

Page 1
Designed for Fan and Pump Applications
User's Manual
Page 2
Copyright © 2005-2007 Fuji Electric FA Components & Systems Co., Ltd.
All rights reserved.
No part of this publication may be reproduced or copied without prior written permission from Fuji Electric FA
Components & Systems Co., Ltd.
All products and company names mentioned in this manual are trademarks or registered trademarks of their
respective holders.
The information contained herein is subject to change without prior notice for improvement.
Page 3
Preface
This manual provides all the information on the FRENIC-Eco series of inverters including its operating
procedure, operation modes, and selection of peripheral equipment. Carefully read this manual for proper use.
Incorrect handling of the inverter may prevent the inverter and/or related equipment from operating correctly,
shorten their lives, or cause problems.
The table below lists the other materials related to the use of the FRENIC-Eco. Read them in conjunction with
this manual as necessary.
Name Description
Catalog
Instruction Manual
RS-485 Communication
User's Manual
RS-485 Communications
Card "OPC-F1-RS"
Installation Manual
Relay Output Card
"OPC-F1-RY" Instruction
Manual
Mounting Adapter for
External Cooling "PB-F1"
Installation Manual
Panel-mount Adapter
"MA-F1" Installation Manual
Multi-function Keypad
"TP-G1" Instruction Manual
Product scope, features, specifications, external drawings, and options of
the product
Acceptance inspection, mounting & wiring of the inverter, operation using
the multi-function keypad, running the motor for a test, troubleshooting,
and maintenance and inspection
Overview of functions implemented by using FRENIC-Eco RS-485
communications facility, its communications specifications, Modbus
RTU/Fuji general-purpose inverter protocol and functions, and related
data formats
Items on acceptance checking, and how to install the card option
Items on acceptance checking, how to install the card option, wiring and
specifications
Items on acceptance checking, what to apply, and how to install the
adapter
Items on acceptance checking, what to apply, and how to install the
adapter
Items on acceptance checking, and how to install and wire the
Multi-function Keypad, an operation guide of the keypad, and
specifications
FRENIC Loader Instruction
Manual
Overview, installation, setting-up, functions, trouble-shooting, and
specifications of FRENIC Loader
The materials are subject to change without notice. Be sure to obtain the latest editions for use.
Documents related to Fuji inverters
Catalogs
FRENIC-Multi
FRENIC-Mini
FRENIC-Lift
FRENIC5000G11S/P11S
FRENIC5000VG7S
User's Manuals and Technical Information
FRENIC-Multi User's Manual
FRENIC-Eco User's Manual
FRENIC-Mini User's Manual
FRENIC5000G11S/P11S & FVR-E11S Technical Information
FRENIC5000VG7S User's Manual
i
Page 4
Guideline for Suppressing Harmonics in Home Electric and General-purpose
Appliances
Our three-phase, 208 V class series inverters of 5 HP or less (FRENIC-Eco series) were the products of which
were restricted by the "Guideline for Suppressing Harmonics in Home Electric an d General-purpose Appliances"
(established in September 1994 and revised in October 1999) issued by the Ministry of Economy, Trade and
Industry.
The above restriction, however, was lifted when the Guideline was revised in January 2004. Since then, the
inverter makers have individually imposed voluntary restrictions on the harmonics of their products.
We, as before, recommend that you connect a reactor (for suppressing harmonics) to your inverter. As a reactor,
select a "DC REACTOR" introduced in this manual. For use of the other reactor, please inquire of us about
detailed specifications.
Japanese Guideline for Suppressing Harmonics by Customers Receiving High
Voltage or Special High Voltage
Refer to this manual, Appendix B for details on this guideline.
Safety precautions
Read this manual and the FRENIC-Eco Instruction Manual thoroughly before proceeding with installation,
connections (wiring), operation, or maintenance and inspection. Ensure you have sound knowledge of the
product and familiarize yourself with all safety information and precautions before proceeding to operate the
inverter.
Safety precautions are classified into the following two categories in this manual.
Failure to heed the information indicated by this symbol may lead to dangerous
conditions, possibly resulting in death or serious bodily injuries.
Failure to heed the information indicated by this symbol may lead to dangerous
conditions, possibly resulting in minor or light bodily injuries and/or substantial
property damage.
Failure to heed the information contained under the CAUTION title can also result in serious consequences.
These safety precautions are of utmost importance and must be observed at all times.
This product is not designed for use in appliances and machinery on which lives depend. Consult your Fuji
Electric representative before considering the FRENIC-Eco series of inverters for equipment and machinery
related to nuclear power control, aerospace uses, medical uses or transportation. When the product is to be
used with any machinery or equipment on which lives depend or with machinery or equipment which could
cause serious loss or damage should this product malfunction or fail, ensure that appropriate safety devices
and/or equipment are installed.
ii
Page 5
Precautions for Use
Driving a 460 V
general-purpose
motor
When driving a 460 V general-purpose motor with an inverter using extremely
long wires, damage to the insulation of the motor may occur. Use an output
circuit filter (OFL) if necessary after checking with the motor manufacturer.
Fuji motors do not require the use of output circuit filters because of their
reinforced insulation.
In running
generalpurpose
motors
Torque
characteristics and
temperature rise
Vibration
Noise
Explosion-proof
motors
Submersible
motors and pumps
When the inverter is used to run a general-purpose motor, the temperature of
the motor becomes higher than when it is operated using a commercial power
supply. In the low-speed range, the cooling effect will be weakened, so
decrease the output torque of the motor.
When an inverter-driven motor is mounted to a machine, resonance may be
caused by the natural frequencies of the machine system.
Note that operation of a 2-pole motor at 60 Hz or higher may cause abnormal
vibration.
* The use of a rubber coupling or vibration dampening rubber is
recommended.
* Use the inverter's jump frequency control feature to skip the resonance
frequency zone(s).
When an inverter is used with a general-purpose motor, the motor noise level is
higher than that with a commercial power supply. To reduce noise, raise carrier
frequency of the inverter. Operation at 60 Hz or highe r can also res ult in hig her
level of wind roaring sound.
When driving an explosion-pro of motor with an inverter, use a combination of
a motor and an inverter that has been approved in advance.
These motors have a higher rated current than general-purpose motors. Select
an inverter whose rated output current is higher than that of the motor.
These motors differ from general-purpose motors in thermal characteristics.
Set a low value in the thermal time constant of the motor when setting the
electronic thermal overcurrent protection (for motor).
In running
special
motors
Brake motors
Geared motors
Synchronous
motors
Single-phase
motors
For motors equipped with parallel-connected brakes, their braking power must
be supplied from the inverter’s primary circuit. If the brake power is connected
to the inverter's output circuit by mistake, the brake will not work.
Do not use inverters for driving m otors equippe d with series -connected brakes.
If the power transmission mechanism uses an oil-lubricated gearbox or speed
changer/reducer, then continuous m otor operation at low speed may cause poor
lubrication. Avoid such operation.
It is necessary to take special measures suitable for this motor type. Contact
your Fuji Electric representative for details.
Single-phase motors are not suitable for inverter-driven variable speed
operation. Use three-phase motors.
iii
Page 6
Environmental
conditions
Installation
location
Installing an
MCCB or
RCD/GFCI
Installing an MC
in the secondary
circuit
Use the inverter within the ambient temperature range from -10 to +50°C (14 to
122°F).
The heat sink and braking resistor of the inverter may become hot under certain
operating conditions, so install the inverter on nonflammable material such as
metal.
Ensure that the installation location meets the environmental conditions
specified in Chapter 8, Section 8.4 "Operating Environment and Storage
Environment."
Install a recommended molded case circuit breaker (MCCB) or
residual-current-operated protective device (RCD)/ground fault circuit
interrupter (GFCI) (with overcurrent protection) in the primary circuit of each
inverter to protect the wiring. Ensure that the circuit breaker capacity is
equivalent to or lower than the recommended capacity.
If a magnetic contactor (MC) is installed in the inverter's output (secondary)
circuit for switching the motor to commercial power or for any other purpose,
ensure that both the inverter and the motor are completely stopped before you
turn the MC on or off.
Remove a surge killer integrated with the magnet contactor in the inverter's
output (secondary) circuit.
Combination with
peripheral
devices
Installing an MC
in the primary
circuit
Protecting the
motor
Discontinuance of
power-factor
correcting
capacitor
Discontinuance of
surge killer
Reducing noise
Do not turn the magnetic contactor (MC) in the primary circuit on or off more
than once an hour as an inverter failure may result.
If frequent starts or stops are required during motor operation, use
(FWD)/(REV) signals or the RUN/STOP key.
The electronic thermal feature of the inverter can protect the motor. The
operation level and the motor type (general-purpose motor, inverter motor)
should be set. For high-speed motors or water-cooled motors, set a small value
for the thermal time constant.
If you connect the motor thermal relay to the motor with a long wire, a
high-frequency current may flow into the wiring stray capacitance. This may
cause the thermal relay to trip at a current lower than the set value. If this
happens, lower the carrier frequency or use the output circuit filter (OFL).
Do not connect power-factor correcting capacitors to the inverter’s primary
circuit. (Use the DC reactor to improve the inverter power factor.) Do not use
power-factor correcting capacitors in the inverter’s output (secondary) circuit.
An overcurrent trip will occur, disabling motor operation.
Do not connect a surge killer to the inverter's output (secondary) circuit.
Use of a filter and shielded wires is typically recommended to satisfy EMC
Directives.
Refer to Appendices, App. A "Advantageous Use of Inverters (Notes on
electrical noise)" for details.
If an overvoltage trip occurs while the inverter is stopped or operated under
Measures against
surge currents
light load, it is assumed that the surge current is generated by open/close of the
phase-advancing capacitor in the power system.
* Connect a DC reactor to the inverter.
When checking the insulation resistance of the inverter, use a 500 V megger
Megger test
and follow the instructions contained in th e FRENIC-Eco Instructio n Manual,
Chapter 7, Section 7.5 "Insulation Test."
iv
Page 7
Wiring
Control circuit
wiring length
Wiring length
between inverter
and motor
Wire size
When using remote control, limit the wiring length between the inverter and
operator box to 66ft (20 m) or less and use twisted pair or shielded wire.
If long wiring is used between the inverter and the motor, the inverter may
overheat or trip due to overcurrent because a higher harmonics current flows
into the stray capacitance between each phase wire. Ensure that the wiring is
shorter than 164ft (50 m). If this length must be exceeded, lower the carrier
frequency or install an output circuit filter (OFL).
Select wires with a sufficient capacity by referring to the current value or
recommended wire size.
Selecting
inverter
capacity
Transportation and
storage
Wir e type
Grounding Securely ground the inverter using the grounding terminal.
Driving
general-purpose
motor
Driving special
motors
When transporting or storing inverters, follow the procedures and select locations that meet the
environmental conditions listed in the FRENIC-Eco Instruction Manual, Chapter 1, Section 1.3
"Transportation" and Section 1.4 "Storage Environment."
Do not share one multi-core cable in order to connect several inverters with
motors.
Select an inverter according to the applicable motor ratings listed in the
standard specifications table for the inverter.
When high starting torque is required or quick acceleration or deceleration is
required, select an inverter with a capacity one size greater than the standard.
Refer to Chapter 7, Section 7.1 "Selecting Motors and Inverters" for details.
Select an inverter that meets the following condition:
Inverter rated current > Motor rated current
v
Page 8
How this manual is organized
This manual contains Chapters 1 through 10, Appendices and Glossary.
Part 1 General Information
Chapter 1 INTRODUCTION TO FRENIC-Eco
This chapter describes the features and control system of the FRENIC-Eco series, and the recommended
configuration for the inverter and peripheral equipment.
Chapter 2 PARTS NAMES AND FUNCTIONS
This chapter contains external views of the FRENIC-Eco series and an overview of terminal blocks, including a
description of the LED display and keys on the keypad.
Chapter 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
This chapter describes inverter operation using the multi-function keypad. The inverter features three operation
modes (Running, Programming and Alarm modes) which ena ble y ou t o ru n an d st op th e motor, monitor ru nnin g
status, set function code data, display running information required for maintenance, and display alarm data.
Part 2 Driving the Motor
Chapter 4 BLOCK DIAGRAMS FOR CONTROL LOGIC
This chapter describes the main block diagrams for the control logic of the FRENIC-Eco series of inverters.
Chapter 5 RUNNING THROUGH RS-485 COMMUNICATION
This chapter describes an overview of inverter operation through the RS-485 communications facility. Refer to
the RS-485 Communication User's Manual or RS-4 85 C omm unicatio ns Card " OPC-F1-RS" Installati on Man ual
for details.
Part 3 Peripheral Equipment and Options
Chapter 6 SELECTING PERIPHERAL EQUIPMENT
This chapter describes how to use a range of peripheral equipment and options, FRENIC-Eco's configuration
with them, and requirements and precautions for selecting wires and crimp terminals.
Part 4 Selecting Optimal Inverter Model
Chapter 7 SELECTING OPTIMAL MOTOR AND INVERTER CAPACITIES
This chapter provides you with information abou t t he i n verter out put t orque charact eristics, selection procedure,
and equations for calculating capacities to help you select optimal motor and inverter models. It also helps you
select braking resistors.
vi
Page 9
Part 5 Specifications and Troubleshooting
Chapter 8 SPECIFICAT IONS
This chapter describes specifications of the output ratings, control system, and terminal functions for the
FRENIC-Eco series of inverters. It also provides descriptions of the operating and st orage environment, exter nal
dimensions, examples of basic connection diagrams, and details of the protective functions.
Chapter 9 FUNCTION CODES
This chapter contains overview lists of seven groups of function codes available for the FRENIC-Eco series of
inverters and details of each function code.
Chapter 10 TROUBLESHOOTING
This chapter describes troubleshooting procedures to be followed when the inverter malfunctions or detects an
alarm condition. In this chapter, first check whether any alarm code is displayed or not, and then proceed to the
troubleshooting items.
Appendices
App. A Advantageous Use of Inverters (Notes on electrical noise)
App. B Japanese Guideline for Suppressing Harmonics by Customers Receivi ng High Voltage or Special H igh
Voltage
App. C Effect on Insulation of General-purpose Motors Driven with 460 V Class Inverters
App. D Inverter Generating Loss
App. E Conversion from SI Units
App. F Allowable Current of Insulated Wires
Glossary
Icons
The following icons are used throughout this manual.
This icon indicates information which, if not heeded, can result in the inverter not operating to full
efficiency, as well as information concerning incorrect operations and settings which can result in
accidents.
This icon indicates information that can prove handy when perform ing certain sett ings or operations .
This icon indicates a reference to more detailed information.
vii
Page 10
CONTENTS
Part 1 General Information
Chapter 1 INTRODUCTION TO FRENIC-Eco
1.1 Features...........................................................................................................................................................1-1
1.2 Control System.............................................................................................................................................1-18
1.3 Recommended Configuration.......................................................................................................................1-19
Chapter 2 PARTS NAMES AND FUNCTIONS
2.1 External View and Allocation of Terminal Blocks..........................................................................................2-1
2.2 Key, LED, and LCD Monitors on the Keypad................................................................................................2-3
Chapter 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
3.1 Overview of Operation Modes ....................................................................................................................... 3-1
3.2 Running Mode................................................................................................................................................3-2
3.2.1 Running/stopping the motor......................................................................................................................3-2
3.2.2 Setting up the frequency and PID process commands ..............................................................................3-5
3.2.3 LED monitor (Monitoring the running status)..........................................................................................3-9
3.3 Programming Mode......................................................................................................................................3-10
3.3.1 Setting function codes -- "1. Data Setting" .............................................................................................3-11
3.3.2 Setting up function codes quickly using Quick setup -- "0. QUICK SET".............................................3-14
3.3.3 Checking changed function codes -- "2. DATA CHECK".......................................................................3-14
3.3.4 Monitoring the running status -- "3. OPR MNTR".................................................................................3-15
3.3.5 Checking I/O signal status -- "4. I/O CHECK".......................................................................................3-17
3.3.6 Reading maintenance information -- "5. MAINTENANC"....................................................................3-20
3.3.7 Reading alarm information -- "6. ALM INF"..........................................................................................3-23
3.3.8 Viewing cause of alarm -- "7. ALM CAUSE".........................................................................................3-26
3.3.9 Data copying -- "8. DATA COPY"..........................................................................................................3-28
3.3.10 Measuring load factor -- "9. LOAD FCTR"............................................................................................3-35
3.3.11 Changing function codes covered by Quick setup -- "10. USER SET"..................................................3-38
3.3.12 Performing communication debugging -- "11. COMM DEBUG"..........................................................3-39
3.4 Alarm Mode..................................................................................................................................................3-40
3.5 Other Precautions..........................................................................................................................................3-42
3.5.1 Function code setting for F02 (Run and operation).................................................................................3-42
3.5.2 Remote/local operation ...........................................................................................................................3-42
3.5.3 Tuning motor parameters ........................................................................................................................3-43
Part 2 Driving the Motor
Chapter 4 BLOCK DIAGRAMS FOR CONTROL LOGIC
4.1 Symbols Used in Block Diagrams and their Meanings ..................................................................................4-1
4.2 Drive Frequency Command Generator...........................................................................................................4-2
4.3 Drive Command Generator.............................................................................................................................4-4
4.4 Digital Terminal Command Decoder.............................................................................................................. 4-6
4.4.1 Terminals and related function codes........................................................................................................4-6
4.4.2 Functions assigned to digital control input terminals................................................................................4-7
4.4.3 Block diagrams for digital control input terminals....................................................................................4-8
4.5 Digital Output Selector.................................................................................................................................4-12
4.5.1 Digital output components (Internal block)............................................................................................4-12
4.5.2 Universal DO (Access to the function code S07 exclusively reserved for the
4.6 Analog Output (FMA and FMI) Selector......................................................................................................4-16
4.7 Drive Command Controller..........................................................................................................................4-17
4.8 PID Frequency Command Generator............................................................................................................4-19
communications link)..............................................................................................................................4-15
viii
Page 11
Chapter 5 RUNNING THROUGH RS-485 COMMUNICATION
5.1 Overview on RS-485 Communication............................................................................................................5-1
5.1.1 RS-485 common specifications (standard and optional)...........................................................................5-2
5.1.2 RJ-45 connector pin assignment for standard RS-485 communications port............................................5-3
5.1.3 Pin assignment for optional RS-485 Communications Card.....................................................................5-4
5.1.4 Cable for RS-485 communications port....................................................................................................5-4
5.1.5 Communications support devices..............................................................................................................5-5
5.2 Overview of FRENIC Loader.........................................................................................................................5-6
5.2.1 Specifications............................................................................................................................................5-6
5.2.2 Connection................................................................................................................................................5-7
5.2.3 Function overview.....................................................................................................................................5-7
5.2.3.1 Setting of function code....................................................................................................................5-7
5.2.3.2 Multi-monitor....................................................................................................................................5-8
5.2.3.3 Running status monitor ..................................................................................................................... 5-9
5.2.3.4 Test-running ....................................................................................................................................5-10
5.2.3.5 Real-time trace—Displaying running status of an inverter in waveforms ......................................5-11
Part 3 Peripheral Equipment and Options
Chapter 6 SELECTING PERIPHERAL EQUIPMENT
6.1 Configuring the FRENIC-Eco........................................................................................................................6-1
6.2 Selecting Wires and Crimp Terminals.............................................................................................................6-2
6.2.1 Recommended wires.................................................................................................................................6-4
6.3 Peripheral Equipment .....................................................................................................................................6-8
6.4 Selecting Options..........................................................................................................................................6-14
6.4.1 Peripheral equipment options..................................................................................................................6-14
6.4.2 Options for operation and communications............................................................................................6-21
6.4.3 Extended installation kit options.............................................................................................................6-29
6.4.4 Meter options ..........................................................................................................................................6-31
Part 4 Selecting Optimal Inverter Model
Chapter 7 SELECTING OPTIMAL MOTOR AND INVERTER CAPACITIES
7.1 Selecting Motors and Inverters.......................................................................................................................7-1
7.1.1 Motor output torque characteristics...........................................................................................................7-1
7.1.2 Selection procedure...................................................................................................................................7-3
7.1.3 Equations for selections ............................................................................................................................7-6
7.1.3.1 Load torque during constant speed running ......................................................................................7-6
7.1.3.2 Acceleration and deceleration time calculation.................................................................................7-7
7.1.3.3 Heat energy calculation of braking resistor.....................................................................................7-10
ix
Page 12

