

Page 1
LIDAR-LITE V4 LED
DRAFT
OPERATION
MANUAL AND
TECHNICAL SPECIFICATIONS
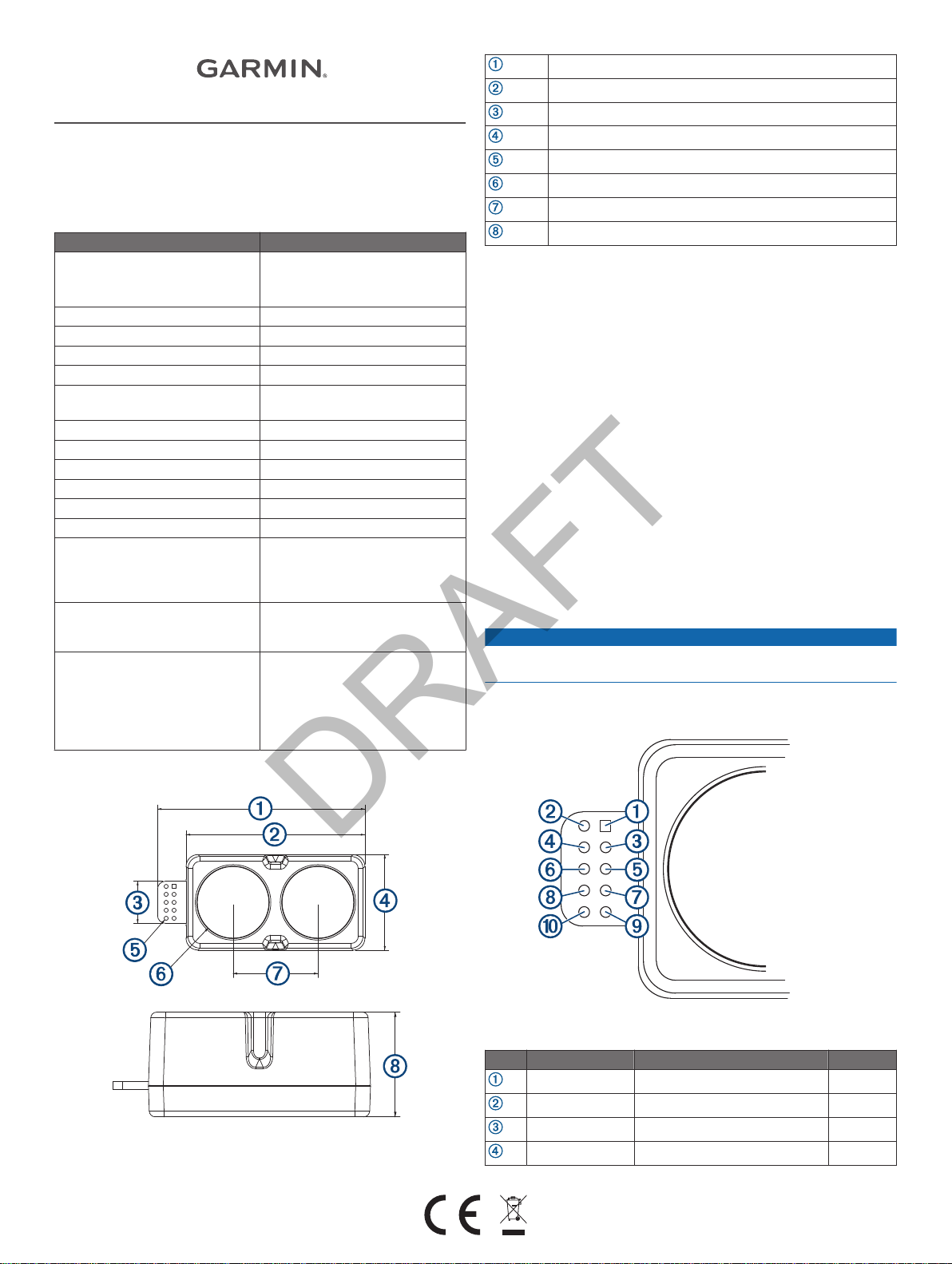
Specifications
Specification Measurement
Unit dimensions (L × W × H)
NOTE: Measurements do not
include an attached connector.
Weight 14.6 g (0.5 oz.)
Operating temperature -20 to 60°C (-4 to 140°F)
Storage temperature -40 to 85°C (-40 to 185°F)
Power (operating voltage) 4.75 to 5.25 Vdc
Current consumption 2 mA idle
Input voltage (VIN) 3.3 V Max
Range 5 cm (1.97 in.) to 10 m (32.8 ft.)
Resolution 1 cm (0.4 in.)
