

Hitachi WJ200 Series Sales Brochure
Pursuing the Ideal Compact Inverter
Pursuing the Ideal Compact Inverter
Series
Designed for excellent performance and user friendliness
Industry-leading Levels of Performance
Index
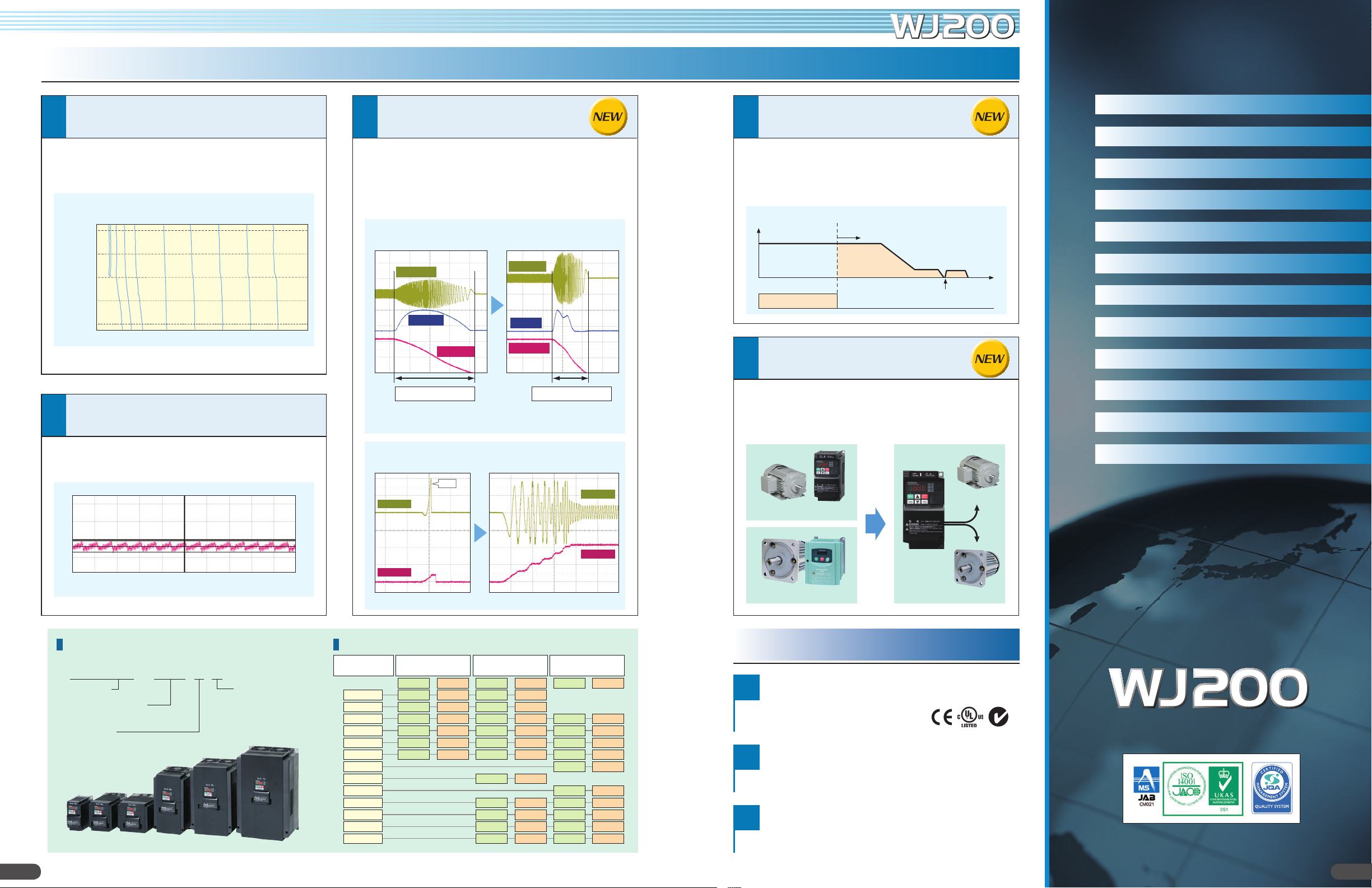
High starting torque of 200% or greater achieved
1
by sensorless vector control
Integrated auto-tuning function for easy sensorless vector control
realizes high torque suitable for applications requiring it such as crane
hoists, lifts, elevators, etc.
Example of Torque Characteristics
Exa mple of Hitachi's s tandard moto r. (7. 5kW 4-p ole)
Torque
200
100
-100
-200
(%)
0
1 3
0.5
6 10 20 30 40 50 60Hz
Auto-tuning to perform sensorless vector control can now be easily done.
(when sized for heavy duty
Speed (min-1)
Speed regulation at low-speed is greatly improved.
2
–
Fluctuation is 1/2* compared with the previous model.
Trip avoidance functions
).
3
Simple positioning control
4
(when feedback signal is used.)
Features P2–5
Standard Speci cations P6
Minimum time deceleration function, over-current suppress function
and DC bus AVR function are incorporated. The functions reduce
nuisance tripping. Improved torque limiting/current limiting function
enables a load limit to protect machine and equipment.
(Exa mple of WJ20 0-075 LF)
Minimum time deceleration Function
OFF ON
Motor Curr ent
DC Vol tage
Output Frequency
Deceleration Time:
4.2 sec.
Motor Curren t
DC Voltage
Output Frequency
Deceleration Time:
1.9 sec.
2.3 sec. reduction of deceleration time without a braking
–
resistor is achieved when the function is active.
When simple positioning function is activated, speed control operation or
positioning control operation is selectable via intellient input. While the [SPD]
input is ON, the current position counter is held at 0. When [SPD] is OFF, the
inverter enters positioning control operation and the position counter is active.
Output Frequency
Speed control Position control
SPD input
ON
Start position counting
DB
Target position
Time
Induction motor & Permanent magnetic motor*
5
control with one inverter
The WJ200 inverter can drive both induction motors (IM) and permanent
magnetic motors (PM). Energy conservation and miniaturization can be
achieved using PM motors. Moreover, one inverter used for two types of motor.
(* planned)
General Speci cations P7
Dimensions P8
Operation and Programming P9
Terminal (Arrangements/ Functions) P 10 – 11
Function List P 12 – 20
Protective Functions P 21
Connecting Diagram P 22 – 23
Connecting to PLC P 24
Wiring and Accessories P 25
Speed regulation at low speed has been drastically improved to
enhance process stability and precision.
(Example of W J200- 055LF )
• Frequency commanded by t he inverter: 0.5Hz .
• Motor: Hitachi's standard 3-phase 5. 5kW 4-pole totally enclosed type mo tor.
* WJ20 0: 5min-1, Prev ious model: 13mi n
-1
WJ200 – 001 L F
Series Name
Applied Motor Capacit y
00 1: 0.1kW – 15 0: 15k W
Power Source
S: 1-phase 200 V class
L: 3- phase 200 V class
H: 3- phase 400 V class
wit h Digital Operator
Over-current Suppress Function*
OFF ON
Trip
Motor Curren t
Output Frequency
*Turn of f this funct ion for lifti ng equipment .
