

Page 1

935
9
35
W7762A,B HYDRONIC CONTROLLERS
HONEYWELL EXCEL 5000 OPEN SYSTEM
Excel 10
SYSTEM ENGINEERING
CONTENTS
Revision overview ........................................................................................................................................................................ 2
Introduction .................................................................................................................................................................................. 3
Description of Devices ................................................................................................ 3
Products Covered ....................................................................................................... 4
Organization of Manual ............................................................................................... 4
Applicable Literature ................................................................................................... 4
Product Names ........................................................................................................... 4
Control Application...................................................................................................... 5
Control Provided ......................................................................................................... 5
Setpoints.......................................................................................................... 6
Bypass............................................................................................................. 7
LED/LCD ......................................................................................................... 7
Energy-Saving Features .................................................................................. 7
Occupancy Status............................................................................................ 8
Operating Modes ............................................................................................. 9
Agency Listings........................................................................................................... 9
Design....................................................................................................................... 10
Controller Performance Specifications ...................................................................... 11
Configurations........................................................................................................... 12
General.......................................................................................................... 12
Fan Interlock (not available through E-Vision) ............................................... 12
Type of Heating and Cooling Equipment ....................................................... 12
Digital Input.................................................................................................... 13
Excel 10 Wall Module Options ....................................................................... 14
Abbreviations and Definitions.................................................................................... 15
Overview................................................................................................................... 16
Step 1. Plan The System .......................................................................................... 16
Application Steps ....................................................................................................................................................................... 16
Step 2. Determine Other Bus Devices Required....................................................... 16
Step 3. Lay Out Communications and Power Wiring ................................................ 17
E-Bus Layout ................................................................................................. 17
Power Wiring ................................................................................................. 19
Step 4. Prepare Wiring Diagrams ............................................................................. 20
General Considerations ................................................................................. 20
W7762 Controller........................................................................................... 21
E-Bus Termination Module ............................................................................ 22
Step 5. Order Equipment .......................................................................................... 23
Step 6. Configure Controllers.................................................................................... 24
General.......................................................................................................... 24
Outputs .......................................................................................................... 25
Inputs............................................................................................................. 26
Equipment Control ......................................................................................... 27
Switching Levels ............................................................................................ 27
Zone Options ................................................................................................. 28
Miscellaneous ................................................................................................ 28
PID................................................................................................................. 28
Commissioning .............................................................................................. 29
ID Number ..................................................................................................... 29
Excel 10 Hydronic Controller Point Mapping.................................................. 29
Step 7. Troubleshooting............................................................................................ 31
® U.S. Registered Trademark 74-2935-3r0909
Copyright © 2009 Honeywell Inc.
All Rights Reserved
74-2
-2
74-2
-2
Page 2
EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Troubleshooting Excel 10 Hydronic Controllers and Wall Modules.................31
Alarms ............................................................................................................31
Broadcasting the Service Message ................................................................33
W7762 Controller Status LED ........................................................................33
Manual Mode..................................................................................................33
Appendix A. Using E-Vision to Commission a Hydronic Controller.......................................................................................34
Temperature Sensor Calibration................................................................................34
Procedure.......................................................................................................34
Appendix B. Configuring for Master/Slave Operation..............................................................................................................35
Output Configuration Options ....................................................................................35
Input Configuration Options .......................................................................................35
Equipment Control Options........................................................................................35
Zone Control Options.................................................................................................35
Network Variable Binding...........................................................................................35
Appendix C. Complete List of Excel 10 Hydronic Controller User Addresses. .....................................................................36
Appendix D. Q7750A Excel 10 Zone Manager Point Estimating Guide. .................................................................................74
Approximate Memory Size Estimating Procedure......................................................74
REVISION OVERVIEW
On the following pages, changes have been made compared to the previous release of this document:
Page: Change:
App. C Minor corrections in Appendix C
74-2935-3r0909 2
Page 3
EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
INTRODUCTION
Description of Devices
The W7762A and B Controllers are two Hydronic Controllers
in the Excel 10 family product line. They cover a wide range
of control applications including radiators, induction units, and
fan coil units with manual fan switching, and are suitable for
either wall mounting or unit mounting. Heating systems can
be water or electric, and cooling systems can be chilled water
supply or compressors. Extensive timing and interlock
features make the W7762 especially suitable for systems
using electric heat and compressors. The W7762 Controllers
are capable of stand-alone operation; however, optimum
functional benefits are achieved when the network
communication capabilities are used.
PERSONAL COMPUTER TOOLS
E-VISION
E-BUS COMMUNICATIONS NETWORK
Q7752A
E-BUS
SERIAL
ADAPTER
EXCEL 10
Q7750A
ZONE
MANAGER
The zone controlled by the W7762 Controllers will typically
use an Excel 10 wall module with a temperature sensor for
space temperature measurement, analog setpoint input,
bypass digital input push-button, and override status LED.
See page 4 for form numbers of Excel 10 wall module
literature for further information.
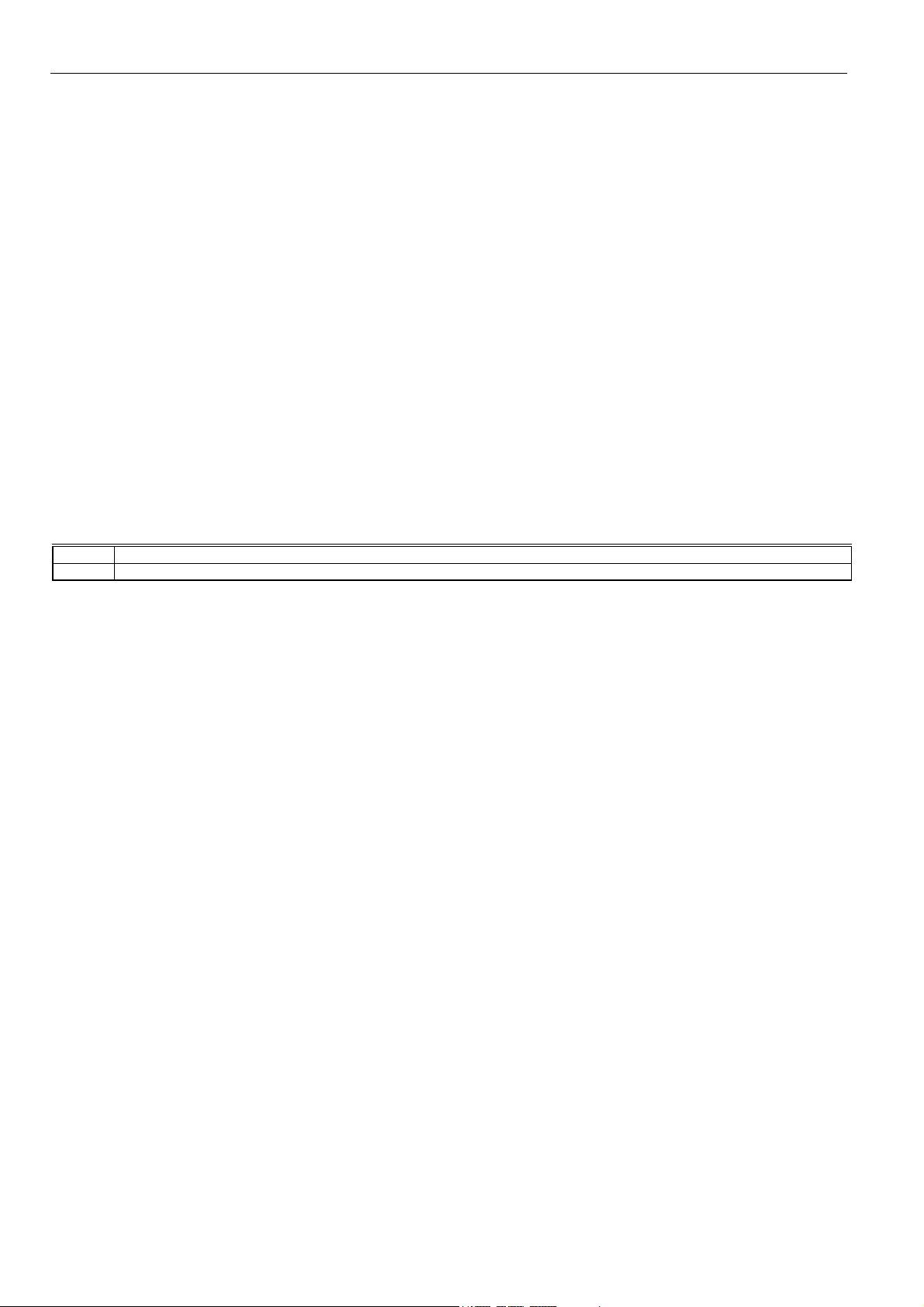
The Q7750A Excel 10 Zone Manager is a communications
interface that allows devices on the Excel 10 Echelon
L
ONWORKS
the EXCEL 5000
®
network (E-Bus) to communicate with devices on
®
System C-Bus. Fig. 1 shows an overview
®
of a typical system layout. The Q7750A also provides some
control and monitoring functions.
C-BUS COMMUN ICATION N ETWORK
EXCEL 500
C-BUS TO E-BUS
INTERFACE DEVICE
EXCEL BUILDING SUPERVISOR
E-BUS COMMUN ICATI ONS N ETWOR K
EXCEL 10 HYDRONIC
CONTROLLER
Q7751A
E-BUS
ROUTER
Fig. 1. Typical system overview
3 74-2935-3r0909
Page 4

