

Page 1

Operating Guide
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
VLT® AQUA Drive FC 202
drives.danfoss.com
Page 2

Page 3

VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Contents
1
Introduction 6
1.1
Purpose of the Operating Guide 6
Trademarks 6
1.2
Additional Resources 6
1.3
1.4
Document and Software Version 6
1.5
Product Overview 6
1.5.1
Intended Use 7
Safety 8
2
Safety Symbols 8
2.1
Qualied Personnel 8
2.2
Safety Precautions 8
2.3
3
Applications 11
Contents
3.1
Application Overview 11
3.2
Supported Congurations 12
3.2.1
Hardware Conguration for Expanding of Basic Cascade 12
3.2.2
Hardware Conguration for Master/Follower Cascade Control 14
3.2.3
Hardware Conguration for Mixed Pumps 15
3.2.3.1
3.2.3.2
3.2.4
Using Soft Starters for Fixed-speed Pumps 20
3.3
Sleep Mode 20
3.3.1
Basic Cascade Controller 20
3.3.2
Master/Follower and Mixed-pump Congurations 20
3.3.3
Temporary Boost of the Setpoint Before Sleep Mode 21
4
Installation 22
4.1
Before Start 22
4.2
VLT® Extended Cascade Controller MCO 101 22
4.2.1
Installing the VLT® Extended Cascade Controller MCO 101 22
Unequal-sized Pumps Conguration 16
Mixed-pump Conguration with Alternation 18
4.2.2
Electrical Data, VLT® Extended Cascade Control MCO 101 24
4.3
VLT® Advanced Cascade Controller MCO 102 24
4.3.1
Installing the VLT® Advanced Cascade Controller MCO 102 24
4.3.2
Electrical Data, VLT® Advanced Cascade Control MCO 102 26
5
Conguration of the System 27
5.1
Conguration of the Extended and Advanced Cascade Controllers 27
AQ326832164524en-000101/130R0345 | 3Danfoss A/S © 2020.08
Page 4

VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
5.1.1
5.1.2
5.1.3
5.1.4
5.1.5
5.2
Operation 30
5.2.1
5.2.2
5.2.3
5.2.4
5.2.5
5.2.6
5.2.7
5.2.8
Contents
Basic Conguration of the Extended and Advanced Cascade Controllers 27
Conguring Multiple Drives 28
Conguring Closed-loop Control 28
Staging/Destaging of Variable-speed Pumps 28
Staging/Destaging of Fixed-Speed Pumps 29
Checking Pump Status and Controlling Pumps 30
Manual Pump Control 30
Run-time Balancing 30
Pump Spin for Unused Pumps 31
Total Lifetime Hours 31
Alternation of the Lead Pump 31
Staging/Destaging in Mixed-pump Congurations 31
Override Staging/Destaging 32
5.2.9
Minimum Speed Destaging 32
5.2.10
Fixed-speed-only Operation 32
5.2.11
Flow Compensation for Applications with Cascade Controller 32
6
Parameter Descriptions 34
6.1
Parameter Group 27-**, Cascade CTL Option 34
6.1.1
Parameter Group 27-0*, Control & Status 34
6.1.2
Parameter Group 27-1*, Conguration 35
6.1.3
Parameter Group 27-2*, Bandwidth Settings 37
6.1.4
Parameter Group 27-3*, Staging Speed 40
6.1.5
Parameter Group 27-4*, Staging Settings 41
6.1.6
Parameter Group 27-5*, Alternation Settings 44
6.1.7
Parameter Group 27-6*, Digital Inputs 45
6.1.8
Parameter Group 27-7*, Connections 47
6.1.9
Parameter Group 27-9*, Readouts 50
6.2
Parameter Lists 51
6.2.1
25-** Cascade Controller 51
6.2.2
27-** Cascade CTL Option 53
7
Conguration Example 56
7.1
Master/Follower 56
7.1.1
Basic Settings 56
7.1.1.1
7.1.1.2
7.1.2
Master Drive Settings 57
Basic Settings, Master and Follower 56
Display Settings, Master and Follower 56
AQ326832164524en-000101/130R03454 | Danfoss A/S © 2020.08
Page 5

VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
7.1.3
7.1.4
Contents
7.1.2.1
7.1.2.2
7.1.2.3
7.1.2.4
7.1.2.5
Follower Drive Settings 58
7.1.3.1
7.1.3.2
Conguring Sleep Mode 59
Conguration Settings 57
Bandwidth Settings 57
Staging Speed Settings 57
Alternate Settings 58
Connection Settings 58
Open-loop Settings 58
Digital In/Out Settings 58
AQ326832164524en-000101/130R0345 | 5Danfoss A/S © 2020.08
Page 6
•
Edition
Remarks
Software version
AQ326832164524, version 0101
Editorial update.
VLT® Extended Cascade Controller MCO 101: 2.6X
VLT® Advanced Cascade Controller MCO 102: 1.2X
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Introduction
1 Introduction
1.1 Purpose of the Operating Guide
The purpose of this Operating Guide is to describe the VLT® Extended Cascade Controller MCO 101 and VLT® Advanced Cascade
Controller MCO 102. The Operating Guide contains information about:
•
Applications for cascade control.
•
Installation.
•
Conguration of the system.
•
Parameters.
•
Conguration examples.
The Operating Guide is intended for use by qualied personnel. To use the cascade controller options safely and professionally, read
this Operating Guide thoroughly and pay particular attention to the safety instructions and general warnings.
1.2 Trademarks
VLT® is a registered trademark for Danfoss A/S.
1.3 Additional Resources
Various resources are available to understand advanced drive operation, programming, and directives compliance.
•
The VLT® AQUA FC 202 Operating Guide provides detailed information for the installation and start-up of the drive.
•
The VLT® AQUA FC 202 Programming Guide provides greater detail on how to work with parameters. It also contains application
examples.
•
The VLT® AQUA FC 202 Design Guide provides detailed information about capabilities and functionality to design motor control
systems.
•
Supplemental publications, drawings, and manuals are available at www.danfoss.com.
Contact a Danfoss supplier or visit www.danfoss.com for more information.
1.4 Document and Software Version
This manual is regularly reviewed and updated. All suggestions for improvement are welcome.
The original language of this manual is English.
Table 1: Document and Software Version
N O T I C E
The Cascade Controller options for the VLT® AQUA Drive FC 202 are supported in the VLT® AQUA Drive software version 1.24 and
onwards.
1.5 Product Overview
The VLT® Extended Cascade Controller MCO 101 and VLT® Advanced Cascade Controller MCO 102 are add-on options extending the
supported number of pumps and the functionalities of the built-in Cascade Controller in the VLT® AQUA Drive FC 202.
The MCO 101 consists of an option board with 3 relays and is installed in slot B. Once the options are installed, the parameters
supporting the Cascade Controller functions are available via the LCP in parameter group 27-** Cascade CTL Option.
The following options for cascade control are available in the VLT® AQUA Drive FC 202:
•
Built-in Basic Cascade Controller (standard Cascade Controller)
•
VLT® Extended Cascade Controller MCO 101
•
VLT® Advanced Cascade Controller MCO 102
The MCO 101 and MCO 102 can be used in 2 dierent modes:
AQ326832164524en-000101 / 130R03456 | Danfoss A/S © 2020.08
Page 7

VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
•
With the extended features controlled by parameter group 27-** Cascade CTL Option.
•
Extending the number of available relays for the Basic Cascade Controller via parameter group 25-** Cascade Controller.
With MCO 101, a total of 5 relays can be used for cascade control. With MCO 102, a total of 8 pumps can be controlled. The options
are able to alternate the lead pump with 2 relays per pump.
Introduction
N O T I C E
If the MCO 102 is installed, the VLT® Relay Card MCB 105 can extend the number of relays to 13.
1.5.1 Intended Use
Cascade control is a common control system used to control parallel pumps or fans in an energy-ecient way.
The VLT® Extended Cascade Controller MCO 101 and the VLT® Advanced Cascade Controller MCO 102 are designed for pump appli-
cations, however, it is also possible to use Cascade Controllers in any application requiring multiple motors congured in parallel.
The MCO 101 and MCO 102 enable control of multiple pumps congured in parallel by:
•
Automatically turning individual pumps on/o.
•
Controlling the speed of the pumps.
When using Cascade Controllers, the individual pumps are automatically turned on (staged) and turned o (destaged) as needed to
meet the required system output for ow or pressure. The speed of pumps connected to the VLT® AQUA Drive FC 202 is also controlled to provide a continuous range of system output.
The Cascade Controller software runs from a single drive with a Cascade Controller option installed (master drive). It controls a set of
pumps, each controlled by a drive or connected to a contactor or a soft starter.
Other drives in the system (follower drives) do not need to have a Cascade Controller option card installed. They are operated in
open-loop mode and receive the speed reference from the master drive. Pumps connected to drives are referred to as variablespeed pumps. Pumps connected to mains through a contactor or through a soft starter are referred to as xed-speed pumps.
Each pump, variable speed or xed speed, is controlled by a relay in the drive. The MCO 101 and MCO 102 can control a mix of
variable-speed and xed-speed pumps.
N O T I C E
VLT® Digital Cascade can be used instead of MCO 101 and MCO 102 for master/follower applications for full redundant system.
The VLT® Digital Cascade control is unlocked with a license code. Installation is easy using embedded Modbus RTU and multi-
master ability makes system redundant. Example: If the master breaks down, the back-up master takes its place until a replace-
ment takes place.
AQ326832164524en-000101 / 130R0345 | 7Danfoss A/S © 2020.08
Page 8

VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
2 Safety
2.1 Safety Symbols
The following symbols are used in this manual:
D A N G E R
Indicates a hazardous situation which, if not avoided, will result in death or serious injury.
W A R N I N G
Indicates a hazardous situation which, if not avoided, could result in death or serious injury.
C A U T I O N
Indicates a hazardous situation which, if not avoided, could result in minor or moderate injury.
N O T I C E
Indicates information considered important, but not hazard-related (for example, messages relating to property damage).
Safety
2.2 Qualied Personnel
To allow trouble-free and safe operation of the unit, only qualied personnel with proven skills are allowed to transport, store, assemble, install, program, commission, maintain, and decommission this equipment.
Persons with proven skills:
•
Are qualied electrical engineers, or persons who have received training from qualied electrical engineers and are suitably experienced to operate devices, systems, plant, and machinery in accordance with pertinent laws and regulations.
•
Are familiar with the basic regulations concerning health and safety/accident prevention.
•
Have read and understood the safety guidelines given in all manuals provided with the unit, especially the instructions given in
the Operating Guide.
•
Have good knowledge of the generic and specialist standards applicable to the specic application.
2.3 Safety Precautions
W A R N I N G
HIGH VOLTAGE
AC drives contain high voltage when connected to AC mains input, DC supply, or load sharing. Failure to perform installation,
start-up, and maintenance by qualied personnel can result in death or serious injury.
Only qualied personnel must perform installation, start-up, and maintenance.
-
W A R N I N G
UNINTENDED START
When the drive is connected to the AC mains, DC supply, or load sharing, the motor may start at any time, causing risk of death,
serious injury, and equipment or property damage. The motor may start by activation of an external switch, a eldbus command,
an input reference signal from the LCP or LOP, via remote operation using MCT 10 Set-up software, or after a cleared fault condi-
tion.
Press [O] on the LCP before programming parameters.
-
Disconnect the drive from the mains whenever personal safety considerations make it necessary to avoid unintended motor
-
start.
Check that the drive, motor, and any driven equipment are in operational readiness.
-
AQ326832164524en-000101 / 130R03458 | Danfoss A/S © 2020.08
Page 9

Voltage
[V]
Minimum waiting time (minutes)
47152030
40
200–240
0.25–3.7 kW (0.34–
5 hp)
–
5.5–45 kW (7.5–60
hp)
–––
380–480
0.37–7.5 kW (0.5–
10 hp)
–
11–90 kW (15–125
hp)
110–250 kW
(150–335 hp)
–
315–1500 kW
(425–2000 hp)
525–600
0.75–7.5 kW (1.0–
10 hp)
–
11–90 kW (15–125
hp)
–––
525–690
–
1.1–7.5 kW
(1.5–10 hp)
11–90 kW (15–125
hp)
45–400 kW (60–
540 kW)
450–1200 kW
(600–1600 hp)
1400 kW
(1875 hp)
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Safety
W A R N I N G
DISCHARGE TIME
The drive contains DC-link capacitors, which can remain charged even when the drive is not powered. High voltage can be
present even when the warning indicator lights are o.
Failure to wait the specied time after power has been removed before performing service or repair work could result in death or
serious injury.
Stop the motor.
-
Disconnect AC mains, permanent magnet type motors, and remote DC-link supplies, including battery back-ups, UPS, and
-
DC-link connections to other drives.
Wait for the capacitors to discharge fully. The minimum waiting time is specied in the table Discharge time and is also visible
-
on the nameplate on top of the drive.
Before performing any service or repair work, use an appropriate voltage measuring device to make sure that the capacitors
-
are fully discharged.
Table 2: Discharge Time
W A R N I N G
LEAKAGE CURRENT HAZARD
Leakage currents exceed 3.5 mA. Failure to ground the drive properly can result in death or serious injury.
Ensure the correct grounding of the equipment by a certied electrical installer.
-
W A R N I N G
ROTATING SHAFTS
Contact with rotating shafts and electrical equipment can result in death or serious injury.
Ensure that only trained and qualied personnel perform installation, start-up, and maintenance.
-
Ensure that electrical work conforms to national and local electrical codes.
-
Follow the procedures in this guide.
-
W A R N I N G
UNINTENDED MOTOR ROTATION WINDMILLING
Unintended rotation of permanent magnet motors creates voltage and can charge the unit, resulting in death, serious injury, or
equipment damage.
Ensure that permanent magnet motors are blocked to prevent unintended rotation.
-
AQ326832164524en-000101 / 130R0345 | 9Danfoss A/S © 2020.08
Page 10

VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
C A U T I O N
INTERNAL FAILURE HAZARD
An internal failure in the drive can result in serious injury when the drive is not properly closed.
Ensure that all safety covers are in place and securely fastened before applying power.
-
Safety
AQ326832164524en-000101 / 130R034510 | Danfoss A/S © 2020.08
Page 11

Built-in
MCO 101
MCO 102
100% 100% 100% 100%
e30ba594.12
Relay 1
Relay 2
Relay 10
1
1 2 3 4
1 VSP
(1)
+ 2
FSP
(2)
, pa-
rameter
group 25-**
Cascade
Controller
1 VSP + 5 FSP, parameter group 25-** Cascade Controller
1 VSP + 8 FSP, parameter group 25-** Cascade Controller
100% 100% 200% 200%
e30ba593.12
Relay 1
Relay 2
Relay 10
1
21
2 3 4
–
1–6 VSP + 1–5 FSP
(maximum 6 pumps),
parameter group 27-**
Cascade CTL Option
1–8 VSP + 1–7 FSP
(maximum 8 pumps),
parameter group 27-**
Cascade CTL Option
Builtin
MCO 101
MCO 102
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
3 Applications
3.1 Application Overview
Applications
1
VSP=Variable-speed pump (directly connected to the drive).
2
FSP=Fixed-speed pump (the motor could be connected via contactor, soft starter, or star/delta starter).
AQ326832164524en-000101 / 130R0345 | 11Danfoss A/S © 2020.08
Page 12

