

Page 1

Worcester Controls
WCAIM2053
(Part 19504)
Pulsair Loop-Powered Positioner
Modular Accessory System (Series I90/L90)
Installation, Operation and Maintenance Instructions
I. Introduction...........................................................................................................................................2
II. Installation............................................................................................................................................4
A. Mounting Instructions .....................................................................................................................4
B. Air Connections ...............................................................................................................................5
C. Wiring Connections .........................................................................................................................6
III. Operating and Maintenance Instructions.............................................................................................6
A. Positioner.........................................................................................................................................6
1. Positioner Specifications and Technical Data ..............................................................................6
2. Environmental Considerations .....................................................................................................7
3. Electronic Circuit Board Basics....................................................................................................7
4. Calibration ...................................................................................................................................9
5. Recalibration..............................................................................................................................10
6. Operating Function Settings ......................................................................................................10
7. Wiring Diagrams and Fail Open Modifications Table .................................................................12
8. Troubleshooting.........................................................................................................................13
9. Circuit Board Replacement ........................................................................................................13
B. Housing Assembly.........................................................................................................................14
1. Cover .........................................................................................................................................14
2. Base...........................................................................................................................................14
3. Troubleshooting.........................................................................................................................15
C. Piezo Valve Block...........................................................................................................................16
1. Assembly...................................................................................................................................16
2. Wiring........................................................................................................................................17
3. Operation...................................................................................................................................18
4. Troubleshooting.........................................................................................................................18
D. Switch Options ..............................................................................................................................18
1. Assembly...................................................................................................................................18
2. Cams .........................................................................................................................................19
3. Wiring........................................................................................................................................19
4. Operation...................................................................................................................................19
5. Troubleshooting.........................................................................................................................19
E. Feedback Potentiometer and Potentiometer Options .....................................................................20
1. Assembly...................................................................................................................................20
2. Wiring........................................................................................................................................20
3. Troubleshooting Potentiometer..................................................................................................21
F. 4-20 mA Output Transmitter Option ...............................................................................................21
1. Assembly...................................................................................................................................21
2. Wiring........................................................................................................................................21
3. Calibration .................................................................................................................................22
4. Troubleshooting.........................................................................................................................22
G. Radio Frequency Interference (RFI) Filter......................................................................................23
1. Installation and Wiring...............................................................................................................23
Page 2
2 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) WCAIM2053
I. INTRODUCTION
Pulsair Loop-Powered Positioner Modular Accessory System Series
I90/L90
(or I90/L90 M.A.S.) is designed to provide accurate control
over valve position, while providing feedback information from
pneumatically actuated valves. This version of the M.A.S. uses “looppowered” technology; the 4 to 20 milliamp signal loop provides all the
power that is required to operate both the electronic positioner
circuitry and solenoid valving.
The concept behind the unit is flexibility, allowing the user to
customize an I90/L90 M.A.S. for a particular application. For this
reason, these instructions have been arranged as a series of individual
chapters, each dealing with separate options or components available
in the I90/L90 M.A.S. Regardless, this unit is a complex device and
not all options can be accommodated simultaneously. A table
summarizing the available options follows on the bottom of page 3.
PLEASE READ (Regarding Stability of Position)
The following is to explain how the Pulsair operates from loop power,
and why, with some current sources, the Pulsair may seem jittery at
current input levels between 4 and 6 mA. One point that should be
made clear before starting is the fact that the loop driving voltage is
to be between 18 and 30 volts for the intrinsically safe board and
between 18 and 35 volts for the non-intrinsically safe board.
The Pulsair is loop-powered. Loop-powered means that the 4-20 mA
current signal provides both the signal to position the valve as well
as providing all the power required by the circuit board electronics
and the piezo valves. The piezo valve is a three-way pneumatic valve
wherein the operator is a piezo crystal (a form of quartz crystal). This
crystal has an unusual property. When an electrical field is placed
across the crystal, the crystal distorts (bends). The crystal in the
valve is shaped like a thin flat bar where the top and bottom surfaces
are metallized (a metallic coating is applied to the crystal surface).
The wires carrying the operating voltage are attached to these
surfaces, one wire to each surface. Quartz is an insulator and, for all
practical purposes, there is no current flow between the two
surfaces. The crystal, therefore, electrically simulates a capacitor in
operation. As with a capacitor, there is an inrush current associated
with charging the piezo crystal. This can be as much as 2 mA. The
valves and the circuit board must be capable of operating with a loop
current as low as 4 mA and, in fact, they will operate with the loop
current as low as 3.6 mA.
At this low current level it becomes very important that the current
source be capable of not only maintaining the average set loop
current, such as 5 mA, but also quickly responding to the power
demands of the piezo valves as they operate. It is critical that the
current source be capable of outputting an adjustable current that is
independent of loop resistance (impedance). This means that for a set
current, let’s say 5 mA, when the loop resistance changes from 50
ohms to 600 ohms (as an example) the loop current does not vary.
This requires an active circuit that will quickly adjust its output voltage
in order to maintain a constant set current in the loop as the loop
resistance or impedance changes. The only way to increase the power
available in the loop is to increase the loop driving voltage. In order
for the loop driving voltage to increase and yet maintain a constant
loop current, the input resistance of the circuit board must increase.
This takes place within the electronics of the circuit board, which is
why it is impossible to give an input impedance for the board. The
input impedance changes as the power requirements of the board and
piezo valves change.
This capability of the current source to respond quickly to the
changing power requirements of the loop is very important. This is
why, with some current sources, the Pulsair acts jittery at the lower
current end of signal range. These current sources are not capable of
maintaining a constant output current while responding to the
changing input impedance of the Pulsair circuit board. There are
some calibrators on the market, for example, that will maintain a set
output current only as long as the load impedance doesn’t change, or
they are incapable of responding quickly enough or not at all at the
lower end of the current range.
There are two other factors that can contribute to instability in the
Pulsair positioner. The first of these is that it is recommended that the
Pulsair not be set to an actuation time of less than the greater
actuation time displayed during self-calibration. This is the value that
“Auto” selects in the menu choices. A cycle time faster than this can
potentially lead to overshooting and hunting. This parameter is called
“tS” on the Pulsair setup menu. The other factor that can affect the
stability of the positioner is the dead band setting. Setting the dead
band too low can also lead to overshooting and hunting of the
positioner. The recommended setting of the dead band is “AUto” in
the “dEbA” parameter of the setup menu. This permits the
microprocessor to determine the best dead band setting. This is a
dynamic adjustment and will automatically change as loop conditions
change if this parameter is kept set to “AUto”. If you should choose to
set this parameter to a manual setting that is too low, be aware that
this can lead to instability of the positioner.
WARNING: The PULSAIR Series I90/L90 M.A.S. is an electromechanical device subject to normal wear and tear. Its life is
dependent upon application and environmental conditions.
Breather/drain fittings are recommended for humid environments
when moisture may condense inside the sealed M.A.S. Housing.
Supply Air Quality – See page 16; it is very important that clean,
dry, oil-free air be supplied.
CAUTION: Flowserve recommends that all product which must be
stored prior to installation be stored indoors, in an environment
suitable for human occupancy. Do not store product in areas where
exposure to relative humidity above 85%, acid or alkali fumes,
radiation above normal background, ultraviolet light, or
temperature above 120°F or below 40°F may occur. Do not store
within 50 feet of any source of ozone.
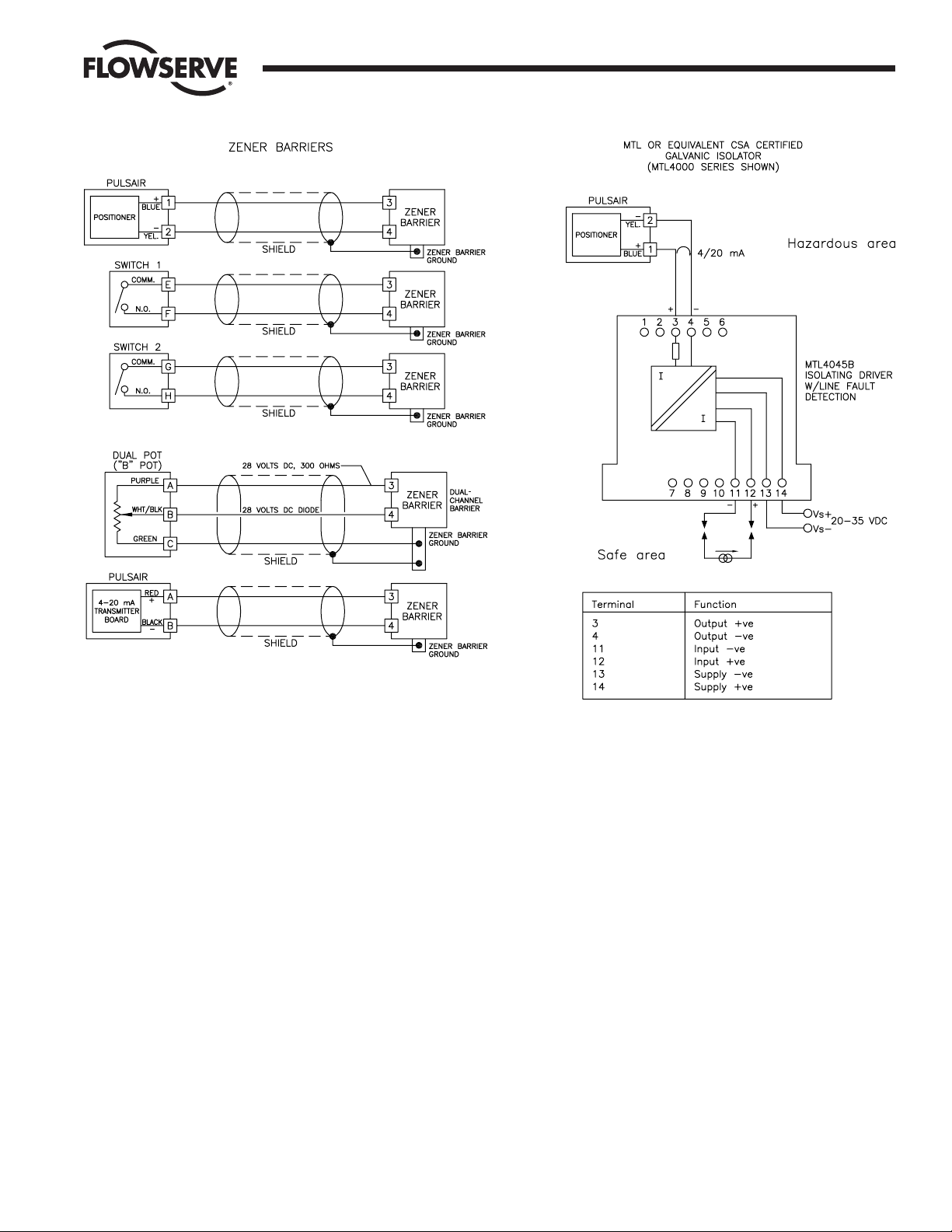
The Intrinsically Safe (I90) version of the Pulsair will be intrinsically safe
when connected through CSA certified zener barriers or CSA certified
galvanic isolators rated 28 volts DC maximum, 300 ohms minimum
(Potentiometer – rated 28 volts DC maximum, 300 ohms minimum and
28 Volts DC-diode return) as shown in the wiring diagrams.
IMPORTANT: Shielded cable must be used for each intrinsically safe
circuit and, for zener barriers, the shield must be connected to a
zener barrier ground.
Flow Control Division
Worcester Controls
Page 3
M.A.S. Model: The M.A.S. product code is marked on the nameplate
as the M.A.S. model number, with the exception of the voltage rating
(if any) and Product Revision Level (R#). Voltage rating and R# are
marked in separate locations on the nameplate.
Example: 20 P L90 S M2 P 4 T3293
The Product Code is Composed of:
Size . . . . . . . . . . . . . . . . . . . . . . . .Size of actuator (10, 15, 20, etc.)
to which the M.A.S. will be
mounted. Will be blank if unknown.
Product Options . . . . . . . . . . . . . . .See Available Options.
Product Series . . . . . . . . . . . . . . .I90 – Loop-Powered
Intrinsically Safe
L90 – Loop-Powered NonIntrinsically Safe
Action . . . . . . . . . . . . . . . . . . . . . .S – Single-Acting Manifold Block
Switch Options . . . . . . . . . . . . . . .See Available Options.
