

Page 1

MSXX10, MSXX20 Series
88 AND 175 LB-IN (10 AND 20 NM) SPRING RETURN DIRECT COUPLED
ACTUATORS
PRODUCT DATA
FEATURES
• Brushless DC submotor with electronic stall
protection for floating/modulating models.
• Floating/Modulating models can provide twoposition (SPST) control.
• Brush DC submotor with electronic stall protection
for two-position models.
• Self-centering shaft adapter (shaft coupling) for
wide range of shaft sizes.
• Access cover to facilitate connectivity.
• Metal housing with built-in mechanical end limits.
• Spring return direction field-selectable.
• Shaft position indicator and scale.
• Manual winding capability with locking function.
• UL (cUL) listed.
• All Models are plenum-rated per UL2043.
APPLICATION
MS31XX, MS41XX, MS71XX, MS75XX, MS81XX Spring
Return Direct Coupled Actuators (DCA) are used within
heating, ventilating, and air-conditioning (HVAC) systems.
They can drive a variety of quarter-turn, final control
elements requiring spring return fail-safe operation.
• Models available with 3-foot, 18 AWG color-coded
cable.
• Sylk-enabled models available.
• Features shown in Table 1.
Applications include:
• Volume control dampers, mounted directly to the drive
shaft or remotely (with the use of accessory hardware).
• Quarter-turn rotary valves, such as ball or butterfly
valves mounted directly to the drive shaft.
• Linear stroke globe or cage valves mounted with
linkages to provide linear actuation.
Contents
Application ..................................................................................... 1
Features .......................................................................................... 1
Specifications ............................................................................... 2
Wiring .............................................................................................. 8
Operation ....................................................................................... 15
Checkout ........................................................................................ 16
63-2607-26
Page 2
MSXX10, MSXX20 SERIES
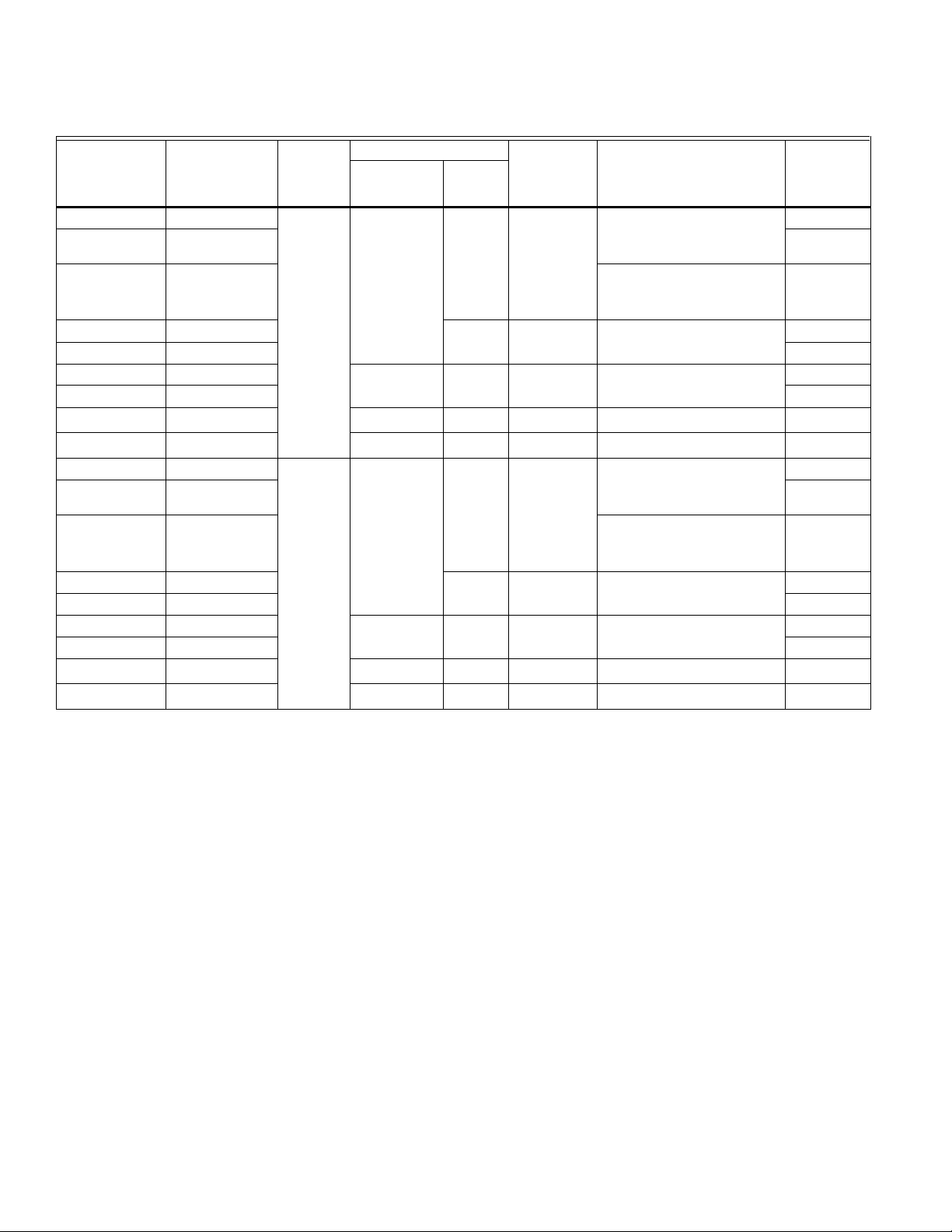
Table 1. Features
Model
Model
Number
Number
(including 3
Tor que
ft. whip)
MS7510A2008 MS7510W2008
MS7510A2206 MS7510W2206 2
MS7510H2209
Power Supply
Voltage
24 Vac/dc
VA
Driving
1
14 90
Drive
2
(sec)
Control Input/Output
Description
Floating, Modulating3,
Two-Position (SPST),
Feedback
Floating, Modulating3,
Feedback, Two-Position
SPDT Aux
Switch
(SPST), Adj. Zero & Span
MS8110A1008 MS8110W1008
MS8110A1206 MS8110W1206 2
MS4110A1002
MS4110A1200 2
MS3110J1008 24 Vac/dc
MS3110J1206 24 Vac/dc
MS7520A2007 MS7520W2007
MS7520A2205 MS7520W2205 2
MS7520H2208
88 lb-in
(10 Nm)
30 45 Two-Position (SPST)
100-250 Vac 45 45 Two-Position (SPST)
14
14
4
4
90 Sylk Enabled 0
90 Sylk Enabled 2
Floating, Modulating
Two-Position (SPST),
16 90
24 Vac/dc
Feedback
Floating, Modulating
Two-Position (SPST),
3
,
3
,
Feedback, Adj. Zero & Span
MS8120A1007 MS8120W1007
MS8120A1205 MS8120W1205 2
MS4120A1001
MS4120A1209 2
MS3120J1007 24 Vac/dc
MS3120J1205 24 Vac/dc
1
Number represents range
2
All spring return actuators have <25 second spring return time
3
0/2-10 Vdc
4
45 second drive has 15 VA for MSxx10 and 22 VA driving for MSxx20
175 lb-in
(20 Nm)
40 45 Two-Position (SPST)
100-250 Vac 60 45 Two-Position (SPST)
16
16
4
4
90 Sylk Enabled 0
90 Sylk Enabled 2
0
2
0
0
0
2
0
0
SPECIFICATIONS
Models: See Tables 2 and 4.
