

Page 1
Your Imagination, Our Creatio
n
GL602USB
GL602USB-A
USB KEYBOARD
MICROCONTROLLER
SPECIFICATION 1.6
Feb. 28, 2001
Genesys Logic, Inc.
10F, No.11, Ln.3, Tsao Ti Wei, Shenkeng, Taipei, Taiwan
Tel: +886-2-2664-6655 Fax: +886-2-2664-5757
http://www.genesyslogic.com/
Page 2

Index
1 FEATURES............................................................................................................4
2 FUNCTIONAL OVERVIEW...............................................................................5
3 PIN DEFINITIONS AND DESCRIPTIONS......................................................6
3.1 GL602USB...............................................................................................................................6
3.2 GL602USB-A...........................................................................................................................7
4 FUNCTIONAL DESCRIPTION .........................................................................9
4.1 MEMORY ORGANIZATION.................................................................................................9
4.2 USB FUNCTION REGISTERS.............................................................................................11
4.3 MCU FUNCTION REGISTERS............................................................................................16
4.4 GENERAL PURPOSE I/O PORTS .......................................................................................18
4.5 TIMER INTERRUPT.............................................................................................................18
4.6 USB ENGINE.........................................................................................................................19
4.7 INSTRUCTION SET SUMMARY........................................................................................21
5 Firmware Programming Guide..........................................................................23
5.1 USB Power On Reset and Bus Reset Initialization.................................................................23
5.2 Suspend/Resume/Wakeup ......................................................................................................24
5.3 Receive Packet via Endpoint 0...............................................................................................25
5.4 Transmit Packet via Endpoint 0..............................................................................................26
5.5 Transmit Packet via Endpoint 1/2/3........................................................................................27
5.6 Timer Interrupt .......................................................................................................................28
5.7 Conditional Branch.................................................................................................................28
5.8 Change Register Bank............................................................................................................28
5.9 Change Code Bank.................................................................................................................28
5.10 Receive Data from PS/2 Mouse Port......................................................................................29
5.11 Scan Key Matrix.....................................................................................................................30
5.12 Turn LED On/Off...................................................................................................................30
6 ABSOLUTE MAXIMUM RATINGS................................................................31
7 ELECTRICAL CHARACTERISTICS.............................................................31
8 PACKAGE DIAGRAMS....................................................................................33
8.1 40-pin P-DIP...........................................................................................................................33
8.2 24-pin SOP .............................................................................................................................34
Revision 1.6 -2- 02/28/2000
Page 3

Figures
Figure 3-1 40-pin DIP (GL602USB) ........................................................................... 7
Figure 3-2 24-pin SOP (GL602USB-A)...................................................................... 8
Figure 4-1 Program Memory Space............................................................................. 9
Figure 4-2 Data Memory Space................................................................................. 10
Figure 4-3 Differential Input Sensitivity over Entire Common Mode Range ........... 20
Figure 4-4 Receiver Jitter Tolerance.......................................................................... 20
Figure 4-5 Data Signal Rise and Fall Time................................................................ 21
Figure 7-3 Package outline dimension for 40-pin P-DIP........................................... 33
Figure 7-4 Package outline dimension for 24-pin SOP ............................................. 35
Tables
Table 3-1 GL602USB Pin Definitions and Descriptions............................................. 6
Table 3-2 GL602USB-A Pin Definitions and Descriptions......................................... 7
Table 4-1 USB Function Register Summary ............................................................. 11
Table 4-2 MCU Function Register Summary............................................................ 16
Revision 1.6 -3- 02/28/2000
Page 4

1. FEATURES
• Low-cost solution for low-speed USB keyboard
• 8-bit micro-controller
− Operation Speed: 6MHz clock input
− Performance: 3 MIPS @ 6MHz
− Single cycle instruction execution
− RISC-like architecture
− USB optimized instruction set
• USB Specification Compliance
− Conforms to USB 12Mbps Specification, Version 1.1
− Conforms to USB HID Class Specification, Version 1.1
− Supports 1 device address and 4 endpoints (include endpoint 0)
• I/O ports
− Up to 7(GL602USB)/5(GL602USB-A) general purpose I/O pins (OTP type is less a GPIO pin than mask
type).
− Up to 8 sense pins and 1 I/O pin with remote wakeup capability
− Up to 18(GL602USB)/8(GL602USB-A) output pins optimized for key matrix drive pin
− Up to 8(GL602USB)/4(GL602USB-A) output pins optimized for key matrix sense pin
− Up to 3(GL602USB)/1(GL602USB-A) I/O pins with LED drive capability
• Internal memory
− 96 bytes of RAM
− 4K x 14 of program ROM
• On-chip 3.3v output
− No external regulator required
• Improved output drivers with slew-rate control to reduce EMI
• 6 MHz external clock
• Internal power-on reset (POR)
• Internal power-fail detector
• Supports suspend/normal mode power management
− Suspend current lower than 400µA for the whole keyboard system (mask type)
• 8-bit free-running timer
• Available in cost saving 40-pin(GL602USB) PDIP, 24-pin(GL602USB-A) SOP
• Support a PS/2 mouse to USB mouse converter in the default firmware.
Revision 1.6 -4- 02/28/2000
Page 5

