

Page 1

230V Series
370.75 KW
1.0 50HP
460V Series
70.75 5KW
1.0 100HP
Page 2

Page 3
Page 4
VFD-B Series
Preface
Thank you for choosing DELTA’s high-performance VFD-B Series. VFD-B Series are
manufactured by adopting high-quality components, material and incorporating the latest
microprocessor technology available.
Getting Started
This manual will be helpful in the installation, parameter setting, troubleshooting, and daily
maintenance of the AC motor drives. To guarantee safe operation of the equipment, read
the following safety guidelines before connecting power to the AC drives. Keep this
operating manual handy and distribute to all users for reference.
!
WARNING
!
Always read this manual thoroughly before using VFD-B series AC Motor Drives.
!
DANGER!
not connect or disconnect wires and connectors while power is applied to the
circuit. Maintenance must be performed by qualified technicians.
!
CAUTION! There are highly sensitive MOS components on the printed circuit boards.
These components are especially sensitive to static electricity. To avoid damage to
these components, do not touch these components or the circuit boards with metal
objects or your bare hands.
!
DANGER! A charge may still remain in the DC-link capacitor with hazardous voltages
even if the power has been turned off. To avoid personal injury, please ensure that
power has turned off before operating AC drive and wait ten minutes for capacitors to
discharge to safe voltage levels.
!
CAUTION! Ground the VFD-B using the ground terminal. The grounding method
must comply with the laws of the country where the AC drive is to be installed. Refer to
Basic Wiring Diagram.
!
DANGER! The AC drive may be destroyed beyond repair if incorrect cables are
connected to the input/output terminals. Never connect the AC drive output terminals
U/T1, V/T2, and W/T3 directly to the AC main circuit power supply.
!
CAUTION! The final enclosures of the AC drive must comply with EN50178. (Live
parts shall be arranged in enclosures or located behind barriers that meet at least the
requirements of the Protective Type IP20. The top surface of the enclosures or barrier
that is easily accessible shall meet at least the requirements of the Protective Type
IP40). (VFD-B series corresponds with this regulation.)
AC input power must be disconnected before any maintenance. Do
CAUTION! Heat sink may heat up over 70oC (158oF), during the operation. Do not
touch the heat sink.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 5

Page 6
VFD-B Series
TABLE OF CONTENTS
CHAPTER 1 RECEIVING AND INSPECTIONS
1.1 Nameplate Information ....................................................................... 1 - 1
1.2 Model Explanation .............................................................................. 1 - 1
1.3 Serial Number Explanation................................................................. 1 - 2
CHAPTER 2 STORAGE AND INSTALLATION
2.1 Storage ............................................................................................... 2 - 1
2.2 Installation .......................................................................................... 2 - 2
CHAPTER 3 WIRING
3.1 Basic Wiring Diagram ......................................................................... 3 - 2
3.2 External Wiring ................................................................................... 3 - 6
3.3 Terminal Explanation .......................................................................... 3 - 7
3.4 Control Terminal Explanation..............................................................3 - 7
3.5 Main Circuit Wiring ............................................................................3 - 9
3.6 Wiring Notes ....................................................................................... 3-16
3.7 Motor Operation Precautions.............................................................. 3-17
CHAPTER 4 DIGITAL KEYPAD OPERATION
4.1 Description of the Digital Keypad VFD-PU01 ..................................... 4 - 2
4.2 Operation steps of the Digital Keypad VFD-PU01.............................. 4 - 4
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 7

VFD-B Series
CHAPTER 5 DESCRIPTION OF PARAMETER SETTINGS
Group 0: User Parameters .......................................................................5 - 1
Group 1: Basic Parameters ...................................................................... 5 - 5
Group 2: Operating Method Parameters .................................................. 5- 11
Group 3: Output Function Parameters .....................................................5-17
Group 4: Input Function Parameters ........................................................ 5-22
Group 5:Multi-step Speed and PLC (Process Logic Control) Parameter . 5-32
Group 6: Protection Parameters...............................................................5-38
Group 7: Motor Parameters...................................................................... 5-44
Group 8: Special Parameters ...................................................................5-47
Group 9: Communication Parameters ...................................................... 5-54
Group 10: PID Control Parameters ..........................................................5-69
Group 11: Fan and Pump Control Parameters ......................................... 5-74
CHAPTER 6 MAINTENANCE AND INSPECTIONS
6.1 Periodic Inspection ............................................................................. 6 - 1
6.2 Periodic Maintenance ......................................................................... 6 - 1
CHAPTER 7 TROUBLESHOOTING AND FAULT INFORMATION........... 7 - 1
CHAPTER 8 SUMMARY OF PARAMETER SETTINGS ............................ 8 - 1
APPENDIX A SPECIFICATIONS ............................................................... A - 1
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 8

VFD-B Series
APPENDIX B ACCESSORIES
B.1 Non-fused Circuit Breaker and Fuse Specification Chart................... B - 1
B.2 Braking Resistors & Braking Units ..................................................... B - 3
B.3 AMD-EMI Filter Cross Reference ....................................................... B - 7
B.4 PG Cards ...........................................................................................B-16
B.5 Remote Controller RC-01................................................................... B-22
B.6 Remote Panel Adapter ....................................................................... B-23
B.7 Zero Phase Reactor ........................................................................... B-24
APPENDIX C DIMENSIONS....................................................................... C - 1
APPENDIX D EC DECELERATION OF CONFORMITY............................. D - 1
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 9

Page 10
VFD-B Series
A
A
CHAPTER 1 RECEIVING AND INSPECTION
This VFD-B AC drive has gone through rigorous quality control tests at the factory before
shipment. After receiving the AC drive, please check for the following:
Receiving
Check to make sure that the package includes an AC drive, the User Manual, dust
covers and rubber bushings.
Inspect the unit to insure it was not damaged during shipment.
Make sure that the part number indicated on the nameplate corresponds with the part
number of your order.
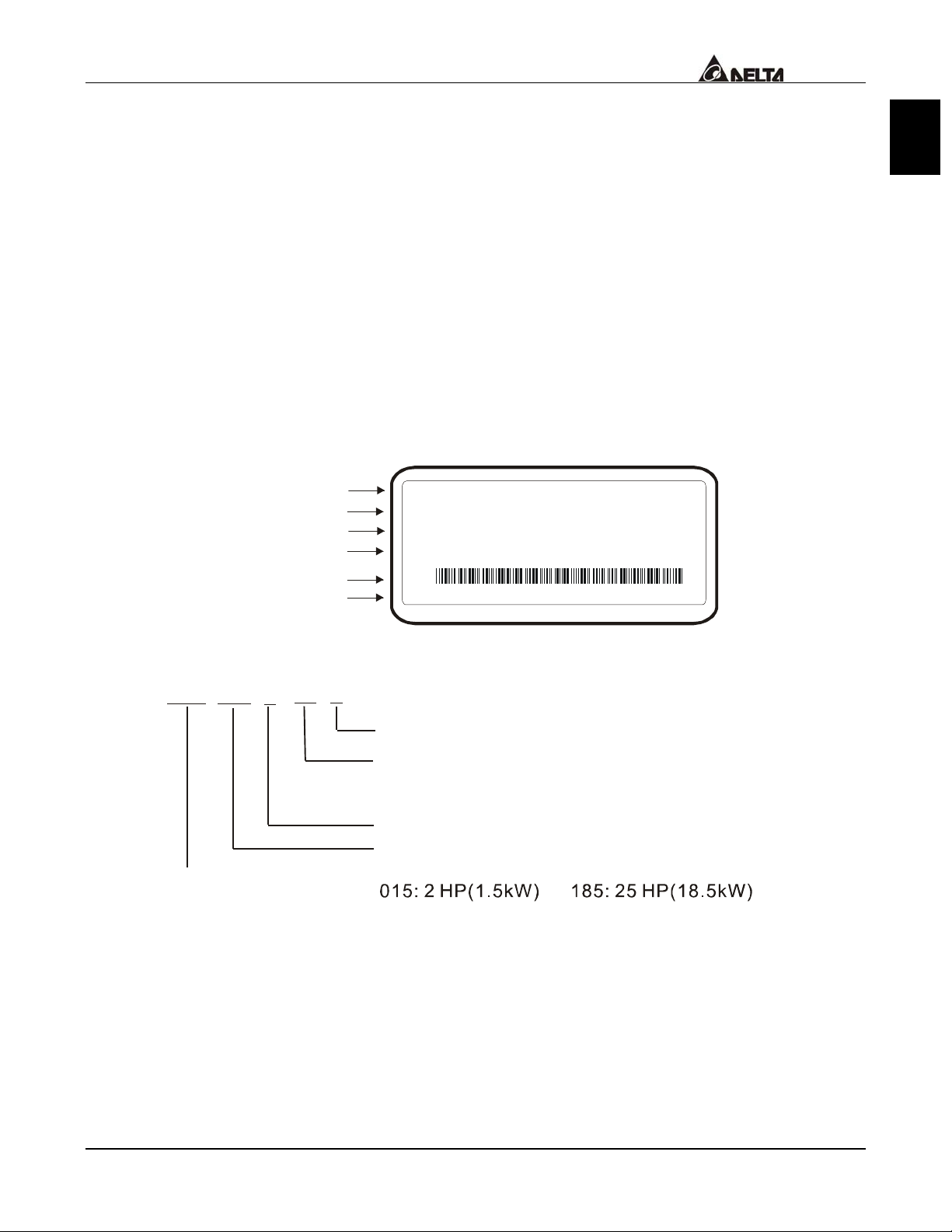
1.1 Nameplate Information: Example for 1HP/0.75kW 3-phase 230V AC drive
AC Drive Model
Input Spec.
Output Spec.
Output Frequency Range
MODE : VFD007B23A
INPUT : 3PH 200-240V 50/60Hz 6.0A
OUTPUT : 3PH 0-240V 5.0A 1.9kVA 1HP
Freq. Range : 0.1~400Hz
ENCLOSURE: TYPE 1
1
Enclosure type
Serial Number & Bar Code
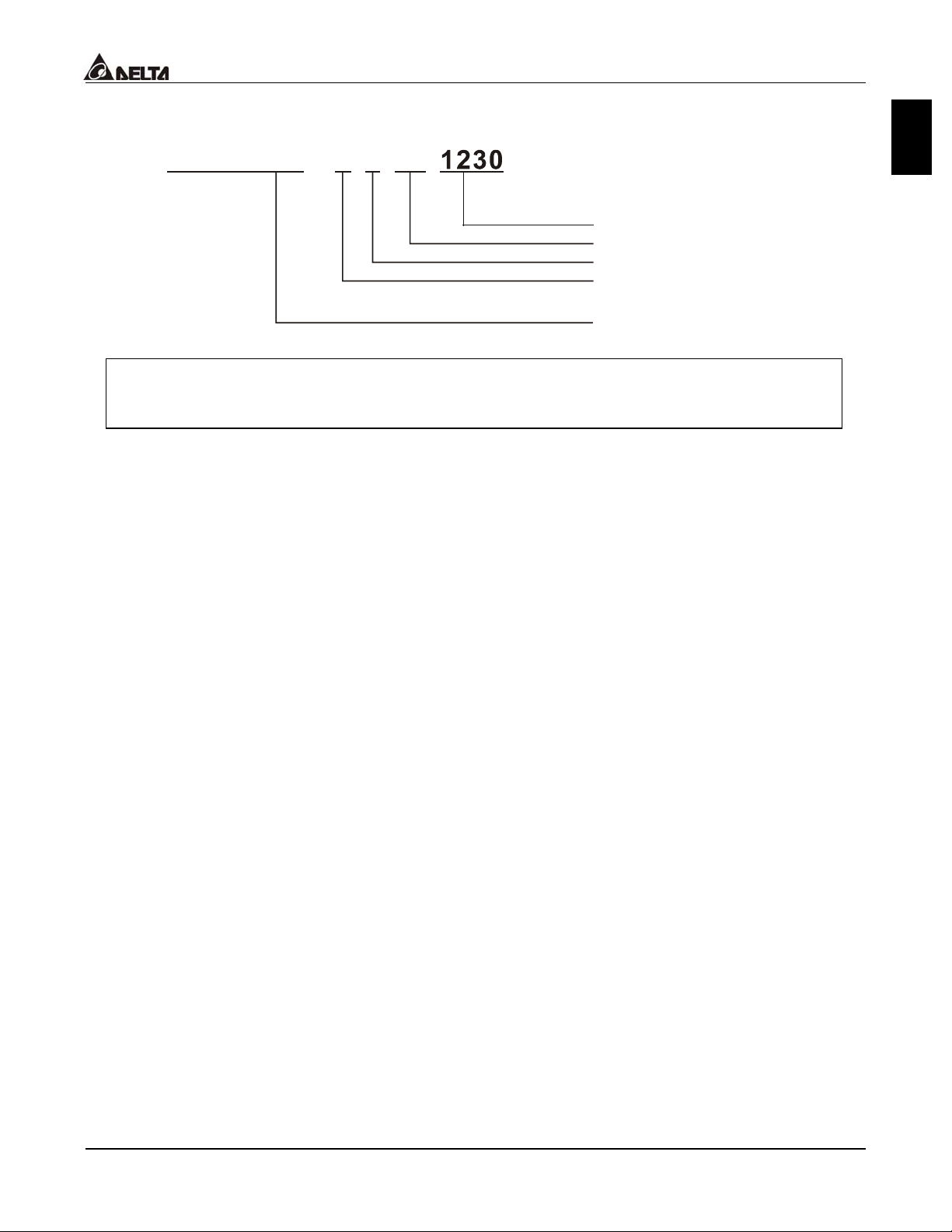
1.2 Model Explanation:
VFD
007
Series Name
23
B
007B23A0T0220001
Version Type
Input Voltage
21:Single phase 230V
23:Three phase 230V
43:Three phase 460V
B Series
pplicable motor capacity
007: 1 HP(0.7kW) 150: 20HP(15kW)
022: 3 HP(2.2kW) 220: 30 HP(22kW)
037: 5 HP(3.7kW) 300: 40HP(30kW)
055: 7.5HP(5.5kW) 370: 50 HP(37kW)
075: 10 HP(7.5kW) 450: 60HP(45kW)
110: 15 HP(11kW) 550: 75HP(55kW)
750: 100HP(75kW)
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
1-1
Page 11
VFD-B Series
3
1.3 Series Number Explanation:
007B23A0
230V 3-phase 1HP(0.75kW)
If there is any nameplate information not corresponding to your purchase order or any
problem, please contact your distributor.
T
01
Production number
Production week
Production year 2003
Production factory
(Taoyuan)
Model
1
1-2
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 12

