

Page 1
INTEGRATED CIRCUITS
AU5790
Single wire CAN transceiver
Preliminary specification
Supersedes data of 1998 Mar 10
IC18 Data Handbook
1999 Oct 28
Page 2
Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
FEATURES
•Supports in-vehicle class B multiplexing via a single bus line with
ground return
•33 kbps CAN bus speed with loading as per J2411, up to
41.6 kbps with modified loading
•83 or 100 kbps high-speed transmission mode
•Low RFI due to output waveshaping
•Direct battery operation with protection against load dump, jump
start and transients
•Bus terminal protected against short-circuits and transients in the
automotive environment
•Built-in loss of ground protection
•Thermal overload protection
•Supports communication between control units even when
network in low-power state
•70 µA typical power consumption in sleep mode
•8-pin SOIC
•Fully integrated receiver filter
•±8kV ESD protection on bus and battery pins
DESCRIPTION
The AU5790 is a line transceiver, primarily intended for in-vehicle
multiplex applications. The device provides interfacing between a
CAN data link controller and a single wire physical bus line. The
achievable bus speed is primarily a function of the network time
constant and bit timing, e.g., up to 41.6 kbps with a network
including 32 bus nodes. The AU5790 provides advanced
sleep-/wake-up functions to minimize power consumption when a
vehicle is parked, while offering the desired control functions of the
network at the same time. Fast transfer of larger blocks of data is
supported using the high-speed data transmission mode.
PIN CONFIGURATION
TxD
NSTB (Mode 0)
1
2
8
7
GND
CANH (BUS)
AU5790
EN (Mode 1)
RxD
3
4
SO8
6
5
RTH (Load)
BAT
QUICK REFERENCE DA TA
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
V
BAT
T
amb
V
BATD
V
CAN_N
V
T
t
BO
t
BI
I
BATS
Operating supply voltage 5.5 12 27 V
Operating ambient temperature –40 +125 °C
Battery voltage load dump; 1s +45 V
Bus output voltage 3.6 4.55 V
Bus input threshold 1.8 2.2 V
Bus output delay 7.2 µs
Bus input delay 1 µs
Sleep mode supply current 70 µA
ORDERING INFORMATION
DESCRIPTION TEMPERATURE RANGE ORDER CODE DWG #
SO8: 8-pin plastic small outline package; packed in tubes
SO8: 8-pin plastic small outline package; packed on tape and reel
–40_ to +125_C
–40_ to +125_C
AU5790D SOT96–1
AU5790D–T SOT96–1
SL01198
1999 Oct 28
2
Page 3
Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
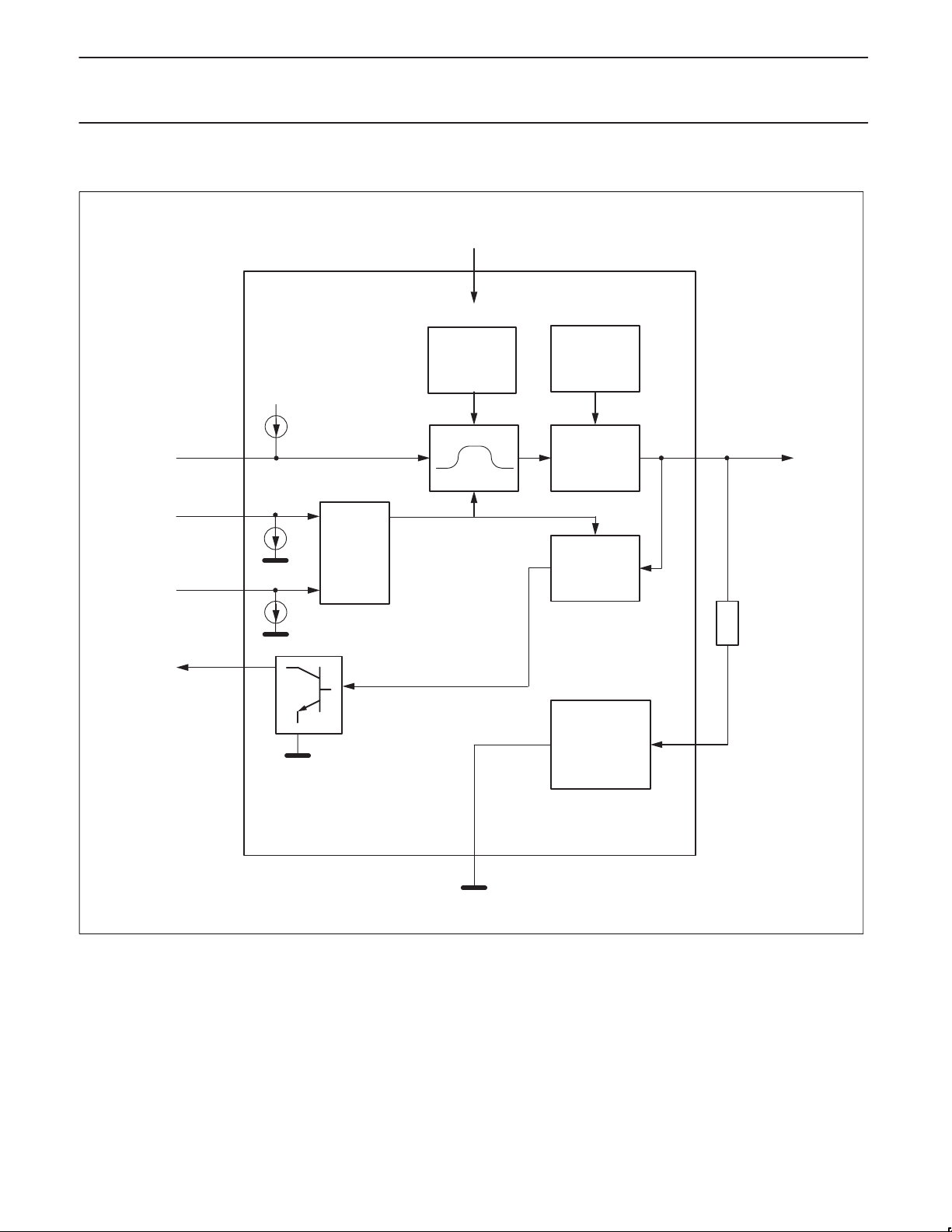
BLOCK DIAGRAM
BATTERY (+12V)
BAT
1
TxD
NSTB
(Mode 0)
(Mode 1)
RxD
EN
VOLTAGE
REFERENCE
3
MODE
6
4
