する
移動 EBL 機能の使用方法は、
「3.3.14 EBL と VRM を移動して使用するには」
を参照してください。
3333.平行線カーソルの方位を変更する
.平行線カーソルの方位を変更する
.平行線カーソルの方位を変更する.平行線カーソルの方位を変更する
が共に表示されているとき
の一方のみ画面上に表示されているとき
平行線カーソル機能の使用方法は、
「3.3.15 平行線カーソルを使用するには」
を参照してください。
4444.十字カーソルを使用する
.十字カーソルを使用する
.十字カーソルを使用する.十字カーソルを使用する
十字カーソルの使用方法は、
「3.3.18 物標の方位・距離、物標までの所要時間を同時に測るには」
を参照してください。
46
Page 63

3.3.14 EBL と VRM を移動して使用するには
EBL と VRM を移動して使用するには、移動 EBL 機能を使用します。
移動して使用できるのは#1EBL と#1VRM です。
#1EBL
#1EBL および
#1EBL#1EBL
および#1VRM
およびおよび
#1VRM を移動可能に設定する
#1VRM#1VRM
を移動可能に設定する
を移動可能に設定するを移動可能に設定する
(a) メニュー「機能設定」―「EBL1/VRM1」行―「移動」に設定する。
#1EBL の始点および#1VRM 中心が移動可能になります。
ただし、#1EBL の始点と#1VRM の中心位置は常に同じです。
始点・中心位置の設定
始点・中心位置の設定
始点・中心位置の設定始点・中心位置の設定
(a) EBL
EBL スイッチまたは VRM
EBLEBL
クロスキーが移動 EBL/移動 VRM モード
マーカが表示されマーカの位置情報を画面右下に表示します。
マーカの位置情報が表示されているのは始点
(b) クロスキーを操作して、 ENTER
設定したマーカ位置が#1EBL の始点、#1VRM の中心位置として確定します。
EBL
EBL、、、、VRM
EBLEBL
VRM の操作
の操作
VRMVRM
の操作の操作
操作方法は通常の EBL、VRM と同様です。
・ 操作できるのは“始点・中心位置の設定”で EBL スイッチが押された場合は#1EBL
のみの操作、VRM スイッチが押されていた場合は#1VRM の操作のみが可能になります。
VRM スイッチを押す。
VRMVRM
となります。
・中心位置が決定されるまでです。
ENTER スイッチを押す。
ENTERENTER
・ 始点・中心位置の移動が可能なのは#1VRM/#1EBL です。操作する前に必ず#1EBL
または#1VRM が選択してください。
「3.3.11 物標までの距離を測るには」―「1.VRM を使用する」
「3.3.13 物標の方位を測るには」―「1.EBL を使用する」
を参照してください。
始点・中心位置の解除
始点・中心位置の解除
始点・中心位置の解除始点・中心位置の解除
(a) メニュー「機能設定」―「EBL1/VRM1」行―「固定」に設定する。
移動 EBL が解除され、始点・中心が自船位置固定になります。
47
Page 64

3.3.15 平行線カーソルを使用するには
#1EBL
#1EBL、、、、#1VRM
#1EBL#1EBL
#1VRM を平行線カーソル機能に設定する
#1VRM#1VRM
を平行線カーソル機能に設定する
を平行線カーソル機能に設定するを平行線カーソル機能に設定する
(a) メニュー「機能設定」―「EBL1/VRM1」行―「平行線(半周)」
または「平行線(全周)」に
「平行線(半周)」に設定した場合、平行線カーソルが半周表示されます。
「平行線(全周)」に設定した
平行線カーソルを操作する
平行線カーソルを操作する
平行線カーソルを操作する平行線カーソルを操作する
(a) EBL
EBL スイッチまたは VRM
EBLEBL
メニュー「機能設定」―「
ソルが表示されます。
ただし、#1EBL、#1
(b) クロスキーの上下左右を操作し平行線カーソルの方位、間隔を設定する。
・クロスキーの上側を押すと
・クロスキーの下側を押すと間隔が狭まります。
・クロスキーの左側を押すと左に回転します。
・クロスキーの右側を押すと右
平行線カーソルを解除する
平行線カーソルを解除する
平行線カーソルを解除する平行線カーソルを解除する
設定する。
場合、平行線カーソルが全周表示されます。
VRM スイッチを押す。
VRMVRM
EBL1/VRM1」行の設定に応じて半周/全周の平行線カー
VRM がクロスキーで操作可能となるように設定してください。
間隔が広がります。
に回転します。
(a) メニュー「機能設定」―「EBL1/VRM1」行の「固定」を選択する。
平行線カーソルの表示が解除され、通常の#1EBL、#1VRM が使用可能になります。
3.3.16 EBL およびカーソルの方位表示を「相対」と「真」および「磁気」とで切り
替えるには
EBL およびカーソルの方位表示には、
・相対方位表示: 船首(船首線輝線)方位を 0°としたときの、EBL およびカーソ
ルの向いている方位の表示
・真方位表示(注): 真北(北極点)方向を 0°としたときの、EBL およびカーソルの
向いている方位の表示
・磁気方位表示: 磁気コンパスでの北を 0°としたときの、EBL およびカーソルの
向いている方位の表示
の 3 つの表示方法があります。
(注) 「真方位」と、以下の「ジャイロ方位」、「ジャイロコンパス方位」とは同じ意味です。
48
Page 65

真方位表示および磁気方位表示をするには、指示機に方位情報の入力をする必要が
あります。
方位情報については「3.6.1 方位情報を得るには」を参照してください。
「R」:EBL 相対方位表示
#1EBL の相対方位角
#2EBL の相対方位角
「T」:EBL 真方位表示
#1EBL の真方位角
#2EBL の真方位角
「M」:EBL 磁気方位表示
#1EBL の磁気方位角
#2EBL の磁気方位角
49
Page 66