NOTE: This document also covers the MS7110K and
MS7106K.
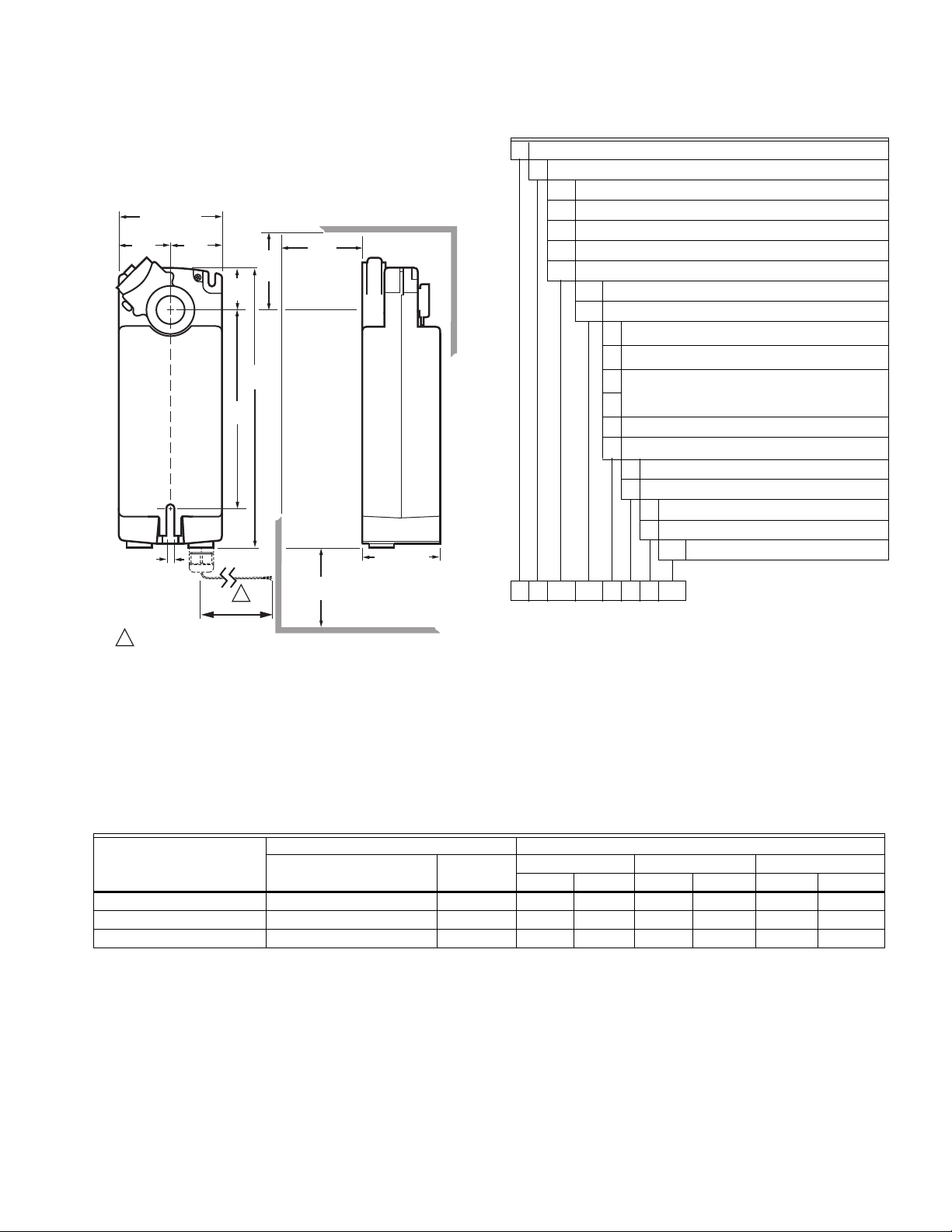
Dimensions: See Fig. 1.
Device Weight: 6 lb (2.7 kg).
Temperature Ratings:
Ambient: -40°F to 140°F (-40°C to 60°C).
Shipping and Storage: -40°F to 158°F (-40°C to 70°C).
Humidity Ratings: 5% to 95% RH noncondensing.
Electrical Connections:
Field wiring 14 to 22 AWG (2.0 to 0.344 mm sq) to screw
terminals, located under the removable access cover.
Electrical Ratings: See Table 3.
63-2607—26 2
End Switches (Two SPDT):
Dry Contact
Settings (fixed): 7° nominal stroke, 85° nominal stroke.
Ratings (maximum load): 250 Vac, 5A resistive.
Mounting: Self-centering shaft adapter (shaft coupling).
Round Damper Shafts: 0.375 to 1.06 in. (10 to 27 mm).
Square Damper Shafts: 1/2 to 3/4 in. (13 to 19 mm).
Actuator can be mounted with shaft in any position.
NOTE: For 175 lb-in. (20 Nm) models: 3/4 in. or greater
shaft diameter recommended.
Minimum Damper Shaft Length: 1 in. (25 mm); 3 in.
(76 mm) recommended.
Cable Specification:
300 V, 75° C, Plenum Rated, 3 ft length from end of access
cover, 18 AWG
Page 3
Timing (At Rated Torque and Voltage):
9-3/4
(247)
1-9/16
(40)
2-1/2
(64)
MIN.
3 (76)
MIN.
3 (76)
MIN.
FROM
SHAFT
END
6-1/8
(156)
1-9/16
(40)
1-9/16
(40)
3-15/16 (100)
2-15/16 (75)
1/4 (6)
M28939
144 (3658)
1
1
CABLE AND STRAIN RELIEF
ON SELECT MODELS ONLY.
Table 2. Model Selection.
a
Model manufactured for sale in the United States.
b
Model manufactured for sale in Europe.
c
Cables available on 75 and 81 Series only.
M Electrical Motor
S Fail Safe Function (Spring Return)
31 24 Vac communicating (Sylk Enabled)
41 120 Vac Two-Position Control; Reversible Mount
71 24 Vac Modulating Control; Reversible Mount
75 24 Vac Modulating and Floating Control; Reversible Mount
81 24 Vac Two-Position Control; Reversible Mount
10 88 lb-in. (10 Nm)
20 175 lb-in. (20 Nm)
A
a
Standard U.S. Model
B
b
Standard European Model
E
b
Selectable control signal; Adjustable zero and span;
Includes service and auto-adapt modes
H
a
J Sylk Enabled
W
c
Standard U.S. Model with Cable
1 No Feedback
2 Voltage Feedback Signal
0 No End Switches
2 Two End Switches
XX System Controlled Numbers
M S 75 20 A 2 0 XX
Drive Open (typical):
Floating, Modulating Models: 90 seconds.
Floating, Modulating Models: 60 seconds.
Two-Position Models: 40 seconds ±10 seconds.
Spring Close: <25 seconds.
MSXX10, MSXX20 SERIES
Fig. 1. Dimensional drawing of actuator in in. (mm).
* Floating/Modulating 60 sec models
Stroke: 95° ±3°, mechanically limited. Approvals: See Table 4.