Line supply
R1 R2
R10
e30ba595.12
1
2
3
4
1
2
3
4
100%
100%
100%
100%
–
6 VSP, parame-
ter group 27-**
Cascade CTL
Option
8 VSP, parameter group 27-**
Cascade CTL
Option
R1
R2
Drive R10
R11
K3
K3
K5
K5
K7
K7
K2
K2
K2
K1
K1
K1
K1K5K5
K7
K7 K4
K4
K4
K3
K3
K1
K3
K1
K3
K7
K7
K6
K6
K6K5
K5
K1
K1
K3
K3
K5
K5
K8
K8
K8
K7
K7
e30ba876.11
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Applications
3.2 Supported Congurations
When setting up the system, create a hardware conguration which communicates the number of connected pumps and drives to
the master. The necessary hardware is explained in the hardware conguration examples.
3.2.1 Hardware Conguration for Expanding of Basic Cascade
In applications already controlled by the built-in Cascade Controller in parameter group 25-** Control Mode, the option cards can be
used to extend the number of relays for cascade control, for example, if a new pump is added to the system.
To enable the basic Cascade Controller in parameter 27-10 Cascade Controller, select [3] Basic Cascade Ctrl. Refer to VLT® AQUA Drive
FC 202 Programming Guide for further programming with settings from parameter group 25-** Control Mode.
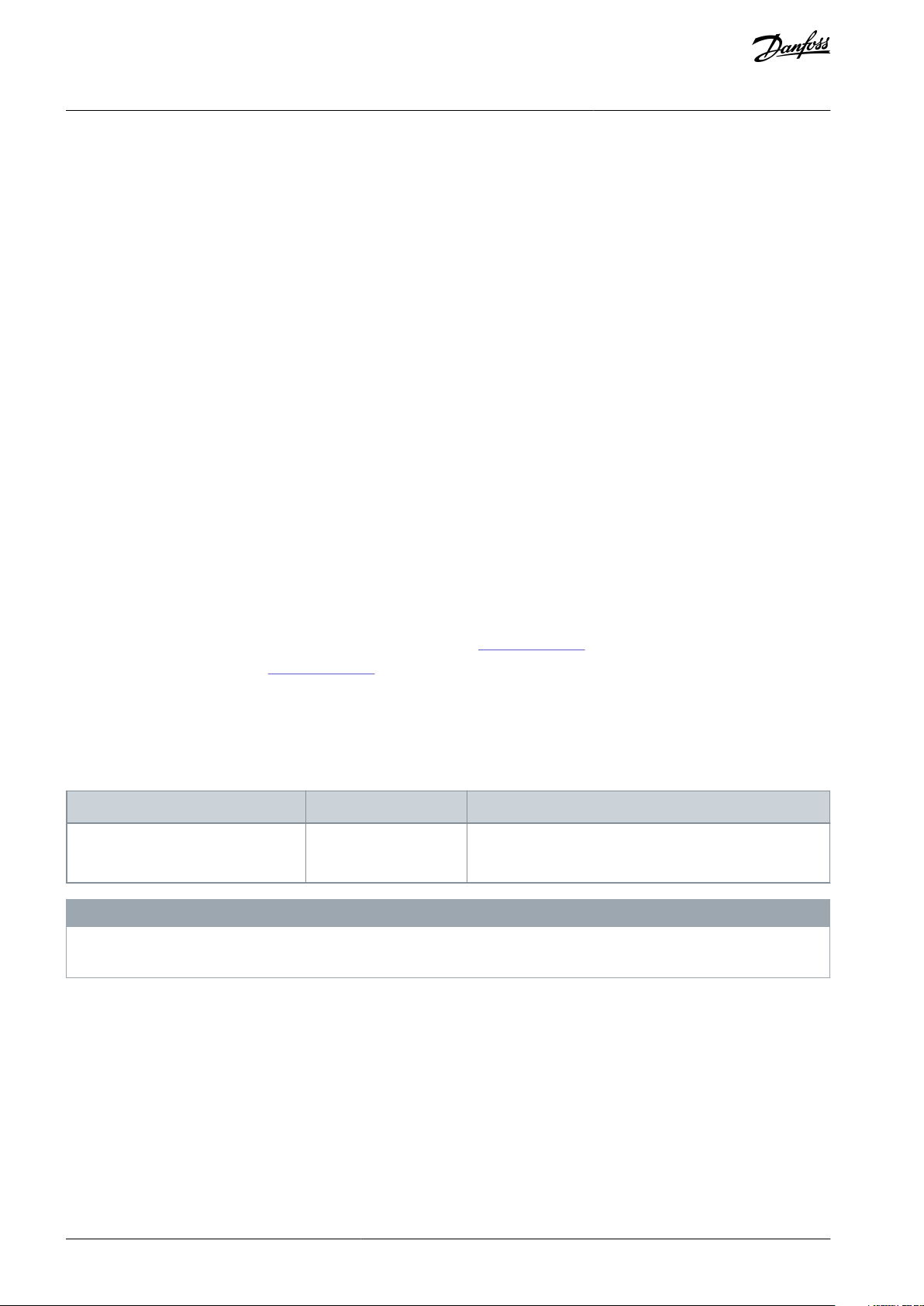
Refer to
using basic cascade and VLT® Extended Cascade Controller MCO 101 as relay extension.
Illustration 1 and Illustration 2 for examples of external wiring required for systems with alternating lead pump of 4 pumps
Illustration 1: Control Circuit Alternating Lead Pump (4 Pumps)
AQ326832164524en-000101 / 130R034512 | Danfoss A/S © 2020.08
Page 13

FC
K1
K2
K3
K4
K5
K6
K7
K8
M
M
M
M
e30ba875.11
e30ba592.13
Relay 1
Relay 2
Relay 10
1
1
2
3
4
100%
1
100% 100%
100%
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
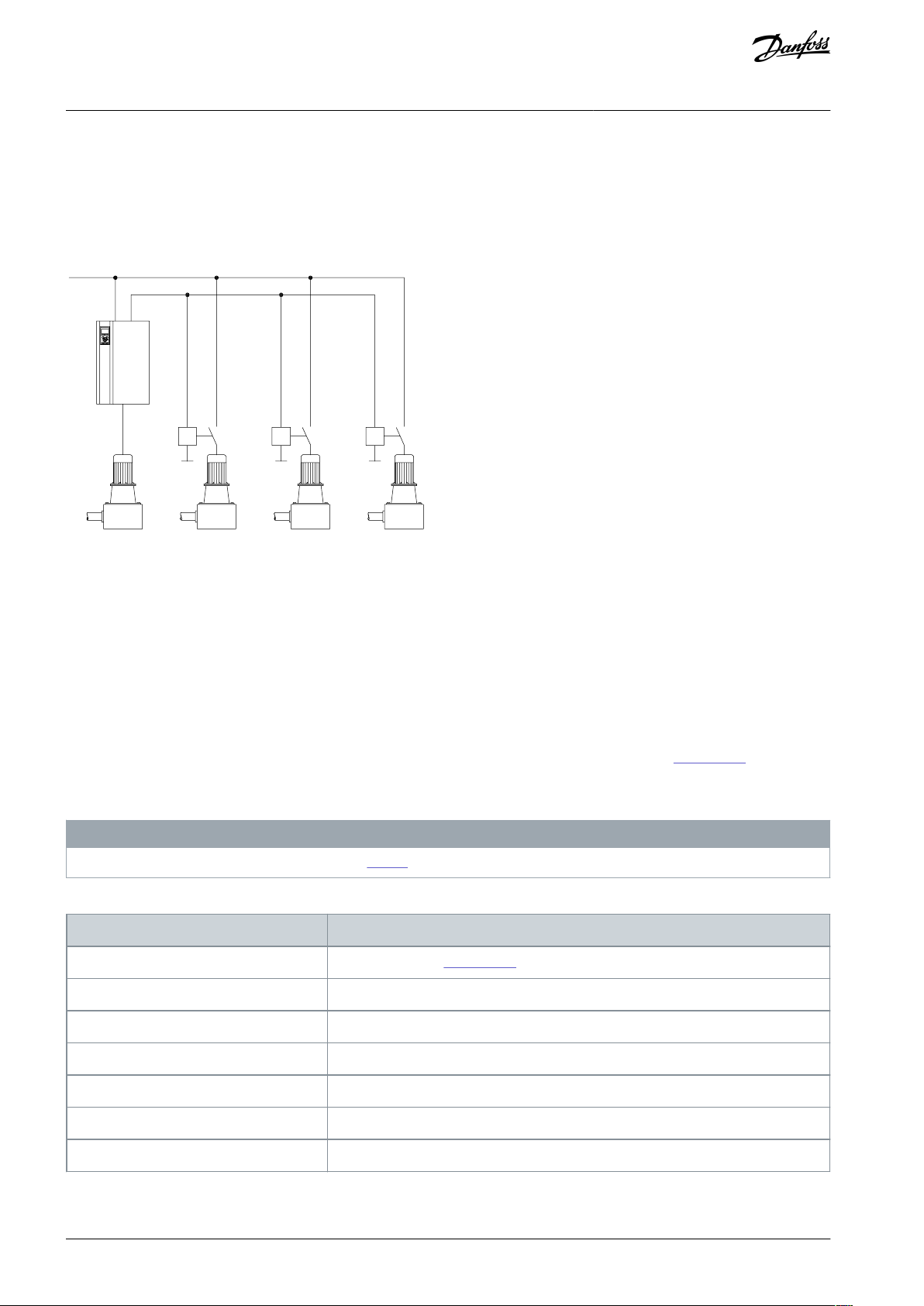
Illustration 2: Mains Circuit Alternating Lead Pump (4 Pumps)
Applications
The xed-speed pump conguration provides a cost-eective method for controlling up to 9 pumps. It is able to control system
output by controlling the number of running pumps and the speed of the single variable-speed pump.
In this conguration, the VLT® AQUA Drive FC 202 with a VLT® Advanced Cascade Controller MCO 102 controls 1 variable-speed
pump and up to 8 xed-speed pumps. The xed-speed pumps are staged and destaged as needed through contactors direct online.
The variable-speed pump provides the ner level of control needed between the stages.
The direct online pumps are staged or destaged depending on their feedback.
Illustration 3: Fixed-speed Pump Conguration Example
N O T I C E
If the pumps are not equal in size or if 2 relays per pump are used, a mixed-pump conguration must be selected in parameter
27-10 Cascade Controller. For the conguration shown in Illustration 3, relay selections in parameter group 27-7* Connections are as
follows:
27-70.0 Relay 1 → [73] Pump 2 to mains
-
27-70.1 Relay 2 → [74] Pump 3 to mains
-
27-70.9 Relay 10 → [75] Pump 4 to mains
-
27-70.10 Relay 11 → [0] Standard relay
-
27-70.11 Relay 12 → [0] Standard relay
-
AQ326832164524en-000101 / 130R0345 | 13Danfoss A/S © 2020.08
Page 14