2. FUNCTIONAL OVERVIEW
The GL602USB is an 8-bit RISC-like high performance microcontroller with a built-in 1.5Mbps SIE and
transceiver. The microcontroller features 33 instructions optimized for USB keyboard. There are 96 bytes onchip RAM and 4K x 14 bits program ROM incorporated into the micro-controller. The micro-controller features
18 output pins and 8 input pins to make a 18 x 8 key matrix. Additionally, 3 GPIO pin s are strong enough to
drive LEDs. 4 GPIO pins can be used by any function, for example, support a PS/2 3D mouse to USB 3D mouse
converter in the default firmware. Legacy USB cable can be used for keyboard in USB mode. All GPIO ports
feature low EMI emissions as a result of improved output drivers with slew-rate control.
Revision 1.6 -5- 02/28/2000
Page 6
3. PIN DEFINITIONS AND DESCRIPTIONS
3.1 GL602USB
Table 3-1 GL602USB Pin Definitions and Descriptions
Pin No. Name I/O Description
1 GND - Ground
2 V3.3 O 3.3V output
3 D+ I/O USB data+
4 D- I/O USB data5 DRV1 O Key matrix output drive 1, open drain output
6 DRV2 O Key matrix output drive 2, open drain output
7 P1.1/MOUSE CLK I/O Port 1 bit 1 / PS2 mouse clock input
8 P1.2/MOUSE DATA I/O Port 1 bit 2 / PS2 mouse data input
9 P1.3/VPP I/O Port 1 bit 3 (for mask) / 12.75V programming power
(for OTP)
10 P1.4/PWRCTL I/O Port 1 bit 4 / PS2 mouse power control
11 DRV3 O Key matrix output drive 3, open drain output
12 DRV4 O Key matrix output drive 4, open drain output
13 DRV5 O Key matrix output drive 5, open drain output
14 DRV6 O Key matrix output drive 6, open drain output
15 DRV7 O Key matrix output drive 7, open drain output
16 DRV8 O Key matrix output drive 8, open drain output
17 DRV9 O Key matrix output drive 9, open drain output
18 DRV10 O Key matrix output drive 10, open drain output
19 DRV11 O Key matrix output drive 11, open drain output
20 DRV12 O Key matrix output drive 12, open drain output
21 DRV13 O Key matrix output drive 13, open drain output
22 DRV14 O Key matrix output drive 14, open drain output
23 DRV15 O Key matrix output drive 15, open drain output
24 DRV16 O Key matrix output drive 16, open drain output
25 DRV17 O Key matrix output drive 17, open drain output
26 DRV18 O Key matrix output drive 18, open drain output
27 SENSE1 I Key matrix input sense 1, internal pull up 10K
28 SENSE2 I Key matrix input sense 2, internal pull up 10K
29 SENSE3 I Key matrix input sense 3, internal pull up 10K
30 SENSE4 I Key matrix input sense 4, internal pull up 10K
31 SENSE5 I Key matrix input sense 5, internal pull up 10K
32 SENSE6 I Key matrix input sense 6, internal pull up 10K
33 SENSE7 I Key matrix input sense 7, internal pull up 10K
34 SENSE8 I Key matrix input sense 8, internal pull up 10K
35 P1.5/NUMLOCK I/O Port 1 bit 5/number lock indicator, internal pull up
36 P1.6/CAPSLOCK I/O Port 1 bit 6/caps lock indicator, internal pull up
37 P1.7/SCROLLLOCK I/O Port 1 bit 7/scroll lock indicat or, internal pull up
38 VDD - Voltage supply
39 XTAL1 O Ceramic resonator or crystal out
40 XTAL2 I Ceramic resonator or crystal in
Note 1: Name or description after “/” means default function specified by Genesys Logic firmware
Revision 1.6 -6- 02/28/2000
Page 7
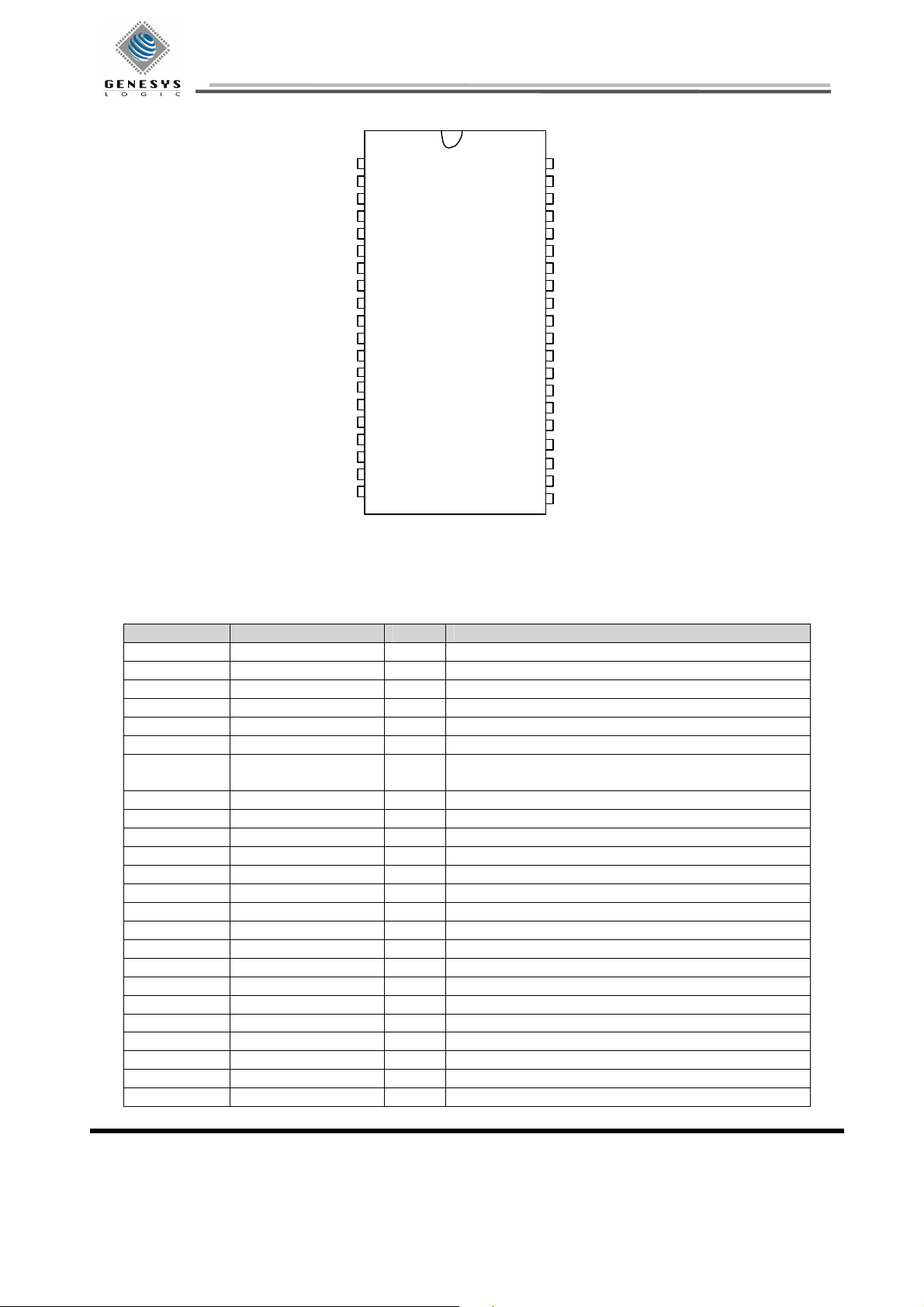
GND
V3.3
D+
D-
DRV1
DRV2
P1.1/MOUST CLK
P1.2/MOUSE DATA
P1.3
P1.4/PWRCTL
DRV3
DRV4
DRV5
DRV6
DRV7
DRV8
DRV9
DRV10
DRV11
DRV12
3.2 GL602USB-A
Table 3-2 GL602USB-A Pin Definitions and Descriptions
Pin No. Name I/O Description
1 GND - Ground
2 V3.3 O 3.3V output
3 D+ I/O USB data+
4 D- I/O USB data5 P1.1/MOUSE CLK I/O Port 1 bit 1/PS2 mouse clock input
6 P1.2/MOUSE DATA I/O Port 1 bit 2/PS2 mouse data input
7 P1.3/VPP I/O Port 1 bit 3 (for mask) / 12.75V programming power
8 P1.4/PWRCTL I/O Port 1 bit 4 / PS2 mouse power control
9 DRV7 O Key matrix output drive 7, open drain output
10 DRV8 O Key matrix output drive 8, open drain output
11 DRV10 O Key matrix output drive 10, open drain output
12 DRV12 O Key matrix output drive 12, open drain output
13 DRV13 O Key matrix output drive 13, open drain output
14 DRV15 O Key matrix output drive 15, open drain output
15 DRV16 O Key matrix output drive 16, open drain output
16 DRV17 O Key matrix output drive 17, open drain output
17 SENSE1 I Key matrix input sense 1, internal pull up 10K
18 SENSE3 I Key matrix input sense 3, internal pull up 10K
19 SENSE6 I Key matrix input sense 6, internal pull up 10K
20 SENSE8 I Key matrix input sense 8, internal pull up 10K
21 P1.7/LED I/O Port 1 bit 7/LED indicator
22 VDD - Voltage supply
23 XTAL1 O Ceramic resonator or crystal out
24 XTAL2 I Ceramic resonator or crystal in
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Figure 3-1 40-pin DIP (GL602USB)
(for OTP)
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
XTAL2
XTAL1
VDD
P1.7SCROLOCK
P1.6/CAPSLOCK
P1.5/NUMLOCK
SENSE8
SENSE7
SENSE6
SENSE5
SENSE4
SENSE3
SENSE2
SENSE1
DRV18
DRV17
DRV16
DRV15
DRV14
DRV13
Revision 1.6 -7- 02/28/2000
Page 8
Note 1: Name or description after “/” means default function specified by Genesys Logic firmware
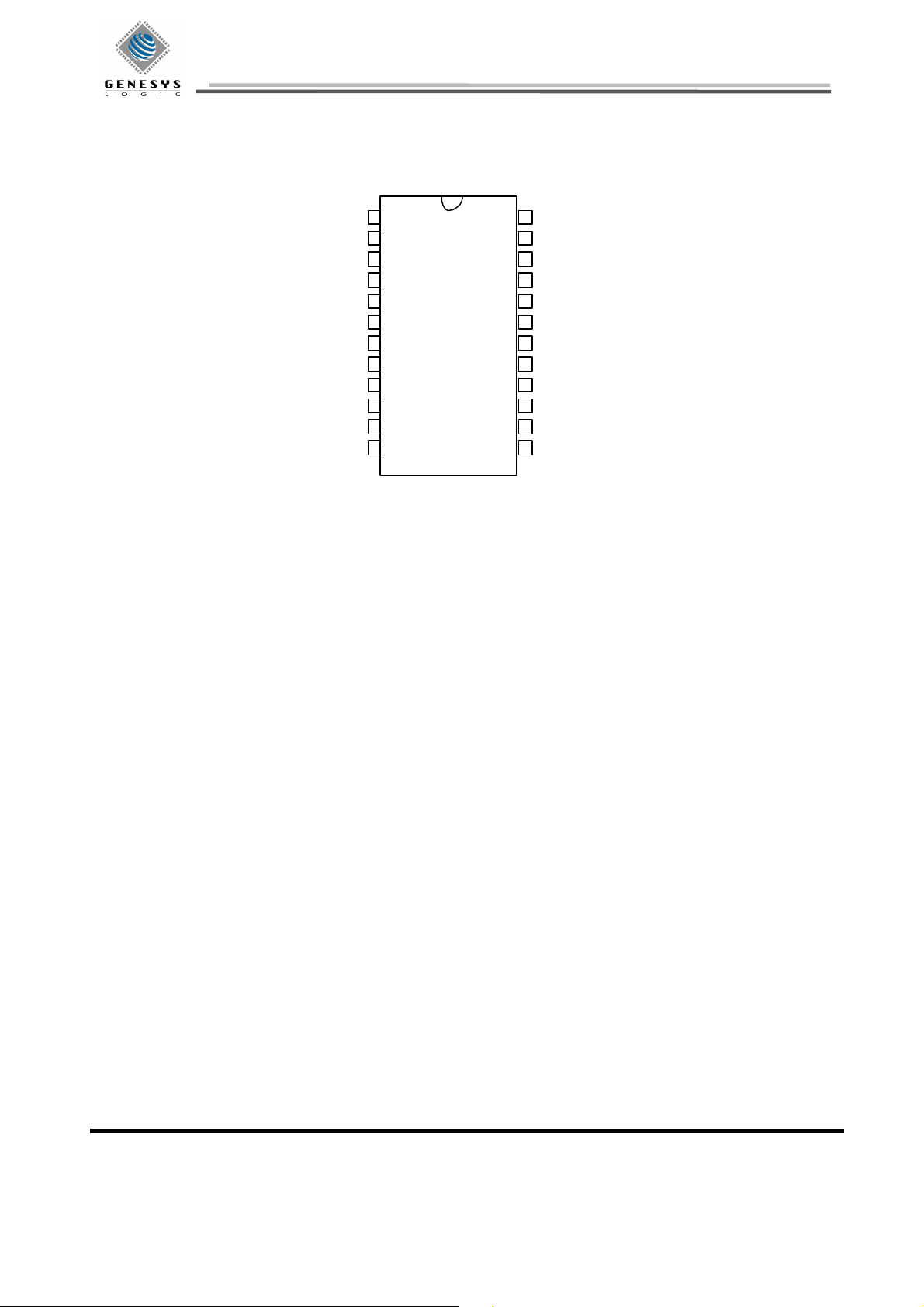
GND
V3.3
D-
P1.1/MOUSE CLK
P1.2/MOUSE DATA
P1.3/VPP
P1.4/PWRCTL
DRV7
DRV8
DRV10
DRV12
Figure 3-2 24-pin SOP (GL602USB-A)
D+
1
2
3
4
5
6
7
8
9
10
11
12
24
23
22
21
20
19
18
17
16
15
14
13
XTAL2
XTAL1
VDD
P1.7/LED
SENSE8
SENSE6
SENSE3
SENSE1
DRV17
DRV16
DRV15
DRV13
Revision 1.6 -8- 02/28/2000
Page 9
4. FUNCTIONAL DESCRIPTION
The Genesys Logic GL602USB micro-controller is optimized for PC keyboard. This USB microcontroller
conforms to the low-speed (1.5Mbps) requirements of the USB Specification version 1.1. The micro-controller is a
self-contained unit with an USB SIE, an USB transceiver, an 8-bit RISC-like microcontroller, a timer, data and
program memories. It supports one USB device address and four endpoints (include endpoint 0).
4.1 MEMORY ORGANIZATION
The memory in the microcontroller is organized into user program memory in program ROM and data memory
in SRAM space.
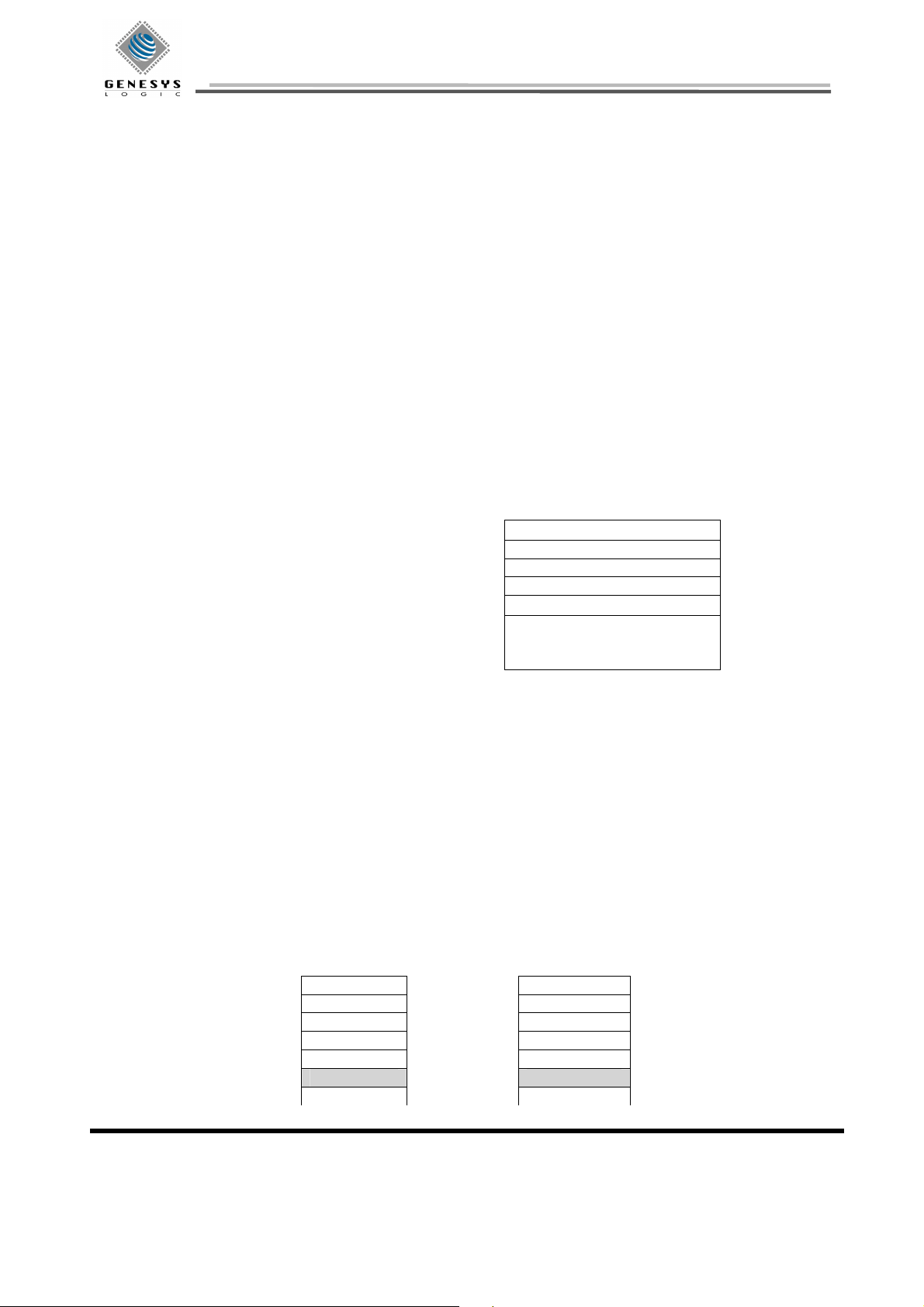
4.1.1 Program Memory Organization
The 12-bit Program Counter (PC) is capable of addressing 4K x 14 of program space. All of the 4K * 14 ROM
space can be used. The program memory space is divided into two functional groups: Interrupt Vectors and
program code. After a reset, the Program Counter points to location zero of the program space and all registers
are reset to the default value. After a timer interrupt, the Program Counter points the location 0x0004 of the
program space.
Address
After Reset
After Timer Interrupt
0x0005
Figure 4-1 Program Memory Space
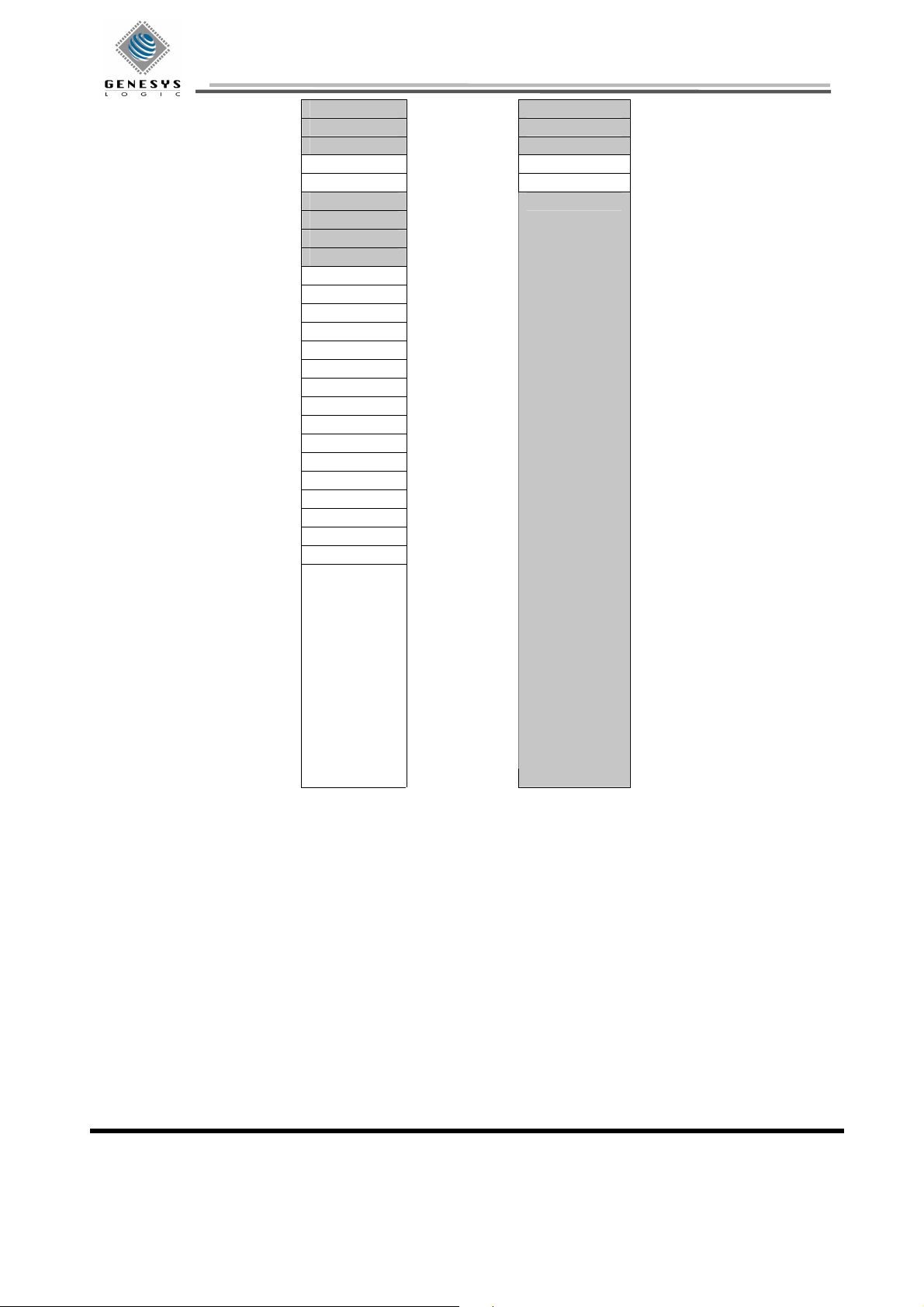
4.1.2 Data Memory Organization
The data memory is partitioned into two Banks that contain the General Purpose Registers, MCU Function
Registers and USB Function Registers. Bit BS is the bank select bit.
BS (STATUS<5>) = 1 → Bank 1
BS (STATUS<5>) = 0 → Bank 0
The lower locations of each Bank are reserved for MCU Function Registers and USB Function Registers.
Above the MCU Function Registers and USB Function Registers are General Purpose Registers implemented
as SRAM. Both Bank 0 and Bank 1 contain MCU Function Registers. USB Function Registers are l ocated in
Bank 0. Some “high use” MCU Function Registers from Bank 0 are mirrore d in Bank 1 for code reduction and
quicker access.
Data
Memory
Address
00h INDR 80h INDR
01h TIMER 81h PSCON
02h PCL 82h PCL
03h STATUS 83h STATUS
04h INDAR 84h INDAR
05h 85h
06h PORT1 86h PORT1CON
Data Memory
0x0000 Reset Vector
→
0x0004 Timer Interrupt Vector
→
0x0FFF
Address
4K x 14 ROM
Revision 1.6 -9- 02/28/2000
Page 10
07h 87h
08h 88h
09h 89h
0Ah PCHBUF 8Ah PCHBUF
0Bh INTEN 8Bh INTEN
0Ch 8Ch
0Dh 8Dh
0Eh 8Eh
0Fh 8Fh
10h DEVCTL
11h EVTFLG
12h DEVADR
13h RXCTL0
14h TXCTL0
15h TXCTL123
16h FFDAT0
17h FFDAT123
18h DRVSEL
19h SENSE
1Ah FFRST
1Bh MODESEL
1Ch PS2CTL
1Dh EPSEL
1Eh SERCTL
1Fh SERDAT
20h
7Fh
Bank 0 Bank 1
General
Purpose
Registers
(96 bytes)
FFh
Figure 4-2 Data Memory Space
Revision 1.6 -10- 02/28/2000
Page 11
4.2 USB FUNCTION REGISTERS
Table 4-1 USB Function Register Summary
Address Name Function
10h DEVCTL Device control register
11h EVTFLG Event flag register
12h DEVADR USB device add r ess register
13h RXCTL0 Endpoint 0 receive control register
14h TXCTL0 Endpoint 0 transmit control register
15h TXCTL123 Endpoint 1/2/3 transmit control register
16h FFDAT0 Endpoint 0 FIFO data port
17h FFDAT123 Endpoint 1/2/3 FIFO data port
18h DRVSEL Key matrix drive pin control register
19h SENSE Key matrix sense register
1Ah FFRST FIFO reset register
1Bh MODESEL USB mode select register
1Ch Reserved
1Dh EPSEL Endpoint select register
1Eh SERCTL PS/2 mouse port control register
1Fh SERDAT PS/2 mouse port data register
DEVCTL (Address 10h, Device control register)
R/W
[1]
R/W R/W R/W R/W R/W R/W
EP3STL EP2STL EP1STL EP0STL WAKE WKDIS PWRDN
EP3STL: Endpoint 3 stall bit
1: Endpoint 3 will respond with a STALL to a valid transaction
0: Endpoint 3 will not respond with a STALL to a valid transaction
EP2STL: Endpoint 2 stall bit
1: Endpoint 2 will respond with a STALL to a valid transaction
0: Endpoint 2 will not respond with a STALL to a valid transaction
EP1STL: Endpoint 1 stall bit
1: Endpoint 1 will respond with a STALL to a valid transaction
0: Endpoint 1 will not respond with a STALL to a valid transaction
EP0STL: Endpoint 0 stall bit
1: Endpoint 0 will respond with a STALL to a valid transaction.
0: Endpoint 0 will not respond with a STALL to a valid transaction
WAKE: Wake-up bit
1: Set this bit to wake up host controller by placing USB bus into K state
0: Clear this bit to force USB bus leave K state
WKDIS: Wake-up disable bit
1: Disable remote wake-up capability
0: Enable remote wake-up capability
PWRDN: Power-down mode bit
1: Entering power-down mode
If USB suspend is detected, firmware should set this bit to enter power-down mode. In power-down mode,
6MHz crystal clock will be stopped. Hardware will automatically clear PWRDN bit upon hardware reset,
USB D+/D- toggle, SENSE1~SENSE8 at logic ‘0’, or Port 1.1 at logic ‘0’.
Value on POR: “0 0 0 0 0 0 0 0”
Note 1: “R/W” means readable and writable bit
EVTFLG (Address 11h, Event flag register)
R/W1C
[1]
R/W1C R/W1C R/W1C R/W1C R/W1C R/W1C R/W1C
WAKEUP RESUME SUSPD EP3TX EP2TX EP1TX EP0TX EP0RX
Revision 1.6 -11- 02/28/2000
Page 12

