

Page 1
MultiProcessor
Specification
Version 1.4
May
1997
Page 2

THIS SPECIFICATION IS PROVIDED "AS IS" WITH NO WARRANTIES WHATSOEVER, INCLUDING ANY WARRANTY
OF MERCHANTABILITY, FITNESS FOR ANY PARTICULAR PURPOSE, OR ANY WARRANTY OTHERWISE ARISING
OUT OF ANY PROPOSAL, SPECIFICATION OR SAMPLE.
A license is hereby granted to copy and reproduce this specification for internal use only.
No other license, express or implied, by estoppel or otherwise, to any other intellectual property rights is granted herein.
Intel disclaims all liability, including liability for infringement of any proprietary rights, relating to implementation of information in
this specification. Intel does not warrant or represent that such implementation(s) will not infringe such rights.
Intel Corporation and Intel's FASTPATH are not affiliated with Kinetics, a division of Excelan, Inc. or its FASTPATH trademark
or products.
* Third-party trademarks are the property of their respective owners.
Additional copies of this document or other Intel literature may be obtained from:
Intel Corporation
Literature Center
P.O. Box 7641
Mt. Prospect IL 60056-7641
or call 800-879-4683
printed on
recycled paper
Copyright 1993-1997 . Intel Corporation, All Rights Reserved.
Page 3
Revision History
Revision Revision History Date
Pre-release Version 1.0. Formerly called “PC+MP Specification” 10/27/93
-001 Version 1.1. Resolves conflicts with MCA-based systems. The following
changes have been made:
1. Two MP feature information bytes were moved from the BIOS System
Configuration Table to the RESERVED area of the MP Floating Pointer
Structure.
2. If the MP Floating Pointer Structure is present, it indicates that the system
is MP-compliant, in accordance with this specification. (Previously, this was
indicated by bit 0 of MP Feature Information Byte 1.)
3. One more hardware default system configuration was added for MCA+PCI
with the integrated APIC.
-002 Minor technical corrections. 6/1/94
-003 Added Appendix D: Multiple I/O APIC Multiple PCI Bus Systems. 9/1/94
-004 Version 1.4. Added extended configuration table to improve support for
multiple PCI bus configurations and improve future expandability. Made
clarifications to Appendix B.
-005 Added Appendix E: Errata. Includes information for hierarchical PCI bus. 08/15/96
-006 Appendix E Update. Included Byte 2, Bit 6 information to MP Floating Point
Structure section (4.1).
4/11/94
7/1/95
05/12/97
iii
Page 4

Page 5
Table of Contents
Chapter 1 Introduction
1.1 Goals ........................................................................................................1-1
1.2 Features of the Specification....................................................................1-2
1.3 Scope........................................................................................................1-2
1.4 Target Audience .......................................................................................1-3
1.5 Organization of This Document................................................................ 1-3
1.6 Conventions Used in This Document ....................................................... 1-4
1.7 For More Information................................................................................1-4
Chapter 2 System Overview
2.1 Hardware Overview.................................................................................. 2-2
2.1.1 System Processors......................................................................2-2
2.1.2 Advanced Programmable Interrupt Controller .............................2-3
2.1.3 System Memory...........................................................................2-4
2.1.4 I/O Expansion Bus....................................................................... 2-4
2.2 BIOS Overview.........................................................................................2-5
2.3 Operating System Overview.....................................................................2-5
Chapter 3 Hardware Specification
3.1 System Memory Configuration .................................................................3-1
3.2 System Memory Cacheability and Shareability.........................................3-2
3.3 External Cache Subsystem ...................................................................... 3-4
3.4 Locking .....................................................................................................3-4
3.5 Posted Memory Write............................................................................... 3-5
3.6 Multiprocessor Interrupt Control ...............................................................3-5
3.6.1 APIC Architecture ........................................................................3-5
3.6.2 Interrupt Modes............................................................................3-6
3.6.2.1 PIC Mode......................................................................3-7
3.6.2.2 Virtual Wire Mode .........................................................3-9
3.6.2.3 Symmetric I/O Mode...................................................3-11
3.6.3 Assignment of System Interrupts to the APIC Local Unit...........3-12
3.6.4 Floating Point Exception Interrupt..............................................3-12
3.6.5 APIC Memory Mapping..............................................................3-12
v
Page 6

Contents
3.6.6 APIC Identification .....................................................................3-13
3.6.7 APIC Interval Timers..................................................................3-13
3.6.8 Multiple I/O APIC Configurations...............................................3-13
3.7 RESET Support......................................................................................3-14
3.7.1 System-wide RESET ................................................................. 3-14
3.7.2 System-wide INIT.......................................................................3-15
3.7.3 Processor-specific INIT..............................................................3-15
3.8 System Initial State.................................................................................3-16
3.9 Support for Fault-resilient Booting.......................................................... 3-16
Chapter 4 MP Configuration Table
4.1 MP Floating Pointer Structure...................................................................4-3
4.2 MP Configuration Table Header............................................................... 4-5
4.3 Base MP Configuration Table Entries....................................................... 4-6
4.3.1 Processor Entries.........................................................................4-7
4.3.2 Bus Entries.................................................................................4-10
4.3.3 I/O APIC Entries.........................................................................4-12
4.3.4 I/O Interrupt Assignment Entries................................................4-12
4.3.5 Local Interrupt Assignment Entries............................................4-15
4.4 Extended MP Configuration Table Entries.............................................. 4-17
4.4.1 System Address Space Mapping Entries................................... 4-18
4.4.2 Bus Hierarchy Descriptor Entries...............................................4-21
4.4.3 Compatibility Bus Address Space Modifier Entries....................4-22
Chapter 5 Default Configurations
5.1 Discrete APIC Configurations...................................................................5-2
5.2 Integrated APIC Configurations................................................................5-4
5.3 Assignment Of I/O Interrupts To The APIC I/O Unit .................................5-6
5.3.1 EISA and IRQ13 ..........................................................................5-7
5.3.2 Level-triggered Interrupt Support.................................................5-7
5.4 Assignment Of System Interrupts To The APIC Local Unit ......................5-7
vi
Page 7

Appendix A System BIOS Programming Guidelines
A.1 BIOS Post Initialization ............................................................................A-1
A.2 Controlling the Application Processors....................................................A-2
A.3 Programming the APIC for Virtual Wire Mode.........................................A-2
A.4 Constructing the MP Configuration Table................................................A-4
Appendix B Operating System Programming Guidelines
B.1 Operating System Boot-up .......................................................................B-1
B.2 Operating System Booting and Self-configuration....................................B-2
B.3 Interrupt Mode Initialization and Handling ................................................B-2
B.4 Application Processor Startup ..................................................................B-3
B.4.1 USING INIT IPI ............................................................................B-4
B.4.2 USING STARTUP IPI...................................................................B-5
B.5 AP Shutdown Handling.............................................................................B-5
B.6 Other IPI Applications...............................................................................B-6
Contents
B.6.1 Handling Cache Flush..................................................................B-6
B.6.2 Handling TLB Invalidation............................................................ B-6
B.6.3 Handling PTE Invalidation............................................................B-6
B.7 Spurious APIC Interrupts.......................................................................... B-6
B.8 Supporting Unequal Processors...............................................................B-7
Appendix C System Compliance Checklist
Appendix D Multiple I/O APIC Multiple PCI Bus Systems
D.1 Interrupt Routing with Multiple APICs.......................................................D-1
D.1.1 Variable Interrupt Routing............................................................D-1
D.1.2 Fixed Interrupt Routing................................................................D-2
D.2 Bus Entries in Systems with More Than One PCI Bus .............................D-3
D.3 I/O Interrupt Assignment Entries for PCI Devices.....................................D-3
Appendix E Errata
Glossary
vii
Page 8

Contents
Figures
1-1. Conceptual Overview......................................................................1-1
1-2. Memory Layout Conventions .......................................................... 1-4
2-1. Multiprocessor System Architecture................................................2-2
2-2. APIC Configuration .........................................................................2-3
3-1. System Memory Address Map........................................................3-2
3-2. PIC Mode.......................................................................................3-8
3-3. Virtual Wire Mode via Local APIC...................................................3-9
3-4. Virtual Wire Mode via I/O APIC.....................................................3-10
3-5. Symmetric I/O Mode .....................................................................3-11
3-6. Multiple I/O APIC Configurations .................................................. 3-14
4-1. MP Configuration Data Structures ..................................................4-1
4-2. MP Floating Pointer Structure.........................................................4-3
4-3. MP Configuration Table Header......................................................4-5
Tables
4-4. Processor Entry...............................................................................4-7
4-5. Bus Entry.......................................................................................4-10
4-6. I/O APIC Entry...............................................................................4-12
4-7. I/O Interrupt Entry ......................................................................... 4-13
4-8. Local Interrupt Entry...................................................................... 4-15
4-9. System Address Space Entry .......................................................4-18
4-10. Example System with Multiple Bus Types and Bridge Types .......4-19
4-11. Bus Hierarchy Descriptor Entry.....................................................4-21
4-12. Compatibility Bus Address Space Modifier Entry..........................4-23
5-1. Default Configuration for Discrete APIC..........................................5-3
5-2. Default Configuration for Integrated APIC.......................................5-5
1-1. Document Organization .................................................................. 1-3
3-1. Memory Cacheability Map............................................................... 3-3
3-2. APIC Versions.................................................................................3-6
4-1. MP Floating Pointer Structure Fields ..............................................4-3
viii
4-2. MP Configuration Table Header Fields...........................................4-6
4-3. Base MP Configuration Table Entry Types..................................... 4-7
4-4. Processor Entry Fields....................................................................4-8
4-5. Intel486™ and Pentium® Processor Signatures.............................4-9
Page 9

Contents
4-6. Feature Flags from CPUID Instruction............................................4-9
4-7. Bus Entry Fields............................................................................4-10
4-8. Bus Type String Values.................................................................4-11
4-9. I/O APIC Entry Fields.................................................................... 4-12
4-10. I/O Interrupt Entry Fields............................................................... 4-14
4-11. Interrupt Type Values.................................................................... 4-15
4-12. Local Interrupt Entry Fields...........................................................4-16
4-13. Extended MP Configuration Table Entry Types............................4-17
4-14. System Address Space Mapping Entry Fields..............................4-19
4-15. Bus Hierarchy Descriptor Entry Fields..........................................4-22
4-16. Compatibility Bus Address Space Modifier Entry Fields ...............4-24
4-17. Predefined Range Lists.................................................................4-24
5-1. Default Configurations..................................................................... 5-2
5-2. Default Configuration Interrupt Assignments ..................................5-6
5-3. Assignment of System Interrupts to APIC Local Unit......................5-7
Examples
D-1. I/O Interrupt Entry Source Bus IRQ Field for PCI Devices..............D-3
A-1. Programming Local APIC for Virtual Wire Mode.............................A-3
B-1. Universal Start-up Algorithm...........................................................B-3
ix
Page 10

Page 11
Introduction
HARDWARE
DRIVER/
HARDWARE
ABSTRACTION LAYER
MP BIOS
OPERATING SYSTEM
MP
CONFIGURATION
DATA
STRUCTURES
The MultiProcessor Specification, hereafter known as the “MP specification,” defines an
enhancement to the standard to which PC manufacturers design DOS-compatible systems.
MP-capable operating systems will be able to run without special customization on multiprocessor
systems that comply with this specification. End users who purchase a compliant multiprocessor
system will be able to run their choice of operating systems.
The MP specification covers PC/AT-compatible MP platform designs based on Intel processor
architectures and Advanced Programmable Interrupt Controller (APIC) architectures. The term
“PC/AT-compatible” here refers to the software-visible components of the PC/AT, not to hardware
features, such as the bus implementation, that are not visible to software. An implementation of
this specification may incorporate one or more industry standard buses, such as ISA, EISA, MCA,
PCI, or other OEM-specific buses.
1.1 Goals
The intent of this specification is to establish an MP Platform interface standard that extends the
performance of the existing PC/AT platform beyond the traditional single processor limit, while
maintaining 100% PC/AT binary compatibility.
1
The ultimate goal is to enable scalable, high-end workstations and enterprise server systems that
provide computer users with superior price/performance and have the ability to execute all existing
AT binaries, as well as MP-ready software packages on shrink-wrapped MP operating systems.
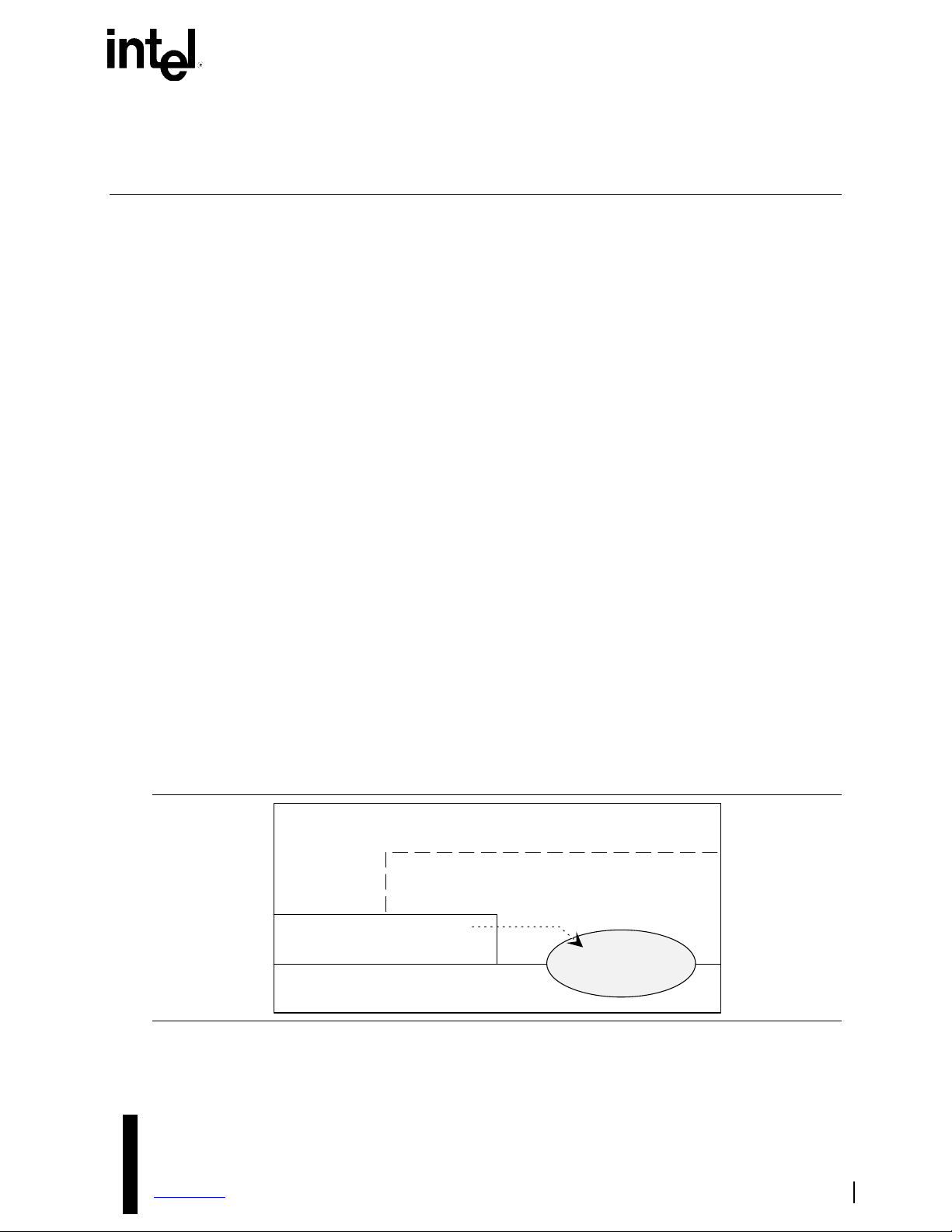
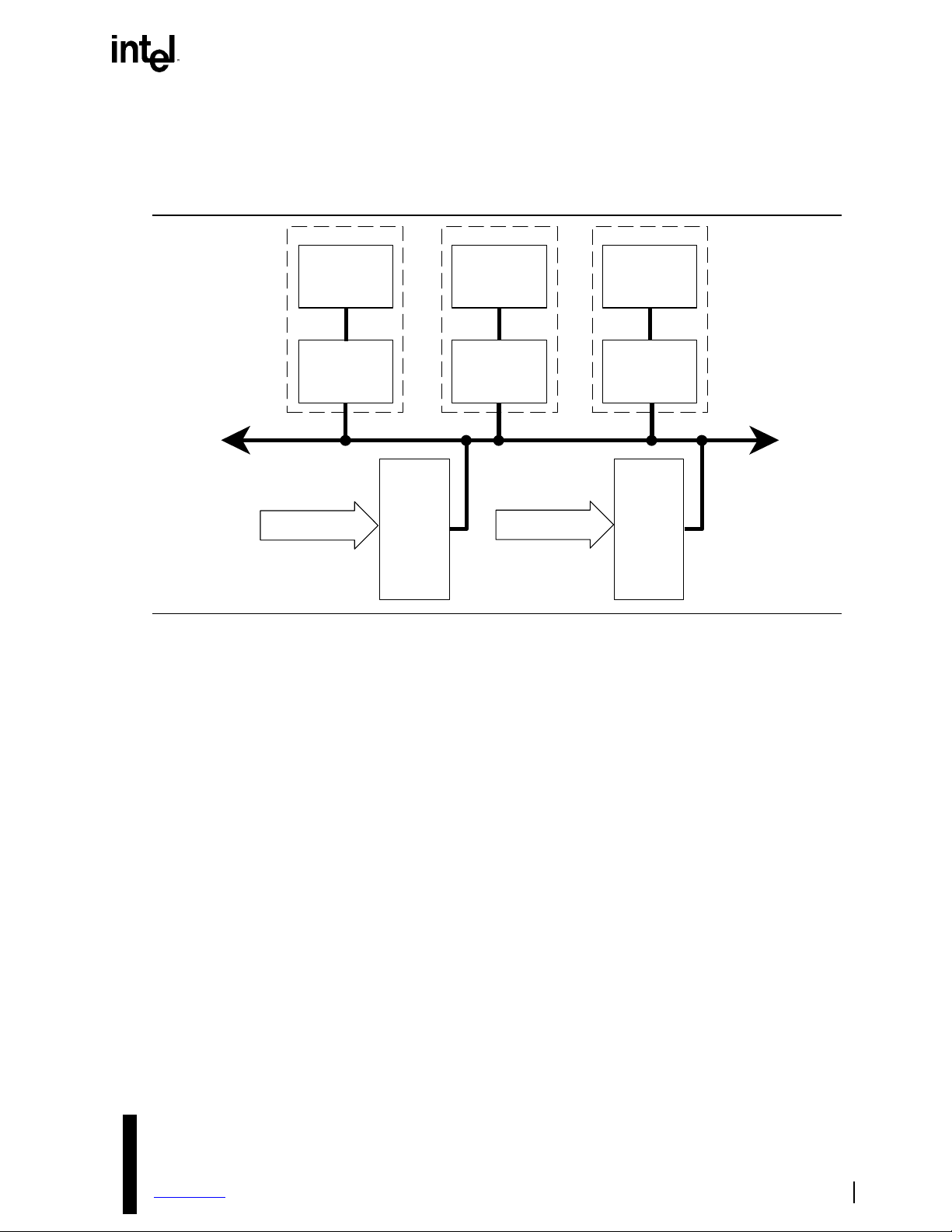
Figure 1-1 shows that at the heart of the specification are the data structures that define the
configuration of the MP system. The BIOS constructs the MP configuration data structures,
presenting the hardware in a known format to the standard device drivers or to the hardware
abstraction layer of the operating system. The specification details default hardware
configurations, and, for added flexibility, outlines extensions to the standard BIOS.
Figure 1-1. Conceptual Overview
Version 1.4 1-1
Page 12