Floating, Modulating 24 Vac ±20% (Class 2), 24 Vdc 50/60 Hz. 13 5 14 5 16 5
Two-Position, Low-voltage 24 Vac ±20% (Class 2), 24 Vdc 50/60 Hz. 25 8 30 8 40 8
Two-Position, Line-voltage 100-250 Vac 50/60 Hz. 45 13 45 13 60 13
88 lb-in. (10 Nm) 18 VA Driving
175 lb-in. (20 Nm) 22 VA Driving
24 VAC +- 20%
Model(s)
60 second models:
MS7510A2016
MS7510A2214
MS7520A2015
MS7520A2213
Table 3. Electrical Ratings*.
Power Input Power Consumption (VA)
44 lb-in. (5 Nm) 88 lb-in. (10 Nm) 175 lb-in. (20 Nm)
Voltage Frequency
Driving Holding Driving Holding Driving Holding
3 63-2607—26
Page 4
MSXX10, MSXX20 SERIES
TRTDAD×=
N
T
R
TASF×
-------------------=
Design Life (at Rated Voltage):
a
Two-position models: 50,000 full stroke cycles;
50,000 full stroke spring returns.
Floating and Modulating models: 60,000 full stroke cycles;
1,500,000 repositions.
Input Impedance: 95K ohms minimum.
Feedback Signal: 0/2-10 Vdc;
Driving current is 3 mA minimum.
Torque Ratings:
Typical Holding, Driving, Spring Return:
MSXX10: 88 lb-in. (10 Nm).
MSXX20: 175 lb-in. (20 Nm).
Stall Maximum (fully open at 75°F):
MSXX10: 175 lb-in (20 Nm)
MSXX20: 350 lb-in. (39.6 Nm).
Noise Rating at 1m (Maximum):
Holding: 20 dBA (no audible noise).
Two-position models:
Driving: 50 dBA.
Spring Return: 65 dBA.
Floating/Modulating models:
Driving: 40 dBA.
Spring Return: 50 dBA.
Sylk Enabled models:
Driving: < 50 dBA
Spring Return: < 60 dBA
Vibration:
Not suitable for high vibration applications (Example
installation environment: Truck Trailers or Railroad Cars)
Acceptable Vibration Levels 0.6g at 30 to 300 Hz.
Table 4. Approvals.
MS31XX,
MS41XX,
MS75XX,
MS81XX,
MS7110,
MS7106,
UL/cUL X X
UL2043 Plenum Rating,
File No. E4436; Guide No.
XX
XAPX.
Environmental Protection Ratings:
NEMA2 (US Models) or IP54 (European Models) when
mounted on a horizontal shaft with access cover below
the shaft.
Safety:
Protection Class IP54
Overvoltage Category II
a
Floating/Modulating 60 sec models
20,000 full stroke cycles
100,000 repositions
Accessories:
27518 Balljoint (5/16 in.).
103598 Balljoint (1/4 in.).
205860 Electronic Minimum Position Potentiometer.
27520A-E,G,H-L,Q Pushrod (5/16 in. diameter).
32000085-001 Water-tight Cable Gland/Strain-relief Fit-
ting (10 pack).
32003036-001 Weather Enclosure.
32004254-002 Self-Centering Shaft Adapter (supplied
with actuator).
50001194-001 Foot Mount Kit.
50005859-001 NEMA4/4X Enclosure.
50006427-001 Anti-Rotation Bracket (supplied with actu-
ator).
SW2-US Auxiliary Switch Package.
See also Form 63-2620.
Sylk™ Bus:
Sylk is a two-wire, polarity insensitive bus that provides
communications between a Sylk-enabled actuator and a
Sylk-enabled controller. For wiring, the Sylk-enabled
actuator may be mounted up to 200 ft. (61m) from the
controller; twisted pair wire is recommended for wire
runs longer than 100 ft. (30.5m). Using Sylk-enabled
actuators saves I/O on the controller and is faster and
cheaper to install since the bus is polarity insensitive.
Sizing
Required Torque
In lieu of data from a Specification Engineer or
Manufacturer, required torque for a given damper load can
be determined using the following method:
Where:
—T
= Required torque for the damper load.
R
—T
= Damper torque rating from the manufacturer,
D
expressed in either (lb-in.)/(sq ft) or (Nm)/(sq m). the
damper load.
—A
= Damper area expressed in either sq ft or sq m.
D
Actuators Required
In lieu of data from a Specification Engineer or
Manufacturer, the number of required actuators for a given
damper load can be determined using the following
method:
Where:
— N = Number of actuators.
—T
= Required torque for the damper load. (See above.)
R
—T
= Actuator torque rating.
A
— SF = Safety factor.
NOTE: The safety factor accounts for variables such as
misalignments, aging of the damper, etc. 0.8 is a
typical safety factor.
63-2607—26 4
Page 5
INSTALLATION
CAUTION
CAUTION
CAUTION
MSXX10, MSXX20 SERIES
When Installing this Product...
1. Read these instructions carefully. Failure to follow
them could damage the product or cause a hazardous condition.
2. Check the ratings given in the instructions and on the
product to make sure the product is suitable for your
application.
3. Installer must be a trained, experienced service
technician.
4. After installation is complete, check out product
operation as provided in these instructions.
Electrical Shock or Equipment Damage Hazard.
Low voltage can shock individuals or short
equipment circuitry.
Disconnect power supply before installation.
IMPORTANT
All wiring must agree with applicable codes,
ordinances and regulations.
Location
These actuators are designed to mount directly to a
damper external drive shaft. The shaft coupling fastens to
the drive shaft. The actuator housing includes slots which,
along with an anti-rotation bracket, secure the actuator to
the damper frame or duct work (see Fig. 9).
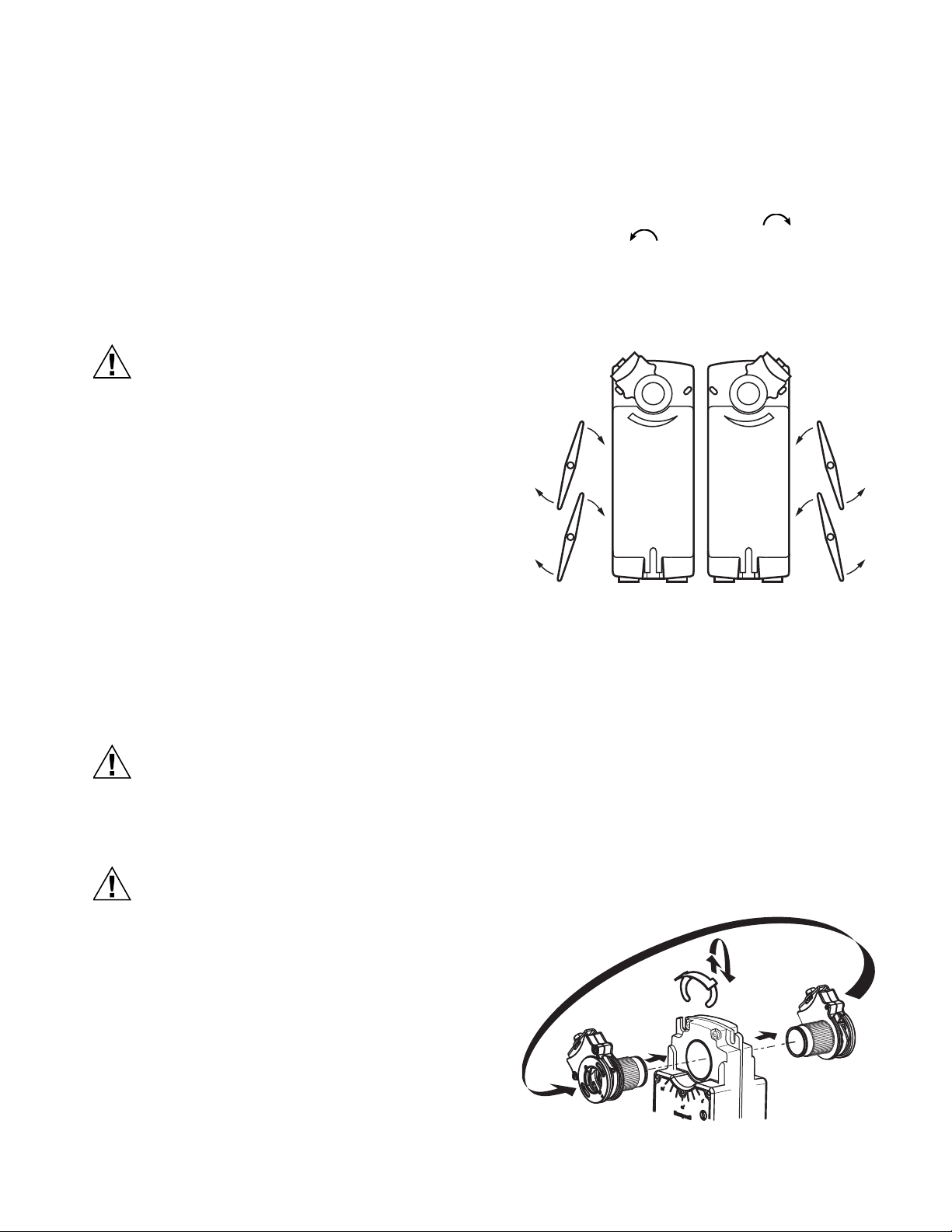
Determine Appropriate Mounting
Orientation
The actuators are designed to open a damper by driving
the damper shaft in either a clockwise or
counterclockwise direction (see Fig. 2).
