

MAKING MODERN LIVING POSSIBLE
Produkthandbuch
VLT® Positioning Controller MCO 351
VLT® AutomationDrive FC 301/302
www.danfoss.com/drives

Inhaltsverzeichnis Produkthandbuch
Inhaltsverzeichnis
1 Einführung
1.1 Zielsetzung des Handbuchs
1.2 Zusätzliche Handbücher
1.3 Übersicht
1.3.1 Softwareversion 4
1.4 Zulassungen
1.5 Entsorgung
2 Sicherheit
2.1 Sicherheitssymbole
2.2 Sicherheitswarnungen
2.3 Funktionale Sicherheit
3 Mechanische Installation
4 Elektrische Installation
4.1 MCO 350/351 Steuerklemmen
4.1.1 Gehäusetypen A2 und A3 10
4
4
4
4
5
5
6
6
6
7
8
10
10
4.1.2 Gehäusetypen A5, B1 und B2 10
4.2 Steuerkartenklemmen bei einem Frequenzumrichters
4.3 Anschlussplan
4.4 MCO Optionskartenklemmen
4.4.1 X55 Istwert Drehgebereingang 14
4.4.2 X56 Master Drehgebereingang/Virtueller Master Drehgeberausgang 14
4.4.3 X57 Digitaleingänge 14
4.4.4 X58 24-V-DC-Versorgung 15
4.4.5 X59 Digitalausgänge 15
4.4.6 X62 MCO-CAN 15
4.5 Beschreibung der Klemmen
4.5.1 Steuerkartenklemmen bei einem Frequenzumrichters 16
4.5.2 MCO Digitaleingangsklemme (X57) 18
4.5.3 MCO Digitalausgangsklemme (X59) 18
4.5.4 MCO-Drehgeberanschluss 19
4.5.4.1 Beispiele für Drehgeberanschlüsse 19
4.6 Feldbus-Schnittstelle
11
13
14
16
21
4.6.1 Einführung 21
4.6.2 Datenlayout 21
5 Programmieren
5.1 Sicherheitshinweise
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 1
24
24
Inhaltsverzeichnis Produkthandbuch
5.2 Konfiguration der grundlegenden Parameter
5.3 Grundkonfiguration
5.4 PID-Einstellungen
5.5 Beschreibung der Anwendungsparameter
5.5.1 19-** Anwendungsparameter 25
5.6 MCO Grundeinstellungen
5.6.1 32-0* und 32-1*, Drehgeber 2 Parameter 30
5.6.2 32-3* und 32-4*, Drehgeber 1 Parameter 33
5.6.3 32-5* Rückführungsquelle 35
5.6.4 32-6* und 32-7*, PID-Regler-Parameter 35
5.6.5 32-8* Geschwindigkeit & Beschleunigung 38
5.7 Erweiterte Einstellungen MCO
5.7.1 33-0* Homefahrt 40
5.7.2 33-4* Wegbegrenzungsbehandlung 41
5.7.3 33-8*, Globale Parameter 42
5.7.4 33-9* MCO Anschlusseinstellungen 43
5.8 MCO-Datenanzeigen
24
24
25
25
30
40
43
5.8.1 34-0*, PCD Schreib-Parameter 43
5.8.2 34-2* PCD Lese-Parameter 43
5.8.3 34-4*, Eingänge und Ausgänge 44
5.8.4 34-5*, Prozessdaten 44
6 Anwendungsbeispiele
6.1 Homefahrt
6.2 Touch-Probe-Positionierung
6.3 Bremskontrolle
6.4 Hardware-Wegbegrenzung
6.5 Software-Endschalter
6.6 Indexpositionierung
6.7 Quickbus-Positionierung
7 Diagnose
7.1 Fehlerbehebung
7.2 Fehlermeldungen
45
45
45
45
46
46
46
47
48
48
49
8 Anhang
8.1 Abkürzungen und Konventionen
8.2 Begriffsglossar
8.3 Positionierung
8.3.1 Positioniertabelle 53
8.3.2 Positioniervorlagen 54
2 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303
51
51
51
53

Inhaltsverzeichnis Produkthandbuch
8.3.2.1 Beispiel für Indexpositionierung über Feldbus 54
8.3.2.2 Beispiel einer Indexpositionierung über Quick-Bus 54
Index
55
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 3