MultiProcessor Specification
1.2 Features of the Specification
The MP specification includes the following features:
• A multiprocessor extension to the PC/AT platform that runs all existing uniprocessor shrink-
wrapped binaries, as well as MP binaries.
• Support for symmetric multiprocessing with one or more processors that are Intel architecture
instruction set compatible, such as the CPUs in the Intel486™ and the Pentium
family.
• Support for symmetric I/O interrupt handling with the APIC, a multiprocessor interrupt
controller.
• Flexibility to use a BIOS with minimal MP-specific support.
• An optional MP configuration table to communicate configuration information to an MP
operating system.
• Incorporation of ISA and other industry standard buses, such as EISA, MCA, VL and PCI
buses in MP-compliant systems.
• Requirements that make secondary cache and memory bus implementation transparent to
software.
®
processor
1.3 Scope
There are many vendors building innovative MP systems based on Intel architectures today. Intel
supports and encourages vendors to develop advanced approaches to the technological
requirements of today's computing environments. In no way does the MP specification prevent
system manufacturers from adding their own unique value to MP systems. This specification does
not define the only way that multiprocessor systems can be implemented. Vendors may, for
example, create noncompliant, high-performance, scalable multiprocessor systems that do not have
the PC/AT compatibility required by this specification. Hardware vendors will always have the
option of offering one or more customized operating systems that support the unique, value-added
capabilities that they have designed into their systems. End users will be able to benefit from the
additional capabilities that these vendors offer.
The MP specification benefits PC vendors who wish to offer MP-enabled systems without having
to invest in the customization of one or more operating systems. This specification focuses on
providing a standard mechanism to add MP support to personal computers built around the PC/AT
hardware standard. With that goal, the specification covers only the minimum set of capabilities
required to extend the PC/AT platform to be MP-capable. The hardware required to implement the
MP specification is kept to a minimum, as follows:
• One or more processors that are Intel architecture instruction set compatible, such as the CPUs
in the Intel486 or Pentium processor family.
• One or more APICs, such as the Intel 82489DX Advanced Programmable Interrupt Controller
or the integrated APIC, s
together with a discrete I/O APIC unit.
• The necessary supporting electronics to duplicate the initialization and signaling protocol
described in this specification.
• PC/AT-compliant hardware.
uch as that on the Intel Pentium 735\90 and 815\100 processors,
1-2 Version 1.4
Page 13
In addition to the hardware requirements, this document also specifies MP features that are visible
to the BIOS and operating system. However, it is important to understand that as hardware
technology progresses, the functions performed by the BIOS may change in accordance with the
hardware technology. ONLY THE INTERFACE TO THE OPERATING SYSTEM LEVEL
IS EXPECTED TO REMAIN CONSTANT.
This specification does not address issues relating to the processor's System Management Mode
(SMM).
1.4 Target Audience
This document is intended for the following users:
• OEMs who will be creating PC/AT-compatible, MP-ready hardware based on this
specification.
• BIOS developers, either those who create general-purpose BIOS products or those who modify
these products to suit specific MP hardware.
• Operating-system developers who will be adapting MP operating systems to run on the class of
MP-ready platform specified here.
Introduction
1.5 Organization of This Document
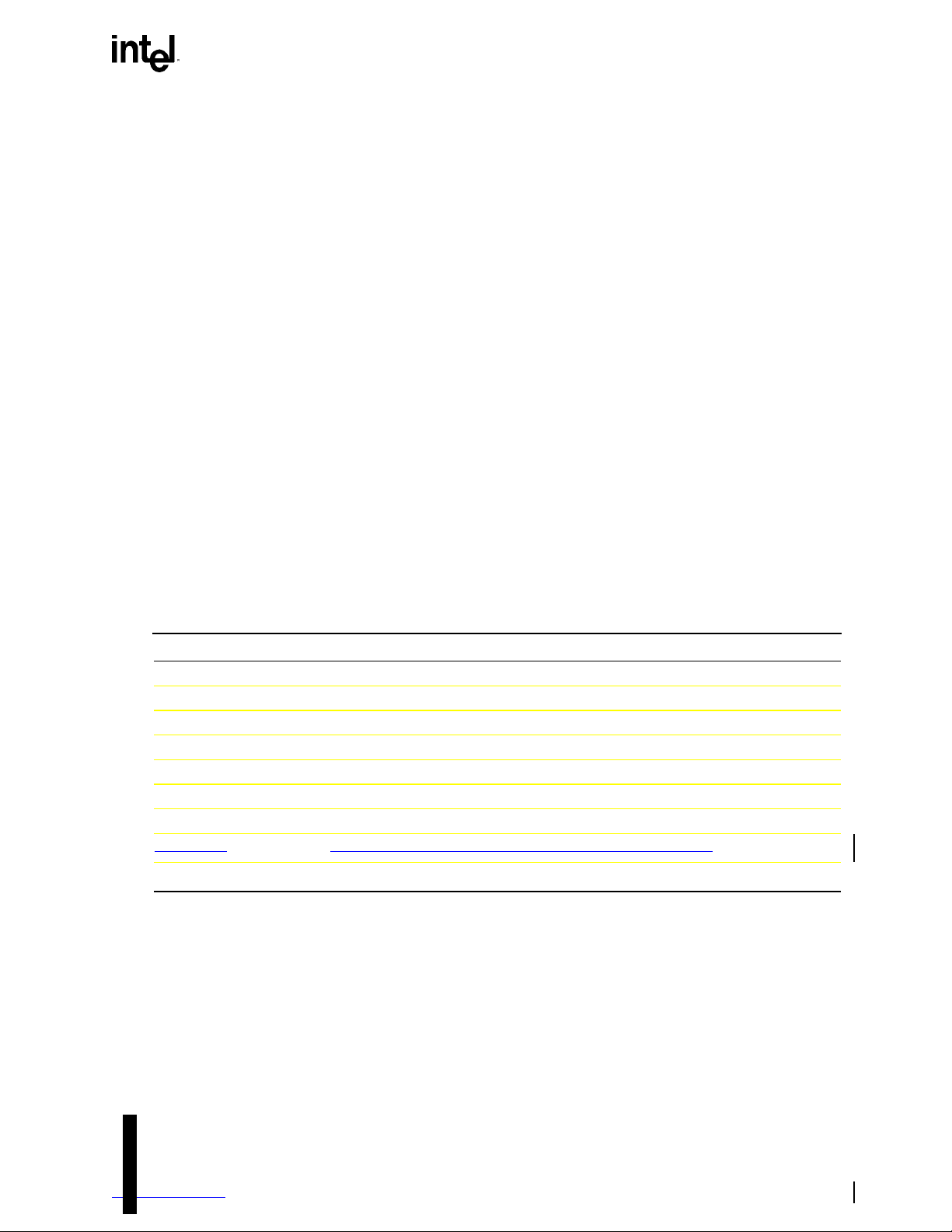
Table 1-1 shows the organization of this document.
Table 1-1. Document Organization
Chapter Description
2 Overview of the MultiProcessor Specification
3 Specification of the MP hardware
4 Specification of MP configuration information available to OS
5 Specification of default hardware configurations
Appendix A Guidelines for MP BIOS programming
Appendix B Guidelines for MP operating system programming
Appendix C Checklist for hardware compliance to the specification
Appendix D Clarifications for multiple I/O APIC, multiple PCI bus systems
Glossary Definitions of specialized terms used in this document
Version 1.4 1-3
Page 14
MultiProcessor Specification
RESERVED
RESERVED
THREE-BYTE FIELD
RESERVED
00H
04H
08H
0CH
31 07815162324
31 07815162324
ONE-BYTE
FIELD
TWO-BYTE FIELD
LOW-ORDER BITSHIGH-ORDER BITS
INCREASING
ADDRESSES
1.6 Conventions Used in This Document
Signal names that are followed by the character # represent active low signals. For example,
FERR# is active when at its low-voltage state.
Throughout this document, the Intel 82489DX APIC is referred to as the “discrete APIC.” The
term “integrated APIC” is used to refer to an APIC integrated with other system components, such
as the Pentium 735\90 and 815\100 processors. This specification uses the term APIC to refer to
both discrete and integrated versions.
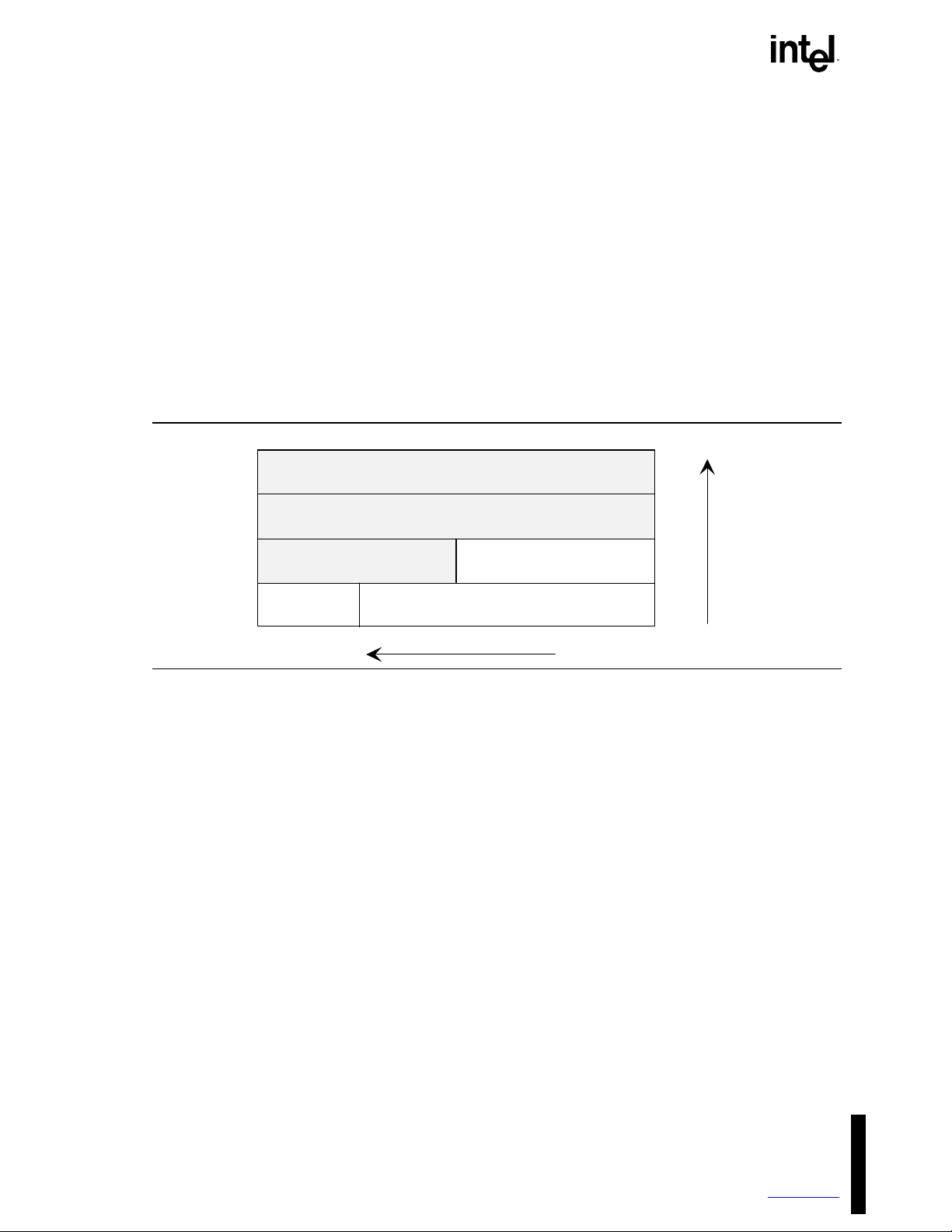
The processors of the Intel486 and Pentium processor family are “little endian” machines. This
means that the low-order byte of a multibyte data item in memory is at the lowest address, while
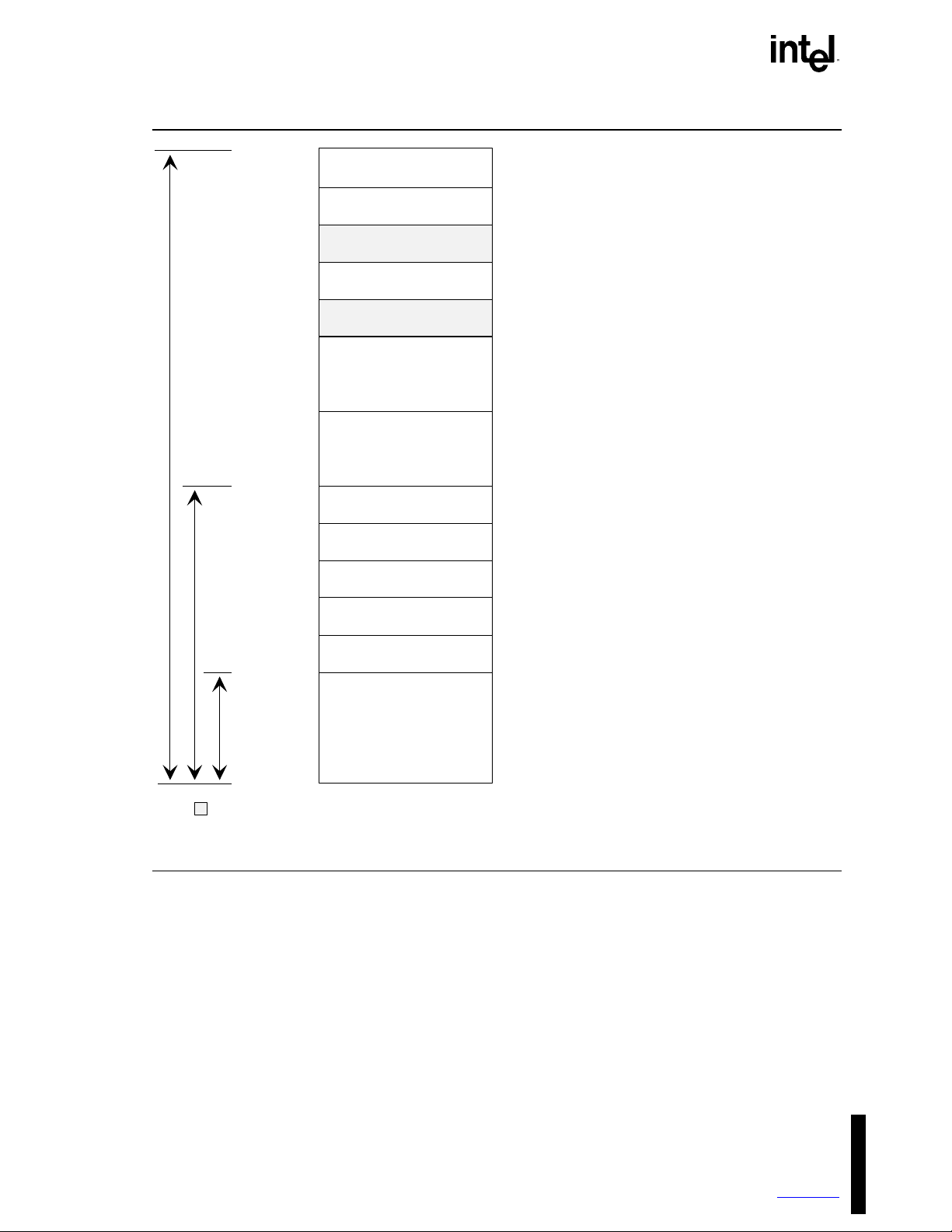
the high-order byte is at the highest address. Illustrations of data structures in memory show the
lowest addresses at the bottom and the highest addresses at the top of the illustration, as shown in
Figure 1-2. Bit positions are numbered from right to left.
In some memory layout descriptions, certain fields are marked RESERVED. Software should
initialize these fields as binary zeros, but should otherwise treat them as having a future, though
unknown effect. SOFTWARE SHOULD AVOID ANY DEPENDENCE ON THE VALUES
IN THE RESERVED FIELDS.
1.7 For More Information
Figure 1-2. Memory Layout Conventions
For more information, refer to any of the following documents:
• 82489DX Advanced Programmable Interrupt Controller (data book), Intel order number
290446
• Intel486 Microprocessor Programmer's Reference Manual, Intel order number 240486
• Intel Processor Identification with the CPUID Instruction AP-485, Intel order number 241618
• Pentium Processor User’s Manual, Intel order number 241428
1-4 Version 1.4
Page 15
2
System Overview
In the realm of multiprocessor architectures, there are several conceptual models for tying together
computing elements, and there are a variety of interconnection schemes and details of
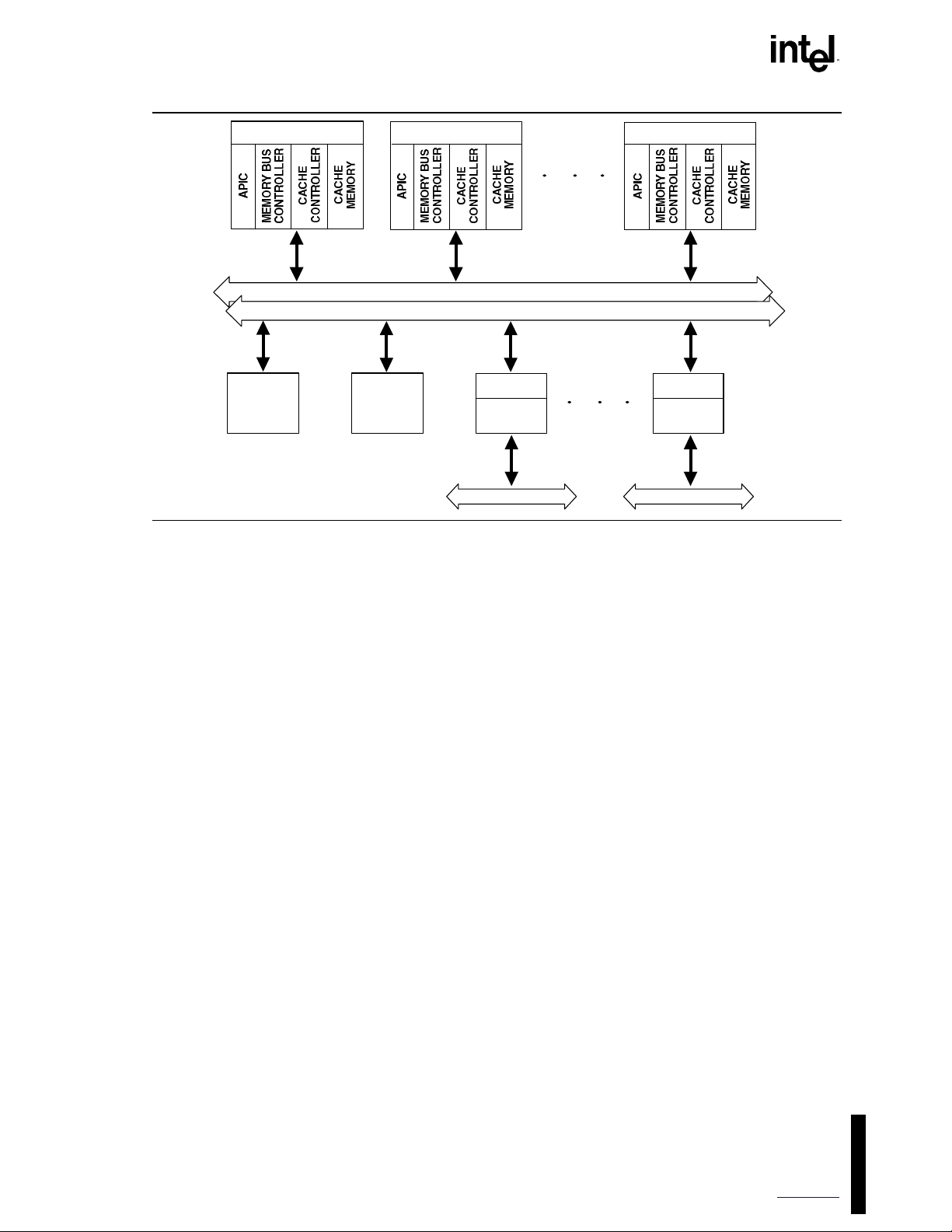
implementation. Figure 2-1 shows the general structure of a design based on the MP specification.
The MP specification’s model of multiprocessor systems incorporates a tightly-coupled, sharedmemory architecture with a distributed interprocessor and I/O interrupt capability. It is fully
symmetric; that is, all processors are functionally identical and of equal status, and each processor
can communicate with every other processor. There is no hierarchy, no master-slave relationship,
no geometry that limits communication only to “neighboring” processors. The model is symmetric
in two important respects:
• Memory symmetry. Memory is symmetric when all processors share the same memory space
and access that space by the same addresses. Memory symmetry offers a very important
feature—the ability for all processors to execute a single copy of the operating system. Any
existing system and application software will execute the same, regardless of the number of
processors installed in a system.
• I/O symmetry. I/O is symmetric when all processors share access to the same I/O subsystem
(including I/O ports and interrupt controllers) and any processor can receive interrupts from
any source. Some multiprocessor systems that have symmetric access to memory are actually
asymmetric with regard to I/O interrupts, because they dedicate one processor to interrupt
functions. I/O symmetry helps eliminate the potential of an I/O bottleneck, thereby increasing
system scalability.
With both memory and I/O symmetry, a system that complies with the MP specification can
achieve hardware scalability as well as support software standardization. Based on this kind of
scalable architecture, systems developers can produce systems that span a wide range of price and
performance, and that all execute the same binaries.
Version 1.4 2-1
Page 16
MultiProcessor Specification
HIGH-BANDWIDTH MEMORY BUS
APIC
ADVANCED PRO G RAMMABLE
INTERRUPT CONTROLLER
ICC INTERRUPT CONTROLLER
COMMUNICATIONS
CPU CPU CPU
SHARED
MEMORY
MODULE
GRAPHICS
FRAME
BUFFER
I/O
INTERFACE
APIC
I/O
INTERFACE
APIC
ICC BUS
I/O EXPANSION BUSI/O EXPANSION BUS
2.1 Hardware Overview
The MP specification defines a system architecture based on the following hardware components:
• One or more processors that are Intel architecture instruction set compatible, such as the CPUs
• One or more APICs, such as the Intel 82489DX Advanced Programmable Interrupt Controller
• Software-transparent cache and shared memory subsystem.
• Software-visible components of the PC/AT platform.
2.1.1 System Processors
Figure 2-1. Multiprocessor System Architecture
in the Intel486 and the Pentium processor family.
or the integrated APIC on the Pentium 735\90 and 815\100 processors.
To maintain compatibility with existing PC/AT software products, this specification is based on
the Intel486 and the Pentium processor family. To achieve a minimum level of MP system
performance, two or more processors that are Intel architecture instruction set compatible are
required.
Figure 2-2 gives a different point of view of a compliant system, showing the configuration of the
APICs with respect to the CPUs. While all processors in a compliant system are functionally
identical, this specification classifies them into two types: the bootstrap processor (BSP) and the
application processors (AP). Which processor is the BSP is determined by the hardware or by the
hardware in conjunction with the BIOS. This differentiation is for convenience and is in effect
2-2 Version 1.4
Page 17
System Overview
ICC BUS
LOCAL
APIC
1
CPU 1
LOCAL
APIC
2
LOCAL
APIC
3
CPU 2 CPU 3
BSP AP1 AP2
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
I/O
APIC
INTERRUPT
REQUESTS
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
I/O
APIC
INTERRUPT
REQUESTS
only during the initialization and shutdown processes. The BSP is responsible for initializing the
system and for booting the operating system; APs are activated only after the operating system is
up and running. CPU1 is designated as the BSP. CPU2, CPU3, and so on, are designated as the
APs.
Figure 2-2. APIC Configuration
2.1.2 Advanced Programmable Interrupt Controller
The Advanced Programmable Interrupt Controller (APIC) is based on a distributed architecture in
which interrupt control functions are distributed between two basic functional units, the local unit
and the I/O unit. The local and I/O units communicate through a bus called the Interrupt Controller
Communications (ICC) bus, as shown in Figure 2-2.
In a multiprocessor system, multiple local and I/O APIC units operate together as a single entity,
communicating with one another over the ICC bus. The APIC units are collectively responsible
for delivering interrupts from interrupt sources to interrupt destinations throughout the
multiprocessor system.
The APICs help achieve the goal of scalability by doing the following:
• Off-loading interrupt-related traffic from the memory bus, making the memory bus more
available for processor use.
• Helping processors share the interrupt processing load with other processors.
The APICs help achieve the goal of AT-compatibility by cooperating with 8259A-equivalent PICs
in the system.
Version 1.4 2-3
Page 18

MultiProcessor Specification
The local APIC units also provide interprocessor interrupts (IPIs), which allow any processor to
interrupt any other processor or set of processors. There are several types of IPIs. Among them,
the INIT IPI and the STARTUP IPI are specifically designed for system startup and shutdown.
Each local APIC has a Local Unit ID Register and each I/O APIC has an I/O Unit ID Register.
The ID serves as a physical name for each APIC unit. It is used by software to specify destination
information for I/O interrupts and interprocessor interrupts, and is also used internally for accessing
the ICC bus.
Due to the distributed architecture, the APIC local and I/O units can be implemented in either a
single chip, such as Intel’s 82489DX interrupt controller, or they can be integrated with other parts
of the system’s components. For example, the local APIC may be integrated with the CPU chip,
such as Intel’s Pentium processors (735\90, 815\100), and the I/O APIC may be integrated with the
I/O chipset, such as Intel’s 82430 PCI-EISA bridge chipset.
2.1.3 System Memory
A system that complies with the MP specification uses the standard AT memory architecture. All
memory is allocated for system memory with the exception of addresses 0A_0000h through
0F_FFFFh and 0FFFE_0000h through 0FFFF_FFFFh, which are reserved for I/O devices and the
BIOS.
Compared to a uniprocessor system, a symmetric multiprocessor system imposes a high demand
for memory bus bandwidth. The demand is proportional to the number of processors on the
memory bus. To reduce memory bus bandwidth limitations, an implementation of this
specification should use a secondary cache that has high-performance features, such as a write-back
update policy and a snooping cache-consistency protocol. A secondary cache can push the
scalability limit upward by reducing bus traffic and increasing bus bandwidth.
While both secondary caches and memory bus controllers are critical components for high
performance in a symmetric multiprocessor system, this specification does not detail their
implementation, requiring only that they be totally software transparent.
2.1.4 I/O Expansion Bus
The MP specification provides a multiprocessor extension to the industry-standard PC/AT
platform. The term “industry-standard PC/AT platform” here refers to the software-visible
components of the PC/AT. The standard does not designate a specific bus architecture. All
industry-standard buses, such as ISA, EISA, MCA, VL, and PCI, can be incorporated in the
design. Systems developers can implement one or more bus types in their designs, depending on
the systems’ I/O performance or capacity requirements.
2-4 Version 1.4
Page 19

System Overview
2.2 BIOS Overview
A BIOS functions as an insulator between the hardware on one hand, and the operating system and
applications software on the other. A standard uniprocessor BIOS performs the following
functions:
• Tests system components.
• Builds configuration tables to be used by the operating system.
• Initializes the processor and the rest of the system to a known state.
• Provides run-time device-oriented services.
For a multiprocessor system, the BIOS may perform the following additional functions:
• Pass configuration information to the operating system that identifies all processors and other
multiprocessing components of the system.
• Initialize all processors and the rest of the multiprocessing components to a known state.
This specification allows a wide range of capability in the BIOS. At the minimal end of the
capability scale, the system developer can simply insert an MP floating pointer structure in the
standard BIOS. The cost of this level of simplicity in the BIOS, however, is that the system
developer has less flexibility in the design of the hardware. At the maximal end of the BIOS
capability scale might be a BIOS that dynamically configures the system to provide resilience in
the face of component malfunctions.
BIOS developers should read Chapters 3, 4, 5, and Appendix A to understand the tradeoffs
between hardware and BIOS capabilities.
2.3 Operating System Overview
Enabling the creation of shrink-wrapped MP operating systems is one of the principal goals of this
specification. This goal is achieved by allowing a flexible balance between the capabilities of the
hardware and those of the BIOS. The potentially vast variety of hardware configurations is
reduced by the BIOS to a few simple scenarios that can be readily handled by the low-level bootup phase of the operating system.
Operating-system developers should read Chapters 3, 4, and 5, and Appendixes A and B to fully
understand the interface between the BIOS and the operating system.
Version 1.4 2-5
Page 20