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Products Covered
This System Engineering Guide describes how to apply the
Excel 10 Hydronic Controller and the accessories to typical
Hydronic applications. The specific devices covered include:
• W7762A,B Hydronic Controllers.
• T7460 Wall Modules.
• T7560 Wall Modules.
• T7770 Wall Modules.
• Q7750A Excel 10 Zone Manager.
• Q7751A Bus Router (US part number; US only).
• Q7752A Serial Adapter (US part number; US only).
Organization of Manual
The Introduction and Application Steps 1 through 5 provide
the information needed to make accurate ordering decisions.
Application Step 6 and the Appendices include configuration
engineering that can be started using E-Vision software after
the devices and accessories are ordered. Application Step 7
is troubleshooting. Information provided in support of the use
of third-party E-bus communication packages to configure
Hydronic Controllers is found in the Appendices.
The organization of the manual assumes a project is being
engineered from start to finish. If you are adding to, or
changing an existing system, the Table of Contents can guide
you to the relevant information.
Applicable Literature
The following is a list of documents that contains information
related to the Excel 10 Hydronic Controller and the EXCEL
5000 System in general.
Form No. Title
74-2934 Excel 10 W7762A,B Hydronic Controller
Specification Data
95-7563 Excel 10 W7762A,B Hydronic Controller
Installation Instructions
74-3083 Excel 10 T7460 Wall Modules Specification
Data
95-7610 Excel 10 T7460 Wall Modules Installation
Instructions
74-3097 Excel 10 T7560 Wall Modules Specification
Data
95-7620 Excel 10 T7560 Wall Modules Installation
Instructions
74-2697 Excel 10 T7770 Wall Modules Specification
Data
95-7538 Excel 10 T7770 Wall Modules Installation
Instructions
74-2950 Excel 10 Q7750A, Excel 10 Zone Manager
Specification Data
95-7509 Excel 10 Q7750A Zone Manager Installation
Instructions.
95-7554 Excel 10 FTT/LPT 209541B Termination
Module Installation Instructions
95-7510 Excel 10 Q7751A Router Installation
95-7511 Excel 10 Q7752A Serial Interface Installation
74-2039 XBS User’s Manual
74-5018 XBS Application Guide
Product Names
The W7762 Hydronic Controller can use any of the following
Excel 10 wall modules:
• T7460A with temperature sensor.
• T7460B with temperature sensor and setpoint adjustment.
• T7460C with temperature sensor, setpoint adjustment, and
bypass button and LED.
• T7560A with temperature sensor, unit enable button,
setpoint adjustment, bypass button, LCD display and
configurable fan override with up to five settings.
• T7770A Wall Module with temperature sensor and optional
E-Bus jack.
• T7770B Wall Module with temperature sensor, setpoint
adjustment, and E-Bus jack.
• T7770C Wall Module with temperature sensor, setpoint
adjustment, bypass button and LED, and E-Bus jack.
• T7770D Wall Module with temperature sensor, bypass
button and LED, and E-Bus jack.
Other products:
• Q7750A Excel 10 Zone Manager.
• Q7751A Bus Router (US only).
• Q7752A Serial Adapter (US only).
• AK3781 E-Bus (non-plenum): 22 AWG (0.325 mm
twisted pair solid conductor, non-shielded wire (one twisted
pair) (US only).
• AK3782 E-Bus (non-plenum): 22 AWG (0.325 mm
twisted pair solid conductor, non-shielded wire (two twisted
pairs) (US only).
• AK3791 E-Bus (plenum): 22 AWG (0.325 mm
pair solid conductor, non-shielded wire (one twisted pair)
(US only).
• AK3792 E-Bus (plenum): 22 AWG (0.325 mm
pair solid conductor, non-shielded wire (two twisted pairs)
(US only).
• C7608A Return Air Sensor (Europe only).
Refer to the Table 12 (see Application Steps, Step 5. Order
Equipment) for complete listing of all available part numbers.
Instructions (US only)
Instructions (US only)
2
)
2
)
2
) twisted
2
) twisted
74-2935-3r0909 4
Page 5
EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
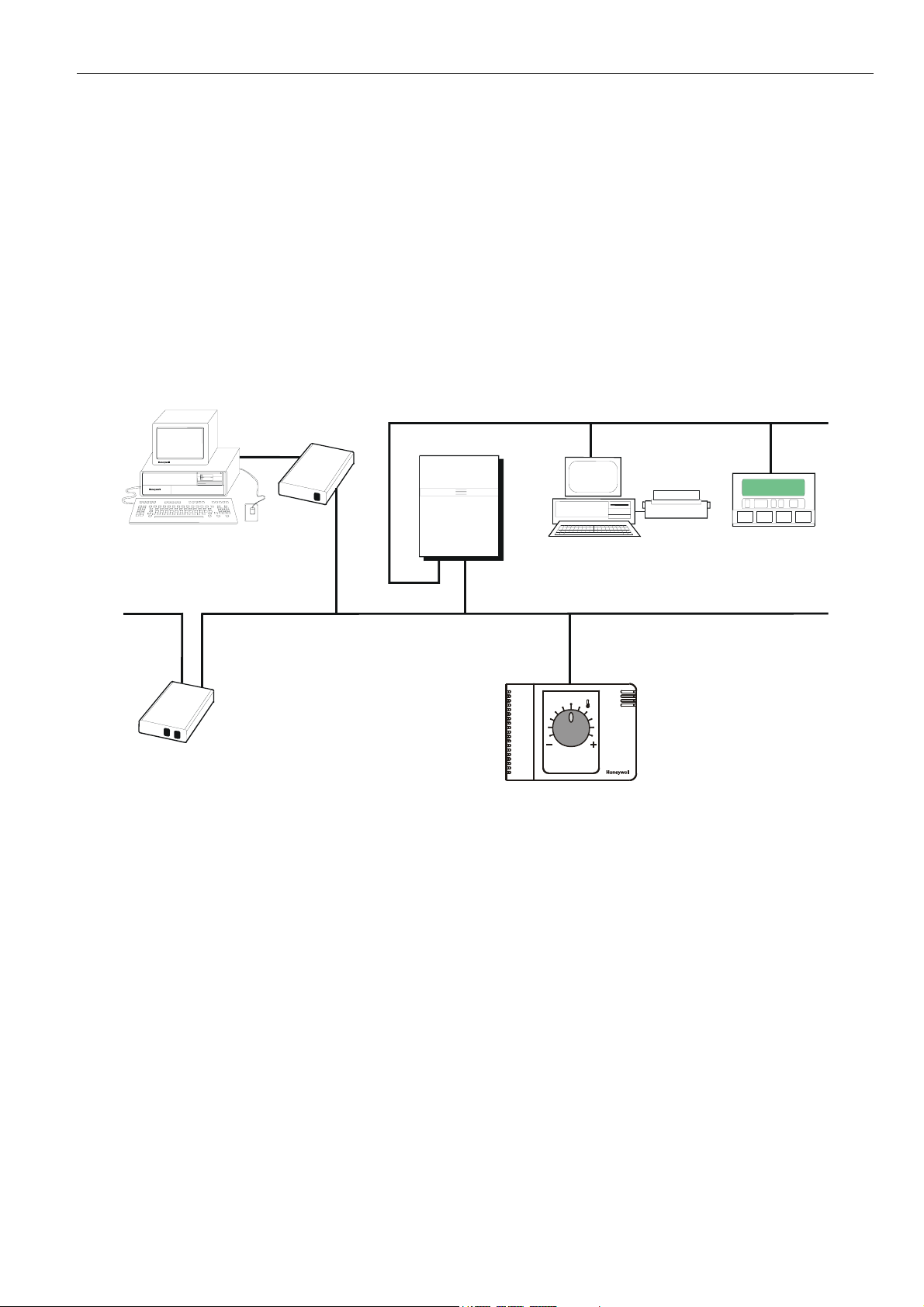
Control Application
Hydronic systems in commercial buildings control room
temperature through the control of heat and/or cold water
valves. The Hydronic controller is typically connected to an
Excel 10 wall module that incorporates a temperature sensor,
W7762B HYDRONIC
CONTROLLER
Fig. 2. Typical W7762 Hydronic control application.
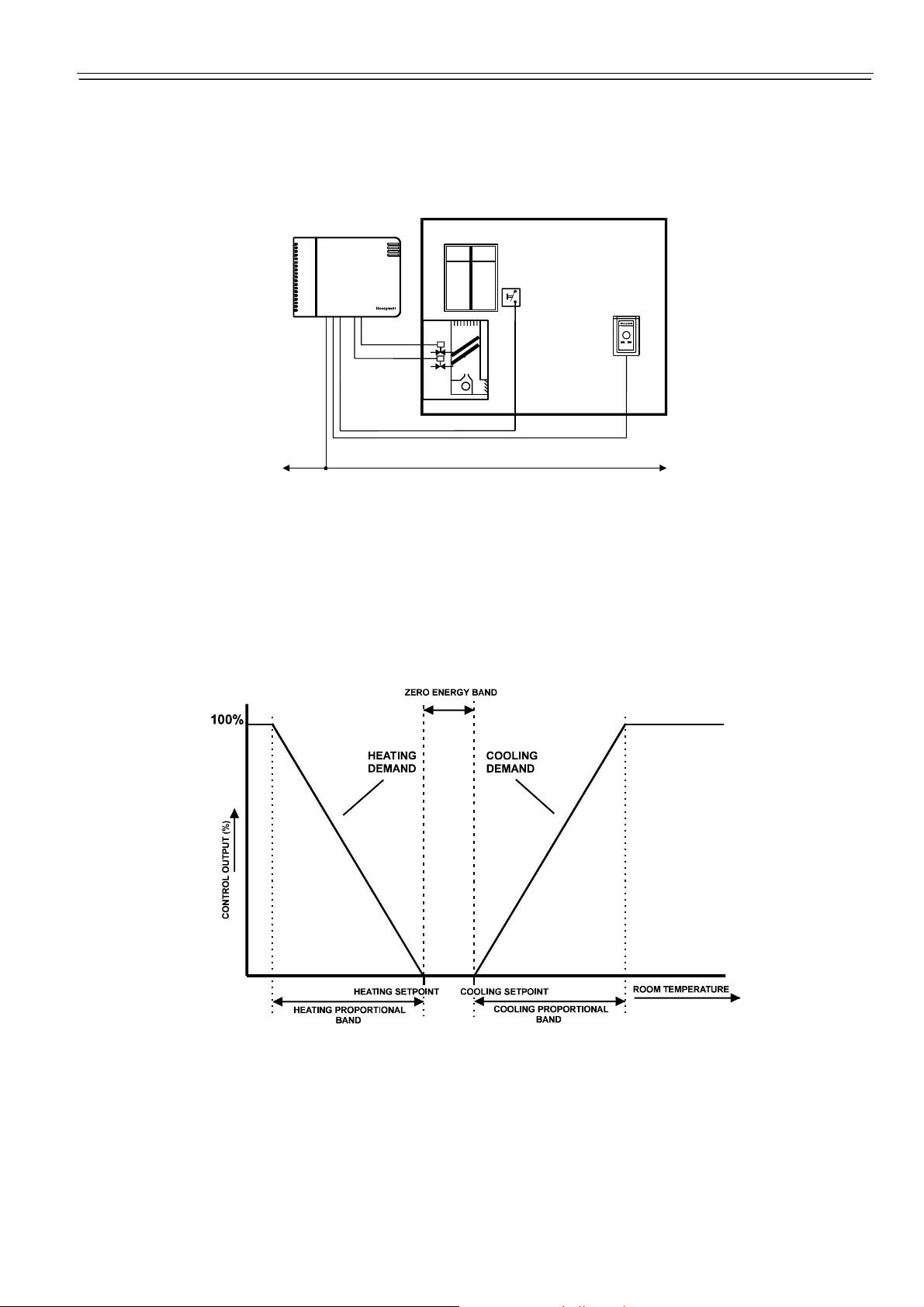
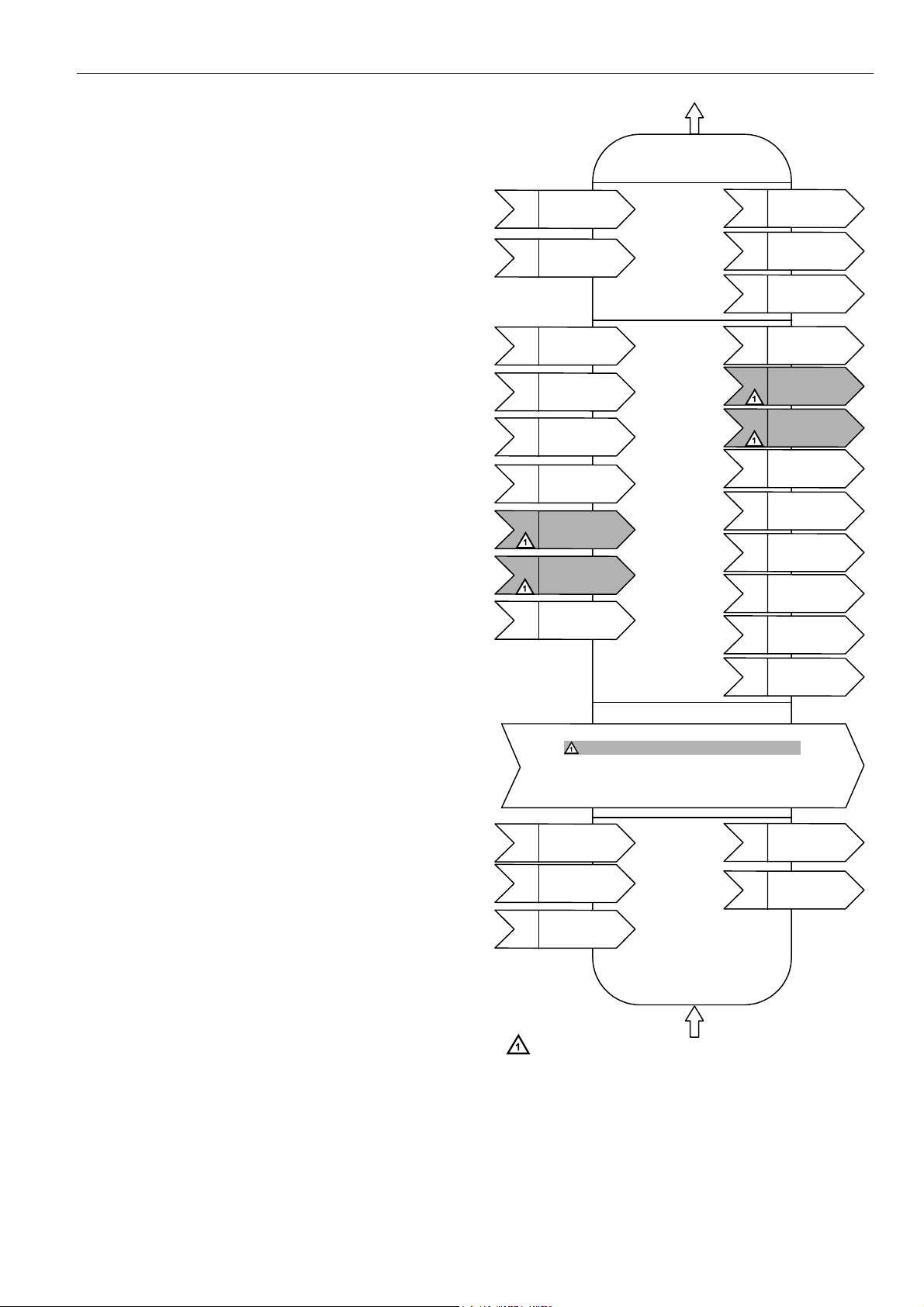
Control Provided
The W7762 Hydronic Controllers provide room temperature
control for two and four pipe fan coil units. The basic control
sequence is shown in Fig. 3. As space temperature falls
below the heating setpoint, the heating output is increased.
As space temperature increases above the cooling setpoint,
the cooling output is modulated to 100%. Switching levels for
staged heating/cooling are configurable.
setpoint and a bypass or override button. Fig. 2 shows a
typical Hydronic control application.
WINDOW
CONTACT
WALL MODULE
WITH TEMP
SENSOR
E-BUSE-BUS
W7762 Hydronic controllers use a PID control algorithm
where each of the three parameters can be configured. There
are additional configurable boost parameters (HeatBoost and
CoolBoost) that specify a range outside of which the heating
or cooling outputs are turned on fully for faster response (for
thermal actuators this specifies the control hysteresis). The
controllers are delivered with factory defaults for each of the
parameters.
Fig. 3. Control sequence diagram.
5 74-2935-3r0909
Page 6
EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Setpoints
Setpoint Knob
W7762A Hydronic controllers have a built-in setpoint
potentiometer. W7762B controllers may have an Excel 10
wall module with setpoint potentiometer connected to them.
When configured (UseWallModSpt), the value from the
setpoint knob is used to calculate the cooling or heating
Occupied setpoint. There are two options (SptKnob) that
determine how the setpoint to be used by the control
algorithm is calculated: Relative (or Offset) and Absolute
Middle. When configured for Relative, the Wall Module
setpoint knob represents a number from -5° to +5°C (-9° to
+9°F) that is added to the software occupied setpoints for the
heat and the cool modes (SptCoolOcc and SptHeatOcc).
When SptKnob is set to Absolute Middle, the setpoint knob
becomes the center of the Zero Energy Band (ZEB) between
the cooling and heating occupied setpoints. The range of the
ZEB is found by taking the difference between the configured
heating and cooling occupied setpoints; therefore, for
Absolute Middle, the actual setpoints are found as follows:
SrcRmTempSptEff (in cooling mode) = SrcRmTempSptHw
+ (SptCoolOcc - SptHeatOcc) / 2
SrcRmTempSptEff (in heating mode) = SrcRmTempSptHw
- (SptCoolOcc - SptHeatOcc) / 2
During Standby and Unoccupied modes, the remote setpoint
knob is ignored, and the configured setpoints for those modes
Setpoint Limits
Setpoint knob limits are provided by SptKnobLoLim and
SptKnobHiLim. The occupied setpoints used in the control
algorithms are limited by these parameters. When the
setpoint knob is configured to be Absolute Middle, the lowest
actual setpoint allowed is equal to SptKnobLoLim, and the
highest actual setpoint allowed is equal to SptKnobHiLim.
When the setpoint knob is configured to be Relative, the
lowest actual setpoint allowed is equal to SptHeatOcc SptKnobLoLim, and the highest allowed is equal to
SptCoolOcc + SptKnobHiLim.
Setpoint from Network
When not configured for UseWallModSpt, DestRmTempSpt
must be bound to another node that provides a setpoint.
When bound and a valid update is received, DestRmTempSpt
is used with the appropriate ZEB:
ZEBoccupied = SptCoolOcc - SptHeatOcc
ZEBstandby = SptCoolStby - SptHeatStby
The Unoccupied setpoint does not depend on
DestRmTempSpt at all.
Setpoint Offset
Third party nodes may be bound to DestSptOffset to shift the
setpoint in the range of -10 delta °C to +10 delta °C.
are used instead.
Table 1. Example setpoint values based upon default configuration - Absolute Middle setpoint knob (°C).
Occupancy
Mode
Configured
Cooling Spt.
Configured
Heating Spt. ZEB
Setpoint
1
Knob
Effective
Cooling Spt.
2,3
Effective
Heating Spt.
2,4
Occupied 23 21 2 21 22 20
Standby 25 19 6 21 24 18
Unoccupied 28 16 12 X 28 16
NOTES:
1. Sample value shown. Limited by default configuration settings to the range of 12 to 30°C.
2. Limited to the range of 10 to 35°C.
3. = Setpoint Knob + (ZEB/2)
4. = Setpoint Knob – (ZEB/2)
Table 2. Example setpoint values based upon default configuration - Relative setpoint knob (°C).
Occupancy
Mode
Configured
Cooling Spt.
Configured
Heating Spt. ZEB
Setpoint
1
Knob
Effective
Cooling Spt.
2,3
Effective
Heating Spt.
2,4
Occupied 23 21 2 -2 21 19
Standby 25 19 6 -2 23 17
Unoccupied 28 16 12 X 28 16
NOTES:
1. Sample value shown. Limited by default configuration settings to the range of -5 to 5°C.
2. Limited to the range of 10 to 35°C.
3. = Configured Cooling Setpoint + Setpoint Knob
4. = Configured Heating Setpoint + Setpoint Knob
74-2935-3r0909 6
Page 7
EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Bypass
Bypass Mode
During Unoccupied periods, the bypass push-button on the
Wall Module may be used to cause the Occupied setpoints to
be used by the control algorithm. The mode may also be
initiated by setting DestManOcc to OC_BYPASS via the
network The controller remains in Bypass mode until:
1. The bypass timer has timed out, or
2. The user again presses the Wall Module push-button to
cancel Bypass mode, or
3. The occupancy schedule (DestSchedOcc network
input) switches the mode to Occupied.
4. The network input DestManOcc is set to to OC_NUL.
The Excel 10 wall module indicates the current bypass mode
status (see Excel 10 wall module literature for further
information).
Bypass Timer
When the bypass mode has been activated, the bypass timer
is set to BypTime (default of 180 minutes), at the end of which
the mode reverts to the original occupancy state (see Excel
10 wall module literature for further information).
Continuous Unoccupied Mode
This mode is entered when an Excel 10 wall module is
configured to allow it and:
• T7460 and T7770: The bypass button is pressed for four to
seven seconds (until the LED blinks),
• T7560: The bypass button is pressed for more than five
seconds (until flashing moon appears).
This mode can also be entered via a network command
(DestManOcc set to OC_UNOCCUPIED). The controller uses
the Unoccupied setpoints. The controller remains in this mode
indefinitely, or until the bypass button is pressed to exit the
mode, or a network command is sent to clear the mode.
Bypass Push-Button
The Hydronic Controller may have an Excel 10 wall module
with bypass push-button connected to it. There are three
ways to configure the bypass push-button (see Table 14 for
further information):
NONE
BYPASS_UNOCCUPIED
BYPASS_ONLY
Override Priority
The Hydronic controller can be configured to arbitrate
overrides coming from the Wall Module and the network.
There are two possible states that have the following
meanings:
LAST_WINS-Specifies that the last command received
from either the wall module or DestManOcc determines
the effective override state.
NETWORK_WINS-Specifies that when DestManOcc is not
OC_NUL, then the effective occupancy is DestManOcc
regardless of the wall module override state.
LED/LCD
LED Override
The wall module’s LED shows the override from the bypass
button or from the network.
• LED on ⇒ Override Bypass
• One flash per second ⇒ Override Unoccupied
• Two flashes per second ⇒ Override Standby or Occupied
• LED off ⇒ No Override
• Four flashes per second ⇒ Controller answers network
management wink command.
LED Occupancy
The wall module’s LED shows the effective occupancy mode.
• LED on ⇒ Effective Occupied or Bypass
• One flash per second ⇒ Effective Standby
• LED off ⇒ Effective Unoccupied
• Four flashes per second ⇒ Controller answers network
management wink command.
LCD Display
This mode is only used for T7560 Wall Modules. The
occupancy mode is represented by the following symbols:
⇒ Effective Occupied or Bypass
⇒ Effective Standby
⇒ Effective Unoccupied
⇒ Controller is off
and ⇒ Controller is off, frost protection is enabled.
Flashing symbols represent the Override mode:
⇒ Override Occupied or Bypass
⇒ Override Standby
⇒ Override Unoccupied
⇒ Controller answers the network management wink
command.
Energy-Saving Features
Standby Mode
The digital input for an occupancy sensor (usually a motion
detector) provides the controller with a means to enter an
energy-saving Standby mode whenever there are no people
in the room. Standby mode occurs when the scheduled
occupancy is Occupied and the occupancy sensor indicates
no people currently in the room. If no occupancy sensor is
connected directly to the controller, an occupancy sensor
from another node may be bound to the network input
DestOccSensor. The controller can also be put in Standby
mode by settin DestManOcc to OC_STANDBY via the
network. When in Standby mode, the Hydronic Controller
uses the Standby Cooling or Heating setpoint (SptCoolStby or
SptHeatStby).
Window Sensor
The digital input for a window contact provides the algorithm
with a means to disable its temperature control activities if
someone has opened a window or door in the room. If no
window sensor is connected to the controller, the sensor from
another node may used by binding it to DestWindow. Frost
protection remains active (controller enables heating circuit
with room temperatures below 46°F (8°C)). Normal
temperature control resumes when the window closes.
7 74-2935-3r0909
Page 8
EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Demand Limit Control
When a high-electrical-demand signal is received from an
energy management system via the E-Bus network
(DestDldShed), the controller uses DlcStptBump to shift the
current setpoint (down for heating and up for cooling) by the
configured value to save energy.
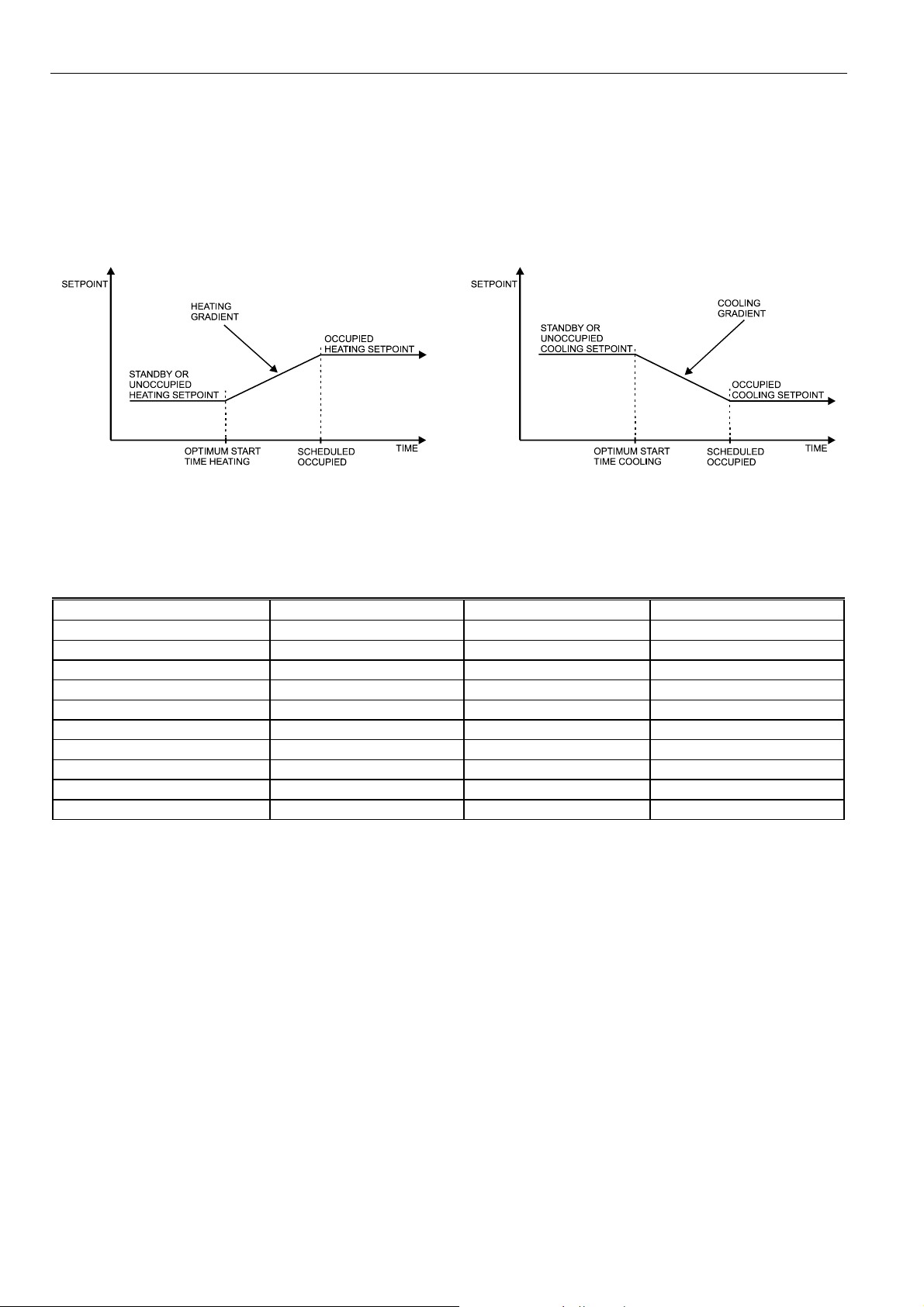
Fig. 4. Optimum start - heating.
Optimum Start Gradients
There are two parameters, RecRampCool and
RecRampHeat, that can be configured to cause the cooling
and heating setpoints respectively to ramp up to their
Occupied settings from their Unoccupied or Standby settings
prior to scheduled Occupancy. The Hydronic controller uses
the configured rates to determine the optimum time to start
increasing the heating or cooling demand. See the following
figures. The configuration parameters are in K/hour.
Fig. 5. Optimum start - cooling.
Occupancy Status
The occupancy status is determined based upon the following table. Manual override may come from the network input
DestManOcc or from the bypass push-button.
Table 3. Effective Occupancy Mode Arbitration
Scheduled occupancy mode Occupancy sensor status Manual override status Effective operating mode
Occupied Occupied Not assigned OC_OCCUPIED
Occupied Not occupied Not assigned OC_STANDBY
X X Occupied OC_OCCUPIED
X X Unoccupied OC_UNOCCUPIED
X X Standby OC_STANDBY
Occupied X Bypass OC_OCCUPIED
Standby X Not assigned OC_STANDBY
Standby X Bypass OC_OCCUPIED
Unoccupied X Not assigned OC_UNOCCUPIED
Unoccupied X Bypass OC_BYPASS
X=Don't care
74-2935-3r0909 8
Page 9
EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Operating Modes
The possible modes of operation are listed in Table 4.
Table 4. Modes of Operation for Excel 10 Hydronic Controller.
Mode Description Events Causing a Controller to Switch to This Mode
Operational Modes (User Address: SrcHydModeS)
START-UP AND
WAIT
FLOATING
OUTPUTS SYNCH
COOLING The Excel 10 Hydronic Controller is
HEATING The Excel 10 Hydronic Controller is
MANUAL No control algorithms are active.
FACTORY TEST Control algorithm is disabled; special
DISABLED Control algorithms are terminated,
Control algorithms are disabled.
Outputs stay in their initial positions.
Physical inputs are periodically read
and digital filtering of analog inputs is
turned off to speed up settling time.
Network input variables are received
and output variables are sent
periodically.
The Hydronic Controller drives the
floating control valves to their initial
positions and then transitions to one
of the control modes.
controlling in the Cooling mode.
controlling in the Heating mode.
Physical inputs are periodically read
and digital filtering of analog inputs is
turned off to speed up settling time.
Network input variables are received
and output variables are sent
periodically Outputs may be turned on
or off by settings in network input
nviTest.
factory test program runs.
outputs are turned off (turn-off
sequences and interlocks are active).
Frost protection is disabled.
This is the first mode after an application restart.
When the effective occupancy changes to unoccupied or
standby, after start-up or 24 hours have elapsed since the last
start-up, the Hydronic Controller transitions to this mode..
Network input (DestHvacMode) has a value of HVAC_COOL or
HVAC_AUTO and the space temperature is above the cooling
setpoint.
Network input (DestHvacMode) has the value of HVAC_HEAT or
HVAC_AUTO and the space temperature is below the heating
setpoint..
Network input (DestManMode) has value of MODE_MANUAL.
This mode is for factory testing only.
Network input (DestManMode) has a value of
MODE_DISABLED.
Agency Listings
Table 5 provides information on agency listings for Excel 10 Hydronic Controller products.
Table 5. Agency listings.
Device Agency Comments
W7762 Hydronic Controller CE General Immunity per European Consortium standards EN50081-1 (CISPR 22 Class
B) and EN 50082-1:1992 (based on Residential, Commercial, and Light Industrial).
EN 61000-4-2 IEC 1000-4-2 (IEC 801-2) Electromagnetic Discharge.
EN 50140, EN 50204 IEC 1000-4-3 (IEC 801-3) Radiated Electromagnetic Field.
EN 61000-4-4 IEC 1000-4-4 (IEC 801-4) Electrical Fast Transient (Burst).
Radiated Emissions and Conducted Emissions.
EN 55022:1987 Class B.
CISPR-22: 1985.
FCC Complies with requirements in FCC Part 15 rules for a Class B Computing Device.
9 74-2935-3r0909
Page 10
EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
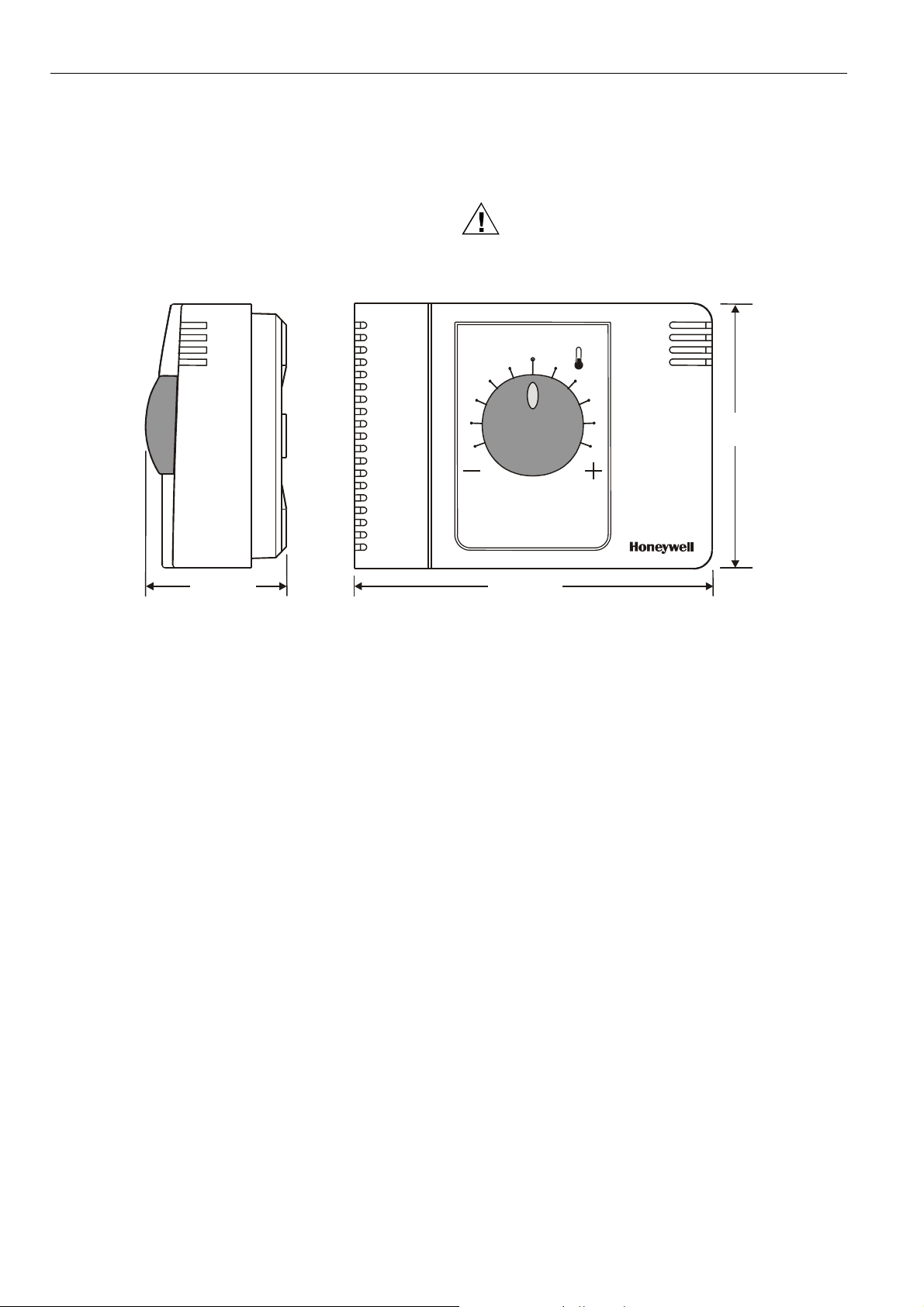
Design
The Excel 10 W7762 Hydronic Controller is available in two
basic models. The W7762A has a built-in setpoint adjustment
knob, available in relative or degrees C absolute scales. The
W7762B has no built-in setpoint adjustment and as such
requires either a setpoint input from a direct-connected wall
module or from the E-Bus network. All of the controllers are
powered by 24 Vac.
All wiring connections to the controllers are made at screw
terminal blocks accessible beneath a plastic safety cover.
Mounting dimensions are shown in Fig. 6.
CAUTION
Turn off power prior to connecting to or removing
connections from any terminals to avoid electrical
shock or equipment damage.
3-3/8
(86)
1-13/16 (46)
Fig. 6. W7762 construction in inches (mm).
4-9/16 (116)
74-2935-3r0909 10
Page 11
EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Controller Performance Specifications
Power Supply:
24 Vac ± 20%, 50/60 Hz.
Operating Temperature:
32° to 122°F (0° to 50°C).
Shipping/Storage Temperature:
-40° to 158°F (-40° to 70°C).
Relative Humidity:
5% to 95% non-condensing
Inputs:
Temperature Sensor:
20k ohm NTC
Setpoint Potentiometer:
10k ohm
Digital Input:
Closed ≤ 400 ohms (1.5 mA)
Open ≥ 10k ohms (4.8 V)
Outputs:
Triac voltage range:
24 Vac ± 20%.
Triac maximum current ratings:
250 mA continuous
650 mA surge for 30 sec.
IMPORTANT:
When any device is energized by a Triac, the device
must be able to sink a minimum of 15 mA. If nonHoneywell motors, actuators, or transducers are to
be used with Excel 10 Hydronic Controllers, compatibility must be verified.
Interoperability
The W7762 Controllers use the Echelon Bus (E-Bus) LonTalk
protocol. They support the L
“Fan Coil Unit Controller”, version 2.0. Fig. 7 shows the
implementation used.
ONMARK Functional Profile # 8020
nviSpaceTemp
nv1
SNVT_temp_p
nviSetPoint
nv2
SNVT_temp_p
nviFanSpeedCmd
nv6
SNVT_switch
nviOccCmd
nv7
SNVT_occupancy
nviApplicMode
nv8
SNVT_hvac_mode
nviSetPtOffset
nv9
SNVT_temp_p
nviWaterTemp
nv10
SNVT_temp_p
nviDischAirTemp
nv17
SNVT_temp_p
nviEnergyHoldOff
nv18
SNVT_switch
nviSensorOcc
SNVT_Occupancy
nviEmerg
SNVT_hvac_emerg
Hardware
Output
Fan Coil Unit Controller
Object #8020
nvoHeatOutput
nv3
SNVT_lev_percent
Mandatory
Network
Var ia ble s
Optional
Network
Var iable s
nvoCoolOutput
nv4
SNVT_lev_percent
nvoFanSpeed
nv5
SNVT_switch
nvoTerminalLoad
nv11
SNVT_lev_percent
nvoLoadAbs
nv12
SNVT_power
nvoDischAirTemp
nv13
SNVT_temp_p
nvoReheat
nv14
SNVT_switch
nvoSpaceTemp
nv15
SNVT_temp_p
nvoEffectSetPt
nv16
SNVT_temp_p
nvoEffectOcc
nv19
SNVT_occupancy
nvoEnergyHoldOff
nv20
SNVT_switch
nvoUnitStatus
nv21
SNVT_hvac_status
Configuration Properties
nc49 - nciSndHrtBt SNVT_time_sec mandatory
nc52 - nciMinOutTm SNVT_time_sec optional
nc48 - nciRcvHrtBt SNVT_time_sec optional
nc17 - nciLocation SNVT_str_asc optional
nc60 - nciSetPnts
nc59 - nciNumValve
SNVT_temp_setpt
SNVT_count
Manufacturer
Defined
mandatory
optional
nvoSensorOcc
SNVT_occupancy
Section
nvoDigitInState
SNVT_switch
nviReheatRelay
SNVT_switch
Hardware
Input
NOT SUPPORTED.
Fig. 7. LONMARK Fan Coil Unit object profile.
11 74-2935-3r0909
Page 12
EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Configurations
General
The following sections provide an overview of the Excel 10
Hydronic Controller options related to inputs and outputs. See
Application Step 6. Configure Controllers for complete list of
configuration options and defaults.
Table 6. Hardware options summary.
Option Possible Configurations
Fan interlock enabled
disabled
Hydronic system type two-pipe
four-pipe
Heating actuator type floating
floating-mid (one for heat/cool)
one-stage
two-stage
three-stage
PWM
thermal
Cooling actuator type floating
floating-mid (one for heat/cool)
one-stage
two-stage
three-stage
PWM
thermal
Digital input
Wall module option local
Temperature sensor type none
NOTE:
1
The floating-mid option is only for changeover applications
and uses only one of the two outputs.
not used
window closed
occupied sensor
airflow detector
cool changeover
movement
window open
unoccupied sensor
no airflow
heat changeover input
no movement
shared
NTC non-linearized
1
1
Fan Interlock (not available through E-Vision)
A fan interlock can be configured that prevents heating or
cooling outputs from being turned on in the event of a fan
failure (where an airflow detector is installed to detect fan
failure). As the Hydronic Controller has no fan outputs, the
interlock feature is applicable only to systems with manual fan
switches.
Type of Heating and Cooling Equipment
W7762 controllers can operate with either two-pipe or fourpipe systems. A two-pipe system requires a changeover input
to the controller (hardware or network input).
W7762 controllers can operate with a variety of actuators for
heating and cooling equipment. Floating actuators requiring
that the valve run time be specified during configuration of the
controller can be used. Valve action can be configured as
either direct or reverse. When in a two-pipe system with a
changeover input, a floating actuator can be used that has the
middle position (50%) as the zero energy position. The cool
range is then 0 to 50% and the heat range 50 to 100%. The
output must be configured as floating-mid.
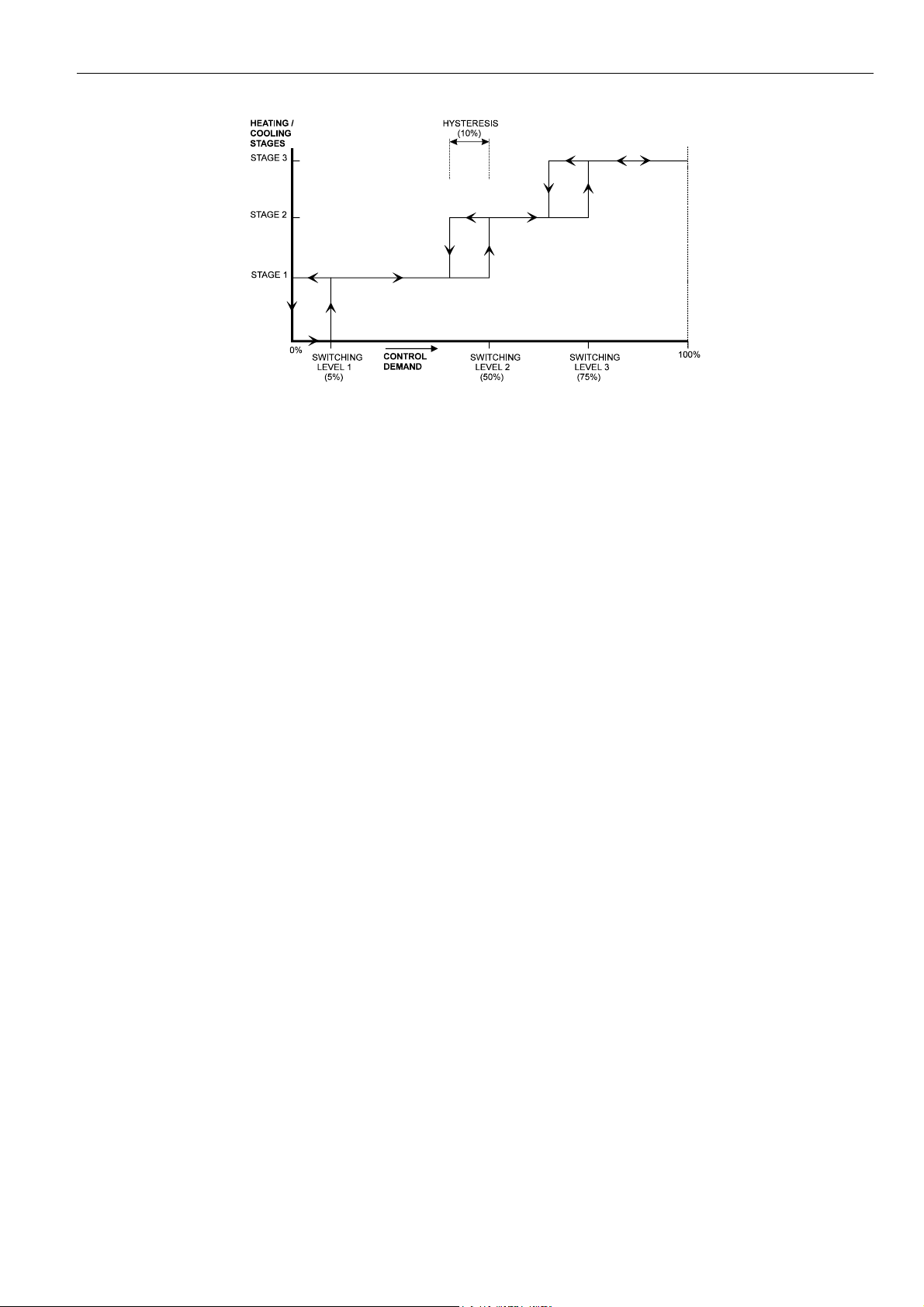
Multi-stage systems can be controlled with up to three
different stages of heating/cooling control. Switching levels
are specified in % of control level (see Fig. 8) as is a
hysteresis setting that applies to all switching levels. Heating
and Cooling switching levels and hysteresis are specified
separately. Minimum off times can be configured, and a
minimum on time can also be configured.
PWM electronic valves and thermal actuators can also be
connected and can be configured as either direct or reverse
action. The cycle time must be specified during configuration.
For PWM valves the zero and full positions must also be
configured.
74-2935-3r0909 12
Page 13
EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Fig. 8. Three-stage heating/cooling switching (defaults for switching levels and hysteresis shown).
Digital Input
There is a single digital input to the W7762 Controller that
may be configured to accommodate an occupancy sensor, a
window open/closed contact, an airflow detector for fan failure
detection (not available through E-Vision), or a changeover
input. It is possible to configure the input for either normally
open or normally closed contacts for any of the switches.
Choose the option that corresponds to the condition of a
closed contact (input high).
The control algorithm in the Hydronic Controller uses the
Occupancy Sensor, if configured, to determine the Effective
Occupancy mode of operation (see Table 3). If the Time Of
Day (TOD) schedule indicates an Occupied state, and the
Occupancy Sensor contact is closed, the Effective Occupancy
mode will be Occupied. However, if the TOD schedule
indicates an Occupied state and the Occupancy Sensor
contact is open, then the Effective Occupancy mode will be
Standby. The flow control algorithm will then control to the
Standby Cooling and Heating Setpoints.
Configuring the digital input for movement or no movement
(dependent upon normally-open or normally-closed contacts)
adds a delay of 15 minutes to the occupancy sensor such that
the space is considered occupied until 15 minutes has
elapsed since the last movement is detected.
If the digital input is configured as a window open/closed
contact, heating and cooling control will be disabled while the
window is detected open. Frost protection will be in effect,
however, and heating control will be enabled if the
temperature drops below 46°F (8°C). A set of contacts may
be wired in series for multiple windows.
If the digital input is configured for an airflow detector (fan
status), heating and cooling control will be disabled for a fan
failure (no airflow detected). This option is not available
through E-Vision.
The input may also be configured for changeover for a twopipe system. The input can accommodate a switch that is
closed for heating and open for cooling or open for heating
and closed for cooling.
NOTE: The Excel 10 Hydronic Controller has limited power
available (only 1.5 mA/4.8 V) for checking the digital
input for contact closures. Ensure that contacts used
remain within the specified resistance tolerance
range (closed ≤ 400 ohms) even when aged.
13 74-2935-3r0909
Page 14