Einführung
Produkthandbuch
1
1 Einführung
1.1 Zielsetzung des Handbuchs
Dieses Produkthandbuch enthält Informationen zur
sicheren Installation und Inbetriebnahme des VLT® Positi-
onierreglers MCO 351. Dieses Produkthandbuch richtet sich
an qualifiziertes Personal. Lesen Sie dieses Produkthandbuch vollständig durch, um sicher und professionell
mit dem Positionierregler zu arbeiten. Berücksichtigen Sie
insbesondere die Sicherheitshinweise und allgemeinen
Warnungen. Bewahren Sie dieses Produkthandbuch immer
zusammen mit der MCO 351 auf.
Die Einhaltung der Angaben in diesem Produkthandbuch
ist Voraussetzung für:
den störungsfreien Betrieb
•
die Erfüllung von Mängelhaftungsansprüchen
•
Lesen Sie deshalb zuerst das Produkthandbuch, bevor Sie
mit der MCO 351 arbeiten.
VLT® ist eine eingetragene Marke.
1.2 Zusätzliche Handbücher
1.3
Übersicht
Der VLT® Positionierregler MCO 351 wird mit Frequenzumrichtern der Baureihe FC 300 eingesetzt. Die SteuerkartenOption erweitert die funktionalen Eigenschaften des
Frequenzumrichters in Positionieranwendungen. Er ist
benutzerfreundlich und ermöglicht die Konfiguration aller
Parameter über VLT® AutomationDrive die Bedieneinheit
(LCP) oder über die VLT® MCT 10 Konfigurationssoftware.
Das Modul ist als Optionskarte für die Feldinstallation oder
als integrierte Option in allen VLT® AutomationDrive
verfügbar. Es ist mit oder ohne Schutzbeschichtung
erhältlich.
Da es sich bei MCO 351 um ein serienmäßiges Produkt mit
festen funktionalen Eigenschaften handelt, ist keine
zusätzliche Anwendungsprogrammierung erforderlich.
Der Positionierregler kann die meisten Positionieranwendungen mit senkrechten sowie waagerechten Bewegungen
durchführen. Die Option eignet sich für Anwendungen mit
einer Gesamtsteuerung, z. B. einer SPS.
Es stehen Handbücher zur Verfügung, die Ihnen helfen,
erweiterte Funktionen und Programmierung von Frequenzumrichtern und MCO zu verstehen:
VLT® AutomationDrive FC 301/FC 302 Produk-
•
thandbuch
VLT® AutomationDrive FC 301/FC 302 Projektie-
•
rungshandbuch
VLT® AutomationDrive FC 301/FC 302 Program-
•
mierhandbuch
Motion Control-Option MCO 305 Produk-
•
thandbuch
Motion Control-Option MCO 305 Projektierungs-
•
handbuch
Zusätzliche Veröffentlichungen und Handbücher sind
verfügbar auf Danfoss. Siehe www.danfoss.com/Busines-
sAreas/DrivesSolutions/Documentations/VLT+Technical
+Documentation.htm Liste.
Es umfasst die folgenden Funktionen:
Direkte Positionierung per Feldbus
•
Relative, absolute und Touch-Probe-Positio-
•
nierung
32 feste Positionen (64 über den Feldbus)
•
Handhabung von Endbegrenzungen (Software
•
und Hardware)
Steuerung einer mechanischen Bremse
•
Fehlerhandhabung
•
JOG-Geschwindigkeit/manueller Betrieb
•
Home-Funktion
•
PID Auto-Berechnung
•
Softwareversion
1.3.1
Die Softwareversionsnummer finden Sie in Parameter 19-90
Type/Version.
4 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303
Einführung Produkthandbuch
1.4 Zulassungen
HINWEIS
Die Frequenzumrichter T7 (525-690 V) sind nicht nach
UL-Anforderungen zertifiziert.
1.5 Entsorgung
Elektrische Geräte und Komponenten
dürfen nicht zusammen mit normalem
Hausabfall entsorgt werden.
Sie müssen separat mit Elektro- und
Elektronik-Altgeräten gemäß den lokalen
Bestimmungen und den aktuell gültigen
Gesetzen gesammelt werden.
1
1
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 5
Sicherheit
Produkthandbuch
2 Sicherheit
22
2.1 Sicherheitssymbole
Folgende Symbole kommen in diesem Dokument zum
Einsatz:
WARNUNG
Kennzeichnet eine potenziell gefährliche Situation, die
den Tod oder schwere Verletzungen zur Folge haben
kann.
VORSICHT
Kennzeichnet eine potenziell gefährliche Situation, die
leichte Verletzungen zur Folge haben kann. Die
Kennzeichnung kann ebenfalls als Warnung vor
unsicheren Verfahren dienen.
HINWEIS
Kennzeichnet wichtige Informationen, einschließlich
Situationen, die zu Geräte- oder sonstigen Sachschäden
führen können.
2.2 Sicherheitswarnungen
WARNUNG
UNERWARTETER ANLAUF
Bei Anschluss des Frequenzumrichters an Versorgungsnetz, DC-Stromversorgung oder
Zwischenkreiskopplung kann der angeschlossene Motor
jederzeit unerwartet anlaufen. Ein unerwarteter Anlauf
im Rahmen von Programmierungs-, Service- oder Reparaturarbeiten kann zu schweren bzw. tödlichen
Verletzungen oder zu Sachschäden führen. Der Motor
kann über einen externen Schalter, einen seriellen
Busbefehl, ein Sollwertsignal, über ein LCP, LOP, den
Fernbetrieb mithilfe der MCT 10-Software oder einen
quittierten Fehlerzustand anlaufen.
So verhindern Sie einen unerwarteten Anlauf des Motors:
Trennen Sie den Frequenzumrichter vom Netz.
•
Drücken Sie [Off/Reset] am LCP, bevor Sie
•
Parameter programmieren.
Stellen Sie sicher, dass Frequenzumrichter,
•
Motor und alle angetriebenen Geräte
vollständig verkabelt und montiert sind, wenn
der Frequenzumrichter an Versorgungsnetz, DCStromversorgung oder Zwischenkreiskopplung
angeschlossen wird.
WARNUNG
HOCHSPANNUNG
Bei Anschluss an die Netzspannung führen Frequenzumrichter Hochspannung. Erfolgen Installation,
Inbetriebnahme und Wartung nicht durch qualifiziertes
Personal, kann dies Tod oder schwere Verletzungen zur
Folge haben.
Ausschließlich qualifiziertes Personal darf Instal-
•
lation, Inbetriebnahme und Wartung
vornehmen.
WARNUNG
ENTLADEZEIT
Die Zwischenkreiskondensatoren des Frequenzumrichters
können auch bei abgeschalteter und getrennter Netzversorgung geladen bleiben. Trennen Sie zum Schutz vor
elektrischen Gefahren die Netzversorgung vom Frequenzumrichter, bevor Sie Wartungs- oder Reparaturarbeiten
durchführen und halten Sie die in Tabelle 2.1
vorgegebene Wartezeit ein. Wird diese Wartezeit nach
Entfernen der Netzversorgung vor Wartungs- oder
Reparaturarbeiten am Frequenzumrichter nicht
eingehalten, kann dies Tod oder schwere Verletzungen
zur Folge haben.
Spannung [V]
200–240 0,25–3,7 kW 5,5–37 kW
380–480 0,25–7,5 kW 11-75 kW
525–600 0,75-7,5 kW 11-75 kW
525–690 N.v. 11-75 kW
Auch wenn die Warn-LED nicht leuchten, kann Hochspannung
Mindestwartezeit (Minuten)
4 15
vorliegen.
Tabelle 2.1 Entladezeit
6 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Sicherheit Produkthandbuch
HINWEIS
Installation in großen Höhenlagen:
380–500 V: Gehäuse A, B und C: Bei
•
Höhenlagen von mehr als 2 km über NN ziehen
Sie bitte Danfoss bezüglich PELV (Schutzkleinspannung) zurate.
380–500 V: Gehäuse D, E, und F: Bei
•
Höhenlagen über 3 km über NN sollten Sie
Danfoss bezüglich PELV (Schutzkleinspannung)
zurate ziehen.
525–690 V: Bei Höhenlagen von mehr als 2 km
•
über NN ziehen Sie bitte Danfoss bezüglich
PELV (Schutzkleinspannung) zurate.
2.3 Funktionale Sicherheit
„Sicher abgeschaltetes Moment“ (STO) ist eine Option. Zur
Ausführung der Funktion „Sicher abgeschaltetes Moment“
(STO) ist eine zusätzliche Verkabelung des Frequenzumrichters erforderlich. Nähere Informationen finden Sie im
Produkthandbuch der Funktion Sicher abgeschaltetes
Moment (STO).
2 2
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 7
Mechanische Installation Produkthandbuch
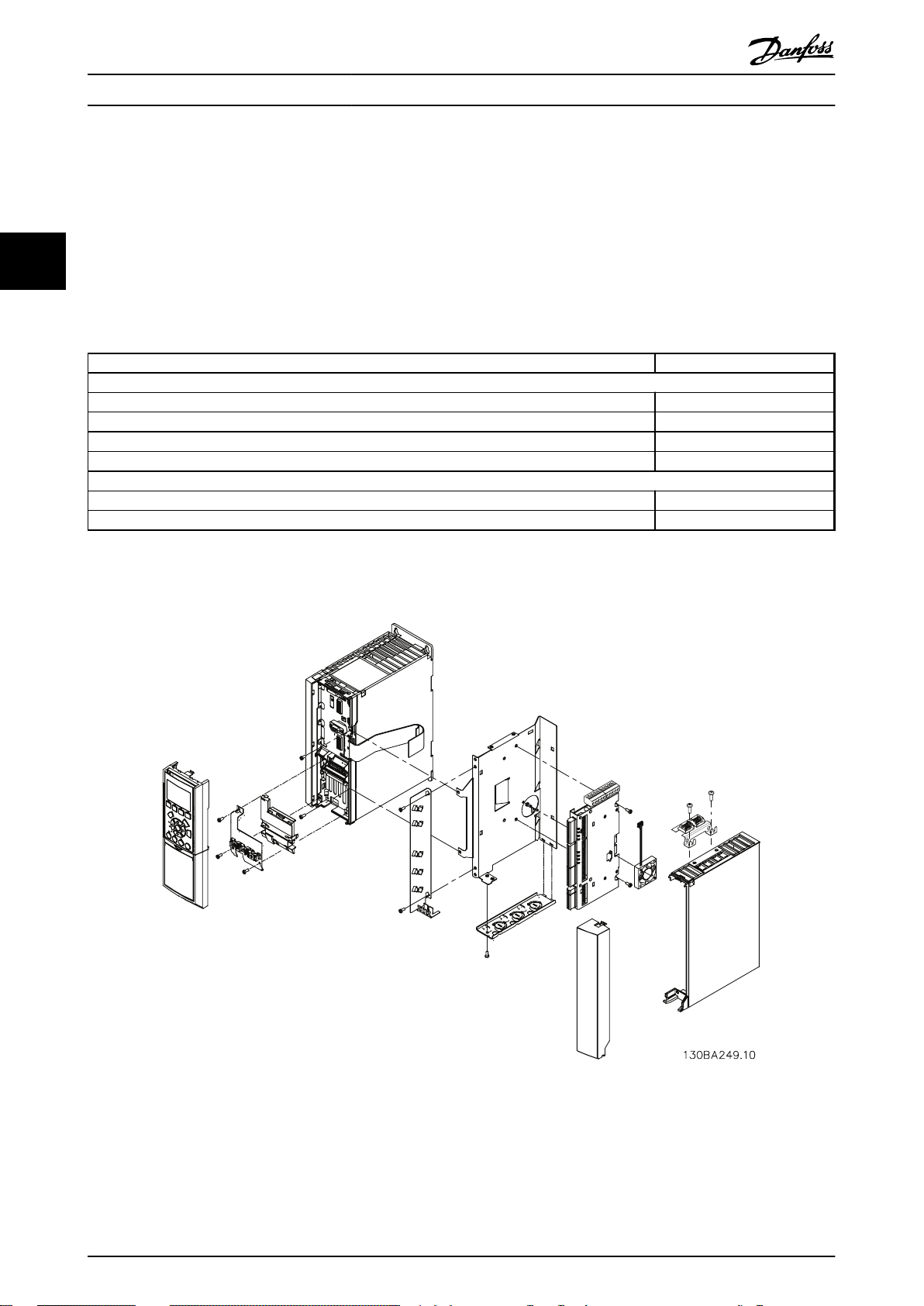
3 Mechanische Installation
Dieses Kapitel ist nur relevant, wenn MCO 350/351 als Option zur Aufrüstung eines vorhandenen VLT® AutomationDrive
dient. Wenn es mit dem Frequenzumrichter bestellt wird, ist MCO 350/351 vorinstalliert. Erwerben Sie zur Nachrüstung
33
einen Einbausatz.
Für die verschiedenen Gehäuse gibt es unterschiedliche Einbausätze. Verwenden Sie MCO 350/351 in Steckplatz C0 oder
kombinieren Sie es mit einer anderen Option in Steckplatz C1.
Einbausatz für das entsprechende Gehäuse Bestellnr.
Buchformat-Gehäuse
A2 und A3 (40 mm für Option 1 C) 130B7530
A2 und A3 (60 mm für Option C0 + C1) 130B7531
B3 (40 mm für Option 1 C) 130B1413
B3 (60 mm für Option C0 + C1) 130B1414
Kompaktes Gehäuse
A5 130B7532
B, C, D, E, und F (außer B3) 130B7533
Tabelle 3.1 Einbausätze
Montieren Sie bei B4, C3, C4, D, E, und F nicht den kleinen Lüfter.
Abbildung 3.1 Buchformat-Gehäuse - A2, A3, B3
8 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303
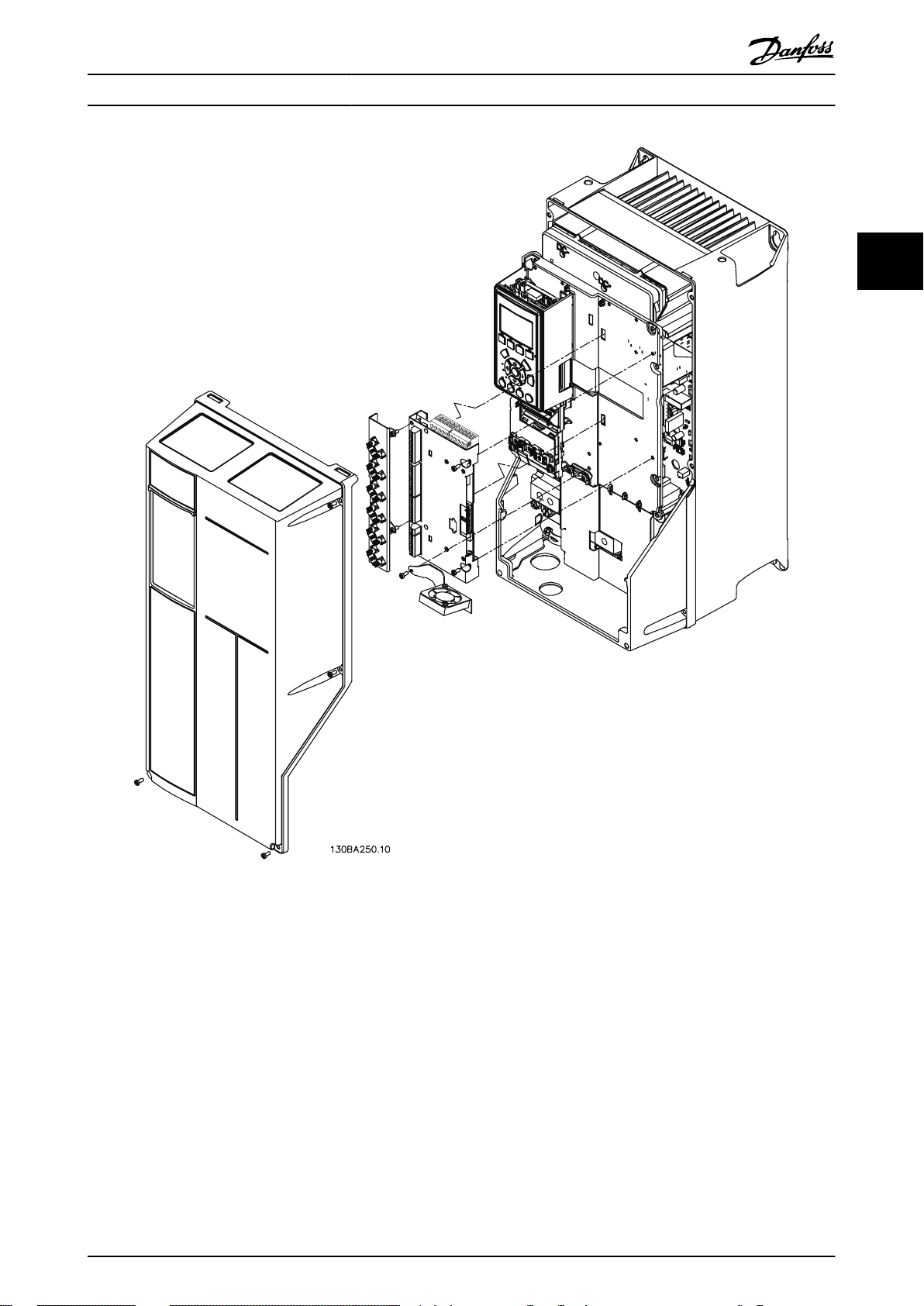
Mechanische Installation Produkthandbuch
3 3
Abbildung 3.2 Kompaktes Gehäuse - A5, B (außer B3), C, D, E, F
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 9
130BA248.11
130BT334.10
Elektrische Installation Produkthandbuch
4 Elektrische Installation
Beachten Sie vor der Inbetriebnahme der MCO die Sicherheitswarnungen in Kapitel 2 Sicherheit.
Schirmen Sie alle Steuerleitungen ab und verbinden Sie die
Kabelabschirmung beidseitig mit der Erde, um EMV-
44
Probleme zu vermeiden. Folgen Sie stets den Anweisungen
des Drehgeber-Anbieters. Ziehen Sie auch das Projektie-
rungshandbuch VLT
0,25–75 kW zurate, um weitere Informationen zur Kabelinstallation zur erhalten.
®
AutomationDrive FC 301/FC 302
4.1 MCO 350/351 Steuerklemmen
4.1.1 Gehäusetypen A2 und A3
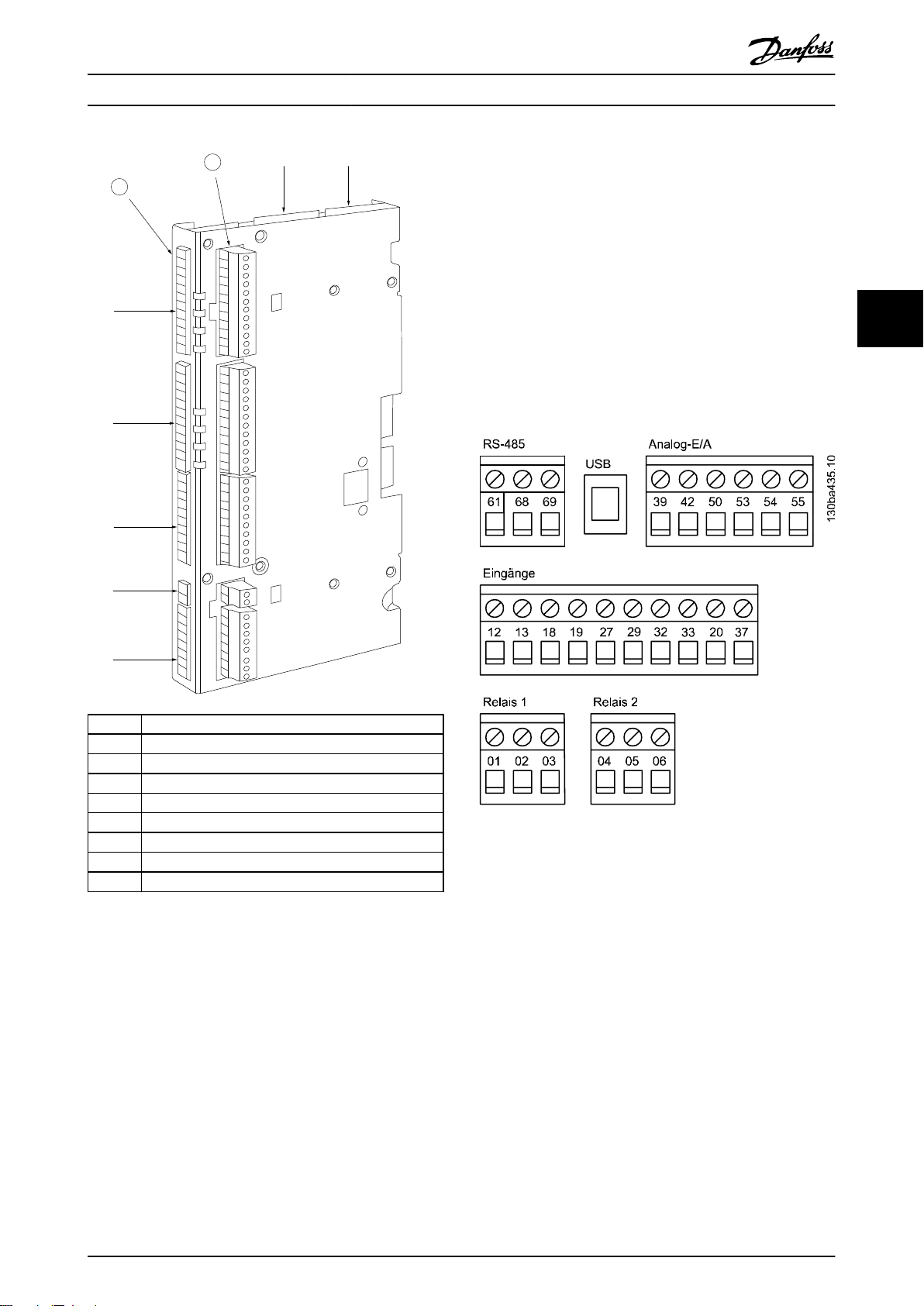
Drehgeber und I/O-Klemme befinden sich hinter der
Klemmenabdeckung der Option C, siehe Abbildung 4.1.
MCO CAN-Bus-Klemmen und Debug-Klemmen (RS-485)
befinden sich auf der Oberseite der Abdeckung der Option
C. Wenn diese Anschlüsse benutzt werden, schneiden Sie
die Kunststoffteile über den Anschlüssen auf und
befestigen Sie die Kabelentlastung.
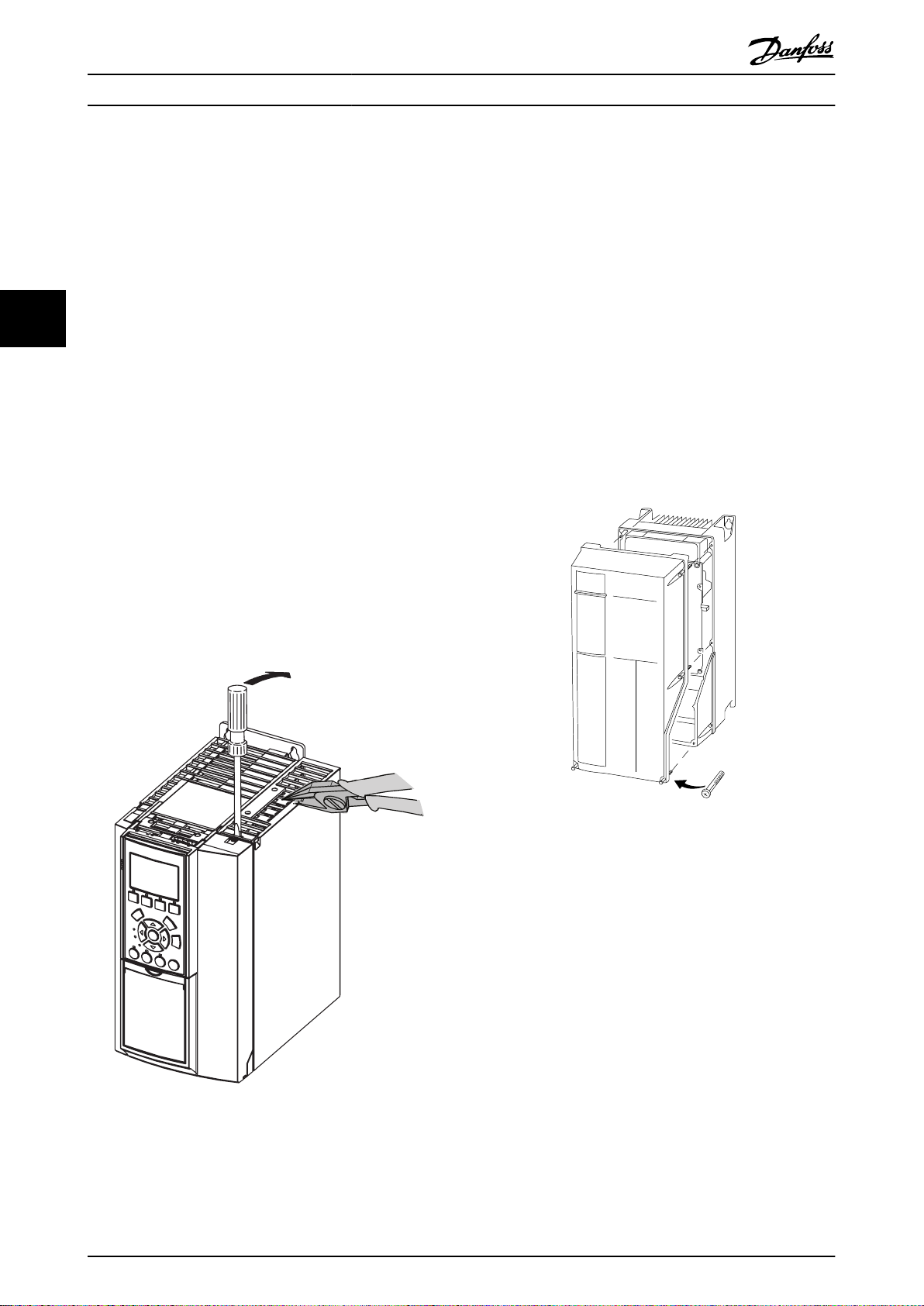
Gehäusetypen A5, B1 und B2
4.1.2
Alle Klemmen von MCO 350/351 befinden sich neben der
VLT® AutomationDrive Steuerkarte. Entfernen Sie die
Frontabdeckung, um auf sie zugreifen zu können. Siehe
Abbildung 4.2.
Bei MCO Steuerklemmen handelt es sich um steckbare
Klemmen mit Schraubanschlüssen. Die Klemmen X55, X56,
X57, X58, und X59 sind dupliziert, damit sie sowohl mit
Buchformat-Gehäusen als auch mit kompakten
Gehäusetypen verwendet werden können.
In Abbildung 4.3 erkennen Sie die Lage der
Klemmenblöcke.
Abbildung 4.1 Lage des Drehgebers und der I/O-Klemmen
Abbildung 4.2 Entfernen der Frontabdeckung
10 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303
X62
X55
X56
X57
X58
X59
2
X60
130BB794.10
1
Elektrische Installation Produkthandbuch
4.2
Steuerkartenklemmen bei einem
Frequenzumrichters
Die Klemmen an der VLT® AutomationDrive Steuerkarte
sind der MCO 351 zugeordnet.
Die folgenden Parameter für die I/O-Einstellungen dürfen
nicht verändert werden:
Parameter 5-10 bis 5-15 eingestellt auf [0] Ohne
•
4 4
Funktion (Werkseinstellung)
Parameter 3-15, 3-16 und 3-17 eingestellt auf [0]
•
Ohne Funktion (Werkseinstellung)
Parameter 6-50 eingestellt auf [52] MCO 0–20 mA
•
1 Klemmenblock 1
2 Klemmenblock 2
X55 Drehgeber 2
X56 Drehgeber 1
X57 Digitale Eingänge
X58 24-V-DC-Versorgung
X59 Digitale Ausgänge
X60 MCO CAN-Bus
X62 Debug-Anschlüsse (RS 485)
Abbildung 4.4 FC 300 Klemmen
Technische Daten zu diesen Klemmen finden Sie im Projektierungshandbuch VLT® AutomationDrive FC 301/FC 302.
Abbildung 4.3 Lage der Klemmenblöcke 1 und 2
Verwenden Sie bei Buchformat-Gehäusen Klemmenblock 1
und bei kompakten Gehäusen Klemmenblock 2.
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 11
Elektrische Installation Produkthandbuch
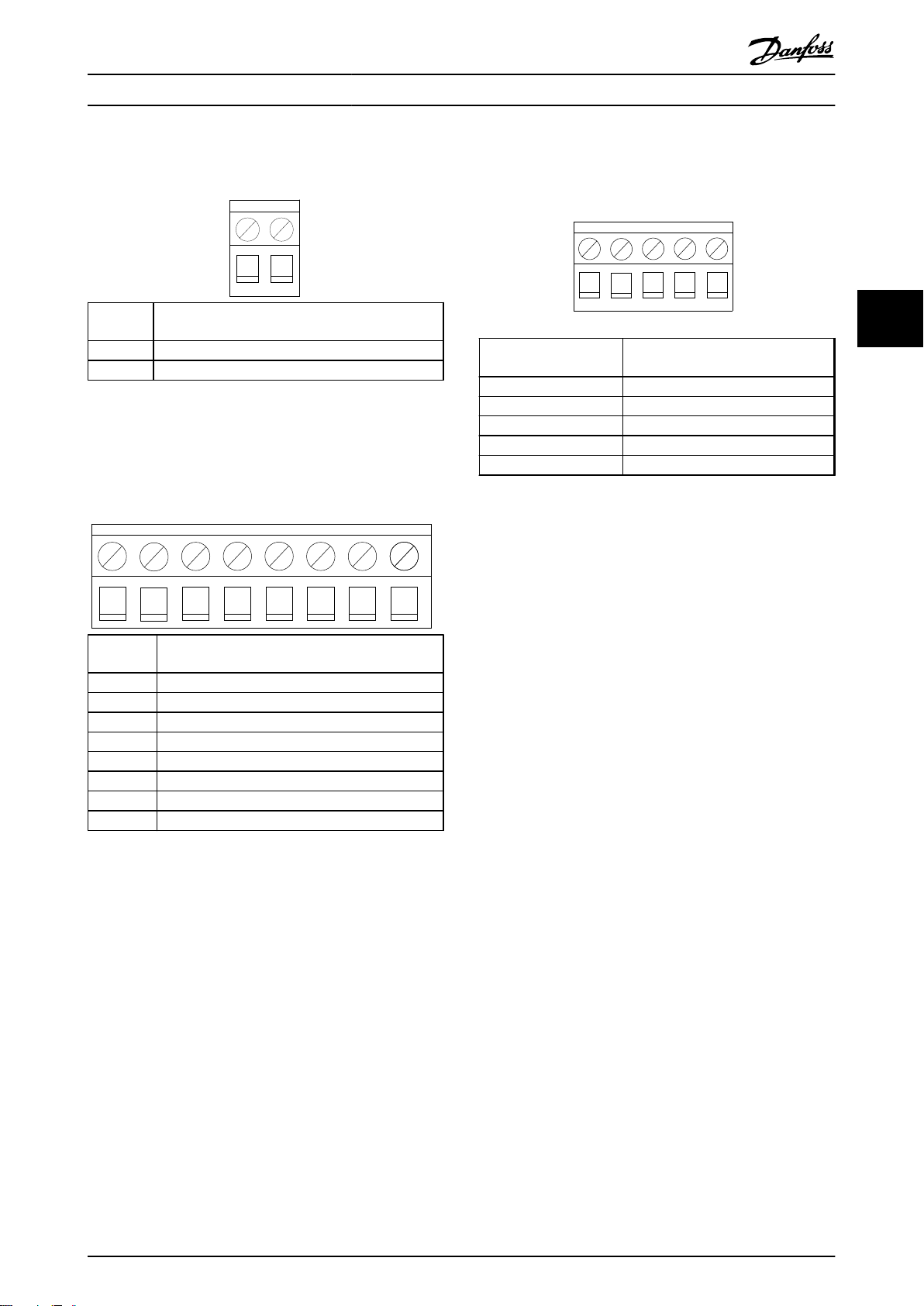
Digitale Eingänge
12 +24 V OUT
13 +24 V OUT
18 Referenz Index Bit 0
19 Referenz Index Bit 1
27 Aktivierung (Fehler quittieren im digitalen Steuer-
ungsmodus)
44
29 Referenz Index Bit 4
32 Referenz Index Bit 3
33 Referenz Index Bit 2
20 Masse für Digitalsignale
37 Sicher abgeschaltetes Moment (STO)
Tabelle 4.1 Digitale Eingänge
Relais 1:
Mechanische Bremse (normalerweise geöffnet)
Relais 2:
Überwachung der mechanischen Bremse (normalerweise
geschlossen)
Analogeingang:
53 ±10 V-In Manueller JOG positiv
54 ±10 V-In Manueller JOG negativ
55 Masse für Analogeingänge
Versorgungsspannung:
12, 13 +24 V Out
20 Masse für Digitaleingänge (intern verbunden mit
X55/4-X56/4-X58/2)
12 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303
FC300
Reference index Bit 1
Enable (error clear in dig. control mode)
Reference index Bit 4
Reference index Bit 3
Reference index Bit 2
Touchprobe pos. locked
Manual Jog positive
Reset Touchprobe pos.
Go to Home position
Latch new index
2
Homing completed
Reference pos. reached
Reference index Bit 0
Reference index Bit 1
Reference index Bit 2
Reference index Bit 3
Reference index Bit 4
02
03
04
06
+24 V DC out
+8 V DC out
+5 V DC out
COM
+24 V DC out
+8 V DC out
+5 V DC out
COM
A
/A
B
/B
CLK
/CLK
DATA
/DATA
Analog
Output
Analog
Inputs
S201, S202 = O
MCO 351
Relay
01
Relay
02
Mains
Motor
X56
Encoder 1
X55
Encoder 2
+24 V OUT
+24 V OUT
Reference index Bit 0
COM D in
Safe torque o (STO)
COM A in
+10 V OUT
Quickstop
Manual Jog negative
COM A out
Touchprobe switch
Positive HW limit switch
Negative HW limit switch
Home reference switch
Go to target position
Reset Home ag
+24 V supply
COM
Error occured
12
13
18
19
27
29
32
33
20
37
39
42
50
53
54
55
1
2
3
4
5
6
7
8
9
10
1
1
2
3
4
5
6
7
8
Digital
Inputs
X57
Digital
Inputs
X58
24 V DC
Supply
X59
Digital
Outputs
91
92
93
PE
96
97
98
99
U
V
W
01 Brake Supply
Brake Brake COM
05
L1
L2
L3
PE
PE
TTL SSI SINCOS
A
/A
B
/B
Z
/Z
CLK
/CLK
DATA
/DATA
SIN
REFSIN
COS
REFCOS
1
2
3
4
5
6
7
8
9
10
11
12
Z
/Z
1
2
3
4
5
6
7
8
9
10
11
12
130BD658.10
Elektrische Installation Produkthandbuch
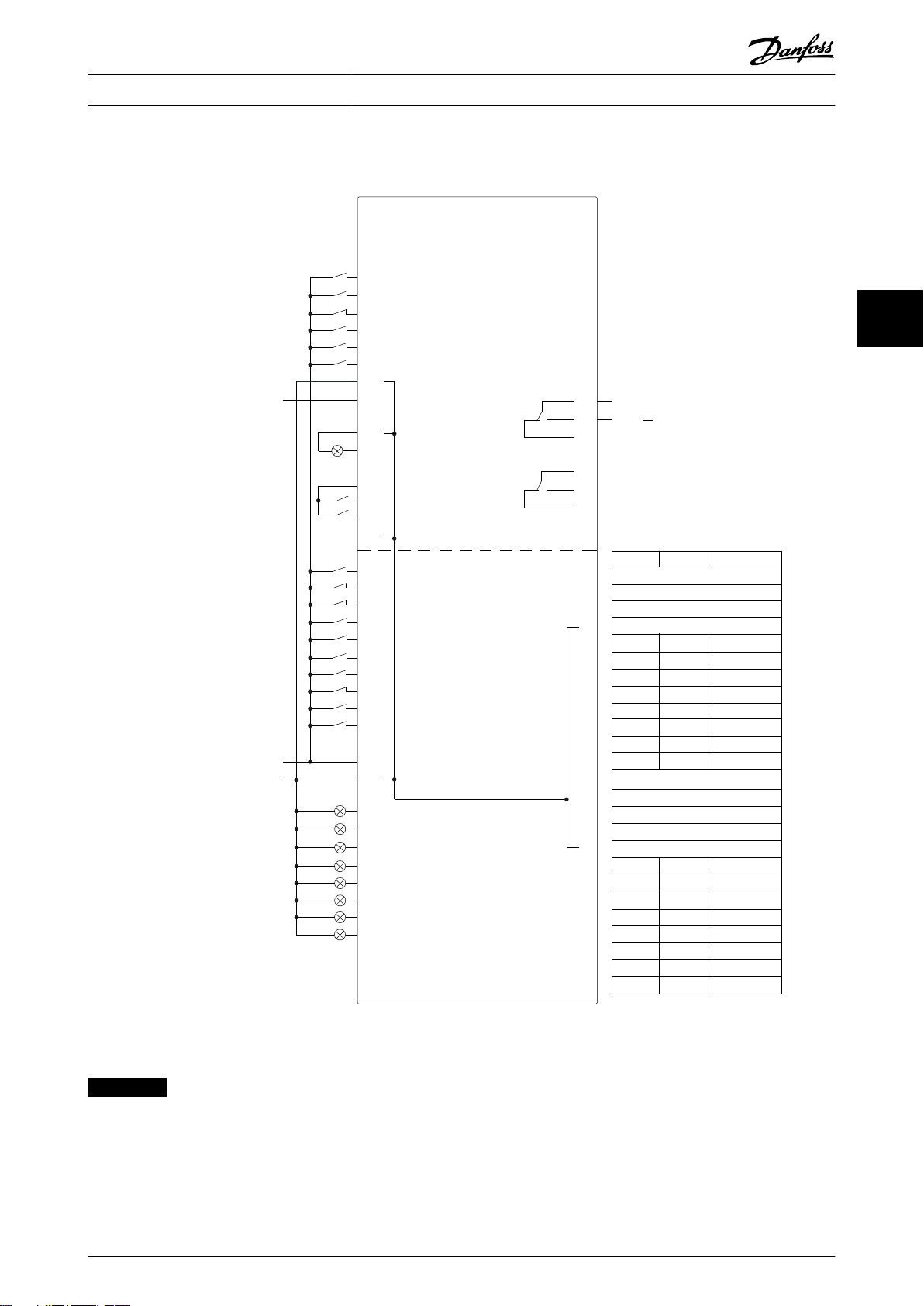
4.3 Anschlussplan
4 4
Abbildung 4.5 Anschlussplan
HINWEIS
Eingang 29 ist bei FC 301 nicht verfügbar. Daher können bei FC 301 nur 16 Positionen über die Digitaleingänge
ausgewählt werden.
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 13
130BD653.10
1 2 3 4 5 7
9
116
8 10
12
130BD653.10
1 2 3 4 5 7
9
116
8 10
12
1 2 3 4 5 7 96 8 10
130BD655.10
Elektrische Installation Produkthandbuch
X56 Master Drehgebereingang/
4.4 MCO Optionskartenklemmen
4.4.2
Virtueller Master Drehgeberausgang
Technische Daten zu diesen Klemmen finden Sie im
Produkthandbuch zu Motion Control Option MCO 305.
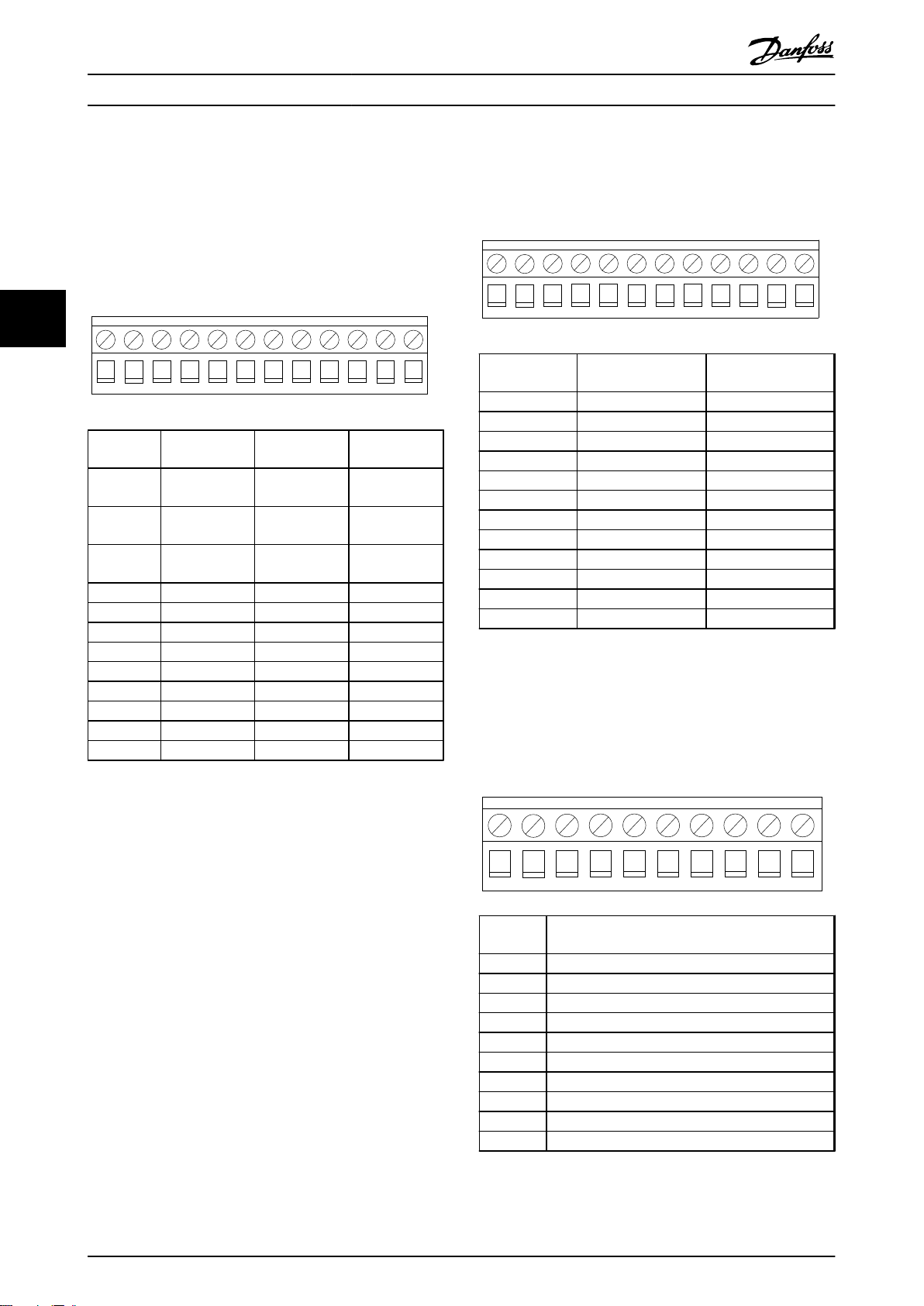
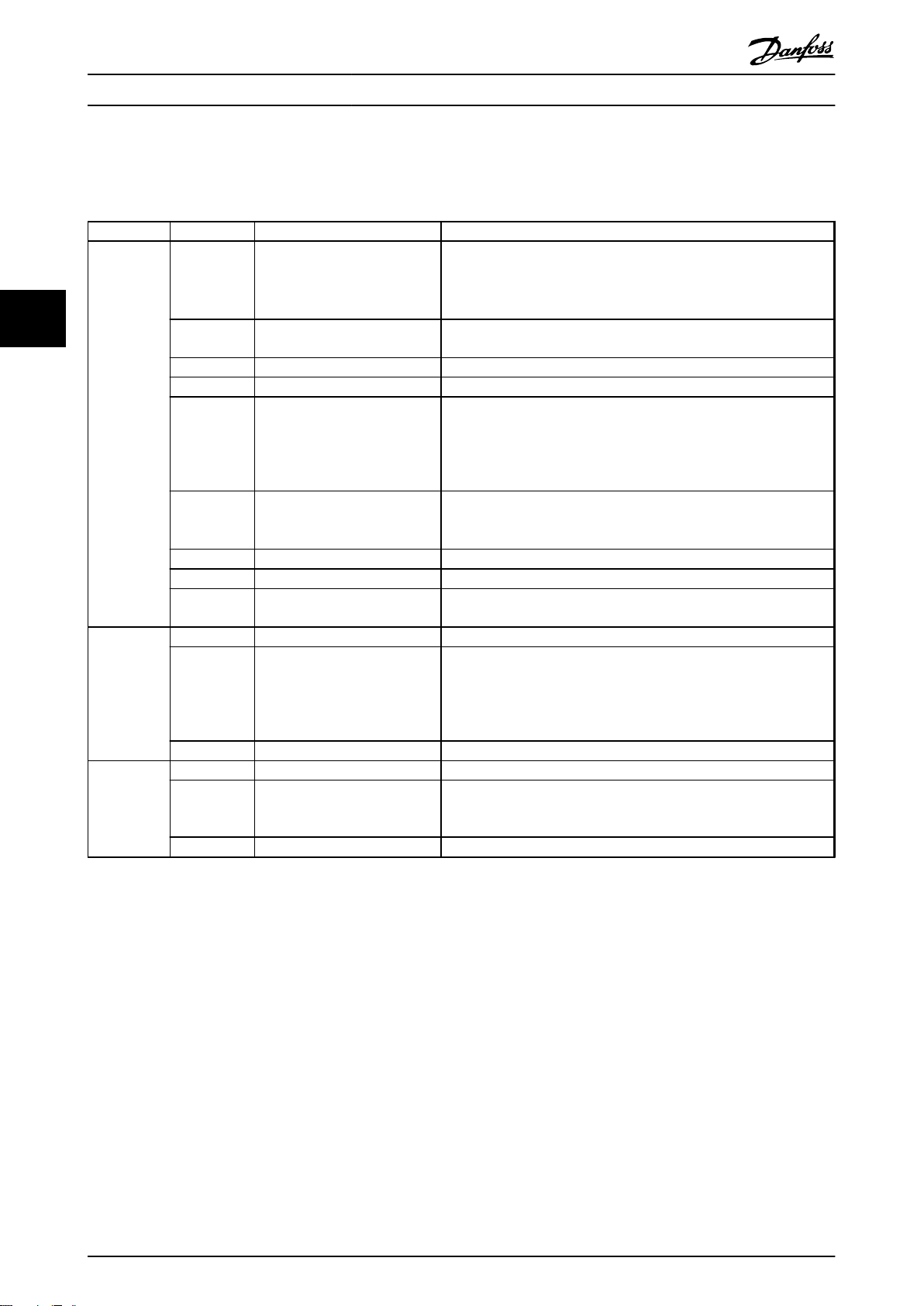
4.4.1 X55 Istwert Drehgebereingang
44
Klemmen-
Nummer
10 Z nicht CLK nicht 11 - DATEN 12 - DATEN nicht -
Abbildung 4.6 X55 Istwert Drehgebereingang
TTL-Drehgeber SSI-Drehgeber SinCos-
1 +24-V-DC-
Versorgung
2 +8-V-DC-
Versorgung
3 +5-V-DC-
Versorgung
4 GND GND GND
5 A - +SIN
6 A nicht - REFSIN
7 B - +COS
8 B nicht - REFCOS
9 Z CLK -
+24-V-DC-
Versorgung
+8-V-DC-
Versorgung
+5-V-DC-
Versorgung
Drehgeber
+24-V-DC-
Versorgung
+8-V-DC-
Versorgung
+5-V-DC-
Versorgung
Klemmen-
Nummer
1 +24-V-DC-Versorgung +24-V-DC-Versorgung
2 +8-V-DC-Versorgung +8-V-DC-Versorgung
3 +5-V-DC-Versorgung +5-V-DC-Versorgung
4 GND GND
5 A 6 A nicht 7 B 8 B nicht -
9 Z CLK
10 Z nicht CLK nicht
11 - DATEN
12 - DATEN nicht
Abbildung 4.7 X56 Master Drehgebereingang/Virtueller Master
Drehgeberausgang
X57 Digitaleingänge
4.4.3
TTL-Drehgeber SSI-Drehgeber
14 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303
Klemmen-
Nummer
1 Touch-Probe-Schalter
2 Positiver Hardware-Endschalter
3 Negativer Hardware-Endschalter
4 Home-Schalter
5 Fahre zur Sollposition
6 Home-Merker zurücksetzen
7 Touch-Probe-Position zurücksetzen
8 Quick stop
9 Fahre zur Home-Position
10 Speichere neue Indexnummer der Sollposition
Abbildung 4.8 X57 Digitaleingänge
Beschreibung
1 2
130BD656.10
1 2 3 4 5 76 8
130BD657.10
1
2
3 4 5
130BD672.10
Elektrische Installation Produkthandbuch
4.4.4 X58 24-V-DC-Versorgung
Klemmen-
Nummer
1 +24 V
2 COM
Abbildung 4.9 X58 24-V-DC-Versorgung
X59 Digitalausgänge
4.4.5
Beschreibung
X62 MCO-CAN
4.4.6
Klemmen-
Nummer
1 –
2 CAN_L (CAN niedrig)
3 Ablass
4 CAN_H (CAN hoch)
5 –
Abbildung 4.11 X62 MCO CAN
4 4
Beschreibung
Klemmen-
Nummer
1 Homefahrt abgeschlossen
2 Sollposition erreicht
3 Fehler
4 Referenz Index Bit 0
5 Referenz Index Bit 1
6 Referenz Index Bit 2
7 Referenz Index Bit 3
8 Referenz Index Bit 4
Abbildung 4.10 X59 Digitalausgänge
Beschreibung
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 15
Elektrische Installation Produkthandbuch
4.5 Beschreibung der Klemmen
4.5.1 Steuerkartenklemmen bei einem Frequenzumrichters
Anschluss Klemme Bezeichnung Beschreibung
Eingänge
44
Relais 01
Relais 02
12, 13 +24 V OUT 24 V (+1, –3 V) Spannungsversorgung
Maximallast:
VLT® AutomationDrive FC 301: 130 mA
VLT® AutomationDrive FC 302: 200 mA
18 Referenz Index Bit 0 (LSB) Referenzposition Index Bit Nummer 0 (niederwertigstes Bit). Im Feldbus-
Modus nicht benutzt.
19 Referenz Index Bit 1 Referenzposition Index Bit Nummer 1. Im Feldbus-Modus nicht benutzt.
20 Masse für Digitaleingänge Masse für 24 V – intern verbunden mit 39, 55, X55/4, X56/4 und X58/2
27 Aktivierung (Fehler quittieren im
digitalen Steuerungsmodus)
29 Referenz Index Bit 4 (msb) Referenzposition Index Bit Nummer 4 (höchstwertiges Bit). Im Feldbus-
32 Referenz Index Bit 3 Referenzposition Index Bit Nummer 3. Im Feldbus-Modus nicht benutzt.
33 Referenz Index Bit 2 Referenzposition Index Bit Nummer 2. Im Feldbus-Modus nicht benutzt.
37 Sicher abgeschaltetes Moment
(STO)
01 COM-Relais 01 Gemeinsame Klemme für Relais 01.
02 Anschluss an elektromechanische
Bremse Normal Offen
03 NC Normal geschlossen
04 COM-Relais 02 Gemeinsame Klemme für Relais 02.
05 Bremse aktiviert NC Normal geschlossen Relais 02 ist geschlossen, um eine elektromecha-
06 NO Normal offen
Zur Aktivierung des Betriebs muss dieser Eingang sowohl im digitalen
als auch im Feldbus-Steuerungsmodus auf high gehalten werden.
Digitaler Steuerungsmodus: Fehler werden mit der steigenden Flanke
gelöscht. Es müssen mindestens 1 ms lang 0 V anliegen, um die
Erkennung von Pegeländerungen zu gewährleisten.
Modus nicht benutzt. Nicht verfügbar bei VLT® AutomationDrive FC
301.
Sicherer Eingang. Dient zur sicheren Abschaltung des Motormoments.
Normal offen Relais 01 ist während des Herunterfahrens und
Hochfahrens des FC 300 geöffnet (Bremse aktiviert). Das Relais ist
immer nach einem Schnellstopp oder im Fehlerzustand geöffnet. Relais
01 schließt nur in Zusammenhang mit einer Fahrt oder wie in
Parameter 19-09 Bremskontrolle festgelegt.
nische Bremse zu aktivieren. Ist das Relais geöffnet, ist die Bremse
deaktiviert. Wird im Feldbus-Steuerungsmodus nicht benutzt.
16 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Elektrische Installation Produkthandbuch
Anschluss Klemme Bezeichnung Beschreibung
Analoge Ein-/
Ausgänge
RS-485
39 COM A Ausgang Masse für analogen Ausgang. Intern verbunden mit Klemme 20 und 55.
42 Touch Probe Position erfasst Dieser analoge Ausgang liefert entweder 0 mA (nicht erfasst) oder 20
mA (erfasst) bei maximal 500 Ω.
50 +10 V OUT Stromversorgung für manuelle JOG-Eingänge (Klemme 53 und 54).
Maximal 15 mA.
53 ±10 V-In Manueller JOG positiv Bei einem hohen Wert (mehr als 5 V) verfährt der Antrieb mit JOG-
Geschwindigkeit (Parameter 19-16) und beschleunigt (Parameter 19-17)
in positiver Richtung. Bei einem niedrigen Wert (weniger als 5 V)
bremst der Antrieb und stoppt, sofern keine andere Bewegung aktiviert
wurde. Positiver JOG hat eine höhere Priorität als negativer JOG. Im
Feldbus-Modus nicht standardmäßig benutzt. Kann über Parameter
19-31 Dig Jogging in FB Mode aktiviert werden.
54 ±10 V-In Manueller JOG negativ Bei einem hohen Wert (mehr als 5 V) verfährt der Antrieb mit JOG-
Geschwindigkeit (Parameter 19-16) und beschleunigt (Parameter 19-17)
in negativer Richtung. Bei einem niedrigen Wert (weniger als 5 V)
bremst der Antrieb und stoppt, sofern keine andere Bewegung aktiviert
wurde. Im Feldbus-Modus nicht standardmäßig benutzt. Kann über
Parameter 19-31 Dig Jogging in FB Mode aktiviert werden.
55 (COM A EIN) Masse für Analogeingänge. Intern verbunden mit Klemme 20 und 39.
61 Abschirmung
68 RxTx+ Ein Schalter auf der Steuerkarte dient zum Zuschalten des Abschlusswi69 RxTx–
Integrierter RC-Filter für Kabelabschirmung. Dient nur zum Anschluss
der Abschirmung bei EMV-Problemen.
derstands.
4 4
Tabelle 4.2 Steuerkartenklemmen
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 17