Page 21
3
Hardware Specification
This section outlines the minimal set of common hardware features necessary for the operating
system to operate on multiple hardware platforms. The MP hardware specification defines how the
components mentioned in Chapter 2 are implemented. Compliance to the specification involves
the following aspects of hardware implementation:
• System memory configuration
• System memory cacheability and shareability
• External cache implementation requirements
• Control of memory contention (locking)
• Ordering of posted memory writes
• Multiprocessor interrupt control
• Reset support
• Interval timer usage
• Support for fault-resilient booting
While the bulk of the MP hardware specification pertains to multiprocessor interrupt control, other
areas also require some attention. The following sections take up each of these topics in turn.
3.1 System Memory Configuration
The MP memory specifications are based on the standard PC/AT memory map, which currently
has a physical memory space of four gigabytes, as shown in see Figure 3-1. Physical memory
should begin at 0 and be contiguous. Memory-mapped I/O devices should be mapped at the top of
physical memory. The APIC default base memory addresses defined by this specification are
0FEC0_0000h and 0FEE0_0000h.
Version 1.4 3-1
Page 22
MultiProcessor Specification
4GB
1MB
640K
FFFF_FFFF H
FFFE_0000H
FEF0_0000H
FEE0_0000H
FED0_0000H
FEC0_0000H
0010_0000H
000F_0000H
000E_0000H
000D_0000H
000C_0000H
000A_0000H
BIOS PROM
LOCAL APIC
I/O APIC
MEMORY-MAPPED
I/O SPACE
EXTENDED
MEMORY REGION
SHADOWED BIOS
SHADOWED
EXPANSION BIOS
EXPANSION ROM
ROM EXTENSIONS
VIDEO BUFFER
SYSTEM-BASED
MEMORY
0000_0000H
PART OF THIS SPECIFICATION
UNSHADED ADDRESS REGIONS ARE FOR REFERENCE ONLY AND SHOULD NOT BE CONSTRUED AS THE SOLE
DEFINITION OF A PC/AT-COMPATIBLE ADDRESS SPACE.
Figure 3-1. System Memory Address Map
3.2 System Memory Cacheability and Shareability
The cacheability and shareability of the physical memory space are defined in Table 3-1. The
address space reserved for the local APIC is used by each processor to access its own local APIC.
The address space reserved for the I/O APIC must be shareable by all processors to permit dynamic
reconfiguration.
3-2 Version 1.4
Page 23
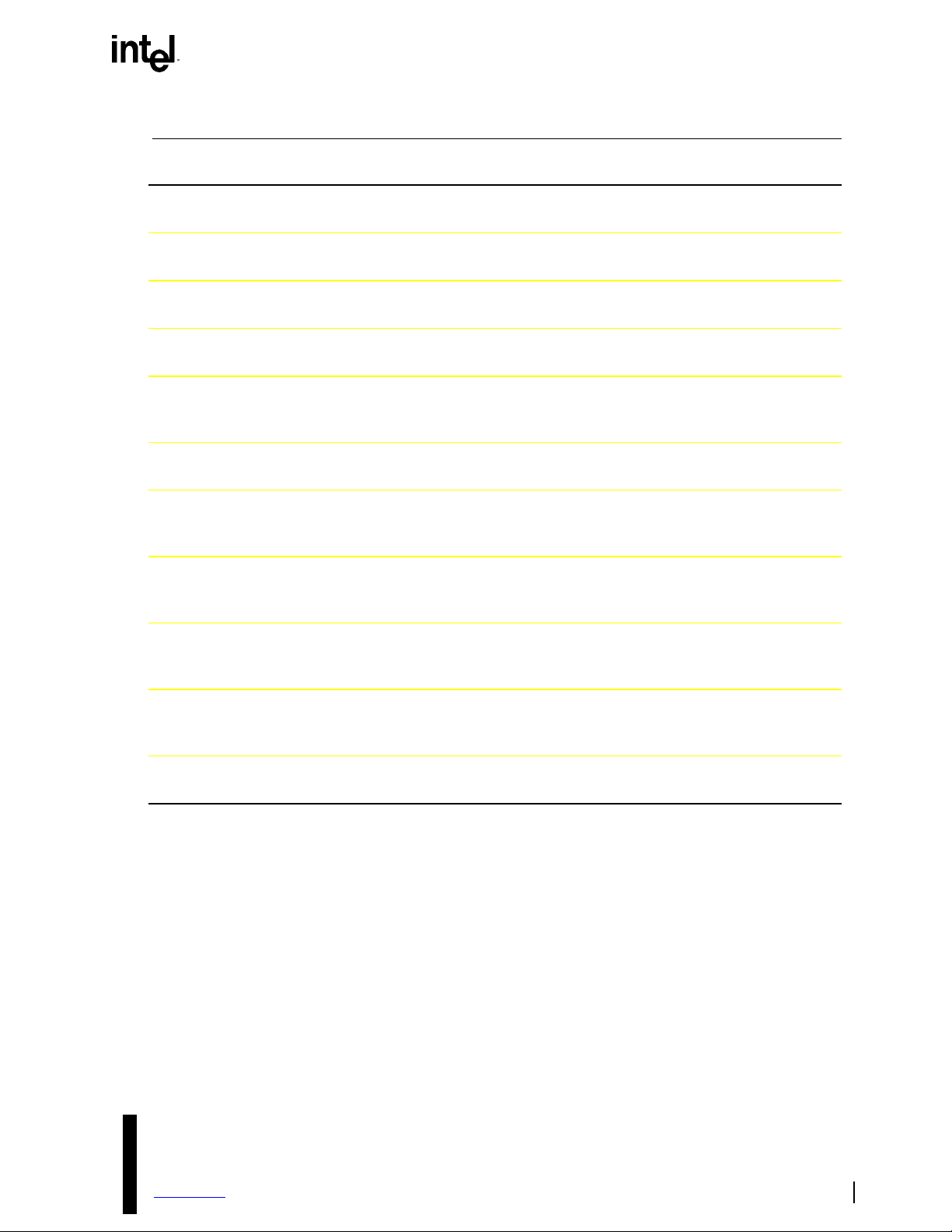
Table 3-1. Memory Cacheability Map
Hardware Specification
Addresses
(in hex) Size Description
0000_0000h –
640KB Main memory Yes Yes
0009_FFFFh
000A_0000h –
000B_FFFFh
000C_0000h –
000D_FFFFh
000E_0000h –
128KB Display buffer for
video adapters
128KB ROM BIOS for add-on
cards
128KB System ROM BIOS Yes Yes
000F_FFFFh
0010_0000h –
Main memory Yes Yes Maximum address
0FEBF_FFFFh
Not specified. Memory-mapped I/O
devices
0FEC0_0000h –
0FECF_FFFFh
0FED0_0000h –
0FEDF_FFFFh
1
APIC I/O unit Yes No Refer to the register
Reserved for
memory-mapped I/O
devices
Shared by All
Processors? Cacheable? Comment
Yes No
Yes Yes
depends on total memory
installed in the system.
2
Yes
Not
Top unused memory
specified
description in the APIC
data book.
2
Yes
Not
specified
0FEE0_0000h0FEEF_FFFFh
1
APIC Local Unit No No Refer to the register
description in the APIC
data book.
0FEF0_0000h –
0FFFD_FFFFh
Reserved for
memory-mapped I/O
Yes
2
Not
specified
devices
0FFFE_0000h –
0FFFF_FFFFh
NOTES:
1. These addresses are part of this specification. The other address regions in this table are shown for reference only, and
should not be construed as the sole definition of a PC/AT-compatible address space format or cache.
2. Any memory-mapped device should be shareable unless the nature of the device is that there is one device per
processor.
128KB Initialization ROM Yes Not
specified
Version 1.4 3-3
Page 24

MultiProcessor Specification
3.3 External Cache Subsystem
Intel-compatible processors support multiprocessing both on the processor bus and on a memory
bus, both with and without secondary cache units. Due to the high bandwidth demands of
multiprocessor systems, external caches are often employed to improve performance. The
existence and implementation details of external caches are not a part of this specification.
However, when external caches are used, they must conform to certain requirements with regard to
the following design issues:
• Maintaining cache coherency—When one processor accesses data cached in another
processor’s cache, it must not receive incorrect data. If it modifies data, all other processors
that access that data also must not receive stale data. External caches must maintain coherency
among themselves, and with the main memory, internal caches, and other bus master DMA
devices.
• Cache flushing—The processor can generate special flush and write-back bus cycles that must
be used by external caches in a manner that maintains cache coherency. The actual responses
are implementation-specific and may vary from design to design. A program can initiate
hardware cache flushing by executing a WBINVD instruction. This instruction is only
guaranteed to flush the caches of the local processor. See Appendix B for system-wide
flushing mechanisms. Given that cache coherency is maintained by hardware, there is no need
for software to issue cache flush instructions under normal circumstances.
• Reliable communication—All processors must be able to communicate with each other in a
way that eliminates interference when more than one processor accesses the same area in
memory simultaneously. The processor uses the LOCK# signal for this purpose. External
caches must ensure that all locked operations are visible to other processors.
• Write ordering—In some circumstances, it is important that memory writes be observed
externally in precisely the same order as programmed. External write buffers must maintain
the write ordering of the processor.
3.4 Locking
To protect the integrity of certain critical memory operations, Intel-compatible processors provide
an output signal called LOCK#. For any given memory access, LOCK# is asserted once, but may
remain asserted for as many memory bus cycles as required to complete the memory operation. It
is the responsibility of the system hardware designers to use this signal to control memory accesses
among processors.
A compliant system in multiprocessor mode must guarantee atomicity of locked-aligned memory
operations; however, the implementation is not specified in this specification. A compliant system
must lock at least the area of memory defined by the destination operand. A specific
implementation may lock a broader area—it may even lock the entire bus. Therefore, software
must consider this behavior.
To guarantee AT compatibility, locking of misaligned memory operations over other
AT-compatible buses in the compliant system must be strictly implemented in accordance with the
bus specifications. A compliant system may not be required to support the misaligned memory
3-4 Version 1.4
Page 25

Hardware Specification
operations over its internal shared memory bus, if it is AT compatible. Operating system and
software developers must ensure
operations on misaligned data are not guaranteed to work on all platforms.
that data is aligned if locked access is required, because lock
3.5 Posted Memory Write
When controlling I/O devices, it is important that memory and I/O operations be carried out in the
order programmed. Intel-compatible processors do not buffer I/O writes; thus, strict ordering
among I/O operations is enforced by the processors.
To optimize memory performance, processors and chipsets often implement write buffers and
writeback caches. Intel-compatible processors guarantee processor ordering on all internal cache
and write buffer accesses. However, chipsets must also guarantee processor ordering on all
external memory accesses.
For systems based on the integrated APIC, posting of memory writes may result in spurious
interrupts for memory-mapped I/O devices using level-triggered interrupts. I/O device drivers
must serialize instructions to ensure that the device interrupt clear command reaches the device
before the EOI command reaches the APIC and handles the spurious interrupt in case one occurs.
3.6 Multiprocessor Interrupt Control
In an MP-compliant system, interrupts are controlled through the APIC. The following sections
describe the APIC architecture and the three interrupt modes allowed in an MP-compliant system.
3.6.1 APIC Architecture
The Intel Advanced Programmable Interrupt Controller (APIC) is based on a distributed
architecture. Interrupt control functions are distributed between two basic functional units: the
local unit and the I/O unit. The local and I/O units communicate through a bus called the ICC bus.
The I/O unit senses an interrupt input, addresses it to a local unit, and sends it over the ICC bus.
The local unit that is addressed accepts the message sent by the I/O unit.
In an MP-compliant system, one local APIC per CPU is required. Depending on the total number
of interrupt lines in an MP system, one or more I/O APICs may be used. The bus interrupt line
assignments can be implementation-specific and can be defined by the MP configuration table
described in Chapter 4.
The Intel 82489DX APIC is a “discrete APIC” implementation. The programming interface of the
82489DX APIC units serves as the base of the MP specification. Each APIC has a version register
that contains the version number of a specific APIC implementation. The version register of the
82489DX family has a version number of “0x,” where x is a four-bit hexadecimal number. Version
number “1x” refers to Pentium processors with integrated APICs, such as the Pentium 735\90 and
815\100 processors, and x is a four-bit hexadecimal number.
The integrated APIC maintains the same programming interface as the 82489DX APIC. Table 3-2
describes the features specific to the integrated APIC.
Version 1.4 3-5
Page 26
MultiProcessor Specification
Table 3-2. APIC Versions
Local APIC Version
APIC Type
82489DX APIC 0x
Integrated APIC, i.e.,
Pentium processors (735\90,
815\100)
NOTE:
is a 4-bit hexadecimal number.
x
Register (hexadecimal) Integrated APIC Features
1x STARTUP IPI. See Appendix B.4.2 for details.
Programmable interrupt input polarity
To encourage future extendibility and innovation, the Intel APIC architecture definition is limited
to the programming interface of the APIC units. The ICC bus protocol and electrical specifications
are considered implementation-specific. That is, while different versions of APIC implementations
may execute the same binary software, different versions of APIC components may be
implemented with different bus protocols or electrical specifications. Care must be taken when
using different versions of the APIC in a system.
The APIC architecture is designed to be scaleable. The 82489DX APIC has an 8-bit ID register
that can address from one to 255 APIC devices. Furthermore, the Logical Destination register for
the 82489DX APIC supports 32 bits, which can address up to 32 devices. For small system
implementations, the APIC ID register can be reduced to the least significant 4 bits and the Logical
Destination register can be reduced to the most significant 8 bits.
To ensure software compatibility with all versions of APIC implementations, software developers
must follow the following programming guidelines:
1. Assign an 8-bit APIC ID starting from zero.
2. Assign logical destinations starting from the most significant byte of the 32-bit register.
3. Program the APIC spurious vector to hexadecimal “xF,” where x is a 4-bit hexadecimal
number.
The following features are only available in the integrated APIC:
1. The I/O APIC interrupt input signal polarity can be programmable.
2. A new interprocessor interrupt, STARTUP IPI is defined.
In general, the operating system must use the STARTUP IPI to wake up application processors in
systems with integrated APICs, but must use INIT IPI in systems with the 82489DX APIC. Refer
to Appendix B, Section B.4, for application processor startup.
3.6.2 Interrupt Modes
The MP specification defines three different interrupt modes as follows:
1. PIC Mode—effectively bypasses all APIC components and forces the system to operate in
single-processor mode.
2. Virtual Wire Mode—uses an APIC as a virtual wire, but otherwise operates the same as PIC
Mode.
3. Symmetric I/O Mode—enables the system to operate with more than one processor.
3-6 Version 1.4
Page 27

Hardware Specification
The first two interrupt modes, PIC Mode and Virtual Wire Mode, provide PC/AT-compatibility.
At least one of these modes must be implemented in systems that comply with the MP
specification. In these modes, full DOS compatibility with the uniprocessor PC/AT is provided by
using the APICs in conjunction with standard 8259A-equivalent programmable interrupt
controllers (PICs).
The third mode, Symmetric I/O Mode, must be implemented in addition to either PIC Mode or
Virtual Wire Mode. An MP operating system is booted under either one of the two PC/ATcompatible modes. Later the operating system switches to Symmetric I/O Mode as it enters
multiprocessor mode.
The interrupt modes are implemented by a combination of hardware and software. The hardware
and programming specifications for each of these modes are further defined in the following
subsections. BIOS programmers should refer to Appendix A, which includes information about
programming the APIC for Virtual Wire Mode. Operating system programmers should refer to
Appendix B, which provides more information about initializing the APIC for Symmetric I/O
Mode.
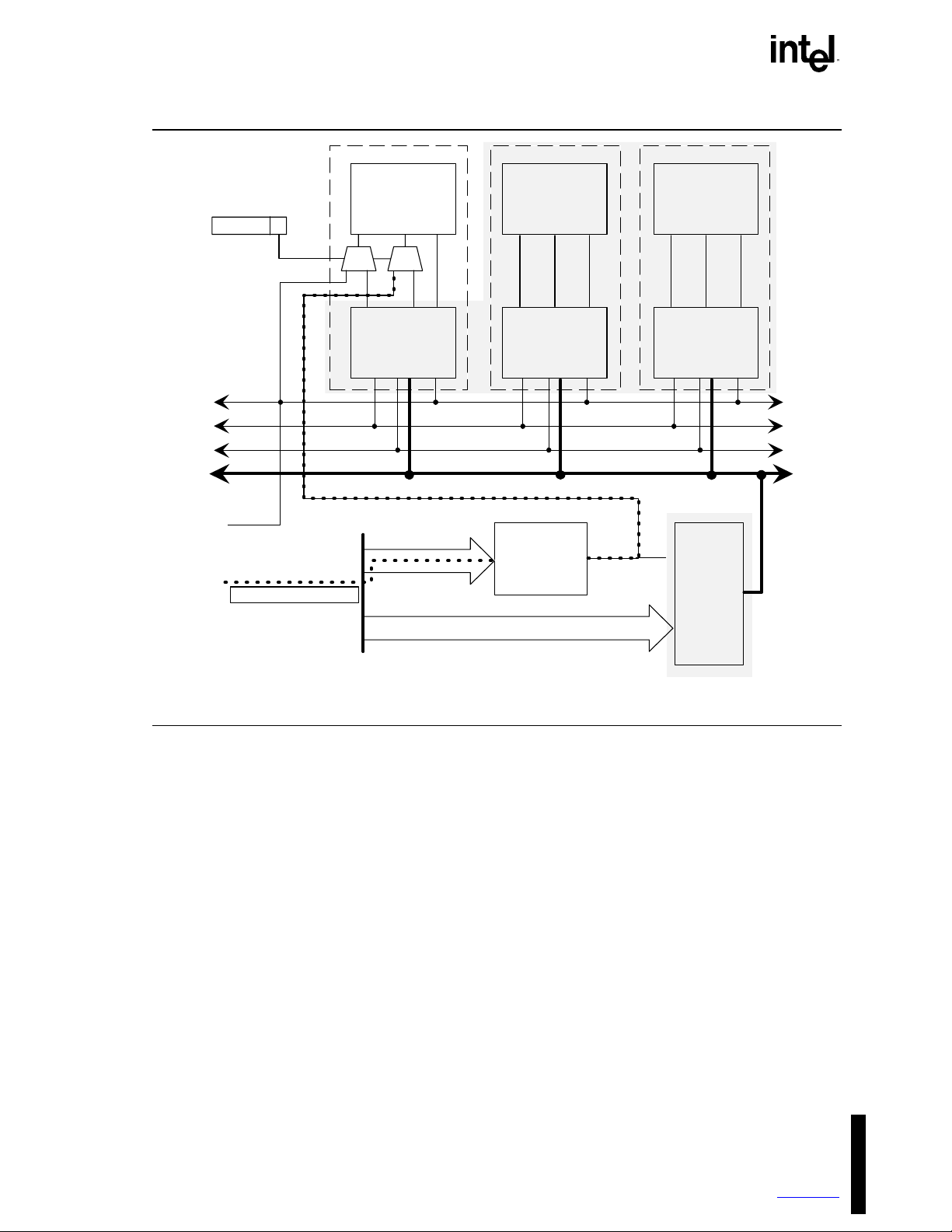
3.6.2.1 PIC Mode
PIC Mode is software compatible with the PC/AT because it actually employs the same hardware
interrupt configuration. As Figure 3-2 illustrates, the hardware for PIC Mode bypasses the APIC
components by using an interrupt mode configuration register (IMCR). This register controls
whether the interrupt signals that reach the BSP come from the master PIC or from the local APIC.
Before entering Symmetric I/O Mode, either the BIOS or the operating system must switch out of
PIC Mode by changing the IMCR.
Version 1.4 3-7
Page 28
MultiProcessor Specification
BSP AP1 AP2
IMCR
E0
REG.
MARK
LINTIN1
LINTIN0
RESET
ICC BUS
NMI
INTERRUPT INPUTS
CPU 1
NMI
INTR
LOCAL
APIC
1
LINTIN0 LINTIN1
CPU 2
NMI INTR
LOCAL
APIC
2
LINTIN0 LINTIN1 LINTIN0 LINTIN1
8259A-
EQUIVALENT
PICS
INTR
CPU 3
NMI INTR
LOCAL
APIC
APIC
3
I/O
SHADED AREAS INDICATE UNUSED CIRCUITS. DOTTED LINE SHOWS INTERRUPT PATH.
Figure 3-2. PIC Mode
The IMCR is supported by two read/writable or write-only I/O ports, 22h and 23h, which receive
address and data respectively. To access the IMCR, write a value of 70h to I/O port 22h, which
selects the IMCR. Then write the data to I/O port 23h. The power-on default value is zero, which
connects the NMI and 8259 INTR lines directly to the BSP. Writing a value of 01h forces the
NMI and 8259 INTR signals to pass through the APIC.
The IMCR must be cleared after a system-wide INIT or RESET to enable the PIC Mode as default.
(Refer to Section 3.7 for information on the INIT and RESET signals.)
The IMCR is optional if PIC Mode is not implemented. The IMCRP bit of the MP feature
information bytes (refer to Chapter 4) enables the operating system to detect whether the IMCR is
implemented.
3-8 Version 1.4
Page 29
Hardware Specification
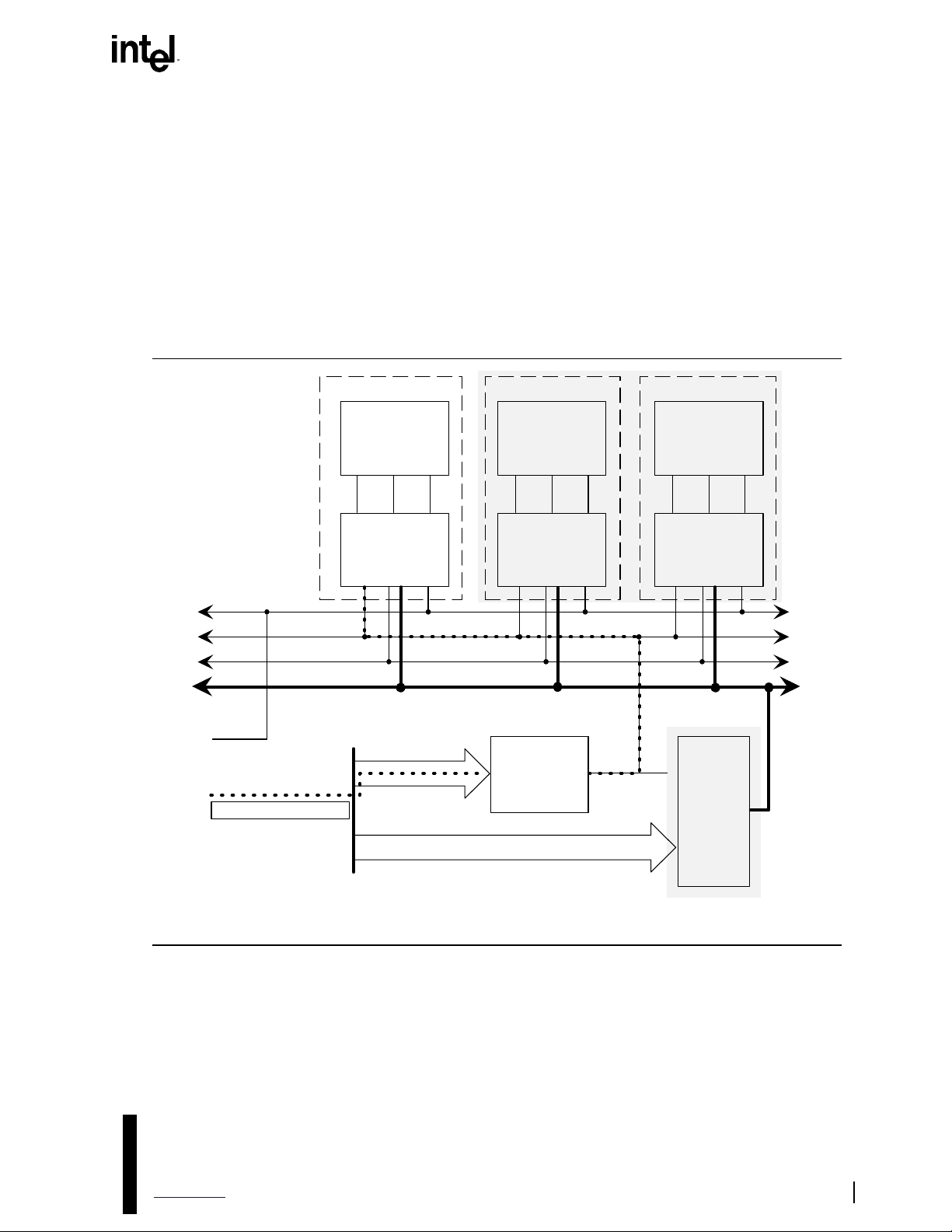
3.6.2.2 Virtual Wire Mode
Virtual Wire Mode provides a uniprocessor hardware environment capable of booting and running
all DOS shrink-wrapped software.
In Virtual Wire Mode, as shown in Figure 3-3, the 8259A-equivalent PIC fields all interrupts, and
the local APIC of the BSP becomes a virtual wire, which delivers interrupts from the PIC to the
BSP via the local APIC’s local interrupt 0 (LINTIN0). The LINTIN0 pin of the local APIC is
programmed as ExtINT, specifying to the APIC that the PIC is to serve as an external interrupt
controller. Whenever the local APIC finds that a particular interrupt is of type ExtINT, it asserts
the ExtINTA transaction along with the PINT interrupt to the processor. In this case, the I/O APIC
is not used.
BSP AP1 AP2
REG.
MARK
LINTIN1
LINTIN0
RESET
ICC BUS
NMI
INTERRUPT INPUTS
CPU 1
NMI
INTR
LOCAL
APIC
1
LINTIN0 LINTIN1
CPU 2
NMI INTR
LOCAL
APIC
2
LINTIN0 LINTIN1 LINTIN0 LINTIN1
8259A-
EQUIVALENT
PICS
INTR
CPU 3
NMI INTR
LOCAL
APIC
APIC
3
I/O
SHADED AREAS INDICATE UNUSED CIRCUITS. DOTTED LINE SHOWS INTERRUPT PATH.
Figure 3-3. Virtual Wire Mode via Local APIC
Version 1.4 3-9
Page 30
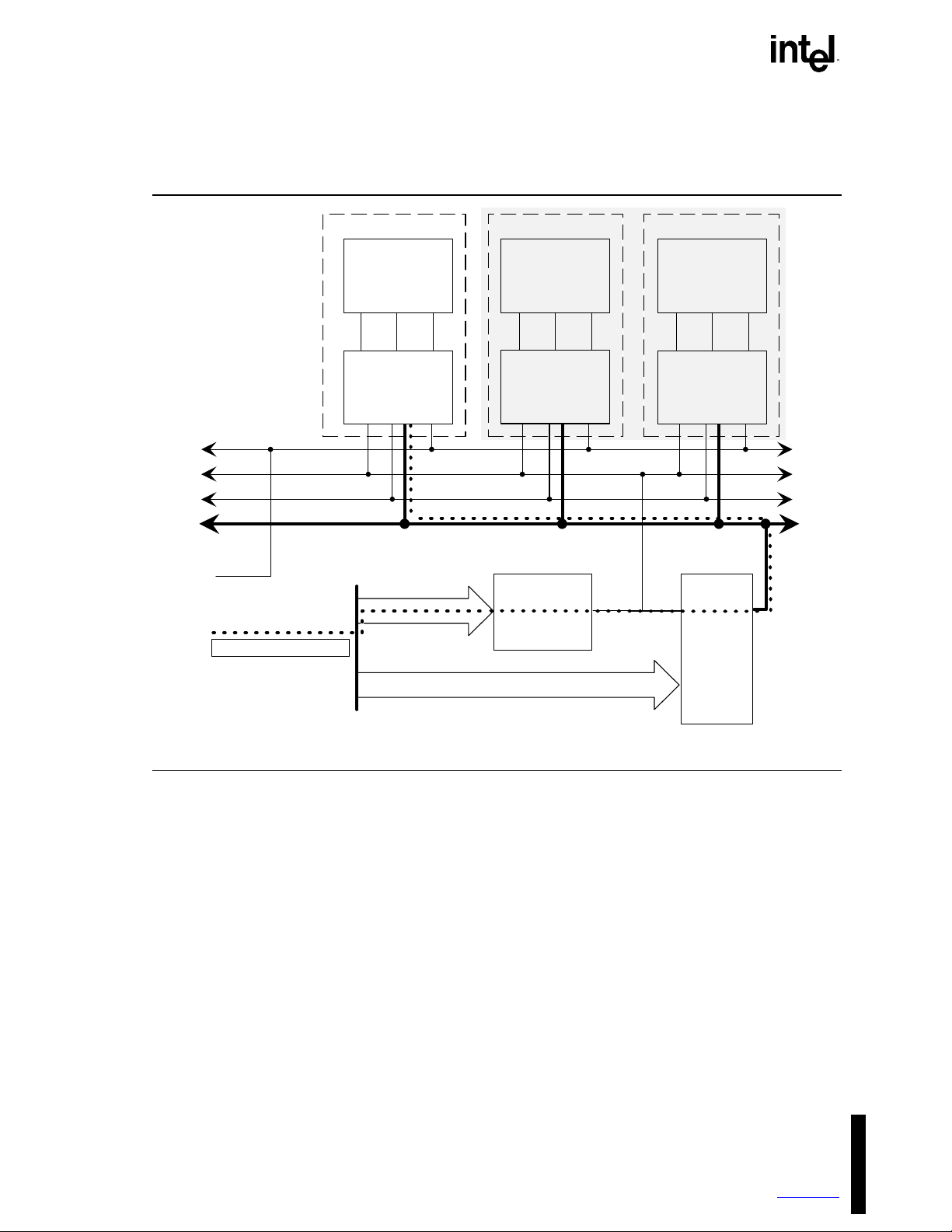
MultiProcessor Specification
Figure 3-3 shows how Virtual Wire Mode can be implemented through the BSP’s local APIC. It is
also permissible to program the I/O APIC for Virtual Wire Mode, as shown in Figure 3-4. In this
case the interrupt signal passes through both the I/O APIC and the BSP’s local APIC.
BSP AP1 AP2
LINTIN1
LINTIN0
RESET
ICC BUS
NMI
INTERRUPT INPUTS
REG.
MARK
CPU 1
NMI
INTR
LOCAL
APIC
1
LINTIN0 LINTIN1
CPU 2
NMI INTR
LOCAL
APIC
2
LINTIN0 LINTIN1 LINTIN0 LINTIN1
8259A-
EQUIVALENT
PICS
INTR
CPU 3
NMI INTR
LOCAL
APIC
APIC
3
I/O
SHADED AREAS INDICATE UNUSED CIRCUITS. DOTTED LINE SHOWS INTERRUPT PATH.
Figure 3-4. Virtual Wire Mode via I/O APIC
3-10 Version 1.4
Page 31