NOTES:
— Actuators are shipped in the fully closed (spring
return) position.
— An arrow molded into the hub points to tick
marks on the label to indicate the hub rotary
position.
CCW TO CLOSE
(FAIL-SAFE
POSITION)
CW TO OPEN
Fig. 2. Spring Return DCA mounting orientation.
CW TO CLOSE
(FAIL-SAFE
POSITION)
CCW TO OPEN
M20953
NOTES:
— When mounted correctly, these slots allow the
actuator to float without rotating relative to the
damper shaft.
— Using other brackets or linkages, the actuator
can be foot-mounted or tandem-mounted.
Motor Damage Hazard.
Deteriorating vapors and acid fumes can damage
metal parts.
Install motor in areas free of acid fumes and other
deteriorating vapors.
Equipment Damage Hazard.
Tightly securing actuator to damper housing can
damage actuator.
Mount actuator to allow it to float along its vertical
axis.
Preparation
Before mounting the actuator onto the damper shaft,
determine the:
— Damper/valve opening direction for correct spring
return rotation. The actuator can be mounted to provide
clockwise or counterclockwise spring return.
— Damper shaft size (see the Specifications section).
Measure Damper/Valve Shaft Length
If the shaft is less than three inches in length, the shaft
coupling must be located between the damper/valve and
actuator housing. If the shaft length is more than three
inches, the shaft coupling may be located on either side of
the actuator housing.
If the coupling must be moved from one side of the
actuator to the reverse, follow these instructions (see
Fig. 3):
1. Remove the retainer clip from the shaft coupling and
set it aside for later use.
2. Remove shaft coupling from one side of the actuator.
3. Replace the shaft coupling on the opposite side of
the actuator aligning it based on the stroke labelling.
4. Replace the retainer clip on the shaft coupling using
the groove of the coupling.
M19579
Fig. 3. Mounting shaft coupling to actuator opposite
side.
5 63-2607—26
Page 6

MSXX10, MSXX20 SERIES
32007163-011 Rev. C
Modulating, Forward
Modulating, Reverse
Floating, Forward
Floating, Reverse
Service
Auto Adapt
Start
0V
10V
2V
32V
Span
M20954A
ZERO
LOCKING PIN
SPAN
MODE SELECT
1
1
1
SPAN AND ZERO EXIST ONLY
ON MODELS MS75XXE,H.
M34296A
LOCKING PIN
SYLK ADDRESS
SELECTION
RANGE/DIRECTION
CONTROL SELECTOR
Select Actuator Control Signal
MS41XX, MS71XX, MS75XX, MS81XX
These actuators are available in two control types:
— Standard: includes mode selection dial to select the
desired input signal.
— Enhanced: includes different mode selection dial to
select the desired input signal. Also includes dials for
adjusting the input signal zero and span.
NOTE: Selections are made using a dial that appears on
both the front and back of the actuator (see Fig. 4).
For available options, see Table 5.
To select the control signal simply turn the mode selection
dial to the desired control signal (as indicated on the device
label).
MS31XX
These actuators are available with Sylk address selection
pot and Range/Direct control selector pot. The Range pot
has 3 ranges that cause the actuator to be direct acting
and 3 ranges to cause the actuator to be reverse acting.
NOTE: When Direct range pot called out, a 0 to 100%
command would associate 0% with full spring
return and 100% with position farthest from
spring return. When Reverse range pot called out,
a 0 to 100% command would associate 100%
with full spring return and 0% farthest from spring
return.
There are 15 effective Sylk addresses that you can choose
from. For example, to select Sylk address 11 move the
range pot to Direct control selection and Sylk address pot
to G.
Fig. 4. Dials for control signal and zero/span.
Fig. 5. Dials for control signal.
Table 5. Actuator Control Signal Selections.
Mode Options Standard Enhanced Details
Floating: forward
Floating: reverse
Modulating: 0-10 Vdc
Modulating: 10-0 Vdc
Modulating: 2-10 Vdc
Modulating: 10-2 Vdc
a
X
b
X
c
X
c
X
c
X
c
X
a
X
b
X
Series 60 control. Power to terminal 4 drives toward spring return position.
Series 60 control. Power to terminal 3 drives toward spring return position.
Series 70 control. 0 Vdc signal drives toward spring return position.
Series 70 control. 10 Vdc signal drives toward spring return position.
Series 70 control. 2 Vdc signal drives toward spring return position.
Series 70 control. 10 Vdc signal drives toward spring return position.
Modulating: forward X Voltage input with adjustable zero and span. Minimum signal drives toward
spring return position.
Modulating: reverse X Voltage input with adjustable zero and span. Maximum signal drives toward
spring return position.
Service X Actuator hub stops in place and ignores control signal changes.
Auto-adapt X For setup only. Rescales to allow full input signal over mechanically limited
stroke.
a
Feedback: MS75XXA,H and U.S. S… models are 2-10 Vdc, MS75XXB,E and European S… models are 0-10 Vdc.
b
Feedback: MS75XXA,H and U.S. S… models are 10-2 Vdc, MS75XXB,E and European S… models are 10-0 Vdc.
c
When operating in Modulating mode, the feedback signal matches the control signal.
Non-Standard Stroke
Mechanical Stroke Limit Reduction
For applications requiring a span less than 95 degrees, a
simple adjustment can be made. When the rotational
mounting of the shaft coupling is changed, the actuator
drives less than the full 95 degrees stroke.
The stroke is adjustable in 5 degree increments. Once
adjusted, the actuator drives until the shaft coupling
reaches the mechanical stop (part of the housing). The
stop causes the motor to discontinue driving and the shaft
coupling drives no farther. When the actuator returns, it
stops at the fail-safe position.