方位基準(磁気方位、ジャイロコンパス方位)の選択
方位基準(磁気方位、ジャイロコンパス方位)の選択
方位基準(磁気方位、ジャイロコンパス方位)の選択方位基準(磁気方位、ジャイロコンパス方位)の選択
接続している機器が、
マグネットコンパスのとき:「磁気方位」
ジャイロコンパスのとき :「ジャイロ方位」
を選択します。
GPS や LORAN 等を接続しているときに下記の(a)を実行しても真方位表示モードに切
り替わらない場合には、方位基準を他方に切り替えてください。
(a) メニュー「セットアップ1」―「方位基準」行の「磁気方位」または「ジャイロ方
位」を選択する。
(b) MENU
MENU スイッチを押す。
MENUMENU
メニュー設定を終了します。
方位基準の選択
方位基準の選択
方位基準の選択方位基準の選択
(a) メニュー「機能設定」―「EBL の読み」行の「相対」または「真」を選択する。
・「相対」を選択すると、船首
いる方位を表示します。
・「真」を選択すると、上記「方位基準」で選択した機器が検出した「北」を 0°とし
たときに EBL が向いている方位を表示します。
(船首線輝線)方位を 0°としたときに EBL が向いて
3.3.17 PPI 画面の方位表示方法を変えるには
レーダ
・ 相対方位表示(ヘッドアップ表示)
船首が
船首方向が変化すると、
ジャイロコンパス等の航法装置から方位情報が得られない場合は、この相対方位表示
となります。
画面の表示方法には次の3種類があります。
PPI
画面の真上(方位目盛の0°)となるように表示されます。
PPI
画面上のエコーの映像の方位も変化します。
PPI
船右回転
50
PPI 映像が左回転をする。
Page 67

・ 真方位表示(ノースアップ表示)
「北」が PPI 画面の真北となるように表示されます。
船の船首方向が変化しても、PPI 映像の方位は変化しません。
(ジャイロコンパス等、方位情報が得られる機器が必要です。)
船右回転
船首輝線が右回転をする。
・ コースアップ表示
BRIL/HL
BRIL/HL OFF
BRIL/HLBRIL/HL
が、常に
PPI
船の船首方向が変化しても
OFF スイッチを長押しして(コース設定)したときの船首方位
OFFOFF
画面の真上となるように表示されます。
画面上のエコーの映像の方位は変化せず、船首方向の
PPI
変化分だけ船首輝線が回転します。
針路を大きく変更したときには BRIL/HL
ースの再設定をします。
BRIL/HL OFF
BRIL/HLBRIL/HL
OFF スイッチを長押ししてコ
OFFOFF
(ジャイロコンパス等、方位情報が得られる機器が必要です。)
BRIL
HL OFF
船右回転
船首輝線が右回転をする。
51
Page 68

PPI 画面の方位表示方法を変えるには、航法装置から方位情報の入力が必要となり
ます。
方位表示については
「3.6.1 方位情報を得るには」
を参照してください。
コースアップモードにおけるコースの設定
コースアップモードにおけるコースの設定
コースアップモードにおけるコースの設定コースアップモードにおけるコースの設定
(a) BRIL/HL
BRIL/HL OFF
BRIL/HLBRIL/HL
OFF スイッチを長押しする。
OFFOFF
コースが PPI 画面真上に設定
されます
。
3.3.18 物標の方位・距離、物標までの所要時間を同時に測るには
カーソル機能を使用します。
ここで使用されるカーソルは、PPI 画面上では「+」マークで表示されます。
この機能を使用することにより、カーソル位置までの距離の他に、方位、カーソル位置まで
の所要時間を知ることができます。
所要時間を知るためには、航法装置による自船の速力情報の入力を必要とします。
「3.6.2 速力情報を得るには」
を参照してください。
52
Page 69

カーソルの表示
カーソルの表示
カーソルの表示カーソルの表示
(a) ソフトキー 表示
表示 を押す。
表示表示
(b) ソフトキー4 を押して カーソル
カーソル 接接接接 に設定する。
カーソルカーソル
画面右下に次のような情報が表示されます。
クロスキーがカーソルモードの状態
カーソル機能作動中
船首方向からのカーソルまでの方位角
自船位置からカーソルまでの距離
自船位置からのカーソル位置へ航行した
場合の所要時間
カーソルの移動
カーソルの移動
カーソルの移動カーソルの移動
(a)
カーソルの消去
カーソルの消去
カーソルの消去カーソルの消去
(a) ソフトキー 表示
(b) ソフトキー4 を押して カーソル
・速力情報が入力された場合の最大所要時間は「9
・PPI 画面上にカーソルが現れ、クロスキーがカーソルモード
クロスキーを操作する。
:59」です。
になります。
カーソルの移動をやめると、その位置の方位・距離、その位置までの所要時間が
示
されます。
表示 を押す。
表示表示
カーソル 断断断断 に設定する。
カーソルカーソル
カーソルと方位、距離、所要時間が消去されます。
表
53
Page 70

3.3.19 カーソルの L/L 表示をするには
ご注意
ご
意ご
意
ご注意
この機能は航法装置による自船位置情報の入力を必要とします。
自船位置情報については
「3.6.3 位置情報を得るには」
を参照してください。
メニュー「セットアップ 1」―「方位基準」を「ジャイロ方位」に設定してくだ
さい。
「磁気方位」に設定した場合、航法装置から磁気方位の値をジャイロ方位に換算
するための情報が入力されている場合は L/L を表示しますが、換算が不可能な場
合は L/L 値に誤差が発生するため表示は行いません。
3.3.20 PPI 画面のエコーの映像を大きく表示するには
画面に映し出されているエコーの映像を大きくするには、次の方法があります。
PPI
・ 映像拡大機能を使用する。
・ 送信パルス幅を広く設定する。
・ ズーム機能を使用する。
1111.映像拡大機能を使用する
.映像拡大機能を使用する
.映像拡大機能を使用する.映像拡大機能を使用する
映像拡大機能は、
映像拡大機能を使用すると、距離方向(前後)および角度方向で接近した2つの
物標によるエコーが、1つの映像として PPI 画面に映しだされる場合があります。
(a) ソフトキー 表示
(b) ソフトキー1を押して 映像拡大
注
注
PPI
のエコー映像を角度方向・距離方向に延ばします。
表示 を押す。
表示表示
映像拡大 接接接接 に設定する。
映像拡大映像拡大
54
Page 71