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Excel 10 Wall Module Options
A typical Hydronic installation will include an Excel 10 wall
module containing a 20k ohm NTC room temperature sensor
and additional features depending on the wall module type
(see Excel 10 wall module literature for further information).
IMPORTANT
Wall modules with fan speed switches must not be
used with W7762 Hydronic Controllers.
The Hydronic Controller can be configured to use a return air
sensor rather than the sensor in the wall module. Setpoint
adjustments can be configured as relative or absolute, and
upper and lower limits can be set. The bypass button can be
configured to override the control mode to occupied for a
configurable bypass time and to override the control mode
indefinitely to unoccupied or it may be configured to only
override to occupied. The button may also be used to cancel
the override.
Common Temperature Control (Master/Slave Controllers)
When one or more Hydronic Controllers serve a common
area and a single temperature sensor is to be used, a
master/slave arrangement can be configured. One Excel 10
Hydronic Controller is configured for the local wall module
with the desired options. The other Excel 10 Hydronic
Controller(s) will be configured without wall modules and with
certain network variables bound with the master controller.
Refer to Appendix B of this document for more details.
IMPORTANT
The slave units must have the same HVAC
equipment connected to it as the master units.
The slave units will not use any internal temperature
setpoints or control algorithms. The master controller
determines heating/cooling output based upon
setpoints and occupancy and command mode status
and communicates this to the slave via the network.
See Appendix B, Configuring for Master/Slave
Operation, for more information,
74-2935-3r0909 14
Page 15