63-2607—26 6
Page 7

MSXX10, MSXX20 SERIES
M32268
ROTATING
95
To set the fail-safe position, proceed as follows:
1. Remove the retainer clip from the shaft coupling and
set it aside for later use.
2. Remove shaft coupling from the actuator.
3. Rotate the coupling to the desired fail-safe position,
aligning it based on the stroke labelling. See Fig. 6.
NOTE: The shaft coupling location determines the
travel span.
EXAMPLE:Setting shaft coupling to an approximate
fail-safe position of 35 degrees (as indicated on the housing) limits stroke to 60
degrees. (See Fig. 6)
4. Install the shaft coupling at this position.
5. Replace the retainer clip on the shaft coupling using
the groove of the coupling.
6. If necessary, replace the holder and position indicator
on the shaft coupling.
90
45
D
R
I
S
P
R
I
N
G
R
9
0
S
T
0
E
V
N
R
U
T
E
E
K
O
R
90
45
D
S
R
I
V
P
E
R
I
N
G
R
E
6
T
U
R
0
S
T
R
O
K
E
0
N
M22065
Fig. 6. Stroke reduction.
Auto-Adapt
When using these actuators for standard stroke
applications, this function can be ignored. When it is
desirable to use a mechanically limited stroke (see
Mechanical Stroke Limit Adjustment section), it is possible
to use the Auto-Adapt feature to rescale the input signal
over the new limited stroke.
1. Rotate actuator control signal dial to Auto-Adapt.
NOTE: The actuator will drive open, then closed to
establish the new open and closed positions.
2. Return the actuator control signal dial to the desired
input signal position.
Manual Positioning
The actuator can be operated with no power present. Use
this feature during installation or to move and lock the
damper or valve shaft position when there is no power.
To operate the manual positioning:
1. If the power is on, turn it off.
2. Insert supplied hex wrench (key) as shown in Fig. 7.
3. Rotate key in the direction indicated on the cover.
4. Once the desired position is reached, hold the key to
prevent the spring return from moving the actuator.
5. With the key held in place, use a screwdriver to turn
the gear train lock pin in the indicated direction until
the detent is reached.
NOTE: At the detent, the pin resists further rotation.
6. Remove the key without rotating it further.
Adjustable Zero and Span
(Enhanced Modulating Models only)
These actuators have the capability of adjustable zero and
span. Fig. 4 shows the dials. These dials are present only on
the Enhanced Modulating models. A basic description of
these dials follows:
— Zero: Sets input voltage to define the 0% angle of
rotation. It is factory set to 0 Vdc, and can be adjusted up
to 10 Vdc.
— Span: Adjusts motor response to travel full stroke
through the selected input span. It is factory set to 10
Vdc, and is adjustable from 2 to 32 Vdc.
SET ADJUSTABLE ZERO AND SPAN
1. Apply 24 Vac to the actuator.
2. Turn the zero dial (see Fig. 4) past the desired start
point.
3. Using either a controller or signal generator, apply an
input signal equal to the start point signal.
4. Slowly adjust zero toward the minimum setting until
the actuator hub begins to move.
5. Turn the span dial (see Fig. 4) to the
minimum setting (2 Vdc).
6. Using either a controller or signal generator, apply an
input signal equal to the desired end point signal.
7. Allow the actuator to open fully.
8. Slowly adjust span toward the maximum setting until
the actuator hub moves slightly from fully open.
9. Carefully adjust span knob toward minimum until the
actuator hub returns to fully open.
To release the manual positioning with no power present:
1. Insert supplied key.
2. Turn key 1/4 turn in the direction indicated on the
cover.
3. Remove key without engaging the gear train lock pin.
4. The spring will return actuator to the fail-safe posi-
tion.
NOTE: Once power is restored, the actuator will
return to normal automated control.
Fig. 7. Manual positioning.
7 63-2607—26
Page 8

MSXX10, MSXX20 SERIES
CAUTION
CAUTION
CAUTION
CAUTION
M20956
ENSURE THAT MOUNTING ASSEMBLY PREVENTS ACTUATOR
ROTATION AND ALLOWS ACTUATOR TO FLOAT ALONG
INDICATED AXIS. WHEN TOO TIGHT, THE RESULTING BINDING
CAN DAMAGE THE ACTUATOR OR REDUCE TORQUE OUTPUT.
THE BRACKET CAN BE BENT TO ALLOW MOUNTING THE
ACTUATOR PARALLEL TO THE MOUNTING SURFACE.
1
PART NO. 5006427-001
1
2
2
Mounting
Device Malfunction Hazard.
Improper shaft coupling tightening causes device
malfunction.
Tighten shaft coupling with proper torque to
prevent damper shaft slippage.
Actuator Damage Hazard.
Using actuator as shaft bearing causes device
damage.
Use actuator only to supply rotational torque. Avoid
any side loads to actuator output coupling bearings.
Equipment Damage Hazard.
Can damage the motor beyond repair.
Never turn the motor shaft by hand or with a
wrench.
Forcibly turning the motor shaft can damage the
gear train.
To mount the actuator to an external drive shaft of a
damper, proceed as follows:
1. Place actuator over damper shaft; and hold mounting
bracket in place. See Fig. 9.
2. Mark screw holes on damper housing.
3. Remove actuator and mounting bracket.
4. Drill or center-punch holes for mounting screws (or
use no.10 self-tapping sheet metal screws).
5. Turn damper blades to desired normal (closed) position.
6. Place actuator and mounting bracket back into position and secure bracket to damper box with sheet
metal screws.
7. Using 10 mm wrench, tighten shaft coupling securely
onto damper shaft using minimum 120 lb-in. (13.6
Nm), maximum 180 lb-in. (20.3 Nm) torque.
NOTE: See Fig. 8 for proper mounting to a square
damper shaft.
Fig. 8. Proper mounting to square damper shaft.
M21007
DAMPER SHAFT
Fig. 9. Mounting actuator to damper housing.
WIRING
Electrical Shock or Equipment Damage Hazard.
Disconnect all power supplies before installation.
Motors with auxiliary switches can have more than
one disconnect.
IMPORTANT
All wiring must comply with local electrical codes,
ordinances and regulations.
63-2607—26 8
Page 9

Access Cover Removal (Fig. 10)
CAUTION
M20957
Equipment Damage Hazard.
Improper cover removal can damage electric
connections.
Pull the cover along the axis of the actuator.
The cover contains contact sockets that must
connect to actuator contact pins.
Bending these pins can permanently damage the
device.
NOTE: This cover can be removed before or after actuator
mounting.
In order to wire the device, the access cover must be
removed as follows:
1. Remove the screw from the center of the cover, set
the screw aside.
2. Pull the cover along the long axis of the actuator.
3. If the actuator is not yet mounted, set it aside.
4. Remove conduit dust covers as necessary.
5. Thread wire through conduit holes.
6. Connect wires as appropriate to the terminal block(s).
(See Fig. 11 and 12.)
MSXX10, MSXX20 SERIES
NOTE: With US Models, use 1/2 in. NPS strain relief
gland or 1/2 in. conduit adapters. Recommend using flex conduit.
With European Models, use M16 strain relief
gland.
Fig. 10. Removing access cover.
WIRING
See Fig. 11 through 28 for typical wiring details for
actuators without cables (whips). See Fig. 29 through 31
for wiring actuators with cables (whips).