ご注意
ご
意ご
意
ご注意
2222.送信パルス幅を変更する
.送信パルス幅を変更する
.送信パルス幅を変更する.送信パルス幅を変更する
1.5 海里、3 海里、6 海里レンジについて、送信パルス幅の変更ができます。
広いパルス幅を選択すると、PPI 画面上のエコーの映像が距離方向に長く映し出されま
す。逆に、狭いパルス幅を選択すると、映像が小さく(短く)映し出されます。
映像拡大機能との違いは、パルス幅が広くなると、今まで映っていなかったエコーも映
像として映るようになる場合があるという点です。
注
広いパルス幅に切り替えると距離方向(前後)で接近した 2 つのエコーが 1 つの
エコーとして PPI 画面に映し出される場合があります。
注
拡大前
拡大後
(a) メニュー「セットアップ 1」―「送信パルス幅」-「(1.5NM)」、「(3NM)」、
「(6NM)」行からパルス幅を設定
する
55
。
Page 72

拡大前(パルス幅:狭)
3333.ズーム機能を使用する
.ズーム機能を使用する
.ズーム機能を使用する.ズーム機能を使用する
ズーム機能で、PPI 画面上の任意の場所を2倍に拡大することができます。
拡大する任意の場所は、マーカで指定します。
zこの機能は 0.125 海里レンジ使用時 真運動表示使用時 または 中心移動機能作
動中は働きません。
ズーム位置の設定
ズーム位置の設定
ズーム位置の設定ズーム位置の設定
(a) メニュー「機能設定」―「ズーム」行の「設定」を選択する。
PPI
画面上にマーカ「+」が表示されます。
(b) クロスキーでマーカをズームしたい場所に合わせる。
拡大後(パルス幅:広)
zマーカは、観測レンジの 66%の位置まで移動することが可能です。
ENTER
ENTER
(c)
ENTERENTER
マーカ位置を中心に2倍に拡大されます。
スイッチを押す。
56
Page 73

ご注意
ご
意ご
意
ご注意
ズームの解除
ズームの解除
ズームの解除ズームの解除
マーカで設定を行った位置
(a) メニュー「機能設定」―「ズーム」行の「しない」を選択する。
ズームが解除されます。
3.3.21 不要なノイズを減少させ、物標を強調するには
レーダビーコン、SART 信号およびレーダ画面上を高速で移動する物標を見る場
合は、本機能は使用しないでください。
この機能は TM モードでの使用が最適です。
RM モードで使用する場合は N-UP または C-UP でご使用願います。H-UP で使用
すると、映像ににじみが出る場合があります。
映像処理を設定する
映像処理を設定する
映像処理を設定する映像処理を設定する
(a) メニュー「機能設定」―「映像処理」行の「処理 1」または「処理 2」を選択する。
・処理 1:低速で移動している物標がある場合に使用します。
注
注
比較的不安定な物標の映像が強調され、安定表示されます。
海面反射のように不規則な信号を抑圧する効果があります。
ただし、高速で移動している物標の映像は薄くなります。
目安として、3海里以上のレンジで使用してください。
・処理 2:不安定な映像を「処理1」より更に安定させて表示させたい場合に使用して
さい。
57
くだ
Page 74

映像処理を解除する
映像処理を解除する
映像処理を解除する映像処理を解除する
(a) メニュー「機能設定」―「映像処理」行の「しない」を選択する。
海面反射が特に多いときに有効です。
目安として、3 海里以上のレンジで使用してください。
映像処理機能が解除されます。
3.3.22 PPI
PPI 画面の中心を移動(中心移動)することにより、任意方向の表示距離を長くすることがで
きます。
中心移動の位置設定
中心移動の位置設定
中心移動の位置設定中心移動の位置設定
画面中心位置を移動するには
zこの機能はズーム作動中 または 最大レンジ使用時には働きません。
(a) ソフトキー 表示
(b) キー2を押して 中心移動
PPI 上に
表示 を押す。
表示表示
中心移動 断断断断 から 中心移動
中心移動中心移動
が表示されます。
マーカ
中心移動 接接接接 を選択する。
中心移動中心移動
(c) クロスキーでマーカを PPI 画面の中心としたい場所に合わせる。
zマーカは観測レンジの最大66%の位置まで移動できます。
(d) ENTER
ENTER
ENTERENTER
PPI 画面の中心が移動します。
スイッチ
を押す。
58
Page 75

中心移動の解除
中心移動の解除
中心移動の解除中心移動の解除
(a) ソフトキー 表示
(b) キー2 を押して 中心移動
中心移動が解除されます。
表示 を押す。
表示表示
中心移動 接接接接 から 中心移動
中心移動中心移動
中心移動 断断断断 を選択する。
中心移動中心移動
3.3.23 レーダの消費電力を抑えるには
消費電力を抑えるためには断続送信機能を使用します。
断続送信機能を使用すると、送信状態と準備状態が自動的に繰り返されます。
送信時間の設定
送信時間の設定
送信時間の設定送信時間の設定
(a) メニュー「表示設定」―「送信時間」行の「10」「20」「30」のいずれかを選択する。
送信時間は、空中線の回転数で指定します。
準備時間の設定
準備時間の設定
準備時間の設定準備時間の設定
(b) メニュー「表示設定」―「準備時間」行の「3」「5」「10」「15」のいずれかを選択する。
準備時間は、3,5,10,15 分の
いずれ
かで指定します。
断続送信の開始
断続送信の開始
断続送信の開始断続送信の開始
(c) メニュー「表示設定」―「断続送信」行の「する」を選択する。
(d) MENU
この時点で断続送信を開始
MENU スイッチを押す。
MENUMENU
メニュー設定を終了します。
します
。
59
Page 76

