

Page 1
Put Bar Code Here
PIR Application Guide for TB7200
TB7300 Series
Thermostat with
Occupancy Sensor
Contents
Product Overview ............................................................. 1
Applications ...................................................................... 1
More Information .............................................................. 1
Occupancy Sensor Cover Models ....................................2
Occupancy Sensing Configuration Parameters ................ 2
Important Things to Know ................................................ 3
Typical Commercial Applications ..................................... 7
Typical Lodging Applications ............................................ 20
Installation ........................................................................ 33
Specifications ................................................................... 35
and TB7300 Series Thermostats
APPLICATION GUIDE
Typical applications include:
• Stand-alone lodging FCU applications
• Networked lodging FCU applications fully integrated to a
reservation system
• Networked or stand-alone conference rooms
• Networked or stand-alone classrooms units
• Any commercial offices that have random occupancy
schedules during occupied hours as dictated by the
function of the tenant
• Any controlled piece of HVAC equipment that may yield
energy savings with the introduction of a new automatic
stand-by level of occupancy.
MORE INFORMATION
PRODUCT OVERVIEW
This application guide provides application information and for
Honeywell TB7200 and TB7300 Series communicating
thermostats. When equipped with an occupancy sensor cover
or a remote PIR sensor (wired to one of the remote inputs),
these thermostats provide advanced active occupancy logic,
which automatically switches occupancy levels from Occupied
to Stand-by to Unoccupied as required by local activity being
present or not. TB7200 and TB7300 Series thermostats can
be ordered with an occupancy sensor cover or have one
added at a later time. All thermostats are PIR ready. The
occupancy sensor covers have an embedded, passive-infrared motion detector designed to work with TB7200 and
TB7300 thermostats. This advanced occupancy functionality
provides advantageous energy savings during occupied hours
without sacrificing occupant comfort.
APPLICATIONS
The range of applications covered with the PIR occupancy
logic can be segmented into two important categories in terms
of functionality. Both use different settings and have different
behaviors:
• Hotel and lodging applications
• Standard commercial applications
The additional following documentation is available at Honeywell Buildings Forum (http://buildingsforum.honeywell.com
• TB7200 Installation Instructions (form number 62-2019)
• TB7300 Installation Instructions (form number 62-2018)
• Occupancy Sensor Cover for TB7200/TB7300/TB7600
Series Thermostats (62-2021)
• BACnet Integration Manual for TB7200 & TB7300 (form
number 63-4524) for detailed integration information.
• Wireless Reference Manual for TB7200, TB7300, and
TB7600 Series (form number 63-4522).
).
63-4526-01
Page 2
PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
OCCUPANCY SENSOR COVER MODELS
PIR Cover OS Number Description
TB-PIR-FCU-C PIR cover with Commercial FCU interface TB73x0X5014(X)
TB-PIR-FCU-L PIR cover with Hotel/Lodging interface TB73x5X5014(X)
TB-PIR-ZN PIR cover for zoning thermostats All TB7200 Series
Compatible with the
Following Thermostats
OCCUPANCY SENSING CONFIGURATION PARAMETERS
The following configuration parameters are specifically provided as standard on all TB7200 and TB7300 Series thermostats.
They are associated with the advanced occupancy functionality introduced with the addition of a PIR cover or a remote PIR
sensor. These parameters will allow the installer to set the thermostat occupancy functions exactly as required by the application.
Their functionality only becomes active if a PIR occupancy sensor cover is connected or one of the binary/digital input is
configured to use a remote PIR sensing device.
Configuration Parameter Description of Configuration parameter
It is possible to configure some of the digital or binary inputs to effectively use the
BI or DI input door setting
advanced functions allowed by the installation of a door switch contact. This function is
mostly used with fan coil units in lodging applications
Default: None for no function used
Stand-by Heating Setpoint:
Default: 69 °F (20.5 °C)
Stand-by Cooling Setpoint:
Default: 78 °F (25.5 °C)
Stand-by Time:
Default 0.5 hours
Unoccupied Time:
Default 0.0 hours
When a door contact is used and configured, the Stand-By timer is no longer active.
The occupancy toggle between occupied and stand-by is now dictated by both the door
contact and the PIR cover.
• Movement detected by the PIR cover = Always occupied
• Door opens / closes detected by the door switch = Stand-by mode
This parameter sets the stand-by heating setpoint value.
The set value of this parameter should reside between the occupied and unoccupied
heating setpoints and make sure that the difference between the stand-by and occupied
value can be recovered in a timely fashion when movement is detected in the zone.
Adjustable from 40 to 90 °F ( 4.5 to 32 °C ) in 0.5 degree increments.
This parameter sets the stand-by cooling setpoint value.
The set value of this parameter should reside between the occupied and unoccupied
cooling setpoints and make sure that the difference between the stand-by and occupied
value can be recovered in a timely fashion when movement is detected in the zone.
Adjustable from 54 to 100 °F ( 12.2 to 37.8 °C ) in 0.5 degree increments.
This parameter sets the time delay between the moment where the PIR cover detected
the last movement in the area and the time which the thermostat stand-by mode and
setpoints become active.
Adjustable from 0.5 to 24 hours in .5hr increments
If no movement is detected in the area and the current mode is stand-by, this parameter
will then set the time delay between the moment where the thermostat toggles to standby mode and the time which the thermostat unoccupied mode and setpoints become
active.
The factory value or 0.0 hours: Setting this parameter to its default value of 0.0 hours
disables the unoccupied timer. This prevents the thermostat from drifting from stand-by
mode to unoccupied mode when PIR functions are used
Adjustable from 0.0 to 24 hours in .5hr increments
63-4526—01 2
Page 3
PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
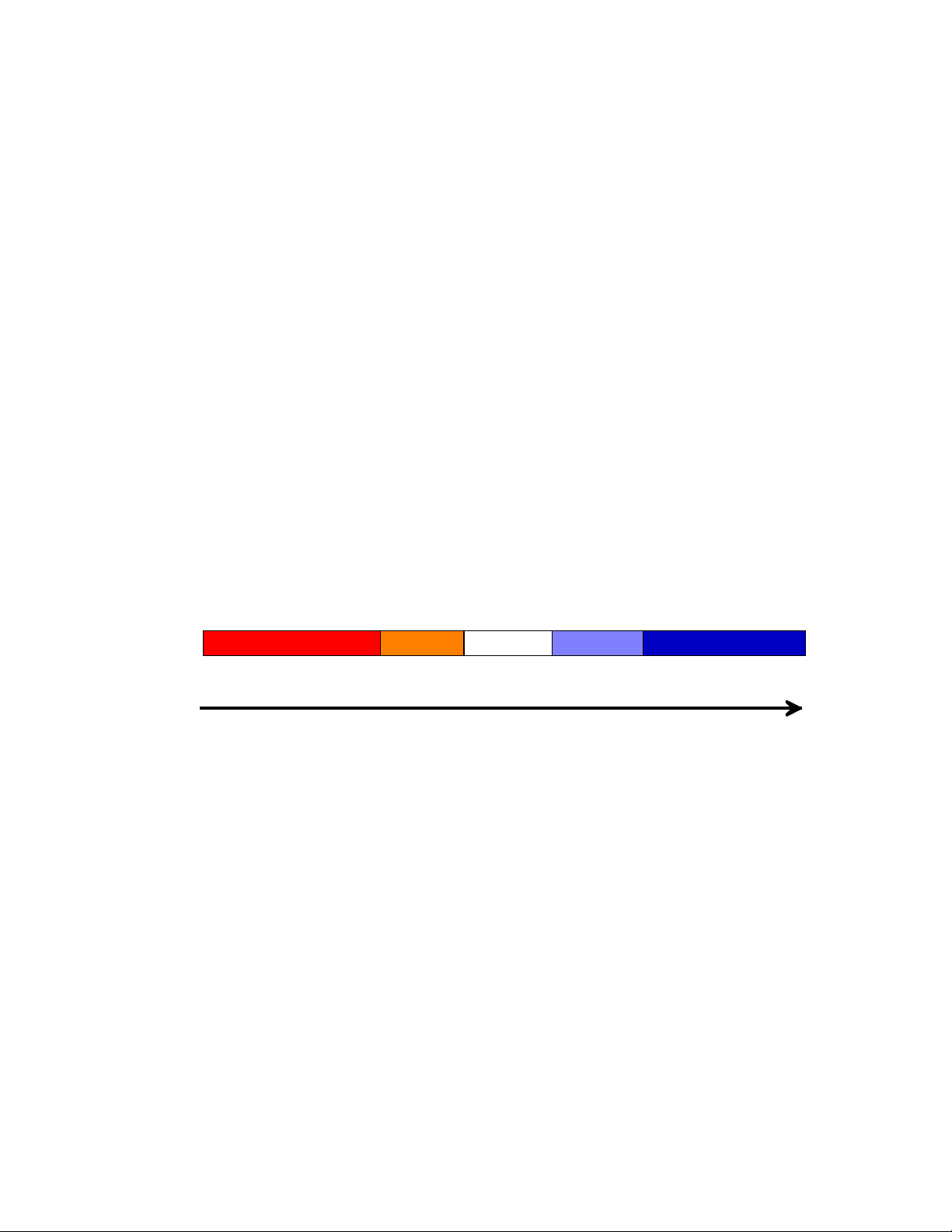
Occ Heat
= 72F
Occ Cool
= 75F
St-By Heat
= 69F
Unocc Heat
= 65F
St-By Cool
= 78F
Unocc Cool
= 82F
Room Temperature
Deadband
IMPORTANT THINGS TO KNOW
When reviewing the following document and planning an application using a Honeywell thermostat with PIR functionality, please
remember the important following notes:
• Configuration of PIR Functions: All PIR application related configuration parameters are displayed in the configuration menu
or available as objects in the network object list. However, the advanced occupancy functionality of a PIR attached to a
thermostat is only enabled if either:
— A Honeywell occupancy sensor cover is installed on the thermostat
— A remote input is configured as a remote PIR sensor ( Motion NO or Motion NC )
• PIR Cover Warm-Up Period: When occupancy sensor accessory cover is used and a thermostat is powered up; there will be a
1 minute warm up period before any local movements can being detected and acknowledged by the PIR sensing device. The
local status LEDs for the occupancy sensor cover will also not be active during that one minute period.
Only when that 1 minute period has elapsed after initial power up of the thermostat will the PIR functionality and local
movement status LEDs be activated.
• Setpoints: The implemented stand-by setpoints are under the same limitations and restrictions as the occupied and
unoccupied ones. This means that:
— They use exactly the same range:
• Heating setpoints: 40 to 90 °F ( 4.5 to 32.0 °C )
• Cooling setpoints: 54 to 100 °F ( 12.0 to 37.5 °C )
— They are always limited by the applied minimum deadband configuration
They will be limited by the Heat Maximum and Cool Minimum configuration parameters
All individual cooling setpoints and all individual heating setpoints can be set independently. However, A typical arrangement
will always have the set value of the stand-by parameters residing between the corresponding occupied and unoccupied setpoint values.
The installer must make sure that the difference between the stand-by and occupied value can be recovered in a timely
fashion when movement is detected in the zone and large enough to warrant maximum energy savings.
• Application Range: The range of applications covered with the PIR occupancy logic can be segmented in 2 categories in
terms of functionality. Both use different settings and have different behaviors:
— Hotel and lodging applications
— Standard commercial applications
Hotel and Lodging Applications can benefit the addition of an entry door switch wired to one of the appropriately configured
remote input of a thermostat.
When a door contact is used and configured, the Stand-By timer and its configuration are no longer active or used. The occupancy front toggle between occupied and stand-by is now simply dictated by both the door contact and the PIR sensing device
used.
If movements are detected by the PIR cover, the room will always be occupied. The switch back to stand-by mode will only
happen if the door switch toggles open / close. Please review attached lodging application examples in the document for more
information
Standard Commercial Applications would not typically use a remote door switch contact attached to the thermostat.
PIR occupancy functionality is simply dictated by both the Stand-By Timer and Unoccupied Timer configuration value and
movements being present or not in the area. Please review attached typical commercial application examples in the document
for more information
3 63-4526—01
Page 4
PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
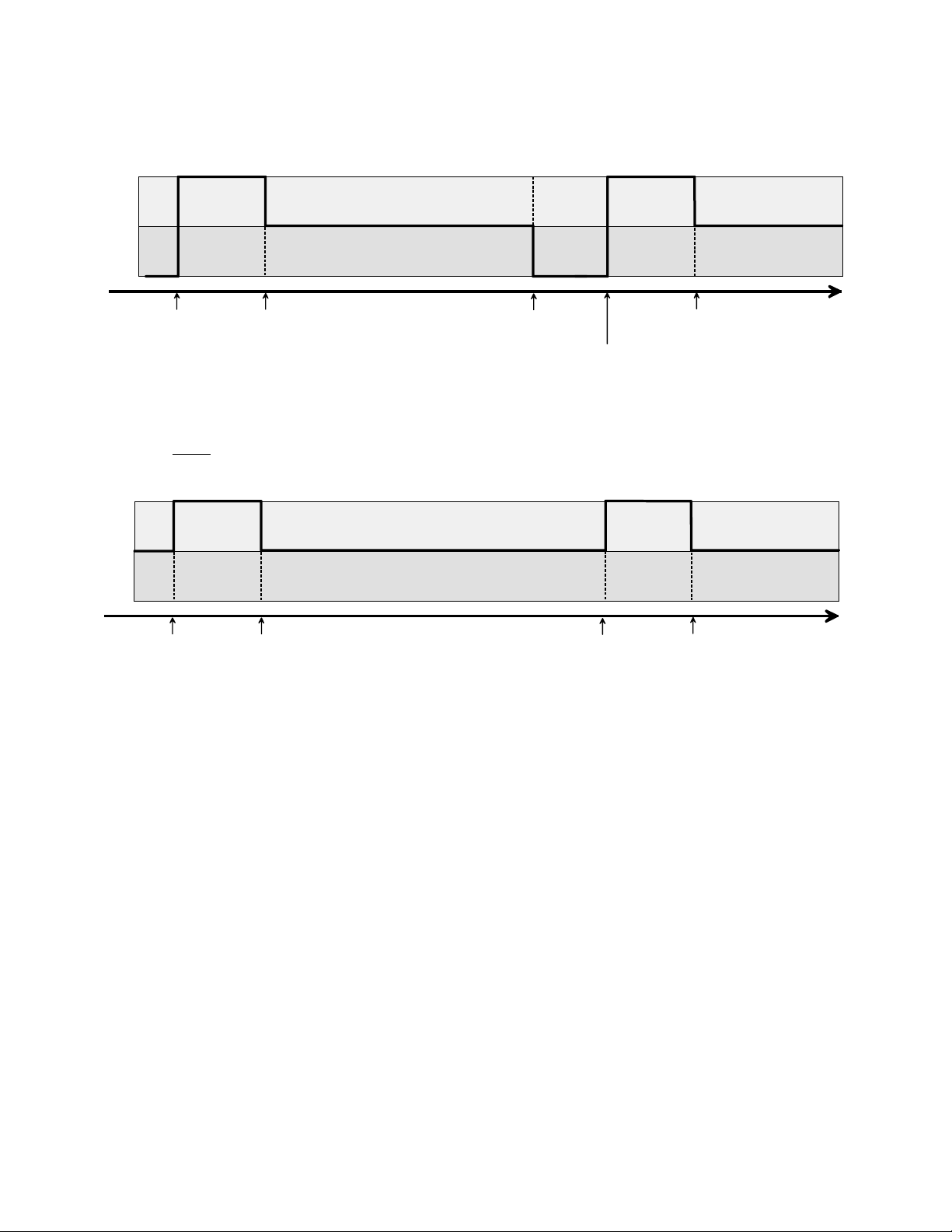
Unoccupied Time
= 6 Hours
Stand-By Time
= 2 Hours
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Unoccupied Time Elapsed
= Unoccupied Mode
Last Movement Detected
by PIR Activity
Time
Stand-By Time Elapsed
= Stand-By Mode
Stand-By Time
= 2 Hours
Last Movement Detected
by PIR Activity
Unoccupied Time
= 6 Hours
Unoccupied Time
= 0 Hours
Stand-By Time
= 2 Hours
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Last Movement Detected
by PIR Activity
Time
Stand-By Time Elapsed
= Stand-By Mode
Stand-By Time
= 2 Hours
Last Movement Detected
by PIR Activity
Unoccupied Time
= 0 Hours
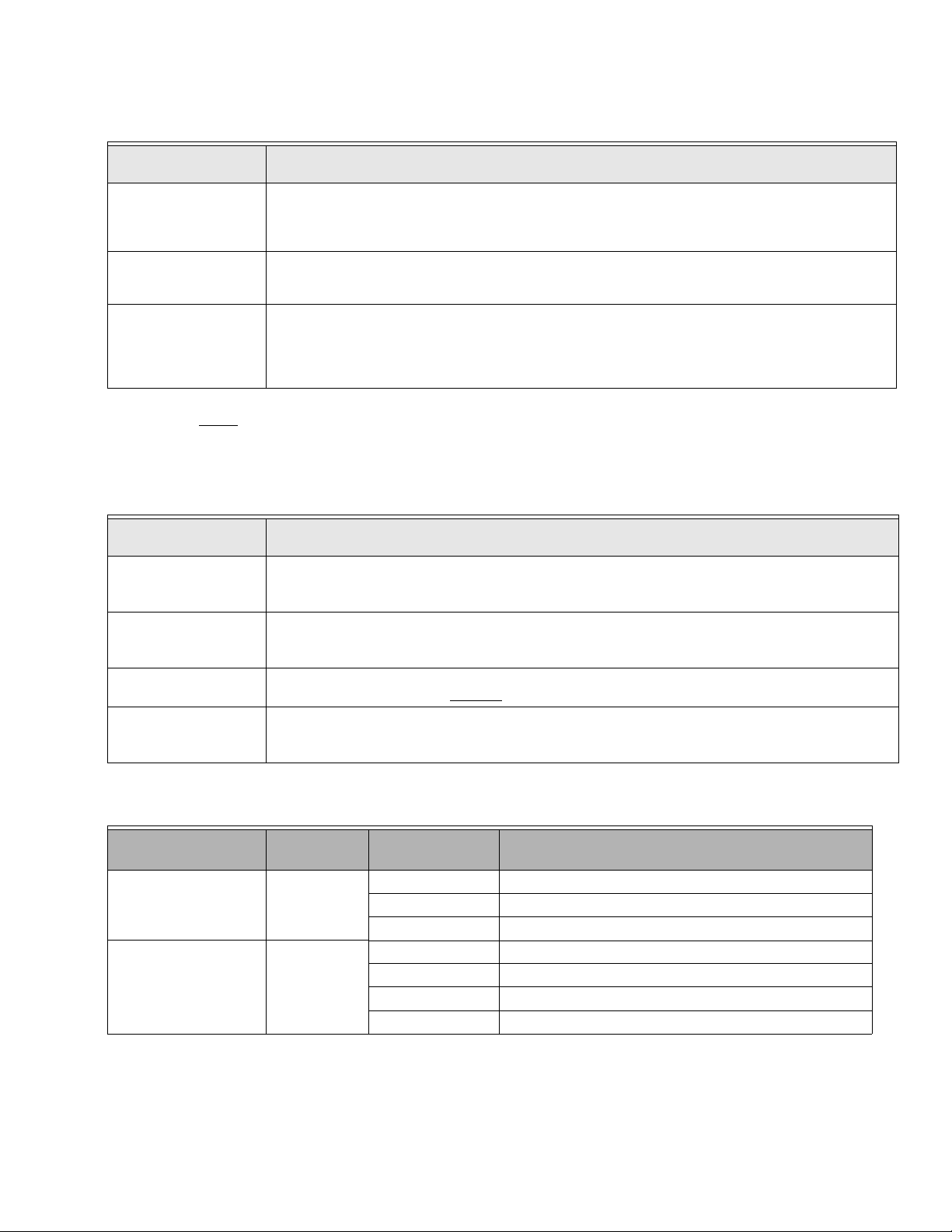
• Unoccupied Timer Disable: In certain application cases, it may be desired to never let the local area enter the unoccupied
mode and always stay at the stand-by occupancy level when no activity is present.
This allows for advanced flexibility when used in conjunction with a network or in cases when areas always need to be on
stand-by status ready to respond to demand at any point in time.
Fig. 1. Unoccupied timer set 6 Hours and stand-by timer set to 2 hours
When the local PIR occupancy routine is running at the thermostat, the zone will drift into unoccupied mode when the unoccupied timer is set above
its factory default value of 0.0 hours
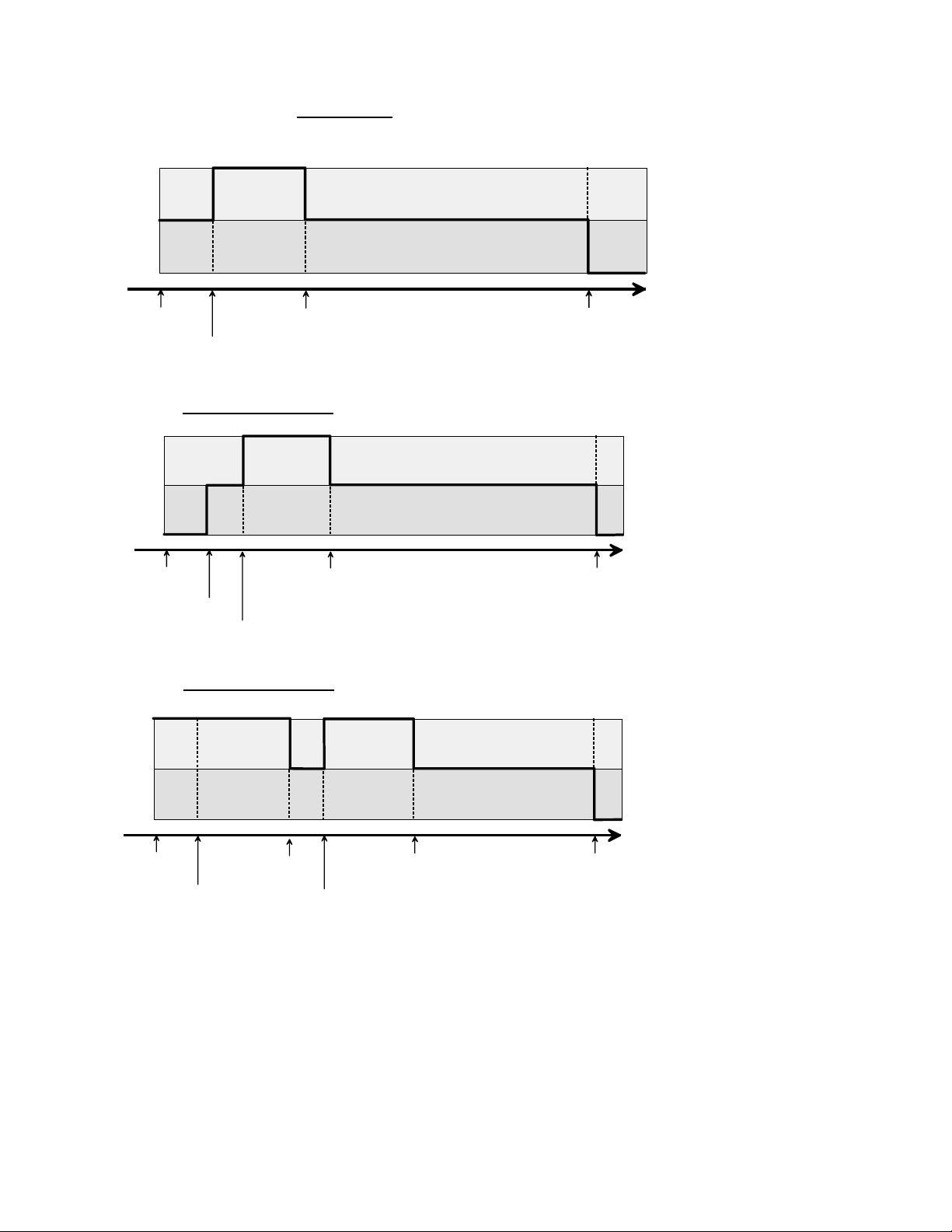
Fig. 2. Unoccupied timer set 0 Hours and stand-by timer set to 2 hours
When the local PIR occupancy routine is running at the thermostat, the zone will never drift into unoccupied mode when the
unoccupied timer is set to its factory default value of 0.0 hours
• Network Priority and Local Occupancy Routine: The internal PIR occupancy logic implementation in conjunction with
network commands has been conceived to give the most flexibility while allowing for simple implementation and use.
63-4526—01 4
Page 5
PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Network Occupancy Commands: All TB7200 and TB7300 series thermostat have 3 occupancy command levels. This is
valid for all BACnet-MS-TP and wireless thermostats.
Table 1. Three levels occupancy state level commands.
State Occupancy
Function
Command Levels
Local occupancy • Releases the thermostat to its own occupancy schemes
• This may be a PIR sensing device, a local schedule or an occupancy routine done by one of the
digital input
• This state command level is used to effectively release the thermostat to use the PIR functions
Occupied • Leaves the thermostat in occupied mode and cancels any local occupancy functions, including the
PIR occupancy routine
• This state command level is used to force the zone to be always occupied
Unoccupied • Leaves the thermostat in unoccupied mode and cancels any local occupancy functions, including
the PIR occupancy routine
• This state command level is used to force the zone to be always unoccupied.
• The only local possible command is a local override if the thermostat is equipped with such an
option or if the local keypad lockout allows so
Stand-by is never
a commandable level. It only exists as a feedback status level.
Network Occupancy Feedback Status: All TB7200 and TB7300 series thermostats have 4 occupancy feedback levels. This
is valid for BACnet-MS-TP or wireless models.
State Occupancy
Function
Command Levels
Override / By-Pass Indicates that the zone is currently local occupied override mode from the unoccupied state
This function will operate like a normal local override and its time value is as dictated by the ToccTime
configuration parameter setting
Occupied Indicates that the zone is currently occupied
