

Page 1
Mod. 4 EM208S4405F
Opción EPSON RC+ 7.0
Alimentación de
piezas 7.0
Tolva y controlador de tolva
CPD-60402
Page 2

Opción EPSON RC+ 7.0 Alimentación de piezas 7.0 Tolva y controlador de tolva M
od. 4
Page 3
Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4 i
Opción EPSON RC+ 7.0
Alimentación de piezas 7.0 Tolva y controlador de tolva
Mod. 4
Copyright 2018-2020 SEIKO EPSON CORPORATION. Todos los derechos reservados.
Page 4

ii Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4
PRÓLOGO
Gracias por comprar nuestro sistema de robot.
Este manual contiene la información necesaria para el uso correcto de la opción
Alimentación de piezas de EPSON RC+.
Lea atentamente este manual y otros manuales relacionados antes de instalar el sistema de
robot.
Mantenga este manual a la mano para un acceso fácil en todo momento.
GARANTÍA
El sistema de robot y las piezas opcionales se envían a nuestros clientes solo después de
haberlos sometido a los más estrictos controles, pruebas e inspecciones de calidad para
certificar que cumplen con nuestras altas normas de rendimiento.
Los productos que tengan un mal funcionamiento como resultado de la manipulación u
operación normales se repararán en forma gratuita durante el período normal de la garantía.
(Comuníquese con el proveedor de su región para obtener información sobre el período de
garantía).
Sin embargo, se cobrarán al cliente las reparaciones en los siguientes casos (aunque sucedan
dentro del período de garantía):
1.
Daño o mal funcionamiento provocados por un uso inadecuado que no se describe en
este manual o por uso descuidado.
2.
Mal funcionamiento provocado por el desmontaje no autorizado del producto por parte
de los clientes.
3.
Daños debido a ajustes inadecuados o a intentos de reparación no autorizados.
4.
Daño provocado por desastres naturales, como terremotos, inundaciones, etc.
Advertencias, peligros, uso:
1.
Si el equipo asociado al sistema de robot no se usa de acuerdo con las condiciones de
uso y las especificaciones del producto descritas en los manuales, esta garantía queda
nula.
2.
Si no se respetan las ADVERTENCIAS y los PELIGROS de este manual, no podemos
hacernos responsables del mal funcionamiento o de accidentes, incluso si tienen como
resultado sea una lesión o la muerte.
3.
No podemos prever todos los posibles peligros y consecuencias. Por lo tanto, este
manual no puede advertir al usuario de todos los posibles peligros.
Page 5

Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4 iii
MARCAS COMERCIALES
Microsoft, Windows, el logotipo de Windows, Visual Basic y Visual C++ son marcas
registradas o marcas comerciales de Microsoft Corporation en los Estados Unidos y en otros
países. Otras marcas y nombres de productos son marcas comerciales o marcas registradas
de sus respectivos titulares.
NOTACIÓN DE MARCAS COMERCIALES EN ESTE MANUAL
Sistema operativo Microsoft® Windows® 8
Sistema operativo Microsoft® Windows® 10
En todo este manual, Windows 8 y Windows 10 se refieren a los respectivos sistemas
operativos ya citados. En algunos casos, Windows se refiere en forma genérica a Windows
8 y Windows 10.
AVISO
Ninguna parte de este manual se puede copiar o reproducir sin autorización.
El contenido de este manual está sujeto a cambios sin previo aviso.
Notifíquenos si encuentra errores en este manual o si tiene comentarios con respecto a su
contenido.
FABRICANTE
INFORMACIÓN DE CONTACTO
La información de contacto se describe en “PROVEEDORES” en las primeras páginas del
siguiente manual:
Seguridad e instalación del sistema de robot Lea primero este manual
Page 6

iv Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4
Page 7

Índice
Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4 v
Hardware (Tolva)
1. Datos técnicos 3
2. Instrucciones de seguridad 4
3. Construcción y función del alimentador lineal 6
4. Transporte y montaje 7
5. Partida 8
5.1 Ajuste ............................................................................................ 8
6. Especificaciones para el diseño de la pista 13
7. Mantenimiento 14
8. Repuestos (Piezas de mantenimiento) 14
9. Qué hacer en caso de... (Instrucciones para la resolución de
problemas) 14
Page 8

Índice
vi Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4
Hardware (Controlador de tolva)
1. Datos técnicos 19
1.1 Descripción funcional .................................................................. 19
1.2 Declaración de conformidad EC ................................................. 19
1.3 Datos técnicos............................................................................. 19
2. Notas sobre seguridad 20
3. Información de partida 20
3.1 Explicaciones sobre el término MODO OPERATIVO ................ 21
3.2 Cambio a otro voltaje de suministro de red ................................ 22
3.3 Configuración del voltaje de salida mínima y máxima ............... 22
3.4 Cambio a otro voltaje de suministro de red ................................ 23
3.5 Liberación de la función mediante componentes externos ........ 23
3.6 Cambio en el tiempo de partida suave ....................................... 23
4. Plano que muestra la posición de los elementos operativos en los
tableros 24
5. Planos a escala 25
6. Diagrama de conexiones 25
Page 9