Part 5 Specifications and Troubleshooting
Chapter 8 SPECIFICATIONS
8.1 Standard Models.............................................................................................................................................8-1
8.1.1 Three-phase 208V.....................................................................................................................................8-1
8.1.2 Three-phase 460 V....................................................................................................................................8-2
8.2 Common Specifications..................................................................................................................................8-4
8.3 Terminal Specifications ..................................................................................................................................8-7
8.3.1 Terminal functions ....................................................................................................................................8-7
8.3.2 Terminal arrangement diagram and screw specifications........................................................................8-18
8.3.2.1 Main circuit terminals .....................................................................................................................8-18
8.3.2.2 Control circuit terminals..................................................................................................................8-20
8.4 Operating Environment and Storage Environment.......................................................................................8-21
8.4.1 Operating environment............................................................................................................................8-21
8.4.2 Storage environment...............................................................................................................................8-22
8.4.2.1 Temporary storage...........................................................................................................................8-22
8.4.2.2 Long-term storage...........................................................................................................................8-22
8.5 External Dimensions.....................................................................................................................................8-23
8.5.1 Standard models......................................................................................................................................8-23
8.5.2 DC reactor...............................................................................................................................................8-26
8.5.3 Multi-function Keypad............................................................................................................................8-27
8.6 Connection Diagrams ...................................................................................................................................8-28
8.6.1 Running the inverter with keypad...........................................................................................................8-28
8.6.2 Running the inverter by terminal commands..........................................................................................8-29
8.7 Protective Functions .....................................................................................................................................8-31
Chapter 9 FUNCTION CODES
9.1 Function Code T ables.....................................................................................................................................9-1
9.2 Overview of Function Codes........................................................................................................................9-23
9.2.1 F codes (Fundamental functions)............................................................................................................9-23
9.2.2 E codes (Extension terminal functions)...................................................................................................9-52
9.2.3 C codes (Control functions of frequency)...............................................................................................9-91
9.2.4 P codes (Motor parameters) ....................................................................................................................9-95
9.2.5 H codes (High performance functions)...................................................................................................9-98
9.2.6 J codes (Application functions).............................................................................................................9-120
9.2.7 y codes (Link functions)........................................................................................................................9-131
Chapter 10 TROUBLESHOOTING
10.1 Before Proceeding with Troubleshooting .....................................................................................................10-1
10.2 If No Alarm Code Appears on the LED Monitor..........................................................................................10-2
10.2.1 Motor is running abnormally...................................................................................................................10-2
10.2.2 Problems with inverter settings...............................................................................................................10-7
10.3 If an Alarm Code Appears on the LED Monitor...........................................................................................10-8
10.4 If an Abnormal Pattern Appears on the LED Monitor while No Alarm Code is Displayed........................10-19
x
Page 13
Appendices
App.A Advantageous Use of Inverters (Notes on electrical noise).........................................................................A-1
A.1 Effect of inverters on other devices.............................................................................................................A-1
A.2 Noise............................................................................................................................................................A-2
A.3 Noise prevention..........................................................................................................................................A-4
App.B Japanese Guideline for Suppressing Harmonics by Customers Receiving High Voltage or
Special High Voltage .................................................................................................................................A-12
B.1 Application to general-purpose inverters...................................................................................................A-12
B.2 Compliance to the harmonic suppression for customers receiving high voltage or
special high voltage...................................................................................................................................A-13
App.C Effect on Insulation of General-purpose Motors Driven with 460V Class Inverters.................................A-17
C.1 Generating mechanism of surge voltages..................................................................................................A-17
C.2 Effect of surge voltages.............................................................................................................................A-18
C.3 Countermeasures against surge voltages ...................................................................................................A-18
C.4 Regarding existing equipment...................................................................................................................A-19
App.D Inverter Generating Loss...........................................................................................................................A-20
App.E Conversion from SI Units..........................................................................................................................A-21
App.F Allowable Current of Insulated Wires .......................................................................................................A-23
Glossary
xi
Page 14

Page 15

Part 1 General Information
Chapter 1 INTRODUCTION TO FRENIC-Eco
Chapter 2 PARTS NAMES AND FUNCTIONS
Chapter 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
Page 16

Page 17
Chapter 1
INTRODUCTION TO FRENIC-Eco
This chapter describes the features and control system of the FRENIC-Eco series and the recommended
configuration for the inverter and peripheral equipment.
Contents
1.1 Features.............................................................................................................................................................1-1
1.2 Control System................................................................................................................................................1-18
1.3 Recommended Configuration .........................................................................................................................1-19
Page 18

Page 19
A
1.1 Features
1.1 Features
Chap. 1
Default functions for fans and pumps
Switching motor pow er between commercial lines and inverter outputs
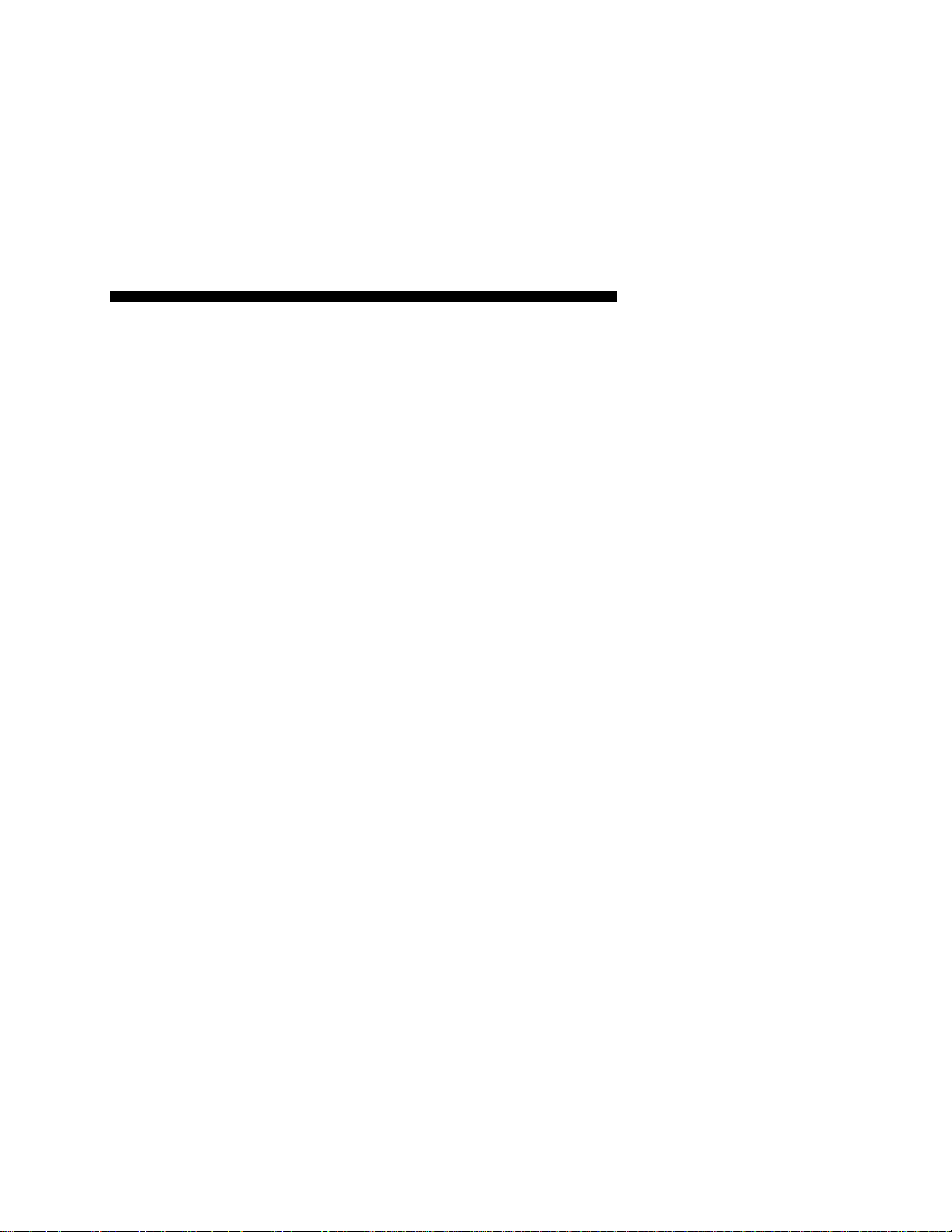
The FRENIC-Eco series of inverters is equipped with built-in sequence control logic that supports starting
of the motor via the commercial lines by using an external sequence and switches the motor power
between commercial lines and inverter outputs. This feature simplifies the user’s power control system
configuration.
In addition to this Fuji’s standard switching sequence, an auto-switching sequence is also available upon
occurrence of an inverter alarm.
The schematic diagram below shows a typical sequence control circuit externally configured for an
effective application of the sequence control logic.
GFCI or
MCCB
Refer to function codes E01 to E05 in Section 9.2.2 "E codes" and J22 in Section 9.2.6 "J codes."
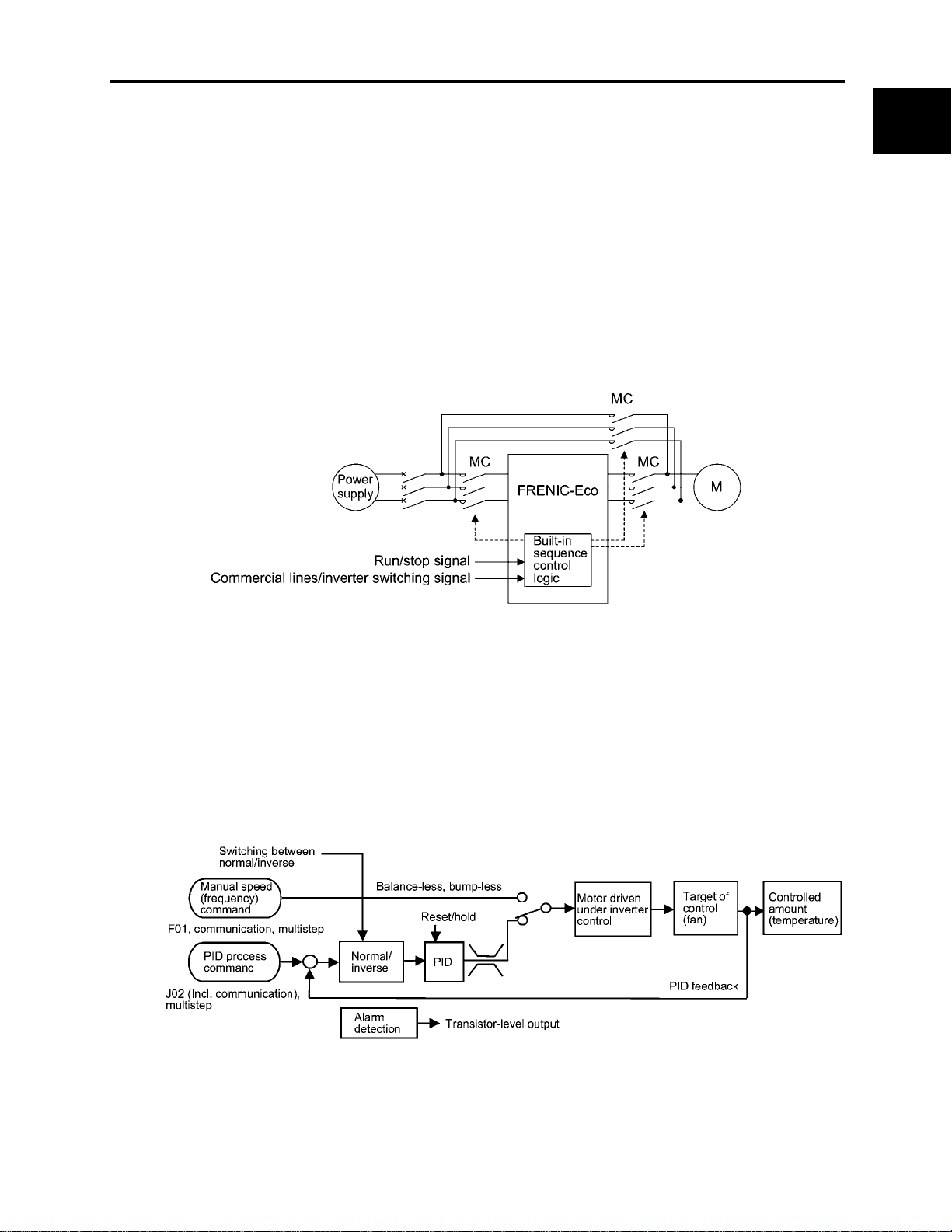
Full PID control functions
The PID control has the "slow flowrate stop" and "de viation alarm/absolute value alarm outp ut" functions.
It also supports a variety of manual speed (frequency) commands to make a balance-less and bump-less
switching available that automatically adjusts the output frequency against the frequency command.
Further, the PID control has an anti-reset wind-up function for prevention of overshooting, as well as
supporting PID output limiter and integration hold/reset signals, facilitating the adjustment necessary for
PID control.
BOUT FRENIC-Eco
Refer to the PID Frequency Command Generator in Section 4.8, function codes E01 to E05, E20 to
E22, E24, and E27 in Section 9.2.2 "E codes," and J01 to J06, J10 to J13, and J15 to J19 in Section
9.2.6 "J codes."
1-1
Page 20
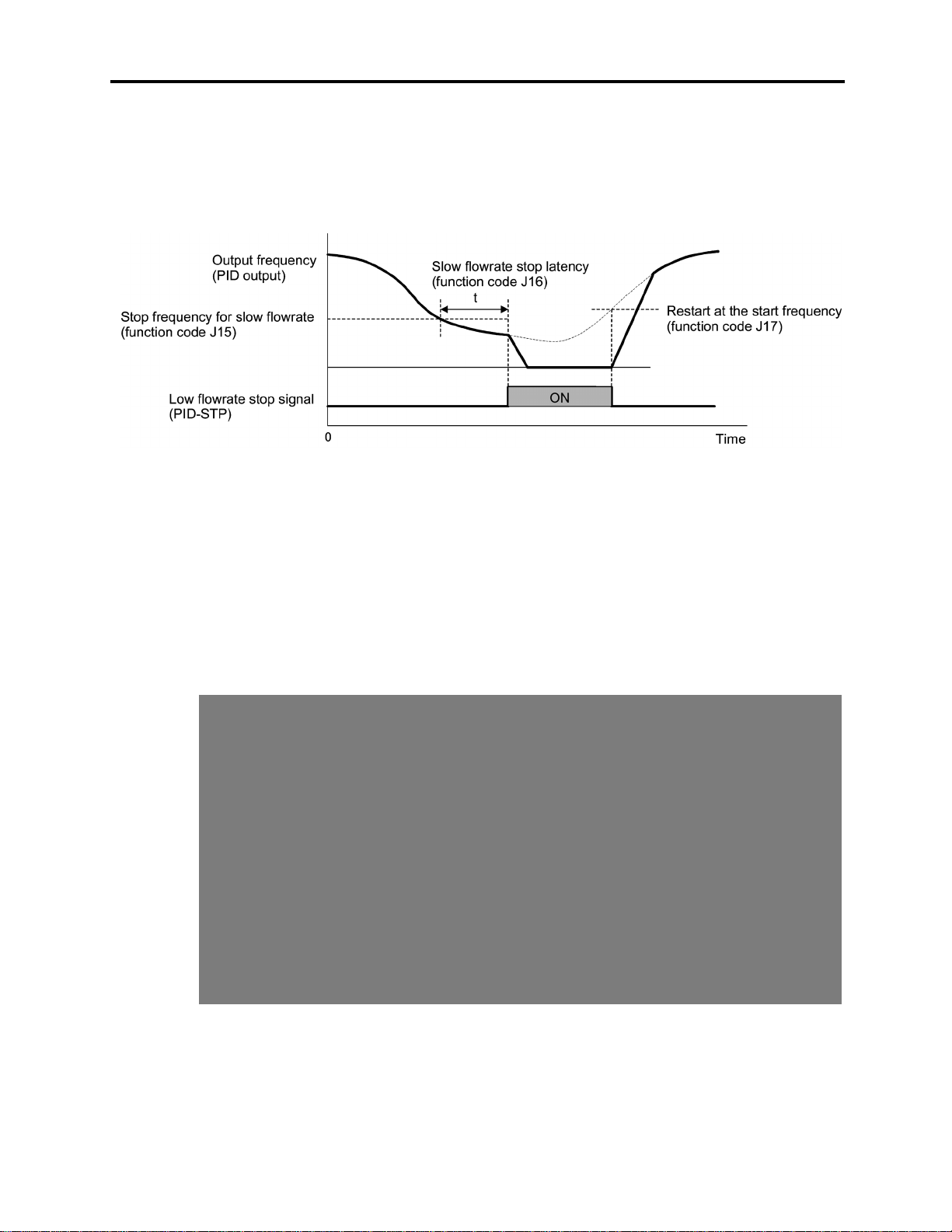
Slow flow rate stop function
A new function called slow flowrate stop is now added to the low limiter for securing the minimum
operation speed of a fan and pum p, etc., whereby the o peration w ill st op if the fl owrate dro ps and rem ains
below the low limit for a certain length of time. This, combined with PID control, contributes to more
energy-saving operation.
Refer to function codes E20 to E22, E24, and E27 in Section 9.2.2 "E codes" and J15, J16, and J17 in
Section 9.2.6 "J codes."
Command loss detection
The analog frequency command is monitored an d when an abnormal condi tion is detected, an alarm signal
is output. Further, if in a critical system such as an air conditioner for an important facility, an abnormal
condition is detected in the circuit handling the analog frequency command source, the system will be
stopped or will continue its operation at the specified speed (at the specified percentage of the command
just before the detection of the abnormal condition).
Refer to function codes E20 to E22, E24, E27, and E65 in Section 9.2.2 "E codes."
1-2
Page 21
A
Low output torque detection
A low output torque detection signal is asserted in the event of sudden decrease in torque as a result of an
abnormal condition such as the belt being broken between the m otor and t he load (e .g., a belt- driv en fan).
This signal, which indicates abnormal condi tion s occu rring in the facility (load), can therefore be used as
maintenance information.
1.1 Features
Chap. 1
BOUT FRENIC-Eco
Refer to function codes E20 to E22, E24, E27, E80 and E81 in Section 9.2.2 "E codes."
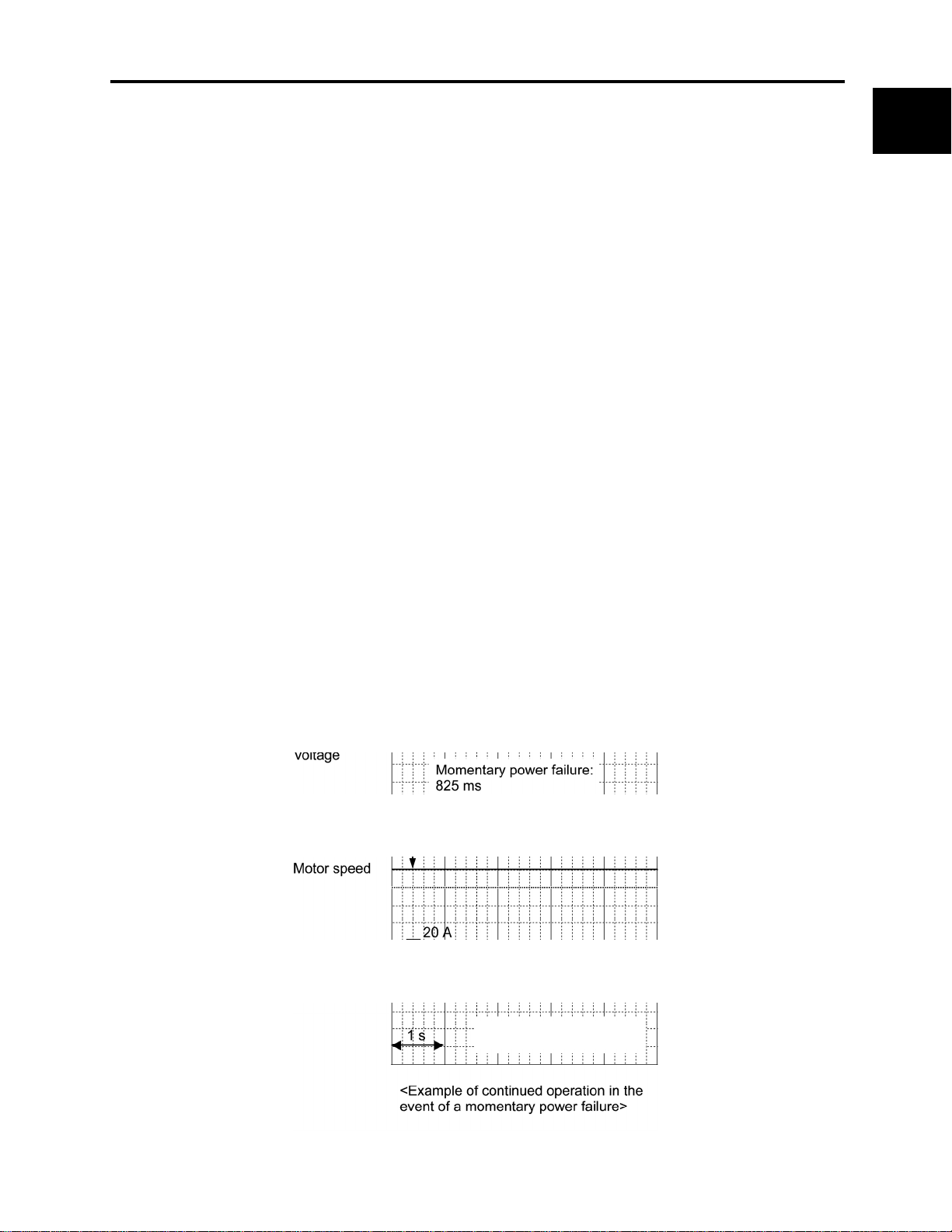
Continuous operation at momentary power failure
You can choose either tripping or automatic restart in the event of a momentary power failure. You can
choose starting at the frequency at the momentary power failure occurrence or starting at 0 Hz, according
to the requirement. Further, you can choose a control mode to prolong the running time utilizing the
kinetic energy due to the load’s moment of inertia during the momentary power failure.
Inverter: FRN007F1S-2U
Motor: 7HP
Refer to function code F14 in Section 9.2.1 "F codes."
1-3
Page 22