This effective feedback state may be driven by a local occupancy routine like a PIR sensor or by an
occupied network command
Stand-By Indicates that the zone is currently in stand-by mode
This effective feedback state can only be driven by a local PIR occupancy routine
Unoccupied Indicates that the zone is currently unoccupied
This effective feedback state may be driven by a local occupancy routine like a PIR sensor or by an
unoccupied network command
1. MV Objects Used for Occupancy Commands and Feedback
Object Name
BACnet
Object ID*
BACnet/Wireless
Index
Text
1 Local Occupancy ( PIR or Internal Schedule )
Occupancy Command MV 13
2 Occupied
3 Unoccupied
1Occupied
Effective Occupancy MV 83
2 Unoccupied
3 Temporary Occupied
4 Stand-By
* MV Object IDs only apply to BACnet thermostats.
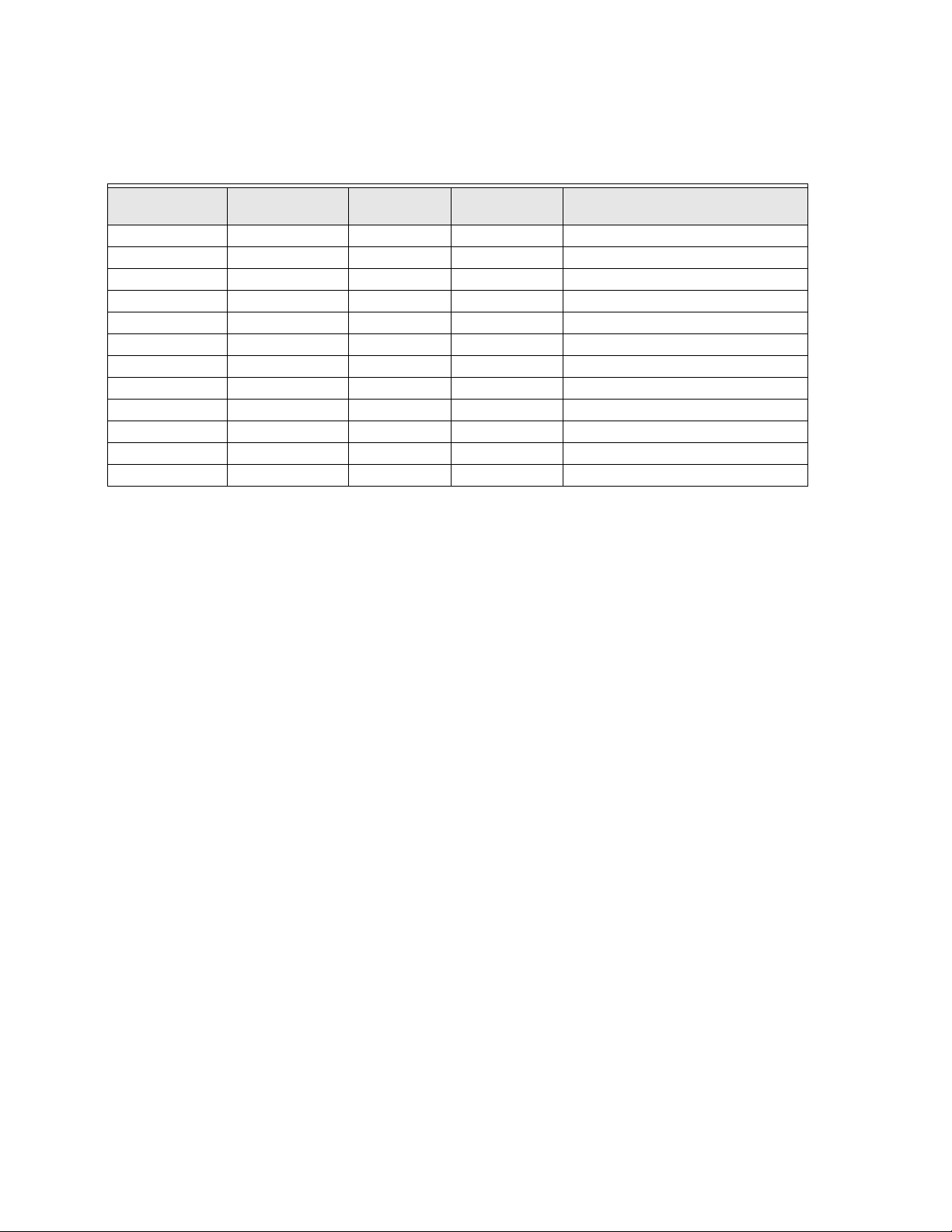
Initial State, PIR Occupancy Routine: The initial effective occupancy state on power-up with either a PIR cover is
present or one of the inputs is configured for a remote PIR sensor is always:
• In stand-alone applications at power-up: Local occupancy mode = Stand-by
• From a previous network unoccupied command: Local occupancy mode = Stand-by
• From a previous network occupied command: Local occupancy mode = Occupied.
5 63-4526—01
Page 6
PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Unoccupied Time
= 6 Hours
Stand-By Time
= 2 Hours
First Movement Detected
by the PIR Cover
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Unoccupied Time Elapsed
= Unoccupied Mode
Initial State at
Power-Up = Stand-By
Unoccupied Time
= 6 Hours
Stand-By Time
= 2 Hours
First Movement Detected
by the PIR Cove r
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Unoccupied Time Elapsed
= Unoccupied Mode
Initial State at
Local Occupancy
Network Command
= Stand-By
Current Network
Command = Unoccupied
Unoccupied Time
= 4 Hours
Stand-By Time
= 2 Hours
First Movement Detected
by the PIR Cover
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Unoccupied Time Elapsed
= Unoccupied Mode
Initial State at
Local Occupancy
Network Command
= Occupied
Current Network
Command = Occupied
Stand-By Time
= 2 Hours
Stand-By Time Elapsed
= Stand-By Mode
When the network effectively releases a thermostat to its local PIR routine from a previous occupied or unoccupied network state,
the resulting occupancy state is always Stand-By mode
.
Initial Power-Up, Stand-Alone or Networked
After Receiving the Local Occupancy / PIR Network Command From a Previous Unoccupied State
After Receiving the Local Occupancy / PIR
63-4526—01 6
Network Command From a Previous Occupied State
Page 7
PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
TYPICAL COMMERCIAL APPLICATIONS
This section provides some typical networked and stand-alone commercial applications using the TB7300 Series. Each
application includes configuration information and describes system behavior using the occupancy sensing options.
Application
Number
1 3 Yes No Yes, BACnet or wireless
2 2 Yes No Yes, BACnet or wireless
3 3 No Yes Yes, BACnet or wireless
4 2 No Yes Yes, BACnet or wireless
5 3 Yes Yes Yes, BACnet or wireless
6 2 Yes Yes Yes, BACnet or wireless
7 3 Yes No None, stand-alone
8 2 Yes No None, stand-alone
9 3 No Yes None, stand-alone
10 2 No Yes None, stand-alone
11 3 Yes Yes None, stand-alone
12 2 Yes Yes None, stand-alone
PIR Levels of
Occupancy
PIR Cover
Used
Remote PIR
Used
Network interface
7 63-4526—01
Page 8
PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
BACnet or Echelon Network
BACnet or wireless network
Unoccupied Time
= 6 Hours
Stand-By Time
= 2 Hours
First Movement Detected
by a PIR Device
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Unoccupied Time Elapsed
= Unoccupied Mode
Network Command
= Local PIR Occupancy
Initial Network
Command = Unoccupied
PIR Movements Ignored
Network Command
= Occupied
PIR Movements Ignored
Network Command
= Unoccupied
PIR Movements Ignored
1. TB7300 networked fan coil application—3 levels of occupancy with an occupancy sensor cover
Set-up and Configuration
Thermostat used TB73x0X5014 (commercial models)
PIR used TB-PIR-FCU-C cover
BI2 Configuration None, no function
Stand-by timer value 2.0 hours
Unoccupied timer value 6.0 hours
Network interface used BACnet MS/TP or wireless
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; if there is no occupancy network command received by
the thermostat and if the PIR device does not detect any movement, the initial occupancy of the zone will be stand-by mode.
Occupied state network command
At any time, an occupied network command will always force the local zone to be in occupied mode and to use the occupied
setpoints.
Unoccupied state network command
At any time, an unoccupied network command will always force the local zone to be in unoccupied mode and to use the
unoccupied setpoints. If the thermostat local override function is not locked out by configuration, the local user may initiate a
temporary local override to occupied as dictated by the temporary occupancy time configuration parameter setting.
Local occupancy state network command
If previously in unoccupied mode when the thermostat receives a local occupancy state network command, the local PIR
occupancy loop will now be enabled. If the PIR device does not then detect any movement, the occupancy of the zone will be
stand-by mode.
As soon as the PIR device detects a movement or motion while in the local occupancy state network command, the occupancy
status switches to occupied and the occupied setpoints are used.
Anytime the PIR device detects local motion, the elapsed stand-by timer value will be reset. If no motion is detected in the zone
for the entire stand-by timer duration, then the room switches to stand-by mode and the stand-by setpoints are used.
While in stand-by mode, if no motion is detected in the zone for the entire unoccupied timer duration, then the room switches to
unoccupied mode and the unoccupied setpoints are used.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
63-4526—01 8
Page 9
PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
BACnet or Echelon Network
BACnet or wireless network
Unoccupied Time
= 0 Hours
Stand-By Time
= 2 Hours
First Movement Detected
by a PIR Device
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Network Command
= Local PIR Occupancy
Initial Network
Command = Unoccupied
PIR Movements Ignored
Network Command
= Occupied
PIR Movements Ignored
Network Command
= Unoccupied
PIR Movements Ignored
2. TB7300 networked fan coil application—2 levels of occupancy with occupancy sensor cover
Set-up and Configuration
Thermostat used TB73x0X5014 (commercial models)
PIR used TB-PIR-FCU-C cover
BI2 Configuration None, no function
Stand-by timer value 2.0 hours
Unoccupied timer value 0.0 hours
Network interface used BACnet MS/TP or wireless
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; if there is no occupancy network command received by
the thermostat and if the PIR device does not detect any movement, the initial occupancy of the zone will be stand-by mode.
Occupied state network command
At any time, an occupied network command will always force the local zone to be in occupied mode and to use the occupied
setpoints.
Unoccupied state network command
At any time, an unoccupied network command will always force the local zone to be in unoccupied mode and to use the
unoccupied setpoints. If the thermostat local override function is not locked out by configuration, the local user may initiate a
temporary local override to occupied as dictated by the temporary occupancy time configuration parameter setting.
Local occupancy state network command
If previously in unoccupied mode when then the thermostat receives a local occupancy state network command, the local PIR
occupancy loop will now be enabled. If the PIR device does not then detect any movement, the occupancy of the zone will be
stand-by mode.
As soon as the PIR device detects a movement or motion while in the local occupancy state network command, the occupancy
status switches to occupied and the occupied setpoints are used.
Anytime the PIR device detects local motion, the elapsed stand-by timer value will be reset. If no motion is detected in the zone
for the entire stand-by timer duration, then the room switches to stand-by mode and the stand-by setpoints are used.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
While in the local occupancy state network command, the local zone never goes into unoccupied mode and the unoccupied
setpoints are never used
9 63-4526—01
Page 10
PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Remote PIR Sensor
BACnet or Echelon Network
Remote PIR Sensor
BACnet or wireless network
Unoccupied Time
= 6 Hours
Stand-By Time
= 2 Hours
First Movement Detect ed
by a PIR Device
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Unoccupied Time Elapsed
= Unoccupied Mode
Network Command
= Local PIR Occupancy
Initial Network
Command = Unoccupied
PIR Movements Ignored
Network Command
= Occupied
PIR Movements Ignored
Network Command
= Unoccupied
PIR Movements Ignored
3. TB7300 networked fan coil application—3 levels of occupancy with a remote PIR sensor
Set-up and Configuration
Thermostat used TB73x0X5014X (commercial models)
PIR used BI1 configured for remote PIR sensor
BI2 Configuration None, no function
Stand-by timer value 2.0 hours
Unoccupied timer value 6.0 hours
Network interface used BACnet MS/TP or wireless
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; if there is no occupancy network command received by
the thermostat and if the PIR device does not detect any movement, the initial occupancy of the zone will be stand-by mode.
Occupied state network command
At any time, an occupied network command will always force the local zone to be in occupied mode and to use the occupied
setpoints.
Unoccupied state network command
At any time, an unoccupied network command will always force the local zone to be in unoccupied mode and to use the
unoccupied setpoints. If the thermostat local override function is not locked out by configuration, the local user may initiate a
temporary local override to occupied as dictated by the temporary occupancy time configuration parameter setting.
Local occupancy state network command
If previously in unoccupied mode when the thermostat receives a local occupancy state network command, the local PIR
occupancy loop will now be enabled. If the PIR device does not then detect any movement, the occupancy of the zone will be
stand-by mode.
As soon as the PIR device detects a movement or motion while in the local occupancy state network command, the occupancy
status switches to occupied and the occupied setpoints are used.
Anytime the PIR device detects local motion, the elapsed stand-by timer value will be reset. If no motion is detected in the zone
for the entire stand-by timer duration, then the room switches to stand-by mode and the stand-by setpoints are used.
While in stand-by mode, if no motion is detected in the zone for the entire unoccupied timer duration, then the room switches to
unoccupied mode and the unoccupied setpoints are used.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
63-4526—01 10
Page 11
PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Remote PIR Sensor
BACnet or Echelon Network
Remote PIR Sensor
BACnet or wireless network
Unoccupied Time
= 0 Hours
Stand-By Time
= 2 Hours
First Movement Detected
by a PIR Device
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Network Command
= Local PIR Occupancy
Initial Network
Command = Unoccupied
PIR Movements Ignored
Network Command
= Occupied
PIR Movements Ignored
Network Command
= Unoccupied
PIR Movements Ignored
4. TB7300 networked fan coil application —2 levels of occupancy with a remote PIR sensor
Set-up and Configuration
Thermostat used TB73x0X5014X (commercial models)
PIR used BI1 configured for remote PIR sensor
BI2 Configuration None, no function
Stand-by timer value 2.0 hours
Unoccupied timer value 0.0 hours
Network interface used BACnet MS/TP or wireless
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; if there is no occupancy network command received by
the thermostat and if the PIR device does not detect any movement, the initial occupancy of the zone will be stand-by mode.
Occupied state network command
At any time, an occupied network command will always force the local zone to be in occupied mode and to use the occupied
setpoints.
Unoccupied state network command
At any time, an unoccupied network command will always force the local zone to be in unoccupied mode and to use the
unoccupied setpoints. If the thermostat local override function is not locked out by configuration, the local user may initiate a
temporary local override to occupied as dictated by the temporary occupancy time configuration parameter setting.
Local occupancy state network command
If previously in unoccupied mode when the thermostat receives a local occupancy state network command, the local PIR
occupancy loop will now be enabled. If the PIR device does not then detect any movement, the occupancy of the zone will be
stand-by mode.
As soon as the PIR device detects a movement or motion while in the local occupancy state network command, the occupancy
status switches to occupied and the occupied setpoints are used.
Anytime the PIR device detects local motion, the elapsed stand-by timer value will be reset. If no motion is detected in the zone
for the entire stand-by timer duration, then the room switches to stand-by mode and the stand-by setpoints are used.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
While in the local occupancy state network command, the local zone never goes into unoccupied mode and the unoccupied
setpoints are never used.
11 63-4526—01
Page 12