VFD-B Series
CHAPTER 2 STORAGE AND INSTALLATION
2.1 Storage
The AC drive should be kept in the shipping carton before installation. In order to retain the
warranty coverage, the AC drive should be stored properly when it is not to be used for an
extended period of time.
Ambient Conditions:
Operation
Air Temperature: -10oC to +40oC (14oF to 104oF) (UL & cUL);
+50oC (122oF) without dust cover.
Atmosphere pressure: 86 to 106 kPa
Installation Site Altitude: below 1000m
Vibration: Maximum 9.80 m/s2 (1G) at less than 20Hz
Maximum 5.88 m/s2 (0.6G) at 20Hz to 50Hz
2
Storage
Temperature: -20oC to +60oC (-4oF to 140oF)
Relative Humidity: Less than 90%, no condensation allowed
Atmosphere pressure: 86 to 106 kPa
Transportation
Temperature: -20oC to +60oC (-4oF to 140oF)
Relative Humidity: Less than 90%, no condensation allowed
Atmosphere pressure: 86 to 106 kPa
Vibration: Maximum 9.80 m/s2 (1G) at less than 20Hz, Maximum 5.88
2
(0.6G) at 20Hz to 50Hz
m/s
Pollution Degree 2: good for a factory type environment.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
2-1
Page 13
VFD-B Series
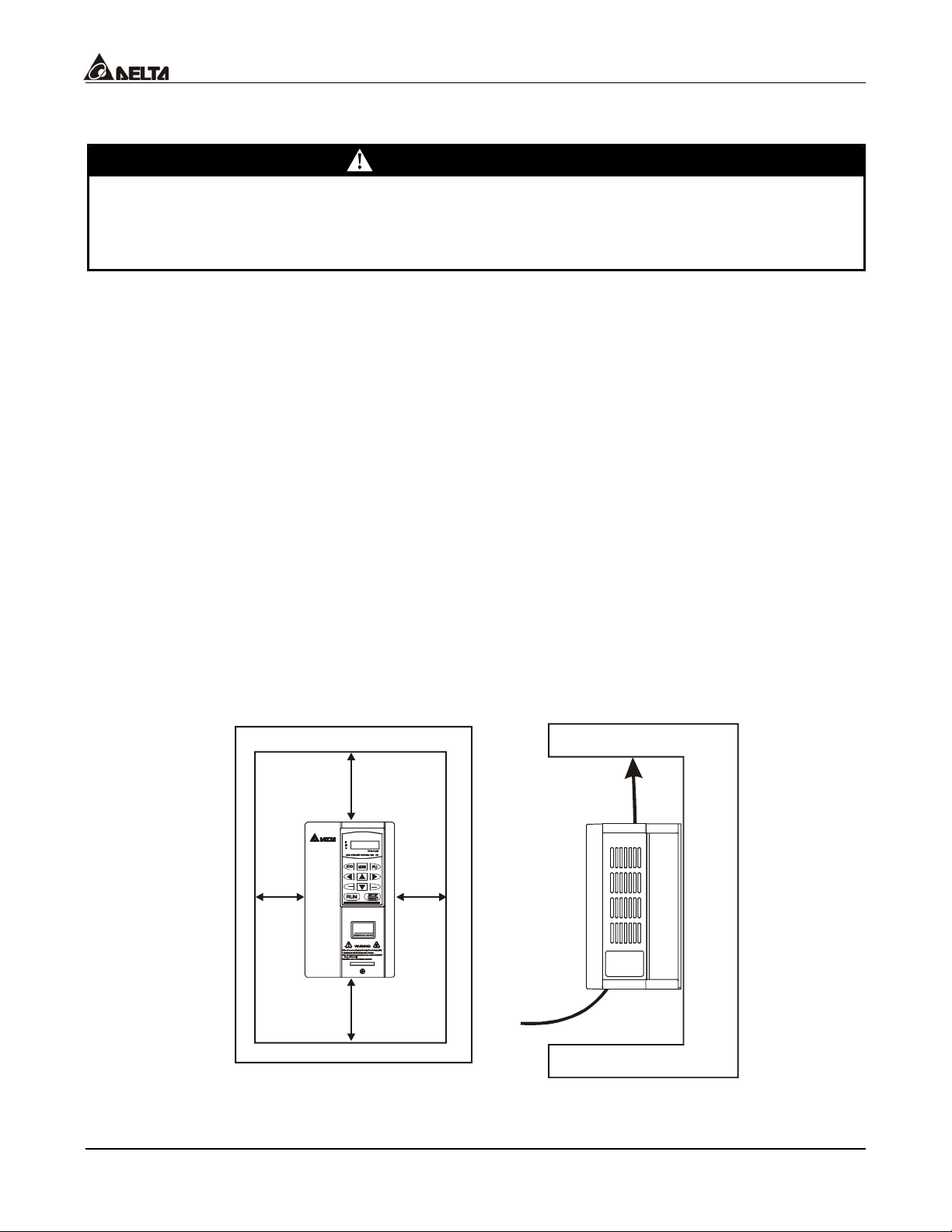
2.2 Installation
CAUTION
The control, power supply and motor leads must be laid separately. They must not be
fed through the same cable conduit / trunking.
High voltage insulation test equipment must not be used on cables connected to the
drive.
Improper installation of the AC drive will greatly reduce its life. Be sure to observe the
following precautions when selecting a mounting location.
Failure to observe these precautions may void the warranty!
Do not mount the AC drive near heat-radiating elements or in direct sunlight.
Do not install the AC drive in a place subjected to high temperature, high humidity,
excessive vibration, corrosive gases or liquids, or airborne dust or metallic particles.
Mount the AC drive vertically and do not restrict the air flow to the heat sink fins.
The AC drive generates heat. Allow sufficient space around the unit for heat dissipation.
120mm
Air Flow
50mm
FWD
PROG
REV
DATA
50mm
120mm
2-2
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 14
VFD-B Series
CHAPTER 3 WIRING
DANGER
Hazardous Voltage
Before accessing the AC drive:
Disconnect all power to the AC drive.
Wait five minutes for DC bus capacitors discharge.
Any electrical or mechanical modification to this equipment without prior written
consent of Delta Electronics, Inc. will void all warranties and may result in a safety
hazard in addition to voiding the UL listing.
Short Circuit Withstand:
The rated voltage must be equal to or less than 240V (460V model is 480Volts) and the
current must be equal to or less than 5000A RMS. (the model of 40HP or above is 10000A
3
RMS)
General Wiring Information
Applicable Codes
All VFD-B AC drives except 015B21A, 015B23A and 075B23B are Underwriters
Laboratories, Inc. (UL) and Canadian Underwriters Laboratories (cUL) listed, and therefore
comply with the requirements of the National Electrical Code (NEC) and the Canadian
Electrical Code (CEC).
Installation intended to meet the UL and cUL requirements must follow the instructions
provided in “Wiring Notes” as a minimum standard. Follow all local codes that exceed UL
and cUL requirements. Refer to the technical data label affixed to the AC drive and the
motor nameplate for electrical data.
The "Line Fuse Specification" in Appendix B, lists the recommended fuse part number for
each B-Series part number. These fuses (or equivalent) must be used on all installations
where compliance with U.L. standards is a required.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
3-1
Page 15
VFD-B Series
V
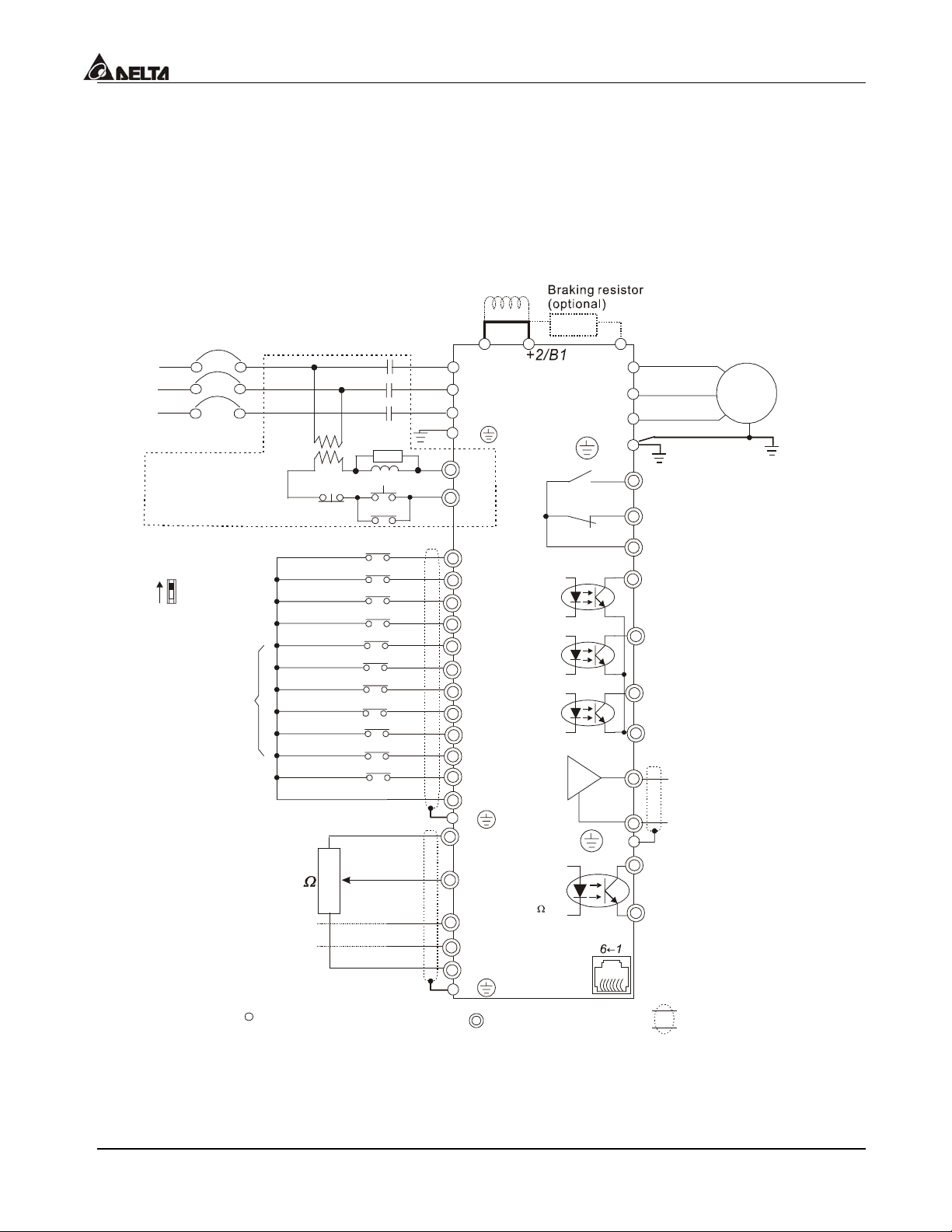
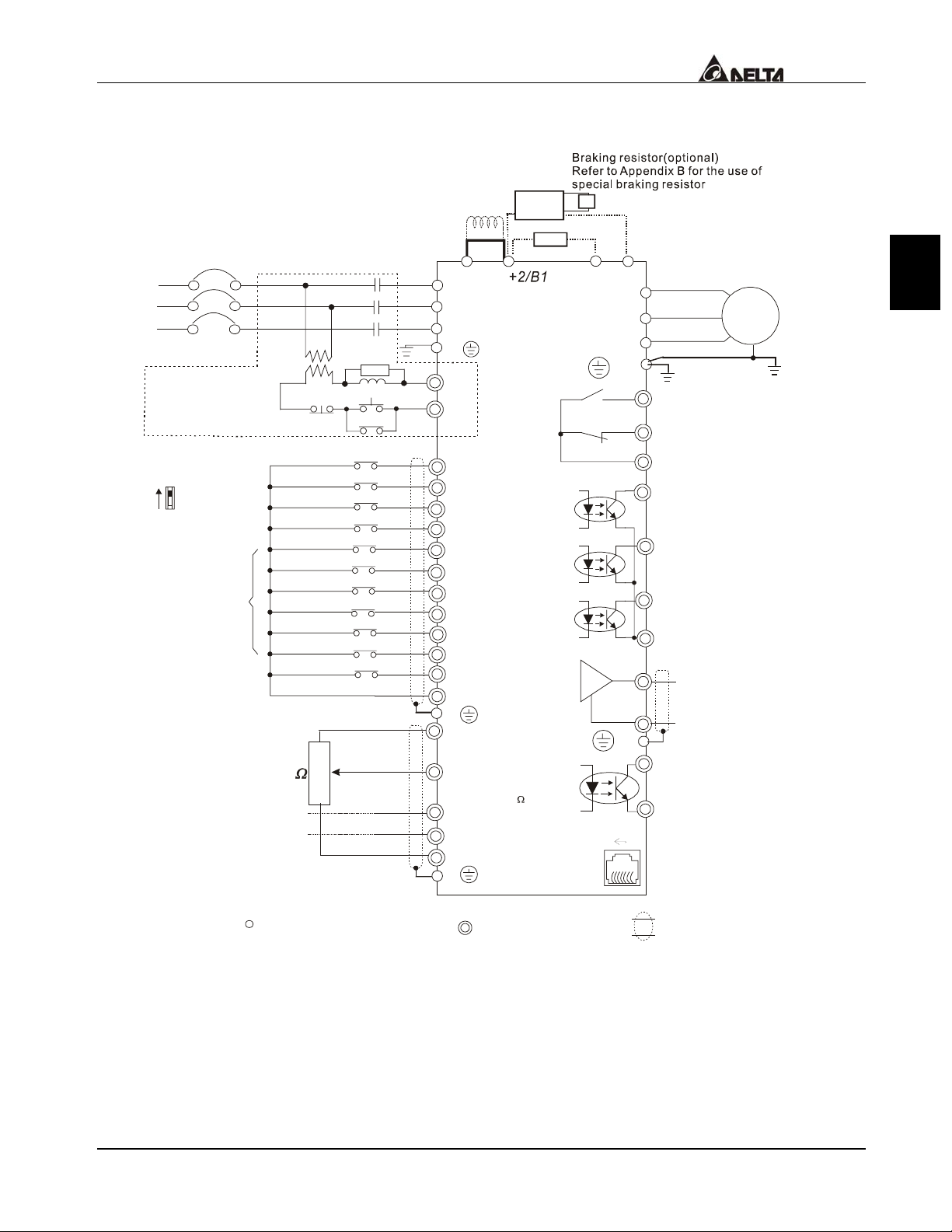
3.1 Basic Wiring Diagram
Users must connect wires according to the following circuit diagram shown below. Do not
plug a Modem or telephone line to the RS-485 communication port, permanent damage may
result. Terminals 1 & 2 are the power sources only for the optional copy keypad and should
not be used while using RS-485 communication.
Figure 1 for models of VFD-B Series
FD007B21A/23A/43A, VFD015B21A/21B/23A/23B/43A
SA
ON
DC choke
(optional)
MC
MC
Jumper
+1
R(L1)
S(L2)
T(L3)
E
RB
RC
+24V
FWD
REV
JOG
EF
MI1
MI2
MI3
MI4
MI5
MI6
TRG
DCM
E
+10V
Power supply
+10V 20mA
AVI
Master Frequency
0 to 10V 47K
ACI
AUI
ACM
E
MO1
MO2
MO3
B2
U(T1)
V(T2)
W(T3)
E
RA
RB
RC
MCM
AFM
ACM
E
DFM
DCM
Motor
IM
3~
Please refer to “Control
Terminal Explanation”.
Factory default:
indicates during operation
48V50mA
Factory default:
Freq. Setting Indication
48V50mA
Factory default:
Low-voltage Indication
48V50mA
Multi-function
Photocoulper Output
Analog Multi-function Output
Te rm in al
Factory default: Analog freq.
/ current meter
Analog Signal common
Digital Frequency Output
Te rm in al
Factory default: 1:1
Duty=50%
Digital Signal Common
RS-485
Serial interface
1: EV 2: GND
5:NC
4: SG+
6: for communication
0~10VDC/2mA
3: SG-
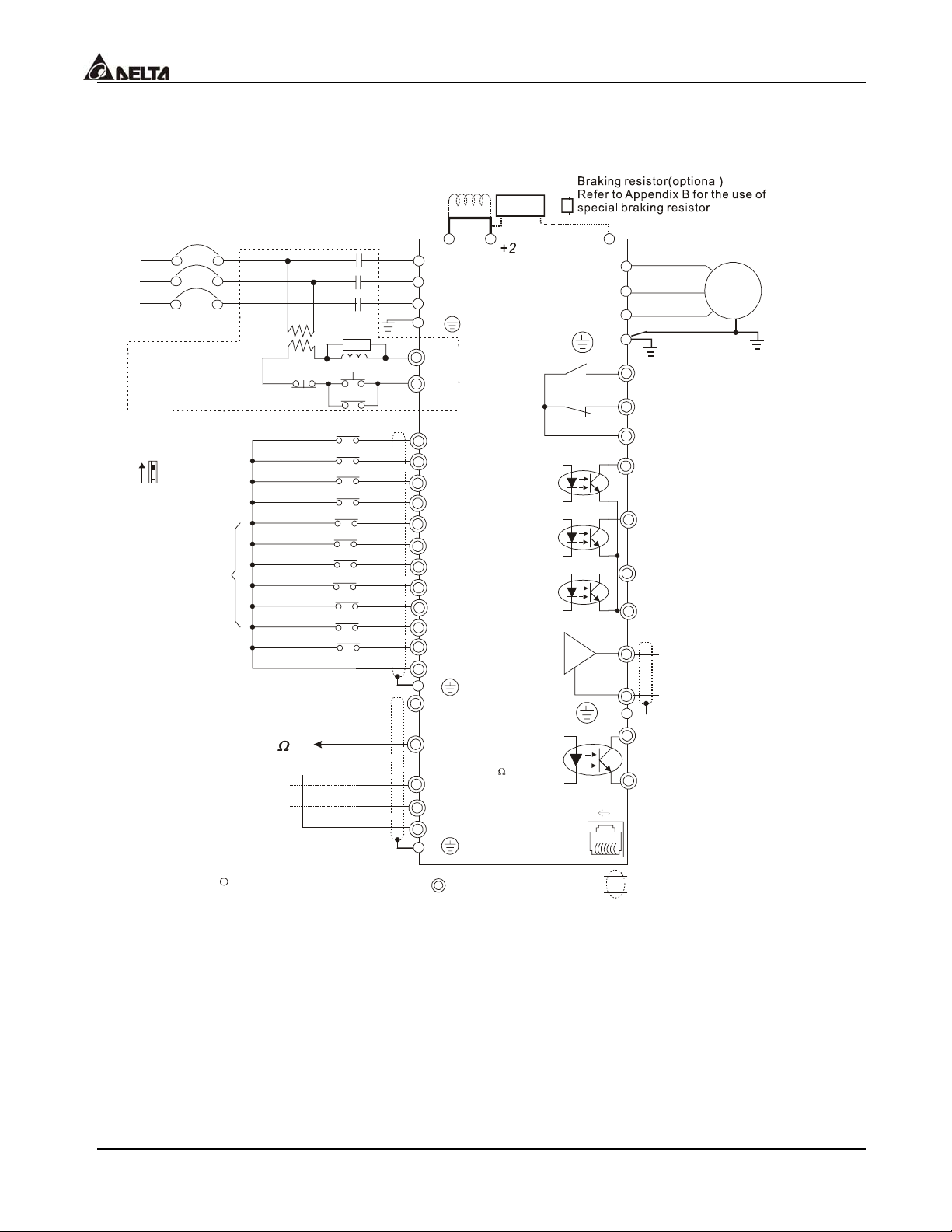
VFD022B23B/43B
Fuse/NFB(None Fuse Breaker)
R(L1)
S(L2)
T(L3)
Recommended Circuit
when power supply
is turned OFF by a
fault output
Factory Default:
SINK Mode
Sink
Sw1
Source
Please refer to Figure 4
for wiring of SINK
mode and SOURCE
mode.
Factory
default
* Don't apply the mains voltage directly
to above terminals.
OFF
FWD/STOP
REV/STOP
JOG
E.F.
Multi-step 1
Multi-step 2
Multi-step 3
Multi-step 4
RESET
Accel/Decel prohibit
Counter
Digital Signal Common
3
5K
2
1
4~20mA
-10~+10V
Analog Signal Common
Main circuit (power) terminals
Control circuit terminals
Shielded leads & Cable
3-2
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 16
AFMA
Figure 2 for models of VFD-B Series 3-15 HP
VFD022B21A, VFD037B23A/43A, VFD055B23A/43A, VFD075B23A/43A, VFD110B23A/43A
* Three phase input power may apply to single phase drives.
* For the single phase application, the AC input line can
be connected to any two of the three input terminals R,S,T
DC chock
(optional)
Fuse/NFB(None Fuse Breaker)
Jumper
R(L1)
S(L2)
T(L3)
2
4~20mA
SA
ON
MC
MC
Recommended Circuit
when power supply
is turned OFF by a
fault output
Factory Default:
SINK Mode
Sink
Sw1
Source
Please refer to Figure 4
for wiring of SINK
mode and SOURCE
mode.
Factory
default
* Don't apply the mains voltage directly
to above terminals.
OFF
FWD/STOP
REV/STOP
JOG
E.F.
Multi-step 1
Multi-step 2
Multi-step 3
Multi-step 4
RESET
Accel/Decel prohibit
Counter
Digital Signal Common
3
5K
1
-10~+10V
Analog Signal Common
VFDB
+1
R(L1)
S(L2)
T(L3)
E
RB
RC
+24V
FWD
REV
JOG
EF
MI1
MI2
MI3
MI4
MI5
MI6
TRG
DCM
E
+10V
Power supply
+10V 20mA
AVI
Master Frequency
0 to 10V 47 K
ACI
AUI
ACM
E
BR
MO2
MO3
BR
B2
W(T3)
MO1
-(minus sign)
U(T1)
V(T2)
E
RA
RB
RC
MCM
CM
E
DFM
DCM
RS-485
6 1
Serial interface
1: EV 2: GND
4: SG+
6: for communication
Please refer to “Control
Terminal Explanation”.
Factory default:
indicates during operation
48V50mA
Factory default:
Freq. Setting Indication
48V50mA
Factory default:
Low-voltage Indication
48V50mA
Multi-function
Photocoulper Output
Analog Multi-function Output
Te rm in al
Factory default: Analog freq.
/ current meter
Analog Signal common
Digital Frequency Output
Term in al
Factory default: 1:1
Duty=50%
Digital Signal Common
5:NC
Motor
IM
3~
3: SG-
VFD-B Series
3
0~10VDC/2mA
Main circuit (power) terminals
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Control circuit terminals
3-3
Shielded leads & Cable
Page 17
VFD-B Series
Figure 3 for models of VFD-B Series 20 HP and above
VFD150B23A/43A, VFD220B23A/43A, VFD300B23A/43A,
VFD185B23A/43A,
VFD370B23A/43A, VFD450B43A, VFD550B43A, VFD750B43A
DC chock
Fuse/NFB(None Fuse Breaker)
R(L1)
S(L2)
T(L3)
Recommended Circuit
when power supply
is turned OFF by a
fault output
Factory Default:
SINK Mode
Sink
Sw1
Source
Please refer to Figure 4
for wiring of SINK
mode and SOURCE
mode.
Factory
default
* Don't apply the mains voltage directly
to above terminals.
SA
MC
OFF
FWD/STOP
REV/STOP
JOG
E.F.
Multi-step 1
Multi-step 2
Multi-step 3
Multi-step 4
RESET
Accel/Decel prohibit
Counter
Digital Signal Common
3
5K
1
ON
2
4~20mA
-10~+10V
Analog Signal Common
(optional)
Jumper
R(L1)
S(L2)
T(L3)
E
RB
RC
MC
+24V
FWD
REV
JOG
EF
MI1
MI2
MI3
MI4
MI5
MI6
TRG
DCM
E
+10V
Power supply
+10V 20mA
AVI
Master Frequency
0 to 10V 47K
ACI
AUI
ACM
E
+1
+1
VFDB
-(minus sign)
U(T1)
V(T2)
W(T3)
E
RA
RB
RC
MO1
MO2
MO3
MCM
AFM
ACM
DFM
DCM
6
Please refer to “Control
Terminal Explanation”.
Factory default:
indicates during operation
48V50mA
Factory default:
Freq. Setting Indication
48V50mA
Factory default:
Low-voltage Indication
48V50mA
Multi-function
Photocoulper Output
Analog Multi-function Output
Te rm in al
Factory default: Analog freq.
/ current meter
E
1
Analog Signal common
Digital Frequency Output
Te rm in al
Factory default: 1:1
Duty=50%
Digital Signal Common
RS-485
Serial interface
1: EV 2: GND
5:NC
4: SG+
6: for communication
Motor
IM
3~
3: SG-
0~10VDC/2mA
Main circuit (power) terminals
Control circuit terminals
3-4
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Shielded leads & Cable
Page 18
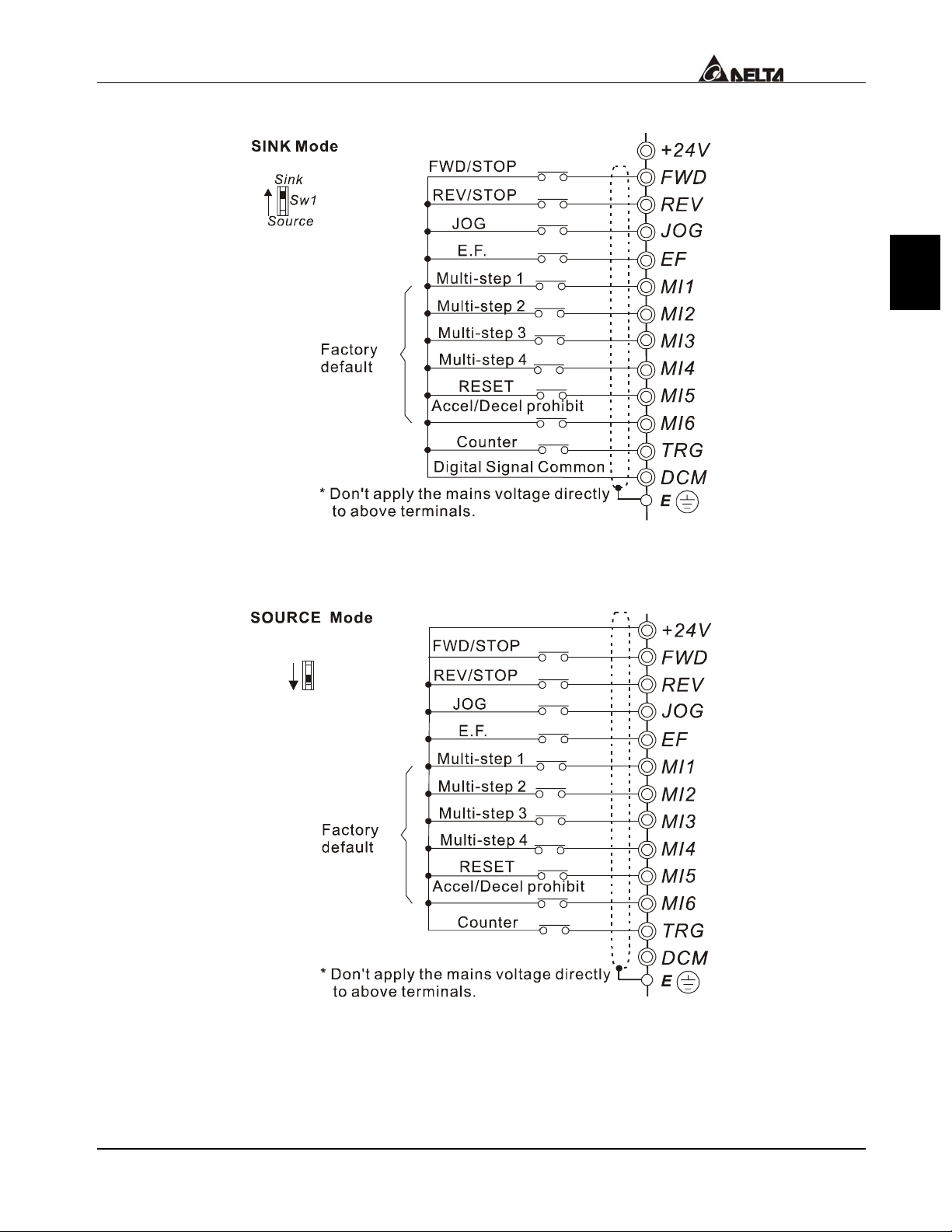
Figure 4 Wiring for SINK mode and SOURCE mode
VFD-B Series
3
Sink
Sw1
Source
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
3-5
Page 19
VFD-B Series
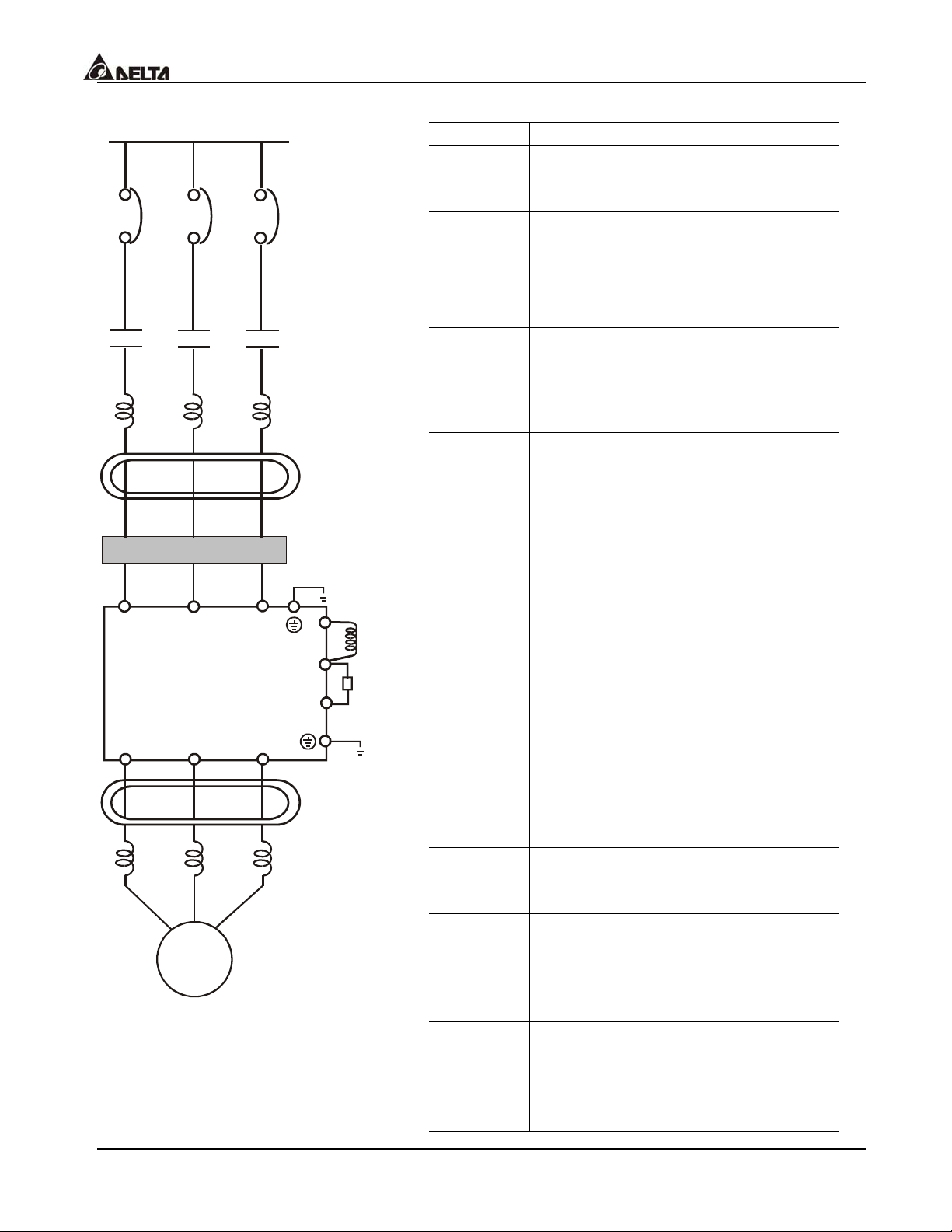
3.2 External Wiring
Power Supply
FUSE/NFB
Magnetic
contactor
Items Explanations
Power
supply
Please follow the specific power
supply requirement shown in
APPENDIX-A.
There may be inrush current during
Fuse/NFB
power up. Please check the chart of
APPENDIX B and select the correct
(Optional)
fuse with rated current. NFB is
optional.
EMI Filter
R/L1 S/L2
U/T1 V/T2
T/L3
W/T3
Input AC
Line Reactor
Zero-phase
Reactor
+1
+2/B1
B2
Zero-phase
Reactor
Output AC
Line Reactor
DC
Choke
Braking
Resistor
Magnetic
contactor
(Optional)
Input AC
Line
Reactor
(Optional)
Zero-phase
Reactor
(Ferrite
Core
Common
Choke)
(Optional)
EMI filter
(Optional)
Please do not use a Magnetic
contactor as the I/O switch of the AC
drive, this will reduce the operating