Switching betw een remote and local modes
You can choose a mode of inverter operation between remote (communications link or terminal
commands) and local (keypad in any locati on such as built-in or o n the panel) f or both run comm ands and
frequency commands, with combination sets of frequency command 1 and frequency command 2, run
command 1 and run command 2.
Refer to Running/stopping the motor in Section 3.2.1 and function codes F01 and F02 in Section
9.2.1 "F codes."
Auto search for idling motor's speed
The auto search feature helps the idling motor start smoothly, by setting an auto search frequency. When
the motor is in idling state due to natural con vection, momentary power failure or other similar situations,
the inverter can automatically search for the current motor speed and direction and start/restart the motor
smoothly from the frequency that can be harmonized with the current motor speed and rotation, without
stopping it. For restart after a recovery from the momentary power failure, you hav e a choice of two
frequencies--the frequency saved at the power failure and the starting frequency.
Refer to function codes H09 and H17 in Section 9.2.5 "H codes."
1-4
Page 23
A
Choosing from a variety of frequency command sources
A variety of frequency command sources are provided to match your power system as listed below.
1.1 Features
Chap. 1
• Keypad (
/ keys)
The keypad allows you to set a frequency command as an ou tput frequency, motor spe ed, load shaft speed,
percentage to the maximum frequency, etc.
• Analog terminal inputs
You can set up analog inputs with the following signals, either individually or in combination of them.
- 4 to 20 mA DC [C1] or 0 to 10 VDC [12]
- Inverse of the above signals
- Voltage input terminal for analog setting [V2] (built-in)
• Multistep frequency (8 steps)
• UP/DOWN operation
• Switching between frequency commands 1 and 2
• Suitable manipulation (addition) of frequencies, av ailable by using auxiliary freque ncy commands 1 and
2
• RS-485 communications link facility supported as standard
• Switching between remote and local modes
BOUT FRENIC-Eco
Refer to function code F01 in Section 9.2.1 "F codes," E 01 to E05 an d E61 to E63 in S ection 9.2.2 "E
codes," and H30 in Section 9.2.5 "H codes."
1-5
Page 24

Monitor for analog input
The inverter is equipped with input terminals for accepting analog signals from the outside equipment or
the motor. By connecting the outputs of a flow meter, a pressure gauge, or any other sensor, you can
display them on the LED monito r on the keypad that shows thei r physical values in easy-to-understand
analog values (multiplied with a specified coefficient in some cases). It is also possible to build a
host-controlled system by sending/receiv ing suc h inform ation via the c omm unicatio ns lin k to/from a host
computer.
Refer to function codes E43, E45, and E48 in Section 9.2.2 "E codes."
1-6
Page 25

A
Contribution to energy-saving
Automatic energy-saving (standard feature)
A new, automatic energy-saving function is included as a standard feature, which controls the system to
minimize the total loss (motor loss plus inverter loss), rather than just the motor loss as in the pre decessor
models. This feature thus contributes to further energy saving in applications with fans and pumps.
1.1 Features
Chap. 1
BOUT FRENIC-Eco
Figure 1.1 Example of Energy-Saving
Refer to the Drive Command Controller in Section 4.7 and function codes F09 and F37 in Section
9.2.1 "F codes."
Monitoring electric power
In addition to electric power monitor ing on the multi-fu nction keypad, o nline monitoring is available from
the host equipment through the communications link.
This function monitors real-time power consumption, cumulative power consumption in watt-hours, and
cumulative power consumption with a specified coefficient (such as an electricity charge).
Refer to Chapter 3 "OPERATION USING THE MULTI-FUNCTION KEYPAD" and Chapter 5
"RUNNING THROUGH RS-485 COMMUNICATION."
1-7
Page 26

PID control supported
PID control, which is a standard feature on the inverter, allows you to control temperature, pressure, and
flowrate without using any external adjustment devices so that you can configure a temperature control
system without an external thermal conditioner.
Refer to the PID Frequency Command Generator in Section 4.8 and function codes J01 to J06 in
Section 9.2.6 "J codes."
Cooling fan ON/OFF control
The inverter's cooling fan can be stopped whenever the invert er does not output power. T his contributes to
noise reduction, longer service life, and energy saving.
Refer to function codes E20 to E22, E24, and E27 in Section 9.2.2 "E codes" and H06 in Section
9.2.5 "H codes."
1-8
Page 27
A
Consideration for surrounding environment
Reactor built-in type added to standard line-up
A DC reactor for power-factor correction is now integrated in the inverter (for the range of 1 to 60 HP for
208 V, 1 to 75 HP for 460 V). In addition, a zero-phase reactor (ferrite ring) and a capacitive filter are
integrated in the inverters of 25 HP for 208 V, 30 HP for 460 V or below. These features simplify the
power-related wiring (no need for DC reactor and capacitive filter wiring). The new good-shortcut wiring
feature also fully covers Standard Specifications for Public Building Construction set by the Japanese
Ministry of Land, Infrastructure and Transport (Volum e for Electric Facilities and Volume for Mechanical
Facilities).
(*) for models with capacity of
25 HP for 208 V, 30 HP for 460 V or bel ow
Refer to Chapter 6 "SELECTING PERIPHERAL EQUIPMENT."
Inrush current suppression circuit integrated in all models
An inrush current suppression circuit is integrated as standard in all models, therefore the cost of
peripheral devices such as magnetic contactor (MC) can be reduced.
EMC-filter built-in type added to semi-standard line-up
The product can be used to fully comply with the EMC Directives in EU. (15 HP for 208 V, 20 HP for 460
V or below)
Standard installation of input terminals for auxiliary control power of all models
The auxiliary control input terminals provide a convenient shortcut for automatic input power source
switching between commercial line and inverter as standard terminals.
Refer to Section 8.3 "Terminal Specifications."
1.1 Features
Chap. 1
BOUT FRENIC-Eco
Various functions for protection and easy maintenance
FRENIC-Eco series features the following facilities useful for maintenance.
Refer to Chapter 3 "OPERATION USING THE MULTI-FUNCTION KEYPAD" in this manual and
the "FRENIC-Eco Instruction Manual", Chapter 7 "MAINTENANCE AND INSPECTION."
Lifetime estimation for DC link bus capacitors (reservoir capacitors)
This function shows the lifetime of the DC link bus capacitor as a ratio to its initial capacitance value,
helping you determine the replacement timing of the capacitor. (Design life of D C l ink bus capacitors: 10
years under these conditions: load = 80% of inverter' s rated current; ambient tem perature = 40°C (104°F) )
Long-life fans
Use of a long-life fan reduces replacement work. (Design life of fans: 10 years for m odels of 30 HP for 208
V, 40 HP for 460 V or below; 7 years for models of 40 HP for 208 V, 50 HP for 460 V or above, at ambient
temperature of 40°C (104°F))
1-9
Page 28

Easy to replace cooling fans
On 7 to 30 HP for 208 V, 7 to 40 HP for 460 V models, you can easily replace the cooling fan in simple
steps, since it is mounted on the upper part of the in verter. On models of 40 HP for 20 8 V, 50 HP for 460 V
or above, you can replace it easily from the front side without detaching the inverter from your panel.
To replace the cooling fan, follow the procedures as shown below.
<FRN015F1S-2U>
<FRN050F1S-2U>
1-10
Page 29

A
Cumulative running hours of inverter, capacitor, cooling fan, and motor
FRENIC-Eco series accumulates running hours of the inverter itself, motor (mechanical system), cooling
fan, and electrolytic capacitor on the printed circuit board for recording and displaying on the keypad.
These data can be transferred to host equipment via th e comm unications lin k and us ed for monitoring a nd
maintenance for mechanical system to increase the reliability of the facility or plant (load).
Outputting a lifetime early warning signal to the programmable transistor
When either one of the DC link bus capacitor (reservoir capacitor), the electrolytic capacitors on the
printed circuit boards, and the coolin g fans is nearing the end of its lifetim e, a lifetime early warning signal
is output.
1.1 Features
Chap. 1
BOUT FRENIC-Eco
Refer to function codes E20 to E22, E24, and E27 in Section 9.2.2 "E codes."
Record of the 4 latest alarm history available
You can view alarm codes and their related information up to four latest ones.
Refer to Section 3.3.7 "Reading alarm information."
Protective function against phase loss in input/output
Protection against phase loss in input/output circuits is possible at start-up and during operation.
Refer to the Protective Functions in Section 8.7 and function code H98 in Section 9.2.5 "H codes."
Protective function for grounding fault
Protection is provided for an overcurrent caused by a grounding fault.
Refer to the Protective Functions in Section 8.7.
1-1 1
Page 30
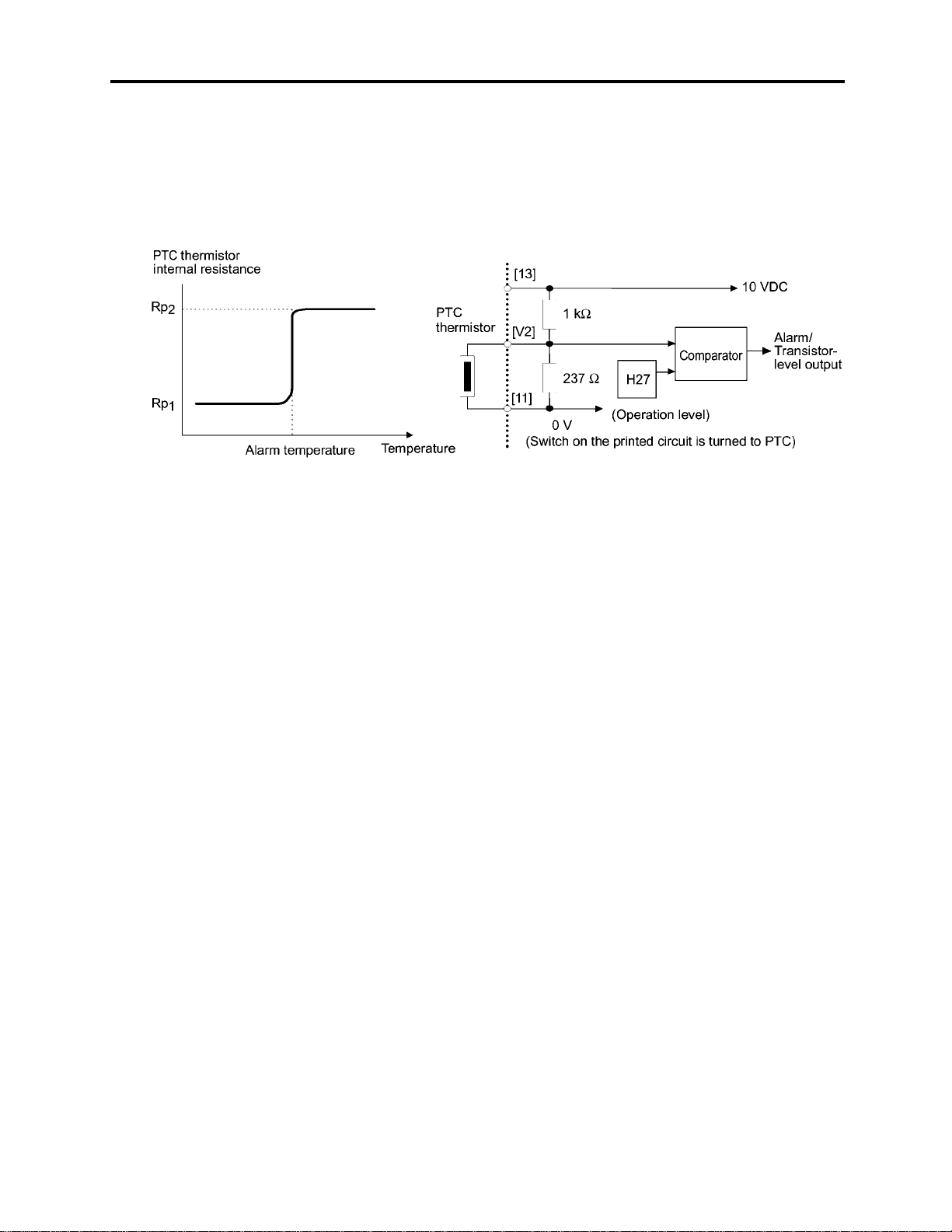
Protection of motor with PTC thermistor
By connecting the Positive Temperature Coefficient (PTC) thermistor embedded in the motor to the
terminal [V2], you can monitor the temperature of the m otor, and stop the inv erter output before the motor
overheats, thereby protecting the motor. You can select the action in the event of an overheat hazard
according to the PTC protection level: whether to stop the inverter (alarm stop) or to turn ON the alarm
output signal on the programmed terminal.
Refer to function codes F10 to F12 in Section 9.2.1 " F c odes" a nd H 2 6 and H27 in Section 9.2.5 "H
codes."
1-12
Page 31