Beam divergence 4.77 degrees
LED wavelength 940 nm
Optical aperture 14.9 mm
Update rate I2C: Greater than 200 Hz typical
Interface I2C or ANT
Measurement repeatability
NOTE: As measured indoors to a
90% reflective target; 1 cm is
equivalent to 1 standard deviation.
Measurements were obtained
using high accuracy mode.
52.2 x 24 x 21.2 mm (2.1 x 0.9 x
0.8 in.)
85 mA during an acquisition
ANT: Up to 200 Hz to a 90%
reflective target indoors at 2 m in
normal operating mode
®
Configurable for SPI with user
applications
± 1 cm to 2 m
± 2 cm to 4 m
± 5 cm to 10 m
52.17 mm (2.05 in.)
44.98 mm (1.77 in.)
10.6 mm (0.42 in.)
24.03 mm (0.95 in.)
1 mm (0.04 in.)
18 mm (0.71 in.)
21.35 mm (0.84 in.)
21.2 mm (0.83 in.)
Mounting Options
Cable tie
Double-sided tape: You can secure the bottom of the device to
Labeling Requirements
The LIDAR-Lite
you are integrating the device with another product, you must
ensure the FCC ID is visible from the outside of your product.
You are responsible for meeting any other labeling requirements
imposed by the FCC rules and any rules related to the
compliance of your end product.
: You can secure the device to your application using a
3.6 mm (0.14 in.) wide cable tie. You should route the cable
tie through the channel in the center of the device.
your application using double-sided tape. For best results,
you should select a tape that has a high-strength bond.
v4 LED device is an FCC-certified transmitter. If
Connections
LIDAR-Lite v4 LED Connection Diagram
The through-holes on the LIDAR-Lite v4 LED device are
arranged in 2 rows of 5 holes each, with a 2 mm pitch between
each connection.
NOTICE
The LIDAR-Lite v4 LED maximum signal level is 3.3 V. A signal
greater than 3.3 V will damage the device.
Device Dimensions
Pin Pin Name Function V Max
VIN 5 V Power 5 V
GND Ground --
I2C SDA I2C Data 3.3 V
I2C SCL I2C Clock 3.3 V
August 2019
190-02533-00_01
Page 2

Pin Pin Name Function V Max
DRAFT
GPIOA General Purpose I/O 3.3 V
GPIOB General Purpose I/O 3.3 V
VRETURN nRF52840 DBG 3.3 V
nRESET nRF52840 DBG 3.3 V
SWCLK nRF52840 DBG 3.3 V
SWDIO nRF52840 DBG 3.3 V
Operational Information
Technology
This device measures distance by calculating the time delay
between the transmission of a near-infrared light and its
reception after reflecting off of a target, using the known speed
of light.
The
LIDAR-Lite
Semiconductor. This SoC pairs an ARM Cortex-M4 processor
with 1 MB of flash memory and 256 KB of RAM. The included
2.4GHz multiprotocol radio and S340 SoftDevice support Ultra
Low Power (ULP) wireless technologies, including ANT and
Bluetooth® 5 LE.
The
LIDAR-Lite
that allows the developer to communicate with the device using
several methods. An I2C interface allows the device to be
connected to an external micro-controller, or it can be controlled
and operated wirelessly using the ANT wireless protocol in
accordance with the ANT Ranging Profile.
The
LIDAR-Lite
LE secure DFU bootloader, which enables wireless software
updates using a Bluetooth LE capable device.
Theory of Operation
When the device takes a measurement, it first performs a
receiver adjustment routine, correcting for changing ambient
light levels and allowing maximum sensitivity.
The device sends a reference signal directly from the transmitter
to the receiver. It stores the transmit signature, sets the time
delay for “zero” distance, and recalculates this delay periodically
after several measurements.
Next, the device initiates a measurement by performing a series
of acquisitions. Each acquisition is a transmission of the main
light signal while recording the return signal at the receiver. If
there is a signal match, the result is stored in memory as a
correlation record. The next acquisition is summed with the
previous result. When an object at a certain distance reflects the
light signal back to the device, these repeated acquisitions
cause a peak to emerge, out of the noise, at the corresponding
distance location in the correlation record.
The device integrates acquisitions until the signal peak in the
correlation record reaches a maximum value. If the returned
signal is not strong enough for this to occur, the device stops at
a predetermined maximum acquisition count.
Signal strength is calculated from the magnitude of the signal
record peak and a valid signal threshold is calculated from the
noise floor. If the peak is above this threshold, the measurement
is considered valid and the device will calculate the distance. If
the peak is not above the threshold, it will report 1 cm. When
beginning the next measurement, the device clears the signal
record and starts the sequence again.
Interface
Initialization
When you turn on or reset the device, it performs a self-test
sequence and initializes all registers with default values. After
roughly 22 ms, you can take distance measurements using the
v4 LED contains an nRF52840 SoC from Nordic
v4 LED comes preloaded with an application
v4 LED also comes preloaded with a Bluetooth
I2C interface, the mode control pin, or a wireless ANT
connection.