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Remote PIR Sensor
BACnet or Echelon Network
Remote PIR Sensor
BACnet or wireless network
Unoccupied Time
= 6 Hours
Stand-By Time
= 2 Hours
First Movement Detected
by a PIR Device
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Unoccupied Time Elapsed
= Unoccupied Mode
Network Command
= Local PIR Occupancy
Initial Network
Command = Unoccupied
PIR Movements Ignored
Network Command
= Occupied
PIR Movements Ignored
Network Command
= Unoccupied
PIR Movements Ignored
5. TB7300 networked fan coil application—3 levels of occupancy with dual PIR sensors
Set-up and Configuration
Thermostat used TB73x0X5014X (commercial models)
PIR used BI1 configured for remote PIR sensor
and TB-PIR-FCU-C cover
BI2 Configuration None, no function
Stand-by timer value 2.0 hours
Unoccupied timer value 6.0 hours
Network interface used BACnet MS/TP or wireless
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; if there is no occupancy network command received by
the thermostat and if the PIR devices do not detect any movement, the initial occupancy of the zone will be stand-by mode.
Occupied state network command
At any time, an occupied network command will always force the local zone to be in occupied mode and to use the occupied
setpoints.
Unoccupied state network command
At any time, an unoccupied network command will always force the local zone to be in unoccupied mode and to use the
unoccupied setpoints. If the thermostat local override function is not locked out by configuration, the local user may initiate a
temporary local override to occupied as dictated by the temporary occupancy time configuration parameter setting.
Local occupancy state network command
If previously in unoccupied mode when the thermostat receives a local occupancy state network command, the local PIR
occupancy loop will now be enabled. If the PIR devices do not then detect any movement, the occupancy of the zone will be
stand-by mode.
As soon as a PIR device detects a movement or motion while in the local occupancy state network command, the occupancy
status switches to occupied and the occupied setpoints are used.
Anytime the PIR device detects local motion, the elapsed stand-by timer value will be reset. If no motion is detected in the zone
for the entire stand-by timer duration, then the room switches to stand-by mode and the stand-by setpoints are used.
While in stand-by mode, if no motion is detected in the zone for the entire unoccupied timer duration, then the room switches to
unoccupied mode and the unoccupied setpoints are used.
At anytime, if a PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
63-4526—01 12
Page 13