Model ConfigurationModel Name Indication
Model Name
WJ200-xxx
001 0.2 0.1 0.2 0 .1
002 0.4 0.2 0.4 0.2
004 0.55 0.4 0.7 5 0.4 0.7 5 0.4
007 1.1 0.75 1.1 0.7 5 1. 5 0.75
015 2.2 1.5 2.2 1. 5 2.2 1. 5
022 3.0 2.2 3.0 2.2 3.0 2.2
030 4.0 3.0
037 5.5 3.7
040 5.5 4.0
055 7. 5 5.5 7.5 5.5
075 11 7. 5 11 7. 5
110 15 11 15 11
150 18. 5 15 18. 5 15
1-phase 200V clas s 3-phase 200V class 3-phase 40 0V class
VT CT VT CT VT CT
Motor Curren t
Output Frequency
IM
IM + Inverter
WJ200
PM + Dedicated Controller
PM
Global standards
1
Conformity to global standards
CE, UL, c-UL, c-Tick approvals.
2
Sink / source logic is standard
Logic input and output terminal can be con gured for sink or source logic.
3
Wide input power voltage range
Input voltage 240V for 200V class and 480V for 400V class as standard.
For Correct Operation P 26 – 27
Pursuing the Ideal Compact Inverter
Designed for excellent performance and user friendliness
EC97J1095
2 3
3
Pursuit of Ease of Use
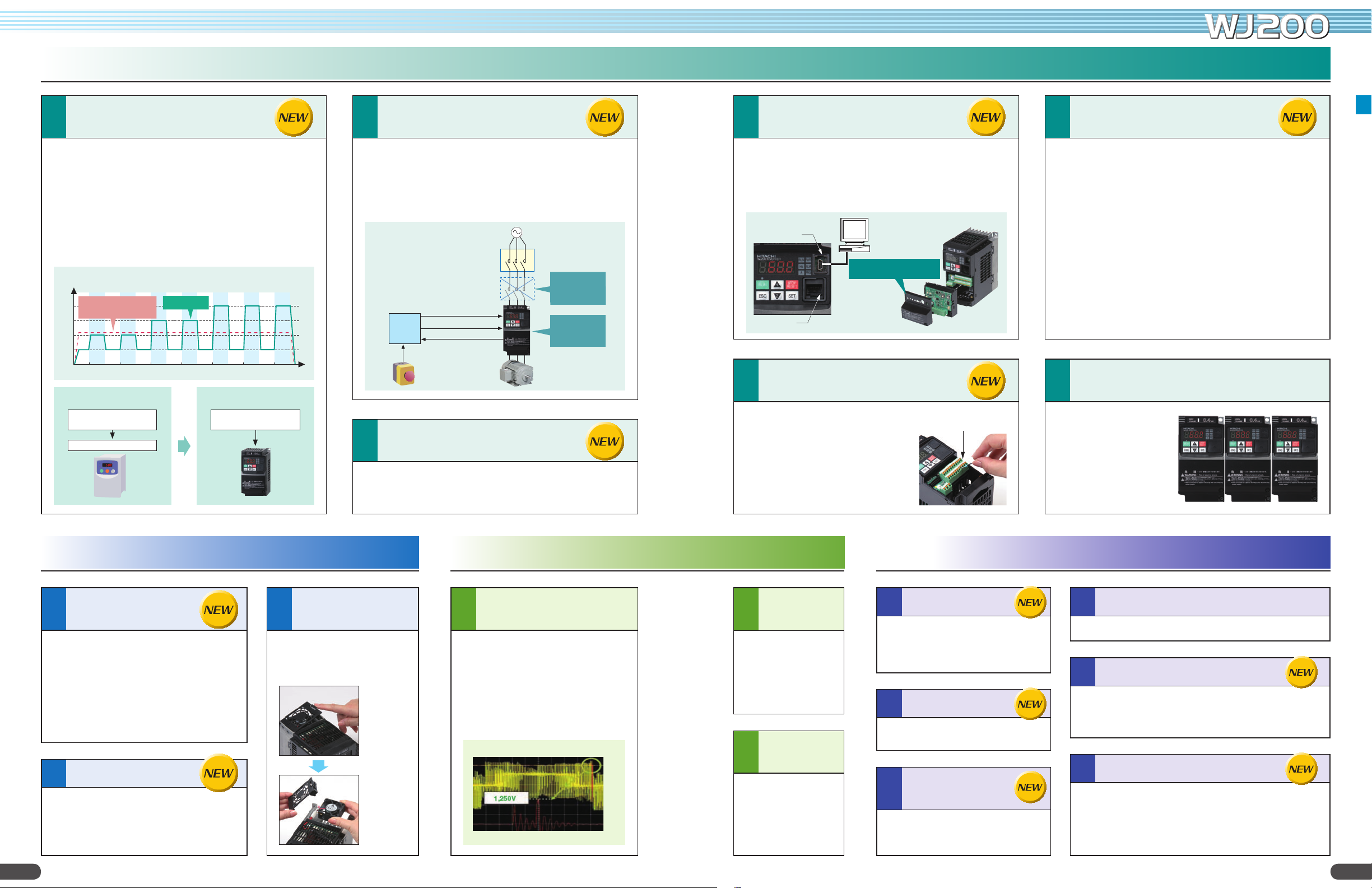
Easy sequence [EzSQ]
1
programming function
Sequence operation is realized by downloading to an inverter a
program created with Hitachi's EzSQ software. User program can
be compiled on EzSQ software on a PC. External components can
be simpli ed or eliminated, resulting in cost-savings.
●
EzSQ Example: Energy cost saving by speed reduction.
■Daytime: Motor speed is automatically reduced to reduce demand during peak hours.
■Nighttime: Motor speed is increased to take a ad vant age of of f-peak power rates.
Example of driving program
Night time
Standard driving
(Frequency is constant.)
Motor Speed
1st 2nd 3rd 4th 5th 6th 7th
Standard Inverter WJ 20 0 Using EzSQ
Operation panel
(Sw itch/ timer et c.)
Rely sequence
POWER
RUN
Hz
PRG
A
STOP
RUN
RESET
MIN
MAX
Conventional
Panel lead
Inver ter
WJ200 driving
Panel lead
Operation panel
(Sw itch/ timer et c.)
date
Inverter
WJ200
Safe stop function
2
(planning)
WJ200 conforms to the applicable safety standards and corresponds
to Machinery Directive of Europe. Shuts down the inverter by
hardware, bypassing the CPU, to achieve reliable safe stop function.
The safety standard can be met at a low cost.
(ISO13849-1 Category 3 / IEC60204-1 Stop Category 0)
Only one MC is enough
•Reduction in costs.
Safety Module
Safety SW
(Emergency Stop)
3
Password function
ST01 (GS1)
ST02 (GS2)
EDM
Safety terminal
(In /output)
•Miniaturiz ation
Emergency output
shut-down
via hardware
The WJ200 inverter has a password function to prevent changing
parameters or to hide some or all parameters.
Network compatibility & External ports
4
A serial RS-485 Modbus/RTU port is standard. The WJ200 can
communicate via DeviceNet, CompoNet, PROFIBUS and CANopen
with optional expansion card
(planned) . USB (Mini-B connector) port
and RS-422 (RJ45 connector) port are standard.
USB po rt
One net work expansion card can
be inst alled inside the W J200 .