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Abbreviations and Definitions
CARE - Computer Aided Regulation Engineering; the PC
based tool used to configure C-Bus-Bus devices.
C-Bus -Honeywell proprietary Control Bus for
communications between EXCEL 5000
controllers and components.
CPU - Central Processing Unit; an EXCEL 5000
controller module.
E-Bus - Echelon
®
LONWORKS® network for communication
among Excel 10 Controllers.
E-Bus Segment - An E-Bus section containing no more than
60 Excel 10s. Two segments can be joined together
using a router.
Echelon
®
- The company that developed the LONWORKS®
network and the Neuron
®
chips used to
communicate on the E-Bus.
EMI - Electromagnetic Interference; electrical noise that
can cause problems with communications signals.
EMS - Energy Management System; refers to the
controllers and algorithms responsible for calculating
optimum operational parameters for maximum
energy savings in the building.
EEPROM - Electrically Erasable Programmable Read Only
Memory; the variable storage area for saving user
Setpoint values and factory calibration information.
EPROM - Erasable Programmable Read Only Memory; the
firmware that contains the control algorithms for the
Excel 10 Controller.
E-Vision - PC-based tool used for configuration and
commissioning of Excel 10 devices.
Excel 10 Zone Manager - A controller that is used to
interface between the C-Bus and the E-Bus. The
Excel 10 Zone Manager also has the functionality of
an Excel 100 Controller, but has no physical I/O
points.
NOTE: The Q7750A Zone Manager may be
referred to as E-Link.
®
System
®
System
Firmware - Software stored in a nonvolatile memory medium
such as an EPROM.
I/O - Input/Output; the physical sensors and actuators
connected to a controller.
I x R - I times R or current times resistance; refers to Ohms
Law: V = I x R.
K - Kelvin.
LiveCARE - The PC based tool used to monitor and change
parameters in C-Bus devices.
NEC - National Electrical Code; the body of standards for
safe field-wiring practices.
NEMA - National Electrical Manufacturers Association; the
standards developed by an organization of
companies for safe field wiring practices.
NV - Network Variable; an Excel 10 Controller parameter
that can be viewed or modified over the E-Bus
network.
OEM - Original Equipment Manufacturer; the company that
builds the fan coil units.
PC - Personal Computer.
Pot - Potentiometer. A variable resistance electronic
component located on Excel 10 wall modules. Used
to allow user-adjusted Setpoints to be input into the
Excel 10 Controller.
Subnet - An E-Bus segment that is separated by a router
from its Q7750A Zone Manager.
TOD - Time-Of-Day; the scheduling of Occupied and
Unoccupied times of operation.
VA - Volt-Amperes; a measure of electrical power output
or consumption as applicable to an ac device.
Vac - Voltage alternating current; ac voltage as opposed to
dc voltage.
XBS - Excel Building Supervisor; a PC-based tool for
monitoring and changing parameters in C-Bus
devices.
15 74-2935-3r0909
Page 16
EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
APPLICATION STEPS
Overview
Steps one through seven, see Table 7, address considerations for engineering an Excel 10 Hydronic System.
These steps are guidelines intended to aid understanding of
the product I/O options, bus arrangement choices, configuration options and the Excel 10 Hydronic Controllers’ role
in the overall EXCEL 5000® System architecture.
Table 7. Application steps.
Step No. Description
1 Plan The System
2 Determine Other Bus Devices Required
3 Lay out Communication and Power Wiring
4 Prepare Wiring Diagrams
5 Order Equipment
6 Configure Controllers
7 Troubleshooting
Step 1. Plan The System
Plan the use of the W7762 Controllers according to the job
requirements. Determine the location, functionality and sensor
or actuator usage. Verify the sales estimate of the number of
W7762 Controllers and wall modules required for each model
type. Also check the number and type of output actuators and
other accessories required.
When planning the system layout, consider potential
expansion possibilities to allow for future growth. Planning is
very important to be prepared for adding HVAC systems and
controllers in future projects.
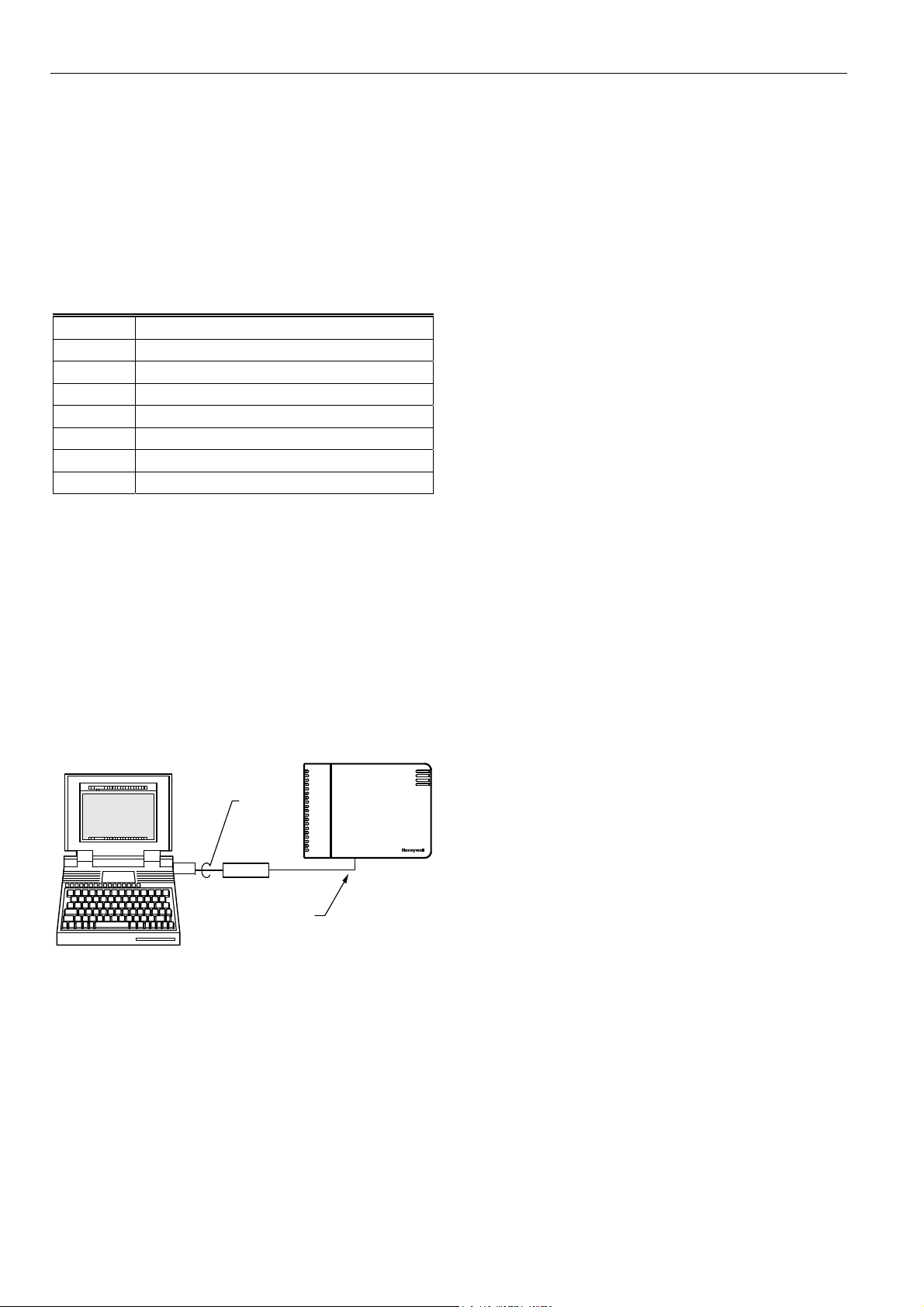
NOTEBOOK PC
USING E-VISION
SHIELDED
INTERFACE
CABLE
RS-232
SERIAL
PORT
SLTA
Fig. 9. Connecting the portable operator terminal to the
E-Bus.
HYDRONIC CONTROLLER
E-BUS
PORT
The E-Bus communication loop between controllers must be
laid out according to the guidelines applicable for that
topology. Hydronic Controllers use FTT technology that
allows daisy chain, star, loop or combinations of these bus
configurations. See Application Step 3. Lay Out
Communications and Power Wiring, for more information on
bus wiring layout, and see Fig. 10, Fig. 11, and Fig. 12 in
Application Step 4. Prepare Wiring Diagrams, for wiring
details.
It is important to understand the interrelationships between
controllers on the E-Bus early in the job engineering process
to ensure their implementation when configuring the
controllers. (See Application Step 6. Configure Controllers, for
information on the various Excel 10 Hydronic Controller
parameters and on Excel 10 Hydronic Controller point
mapping).
The T7770 Wall Modules can be installed only as I/O devices,
or additional wiring can be run to them for the E-Bus network
to allow a CARE/E-Vision operator terminal to have access to
the E-Bus. It must be determined and documented prior to
installation that T7770 Wall Modules will have their E-Bus
network jacks connected.
Step 2. Determine Other Bus Devices
Required
A maximum of 62 nodes can communicate on a single E-Bus
segment. If more nodes are required, a router is necessary.
Using a router allows up to 125 nodes, divided between two
E-Bus segments. The router accounts for two of these nodes
(one node on each side of the router); a Q7750A Excel 10
Zone Manager can take one node and two slots are available
for operator terminal nodes, leaving 120 nodes available for
Excel 10 Hydronic Controllers. All 120 controllers are able to
communicate through the router. A Q7750A Excel 10 Zone
Manager is required to connect the E-Bus to the standard
EXCEL 5000 System C-Bus. Each Excel 10 Zone Manager
can support no more than 120 W7762s. This is a limit set in
the Excel 10 Zone Manager database and is an absolute
maximum.
Each E-Bus segment is set up with two unused nodes to allow
for an E-Vision operator terminal to be connected to the EBus. Multiple E-Vision terminals can be connected to the bus
at the same time. Table 8 summarizes the E-Bus segment
configuration rules.
74-2935-3r0909 16
Page 17
EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
)
Table 8. E-Bus configuration rules and device node numbers.
One E-Bus Segment Example Maximum Number of Nodes Equals 62
One Q7750A Excel 10 Zone Manager 1 node
Port for operator terminal access (E-Vision) 1 node
Maximum number of Excel 10 Controllers 60 nodes (wall modules are not E-Bus nodes)
Total 62 nodes
Two E-Bus Segments Example Maximum Number of Nodes Equals 125
One Q7750A Excel 10 Zone Manager 1 node
One Q7751A Router 2 nodes (1 in each Bus Segment)
Ports for operator terminal access (two E-Vision terminals) 2 nodes (1 in each Bus Segment)
Maximum number of Excel 10 Controllers in segment number one 60 nodes (wall modules are not E-Bus nodes)
Maximum number of Excel 10 Controllers in segment number two 60 nodes (wall modules are not E-Bus nodes)
Total 125 nodes
The maximum length of an FTT E-Bus segment is 4600 ft
(1400 m) for a daisy chain configuration or 1650 ft (500 m)
total wire length and (400 m) node-to-node for any other type
of configuration.
NOTE: For FTT E-Bus segments the distance from each
transceiver to all other transceivers and to the
termination must not exceed the maximum node-tonode distance. If multiple paths exist, the longest
one should be used for the calculation.
If longer runs are required, add a Q7751A Router to partition
the system into two segments. It is not legal to use more than
one router per Excel 10 Zone Manager.
In addition, all E-Bus segments require the installation of a
Bus Termination Module. For an FTT E-Bus segment, one or
two Termination Modules may be required depending upon
the bus configuration. See Application Step 3. Lay Out
Communications and Power Wiring, and the E-Bus
Termination Module subsection in Application Step 4. for
more details.
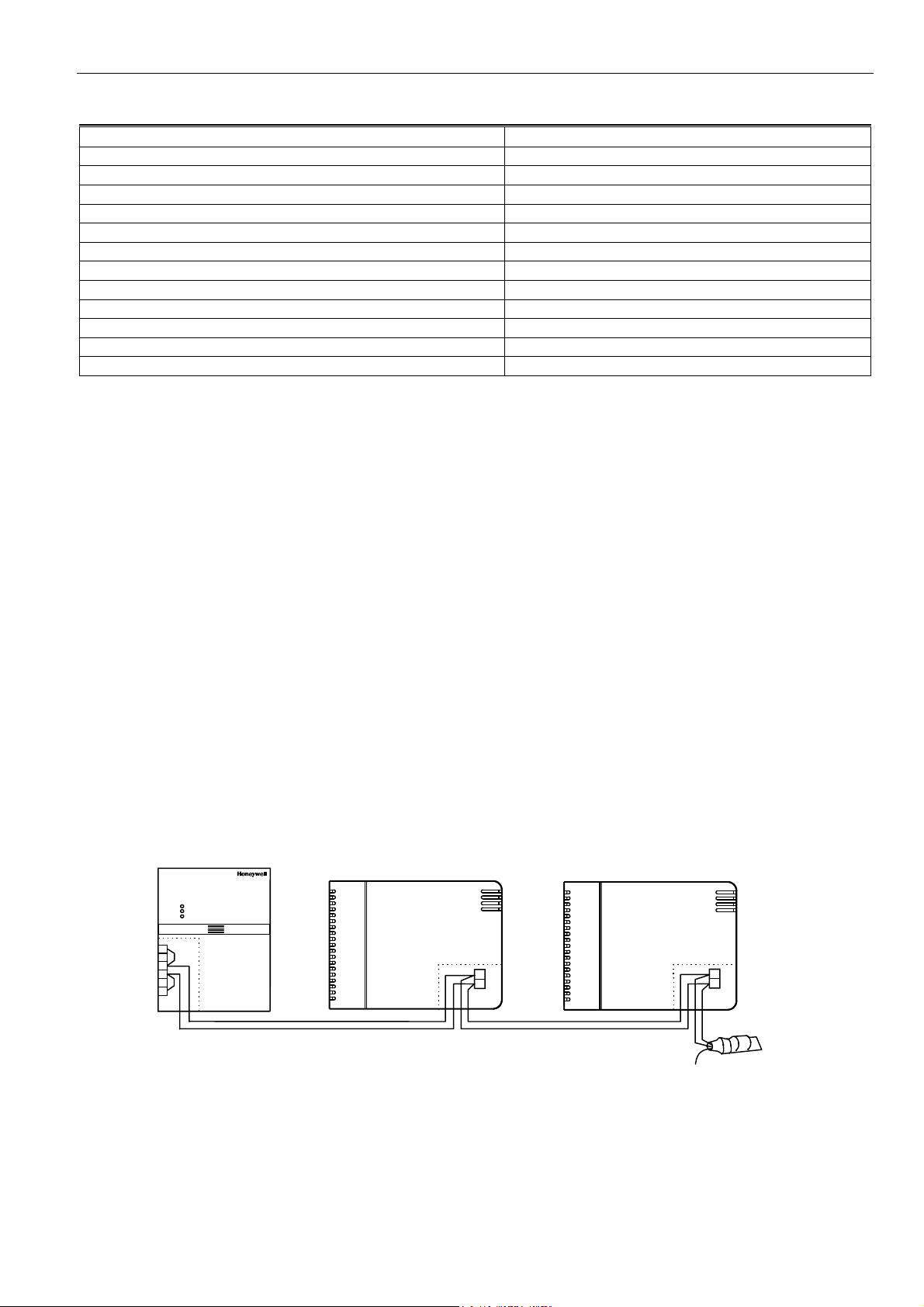
Q7750A2xxx ZONE MANAGER
W7762 HYDRONIC CONTROLLER W7762 HYDRONIC CONTROLLER
Step 3. Lay Out Communications and Power
Wiring
E-Bus Layout
The communications bus, E-Bus, is a 78-kilobit serial link that
uses transformer isolation and differential Manchester
encoding. Wire the E-Bus using level IV 22 AWG or plenum
rated level IV 22 AWG non-shielded, twisted pair, solid
conductor wire as the recommended wire size (see Table 10
for part numbers). An FTT E-Bus can be wired in daisy chain,
star, loop or any combination thereof as long as the maximum
wire length requirements given in Step 2 are met.
NOTE: Due to the transformer isolation, the bus wiring does
not have a polarity; that is, it is not important which
of the two E-Bus terminals are connected to each
wire of the twisted pair.
E-Bus networks can be configured in a variety of ways, but
the rules listed in Table 8 always apply. Fig. 10 and Fig. 11
depict two typical daisy chain E-Bus network layouts; one as a
single bus segment that has 60 nodes or less, and one
showing two segments. Fig. 12 shows examples of free
topology bus layouts using 2000-series devices. The bus
configuration is set up using the Network Manager tool from
within E-Vision (see the E-Vision User Guide).
3
4
5
6
7
8
NOTE: C7750A Zone Manager has internal termination module (with jumpers installed as shown).
19
20
ORANGE
19
20
BROWN
TERMINATION
MODULE (209541B
Fig. 10. E-Bus wiring layout for one daisy-chain network segment.
17 74-2935-3r0909
Page 18
EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
(
)
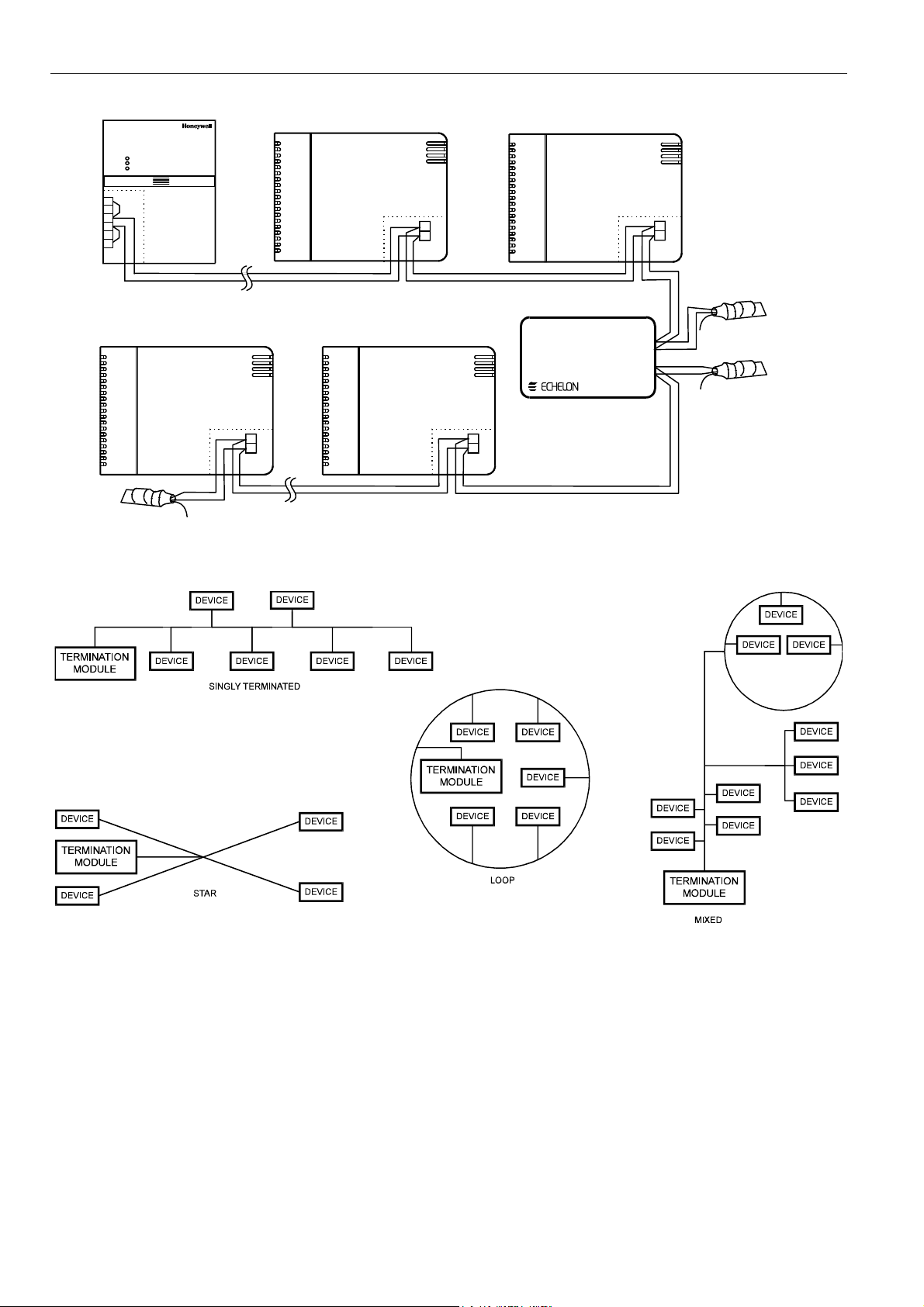
R
Q7750A2xxx ZONE MANAGE
3
4
5
6
7
8
UP TO 60
TOTAL NODES
W7762 HYDRONIC CONTROLLER
TERMINATION
209541B
MODULE
W7762 HYDRONIC CONTROLLER
W7762 HYDRONIC CONTROLLER
19
20
UP TO 60
TOTAL NODES
W7762 HYDRONIC CONTROLLER
19
20
LW R
ON ORKS OUTER
19
20
19
20
TERMINATION
MODULE (209541B)
TERMINATION
MODULE (209541B)
Fig. 11. E-Bus wiring layout for two daisy-chain network segments.
Fig. 12. Free topology E-Bus layout examples.
NOTE: See the E-Bus Termination Module section for
additional details.
IMPORTANT
Notes on Communications Wiring:
• Do not use different wire types or gauges on the
same E-Bus segment. The step change in line
impedance characteristics would cause
unpredictable reflections on the bus. When the
use of different types is unavoidable, use a
Q7751A Router at the junction.
• All field wiring must conform to local codes and
ordinances.
74-2935-3r0909 18
Page 19
EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
• Do not use shielded cable for E-Bus wiring runs.
The higher capacitance of the shielded cable will
cause degradation of communications
throughput. In noisy (high EMI) environments,
avoid wire runs parallel to noisy power cables, or
lines containing lighting dimmer switches, and
keep at least 3 in. (76 mm) of separation between
noisy lines and the E-Bus cable.
• Make sure that neither of the E-Bus wires is
grounded.
Power Wiring
A power budget must be calculated for each Excel 10 W7762
Controller to determine the required transformer size for
proper operation. A power budget is simply the summing of
the maximum power draw ratings (in VA) of all the devices to
be controlled by an Excel 10 W7762 Controller. This includes
the controller itself, the equipment and various contactors and
transducers, as appropriate, for the Excel 10 configuration.
Power Budget Calculation Example
The following is an example power budget calculation for a
typical W7762 Excel 10 Hydronic Controller.
Assume a W7762 unit with a thermal actuator for cooling
control and an electric actuator for heating. The power
requirements are:
Device VA Information obtained from
Excel 10 W7762 0.5 W7762
Hydronic Controller Specification Data
Z100A 12.0 Product Data
Thermal actuator
M7410A 0.7 Product Data
Electric Actuator
TOTAL: 13.2 VA
The Excel 10 System example requires 13.2 VA of peak
power; therefore, a 48 VA CRT 2 (20 VA AT20A for US)
Transformer is able to provide ample power for this controller
and its accessories.
Table 9. VA Ratings For Transformer Sizing.
Device Description VA
W7762A,B Excel 10 Hydronic Controller 0.5
T7560A DWM 0.2
Z100A Thermal actuator 12.0
M7410A Electric actuator 0.7
For contactors and similar devices, the in-rush power ratings
should be used as the worst-case values when performing
power budget calculations. Also, the application engineer
must consider the possible combinations of simultaneously
energized outputs and calculate the VA ratings accordingly.
The worst case, which uses the largest possible VA load,
should be determined when sizing the transformer.
Line Loss
Excel 10 Controllers must receive a minimum supply voltage
of 20 Vac. If long power or output wire runs are required, a
voltage drop due to Ohms Law (I x R) line loss must be
considered. This line loss can result in a significant increase
in total power required and thereby affect transformer sizing.
The following example is an I x R line-loss calculation for a
200 ft (61m) run from a transformer to a W7750 CVAHU
Controller drawing 37 VA using two 18 AWG (1.0 mm
2
) wires.
The formula is:
Loss = [length of round-trip wire run (ft)] x [resistance in
wire (ohms per ft)] x [current in wire (amperes)]
From specification data:
18 AWG twisted pair wire has 6.38 ohms per 1000 feet.
Loss = [(400 ft) x (6.38/1000 ohms per ft)] x
[(37 VA)/(24V)] = 4.0 volts
This means that four volts are going to be lost between the
transformer and the controller; therefore, to ensure that the
controller receives at least 20 volts, the transformer must
output more than 24 volts. Because all transformer output
voltage levels depend on the size of the connected load, a
larger transformer outputs a higher voltage than a smaller one
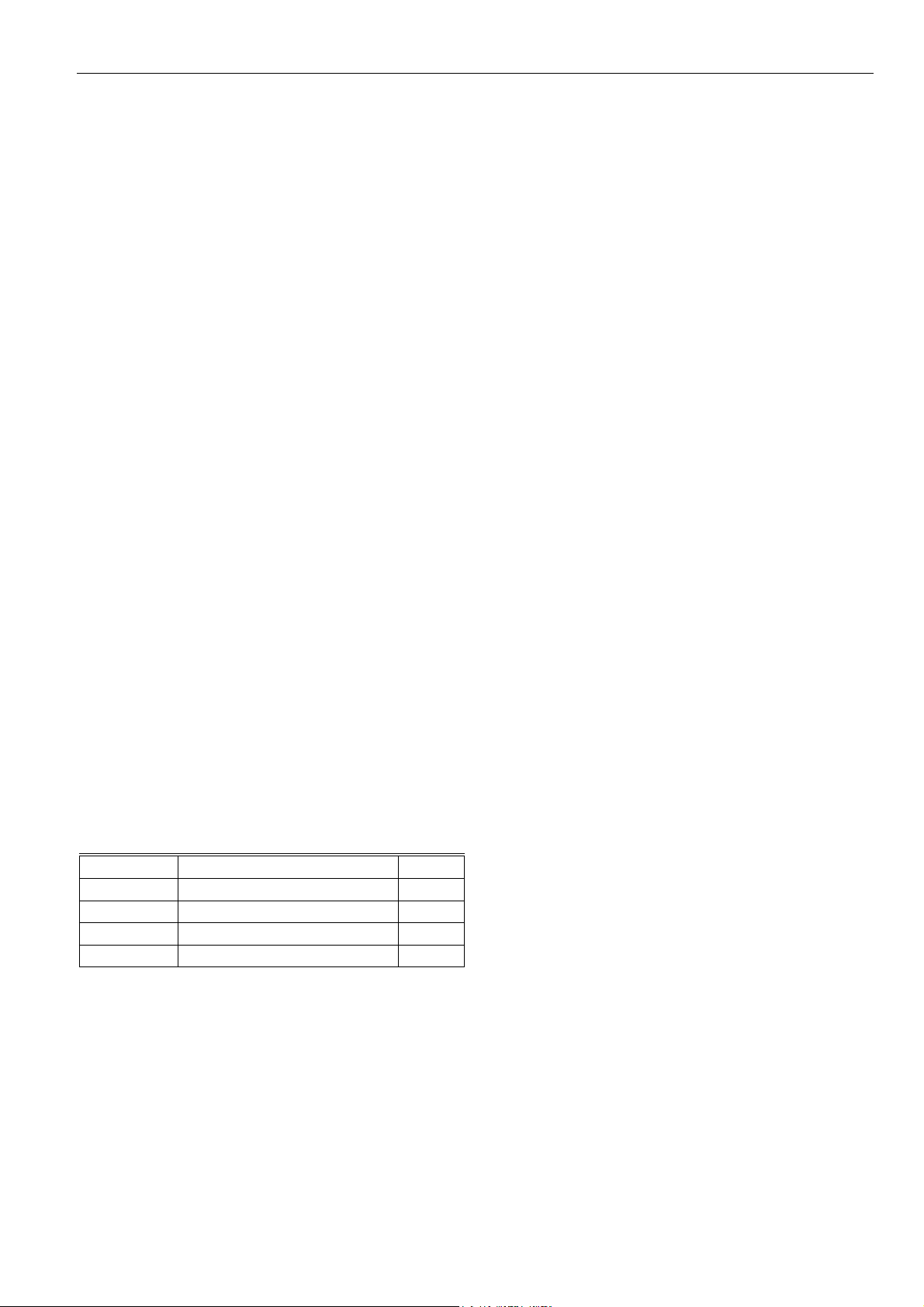
for a given load. Fig. 13 shows this voltage load dependence.
In the preceding I x R loss example, even though the controller load is only 37 VA, a standard 40 VA transformer is not
sufficient due to the line loss. From Fig. 13, a 40 VA transformer is just under 100 percent loaded (for the 37 VA controller) and, therefore, has a secondary voltage of 22.9 volts.
(Use the lower edge of the shaded zone in Fig. 13 that
represents the worst-case conditions.) When the I x R loss of
four volts is subtracted, only 18.9 volts reaches the controller,
which is not enough voltage for proper operation.
In this situation, the engineer basically has three alternatives:
1. Use a larger transformer; for example, if an 80 VA
model is used, see Fig. 13, an output of 24.4 volts
minus the four volt line loss supplies 20.4 volts to the
controller. Although acceptable, the four-volt line-loss in
this example is higher than recommended. See the
following IMPORTANT.
2. Use heavier gauge wire for the power run. 14 AWG (2.0
2
mm
) wire has a resistance of 2.57 ohms per 1000 ft
that, using the preceding formula, gives a line-loss of
only 1.58 volts (compared with 4.02 volts). This would
allow a 40 VA transformer to be used. 14 AWG (2.0
2
mm
) wire is the recommended wire size for 24 Vac
wiring.
3. Locate the transformer closer to the controller, thereby
reducing the length of the wire run, and the line loss.
The issue of line-loss is also important in the case of the output wiring connected to the Triac digital outputs. The same
formula and method are used. The rule to remember is to
keep all power and output wire runs as short as practical.
When necessary, use heavier gauge wire, a bigger transformer, or install the transformer closer to the controller.
19 74-2935-3r0909
Page 20
EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
IMPORTANT
No installation should be designed where the line
loss is greater than two volts to allow for nominal
operation if the primary voltage drops to 102 Vac
(120 Vac minus 15%) or 193 Vac (230 minus 15%).
To meet the National Electrical Manufacturers Association
(NEMA) standards, a transformer must stay within the NEMA
limits. The chart in Fig. 13 shows the required limits at various
loads.
With 100 percent load, the transformer secondary must
supply between 23 and 25 volts to meet the NEMA standard.
When a purchased transformer meets the NEMA standard
DC20-1986, the transformer voltage-regulating ability can be
considered reliable. Compliance with the NEMA standard is
voluntary.
The following Honeywell transformers meet this NEMA
standard:
Transformer Type VA Rating
AT20A 20
AT40A 40
AT72D 40
AT87A 50
AK3310 Assembly 100
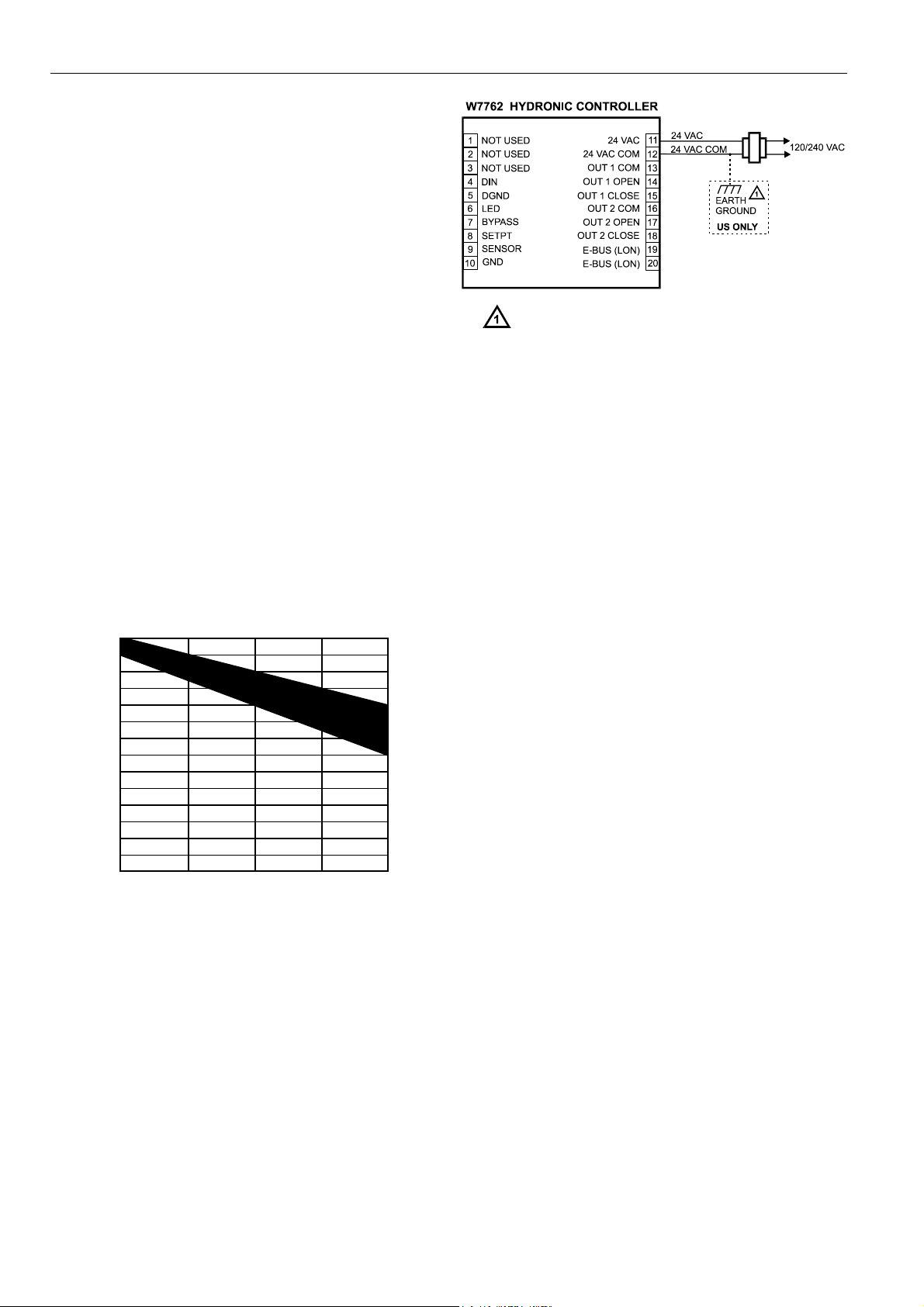
IMPORTANT (US ONLY)
If the W7762 Controller is used on Heating and
Cooling Equipment (UL 1995) devices and the
transformer primary power is more than 150 volts,
connect the transformer secondary to earth ground,
see Fig. 14.
27
26
25
24
23
22
21
20
19
18
SECONDARY VOLTAGE
17
16
15
14
0 50 100 150
% OF LOAD
M993
200
Fig. 13 NEMA class 2 transformer voltage output limits.
IMPORTANT
Step 4. Prepare Wiring Diagrams
General Considerations
The purpose of this step is to assist the application engineer
in developing job drawings to meet job specifications. Wiring
details for the W7762 Hydronic Controller are shown in Fig.
16. Table 11 gives additional details for output connections.
NOTE: For field wiring, when two or more wires are to be
Table 10 lists wiring types, sizes, and length restrictions for
Excel 10 Hydronic Controller products.
If the W7762 Controller is used in UL 1995 equipment and the
primary power is more than 150 Vac, ground one side of the
transformer.
Fig. 14 Power wiring details for one Excel 10 per
transformer.
Notes on power wiring:
• All field wiring must conform to local codes and
ordinances or as specified on installation wiring
diagrams.
• To maintain NEC Class 2 and UL ratings, the
installation must use transformers of 100 VA or less
capacity.
• For multiple controllers operating from a single
transformer, the same side of the transformer
secondary must be connected to the same input
terminal in each controller.
• For the W7762 Controller (which has Triac outputs),
all output devices must be powered from the same
transformer as the one powering the W7762
Controller.
• Use the heaviest gauge wire available, up to
14 AWG (2.0 mm
(1.0 mm
2
) for all power and earth ground connec-
2
) with a minimum of 18 AWG
tions.
• To minimize EMI noise, do not run Triac and/or relay
output wires in the same conduit as the input wires
or the E-Bus communications wiring.
• Unswitched 24 Vac power wiring can be run in the
same conduit as the E-Bus cable.
attached to the same connector block terminal, be
sure to twist them together. Deviation from this rule
can result in improper electrical contact. See Fig. 15.
74-2935-3r0909 20
Page 21
EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table 10. Field wiring reference table (US part numbers shown).
Wire
Function
E-Bus
(Plenum)
E-Bus
(Non-
Recommended
Minimum Wire
Size AWG (mm
2
)
22 AWG Twisted pair solid conductor,
22 AWG Twisted pair solid conductor,
Construction
non-shielded.
non-shielded.
plenum)*
Input
Wiring
Sensors
Contacts
14 to 20 AWG
(2.0 to 0.5 mm
Multiconductor (usually five-
2
)
wire cable bundle). For runs
>100 ft (30 m) twisted pair or
shielded cable is
recommended.
Output
Wiring
Actuators
Relays
14 AWG (2.5
2
mm
)
(18 AWG (1.0
2
mm
) acceptable
Any pair non-shielded (use
heavier wire for longer runs).
for short runs)
Power
Wiring
14 AWG
(2.5 mm
2
Any pair non-shielded (use
)
heavier wire for longer runs).
NOTE: PVC wire must not be used where prohibited by local fire regulations.
W7762 Controller
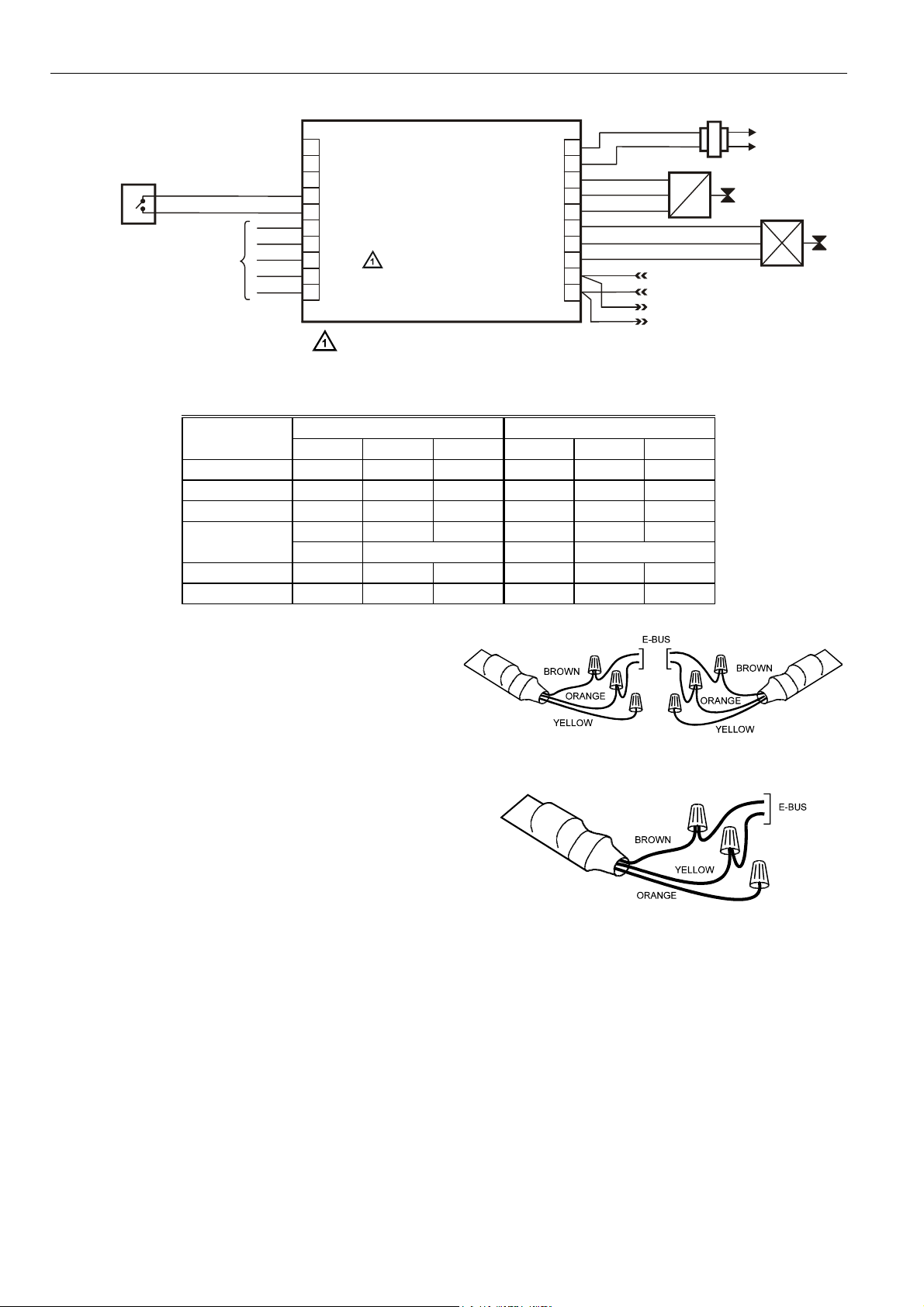
Fig. 16 illustrates W7762 Controller terminal block assignments and wiring for a sample Hydronic installation. All
connections are made at terminal blocks.
Specification
or
Requirement
Level IV 140°F
(60°C) rating
Level IV 140°F
(60°C) rating
140°F (60°C)
rating
NEC Class 2
140°F (60°C)
rating
NEC Class 2
140°F (60°C)
rating
Table 11 lists wiring information for wiring all of the possible
actuator types.
Vendor Wire Type
Honeywell (US)
Maximum Length
ft (m)
See Step 2
AK3791 (one twisted pair)
AK3792 (two twisted pairs)
(Europe: Belden
9H2201504)
Honeywell (US)
See Step 2
AK3781 (one twisted pair)
AK3782 (two twisted pairs)
(Europe: Belden
9D220150)
Standard thermostat wire 82.5 ft (25m)
Honeywell (US)
200 ft (60m)
AK3702 (18 AWG)
AK3712 (16 AWG)
AK3754 (14 AWG)
or equivalent
Honeywell (US)
AK3754 (14 AWG)
(twisted pair)
AK3909 (14 AWG) single
conductor or equivalent
Limited by line loss
effects on power
consumption.
(See Line Loss
subsection.)
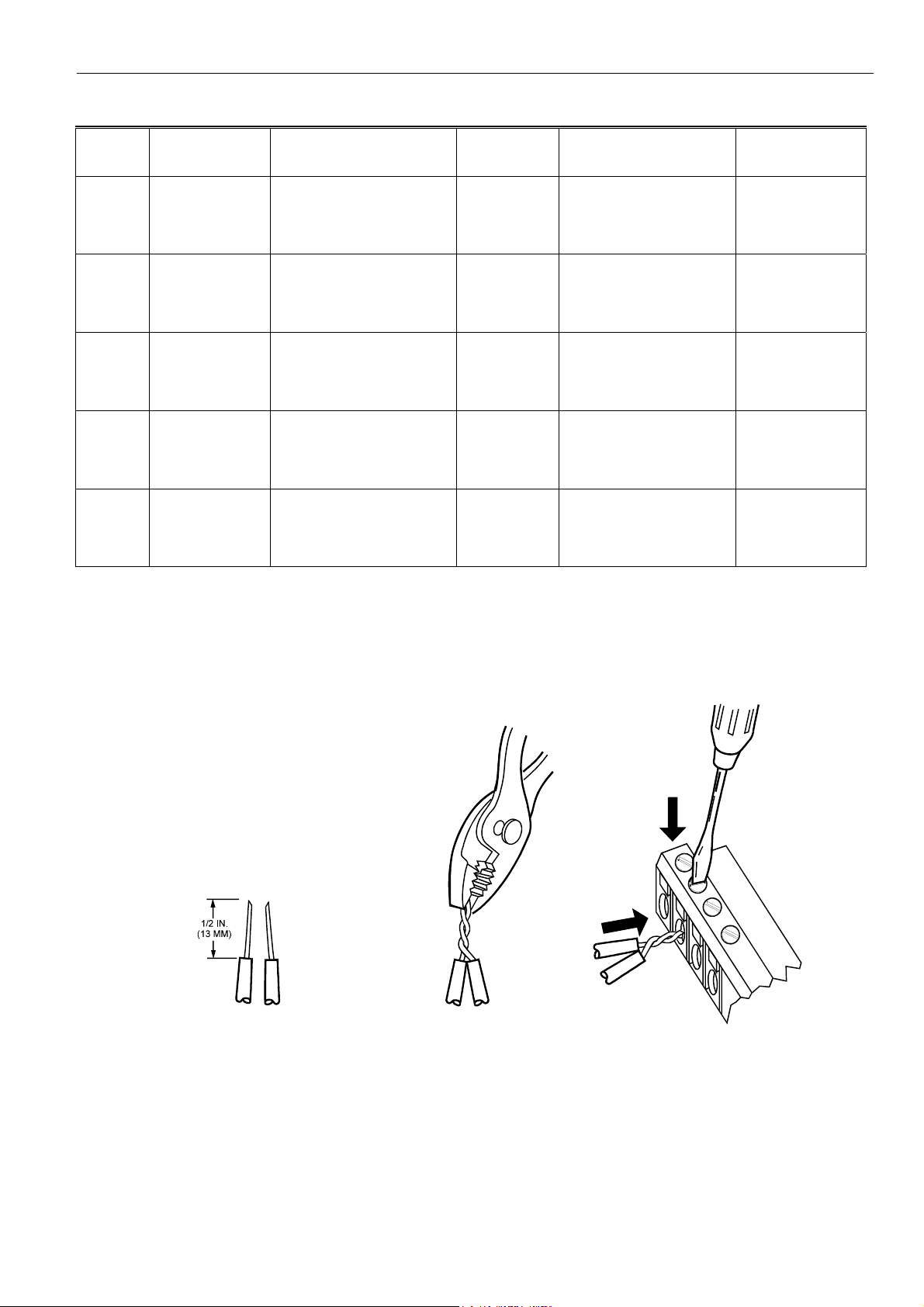
1. STRIP 1/2 IN. (13 MM) FROM W IRES TO
BE ATTACHED AT ONE TERMAINAL
2. TWIST WIRES TOGETHER WITH
PLIERS (A MINIMUM OF THREE
TURNS).
3. CUT TW ISTED END OF WIRES TO 3/16 IN. (5 MM) BEFORE
INSERTING INTO TERMINAL AND TIGHTENING SCREW . THEN
PULL ON EACH WIRE IN ALL TERMINALS TO CHECK FOR GOOD
MECHANICAL CONNECTION.
Fig. 15. Attaching two or more wires at terminal blocks.
21 74-2935-3r0909
Page 22
EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
W7762 HYDRONIC CONTROLLER
OCCUPANCY SENSOR
CHANGEOVER CONTACT
AIRFLOW CONTACT
WINDOW CONTACT
MOTION SENSOR
WALL MODULE
CONNECTIONS
1
2
3
4
5
6
7
8
9
10
N
N
N
D
D
LED
BYPASS
SETPT
SENSOR
GND
D
T
U
E
O
S
T
O
D
U
E
S
O
D
T
U
E
S
T
I
A
G
I
G
U
T
P
N
I
L
D
N
Wall module setpoint connection for W7762B only.
24 VAC COM
OUT 1 OPEN
OUT 1 CLOSE
OUT 2 OPEN
OUT 2 CLOSE
E-BUS (LON)
E-BUS (LON)
Fig. 16. W7762 Hydronic Controller wiring example.
Table 11. Output assignments for various actuator types.
Output type Out 1 Terminal Out 2 Terminal
13 14 15 16 17 18
Floating 24 Vac open close 24 Vac open close
1-stage 24 Vac on/off — 24 Vac on/off —
2-stage 24 Vac stage 1 stage 2 24 Vac stage 1 stage 2
3-stage 24 Vac stage 1 stage 2 24 Vac stage 1 stage 2
stage 3 stage 3
PWM 24 Vac PWM — 24 Vac PWM —
Thermal 24 Vac on/off — 24 Vac on/off —
E-Bus Termination Module
One or two E-Bus Termination Modules, part no. 209541B,
are required for an E-Bus with FTT devices on it, depending
upon the configuration. Double termination is only required
when the network is a daisy-chain configuration and the total
wire length is greater than 1640 ft (500 m). The maximum
lengths described in Step 2 must be adhered to for either a
daisy chain or free topology E-Bus layout. See Fig. 17 for
connection details for a doubly terminated bus. See Fig. 18
for connection details for a singly terminated bus.
NOTE: The Q7750A Zone Manager has an internal ter-
mination circuit, although jumpers are required at the
terminal block to connect it. See form number 957509-2 for details.
Fig. 17. Termination Module connections for a doubly-
Fig. 18. Termination Module connections for a singly-
24 VAC
OUT 1 COM
OUT 2 COM
24 VAC
11
12
13
14
15
16
17
18
19
20
24 VAC COM
COM
OPEN
CLOSE
LONW
L
ONWORKS
HEAT
+
ORKS
NETWORK IN
NETWORK OUT
terminated FTT network.
terminated FTT network.
COM
OPEN
CLOSE
120/240 VAC
COOL
-
74-2935-3r0909 22
Page 23
EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Step 5. Order Equipment
After compiling a bill of materials through completion of the previous application steps, refer to Table 12 for ordering information.
Contact Honeywell for information about Controllers and Wall Modules with no logo.
Table 12. Excel 10 Hydronic Controller ordering information.
Part Number Product Description Comments
Excel 10 Hydronic Controllers
W7762A1045 with setpoint knob °C absolute
W7762A1052 with setpoint knob +/- relative
W7762B1019 no setpoint knob
Excel 10 Wall Modules
T7460
T7560
T7770
Excel 10 Sensors
C7068A1007 (Europe) Air Temperature Sensor Return air
Echelon-Based Components and Parts
Q7751A2002 (US)
(UK)
(Europe)
Q7752A2001 (US)
(UK)
(Europe)
209541B FTT Termination Module Two required per E-Bus segment.
205979A (US only) SLTA Connector Cable for E-Bus Serial interface to wall module or controller.
Excel 10 Zone Manager
Q7750A2003 FTT E-Bus Zone Manager C-Bus to E-Bus interface
XD 505A 9600 Baud C-Bus Communications
XD 508 (1 Megabit Baud Rate) C-Bus
Cabling
— Serial Interface Cable, male DB-9 to female
Honeywell (US)
AK3791 (one twisted pair)
AK3792 (two twisted pairs)
Belden 9H2201504 (Europe)
Honeywell (US)
AK3781 (one twisted pair)
AK3782 (two twisted pairs)
Belden 9D220150 (Europe)
Honeywell (US) AK3725 Inputs: 18 AWG (1.0 mm2) five wire cable
Honeywell (US) AK3752
(typical or equivalent)
Honeywell (US) AK3702
(typical or equivalent)
Honeywell (US) AK3712
(typical or equivalent)
Honeywell (US) AK3754
(typical or equivalent)
FTT E-Bus Router
FTT E-Bus Serial Interface (SLTA)
Submodule
Communications Submodule
DB-9 or female DB-25.
E-Bus (plenum): 22 AWG twisted pair solid
conductor, non-shielded.
E-Bus (non-plenum): 22 AWG twisted pair
solid conductor, non-shielded.
bundle.
Outputs/Power: 14 to 18 AWG (2.5 to
2
1.0 mm
18 AWG (1.0 mm2) twisted pair. Non-plenum
16 AWG (1.5 mm2) twisted pair. Non-plenum
14 AWG (2.5 mm2) two conductor. Non-plenum
).
See Excel 10 wall module literature for details.
Order from local Echelon supplier (Europe)
Order from local Echelon supplier (Europe)
—
—
Obtain locally from any computer hardware
vendor.
Level IV 140°F (60°C) rating
Level IV 140°F (60°C) rating
Standard thermostat wire
NEC Class 2 140°F (60°C) rating
23 74-2935-3r0909
Page 24