Hardware (Tolva)
Page 10

Page 11
Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4 3
1. Datos técnicos
Tipo de alimentador lineal
SLL 400-400
Dimensiones L × B 2) × H (mm)
430 × 84 × 103
Peso
6,5
Tipo de aislamiento
IP54
Longitud del cable de conexión (m)
1,5
Consumo de energía 1) (VA)
120
Consumo de corriente 1) (A)
0,6
voltaje nominal de imán 1) / Frecuencia (V / Hz)
200 / 50
Número de imanes
1
Tipo de imán
WZAW 040
Color del imán
negro
Espacio de aire (mm)
1,0
Frecuencia de vibración Hz
100 Hz
Cantidad de conjuntos de resortes
2
Cantidad estándar de resortes
Cantidad por conjunto de resortes
2 × 2,0
3 × 3,0
Dimensiones del resorte (mm)
Longitud (calibre para barrenos) × ancho
70(56) × 40(18)
Tamaño del resorte (mm)
2,0 y 3,0
Calidad de los tornillos de fijación de los resortes
8,8
Momento de apriete de los tornillos de fijación de los resortes
15 N·m
Peso máximo de las unidades de oscilación (pista lineal)
dependiente del momento de inercia de la masa y de la velocidad
de marcha requerida
alrededor de 5 kg
Longitud máxima de pista (mm)
700
Peso útil máximo del alimentador lineal dependiente del
momento de inercia de la masa y de la velocidad de marcha
requerida
1,5 – 2 kg
1)
A valores de conexión especiales (tensión/ frecuencia, consulte la placa de tipo del imán)
2)
Dimensión de ancho para diseño b (= ancho)
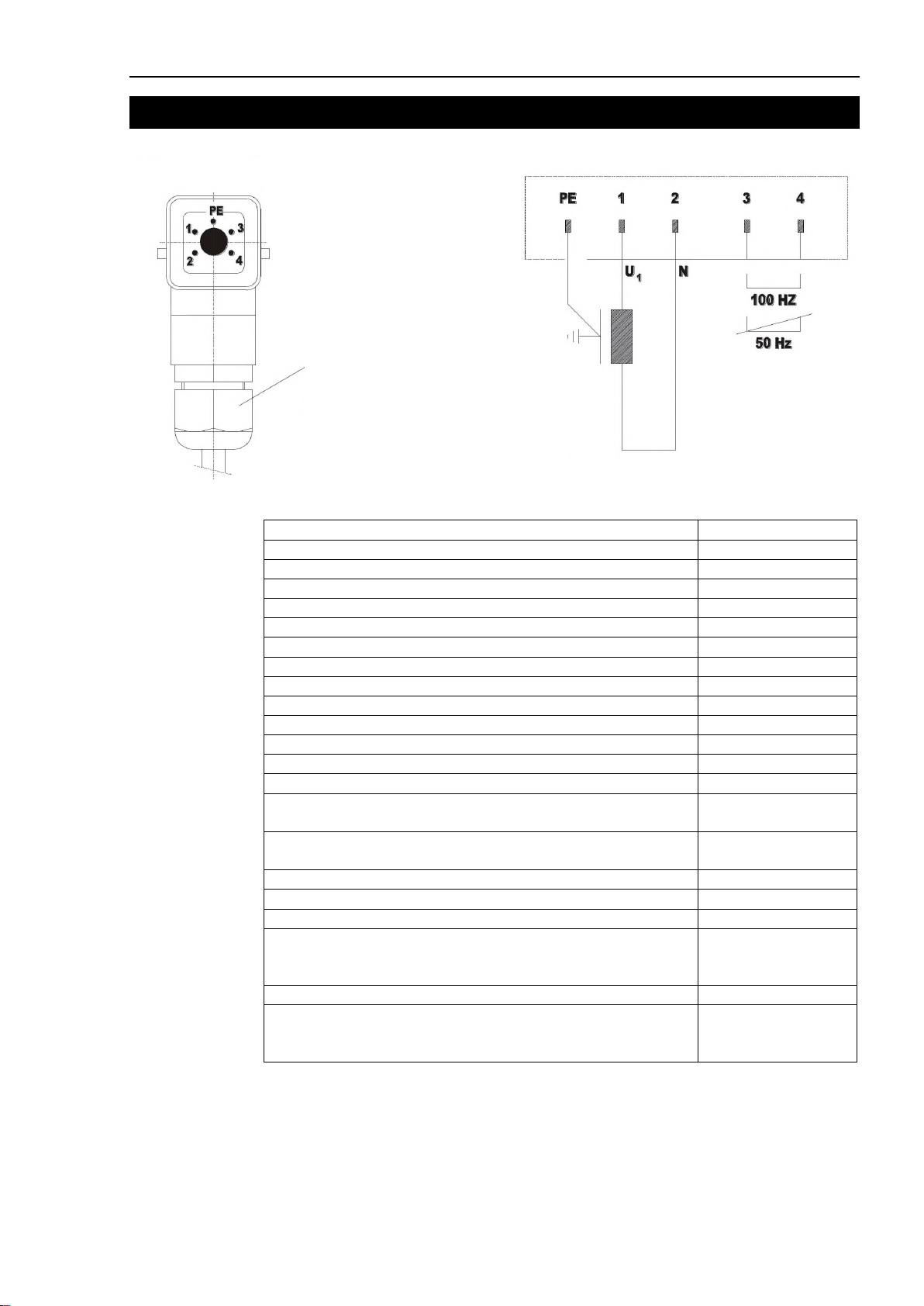
Asignación de pin
Conexión de tornillo M20
Gris-2, 100 Hz
Negro-1, 50 Hz
Conexión de tornillo de metal EMV
Para equipos controlados por
frecuencia
Último alimentador
de recipientes
Modo de operación
Frecuencia de vibración
Con puente 100 Hz
Sin puente 50 Hz
Codificación en enchufe
Con puente: El puente se debe instalar en
la conexión 3 + 4
Page 12

4 Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4
2. Instrucciones de seguridad
La concepción y producción de nuestros alimentadores lineales han sido cuidadosas, a fin
de garantizar una operación segura y sin problemas. Usted también puede aportar de manera
significativa a la seguridad en el trabajo. Por tanto, termine de leer estas breves instrucciones
de operación antes de hacer partir la máquina. Siga siempre las instrucciones de seguridad.
Verifique que todos los que trabajan con esta máquina o en esta máquina lean y cumplan las
siguientes instrucciones de seguridad en forma cuidadosa.
Esta mano apunta a información que ofrece sugerencias
útiles para la operación del alimentador lineal.
ADVERTENCIA
Este triángulo de advertencia simboliza las instrucciones
de seguridad.
No acatar estas advertencias puede provocar lesiones
graves o letales.
Peligros que ocurren en la máquina
- Las piezas más peligrosas de la máquina son las instalaciones eléctricas del alimentador
lineal. Si el alimentador lineal se humedece, existe el peligro de descarga eléctrica.
- Asegúrese de que la conexión a tierra de protección de la fuente de alimentación
eléctrica se encuentre en estado óptimo.
Uso previsto
El uso previsto del alimentador lineal es el accionamiento de las pistas transportadoras. Se
usan para el transporte y la alimentación lineales de piezas producidas en serie que estén
bien posicionadas, así como para la alimentación proporcional de material a granel. El uso
previsto también incluye el cumplimiento de las instrucciones de operación y servicio.
Conozca los datos técnicos de su alimentador lineal en la tabla descrita en 1. Datos técnicos.
Verifique la compatibilidad entre la carga conectada del alimentador lineal, la unidad de
control y el suministro de energía.
El alimentador lineal solo puede funcionar en condiciones
óptimas.
No se debe operar en una zona de explosivos o con humedad.
Según lo especificado por el fabricante, el alimentador lineal solo puede funcionar en la
unidad de mando de configuración, en la unidad de control y en la unidad de oscilación.
Ninguna carga adicional puede actuar en el alimentador lineal, aparte del material que se va
a transportar, para el cual se diseña el tipo especial.
ADVERTENCIA
Queda estrictamente prohibido retirar de operación algún
dispositivo de seguridad.
NOTA
NOTA
Page 13

Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4 5
Exigencias para el usuario
- Se deben seguir los detalles de las instrucciones de operación en todas las actividades
(operación, mantenimiento, reparación, etc.).
- El operador debe evitar cualquier método de trabajo que menoscabe la seguridad del
alimentador lineal.
- El operador se debe preocupar de que solo personal autorizado trabaje en el alimentador
lineal.
- El usuario tiene la obligación de informar al operador de inmediato sobre cualquier
cambio en las condiciones del alimentador lineal que podría arriesgar la seguridad.
ADVERTENCIA
Solo personal experto puede instalar, poner en
funcionamiento y reparar el alimentador lineal. La
normativa vinculante para la calificación de electricistas y
personal instruido en ingeniería eléctrica es válida según lo
definido en IEC 364 y en DIN VDE 0105, parte 1.
PELIGRO
Dado que el campo electromagnético puede afectar a las
personas con marcapasos, se recomienda mantener una
distancia mínima de 25 cm.
PELIGRO
- Desconecte el enchufe de alimentación principal cuando
enchufe y desenchufe el cable.
- Desconecte el enchufe de alimentación principal mientras
se efectúa un ajuste o un mantenimiento.
Emisión de ruidos
El nivel de ruidos del lugar de operación depende de todos los equipos y del material que se
va a transportar. Por tanto, de acuerdo con las normativas CE para maquinaria, el nivel de
ruidos solo se puede determinar en el lugar de la operación.
Si el nivel de ruidos del lugar de operación supera el límite permitido, se pueden usar las
fundas con predicción de ruido que ofrecemos como accesorios (consulte el catálogo).
Normas y reglamentos
El dispositivo se construyó de acuerdo con las siguientes normas y reglamentos:
- Directiva de baja tensión 2014/35/UE
- Directiva de compatibilidad electromagnética 2014/30/UE
Suponemos que nuestro producto se integrará a una máquina fija. El usuario debe considerar
las disposiciones de la directiva CEM 2014/30/UE.
- Normas homologadas aplicadas
EN 60204-1
Page 14

6 Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4
3. Construcción y función del alimentador lineal
Los alimentadores lineales se usan para accionar los equipos transportadores. El
accionamiento se realiza mediante un electroimán. El siguiente diagrama esquemático
muestra la función de un alimentador lineal:
El alimentador lineal es un dispositivo de la familia de alimentadores con cuba vibrante. Sin
embargo, está equipado con un transportador lineal. Las vibraciones electromagnéticas se
convierten en vibraciones mecánicas y se emplean para transportar el material B. Si recibe
corriente el imán D, que está conectado firmemente a la masa del contrapeso F, se genera
una potencia que, según sea la frecuencia de vibración del suministro de la red eléctrica,
atrae y libera al armazón E. En un período de 50 Hz de la red de CA, el imán consigue dos
veces su máxima potencia de atracción, pues depende de la dirección de la conducción de
corriente. Por tanto, la frecuencia de vibración es de 100 Hz. En caso de bloqueo de media
onda, es de 50 Hz. Conozca la frecuencia de vibración de su alimentador lineal en la tabla
descrita en 1. Datos técnicos.
Un alimentador lineal es un sistema resonante (sistema masa-resorte). Como resultado, rara
vez el ajuste de fábrica cumplirá con sus requisitos. El Capítulo 5 describe en detalle cómo
adaptar el alimentador lineal a sus requisitos.
El control del alimentador lineal ocurre gracias a una unidad de control electrónico de baja
pérdida tipo ESG 1000. En su panel frontal, cuenta con una conexión mediante enchufe de
7 polos, con la cual se conecta al alimentador lineal.
La asignación de pines de la toma se muestra en la tabla descrita en 1. Datos técnicos.
Para acceder a más información sobre toda la gama de
unidades de control, consulte en Hardware (Controlador de
tolva).
Todas las unidades de control poseen dos elementos operativos principales:
- El alimentador lineal se enciende o se apaga mediante el interruptor de red eléctrica.
- La capacidad de transporte de la unidad transportadora se establece mediante el mando
giratorio.
NOTA
A Pista de transporte y peso de oscilación
B Material a transportar
C Conjunto de resorte
D Imán de accionamiento
E Armazón
F Contrapeso
G Amortiguador de impacto
H Contramasa
Page 15

Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4 7
4. Transporte y montaje
Transporte
Procure que el alimentador lineal no se pueda estrellar con otros
objetos durante el transporte.
El peso del alimentador lineal aparece en la tabla descrita en 1. Datos técnicos.
Montaje
El alimentador lineal se debe montar en una subestructura estable (disponible como
accesorio) del lugar en el cual se usa. La subestructura se debe dimensionar de modo tal que
no puedan ocurrir vibraciones en el alimentador lineal.
Los alimentadores lineales se fijan a los amortiguadores desde abajo (pieza G del plano
general en 3. Construcción y función del alimentador lineal).
La siguiente tabla ofrece una síntesis de los datos de calibre de diversos tipos:
Tipo de
alimentador lineal
Longitud en
mm
Ancho en mm
Hilo del amortiguador
SLL 400 – 400
200
100
M6
Asegúrese de que el alimentador lineal no pueda entrar en contacto con los demás
dispositivos durante la operación.
Para más detalles sobre la unidad de control (plan de calibre, etc.), consulte Hardware
(Controlador de tolva).
ADVERTENCIA
Tenga cuidado de que sus manos, dedos o pies no queden
atrapados y de que los equipos no sufran daños por una
caída de la tolva o del controlador de tolva. Cuando trabaje,
use equipos de protección, como zapatos de seguridad.
NOTA
Page 16