I2C Interface
This device has a 2-wire, I2C-compatible serial interface. It can
be connected to an I2C bus as a slave device, under the control
of an I2C master device. It supports 400 kHz Fast Mode data
transfer.
The I2C bus operates internally at 3.3 Vdc. Internal 13 kiloohm
pull-up resistors ensure this functionality and allow for a simple
connection to the I2C host.
The device has a 7-bit slave address with a default value of
0x62. The effective 8-bit I2C address is 0xC4 write and 0xC5
read. The device does not respond to a general call. Support is
not provided for 10-bit addressing. The device auto-increments
the register address with successive reads or writes within an
I2C block transfer. This is commonly used to read the two bytes
of a 16-bit value within one transfer. See Obtaining
Measurements from the I2C Interface
For a list of all available control registers, see Control Register
List
, page 5
For more information about the I2C protocol, see I2C Protocol
Information
Obtaining Measurements from the I2C Interface
You can obtain measurement results from the I2C interface.
Write 0x04 to register 0x00.
1
Read register 0x01.
2
Repeat step 2 until bit 0 (LSB) goes low.
3
Read two bytes from 0x10 (low byte 0x10 then high byte
4
0x11) to obtain the 16-bit measured distance in centimeters.
Settings
You can configure the device with alternate parameters for the
distance measurement algorithm. You can use this algorithm to
customize performance by enabling configurations that allow
speed, range, and sensitivity options. See the full control
register list
settings.
Configurable I2C Address
You can change the I2C address from its default to any 7-bit
value. Before you can configure the secondary I2C address, you
must first enable flash storage (0xEA). After you configure the
secondary I2C address, the address persists if you turn off the
device. You can use this process to run multiple devices on a
single bus by enabling a device, changing its address, and then
enabling the next device. Before you can change the I2C
address, the I2C communications bus must read the UNIT_ID
and write it back to the device in a single five-data-byte
transaction with the new I2C address as the fifth byte. Software
template functions for configuring the I2C address are available
at https://github.com/garmin/.
Mode Control Pins
The mode control pins can be used to trigger distance
measurements and check the status of the
These connections are not required. These pins can provide a
simpler and faster method of controlling the device, and they are
intended to be used in conjunction with the I2C interface. For
more information, go to
.
, page 4
(Control Register List, page 5)
.
https://github.com/garmin/
, page 2
.
for additional
LIDAR-Lite
.
v4 LED.
2
Page 3

Pin Description Functionality Details
DRAFT
GPIO A TRIGGER LIDAR-Lite v4
GPIO B MONITOR LIDAR-Lite v4
Triggering and Reading Distance Measurements
Toggle the TRIGGER pin.
1
Wait for the MONITOR pin to go low.
2
Read two bytes from 0x10 (low byte 0x10, then high byte
3
0x11) to obtain the 16-bit measured distance in centimeters.
NOTE: If you need to take distance measurements as quickly
as possible, you can reverse steps 2 and 3 so the LIDAR-Lite
v4 LED device takes a distance measurement while
performing the I2C register read. When this occurs, the
LIDAR-Lite v4 LED device is in the process of measuring the
distance while the registers are read. The distance returned
is the previously triggered measurement.
ANT
ANT is a practical wireless network protocol running in the 2.4
GHz ISM band. Designed for ultra-low power, ease of use,
efficiency, and scalability, ANT easily handles peer-to-peer, star,
tree, and mesh topologies. Other ANT capable devices can
connect to the LIDAR-Lite v4 LED to control it, receive data from
it, and configure it wirelessly. ANT messages are sent and
received from the
ranging profile.
For more details about the ANT ranging profile and the
capabilities and workings of the ANT wireless protocol, see ANT
Ranging Profile and ANT Message Protocol and Usage at
https://github.com/garmin/.
Connecting Wirelessly Using ANT
Before you can connect to the
you must complete these tasks.
LED
measurement
trigger input
LED BUSY
status output
LIDAR-Lite
v4 LED in accordance to the
Toggle to start a distance
measurement. The
Lite v4 LED starts a distance
measurement on either the
rising or falling edge. If a
distance measurement is
triggered while the device is
busy, the requested
measurement is ignored.
Indicates when the LIDARLite v4 LED is busy. If low,
the device is idle and is ready
to start a distance
measurement. If high, the
device is busy taking a
distance measurement. Wait
for the signal to drop before
you toggle GPIO A to trigger
a distance measurement.