life cycle of the AC drive.
In order to improve the input power
factor, reduces harmonics and
protection from AC line
disturbances. (Surge, switching
spike, power flick, etc.) AC line
reactor should be installed when the
power supply capacity is 500kVA or
more and exceeds 6 times of the
inverter capacity, or the wiring
distance within 10m.
Zero phase reactors are used to
reduce radio noise specify when the
audio equipments installed near the
inverter. Good effective for noise
reduction on both the input and
output sides. Attenuation quality is
good in a wide range from AM band
to 10Mhz. Appendix B for specifies
zero phase reactors. (RF220X00A)
To reduce the electromagnetic
interference. Please refer to
Appendix B for detail.
Motor
Braking
Resistor
(Optional)
Output AC
Line
Reactor
(Optional)
3-6
Used to reduce stopping time of the
motor. Please refer to the chart on
Appendix B for specific Braking
Resistors.
Motor surge voltage amplitudes
depending on the motor cable
length. For long motor cable
application, it is necessary installed
on the inverter output side.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 20
VFD-B Series
3.3 Terminal Explanations
Terminal Symbol Explanation of Terminal Function
R/L1, S/L2, T/L3 AC line input terminals
U/T1, V/T2, W/T3 AC drive output terminals motor connections
+1,+2 Connections for DC Link Reactor (optional)
+2/B1~B2 Connections for Braking Resistor (optional)
+2 ~ -(minus sign)
Connections for External Braking Unit (VFDB series)
+2/B1~ -(minus sign)
Earth Ground
3.4 Control Terminals Explanations
Terminal Symbols Terminal Functions Factory Settings
FWD Forward-Stop command
3
REV Reverse-Stop command
JOG Jog command
EF External fault
TRG External counter input
MI1
MI2
MI3
MI4
MI5
MI6
Multi-function Input 1
Multi-function Input 2
Multi-function Input 3
Multi-function Input 4
Multi-function Input 5
Multi-function Input 6
Digital Frequency Meter
Refer to Pr.04-04 to Pr.04-09
Multi-function Input Terminals
Factory setting 1:1
DFM
(Maximum 48VDC, 50mA)
(+24V, 20mA), used for source mode.
Used as common for digital inputs
and used for sink mode.
+24V
DCM
(Open Collector Output)
DC Voltage Source
Digital Signal Common
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
3-7
Page 21
VFD-B Series
Terminal Symbols Terminal Functions Factory Settings
RA
RB
RC
MO1
MO2
MO3
MCM
+10V
Multi-function Relay output
(N.O.) a
Multi-function Relay output
(N.C.) b
Multi-function Relay common
Multi-function output 1
(Photocoupler)
Multi-function output 2
(Photocoupler)
Multi-function output 3
(Photocoupler)
Multi-function output common
Potentiometer output power
source
Resistor Load
5A(N.O.)/3A(N.C.) 240VAC
5A(N.O.)/3A(N.C.) 24VDC
Inductive Load
1.5A(N.O.)/0.5A(N.C.) 240VAC
1.5A(N.O.)/0.5A(N.C.) 24VDC
Refer to Pr.03-01 to Pr.03-03
Maximum 48VDC, 50mA
Refer to Pr.03-01 to Pr.03-03
Maximum 48VDC, 50mA
+10V 20mA
AVI Analog voltage Input
ACI Analog current Input
AUI
AFM
Auxiliary analog voltage input -10 to +10V
Analog output meter 0 to 10V, 2mA
Analog control signal
ACM
(common)
* Control signal wiring size: 18 AWG (0.75 mm2).
0 to +10V
4 to 20mA
3-8
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 22
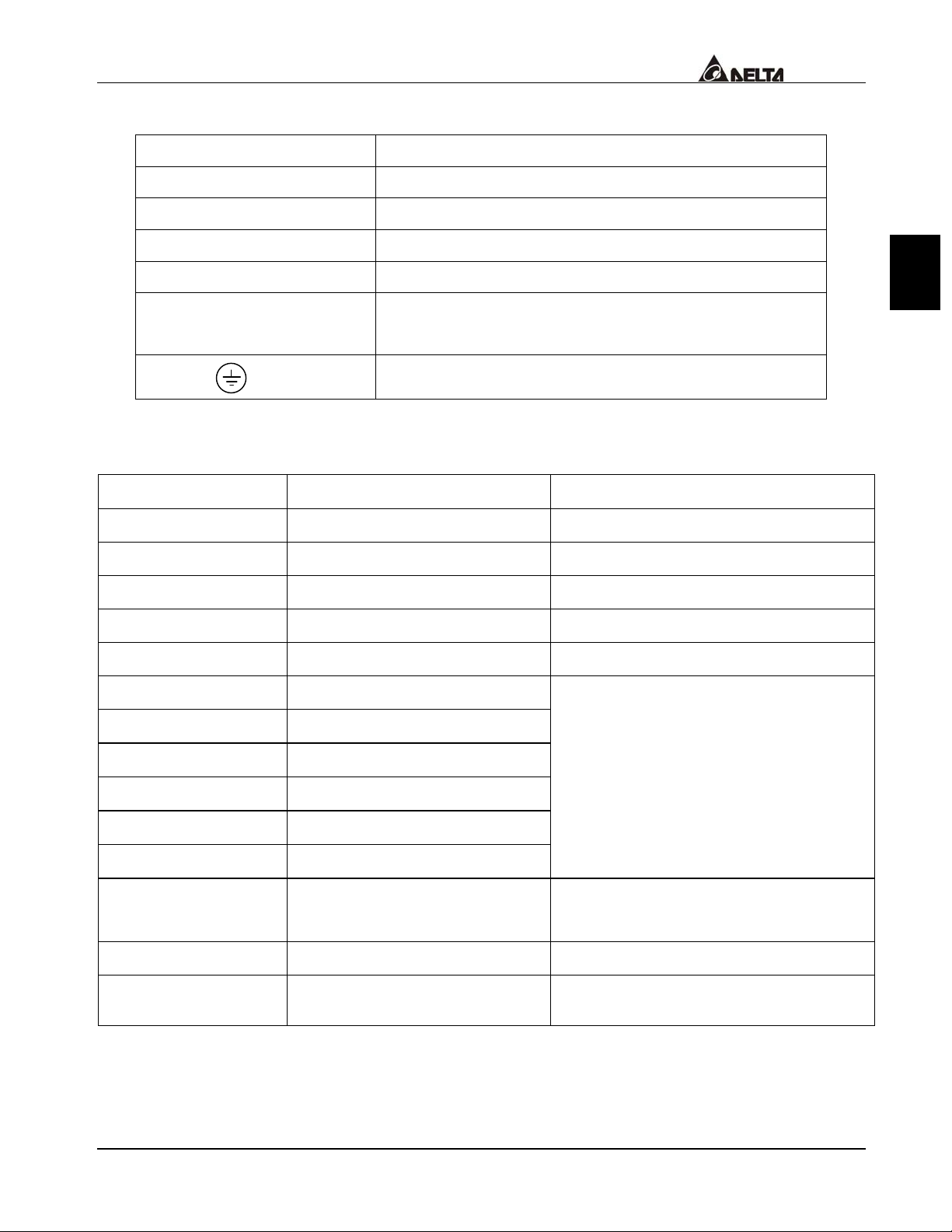
3.5 Main Circuit Wiring
1HP to 3HP (VFD007B23A, VFD007B43A, VFD007B21A, VFD015B21A,
VFD015B23A, VFD015B43A, VFD015B21B, VFD015B23B,
VFD-B Series
VFD022B23B, VFD022B43B)
3
S
R
T
/
/
/
L3
L2
L1
+2
/
+1 B2
B1
V
U
/
W
/
/
T1
T3
T2
Control Terminal
Torque: 4Kgf-cm (3 in-lbf)
Wire: 12-24 AWG
Power Terminal
Torque: 18 kgf-cm (15.6 in-lbf)
Wire Gauge: 10-18 AWG stranded wire, 12-18 AWG solid wire
Wire Type: Copper only, 75°C
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
3-9
Page 23
VFD-B Series
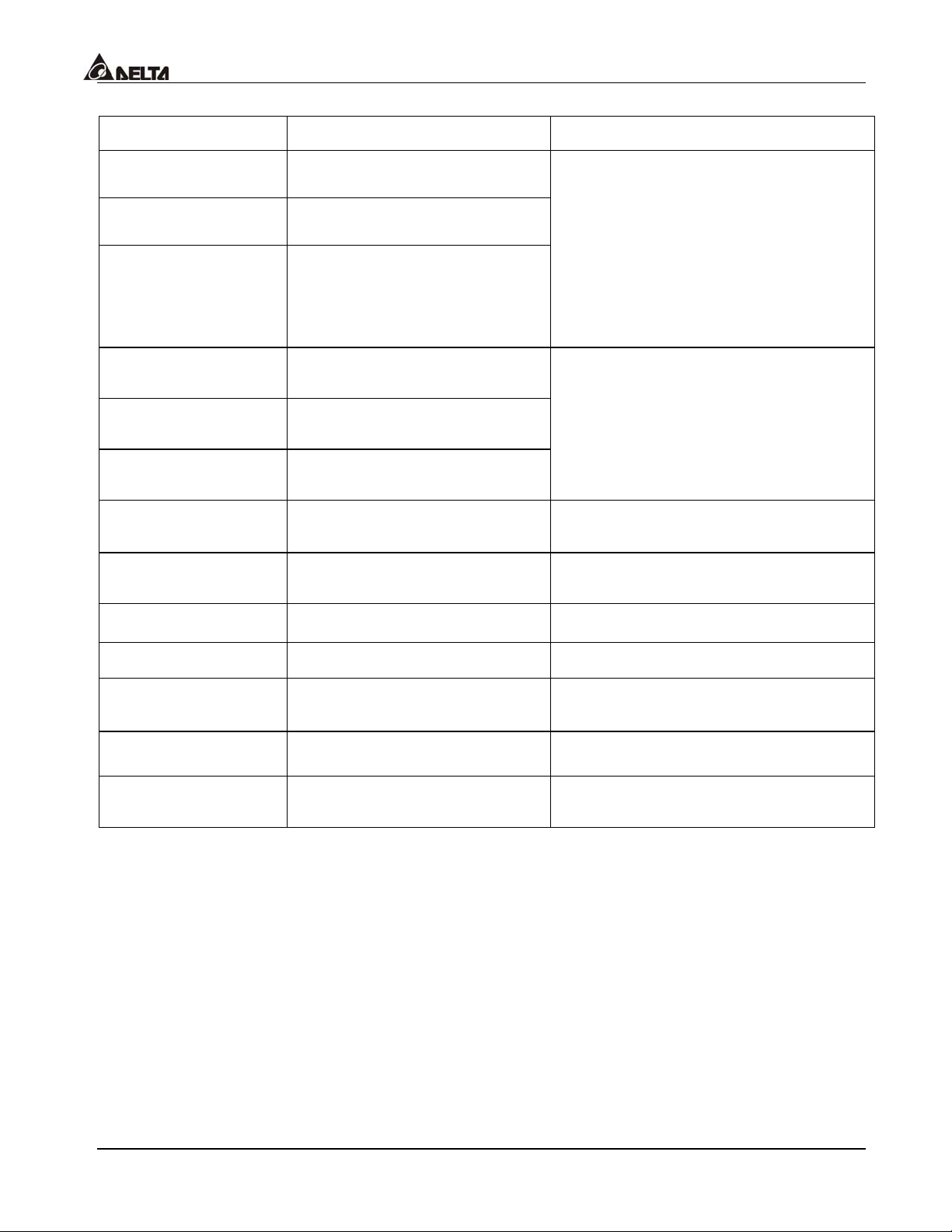
3HP to 5HP (VFD022B21A, VFD037B23A, VFD037B43A)
+2
+1
R/L1 S/L2 T/L3
Control Terminal
Torque: 4Kgf-cm (3 in-lbf)
Wire: 12-24 AWG
Power Terminal
]Torque: 18 kgf-cm (15.6 in-lbf)
Wire Gauge: 10-18 AWG
Wire Type: Stranded copper only, 75°C
-
B
B
1
U/T1 V/T2 W/T3
2
Screw Torque :
Wire Gauge :
18Kgf-cm
18~10AWG
3-10
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 24
7.5 HP to 15 HP (VFD055B23A, VFD055B43A, VFD075B23A, VFD075B43A,
VFD110B23A, VFD110B43A)
VFD-B Series
3
POWER
IM
MOTOR3
Control Terminal
Torque: 4Kgf-cm (3 in-lbf)
Wire: 12-24 AWG
Power Terminal
Torque: 30Kgf-cm (26 in-lbf)
Wire: 8-12 AWG
Wire Type: Stranded Copper only, 75°C
NOTE: If wiring of the terminal utilizes the wire with a 6AWG-diameter, it is thus necessary
to use the Recognized Ring Terminal to conduct a proper wiring.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
3-11
Page 25
VFD-B Series
20 HP to 30 HP (VFD150B23A, VFD150B43A, VFD185B23A, VFD185B43A,
VFD220B23A, VFD220B43A)
R/L1
S/L2
POWER
T/L3
+1-+2
+ DC DC
- ( ) ( )
IM
3
W/T3V/T2
MOTOR
Control Terminal
Torque: 4Kgf-cm (3 in-lbf)
Wire: 12-24 AWG
Power Terminal
Torque: 30Kgf-cm (26 in-lbf)
Wire: 2-8 AWG
Wire Type: Stranded Copper only, 75°C
NOTE: If wiring of the terminal utilizes the wire with a 1AWG-diameter, it is thus necessary
to use the Recognized Ring Terminal to conduct a proper wiring.
3-12
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 26
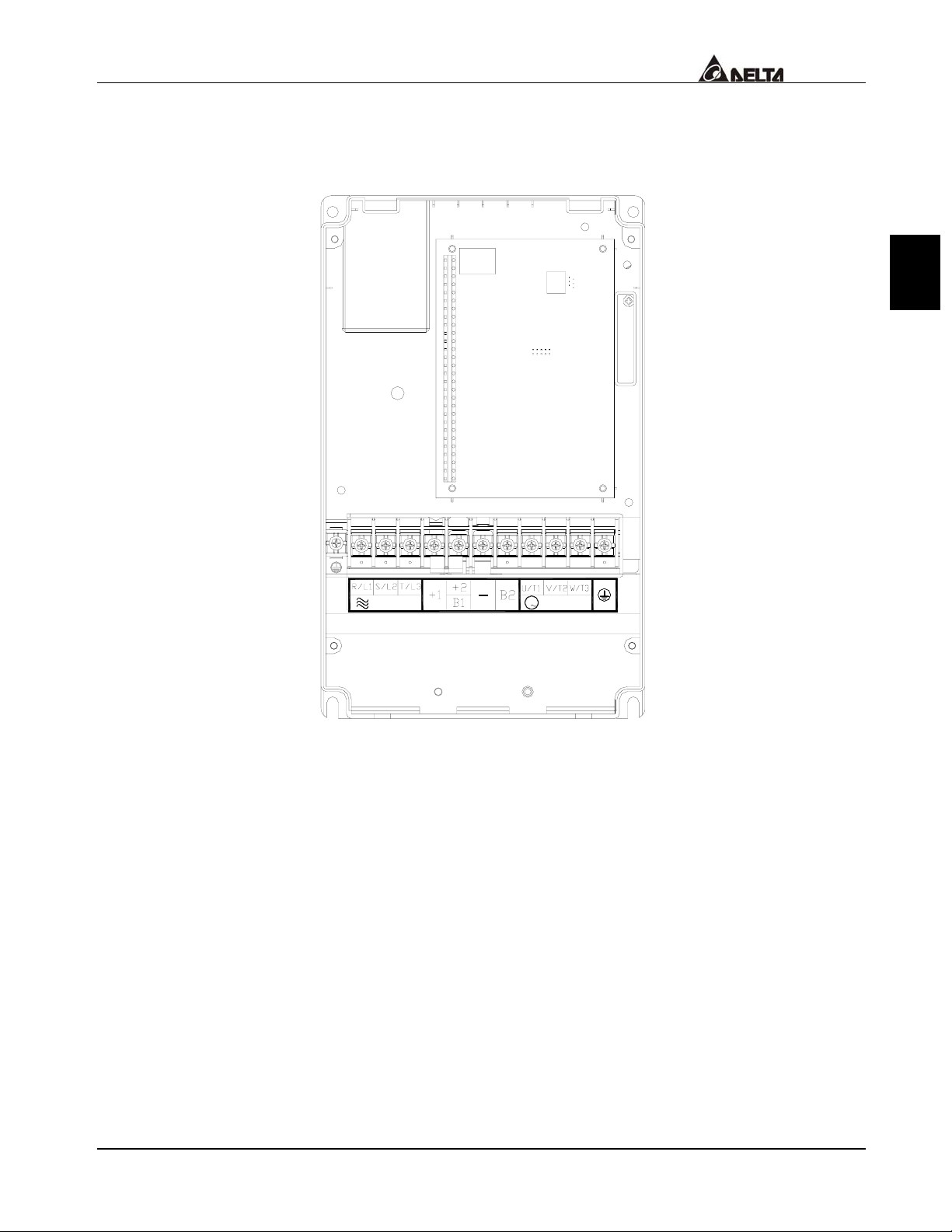
40 HP to 50 HP 230V (VFD300B23A, VFD370B23A)
VFD-B Series
POWER
CHARGE
Screw Torque:
200kgf-cm
(173in-lbf)
POWER
ALARM
3
W/T3S/L2R/L1 T/L3 +2+1 U/T1 V/T2
IM
MOTOR
3
Control Terminal
Torque: 4Kgf-cm (3 in-lbf)
Wire: 12-24 AWG
Power Terminal
Torque: 200kgf-cm (173 in-lbf)
Wire Gauge: 2/0 - 3/0 AWG
Wire Type: Stranded copper only, 75°C
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
3-13
Page 27
VFD-B Series
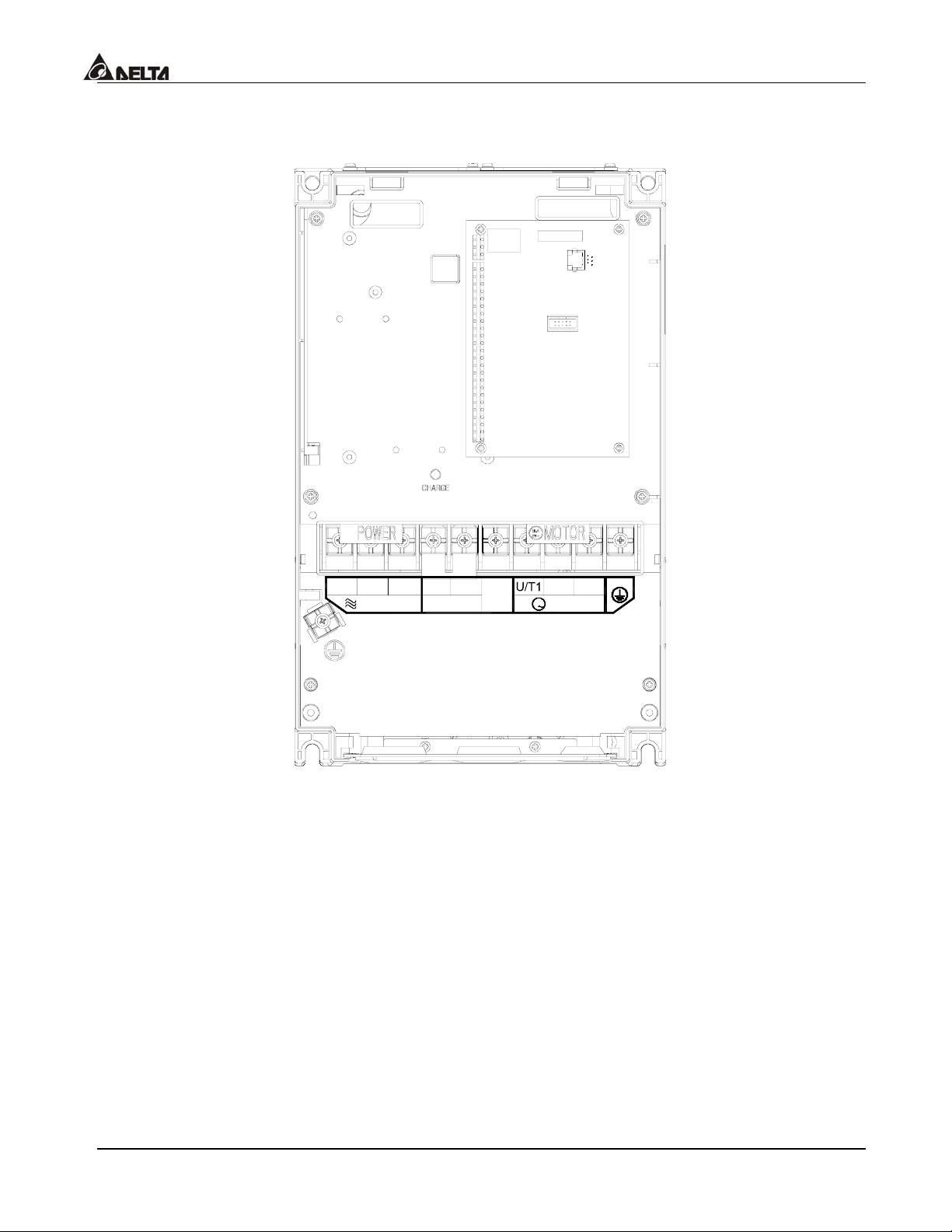
40 HP to 60 HP 460V (VFD300B43A, VFD370B43A, VFD450B43A)
POWER
ALARM
CHARGE
R/L1
S/L2 T/L3 U/T1 V/T2 2/T3
POWER
Control Terminal
Torque: 4Kgf-cm (3 in-lbf)
Wire: 12-24 AWG
Power Terminal
Torque: 58.7kgf-cm (50.9 in-lbf) max.
Wire Gauge: 2-4AWG
Wire Type: Stranded copper only, 75°C
+1
-
+2
IM
MOTOR
3
3-14
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 28
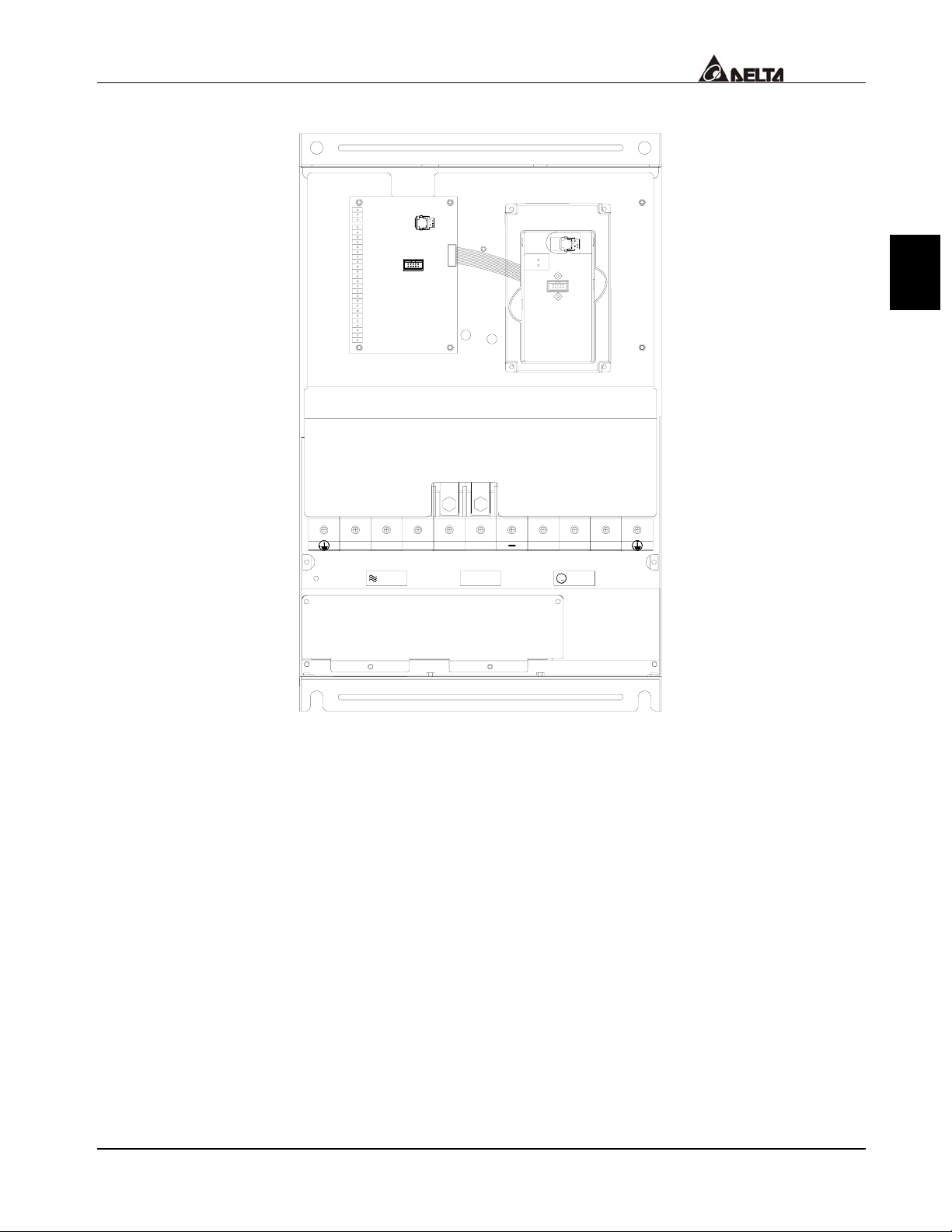
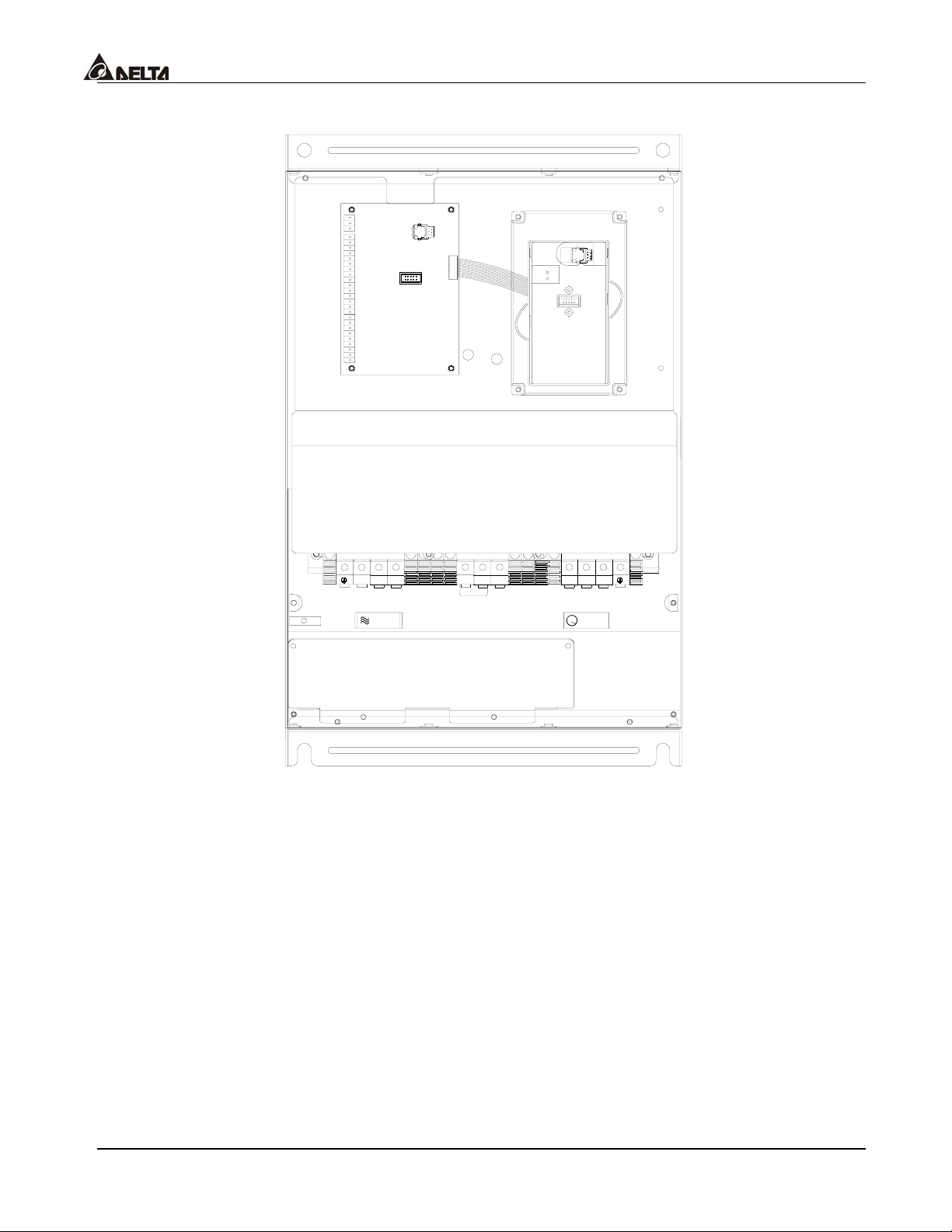
75-100 HP 460V (VFD550B43A, VFD750B43A)
VFD-B Series
3
T/L3S/L2R/L1
POWER
Control Terminal
Torque: 4Kgf-cm (3 in-lbf)
Wire: 12-24 AWG
Power Terminal
Torque: 200 kgf-cm (173 in-lbf)
Wire Gauge: 2/0-3/0 AWG
Wire Type: Stranded copper only, 75°C
+1
+2
Scre w Torqu e:
200kgf-cm
(173in-lbf)
IM
3
V/T2U/T1
MOTOR
W/T3
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
3-15
Page 29
VFD-B Series
3.6 Wiring Notes:
PLEASE READ PRIOR TO INSTALLATION.
1. There are corresponding ring terminals which will be included with each unit (20-30HP),
and please use the proper crimping tool by KST INC. P/N: KST-HDC38A for securing
the conductor.
2.
CAUTION:
Do not connect the AC power to the U/T1, V/T2, W/T3 terminals, as it
will damage the AC drive.
3.
WARNING:
Ensure all screws are tightened to the proper torque rating.
4. During installation, follow all local electrical, construction, and safety codes for the
country the drive is to be installed in.
5. Ensure that the appropriate protective devices (circuit breaker or fuses) are connected
between the power supply and AC drive.
6. Make sure that the leads are connected correctly and the AC drive is properly grounded.
(Ground resistance should not exceed 0.1Ω.)
7. Use ground leads that comply with AWG/MCM standards and keep them as short as
possible.
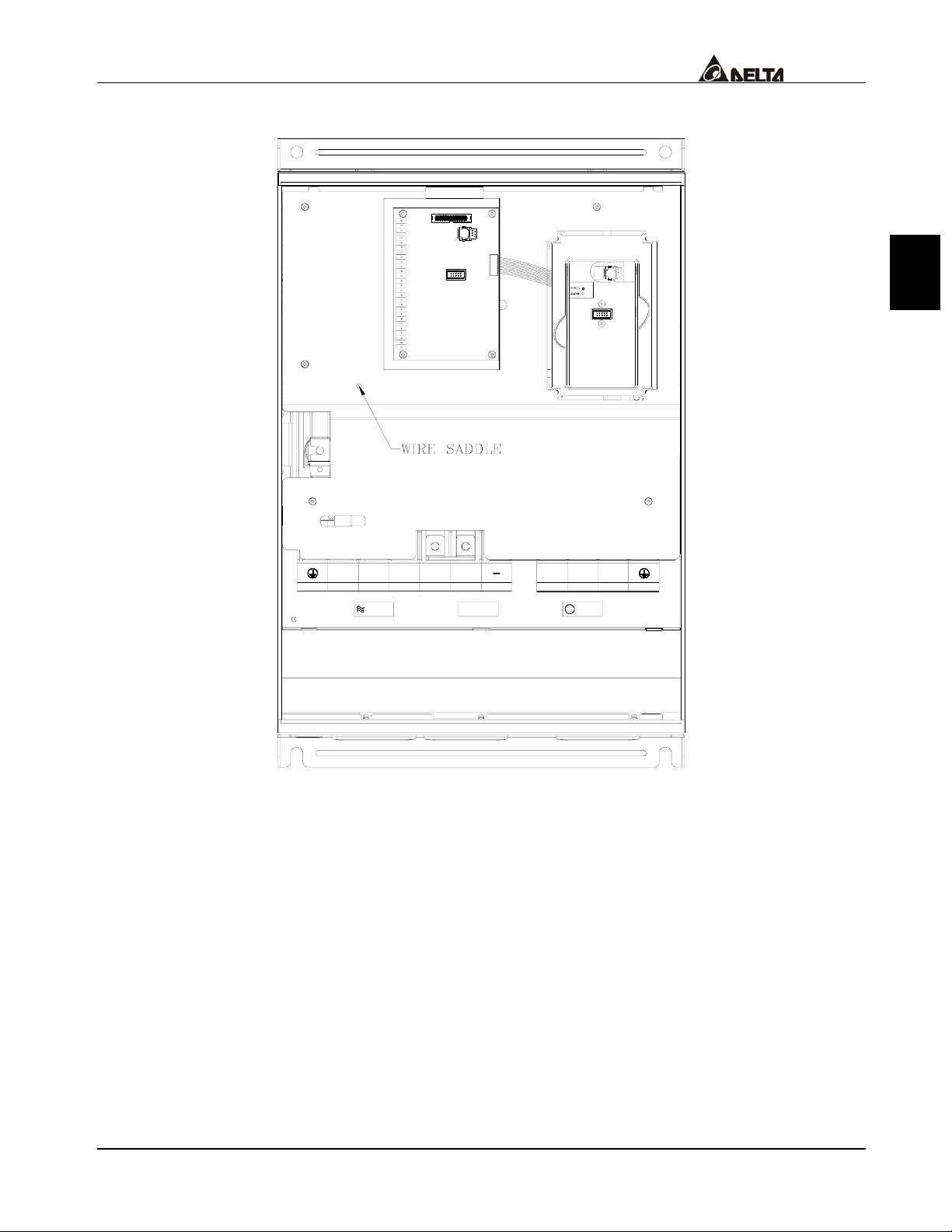
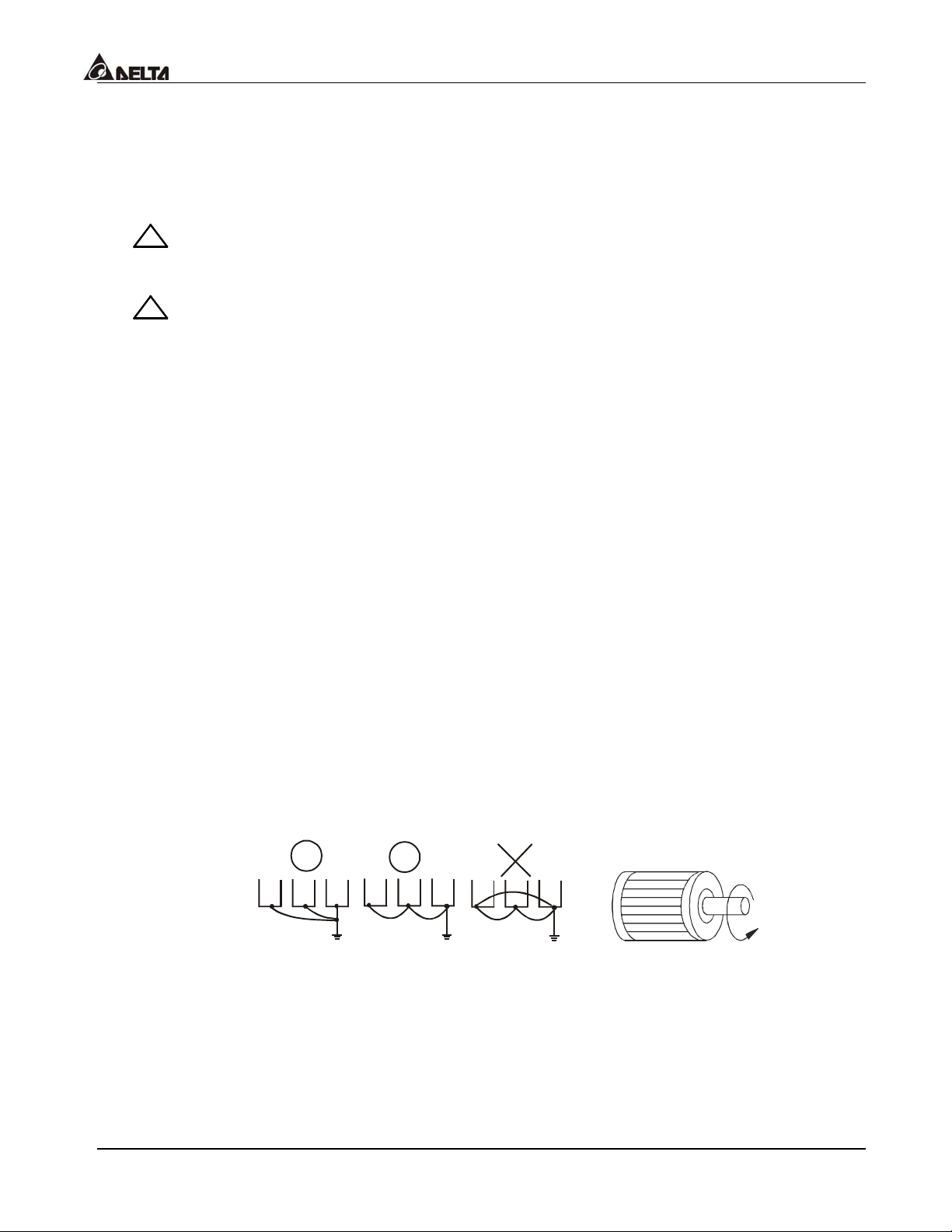
8. Multiple VFD-B units can be installed in one location. All the units should be grounded
directly to a common ground terminal. The VFD-B ground terminals may also be
connected in parallel, as shown in the figure below.
loops.
Ensure there are no ground
Forward
running
9. When the AC drive output terminals U/T1, V/T2, and W/T3 are connected to the motor
terminals U/T1, V/T2, and W/T3, respectively, the motor will rotate counterclockwise (as
viewed from the shaft ends of the motor) when a forward operation command is received.
To reverse the direction of motor rotation, switch over any of the two motor leads.
3-16
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 30
VFD-B Series
10. Make sure that the power source is capable of supplying the correct voltage and
required current to the AC drive.
11. Do not attach or remove wiring when power is applied to the AC drive.
12. Do not monitor the signals on the circuit board while the AC drive is in operation.
13. For the single-phase rated AC drives, the AC power can be connected to any two of the
three input terminals R/L1, S/L2, T/L3.
with single-phase motors.
Note: This drive is not intended for the use
14. Route the power and control wires separately, or at 90°angle to each other.
15. If a filter is required for reducing EMI (Electro Magnetic Interference), install it as close
as possible to AC drive. EMI can also be reduced by lowering the Carrier Frequency.
16. If the AC drive is installed in the place where a load reactor is needed, install the filter
close to U/T1, V/T2, W/T3, side of AC drive. Do not use a Capacitor or L-C Filter
(Inductance-Capacitance) or R-C Filter (Resistance-Capacitance), unless approved by
Delta.
17. When using a GFCI (Ground Fault Circuit Interrupt), select current sensor with sensitivity
3
of 200mA, and not less than 0.1-second detection to avoid nuisance tripping.
3.7 Motor Operation Precautions
1. When using the AC drive to operate a standard 3-phase induction motor, notice that the
energy loss is greater than for an inverter duty motor.
2. Avoid running a standard induction motor at low speed. Under these conditions, the
motor temperature may rise above the motor rating due to limited airflow produced by
the motor’s fan.
3. When the standard motor operates at low speed, the output load must be decreased.
4. If 100% output torque is desired at low speed, it may be necessary to use a special
“inverter-duty” rated motor.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
3-17
Page 31