WAKEUP: Remote wakeup bit
1: Remote wakeup from P1.1~P1.4 or SENSE1~SENSE8 was detected
0: Remote wakeup was not detected
RESUME: Global resume bit
1: Global resume (USB D+/D- toggle) was detected
0: Global resume was not detected
SUSPD: Global suspend bit
1: Global suspend (USB idle more than 3ms) was detected
0: Global suspend was not detected
EP3TX: Endpoint 3 transmitting status bit
1: Data has been sent from endpoint 3
0: Data has not been sent from endpoint 3
EP2TX: Endpoint 2 transmitting status bit
1: Data has been sent from endpoint 2
0: Data has not been sent from endpoint 2
EP1TX: Endpoint 1 transmitting status bit
1: Data has been sent from endpoint 1
0: Data has not been sent from endpoint 1
EP0TX: Endpoint 0 transmitting status bit
1: Data has been sent from endpoint 0
0: Data has not been sent from endpoint 0
EP0RX: Endpoint 0 receiving status bit
1: Data has been received by endpoint 0
0: Data has not been received by endpoint 0
Value on POR: “0 0 0 0 0 0 0 0”
Note 1: “R/W1C” means read-only and write “1” to clear bit
DEVADR (Address 12h, USB device address register)
R/W R/W R/W R/W R/W R/W R/W
DADR6 DADR5 DADR4 DADR3 DADR2 DADR1 DADR0
Write this register to set the USB device address
Value on POR: “0 0 0 0 0 0 0 0”
RXCTL0 (Address 13h, Endpoint 0 receive control register)
R/W R/O
[1]
R/O R/O R/W R/W R/W R/W
RXDIS RXST2 RXST1 RXST0 RXCNT3 RXCNT2 RXCNT1 RXCNT0
RXDIS: Endpoint 0 receiving not available bit
1: Endpoint 0 FIFO is not available. The received data cannot be pushed into FIFO. The USB controller will
respond with a NAK to a valid OUT transaction. This bit is set by hardware when endpoint 0 data is received
(both SETUP and OUT transaction).
0: Endpoint 0 FIFO is available for data receiving
RXST[2:0]: RXST[2:0] indicate the PID received.
Bit Value Packet received
100 SETUP token with DATA0 packet
010 OUT token with DATA0 packet
011 OUT token with DATA1 packet
RXCNT[3:0]: Number of bytes received from endpoint 0.
Value on POR: “0 X X X X X X X”
Note 1: “R/O” means read-only bit
TXCTL0 (Address 14h, Endpoint 0 transmit control register)
R/W R/W R/W R/W R/W R/W
TXSEQ TXOE TXCNT3 TXCNT2 TXCNT1 TXCNT0
TXSEQ: Endpoint 0 transmitting sequence bit
1: Transmitting data use DATA1 as PID
0: Transmitting data use DATA0 as PID
Revision 1.6 -12- 02/28/2000
Page 13