Circuit Board . . . . . . . . . . . . . . . . .P – Positioner Circuitry
Input Signal . . . . . . . . . . . . . . . . .4 – 4 to 20 milliamp Input Signal
Custom Product No. (if special) . . .P#, T#, C# or similar #
Available Options:
Order Codes and Descriptions
B – Breather/Drain Fitting
P – 5000/1000 ohm Dual Potentiometer
5 – 5000/5000 ohm Dual Potentiometer
4 – 4-20 milliamp Output Transmitter (5000/1000 ohm
Dual Potentiometer Included)
M2 – 2 SPDT Mechanical Switches
Notes: All units are single-acting (spring-return) positioners with 4 to 20
milliamp input signal. Double-acting solenoids, "controller" function, and
other input signals are not available.
P, 5 AND 4 OPTIONS CANNOT BE COMBINED IN ONE POSITIONER.
WCAIM2053 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) 3
Flow Control Division
Worcester Controls
Page 4
4 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) WCAIM2053
II. INSTALLATION
A. MOUNTING INSTRUCTIONS
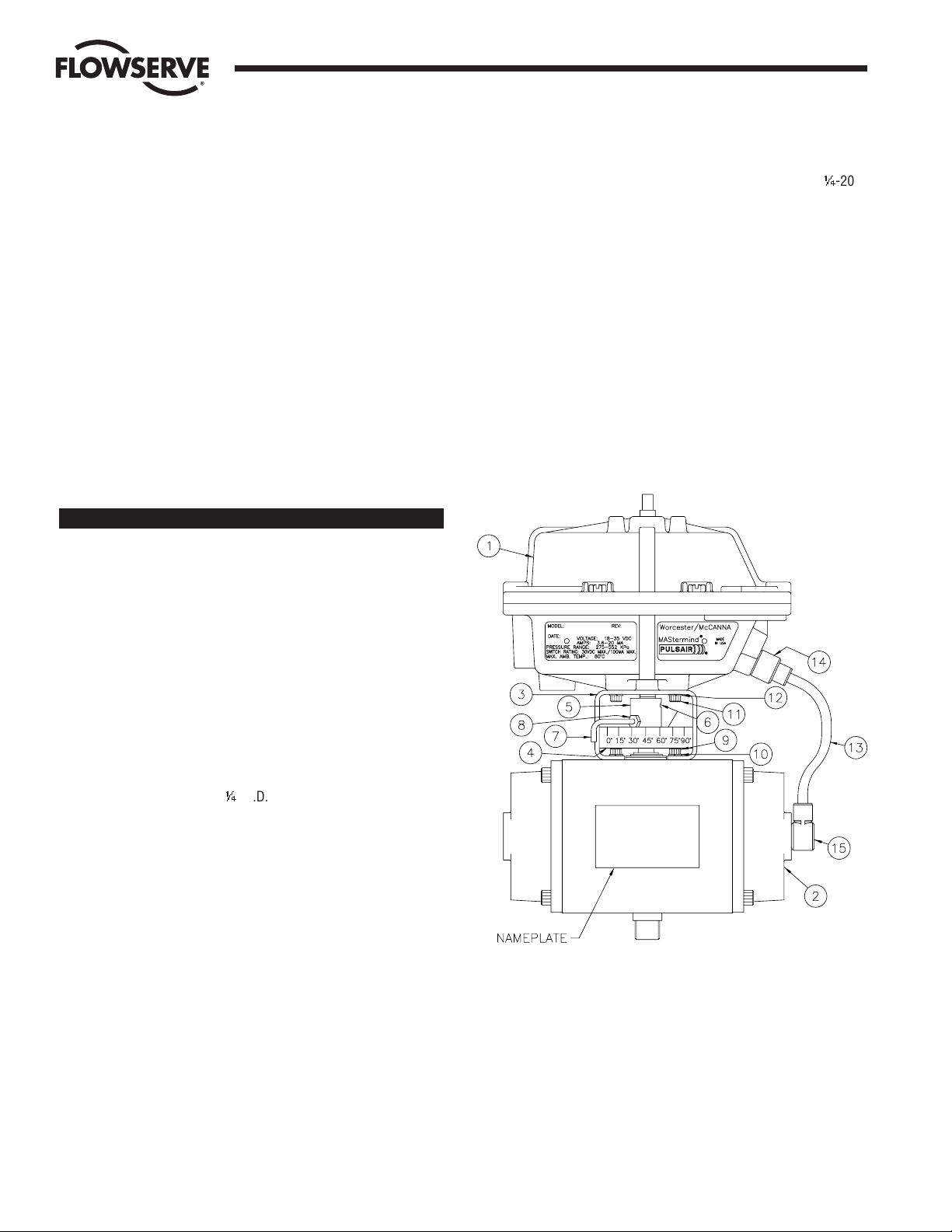
1. Refer to Figure 1. The Series I90/L90 is designed to be
mounted in-line with the major axis of the actuator. The air
connections for the Series I90/L90 should be on the same
end as the air connections for the actuator. The standard 39
actuator has its air connections on the right-hand end cap as
you face the actuator nameplate. The Series I90/L90
nameplate will be on the same side as the actuator nameplate.
2. Ensure that the actuator shaft is in its clockwise position.
Spring-return actuators will be in this position already.
3. Place the mounting bracket on the actuator. Secure the
mounting bracket with the four (4) screws and lockwashers
supplied in the kit.
4. Place the coupling over the actuator shaft. (Note: For the
1039 actuator, shallow slot is placed over the actuator shaft).
The coupling has four (4) threaded holes in it; two are
Z|v
-20
thread for set screws; the other two are #10-32 (located 45
degrees off the center line of the coupling) and are not used.
DO NOT tighten the set screws at this time.
5. Place the Series I90/L90 unit on the bracket while inserting the
shaft into the coupling slot. Be certain the holes in the bracket
and I90/L90 housing are aligned and secure with the four (4)
#10-32 socket head screws and lockwashers provided.
6. The coupling set screws can be tightened after the actuator
has been cycled 90 degrees.
Flow Control Division
Worcester Controls
Item No. Qty. Description
1 1 Series I90/L90 M.A.S.
2 1 Series 39 Actuator
3 1 Mounting Bracket
4 1 Indicating Scale
5 2 Coupling
6 2 Set Screw
7 1 Indicating Arm
8 1 Locking Nut
9 4 Actuator Mounting Screw
10 4 Actuator Mounting Lockwasher
11 4 M.A.S. Mounting Screw
12 4 M.A.S. Mounting Lockwasher
13 1
Z|v
" O.D. X 31" Tubing
(Cut By User)
14 2 Straight Fitting
15 2 Elbow Fitting
Figure 1
Page 5
WCAIM2053 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) 5
B. AIR CONNECTIONS
IMPORTANT: Use industrial air (or other non-corrosive gas),
which must be dry and oil-free. See section lll.C on page 15 for
other air supply requirements and technical data.
1. Series I90/L90 mounting kits contain two (2) elbow “quick”
fittings, two (2) straight “quick” fittings, and one (1) length of
Z|v
" O.D. tubing. Single-acting, or “spring-return,” assemblies
will use one elbow and one straight fitting. The length of
tubing will be cut to suit the assembly.
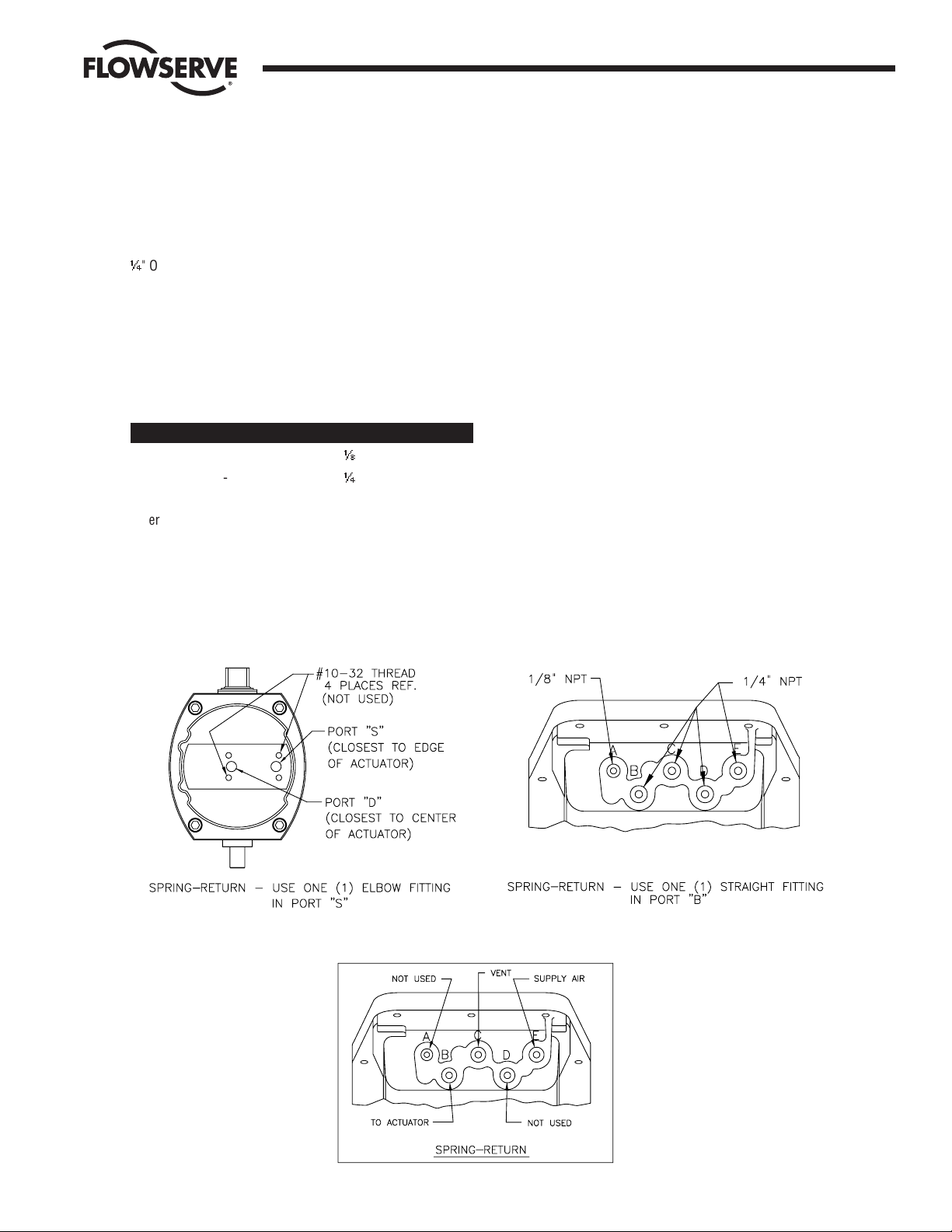
2. Refer to Figure 2. Assemble the elbow fitting(s) to the
actuator. Pipe thread sealant may be used on the threads (do
not allow thread sealant to contaminate the internal air
passages of the M.A.S.). Fluoropolymer tape thread sealant
should not be used.
Actuator Size Port Thread (NPT)
10 - 20
Z|,
"
25 - 40
Z|v
"
3. Refer to Figure 3. Assemble the straight fitting(s) to the
Series I90/L90 housing as shown in Figure 3. The thread
sizes are labeled for reference in the figure. Pipe sealant may
be used on the threads (do not allow thread sealant to
contaminate the internal air passages of the M.A.S.).
Fluoropolymer tape thread sealant should not be used.
4. Cut the tubing provided to as short a length as possible that
will still reach comfortably from the Series I90/L90 to the
actuator. Connect the tubes to their respective actuator and
Series I90/L90 ports (reference Figures 2, 3, and 4).
5. Refer to Figure 4 for a diagram of the Series I90/L90 air
connections.
a. Connect the supply air for the actuator (pressure can
range from 30 psi minimum to 100 psi maximum with 80
psi as nominal) to the location labeled “SUPPLY” in the
appropriate sketch.
b. Locations labeled “VENT” are fitted with an orifice plug. A
porous muffler or other fitting designed to reduce exhaust
noise could be substituted if desired. Air must be allowed
to flow freely from these ports. “VENT” locations must
not be plugged under any circumstances.