Motor / Pump
1
Motor / Pump 2
Motor / Pump 3
DI 18
DI 18 DI
29
DI 29
DO
27
R 1
R 2
100%
100%
100%
P
U / I
T 54
T 55
T 20
2
Pressure
Transmitter
0 - 10 V
0 - 20 mA or
4 - 20 mA
T 12
DI18
2
Start
Master with
MCO 101/102
Follower 1
Follower 2
e30bd072.11
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Applications
N O T I C E
Pressure uctuations during staging/destaging transitions may occur and it may be less energy-ecient than the master/follower
congurations.
3.2.2 Hardware Conguration for Master/Follower Cascade Control
The master/follower cascade control mode oers the best performance, the most precise control, and maximum energy savings. It
controls multiple equally sized pumps in parallel, running all pumps at the same speed, and stages the pumps on and o according
to system requirements. Compared to traditional cascade control, the number of running pumps is controlled by speed instead of
feedback. To obtain the highest energy saving, staging speed on and o must be set correctly according to the system. In this example, terminal 27 of the master drive is used as pulse output for the reference, and terminals 29 of the follower drives are used as
pulse input for this reference. While the master drive is running in closed loop, the follower drives are running in open loop. All
follower drives are connected to mains and motor in the same way as the master drive.
Illustration 4: Basic Wiring Principle for a Master/Follower Conguration (Example)
AQ326832164524en-000101 / 130R034514 | Danfoss A/S © 2020.08
Page 15

100% 100% 200% 200%
e30ba593.12
Relay 1
Relay 2
Relay 10
1
21
2 3 4
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Applications
In this conguration, each pump is controlled by a drive. All pumps and drives must be of the same size. Staging and destaging
decisions are made based on the speed of the drive. The constant pressure is controlled by the master drive operating in closed
loop. The speed is the same in all running pumps.
In the master/follower mode, VLT® Extended Cascade Controller MCO 101 supports up to 6 pumps, while VLT® Advanced Cascade
Controller MCO 102 supports up to 8 pumps.
Conguring as in Illustration 4 requires the following settings in parameter group 27-7* Connections:
•
27-70.0 Relay 1 → [1] Drive 2 enable
•
27-70.1 Relay 2 → [2] Drive 3 enable
•
27-70.9 Relay 10 → [0] Standard relay
•
27-70.10 Relay 11 → [0] Standard relay
•
27-70.11 Relay 12 → [0] Standard relay
The system run-time balances all pumps automatically depending on the pump prioritization made in parameter 27-16 Runtime Bal-
ancing. The master/follower system provides a certain level of redundancy. If the master drive trips, it continues to control the follower drives.
N O T I C E
VLT® 24 V DC Supply MCB 107 can be added to increase the level of system redundancy.
Relays set to [0] Std. Relay can be used as general purpose relay controlled by parameter group 5-4* Relays.
3.2.3 Hardware Conguration for Mixed Pumps
This conguration combines some of the benets of the master/follower conguration with some of the initial cost savings of the
xed-speed congurations. It is a good choice when the extra capacity of the xed pumps is rarely needed.
The mixed-pump conguration supports a mix of variable-speed pumps connected to drives and also some xed-speed pumps.
First, the variable-speed pumps are staged and destaged based on the drive speed. The xed-speed pumps are staged and destaged last based on the feedback pressure.
N O T I C E
The variable-speed pumps and the drives must be of the same size. Fixed-speed pumps may be of dierent size.
Illustration 5: Mixed-pump Conguration Example
For this conguration, set the relays as follows in parameter group 27-7* Connections:
•
•
•
27-70.0 Relay 1 → [1] Drive 2 enable
27-70.1 Relay 2 → [74] Pump 3 to mains
27-70.9 Relay 10 → [75] Pump 4 to mains
AQ326832164524en-000101 / 130R0345 | 15Danfoss A/S © 2020.08
Page 16
100% 100% 200% 200%
e30bh880.10
Relay 1
Relay 2
Relay 10
1
1 2 3 4
Variable speed
Fixed speed
100%
100% + 200% (see Illustration 7)
100%
100% + 200% + 200%
100%
100% + 100% + 300%
100%
100% + 100% + 300% + 300%
100%
100% + 200% + 400%
100% + 100%
200%
100% + 100%
200% + 200%
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
•
27-70.10 Relay 11 → [0] Standard relay
•
27-70.11 Relay 12 → [0] Standard relay
Applications
3.2.3.1 Unequal-sized Pumps Conguration
The unequal-sized pumps conguration supports a limited mix of xed-speed pumps in dierent sizes. It provides for the largest
range of system output with the smallest number of pumps.
Illustration 6: Example of a Conguration with Unequal-sized Pumps
For this conguration, set the relays as follows in parameter group 27-7* Connections:
•
27-70.0 Relay 1 → [73] Pump 2 to mains
•
27-70.1 Relay 2 → [74] Pump 3 to mains
•
27-70.9 Relay 10 → [75] Pump 4 to mains
•
27-70.10 Relay 11 → [0] Standard relay
•
27-70.11 Relay 12 → [0] Standard relay
For a conguration to be valid, it must be possible to stage pumps in increments of 100% of the size of the variable-speed pump of
the master drive. The variable-speed pump must control the output between the xed-speed stages, see Illustration 7.
100% is dened as the maximum ow produced by the pump connected to the master drive. The xed-speed pumps must be mul-
tiples of this size.
N O T I C E
Other valid congurations than the ones shown in Table 3 are possible.
Table 3: Valid Congurations
AQ326832164524en-000101 / 130R034516 | Danfoss A/S © 2020.08
Page 17

100 %
100 %
100 %
100 %
100 %
100 %
200 % 200 %
C
1
100 %
200 %
300 %
400 %
2
3
4
e30bd073.11
Variable speed
Fixed speed
100%
200%
No control between 100% and 200%
100%
100% + 300%
No control between 200% and 300%, see Illustration 8
100%
100% + 200% + 600%
No control between 400% and 600 %
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Applications
Illustration 7: Example of a Valid Conguration
N O T I C E
Invalid congurations, as in Illustration 8, will still run, but will have a poor control performance. This allows only limited operation
if a pump fails or is interlocked.
Table 4: Invalid Congurations
AQ326832164524en-000101 / 130R0345 | 17Danfoss A/S © 2020.08
Page 18

e30bd074.11
100 %
100 %
100 %
300 %
100 %
100 %
100 %
300 %
C
1
100 %
200 %
300 %
400 %
2 3 4
e30ba602.12
Relay 10
Relay 1
Relay 2
Relay 12
1
1
2
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Applications
Illustration 8: Example of an Invalid Conguration
3.2.3.2 Mixed-pump Conguration with Alternation
In this conguration, the drive alternates between 2 pumps and controls the other as extra xed-speed pumps. The Cascade Controller attempts to balance the running hours of the pumps.
Illustration 9: Example 1
In Illustration 9, the 2 pumps are operated either as variable-speed pumps or as xed-speed pumps.
For this conguration, set the relay selection as follows in parameter group 27-7* Connections:
AQ326832164524en-000101 / 130R034518 | Danfoss A/S © 2020.08
Page 19

e30ba601.12
Relay 10
Relay 1
Relay 2
Relay 11
Relay 12
1
1
2
3
e30ba600.12
Relay 1
Relay 2
Relay 10
Relay 11
Relay 12
1
1
2
3
4
5
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
•
27-70.0 Relay 1 → [8] Pump 1 to drive 1
•
27-70.1 Relay 2 → [16] Pump 2 to drive 1
•
27-70.9 Relay 10 → [72] Pump 1 to mains
•
27-70.10 Relay 11 → [73] Pumps 2 to mains
•
27-70.11 Relay 12 → [0] Standard relay
Applications
Illustration 10: Example 2
In Illustration 10, 2 pumps are operated either as variable-speed pumps or as xed-speed pumps. The 3rd pump is an extra xedspeed pump.
For this conguration, set the relays as follows in parameter group 27-7* Connections:
•
27-70.0 Relay 1 → [8] Pump1 to drive 1
•
27-70.1 Relay 2 → [16] Pump2 to drive 1
•
27-70.9 Relay 10 → [72] Pump 1 to mains
•
27-70.10 Relay 11 → [73] Pump 2 to mains
•
27-70.11 Relay 12 → [74] Pump 3 to mains
Illustration 11: Example 3
AQ326832164524en-000101 / 130R0345 | 19Danfoss A/S © 2020.08
Page 20