RS 422 por t
Ease of wiring
5 7
Screw-less terminals (control circuit
terminals) spring-loaded, for use with
Screw-le ss terminals
(Cont rol circuit ter minals)
solid or stranded wire with ferrules.
Easy to maintain
6
Easy selection of displayed parameters
●
Data comparison function
Display parameters changed from default setting.
●
Basic display
Display most frequently used parameters.
●
Quick display
Display 32 user-selected parameters.
●
User-changed parameter display
Store automatically and display the parameters changed by
the user (Up to 32 sets); can also be used as change history.
●
Active parameter display
Display those parameters which are enabled.
Side-by-side installation
Inverters can be installed
with no space between them
to save space in the panel.
*Ambien t tempera ture 40ºC max .,
individual mount ing.
Ease of Maintenance Environmental Friendliness
Long life time components
1 3
(Design life time 10 years or more*)
Design lifetime 10 Years or more for DC bus
capacitors and cooling fan.
Cooling fan ON / OFF control function for longer
fan life.
*Ambien t temperat ure : Average 4 0ºC (
Design l ifetime is cal culated, and n ot guarant eed.
Life time warning function
2
WJ200 diagnoses lifetime of DC bus capacitors
and cooling fan(s).
no cor rosive gase s, oil mist or dust
)
Easy-removable
cooling fan
The cooler fan can be exchanged
without special tools.
Top cover can
be removed
w i t h n g e r t i p s .
Remove cooling
fan after
disconnecting
power plug.
Micro surge voltage suppress
1
function
(Patent registered)
Hitachi original PWM control method
limits motor terminal voltage to less than
twice inverter DC bus voltage.
Lower than Hitachi motor max. insulation
voltage (1,250V)
(Durin g regenera tion, the mot or terminal v oltage may ex ceed
the mo tor maximum in sulation vol tage (1,250 V))
Motor terminal voltage
E=62 5V cable:100m
EU RoHS
2
compliant
Environment-friendly
inverter meets RoHS
requirements
(ordered items).
Improvement
3
of environment
Varnish coating of
internal PC board is
standard.
(Logic PCB and I /F PCB ar e
excluded.)
Various Versatile Functions
Dual rating
1
WJ200 can be used for both heavy and
normal duty. One-frame-size smaller WJ200
can be applicable to certain applications.
Watt-hour monitor
2
Energy consumption is displayed in kwh.
Output monitoring
3
(2 terminals)
Two monitor output terminals
(10-bit), pulse train (0–10VDC, max 32kHz) )
(Analo g 0 –10 V DC
.
4
Built-in BRD circuit for all models (Op tional resistor).
5
WJ200 supports Peer-to-Peer communication between multiple
inverters. One administrator inverter is necessary in the network, and
the other inverters act as master or slave.
6
Automatic return to the initial display: 10 min. af ter the last
key operation, display returns to the initial parameter set.
Display limitation:
Dual monitor: Two arbitrary monitor items can be set. Parameters
are switched by up/down keys.
Built-in BRD circuit
EzCOM (Peer-to-Peer communication)
Flexible display functions
Show only the contents of display parameter.
4 5
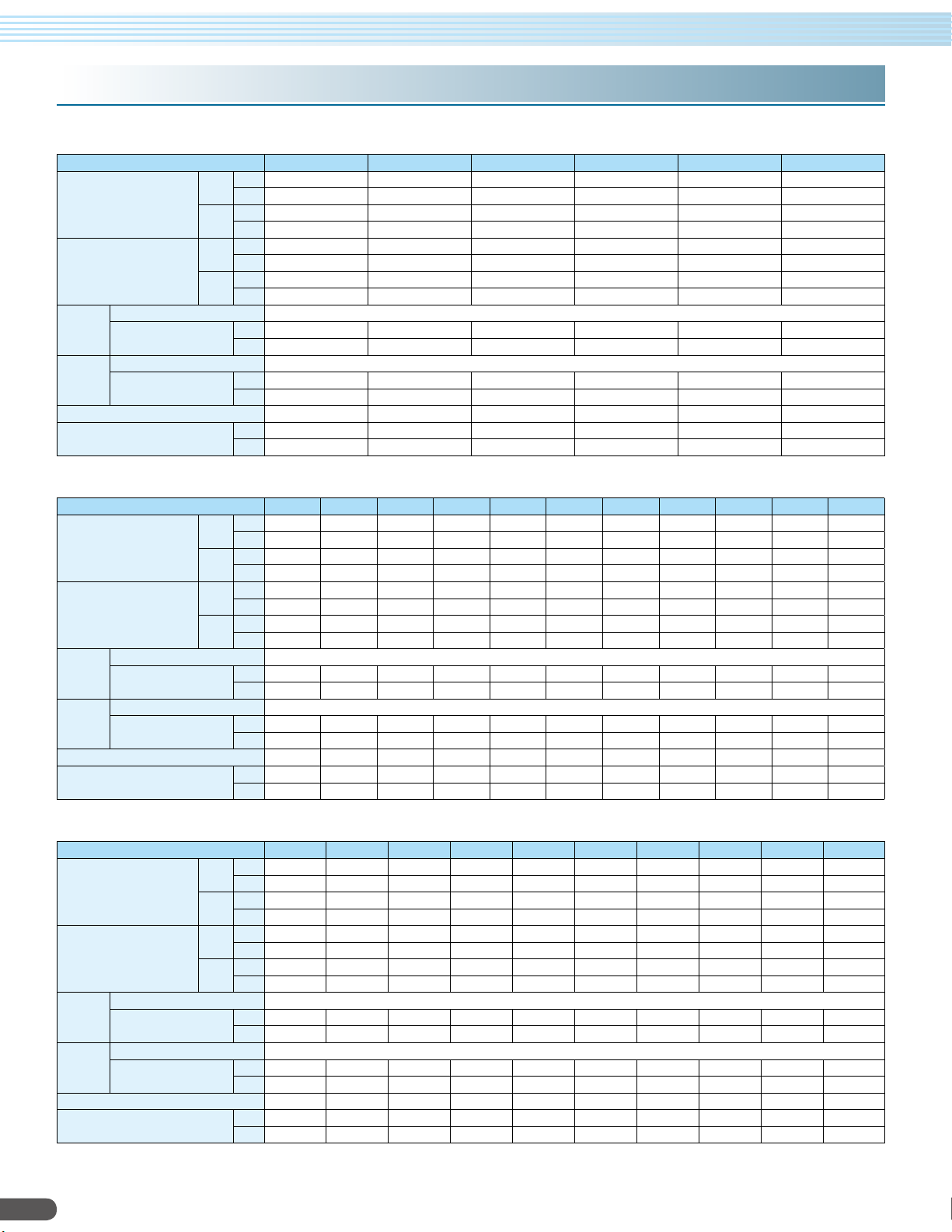
Standard Specications
1-phase 200V class
Models WJ2 00- 001SF 002SF 004SF 007SF 0 15 S F 022SF
VT 0.2 0.4 0.55 1.1 2.2 3.0
kW
Applicable mot or size *
Rated capaci ty (kVA)
Input
Rating
Output
Rating
Minimum value of r esistor (Ω) 100 100 100 50 50 35
Weight
Rated input volt age (V ) 1-phase: 20 0V-15% to 240V +10%, 5 0/ 60Hz ±5%
Rated inpu t current (A)
Rated output voltage (V) *
Rated output current (A)
1
3-phase 200V class
Models WJ2 00- 001LF 002LF 004LF 007LF 015 LF 022LF 037LF 055LF 075LF 110 LF 150 LF
Applicable mot or size *
Rated capaci ty (kVA)
Input
Rating
Output
Rating
Minimum value of r esistor (Ω) 100 100 100 50 50 35 35 20 17 17 10
Weight
Rated input volt age (V ) 3-phase: 200V-15% to 240V +10%, 5 0/ 60Hz ±5%
Rated inpu t current (A)
Rated output voltage (V) *
Rated output current (A)
1
CT 0 .1 0.2 0.4 0.75 1.5 2.2
VT 1/4 1/ 2 3/4 1.5 3 4
HP
CT 1/8 1/4 1/2 1 2 3
VT 0.4 0.6 1.2 2.0 3.3 4 .1
200V
CT 0.2 0.5 1.0 1.7 2.7 3.8
VT 0.4 0.7 1. 4 2.4 3.9 4.9
240V
CT 0.3 0.6 1.2 2.0 3.3 4.5
VT 2.0 3.6 7. 3 13. 8 20.2 24.0
CT 1.3 3.0 6.3 11.5 16 .8 22.0
2
VT 1.2 1.9 3.5 6.0 9.6 12.0
CT 1.0 1.6 3.0 5.0 8.0 11. 0
kg 1.0 1.0 1.1 1.6 1.8 1.8
lb 2.2 2.2 2.4 3.5 4.0 4.0
VT 0.2 0.4 0.75 1.1 2.2 3.0 5.5 7.5 11 15 18.5
kW
CT 0 .1 0.2 0.4 0.75 1.5 2.2 3.7 5.5 7. 5 11 15
VT 1/4 1/2 1 1.5 3 4 7. 5 10 15 20 25
HP
CT 1/8 1/4 1/2 1 2 3 5 7.5 10 15 20
VT 0.4 0.6 1.2 2.0 3.3 4.1 6.7 10.3 13.8 19 .3 23.9
200V
CT 0.2 0.5 1.0 1.7 2.7 3.8 6.0 8.6 11.4 16. 2 20.7