8 Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4
5. Partida
Asegúrese de que el bastidor (soporte, base, bastidor, etc.)
esté conectado al cable de tierra (PE). Si es necesario, se
debe agregar una puesta a tierra de predicción en el lugar.
Compruebe lo siguiente:
- Si el alimentador lineal está en una posición aislada y no viene fijo con un cuerpo sólido.
- Si la pista lineal está atornillada y ajustada.
- Si el cable de conexión del alimentador lineal está enchufado en la unidad de control.
ADVERTENCIA
La conexión eléctrica del alimentador lineal solo puede ser
realizada por personal capacitado (electricistas). En caso de
modificaciones en la conexión eléctrica, es absolutamente
necesario seguir las instrucciones de funcionamiento de
“unidades de control”.
- El voltaje de suministro disponible (frecuencia, voltaje, salida) es adecuado de
conformidad con los datos de conexión de la unidad de control (consulte la placa de tipo
de la unidad de control).
Conecte el cable de alimentación de la unidad de control y encienda la unidad de control
con el interruptor de red eléctrica.
El rango operativo óptimo del alimentador lineal es aquel en que la posición del controlador
es 80 % en la unidad de control. En caso de desviaciones más grandes (> = ± 15 %), se debe
efectuar un reajuste.
5.1 Ajuste
Los conjuntos de resortes tienen un peso de pista transportadora alrededor de 25 % inferior
al peso máximo de pista descrito en 1. Datos técnicos, y una velocidad de marcha de 4 a
6 m/min. En caso de que se instalen pistas transportadoras más pesadas o más livianas o de
que se requieran velocidades de transporte considerablemente más rápidas o más lentas, se
deben modificar los conjuntos de resorte. Para ello se deben cumplir las siguientes reglas
básicas:
Al principio se debe efectuar un ajuste general de la velocidad
de transporte (ajuste de la frecuencia natural), seguido de un
ajuste del comportamiento de marcha. Por último, se ajusta
la velocidad de transporte (frecuencia natural).
NOTA
NOTA
Page 17

Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4 9
5.1.1 Ajuste de la velocidad de marcha requerida
En caso de no alcanzar la velocidad de marcha requerida con el conjunto estándar de
resortes, primero se debe averiguar el rango de ajuste de corriente del sistema de oscilación,
sea una frecuencia natural inferior a 50 o 100 Hz o una frecuencia natural superior a 50 o
100 Hz.
Con este fin, se desmontan una o dos placas del contrapeso móvil para ejecutar una prueba.
Si se percibe un cambio en la velocidad de marcha de la pista transportadora, se puede tomar
de la siguiente tabla, sea que se deban instalar o retirar resortes. No se puede cambiar la
posición del controlador en la unidad de control durante esta prueba. Los diferentes tamaños
se equipan en fábrica.
Cambio de
velocidad de
marcha en la pista
transportadora
después de
desmontar el
contrapeso
Se debe
aumentar la
velocidad de
marcha
requerida.
Se debe
disminuir la
velocidad de
marcha
requerida.
Posición de la
frecuencia
natural
Más lenta
1. Instale un
contrapeso.
2. Desmonte los
resortes.
1. Instale un
contrapeso.
2. Instale los
resortes.
> 50 o 100 Hz
Más rápida
1. Instale un
contrapeso.
2. Instale los
resortes.
1. Instale un
contrapeso.
2. Desmonte los
resortes.
< 50 o 100 Hz
El siguiente recuadro muestra la curva de resonancia de un alimentador lineal:
Es posible que la curva de resonancia del alimentador lineal
no se ajuste a la frecuencia de la red eléctrica.
Al intercambiar resortes, se debe considerar la valencia de los diversos tamaños de resorte
de ballesta. A medida que el tamaño del resorte ingrese al cuadrado de potencia de entrada
del resorte, se deben cumplir los siguientes ejemplos:
- Tamaño de resorte de 2,5 mm = 6,25 de potencia de resorte
- Tamaño de resorte de 3,0 mm = 9,0 de potencia de resorte
- Tamaño de resorte de 3,5 mm = 12,25 de potencia de resorte
NOTA
A Velocidad de transporte
B Frecuencia natural
C Curva de resonancia
(no a escala)
D Potencia de resorte
(cantidad de resortes)
Page 18

10 Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4
Un resorte de ballesta de 3,5 mm tiene más o menos la misma valencia que dos resortes de
ballesta de 2,5 mm. Por ese motivo, siempre se recomienda un ajuste final o ajuste fino en
el caso de resortes de ballesta fina.
Al cambiar las masas de los contrapesos y de los pesos de
oscilación (instalación o desmontaje de contrapesos o de
pesos adicionales), se cambia la velocidad de marcha o la
frecuencia natural del alimentador lineal. Si es necesario, se
deben agregar o retirar resortes de ballesta.
Cambio del conjunto de resortes para alimentadores lineales tipo SLL 400
Desatornille los 4 o 6 tornillos de fijación del resorte lateral superior (“C”) (M6 DIN 912).
Ahora se puede elevar el oscilador completo con la pista montada. Para retirar el paquete de
resortes deseado, suelte los tornillos de fijación del resorte lateral inferior (“D”) (M6 DIN
912).
Antes de retirar el paquete de resortes, se debe extraer el conductor de protección del lado
de alimentación del accesorio del resorte inferior.
Atornille en el dispositivo de montaje el paquete de resortes que fue retirado, para instalar
los resortes de tamaño 400 y apriételo en un banco para tornillos. Cuando instale y retire los
resortes laminados, asegúrese de que exista poca distancia entre los resortes.
Si no tiene un dispositivo de montaje para los paquetes de resortes, proceda del siguiente
modo:
Fije de manera horizontal el paquete de resortes que fue desmontado en un banco para
tornillos paralelo mediante mordazas de sujeción lisas y efectúe los ajustes deseados.
Cuando apriete los paquetes de resortes, asegúrese de que estén alineados en paralelo.
El dispositivo de montaje alinea los dos accesorios de resortes entre sí. Los tornillos de
fijación de los resortes se deben apretar con un torque de 12,5 Nm.
Reinstale el paquete de resortes completo.
Para restaurar la alineación anterior del alimentador lineal, se debe alinear el orificio de
ajuste del extremo superior de la masa del contrapeso (“E”) con el oscilador mediante un
pin (6 mm de diámetro con una longitud mínima de 70 mm).
En el lado de la alimentación, el oscilador se alinea cerca del contrapeso mediante la
inserción de otro pin (6 mm de diámetro con una longitud mínima de 70 mm) en el orificio
de ajuste (“I”).
Tras ajustar el ángulo del resorte hacia la posición deseada, se vuelven a apretar los tornillos
de fijación laterales con un torque de 12,5 Nm.
Antes de volver a funcionar, recuerde retirar los pines de centrado.
NOTA
Page 19

Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4 11
5.1.2 Ajuste del comportamiento de marcha requerido o del
sincronismo de la pista del alimentador lineal
Para lograr la sincronización de la pista del alimentador lineal, se debe ajustar el ángulo del
resorte del mismo modo que el ángulo del centro de gravedad. El ángulo del centro de
gravedad está determinado por la posición de los dos centros de gravedad de la oscilación y
del contrapeso.
Ejemplo con un ángulo de centro de gravedad de 12,5°
El ángulo del resorte es igual al ángulo del centro de gravedad.
La dirección de la fuerza de los resortes se inicia exactamente en el centro de gravedad del
vibrador. Consecuencia: La amplitud de altura es la misma en el lado de alimentación y en
el lado de descarga.
El ángulo del resorte es mayor que el ángulo del centro de gravedad.
La dirección de la fuerza de los resortes se inicia antes del centro de gravedad del vibrador.
Consecuencia: La amplitud de altura es mayor en el área de alimentación que en el área de
descarga.
Page 20