① 指定した空中線の回転数だけ送信した後、指定した時間の準備状態に入ります。
② 準備時間終了後、再び指定した空中線回転数分だけ送信を開始します。
③ 以上を繰り返します。
断続送信の解除
断続送信の解除
断続送信の解除断続送信の解除
(e) メニュー「表示設定」―「断続送信」行の「しない」を選択する。
準備状態中はレーダのエコーは画面上から消え、送信開始までの残り時間を示すタイ
マーが表示されます。
警告
警告
警告警告
断続送信で運転中は、空中線には絶対に近づかないでください。
準備時間中には空中線は停止していますが、準備時間終了後、再び空中線が
回転を再開し、人体を殴打し、負傷する原因となります。
断続送信が解除
(f) MENU
MENU スイッチを押す。
MENUMENU
メニュー設定を
準備中に断続送信を解除する
準備中に断続送信を解除する
準備中に断続送信を解除する準備中に断続送信を解除する
(g) STBY
STBY スイッチを押す。
STBYSTBY
断続送信が解除され、通常の準備状態になります。
されます
します。
終了
。
60
Page 77

3.3.24 自船が航行中にレーダ PPI 画面上の固定物標を固定したいとき
通常、自船が移動すると、PPI 映像が移動します。
この表示方法を
相対運動表示 : RM(Relative Motion)
と呼びます。
それに対し、PPI 映像のうち陸地などの固定物標によるエコーの映像は移動せずに、自船の位
置(PPI の中心)が、自船の針路と速力に従って移動する表示方法を
真運動表示 : TM(True Motion)
と呼びます。
TM表示をする場合には、航法装置による方位情報と自船の航行速力の入力が必要
となります。
方位情報、速力情報については
「3.6.1 方位情報を得るには」
「3.6.2 速力情報を得るには」
を参照してください。
真運動表示の開始
真運動表示の開始
真運動表示の開始真運動表示の開始
(a)
・真運動表示(TM)で動作する方位表示は N-UP のみです。
真運動表示モード:TM
メニュー
「機能設定」―「TM/RM」行の「TM」を選択する。
PPI 画面の運動表示が「真運動」となります。
機能設定
固定
EBL1/VRM1
EBL2
VRM2
EBLの読み
ズーム表示
TM/RM
方位表示
映像処理
クロスキーの で項目を選択し、
ENTERキーを押して下さい。
MENUキーを押すと終了します。
始点移動
平行線/半周 平行線/全周
使用しない
使用する
使用しない
使用する
相対
真
しない
設定
RM TM
H-UP N-UP
しない 処理1 処理2
C-UP
61
Page 78

真運動表示の解除
真運動表示の解除
真運動表示の解除真運動表示の解除
(a) メニュー「機能設定」―「TM/RM」行の「RM」を選択する。
TM が解除され RM の N-UP となります。
相対運動表示モード:RM
機能設定
EBL1/VRM1
EBL2
VRM2
EBLの読み
ズーム表示
TM/RM
方位表示
映像処理
クロスキーの で項目を選択し、
ENTERキーを押して下さい。
MENUキーを押すと終了します。
固定
始点移動
平行線/半周 平行線/全周
使用しない
使用する
使用しない
使用する
相対
真
しない
設定
RM
TM
H-UP N-UP
しない 処理1 処理2
C-UP
62
Page 79

・ 次に相対運動表示(RM)を真運動表示(TM)に切り替えた場合の例をあげます。
「TM」選択
相対運動表示
PPI の中心が半径の 66
パーセントの位置まで
移動する。
自船の移動に従って
PPI の中心が移動す
る。
PPI の中心が半径の 66 パーセントの位
置まで移動すると、PPI の中心は、自動
的にその対角上の半径の 66 パーセント
の位置から再び移動を開始します。
63
Page 80

3.3.25 他船(物標)の動きを監視するとき
他船(物標)の動きを監視するためには、次のいずれかの機能を使用します。
・ 航跡(ソフトキー設定)
・ 見張りアラーム(ソフトキー設定)
1111.レーダ航跡表示をする
.レーダ航跡表示をする
.レーダ航跡表示をする.レーダ航跡表示をする
航跡の長さと方向から他船の動きが確認でき、衝突の回避に役立てることができます。
航跡の長さは、およそ 15 秒、30 秒、1 分、3 分、6 分、15 分、30 分、連続の中から選
択できます。
レーダ航跡表示の開始
レーダ航跡表示の開始
レーダ航跡表示の開始レーダ航跡表示の開始
(a) ソフトキー 処理
(b) キー4 を押して航跡時間を 航跡表示
レーダ航跡表示を開始します。
レーダ航跡表示の終了
レーダ航跡表示の終了
レーダ航跡表示の終了レーダ航跡表示の終了
(a) ソフトキー 処理
(b) キー4 を押して航跡時間を 航跡表示
航跡表示を終了します。
2222.見張りアラームを使用する
.見張りアラームを使用する
.見張りアラームを使用する.見張りアラームを使用する
見張りアラームを使用して、ガードゾーンを設定します。
ガードゾーンとは、PPI 画面上に設定された「区域」のことです。
この「区域」に物標が進入、または「区域」から離脱したときにアラームを鳴らすこと
ができます。
処理 を押す。
処理処理
航跡表示 断断断断 以外に設定する。
航跡表示航跡表示
処理 を押す。
処理処理
航跡表示 断断断断 に設定する。
航跡表示航跡表示
ガードゾーンへ物標が進入したときに鳴らすアラームモードを進入モードと呼びます。
ガードゾーンから物標が離脱したときに鳴らすアラームモードを離脱モードと呼びます。
ガードゾーンの設定
ガードゾーンの設定
ガードゾーンの設定ガードゾーンの設定
(a) ソフトキー 見張りアラーム
PPI 画面上にマーカ「+」が現れ、マーカの距離と方位を示す点線の距離補助線と
方位補助線を表示します。
(b) キー1 の 領域作成
見張りアラーム を押す。
見張りアラーム見張りアラーム
領域作成 を押す。
領域作成領域作成
64
Page 81