NOTE: Orifice plug in port “C” can be removed to allow
slightly faster actuation times on larger actuators (sizes
3039 and up).
c. Ports labeled “NOT USED” must remain plugged with the
stainless steel pipe plugs provided.
Flow Control Division
Worcester Controls
Figure 2 – Actuator Fitting Locations Figure 3 – M.A.S. Fitting Locations
Figure 4 – Air Connections For All I90/L90 M.A.S. Configurations
Page 6
6 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) WCAIM2053
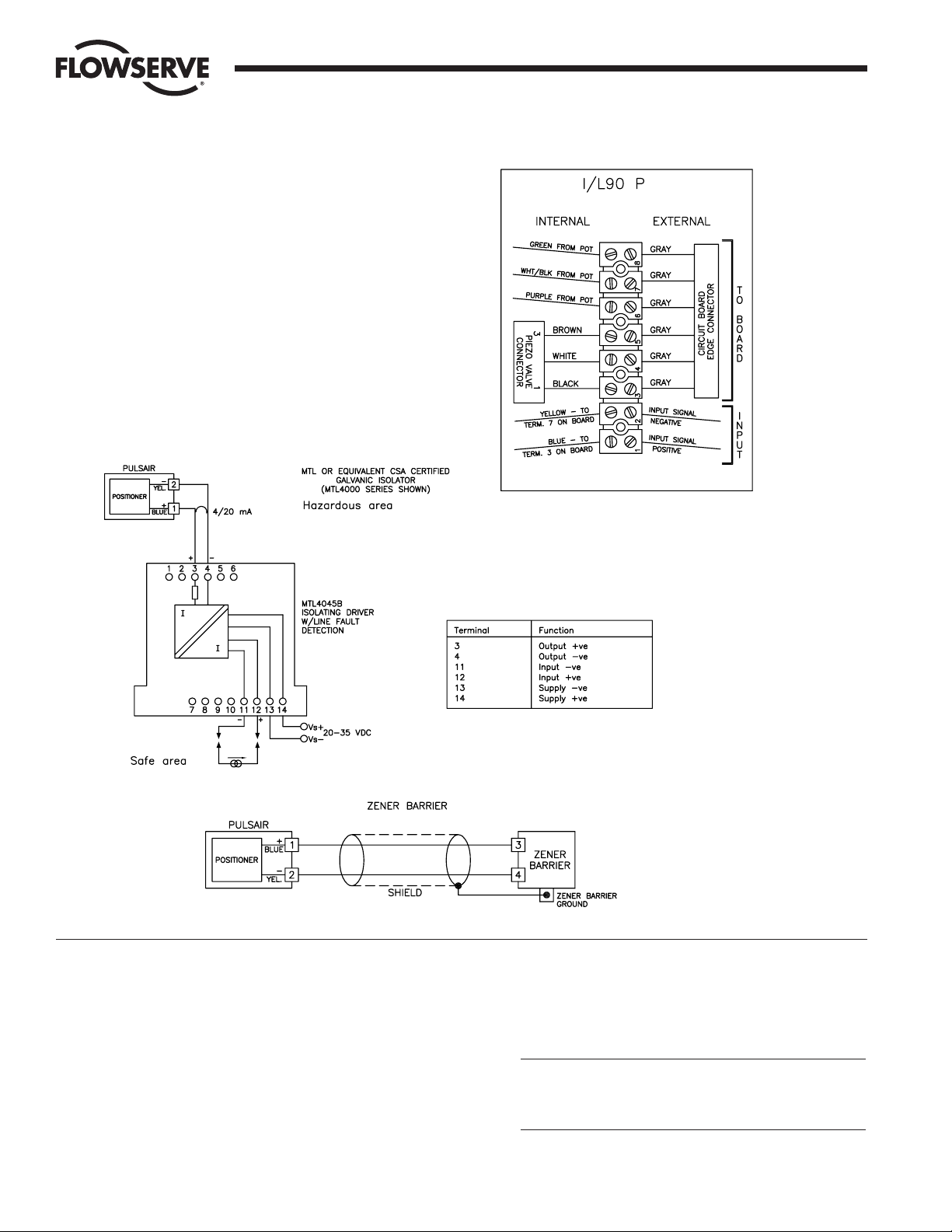
C. WIRING CONNECTIONS
1. Connect 4-20 mA signal to terminals 1 and 2 as shown in
wiring diagram to the right. If unit is intrinsically safe,
connection must be made through a CSA certified zener
barrier or a CSA certified galvanic isolator as shown below.
NOTE: Terminal numbers and polarity. Shielded cable should
be used for all connections. For zener barriers, the shield
must be connected to a zener barrier ground.
For switch, potentiometer and feedback option wiring, see
Sections III.D.3, III.E.2 and III.F.2 respectively.
NOTE: All wiring to terminal strip should be inserted only to
mid-point of terminal strip.
2. Please review cautions and background information below
and on pages 7 and 8 before proceeding with calibration
section III.A.4. on page 9.
III. OPERATING AND MAINTENANCE
INSTRUCTIONS
A. POSITIONER
The Worcester/McCANNA Pulsair Loop-Powered Positioner circuit
board is designed for use with the Worcester Series 90 Modular
Accessory System. It is a microprocessor-controlled, loop-powered
circuit capable of high-resolution control. The circuit is userprogrammable, allowing a new level of flexibility and performance.
IMPORTANT: Instructions for powering up the Pulsair are located
on page 9, Section 4 Calibration. It is highly recommended that
the information be reviewed before turning on power supply.
1. POSITIONER SPECIFICATIONS AND TECHNICAL DATA
CAUTION: The voltage and current to the signal input circuit
must never exceed 30 volts and/or 40 mA. Please observe
proper signal polarity as marked in these instructions and
on the wiring diagram located inside the M.A.S. cover.
Flow Control Division
Worcester Controls
Page 7
WCAIM2053 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) 7
The Pulsair Loop-Powered positioner board 4-20 mA signal
input circuit is protected with a 63 mA fuse. The intrinsically
safe version of the circuit board does not have a fuse,
however, due to the requirements imposed by intrinsic
safety practices.
Technical Data
Ambient Temperature: Circuit Board Temperature:
Resistance to Vibration: 2 g’s – 0 to 100 Hertz
Nominal Signal Range: 4 to 20 milliamp
Minimum Current to
Maintain Power Supply: 3.6 milliamp
Load Voltage: 14[V] - ((i[mA] - 4)/2.67)[V]
+ .05[kohm] x i[mA]
Static Destruction Limit: +/-40 mA
Dynamic Destruction Limit
1.2/50 usec, 82 ohm: +/-500 V
Internal Capacitance: Negligible
Internal Inductance: Negligible
2. ENVIRONMENTAL CONSIDERATIONS
a. General
Caution: The Worcester/McCANNA Pulsair LoopPowered Positioner M.A.S. circuit board is relatively
insensitive to electrical noise on signal lines, and from
noise in the environment. Follow installation,
calibration, and adjustment guidelines carefully and
use shielded wire as stated in paragraph III.A.2.d.
Flowserve recommends that all products which must be
stored prior to installation be stored indoors, in an
environment suitable for human occupancy. Do not store
in areas where exposure to relative humidity levels above
85 percent, acid or alkali fumes, radiation above normal
background, ultraviolet light, or temperatures above
120°F or below 40°F may occur. Do not store within 50
feet of any source of ozone.
Temperature and humidity are the two most important
factors that determine the usefulness and life span of
electronic equipment.
b. Temperature
Operating solid-state electronic equipment near or
beyond its high temperature rating is the primary cause
for most failures. It is, therefore, very important that the
user be aware of, and take into consideration, factors
that affect the temperature at which the electronic
circuits will operate.
Operating an electronic device at or below its low
temperature rating generally results in a unit operating
poorly or not at all, but it will usually resume normal
operation as soon as rated operating temperatures are
reached. Low-temperature problems can be easily cured
by addition of a thermostatically controlled heater to the
unit’s housing.
The Worcester/McCANNA Pulsair-Loop Powered
Positioner M.A.S. circuit board is rated for operation
between 0°F and 176°F. Do not exceed an ambient
temperature of 170°F. in order to ensure that the interior
of the sealed M.A.S. housing does not exceed 176°F.
CAUTION: Exposure to direct sunlight can result in
internal temperatures up to 40°F higher than ambient
conditions.
c. Humidity
Most electronic equipment has a reasonable degree of
inherent humidity protection and additional protection is
supplied by Flowserve in the form of a moisture proofing
and fungicidal coating.
Such protection will generally suffice for environments
where the average relative humidity is in the area of 80
percent or less and ambient temperatures are in the order
of 70°F average. Where relative humidity is consistently
80 to 90 percent and the ambient temperature is subject
to large variations, a desiccant can be used to control
humidity. The desiccant will need to be changed
periodically to maintain its effectiveness.
In those instances where high ambient temperature would
bring the internal operating temperature near or above its
maximum rating, the user should consider purging the
enclosure with a cool, dry gas. The initial costs can
usually be paid off quickly in the form of greatly extended
equipment life, reduced maintenance needs and much
less process downtime.
d. Shielding – Grounding of Shielding
Shielded wiring should be used for all signal input
circuit wiring.
The shields should never be used in place of one of the
input wires, and the shields normally should be grounded
to equipment housings at one end of the wiring run only.
Grounding both ends of shielding can eliminate the
shielding benefits because of ground loops. If two or more
shielded cables come to the positioner from different
locations, they must be grounded at the positioner. For
intrinsically safe Pulsair, using zener barriers, grounded
shield must be connected to a zener barrier ground.
3. ELECTRONIC CIRCUIT BOARD BASICS
a. Circuit Board Configurations
There are two basic circuit board configurations. Both
versions contain the same basic input, logic and solenoid
control circuitry. The difference is in between the two is
intrinsic safety. One version of the circuit is not
intrinsically safe primarily due to the presence of a fuse
on the circuit board, while the intrinsically safe version
does not have the fuse.
Flow Control Division
Worcester Controls
Page 8
8 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) WCAIM2053
The Pulsair Loop-Powered Positioner M.A.S. as provided
by Flowserve accepts a 4-20 mA position input control
signal and uses a 5000 ohm feedback potentiometer (“A”
pot, if dual pot is installed). The 4-20 milliamp signal
also supplies all the power that the circuit and solenoid
valves require to operate — no additional power is
required. A minimum of 3.6 milliamps is needed to keep
the circuitry operating.
b. Controls
Each version of the positioner board is calibrated and
controlled by a set of three push buttons. These buttons, in
conjunction with a system of programming menus, allow
the user to calibrate, adjust and operate all features of the
positioner. An LCD display provides feedback to the user
about the menu selections and settings. The configuration
table below lists the available functions and settings.