A
Simple operation and wiring
Standard keypad capable of operating at a remote site
Using the optional extension cable easily allows local mode operation at a remote site such as on the power
system panel or on hand.
The standard keypad has the function code data copying function that allows you to copy data to other
inverters.
1.1 Features
Chap. 1
BOUT FRENIC-Eco
Refer to Chapter 2 "PARTS NAMES AND FUNCTIONS," Section 3.3.9 "Data copying," Section
6.4.2 "Options for operation and communications," and Section 9.2 "Overview of Function Codes."
Refer to function codes E43, E45 to E47 in Section 9.2.2 "E codes."
Quick setup function
Using an multi-function keypad can define a set of 19 function codes for quick setup. This feature thus
allows you to combine only frequently used or important function codes into a customized set to shortcut
operation and management.
Refer to Section 3.3.2 "Setting up function codes quickly."
Menu mode accessible from the keypad
You can easily access the keypad menu mode including "Data setting," "Data checking," "Drive
monitoring," "I/O checking," "Maintenance information," and "Alarm information."
Refer to Section 3.3 "Programming Mode."
1-13
Page 32

Global products
FRENIC-Eco series of inverters are designed for use in global market and to comply with the global
standards listed below.
All standard models comply with the EC Directive (CE marking), UL standards and
Canadian standards (cUL certification).
All standard FRENIC-Eco inverters comply with European and North American/Canadian standards,
enabling standardization of the specifications for machines and equipment used at home and abroad.
If the model with built-in EMC filter is used, the model conforms to the European EMC
Directive.
Enhanced network support
With an optional card, the inverter extends its conformity with various world-standard of open bus
protocols such as DeviceNet, PROFIBUS-DP, LonWorks network, Modbus Plus or CC-Link.
A standard RS-485 communications p ort (compatible to Modbus RTU prot ocol, shared with a keypad) is a
built-in feature. With an additional RS-485 com m unications card (opti onal), up to two ports are available.
Networking allows you to control up to 31 inverters through host equipment such as a PC (personal
computer) and PLC (programmable logic controller.)
Refer to Chapter 5 "RUNNING THROUGH RS-485 COMMUNICATION," Section 6.4.2 "Options
for operation and communications," and Section 9.4.7, "y codes."
1-14
Page 33

A
Space saving
Side-by-side mounting is possible.
When multiple inverter units are installed next to each other inside a panel, the installation space can be
minimized. This applies to inverters of 5 HP for 208 V, 7 HP for 460 V or below operating at ambient
temperatures of 40°C (104°F) or below.
1.1 Features
Chap. 1
BOUT FRENIC-Eco
Figure 1.2 Side-by-side Mounting (Example)
1-15
Page 34

The ideal functions to serve a multiplicity of needs
Compatible with a wide range of frequency command sources
You can select the optimum frequency command source that matches your machine or equipment via the
keypad (
to 7), or the RS-485 communications link.
Switchable sink/source signal input mode
The input mode (sink/source) of the digital input terminals can be switched by means of a slide switch
inside the inverter. No engineering change is required in other control equipments including PLC.
Three transistor switch outputs and a relay output card option available
The three transistor switch outputs enable issuing of m otor overload ea rly warning, lif etime early warnin g
and other information signals when the i nverter is running. In additi on, using the optional rel ay output card
OPC-F1-RY can convert these outputs to three pairs of transfer relay contact outputs [Y1A/Y1B/Y1C],
[Y2A/Y2B/Y2C] and [Y3A/Y3B/Y3C], which can be used in the same manner as the conventional relay
contact output [30A/B/C].
/ keys), analog voltage input, analog current input, multistep frequency commands (steps 0
Refer to function codes E01 to E05 in Section 9.2.5 "H codes."
Refer to Section 8.3.1 "Terminal functions."
Refer to function codes E20 to E22, E24, and E27 in Section 9.2.2 "E codes" in this manual and the
Relay Output Card "OPC-F1-RY" Instruction Manual.
Maximum frequency - up to 120 Hz
The inverter can be used with equipment that requires a high motor speed. For high-speed applications,
you need to ensure beforehand that the inverter can operate normally with the motor.
Refer to function code F03 in Section 9.2.1 "F codes."
Two points can be set for a non-linear V/f pattern.
The addition of an extra point (total: 2 points) for the non-linear V/f pattern, which can be set as desired,
improves the FRENIC-Eco's drive capability, because the V/f pattern can be adjusted to match a wider
application area. (Maximum frequency: 120 Hz; Base frequency range: 25 Hz and above)
Refer to Section 4.7 "Drive Command Controller" and function codes F04 and F05 in Section 9.2.1
"F codes."
1-16
Page 35

A
Flexible through options
Function code data copying function
Because the multi-function keypad is provided wi th a built-in copy function , similar to that installed on th e
inverter as a standard feature, function code data can be easily copied to the second or more inverters
without requiring setups individual to the inverter.
Refer to Section 9.2 "Overview of Function Codes" and Section 3.3.9 "Data copying."
Customized set of function code for simplified operation
By using a multi-function keypad, you can define your own set of function codes (in addition to those for
quick setup) which you will use most frequently, so that you can modify and manage the data for those
function codes in simple operation.
Refer to the Multi-function Keypad Instruction Manual.
Inverter loader software (option)
FRENIC Loader is a support tool for FRENIC-Eco/Mini series of inverters to enable a Windows-bas ed PC
to remotely control the inverter. The Loader makes it significantly easier to perform data editing and
management such as data management, data copying, and real-time tracing. (For connection via a USB
port of your PC, an optional USB–RS-485 interface converter is available.)
1.1 Features
Chap. 1
BOUT FRENIC-Eco
Refer to Chapter 5 "RUNNING THROUGH RS-485 COMMUNICATION" in this manual and the
FRENIC Loader Instruction Manual.
Mounting Adapter for External Cooling
A mounting adapter for external cooling ( Option for 30 H P for 208 V, 40 HP for 460 V or bel ow. Standard
for 40 HP for 208 V, 50 HP for 460 V or above) cools the inverter outside the panel. It can be easily
mounted on the panel.
Refer to Section 6.4.3 "Extended installation kit options."
1-17
Page 36

1.2 Control System
This section gives you a general overview of inverter control systems and features specific to the
FRENIC-Eco series of inverters.
As shown in Figure 1.4, the converter s ection converts the i nput commercial power to DC power by means
of a full-wave rectifier, which is then used to charge the DC link bus capacitor (reservoir capacitor). The
inverter portion modulates the electric energy charged in the DC link bus capacitor by Pulse Width
Modulation (PWM) and feeds the output to the motor. (The PWM switching frequency is called the
"Carrier Frequency.") The voltage applied to the motor terminals has a waveform shown on the left-hand
side ("PWM voltage waveform") of Figure 1.3, consisti ng of alternati ng cycles of po sitive pulse tra ins and
negative pulse trains. The current running through the motor, on the other hand, has a fairly smooth
alternating current (AC) waveform shown on the right-hand side ("Current waveform") of Figure 1.3,
thanks to the inductance of the motor coil inducta nce. The c ontrol lo gic section c ontrols the PWM so as to
bring this current waveform as close to a sinusoidal waveform as possible.
PW M voltage waveform Current waveform
Figure 1.3 Output Voltage and Current Waveform of the Inverter
For the frequency command given in the control logic, the accelerat or/decelerator processor cal culates the
acceleration/deceleration rate required by run/stop control of the motor and transfers the calculated r esults
to the 3-phase voltage processor directly or via the V/f pattern generator whose output drives the PWM
block to switch the power gates.
Refer to Section 4.7 "Drive Command Controller" for details.
The FRENIC-Eco series features simplified magnetic flux estimation integrated in the V/f pattern
generator section. This feature automatically adjusts the voltage applied to the motor according to the
motor load so as to make the motor generate more stable and higher torque even during low speed
operation.
The control logic section, which is the very brain of the inverter, allows you to customize the inverter's
driving patterns throughout the function code data settings.
Refer to Section 4.7 "Drive Command Controller," function codes F04 and F05 in Section 9.2.1 "F
codes," and H50 and H51 in Section 9.2.5 "H codes" for details.
Figure 1.4 Schematic Block Diagram of FRENIC-Eco
1-18
Page 37

A
1.3 Recommended Configuration
1.3 Recommended Configuration
Chap. 1
To control a motor with an inverter correctly, you should consider the rated capacity of both the m otor and
the inverter and ensure that the combination matches the specifications of the machine or system to be
used. Refer to Chapter 7 "SELECTING OPTIMAL MOTOR AND INVERTER CAPACITIES" for
details.
After selecting the rated capacity, select appropriate peripheral equipment for the inverter, then connect
them to the inverter.
Refer to Chapter 6 "SELECTING PERIPHERAL EQUIPMENT" and Section 8.6 "Connection
Diagrams" for details on the selection and connection of peripheral equipment.
Figure 1.5 shows the recommended configuration for an inverter and peripheral equipment.
BOUT FRENIC-Eco
Figure 1.5 Recommended Configuration Diagram
1-19
Page 38

Page 39

Chapter 2
PARTS NAMES AND FUNCTIONS
This chapter contains external views of the FRENIC-Eco series and an overview of terminal blocks, including a
description of the LED monitor, keys and LED indicators on the keypad.
Contents
2.1 External View and Allocation of Terminal Blocks............................................................................................2-1
2.2 Key, LED, and LCD Monitors on the Keypad..................................................................................................2-3
Page 40

Page 41

2.1 External View and Allocation of Terminal Blocks
2.1 External View and Allocation of Terminal Blocks
Figure 2.1 shows the external views of the FRENIC-Eco.
(1) External views
Standard types
(a) FRN015F1S-2U
Chap. 2 PARTS NAMES AND FUNCTIONS
(b) FRN040F1S-2U
(c) FRN350F1S-4U
Figure 2.1 External Views of Standard Type Inverters
2-1
Page 42

(2) Terminal block location
(a) FRN015F1S-2U
(c) FRN350F1S-4U
Figure 2.2 Terminal Blocks and Keypad Enclosure Location
(b) FRN040F1S-2U
(a) FRN020F1S-4U (b) FRN050F1S-4U
Figure 2.3 Enlarged View of the Terminal Blocks
Refer to Chapter 8 "SPECIFICATIONS" for details on terminal functions, arrangement and
connection and to Chapter 6, Section 6.2.1 "Recommended wires" when selecting wires.
For details on the keys and their functions, refer to Se ction 2.2 "Key, LED, an d LCD Monitors on the
Keypad." For details on keying operation and function code setting, refer to Chapter 3
"OPERATION USING THE MULTI-FUNCTION KEYPAD."
2-2
Page 43

y
(
r
r
r
2.2 Key, LED, and LCD Monitors on the Keypad
2.2 Key, LED, and LCD Monitors on the Keypad
The keypad allows you to start and stop the motor, view various data including maintenance information
and alarm information, set function codes, monitor I/O signal status, copy data, and calculate the load
factor.
7-segment LED
monito
LCD Monito
Program ke
Shift key
Reset key
LED indicator
indexes
RUN key
forward)
LED indicato
RUN key
(reverse)
STOP key
Chap. 2 PARTS NAMES AND FUNCTIONS
UP key Function/Data key
DOWN key
Remote/Local
key
Figure 2.4 Keypad
2-3
Page 44
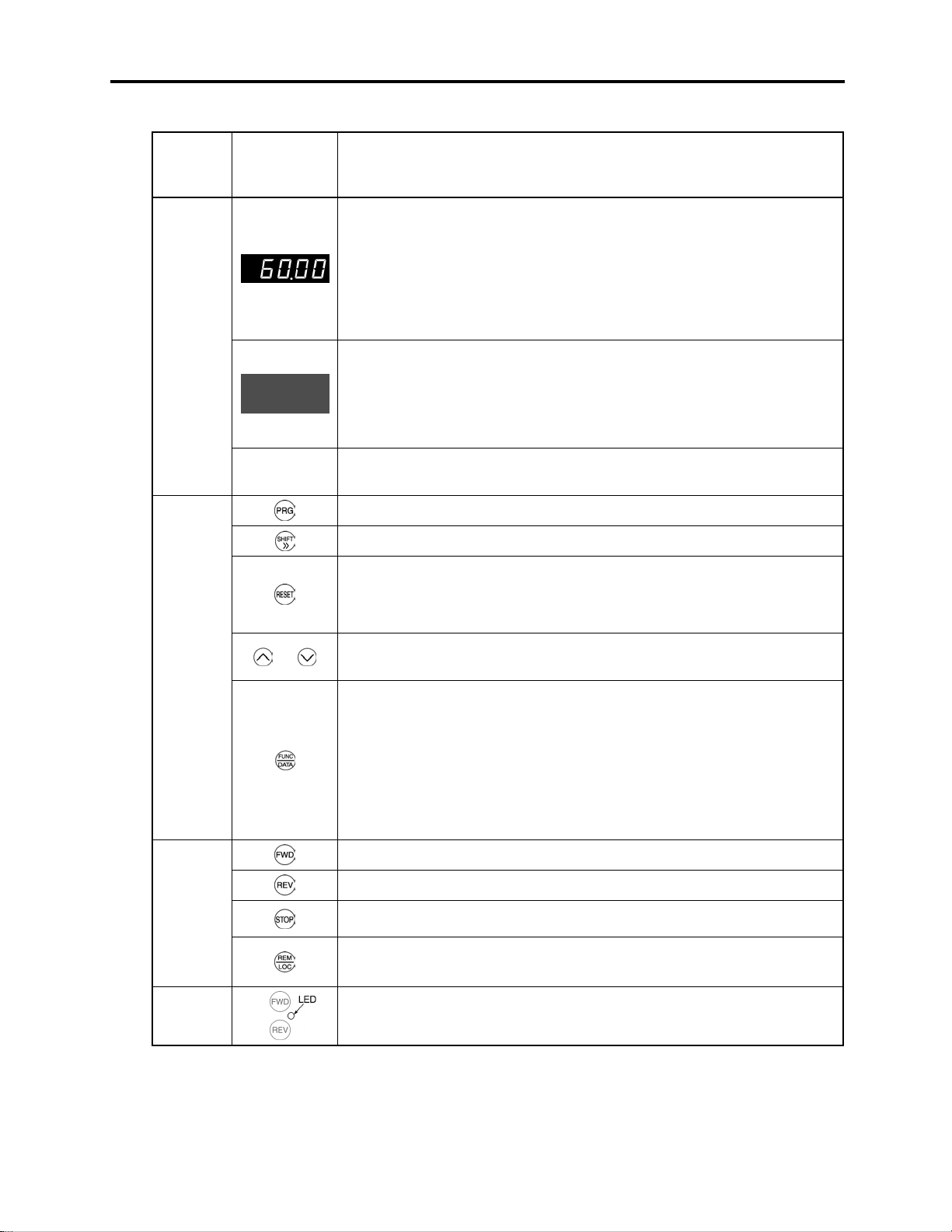
Table 2.1 Overview of Keypad Functions
Monitor, LED
Item
LED/LCD
Monitor
indicator or
Key
Five-digit, 7-segment LED monitor which displays the following according to the
operation modes:
In Running Mode: Running status information (e.g., output frequency, current, and
voltage)
In Programming Mode: same as above
In Alarm Mode: Alarm code, which identifies the cause of alarm if the protective
function is activated.
LCD monitor which displays the following according to the operation modes:
In Running Mode: Running status information
In Programming Mode: Menus, function codes and their data
In Alarm Mode: Alarm code, which identifies the cause of alarm if the protective
function is activated.
Functions
Keypad
Operation
Key
Run
Operation
Key
LED indicator
indexes
and
In running mode, display the unit of the number displayed on the LED monitor and the
running status information shown on the LCD monitor. For details, see next page.
Switches the operation modes of the inverter.
Shifts the cursor to the right when entering a number.
Pressing this key after removing the cause of an alarm will switch the inverter to
Running Mode.
Used to reset a setting or screen transition.
UP and DOWN keys. Used to select the setting items or change the function code data
displayed on the LED monitor.
Function/Data key. Switches the operation as follows:
In Running Mode: Pressing this key switches the information to be displayed
concerning the status of the inverter (output frequency (Hz),
output current (A), output voltage (V), etc.).
In Programming Mode: Pressing this key displays the function code and confirms
the data you have entered.
In Alarm Mode: Pressing this key displays the details of the problem indicated by
the alarm code that has come up on the LED monitor.
Starts running the motor (forward rotation).
Starts running the motor (reverse rotation).
Stops the motor.
Pressing this toggle key for more than 1 second switches between Local and Remote
modes.
LED
Indicator
Lights while a run command is supplied to the inverter.
2-4
Page 45

2.2 Key, LED, and LCD Monitors on the Keypad
Table 2.2 Items Displayed on LED Indicators
Type Item Description (information, condition, status)
Hz Output frequency, frequency command
A Output current
V Output voltage
% Calculated torque, load factor, speed
r/min Motor speed, set motor speed, load shaft speed, set load shaft speed
Unit of Number
Displayed on
LED Monitor
Operating Status
m/min Line speed, set line speed (Not applicable to FRENIC-Eco)
kW Input power, motor output
X10 Data greater than 99,999
min
sec Timer
PID PID process value
FWD Running (forward rotation)
REV Running (reverse rotation)
STOP No output frequency
Constant feeding rate time, constant feeding rate time setting (Not applicable to
FRENIC-Eco)
Chap. 2 PARTS NAMES AND FUNCTIONS
REM Remote mode
LOC Local mode
Source of
Operation
COMM Communication enabled (RS-485 (standard, optional), field bus option)
JOG Jogging mode (Not applicable to FRENIC-Eco)
HAND Keypad effective (lights also in local mode)
2-5
Page 46