CONTROL
TEMP.
PROTECTION
OUTPUT
BUFFER
BUS
RECEIVER
LOSS OF
GROUND
PROTECTION
CANH
7
R
T
5
RTH
(LOAD)
1999 Oct 28
AU5790
8
GND
SL01199
Figure 1. Block Diagram
3
Page 4
Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
PIN DESCRIPTION
SYMBOL PIN DESCRIPTION
TxD 1 Transmit data input; high: transmitter passive; low: transmitter active
NSTB (Mode 0) 2 Stand-by control; high: normal and high-speed mode; low: sleep and wake-up mode
EN (Mode 1) 3 Enable control; high: normal and wake-up mode; low: sleep and high-speed mode
RxD 4 Receive data output; low: active bus condition detected; float/high: passive bus condition detected
BAT 5 Battery supply input (12V nom.)
RTH 6 Switched ground pin, pulls the load to ground, except in case the module ground is disconnected
CANH 7 Bus line transmit input/output
GND 8 Ground
FUNCTIONAL DESCRIPTION
The AU5790 is an integrated line transceiver IC that interfaces a
CAN protocol controller to the vehicle’s multiplexed bus line. It is
primarily intended for automotive “Class B” multiplexing applications
in passenger cars using a single wire bus line with ground return.
The achievable bit rate is primarily a function of the network time
constant and the bit timing parameters. For example, the maximum
bus speed is 33 kbps with bus loading as specified in J2411 for a full
32 node bus, while 41.6 kbps is possible with modified bus loading.
The AU5790 also supports a low-power sleep mode to help meet
ignition-off current draw requirements.
The protocol controller feeds the transmit data stream to the
transceiver’s TxD input. The AU5790 transceiver converts the TxD
data input to a bus signal with controlled slew rate and waveshaping
to minimize emissions. The bus output signal is transmitted via the
CANH in/output, connected to the physical bus line. If TxD is low,
then a typical voltage of 4V is output at the CANH pin. If TxD is high,
then the CANH output is pulled passive low via the local bus load
resistance R
module ground, the resistor R
AU5790. By providing this switched ground pin, no current can flow
from the floating module ground to the bus. The bus receiver detects
the data stream on the bus line. The data signal is output at the RxD
pin being connected to a CAN controller. The AU5790 provides
appropriate filtering to ensure low susceptibility against
electromagnetic interference. Further enhancement is possible by
applying an external capacitor between CANH and ground potential.
The device features low bus output leakage current at power supply
failure situations.