LIDAR-Lite
v4 LED using ANT,
LIDAR-
ANT
• Install Windows 7 Service Pack 1 or higher on your PC
• Install .Net Framework 4.5 or higher on your PC
• Install Visual C++ 2008 SP1 Redistributable Package or
higher on your PC
• Purchase a Garmin®
Connect the USB
1
Download and install the Garmin ANT demo PC application
2
on your computer (https://github.com
Configure and connect the PC application to the LIDAR-Lite
3
v4 LED device as specified in the readme file that is included
with the Garmin
Activating the Bluetooth LE Bootloader
NOTE: If you are installing a custom unsigned application to the
LIDAR-Lite v4 LED, you should first test and debug the custom
application using a J-Link debugging probe before you perform
wireless updates.
The
LIDAR-Lite
Bluetooth LE bootloader that allows you to update the device
software wirelessly. You can use the Nordic Secure DFU
bootloader to install an official update signed by Garmin, or a
developer can use that bootloader to install a custom, unsigned
application.
Disconnect power from the
1
Ground the boot pin (GPIO B).
2
Connect power to the LIDAR-Lite v4 LED device.
3
The
Bluetooth
Mode."
Updating the Firmware Using the Bluetooth LE Bootloader
You can use the
v4 LED firmware using a smartphone equipped with Bluetooth
LE or a PC equipped with an nRF52 DK or nRF52840 dongle.
The firmware is contained in a file called DFU.zip.
Copy the DFU.zip file to a smartphone or PC.
1
NOTE: You can use the DFU.zip file provided by Garmin or a
custom DFU.zip file.
Using the nRF Connect or nRF Toolbox app, start the
2
firmware upgrade using the DFU.zip file you copied.
After the DFU process reaches 100%, verify the new
3
application runs correctly.
For more information about how to update the nRF52840 using
the Nordic secure DFU bootloader, go to https://github.com
/garmin/.
ANT
v4 LED device comes preloaded with a
LE bootloader starts advertising as "LLV4 DFU
Bluetooth
USB-m stick
ANT
stick to your computer.
ANT
/garmin/
demo PC application.
LIDAR-Lite
bootloader to update the LIDAR-Lite
) .
v4 LED device.
3
Page 4

I2C Protocol Information
DRAFT
The sensor module has a 7-bit slave address with a default value of 0x62 in hexadecimal notation. The effective 8 bit I2C address is
0xC4 write, 0xC5 read. The device will not respond to a general call.
The last NACK in the read is optional, but the formal I2C protocol states that the master shall not acknowledge the last byte.
I2C Protocol Operation
This protocol description uses the term master to refer to the
host controller, and the term
LIDAR-Lite v4 LED device acting as a slave on the I2C bus.
When working with the I2C serial bus protocol, the LIDAR
device operates as follows.
The master initiates data transfer by establishing a start
1
condition, which consists of a high-to-low transition on the
SDA line while SCL is high.
The master sends an address byte, which consists of the 7-
2
bit slave address.
The master sends a read/write bit with a zero state, which
3
indicates a write request. A write operation is used as the
initial stage of both read and write transfers.
If the slave address corresponds to the LIDAR device
4
address, the
during the ninth clock pulse. This operation is considered the
acknowledge bit. At this stage, all other devices on the bus
remain idle while the selected LIDAR device waits for data to
be written to or read from its shift register.
Data transmits over the serial bus in sequences of nine clock
5
pulses (eight data bits followed by an acknowledge bit).
device responds by pulling SDA low
LIDAR
device to refer to the
LIDAR
These transmissions must occur on the SDA line during the
low period of SCL and remain stable during the high period of
SCL.
The master sends an 8-bit data byte following the slave
6
address, which loads the I2C control register on the LIDAR
device with the address of the first control register to be
accessed.
The master requests a read operation from the LIDAR device
7
or sends a write operation to the LIDAR device.
Read Operation
After the master establishes communication with the LIDAR
device, you can obtain a reading from the LIDAR device.
The first data frame sets the address of the desired read
1
register.
The master sends a stop bit at the completion of the first data
2
frame.
The master initiates a new start condition, which consists of
3
the slave I2C device address with the read bit set (one state).
The
4
when it receives a valid address.
device sends an acknowledge bit to the master
LIDAR
4
Page 5

The master reads one or more data bytes in succession. The
DRAFT
5
internal device address pointer auto increments with each
byte access.
The master strobes the acknowledge bit following each data
6
byte except for the final byte in the transfer before sending
the stop condition.
After the read cycle is done, the master sends a stop
7
condition to complete the operation.
Write Operation
After the master establishes communication with the LIDAR
device, writing to the
device operates as follows.
LIDAR
The master sends one or more 8-bit data blocks to the LIDAR
1
device. The internal device address pointer auto increments
with each byte access.
The
2
when it receives and writes a valid data byte.