12 Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4
El ángulo de resortes es menor que el ángulo del centro de gravedad.
La dirección de la fuerza de los resortes se inicia detrás del centro de gravedad del vibrador.
Consecuencia: La amplitud de altura es menor en el área de alimentación que en el área de
descarga.
Si los ángulos no son los mismos, las pistas transportadoras se ejecutan en forma inestable.
En caso de desviaciones muy altas con respecto a este ángulo, la pista transportadora hasta
puede presentar desviaciones laterales (oscilaciones).
Los centros o ángulos de gravedad pueden reflejar la influencia de las siguientes medidas:
- Agregar o desplazar el contrapeso (“F”).
- Elegir la posición y la altura de la pista de modo que se obtenga un centro de gravedad
favorable.
- Mantener el menor peso de pista que sea posible, para conservar el centro de gravedad
del vibrador en el mínimo posible.
- Instalar un contrapeso adicional en el área de descarga del vibrador (“G”).
- Ajustar el ángulo del resorte según el ángulo del centro de gravedad.
El ángulo del resorte de los alimentadores lineales tipo SLL 400 se puede ajustar entre 5 ° y
25 °. Si el ángulo del centro de gravedad queda fuera de esta área, es imposible el
sincronismo de esta pista. En este caso, se deben efectuar modificaciones en los centros de
gravedad del contrapeso y del peso de oscilación, de acuerdo con los puntos anteriores.
Ajuste del ángulo del resorte
Fije el vibrador hacia la masa del contrapeso (consulte en 5.1 Ajuste). Después, se pueden
aflojar las cuatro fijaciones laterales de resorte (“C” + “D”) para que el conjunto de resortes
gire hacia el ángulo deseado. A continuación, apriete los tornillos de fijación de resorte
según el torque de ajuste admisible (consulte en 1. Datos técnicos) y retire los tornillos de
ajuste, las placas de distancia o los pernos.
Ajuste del espacio de aire del imán
El espacio de aire entre el armazón y el imán ajustado en fábrica se puede encontrar en 1.
Datos técnicos.
El espacio de aire se puede ajustar desde afuera, sin desmontar ninguna pieza de un
componente. Afloje un poco los dos tornillos de fijación del armazón (“A” o “A” + “B”)
(M5 DIN 912 en el alimentador lineal tipo SLL 400:). En ambos orificios de perforación del
perfil de oscilación (“H”) se debe insertar un pin redondo (Φ1 mm, 80 mm de longitud en
SLL400). Cuando se presionan y luego se aprietan los dos tornillos de fijación del armazón
en la dirección de marcha, se ajusta el espacio magnético especificado (consulte en 1. Datos
técnicos). Después, extraiga los pines redondos. Si no hay pines redondos, el espacio
magnético se puede ajustar desde abajo (tal vez, luego de desmontar el alimentador lineal
completo desde la estructura de apoyo o desde la mesa de apoyo) mediante una galga de
espesor o con distanciadores, de acuerdo con el espacio magnético prescrito.
Con el mando giratorio en una posición de 100 % en la
unidad de control y un espacio magnético bien ajustado, el
imán no se puede estrellar con el armazón. Si esto sucede,
proceda de acuerdo con el punto 5.1 Ajuste (retire los
resortes).
NOTA
Page 21

Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4 13
El objetivo del ajuste es:
Si se alcanza la velocidad de transporte requerida con el controlador en una posición de
80 %, siempre se debe aumentar la velocidad de transporte cuando retire una placa de peso.
Tenga cuidado de que el número de resortes por conjunto de
resortes no difiera en más de 2 a 3 resortes.
6. Especificaciones para el diseño de la pista
Como el vibrador es bastante flexible gracias al uso de un perfil de aluminio, el diseño de
las pistas transportadoras debe ser muy liviano. El diseño de la pista transportadora solo
debe ser inflexible según la distorsión correspondiente en el caso de pistas transportadoras
que sobresalgan del vibrador (100 mm como máximo en el área de alimentación y 200 mm
como máximo en la zona de descarga). Para alcanzar más distorsión-inflexibilidad lateral,
se debe atornillar una placa de apoyo de una sola pieza de aluminio de 4 a 6 mm de espesor
en los perfiles del alimentador lineal. Al reemplazar los perfiles del alimentador lineal, se
crear un tipo de construcción como una “S” pequeña o una “B” ancha.
A mayor velocidad de alimentación, mayor la separación entre el borde superior de la pieza
que se va a transportar y el borde inferior de la cubierta de la pista transportadora que se va
a elegir. Si es posible, la separación debe llegar a la máxima medida permitida. Al instalar
y fijar las pistas transportadoras, se deben cumplir los siguientes puntos:
- Instalar cerca del borde superior del vibrador.
- Si es posible, en el centro del perfil de aluminio.
- Elegir tornillos sólidos y rígidos (mínimo M5).
- Para lograr más velocidad de transporte, el alimentador lineal se puede instalar con una
leve inclinación de unos 3 a 5 °.
- En ninguna circunstancia use cubiertas sueltas o con bisagras, desatornilladas.
La pista transportadora también puede constar de varios segmentos cortos que se unen y
atornillan al vibrador. En el lado de la alimentación, los chaflanes planos facilitan el paso
de la pieza de trabajo desde un segmento de la pista transportadora a otro.
Se recomienda de manera especial la construcción que consta de varios segmentos para el
uso de pistas transportadoras endurecidas o con superficie endurecida (fabricación con baja
distorsión).
Se pueden lograr pistas transportadoras muy livianas mediante rieles de aluminio o perfiles
de aluminio. La resistencia necesaria a la abrasión se puede lograr con segmentos elaborados
en acero endurecido con banda de resorte, los cuales se atornillan o se insertan. Están
disponibles a pedido con el fabricante.
NOTA
Page 22

