

Page 1
www.fairchildsemi.com
FAN8082D
Bi-directional DC Motor Driver
Features
• Built-in brake function for stable brake characteristics.
• Built-in element to absorb a surge current derived from
changing motor direction and braking motor drive.
• Motor speed control by a n exter na l volt age.
• Stable motor dir e c ti on ch a ng e.
• Interfaces with CMOS devices.
• Built-in the thermal shut down circuit (165°C).
• Low standby current. (6.5mA)
Description
The FAN8082D is a monolithic integrated circuit designed
for driving bi-directional DC motor with braking and speed
control, and it is suitable for the loading motor driver of
VCR, CDP, and TOY systems. The speed control can be
achieved by adjusting the external voltage of the speed
control pin. It has two pins of logic inputs for control ling the
forward/ reverse and braking.
8-SOP-225
Typical Applications
• Compact disk player (CDP) tray or changer
• Low current DC motor such as audio or video equipment.
• General DC motor
©2001 Fairchild Semiconductor Corporation
Ordering Information
Device Package Operating Temp.
FAN8082D 8-SOP-225 −25°C ~ +75°C
FAN8082DTF 8-SOP-225 −25°C ~ +75°C
Rev. 1.0.0
Page 2
BI-DIRECTIONAL DC MOTOR DRIVER
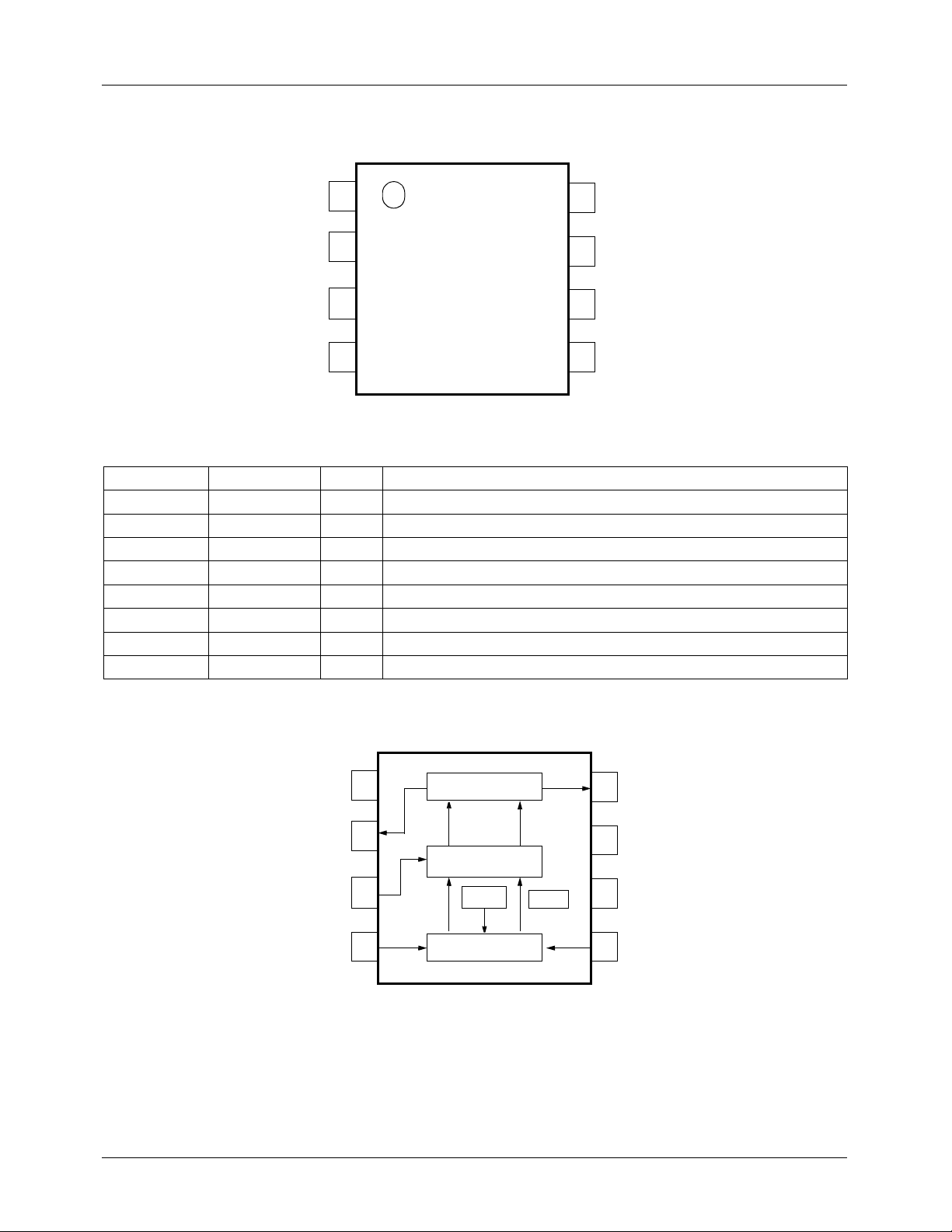
Pin Assignments
GND
V
O1
1
2
8
V
O2
7
PV
CC
FAN8082D
V
CTL
3
V
IN1
4
Pin Definitions
Pin Number Pin Name I/O Pin Function Description
1 GND - Ground
2V
3V
4V
5V
6SV
7PV
8V
O1
CTL
IN1
IN2
CC
CC
O2
O Output 1
I Motor speed control
I Input 1
I Input 2
- Supply voltage (Signal)
- Supply voltage (Power)
O Output 2
6
SV
CC
5
V
IN2
Internal Block Diagram