Page 47
Chapter 3
OPERATION USING THE MULTI-FUNCTION
KEYPAD
This chapter describes inverter operation using the multi-function keypad. The inverter features three operation
modes (Running, Programming and Alarm modes) w hic h ena ble you to run and st op th e m otor, m onitor r un ning
status, set function code data, display running information required for maintenance, and display alarm data.
Contents
3.1 Overview of Operation Modes..........................................................................................................................3-1
3.2 Running Mode ..................................................................................................................................................3-2
3.2.1 Running/stopping the motor......................................................................................................................3-2
3.2.2 Setting up the frequency and PID process commands ..............................................................................3-5
3.2.3 LED monitor (Monitoring the running status)..........................................................................................3-9
3.3 Programming Mode........................................................................................................................................3-10
3.3.1 Setting function codes – "1. Data Setting"..............................................................................................3-11
3.3.2 Setting up function codes quickly using Quick setup – "0. QUICK SET"..............................................3-14
3.3.3 Checking changed function codes – "2. DATA CHECK" .......................................................................3-14
3.3.4 Monitoring the running status – "3. OPR MNTR"..................................................................................3-15
3.3.5 Checking I/O signal status – "4. I/O CHECK"........................................................................................3-17
3.3.6 Reading maintenance information – "5. MAINTENANC".....................................................................3-20
3.3.7 Reading alarm information – "6. ALM INF" ..........................................................................................3-23
3.3.8 Viewing cause of alarm – "7. ALM CAUSE".........................................................................................3-26
3.3.9 Data copying – "8. DATA COPY" ..........................................................................................................3-28
3.3.10 Measuring load factor – "9. LOAD FCTR" ............................................................................................3-35
3.3.11 Changing function codes covered by Quick setup – "10. USER SET"...................................................3-38
3.3.12 Performing communication debugging – "11. COMM DEBUG"...........................................................3-39
3.4 Alarm Mode....................................................................................................................................................3-40
3.5 Other Precautions ............................................................................................................................................3-42
3.5.1 Function code setting for F02 (Run and operation).................................................................................3-42
3.5.2 Remote/local operation ...........................................................................................................................3-42
3.5.3 Tuning motor parameters........................................................................................................................3-43
Page 48

Page 49

3.1 Overview of Operation Modes
3.1 Overview of Operation Modes
FRENIC-Eco features the following three operation modes:
Running Mode: This mode allows you to enter run/stop comm ands in regul ar operat ion. Y ou c an
also monitor the running status in real time.
Programming Mode: This mode allows you to set function code data and check a variety of
information relating to the inverter status and maintenance.
Alarm Mode: If an alarm condition occurs, the inverter automatically enters the Alarm Mode.
In this mode, you can view the corresponding alarm code* and its related
information on the LED and LCD Monitors.
* Alarm code: Indicates the cause of the alarm condition that has triggered a protective function. For details, refer to
Chapter 8, Section 8.7 "Protective Functions."
Figure 3.1 shows the status transition of the inverter between these three operation modes.
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
Figure 3.1 Status Transition between Operation Modes
3-1
Page 50

3.2 Running Mode
When the inverter is turned on, it automatically enters Running Mode. In Running Mode, you can:
[ 1 ] Run or stop the motor;
[ 2 ] Set the frequency command and others;
[ 3 ] Monitor the running status (e.g., output frequency, output current)
3.2.1 Running/stopping the motor
By factory default, pressing the key starts running the motor in the forward direction and press ing the
key decelerates the motor to stop. The
only in Running mode and Programming mode.
To run the motor in reverse direction, or to run the motor in reversible mode, chang e the setting of function
code F02.
For details of function code F02, refer to Chapter 9.
key is disabled. You can run or stop the motor using the keypad
Figure 3.2 Rotational Direction of Motor
Note) The rotational direction of IEC-compliant motor is opposite to the one shown here.
Display of running status (on LCD monitor)
(1) When function code E45 (LCD Monitor (optional)) is set to "0," the LCD Monitor displays the
running status, the rotational direction, and the operation guide.
(The indicators above the LCD Monitor indicate the unit of the number displayed on the LED
Monitor; the indicators underneath the LCD Monitor indicate the running status and the source of
Run command.)
Figure 3.3 Display of Running Status
The running status and the rotational direction are displayed as shown in Table 3.1.
Table 3.1 Running Status and Rotational Direction
Status/Direction Description
Running status
Rotational direction
RUN: The Run command is present, or the inverter is driving the motor.
STOP: The Run command is not present, or the inverter is in stopped state.
FWD: Forward
REV: Reverse
Blank: Stopped
3-2
Page 51

3.2 Running Mode
(2) When function code E45 (LCD Monitor (optional)) is set to "1," the LCD Monitor displays the
output frequency, output current, and calculated torque in a bar chart.
(The indicators above the LCD Monitor indicate the unit of the number displayed on the LED
Monitor; the indicators underneath the LCD Monitor indicate the running status and the source of
Run command.)
The full scale (maximum value) for each parameter is as follows:
Output frequency: Maximum frequency
Output current: 200% of inverter’s rated current
Calculated torque: 200% of rated torque generated by motor
Figure 3.4 Bar Chart
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
Switching the operation mode betw een remote and local
The inverter can be operated either in remote mode or in local mode. In remote mode, which applies to
normal operation, the inverter is driven under the control of the data settings held in it, whereas in local
mode, which applies to maintenance operation, it is separated from the system and is driven manually
under the control of the keypad.
Remote mode: The sources for setting run and frequency commands is determined by various
setting means switching signals such as fun ction codes, switch ing of run command
1/2, and link priority function.
Local mode: The sources for setting run and frequency commands is the keypad, regardless of
the settings specified by function codes. The keypad takes precedence over the
setting means specified by the run command 1/2 or the link priority function.
What follows shows the setting means of run command using the keypad in the local operation mode.
3-3
Page 52

Table 3.2 Run Commands from the Keypad in the Local Operation Mode
If function code F02 is set to: Setting means of the run command
0: Keypad You can run/stop the motor using the / / key on the keypad.
1: External signal
2: Keypad (forward) You can run/stop the motor using the / key on the keypad.
You can run the motor in forward direction only. (The
3: Keypad (reverse) You can run/stop the motor using the / key on the keypad.
You can run the motor in reverse direction only. (The
key has been disabled.)
key has been disabled.)
The source for setting run and frequency commands can be switched between Remote and Local modes by
the
key on the keypad. (This key is a toggle switch: Each time you press it for more than 1 second , the
mode switches from Romote to Local or vice versa.)
The mode can be switched also by an external digital input signal. To enable the switching you need to
assign (LOC) to one of the digital input terminals, which means that the commands from the keypad are
given precedence (one of function codes E01 to E05, E98, or E99 m ust be se t to " 35"). By fact ory default,
(LOC) is assigned to [X5].
You can confirm the current mode on the indicators (REM: Remote mode; LOC: Local mode).
When the mode is switched from Remote to Local, the frequency settings in the Remote mode are
automatically inherited. Further, if the inverter is in Running mode at the time of the switching from
Remote to Local, the Run command is au tomatically turned ON so t hat all the necess ary data settin gs will
be carried over. If, however, there is a discrepancy between the settings on the keypad and those on the
inverter itself (e.g., switching from reverse rotation in the Remote mode to forward rotation in the Local
mode using the keypad that is for forward rotation only), the inverter automatically stops.
The paths of transition between Remote and Local modes depend on the current mode and the value
(ON/OFF) of (LOC), the signal giving precedence to the commands from the keypad, as shown in the state
transition diagram (Figure 3.5) given below.
For further details on how to set operation commands and frequencies in Remote and Local modes,
refer to Chapter 4 "BLOCK DIAGRAMS FOR CONTROL LOGIC" (especially Section 4.3 “Drive
Command Generator” block diagram).
Figure 3.5 Transition between Remote and Local Modes
3-4
Page 53

3.2 Running Mode
3.2.2 Setting up the frequency and PID process commands
You can set up the desired frequency c omm and and PID proc ess comm and by using and keys on the
keypad.
You can also view and set up the frequency command as load shaft speed by setting function code E48.
Setting the frequency command
Using and keys (factory default)
(1) Set function code F01 to "0: Keypad operation." This cannot be done when the keypad is in
and
Programming mode or Alarm mode. To e nable frequ ency sett ing by using
the keypad in Running mode.
keys, first move
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
(2) Pressing the
/ key causes the frequency command to be display ed on the LCD Monitor, with the
lowermost digit blinking.
Figure 3.6 Setting the Frequency Command in Local Mode
(3) If you need to change the frequency command, press the / key again. The new setting will be
automatically saved into the inverter’s internal non-volatile memory. It is kept there even while the
inverter is powered OFF, and will be used as the initial frequency next time the inverter is powered
ON.
3-5
Page 54

y
a
• The frequency setting can be saved either automatically as mentioned above or by pre ssing the
key. You can choose either way using function code E64.
• When you start specifying or changing the frequency command or any other parameter with
the
/ key, the lowest digit on the display will blink and start changing. As you are holding
the key down, blinking will gradually move to the upper digit places and the upper digits will
be changeable.
• Pressing the
key moves the changeable digit place (blinking) and thus allows you to change
upper digits easily.
• By setting function code C30 to "0: Keypad operation (
command 2 as the frequency setting method, you can also specify or change the frequenc
command in the same manner using the
/ key.
• If you have set the function code F01 to "0: Keypad operation (
frequency setting other than frequency 1 (i.e., frequency 2, set it via communications, or as
multistep frequency), then you cannot use the
/ key for setting the frequency command
/ key)" and selecting frequency
/ key)" but have selected a
even if the keypad is in Running Mode. Pressing either of these keys will just display the
currently selected frequency command.
To have the frequency command displ ayed as the m otor speed, load shaft sp eed, or speed (%), set function
code E48 (speed monitor selection) to 3, 4, or 7, respectively, as shown in Table 3.5 Monitored Items.
Table 3.3 Available Means of Setting
Symbol Command sources Symbol
HAND Keypad MULTI
12 Terminal [12] PID-P1 PID process command 1
C1 Terminal [C1] RS-485-1
12 + C1
V2 Terminal [V2] BUS Bus option PID_LINK
U/D UP/DOWN control LOADER FRENIC loader PID+MULTI
Terminal [12] +
Terminal [C1]
RS-485-2
Command
sources
Multistep
frequency
RS-485
(standard)
RS-485
(optional)
Symbol Command sources
PID-HAND PID keypad command
PID-P2 PID process command 2
PID-U/D
PID UP/DOWN
process command
PID communication process
command
PID multistep frequency
command
3-6
Page 55

Make setting under PID control
To enable PID control, you need to set function code J01 to 1 or 2.
3.2 Running Mode
Under the PID control, the items that can be set or checked with
and keys are different from those
under regular frequency control, depending upon the current LED monitor setting. If the LED monitor is
set to the speed monitor, you may access manual speed commands (frequency command) with
and
keys; if it is set to any other value, you may access the PID process command with those keys.
Refer to the FRENIC-Eco User's Manual for details on the PID control.
Setting the PID process command with
(1) Set function code J02 to "0: Keypad operation."
(2) Set the LED monitor to something other than the speed monitor (E43 = 0) while the keypad is in
Running Mode. You cannot m odify the PID process command using the
is in Programming Mode or Alarm Mode. To enable the modification of the PID process command
by the
(3) Press the
key, first switch to Running Mode.
/
/ key to have the PID process command displayed. The lowest digit will blink
together with the dot on the LED monitor.
and keys
/ key while the keypad
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
Figure 3.7 PID Process Commands
(4) To change the PID process command, press the / key again. The PID process command you
have specified will be automatically saved into the invert er’s internal memory. It is kept t here even if
you temporarily switch to another means of specifying the PID process command and then go back to
the means of specifying the PID process command via the keypad. Also, it is kept there even while
the inverter is powered OFF, and will be used as the initial PID process command next time the
inverter is powered ON.
3-7
Page 56

• Even if multistep frequency is selected as the PID process command ((SS4) = ON), you still
can set the process command using the keypad.
• When function code J02 is set to any value other than 0, pressing the
/ key displays, on
the 7-segment LED monitor, the PID command currently selected, while you cannot change
the setting.
• On the 7-segment LED monitor, the decimal point of the lowest digit is used to characterize
what is displayed. The decimalpoint of the lowest digit blinks when a PID process com mand is
displayed; the decimal point lights when a PID feedback value is displayed.
Setting up the frequency command with and keys under PID control
When function code F01 is set at "0: Keypad operat ion" and freq uency comm and 1 (Frequency setting via
communications link: Disabled; Multistep frequency setting: Disabled; PID control: Disabled) is selected
key if you specify
as the manual speed command, you can modify the frequency setting using the
/
the LED monitor as the speed monitor while the keypad is in Running Mode. You cannot modify the
frequency setting using the
enable the modification of the frequency setting using the
key while the keypad is in Programming Mode or Alarm Mode. To
/
key, first switch to Running Mode. These
/
conditions are summarized in Table 3.4 and the figure below. Table 3.4 shows the combinations of the
parameters, while the figure below illustrat es how the manua l speed comm and
entered via the keypad is
translated to the final frequency command .
The setting and viewing procedures are the same as those for usual frequency setting.
Table 3.4 Speed (Frequency) Command Manually Set with / Key and Requirements
Frequency
command
1 (F01)
Frequency setting via
communications link
Multistep
frequency setting
PID control
disabled
Display during
/ key operation
PID enabled PID output (as final frequency command)
0 Disabled Disabled
Disabled
PID enabled PID output (as final frequency command)
Other than the above
Disabled
3-8
Manual speed setting by keypad
(frequency setting)
Manual speed command currently selected
(frequency setting)
Page 57

3.2 Running Mode
3.2.3 LED monitor (Monitoring the running status)
The eleven items listed below can be monitored on the LED Monitor. Immediately after the inverter is
turned ON, the monitor item specified by function code E43 is displayed. In Running Mode, press the
key to switch between monitor items. The item being monitored shifts as you press the
sequence shown in Table 3.5.
Table 3.5 Items Monitored
key in the
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
Page to
be
selected
0 Speed Monitor Function code E48 specifies what to be displayed. 0
Output frequency
Load shaft speed
8 Output current
9 Input Power
10 Calculated torque
11 Output voltage
12 Motor output
13 Load factor
14
15
Monitored Item Example Unit Meaning of Displayed Value
Hz Frequency actually being output (Hz) (E48 = 0)
120
r/min
r/min Output frequency (Hz) x E50 (E48 = 4)
%
A Output of the inverter in current in rms 3
kW Input power to the inverter 9
% Motor output torque in % (Calculated value) 8
V Output of the inverter in voltage in rms 4
kW Motor output in kW 16
Load rate of the motor in % with the rated output being at
%
.
.
100%
PID process command/feedback value transformed to that
− 10
of physical value of the object to be controlled.
Refer to the function codes E40 and E41 for details.
−
×frequency Output
P01
frequencyOutput
frequency Maximum
100×
Motor speed
Speed (%)
PID process command
PID feedback value
(Note 1)
(Note 1)
50.00
1500
300.0
50.0
12.34
10.25
50
200
9.85
50
10.00
9.00
Function
code E43
(E48 = 3)
(E48 = 7)
15
12
PID output
16
Analog input monitor
18
(Note 1) Displayed only if the inverter PID-controls the motor according to a PID process command specified by the
function code J01 (= 1 or 2). While the 7-segment LED monitor is displaying PID process command, PID
feedback value, or PID output value, the dot (decimal point) at the lowest digit on it is lit or blinking respectively.
(Note 2) Analog input monitoring becomes active only when enabled by any data of the function codes E61, E62 or E63
(Select terminal function).
(Note 1)
(Note 2)
Figure 3.8 Selecting Items to be Monitored on LED Monitor
100.0
82.00
.
PID output in % with the maximum output frequency (F03)
%
being at 100%
Analog input to the inverter converted per E40 and
−
E41
Refer to the function cod
es E40 and E41 for details.
3.5.
3-9
14
17
Page 58

3.3 Programming Mode
Programming Mode provides you with the functions of setting and checking function code data,
monitoring maintenance information and checking input/output (I/O) signal status. The functions can be
easily selected with a menu-driven system. Table 3.6 lists menus available in the Programming Mode.
Table 3.6 Menus Available in Programming Mode
Menu # Menu Main functions Refer to:
0 Quick Setup Displays only basic function codes that are pre-selected. 3.3.2
1 Data Setting
2 Data Checking
3 Drive Monitoring
4 I/O Checking Displays external interface information. 3.3.5
5 Maintenance Information Displays maintenance information including cumulative run time. 3.3.6
6 Alarm Information
7 Alarm cause Displays the cause of the alarm.
8 Data Copying
Load Factor
9
Measurement
10 User Setting
Allows you to view and change the setting of the function code you
select. (Note)
Allows you to view and change a function code and its setting
(data) on the same screen. Also allows you to check the function
codes that have been changed from their factory defaults.
Displays the running information required for maintenance or test
running.
Displays four latest alarm codes. Also allows you to view the
information on the running status at the time the alarm occurred.
Allows you to read or write function code data, as well as to verify
it.
Allows you to measure the maximum output current, average
output current, and average braking power.
Allows you to add or delete function codes covered by Quick
Setup.
3.3.1
3.3.3
3.3.4
3.3.7
3.3.8
11
Communication
Debugging
Allows you to confirm the data of the function codes for
communication (S, M, W, X, and Z codes).
(Note) The function codes for optional features (o code) are displayed only when they are installed. For details, refer to
their instruction manuals.
Figure 3.9 shows the transitions between menus in Programming mode.
Figure 3.9 Menu Transition in Programming Mode
When there has been no key operation for about 5 minutes, the inverter automatically goes back to the
Running mode and the back light goes OFF.
3-10
Page 59