After the write cycle is done, the master sends a stop
3
condition to complete the operation.
device sends an acknowledge bit to the master
LIDAR
Control Register List
NOTE: Unless otherwise noted, all registers contain one byte and are read and write.
Address R/W Name Description Initial Value Details
0x00 W ACQ_COMMANDS Device command -- 0x00
0x01 R STATUS System status -- 0x01
0x05 R/W ACQUISITION_COUNT Maximum acquisition count 0xFF 0x05
0x10 R FULL_DELAY_LOW Distance measurement low byte -- 0x10
0x11 R FULL_DELAY_HIGH Distance measurement high byte -- 0x11
0x16 R UNIT_ID_0 Unit ID, byte 0 -- 0x16
0x16 W UNIT_ID_0_UNLOCK Write unit ID 0 for I2C address unlock -- 0x16
0x17 R UNIT_ID_1 Unit ID, byte 1 -- 0x17
0x17 W UNIT_ID_1_UNLOCK Write unit ID 1 for I2C address unlock -- 0x17
0x18 R UNIT_ID_2 Unit ID, byte 2 -- 0x18
0x18 W UNIT_ID_2_UNLOCK Write unit ID 2 for I2C address unlock -- 0x18
0x19 R UNIT_ID_3 Unit ID, byte 3 -- 0x19
0x19 W UNIT_ID_3_UNLOCK Write unit ID 3 for I2C address unlock -- 0x19
0x1A R/W I2C_SEC_ADDR Write new I2C address after unlock -- 0x1A
0x1B W I2C_CONFIG Default address response control 0x00 0x1B
0x1C R/W DETECTION_SENSITIVITY Peak detection threshold bypass 0x00 0x1C
0x30 R LIB_VERSION Read
0x52 R/W CORR_DATA Correlation record data control -- 0x52
0x72 R CP_VER_LO Coprocessor firmware version low byte -- 0x72
0x73 R CP_VER_HI Coprocessor firmware version high byte -- 0x73
0xE0 R BOARD_TEMPERATURE Board temperature -- 0xE0
0xE1 R HARDWARE_VERSION Board hardware version -- 0xE1
0xE2 R/W POWER_MODE Power state control 0xFF 0xE2
0xE3 R/W MEASUREMENT_INTERVAL Automatic measurement rate 0xFF 0xE3
0xE4 W FACTORY_RESET Reset default settings -- 0xE4
0xE5 R/W QUICK_TERMINATION Quick acquisition termination 0x08 0xE5
0xE6 W START_BOOTLOADER Start secure
0xEA R/W ENABLE_FLASH_STORAGE Store register settings 0x00 0xEA
0xEB R/W HIGH_ACCURACY_MODE Improved accuracy setting 0x14 0xEB
0xEC R SOC_TEMPERATURE SoC temperature -- 0xEC
software library version string -- 0x30
Garmin
Bluetooth
LE bootloader -- 0xE6
, page 5
, page 5
, page 6
, page 6
, page 6
, page 6
, page 6
, page 6
, page 6
, page 6
, page 6
, page 6
, page 6
, page 6
, page 6
, page 6
, page 7
, page 7
, page 7
, page 7
, page 7
, page 7
, page 7
, page 7
, page 7
, page 7
, page 7
, page 7
, page 8
, page 8
0x00
R/W Name Description Initial Value
W ACQ_COMMANDS Device command --
Bit Function
7:0 Write 0x03: Take distance measurement without receiver bias
correction
Write 0x04: Take distance measurement with receiver bias
correction
0x01
R/W Name Description Initial Value
R STATUS System status --
Bit Function
5 DC error flag
4 DC bias done flag
3 Low power flag
0: No error detected
1: An error was detected in correcting DC noise bias, and distance
measurements are expected to be inaccurate
0: The device is performing automatic DC noise bias corrections
1: DC noise is within tolerance, and the automatic DC noise bias
corrections are currently idle
0: Device is powered on. I2C commands can be issued at a normal
rate.
1: The device is in low power mode. To allow the device to power
on and perform the I2C command, a 10ms delay after each
command is recommended.
5
Page 6

Bit Function
DRAFT
2 Reference overflow flag
0: Reference data has not overflowed
1: Reference data in correlation record has reached the maximum
value before overflow (this occurs when taking measurements with
biasing enabled)
1 Signal overflow flag
0: Signal data has not overflowed
1: Signal data in correlation record has reached the maximum
value before overflow (this occurs with a strong received signal
strength)
0 Busy flag
0: Device is ready for a new command
1: Device is busy taking a measurement or powering on
0x05
R/W Name Description Initial Value
R/W ACQUISITION_COUNT Maximum acquisition
count
0xFF
0x18
R/W Name Description Initial
R UNIT_ID_2 Unit ID, byte 2 --
W UNIT_ID_2_UNLOCK Write unit ID 2 for I2C
address unlock
Bit Function
7:0 Read byte two of the unit ID
Write the value in UNIT_ID_2 here as part of enabling a nondefault I2C address. See I2C_SEC_ADDR (0x1A
, page 6
Value
--
).