Elektrische Installation Produkthandbuch
4.5.2 MCO Digitaleingangsklemme (X57)
Klemme Bezeichnung Beschreibung
1 Eingang Touch-Probe-Schalter Eingang mit der steigenden Flanke ausgelöst. Wenn dieses Signal ansteigt und aktuell
keine Touch-Probe-Zielposition vorliegt, wird eine neue Touch-Probe-Zielposition
berechnet und gespeichert.
2 Eingang positiver Hardware-
Endschalter
44
3 Eingang negativer Hardware-
Endschalter
4 Eingang Home Referenzschalter Aktiv high. Markiert die Home-Position der Anwendung.
5 Gehe zur Zielposition Aktiv high. Bei Aktivierung fährt der Motor zur angegebenen Zielposition. Ein Low-Signal
6 Home-Merker zurücksetzen Aktiv high. Dieser Eingang setzt den Home-Merker zurück. Damit kann der Benutzer eine
7 Touch-Probe-Position zurück-
setzen
8 Quick stop
9 Fahre zur Home-Position Während dieser Eingang high ist, führt der Motor eine Homefahrt aus; es werden keine
10 Speichere neue Indexnummer
der Sollposition
Eingang mit der fallenden Flanke ausgelöst. Löst einen Hardware-Endschalter Fehler aus
und der Motor stoppt entsprechend dem Parameter 19-06 Fehlerreaktion.
Eingang mit der fallenden Flanke ausgelöst. Löst einen Hardware-Endschalter Fehler aus
und der Motor stoppt entsprechend dem Parameter 19-06 Fehlerreaktion.
unterbricht alle Positionierfahrten. Im Feldbus-Modus nicht benutzt.
zweite Homefahrt ausführen.
Aktiv high. Dieser Eingang setzt den Positions-Merker der Touch Probe zurück. Das
Rücksetzen ist erforderlich, um mittels eines Positionierbefehls eine neue Touch Probe
Position anzufahren. Im Feldbus-Modus nicht benutzt.
Aktiv low. Diese Eingabe aktiviert die Quick stop Funktion. Der Motor stoppt gemäß der
Einstellung des Parameters 19-06 Fehlerreaktion. Die elektro-mechanische Bremse ist nach
Auslösen eines Quick stops ständig aktiviert – unabhängig von der Einstellung des
Parameters 19-06 Fehlerreaktion.
Positions- oder JOG-Operationen ausgeführt. Jede Homefahrt wird durch einen LowZustand an diesem Eingang unterbrochen. Im Feldbus-Modus nicht benutzt.
Aktiv an der steigenden Flanke (0 V muss mindestens 1 ms anliegen, um die Erkennung
von Pegeländerungen zu gewährleisten): Abspeichern der Indexnummern der Referenzposition, die an Klemme 18, 19, 29, 32, 33 spezifiziert wurde. Der digitale Ausgang 4-8
wird geändert, um bei digitaler Eingangssteuerung den neuen Referenzindex zu
spiegeln. Im Feldbus-Modus nicht benutzt.
Tabelle 4.3 MCO Digitaleingangsklemme (X57)
MCO Digitalausgangsklemme (X59)
4.5.3
Klemme Bezeichnung Beschreibung
1 Homefahrt abgeschlossen Aktiv high. Dieser Ausgang ist immer high, wenn ein Absolutgeber verwendet wird.
2 Referenzposition erreicht Aktiv high. Der Ausgang wird gesetzt, wenn die Zielposition gemäß der Einstellung von Parameter
33-47 Größe des Zielfensters erreicht wurde.
3 Fehler aufgetreten Aktiv high. Dieser Ausgang wird bei jedem aufgetretenen Fehler gesetzt. Er wird nach jedem erfolg-
reichen „Fehler löschen“ zurückgesetzt. Der Ausgang bleibt so lange high, bis die Power-RecoveryFunktion (Parameter 19-08 Jog aus Endlagen) ausgewählt wurde und aktiv ist.
4 Referenz Index Bit 0 Spiegelt das aktuell eingestellte Referenz Index Bit 0. Im Feldbus-Modus nicht benutzt.
5 Referenz Index Bit 1 Spiegelt das aktuell eingestellte Referenz Index Bit 1. Im Feldbus-Modus nicht benutzt.
6 Referenz Index Bit 2 Spiegelt das aktuell eingestellte Referenz Index Bit 2. Im Feldbus-Modus nicht benutzt.
7 Referenz Index Bit 3 Spiegelt das aktuell eingestellte Referenz Index Bit 3. Im Feldbus-Modus nicht benutzt.
8 Referenz Index Bit 4 Spiegelt das aktuell eingestellte Referenz Index Bit 4. Im Feldbus-Modus nicht benutzt.
Tabelle 4.4 MCO Digitalausgangsklemme (X59)
18 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

MOTOR
X55 X56
130BD828.10
MOTOR
X55 X56
130BD829.10
Elektrische Installation Produkthandbuch
4.5.4 MCO-Drehgeberanschluss
MCO 351 verfügt über 2 Drehgeberschnittstellen, X55 und
X56. Standardmäßig ist Klemmenblock X55 als FeedbackDrehgebereingang konfiguriert.
unterstützte Drehgeber
TTL/RS422 Inkrementalgeber (X55, X56)
•
SSI Absolutgeber – Gray code (X55, X56)
•
Sinus/Cosinus Drehgeber 1 Vpp (nur X55)
•
Resolver (benötigt zusätzliche Option MCB103) –
•
nur bei geschlossener Regelschleife.
CANopen-Drehgeber (X62)
•
HINWEIS
Verwenden Sie Parameter 32-50 Quelle Follower, um die
Geberrückführung auf [1] Drehgeber 1 X56 oder [3]
Motorsteuerung einzustellen.
4.5.4.1 Beispiele für Drehgeberanschlüsse
Beispiel 1
Der Drehgeber wird zur Positionsregelung an X55
angeschlossen. Da der Drehgeber direkt auf der
Motorwelle montiert ist, kann dieselbe Rückführung
sowohl für die Positionsregelschleife der MCO als auch für
die Geschwindigkeitsregelschleife des FC verwendet
werden.
Beispiel 2
Der Drehgeber wird zur Positionsregelung an X55
angeschlossen. Da der Drehgeber nicht direkt auf der
Motorwelle montiert ist, kann diese Konfiguration für die
Positionsregelung der MCO verwendet werden, jedoch
nicht für die Geschwindigkeitsregelschleife des FC.
4 4
Abbildung 4.13 Drehgeber an Getriebe montiert
Abbildung 4.12 Drehgeber am Motor montiert
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 19

130BD830.10
MOTOR
X55 X56
MOTOR
X55 X56
MCB 103
130BD831.10
Elektrische Installation Produkthandbuch
Beispiel 3
Der Drehgeber wird zur Positionsregelung an X55
angeschlossen. Da der Drehgeber nicht direkt an der
Motorwelle befestigt ist, ist eine 2. Drehgeberverbindung
Beispiel 4
Einsatz von Resolver-Rückführung. Option MCB 103
erforderlich. Die Geschwindigkeitsregelschleife des FC muss
geschlossen sein.
(X56) erforderlich, um die Geschwindigkeitsregelschleife
des FC zu schließen.
44
Abbildung 4.14 Drehgeber an Motor und Getriebe montiert
Abbildung 4.15 Resolver auf Motor montiert
20 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

175ZA813.12
Quick bus go to target
Elektrische Installation Produkthandbuch
4.6 Feldbus-Schnittstelle
4.6.1 Einführung
Dieser Abschnitt ist nur relevant, wenn der Frequenzumrichter sowohl mit einem Feldbus-Interface (Option) als auch mit
einem Positionierregler ausgestattet ist.
Der Positionierregler kann durch die digitalen/analogen Eingänge oder über einen Feldbus gesteuert werden. Die Steuerquelle wird im Parameter 19-04 Steuerquelle ausgewählt. Es kann nur 1 Steuerquelle zur gleichen Zeit geben, das heißt dass
die digitalen/analogen Eingänge nicht aktiv sind, wenn der Feldbus als Steuerung ausgewählt ist und umgekehrt. Die
Ausnahmen sind in Tabelle 4.5 aufgelistet. Im Feldbus-Modus ist es möglich, die Zielposition und Geschwindigkeit
festzulegen. Wenn die Beschleunigungs- und Verzögerungs-PCD freigelassen werden, werden die Werte der Beschleunigung
und Verzögerung aus Index 1 verwendet.
Datenlayout
4.6.2
Steuerungs- und Statussignale werden über den sog. Process Data Channel (PCD) der verschiedenen Feldbus-Interfaces
übertragen. Die Telegrammstruktur und die verfügbare Anzahl der Datenworte hängt vom eingesetzten Feldbus ab. Weitere
Details können Sie im Handbuch der eingesetzten Feldbus-Option nachlesen. Das Beispiel in Abbildung 4.16 basiert auf dem
Layout eines Profibus-Telegrammes, ein sog. PPO:
4 4
Abbildung 4.16 Beispiel mit PROFIBUS PPO Typ 5
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 21

Elektrische Installation Produkthandbuch
Feldbus Steuersignale (Eingänge)
Feldbus
[word.bit]
1.1 Quick Bus zur Zielposition fahren (high) N.v.
1.2 Fehler quittieren (high) 27
1.3 Fahre zur Home-Position (high) 9
1.4 Neuen Fahrweg-Index lesen (high) 10
1.5 Indexpositionierung starten (high)/Indexpositionierung
44
1.6 Reset Home Status (high) 6
1.7 Reset Touch-Probe Position (high) 7
1.8 Quick stop (low) 8
1.9 Positiver JOG (high) 53
1.10 Negativer JOG (high) 54
1.11 Quick Bus Typ absolut (high) N.v.
1.12 Quick Bus Typ relativ (high) N.v.
1.13 Quick Bus Typ Touch Probe positiv (high) N.v.
1.14 Quick Bus Typ Touch Probe negativ (high) N.v.
1.15 Teach in (über LCP oder Feldbus) (high) [Back] oder [Cancel] auf LCP
1.16 Vorzeichen an der Quick-Bus-Position ändern (high) N.v.
2 Quick Bus Zielposition (MSB) N.v.
3 Quick Bus Zielposition (LSB) N.v.
4 Quick Bus Zielgeschwindigkeit N.v.
5 Quick Bus Zielbeschleunigung N.v.
6 Quick Bus Zielverzögerung N.v.
7.1 Referenz Index Bit 0 18
7.2 Referenz Index Bit 1 19
7.3 Referenz Index Bit 2 33
7.4 Referenz Index Bit 3 32
7.5 Referenz Index Bit 4 29
7.6 Referenz Index Bit 5 N.v.
Feldbus-Modus Entsprechender Eingang
5
stoppen (manueller Modus aktiviert) (low)
Tabelle 4.5 Feldbus Steuersignale (Eingänge)
22 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Elektrische Installation Produkthandbuch
Feldbus Steuersignale (Ausgänge)
Feldbus
[word.bit]
1.1 Homefahrt durchgeführt (high) 1
1.2 Referenzposition erreicht (high) 2
1.3 Fehler aufgetreten (high) 3
1.4 Elektro-mechanische Bremse geschlossen (high) 04
1.5 Touch-Probe-Position gesichert (high) N.v.
1.6 Watchdog Ausgang (Toggle) N.v.
1.7 Positiver Hardware-Endschalter (high) N.v.
1.8 Negativer Hardware-Endschalter (high) N.v.
2.1 Aktueller Index, Bit 0 4
2.2 Aktueller Index, Bit 1 5
2.3 Aktueller Index, Bit 2 6
2.4 Aktueller Index, Bit 3 7
2.5 Aktueller Index, Bit 4 8
2.6 Aktueller Index, Bit 5 N.v.
3 Aktuelle Position (hochwertiges Wort)
4 Istposition (niedrigwertiges Wort)
5 Fehlerstatus
Tabelle 4.6 Feldbus-Steuersignale (Ausgänge)
Feldbus-Modus Entsprechender Ausgang/Parameter
Parameter 34-50 Istposition (hochwertiges Wort)
Parameter 34-50 Istposition (niedrigwertiges Wort)
19-93 Fehler Status angezeigt
4 4
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 23

Programmieren
5 Programmieren
Produkthandbuch
5.1 Sicherheitshinweise
Beachten Sie vor der Inbetriebnahme der MCO die Sicherheitswarnungen in Kapitel 2 Sicherheit.
5.2 Konfiguration der grundlegenden
Parameter
VLT Parametergruppen
55
MCO Grundlegende Parameter
5.3
Beachten Sie vor der Inbetriebnahme der MCO die Sicherheitswarnungen in Kapitel 2 Sicherheit.
Weitere Informationen zum Anlegen von Spannung und
dem Betrieb des LCP finden Sie im Produkthandbuch VLT
AutomationDrive FC 301/FC 302.
Parameter 1-**Motordaten, offene oder
•
geschlossene Regelschleife, Automatische Motor
Anpassung (AMA)
Parameter 2-** Dynamische Bremse
•
Parameter 3-** Sollwertbereich und Grenzen,
•
Rampen
Parameter 4-** Drehzahlgrenzen, Drehmoment-
•
grenzen
Parameter 7-**Stimmen Sie bei Verwendung der
•
geschlossenen Geschwindigkeitsregelschleife
diese ab, bevor Sie die PID-Parameter der MCO
abstimmen
Parameter 32-0* Drehgeber2 (Rückführung)
•
Einstellung des Typs und der Auflösung
Parameter 32-3* Drehgeber1 (falls vorhanden)
•
Einstellung des Typs und der Auflösung
Parameter 32-6* Einstellung der PID-Werte
•
Parameter 32-8* Maximalgeschwindigkeit,
•
Rampen
Grundkonfiguration
1. Prüfen Sie den Motoranschluss. Steuern Sie die
Bremse unabhängig von der Option bis die
Einstellung beendet ist, da die Steuerung der
mechanischen Bremse während der Basiseinstellung nicht gewährleistet werden kann. Stellen
Sie außerdem sicher, dass der Motor frei drehen
kann, ohne Schaden anzurichten oder Personen
zu verletzen.
®
2. Entfernen Sie alle Signale an den Eingängen. Nur
Eingang 27 (Freilauf), I8 (Quickstopp), I3
(negativer Hardware-Endschalter) und I2 (positiver
Hardware-Endschalter) müssen angeschlossen
und high sein.
3.
Wählen Sie den Modus Off aus
4. Führen Sie das [Quick Menu] mit den korrekten
Motordaten durch.
5.
Rufen Sie den Modus Hand on auf und stellen Sie
die Frequenz auf einen niedrigen positiven Wert
ein, zum Beispiel +3 Hz als Sollwert. Der Motor
sollte sich nun drehen.
6. Wenn sich der Motor in der falschen (negativen)
Richtung dreht, die Motorphasen tauschen.
7. Stellen Sie die Parameter für den RückführungsDrehgeber in Parametergruppe 32-0* Parameter
Drehgeber 2 und gegebenenfalls die Parameter
für den Drehgeber in Parametergruppe 32-3*
Parameter Drehgeber 1 ein.
7a
Bei Inkrementalgebern:
Stellen Sie den Parameter 32-00
Inkrementaler Signaltyp auf den erforder-
lichen Typ ein. Stellen Sie die Auflösung
des Drehgebers in Parameter 32-01
Inkrementalauflösung ein. Stellen Sie den
Parameter 32-00 Inkrementaler Signaltyp
ein.
7b
Bei Absolutgebern:
Stellen Sie den Parameter 32-00
Inkrementaler Signaltyp auf [0]. Stellen
Sie den Parameter 32-02 Absolutwertprotokoll auf den verwendeten
Drehgebertyp ein und 32-03 Absolutwertauflösung auf die Drehgeberauflösung.
Stellen Sie die Datenbits und die
Takteinstellungen für den Absolutgeber
von Parameter 32-05 Absolutwertgeber
Datenlänge auf 32-08 Absolutgeber
Kabellänge.
8. Drücken Sie die Taste [Status] am LCP. Nun
erscheinen die Werte U/min [UPM] und Istposition
in der oberen Zeile des Displays.
9. Optimieren Sie den/die PID-Regler.
24 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Programmieren Produkthandbuch
5.4 PID-Einstellungen
Berechnen Sie die Vorsteuerung für die Geschwindigkeit
(FFVEL – 32-65 Geschwindigkeitsvorsteuerung)
FFVEL =
MaxVelEnc x EncRes x Tsample
FFVEL = 32-65 Geschwindigkeitsvorsteuerung
•
MaxVelEnc = Parameter 32-80 Maximalgeschwin-
•
digkeit (Drehgeber)
EncRes = Drehgeberauflösung
•
Tsample = PID Abtastzeit (32-69 Abtastzeit für PID-
•
Regler)
Verwenden Sie Parameter 19-19 Optim. Vorsteuer um
festzulegen, ob die Berechnung automatisch erfolgen soll.
Dies ist nur möglich, wenn der Drehgeber und die
Geschwindigkeitsparameter vorher festgelegt worden sind.
Einstellung von PID:
62914560000
Bei inkrementalen und sinusförmigen
-
Drehgebern: EncRes = 4 x (32-01
Inkrementalauflösung)
Bei CAN-Drehgebern: EncRes = 1 x
-
(Parameter 32-01 Inkrementalauflösung)
Bei Absolutgebern: EncRes = 32-03
-
Absolutwertauflösung
19-01 Endlospositionierung
Option: Funktion:
[0] * Begrenzt Die Positionierung erfolgt in einem begrenzten
Positionierbereich ohne Positionsüberlauf.
[1] Endlos Die Positionierung erfolgt durchgängig in eine
Richtung. Denken Sie auch daran, die Parameter
19-08 Jog aus Endlagen, 33-43 Negativer SoftwareEndschalter Aktiv und 33-44 Positiver SoftwareEndschalter Aktiv auf [0] zu stellen.
19-02 Blockierrichtung
Option: Funktion:
[0] * Keine
Blockierung
[1] Blockierung in
Rückwärtsrichtung
[2] Blockierung in
Vorwärtsrichtung
Der Motor kann sich in beiden
Richtungen bewegen.
Als Fehlersituation definiert („Rückwärtsbetrieb nicht zulässig“ - FEHLERSTATUS
=12), wenn der Motor sich in Rückwärtsrichtung bewegt.
Definiert als Fehlersituation („Vorwärtsbetrieb nicht zulässig“ - FEHLERSTATUS =
13), wenn sich der Antrieb vorwärts
bewegt.
19-03 Touch Probe Verzögerung
Range: Funktion:
0 [1–100000 ms] Dieser Parameter erlaubt die Kompensation
einer Schaltverzögerung des Touch-Probe
Sensors.
5 5
32-60 P-Faktor ≈ FFVEL/50
32-61 D-Faktor ≈ FFVEL/10
32-62 I-Faktor = 5
5.5
Beschreibung der
Anwendungsparameter
5.5.1 19-** Anwendungsparameter
Mit den 19-** Parametern wird die spezifische
Anwendungssoftware des Positionierreglers MCO 351
konfiguriert. Über die anderen Parameter wird die dazugehörige Firmware konfiguriert.
19-00 Steuerungsmodus
Option: Funktion:
[0] * MCO-
Steuerung
[1] VLT
Steuerung
Der Motor wird über die MCO gesteuert.
Der Motor wird vom FC und nicht von der
MCO gesteuert. Ein manueller Betrieb ist
möglich. Beachten Sie, dass die Standardregler-Funktionen, zum Beispiel Endschalter
und andere sicherheitsbezogene Funktionen,
nicht aktiv sind.
19-04 Steuerquelle
Option: Funktion:
[0] * Digitale Ein-/
Ausgabe
[1] Feldbus Die Positionierung erfolgt über den
Die Positionierung erfolgt über Digitaleingänge.
Feldbus.
19-05 Benutzer Einstellung Referenzposition
Range: Funktion:
0 [–1073741824 bis
1073741824]
Bei Netz-Einschaltung, wenn der
Parameter 33-00 Homefahrt erzwingen
auf [0] Homefahrt nicht erzwingen
eingestellt ist, entspricht die Referenzposition dem hier eingestellten Wert.
19-06 Fehlerverhalten
Option: Funktion:
[0]*Elektronische
Bremse
Dieser Parameter bestimmt das Verhalten
des Motors bei Erkennen eines Fehlers.
Der Motor bremst mit der kürzestmöglichen
Rampe bis zum Stillstand ab (Parameter
32-81). Sobald der Stillstand erreicht ist,
wird die elektronische Bremse entsprechend
der Einstellung von Parameter 19-10 Freilauf
Verzög. aktiviert. Wenn sich der Motor zu
einem beliebigen Zeitpunkt während der
Bremsrampe stromlos geschaltet wird (z.
B.aufgrund eines Überstromalarms), wird
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 25