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Step 6. Configure Controllers
General
The process of configuring Excel 10 Hydronic Controllers is
the same for all models. In all cases, the process involves
giving the Excel 10 Hydronic Controller information using the
E-Vision PC tool. Details on the use of E-Vision are found in
the E-Vision User Guide. The E-Vision User Guide provides
detailed steps for defining the Excel 10 Zone Manager (if
required); creating or starting an existing E-Vision project;
creating or selecting an existing network; building or modifying
the network; defining and copying controllers; mapping points
between controllers, the Zone Manager, and third-party
devices; connecting to controllers for commissioning,
monitoring and uploading; and various other functions. This
section will provide details on the configuration options found
in E-Vision for W7762 Controllers. If another E-Bus communication tool is used for set-up, see Appendix C for
reference information.
Using E-Vision
The configuration process is primarily performed in a series of
screens seen as file tabs under the menu option Application
Selection and is easily followed using the tables included in
this section. There are 8 file tabs:
• Output
• Input
• Equipment Control
• Switching Levels
• Zone Options
• Miscellaneous
• PID
• Wiring (information only, no configuring).
The specific parameters to be configured in each of these
four categories are tabulated in the following subsections. For
a complete list of all Excel 10 Hydronic Controller User
Addresses, see Appendix C.
The configuration of the setpoints as either absolute or
relative is performed in E-Vision in the Project Defaults
screen.
NOTE: To set the following configuration parameters, use
the E-Vision PC tool. These sections describe the
various parameters and the allowable settings. For
details on using E-Vision, refer to the E-Vision User
Guide.
74-2935-3r0909 24
Page 25

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
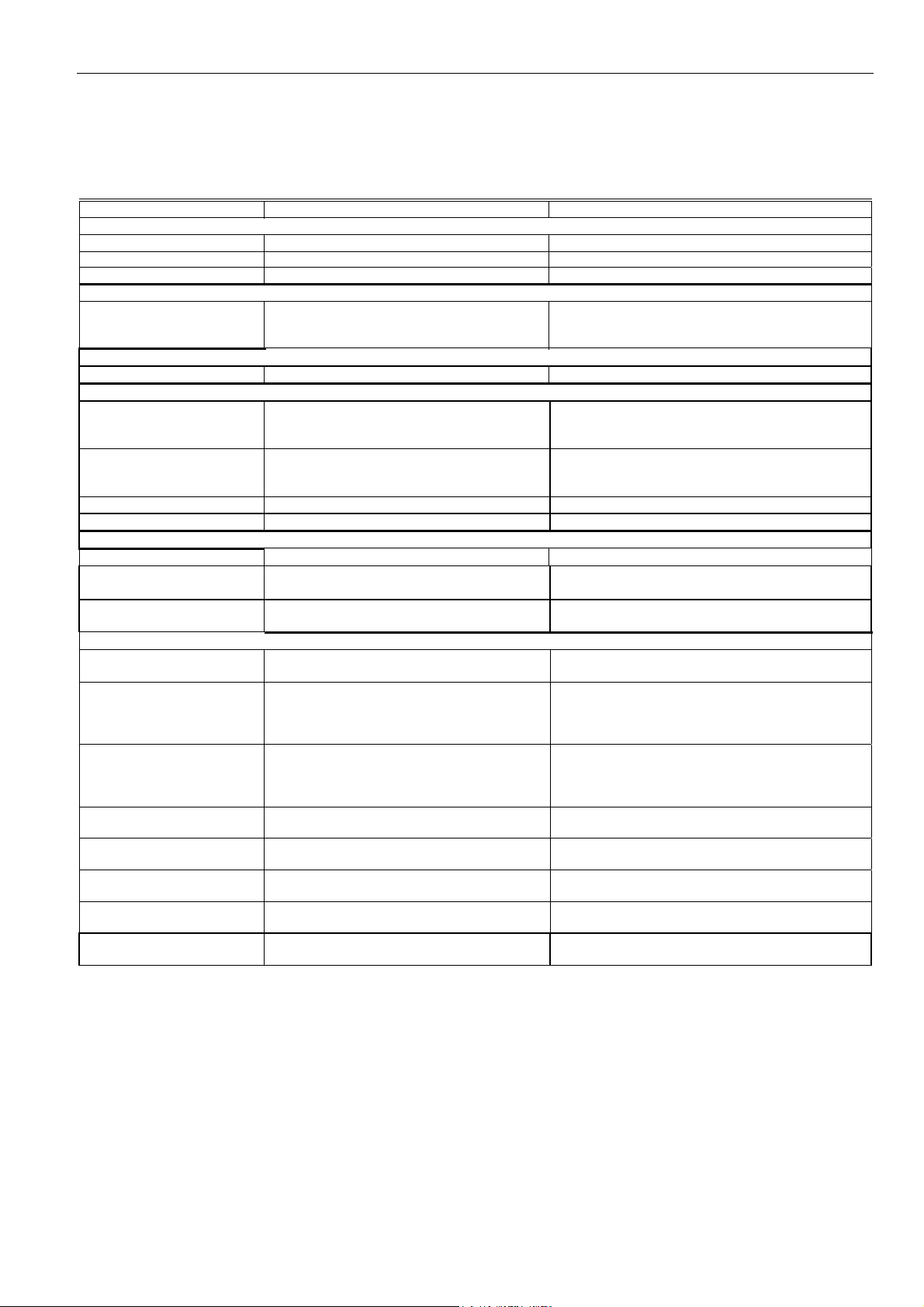
Outputs
The available options for output configurations with the default values shown are listed in Table 13. See Configurations section
above for more information about parameters.
Table 13. Hydronic Controller output configuration options.
Function Configuration options Default
System type two pipe (1 valve)
four pipe (2 valves)
Output1 (triac 1 and 2) control1 not used
cooling
heating
heat/cool changeover
Output 1 (triac 1 and 2) type floating
floating-mid
2
1-stage
2-stage
3-stage
PWM
thermal
Output 2 (triac 3 and 4) control1 not used
cooling
heating
heat/cool changeover
Output 2 (triac 3 and 4) type floating
floating-mid
2
1-stage
2-stage
3-stage
PWM
thermal
NOTES:
1. The output mode settings only apply to a 4-pipe system. In a 2-pipe system output1 will always operate in changeover mode.
2. The floating-mid option is only for changeover applications and uses only one of the two outputs.
The operation of the triacs based upon the output type is given in Table 11.
four pipe
heating
floating
cooling
floating
25 74-2935-3r0909
Page 26

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Inputs
The available options for input configurations with the default values shown are listed in Table 14. Setpoint knob settings may
apply to the built-in setpoint knob (W7762A only) or remote wall module (for W7762B controllers). See Control Provided and
Configurations sections above for more information on parameters.
Table 14. Hydronic Controller input configuration options.
Function Configuration options Default
Space temperature sensor no sensor
sensor
Bypass button none - bypass button is disabled.
bypass unoccupied - bypass button overrides current mode to occupied
for configurable bypass time for button press of 1.1 to 4 seconds (single
press with T7560) or permanently overrides to unoccupied for button
press of 4.1 to 7 seconds (more than 5 seconds with T7560).
bypass - bypass button only overrides current mode to occupied and to
cancel the override again.
LED/LCD LED override - shows override from bypass button or from network.
LED occupancy - shows effective occupancy mode.
LCD display - only used with T7560 Wall Modules; occupancy mode is
represented by different symbols.
Setpoint knob no knob
relative
absolute middle
Minimum limit setpoint pot limit for setpoint knob in either degrees F (absolute setpoint, 53.6 to
86°F) or DDF (relative setpoint, -9 to 9 DDF)
(limit for setpoint knob in either degrees C (absolute setpoint, 12 to
30°C) or K (relative setpoint, -5 to 5 K))
Maximum limit setpoint pot limit for setpoint knob in either degrees F (absolute setpoint, 53.6 to
86°F) or DDF (relative setpoint, -9 to 9 DDF)
(limit for setpoint knob in either degrees C (absolute setpoint, 12 to
30°C) or K (relative setpoint, -5 to 5 K))
Digital input not used
window closed
occupied sensor
cool changeover
window open
unoccupied sensor
heat changeover
movement
no movement
NOTES:
1. The temperature sensor option no sensor requires that either the Hydronic controller is configured as a slave unit receiving
heating and cooling control levels from the master unit via the network, or that it is receiving temperature information over the
network from another device.
2. The digital input option to be selected is the condition in which the input will be high (switch contact closed).
sensor
bypass unoccupied
LED override
relative
-9 DDF (53.6°F for
absolute setpoint)
(-5 K (12°C for
absolute setpoint))
9 DDF (86°F for
absolute setpoint)
(5 K (30°C for
absolute setpoint))
not used
74-2935-3r0909 26
Page 27

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Equipment Control
The available options for equipment control configurations with the default values shown are listed in the following table. See
Configurations section above for more information on parameters.
Table 15. Hydronic Controller equipment control configuration options.
Function Configuration options Default
Output 1 valve direction1 direct
reverse
Output 2 valve direction1 direct
reverse
Output 1 minimum stage off time 0 to 600 seconds 90 s
Output 2 minimum stage off time 0 to 600 seconds 90 s
Output 1 valve run time/PWM
period/minimum stage on time
Output 2 valve run time/PWM
period/minimum stage on time
PWM zero position2 0 to 100% 0%
PWM full position2 0 to 100% 100%
NOTES:
1. Valve action settings apply to floating, PWM, or thermal types.
2. Settings apply to both actuators if both are PWM.
floating/floating-mid - valve run time (20 to 600 seconds)
PWM - cycle time (20 to 600 seconds)
1, 2, and 3-stage - minimum on time (0 to 1200 seconds)
floating/floating-mid - valve run time (20 to 600 seconds)
PWM - cycle time (20 to 600 seconds)
1, 2, and 3-stage - minimum on time (0 to 1200 seconds)
direct
direct
150 s
150 s
Switching Levels
The available options for switching level configurations with the default values shown are listed in the following table. See
Configurations section above for more information on parameters.
Table 16. Hydronic Controller switching levels configuration options.
Function Configuration options Default
Cooling stage 1 switching level 0 to 100% 5%
Heating stage 1 switching level 0 to 100% 5%
Cooling stage 2 switching level 0 to 100% 50%
Heating stage 2 switching level 0 to 100% 50%
Cooling stage 3 switching level 0 to 100% 75%
Heating stage 3 switching level 0 to 100% 75%
Cooling hysteresis 0 to 100%, 10%
Heating hysteresis 0 to 100% 10%
27 74-2935-3r0909
Page 28

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Zone Options
The available options for input configurations with the default values shown are listed in the following table.
Table 17. Hydronic Controller zone configuration options.
Function Configuration options Default
Cooling occupied setpoint1
Heating occupied setpoint
Cooling standby setpoint
Heating standby setpoint
Cooling unoccupied setpoint
Heating unoccupied setpoint
1,2
50 to 95°F (10 to 35°C) 73.4°F (23°C)
1,2
50 to 95°F (10 to 35°C) 69.8°F (21°C)
1,2
50 to 95°F (10 to 35°C) 77°F (25°C)
1,2
50 to 95°F (10 to 35°C) 66.2°F (19°C)
1,2
50 to 95°F (10 to 35°C) 82.4°F (28°C)
1,2
50 to 95°F (10 to 35°C) 60.8°F (16°C)
NOTES:
1. Default setpoints are used when there is no setpoint knob and no network setpoint input.
2. Ensure that unoccupied heating<occupied heating<occupied cooling<unoccupied cooling and standby
heating<standby cooling.
Miscellaneous
The available options for the miscellaneous tab with the default values shown are listed in the following table. See Control
Provided and Configurations sections above for more information on parameters.
Table 18. Hydronic Controller miscellaneous configuration options.
Function Configuration options Default
Bypass time 0 to 1080 minutes 180 minutes
Override priority last wins - the last command from either the wall module or from the
Last wins
network has priority.
network wins - a network command always has priority until canceled.
Demand limit control bump 0 to 10 K 2 K
Cool rec ramp
-20 to 0 K/hour 0
(Cooling optimum start gradient)
Heat rec ramp
0 to 20 K/hour 0
(Heating optimum start gradient)
PID
The available options for configuring the PID parameters with the default values shown are listed in the following table. See
Control Provided section above for more information on parameters.
Table 19. Hydronic Controller PID configuration options.
Function Configuration options Default
Cooling proportional gain1 4 to 100 K (0 = disable) 4 K
Heating proportional gain1 4 to 100 K (0 = disable) 4 K
Cooling reset time 10 to 3200 seconds (0 = disable) 300 s
Heating reset time 10 to 3200 seconds (0 = disable) 300 s
Cooling derivative time 1 to 3200 seconds (0 = disable) 0
Heating derivative time 1 to 3200 seconds (0 = disable) 0
Cooling boost temperature 0.5 to 10 K (0 = disable) 1 K
Heating boost temperature 0.5 to 10 K (0 = disable) 1 K
NOTES:
1. With version 1.0.2 and later firmware, it is possible to configure the proportional gain as low as 2 for PI control or
1.25 for P control.
74-2935-3r0909 28
Page 29

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Commissioning
Commissioning refers to the activities performed to optimize
the Hydronic operation to meet the job specification
requirements and overall fine-tuning of the Hydronic control.
E-Vision is the tool used to perform these activities, as
described in Appendix B.
Job Commissioning
The CARE database that is generated for the Excel 10
Hydronic Controllers and associated Zone Managers contains
information concerning interrelationships and network
identifications. For this reason, it is mandatory to commission
(assign ID and download) all Excel 10 Hydronic Controllers
and the Zone Managers from a single database.
This project database can be backed up and restored to be
placed onto various PCs during the commissioning phase (but
only a single copy can be used at a time) and then must be
redesignated as the master and given to the next PC for
further commissioning.
CAUTION
If more than one copy of the same database is used in
multiple PCs to assign IDs and download to Excel 10
Hydronic Controllers, there is currently no means to
recombine the multiple copies into a single database
for any project. If multiple copies are used, it is
necessary to designate one database as the master
and recommission the controllers that do not indicate
being commissioned. If E-Vision displays an assigned
ID only the application needs to be downloaded to the
controller. If no ID has been assigned, assign ID(s)
and download the application to the controller(s). In
both of these cases, parameter changes (Setpoints,
Temperature Sensor Calibration, etc.) made with the
other PC database are lost and have to be re-entered.
ID Number
Each Excel 10 Hydronic Controller is shipped with an internal
Identification Number from the factory called the Neuron ID
This ID number is on a removable sticker on the side of the
W7762 housing and is required for identifying the controller
©
.
on the E-Bus network through E-Vision. The ID number can
either be manually entered or it can be received from the
network. Pressing the bypass push-button on the wall module
when the Hydronic controller is in its Service Mode or
pressing the service pin button on the controller itself causes
it to broadcast a service message containing its Neuron ID
number. E-Vision is used to perform both methods (see EVision User Guide).
Configuring the Zone Manager
The Q7750A Excel 10 Zone Manager sends out a one-time
L
ONWORKS message containing its 48-bit Neuron ID after any
power-up WARMSTART or when the Excel 10 Zone Manager
is reset by pressing the reset button.
IMPORTANT
Pressing the reset button on the Excel 10 Zone
Manager causes all application files in the Q7750A,
including the C-Bus setup, to be lost.
The L
ONWORKS message is sent out one time and only on the
E-Bus, not on the B-Port. The message will be the same as
the one generated after pressing the service button, which is
available on Excel 10 Hydronic Controllers via the wall
module bypass push-button. E-Vision uses this message to
assign the node address.
The Assign ID procedure is the same as for an Excel 10
Hydronic Controller except, instead of pressing the bypass
button, the reset button must be pressed or the power must
be cycled (down then up) on the Q7750A Excel 10 Zone
Manager.
Excel 10 Hydronic Controller Point Mapping
In typical Excel 10 Hydronic Systems, there are often
variables that contain values or information that must be
shared with devices on the C-Bus. E-Vision is used to perform
these operations through the Point Mapping function. Mapped
points are available to the C-Bus. Table 20 lists Hydronic
Controller source variables for mapping, and Table 21 lists
variables from other sources that may be mapped to Hydronic
Controller input variables. See Appendix D for a complete list
of all Excel 10 Hydronic Controller User Addresses.
29 74-2935-3r0909
Page 30

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table 20. List of Excel 10 Hydronic Controller source variables for mapping:
Hydronic Controller source points with receivers elsewhere on E-Bus or C-Bus
Source (Excel 10
Hydronic Controller)
variable name
SrcOccEff This signal contains the effective occupancy
SrcOccOvrdHwS This signal contains the state of the remote
SrcHydModeS Indicates the current Control mode of the Excel
SrcAlarmNode Indicates latest alarm detected by the node
SrcTermLoad This indicates the current calculated terminal
SrcRmTempSptEffS This indicates the current temperature control
NOTE: E-Vision handles the mapping process for C-Bus accessible Excel 10 points. If custom mapping arrangements are
required, see Appendix D for a complete listing of the Excel 10 Hydronic Controller User Addresses.
Table 21. Mapping of source points elsewhere on E-Bus or C-Bus to Excel 10 Hydronic Controller receiver points.
Description
(including receiver information)
status of the Excel 10 Hydronic Controller.
override button.
10 Hydronic Controller.
(if any) and return to normal.
cooling load as a percentage of what the unit is
designed to handle. Positive value indicates a
cooling load. Negative value indicates a heating
load.
point calculated from the various Setpoints and
Operating modes.
Allowable values
Occupied
Standby
Unoccupied
Unoccupied
Bypass
Not Assigned
10 possible values.
See Table 4.
22 possible values.
See Table 22.
-160 to 160 percent XBS for monitoring.
50 to 95°F (10 to
35°C)
Typical destination
XBS for monitoring.
XBS for monitoring
and tenant logging.
XBS for monitoring.
XBS for monitoring.
XBS for monitoring.
Typical source
(non-Excel 10
Controller)
variable name
OccSignal Signal containing TOD Schedule mode command from
HvacMode Signal from main equipment controller to command the
DmndShed Signal containing the Shed mode command (based on
SetPtReset Amount (in degrees) to add to the temperature setpoint
Description
the Excel 10 Zone Manager or a C-Bus controller.
Excel 10 Hydronic Controller into a particular mode of
operation.
electrical demand) from the Excel 10 Zone Manager, or
a C-Bus controller. When signal is TRUE, the value in
DlcStptBump is added to the Space Temperature
Setpoint.
reading for energy savings. Typically sent from another
controller doing EMS calculations.
Allowable values
Occupied
Unoccupied
Standby
Cooling
Heating
Auto
Off
Shed not Active
Shed Active
-5 to +5°F
(-3 to +3°C)
Typical destination
(Excel 10 Hydronic
Controller) name
DestSchedOcc
DestHvacMode
DestDlcShed
DestSptOffset
74-2935-3r0909 30
Page 31