34
5
5
S1 S2
S3 S4
2
1
234
S5
S6
1
M20958
Fig. 11. Terminal block details.
9 63-2607—26
Page 10

MSXX10, MSXX20 SERIES
1 POWER SUPPLY. PROVIDE DISCONNECT MEANS AND OVERLOAD
PROTECTION AS REQUIRED.
ENSURE PROPER GROUNDING OF ACTUATOR CASE.
2
V
OR
+
OR
N/A
FEEDBACK
ACTUATOR
1
2
5
4
3
1
7° 85°
S1 S2
S3
S4
S5 S6
2
M33486
ACTUATOR
SPST
24 VAC
1
1
2
2
LINE VOLTAGE POWER SUPPLY. PROVIDE DISCONNECT MEANS
AND OVERLOAD PROTECTION AS REQUIRED.
24 VDC SUPPLY ACCEPTABLE.
ENSURE PROPER GROUNDING OF ACTUATOR CASE.
V
1
2
M35094
3
3
NOTES: AFTER TRANSFORMER SELV–SAFETY EXTRA LOW VOLTAGE FOR
INTERNAL CIRCUIT AND MOTOR.
Fig. 12. Terminal block details.
Terminal Floating Modulating
1 power power power power power Red
2 common common common neutral common Black
3 cw input — — s-bus White
Table 6. Wiring details.
Two-Position
120 Vac
24 Vac
240 Vac Sylk-enabled
Color
a
4 ccw — — — s-bus —
5 feedback feedback — — Brown
a
Only applies to models with wires.
Typical Wiring Without Cables
Fig. 13. Wiring for low-voltage two-position control.
63-2607—26 10
1
1 LINE VOLTAGE POWER SUPPLY. PROVIDE DISCONNECT MEANS
AND OVERLOAD PROTECTION AS REQUIRED.
2
ENSURE PROPER GROUNDING OF ACTUATOR CASE.
SPST
1
2
V
2
ACTUATOR
M22289A
Fig. 14. Wiring for line-voltage two-position control.
Page 11

Fig. 15. Wiring for SPDT on/off control.
SPDT
24 VAC
1
1
2
3
2
LINE VOLTAGE POWER SUPPLY.
PROVIDE DISCONNECT MEANS AND
OVERLOAD PROTECTION AS REQUIRED.
24 VDC SUPPLY ACCEPTABLE.
SET SWITCH TO FLOATING.
M35122
ACTUATOR
V
OR +
OR N/A
FEEDBACK
5
4
3
1
2
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
3
4
ENSURE PROPER GROUNDING OF ACTUATOR CASE.
4
NOTES: AFTER TRANSFORMER SELV–SAFETY
EXTRA LOW VOLTAGE FOR INTERNAL
CIRCUIT AND MOTOR.
ACTUATOR
SPST
24 VAC
1
1
2
3
2
LINE VOLTAGE POWER SUPPLY.
PROVIDE DISCONNECT MEANS AND
OVERLOAD PROTECTION AS REQUIRED.
24 VDC SUPPLY ACCEPTABLE.
SET SWITCH TO FLOATING.
V
OR +
OR N/A
FEEDBACK
5
4
3
1
2
M35123
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
3
4
ENSURE PROPER GROUNDING OF ACTUATOR CASE.
4
NOTES: AFTER TRANSFORMER SELV–SAFETY
EXTRA LOW VOLTAGE FOR INTERNAL
CIRCUIT AND MOTOR.
ACTUATOR
SPST
24 VAC
1
1
2
3
2
LINE VOLTAGE POWER SUPPLY.
PROVIDE DISCONNECT MEANS AND
OVERLOAD PROTECTION AS REQUIRED.
24 VDC SUPPLY ACCEPTABLE.
SET SWITCH TO MODULATING.
V
OR +
OR N/A
FEEDBACK
5
4
3
1
2
M35124
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
3
4
ENSURE PROPER GROUNDING OF ACTUATOR CASE.
4
NOTES: AFTER TRANSFORMER SELV–SAFETY
EXTRA LOW VOLTAGE FOR INTERNAL
CIRCUIT AND MOTOR.
5
A JUMPER WIRE IS NOT REQUIRED BETWEEN
PIN 1 AND PIN 3 IF SWITCH IS SET TO 10-2 VDC.
5
ACTUATOR
0/2 TO 10 VDC
PROPORTIONING
CONTROLLER
24 VAC
1
1
2
3
2
LINE VOLTAGE POWER SUPPLY. PROVIDE DISCONNECT
MEANS AND OVERLOAD PROTECTION AS REQUIRED.
24 VDC SUPPLY ACCEPTABLE.
SET SWITCH TO MODULATING.
V
OR +
OR N/A
FEEDBACK
–
+
FEEDBACK
5
4
3
1
2
M35095
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
3
4
ENSURE PROPER GROUNDING OF ACTUATOR CASE.
4
NOTES: AFTER TRANSFORMER SELV–SAFETY EXTRA LOW VOLTAGE
FOR INTERNAL CIRCUIT AND MOTOR.
ACTUATOR
4 TO 20 mA
PROPORTIONING
CONTROLLER
24 VAC
1
1
2
3
2
490 TO 510
OHMS,
1/2 W
MINIMUM
LINE VOLTAGE POWER SUPPLY.
PROVIDE DISCONNECT MEANS AND
OVERLOAD PROTECTION AS REQUIRED.
24 VDC SUPPLY ACCEPTABLE.
SET SWITCH TO MODULATING.
V
OR +
OR N/A
FEEDBACK
–
+
FEEDBACK
5
4
3
1
2
M35096
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
3
4
ENSURE PROPER GROUNDING OF ACTUATOR CASE.
4
NOTES: AFTER TRANSFORMER SELV–SAFETY EXTRA LOW VOLTAGE
FOR INTERNAL CIRCUIT AND MOTOR.
MSXX10, MSXX20 SERIES
1
NOTES: AFTER TRANSFORMER SELV–SAFETY
EXTRA LOW VOLTAGE FOR INTERNAL
CIRCUIT AND MOTOR.
1
2
3
4
24 VAC
2
LINE VOLTAGE POWER SUPPLY.
PROVIDE DISCONNECT MEANS AND
OVERLOAD PROTECTION AS REQUIRED.
24 VDC SUPPLY ACCEPTABLE.
SET SWITCH TO FLOATING.
ENSURE PROPER GROUNDING OF ACTUATOR CASE.
4
Fig. 18. Wiring for floating control.
1
2
3
4
5
3
ACTUATOR
V
OR +
OR N/A
FEEDBACK
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
M35125
Fig. 16. Wiring for SPST on/off control.
Fig. 17. Wiring for two-wire SPST on/off control.
Fig. 19. Wiring for 0/2-10 Vdc modulating controllers.
Fig. 20. Wiring for 4-20 mA modulating controllers.
11 63-2607—26
Page 12

MSXX10, MSXX20 SERIES
ACTUATOR
CONTROLLER
24 VAC
1
1
2
LINE VOLTAGE POWER SUPPLY. PROVIDE DISCONNECT MEANS
AND OVERLOAD PROTECTION AS REQUIRED.
SET SWITCH TO FLOATING.
V
OR +
OR N/A
FEEDBACK
HOT
COM
5
4
3
1
2
M35126
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
2
3
3
ENSURE PROPER GROUNDING OF ACTUATOR CASE.