Stage ON [Hz]
Stage OFF [Hz]
Stage 1
48.5 (parameter 2732.1)
30 (parameter 2734.1)
Stage 2
48.5 (parameter 2732.2)
40 (parameter 2734.2)
Stage 3
48.5 (parameter 2732.3)
42 (parameter 2734.3)
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
In Illustration 11, either pump 1 or pump 2 is connected to the drive. The pump for the connection to the drive can be selected
either automatically for balancing the running hours or forced by the congured alternation event. The xed-speed pumps 3, 4, and
5 are turned on and o as required.
For this conguration, set the relay as follows in parameter group 27-7* Connections:
•
27-70.0 Relay 1 → [8] Pump 1 to drive 1
•
27-70.1 Relay 2 → [16] Pump 2 to drive 1
•
27-70.9 Relay 10 → [74] Pump 3 to mains
•
27-70.10 Relay 11 → [75] Pump 4 to mains
•
27-70.11 Relay 12 → [76] Pump 5 to mains
Applications
3.2.4 Using Soft Starters for Fixed-speed Pumps
Soft starters can be used instead of contactors for any conguration using xed-speed pumps.
N O T I C E
Mixing soft starters and contactors prevents control of output pressure during staging and destaging transitions. The use of soft
starters delays the staging due to the ramp time of the xed-speed pump.
3.3 Sleep Mode
If the load on the multi-pump system allows it, it can be stopped by activating the sleep mode function. When in sleep mode, certain congurable conditions are monitored to nd out when load has been applied again and the system has to be restarted.
Depending on the system, sleep mode can be activated either from the low-power detection/low-speed detection or via an external
signal applied to 1 of the digital inputs (must be programmed via parameter group 5-1* Digital Inputs). Using, for example, an electromechanical ow switch to detect a no-ow condition, activates sleep mode at the raising edge of the external signal applied.
Implementation and conguration of sleep mode depend on the hardware conguration and the requirements.
3.3.1 Basic Cascade Controller
For Basic Cascade Controller applications, sleep mode can be used and congured exactly as it is described for single-pump applica-
tions in the parameter groups 22-2* to 22-4* in the VLT® AQUA Drive FC 202 Programming Guide.
Low-speed detection and low-power detection combined with the timers for minimum run-time, minimum sleep time, and the
boost feature are supported. The feedback from the pressure transducer is monitored and when this pressure has dropped with a
set percentage below the normal setpoint for pressure (parameter 22-44 Wake-up Ref./FB Dierence), the motor ramps up again, and
pressure is controlled for reaching the set value.
3.3.2 Master/Follower and Mixed-pump Congurations
In multiple-drive applications, sleep mode can be used in 2 dierent ways:
•
Low-speed detection for applications with multiple drives can be enabled by a selection in parameter 22-22 Low Speed Detection.
•
Using the Stage O-speeds in parameter group 27-3* Staging Speed.
In the following example, sleep mode is entered at 30 Hz in a master/follower application.
This mode is activated by programming the corresponding speed in parameter 27-33 Stage O Speed [RPM] or parameter 27-34 Stage
O Speed [Hz].
The value for this speed has to be higher than the minimum speed in parameter 4-11 Motor Speed Low Limit [RPM] or parameter 4-12
Motor Speed Low Limit [Hz].
The value for the override limit in parameter 27-21 Override Limit causes the drive to wake up again. The value is entered as a % of
the maximum reference as programmed in parameter 3-03 Maximum Reference.
AQ326832164524en-000101 / 130R034520 | Danfoss A/S © 2020.08
Page 21

Output speed
No/low flow detection speed
Reference and feedback
11
10
98
7654
321 0
e30bh881.10
0
System is going into a no-ow condition
1
Conditions for pulse are present
2
Pulse equals boost
3
Boost setpoint is reached
4
Pressure loss due to back-ow to close no-return
valve5No-return valve is closed and there is no load
6
PID, bring output frequency to minimum speed due
to FB>Ref
7
Delay time for no-ow has expired. Sleep mode
8
Drive stop, sleep
9
Load return to system
10
Conditions for wake-up are present
11
System running normally
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Applications
3.3.3 Temporary Boost of the Setpoint Before Sleep Mode
In some applications, it can be dicult to detect the no-ow conditions in a reliable way with a xed setpoint. This may be the case
in applications with varying inlet pressure or if the closure of a non-return valve causes a pressure loss.
In these cases, a temporary boost of the setpoint can force the PID to reduce speed. See parameter 22-22 Low Speed Detection in the
VLT® AQUA Drive FC 202 Programming Guide for further details.
Illustration 12: Temporary Boost of Setpoint
AQ326832164524en-000101 / 130R0345 | 21Danfoss A/S © 2020.08
Page 22

Voltage
[V]
Minimum waiting time (minutes)
47152030
40
200–240
0.25–3.7 kW (0.34–
5 hp)
–
5.5–45 kW (7.5–60
hp)
–––
380–480
0.37–7.5 kW (0.5–
10 hp)
–
11–90 kW (15–125
hp)
110–250 kW
(150–335 hp)
–
315–1500 kW
(425–2000 hp)
525–600
0.75–7.5 kW (1.0–
10 hp)
–
11–90 kW (15–125
hp)
–––
525–690
–
1.1–7.5 kW
(1.5–10 hp)
11–90 kW (15–125
hp)
45–400 kW (60–
540 kW)
450–1200 kW
(600–1600 hp)
1400 kW
(1875 hp)
e30ba607.11
MCO 101
1
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
4 Installation
4.1 Before Start
W A R N I N G
Never install an option card in a drive during operation.
Interrupt the power supply to the drive before starting the installation. Note that high voltage may be present, even when
-
the warning LED display lights are o.
Table 5: Discharge Time
Installation
4.2 VLT® Extended Cascade Controller MCO 101
4.2.1 Installing the VLT® Extended Cascade Controller MCO 101
The VLT® Extended Cascade Control MCO 101 includes 2 changeover contacts and can be tted into option slot B.
Illustration 13: Mounting of B Options
Procedure
1.
Disconnect power to the drive.
2.
Disconnect power to the live part connections on the relay terminals.
3.
Remove the LCP, the terminal cover, and the cradle from the drive.
AQ326832164524en-000101 / 130R034522 | Danfoss A/S © 2020.08
Page 23

Relay 10
NC NCNC
Relay 12Relay 11
1 2 3 12
e30ba606.10
754 6 8 9 10 11
e30ba177.10
8-9mm
2mm
1 1 1
1102 3
4 5 6 7 8 9 1211
2 2 3
1 1 1
1102
3
4 5
6 7 8 9 1211
3
3 3
1 1 1
1 10
2 3
4
5 6 7 8 9 1211
2
2
2
e30ba176.11
1NC2
Live part
3
PELV
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
4.5.Fit the MCO 101 option in slot B.
Connect the control cables and relieve the cables with the enclosed cable strips.
Illustration 14: Wiring of Connections
Installation
Illustration 15: Mounting of Cables
Illustration 16: Incorrect and Correct Relay Wiring
Do not combine low-voltage parts and PELV systems.
N O T I C E
AQ326832164524en-000101 / 130R0345 | 23Danfoss A/S © 2020.08
Page 24

