

Page 1
FW803 PHY IEEE * 1394A
Three-Cable Transceiver/Arbiter Device
Supports LPS/link-on as a part of PHY-link interface.
Distinguishing Features
■
Compliant with IEEE P1394a Draft 2.0 Standard
for a High Performance Serial Bus (Supplement)
Supports extended BIAS_HANDSHAKE time for
■
enhanced interoperability with camcorders.
While unpowered and connected to the bus, will not
■
drive TPBIAS on a connected port even if receiving
incoming bias voltage on that port.
Does not require external filter capacitors for PLL.
■
Does not require a separate 5 V supply for 5 V link
■
controller interoperability.
Interoperable across 1394 cable with 1394 physical
■
layers (PHY) using 5 V supplies.
Interoperable with 1394 link-layer controllers using
■
5 V supplies.
Powerdown features to conserve energy in battery-
■
powered applications include:
— Device powerdown pin.
— Link interface disable using LPS.
— Inactive ports power down.
Interface to link-layer controller supports Annex J
■
electrical isolation as well as bus-keeper isolation.
Features
■
Supports provisions of IEEE 1394-1995 Standard for
■
a High Performance Serial Bus.
Fully interoperable with FireWire† implementation of
■
IEEE 1394-1995.
Reports cable power fail interrupt when voltage at
■
CPS pin falls below 7.5 V.
Separate cable bias and driver termination voltage
■
supply for each port.
Other Features
64-pin TQFP package.
■
Single 3.3 V supply operation.
■
Data interface to link-layer controller provided
■
through 2/4/8 parallel lines at 50 Mbits/s.
25 MHz crystal oscillator and PLL provide transmit/
■
receive data at 100 Mbits/s, 200 Mbits/s, and
400 Mbits/s, and link-layer controller clock at
50 MHz.
Node power-class information signaling for system
■
power management.
Multiple separate package signals provided for ana-
■
log and digital supplies and grounds.
Data Sheet, Rev. 3
June 2001
Provides three fully compliant cable ports at
■
100 Mbits/s, 200 Mbits/s, and 400 Mbits/s.
Fully supports open HCI requirements.
■
Supports arbitrated short bus reset to improve
■
utilization of the bus.
Supports ack-accelerated arbitration and fly-by con-
■
catenation.
Supports connection debounce.
■
Supports multispeed packet concatenation.
■
Supports PHY pinging and remote PHY access
■
packets.
Fully supports suspend/resume.
■
Supports PHY-link interface initialization and reset.
■
Supports 1394a-2000 register set.
■
Description
The Agere Systems Inc. FW803 device provides the
analog physical layer functions needed to implement a
three-port node in a cable-based IEEE 1394-1995 and
IEEE 1394a-2000 network.
* IEEE is a registered trademark of The Institute of Electrical and
Electronics Engineers, Inc.
† FireWire is a registered trademark of Apple Computer, Inc.
Page 2

FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
Data Sheet, Rev. 3
June 2001
Table of Contents
Contents Page
Distinguishing Features ............................................................................................................................................ 1
Features ...................................................................................................................................................................1
Other Features ......................................................................................................................................................... 1
Description ................................................................................................................................................................1
Signal Information ..................................................................................................................................................... 6
Application Information ........................................................................................................................................... 10
Crystal Selection Considerations ............................................................................................................................ 11
1394 Application Support Contact Information ....................................................................................................... 12
Absolute Maximum Ratings .................................................................................................................................... 12
Electrical Characteristics ........................................................................................................................................13
Timing Characteristics ............................................................................................................................................16
Timing Waveforms .................................................................................................................................................. 17
Internal Register Configuration ............................................................................................................................... 18
Outline Diagrams .................................................................................................................................................... 23
Ordering Information ............................................................................................................................................... 23
List of Figures
Figures Page
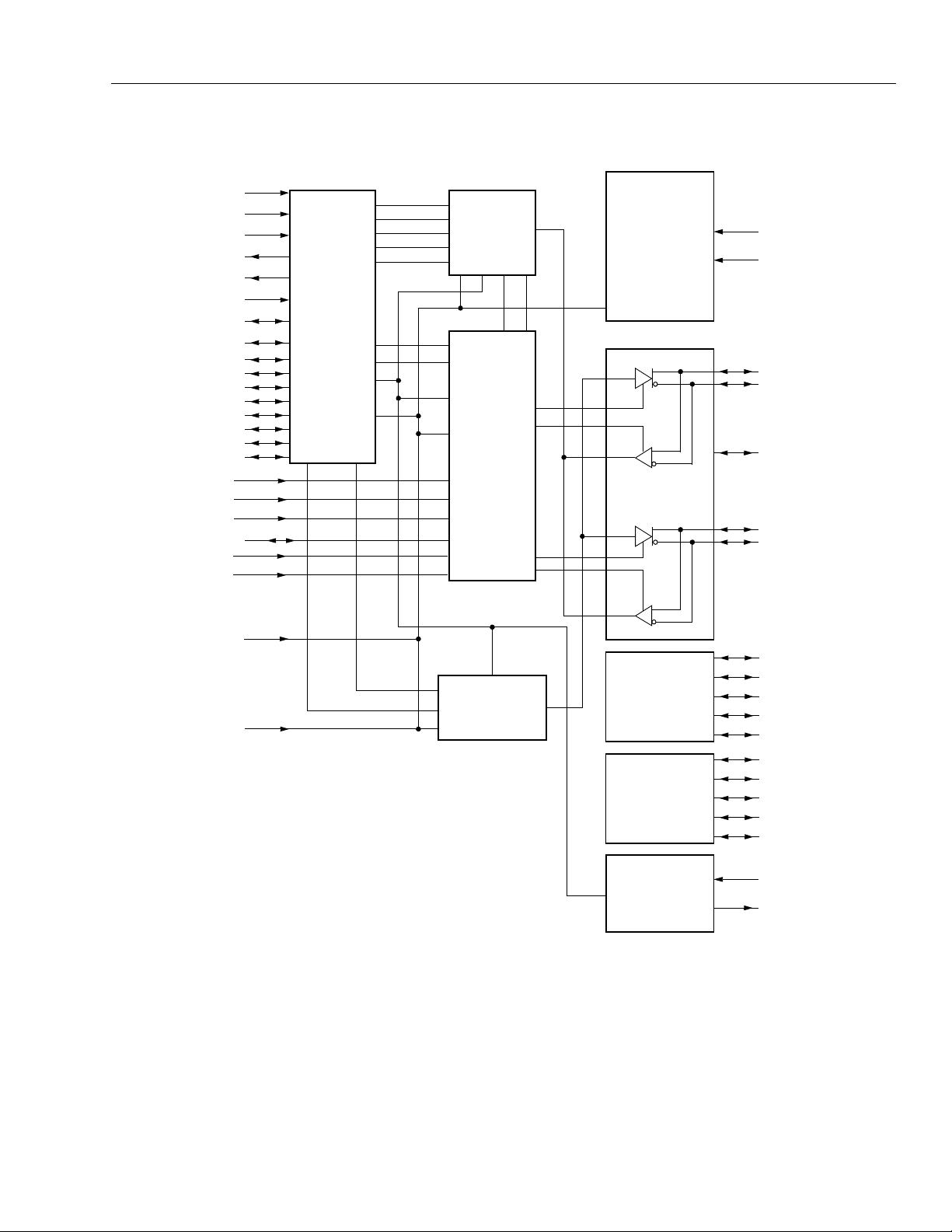
Figure 1. Block Diagram ........................................................................................................................................... 5
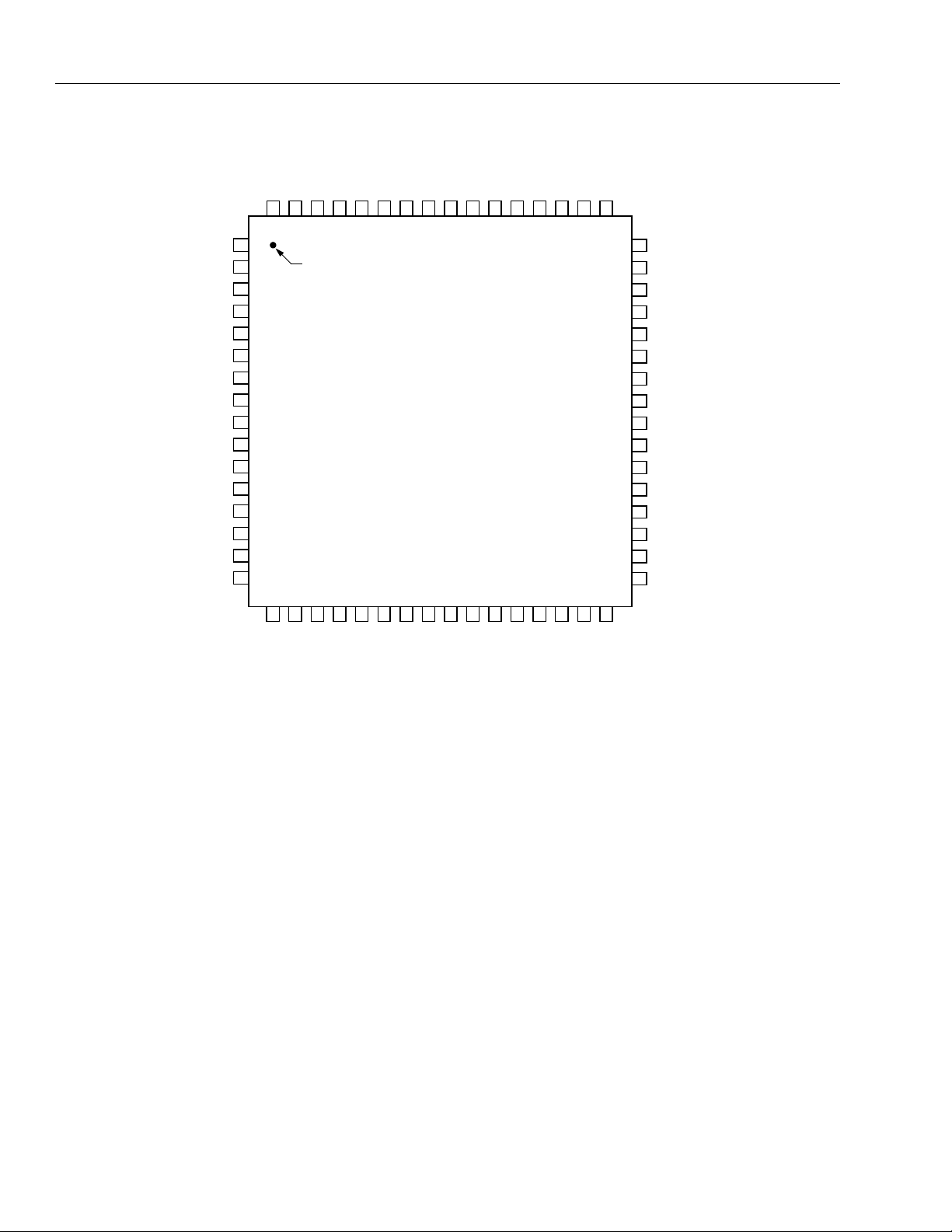
Figure 2. Pin Assignments ........................................................................................................................................ 6
Figure 3. Typical External Component Connections ..............................................................................................10
Figure 4. Typical Port Termination Network ........................................................................................................... 11
Figure 5. Dn, CTLn, and LREQ Input Setup and Hold Times Waveforms ............................................................. 17
Figure 6. Dn, CTLn Output Delay Relative to SYSCLK Waveforms ....................................................................... 17
List of Tables
Table s Page
Table 1. Signal Descriptions ..................................................................................................................................... 7
Table 2. Absolute Maximum Ratings ...................................................................................................................... 12
Table 3. Analog Characteristics .............................................................................................................................. 13
Table 4. Driver Characteristics ............................................................................................................................... 14
Table 5. Device Characteristics ..............................................................................................................................15
Table 6. Switching Characteristics ......................................................................................................................... 16
Table 7. Clock Characteristics ...............................................................................................................................16
Table 8. PHY Register Map for the Cable Environment .........................................................................................18
Table 9. PHY Register Fields for the Cable Environment ...................................................................................... 18
Table 10. PHY Register Page 0: Port Status Page ................................................................................................ 20
Table 11. PHY Register Port Status Page Fields .................................................................................................. 21
Table 12. PHY Register Page 1: Vendor Identification Page .................................................................................22
Table 13. PHY Register Vendor Identification Page Fields .................................................................................... 22
22 Agere Systems Inc.
Page 3
Data Sheet, Rev. 3 FW803 PHY IEEE 1394A
June 2001 Three-Cable Transceiver/Arbiter Device
Description
Each cable port incorporates two differential line transceivers. The transceivers include circuitry to monitor
the line conditions as needed for determining connection status, for initialization and arbitration, and for
packet reception and transmission. The PHY is
designed to interface with a link-layer controller (LLC).
The PHY requires either an external 24.576 MHz
crystal or crystal oscillator. The internal oscillator
drives an internal phase-locked loop (PLL), which
generates the required 400 MHz reference signal. The
400 MHz reference signal is internally divided to
provide the 49.152 MHz, 98.304 MHz, and
196.608 MHz clock signals that control transmission of
the outbound encoded strobe and data information.
The 49.152 MHz clock signal is also supplied to the
associated LLC for synchronization of the two chips
and is used for resynchronization of the received data.
The powerdown function, when enabled by the PD
signal high, stops operation of the PLL and disables all
circuitry except the cable-not-active signal circuitry.
The PHY supports an isolation barrier between itself
and its LLC. When /ISO is tied high, the link interface
outputs behave normally. When /ISO is tied low,
internal differentiating logic is enabled, and the outputs
become short pulses, which can be coupled through a
capacitor or transformer as described in the
IEEE 1394-1995 Annex J. To operate with bus-keeper
isolation, the /ISO pin of the FW803 must be tied high.
Data bits to be transmitted through the cable ports are
received from the LLC on two, four, or eight data lines
(D[0:7]), and are latched internally in the PHY in
synchronization with the 49.152 MHz system clock.
These bits are combined serially, encoded, and
transmitted at 98.304 Mbits/s, 196.608 Mbits/s, or
393.216 Mbits/s as the outbound data-strobe
information stream. During transmission, the encoded
data information is transmitted differentially on the TPA
and TPB cable pair(s).
During packet reception, the TPA and TPB
transmitters of the receiving cable port are disabled,
and the receivers for that port are enabled. The
encoded data information is received on the TPA and
TPB cable pair. The received data-strobe information
is decoded to recover the receive clock signal and the
serial data bits. The serial data bits are split into two,
four, or eight parallel streams, resynchronized to the
local system clock, and sent to the associated LLC.
The received data is also transmitted (repeated) out of
the other active (connected) cable ports.
(continued)
Both the TPA and TPB cable interfaces incorporate
differential comparators to monitor the line states
during initialization and arbitration. The outputs of
these comparators are used by the internal logic to
determine the arbitration status. The TPA channel
monitors the incoming cable common-mode voltage.
The value of this common-mode voltage is used during
arbitration to set the speed of the next packet
transmission. In addition, the TPB channel monitors
the incoming cable common-mode voltage for the
presence of the remotely supplied twisted-pair bias
voltage. This monitor is called bias-detect.
The TPBIAS circuit monitors the value of incoming
TPA pair common-mode voltage when local TPBIAS is
inactive. Because this circuit has an internal current
source and the connected node has a current sink, the
monitored value indicates the cable connection status.
This monitor is called connect-detect.
Both the TPB bias-detect monitor and TPBIAS
connect-detect monitor are used in suspend/resume
signaling and cable connection detection.
The PHY provides a 1.86 V nominal bias voltage for
driver load termination. This bias voltage, when seen
through a cable by a remote receiver, indicates the
presence of an active connection. The value of this
bias voltage has been chosen to allow interoperability
between transceiver chips operating from 5 V or 3 V
nominal supplies. This bias voltage source should be
stabilized by using an external filter capacitor of
approximately 0.33 µF.
The transmitter circuitry, the receiver circuitry, and the
twisted-pair bias voltage circuity are all disabled with a
powerdown condition. The powerdown condition
occurs when the PD input is high. The port transmitter
circuitry, the receiver circuitry, and the TPBIAS output
are also disabled when the port is disabled,
suspended, or disconnected.
The line drivers in the PHY operate in a highimpedance current mode and are designed to work
with external 112 Ω line-termination resistor networks.
One network is provided at each end of each twistedpair cable. Each network is composed of a pair of
series-connected 56 Ω resistors. The midpoint of the
pair of resistors that is directly connected to the
twisted-pair A (TPA) signals is connected to the
TPBIAS voltage signal. The midpoint of the pair of
resistors that is directly connected to the twisted-pair B
(TPB) signals is coupled to ground through a parallel
RC network with recommended resistor and capacitor
values of 5 kΩ and 220 pF, respectively.
Lucent Technologies Inc. 3
Page 4