VT 0.4 0.7 1.4 2.4 3.9 4.9 8 .1 12.4 16.6 23.2 28.6
240V
CT 0.3 0.6 1.2 2.0 3.3 4.5 7.2 10.3 13.7 19 .5 24.9
VT 1.2 1.9 3.9 7.2 10.8 13.9 23.0 3 7.0 48.0 68.0 72.0
CT 1.0 1.6 3.3 6.0 9.0 12.7 20.5 30.8 39.6 57.1 62.6
2
VT 1.2 1.9 3.5 6.0 9.6 12.0 19.6 30.0 40.0 56.0 69.0
CT 1.0 1.6 3.0 5.0 8.0 11. 0 17. 5 25.0 33.0 47.0 60.0
kg 1.0 1.0 1.1 1.2 1.6 1.8 2.0 3.3 3.4 5.1 7.4
lb 2.2 2.2 2.4 2.6 3.5 4.0 4.4 7.3 7.5 11.2 16.3
3-phase: 200 to 240V (proportional to input voltage)
3-phase: 200 to 240V (proportional to input voltage)
3-phase 400V class
Models WJ2 00- 00 4HF 007HF 015HF 022HF 0 30HF 0 40HF 055HF 075HF 110 HF 150HF
VT 0.75 1. 5 2.2 3.0 4.0 5.5 7.5 11 15 18. 5
kW
Applicable mot or size *
Rated capaci ty (kVA)
Input
Rating
Output
Rating
Minimum value of r esistor (Ω) 180 18 0 180 100 100 10 0 70 70 70 35
Weight
*1: The ap plicable mot or refers t o Hitachi st andard 3- phase mot or (4p). Whe n using other motors, ca re must be ta ken to prev ent the rat ed motor cur rent (50/ 60Hz) fr om exceedi ng the rate d output cu rrent of th e inverte r.
*2: Th e output vo ltage vari es as the main s upply volt age varies (e xcept when using the AVR f unction). In any case, t he output v oltage can not exceed the input po wer supply v oltage.
Rated input volt age (V ) 3-phase: 380V-15% to 480 V +10%, 50 / 60Hz ±5%
Rated inpu t current (A)
Rated output voltage (V) *
Rated output current (A)
1
6
CT 0.4 0.75 1.5 2.2 3.0 4.0 5.5 7.5 11 15
VT 1 2 3 4 5 7.5 10 15 20 25
HP
CT 1/2 1 2 3 4 5 7.5 10 15 20
VT 1. 3 2.6 3.5 4.5 5.7 7. 3 11. 5 15.1 20.4 25.0
200V
CT 1.1 2.2 3.1 3.6 4.7 6.0 9.7 11. 8 15.7 20.4
VT 1. 7 3.4 4.4 5.7 7. 3 9.2 14 .5 19 .1 25.7 31.5
240V
CT 1.4 2.8 3.9 4.5 5.9 7. 6 12 .3 14.9 19.9 25.7
VT 2.1 4.3 5.9 8.1 9.4 13.3 20.0 24.0 38.0 44.0
CT 1. 8 3.6 5.2 6.5 7.7 11. 0 16. 9 18.8 29.4 35.9
2
VT 2.1 4 .1 5.4 6.9 8.8 11.1 1 7.5 23.0 31.0 38.0
CT 1. 8 3.4 4.8 5.5 7.2 9.2 14.8 18.0 24 .0 31.0
kg 1. 5 1.6 1.8 1.9 1. 9 2 .1 3.5 3.5 4.7 5.2
lb 3.3 3.5 4.0 4.2 4.2 4.6 7. 7 7.7 10.4 11.5
3-phase: 380 to 480 V (proportional to input voltage)
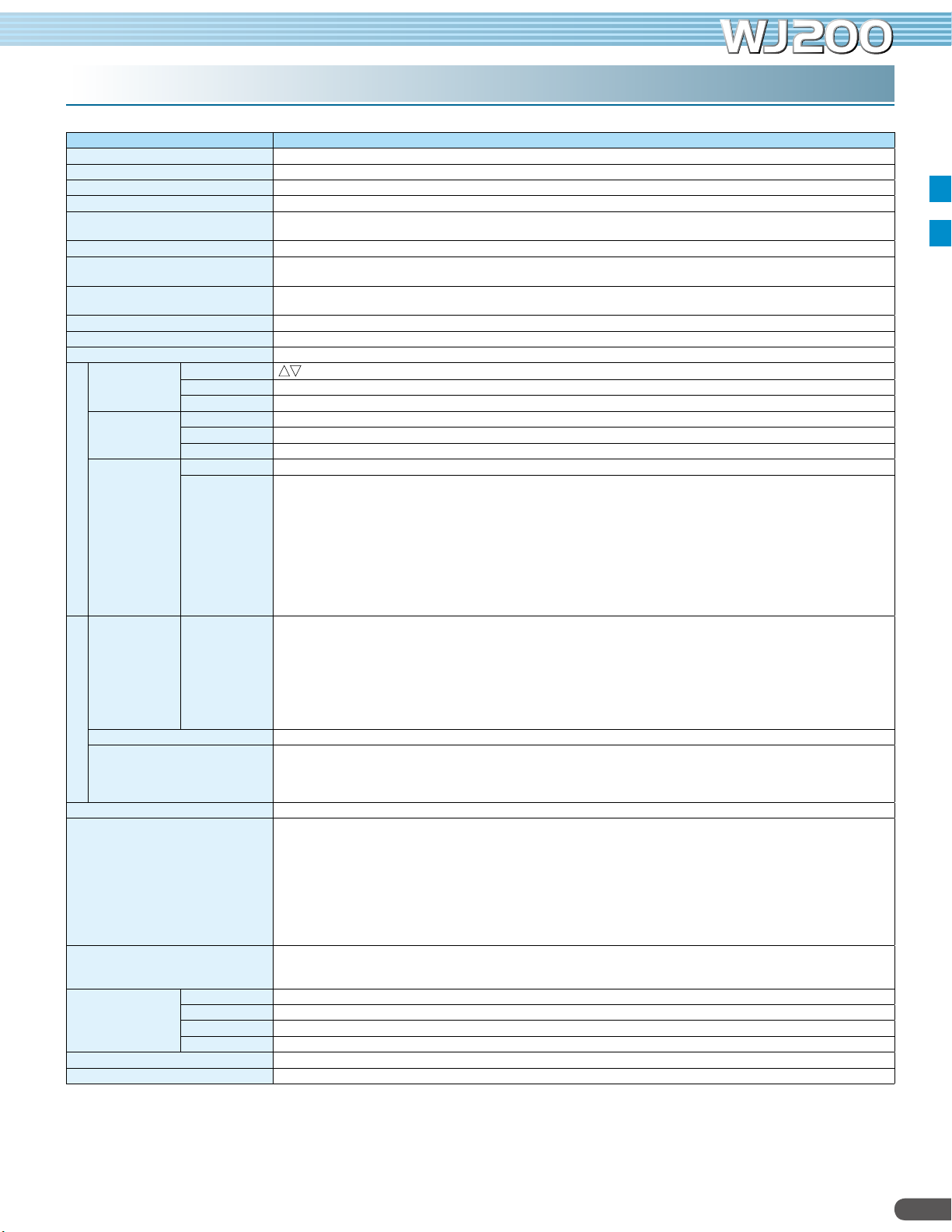
General Specications
Item General Specications
Protect ive housing *
3
Control method Sinusoidal Pulse Width Modulation (PW M) control
Carrier frequency 2kHz to 15kHz (derating required depending on the model)
Output f requency range *
4
Frequency accuracy
Frequency set ting resolut ion Digital: 0.01Hz; Analog: max . frequency / 1000
Volt ./ Freq. character istic
Overload capacity
Acceleration /deceleration time 0.01 to 3600 seconds, linear and S -curve accel /decel, second accel /decel setting available
Start ing torque 200% @0.5Hz (sensorless ve ctor control)
DC braking Variable operating f requency, time, and braking force
Operator panel
Freq . setting
Ex ternal signal *
Via network RS485 ModBus RT U, other net work option
Operator panel Run / Stop (For ward /Reverse run change by command)
FW D/ REV run
Ex ternal signal *
Via network RS485 ModBus RT U, other net work option
Terminals 7 terminals, sink / source changeable by a short b ar
Intelligent input
Input signal
terminal
68 funct ions
Functions
assignable
Intelligent output
terminal
Functions
48 f unctions
assignable
Output signal
Moni tor output (analog) Output freq., output current, output torque, output voltage, input power, thermal load ratio, L AD freq., heat sink temperature, general ou tput (EzSQ)
Pulse train output
(0 – 10VDC, 32 kHz max.)
Alar m output cont act ON for inverter alar m (1c contacts, both nor mally open or closed available.)
Other functions
Protect ive funct ion
Temperature Operating (ambient): -10 to 50
Operating environment
Humidity 20 to 90% humidity (non-condensing)
Vibration *
Location Altitude 1,000m or less, indoors (no corrosive gasses or dust)
Coat ing color Black
Options Remote operator unit, cables for the units, braking unit, braking resistor, AC reactor, DC reactor, EMC lter
IP20
0.1 to 400Hz
Digital command: ±0.01% of the maximum frequency
Analog command: ±0.2% of the maximum frequency (25
°
C ±10°C)
V/f control (constant torque, reduced torque, free-V /F): b ase freq. 3 0Hz – 400Hz adjustable,
Sensorless vector control, Closed loop control with motor encoder feedback (only V/f control).
Dual rating: CT (Heavy duty): 60 sec. @150%
V T (Normal duty): 60 sec. @120%
2
1
keys / Value set tings
6
0 to 10 VDC (input impedance 10kΩ), 4 to 20mA (input imp edance 100Ω), Potentiometer (1k to 2kΩ, 2W )
6
Forward r un /stop, Reverse run / stop
FW (forward run command), RV (reverse run command), CF1 – CF4 (multi-stage speed setting), JG (jog command), DB (external braking), SET (set second