(c) クロスキーでマーカを移動する。
設定するゾーンの始点にマーカを移動します。
(d) ENTER
ENTER スイッチを押します。
ENTERENTER
ガードゾーンの始点を
このとき点線の距離補助線
設定します。
と方位補助線は始点位置に固定されます。
(e) クロスキーでマーカを移動する。
設定する
このとき新しい
ガードゾーン距離範囲にマーカを移動します。
点線の距離補助線を表示します。
(f) ENTER
ENTER スイッチを押す。
ENTERENTER
ガードゾーンの距離を設定します。
このとき実線で距離範囲のリングが表示されます。
(g) クロスキーでマーカを移動する。
ガードゾーンが任意の形状
扇が広がる(または閉じる)
(h) ENTER
ENTER スイッチを押す。
ENTERENTER
ガードゾーンの終点を設定し、終了します。
になるようにマーカを移動します。
ように形状が変化します。
設定中の
ガードゾーン
65
Page 82

アラームモードの変更
アラームモードの変更
アラームモードの変更アラームモードの変更
(a) ソフトキー 見張りアラーム
見張りアラーム を押す。
見張りアラーム見張りアラーム
(b) キー4 を押して航跡時間を 進入アラーム
設定された
アラームモード
進入アラーム / 離脱アラーム
進入アラーム進入アラーム
離脱アラーム を切り替える。
離脱アラーム離脱アラーム
が動作します。
ガードゾーンの終了
ガードゾーンの終了
ガードゾーンの終了ガードゾーンの終了
(a) ソフトキー 見張りアラーム
見張りアラーム を押す。
見張りアラーム見張りアラーム
(b) キー2 を押して アラーム
作成したガードゾーンが PPI 画面上から消え、見張りアラーム機能が終了
アラーム 断断断断 に設定する。
アラームアラーム
します
。
ガードゾーンの呼び出し
ガードゾーンの呼び出し
ガードゾーンの呼び出しガードゾーンの呼び出し
(a) ソフトキー 見張りアラーム
見張りアラーム を押す。
見張りアラーム見張りアラーム
(b) キー2 を押して アラーム
アラーム 接接接接 に設定する。
アラームアラーム
前回作成されたガードゾーンを PPI 画面上に表示し、見張りアラーム機能が開始し
ます。
アラーム感度の変更
アラーム感度の変更
アラーム感度の変更アラーム感度の変更
(a) ソフトキー 見張りアラーム
見張りアラーム を押す。
見張りアラーム見張りアラーム
(b) キー3 を繰り返し押してアラーム感度を設定する。
アラーム感度「1」から「7」は、
アラーム
を鳴らす映像のレベル(エコーの強度)
を示しています。
感度1
感度1 が最もアラームが
感度1感度1
鳴りやすく
、 感度7
感度7 が最もアラームが鳴りにく
感度7感度7
くなっています。
雑音等に反応し、アラームがなることもあります。
66
Page 83

3.4 その他便利な機能
3.4.1 自船速力を指示機に表示するには
自船速力は、指示機に自船速力情報を入力すると、自動的に表示されます。
この機能を使用するには、航法装置から指示機に
自船速力情報
の入力が必要です。
「3.6.2 速力情報を得るには」
を参照してください。
自船速力
3.4.2 船首方位を指示機に表示するには
船首方位は、指示機に方位情報を入力すると自動的に表示されます。
この機能を使用するには、航法装置から指示機に
方位情報
の入力が必要です。
「3.6.1 方位情報を得るには」
を参照してください。
本レーダ装置は、方位情報を指示機背面の
・EXT1(J3)コネクタの CMPS+、CMPS- 端子
・GPS(J4)コネクタの NAVRX、NAVCOM 端子
の 2 箇所から入力できます。
入力端子表示
67
Page 84

MMMM :EXT1(J3)コネクタの CMPS+、CMPS- 端子から入力された方位情報
LLLL :GPS(J4)コネクタ NAVRX、NAVCOM 端子から入力された方位情報
方位情報を採用する際の優先順位は、下記のとおりです。
MMMM LLLL
CMPS+、CMPS-端子 > NAVRX、NAVCOM 端子
(優先度:高) (優先度:低)
3.4.3 自船の位置情報(緯度/経度、ロラン C 時間差)や目的地の位置情報
(緯度/経度)を表示するには
位置情報の表示
位置情報の表示
位置情報の表示位置情報の表示
(a) メニュー「表示設定」―「位置表示」行の「L/L」「TD」「カーソルの L/L」「目
的地の L/L」のいずれかを選択する。
緯度/経度(Latitude/Longitude)を表示する場合 : 「L/L」
ロラン C 時間差を表示する場合 : 「TD」
カーソルの L/L を表示する場合 : 「カーソルの L/L」
目的地の緯度/経度を表示する場合 : 「目的地の L/L」
を選択します。
位置情報の消去
位置情報の消去
位置情報の消去位置情報の消去
(b)
メニュー
位置情報が消去
「L/L」を選択した場合、航法装置から自船位置情報(緯度/経度)の入力が必要
です。
「TD」を選択した場合、航法装置から自船位置情報(LORAN C 時間差)の入力
が必要です。
「カーソルの L/L」を選択した場合、航法装置から自船位置情報(緯度/経度)の
入力が必要です。
「目的地の L/L」を選択した場合、航法装置から目的地の位置情報(緯度/経度)
「表示設定」―「位置表示」行の[しない]を選択する。
されます
。
の入力が必要です。
詳しくは「3.6.3 位置情報を得るには」を参照してください。
68
Page 85

3.4.4 目的地を表示するには
この機能を使用するには、指示機に
目的地の方位情報
目的地までの距離情報
自船速力情報
の入力が必要です。
「3.6.1 方位情報を得るには」
「3.6.2 速力情報を得るには」
「3.6.4 目的地までの距離情報を得るには」
を参照してください。
目的地の表示
目的地の表示
目的地の表示目的地の表示
(a) メニュー「表示設定」―「目的地表示」行の「する」を選択する。
・目的地の方位、距離、所要時間(速力
・自船から目的地までは下記のマークで表示
情報入力時)が表示されます。
されます。
円 : 目的地位置
「2.2 画面表示の説明」参照
目的地の消去
目的地の消去
目的地の消去目的地の消去
(a) メニュー「表示設定」―「目的地表示」行の「しない」を選択する。
目的地マークと、目的地の方位、
、所要時間が消去されます。
距離
69
Page 86