Flow Control Division
Worcester Controls
Display
Configuring Settings/ Default
Position Value Setting* Resolution Meaning
YFct Lin, nLin nLin
—
Position feedback function • Linear/non-linear
init no/oCay, Strt no — Self-Calibration
SCUr 0 MA, 4 MA 4 MA — Setpoint current range • 0 to 20 mA
• 4 to 20 mA
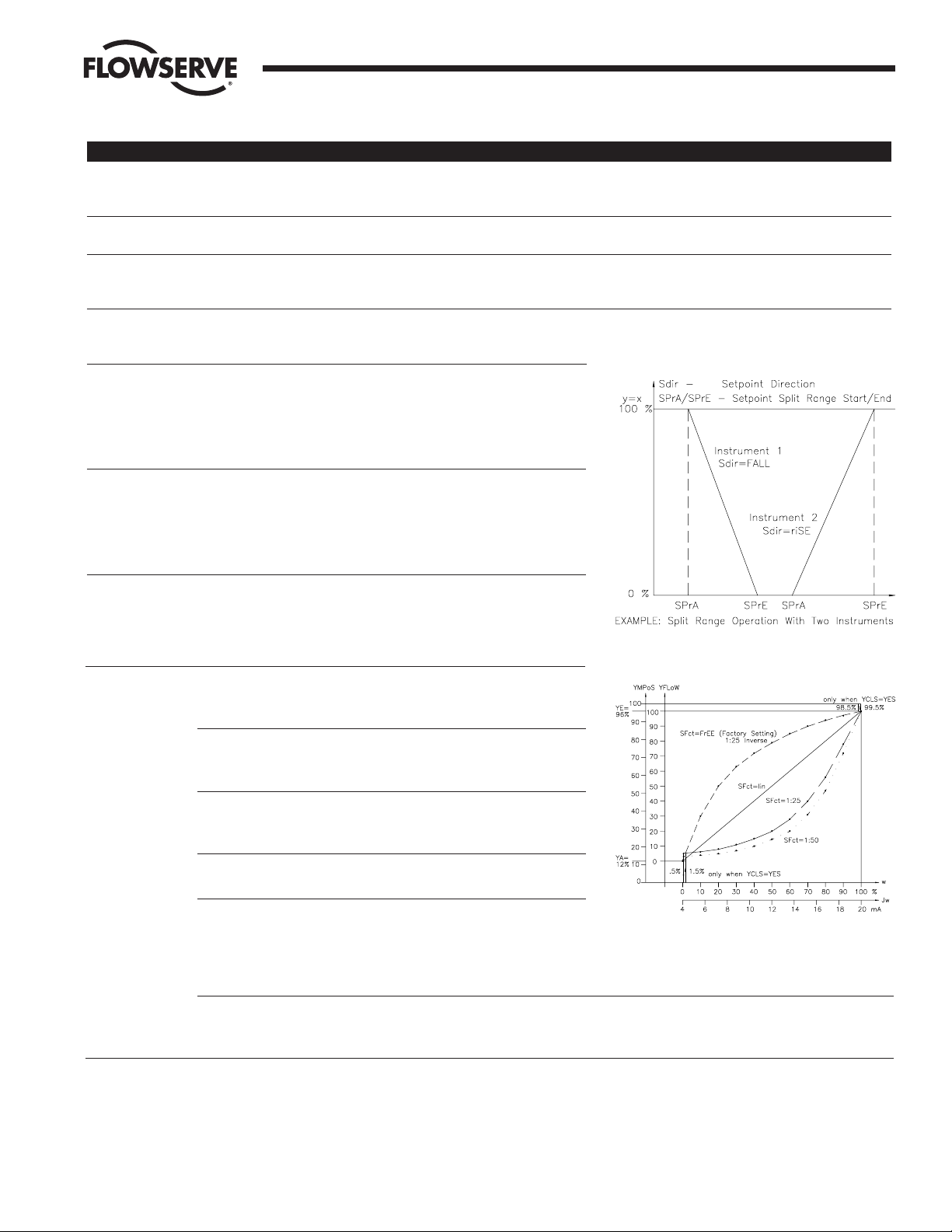
Sdir riSE, FALL riSE — Setpoint direction
SPrA 0.0 to 100.0 0.0 0.1 % Setpoint split range • Start
SPrE 0.0 to 100.0 100.0 0.1 % Setpoint split range • End
tS Auto, 0 to 40 0 1 s Setpoint ramp
SFct Lin Lin — Setpoint function • Linear
1 : 25 • equal percentage 1:25
1 : 50 • equal percentage 1:50
FrEE • freely adjustable
SL 0 0.0 0.1 % Setpoint vertices for freely 0 %
SL 1 28.5 adjustable setpoint function 10 %
SL 2 50.0 20 %
SL 3 62.6 30 %
SL 4 71.5 40 % Vertices Displayed only
SL 5 0.0 to 100.0 78.5 50 % when SFct = FrEE
SL 6 84.1 60 %
SL 7 88.9 70 %
SL 8 93.1 80 %
SL 9 96.7 90 %
SL 10 100.0 100 %
dEbA AUto, 0.1 to 10.0 AUto 0.1 % Positioner dead band
Ydir riSE, FALL riSE — Direction of action of manipulated variable
YnrM MPoS, FLoW MPoS — Manipulated variable standardization, mechanical travel, flow
YA 0.0 to 100.0 0.0 0.1 % Manipulated variable limit • Start
YE 0.0 to 100.0 100.0 0.1 % • End
YCLS YES, no no 0.1 % Tight shutoff of valve
AFct oFF oFF — Alarms function • not present
Mi : MA — • A1 Min, A2 Max
Mi : Mi — • A1 Min, A2 Min
MA : MA — • A1 Max, A2 Max
A1 0.0 to 100.0 10.0 0.1 % Alarm 1 threshold
A2 0.0 to 100.0 90.0 0.1 % Alarm 2 threshold
Fct — Fault alarm output function •
.H.C. • + H + C
PrSt no/oCAY, Strt no — Preset (factory setting)
* Certain default settings must be changed to work with rotary actuators. Example: “YFct” must be set to “Lin.”
See section III.A.7 (OPERATION FUNCTION SETTINGS) for more information.
Page 9

WCAIM2053 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) 9
4. CALIBRATION
a. Input Signal
The 4 to 20 milliamp input signal is normally calibrated so
that 4 mA equals full closed and 20 mA equals full open.
b. Power Supply
The loop-powered positioner board is powered strictly
from the 4-20 mA input signal. It is therefore necessary
to keep the input current above 3.6 mA to maintain the
power supply to the circuit and allow the digital display to
operate. The calibration parameters are stored in memory
— if power does fail, recalibration will not be required.
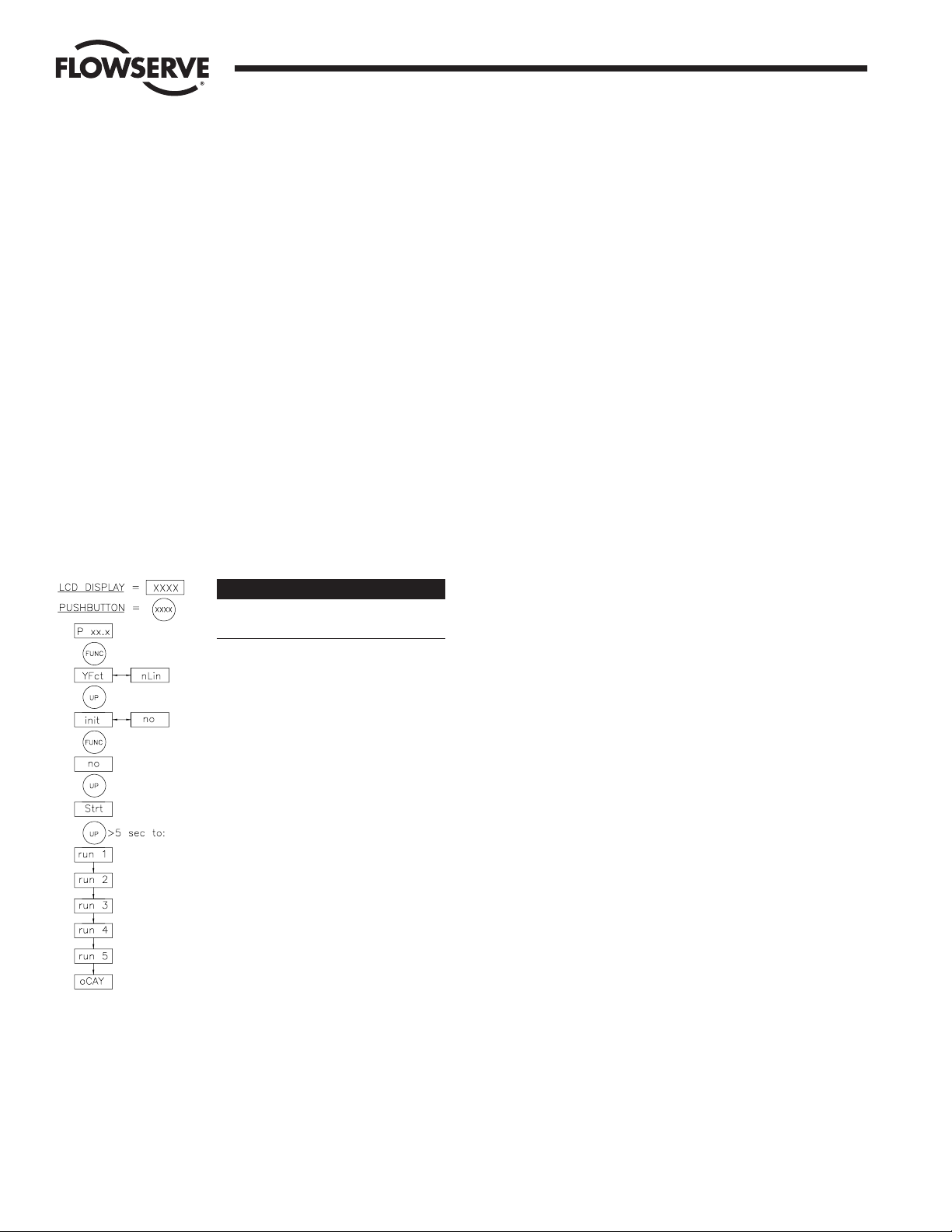
c. Self-Calibration Procedure (Refer to Self-Calibration
Flowchart on page 10).
WARNING: DURING SELF-CALIBRATION, ACTUATOR
ADJUSTMENTS OCCUR AUTOMATICALLY.
ADJUSTMENTS MAY ALSO BE NECESSARY TO THE
FEEDBACK LOOP. USE CAUTION TO AVOID TOUCHING
MOVING PARTS — THEY MAY MOVE WITHOUT
WARNING. IN EMERGENCIES, THE ACTUATOR MAY BE
STOPPED BY PRESSING THE “FUNCT” BUTTON. THE
ACTUATOR WILL STOP AND THE POSITIONER WILL
ENTER THE “INIT NON MANUAL” MODE.
This positioner has an automatic calibration program built
in. The only adjustment required is an initial setting of the
feedback potentiometer (“A” pot, if dual pot is installed).
The steps necessary to calibrate the unit are as follows:
1. Connect an air supply (60–80 psi nominal) to the
M.A.S. port labeled “E”. Connect the positive side of
the 4-20 mA source to terminal 1 and the negative to
terminal 2 (reference wiring diagram on inside of
cover and on page 12).
2. Turn on the signal source. Adjust the output for at
least 3.6 mA.
3. At this point, there may or may not be numbers
visible in the LCD depending on whether or not the
unit has been calibrated. If the unit has been
calibrated, the display will be blank and the unit is
ready for operation. If the unit needs to be
recalibrated, then refer to the next section titled
“Recalibrating...”. For local operation, see step 10 of
this section. If the unit has not been calibrated, then
the letter “P” followed by a number between 0.0 and
99.9 will appear. This number represents the position
of the feedback potentiometer in percent of rotation.
4. With the actuator in the full clockwise (CW) position,
the display needs to indicate a reading between P6.0
and P7.5. If the display does not indicate this, then
rotate the face gear until the reading falls in the P6.0
to P7.5 range.
NOTE: It is not necessary to loosen or remove face
gear snap ring to rotate gear.
Hold the “UP” button to drive the actuator to its full
counterclockwise (CCW) position. Verify that the
display indicates between P90.0 and P99.0. If it does
not, then it may be necessary to adjust the feedback
potentiometer so that the offset from 0 and 100 is the
same at each end of travel (i.e., closed=6 open=94).
NOTE: In some cases, it may be necessary to hold the
“DOWN” button to drive the actuator to the open
position until the microprocessor determines the
proper direction of rotation in the next step.
5. The feedback potentiometer is now adjusted and the
unit is ready to calibrate. Hold the “DOWN” button
until the reading on the display indicates between
20.0 and 50.0 percent. (This is done so that the
microprocessor can determine the direction of
rotation for loss of air pressure).
6. Hold down the “FUNCT” button for about 5 seconds
until the display changes and begins flashing between
“yFct” and “nLin,” then release the button.
NOTE: If the menu changes (other words or symbols
appear), momentarily pressing the “DOWN” button
will move back through the menu one item each
time the button is pressed until the “yFct” / “nLin”
display appears.
7. Momentarily press the “UP” button. The display
should begin flashing between “init” and “no”.
8. Momentarily press the “FUNCT” button. The display
should flash “no.”
9. Press and hold the “UP” button (“Strt” will appear in
the display) until the display switches to “run1” and
release the button. The unit has now entered the
self-calibration mode. It will take 1–2 minutes to
complete the calibration program (“run 1”, “run 2”,
etc.), depending on actuator size. At the end of the
self-calibration procedure, the display will begin
flashing “oCay.”