TXOE: Endpoint 0 FIFO data ready bit
1: Endpoint 0 FIFO data are ready to be transmitted. Data will be transmitted when a valid IN token is
received. This bit is automatically cleared by hardware after the transaction complete (ACK is received).
0: Endpoint 0 FIFO data are not ready to be transmitted and respond with a NAK to a valid IN transaction.
TXCNT[3:0]: Number of bytes to be sent by endpoint 0 when IN token is received
Value on POR: “0 0 0 0 0 0 0 0”
TXCTL123(Address 15h, Endpoint 1/2/3 transmit control register)
R/W R/W R/W R/W R/W R/W
TXSEQ TXOE TXCNT3 TXCNT2 TXCNT1 TXCNT0
TXSEQ: Endpoint 1/2/3 transmitting sequence bit
1: Transmitting data use DATA1 as PID
0: Transmitting data use DATA0 as PID
TXOE: Endpoint 1/2/3 FIFO data ready bit
1: Endpoint 1/2/3 FIFO data are ready to be transmitted. Data will be transmitted when a valid IN token is
received. This bit is automatically cleared by hardware after the transaction complete (ACK is received).
0: Endpoint 1/2/3 FIFO data are not ready to be transmitted and respond with a NAK to a valid IN transaction.
TXCNT[3:0]: Number of bytes to be sent by endpoint 0 when IN token is received
Value on POR: “0 0 0 0 0 0 0 0”
FFDAT0 (Address 16h, Endpoint 0 FIFO port)
R/W R/W R/W R/W R/W R/W R/W R/W
FFDAT7 FFDAT6 FFDAT5 FFDAT4 FFDAT3 FFDAT2 FFDAT1 FFDAT0
Endpoint 0 FIFO data port
Endpoint 0 FIFO is a 8 bytes FIFO. Firmware can read/write this port 8 times to get/put the FIFO data.
Value on POR: “X X X X X X X X”
FFDAT1/2/3 (Address 17h, Endpoint 1/2/3 FIFO port)
R/W R/W R/W R/W R/W R/W R/W R/W
FFDAT7 FFDAT6 FFDAT5 FFDAT4 FFDAT3 FFDAT2 FFDAT1 FFDAT0
Endpoint 1/2/3 FIFO data port
Endpoint 1 FIFO is 8 bytes FIFO. Firmware can read this port 8 times to get the FIFO data.
Endpoint 2 FIFO is 6 bytes FIFO. Firmware can read this port 6 times to get the FIFO data.
Endpoint 3 is 2 bytes FIFO only. Firmware can read this port 2 times to get the FIFO data.
Before read this register, firmware should selects endpoint via EPSEL register (address 1Dh).
Value on POR: “X X X X X X X X”
DRVSEL (Address 18h, Key matrix drive pin control register)
R/W R/W R/W R/W R/W R/W R/W
INVDRV DRVOE DRV4 DRV3 DRV2 DRV1 DRV0
INVDRV: Inverse drive signal. This function can be used to detected ghost keys.
1: Drive all DRV1-18 to low except the selected pin when DRVOE is set
0: Drive the selected pin to low only when DRVOE is set
DRVOE: DRV1-18 output enable
1: Enable DRV1-18 pins to drive key matrix
0: Disable DRV1-18 pins and not to drive key matrix
DRV[4:0]: Select DRV1 to DRV18 port to dr ive low if DRVOE is set.
5’h00 selects DRV1
5’h01 selects DRV2
5’h0f selects DRV16
5’h10 selects DRV17
5’h11 selects DRV18
5’h12 ~ 5’h1f are invalid.
Value on POR: “0 0 0 0 0 0 0 0”
SENSE (Address 19h, Key matrix sense resister )
Revision 1.6 -13- 02/28/2000
Page 14