Hardware Specification
3.6.2.3 Symmetric I/O Mode
Some MP operating systems operate in Symmetric I/O Mode. This mode requires at least one I/O
APIC to operate. In this mode, I/O interrupts are generated by the I/O APIC. All 8259 interrupt
lines are either masked or work together with the I/O APIC in a mixed mode. See Figure 3-5 for
an overview of Symmetric I/O Mode.
BSP AP1 AP2
REG.
MARK
LINTIN1
LINTIN0
RESET
ICC BUS
NMI
INTERRUPT INPUTS
CPU 1
NMI
INTR
LOCAL
APIC
1
LINTIN0 LINTIN1
CPU 2
NMI INTR
LOCAL
APIC
2
LINTIN0 LINTIN1 LINTIN0 LINTIN1
8259A-
EQUIVALENT
PICS
INTR
CPU 3
NMI INTR
LOCAL
APIC
APIC
3
I/O
SHADED AREAS INDICATE UNUSED CIRCUITS. DOTTED LINE SHOWS INTERRUPT PATH.
Figure 3-5. Symmetric I/O Mode
The APIC I/O unit has general-purpose interrupt inputs that can be individually programmed to
different operating modes. The I/O APIC interrupt line assignments are system implementation
specific. Refer to Chapter 4 for custom implementations and to Chapter 5 for default
configurations.
The hardware must support a mode of operation
in which the system can switch easily to
Symmetric I/O mode from PIC or Virtual Wire mode. When the operating system is ready to
switch to MP operation, it writes a 01H to the IMCR register, if that register is implemented, and
enables I/O APIC Redirection Table entries. The hardware must not require any other action on the
part of software to make the transition to Symmetric I/O mode.
Version 1.4 3-11
Page 32

MultiProcessor Specification
3.6.3 Assignment of System Interrupts to the APIC Local Unit
The APIC local unit has two general-purpose interrupt inputs, which are reserved for system
interrupts. These interrupt inputs can be individually programmed to different operating modes.
Like the I/O APIC interrupt lines, the local APIC interrupt line assignments of a non-PC/ATcompatible system are system implementation specific. Refer to Chapter 4 for custom
implementations and to Chapter 5 for default configurations.
3.6.4 Floating Point Exception Interrupt
For PC/AT compatibility, the bootstrap processor must support DOS-compatible FPU execution
and exception handling while running in either of the PC/AT-compatible modes. This means that
floating point error signals from the BSP must be routed to the interrupt request 13 signal, IRQ13,
when the system is in PIC or virtual wire mode. While floating point error signals from an
application processor need not be routed to IRQ13, platform designers may choose to connect the
two. For example, connecting the floating point error signal from application processors to IRQ13
can be useful in the case of a platform that supports dynamic choice of BSP during boot.
In symmetric mode, a compliant system supports only on-chip floating point units, with error
signaling via interrupt vector 16. Operating systems must use interrupt vector 16 to manage
floating point exceptions when the system is in symmetric mode.
It is recommended that hardware platforms be designed to block delivery of floating point
exception signals from the processors once the system has switched into symmetric mode to avoid
delivery of superfluous interrupts. If done, such blocking must be implemented in a manner that is
transparent to the operating system. However, the operating system must still be prepared to
handle interrupts generated through assertion of floating point error signals, because on some
platforms these signals may still be routed to IRQ13 even after the switch to symmetric mode.
3.6.5 APIC Memory Mapping
In a compliant system, all APICs must be implemented as memory-mapped I/O devices. APIC
base addresses are at the top of the memory address space. All APIC local units are mapped to the
same addresses, which are not shared. Each processor accesses its local APIC via these memory
addresses. The default base address for the local APICs is 0FEE0_0000h.
Unlike the local APICs, the I/O APICs are mapped to give shared access from all processors,
providing full symmetric I/O access. The default base address for the first I/O APIC is
0FEC0_0000h. Subsequent I/O APIC addresses are assigned in 4K increments. For example, the
second I/O APIC is at 0FEC0_1000h.
Non-default APIC base addresses can be used if the MP configuration table is provided. (Refer to
Chapter 4.) However, the local APIC base address must be aligned on a 4K boundary, and the I/O
APIC base address must be aligned on a 1K boundary.
3-12 Version 1.4
Page 33

Hardware Specification
3.6.6 APIC Identification
Systems developers must assign APIC local unit IDs and ensure that all are unique. There are two
acceptable ways to assign local APIC IDs, as follows:
• By hardware. The ID of each APIC local unit is sampled from the appropriate pins at RESET.
• By the BIOS. Software can override the APIC IDs assigned by hardware by writing to the
Local Unit ID Register. This is possible only with help from the hardware; for example, using
board ID registers that the software can read to determine which board has the BSP.
Local APIC IDs must be unique, and
The MP operating system can use the local APIC ID to determine on which processor it is
executing.
The ID of each I/O APIC unit is set to zero during RESET. It is the responsibility of the operating
system to verify the uniqueness of the I/O APIC ID and to assign a unique ID if a conflict is found.
The assignment of APIC IDs for I/O units must always begin from the lowest number that is
possible after the assignment of local APIC IDs. The operating system must not attempt to change
the ID of an APIC I/O unit if the preset ID number is acceptable.
need not be consecutive.
3.6.7 APIC Interval Timers
The 82489DX APIC local unit contains a 32-bit wide programmable timer with the following two
independent clock input sources:
1. The CLK pin provides the clock signal that drives the 82489DX APIC’s internal operation.
2. The TMBASE pin allows an independent clock signal to be connected to the 82489DX APIC
for use by the timer functions.
The interval timers of the integrated APIC have only one clock input source, CLK. To maintain
consistency, developers of compliant systems based on the 82489DX must choose CLK as the
source of the 82489DX APIC timer clock. TMBASE must be left disabled. An MP operating
system may use the IRQ8 real-time clock as a reference to determine the actual APIC timer clock
speed.
Special consideration must be made for systems with stop clock (STPCLK#) capability. Timer
interrupts are ignored while STPCLK# is asserted. The system time-of-day clock may need to be
reset when STPCLK# is deasserted.
3.6.8 Multiple I/O APIC Configurations
Systems may provide more than one I/O APIC for increased interrupt scalability in Symmetric I/O
Mode. To preserve PC/AT compatibility in PIC or Virtual Wire mode, interrupts connected to
additional I/O APICs must also be connected to the 8259A programmable interrupt controller.
Figure 3-6 represents one possible interrupt connection scheme for a system with two I/O APICs.
The non-ISA interrupts are connected to both the 8259A IRQ inputs and the inputs of the
associated I/O APIC. To prevent non-ISA interrupts from appearing at inputs on both I/O APICs,
the hardware must provide a means to disable the interrupt routing network when the system
switches to symmetric I/O mode with the second I/O APIC enabled.
More information about the implementation of multiple I/O APIC configurations is presented in
Appendix D.
Version 1.4 3-13
Page 34

MultiProcessor Specification
REG.
MARK
INTR/LINT0
ICC BUS
NON-ISA INTERRUPT
INTERRUPT
ROUTING
NETWORK
ISA INTERRUPT
I/O APIC
2
I/O APIC
1
8259A-
EQUIVALENT
PICS
Figure 3-6. Multiple I/O APIC Configurations
3.7 RESET Support
To bring all circuitry in a computer system to an initial state, computer systems require a systemwide reset capability. To support multiple processors, a compliant system requires a processorspecific reset or initialization capability in addition to the typical system-wide reset and
initialization capabilities.
• The term “RESET” refers to the system-wide hard reset. It refers to the RESET signal on both
Pentium and Intel486 processors or the RESET signal of the 82489DX APIC. (See
Section 3.7.1.)
• The term “INIT,” refers to either a system-wide soft reset/initialization or a processor-specific
initialization. For example, the term “INIT” may refer to the INIT signal on the Pentium
processor or to the RESET signal on the Intel486 processor. (See Sections 3.7.2. and 3.7.3.)
Because the INIT signal is available on the Pentium processor but not on the Intel486 processor,
the remainder of this document uses the above-mentioned special definitions for the terms “INIT”
and “RESET”:
3.7.1 System-wide RESET
The system-wide RESET, as defined by this specification, refers to a hard or cold reset, which
sets all circuitry, including processor, coprocessor, add-in cards, and control logic, to an initial
state. A hard reset is the reset signal that is sent to all components of the system during a power-on
3-14 Version 1.4
Page 35

Hardware Specification
or by the front panel reset button (if the system is so equipped). This type of reset operates without
regard to cycle boundaries, and, for example, is connected to the RESET pin of Pentium
processors.
3.7.2 System-wide INIT
The system-wide INIT, as defined by this specification, refers to a soft or warm reset that
initializes only portions of the processor. This type of reset initializes the microprocessor in such a
way that the reset does not corrupt any pending cycles, but waits instead for a cycle boundary, and
does not invalidate the contents of caches and floating point registers. This type of reset request is
connected to the INIT signal of newer processors, such as the Pentium processors. On Intel486
processors, the RESET pin is used for this function, as well as for hard resets, but the RESET pin
does not provide the advantages of the INIT pin. There are many possible
reset, including:
• A write either to a port of the 8042 Keyboard Controller or to some other port provided for the
same purpose by a chipset.
• A shutdown special bus cycle. Usually a chipset senses a shutdown cycle and asserts a soft
reset to the processor.
In a compliant system, the standard PC/AT-platform resets mentioned above, both hard and soft,
must be directed to all processors in the system, except in the case of fault-tolerant MP systems, in
which a soft reset may be handled on a per-processor basis.
ways to assert a soft
3.7.3 Processor-specific INIT
A processor-specific INIT is one of the basic multiprocessor support functions of a compliant
multiprocessor system, along with processor startup and shutdown. With it, the BSP can
selectively initialize an AP for subsequent startup or recover an AP from a fatal system error. This
type of INIT function is exclusively used by the MP operating system or BIOS self-test routine.
The system must be designed so that the processor-specific INIT can be initiated by software
programming; it is not necessary that it be initiated by hardware.
A compliant system supports the processor-specific INIT via a special interprocessor interrupt (IPI)
mechanism called INIT IPI. For the 82489DX APIC, INIT IPI is an IPI that has the delivery mode
RESET, which delivers the signal to all processors listed in the destination by asserting/deasserting
the addressed APIC local unit’s PRST output pin. When the PRST signal is connected to the INIT
pin of the Pentium processor or to the RESET pin of the Intel486 processor, the INIT IPI forces the
processor to begin executing at the reset vector.
For systems based on the Intel486 processor, the 82489DX APIC’s PRST line must be the only
line connected to the processor’s RESET input, so that the INIT IPI resets the targeted processor
only. The system reset signal is connected to the local 82489DX APIC’s RESET input. Assertion
of the system reset signal then causes all of the local 82489DX APICs to assert their PRST outputs,
thereby resetting all the processors.
For integrated APIC versions of the Pentium processor, INIT IPI asserts and deasserts the internal
INIT signal of the Pentium processor.
Version 1.4 3-15
Page 36

MultiProcessor Specification
3.8 System Initial State
The system initial state is the state before the BIOS gives control to the operating system. It is
identical to the system initial state of a typical PC/AT system, with the additional MP components
in the following state:
1. All local APICs are disabled, except for the local APIC of the BSP if the system starts in
Virtual Wire Mode.
2. All pending I/O APIC interrupts are cleared and disabled.
3. If IMCR is present, it should be set to 0 or 1 depending on the interrupt mode chosen for
startup.
4. All APs are in Real Mode.
5. All APs are in HALT state or off the system bus.
The BIOS must disable interrupts to all processors and set the APICs to the system initial state
before giving control to the operating system. The operating system is responsible for initializing
all of the APICs.
3.9 Support for Fault-resilient Booting
OEMs may choose not to implement a fault-resilient booting capability in their systems. However,
if such a capability is provided, systems developers must observe the following guidelines:
• BSP determination may be performed by special hardware or by the BIOS, but it must be
totally transparent to the operating system.
• NMI and INTR must be connected to the BSP.
• FERR# and IGNNE# signals from the designated BSP must be used to support IRQ13.
• The A20M# signal from the designated BSP must be used to support the masking of physical
address bit 20 on the BSP (to support DOS compatibility).
3-16 Version 1.4
Page 37

00H
PHYSICAL ADDRESS POINTER
FIXED-LENGTH
HEADER
31 0
ENTRY TYPE
ENTRY T YPE
ENTRY LENGTH DEPENDS ON ENTRY TYPE
ENTRY LEN GTH DE PENDS ON ENT RY TYPE
VARIABL E NUMBE R OF
VARIABL E- LE NGT H
ENTRIES
31 07815162324
31 07815162324
02CH
FLOATING
POINT ER
STRUCTURE
MP
CONFIGURATION
TABLE
The operating system must have access to some information about the multiprocessor
configuration. The MP specification provides two methods for passing this information to the
operating system: a minimal method for configurations that conform to one of a set of common
hardware defaults, and a maximal method that provides the utmost flexibility in hardware design.
Figure 4-1 shows the general layout of the MP configuration data structures.
4
MP Configuration Table
Figure 4-1. MP Configuration Data Structures
Version 1.4 4-1
Page 38

MultiProcessor Specification
The following two data structures are used:
1. The MP Floating Pointer Structure. This structure contains a physical address pointer to the
MP configuration table and other MP feature information bytes. When present, this structure
indicates that the system conforms to the MP specification. This structure must be stored in at
least one of the following memory locations, because the operating system searches for the MP
floating pointer structure in the order described below:
a. In the first kilobyte of Extended BIOS Data Area (EBDA), or
b. Within the last kilobyte of system base memory (e.g., 639K-640K for systems with 640
KB of base memory or 511K-512K for systems with 512 KB of base memory) if the
EBDA segment is undefined, or
c. In the BIOS ROM address space between 0F0000h and 0FFFFFh.
The MP Configuration Table. This table is optional. The table is composed of a base section
2.
and an extended section. The base section contains entries that are completely backwards
compatible with previous versions of this specification. The extended section contains
additional entry types. The MP configuration table contains explicit configuration information
about APICs, processors, buses, and interrupts. The table consists of a header, followed by a
number of entries of various types. The format and length of each entry depends on its type.
When present, this configuration table must be stored either in a non-reported system RAM or
within the BIOS read-only memory space.
An MP configuration table is not required if the system design corresponds to one of the default
configurations listed in Chapter 5. Note that these defaults are only for designs that are always
equipped with two processors. Systems that support a variable number of installed processors
must supply a complete MP configuration table that indicates the correct number of installed
processors. For example, systems that ship with only one processor but provide for a later upgrade
with a second processor may not use a default MP configuration.
The following is a list of the suggested memory spaces for the MP configuration table:
a. In the first kilobyte of Extended BIOS Data Area (EBDA), or
b. Within the last kilobyte of system base memory if the EBDA segment is undefined, or
c. At the top of system physical memory, or
d. In the BIOS read-only memory space between 0E0000h and 0FFFFFh.
The BIOS reports the base memory size in a two-byte location (40:13h) of the BIOS data area.
The base memory size is reported in kilobytes minus 1K, which is used by the EBDA segment or
for other purposes.
The exact starting address of the EBDA segment for EISA or MCA systems can be found in a twobyte location (40:0Eh) of the BIOS data area. If system memory is used, the BIOS must not report
this memory as part of the available memory space.
These two MP configuration data structures can be located in the ROM space only if the system is
not dynamically reconfigurable. The MP configuration information is intended to be read-only to
the operating system.
Strings in the configuration tables are coded in ASCII. The first character of the string is stored at
the lowest address of the string field. If the string is shorter than its field, the extra character
locations are filled with space characters. Strings are not null terminated.
4-2 Version 1.4
Page 39

SPEC_REV
LENGTH
_ (5Fh)M (4Dh)
SIGNATURE
00H
04H
CHECKSUM
08
0CH
H
31 07815162324
31 07815162324
PHYSICAL ADDRESS POINTER
P (50h)_ (5Fh)
MP FEATURE
BYTE 1
MP FEATURE
BYTES 2-5
MP Configuration Table
4.1 MP Floating Pointer Structure
An MP-compliant system must implement the MP floating pointer structure, which is a variable
length data structure in multiples of 16 bytes. Currently, only one 16-byte data structure is defined.
It must span a minimum of 16 contiguous bytes, beginning on a 16-byte boundary, and it must be
located within the physical address as specified in the previous section. To determine whether the
system conforms to the MP specification, the operating system must search for the MP floating
pointer structure in the order specified in the previous section. Figure 4-2 shows the format of this
structure, and Table 4-1 explains each of the fields. See also Appendix E, for more information.
Figure 4-2. MP Floating Pointer Structure
Table 4-1. MP Floating Pointer Structure Fields
Offset
Field
(in bytes:bits)
SIGNATURE 0 32 The ASCII string represented by “_MP_” which
PHYSICAL ADDRESS
4 32 The address of the beginning of the MP
POINTER
LENGTH 8 8 The length of the floating pointer structure table
SPEC_REV 9 8 The version number of the MP specification
CHECKSUM 10 8 A checksum of the complete pointer structure.
Length
(in bits) Description
serves as a search key for locating the pointer
structure.
configuration table. All zeros if the MP
configuration table does not exist.
in paragraph (16-byte) units. The structure is
16 bytes or 1 paragraph long; so this field
contains 01h.
supported. A value of 01h indicates Version 1.1.
A value of 04h indicates Version 1.4.
All bytes specified by the length field, including
CHECKSUM and reserved bytes, must add up to
zero.
Version 1.4 4-3
Page 40