Page 32

VFD-B Series
CHAPTER 4 DIGITAL KEYPAD OPERATION
This chapter describes the various controls and indicators found on the digital keypad/display
PU01. The information in this chapter should be read and understood before performing the
start–up procedures described in the chapter of parameter settings.
ª Description of the Keypad
ª Description of Display
ª Keypad Operation Modes & Programming Steps
VFD-PU01 Dimensions: mm (inch)
73.0 [2.87]
JOG
RUN
MODE
PROG
DATA
STOP
110.0 [4.33]
19.0 [0.75]
77.0 [3.03]
44.0 [1.73]
?
4
0
.
0
M4* 0.7(2X)
[
1
.
5
8
]
4
97.0 [3.82]
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
6.5 [0.26]
4-1
Page 33

VFD-B Series
4.1 Description of the Digital Keypad VFD-PU01
JOG
By pressing JOG key.
Initiates jog operation.
moves cursor to the left
UP and DOWN Key
Sets the parameter
number and changes the
numerical data, such as
Master Frequency.
Left key
F
H
U
JOG
RUN
VFD-PU01
STOP
RESET
LED Display
Display frequency, current, voltage
and error, etc.
Part Number
Status Display
Display the driver's current status
MODE
C
hanges between different
display mode.
STOP/RESET
RUN key
Display Message Descriptions
Display the AC drive Master Frequency.
Display the actual operation frequency present at terminals
U/T1, V/T2, and W/T3.
User defined unit, where (U = F x Pr.00-05)
4-2
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 34

VFD-B Series
Display Message Descriptions
Display the output current present at terminals U/T1, V/T2, and
W/T3.
Display the AC drive forward run status.
The AC drive reverse run status.
The counter value (C).
Display the specified parameter setting.
Display the actual value stored within the specified parameter.
External Fault.
Display “End” for approximately 1 second if input has been
accepted. After a parameter value has been set, the new
value is automatically stored in memory. To modify an entry,
use the
or keys.
4
Display “Err”, if the input is invalid.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
4-3
Page 35

VFD-B Series
4.2 Operation steps of the Digital Keypad VFD-PU01
Selecting mode
START
F
H
U
MODE
Note
Setting parameters
F
H
U
In the selection mode, press
:
H
F
U
MODE
F
H
U
MODE
to set the parameters.
F
H
U
MODE
move to previous display
F
H
U
F
H
U
F
H
U
MODEMODE
GO START
F
H
U
Success to set parameter.
F
H
U
Input data error
NOTE
:
To shift data
START
F
H
U
To modify data
START
F
H
U
Setting direction
MODE
F
H
U
F
H
U
F
H
U
F
H
U
to return the selecting mode.In the parameter setting mode, you can press
F
H
U
F
H
U
F
H
U
or
F
H
U
F
H
U
or
4-4
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 36

VFD-B Series
CHAPTER 5 DESCRIPTION OF PARAMETER SETTINGS
Group 0: User Parameters a: This parameter can be set during operation.
00 - 00
00 - 01
Identity Code of AC Drive Factory setting: ##
Factory Setting
Rated Current Display of the AC drive Factory setting: #.#
Settings None Unit: 0.1 A
This parameter displays the rated current of the AC drive. It is based on Pr.00-00, and is
read-only.
Users can use the following table to check if the rated current of the AC drive is
corresponds to the identity code.
230V Series
KW 0.75 1.5 2.2 3.7 5.5 7.5 11 15 18.5 22 30 37
HP 1.0 2.0 3.0 5.0 7.5 10 15 20 25 30 40 50
Pr.00-00 04 06 08 10 12 14 16 18 20 22 24 26
Rated
current (A)
5.0 7.0 11 17 25 33 49 65 75 90 120 146
Max.
Carried
15KHz 15 KHz 9 KHz
Freq.
5
460V Series
KW 0.75 1.5 2.2 3.7 5.5 7.5 11 15 18.5 22 30 37 45 55 75
HP 1.0 2.0 3.0 5.0 7.5 10 15 20 25 30 40 50 60 75 100
Pr.00-00 05 07 09 11 13 15 17 19 21 23 25 27 29 31 33
Rated
Current (A)
2.7 4.2 5.5 8.5 13 18 24 32 38 45 60 73 91 110 150
Max.
Carried
15 KHz 15 KHz 9 KHz 6 KHz
Freq.
00 - 02
Parameter Reset Factory Setting: 00
Settings 08 Keypad Lock
10 All parameters are reset to factory settings
This setting allows the user to return all parameters to the factory default settings except
the fault records (Pr.06-08 ~ Pr06-11).
If this parameter is set to 08, the operation function of VFD-PU01 keypad is disabled. At
this time, you should set Pr.00-02 to 00 to disable parameter lock function.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-1
Page 37

VFD-B Series
00 - 03
Start-up Display Page Selection
a
Factory Setting: 00
Settings 00 Display the Master Frequency (F)
01 Display the actual operation frequency (H)
02 Display the content of user-defined unit (U)
03 Multifunction display, [default setting: output current (A)]
04 FWD/REV command
This setting determines the display mode after power is applied to the drive.
00 - 04
Content of Multi Function Display
a
Factory Setting: 00
Settings 00 Display the output current (A)
01 Display the counter value (C)
02 Display the content of PLC time (1.tt)
03 Display the DC BUS voltage (U)
04 Display the output voltage (E)
05 Display the power factor angle (n.)
06 Display the output power (P), unit: kW
07 Display actual motor speed (enable during vector control or Pulse
Generator feedback control) (HU)
08 Display the estimative value of the ration of torque (t)
09 Display PG numbers/10ms (G)
10 Display analog feedback signal value (b) (%)
11 Display AVI (U1.) (%)
12 Display ACI (U2.) (%)
13 Display AUI (U3.) (%)
This parameter determines the content for Multi function Display. User also can view
other information by pressing the “LEFT” key on the VFD-PU01 when the display page is
at Multi function Display.
The 100% of settings 11-13 is +10V or 20mA.
00 - 05
User Defined Coefficient K
a
Factory Setting: 1.00
Settings 0.01 to d 160.00 Unit: 0.01
The coefficient K determines the multiplying factor for the user-defined unit.
The display value is calculated as follows:
U (user-defined unit) = Frequency Command x K (Pr.00-05)
H (actual output) = (actual output frequency) x K (Pr.00-05)
5-2
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 38