FW803 PHY IEEE 1394A Data Sheet, Rev. 3
Three-Cable Transceiver/Arbiter Device June 2001
Description
The value of the external resistors are specified to
meet the standard specifications when connected in
parallel with the internal receiver circuits.
The driver output current, along with other internal
operating currents, is set by an external resistor. This
resistor is connected between the R0 and R1 signals
and has a value of 2.49 kΩ ± 1%.
The FW803 supports suspend/resume as defined in
the IEEE 1394a-2000 specification. The suspend
mechanism allows an FW803 port to be put into a
suspended state. In this state, a port is unable to
transmit or receive data packets, however, it remains
capable of detecting connection status changes and
detecting incoming TPBias. When all ports of the
FW803 are suspended, all circuits except the bias
voltage reference generator, and bias detection
circuits are powered down, resulting in significant
power savings. The use of suspend/resume is
recommended.
Four signals are used as inputs to set four
configuration status bits in the self-identification (selfID) packet. These signals are hardwired high or low as
a function of the equipment design. PC[0:2] are the
three signals that indicate either the need for power
from the cable or the ability to supply power to the
cable. The fourth signal, C/LKON, as an input,
indicates whether a node is a contender for bus
manager. When the C/LKON signal is asserted, it
means the node is a contender for bus manager.
When the signal is not asserted, it means that the
node is not a contender. The C bit corresponds to bit
20 in the self-ID packet, PC0 corresponds to bit 21,
PC1 corresponds to bit 22, and PC2 corresponds to bit
23 (see Table 4-29 of the IEEE 1394-1995 standard
for additional details).
A powerdown signal (PD) is provided to allow a
powerdown mode where most of the PHY circuits are
powered down to conserve energy in battery-powered
applications. The internal logic in FW803 is reset as
long as the powerdown signal is asserted. A cable
status signal, CNA, provides a high output when none
of the twisted-pair cable ports are receiving incoming
bias voltage. This output is not debounced. The CNA
output can be used to determine when to power the
PHY down or up. In the powerdown mode, all circuitry
is disabled except the CNA circuitry. It should be noted
that when the device is powered down, it does not act
in a repeater mode.
(continued)
When the power supply of the PHY is removed while
the twisted-pair cables are connected, the PHY
transmitter and receiver circuitry has been designed to
present a high impedance to the cable in order to not
load the TPBIAS signal voltage on the other end of the
cable.
For reliable operation, the TPBn signals must be
terminated using the normal termination network
regardless of whether a cable is connected to a port or
not connected to a port. For those applications, when
FW803 is used with one or more of the ports not
brought out to a connector, those unused ports may be
left unconnected without normal termination. When a
port does not have a cable connected, internal
connect-detect circuitry will keep the port in a
disconnected state.
Note: All gap counts on all nodes of a 1394 bus must
be identical. This may be accomplished by using
PHY configuration packets (see Section 4.3.4.3
of IEEE 1394-1995 standard) or by using two
bus resets, which resets the gap counts to the
maximum level (3Fh).
The link power status (LPS) signal works with the
C/LKON signal to manage the LLC power usage of the
node. The LPS signal indicates that the LLC of the
node is powered up or powered down. If LPS is inactive for more than 1.2 µs and less than 25 µs, PHY/link
interface is reset. If LPS is inactive for greater than
25 µs, the PHY will disable the PHY/link interface to
save power. FW803 continues its repeater function. If
the PHY then receives a link-on packet, the C/LKON
signal is activated to output a 6.114 MHz signal, which
can be used by the LLC to power itself up. Once the
LLC is powered up, the LPS signal communicates this
to the PHY and the PHY/link interface is enabled.
C/LKON signal is turned off when LPS is active or
when a bus reset occurs, provided the interrupt that
caused C/LKON is not present.
Two of the signals are used to set up various test
conditions used in manufacturing. These signals, SE
and SM, should be connected to V
operation.
SS
for normal
4 Lucent Technologies Inc.
Page 5
Data Sheet, Rev. 3 FW803 PHY IEEE 1394A
June 2001 Three-Cable Transceiver/Arbiter Device
Description
SYSCLK
LREQ
CTL0
CTL1
PC0
PC1
PC2
C/LKON
SE
SM
(continued)
CPS
LPS
/ISO
CNA
D0
D1
D2
D3
D4
D5
D6
D7
LINK
INTERFACE
I/O
RECEIVED
DATA
DECODER/
RETIMER
ARBITRATION
AND
CONTROL
STATE
MACHINE
LOGIC
BIAS
VOLTAGE
AND
CURRENT
GENERATOR
CABLE PORT 0
R0
R1
TPA0+
TPA0–
TPBIAS0
TPB0+
TPB0–
PD
/RESET
TRANSMIT
DATA
ENCODER
Figure 1. Block Diagram
CABLE PORT 1
CABLE PORT 2
CRYSTAL
OSCILLATOR,
PLL SYSTEM,
AND
CLOCK
GENERATOR
TPA1+
TPA1–
TPBIAS1
TPB1+
TPB1–
TPA2+
TPA2–
TPBIAS2
TPB2+
TPB2–
XI
XO
5-5459.d (F)
Lucent Technologies Inc. 5
Page 6
FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
Signal Information
LREQ
V
CTL0
CTL1
D0
D1
V
DD
D2
D3
D4
D5
D6
D7
V
CNA
LPS
SS
V
63
64
1
2
SS
3
4
5
6
7
8
9
10
11
12
13
14
SS
15
16
PIN #1 IDENTIFIER
17
18
XO
/RESET
VDDSYSCLK
59
60
61
62
AGERE FW803
19
20
21
22
Data Sheet, Rev. 3
June 2001
SSAVDDA
DDA
SSAVSSA
V
R0
R1
VSSPLLVDDPLLVSSXI
52
53
54
55
56
57
58
23
24
25
26
27
28
29
V
V
49
50
51
30
48
TPBIAS2
47
TPA2+
46
TPA2–
45
TPB2+
44
TPB2–
43
V
DDA
42
TPBIAS1
41
TPA1+
40
TPA1–
39
TPB1+
38
TPB1–
37
TPBIAS0
36
TPA0+
35
TPA0–
34
TPB0+
33
TPB0–
31
32
DD
V
C/LKON
PD
PC0
PC1
PC2
SS
DD
SE
SM
V
/ISO
VDDV
CPS
DDAVDDA
V
Note: Active-low signals are indicated by “/” at the beginning of signal names, within this document.
Figure 2. Pin Assignments
SSA
V
5-6236.b (F)
66 Agere Systems Inc.
Page 7
Data Sheet, Rev. 3
June 2001
FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
Signal Information
Table 1. Signal Descriptions
Pin Signal* Type Name/Description
18 C/LKON I/O Bus Manager Capable Input and Link-On Output. On hardware reset,
15 CNA O Cable-Not-Active Output. CNA is asserted high when none of the PHY
24 CPS I Cable Power Status. CPS is normally connected to the cable power
3 CTL0 I/O Control I/O. The CTLn signals are bidirectional communications control
4CTL1
5, 6, 8,
9, 10, 11,
12, 13
23 /ISO I Link Interface Isolation Disable Input (Active-Low). /ISO controls the
* Active-low signals are indicated by “/ ” at the beginning of signal names, within this document.
D[0:7] I/O Data I/O. The Dn signals are bidirectional and pass data between the
(continued)
this pin is used to set the default value of the contender status indicated
during self-ID. The bit value programming is done by tying the signal
through a 10 kΩ resistor to V
(low, not bus manager capable). Using either the pull-up or pull-down
resistor allows the link-on output to override the input value when necessary.
After hardware reset, this pin is set as an output.
C/LKON indicates one of the following events by asserting a 6.114 MHz
signal.
1. FW803 receives a link-on packet addressed to this node.
2. Port_event register bit is 1.
3. Any of the Timeout, Pwr_Fail, or Loop register bits are 1 and the
Resume_int register bit is also 1. Once activated, the C/LKON output will
continue active until the LPS becomes active. The PHY also deasserts
the C/LKON output when a bus reset occurs, if the C/LKON is active due
solely to the reception of a link-on packet.
Note:
ports are receiving an incoming bias voltage. This circuit
during the powerdown mode.
through a 400 kΩ resistor. This circuit drives an internal comparator that
detects the presence of cable power. This information is maintained in
one internal register and is available to the LLC by way of a register read
(see Table 8,
signals between the PHY and the LLC. These signals control the passage
of information between the two devices. Bus-keeper circuitry is built into
these terminals.
PHY and the LLC. Bus-keeper circuitry is built into these terminals.
operation of an internal pulse differentiating function used on the
PHY-LLC interface signals, CTLn and Dn, when they operate as outputs.
When /ISO is asserted low, the isolation barrier is implemented between
PHY and its LLC (as described in Annex J of IEEE 1394-1995).
/ISO is normally tied high to disable isolation differentiation. Bus-keepers
are enabled when /ISO is high (inactive) on CTL, D, and LREQ. When
/ISO is low (active), the bus-keepers are disabled. Please refer to Agere’s
application note AP98-074CMPR for more information on isolation.
If an interrupt condition exists which would otherwise cause the
C/LKON output to be activated if the LPS were inactive, the C/LKON
output will be activated when the LPS subsequently becomes inactive.
Register 0
DD (high, bus manager capable) or to GND
If the LPS is inactive,
remains active
).
Agere Systems Inc. 7
Page 8
FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
Data Sheet, Rev. 3
June 2001
Signal Information
(continued)
Table 1. Signal Descriptions (continued)
Pin Signal* Type Name/Description
DD
16 LPS I Link Power Status. LPS is connected to either the V
supplying the
LLC or to a pulsed output that is active when the LLC is powered for the
purpose of monitoring the LLC power status. If LPS is inactive for more
than 1.2 µs and less than 25 µs, interface is reset. If LPS is inactive for
greater than 25 µs, the PHY will disable the PHY/Link interface to save
power. FW803 continues its repeater function.
1LREQ ILink Request. LREQ is an output from the LLC that requests the PHY to
perform some service. Bus-keeper circuitry is built into this terminal.
20 PC0 I Power-Class Indicators. On hardware reset, these inputs set the default
21 PC1
22 PC2
value of the power class indicated during self-ID. These bits can be
programmed by tying the signals to V
DD
(high) or to ground (low).
19 PD I Powerdown. When asserted high, PD turns off all internal circuitry except
the bias-detect circuits that drive the CNA signal.
57 PLLV
DD
— Power for PLL Circuit. PLLV
DD
supplies power to the PLL circuitry
portion of the device.
58 PLLV
SS
— Ground for PLL Circuit. PLLVSS is tied to a low-impedance ground
plane.
54 R0 I Current Setting Resistor. An internal reference voltage is applied to a
resistor connected between R0 and R1 to set the operating current and
the cable driver output current. A low temperature-coefficient resistor
55 R1
(TCR) with a value of 2.49 kΩ ± 1% should be used to meet the
IEEE 1394-1995 standard requirements for output voltage limits.
61 /RESET I Reset (Active-Low). When /RESET is asserted low (active), the FW803
is reset. An internal pull-up resistor, which is connected to VDD, is
provided, so only an external delay capacitor is required to ensure that the
capacitor is discharged when PHY power is removed. This input is a standard logic buffer and can also be driven by an open-drain logic output
buffer.
28 SE I Test Mode Control. SE is used during the manufacturing test and should
be tied to V
SS.
29 SM I Test Mode Control. SM is used during the manufacturing test and should
be tied to V
SS.
63 SYSCLK O System Clock. SYSCLK provides a 49.152 MHz clock signal, which is
synchronized with the data transfers to the LLC.
36 TPA0+ Analog I/O Portn, Port Cable Pair A. TPAn is the port A connection to the twisted-
41 TPA1+
47 TPA2+
pair cable. Board traces from each pair of positive and negative differential signal pins should be kept matched and as short as possible to the
external load resistors and to the cable connector.
35 TPA0− Analog I/O Portn, Port Cable Pair A. TPAn is the port A connection to the twisted-
40 TPA1−
46 TPA2−
* Active-low signals are indicated by “/ ” at the beginning of signal names, within this document.
pair cable. Board traces from each pair of positive and negative differential signal pins should be kept matched and as short as possible to the
external load resistors and to the cable connector.
88 Agere Systems Inc.
Page 9