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Step 7. Troubleshooting
Troubleshooting Excel 10 Hydronic Controllers and
Wall Modules
In addition to the following information, refer to the various
Checkout and Test manuals for these products. See
Applicable Literature section for form numbers.
Alarms
When an Excel 10 Hydronic Controller has an alarm
condition, it reports it to the central node on the E-Bus
(typically, the Excel 10 Zone Manager) via the variable
nvoAlarm. See Table 22. The information contained in
nvoAlarm is:
• Subnet Number: The E-Bus subnet that contains the
Excel 10 Hydronic Controller node that has the alarm
condition. Subnet 1 is on the Zone Manager side of the
router; Subnet 2 is on the opposite side.
• Node Number: The Excel 10 Hydronic Controller node
that has the alarm condition.
• Alarm Type: The specific alarm being issued and return
to normal. An Excel 10 Hydronic Controller can provide
the alarm types listed in Table 22.
All current alarms are contained in a variable called
nvoAlarmStatus (User Addresses SrcAlarmStatus1,
SrcAlarmStatus2, and SrcAlarmStatus3) that is composed of
three bytes (nvoAlarmStatus.alarm_bit[n] with n = 0 through
2) with a bit corresponding to each of the alarms listed in
Table 22. The coding is ordered in that the least significant bit
of nvoAlarmStatus.alarm_bit[0] corresponding to alarm type 1,
the most significant bit corresponding to alarm type 8, the
least significant bit of nvoAlarmStatus.alarm_bit[1]
corresponding to alarm type 9, and so on. Even alarms that
are suppressed in nvoAlarm (see below) are contained in
nvoAlarmStatus.
Also, the Excel 10 Hydronic Controller variables,
nvoAlarmLog.type[n], where n is 0 through 4, (User
Addresses SrcAlarmLog1 through SrcAlarmLog5) that store
the last five alarms to occur in the controller, are available.
These points can be viewed through XBS or E-Vision.
Certain alarm conditions are suppressed conditionally as
follows:
If an input network variable with failure detect is bound to the
same node as nvoAlarm, then nvoAlarm and nvoAlarmLog do
not report the related Hydronic Controller variable receive
failure error and its associated return to normal. Suppression
occurs only when the nvoAlarm is bound to only one node
using L
ONWORKS subnet/node addressing and only after the
input variable has actually received a network variable from
the node since the latest application restart (or power-up
condition
31 74-2935-3r0909
Page 32

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table 22. Excel 10 Hydronic Controller alarms.
Name of alarm or alarm bit Alarm type
number
No Alarm/Return to Normal:
RETURN_TO_NORMAL 128 Return to no error after being in an error condition. This code is added
ALARM_NOTIFY_DISABLED 255 The alarm reporting has been turned off by the nviManualMode
NO_ALARM 0 No errors since last application restart; initial condition
Hydronic Alarms:
ALARM_NODE_OFF 1 Control algorithm has stopped due to controller disabled, or in test
ALARM_FROST 2 The space temperature is below the frost alarm limit. The alarm
ALARM_INVALID_SETPOINTS 3 One of the setpoints is not in the valid range
ALARM_TEMP_SENSOR 4 Temperature sensor failed
ALARM_SETPOINT_KNOB 5 Remote setpoint potentiometer failed
ALARM_FAN_FAILURE 7 The fan feedback input does not detect airflow.
ALARM_FD_SPACE_TEMP 8 nviSpaceTemp is bound and has failed in receiving an update within its
ALARM_FD_APPL_MODE 9 nviApplicMode is bound and has failed in receiving an update within its
ALARM_FD_SETPT_OFFSET 10 nviSetPtOffset is bound and has failed in receiving an update within its
ALARM_FD_TOD_EVENT 11 nviTodEvent is bound and has failed in receiving an update within its
ALARM_FD_DLC_SHED 12 nviDlcShed is bound and has failed in receiving an update within its
ALARM_FD_TEMP_RESET 13 nviTempReset is bound and has failed in receiving an update within its
ALARM_FD_OD_TEMP 14 nviOdTemp is bound and has failed in receiving an update within its
ALARM_FD_SENSOR_OCC 15 nviSensorOcc is bound and has failed in receiving an update within its
ALARM_FD_WINDOW 16 nviWindow is bound and has failed in receiving an update within its
ALARM_FD_MAN_HEAT 17 nviManHeat is bound and has failed in receiving an update within its
ALARM_FD_MAN_COOL 18 nviManCool is bound and has failed in receiving an update within its
ALARM_HARDWARE_SOFTWARE_
NOT_COMPATIBLE
19 The software is not compatible with the hardware configuration
Meaning of alarm code or alarm bit
numerically to another alarm code to indicate that the error condition
has returned to normal.
=SUPPRESS_ALARMS. No more alarms are reported until
nviManualMode turns on alarm reporting or upon application restart.
mode, or other conditions
condition remains until the temperature exceeds the alarm limit plus
hysteresis.
specified FAILURE_DETECT_TIME
specified FAILURE_DETECT_TIME
specified FAILURE_DETECT_TIME
specified FAILURE_DETECT_TIME
specified FAILURE_DETECT_TIME
specified FAILURE_DETECT_TIME
specified FAILURE_DETECT_TIME
specified FAILURE_DETECT_TIME
specified FAILURE_DETECT_TIME
specified FAILURE_DETECT_TIME
specified FAILURE_DETECT_TIME
specified by the hardware configuration resistor value. Compatibility is
checked only once after application restart.
74-2935-3r0909 32
Page 33

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Broadcasting the Service Message
The Service Message allows a device on the E-Bus to be
positively identified. The Service Message contains the controller Neuron ID number and can therefore be used to confirm the physical location of a particular Excel 10 Hydronic
Controller in a building.
When an Assign Neuron ID command is issued from
E-Vision, the node goes into the SERVICE_MESSAGE mode
for one minute. In the SERVICE_MESSAGE mode, pressing
the occupancy override button on the remote wall module
causes the Service Message to be broadcast on the network.
All other functions are normal in the SERVICE_MESSAGE
mode. If a Hydronic Controller does not have a wall module
with a bypass push-button connected, press the service
button on the controller itself located as shown in the following
figure.
SERVICE LED
W7762 Controller Status LED
The LED at the top right of the controller provides an
indication of device status. The LED has the following states:
1. Off—no power to the processor.
2. Continuous on—processor is initialized state.
3. Slow blink—controlling, normal state.
4. Fast blink—controller in alarm.
Manual Mode
The Hydronic Controller can be put into a manual mode that
disables the control algorithms and allows manual setting of
outputs for system checkout. The variable nviManualMode
must be set to Mode_Manual using the E-Vision PC tool.
Inputs are read and digital filtering of analog inputs is turned
off to speed up settling time. Input network variables are
received, and output network variables are sent periodically.
Triac outputs can be set to any combination of on/off or can
be set to a test position based upon the configured valve
runtime/cycle time. The override LED can be commanded
on/off in this mode also. See the E-Vision User Guide section
for Manual Mode for detailed procedures.
SERVICE
BUTTON
Fig. 19. Hydronic Controller LED and service button.
E-Vision is used to perform the ID Assignment task during
commissioning (see E-Vision User Guide, Step 12.
Commission Controllers).
33 74-2935-3r0909
Page 34

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
APPENDIX A. USING E-VISION TO COMMISSION A HYDRONIC CONTROLLER
Temperature Sensor Calibration
The temperature sensor in the Excel10 wall modules can be
calibrated to correct for sensor inaccuracies, wire resistance,
etc. This allows the Excel 10 Hydronic Controller to sense the
space temperature with a high degree of accuracy.
Procedure
Select the controller being worked on with E-Vision (see the
E-Vision User Guide for details on using E-Vision
From within E-Vision, with the desired Hydronic plant loaded
and the SLTA (Q7752A) connected to the E-Bus or via the BPort of an Excel 10 Zone Manager, perform the following
procedure:
1. Select a controller symbol from a network diagram.
2. Click on Calibrate from the Controller menu. Once
E-Vision logs on to the controller, the Room
Temperature Calibration dialog box appears.
3. The box displays the Current Value of the sensor and
the current Offset; it also contains a field for entering
the actual Measured Value. When a value is typed in
and Calibrate is clicked, the offset value is
automatically calculated, displayed, and written to the
Excel 10 Hydronic Controller.
Fig. 20. Calibration dialog box.
NOTE: Record the offset value to be manually restored
if additional downloads are performed.
4. Click on Close after completing adjustments.
74-2935-3r0909 34
Page 35

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
APPENDIX B. CONFIGURING FOR MASTER/SLAVE OPERATION
More than one W7762 Hydronic Controller may be used to
control the temperature of a room. In this situation one controller must be identified as the master unit that will perform
the temperature control algorithm. The other Hydronic controllers in the room are designated as slave units, and their
control algorithms are disabled. The slave units receive
heating and cooling output information from the master controller via network variables sent across the E-Bus. There can
be a maximum of one wall module active in the room, and it
must be wired directly to the master controller. If a slave
controller has a wall module connected to it, the wall module
will be ignored.
Configuration of the master controller is the same as for any
controller operating alone in a room. Configuration of the
slave controllers must follow the rules described in this
section. The following sections correspond to the screens in
E-Vision used for configuring Hydronic controllers. An
additional section discusses binding of network variables to
support master/slave configurations.
Output Configuration Options
Slave devices must have their outputs configured identically
with the master controller. The same system type and
actuator types must be used. Valve run times, cycle times,
and PWM zero and full position configuration options must be
the same as well.
Input Configuration Options
Slave controllers may have wall modules connected to them,
but they must be deactivated while the controllers are
operating as slave units. They must be configured for no
temperature sensor. The digital input may be used on the
slave units for window open/closed or airflow (fan fail)
detection and must be configured as such. In the case of
window sensing, the window status network variable must be
mapped to the master controller as the slave controller does
not execute the control algorithm.
Equipment Control Options
Valve action and fan interlock settings must be the same as
for the master controller. Output staging hysteresis and
minimum stage off times should be the same as in the master
controller.
All heating and cooling stage switching levels should be
identical to those of the master controller.
Zone Control Options
All zone temperature control options including PID settings
and miscellaneous settings are used only by the master
controller and are ignored in the slave units.
Network Variable Binding
In a master/slave configuration, the control algorithm is
executed in the master controller only. Heating and cooling
output as calculated by the control algorithm is then sent via
the network to the slave controllers. The master controller
output variables nvoHeatOutput (user address - SrcHeatPos)
and nvoCoolOutput (user address - SrcCoolPos) must be
bound using E-Vision (see E-Vision User Guide) to the slave
input variables nviManHeat (user address - DestManHeat)
and nviManCool (user address - DestManCool), respectively.
For a master/slave system using heat/cool changeover, the
master controller output variable nvoApplicMode (user
address SrcHvacMode) must be bound to the slave
controllers’ input variable nviApplicMode (user address DestHvacMode).
The active wall module must be connected to the master
controller.
35 74-2935-3r0909
Page 36

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
APPENDIX C. COMPLETE LIST OF EXCEL 10 HYDRONIC CONTROLLER USER
ADDRESSES.
Table C1. Analog points engineering units.
English Units (Inch-Pound) Standard International Units (SI)
Measured Item
Temperature Degrees Fahrenheit F Degrees Celsius C
Relative Temperature Delta Degrees Fahrenheit DDF Kelvin K
The following tables list all network variables associated with the W7762 Controller and the default User Address names. Point
attributes given are defined as follows:
SHD— Sharable (bindable) points can be set up for data sharing in Command Multiple Points, Read Multiple Points,
or Refer Excel 10 Points as either a data source or a destination.
MAP— Mappable can be converted into a C-Bus point use by C-Bus devices. A mappable point has a one-to-one
relationship with a C-Bus User Address.
DIR— Direct Access points are accessible through the Subsystem Points mechanism in XBS.
MON— These points are viewable within the E-Vision Controller Monitoring on-line screen. PAR refers to control
parameters settable in the Application Selection dialog boxes in E-Vision.
Heartbeat These points are either sent out on the network (outputs) or received from the network (inputs) at a certain
fixed interval.
NOTES:
1. Mapped points can be viewed and changed, on C-Bus devices such as an XI581, XI582 and XI584 and on an XBS
central and LiveCARE.
2. All Excel 10 points, mappable and calibration, configuration and internal data sharing points, can be viewed and
changed, as allowed, via Direct Access (DA) mode in the XBS subsystem menu or via XI584.
The tables are divided as follows:
Table C2—Configuration variables
Table C3—Input variables
Table C4—Output variables
Table C5—Unused variables
NOTE: Table C5 includes network variables related to fan control and reheat. The W7762 Hydronic Controller does not have
outputs for direct connection of these devices, however the network inputs and outputs could be used for a
master/slave configuration with a slave controller that does have such outputs (e.g., W7752D). Such a configuration is
not recommended. For more information about these network variables, see form number 74-2961, W7752 Fan Coil
Unit System Engineering.
—
Abbreviations
(used in CARE
and E-Vision)
—
Abbreviations
(used in CARE
and E-Vision)
74-2935-3r0909 36
Page 37

Page 38

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C2. Configuration Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
ApplType nciApplVer application_type UBYTE, 0 to 255 0
ApplVer nciApplVer version_no UBYTE, 0 to 255 0
ApplTime0 nciApplVer time[0] UBYTE, 0 to 255 0
ApplTime1 nciApplVer time[1] UBYTE, 0 to 255 0
ApplTime2 nciApplVer time[2] UBYTE, 0 to 255 0
ApplTime3 nciApplVer time[3] UBYTE, 0 to 255 0
nciDeviceName ch[0-17] UBYTE, 0 to 255 0
nciLocation SNVT_str_asc 0x00
nciMaxSendTime SNVT_temp_p
0 to 6553 seconds
nciRcvHrtBt SNVT_time_sec
0 to 6553 seconds
0 = Disabled
nciSndHrtBt SNVT_time_sec
0 to 6553 seconds
0 = Disabled
Digital
State
0 s from factory, 60 s
0 s from factory, 300 s
0 s from factory, 300 s
or
default from E-Vision
default from E-Vision
default from E-Vision
(continued)
74-2935-3r0909 38
Page 39

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C2. Configuration Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
X ApplicationType identifies the current application number of the Excel 10.
X VersionNo identifies the version number of the Excel 10 application.
X The time stamp of the last change to the Excel 10 application configuration. Time meets the ANSI
X See above.
X See above.
X See above.
nciDeviceName contains the name of each device. This is an ASCII string with the a size of 18
This configuration property can be used to provide more descriptive physical loacation information
This is the configuration property used to control the maximum time that expires before the node
This is the configuration property used to control the maximum time that elapses after the last
This is the configuration property used to control the maximum time that expires before the object
C time stamp requirement specifying the number of seconds elapsed since midnight (0:00:00),
January 1, 1970. It is represented in the Intel Format and is four bytes in length.
characters. A name with all NULLs means that the device has not been configured.
than can be provided by the Neuron Chip's 6 byte location string.
object automatically transmits nvoStatus. This provides a heartbeat output that can be used by the
destination objects to ensure that the node is still healthy. The heartbeat output may be disabled by
setting nciMaxSendTime = 0.
update to
• nviApplicMode
• nviDlcShed
• nviWindow
• nviManCool
• nviManHeat
• nviSensorOcc
• nviSetPtOffset
• nviSpaceTemp
• nviTodEvent
before these NV inputs adopt their default values. Setting nciRcvHrtBt = 0 means, that the
assigned NV input does not wait for an periodic update, and that it will never revert to any default
when not receiving an update. If nviSpaceTemp and nviApplicMode are not received at regular
intervals that are less than the heartbeat time, the controller will assume that there is a
communication failure and revert to Occupied mode.
automatically transmits the current value of
• nvoActiveSetPt
• nvoAlarm
• nvoApplicMode
• nvoCoolOutput
• nvoWindow
• nvoHeatOutput
• nvoHydStatus
• nvoSensorOcc
• nvoSpaceTemp
• nvoTerminalLoad
• nvoUnitStatus
This provides a heartbeat output that can be used by the destination objects to ensure that the
node is still healthy. The heartbeat output may be disabled by setting nciSndHrtBt = 0.
(continued)
39 74-2935-3r0909
Page 40

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C2. Configuration Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
FirstStageCooL nciCntrlSettings switch_level_cool[0] SNVT_lev_percent
0 to 100%, 0 = Disable
SecondStageCool nciCntrlSettings switch_level_cool[1] SNVT_lev_percent
0 to 100%, 0 = Disable
ThirdStageCool nciCntrlSettings switch_level_cool[2] SNVT_lev_percent
0 to 100%, 0 = Disable
FirstStageHeat nciCntrlSettings switch_level_heat[0] SNVT_lev_percent
0 to 100%, 0 = Disable
SecondStageHeat nciCntrlSettings switch_level_heat[1] SNVT_lev_percent
0 to 100%, 0 = Disable
ThirdStageHeat nciCntrlSettings switch_level_heat[2] SNVT_lev_percent
0 to 100%, 0 = Disable
StageHyst1 nciCntrlSettings staging_hysteresis[0] SNVT_lev_percent
0 to 100%
StageHyst2 nciCntrlSettings staging_hysteresis[1] SNVT_lev_percent
0 to 100%
DlcStptBump nciEnergyManag si_dlc_setpt_bump SNVT_temp_p
0 to 10 K
RecRampCool nciEnergyManag si_optstart_grad[0] SNVT_temp_p
-20 to 0 K/hr
RecRampHeat nciEnergyManag si_optstart_grad[1] SNVT_temp_p
0 to 20 K/hr
Digital
State
5%
50%
75%
5%
50%
75%
10%
10%
2 K
0 K/hr
0 K/hr
or
(continued)
74-2935-3r0909 40
Page 41

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C2. Configuration Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
X This is the switching level to turn on stage 1 of the cooling equipment (if configured as multistage).
X This is the switching level to turn on stage 2 of the cooling equipment (if configured as multistage).
X This is the switching level to turn on stage 2 of the cooling equipment (if configured as multistage).
X This is the switching level to turn on stage 1 of the heating equipment (if configured as multistage).
X This is the switching level to turn on stage 2 of the heating equipment (if configured as multistage).
X This is the switching level to turn on stage 3 of the heating equipment (if configured as multistage).
X This value only applies to cool outputs configured as multistage outputs and specifies the
X This value only applies to heat outputs configured as multistage outputs and specifies the
X This is used to shift the temperature setpoint during demand limit control load shedding. When
X This is the cooling gradient used by the optimum start function to calculate the optimum time for
X This is the heating gradient used to determine the optimum time to start increasing the current
hysteresis between switching the cool stages ON and OFF.
hysteresis between switching the heat stages ON and OFF.
nviDlcShed is different from zero, the current occupancy setpoint will be decreased by this value
for heating and increased for cooling.
starting to decrease the effective setpoint smoothly from the unoccupied or standby cooling
setpoint to the occupied cooling setpoint.
effective setpoint smoothly to the occupied setpoint at the beginning of scheduled occupancy.
(continued)
41 74-2935-3r0909
Page 42

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C2. Configuration Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
nciHydConfig room_temp_sensor BYTE
NO_TEMP_SENSOR
NTC_NON_LINEARIZED
nciHydConfig DI1_config BYTE
DI_WINDOW_CLOSED
DI_OCCUPIED_SENSOR
DI_AIR_FLOW
DI_CHANGEOVER_COOL
DI_WINDOW_OPEN
DI_UNOCCUPIED_SENS
DI_NO_AIR_FLOW
DI_CHANGEOVER_HEAT
DI_MOVEMENT
DI_NO_MOVEMENT
DI_NOT_USED
nciHydConfig output_mode[0] BYTE
OUTP_COOLING
OUTP_HEATING
OUTP_CHANGEOVER
OUTP_NOT_USED
nciHydConfig output_mode[1] BYTE
OUTP_COOLING
OUTP_HEATING
OUTP_CHANGEOVER
OUTP_NOT_USED
nciHydConfig output_type[0] BYTE
FLOATING
ONE_STAGE
TWO_STAGE
THREE_STAGE
PWM
THERMAL
FLOATING_MID
nciHydConfig output_type[1] BYTE
FLOATING
ONE_STAGE
TWO_STAGE
THREE_STAGE
PWM
THERMAL
FLOATING_MID
nciHydConfig valve_reverse_0 Bit
DIRECT
REVERSE
nciHydConfig valve_reverse_1 Bit
DIRECT
REVERSE
Digital
State
0
2
0
1
2
3
4
5
6
7
8
9
255
0
1
2
255
0
1
2
255
0
1
2
3
4
5
6
0
1
2
3
4
5
6
0
1
0
1
or
NTC_NON_LINEARIZED
DI_NOT_USED
OUTP_HEATING
OUTP_COOLING
FLOATING
FLOATING
DIRECT
DIRECT
(continued)
74-2935-3r0909 42
Page 43

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C2. Configuration Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
This specifies whether a direct wired room temperature sensor is connected to the node or room
This variable specifies the digital input function and type of switch. The option to be selected is the
This specifies the operating mode of the output 1.
This specifies the operating mode of the output 2. This setting is ignored for nciNumValve =
This specifies the output type to drive the connected actuator for the output 1:
This specifies the output type to drive the connected actuator for the output 2 (see above).
This setting applies to outputs only that have been configured as FLOATING, PWM, or THERMAL
This setting applies to outputs only that have been configured as FLOATING, PWM, or THERMAL
temperature value from the network is used.
one which is the condition for a closed switch contact (e.g., normally-closed window switch contact
= DI_WINDOW_CLOSED, normally-open window switch contact = DI_WINDOW_OPEN).
NOTE: The digital input cannot be configured for an airflow detector with E-Vision.
DI_MOVEMENT and DI_NO_MOVEMENT are supported starting with HYD2 version 1.0.2. These
configuration settings cause the controller to retain the occupied state for 15 minutes after the last
movement is detected.
TWO_PIPE.
FLOATING/FLOATING_MID - This setting considers valve_reverse[] and cycle_time[].
Synchronization is performed at every restart and at least once per day.
ONE_STAGE - Triac 2 is not used.
TWO_STAGE/THREE_STAGE - Triac 1 and 2 used (triac 1 and 2 both on for stage 3). When
configured as multistage, cycle_time and min_stage_off_time are considered.
PWM/THERMAL - Triac 2 is not used. Triac 1 operates as a pulse-width modulated output, and the
cycle time must be specified in cycle_time[]. For PWM outputs, PwmZeroPosn and PwmFullPosn
must also be specified.
and specifies the direct/reverse operation of output 1.
and specifies the direct/reverse operation of output 2.
(continued)
43 74-2935-3r0909
Page 44

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C2. Configuration Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
nciHydConfig cycle_time[0] SNVT_time_sec
0 to 1200 s for stage output
0 to 600 s for floating output
20 to 600 s for PWM output
nciHydConfig cycle_time[1] SNVT_time_sec
0 to 1200 s for stage output
0 to 600 s for floating output
20 to 600 s for PWM output
MinOffTime1 nciHydConfig min_stage_off_time[0] SNVT_time_sec
0 to 600 seconds
MinOffTime2 nciHydConfig min_stage_off_time[1] SNVT_time_sec
0 to 600 seconds
nciHydConfig PwmZeroPosn SNVT_lev_percent
0 to 100%
nciHydConfig PwmFullPosn SNVT_lev_percent
0 to 100%
GainCoolProp nciHydGains si_pid_Xp[0] SNVT_temp_p
1.25 to 100 K, 0 = Disable
GainHeatProp nciHydGains si_pid_Xp[1] SNVT_temp_p
1.25 to 100 K, 0 = Disable
GainCoolInt nciHydGains si_pid_Tn[0] SNVT_time_sec
10 to 3200 seconds
0 = Disable
GainHeatInt nciHydGains si_pid_Tn[1] SNVT_time_sec
10 to 3200 seconds
0 = Disable
GainCoolDer nciHydGains si_pid_Tv[0] SNVT_time_sec
10 to 3200 seconds
0 = Disable
GainHeatDer nciHydGains si_pid_Tv[1] SNVT_time_sec
10 to 3200 seconds
0 = Disable
CoolBoost nciHydGains si_boost[0] SNVT_temp_p
0.5 to 10 K
0 = Disable
HeatBoost nciHydGains si_boost[1] SNVT_temp_p
0.5 to 10 K
0 = Disable
nciNumValve SNVT_count
TWO_PIPE
FOUR_PIPE
Digital
State
150 s for floating
150 s for floating
90 s
90 s
0%
100%
4 K
4 K
300 s
300 s
0 s
0 s
1 K
1 K
1
2
or
FOUR_PIPE
(continued)
74-2935-3r0909 44
Page 45