If the NSTB and EN control inputs are pulled low or floating, the
AU5790 enters a low-power or “sleep” mode. This mode is
dedicated to minimizing ignition-off current drain, to enhance system
efficiency. In sleep mode, the bus transmit function is disabled,
. To provide protection against disconnection of the
T
is connected to the RTH pin of the
T
e.g., the CANH output is inactive even when TxD is pulled low. An
internal network active detector monitors the bus for any occurrence
of signal edges on the bus line. If such edges are detected, this will
be signalled to the CAN controller via the RxD output. Normal
transmission mode will be entered again upon a high level being
applied to the NSTB and EN control inputs. These signals are
typically being provided by a controller device.
Sleeping bus nodes will generally ignore normal communication on
the bus. They should be activated using the dedicated wake-up
mode. When NSTB is low and EN is high the AU5790 enters
wake-up mode, i.e., it sends data with an increased signal level.
This will result in an activation of other bus nodes being attached to
the network.
The AU5790 also provides a high-speed transmission mode,
supporting bit rates up to 100 kbps. If the NSTB input is pulled high
and the EN input is low, then the internal waveshaping function is
disabled, i.e., the bus driver is turned on and off as fast as possible
to support high-speed transmission of data. Consequently, the EMC
performance is degraded in this mode compared to the normal
transmission mode. In high-speed transmission mode the AU5790
supports the bus signal levels as specified for the CANH output of
the fault-tolerant CAN transceiver TJA1054.
The AU5790 features special robustness at its BAT and CANH pins.
Hence the device is well suited for applications in the automotive
environment. The BA T input is protected against 45V load dump and
jump start conditions. The CANH output is protected against wiring
fault conditions, e.g., short circuit to ground or battery voltage as
well as typical automotive transients. In addition, an over-temperature
shutdown function with hysteresis is incorporated protecting the
device under system fault conditions. In case of the chip
temperature reaching the trip point, the AU5790 will latch-off the
transmit function. The transmit function is available again after a
small decrease of the chip temperature.
Table 1. Control Input Summary
NSTB EN TxD Description CANH RxD
0 0 don’t care Sleep mode 0V float (high)
0 1 Tx-data Wake-up transmission mode 0V, 12V bus state
1 0 Tx-data High-speed transmission mode 0V, 4V bus state
1 1 Tx-data Normal transmission mode 0V, 4V bus state
NOTE:
1. RxD outputs the bus state. If the bus level is below the receiver threshold (i.e., all transmitters passive), then RxD will be floating (i.e., high,
considering external pull-up resistance). Otherwise, if the bus level is above the receiver threshold (i.e., at least one transmitter is active),
then RxD will be low.
1999 Oct 28