NOTE: The self-calibration procedure can hang up
(stall) during “run 2” if the feedback potentiometer is
adjusted too closely to the end of its range. Factory
specifications call for a potentiometer setting of P4.0
to P13.0; Flowserve recommends a setting between
6.0 and 7.5 to assure trouble-free operation.
If the self-calibration procedure stalls during the
“run 2” phase, there is a procedure that can be
followed. When the self-calibration stalls, there will
be a “d” at the left end of the display and a “U” at
the right end. There will be four vertical lines
between the two letters — three short ones, and one
long one. Turn the face gear such that the long line
moves to the center of the display and becomes a
colon (:). This centers the potentiometer.
Momentarily pressing the “UP” button should cause
the self-calibration procedure to proceed. If this
doesn’t work, then manually set the potentiometer
between P6.0 and P7.5 and run the entire calibration
Flow Control Division
Worcester Controls
Page 10
10 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) WCAIM2053
procedure again. If the unit will still not calibrate,
then there could be a problem with the
potentiometer, wiring, or positioner board.
10. Press and hold the “FUNCT” button until the display
stops flashing (about 5 seconds). The display will
now show a readout of valve position in percent open.
The unit cannot be operated remotely with the 4-20
mA signal when the position is indicated on the
display. Momentarily press the “FUNCT” button to
clear the display and enable remote operation. The
actuator should immediately move to the position
dictated by the input signal. The valve position can be
checked at any time by pressing the “FUNCT” button.
When the display is set to indicate valve position, the
“UP” and “DOWN” buttons can be used to position
the actuator to any desired position:
• “UP” causes the actuator to rotate in the
CCW direction
• “DOWN” causes the actuator to rotate in the
CW direction.
Be certain to clear the display when finished to allow
remote operation of the valve.
SELF-CALIBRATION FLOWCHART
OPERATION OCCURRING IN
POSITIONER
init non manual mode (actuator 25% to
75% open to start)
Configuring first position
Configuring second position
Self-calibration has not been completed
START OF SELF-CALIBRATION
Determine the direction of action
Control of actuator travel; scaling of zero
point and stroke to the setpoint range
Determine up and down actuating times;
displayed alternately in seconds
Determine the minimum positioning
increments
Optimize transient response
END OF SELF-CALIBRATION
IMPORTANT: The feedback potentiometer (“A” potentiometer, if dual
pot is installed) is now calibrated for only one 90 degree quadrant of
valve operation. If the output shaft is repositioned to another 90
degree quadrant or if the output shaft is rotated a multiple of 360
degrees from its original position or if the M.A.S. package is removed
from the actuator, the feedback potentiometer will no longer be in
calibration and the positioner must be recalibrated as directed.
5. RECALIBRATION OF POSITIONER
If the positioner needs to be recalibrated for any reason, such
as the installation of a new feedback potentiometer, use one
of the following two procedures:
a. If it is desired to restore the factory settings as well as
recalibrate the positioner, then use the “PrSt” function
from the selection menu. This function is known as the
factory preset function. the “FUNCT” button until the
display begins flashing then press the “DOWN” button
momentarily to get “PrSt” flashing on the display.
Momentarily press the “FUNCT” button. The display
should now show a continuous “no” or “oCAY”. “no”
means that not all of the functions are set to the factory
presets. “oCAY” means that they are set to factory
presets. If the display shows “no”, then press the “UP”
button and “Strt” will begin flashing on the display, and
then shortly thereafter “oCAY” will begin flashing. When
this happens, the factory presets are loaded.
b. If it is desired to recalibrate the positioner without
changing any of the functions, then use the “init” function
from the selection menu. Perform steps 1 through 9 of
the calibration procedure outlined in Section III.A.4.c until
“run1” appears in the display. Immediately turn off (or
disconnect) the loop power. The display will go blank.
When the power is restored, the display will show a letter
“P” and a position number from 0 to 99. This indicates
that the positioner is no longer calibrated. You may now
proceed to adjust the potentiometer and calibrate the
positioner as outlined in steps 1 through 10 of the
calibration procedure (section III.A.4.c).
6. OPERATING FUNCTION SETTINGS
a. Changing function settings
The loop-powered positioner board has a number of
functions that can be programmed into memory after the
circuit board has been calibrated. Following is a list of
these functions, a short explanation of each, and how
they are entered into memory. The letters at the beginning
of each explanation are those that will appear in the
display window when that function is selected with the
function button (labeled “FUNCT”). These changes all take
place in the manual mode. To get to any particular
function on the digital display, press and hold the
“FUNCT” button until the display begins flashing between
“YFct” and its current setting (“Lin” or “nLin”). Quickly
press and release the “FUNCT” button and the display will
lock on the current setting (it will still be flashing). Use
the “UP” or “DOWN” buttons to change the setting. To go
to the next function, quickly press and release the
“FUNCT” button. The display should again begin flashing
between the selected function and its current setting. Now
quickly pressing the “UP” or the “DOWN” button will
move to the next function. Continue pressing and
releasing the button until the desired function appears.
b. Function Descriptions (Refer to table in Section III.A.3.b.)
Flow Control Division
Worcester Controls
Page 11
WCAIM2053 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) 11
Name Purpose of Function
1. “YFct” This function tells the positioner whether the shaft position feedback is linear or nonlinear. In the case of a rotary ball valve,
it should be set to linear. This is because the M.A.S. shaft rotates the feedback potentiometer an equal amount for every
incremental change in stem position.
NOTE: It does not relate to the flow characteristic of the valve.
2. “init” This function tells the positioner whether the unit has been calibrated. The proper setting is “oCAY”. If “no” is displayed,
then it is necessary to run the self-calibration procedure described in section III.A.4.c.
3. “SCUr” This function tells the positioner whether the low end of the input signal will be 0 mA or 4 mA. Because the positioner
boards being used are loop-powered, they require a minimum of 3.6 mA to operate the circuit board’s power supply and
display. The required setting is “4”.
4. “Sdir” This function tells the positioner the setpoint direction — is the signal rising or falling? The two possible settings are “riSE”
and “FALL”. For a direct acting response, select “riSE”. The actuator will rotate in the counterclockwise (CCW) direction on
an increasing signal. Refer to Figure 5.
5. “SPrA” This function tells the positioner the desired start of the signal range
for the full closed position and is used for split range applications.
The setting can be anywhere from 0 to 100% of the signal range in
0.1 percent increments. This function is used in conjunction with
“SPrE”. The “SPrA” setting should be less than the “SPrE” setting.
See Figure 5.
6. “SPrE” This function tells the positioner the desired end of the signal range
for the full open position and is used for split range applications.
The setting can be anywhere from 0 to 100% of the signal range in
0.1 percent increments. This function is used in conjunction with
“SPrA”. The “SPrE” setting should be greater than the “SPrA”
setting. See Figure 5.
7. “tS” - This function tells the positioner the desired rate of response to a
step change in signal. It can be used to slow the positioning of the
actuator. Possible settings are “AUto” or 0 to 40 seconds in 1 second
increments. With “AUto” selected, the positioner chooses the best
response. The factory default setting is 0 seconds.
8. “SFct” This function tells the positioner the desired shaft positioning
characteristic with respect to input signal. The four possible settings
are “Lin”, “1:25”, “1:50”, and “FrEE”. Refer to Figure 6.
“Lin” causes the shaft position to vary in a linear fashion as the input
signal changes (i.e. if the signal is at 50 percent, the shaft position
will be at 50 percent of the selected operating range).
“1:25” causes shaft position to change in an equal percentage ratio of
1 to 25 (i.e. the shaft will rotate less at the lower end of the signal
range when given an equal change in input signal).
“1:50” causes shaft rotation to change in an equal percentage ratio
of 1 to 50.
“FrEE” allows 11 setpoint vertices to be set. In this way, a custom
shaft positioning characteristic can be entered. There is a vertices set
(data point) at 4 mA and then every 1.6 mA up to and including 20 mA. The vertices are displayed as “SL 0” to “SL 10” and
will only be displayed when “FrEE” is chosen as the setting. Use the “UP”, “DOWN”, and “FUNCT” buttons to select and
change the vertices settings.
The vertices are shown as percent of shaft rotation for the established operating range and have a resolution of 0.1 percent.
The factory default settings for the “FrEE” setting are the inverse of the 1:25 characteristic. The factory default for the “SFct”
function is “Lin”.
9. “dEbA” This function tells the positioner the desired positioner deadband. The possible settings are “Auto” or 0.1 to 10.0 percent of
signal span in increments of 0.1 percent. When “AUto” is selected, the deadband is constantly adapted to the operating
conditions. It is suggested that this setting be used unless special conditions exist (such as a randomly noisy signal) that
cause the process to become unstable intermittently. The factory default setting is “AUto”.
Flow Control Division
Worcester Controls
Figure 5 – Split Ranging
Figure 6 – Flow Characteristics
Page 12

12 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) WCAIM2053
Name Purpose of Function
10. ”Ydir” This function tells the positioner the desired direction of action of the display when using it for position output indication.
The two possible settings are “riSE” and “FALL”. The factory default setting is “riSE”. When “riSE” is selected, the displayed
output will increase as the actuator shaft rotates CCW. When “FALL” is selected, the displayed output will decrease when the
shaft rotates CCW.
11. ”YnrM” This function tells the positioner how the displayed position output should be standardized. The two choices are “MPoS” and
“FLoW”. “MPoS” shows the actual actuator shaft position dictated by the “YA” and “YE” functions. For example, with “YA”
set to the 25% open position and “YE” set to the 75% open position, the displayed position will be 0 at 25% open and 100 at
75% open. If “YA” and “YE” are set to 0 and 100 percent, respectively, then it is recommended that “MPoS” be selected. If
“YA” and “YE” are set to values other than 0 and 100 percent, then it is recommended that “FLoW” be selected. The factory
default is “MPoS”. Refer to Figure 6.
12. ”YA” This function tells the positioner the desired lower limit for shaft position at the start of the signal range. It can be set to a
value from 0.0 to 100.0 in increments of 0.1 percent. The factory for this function is 0.0 percent. Refer to Figure 6.
13. “YE” This function tells the positioner the desired upper limit for shaft position at the end of the signal range. It can be set to a
value from 0.0 to 100.0 in increments of 0.1 percent. The factory for this function is 100.0 percent. Refer to Figure 6.
14. ”YCLS” This function tells the positioner whether tight valve shutoff is desired when the input signal reaches the low end of its range and
whether the valve will fully open when the input signal reaches the upper end of its range. It is significant when the “YA” function
is set to a value other than 0.0 percent. The two choices are “YES” and “no”; “no” is the factory default. Refer to Figure 6.
15. “Afct” This function is used to set alarm limits. It is not available in the unit at this time.
16. “A1” This function sets the alarm 1 threshold. It is not available in the unit at this time.
17. “A2” This function sets the alarm 2 threshold. It is not available in the unit at this time.
18. “Fct” This function sets the alarm output function. It is not available in the unit at this time.
19. “PrSt” This function is an indicator of whether the factory settings have been altered. The two possible indications are “no” and
“oCAY”. “oCAY” indicates that all the factory defaults are being used. If “no” is displayed and it is desired that the factory
settings be restored, then press the “FUNCT” button momentarily to lock in the display. Then press the “UP” button for greater
than 5 seconds until the display flashes “oCAY”. The default settings are now loaded into memory. Refer to Section III.A.5.
7. WIRING DIAGRAMS – Reference General Arrangement Drawing Below
General Wiring Arrangement
Flow Control Division
Worcester Controls
Modifications for “Fail-Open” Operation
Actuator Actuator Wiring
Mounting Size Modifications Notes
In-line 10-20 Swap Green and Actuator is
Purple Wires at Inverted
Terminals 6 and 8
In-line 25-40 No Change —
Cross-line 10-20 No Change —
Cross-line 25-40 No Change —
NOTE: For wiring of M2 switch,
dual potentiometer or
4-20 mA output
transmitter options,
refer to Sections III.D.3,
III.E.2, or III.F.2
respectively.
Page 13

WCAIM2053 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) 13
8. TROUBLESHOOTING
If the unit does not appear to be functioning properly, then
make the following basic checks.
• Check all wiring to the Positioner board, solenoid valves, and
feedback potentiometer against the wiring diagrams in
Section III.A.7. Also check for broken wires and blown fuses.