Data Sheet, Rev. 3
June 2001
FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
Signal Information
Table 1. Signal Descriptions (continued)
Pin Signal* Type Name/Description
34 TPB0+ Analog I/O Portn, Port Cable Pair B. TPBn is the port B connection to the twisted-
39 TPB1+
45 TPB2+
33 TPB0− Analog I/O Portn, Port Cable Pair B. TPBn is the port B connection to the twisted-
38 TPB1−
44 TPB2−
37 TPBIAS0 Analog I/O Portn, Twisted-Pair Bias. TPBIAS provides the 1.86 V nominal bias
42 TPBIAS1
48 TPBIAS2
7, 17,
26, 27, 62
30, 31,
43, 50, 51
2, 14,
25, 56, 64
32, 49,
52, 53
59 XI — Crystal Oscillator. XI and XO connect to a 24.576 MHz parallel resonant
60 XO
* Active-low signals are indicated by “/ ” at the beginning of signal names, within this document.
V
DD — Digital Power. VDD supplies power to the digital portion of the device.
V
DDA — Analog Circuit Power. VDDA
SS — Digital Ground. All VSS signals should be tied to the low-impedance
V
V
SSA — Analog Circuit Ground. All VSSA signals should be tied together to a low-
(continued)
pair cable. Board traces from each pair of positive and negative differential signal pins should be kept matched and as short as possible to the
external load resistors and to the cable connector.
pair cable. Board traces from each pair of positive and negative differential signal pins should be kept matched and as short as possible to the
external load resistors and to the cable connector.
voltage needed for proper operation of the twisted-pair cable drivers and
receivers and for sending a valid cable connection signal to the remote
nodes.
supplies power to the analog portion of the
device.
ground plane.
impedance ground plane.
fundamental mode crystal. Although, when a 24.576 MHz clock source is
used, it can be connected to XI with XO left unconnected. The optimum
values for the external shunt capacitors are dependent on the specifications of the crystal used. It is suggested that two 12 pF shunt capacitors
be used for a crystal with a specified
details, see Crystal Selection Considerations in the Application Information section.
pF loading capacitance. For more
7
Agere Systems Inc. 9
Page 10

FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
Application Information
12 pF 12 pF
0.1 µF
LLC
LLC PULSE
DD
OR V
LLC
LREQ
V
SS
CTL0
CTL1
D0
D1
V
DD
D2
D3
D4
D5
D6
D7
V
SS
CNA
LPS
SS
V
63
64
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
PIN #1 IDENTIFIER
17
181920
XO
/RESET
VDDSYSCLK
60
61
62
21
24.576 MHz
DD
VSSPLLV
PLLVSS
XI
56
57
58
59
AGERE FW803
22
23
24
Data Sheet, Rev. 3
June 2001
2.49 kΩ
DDA
SSA
SSA
V
V
R0
R1
52
53
54
55
25
26
27
28
29
VSSA
VDDA
V
49
50
51
30
31
32
TPBIAS2
48
TPA2+
47
TPA2–
46
TPB2+
45
TPB2–
44
V
43
42
41
40
39
38
37
36
35
34
33
DDA
TPBIAS1
TPA1+
TPA1–
TPB1+
TPB1–
TPBIAS0
TPA0+
TPA0–
TPB0+
TPB0–
PORT 1*
PORT 0*
SS
DD
VDD
PD
PC0
PC1
PC2
/ISO
V
CPS
VDDV
SE
SM
DDA
V
VDDA
VSSA
C/LKON
10 kΩ
400 kΩ
POWER CLASS
CABLE
LKON
BUS
MANAGER
POWER
5-6767 (F)
* See Figure 4 for typical port termination network.
Figure 3. Typical External Component Connections
1010 Agere Systems Inc.
Page 11

Data Sheet, Rev. 3
June 2001
FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
Application Information
42
41
40
39
38
37
36
35
34
33
TPBIAS1
TPA1+
TPA1–
TPB1+
TPB1–
TPBIAS0
56 Ω
TPA0+
TPA0–
TPB0+
TPB0–
56 Ω
TPBIAS1
56 Ω
56 Ω
(continued)
0.33 µF
USE SAME PORT TERMINATION NETWORK AS ILLUSTRATED BELOW.
5
3
6
IEEE 1394-1995 STANDARD
CONNECTOR
4
220 pF
5 kΩ
CABLE
POWER
1
2
VGVP
5-6930 (F)
Figure 4. Typical Port Termination Network
Crystal Selection Considerations
The FW803 is designed to use an external 24.576 MHz crystal connected between the XI and XO terminals to provide the reference for an internal oscillator circuit. IEEE 1394a-2000 standard requires that FW803 have less than
±100 ppm total variation from the nominal data rate, which is directly influenced by the crystal. To achieve this, it is
recommended that an oscillator with a nominal 50 ppm or less frequency tolerance be used.
The total frequency variation must be kept below
by board and device variations. Trade offs between frequency tolerance and stability may be made as long as the
total frequency variation is less than
100 ppm.
±
Load Capacitance
100 ppm from nominal with some allowance for error introduced
±
The frequency of oscillation is dependent upon the load capacitance specified for the crystal, in parallel resonant
mode crystal circuits. Total load capacitance (CL) is a function of not only the discrete load capacitors, but also
capacitances from the FW803 board traces and capacitances of the other FW803 connected components.
Agere Systems Inc. 11
Page 12

FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
Data Sheet, Rev. 3
June 2001
Crystal Selection Considerations
Load Capacitance
The values for load capacitors (CA and CB) should be calculated using this formula:
C
= CB = (CL – C
A
Where:
C
= load capacitance specified by the crystal manufacturer
L
C
= capacitance of the board and the FW803, typically 2—3 pF
stray
Board Layou
The layout of the crystal portion of the PHY circuit is important for obtaining the correct frequency and minimizing
noise introduced into the FW803 PLL. The crystal and two load capacitors should be considered as a unit during layout. They should be placed as close as possible to one another, while minimizing the loop area created by the combination of the three components. Minimizing the loop area minimizes the effect of the resonant current that flows in
this resonant circuit. This layout unit (crystal and load capacitors) should then be placed as close as possible to the
PHY XI and XO terminals to minimize trace lengths. Vias should not be used to route the XI and XO signals.
t
(continued)
) × 2
stray
(continued)
1394 Application Support Contact Information
E-mail: 1394support@agere.com
Absolute Maximum Ratings
Stresses in excess of the absolute maximum ratings can cause permanent damage to the device. These are absolute stress ratings only. Functional operation of the device is not implied at these or any other conditions in excess of
those given in the operational sections of the data sheet. Exposure to absolute maximum ratings for extended periods can adversely affect device reliability.
Table 2. Absolute Maximum Ratings
Parameter Symbol Min Max Unit
Supply Voltage Range V
Input Voltage Range* V
Output Voltage Range at Any Output V
Operating Free Air Temperature T
Storage Temperature Range T
* Except for 5 V tolerant I/O (CTL0, CTL1, D0—D7, and LREQ) where VI max = 5.5 V.
DD
I
O
A
stg
3.0 3.6 V
−0.5 V
−0.5 V
DD + 0.5 V
DD + 0.5 V
070°C
–65 150 °C
1212 Agere Systems Inc.
Page 13