3.3 Programming Mode
3.3.1 Setting function codes – "1. Data Setting"
Menu #1 "Data Setting" in Programming Mode allows you to set function codes according to your needs.
Table 3.7 lists the function codes available on the FRENIC-Eco.
Table 3.7 Function Codes Available on FRENIC-Eco
Function Code Group Function Code Function Description
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
(Fundamental functions)
F code
E code
(Extension terminal
functions)
C code
(Control functions of
frequency)
P code
(Motor parameters)
H code
(High performance
functions)
J code
(Application functions)
y code
(Link functions)
o code
(Option functions)
(Note) The o code is displaye d only when the corresponding optional feature is installed.
For details of the o code, refer to the Instruction Manual for the corresponding optional feature.
F00 to F44
E01 to E99
C01 to C53
P01 to P99
H03 to H98
J01 to J22
y01 to y99
o27 to o59
Fundamenta
l functions
Terminal
functions
Control
functions
Motor
parameters
High-level
functions
Application
functions
Link
functions
Optional
functions
Fundamental functions used in operation of the motor
Functions concerning the selection of operation of the
control circuit terminals; Functions concerning the
display on the LED monitor
Functions associated with frequency settings
Functions for setting up characteristics parameters (such
as capacity) of the motor
Highly added-value functions; Functions for
sophisticated control
Functions for applications such as PID Control
Functions for controlling communications
Functions for optional features (Note)
Function codes requiring simultaneous keying
To modify the data for function code F00 (data protection), H03 (data initialization), or H97 (clear alarm
data), simultaneous keying is needed, involving the
key + the
key, or the key + the
key.
Modifying function code data during running; making the modification valid and saving the
modification
Some function codes can be modified while the inverter is running, whereas others cannot. Further,
depending on the function code, m odifications m ay or may no t becom e effective immediately . For detail s,
refer to the "Change when running" column in 9.1 "Function Code Tables" in Chapter 9.
For details of function codes, refer to 9.1 "Function Code Tables" in Chapter 9.
Figure 3.10 illustrates LCD screen transition for Menu item 1. DATA SET.
Menu screen
Function code list screen
Figure 3.10 Screen Transition for Data Setting Menu
3-1 1
Screen for modifying
function code data
Page 60

play
Basic key operation
This section will give a description of the basic key operatio n, following t he exam ple of th e function c ode
data changing procedure shown in Figure 3.11.
This example shows you how to change function code F03 data (maximum frequency) from 58.0 Hz to
58.1 Hz.
(1) When the inverter is powered ON, it automatically enters Running Mode. In Running Mode, press
key to enter Programming Mode. The menu for function selection will be displayed.
the
(2) Using and keys, move the pointer Æ to "1. DATA SET" and then press the key, which will
display a list of function codes.
(3) Use
and keys to select the desired function code group (in t his exam ple, F0 3:), and press the
key, which will display the screen for changing the desired function code data.
(4) Change the function code data by using
and keys. Pressing the key causes the blinking digi t
place to shift (cursor shifting) (The blinking digit can be changed).
(5) Press the
key to finalize the function code data.
The data will be saved in the memory inside the inverter. The display will return to the function code
list, then move to the next function code (in this example, F04).
If you press the
key before the key, the change made to data of the function code is cancelled.
The data reverts to the previous value, the screen returns to the function code list, a nd the func tion
code (F03) reappears.
(6) Press the key to return to the menu from the function code list.
Screen
Function code
Function code
Operation guide: The function of each key is
ed by automatic scrolling of this line.
dis
Function code #, name
: Function code that has been changed from factory default
Data
Allowable range
Operation guide
Data before change
Data after change
Figure 3.11 Screen for Changing Function Code Data
Additional note on function code being selected
The function code being selected blinks, i ndicating the m ovement of the cursor (F03 blinks in this
example).
3-12
Page 61

3.3 Programming Mode
Press key to enter Menu.
/
Select desired menu by shifting the pointer Æ with /
key.
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
/
/
Press
Press key to return to Menu.
Select desired function code by moving the cursor with
Press
Press / key to change function code data.
Press
Press
key to finalize desired menu.
key to finalize desired function code.
key to finalize function code data.
key to cancel change of data.
key.
/
Figure 3.12 Changing Function Code Data
3-13
Page 62

3.3.2 Setting up function codes quickly using Quick setup –
"0. QUICK SET"
Menu #0 "QUICK SET" in Programm ing Mode allows you t o quickly set up a fundamental set of f unction
codes that you specify beforehand. Whereas at shipment from factory, only a predetermined set of
function codes is registered, you can add or dele te some function c odes using "10. US ER SET." The set of
function codes covered by Quick Setup is held in the inverter (not the keypad). Therefore, if you mount
your keypad onto another inverter, the set of function codes held in the new inverter is subject to Quick
Setup. If necessary, you may copy the set of function codes subject to Quick Setup using the copy function
("8. DATA COPY").
If you perform data initialization (function code H03), the set of function codes subject to Quick Setup will
be reset to the factory default.
For the list of function codes subject to Quick Setup by factory default, refer to Chapter 9
"FUNCTION CODES."
LCD screen transition from the "0. QUICK SET" menu is the same as with "1. DATA SET."
Basic key operation
Same as the basic key operation for "1. DATA SET."
3.3.3 Checking changed function codes – "2. DATA CHECK"
Menu #2 "DATA CHECK" in Programming Mode allows you to check function codes (together with their
data) that have been changed. The functi on codes whose data have been changed from factory default are
marked with
. By selecting a function code and pressing the
LCD screen transition from the "2. DATA CHECK" menu is the same as with "1. DATA SET," except for
the different screen listing function codes as shown below.
Function code
Figure 3.13 LCD Screen Listing Function Codes
Function code data Changed
key, you can view or change its data.
Basic key operation
Same as the basic key operation for "1. DATA SET."
3-14
Page 63

3.3 Programming Mode
3.3.4 Monitoring the running status – "3. OPR MNTR"
Menu #3 "OPR MNTR" allows you to check the ru nnin g status duri ng m ainten ance and test run ning. T he
display items for "Drive Monitoring" are listed in Table 3.8.
Table 3.8 Drive Monitoring Display Items
Symbol Item Description
Fot1 Output frequency Output frequency
Fot2 Reserved
Iout Output current Output current
Vout Output voltage Output voltage
TRQ Calculated torque Calculated output torque generated by motor
Fref Frequency
command
Running direction FWD: Forward, REV: Reverse, Blank: Stopped
Running status IL: Current limitation, LU: Undervoltage, VL: V oltage limitation
SYN Motor shaft speed
LOD Load shaft speed Display value = (Output frequency Hz) × (Function code E50)
LIN Reserved
SV PID process
command
PV PID feedback
value
Frequency command
120
Display value =
The PID process command and PID feedback value are displayed after converting the
value to a virtual physical value (e.g., temperature or pressure) of the object to be
controlled using the function code E40 and E41 data (PID display coef ficients A and B).
Display value = (PID process command/feedback value) × (Coefficient A - B) + B
× Hz)frequency (Output
P01
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
MV PID output value PID output value, displayed in % (with Maximum frequency (F03) being 100%).
Figure 3.14 shows the LCD screen transition starting from the "OPR MNTR" menu.
3-15
Page 64
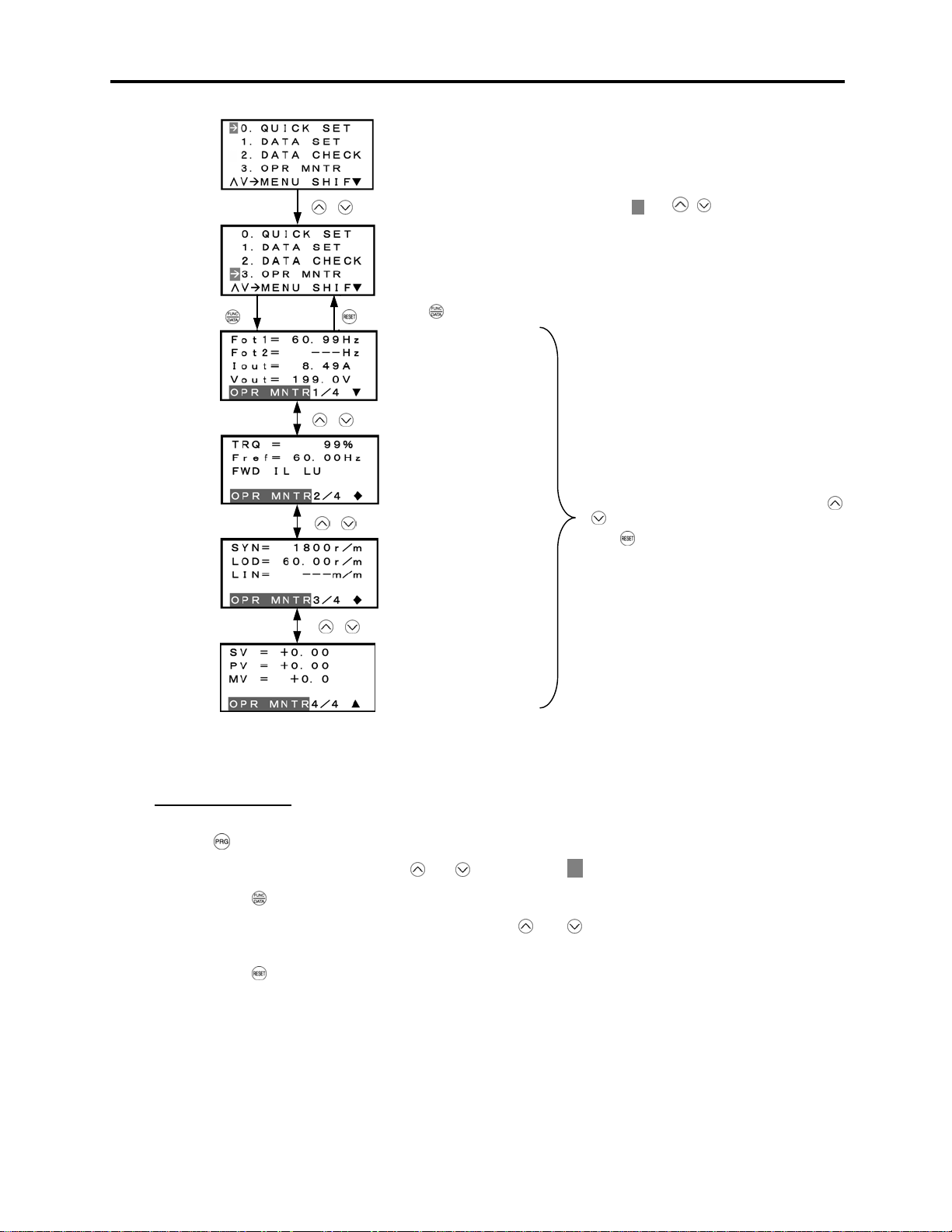
/
/
/
Select desired menu by moving the pointer Æ with / key.
Press
Output frequency
Reserved
Output current
Output voltage
key to finalize desired menu.
Calculated torque
Frequency command
Running direction, status
Motor shaft speed
Load shaft speed
Reserved
Common operation:
To confirm data, call the desired page using
/ key.
Press
key to return to Menu.
PID process command
PID feedback value
PID output value
/
Figure 3.14 Menu Transition for "OPR MNTR"
Basic key operation
(1) When the inverter is powered ON, it automatically enters Running Mode. In Running Mode, press
key to enter Programming Mode. The menu for function selection will be displayed.
the
(2) Select "3. OPR MNTR" by using and keys (moving Æ).
(3) Press the
(4) Select the page for the desired item by using
key to display the screen for Operation Monitor (1 page out of a total of 4 pages).
and
keys and confirm the running status
information for the desired item.
(5) Press the
key to go back to the menu.
3-16
Page 65

3.3 Programming Mode
3.3.5 Checking I/O signal status – "4. I/O CHECK"
Menu #4 "I/O CHECK" in Programming mode allows you to check the digital and analog input/output
signals coming in/out of the inv erter. This m enu is used t o check the running sta tus during m aintenance or
test run.
Table 3.9 lists check items available.
Table 3.9 I/O Check Items
Item Symbol Description
Input signals at terminal
block of control circuit
Input signals coming via
Communication link
Output signals Y1 - Y3, Y5, 30ABC Output signal information
I/O signals
(hexadecimal)
Analog input signals
Analog output signals
FWD, REV, X1 - X5 Shows the ON/OFF state of the input signals at the terminal block
FWD, REV, X1 - X5,
XF, XR, RST
DI Input signal at terminal block of control circuit (in hexadecimal)
DO Output signal (in hexadecimal)
LNK Input signal via communication link (hexadecimal)
12 Input voltage at terminal [12]
C1 Input current at terminal [C1]
V2 Input voltage at terminal [V2]
FMA Output voltage at terminal [FMA]
FMA Output current at terminal [[FMA]
FMP Average output voltage at terminal [FMP]
of the control circuit.
(Highlighted when short-circuited; normal when open)
Input information for function code S06 (communication)
(Highlighted when 1; normal when 0)
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
FMP Pulse rate at terminal [FMP]
Basic key operation
(1) When the inverter is powered ON, it automatically enters Running Mode. In Running Mode, press
key to enter Programming Mode. The menu for function selection will be displayed.
the
(2) Select "4. I/O CHECK" by using and keys (moving Æ).
(3) Press the
(4) Select the page for the desired item by using
key to display the screen for I/O Checking (1 page out of a total of 6 pages).
and
keys and confirm the I/O check data for the
desired item.
(5) Press the
key to go back to the menu.
Figure 3.15 shows the LCD screen transition starting from the "4. I/O CHECK" menu.
3-17
Page 66

/
Select desired menu by moving the pointer Æ with / key.
Press
Input signal at control circuit terminal block
Highlighted when short-circuited; normal when open
key to finalize desired menu.
Input signal coming via communication link
Highlighted when 1; normal when 0
Output signal
Highlighted when ON; normal when OFF
/
/
/
/
/
I/O signal (hex)
Input signal at control circuit terminal block
Output signal
Input signal coming via communication link
Analog input signal
Input voltage at terminal [12]
Input current at terminal [C1]
Input voltage at terminal [V2]
Analog output signal
Output voltage at terminal [FMA]
Output current at terminal [FMA]
Average output voltage at terminal [FMP]
Pulse rate at terminal [FMP]
Common operation:
To confirm data, call the desired
page using
Press
/ key.
key to return to Menu.
Figure 3.15 Menu Transition for "I/O CHECK"
3-18
Page 67

3.3 Programming Mode
Hexadecimal expression
Each I/O terminal is assigned to one of the 16 binary bits (bit 0 through bit 15). The bit to which no I/O
terminal is assigned is considered to have a value of "0." The I/O signa ls are thus collectively expre ssed as
a hexadecimal number (0 through F).
In the FRENIC-Eco Series, digital input terminals [FWD] and [[REV] are assigned to bits 0 and 1, and
[X1] through [X5] to bits 2 through 6, respectively. Each bit assumes a value of "1" when the
corresponding signal is ON and a value of "0" when it is OFF
(Note)
. For example, when signals [FWD] and
[X1] are ON while all the other signals are OFF, the status is expressed as "0005H."
(Note) The ON/OFF state of each signal at terminals [FWD], [REV], and X1 through [X5] is to be interpreted according
to the states of the source/sink switch as shown in Chapter 8, Section 8.3.1 "Terminal functions."
Digital output terminals [Y1] through [Y3] are assigned to bits 0 through 2. Each is given a val ue of "1"
when it is short-circuited to [CMY], or a value of "0" when its circuit to [CMY] is open. The s tatus of relay
output terminal [Y5A/C] is assigned to bit 4, which assumes a value of "1" when the contact between
[Y5A] and [Y5C] is closed. The status of relay output terminal [30A/B/C] is assigned to bit 8, which
assumes a value of "1" when the contact between [30A] and [30C] is closed or "0" when the contact
between [30B] and [30C] is closed. For example, when term inal [Y1] is O N, term inals [Y2] and [Y3]] ar e
OFF, the contact between [Y5A] and [Y5C] is opened, and the link between 30A and 30C is closed, the
status is expressed as "0101H."
Table 3.10 Hexadecimal Notation
Data Displayed Highest digit Lowest digit
Bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Input signal (RST)
Output signal - - - - - - -
*
(XR)* (XF)* - - - - - - [X5] [X4] [X3] [X2] [X1] [REV] [FWD]
[30A/
B/C]
- - -
[Y5A
/C]
- [Y3] [Y2] [Y1]
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
Binary 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 1
(input)
Hex 0005H
Example
* (XF), (XR), (RST) are for communications. Refer to the subsection below.
Displaying control I/O signal terminals under communication control
During control via communication, input c ommands sent via RS-4 85 comm unications can be displ ayed in
two ways depending on setting of the function code S06: "Display with ON/OFF of the LED segment" o r
"In hexadecimal format." The conten t to be displayed is basically the same as that for the control I/O signal
terminal status display; however, (XF), (XR), and (RST) are added as inputs. Note that under
communications control, I/O display is in normal logic (ON when active) (using the original signals that
are not inverted).
Refer to the RS-485 Communication User's Manual for details on input commands sent through
RS-485 communications and the instruction manual of communication-related options as well.
-: unassigned
3-19
Page 68

3.3.6 Reading maintenance information – "5. MAINTENANC"
Menu #5 "MAINTENANC" in Programming Mode allows you to view information necessary for
performing maintenance on the inverter.
Table 3.11 lists the maintenance information display items.
Table 3.11 Display Items for Maintenance
Symbol Item Description
TIME Cumulative run time
EDC DC link circuit voltage Shows the DC link circuit voltage of the inverter’s main circuit.
TMPI Max. temperature inside the inverter Shows a maximum temperatur e inside the inerter every hour.
TMPF Max. temperature of heat sink Shows the maximum temperature of the heat sink every hour.
Imax Max. effective current Shows the maximum current in rms every hour.
CAP Capacitance of the DC bus capacitor
MTIM Cumulative motor run time
TCAP
TFAN
NST Count of start-ups
Wh Input watt-hour Note 1)
PD Input watt-hour data Note 1)
NRR1
NRR2
NRO
MAIN ROM version of the inverter Shows the ROM version of the inverter in 4 digits.
KP ROM version of the keypad Shows the ROM version of the keypad in 4 digits.
OP1 ROM version of the option Shows the ROM version of the option in 4 digits.
Cumulative run time of electrolytic
capacitor on the printed circuit board
Cumulative run time of the cooling
fan
Count of RS-485-1 errors
RS-485-1 error content Note 2)
Count of RS-485-2 errors
RS-485-2 error content Note 2)
Count of option errors
Option error code
Shows the cumulative run time during which the inverter was powered ON.
When the total time exceeds 65,535 hours, the counter will be reset to 0 and the
count will start again.
Shows the current capacitance of the DC bus capacitor as % of the capacitance at
factory shipment. Refer to the FRENIC-Eco Instruction Manual, Chapter 7
"MAINTENANCE AND INSPECTION" for details.
Shows the cumulative run time of the motor.
When the total time exceeds 65,535 hours, the counter will be reset to 0 and the
count will start again.
Shows the product of the cumulative time of voltage being applied to the electrolytic
capacitor on the printed circuit board and a coefficient determined by the
environmental condition. When the total time exceeds 65,535 hours, the counting
will stop.
As a guide, 61,000 hours is considered as life.
Shows the cumulative run time of the cooling fan. When the total time exceeds
65,535 hours, the counting will stop.
As a guide, 61,000 hours is considered as life (This number varies with the capacity
of the inverter.)
Shows the total count of start-ups of the motor (count of times when the run
command for the inverter was turned ON). When the total time exceeds 65,535
hours, the counter will be reset to 0 and the count will start again.
Shows the input watt-hours of the inverter. Upon exceeding 1,000,000 kWh, the
count goes back to 0.
Shows the input watt-hour data as input watt-hour (kWh) x function code E51. (The
range of display is 0.001 to 9,999. Values exceeding 9,999 are expressed as 9,999.)
Shows the cumulative count of RS-485 communications card (standard) errors since
first power ON.
Shows the latest error that has occurred with RS-485 communications (standard) in
a code.
Shows the cumulative count of RS-485 communications card (option) errors since
first power ON.
Shows the latest error that has occurred with RS-485 communications (option) in a
code.
Shows the cumulative count of errors detected during optional communication with
option installed.
Shows the latest error that has been detected during optional communication in a
code.
Note 1) To reset the input watt-hour and input watt-hour data to 0, set function code E51 to "0.000."
Note 2) For details of errors, refer to the RS-485 Communication User’s Manual.
3-20
Page 69