V
GND
V
O1
CTL
V
IN1
1
2
DRIVER OUT
8
V
O2
7
PV
CC
PRE DRIVER
3
4
TSD
LOGIC SWITCH
BIAS
6
SV
CC
5
V
IN2
2
Page 3

Equivalent Circuit
V
Description Pin No. Internal circuit
BI-DIRECTIONAL DC MOTO R DRIV E R
Vcc
Vcc
Output 2, 8
Speed control 3
2
8
3
VCC
VCC
Vcc
Vcc
cc
Vcc
Input 4, 5
SVCC
PVCC
4
5
VCC
6
7
6
7
3
Page 4
BI-DIRECTIONAL DC MOTOR DRIVER
Absolute Maximum Ratings (Ta = 25°°°°C)
Parameter Symbol Value Unit Remark
Supply voltage V
Maxium Output current I
Power dissipation P
Operating temperature T
Storage temperature T
NOTES:
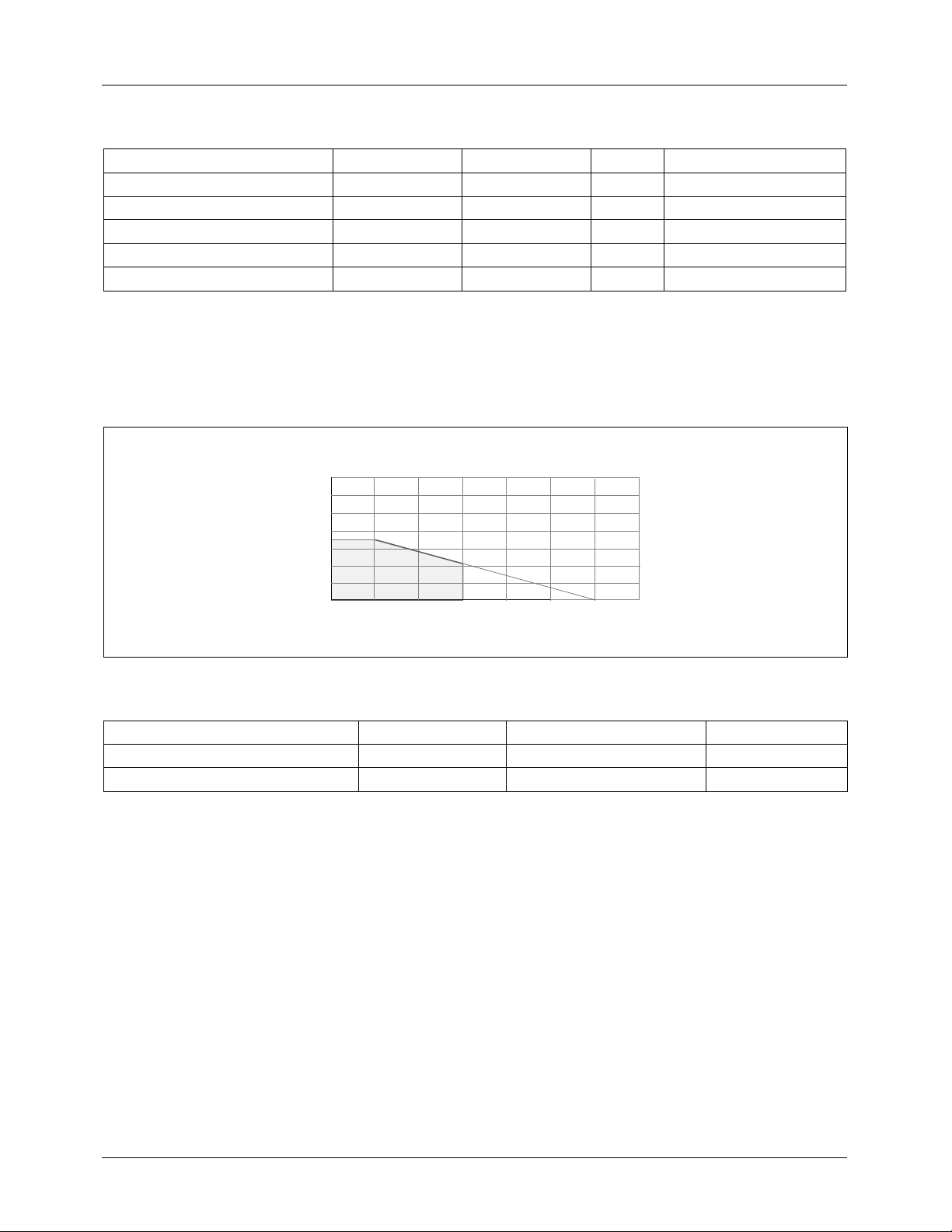
1. Duty 1 / 100, pulse wid t h 50 0µs
2. 1) When mounted on glass epoxy PCB (76.2 × 114 × 1.57mm)
2) Power dissipation reduces 2.64mW / °C for using above Ta=25°C.
3)
Do not exceed Pd and SOA(Safe Operating Area).