NOTES: AFTER TRANSFORMER SELV–SAFETY EXTRA LOW VOLTAGE
FOR INTERNAL CIRCUIT AND MOTOR.
Fig. 21. Wiring for high side (triac source) floating
control.
1
CONTROLLER
NOTES: AFTER TRANSFORMER SELV–SAFETY
EXTRA LOW VOLTAGE FOR INTERNAL
CIRCUIT AND MOTOR.
24 VAC
HOT
COM
LINE VOLTAGE POWER SUPPLY. PROVIDE DISCONNECT
1
MEANS AND OVERLOAD PROTECTION AS REQUIRED.
2
SET SWITCH TO FLOATING.
ENSURE PROPER GROUNDING OF ACTUATOR CASE.
3
3
Fig. 22. Wiring for low side (triac sink) floating control.
63-2607—26 12
1
2
3
4
5
2
ACTUATOR
V
OR +
OR N/A
FEEDBACK
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
M35127
1
1
CONTROLLER
NOTES: AFTER TRANSFORMER SELV–SAFETY EXTRA LOW VOLTAGE
FOR INTERNAL CIRCUIT AND MOTOR.
24 VAC
HOT
COM
LINE VOLTAGE POWER SUPPLY. PROVIDE DISCONNECT
1
MEANS AND OVERLOAD PROTECTION AS REQUIRED.
2
SET SWITCH TO FLOATING.
ENSURE PROPER GROUNDING OF ACTUATOR CASE.
3
24 VAC
ACTUATOR
1
2
3
4
5
V
OR +
OR N/A
FEEDBACK
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
M35128
3
2
Fig. 23. Wiring for low side (triac sink) floating control
using separate transformers.
ACTUATOR
1
0/2 TO 10 VDC
PROPORTIONING
CONTROLLER
FEEDBACK
NOTES: AFTER TRANSFORMER SELV–SAFETY
EXTRA LOW VOLTAGE FOR INTERNAL
CIRCUIT AND MOTOR.
1
2
3
4
24 VAC
2
–
+
LINE VOLTAGE POWER SUPPLY.
PROVIDE DISCONNECT MEANS AND
OVERLOAD PROTECTION AS
REQUIRED.
24 VDC SUPPLY ACCEPTABLE.
SET SWITCH TO MODULATING.
ENSURE PROPER GROUNDING OF ACTUATOR CASE.
1
4
2
3
4
5
3
1
2
3
4
5
3
V
OR +
OR N/A
FEEDBACK
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
ACTUATOR
V
OR +
OR N/A
FEEDBACK
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
M35097
Fig. 24. Wiring for 0/2-10 Vdc modulating controller
operating multiple actuators.
Page 13

Fig. 25. Wiring for Sylk BUS, MS31 series.
S-BUS
LINE VOLTAGE POWER SUPPLY. PROVIDE
DISCONNECT MEANS AND OVERLOAD
PROTECTION AS REQUIRED.
24 VDC SUPPLY ACCEPTABLE.
M35129
1
2
1
2
S-BUS
24 VAC
ACTUATOR
1
2
3
4
5
S-BUS
S-BUS
V
S1 S2
S3
S4 S5
S6
85º
7º
NOTES: AFTER TRANSFORMER SELV–SAFETY EXTRA LOW
VOLTAGE FOR INTERNAL CIRCUIT AND MOTOR.
ACTUATOR
0/2 TO 10 VDC
PROPORTIONING
CONTROLLER
24 VAC
1
1
2
3
4
4
2
LINE VOLTAGE POWER SUPPLY. PROVIDE
DISCONNECT MEANS AND OVERLOAD
PROTECTION AS REQUIRED.
24 VDC SUPPLY ACCEPTABLE.
SET SWITCH TO MODULATING.
LOCATE RESISTOR AT THE LAST ACTUATOR.
V
OR +
OR N/A
FEEDBACK
–
+
FEEDBACK
5
4
3
1
2
M35098
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
3
ACTUATOR
V
OR +
OR N/A
FEEDBACK
5
4
3
1
2
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
3
500
OHMS
5
ENSURE PROPER GROUNDING OF ACTUATOR CASE.
5
NOTES: AFTER TRANSFORMER SELV–SAFETY
EXTRA LOW VOLTAGE FOR INTERNAL
CIRCUIT AND MOTOR.
ACTUATOR
0/2 TO 10 VDC
PROPORTIONING
CONTROLLER
24 VAC
1
1
2
3
2
LINE VOLTAGE POWER SUPPLY.
PROVIDE DISCONNECT MEANS AND
OVERLOAD PROTECTION AS REQUIRED.
24 VDC SUPPLY ACCEPTABLE.
SET SWITCH TO MODULATING.
V
OR +
OR N/A
FEEDBACK
–
+
FEEDBACK
5
4
3
1
2
M35099
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
3
ACTUATOR
V
OR +
OR N/A
FEEDBACK
5
4
3
1
2
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
3
4
ENSURE PROPER GROUNDING OF ACTUATOR CASE.
4
NOTES: AFTER TRANSFORMER SELV–SAFETY
EXTRA LOW VOLTAGE FOR INTERNAL
CIRCUIT AND MOTOR.
MSXX10, MSXX20 SERIES
Fig. 26. Wiring for 4-20 mA modulating controller
operating multiple actuators.
Fig. 27. Wiring for 0/2-10 Vdc modulating controller
operating multiple actuators as master/drone.
13 63-2607—26
Page 14

MSXX10, MSXX20 SERIES
ACTUATOR
0/2 TO 10 VDC
PROPORTIONING
CONTROLLER
1
2
3
2
LINE VOLTAGE POWER SUPPLY.
PROVIDE DISCONNECT MEANS AND
OVERLOAD PROTECTION AS REQUIRED.
24 VDC SUPPLY ACCEPTABLE.
SET SWITCH TO MODULATING.
V
OR +
OR N/A
FEEDBACK
5
4
3
1
2
M35100
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
3
ACTUATOR
V
OR +
OR N/A
FEEDBACK
5
4
3
1
2
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
3
24 VAC
1
24 VAC
1
2
24 VAC
1
HOT
COM
–
+
4
ENSURE PROPER GROUNDING OF ACTUATOR CASE.
NOTES: AFTER TRANSFORMER SELV–SAFETY
EXTRA LOW VOLTAGE FOR INTERNAL
CIRCUIT AND MOTOR.
M28934
ACTUATOR
BLU
BRN
WHT
BLK
RED
5
4
3
1
2
Dir
Service/Off
Rev
2... 10 V
0... 10 V
10... 0 V
10... 2 V
V
OR +
FEEDBACK
POS 50%
M28935
ACTUATOR
BLK
RED
5
4
3
1
2
Dir
Service/Off
Rev
2... 10 V
0... 10 V
10... 0 V
10... 2 V
V
M28936
ACTUATOR
GRY
PPL
YEL
ORG
4
3
1
2
PNK5
TAN6
Fig. 29. MS7510W2008/2206; MS7520W2007/2205
Floating Modulating.
Fig. 28. Wiring for 0/2-10 Vdc modulating controller
operating multiple actuators with separate
transformers.
Typical Wiring With Cables
See Fig. 29 through 31 for wiring actuators with cables
(whips). See Fig. 11 through 28 for typical wiring details for
actuators without cables (whips).
63-2607—26 14
Fig. 30. MS8110W1008/1206; MS81200W1007/1205
Two Position Low.