Programmieren Produkthandbuch
19-06 Fehlerverhalten
Option: Funktion:
sofort die Bremse aktiviert und der Motor in
den Freilauf geschaltet.
[1] Mechanische
Bremse
Der Motor aktiviert sofort die Bremse und
schaltet den Motor in den Freilauf.
HINWEIS
Die Bremse ist nach jeder Fehlersituation (oder
Schnellstopp) aktiviert, unabhängig von der Einstellung
von Parameter 19-09 Bremskontrolle.
55
19-07 Fehler zurücksetzen
Option: Funktion:
[0] * Kein Zurück-
setzen
[1] Fehler
quittieren
Fehler nicht zurücksetzen.
Durch Auswahl dieser Option ist es möglich,
das Fehler-Flag zu löschen (vorausgesetzt,
die Fehlerursache wurde behoben). Der
Parameter wird automatisch auf [0] Fehler
nicht zurücksetzen gesetzt, wenn er
erfolgreich quittiert wurde.
19-08 Power-Recovery
Option: Funktion:
[0] Deaktiviert Wenn die Power-Recovery-Funktion deaktiviert
(auf [0] eingestellt) ist, kann die Anwendung
unter keinen Umständen (weder JOG-noch
Positionierbetrieb) betrieben werden, solange
sich die Anwendung außerhalb der HW- oder
SW-Endschalter befindet. Diese Situation lässt
sich nur lösen, indem die Mechanik mit der
Handbewegt wird.
[1]*Aktiviert Wenn die Funktion Power-Recovery aktiviert
(auf [1] eingestellt ist), lässt sich dagegen ein
„teilweises Rücksetzen“ des Endschalters
(FEHLERSTATUS= 2/3/4/5) durchführen, wobei es
möglich ist, die JOG-Funktion zu nutzen, um
aus dem HW- oder SW-Endschalter zu fahren. Es
ist nicht möglich,die Anwendung mit
Homefahrt, Positionierung oder Jogging (in der
falschen Richtung) zu betreiben, solange sich
die Anwendung innerhalb des HW- oder SWEndschalters befindet. Der Ausgang Fehler
aufgetreten bleibt high, um die Wirksamkeit
dieser Einschränkungen anzuzeigen. Sobald die
Anwendung aus dem HW- oder SW-Endschalter
gefahren wird, wird der Fehler automatisch
gelöscht und das Signal Fehler aufgetreten
erlischt, um anzuzeigen, dass der Normalbetrieb
wiederhergestellt ist.
19-09 Automatische Bremskontrolle
Option: Funktion:
[0] Deaktiviert Wenn die automatische Bremskontrolle
deaktiviert (auf [0] eingestellt) ist, ist die
Regelschleife des Frequenzumrichters aktiv,
selbst wenn sich die Anwendung im Stillstand
befindet.
[1] * Aktiviert Sobald die automatische Bremskontrolle
aktiviert (auf [1] eingestellt ist), wird die elektromechanische Bremse jedes Mal, wenn die
Anwendung für einen in Parameter 19-12
Bremsverzög. Zu angegebenen Zeitraum stillsteht,
automatisch aktiviert. Dies ist insbesondere bei
Hebeanwendungen nützlich, bei denen es zur
Überhitzung des Motors kommen kann, wenn
über einen längeren Zeitraum hinweg das volle
Drehmoment im Stillstand bereitgestellt werden
muss.
19-10 Freilaufverzögerung
Range: Funktion:
200ms [0–
1000
ms]
Wird zusammen mit der automatischen
Bremskontrolle verwendet. Unter Freilaufverzögerung versteht man die Verzögerung nach
Aktivierung der elektromechanischen Bremse vor
Deaktivierung der Regelung und dem Freilauf des
Motors. Die Funktion ist bei Hebeanwendungen
hilfreich, bei denen die Last dazu neigt, nach
jedem Stopp ein wenig abzusacken. Grund
hierfür ist, dass die Aktivierung der Bremse
langsamer erfolgt als das Abschalten des Motors.
19-11 Bremsverzögerung
Range: Funktion:
200ms [0–
1000
ms]
Wird zusammen mit der automatischen
Bremskontrolle verwendet. Unter Bremsverzögerung versteht man die Verzögerung nach
Aktivierung der Regelung und Magnetisieren des
Motors, bevor die Bremse deaktiviert wird. Die
Funktion ist bei Anwendungen mit
(üblicherweise großen) Motoren nützlich, deren
volle Magnetisierung länger dauert als die
Deaktivierung der elektromechanischen Bremse.
19-12 Halte-Verzögerung
Range: Funktion:
0 s [0–
10000 s]
Wird zusammen mit der automatischen
Bremskontrolle verwendet. Unter HalteVerzögerung versteht man die Wartezeit, während
der die Bremse nicht aktiviert ist, obwohl sich die
Anwendung im Stillstand befindet. Diese Funktion
eignet sich für Anwendungen, bei denen auf eine
Reihe schneller Positionierbefehle längere
Stillstandszeiten folgen.
26 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Programmieren Produkthandbuch
19-13 Bremslebensdauer
Range: Funktion:
0 [0–
1073741824
BE]
Wenn ein höherer Wert als [0] (deaktiviert)
eingestellt ist, erkennt der Antrieb eine
Fehlersituation (Bremslebensdauer
überschritten – FEHLERSTATUS =7), wenn sich
der Motor weiter dreht als die Anzahl der
Benutzereinheiten (BE), die in diesem
Parameter festgelegt sind, während die
elektronische Bremse aktiviert ist.
19-14 Zähler Getriebefaktor Motor/Drehgeber
Range: Funktion:
1 [1–
100000]
Wenn der Drehgeber auf einem Getriebe montiert
ist, bei dem 5 Motorumdrehungen 2 Drehgeberumdrehungen entsprechen, ist dieser Parameter
auf [5] (die Anzahl der Motorumdrehungen) und
Parameter 19-15 Getriebe Nenner auf [2] (die
Anzahl der Drehgeberumdrehungen) einzustellen.
Ist der Drehgeber direkt auf der Motorwelle
montiert, sollten Sie die Parametereinstellung [1]
beibehalten.
19-15 Nenner Getriebefaktor Motor/Drehgeber
Range: Funktion:
1 [1–100000]
Siehe Beschreibung für Parameter 19-14 Zähler
Getriebefaktor Motor/Drehgeber. Ist der Drehgeber
direkt auf der Motorwelle montiert, sollten Sie
die Parametereinstellung [1] beibehalten.
19-16 Maximale JOG-Geschwindigkeit
Range: Funktion:
100 DrehgeberU/min
[1–20000
Drehgeber-U/
min]
Die maximal zulässige JOGGeschwindigkeit der
Anwendung wird in Drehgeberumdrehungen pro Minute
angegeben.
HINWEIS
Diese Einstellung darf unter keinen Umständen einen
Wert überschreiten, der ca. 5 Prozent unter dem in
Parameter 32-80 Maximale Geschwindigkeit (Drehgeber)
berechneten Wert liegt.
19-17 JOG Rampenzeit
Range: Funktion:
5000ms [10–
100000
ms]
Dieses Parameter gibt sowohl die Beschleunigungs- als auch die Verzögerungszeit
während des JOG-Betriebs an. Die
Rampenzeit ist definiert als die Zeit (in
Millisekunden), die die Beschleunigung vom
Stillstand auf die maximal zulässige
Geschwindigkeit in Parameter 32-80
Maximalgeschwindigkeit (Drehgeber)
erfordert.
19-18 Skalierung der JOG-Geschwindigkeit
Option: Funktion:
[0] * Keine Skalierung Die JOG-Geschwindigkeit wird definiert
als Drehgeberumdrehungen pro Minute.
[1] Skalierung Die Skalierung der JOG-Geschwindigkeit
erfolgt mittels des Zählers Getriebefaktor/
Nenners Getriebefaktor.
19-19 FFVEL Auto-Berechnung
Option: Funktion:
[0]*Deaktiviert Die automatische Berechnung ist sowohl für
die Geschwindigkeitsvorsteuerung (FFVEL) als
auch für die Geschwindigkeitsregelschleife
(PID) deaktiviert.
[1] FFVEL
aktiviert
[2] FFVEL + PID
aktiviert
Die optimale Einstellung des Parameters
Geschwindigkeitsvorsteuerung wird
automatisch berechnet. Dieser Parameter
wird automatisch auf [0] Deaktiviert zurückgesetzt, sobald die Berechnung
abgeschlossen ist.
Die optimale Einstellung des P-, D- und IFaktors und der
Geschwindigkeitsvorsteuerung wird
automatisch berechnet. Dieser Parameter
wird automatisch auf [0] Deaktiviert zurückgesetzt, sobald die Berechnung
abgeschlossen ist.
Parameter 32-80 Maximale Geschwindigkeit
Parameter 32-00 ODER 32-02 Drehgebertyp
Parameter 32-01 ODER 32-03 Drehgeberauf-
lösung
Parameter 19-14 Getriebe Zähler
Parameter 19-15 Getriebe Nenner
HINWEIS
Die Änderung eines der genannten Parameter erfordert
eine Neuberechnung, da sich der optimale Wert für die
Regelungsparameter verändert hat.
19-20 Rücksetzen auf Werkseinstellungen
Option: Funktion:
[0] * Deaktiviert Es werden keine Parameter zurückgesetzt.
[1] Aktiviert Alle Parameterwerte sowie die Fahrweg-Daten
werden auf den Standardwert zurückgesetzt.
Der Parameter wird nach erfolgreichem Reset
automatisch auf [0] Deaktiviert zurückgesetzt.
19-21 LCP Eingabe mit Index verknüpfen
Option: Funktion:
[0] * Deaktiviert Deaktiviert die automatische Aktualisierung des
Parameters 19-23 Positions-Index. Dies ist
erforderlich, wenn eine Positionsnummer
programmiert werden soll, die nicht in der SPS
gespeichert ist.
5 5
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 27

Programmieren Produkthandbuch
19-21 LCP Eingabe mit Index verknüpfen
Option: Funktion:
[1] Aktiviert
Parameter 19-23 Positions-Index wird
automatisch mit der letzten gespeicherten
Positionsreferenznummer aktualisiert. Damit
kann der Benutzer erkennen, welche Positionsreferenz das SPS-System aktuell vorgibt.
19-23 Indexnummer
Range: Funktion:
0 [0–31
55
(0–63 im
FeldbusModus)]
Mit diesem Parameter können Sie festlegen,
welche Positionsdaten in den Parametern 19-24
Index: Zielpos. bis 19-28 Index: Pos. Typ angezeigt
werden sollen. Immer wenn die Indexnummer
geändert wird, werden die aktuellen Werte der
Index-Parameter unter der zuvor angegebenen
Indexnummer gespeichert. Danach werden die
Werte der Indexparameter mit den gespeicherten
Daten aktualisiert, die für die neu angegebenen
Indexnummern relevant sind.
19-24 Index Zielposition
Range: Funktion:
0 [–
1073741824
bis
1073741824
BE]
Die Bedeutung dieses Parameters ist abhängig
von dem Positionstyp, der in Parameter 19-28
Index: Pos. Typ ausgewählt ist.
Wenn der Parameter 19-28 Index: Pos. Typ = [0]
Fahrwegtyp Absolut ausgewählt ist, dann
bezieht sich der Wert dieses Parameters auf
eine absolute Position (relativ zur festen HomePosition).
Wenn der Parameter 19-28 Index: Pos. Typ = [1]
Fahrwegtyp Relativ ausgewählt ist und die
letzte Position durch JOG-Betrieb erreicht
wurde, handelt es sich bei dem Wert des
Parameters um eine relative Position zu dieser
Position. Wurde die letzte Position dagegen
infolge eines Positionierbefehls erreicht, gibt
der Wert eine Position relativ zur letzten
Zielposition an (unabhängig davon, ob sie
erreicht wurde oder nicht).
Wenn der Parameter 19-28 Index: Pos. Typ = [2]
Fahrwegtyp Touch Probe positiv ausgewählt ist,
dann fährt die Anwendung in die positive
Richtung, bis eine Touch-Probe-Position
definiert wird. Falls bereits eine Touch-ProbePosition definiert war, fährt die Anwendung
diese direkt an.
Eine Touch-Probe-Position ist definiert als die
Position, bei der am Eingang Touch-ProbeSchalter eine steigende Flanke erkannt wird
plus dem Wert des Parameters 19-24 Index:
Zielposition.
Eine Touch-Probe-Position wird durch ein
High-Signal am Eingang „Reset Touch-ProbePosition“ gelöscht. Der Ausgang „Touch-Probe-
19-24 Index Zielposition
Range: Funktion:
Position gesichert“ ist high, falls eine TouchProbe-Position definiert wurde.
Wenn der Parameter 19-28 Index: Pos. Typ = [3]
Touch Probe negativ ausgewählt ist, dann fährt
die Anwendung so lange in negative Richtung,
bis eine Touch-Probe-Position definiert wird.
Falls bereits eine Touch-Probe-Position
definiert war, fährt die Anwendung diese direkt
an.
HINWEIS
Dieser Parameter wird automatisch in Abhängigkeit von
Parameter 19-23 Positions-Index aktualisiert.
19-25 Index Beschleunigungsrampenzeit
Range: Funktion:
5000 [10–
100000
ms]
Die Index-Beschleunigungsrampenzeit wird als
Zeit (in Millisekunden) definiert, die es dauert,
bis aus dem Stillstand die in Parameter 32-80
Maximale Geschwindigkeit (Drehgeber)
festgelegte Geschwindigkeit erreicht wird. Diese
Einstellung ist während der Positionierung mit
dem aktuellen Index relevant.
HINWEIS
Dieser Parameter wird automatisch in Abhängigkeit von
Parameter 19-23 Positions-Index aktualisiert.
19-26 Index Verzögerungsrampenzeit
Range: Funktion:
5000 [10–
100000
ms]
Die Index-Verzögerungsrampenzeit wird als die
Zeit (in Millisekunden) definiert, die es dauert,
bis ausgehend von der in Parameter 32-80
Maximale Geschwindigkeit (Drehgeber) festgelegten maximal zulässigen Geschwindigkeit der
Stillstand erreicht wird. Diese Einstellung ist
während der Positionierung mit dem aktuellen
Index relevant.
HINWEIS
Dieser Parameter wird automatisch in Abhängigkeit von
Parameter 19-23 Positions-Index aktualisiert.
19-27 Index Maximale Geschwindigkeit
Range: Funktion:
100
DrehgeberU/min
[1–20000
Drehgeber-U/
min]
Der Index Maximale Geschwindigkeit wird definiert in
Drehgeberumdrehungen pro
Minute. Diese Einstellung ist
während der Positionierung mit
dem aktuellen Index relevant.
28 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Programmieren Produkthandbuch
HINWEIS
Dieser Parameter wird automatisch in Abhängigkeit von
Parameter 19-23 Positions-Index aktualisiert. Der Wert
dieser Einstellung sollte unter keinen Umständen höher
liegen als der um 5% verringerte Wert des Parameters
32-80 Maximale Geschwindigkeit (Drehgeber).
19-28 Index Fahrwegtyp
Option: Funktion:
[0] * Absolutwertgeber
[1] Relativ ausgewählt
ist
[2] Touch Probe
positiv ausgewählt
ist, dann
[3] Touch Probe
negativ
ausgewählt ist,
dann
Positionierung ist absolut zur HomePosition.
Positionierung ist relativ zur letzten
Zielposition, unabhängig davon, ob sie
erreicht wurde oder nicht. Wenn zuvor
ein JOG-Betrieb ausgeführt wurde, ist
die Positionierung relativ zur der durch
den JOG-Betrieb erreichten Position.
Die Positionierung ist relativ zur
erwarteten Touch-Probe Position in
positiver Richtung.
Die Positionierung ist relativ zur
erwarteten Touch-Probe Position in
negativer Richtung.
Siehe auch Parameter 19-24 Index: Zielpos.
HINWEIS
Dieser Parameter wird automatisch in Abhängigkeit von
Parameter 19-23 Positions-Index aktualisiert.
19-29 Parameter speichern
Option: Funktion:
[0] * Keine
Aktion
[1] Sichern Sichert Fahrweg- und Parameter-Daten
Keine Speicherung der Fahrweg-Daten.
Fahrweg-Daten werden nicht automatisch
gespeichert und sind deshalb nach einem Ausund Einschaltzyklus nicht automatisch
verfügbar.
dauerhaft. Dieser Parameter wird nach
erfolgreicher Speicherung der Daten
automatisch auf [0] zurückgesetzt.
19-30 Konfiguration des Hauptbildschirms sichern
Option: Funktion:
[0] * Keine
Aktion
[1] Sichern Sichert die Konfiguration des Hauptbildschirms
Konfiguration des Hauptbildschirms wird nicht
dauerhaft gespeichert. Die Konfiguration des
Hauptbildschirms wird nicht automatisch
gespeichert und ist daher nicht automatisch
nach jedem Aus- und Einschaltzyklus
verfügbar.
dauerhaft. Dieser Parameter wird nach
erfolgreichem Sichern der Konfiguration des
Hauptbildschirms automatisch auf [0] Keine
Aktion zurückgesetzt.
19-31 Digitaler JOG im Feldbus-Modus
Option: Funktion:
[0] * Aus
[1] Aktiviert den JOG-Betrieb über die Digitaleingänge (53,
54), auch im Feldbus-Modus.
19-90 Typ/Version
Range: Funktion:
[351xxyy] Dieser Parametern zeigt den Produkttyp/die Softwa-
reversion der MCO.
19-91 Softwareversion
Range: Funktion:
[xxyy] Dieser Parameter zeigt die Software-Versionsnummer
(xx = Hauptversionsnummer, yy = untergeordnete
Versionsnummer).
19-92 Neuer Index
Range: Funktion:
0 [0–31
(0–63 im Feldbus-Modus)]
Derzeit gesicherte Indexnummer.
19-93 Fehlerzustand
Option: Funktion:
[0] * 0 = OK
1 = Homefahrt erforderlich
2 = Positiver HW-Endschalter
3 = Negativer HW-Endschalter
4 = Positiver SW-Endschalter
5 = Negativer SW-Endschalter
6 = VLT nicht in Betrieb
7 = Bremslebensdauer
8 = Schnellstopp
9 = Schleppfehler (PID-Fehler) zu groß
12 = Rückwärtsbetrieb
13 = Vorwärtsbetrieb
92 = Hardwarefehler Drehgeber
Hierbei handelt es
sich um eine NurLese-Parameter. Es
zeigt den aktuellen
Fehlercode an.
5 5
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 29