• Test the input signal current and check its connections to
the M.A.S. A minimum of 3.6 milliamps is required for the
positioner to operate.
• Check air connections against the information contained in
the Manifold Block Instructions - Section III.C.1. Test the
supply air for pressure and proper connections.
• Rerun the positioner self-calibration procedure outline in
Section III.A.4.c.
NOTE: Many times M.A.S. units are received for repair at
Flowserve and the only problem with the unit is that the
feedback potentiometer is out of calibration. It is very
important that the feedback potentiometer be properly
calibrated for correct operation of the positioner board. It is
also very important that the M.A.S. shaft not be rotated out of
the quadrant for which the feedback potentiometer has been
calibrated. Whenever a problem occurs with positioner
calibration, rerun the positioner self-calibration program
described in section III.A.4.c as a first step.
Problem Possible Cause(s) Solution
Unit constantly Actuator moving Adjust ramp time
overshoots too fast parameter – “tS”
setpoint
No response to Fuse is blown Replace fuse
input signal (L90 only) (#5X20MM, 63 mA,
fast-acting)
Signal source Connect good input
connected incorrectly source as shown on
or no signal wiring label
As signal increases Potentiometer wires Check wiring at
actuator suddenly (green and purple) terminal strip per
goes full open and reversed chart below (refer to
will not close Section III.A.7):
TERM #
POT
8 Green
7 White/Black
6 Purple
Actuator Ramp time parameter Adjust parameter “tS”
responding slowly set too high
No response from Air pressure too low Pressure should be
piezo valve 40 psig minimum
9. CIRCUIT BOARD REPLACEMENT
a. The following information is provided if it becomes
necessary to replace the circuit board.
b. Removing and remounting the positioner circuit board
It may be preferable to wire the new circuit board to the
terminal strip before mounting the circuit board to the
M.A.S. baseplate. This can be done with the baseplate
removed from the housing, if desired. Refer to Figure 7:
1. Turn off the power supply and disconnect the circuit
board (item 1) wires from the terminal strip.
Remove the two #4 screws (item 3) and lift out the
circuit board.
2. Locate the new positioner circuit board (item 1) to the
baseplate (item 2). The bottom edge of the circuit
board fits into a groove in the baseplate as shown.
3. Secure the circuit board with two #4 x
Z|v
" self-tapping
screws (item 3) through the top two holes in the
board.
4. Make electrical connections per the wiring diagrams
shown in section III.A.7.
5. Calibrate new board per section III.A.4.
NOTE: All wiring is to be run smoothly and neatly and
away from any rotating parts, using wire ties if necessary.
Use caution to avoid pinching the wires between the base
and cover flanges.
All wiring to terminal strips shall be inserted only to midpoint of terminal strips.
Flow Control Division
Worcester Controls
Figure 7
Page 14

14 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) WCAIM2053
B. HOUSING ASSEMBLY
The housing consists of the base, cover, shaft, baseplate and
associated hardware. The housing is assembled as received from
Flowserve. For ease of maintenance, assembly instructions will be
provided here.
1. COVER
CAUTION: Use care to avoid damaging the machined flange
surface of the cover.
a. Apply a light coat of Cindol 2321 lubricant (or other
bearing grease) to the shaft hole.
b. Assemble the captive type cover screws through the
flange holes. The screws must be turned through
approximately
Z|v
" of thread until they reach the clearance
diameter and remain loose in the cover. Use caution to
avoid cross-threading these screws. Refer to Figure 8.
c. Check to see that the shaft seal has been installed as
shown in Figure 9.
CAUTION: When assembling cover to base, be sure wires
are away from any rotating parts and are not pinched
between cover and base flanges. Relubricate the shaft hole
anytime cover is removed and replaced. To avoid damaging
the cover hole finish and binding the shaft to cover, check
the top of the shaft for burrs or impact damage before
installing or removing cover.
2. BASE
CAUTION: Use care to avoid damaging the machined flange
surface of the base.
a. Check to see that the shaft seal and bearing have been
installed as shown in Figure 9.
b. Apply a light coat of bearing lubricant to the shaft hole.
c. Insert the shaft through the shaft hole in the base from
the inside. The shaft fits through this hole with minimal
clearance — care must be taken to avoid damaging the
bearing surfaces or causing the shaft to gall.
d. Place one of the nylon thrust washers onto the shaft end
protruding outside the base. Assemble one of the snap
rings to the shaft in the groove below this thrust washer
(rounded side towards thrust washer — see detail).
e. Place a second nylon thrust washer over the shaft and
into place against the shaft boss on the inside of the
base. Secure the shaft in place with a second snap ring in
the groove adjacent to the second thrust washer (rounded
side towards thrust washer — see detail).
f. Place the third snap ring into the upper groove as shown
in Figure 9.
g. If the base is machined to accept a breather/drain fitting as
shown in Figure 10, then the boss on the bottom of the
base near the electrical conduit connection bosses will be
tapped with
C|,
" NPT threads. If this boss is tapped, the
breather/drain fitting must be installed. The use of
fluoropolymer tape or other thread sealant is recommended
prior to installing this fitting into the boss.
Flow Control Division
Worcester Controls
Figure 8
Figure 9
Figure 10
"
"
Page 15
WCAIM2053 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) 15
h. Plug (1)
Z|v
" NPT and (1)
Z\,
" NPT air connection ports
(labeled “D” and “A”) with the stainless steel pipe plugs
provided. Thread sealant is not recommended prior to
installing these plugs. The residue left by a thread sealing
compound could foul the piezo valve air passages.
Refer to the figures in Section III.C.1 for further
information.
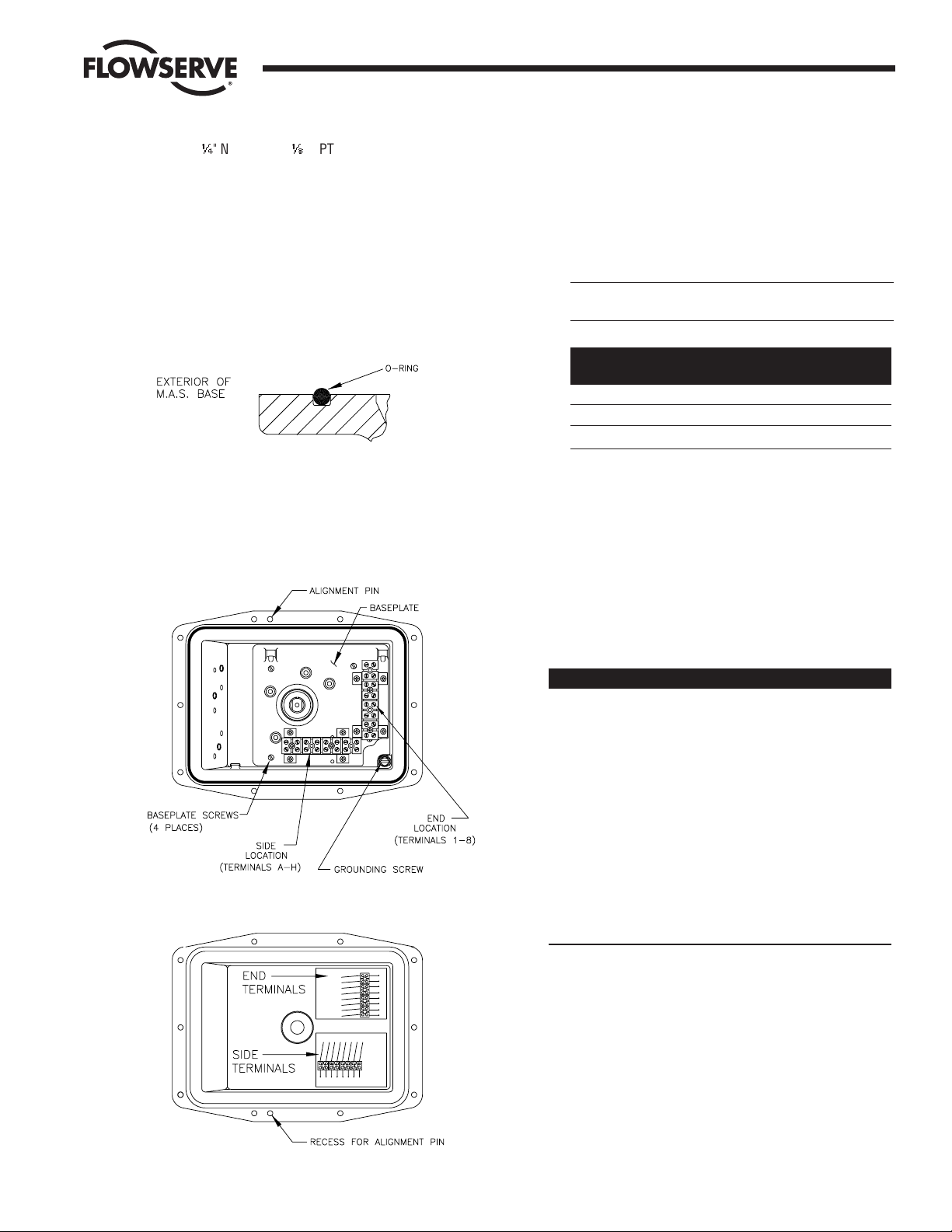
i. The M.A.S. uses a standard O-ring to achieve both
Watertight (TYPE 4) and Explosion-proof (TYPE 7)
ratings. Refer to Figure 11.
j. Refer to Figure 12. The baseplate contains one or two
factory-assembled terminal strips, depending on selected
options. The “end” location is always used. A second
terminal strip is added to the “side” locations when
required as outlined below.
k. Assemble the baseplate into the base using the four #6-
32 screws provided. Use care when tightening these
screws as the baseplate is plastic and could be damaged
if over-tightened.
If options such as Switches, etc., are to be installed,
assemble them to the baseplate prior to installing
baseplate into base.
CAUTION: Avoid contacting baseplate with solvents –
damage may result.
Options Requiring
Second Terminal Strip
SPDT Switches M2
Dual Potentiometer P, 5
4-20 Output 4
l. The base is provided with an alignment pin pressed into
the flange which will allow the cover to be assembled in
only one orientation (See Figures 12 and 13). Be certain
the cover is correctly positioned prior to tightening bolts
or damage may result.
m. M.A.S. options are supplied with wiring diagrams which
should be affixed to the inside of the cover as shown in
Figure 13. Note the orientation of the terminal strips on
the wiring diagrams, and their locations in the cover.
3. TROUBLESHOOTING
Problem Possible Cause(s) Solution
Shaft binds Cover not centered Loosen cover screws
and allow cover to
center on shaft.
Retighten cover
screws.
Inadequate lubrication Remove cover and
lubricate shaft hole
with bearing grease,
such as Cindol 2321.
If excessive wear or
galling is present,
shaft and affected
part of housing will
have to be replaced.
Flow Control Division
Worcester Controls
Figure 11
Figure 12
Figure 13
Page 16

16 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) WCAIM2053
C. PIEZO VALVE BLOCK
The Worcester/McCANNA Pulsair Series I90/L90 Loop-Powered
Positioner uses specially designed piezo-electric valves to control
a single-acting (spring-return) pneumatic actuator. One of the
valves is used to control the flow of air into the actuator; the other
to control the exhaust. This allows the actuator to “lock” in place.
The valve unit actually houses two high-flow, three-way spool
valves which are piloted by the piezo-electric elements. A piezoelectric device is one that changes its shape when exposed to an
electrical potential (voltage). Only minute amounts of current are
required for this action to occur.
Air Supply Requirements and Technical Data
Air Supply:
Medium: Industrial Air (or other non-corrosive gas),
must be dry and oil free
Pressure: 30–100 psi
Filtration: < 30 micron required / 20 micron strongly
recommended
Dew Point: < -40°F
Air Consumption:
(Settled State) < .00824 SCFM
Unrestricted Air
Flow Through Valve
Inlet: 3.24 SCFM
(With 15 psi differential pressure)
Outlet: 2.94 SCFM
(With 15 psi differential pressure)
Type of Actuator: Single-acting (spring-return) rotary
Mounting Position: Any, exhaust port not upwards
All lead wires are equipped with quick-connect plugs that are
easily connected/disconnected to the piezo valve unit. See Figure
14. Do not force the plugs together; damage can result. Do not
pull directly on wires when disconnecting the plugs — the wires
can be damaged and/or disconnected if abused.