motor), 2CH (2-stage accel. /decel. command), FRS (free run stop command), E XT (exter nal trip), USP (st artup function), CS (commercial power switchover),
SFT (soft lock), AT (analog input selection), RS (reset), PTC (thermistor thermal protection), STA (start), STP (stop), F/ R (forward /reverse), PID (PID
disable), PIDC (PID reset), UP (remote control up function), DWN (remote control down function), UDC (remote control data clear), OPE (operator control),
SF1– SF7 (multi-stage speed setting; bit operation), OLR (overload restriction), TL (torque limit enable), TRQ1 (torque limit changeover1), TRQ2 (torque
limit changeover2), BOK (Braking conrmation), L AC (LAD cancellation), PCLR (position deviation clear), ADD (add frequency enable), F-TM (force terminal
mode), ATR (permission of torque command input), KHC (Cumulative power clear), MI1– MI7 (general purpose inputs for EzSQ), AHD (analog command hold),
CP1– CP3 (multistage-position switches), ORL (limit signal of zero-return), ORG (trigger signal of zero-return), SPD (speed/position changeover), GS1,GS2 (STO
inputs, safety related signals), 485 (Starting communication signal), PRG (executing E zSQ program), HLD (retain output frequency), ROK (permission of run
command), EB (rotation direction detection of B-phase), DISP (display limitation), NO (no function)
RUN (run signal), FA1 –FA 5 (frequency arrival signal), OL,OL2 (overload advance notice signal), OD (PID deviation error signal), A L (alarm signal),
OTQ (over / under torque thre shold), UV (under-voltage), TRQ (torque limit signal), RNT (run time expired), ONT (power ON time expired), THM (thermal
warning), BRK (brake release), BER (brake error), ZS (0Hz detection), DSE (speed deviation excessive), POK (positioning completion), ODc (analog
voltage input disconnection), OIDc (analog cur rent input disconnection), FB V (PID second stage output), NDc (network disconnec t detection), LOG1 –
LOG3 (Logic output signals), WAC (capacitor life warning), WA F (cooling fan warning), FR (st arting contact), OHF (heat sink overheat warning), LOC
(Low load), MO1 –MO3 (general outputs for EzSQ), IRDY (inver ter ready), FWR (forward operation), RVR (reverse operation), M JA (major failure),
WCO (window comparator O), WCOI (window comparator OI), FREF (frequency command source), REF (run command sour ce), SETM (second motor in
operation), EDM (STO (safe torque off ) per formance monitor), OP (option control signal), NO (no function)
[PW M output]
Output fre q., output current, output torque, output voltage, input power, thermal load ratio, LAD freq., heat sink temperature, general output (EzSQ)
[Pulse train output]
Output frequency, output cur rent , pulse train input monitor
Free-V/f, manual / automatic torque boost, output voltage gain adjustment, AVR function, reduced voltage start, motor data selection, autotuning, motor stabilization control, reverse r unning protection, simple position control, simple torque control, torque limiting, automatic carrier
frequency r educ tion, energy saving operation, PID function, non-stop operation at instantaneous power failure, brake control, DC inje ction
braking, dynamic braking (BRD), f requency upper and lower limiters, jump frequencies, curve accel and decel (S, U, inversed U,EL-S), 16-stage
speed prole, ne adjustment of st art frequency, accel and decel stop, process jogging, frequency calculation, frequency addition, 2-stage
accel/decel, stop mode selection, start /end freq., analog input lter, window comparators, input terminal response time, output signal delay/
hold function, rotation direction restriction, stop key sele ction, sof tware lock, safe stop function, scaling function, display restriction, passwor d
function, user p arameter, initialization, initial display selection, cooling fan control, warning, trip retry, frequency pull-in r estart, frequency
matching, overload restriction, over current restriction, DC bus voltage AVR
Over-current, over-voltage, under-voltage, overload, brake resistor overload, CPU error, memory error, external trip, USP error, ground fault detection
at power on, temperature error, internal communication error, driver error, thermistor error, brake error, safe stop, overload at low speed, modbus
communication error, option error, encoder disconnection, speed excessive, EzSQ command error, EzSQ nesting error, EzSQ execution error, EzSQ user trip
°
C / Stor age: -2 0 to 65°C *
8
5.9m/s2 (0.6G), 10 to 55 Hz
7
*3: Th e protect ion method conforms t o JEM 1030.