R/O R/O R/O R/O R/O R/O R/O R/O
SENSE8 SENSE7 SENSE6 SENSE5 SENSE4 SENSE3 SENSE2 SENSE1
Key matrix sense input port
All SENSE1~SENSE8 bits indicate state of the corresponding SENSE1~SENSE8 pins.
Value on POR: “X X X X X X X X”
FFRST (Address 1Ah, FIFO reset register)
W/O W/O
FFRST123 FFRST0
FFRST123: Reset endpoint 1/2/3 FIFO read/write pointer
Write “1” to this bit will reset endpoint 1/2/3 FIFO read/write pointer. Data in endpoint 1/2/3 FIFO remain
unchanged. Before data are written into endpoint 1/2/3 FIFO, EPSEL should be set correctly then FFRST123
should be set.
FFRST0: Reset endpoint 0 FIFO read/write pointer
Write “1” to this bit will reset endpoint 0 FIFO read/write pointer. Data in endpoint 0 FIFO remain
unchanged. Before data are read/written into endpoint 0 FIFO, FFRST0 should be set first.
MODESEL (Address 1Bh, Mode select register)
R/W R/W
OSCSTP PWRON
OSCSTP: Suspend clock stop control bit
1: Clock is stopped while suspend
0: Clock is not stopped while suspend
PWRON: Power reset indicator
1: Power on reset detected
0: USB bus reset detected
Value on P OR: “- - - - - - 0 1”
USBIOCTL (Address 1Ch, I/O control register for USB D+/D-)
R/W R/W R/W R/W
DMOE DPOE DM DP
DMOE: D- pin output enable control bit
1: D- pin digital output enable
0: D- pin digital output disable
DPOE: D+ pin output enable control bit
1: D+ pin digital output enable
0: D+ pin digital output disable
DM: Digital output value of D- pin. This pin is open drain output. Output high will be tri-stated.
DP: Digital output value of D+ pin. This pin is open drain output. Output high will be tri-stated.
Value on POR: “- - - - 1 1 0 0”
EPSEL (Address 1Dh, Endpoint select register)
R/W R/W R/W
EPSEL3 EPSEL2 EPSEL1
EPSEL[3: 1]: Endpoint select control bits
Bit Value Endpoint to be selected
001 Endpoint 1
010 Endpoint 2
100 Endpoint 3
Value on POR: “- - - - - X X X”
SERCTL (Address 1Eh, PS/2 or RS232 mouse port control register)
R/WC R/W
RXFLG SRXEN
RXFLG: Data received flag on PS/2 interface
1: Data received and saved in SERBUF
Revision 1.6 -14- 02/28/2000
Page 15

0: No data received
SRXEN: Receiver enable bit for PS/2 interface
1: Enable serial port receiver
0: Disable serial port receiver
Value on P OR: “- - - - - 0 - 0”
SERDAT (Address 1Fh, PS/2 mouse port data register)
R/W R/W R/W R/W R/W R/W R/W R/W
SERDAT7 SERDAT6 SERDAT5 SERDAT4 SERDAT3 SERDAT2 SERDAT1 SERDAT0
SERDAT[7: 0]: PS/2 mouse data input port. This port is a 2 bytes FIFO. Therefore, about 1 mini-second delay is
allowed between RXFLG in SERCTL register set and to read the PS/2 mouse data. If the 2 bytes FIFO full,
GL602USB will drive the PS/2 clock low to avoid the mouse send more data.
Value on POR: “X X X X X X X X”
Revision 1.6 -15- 02/28/2000
Page 16

4.3 MCU FUNCTION REGISTERS
Table 4-2 MCU Function Register Summary
Address Name Function
00h INDR Addressing this location will use the content of INDAR to address data
memory (not a physical address)
01h TIMER Timer register
02h PCL Program Counter’s low byte
03h STATUS Status register
04h INDAR Indirect address register
05h Reserved
06h PORT1 Port 1 data register
0Ah PCHBUF Write buffer of Program Counter’s bit 11-8
0Bh INTEN Interrupt enable register
80h INDR Addressing this location will use the content of INDAR to address data
memory (not a physical address)
81h PSCON Prescaler control register
82h PCL Program Counter’s low byte
83h STATUS Status register
84h INDAR Indirect address register
85h Reserved
86h PORT1CON Port 1 direction control register
8Ah PCHBUF Write buffer of Program Counter’s bit 12-8
8Bh INTEN Interrupt enable register
INDR (Address 00h/80h)
INDR is not a physical register. Addressing INDR register will cause indirect addressing. Any instruction using the
INDF register actually accesses the register pointed by the INDAR register. The indirect addressing method only can
be used for general purpose registers.
TIMER (Address 01h, Timer register)
R/W R/W R/W R/W R/W R/W R/W R/W
TIMER7 TIMER6 TIMER5 TIMER4 TIMER3 TIMER2 TIMER1 TIMER0
The timer starts to count up after power on reset. The TMROF bit at INTEN register will be set when the TIMER
register overflows from FFh to 00h. If both TMROEN and GIE bits at INTEN register are set, an interrupt will be
generated when TIMER register over fl ows.
Value on POR: “0 0 0 0 0 0 0 0”
PCL (Address 02h/82h, Program Counter’s low byte)
R/W R/W R/W R/W R/W R/W R/W R/W
PCL7 PCL6 PCL5 PCL4 PCL3 PCL2 PCL1 PCL0
The Program Counter (PC) is 12-bits wide. The low byte comes from the PCL register, which is a readable and
writable register. The high byte is not directly readable or writable and comes from PCHBUF. The GL602USB has a 8
level deep x 11-bit wide hardware stake. The stake space is not part of either program or data space and the stack
pointer is not readable or writable. The PC is pushed onto the stack when a CALL instruction is executed or an
interrupt causes a branch. The stack is poped in the event of a RETIA, RETI or a RET instruction execution. PCHBUF
is not affected by a push or pop operation.
Because branch address gotten from stack or direct from instruction is only 11 bits long, the highest bit will be loaded
to PC from PCHBUF when branch instruction is executed.
When write to PCL command executed, all 4 bits of PCHBUF will be loaded to PC because PCL is only a 8 bits
register.
Value on POR: “0 0 0 0 0 0 0 0”
Revision 1.6 -16- 02/28/2000
Page 17

STATUS (Address 03h, Status register)
R/W R/W R/W R/W
BS ZO HC CA
BS: Bank Select. Because only 7 bits (bit 0~bit 6) operand implied by instruction for register address, this bit is used
as address bit 7 when register access.
1: Bank 1 (80h-FFh)
0: Bank 0 (00h-7Fh)
ZO: Zero bit
1: The result of last arithmetic or logic operation is zero
0: The result of last arithmetic or logic operation is not zero
HC: Half Carry/Borrow bit
1: Carry or not borrow from the 4
0: Borrow or not carry from the 4
th
low order bit
th
low order bit
CA: Carry/Borrow bit
1: Carry or not borrow from the most significant bit
0: Borrow or not carry from the most significant bit
Value on POR: “- - 0 - - 0 0 0”
INDAR: (Address 04h/84h, Indirect address register)
R/W R/W R/W R/W R/W R/W R/W R/W
INDAR7 INDAR6 INDAR5 INDAR4 INDAR3 INDAR2 INDAR1 INDAR0
Any instruction using the INDF register actually accesses the register pointed by the INDAR register.
Value on POR: “x x x x x x x x”
[1]
Note 1: “x” means unknown
PORT1 (Address 06h, Port 1 data register)
R/W R/W R/W R/W R/W R/W R/W
PORT 1.7 PORT1.6 PORT1.5 PORT1.4 PORT1.3 PORT1.2 PORT1.1
PORT1 is a 7-bits latch for Port 1.1~Port 1.7. Reading the PORT1 register gets the status on the pins. Writing to it will
write to the port latch. All write operations are read-modify-write operations. PORT1CON is used to enable/disable
every bits of the port latch.
Value on POR: “x x x x x x x -”
PCHBUF (Address 0Ah/8Ah, Write buffer of Program Counter’s bit 11-8)
R/W R/W R/W R/W
PCHBUF3 PCHBUF2 PCHBUF1 PCHBUF0
Write buffer for upper 4-bits of Program Counter. The upper byte of Program Counter is not directly accessible.
PCHBUF is a holding register for the PC[11:8] that are transferred to the upper byte of the Program Counter when
branch occur. Please see PCL register to get more detail information.
Value on POR: “- - - 0 0 0 0 0”
INTEN (Address 0Bh/8Bh, Interrupt enable register)
R/W
R/W R/W
GIE TMROEN TMROF
GIE: Global interrupt enable bit
1: Enable all interrupts
0: Disable all interrupts
TMROEN: Timer overflow interrupt enable bit
1: Enable timer interrupt
0: Disable timer interrupt
TMROF: Timer overflow interrupt flag bit. This bit should be cleared to ‘0’ by firmware after it is set by hardware.
1: Timer register has overflowed
0: Timer register did not overflow
Value on P OR: “0 - 0 - - 0 - -“
PSCON (Address 81h, Prescaler control register)
Revision 1.6 -17- 02/28/2000
Page 18