VFD-B Series
The display window is only capable of showing five digits, yet you could use Pr.00-05 to
create larger numbers. The display windows use decimal points to signify numbers up
to seven digits as illustrated below:
Display Number Represented
99999 The absence of a decimal point indicates a five-digit integer.
9999.9
A signal decimal point between the middle and the right-most numbers is a true
decimal point. For example, the number 1234.5 would be displayed as “1234.5”.
A single decimal point after the right-most number is not a true decimal point;
99999.
instead it indicates that a zero follows the right-most number. For example, the
number 123450~123459 would be displayed as “12345.”
Two decimal points (one between the middle and the right-most numbers, and one
after the right-most number) are not true decimal points; instead they indicate that
9999.9.
two zeros follow the right-most number. For example, the number
3456700~3456799 would be displayed as “3456.7.”.
00 - 06
Software Version Factory Setting: ###
Settings None
The software version is read-only.
00 - 07
Password Decode Factory Setting: 00
Display 00-02 (times of wrong password)
5
Settings 1 to 65535 Unit: 1
Function of this parameter is to decode the password that is to be input into Pr.00-08.
Input the correct password here so as to revise the parameters; the trials are limit to 3
times only. If the entered passwords are wrong consecutively, a blinking “codE” will
show up to caution the users to restart the AC drive in order to key in the correct
password again.
00 - 08
Password Input Factory Setting: 00
Settings 1 to 65535 Unit: 1
To cancel the parameter lock, setting the parameter as 0. To lock all parameters, setting
a value other than 0 in the parameter as a password. To change the one of the
parameter settings of this AC drive, one must enter the correct password in Pr.00-07 to
activate this function. Be sure to keep the password in mind for later use.
Display states:
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-3
Page 39

VFD-B Series
00: no password 01: password has been set
Password Decode Flow Chart
00-08
Displays 0 when
password entered
correctly.
Correct Password
END
00-08
Displays 0 when
password entered
correctly.
00-07
Incorrect Password
END
00-07
3 chances to enter the correct
password.
1st time displays "1" if
password is incorrect.
2nd time displays "2", if
password is incorrect.
3rd time displays "codE
(blinking)
If the password was entered
incorrectly after three tries,
the keypad will be locked.
Turn the power OFF/ON to
re-enter the password.
00 - 09
Control methods Factory Setting: 00
Settings 00 V/F control
01 V/F + PG Control
02 Vector Control
03 Vector + PG Control
This parameter determines the control methods of the AC drive.
00 - 10
Reserved
5-4
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 40

Group 1: Basic Parameters
VFD-B Series
01 - 00
Maximum Output Frequency (Fmax) Factory Setting: 60.00
Settings 50.00 to 400.00 Hz Unit: 0.01Hz
This parameter determines the AC drive’s Maximum Output Frequency. All the AC drive
analog inputs (0 to +10V, 4 to 20mA, -10V to +10V) are scaled to correspond to the output
frequency range.
01 - 01
Maximum Voltage Frequency (Fbase) Factory Setting: 60.00
Settings 0.10 to 400.00Hz Unit: 0.01Hz
This value should be set according to rated frequency of the motor as indicated on the
motor nameplate. Maximum Voltage Frequency determines the volts per hertz ratio. For
example, if the drive is rated for 460 VAC output and the Maximum Voltage Frequency is
set to 60Hz, the drive will maintain a constant ratio of 7.66 V/Hz (460V/60Hz=7.66V/Hz).
This parameter value must be equal to or greater than the Mid-Point Frequency
(Pr.01-03).
01 - 02
Maximum Output Voltage (Vmax) Unit: 0.1
Settings 230V series 0.1 to 255.0V Factory Setting: 220.0
5
460V series 0.1 to 510.0V Factory Setting: 440.0
This parameter determines the Maximum Output Voltage of the AC drive. The Maximum
Output Voltage setting must be smaller than or equal to the rated voltage of the motor as
indicated on the motor nameplate. This parameter value must be equal to or greater than
the Mid-Point Voltage (Pr.01-04).
01 - 03
Mid-Point Frequency (Fmid) Factory Setting: 0.50
Settings 0.10 to 400.00Hz Unit: 0.01Hz
This parameter sets the Mid-Point Frequency of the V/F curve. With this setting, the V/F
ratio between Minimum Frequency and Mid-Point frequency can be determined. This
parameter must be equal to or greater than Minimum Output Frequency (Pr.01-05) and
equal to or less than Maximum Voltage Frequency (Pr.01-01).
01 - 04
Mid-Point Voltage (Vmid) Unit: 0.1
Settings 230V series 0.1 to 255.0V Factory setting: 1. 7V
460V series 0.1 to 510.0V Factory setting: 3.4V
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-5
Page 41

VFD-B Series
This parameter sets the Mid-Point Voltage of any V/F curve. With this setting, the V/F
ratio between Minimum Frequency and Mid-Point Frequency can be determined. This
parameter must be equal to or greater than Minimum Output Voltage (Pr.01-06) and
equal to or less than Maximum Output Voltage (Pr.01-02). However, this parameter is
ineffective when Pr.11-00 is set to 1 to 4.
01 - 05
Minimum Output Frequency (Fmin) Factory Setting: 0.50
Settings 0.10 to 400.00Hz Unit: 0.01Hz
This parameter sets the Minimum Output Frequency of the AC drive. This parameter
must be equal to or less than Mid-Point Frequency (Pr.01-03).
The settings of 01-03, 01-04, 01-06 are invalid in Vector Control mode.
01 - 06
Minimum Output Voltage (Vmin) Unit: 0.1
Settings 230V series 0.1 to 255.0V Factory setting: 1. 7V
460V series 0.1 to 510.0V Factory setting: 3.4V
This parameter sets the Minimum Output Voltage of the AC drive. This parameter must
be equal to or less than Mid-Point Voltage (Pr.01-04).
The settings of Pr.01-01 to Pr.01-06 have to meet the agreement that Pr.01-02 ≥
Pr.01-04 ≥ Pr.01-06 and Pr.01-01 ≥ Pr.01-03 ≥ Pr.01-05.
01 - 07
Upper Bound of Output Frequency Factory Setting: 100
Settings 1 to 120% Unit: 1%
This parameter must be equal to or greater than the Lower Bound of Output Frequency
(Pr.01-08). The Maximum Output Frequency (Pr.01-00) is regarded as 100%.
Upper Bound of Output Frequency value = (Pr.01-00 x Pr.01-07)/100
01-07
Upper Bound
Output Frequency
01-01
01-00
Maximum
Output
Frequency
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Vol tag e
01-02
Maximum
Output
Vol tag e
01-04
Mid-point
Vol tag e
01-06
Minimum
Output
Vol tag e
Minimum
Output
Freq.
01-08
Lower Bound
Output Frequency
01-05
01-03
Mid-point
Freq.
Output Frequency
setting limit
Maximum Voltage
Frequency
(Base Frequency)
V/F Curve
5-6
Page 42

VFD-B Series
01 - 08
Lower Bound of Output Frequency Factory Setting: 00
Settings 00 to 100% Unit: 1%
The Upper/Lower Bound is to prevent operation error and machine damage.
If the Upper Bound of Output Frequency is 50Hz and the Maximum Output Frequency is
60Hz, the Maximum Output Frequency will be limited to 50Hz.
If the Lower Bound of Output Frequency is 10Hz, and the Minimum Output Frequency
(Pr.01-05) is set at 1.0Hz, then any Command Frequency between 1.0-10Hz will
generate a 10Hz output from the drive.
This parameter must be equal to or less than the Upper Bound of Output Frequency
(Pr.01-07).
The Lower Bound of Output Frequency value = (Pr.01-00 x Pr.01-08) /100
01 - 09
01 - 10
01 - 11
Acceleration Time 1 (Taccel 1) a Factory Setting: 10.0
Deceleration Time 1 (Tdecel 1) a Factory Setting: 10.0
Acceleration Time 2 (Taccel 2) a Factory Setting: 10.0
5
01 - 12
01 - 18
01 - 19
01 - 20
01 - 21
Deceleration Time 2 (Tdecel 2) a Factory Setting: 10.0
Acceleration Time 3 (Taccel 3)
Deceleration Time 3 (Tdecel 3)
Acceleration Time 4 (Taccel 4)
Deceleration Time 4 (Tdecel 4)
a
a
a
a
Factory Setting: 10.0
Factory Setting: 10.0
Factory Setting: 10.0
Factory Setting: 10.0
Settings 0.01 to 3600.0 sec Unit: 0.1/0.01sec
♦ Factory setting 60sec is for the models of 30 HP and above.
Unit can be set by Pr.01-23.
The Acceleration Time is used to determine the time required for the AC drive to ramp
from 0 Hz to its Maximum Output Frequency (Pr.01-00). The rate is linear unless
S-Curve is “Enabled.”
The Deceleration Time is used to determine the time required for the AC drive to
decelerate from the Maximum Output Frequency (Pr.01-00) down to 0 Hz. The rate is
linear unless S-Curve is “Enabled.”
The Acceleration/Deceleration Time 1, 2, 3, 4 is switched according to the Multi-Function
Input Terminals Setting. See Pr.04-04 to Pr.04-09 for more details.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-7
Page 43

VFD-B Series
A
In the diagram shown below, the Acceleration/Deceleration Time of the AC drive is time
between 0 Hz to Maximum Output Frequency (Pr.01-00). Suppose the Maximum Output
Frequency is 60 Hz, Minimum Output Frequency (Pr.01-05) is 1.0 Hz, and
Acceleration/Deceleration Time is 10 seconds. The actual time for the AC drive to
accelerate from start-up to 60 Hz is 9.83 seconds and the deceleration time is also 9.83
seconds. ((60-1) x 10/60=9.83secs).
Frequency
01-00
Max.
Output
Freq.
Setting
running
Freq.
Time
a
Factory Setting: 1.0
01 - 13
Jog Acceleration Time
Accel
Time
01-09 01-11
01-18 01-20
ccel/Decel Time Definition
Decel
Time
01-10 01-12
01-19 01-21
Settings 0.1 to 3600.0 sec Unit: 0.1sec
01 - 22
Jog Deceleration Time
a
Factory Setting: 1.0
Settings 0.1 to 3600.0 sec Unit: 0.1sec
01 - 14
Jog Frequency
a
Factory Setting: 6.00
Settings 0.10 to 400.00Hz Unit: 0.01Hz
When the Jog command is “ON”, the AC drive will accelerate from Minimum Output
Frequency (Pr.01-05) to Jog Frequency (Pr.01-14). When the Jog command is “OFF”,
the AC drive will decelerate from Jog Frequency to zero. The Accel/Decel time is decided
by the Jog Accel/Decel time (Pr.01-13, Pr01-22).
During operation, the AC drive cannot perform Jog command. And during Jog operation,
other operation commands cannot be accepted, except command of FORWARD,
REVERSE and STOP keys on the digital keypad.
5-8
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 44

Frequency
01-14
JOG
Freq.
01 - 15
JOG
Accel
Time
01-13
Auto-Acceleration / Deceleration
JOG
Decel
Time
01-13
a
Settings 00 Linear acceleration / deceleration
01 Auto acceleration, linear Deceleration.
Time
Factory Setting: 00
VFD-B Series
5
02 Linear acceleration, auto Deceleration.
03 Auto acceleration / deceleration
04 Auto acceleration / deceleration (refer to Accel/Decel Time
setting)
If this parameter is set to 03, the AC drive will accel/decel in the fastest and smoothest
means possible by automatically adjusting the time of accel/decel.
If this parameter is set to 04, the real accel/decel time will be equal to or more than
parameter Pr.01-09 ~Pr.01-12 and Pr.01-18 to Pr.01-21.
01 - 16
01 - 17
Acceleration S-Curve Factory Setting: 00
Deceleration S-Curve Factory Setting: 00
Settings 00 to 07
This parameter is used to ensure a smooth acceleration and deceleration. The S-curve
is enabled when sets at 01-07. Setting 1 offers the quickest S-curve and 07 offers the
longest and smoothest S-curve. The AC drive will not follow Accel/Decel Time in
Pr.01-09 to Pr.01-12. To Disable the S-curve, set Pr.01-16 and Pr.01-17 to 00.
NOTE: From the diagram shown below, the original setting Accel/Decel Time will be for
reference when the function of the S-curve is enabled. The actual Accel/Decel Time will be
determined based on the S-curve selected (01 to 07).
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-9
Page 45

VFD-B Series
A
Freq.
ccel/Decel characteristics
(1), (2) Disabling S curve
(3), (4) Enabling S curve
01 - 23
Unit for Accel/Decel Time
Settings 00 Unit: 1 sec
01 Unit: 0.1 sec
02 Unit: 0.01 sec
a
Factory Setting: 00
This parameter can be used to set the unit of Accel/Decel Time and the setting range of
Accel/Decel Time is also changed at the same time.
5-10
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 46

Group 2: Operation Method Parameters
VFD-B Series
02 - 00
Source of First Frequency Command
a
Factory Setting: 00
Settings 00 Master Frequency determined by the digital keypad or external
UP/DOWN keys of the Multi Function Inputs.
01 Master Frequency determined by analog signal DC 0V to +10V
(external terminal AVI)
02 Master Frequency determined by analog signal DC 4mA to
20mA (external terminal ACI).
03 Master Frequency determined by analog signal DC -10V to +10V
(external terminal AUI).
04 Master Frequency determined by RS-485 serial communication.
(RJ-11).
05 Master Frequency determined by RS-485 serial communication.
(RJ-11). It won’t memorize the frequency.
06 Combined usage of the master and auxiliary frequency
command Pr. 02-10, 02-11,02-12
02 - 13
Source of Second Frequency Command
a
Factory Setting: 00
Settings 00 Master Frequency determined by the digital keypad or external
UP/DOWN keys of the Multi Function Inputs.
5
01 Master Frequency determined by analog signal DC 0V to +10V
(external terminal AVI)
02 Master Frequency determined by analog signal DC 4mA to
20mA (external terminal ACI).
03 Master Frequency determined by analog signal DC -10V to +10V
(external terminal AUI).
04 Master Frequency determined by RS-485 serial communication.
(RJ-11).
05 Master Frequency determined by RS-485 serial communication.
(RJ-11). It won’t memorize the frequency.
06 Combined usage of the master and auxiliary frequency
command Pr. 02-10, 02-11,02-12
These parameters set the Frequency Command Source of the AC drive.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-11
Page 47

VFD-B Series
02 - 01
Source of First Operation Command
a
Factory Setting: 00
Settings 00 Controlled by the digital keypad
01 Controlled by the external terminals, keypad STOP enabled.
02 Controlled by the external terminals, keypad STOP disabled.
03 Controlled by the RS-485 communication interface, keypad
STOP enabled.
04 Controlled by the RS-485 communication interface, keypad
STOP disabled.
02 - 14
Source of Second Operation Command
a
Factory Setting: 00
Settings 00 Controlled by the digital keypad
01 Controlled by the external terminals, keypad STOP enabled.
02 Controlled by the external terminals, keypad STOP disabled.
03 Controlled by the RS-485 communication interface, keypad
STOP enabled.
04 Controlled by the RS-485 communication interface, keypad
STOP disabled.
When the AC drive is controlled by external terminal, please refer to Pr.02-05 for
detailed explanations.
The first /second frequency/operation command is enable/disable by Multi Function
Input Terminals. Please refer to the setting of Pr.04-04 ~ 04-09.
02 - 02
Stop Method Factory Setting: 00
Settings 00 STOP: ramp to stop; E.F. (External Fault) : coast to stop
01 STOP: coast to stop; E.F. : coast to stop
02 STOP: ramp to stop; E.F. : ramp to stop
03 STOP: coast to stop; E.F. : ramp to stop
The parameter determines how the motor is stopped when the AC drive receives a valid
stop command or External Fault.
1. Ramp: the AC drive decelerates to Minimum Output Frequency (Pr.01-05) according to
the deceleration time and then stops.
2. Coast: the AC drive stops output instantly upon command, and the motor free runs until it
comes to a complete stop.
3. The motor stop method is usually determined by the characteristics of the motor load
and the frequency of stop
5-12
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 48

VFD-B Series
(1) It is recommended to use “ramp to stop” for the personnel’s safety or to prevent the
materials from being wasted applications that the motor has to stop after the drive is
stopped. As for the deceleration time, it has to be set according to the field tuning.
(2) If the motor free run is okay or the loading inertia is great, it is recommended to set it
as “coast to stop”.
For example: blowers, punching machines, and pumps.
Hz
Hz
Motor
Speed
Operation
command
02 - 03
Freq.
Freq.
Motor
Speed
Time
RUN
Sto ps according
to deceleration
time
RUN
Free running
to stop
PWM Carrier Frequency Selections Unit: 1
HP Setting range Factory setting
1-5HP 01-15KHz 15
7.5-25HP 01-15KHz 09
30-60HP 01-09KHz 06
75-100HP 01-06KHz 06
5
Time
This parameter determines the PWM carrier frequency of AC drive.
Carrier Frequency Acoustic Noise
1kHz
15KHz
Significant
Minimal
Electromagnetic Noise,
Leakage Current
Minimal
Significant
Heat Dissipation
Minimal
Significant
From the table, we see that the PWM carrier frequency has a significant influence on the
electromagnetic noise, heat dissipation of the AC drive, and the acoustic noise to the
motor.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-13
Page 49

VFD-B Series
V
V
V
02 - 04
Settings 00 Enable Forward/Reverse operation
01 Disable Reverse operation
02 Disabled Forward operation
The parameter determines the direction that AC drive can operate.
02 - 05
Settings 00 FWD/STOP, REV/STOP
01 FWD/REV, RUN/STOP
02 3-wire Operation
There are three different types of control modes:
Motor Direction Control Factory Setting: 00
2-wire/ 3-wire Operation Control Modes Factory Setting: 00
External Terminal
FWD:("OPEN":STOP)
("CLOSE":FWD)
REV:("OPEN": STOP)
("CLOSE": REV)
00
2-wire
02-05
FWD /STOP
REV / STOP
FWD/STOP
REV/STOP
01
2-wire
02
3-wire
FWD/ REV
RUN / STOP
RUN/STOP
FWD/STOP
STOP RUN
RUN/FWD
DCM
FWD:("OPEN":STOP)
("CLOSE":RUN)
REV:("OPEN": F
("CLOSE": REV)
DCM
FWD:("CLOSE":RUN)
EF: ("OPEN":STOP)
REV:("OPEN": F
("CLOSE": REV)
DCM
WD)
WD)
FD-B
FD-B
FD-B
02- 06
Settings 00 Disable
01 Enable
Line Start Lockout Factory Setting: 00
5-14
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 50

VFD-B Series
When enabled, the AC drive will not start when powered up with run commands applied.
To start in Line Start Lockout mode, the AC drive must see the run command go from stop
to run after power up. When Line Start Lockout is disable (also known as Auto-Start), the
drive will start when powered-up with run commands applied.
The Line Start Lockout feature does not guarantee the motor will never start under this
condition. It is possible the motor may be set in motion by a malfunctioning switch.
02- 07
Loss of ACI Signal (4-20mA) Factory Setting: 00
Settings 00 Decelerate to 0Hz.
01 Stop immediately and display “EF”.
02 Continue operation by the last frequency command.
This parameter determintes the process when ACI is lost.
02 - 08
Up/Down Key Mode
a
Factory Setting: 00
Settings 00 Based on Accel/Decel Time
01 Constant speed
02 - 09
The Acce/Decel Speed of the UP/DOWN Key with
Constant Speed
a
Factory Setting: 0.01
Settings 0.01~1.00 Hz/msec
These parameters determine increasment/decreasment method of frequency command
when the Multi-Function Input parameters Pr.04-04~Pr.04-09 are set to 11 (Up command)
or 12 (Down command).
Pr.02-08=0: It will increase/decrease frequency command by the setting of accel/decel
5
speed.
Pr.02-08=1: It will accel/decel frequency command by Pr.02-09.
02 - 10
Source of the Master Frequency Command (FCHA)
Settings 00 Digital keypad
01 0 to +10V from AVI
02 4 to 20mA from ACI
03 -10 to +10Vdc from AUI
04 RS-485 communication interface
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-15
a
Factory Setting: 00
Page 51

VFD-B Series
02 - 11
Source of the Auxiliary Frequency Command (FCHB)
a
Factory Setting: 00
Settings 00 Digital keypad
01 0 to +10V from AVI
02 4 to 20mA from ACI
03 -10 to +10Vdc from AUI
04 RS-485 communication interface
02 - 12
Combination of the Master and Auxiliary Frequency
Command
a
Factory Setting: 00
Settings 00 Master frequency + Auxiliary frequency
01 Master frequency - Auxiliary frequency
These three parameters (Pr.02-10~02-12) are enabled when Pr.02-00 or Pr.02-13 is set to
06. If they are enabled, the frequency command will be determined by these parameters.
02 - 15
Keyboard Frequency Command
a
Factory Setting: 60.00
Settings 0.00 ~ 400.00Hz Unit: 0.01
This parameter can be used to set frequency command or read keypad frequency
command.
5-16
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 52

Group 3: Output Function Parameters
VFD-B Series
03 - 00
03 - 01
03 - 02
03 - 03
Multi-function Output Terminal
(Relay contact point RA, RB, RC)
Multi-function Output Terminal MO1 Factory Setting: 01
Multi-function Output Terminal MO2 Factory Setting: 02
Multi-function Output Terminal MO3 Factory Setting: 20
Factory Setting: 08
Settings 00 to 28
Function Table List:
Setting Functions Descriptions
00 No function
The terminal will be activated when there is
01 AC Drive Operational
an output from the drive or RUN command is
“ON”.
02 Master Frequency Attained
The output will be activated when the AC
drive attains the Output Frequency Setting.
The output will be activated when Command
03 Zero speed
Frequency is lower than the Minimum Output
Frequency.
The output will be activated as long as
04 Over-Torque detection
over-torque is detected. (Refer to Pr.06-03 ~
Pr.06-05)
The output will be activated when the output
05 Baseblock (B.B.) Indication
of the AC drive is shut off by external
baseblock.
06 Low-Voltage Indication
07 Operation Mode Indication
The output will be activated when low voltage
is detected.
The output will be activated when operation
command is controlled by external terminal.
The output will be activated when faults occur
08 Fault Indication
(oc, ov, oH, oL, oL1, EF, cF3, HPF, ocA, ocd,
ocn, GFF).
09 Desired Frequency Attained 1
10 PLC Program Running
11 PLC Program Step Completed
The output will be activated when the desired
frequency (Pr.03-04) is attained.
The Output will be activated when PLC
Program is running.
The Output will be activated for 0.5 sec when
each multi-step speed is attained.
5
12 PLC Program Completed
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
The output will be activated for 0.5 sec when
the PLC program cycle has completed
5-17
Page 53

VFD-B Series
Setting Functions Descriptions
13 PLC Operation Paused
14 Terminal Count Value Attained
15 Preliminary Count Value Attained
16
17
Auxiliary Motor 1, 2 and 3
18
19 Heatsink overheat warning (OH1)
20 AC drive ready
21 Emergency Stop Indication
22 Desired Frequency Attained 2
23 Soft Braking Signal
24
25
26
27
28
Zero Speed Output Signal
Low-current Detection
Operation Indication (H>=Fmin)
Feedback Signal Error
User-defined low-voltage Detection
The output will be activated when PLC
operation is paused.
The output will be activated when the counter
reaches Terminal Count Value.
The output will be activated when the counter
reaches Preliminary Count Value.
For the fan & pump control applications, one
can use the Multi-function Output Terminals to
define the auxiliary motor 1-3. Refer to CH
5-11 (PID Controls) and CH 5-12 (Fan and
Pump Control).
When heatsink overheats, it will signal to
prevent OH turn off the drive. > 85 oC (185oF)
o
ON, < 85
C (185 oF) OFF.
The output will be activated when the drive is
on and no abnormality detected.
The contact will be activated once the
drive’s emergency stop function is activated.
The output will be activated when the desired
frequency (Pr.03-10) is attained.
This function is used in conjunction with a
VFDB Braking Unit. The output will be
activated when the drive needs help braking
the load. A smooth deceleration is achieved
using this function.
The output is always active unless there is an
output frequency present at terminals U/T1,
V/T2, and W/T3.
The output will be activated once the drive’s
current is too low. (Refer to Pr.06-12, 06-13)
The output will be activated when there is
output voltage from U, V, W.
The output will be activated once the
feedback signal is abnormal. (Refer to
Pr.10-08, Pr.10-16)
The output will be activated once the DC Bus
voltage is too low. (Refer to Pr.06-16,
Pr.06-17)
03 - 04
Desired Frequency Attained 1 Factory Setting: 0.00
Settings 0.00 to 400.00 Hz Unit: 0.01Hz
5-18
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 54