4
1
1
1
Page 5
Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
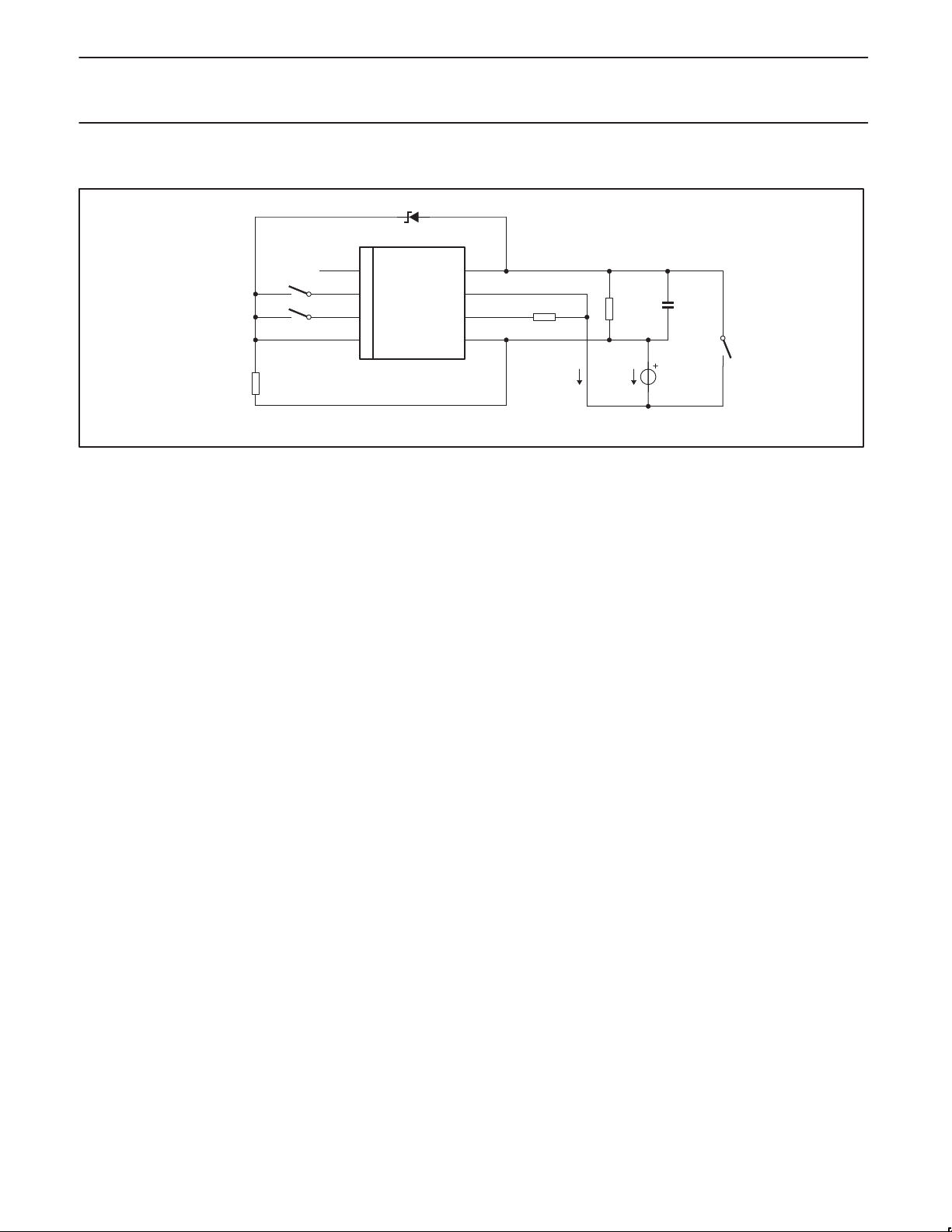
TEST CIRCUITS
5.1V
TxD
NSTB
EN
RxD
2.4 kΩ
NOTES:
Opening S3 simulates loss of module ground.
Check I_CAN_LG with the following switch positions:
1. S1 = open = S2
2. S1 = open, S2 = closed
3. S1 = closed, S2 = open
4. S1 = closed = S2
GND
CANH
AU5790
RTH
BAT
9.1 kΩ
I_CAN_LG
Figure 2. Loss of ground test circuit
2.4 kΩ
1 µF
S3
V
BAT
SL01234
1999 Oct 28
5
Page 6

Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
APPLICATION INFORMATION
The information provided in this Section is not part of the IC specification, but is presented for information purpose only.
CAN CONTROLLER
(e.g. SJA1000)
PORT
TX0 RX0
PORT
2.4KΩ
R
D
+5V
100 nF
1N5060
or equiv.
+12V
SL01200
TxD RxD
(Mode 0) (Mode 1)
AU5790
TRANSCEIVER
RTH
9.1K, 1%
CAN BUS LINE
Note 1 TX0 should be configured to push-pull operation, active low; e.g., Output Control Register = 1E hex.
Note 2 Recommended range for the load resistor is 3k < R
< 11k.
T
CANH
R
T
47 µH
10%
ENNSTB
220 pF
BAT
GND
C
L
Figure 3. Application Example for the AU5790 with High-Speed Capability Through the EN Input
Table 2. Maximum CAN Bit Rate
MAXIMUM BIT RATE AT
MODE
0.2% CLOCK ACCURACY
Normal transmission 41.6 kbps 33.3 kbps
High-speed transmission 100 kbps 83.3 kbps
Sample point as % of bit time 85% 85%
Bus Time constant, normal mode 1.0 to 3.7µS 1.0 to 4.6 µS
MAXIMUM BIT RATE AT
0.35% CLOCK ACCURACY
1999 Oct 28
6
Page 7

Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
ABSOLUTE MAXIMUM RATINGS
According to the IEC 134 Absolute Maximum System: operation is not guaranteed under these conditions; all voltages are referenced to
pin 8 (GND); positive currents flow into the IC, unless otherwise specified.
SYMBOL
V
BAT
V
BATld
V
BATtr2
V
BATtr3
V
CANH_1
V
CANH_2
V
CANHtr1
V
CANHtr2
V
CANHtr3
V
RTH1
V
RTH0
V
I
ESD
BAHB
ESD
CHHB
ESD
RTHB
ESD
LGHB
R
Tmin
P
tot
Θ
JA1
Θ
JA2
Θ
JA3
T
amb
T
stg
T
vj
Supply voltage –0.3 +27 V
Short-term supply voltage Load dump; ISO7637/1
Transient supply voltage ISO 7637/1 test pulse 2
Transient supply voltage ISO 7637/1 pulses 3a and 3b
CANH voltage V
CANH voltage V
Transient bus voltage ISO 7637/1 test pulse 1, Notes 1 and 2 –100 V
Transient bus voltage ISO 7637/1 test pulse 2, Notes 1 and 2 +100 V
Transient bus voltage ISO 7637/1 test pulses 3a, 3b,
DC voltage on pin RTH V
DC voltage on pin RTH V
DC voltage on pins TxD, EN, RxD, NSTB –0.3 +7 V
ESD capability of pin BAT Direct contact discharge,
ESD capability of pin CANH Direct contact discharge,
ESD capability of pin RTH Direct contact discharge,
ESD capability of pins TxD, NSTB, EN, RxD
and RTH
Bus load resistance RT being connected to pin
RTH
Maximum power dissipation
Thermal impedance Without copper area being attached to
Thermal impedance With 10 sqmm of copper area being
Thermal impedance With 25 sqmm of copper area being
Operating ambient temperature –40 +125
Storage temperature –40 +150 °C
Junction temperature –40 +150 °C
NOTES:
1. Test pulses are applied to CANH through a series capacitance of 1 nF.
2. Rise time for test pulse 1: tr < 1 µs; pulse 2: tr < 100 ns; pulses 3a/3b: tr < 5 ns.
PARAMETER CONDITIONS MIN. MAX. UNIT
+45 V
test pulse 5 (SAE J1113, test pulse 5),
T < 1s
+100 V
(SAE J1113, test pulse 2), with series
diode and bypass cap of 100 nF
between BAT and GND pins, Note 2.
–150 +100 V
(SAE J1113 test pulse 3a and 3b), Note
2.
> 2 V –10 +18 V
BAT
< 2 V –16 +18 V
BAT
–150 +100 V
Notes 1 and 2
> 2 V, voltage applied to pin RTH
BAT
via a 2 kΩ series resistor
> 2 V, voltage applied to pin RTH
BAT
via a 2 kΩ series resistor
–10 +18 V
–16 +18 V
–8 +8 kV
R=1.5 kΩ, C=100 pF
–8 +8 kV
R=1.5 kΩ, C=100 pF
–8 +8 kV
R=1.5 kΩ + 3 kΩ, C=100 pF
Direct contact discharge,
–2 +2 kV
R=1.5 kΩ , C=100 pF
3 kΩ
at T
= +125 °C with 25 sqmm of
amb
copper area being attached to GND pin
180 mW
t.b.f. K/W
GND pin
152 K/W
attached to GND pin
138 K/W
attached to GND pin
°C
1999 Oct 28
7
Page 8

Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
DC CHARACTERISTICS
–40°C < T
–1V < V
C
< 11 nF; 1µs < RL ∗ CL < 3.7µs; RxD pull-up resistor 2.2 kΩ < Rd < 2.6 kΩ; RxD: loaded with CLR < 30pF to GND;
L
all voltages are referenced to pin 8 (GND); positive currents flow into the IC;
typical values reflect the approximate average value at V
SYMBOL
Pin BAT
V
BAT
V
BATL
V
BATLO
I
BATPN
I
BATPW
I
BATPH
I
BATN
I
BATW
I
BATH
I
BATS
Pin CANH
V
CANHN
V
CANHW
V
CANHWL
V
CANHH
I
CANHRR
I
CANHRD
I
CANHDD
–I
CANH_N
–I
CANHW
–I
CANHH
I
CANLG
< +125_C; 5.5V < V
amb
< +16V; bus load resistor at pin RTH: 3 kΩ < RT < 11 kΩ; total bus load resistance 270 Ω < RL < 11 kΩ;
CANH
< 16V; –0.3V < V
BAT
< 5.5V; –0.3V < V
TxD
= 13V and T
BAT
< 5.5V; –0.3V < VEN < 5.5V; –0.3V < V
NTSB
= 25°C, unless otherwise specified.