3.3 Programming Mode
Basic key operation
(1) When the inverter is powered ON, it automatically enters Running Mode. In Running Mode, press
key to enter Programming Mode. The menu for function selection will be displayed.
the
(2) Select "5. MAINTENANC" by using and keys (moving Æ).
(3) Press the
(4) Select the page for the desired item by using
key to display the screen for Maintenance (1 page out of a total of 7 pages).
and
keys and confirm the Maintenance data f or the
desired item.
(5) Press the
key to go back to the menu.
Figure 3.16 shows the LCD screen transition starting from the "5. MAINTENANC" menu.
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
3-21
Page 70

Select desired menu by moving the pointer Æ with / key.
/
/
/
/
/
Press
key to finalize desired menu.
Cumulative run time
DC link circuit voltage
Max. temperature inside the inverter
Max. temperature of heat sink
Max. effective current
Capacitance of the DC bus capacitor
Cumulative motor run time
Cumulative run time of
electrolytic capacitor (reference)
Cumulative run time of
the cooling fan (reference)
Number of start-ups
Input watt-hour
Input watt-hour data
No. of errors & Error content for RS-485-1
No. of errors & Error content for RS-485-2
No. of errors & Error code
for Option communication
ROM version of the inverter
ROM version of the keypad
Common operation:
To confirm data, call the desired
page using
Press
/ key.
key to return to Menu.
/
/
ROM version of the option
Figure 3.16 Menu Transition for "MAINTENANC"
3-22
Page 71

3.3 Programming Mode
3.3.7 Reading alarm information – "6. ALM INF"
Menu #6 "ALM INF" in Programming Mode allows you to view the information on the four most recent
alarm conditions that triggered protective functions (in a larm code a nd the num ber of occurrences). It also
shows the status of the inverter when the alarm condition occurred.
Table 3.12 lists the details of the alarm information.
Table 3.12 Alarm Information Displayed
Symbol Item Description
O/1 Most recent alarm Alarm code and count of occurrences
-1 2nd recent alarm Alarm code and count of occurrences
-2 3rd recent alarm Alarm code and count of occurrences
-3 4th recent alarm Alarm code and count of occurrences
Fot1 Output frequency Output frequency
Iout Output current Output current
Vout Output voltage Output voltage
TRQ Calculated torque Motor output torque
Fref Frequency command Frequency command
Running direction FWD: Forward, REV: Reverse, Blank: Stopped
Running status IL: current limitation, LU: undervoltage, VL: voltage limitation
TIME Cumulative run time
NST Count of startups
EDC DC link circuit voltage Shows the DC link circuit voltage of the inverter's main circuit.
TMPI Temperature inside the inverter Shows the temperature inside the inverter.
TMPF Max. temperature of heat sink Shows the maximum temperature of the heat sink.
Shows the cumulative power-ON time of the inverter.
When the total time exceeds 65,535 hours, the display will be reset to 0 and the count
will start again.
Shows the cumulative count of times the motor has been started (the inverter run
command has been issued). When the total count exceeds 65,535, the display will be
reset to 0 and the count will start again.
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
TRM
LNK
- Output signal Output signals to the terminals [Y1] to [Y3], [Y5], [30ABC]
3 Overlapping alarm 1
2 Overlapping alarm 1
SUB Error sub-code Secondary error code for the alarm.
Input signal status at terminal
block of control circuit
Terminal input signal status under
communication control
ON/OFF status of input signals of the terminals
[FWD], [REV], [X1] to [X5] (Highlighted when short-circuited; normal when open)
ON/OFF status of input signals for function code S06 (Communication).
[FWD], [REV], [X1] to [X5], (XF), (XR), (RST) (H ighlighted when 1; normal when o)
Simultaneously occurring alarm codes (1)
("----" is displayed if no alarms have occurred.)
Simultaneously occurring alarm codes (2)
("----" is displayed if no alarms have occurred.)
When the same alarm occurs a number of times in succession (reoccurring alarm), the alarm
information for the first occurrence is retained and the i nformation f or the subs equent occurrences
is discarded. Only the number of consecutive occurrences will be updated.
3-23
Page 72

Basic key operation
(1) When the inverter is powered ON, it automatically enters Running Mode. In Running Mode, press
key to enter Programming Mode. The menu for function selection will be displayed.
the
(2) Select "6. ALM INF" by using and keys (moving Æ).
(3) Press the
key to get the Alarm list screen, which displays information on the four most recent
alarm conditions (alarm code and the number of occurrences for each alarm condition).
(4) Select the alarm condition to be displayed, by using
(5) Press the
key to display the alarm code on the LED Monitor and the screen for the status data at the
and
keys.
time of the alarm (1 page out of a total of 7 pages) on the LCD Monitor.
(6) Select the page for the desired item by using
and
keys and confirm the status data for the
desired item.
(7) Press the
key to return to the alarm list. Press the key again to return to the menu.
Figure 3.17 shows the LCD screen transition starting from the "6. ALM INF" menu.
/
/
Select desired menu by moving the pointer Æ with / key.
Press key to finalize desired menu.
Cause & No. of occurrences of most recent alarm
Cause & No. of occurrences of 2
Cause & No. of occurrences of 3
Cause & No. of occurrences of 4
Press
Select desired alarm by moving the cursor with / key.
key to return to Menu.
nd
most recent alarm
rd
most recent alarm
th
most recent alarm
Press key to finalize desired alarm info.
Figure 3.17 Menu Transition for "ALM INF"
3-24
Page 73

3.3 Programming Mode
/
Press key to finalize desired alarm info.
Output frequency
Output current
Output voltage
Calculated torque
Frequency command
Running direction/status
Cumulative run time
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
/
No. of startups
DC link circuit voltage
Temperature inside inverter
Max. temperature of heat sink
/
Input signal status at terminal block
of control circuit
Highlighted when short-circuited;
normal when opened
Common operation:
To confirm data, call the desired
page using
Press
/ key.
key to return to Menu.
/
Terminal input signal status
under communication control
Highlighted when 1; normal when 0
/
Output signal
Highlighted when ON;
normal when OFF
/
Overlapping alarm 2
Overlapping alarm 1
Error sub-code
Figure 3.17 Menu Transition for "ALM INF" (continued)
3-25
Page 74

3.3.8 Viewing cause of alarm – "7. ALM CAUSE"
Menu #7 "ALM CAUSE" in Programming M ode allows you to view the information on th e four most
recent alarm conditions that triggered protective functi ons (in alarm code and the num ber of occurrences).
It also shows the cause of each alarm.
Basic key operation
(1) When the inverter is powered ON, it automatically enters Running Mode. In Running Mode, press
key to enter Programming Mode. The menu for function selection will be displayed.
the
(2) Select "7. ALM CAUSEF" by using and keys (moving Æ).
(3) Press the
alarm conditions (alarm code and the number of occurrences for each alarm condition).
(4) Select the alarm condition to be displayed, by using
(5) Press the
alarm (can be more than 1 page) on the LCD Monitor.
(6) Press
(7) Press the
Figure 3.18 shows the LCD screen transition starting from the "7. ALM CAUSE" menu.
and
key to get the Alarm list screen, which displays information on the four most recent
and
key to display the alarm code on the LED Monitor and the screen for the cause of the
keys to view the previous/next page.
key to return to the alarm list. Press the key again to return to the menu.
keys.
3-26
Page 75

3.3 Programming Mode
/
/
/
Select desired menu by moving the pointer Æ with / key.
Press key to finalize desired menu.
Cause & No. of occurrences of most recent alarm
Cause & No. of occurrences of 2
Cause & No. of occurrences of 3
Cause & No. of occurrences of 4
Press
Select desired alarm by moving the cursor with / key.
key to return to Menu.
nd
most recent alarm
rd
most recent alarm
th
most recent alarm
Press key to finalize desired alarm cause page.
Alarm cause (1st page)
Press
Press / key to check all alarm causes.
Alarm cause (2nd page)
key to return to alarm list screen.
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
Figure 3.18 Menu Transition for "ALM CAUSE"
3-27
Page 76

3.3.9 Data copying – "8. DATA COPY"
Menu #8 "Data Copying" in Programming Mode allows you to read function code data out of an inverter
for which function codes are already set up and then to write such function code data altogether into
another inverter, or to verify the function code data held in the keypad with the one in the inverter.
The keypad can hold three sets of functi on cod e dat a in three areas of its in ternal memory so that it can be
used with three different inverters. You can read the function code data of an inverter into one of these
memory areas or write the function code data held in one of these memory areas into the inverter you select.
On the LCD screen, each set of function code data or memory area is given a name such as DATA 1 and
DATA 2.
Basic key operation
(1) When the inverter is powered ON, it automatically enters Running Mode. In Running Mode, press
key to enter Programming Mode. The menu for function selection will be displayed.
the
(2) Select "8. DATA COPY" by using and keys (moving Æ).
(3) Press the
(4) Select the operation (read, write, verify, check), by using and
(5) Press the
key to get the data copy index screen (list of data copy operations).
keys (moving Æ).
key to finalize the choice of operation and then select the data set (or storage area) on the
keypad.
(6) Press the
key to finalize the selection and perform the operation of your choice (for details, refer to
the LCD screen transition diagram below).
(7) Press the
key to return to the menu.
Figure 3.19 shows the LCD screen transition starting from the "8. DATA COPY" menu.
1) Selecting Copy Operation
/
Select desired menu by moving the pointer Æ with / key.
Figure 3.19 Menu Transition for "DATA COPY"
Operation Description
Read: Read data Reads out function code data from the inverter and stores it into the internal memory of the
Write: Write data Writes the data held in the selected memory area of the keypad into the inverter.
Verify: Verify data Verifies the data held in the keypad’s internal me mory against the function code data in the
Check: Check data Checks the model information (format) and function code data held in the three memory areas of
keypad.
inverter.
the keypad.
Press key to finalize desired menu.
List of data copy operations
Select desired operation by moving the cursor with
To return to Menu, press
key.
Table 3.13 List of DATA COPY Operations
3-28
/ key.
Page 77

2) Read Operation
List of data copy operations
Select desired operation by moving the cursor with
3.3 Programming Mode
/ key.
Error screens
Press key to finalize desired operation.
Data selection screen
Select desired data by moving the cursor with
To go back to List of data copy operations, press
/ key.
key.
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
Press key to finalize desired data.
Confirmation screen
If "Read" is actually performed, the data read out from the inverter will overwrite
the data held in this memory area in the keypad. If OK, press
To go back to Data selection screen, press
key.
key.
Press key to start Read operation.
"In progress" screen
A bar indicating progress appears in the bottom.
Upon completion, Completion screen automatically appears.
Completion screen
Indicates that Read operation has completed successfully.
To go back to List of data copy operations, press
key.
If you press / key during Read operation, the operation under way will be
aborted, and this Error screen will appear.
the keypad’s memory would be deleted.
(Note)
Once aborted, all the data held in
If a communication error is detected between the keypad and the inverter, this
Error screen will appear.
Figure 3.20 Menu Transition for "READ"
If an ERROR screen or an ERROR Ver. Screen appears during operation, press the key to
reset the error condition. When Reset is complete, the screen will go back to List of data copy
operations.
3-29
Page 78
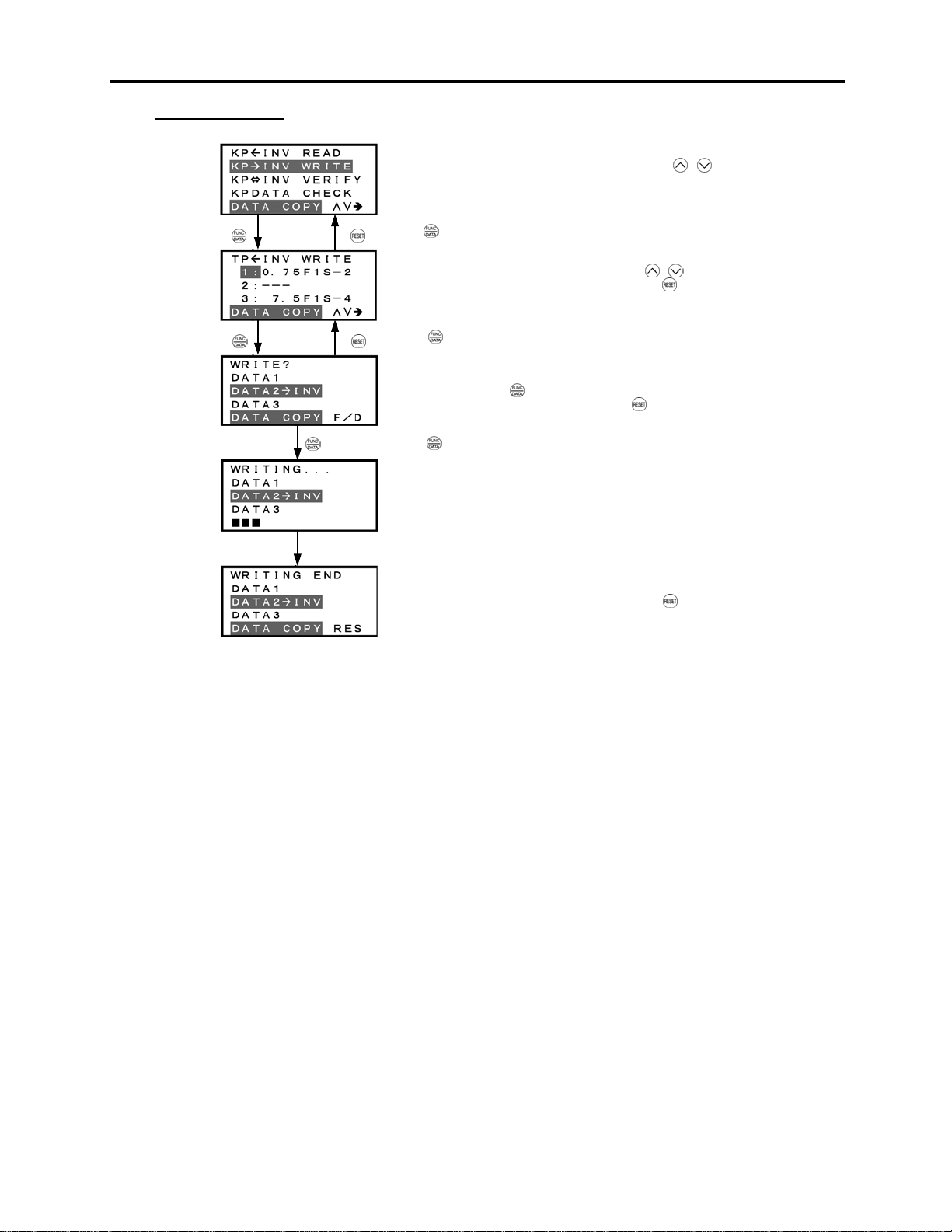
3) Write operation
List of data copy operations
Select desired operation by moving the cursor with
/ key.
Press key to finalize desired operation.
Data selection screen
Select desired data by moving the cursor with
To go back to List of data copy operations, press
/ key.
key.
Press key to finalize desired data.
Confirmation screen
If "Write" is actually performed, the selected data will overwrite the data held in the
inverter. If OK, press
To go back to Data selection screen, press
key.
key.
Press key to start Write operation.
"In progress" screen
A bar indicating progress appears in the bottom.
Upon completion, Completion screen automatically
Completion screen
Indicates that Write operation has completed successfully.
To go back to List of data copy operations, press
key.
Figure 3.21 Menu Transition for "WRITE"
3-30
Page 79

Error screens
If you press / key during Write operation, the operation under way will be
aborted, and this Error screen will appear.
in the inverter is incomplete, with some of it remaining old. Do not run the inverter
in this state. Before running the inverter, redo the writing or perform initialization.
(Note)
For safety considerations, the following situations are treated as an error:
• No valid data is found in the keypad’s memory. (No Read operation has been
performed since factory shipment; or, a Read operation has been cancelled or
aborted.)
• The data held in the keypad’s memory has an error.
• There is a mismatch in inverter’s model number.
• A Write operation has been performed while the inverter is running.
• The inverter is data-protected.
• The Write enable for keypad command (WE-KP) is OFF.
The function code data held in the keypad is incompatible with that in the inverter.
(Either data may be non-standard; or a version upgrade performed in the past may
have made the keypad or the inverter incompatible. Contact your Fuji Electric
representative.)
Figure 3.21 Menu Transition for "WRITE" (continued)
3.3 Programming Mode
Updating of the function code data
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
If an ERROR screen or an ERROR Ver. Screen appears during operation, press the key to reset
the error condition. When Reset is complete, the screen will go back to List of data copy
operations.
3-31
Page 80

4) Verify operation
List of data copy operations
Select desired operation by moving the cursor with
/ key.
Press key to finalize desired operation.
Data selection screen
Select data to be verified by moving the cursor with
To go back to List of data copy operations, press
/ key.
key.
Press key to finalize desired data.
Confirmation screen
If OK, press
To go back to Data selection screen, press
key.
key.
Press key to start Verify operation.
"In progress" screen
A bar indicating progress appears in the bottom.
When a mismatch is found, the Verify operation is halted, with the function code
and its data displayed on the LCD Monitor. To resume the Verify operation from
the next function code, press
key again.
To resume Verify, press key.
"In progress" screen
A bar indicating progress appears in the bottom.
Upon completion, Completion screen automatically appears.
Completion screen
Indicates that Verify operation has completed successfully.
To go back to List of data copy operations, press
key.
Figure 3.22 Menu Transition for "VERIFY"
3-32
Page 81

Error screens
3.3 Programming Mode
If you press / key during Verify operation, the operation under way will be
aborted, and this Error screen will appear.
(Note)
If the keypad does not have any valid data, this Error screen will appear.
The function code data held in the keypad is incompatible with that in the inverter.
(Either data may be non-standard; or a version upgrade performed in the past
may have made the keypad or the inverter incompatible. Contact your Fuji Electric
representative.)
(Note)
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
Figure 3.22 Menu Transition for "VERIFY" (continued)
If an ERROR screen or an ERROR Ver. Screen appears during operation, press the key to reset
the error factor. When Reset is complete, the screen will go back to List of data copy operations.
3-33
Page 82