Programmieren
Produkthandbuch
5.6 MCO Grundeinstellungen
5.6.1 32-0* und 32-1*, Drehgeber 2
Parameter
Die Parameter 32-0* und 32-1* konfigurieren die Drehgeberschnittstelle 2.
32-00 Inkrementalgeber Signaltyp (0x1234)
Nenner Follower (Subindex 02)
Dieser Parameter legt den Typ des Inkrementalgebers fest, der
mit der Drehgeber 2 Schnittstelle (X55 und X62, wenn ein CAN-
55
Drehgeber verwendet wird) verbunden ist.
Option: Funktion:
[0] Keine Es wird kein Inkremen-
talgeber verwendet.
[1] * RS422 (5 V TTL) Ein Inkrementalgeber mit
einer RS422-Schnittstelle ist
angeschlossen.
[2] Sinusförmig 1Vss Ein analoger Inkremen-
talgeber mit einer
Ausgangsspannung von 1 Vss
ist angeschlossen.
[3] CAN-Drehgeber Es wird ein CAN-Drehgeber
eingesetzt.
32-01 Inkrementalauflösung
Range: Funktion:
1024*
[1073741823]
Die Drehgeberauflösung wird benutzt, um
sowohl die Geschwindigkeit in U/min
(Umdrehungen pro Minute) zu berechnen,
als auch die Timeout-Erkennung des
Nullimpulses in Verbindung mit einer
Homefahrt. Tragen Sie die Auflösung des
Inkrementalgebers ein, der mit der
Drehgeber 2 Schnittstelle (X55 und X62,
wenn ein CAN-Drehgeber verwendet wird)
verbunden ist. Die Drehgeberauflösung
finden Sie auf dem Typenschild oder im
Datenblatt des Drehgebers.
Wenn der Parameter 32-00 Inkremen-
talgeber Signaltyp auf
[0] Digitaler Inkrementalgeber
•
eingestellt ist, dann muss die
Auflösung in Pulsen pro
Umdrehungen gesetzt werden.
[1] Analoger Inkrementalgeber
•
eingestellt ist, dann ergibt die
Anzahl der sinusförmigen
Perioden pro Umdrehung die
Auflösung.
[2] CAN-Drehgeber eingestellt ist
•
und bei dem CAN-Drehgeber
handelt es sich um einen
Inkrementalgeber, dann muss die
32-01 Inkrementalauflösung
Range: Funktion:
Auflösung in Pulsen pro
Umdrehung gesetzt werden.
Handelt es sich beim CANDrehgeber um einen
Absolutgeber, dann muss die
Auflösung in (Pulsen pro
Umdrehung)/4 gesetzt werden.
HINWEIS
Der Parameter für die Inkrementalauflösung (32-01 oder
32-31) werden immer verwendet, wenn es sich bei dem
CAN-Drehgeber um einen Absolutgeber handelt. Nur ein
Viertel der Drehgeberauflösung muss für einen CANAbsolutgeber eingetragen werden. Grund hierfür ist die
interne Berechnung, welche die vierfache Anzahl an
Pulsen zugrunde legt, da ein Inkrementalgeber die 4fache Anzahl an Pulsflanken (Quadcounts) zurückgibt,
die seiner Pulsanzahl entspricht. Ein Absolutwertgeber
gibt höchstens nur die tatsächliche Auflösung zurück.
HINWEIS
Wenn [3] „Motorkontrolle“ in Parameter 32-50 Quelle
Follower ausgewählt wurde, kann die Auflösung mit
diesem Parameter gesetzt werden. Der Auflösungswert
muss eine Quadratzahl sein. Andernfalls führen
Rundungsfehler zu Positionierungsdrifts. Die maximale
Frequenz des Drehgebersignals darf 410 kHz nicht
überschreiten. Der Parameter ist nur sichtbar, wenn
Parameter 32-00 Inkrementalgeber Signaltyp nicht auf [0]
„Kein“ gesetzt ist.
32-02 Absolutwertprotokoll
Dieser Parameter bestimmt den Typ des Absolutgebers, der an
der Drehgeber 2 Schnittstelle (X55 und X62, wenn ein CANDrehgeber verwendet wird) angeschlossen ist.
Option: Funktion:
[0] * Keine Es ist kein Absolutgeber
angeschlossen.
[1] HIPERFACE HIPERFACE Absolutgeber ist
angeschlossen. Die Auswahl
umfasst die Werkseinstellungen
Drehgeber-ID 1 und Parität der
Drehgeber.
[4] SSI Ein Absolutgeber mit SSI-Schnitt-
stelle ist angeschlossen
[5] SSI mit Filter Ein Absolutgeber mit SSI-Schnitt-
stelle ist angeschlossen und die
Kommunikation/das Signal ist
instabil.
Ein Sprung in den Positionsdaten wird erkannt, wenn er
größer als die Drehgeberauflösung/2 ist. Dieser wird
mithilfe eines künstlichen Positionswertes korrigiert, der
auf Basis der letzten Geschwindigkeit berechnet wird.
30 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Programmieren Produkthandbuch
Wenn der Fehler länger als 100 Datenausgaben (> 100 ms)
anhält, wird nicht weiterkorrigiert, was dann tatsächlich zu
einem „Positionsfehler” (Fehler 108) führt.
32-03 Absolutwertauflösung
Range: Funktion:
8192* [1 bis
1073741823]
Die Absolutgeberauflösung wird benutzt,
um die Geschwindigkeit in U/min
(Umdrehungen pro Minute) zu
berechnen.
Setzen Sie die Auflösung des Absolutgebers, der mit der Drehgeber 2
Schnittstelle (X55/X62) verbunden ist, in
Positionen pro Umdrehung. Die Drehgeberauflösung finden Sie auf dem
Typenschild oder im Datenblatt des
Drehgebers.
HINWEIS
Der Parameter wird nur angezeigt, wenn der Parameter
32-02 Absolutwertprotokoll auf [0] „Keiner“ eingestellt ist.
32-04 Absolutgeber Baudrate X55
Wählen Sie die Baudrate des angeschlossenen Drehgebers.
Option: Funktion:
[0] 600 Baud
[1] 1200
[2] 2400
[3] 4800
[4] * 9600
[5] 19200
[6] 38400
32-05 Absolutgeber Datenlänge
Range: Funktion:
25* [8-37
Bit]
Bestimmen Sie die Anzahl der Datenbits für den
angeschlossenen Absolutgeber, siehe Datenblatt
des Drehgebers. Dies ist notwendig, damit die
MCO die richtige Anzahl der Taktbits erzeugt.
HINWEIS
Der Parameter wird nur angezeigt, wenn der Parameter
32-02 Absolutwertprotokoll auf [0] „Keiner“ eingestellt ist.
32-06 Absolutwertgeber-Taktfrequenz
Range: Funktion:
262.000* [78.124–
2.000.000
kHz]
Bestimmt die Frequenz des Taktsignals
für den Absolutwertgeber, das von der
MCO erzeugt wird. Legen Sie eine
geeignete Frequenz für den
angeschlossenen Drehgeber fest.
HINWEIS
Dieser Parameter wird nur angezeigt, wenn Parameter
32-02 Absolutwertprotokoll nicht auf [0] „Keiner“
eingestellt ist.
32-07 Absolutwertgeber Takt
Wählen Sie aus, ob die MCO ein Taktsignal für den Absolutgeber
erzeugen soll oder nicht.
Option: Funktion:
[0] Aus Wählen Sie diese Option aus, wenn mehrere MCO an
denselben Absolutgeber angeschlossen sind und eine
andere MCO das Taktsignal erzeugt. Nur ein Gerät darf
das Taktsignal erzeugen und nur ein Gerät (Drehgeber
oder MCO) darf das Datensignal erzeugen, wenn
mehrere MCO miteinander verbunden sind.
[1] * An Wählen Sie diese Option aus, wenn es sich bei der
MCO um den einzigen Taktgenerator für den
angeschlossenen Absolutgeber handelt.
HINWEIS
Dieser Parameter wird nur angezeigt, wenn Parameter
32-02 Absolutwertprotokoll nicht auf [0] eingestellt ist.
32-08 Absolutgeber Kabellänge
Range: Funktion:
0* [0-300m]Die Takt- und Datensignale des Absolutgebers (SSI)
sind nicht mehr synchron, wenn die vom Drehgeberkabel verursachte Signalverzögerung zu lang ist.
Die MCO gleicht die Kabelverzögerung automatisch
aus, wenn die Kabellänge bekannt ist. Die Kompensation der Kabelverzögerung basiert auf einer
Verzögerung von etwa 6 ns (6 x 10-9 Sekunden) pro
Meter. Geben Sie die Gesamtlänge des Kabels (in
Metern) zwischen der MCO und dem Absolutgeber
an.
HINWEIS
Dieser Parameter wird nur angezeigt, wenn Parameter
32-02 Absolutwertprotokoll nicht auf [0] „Keiner“
eingestellt ist.
32-09 Drehgeberüberwachung
Die Überwachung der Drehgeberanschlüsse auf Unterbrechung
oder Kurzschluss kann aktiviert oder deaktiviert werden.
Ein Drehgeberfehler zeigt den Fehlercode 192.
Option: Funktion:
[0] * Aus Eine Überwachung der
Hardware ist nicht erforderlich.
[1] 3 Kanäle Alle 3 Kanäle (A, B und Index)
werden überwacht.
[2] 2 Kanäle Kanäle A und B werden
überwacht.
5 5
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 31

130BD771.10
25
1
500 25
50 1
qc =
1000
1
qc = qc = 1 UU
4 10 4
130BD772.10
5
1
500 5
3600 3600
qc =
qc = 1 UU
25
9
qc = 1 UU =
Parameter 32-12 User Unit Numerator
Parameter 32-11 User Unit Denominator
4 500 4
Programmieren
Produkthandbuch
32-10 Drehrichtung
Normalerweise bewirkt ein positiver Sollwert auch eine positive
Änderung der Position. Falls dies nicht der Fall ist, kann der
Sollwert intern invertiert werden.
Option: Funktion:
[1] * Keine Aktion Keine Veränderung. Positive Sollwerte
ergeben positive Drehgeberwerte.
[2] Invertierung des
Sollwerts
55
[3] Umkehrung der
Benutzereinheiten
(-1)
[4] Umkehr der
Benutzereinheiten
und Sollwerte (-2)
Das Vorzeichen des Sollwerts wird
intern getauscht (Plus wird Minus und
umgekehrt). Dies kommt einem
Vertauschen der Motorleitungen gleich
bzw. dem Vertauschen der A- und BSpur beim Drehgeber.
Das Vorzeichen der Benutzereinheit
wird gedreht. Positive Sollwerte
ergeben demnach positive Drehgeberwerte, die aber negativ angezeigt
werden. Dies gilt für alle Ausgaben
(Parameter 34-50 Istposition, 34-51
Sollposition, …), alle Benutzereingaben
(Parameter 19-24 Index: Zielpos.) und
alle Synchronisationsfaktoren sowie
Geschwindigkeiten (Parameter 33-03
Homefahrt-Geschwindigkeit).
Das Vorzeichen des Sollwerts wird
intern getauscht; zusätzlich wird das
Vorzeichen der Benutzereinheit wie in
32-12 Benutzereinheit Zähler
Range: Funktion:
1* [1 bis
10737418237/
max. Position
(BE)]
Alle Pfadinformationen in den Bewegungsbefehlen erfolgen in den Benutzereinheiten und
werden anschließend intern in Quadcounts
umgewandelt. Wenn Sie diese Skalierungseinheiten entsprechend auswählen, ist es
möglich, mit beliebigen technischen Maßeinheiten (z. B. mm) zu arbeiten. Bei diesem
Faktor handelt es sich um einen Bruch, der
aus einem Zähler und einem Nenner besteht.
1 BE =
P32-12 Benutzereinheit Zähler
P32-11 Benutzereinheit Nenner
Durch die Skalierung ist festgelegt, aus wie
vielen Quadcounts eine Benutzereinheit
besteht.
Beispiel 1
Welle oder Spindel
25 Motorumdrehungen ergeben 1 Spindelumdrehung; Getriebefaktor = 25/1
Drehgeberauflösung (Inkrementalgeber) = 500
Spindelsteigung = 1 Umdrehung der Spindel
= 5 mm
Skalierfaktor, wenn mit 1/10 mm Auflösung
gearbeitet werden soll = 5 x 10 = 50
Option [3] negiert.
32-11 Benutzereinheit Nenner
Abbildung 5.1 Beispiel 1
Range: Funktion:
1* [1 bis
1073741823]
Alle Pfadinformationen in den Bewegungsbefehlen erfolgen in den Benutzereinheiten und
werden intern in Quadcounts umgewandelt.
Wenn Sie diese Skalierungseinheiten
entsprechend auswählen, ist es möglich, mit
beliebigen technischen Maßeinheiten (z. B. mm)
zu arbeiten. Bei diesem Faktor handelt es sich
um einen Bruch, der aus einem Zähler und
einem Nenner besteht.
1 BE =
P32-12 Benutzereinheit Zähler
P32-11 Benutzereinheit Nenner
Durch die Skalierung ist festgelegt, aus wie
vielen Quadcounts eine Benutzereinheit
besteht. Wenn es sich um 50375/1000 handelt,
dann entspricht 1 BE genau 50,375 qc.
Parameter
32-12 Benutzereinheit Zähler = 1000
Parameter 32-11 Benutzereinheit Nenner = 1
Beispiel 2
Walze
Getriebefaktor = 5/1
Drehgeberauflösung (Inkrementalgeber) = 500
Eine Walzenumdrehung beträgt 360 Grad.
Arbeiten Sie mit einer Auflösung von 1/10.
Das bedeutet, dass eine Walzenumdrehung in
3600 Benutzereinheiten eingeteilt wird.
Skalierfaktor = 3600
Abbildung 5.2 Beispiel 2
Parameter 32-12 Benutzereinheit Zähler = 25
Parameter 32-11 Benutzereinheit Nenner = 9
32 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Programmieren Produkthandbuch
32-14 Drehgeber 2 Node-ID
Range: Funktion:
127* [1-127] Geben Sie die Knotennummer des Rückführungs-
CAN-Drehgebers ein.
32-15 Drehgeber 2 CAN-Schutz
Die Überwachung des Rückführungs-CAN-Drehgebers kann
aktiviert oder deaktiviert werden.
Option: Funktion:
[0] * Aus Werkseinstellung. Keine
Überwachung.
[1] An Rückführungs-CAN-Drehgeber
wird überwacht.
5.6.2 32-3* und 32-4*, Drehgeber 1
Parameter
Die Parameter 32-3* und 32-4* konfigurieren die Schnittstelle für den Drehgeber1.
32-30 Inkrementaler Signaltyp
Bestimmt den Typ des Inkrementalgebers, der an Drehgeberschnittstelle 1 (X56 und X62 bei Verwendung eines CAN-
Drehgebers) angeschlossen ist.
Option: Funktion:
[0] Keine Es ist kein Inkrementalgeber
angeschlossen.
[1] * RS422 (5 V TTL) Ein digitaler Inkrementalgeber
mit einer RS422-Schnittstelle
ist angeschlossen.
[3] CAN-Drehgeber Es ist ein Drehgeber mit einer
CAN-Schnittstelle
angeschlossen.
32-31 Inkrementalauflösung
Range: Funktion:
1024* [1 bis
1073741823]
Stellt die Auflösung des Inkrementalgebers
ein, der an Drehgeberschnittstelle 1 (X56)
angeschlossen ist. Die Drehgeberauflösung
finden Sie auf dem Typenschild oder im
Datenblatt des Drehgebers.
Digitaler Inkrementalgeber
•
(Parameter 32-30 = [1]): Die
Auflösung müssen Sie in
Impulsen pro Umdrehung
einstellen.
CAN-Drehgeber (Parameter 32-30
•
= [3]):
Inkrementalgeber:
-
Impulse pro Umdrehung
Absolutgeber: Impulse
-
pro Umdrehung/4
HINWEIS
Der Parameter für die Inkrementalauflösung (32-01 oder
32-31) werden immer verwendet, wenn es sich bei dem
CAN-Drehgeber um einen Absolutgeber handelt. Jedoch
müssen Sie für einen CAN-Absolutgeber ein Viertel der
Drehgeberauflösung einstellen.
Die maximale Frequenz des Drehgebersignals darf 410
kHz nicht überschreiten.
Dieser Parameter wird nur angezeigt, wenn der
Parameter 32-30 nicht auf [0] „Keiner“ eingestellt ist.
32-32 Absolutwertprotokoll
Bestimmt den Typ des Absolutgebers, der an Drehgeberschnittstelle 1 (X56/X62) angeschlossen ist.
Option: Funktion:
[0] * Keine Es ist kein Absolutgeber angeschlossen.
[4] SSI Es ist ein Absolutgeber mit SSI-Schnittstelle
angeschlossen.
[5] SSI mit Filter Es ist ein Absolutgeber mit SSI-Schnittstelle
angeschlossen und die Kommunikation/das
Signal ist instabil.
32-33 Absolutwertauflösung
Range: Funktion:
8192* [1 bis
1073741823]
Dieser Parameter wird nur
angezeigt, wenn Parameter 32-32
Absolutwertprotokoll nicht auf [0]
„Keiner“ eingestellt ist.
32-34 Absolutgeber Baudrate X56
Wählen Sie die Baudrate des angeschlossenen Drehgebers.
Option: Funktion:
[0] 600 Baud
[1] 1200 Baud
[2] 2400 Baud
[3] 4800 Baud
[4] * 9600 Baud
[5] 19200 Baud
[6] 38400 Baud
32-35 Absolutgeber Datenlänge
Range: Funktion:
25* [8-37 Bit] Bestimmt die Anzahl der Datenbits für den
angeschlossenen Absolutgeber, siehe Datenblatt
des Drehgebers. Dies ist notwendig, damit die
MCO die richtige Anzahl der Taktbits erzeugt.
HINWEIS
Der Parameter wird nur angezeigt, wenn der Parameter
32-32 Absolutwertprotokoll nicht auf [0] „Keiner“
eingestellt ist.
5 5
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 33

Programmieren Produkthandbuch
32-36 Absolutwertgeber-Taktfrequenz
Range: Funktion:
262.000* [78,125 –
2000,000 kHz]
Bestimmt die Frequenz des Taktsignals
für den Absolutwertgeber, das von der
MCO erzeugt wird. Legen Sie eine
geeignete Frequenz für den
angeschlossenen Drehgeber fest.
HINWEIS
Der Parameter wird nur angezeigt, wenn der Parameter
32-32 Absolutwertprotokoll nicht auf [0] „Keiner“
eingestellt ist.
55
32-37 Absolutwertgeber Takt
Wählen Sie aus, ob die MCO ein Taktsignal für den Absolutgeber
erzeugen soll oder nicht.
Option: Funktion:
[0] Aus Wählen Sie diese Option aus, wenn mehrere MCO an
denselben Absolutgeber angeschlossen sind und eine
andere MCO das Taktsignal erzeugt. Nur ein Gerät darf
das Taktsignal erzeugen und nur ein Gerät (Drehgeber
oder MCO) darf das Datensignal erzeugen, wenn
mehrere MCO miteinander verbunden sind.
[1] * An Wählen Sie diese Option aus, wenn es sich bei der
MCO um den einzigen Taktgenerator für den
angeschlossenen Absolutgeber handelt.
HINWEIS
Dieser Parameter wird nur angezeigt, wenn Parameter
32-32 Absolutwertprotokoll nicht auf [0] „Keiner“
eingestellt ist.
32-39 Drehgeberüberwachung
Die Überwachung der Drehgeberanschlüsse auf Unterbrechung
oder Kurzschluss kann aktiviert oder deaktiviert werden.
Ein Drehgeberfehler zeigt den Fehlercode 192.
Option: Funktion:
[0] * Aus Eine Überwachung der
Hardware ist nicht erforderlich.
[1] 3 Kanäle Alle 3 Kanäle (A, B und Index)
werden überwacht.
[2] 2 Kanäle Kanäle A und B werden
überwacht.
32-40 Drehgeberterminierung
Die Abschlusswiderstände können für den Drehgeber 1 an- und
abgeschaltet werden.
Option: Funktion:
[0] Aus Wählen Sie diese Option, falls eine hohe Eingangs-
Impedanz erforderlich ist, wenn ein Drehgeber mit
mehreren MCO verbunden ist.
[1] * An Wählen Sie diese Option, wenn der Drehgeber nur mit
dieser MCO verbunden ist.
32-43 Steuerung Drehgeber 1
Mit dem Steuerwort des Drehgebers wird die Bewertung der
Positionen nach einer Änderung der Drehgeberquelle
konfiguriert. Ein sanfter Wechsel ist dann sinnvoll, wenn die
Drehgeber während des Betriebs umgeschaltet werden sollen.
Wenn Sie diesen Prozess nicht mithilfe dieses Parameters
durchführen, führt die Umschaltung zu dem neuen Drehgeber in
der Regel zu einem Positionsfehler, da die Drehgeberwerte nicht
übereinstimmen.
Option: Funktion:
32-38 Absolutgeber Kabellänge
Range: Funktion:
0* [0–
Die Takt- und Datensignale des Absolutgebers (SSI)
300
sind nicht mehr synchron, wenn die vom Drehge-
m]
berkabel verursachte Signalverzögerung zu lang ist.
Die MCO gleicht die Kabelverzögerung automatisch
aus, wenn die Kabellänge bekannt ist. Die Kompensation der Kabelverzögerung basiert auf einer
Verzögerung von etwa 6 ns (6 x 10-9 Sekunden) pro
Meter. Geben Sie die Gesamtlänge des Kabels (in
Metern) zwischen der MCO und dem Absolutgeber
an.
HINWEIS
Dieser Parameter wird nur angezeigt, wenn Parameter
32-32 Absolutwertprotokoll nicht auf [0] „Keiner“
eingestellt ist.
[0] * Kein sanfter Wechsel Wählen Sie diese Option, um
direkt auf die Positionsdaten
des neuen Drehgebers zu
wechseln.
[1] Sanfte Drehgeberum-
schaltung
[2] Soft-Nulleinstellung Wählen Sie diese Option, wenn
Wählen Sie diese Option, wenn
Sie nicht unmittelbar auf den
Positionswert des neuen
Drehgebers wechseln möchten.
Stattdessen wird der alte Positionswert beibehalten und die
neu hinzukommenden Positionswerte des neuen Drehgebers
werden addiert. Dadurch
können „während des Betriebs“
Drehgeber umgeschaltet
werden.
Sie den tatsächlichen Drehgeberwert bei der Homefahrt nicht
zwangsläufig ändern möchten.
Bei aktivierter Soft-Nulleinstellung können Sie die
Homefahrt durchführen, sodass
34 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Programmieren Produkthandbuch
32-43 Steuerung Drehgeber 1
Mit dem Steuerwort des Drehgebers wird die Bewertung der
Positionen nach einer Änderung der Drehgeberquelle
konfiguriert. Ein sanfter Wechsel ist dann sinnvoll, wenn die
Drehgeber während des Betriebs umgeschaltet werden sollen.
Wenn Sie diesen Prozess nicht mithilfe dieses Parameters
durchführen, führt die Umschaltung zu dem neuen Drehgeber in
der Regel zu einem Positionsfehler, da die Drehgeberwerte nicht
übereinstimmen.
Option: Funktion:
die neue Istposition
anschließend [0] beträgt.
[3] Sanfte Drehgeberum-
schaltung und die
Soft-Nulleinstellung
aktivieren
Mit dieser Option wird während
des Betriebs die leichte
Änderung des RückführungDrehgebers und die aktuelle
Position auf [0] zu stellen, ohne
die tatsächliche Position zu
verlieren.
32-44 Drehgeber 1 Node-ID
Range: Funktion:
127* [1–127] Geben Sie die Knotennummer des CAN-
Drehgebers ein.
32-45 Drehgeber 1 CAN-Schutzvorrichtung
Die CAN-Drehgeber-Überwachung kann aktiviert oder deaktiviert
werden.
Option: Funktion:
[0] * Aus Werkseinstellung. Keine Überwachung.
[1] An CAN-Drehgeber wird überwacht.
5.6.3 32-5* Rückführungsquelle
Die 32-5* Parameter dienen zur Konfiguration der Rückführungsquelle.
32-50 Quelle Follower
Bestimmt die Rückführungsquelle für die MCO.
Option: Funktion:
[1] Drehgeber 1 X56 Wählen Sie diese Option, um Drehgeber
1 als Rückführungsquelle zu verwenden.
[2] * Drehgeber 2 X55 Wählen Sie diese Option, um Drehgeber
2 als Rückführungsquelle zu verwenden.
[3] Motorsteuerung Wählen Sie diese Option, um die
Rückführungsquelle zu verwenden, die
im Parameter 1-02 Drehgeber Anschluss
festgelegt ist. Hierbei kann es sich um
den internen 24-V-Drehgeberanschluss,
eine Drehgeber-oder eine ResolverOption handeln. Die Auflösung für die
„Motorkontrolle“ kann in Parameter 32-01
Inkrementalgeberauflösung eingestellt
werden.
32-52 Quell-Master
Option: Funktion:
[1] * Drehgeber 1 X56 Der Quell-Master ist Drehgeber 1 an X56.
[2] Drehgeber 2 X55 Der Quell-Master ist Drehgeber 2 an X55.
[3] Motorsteuerung Beim Quell-Master kann es sich um den
internen 24-V-Drehgeberanschluss, eine
Drehgeber-oder eine Resolver-Option
handeln.
5.6.4 32-6* und 32-7*, PID-ReglerParameter
Die Parameter 32-6* und 32-7* dienen zur Optimierung
des Reglers.
32-60 P-Faktor
Range: Funktion:
30* [0–
100000]
32-61 Differentialwert für PID-Regelung
Range: Funktion:
0* [0–100000] Der Differentialwert ist der Korrekturfaktor, mit
32-62 Integralfaktor
Range: Funktion:
0* [0–
100000]
32-63 Grenzwert für die Integralsumme
Range: Funktion:
1000* [0–1000] 0 = Integral aus.
Der Proportionalfaktor gibt den linearen Korrekturfaktor an, mit dem die Abweichung zwischen
der aktuellen Soll- und Istposition bewertet und
eine entsprechende Korrektur der Motordrehzahl
vorgenommen wird. Je höher der Wert ist, umso
steifer wird das Motorverhalten. Wenn der Wert
zu hoch ist, neigt der Motor zum
Überschwingen.
dem die Geschwindigkeit der Änderung eines
Motorpositionsfehlers bewertet wird. Der
Differentialwert wirkt der durch einen hohen PAnteil verursachten Überschwingungsneigung
entgegen und dämpft das System. Ein zu groß
gewählter Differentialfaktor führt jedoch zu
einem instabilen Motorverhalten.
Der Integralfaktor ist der Gewichtungsfaktor, mit
dem im Zeitpunkt n die Summe aller Motorpositionsfehler bewertet wird. Der Integralfaktor des
PID-Reglers bewirkt ein entsprechend zeitlich
anwachsendes, korrigierendes Motordrehmoment.
Durch den Integralanteil wird ein statischer Positionsfehler zu 0 ausgeregelt, auch wenn eine
konstante Last am Motor anliegt. Ein zu großer
Integralfaktor führt jedoch zu einem instabilen
Motorverhalten.
Begrenzt die Integralsumme, um bei Rückführungsfehlern Instabilität und Schwingen zu
vermeiden.
5 5
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 35