MultiProcessor Specification
Table 4-1. MP Floating Pointer Structure Fields (continued)
Field
MP FEATURE
INFORMATION BYTE 1
MP FEATURE
INFORMATION BYTE 2
MP FEATURE
INFORMATION BYTES 3-5
Offset
(in bytes:bits)
11 8
12:0
12:7
13 24 Reserved for future MP definitions. Must be
Length
(in bits) Description
Bits 0-7:
When these bits are all zeros, the MP
configuration table is present. When nonzero,
the value indicates which default configuration
(as defined in Chapter 5) is implemented by the
system.
7
1
Bits 0-6:
Bit 7:
set, the IMCR is present and PIC Mode is
implemented; otherwise, Virtual Wire Mode is
implemented.
zero.
MP System Configuration Type.
Reserved for future MP definitions.
IMCRP. When the IMCR presence bit is
The MP feature information byte 1 specifies the MP system default configuration type. If nonzero,
the system configuration conforms to one of the default configurations. The default configurations,
specified in Chapter 5, may only be used to describe systems that always have two processors
installed.
Bit 7 of MP feature information byte 2, the IMCR present bit, is used by the operating system to
determine whether PIC Mode or Virtual Wire Mode is implemented by the system.
The physical address pointer field contains the address of the beginning of the MP configuration
table. If it is nonzero, the MP configuration table can be accessed at the physical address provided
in the pointer structure. This field must be all zeros if the MP configuration table does not exist.
4-4 Version 1.4
Page 41

MP Configuration Table
SPEC_REV BASE TABLE LENGTH
P (50h)P (50h) M (4Dh)
C (43h)
SIGNATURE
00H
04HCHECKSUM
OEM TABLE POINTER
OEM TABLE SIZE
MEMORY-MAPPED ADDRESS OF LOCAL APIC
10H
1CH
20H
24H
08H
31 07815162324
31 07815162324
O
E
Mspace
IDspacespace
PROD
ID spacespace
ENTRY COUNT
28H
space space space space
RESERVED
EXTENDED
TABLE
CHECKSUM
EXTENDED TABLE LENGTH
PRODUCT ID STRING
OEM ID STRING
4.2 MP Configuration Table Header
Figure 4-3 shows the format of the header of the MP configuration table, and Table 4-2 explains
each of the fields.
Figure 4-3. MP Configuration Table Header
Version 1.4 4-5
Page 42

MultiProcessor Specification
Table 4-2. MP Configuration Table Header Fields
Offset
Field
SIGNATURE 0 32 The ASCII string representation of “PCMP,” which
BASE TABLE LENGTH 4 16 The length of the base configuration table in bytes,
SPEC_REV 6 8 The version number of the MP specification. A value
CHECKSUM 7 8 A checksum of the entire base configuration table. All
OEM ID 8 64 A string that identifies the manufacturer of the system
PRODUCT ID 16 96 A string that identifies the product family.
OEM TABLE POINTER 28 32 A physical-address pointer to an OEM-defined
OEM TABLE SIZE 32 16 The size of the base OEM table in bytes. If the table
ENTRY COUNT 34 16 The number of entries in the variable portion of the
ADDRESS OF LOCAL APIC 36 32 The base address by which each processor accesses
(in bytes)
Length
(in bits) Description
confirms the presence of the table.
including the header, starting from offset 0. This field
aids in calculation of the checksum.
of 01h indicates Version 1.1. A value of 04h indicates
Version 1.4.
bytes, including CHECKSUM and reserved bytes,
must add up to zero.
hardware.
configuration table. This table is optional. If not
present, this field is zero.
is not present, this field is zero.
base table. This field helps the software identify the
end of the table when stepping through the entries.
its local APIC.
EXTENDED TABLE
LENGTH
EXTENDED TABLE
CHECKSUM
40 16 Length in bytes of the extended entries that are
located in memory at the end of the base
configuration table. A zero value in this field indicates
that no extended entries are present.
42 8 Checksum for the set of extended table entries,
including only extended entries starting from the end
of the base configuration table. When no extended
table is present, this field is zero.
4.3 Base MP Configuration Table Entries
A variable number of variable length entries follow the header of the MP configuration table. The
first byte of each entry identifies the entry type. Each entry type has a known, fixed length. The
total length of the MP configuration table depends upon the configuration of the system. Software
must step through each entry in the base table
sorted on ENTRY TYPE in ascending order. Table 4-3 gives the meaning of each value of
ENTRY TYPE.
until it reaches ENTRY COUNT. The entries are
4-6 Version 1.4
Page 43

RESERVED
RESERVED
31 0374811121516192023242728
CPU SIGNATURE
LOCAL APIC ID
CPU FLAGS
FEATURE FLAGS
31 0374811121516192023242728
00H
04H
08H
0CH
10H
LOCAL APIC
VERSION #
ENTRY TYPE
0
E
N
RESERVED
B
P
Table 4-3. Base MP Configuration Table Entry Types
Length
Entry Description Entry Type Code*
(in bytes) Comments
Processor 0 20 One entry per processor.
Bus 1 8 One entry per bus.
I/O APIC 2 8 One entry per I/O APIC.
I/O Interrupt Assignment 3 8 One entry per bus interrupt source.
Local Interrupt Assignment 4 8 One entry per system interrupt
source.
* All other type codes are reserved.
4.3.1 Processor Entries
Figure 4-4 shows the format of each processor entry, and Table 4-4 defines the fields.
MP Configuration Table
Figure 4-4. Processor Entry
In systems that use the MP configuration table, the only restriction placed on the assignment of
APIC IDs is that they be unique
. They do not need to be consecutive. For example, it is possible
for only APIC IDs 0, 2, and 4 to be present.
Version 1.4 4-7
Page 44

MultiProcessor Specification
Table 4-4. Processor Entry Fields
Offset
Field
ENTRY TYPE 0 8 A value of 0 identifies a processor entry.
LOCAL APIC ID 1 8 The local APIC ID number for the particular
LOCAL APIC VERSION # 2 8 Bits 0–7 of the local APIC’s version register.
CPU FLAGS: EN 3:0 1 If zero, this processor is unusable, and the
CPU FLAGS: BP 3:1 1 Set if specified processor is the bootstrap
CPU SIGNATURE:
STEPPING 4:0 4 Refer to Table 4-5 for values.
MODEL 4:4 4 Refer to Table 4-5 for values.
FAMILY 5:0 4 Refer to Table 4-5 for values.
FEATURE FLAGS 8 32 The feature definition flags for the processor as
(in bytes:bits)
Length
(in bits) Description
processor.
operating system should not attempt to access this
processor.
processor.
returned by the CPUID instruction. Refer to
Table 4-6 for values. If the processor does not
have a CPUID instruction, the BIOS must assign
values to FEATURE FLAGS according to the
features that it detects.
The configuration table is filled in by the BIOS after it executes a CPU identification procedure on
each of the processors in the system. Whenever possible, the complete 32-bit CPU signature
should be filled with the values returned by the CPUID instruction. The CPU signature includes
but is not limited to, the stepping, model, and family fields. If the processor does not have a
CPUID instruction, the BIOS must fill these and future reserved fields with information returned
by the processor in the EDX register after a processor reset. See the Pentium
Processor User’s
Manual and Intel Processor Identification with the CPUID Instruction (AP-485) for details on the
CPUID instruction.
4-8 Version 1.4
Page 45

MP Configuration Table
Table 4-5. Intel486 and Pentium Processor Signatures
Family Model
Stepping
0000 0000 0000 Not a valid CPU signature.
0100 0000 and 0001 xxxx Intel486 DX Processor
0100 0010 xxxx Intel486 SX Processor
0100 0011 xxxx Intel487 Processor
0100 0011 xxxx IntelDX2™ Processor
0100 0100 xxxx Intel486 SL Processor
0100 0101 xxxx IntelSX2™ Processor
0100 1000 xxxx IntelDX4™ Processor
0101 0001 xxxx Pentium Processors (510\60, 567\66)
0101 0010 xxxx Pentium Processors (735\90, 815\100)
Values not shown are reserved for future processors.
Refer to the documentation of each new processor for its family and model values.
1111 1111 1111 Not a valid CPU signature. Indicates a processor that is not
a
Intel releases information about stepping numbers as needed.
a
Description
an Intel architecture-compatible processor (a graphics
controller, for example)
Table 4-6. Feature Flags from CPUID Instruction
Bit Name Description Comments
0 FPU On-chip Floating
Point Unit
1–6 Reserved.
7 MCE Machine Check
Exception
8 CX8 CMPXCHG8B
Instruction
9 APIC On-chip APIC Indicates that an integrated APIC is present and hardware enabled.
10–31 Reserved.
The processor contains an FPU that supports the Intel387
processor floating point instruction set.
Exception 18 is defined for machine checks, including CR4.MCE for
controlling the feature. This feature does not define the modelspecific implementations of machine-check error logging reporting
and processor shutdowns. Machine-check exception handlers may
have to depend on processor version to do model-specific
processing of the exception or test for the presence of the standard
machine-check feature.
The 8 byte (64 bits) compare-and-exchange instruction is supported
(implicitly locked and atomic). Introduced by the Pentium
processor.
(Software disabling does not affect this bit.)
Version 1.4 4-9
Page 46

00H
04H
31 07815162324
31 07815162324
ENTRY TYPE
1
BUS ID
BUS TYPE STRING
MultiProcessor Specification
4.3.2 Bus Entries
Bus entries identify the kinds of buses in the system. Because there may be more than one bus in a
system, each bus is assigned a unique bus ID number by the BIOS. The bus ID number is used by
the operating system to associate interrupt lines with specific buses. Figure 4-5 shows the format
of a bus entry, and Table 4-7 explains the fields of each entry.
Figure 4-5. Bus Entry
Table 4-7. Bus Entry Fields
Offset
Field
(in bytes)
ENTRY TYPE 0 8 Entry type 1 identifies a bus entry.
BUS ID 1 8 An integer that identifies the bus entry. The BIOS assigns
BUS TYPE
2 48 A string that identifies the type of bus. Refer to Table 4-8 for
STRING
Length
(in bits) Description
identifiers sequentially, starting at zero.
values. These are 6-character ASCII (blank-filled) strings
used by the MP specification.
4-10 Version 1.4
Page 47

Table 4-8. Bus Type String Values
Bus Type String Description
CBUS Corollary CBus
CBUSII Corollary CBUS II
EISA Extended ISA
FUTURE IEEE FutureBus
INTERN Internal bus
ISA Industry Standard Architecture
MBI Multibus I
MBII Multibus II
MCA Micro Channel Architecture
MPI MPI
MPSA MPSA
NUBUS Apple Macintosh NuBus
PCI Peripheral Component Interconnect
PCMCIA PC Memory Card International Assoc.
TC DEC TurboChannel
VL VESA Local Bus
VME VMEbus
XPRESS Express System Bus
MP Configuration Table
Each bus in a system must have a unique BUS ID if any one of the following criteria are true:
1. The bus does not share its memory address space with another bus.
2. The bus does not share its I/O address space with another bus.
3. The bus does not share interrupt lines with another bus.
4. Any aspect of the bus as an independent entity is software visible (such as PCI configuration
space).
Special consideration must be given when assigning a BUS ID for local buses such as VL, which
are designed to work in conjunction with another bus. If the bus looks like a part of another bus
because it uses a subset of that bus's interrupts and address space, rendering it totally invisible to
software, it does not need its own bus entry in the table. The two buses are then considered a single
logical bus.
Version 1.4 4-11
Page 48

00H
04H
31 07815162324
31 07815162324
ENTRY TYPE
2
I/O APIC ID
I/O APIC
VERSION #
MEMORY-MAPPED ADDRESS OF I/O APIC
I/O APIC FLAGS
E
N
RESERVED
MultiProcessor Specification
4.3.3 I/O APIC Entries
The configuration table contains one or more entries for I/O APICs. Figure 4-6 shows the format
of each I/O APIC entry, and Table 4-9 explains each field.
Table 4-9. I/O APIC Entry Fields
Field
ENTRY TYPE 0 8 A value of 2 identifies an I/O APIC entry.
I/O APIC ID 1 8 The ID of this I/O APIC.
I/O APIC VERSION # 2 8 Bits 0–7 of the I/O APIC’s version register.
I/O APIC FLAGS: EN 3:0 1 If zero, this I/O APIC is unusable, and the
I/O APIC ADDRESS 4 32 Base address for this I/O APIC.
Offset
(in bytes:bits)
Figure 4-6. I/O APIC Entry
Length
(in bits) Description
operating system should not attempt to access
this I/O APIC.
At least one I/O APIC must be enabled.
4.3.4 I/O Interrupt Assignment Entries
These entries indicate which interrupt source is connected to each I/O APIC interrupt input. There
is one entry for each I/O APIC interrupt input that is connected. Figure 4-7 shows the format of
each entry, and Table 4-10 explains each field. Appendix D provides the semantics for encoding
PCI interrupts.
The MP specification enables significantly more interrupt sources than the standard AT
architecture by using I/O APICs. When using I/O APICs, it is preferable that the buses do not
share interrupts with the other buses. Bus implementations that share interrupts, such as the PCI
and VL local buses, support their bus interrupts by overloading them into another bus space. These
buses can be supported in one of the following two ways:
1. Interrupt Assignment Entries for each of the bus interrupts are listed in the MP configuration
table. Each interrupt destination matches the destination of another interrupt source interrupt
that this interrupt shares. For example, if PCI-Device1/INTA#
ISA-IRQ2, then both Interrupt Assignment Entries for these vectors would refer to the same
destination I/O APIC and INTIN#.
has the same vector as
4-12 Version 1.4
Page 49

00H
04H
31 07815162324
ENTRY TYPE
3
INTERRUPT
TYPE
RESERVED
SOURCE
BUS ID
SOURCE BUS
IRQ
DESTINATION
I/O APIC ID
DESTINATION
I/O APIC INTIN#
P
O
E
L
31 07815162324
I/O INTERRUPT FLAG
MP Configuration Table
2. No Interrupt Assignment Entries are declared for any of the bus source interrupts, and the
operating system uses some other bus-specific knowledge of bus interrupt schemes in order to
support the bus. This operating system bus-specific knowledge is beyond the scope of this
specification.
Figure 4-7. I/O Interrupt Entry
Version 1.4 4-13
Page 50

MultiProcessor Specification
Table 4-10. I/O Interrupt Entry Fields
Offset
Field
ENTRY TYPE 0 8 Entry type 3 identifies an I/O interrupt
INTERRUPT TYPE 1 8 See Table 4-11 for values.
PO 2:0 2 Polarity of APIC I/O input signals:
EL 2:2 2 Trigger mode of APIC I/O input signals:
SOURCE BUS ID 4 8 Identifies the bus from which the interrupt
SOURCE BUS IRQ 5 8 Identifies the interrupt signal from the
DESTINATION I/O APIC ID 6 8 Identifies the I/O APIC to which the signal
DESTINATION I/O APIC INTIN# 7 8 Identifies the INTINn pin to which the
(in bytes:bits)
Length
(in bits) Description
entry.
00 = Conforms to
specifications of bus (for
example, EISA is activelow for level-triggered
interrupts)
01 = Active high
10 = Reserved
11 = Active low
Must be 00 if the 82489DX is used.
00 = Conforms to
specifications of bus (for
example, ISA is edge-
triggered)
01 = Edge-triggered
10 = Reserved
11 = Level-triggered
signal comes.
source bus. Values are mapped onto
source bus signals, starting from zero. A
value of 0, for example, would indicate
IRQ0 of an ISA bus. See Section D.3 for
PCI bus semantics.
is connected. If the ID is 0FFh, the signal
is connected to all I/O APICs.
signal is connected.
4-14 Version 1.4
Page 51

00H
04H
ENTRY TYPE
4
INTERRUPT
TYPE
RESERVED
SOURCE
BUS ID
SOURCE BUS
IRQ
DESTINATION
LOCAL APIC ID
DESTINATION
LOCAL APIC
LINTIN#
P
O
E
L
31 07815162324
LOCAL INTERRUPT FLAG
31 07815162324
MP Configuration Table
Table 4-11. Interrupt Type Values
Interrupt Type* Description Comments
0 INT Signal is a vectored interrupt; vector is supplied by APIC
redirection table.
1 NMI Signal is a nonmaskable interrupt.
2 SMI Signal is a system management interrupt.
3 ExtINT Signal is a vectored interrupt; vector is supplied by external PIC.
For example, if an 8259 is used as the external PIC, the source is
the 8259 INTR output line, and the vector is supplied by the 8259.
* All other values are reserved.
4.3.5 Local Interrupt Assignment Entries
These configuration table entries tell what interrupt source is connected to each local interrupt
input of each local APIC. Figure 4-8 shows the format of each entry, and Table 4-12 explains each
field.
Figure 4-8. Local Interrupt Entry
Version 1.4 4-15
Page 52

MultiProcessor Specification
Table 4-12. Local Interrupt Entry Fields
Offset (in
Field
ENTRY TYPE 0 8 Entry type 4 identifies a local interrupt
INTERRUPT TYPE 1 8 See Table 4-11 for values
PO 2:0 2 Polarity of APIC local input signals:
EL 2:2 2 Trigger mode of APIC local input signals:
SOURCE BUS ID 4 8 Identifies the bus from which the interrupt
SOURCE BUS IRQ 5 8 Identifies the interrupt signal from the
DESTINATION LOCAL APIC ID 6 8 Identifies the local APIC to which the
DESTINATION LOCAL APIC
LINTIN#
bytes:bits)
7 8 Identifies the LINTINn pin to which the
Length
(in bits) Description
entry.
00 = Conforms to
specifications of bus
(for example, EISA is
active-low for level
triggered interrupts)
01 = Active high
10 = Reserved
11 = Active low
Must be 00 if the 82489DX is used.
00 = Conforms to
specifications of bus
(for example, ISA is
edge triggered)
01 = Edge-triggered
10 = Reserved
11 = Level-triggered
signal came.
source bus. Values are mapped onto
source bus signals, starting from zero. A
value of 0, for example, would indicate
IRQ0 of an ISA bus. See Section D.3 for
PCI bus semantics.
signal is connected. If the ID is 0FFh, the
signal is connected to all local APICs.
signal is connected, where n = 0 or 1.
4-16 Version 1.4
Page 53

MP Configuration Table
4.4 Extended MP Configuration Table Entries
A variable number of variable-length entries are located in memory, immediately following entries
in the base section of the MP configuration table described in Section 4.3. These entries compose
the extended section of the MP configuration table. Each entry in the extended section of the table
has three elements:
• ENTRY TYPE
• ENTRY LENGTH
• DATA
ENTRY TYPE and ENTRY LENGTH make up a header that is present in all extended
configuration table entries. The ENTRY TYPE and ENTRY LENGTH fields are eight bit
unsigned values. ENTRY LENGTH specifies the total length of the given configuration entry. The
length of the DATA field is two bytes less than the value specified by ENTRY LENGTH.
This scheme ensures that operating systems can parse all the entries in the extended MP
configuration table area, even if an entry type is unrecognized. Operating systems that find an
unknown entry type when parsing this section of the table should ignore the content and move on
to the next entry, until the offset from the end of the base table reaches the length that is specified
in the EXTENDED TABLE LENGTH field of the configuration table header. The ability to skip
entries with unrecognized type codes beyond those listed in Table 4-13 is essential since it is
anticipated that more types of entries will be added to this list over time.
The total length of the Extended MP configuration table depends upon the configuration of the
system. The entries are sorted on ENTRY TYPE in ascending order. Table 4-13 gives the meaning
of each value of ENTRY TYPE.
Table 4-13. Extended MP Configuration Table Entry Types
Entry Type
Entry Description
SYSTEM ADDRESS SPACE
MAPPING
BUS HIERARCHY DESCRIPTOR 129 8 Entry to describe I/O bus interconnection.
COMPATIBILITY BUS ADDRESS
SPACE MODIFIER
All other type codes are reserved.
*
Code*
128 20 Entry to declare system visible memory
130 8 Entry to describe predefined address
Length
(in bytes) Comments
or I/O space on a bus.
ranges that modify the memory or I/O
space visible on a bus in order to support
ISA compatibility.
Version 1.4 4-17
Page 54

MultiProcessor Specification
4.4.1 System Address Space Mapping Entries
System Address Space Mapping entries define the system addresses that are visible on a particular
bus. Each bus defined in the Base Table can have any number of System Address Space Mapping
entries included in the Extended Table. Thus, individual buses can be configured to support
different address ranges, thereby decreasing the amount of bus traffic on a given bus and increasing
the overall system performance. Each consecutive address range that is usable by the operating
system to access devices on a given bus has a System Address Space Mapping entry. Figure 4-9
shows the format of each entry, and Table 4-14 explains each field. See also Appendix E, for more
information.
31 0374811121516192023
31 0374811121516192023
24
2728
24
2728
Figure 4-9. System Address Space Entry
ADDRESS LENGT H
ADDRESS BASE
ENTRY LENGTHBUS IDADDRESS TYPE
ENTRY TYPE
128
10H
0CH
08H
04H
00H
4-18 Version 1.4
Page 55
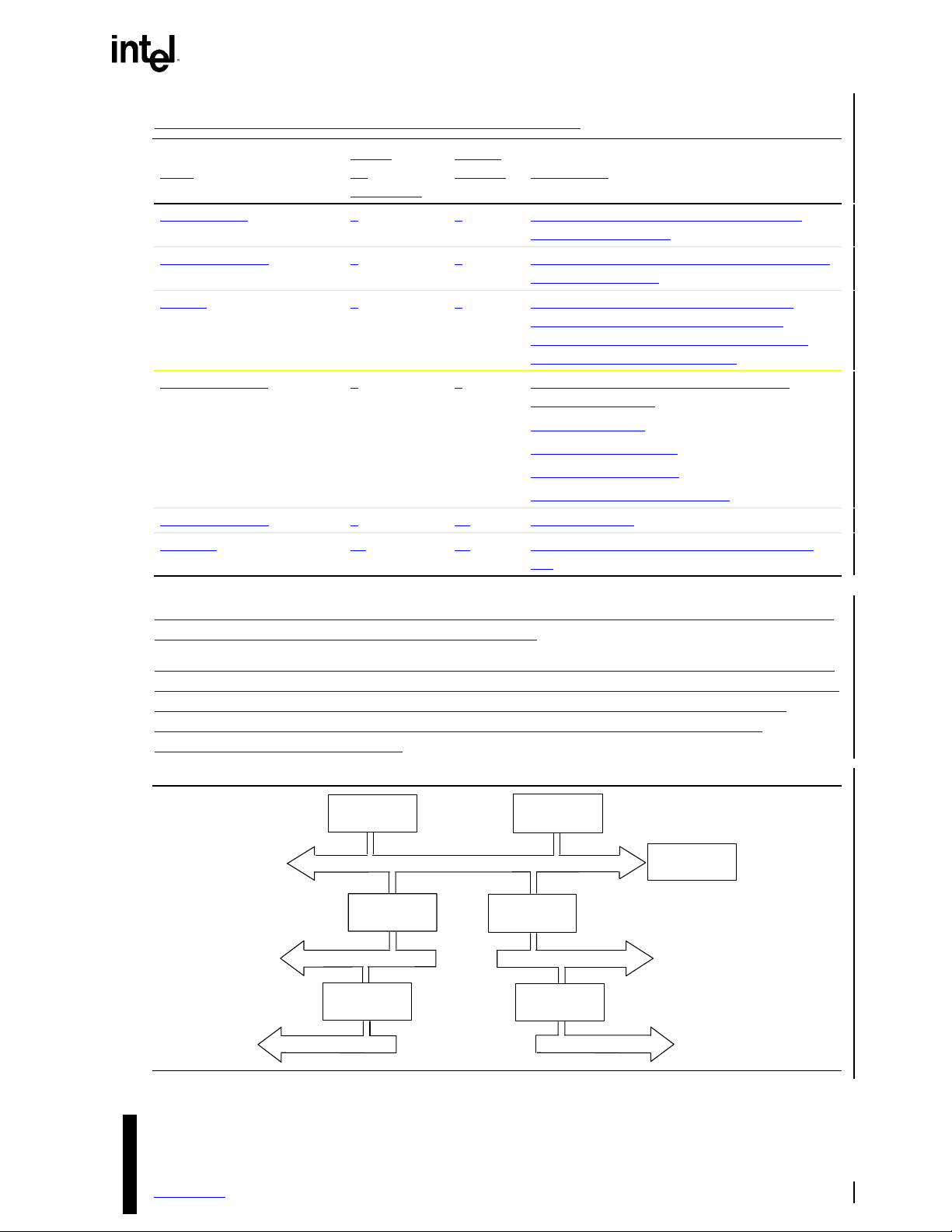
Table 4-14. System Address Space Mapping Entry Fields
Processor 1
PCI Bus 1
EISA Bus
PCI Bus 2
Memory
Controller
EISA Bridge
Processor 0
System Bus
PCI
Host Bridge
PCI-to-PCI
Bridge
PCI Bus 0
PCI
Host Bridge
MP Configuration Table
Field
Offset
(in
Length
(in bits) Description
bytes:bits)
ENTRY TYPE 0 8 Entry type 128 identifies a System Address
Space Mapping Entry.
ENTRY LENGTH 1 8 A value of 20 indicates that an entry of this type
is twenty bytes long.
BUS ID 2 8 The BUS ID for the bus where the system
address space is mapped. This number
corresponds to the BUS ID as defined in the
base table bus entry for this bus.
ADDRESS TYPE 3 8 System address type used to access bus
addresses must be:
0 = I/O address
1 = Memory address
2 = Prefetch address
All other numbers are reserved.
ADDRESS BASE 4 64 Starting address
LENGTH 12 64 Number of addresses which are visible to the
bus
If any main memory address is mapped to a software visible bus, such as PCI, it must be explicitly
declared using a System Address Space Mapping entry.
In the case of a bus that is directly connected to the main system bus, system address space records
and compatibility base address modifiers must be provided as needed to fully describe the complete
set of addresses that are mapped to that bus. For example, in Figure 4-10, complete explicit
descriptions must be provided for PCI BUS 0 and PCI BUS 1 even if one of the buses is
programmed for subtractive decode.
Version 1.4 4-19
Page 56