5) Check operation
List of data copy operations
Select desired operation by moving the cursor with
/ key.
Press key to finalize desired operation.
Data selection screen
Select data to be checked by moving the cursor with
To go back to List of data copy operations, press
Press key to finalize desired data.
"Check data" screen
Displays function codes and their data.
To check other function codes, press
To go back to List of data copy operations, press
/ key.
/ key.
key.
key.
Figure 3.23 Menu Transition for "DATA CHECK"
Error screen
If no valid data is found in the keypad, this Error screen will appear.
(Note)
Figure 3.24 Error Screen for "DATA COPY"
If an ERROR screen appears during operation, press the key to reset the error factor. When
Reset is complete, the screen will go back to List of data copy operations.
3-34
Page 83

3.3 Programming Mode
3.3.10 Measuring load factor – "9. LOAD FCTR"
Menu #9 "LOAD FCTR" in Programming Mode allows you to measure the maximum output current, the
average output current, and the average braking power. There are two m odes of measurem ent: "hours," in
which the measurement takes place for a specified length of time, and "start to stop," in which the
measurement takes place from the start of running to the stop.
If the "start to stop" mode is entered while the inverter is running, the measurement takes place
until it is stopped. If the "start to stop" mode is entered while the inverter is stopped, the
Basic key operation
(1) When the inverter is powered ON, it automatically enters Running Mode. In Running Mode, press
(2) Select "9. LOAD FCTR" by using and keys (moving Æ).
measurement will take place from the next start of running until it is stopped.
key to enter Programming Mode. The menu for function selection will be displayed.
the
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
(3) Press the
(4) Select the measurement mode, by using and
(5) Press the
key to get the measurement mode selection screen.
keys (moving Æ).
key to start the measurement. For "start to stop" mode, you will be prompted to enter a
run command via a confirmation screen. For details, refer to the LCD screen transition chart.
(6) Press the
key to return to the menu.
Figure 3.25 shows the LCD screen transition starting from the "9. LOAD FCTR" menu.
1) Selecting measurement mode
/
Figure 3.25 Menu Transition for Selecting Measurement Mode
Select desired menu by moving the pointer Æ with / key.
To finalize desired menu, press key.
Mode selection screen
HOURS SET: Measurement takes place for specified duration
STARTÎSTOP: Measurement takes place from start to stop.
EXECUTING: Measurement is taking place according to the specified duration
set in HOURS SET.
To return to Menu, press
key.
3-35
Page 84

2) Selecting "hours set" mode
Mode selection screen
Select desired mode of measurement by moving the cursor with
/ key.
/
/
Select desired mode of measurement with / key.
Press
Set time duration (Default: 1 hour)
To go back to Mode selection, press
Set the duration by using , , and keys.
key to finalize desired mode of measurement.
key.
Press key to finalize the duration and start measurement.
Measurement in progress (remaining time)
While the measurement is in progress, the remaining time is displayed.
When key is pressed or the measurement duration has elapsed, the measurement
stops, displaying the results.
Specified duration
Max. output current
Average output current
Average braking power
[Display of measurement results]
Figure 3.26 Menu Transition for "LOAD FCTR" (hours set mode)
3-36
Page 85

3) Selecting "start to stop" mode
3.3 Programming Mode
Mode selection screen
Select desired mode of measurement by moving the cursor with
/ key.
Run com. ON
Stopped /
Confirmation screen
If OK, press
To go back to Mode selection, press
key.
key.
Press key to signal "Ready."
Waiting for Run command (Standby for measurement)
Upon receiving Run command, the measurement will start.
If a Run command has already been received, this screen will be skipped.
Measurement will start upon receiving Run command.
Measurement in progress
The measurement will continue until the inverter is stopped.
To discontinue the measurement, press
key.
Measurement will stop when the inverter is stopped or you press key.
Duration
Max. output current
Average output current
Average braking power
To return to Mode selection, press key.
[Display of measurement results]
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
Figure 3.27 Menu Transition for "LOAD FCTR" (start to stop mode)
4) Going back to Running mode
While the measurement of the load factor is in progress, you ca n go ba ck to the run ning m ode by pressin g
the key (or, to the Mode selection screen by pressing the key).
In these cases, the measurement of the load factor will continue. You can go back to "9. LOAD FCTR" and
confirm, on the Mode selection screen, that the measurement is in progress.
After the measurement has ended, you can view the results of the measurement by pressing the
the Mode selection screen.
The results of the measurement will be deleted when the inverter is powered OFF.
key on
3-37
Page 86

3.3.11 Changing function codes covered by Quick setup –
"10. USER SET"
Menu #10 "USER SET" in Programming Mode allows you to change the set of function codes that are
covered by Quick setup.
Basic key operation
(1) When the inverter is powered ON, it automatically enters Running Mode. In Running Mode, press
key to enter Programming Mode. The menu for function selection will be displayed.
the
(2) Select "10. USER SET" by using and keys (moving Æ).
(3) Press the
(4) Select the function codes to be added or deleted, by using and
(5) Press the
(6) Press the
key to get the list of function codes.
key to perform the addition or deletion.
key to return to the menu.
keys (moving Æ).
Figure 3.28 shows the LCD screen transition starting from the "10. USER SET" menu.
/
Select desired menu by moving the pointer Æ with / key.
Press key to finalize desired menu.
List of function codes
Lists function codes with their names.
The function codes covered by Quick setup are highlighted (names are
highlighted).
Select the function code to be added (not highlighted) by moving the cursor with
and keys.
To go back to the menu, press
Press key to add it to Quick setup.
Select the function code to be deleted (highlighted) by moving the cursor with
and keys.
To go back to the menu, press
Press key to delete it from Quick setup.
key.
key.
To go back to Menu, press key.
Figure 3.28 Menu Transition for Changing Function Codes Covered by Quick Setup
3-38
Page 87

3.3 Programming Mode
3.3.12 Performing communication debugging – "11. COMM DEBUG"
Menu #11 "COMM DEBUG" in Programming Mode allows you to view the data of
communication-related function codes (S, M, W, X, and Z codes) to help debug programs for
communication with an upper-level device.
Basic key operation
(1) When the inverter is powered ON, it automatically enters Running Mode. In Running Mode, press
the
key to enter Programming Mode. The menu for function selection will be displayed.
(2) Select "11. COMM DEBUG" by using and keys (moving Æ).
(3) Press the
key to get the list of communication-related function codes.
(4) Select the function code, by using and keys (moving Æ).
(5) Press the
(6) Press the
key to check or change the function code.
key to return to the menu.
Figure 3.29 shows the LCD screen transition starting from the "11. COMM DEBUG" menu.
S Code
M, W, X, Z Code
/
Figure 3.29 Menu Transition for Communication Debugging
Select desired menu by moving the pointer Æ with / key.
Press key to finalize desired menu.
List of communication-related function codes
Lists function codes with their names.
Select the function by moving the cursor with
To go back to the menu, press
key.
and keys.
Press key to finalize desired menu.
# & name of function code
: Data exists (≠ 0))
(
Data
Range
Operation guide
Data
Operation guide
Data can be changed by pressing
Reference only (Cannot be changed)
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
/ key.
3-39
Page 88

3.4 Alarm Mode
When a protective function is triggered, resulting in an alarm, the inverter automatically enters the alarm
mode, displaying the alarm code on the LED Monitor and t he deta ils of the alarm on the LCD Monitor as
shown below.
If there is no overlapping alarm
Most recent cause; No. of consecutive occurrences
Cause of alarm
Operation guide
Operation guide
Figure 3.30 Without Non-overlapping Alarm
If there is an overlapping alarm
Most recent cause; No. of consecutive occurrences
Cause of alarm
Operation guide
Operation guide
( is added if there is an overlapping alarm.)
Figure 3.31 With Overlapping Alarm
If there is an overlapping alarm, you can view more detailed information by pressing the key.
In the examples below, "2 = Er6" corresponds to the first overlapping occurrence, and "3 = Er6" to the
second overlapping occurrence.
Display of alarm history
In addition to the most recent (current) alarm, you can view three recent alarms and any overlapping
alarms by pressing the
/ key while the most recent one is being displayed.
Overlapping alarm; No. of consecutive occurrences
Cause of alarm
Operation guide
Operation guide
Most recent alarm; No. of consecutive occurrences
Cause of alarm
Operation guide
Operation guide
is added if there is an overlapping alarm.)
(
Previous alarm; No. of consecutive occurrences
Cause of alarm
Operation guide
Operation guide
Figure 3.32 Switching of Display of Overlapping Alarm History
3-40
Page 89

3.4 Alarm Mode
Display of running status information at the time of alarm
By pressing the
key while an alarm code is displayed, you can view the outp ut frequency, output current,
and other data concerning the running status. The data you can view is the same as with "6. ALM INF."
Use
and keys for scrolling pages within the menu.
Pressing the
key or the key while the running status information is disp layed will take you b ack to the
display of the alarm code.
Transition to Programming mode
By pressing the
key while alarm information is displayed, y ou can swi tch to the Programm ing mode, i n
which you can use a variety of features such as changing function code data.
Resetting alarm; transition to Running mode
When you remove the cause of the alarm and press the key, the alarm condition will be reset, and the
inverter will go back to the Running mode.
Figure 3.33 summarizes the menu transition between these modes.
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
Figure 3.33 Menu Transition in/from Alarm Mode
3-41
Page 90

3.5 Other Precautions
For using a multi-function keypad note that your key operation will be differed from ones on a standard
keypad (TP-E1) for following points.
3.5.1 Function code setting for F02 (Run and operation)
The / key controls to run/stop the motor on the standard keypad (TP-E1) while the rotation
command input is required. On the contrary, the
run forward/reverse the motor without inputting any rotation command or stop it.
The function code F02 specifies the run command source to drive the motor.
F02 data Run command source
0: Keypad Pressing the / / key runs/stops the motor.
1: Digital input The terminal command (FWD) or (REV) runs/stops the motor.
2: Keypad (Forward) The / key runs the motor forward or stops it, but does not run it reverse.
/ /
key on the multi-function keypad co ntro ls to
3: Keypad (Reverse) The / key runs the motor reverse or stops it, but does not run it forward.
If you select Local by the Remote/Local switching command, operation of the run command from the
keypad will be changed by setting of the function code F02.
For details, refer to “ Switching the operation mode between remote and local” in “3.3.1
Running/stopping the motor.”
3.5.2 Remote/local operation
The multi-function keypad features the key to switch the operation between remote and local modes.
For details, refer to “ Switching the operation mode between remote and local” in “3.3.1
Running/stopping the motor.”
3-42
Page 91

3.5 Other Precautions
3.5.3 Tuning motor parameters
The LCD monitor of multi-function keypad shows the lead-through scr een for tuning of m otor parameters.
To tune motor parameters follow screens below.
Entering into tuning motor parameters
Set data 1 or 2 into the function code P04 and press the
key.
Chap. 3 OPERATION USING THE MULTI-FUNCTION KEYPAD
/
Turn on the
run command.
End of tuning
Turn off the run
command.
Press /
Press
Waiting for a run command.
Give the specific run command, Run forward or Run reverse. (Note 1)
Tuning the motor parameters. (Note 2)
Upon turning off the run command (while the run command given by the keypad or the
link operation is automatically turned off) the lead-through ends the tuning process, and
moves to the next function code P06.
key to select the data either 1 or 2 being set to the function code P04.
key to select the tuning mode.
(Note 1) The factory default setting is “Run forward” by using the
key on the keypad. To tune the motor parameters in
“Run reverse”, change data of the function code F02.
(Note 2) • Time needed for tuning while the motor is stopped (P04 = 1) will be less than 40 seconds.
• In tuning while the motor is running (P04 = 2), the inverter accelerates th e motor u p to around 50% of the base
frequency, starts tuning of motor parameters, and decelerates to stop the motor after the end of tuning.
Estimated time needed for tuning in this case will be (acceleration time + 10 + deceleration time) seconds.
3-43
Page 92

Page 93

Part 2 Driving the Motor
Chapter 4 BLOCK DIAGRAMS FOR CONTROL LOGIC
Chapter 5 RUNNING THROUGH RS-485 COMMUNICATION
Page 94

Page 95

Chapter 4
BLOCK DIAGRAMS FOR CONTROL LOGIC
This chapter describes the main block diagrams for the control logic of the FRENIC-Eco series of inverters.
Contents
4.1 Symbols Used in Block Diagrams and their Meanings.....................................................................................4-1
4.2 Drive Frequency Command Generator.............................................................................................................4-2
4.3 Drive Command Generator...............................................................................................................................4-4
4.4 Digital Term inal Command Decoder................................................................................................................4-6
4.4.1 Terminals and related function codes........................................................................................................4-6
4.4.2 Functions assigned to digital control input terminals................................................................................4-7
4.4.3 Block diagrams for digital control input terminals....................................................................................4-8
[ 1 ]
Digital control input block (General) ..................................................................................................4-8
[ 2 ] Digital control input block (Only for terminals)..................................................................................4-9
[ 3 ] Digital control input block (ORing the signals on terminals and the communications link)...............4-9
[ 4 ] Digital control input block (Forced to turn off the signals on terminals during (LE)
being turned on).................................................................................................................................4-10
[ 5 ] Assigning terminal functions via the communications link (Access to function code S06
exclusively reserved for the communications link)...........................................................................4-11
4.5 Digital Output Selector ...................................................................................................................................4-12
4.5.1 Digital output components (Internal block) ............................................................................................4-12
4.5.2 Universal DO (Access to the function code S07 exclusively reserved for the
communications link)..............................................................................................................................4-15
4.6 Analog Output (FMA and FMI) Selector........................................................................................................4-16
4.7 Drive Command Controller.............................................................................................................................4-17
4.8 PID Frequency Command Generator..............................................................................................................4-19
Page 96

Page 97

4.1 Symbols Used in the Block Diagrams and their Meanings
FRENIC-Eco series of inverters for variable torque loads increasing in prop orti on t o the sq uare of speed such as
fans and pumps are equipped with a number of function codes to m atch a vari ety of m otor operations req uired in
your system. Refer to Chapter 9 "FUNCTION CODES" for details of the function codes.
The function codes have functional relationship each other. Several special function codes also work with
execution priority each other depending on their functions or data settings.
This chapter explains the main block diagrams for control logic in the inverter. You are requested to fully
understand the inverter's control logic together with the function codes in order to set the function code data
correctly.
The block diagrams contained in this chapter show only function codes having mutual relationship. For the
function codes that work independently and for detailed explanation of each function code, refer to Chapter 9
"FUNCTION CODES."
4.1 Symbols Used in Block Diagrams and their Meanings
Table 4.1 lists symbols commonly used in block diagrams and their meanings with some examples.
Table 4.1 Symbols and Meanings
Symbol Meaning Symbol Meaning
[FWD], [Y1]
etc.
(FWD), (REV)
etc.
Digital inputs/outputs to/from
the inverter's control terminal
block.
Terminal commands assigned
to digital inputs/
outputs.
Low-pass filter: Features
appropriate characteristics by
changing the time constant
through the function code data.
Internal control command for
inverter logic.
High limiter: Limits the upper
value by a constant or data set
to a function code.
Low limiter: Limits the lower
value by a constant or data set
to a function code.
Zero limiter: Prevents data
from dropping to a negative
value.
Gain multiplier for reference
frequencies given by current
and/or voltage input or for
analog output signals.
C = A × B
Adder for 2 signals or values. C
= A + B
If B is negative then C = A – B
(acting as a subtracter).
Function code.
Switch controlled by a function
code. Numbers assigned to the
terminals express the function
code data.
Switch controlled by a terminal
command. In the example
shown on the left, the enable
communications link command
(LE) assigned to one of the
digital input terminals from
[X1] to [X5] controls the
switch.
OR logic: In normal logic, if
any input is ON, then C = ON.
Only if all inputs are OFF, then
C = OFF.
NOR (Not-OR) logic: In
normal logic, if any input is
OFF, then C = ON. If all inputs
are ON, C = OFF.
AND logic: In normal logic,
only if A = ON and B = ON,
then C = ON. Otherwise, C =
OFF.
NOT logic: In normal logic, if
A = ON , then B = OFF, and vice
versa.
Chap. 4 BLOCK DIAGRAMS FOR CONTROL LOGIC
4-1
Page 98

4.2 Drive Frequency Command Generator
for details.
Figure 4.1 Block Diagram of Drive Frequency Command Generator
4-2
Page 99

4.2 Drive Frequency Command Generator
Figure 4.1 shows the processes that generate the internal drive frequency command through the various
frequency command and switching steps by means of function codes. If PID process control takes effect (J01=1
or 2), the drive frequency command generator will differ from that shown in this diagram. (Refer to Section 4.8
"PID Frequency Command Generator.")
Additional and supplemental information is given below.
• Frequency command sources using the
key on the keypad may take different formats such as motor
/
speed in r/min, load shaft speed in r/m in or speed in % by m eans of the da ta setup of function c ode E48. Refer
to the function code E48 in Chapter 9 "FUNCTION CODES" for details.
• If the voltage input terminal [V2] is spec ified to t he PTC therm istor input (i.e. setting the sli de switch SW5 o n
the control printed circuit board (control P CB) to th e PT C side an d set up of fun ction code H 26 d ata at 1 or 2),
then the frequency command input signal on the terminal [V2] will always be interpreted as "0."
• Case that data setup for both the gain and bias will take effect concurrently is only ava ila ble for the f reque ncy
command source 1 (F01). For the frequency command source 2 (C30) and auxiliary frequency command
sources 1 and 2 (E61 to E63), only setup of the gain will take effect.
• Switching between normal and inverse operation is only effective for the reference fr equency from the ana log
frequency command input signal (term inal [12], [C1] or [V2]). Note that the frequency command source set up
by using the
/
key is only valid for normal operation.
• Frequency commands by S01 and S05 for the communicati ons link facility tak e different command form ats as
follows.
- S01: the setting range is –32768 to +32767, where the maximum frequency is obtained at ±20000
- S05: the setting range is 0.00 to 655.35 Hz in increments of 0.01 Hz
- Basically, priority level for the command in S01 is higher than that in S05. If a value other than "0" is
set in S01, the data set in S01 will take effect. If S01 is set at "0", data in S05 will take effect.
- Refer to the RS-485 Communication User’s Manual for details.
• The frequency limiter (Low) (F16) helps user select the inverter operation for either the output frequency is
held at data of the frequency limiter (lower), or the inverter decelerates to stop the motor with reference
frequency data of "0", by specifying the lower limiter (select) (H63.)
Chap. 4 BLOCK DIAGRAMS FOR CONTROL LOGIC
4-3
Page 100

4.3 Drive Command Generator
for details.
Figure 4.2 Block Diagram of Drive Command Generator
4-4
 Loading...
Loading...