

Page 1

Product Information Package
pg
PIP-CW_10 Upgrade Kit
Nov., 2006
CW_10 Hardware
ControlWave_10
HARDWARE INSTALLATION GUIDE
For u
rade of the 3310 RTU
www.EmersonProcess.com/Bristol
Page 2

IMPORTANT! READ INSTRUCTIONS BEFORE STARTING!
Be sure that these instructions are carefully read and understood before any
operation is attempted. Improper use of this device in some applications may result in
damage or injury. The user is urged to keep this book filed in a convenient location for
future reference.
These instructions may not cover all details or variations in equipment or cover
every possible situation to be met in connection with installation, operation or maintenance. Should problems arise that are not covered sufficiently in the text, the purchaser is advised to contact Bristol for further information.
EQUIPMENT APPLICATION WARNING
The customer should note that a failure of this instrument or system, for
whatever reason, may leave an operating process without protection. Depending upon
the application, this could result in possible damage to property or injury to persons.
It is suggested that the purchaser review the need for additional backup equipment
or provide alternate means of protection such as alarm devices, output limiting, failsafe valves, relief valves, emergency shutoffs, emergency switches, etc. If additional
in-formation is required, the purchaser is advised to contact Bristol .
RETURNED EQUIPMENT WARNING
When returning any equipment to Bristol for repairs or evaluation, please note
the following: The party sending such materials is responsible to ensure that the
materials returned to Bristol are clean to safe levels, as such levels are defined and/or
determined by applicable federal, state and/or local law regulations or codes. Such
party agrees to indemnify Bristol and save Bristol harmless from any liability or
damage which Bristol may incur or suffer due to such party's failure to so act.
ELECTRICAL GROUNDING
Metal enclosures and exposed metal parts of electrical instruments must be
grounded in accordance with OSHA rules and regulations pertaining to "Design
Safety Standards for Electrical Systems," 29 CFR, Part 1910, Subpart S, dated: April
16, 1981 (OSHA rulings are in agreement with the National Electrical Code).
The grounding requirement is also applicable to mechanical or pneumatic instruments that include electrically-operated devices such as lights, switches, relays,
alarms, or chart drives.
EQUIPMENT DAMAGE FROM ELECTROSTATIC DISCHARGE VOLTAGE
This product contains sensitive electronic components that can be damaged by
exposure to an electrostatic discharge (ESD) voltage. Depending on the magnitude
and duration of the ESD, this can result in erratic operation or complete failure of the
equipment. Read supplemental document S14006 at the back of this manual for
proper care and handling of ESD-sensitive components.
Bristol 1100 Buckingham Street, Watertown, CT 06795
Telephone (860) 945-2200
Page 3

WARRANTY
A. Bristol warrants that goods described herein and manufactured by Bristol are free
from defects in material and workmanship for one year from the date of shipment
unless otherwise agreed to by Bristol in writing.
B. Bristol warrants that goods repaired by it pursuant to the warranty are free from
defects in material and workmanship for a period to the end of the original warranty
or ninety (90) days from the date of delivery of repaired goods, whichever is longer.
C. Warranties on goods sold by, but not manufactured by Bristol, are expressly limited
to the terms of the warranties given by the manufacturer of such goods.
D. All warranties are terminated in the event that the goods or systems or any part
thereof are (i) misused, abused or otherwise damaged, (ii) repaired, altered or
modified without Bristol's consent, (iii) not installed, maintained and operated in
strict compliance with instructions furnished by Bristol, or (iv) worn, injured or
damaged from abnormal or abusive use in service time.
E. THESE WARRANTIES ARE EXPRESSLY IN LIEU OF ALL OTHER
WARRANTIES EXPRESS OR IMPLIED (INCLUDING WITHOUT LIMITATION
WARRANTIES AS TO MERCHANTABILITY AND FITNESS FOR A PARTICULAR
PURPOSE), AND NO WARRANTIES, EXPRESS OR IMPLIED, NOR ANY
REPRESENTATIONS, PROMISES, OR STATEMENTS HAVE BEEN MADE BY
BRISTOL UNLESS ENDORSED HEREIN IN WRITING. FURTHER, THERE ARE
NO WARRANTIES WHICH EXTEND BEYOND THE DESCRIPTION OF THE
FACE HEREOF.
F. No agent of Bristol is authorized to assume any liability for it or to make any written
or oral warranties beyond those set forth herein.
A. Buyer's sole remedy for breach of any warranty is limited exclusively to repair or
replacement without cost to Buyer of any goods or parts found by Seller to be
defective if Buyer notifies Bristol in writing of the alleged defect within ten (10) days
of discovery of the alleged defect and within the warranty period stated above, and if
the Buyer returns such goods to Bristol's Watertown office, unless Bristol's Watertown office designates a different location, transportation prepaid, within thirty (30)
days of the sending of such notification and which upon examination by Bristol
proves to be defective in material and workmanship. Bristol is not responsible for
any costs of removal, dismantling or reinstallation of allegedly defective or defective
goods. If a Buyer does not wish to ship the product back to Bristol, the Buyer can
arrange to have a Bristol service person come to the site. The Service person's
transportation time and expenses will be for the account of the Buyer. However,
labor for warranty work during normal working hours is not chargeable.
B. Under no circumstances will Bristol be liable for incidental or consequential
damages resulting from breach of any agreement relating to items included in this
quotation, from use of the information herein or from the purchase or use by Buyer,
its em-ployees or other parties of goods sold under said agreement.
REMEDIES
Page 4

How to return material for Repair or Exchange
Before a product can be returned to Bristol for repair, upgrade, exchange, or to verify
proper operation, form (GBU 13.01) must be completed in order to obtain a RA (Return
Authorization) number and thus ensure an optimal lead time. Completing the form is very
important since the information permits the Bristol Repair Dept. to effectively and
efficiently process the repair order.
You can easily obtain a RA number by:
A. FAX
Completing the form (GBU 13.01) and faxing it to (860) 945-3875. A Bristol Repair
Dept. representative will return call (or other requested method) with a RA number.
B. E-MAIL
Accessing the form (GBU 13.01) via the Bristol Web site (www.bristolbabcock.com)
and sending it via E-Mail to brepair@bristolbabcock.com
representative will return E-Mail (or other requested method) with a RA number.
C. Mail
Mail the form (GBU 13.01) to
Bristol Inc.
Repair Dept.
1100 Buckingham Street
Watertown, CT 06795
A Bristol Repair Dept. representative will return call (or other requested method)
with a RA number.
D. Phone
Calling the Bristol Repair Department at (860) 945-2442. A Bristol Repair Depart-
ment representative will record a RA number on the form and complete Part I, then
send the form to the Customer via fax (or other requested method) for Customer
completion of Parts II & III.
A copy of the completed Repair Authorization Form with issued RA number should be included with the product being returned. This will allow us to quickly track, repair, and
return your product to you.
. A Bristol Repair Dept.
Page 5

Bristol Inc. Repair Authorization Form (off-line completion)
(Providing this information will permit Bristol Inc. to effectively and efficiently process your return. Completion is required
to receive optimal lead time. Lack of information may result in increased lead times.)
Date___________________ RA #___________________SH_ Line No.____________
Standard Repair Practice is as follows: Variations to this is
practice may be requested in the “Special Requests” section.
• Evaluate / Test / Verify Discrepancy
• Repair / Replace / etc. in accordance with this form
• Return to Customer
Part I Please complete the following information for single unit or multiple unit returns
Address No. (office use only) Address No. (office use only)
Bill to : Ship to:
Purchase Order: Contact Name:____________________________________
Phone: Fax: E-Mail:
Part II Please complete Parts II & III for each unit returned
Model No./Part No. Description
Please be aware of the Non warranty standard charge:
• There is a $100 minimum evaluation charge, which is
applied to the repair if applicable (√ in “returned”
B,C, or D of part III below)
Range/Calibration S/N
Reason for return
: Failure Upgrade Verify Operation Other
1. Describe the conditions of the failure (Frequency/Intermittent, Physical Damage, Environmental Conditions,
Communication, CPU watchdog, etc.)
(Attach a separate sheet if necessary)
2. Comm. interface used: Standalone RS-485 Ethernet Modem (PLM (2W or 4W) or SNW) Other:______________
3. What is the Firmware revision? _____________________ What is the Software &version?
Part III If checking “replaced” for any question below, check an alternate option if replacement is not available
A. If product is within the warranty time period but is excluded due
to Bristol’s warranty clause, would you like the product:
repaired returned replaced scrapped?
B. If product were found to exceed the warranty period,
would you like the product:
C. If product is deemed not repairable would you like your product:
D. If Bristol is unable to verify the discrepancy, would you like the product:
repaired returned replaced scrapped?
returned replaced scrapped?
returned replaced *see below?
* Continue investigating by contacting the customer to learn more about the problem experienced? The person to contact
that has the most knowledge of the problem is: ______________________________ phone_____________________
If we are unable to contact this person the backup person is: _________________________
Special Requests: ____________________________________________________________________________________
phone_____________________
____________________________________________________________________________________________________
Ship prepaid to: Bristol Inc., Repair Dept., 1100 Buckingham Street, Watertown, CT 06795
Phone: 860-945-2442 Fax: 860-945-3875 Form GBU 13.01 Rev. B 04/11/06
Page 6

Bristol
Training
GET THE MOST FROM YOUR BRISTOL
BABCOCK INSTRUMENT OR SYSTEM
• Avoid Delays and problems in getting your system on-line
• Minimize installation, start-up and maintenance costs.
• Make the most effective use of our hardware and software.
• Know your system.
As you know, a well-trained staff is essential to your operation. Bristol Inc. offers a full
schedule of classes conducted by full-time, professional instructors. Classes are offered
throughout the year at three locations: Houston, Orlando and our Watertown, CT
headquarters. By participating in our training, your personnel can learn how to install,
calibrate, configure, program and maintain any and all Bristol products and realize the full
potential of your system.
For information or to enroll in any class, contact our training department in Watertown at
(860) 945-2343. For Houston classes, you can also contact our Houston office, at (713) 685-
6200.
Page 7

A Few Words About Bristol Inc.
For over 100 years, Bristol® has been providing innovative solutions for the measurement
and control industry. Our product lines range from simple analog chart recorders, to
sophisticated digital remote process controllers and flow computers, all the way to turnkey
SCADA systems. Over the years, we have become a leading supplier to the electronic gas
measurement, water purification, and wastewater treatment industries.
On off-shore oil platforms, on natural gas pipelines, and maybe even at your local water
company, there are Bristol Inc. instruments, controllers, and systems running year-in and
year-out to provide accurate and timely data to our customers.
Getting Additional Information
In addition to the information contained in this manual, you may receive additional assistance in using this product from the following sources:
Help Files / Release Notes
Many Bristol software products incorporate help screens. In addition, the software typically
includes a ‘read me’ release notes file detailing new features in the product, as well as other
information which was available too late for inclusion in the manual.
Contacting Bristol Inc. Directly
Bristol's world headquarters is located at 1100 Buckingham Street, Watertown,
Connecticut 06795, U.S.A.
Our main phone numbers are:
(860) 945-2200
(860) 945-2213 (FAX)
Regular office hours are Monday through Friday, 8:00AM to 4:30PM Eastern Time,
excluding holidays and scheduled factory shutdowns. During other hours, callers may leave
messages using Bristol's voice mail system.
Telephone Support - Technical Questions
During regular business hours, Bristol's Application Support Group can provide telephone
support for your technical questions.
For technical questions about TeleFlow products call (860) 945-8604.
For technical questions about ControlWave call (860) 945-2394 or (860) 945-2286.
For technical questions regarding Bristol’s OpenEnterprise product, call (860) 945-3865
or e-mail: scada@bristolbabcock.com
Page 8

For technical questions regarding ACCOL products, OpenBSI Utilities, UOI and all other
software except for ControlWave and OpenEnterprise products, call (860) 945-2286.
For technical questions about Network 3000 hardware, call (860) 945-2502.
You can e-mail the Application Support Group at: bsupport@bristolbabcock.com
The Application Support Group maintains an area on our web site for software updates and
technical information. Go to: www.bristolbabcock.com/services/techsupport/
For assistance in interfacing Bristol hardware to radios, contact Bristol’s Communication
Technology Group in Orlando, FL at (407) 629-9463 or (407) 629-9464.
You can e-mail the Communication Technology Group at:
orlandoRFgroup@bristolbabcock.com
Telephone Support - Non-Technical Questions, Product Orders, etc.
Questions of a non-technical nature (product orders, literature requests, price and delivery
information, etc.) should be directed to the nearest sales office (listed on the rear cover of
this manual) or to your Bristol-authorized sales representative.
Please call the main Bristol Inc. number (860-945-2200) if you are unsure which office
covers your particular area.
Visit our Site on the World Wide Web
For general information about Bristol Inc. and its products, please visit our site on the
World Wide Web at: www.bristolbabcock.com
Training Courses
Bristol’s Training Department offers a wide variety of courses in Bristol hardware and
software at our Watertown, Connecticut headquarters, and at selected Bristol regional
offices, throughout the year. Contact our Training Department at (860) 945-2343 for course
information, enrollment, pricing, and scheduling.
Page 9

PIP-CW_10 Upgrade Kit
Hardware Installation Guide
TABLE OF CONTENTS
SECTION TITLE PAGE #
SECTION 1 – ControlWave_10 INTRODUCTION...................................... 1
SECTION 2 – ControlWave PROGRAMMING ENVIRONMENT......................... 1
SECTION 3 – PHYSICAL DESCRIPTION ............................................ 3
3.1 CW_10 CPU Board Overview............................................................................................ 3
3.1.1 CW_10 CPU Board Serial Comm. Port Connectors......................................................... 6
3.1.2 CW_10 CPU Board Memory.............................................................................................. 6
3.1.3 CW_10 CPU Board Configuration Jumpers..................................................................... 6
3.1.4 CW_10 CPU Board Configuration Switches .................................................................... 7
3.1.5 CW_10 CPU Board LEDs .................................................................................................. 8
3.2 CW_10 Multi-Function Interface Board (MFIB) Overview........................................... 10
3.2.1 Setting MFIB Board DIP Switches................................................................................. 11
3.2.2 Setting MFIB Board Configuration Jumpers ................................................................ 14
3.2.3 MFIB Board LED Indicators........................................................................................... 15
3.2.4 MFIB Board Communication Port Information............................................................. 15
SECTION 4 – ControlWave_10 CONFIGURATION.................................. 16
4.1 Step 1 - Hardware Configuration ................................................................................... 16
4.2 Step 2 - Software Installation on the PC Workstation .................................................. 21
4.3 Step 3 - Establish Communications using either LocalView or NetView,
and Run the Flash Configuration Utility ....................................................................... 21
4.4 Step 4 - Create an Application-specific Control Strategy in
ControlWave Designer..................................................................................................... 21
4.5 Step 5 - Create Application Specific Web Pages (OPTIONAL) ..................................... 22
4.6 Step 6 - Create an Open BSI Network Containing the CW_10,
or add the CW_10 to an Existing Open BSI Network ................................................... 23
4.7 Step 7 - Download the Application-specific Control Strategy
into the CW_10 RTU ....................................................................................................... 23
SECTION 5 – OPERATIONAL DETAILS........................................... 23
5.1 Downloading the Application Load................................................................................. 24
5.2 Upgrading CW_10 Firmware.......................................................................................... 24
5.2.1 Using LocalView to Upgrade CW_10 Firmware ............................................................ 24
5.2.2 Using HyperTerminal to Upgrade CW_10 Firmware ................................................... 27
5.2.3 Remote Upgrade of CW_10 Firmware............................................................................ 30
5.3 Core Updump ................................................................................................................... 30
SECTION 6 – GENERAL SERVICE NOTES ........................................ 31
6.1 Extent of Field Repairs.................................................................................................... 31
6.2 Disconnecting RAM Battery ........................................................................................... 31
6.3 Maintaining Backup Files............................................................................................... 31
PIP-CW_10 Upgrade Kit Contents / 0 - 1
Page 10

PIP-CW_10 Upgrade Kit
Hardware Installation Guide
TABLE OF CONTENTS
SECTION TITLE PAGE #
SECTION 7 – WINDIAG DIAGNOSTICS ........................................... 32
7.1 Diagnostics Using WINDIAG ......................................................................................... 33
7.1.1 Communication Diagnostic Port Loop-back Tests......................................................... 34
7.1.2 Serial Comm. Port External Loop-back Test Procedure ............................................... 34
SECTION 8 – CW_10 SPECIFICATIONS ........................................... 36
8.1 CW_10 CPU Board Specifications .................................................................................. 36
8.1.1 CPU Board Communication Port Specifications ........................................................... 36
8.1.2 CPU Board 3.3V Power Supply Specifications............................................................... 36
8.1.3 CPU Board Environmental Specifications ..................................................................... 37
8.2 CW_10 Multi-Function Interface Board (MFIB) Specifications ................................... 37
8.2.1 MFIB Board Connectors.................................................................................................. 37
8.2.2 MFIB Board Communication Port Specifications.......................................................... 37
8.2.3 MFIB Board Power Supply Specifications ..................................................................... 37
8.2.4 MFIB Board Environmental Specifications ................................................................... 38
APPENDICES
MATERIAL SAFETY DATA SHEETS..........................................................................Appendix Z
REFERENCED BRISTOL CUSTOMER INSTRUCTION MANUALS
WINDIAG - Windows Diagnostics for Bristol Controllers ................................... D4041A
Open BSI Utilities Manual ...................................................................................... D5081
Getting Started with ControlWave Designer.......................................................... D5085
ACCOL Translator User Guide ............................................................................... D5086
Web_BSI Manual...................................................................................................... D5087
ControlWave Designer Reference Manual .............................................................. D5088
ControlWaveMICRO Quick Setup Guide ................................................................ D5124
ControlWave Designer Programmer’s Handbook................................................... D5125
0 - 2 / Contents PIP-CW_10 Upgrade Kit
Page 11