*4: To operat e the motor b eyond 50 / 60Hz, c onsult the m otor manuf acturer f or the maxim um allowable r otation sp eed.
*5: Th e brakin g torque via ca pacitive feedbac k is th e averag e decele ration t orque at the sh ortest deceler ation (st opping f rom 50 / 60Hz as indic ated). I t is no t continu ous rege nerative braking torque. The a verage d ecelerati on
torqu e varies wit h motor los s. This value d ecreases when opera ting beyon d 50Hz. If a large rege nerative t orque is req uired, the o ptional reg enerativ e braking un it and a resis tor should be used.
*6: T he frequenc y command is t he maximum f requency a t 9.8V for inp ut voltage 0 t o 10V DC, or at 19.6m A for input cur rent 4 to 20m A. If this ch aracteris tic is not sat isfactor y for your app lication, co ntact your H itachi rep resentat ive.
*7: The stora ge tempera ture refe rs to the sho rt-term t emperatur e during tr ansport ation.
*8: Co nforms to t he test met hod speci ed in JIS C0 040 (1999) . For the mo del types excluded in t he standar d specic ations, con tact your H itachi sale s represe ntative.
7
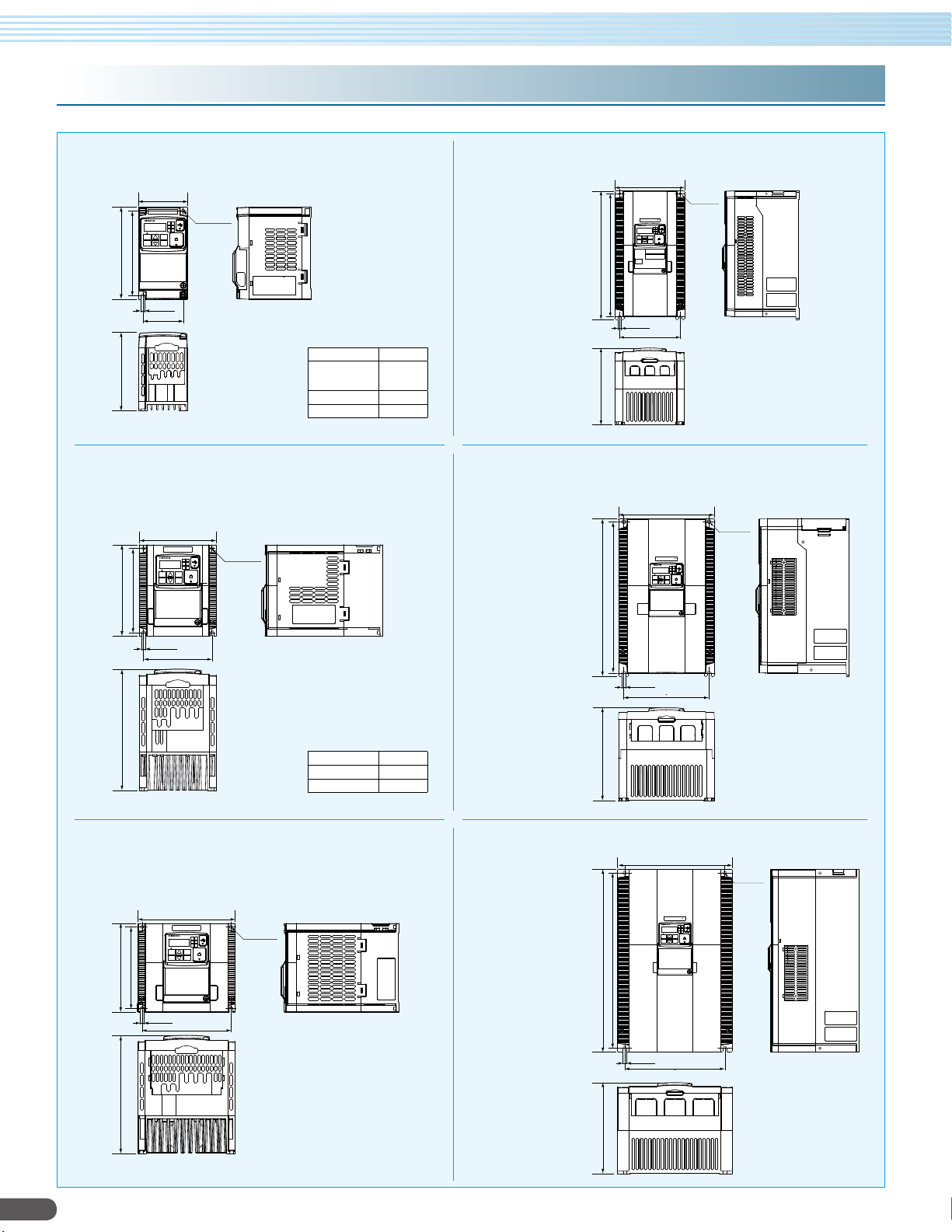
Dimensions
• WJ200-001LF – 007LF
• WJ200-001SF – 004SF
68 (2.68)
WJ200 INVERTER
PWR
RUN
Hz
ALM
A PRG
STOP
RUN
1
RESET
ESC
2 SET
128 (5.04)
118 (4.65)
5 (0.20)
56 (2.20)
D
Ø4.5 (0.18)
Model D
001LF, 002LF
001SF, 00 2SF
109 (4. 29)
004 LF, 004SF 122.5 (4 .82)
007LF 145.5 ( 5.73)
• WJ200-055LF
• WJ200-075LF
• WJ200-055HF
• WJ200-075HF
248 (9.76)
260 (10.24)
155 (6.10)
140 (5.51)
6 (0.24)
122 (4.80)
[Unit : mm(inch)]
Inche s for refere nce only
Ø6 (0.24)
WJ200 INVERTER
PWR
RUN
Hz
ALM
A
PRG
STOP
RUN
1
RESET
ESC
2 SET
• WJ200-015LF, 022LF
• WJ200-007SF – 022SF
• WJ200-004HF – 030HF
108 (4.25)
WJ200 INVERTER
RUN
Hz
A PRG
STOP
RUN
1
RESET
ESC2SET
128 (5.04)
118 (4.65)
5 (0.20)