Data Sheet, Rev. 3
June 2001
Three-Cable Transceiver/Arbiter Device
Electrical Characteristics
Table 3. Analog Characteristics
Parameter Test Conditions Symbol Min Typ Max Unit
Supply Voltage Source power node V
Differential Input Voltage Cable inputs, 100 Mbits/s operation V
Cable inputs, 200 Mbits/s operation V
Cable inputs, 400 Mbits/s operation V
Cable inputs, during arbitration V
Common-mode Voltage
Source Power Mode
Common-mode Voltage
Nonsource Power Mode*
Receive Input Jitter TPA, TPB cable inputs,
Receive Input Skew Between TPA and TPB cable inputs,
Between TPA and TPB cable inputs,
Between TPA and TPB cable inputs,
Positive Arbitration
Comparator Input
Threshold Voltage
Negative Arbitration
Comparator Input
Threshold Voltage
Speed Signal Input
Threshold Voltage
Output Current TPBIAS outputs I
TPBIAS Output Voltage At rated I/O current V
Current Source for
Connect Detect Circuit
* For a node that does not source power (see Section 4.2.2.2 in IEEE 1394-1995 Standard).
TPB cable inputs,
speed signaling off
TPB cable inputs,
S100 speed signaling on
TPB cable inputs,
S200 speed signaling on
TPB cable inputs,
S400 speed signaling on
TPB cable inputs,
speed signaling off
TPB cable inputs,
S100 speed signaling on
TPB cable inputs,
S200 speed signaling on
TPB cable inputs,
S400 speed signaling on
100 Mbits/s operation
TPA, TPB cable inputs,
200 Mbits/s operation
TPA, TPB cable inputs,
400 Mbits/s operation
100 Mbits/s operation
200 Mbits/s operation
400 Mbits/s operation
—V
—V
200 Mbits/s V
400 Mbits/s V
—I
CM—SP—100
V
CM—SP—200 0.935 — 2.515 V
V
CM—SP—400 0.532 — 2.515 V
V
CM—NSP—100 1.165 — 2.015 V
V
CM—NSP—200 0.935 — 2.015 V
V
CM—NSP—400 0.532 — 2.015 V
V
FW803 PHY IEEE 1394A
DD—SP 3.0 3.3 3.6 V
ID—100
ID—200 132 — 260 mV
ID—400 100 — 260 mV
ID—ARB 168 — 265 mV
V
CM 1.165 — 2.515 V
VCM 1.165 — 2.015 V
———1.08ns
———0.5ns
———0.315ns
———0.8ns
———0.55ns
———0.5ns
TH
+89—168mV
TH
− –168 — –89 mV
TH—S200 45 — 139 mV
TH—S400 266 — 445 mV
O –5 — 2.5 mA
O
CD ——76µA
142 — 260 mV
1.165 — 2.515 V
1.665 — 2.015 V
Agere Systems Inc. 13
Page 14

FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
Data Sheet, Rev. 3
June 2001
Electrical Characteristics
(continued)
Table 4. Driver Characteristics
Parameter Test Conditions Symbol Min Typ Max Unit
Differential Output Voltage 56 Ω load V
Off-state Common-mode Voltage Drivers disabled V
Driver Differential Current,
TPA+, TPA−, TPB+, TPB−
Common-mode Speed Signaling
Current, TPB+, TPB−
Driver enabled,
speed signaling off*
200 Mbits/s speed
signaling enabled
†
400 Mbits/s speed
signaling enabled
* Limits are defined as the algebraic sum of TPA+ and TPA− driver currents. Limits also apply to TPB+ and TPB− as the algebraic sum of driver
currents.
† Limits are defined as the absolute limit of each of TPB+ and TPB− driver currents.
†
OD 172 — 265 mV
OFF ——20mV
IDIFF
ISP
SP
I
−1.05 — 1.05 mA
−2.53 — −4.84 mA
−8.1 — −12.4 mA
1414 Agere Systems Inc.
Page 15

Data Sheet, Rev. 3
June 2001
FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
Electrical Characteristics
(continued)
Table 5. Device Characteristics
Parameter Test Conditions Symbol Min Typ Max Unit
Supply Current:
V
DD = 3.3 V
One Port Active
All Ports Active
No Ports Active, LPS = 0
PD = 1
High-level Output Voltage I
Low-level Output Voltage I
OH max, VDD = min VOH VDD – 0.4 — — V
OL min, VDD = max VOL ——0.4V
High-level Input Voltage CMOS inputs V
Low-level Input Voltage CMOS inputs V
Pull-up Current,
V
I = 0 V II 11 — 32 µA
/RESET Input
Powerup Reset Time,
V
I = 0 V — 2 — — ms
/RESET Input
Rising Input Threshold Voltage
—VI
/RESET Input
Output Current SYSCLK I
Control, data I
@ CMOS
CNA I
C/LKON I
Input Current,
V
I
= V
DD
or 0 V I
LREQ, LPS, PD, SE, SM,
PC[0:2] Inputs
Off-state Output Current,
O = VDD or 0 V IOZ ——°±5 µA
V
CTL[0:1], D[0:7], C/LKON I/Os
Power Status Input Threshold
400 kΩ resistor V
Voltage, CPS Input
Rising Input Threshold Voltage*,
—V
LREQ, CTLn, Dn
Falling Input Threshold Voltage*,
—V
LREQ, CTLn, Dn
Bus Holding Current,
V
I = 1/2(VDD) — 250 — 550 µA
LREQ, CTLn, Dn
Rising Input Threshold Voltage
—V
LPS
Falling Input Threshold Voltage
—V
LPS
* Device is capable of both differentiated and undifferentiated operation.
I
DD
IDD
IDD
IDD
IH
IL — — 0.2VDD V
RST 1.1 — 1.4 V
OL/IOH
—
—
—
—
DD
0.7V
–16 — 16 mA
1
13
1
51
85
1
—— V
—
—
—
—
mA
mA
mA
mA
@ TTL
OL/IOH
OL/IOH –16 — 16 mA
OL/IOH –2 — 2 mA
I
TH 7.5 — 8.5 V
IT+VDD/2 + 0.3 — VDD/2 + 0.8 V
IT
− V
LIH
LIL 0.24VDD + 0.2 — — V
–12 — 12 mA
——°±1 µA
DD
/2 – 0.8 — VDD/2 – 0.3 V
— — 0.24VDD + 1 V
Agere Systems Inc. 15
Page 16

FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
Data Sheet, Rev. 3
June 2001
Timing Characteristics
Table 6. Switching Characteristics
Symbol Parameter Measured Test Conditions Min Typ Max Unit
— Jitter, Transmit TPA, TPB — — — 0.15 ns
— Transmit Skew Between
TPA and TPB
tr Rise Time, Transmit (TPA/TPB) 10% to 90% RI = 56 Ω,
t
f Fall Time, Transmit (TPA/TPB) 90% to 10% RI = 56 Ω,
t
su
Setup Time,
50% to 50% See Figure 5 6 — — ns
Dn, CTLn, LREQ↑↓ to SYSCLK↑
t
h Hold Time,
50% to 50% See Figure 5 0 — — ns
Dn, CTLn, LREQ↑↓ from SYSCLK↑
t
d Delay Time,
50% to 50% See Figure 6 1 — 6 ns
SYSCLK↑ to Dn, CTLn↑↓
———±0.1 ns
——1.2ns
C
I = 10 pF
——1.2ns
C
I = 10 pF
Table 7. Clock Characteristics
Parameter Symbol Min Typ Max Unit
External Clock Source Frequency f 24.5735 24.5760 24.5785 MHz
1616 Agere Systems Inc.
Page 17

Data Sheet, Rev. 3
June 2001
Timing Waveforms
Figure 5. Dn, CTLn, and LREQ Input Setup and Hold Times Waveforms
FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
SYSCLK
th
tsu
Dn, CTLn, LREQ
5-6017.a (F)
SYSCLK
td
Dn, CTLn
Figure 6. Dn, CTLn Output Delay Relative to SYSCLK Waveforms
5-6018.a (F)
Agere Systems Inc. 17
Page 18

FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
Internal Register Configuration
The PHY register map is shown below in Table 8.
Table 8. PHY Register Map for the Cable Environment
Address Contents
Bit 0 Bit 1 Bit 2 Bit 3 Bit 4 Bit 5 Bit 6 Bit 7
2 Physical_ID R PS
0000
0001
2 RHB IBR Gap_count
0010
2 Extended (7)
0011
2 Max_speed
0100
2
0101
2 Resume_int ISBR Loop Pwr_fail Timeout Port_event Enab_accel Enab_multi
0110
2
01112 Page_select
1000
2 Register 0 Page_select
LCtrl
XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX
Contender Jitter Pwr_class
XXXXX
XXXXX
XXXXX
Data Sheet, Rev. 3
June 2001
Tot al _p or ts
Delay
Port_select
11112 Register 7 Page_select
REQUIRED
The meaning of the register fields within the PHY register map are defined by Table 9 below. Power reset values
not specified are resolved by the operation of the PHY state machines subsequent to a power reset.
Table 9. PHY Register Fields for the Cable Environment
Field Size Type Power Reset
Value
Physical_ID 6 r 000000 The address of this node determined during self-identification. A
R 1 r 0 When set to one, indicates that this node is the root.
PS 1 r — Cable power active.
RHB 1 rw 0 Root hold-off bit. When set to one, the force_root variable is TRUE,
IBR 1 rw 0 Initiate bus reset. When set to one, instructs the PHY to set ibr
Gap_count 6 rw 3F
Extended 3 r 7 This field has a constant value of seven, which indicates the
16 Used to configure the arbitration timer setting in order to optimize
XXXXX
value of 63 indicates a malconfigured bus; the link will not transmit
any packets.
which instructs the PHY to attempt to become the root during the
next tree identify process.
TRUE and reset_time to RESET_TIME. These values in turn
cause the PHY to initiate a bus reset without arbitration; the reset
signal is asserted for 166 µs. This bit is self-clearing.
gap times according to the topology of the bus. See Section 4.3.6
of IEEE Standard 1394-1995 for the encoding of this field.
extended PHY register map.
RESERVED
Description
1818 Agere Systems Inc.
Page 19

Data Sheet, Rev. 3
June 2001
FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
Internal Register Configuration
(continued)
Table 9. PHY Register Fields for the Cable Environment (continued)
Field Size Type Power Reset Value Description
Total_ports 4 r 3 The number of ports implemented by this PHY. This count
reflects the number.
Max_speed 3 r 010
2 Indicates the speed(s) this PHY supports:
000
2 = 98.304 Mbits/s
001
2 = 98.304 and 196.608 Mbits/s
010
2 = 98.304, 196.608, and 393.216 Mbits/s
011
2 = 98.304, 196.608, 393.216, and 786.43 Mbits/s
100
2 = 98.304, 196.608, 393.216, 786.432, and
1,572.864 Mbits/s
101
2 = 98.304, 196.608, 393.216, 786.432, 1,572.864, and
3,145.728 Mbits/s
All other values are reserved for future definition.
Delay 4 r 0000 Worst-case repeater delay, expressed as 144 + (delay * 20) ns.
LCtrl
1rw 1 Link Active. Cleared or set by software to control the value of
the L bit transmitted in the node’s self-ID packet 0, which will be
the logical AND of this bit and LPS active.
Contender 1 rw See description. Cleared or set by software to control the value of the C bit
transmitted in the self-ID packet. Powerup reset value is set by
C/LKON pin.
Jitter 3 r 000 The difference between the fastest and slowest repeater data
delay, expressed as (jitter + 1) * 20 ns.
Pwr_class 3 rw See description. Power-Class. Controls the value of the pwr field transmitted in
the self-ID packet. See Section 4.3.4.1 of IEEE Standard 13941995 for the encoding of this field. PC0, PC1, and PC2 pins set
up power reset value.
Resume_int 1 rw 0 Resume Interrupt Enable. When set to one, the PHY will set
Port_event to one if resume operations commence for any port.
ISBR 1 rw 0 Initiate Short (Arbitrated) Bus Reset. A write of one to this bit
instructs the PHY to set ISBR true and reset_time to
SHORT_RESET_TIME. These values in turn cause the PHY to
arbitrate and issue a short bus reset. This bit is self-clearing.
Loop 1 rw 0 Loop Detect. A write of one to this bit clears it to zero.
Pwr_fail 1 rw
1
Cable Power Failure Detect. Set to one when the PS bit
changes from one to zero. A write of one to this bit clears it to
zero.
Timeout 1 rw 0 Arbitration State Machine Timeout. A write of one to this bit
clears it to zero (see MAX_ARB_STATE_TIME).
Port_event 1 rw 0 Port Event Detect. The PHY sets this bit to one if any of con-
nected, bias, disabled, or fault change for a port whose
Int_enable bit is one. The PHY also sets this bit to one if
resume operations commence for any port and Resume_int is
one. A write of one to this bit clears it to zero.
Agere Systems Inc. 19
Page 20

FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
Data Sheet, Rev. 3
June 2001
Internal Register Configuration
Table 9. PHY Register Fields for the Cable Environment (continued)
Field Size Type Power Reset
Value
Enab_accel 1 rw 0 Enable Arbitration Acceleration. When set to one, the PHY will
Enab_multi 1 rw 0 Enable multispeed packet concatenation. When set to one, the link
Page_select 3 rw 000 Selects which of eight possible PHY register pages are accessible
Port_select 4 rw 000 If the page selected by Page_select presents per-port information,
The port status page is used to access configuration and status information for each of the PHY’s ports. The port is
selected by writing zero to Page_select and the desired port number to Port_select in the PHY register at address
2. The format of the port status page is illustrated by Table 10 below; reserved fields are shown shaded. The
0111
meanings of the register fields with the port status page are defined by Table 11.
(continued)
Description
use the enhancements specified in clause
specification. PHY behavior is unspecified if the value of
Enab_accel is changed while a bus request is pending.
will signal the speed of all packets to the PHY.
through the window at PHY register addresses 1000
1111
2, inclusive.
this field selects which port’s registers are accessible through the
window at PHY register addresses 1000
Ports are numbered monotonically starting at zero, p0.
of 1394
8.11
2 through 11112, inclusive.
a-2000
2 through
Table 10. PHY Register Page 0: Port Status Page
Address Contents
Bit 0 Bit 1 Bit 2 Bit 3 Bit 4 Bit 5 Bit 6 Bit 7
1000
2 AStat BStat Child Connected Bias Disabled
1001
2 Negotiated_speed Int_enable Fault
10102
10112
11002
11012
11102
11112
XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX
XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX
XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX
XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX
XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX
XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX
REQUIRED
XXXXX
RESERVED
XXXXX XXXXX XXXXX
2020 Agere Systems Inc.
Page 21

Data Sheet, Rev. 3
June 2001
FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
Internal Register Configuration
The meaning of the register fields with the port status page are defined by Table 11 below.
Table 11. PHY Register Port Status Page Fields
Field Size Type Power Reset
AStat 2 r — TPA line state for the port:
BStat 2 r — TPB line state for the port (same encoding as AStat).
Child 1 r 0 If equal to one, the port is a child; otherwise, a parent. The
Connected 1 r 0 If equal to one, the port is connected.
Bias 1 r 0 If equal to one, incoming TPBIAS is detected.
Disabled 1 rw 0 If equal to one, the port is disabled.
Negotiated_speed 3 r 000 Indicates the maximum speed negotiated between this PHY
Int_enable 1 rw 0 Enable port event interrupts. When set to one, the PHY will
Fault 1 rw 0 Set to one if an error is detected during a suspend or resume
(continued)
Value
Description
2 = invalid
00
01
2 = 1
10
2
= 0
11
2
= Z
meaning of this bit is undefined from the time a bus reset is
detected until the PHY transitions to state T1: Child Handshake during the tree identify process (see Section 4.4.2.2 in
IEEE Standard 1394-1995).
port and its immediately connected port; the encoding is the
same as for they PHY register Max_speed field.
set Port_event to one if any of connected, bias, disabled, or
fault (for this port) change state.
operation. A write of one to this bit clears it to zero.
Agere Systems Inc. 21
Page 22

FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
Data Sheet, Rev. 3
June 2001
Internal Register Configuration
The vendor identification page is used to identify the PHY’s vendor and compliance level. The page is selected by
writing one to Page_select in the PHY register at address 0111
shown in Table 12; reserved fields are shown shaded.
(continued)
2
. The format of the vendor identification page is
Table 12. PHY Register Page 1: Vendor Identification Page
Address Contents
Bit 0 Bit 1 Bit 2 Bit 3 Bit 4 Bit 5 Bit 6 Bit 7
2 Compliance_level
1000
1001
2
XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX XXXXX
10102
10112 Vendor_ID
1100
2
11012
11102 Product_ID
1111
2
REQUIRED
XXXXX
RESERVED
The meaning of the register fields within the vendor identification page are defined by Table 13.
Table 13. PHY Register Vendor Identification Page Fields
Field Size Type Description
Compliance_level 8 r Standard to which the PHY implementation complies:
0 = not specified
1 = IEEE 1394
a-2000
Agere’s FW803 compliance level is 1.
All other values reserved for future standardization.
Vendor_ID 24 r The company ID or organizationally unique identifier (OUI) of the manufacturer
of the PHY. Agere’s vendor ID is 00601D
16. This number is obtained from the
IEEE registration authority committee (RAC). The most significant byte of
Vendor_ID appears at PHY register location 1010
1100
2.
2 and the least significant at
Product_ID 24 r The meaning of this number is determined by the company or organization that
has been granted Vendor_ID. Agere’s FW803 product ID is 081402
significant byte of Product_ID appears at PHY register location 1101
least significant at 1111
2
.
16
. The most
2
and the
The vendor-dependent page provides access to information used in manufacturing test of the FW803.
2222 Agere Systems Inc.
Page 23

Data Sheet, Rev. 3
)
June 2001
Outline Diagrams
64-Pin TQFP
Dimensions are in millimeters.
.
12.00 ± 0.20
10.00 ± 0.20
PIN #1
IDENTIFIER ZONE
64 49
FW803 PHY IEEE 1394A
Three-Cable Transceiver/Arbiter Device
1.00 REF
0.25
GAGE PLANE
1
16
0.50 TYP
17 32
DETAIL A
DETAIL B
0.05/0.15
48
10.00
± 0.20
33
1.40 ± 0.05
1.60 MAX
12.00
± 0.20
SEATING PLANE
0.08
SEATING PLANE
0.19/0.27
DETAIL A
DETAIL B
0.45/0.75
0.106/0.200
0.08
M
5-3080 (F
Ordering Information
Device Code Package Comcode
FW803-09-DB 64-Pin TQFP 108697079
Agere Systems Inc. 23
Page 24

For additional information, contact your Agere Systems Account Manager or the following:
INTERNET: http://www.agere.com
E-MAIL: docmaster@micro.lucent.com
N. AMERICA: Agere Systems Inc., 555 Union Boulevard, Room 30L-15P-BA, Allentown, PA 18109-3286
1-800-372-2447, FAX 610-712-4106 (In CANADA: 1-800-553-2448, FAX 610-712-4106)
ASIA PACIFIC: Agere Systems Singapore Pte. Ltd., 77 Science Park Drive, #03-18 Cintech III, Singapore 118256
Tel. (65) 778 8833, FAX (65) 777 7495
CHINA: Agere Systems (Shanghai) Co., Ltd., 33/F Jin Mao Tower, 88 Century Boulevard Pudong, Shanghai 200121 PRC
Tel. (86) 21 50471212, FAX (86) 21 50472266
JAPAN: Agere Systems Japan Ltd., 7-18, Higashi-Gotanda 2-chome, Shinagawa-ku, Tokyo 141, Japan
Tel. (81) 3 5421 1600, FAX (81) 3 5421 1700
EUROPE: Data Requests: DATALINE: Tel. (44) 7000 582 368, FAX (44) 1189 328 148
Technical Inquiries: GERMANY: (49) 89 95086 0 (Munich), UNITED KINGDOM: (44) 1344 865 900 (Ascot),
FRANCE: (33) 1 40 83 68 00 (Paris), SWEDEN: (46) 8 594 607 00 (Stockholm), FINLAND: (358) 9 3507670 (Helsinki),
ITALY: (39) 02 6608131 (Milan), SPAIN: (34) 1 807 1441 (Madrid)
Agere Systems Inc. reserves the right to make changes to the product(s) or information contained herein without notice. No liability is assumed as a result of their use or application.
Copyright © 2001 Agere Systems Inc.
All Rights Reserved
Printed in U.S.A.
June 2001
DS99-302CMPR-3 (DS99-302CMPR-2)
 Loading...
Loading...