Programmieren Produkthandbuch
32-64 PID Bandbreite
Range: Funktion:
1000* [0–1000
[1/10%]]
55
0 = PID aus.
Der Wert 1000 bedeutet, dass der PID-Regler
den vollen Sollwert ausgeben kann. Bei einer
Bandbreite von 500 werden nur 50 % des
Sollwerts ausgeben. Kleinere Werte als 1000
begrenzen also den P-Anteil entsprechend.
Die Bandbreite, in der der PID-Regler wirken
soll, kann begrenzt werden, um zum Beispiel
bei schwingungsgefährdeten Systemen das
Aufschaukeln der Schwingungen zu
vermeiden. Dann ist es jedoch notwendig,
wesentlich höhere Werte für die Parameter
32-65 Geschwindigkeitsvorsteuerung und 32-66
Beschleunigungsvorsteuerung einzugeben, um
die entsprechende Regelung zu erreichen. Ein
so eingestelltes System ist zwar nicht mehr so
dynamisch, dafür aber wesentlich stabiler und
neigt weniger zu unkontrollierten
Schwingungen.
32-65 Geschwindigkeitsvorsteuerung
Range: Funktion:
0* [0–
100000]
Wenn eine Regelung in der Bandbreite begrenzt
ist, muss eine Grundgeschwindigkeit vorgegeben
werden, damit ausgeschlossen wird, dass die
Regelung durch die eingestellte Begrenzung das
Fahren des Motors gänzlich verhindert. Dieser
Parameter gibt an, mit welcher Geschwindigkeit
die Vorwärtsbewegung ausgeführt wird. Beim
Arbeiten mit einem normalen PID-Algorithmus
muss die Geschwindigkeitsvorsteuerung immer
dieselbe Größe wie der Differentialfaktor haben,
um eine typische Differentialdämpfung zu
erreichen.
32-66 Beschleunigungsvorsteuerung
Range: Funktion:
0* [0–
100000]
Geben Sie eine Grundbeschleunigung vor, wenn
Sie die Regelung in der Bandbreite begrenzt
haben. Damit verhindern Sie, dass der Motor
durch die eingestellte Begrenzung überhaupt
nicht beschleunigt. Dieser Parameter gibt an, mit
welcher Beschleunigung die Vorwärtsbewegung
ausgeführt wird. Bei einem normalen PIDAlgorithmus beträgt dieser Wert 0.
32-67 Maximaler tolerierter Positionsfehler
Range: Funktion:
20000* [1 bis
1073741823
qc]
Definiert die erlaubte Toleranz zwischen
der aktuellen Istposition und der
errechneten Sollposition. Wird der
definierte Wert überschritten, wird die
Positionsregelung abgeschaltet und ein
Positionsfehler ausgelöst. Der Positionsfehler hat keinen Einfluss auf die
Positioniergenauigkeit, sondern bestimmt
lediglich, wie exakt der theoretisch
errechnete Verfahrweg eingehalten
werden muss, ohne dass ein Fehler
ausgelöst wird.
Zur Vermeidung häufiger Fehlermeldungen muss der Wert jedoch größer
sein als die Fähigkeit der Achse, einer
durch den Trajektoriengenerator
erzeugten Position folgen zu können. Als
Richtwert kann die vierfache Strichzahl
des Drehgebers angesetzt werden, was
einer Drehgeberumdrehung entspricht.
WARNUNG
UNERWARTETER ANLAUF
Der Motor kann unerwartet wieder anlaufen, wenn der
Wert dieses Parameters höher als die zulässige Positionsabweichung ist.
Achten Sie darauf, dass der Wert dieses
•
Parameters niedriger ist als die zulässige Positionsabweichung.
32-68 Reversierverhalten Follower nicht vorgesehen ist.
Dieser Parameter legt das Verhalten beim Rückwärtsfahren
(Fahren in negativer Richtung) fest.
Option: Funktion:
[0] * Reversieren erlaubt. –
[1] Reversieren nur erlaubt, wenn der
Master rückwärts fährt.
[2] Reversieren gesperrt. –
32-69 Abtastzeit für PID-Regler
Range: Funktion:
2* [1–
1000
ms]
Bestimmt die Abtastzeit des Positionsregelalgorithmus. Erhöhen Sie beispielsweise den Wert der
Werkseinstellung folgendermaßen:
Bei sehr kleinen Pulsfrequenzen wie 1 bis 2
•
qc per Abtastzeit: Sie benötigen
mindestens 10 bis 20 qc per Abtastzeit.
Bei sehr langsamen Systemen mit einer
•
großen Totzeit: Würde man hier mit 1 ms
regeln, würden große Motoren schwingen.
–
36 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Control ON
Control OFF
Control ON
Deactivation
Size
Deactivation
Size
Activation
Size
Activation
Size
Target
Position
130BD767.10
Programmieren
Produkthandbuch
32-69 Abtastzeit für PID-Regler
Range: Funktion:
HINWEIS
Der Wert hat einen direkten Einfluss auf die
Berechnung der Vorsteuerung. Wenn Sie zum
Beispiel den Wert dieses Parameters
verdoppeln, wirkt Parameter 32-65 Geschwin-
digkeitsvorsteuerung nur halb so stark.
32-70 Abtastzeit für Profilgenerator
Dieser Parameter ermöglicht es, die Abtastzeit für den Profilgenerator unabhängig von der Abtastzeit des PID-Reglers zu setzen.
Bei anspruchsvollen Regelaufgaben im Hintergrund kann die
Ausführungszeit des Anwendungsprogramms drastisch ansteigen.
In solchen Fällen kann die Abtastzeit des Profilgenerators auf 2
ms erhöht werden. Höhere Werte als 2 ms sind jedoch kaum von
Vorteil.
Option: Funktion:
[1] 1 ms –
[2] * 2 ms –
[3] 3 ms –
[4] 4 ms –
[5] 5 ms –
32-71 Größe des Regelfensters (Aktivierung)
Range: Funktion:
0* [0 bis
1073741823 qc]
Abbildung 5.3 Größe des Regelfensters
32-72 Größe des Regelfensters (Deaktivierung)
Range: Funktion:
0* [0 bis 1073741823
qc]
Die Parameter 32-71 Größe des Regelfensters
(Aktivierung) und 32-72 Größe des
Regelfensters (Deaktivierung) werden
benutzt, um die Positionsregelung
innerhalb von definierten Bereichen
(Regelfenster) an- und abschalten zu
können. Der Parameter 32-71 Größe des
Regelfensters (Aktivierung) gibt dabei die
Größe des Fensters an, außerhalb dessen
die Regelung wieder beginnen soll.
Gibt die Größe des Fensters an,
innerhalb dessen die Regelung
deaktiviert werden soll, bis wieder der
Parameter 32-71 Größe des Regelfensters
(Aktivierung) erreicht wird.
32-73 Integralbegrenzungsfilterzeit festgelegten
Zeitraums.
Range: Funktion:
0* [-10000
bis 10000]
Zeit in ms, die zur Erhöhung oder Verringerung
der Integralbegrenzung der Positionsregelschleife
bis zum Parameter 32-63 Grenzwert für
Integralsumme verwendet wird. Der Integralanteil
der PID-Positionsregelschleife kann dauerhaft
aktiv sein, nur bei einer Bewegung oder nur im
Stillstand. Dieses Verhalten wird durch den Wert
dieses Parameters festgelegt.
Mit dem Wert 0 ist der Integralanteil der PIDPositionsregelschleife dauerhaft aktiv,
entsprechend dem Parameter 32-62 Integralfaktor
und dem Begrenzungsparameter 32-63 Grenzwert
für Integralsumme aktiviert werden.
Mit einem Wert > 0 ist der Integralanteil der PIDPositionsregelschleife nur bei einer
Motorbewegung aktiv. Wenn sich der Motor im
Stillstand befindet, wird der Integralanteil auf 0
reduziert. Wenn der Motor anfängt, sich zu
bewegen,wird die Integrationsbegrenzung von 0
auf den in 32-63 Grenzwert für Integralsumme
festgelegten Wert erhöht. Dies erfolgt innerhalb
des im Parameter 32-73 Integralbegrenzungsfil-
terzeit festgelegten Zeitraums. Wenn der Motor
wieder angehalten wird, wird der Integralanteil
erneut reduziert, indem die Begrenzung innerhalb
des festgelegten Zeitraums auf 0 gesenkt wird.
Diese Handhabung des Integralanteils kann einen
Vorteil für Synchronisierungsanwendungen
darstellen, bei denen niedrige Synchronisierungsfehler verlangt werden, jedoch keine strenge
Regulierung bei Stillstand gewünscht wird.
Mit einem Wert < 0 wird der Integralanteil der
PID-Positionsregelschleife nur bei Stillstand
aktiviert. Wenn der Motor anfängt, sich zu
bewegen, wird der Integralanteil auf 0 reduziert,
indem die Integrationsbegrenzung innerhalb des
Zeitraums gesenkt wird, der durch den im
Parameter 32-73 Integralbegrenzungsfilterzeit
eingestellten Wert festgelegt wird. Wenn der
Motor erneut angehalten wird, wird die Integrationsbegrenzung von 0 auf den in Parameter 32-63
Grenzwert für die Integralsumme festgelegten Wert
innerhalb des festgelegten Zeitraums erhöht.
Diese Handhabung des Integralanteils kann zur
Vermeidung von unstabilem Motorverhalten bei
einer Bewegung und dennoch genauer Positionierung im Stillstand genutzt werden.
Siehe auch die Parameter 32-60 Proportionalfaktor
und 32-61 Differentialwert für die PID-Regelung.
5 5
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 37

130BD768.10
1 2 3
0 50 100 150 200 250 300 350 400 450
130BD769.10
1 2 3
0 50 100 150 200 250 300 350 400 450
130BD770.10
1 2 3
0 50 100 150 200 250 300 350 400 450
500 550
Programmieren
Produkthandbuch
32-74 Schleppfehlerfilterzeit
Range: Funktion:
0* [0–
10000]
55
32-8* Geschwindigkeit &
5.6.5
Beschleunigung
Die Parameter 32-8* bestimmen Geschwindigkeit,
Beschleunigung und Rampe.
32-80 Maximalgeschwindigkeit (Drehgeber)
Range: Funktion:
1500* [1-100000
U/min]
32-81 Kürzeste Rampe
Range: Funktion:
1.000* [0,001–
3600,000 s]
Zeitfenster in Millisekunden zum Auslösen des
Schleppfehlerzustands. Zu großer Schleppfehler
(Parameter 19-93 Fehlerzustand= 9) lösen nur einen
Fehlerzustand aus, wenn diese über die in diesem
Parameter festgelegte Schleppfehlerfilterzeit hinaus
bestehen bleiben.
Der Standardwert beträgt [0]. Beträgt der Wert
nicht [0], wird ein Positionsfehler nur ausgelöst,
wenn der in Parameter 32-67 Maximaler tolerierter
Positionsfehler festgelegte Wert für einen längeren
Zeitraum als die Positionsfehlerfilterzeit
überschritten wird.
Dieser Parameter definiert die Nenngeschwindigkeit des Motors. Der Wert wird in
U/min angegeben und zur Berechnung von
Rampen und Ist-Geschwindigkeiten benötigt.
Die Nenngeschwindigkeit bezieht sich auf
die Drehzahl des Drehgebers.
Bei linearen Drehgebern entspricht diese der
Anzahl von Inkrementen pro Minute, die
durch den Wert in Parameter 32-01
Inkrementalauflösung oder 32-03 Absolutwertauflösung geteilt werden.
Der Parameter legt die kürzeste Rampe
(maximale Beschleunigung) fest. Er gibt an,
wie lange die Beschleunigungsphase
mindestens dauert, um die Nenngeschwindigkeit zu erreichen. Setzen Sie die Rampen
immer über die MCO und nicht im Frequenzumrichter. Die Rampen des
Frequenzumrichters (Parameter 3-41 und
3-42) müssen immer auf den kleinstmöglichen Wert gesetzt sein.
32-82 Rampenform
Dieser Parameter bestimmt die Rampenform: Trapez, sinusförmig
oder mit Ruckbegrenzung. Diese Rampentypen sind für alle
Fahrbewegungen relevant.
Option: Funktion:
[0] * Linear
Abbildung 5.4 Lineare Rampe
1 = Beschleunigung
2 = Drehzahl
3 = Position
[1] S-Rampe
Abbildung 5.5 S-Rampe
1 = Beschleunigung
2 = Drehzahl
3 = Position
[2] Bewegungsprofil
mit Ruckbegrenzung
Abbildung 5.6 Bewegungsprofil mit
Ruckbegrenzung
1 = Beschleunigung
2 = Drehzahl
3 = Position
Fahrbewegungen mit Ruckbegrenzung beginnen mit der
Beschleunigung 0 und werden mit maximalem Ruck
solange erhöht, bis die maximale Beschleunigung, die in
Parameter 32-81 Kürzeste Rampe festgelegt ist, erreicht ist.
Dann wird die Bewegung mit der maximalen Beschleunigung fortgeführt. Am Ende wird die Beschleunigung mit
maximalem Ruck verringert, bis die Beschleunigung erneut
0 beträgt. Der maximale Ruck wird durch den Parameter
32-86 Auf-Rampe der Beschleunigung berechnet.
38 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Programmieren Produkthandbuch
Wenn Sie Rampenform 2 verwenden, sehen Sie auch die
Parameter 32-86 bis 32-89.
32-83 Geschwindigkeitsteiler
Range: Funktion:
1000* [Fixiert
auf 1000]
Definiert eine Bezugsgröße für die Geschwindigkeitswerte der Fahrbefehle und Parameter.
Die Angabe der Geschwindigkeit und
Beschleunigung kann dann in ganzen Zahlen,
bezogen auf diese Normierung, erfolgen. Der
Wert 1000 bedeutet, dass sich die Angaben in
den Befehlen auf 1000 beziehen, also in
Promille.
32-84 Standardgeschwindigkeit
Range: Funktion:
50* [1 bis Wert des
Parameters 32-83
Geschwindigkeitsteiler]
Gibt die Standardgeschwindigkeit an,
die immer dann verwendet wird, wenn
keine Geschwindigkeit in der
Anwendung definiert wurde. Der Wert
bezieht sich auf den Parameter 32-83
Geschwindigkeitsteiler.
32-85 Standardbeschleunigung
Range: Funktion:
100* [0 bis
1073741823]
Gibt die Beschleunigung an, die
verwendet wird, wenn keine explizite
Angabe vorliegt. Die Angabe erfolgt im
Verhältnis zu Parameter 32-81 Kürzeste
Rampe und bezieht sich auf den
Parameter 32-83 Geschwindigkeitsteiler.
32-86 Auf-Rampe der Beschleunigung zur Ruckbegrenzung
Range: Funktion:
100* [0 bis
1073741823 ms]
Auf-Rampen-Konstante der Beschleunigung zur Ruckbegrenzung. Dieser
Parameter bestimmt die Zeit in ms, die
für die Erhöhung der Beschleunigung von
0 bis zur maximalen Beschleunigung
erforderlich ist.
Für die Ruckbegrenzung sind 4
verschiedene Parameter vorhanden: 32-86
bis 32-89.
In diesem Parameter wird der in
Parameter 32-82 Rampenform verwendete
maximale Ruck für Rampenform 2
berechnet. Die folgenden Formeln
werden dabei verwendet:
Max. Beschl. =
Max. Ruck =
Max. Geschwindigkeit
Parameter 32-81
Max. Beschl.
Parameter 32-86
32-86 Auf-Rampe der Beschleunigung zur Ruckbegrenzung
Range: Funktion:
HINWEIS
Die Parameter 32-81 Kürzeste
Rampe und 32-86 Auf-Rampe der
Beschleunigung zur Ruckbegrenzung
sind Zeitwerte in Millisekunden.
Rechenbeispiel:
32-80 Maximale Geschwindigkeit
(Drehgeber) = 3000 U/min
32-01, 32-31 Inkrementalauflösung = 500
Pulse/Umdrehung
32-81 Kürzeste Rampe = 500 ms
32-86 Auf-Rampe der Beschleunigung zur
Ruckbegrenzung = 200 ms
Hieraus ergibt sich:
32-80 Maximale Geschwindigkeit
(Drehgeber) = 3000 x 500 x (4/60) =
100000 qc/s
= 100 qc/ms
MaxBeschl = 200000 qc/s2 = 0,2 qc/ms
MaxRuck = 1000000 qc/s3 = 0,001 qc/ms
32-87 Ab-Rampe der Beschleunigung zur Ruckbegrenzung
Range: Funktion:
0* [0 bis
1073741823 ms]
Ab-Rampen-Konstante der Beschleunigung
Dieser Parameter legt die Zeit in Millisekunden fest, die zur Verringerung der
Beschleunigung von der maximalen
Beschleunigung auf 0 erforderlich ist (das
heißt in der Regel auf die konstante
maximale Geschwindigkeit). Wenn dieser
Wert auf [0] gesetzt wird, dann wird
derselbe Wert wie in Parameter 32-86 Auf-
Rampe der Beschleunigung zur
Ruckbegrenzung verwendet.
HINWEIS
Wenn dieser Wert auf [0] gesetzt wird, dann wird
derselbe Wert wie in Parameter 32-86 Auf-Rampe der
Beschleunigung zur Ruckbegrenzung verwendet.
32-88 Verzögerung Auf für Ruckbegrenzung
Range: Funktion:
0* [0 bis 1073741823
ms]
Auf-Rampen-Konstante der
Verzögerung. Dieser Parameter legt die
Zeit in Millisekunden fest, die zur
Erhöhung der Verzögerung von 0 bis
zur maximalen Verzögerung erforderlich
ist.
5 5
2
3
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 39

Programmieren
Produkthandbuch
HINWEIS
Wenn dieser Wert auf [0] gesetzt wird, dann wird
derselbe Wert wie in Parameter 32-86 Auf-Rampe der
Beschleunigung zur Ruckbegrenzung verwendet.
32-89 Ab-Rampe der Verzögerung zur Ruckbegrenzung
Range: Funktion:
0* [0 bis
1073741823 ms]
55
Ab-Rampen-Konstante der Verzögerung.
Dieser Parameter legt die Anzahl der
Millisekunden fest, die zur Verringerung
der Verzögerung von der maximalen
Verzögerung auf 0 erforderlich ist (das
heißt in der Regel auf die Geschwindigkeit 0).
HINWEIS
Wenn dieser Wert auf [0] gesetzt wird, dann wird
derselbe Wert wie im Parameter 32-86 Auf-Rampe der
Beschleunigung zur Ruckbegrenzung
5.7 Erweiterte Einstellungen MCO
5.7.1 33-0* Homefahrt
33-01 Nullpunkt-Offset zur Home-Position
Range: Funktion:
0* [–1073741823 bis
+1073741823 qc]
Wird benutzt, um einen Offset
(Versatz) zu dem Referenzschalter oder
Indexpuls einzustellen. Nach der
Homefahrt wird der Motor auf den in
diesem Parameter festgelegten Wert
positioniert.
33-02 Die Homefahrt-Rampe
Range: Funktion:
10* [1 bis Wert des
Parameters 32-83
Geschwindigkeitsteiler]
Beschleunigung, die für die Fahrt zur
Home-Position verwendet wird. Angabe
bezieht sich auf die kürzeste Rampe, die
in Parameter 32-81 Kürzeste Rampe
definiert ist. Die Einheit ergibt sich durch
den Parameter 32-83 Geschwindigkeits-
teiler, in % von der kürzesten Rampe; 50
% bedeutet dann halb so schnell, d. h.
doppelt so lange. Für die Rampe ergibt
sich folgende Formel:
Homefahrt-Rampenzeit =
P32-83
P33-02
× P32-81 in ms
Der Parameter 33-0* legt das Verhalten für die Homefahrt
fest.
33-00 Homefahrt erzwingen
Option: Funktion:
[0] * Homefahrt
wird nicht
erzwungen
[1] Homefahrt
wird
erzwungen
Nach dem Einschalten gilt die Istposition als
Realnullpunkt.
Nach dem Einschalten des Frequenzumrichters sowie nach dem Ändern von
Achsparametern muss vor einem Fahrbefehl
– ob direkt oder durch das Programm
ausgeführt – zwingend zuerst eine
Homefahrt erfolgen.
Bei dieser Einstellung muss eine Homefahrt
ausgeführt werden, bevor eine andere
Positionierfahrt ausgeführt werden kann.
Bei einem Fahrbefehl ohne erfolgreich
ausgeführte Referenzfahrt wird der Fehler 1
in Parameter 19-93 Fehler Status ausgelöst.
HINWEIS
Aus Sicherheitsgründen und zur Vermeidung von Fehlpositionierungen sollte der Parameter immer auf [1] gesetzt
und damit eine Homefahrt erzwungen werden. Um
jedoch einen einwandfreien Betrieb zu gewährleisten,
muss vor dem ersten Fahrbefehl eine Homefahrt
ausgeführt werden.
HINWEIS
Die Homefahrt-Rampe kann nie einen höheren Wert
haben als der Parameter 32-85 Standardbeschleunigung.
33-03 Homefahrt-Geschwindigkeit
Range: Funktion:
10* [– Wert bis +
Wert in
Parameter 32-83
Geschwindigkeitsteiler]
Bestimmt die Geschwindigkeit, mit der
die Fahrt zum Referenzschalter
ausgeführt wird. Die Angabe ist auf die
Nenngeschwindigkeit bezogen und von
dem Parameter 32-83 Geschwindigkeits-
teiler abhängig. Ein negatives Vorzeichen
heißt, dass die Suche in der anderen
Richtung erfolgt.
Für die Rampe ergibt sich folgender
Zusammenhang:
Homefahrt-Geschwindigkeit in U/min =
P33-03
P32-83
HINWEIS
Da immer in der gleichen Drehrichtung (abhängig vom
Vorzeichen) nach dem Referenzschalter gesucht wird,
sollte dieser an den Grenzen des Fahrbereichs
angebracht werden. Nur so kann sichergestellt werden,
dass sich der Motor bei einer Homefahrt auch tatsächlich
in Richtung des Referenzschalters und nicht von ihm
weg bewegt.
Um eine gute Repetierbarkeit der Referenzfahrt zu
erhalten, sollte mit höchstens 10 % der maximalen
Drehzahl gefahren werden.
40 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Programmieren Produkthandbuch
33-04 Homefahrt-Verhalten
Option: Funktion:
[0] * Reversieren und
Index
[1] Reversieren, kein
Index
[2] Vorwärts und
Index
[3] Vorwärts, kein
Index
Mit Homefahrt-Geschwindigkeit und
Richtung bis zum Referenzschalter
fahren, dann Reversieren und langsam
den Schalter verlassen. Anschließend
zum nächsten Indeximpuls fahren.
Wie [0], jedoch ohne Suchen des
Indeximpulses.
Wie [0], jedoch ohne Reversieren,
sondern in gleicher Richtung weiter aus
dem Schalter herausfahren.
Wie [1], jedoch ohne Reversieren.
5.7.2 33-4* Wegbegrenzungsbehandlung
Die Parameter 33-4* bestimmen das Verhalten bei
Erreichen einer Wegbegrenzung.
Bei Aktivierung des positiven oder negativen HardwareEndschalters wird die Fahrt angehalten. Der Parameter
19-93 Fehler Status wird entweder auf [2] „Positive HWWegbegrenzung“ oder [3] „Negative HW-Wegbegrenzung“
gesetzt. Zum Verhalten im Fehlerfall siehe Parameter 33-83
Verhalten im Fehlerfall.
33-41 Negative Software-Wegbegrenzung
Range: Funktion:
–500000* [–1073741823
bis +1073741823
qc]
33-42 Positive Software-Wegbegrenzung
Range: Funktion:
500000* [–1073741823
bis +1073741823
qc]
Gibt die negative Positionsbegrenzung für alle Fahrbewegungen
an. Wenn dieser Wert überschritten
wird, wird Fehler 5 ausgelöst. Dieser
Parameter ist nur aktiv, wenn der
Parameter 33-43 Negative Software-
Wegbegrenzung aktiv eingestellt
wurde.
Ein Positionierbefehl, der außerhalb
der eingestellten Grenzen liegt, wird
nicht ausgeführt.
Gibt die positive Positionsbegrenzung für alle Fahrbewegungen
an. Wenn dieser Wert überschritten
wird, wird Fehler 4 ausgelöst. Dieser
Parameter ist nur aktiv, wenn der
Parameter 33-44 Positive Software-
Wegbegrenzung aktiv eingestellt
wurde.
Ein Positionierbefehl, der außerhalb
der eingestellten Grenzen liegt, wird
nicht ausgeführt.
33-43 Negative Software-Wegbegrenzung aktiv
Option: Funktion:
[0] * Inaktiv Die negative Software-Wegbegrenzung wird nicht
überwacht.
[1] Aktiv Die negative Software-Wegbegrenzung wird
überwacht. Bei jeder Bewegung wird überprüft, ob
sich die Zielposition außerhalb des zulässigen
Fahrbereichs befindet. Wenn dies der Fall ist, wird
die Fehlermeldung 5 in Parameter 19-93 Fehler
Status ausgelöst und die Motorregelung
abgeschaltet.
33-44 Positive Software-Wegbegrenzung aktiv
Option: Funktion:
[0] * Inaktiv Die positive Software-Wegbegrenzung wird nicht
überwacht.
[1] Aktiv Die positive Software-Wegbegrenzung wird
überwacht. Bei jeder Bewegung wird überprüft, ob
sich die Zielposition außerhalb des zulässigen
Fahrbereichs befindet. Wenn dies der Fall ist, wird
die Fehlermeldung 4 in Parameter 19-93 Fehler
Status ausgelöst und die Motorregelung
abgeschaltet.
33-45 Zeit in Zielfenster
Range: Funktion:
0* [0–10
ms]
Nach dem Erreichen des Zielfensters wird zweimal
die Istposition gemessen und mit dem Parameter
33-46 Zielfenster-Grenzwert verglichen. Ist das
Ergebnis kleiner als dieser Grenzwert, gilt die
Position als erreicht, andernfalls wird erneut
gemessen. Dieser Parameter gibt den Zeitabstand
zwischen den Messungen an.
HINWEIS
Die Einschränkung auf 10 ms ist dadurch begründet,
dass das Anwendungsprogramm in dieser Zeit blockiert
ist und solange auch keine Endschalter- und Positionsfehler-Überwachung aktiv ist.
33-46 Zielfenster-Grenzwert
Range: Funktion:
1* [1–10000
qc]
Das Zielfenster wird mit einem in Parameter
33-45 Zeit in Zielfenster festgelegten Abstand
gemessen. Das Zielfenster wird erreicht, wenn
zwei Messungen in Folge innerhalb des in
Parameter 33-46 Zielfenster-Grenzwert
eingestellten Zielfensters erfolgen.
HINWEIS
Beispiel: Wenn die in Parameter 33-45 Zeit in Zielfenster
eingestellte Zeit 1000 ms beträgt, gilt das Zielfenster
1000 ms, nachdem sich die Position innerhalb des
Zielfensters befindet, als erreicht.
5 5
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 41