CAUTION: The plug that connects to the piezo valve unit can be
assembled two ways. Be certain that the numbers on the plug
match the numbers on the valve unit as shown. The black wire
goes to terminal number 1.
The manifold block gasket has been designed to adapt the
manifold block to the Series 90 M.A.S. housing air connections.
The gasket is illustrated in Figure 15 for future reference in
these instructions.
1. ASSEMBLY (Refer to Figure 16)
a. SINGLE-ACTING LOOP-POWERED POSITIONING TYPE
NOTE: Where lubrication is required, Vaseline or other
non-corrosive grease is acceptable unless otherwise
noted. Use sparingly.
1. Attach the exhaust gasket (item 1) to the manifold
block (item 2) using two #4 x
>|zn
" round head screws
(item 3).
CAUTION: Do NOT over-tighten screws, as this will
make it difficult to install piezo unit.
2. Insert the three #10-32 x
C|v
" socket head screws
(item 4) through the manifold block from the side
shown (marked SR-L). Position the manifold block
gasket (item 5) on these screws.
3. Attach the manifold block and gasket to the angled
inside wall of the M.A.S. base using the three
#10-32 x
C|v
" screws.
4. Install the piezo valve unit (item 6). Be certain that the
spring plunger (item 7) engages its location in the
piezo valve unit as well as the counterbore in the
manifold block. It will be necessary to apply light force
to compress the rubber portion of the exhaust gasket
and slip the piezo unit into place. There are two locator
Flow Control Division
Worcester Controls
Figure 15 – Single-acting (Spring-return)
Figure 14
Page 17

WCAIM2053 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) 17
pins that drop into place when the unit is properly
aligned. While holding the piezo valve unit in place,
secure it with the four #6-32 x 1
Z|v
" screws (item 8).
5. Mount the push-button control circuit board (item 9)
to the manifold block as shown using two #4-40 x
C|,
"
round head screws (item 10). An electronic
connector will be plugged into the bottom of this
circuit board at a later time.
2. WIRING
NOTE: All wiring is to be run smoothly, neatly and away from
any rotating parts and also away from the base/cover flange
joint, using wire ties, if necessary. Use caution to avoid
pinching wires between the base and cover flanges. All wiring
to terminal strip should be inserted only to mid-point of
terminal strip.
Connect the lead wires from the valve connector plug to the
end terminal strip as shown in the wiring diagram to the
right. The plug is the large tan colored one with three wires
attached to it.
Flow Control Division
Worcester Controls
Figure 16
NOTE: Orifice plug in port “C” can be
removed to allow slightly faster
actuation times on larger actuators
(sizes 3039 and up).
Page 18
3. OPERATION
The piezo valves are controlled by the positioner circuitry. The
valve block contains two separate valves. One allows air to
enter the actuator, the other allows air to vent from the
actuator. Opening, closing and holding are accomplished by
energizing the appropriate combination of valves. The unit is
fail-safe on loss of air pressure or electrical signal.
4. TROUBLESHOOTING
Problem Possible Cause(s) Solution
Air leak between Loose piezo valve unit Tighten piezo valve
piezo unit/block screws.
or between Gasket out of position Remove manifold
block/housing block, realign gasket
and reattach manifold
block.
Defective gasket Contact Flowserve
for replacement.
Rough surfaces on Contact Flowserve
manifold block for replacement.
Actuator not Valve Block
operating Power supply not Check power supply.
connected/not working 3.6 mA minimum is
required for
operation.
Defective lead wires Check leads with
ohmmeter or try new
lead wires.
Defective piezo valve Contact Flowserve.
or manifold block
Problem with Contact Flowserve.
positioner board
Actuator
High valve torque Disconnect valve and
check operation/
torque.
Air supply not Check supply air
connected/low pressure piping and pressure.
Tubing connections to Check M.A.S. air
M.A.S. not correct connections.
Debris in piezo valve Remove and clean
or manifold block manifold block; do
not disassemble
piezo valves (contact
Flowserve); check
filtering per
Section III.C.
No obvious cause(s) Disconnect M.A.S.
from actuator; test
each unit separately.
D. SWITCH OPTIONS
A mechanical switch option is available in the Pulsair Series
I90/L90 Modular Accessory System. The switches can be used to
provide actuator position indication or to control other equipment.
The option always available (regardless of other options) is:
M2 – Two Single-Pole Double-Throw Mechanical Switches
The standard switches provided will be gold contact types suitable
for low-power applications (120/240 VAC, 1A). Switches capable
of handling higher currents are available through Flowserve.
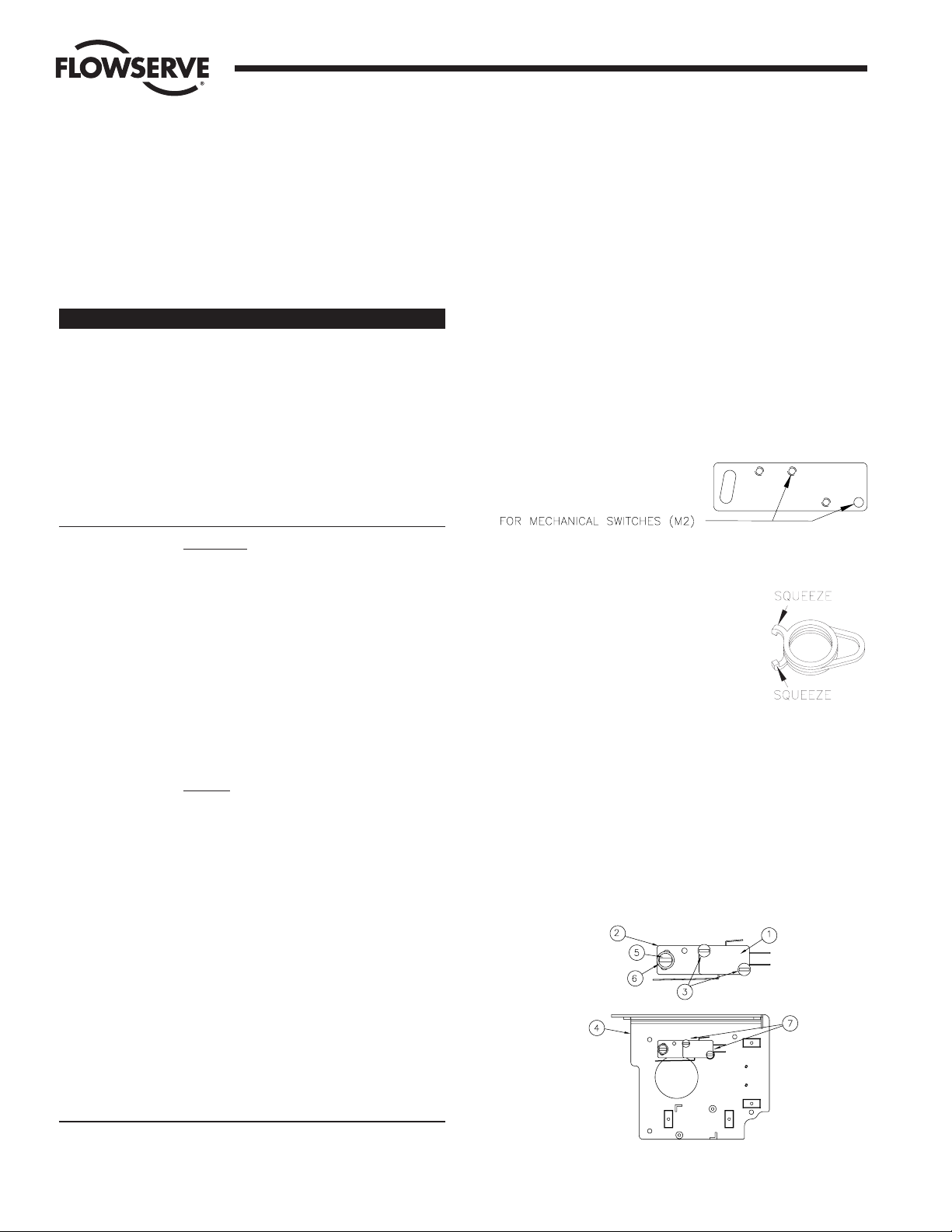
An “Adjustment Plate” is used to mount the single pole
mechanical switches to the baseplate. Mechanical switches are
mounted to the adjustment plate and set to a middle position —
not rotated towards or away from the shaft. There are two sets of
mounting holes in the adjustment plate, use the appropriate set as
shown below in Figure 17. Their use will be detailed later.
The cams used to actuate the switches offer
unlimited positioning without the use of tools.
These cams are essentially “wrap-springs”
and grip the shaft tightly enough to prevent
accidental rotation. Squeezing together the
two small protrusions from the cam, as
shown in Figure 18, loosens the spring and
allows adjustment. Needle nose pliers may
prove to be helpful when installing the cams,
but are not required.
1. ASSEMBLY
a. M2 – TWO SPDT MECHANICAL SWITCHES
1. Stack two switches (item 1) and attach to the
adjustment plate (item 2), as shown in Figure 19,
using two #4-40 x 1" screws (item 3) provided. Note:
One of the screws will thread into a tapped hole in the
adjustment plate while the other engages a clearance
hole without threads.
Flow Control Division
Worcester Controls
Figure 17
Figure 18
Figure 19
18 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) WCAIM2053
Page 19

WCAIM2053 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) 19
2. Assemble the switches and adjustment plate to the
baseplate (item 4) as shown below, using the “loose”
#4-40 x 1" screw and the #4-40 x
C|,
" screw (item 5)
and #4 washer (item 6). Move the adjustment plate to
a middle position and tighten the screws.
2. CAMS
Assemble the first spring
cam, the spacer and second
spring cam. To work the
spring cam down the shaft,
squeeze the two protrusions
and turn. See Figure 20.
3. WIRING
NOTE: All wiring is to be run
smoothly and neatly and
away from any rotating
parts, using wire ties, if necessary. Use caution to avoid
pinching wires between the base and cover flanges. All wiring
to terminal strip should be inserted only to mid-point of
terminal strip.
a. The wire leads will be connected to the switches as
provided. Pay close attention to the switch labels,
schematics, wire colors, etc. when wiring the switches.
Switches are to be wired to the side terminal strip as shown
in wiring diagram below. The end terminal strip is for
connecting the potentiometer and the positioner circuitry
only. See Figures 12 and 13 for location of terminal strips.
For Intrinsically Safe (I90) version only, dividers are to be
in place between terminals D and E, F and G.
b. Route the wires neatly and use wire ties if necessary. Be
certain that the wires will not get fouled on the shaft when
it rotates.
NOTE: FOR INTRINSICALLY SAFE SYSTEMS ONLY.
All inputs/outputs (“external” wiring connections) must
be run through CSA certified zener barriers.
IMPORTANT: Shielded cable must be used for each
intrinsically safe circuit and for zener barriers, the shield
must be connected to a zener barrier ground.
4. OPERATION
a. Once the M.A.S. unit has been assembled and connected
to the actuator, the switch cams can be set per user’s
requirements. Normally switch I indicates “closed” and
switch II indicates “open”.
b. The unit should be operated to ensure that switch
actuation occurs at the end of rotation (or in whatever
position is desired by the customer) repeatably.
5. TROUBLESHOOTING
Problem Possible Cause(s) Solution
Switches do not Improper cam settings Reset cams.
indicate at proper
positions
Switch does not Switch too far Loosen the
actuate (never from cam adjustment plate
trips) screws and rotate
switches towards
shaft until actuation
is correct — retighten
screws.
Switch does not Switch too Loosen the
reset (always close to cam adjustment plate
tripped) screws and rotate
switches away from
shaft until actuation
is correct — retighten
screws.
No indication at Broken, defective, or Check wiring with
terminal strip misplaced wire appropriate wiring
diagram per
Section III.D.3.
Cams not aligned Cams/spacers in Check and
with switch arms wrong order reassemble cams per
Section III.D.2.
Cams not pushed Push cams into
into place proper locations —
align with switch
arms.
Flow Control Division
Worcester Controls
Figure 20
Switch Com. N.O.