CCmax
Omax
d
OPR
STG
13 V -
note1
0.8
330
note2
A-
mW -
−25 ~ +75 °C-
−55 ~ +125 °C-
Power Dissipation Curve
Pd (mW)
330
SOA
0
0 25 50 75 100 125
150
Ambient temperature, Ta [°C]
15
Recommened Operating Conditions (Ta = 25°°°°C)
Parameter Symbol Operating voltage range Unit
Operating supply voltage (Signal)
Operating supply voltage (Power)
NOTE:
Caution 1) PV
Caution 2) V
≤ SV
CC
CTL
CC
must be opened or 4.0 ≤ V
note
note
CTL
≤ PV
SV
PV
CC
CC
CC
7 ~ 12 V
4 ~ 8 V
4
Page 5

BI-DIRECTIONAL DC MOTO R DRIV E R
Electrical Characteristics
(SVCC=PVCC=12V,Ta = 25°°°°C)
Parameter Symbol Conditions Min. Typ. Max. Unit
Quiescent current I
Min. input-on current 1 I
Min. input-on current 2 I
Input threshold voltage 1 V
Input threshold voltage 2 V
Output leakage current 1 I
Output leakage current 2 I
Zener current 1 I
Zener current 2 I
Output voltage 1 V
Output voltage 2 V
Saturation voltage 1 (Upper) V
Saturation voltage 2 (Upper) V
Saturation voltage 1 (Lower) V
Saturation voltage 2 (Lower) V
CC
IN1
IN2
ITH1
ITH2
OL1
OL2
Z1
Z2
O1
O2
SAT1IO
SAT2
SAT3
SAT4
Pin4 & 5: GND, RL=
RL=∞, Pin4=I
, Pin5=L - 10 30 µA
IN1
RL=∞, Pin4=L, Pin5=I
∞
IN
46.59.5mA
-1030µA
RL=∞, Pin4=VIN, Pin5=L 1.0 1.3 1.6 V
RL=∞, Pin4=L, Pin5=V
IN
1.0 1.3 1.6 V
RL=∞, Pin4 & 6=GND - 0.01 1 mA
RL=∞, Pin4 & 6=GND - 0.01 1 mA
RL=∞, Pin4=H, Pin5=L - 0.85 1.5 mA
RL=∞, Pin4=L, Pin5=H - 0.85 1.5 mA
RL=60Ω, Pin4=H, Pin5=L 6.6 7.2 7.4 V
RL=60Ω, Pin4=L, Pin5=H 6.6 7.2 7.4 V
=300mA - 1.9 2.3 V
IO=500mA - 1.9 2.3 V
IO=300mA - 0.25 0.5 V
IO=500mA - 0.4 0.65 V
5
Page 6

BI-DIRECTIONAL DC MOTOR DRIVER
Application Information
1. Thermal Shut Down Circuit
I
Q1
V1
R1
Q2
V2
R2
When Ta = 25°C, Q2 & Q3 are Turned-off and output stage operates normally.
V
= I × (R1 + R2)
1
V
= R2 / (R1 + R2) × V1 = 0.37V
2
When Ta = 165°C, Q2 & Q3 Turn-on and it turns-off the output stage.
0.70V - 0.37V = 330mV (When Q
And temperature coefficient of Q
& Q3 are Turn-on, VbeQ2 = VbeQ3 = 0.70V)
2
= Q3 = −2mV / °C
2
∴ T .S . D: 330mV / 2mV = 165°C
Q3
2. Logic Input & Output Table
Input Output
Pin #4 Pin #5 Pin #2 Pin #8
Low Low *Low *Low Standby
High Low High Low Forward
Low High Low High Reverse
High High *Low *Low Brake
INPUT High is above 2.0V.
INPUT Low is below 0.7V.
*Low : All Power TRs are off-state.
But internal Bias makes output Voltage low state.
Motor
6
Page 7

3. Logic Switch Circuit
SV
BI-DIRECTIONAL DC MOTO R DRIV E R
CC
V1
4
V
7.4V
Q4
Q5
CTL
ZD
V2
Q7
Q6
3
5
ZD : External Component
*
This circuit define reference voltage o f output.
When pin #4 is “H” and pin #5 is “L”,
- V1 = Vzd + Vbe
- V2 = Vbeq 7 + Vsat
+ VbeQ5 ·=· 8.9V
Q4
·=· 0.87V
Q6
V1 and V2 are related with the output voltage of the motor and change according to the voltage of pin #3 (V
4. Drive Output Circuit
P
VCC
V1
Q1
Q4
V2
CTL
).
V1 = 8.9V
V
= 0.87V
2
V
= V1 - V
O1
VO2 = V
VO = V
Q6SAT
- V
O1
BEQ1
O2
- V
= V1 - V
IRL = (VO1 - VO2) / R
BEQ2
L
BEQ1
- V
BEQ2
- V
R1
Q6SAT
Q2 Q5
V
O1
Q3
R
L
M
Q6
R2
V
O2
7
Page 8

BI-DIRECTIONAL DC MOTOR DRIVER
Typical Perfomance Chracteristics
CHARACTERISTIC GRAPHS
CHARACTERISTIC GRAPHS
CHARACTERISTIC GRAPHS
CHARACTERISTIC GRAPHS
CHARACTERISTIC GRAPHSCHARACTERISTIC GRAPHS
CHARACTERISTIC GRAPHSCHARACTERISTIC GRAPHS
CC
CC
CC
CC
CC
CC
CC
1.