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Remote PIR Sensor
BACnet or Echelon Network
Remote PIR Sensor
BACnet or wireless network
Unoccupied Time
= 0 Hours
Stand-By Time
= 2 Hours
First Movement Detect ed
by a PIR Device
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Network Command
= Local PIR Occupancy
Initial Network
Command = Unoccupied
PIR Movements Ignored
Network Command
= Occupied
PIR Movements Ignored
Network Command
= Unoccupied
PIR Movements Ignored
6. TB7300 networked fan coil application—2 levels of occupancy with dual PIR sensors
Set-up and Configuration
Thermostat used TB73x0X5014X (commercial models)
PIR used BI1 configured for remote PIR sensor
and TB-PIR-FCU-C cover
BI2 Configuration None, no function
Stand-by timer value 2.0 hours
Unoccupied timer value 0.0 hours
Network interface used BACnet MS/TP or wireless
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; if there is no occupancy network command received by
the thermostat and if the PIR devices do not detect any movement, the initial occupancy of the zone will be stand-by mode.
Occupied state network command
At any time, an occupied network command will always force the local zone to be in occupied mode and to use the occupied
setpoints.
Unoccupied state network command
At any time, an unoccupied network command will always force the local zone to be in unoccupied mode and to use the
unoccupied setpoints. If the thermostat local override function is not locked out by configuration, the local user may initiate a
temporary local override to occupied as dictated by the temporary occupancy time configuration parameter setting.
Local occupancy state network command
If previously in unoccupied mode when the thermostat receives a local occupancy state network command, the local PIR
occupancy loop will now be enabled. If the PIR devices do not then detect any movement, the occupancy of the zone will be
stand-by mode.
As soon as the PIR device detects a movement or motion while in the local occupancy state network command, the occupancy
status switches to occupied and the occupied setpoints are used.
Anytime a PIR device detects local motion, the elapsed stand-by timer value will be reset. If no motion is detected in the zone for
the entire stand-by timer duration, then the room switches to stand-by mode and the stand-by setpoints are used.
At anytime, if a PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
While in the local occupancy state network command, the local zone never goes into unoccupied mode and the unoccupied
setpoints are never used
13 63-4526—01
Page 14

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Unoccupied Time
= 6 Hours
Stand-By Time
= 2 Hours
First Movement Detected
by the PIR Cover
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Unoccupied Time Elapsed
= Unoccupied Mode
Initial State at
Power-Up = Stand-By
7. TB7300 stand-alone fan coil application—3 levels of occupancy with an occupancy sensor cover
Set-up and Configuration
Thermostat used TB73x0X5014X (commercial models)
PIR used TB-PIR-FCU-C cover
BI2 Configuration None, no function
Stand-by timer value 2.0 hours
Unoccupied timer value 6.0 hours
Network interface used None, stand-alone
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; the initial occupancy of the zone will be stand-by mode if
the PIR device does not detect any movement.
As soon as the PIR device detects a movement or motion, the occupancy status switches to occupied and the occupied setpoints
are used.
Anytime the PIR device detects local motion, the elapsed stand-by timer value will be reset. If no motion is detected in the zone
for the entire stand-by timer duration, then the room switches to stand-by mode and the stand-by setpoints are used.
While in stand-by mode, if no motion is detected in the zone for the entire unoccupied timer duration, then the room switches to
unoccupied mode and the unoccupied setpoints are used.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
63-4526—01 14
Page 15

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Unoccupied Time
= 0 Hours
Stand-By Time
= 2 Hours
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Last Movement Detected
by PIR Activity
Time
Stand-By Time Elapsed
= Stand-By Mode
Stand-By Time
= 2 Hours
Unoccupied Time
= 0 Hours
First Movement Detected
by the PIR Cover
Initial State at
Power-Up = Stand-By
8. TB7300 stand-alone fan coil application—2 levels of occupancy with an occupancy sensor cover
Set-up and Configuration
Thermostat used TB73x0X5014X (commercial models)
PIR used TB-PIR-FCU-C cover
BI2 Configuration None, no function
Stand-by timer value 2.0 hours
Unoccupied timer value 0.0 hours
Network interface used None, stand-alone
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; the initial occupancy of the zone will be stand-by mode if
the PIR device does not detect any movement.
As soon as the PIR device detects a movement or motion, the occupancy status switches to occupied and the occupied setpoints
are used.
Anytime the PIR device detects local motion, the elapsed stand-by timer value will be reset. If no motion is detected in the zone
for the entire stand-by timer duration, then the room switches to stand-by mode and the stand-by setpoints are used.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
The local zone never goes into unoccupied mode and the unoccupied setpoints are never used.
15 63-4526—01
Page 16