7. Mantenimiento
Espacio magnético
ADVERTENCIA
Solo un electricista puede abrir la unidad de control o la
caja de conexiones. Antes de abrir los dispositivos a.m., se
debe desconectar el enchufe de la red eléctrica.
Los alimentadores lineales suelen no requerir mantenimiento. Sin embargo, se deben limpiar
de manera minuciosa si están considerablemente sucios o si se han derramado líquidos sobre
ellos.
- Para este fin, primero desconecte el enchufe de la red eléctrica.
- Limpie el interior del alimentador lineal, en especial, el espacio magnético.
- Una vez conectado el enchufe de la red eléctrica, el alimentador lineal está listo para
volver a funcionar.
8. Repuestos (Piezas de mantenimiento)
Comuníquese con el proveedor de su región.
9. Qué hacer en caso de...
(Instrucciones para la resolución de problemas)
En caso de que la pista transportadora no tenga una velocidad de marcha o una amplitud de
altura constante, sino una velocidad de marcha o una amplitud de altura mayor en el lado de
descarga que en el lado de la alimentación, el ángulo del resorte está mal ajustado con
respecto al ángulo del centro de gravedad (consulte en 5.1.2 Ajuste del comportamiento de
marcha requerido o del sincronismo de la pista del alimentador lineal). En este caso,
proceda del siguiente modo:
- Ajuste el ángulo de resorte más grande en todos los conjuntos de resortes.
- Desplace el contrapeso “F” en contra de la dirección de marcha.
- Instale más placas de peso en el contrapeso.
- Instale un peso adicional “G” en el perfil de oscilación.
En caso de que la pista transportadora no tenga una velocidad de marcha o una amplitud de
altura constante, sino una velocidad de marcha o una amplitud de altura mayor en el lado de
alimentación que en el lado de descarga, el ángulo del resorte está mal ajustado con respecto
al ángulo del centro de gravedad (consulte en 5.1.2 Ajuste del comportamiento de marcha
14 Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4
Page 23

Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4 15
requerido o del sincronismo de la pista del alimentador lineal). En este caso, proceda del
siguiente modo:
- Ajuste el ángulo de resorte más pequeño en todos los conjuntos de resortes.
- Desplace el contrapeso “F” en la dirección de marcha.
- Desmonte más placas de peso en el contrapeso.
- Desmonte un peso adicional “G” desde el perfil de oscilación.
Si el comportamiento de marcha es inestable con la pista transportadora a velocidad
constante y si el material que se va a transportar salta demasiado entre la superficie del
cojinete y la cubierta, el ángulo del centro de gravedad y el ángulo del resorte ajustado en el
sistema total son demasiado grandes y, por tanto, la amplitud de altura es demasiado alta.
En este caso, proceda del siguiente modo:
- Para cambiar el ángulo del centro de gravedad (que sea más “plano”), desplace el
contrapeso “F” en contra de la dirección de marcha, instale más placas de peso en el
contrapeso, instale un peso adicional en el perfil de oscilación y escoja un diseño más
liviano para la pista transportadora, si es necesario.
- Ajuste el ángulo del resorte según el ángulo del centro de gravedad.
Si el comportamiento de marcha es inestable, en especial en el material que se va a
transportar con una superficie amplia o que se contamina con aceite, el ángulo del centro de
gravedad y el ángulo del resorte ajustado en el sistema total son demasiado pequeños. La
amplitud de altura es demasiado baja.
Debido a esto, no puede ocurrir el movimiento de proyección y, en el caso de piezas de
trabajo oleosas, el poder adhesivo es mayor al del proyectil, es decir, no se puede levantar
la pieza de trabajo.
En este caso, proceda del siguiente modo:
- Para cambiar el ángulo del centro de gravedad (que sea “más inclinado”), desplace el
contrapeso “F” en la dirección de marcha, desmonte más placas de peso en el contrapeso
y desmonte el peso adicional desde el perfil de oscilación.
- Ajuste el ángulo del resorte según el nuevo ángulo del centro de gravedad.
En caso de que la pista transportadora no se pueda ajustar de acuerdo con los criterios ya
mencionados, y, por ejemplo, ocurran vibraciones laterales o “puntos muertos” en ciertas
áreas, la rigidez de la pista es insuficiente. Los puntos de impacto o separación trabajan de
manera recíproca o las piezas estructurales asimétricas de la pista conducen a un
comportamiento de marcha inestable. En este caso, proceda del siguiente modo:
- Monte refuerzos adicionales.
- Conecte los puntos de impacto o separación mediante atornillado.
- Aporte piezas estructurales asimétricas con contrapesos o reemplácelas por materiales
más livianos.
Page 24

16 Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4
Problema
Causa posible
Solución
El alimentador lineal no parte
al encenderlo.
- Se apaga la red eléctrica.
- Encienda el interruptor de
la red eléctrica.
- No está conectado el
enchufe de la red eléctrica
en la unidad de control.
- Conecte el enchufe de la
red eléctrica.
- No está enchufado el cable
de conexión entre el
alimentador lineal y la
unidad de control.
- Conecte el enchufe de 5
polos de la unidad de
control.
- Fusible defectuoso en la
unidad de control
- Reemplace el fusible.
Leve vibración en el
alimentador lineal
- Mando giratorio de la
unidad de control
establecido en 0 %
- Establezca el controlador
en 80 %.
- No se ha retirado el
dispositivo de seguridad
de transporte.
- Retire el dispositivo de
seguridad de transporte.
- Frecuencia de vibración
incorrecta
- Compruebe si es correcto
el código del enchufe del
alimentador lineal
(consulte la placa de tipo
y 1. Datos técnicos)
PELIGRO
En caso de operar un alimentador lineal SLL 400 sin
puente en un enchufe de 7 polos, la unidad de control
y el imán están en peligro.
Tras un tiempo de
funcionamiento más
prolongado, el alimentador
lineal ya no logra la
capacidad de transporte
requerida.
- Los tornillos de fijación
de la pista lineal están
sueltos.
- Vuelva a apretar los
tornillos.
- Los tornillos de uno o dos
conjuntos de resortes
están sueltos.
- Apriete los tornillos (Para
conocer los torques de
ajuste, consulte 1. Datos
técnicos)
- Espacio magnético
desajustado
- Reajuste el espacio
magnético (Para conocer
el ancho del espacio,
consulte 1. Datos
técnicos)
- Vibrador desplazado hacia
la masa del contrapeso
- Reajuste el vibrador
(consulte 5.1.1 Ajuste de
la velocidad de marcha
requerida).
El alimentador lineal
produce ruidos fuertes.
- Cuerpos extraños en el
espacio magnético
- Apague el alimentador
lineal y retire los cuerpos
extraños. Luego verifique
el ajuste del espacio
magnético.
No se puede ajustar el
alimentador lineal a una
velocidad de transporte
constante.
- Ha cambiado la constante
de resorte del sistema de
oscilación. El alimentador
lineal funciona cerca del
punto de resonancia.
- Reajuste el alimentador
lineal. Se deben retirar los
resortes.
(Consulte 5. Partida).
Page 25