ControlWave_10
HARDWARE INSTALLATION GUIDE
SECTION 1 - ControlWave_10 INTRODUCTION
An RTU 3310 can be field upgraded to become a ControlWave_10 RTU (herein referred to
as CW_10) by utilizing the hardware provided in an installation kit. Upgrade will require
replacement of the standard RTU 3310 CPU and Multi-Function Interface Boards with the
CW_10 CPU (CPU) and CW_10 Multi-Function Interface (MFIB) Boards provided in the
upgrade kit.
ControlWave® products have been designed and integrated as a highly adaptable, high
performance Distributed Open Controller family with exceptional networking capability
that provides a complete Process Automation Management Solution. The CPU and MFIB
Boards were designed with an emphasis on providing high performance with low power
consumption and scalability.
The CPU Board utilizes Sharp’s LH7A400 System-on-Chip Advanced RISC Machine (ARM)
microprocessor with 32-bit ARM9TDMI Reduced Instruction Set Computer (RISC) Core. In
addition to the microprocessor and control logic, the CPU Board includes two
communication ports that can be individually configured for RS-232 or RS-485 operation,
1MB of battery backed Static RAM (SRAM), 4MB of Synchronous Dynamic RAM (SDRAM),
512kB Boot/Downloader FLASH, 16MB simultaneous read/write FLASH, and an I/O Bus
Connector.
In addition to Idle and Watchdog LEDs, there are six status LEDs located on the CPU
Board that will display run time status information. Two LEDs are also provided for each
Comm. Port.
CW_10 Distributed Process Controllers provide the following key features:
• ARM processor provides exceptional performance and low power consumption
• Four independently configurable asynchronous serial communication ports (RS-
232/RS-485), one asynchronous serial RS-232 communication port, one asynchronous serial RS-485/modem communication port and one 3-wire serial RS-232
Utility Port
• Wide temperature range: (-40 to +70°C) (-40 to 158°F)
• Utilizes existing RTU 3310 Chassis and I/O Boards
• RS-232/RS-485 Comm. Ports provided with LED status Indicators
• Battery backup for the real-time clock and the system’s SRAM is provided by a 3.0V,
300mA-hr lithium coin cell battery located on the CPU Board Ass’y.
• Class I, Div. 2 Hazardous Location approval
SECTION 2 - ControlWave PROGRAMMING ENVIRONMENT
The ControlWave programming environment uses industry-standard tools and protocols to
provide a flexible, adaptable approach for various process control applications in the water
treatment, wastewater treatment, and industrial automation business.
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 1
Page 12
The ControlWave programming environment consists of a set of integrated software tools
which allow a user to create, test, implement, and download complex control strategies for
use with Bristol’s CW_10 Remote Terminal Unit.
The tools that make up the programming environment are:
• ControlWave Designer load building package offers several different methods for
generating and debugging control strategy programs including function blocks, ladder
logic, structured languages, etc. The resulting process control load programs are fully
compatible with IEC 61131-3 standards. Various communication methods are offered,
including TCP/IP, serial links, as well as communication to Bristol’s Open BSI software
and networks
The I/O Configuration Wizard, accessible via a menu item in ControlWave Designer,
•
.
allows you to define process I/O modules in the CW_10 and configure the individual
mapping of I/O points for digital and analog inputs and outputs.
• The ACCOL3 Firmware Library which is imported into ControlWave Designer,
includes a series of Bristol specific function blocks. These pre-programmed function
blocks accomplish various tasks common to most user applications including alarming,
historical data storage, as well as process control algorithms such as PID control.
• The OPC Server (Object Linking and Embedding (OLE) for Process Control) allows
real-time data access to any OPC [Object Linking and Embedding (OLE) for Process
Control] compliant third-party software packages.
• A series of Configuration Controls are available for setting up various aspects of the
system such as historical data storage, system security, and soft switches. Additional
Data Access Controls are also available for retrieval of real-time data values and
communication statistics. The configuration controls and the data access controls utilize
ActiveX technology and are called through a set of fixed Web pages, compatible with
Microsoft® Internet Explorer. Alternatively, developers can place the controls in thirdparty ActiveX compatible containers such as Visual BASIC or Microsoft® Excel.
• User-defined Web Pages - If desired, user-defined web pages can be stored within a
PC to provide a customized human-machine interface (HMI).
• Flash Configuration Utility – Parameters such as the BSAP local address, IP ad-
dress, etc. are set using the Flash Configuration Utility, accessible via Open BSI
LocalView or NetView.
Note: RTU 3310s that are upgraded with “CW_10 Hardware,” must have their
ACCOL application load converted to an IEC 61131 ControlWave Program Load.
This is accomplished via the ACCOL Translator (see User Guide D5086).
Pg. 2 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 13

Figure 1 - ControlWave - Control Strategy Software Diagram
SECTION 3 - PHYSICAL DESCRIPTION
CW-10 Upgrade kits are comprised of the following major components:
• CW_10 CPU Board (CPU) Overview (Section 3.1)
• CW_10 Multi-Function Interface Board (MFIB) Overview (Section 3.2)
3.1 CW_10 CPU Board Overview
The multilayer CPU Board provides CW_10 CPU, I/O monitor/control, memory and
communication functions. CW_10 CPU Boards operate over an extended temperature range
with long-term product reliability.
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 3
Page 14

CW_10 CPU Boards are based on a 32-bit ARM9TDMI RISC Core Processor. CPU Boards
are specified to operate on CW_10 (+12Vdc or +24Vdc systems) and with a system clock
speed of 150 MHz. In addition to the microprocessor and control logic, the CW_10 CPU
Board includes two independently (DIP-Switch) configurable communication ports (RS232/RS-485) (COM5 & COM6), CPU Memory consists of 1MB of battery backed Static RAM
(SRAM), 512kB Boot/Downloader FLASH and 16MB simultaneous read/write FLASH.
CPU Boards are provided backup power via a coin cell socket that accepts a 3.0V, 300mA-hr
lithium battery. This 3.0V battery provides backup power for the real-time clock and the
system’s Static RAM (SRAM). Backup power is enabled when Configuration Jumper W3
(just below the battery) is installed in position 1 to 2.
If the 3.3Vdc that powers the unit goes out of specification, a supervisory circuit on the CPU
Board switches the battery voltage to the CPU’s SRAM and RTC.
The system SRAM is specified to have a standby current of 20:A for each part (1MB),
(40:A maximum) (plus 2uA for the RTC). For a system containing 1MB of system SRAM, a
worst-case current draw of 42:A allows a battery life of approximately 7142 hours.
A supervisory circuit is used to switch to battery power when VCC falls out of specification.
For maximum shelf life, the battery may be isolated from the circuit by removing the
Backup Enable Jumper W3 from position 1 to 2 and then installing it in position 2 to 3. If
the Real-time clock looses its battery backup a ControlWave Designer system variable bit
(_QUEST_DATE) is set. This bit can be used to post a message or alarm to the PC (see the
ControlWave Designer Programmer’s Handbook - D5125, System Variables
Section).
Basic CCPU Board components and features are summarized as follows:
• LH7A400 System-on-Chip 32-bit ARM9TDMI RISC Core microprocessor
• Supports process control loads that are fully compatible with IEC 61131-3 standards
• 512KB FLASH Boot/Downloader, 29LV040B, 90 nS, 8-bit access
• 1MB SRAM, 3.3V, 256 x 16, 70 nsec., with Battery Back-up
• 4 MB SDRAM via two 1M x 16, 100MHz SDRAMs configured as a 1M x 32-bit array.
• 16MB simultaneous read/write FLASH, 90 nsec.
• 2 user configurable serial Comm. ports (RS-232/RS-485) (COM5 & COM6) (compatible
with existing 3310 communication cables)
• I/O Bus Interface, control for up to 4 I/O Boards
• Spread Spectrum clock for lower EMI
• Serial Real Time Clock with battery backup
• 8-Position general-purpose switch bank plus a 4-Position recovery switch bank
• Coin cell socket accepts a 3.0V, 300mA-hr lithium battery
• Six Status LEDs, 6 Comm. Port LEDs plus Watchdog, Idle and Comm. Port LEDs
• 3-wire (RS-232) Utility Port
Pg. 4 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 15

Figure 2 - CW_10 CPU Board Component Identification Diagram
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 5
Page 16

3.1.1 CW_10 CPU Board Serial Comm. Port Connectors
CPU Boards supports up to two serial communication ports (COM5 and COM6). COM5 and
COM6 are interconnected to the Connector Mounting Plate on the top of the CW_10 cover,
which contains two Female D-Type connectors (see Table 10 for D-type connector pin
assignments). One end of the interface cable is connected to J5 on the CW_10 CPU Board.
The other end of the cable is terminated into the two 9-pin D-type connectors on the
Connector Mounting Plate. Connector Mounting Plate Assembly Connector BIP1 supports
Comm. Port 5 while connector BIP2 supports Comm. Port 6. When configured for RS-485
operation Comm. 5 and Comm. 6 receivers are enabled by DTR the RS-485 driver is enabled
by RTS. An eight position DIP-Switch (SW3) is assigned to Comm. Port 5 and another
(SW4) is assigned to Comm. Port 6. These switches provide user configuration of RS-485
port receiver biasing and termination as well as 2-wire or 4-wire operation.
3.1.2 CW_10 CPU Board Memory
Boot/downloader FLASH
Boot/download code is contained in a single 512Kbytes FLASH IC. 4-Position DIP-Switch
SW1’s position 3 allows start-up menu options to be displayed or boot-up from system
FLASH. If SW1-3 is closed (ON) when a reset occurs, the boot-up code will cause a recovery
menu to be sent out the Utility Port (on the CPU Board) to a terminal program running on
an external host computer. Note: Recovery Mode will also be initiated if CPU Board Switch
SW1 positions 1 and 2 are both set ON or OFF when a reset occurs.
FLASH Memory
The base version of the CPU Module has 16Mbytes of 3.3V, simultaneous read/write (DL)
FLASH memory. System Firmware and the Boot Project are stored here.
System Memory (SRAM)
The CPU Board has 1Mbyte of static RAM, implemented with two 256K x 16, 70
nanosecond asynchronous SRAMs. All random access memory retained data is stored in
SRAM. During power loss periods, SRAM is placed into data retention mode (powered by a
backup 3.0V lithium battery). SRAM’s operates at 3.3V and are packaged in a 44-pin
uTSOP. Critical system information that must be retained during power outages or when
the system has been disabled for maintenance is stored here. Data includes: Last states of
all I/O, historical data, retain variables and pending alarm messages not yet reported. The
SRAM supports 32-bit accesses.
Synchronous Dynamic RAM (SDRAM)
The CW_10 CPU Board contains 4 Mbytes of Synchronous Dynamic RAM (SDRAM)
implemented with two 1M x 16, 100MHz Synchronous DRAMs. The running application is
stored here. This allows the system to run faster than it will from the FLASH memory.
SDRAM is not battery-backed.
3.1.3 CW_10 CPU Board Configuration Jumpers
CW_10 CPU Boards are provided with 18 User Configuration Jumpers that function as
follows:
• W3 - Enable/Disable Battery Back-up Selection
1 to 2 = Enable Battery Back-up
2 to 3 = Disable Battery Back-up
Pg. 6 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 17

• W5 - Status LED Enable/Disable Selection
1 to 2 = Enable Status LEDs
2 to 3 = Disable Status LEDs
• W8 - Serial Comm. Port Status LED Enable/Disable Selection
1 to 2 = Enable Serial Comm. Port Status LEDs
2 to 3 = Disable Serial Comm. Port Status LEDs
• W9 - BIP1 (Comm. Port 5) Configuration Selection Note: W10 through W13 ditto
1 to 2 = Set for RS-232 Operation
2 to 3 = Set for RS-485 Operation
• W14 - BIP1 (Comm. Port 5) DSR/DTR Control
1 to 2 = DSR on Pin-8 of D-type Connector
2 to 3 = DTR on Pin-8 of D-type Connector
• W15 - BIP1 (Comm. Port 5) Control
1 to 2 = CTS Source is from Port
2 to 3 = RTS to CTS Loopback
• W16 - BIP2 (Comm. Port 6) Configuration Selection Note: W17 through W20 ditto
1 to 2 = Set for RS-232 Operation
2 to 3 = Set for RS-485 Operation
• W21 - BIP2 (Comm. Port 6) DSR/DTR Control
1 to 2 = DSR on Pin-8 of D-type Connector
2 to 3 = DTR on Pin-8 of D-type Connector
• W22 - BIP2 (Comm. Port 6) Control
1 to 2 = CTS Source is from Port
2 to 3 = RTS to CTS Loopback
• W23 - Power Good LED Control
1 to 2 = Enable Power Good LED
2 to 3 = Disable Power Good LED
3.1.4 CW_10 CPU Board Configuration Switches
Four user-configurable DIP Switches are provided on the CW_10 CPU Board. Eight-bit
DIP-Switch SW2 is provided for user configuration settings while four-bit DIP-Switch SW1
provides forced recovery functions. Eight-bit DIP-Switch SW3 provides loopback,
termination control, and receiver bias settings for the Comm. Port 5 (BIP1) when BIP1 has
been configured for RS-485 operation (via jumpers W9 through W13). Eight-bit DIP-Switch
SW4 provides loopback, termination control, and receiver bias settings for Comm. Port 6
(BIP2) when BIP2 has been configured for RS-485 operation (via jumpers W16 through
W20).
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 7
Page 18
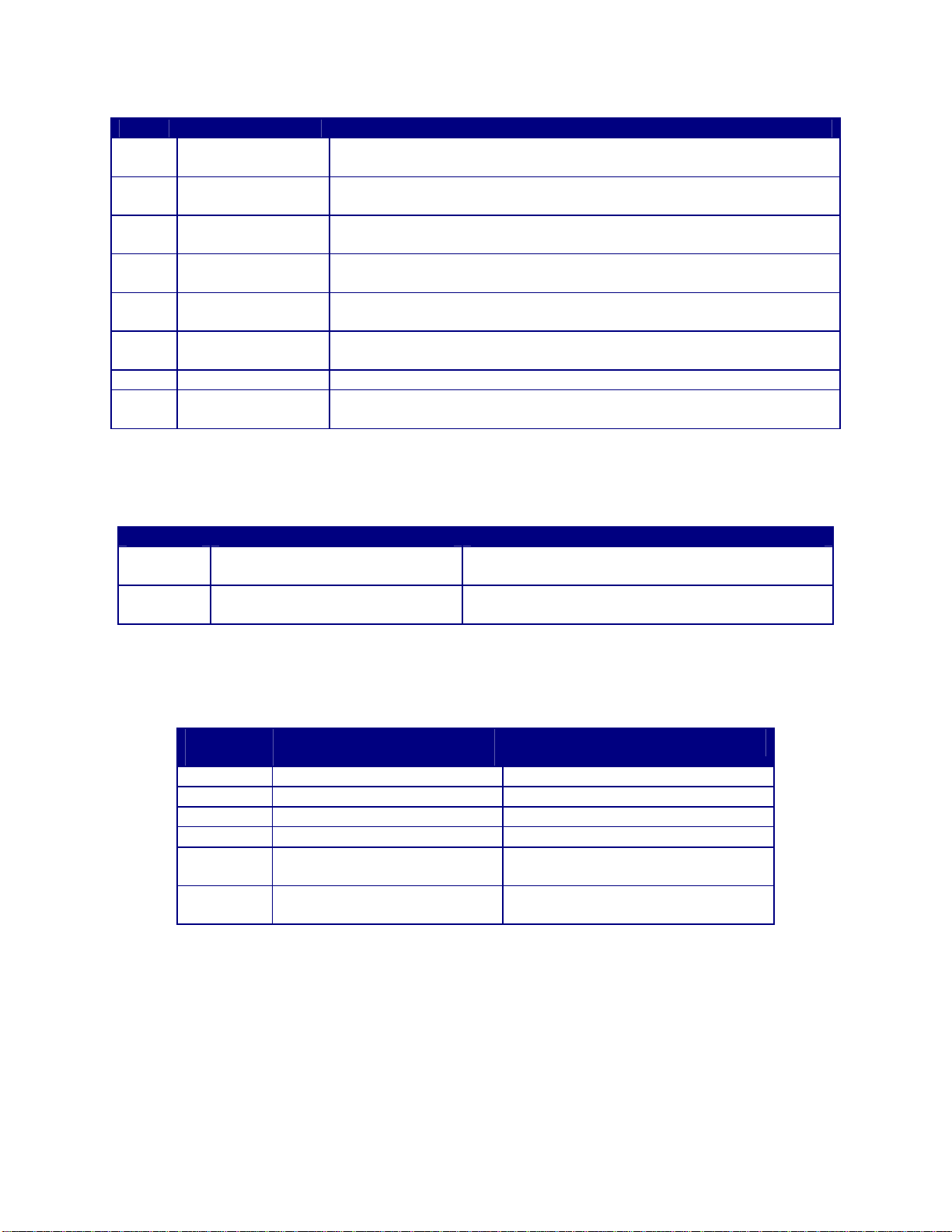
Table 1 - CW_10 CPU Board (General Purpose Switch SW2) Assignments
Note: Except for SW2-4, ON = Factory Default
SW# Function Setting - (ON = Factory Default)
SW2-1 Watchdog Enable
SW2-2
SW2-3
SW2-4
SW2-5 SRAM Control
SW2-6
SW2-7 N/A
SW2-8 Enable WINDIAG
* = Boot PROM version 4.7 or higher and System PROM version 4.6 or higher
Lock/Unlock
Soft Switches
Use/Ignore
Soft Switches
Core Updump
See Section 3.6
System Firmware
Load Control
ON = Watchdog circuit is enabled
OFF = Watchdog circuit is disabled
ON = Write to Soft Switches and FLASH files
OFF = Soft Switches, configurations and FLASH files are locked
ON = Use Soft Switches (configured in FLASH)
OFF = Ignore Soft Switch Configuration and use factory defaults
ON = Core Updump Disabled
OFF = Core Updump Enabled via Recovery Switch (SW1)
ON = Retain values in SRAM during restarts
OFF = Force system to reinitialize SRAM
ON = Enable remote downloading of System Firmware *
OFF = Disable remote downloading of System Firmware
ON = Normal Operation (don’t allow WINDIAG to run test)
OFF = Disable boot project (allow WINDIAG to run test)
Table 2 - CW_10 CPU Board (Switch SW1) Assignments CPU/System
Recovery Mode/Local Mode Control (Note: SW1-4 not used)
SWITCH Function Setting
SW1-1/2
SW1-3 Force Recovery Mode
* Note: Only the CCPU Switch SW1 settings listed in this table have been tested.
Recovery/Local Mode *
Both ON or OFF = Recovery Mode
SW1 OFF & SW2 ON = Local Mode
ON = Force Recovery Mode (via CW Console)
OFF = Recovery Mode disabled
Table 3 - CW_10 CPU Board Switch SW3/SW4 Assignments
RS-485
Loopback & Termination Control (COM5 = SW3 & COM6 = SW4)
SWITCH
#
SW3/4-1 TX+ to RX+ Loopback/2-Wire ON - Only for Diagnostics
SW3/4-2
SW3/4-3 100 Ohm RX+ Termination ON - End Nodes Only
SW3/4-4
SW3/4-7 RX+ Bias (End Nodes/Node)
SW3/4-8
RS-485 Function
Switch ON
TX− to RX− Loopback/2-Wire
100 Ohm RX− Termination
RX− Bias (End Nodes/Node)
Setting
ON - Only for Diagnostics
ON - End Nodes Only
ON - 4-Wire = Both End Nodes
ON - 2-Wire = One End Node Only
ON - 4-Wire = Both End Nodes
ON - 2-Wire = One End Node Only
3.1.5 CW_10 CPU Board LEDs
CW_10 CPU Boards are equipped with 15 LEDs. Table 4 provides CPU Board LED
assignments. Table 5 provides definitions for the six Status LEDS.
Pg. 8 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 19
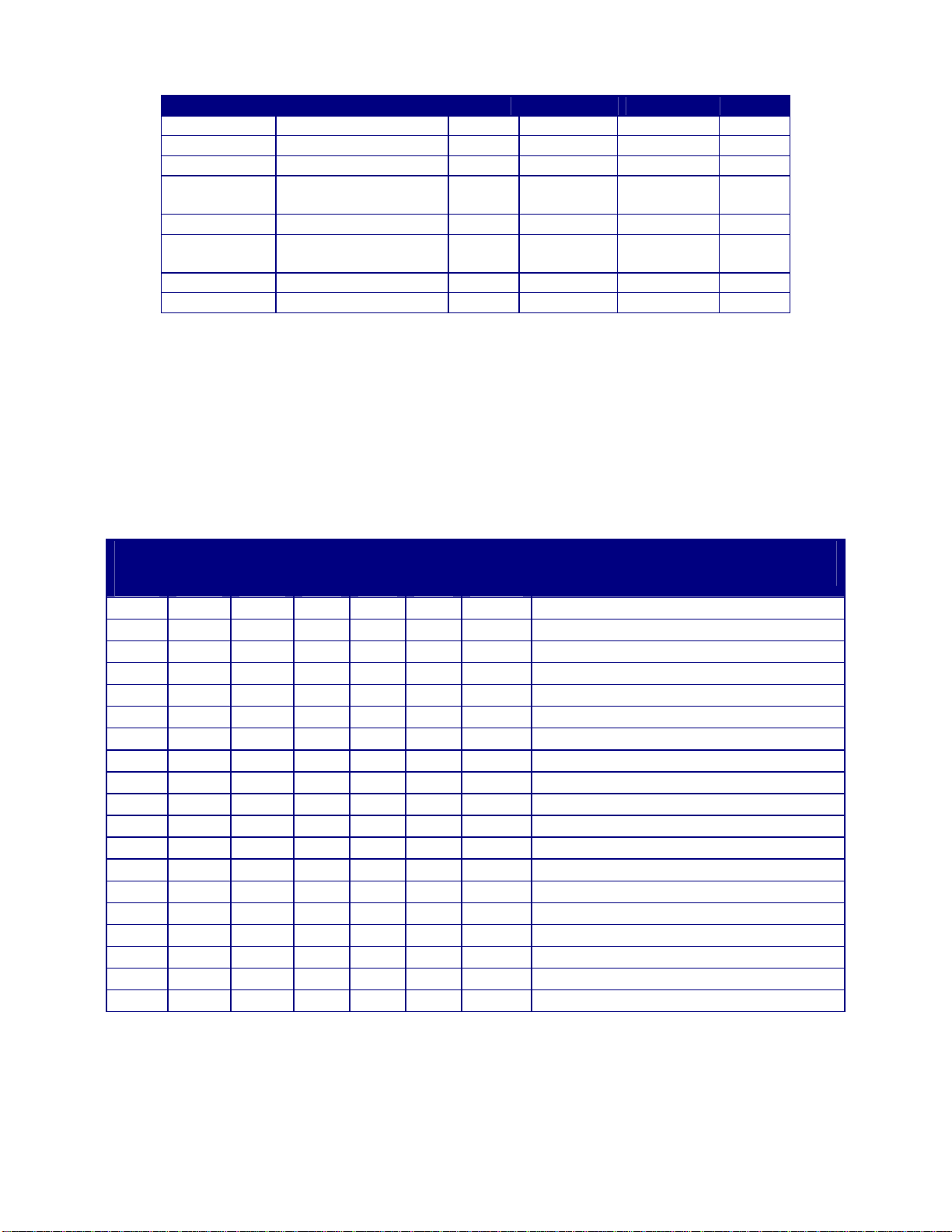
Table 4 - Assignment of CW_10 CPU Board LEDs
LED Ref. Function Color LED Ref. Function Color
CR2 Utility Port TX Red CR8 Status 2 Red
CR3 Utility Port RX Red CR9 Status 3 Red
CR4 - Top COM5 (BIP1) TX Red CR10 Status 4 Red
CR4 Bottom
CR5 - Top COM6 (BIP2)TX Red CR12 Status 6 Red
CR5 Bottom
CR6 Power Good Green CR14 Idle Red
CR7 Status 1 Red
COM5 (BIP1) RX Red CR11 Status 5 Red
COM6 (BIP2) RX Red CR13 Watchdog Red
Two red LEDs provide for the following status conditions when lit: WD (CR13 - Indicates a
Watchdog condition has been detected) & IDLE (CR14 - Indicates that the CPU has free
time at the end of its execution cycle. Normally, it should be ON most of the time. When the
Idle LED is OFF, it indicates that the CPU has no free time, and may be overloaded). The
green Power Good LED (CR6) is on when power is within specification. Six status LEDs
provide run time status codes.
Table 5
System Status Codes for Status LCDs CW_10 CPU Board (see Figure 3)
LED
6
CR12
LED
5
CR11
LED
4
CR10
LED
3
CR9
LED
2
CR8
LED
1
CR7
Status
In
Hex
Indication
Definition
0 0 0 0 0 0 00 Application Running
0 0 0 0 0 1 01 Unit in Diagnostic Mode
0 0 0 0 1 1 03 Unit Running Diagnostics
0 0 0 1 0 0 04 Flash XSUM Error
0 0 0 1 0 1 05 Error Initializing Application Device
0 0 0 1 1 1 07 Flash Programming Error
0 0 1 0 0 0 08 Using Factory Defaults *
0 0 1 0 0 1 09 Battery Failure Detected *
0 0 1 0 1 0 0A Currently Loading the Boot Project
0 0 1 0 1 1 0B System Initialization in Progress
0 1 0 0 0 0 10 Waiting in Recovery Mode
0 1 0 0 1 0 12 Error Testing SRAM
1 0 0 0 0 0 20 Application Loaded
1 0 1 0 0 0 28 Stopped at a Break Point
1 1 0 0 0 0 30 No Application Loaded
1 1 1 0 0 0 38 Running with Break Points
1 1 1 0 1 1 3B Waiting for Power-down (after NMI)
1 1 1 1 1 0 3E Waiting for Updump to be Performed
1 1 1 1 1 1 3F Unit Crashed (Watchdog Disabled)
* = Flashed at startup
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 9
Page 20