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Remote PIR Sensor
Remote PIR Sensor
Unoccupied Time
= 6 Hours
Stand-By Time
= 2 Hours
First Movement Detected
by a PIR Device
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Unoccupied Time Elapsed
= Unoccupied Mode
Initial State at
Power-Up = Stand-By
9. TB7300 stand-alone fan coil application—3 levels of occupancy with a remote PIR sensor
Set-up and Configuration
Thermostat used TB73x0X5014X (commercial models)
PIR used BI1 configured for remote PIR sensor
BI2 Configuration None, no function
Stand-by timer value 2.0 hours
Unoccupied timer value 6.0 hours
Network interface used None, stand-alone
Sequence of operation
At initial power-up, when the thermostat 24 Vac power supply is applied; the initial occupancy of the zone will be stand-by mode if
the PIR device does not detect any movement.
As soon as the PIR device detects a movement or motion, the occupancy status switches to occupied and the occupied setpoints
are used.
Anytime the PIR device detects local motion, the elapsed stand-by timer value will be reset. If no motion is detected in the zone
for the entire stand-by timer duration, then the room switches to stand-by mode and the stand-by setpoints are used.
While in stand-by mode, if no motion is detected in the zone for the entire unoccupied timer duration, then the room switches to
unoccupied mode and the unoccupied setpoints are used.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
63-4526—01 16
Page 17

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Remote PIR Sensor
Remote PIR Sensor
Unoccupied Time
= 0 Hours
Stand-By Time
= 2 Hours
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Last Mo vement Detected
by PIR Activity
Time
Stand-By Time Elapsed
= Stand-By Mode
Stand-By Time
= 2 Hours
Unoccupied Time
= 0 Hours
First Movement Detected
by a PIR Device
Initial State at
Power-Up = Stand-By
10. TB7300 stand-alone fan coil application—2 levels of occupancy with a remote PIR sensor
Set-up and Configuration
Thermostat used TB73x0X5014X (commercial models)
PIR used BI1 configured for remote PIR sensor
BI2 Configuration None, no function
Stand-by timer value 2.0 hours
Unoccupied timer value 0.0 hours
Network interface used None, stand-alone
Sequence of operation
At initial power-up, when the thermostat 24 Vac power supply is applied; the initial occupancy of the zone will be stand-by mode if
the PIR device does not detect any movement.
As soon as the PIR device detects a movement or motion, the occupancy status switches to occupied and the occupied setpoints
are used.
Anytime the PIR device detects local motion, the elapsed stand-by timer value will be reset. If no motion is detected in the zone
for the entire stand-by timer duration, then the room switches to stand-by mode and the stand-by setpoints are used.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
The local zone never goes into unoccupied mode and the unoccupied setpoints are never used.
17 63-4526—01
Page 18

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Remote PIR Sensor
Remote PIR Sensor
Unoccupied Time
= 6 Hours
Stand-By Time
= 2 Hours
First Movement Detected
by a PIR Device
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Unoccupied Time Elapsed
= Unoccupied Mode
Initial State at
Power-Up = Stand-By
11. TB7300 stand-alone fan coil application—3 levels of occupancy with dual PIR sensors
Set-up and Configuration
Thermostat used TB73x0X5014 (commercial models)
PIR used BI1 configured for remote PIR sensor and
TB-PIR-FCU-C cover
BI2 Configuration None, no function
Stand-by timer value 2.0 hours
Unoccupied timer value 6.0 hours
Network interface used None, stand-alone
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; the initial occupancy of the zone will be stand-by mode if
the PIR devices do not detect any movement.
As soon as any of the PIR devices detect a movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
Anytime local motion is detected by one of the PIR devices, the elapsed stand-by timer value will be reset. If either PIR devices in
the zone detect no motion for the entire stand-by timer duration, then the room switches to stand-by mode and the stand-by
setpoints are used.
While in stand-by mode, if no motion is detected in the zone by either PIR device for the entire unoccupied timer duration, then
the room switches to unoccupied mode and the unoccupied setpoints are used.
At anytime, if one of the PIR devices detects a local movement or motion, the occupancy status switches to occupied and the
occupied setpoints are used.
63-4526—01 18
Page 19

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Remote PIR Sensor
Remote PIR Sensor
Unoccupied Time
= 0 Hours
Stand-By Time
= 2 Hours
Occupied
Stand-By
Unoccupîed
Time
Stand-By Time Elapsed
= Stand-By Mode
Last Movement Detected
by PIR Activity
Time
Stand-By Time Elapsed
= Stand-By Mode
Stand-By Time
= 2 Hours
Unoccupied Time
= 0 Hours
First Movement Detected
by a PIR Device
Initial State at
Power-Up = Stand-By
12. TB7300 stand-alone fan coil application—2 levels of occupancy with dual PIR sensors
Set-up and Configuration
Thermostat used TB73x0X5014X (commercial models)
PIR used BI1 configured for remote PIR sensor and
TB-PIR-FCU-C cover
BI2 Configuration None, no function
Stand-by timer value 2.0 hours
Unoccupied timer value 0.0 hours
Network interface used None, stand-alone
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; the initial occupancy of the zone will be stand-by mode if
the PIR devices do not detect any movement.
As soon as either of the PIR devices detect a movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
Anytime local motion is detected by one of the PIR devices, the elapsed stand-by timer value will be reset. If either PIR devices in
the zone detect no motion for the entire stand-by timer duration, then the room switches to stand-by mode and the stand-by
setpoints are used.
At anytime, if one of the PIR devices detects a local movement or motion, the occupancy status switches to occupied and the
occupied setpoints are used.
The local zone never goes into unoccupied mode and the unoccupied setpoints are never used.
19 63-4526—01
Page 20

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
TYPICAL LODGING APPLICATIONS
This section provides some typical networked and stand-alone hotel/lodging applications using the TB7300 Series. Each
application includes configuration information and describes system behavior using the occupancy sensing options.
Application
Number
1 3 Yes No Yes, BACnet or wireless
2 2 Yes No Yes, BACnet or wireless
3 3 No Yes Yes, BACnet or wireless
4 2 No Yes Yes, BACnet or wireless
5 3 Yes Yes Yes, BACnet or wireless
6 2 Yes Yes Yes, BACnet or wireless
7 3 Yes No None, stand-alone
8 2 Yes No None, stand-alone
9 3 No Yes None, stand-alone
10 2 No Yes None, stand-alone
11 3 Yes Yes None, stand-alone
12 2 Yes Yes None, stand-alone
Advanced network interface can be obtained when thermostats are fully integrated to the reservation system
In these cases, the occupancy network commands state enumerations text presented by a front end system can be expanded to
better represent the nature of the application.
Occupancy network commands state Front end system state text examples
Local Occupancy ( PIR active ) Room rented PIR economy enabled
Occupied Room rented high comfort assured
Unoccupied Room not rented
PIR Levels of
Occupancy
PIR Cover
Used
Remote PIR
Used
Network interface
63-4526—01 20
Page 21

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
BACnet or Echelon Network
Door Switch
Door Switch
BACnet or wireless network
Unoccupied Time
= 6 Hours
Always
Occupied
First Movement Detected
by a PIR Device
Occupied
Stand-By
Unoccupîed
Time
Door Open/Close
Toggle Detected
Unoccupied Time Elapsed
= Unoccupied Mode
Network Command
= Local PIR Occupancy
Initial Network
Command = Unoccupied
PIR Movements Ignored
Network Command
= Occupied
PIR Movements Ignored
Network Command
= Unoccupied
PIR Movements Ignored
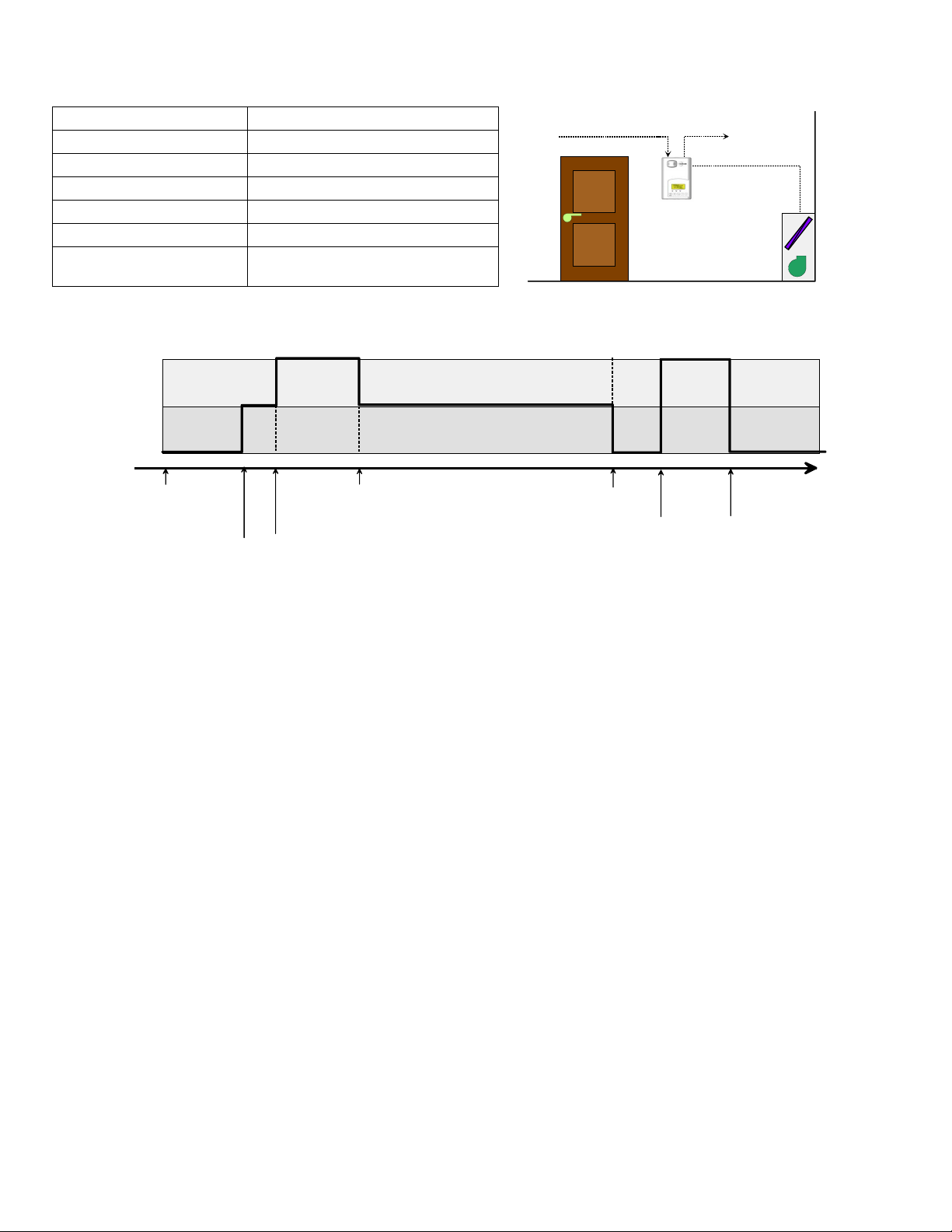
1. TB7300 networked fan coil application—3 levels of occupancy with an occupancy sensor cover
Set-up and Configuration
Thermostat used TB73x5X5014X (lodging models)
PIR used TB-PIR-FCU-L cover
BI2 Configuration Door dry contact
Stand-by timer value Not used
Unoccupied timer value 6.0 hours
Network interface used BACnet MS/TP or wireless
Advanced network interface can be obtained when thermostats are fully integrated to the reservation system. In these cases, the
occupancy network commands state enumerations text presented by a front end system can be expanded to better represent the
nature of the application.
Occupancy network commands state Front end system state text examples
Local Occupancy ( PIR active ) Room rented PIR economy enabled
Occupied Room rented high comfort assured
Unoccupied Room not rented
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; if there is no occupancy network command received by
the thermostat and if the PIR device does not detect any movement, the initial occupancy of the zone will be stand-by mode.
Occupied state network command
At any time, an occupied network command will always force the local zone to be in occupied mode and to use the occupied
setpoints.
Unoccupied state network command
At any time, an unoccupied network command will always force the local zone to be in unoccupied mode and to use the
unoccupied setpoints. If the thermostat local override function is not locked out by configuration, the local user may initiate a
temporary local override to occupied as dictated by the temporary occupancy time configuration parameter setting.
Local occupancy state network command
If previously in unoccupied mode when the thermostat receives a local occupancy state network command, the local PIR
occupancy loop will now be enabled. If the PIR device does not then detect any movements, the occupancy of the zone will be
stand-by mode.
As soon as the PIR device detects a movement or motion, the occupancy status switches to occupied and the occupied setpoints
are used. The room will then be in occupied mode until a door toggle is detected.
If a door toggle is detected, then the room switches to stand-by mode and the stand-by setpoints are used. If any occupants are
left in the room, local movements must be seen to resume the occupied mode.
While in stand-by mode, if no motion is detected in the zone for the entire unoccupied timer duration, then the room switches to
unoccupied mode and the unoccupied setpoints are used. At anytime, if the PIR device detects a local movement or motion, the
occupancy status switches to occupied and the occupied setpoints are used.
21 63-4526—01
Page 22