Fig. 31. Switch only models.
Page 15

OPERATION
ACTUATOR
0/2 TO 10 VDC
PROPORTIONING
CONTROLLER
24 VAC
1
1
2
3
2
LINE VOLTAGE POWER SUPPLY.
PROVIDE DISCONNECT MEANS AND
OVERLOAD PROTECTION AS REQUIRED.
24 VDC SUPPLY ACCEPTABLE.
SET SWITCH TO MODULATING.
V
OR +
OR N/A
FEEDBACK
–
+
FEEDBACK
5
4
3
1
2
M19576A
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
3
SPDT
ACTUATOR
0/2 TO 10 VDC
PROPORTIONING
CONTROLLER
24 VAC
1
1
2
3
2
LINE VOLTAGE POWER SUPPLY.
PROVIDE DISCONNECT MEANS AND
OVERLOAD PROTECTION AS REQUIRED.
24 VDC SUPPLY ACCEPTABLE.
SET SWITCH TO MODULATING.
V
OR +
OR N/A
FEEDBACK
–
+
FEEDBACK
5
4
3
1
2
M19577A
2-10 VDC
10-2 VDC
0-10 VDC
10-0 VDC
Fltg, fwd
Fltg, rev
3
SPST
M19578
95
SWITCH CONNECTIONS
ACTUATOR POSITION
85
7
3
0
S4S1
S6
S5
S3
S2
CONTACT OPEN
CONTACT MADE
+
-
3
+
-
The actuator is designed to be used in ventilating and air
conditioning installations to operate valves, dampers,
ventilation flaps and louvers requiring torque up to the
rating. (For ratings, see the Specifications section.) If the
power fails, the actuator will spring return to the start
position.
The actuator is operated by a proportional controller. When
using a proportional controller, the actuator drives toward
its fully open position when the input signal increases; the
actuator drives toward the fully closed position when the
input signal decreases. The actuator stops when the input
signal reaches the desired proportional control point.
IMPORTANT
The actuator is designed to respond to DDC
Controller instantaneous contact closures. Take
care not to short cycle the actuator. Unstable
damper control can cause premature actuator failure.
MSXX10, MSXX20 SERIES
Actuator Override
To override the control signal (for freeze protection or
similar applications):
1. Override to full open:
a. Disconnect the input signal (from terminal 3).
b. Apply 24 Vac to terminal 3.
c. See Fig. 32.
2. Override to full closed:
a. Disconnect the input signal (from terminal 3).
b. See Fig. 33.
Fig. 33. Override to full close.
End Switches
Some models include end switches (see Table 2). For wiring
details, see Fig. 12.
SPDT Switches (Fig. 34)
For SPDT end switch wiring, see Fig. 12.
Fig. 32. Override to full open.
Fig. 34. SPDT End Switch Operation.
15 63-2607—26
Page 16

MSXX10, MSXX20 SERIES
CHECKOUT
Modulating/Floating Operation
1. Mount actuator for required application (either
clockwise or counterclockwise rotation to
open the damper).
2. Connect power to terminals 1 and 2. (See Fig. 12 and
Tab le 6 .)
3. Set “Mode Select” dial to desired control signal.
(See Fig. 4 and Table 5.)
4. Apply control signal for actuator 100% position.
(See Fig. 12 and Table 6.)
a. (0)2-10 Vdc: apply 10 Vdc signal to terminal 3.
b. 10-(0)2 Vdc: apply (0)2 Vdc signal to terminal 3.
c. (0)4-20 mA: apply 20 mA signal to terminal 3.
d. 20-(0)4mA: apply (0)4 mA signal to terminal 3.
e. Floating: apply 24 Vac to appropriate CW (3) or
5. Actuator drives to 100% position.
6. Apply control signal for actuator 0% position.
7. Actuator drives to 0% position.
Spring Return Operation
1. Mount actuator for required application (either
2. Connect power to terminals 1 and 2. (See Fig. 12 and
3. Set “Mode Select” dial to desired control signal.
4. Apply control signal for actuator 50% position.
5. Allow the actuator to drive to 50% position.
6. Disconnect wire from terminal 1.
7. Actuator spring returns to 0% position.
8. Re-connect wire to terminal 1, actuator drives
Feedback Operation
1.
2. Apply the same signal as in step 4 of Modulating
CCW (4) terminal.
(See Fig. 12 and Table 6.)
a. (0)2-10 Vdc: apply (0)2 Vdc signal to terminal 3.
b. 10-(0)2 Vdc: apply 10 Vdc signal to terminal 3.
c. (0)4-20 mA: apply (0)4 mA signal to terminal 3.
d. 20-(0)4mA: apply 20 mA signal to terminal 3.
e. Floating: apply 24 Vac to appropriate CW (3) or
CCW (4) terminal.
clockwise or counterclockwise rotation to
open the damper).
Tab le 6 .)
NOTE: For two-position models skip to step 5.
(See Fig. 4 and Table 5.)
(See Fig. 12 and Table 6.)
a. Vdc Input Signal: apply 5-6 Vdc signal to terminal 3.
b. mA Input Signal: apply 10-12 mA signal to termi-
nal 3.
c. Floating: apply 24 Vac to appropriate CW (3) or
CCW (4) terminal.
towards 100% position.
Connect a multi-meter, set for Vdc, to terminals 2 and 5.
Operation.
3.
The multi-meter reading increases to match the input
signal as actuator drives towards 100% position.
4. Apply the same signal as in step 6 of Modulating
Operation.
5. The multi-meter reading decreases to match the
input signal as actuator drives towards 0% position.
Direct Checkout
1. Mount actuator for required application (either
clockwise or counterclockwise rotation to
open the damper).
2.
Check damper position and make sure that 24 Vac is
present at the appropriate connections. (See Fig. 11.)
3. Apply control signal to the appropriate connections
to move the damper to the opposite position. The
actuator should drive the damper.
4. If actuator does not run, verify that the actuator is
properly installed for either clockwise or counterclockwise rotation.
5. If actuator is correctly installed and still does not
run, replace the actuator.
Two-Position Checkout
1. Mount actuator for required application (either
clockwise or counterclockwise rotation to
open the damper).
2. Check damper position and make sure that power is
present at terminals 1 and 2.
3. Actuator drives to 100% position.
4. Disconnect power from terminals 1 and 2.
5. Actuator spring-returns to 0% position.
6. If actuator is correctly installed and does not run,
replace the actuator.
Sylk-enabled (S-BUS) Checkout
1. Mount actuator for required application (either
clockwise or counterclockwise rotation to open the
damper).
2. Connect Sylk-enabled (S-BUS) controller to terminals 3 and 4.
3. Connect power to terminals 1 and 2.
4. Select the proper letters on the A-F and G-L dials to
correspond with the address you wish to use (as
seen in the table next to the dials). Be sure to select
“Direct” or “Reverse” as is needed for your application.
5. Apply S-BUS command via the connected Sylkenabled controller for actuator full open or full
closed position. Local test mode may be selected by
utilizing the “L” field on the G-L dial. Remember to
reset the dials to the appropriate settings for your
address of choice after the test has been completed.
Honeywell Building Technologies
In the U.S.:
Honeywell
715 Peachtree Street NE
Atlanta, GA 30308
customer.honeywell.com
® U.S. Registered Trademark
© 2019 Honeywell International Inc.
63-2607—26 M.S. Rev. 10-19
Printed in United States
 Loading...
Loading...