Figure 3 - CW_10 CPU Status LED Hexi-decimal Codes
3.2 CW_10 Multi-Function Interface Board (MFIB) Overview
Multi-Function Interface Boards provides plug-in connections for each PC board and I/O
Module used in the RTU CW-10. MFIBs generate +15Vdc, -15Vdc and +5Vdc outputs from
an integral DC-to-DC Converter and also provide other precision voltages required to
operate the RTU. Termination for dc power, Form “C” watchdog contacts are provided for
field wiring connections. The CMFIB also provides four communication ports which utilize
9-pin, D-Type, female connectors. Communications Ports 1 through 4 are identified in
Figure 5A and Figure 5B.
Standard 9-Pin D-Type Connectors are used. Communication Port 1 is dedicated to RS-232
operation and Comm. Port 2 is factory configured for RS-485 operation but may be user
configured (via Jumpers) for operation with a piggyback mounted Bristol modem. Communication Ports 3 and 4 can be configured for an RS-485 or RS-232 interface. The former
is required for BSAP network communications, while the latter is required for devices such
Pg. 10 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 21
as a PC or printer. However; these ports can also be configured for other applications. For
example, port 3 can be configured to interface with a PC while port 4 can be configured for
use with options such as an external modem or printer.
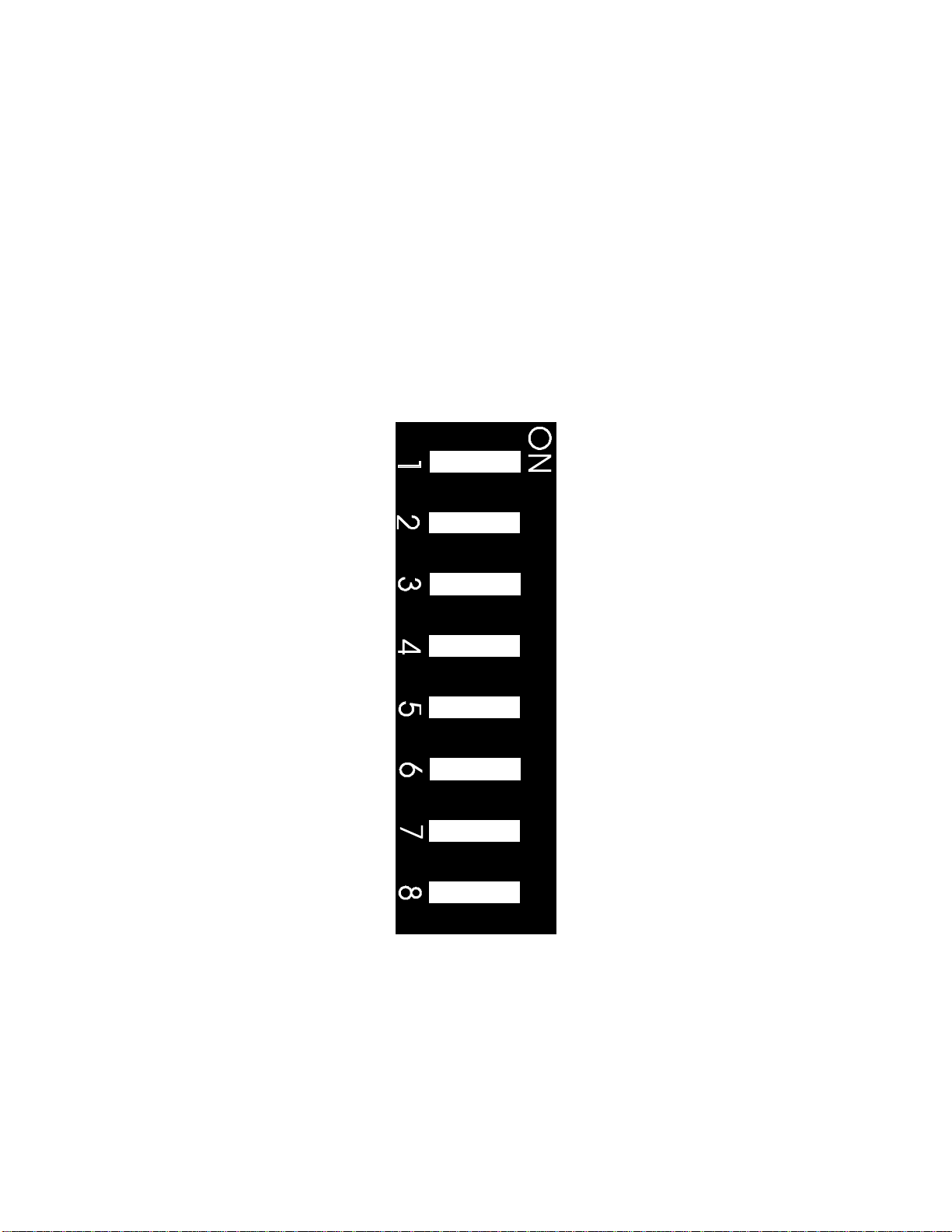
3.2.1 Setting MFIB Board DIP Switches
MFIB Boards contains three DIP switches (SW2, SW3 and SW4) for RS-485 operation
configuration of Comm. Ports 2 through 4 respectively. When an individual switch (toggle)
is pressed to the right it is set to its ON position (see Figure 4). Switches SW2 through SW4
control port configuration and are assigned as follows:
SW2 - Controls Port 2
SW3 - Controls Port 3
SW4 - Controls Port 4
Switch functions are provided for RS-485 operation, in Tables 7.
Figure 4 - Enlarged View of SW2-SW4
Setting switches SW2 through SW4 does not complete the set-up configuration. The
jumpers listed in Table 8 must also be set to complete the procedure.
Note: When the RTU is specified with an internal (Port 2 only) 1200 bps Private Line (PL)
Modem, a 1200 bps PL/PSTN Modem, a 9600 bps Publicly Switched Telephone Network
(PSTN) Modem, refer to the appropriate Customer Instruction Manual, i.e., CI-1200-PL, CI1200 (PL/PSTN), CI-9600 (PSTN) or CI-9600A (PSTN). For details on the Fiber Optic
Interface, refer to Appendix FA of Instruction Manual CI-3310.
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 11
Page 22