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
BACnet or Echelon Network
Door Switch
Door Switch
BACnet or wireless network
Unoccupied Time
= 0 Hours
First Movement Detected
by a PIR Device
Occupied
Stand-By
Unoccupîed
Time
Network Command
= Local PIR Occupancy
Initial Network
Command = Unoccupied
PIR Movements Ignored
Network Command
= Occupied
PIR Movements Ignored
Network Command
= Unoccupied
PIR Movements Ignored
Always
Occupied
Door Open/Close
Toggle Detected
2. TB7300 networked fan coil application—2 levels of occupancy with an occupancy sensor cover
Set-up and Configuration
Thermostat used TB73x5X5014X (lodging models)
PIR used TB-PIR-FCU-L cover
BI2 Configuration Door dry contact
Stand-by timer value Not used
Unoccupied timer value 0.0 hours
Network interface used BACnet MS/TP or wireless
Advanced network interface can be obtained when thermostats are fully integrated to the reservation system.
In these cases, the occupancy network commands state enumeration text presented by a front end system can be expanded to
better represent the nature of the application.
Occupancy network commands state Front end system state text examples
Local Occupancy ( PIR active ) Room rented PIR economy enabled
Occupied Room rented high comfort assured
Unoccupied Room not rented
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; if there is no occupancy network command received by
the thermostat and if the PIR device does not detect any movement, the initial occupancy of the zone will be stand-by mode.
Occupied state network command
At any time, an occupied network command will always force the local zone to be in occupied mode and to use the occupied
setpoints.
Unoccupied state network command
At any time, an unoccupied network command will always force the local zone to be in unoccupied mode and to use the
unoccupied setpoints. If the thermostat local override function is not locked out by configuration, the local user may initiate a
temporary local override to occupied as dictated by the temporary occupancy time configuration parameter setting.
Local occupancy state network command
If previously in unoccupied mode when the thermostat receives a local occupancy state network command, the local PIR
occupancy loop will now be enabled. If the PIR devices do not then detect any movements, the occupancy of the zone will be
stand-by mode.
As soon as the PIR device detects a movement or motion, the occupancy status switches to occupied and the occupied setpoints
are used. The room will then be in occupied mode until a door toggle is detected.
If a door toggle is detected, then the room switches to stand-by mode and the stand-by setpoints are used. If any occupants are
left in the room, local movements must be seen to resume the occupied mode.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
The local zone never goes into unoccupied mode and the unoccupied setpoints are never used.
63-4526—01 22
Page 23

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Remote PIR Sensor
BACnet or Echelon Network
Door Switch
BACnet or wireless network
Door Switch
Remote PIR Sensor
Unoccupied Time
= 6 Hours
Always
Occupied
First Movement Detected
by a PIR Device
Occupied
Stand-By
Unoccupîed
Time
Door Open/Close
Toggle Detected
Unoccupied Time Ela psed
= Unoccupied Mode
Network Command
= Local PIR Occupancy
Initial Network
Command = Unoccupied
PIR Movements Ignored
Network Command
= Occupied
PIR Movements Ignored
Network Command
= Unoccupied
PIR Movements Ignored
3. TB7300 networked fan coil application—3 levels of occupancy with a remote PIR sensor
Set-up and Configuration
Thermostat used TB73x5X5014X (lodging models)
PIR used BI1 configured for remote PIR sensor
BI2 Configuration Door dry contact
Stand-by timer value Not used
Unoccupied timer value 6.0 hours
Network interface used BACnet MS/TP or wireless
Advanced network interface can be obtained when thermostats are fully integrated to the reservation system
In these cases, the occupancy network commands state enumerations text presented by a front end system can be expanded to
better represent the nature of the application.
Occupancy network commands state Front end system state text examples
Local Occupancy ( PIR active ) Room rented PIR economy enabled
Occupied Room rented high comfort assured
Unoccupied Room not rented
Sequence of operation
At initial power-up, when the thermostat 24 Vac power supply is applied; if there is no occupancy network command received by
the thermostat and if the PIR devices do not detect any movement, the initial occupancy of the zone will be stand-by mode.
Occupied state network command
At any time, an occupied network command will always force the local zone to be in occupied mode and to use the occupied
setpoints.
Unoccupied state network command
At any time, an unoccupied network command will always force the local zone to be in unoccupied mode and to use the
unoccupied setpoints. If the thermostat local override function is not locked out by configuration, the local user may initiate a
temporary local override to occupied as dictated by the temporary occupancy time configuration parameter setting.
Local occupancy state network command
If previously in unoccupied mode when the thermostat receives a local occupancy state network command, the local PIR
occupancy loop will now be enabled. If the PIR devices do not then detect any movements, the occupancy of the zone will be
stand-by mode.
As soon as the PIR device detects a movement or motion, the occupancy status switches to occupied and the occupied setpoints
are used. The room will then be in occupied mode until a door toggle is detected.
If a door toggle is detected, then the room switches to stand-by mode and the stand-by setpoints are used. If any occupants are
left in the room, local movements must be seen to resume the occupied mode.
While in stand-by mode, if no motion is detected in the zone for the entire unoccupied timer duration, then the room switches to
unoccupied mode and the unoccupied setpoints are used.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
23 63-4526—01
Page 24

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Remote PIR Sensor
BACnet or Echelon Network
Door Switch
BACnet or wireless network
Door Switch
Remote PIR Sensor
Unoccupied Time
= 0 Hours
First Movement Detected
by a PIR Device
Occupied
Stand-By
Unoccupîed
Time
Network Command
= Local PIR Occupancy
Initial Network
Command = Unoccupied
PIR Movements Ignored
Network Command
= Occupied
PIR Movements Ignored
Network Command
= Unoccupied
PIR Movements Ignored
Always
Occupied
Door Open/Close
Toggle Detected
4. TB7300 networked fan coil application—2 levels of occupancy with a remote PIR sensor
Set-up and Configuration
Thermostat used TB73x5X5014X (lodging models)
PIR used BI1 configured for remote PIR sensor
BI2 Configuration Door dry contact
Stand-by timer value Not used
Unoccupied timer value 0.0 hours
Network interface used BACnet MS/TP or wireless
Advanced network interface can be obtained when thermostats are fully integrated to the reservation system.
In these cases, the occupancy network commands state enumerations text presented by a front end system can be expanded to
better represent the nature of the application.
Occupancy network commands state Front end system state text examples
Local Occupancy ( PIR active ) Room rented PIR economy enabled
Occupied Room rented high comfort assured
Unoccupied Room not rented
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; if there is no occupancy network command received by
the thermostat and if the PIR devices do not detect any movement, the initial occupancy of the zone will be stand-by mode.
Occupied state network command
At any time, an occupied network command will always force the local zone to be in occupied mode and to use the occupied
setpoints.
Unoccupied state network command
At any time, an unoccupied network command will always force the local zone to be in unoccupied mode and to use the
unoccupied setpoints. If the thermostat local override function is not locked out by configuration, the local user may initiate a
temporary local override to occupied as dictated by the temporary occupancy time configuration parameter setting.
Local occupancy state network command
If previously in unoccupied mode when the thermostat receives a local occupancy state network command, the local PIR
occupancy loop will now be enabled. If the PIR devices do not then detect any movements, the occupancy of the zone will be
stand-by mode.
As soon as the PIR device detects a movement or motion, the occupancy status switches to occupied and the occupied setpoints
are used. The room will then be in occupied mode until a door toggle is detected.
If a door toggle is detected, then the room switches to stand-by mode and the stand-by setpoints are used. If any occupants are
left in the room, local movements must be seen to resume the occupied mode.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
The local zone never goes into unoccupied mode and the unoccupied setpoints are never used.
63-4526—01 24
Page 25

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Remote PIR Sensor
BACnet or Echelo n Network
Door Switch
BACnet or wireless network
Door Switch
Remote PIR Sensor
Unoccupied Time
= 6 Hours
Always
Occupied
First Movement Detected
by a PIR Device
Occupied
Stand-By
Unoccupîed
Time
Door Open/Close
Toggle Detected
Unoccupied Time Elapsed
= Unoccupied Mode
Network Command
= Local PIR Occupancy
Initial Network
Command = Unoccupied
PIR Movements Ignored
Network Command
= Occupied
PIR Movements Ignored
Network Command
= Unoccupied
PIR Movements Ignored
5. TB7300 networked fan coil application—3 levels of occupancy with dual PIR sensors
Set-up and Configuration
Thermostat used TB73x5X5014X (lodging models)
PIR used BI1 configured for remote PIR sensor
and TB-PIR-FCU-L cover
BI2 Configuration Door dry contact
Stand-by timer value Not used
Unoccupied timer value 6.0 hours
Network interface used BACnet MS/TP or wireless
Advanced network interface can be obtained when thermostats are fully integrated to the reservation system
In these cases, the occupancy network commands state enumerations text presented by a front end system can be expanded to
better represent the nature of the application.
Occupancy network commands state Front end system state text examples
Local Occupancy ( PIR active ) Room rented PIR economy enabled
Occupied Room rented high comfort assured
Unoccupied Room not rented
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; if there is no occupancy network command received by
the thermostat and if the PIR devices do not detect any movement, the initial occupancy of the zone will be stand-by mode.
Occupied state network command
At any time, an occupied network command will always force the local zone to be in occupied mode and to use the occupied
setpoints.
Unoccupied state network command
At any time, an unoccupied network command will always force the local zone to be in unoccupied mode and to use the
unoccupied setpoints. If the thermostat local override function is not locked out by configuration, the local user may initiate a
temporary local override to occupied as dictated by the temporary occupancy time configuration parameter setting.
Local occuupancy state network command
If previously in unoccupied mode when the thermostat receives a local occupancy state network command, the local PIR
occupancy loop will now be enabled. If the PIR devices do not then detect any movements, the occupancy of the zone will be
stand-by mode.
As soon as the PIR device detects a movement or motion, the occupancy status switches to occupied and the occupied setpoints
are used. The room will then be in occupied mode until a door toggle is detected.
If a door toggle is detected, then the room switches to stand-by mode and the stand-by setpoints are used. If any occupants are
left in the room, local movements must be seen to resume the occupied mode.
While in stand-by mode, if no motion is detected in the zone for the entire unoccupied timer duration, then the room switches to
unoccupied mode and the unoccupied setpoints are used.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
25 63-4526—01
Page 26

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Remote PIR Sensor
BACnet or Echelo n Network
Door Switch
BACnet or wireless network
Door Switch
Remote PIR Sensor
Unoccupied Time
= 0 Hours
First Movement Detected
by a PIR Device
Occupied
Stand-By
Unoccupîed
Time
Network Command
= Local PIR Occupancy
Initial Network
Command = Unoccupied
PIR Movements Ignored
Network Command
= Occupied
PIR Movements Ignored
Network Command
= Unoccupied
PIR Movements Ignored
Always
Occupied
Door Open/Close
Toggle Detected
6. TB7300 networked fan coil application—2 levels of occupancy with dual PIR sensors
Set-up and Configuration
Thermostat used TB73x5X5014X (lodging models)
PIR used BI1 configured for remote PIR sensor
and TB-PIR-FCU-L cover
BI2 Configuration Door dry contact
Stand-by timer value Not used
Unoccupied timer value 0.0 hours
Network interface used BACnet MS/TP or wireless
Advanced network interface can be obtained when thermostats are fully integrated to the reservation system.
In these cases, the occupancy network commands state enumerations text presented by a front end system can be expanded to
better represent the nature of the application.
Occupancy network commands state Front end system state text examples
Local Occupancy ( PIR active ) Room rented PIR economy enabled
Occupied Room rented high comfort assured
Unoccupied Room not rented
Sequence of operation
At initial power-up, when the thermostat 24 Vac power supply is applied; if there is no occupancy network command received by
the thermostat and if the PIR devices do not detect any movement, the initial occupancy of the zone will be stand-by mode.
Occupied state network command
At any time, an occupied network command will always force the local zone to be in occupied mode and to use the occupied
setpoints.
Unoccupied state network command
At any time, an unoccupied network command will always force the local zone to be in unoccupied mode and to use the
unoccupied setpoints. If the thermostat local override function is not locked out by configuration, the local user may initiate a
temporary local override to occupied as dictated by the temporary occupancy time configuration parameter setting.
Local occupancy state network command
If previously in unoccupied mode when the thermostat receives a local occupancy state network command, the local PIR
occupancy loop will now be enabled. If the PIR devices do not then detect any movements, the occupancy of the zone will be
stand-by mode.
As soon as the PIR device detects a movement or motion, the occupancy status switches to occupied and the occupied setpoints
are used. The room will then be in occupied mode until a door toggle is detected.
If a door toggle is detected, then the room switches to stand-by mode and the stand-by setpoints are used. If any occupants are
left in the room, local movements must be seen to resume the occupied mode.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
The local zone never goes into unoccupied mode and the unoccupied setpoints are never used.
63-4526—01 26
Page 27