MultiProcessor Specification
Figure 4-10. Example System with Multiple Bus Types and Bridge Types
Since all device settings must fall within supported System Address Space mapping for a given bus
in order to be usable by the operating system, buses that do not support dynamically configurable
devices (i.e., ISA, EISA) should support all possible addresses to that bus.
In general, the MP configuration table must provide entries to describe system address space
mappings for all I/O buses present in the system. There are two exceptions to this rule:
1. For buses that are connected via PCI-to-PCI-bridge-specification-compliant bridges: in this
case, the system address space mappings for such buses may be omitted from the configuration
table. In such cases, the operating system is expected to discover the address space mapping by
querying the PCI-to-PCI-bridge-specification-compliant bridge directly.
2. For buses that are connected via a parent I/O bus and for which the subtractive decode bit is set
(refer to Section 4.4.2 for details).
Typically, this would mean that a minimal description of resources allocated to PCI buses in a
system need only include System Address Space Mapping entries for PCI bus zero and any
additional peer PCI buses (if present) where these buses are connected by PCI bridges that are
specific to the chipset or host bus.
Note
System Address Mappings are unidirectional in nature. They only describe system addresses that
propagate to the target bus from any given processor. For DMA support on the target bus, all memory
addresses that contain real memory should be accessible directly by either the bus or by a bus-specific
DMA controller. For buses with fewer than 32-bit address lines, all real memory at addresses that the
bus can generate must be accessible for DMA.
4-20 Version 1.4
Page 57

MP Configuration Table
4.4.2 Bus Hierarchy Descriptor Entry
If present, Bus Hierarchy Descriptor entries define how I/O buses are connected relative to each
other in a system with more than one I/O bus. Bus Hierarchy Descriptors are used to supplement
System Address Mapping entries to describe how addresses propagate to particular buses in
systems where address decoding cannot be completely described by System Address Space
Mapping entries alone. Entries of this type are required for each bus that is connected to the
system hierarchically below another I/O bus. For example, given the system described in
Figure 4-10, bus hierarchy entries are required for the EISA bus and the PCI BUS 2 since both
have parent buses that are themselves I/O buses.
The Bus Hierarchy entry provides information about where in a hierarchical connection scheme a
given bus is connected and the type of address decoding performed for that bus. Figure 4-11 shows
the format of each entry, and Table 4-15 explains each field. See also Appendix E, for more
information.
31 0374811121516192023
BUS INFO
RESERVED
31 0374811121516192023
24
2728
S
D
24
2728
Figure 4-11. Bus Hierarchy Descriptor Entry
RESERVED
BUS ID
ENTRY LENGTH
PARENT BUS
ENTRY TYPE
129
04H
00H
Version 1.4 4-21
Page 58

MultiProcessor Specification
Table 4-15 Bus Hierarchy Descriptor Entry Fields
Offset
Field
ENTRY TYPE 0 8 Entry type 129 identifies a Bus Hierarchy
ENTRY LENGTH 1 8 A value of 8 indicates that this entry type is eight
BUS ID 2 8 The BUS ID identity of this bus. This number
BUS INFORMATION:SD 3:0 1 Subtractive Decode Bus. If set, all addresses
PARENT BUS 4 8 Parent Bus. This number corresponds to the
(in bytes:bits)
Length
(in bits) Description
Descriptor Entry.
bytes long.
corresponds to the BUS ID as defined in the
base table bus entry for this bus.
visible on the parent bus but not claimed by
another device on the parent bus (including
bridges to other buses) are useable on this bus.
BUS ID as defined in the base table bus entry for
the parent bus of this bus
For buses where the BUS INFORMATION:SD bit is set, System Address Mappings may not be
needed. Since the bus is defined as being subtractive decode, the range of addresses that appear on
the bus can be derived from address decoding information for parent and peer buses.
4.4.3 Compatibility Bus Address Space Modifier Entry
The Compatibility Bus Address Space Modifier defines a set of predefined address ranges that
should either be added or removed from the supported address map ranges for a given bus. This
entry type is used in combination with System Address Space Mapping entries to complete the
description of memory and I/O ranges that are visible on a bus that incorporates support for ISA
device compatibility.
4-22 Version 1.4
Page 59

MP Configuration Table
For example, a host bus bridge for a PCI bus that provides ISA compatibility may decode a
predefined range of addresses used for ISA device support in addition to the addresses used for PCI
devices on that bus. A Compatibility Bus Address Space Modifier can be used in this case to add
these predefined address ranges to the list specified by System Address Space Mapping entries for
that PCI bus. As a corollary, in a system where two peer PCI buses are included, one of which
provides ISA compatibility, a Compatibility Bus Address Space Modifier can be used to subtract
these predefined ranges from the address space assigned to the PCI bus that does not support ISA
devices to avoid any potential conflict.
The same effect can be achieved by using System Address Space Mapping entries to completely
describe the address ranges supported on a bus, including those ranges that might otherwise be
described by a Compatibility Bus Address Space Modifier entry. However, given the number of
discrete address ranges that are used for ISA device compatibility, using an approach based solely
on System Address Space Mapping entries may result in a significantly larger number of
configuration table entries and a corresponding increase in table size.
Figure 4-12 shows the format of each entry, and Table 4-16 explains each field.
31 0374811121516192023
ADDRESS MOD
RESERVED
31 0374811121516192023
24
2728
PREDEFINED RANGE LIST
BUS ID
P
R
24
2728
ENTRY LENGTH
ENTRY TYPE
130
04H
00H
Figure 4-12. Compatibility Bus Address Space Modifier Entry
Version 1.4 4-23
Page 60

MultiProcessor Specification
Table 4-16. Compatibility Bus Address Space Modifier Entry Fields
Offset
Field
ENTRY TYPE 0 8 Entry type 130 identifies a Compatibility Bus
ENTRY LENGTH 1 8 A value of 8 indicates that an entry of this type is
BUS ID 2 8 Bus for address space mappings are to be
ADDRESS MODIFIER:PR 3:0 1 If this bit is set to one, the address ranges
PREDEFINED RANGE LIST 4 32 A number that indicates the list of predefined
(in
bytes:bits)
Length
(in bits) Description
Address Space Modifier Entry.
eight bytes long.
modified. This number corresponds to the BUS
ID as defined in the base table entry for this bus.
specified by PREDEFINED RANGE LIST are to
be subtracted from the address space
associated with the bus. If this bit is set to zero,
the specified address ranges are to be added to
the address space associated with the bus.
address space ranges that this record will
modify for the bus.
PREDEFINED RANGE LIST may take one of the values from Table 4-17. The value of
PREDEFINED RANGE LIST indicates the set of address ranges that are to be either added to or
subtracted from the address range associated with the BUS ID.
Table 4-17. Predefined Range Lists
List Value Address Ranges
ISA Compatible I/O Range 0 X100-X3FF
X500-X7FF
X900-XBFF
XD00-XFFF
VGA Compatible I/O Range 1 X3B0 - X3BB
X3C0 - X3DF
X7B0 - X7BB
X7C0 - X7DF
XBB0 - XBBB
XBC0 - XBDF
XFB0 - XFBB
XFC0 - XFDF
All addresses in Table 4-17 are in hexadecimal notation. In each case the X represents any
hexadecimal digit, 0-F. As a result, the ISA Compatible I/O Range describes 64 distinct ranges.
4-24 Version 1.4
Page 61

Default Configurations
The MP specification defines several default MP system configurations. The purpose of these
defaults is to simplify BIOS design. If a system conforms to one of the default configurations, the
BIOS will not need to provide the MP configuration table. The operating system will have the
default MP configuration table predefined internally.
Default system configuration types are defined by MP feature information byte 1, which is part of
the MP floating pointer structure. The physical address pointer field of the MP floating pointer
structure must be zero if one of the default configurations is selected. (Refer to Chapter 4 for a
detailed description of the MP floating pointer structure.)
To use a default configuration, a system must meet the following basic criteria:
1. The system supports two processors.
2. Both processors must execute the common Intel architecture instruction set.
3. The local APICs are located at base memory address 0FEE0_0000h.
4. The local APIC IDs are assigned consecutively by hardware starting from zero.
5. An I/O APIC is present at base memory address 0FEC0_0000h.
6. Either PIC Mode or Virtual Wire Mode is implemented as the power-on default interrupt
mode.
5
The default system configurations include configurations that use the discrete APIC, such as the
Intel 82489DX or its equivalent, and configurations that use the integrated APIC, such as the
Pentium processors (735\90, 815\100).
Each default configuration has a unique code. Table 5-1 specifies the configuration associated with
each code.
Version 1.4 5-1
Page 62

MultiProcessor Specification
Table 5-1. Default Configurations
Default
Config Code
1 2 ISA 82489DX As in Figure 5-1, but without
2 2 EISA 82489DX Neither timer
3 2 EISA 82489DX As in Figure 5-1.
4 2 MCA 82489DX As in Figure 5-1, but without
5 2 ISA + PCI Integrated As in Figure 5-2, but without
6 2 EISA + PCI Integrated As in Figure 5-2.
7 2 MCA + PCI Integrated As in Figure 5-2, but without
8-255 Reserved for MP future use.
Number
of CPUs
Bus
Type
APIC
Type Variant Schematic
EISA logic.
As in Figure 5-1, but without
IRQ0 nor DMA
chaining
IRQ0 and IRQ13 connection to
the I/O APIC.
EISA bus logic, with inverters
before I/O APIC inputs 1-15.
EISA logic.
EISA bus logic, with inverters
before I/O APIC inputs 1-15.
The default system configurations are designed to support dual-processor systems with fixed
configurations. Systems with dynamically configurable components, for example, a uniprocessor
system with an upgrade socket for the second processor, must always generate the MP
configuration table. Failure to do so may cause the operating system to install the wrong modules
due to erroneous configuration information.
5.1 Discrete APIC Configurations
Figure 5-1 shows the default configuration for systems that use the discrete 82489 APIC. The
Intel486 processor is shown as an example; however, this configuration can also employ Pentium
processors. In Pentium processor systems, PRST is connected to INIT instead of to RESET.
5-2 Version 1.4
Page 63

BSP AP2
Default Configurations
A
IMCR
E0
REG.
MARK
NMI
INTR
RESET
ICC BUS
I/O BUS
NMI
IRQ1
B
8254 TIMER
IRQ8#
IRQ13
C
EISA DMA CHAINING
FROM BSP
FERR#
IGNNE#
ABFULL
(PS/2 MOUSE)
FERR
SAMPLING
ABFULL
SAMPLING
INTEL486
CPU 1
INTR
NMI RESET
PRSTPNMI PINT
LOCAL
82489DX APIC
LINTIN0 LINTIN1
8
13
12
ExtINTA
INTA
TRAP
3
4
5
6
7
9
10
11
14
15
3
4
5
6
7
INTEL486
CPU 3
NMI INTR
RESET
PRSTPNMI PINT
LOCAL
82489DX APIC
LINTIN0 LINTIN1
0
1
2
3
4
5
6
7
82489DX
8
9
10
11
12
13
14
15
0
1
2
MASTER
3
4
8259A PIC
5
6
7
ExtINTA
INTA
TRAP
I/O
APIC
GLUE
INTR
INTA
D
EDGE/LEVEL TRIGGER
POLARITY CONTROL
IRQ3-7,
9-12,14,15
LITM3-7,
9-12,14,15
IRQx
LITMx
9
10
11
14
12
15
0
1
2
SLAVE
3
4
8259A PIC
5
6
7
SHADED AREAS:
A: OPTIONAL IF VIRTUAL WIRE MODE IS IMPLEMENTED
B,C: MAY NOT BE EXTERNALIZED WITH SOME EISA CHIPSETS
C,D: EISA BUS SPECIFIC
Figure 5-1. Default Configuration for Discrete APIC
Version 1.4 5-3
Page 64

MultiProcessor Specification
The INTA TRAP and GLUE in the figure are the additional hardware interface logic needed for the
82489DX APIC. INTA TRAP conditions all interrupt acknowledge cycles with ExtINTA to steer
the vector either from the 8259A PIC or the APIC. INTA TRAP is also responsible for preventing
the interrupt acknowledge cycle from reaching the 8259A PIC, in case ExtINTA is negated when
PINT is activated. During an interrupt acknowledge cycle with ExtINTA active, the APIC does
not return RDY#. Therefore, the ready generation logic should also take into consideration the
status of ExtINTA to steer the ready signal either from the APIC or from external bus logic,
depending upon the source of the interrupt vector.
The GLUE logic converts the INTR level-triggered interrupt output signal to a signal that is
acceptable to edge-triggered input pins, such as INTIN0 or LINTIN0.
If the AP used in these configurations does not automatically HALT after RESET or INIT, the AP
must be prevented from executing the BIOS by external hardware or by the BIOS itself.
5.2 Integrated APIC Configurations
Figure 5-2 shows the default configuration for systems that use processors with the integrated
APIC, such as Pentium processors (735\90 or 815\100). The local APIC is configured as part of
the processor unit. The APICEN input is used to enable or disable the internal local APIC. If the
internal local APIC is used, the BIOS must initialize the APIC to Virtual Wire Mode during
system initialization.
Both Pentium processors used in the dual-processor (DP) system design are identical. The AP
functions exactly the same as the BSP processor, except that the AP will go to HALT after the
assertion of the RESET or INIT signals. It will remain halted until the MP operating system sends
a STARTUP IPI to bring it on line.
5-4 Version 1.4
Page 65

BSP AP
Default Configurations
PENTIIUM (735\90, 815\100)
CPU1
APICEN
LOCAL
APIC
REG.
MARK
NMI
INIT
SMI#
ICC BUS
IRQ1
A
8254 TIMER
IRQ8# INT8
IRQ13
B
EISA DMA CHAINING
13
APICEN
INTR/LINT0
NMI/LINT1
INIT
SMI#
3
4
5
6
7
9
10
11
14
15
PENTIUM (735\90, 815\100)
CPU2
LOCAL
APIC
0
1
2
3
4
5
6
I/O
7
8
APIC
9
10
11
12
13
14
15
FROM BSP
FERR#
IGNNE#
ABFULL
(PS/2 MOUSE)
FERR
SAMPLING
ABFULL
SAMPLING
0
1
3
4
5
6
7
12
2
MASTER
3
4
8259A PIC
5
6
7
INTR
PIRQ0-3
C
EDGE/LEVEL TRIGGER
POLARITY CONTROL
IRQ3-7,
9-12,14,15
LITM3-7,
9-12,14,15
IRQx
LITMx
D
PIRQ
MAPPING
12
3-7,9-11,14,15
9
10
11
14
15
0
1
2
SLAVE
3
4
8259A PIC
5
6
7
IMCR
E0
SHADED AREAS:
A,B: MAY NOT BE EXTERNALIZED WITH SOME EISA CHIPSETS
B,C: EISA BUS SPECIFIC
D: PCI BUS SPECIFIC
Figure 5-2. Default Configuration for Integrated APIC
Two local interrupt input pins, LINT0 and LINT1, are shared with the INTR and NMI pins,
respectively. The LINT0, LINT1, SMI# and INIT signals are switched by APICEN, and they
Version 1.4 5-5
Page 66

MultiProcessor Specification
should be cross-connected between the BSP and AP processors. Although the INIT pin is crossconnected between BSP and AP, a targeted INIT IPI initializes only the targeted processor, because
the INIT IPI does not cause the INIT pin to change state.
The interconnection of I/O APIC interrupt lines is the same as for the 82489DX APIC
configuration. However, for PCI system implementations based on the Intel PCI chipset, the PCI
PIRQx lines are mapped to the ISA IRQx via a mapping register. This type of implementation
makes PCI interrupt lines appear as ISA interrupt lines, which are transparent to the operating
system. All PCI systems defined in the default configurations are of this type. No I/O interrupt
assignment entries are declared for PCI interrupts, as described in Section 4.3.4.
5.3 Assignment of I/O Interrupts to the APIC I/O Unit
The typical APIC I/O unit has 16 general-purpose interrupt inputs. Table 5-2 shows how the
interrupt request line (IRQ) assignments are connected to the I/O APIC in each of the default
configurations.
Table 5-2. Default Configuration Interrupt Assignments
First I/O
APIC
INTINx
INTIN0 8259A
INTIN1 IRQ1 IRQ1 IRQ1 IRQ1 IRQ1 IRQ1 IRQ1
INTIN2 IRQ0 N/C IRQ0 IRQ0 IRQ0 IRQ0 IRQ0
INTIN3 IRQ3 IRQ3 IRQ3 IRQ3 IRQ3 IRQ3 IRQ3
INTIN4 IRQ4 IRQ4 IRQ4 IRQ4 IRQ4 IRQ4 IRQ4
INTIN5 IRQ5 IRQ5 IRQ5 IRQ5 IRQ5 IRQ5 IRQ5
INTIN6 IRQ6 IRQ6 IRQ6 IRQ6 IRQ6 IRQ6 IRQ6
INTIN7 IRQ7 IRQ7 IRQ7 IRQ7 IRQ7 IRQ7 IRQ7
INTIN8 IRQ8 IRQ8 IRQ8 IRQ8 IRQ8 IRQ8 IRQ8
INTIN9 IRQ9 IRQ9 IRQ9 IRQ9 IRQ9 IRQ9 IRQ9
INTIN10 IRQ10 IRQ10 IRQ10 IRQ10 IRQ10 IRQ10 IRQ10
INTIN11 IRQ11 IRQ11 IRQ11 IRQ11 IRQ11 IRQ11 IRQ11
INTIN12 IRQ12 IRQ12 IRQ12 IRQ12 IRQ12 IRQ12 IRQ12
INTIN13 IRQ13 N/C IRQ13 IRQ13 IRQ13 IRQ13 IRQ13
INTIN14 IRQ14 IRQ14 IRQ14 IRQ14 IRQ14 IRQ14 IRQ14
INTIN15 IRQ15 IRQ15 IRQ15 IRQ15 IRQ15 IRQ15 IRQ15
Config1Config2Config3Config4Config5Config6Config
7 Comments
INTR
8259A
INTR
8259A
INTR
8259A
INTR
8259A
INTR
8259A
INTR
N/C
INTR output from
master 8259A or
equivalent
Keyboard controller
buffer full
8254 Timer
Real time clock
Floating point
exception and
DMA chaining
NOTE:
N/C designates not connected.
5-6 Version 1.4
Page 67

Default Configurations
Certain EISA chipsets do not bring out the IRQ0, 8254 timer interrupt, and IRQ13 EISA DMA
chaining interrupt signals. If these signals are not directly available, INTIN2 and INTIN13 should
be disabled. Refer to Section 5.3.1 for more details.
5.3.1 EISA and IRQ13
IRQ13 is a shared interrupt as defined in the EISA bus specification. Because a compliant system
supports only the on-chip floating point unit, IRQ13 carries only the EISA chaining interrupt.
If IRQ13 is not connected to the I/O APIC, the EISA chaining interrupt may be handled as a
mixed-mode operation. Mixed mode means that the APIC and 8259A-equivalent PIC are
connected in a cascading manner via INTIN0, and INTIN0 is programmed for ExtINT and edgetriggered mode. If all other interrupts are masked off in the PIC, INTIN0 only receives the DMA
chaining interrupt.
An MP operating system should disable the I/O APIC INTIN13 and configure the I/O APIC to
mixed mode if the EISA DMA chaining signal is not available at the I/O APIC.
5.3.2 Level-triggered Interrupt Support
Several AT-compatible buses, such as EISA and MCA, support active-low, level-triggered
interrupts. If these types of buses are to be incorporated in a compliant system, external inverters
must be implemented to ensure that signals presented to the 82489DX APIC are active-high and
level-triggered. See Section 4.3.4 on I/O Interrupt Assignment Flags.
For EISA implementations, the external interrupt polarity control inverters must be controlled by
the EISA edge/level-triggered polarity control registers (4D0h-4D1h). MCA does not have this
register. To convert an active-high trigger to an active-low trigger, an inverter for each interrupt
line must be implemented.
5.4 Assignment of System Interrupts to the APIC Local Unit
The APIC local unit has two general-purpose interrupt inputs that are reserved for system
interrupts. Table 5-3 shows how the interrupt request line (IRQ) assignments are connected to the
local APIC in each of the default configurations.
Table 5-3 Assignment of System Interrupts to APIC Local Unit
All Local
APICs
LINTINx
LINTIN0 8259A
LINTIN1 NMI NMI NMI NMI NMI NMI NMI Nonmaskable
Config1Config2Config3Config4Config5Config6Config
7 Comments
INTR
8259A
INTR
8259A
INTR
8259A
INTR
8259A
INTR
8259A
INTR
8259A
INTR
INTR output from
master 8259A or
equivalent
interrupt
Version 1.4 5-7
Page 68

MultiProcessor Specification
The 8259A INTR output signal is connected to the LINTIN0 of all local APICs, which makes
INTR dynamically routable via software. NMI is connected to the LINTIN1 of all local APICs,
which makes NMI dynamically routable via software.
In PIC-Mode configurations, the NMI signal is delivered to the local interrupt input 1 (LINTIN1)
of all local APICs and the input of a 2-to-1 MUX. When the system is operated in PIC Mode, the
NMI is sent to the BSP directly via the MUX. The BIOS and the operating system must leave the
LINTIN1 of all local APICs disabled to ensure that the BSP is the only processor that receives the
NMI.
In PIC-Mode configurations, the 8259 INTR signal also follows the same convention, connecting
to the local interrupt line 0 (LINTIN0) of all local APICs and the input of the second 2-to-1 MUX.
When the system is operated in PIC Mode, the 8259 INTR is sent to the BSP directly via the
MUX. The BIOS and the operating system must leave the LINTIN0 of all local APICs disabled to
ensure that the BSP is the only processor that receives the 8259 INTR signal.
When the system is operated in Symmetric I/O Mode, the operating system may enable the
LINTIN0 and LINTIN1 of any or all local APICs as necessary.
5-8 Version 1.4
Page 69