3.5 知っておきたいこと
ご注意
ご
意ご
意
ご注意
3.5.1 電池(BT1)の交換
設定情報を保持するため、定期的に電池(BT1)を交換する必要があります。
(a) 電池(BT1)を交換する。(型名:CR2032-FT6-1、三洋電機)
・電池の交換は、最寄りの販売店に依頼してください。
(b) 初期設定を再び行う。
・このリチウム電池によりメニュー、ソフトキーの設定内容の状態は電源を切っても保
持され、次に使用するときには、最後に使用した状態から使用できます。
・電池が消耗すると、メニューを含む全ての状態が自動的にリセットされます。
したがって電池交換後、初期設定が必要です。
注
注
電池が消耗すると、距離と方位が正確でなくなることがあります。
ただちに、電池交換および初期設定を行ってください。
・ もし、ただちに電池交換を行うことが困難である場合には応急措置として、電源を投
入するたびに初期設定を行ってください。ただし、電源を切ると設定内容はリセット
されます。
初期
設定については、
「9.8 初期設定について」
を参照
してください。
70
Page 87

3.5.2
ご注意
ご
意ご
意
ご注意
使用中に不可解な現象が起きたとき
レーダ使用中に
画面が乱れる
スイッチ操作を受け付けない。
等の現象が起きたときは、次の手順により初期化をおこなってください。
注
注
初期設定メニュー「装備時の設定1」、「装備時の設定2」以外は全てリセットさ
れ、工場出荷時の状態に戻ります。
(a) STBY/OFF
(b) MENU
STBY/OFF と X-MIT/OFF
STBY/OFFSTBY/OFF
電源が切れます。
MENU と ENTER
MENUMENU
押す。
通常の
電源
X-MIT/OFF スイッチを同時に押す。
X-MIT/OFFX-MIT/OFF
ENTER と STBY/OFF
ENTERENTER
投入時と同様に電源が投入されます。
STBY/OFF スイッチを同時に
STBY/OFFSTBY/OFF
71
Page 88

3.6
外部航法装置について
接続
個所等については、
「9.3.4 指示機背面図」
してください。
を参照
本レーダ装置は指示機の背面に
・NMEA
のバスを持っていますので、上記いずれかのバスを持つ外部機器を接続し、情報の受け渡し
を行うことができます。
3.6.1
方位情報を得るには
自船の船首方位の情報を得るには、指示機に
・マグネットコンパス
・GPS ジャイロ
のいずれかを接続します。
方位情報は、CMPS または NAVRX 端子から入力します。
EXT1(J3)コネクタの CMPS+、CMPS- 端子
GPS(J4)コネクタの NAVRX、NAVCOM 端子
3.6.2
3.6.3
速力情報を得るには
自船が航行している速力の情報を得るためには指示機に、
・GPS
・LORAN C
等の機器を接続します。
速力情報は CMPS または NAVRX 端子から入力します。
位置情報を得るには
緯度/経度で自船位置情を得るには指示機に
・GPS
・LORAN C
等の機器を接続します。
LORAN C の時間差で自船位置情報を得るためには指示機に
・LORAN C
72
Page 89

を接続します。
目的地の L/L の情報を得るためには指示機に
・GPS
・LORAN C
等の機器を接続した上で、それらの機器側で目的地設定を行います。
位置情報は、CMPS または NAVRX 端子から入力します。
3.6.4
目的値までの距離情報を得るには
目的地までの距離情報を得るには、指示機に
・GPS
・LORAN C
等の機器を接続した上で、航法装置側にて設定した目的地を表示します。
距離情報は、CMPS または NAVRX 端子から入力します。
73
Page 90

第 4 章 画面の見方
4.1 物標の高さと物標までの距離
レーダで観測できる物標までの最長距離は、そのレーダの送信出力、空中線ビーム幅、受信
感度等の性能のほかに、物標の高さ、物標までの距離、レーダ空中線の高さなども、最大探知
距離に影響を与えます。これは、レーダから発射される電波は地球の湾曲による影響をほとん
ど受けずに直進するためです。
a1=2.23√h1
a
=2.23√h2
a
1
2
+ a2=2.23 (√h1 + √h2 )
a
, a2:単位[海里]
1
, h2:単位[メートル]
h
1
【探知距離と物標】
例えば、空中線が水面から 3 メートルの高さにある場合、その位置から 10 海里の距離にあ
る高さ 10 メートルの島によるエコーの映像は画面上に映し出されますが、同じ距離にある高
さ 5 メートルの島は、レーダから発射された電波が当たらないため、エコーの映像は映し出
されません。ただし、これらの値は理論値であり、気象条件等により一定ではありません。
10 海里の距離にある物標は理論上 7.6 メートル以上の高さが必要で、それより低い物標は画
面上に映し出されないことになるので注意が必要です。
空中線あるいは物標の高さが低い場合、その物標は観測できない場合があります。
映らない島
海里
10
h1[メートル]
レーダ空中線の高さ
+ a2[海里]
a
1
探知距離
h2[メートル]
物標の高さ
74
Page 91

4.2 物標からの反射
物標からの反射の強さは物標の大きさだけでなく物標を構成している材料や形状にも関係し
ていますので、大きな物標からの反射が強いとは限りません。特に海岸線では地形の条件に左
右され、海岸がとてもなだらかな傾斜のときは内陸にある山等だけが映像として画面上に現れ
ることもあるので、海岸線までの距離の測定には注意してください。
なだらかな傾斜の陸地から返ってくるエコーは弱いため、このような陸地の観測
はできない場合があります。
4.3 電波の伝搬路の状況
電波の伝搬路上に大きな遮蔽物(山や雨雪等)があると、電波はそれらに遮られ
てしまい、その背後の物標が観測できないことがあります。
自船との間に豪雨があるため映し
出されない映像(島)
自船との間に島があるため映し出されない映像
(船舶)
75
Page 92