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
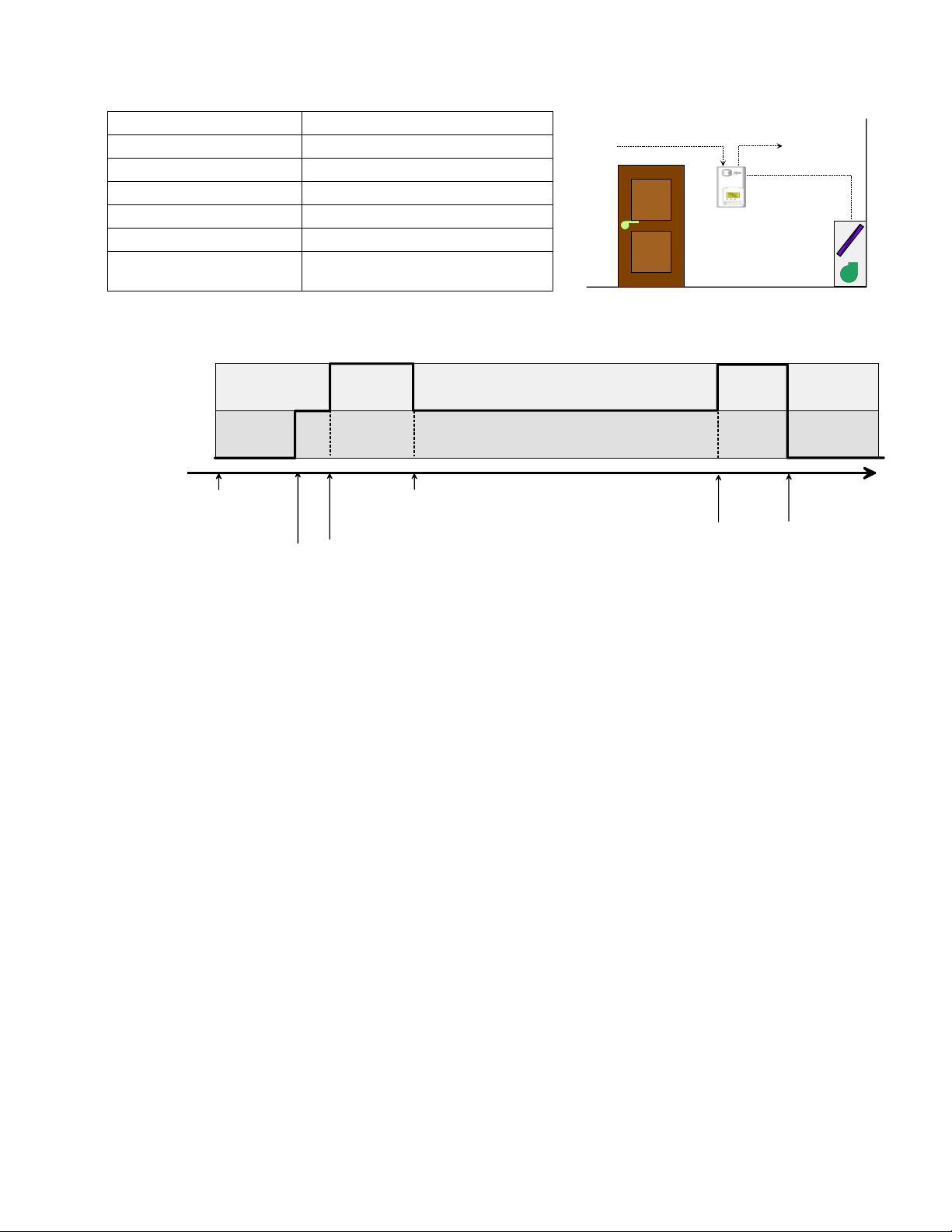
Door Switch
Door Switch
Unoccupied Time
= 6 Hours
Occupied
Stand-By
Unoccupîed
Time
Unoccupied Time Elapsed
= Unoccupied Mode
Initial State at
Power-Up = Stand-By
Always
Occupied
Door Open/Close
Toggle Detected
7. TB7300 stand-alone fan coil application—3 levels of occupancy with an occupancy sensor cover
Set-up and Configuration
Thermostat used TB73x0X5014X (lodging models)
PIR used TB-PIR-FCU-L cover
BI2 Configuration Door dry contact
Stand-by timer value Not used
Unoccupied timer value 6.0 hours
Network interface used None, stand-alone
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; the initial occupancy of the zone will be stand-by mode if
the PIR device does not detect any movement.
As soon as the PIR device detects a movement or motion, the occupancy status switches to occupied and the occupied setpoints
are used. The room will then be in occupied mode until a door toggle is detected.
If a door toggle is detected, then the room switches to stand-by mode and the stand-by setpoints are used. If any occupants are
left in the room, local movements must be seen to resume the occupied mode.
While in stand-by mode, if no motion is detected in the zone for the entire unoccupied timer duration, then the room switches to
unoccupied mode and the unoccupied setpoints are used.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
27 63-4526—01
Page 28

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
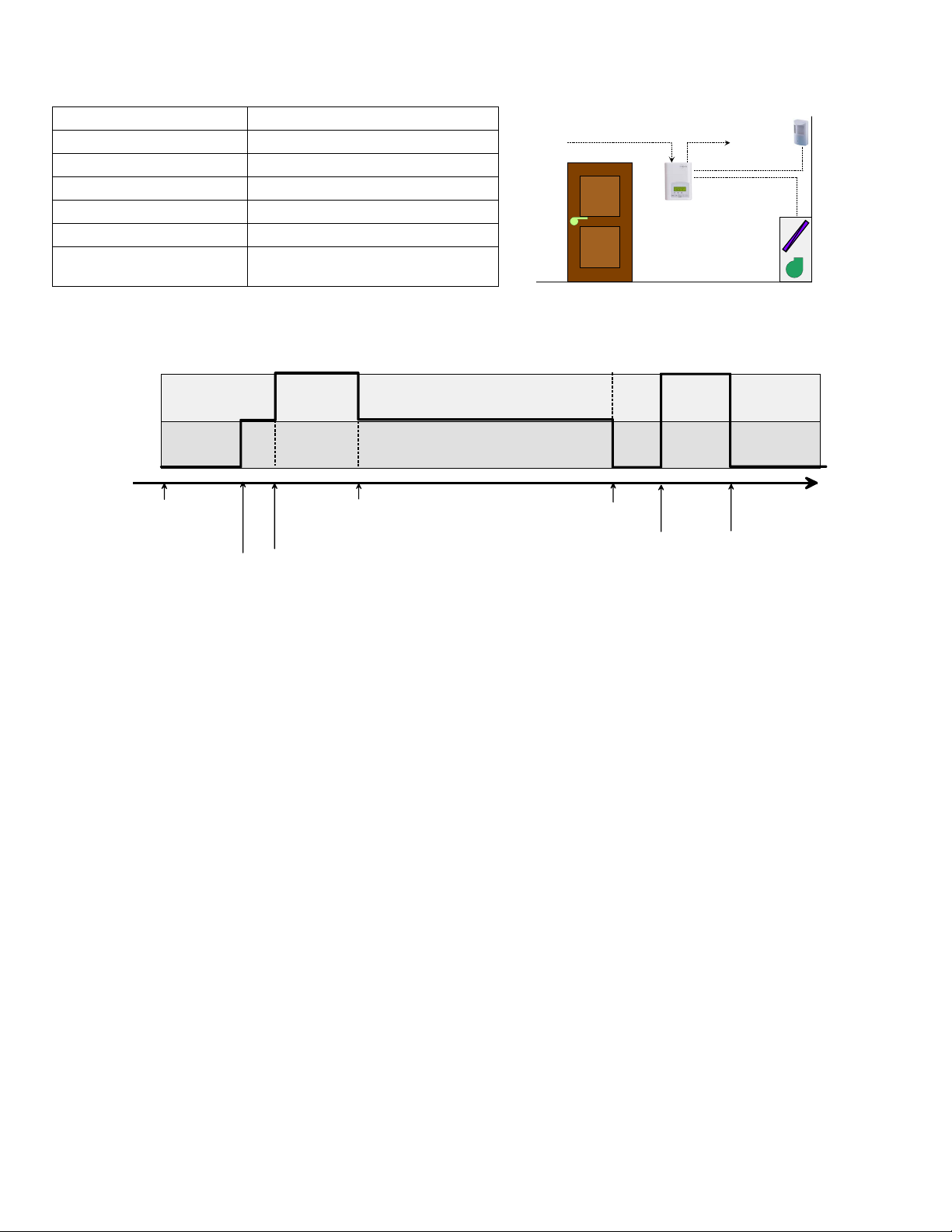
Door Switch
Door Switch
Unoccupied Time
= 0 Hours
Occupied
Stand-By
Unoccupîed
Time
Last Movement Detected
by PIR Activity
Time
Unoccupie d Time
= 0 Hours
First Movement Detected
by a PIR Device
Initial State at
Power-Up = Stand-By
Always
Occupied
Always
Occupied
Door Open/Close
Toggle Detected
Door Open/Close
Toggle Detected
8. TB7300 stand-alone fan coil application—2 levels of occupancy with an occupancy sensor cover
Set-up and Configuration
Thermostat used TB73x0X5014X (lodging models)
PIR used TB-PIR-FCU-L cover
BI2 Configuration Door dry contact
Stand-by timer value Not used
Unoccupied timer value 0.0 hours
Network interface used None, stand-alone
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; the initial occupancy of the zone will be stand-by mode if
the PIR device does not detect any movement.
As soon as the PIR device detects a movement or motion, the occupancy status switches to occupied and the occupied setpoints
are used. The room will then be in occupied mode until a door toggle is detected.
If a door toggle is detected, then the room switches to stand-by mode and the stand-by setpoints are used. If any occupants are
left in the room, local movements must be seen to resume the occupied mode.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
The local zone never goes into unoccupied mode and the unoccupied setpoints are never used.
63-4526—01 28
Page 29