Figure 5A - CW_10 - MFIB Board Component Identification Diagram
(Original Version)
Pg. 12 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 23
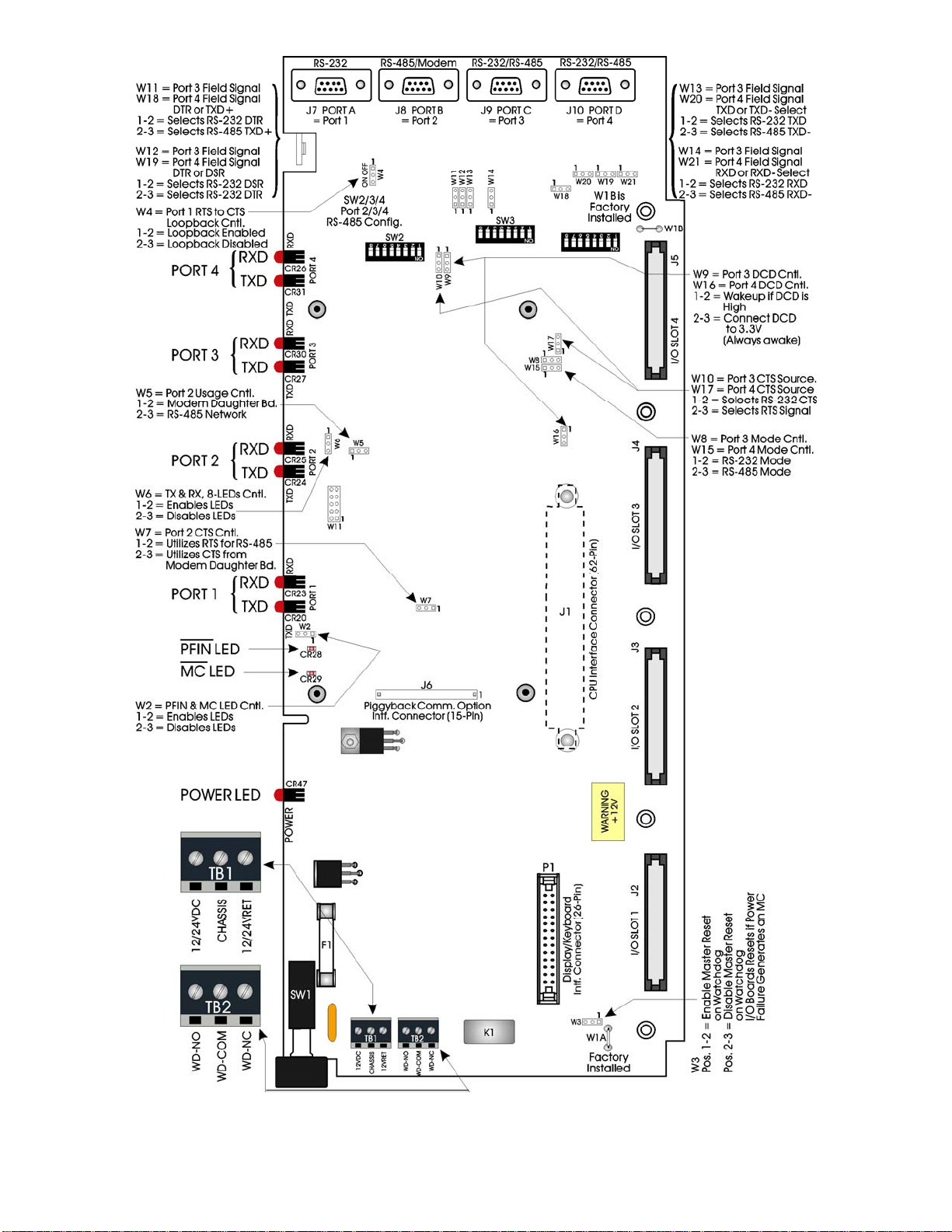
Figure 5B - CW_10 - MFIB Board Component Identification Diagram
(Present Version)
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 13
Page 24
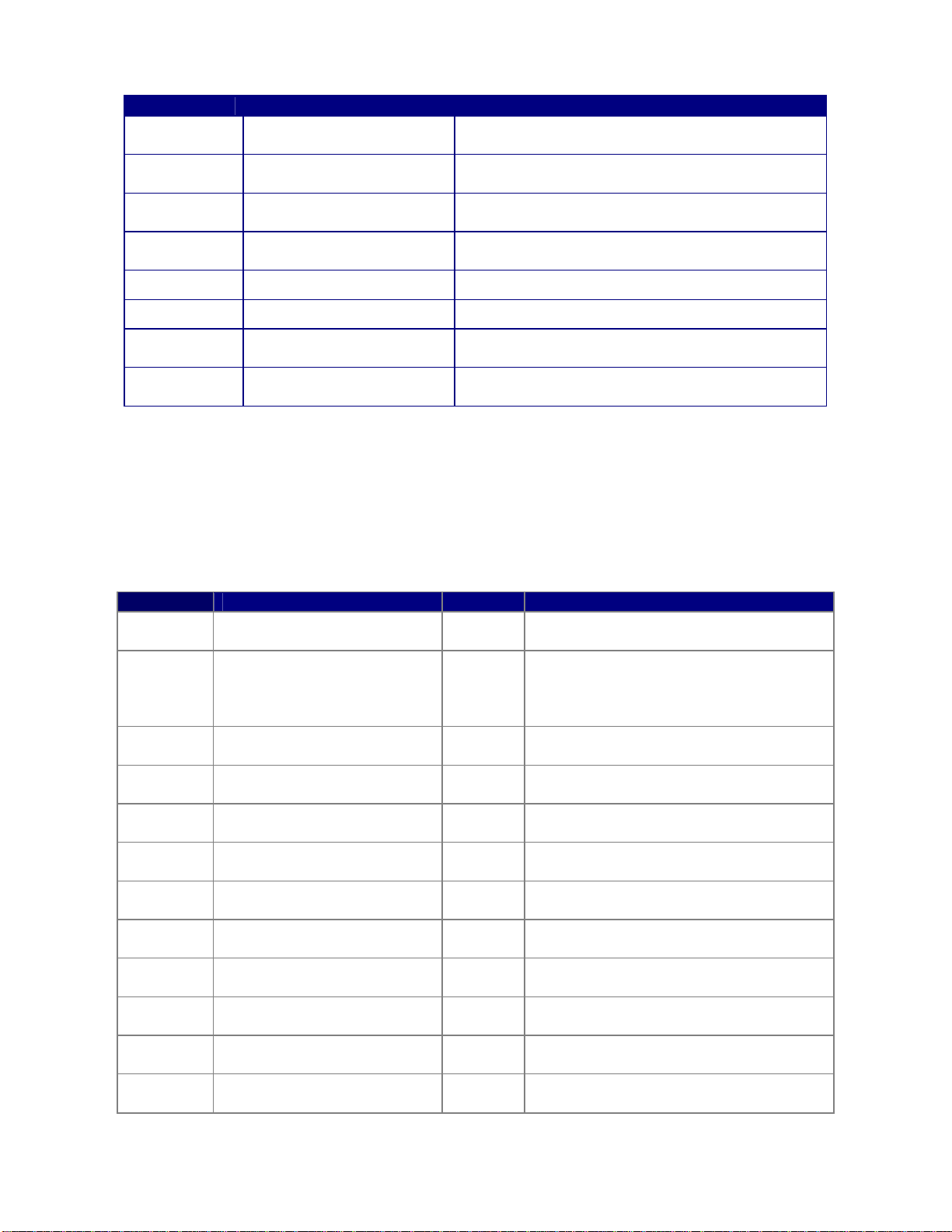
Table 6 - MFIB Board DIP Switches SW2 - SW4 - RS-485 Configuration Selections
SW1- SW4 Function Setting
1 TX+ to RX+ Loopback
2
3 RS-485 Termination
4 RS-485 Termination
5 OFF
6 OFF
7 RS-485 Bias Termination
8 RS-485 Bias Termination
TX− to RX− Loopback
ON =
OFF = Loopback Disabled, 4-Wire
ON =
OFF = Loopback Disabled, 4-Wire
ON =
OFF = No Termination
ON =
OFF = No Termination
ON = Bias Enabled (Pos. side of bias to +15Vdc)
OFF = No Bias
ON = Bias Enabled (Neg. side of bias to -15Vdc)
OFF = No Bias
Loopback Enabled, 2-Wire
Loopback Enabled, 2-Wire
Termination Installed
Termination Installed
3.2.2 Setting MFIB Board Configuration Jumpers
MFIB Boards contains up to twenty user configuration jumpers to set various
communication and operating parameters. The location of these jumpers is shown in Figure
5A and Figure 5B. Jumpers are set according to Table 7.
Table 7 - MFIB Board Configuration Jumper Settings
Jumper Description Setting Configuration
W2 PFIN & MC LED Control
W3 Master Reset Control
W4
W5 Port 2 Usage Control
W6
W7 Port 2 CTS Source Control
W8 Port 3 Mode Control
W9 Port 3 DCD Control
W10 Port 3 CTS Source Control
W11
W12
W13
Port 1 RTS/CTS Loopback
Control
Ports 1 through 4
TX/RX LED Control
Port 3 Field Signal Selection
DTR or TXD+
Port 3 Field Signal Selection
DTR or DSR
Port 3 Field Signal Selection
TXD or TXD−
1 to 2
2 to 3
1 to 2
2 to 3
1 to 2
2 to 3
1 to 2
2 to 3
1 to 2
2 to 3
1 to 2
2 to 3
1 to 2
2 to 3
1 to 2
2 to 3
1 to 2
2 to 3
1 to 2
2 to 3
1 to 2
2 to 3
1 to 2
2 to 3
Enable PFIN & MC LEDs
Disable PFIN & MC LEDs
Enable I/O Board Reset on Watchdog
Disable I/O Board Reset on Watchdog*
*I/O Boards reset if Power Failures
Generates on MC
Loopback Enabled
Loopback Disabled
Port 2 = Has Modem Daughter Board
Port 2 = RS-485 Network
Enables TX/RX LEDs
Disabled TX/RX LEDs
Utilize RTS for RS-485
Utilize CTS from Modem Daughter Bd.
Port 3 = RS-232
Port 3 = RS-485
Wakeup if DCD is High
Connect DCD to 3.3Vdc (Always awake)
Utilize Port 3 RS-232 CTS Signal
Utilize Port 3 RTS Signal
Utilize RS-232 DTR
Utilize RS-485 TXD+
Utilize RS-232 DSR
Utilize RS-232 DTR
Utilize RS-232 TXD
Utilize RS-485 TXD−
Pg. 14 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 25
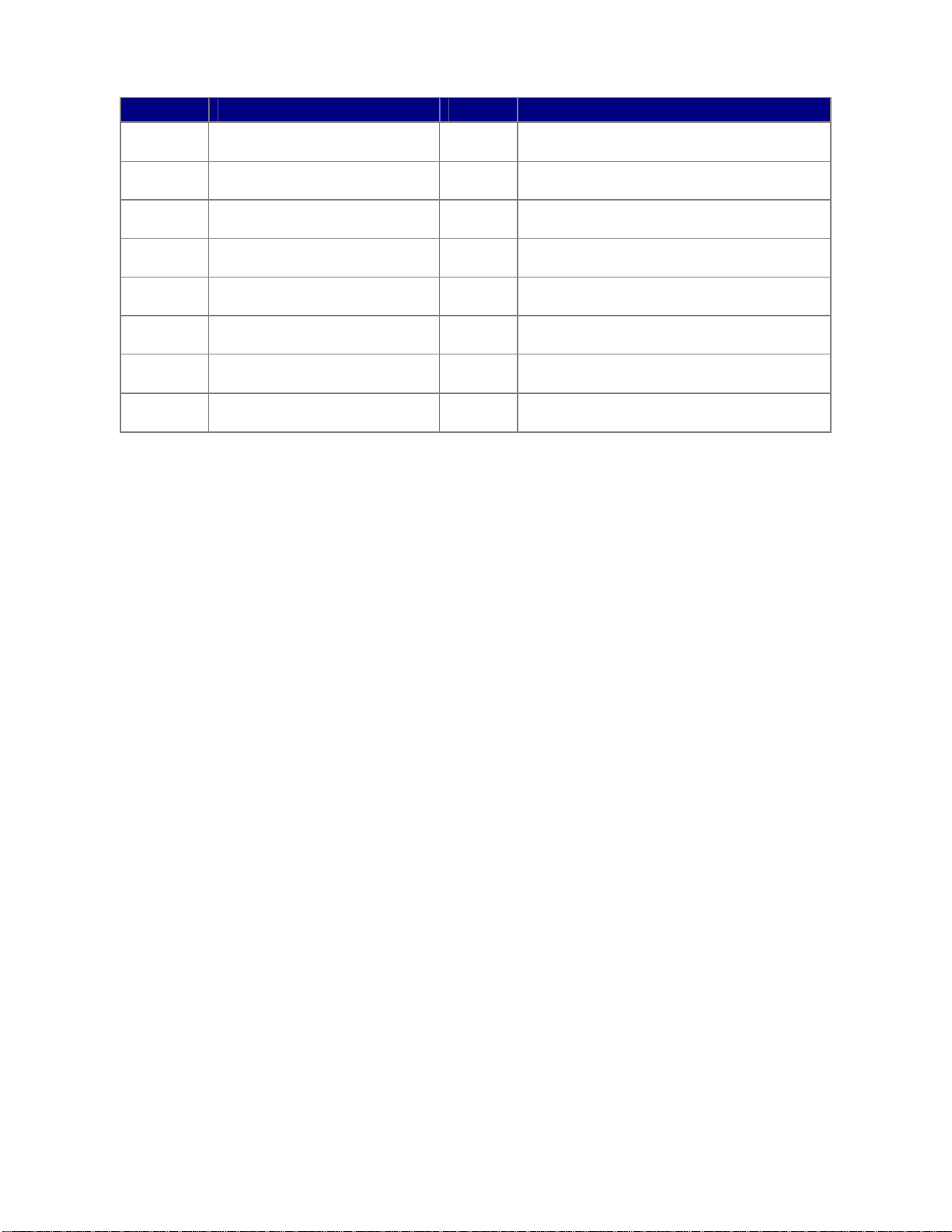
Table 7 - MFIB Board Configuration Jumper Settings (Continued)
Jumper Description Setting
W14
W15 Port 4 Mode Control
W16 Port 4 DCD Control
W17 Port 4 CTS Source Control
W18
W19
W20
W21
Port 3 Field Signal Selection
RXD or RXD−
Port 4 Field Signal Selection
DTR or TXD+
Port 4 Field Signal Selection
DTR or DSR
Port 4 Field Signal Selection
TXD or TXD−
Port 4 Field Signal Selection
RXD or RXD−
1 to 2
2 to 3
1 to 2
2 to 3
1 to 2
2 to 3
1 to 2
2 to 3
1 to 2
2 to 3
1 to 2
2 to 3
1 to 2
2 to 3
1 to 2
2 to 3
Utilize RS-232 RXD
Utilize RS-485 RXD−
Port 4 = RS-232
Port 4 = RS-485
Wakeup if DCD is High
Connect DCD to 3.3Vdc (Always awake)
Utilize Port 4 RS-232 CTS Signal
Utilize Port 4 RTS Signal
Utilize RS-232 DTR
Utilize RS-485 TXD+
Utilize RS-232 DSR
Utilize RS-232 DTR
Utilize RS-232 TXD
Utilize RS-485 TXD−
Utilize RS-232 RXD
Utilize RS-485 RXD−
Configuration
3.2.3 MFIB Board LED Indicators
In addition to power on (POWER) Power Fail Indication NOT (PFIN) and Master Clear
NOT (MC) LEDs, MFIB Boards provide a TX and RX indicator for each communication
channel. TX will light when the channel is transmitting data and RX lights when the
channel is receiving data. Depending upon the data activity, the TX/RX LEDs may blink or
appear continuously lit during communication activity. The TX/RX LEDs will be out when
there is no activity (see Figures 5A & 5B).
3.2.4 MFIB Board Communication Port Information
MFIB Boards have 4 serial communication ports that are supported by 9-pin female D-type
connectors that have pinouts similar to RTU 3310 MFIB Boards (see Figures 5A & 5B and
Table 9). CMFIB Board Communication Ports 3 and 4 can be individually user configured
for RS-232 or RS-485 operation. Communication Port 1 is dedicated to RS-232 operation.
Communication Port 2 can be configured for RS-485 or piggyback modem operation.
The following information is provided to support use of MFIB Board Comm. Ports:
• When configured for RS-232 operation, MFIB Comm. Ports support RTS, DTR, CTS,
DCD and DSR modem control signals.
• RS-232 transceivers are enabled by the port’s DTR signal, i.e., when DTR goes high the
port becomes active.
• Each RS-232 transceiver has one active receiver (DCD) while in the power-down mode
(disabled). DCD is connected to the active receiver.
• When configured for RS-485 operation, the MFIB Comm. Port receiver is enabled by
DTR while the driver is enabled by RTS.
• For RS-485 operation, an eight-position DIP switch (one per port 2 through 4) enables
receiver biasing and termination as well as two-wire and 4-wire selection.
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 15
Page 26

• MFIB RS-485 configured Comm. Port 4 is surge protected by a LC04-6 device.
• A 15-pin header (J6) supports the following CW_10 external communication device
options on MFIB Board Comm. Port 2: Radio Delay Interface (RDI), Transmitter
Interface Board (TIB), 1200 Baud, 9600 Baud and Fiber Optic Modems.
• Optional Piggy-back modems are supported by Comm. Port 2 only.
Table 8 - MFIB Board Connector J6 - Modem Option Header Pin Designations
Pin # Signal
2 GND
3 +5V
4 +15V
5 -15V
6 TXD
7 RTS NOT
8 DTR NOT
9 RXD
10 CTS NOT
11 DSR NOT
12 DCD NOT
Note: Pins 1, 13, 14 and 15 are unpopulated.
Table 9 - MFIB Board RS-232/RS-485 D-Type Connector
Pin Assignments
Note: Identical to CW_10 Ports 5 & 6 on Connector Mounting Plate
Pin #
1 DTR Data Terminal Ready Output TXD+ Transmit Data +
2 TXD Transmit Data Output
3 RXD+ Receive Data +
4 RXD Receive Data Input
5 RTS Request To Send Output
6 CTS Clear To Send Input
7 DCD Data Carrier Detect Input
8 DSR Data Set Ready Input
9 GND Ground GND Ground
Signal
RS-232
Description:
RS-232 Signals
Signal
RS-485
TXD− Transmit Data −
RXD− Receive Data −
Description:
RS-485 Signals
SECTION 4 - ControlWave_10 CONFIGURATION
There are seven (7) main steps required to configure a CW_10 RTU. This document
provides an overview of these steps with an emphasis on the installation and configuration
of the hardware. This section is also intended to serve as a reference for users who may
have already upgraded at least one CW_10 RTU.
4.1 Step 1 - Hardware Configuration
This involves unpacking the CW_10 upgrade hardware, setting switches and setting
jumpers on the new CW_10 boards, replacing the 3310’s CPU and MFIB Boards with the
CW_10 boards, reconnecting any permanent communication cables, and connecting a
communications cable to a PC workstation to facilitate downloading the application load. To
upgrade the 3310 RTU to a CW_10, follow Hardware Configuration steps 1 through 6
below:
Pg. 16 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 27

1. Remove the CW_10 boards from their carton. Remove all communication cables and the
CPU, I/O and MFIB Boards from the 3310 RTU being upgraded. (see Figures 2, 5A & 5B
as required). Note make sure the Comm. Cables are identified for proper
reinstallation.
2. Configure the DIP Switches and Jumpers on the MFIB (see Figures 4, 5A & 5B). Section
3.2.1 and Table 6 provide information on MFIB Board DIP Switches. Table 7 provides
information on MFIB Board Jumpers. If required remove the optional modem from the
MFIB Board removed from the 3310 RTU in Hardware Configuration step # 1 and
reinstall the modem onto the replacement MFIB Board. Install the replacement MFIB
Board into the CW_10.
3. Make sure that the Lithium Backup Battery has been enabled, i.e., Backup Battery
Jumper W3 on the CW_10 CPU should be installed across jumper posts 1 and 2.
Configure the CW_10 CPU Board’s DIP Switches and Jumpers. Figure 2 and Tables 1
through 3 provide information on Switch Settings. Jumper settings are provided in
Figure 2 and in section 3.1.4. Install the CW_10 CPU Board into the CW_10.
4. Re-install any I/O Module(s) removed in Hardware Configuration steps 1.
5. Connect the communication port cables removed in step 1. Connect the CW_10 CPU’s 3Wire Utility to a Communication Port of a PC (typically PC COMM. Port 1).
A CW_10 can be configured as a Master or Slave node on either a MODBUS network or
a BSAP network. A variety of communication schemes are available. Three
communication ports are contained on the CW_10 CPU Board. These communication
ports are discussed in Sections 3.1.2, 3.1.4 and 3.1.5 (CPU) and 3.2, 3.2.1, 3.2.2 and 3.2.4
(MFIB) and are designated as follows:
CW_10 CPU Board:
COM5 - Port BIP1 (physically located on the Connector Mounting Plate: (9-Pin Female
D-Type) RS-232 or RS-485 operation (Configured by CPU Jumpers W9 through
W15) (RS-485 operation utilizes CPU Switch SW3). Note: This port was
named BIP1 on original 3310 RTUs. When set for factory defaults, COM5
defaults to 9600 baud, 8-bits, no parity, 1 stop bit, BSAP/ControlWave Designer
protocol operation.
COM6 - Port BIP2 (physically located on the Connector Mounting Plate: (9-Pin Female
D-Type) RS-232 or RS-485 operation (Configured by CPU Jumpers W16
through W22) (RS-485 operation utilizes CPU Switch SW4). Note: This port
was named BIP2 on original 3310 RTUs. When set for factory defaults,
COM6 defaults to 9600 baud, 8-bits, no parity, 1 stop bit, BSAP/ControlWave
Designer protocol operation.
Utility Port - 3-Wire RS-232 (for FLASH Firmware and Core Updumps) (Utilizes CPU
Switch SW1). The Utility Port operates at 115.2 Kbaud and utilizes the
1KXModem or Xmodem protocol.
CW_10 MFIB Boards:
COM1 - Port 1 (J7): (9-Pin Female D-Type) RS-232 (Configured by MFIB Jumper W4).
Note: This port was named A on original RTU 3310s. When set for factory
defaults, COM1 defaults to 115 Kbaud (RS-232), BSAP operation.
COM2 - Port 2 (J8): (9-Pin Female D-Type) RS-232 or Piggyback Modem operation
(Configured by MFIB Jumpers W5 and W7) (RS-485 operation utilizes MFIB
Switch SW2). Note: This port was named B on original RTU 3310s. When
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 17
Page 28

set for factory defaults, COM2 defaults to 9600 baud, 8-bits, no parity, 1 stop
bit, BSAP/ControlWave Designer protocol operation.
COM3 - Port 3 (J9): (9-Pin Female D-Type) RS-232 or RS-485 operation (Configured by
MFIB Jumpers W8 through W14) (RS-485 operation utilizes MFIB Switch
SW3). Note: This port was named C on original RTU 3310s. When set for
factory defaults, COM3 defaults to 9600 baud, 8-bits, no parity, 1 stop bit,
BSAP/ControlWave Designer protocol operation.
COM4 - Port 4 (J10): (9-Pin Female D-Type) RS-232 or RS-485 operation (Configured by
MFIB Jumpers W15 through W21) (RS-485 operation utilizes MFIB Switch
SW4). Note: This port was named D on original RTU 3310s. When set for
factory defaults, COM4 defaults to 9600 baud, 8-bits, no parity, 1 stop bit,
BSAP/ControlWave Designer protocol operation.
Communication Ports COM1 through COM6 and the Utility Port support serial
asynchronous operation as listed above. Communication ports COM1 through COM6
can be configured for local communications, i.e., connected to a PC loaded with
ControlWave Designer and OpenBSI software. The Utility Port (J8 on the CW_10 CPU
Board) is used for FLASH firmware loads or Core Updumps. The pin labels for the
various RS-232/485 interface connectors are provided in Table 9 (see Figure 6 for RS232 wiring diagrams and CPU Port J8 Pin assignments).
4.1 Step 1 - Hardware Configuration (Continued)
RS-232 & RS-485 Interfaces
CW_10 RTU RS-232 & RS-485 communication schemes are discussed herein.
RS-232 Ports
An RS-232 interface supports Point to Point, half-duplex and full-duplex
communications (20 feet maximum, using data quality cable). Half-duplex communications supported by the CW_10 utilize MODBUS or BSAP protocol, while fullduplex is supported by the Point to Point (PPP) protocol. CW_10 RS-232 ports utilize
the cable shown in Figure 6A - Top to interconnect with other devices such as a PC or a
ControlWave series unit (other than a CW_10/30/35 the CW_10 RTU is
communicating using the full-duplex PPP protocol. The half-duplex cable of Figures 6A
(Bottom), is utilized when the CW_10 is connected to a ControlWave series unit other
than a CW_10/30/35 and is running other than the PPP protocol. If communicating with
a Bristol series 3305, 3310, 3330, 3335 RTU/DPC or to another CW_10/30/35 RTU/DPC,
one of the cables shown in Figure 6B must be used.
CW_10 RTU CPU Board’s Utility Port utilizes the cable shown in Figure 6C.
Note: The following facts regarding CW_10 RS-232 serial communication ports should
be observed when constructing communications cables:
• DCD must be high to transmit (except when dialing a modem)
• Each RS-232 transceiver has one active receiver while in powerdown mode
(disabled); the DCD signal is connected to the active receiver.
• CTS must be high to transmit.
• When port is set for full-duplex operation - RTS is always ON.
• DTR is always high (when port is active); DTR enables RS-232 Transceivers.
• When port is set for half-duplex operation - CTS must go low after RTS goes low.
• All RS-232 Comm. ports support RTS, DTR, CTS, DCD and DSR control signals.
Pg. 18 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 29