VFD-B Series
03 - 10
Desired Frequency Attained 2
Factory Setting: 0.00
Settings 0.00 to 400.00 Hz Unit: 0.01
If a Multi-function output terminal is set to function as Desired Frequency Attained 1
(Pr.03-00 to Pr.03-03 = 09), then the output will be activated when the programmed
frequency is attained.
Freq.
Max. Output
Freq.
Desired Freq. 1
03-04
Max. Freq.
Attained
Indication
03-00 to 03-03
Desired Freq.
Attained 1
Indication
03-00 to 03-03
Detection range
+
2Hz
-
OFF
OFF
ON
ON
Detection range
+
4Hz
-
Detection
range
-2Hz
Time
OFF
OFF
5
Desired Freq. Attained 1 & Max. Freq. Attained
03 - 05
Analog Output Signal (AFM)
Factory Setting: 00
Settings 00 Analog Frequency Meter (from 0 to the Maximum Output
Frequency)
01 Analog Current Meter (from 0 to 250% of the rated AC drive
current)
02 Output voltage (from 0 to Pr.01-02)
03 Output frequency command (from 0 to the Maximum Frequency)
04 Output motor speed (from 0 to the Maximum Frequency)
05
Load power factor (cosθ = 90
o
to cosθ = 0o )
This parameter determines the meaning of the 0~+10VDC output from AFM and ACM.
03 - 06
Analog Output Gain
a
Factory Setting: 100
Settings 01 to 200% Unit: 1%
This parameter sets the voltage range of the analog output signal.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-19
Page 55

VFD-B Series
When Pr.03-05 is set to 0, the analog output voltage is directly proportional to the output
frequency of the AC drive. With Pr.03-06 set to 100%, the Maximum Output Frequency
(Pr.01-00) of the AC drive corresponds to +10VDC on the AFM output.
Similarly, if Pr.03-05 is set to 1, the analog output voltage is directly proportional to the
output current of the AC drive. With Pr.03-06 set to 100%, then 2.5 times the rated current
corresponds to +10VDC on the AFM output.
Note: Any type of voltmeter can be used. If the meter reads full scale at a voltage less than 10
volts, the parameter 03-06 should be set using the following formula:
Pr. 03-06 = ((meter full scale voltage)/10) x 100%
For Example: When using the meter with full scale of 5 volts, adjust Pr.03-06 to 50%. If
Pr.03-05 is set to 0, then 5Vdc will correspond to Maximum Output Frequency.
03 - 07
Digital Output Multiplying Factor
a
Factory Setting: 01
Settings 01 to 20 times Unit: 1
This parameter determines the multiplying factor for the AC drives digital output frequency
at the digital output terminals (DFM-DCM). The number of output pulses per second is
equal to the AC drive output frequency multiplied by Pr.03-07. (Pulse per second = actual
output frequency x Pr.03-07)
03 - 08
Terminal Count Value
a
Factory Setting: 00
Settings 00 to 65500 Unit: 1
The parameter determines the value of the internal counter. The internal counter can be
triggered by the external terminal TRG. Upon completion of counting, the specified output
terminal will be activated. (Pr.03-00, to Pr.03-03 set to 14).
When the display shows c5555, the drive has counted 5,555 times. If display shows
c5555., it means that real counter value is between 55,550 to 55,559.
03 - 09
Preliminary Count Value
a
Factory Setting: 00
Settings 00 to 65500 Unit: 1
When the counter value is counted up from “1” to the set value of this parameter, the
corresponding multi-function output terminal will be activated, when set to 15 (Preliminary
Count Value Setting). The corresponding multi-function output terminal will be deactivated
upon completion of Terminal Count Value Attained.
5-20
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 56

The timing diagram:
VFD-B Series
Display
(Pr.00-04=01)
TRG
Counter Trigger
Preliminary Count Value
(Pr. 03-00~Pr. 03-03=15)
Terminal Count Value
(Pr. 03-00~Pr. 03-03=14)
Ex:03-08=5,03-09=3
The width of trigger signal
should not be less than
2ms(<250 Hz)
2msec
2msec
03 - 11
EF Active when Preliminary Count Value Attained Factory Setting: 00
Settings 00 No function.
01 Preliminary count value attained, EF active.
If this parameter is set to 01, When the desired value of counter is attained, the AC drive
treat it as a fault, the drive will stop and show the “cEF” message on the display.
03 - 12
Fan Control Factory Setting: 00
5
Settings 00 Always fan on
01 Power off 1 minute later, fan off
02 Run and fan on, stop and fan off
03 Preliminary temperature attained, Fan start to run
This parameter determines the operation mode of cooling fan.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-21
Page 57

VFD-B Series
Group 4: Input Function Parameters
04 - 00
AVI Analog Input Bias
a Factory Setting: 0.00
Settings 0.00 to 200.00% Unit: 0.01%
04 - 01
AVI Bias Polarity
Factory Setting: 00
Settings 00 Positive Bias
01 Negative Bias
04 - 02
AVI Input Gain
a Factory Setting: 100
Settings 1 to 200% Unit: 1%
04 - 03
AVI Negative Bias, Reverse Motion Enabled
Factory Setting: 00
Settings 00 Forward motion only
01 Forward and reverse motion enabled. Forward motion with
positive bias. Reverse motion with negative bias.
02 Forward and reverse motion enabled. Forward and Reverse
motion with positive or negative bias. Select direction via the
keypad or external terminals.
04 - 11
ACI Analog Input Bias
a Factory Setting: 0.00
Settings 0.00 to 200.00% Unit: 0.01%
04 - 12
ACI Bias Polarity
Factory Setting: 00
Settings 00 Positive Bias
01 Negative Bias
04 - 13
ACI Input Gain
a Factory Setting: 100
Settings 01 to 200% Unit: 1%
04 - 14
ACI Negative Bias, Reverse Motion Enable
Factory Setting: 00
Settings 00 No ACI Negative bias command
01 Negative bias, REV motion enabled
02 Negative bias, REV motion disabled
04 - 15
AUI Analog Input Bias
a Factory Setting: 0.00
Settings 0.00 to 200.00% Unit: 0.01%
04 - 16
AUI Bias Polarity
Factory Setting: 00
Settings 00 Positive Bias
01 Negative Bias
5-22
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 58

VFD-B Series
A
A
A
A
A
04 - 17
AUI Input Gain
a Factory Setting: 100
Settings 01 to 200% Unit: 1%
04 - 18
No AUI Negative bias command
Factory Setting: 00
Settings 00 No ACI Negative bias command
01 Negative bias, REV motion enabled
02 Negative bias, REV motion disabled
Pr.04-00 ~ 04-03, Pr.04-11 ~ 04-18 are used when the source of frequency command is
the analog signal. Refer to the following examples.
Example 1:
Max.
60Hz
30Hz
0Hz
Pr.01-00
0V
4m
5V
12m
Factory Settings
Pr.01-00=60Hz--Max. output Freq.
Pr.04-11=0%--bias adjustment
Pr.04-12 =0-- bias polarity
Pr.04-13=100% -- pot. freq. gain
Pr.04-14=0 -- REV disable in negative bias
10V
20m
Output
Freq.
Example 2:
In this example with the potentiometer set to 0V the Output Frequency is 10 Hz. The mid-point
of the potentiometer becomes 40 Hz. Once the Maximum Output Frequency is reached any
further increase of the potentiometer will not increase output frequency. (If you want to use the
range of 60Hz, please refer to the example 3.) The value of external input voltage/current
0-8.33V (4-13.33mA) corresponds to the setting frequency 0-60Hz.
5
Pr.01-00
60Hz
Bias
Adjustment
10Hz
0Hz
Max. Output Freq.
0V
4m
5V
12mA
10V
20m
Factory Settings
Pr.01-00=60Hz--Max. output Freq.
Pr.04-11=16.7%-- bias adjustment
Pr.04-12=0 -- bias polarity
Pr.04-13=100% -- pot. freq. gain
Pr.04-14=0 -- REV motion disable in negative bias
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-23
Page 59

VFD-B Series
z
z
Example 3:
The example also shows the popular method. The whole scale of the potentiometer can be
used as desired. In addition to signals of 0 to 10V and 4 to 20mA, the popular voltage signals
also include signals of 0 to 5V, 20 to 4mA or that under 10V. Regarding the setting, please
refer to the following examples.
Pr.01-00
60Hz
Max. Output Freq.
50
10V
12V
10-0Hz
=
= 2V
XV
Pr.04-11 = X 100%
2
10
Bias
Adjustment
10Hz
-2V
XV
0Hz
0V 10V
4mA
20mA
Pr. 04-13 = X 100% 83.3% =
Negative bias:
60-10Hz
10V
100
XV =
Example 4:
This example shows a potentiometer range of 0 to 5 Volts. In addition to adjust gain, you also
can set Pr. 01-00 to 120Hz.
Max. Output Freq.
Pr.01-00
60Hz
30Hz
0V
0H
Gain
adjustment
5V
Factory Settings
Pr.01-00=60Hz--Max. output Freq.
Pr.04-11=0.0% bias adjustment
Pr.04-12=0 -- bias polarity
Pr.04-13=200% -- pot. freq. gain
Pr.04-14=0 -- REV motion disable in negative bias
Calculation of gain
10V
)X100% = 200%
5V
Example 5:
In this example a 1-volt negative bias is used. In a noisy environment, it is advantageous to
use negative bias to provide a noise margin (1V in this example).
Pr.01-00
60Hz
54Hz
Negative
bias 6H
0Hz
0V
Max. Output Freq.
1V
10V
Factory Settings
Pr.01-00=60Hz--Max. output Freq.
Pr.04-11=10.0% -- bias adjustment
Pr.04-12=1 -- bias polarity
Pr.04-13=100% -- pot. freq. gain
Pr.04-14=0 -- Rev. motion disable in negative bias
5-24
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 60

VFD-B Series
Example 6:
In this example, a negative bias is used to provide a noise margin. Also a potentiometer
frequency gain is used to allow the Maximum Output Frequency to be reached.
Max. Output Freq.
Pr.01-00
60Hz
Bias
adjustment
Factory Settings
Pr.01-00=60Hz--Max. output Freq.
Pr.04-11=10%--bias adjustment
Pr.04-12=1 -- bias polarity
Pr.04-13=111% -- pot. freq. gain
Pr.04-14=0 -- REV. motion disable in negative bias
Calculation of gain
Pr.04-13=(
10V
9V
)X100%=111%
Negative
bias 6.6Hz
0Hz
0V
1V
10V
Example 7:
In this example, the potentiometer is programmed to run a motor in both forward and reverse
direction. A motor will be idle when the potentiometer position is at mid-point of its scale.
Using this example will disable the external FWD and REV controls.
Pr.01-00
60Hz
30Hz
0V
REV
Max. Output Freq.
FWD
0Hz
5V
30Hz
60Hz
10V
Factory Settings
Pr.01-00=60Hz--Max. output Freq.
Pr.04-11=50%--bias adjustment
Pr.04-12=1 -- bias polarity
Pr.04-13=200% -- pot. freq. gain
Pr.04-14=1 -- REV motion enable in negative bias
Example 8:
In this example, the option of anti-slope is shown. Anti-slope is used in an application where
control of pressure, temperature, or flow is needed. Under a high pressure or flow situation, a
sensor will generate a large signal such as 20 mA or 10V. With anti-slope enable, the large
signal will slow or stop the AC drive. The limit in this application is can’t change the direction
of run. For AC drive, it just can run in reverse direction.
5
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-25
Page 61

VFD-B Series
A
A
Max. Output Freq.
anti-slope
04 - 04
04 - 05
04 - 06
04 - 07
04 - 08
04 - 09
Pr.01-00
60Hz
0Hz
0V
4m
Multi-function Input Terminal (MI1)
Multi-function Input Terminal (MI2)
Multi-function Input Terminal (MI3)
Multi-function Input Terminal (MI4)
Multi-function Input Terminal (MI5)
Multi-function Input Terminal (MI6)
Settings 00 to 36
10V
20m
Factory Settings
Pr.01-00=60Hz--Max. output Freq.
Pr.04-11=100%--bias adjustment
Pr.04-12=1 -- bias polarity
Pr.04-13=100% -- pot. freq. gain
Pr.04-14=1 -- REV. motion enable in negative bias
Factory Setting: 01
Factory Setting: 02
Factory Setting: 03
Factory Setting: 04
Factory Setting: 05
Factory Setting: 06
Settings
Parameters & Functions Table:
Value Functions
00 No Function
01 Multi-Step Speed Command 1
02 Multi-Step Speed Command 2
03 Multi-Step Speed Command 3
04 Multi-Step Speed Command 4
05 External Reset (NO)**
Descriptions
The purpose of this setting is to provide isolation for
unused Multi-Function Input Terminals. Any unused
terminals should be programmed to 0 to insure they
have no effect on drive operation.
Parameter values 1, 2, 3, 4 program any four of the
following Multi-Function Input Terminals for multi-step
speed command function. These four inputs select
the multi-step speeds defined by Pr.05-00 to Pr.05-14
as shown in the following diagram.
Note: Pr.05-00 to Pr.05-14 can also control output
speed by programming the AC drive’s internal PLC
function. There are 17 step speed frequencies
(including Master Frequency and Jog Frequency) to
select for application.
Parameter value 5 programs a Multi-Function Input
Terminal to be an External Reset.
Note: the External Reset has the same function as
the Reset key on the Digital keypad. After fault such
as O.H., O.C. and O.V. are clear, this input can be
used to reset the drive.
5-26
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 62

VFD-B Series
Value Functions
06 Accel/Decel Inhibit
Accel/Decel Time Selection
07
Command 1
Accel/Decel Time Selection
08
Command 2
09 External Base Block (NO)**
10 External Base Block (NC)***
11 Increase Master Frequency
12 Decrease Master Frequency
Descriptions
Parameter value 6 programs Multi-Function Input
Terminal: for Accel/Decel Inhibit. When the command
is active, acceleration and deceleration is stopped
and the AC drive maintains a constant speed.
Parameter value 7, 8 programs any two of
Multi-Function Input Terminals to select the one of
four Accel/Decel Time. (Pr.01-09 to Pr.01-12, Pr.01-18
to Pr.01-21)
Parameter values 9, 10 program Multi-Function Input
Terminals for external Base Block control. Value 9 is
for normally open (N.O.) input, and value d10 is for a
normally close (N.C.) input.
Note:
When a Base-Block signal is received, the AC drive
will stop all output and the motor will free run. When
base block control is deactivated, the AC drive will
start its speed search function and synchronize with
the motor speed, and then accelerate to Master
Frequency.
Parameter values 11, 12 program the Multi-Function
Input Terminals to incrementally increase/ decrease
the Master Frequency each time an input is received.
Please refer to Pr.02-08, 02-09.
5
13 Counter Reset
14 Run PLC Program
15 Pause PLC Program
Auxiliary Motor No.1 output
16
failure
Auxiliary Motor No.2 output
17
failure
Auxiliary Motor No.3 output
18
failure
Emergency Stop (NO)**
19
20 Emergency Stop (NC)***
Parameter value 13 programs Multi Function Input
Terminal to reset the counter.
Parameter value 14 programs Multi-Function Input
Terminal to enable the AC drive internal PLC
program. Parameter value d15 programs an input
terminal to pause the PLC program.
Note: Pr.05-00 to Pr.05-16 defines the PLC program.
Parameter value 16 to 18 program Multi-Function
Input Terminal to disable the corresponding relay of
the AC drive multi-function output terminals, Pr.03-00
to 3-03 (MO1 to MO3).
Parameter value 19 to 20 program Multi-Function
Input Terminal to the AC drive to receive the signals of
malfunction and emergency stop. Please press
“RESET” after fault has been cleared.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-27
Page 63

VFD-B Series
Value Functions
∗21
∗22
Master Frequency Selection
AVI /ACI
Master Frequency Selection
AVI/AUI
Operation Command Selection
23
keypad/external
24 Auto accel/decel mode disable
Forced Stop (NC)***
25
26 Forced Stop (NO)**
Descriptions
Pr.02-00 will automatically be disabled once this
parameter value 21 is enabled; the situation will be
determined by the terminals. If the terminal is open,
it is AVI; if closed, it is ACI otherwise.
Pr.02-00 will automatically be disabled once this
parameter value 22 is enabled; the situation will be
determined by the terminals. If the terminal is open,
it is AVI; if closed, it is AUI otherwise.
Pr.02-01 will automatically be disabled once this
parameter value 21 is enabled; the situation will be
determined by the terminals. If the terminal is open,
it is via keypad; if closed, it is via the external
terminals otherwise.
If enables, the auto accel/decel mode set by Pr.01-15
will be disabled
These two parameters function is the same as the
“STOP” command. It won’t display any error
message. Once parameter value 25 or 26 occurs, you
need to press “RUN” to run AC drive.
27 Parameter lock enable
28 PID function disabled
29 Jog Fwd/Rev command
30 External Reset (NC)***
Source of second frequency
31
command enabled
Source of second operation
32
command enabled
33 One shot PLC
When this setting is enabled, all parameters will be
locked, Read/write parameters is disabled.
When this setting is enabled, PID function will be
disabled.
It will be effective only when external terminal JOG is
active.
The function is the same as setting 05 but it uses in
normal close.
These two functions are used to select the
first/second frequency/operation command source.
The function is the same as setting 14 but the trigger
signal is a one shot pulse, for example: a push button
input. It can be cancel by “STOP” command.
Proximity sensor input for
34
simple Index function
This function should be used with Pr.04-23 ~
Pr.04-25.
5-28
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 64

VFD-B Series
Value Functions
35 Output Shutoff Stop (NO)**
AC drive will stop output and the motor free run if one
of these settings is enabled. If the state of terminal is
changed, AC drive will restart from 0Hz.
36 Output Shutoff Stop (NC)***
∗ Setting 21, 22: you just can set one of them at one time.
** NO: Normal Open input.
*** NC: Normal Close input.
Frequency
Master
Freq.
RUN/STOP
PU External terminal
communication
Accel/Decel time 1 & 2
Multi-function Input
Terminals Pr.04-04 to
Pr.04-09(MI1 to MI6 7)
Accel/Decel time 3 & 4
Multi-function Input
Terminals Pr.04-04 to
Pr.04-09(MI1 to MI6 8)
Acceleration
Accel time 3
Accel time 2
01-11
Accel time 1
01-09
11223
OFF
OFF
OFF
Accel time 4
01-20
01-18
4
1
ON
ON
ON
ON
Accel/Decel Time and Multi-function Input Terminals
Descriptions
Decel time 1
01-10
Delceleration
Decel time 2
01-12
Decel time 3
01-19
Decel time 4
01-21
3
4
5
Time
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-29
Page 65

VFD-B Series
Frequency
1st step speed
Mult i-func tion Terminal
Pr.04-04 to Pr.04-09
(Mi1 to MI6 1)
2nd step speed
Mult i-func tion Terminal
Pr.04-04 to Pr.04-09
(Mi1 to MI6 2)
3rd step speed
Mult i-func tion Terminal
Pr.04-04 to Pr.04-09
(MI1 to MI6 3)
4th step speed
Mult i-func tion Terminal
Pr.04-04 to Pr.04-09
(MI1 to MI6 4)
Run Signal
Jog Freq.
05-02
05-01
05-00
Master Speed
2 3 4 5 6 7 8 9 101112131415
OFF
ON
ON
OFF
ON
OFF
OFF
OFF
Mu lt i-Step Speed via Exte rnal Termin al s
05-05
05-04
05-03
ON ON ON
ON
05-06
ON
ON
05-07
05-08
05-09
05-10
05-11
ON
ON
ON ON
ON
05-12
05-13
ON
JOG Freq.
01-14
05-14
ON
04 - 10
Digital Terminal Input Debouncing Time
Factory Setting: 1
Settings 1 to 20m sec Unit: 1
This parameter is to delay and to check the signals from digital input terminals. 1 unit is
2 msec, 2 units are 4 msec, etc. The delay time is to check if there is any noise that
causes the digital terminal malfunction.
04 - 19
AVI Analog Input Delay
Factory Setting: 0.05
Settings 0.00 to 10.00 Sec Unit: 0.01
04 - 20
ACI Analog Input Delay
Factory Setting: 0.05
Settings 0.00 to 10.00 Sec Unit: 0.01
04 - 21
AUI Analog Input Delay
Factory Setting: 0.05
Settings 0.00 to 10.00 Sec Unit: 0.01
04 - 22
Analog Input Frequency Resolution Factory Setting: 01
Settings 00 0.01Hz
01 0.1Hz
5-30
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 66

VFD-B Series
04 - 23
Gear Ratio for Simple Index Function Factory Setting: 200
Settings 4 ~ 1000 Unit: 1
04 - 24
Settings
04 - 25
Index Angle for Simple Index Function Factory Setting: 180.0
0.0 ~360.0°
Deceleration Time for Simple Index Function
a
Factory Setting: 0.00
Unit: 0.1
Settings 0.00 ~100.00 sec Unit: 0.01
The simple index function is to position the mechine at the same position when it stops.
The function should be used with the function 34 of Multi-Function Input Terminals.
The system diagram is shown below. The mechine is drived by the gear motor or other
reduction gear. The trigger position of sensor is used as the original point of index
angle. When the stop command is accepted, the AC drive will not decelerate until the
sensor is trigged, then the AC drive begin to decelerate and stop according to the
Pr.04-24 and Pr.04-25.
5
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-31
Page 67

VFD-B Series
Group 5: Multi-step Speed and PLC (Process Logic Control) Parameters
05 - 00
05 - 01
05 - 02
05 - 03
05 - 04
05 - 05
05 - 06
05 - 07
05 - 08
05 - 09
05 - 10
05 - 11
05 - 12
05 - 13
05 - 14
1st Step Speed Frequency
2nd Step Speed Frequency
3rd Step Speed Frequency
4th Step Speed Frequency
5th Step Speed Frequency
6th Step Speed Frequency
7th Step Speed Frequency
8th Step Speed Frequency
9th Step Speed Frequency
10th Step Speed Frequency
11th Step Speed Frequency
12th Step Speed Frequency
13th Step Speed Frequency
14th Step Speed Frequency
15th Step Speed Frequency
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
Factory Setting: 0.00
Factory Setting: 0.00
Factory Setting: 0.00
Factory Setting: 0.00
Factory Setting: 0.00
Factory Setting: 0.00
Factory Setting: 0.00
Factory Setting: 0.00
Factory Setting: 0.00
Factory Setting: 0.00
Factory Setting: 0.00
Factory Setting: 0.00
Factory Setting: 0.00
Factory Setting: 0.00
Factory Setting: 0.00
Settings 0.00 to 400.00 Hz Unit: 0.01Hz
The Multi-Function Input Terminals (refer to Pr.04-04 to 04-09) are used to select one of
the AC drive Multi-Step speeds. The speeds (frequencies) are determined by Pr.05-00
to 05-14 shown above. Also can be accompanied with Pr.05-15 to 05-31 for PLC
programs.
05 - 15
PLC Mode Factory Setting: 00
Settings 00 Disable PLC operation
01 Execute one program cycle
02 Continuously execute program cycles
03 Execute one program cycle step by step
04 Continuously execute program cycles step by step
This parameter selects the mode of PLC operation for the AC drive. The AC drive will
change speeds and directions according to the user’s desired programming.
5-32
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 68