A
System BIOS
Programming Guidelines
Depending on the MP components in a multiprocessor system, the system BIOS may have the
following additional responsibilities:
1. Put the APs to sleep, so that they do not all try to execute the same BIOS code as the BSP.
This is necessary, because BIOS code is not typically multithreaded for multiprocessing.
2. Initialize the APICs and other MP components (if any).
3. Build the MP configuration table to communicate information to the operating system about
the APICs and APs.
Note that the above activities can be implemented by the hardware. The BIOS is not required to
perform these activities if the hardware makes them unnecessary. For example, the system BIOS
for one of the default configurations defined in Chapter 5 needs to ensure only that the MP feature
information bytes identify the configuration. In all other respects, the BIOS can be the same as a
standard PC/AT BIOS.
Support for the shutdown status byte (0Fh) of the PC/AT CMOS RAM is required. The startup of
APs by the operating system depends on the jump to warm reset vector (40:67h) capability, as
defined by the shutdown status byte. Appendix B explains this in more detail.
A.1 BIOS Post Initialization
Once system power is applied or the reset button is pressed (if the system is so equipped), a
hardware circuit generates a system RESET sequence to put all the system hardware into an initial
state. All active processors start to execute instructions and enter the POST (power-on self test)
procedure of the BIOS, which is responsible for initializing all components in a system to a known
state and for constructing various system tables in the BIOS data area (400h-4FFh) for the
operating system to use.
For compliant systems that match one of the default configurations listed in Chapter 5, the work
performed by the BIOS POST is minimal. The MP feature information bytes must identify the
default configuration type and determine whether PIC Mode or Virtual Wire Mode is implemented.
During the system INIT or soft reset cycle, both local and I/O APICs must be reinitialized by the
INIT signal and by the BIOS. This is required because the operating system will always assume
that all components in the system are initialized to a known state. For the APIC, this means that
all APIC registers are cleared and the local APIC ID register is initialized by the BIOS or the
hardware.
Upon warm reset, the BIOS must initialize all APICs to the power on state if the warm reset signal
does not physically reset the APICs.
Version 1.4 A-1
Page 70

MultiProcessor Specification
A.2 Controlling the Application Processors
Provision must be made to prevent all processors from executing the BIOS after a power-on
RESET. System developers may choose to do this by the hardware alone or by cooperation
between hardware and the BIOS. In the latter case, the BIOS may be used for selecting the BSP
and placing all APs to sleep after POST. The BIOS may use the APIC ID as a means by which to
identify each processor and select the proper code sequence to execute. Only the selected BSP
continues to load the operating system after the POST routine.
A.3 Programming the APIC for Virtual Wire Mode
The APICs do not require BIOS programming if the default interrupt mode at start-up is PIC
Mode. Special programming is needed only if the startup interrupt mode is Virtual Wire Mode.
Because Virtual Wire Mode must run all existing uniprocessor software, the system BIOS must
initialize and enable the BSP’s APIC first. The local unit must be programmed to function as a
“virtual wire,” which delivers the CPU interrupt from the 8259A-equivalent PIC to the BSP via its
local APIC.
The External Interrupt (ExtINT) delivery mode must be used so that the APICs and 8259Aequivalent PICs can function together in the same system. For interrupts that are programmed for
ExtINT delivery mode, there is no need to issue an EOI to the APIC; only the 8259A PIC requires
an EOI as usual. Also, because the 8259A delivers the vector to the processor for ExtINT delivery
mode, the interrupt vector in the APIC’s redirection table is ignored.
To program the APIC to Virtual Wire Mode, the system BIOS must program the APIC to enable
the LINT0 of the BSP’s local APIC for edge-triggered ExtINT delivery mode, and LINT1 for
level-triggered NMI delivery mode. There is no need to program the I/O APIC if it is not used in
Virtual Wire Mode.
Example A-1 is an example of programming the LINTIN0 and LINTIN1 to support Virtual Wire
Mode.
A-2 Version 1.4
Page 71

System BIOS Programming Guidelines
;-----------------------------------------------------------------------;
; InitLocalAPIC( ) ;
;-----------------------------------------------------------------------;
; ;
; Initialize the local APIC to virtual wire mode. ;
; ;
;-----------------------------------------------------------------------;
SVR equ 0FEE000F0H
LVT1 equ 0FEE00350H
LVT2 equ 0FEE00360H
APIC_ENABLED equ 000000100H
public InitLocalAPIC
InitLocalAPIC proc near
push ds ; save regs used for APIC init
push es
push esi
mov al,080h ; ensure NMI disabled
out 070h,al
in al,021h ; read primary imr
push ax ; save settings
mov al,0ffh ; mask all off
out 021h,al
in al,0a1h ; read secondary imr
push ax ; save settings
mov al,0ffh ; mask all off
out 0a1h,al
extrn pmode_on : near
call pmode_on ; switch into real big mode
;
; The APIC spurious interrupt must point to a vector whose lower
; nibble is 0F, that is 0xF, where x is 0 - F. Here we use Int 00FH,
; which handles spurious interrupts and supplies the necessary IRET.
; This vector is assumed to have already been initialized in memory.
;
; Enable the APIC via SVR and set the spurious interrupt to use Int 00F
;
mov esi,SVR
mov eax,[esi] ; read SVR
and eax,0FFFFFF0FH ; clear spurious vector (use vector
00FH)
or eax,APIC_ENABLED ; bit 8 = 1
mov [esi],eax ; write SVR
;
; Program LVT1 as ExtInt, which delivers the signal to the INTR signal of all
; processors' cores listed in the destination as an interrupt that originated
; in an externally-connected interrupt controller.
;
Example A-1. Programming Local APIC for Virtual Wire Mode
Version 1.4 A-3
Page 72

MultiProcessor Specification
mov esi,LVT1
mov eax,[esi] ; read LVT1
and eax,0FFFE00
or eax,000005700H ; ExtInt
mov [esi],eax ; write LVT1
;
; Program LVT2 as NMI, which delivers the signal on the NMI signal of all
; processors' cores listed in the destination.
;
mov esi,LVT2
mov eax,[esi] ; read LVT2
and eax,0FFFE00
or eax,000005400H ; NMI
mov [esi],eax ; write LVT2
extrn pmode_off : near
call pmode_off ; switch back to real mode
pop ax ; restore imr settings
out 0a1h,al ; restore secondary imr
pop ax
out 021h,al ; restore primary imr
; this routine leaves NMI disabled
pop esi ; restore regs used in APIC init
pop es ; (unless also saved for CPUID)
pop ds
ret
FFH ; not masked, edge, active high
FFH ; not masked, edge, active high
InitLocalAPIC endp
Example A-1. Programming Local APIC for Virtual Wire Mode (continued)
A.4 Constructing the MP Configuration Table
For a compliant system, one of the main functions of the system BIOS is to construct the MP
floating pointer structure and the MP configuration table. Because the MP configuration table is
optional, the BIOS must set the MP feature information bytes in the MP floating pointer structure
to indicate whether an MP configuration table is present.
If the MP configuration table is required, the BIOS constructs it in conjunction with the BSP and
APs. The BIOS is responsible for synchronizing the activities of the APs during the construction
of the table. The BIOS may need some synchronization during processor initialization so that each
processor may be brought up in the proper order. The mechanism for synchronization is not
specified; however, the procedure described in the following paragraphs of this section uses AP
status flags as an example of a synchronization mechanism. This procedure also initializes the APs
serially. System developers may employ other mechanisms and may initialize all processors in
parallel to minimize the system start-up time.
The BIOS maintains an initialized AP status flag for each AP. Each AP will begin executing the
same BIOS code as the BSP, but will eventually be put in a HALT state or held in a loop until the
BSP enables its AP status flag.
A-4 Version 1.4
Page 73

System BIOS Programming Guidelines
The BSP is responsible for positioning the MP configuration table. The table can be located within
any unreported, hidden system memory space or within the BIOS ROM region. The BIOS can
select any unused space in those regions. For example, some PC/AT systems implement the
Extended BIOS Data Segment, a 1-Kbyte block usually positioned at the top of the PC’s 640K
base memory. The configuration table may be placed in this portion of the memory map if enough
free space is available.
The BIOS initializes the floating table pointer with the configuration table’s memory address.
Then the BSP constructs the MP configuration table based on the total number of processors,
buses, I/O APICs, and interrupt sources in the system. It sets all AP processor entry bits to zero.
Next, the BSP enables each AP in turn by setting its AP status flag. Each AP follows these steps:
1. It executes a CPU identification procedure, reads its local APIC ID from the Local Unit ID
Register, and uses this information to complete its entry in the MP configuration table.
2. Just prior to exiting the BIOS, the AP clears its status flag to signal the BSP to enable the next
AP initialization process.
3. The AP, which is in Real Mode with interrupts disabled, executes a HLT instruction, and
enters the HALT state.
After the APs complete the initialization process, the BSP continues filling in the rest of the MP
configuration table entries. For I/O interrupt assignment entries, each line should have its trigger
mode and polarity configured according to the device installed.
Once the MP table configuration process is complete, the BSP must calculate the checksum for the
MP configuration table. The MP configuration table should be fully populated at this point. A
disabled processor entry indicates that an AP failed in the initialization self-test. System
developers may choose either to suspend system start up or to continue with the partially functional
system.
The BSP is the only processor that is responsible for loading the operating system. It is up to the
MP operating system to decide when to bring the APs on-line.
Version 1.4 A-5
Page 74

Page 75

Operating System
Programming Guidelines
The goal of the MP specification is to transfer enough information about the hardware environment
to the operating system that a single, shrink-wrapped, operating-system binary can boot-up and
fully utilize a wide variety of multiprocessor systems. The following sections explain how the
operating system can take advantage of this specification to handle these operations:
1. Operating-system boot-up.
2. Self configuration.
3. Interrupt mode initialization.
4. Application processor startup.
5. Application processor shutdown.
6. Dynamic interrupt masking.
7. Support for unequal processors.
B.1 Operating System Boot-up
While all processors in an MP-compliant system are functionally identical, one of the processors
will be designated as the boot processor (BSP) at system initialization by the system hardware or
by the system hardware in conjunction with the BIOS. The rest of the processors are designated as
the application processors (APs). The BSP is responsible for booting the operating system. Once
the MP operating system is up and running, the BSP functions as an AP.
B
Usually a processor is designated as the BSP because it is capable of controlling all system
hardware, including AP startup and shutdown. The operating system must determine and
remember the
processor during system shutdown. The BSP is not necessarily the first processor, especially in
fault-tolerant MP systems in which any available processor can be designated as the BSP.
At the time that the first instruction of the operating system is executed, the APs are in the
following state:
• The APs have been restrained (either by the BIOS or by the hardware) from executing
operating system code.
• The APs are in a halted condition with interrupts
APICs are passively monitoring the APIC bus and will react only to INIT or STARTUP
interprocessor interrupts (IPIs).
APIC ID of the designated BSP, so it can keep the BSP operating as the last running
disabled. This means that the AP’s local
Version 1.4 B-1
Page 76

MultiProcessor Specification
The operating system’s first task is to determine whether the system conforms to the MP
specification. This is done by searching for the MP floating pointer structure. If a valid floating
pointer structure is detected, it indicates that the system is MP-compliant, and the operating system
should continue to look for the MP configuration table. If the system is not MP-compliant, the
operating system may attempt other means of MP system detection, if it is capable of doing so, or
treat the system as a uniprocessor system.
B.2 Operating System Booting and Self-configuration
An MP configuration table is required by the MP specification, with the exception of the default
system configurations defined in Chapter 5. The table should be treated as read-only by the
operating system. If the MP configuration table exists, the BSP should access the processor entries
in the table to configure the operating system.
The BSP should later configure the operating system based on the bus, I/O APIC, IRQs, and
system interrupt assignment entries of the configuration table. Note that certain types of buses are
mutually exclusive, such as EISA with MCA, or ISA with MCA. The operating system may report
such errors in the configuration table, if they occur.
If the MP configuration table does not exist, the BSP configures
default system configuration indicated by the default configuration bits of the MP feature
information bytes. In this case, only two processors and one I/O APIC exist in the system; both
processors have the same type and features.
The operating system contains a set of predefined internal configuration tables that represent the
default configurations described in Chapter 5. For MP-compliant systems that use one of the
default configurations, the operating system derives the required configuration information from
the corresponding predefined table.
To wake up the AP, the BSP should use the universal algorithm defined in Section B.4.
the operating system for the
B.3 Interrupt Mode Initialization and Handling
At the time the operating system boots, the interrupt structure is configured for DOS compatibility.
The system may be running either in PIC Mode or in Virtual Wire Mode. If it is in PIC Mode, the
NMI and INTR will bypass the BSP’s local APIC when the Interrupt Mode Configuration Register
(IMCR) has a value of zero. The operating system should not try to read the IMCR because it may
not exist.
The operating system should switch over to Symmetric I/O Mode to start multiprocessor operation.
If the IMCRP bit of the MP feature information bytes is set, the operating system must set the
IMCR to APIC mode. The operating system should not write to the IMCR unless the IMCRP bit
is set.
B-2 Version 1.4
Page 77

Operating System Programming Guidelines
Then the operating system should enable its own local APIC, thereby allowing IPI communications
with other APIC-based processors. At this time, the APs’ local APICs have interrupts disabled.
Interrupts must remain disabled at the APs’ local APICs while the BSP is enabling the I/O APIC
and bringing the system to the normal operating state. Otherwise, an I/O interrupt may be
delivered to the uninitialized AP, resulting in the loss of the interrupt.
It is the responsibility of the operating system to assign unique IDs to I/O
APIC units.
B.4 Application Processor Startup
An AP may be started either by the BSP or by another active AP. The operating system causes
application processors to start executing their initial tasks in the operating system code by using the
following universal algorithm. The algorithm detailed below consists of a sequence of
interprocessor interrupts and short programmatic delays to allow the APs to respond to the wakeup
commands. The algorithm shown here in pseudo-code assumes that the BSP is starting an AP for
documentation convenience. The BSP must initialize BIOS shutdown code to 0AH and the warm
reset vector (DWORD based at 40:67) to point to the AP startup code prior to executing the
following sequence:
BSP sends AP an INIT IPI
BSP DELAYs (10mSec)
If (APIC_VERSION is not an 82489DX) {
BSP sends AP a STARTUP IPI
BSP DELAYs (200µSEC)
BSP sends AP a STARTUP IPI
BSP DELAYs (200µSEC)
}
BSP verifies synchronization with executing AP
Example B-1. Universal Start-up Algorithm
If the MP configuration table exists, it provides the IDs of the application processor local APICs.
These IDs should be used as the destination addresses in targeted IPIs.
If the MP configuration table does not exist on an
MP-compliant system, the system must be of
default configuration type. The MP specification requires local APIC IDs to be numbered
sequentially, starting at zero for all default configurations. As a result, the BSP can determine the
AP’s local APIC ID in default, two-processor configurations by reading its own local APIC ID.
Since there are only two possible local APIC IDs in this case, zero and one, when the APIC ID of
the BSP is one, the APIC ID of the AP is zero, and vice versa. This is important, because a BSP
cannot start up an AP unless it already knows the local APIC ID.
Both INIT IPI and STARTUP IPI are open-ended commands. The operating system is responsible
for determining whether its local APIC unit successfully dispatches one of these commands. The
operating system must do so for an INIT and STARTUP IPI because the APIC either does not
automatically retry or guarantee delivery for one of these special messages.
A local APIC unit indicates successful dispatch of an IPI by resetting the Delivery Status bit in the
Interrupt Command Register (ICR). The operating system polls the delivery status bit after
sending an INIT or STARTUP IPI until the command has been dispatched.
Version 1.4 B-3
Page 78

MultiProcessor Specification
A period of 20 microseconds should be sufficient for IPI dispatch to complete under normal
operating conditions. If the IPI is not successfully dispatched, the operating system can abort the
command. Alternatively, the operating system can retry the IPI by writing the lower 32-bit double
word of the ICR. This “time-out” mechanism can be implemented through an external interrupt, if
interrupts are enabled on the processor, or through execution of an instruction or time-stamp
counter spin loop.
Optionally, the operating system can make use of the information provided by the integrated APIC
error register. Integrated local APIC units on Intel Architecture processors provide an APIC error
register that indicates the reason for non-delivery of an APIC message. Reasons for non-delivery
include SEND_ACCEPT and RECEIVE_ACCEPT errors that are generated when no processor
responds to a message on the APIC bus. An example of this type of failure includes sending a
STARTUP IPI to a destination APIC ID for a non-existent processor. Other errors are usually
indicative of hardware problems and include SEND and RECEIVE CHECKSUM errors.
The operating system is responsible for determining whether the IPI was received by the targeted
AP and executed successfully. For example, the operating system can define a status flag for each
processor. After being awakened, a processor sets its status flag, indicating to the operating system
that it is present and running. If the status flag does not change value after a certain time, the
operating system should treat the processor as not present or not functional.
The following two sections describe specifics relating to the use of INIT and STARTUP IPIs that
can be used to guide the implementation of the universal algorithm presented here.
B.4.1 USING INIT IPI
INIT IPIs can be used with systems based on the 82489DX APIC, or on systems that are based on
multiple Pentium (735/90, 815/100) processors. INIT IPI is an Interprocessor Interrupt with trigger
mode set to level and delivery mode set to “101” (bits 8 to 10 of the ICR). INIT IPIs should
always be programmed as level triggered; the operating system must perform two writes to the ICR
to assert and then deassert this delivery mode.
An INIT IPI is an IPI that has its delivery mode set to RESET. Upon receiving an INIT IPI, a local
APIC causes an INIT at its processor. The processor resets its state, except that caches, floating
point unit, and write buffers are not cleared. Then the processor starts executing from a fixed
location, which is the reset vector location. To cause the processor to jump to a different location,
the INIT IPI must be used as part of a warm-reset.
The warm reset is a feature of every standard PC/AT BIOS. It allows the INIT signal to be
asserted without actually causing the processor to run through its entire BIOS initialization
procedure (POST). This feature is used, for example, to return an 80286 processor to Real Mode.
The key components of warm reset are the following:
• Shutdown code. One of the first actions of the BIOS POST procedure is to read the shutdown
code from location 0Fh of the CMOS RAM. This code can have any of several values that
indicate the reason that an INIT was performed. A value of 0Ah indicates a warm reset.
• Warm-reset vector. When POST finds a shutdown code of 0Ah, it executes an indirect jump
via the warm-reset vector, which is a doubleword pointer in system RAM location 40:67h.
B-4 Version 1.4
Page 79

Operating System Programming Guidelines
By putting an appropriate pointer in the warm-reset vector, setting the shutdown code to 0Ah, then
causing an INIT, the BIOS (or the operating system) can cause the current processor to jump
immediately to any location. Because all processors in an MP system share the same system
memory, and because the INIT IPI gives one processor the power to cause an INIT at another, the
operating system can cause any processor to jump immediately to any location.
B.4.2 USING STARTUP IPI
STARTUP IPIs are used with systems based on Intel processors with local APIC versions of 1.x or
higher. These local APICs recognize the STARTUP IPI, which is an APIC Interprocessor Interrupt
with trigger mode set to edge and delivery mode set to “110” (bits 8 through 10 of the ICR).
The STARTUP IPI causes the target processor to start executing in Real Mode from address
000VV000h, where VV is an 8-bit vector that is part of the IPI message. Startup vectors are
limited to a 4-kilobyte page boundary in the first megabyte of the address space. Vectors A0-BF
are reserved; do not use vectors in this range. STARTUP IPIs are not maskable, do not cause any
change of state in the target processor (except for the change to the instruction pointer), and can be
issued only one time after RESET or after an INIT IPI
neither requires the targeted APIC to be enabled nor the interrupt table to be programmed. If the
target processor is in the halted
to leave that state and start executing. The effect is to set CS:IP to VV00:0000h.
state immediately after RESET or INIT, a STARTUP IPI causes it
reception or pin assertion. A STARTUP IPI
For an operating system to use a STARTUP IPI to wake up an AP, the address of the AP
initialization routine (or of a branch to that routine) must be in the form of 000VV000h. Sending a
STARTUP IPI with VV as its vector causes the AP to jump immediately to and begin executing
the operating system’s AP initialization routine.
The operating system should not issue a STARTUP IPI to an 82489DX since the STARTUP IPI
will be ignored instead of forcing the targeted processor to execute from the given address.
B.5 AP Shutdown Handling
An AP may be shut down by itself, by the BSP, or by another active AP. Shutting down an AP
with an active task or a bound device driver is not permitted. Only the BSP may shut itself down,
and it must be the last processor to shut down.
There are several possible alternatives for shutdown handling. Two of the possibilities are
presented here by way of example.
In the simplest case, the operating system can define an IPI for shutting down and taking APs offline. The exact usage and behavior of an IPI that is defined for this purpose is operating system
specific and is not defined in this specification.
Should the BSP need to take an AP off-line or to place the AP back into a HALT state, the BSP
can also use the INIT IPI with Warm Restart. The operating system places the address of a HLT
instruction in the warm-reset vector (40:67), sets the CMOS shut-down code to 0Ah, then sends an
INIT IPI to the AP. The INIT IPI causes the AP to enter the BIOS POST routine, where it
immediately jumps to the warm-reset vector and executes the operating system’s HLT instruction.
Only one processor can execute the shutdown routine at any given time, due to the use of the
shutdown code. The operating system must not rely on any code being executed after the delivery
Version 1.4 B-5
Page 80

MultiProcessor Specification
of an INIT IPI used to shut down an AP. As a result, the operating system must ensure that any
required state information is captured and that caches are flushed as necessary before sending the
INIT IPI.
In order to do a complete system shutdown, followed by a warm restart if necessary, the operating
system should return the system to a state similar to that at power-on. This includes disabling the
Local APIC interrupts (LINT0/LINT1/Local APIC Timer/Error interrupt) on all processors,
disabling the Local APIC on all APs and disabling all interrupts at all the I/O APICs in the system.
The operating system can use an IPI or an NMI to signal to all APs for per-processor shutdown
handling. The operating system may then set the CMOS shutdown code to 0Ah and perform a
keyboard controller reset.
B.6 Other IPI Applications
The operating system may use IPIs for other run-time duties, such as handling the various
processor caches.
B.6.1 Handling Cache Flush
The MP specification requires that hardware maintain cache coherency. Cache flushing by the
operating system should not be required under normal circumstances. The only need for cache
flushing by the operating system is prior to powering down a processor.
Should a system-wide cache flush be necessary, the operating system should use the broadcast IPI
mechanism to request that each of the processors write back and invalidate its own cache
subsystem and then synchronize upon the completion of that activity.
B.6.2 Handling TLB Invalidation
The operating system should use the IPI mechanism to request that each of the processors
invalidate its TLBs. The operating system may use a broadcast IPI for this purpose. The BSP and
APs should synchronize the completion of their actions either via memory-based semaphores or via
targeted return IPIs. The actual IPI vector is operating system dependent.
B.6.3 Handling PTE Invalidation
The operating system should use the IPI mechanism to request that each processor invalidate a
specific page-table entry (PTE) if it is cached in that processor’s TLBs. The operating system may
use a broadcast IPI for this purpose. The BSP and APs should synchronize the completion of their
actions either via memory-based semaphores or via targeted return IPIs. The actual IPI vector is
operating system dependent.
B.7 Spurious APIC Interrupts
For the 8259, there is a time window in which a spurious interrupt may be misinterpreted as a
genuine interrupt. For example, if an interrupt goes inactive just after the first INTA cycle but
before the second INTA cycle, the 8259 will also signal this spurious interrupt as a genuine
B-6 Version 1.4
Page 81

Operating System Programming Guidelines
interrupt. The distributed APIC architecture, by its nature, is more vulnerable to spurious interrupt,
because the device interrupt may be latched and recognized without the INTA cycle.
To ensure that spurious interrupts are handled properly, it is strongly recommended that the device
drivers must read the status register before servicing the device. In cases where spurious interrupts
do occur, the device drivers may simply ignore them.
ote that this spurious interrupt is not related in any way to the Local APIC Spurious Interrupt
N
generated by the Local APIC Error Register (0xFEE00370)
B.8 Supporting Unequal Processors
Some MP operating systems that exist today do not support processors of different types, speeds,
or capabilities. However, as processor lifetimes increase and new generations of processors arrive,
the potential for dissimilarity among processors increases. The MP specification addresses this
potential by providing an MP configuration table to help the operating system configure itself.
Operating system writers should factor in processor variations, such as processor type, family,
model, and features, to arrive at a configuration that maximizes overall system performance. At a
minimum, the MP operating system should remain operational and should support the common
features of unequal processors.
Version 1.4 B-7
Page 82