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C2. Configuration Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
This specifies for the output 1 configured as
This specifies for the output 2 configured as
X This is only used for ONE_STAGE, TWO_STAGE, and THREE_STAGE output 1 and specifies the
X This is only used for ONE_STAGE, TWO_STAGE, and THREE_STAGE output 2 and specifies the
This specifies the zero position for PWM actuators. This setting applies to PWM actuators only and
This specifies the fully open position for PWM actuators. This setting applies to PWM actuators
X This is the throttling range for use in the proportional portion of the PID loop gain for the cooling
X This is the throttling range for use in the proportional portion of the PID loop gain for the heating
X This is the integral time for use in the integral portion of the PID loop gain for the cooling mode.
X This is the integral time for use in the integral portion of the PID loop gain for the heating mode.
X This is the derivative time for use in the derivative portion of the PID loop gain for the cooling
X This is the derivative time for use in the derivative portion of the PID loop gain for the heating
X This is the temperature range to be added to the cooling setpoint, above which the cooling output
X This is the temperature range to be subtracted from the heating setpoint, below which the heating
This is the configuration property used to specify a two-pipe system (one valve) or a four-pipe
• FLOATING: the runtime of the valve (time to run from fully closed to fully open)
• PWM: the cycle time
• ONE_STAGE, TWO_STAGE, and THREE_STAGE: minimum ON time before switching to the
next stage.
• FLOATING: the runtime of the valve (time to run from fully closed to fully open)
• PWM: the cycle time
• ONE_STAGE, TWO_STAGE, and THREE_STAGE: minimum ON time before switching to the
next stage.
minimum OFF time before switching to the next stage.
minimum OFF time before switching to the next stage
is used for both actuators if both are configured as PWM actuators.
only and is used for both actuators if both are configured as PWM actuators.
mode. Since HYD2 version 1.0.2, the range of configurable values is 2 to 100K for PI or 1.25 for P
control. For older versions, the valid range is 4 to 100K.
mode. Since HYD2 version 1.0.2, the range of configurable values is 2 to 100K for PI or 1.25 for P
control. For older versions, the valid range is 4 to 100K.
mode.
mode.
is fully open to allow a faster response. For thermal actuators it is the hysteresis for thermal control
algorithm.
output is fully open to allow a faster response. For thermal actuators it is the hysteresis for thermal
control algorithm.
system (two valves). If set to TWO_PIPE, only the output terminals for output1 are used. If set to
FOUR_PIPE, output1 and output2 are defined by nciHydConfig.output_mode[].
(continued)
45 74-2935-3r0909
Page 46

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C2. Configuration Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
SptCoolOcc nciSetPnts occupied_cool SNVT_temp_p
10 to 35°C
SptCoolStby nciSetPnts standby_cool SNVT_temp_p
10 to 35°C
SptCoolUnocc nciSetPnts unoccupied_cool SNVT_temp_p
10 to 35°C
SptHeatOcc nciSetPnts occupied_heat SNVT_temp_p
10 to 35°C
SptHeatStby nciSetPnts standby_heat SNVT_temp_p
10 to 35°C
SptHeatUnocc nciSetPnts unoccupied_heat SNVT_temp_p
10 to 35°C
BypTime nciWallMod ui_bypass_time UWORD
0 to 1080 minutes
SptKnobLowLim nciWallMod si_low_setpt SNVT_temp_p
-5 to 5 K for relative
12 to 30°C for absolute
SptKnobHiLim nciWallMod si_high_setpt SNVT_temp_p
-5 to 5 K for relative
12 to 30°C for absolute
nciWallMod si_space_temp_zero_cal SNVT_temp_p
-5 to 5 K
UseWallModSpt nciWallMod use_wall_mod_st_pt Bit
NO
YES
SptKnob nciWallMod set_pnt_knob 2 Bits
OFFSET
ABSOLUTE_MIDDLE
nciWallMod override_type 2 Bits
NO_BUTTON
BYPASS_UNOCCUPIED
BYPASS
nciWallMod override_priority Bit
LAST_WINS
NETWORK_WINS
nciWallMod display_type Bit
LED_OVERRIDE
LED_OCCUPANCY
LCD_DISPLAY
Digital
State
23°C
25°C
28°C
21°C
19°C
16°C
180 min
-5 K (relative)
5 K (relative)
0 K
0
1
0
2
0
1
2
0
1
0
1
2
or
YES
OFFSET
BYPASS_UNOCCUPIED
LAST_WINS
LED_OVERRIDE
74-2935-3r0909 46
Page 47

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C2. Configuration Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
X X This is the default setpoint for the occupied cooling setpoint that is used in case there is no locally
X X This is the configured setpoint that applies to the standby cooling mode. Where the ZEB for
X X This is the configured setpoint that applies to the unoccupied cooling mode.
X X This is the default setpoint for the occupied heating setpoint that is used in case there is no locally
X X This is the configured setpoint that applies to the standby heating mode. Where the ZEB for
X X This is the configured setpoint that applies to the unoccupied heating mode.
X This is the parameter that determines the time the controller remains in OCCUPIED mode before
X X This is the low limit for the setpoint knob. It can be relative or absolute depending on the
X X This is the high limit for the setpoint knob. It can be relative or absolute depending on the
The space temperature sensor is corrected by adding this calibration setting (an offset value) to the
This specifies whether the setpoint used is from the knob on the wall module connected to the
This setting specifies the usage of the setpoint knob on the wall module for the occupied setpoint.
This setting determines the behavior of the override button. BYPASS_UNOCCUPIED allows
This setting configures the priority of the local (wall module) or central (network interface) override
This setting configures the display of occupancy and/or override. LED_OVERRIDE shows the
wired setpoint knob or nviSetpoint has not been bound. Where the ZEB for occupied is used, this
derives from the difference of occupied_cool and occupied_heat.
standby is used, it derives from the difference of standby_cool and standby_heat.
wired setpoint knob or nviSetpoint has not been bound. Where the ZEB for occupied is used, this
derives from the difference of occupied_cool and occupied_heat.
standby is used, it derives from the difference of standby_cool and standby_heat.
reverting to the original occupancy mode after pressing the override button at the wall module or
initiating BYPASS via the network. When the bypass mode has been activated, the bypass timer is
set to ui_bypass_time. When the timer expires, nvoHydStatus.occ_status.hw_override reverts from
OC_BYPASS to OC_NUL to quit the bypass override function.
configuration in nciWallMod.set_pnt_knob.
configuration in nciWallMod.set_pnt_knob.
sensed value.
controller or ifrom the network via nciTempSetPts. If set to NO, all setpoints to be used come from
the network via nciTempSetPts. If set to YES, an additional option set_pnt_knob must be set to
specify type of setpoint adjustment (see below).
OFFSET specifies a relative scale on the wall module where the setpoint is calculated by adding
the setpoint potentiometer value (± 5 K) to the appropriate value of nciTempSetPts.
ABSOLUTE_MIDDLE specifies an absolute scale on the wall module. The setpoint knob directly
determines the center point of occupied cooling and heating setpoints. The respective cooling and
heating setpoint is determined by the setpoint knob position adding or subtracting half of the user
selectable ZEB defined in nciSetPnts.<occ_mode>_cool or nciSetPnts.<occ_mode>_heat . This
applies to <occ_mode> OCCUPIED and STANDBY.
overriding the current occupancy mode to OCCUPIED for a configurable bypass time, or causing a
permanent override to UNOCCUPIED. BYPASS allows only the temporary override to OCCUPIED
and canceling it.
concerning override button. If NETWORK_WINS is set and the network sends value NUL, then the
override button is active.
override from the bypass button or from the network. LED_OCCUPANCY shows the effective
occupancy mode. LCD_DISPLAY is only used for T7560 Wall Modules. The display shows the
occupancy mode with different symbols, and the override mode with flashing symbols.
47 74-2935-3r0909
Page 48

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C3. Input Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
DestHvacMode nviApplicMode SNVT_hvac_mode
HVAC_AUTO
HVAC_HEAT
HVAC_COOL
HVAC_OFF
HVAC_NUL
DestDlcShed nviDlcShed BYTE
-128 to 127
NORMAL
SETPOINT_SHIFT
DestEmerg nviEmerg SNVT_hvac_emerg
EMERG_NORMAL
EMERG_PRESSURIZE
EMERG_DEPRESSURIZE
nviInUse UWORD
0 to 65535
DestManCool nviManCool SNVT_lev_percent
0 to 100%
163.835% = INVALID
DestManHeat nviManHeat SNVT_lev_percent
0 to 100%
163.835% = INVALID
DestManOcc nviManOccCmd SNVT_occupancy
OC_OCCUPIED
OC_UNOCCUPIED
OC_BYPASS
OC_STANDBY
OC_NUL
DestManMode nviManualMode BYTE
MODE_ENABLE
MODE_DISABLE
MODE_MANUAL
SUPPRESS_ALARMS
UNSUPPRESS_ALARMS
Digital
State
0
1
3
6
255
0
1
0
1
2
0 (if bound but fails to be
0
1
2
3
255
0
1
2
3
4
or
HVAC_AUTO
(if bound but fails to be
received or at application
restart)
0 (if bound but fails to be
received or at application
restart)
EMERG_NORMAL
(at application restart)
received), 65535 (for 60 s at
application restart)
OC_NUL
(at application restart)
MODE_ENABLE and
UNSUPPRESS_ALARMS
(at application restart)
(continued)
74-2935-3r0909 48
Page 49

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C3. Input Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
X X X X X This is an input that coordinates the controller operation with the main equipment controller.
X X X X X This is an input from an energy management system (e.g. Zone Manager). When it is 0, the
X X X X It is an emergency input from a device that determines the correct action during a given emergency
X This is used by the engineering tool or other supervisory node that it is "logged on" to the controller
X X X X X This can be used for master/slave installations where the cool output is controlled by an external
X X X X X This can be used for master/slave installations where the heat output is controlled by an external
X X X X This is an input from an network connected operator interface or other node that indicates the state
X X X This is an input that is used to disable the controller’s control algorithms in order to manually set its
Dependent on the supply energy available, the main equipment controller commands the Hydronic
controller to operate in heat mode only, cool mode only or heat and cool mode if appropriate to the
configuration. HVAC_AUTO means that both heating and cooling equipment are available, and the
current mode is determined by the control algorithm depending upon the room temperature and
effective setpoint. HVAC_AUTO is invalid for changeover applications. When the Digital input is
configured as Heat/Cool changeover input, this input will always have priority over the network
nviApplicMode’s HVAC_HEAT or HVAC_COOL.
temperature control algorithm operates in a normal mode. When it is 1, the effective setpoint will be
shifted by the amount defined in nciEmergyManag.si_dlc_setpt_bump. For cooling the effective
setpoint will be increased, for heating the effective setpoint will be decreased always regarding the
frost limits.
(such as a fire).
• EMERG_NORMAL: terminates EMERG_PRESSURIZE or EMERG_DEPRESSURIZE and
restores the control algorithm.
• EMERG_PRESSURIZE: heat/cool outputs off.
• EMERG_DEPRESSURIZE: heat/cool outputs closed.
node. It should be set every minute, or the controller will reset it after 60s to automatically log off
the supervisory node.
controller node. In this case, the output signal of the external cool control algorithm (0-100%) has
to be bound to nviManCool that would take over the task of the local (slave) control algorithm while
the switch levels operate as locally configured. The heating output will be closed.
controller node. In this case, the output signal of the external heat control algorithm (0-100%) has
to be bound to nviManHeat that would take over the task of the local (slave) control algorithm while
the switch levels operate as locally configured. The cooling output will be closed.
of manual occupancy control (schedule override). It has priority over the time program
(DestSchedOcc). When the BYPASS mode is set, then the Bypass time is active. When the
bypass time is elapsed, the master controller automatically sets nviManOccCmd to OC_NUL.
nviManOccCmd does not provide a failure detect mechanism in case no periodic update is
received.
physical outputs. The controller still responds to smoke purge even when disabled or set to manual
or factory test mode. It remains unchanged until another mode has been commanded or an
application restart has been performed.
• MODE_ENABLE: starts the control algorithm at an initial state after MODE_DISABLE or
MODE_MANUAL.
• MODE_DISABLE: all outputs switched off, the alarm ALARM_NODE_OFF is issued.
• MODE_MANUAL: all control loops are disabled and the alarm ALARM_NODE_OFF is issued.
The outputs can be controlled manually via the nviTest command.
• SUPPRESS_ALARMS: nvoAlarm is not sent and nvoAlarmStatus and nvoAlarmLog are not
updated until UNSUPPRESS_ALARMS is set or an application restart.
• UNSUPPRESS_ALARMS: releases alarm suppression after SUPPRESS_ALARMS.
(continued)
49 74-2935-3r0909
Page 50

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C3. Input Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
DestRequestObjId nviRequest object_id SNVT_obj_request
UWORD
0=Node Object
1=Fan Coil Object
nviRequest object_request object_request_t
Enum from Echelon defined
RQ_NORMAL
RQ_UPDATE_STATUS
RQ_UPDATE_ALARM
RQ_REPORT_MASK
DestOccSensor nviSensorOcc SNVT_occupancy
OC_OCCUPIED
OC_UNOCCUPIED
OC_BYPASS
OC_NUL
DestRmTempSpt nviSetPoint SNVT_temp_p
10 to 35°C
327.67°C = INVALID
DestSptOffset nviSetPtOffset SNVT_temp_p
-10 to 10 K
327.67°C = INVALID
DestRmTemp nviSpaceTemp SNVT_temp_p
0 to 40°C
327.67°C = INVALID
nviTest output1_cmd BYTE
NORMAL_HC_MODE
OFF1_OFF2
ON1_OFF2
OFF1_ON2
ON1_ON2
TESTPOSITION
nviTest output1_test_pos SNVT_lev_percent
0 to 100%
nviTest output2_cmd BYTE
NORMAL_HC_MODE
OFF1_OFF2
ON1_OFF2
OFF1_ON2
ON1_ON2
TESTPOSITION
nviTest output2_test_pos SNVT_lev_percent
0 to 100%
nviTest override_LED BYTE
NORMAL_LED_MODE
LED_OFF
LED_ON
Digital
State
0
2
4
5
0
1
2
255
INVALID
0 (if bound but fails to be
INVALID
NORMAL_HC_MODE
0 (at application restart)
0
1
2
3
4
5
0 (at application restart)
0
1
2
or
OC_NUL
(if bound but fails to be
received or at
application restart)
(at application restart)
received or at
application restart)
(if bound but fails to be
received or at
application restart)
(at application restart)
NORMAL_HC_MODE
(at application restart)
NORMAL_LED_MODE
(at application restart)
(continued)
74-2935-3r0909 50
Page 51

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C3. Input Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
X This input variable belongs to the Node Object and provides the mechanism to request a particular
See above. Commanding any modes other the ones listed will result in an “invalid_request” when
X X This allows an occupancy sensor of another Excel 10 controller to be used to indicate the sensed
X X X X This is an input intended for binding third party nodes to authorize them for setpoint modifications.
X X X X X This is an input intended for binding third party nodes to authorize them for setpoint shifting.
X X X X X This is the space temperature transmitted from another Excel 10 controller or another node that
This is used by factory test, OEM field test, field installation, and field testing to manually command
This is used for the TESTPOSITION of the output1_cmd and is based on the configured
Same as output1_cmd for output 2.
Same as output1_test_pos for output 2
This can be used to test the wall module LED when nviManualMode = MODE_MANUAL.
mode for a particular object within a node.
reading nvoStatus.
occupancy state of the space. OC_NUL means no input is available because it is not bound, bound
but not received periodically, or not configured by nciHydConfig.DI1_config. More than one
occupancy sensor may be bound to nviSensorOcc. If any one sensor detects occupancy, the
controller considers the space occupied.
When this has been bound and a valid update is received, the local configured setpoints will no
longer be directly used to determine the current occupancy setpoint. For OCCUPIED and
STANDBY modes, this is used with the appropriate ZEB (derived from the configured setpoints),
for UNOCCUPIED mode the setpoint does not depend on this input, but on
nciTempSetPts.unoccupied_cool/_heat only. nviSetpoint is stored in RAM and gets lost after power
failure. In this case, the setpoints of nciTempSetPts will be used until a valid nviSetpoint is
received.
nviSetPtOffset is stored in RAM and will be initialized to zero after application restart or power
failure. If nviSetPtOffset is bound and fails to be received periodically as configured with
nciRcvHrtBt, it will be reset to zero.
has a temperature sensor wired to it. If bound or has a value other than INVALID, then it is used as
the sensed space temperature instead of the wired wall module's temperature. nviSpaceTemp may
be set to a value other than INVALID using a network management tool when nviSpaceTemp is not
bound to set the temperature to a fixed value.
the physical output 1 when the node has been put into manual mode (nviManualMode =
MODE_MANUAL).
NORMAL_HC_MODE: output 1 remains in its current position
OFF1_OFF2, ON1_OFF2, OFF1_ON2, ON1_ON2: set the individual triacs on or off
TESTPOSITION: sets output based on output1_test_pos.
runtime/cycle time.
(continued)
51 74-2935-3r0909
Page 52

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C3. Input Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
DestSchedOcc nviTodEvent current_state SNVT_tod_event.current_state
OC_OCCUPIED
OC_UNOCCUPIED
OC_STANDBY
OC_NUL
DestSchedOccNext nviTodEvent next_state SNVT_tod_event.next_state
OC_OCCUPIED
OC_UNOCCUPIED
OC_STANDBY
OC_NUL
DestSchedOccTime nviTodEvent time_to_next_state SNVT_tod_event.time_to_next_state
UWORD
0 to 2880 minutes
DestWindow nviWindow value SNVT_switch.value
0 to 100%
nviWindow state SNVT_switch.state
CLOSED
OPEN
NO_WINDOW
Digital
State
or
0
1
3
255
0
1
3
255
0 (if bound but
0 (if bound but
0
1
255
OC_OCCUPIED
(if bound but
fails to be
received or at
application
restart)
OC_OCCUPIED
(if bound but
fails to be
received or at
application
restart)
fails to be
received or at
application
restart)
fails to be
received or at
application
restart)
NO_WINDOW
(if bound but
fails to be
received or at
application
restart)
74-2935-3r0909 52
Page 53

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C3. Input Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
X X X X This indicates to the node whether the space is currently scheduled to be occupied, standby or
X X X This indicates to the node whether the next scheduled occupancy mode will be occupied, standby
X X X This is the time in minutes until the next change of scheduled occupancy state. This time is
X X X X This allows a window contact node or another controller to be used as remote window contact.
X See above.
unoccupied.
or unoccupied. This information is required by the controller to perform the optimum start strategy.
updated by the Zone Manager once every 60 seconds. This data is also used by the optimum start
calculation (see nciEnergyManag).
More than one nvoWindow may be bound to one nviWindow, which allows one node to be used to
handle several distributed window contacts. In this case, the control process assumes an open
window, if at least one bound window node detects an open window. ‘Window Closed’ would be
assumed if all nvoWindows bound to nviWindow indicate the window being closed for at least the
failure detect time (nciSndHrtBt).
53 74-2935-3r0909
Page 54

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C4. Output Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
SrcRmTempSptEff nvoActiveSetPt SNVT_temp_p
10 to 35°C
327.67=INVALID
SrcAlarmSubnet nvoAlarm subnet UBYTE
0 to 255
SrcAlarmNode nvoAlarm node UBYTE
0 to 255
nvoAlarm type UBYTE
ALM_NO_ALARM
ALM_NODE_OFF
ALM_FROST
ALM_INVALID_SETPNT
ALM_TEMP_SENSOR_FAIL
ALM_SETPNT_KNOB_FAIL
ALM_FAN_SPEED_SW_FAIL
ALM_FAN_FAILURE
ALM_COMFAIL_SPACETEMP
ALM_COMFAIL_HVACMODE
ALM_COMFAIL_SETPTOFFS
ALM_COMFAIL_SCHEDOCC
ALM_COMFAIL_DLC
ALM_COMFAIL_TEMPRESET
ALM_COMFAIL_ODTEMP
ALM_COMFAIL_OCCSENSOR
ALM_COMFAIL_WINDOW
ALM_COMFAIL_MANHEAT
ALM_COMFAIL_MANCOOL
ALM_HW_SW_MISMATCH
RETURN_TO_NORMAL
RTN_NODE_OFF
RTN_FROST
RTN_INVALID_SETPNT
RTN_TEMP_SENSOR_FAIL
RTN_SETPNT_KNOB_FAIL
RTN_FAN_SPEED_SW_FAIL
RTN_FAN_FAILURE
RTN_COMFAIL_SPACETEMP
RTN_COMFAIL_HVACMODE
RTN_COMFAIL_SETPTOFFS
RTN_COMFAIL_SCHEDOCC
RTN_COMFAIL_DLC
RTN_COMFAIL_TEMPRESET
RTN_COMFAIL_ODTEMP
RTN_COMFAIL_OCCSENSOR
RTN_COMFAIL_WINDOW
RTN_COMFAIL_MANHEAT
RTN_COMFAIL_MANCOOL
RTN_HW_SW_MISMATCH
ALARM_NOTIFY_DISABLED
Digital
State
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
255
or
RETURN_TO_NORMAL
(at application restart)
(continued)
74-2935-3r0909 54
Page 55

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C4. Output Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
X X This is an output showing the active setpoint of the control algorithm. It is based on the occupancy
X The subnet is the LONWORKS subnet number (in domain entry 1 of the node’s domain table).
X The node is the LONWORKS node number (in domain entry 1 of the node’s domain table).
This is an output reporting the latest changed error condition detected in the node. The first 5 bits
setpoints, the offset and recovery ramping.
are used for the alarm type number, and this number is added to RETURN_TO_NORMAL (128)
when the error condition is no longer true. Each error condition/return-to-normal is issued only
once. The type is also recorded in nvoAlarmLog and nvoHydStatus.alarm_type.
Alarm reporting is suppressed by settin nviManualMode to SUPPRESS_ALARMS, in which case
nvoAlarm.type is set to ALARM_NOTIFY_DISABLEd. Alarm reporting is turned on again by setting
nviManualMode to UNSUPPRESS_ALARMS, after which all existing alarms (or ALM_NO_ALARM)
are reported one at a time.
(continued)
55 74-2935-3r0909
Page 56

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C4. Output Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
SrcAlarmLog1 nvoAlarmLog alarm_type[0] Same as nvoAlarm.type
SrcAlarmLog2 nvoAlarmLog alarm_type[1] Same as nvoAlarm.type See nvoAlarm.type
SrcAlarmLog3 nvoAlarmLog alarm_type[2] Same as nvoAlarm.type See nvoAlarm.type
SrcAlarmLog4 nvoAlarmLog alarm_type[3] Same as nvoAlarm.type See nvoAlarm.type
SrcAlarmLog5 nvoAlarmLog alarm_type[4] Same as nvoAlarm.type See nvoAlarm.type
SrcAlarmStatus1 nvoAlarmStatus error_bit[0] UBYTE
Bit coded Alarm:
ALM_NODE_OFF
ALM_FROST
ALM_INVALID_SETPNT
ALM_TEMP_SENSOR_FAIL
ALM_SETPNT_KNOB_FAIL
ALM_FAN_SPEED_SW_FAIL
ALM_FAN_FAILURE
ALM_COMFAIL_SPACETEMP
SrcAlarmStatus2 nvoAlarmStatus error_bit[1] UBYTE
Bit coded Alarm:
ALM_COMFAIL_HVACMODE
ALM_COMFAIL_SETPTOFFS
ALM_COMFAIL_SCHEDOCC
ALM_COMFAIL_DLC
ALM_COMFAIL_TEMPRESET
ALM_COMFAIL_ODTEMP
ALM_COMFAIL_OCCSENSOR
ALM_COMFAIL_WINDOW
SrcAlarmStatus3 nvoAlarmStatus error_bit[2] UBYTE
Bit coded Alarm:
ALM_COMFAIL_MANHEAT
ALM_COMFAIL_MANCOOL
ALM_HW_SW_MISMATCH
SrcHvacMode nvoApplicMode SNVT_hvac_mode
HVAC_AUTO
HVAC_HEAT
HVAC_COOL
HVAC_OFF
SrcCoolPos nvoCoolOutput SNVT_lev_percent
0 to 100%
163.835% = INVALID
SrcStateDI1 nvoDigitInState value SNVT_switch.value
0 to 100%
nvoDigitInState state SNVT_switch.state
OFF
ON
NOT_ASSIGNED
SrcOccEff nvoEffectOcc SNVT_occupancy
OC_OCCUPIED
OC_UNOCCUPIED
OC_BYPASS
OC_STANDBY
Digital
State
See nvoAlarm.type
1
2
4
8
16
32
64
128
1
2
4
8
16
32
64
128
1
2
4
0
1
3
6
0
1
255
0
1
2
3
or
HVAC_OFF
(at application restart)
(continued)
74-2935-3r0909 56
Page 57

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C4. Output Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
X A central node may poll the nvoAlarmLog output for a short history of alarms. It contains the last
X See above.
X See above.
X See above.
X See above. nvoAlarmLog.alarm_type[4] is the oldest alarm.
X This is a polled output containing a list of all the current errors detected by the node. A search for
X See above.
X See above.
X X This is an output used to coordinate the slave devices with the master controller. It reflects the
X X This is the cooling output that is typically used for monitoring or bound to a cooling actuator node or
X X X X This indicates the binary states of the controller's digital input that can be configured to support a
See above.
X This is the output reflecting the effective occupancy mode derived from the time schedule,
five alarms reported via nvoAlarm. At the time a new nvoAlarm is issued, nvoAlarmLog is updated.
error conditions in the node is made periodically. A central node may poll the nvoAlarmStatus
output for all of the current errors. nvoAlarmStatus contains all the current detected errors even
though they may be suppressed for reporting by nvoAlarm.
current heat/cool medium based on supply energy available. This is required for configurations with
heat/cool changeover. HVAC_OFF switches the heat/cool control off while still providing frost
protection and and reporting status and alarms.
another controller operating as slave. nvoCoolOutput will be transmitted immediately when its
value has changed significantly (>= 1%), and periodically according to nciSndHrtBt. The output
value represents the output of the control algorithm but is limited to a range of 0% to 100%.
window contact, an occupancy sensor, an airflow contact, heat/cool changeover contact or
monitoring contact. It can be bound to another Excel 10 controller or a third party node.
occupancy sensor, override button, and network occupancy override.
(continued)
57 74-2935-3r0909
Page 58