Maximum terminal load (AC)
240 V AC, 2 A
Maximum terminal load (DC)
24 V DC, 1 A
Minimum terminal load (DC)
5 V, 10 mA
Maximum switching rate at rated load/minimum load
6 min-1/20 s
-1
Type
Description
Order number
Options
MCF 105
Mounting kit, enclosure sizes A2 and A3 (40 mm for 1 C option)
130B7530
MCF 105
Mounting kit, enclosure size A5
130B7532
MCF 105
Mounting kit, enclosure sizes B (except B3), C, D, E, F1, and F3
130B7533
MCF 105
Mounting kit, enclosure size B3 (40 mm for 1 C option)
130B1413
Accessory bag
MCO 102
Accessory bag
130B0152
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
6.
Fit the extended cradle and terminal cover.
7.
Remount the LCP.
8.
Connect power to the drive.
Installation
4.2.2 Electrical Data, VLT® Extended Cascade Control MCO 101
4.3 VLT® Advanced Cascade Controller MCO 102
4.3.1 Installing the VLT® Advanced Cascade Controller MCO 102
The VLT® Advanced Cascade Controller MCO 102 is exclusively intended for use in option slot C1.
Some items are required for the installation of a C option mounting kit. The items required depend on the drive enclosure.
Table 6: Order Numbers for Mounting Kits and Accessory Bag
A4 does not support C options. If the VLT® Advanced Cascade Controller MCO 102 is needed, select an A5 enclosure.
AQ326832164524en-000101 / 130R034524 | Danfoss A/S © 2020.08
Page 25

e30ba946.10
RemoveJumper to activate Safe Stop
12 13 18 19 27 29 32 33 20
DC
DC
e30ba945.10
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Installation
Illustration 17: Enclosure Sizes A2, A3, and B3, 40 mm (only 1 C option)
Illustration 18: Enclosure Sizes B (except B3) and C
Procedure
1.
Disconnect power to the drive.
AQ326832164524en-000101 / 130R0345 | 25Danfoss A/S © 2020.08
Page 26

e30bb025.11
e30bb026.11
Maximum terminal load (AC)
240 V AC, 2 A
Maximum terminal load (DC)
24 V DC, 1 A
Minimum terminal load (DC)
5 V, 10 mA
Maximum switching rate at rated load/minimum load
6 min-1/20 s
-1
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
2.
Disconnect power to the live part connections on the relay terminals.
3.
Remove the LCP, the terminal cover, and the cradle from the drive.
4.
Fit the MCO 102 in slot C1.
5.
Connect the control cables and relieve the cables with the enclosed cable strips.
Illustration 19: Terminal Connections, 8 Relays
Installation
Illustration 20: Terminal Connections to 7 Digital Inputs and Access to Internal 24 V DC
6.
Fit the extended cradle and terminal cover.
7.
Remount the LCP.
8.
Connect power to the drive.
4.3.2 Electrical Data, VLT® Advanced Cascade Control MCO 102
AQ326832164524en-000101 / 130R034526 | Danfoss A/S © 2020.08
Page 27

Parameter
Description
27-10 Cascade Controller
This parameter is used for enabling or disabling the Extended/Advanced Cascade Controllers. It
is also used to extend the number of pumps in Basic Cascade Control applications. In this case,
the parameters in Parameter Group 25-** Cascade Controller must be used for the conguration
details. The mixed-pump selection is the general selection for the Cascade Controller. If using 1
drive per pump, select the master/follower conguration.
27-11 Number Of
Drives
Set the number of drives.
27-12 Number Of
Pumps
Set the number of pumps. Default is the number of drives.
Parameter 27-13 Max
Number of Pumps
Running
This parameter makes it possible to force pumps to stay idle. Example: In a cascade system
where 3 pumps are necessary in normal operation, but 4 pumps are installed due to legislation,
it is possible to allow only 3 pumps running in parallel to avoid high pressure spikes. Default
always equals the number of pumps.
27-14 Pump Capacity
Pump capacity for each pump (indexed parameter). If all pumps are the same size, use the default values. To adjust the setting, select the pump, press [OK], and adjust the capacity.
27-16 Runtime Balancing
Run-time balancing for each pump (indexed parameter). If the system should balance the running hours equally between the pumps, use the default values.
27-17 Motor starters
All xed-speed pumps must be the same size.
27-18 Spin Time for
Unused Pumps
The spin time depends on the size of the pumps.
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Conguration of the System
5 Conguration of the System
5.1 Conguration of the Extended and Advanced Cascade Controllers
The Extended and Advanced Cascade Controllers, MCO 101 and MCO 102, can be congured quickly using many of the default
parameters. For more information about application types and on how to use advanced features of the Cascade Controllers, refer to
3 Applications.
N O T I C E
To avoid miscongurations, check the settings even if the parameters are set to their default values.
5.1.1 Basic Conguration of the Extended and Advanced Cascade Controllers
N O T I C E
Any unused relays are available for other functions via parameter group 5-4* Relays.
Procedure
1.
Select the values for the parameters in parameter group 27-1* Conguration.
2.
Dene the relays in parameter group 27-7* Connections.
a.
Assign 1 relay for each follower drive in the system.
b.
Assign the relays for the xed-speed pumps.
c.
If a single drive is connected to 2 pumps (alternation), congure more relays accordingly.
AQ326832164524en-000101 / 130R0345 | 27Danfoss A/S © 2020.08
Page 28

DO
Pin 27
DI
Pin 29
DI
Pin 29
1
2
3
e30ba608.11
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Conguration of the System
5.1.2 Conguring Multiple Drives
If more than 1 drive is used with the Cascade Controller, the master drive sets the speed reference for all drives via a digital pulse
signal.
Illustration 21: Multiple Drives Congured for Cascade Control
Procedure
1.
Set the basic cascade parameters, see 5.1.1 Basic Conguration of the Extended and Advanced Cascade Controllers.
2.
Set parameter 5-01 Terminal 27 Mode to [1] Output, parameter 5-30 Terminal 27 Digital Output to [55] Pulse Output, and parameter 5-60 Terminal 27 Pulse Output Variable to [116] Cascade Ref.
3.
Set each follower drive to open loop, set parameter 1-00 Conguration Mode to [0] Open Loop, parameter 3-15 Reference 1
Source to [7] Pulse Input 29, and parameter 5-13 Terminal 29 Digital Input to [32] Pulse Input.
Set the ramps fast enough to enable the PID controller to maintain control of the system.
4.
N O T I C E
Ramp-up times and ramp-down times must be the same for the master drive and for all the follower drives in the sys-
tem.
5.1.3 Conguring Closed-loop Control
The master drive is the primary controller for the system. It monitors the output pressure, adjusts the speed of the drive, and decides
when to add or remove stages.
Procedure
1.
Set up the master drive to closed-loop mode with a feedback sensor connected to an analog input of the drive.
2.
Set up the PID controller of the master drive to match the requirements of the installation.
For further information on setting up the PID parameters, see the VLT® AQUA Drive FC 202 Programming Guide.
5.1.4 Staging/Destaging of Variable-speed Pumps
Staging occurs when the speed on the drive has reached the value in parameter 27-31 Stage On Speed [RPM] (parameter 27-32 Stage
on Speed [Hz]). At this speed, the system pressure is still maintained, but the pumps start to operate outside of their peak eciency
points. Staging on another pump lowers the speed of all running pumps and provides a more energy-ecient operation.
In master/follower congurations and mixed-pump congurations, the variable-speed pumps are staged and destaged based on
the speed of the drives.
Destaging occurs when the speed of the drives drops below the value in parameter 27-33 Stage O Speed [RPM] (parameter 27-34
Stage O Speed [Hz]). At this speed, the system pressure is still maintained, but the pumps are beginning to operate below their peak
eciency points. Destaging a pump causes the speed of the drive to increase into a more energy-ecient range.
AQ326832164524en-000101 / 130R034528 | Danfoss A/S © 2020.08
Page 29

P
tot
A
B
C
1 2
t
e30bb024.11
1
1 pump running
2
2 pumps running
A
Incorrect stage on speed adjustment
B
Correct stage on speed adjustment
C
Stage on speed pump 2
Parameter
Range
Default
27-30 Auto Tune Staging Speeds
{[0] Disabled, [1] Enabled}
[1] Enabled
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Conguration of the System
Parameter 27-31 Stage On Speed [RPM] (parameter 27-32 Stage On Speed [Hz]) and parameter 27-33 Stage O Speed [RPM] (parameter
27-34 Stage O Speed [Hz]) are installation dependent. These parameters are indexed parameters with 1 set of entries for each pump
stage.
The stage on and destage o speed can be autotuned during operation or set manually. If Auto tune is enabled, the system starts
operation using default settings or the presettings programmed in parameter 27-31 Stage On Speed [RPM] (parameter 27-32 Stage on
Speed [Hz]) and parameter 27-33 Stage O Speed [RPM] (parameter 27-34 Stage O Speed [Hz]).
The tuning ensures optimum energy eciency of the system.
Illustration 22: Optimum Energy Eciency
During operation, the system monitors the actual energy consumption and optimizes every time a stage or destage takes place.
5.1.5 Staging/Destaging of Fixed-Speed Pumps
Fixed-speed pumps are staged or destaged based on system pressure.
To avoid turning on and o the pumps too often, dene an acceptable range of system pressure along with a period where the
pressure is allowed to be outside of this band before staging or destaging occurs. Set the values via:
•
Parameter 27-20 Normal Operating Range
•
Parameter 27-23 Staging Delay
•
Parameter 27-24 Destaging Delay
The parameters are installation dependent.
N O T I C E
Stage/destage threshold
The speed of the variable-speed pump at the point of staging or destaging is dened by a stage or destage threshold. These settings prevent overshoot or undershoot in the pressure at staging or destaging.
The optional auto tune of staging and destaging threshold monitors the feedback at the point of staging or destaging and adjusts
the settings every time a staging takes place.
AQ326832164524en-000101 / 130R0345 | 29Danfoss A/S © 2020.08
Page 30