R/W R/W R/W R/W
PSDIS PS2 PS1 PS0
PSDIS: Prescaler disable bit
1: Set prescaler disable
0: Set prescaler enable
PS[2:0]: Prescaler rate select bits. These bits are used to control timer speed. The following table means that how
many instruction cycles the TIMER register should be added by 1 when PSDIS = 0.
Bit Value Timer Rate
(PSDIS = 0)
000 1:2
001 1:4
010 1:8
011 1:16
100 1:32
101 1:64
110 1:128
111 1:256
Value on POR: “- - - - 1 1 1 1”
PORT1CON (Address 86h, Port 1 direction control register)
R/W R/W R/W R/W R/W R/W R/W
P1CON7 P1CON6 P1CON5 P1CON4 P1CON3 P1CON2 P1CON1
There is a data direction control bit to match every pin of Port 1. The direction control bits can configure these pins as
output or input. Setting a PORT1CON register bit put the corresponding output driver in a hi-impedance mode.
Clearing a bit in the PORT1CON register puts the contents of the output latch on the selected pin.
Value on POR: “1 1 1 1 1 1 1 -”
4.4 GENERAL PURPOSE I/O PORTS
Interface with peripherals is conducted via up to 7 GPIO signals. The 7 signals are located at port 1. The port 1 data
register is located at data memory address 06h and direction control register is located at address 86h.
The GL602USB builds in a PS/2 host data receiver. While this receiver enabled, the Port 1.1 is treated as PS/2 CLK
and Port 1.2 is treated as PS/2 DATA. Firmware uses these 2 pins to implement a PS/2 mouse host controller. When
the PS/2 host want to send command to PS/2 device, firmware should drive the 2 I/O pins directly following PS/2
specification.
There are 2 bytes FIFO used as PS/2 data buffer. When the PS/2 receiver has received a data byte already and
firmware does not read it yet, the PS/2 receiver can receive the next data byte into FIFO still. If the firmware cannot
process the first byte until the second byte received complete, the PS/2 receiver will drive low on Port 1.1 (PS/2 CLK)
automatically to avoid the PS/2 device send data again.
P1.3 is VPP pin at OTP. This I/O pin can be used only at mask type.
The Port 1.5/Port 1.6/Port 1.7 can be treat as general purpose output pins in output mode. There are internal pull up
resistors on those pins. Firmware can drive high on these pins to turn off LEDs and drive low to turn off these pins.
External resistors are needed for these LED pins to sink current .
4.5 TIMER INTERRUPT
The Timer Interrupt is generated when the TIMER register overflows from FFh to 00h. This overflow sets bit TMROF
(INTEN<2>). The interrupt can be masked by clearing bit TMROEN (INTEN<5>). Bit TMROF must be cleared in
software by the Timer module interrupt service routine otherwise the Timer Interrupt will not be generated again. If
prescaler is disabled, the timer register will increase every instruction cycle. If prescaler is enabled, its increment cycle
depends on PS0~PS2 bits in PSCON register.
Revision 1.6 -18- 02/28/2000
Page 19

4.6 USB ENGINE
The USB module contains three functional blocks: a 3.3-volt regulator, a low-speed USB transceiver, and the Serial
Interface Engine (SIE). The USB module is only enabled under USB mode. The following description is the function
of the regulator, transceiver, and SIE.
4.6.1 Voltage Regulator
The USB data lines are required by the USB specification to have a maximum output voltage between 2.8V and 3.6V.
Because the GL602USB is a low speed USB device, the D- lines also are required to have an external 1.5-kΩ pull-up
resistor connected between a data line and a voltage source between 3.0 V and 3.6 V. Since the power provided by the
USB cable is specified to be between 4.4V and 5.0V, an on-chip regulator is used to drop the voltage to the
appropriate level for sourcing the USB transceiver and external pull-up resistor. An output pin driven by the regulator
is provided to source the 1.5-kΩ external resistor.
4.6.2 USB Transceiver
The USB transceiver provides the physical interface to the USB D+ and D- data lines. The transceiver is composed of
two parts: an output driver circuit and a receiver.
The USB transceiver uses a differential output driver to drive the USB data signal onto the USB cable. The static
output swing of the driver in its low state is below the V
above the V
of 2.8V with 15-kΩ load to ground. The output swings between the differential high and low state are
OH
of 0.3V with 1.5-kΩ load to 3.6V and in its high state is
OL
well balanced to minimize signal skew. Slew rate control on the driver is used to minimize the radiated noise and cross
talk. The driver’s outputs support 3-state operation to achieve bi-directional half-duplex operation. The driver can
tolerate a voltage on the signal pins of –0.5V to 3.8V with respect to local ground reference without damage.
The rise and fall time of the signals on this cable are greater than 75ns to keep RFI (radio frequency interference)
emissions under FCC (Federal Communications Commission) class B limits and less than 300ns to limit timing delays,
signaling skews, and distortions. The driver reaches the specified static signal levels with smooth rise and fall times,
and minimal reflections and ringing when driving the cable. This driver is used only on segments between low-speed
devices and the ports to which they are connected.
USB data transmission is done with differential signals. A differential input receiver is used to accept the USB data
signal. A differential 1 on the bus is represented by D+ being at least 200mV more positive than D- as seen at the
receiver, and a differential 0 is represented by D- being at least 200mV more positive than D+ as seen at the receiver.
The signal cross over point must be between 1.3V and 2.0V.
The receiver features an input sensitivity of 200mV when both differential data inputs are in the range of 0.8V and
2.5V with respect to the local ground reference. This is called the common mode input voltage range. Proper data
reception also is achieved when the differential data lines are outside the common mode range. The receiver can
tolerate static input voltage between –0.5V to 3.8V with respect to its local ground reference without damage. In
addition to the differential receiver, there is a single-ended receiver for each of the two data lines.
Revision 1.6 -19- 02/28/2000
Page 20

1.0
0.8
0.6
0.4
0.2
Minimum Differential Sensitivity (volts)
0.0
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 2.6 2.8 3.0 3.2
Common Mode Input Voltage (volts)
Figure 4-3 Differential Input Sensitivity over Entire Common Mode Range
The data receivers for all types of devices must be able to properly decode the differential data in the presence of
jitter. The more of the bit time that any data edge can occupy and still be decoded, the more reliable the data
transfer will be. Data receivers are required to decode differential data transitions that occur in a window plus and
minus a nominal quarter bit time from the nominal (centered) data edge position. Jitter will be caused by the delay
mismatches and by mismatches in the source and destination data rates (frequencies).
T
T
D
PPEERRIIOOD
DDiiffffeerreennttiiaall
DDaattaa LLiinneess
T
T
R
JJR
CCoonnsseeccuuttiivvee
TTrraannssiittiioonnss
T
NN ** T
PPEERRIIOOD
D
++ T
T
1
JJRR1
NN ** T
PPaaiirreedd
TTrraannssiittiioonnss
T
++ T
D
PPEERRIIOOD
T
JJRR2
T
T
1
JJRR1
2
T
T
2
JJRR2
Figure 4-4 Receiver Jitter Tolerance
The source of data can have some variation (jitter) in the timing of edges of the data transmitted. The time between
any set of data transitions is N*T
± jitter time, where N is the number of bits between the transitions and T
Period
Period
is defined as the actual period of the data rate. The data jitter is measured with the same capacitive load used for
maximum rise and fall times and is measured at the crossover points of the data lines.
For low-speed transmissions, the jitter time for any consecutive differential data transitions must be within ±25ns
and within ±10ns for any set of paired differential data transitions. These jitter numbers include timing variations
due to differential buffer delay, rise/fall time mismatches, internal clock source jitter, noise and other random
effects.
The output rise time and fall time are measured between 10% and 90% of the signal. Edge transition time for the
rising and falling edges of low-speed signals is 75ns (minimum) into a capacitive load (C
) of 50pF and 300ns
L
(maximum) into a capacitive load of 350pF. The rising and falling edges should be transitioning (monotonic)
smoothly when driving the cable to avoid excessive EMI.
Revision 1.6 -20- 02/28/2000
Page 21