0x19
R/W Name Description Initial
R UNIT_ID_3 Unit ID, byte 3 --
W UNIT_ID_3_UNLOCK Write unit ID 3 for I2C
address unlock
Value
--
Bit Function
7:0 Maximum number of acquisitions during measurement
0x10
R/W Name Description Initial Value
R FULL_DELAY_LOW Distance measurement low
byte
Bit Function
7:0 Distance measurement result in centimeters, low byte.
--
0x11
R/W Name Description Initial Value
R FULL_DELAY_HIGH Distance measurement high
byte
Bit Function
7:0 Distance measurement result in centimeters, high byte.
--
0x16
R/W Name Description Initial
R UNIT_ID_0 Unit ID, byte 0 --
W UNIT_ID_0_UNLOCK Write unit ID 0 for I2C
address unlock
Bit Function
7:0 Read byte zero (LSB) of the unit ID
Write the value in UNIT_ID_0 here as part of enabling a nondefault I2C address. See I2C_SEC_ADDR (0x1A
, page 6
Value
--
).
0x17
R/W Name Description Initial
R UNIT_ID_LOW Unit ID, byte 1 --
W UNIT_ID_1_UNLOCK Write unit ID 1 for I2C
address unlock
Bit Function
7:0 Read byte one of the unit ID
Write the value in UNIT_ID_1 here as part of enabling a nondefault I2C address. See I2C_SEC_ADDR (0x1A
, page 6
Value
--
).
Bit Function
7:0 Read byte three (MSB) of the unit ID.
Write the value in UNIT_ID_3 here as part of enabling a nondefault I2C address. See I2C_SEC_ADDR (0x1A
, page 6
).
0x1A
R/W Name Description Initial Value
R/W I2C_SEC_ADDR Write new I2C address after
Bit Function
7:0 Non-default I2C address.
Available addresses are any non-zero 7-bit values.
The five byte sequence is composed of the four byte UNIT_ID and
the one byte slave address. The UNIT_ID must be entered with the
least significant byte first.
UNIT_ID_0_UNLOCK (0x16,
(0x17, page 6), UNIT_ID_2_UNLOCK (0x18, page 6), and
UNIT_ID_3_UNLOCK (0x19
for the device to respond to the non-default I2C address.
Example: UNIT_ID = 0x01020304, (LSB = 04, MSB = 01)
Example write starting at 0x16: 0x0403020155, would match on
UNIT_ID and set slave address to 0x55 (The effective 8-bit
secondary I2C address would be 0xAA write and 0xAB read)
NOTE: You must enable ENABLE_FLASH_STORAGE before
configuring the secondary I2C address (0xEA, page 7).
unlock
), UNIT_ID_1_UNLOCK
page 6
) must have the correct value
, page 6
--
0x1B
R/W Name Description Initial Value
W I2C_CONFIG Default address response control 0x00
Bit Function
7:0 0x00: Use the default address only (0x62).
0x01: Use the secondary I2C address only. This requires the
address to be configured using write command I2C_SEC_ADDR
(
0x1A, page 6
0x02: Use both addresses.
).
0x1C
R/W Name Description Initial Value
R/W DETECTION_SENSITIVITY Peak detection
threshold bypass
0x00
6
Page 7

Bit Function
DRAFT
7:0 0x00: Use default valid measurement detection algorithm based on
the peak value, signal strength, and noise in the correlation record.
0x01 to 0xFF: Set simple threshold for valid measurement
detection. Values 0x20 to 0x60 generally perform well.
0x30
R/W Name Description Initial Value
R LIB_VERSION Read
version string
Garmin
software library
--
Bit Function
7:0 0x00:
Asynchronous Mode. The coprocessor is always OFF
unless a distance measurement is requested or a register access
is required
0x01: Synchronous Mode. Distance measurement is tied to the
ANT channel period. The coprocessor is turned on and off as
required.
0xFF: Always on. The coprocessor is not turned off, allowing for
the fastest measurements possible.
You must disable HIGH_ACCURACY_MODE before you
NOTE:
adjust the power mode.
Bit Function
7:0 Read 11 consecutive bytes in one I2C read for the full library
version string. Each byte represents a character using ASCII
encoding.
0x52
R/W Name Description Initial Value
R/W CORR_DATA Correlation record data control --
Bit Function
7:0 Read two consecutive bytes to retrieve correlation record data as a
16-bit, two's complement value. The memory index is incremented
automatically, and successive two-byte reads produce sequential
data.
Write 0x00: Reset correlation internal pointer to zero.