Figure 6 - Communication Port RS-232 Cable Wiring Diagram
4.1 Step 1 - Hardware Configuration (Continued)
RS-485 Ports
CW_10 RTUs can use an RS-485 communication port for local network communications
to multiple nodes up to 4000 feet away. Since this interface is intended for network
communications, Table 11 provides the appropriate connections for wiring the master,
1st slave, and nth slave. Essentially, the master and the first slave transmit and receive
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 19
Page 30

data on opposite lines; all slaves (from the first to the "nth") are paralleled (daisy
chained) across the same lines. The master node should be wired to one end of the RS485 cable run.
A 24-gauge paired conductor cable, such as Belden 9843 should be used. Note: Only half-
duplex RS-485 networks are supported
Table 10 - RS-485 Port
Connector Pin Assignments (COM 2 through COM6))
Pin
#
1 TXD+ Transmit Data + Output
2
3 RXD+ Receive Data + Input
4
9 Power Ground Ground
Signal
RS-485
TXD− Transmit Data − Output
RXD− Receive Date − Input
Description:
RS-485 Signals
Receiver biasing and termination as well as 2-wire or 4-wire selection are enabled by
eight-position DIP-Switches situated on the CW_10 CPU Board for COM5 and COM6 or
on CW_10 MFIB Boards for COM 2 through COM 4 as follows:
COM2: MFIB Board Switch SW2 (see Figures 5A & 5B) (see Table 6)
COM3: MFIB Board Switch SW3 (see Figures 5A & 5B) (see Table 6)
COM4: MFIB Board Switch SW4 (see Figures 5A & 5B) (see Table 6)
COM5: CPU Board Switch SW3 (see Figure 2) (see Table 3)
COM6: CPU Board Switch SW4 (see Figure 2) (see Table 3)
Table 10 provides the connector pin assignments for all CW_10 RS-485 communication
ports. Tables 3 & and 6 provide the RS-485 termination and loopback control Switch
Settings for the RS-485 Ports on the CPU and MFIB Boards (respectively).
To ensure that the “Receive Data” lines are in a proper state during inactive
transmission periods, certain bias voltage levels must be maintained at the master and
most distant slave units (end nodes). These end nodes also require the insertion of 100Ohm terminating resistors to properly balance the network. CPU Board and MFIB
Board switches must be configured at each node to establish proper network
performance. This is accomplished by configuring the appropriate CPU/MFIB Board
Switches so that the 100-Ohm termination resistors and biasing networks are installed
at the end nodes and are removed at all other nodes on the network (see Table 3 for
CPU Boards and Table 6 for MFIB Boards).
Table 11 - RS-485 Network Connections
(see Table 10 for CW_10 RS-485 Port Pin # Assignments)
From
Master
TXD+ RXD+ RXD+
TXD− RXD− RXD−
RXD+ TXD+ TXD+
RXD− TXD− TXD−
GND GND GND
To 1st
Slave
To nth
Slave
Pg. 20 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 31

Note: Pins 1, 2, 3, 4 & 9 of Series 3305, 3310, 3330, 3335 & 3340 RTU/DPC RS-485 Comm.
Ports are assigned as follows: 1 = TXD+, 2 = TXD-, 3 = RXD+, 4 = RXD- & 9 = ISOGND.
4.1 Step 1 - Hardware Configuration (Continued)
6. Apply power to the CW_10 RTU. Continue with Steps 2 through 7 below (Sections 4.2
through 4.7 and Section 5.1) and the CW_10 will be ready for on line operation.
4.2 Step 2 - Software Installation on the PC Workstation
ControlWave Designer software must be installed on the PC. This is accomplished by
installing the ControlWave Designer Package from the Open BSI CD ROM.
You must install the Open BSI Network Edition. For information on minimum system
requirements and more details of the installation, see the installation procedure in Chapter
2 of the Open BSI Utilities Manual (document # D5081).
IMPORTANT:
When you start ControlWave Designer, you will be reminded to register the
software. Unregistered software can only be used for a maximum of 30 days. For
more information on the registration process, see Chapter 2 of the Open BSI
Utilities Manual (document# D5081).
4.3 Step 3 - Establish Communications using either LocalView or NetView,
and run the Flash Configuration Utility
Communications must be established with the CW_10 using either LocalView or NetView.
The CW_10 CPU Board ships from the factory with a default Flash configuration. Most
users will need to edit this configuration to set the IP address (if using Ethernet – default
IP address = 10.0.1.1 with IP Mask = 255.255.255.0), BSAP local address, user accounts,
and port parameters. This can be done in one of two ways:
• Either open the supplied Flash Configuration Profile (FCP) file and modify it, directly in
the Flash Configuration Utility, or in a text editor,
• Or retrieve existing Flash Parameters directly from the unit, and edit them in the Flash
Configuration Utility.
Detailed information on the Flash Configuration Utility and LocalView is included in
Chapter 5 of the Open BSI Utilities Manual (document # D5081). NetView is described in
Chapter 6 of that same manual.
4.4 Step 4 - Create an Application-specific Control Strategy in Control-
Wave Designer
At this point, you can create your application-specific control strategy using ControlWave
Designer. If you are upgrading this unit from an RTU 3310 ACCOL II-based unit, you can
start by using the ACCOL Translator utility to take an existing ACCOL II load, and convert
it to a ControlWave Designer project. You will then need to examine the translated project,
and modify it, as necessary, to re-work logic that is unsupported in ControlWave Designer.
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 21
Page 32

If you don’t have a pre-existing ACCOL load to translate, you can create an all-new project
in ControlWave Designer.
MICRO’ template, defining I/O boards using the I/O Configurator, and creating a program
using one or more of the five supported IEC 61131 languages (FBD, ST, SFC, LD, or IL).
Some of these languages are text based, others use graphical diagrams. The choice is up to
you, depending upon your particular application.
The ControlWave MICRO Quick Setup Guide (document # D5124) includes a simple LD
example. Additional examples are included in the manual, Getting Started with
ControlWave Designer (document # D5085). More detailed information about
ControlWave Designer and IEC 61131 is included in the ControlWave Designer Reference
Manual (document # D5088).
The ACCOL3 Firmware Library, which is automatically accessible through the template
referenced above, includes a series of function blocks which perform a variety of process
control and communication functions. These can be included within your program to
perform various duties including PID control, alarming, calculations, etc. Detailed
information about each function block is included in the ControlWave Designer on-line
help files.
On the variables declaration page(s) in ControlWave Designer, you will need to mark any
variable you want to make accessible to external programs, such as Open BSI’s DataView
utility, as “PDD”. Similarly, any variables which should be collected into a database, or
exported using the OLE for Process Control (OPC) Server must be marked as “OPC”.
Variables marked as OPC can be built into a text file by the Open BSI Signal Extractor.
The text file can then be used in the creation of a database for human machine interface
(HMI) software such as OpenEnterprise, or Iconics’ Genesis. These HMI software packages
require that the "Datatype conversion enable" option be selected when generating the
file using Signal Extractor. Information about the Open BSI Signal Extractor is included in
Chapter 12 of the Open BSI Utilities Manual (document # D5081).
Once the program has been created, it is assigned to an executable task. The entire project
is then saved and compiled.
Debugging of your completed control strategy program can be performed using the built-in
debugger. Optionally, you can also use the I/O Simulator to simulate the outputs on your
I/O boards, as your project executes. Note, however, that the I/O Simulator only supports
the IPCxx resource; therefore, to use it, you will need to add a second resource (IPCxx) to
your project, and make copies of your tasks and global variable worksheets under the new
resource.
From this point on, the order of steps may be varied, somewhat,
depending upon the requirements of the user's application.
This involves opening a new project using the ‘ControlWave
NOTE:
4.5 Step 5 - Create Application-specific Web Pages (OPTIONAL)
ControlWave-series controllers, including the CW_10, can optionally export data to user-
created web pages.
A series of ActiveX controls for data collection and configuration are provided on the Open
BSI CD that can be included as part of these web pages (For information on the ActiveX
controls, see the Web_BSI Manual (document# D5087).
Pg. 22 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 33
You can use whichever HTML creation package you want to create the pages, however, all
ControlWave web pages must be viewed within Microsoft® Internet Explorer.
The web pages may reside either on the PC workstation, or they can be downloaded into
FLASH memory at the CW_10. If stored at the CW_10, you must use the ControlView
utility to retrieve the page (using FTP) for viewing in Internet Explorer.
4.6 Step 6 - Create an Open BSI Network Containing the CW_10, or add the
CW_10 to an Existing Open BSI Network
In order for the CW_10 unit to function as part of a Bristol network, it is necessary to include it in the Bristol network.
If no Bristol network exists:
You need to run Open BSI’s NetView software on the PC workstation in order to define
a Bristol network. A series of software wizards are used to define a Network Host PC, a
network, and the DPC/RTUs (controllers) assigned to the network. Finally,
communication lines must be specified which handle the address assigned to the
CW_10. Chapters 3 and 4 of the Open BSI Utilities Manual (document # D5081) include
‘quick start’ examples for performing these steps. More detailed information is included
in the NetView chapter (Chapter 6) of D5081.
If a Bristol network already exists:
You will need to add the CW_10 to the existing network using NetView’s RTU Wizard.
Chapter 6 of the Open BSI Utilities Manual (document # D5081) includes different subsections depending upon whether you are adding the unit to a BSAP network, or an IP
network.
4.7 Step 7 - Download the Application-specifc Control Strategy into the
CW_10 RTU
Either ControlWave Designer or the Open BSI 1131 Downloader allows you to download
your completed control strategy (application load) file into the CW_10 RTU. Users
download the control strategy into the BOOT Project area of FLASH memory; this ensures
that if the CW_10 RTU is reset, or if there has been a failure of the backup battery, that
the control strategy can be restarted from the beginning, i.e., from the BOOT Project in
FLASH memory.
The Open BSI 1131 Downloader also allows the user to download files (such as user-created
web pages) into FLASH memory in the CW_10 RTU. These can be uploaded to the PC
using the ControlView utility. To download the application load, see Section 5.1 titled
Downloading the Application Load
.
SECTION 5 - OPERATIONAL DETAILS
CW_10 RTUs are shipped from the factory with firmware that allows the unit to be
configured in conjunction with an IEC 61131, application program. This section provides
information as follows:
- Steps required to download the application load and place the unit into ‘Run’ mode.
- Steps required to download system firmware.
Core Updumps
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 23
Page 34