1. VVVV
1.
1. VVVV
1. 1.
1. 1.
10
10
9
9
8
8
7
7
6
6
(mA)
(mA)
5
5
CC
CC
I
I
4
4
3
3
2
2
1
1
0
0
0 246810 12 14 16 18 20
0 246810 12 14 16 18 20
3.
3. VVVV
3.
3. VVVV
3. 3.
3. 3.
CC
vs
vs IIII
vs
vs IIII
CCCC
CCCC
CCCC
CCCC
vsvs
vsvs
VIN = 0V
VIN = 0V
(V)
(V)
V
V
CC
CC
Figure 1. VCC vs I
CTL
CTL
CTL
CTL
vs. Vo
vs. Vo 4.
vs. Vo
vs. Vo 4.
CTLCTL
CTLCTL
vs. Vovs. Vo
vs. Vovs. Vo
CC
CC
CC
CC
2.
2. Temperature
Temperature vs
2.
2. Temperature
Temperature vs
2. 2.
TemperatureTemperature
2. 2.
TemperatureTemperature
10
10
9
9
8
8
7
7
6
6
(mA)
(mA)
5
5
CC
CC
I
I
4
4
3
3
2
2
1
1
0
0
-35-155 25 456585
-35-155 25 456585
Figure 2. Temperature vs I
4. Temperatur e vs. Vo
Temperature vs. Vo
4. Temperatur e vs. Vo
Temperature vs. Vo
4. 4.
Temperature vs. VoTemperature vs. Vo
4. 4.
Temperature vs. VoTemperature vs. Vo
vs IIII
vs IIII
vsvs
vsvs
CC
CCCC
CCCC
Temp.(
Temp.(
VCC = 12V
VCC = 12V
VIN = 0V
VIN = 0V
°
°
C)
C)
CC
12
12
10
10
8
8
(V)
(V)
6
6
O
O
V
V
4
4
2
2
0
0
0 246810 12
0 246810 12
V
V
CTL
Figure 3. V
OOOO
OOOO
5.
5. IIII
vs. V
vs. V
5.
5. IIII
vs. V
vs. V
SAT
SAT
SAT
vs. Vvs. V
vs. Vvs. V
SAT
SATSAT
SATSAT
5. 5.
5. 5.
3.0
3.0
2.5
2.5
2.0
2.0
(V)
(V)
1.5
1.5
SAT
SAT
V
V
1.0
1.0
0.5
0.5
0.0
0.0
0.2 0.4 0.60.8 1.0 1.2
0.2 0.4 0.60.8 1.0 1.2
CTL
vs V
CTL
(UPPER)
(UPPER)
(UPPER)
(UPPER)
(UPPER)(UPPER)
(UPPER)(UPPER)
I
I
O
O
Figure 5. IO vs V
(A)
(A)
(V)
(V)
O
SAT
VCC = 12V
VCC = 12V
V
V
= 5V/0V
= 5V/0V
IN
IN
R
R
= 60
= 60
L
L
VCC = 12V
VCC = 12V
V
= ope
V
= ope
CTL
CTL
V
V
= 5V/0V
= 5V/0V
IN
IN
(UPPER)
Ω
Ω
7.7
7.7
7.6
7.6
7.5
7.5
7.4
7.4
7.3
7.3
7.2
7.2
(V)
(V)
7.1
7.1
O
O
V
V
7.0
7.0
6.9
6.9
6.8
6.8
6.7
6.7
6.6
6.6
6.5
6.5
-35-155 25 456585
-35-155 25 456585
Temp.(
Temp.(
Figure 4. Temperature vs V
OOOO
OOOO
5.