%
%
%90%
C
L
C
L
Figure 4-5 Data Signal Rise and Fall Time
4.6.3 Serial Interface Engine (SIE)
The SIE manages data movement between the CPU and the transceiver. The SIE handles both transmit and
receive operations on the USB. It contains the logic used to manipulate the transceiver and the endpoint
registers.
The byte count buffer is loaded from TXCNT(TXCTL0<3~0>) during endpoint 0 transmit operations. This
same buffer is used for receive transactions to count the number of bytes received at endpoint 0 and, upon
the end of transaction, transfer the value to RXCNT(RXCTL0<3~0>).
When transmitting, the SIE handles parallel-to-serial conversion, CRC generation, NRZI encoding, and bit
stuffing. When receiving, the SIE handles sync detection, packet identification, end-of-packet detection, bit
(un)stuffing, NRZI decoding, CRC validation, and serial -to-parallel conversion. Errors detected by the SIE
include bad CRC, timeout while waiting for EOP, and bit stuffing violations.
All USB devices are required to have an endpoint 0 that is used to initialize and manipulate the device.
Endpoint 0 provides access to the device’s configuration information and allows generic USB status and
control accesses. Endpoint 0 can receive and transmit data. Both receive and transmit data share the same 8byte Endpoint 0 FIFO, FFDAT0. Received data may overwrite the data previously in the FIFO.
Transmission from endpoint 0 is controlled by TXCTL0 and receiving from endpoint 0 is controlled by
RXCTL0.
Endpoint 1/endpoint 2/endpoint 3 are of transmit only. Transmission from endpoint 1/endpoint 2/endpoint 3
is controlled by TXCTL123. The target endpoint should be chosen before writing to FFDAT123 and
TXCTL123. There are separated FIFO buffer for the 3 endpoints, but the programming interface for them is
unique, via FFDAT123 register. Size of endpoint 1 FIFO is 8 bytes, endpoint 2 FIFO is 6 bytes, and
endpoint 3 FIFO is 2 bytes.
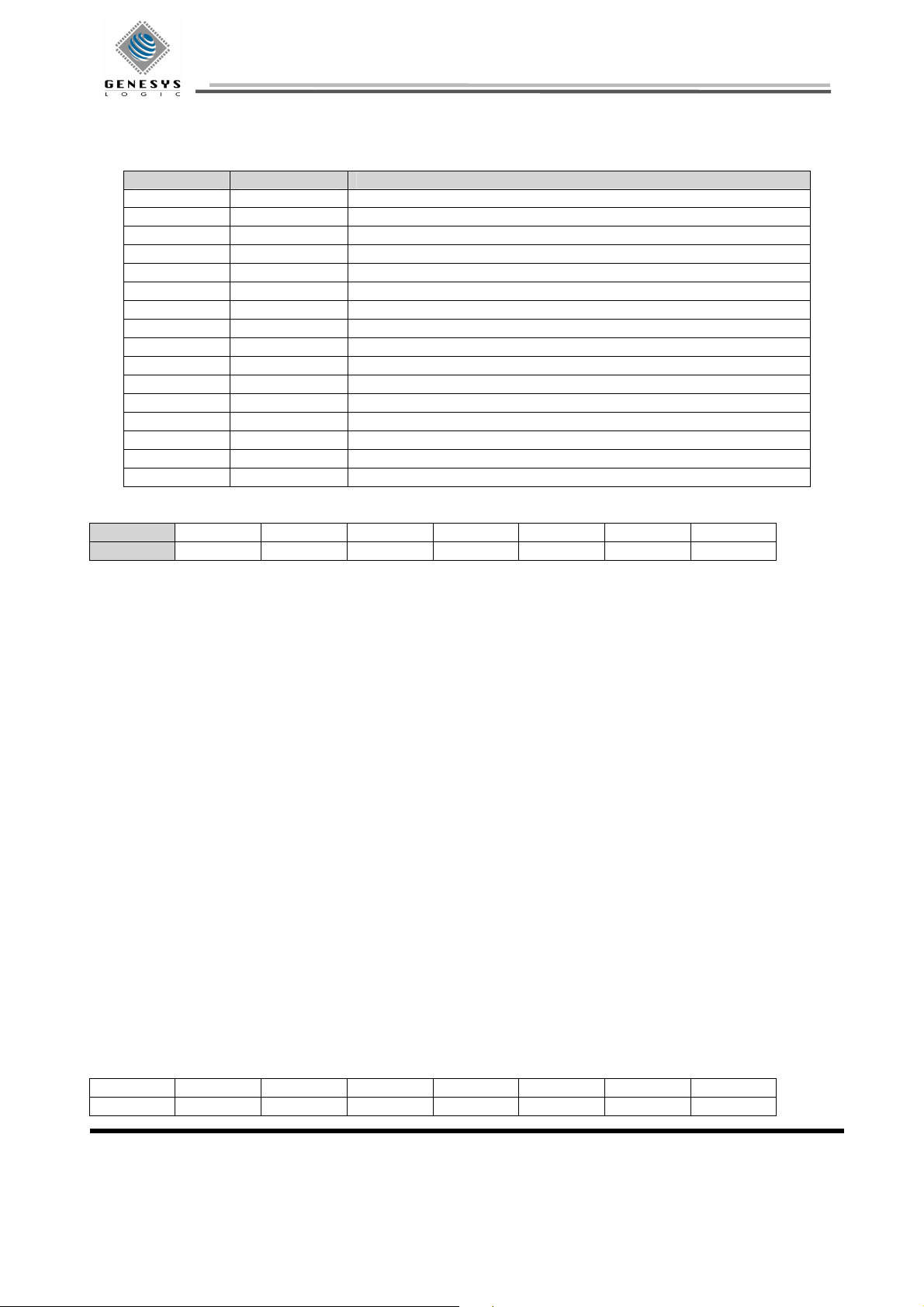
4.7 INSTRUCTION SET SUMMARY
4.7.1 Operand Field Descriptions
Field Description
r Register address
A Accumulator
i Immediate data
b Bit address within a 8-bit register
4.7.2 Instruction Set
Mnemonic,
Operands
Arithmetic Operations
Differential
Data Lines
Rise Time
90
10
t
R
Low Speed: 75ns at CL = 50pF, 300ns at CL = 350pFFull Speed: 4 to 20ns at CL = 50pF
Description Cycles
Fall Time
t
F
Affected
10
Flags
Revision 1.6 -21- 02/28/2000
Page 22

ADDAR r, A Add r and A, r <- r + A 1 CA, HC, ZO
ADDAR A, r Add A and r, A <- A + r 1 CA, HC, ZO
ADDAI i Add A and i, A <- A + i 1 CA, HC, ZO
INCR r Increment r, r <- r +1 1 ZO
INCR A, r Increment r, A <- r + 1 1 ZO
INCRSZ r Increment r, r <- r +1, skip if (r = 0) 1 or 2
INCRSZ A, r Increment r, A <- r +1, skip if (A = 0) 1 or 2
SUBAR r, A Subtract A from r, r <- r - A 1 CA, HC, ZO
SUBAR A, r Subtract A from r, A <- r - A 1 CA, HC, ZO
SUBIA i Subtract A from i, A <- i - A 1 CA, HC, ZO
DECR r Decrement r, r <- r -1 1 ZO
DECR A, r Decrement r, A <- r -1 1 ZO
DECRSZ r Decrement r, r <- r-1, skip if (r = 0) 1 or 2
DECRSZ A, r Decrement r, A <- r -1, skip if (A = 0) 1 or 2
CLRR r Clear r, r <- 0 1 ZO
CLRA Clear A, A <- 0 1 ZO
NOP No operation 1
Logical Operations
ANDAR r, A And r and A, r <- r & A 1 ZO
ANDAR A, r And A and r, A <- A & r 1 ZO
ANDAI i And A and i, A <- A & i 1 ZO
CMPR r Complement r, r <- r ^ FF 1 ZO
CMPR A, r Complement r, A <- r ^ FF 1 ZO
ORAR r, A Inclusive OR r with A, r <- r | A 1 ZO
ORAR A, r In clusive OR A with r, A <- A | r 1 ZO
ORIA i Inclusive OR i with A, A <- A | i 1 ZO
XORAR r, A Exclusive OR r with A, r <- r ^ A 1 ZO
XORAR A, r Exclusi ve OR A with r, A <- A ^ r 1 ZO
XORIA i Exclusive OR i with A, A <- A ^ i 1 ZO
Bit-wise Operations
BCR r, b Bit clear r, r.b <- 0 1
BSR r, b Bit set r, r.b <- 1 1
BTRSC r, b Bit test r, skip if (r.b = 0) 1 or 2
BTRSS r, b Bit test r, skip if (r.b =1) 1 or 2
Data Movement Operations
MOV r, A Move A into r, r <- A 1
MOV A, r Move r into A, A <- r 1 ZO
MOVIA i Move i into A, A <- i 1
Shift Operations
SWAPR r Swap high and low nibbles in r,
result put into r
SWAPR A, r Swap high and low nibbles in r,
result put into A
RLR r Rotate r left through C, (C, r) <- (r, C) 1 CA
RLR A, r Rotate r left through C, (C, A) <- (r, C) 1 CA
RRR r Rotate r right through C, (r, C) <- (C, r) 1 CA
RRR A, r Rotate r right through C, ( A, C) <- (C, r) 1 CA
Control Transfer Operations
CALL i Call subroutine 2
JUMP i Jump to address 2
RETIA Return and load i to A 2
RETI Return from timer interrupt 2
RET Return from subroutine 2
1
1
Revision 1.6 -22- 02/28/2000
Page 23

5. FIRMWARE PROGRAMMING GUIDE
5.1 USB Power On Reset and Bus Reset Initialization
Pow e r on res e t
USB reset
(Address 0)
USB reset
detected
Wait host
con tro ller to
initia liz e th e U S B
device
PWRON = 1No
Yes
Drive (0, 0) on (DP, DM)
about 200 ms
Set DP, DM to input
mode
Set PWRON = 0
Wait for USB reset
Revision 1.6 -23- 02/28/2000
Page 24

5.2 Suspend/Resume/Wakeup
to enter power down mode
W ait fo r re su m e o r w a k e u p
SUSPD = 1
W rite '1' to clear
SUSPD
Disable external
PS/2 mouse
power if needed
Set PW RDN bit
No
W ri te '1' t o c le ar
WAKEUP
Keyboard is
really pressed
?
Yes
Set W AKE bit to drive
'K ' s ta t e o n U S B
Delay about 1 ms
to clear W AKE bit
RESUM E = 1
YesNo
W rite '1' to clear
RESUME
Enable external
PS/2 mouse
power if needed
Suspend &
wakeup process
com plete
Revision 1.6 -24- 02/28/2000
Page 25

5.3 Receive Packet via Endpoint 0
EP0RX = 1
Packet received
com plete
W rite '1' t o c le a r
EP0RX bit
Get received byte
count from
RXCNT
Read received data
continuous from
FFDAT0 (total RXCNT
bytes)
SETUP data
packet received
com plete
Clear RX DIS bit to
enable endpoint 0
rec e ive r
R X S T = (1 , 0 ,
0)
NoYes
OU T data packet
received com plete
Revision 1.6 -25- 02/28/2000
Page 26

5.4 Transmit Packet via Endpoint 0
S ta rt to tran s m it
fu nc tio n
Set FFRST0 to
reset FIFO
Push all
transm itting data
into FFDAT0
(m axim um 8
bytes)
S e t c orre c t d a ta to g g le
sequence via TXSEQ
and
S e t tra ns m it da ta
le n g th in to T X C N T
S e t T X O E b it
S IE w ill tra n sm it
the packet while it
re ce iv es a IN
to ke n
Revision 1.6 -26- 02/28/2000
Page 27

5.5 Transmit Packet via Endpoint 1/2/3
S ta rt to tran s m it
fu nc tio n
S e lec t ta rg e t
endpoint via
EPSEL
Set FFR ST123 to
reset FIFO
Push all
transm itting data
into FFDAT123
(m axim um 8
bytes)
S e t c orr ec t d a ta to g g le
sequence via TXSEQ
and
S e t tra n sm it d a ta
le n g th in to T X C N T
S e t T X O E b it
S IE w ill tra n s m it
the packet while it
re ce iv e s a IN
to ke n
Revision 1.6 -27- 02/28/2000
Page 28