0x72
R/W Name Description Initial Value
R CP_VER_LO Coprocessor firmware version low
byte.
Bit Function
7:0 Coprocessor firmware version low byte.
--
0x73
R/W Name Description Initial Value
R CP_VER_HI Coprocessor firmware verison high
byte
Bit Function
7:0 Coprocessor firmware version high byte.
--
0xE0
R/W Name Description Initial Value
R BOARD_TEMPERATURE Board temperature --
Bit Function
7:0 Returns the board's temperature as an 8-bit, two's complement
value in Celsius.
0xE3
R/W Name Description Initial
R/W MEASUREMENT_INTERVAL Automatic
Bit Function
7:0 This register is used in conjunction with Synchronous Mode
(
0xE2, page 7
0x00 and 0xFF: Trigger a distance measurement for every ANT
message
0x01 to 0xFE: The number of
triggering a distance measurement, effectively reducing the
automatic measurement rate.
HIGH_ACCURACY_MODE must be disabled before adjusting the
measurement interval (0xEB
).
measurement rate
channel periods to wait before
ANT
).
, page 8
Value
0xFF
0xE4
R/W Name Description Initial Value
W FACTORY_RESET Reset default settings --
Bit Function
7:0 0x01 to 0xFE: Resets the NVM/Flash storage information back to
default settings and executes a SoftDevice reset.
0xE5
R/W Name Description Initial Value
R/W QUICK_TERMINATION Quick acquisition
termination
Bit Function
7:0 0x00: Enable measurement quick termination. The device
terminates the distance measurement early if it anticipates the
signal peak in the correlation record will reach the maximum value.
0x08: Disable measurement quick termination.
0x08
0xE6
R/W Name Description Initial Value
W START_BOOTLOADER Start secure
bootloader.
Bluetooth
LE
--
0xE1
R/W Name Description Initial Value
R HARDWARE_VERSION Board hardware version --
Bit Function
7:0 Board hardware version
0xE2
R/W Name Description Initial Value
R/W POWER_MODE Power state control 0xFF
Bit Function
7:0 0x01 to 0xFE: Restarts the device and launches the Bluetooth LE
0xEA
R/W Name Description Initial Value
R/W ENABLE_FLASH_STORAGE Store register
advertiser. All other functionality is disabled while using the
Bluetooth LE bootloader.
0x00
settings
7
Page 8

Bit Function
DRAFT
7:0 0x00: Use RAM storage only.
0x11: Use FLASH/NVM storage. Any register that supports both
read and write operations is stored in NVM and persists over
power cycles.
NOTE: Use caution when enabling flash storage. The total number
of writes and erases is limited to 10,000.
0xEB
R/W Name Description Initial Value
R/W HIGH_ACCURACY_MODE Improved accuracy
Bit Function
7:0 0x00: Disable high accuracy mode. While high accuracy mode is
disabled, you can adjust the POWER_MODE to Asynchronous
Mode
or Synchronous Mode if required (0xE2, page 7
0x01 to 0xFF: Enable high accuracy mode. The value is used as
the number of distance measurements to accumulate and average
before returning them to the user. You must set the
POWER_MODE to
value.
Always On before you adjust to a non-zero
setting
0x14
).
10-pin J-Link Wiring
You should connect the 10-pin J-Link debugging probe to the
LIDAR-Lite v4 LED device as shown in the diagram and table
below.
NOTE: A 10-pin J-link debugging probe cannot supply power to
the LIDAR-Lite v4 LED device. Connections 1 and 2 are
connected to the device from an external power supply. The
power supply and debugging probe should share a common
ground at pin 2 on the LIDAR-Lite v4 LED device.
0xEC
R/W Name Description Initial Value
R SOC_TEMPERATURE SoC temperature --
Bit Function
7:0 Returns the temperature of the nRF SoC as an 8-bit, two's
complement value in Celsius.
Appendix
Reprogramming the nRF52840 SoC
NOTICE
Reprogramming the nRF52840 System on Chip (SoC) removes
all pre-programmed factory software. The device comes
preprogrammed with a unique ANT ID to ensure each device
can be uniquely identified over the ANT wireless protocol. When
reprogramming the device, special precautions should be taken
to preserve the
information about accessing and retaining the ANT ID value.
The
LIDAR-Lite
factory with a
wireless software updates. When reprogramming the
nRF52840, the bootloader is removed. If you require a
bootloader after reprogramming the device, you can follow the
Bluetooth LE Secure DFU Bootloader reference design in the
Nordic nRF5 SDK. If a boot pin is required, you should configure
it to one of the exposed GPIOs (LIDAR-Lite v4 LED Connection
Diagram,
page 1)
ID value. See https://github.com/garmin/ for
ANT
v4 LED device comes preprogrammed from the
Bluetooth
LE secure DFU bootloader for receiving
.