VFD-B Series
Example 1 (Pr.05-15 = 1):
Execute one cycle of the PLC program. Its relative parameter
settings are:
Pr.05-00 to 05-14: 1st to 15th step speed (sets the frequency of each step speed)
Pr.04-04 to 04-09: Multi-Function Input Terminals (set one multi-function terminal as
14 - PLC auto-operation).
Pr.03-00 to 03-03: Multi-Function Output Terminals (set a Multi-Function Terminal as
10-PLC running indication, 11-PLC step completed or 12-PLC
program completed).
Pr.05-16: Direction of operation for the 1st to 15th step speed.
st
Pr.05-17 to 05-31: Operation time setting of the 1
to 15th step speed.
5
Program operation
command
Program operation
indication
Step operation
indication
Program operation
fulfillment indication
Note: The above diagram shows one complete PLC cycle. To restart the cycle, turn the PLC
program off and on again.
Example 2 (Pr.05-15 = 2): Continuously executes program cycles:
The diagram above shows the PLC program stepping through each speed. Set Pr.05-15 to 2
continuously executes the program. To stop the PLC program, one must either pause the
program or turn it off. (Refer to Pr.04-04 to 04-09 values 14 and 15).
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-33
Page 69

VFD-B Series
Example 3 (Pr.05-15 = 3) Execute one cycle step by step:
The example below shows how the PLC can perform one cycle at a time, within in a complete
cycle. Each step will use the accel/decel times in Pr.01-09 to Pr.01-12. It should be noticed
that the time each step spends at its intended frequency is diminished, due to the time spent
during accel/decel.
Frequency
Program operation
command
Program operation
indication
Step operation
indication
OFF
OFF
OFF
05-00
12 3 4
05-17
PLC operation execution one cycle step by step
05-02
05-01
05-18
t
ON
t
ON
05-19
ON
ON
ON
05-03
t
05-20
05 - 16
PLC Forward/Reverse Motion
Factory Setting: 00
Settings 00 to 32767
This parameter controls the direction of motion for the Multi-Step Speeds Pr.05-00 to
Pr.05-14 during PLC mode. All other direction commands are invalid during the PLC
Time
mode.
Note:
The equivalent 15-bit number is used to program the forward/reverse motion for each of
the 15 speed steps. The binary notation for the 15-bit number must be translated into
decimal notation and then entered.
5-34
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 70

VFD-B Series
Weights
Bit
Weights
Bit
123456789101112131415 0
100111000110010 0
0=Forward
1=Reverse
Direction of Pr.05-001st speed for
Direction of Pr.05-012nd speed for
Direction of Pr.05-023rd speed for
Direction of Pr.05-034th speed for
Direction of Pr.05-045th speed for
Direction of Pr.05-056th speed for
Direction of Pr.05-067th speed for
Direction of Pr.05-078th speed for
Direction of Pr.05-089th speed for
Direction of Pr.05-0910th speed for
Direction of Pr.05-1011th speed for
Direction of Pr.05-1112th speed for
Direction of 1 Pr.05-123th speed for
Direction of Pr.05-1314th speed for
Direction of Pr.05-1415th speed for
0=Forward
1=Reverse
Direction of Pr.05-00, 1st speed = Forward
Direction of Pr.05-01,2nd speed=Reverse
5
Direction of ,Pr.05-02 3rd speed=Forward
Direction of ,Pr.05-03 4th speed=Forward
Direction of ,Pr.05-04 5th speed=Reverse
Direction of Pr.05-05,6th speed=Reverse
Direction of Pr.05-06,7th speed=Reverse
Direction of Pr.05-07,8th speed=Forward
Direction of Pr.05-08,9th speed=Forward
Direction of Pr.05-09,10th speed=Forward
Direction of Pr.05-10,11th speed=Reverse
Direction of Pr.05-11,12th speed=Reverse
Direction of 1Pr.05-12, 3th speed=Forward
Direction of Pr.05-13,14th speed=Forward
The setting value = bit14x2 +14bit13x2 +....+bit2x2 +bit1x2 +bit0x2
= 1x 2 +141x2 +1x2 +1x2 +1x2 +1x2 +1x2
11106541
13 2 1 0
Direction of Pr.05-14,15th speed=Reverse
=16384+2048+1024+64+32+16+2
=19570
Setting 05-16
NOTE:
14
2 =16384
9
2=512
4
2=16
=19570
13
2 =8192
8
2=256
3
2=8
2 =4096122 =2048112=1024
2=12872=64
2
2=4
6
1
2=2
10
5
2=32
0
2=1
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-35
Page 71

05 - 17
VFD-B Series
Time Duration of 1st Step Speed
Factory Setting: 0.0
05 - 18
05 - 19
05 - 10
05 - 21
05 - 22
05 - 23
05 - 24
05 - 25
05 - 26
05 - 27
05 - 28
05 - 29
05 - 30
05 - 31
Time Duration of 2nd Step Speed
Time Duration of 3rd Step Speed
Time Duration of 4th Step Speed
Time Duration of 5th Step Speed
Time Duration of 6th Step Speed
Time Duration of 7th Step Speed
Time Duration of 8th Step Speed
Time Duration of 9th Step Speed
Time Duration of 10th Step Speed
Time Duration of 11th Step Speed
Time Duration of 12th Step Speed
Time Duration of 13th Step Speed
Time Duration of 14th Step Speed
Time Duration of 15th Step Speed
Factory Setting: 0.0
Factory Setting: 0.0
Factory Setting: 0.0
Factory Setting: 0.0
Factory Setting: 0.0
Factory Setting: 0.0
Factory Setting: 0.0
Factory Setting: 0.0
Factory Setting: 0.0
Factory Setting: 0.0
Factory Setting: 0.0
Factory Setting: 0.0
Factory Setting: 0.0
Factory Setting: 0.0
Settings 0.0 to 65500 Unit: 1 /0.1sec
Pr.05-17 to Pr.05-31 correspond to operation time of each step speed defined by
Pr.05-00 to Pr.05-14. The maximum setting 65500 seconds will be displayed as t6550. If
it is displayed t6550. that means 6550 seconds.
Note: If a parameter is set to “00” (0 sec), the corresponding step will be skipped. This is
commonly used to reduce the number of program steps
05 - 32
Time Unit Settings Factory Setting: 00
Settings 00 1 Sec
01 0.1 Sec
This parameter determines the time unit for Pr.05-17~Pr.05-31.
05 - 33
Settings
Skip Frequency Width Factory Setting: 0.00
0.00〜400.00 Hz
05 - 34
Bias Frequency Width Factory Setting: 0.00
Settings
0.00〜400.00 Hz
Frequency of ∆ top point Fup= master frequency F + Pr.05-33 + Pr.05-34.
Frequency of ∆ down point F
= master frequency F – Pr.05-33 – Pr.05-34.
down
5-36
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 72

Master
Frequency
(F)
VFD-B Series
Fup
Double Pr. 05-34
Pr.05-33
Pr.01-09
Pr.01-11
Pr.01-10
Pr.01-12
Fdown
5
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-37
Page 73

VFD-B Series
Group 6: Protection Parameters
06 - 00
Over-Voltage Stall Prevention Factory Setting: 390V
Settings 00 Disable Over-Voltage Stall Prevention
230V series: 330 ~ 410V
460V series: 660 ~ 820V
During deceleration, the DC bus voltage may exceed its Maximum Allowable Value due
to motor regeneration. When this function is enabled, the AC drive will not decelerate
and keep the output frequency until the voltage drops below the preset value.
Note:
With moderate inertial load, the over-voltage stall prevention will not occur and the real
deceleration time should be equal to the setting of deceleration time. The AC drive will
automatically extend the deceleration time with high inertial loads. If deceleration time is
critical for the application, then dynamic braking resistor should be used.
Output Frequency
Deceleration characteristic
when Over-Voltage Stall
Prevention enabled
Frequency Held
Time
Deceleration Time
01-10, 01-12, 01-19, 01-21
06 - 01
Over-Current Stall Prevention during Acceleration
Factory Setting: 170
Settings 20 to 250% Unit: 1%
A setting of 100% is equal to the Rated Output Current of the drive.
During acceleration, the AC drive output current may increase abruptly and exceed the
value specified by Pr.06-01 due to rapid acceleration or excessive load on the motor.
When this function is enabled, the AC drive will stop accelerating and keep the output
frequency until the current drops below the maximum value.
5-38
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 74

VFD-B Series
Over-Current
Detection
Level
Current
06-01
Output Frequency
Over-Current Stall
prevention during
Acceleration,
frequency held
06 - 02
Over-current Stall Prevention during Operation
Factory Setting: 170
Settings 20 to 250% Unit: 1%
If the output current exceeds the setting specified in Pr.06-02 (the over-current stall
5
prevention current level during operation) when the drive is operating, the drive will
decrease its output frequency to prevent the motor stall. If the output current is lower
than the setting specified in Pr.06-02, the drive will then accelerate to catch up with the
frequency specified.
Over-Current
Detection
Level
Output Current
06-02
Over-Current Stall
Prevention during
Operation, output
frequency decrease
Output
Frequency
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-39
Page 75

VFD-B Series
06 - 03
Over-Torque Detection Mode (OL2) Factory Setting: 00
Settings 00 Over-Torque detection disabled.
01 Over-Torque detection enabled during constant speed operation,
and keep operation after the over-torque is detected.
02 Over-Torque detection enabled during constant speed operation,
and operation halted after over-torque detection.
03 Over-Torque detection enabled during acceleration, and keep
operation after the over-torque is detected.
04 Over-Torque detection enabled during acceleration, and
operation halted after over-torque detection
This parameter determines the operation mode of the drive after the over-torque is
detected with the following method: if the output current exceeds the over-torque
detection level (Pr.06-04) and which also exceeds the setting of Pr.06-05 Over-Torque
Detection Time, with the [Multi-Functional Output Terminal] specified as an indication for
the over-torque detection, the contact will then be “closed”. Please refer to
Pr.03-00~03-03 for detail.
06 - 04
Over-Torque Detection Level Factory Setting: 150
Settings 10 to 200% Unit: 1%
This setting is proportional to the Rated Output Current of the drive.
06 - 05
Over-Torque Detection Time Factory Setting: 0.1
Settings 0.1 to 60.0Sec Unit: 0.1sec
This parameter determines the time for over-torque detection.
06 - 06
Electronic Thermal Overload Relay Selection Factory Setting: 00
Settings 00 Operate with a Standard Motor (coaxial heat dissipation)
01 Operate with a Special Motor (independent heat dissipation)
02 Operation disabled
This function is used to protect the motor from overload or overheat.
06 - 07
Electronic Thermal Characteristic
a
Factory Setting: 60
Settings 30 to d 600 Sec Unit: 1 Sec
The parameter determines the time required activating the I2t electronic thermal
protection function. The graph below shows I2t curves for 150% output power for 1
minute.
5-40
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 76

Operation
time(min)
5
4
VFD-B Series
60Hz or more
50Hz
3
2
1
0
20
40
60
80
100
120
140
06 – 08
06 - 09
06 - 10
06 - 11
Present Fault Record Factory Setting: 00
Second Most Recent Fault Record
Third Most Recent Fault Record Factory Setting: 00
Fourth Recent Fault Record Factory Setting: 00
Settings 00 No fault occurred
01 Over-current (oc)
02 Over-voltage (ov)
03 Overheat (oH)
10Hz
5Hz
160
Load
factor
(%)
180 200
5
Factory Setting: 00
04 Overload (oL)
05 Overload1 (oL1)
06 External fault (EF)
07 IGBT protection (occ)
08 CPU failure (CF3)
09 Hardware protection failure (HPF)
10 Current exceeds 2 times rated current during accel.(ocA)
11 Current exceeds 2 times rated current during decel.(ocd)
12 Current exceeds 2 times rated current during steady state
operation (ocn)
13 Ground fault (GFF)
14 Low voltage (Lv)
15 CPU READ failure (CF1)
16 CPU WRITE failure (CF2)
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-41
Page 77

VFD-B Series
17 External Base block stop (bb)
18 Motor over load (oL2)
19 Auto accel/decel failure (CFA)
20 Software/password protection (code)
21 Emergency stop (EF1)
22 PHL (Phase-Loss)
23 cEF (Preliminary count value attained, EF active)
24 Lc (Low-current)
25 AnLEr (Analog feedback signal error)
26 PGErr (PG feedback signal error)
Pr.06-08 to Pr.06-11 store records of the four most recent faults that had occurred. Use
the reset key to reset the drive when the fault no longer exits.
06 - 12
Low-Current Detection Level Factory Setting: 00
Settings 00 Disabled
00 ~ 100%
06 - 13
Low-Current Detection Time Factory Setting: 10.0
Settings 0.1~ 3600.0 Sec Unit: 0.1sec
06 - 14
Low-Current Treatment Factory Setting: 00
Settings 00 Warn and keep operating
01 Warn and ramp to stop
02 Warn and coast to stop
03 Warn, after coast to stop, restart (delay 06-15 setting time)
06 - 15
Low-Current Detection Restart Delay Time Factory Setting: 10.0
Settings 1~600.0 Min. Unit: 1min
If output current is lower than Pr.06-12 and exceed the time that Pr.06-13 sets during
running, AC drive will warn as Pr.06-14 sets. If Pr.06-14 is set to 03, AC drive will restart
after the delay time set by Pr.06-15 is up.
5-42
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 78

VFD-B Series
06 - 16
User-Defined Low-Voltage Detection Level Factory Setting: 00
Settings 00 Disabled
230V series: 220 ~ 300VDC
460V series: 440 ~ 600VDC
06 - 17
User-Defined Low-Voltage Detection Time Factory Setting: 0.5
Settings 0.1~ 3600.0 Sec Unit: 0.1sec
When the voltage of DC BUS is lower than Pr.06-16 and the time exceeds the setting of
Pr.06-17, AC drive will output a signal by the setting 28 of Pr.03-00 ~ Pr.03-03.
06 - 18
Reserved
5
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-43
Page 79

VFD-B Series
Group 7: Motor Parameters
07 - 00
Motor Rated Current
a
Factory Setting: 100
Settings 30 to 120% Unit: 1%
Use the following method to calculate the percentage entered in this parameter.
(Motor Rated Current (Ampere)/ AC Drive Rated output current (Pr00-01)) x 100%
Pr.07-00 and Pr.07-01 must be set if the drive is programmed to operate in Vector
Control mode (Pr.0-09 = 2, 3). It also must be set if the "Electronic Thermal Overload
Relay" (Pr.06-06) or "Slip Compensation" functions is selected.
07 - 01
Motor No-load Current
a
Factory Setting: 40
Settings 01 to 90% Unit: 1%
The rated current of the AC drive is regarded as 100%. The setting of the Motor no-load
current will effect the slip compensation.
The setting value must be less than the Pr.07-00 (Motor Rated Current).
07 - 02
Torque Compensation
a
Factory Setting: 0.0
Settings 0.0 to 10.0 Unit: 0.1
This parameter may be set so that the AC drive will increase its voltage output to obtain
a higher torque. Only for V/F control mode.
07 - 03
Slip Compensation (Used without PG)
a
Factory Setting: 0.00
Settings 0.00 to 3.00 Unit: 0.1
While driving an asynchronous motor, increasing load on the AC drive will cause an
increase in slip. This parameter may be used to compensate the slip by increasing the
output frequency. When the output current of the AC drive is greater than the motor
no-load current (Pr.07-01), the AC drive will adjust its output frequency according to this
parameter.
07 - 04
Number of Motor Poles
Factory Setting: 04
Settings 02 to 10 Unit: 2
This parameter sets the number of motor poles (must be an even number).
07 - 05
Motor Parameters Auto Tuning
Factory Setting: 00
Settings 00 Disable Unit: 1
01 Auto Tuning R1
02 Auto Tuning R1 + No-load Test
5-44
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 80

VFD-B Series
It will auto detect by pressing RUN key after this parameter is set to 01 or 02. When
setting to 01, it just auto detect R1 value, and the Pr.07-01 needed to input by manual.
When setting to 02, AC drive should be no-load and the value of Pr.07-01 and Pr.07-06
will be filled automatically.
The steps to AUTO-Tuning are:
1. Make sure that all the parameters are set to factory settings and the wiring
connected to motor is correctly.
2. Make sure that motor is no-load before auto-tuning and the axis doesn’t connect to
any belt or gear motor.
3. Fill in Pr.01-02, Pr.01-01, Pr.07-00, Pr.07-04 and Pr.07-08 with correct value.
4. After Pr.07-05 is set to 1 or 2, the AC drive will execute auto-tuning immediately as
soon as it receives the ”RUN” command The execution time will be 15 seconds +
Pr.01-09 + Pr.01-10. (The more horsepower needs the more Accel/decel time)
5. After executing, please check if there are values filled in Pr.07-01 and Pr.07-06. If
not, please press RUN key after setting Pr.07-05.
6. Then, you can set Pr.00-09 to 02/03 and set other parameters according to your
requirement.
Note 1: It is not suitable for many motors run with parallel in vector control mode.
Note 2: It is not suitable for using in vector control mode if | horsepower of motor | -
| horsepower of AC drive | doesn’t exceed the useful range.
07 - 06
Motor Line-to-line Resistance R1
Settings
00 to 65535 mΩ
Factory Setting: 00
Unit: 01
The motor auto detection will set this parameter. The user may also set this parameter
without using Pr.07-05.
5
07 - 07
Reserved
07 - 08
Motor Rated Slip
Factory Setting: 3.00
Settings 0.00 to 20.00Hz Unit: 0.01
Refer to the rated rpm on the nameplate of the motor and use the following equation to
determine the rated slip.
Rated Slip = F (Pr.01-01 base frequency) – (rated rpm x motor pole/120)
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-45
Page 81

VFD-B Series
07 - 09
Slip Compensation Limit
Factory Setting: 200
Settings 00 to 250% Unit: 1
This parameter can set the upper limit of the compensation frequency (the percentage
of Pr.07-08).
07 - 10
07 - 11
Reserved
Reserved
07 - 12
Torque Compensation Time Constant
Factory Setting: 0.05
Settings 0.01 ~10.00 Sec Unit: 0.01
07 - 13
Slip Compensation Time Constant
Factory Setting: 0.10
Settings 0.05 ~10.00 Sec Unit: 0.01
Setting the Pr.07-12 and Pr.07-13 can change the response time for the compensation.
07 - 14
Accumulative Motor Operation Time (Min.)
Factory Setting: 00
Settings 00 ~1439 Unit: 01
07 - 15
Accumulative Motor Operation Day
Factory Setting: 00
Settings 00 ~65535 Unit: 01
Pr.07-14 and Pr.07-15 are used to record the motor operation time. They can be cleared
by setting to 00 and won’t record if the time is less than 60 seconds.
5-46
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 82

Group 8: Special Parameters
VFD-B Series
08 - 00
DC Braking Current Level
Factory Setting: 0
Settings 0 to 100% Unit: 1%
This parameter determines the level of DC Braking Current output to the motor during
start-up and stopping. When setting DC Braking Current, the Rated Current (Pr.00-01)
is regarded as 100%. It is recommended to start with a low DC Braking Current Level
and then increase until proper holding torque has been attained.
08 - 01
DC Braking Time during Start-up Factory Setting: 0.0
Settings 0.0 to 60.0 sec Unit: 0.1sec
This parameter determines the duration that the DC Braking current will be applied to
the motor during the AC drive start-up. When the time is up, the AC drive will start
acceleration from the Minimum Frequency (Pr.01-05).
08 - 02
DC Braking Time during Stopping
Factory Setting: d 0.0
Settings 0.0 to 60.0 sec Unit: 0.1sec
This parameter determines the duration that the DC Braking current will be applied to
the motor during stopping. If stopping with DC Braking is desired, the Pr.02-02 must be
5
set to RAMP stop.
08 - 03
Start-Point for DC Braking Factory Setting: 0.00
Settings 0.00 to 400.00Hz Unit: 0.01Hz
This parameter determines the frequency that the DC Braking will begin while the output
Frequency reached during deceleration.
Output Frequency
Run/Stop
Start-Point for
DC Braking
Time during
01-05
Minimum Output
Frequency
Stopping
ON
08-03
DC Braking Time
during Stopping
OFF
NOTE: 1. DC Braking during Start-up is used for loads that may move before the AC drive
starts, such as fans and pumps. Under such circumstances, DC Braking can be
executed to hold the load in position before applying a forward motion.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-47
Page 83

VFD-B Series
2. DC Braking during stopping is used to shorten stopping time and also to hold a
stopped load in position. For high inertial loads, a dynamic braking resistor may
also be needed for quick decelerations.
Factory Setting: 00
08 - 04
Momentary Power Loss Operation Selection
Settings 00 Operation stops after momentary power loss.
01 Operation continues after momentary power loss, speed search
starts with the Master Frequency reference value.
02 Operation continues after momentary power loss, speed search
starts with the minimum frequency.
This parameter determines the operation mode when the AC drive restart from a
momentary power loss.
08 - 05
Maximum Allowable Power Loss Time
Factory Setting: 2.0
Settings 0.1 to 5.0 sec Unit: 0.1sec
If the power loss time is less than this parameter setting, the AC drive will resume
operation, or if exceed the Maximum Allowable Power Loss Time, the AC drive output is
then turned off.
08 - 06
Baseblock Time for Speed Search (BB)
Factory Setting: 0.5
Settings 0.1 to 5.0 sec Unit: 0.1sec
When momentary power loss is detected, the AC drive will stop its output, and then wait
for a specified period of time (determined by Pr.08-06, called Base-Block) before
resuming the operation. Setting of this parameter should be the residual voltage with a
close-to-0V value on the output end before the drive is activated again.
This parameter could also determine the searching time when performing External
Baseblock and Auto Restart after Fault (Pr.08-14).
08 - 07
Current Limit for Speed Search
Factory Setting: 150
Settings 30 to 200% Unit: 1%
This parameter limit the current output when the Drive operates in speed search mode.
When executing speed search, V/F curve will base on the setting of Group 01.
5-48
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 84

Power
Input
Output
Frequency
Output
Voltage
08 - 08
Maximum Allowable
08-05
08-04=01
Power Loss Time
Speed Search
Baseblock Time
08-06
Skip Frequency 1 Upper Bound
Speed
Synchronization
Detection
08-05
08-04=02
Baseblock Time
VFD-B Series
Maximum
Allowable Power
08-06
Factory Setting: 0.00
08 - 09
08 - 10
08 - 11
08 - 12
08 - 13
Skip Frequency 1 Lower Bound Factory Setting: 0.00
Skip Frequency 2 Upper Bound Factory Setting: 0.00
Skip Frequency 2 Lower Bound Factory Setting: 0.00
Skip Frequency 3 Upper Bound Factory Setting: 0.00
Skip Frequency 3 Lower Bound Factory Setting: 0.00
Settings 0.00 to 400.00Hz Unit: 0.01Hz
These parameters select the Skip Frequency. It will cause the AC drive to skip operation
at these frequency ranges with continuous frequency output.
Pr.08-09, Pr.08-11, Pr.08-13 are for Lower Bound setting, and the settings should follow
as Pr.08-09
08 - 14
≧
Pr.08-11
Auto Restart After Fault
≧
Pr.08-13.
Factory Setting: 00
Settings 00 to 10 Unit: 1
After fault occurs (allowable faults: over-current OC, over-voltage OV), the AC drive can
be reset/restarted automatically up to 10 times. Setting this parameter to 0 will disable
5
the reset/restart operation after any fault has occurred. When enabled, the AC drive will
restart with speed search, which starts at the Frequency before fault.
08 - 15
Automatic energy-saving
Factory Setting: 00
Settings 00 Energy-saving operation disabled
01 Energy-saving operation enabled
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-49
Page 85