96 (3.78)
D
• WJ200-037LF
• WJ200-040HF
140 (5.51)
WJ200 INVERTER
RUN
1
ESC2SET
128 (5.04)
118 (4.65)
• WJ200-110LF
• WJ200-110HF
• WJ200-150HF
Ø4.5 (0.18)
PWR
ALM
296 (11.65)
Model D
004HF 143.5 ( 5.65)
Other 170.5 (6 .71)
175 (6.89)
284 (11.18)
7 (0.28)
180 (7.09)
WJ200 INVERTER
RUN
STOP
RUN
1
RESET
ESC2SET
160 (6.30)
Ø7 (0.28)
PWR
Hz
ALM
A
PRG
• WJ200-150LF
220 (8.66)
Ø7 (0.28)
WJ200 INVERTER
RUN
PWR
Hz
ALM
A
PRG
STOP
RUN
PWR
RUN
Hz
ALM
A PRG
STOP
RESET
Ø4.5 (0.18)
336 (13.23)
350 (13.78)
ESC2SET
1
RESET
5 (0.20)
128 (5.04)
7 (0.28)
192 (7.56)
170.5 (6.71)
175 (6.89)
8
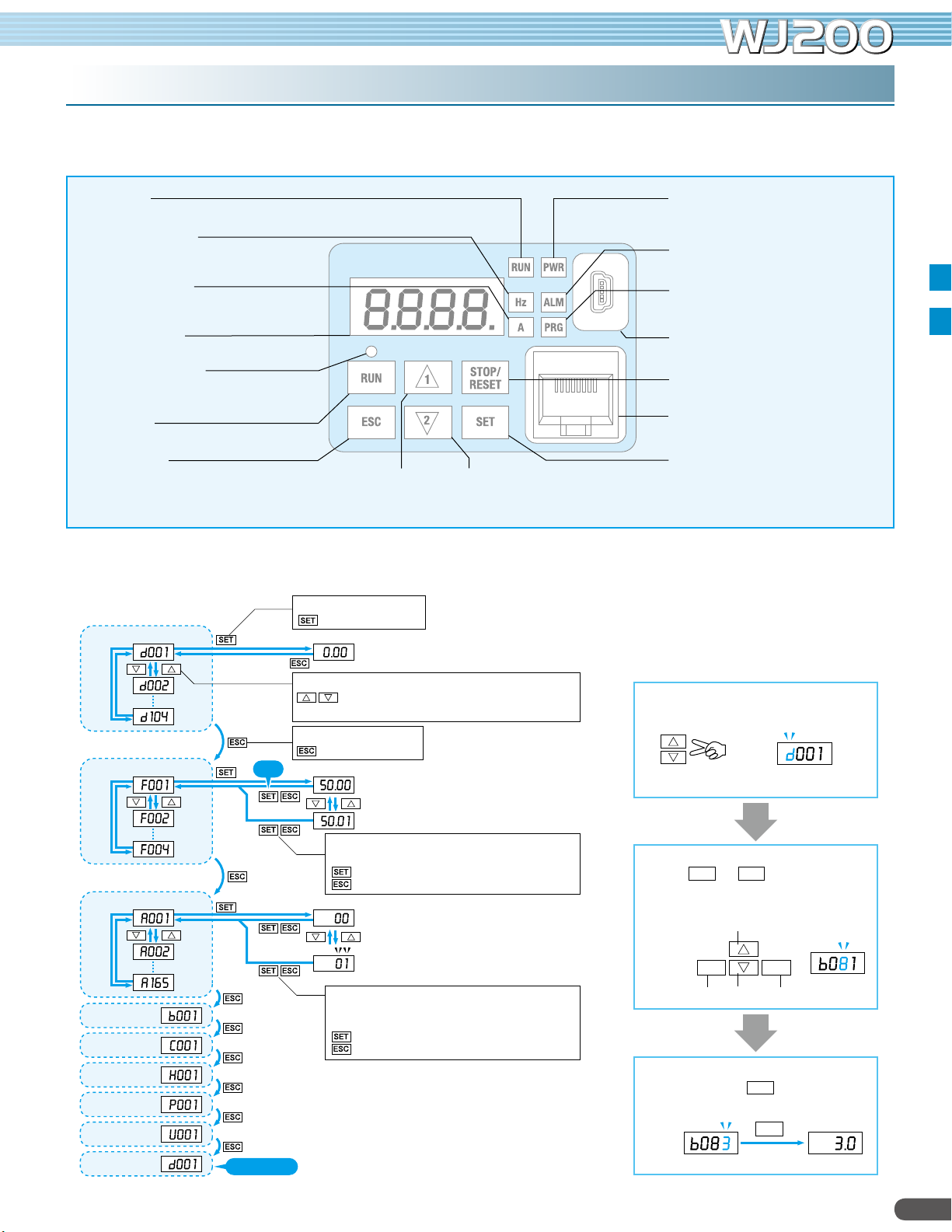
Operation and Programming
Operation Panel
WJ200 Series can be easily operated with the digital operator provided as standard.
( 4 ) Run LED
ON when inverter is in RUN mode.
( 5 ) Monitor L ED [Hz]
ON (Green) when the displayed data is
frequency related.
( 6 ) Monitor LED [A]
ON (Green) when the displayed data is
current related.
( 8 ) 7-segment L ED
Shows each parame ter, monitors etc.
( 7 ) Run command LED
ON (Green) when the Run command is set to the
operator. (Run key is enabled.)
( 9 ) RUN key
Makes inverter run.
(11) Escape key
Go to the top of next function group,
when function mode is displayed.
(12) Up key (13) Down key
Press up or down to sequence through parameters and functions
shown on the display, and increment/decrement values.
(1 ) POWER LED
ON (Green) while t he inverter is receiving
input power.
( 2 ) AL ARM LED
ON (Red) when the inver ter trips.
( 3 ) Program L ED
ON (Green) when the display shows
editable parameter.
(15) USB port
USB connector (mini-B) for PC communication.
(10) Stop /reset key
Makes inverter stop.
(16) RS-422 port
RJ4 5 jack for remote operator.
(14) Set key
Function code: Moves to the data display.
Data code: Press to write the new value
to EEPROM.