amb
PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Operating supply voltage Note 3 5.5 12 27 V
Low battery state Part functional or in
undervoltage lockout state
2.5 5.5 V
Supply undervoltage lockout state TxD = 1 or 0; check CANH and
RxD are floating
Passive state supply current in
NSTB = 5V, EN = 5V, TxD = 5V
normal mode
Passive state supply current in
wake-up mode
Passive state supply current in
high speed mode
Active state supply current in
normal mode
Active state supply current in
wake-up mode
Active state supply current in
high speed mode
NSTB = 5V, EN = 5V, TxD = 5V,
Note 4
NSTB = 5V, EN = 0V, TxD = 5V,
Note 4
NSTB = 5V, EN = 5V, TxD = 0V,
= 270 Ω
R
L
NSTB = 0V, EN = 5V, TxD = 0V,
RL = 270 Ω, Note 4
NSTB = 5V, EN = 0V, TxD = 0V,
= 100 Ω, Note 4
R
L
Sleep mode supply current NSTB = 0V, EN = 0V, TxD = 5V,
CANH
BAT
BAT
BAT
BAT
BAT
< +1V,
< 27V
< 16V
BAT
< 11.3V
< 16V
< 27V
< 16V
3.6 4.55 V
9.85
V
– 1.45
BAT
3.6 4.55 V
–10 10 µA
–20 100 µA
–20 100 µA
30 150 mA
60 150 mA
50 150 mA
–50 50 µA
Bus output voltage in normal
mode
Bus output voltage in wake-up
mode
Bus output voltage in wake-up
mode, low battery
Bus output voltage in high-speed
transmission mode
Recessive state output current,
bus recessive
Recessive state output current,
bus dominant
Dominant state output current,
bus dominant
Bus short circuit current,
normal mode
Bus short circuit current,
wake-up mode
Bus short circuit current,
high-speed mode
Bus leakage current at loss of
ground
(I_CAN_LG = I_CANH + I_RTH)
RxD = 5V, –1V < V
5.5V < V
–40°C < T
< 14V,
BAT
< 125°C
j
NSTB = 5V, EN = 5V,
RL > 270Ω; 5.5V < V
NSTB = 0V, EN = 5V,
RL > 270Ω; 11.3V < V
NSTB = 0V, EN = 5V,
R
> 270Ω; 5.5 V < V
L
NSTB = 5V, EN = 0V,
> 100Ω; 8V < V
R
L
Recessive state or sleep mode,
V
= –1V; 0V < V
CANH
Recessive state or sleep mode,
= 10V; 0V < V
V
CANH
TxD = 0V, normal mode,
high-speed mode and sleep
mode; V
0V < V
V
CANH
TxD = 0V; NSTB = 5V; EN = 5V
V
CANH
TxD = 0V; NSTB = 0V; EN = 5V
V
CANH
TxD = 0V; NSTB = 5V; EN = 0V;
8V < V
0V < V
see figure in the test circuits
CANH
< 16V
BAT
= –1V,
= –1V,
= –1V,
< 16V
BAT
< 16V;
BAT
= 10V;
section
< 5.5V;
RxD
2.5 V
2 mA
3 mA
4 mA
35 mA
45 mA
t.b.d. mA
70 100 µA
min
(V
, 14)
BAT
V
BAT
V
V
1999 Oct 28
8
Page 9

Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
SYMBOL UNITMAX.TYP.MIN.CONDITIONSPARAMETER
T
sd
T
hys
V
T
V
TL
V
TS
V
TSL
Pin RTH
V
RTH1
V
RTH2
Pins NSTB, EN
V
ih
V
il
I
i
Pin TxD
V
itxd
–I
itxd
–I
ihtxd
Pin RxD
V
olrxd
I
rxd
I
ohrxd
NOTES:
3. Operation at battery voltages higher than 16V is recommended to be shorter than 2 minutes.
4. This parameter is characterized but not subject to production test.
Thermal shutdown Note 4 155 190 °C
Thermal shutdown hysteresis Note 4 5 15 °C
Bus input threshold 5.8V < V
all modes except sleep mode
Bus input threshold, low battery 5.5V < V
all modes except sleep mode
Bus input threshold in sleep mode NSTB = 0V, EN = 0V,
V
BAT
Bus input threshold in sleep mode,
low battery
Voltage on switched ground pin I
Voltage on switched ground pin I
NSTB = 0V, EN = 0V,
5.5V < V
RTH
RTH
High level input voltage 5.5V < V
Low level input voltage 5.5V < V
< 27V,
BAT
BAT
> 11.3V
BAT
< 5.8V,
> 11.3V
1.8 2.2 V
1.5 2.2 V
6.15 8.1 V
V
– 4.3 V
BAT
– 3.25 V
BAT
= 1 mA 0.1 V
= 6 mA 1 V
< 27V 3 V
BAT
< 27V 1 V
BAT
Input current Vi = 1V and Vi = 5V 15 50 µA
TxD input threshold 5.5V < V
TxD low level input current V
TxD high level input current in
sleep mode
RxD low level output voltage I
RxD low level output current V
RxD high level leakage V
TxD
NSTB = 0V, EN = 0V,
V
TxD
RxD
V
CANH
RxD
RxD
all modes
< 27V 1 3 V
BAT
= 0V 50 180 µA
= 5V; 5.5V < V
= 2.2 mA;
= 10V, all modes
= 5V; V
CANH
= 5V; V
CANH
< 14V
BAT
= 10V 3 30 mA
= 10V,
–5 10 µA
0.45 V
–10 +10 µA
1999 Oct 28
9
Page 10

Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
Dynamic (AC) CHARACTERISTICS for 33 K bps operation
–40°C < T
–1V < V
C
< 11 nF; 1µs < RL ∗ CL < 3.7µs; RxD pull-up resistor 2.2 kΩ < Rd < 2.6 kΩ; RxD: loaded with CLR < 30pF to GND;
L
all voltages are referenced to pin 8 (GND); positive currents flow into the IC;
typical values reflect the approximate average value at V
SYMBOL
Pin CANH
t
rN
t
fN
t
rW
t
fW
t
rH
t
fH
V
dbAMN
V
dbAMW
Pins NSTB, EN
t
NH
t
NW
t
NS
t
SN
< +125_C; 5.5V < V
amb
< +16V; bus load resistor at pin RTH: 3 kΩ < RT < 11 kΩ; total bus load resistance 270 Ω < RL < 11 kΩ;
CANH
< 16V; –0.3V < V
BAT
< 5.5V; –0.3V < V
TxD
= 13V and T
BAT
< 5.5V; –0.3V < VEN < 5.5V; –0.3V < V
NTSB
= 25°C, unless otherwise specified.