VFD-B Series
Output
Voltage
100%
70%
During the auto energy-saving
operation, it will adjust the output
voltage according to the output
power. The maximum output
voltage can be 30% lower than
the normal output voltage.
Output Frequency
08 - 16
Automatic Voltage Regulation (AVR)
Factory Setting: 00
Settings 00 AVR function enabled
01 AVR function disabled
02 AVR function disabled for deceleration
The rated voltage of motor is usually AC220V/200V, 60Hz/50Hz and the input voltage of
AC drive is AC 180V ~ 264V, 50Hz/60Hz. When AC drive runs without AVR function, if
input power is AC 250V and the output voltage to motor will also be AC 250V. The
voltage exceeds 12% ~ 20% of the rated voltage. When motor runs in the higher voltage,
the temperature of motor will be risen, the insulation will be destroyed and the output of
torque will be unsteadily. The motor will be short life if using in these situation for a long
time.
This function will make the output power stay on the rated voltage of motor when input
power exceeds the rated voltage of motor. For example, V/F curve is set to AC
200V/50Hz, input power is AC 200 ~ 264V, the voltage that output to motor will be AC
200V/50Hz and not exceed the setting voltage. If the input power vary between AC 180
~ 200V, the voltage that output to motor will be the same ratio with input power.
Selecting program value 2 enables the AVR function and will disables the AVR function
during deceleration. This offers a quicker deceleration.
Software Setting of the Braking Level
08 - 17
Unit: 1
(the Action Level of the Braking Resistor)
Settings 230V series: 370 to 430V Factory Setting: 380
460V series: 740 to 860V Factory Setting: 760
5-50
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 86

This parameter is the software setting utilized in controlling the braking Resistor; please
refer to the DC voltage value on the DC-BUS for reference.
VFD-B Series
08 - 18
Base block Speed Search Factory Setting: 00
Settings 00 Speed search starts with last frequency command
01 Starts with minimum output frequency (Pr.01-05)
This parameter determines the AC drive restart method after base block is enabled.
6
1
Stop output voltage
2
Disable B.B. signal
3
Waiting time 08-06
4
Speed search
5
Synchronization speed detection
6
Time
Output frequency
(H)
Output voltage
(V)
08-07
Current Limit for
Baseblock time for
Speed Sear ch
08-06
speed search
output current
FWD Run
B.B.
3
4
2
A
5
1
5
Fig 1: B.B. Speed Search with Last Outpu t Frequency Downward Timing Chart
(Speed Search Current Attains SpeedSearch Level)
Output frequency
(H)
Output voltage
(V)
08-07
Current Limit for
Speed search level
Speed Search
Output current
FWD Run
Fig 2: B.B. Speed Search with Last Output Frequency Downward Timing Chart
A
08-06
1
B.B.
(Speed Search Current doesn't Attain Speed Search Level)
3
2
6
4
5
Time
Input B.B. signal
1
Stop output voltage
2
Disable B.B. signal
3
Waiting time
4
Speed search
5
Synchronization speed detection
6
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-51
Page 87

VFD-B Series
(
)
Output frequency
(H)
Output voltage
(V)
06-01
Over current
stall prevention
during acceleration
FWD Run
B.B.
3
5
4
2
A
1
7
1
Stop output voltage
2
Disable B.B. signal
3
Waiting time 08-06
4
Restart
6
Time
5
Stall prevention
6
Keep accelerating
7
Fig 3: B.B. Speed Search with Minimum Output Frequency Upward Timing Chart
Start-up Current Attains Stall Current Level
08 - 19
Speed Search during Start-up
Factory Setting: 00
Settings 00 Speed search disable
01 Speed search enable
This parameter is used for starting and stopping a motor with high inertia. A motor with
high inertia will take a long time to stop completely. By setting this parameter, the user
does not need to wait for the motor to come to a complete stop before restarting the AC
drive. If a PG card and encoder is being used on the drive and motor, then the speed
search will start from the speed that is detected and accelerate quickly to the
commanded frequency. Pr.08-04 and Pr.08-06 will be disabled when using this
parameter with PG feedback control.
Note: Please make sure Pr.07-04, Pr.10-10, and Pr.10-11 are set correctly. An incorrect
setting may cause the motor to exceed its speed limit and permanent damage to the
motor and machine can occur.
08 - 20
Speed Search Frequency during Start-up
a
Factory Setting: 00
Settings 00 Setting Frequency
01 Maximum Operation Frequency (01-00)
This parameter determines the start frequency of speed search frequency.
5-52
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 88

VFD-B Series
08 - 21
Auto Reset Time at Restart after Fault
Factory Setting: 600
Settings 00 to 60000 sec Unit: 1
This parameter should be used with Pr.08-14. For example: Pr.08-14 is set to 10 and
Pr.08-21 is set to 600s (10 min), if there is no fault over 600 seconds from the restart for
the previous fault, the auto reset times for restart after fault will be reset to 10.
08 - 22
Compensation Coefficient for Motor Instability
a
Factory Setting: 00
Settings 00~1000 Unit: 1
This parameter can improve the motor instability situation.
5
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-53
Page 89

VFD-B Series
Group 9: Communication Parameters
09 - 00
Communication Address
a
Factory Setting: 01
Settings 01 to 254
If the AC drive is controlled by RS-485 serial communication, the communication
address for this drive must be set via this parameter.
09 - 01
Transmission Speed
a
Factory Setting: 01
Settings 00 Baud rate 4800 (data transmission speed: bits / second)
01 Baud rate 9600 (data transmission speed: bits / second)
02 Baud rate 19200 (data transmission speed: bits / second)
03 Baud rate 38400 (data transmission speed: bits / second)
Users can set parameters and control the operation of the AC drive via the RS-485
serial interface of a personal computer. This parameter is used to set the transmission
speed between the computer and AC drive.
09 - 02
Transmission Fault Treatment
a
Factory Setting: 03
Settings 00 Warn and keep operating
01 Warn and RAMP to stop
02 Warn and COAST to stop
03 No warning and keep operating
This parameter is set to detect if an error occurs and take actions.
09 - 03
Time Out Detection
a
Factory Setting: 0.0
Settings 0.0 Disable
0.0 ~ 60.0 sec Unit: 1
If Pr09-03 is not equal to zero, Pr09-02=0~2, and there are not any communication on
the bus during setting time period (set by Pr. 09-03), “cE10” will be shown on the
keypad.
09 - 04
Communication Protocol
a
Factory Setting: 00
Settings 00 Modbus ASCII mode, protocol <7,N,2>
01 Modbus ASCII mode, protocol <7,E,1>
02 Modbus ASCII mode, protocol <7,O,1>
03 Modbus RTU mode, protocol <8,N,2>
04 Modbus RTU mode, protocol <8,E,1>
05 Modbus RTU mode, protocol <8,O,1>
5-54
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 90

1. Computer Control
There is a built-in RS-485 serial interface, marked (RJ-11 Jack) on the control
terminal block. The pins are defined below:
Each VFD-B AC drive has a pre-assigned communication address specified by
Pr.09-00. The computer then controls each AC drive according to its communication
address.
VFD-B Series
1: EV
2: GND
3: SG4: SG+
5: NC
1
6
6: for communication
A VFD-B can be setup to communicate on Modbus networks using one of the
5
following modes: ASCII (American Standard Code for Information Interchange) or
RTU (Remote Terminal Unit). Users can select the desired mode along with the
serial port communication protocol in Pr.9-04.
Code Description:
ASCII mode:
Each 8-bit data is the combination of two ASCII characters. For example, a 1-byte
data: 64 Hex, shown as ‘64’ in ASCII, consists of ‘6’ (36Hex) and ‘4’ (34Hex).
Character ‘0’ ‘1’ ‘2’ ‘3’ ‘4’ ‘5’ ‘6’ ‘7’
ASCII code 30H 31H 32H 33H 34H 35H 36H 37H
Character ‘8’ ‘9’ ‘A’ ‘B’ ‘C’ ‘D’ ‘E’ ‘F’
ASCII code 38H 39H 41H 42H 43H 44H 45H 46H
RTU mode:
Each 8-bit data is the combination of two 4-bit hexadecimal characters. For example,
64 Hex.
2. Data Format
10-bit character frame (For ASCII):
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-55
Page 91

VFD-B Series
p
( 7.N. 2)
Start
bit
( 7.E. 1)
Start
bit
( 7.O.1)
Start
bit
01234
0
0123456
11-bit character frame (For RTU):
( 8. N.2 )
Start
bit
( 8.E .1 )
Start
bit
( 8. O.1 )
Start
bit
0123456
01234
01234
3. Communication Protocol
7-bit character
10-bit character frame
12
7-bit character
10-bit character frame
10-bit character frame
8-bit character
11-bit character frame
8-bit character
11-bit character frame
8-bit character
11-bit character frame
3456
7-bit character
Stop
5
6
bit
Even
parity
Odd
parity
Stop
bit
Stop
bit
Stop
bit
Stop
bit
Even
arity
Odd
parity
Stop
bit
Stop
bit
Stop
bit
7
5
6
7
5
6
7
3.1 Communication Data Frame:
ASCII mode:
STX Start character ‘:’ (3AH)
ADR 1
ADR 0
CMD 1
CMD 0
DATA (n-1)
to
DATA 0
LRC CHK 1
LRC CHK 0
END 1
END 0
Communication address:
8-bit address consists of 2 ASCII codes
Command code:
8-bit command consists of 2 ASCII codes
Contents of data:
n×8-bit data consist of 2n ASCII codes.
n<=25, maximum of 50 ASCII codes
LRC check sum:
8-bit check sum consists of 2 ASCII codes
End characters:
END1= CR (0DH), END0= LF(0AH)
RTU mode:
5-56
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 92

VFD-B Series
START
A silent interval of more than 10 ms
ADR Communication address: 8-bit address
CMD Command code: 8-bit command
DATA (n-1)
to
DATA 0
CRC CHK Low
Contents of data:
n×8-bit data, n<=16
CRC check sum:
16-bit check sum consists of 2 8-bit characters
CRC CHK High
END
A silent interval of more than 10 ms
3.2 ADR (Communication Address)
Valid communication addresses are in the range of 0 to 254. A communication
address equal to 0, means broadcast to all AC drives (AMD). In this case, the AMD
will not reply any message to the master device.
For example, communication to AMD with address 16 decimal:
ASCII mode: (ADR 1, ADR 0)=’1’,’0’ => ‘1’=31H, ‘0’=30H
5
RTU mode: (ADR)=10H
3.3 CMD (Command code) and DATA (data characters)
The format of data characters depends on the command code. The available
command codes and examples for VFD-B are described as followed:
(1) 03H: multi read, read data from registers.
Example: reading continuous 2 data from register address 2102H, AMD address
is 01H.
ASCII mode:
Command message: Response message:
STX ‘:’ STX ‘:’
ADR 0
CMD 1
CMD 0
Starting data
address
Number of data
(count by word)
‘0’ ‘0’ ADR 1
‘1’
‘0’ ‘0’
‘3’
‘2’ ‘0’
‘1’
‘0’ ‘1’
‘2’ ‘7’
‘0’ ‘7’
‘0’
‘0’ ‘0’
‘2’ ‘0’
ADR 1
ADR 0
CMD 1
CMD 0
Number of data
(Count by byte)
Content of
register
2102H
Content of
register 2103H
LRC CHK 1 ‘D’
‘1’
‘3’
‘4’
‘0’
‘0’
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-57
Page 93

VFD-B Series
RTU mode:
Command message:
LRC CHK 0 ‘7’ ‘0’
CR ‘7’ END 1
END 0
LF
CR
LRC CHK 1
LRC CHK 0
END 1
END 0
‘1’
LF
Response message:
ADR 01H
CMD 03H
21H Starting data
address
(count by word)
CRC CHK Low 6FH 00H
02H
00H 17H Number of data
02H
Content of register
Content of register
CRC CHK High F7H
ADR 01H
CMD 03H
Number of data
(count by byte)
2102H
2103H
04H
70H
00H
CRC CHK Low FEH
CRC CHK High 5CH
(2) 06H: single write, write single data to register.
Example: writing data 6000(1770H) to register 0100H. AMD address is 01H.
ASCII mode:
Command message: Response message:
STX ‘:’ STX ‘:’
ADR 1 ‘0’ ADR 1 ‘0’
ADR 0 ‘1’ ADR 0 ‘1’
CMD 1 ‘0’ CMD 1 ‘0’
CMD 0 ‘6’ CMD 0 ‘6’
‘0’ ‘0’
Register adress
‘1’ ‘1’
‘0’ ‘0’
Register address
‘0’
‘1’ ‘1’
Data content
‘7’ ‘7’
‘7’ ‘7’
Data content
‘0’
LRC CHK 1 ‘7’ LRC CHK 1 ‘7’
LRC CHK 0 ‘1’ LRC CHK 0 ‘1’
END 1 CR END 1 CR
END 0 LF END 0 LF
‘0’
‘0’
RTU mode:
5-58
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 94

Command message: Response message:
ADR 01H ADR 01H
CMD 06H CMD 06H
VFD-B Series
Register address
Data content
00H 00H
00H
12H 17H
ABH
Register address
Data content
00H
70H
CRC CHK Low ADH CRC CHK Low ADH
CRC CHK High 14H CRC CHK High 14H
(3) 08H: loop detection, this command is used to test if the communication between
master equipment (PC or PLC) and AC drive is normal or not. AC drive will
send the data received from master equipment back to master equipment.
Example: AMD address is 01H.
ASCII mode:
Command message: Response message:
STX ‘:’ STX ‘:’
ADR 0
CMD 0
‘0’ ‘0’ ADR 1
‘1’
‘0’ ‘0’ CMD 1
‘8’
ADR 1
ADR 0
CMD 1
CMD 0
‘1’
‘8’
‘0’ ‘0’
Data address
‘0’ ‘0’
‘0’ ‘0’
‘0’
Data address
‘0’
‘1’ ‘1’
Data content
‘7’ ‘7’
‘7’ ‘7’
‘0’
‘7’ ‘7’ LRC Check
‘0’
Data content
LRC Check
‘0’
‘0’
CR END CR END
LF LF
RTU mode:
Command message: Response message:
ADR 01H ADR 01H
CMD 08H CMD 1 08H
Data address
Data content
00H 00H
00H
17H’ 17H
70H
Data address
Data content
00H
70H
CRC CHK Low 8EH CRC CHK Low 8EH
CRC CHK High 0EH CRC CHK High 0EH
5
(4) 10H: multi write, write multi data to registers.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-59
Page 95

VFD-B Series
Example: Set the multi-step speed,
Pr.05-00=50.00 (1388H),
Pr.05-01=40.00 (0FA0H). AC drive address is 01H.
ASCII Mode:
Command message: Response message:
STX ‘:’ STX ‘:’
ADR 1 ‘0’ ADR 1 ‘0’
ADR 0 ‘1’ ADR 0 ‘1’
CMD 1 ‘1’ CMD 1 ‘1’
CMD 0 ‘0’ CMD 0 ‘0’
‘0’ ‘0’
Starting register
address
‘5’ ‘5’
‘0’ ‘0’
Starting register
address
‘0’
‘0’ ‘0’
Number of data
(count by word)
‘0’ ‘0’
‘0’ ‘0’
Number of data
(count by word)
‘2’
Number of data
(count by byte)
The first data
content
‘0’ ‘E’
‘4’
‘1’ CR
‘3’
‘8’
LRC Check
END
‘8’
‘0’
The second data
content
‘F’
‘A’
‘0’
‘9’ LRC Check
‘A’
CR END
LF
‘0’
‘2’
‘8’
LF
RTU mode:
Command message: Response message:
ADR 01H ADR 01H
CMD 10H CMD 1 10H
address
(count by word)
Number of data
05H 05H Starting register
00H
00H’ 00H Number of data
02H
04 CRC Check Low 41H
Starting register
address
Number of data
(count by word)
(count by byte)
The first data
content
13H CRC Check High 04H
88H
The second data 0FH
5-60
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
00H
02H
Page 96

VFD-B Series
content A0H
CRC Check Low ‘9’
CRC Check High ‘A’
3.4 CHK (check sum)
ASCII mode:
LRC (Longitudinal Redundancy Check) is calculated by summing up, module 256, the
values of the bytes from ADR1 to last data character then calculating the hexadecimal
representation of the 2’s-complement negation of the sum.
For example, reading 1 word from address 0401H of the AC drive with address 01H
STX ‘:’
‘0’ ADR 1
ADR 0
‘1’
‘0’ CMD 1
CMD 0
‘3’
‘0’
Starting register
address
‘4’
‘0’
‘1’
‘0’
Number of data
‘0’
‘0’
‘1’
‘F’ LRC CHK 1
LRC CHK 0
‘6’
CR END 1
END 0
LF
01H+03H+04H+01H+00H+01H=0AH,
5
the 2’s-complement negation of 0AH is F6
H.
RTU mode:
ADR 01H
CMD 03H
21H Starting register
address
02H
00H Number of data
(count by word)
02H
CRC CHK Low 6FH
CRC CHK High F7H
CRC (Cyclical Redundancy Check) is calculated by the following steps:
Step 1: Load a 16-bit register (called CRC register) with FFFFH.
Step 2: Exclusive OR the first 8-bit byte of the command message with the low order
byte of the 16-bit CRC register, putting the result in the CRC register.
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-61
Page 97

VFD-B Series
Step 3: Examine the LSB of CRC register.
Step 4: If the LSB of CRC register is 0, shift the CRC register one bit to the right with
MSB zerofilling, then repeat step 3. If the LSB of CRC register is 1, shift the
CRC register one bit to the right with MSB zerofilling, Exclusive OR the CRC
register with the polynomial value A001H, then repeat step 3.
Step 5: Repeat step 3 and 4 until eight shifts have been performed. When this is done,
a complete 8-bit byte will have been processed.
Step 6: Repeat step 2 to 5 for the next 8-bit byte of the command message. Continue
doing this until all bytes have been processed. The final contents of the CRC
register are the CRC value. When transmitting the CRC value in the
message, the upper and lower bytes of the CRC value must be swapped,
i.e. the lower order byte will be transmitted first.
The following is an example of CRC generation using C language. The function takes two
arguments:
Unsigned char* data a pointer to the message buffer
Unsigned char length the quantity of bytes in the message buffer
The function returns the CRC value as a type of unsigned integer.
Unsigned int crc_chk(unsigned char* data, unsigned char length){
int j;
unsigned int reg_crc=0xFFFF;
while(length--){
reg_crc ^= *data++;
for(j=0;j<8;j++){
if(reg_crc & 0x01){ /* LSB(b0)=1 */
reg_crc=(reg_crc>>1) ^ 0xA001;
}else{
reg_crc=reg_crc >>1;
}
}
}
return reg_crc;
}
3.5 Address list:
The contents of available addresses are shown as below:
5-62
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 98

Content Address Function
GG means parameter group, nn means parameter number,
AC drive
Parameters
GGnnH
for example, the address of Pr 4-01 is 0401H. Referencing
to chapter 5 for the function of each parameter. When
reading parameter by command code 03H, only one
parameter can be read at one time.
00B: No function
Bit 0-1
01B: Stop
10B: Run
11B: Jog + Run
Bit 2-3 Reserved
00B: No function
01B: FWD
10B: REV
11B: Change direction
00B: Comm. forced 1st accel/decel
01B: Comm. forced 2nd accel/decel
10B: Comm. forced 3rd accel/decel
Command
Write only
Bit 4-5
2000H
Bit 6-7
11B: Comm. forced 4th accel/decel
Bit 8-11
Represented 16 step speeds.
VFD-B Series
5
Command
Write only
Status monitor
Read only
Status monitor
Read only
Bit 12
1: Comm. multi step speed or accel/decel time
Bit 13-15 Reserved
2001H Freq. command
Bit 0 1: EF (external fault) on
0: No comm. multi step speed or accel/decel time
2002H
Bit 1 1: Reset
Bit 2-15 Reserved
Error code:
00: No error occurred
01: Over-current (oc)
02: Over-voltage (ov)
03: Overheat (oH)
04: Overload (oL)
2100H
05: Overload1 (oL1)
06: External fault (EF)
07: IGBT short circuit protection (occ)
08: CPU failure (cF3)
09: Hardware protection failure (HPF)
10: Current exceeds 2 times rated current during accel (ocA)
11: Current exceeds 2 times rated current during decel (ocd)
2100H
12: Current exceeds 2 times rated current during steady state
operation (ocn)
13: Ground Fault (GFF)
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-63
Page 99

VFD-B Series
Content Address Function
14: Low voltage (Lv)
15: CPU failure 1 (cF1)
16: CPU failure 2 (cF2)
17: Base Block
18: Overload (oL2)
19: Auto accel/decel failure (cFA)
20: Software protection enabled (codE)
21: EF1 Emergency stop
22:PHL (Phase-Loss)
23:cEF (Preliminary count value attained, EF active)
24:Lc (Low-current)
25:AnLEr (Analog feedback signal error)
26:PGErr (PG feedback signal error)
Status of AC drive
LED: 0: light off, 1: light up
00: RUN LED
2101H
Bit 0-4
01: STOP LED
02: JOG LED
03: FWD LED
04: REV LED
Bit 5 0: F light off, 1: F light on
Bit 6 0: H light off, 1: H light on
Bit 7 0: “u” light off, 1: “u” light on
Bit 8
1: Main freq. Controlled by communication
interface
Bit 9 1: Main freq. controlled by analog signal
Bit 10
1: Operation command controlled by
communication interface
Bit 11 1: Parameters have been locked
Bit 12 0: AC drive stops, 1: AC drive operates
Bit 13 1: Jog command
Bit 14-15 Reserved
2102H Frequency command (F)
2103H Output frequency (H)
2104H Output current (AXXX.X)
2105H DC-BUS Voltage U (XXX.X)
2106H Output voltage E (XXX.X)
2107H Step number of Multi-Step Speed Operation
2108H Step number of PLC operation
2109H Content of external TRIGGER
210AH Power factor angle
210BH Estimated torque ratio
210CH Motor speed (Hz)
5-64
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
Page 100

Content Address Function
210DH PG pulse (low byte) /unit time (Pr.10-15)
210EH PG pulse (high byte) /unit time (Pr.10-15)
210FH Output power (KW)
2110H Reserved
2200H Feedback Signal (XXX.XX %)
2201H User-defined (Low word)
2202H User-defined (High word)
2203H AVI analog input (XXX.XX %)
2204H ACI analog input (XXX.XX %)
2205H AUI analog input (XXX.XX %)
3.6 Exception response:
The AC drive is expected to return a normal response after receiving command
VFD-B Series
messages from the master device. The following depicts the conditions that no
normal response is replied to the master device.
5
The AC drive does not receive the messages due to a communication error; thus, the
AC drive has no response. The master device will eventually process a timeout
condition.
The AC drive receives the messages without a communication error, but cannot
handle it, an exception response will return to the master device and an error
message “CExx” will display on the keypad of AC drive. The xx of “CExx” is a
decimal code equal to the exception code that will describe below.
In the exception response, the most significant bit of the original command code is set
to 1, and an exception code explains the condition that caused the exception is
returned. An example of exception response of command code 06H and exception
code 02H:
ASCII mode:
RTU mode:
STX ‘:’ ADR 01H
‘0’ CMD 86H ADR 1
ADR 0
‘1’ Exception code 02H
‘8’ CRC CHK Low C3H CMD 1
CMD 0
Error code
‘6’ CRC CHK High A1H
‘0’
‘2’
‘7’ LRC CHK 1
LRC CHK 0
‘7’
CR END 1
END 0
LF
The explanation of error codes:
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-65
 Loading...
Loading...