Keypad Navigation Map Single-Digit Edit Mode
If a target function code or data is far from current
posit ion, using the single-digit edit mode makes it
quicker to navigate there. Pressing the up key and
down key at the same time brings you into the
digit-by-digi t navigation mode.
Press both up key and down key at
Step1:
the same.
1st digit will be blinking.
Group "d"
Function co de
Group "F "
Function co de
Func tion code di splay
:
Moves to dat a display
Data display
Func tion code di splay
: Chang e the value of fun ction code.
Pressing the up key at the bot tom of the group returns to the top of the group.
Func tion code di splay
: Jumps t o the next gr oup
Save
Data display
d001: Output frequency monitoring
F001: Output frequency setting
Function group "d" is a monitor,
data c annot be changed.
Group "b"
Group " C"
Group " H"
Group " P"
Group " U"
Group "d"
Group "A"
Function co de
return to d 001
Data display (F001 to F003)
Data does no t blink becaus e of real time s ynchronizing
Save s the data in EE PROM and re turns to function code display.
)
Data display
Function group "U" return to function group "d" next.
A001: Frequency source setting
Data display
When data is changed, the display starts blinking, which
means that new data has not been stored yet.
: Saves the data in EEPROM and returns to function code display.
: Cancels the data change and returns to function code display.
The blinking digit is moved by the
Step2:
ESC
and
SET
key right and left.
Use up/down keys to change the value
of the digit.
+1
SETESC
Move cursor to left. Move cursor to right.
Step3:
-1
When the least signicant digit is
blinking, the
SET
key selects
that parameter.
SET
9
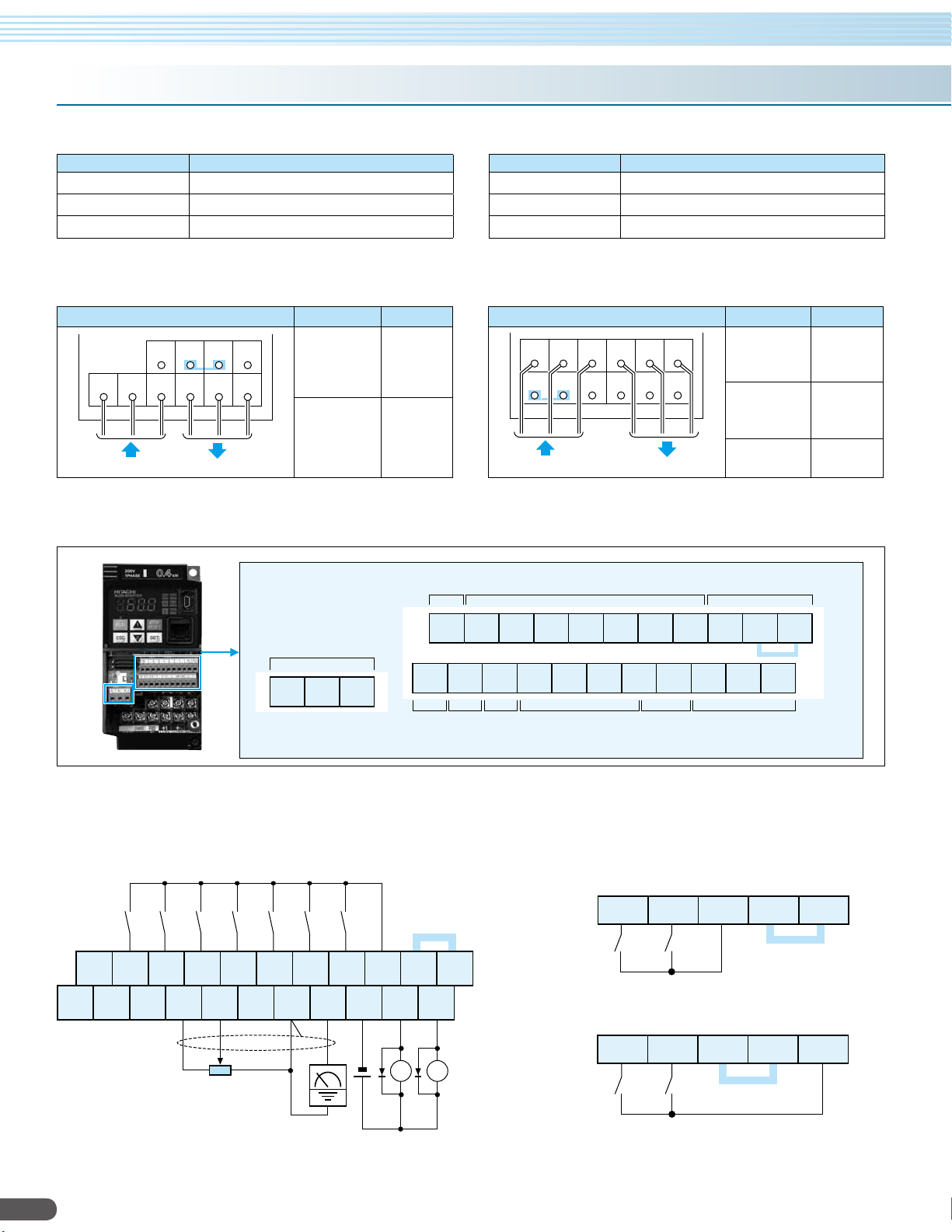
Terminal (
Arrangements / Functions
Terminal Description
Symbol Terminal Name
R/L1, S/L 2, T/L3 Main power supply input terminals
U/T1, V/T2, W/T3 Inverter output terminals
PD/+1, P/+ DC reactor connection terminals
Terminal Arrangement and Screw Diameter
Terminal Model
Screw Diameter
)
Symbol Terminal Name
P/+, RB External braking resistor connection terminals
P/+, N/- External braking unit connection terminals
G Ground connection terminal
Terminal Model
Screw Diameter
RB
PD/+1
P/+ N/-
R/L1 S/L2 T/L3 U/T1 V/T2 W/T3
001 – 007LF
001 – 004SF
M3.5
015 – 037LF
007– 022SF
Power input Output to motor
004 –040HF
Terminal Arrangement of Control Circuit Terminals
Relay contacts
AL2 AL1 AL0
M4
RS-485
comm.
R/L1 S/L2
PD/+ P/+
Power input Output to motor
RS-485
comm.
SN
7 6 5 4 3 2 1 L PLC P24
SP
EO EA H O OI L AM CM2 12 11
Pulse
Pulse
Train
Train
output
input
T/L3 U/T1 V/T2 W/T3
N/-
RB G G
Logic inputs
Analog input Analog output Logic outputs
055 – 075LF
055 – 075HF
110LF
110 – 150HF
150 LF M8
Logic common
and power supply
M5
M6
Short bar
Wiring sample of control logic terminal (Sink logic)
SN 7 6 5 4 3 2 1 L PLC P24
SP EO EA H O OI L AM CM2 12 11
Variable resistor
for freq. set tting
(1kΩ –2kΩ)
Freq. meter
10
Short bar
(Sink logic)
RYRY
(27Vdc 50m A max.)
Sink /source logic of intelligent input terminals
Sink or source logic is switched by a short bar as below.
Sink logic
2 1 L PLC P24
Short bar
Source logic
2 1 L PLC P24
Short bar
 Loading...
Loading...