5.1 Downloading the Application Load
Any CW_10 RTU must have a configured application load before it can be placed into
operation. For units being upgraded with the hardware discussed herein, this will require
connection of the CW_10 RTU to a PC running Windows NT (4.0 or higher), Windows 2000 or
Windows XP Professional and equipped with ControlWave Designer software & OpenBSI
software. Configuration of the application load must be performed by an individual familiar
with the various programming tools. The following software user documentation is referenced:
Getting Started with ControlWave Designer Manual - D5085
ControlWave Designer Reference Manual - D5088
Open BSI Utilities Manual - D5081
Web_BSI Manual - D5087
An application load download can be initiated, i.e., from ControlWave Designer, or from the
OpenBSI 1131 Downloader for CW_10 RTU Nodes.
1. Make sure that the CW_10 CPU’s Recovery Switch (SW1) is set in ‘Local Mode,’ i.e.,
SW1-1 set to the OFF position and SW1-2 set to the ON position.
Note:
From the factory, COM1 defaults to 115.2 Kbaud (RS-232) using the BSAP
Protocol. Don’t connect COM1 to a PC unless the PC’s RS-232 port in question
has been configured for BSAP operation.
2. Once the CW_10 RTU project has been defined, communications and configuration
parameters have been set, perform the download according to either ‘ControlWave
Designer’ (see D5088 - chapter 11) or ‘The Open BSI 1131 Downloader’ (see D5081 Chapter 7).
3. After the download has been completed leave the CPU Mode Switch (SW1) in the ‘Local
Mode’ position.
5.2 Upgrading CW_10 Firmware
CW_10 CPU Boards ship from the factory with system firmware already installed. If an
upgrade of the system firmware is required, use one of the procedures below to download
the new or replacement firmware from the PC.
Upgrade of system firmware via LocalView FLASH Mode requires OpenBSI 5.1 (or newer).
If you have an older version of OpenBSI, FLASH upgrades are to be performed via
HyperTerminal. You will need a binary (*.BIN) system firmware file that is read as follows:
c_30450.bin (where c_3 is the product code and 0450 is the release number). Upgrade of an
unattended CW_10 can be accomplished from a remote PC. This capability is introduced in
Section 5.2.3.
5.2.1 Using LocalView to Upgrade CW_10 Firmware
NOTE
Your CW_10 RTU must be set to Recovery Mode ENABLE (ON) prior to performing the FLASH upgrade, then, set to Recovery Mode DISABLE (OFF) after
the upgrade. On CW_10 RTUs this is accomplished via the CPU Board’s Recovery
Pg. 24 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 35
Switch SW1. Set SW1-3 to the ON position for Recovery Mode. After setting SW1-3
to the ON position, turn power OFF and then ON again.
A communication cable (see Figure 6C) must be connected to the Utility Port on the CW_10
CPU Board and to any RS-232 port on the associated PC. The PC’s RS-232 port used for
this purpose must be set to run at 115.2 Kbaud. CW_10 RTU CPU Switch SW1, position, 3
must be set ON.
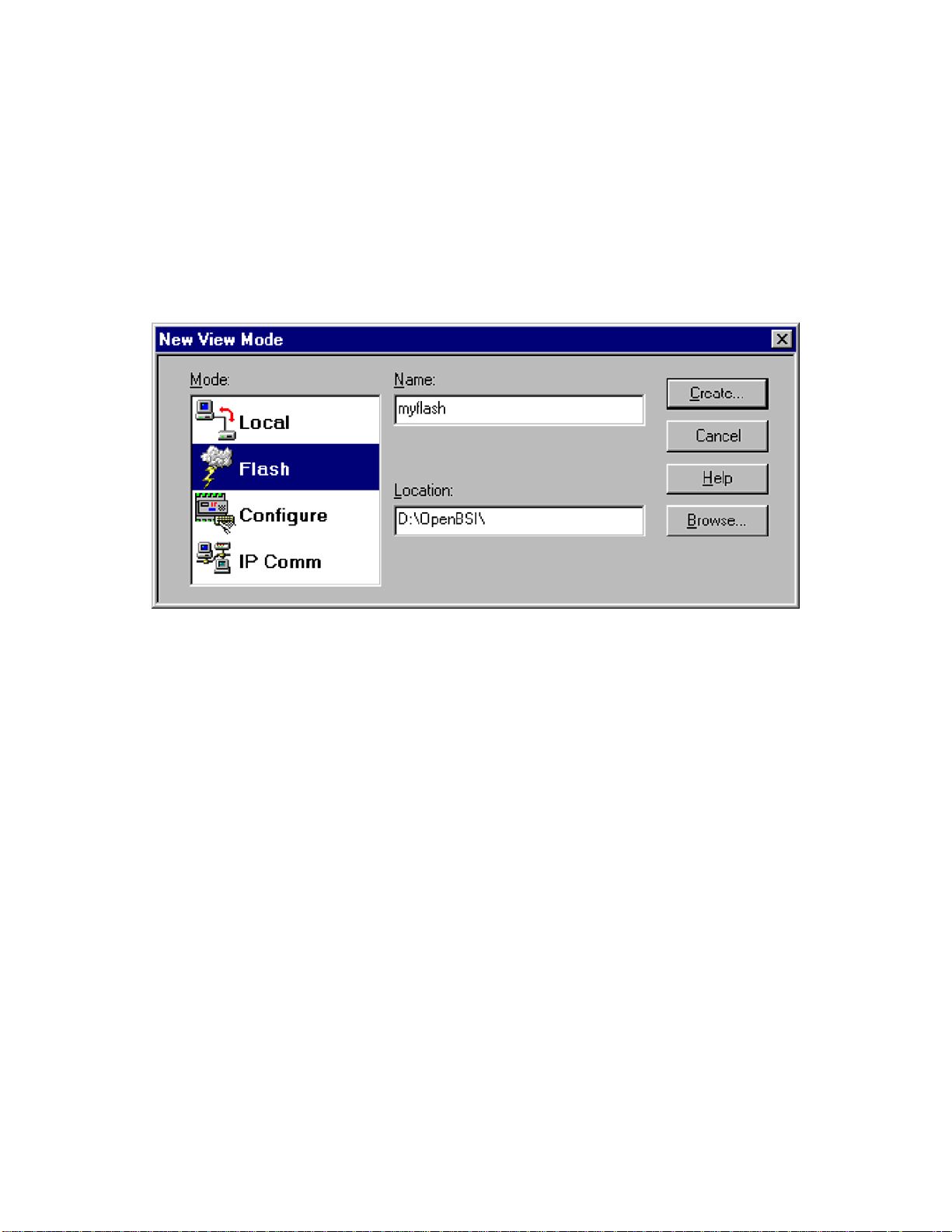
Start LocalView, Choose FLASH, Enter A Name, Click on [Create]
Start LocalView by clicking on: Start Æ Programs Æ OpenBSI Tools Æ LocalView. The
New View Mode dialog box will appear (see Figure 7).
Figure 7 - Local View - New View Mode Menu
"Mode"
Choose 'Flash' for the mode.
"Name"
Enter a name for the View Mode File in the "Name" field.
"Location"
If you want to store the View Mode File in a directory other than that shown in the
"Location" field, enter the new location there, or use the [Browse] push button to find
the directory.
When the "Mode", "Name", and "Location" have been specified, click on the [Create] push
button to activate the Communication Setup Wizard.
Step 1 - Communication Setup
Choose the communication port you want in the What port would you like to use: field.
Click on the [Next] pushbutton to activate the next wizard.
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 25
Page 36
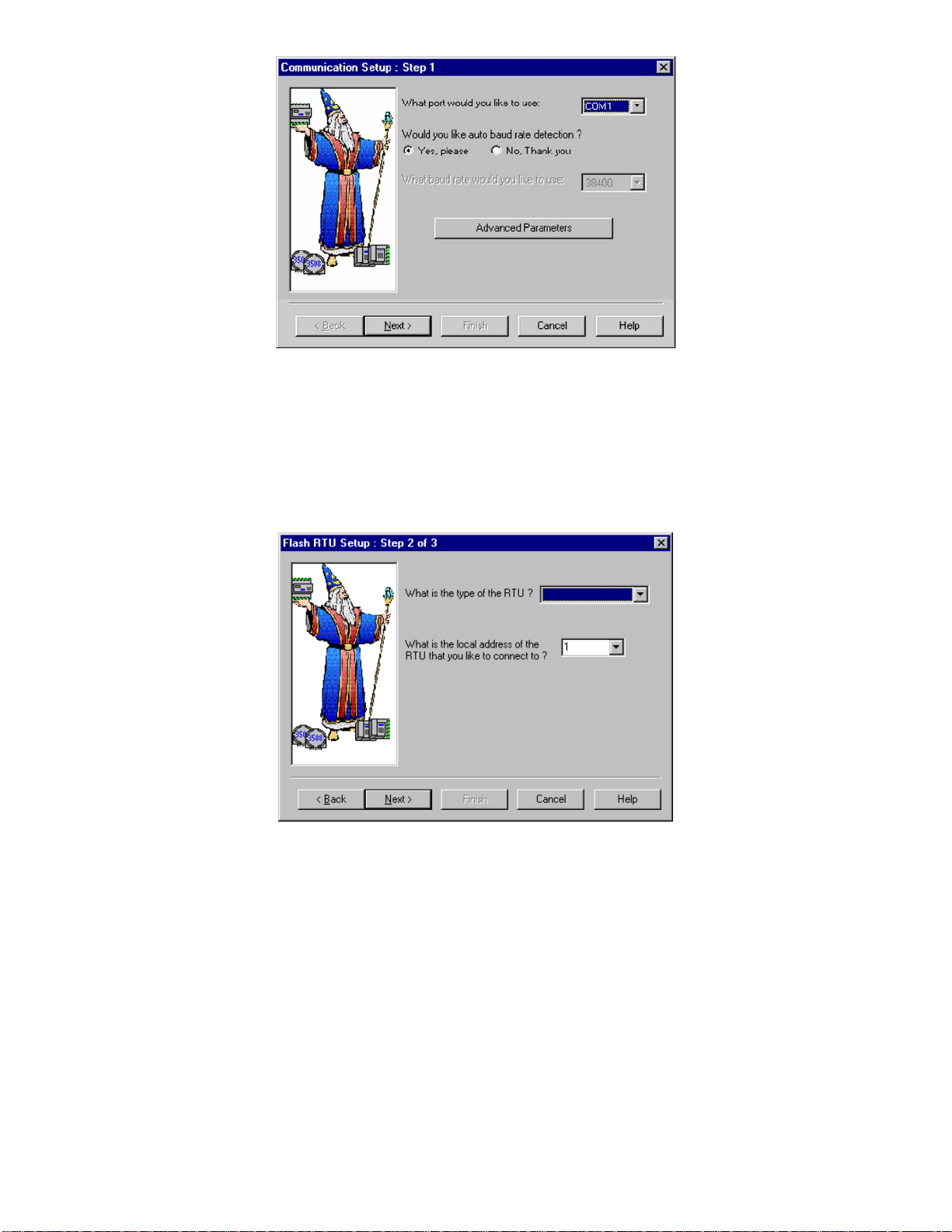
Figure 8 - Communication Setup: Step 1 Menu
Step 2 - Flash RTU Setup
In the Flash RTU Setup Wizard, you need not set the RTU type or local address, since these
are unused in this mode. Click on the [Next] push button to activate the Flash Data Setup
Wizard.
CW_30
Figure 9 - Flash RTU Setup Menu
Step 3 - Flash Data Setup
Complete the following fields in the Flash Data Setup Wizard:
"Please enter the name of the binary file to Flash"
To upgrade system firmware, you must specify the path and name of a binary (*.BIN)
file on your hard disk containing the firmware.
Click on [Finish] to install the specified BIN file in FLASH memory at the RTU.
Once the Flash download has begun, you will NOT be allowed to shut down LocalView,
unless you cancel the download, or it has been completed.
Pg. 26 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 37
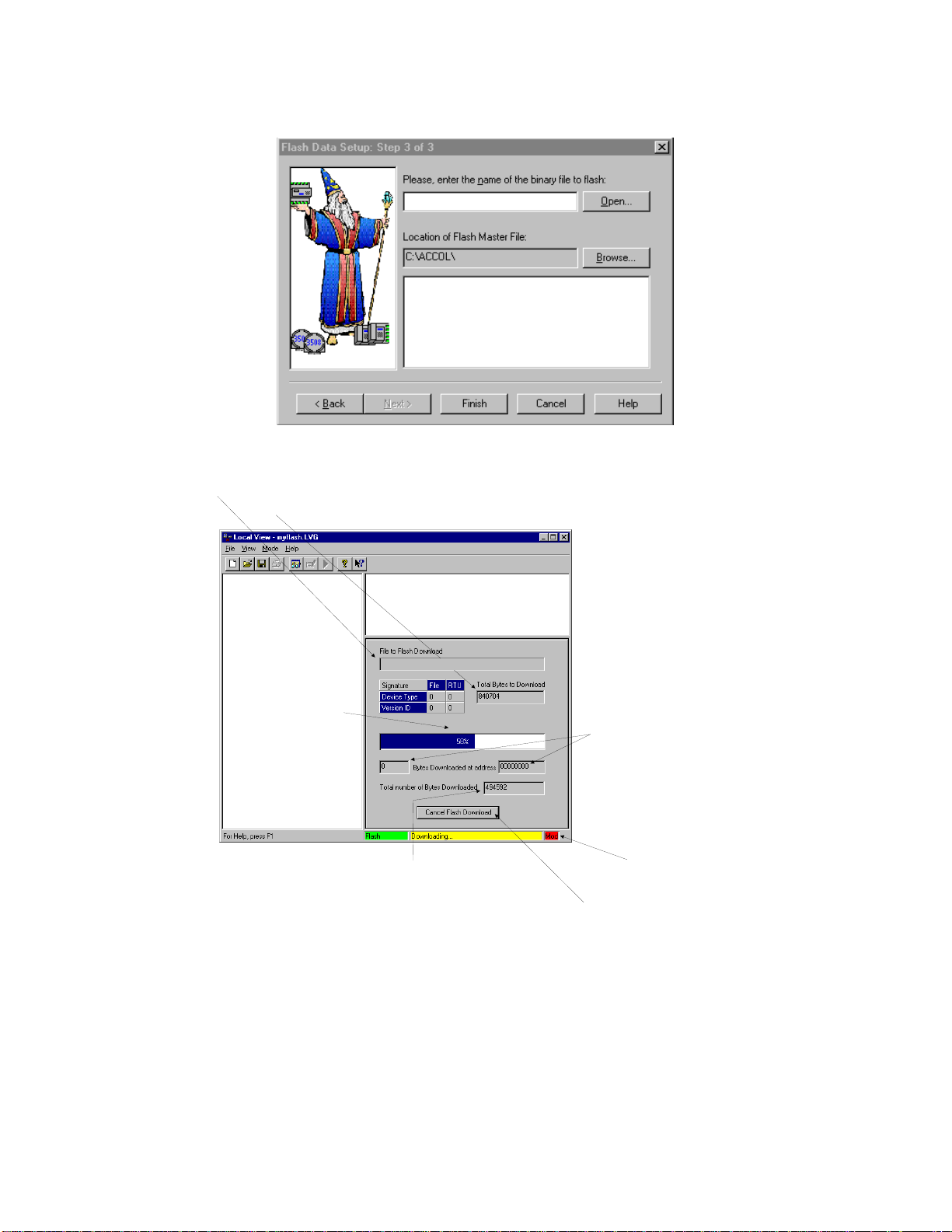
The progress of the Flash download will be displayed in the window. Any mismatch in file
e
versions, or if the type of .BIN file does not match the type of RTU/DPC, the download will
be aborted.
D:\OpenBSI\c_30450.bin
Figure 10 - Flash Data Setup Menu
Path and filename of BIN fil
Total number of bytes in BIN file
D:\OpenBSI\c_30450.bin
Progress of the
flash download
These fields do
NOT apply to
Controlwave-series
units.
Number of bytes
already downloaded
If necessary, click here
to cancel the flash
download
Message area
‘Mod’ indicates
unsaved changes
to LVG file.
Figure 11 - Local View Downloading System Firmware Menu
Once the download has completed, set CPU Switch SW1-3 to the OFF position and then
turn power OFF and then ON again.
5.2.2 Using HyperTerminal to Upgrade CW_10 Firmware
A communication cable (see Figure 6C) must be connected to the CW_10 CPU Board Utility
Port and to any RS-232 port on the associated PC. The PC’s RS-232 port used for this
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 27
Page 38
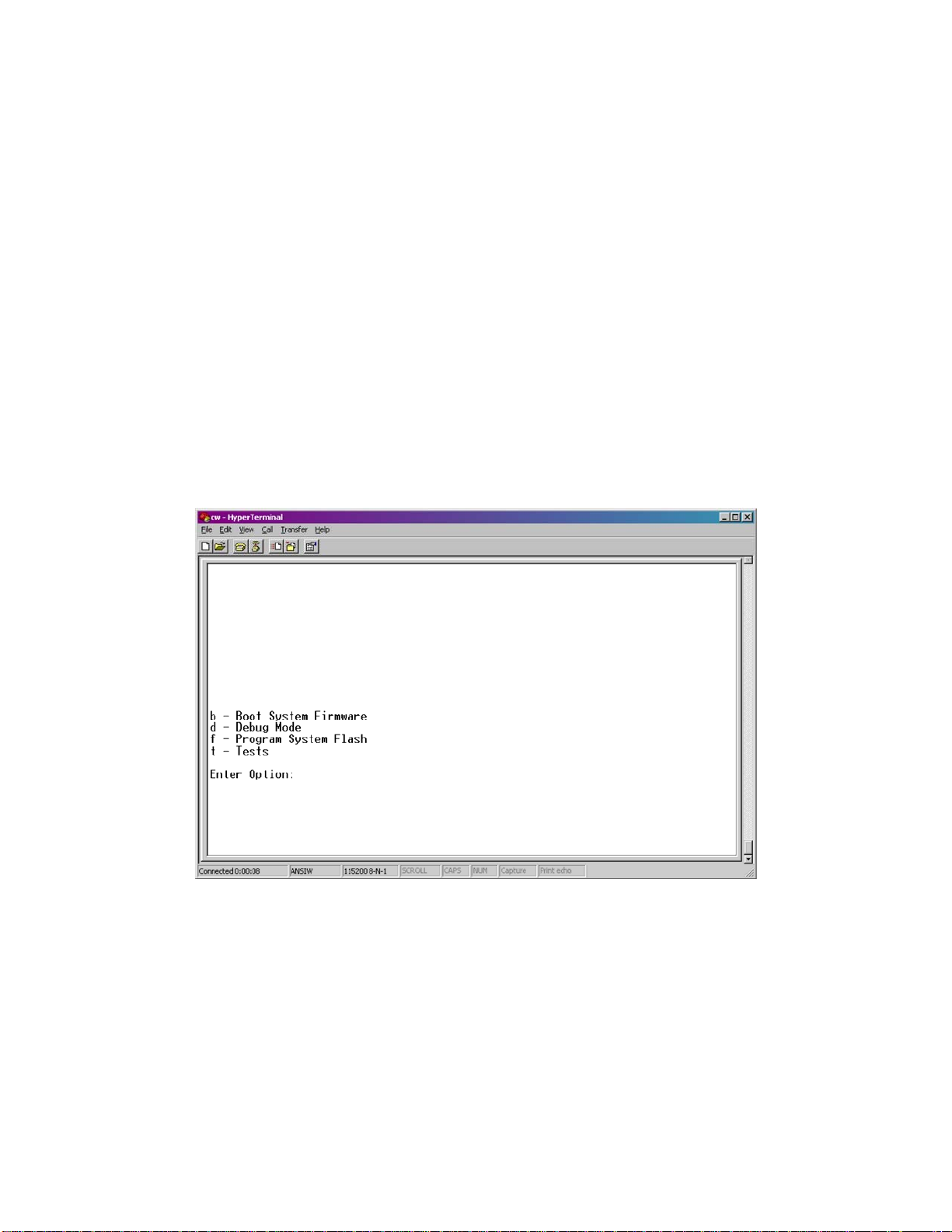
purpose must be set to run at 115.2 Kbaud. CW_10 CPU Board Switch SW1, position, 3
must be set to the ON position.
1. If not already running, apply power to the associated PC.
2. Start the HyperTerminal program on the PC. Note: HyperTerminal is a Windows 95 (or
newer) application utility program. If using HyperTerminal for the first time, set the
communications properties (for the PC Port being utilized) via the Properties Menu as
follows: Bits per second: = 115200, Data bits: = 8, Parity: = None, Stop bits: = 1, and Flow
control: = None. After setting the communications properties, click OK.
3. Set the CW_10 CPU Board’s Recover Switch (SW1) for ‘Recovery Mode,’ i.e., set CPU Board
Switch SW1-3 to the ON position.
4. Apply power to the CW_10 RTU. The resident BIOS will initialize and test the
hardware, this process is referred to as POST (Power On Self Test).
Unless there is a problem status code 10 (Status LED #5 ON) will be posted to the CCPU
Board’s Status LEDs. Detection of a fault during POST will be posted on the Status LEDs.
When the Power On Self Test has completed, a system status code will be posted to the
Status LEDs (see Table 5 and Figure 3).
Figure 12 - HyperTerminal Recovery Mode Menu
From the HyperTerminal Recovery Mode menu (Figure 12), press the ‘F’ key to enter
FLASH download. A message will be displayed warning that the FLASH is about to be
erased; press the ‘Y’ key at the prompt. The screen will display dots as the flash devices are
being erased; this could take a few minutes.
5. When the FLASH is ready for download the letter C will be displayed on the screen. In
the HyperTerminal command bar click on Transfer and then Send File (see Figure 13).
In the Send File Dialog Box (see Figure 14), select “1KXmodem” for the protocol, enter
the filename of the appropriate .bin file in the format “C_3xxxx.bin” (where xxxx varies
from release to release). Click on the Send button to start the download (see Figure 14).
Pg. 28 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 39
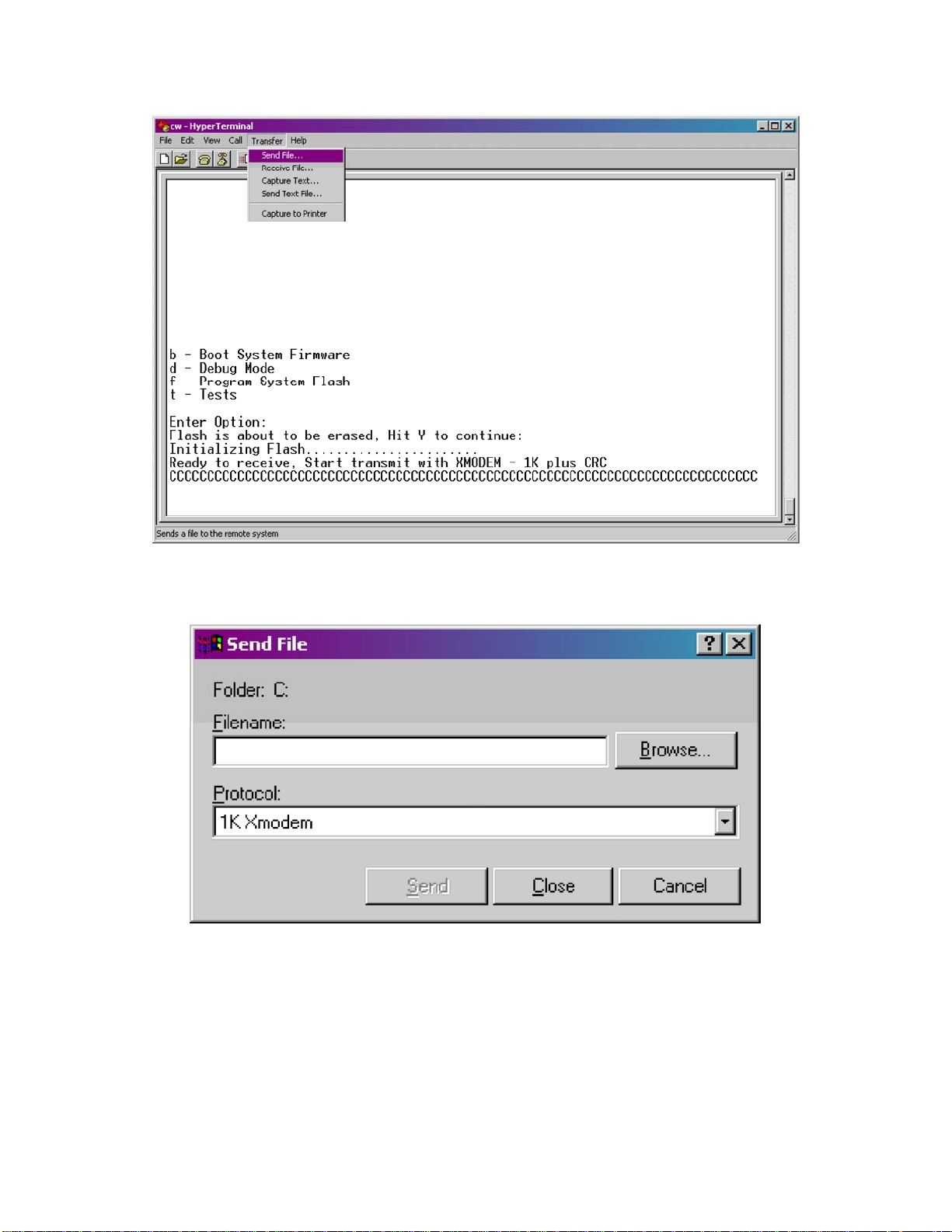
When the HyperTerminal Recovery Mode Menu of Figure 12 appears, the download has
completed.
Figure 13 - HyperTerminal FLASH Download Menu
(Ready to Download) - (Transfer/Send File Selected)
Figure 14 - HyperTerminal Flash Download (Send File Dialog Box)
6. Close the HyperTerminal program. The communication cable connected between the
CW_10 RTU and the PC can be removed if desired.
7. Set the CPU Board’s Recovery Switch (SW1) for ‘Local Mode,’ i.e., set SW1-1 OFF and
SW1-2 ON). Set SW1-3 OFF and then switch power OFF/ON.
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 29
Page 40
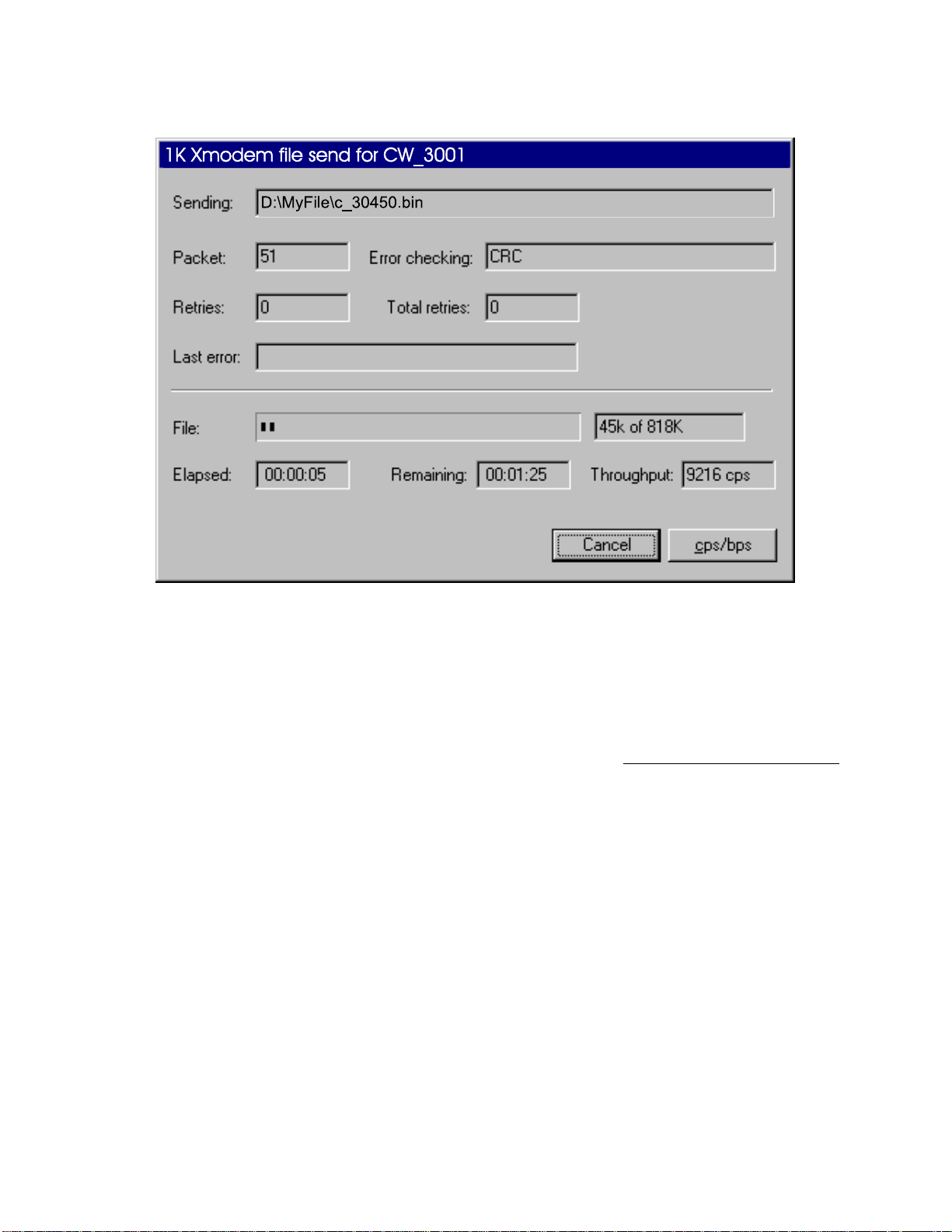
Once the CW_10 RTU is running its application load, status codes will be posted to the six
Status LEDs on the CPU Board. These Status LED (Hex) Codes are listed in Table 5 (see
Figure 3).
Figure 15 - HyperTerminal FLASH Download
(Download in Process)
5.2.3 Remote Upgrade of CW_10 Firmware
It is possible to download system firmware into an unattended remote CW_10 RTU. This
function can only be accomplished if CPU Board Switch SW2-6 (associated with the unit in
question) is set in the ON position (factory default). The procedure for performing a remote
download of system firmware is discussed in Appendix J of the Open BSI Utilities Manual
(document D5081). Note: Remote Upgrade of CW_10 Firmware requires Boot PROM
version 4.7 or higher and System PROM version 4.7 or higher.
5.3 Core Updump
In some cases a copy of the contents of SRAM and SDRAM can be uploaded to a PC for
evaluation by Bristol, Inc. engineers. This upload is referred to as a ‘Core Updump.’ A Core
Updump may be required if the CW_10 Remote Terminal Unit repeatedly enters a
‘Watchdog State’ thus ill effecting system operation. A Watchdog State is entered when the
system crashes, i.e., a CPU timeout occurs due to improper software operation, a firmware
glitch, etc. In some cases the Watchdog State may reoccur but may not be logically
reproduced.
‘Crash Blocks’ (a function of firmware provided for watchdog troubleshooting) are stored in
CPU RAM. The user can view and save the ‘Crash Blocks’ by viewing the Crash Block
Statistic Web Page (see Chapter 4 of the Open BSI Technician’s Toolkit - D5087). Crash
Block files should be forwarded to Bristol, Inc. for evaluation. If additional information is
required to evaluate the condition, a Core Updump may be requested by Bristol. Once the
Pg. 30 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 41