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C4. Output Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
nvoHydStatus field_no UBYTE
FIELD_EFFECT_OCC
FIELD_HW_OVERRIDE
FIELD_SCHED_OCC
FIELD_EFF_SEN_OCC
FIELD_NET_MAN_OCC
FIELD_HW_SEN_OCC
FIELD_R_O_LED
FIELD_MODE
FIELD_ALARM_TYPE
FIELD_DLC_SHED
FIELD_EFF_WINDOW_OPEN
FIELD_HW_WINDOW_OPEN
FIELD_FAN_FEEDBACK
FIELD_EXTERNAL_ACTIVE
FIELD_FAN_STAGES_ACTIVE
FIELD_OUTPUT_POS_1
FIELD_OUTPUT_POS_2
FIELD_REHEAT_RELAY
FIELD_ACTIVE_SET_PT
FIELD_SPACE_TEMP
FIELD_REST_BYPASS_TIME
SrcOccEffS nvoHydStatus effect_occ SNVT_occupancy
OC_OCCUPIED
OC_UNOCCUPIED
OC_BYPASS
OC_STANDBY
SrcOccOvrdHwS nvoHydStatus hw_override SNVT_occupancy
OC_UNOCCUPIED
OC_BYPASS
OC_NUL (No Override)
SrcOccSchedS nvoHydStatus sched_occ SNVT_occupancy
OC_OCCUPIED
OC_UNOCCUPIED
OC_BYPASS
OC_STANDBY
OC_NUL (No Override)
SrcOccSensorS nvoHydStatus eff_sen_occ SNVT_occupancy
OC_OCCUPIED
OC_UNOCCUPIED
OC_NUL (No Override)
SrcOccOvrdNetS nvoHydStatus net_man_occ SNVT_occupancy
OC_OCCUPIED
OC_UNOCCUPIED
OC_BYPASS
OC_STANDBY
OC_NUL
SrcOccSensorHwS nvoHydStatus hw_sen_occ SNVT_occupancy
OC_OCCUPIED
OC_UNOCCUPIED
OC_NUL
Digital
State
or
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
0
1
2
3
0
2
255
0
1
2
3
255
0
1
255
0
1
2
3
255
0
1
255
(continued)
74-2935-3r0909 58
Page 59

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C4. Output Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
X This is used to indicate which other data field in nvoHydStatus has changed since the last time
X X X This is the effective occupancy mode resulting from scheduled occupancy mode, occupancy
X X X It reports the current state of the remote override button.
X X It reports the current scheduled occupancy received via the network.
X X X This reports the effective state of occupancy sensor(s) connected either to the input terminals from
X X This reports the manual occupancy from the network.
X X X It reports the state of the occupancy sensor wired to the node.
nvoHydStatus was sent on the network. If any field has had a significant change, only that field is
updated, and field_no indicates which field. If three or more fields have changed significantly, then
all fields are updated and field_no is set to 0. All fields are also updated every refresh time (55 s).
sensor information, bypass push-button, or manual operator interface.
the network.
(continued)
59 74-2935-3r0909
Page 60

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C4. Output Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
SrcOvrdLedS nvoHydStatus r_o_led SNVT_occupancy
OC_OCCUPIED
OC_UNOCCIPIED
OC_BYPASS
OC_STANDBY
OC_NUL
SrcHydModeS nvoHydStatus mode BYTE
CTL_COOL
CTL_HEAT
CTL_PRESSURIZE
CTL_DE_PRESSURIZE
CTL_MODE_MANUAL
CTL_MODE_FACTORY_TEST
CTL_FLOATING_OUT_SYNCH
CTL_FAN_SWITCH_OFF
CTL_START_UP_WAIT
CTL_DISABLED
nvoHydStatus alarm_type Same as nvoAlarm.type
SrcDlcShed nvoHydStatus dlc_shed Bit
NOT ACTICE
ACTIVE
SrcWindowS nvoHydStatus eff_window_open Bit
CLOSED or NOT_ASSIGNED
OPEN
SrcWindowHwS nvoHydStatus hw_window_open Bit
CLOSED or NOT_ASSIGNED
OPEN
SrcOutput1S nvoHydStatus output_position[0] SNVT_lev_percent
0 to 100%
163.835% = INVALID
SrcOutput2S nvoHydStatus output_position[1] SNVT_lev_percent
0 to 100%
163.835% = INVALID
SrcRmTempSptEffS nvoHydStatus active_set_pt SNVT_temp_p
10 to 35°C
327.67°C = INVALID
SrcRmTempEffS nvoHydStatus space_temp SNVT_temp_p
0 to 40°C
327.67°C = INVALID
SrcRestBypassTimeS nvoHydStatus rest_bypass_time UWORD
0 to 65535 Min
Digital
State
or
0
1
2
3
255
0
1
2
3
4
5
6
7
8
255
0
1
0
1
0
1
(continued)
74-2935-3r0909 60
Page 61

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C4. Output Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
X X This variable reports the current state of the remote override LED that indicates the effective
X X X This is the current operating mode of the node determined by many inputs and arbitrated by control
X This is the latest alarm detected by the node (if any) and has the same value as nvoAlarm.type.
X X This indicates the state of the demand limit control.
X X X This indicates the real status of the window detection, either from the digital input or from the
X X X This indicates the status of the digital input configured as window detection.
X X This indicates the position of the output 1.
X X This indicates the position of the output 2.
X X X This reports the current temperature control point calculated from the various setpoints, operating
X X X This reports the current space temperature used for the control algorithm.
X X This shows the current value in minutes of the active bypass timer
schedule override resulting from the bypass push-button or a network override.
OC_OCCUPIED: 2 flashes per second
OC_UNOCCIPIED: 1 flash per second
OC_BYPASS: on
OC_STANDBY: 2 flashes per second
OC_NUL: off
logic.
CTL_PRESSURIZE and CTL_DE_PRESSURIZE disable the heat/cool outputs.
CTL_MODE_MANUAL allows turning on and off outputs manually through nviTest.
CTL_MODE_FACTORY_TEST is intended only for the factory.
CTL_FLOATING_OUT_SYNCH allows enough time (150% valve run time) for the valve(s) are at
their initial positions (control algorithms are active). The controller then goes into one of the normal
operating modes, such as CTL_COOL. When the effective occupancy changes to unoccupied or
24 hours have elapsed since the last start-up or CTL_FLOATING_OUT_SYNCH mode, the
controller enters this mode again to reset the floating output position tracking.
CTL_START_UP_WAIT is the first mode after an application restart. No control algorithms are
active, and heat/cool outputs stay in their default positions. CTL_FLOATING_OUT_SYNCH
follows.
CTL_DISABLED disables heat/cool control.
network.
modes, and optimum start-up gradients.
(continued)
61 74-2935-3r0909
Page 62

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C4. Output Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
nvoHydStatusP field_no Same as nvoHydStatus.
SrcOccEffP nvoHydStatusP effect_occ Same as nvoHydStatus.
SrcOccOvrdHwP nvoHydStatusP hw_override Same as nvoHydStatus.
SrcOccSchedP nvoHydStatusP sched_occ Same as nvoHydStatus.
SrcOccSensorP nvoHydStatusP eff_sen_occ Same as nvoHydStatus.
SrcOccOvrdNetP nvoHydStatusP net_man_occ Same as nvoHydStatus.
SrcOccSensorHwP nvoHydStatusP hw_sen_occ Same as nvoHydStatus.
SrcOvrdLedP nvoHydStatusP r_o_led Same as nvoHydStatus.
SrcHYDModeP nvoHydStatusP mode Same as nvoHydStatus.
nvoHydStatusP alarm_type Same as nvoHydStatus.
SrcDlcShedP nvoHydStatusP dlc_shed Same as nvoHydStatus.
SrcWindowP nvoHydStatusP eff_window_open Same as nvoHydStatus.
SrcWindowHwP nvoHydStatusP hw_window_open Same as nvoHydStatus.
SrcOutput1P nvoHydStatusP output_position[0] Same as nvoHydStatus.
SrcOutput2P nvoHydStatusP output_position[1] Same as nvoHydStatus.
SrcRmTempSptEffP nvoHydStatusP active_set_pt Same as nvoHydStatus.
SrcRmTempEffP nvoHydStatusP space_temp Same as nvoHydStatus.
SrcRestBypassTimeP nvoHydStatusP rest_bypass_time Same as nvoHydStatus.
SrcHeatPos nvoHeatOutput SNVT_lev_percent
0 to 100%
163.835% = INVALID
nvoSensor override_button Bit
NOT_PRESSED
PRESSED
nvoSensor contact_state_DI1 Bit
CONTACT_OPEN
CONTACT_CLOSED
nvoSensor raw_data[0] UWORD
0 to 65535 for Space Temp
nvoSensor raw_data[2] UWORD
0 to 65535 for Setpoint Knob
SrcRmTempSptHw nvoSensor remote_set_point SNVT_temp_p
-5 to 5 K for relative
12 to 30°C for absolute
SrcRmTempHw nvoSensor space_temp SNVT_temp_p
0 to 40°C
327.67°C for INVALID
nvoSensor ub_hard_config BYTE
INITIAL
W7762A
W7762B
INVALID
Digital
State
or
0
1
0
1
0
1
2
255
INITIAL
(at application
restart)
(continued)
74-2935-3r0909 62
Page 63

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C4. Output Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
Same as nvoHydStatus except not sent as heartbeat. This variable is sent only in response to a
X Same as nvoHydStatus.
X Same as nvoHydStatus.
X Same as nvoHydStatus.
X Same as nvoHydStatus.
X Same as nvoHydStatus.
X Same as nvoHydStatus.
X Same as nvoHydStatus.
X Same as nvoHydStatus.
Same as nvoHydStatus.
X Same as nvoHydStatus.
X Same as nvoHydStatus.
X Same as nvoHydStatus.
X Same as nvoHydStatus.
X Same as nvoHydStatus.
X Same as nvoHydStatus.
X Same as nvoHydStatus.
X Same as nvoHydStatus.
X X This is the heating output that is typically used for monitoring or bound to a heat actuator node or
This indicates the status of the override pushbutton.
This indicates the state of the digital input.
This contains the analog to digital converter count measured from the analog value. This count
See above.
X This is the set point from the wall module setpoint knob and may be absolute or relative depending
X This is the measured space temperature accurately reported between 0°C and 40°C.
This is used to establish hardware-dependent factory default configuration settings for the Hydronic
poll request, typically from a supervisory device.
another Excel 10 controller operating as slave. nvoHeatOutput will be transmitted immediately
when its value has changed significantly (>= 1%), and periodically according to nciSndHrtBt. The
output value represents the output of the control algorithm but is limited to a range of 0% to 100%.
represents the measured time during the second part of each a/d conversion.
upon nciWallMod.set_pnt_knob
.
controller.
(continued)
63 74-2935-3r0909
Page 64

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C4. Output Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
SrcOccSensor nvoSensorOcc SNVT_occupancy
OC_OCCUPIED
OC_UNOCCUPIED
OC_NUL (No Sensor)
SrcRmTempEff nvoSpaceTemp SNVT_temp_p
0 to 40°C
327.67°C = INVALID
SrcObjId nvoStatus object_id UWORD
NODE_OBJECT
HYD_OBJECT
nvoStatus invalid_id Bit
VALID_ID
INVALID_ID
nvoStatus invalid_request Bit
VALID_REQUEST
INVALID_REQUEST
nvoStatus disabled Bit
ENABLED
DISABLED
nvoStatus comm_failure Bit
COMMUNICATION_OK
COMMUNICATION_FAILURE
nvoStatus in_alarm Bit
NO_ALARM
IN_ALARM
nvoStatus report_mask Bit
NO_REPORT_MASK
REPORT_MASK
Digital
State
or
0
1
255
INVALID
0
1
0
1
0
1
0
1
0
1
0
1
0
1
OC_NUL
(at application
restart)
(at application
restart)
(continued)
74-2935-3r0909 64
Page 65

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C4. Output Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
X X X X This is an output showing the state of the hard wired occupancy sensor, if one is configured by
X X This is the sensed space temperature at the node taken from the locally wired sensor. It is typically
X X This output belongs to the Node Object and reports the status for any object on a node. This is the
X This indicates whether nviRequest uses a fault object ID.
X This indicates whether nviRequest uses a fault request.
X This indicates whether the device is enabled or disabled (nviManualMode = DISABLE).
X This indicates whether an update nviRcvHrtBt is missing.
X This indicates whether an alarm occured. See nvoAlarm.
X This shows the answer to nviRequest > REPORT_MASK
nciHydConfig.DI1_config. OC_NUL means no input is available because it is not bound or not
configured by nciHydConfig.DI1_config.
bound to nviSpaceTemp of another node that may not have its own space temperature sensor but
controls the same space. It is also used for monitoring purposes, showing the current space
temperature used for the control algorithm. nvoSpaceTemp is transmitted immediately when its
value has changed significantly (> 0.5 delta°C). The reported space temperature includes the offset
correction nciWallMod.si_space_temp_zero_cal. If a space temperature sensor is not connected or
is shorted or if nviSpaceTemp is bound to another node, nvoSpaceTemp is not reported on the
network.
answer to the nviRequest.
(continued)
65 74-2935-3r0909
Page 66

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C4. Output Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
SrcTermLoad nvoTerminalLoad SNVT_lev_percent
-163..163%
163.835% = INVALID
SrcHvacModeU nvoUnitStatus mode SNVT_hvac_mode
HVAC_HEAT
HVAC_COOL
HVAC_OFF
SrcHeat nvoUnitStatus heat_output_primary SNVT_lev_percent
0 to 100%
163.835% = INVALID
SrcCool nvoUnitStatus cool_output SNVT_lev_percent
0 to 100%
163.835% = INVALID
SrcAlarmUnit nvoUnitStatus in_alarm UBYTE
NO_ALARM
ALARM
ALARM_NOTIFY_DISABLED
SrcWindow nvoWindow value SNVT_switch.value
0 to 100%
nvoWindow state SNVT_switch.state
CLOSED
OPEN
NO_WINDOW
NodeType0 nroPgmVer id[0] UBYTE, 70 = H
NodeType1 nroPgmVer id[1] UBYTE, 67 = Y
NodeType2 nroPgmVer id[2] UBYTE, 85 = D
NodeType3 nroPgmVer id[3] UBYTE, 50 = 2
NodeVerMajor nroPgmVer major_ver UBYTE, 0 to 255
NodeVerMinor nroPgmVer minor_ver UBYTE, 0 to 255
NodeVerBug nroPgmVer bug_ver UBYTE, 0 to 255
NodeTypeNumber nroPgmVer node_type UBYTE, 11 = HYD2
Digital
State
1
3
6
0
1
255
0 (at application
0
1
255
or
restart)
NO_WINDOW
(at application
restart)
74-2935-3r0909 66
Page 67

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C4. Output Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
X X X X X This is an output showing the terminal load, which is a percentage between -160% and +160%
X X X X X This output variable reports the last operating mode of the control algorithm. It is not set to
X X X X This reports the actual heating output value. Any change forces nvoUnitStatus to be transmitted
X X X X This reports the actual cooling output value. A change of more than 1% forces nvoUnitStatus to be
X X X This reports the actual alarm status of the controller and is set to ALARM_NOTIFY_DISABLE when
X X X X This reports the status of the window sensor. It allows the hard wired window sensor to be used by
X See above.
X This identifies the Excel 10 node type by an eight byte constant describing the node type, major
X Second character.
X Third character.
X Fourth character.
X Major Functional Release Number:
X Minor Functional Release Number:
X Bug Fix Number:
X Node type number.
based on the control output level. Negative values indicate heating load and positive values
indicate cooling load. 100% is the full terminal capacity. An absolute terminal load value of more
than 100% indicate that the terminal is not able to supply the required heating or cooling energy
which at the zone controller should cause a demand for more supply energy. nvoHeatOutput will be
transmitted immediately when its value has changed significantly (>= 1%).
HVAC_OFF if the Heating and Cooling Output shows 0%. HVAC_OFF is set when the Device is
disabled from nviRequest, nviManualMode or nviApplicMode.
immediately.
transmitted immediately.
nviManualMode = SUPPRESS_ALARMS.
other nodes on the network.
and minor functional release number and bug fix. First character.
1. Add or delete a network variable (NV), nv field.
2. Change the name of a nv or nv field.
3. Range or type (short / long) of data in a nv field is changed.
4. Enumerated value list of a nv field is changed.
NOTE: Algorithm changes or bug fixes may also be included.
1. Network variables are unchanged.
2. Functionality of the control algorithm has been revised and affects compatibility with other
nodes or the equipment being controlled.
3. The network interface or physical input / output subsystem was revised and affects
compatibility with other nodes.
NOTE: Bug fixes may also be included in a minor functional release.
Network variables are unchanged. A change to the algorithm, network interface, or physical
input/output subsystem was made that does not affect compatibility with other nodes or the
equipment controlled by the node.
67 74-2935-3r0909
Page 68

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C5. Unused Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
nciApplVer not_used1 UBYTE
nciApplVer not_used2 UBYTE
nciCntrlSettings fan_auto_mode CONTINUOUS
AUTO_MODE
nciCntrlSettings fan_run_up_time SNVT_time_sec
0 to 600 seconds
nciCntrlSettings fan_overrun_time SNVT_time_sec
0 to 600 seconds
nciCntrlSettings reheat_switch_level SNVT_lev_percent
0 to 100%
nciCntrlSettings reheat_hysteresis SNVT_lev_percent
0 to 100%
nciCntrlSettings fan_min_on_time SNVT_time_sec
0 to 1200 seconds
nciCntrlSettings fan_min_off_time SNVT_time_sec
0 to 1200 seconds
nciCntrlSettings reserve 7 bits
nciHydConfig fan_speed_switch BYTE
NO_SWITCH
nciHydConfig fan_config BYTE
NO_FAN
nciHydConfig fan_interlock_0 Bit
NO
YES
nciHydConfig fan_interlock_1 Bit
NO
YES
nciHydConfig not_used 4 bits
nciHydConfig reheat_config BYTE
REHEAT
FREE_USE
REL_NOT_USED
nciHydConfig unused1 2 bits
nciHydConfig spare_field[0] UBYTE
nciHydConfig spare_field[1] UBYTE
nciWallMod spare_field[0] UBYTE
nciWallMod spare_field[1] UBYTE
nviFanSpeedCmd value SNVT_switch
0 to 100%
nviFanSpeedCmd state SNVT_switch
OFF
ON
NUL
nviReheatRelay value SNVT_switch
0 to 100%
Digital
State
0
1
0
0
100%
5%
0
0
0
0
0
1
0
1
0
1
255
0
1
255
or
AUTO_MODE
NO_SWITCH
NO_FAN
REL_NOT_USED
(continued)
74-2935-3r0909 68
Page 69

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C5. Unused Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
(continued)
69 74-2935-3r0909
Page 70

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C5. Unused Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
nviReheatRelay state SNVT_switch
OFF
ON
NUL
nviTest reheat_cmd BYTE
NORMAL_HC_MODE
OFF1_OFF2
ON1_ON2
nviTest fan_control BYTE
NORMAL_FAN_MODE
OFF1_OFF2_OFF3
ON1_OFF2_OFF3
OFF1_ON2_OFF3
ON1_ON2_OFF3
OFF1_OFF2_ON3
ON1_OFF2_ON3
OFF1_ON2_ON3
ON1_ON2_ON3
nvoFanSpeed value SNVT_switch.value
0 to 100%
nvoFanSpeed state SNVT_switch.state
OFF
ON
NO_FAN
nvoFanSpeedSw value SNVT_switch.value
0 to 100%
nvoFanSpeedSw state SNVT_switch.state
OFF
ON
NO_FAN_SPEED_SW
nvoHydStatus fan_feedback Bit
FAN_OFF_AFTER_ON_CMD
FAN_RUNS
nvoHydStatus external_active Bit
EXTERNAL_NOT_ACTICE
EXTERNAL_ACTIVE
nvoHydStatus not_used 3 bits
nvoHydStatus fan_stages_active UBYTE
F_OFF
F_SPEED1
F_SPEED2
F_SPEED3
F_NO_FAN
nvoHydStatus reheat_active SNVT_lev_disc
ST_OFF
ST_ON
ST_NUL (No Reheat)
nvoHydStatus spare_field[0] WORD
nvoHydStatusP fan_feedback Same as nvoHydStatus
nvoHydStatusP external_active Same as nvoHydStatus
Digital
State
0
1
4
0
1
2
3
4
5
6
7
8
0
1
0
1
0
1
2
3
255
0
4
255
or
NORMAL_HC_MODE
NORMAL_FAN_MODE
(continued)
74-2935-3r0909 70
Page 71

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C5. Unused Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
X
X
X
X
X
(continued)
71 74-2935-3r0909
Page 72

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C5. Unused Variables for W7762 Controllers (left).
Engineering Units:
English (Metric) or
User Address NvName Field Name States plus Range Value Default
nvoHydStatusP not_used Same as nvoHydStatus
nvoHydStatusP fan_stages_active Same as nvoHydStatus
nvoHydStatusP reheat_active Same as nvoHydStatus
nvoHydStatusP spare_field[0] Same as nvoHydStatus
nvoReheat value SNVT_switch.value
0 to 100%
nvoReheat state SNVT_switch.state
OFF
ON
NO_REHEAT
nvoSensor not_used 6 bits
nvoSensor raw_data[1] UWORD
0 to 65535
nvoSensor fan_speed_switch SNVT_lev_disc
ST_OFF
ST_LOW
ST_MED
ST_HIGH
ST_NUL (No Switch)
nvoStatus out_of_limits Bit not supported
nvoStatus open_circuit Bit not supported
nvoStatus out_of_service Bit not supported
nvoStatus mechanical_fault Bit not supported
nvoStatus feedback_failure Bit not supported
nvoStatus over_range Bit not supported
nvoStatus under_range Bit not supported
nvoStatus electrical_fault Bit not supported
nvoStatus unable_to_measure Bit not supported
nvoStatus fail_self_test Bit not supported
nvoStatus self_test_in_progress Bit not supported
nvoStatus locked_out Bit not supported
nvoStatus manual_control Bit not supported
nvoStatus in_override Bit not supported
nvoStatus reserved1 Bit not supported
nvoStatus reserved2 Bit not supported
nvoUnitStatus heat_output_secondary SNVT_lev_percent
0 to 100%
163.835% = INVALID
nvoUnitStatus econ_output SNVT_lev_percent
not supported
nvoUnitStatus fan_output SNVT_lev_percent
0 to 100%
nvoUnitStatus fan_output SNVT_lev_percent
0 to 100%
Digital
State
0
1
2
0
2
3
4
255
or
74-2935-3r0909 72
Page 73

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Table C5. Unused Variables for W7762 Controllers (right).
Share (SH), Map (MA),
Direct Access (DA)
Monitor (M), Heartbeat (HBT)
SH MA DA M HBT Comments
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
73 74-2935-3r0909
Page 74

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
APPENDIX D. Q7750A EXCEL 10 ZONE MANAGER POINT ESTIMATING GUIDE.
Memory size approximation is shown in Fig. 21: (All sizes in
bytes.) When memory size is less than 110 Kbytes, the size is
adequate.
When memory size is between 110 and 128 Kbytes, the
application may be too large. The user must expect to reduce
the application complexity, reduce the number of attached
Excel 10 Hydronic Controllers or distribute the Excel 10
Hydronic Controllers among more than one Zone Manager.
When memory size is greater than 128 Kbytes, the size is too
large. The application size must be reduced as described
above.
Approximate Memory Size Estimating
Procedure.
1. Determine the number of points per controller required
at the Central (for example, XBS).
NOTE: All remaining points that are not mapped are
available for accessing through the Direct
Access feature.
2. Calculate the number of Excel 10 Zone Manager
program points that will be used in the control logic and
in the switching table.
3. Estimate the program complexity of the Zone Manager
(one of three levels).
a. No time programs, control logic, or switching
tables.
b. 10 Kbytes of control logic (one time program, five
switching tables, and five control loops).
c. 20 Kbytes of control logic (multiple time
programs, ten switching tables, and ten control
loops).
Use Fig. 21 to determine the number of Excel 10
Controllers that can be connected to the Zone
Manager.
NOTE: Where the number of Excel 10 Controllers
exceeds 60 a router is required.
4. Repeat the calculation for each Q7750A Excel 10 Zone
Manager in the project.
Fig. 21. Point capacity estimate for Zone Manager.
The exact equation to use to calculate memory size is:
Memory size = 21,780 byte
+ 4096 byte (in case of a time program)
+ CARE Control Program
+ 14 byte x time points x Excel 10 Controllers
+ 50 byte x Excel 10 Controllers
+ map complexity x Excel 10 Controllers x mapped points
+ 57 byte x C-Bus points
+ 7488 byte x Excel 10 Controller types
Where:
time points = number of switch points in time
program per Excel 10 Hydronic
Controller
Excel 10 Controllers = number of attached Excel 10
Hydronic Controllers
C-Bus points = including mapped points and
74-2935-3r0909 74
others; for example, Remote
Points
Mapped points = number of mapped points for
each Hydronic Controller,
including One-to-Many and
Many-to-One mechanism
Excel 10 Controller types = number of different Excel 10
Controller types (currently one)
Map complexity =
20 = using One-to-Many and not
using points with read/write
ability
30 = average
45 = many points with read/write
ability
Page 75

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
75 74-2935-3r0909
Page 76

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
74-2935-3r0909 76
Page 77

EXCEL 10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
77 74-2935-3r0909
Page 78

EXCEL10 HYDRONIC CONTROLLER SYSTEM ENGINEERING
Manufactured for and on behalf of the Environmental and Combustion Controls Division of Honeywell Technologies Sàrl, Rolle, Z.A. La Pièce 16, Switzerland by its Authorized Representative:
Automation and Control Solutions
Honeywell GmbH
Böblinger Strasse 17
71101 Schönaich
Germany
Phone: (49) 7031 63701
Fax: (49) 7031 637493
http://ecc.emea.honeywell.com
Subject to change without notice. Printed in Germany
74-2935-3r0909
 Loading...
Loading...