Page 83

System Compliance Checklist
Any "NO" answer indicates non-compliance.
Condition YES NO
1. PC/AT Compatibility
Does system contain all necessary MP-compatible circuitry?
Will system boot and run DOS and Microsoft Windows?
2. Memory Subsystem
Are system memory address map, cacheability, and shareability consistent with
definitions in Table 3-1?
Are memory-mapped I/O devices located at the top of the memory address space?
If the system has external cache:
Is cache coherence maintained by hardware?
Is cache flushing supported by hardware?
Is cache flushing limited to the local caches?
Are all locked operations visible to all processors?
Are locked operations guaranteed on aligned memory operations?
Are memory writes observed externally in same order as programmed?
3. Multiprocessor Interrupt Control
Does each processor have its own local APIC?
Is there a processor designated for booting?
Does system support either PIC Mode or Virtual Wire Mode at power-on?
Is Symmetric I/O Mode implemented?
Are all APIC IDs unique?
Are all local APIC IDs assigned by hardware or BIOS?
Do local APIC IDs begin with zero?
4. Reset Support
Does system implement software-initiated processor-specific INIT (INIT IPI)?
Do system soft and hard resets reset all processors?
5. APIC Interval Timer
On 82489DX, is CLK the only clock source of the APIC timer?
6. Fault Resilient Booting
If fault resilient booting feature is implemented:
Is fault resilient booting feature software transparent?
Are system signals: NMI, INTR, FERR#, IGNNE#, and A20M connected to BSP?
7. MP Floating Pointer Structure and MP Configuration Table
Is the MP floating pointer structure implemented?
If the MP feature byte 1 (default configuration type) is nonzero:
Does the system correctly implement one of the default configurations?
If the MP feature byte 1 (default configuration type) is zero:
Has the system created a correct MP configuration table?
If the IMCR presence bit is set, is PIC Mode implemented?
If the IMCR presence bit is not set, is Virtual-Wire Mode implemented?
C
Version 1.4 C-1
Page 84

Page 85

Multiple I/O APIC
Multiple PCI Bus Systems
The information in this specification describes the majority of multiprocessor systems. This
appendix provides clarifications for implementors who are considering designs with more than one
I/O APIC. In particular, a number of proposed systems will incorporate multiple I/O APICs in
order to support multiple PCI buses. This appendix provides guidance for implementors who wish
to be sure that their designs comply with this specification.
D.1 Interrupt Routing with Multiple APICs
Two basic approaches to routing interrupts can be used when the system has more than one I/O
APIC:
• The fixed routing scheme uses the same routing in both PIC or Virtual Wire Mode and
symmetric I/O mode.
• The variable approach changes the routing when switching to symmetric I/O mode.
This section applies when a PCI interrupt is connected both to an I/O APIC input of its own and to
the I/O APIC input of the EISA/ISA IRQ to which the interrupt is routed when in PIC or Virtual
Wire Mode. This double routing is typically used to preserve PC AT compatibility at system startup, allowing a system to boot from a disk connected to a PCI controller on a second PCI bus, for
example. To prevent double delivery of this PCI interrupt once the system switches to symmetric
I/O mode for an MP operating system, the duplicate routing must either be turned off or concealed
from the operating system. If a PCI interrupt is only connected via an EISA/ISA IRQ, the
EISA/ISA entry in the MP configuration table is sufficient to describe the routing.
D
The variable routing method described below is preferred since it is more flexible and offers best
use of available system resources. Fixed routing is described here for compatibility with existing
systems that do not implement a variable routing strategy.
D.1.1 Variable Interrupt Routing
In systems with variable interrupt routing, all PCI interrupts map to EISA/ISA IRQs when in PIC
or Virtual Wire Mode. When switched to symmetric I/O mode, the system disables this routing
and delivers the PCI interrupt through I/O APIC inputs different from those used by the EISA/ISA
IRQs.
If IMCR is implemented, the hardware design can use this bit to enable/disable the routing of the
PCI interrupts to EISA/ISA IRQs. On systems with IMCR, this operation might be the only one
that is required of the operating system when switching to symmetric I/O mode, other than the
actual programming of the I/O and Local APICs.
Version 1.4 D-1
Page 86

MultiProcessor Specification
If IMCR is implemented but the system includes one or more I/O APICs that are not controlled
through IMCR, the hardware must accomplish routing changes for such I/O APICs by some other
means when the system switches into symmetric I/O mode. These routing changes must be done
without requiring any additional intervention from software.
For systems without the IMCR register, the routing of the PCI interrupts to the EISA/ISA IRQ
must be automatically disabled as the I/O APICs are programmed. Therefore, when the operating
system programs the I/O APICs in accordance with the MP configuration table, the hardware must
detect this operation and disable the routing mechanism without additional intervention by the
operating system. This operation can be done globally for an entire system as soon as any APIC
interrupts are enabled or it can be done on an interrupt-by-interrupt basis.
D.1.2 Fixed Interrupt Routing
Several implementations of fixed interrupt routing are possible, depending on hard wiring, via
jumpers for example, or software means, such as chipset-specific registers. Since these
implementations have no mechanism to disable the PCI interrupt to EISA/ISA IRQ routing, the
MP configuration table must be set up carefully to avoid problems with duplicate interrupt
mappings in symmetric I/O mode.
To avoid such problems on systems with fixed routing, PIC or Virtual Wire Mode interrupt
routings must not be used by software when the system is in symmetric mode, since these routings
cannot be disabled or altered. This situation implies two restrictions that must be placed on the
way PCI interrupts are routed to EISA/ISA IRQs and on that way the MP configuration table is
built:
• If a PCI interrupt is routed to an EISA/ISA IRQ that is used by an EISA/ISA device, that PCI
interrupt must be delivered through the same I/O APIC input as that EISA/ISA IRQ. The
connection from the PCI interrupt to the additional I/O APIC input must not be entered in the
MP configuration table.
• If a PCI interrupt is routed to an EISA/ISA IRQ which is NOT used by an EISA/ISA device,
that PCI interrupt must be delivered through its individual I/O APIC connection, and the
connection of that EISA/ISA IRQ to its I/O APIC input should not be entered in the MP
configuration table.
As an example, take a system with two I/O APICs, a PCI bus, and an EISA bus. Each EISA IRQ
is connected to an input of one I/O APIC and each PCI interrupt is connected to the other I/O
APIC. A fixed interrupt routing design could connect all PCI interrupts to a single EISA interrupt.
This design does not give optimum performance, because PCI interrupts must be shareable, but it
does allow all interrupts to be properly handled.
If an EISA device is connected to the same interrupt, the MP configuration table would not contain
any entries for the second I/O APIC. The second I/O APIC is not used.
If no EISA device uses that interrupt, however, the MP configuration table could contain an entry
for each PCI interrupt, describing its connection to the second I/O APIC. The EISA IRQ used by
the PCI interrupts in PIC mode would not have an entry in the table. All other EISA IRQs would
have an entry in the table describing connections to the first I/O APIC.
D-2 Version 1.4
Page 87

Multiple I/O APIC Multiple PCI Bus Systems
Fixed interrupt routing also implies a restriction on software that is implicit but important in the
context of systems with more than one I/O APIC. The operating system must program I/O APICs
to handle only the interrupts for which the MP configuration table contains corresponding I/O
interrupt assignment entries. If the configuration table contains no entry for a given I/O APIC
input, that interrupt must be left in the masked state.
D.2 Bus Entries in Systems with More Than One PCI Bus
To accommodate systems with more than one PCI bus within the confines of version 1.1 of this
specification, construction of the bus entries on the MP configuration table must be handled in a
very particular sequence:
1. Begin with bus entries for the PCI buses. Start at bus zero, using the actual PCI bus number as
the bus ID for the bus entry.
2. Add entries for other buses. These entries can use bus ID numbers left vacant by the PCI bus
entries.
This sequence implies that bus ID numbers do not have to increase sequentially by increments of
one; the requirement is that they must appear in ascending order by bus ID number. This specific
interpretation of the information presented in Table 4-7 ensures consistency between the
information in the MP configuration table and the model for systems with multiple PCI buses that
is presented in the formal PCI specification, which allows for more flexibility in bus numbering.
This numbering scheme requires bus entries in the MP configuration table to be sorted
appropriately. For example, bus entries should appear in the order PCI (0), EISA (1), and PCI(4)
in a system with three buses, two PCI buses numbered 0 and 4, and a single EISA bus numbered
as 1.
D.3 I/O Interrupt Assignment Entries for PCI Devices
Section 4.3.4 defines the format of interrupt assignment entries. The example presented there does
not, however, completely explain the semantics of the source bus IRQ field for PCI devices.
For PCI devices, the semantics for encoding PCI interrupts should mirror the PCI specification as
follows:
Table D-1. I/O Interrupt Entry Source Bus IRQ Field for PCI Devices
Offset
Field
SOURCE BUS IRQ 5:0 2 Identifies the PCI interrupt signal, where
SOURCE BUS IRQ 5:2 5 Gives the PCI Device Number where the
RESERVED 5:7 1 Reserved for future use.
(in bytes:bits)
Length
(in bits) Description
0x0 corresponds to INT_A#, 0x1 to
INT_B#, 0x2 to INT_C# and 0x3 to
INT_D#.
interrupt originates.
Version 1.4 D-3
Page 88

Page 89

The following sections provided here are intended to replace the corresponding sections in the
SPEC_REV
LENGTH
_ (5Fh)M (4Dh)
SIGNATURE
00H
04H
CHECKSUM
08
0CH
H
31 07815162324
31 07815162324
PHYSICAL ADDRESS POINTER
P (50h)_ (5Fh)
MP FEATURE
BYTE 1
MP FEATURE
BYTES 2-5
main body of the specification. The sections provided here are shown in their entirety to provide
context for the changes. Changes contained below are marked with double underlined text which
shows changes relative to the version of the sections that are provided in the main body of the
specification.
4.1 MP Floating Pointer Structure
An MP-compliant system must implement the MP floating pointer structure, which is a variable
length data structure in multiples of 16 bytes. Currently, only one 16-byte data structure is defined.
It must span a minimum of 16 contiguous bytes, beginning on a 16-byte boundary, and it must be
located within the physical address as specified in the previous section. To determine whether the
system conforms to the MP specification, the operating system must search for the MP floating
pointer structure in the order specified in the previous section. Figure 4-2 shows the format of this
structure, and Table 4-1 explains each of the fields.
E
Errata
Figure 4-2. MP Floating Pointer Structure
Version 1.4 E-1
Page 90

MultiProcessor Specification
Table 4-1. MP Floating Pointer Structure Fields
Offset
Field
SIGNATURE 0 32 The ASCII string represented by “_MP_” which
PHYSICAL ADDRESS
POINTER
LENGTH 8 8 The length of the floating pointer structure table
SPEC_REV 9 8 The version number of the MP specification
CHECKSUM 10 8 A checksum of the complete pointer structure.
MP FEATURE
INFORMATION BYTE 1
MP FEATURE
INFORMATION BYTE 2
MP FEATURE
INFORMATION BYTES 3-5
(in bytes:bits)
4 32 The address of the beginning of the MP
11 8
12:0
12:6
12:7
13 24 Reserved for future MP definitions. Must be
Length
(in bits) Description
serves as a search key for locating the pointer
structure.
configuration table. All zeros if the MP
configuration table does not exist.
in paragraph (16-byte) units. The structure is 16
bytes or 1 paragraph long; so this field contains
01h.
supported. A value of 01h indicates Version 1.1.
A value of 04h indicates Version 1.4.
All bytes specified by the length field, including
CHECKSUM and reserved bytes, must add up to
zero.
Bits 0-7:
When these bits are all zeros, the MP
configuration table is present. When nonzero,
the value indicates which default configuration
(as defined in Chapter 5) is implemented by the
system.
6
1
1
Bits 0-5
Bit 6:
indicates that the processors derive clock signals
from different sources. Otherwise when not set
this bit indicates that all processors share a
single clock source.
Bit 7:
set, the IMCR is present and PIC Mode is
implemented; otherwise, Virtual Wire Mode is
implemented.
zero.
MP System Configuration Type.
:
Reserved for future MP definitions.
Multiple Clock Sources. When set, this bit
IMCRP. When the IMCR presence bit is
The MP feature information byte 1 specifies the MP system default configuration type. If nonzero,
the system configuration conforms to one of the default configurations. The default configurations,
specified in Chapter 5, may only be used to describe systems that always have two processors
installed.
Bit 6 of MP feature information byte 2, the Multiple Clock Source bit, is used by the operating
system to determine how processors derive clock sources. If the system design does not provide
for a single clock source shared by all processors then this bit is set. Otherwise this bit is zero to
in dicate that all processors derive their clock
E-2 Version 1.4
from
a common source.
Bit 7 of MP feature
Page 91

00H
04H
08H
0CH
10H
ENTRY LENGTHBUS IDADDRESS TYPE
ADDRESS BASE
ADDRESS LENGTH
ENTRY TYPE
128
31 0374811121516192023242728
31 0374811121516192023242728
MP Configuration Table
information byte 2, the IMCR present bit, is used by the operating system to determine whether
PIC Mode or Virtual Wire Mode is implemented by the system.
The physical address pointer field contains the address of the beginning of the MP configuration
table. If it is nonzero, the MP configuration table can be accessed at the physical address provided
in the pointer structure. This field must be all zeros if the MP configuration table does not exist.
4.4.1 System Address Space Mapping Entries
System Address Space Mapping entries define the system addresses that are visible on a particular
bus. Each bus defined in the Base Table can have any number of System Address Space Mapping
entries included in the Extended Table. Thus, individual buses can be configured to support
different address ranges, thereby decreasing the amount of bus traffic on a given bus and increasing
the overall system performance. Each consecutive address range that is usable by the operating
system to access devices on a given bus has a System Address Space Mapping entry. Figure 4-9
shows the format of each entry, and Table 4-14 explains each field.
Figure 4-9. System Address Space Entry
Version 1.4 E-3
Page 92

MultiProcessor Specification
Processor 1
PCI Bus 1
EISA Bus
PCI Bus 2
Memory
Controller
EISA Bridge
Processor 0
System Bus
PCI
Host Bridge
PCI-to-PCI
Bridge
PCI Bus 0
PCI
Host Bridge
Table 4-14. System Address Space Mapping Entry Fields
Field
Offset
(in bytes:bits)
Length
(in bits) Description
ENTRY TYPE 0 8 Entry type 128 identifies a System Address Space
Mapping Entry.
ENTRY LENGTH 1 8 A value of 20 indicates that an entry of this type is
twenty bytes long.
BUS ID 2 8 The BUS ID for the bus where the system address
space is mapped. This number corresponds to the
BUS ID as defined in the base table bus entry for
this bus.
ADDRESS TYPE 3 8 System address type used to access bus
addresses must be:
0 = I/O address
1 = Memory address
2 = Prefetch address
All other numbers are reserved.
ADDRESS BASE 4 64 Starting address
LENGTH 12 64 Number of addresses which are visible to the bus
If any main memory address is mapped to a software visible bus, such as PCI, it must be explicitly
declared using a System Address Space Mapping entry.
In the case of a bus that is directly connected to the main system bus, system address space records
and compatibility base address modifiers must be provided as needed to fully describe the complete
set of addresses that are mapped to that bus. For example, in Figure 4-10, complete explicit
descriptions must be provided for PCI BUS 0 and PCI BUS 1 even if one of the buses is
programmed for subtractive decode.
Figure 4-10. Example System with Multiple Bus Types and Bridge Types
E-4 Version 1.4
Page 93

MP Configuration Table
Since all device settings must fall within supported System Address Space mapping for a given bus
in order to be usable by the operating system, buses that do not support dynamically configurable
devices (i.e., ISA, EISA) should support all possible addresses to that bus.
In general, the MP configuration table must provide entries to describe system address space
mappings for all I/O buses present in the system. There are two exceptions to this rule:
1. For buses that are connected via PCI-to-PCI-bridge-specification-compliant bridges: in this
case, the system address space mappings for such buses may be omitted from the configuration
4
table if bus hierarchy entries for these buses are also omitted (refer to Section 4.
addit
ional information)
. In such cases, the operating system is expected to discover the address
.2 for
space mapping by querying the PCI-to-PCI-bridge-specification-compliant bridge directly.
2. For buses that are connected via a parent I/O bus and for which the subtractive decode bit is set
(refer to Section 4.4.2 for details).
Typically, this would mean that a minimal description of resources allocated to PCI buses in a
system need only include System Address Space Mapping entries for PCI bus zero and any
additional peer PCI buses (if present) where these buses are connected by PCI bridges that are
specific to the chipset or host bus.
Note
System Address Mappings are unidirectional in nature. They only describe system addresses that
propagate to the target bus from any given processor. For DMA support on the target bus, all memory
addresses that contain real memory should be accessible directly by either the bus or by a bus-specific
DMA controller. For buses with fewer than 32-bit address lines, all real memory at addresses that the
bus can generate must be accessible for DMA.
4.4.2 Bus Hierarchy Descriptor Entry
If present, Bus Hierarchy Descriptor entries define how I/O buses are connected relative to each
other in a system with more than one I/O bus. Bus Hierarchy Descriptors are used to supplement
System Address Mapping entries to describe how addresses propagate to particular buses in
systems where address decoding cannot be completely described by System Address Space
Mapping entries alone.
In general, e
hierarchically below another I/O bus. The one exception to this is for PCI buses that are connected
behind a
may be omitted as the operating system is expected to discover such buses without the need to refer
to the
intended to work in concert
bus behind a compliant bridge or it may provide both. The table must not however provide one
without the other for buses behind
Figure 4-10, bus hierarchy entries are required for the EISA bus and may be provided for
BUS 2 since both have parent buses that are themselves I/O buses. If the configuration table does
include
space records must also be provided
The Bus Hierarchy entry provides information about where in a hierarchical connection scheme a
given bus is connected and the type of address decoding performed for that bus. Figure 4-11 shows
the format of each entry, and Table 4-15 explains each field.
ntries of this type are required for each bus that is connected to the system
PCI to PCI bridge specification compliant bridge. In this case the bus hierarchy entry
configuration table.
Since bus hierarchy
,
the configuration table may chose to omit both types of records
compliant bridges.
descriptor
and system address space records are
For example, given the system described in
a bus hierarchy entry for PCI BUS 2, then
.
a complete set of
corresponding system address
PCI
for a
Version 1.4 E-5
Page 94

31 0374811121516192023242728
00H
04H
ENTRY LENGTH
ENTRY TY PE
129
BUS ID
BUS INFO
RESERVED
PARENT BUS
S
D
31 0374811121516192023242728
RESERVED
MultiProcessor Specification
Figure 4-11. Bus Hierarchy Descriptor Entry
Table 4-15 Bus Hierarchy Descriptor Entry Fields
Offset
Field
(in bytes:bits)
ENTRY TYPE 0 8 Entry type 129 identifies a Bus Hierarchy Descriptor
ENTRY LENGTH 1 8 A value of 8 indicates that this entry type is eight
BUS ID 2 8 The BUS ID identity of this bus. This number
BUS INFORMATION:SD 3:0 1 Subtractive Decode Bus. If set, all addresses visible
PARENT BUS 4 8 Parent Bus. This number corresponds to the BUS
Length
(in bits) Description
Entry.
bytes long.
corresponds to the BUS ID as defined in the base
table bus entry for this bus.
on the parent bus but not claimed by another device
on the parent bus (including bridges to other
buses) are useable on this bus.
ID as defined in the base table bus entry for the
parent bus of this bus
For buses where the BUS INFORMATION:SD bit is set, System Address Mappings may not be
needed. Since the bus is defined as being subtractive decode, the range of addresses that appear on
the bus can be derived from address decoding information for parent and peer buses.
E-6 Version 1.4
Page 95

Glossary
82489DX: The 82489DX Advanced Programmable Interrupt Controller (APIC).
8259A: The 8259A Programmable Interrupt Controller (PIC) or its equivalent.
AP: Application processor, one of the processors not responsible for system initialization.
APIC: Advanced Programmable Interrupt Controller, either the 82489DX APIC or the integrated
APIC on Pentium processors.
BIOS: Basic Input/Output Subsystem.
BSP: Bootstrap processor, the processor responsible for system initialization.
Cache coherency: A property of a cache/memory system that guarantees that a request for an item
from memory will retrieve the most up-to-date value of that item, regardless of what cache or
memory location currently holds that value.
CMOS RAM: The battery backed-up configuration memory of the PC/AT motherboard.
DP: A dual processor system is one with two processors.
ExtINT: A delivery mode of the Local Vector Table of a local APIC that causes delivery of a
signal to the INT pin of the processor as an interrupt that originated in an externally connected
8259A-equivalent PIC. The ExtINTA output signal is also asserted. The INTA cycle that
corresponds to the ExtINT delivery should be routed to the external PIC that is expected to supply
the vector.
Flush: Write back all modified lines of a cache.
INIT: Unless otherwise specified, the processor-specific reset or system-wide soft reset functions.
This definition is functional and sometimes bears no relationship to the actual signal name. For
example, the term "INIT" may refer to the INIT signal on the Pentium processor or to the RESET
signal on the Intel486 processor.
INIT IPI: A type of APIC interprocessor interrupt whose delivery mode is set to RESET. Upon
delivery to the specified destinations, the destination APICs assert their PRST output signals.
When the PRST lines are connected to the INIT or RESET inputs of their respective processors, an
INIT IPI causes reinitialization of the destination processors.
Invalidate: Change the state of a cache line to the Invalid state.
IPI: Interprocessor interrupt.
MESI: A cache coherency protocol named after the states that cache lines may have: Modified,
Exclusive, Shared, Invalid.
MP: A multiprocessor system is one with two or more processors.
PIC: Programmable Interrupt Controller.
Version 1.4 Glossary-1
Page 96

MultiProcessor Specification
PIC Mode: One of three interrupt modes defined by the MP specification. In this mode the APICs
are effectively disabled, while interrupts are generated by 8259A-equivalent PICs and delivered
directly to the BSP. This is a uniprocessor compatibility mode.
POST: Power-On Self Test, the first BIOS procedure executed after a RESET or INIT.
RESET: The system-wide hard reset. This definition is functional. It may refer to the RESET
signal on both Pentium and Intel486 processors or the RESET signal of the 82489DX APIC.
Shutdown code: The value of CMOS RAM location 0Fh, which indicates that reason that a
RESET was performed.
STARTUP IPI: A type of APIC interprocessor interrupt that is similar to an NMI with an
embedded vector. It does not cause any change of state, but merely causes the targeted processor
to start executing in Real Mode from address 000VV000h, VV being an 8-bit vector which is part
of the IPI message. Startup vectors are limited to a 4K page boundary in the first 1 MB of the
address space. STARTUP IPIs are not maskable, and can be issued at any time. The benefit of
STARTUP-IPI compared to NMI is that it does not require the targeted APIC to be enabled, and it
does not require the interrupt table to be programmed. Thus, the operating system's initialization
procedure can use it to wake up an AP that has been sleeping since RESET or INIT. The
STARTUP IPI is not supported by the 82489DX APIC.
Symmetric I/O Mode: One of three interrupt modes defined by the MP specification. In this
mode, the APICs are fully functional, and interrupts are generated and delivered to the processors
by the APICs. Any interrupt can be delivered to any processor. This is the only multiprocessor
interrupt mode.
Symmetry: The relationship of equality among components of a multiprocessor system in which
no processor is special with respect to its access to memory, interrupts, or I/O. For interrupts,
symmetry means that any interrupt from any source can be routed to any processor and handled
there. For I/O, it means that all I/O control registers, be they in memory space, I/O space, or some
other special address space, are accessible to all processors. Per-processor control hardware, such
as interrupt controllers or processor identification registers, must be at the same physical address
for all processors.
Virtual Wire Mode: One of three interrupt modes defined by the MP specification. In this mode
interrupts are generated by the 8259A-equivalent PICs, but delivered to the BSP by an APIC that is
programmed to act as a "virtual wire"; that is, the APIC is logically indistinguishable from a
hardwired connection. This is a uniprocessor compatibility mode.
Warm reset: A technique that allows the RESET or INIT signal to be asserted without actually
causing the BIOS to run through its entire initialization procedure. If a value of 0Ah is placed in
the shutdown code, the first instructions of the BIOS POST procedure read the warm-reset vector
from system RAM location 40:67h, and jump to that address.
Write-back: A cache update policy wherein a modified cache line is not written back to main
memory until the last possible instant—when another processor needs to access the data or when
its location in the cache is needed for other data.
Glossary-2 Version 1.4
Page 97

Order Number: 242016-006
Printed in U.S.A.
 Loading...
Loading...