Hardware (Controlador de tolva)
Page 26

Page 27

Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4 19
1. Datos técnicos
1.1 Descripción funcional
El diseño compacto de la unidad de control puede abastecer a todas las unidades de control
hasta una corriente de carga de 6 amperios. Está pensado para una instalación individual
directa en el oscilador y es completamente conectable mediante enchufe. El rango de
corrección del potenciómetro de la placa delantera trae un ajuste de fábrica en un oscilador
de referencia y permite un ajuste del voltaje de salida entre 40 y 280 voltios efectivos.
El interruptor de balanceo iluminado de la placa delantera separa la unidad de control con
2 polos de la red eléctrica. En el caso de conmutación frecuente o de operación con una
unidad de control superior, existe la posibilidad de desconexión sin vatios mediante contacto
sin potencial, así como por señal de voltaje de 16-30 V CC. En 3.5 Liberación de la función
mediante componentes externos se describe la intervención en el dispositivo que esto
requiere.
La alimentación se suministra cuando transcurre el tiempo (alrededor de 0,5 segundos)
ajustado tras el encendido de la alimentación.
1.2 Declaración de conformidad CE
El dispositivo de control se ajusta a las siguientes normativas:
- Directiva de baja tensión 2014/35/UE
- Directiva de compatibilidad electromagnética 2014/30/UE
Normas homologadas aplicadas:
- DIN EN 60204-1
- EN 61439-1
El dispositivo de control se ajusta a las normativas de UL y CSA:
1.3 Datos técnicos
Voltaje de suministro de red
230 voltios CA, 50 o 60 Hz, +10 15 % o
115 voltios CA, 60 o 60 Hz, +10 15 %
Voltaje de salida
40...208 voltios (efectivos) ajustables, (red eléctrica de
230 V)
20...105 voltios (efectivos) ajustables, (red eléctrica de
115 V)
Corriente de carga
6 amp. máx. (ef.)
Modos operativos
1. Operación simétrica de onda completa
(frecuencia de oscilación = el doble de la frecuencia de la
red eléctrica)
2. Operación asimétrica de media onda
(frecuencia de oscilación = frecuencia de la red eléctrica)
Selección de modo operativo
Puente de codificación en el enchufe de carga
Liberación de la función
seleccionable mediante puentes internos
Liberación mediante señal
externa
Entrada protegida por batería inversa, nivel 16 ... 30 V CC
a 24 voltios alrededor de 8 mA
Partida suave
Ajustable internamente, estándar aprox. 0,5 seg.
Tipo de aislamiento
IP54
Supresión de interferencia radial
de acuerdo con las normativas EMV
Dimensiones
104 × 213 × 153 (ancho × altura × profundidad)
Page 28

20 Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4
2. Notas sobre seguridad
Siempre se deberán leer y comprender las notas sobre seguridad. Su cumplimiento asegura
la conservación de un valioso material y evita el deterioro de la salud.
PELIGRO
Peligro eléctrico, como trabajos bajo voltaje
PELIGRO
De acuerdo con las normativas electrónicas, en el
equipamiento eléctrico de la máquina o del equipo solo puede
trabajar un electricista calificado o personal capacitado bajo
la dirección y supervisión de un electricista calificado.
En las máquinas y en el equipo se deben respetar todas las
notas sobre seguridad y peligro.
Se debe examinar en forma regular el equipamiento eléctrico
de una máquina o de un equipo. Se deben eliminar de
inmediato las fallas, por ejemplo, conexiones sueltas o cables
dañados.
PELIGRO
Antes de abrir el dispositivo, desconecte el enchufe de
alimentación.
PELIGRO
Desconecte el enchufe de alimentación principal cuando
enchufe y desenchufe el cable. Desconecte el enchufe de
alimentación principal para efectuar un ajuste o
mantenimiento.
Page 29

Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4 21
3. Información de partida
PELIGRO
Siempre se deben verificar los siguientes puntos antes de
efectuar una conexión a la red eléctrica y de encender la
unidad de control:
- ¿La unidad de control está bien cerrada y con todos los
tornillos?
- ¿Los dispositivos de fijación de enchufe existentes están
bloqueados en posición o atornillados?
- ¿Todos los cables y ductos están intactos?
- ¿Está garantizado el USO PREVISTO?
- ¿La indicación de voltaje de suministro de red es compatible
con la red local de suministro de energía?
- ¿La indicación de frecuencia de la red eléctrica en el
oscilador es compatible con la red local de suministro de
energía?
- ¿Se ha establecido el modo operativo correcto en la
unidad de control?
(al respecto, lea la explicación sobre modos operativos)
La unidad de control solo se puede poner en funcionamiento si todas las preguntas anteriores
se pueden responder de manera afirmativa.
PELIGRO
En las primeras partidas o en partidas posteriores a algún
trabajo de reparación o de intercambio de unidades de control
u osciladores, antes de encender el dispositivo, se debe
establecer la salida mínima en la unidad de control. Al activar
la salida, se debe tener cuidado para lograr un funcionamiento
correcto.
3.1 Explicaciones sobre el término MODO OPERATIVO
Los osciladores son vibradores mecánicos de resorte. Según su peso o tamaño, se ajustan a
una frecuencia de oscilación cercana a la frecuencia de la red eléctrica. Existen dos modos
operativos posibles:
1. Operación asimétrica de media onda: El oscilador funciona con la frecuencia de la red
eléctrica.
2. Operación simétrica de onda completa: El oscilador funciona con el doble de la
frecuencia de la red eléctrica.
A partir de esto, se obtienen los siguientes detalles para frecuencia de oscilación:
Frecuencia de
suministro de la red
eléctrica
50 Hz
60 Hz
Modo operativo 1
Frecuencia de oscilación
50 Hz = 3000 min -1
Frecuencia de oscilación
60 Hz = 3600 min -1
Modo operativo 2
Frecuencia de oscilación
100 Hz = 6000 min -1
Frecuencia de oscilación
120 Hz = 7200 min -1
Page 30

22 Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4
En una red eléctrica de 50 Hz, solo se pueden operar osciladores con una frecuencia de
oscilación de 50 Hz o 100 Hz. Sin embargo, en una red de 60 Hz, solo se pueden operar
osciladores con una frecuencia de oscilación de 60 Hz o 120 Hz. La unidad de control puede
funcionar en ambos modos operativos. Sin embargo, se debe cambiar al modo correcto. La
frecuencia de la red eléctrica no es importante para la unidad de control.
Conector rápido roscado M20
Gris-2, 100 Hz de frecuencia de
oscilación
Negro-1, 50 Hz de frecuencia de
oscilación
Metal-EMV- Conector rápido roscado
para dispositivos regulados por
frecuencia
Page 31

Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4 23
3.2 Cambio a otro voltaje de suministro de red
El modo operativo se selecciona mediante el ingreso de un código en el enchufe de carga
del oscilador. Un puente en el enchufe desde la conexión 3 a la conexión 4 conmuta la
unidad de control al modo operativo 2: 100 o 120 Hz Si falta la conexión, la unidad de
control funciona en el modo operativo 1: 50 o 60 Hz
De manera estándar, las unidades de transporte de oscilador traen el código correcto en el
enchufe. Para ayudar al usuario, el conector rápido del cable roscado tiene colores distintivos
en el conector hembra que permiten un mejor reconocimiento: NEGRO para modo operativo
1 (50 Hz o 60 Hz) y GRIS para modo operativo 2 (100 Hz o 120 Hz).
3.3 Configuración del voltaje de salida mínimo y máximo
Las unidades de control traen un ajuste de fábrica en un oscilador de referencia. En casos
especiales o tras una modificación, se podría requerir un reajuste. Aquí se debe cumplir en
todos los casos:
El voltaje de salida solo se puede medir con un oscilador
conectado.
El dispositivo de medición se debe diseñar para una medición
eficaz real. (True-RMS), otros dispositivos de medición
indican valores aleatorios. El enchufe de carga debe estar
conectado; de lo contrario, es posible que la medición se
realice en el modo de medición incorrecto.
La siguiente nota sobre seguridad es muy importante, debido a que el ajuste de voltaje de
salida requiere alimentación con el voltaje de suministro de red:
PELIGRO
Alimente el voltaje de suministro únicamente mediante un
transformador de seguridad. Efectúe las mediciones en las
salas o zonas permitidas para ese fin. Esta medición requiere
la contratación de profesionales calificados. Después de las
mediciones, el dispositivo de control debe regresar a su
estado original de lo contrario se detendrá la liberación de la
serie.
Es importante la acotación de que los dispositivos de ajuste para el voltaje de salida no son
pasivos entre sí. Esto quiere decir que un cambio en el voltaje máximo también modifica
levemente el voltaje mínimo y viceversa. Es posible que eso implique un ajuste reiterado de
ambos potenciómetros de recorte.
NOTA
Page 32

24 Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4
3.4 Cambio a otro voltaje de suministro de red
Sin embargo, la unidad de control puede funcionar a 230 V, 50/60 Hz, así como a 115 V,
50/60 Hz. Pero se debe cambiar a este voltaje.
Cambio de 230 V a 115 V:
Saque el enchufe del tomacorriente y abra el dispositivo por el lado derecho. Conmute el
interruptor y cierre el costado del dispositivo. Compruebe el funcionamiento. Es posible que
sea necesario reajustar U MAX.
(Consulte 4. Plano que muestra la posición de los elementos operativos en los tableros y 5.
Planos a escala).
3.5 Liberación de la función mediante componentes externos
El ajuste estándar de la unidad de control determina la partida del oscilador cuando se
enciende el interruptor de la red eléctrica.
Si se opta por que la unidad de control funcione en una operación de partida-detención,
entonces se debe abrir la unidad de control (aplicando todas las medidas de precaución ya
mencionadas) y se debe volver a conectar el puente S1.
Consulte 4. Plano que muestra la posición de los elementos operativos en los tableros y 5.
Planos a escala.
Retire los tapones de obturación del lado de la carcasa e instale un conector roscado de cable
M16 con alivio de tensión; el cable será alimentado por aquí para liberación. La liberación
ocurre por dos vías posibles:
Liberación mediante contacto
Esta sencilla solución de costo razonable funciona de manera tal que la unidad de control se
libera al contacto y funciona el oscilador. La conexión se realiza en los terminales 33 - 34.
Se deben cumplir algunos puntos:
- La conexión se alimenta con el voltaje de suministro de red. Se deben respetar el tipo
y el color de cable, las normas de aislamiento y, desde luego, el contacto debe ser libre
de potencial.
- A partir de los 2 m de altura, el cable debe ser blindado; el blindaje se sitúa a un lado
de la unidad de control en el conductor de tierra de protección.
- La longitud del cable no debe ser superior a 5 metros.
- El cable no se puede instalar junto a equipos de conmutación de alta energía o campos
de interferencia intensa.
3.6 Cambio en el tiempo de partida suave
La partida suave, la activación controlada por tiempo de la salida hacia el valor ajustado, es
una eficaz protección para el oscilador frente a los impactos del imán. En osciladores
pequeños, que parten con tiempos de ciclo elevados, no es necesario el tiempo estándar en
ningún caso. Incluso impide el flujo de producción. En la PARTIDA SUAVE, del reductor
se puede ajustar el tiempo de aceleración. Como también se debe abrir la carcasa para este
cambio, se deben seguir las notas sobre seguridad ya mencionadas.
Page 33

Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4 25
4. Plano que muestra la posición de los elementos
operativos en los tableros
Al reemplazar el fusible, se debe usar el valor preestablecido
de M 6,3 A en todos los casos. Un fusible con una
clasificación demasiado alta puede llevar a un desperfecto en
la unidad de control.
Liberación mediante señal de tensión
La conexión se realiza en las fijaciones 31 (GND) y 32 (+24 V CC). El oscilador parte
cuando se alimenta una señal de 10 a 30 voltios de corriente continua en la polaridad
correcta. La entrada está protegida contra una polaridad defectuosa. El uso de un
optoacoplador en la unidad de control deja a la entrada libre de potencial y permite la
instalación con cables no blindados de casi cualquier longitud. Aquí se deben evitar
interferencias de alta energía.
NOTA
Potenciómetro
Comentario
Interruptor
Voltaje eléctrico
Descarga externa
Voltaje externo
24 V CC
Interruptor eléctrico Pos.
Cable eléctrico
Contacto de descarga
externa
Tierra de carcasa
Detalle B
Conector de salida
Page 34

26 Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4
5. Planos a escala
6. Diagrama de conexiones
El puente debe estar desviado para permitir la descarga externa.
ATENCIÓN: ¡Los conectores para los contactos de descarga tienen voltaje!
El alimentador de recipientes opera cuando la señal de descarga se aprueba o
cuando el contacto de descarga está cerrado.
Selección de operación:
Conectores XS 1/3 -> 4 conectados,
frecuencia de oscilación = duplicar la frecuencia actual
Conectores XS 1/3 -> 4 abiertos, frecuencia de oscilación = frecuencia actual
Puente int.
descarga
Descarga
Contacto s/pot
Conector eléctrico
Carga
máx. 6 A
Page 35

Alimentación de piezas 7.0 Tolva y controlador de tolva Mod. 4 27
 Loading...
Loading...