Connection 10-Pin J-Link Debugging
Probe Pin
-- 2 (GND) to common ground
-- 1 (VIN) to power source
3 (GND) to common ground --
1 (VCC) 7 (VRETURN)
10 (nRESET) 8 (nRESET)
2 (SWDIO) 10 (SWDIO)
4 (SWCLK) 9 (SWCLK)
LIDAR-Lite v4 LED Pin
20-pin J-Link Wiring
You should connect the 20-pin J-Link debugging probe to the
LIDAR-Lite v4 LED as shown in the diagram and table below.
Before you can reprogram the device, you must connect it to a
compatible debugging probe.
The header on the LIDAR-Lite v4 LED device provides access
to the nRF52840 SoC. You can reprogram the nRF52840 SoC
to suit the individual needs of your project. Software
development should be completed using the C programming
language and the Nordic nRF5 SDK. For more information about
the capabilities of the nRF52840, go to www.nordicsemi.com
/nrf52840.
• For information about setting up a LIDAR-Lite v4 LED
development environment, go to https://github.com/garmin/.
• For support in using the nRF5 SDK and reprogramming the
nRF52840 SoC, go to https://devzone.nordicsemi.com/.
8
Connection 20-Pin J-Link Debugging
Probe Pin
LIDAR-Lite v4 LED Pin
7 (SWDIO) 10 (SWDIO)
1 (VCC) 7 (VRETURN)
20 (GND) 2 (GND)
15 (nRESET) 8 (nRESET)
19 (5V Supply) 1 (5V)
9 (SWCLK) 9 (SWCLK)
Short 11 to 12 Not applicable
Page 9

Standard
DRAFT
The
greater than 3.3 V will damage the device.
You should connect the Arduino DUE and the
LED as shown in the diagram and table.
NOTE: You must splice the ground wires so all components
share a common ground. These components include the power
supply, the programmer, the microcontroller operating I2C, and
any GPIOs.
Arduino
LIDAR-Lite
®
DUE I2C Wiring
NOTICE
v4 LED maximum signal level is 3.3 V. A signal
LIDAR-Lite
v4
simulator connects to a device with any device number and
transmission type.
Can I use a microcontroller with 5 V signaling?
The LIDAR-Lite v4 LED device is tolerant to only 3.3 V. If you
need to use a 5 V system, such as the
use a logic level converter to protect the I/O drivers in the
LIDAR-Lite v4 LED device.
recommend using a microcontroller with 5 V signaling.
© 2019 Garmin Ltd. or its subsidiaries
Garmin®, the Garmin logo, and ANT® are trademarks of Garmin Ltd. or its subsidiaries,
registered in the USA and other countries.
Arduino® is a registered trademark of Arduino AG. The BLUETOOTH® word mark and
logos are owned by the Bluetooth SIG, Inc. and any use of such marks by Garmin is
under license. J-Link is a trademark of SEGGER Microcontroller GmbH. Nordic
Semiconductor® is a trademark of Nordic Semiconductor ASA.
Garmin
Arduino
does not endorse or
Uno, you must
Item Arduino DUE LIDAR-Lite v4
LED
5V 1 (5 V) 5 V
GND 2 (GND) --
SDA 20 3 (SDA) 3.3 V
SCL 21 4 (SCL) 3.3 V
PWM 3 6 (GPIOB) 3.3 V
PWM 2 5 (GPIOA) 3.3 V
V Max
Troubleshooting
Product Support
Contact your authorized Garmin
information related to your device and its specific application.
Go to support.garmin.com
such as product manuals, specifications, and frequently asked
questions.
The I2C is not responsive while the device is powered on
GPIO B is used as a boot pin to start the LIDAR-Lite
Bluetooth LE bootloader. If GPIO B is grounded when the device
is powered on, the bootloader is enabled and I2C and ANT
functionality are disabled.
Verify GPIO B is not grounded.
I cannot connect my device to the Garmin
simulator
network key is configured correctly.
• Ensure the
◦ If the LIDAR-Lite v4 LED device still has the default
application installed from the factory, verify that you have
the
◦ If you have reprogrammed the device and you are using
the public network key, verify that you have the public
network key selected.
• Verify that you have the same RF frequency selected on both
the
LIDAR-Lite
• Verify that you have the correct channel parameters selected.
TIP: You can set wildcards for the channel parameters to
connect to any device. On the PC simulator, if you set the
device number and transmission type to zero, the Garmin PC
ANT
developer key selected.
Garmin
v4 LED device and the Garmin PC simulator.
Reseller for troubleshooting
for general help and information,
v4 LED
PC
9
Page 10

© 2019 Garmin Ltd. or its subsidiaries
DRAFT
support.garmin.com
 Loading...
Loading...