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
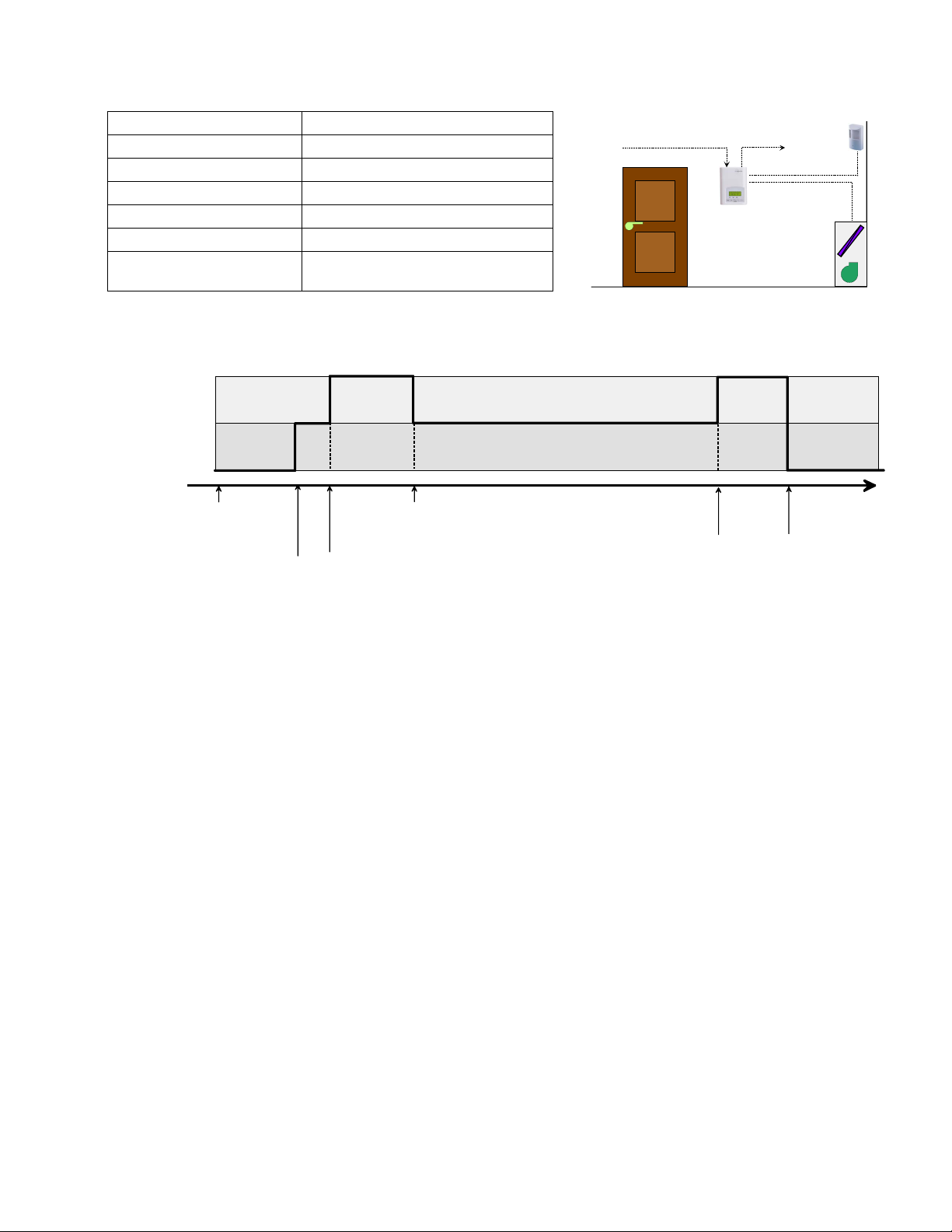
Remote PIR Sensor
Door Switch
Door Switch
Remote PIR Sensor
Unoccupied Time
= 6 Hours
Occupied
Stand-By
Unoccupîed
Time
Unoccupied Time Elapsed
= Unoccupied Mode
Initial State at
Power-Up = Stand-By
Always
Occupied
Door Open/Close
Toggle Detected
9. TB7300 stand-alone fan coil application—3 levels of occupancy with a remote PIR sensor
Set-up and Configuration
Thermostat used TB73x0X5014X (lodging models)
PIR used BI1 configured for remote PIR sensor
BI2 Configuration Door dry contact
Stand-by timer value Not used
Unoccupied timer value 6.0 hours
Network interface used None, stand-alone
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; the initial occupancy of the zone will be stand-by mode if
the PIR device does not detect any movement.
As soon as the PIR device detects a movement or motion, the occupancy status switches to occupied and the occupied setpoints
are used. The room will then be in occupied mode until a door toggle is detected.
If a door toggle is detected, then the room switches to stand-by mode and the stand-by setpoints are used. If any occupants are
left in the room, local movements must be seen to resume the occupied mode.
While in stand-by mode, if no motion is detected in the zone for the entire unoccupied timer duration, then the room switches to
unoccupied mode and the unoccupied setpoints are used.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
29 63-4526—01
Page 30

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Remote PIR Sensor
Door Switch
Door Switch
Remote PIR Sensor
Unoccupied Time
= 0 Hours
Occupied
Stand-By
Unoccupîed
Time
Last Movement Detected
by PIR Activity
Time
Unoccupied Time
= 0 Hours
First Movement Detected
by a PIR Device
Initial State at
Power-Up = Stand-By
Always
Occupied
Always
Occupied
Door Open/Close
Toggle Detected
Door Open/Close
Toggle Detected
10. TB7300 stand-alone fan coil application—2 levels of occupancy with a remote PIR sensor
Set-up and Configuration
Thermostat used TB73x5X5014X (lodging models)
PIR used BI1 configured for remote PIR sensor
BI2 Configuration Door dry contact
Stand-by timer value Not used
Unoccupied timer value 0.0 hours
Network interface used None, stand-alone
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; the initial occupancy of the zone will be stand-by mode if
the PIR device does not detect any movement.
As soon as the PIR device detects a movement or motion, the occupancy status switches to occupied and the occupied setpoints
are used. The room will then be in occupied mode until a door toggle is detected.
If a door toggle is detected, then the room switches to stand-by mode and the stand-by setpoints are used. If any occupants are
left in the room, local movements must be seen to resume the occupied mode.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
The local zone never goes into unoccupied mode and the unoccupied setpoints are never used.
63-4526—01 30
Page 31

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Remote PIR Sensor
Door Switch
Remote PIR Sensor
Door Switch
Unoccupied Time
= 6 Hours
Occupied
Stand-By
Unoccupîed
Time
Unoccupied Time Elapsed
= Unoccupied Mode
Initial State at
Power-Up = Stand-By
Always
Occupied
Door Open/Close
Toggle Detected
11. TB7300 stand-alone fan coil application—3 levels of occupancy with dual PIR sensors
Set-up and Configuration
Thermostat used TB73x5X5014X (lodging models)
PIR used BI1 configured for remote PIR sensor
and TB-PIR-FCU-L cover
BI2 Configuration Door dry contact
Stand-by timer value 2.0 hours
Unoccupied timer value 6.0 hours
Network interface used None, stand-alone
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; the initial occupancy of the zone will be stand-by mode if
the PIR devices do not detect any movement.
As soon as a PIR device detects a movement or motion, the occupancy status switches to occupied and the occupied setpoints
are used. The room will then be in occupied mode until a door toggle is detected.
If a door toggle is detected, then the room switches to stand-by mode and the stand-by setpoints are used. If any occupants are
left in the room, local movements must be seen to resume the occupied mode.
While in stand-by mode, if no motion is detected in the zone for the entire unoccupied timer duration, then the room switches to
unoccupied mode and the unoccupied setpoints are used.
At anytime, if the PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
31 63-4526—01
Page 32

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Remote PIR Sensor
Door Switch
Door Switch
Remote PIR Sensor
Unoccupied Time
= 0 Hours
Occupied
Stand-By
Unoccupîed
Time
Last Movement Detected
by PIR Activity
Time
Unoccupied Time
= 0 Hours
First Movement Detected
by a PIR Device
Initial State at
Power-Up = Stand-By
Always
Occupied
Always
Occupied
Door Open/Close
Toggle Detected
Door Open/Close
Toggle Detected
12. TB7300 stand-alone fan coil application—2 levels of occupancy with dual PIR sensors
Set-up and Configuration
Thermostat used TB73x5X5014X (lodging models)
PIR used BI1 configured for remote PIR sensor
and TB-PIR-FCU-L cover
BI2 Configuration Door dry contact
Stand-by timer value Not used
Unoccupied timer value 0.0 hours
Network interface used None, stand-alone
Sequence of operation:
At initial power-up, when the thermostat 24 Vac power supply is applied; the initial occupancy of the zone will be stand-by mode if
the PIR devices do not detect any movement.
As soon as a PIR device detects a movement or motion, the occupancy status switches to occupied and the occupied setpoints
are used. The room will then be in occupied mode until a door toggle is detected.
If a door toggle is detected, then the room switches to stand-by mode and the stand-by setpoints are used. If any occupants are
left in the room, local movements must be seen to resume the occupied mode.
At anytime, if a PIR device detects a local movement or motion, the occupancy status switches to occupied and the occupied
setpoints are used.
The local zone never goes into unoccupied mode and the unoccupied setpoints are never used.
63-4526—01 32
Page 33

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
WARNING
15°
15° 15°
15°
60° 60°
ZONE NOT RELIABLE ZONE NOT RELIABLE
0°
M21308
45°
20 FEET
CENTER
M21309
Typical PIR Detection Pattern
Fig. 3. Typical Horizontal Angle Fig. 4. Typical Vertical Angle
INSTALLATION
Electronic controls are static sensitive devices. Discharge yourself properly before manipulation and installing
the thermostat and its accessories.
Short circuit or wrong wiring may permanently damage the thermostat or the equipment. All TB7200 and 7300 Series
thermostats are to be used only as operating controls. Whenever a control failure could lead to personal injury and/or loss
of property, it becomes the responsibility of the user to add safety devices and/or alarm system to protect against such
catastrophic failures.
Table 2. Installation Tips
Tip Type Area Of Interest Explanation
General Installation PIR Connector Polarized connector is located at bottom left hand corner of TB7200
or TB7300 Series thermostat
Security Screw A security screw has been provided in the thermostat box. This
screw should be carefully installed in the intended mounting position
located bottom center of thermostat cover.
Initial Power Up &
Commissioning
PIR Warm up
period
Visual indication
(Status of PIR)
PIR Sensor may take up-to 60 seconds after initial warm up period to
detect movement consistent with typical detection pattern.
Visual indication of PIR activity for commissioning is provided via a
blinking LEDs located on the thermostat cover under the PIR lens.
LEDs will be active while occupant is in field of detection pattern for a
period of 30 minutes after initial power up.
33 63-4526—01
Page 34

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
PIR
Connector
TB-PIR Cover Installation
1. Remove security screw on the bottom of the thermostat cover.
2. Open up by pulling on the bottom side of thermostat. (Fig. 3)
°C
°F
M21300
Fig. 5. Removing cover.
3. Insert polarized connector from new cover into PIR female connector located on thermostat base. (Fig. 6)
Fig. 6. PIR connector
4. Snap PIR thermostat cover into place and re-install the security screw. (Fig. 7)
5. Make appropriate parameter settings related to your application within the configuration menu or through the WEBStation-
AX as identified in the thermostat installation instructions.
Fig. 7. Replacing cover.
63-4526—01 34
Page 35

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
PIR Status LED’s
The PIR covers have 2 green status LEDs behind the PIR lens that can be used for diagnostic purposes during commissioning or
servicing. (Fig. 8)
These LEDs are used to indicate a local movement detected by the PIR cover.
— The status LEDs start to function to indicate movement 1 minute after the initial power up of the thermostat.
— The status LEDs will only remain active to indicate sensed movement 30 minutes after the initial power up of the
thermostat.
Fig. 8. LED status lights.
SPECIFICATIONS
PIR cover power requirements: 5 Vdc max current draw of 7mA
Operating conditions: 0 C to 50 C (32 F to 122 F); 0% to 95% R.H. non-condensing
Storage conditions: -30 C to 50 C (-22 F to 122 F); 0% to 95% R.H. non-condensing
Sensor: Local Passive Infrared Sensor
Dimensions: 4.94 in. x 3.38 in. x 1.0 in.
Approximate shipping weight: 0.1 lb
Agency Approvals:
UL: UL 873 (US) and CSA C22.2 No. 24 (Canada), File E27734 with CCN XAPX (US) and XAPX7 (Canada)
FCC: Compliant to CFR 47, Part 15, Subpart B, Class A (US)
Industry Canada: ICES-003 (Canada)
CE: EMC Directive 89/336/EEC (Europe Union)
35 63-4526—01
Page 36

PIR APPLICATION GUIDE FOR TB7200 AND TB7300 SERIES THERMOSTATS
Automation and Control Solutions
Honeywell International Inc.
1985 Douglas Drive North
Golden Valley, MN 55422
Honeywell Limited-Honeywell Limitée
35 Dynamic Drive
Toronto, Ontario M1V 4Z9
customer.honeywell.com
® U.S. Registered Trademark
© 2011 Honeywell International Inc.
63-4526—01 M.S. 06-11
Printed in U.S.A.
 Loading...
Loading...