5.6 Timer Interrupt
Because CPU may enter timer interrupt routine at any time, the timer interrupt routine should backup all
special registers at its entry point and restore them before return.
(Address 0x004)
TIMER_ENTRY: MOV A_TEMP, A
SWAPR A, STATUS
BCR STATUS, BS
MOV S_TEMP, A
MOV A, INDAR
MOV I_TEMP, A
;
; Execute interrupt service routine
;
MOV A, I_TEMP
MOV INDAR, A
SWAPR A, S_TEMP
MOV STATUS, A
SWAPR A_TEMP
SWAPR A, A_TEMP
BCR INTEN, TMROF
RETI
5.7 Conditional Branch
Example: Conditional branch can be according to value of Accumulator. Firmware can use this method to
return value for lookahead table. Because Accumulator is only 8 bits wide, the higher 5 bits of Program
Counter should be load into PCHBUF before the conditional branch executed.
(Address 0x540)
LOOKAHEAD: MOVIA 0x05
MOV PCHBUF, A
MOVIA LOOKAHEAD_VAL
ADDAR PCL, A
RETIA 0 ; Acc = 0
RETIA 1 ; Acc = 1
RETIA 2 ; Acc = 2
. .
. .
. .
5.8 Change Register Bank
Usually keeps BS = 0. If firmware want to access register address 0x80 to 0x8F, set BS = 1. After process
register address 0x80 to 0x8F complete, clear BS = 0 to address 0x00 to 0x7F.
BSR STATUS, BS
MOV PORT1CON, A
BCR STATUS, BS
5.9 Change Code Bank
Because PCL is only 11 bits wide, Program Counter can only jump in 2K boundary directly. If Program
Counter want to jump over 2K boundary, firmware should set PCHBUF to correct bank first.
Revision 1.6 -28- 02/28/2000
Page 29

(Address 0x375)
MOVIA 0x08
MOV PCHBUF, A
JUMP DEST_ADDR
(Address 0x83A)
DEST_ADDR:
5.10 Receive Data from PS/2 Mouse Port
Check P S/2
m ouse data
rec e iv er
RXFLG = 1
Yes
Write '1' to cle ar
RXFLG
No
Read a new PS /2 data
byte from S ER DA T
Process received
PS/2 mouse data
R e turn to m a in
program
Revision 1.6 -29- 02/28/2000
Page 30

5.11 Scan Key Matrix
Scan key m atrix
Se le c t from D R V1 to
DRV18
(write DR V[0. .4] in
DRVSEL)
Se t D RV O E to d rive
selected DRV pin to
low
Read SENSE register
if any bit is logic '0',
indic ate th a t th e
specific key is pressed
Clear DRVOE to
float a ll D R V pin s
No
Set DRVOE and
INVDR V to enable
all other DRV pins
Any same SENSE
bit is logic '0' at
other DRV pin ?
Yes
Ghost key
detected scanned
m a trix in v a lid .
Yes
2 o r m o re b its a re
logic '0' in SENSE
No
Select next DRV
All DRV pins have
been scanned ?
Scan key m atrix
register ?
No
pin
Yes
complete
5.12 Turn LED On/Off
To turn LEDs on, the firmware should set corresponding I/O pins (Port 1.5~Port 1.7) to output low. An external
resistor should be added on every LED pins to limit sink current. To turn LEDs off, the firmware should output
high to corresponding I/O pins (Port 1.5~Port 1.7).
Revision 1.6 -30- 02/28/2000
Page 31

6. ABSOLUTE MAXIMUM RATINGS
Maximum ratings are the extreme limits to which the micro-controller can be exposed without permanently
damaging it. The micro-controller contains circuitry to protect the inputs against damage from high static voltages;
however, do not apply voltages higher tha n those shown in the table. Keep V
(V
IN
or V
) ≤ VCC. Connect unused inputs to the appropr iate voltage level, either GND or VDD.
OUT
and V
IN
within the range GND ≤
OUT
Symbol Characteristic Value Unit
T
Storage temperature -55 to +150
STG
TOP Operating temperature 0 to +70
°C
°C
VCC Supply voltage -0.5 to +7.0 V
VIN DC input voltage -0.5 to +V
+ 0.5 V
CC
I Maximum current per pin excluding VDD and VSS 25 mA
I
Maximum current out of GND 100 mA
MGND
I
Maximum current out of VCC 100 mA
MVCC
V
Static discharge voltage >4000 V
ESD
7. ELECTRICAL CHARACTERISTICS
F
= 6MHz; Operating Temperature = 0 to 85°C; V
OSC
Symbol Characteristic Min Max Units Conditions
General
ICC Operating supply current 10 mA
ISB Supply current – suspend
mode
USB Interface
VOH Static output high 2.8 3.6 V
VOL Static output low 0.3 V
VDI Differential input
sensitivity
VCM Differential common mode
range
VSE Single ended receiver
threshold
ILO Hi-Z state data line leakage -10 +10 V 0V < VIN < 3.3V
V3.3 Regulator supply voltage 3.0 3.6 V IL = 4mA
V
Static output high for
OH1
GPIO Interface
PORT1.1-4
V
Static output low for
OL1
PORT1.1-4
V
Static output high for
OH2
PORT1.5-7
V
Static output low for
OL2
PORT1.5-7
VIH Static input high 2.0 V V
VIL Static input low 0.9 V V
I
Sink cur rent for PORT1 .1-4 4 mA V
SINK1
I
Sink cur rent for PORT1 .5-7 20 mA V
SINK2
IIN Input leakage current -1 +1
USB Low-speed Source
fOP Internal operating 1.5 1.5 MHz
Revision 1.6 -31- 02/28/2000
= 4.4 to 5.5V
CC
360
µA
See note 1
R
of 15KΩ to GND
L
R
of 1.5KΩ to V3.3
L
0.2 V |(D+) – (D-)|
0.8 2.5 V Include VDI range
0.8 2.0 V
2.4 V V
0.4 V V
2.4 V V
0.4 V V
= 5V; IOH = 4mA
CC
= 5V; IOL = 4mA
CC
= 5V; IOH = 20mA
CC
= 5V; IOL = 20mA
CC
= 5V
CC
= 5V
CC
= 0.4V;
OUT
= 0.4V;
OUT
V
µA
= 0V or VCC
OUT
Page 32

frequency
Transition time
tR Rise time 75 ns CL = 50pF
300 ns CL = 350pF
tF Fall time 75 ns CL = 50pF
300 ns CL = 350pF
t
Rise/Fall time matching 80 120 % tR / tF
RFM
V
Output signal crossover
CRS
1.3 2.0 V
voltage
t
Low speed data rate 1.4775
DRATE
Source differential driver
676.8
1.5225
666.0
Mbs
ns
1.5Mbs ± 1.5%
jitter
t
To next transition -25 25 ns
UDJ1
t
For paired transition -10 10 ns
UDJ2
Receiver data jitter
= 350pF measured at
C
L
crossover point
tolerance
t
To next transition -75 75 ns
DJR1
t
For paired transition -45 45 ns
DJR2
t
Source EOP width 1.25 1.50
EOPT
t
Differential to EOP
DEOP
-40 100 ns Measured at crossover point
µs
C
= 350pF measured at
L
crossover point
Measured at crossover point
transition skew
Receiver EOP width
t
Must reject as EOP 330 ns
EOPR1
t
Must accept 675 ns
EOPR2
Measured at crossover point
Notes:
1. I
measured with USB in s uspend mode; using external square wave cl ock source (F
SB
= 6MHz); transceiver pull-
OSC
up resistor of 1.5KΩ between V3.3 and D- and 15KΩ termination resistors on D+ and D- pins; no port pins sourcing
current. The I
value is including power consumed by external resistors.
SB
Revision 1.6 -32- 02/28/2000
Page 33

8. PACKAGE DIAGRAMS
8.1 40- pin P-DIP
E1
A
A1
e
B
B1
D
eB
Dimension in mil Dimension in mm
F
Symbol
Min Nom Max Min Nom Max
A -- 160 -- -- 4.064 --
A1 74 75 76 1.880 1.905 1.930
B -- 18 -- -- 0.457 --
B1 -- 50 -- -- 1.270 --
C -- 10 -- -- 0.254 --
D 2040 2050 2060 51.816 52.07 52.324
E1 549 550 551 13.945 13.970 13.995
F 590 600 610 14.986 15.240 15.494
e
-- 100 -- -- 2.540 --
eB 640 650 660 16.256 16.510 16.764
θθθθ
0
οοοο
7.5
οοοο
15
οοοο
0
οοοο
7.5
οοοο
15
οοοο
Figure 7-3 Package outline dimension for 40-pin P-DIP
C
Revision 1.6 -33- 02/28/2000
Page 34

A
8.2 24- pin SOP
B
D
F
e
C
C
eB
A1
E1
θ
L
eB
Revision 1.6 -34- 02/28/2000
Page 35

Symbol
A 98 100 102 2.489 2.540 2.591
A1 6 --- --- 0.152 --- --A2 39 41 43 0.991 1.041 1.092
B --- 16 --- --- 0.406 ---
C --- 10 --- --- 0.254 ---
D 598 600 602 15.189 15.240 15.291
E1 298 300 302 7.569 7.620 7.671
e --- 50 --- --- 1.270 ---
eB 406 410 414 10.312 10.414 10.516
L 30 32 34 0.762 0.813 0.864
θ
Figure 7-4 Package outline dimension for 24-pin SOP
Dimension in mils Dimension in mm
Min Nom Max Min Nom Max
---
5°
--- ---
5°
---
Revision 1.6 -35- 02/28/2000
 Loading...
Loading...