5. IIII
vs. V
vs. V
5.
5. IIII
vs. V
vs. V
5. 5.
vs. Vvs. V
5. 5.
vs. Vvs. V
1.0
1.0
0.9
0.9
0.8
0.8
0.7
0.7
0.6
0.6
(V)
(V)
0.5
0.5
SAT
SAT
V
V
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0.0
0.0
0.2 0.4 0.60.8 1.0 1.2
0.2 0.4 0.60.8 1.0 1.2
(LOWER)
(LOWER)
(LOWER)
(LOWER)
SAT
SAT
SAT
SAT
SATSAT
SATSAT
(LOWER)(LOWER)
(LOWER)(LOWER)
Figure 6. I
O
I
I
O
O
vs V
(A)
(A)
SAT
°
°
C)
C)
VCC = 12V
VCC = 12V
V
V
CTL
CTL
V
V
IN
IN
(LOWER)
VCC = 12V
VCC = 12V
V
V
= 7.4 V
= 7.4 V
CTL
CTL
V
V
= 5V/0V
= 5V/0V
IN
IN
Ω
Ω
RL = 60
RL = 60
O
= open
= open
= 5V/0V
= 5V/0V
8
Page 9

Test Circuits
BI-DIRECTIONAL DC MOTO R DRIV E R
S1
A
S2
Z
D
7.4V
GND
1
V
2
O1
3
V
CTL
V
IN1
4
A
S5
FAN8082D
S3
S4
A
V
IN
PV
SV
8
V
O2
7
CC
6
CC
V
IN2
5
A
V
CC
9
Page 10

BI-DIRECTIONAL DC MOTOR DRIVER
Application Circuits
GND
1
V
2
O1
F AN8082D
3
V
CTL
PV
SV
8
V
O2
V
CC
CC
CC
RS
7
6
V
V
IN1
4
Z
D
IN2
5
104
104
M
Must use RS.
*
10
Page 11

BI-DIRECTIONAL DC MOTO R DRIV E R
11
Page 12

BI-DIRECTIONAL DC MOTOR DRIVER
DISCLAIMER
FAIRCHILD SEMICONDUCTOR RESERVES THE RIGHT TO MAKE CHANGES WITHOUT FURT HER NOTICE TO ANY
PRODUCTS HEREI N TO IMPROVE RELIABILITY, FUNCTIO N OR DESIGN. FAIRCH IL D DOES NOT ASSUME ANY
LIABILITY ARISING OUT OF THE APPLICATION OR USE OF ANY PRODUCT OR CIRCUIT DESCRIBED HEREIN; NEITHER
DOES IT CONVEY ANY LICENSE UNDER IT S PATENT RIGHTS, NOR THE RIGHTS OF OTHE RS.
LIFE SUPPORT POL I CY
FAIRCHILD’S PR ODUCTS ARE NOT AUTH ORIZED FOR USE AS C RITICAL COMPONENT S IN LIFE SUPPORT DE VICES
OR SYSTEMS WITHOUT THE EXPRESS WRITTEN APPROVAL OF THE PRESIDENT OF FAIRCHILD SEMICONDUCTOR
CORPORATION. As used herein :
1. Life support devices or systems are devices or systems
which, (a) are intended for surgical implant into the body,
or (b) support or sustain life, and (c) whose failure to
perform when properly used in accordance with
2. A critical component in any component of a life support
device or sy stem whose fai lure to perform can be
reasonably expec ted to cause the failur e of the life support
device or system, or to affect its safety or effec t iv ene ss .
instructions for use provided in the labeling, can be
reasonably expected to result in a significant injury of the
user.
www.fairchildsemi.com
10/25/01 0.0m 001
2001 Fairchild Semiconductor Corporation
Stock#DSxxxxxxxx
 Loading...
Loading...