file generated by the Core Updump has been forwarded to Bristol, it will be evaluated and
the results will be provided to the user.
Follow the five steps below to perform a Core Updump.
1. Set CPU Board Switch SW2-1 OFF (Disable Watchdog Timer). If Switch SW2-4 is ON,
set it to OFF (Enable Core Updump). Note: The factory default setting for SW2-4 is
OFF.
2. Wait for the error condition (typically 3F on CPU Status LEDs).
3. Connect CW_10 RTU’s Utility Port to a PC (see Figure 6C).
4. Set CPU Board Switch (SW1- Recovery) so that SW1-1 and SW1-2 are both in either the
ON position or the OFF position.
5. Start the PC’s HyperTerminal Program (at 115.2kbaud) and generate a file using the
1KX-Modem protocol. Save the resulting Core Updump in a file to be forwarded to
Bristol for evaluation.
When the Core Updump has been completed, set the CPU Board’s Recovery Switch as
follows: SW1-1 is in the OFF position & SW1-2 is in the ON position.
SECTION 6 - GENERAL SERVICE NOTES
Certain questions or situations frequently arise when servicing the CW_10 RTU. Some
items of interest are provided in Sections 6.1 through 6.3.
6.1 Extent of Field Repairs
Field repairs to a CW_10 RTU are strictly limited to the replacement of complete modules.
Component replacement on a CW_10 RTU Module constitutes tampering and will violate
the warranty. Defective CW_10 RTU components (printed circuit boards, LCD Displays,
etc.) must be returned to Bristol, Inc. for authorized service.
6.2 Disconnecting RAM Battery
The CW_10 RTU’s Lithium RAM battery cannot be replaced while power is on. Once the
RAM battery has been replaced, the unit will still execute its FLASH-based application load
(Boot Project) upon power-up, but all of the current process data will have been lost. Upon
power-up, the unit will act as though it had just been booted and it will revert back to the
initial values specified in its application load. The battery may be disabled by setting the
CW_10 CPU Board’s Battery Backup Board Jumper (W3) in position 2 to 3.
6.3 Maintaining Backup Files
It is essential to maintain a backup disk of each application load file to guard against an
accidental loss of process configuration data. Without a backup record, it will be necessary
to reconfigure the entire application load; that can be a very time consuming procedure.
Always play it safe and keep backup copies of your operating system loads. A copy of the
application load can be loaded into CW_10 RTU FLASH memory and/or saved to a PC’s
Hard Drive as a ZIP file.
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 31
Page 42

SECTION 7 - WINDIAG DIAGNOSTICS
Bristol’s WINDIAG Software is a diagnostic tool used for testing CW_10 RTU electronics
including, I/O circuitry, CPU memory, communications ports, etc., for proper performance.
The CW_10 RTU must be communicating with a PC equipped with the WINDIAG program.
CW_10 CPU Board configuration switch SW2-8 must be set to the OFF (Closed) position to
enable diagnostics. Communication between the CW_10 RTU (with/without application
loaded) and the PC can be made via a Local or Network Port with the following restrictions:
• CW_10 CPU Board Switch SW2-8 must be OFF to run the WINDIAG program. Setting
SW2-8 OFF will prevent the ‘Boot Project’ from running and will place the unit into
diagnostic mode.
• The CW_10 communication port connected to the PC (running the WINDIAG program)
must match the speed of the PC. All serial communication ports (except COM1) can be
configured for 9600 baud, 8-bits, no parity, 1 stop bit, BSAP/ControlWave Designer
protocol operation by setting CW_10 CPU Switch SW2-3 OFF. This can also be
accomplished via user defined Soft Switches.
• Communication port COM1 is forced to 9600 baud operation when CW_10 CPU
Switches SW2-3 and SW2-8 have both been set OFF. COM1 can also be set to 9600 baud
operation via user defined Soft Switches.
To use the WINDIAG program place any critical process (associated with the CW_10 RTU
unit in question) under manual control. WINDIAG cannot be run while the CW_10 RTU
application is running. Set CW_10 CPU Board Switch SW2-8 to the OFF position. Perform
steps 1 through 6 below.
1. Start the OpenBSI NetView Program. A menu similar to Figure 16 will appear.
Figure 16 - NetView Startup Menu - Example with Multiple Networks
Pg. 32 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 43

Figure 17 - WINDIAG Main Diagnostics Menu
(RTU Type is posted as CW_30 since CW_10s & CW_30s utilize the same Firmware)
2. To start the WINDIAG program, go to the Start Program’s menu, select OpenBSI Tools,
then select Utilities Programs and then select Diagnostics.
3. Once WINDIAG has been entered, the Main Diagnostics Menu of Figure 17 will appear.
4. Select the module to be tested. Enter any prompted parameters (slot #, etc.). WINDIAG
will perform the diagnostics and display pass/fail results.
5. After all diagnostic testing has been performed, exit the WINDIAG program and then
exit the NetView Program if there aren’t any other CW_10 RTUs to be tested.
When you close the NetView program you will be prompted as to whether or not you
want to close the OpenBSI program; select Yes.
6. Set CW_10 CPU Board Switch SW2-8 to the ON (Open) position and reboot the unit.
The CW_10 RTU should resume normal operation.
7.1 Diagnostics Using WINDIAG
CW_10 electronics can be tested using the WINDIAG program. From WINDIAG’s Main
Diagnostics Menu (see Figure 17) the following diagnostic tests can be performed:
CPU & Peripherals Diagnostic: Checks the CPU Board [except for RAM & PROM
(FLASH)].
PROM/RAM Diagnostic: Checks the CPU Board’s RAM and PROM (FLASH)
hardware.
EEPROM Diagnostic: Checks I/O Module EEPROM on an I/O Module.
Communications Diagnostic: Checks all Comm. Ports - The External loop-back tests
require the use of a loop-back plug.
Ethernet Diagnostic: Currently unavailable.
Analog Output Diagnostic: Checks AOs on various AO Modules.
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 33
Page 44

Analog Input Diagnostic: Checks AIs on various AI Modules.
Low Level Analog Input Diag.: Checks AIs on the Low Level AI Module.
Discrete I/O Diagnostic: Checks DIs or DOs on various DI and DO Modules.
High Speed Counter Diagnostic: Checks HSCs on various High Speed Counter Modules.
Keyboard & Display Diagnostics Checks Keyboard/Keypad & Display hardware
Information on serial communication port loop-back testing is provided herein. For
additional information on WINDIAG tests, see document D4041A.
7.1.1 Communication Diagnostic Port Loop-back Tests
WINDIAG’s Communications Diagnostic Menu (see Figure 20) provides for selection of the
communication port to be tested. Depending on the type of network (RS-232 or RS-485) and
the port in question, a special loop-back plug is required as follows:
Ports 1 through 6 - RS-232: use a 9-pin male D-type loop-back plug or loop-back wires
(see Fig. 18).
Ports 2 through 6 - RS-485: use a 9-pin male D-type loop-back plug or loop-back wires
(see Fig. 19) or configure CW_10 CCPU Switches (SW3 and
SW4) and/or CMFIB Switches (SW2, SW3 and SW4) for
loopback operation (see Tables 3 & 6).
This group of tests verifies the correct operation of the Communication Interface. COM1,
through COM6 can be tested with this diagnostic. The CW_10 communication port that is
connected to the PC (local or network and used for running these tests) can’t be tested until
diagnostics has been established via one of the other ports, i.e., to test all CW_10 serial RS232/485 communication ports (via WINDIAG), communications with the PC will have to be
established twice (each time via a different port). It should be noted that the CW_10
communication port that is connected to the PC (RS-232, RS-485 or Ethernet) must be good
for WINDIAG to run the Communications Diagnostics
7.1.2 Serial Comm. Port External Loop-back Test Procedure
1. Connect an external loop-back plug or loop-back wires to the Communications Port to be
tested (see Figures 18 and 19). For RS-485 Loopback testing, CPU Switches SW3 and
SW4 (see Table 3) or MFIB Switches SW2 through SW4 (see Table 6) can be configured
for loopback operation
2. Type "1," "2," "3," etc. (up to "10") for the port to test.
3. Set baud rate to test to 115200 baud or ALL ASYNC and the number of passes to 5.
4. Click on RUN button next to External loop-back.
Test responses:
a) Success - All sections of test passed
b) Failure - TXD RXD Failure
- CTS RTS Failure
Execution time < 5 sec.
Pg. 34 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 45

9
-Pin Male
)
“D” Connector
Loop-back Plug
(Looking from rear/wire side of Plug)
5 = RTS
4 = RXD
7 = DCD
2 = TXD
1 = DTR
6 = CTS
Figure 18 - RS-232 Loop-back Plug/Wires
9-Pin Male
“D” Connector
Loop-back Plug
(Looking from rear/wire side of Plug
4 = RXD
2 = TXD
_
3 = RXD+
_
1 = TXD+
Figure 19 - RS-485 Loop-back Wires
Figure 20 - WINDIAG’s Communications Diagnostic Menu
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 35
Page 46

SECTION 8 - CW_10 SPECIFICATIONS
8.1 CW_10 CPU Board Specifications
Processor: Sharp’s LH7A400 32-bit System-on-Chip with 32-bit
ARM9TDMI RISC Core
Memory: 16 Mbytes of simultaneous read/write FLASH
1 Mbyte of on-board SRAM
512 Kbytes FLASH Boot/Downloader
4 Mbytes of SDRAM
Real Time Clock: A Semtech SH3000 support IC provides a full BCD clock
calender with programmable periodic/wakeup interrupt and
a programmable clock generator with adjustable spectrum
spreading.
Connectors: (see Table 12)
Table 12 - CPU Board Connector Summary
Ref. # Pins Function Notes
P2 62-pin Backplane Intf. CW_10 I/O Bus Interface
J2 8-Pin Ethernet Female Port # 1 10/100Base-T
J3 8-Pin Ethernet Female Port # 2 10/100Base-T
J5 21-pin Off-board Serial Comm. Port Intf.
Connector (RS-232/485)
J8 3-pin RS-232 Utility Port 115.2 Kbaud to PC for Firmware
8.1.1 CPU Board Communication Port Specifications
CPU Board Comm. Ports: J8: 3-pin In-line - Utility Port (RS-232)
J5: 21-pin Interface (Via cable) to Off-board serial Comm.
Ports BIP1/COM5 and BIP2/COM6 (which reside on
Interface Board Assembly 392574-01-2) COM5 & COM6 are
individually configurable for RS-232 or RS-485 operation
and utilize 9-Pin D-Type Female Connectors
Baud Rate: 300 to 115Kbps for RS-232 or RS-485
See Table 10 for connector pin assignments
8.1.2 CPU Board 3.3V Power Supply Specifications
Input: +5Vdc
Output Voltages: +3.3Vdc ±1%
Output Current: 0.6A Max. @ 3.3Vdc
Output Ripple P/P: +3.3V Output: 10mV
Interfaced via a cable to COM5 and
COM6 on Interface Board Ass’y.
No. 392574-01-2.
Flash and Core Updumps
Pg. 36 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 47

8.1.3 CPU Board Environmental Specifications
Temperature: Operating
Storage
: -40 to +158 °F (-40 to +70 °C)
: -40 to +185 °F (-40 to +85 °C)
Relative Humidity: 0-95% Non-condensing (Operating & Storage)
Vibration: 1g acceleration over 10 to 150 Hz
.5g acceleration over 150 to 2000 Hz
RFI/Emissions: In conformity with the following standards: ENV 50140
Radio-frequency electromagnetic field amplitude modulated
EMV
8.2 CW_10 Multi-Function Interface Board (MFIB) Specifications
8.2.1 MFIB Board Connectors
Table 13 - MFIB Board Connector Summary
Ref. # Pins Function Notes
J1 62-pin CPU Interface Female Card Receptacle
P1 26-pin Display/Keyboard Interface Mass Termination Header
J2 36-pin I/O Board Slot #1 Female Card Receptacle
J3 36-pin I/O Board Slot #2 Female Card Receptacle
J4 36-pin I/O Board Slot #3 Female Card Receptacle
J5 36-pin I/O Board Slot #4 Female Card Receptacle
J6 15-pin Optional Comm. Interface On or Off-board Comm. Options
J8 9-pin RS-232/485 Serial Comm. Port 1 Female D-Type
J9 9-pin RS-232/485 Serial Comm. Port 2 Female D-Type
J10 9-pin RS-232/485 Serial Comm. Port 3 Female D-Type
J11 9-pin RS-232/485 Serial Comm. Port 4 Female D-Type
8.2.2 MFIB Board Communication Port Specifications
Comm. Ports: see Table 13
Baud Rate: 300 to 115Kbps for RS-232 or RS-485
See Table 9 for connector pin assignments
RS-485 Port Protection: Surge Protection (by LC04-6 device) (ANSI/IEEE C37.90 -
1978)
8.2.3 MFIB Board Power Supply Specifications
DC to DC Supply Specifications
Input Power Range: 12Vdc: (10.5 to 30.0 Vdc) (Factory Configured)
24Vdc: (22.0 to 30.0 Vdc) (Factory Configured)
Inrush Current: 4A Peak Duration 2 msec
Fusing: 4A for 10.5 to 30.0 Vdc
PIP-CW_10 Upgrade Kit Hardware Upgrade Installation Guide / Pg. 37
Page 48

Efficiency: 70% Min. @ 10.5Vdc
Reverse Voltage Protection: Diode Clamp
Overvoltage Protection: Transorb Clamp
Output Voltages/Currents: +5Vdc @ 1.2A (Regulated, Non-isolated)
+5Vdc @ 50mA Minimum Load
-5Vdc @ 40mA (from Regulated -15Vdc)
+15Vdc @ 250mA (Regulated, Non-isolated)
-15Vdc @ 150mA (Regulated, Non-isolated)
Regulation (Line): 5V: .2% for +10.5 to +30.0 Vdc
Regulation (Load): 5V: .1% for 100% Load Change
Ripple (RMS): .1% or 10mV RMS Max.
Ripple (Peak to Peak): 1% or 50mV (whichever is greater)
Transient Response: Output Voltage returns to within 1% in less than 500μsec in
response to a 25% load step on 5V output. Maximum
excursion is less than 200mV from normal.
Overshoot: Overload and Short Circuit Protection
Current Limit: 150% of Combined Rated Load
Overvoltage Protection: Transorbs on +5, +15 and −15 Vdc Non-isolated Outputs
Diode Clamp on -5Vdc Output
Sequencer Circuit Specifications
12V Operation: OFF to ON Transition - Vin > 10.5Vdc
ON to OFF Transition - Vin < 10.0Vdc
24V Operation: OFF to ON Transition - Vin > 22.0Vdc
ON to OFF Transition - Vin < 21.0Vdc
Low Supply Voltage
Trip Points: +5V Supply: +4.750Vdc
−5V Supply: −4.750Vdc
+15V Supply: +14.25Vdc
-15V Supply: −14.25Vdc
8.2.4 MFIB Board Environmental Specifications
Temperature: Operating
Storage
: -40 to +158 °F (-40 to +70 °C)
: -40 to +185 °F (-40 to +85 °C)
Relative Humidity: 0-95% Non-condensing (Operating & Storage)
Vibration: 1g acceleration over 10 to 150 Hz
.5g acceleration over 150 to 2000 Hz
Pg. 38 / Hardware Upgrade Installation Guide PIP-CW_10 Upgrade Kit
Page 49
ControlWave_10
Material Safety Data Sheets
A Material Safety Data Sheet is provided herein to comply with OSHA’s Hazard Communication Standard, 29 CFR 1910.1200. This standard must be consulted for specific
requirements.
Material Safety Data Sheets are provided in the order listed in Table Z-1 below.
TABLE Z-1
MSDS for ControlWave_10 Instruction Document
(PIP-CW_10 Upgrade Kit)
Manufacturer General Description Part Number
DURACELL
Bristol, Inc Part Number = 395620-01-5
The 3V Lithium Manganese Dioxide Battery is situated on the CW_10 CCPU Board.
3V Lithium Manganese
Dioxide Battery
DL 2450
11/02/06 Appendix Z – PIP-CW_10 Upgrade Kit MSDS
Page 50