Programmieren Produkthandbuch
33-47 Größe des Zielfensters
5.7.3 33-8*, Globale Parameter
Range: Funktion:
0* [0–
10000
qc]
55
0 = Aus
Gibt die Größe des Zielfensters an. Eine Position
gilt erst dann als erreicht, wenn der Fahrprofilgenerator die Fahrt beendet hat, die Istposition
innerhalb des Fensters liegt und die Geschwindigkeit kleiner als der Parameter 33-46 Zielfenster-
Grenzwert geteilt durch 33-45 Zeit in Zielfenster ist
(Voraussetzung: Die Parameter 33-47 Größe des
Zielfensters und 33-45 Zeit in Zielfenster sind
aktiviert.)
Hierbei ist die Geschwindigkeit folgendermaßen
angegeben:
P33-46 in qc
P33-45
Die Steuerung wartet mit dem Ausführen des
jeweils nächsten Befehls, bis die Istposition
innerhalb des Zielfensters liegt. Wenn dieser
Parameter nicht aktiv ist, gilt das Ziel als erreicht,
sobald die Sollposition gleich der Zielposition ist.
Diese muss jedoch nicht mit der Istposition des
Motors übereinstimmen.
HINWEIS
Wird das Zielfenster um die Endposition zu klein
gewählt, könnte sich der Motor in einer sehr kleinen
Umgebung um die Endposition bewegen, ohne das
Zielfenster zu erreichen, sodass das Anwendungsprogramm bei dem entsprechenden Positionierbefehl
„hängen” bleibt. Ein Zielfenster von 0 deaktiviert die
Überwachung der Istposition und überwacht lediglich
die Sollposition.
33-81 Einschaltstatus
Option: Funktion:
[0] Motor
aus
[1] * Motor
ein
Wählen Sie diese Option, wenn der Motor nach
dem Einschalten unbestromt (Frequenzumrichter
im Leerlauf) bleiben soll. Den Frequenzumrichter
und die Positionierregelung müssen Sie durch
Betätigen von [Auto On] auf dem LPC-Display
aktivieren, bevor eine Bewegung gestartet werden
kann.
Wählen Sie diese Option, wenn der Motor nach
dem Einschalten bestromt werden soll, die Positionierregelung aktiv sein soll und der Motor auf
der aktuellen Position bleiben soll, bis ein anderer
Befehl gegeben wird.
33-82 Statusüberwachung Antrieb
Dieser Parameter aktiviert/deaktiviert die Überwachung des
Status FC 300, während die Positionierregelung der MCO aktiv ist.
Option: Funktion:
[0] Aus Wählen Sie diese Option, wenn die Überwachung
abgeschaltet sein soll. Die MCO versucht dann, den
Motor unabhängig vom Status FC 300 zu regeln.
Wenn versucht wird, eine Bewegung zu starten,
solange der FC 300 nicht aktiviert ist, wird die Fehlermeldung 6 in Parameter 19-93 Fehler Status
ausgegeben.
[1] * An Wählen Sie diese Option, wenn die Überwachung
aktiviert sein soll. Fehler 113 wird aktiviert, wenn der
FC 300 z. B. bei Motorabschaltung nicht freigegeben
ist, während die Positionierregelung der MCO aktiv ist.
33-83 Verhalten im Fehlerfall
HINWEIS
Abweichende Handhabung des Zielfensters zur
Anpassung an die Anforderungen von CANopen: Wenn
der Parameter 33-45 Zeit in Zielfenster eingestellt wird,
der Parameter 33-46 Zielfenster-Grenzwert jedoch nicht,
wird angenommen, dass ein CANopen-Drehgeber
verwendet wird. In diesem Fall wird geprüft, ob die Zeit
innerhalb des Zielfensters länger als die in Parameter
33-45 Zeit in Zielfenster festgelegte Zeit ist. Wenn dies
der Fall ist, ist die Position erreicht. Andernfalls ist die
Position nicht erreicht.
Mit den Hardware- und Software-Endschaltern können Sie einen
Software-Wegbegrenzungsfehler löschen und anschließend in die
entgegengesetzte Richtung fahren. Wenn erneut eine Fahrt in die
falsche Richtung versucht wird, wird ein neuer Fehler ausgelöst.
Die Handhabung der Hardware-Enschalter ist identisch mit der
der Software-Endschalter. Das bedeutet, dass Sie den Fehler
löschen können und anschließend der Motor in die entgegengesetzte Richtung fahren kann. Wenn eine Fahrt in die falsche
Richtung versucht wird, wird der Fehler 198 (Endschalter-Fehler)
ausgegeben.
Option: Funktion:
[0] * Motorfreilauf Standard, d. h. Motor geht
in Freilauf, die
Regelschleife wird
unterbrochen.
[1] Freilauf und Bremse Wie [0]. Zusätzlich wird der
Ausgang Bremse (falls
definiert) aktiviert.
[2] Geregelter Stopp Motorstopp mit max.
Verzögerung (Stopprampe),
anschließend stillstandgeregelt.
42 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Programmieren Produkthandbuch
33-83 Verhalten im Fehlerfall
Mit den Hardware- und Software-Endschaltern können Sie einen
Software-Wegbegrenzungsfehler löschen und anschließend in die
entgegengesetzte Richtung fahren. Wenn erneut eine Fahrt in die
falsche Richtung versucht wird, wird ein neuer Fehler ausgelöst.
Die Handhabung der Hardware-Enschalter ist identisch mit der
der Software-Endschalter. Das bedeutet, dass Sie den Fehler
löschen können und anschließend der Motor in die entgegengesetzte Richtung fahren kann. Wenn eine Fahrt in die falsche
Richtung versucht wird, wird der Fehler 198 (Endschalter-Fehler)
ausgegeben.
Option: Funktion:
[3] Geregelter Stopp und
Bremse
[5] Vom Anwendungs-
programm gesteuert
Wie [2], zusätzlich wird der
Ausgang Bremse aktiviert
(falls definiert), aber erst
nach Motorstopp.
Das Verhalten wird durch
das Anwendungsprogramm
festgelegt.
HINWEIS
Der Ausgang Bremse wird in den Parametern 33-63 bis
33-70 mit Option 5 und 6 ausgewählt (siehe Motion
Control Option MCO 305 Projektierungshandbuch).
5.8 MCO-Datenanzeigen
Die Parameter in den Gruppen 34-0* und 34-2*
unterstützen das Lesen und Schreiben der PCD Arrays und
stimmen mit dem PROFIdrive Profil überein.
5.8.1 34-0*, PCD Schreib-Parameter
34-01 bis 34-10 PCD n zur MCO schreiben
Die PCD 1-7 werden standardmäßig von der MCO verwendet. Die
übrigen PCD können zum Schreiben von benutzerdefinierten
Parametern konfiguriert werden.
Option: Funktion:
[34-01] PCD 1 zur MCO schreiben
[34-02] PCD 2 zur MCO schreiben
[34-03] PCD 3 zur MCO schreiben
[34-04] PCD 4 zur MCO schreiben
[34-05] PCD 5 zur MCO schreiben
[34-06] PCD 6 zur MCO schreiben
[34-07] PCD 7 zur MCO schreiben
[34-08] PCD 8 zur MCO schreiben
[34-09] PCD 9 nach MCO schreiben
[34-10] PCD 10 nach MCO schreiben
5 5
33-85 Externe 24 V DC MCO Versorgung
Option: Funktion:
[0] * Nein Externe 24 V Versorgung nicht angeschlossen.
[1] Ja Externe 24 V Versorgung an Klemme X58
angeschlossen.
5.7.4 33-9* MCO Anschlusseinstellungen
33-91 X62 MCO CAN-Baudrate
Dieser Parameter legt die Baudrate der MCO CAN-Schnittstelle
fest.
Option: Funktion:
[16] 10 kBit/s –
[17] 20 kBit/s –
[18] 50 kBit/s –
[19] 100 kBit/s –
[20] * 125 kBit/s –
[21] 250 kBit/s –
[22] 500 kBit/s –
[24] 1000 kBit/s –
5.8.2 34-2* PCD Lese-Parameter
34-21 bis 34-31 PCD n von der MCO lesen
Die PCD 1- 5 werden standardmäßig von der MCO verwendet.
Die übrigen PCD können zum Schreiben von benutzerdefinierten
Parametern konfiguriert werden, beispielsweise zum Lesen der
digitalen Eingänge.
Option: Funktion:
[34-21] PCD 1 von der MCO lesen
[34-22] PCD 2 von der MCO lesen
[34-23] PCD 3 von der MCO lesen
[34-24] PCD 4 von der MCO lesen
[34-25] PCD 5 von der MCO lesen
[34-26] PCD 6 von der MCO lesen
[34-27] PCD 7 von der MCO lesen
[34-28] PCD 8 von der MCO lesen
[34-29] PCD 9 von der MCO lesen
[34-30] PCD 10 von der MCO
lesen
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 43

Programmieren Produkthandbuch
5.8.3 34-4*, Eingänge und Ausgänge
34-40 Digitale Eingänge
Lesen der digitalen Eingänge.
34-41 Digitale Ausgänge
Lesen der digitalen Ausgänge.
5.8.4 34-5*, Prozessdaten
Mithilfe der folgenden Parameter können einige Istdaten
55
über das Anwendungsprogramm ausgelesen werden.
34-50 Istposition
Aktuelle Follower-Position in Benutzereinheiten (BE).
34-51 Sollposition
Sollposition in Benutzereinheiten (BE).
34-52 Istposition Master
Aktuelle Master-Position in qc.
34-56 Schleppfehler
Aktuellen Schleppfehler der Achse in Benutzereinheiten abfragen
(mit Berücksichtigung des Vorzeichens).
34-58 Aktuelle Geschwindigkeit
Aktuelle Geschwindigkeit in BE/s.
34-59 Aktuelle Master-Geschwindigkeit
Aktuelle Master-Geschwindigkeit in qc/s.
44 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

130BB996.10
Time
Time defined in P 19-11
Start magnetizing the
motor [MOTOR ON]
Brake closed
Start
Start positioning
Brake opened
130BB997.10
Time
Time defined in P 19-11
Position reached
Motor stop - Brake closed
Stop
Motor
demagnetized
Anwendungsbeispiele Produkthandbuch
6 Anwendungsbeispiele
6.1 Homefahrt
Funktion Digitaler Steuer-
ungsmodus
Homefahrt IN 9 PCD[1].3 PCD[1].3
Home-Status
löschen
Tabelle 6.1 Homefahrt-Signale
IN 6 PCD[1].6 PCD[1].6
FeldbusModus
Quickbus
(FeldbusModus)
HINWEIS
Schließen Sie den Home-Schalter an IN 4 an und wählen
Sie die Abfolge im Parameter 33-04 Homefahrt-Verhalten.
6.2 Touch-Probe-Positionierung
Nach Aktivierung des Touch-Probe-Eingangs wird die
Zielposition relativ zur Istposition berechnet.
Eine ähnliche Konfiguration wie relative/absolute Positionierung, mit folgendem Unterschied:
Der Parameter 19-28 Index: Pos. Typ muss entweder positiv
(2) oder negativ (3) sein
Durch Verendung von Quick-Bus: PCD[1].13 (positiv) /
PCD[1].14 (negativ) Parameter 19-03 Probe Verz. in ms.
6.3
Bremskontrolle
Wichtige Parameter:
19-09 Bremskontrolle
•
19-10 Freilauf Verzög.
•
19-11 Bremsverzög. Auf gewählte Zeit
•
19-12 Bremsverzög. Zu
•
19-13 Bremsschlupf
•
Wenn die Anwendung nicht über eine elektromechanische
Bremse verfügt, sind diese Parameter nicht relevant.
Jedoch sollten Sie den Parameter 19-09 Bremskontrolle
unbedingt auf [0] „Deaktiviert“ stellen, um den Motor auch
bei Stillstand zu aktivieren.
Startverfahren:
Nach Aktivierung von Positionierung starten wird die
mechanische Bremse nach der in 19-11 Bremsverzög.
eingestellten Zeit gelöst. Mit dieser Zeitverzögerung wird
sichergestellt, dass der Motor beim Lösen der Bremse
vollständig magnetisiert ist, um so ein Abfallen der Last
nach dem Starten zu verhindern.
6 6
Betriebsart
Funktion Digitaler Steuer-
ungsmodus
Positionierung
starten
Position
erreicht
Touch-Probe
zurücksetzen
Tabelle 6.2 Betriebsart
IN 5 PCD[1].5 PCD[1].1
OUT 2 PCD[1].2 PCD[1].2
IN 7 PCD[1].7 PCD[1].7
FeldbusModus
Quickbus
(FeldbusModus)
Abbildung 6.1 Bremsverzögerung
Stoppverfahren:
Bei Position erreicht wird durch die in 19-10 Freilauf Verzög.
eingestellte Verzögerung sichergestellt, dass die Bremse
geschlossen ist, wenn der Regler in den Motorfreilauf
schaltet.
Abbildung 6.2 Freilaufverzögerung
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 45

130BB998.10
MCO351
controlled
Mech. brake
+
130BB999.10
FC300
controlled
MCO351
controlled
+
Relay 1
Relay 2
Anwendungsbeispiele
Produkthandbuch
66
Parameter 19-12 Bremsverzög. Zu
Wird insbesondere für Anwendungen verwendet, bei
denen nach einer Reihe kurz aufeinander folgender Positionierungen eine längere Stillstandzeit folgt. Der Parameter
legt den Zeitraum fest, in dem die Bremse noch nicht
aktiviert wird, obwohl sich der Motor im Stillstand befindet.
Dadurch werden die Bremsen bei kurz aufeinander
folgenden Positionierungen vor Verschleiß bewahrt.
Parameter 19-13 Bremsschlupf
Überwacht den Bremsverschleiß. Er bestimmt die Anzahl
der Benutzereinheiten, die der Motor bei geschlossener
Bremse fahren kann.
Abbildung 6.3 MCO-gesteuerte Bremse
Bremskontrolle durch FC 300 und MCO
Für zusätzliche Zuverlässigkeit können sowohl die MCO als
auch FC 300 zur mechanischen Bremskontrolle verwendet
werden. Der FC 300 hat nur beim Starten einen Einfluss
Unter normalen Bedingungen sollte nach der in Parameter
19-11 festgelegten Zeit die Stromstärke zur Aktivierung der
FC-Bremskontrolle erreicht werden. Wenn die MCO die
Kontrolle über den Motor verliert und der Regler den
Motor nicht magnetisieren kann, kann die Bremse nicht
geöffnet werden. Ohne die FC-Bremskontrolle wird die
Bremsekurz geöffnet und aufgrund eines Positionsfehlers
wieder geschlossen. Die in Parameter 19-11 Bremsverzög.
Auf gewählte Zeit muss unbedingt entsprechend dem
maximal zulässigen Positionsfehler optimiert werden.
Abbildung 6.4 MCO- und FC 300-gesteuerte Bremse
46 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303
6.4 Hardware-Wegbegrenzung
Der Hardware-Endschalter ist ein Notschalter für die
Anwendung.
Eingänge:
X57/2: Eingang positiver Hardware-Endschalter
•
X57/3: Eingang negativer Hardware-Endschalter
•
Muss auf High-Pegel gehalten werden, um die Anwendung
zu starten/auszuführen.
6.5 Software-Endschalter
Die Software-Endschalter werden kurz vor die HardwareEndschalter gelegt, und zwar mit einem Abstand zu den
Hardware-Endschaltern, der es ermöglicht, dass der Motor
mit der kürzesten zulässigen Rampe gestoppt werden
kann, bevor der HW-Endschalter aktiviert wird.
Parameter:
33-41: Negative Software-Wegbegrenzung
•
33-42: Positive Software-Wegbegrenzung
•
33-43: Negative Software-Wegbegrenzung aktiv
•
33-44: Positive Software-Wegbegrenzung aktiv
•
Es müssen entweder beide oder keine SoftwareWegbegrenzungen aktiv sein. Die Aktivierung eines
einzigen Endschalters gilt nicht. Nach Aktivierung oder
Deaktivierung der Software-Wegbegrenzungen muss der
Motor erneut eingeschaltet werden.
6.6
Indexpositionierung
Positionierungen mit jeweils eigenen Rampen, Geschwindigkeiten und Positionstypen können im VLT
Positionierregler MCO 351 voreingestellt werden.
64 Positionen bei Verwendung der Feldbus-
•
Option.
32 Positionen bei Verwendung digitaler I/O und
•
FC 302.
16 Positionen bei Verwendung digitaler I/O und
•
FC 301.
Verwendete Parameter zur Festlegung der Indexpositionierung:
19-23: Positions-Index
•
19-24: Index: Zielpos. (BE)
•
19-25: Index: Rampe Auf (ms)
•
19-26: Index: Rampe Ab (ms)
•
19-27: Index: Max. Geschw. (U/min, an der Drehge-
•
berseite)
®

Anwendungsbeispiele Produkthandbuch
19-28: Index: Pos. Typ (absolut, relativ oder Touch-
•
Probe)
19-29 Speichere Daten: Parametereinstellungen für
•
19-24 bis 19-28 speichern
Eingänge:
18 Referenz Index Bit 0
•
19 Referenz Index Bit 1
•
33 Referenz Index Bit 2
•
32 Referenz Index Bit 3
•
29 Referenz Index Bit 4
•
Ausgänge:
X59/4 Referenz Index Bit 0
•
X59/5 Referenz Index Bit 1
•
X59/6 Referenz Index Bit 2
•
X59/7 Referenz Index Bit 3
•
X59/8 Referenz Index Bit 4
•
Betriebsablauf:
1. Wählen Sie den Index (DI 18, 19, 29, 32, 33/
PCD[7].1, .2, .3, .4, .5, .6)
2. Speichern Sie den Index (DI 10/PCD[1].4)
3. Neuen Index lesen? (DO 4, 5, 6, 7, 8/PCD[2].1, .2, .
3, .4, .5, .6)
4. Positionierung starten (DI 5/PCD[1].5)
5. Bezugsposition erreicht (DO 2/PCD[1].2)
6.7
Quickbus-Positionierung
Die MCO 351 wird durch eine übergeordnete Steuerung
gesteuert, z. B. eine SPS.
Zur Aktivierung des Feldbus-Betriebs muss der Parameter
19-04 Steuerquelle auf [1] „Feldbus“ eingestellt werden.
Betriebsablauf:
1. Referenzierte Zielposition: PCD[2]msb + PCD[3]lsb
(UU)
2. Typ: PCD[1].11 (Absolut)/PCD[1].12 (Relativ)
3. Vorzeichen: PCD[1].16 (negativ)
4. Geschwindigkeit: PCD[4] (U/min, an der Drehgeberseite)
5. Beschleunigung: PCD[5] (% der kürzesten
Rampenzeit in Parameter 32-81)
6. Verzögerung: PCD[6] (% der kürzesten
Rampenzeit in Parameter 32-81)
7. Gehe zur Zielposition: PCD[1].1 (Start/Stopp)
8. Position erreicht: PCD[1].2
Schnellstopp: PCD[1].8 (muss für den Betrieb stets aktiviert
sein)
Fehler zurücksetzen: PCD[1].2
Die Kommunikation über Feldbus wird nur unterstützt,
wenn PCD-Kanäle verfügbar sind, z. B. über Profibus,
DeviceNet, Ethernet/IP, CANopen usw.
6 6
Eingang 18 (LSB) 19 33 32 29 (MSB) Index
Zustand 0 0 0 0 0 0
Zustand 0 1 1 0 0 6
Zustand 1 0 1 1 0 13
Tabelle 6.3 Indexnummerierung über digitale Eingänge
PCD(7) Bit1 Bit2 Bit3 Bit4 Bit5 Bit6 Index
Zustand 0 0 0 0 0 0 0
Zustand 0 1 1 0 0 0 6
Zustand 1 0 1 1 0 1 45
Tabelle 6.4 Indexnummerierung anhand PCD
Eine Tabelle zur Eintragung der Positioniereinstellungen
finden Sie in Kapitel 8.3.1 Positioniertabelle.
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 47

Diagnose
Produkthandbuch
7 Diagnose
7.1 Fehlerbehebung
Problem Lösung
Wenn ein „PID-Schleppfehler zu groß“-Fehler (19-93 Fehler Status)
vorliegt, löst der Frequenzumrichter auch den ALARM 13
(Überstrom) aus
Für den Parameter 32-80 Maximale Geschwindigkeit (Drehgeber) ist
77
eine Anpassung erforderlich.
Der Frequenzumrichter löst beim Abbremsen häufig ALARM 7 (DCÜberspannung) aus.
Der Frequenzumrichter löst beim Abbremsen häufig ALARM 13
(Überstrom) aus.
Es wird zwar die korrekte Zielposition erreicht, aber der PIDSchleppfehler (Parameter 34-56 Schleppfehler) ist zu hoch, während
der Motor in Bewegung ist.
Nach einem Aus- und Einschalten scheint das Programm manchmal
Änderungen, die an den Fahrwegwerten vorgenommen wurden, zu
„vergessen“.
Überprüfen Sie die Geschwindigkeitseinstellung.
•
Überprüfen Sie, ob die Drehrichtung des Drehgebers richtig ist.
•
Überprüfen Sie die Drehgeberverkabelung und die Parameter-
•
konfiguration.
Überprüfen Sie, ob die Bremse korrekt gehandhabt wird.
•
Überprüfen Sie die Geschwindigkeitsbegrenzungen.
•
Die in Parameter 3-81 Schnellstopp Rampenzeit festgelegte Zeit
•
ist zu kurz. Versuchen Sie, den Wert zu erhöhen.
Versuchen Sie, den Wert in Parameter 3-03 Maximaler Sollwert zu
erhöhen. Damit wird auch die Wirkung der Parameter 32-60 Propor-
tionalfaktor bis 32-66 Beschleunigungsvorsteuerung beeinflusst.
Kleinere Änderungen des Parameters 3-03 Maximaler Sollwert
dürften bei den meisten dieser Parameter keine nennenswerte
Wirkung zeigen. Der Parameter 32-65 Geschwindigkeitsvorsteuerung
sollte dagegen mittels der automatischen Berechnungsfunktion
19-19 Optim. Vorsteuer immer neu berechnet werden.
Stellen Sie einen höheren Wert für die Rampenzeit ein
•
(Parameter 19-17 Jog Rampenzeit für Jogging und Parameter
19-26 Index: Rampe Ab für Positionierung).
Prüfen Sie PCD [6] „Quickbus-Zielverzögerung“.
•
Wenn eine niedrigere Rampenzeit erforderlich ist, installieren Sie
•
einen Bremswiderstand.
Die Rampeneinstellungen erfordern zu viel Drehmoment.
•
Versuchen Sie herauszufinden, welche Operation (manuelle
Bewegung oder Positionierung) für die Auslösung verantwortlich
ist und stellen Sie dann die Rampenzeit (Parameter 19-17 Jog
Rampenzeit für Jogging und Parameter 19-25 Index: Rampe Auf
für Positionierung) auf einen entsprechend höheren Wert ein.
Prüfen Sie PCD [5] „Quickbus-Zielbeschleunigung“.
•
Der PID-Regler ist möglicherweise instabil – optimieren Sie die
•
Parameter des PID-Reglers neu.
Vermutlich ist der PID-Regler straffer einzustellen – optimieren
•
Sie die Parameter des PID-Reglers neu.
Nach einem Ausschalten bleiben Änderungen an den Fahrwegdaten
nur dann gespeichert, wenn der Parameter 19-29 Speichere Daten
zuvor aktiviert wurde.
Tabelle 7.1 Fehlerbehebung
48 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Diagnose Produkthandbuch
7.2 Fehlermeldungen
Im LCP-Display werden alle Fehlermeldungen in der Statusanzeige (unter der Indexnummer) dargestellt. Sie werden
ebenfalls im Parameter 19-93 Fehler Status angezeigt. Detailinformationen, zusätzliche Anmerkungen zu möglichen Fehlerursachen sowie Tipps zur Behebung von Fehlern finden Sie in Tabelle 7.2.
Parameter
19-93,
Wert
0 Status OK. Keine Fehler erkannt Keine Fehler erkannt.
1 Homefahrt erforderlich
2 Positive Hardware-Wegbegrenzung
3 Negative Hardware-Wegbegrenzung
4 Positive Software-Wegbegrenzung
5 Negative Software-Wegbegrenzung
6 Der Motor dreht nicht.
7 Bremslebensdauer überschritten
Status-/Fehlermeldung Bedeutung/Ursache
Der Benutzer hat einen Positionierbefehl zu einer bestimmten Position
•
eingegeben, obwohl keine Home-Position festgelegt wurde.
Löschen Sie den Fehler und führen Sie eine Homefahrt erfolgreich durch,
•
bevor Sie den nächsten Positionierbefehl eingeben.
Der Eingang des positiven Hardware-Endschalters wurde aktiviert.
•
erreicht
erreicht
überschritten
überschritten
Die Anwendung ist an den positiven Endschalter gestoßen. Es kann auch sein,
•
dass die Verbindung zum Endschalter unterbrochen wurde oder dass der
Endschalter defekt ist.
Der Eingang des negativen Hardware-Endschalters wurde aktiviert.
•
Die Anwendung ist an den negativen Endschalter gestoßen. Es kann auch
•
sein, dass die Verbindung zum Endschalter unterbrochen wurde oder dass der
Endschalter defekt ist.
Ein Fahrbefehl hat den Software-Endschalter aktiviert. Die maximale Grenze ist
•
in Parameter 33-42 Positive Software-Wegbegrenzung definiert.
Die Anwendung muss aus dem Endschalter gefahren werden, bevor der Fehler
•
gelöscht werden kann. Wenn „Power Recovery“ in Parameter 19-08 Jog aus
Endlagen aktiviert ist, kann dies durch eine Fehlerquittierung und einen
negativen JOG (Eingang 54) erfolgen.
Ein Fahrbefehl hat den Software-Endschalter aktiviert. Die maximale Grenze ist
•
in Parameter 33-41 Negative Software-Wegbegrenzung angegeben.
Die Anwendung muss aus dem Endschalter gefahren werden, bevor der Fehler
•
gelöscht werden kann. Wenn „Power Recovery“ in Parameter 19-08 Jog aus
Endlagen aktiviert ist, kann dies durch eine Fehlerquittierung und einen
positiven JOG (Eingang 53) erfolgen.
Der Motor wurde nicht magnetisiert, obwohl der Betriebszustand es erforderte.
•
Die elektromechanische Bremse wird in diesem Fall sofort aktiviert,
unabhängig von den Einstellungen in den Parametern 19-12 Bremsverzög. Zu
und 19-06 Fehlerreaktion.
Während der Motor die Last gehalten oder bewegt hat, hat der Frequenzum-
•
richter einen Fehler ausgelöst, die Verbindung zu Klemme X57/8 wurde
unterbrochen oder die Taste [Hand On] oder [Off] auf dem LCP-Display wurde
betätigt.
Diese Fehlermeldung erfolgt, wenn sich der Motor mehr als die in Parameter
•
19-13 Bremsschlupf festgelegte zulässige Anzahl an Benutzereinheiten bewegt
hat, während die elektromechanische Bremse aktiviert war.
Entweder ist die elektromechanische Bremse ist verschlissen und sollte
•
baldmöglichst ausgetauscht werden oder der in Parameter 19-13 Bremsschlupf
angegebene Grenzwert ist zu niedrig.
7 7
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 49