4.3.1 海面反射
波立っている海面では画面の中心に明るく広がった映像が現れます。これは海面からの反射映
像で、波の大きさ・範囲また風向きによっても映像の現れかたが変化します。
4.3.2 偽 像
実在しない物標が画面上に映像として現れたり、実在する物標が映像として現れないことがあり
ます。このような映像を偽像と呼びます。
偽像は次のような原因によります。
観測は、常に偽像の存在を念頭に置き、注意して行ってください。
(a) 影
空中線の設置場所によっては、近くにある煙突やマストで電波が反射して「影」ができ、
その方向にある物標が PPI 画面上に映像として現れないことがあります。
このような「影」があるかどうかは、海面反射映像を見てその映像に薄い部分か、あるい
は映し出されない部分が有るかを調べることでわかります。もし、「影」が出るときはその
方向をよく覚えておき、注意して物標を観測してください。
(b) サイドエコー
物標の映像と同一距離上に円弧状の破線の映像が現れることがあ
ります。これは、空中線から輻射されるビームのサイドローブによる
ものです。この偽像は物標が孤立しているときには、比較的判断しや
すいでしょう。
(c) 二次反射映像
レーダ空中線から発射された電波
が、船の煙突やマストなどに反射(二
次反射)して方向が変わってしまい、
実際には存在しない方向にも、物標
があるかのように映し出されること
があります。
このときの二次反射による映像は、
空中線からの電波を反射した煙突や
マストの方向に現れます。
76
Page 93

(d) 多重反射像
大きな垂直面をもった建造物や大形船があるときは、多重反射により複数の像が現れるこ
とがあります。これらの像は等間隔に並んで現れ、その中で自船に最も近い像が物標が真の
映像です。
(e) レーダ干渉
同じ周波数を使っている他のレーダが近くにあるとそのレーダによる干渉像が PPI 画面上に
現れます。この干渉は多数の斑点となっていろいろな現れかたをしますが、同じ所には現れない
ので物標の映像との識別は容易です。
レーダ干渉の除去には、指示機操作パネルの
スイッチを使用します。
【レーダ干渉の例】
77
Page 94

4.4 レーダトランスポンダ(SART)の画面表示
ご注意
ご
意ご
意
ご注意
SART は、GMDSS により承認された装置で、遭難事故が発生した場合に、生存者の位置を
突き止めるために使われる人命維持装置です。SART は、9GHz の周波数帯で作動し、救命船
や捜索飛行機のレーダにより発射された 9GHz のレーダ波を受信すると、捜索者に遭難位置を
知らせるため、一連の応答信号を発生します。
SART をレーダ画面に表示するために次の設定を行ってください
① 距離範囲(レンジ) : 6海里または 12 海里
② 海面反射抑制(SEA)つまみ : 最小(左方向一杯に回す)
③
自動海面反射抑制(AUTO SEA)
④ 同調調整(TUNE)つまみ : 同調をはずす(クラッタ表示を弱くするため)
⑤ 干渉除去(IR) : オフにする
⑥ 映像処理(PROCESS) : オフにする
: オフにする
【画面例】
注
SART 信号を表示するために上記①~⑥の設定をした場合、自船の周囲の物標が
レーダに写らなくなりますので、衝突防止と座礁防止のため目視による自船周囲
の監視を十分に行ってください。
また、複数のレーダを搭載している場合は、1 台の 9GHz 帯レーダで SART 信号
の探知に用い、他のレーダは必ず衝突防止、自船周囲物標の監視、座礁防止およ
び自船位置の確認をするために、通常のレーダとして使用してください。
SART 信号探知終了後は、レーダを通常航海用に再調整する必要があります。
注
78
Page 95

第 5 章 保守・点検
5.1 一般的保守
警告
警告
警告警告
お客様による内部の点検・修理は行わないでください。
専門整備員以外による点検・修理は火災・感電の原因となります。
内部の点検・修理は当社営業部またはお近くの支社・支店・営業所または当
社代理店にご依頼ください。
雨保守を行う際は、必ず主電源を切ってください。
電源を切らないで行うと、感電の原因となります
表面を清掃するときは、シンナーやベンジン等の有機溶剤を使用しないでく
ださい。
表面の塗装を痛める原因となります。
表面の清掃はチリ、ゴミを取り除き、清潔な布で乾拭きするようにしてくだ
さい。
注意
注意
注意注意
レーダを常に良好な状態で動作させるには次に述べるような保守が必要です。保守がよく行
われていれば故障は少なくなりますので、できるだけ定期的にお手入れをすることをおすすめ
します。
各機器に共通の一般保守として、次の点があります。
清掃
筐体のほこり、汚れ、海水の付着などはできるだけ清掃します。清掃は乾いた布で行ってく
ださい。特に、通気孔は空気の流通が良くなるようにハケなどでよく清掃してください。
79
Page 96

5.2 空中線
警告
警告
警告警告
空中線を保守・点検する際は、必ず主電源を切ってください。
急に輻射部が回転し人体に殴打して、負傷の原因となります。
保守・点検で空中線に接近する場合は主電源を切ってください。
至近距離で直接電波をあびると人体に影響を及ぼす原因となります。
(1)輻射部
輻射部の前面(輻射面)が煤煙、塩、塵埃塗料、鳥の糞等で汚損されると、電波の減衰、
反射を起こして、レーダの性能が低下する原因となります。
輻射部を点検し、汚損しているときは、アルコールまたは水を浸した柔らかい布で拭いて
常に清浄に保ってください。
また、ガソリン、ベンジン、トリクレン、ケトンなどの溶液は絶対に使用しないでくださ
い。
(2)取付脚
空中線筐体の取付脚部および取付ボルトはときどき腐蝕状況を点検し、危険のないよう保
守します。ペイントの塗布は最もよい腐蝕対策なので半年ごとに行うことをおすすめします。
5.3 指示機
ブラウン管の清掃
ブラウン管面に埃が付着すると透明度が悪くなり、映像が暗くなってしまいます。
清掃は水で湿らせた柔らかい布(ネルまたは綿)で拭きます。乾いた布で強く拭いたり、ガ
ソリン、シンナーなどは使用しないでください。
注意
注意
注意注意
ブラウン管の清掃は、乾いた布で強く拭いたり、ガソリン、シンナー等は使
用しないでください。
傷、変質の原因となることがあります。
80
Page 97