amb
PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Normal mode bus output rise time
(1V to 3V)
Normal mode bus output fall time
(3V to 1V)
Wake-up mode bus output
rise time (20% to 80%)
Wake-up mode bus output
fall time (80% to 20%)
High-speed mode bus output
rise time
(1V to 3V)
High-speed mode bus output
fall time
(3V to 1V)
CANH harmonic content in
normal mode
CANH harmonic content in
wake-up mode
RL = 250 Ω, CL = 15 nF;
8V < V
BAT
< 16V
RL = 250 Ω, CL = 15 nF;
BAT
< 16V
8V < V
NSTB = 0V, EN = 5V;
R
= 250 Ω, CL = 15 nF;
L
8V < V
BAT
< 16V
NSTB = 0V, EN = 5V;
= 250 Ω, CL = 15 nF;
R
L
8V < V
BAT
< 16V
NSTB = 5V, EN = 0V;
= 100 Ω, CL = 15 nF;
R
L
8V < V
< 16V; Note 6
BAT
NSTB = 5V, EN = 0V;
= 100 Ω, CL = 15 nF;
R
L
8V < V
< 16V; Note 6
BAT
NSTB = 5V, EN = 5V;
RL = 250 Ω, CL = 15 nF;
= 20 kHz, 50% duty cycle;
f
TxD
8V < V
0.53 MHz < f < 1.7 MHz, Note 6
BAT
< 16V;
NSTB = 5V, EN = 0V;
= 250 Ω, CL = 15 nF;
R
L
f
= 20 kHz, 50% duty cycle;
TxD
8V < V
0.53 MHz < f < 1.7 MHz, Note 6
BAT
< 16V;
1.8 3.6 µs
3 5 µs
3 14 µs
4 10 µs
Normal mode to high-speed mode
delay
Normal mode to wake-up mode
delay
EN = 5V; measured from
NSTB = 2.5V to V
CANH
= 4V
Normal mode to sleep mode delay 500 µs
Sleep mode to normal mode delay V
= 4V; measured from
CANH
NSTB = 2.5V to RxD = 2.5V
< 5.5V;
RxD
1 µs
1.5 µs
70 dBµV
80 dBµV
30
30
50
µs
µs
µs
1999 Oct 28
10
Page 11

Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
SYMBOL UNITMAX.TYP.MIN.CONDITIONSPARAMETER
Pin TxD
t
TrN
t
TfN
t
TrW
t
TfW
t
TfWL
t
TrHS
t
TfHS
Pin RxD
t
DN
t
DW
t
DHS
t
DS
NOTES:
5. Operation at battery voltages higher than 16V is recommended to be shorter than 2 minutes.
6. This parameter is characterized but not subject to production test.
Transmit delay in normal mode,
bus rising edge
Transmit delay in normal mode,
bus falling edge
Transmit delay in wake-up mode,
bus rising edge
Transmit delay in wake-up mode,
bus falling edge
Transmit delay in wake-up mode,
bus falling edge, low battery
Transmit delay in high-speed
mode, bus rising edge
Transmit delay in high-speed
mode, bus falling edge
Receive delay in normal mode,
bus rising and falling edge
Receive delay in wake-up mode,
bus rising and falling edge
Receive delay in high-speed
mode, bus rising and falling edge
Receive delay in sleep mode,
bus rising edge
NSTB = 5V, EN = 5V;
= 250 Ω, CL = 15 nF;
R
L
5.5V < V
measured from the falling edge
on TxD to V
BAT
< 27V;
CANH
= 3.0V
NSTB = 5V, EN = 5V;
= 250 Ω, CL = 15 nF;
R
L
5.5V < V
measured from the rising edge
on TxD to V
BAT
< 27V;
CANH
= 1.0V
NSTB = 0V, EN = 5V;
R
= 250 Ω, CL = 15 nF;
L
5.5V < V
measured from the falling edge
on TxD to V
BAT
< 27V;
CANH
= 3.0V
NSTB = 0V, EN = 5V;
= 250 Ω, CL = 15 nF;
R
L
9V < V
measured from the rising edge
on TxD to V
BAT
< 27V;
CANH
= 5V
NSTB = 0V, EN = 5V;
= 250 Ω, CL = 15 nF;
R
L
5.5V < V
measured from the rising edge
on TxD to V
BAT
< 9V;
CANH
= 1V
NSTB = 5V, EN = 0V;
= 100 Ω, CL = 15 nF;
R
L
8V < V
measured from the falling edge
on TxD to V
BAT
< 16V;
CANH
= 3.0V
NSTB = 5V, EN = 0V;
R
= 100 Ω, CL = 15 nF;
L
8V < V
measured from the rising edge
on TxD to V
BAT
< 16V;
CANH
= 1.0V
NSTB = 5V, EN = 5V;
5.5V < V
CANH to RxD time measured
from V
V
RxD
BAT
CANH
= 2.5V
< 27V;
= 2.0V to
NSTB = 0V, EN = 5V;
5.5V < V
CANH to RxD time measured
from V
V
RxD
BAT
CANH
= 2.5V
< 27V;
= 2.0V to
NSTB = 5V, EN = 0V;
8V < V
CANH to RxD time measured
from V
V
RxD
BAT
CANH
= 2.5V
< 16V;
= 2.0V to
NSTB = 0V, EN = 0V;
CANH to RxD time, measured
CANH
= min {(V
from V
3.78V), 7.13V} to V
RxD
–
BAT
= 2.5V
3 8 µs
3 9 µs
3 10 µs
3 12 µs
3 12 µs
0.2 1.5 µs
0.2 2 µs
0.3 1 µs
0.3 1 µs
0.2 0.8 µs
10 50 µs
1999 Oct 28
11
Page 12

Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
SO8: plastic small outline package; 8 leads; body width 3.9mm SOT96-1
1999 Oct 28
12
Page 13

Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
NOTES
1999 Oct 28
13
Page 14

Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
Data sheet status
Data sheet
status
Objective
specification
Preliminary
specification
Product
specification
Product
status
Development
Qualification
Production
Definition
This data sheet contains the design target or goal specifications for product development.
Specification may change in any manner without notice.
This data sheet contains preliminary data, and supplementary data will be published at a later date.
Philips Semiconductors reserves the right to make changes at any time without notice in order to
improve design and supply the best possible product.
This data sheet contains final specifications. Philips Semiconductors reserves the right to make
changes at any time without notice in order to improve design and supply the best possible product.
[1]
[1] Please consult the most recently issued datasheet before initiating or completing a design.
Definitions
Short-form specification — The data in a short-form specification is extracted from a full data sheet with the same type number and title. For
detailed information see the relevant data sheet or data handbook.
Limiting values definition — Limiting values given are in accordance with the Absolute Maximum Rating System (IEC 134). Stress above one
or more of the limiting values may cause permanent damage to the device. These are stress ratings only and operation of the device at these or
at any other conditions above those given in the Characteristics sections of the specification is not implied. Exposure to limiting values for extended
periods may affect device reliability.
Application information — Applications that are described herein for any of these products are for illustrative purposes only. Philips
Semiconductors make no representation or warranty that such applications will be suitable for the specified use without further testing or
modification.
Disclaimers
Life support — These products are not designed for use in life support appliances, devices or systems where malfunction of these products can
reasonably be expected to result in personal injury . Philips Semiconductors customers using or selling these products for use in such applications
do so at their own risk and agree to fully indemnify Philips Semiconductors for any damages resulting from such application.
Right to make changes — Philips Semiconductors reserves the right to make changes, without notice, in the products, including circuits, standard
cells, and/or software, described or contained herein in order to improve design and/or performance. Philips Semiconductors assumes no
responsibility or liability for the use of any of these products, conveys no license or title under any patent, copyright, or mask work right to these
products, and makes no representations or warranties that these products are free from patent, copyright, or mask work right infringement, unless
otherwise specified.
Philips Semiconductors
811 East Arques Avenue
P.O. Box 3409
Sunnyvale, California 94088–3409
Telephone 800-234-7381
Copyright Philips Electronics North America Corporation 1999
All rights reserved. Printed in U.S.A.
print code Date of release: 10-99
Document order number: 9397-750-06541
1999 Oct 28
14
 Loading...
Loading...