I Brn/Wht Orange
II Red Blue
Page 20

20 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) WCAIM2053
E. FEEDBACK POTENTIOMETER AND POTENTIOMETER OPTIONS
The Pulsair I90/L90 M.A.S. requires a precision 5000 ohm
potentiometer to provide feedback representing the position of the
M.A.S. shaft to the positioner circuit board. In addition, a second
potentiometer can be provided (in the form of a dual
potentiometer) to allow remote monitoring of the shaft position.
1. ASSEMBLY (See Figure 21)
Note: Assembly is the same for both dual potentiometer and
single potentiometer.
a. With the potentiometer (item 3) mounted to the
potentiometer bracket (item 4) and the pinion gear (item
1) loosely fitted to the potentiometer shaft (item 2),
mount the potentiometer bracket (item 4), if not already
mounted, to the baseplate (item 5) using two #8-32 x
B|zn
screws (item 10) provided.
b. Remove the upper snap ring (item 6) from the shaft (item
7). Use care to avoid deforming it permanently.
c. Slide the face gear (item 8) onto the shaft, teeth facing
down and secure with the snap ring (item 9) provided.
NOTE: The face gear utilizes a friction fit to the shaft. For
best results, wipe off any lubricant that may be on the
shaft before sliding on the face gear.
CAUTION: Do not overstretch the snap ring, use
minimum opening to allow it to slip over the gear.
d. Replace the upper snap ring (item 6).
e. Adjust the potentiometer pinion gear so that there is
approximately
Z|zn
" tooth engagement between the face
and the pinion gear and tighten the pinion gear set screw.
2. WIRING
NOTE: All wiring is to be run smoothly and neatly and away
from any rotating parts. Use caution to avoid pinching wires
between the base and cover flanges. All wiring to terminal
strips should be inserted only to mid-point of terminal strips.
a. For Feedback (Single) Potentiometer – Connect the
potentiometer lead wires to the end terminal strip as
indicated by the wiring diagram below.
b. For Dual Potentiometer – Connect the lead wires from the
feedback “A” (front) potentiometer to the end terminal
strip as indicated by the wiring diagram below.
The three leads from the “B” (rear) potentiometer will be
connected to the side terminal strip as indicated by the
wiring diagram below.
IMPORTANT: Voltage limit of “B” potentiometer is 30 volts
maximum.
c. Route the wires neatly and use wire ties, if necessary. Be
certain that the wires will not get fouled on the shaft when
it rotates.
d. “Fail-Open” operation may require wiring modifications.
For details, see Table in Section III.A.7, Wiring Diagrams.
NOTE: FOR
INTRINSICALLY SAFE
SYSTEMS ONLY.
All inputs/outputs
(“external” wiring
connections) must be
run through a CSA
certified zener barrier:
Flow Control Division
Worcester Controls
Figure 21
Feedback (Single) Potentiometer Only
Dual Potentiometer
Page 21

WCAIM2053 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) 21
IMPORTANT: Shielded cable must be used for each intrinsically safe
circuit and, for zener barriers, the shield must be connected to a
zener barrier ground.
3. TROUBLESHOOTING POTENTIOMETER
Problem Possible Cause(s) Solution
Indicates Green and Purple Check wiring per
backwards wires reversed Section III.E.2.
Reverse-acting Reverse green and
actuator purple wires.
Indication not Gears slipping Check gear tooth
consistent engagement of face
gear (approximately
Z|zn
")
Pinion gear set Recalibrate and
screw loose tighten set screw.
Indication not Potentiometer needs Calibrate
correct to be calibrated potentiometer per
Section III.A.4.
M.A.S. shaft turned Recalibrate for new
more than 90 degree quadrant.
F. TWO-WIRE 4 to 20 mA OUTPUT TRANSMITTER OPTION
The 4-20 mA output board has been designed for use in the
Pulsair Positioner unit as a position feedback option which will
operate as a two-wire loop-powered transmitter. The circuit can
operate on 12 or 24 Volts DC, or in intrinsically safe systems.
Provided on the board is a two-pin connector for wiring the board to
the Pulsair terminal strip and a three terminal strip for connection to
the 1000 ohm feedback “B” pot (rear) of the dual potentiometer.
NOTE: Dual potentiometer option (coded P or 5) and 4-20 mA
output transmitter option (coded 4) cannot both be ordered at the
same time. The 1000 ohm Feedback “B” pot (rear) for the 4-20
mA transmitter board connects to the terminal strip on
transmitter circuit board.
1. ASSEMBLY (Refer to Figure 22)
a. Dual Potentiometer
1. Remove single feedback pot and bracket, if installed,
and install dual pot and bracket provided. Use
existing face gear on shaft, if installed (refer to
section III.E.1).
b. 4-20 mA Output Transmitter Board
1. The circuit board (item 11) is mounted to the Pulsair
baseplate with two #4 x
C|,
" self-tapping screws (item
12). The terminal strip on the board should be
oriented toward the Pulsair shaft.
2. WIRING (Refer to General Wiring Arrangement on next page.)
NOTE: All wiring is to be run smoothly and neatly and away
from any rotating parts, using wire ties, if necessary. Use
caution to avoid pinching wires between the base and cover
flanges. All wiring to terminal strip should be inserted only to
mid-point of terminal strip.
a. Wire the 4-20 1000 ohm “B” (rear) potentiometer of the
dual potentiometer to the circuit board terminal strip as
follows:
Green wire to TB-1 terminal 1
White/Black wire to TB-1 terminal 2
Purple wire to TB-1 terminal 3
A two-wire connector assembly connects the signal loop
to the circuit board. Connect the red wire to Pulsair
terminal A (positive) and the black wire to Pulsair terminal
B (negative).
Flow Control Division
Worcester Controls
Figure 22
NOTE: Terminal strips, shaft and potentiometer
assembly not shown for clarity.
Page 22

22 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) WCAIM2053
b. Loop Voltage Selection
The jumpers on the circuit board must be set up for the
applied loop driving voltage. As provided, all jumpers will
be installed. See tables below for appropriate jumpers to
be used.
NOTE: Supply voltage must be constant to assure
proper operation.
Old-Style Board Jumpers
Supply Remove Jumpers Keep Jumpers
24 VDC J1 and J3 J2 and J4
12 VDC J2 and J4 J1 and J3
Intrinsically Safe J2 and J4 J1 and J3
New-Style Board Jumpers
Supply Jumpers J1 and J2
24 VDC Removed
12 VDC Installed
Intrinsically Safe Installed
NOTE: For Intrinsically Safe Operation, the circuit must be powered
through a CSA certified zener barrier:
Entity Parameters For I.S. Operation With Barrier
Voltage ≤ 30 Volts DC
Current ≤ 100 milliamp
Power ≤ 1 Watt
IMPORTANT: Shielded cable must be used for each intrinsically safe
circuit and, for zener barriers, the shield must be connected to a
zener barrier ground.
3. CALIBRATION
a. 4-20 mA Output
To adjust the 4-20 mA output of the circuit board connect
the appropriate loop power to the circuit. Connect the
positive lead to terminal A, and the negative to terminal B.
NOTE: The voltage supply loop for the 4-20 mA output
transmitter is independent from the 4-20 mA positioner
input signal loop — they cannot share common wires.
Although the transmitter will operate with no load,
Flowserve recommends using a load of at least 100 ohms
in the current loop.
With the actuator in the full clockwise position, adjust
trimpot TP1 (labeled 4 mA) for a reading of 4 mA on a
milliammeter connected in series with the loop. Once this
adjustment is made, position the actuator to the full
counterclockwise position. Adjust trimpot TP2 (labeled 20
mA) for a reading of 20 mA on the meter. Recheck the 4
mA end of travel and make adjustments as necessary. A
good rule of thumb to follow is that if an adjustment is
made at one end of travel, always go back to the other
end to recheck its adjustment. It should not be necessary
to check each end more than three or four times before
everything is zeroed in.
Flow Control Division
Worcester Controls
General Wiring Arrangement
-
Page 23

WCAIM2053 Pulsair Loop-Powered Positioner Modular Accessory System (Series I90/L90) 23
4. TROUBLESHOOTING
Problem Possible Cause(s) Solution
Indicates Green and Purple Check wiring per
backwards wires reversed Section III.F.2.
Reverse-acting Reverse green and
actuator purple wires.
Recalibrate
potentiometer per
Section III.A.4.
Indication not Gears slipping Check gear tooth
consistent engagement of upper
face gear
(approximately
Z|zn
").
Pinion gear set Recalibrate and
screw loose tighten set screw.
Potentiometer loose Tighten potentiometer
nut.
Indication not Potentiometer needs Calibrate
correct to be calibrated potentiometer per
Section III.A.4.
M.A.S. shaft turned Recalibrate for new
more than 90 degree quadrant.
4-20 mA output Power supply Check/connect
not operating not connected power supply.
properly
Board not calibrated Complete calibration
procedure per
Section III.F.3.a.
Wiring not correct Recheck wiring per
Section III.F.2.
Power supply voltage Check for proper
is varying or incorrect supply voltage and
whether jumpers are
installed or removed
per Section III.F.2.b.
Supply must be
constant voltage for
proper operation.
G. RADIO FREQUENCY INTERFERENCE (RFI) FILTER
The RFI filter is incorporated into the input circuit of the Pulsair
positioner to prevent or minimize interference from radio
sources such as walkie-talkies. The RFI filter consists of two 1
millihenry inductors in combination with a .1 microfarad
capacitor to block any radio frequency interference on the signal
lines. The RFI filter is factory installed and wired. The following
installation and wiring information is provided for service and
repair operations, if necessary.
1. INSTALLATION AND WIRING
a. Remove the two #4 screws securing the circuit board in
place. Carefully raise the board to gain access to the
circuit board terminal strips.
b. Remove the blue wire and the yellow wire connected
between terminals 1 and 2 of the enclosure terminal strip
and the Pulsair positioner board. Make a note as to where
each wire is connected to the circuit board terminals.
c. Connect the filter assembly to the back of the enclosure
terminal strip as follows:
1. Install the free lead of the inductor connected to the
blue wire into the back of terminal 1.
2. Install the free lead of the inductor connected to the
yellow wire into the back of terminal 2.
d. Connect the blue wire and yellow wire to the circuit board
as follows:
1. Connect the free end of the blue wire to terminal 3 on
the circuit board.
2. Connect the free end of the yellow wire to terminal 7
on the circuit board.
e. Reposition the circuit board in its proper location being
careful not to pinch or pull any wires. Reinstall the two #4
screws to secure the board in place.
f. This completes the installation.
Flow Control Division
Worcester Controls
Page 24

Flow Control Division
Worcester Controls
Flowserve Corporation has established industry leadership in the design and manufacture of its products. When properly selected, this Flowserve product is designed to perform its intended function
safely during its useful life. However, the purchaser or user of Flowserve products should be aware that Flowserve products might be used in numerous applications under a wide variety of industrial
service conditions. Although Flowserve can (and often does) provide general guidelines, it cannot provide specific data and warnings for all possible applications. The purchaser/user must therefore
assume the ultimate responsibility for the proper sizing and selection, installation, operation, and maintenance of Flowserve products. The purchaser/user should read and understand the Installation
Operation Maintenance (IOM) instructions included with the product, and train its employees and contractors in the safe use of Flowserve products in connection with the specific application.
While the information and specifications contained in this literature are believed to be accurate, they are supplied for informative purposes only and should not be considered certified or as a guarantee of
satisfactory results by reliance thereon. Nothing contained herein is to be construed as a warranty or guarantee, express or implied, regarding any matter with respect to this product. Because Flowserve
is continually improving and upgrading its product design, the specifications, dimensions and information contained herein are subject to change without notice. Should any question arise concerning
these provisions, the purchaser/user should contact Flowserve Corporation at any one of its worldwide operations or offices.
For more information about Flowserve Corporation, contact www.flowserve.com or call USA 1-800-225-6989.
FLOWSERVE CORPORATION
FLOW CONTROL DIVISION
1978 Foreman Drive
Cookeville, Tennessee 38501 USA
Phone: 931 432 4021
Facsimile: 931 432 3105
www.flowserve.com
© 2003 Flowserve Corporation, Irving, Texas, USA. Flowserve and Worcester Controls are registered trademarks of Flowserve Corporation. WCAIM2053 10/03 Printed in USA
 Loading...
Loading...