5.4 特殊部品
JMA-2343
部品番号 品名 型名 メーカ 使用場所 JRCコード
V201
A101
A102
E301
JMA-2344
部品番号 品名 型名 メーカ 使用場所 JRCコード
V201
A101
A102
E301
マグネトロン
サーキュレータ
ダイオードリミッタ
フロントエンド
マグネトロン
サーキュレータ
ダイオードリミッタ
フロントエンド
MSF1421B
H-6AJRD00001
NJS6930
NJT1028
MSF1422B
H-6AJRD00001
NJS6930
NJT1969
新日本無線 空中線
東芝 空中線
新日本無線 空中線
新日本無線 空中線
新日本無線 空中線
東芝 空中線
新日本無線 空中線
新日本無線 空中線
5VMAA00049
6AJRD00001
5EZAA00024
5EZAA00039
5VMAA00068
6AJRD00001
5EZAA00024
5EZAA00037
5.5 修理ブロック
NKE-249
名称
変調回路 CME-307
受信機 NRG-140
NKE-250
名称
変調回路 CME-308
受信機 NRG-141
モータ部 CBP-153
モータブラシ
ユニット/回路型名
BRXP05247
ユニット/回路型名
回転パルス発生回路付き
2 個入り
備考
備考
81
Page 98

NCD-4170
名称 型名 備考
主制御回路
電源回路
主パネル回路
ソフトキーパネル回路 CCK—872
モニタ機内
モニタ主制御回路
CMC-1156
CBD-1596
CCK-873
CKJ-159
CCN-366
CRT+偏向コイル
ソケット回路付き
82
Page 99

5.6 異常・故障への対処方法
半導体回路の場合、設計および検査上の不備あるいは外部的、人為的な原因による以外、半導
体の不良あるいは性能の劣化はあまりないと考えられます。一般に比較的多い故障原因は、高抵
抗器の湿気による断線、可変抵抗の不良、スイッチおよびリレーの接触不良などがあります。
また、部品不良以外に調整不良(同調調整不良が多い)あるいは整備不良(ケーブル接触不良が
多い)が故障の原因となっていることも少なくないので、これらの点を点検あるいは再調整する
ことが有効です。次の表を参考にしてください。
ヒューズの溶断には必ず原因があるので、単に交換したあと異常がなくても関連回路を調査する
必要があります。ただし、ヒューズの溶断特性にはかなりばらつきがあることも考慮してくださ
い。
No.
章に使用しているヒューズの一覧表を示します。
9.4
1
2
に何もでない。
CRT
空中線が回転しない
故障状況
a.
a.
電源部(
ヒューズF1が溶断
b.
モニタの故障
c.
メインコントロール回路(
d.
船内電源が下がっている。
e.
ヒューズF2が溶断。
モータ部(
b.
考えられる原因
CBD-1596
JMA-2343:CML-645
)の故障。
CMC-1156
空中線機内の
)の故障
3
空中線は回転するがレーダ
映像が出てこない(文字やマ
ーカは出ている。)
4
操作部スイッチを受け付け
ない。
H-7BDRD0023、JMA-2344:CBP-153
空中線安全スイッチ(
c.
受信機の故障(
a.
CAE-457-1)
メインコントロール回路(
b.
リガ(TI)は?
モータ部(
c.
H-7BDRD0023、JMA-2344:CBP-153
電源再投入しても受け付けない場合は、メインコント
a.
ロール回路(
主操作パネル回路(
b.
(
CCK-872
操作部との接続ケーブルの断線。
c.
JMA-2343:CAE-457、JMA-2344
JMA-2343:CML-645
CMC-1156
)の故障。
JMA-2344
CMC-1156
)の故障
CCK-873
)、ソフトキーパネル回路
)の故障
のみ)の故障
)の 故 障 。送 信ト
空中線機内の
)の故障
:
83
Page 100

No.
故障状況
考えられる原因
5
雑音はでるがレーダ映像が
でない。(文字やマーカは出
ている。)
6
レーダ映像は出るが文字や
マーカが出ない。
7
感度が悪い
8
画面がゆがんだり流れたり
a.
変調器(
a.
マグネトロンの不良
b.
メインコントロール回路(
c.
同調電圧不良
d.
メインコントロール回路(
a.
JMA-2343:CME-307、JMA-2344:CME-308)
CMC-1156
)の故障。
CMC-1156
)の故障
マグネトロンの劣化、不良
変調器(
b.
JMA-2343:CME-307、JMA-2344:CME-308
の故障、パルス幅切り替え不良?
受信機(
c.
MIC
輻射部、機器間ケーブルの漏水。
d.
JMA-2343:CAE-457、JMA-2344:CAE-457-1
の故障。
)
)、
(輻射面の汚れ、氷雪の付着、機器間ケーブル内部の
腐食)
同調電圧不良
e.
パルス幅切り替え信号(PW)の切断
f.
モニタの故障または調整不良。
a.
する。
9
固定距離マーカ、可変距離
マーカ、電子カーソル、およ
水平(HS)、垂直(VS)同期信号の断線。
b.
c. CRT
a.
b.
モニタ回路(
CNN-366
輝度調整が最低になっている。
メインコントロール回路(
)の故障
CMC-1156
)の故障。
びパネル照明のスイッチを
押しても画面に何も表示さ
れない。
10
動作中に初期画面に戻って
しまう。
11
アラームが動作しない。
12
レーダ航跡が動作しない。
13
真方位(ノースアップ)又はコ
ースアップ表示にならない。
船内電源が下がっている。
a.
a.
a.
メインコントロール回路(
b.
電源部の故障。
c.
メインコントロール回路(
メインコントロール回路の故障。
映像輝度が低くなっている。
b.
方位センサからのデータが無い。(
a.
CMC-1156
CMC-1156
NMEA)
)の故障。
)の故障。
84
 Loading...
Loading...