Diagnose Produkthandbuch
Parameter
19-93,
Wert
8 Schnellstoppeingang aktiviert
9 Schleppfehler (PID-Fehler) zu groß
77
12 Umkehrbetrieb nicht zulässig Der Motor wurde im Umkehrbetrieb betrieben, obwohl dies gemäß der
13 Vorwärtsbetrieb nicht zulässig Der Motor wurde vorwärts betrieben, obwohl dies gemäß der Einstellung im
92 Fehler von der Drehgeberüberwachung
Status-/Fehlermeldung Bedeutung/Ursache
Der Schnellstoppeingang wurde aktiviert. Als Vorsichtsmaßnahme wurde die
•
elektromechanische Bremse gemäß der Einstellung in Parameter 19-06 Fehlerreaktion aktiviert, und der Motor wurde unabhängig von der Einstellung im
Parameter 19-09 Bremskontrolle abgeschaltet.
Löschen Sie den Fehler, damit der Normalbetrieb wieder aufgenommen
•
werden kann.
Der Unterschied zwischen der gewünschten Position und der tatsächlichen
•
Position gemäß Drehgeber-Rückführung hat den im Parameter 32-67 Maximal
tolerierter Positionsfehler festgelegten Grenzwert überschritten.
Mögliche Ursachen:
•
Der Drehgeber ist nicht ordnungsgemäß angeschlossen. Überprüfen
-
Sie den Drehgeberanschluss.
Der Drehgeber zählt positiv in der falschen Richtung. Vertauschen Sie
-
gegebenenfalls die Spuren A und B.
Die Einstellungen für den PID-Regler sind nicht ordnungsgemäß
-
optimiert worden. Folgen Sie den Anweisungen zum Optimieren.
Die im Parameter 32-67 Maximaler tolerierter Positionsfehler festge-
-
legten Grenzwerte sind möglicherweise zu eng.
Einstellung in Parameter 32-68 Reversierverhalten Follower nicht vorgesehen ist.
Parameter 32-68 Reversierverhalten Follower nicht vorgesehen ist.
Unterbrechung oder Kurzschluss gemäß der anzeigenden LED.
•
Ein Fehler wird auch dann ausgegeben, wenn kein Drehgeber angeschlossen
•
ist und die Überwachung aktiv ist (Parameter 32-09 Drehgeber-Überwachung =
[1] 3 Kanäle).
Tabelle 7.2 Fehlermeldungen
50 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Anhang Produkthandbuch
8 Anhang
8.1 Abkürzungen und Konventionen
Abkürzung Erläuterung
AC Wechselstrom
AEO Automatische Energieoptimierung
AWG American Wire Gauge
AMA Automatische Motoranpassung
°C
DC Gleichstrom
EMV Elektromagnetische Verträglichkeit
ETR Elektronisches Thermorelais
f
M,N
FC Frequenzumrichter
HO Hohe Überlast
IP Schutzart
I
LIM
I
INV
I
M,N
I
VLT,MAX
I
VLT,N
LCP LCP Bedieneinheit
N.v. Keine Angabe
NO Normale Überlast
P
M,N
PCB Leiterplatte
PE Schutzleiter
PELV Schutzkleinspannung
PM Motor Permanentmagnet-Motor
Regen Generatorische Klemmen
U/min Umdrehungen pro Minute
T
LIM
U
M,N
Tabelle 8.1 Abkürzungen
Konventionen
Nummerierte Listen zeigen Vorgehensweisen.
Punktelisten zeigen weitere Informationen und
Beschreibung der Abbildungen.
Kursivschrift bedeutet:
Querverweise
•
Links
•
Fußnoten
•
Parameternamen, Parametergruppennamen,
•
Parameteroptionen
Grad Celsius
Motornennfrequenz
Stromgrenze
Wechselrichter-Nennausgangsstrom
Motornennstrom
Maximaler Ausgangsstrom
Vom Frequenzumrichter gelieferter
Nennausgangsstrom
Motornennleistung
Drehmomentgrenze
Motornennspannung
8.2
Begriffsglossar
Absolutwertgeber
Hierbei handelt es sich um einen Drehgebertyp, der nicht
nur Drehzahl und Drehrichtung angibt, sondern auch die
absolute physikalische Position. Die Übertragung erfolgt
mittels Positionstransfer in paralleler Form oder in Form
eines Telegramms in serieller Form. Absolutwertgeber sind
in zwei Ausführungen erhältlich: Single-Turn-Drehgeber
liefern eine absolute Position innerhalb einer Umdrehung.
Multi-Turn-Drehgeber liefern eine absolute Position über
eine bestimmte Anzahl oder eine frei einstellbare Anzahl
an Umdrehungen.
AMA
Automatische Motoranpassung – Funktion in Parameter
1-29 Automatische Motoranpassung (AMA).
ERPM
Die Drehzahl wird in Bezug auf die Drehzahl des
Drehgebers definiert. Aus diesem Grund wurde der Begriff
„Drehgeber-Umdrehungen pro Minute“ (Drehgeber-U/min)
als Einheit gewählt.
Übersetzungsverhältnis Motor/Drehgeber
Da der Drehgeber nicht notwendigerweise am Motor
selbst montiert sein muss, ist das Verhältnis zwischen der
Nenndrehzahl des Motors und der Nenndrehzahl des
Drehgebers in Drehgeber-U/min festzulegen.
Inkrementalgeber
Dieses Drehgebersystem nimmt Drehzahl und
Drehrichtung auf und überträgt dies an die entsprechende
Konfiguration. Die Anzahl der Geberspuren – und damit
die Anzahl der Signale – gibt die Eigenschaften des
Drehgebersystems an. So gibt es einspurige Systeme, die
ein drehzahlabhängiges Impulssignal sowie ein festes
Richtungssignal liefern. Zweispurige Systeme liefern
dagegen zwei Impulssignale, die um 90 Grad versetzt sind.
Durch Auswerten der beiden Geberspuren ergibt sich das
Richtungssignal. Dreispurige Drehgeber liefern neben den
beiden Geberspuren des Zweispur-Drehgebers noch eine
zusätzliche „Null-Spur“. Hier wird an der Null-Position ein
Signal ausgegeben.
8 8
Abbildung 8.1 Inkrementalgebersignale
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 51

130BD659.10
Go to target position
I 5 X57/5 PCD 1.5
Touch probe switch
I 1 X57/1
Velocity
Reference pos. reached
O 2 X59/2 PCD 1.2
Reset touch probe pos.
I 7 X57/7 PCD 1.7
Touchprobe pos. locked
PCD 1.5
19-24 (19-28=2)
Touchprobe
Target
position
Anhang Produkthandbuch
Abbildung 8.2 Inkrementalgebersignale
Quadcounts
Durch Flankenerkennung erfolgt eine Vervierfachung der
Inkremente der beiden Geberspuren (A/B) des Inkrementalgebers. Dies hat eine bessere Auflösung zur Folge.
Touch-Probe-Positionierung
Abbildung 8.4 Touch-Probe-Positionierung
88
Abbildung 8.3 Herleitung der Quadcounts
SinCos-Drehgeber
Ebenso wie der Inkrementalgeber liefert der SinCosDrehgeber zwei Geberspuren, die um 90° voneinander
versetzt sind. Die Signalform ist dabei nicht rechteckig
sondern sinusförmig. Dies ermöglicht eine höhere
Auflösung der Drehgeberposition, da die beiden Analogsignale SIN und COS jeden Wert zwischen 0 und 1 liefern.
Eine Verzögerung im Touch Probe Sensor führt zu einer
Verschiebung der Zielposition. Das heißt, die Zielpositionsdifferenz wird größer werden, als in Parameter 19-24
Index: Zielpos. festgelegt ist. Um dies auszugleichen,
definieren Sie in Parameter 19-03 Probe Verz. einen Wert
für die Verzögerung. Allerdings kann nur eine konstante
Verzögerung ausgeglichen werden, keine variable
Verzögerung.
Schleppfehler
Der PID-Schleppfehler wird als Unterschied zwischen dem
internen Reglersollwert und der Istposition definiert. Der
Schleppfehler wird in Benutzereinheiten (BE) festgelegt
und im Parameter 34-56 Schleppfehler angezeigt. Der
maximale tolerierte PID-Fehler wird im Parameter 32-67
Maximaler tolerierter Positionsfehler in Quadcounts (qc)
eingegeben.
HINWEIS
52 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Anhang
8.3 Positionierung
8.3.1 Positioniertabelle
Produkthandbuch
Position
[INDEX]
Parameter
19-23
0 0 0 0 0 0 0000
1 0 0 0 0 1 0001
2 0 0 0 1 0 0002
3 0 0 0 1 1 0003
4 0 0 1 0 0 0004
5 0 0 1 0 1 0005
6 0 0 1 1 0 0006
7 0 0 1 1 1 0007
8 0 1 0 0 0 0008
9 0 1 0 0 1 0009
10 0 1 0 1 0 000A
11 0 1 0 1 1 000B
12 0 1 1 0 0 000C
13 0 1 1 0 1 000D
14 0 1 1 1 0 000E
15 0 1 1 1 1 000F
16 1 0 0 0 0 0010
17 1 0 0 0 1 0011
18 1 0 0 1 0 0012
19 1 0 0 1 1 0013
20 1 0 1 0 0 0014
21 1 0 1 0 1 0015
22 1 0 1 1 0 0016
23 1 0 1 1 1 0017
24 1 1 0 0 0 0018
25 1 1 0 0 1 0019
26 1 1 0 1 0 001A
27 1 1 0 1 1 001B
28 1 1 1 0 0 001C
29 1 1 1 0 1 001D
30 1 1 1 1 0 001E
31 1 1 1 1 1 001F
* = Nur für FC 302. Nicht gültig für FC 301.
FC 300
Klemme
29* 32 33 19 18
Zielpos.
festgelegt ist
Parameter
19-24
Anlaufzeit
Parameter
19-25
Ab-Rampenzeit
Parameter
19-26
Geschwin-
digkeit
Parameter
19-27
Fahrweg-Typ
Parameter
19-28
Feldbus
[HEX]
PCD 7
8 8
Tabelle 8.2 Positioniertabelle
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 53

Anhang Produkthandbuch
8.3.2 Positioniervorlagen
8.3.2.1 Beispiel für Indexpositionierung über Feldbus
PCD 1 – – – – PCD 7
0 0 8 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Fehler zurücksetzen (Bit 2 umschalten)
0 0 8 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Tatsächliche Zielposition für Index 1
0 0 8 8 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1
Fahre zur Index 1 Zielposition
0 0 9 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1
Tatsächliche Zielposition für Index 0
0 0 8 8 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Vorwärts-Jog (manuelles Fahren in die positive Richtung)
0 1 8 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Tabelle 8.3 Beispiel für Indexpositionierung über Feldbus
8.3.2.2
Beispiel einer Indexpositionierung über Quick-Bus
88
PCD 1 PCD 2 PCD 3 PCD 4 PCD 5 PCD 6
Lesen: Absolute Position 65535 BE; Geschwindigkeit 1000 U/min; Auf-/Ab-Rampenzeit 500 ms
0 4 8 0 0 0 0 0 F F F F 0 3 E 8 0 1 F 4 0 1 F 4
Fahre zur absoluten Position 65535 BE mit einer Geschwindigkeit von 1000 U/min und einer Auf-/Ab-Rampenzeit von 500 ms
0 4 8 1 0 0 0 0 F F F F 0 3 E 8 0 1 F 4 0 1 F 4
Fahre zur relativen Position 10000 BE mit einer Geschwindigkeit von 750 U/min, einer Auf-Rampenzeit von 1 s und einer Ab-
Rampenzeit von 500 ms
0 8 8 1 0 0 0 0 2 7 1 0 0 2 E E 0 3 E 8 0 1 F 4
Fahre zur absoluten Position 131072 BE mit einer Geschwindigkeit von 500 U/min und einer Auf-/Ab-Rampenzeit von 100 ms
0 4 8 1 0 0 0 1 F F F F 0 1 F 4 0 0 6 4 0 0 6 4
Setze einen ausstehenden Fehler über Quick-Bus zurück
0 4 8 2 X X X X X X X X X X X X X X X X X X X X
Tabelle 8.4 Beispiel einer Indexpositionierung über Quick-Bus
54 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303

Index Produkthandbuch
Index
A
Abkürzungen......................................................................................... 51
Ab-Rampe der Beschleunigung zur Ruckbegrenzung........... 39
Ab-Rampe der Verzögerung zur Ruckbegrenzung.................. 40
Absolutgeber
Baudrate X55..................................................................................... 31
Baudrate X56..................................................................................... 33
Datenlänge.................................................................................. 31, 33
Kabellänge................................................................................... 31, 34
Takt................................................................................................. 31, 34
Taktfrequenz............................................................................... 31, 34
Absolutwertauflösung................................................................. 31, 33
Absolutwertprotokoll................................................................... 30, 33
Abtastzeit für PID-Regelung............................................................. 36
Abtastzeit für Profilgenerator.......................................................... 37
Aktuelle Geschwindigkeit................................................................. 44
Aktuelle Master-Geschwindigkeit.................................................. 44
ALARM 13................................................................................................ 48
AMA........................................................................................................... 51
Anhang..................................................................................................... 51
Anwendungsbeispiele
Bremskontrolle.................................................................................. 45
Hardware-Wegbegrenzung......................................................... 46
Homefahrt.......................................................................................... 45
Indexpositionierung....................................................................... 46
Quickbus-Positionierung.............................................................. 47
Software-Endschalter..................................................................... 46
Touch-Probe-Positionierung....................................................... 45
Anwendungsparameter..................................................................... 25
Auf-Rampe der Beschleunigung zur Ruckbegrenzung.......... 39
Auf-Rampe der Verzögerung zur Ruckbegrenzung................ 39
Automatische Bremskontrolle......................................................... 26
B
Benutzer Einstellung Referenzposition........................................ 25
Benutzereinheit Nenner..................................................................... 32
Benutzereinheit Zähler....................................................................... 32
Beschleunigungsvorsteuerung....................................................... 36
Blockierrichtung.................................................................................... 25
Bremskontrolle...................................................................................... 45
Bremslebensdauer............................................................................... 27
Bremsverzögerung.............................................................................. 26
D
DC-Überspannung............................................................................... 48
Diagnose.................................................................................................. 48
Differentialwert für PID-Regelung.................................................. 35
Digitale Ausgänge................................................................................ 44
Digitale Eingänge................................................................................. 44
Digitaler JOG im Feldbus-Modus.................................................... 29
Drehgeber 1
CAN-Überwachung......................................................................... 35
Node-ID............................................................................................... 35
Steuerung........................................................................................... 34
Drehgeber 2
CAN-Überwachung......................................................................... 33
Die Parameter.................................................................................... 30
Node-ID............................................................................................... 33
Drehgeberterminierung.................................................................... 34
Drehgeberüberwachung............................................................ 31, 34
Drehrichtung.......................................................................................... 32
E
Einschaltstatus....................................................................................... 42
Einstellungen
Erweiterte............................................................................................ 40
Grund................................................................................................... 30
Elektrische Installation........................................................................ 10
Endlospositionierung.......................................................................... 25
Entladezeit................................................................................................. 6
Entsorgung................................................................................................ 5
ERPM......................................................................................................... 51
Erweiterte Einstellungen.................................................................... 40
F
Fahrweg-Typ.......................................................................................... 29
Fehler zurücksetzen............................................................................. 26
Fehlermeldungen................................................................................. 49
Fehlerstatus............................................................................................ 29
Fehlerverhalten..................................................................................... 25
Feldbus Steuersignale................................................................. 22, 23
Feldbus-Schnittstelle.......................................................................... 21
FFVEL Auto-Berechnung.................................................................... 27
Freilaufverzögerung............................................................................ 26
G
Geschwindigkeit................................................................................... 38
Geschwindigkeitsteiler....................................................................... 39
Geschwindigkeitsvorsteuerung...................................................... 36
Globale Parameter............................................................................... 42
Glossar...................................................................................................... 51
Grenzwert für die Integralsumme.................................................. 35
Größe des Regelfensters (Aktivierung)......................................... 37
Größe des Regelfensters (Deaktivierung).................................... 37
Größe des Zielfensters........................................................................ 42
Grundeinstellungen............................................................................ 30
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 55

Index Produkthandbuch
Grundkonfiguration............................................................................. 24
H
Halte-Verzögerung.............................................................................. 26
Homefahrt........................................................................................ 40, 45
Homefahrt erzwingen......................................................................... 40
Homefahrt-Geschwindigkeit............................................................ 40
Homefahrt-Rampe............................................................................... 40
Homefahrt-Verhalten.......................................................................... 41
I
Index Zielposition................................................................................. 28
Indexnummer........................................................................................ 28
Indexpositionierung............................................................................ 46
Inkrementalauflösung................................................................. 30, 33
Inkrementaler Signaltyp............................................................. 30, 33
Installation
Elektrische........................................................................................... 10
Mechanische........................................................................................ 8
Integralbegrenzungsfilterzeit.......................................................... 37
Integralfaktor......................................................................................... 35
Istposition................................................................................................ 44
Istposition Master................................................................................. 44
J
JOG Rampenzeit................................................................................... 27
K
Klemmen
X55 Istwert Drehgebereingang.................................................. 14
X56 Master Drehgebereingang/Virtueller Master Drehge-
berausgang...... 14
X57 Digitaleingänge................................................................ 14, 18
X58 24-V-DC-Versorgung.............................................................. 15
X59 Digitalausgänge............................................................... 15, 18
X62 MCO CAN................................................................................... 15
Konfiguration des Hauptbildschirms sichern............................. 29
Konventionen........................................................................................ 51
Kürzeste Rampe.................................................................................... 38
L
LCP Eingabe mit Index verknüpfen............................................... 27
MCO
Anschlusseinstellungen................................................................. 43
CAN-Baudrate (X62)........................................................................ 43
Datenanzeigen.................................................................................. 43
Externe 24 VDC Versorgung......................................................... 43
Optionskartenklemmen................................................................ 14
Mechanische Installation..................................................................... 8
N
Negative Software-Wegbegrenzung............................................ 41
Negative Software-Wegbegrenzung aktiv.................................. 41
Nenner Getriebefaktor Motor/Drehgeber................................... 27
Neuer Index............................................................................................ 29
Nullpunkt-Offset zur Home-Position............................................. 40
O
Optionskartenklemmen
X55 Istwert Drehgebereingang.................................................. 14
X56 Master Drehgebereingang/Virtueller Master Drehge-
berausgang...... 14
X57 Digitaleingänge................................................................ 14, 18
X58 24-V-DC-Versorgung.............................................................. 15
X59 Digitalausgänge............................................................... 15, 18
X62 MCO CAN................................................................................... 15
P
Parameter speichern........................................................................... 29
Parametergruppen.............................................................................. 24
PCD Lese-Parameter............................................................................ 43
PCD n von der MCO lesen................................................................. 43
PCD n zur MCO schreiben................................................................. 43
PCD Schreib-Parameter...................................................................... 43
PID
Abtastzeit für PID-Regelung........................................................ 36
Bandbreite.......................................................................................... 36
Einstellungen..................................................................................... 25
Regler................................................................................................... 35
Positioniertabelle.................................................................................. 53
Positionierung
Über Feldbus..................................................................................... 54
Über Quick-Bus................................................................................. 54
Positive Software-Wegbegrenzung............................................... 41
Positive Software-Wegbegrenzung aktiv.................................... 41
Power-Recovery.................................................................................... 26
Proportionalfaktor................................................................................ 35
M
Maximal tolerierter Positionsfehler................................................ 36
Maximale Geschwindigkeit........................................................ 28, 48
Maximale JOG-Geschwindigkeit..................................................... 27
Maximalgeschwindigkeit (Drehgeber)......................................... 38
56 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. MG33R303
Q
Quelle Follower..................................................................................... 35
Quell-Master........................................................................................... 35
Quickbus-Positionierung................................................................... 47

Index Produkthandbuch
R
Rampe ab................................................................................................. 28
Rampe auf............................................................................................... 28
Rampenform.......................................................................................... 38
Reversierungsverhalten Follower................................................... 36
Rückführungsquelle............................................................................ 35
Rücksetzen auf Werkseinstellungen.............................................. 27
S
Safe Torque Off........................................................................................ 7
Schleppfehler......................................................................................... 44
Schleppfehlerfilterzeit........................................................................ 38
Sicherheitsbestimmungen.................................................................. 6
Sicherheitswarnungen.......................................................................... 6
Skalierung der JOG-Geschwindigkeit........................................... 27
Software-Endschalter.......................................................................... 46
Softwareversion................................................................................ 4, 29
Sollposition............................................................................................. 44
Standardbeschleunigung.................................................................. 39
Standardgeschwindigkeit................................................................. 39
Statusüberwachung Antrieb............................................................ 42
Steuerklemmen..................................................................................... 10
Steuerquelle........................................................................................... 25
Steuerungsmodus................................................................................ 25
STO............................................................................................................... 7
X62 MCO CAN........................................................................................ 15
Z
Zähler Getriebefaktor Motor/Drehgeber..................................... 27
Zeit in Zielfenster.................................................................................. 41
Zielfenster-Grenzwert......................................................................... 41
Zulassungen............................................................................................. 5
Zusätzliche Handbücher...................................................................... 4
T
Touch Probe Verzögerung................................................................ 25
Touch-Probe-Positionierung............................................................ 45
Ü
Überstrom............................................................................................... 48
V
Verhalten im Fehlerfall....................................................................... 42
W
Wegbegrenzungshandlung............................................................. 41
X
X55 Istwert Drehgebereingang....................................................... 14
X56 Master Drehgebereingang/Virtueller Master Drehgeber-
ausgang...... 14
X57 Digitaleingänge..................................................................... 14, 18
X58 24-V-DC-Versorgung.................................................................. 15
X59 Digitalausgänge.................................................................... 15, 18
MG33R303 Danfoss A/S © 07/2014 Alle Rechte vorbehalten. 57

www.danfoss.com/drives
Die in Katalogen, Prospekten und anderen schriftlichen Unterlagen, wie z.B. Zeichnungen und Vorschlägen enthaltenen Angaben und technischen Daten sind vom Käufer vor Übernahme und
Anwendung zu prüfen. Der Käufer kann aus diesen Unterlagen und zusätzlichen Diensten keinerlei Ansprüche gegenüber Danfoss oder Danfoss-Mitarbeitern ableiten, es sei denn, dass diese
vorsätzlich oder grob fahrlässig gehandelt haben. Danfoss behält sich das Recht vor, ohne vorherige Bekanntmachung im Rahmen der angemessenen und zumutbaren Änderungen an seinen
Produkten – auch an bereits in Auftrag genommenen – vorzunehmen. Alle in dieser Publikation enthaltenen Warenzeichen sind Eigentum der jeweiligen Firmen. Danfoss und das Danfoss-Logo
sind Warenzeichen der Danfoss A/S. Alle Rechte vorbehalten.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
www.danfoss.com/drives
130R0328 MG33R303 07/2014
*MG33R303*
 Loading...
Loading...