BLANK PAGE
Page 51
Gillette
y
)
)
)
)
;
)
)
Environment
Health and Safet
MATERIAL SAFETY DATA SHEET
37 A Street
Needham, MA 02492
Tel 781.292.8151
Page 1 of 4
NAME:
CAS NO:
DURACELL LITHIUM MANGANESE DIOXIDE COIN BATTERIES
Not applicable
Effective Date:
8/8/03
Rev:
A. — IDENTIFICATION
Manganese Dioxide (1313-13-9
Propylene Carbonate (108-32-7
Lithium (7439-93-2
Graphite, synthetic (7440-44-0
1,2-Dimethoxyethane (110-71-4
Lithium Perchlorate (7791-03-9
Formula: Mixture
%
Molecular Weight:
65-75
10-15
5-10
Synonyms:
5-10
1-10
<1.5
Mixture
NA
Lithium Manganese Dioxide Coin Cells:
3V-DL2016; DL2025; DL2430; DL2450
DL2032; DL1616; DL1620
B. — PHYSICAL DATA
Boiling Point Melting Point Freezing Point
NA °F NA °C NA °F NA °C NA °F NA °C
Specific Gravity (H2O=1) Vapor Density (air=1) Vapor Pressure @
NA NA NA
Evaporation Saturation in Air Autoignition Temperature
(
Ether
NA NA
% Volatiles Solubility in Water
NA NA
=1) (by volume@
°F) °F °C
NA
pH
mm Hg
NA
3
°F
Appearance/Color
Flash Point and
Test Method(s)
Flammable Limits in Air
(% by volume)
Coin cells. Contents dark in color.
1,2-Dimethoxyethane (Approximately 3-7% of contents): 42.8 °F, 6°C (Closed Cup)
Lower
NA
%
Upper
NA
%
C. — REACTIVITY
Stability
Do not heat, crush, disassemble, short circuit or
stable unstable Polymerization may occur
X
Conditions to Avoid Conditions to Avoid
Not applicable
will not occur
X
recharge.
Incompatible Materials Hazardous Decomposition Products
Contents incompatible with strong oxidizing agents. Thermal degradation may produce hazardous fumes
of manganese and lithium; oxides of carbon and other
toxic by-products.
* IF MULTIPLE INGREDIENTS, INCLUDE CAS NUMBERS FOR EACH NA=NOT AVAILABLE
Footnotes
Not applicable
GMEL#
2033.3
Page 52
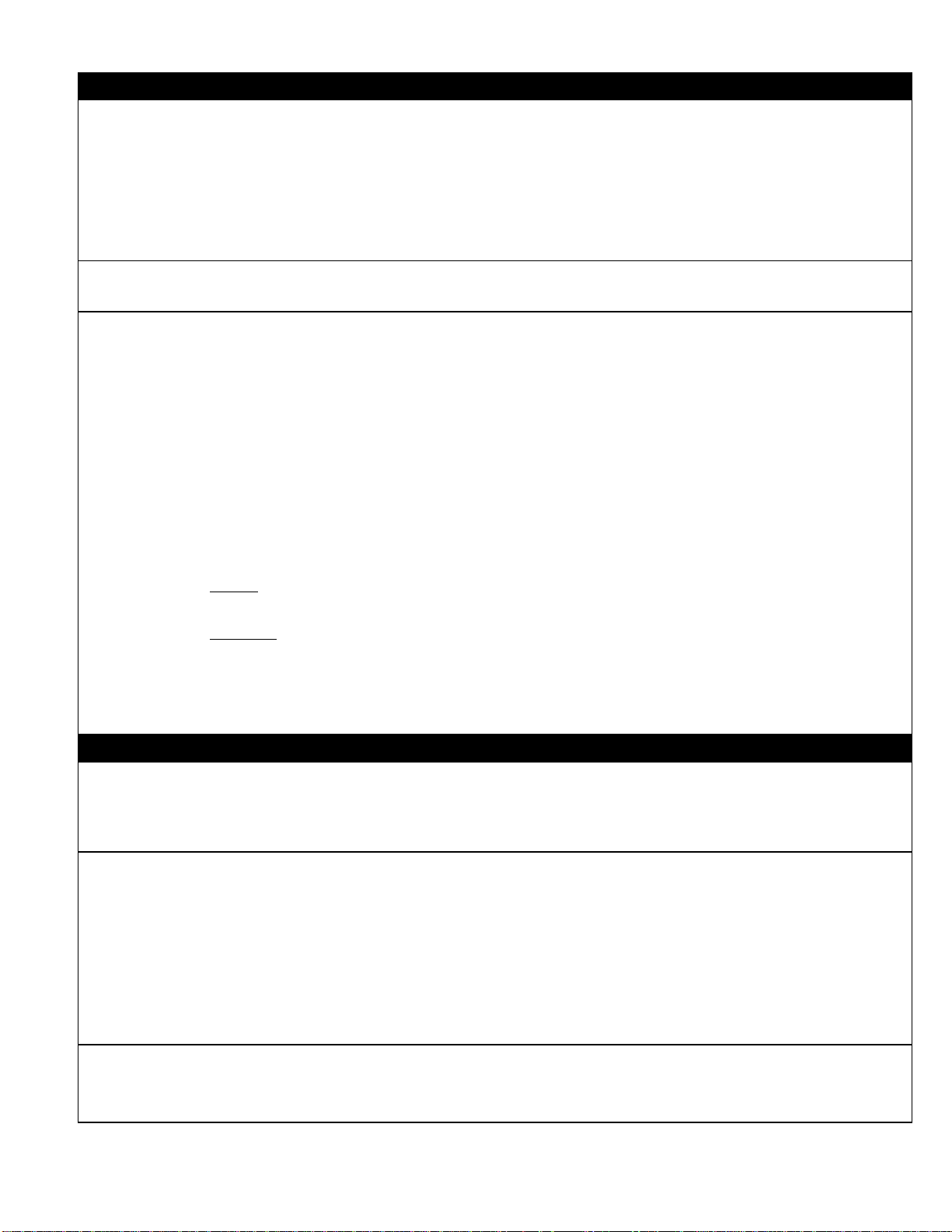
Page 2 of 4
D. — HEALTH HAZARD DATA
Occupational Exposure Limits PEL’s, TLV’s, etc.)
8-Hour TWAs: Manganese Dioxide (as Mn) - 5 mg/m3 (Ceiling) (OSHA); 0.2 mg/m3 (ACGIH/Gillette)
1,2-Dimethoxyethane - 0.15 ppm (Gillette)
Graphite (all kinds except fibrous) - 2 mg/m
5 mg/m
3
(synthetic, ACGIH); 15 mg/m3 (total, OSHA);
3
(respirable, OSHA)
These levels are not anticipated under normal consumer use conditions.
Warning Signals
Not applicable
Routes/Effects of Exposure
These chemicals and metals are contained in a sealed can. For consumer use, adequate hazard warnings are
included on both the package and on the battery. Potential for exposure should not exist unless the battery
leaks, is exposed to high temperature, is accidentally swallowed or is mechanically, physically, or electrically
abused.
1. Inhalation
Not anticipated. Respiratory (and eye) irritation may occur if fumes are released due to heat or
an abundance of leaking batteries.
2. Ingestion
An initial x-ray should be obtained promptly to determine battery location. Batteries lodged in
the esophagus should be removed immediately since leakage, burns and perforation can occur
as soon as 4-6 hours after ingestion. Irritation to the internal/external mouth areas may occur
following exposure to a leaking battery.
3. Skin a. Contact
Irritation may occur following exposure to a leaking battery.
b. Absorption
Not anticipated.
4. Eye Contact
5. Other
Irritation may occur following exposure to a leaking battery.
Not applicable
E. — ENVIRONMENTAL IMPACT
1. Applicable Regulations
2. DOT Hazard Class -
3. DOT Shipping Name -
While lithium batteries are regulated by IATA and ICAO, the type of lithium batteries offered for sale by DURACELL are
considered non-hazardous per provision A45 of the IATA Dangerous Goods Regulations and provision A45 of the ICAO
Technical Instructions For The Safe Transport Of Dangerous Goods By Air. Per section A45 of the IATA and ICAO
regulations, properly marked, labeled and packaged DURACELL consumer lithium batteries, which are of the solid cathode
type, with less than 1g lithium per cell and less than 2g lithium per battery, are exempt from further regulation. When these
batteries are separated to prevent short circuits and properly packaged in strong packaging (except when installed in electronic
devices), they are acceptable for air transport as airfreight without any other restrictions. In addition, when installed in
equipment or when no more than 24 cells or 12 batteries meeting the A45 provision are shipped, they are not subject to
special packaging, marking, labeling or shipping documentation requirements. Thus, these batteries are not considered
hazardous under the current regulations and are acceptable for air transport.
All ingredients listed in TSCA inventory.
Not applicable
Not applicable
Environmental Effects
These batteries pass the U. S. EPA's Toxicity Characteristic Leaching Procedure and therefore, maybe
disposed of with normal waste.
GMEL#
2033.3
Page 53

F. — EXPOSURE CONTROL METHODS
Engineering Controls
General ventilation under normal use conditions.
Eye Protection
None under normal use conditions. Wear safety glasses when handling leaking batteries.
Skin Protection
None under normal use conditions. Use butyl gloves when handling leaking batteries.
Respiratory Protection
None under normal use conditions.
Page 3 of 4
Other
Keep batteries away from small children.
G. — WORK PRACTICES
Handling and Storage
Store at room temperature. Avoid mechanical or electrical abuse. DO NOT short or install incorrectly.
Batteries may explode, pyrolize or vent if disassembled, crushed, recharged or exposed to high temperatures.
Install batteries in accordance with equipment instructions. Replace all batteries in equipment at the same
time. Do not carry batteries loose in pocket or bag.
Normal Clean Up
Not applicable
Waste Disposal Methods
No special precautions are required for small quantities. Large quantities of open batteries should be treated
as hazardous waste. Dispose of in accordance with federal, state and local regulations. Do not incinerate,
since batteries may explode at excessive temperatures.
GMEL#
2033.3
Page 54
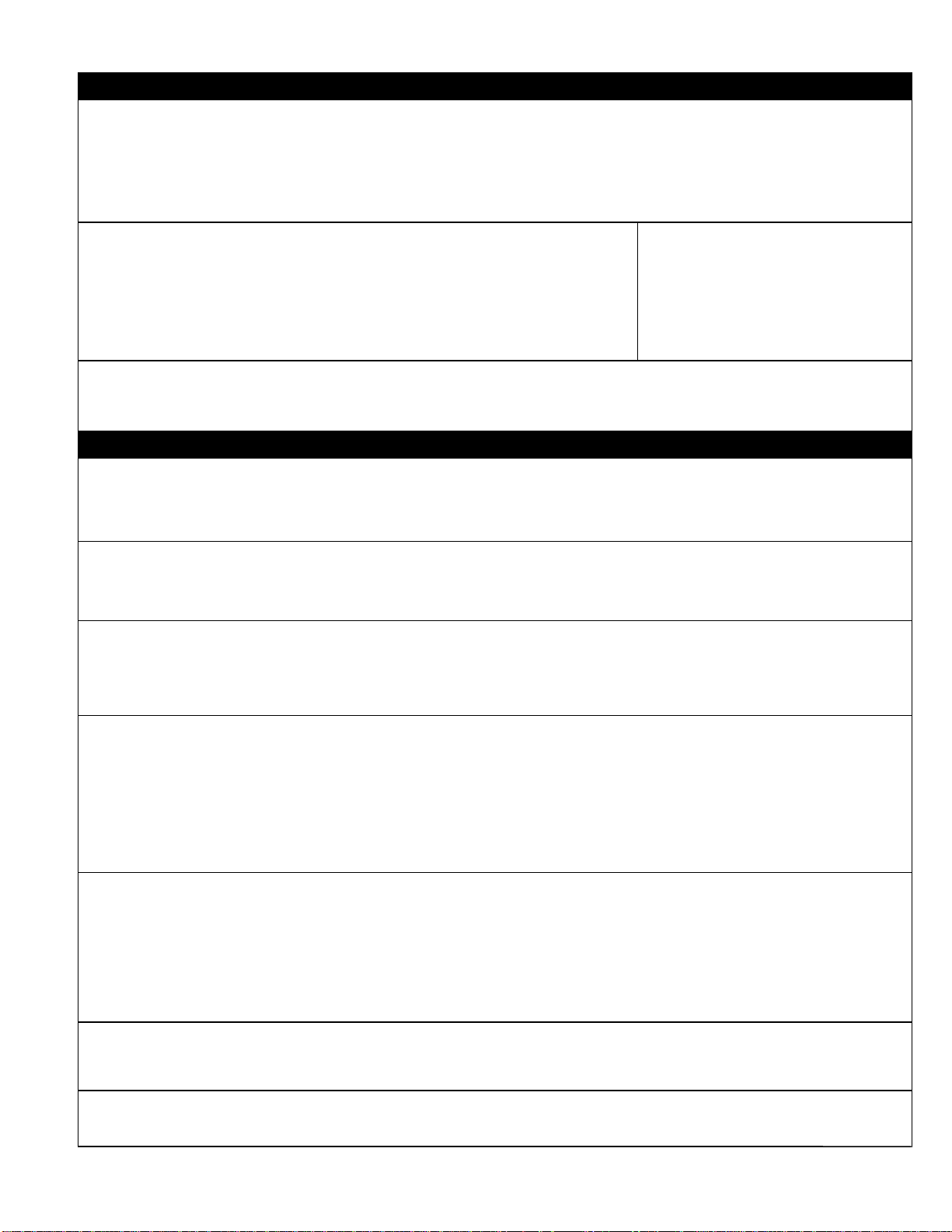
Page 4 of 4
H. — EMERGENCY PROCEDURES
Steps to be taken if material is released to the environment or spilled in the work area
Evacuate the area and allow vapors to dissipate. Increase ventilation. Avoid eye or skin contact. DO NOT
inhale vapors. Clean-up personnel should wear appropriate protective gear. Remove spilled liquid with
absorbent and contain for disposal.
Fire and Explosion Hazard Extinguishing Media
Batteries may burst and release hazardous decomposition products when
exposed to a fire situation. See Sec. C.
As for surrounding area. Dry
chemical, alcohol foam, water or
carbon dioxide. For incipient
fires, carbon dioxide extinguishers
are more effective than water.
Firefighting Procedures
Cool fire-exposed batteries and adjacent structures with water spray from a distance. Use self-contained
breathing apparatus and full protective gear.
I. — FIRST AID AND MEDICAL EMERGENCY PROCEDURES
Eyes
Not anticipated. If battery is leaking and material contacts eyes, flush with copious amounts of clear, tepid
water for 30 minutes. Contact physician at once.
Skin
Not anticipated. If battery is leaking, irrigate exposed skin with copious amounts of clear, tepid water for a
least 15 minutes. If irritation, injury or pain persists, consult a physician.
Inhalation
Not anticipated. Respiratory (and eye) irritation may occur if fumes are released due to heat or an abundance
of leaking batteries. Remove to fresh air. Contact physician if irritation persists.
Ingestion
Consult a physician. Published reports recommend removal from the esophagus be done endoscopically
(under direct visualization). Batteries beyond the esophagus need not be retrieved unless there are signs of
injury to the GI tract or a large diameter battery fails to pass the pylorus. If asymptomatic, follow-up x-rays
are necessary only to confirm passage of larger batteries. Confirmation by stool inspection is preferable
under most circumstances. If mouth area irritation/burning has occurred, rinse the mouth and surrounding
area with clear, tepid water for at least 15 minutes.
Notes to Physician
1) For information on treatment, telephone (202)-625-3333 collect.
2) Potential leakage of less than 50 milligrams of propylene carbonate (CAS #108-32-1) and
dimethoxyethane (CAS #110-71-4).
3) Dimethoxyethane readily evaporates.
4) Under certain misuse conditions and by abusively opening the battery, exposed lithium can react with
water or moisture in the air causing potential thermal burns or fire hazard.
Replaces # 1461
The information contained in the Material Safety Data Sheet is based on data considered to be accurate, however, no warranty is
expressed or implied regarding the accuracy of the data or the results to be obtained from the use thereof.
MSDS-4 (8/95) GMEL#
2033.3
Page 55

BLANK PAGE
Page 56

Product Information Package
PIP-CW_10 Upgrade Kit
CW_10 Hardware Installation Guide
Nov., 2006
Emerson Process Management
Bristol, Inc.
1100 Buckingham Street
Watertown, CT 06795
Phone: +1 (860) 945-2262
Fax: +1 (860) 945-2525
www.EmersonProcess.com/Bristol
Emerson Electric Canada, Ltd.
Bristol Canada
6338 Viscount Rd.
Mississauga, Ont. L4V 1H3
Canada
Phone: 905-362-0880
Fax: 905-362-0882
www.EmersonProcess.com/Bristol
Emerson Process Management
BBI, S.A. de C.V.
Homero No. 1343, 3er Piso
Col. Morales Polanco
11540 Mexico, D.F.
Mexico
Phone: (52-55)-52-81-81-12
Fax: (52-55)-52-81-81-09
www.EmersonProcess.com/Bristol
Emerson Process Management
Bristol Babcock, Ltd.
Blackpole Road
Worcester, WR3 8YB
United Kingdom
Phone: +44 1905 856950
Fax: +44 1905 856969
www.EmersonProcess.com/Bristol
Emerson Process Management
Bristol, Inc.
22 Portofino Crescent,
Grand Canals Bunbury, Western Australia 6230
Mail to: PO Box 1987 (zip 6231)
Phone: +61 (8) 9725-2355
Fax: +61 (8) 8 9725-2955
www.EmersonProcess.com/Bristol
The information in this document is subject to change without notice. Every effort has
been made to supply complete and accurate information. However, Bristol, Inc.
assumes no responsibility for any errors that may appear in this document.
If you have comments or questions regarding this manual, please direct them to your
local Bristol sales representative, or direct them to one of the addresses listed at left.
Bristol, Inc. does not guarantee the accuracy, sufficiency or suitability of the software
delivered herewith. The Customer shall inspect and test such software and other
materials to his/her satisfaction before using them with important data.
There are no warranties, expressed or implied, including those of merchantability and
fitness for a particular purpose, concerning the software and other materials delivered
herewith.
TeleFlow™ is a trademark of Bristol, Inc. The Emerson logo is a trade mark and service
mark of Emerson Electric Co. Other trademarks or copyrighted products mentioned in
this document are for information only, and belong to their respective companies, or
trademark holders.
Copyright (c) 2006, Bristol, Inc., 1100 Buckingham St., Watertown, CT 06795. No part
of this manual may be reproduced in any form without the express written permission of
Bristol Inc.
 Loading...
Loading...