Parameter
Range
Default
27-40 Auto Tune Staging Settings
{[0] Disabled, [1] Enabled}
[1] Enabled
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Conguration of the System
5.2 Operation
When the Cascade Controller is enabled, it controls system pressure by varying the speed of the drive and by staging pumps on and
o.
The Cascade Controller provides 2 stop functions. One function quickly stops the system. The other function destages the pumps in
a sequence, resulting in a pressure-controlled stop. For a VLT® AQUA Drive FC 202 equipped with STO, terminal 37 turns o all relays
and coasts the master drive. If any of the digital inputs are set to [8] Start, and the corresponding terminal is used to control start and
stop of the drive, setting the terminal to 0 V will turn o all relays and coast the master drive. Pressing [O] on the LCP causes a
sequenced destaging of running pumps.
5.2.1 Checking Pump Status and Controlling Pumps
Select parameter group 27-0* Control & Status to check on the status of the Cascade Controller and to control individual pumps.
Select a specic pump to view the status, the current running hours, and the total lifetime hours.
Procedure
1.
Navigate to parameter group 27-0* Control & Status.
Press [▵] and [▿] on the LCP to select the pump.
2.
Press [▵] and [▿] on the LCP to select the parameter.
3.
5.2.2 Manual Pump Control
Use the Extended/Advanced Cascade Controllers for complete control of each pump in the system, for example for maintenance
purposes. Use parameter 27-02 Manual Pump Control to control individual pumps through their relays.
This parameter diers from other value-related parameters as selecting 1 of these options causes the action to occur and then the
parameter reverts to its default state.
The selections are as follows:
•
[0] No Operation - Default value.
•
[1] Online - Makes the pump available to the VLT® Extended Cascade Controller MCO 101.
•
[2] Alternate On - Forces the selected pump to be the lead pump.
•
[3] Oine-O - Turns o the pump and makes it unavailable for cascading.
•
[4] Oine-On - Turns on the pump and makes it unavailable for cascading.
•
[5] Oine-Spin - Initiates a pump spin.
If any of the Oine selections are selected, the pump is no longer available to the Cascade Control until Online is selected.
If a pump is taken oine through parameter 27-02 Manual Pump Control, the Cascade Controller attempts to compensate for the
oine pumps as follows:
•
If [3] Oine-O is selected for a pump that is running, another pump is staged on to compensate for the loss of output.
•
If [4] Oine-On is selected for a pump that is o, another pump is staged o to compensate for the excess output.
5.2.3 Run-time Balancing
The Extended/Advanced Cascade Controllers are designed to balance the running hours of the available pumps, but parameter
27-16 Runtime Balancing also provides an optional balancing priority for each pump in the system.
Three levels of priority are available:
•
[0] Balanced Priority 1
•
[1] Balanced Priority 2
•
[2] Spare Pump
The Cascade Controller selects a pump to be staged or destaged based on the maximum capacity of the pump (parameter 27-14
Pump Capacity), parameter 27-03 Current Runtime Hours, and parameter 27-16 Runtime Balancing.
During staging, the Cascade Controller balances the current running hours for all pumps set to [0] Balanced Priority 1 in parameter
27-16 Runtime Balancing.
If all priority 1 pumps are running, the Cascade Controller balances the pumps set to [1] Balanced Priority 2.
AQ326832164524en-000101 / 130R034530 | Danfoss A/S © 2020.08
Page 31

VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
If all priority 1 and 2 pumps are running, pumps set to [2] Spare Pump are selected.
During destaging, the reverse occurs. Spare pumps are destaged rst, followed by priority 2 pumps, followed by priority 1 pumps. At
each priority level, the pump with the highest current run-time hours is destaged rst.
Conguration of the System
N O T I C E
In mixed-pump congurations with more than 1 drive, all variable-speed pumps are staged or destaged before xed-speed
pumps.
Select parameter 27-19 Reset Current Runtime Hours to reset the current run-time hours and restart the balancing process. This parameter does not aect the total lifetime hours (parameter 27-04 Pump Total Lifetime Hours) for each pump. The total lifetime hours-
function is not used for run-time balancing.
5.2.4 Pump Spin for Unused Pumps
If a pump is used only occasionally, the Cascade Controller balances the running hours of the pumps via alternation. If a pump is not
used for 72 hours, a pump spin can be triggered.
The spin time can be set in parameter 27-18 Spin Time for Unused Pumps. The spin time should be long enough to ensure that the
pump stays in good working condition, but short enough not to overpressure the system. To disable the function, set parameter
27-18 Spin Time for Unused Pumps to 0.
N O T I C E
The Cascade Controller does not compensate for the extra pressure generated during a pump spin. Keep the spin time as short as
possible to prevent damage caused by overpressuring the output.
5.2.5 Total Lifetime Hours
The VLT® Extended Cascade Controller MCO 101 and the VLT® Advanced Cascade Controller MCO 102 track the total lifetime hours
for each controlled pump.
Parameter 27-04 Pump Total Lifetime Hours shows a running total of the operating hours for each pump. The total lifetime hours are
saved in the non-volatile memory once every hour.
This parameter can also be set to an initial value that reects the hours of operation for a pump before it was added to the system.
5.2.6 Alternation of the Lead Pump
The Cascade Controller can be congured for lead pump alternation, see also examples in 3.2.3.2 Mixed-pump Conguration with
Alternation.
In a conguration with multiple drives, the lead pump is dened as the last variable-speed pump running.
In a conguration with only 1 drive, the lead pump is dened as the pump connected to the drive.
During start-up and normal staging/destaging, the Cascade Controller balances the running hours by alternating the lead pump.
Alternation of lead pumps can also be forced manually, for example, via parameter 27-54 Alternation At Time of Day, via a digital
input, or by alternation time parameters.
5.2.7 Staging/Destaging in Mixed-pump Congurations
Two methods are used to decide when pumps should be staged or destaged:
Speed of the drives.
•
Feedback pressure exceeding the normal operating range.
•
In a mixed-pump conguration with more than 1 drive, both methods are used. In the following example, feedback is referred to as
pressure.
Staging
When the master drive receives a start command, a variable-speed pump is selected and starts using 1 of the available drives.
If the system pressure drops, the speed of the drive increases to meet the demand for more ow. While maintaining the pressure, if
the drive exceeds parameter 27-31 Stage On Speed [RPM] (or parameter 27-32 Stage On Speed [Hz]) and remains above that speed for
the time specied in parameter 27-33 Stage O Speed [RPM] (parameter 27-34 Stage O Speed [Hz], the next variable-speed pump is
staged on.
If the Cascade Controller is unable to maintain the system pressure with all variable-speed pumps running at maximum, it stages on
xed-speed pumps. If pressure goes below the setpoint with the percentage set in parameter 27-20 Normal Operating Range and
stays below the setpoint for the time specied in parameter 27-23 Staging Delay, a xed-speed pump stages on.
AQ326832164524en-000101 / 130R0345 | 31Danfoss A/S © 2020.08
Page 32

VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Destaging
If the system pressure increases, the speed of the drive decreases. If the drive drops below the values specied in parameter 27-33
Stage O Speed [RPM] (or parameter 27-32 Stage O Speed [Hz] and stays there for the time specied in parameter 27-24 Destaging
Delay, a variable-speed pump is staged o.
If the system pressure is still too high with only 1 drive running at minimum speed, it destages xed-speed pumps. A xed-speed
pump is destaged when the pressure exceeds the setpoint in parameter 27-20 Normal Operating Range and stays there for the time
specied in parameter 27-24 Destaging Delay. If the system demand continues to drop, the system enters sleep mode.
Conguration of the System
5.2.8 Override Staging/Destaging
Normal staging and destaging handle most of the situations in typical applications. However, when rapid response to changes in
system pressure is required, the Cascade Controller is equipped to stage and destage pumps immediately.
Staging
When the system pressure drops below the override limit (parameter 27-21 Override Limit), the Cascade Controller immediately
stages on a pump to meet the demand.
If the system pressure continues to stay below parameter 27-21 Override Limit for the time specied in parameter 27-25 Override Hold
Time, the Cascade Controller stages on the next pump. This behavior is repeated until all pumps are on or until system pressure
drops below the override limit.
Destaging
When the system pressure exceeds parameter 27-21 Override Limit, the Cascade Controller immediately destages a pump to reduce
the pressure.
If the system pressure continues to stay above the value in parameter 27-21 Override for the time specied in parameter 27-25 Over-
ride Hold Time, the Cascade Controller destages another pump. This behavior is repeated until only the lead pump is left on or until
the pressure stabilizes.
Parameter 27-21 Override Limit is set as a % of the maximum reference. It denes a point above and below the system setpoint where
override staging and destaging occur.
5.2.9 Minimum Speed Destaging
To reduce energy usage, the Cascade Controller can destage a xed-speed pump if the lead pump is running at minimum speed for
the time set in parameter 27-27 Min Speed Destage Delay.
5.2.10 Fixed-speed-only Operation
Fixed-speed-only operation keeps critical systems operating even if all variable-speed pumps are unavailable to the Cascade Controller. In this situation, the Cascade Controller maintains system pressure by turning on and o xed-speed pumps.
Staging
If all the variable-speed pumps are unavailable and the system pressure drops below the limit in parameter 27-22 Fixed Speed Only
Operating Range for the time specied in parameter 27-23 Staging Delay, a xed-speed pump is turned on.
Destaging
If all variable-speed pumps are unavailable and the system pressure exceeds the limit set in parameter 27-22 Fixed Speed Only Oper-
ating Range for the time specied in parameter 27-24 Destaging Delay, a xed-speed pump is turned o.
5.2.11 Flow Compensation for Applications with Cascade Controller
Flow compensation allows placing the pressure sensor close to the drive, even if it is not the place for the wanted pressure setpoint.
It adjusts the setpoint automatically according to the pressure drop in the system which depends on the system ow. In Cascade
Controller applications, this is done step-wise based on the number of pumps in operation.
It uses the feedback to estimate the setpoint required at various rates of ow. The calculation of the theoretical curve results in step-
wise adjusted setpoints following this curve. Setpoint 1 is the minimum pressure required when the system is running with only 1
pump operating and under minimum load conditions. Setpoint 2 is used when all pumps are running.
AQ326832164524en-000101 / 130R034532 | Danfoss A/S © 2020.08
Page 33

Theoretical
Setpoint
Setpoint
Pump 1
2 3
4
5
e75za642.11
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Illustration 23: Calculation of Theoretical Curve
Conguration of the System
The range of the curve is determined by the no/low ow point and the uncompensated setpoint (for example, in parameter 20-21
Setpoint 1).
Besides the conguration of the Cascade Controller, the required programming steps are:
•
Enable ow compensation in parameter 22-80 Flow Compensation.
•
Program the pressure at no-ow speed in parameter 22-87 Pressure at No-Flow Speed.
•
Program the uncompensated setpoint (for example, in parameter 20-21 Setpoint 1).
If the pressure feedback signal originates at the far end of the system, the drive does not need to compensate for system pressure
changes due to ow, and the default feedback process can be used.
AQ326832164524en-000101 / 130R0345 | 33Danfoss A/S © 2020.08
Page 34

Option
Function
Pump Status is a readout parameter showing the status of each pump in the system.
[0]
Ready
The pump is available for use by the Cascade Controller.
[1]
On Drive
The pump is controlled by the Cascade Controller, the pump is connected to a drive and running.
[2]
On Mains
The pump is controlled by the Cascade Controller, the pump is connected to mains and running.
[3]
Oine - O
The pump is not available for use by the Cascade Controller, and the pump is o.
[4]
Oine - On Mains
The pump is not available for use by the Cascade Controller, and the pump is connected to mains
and running.
[5]
Oine - On Drive
The pump is not available for use by the Cascade Controller, and the pump is connected to mains
and running.
[6]
Oine - Fault
The pump is not available for use by the Cascade Controller, and the pump is connected to mains
and running.
[7]
Oine - Hand
The pump is not available for use by the Cascade Controller, and the pump is connected to mains
and running.
[8]
Oine - External Interlock
The pump has been externally interlocked and is o.
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Parameter Descriptions
6 Parameter Descriptions
6.1 Parameter Group 27-**, Cascade CTL Option
N O T I C E
If 1 of the Cascade Controller options is used to extend the number of pumps in a Basic Cascade, use the parameters in parameter
group 25-** Cascade Controller. See VLT® AQUA Drive FC 202 Programming Guide for further information.
For the following array parameters, the index refers to the number of the (specic) pump. For stage on/stage o speeds, the index
reects the number of pumps in operation.
•
Parameter 27-01 Pump Status
•
Parameter 27-02 Manual Pump Control
•
Parameter 27-03 Current Runtime Hours
•
Parameter 27-04 Pump Total Lifetime Hours
•
Parameter 27-14 Pump Capacity
•
Parameter 27-16 Runtime Balancing
•
Parameter 27-31 Stage On Speed [RPM]
•
Parameter 27-32 Stage On Speed [Hz]
•
Parameter 27-33 Stage O Speed [RPM]
•
Parameter 27-34 Stage O Speed [Hz]
N O T I C E
For parameter 27-70 Relay, index 0 refers to relay 1, index 1 refers to relay 2, index 2 refers to relay 3 … index 19 refers to relay 20.
6.1.1 Parameter Group 27-0*, Control & Status
Control and status parameters are for monitoring and manual control of the pumps.
Press [▵] and [▿] to select a pump. Press [▵] and [▿] to change settings.
Table 7: Parameter 27-01 Pump Status
AQ326832164524en-000101 / 130R034534 | Danfoss A/S © 2020.08
Page 35

•••
•
Option
Function
[9]
Spinning
The Cascade Controller is executing a spin cycle for the pump.
[10]
No Relay Connection
The pump is not directly connected to a drive, and no relay has been assigned to the pump.
Range
Function
0 h*
[0-2147483647 h]
Current Runtime Hours is a readout parameter showing the total number of hours each pump has been
running since the last reset. This time is used to balance the running hours between the pumps. The
times may all be reset to 0 via parameter 27-91 Cascade Reference.
Range
Function
0 h*
[0-2147483647 h]
N O T I C E
This parameter may be set individually to any value for maintenance purposes.
Pump Total Lifetime Hours is the total operating hours for each connected pump.
Option
Function
Cascade Controller Mode sets the operating mode.
[0]
Disabled
[1]
Master/Follower
[2]
Mixed Pumps
[3]
Basic Cascade Ctrl
Range
Function
Size related*
[1-8]
Number of drives to be controlled by the Cascade Controller.
MCO 101: 1–6
MCO 102: 1–8
Range
Function
0*
[0-Number of Drives]
Number of pumps to be controlled by the Cascade Controller.
MCO 101: 0–6
MCO 102: 0–8
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Table 8: Parameter 27-03 Current Runtime Hours
Table 9: Parameter 27-04 Pump Total Lifetime Hours
Parameter Descriptions
6.1.2 Parameter Group 27-1*, Conguration
Use the conguration parameters for setting, for example, cascade control mode, number of pumps, number of drives, and pump
capacity.
Table 10: Parameter 27-10 Cascade Controller Mode
Table 11: Parameter 27-11 Number of Drives
Table 12: Parameter 27-12 Number of Pumps
AQ326832164524en-000101 / 130R0345 | 35Danfoss A/S © 2020.08
Page 36

Range
Function
Parameter 27-12
Number of Pumps*
[1-8]
Limit the maximum number of pumps running simultaneously to prevent overpressure. Default is
always equal to parameter 27-12 Number of Pumps. Any change to parameter 27-12 Number of
Pumps forces a change to parameter 27-13 Max Number of Pumps Running.
Range
Function
100%*
[10-800%]
Pump Capacity sets the capacity of each pump in the system relative to the 1st pump. This is an indexed
parameter with 1 entry per pump. The capacity fo the 1st pump is always considered to be 100%.
Option
Function
Runtime Balancing sets the priority of each pump for balancing its running hours. The pumps with the
higest priority are operated before the lower-prioritized pumps. Pumps with the same priority are staged/destaged based on the running hours.
[0]
Balanced Priority 1
Turned on rst, turned o last.
[1]
Balanced Priority 2
Turned on if no priority 1 pumps are available. Turned o before priority 1 pumps are turned o.
[2]
Spare Pump
Turned on last, turned o rst.
Option
Function
Motor Starters selects the type of mains starters used on the xed-speed pumps. All xed-speed pumps
must be congured in the same way.
[0]
Direct Online
[1]
Soft Starter
Adds a delay when staging and destaging corresponding to the soft starter ramp time, see parameter 27-41
Ramp Down Delay and parameter 27-42 Ramp Up Delay.
[2]
Star/Delta
Adds a delay at staging, controlled by parameter 27-42 Ramp Up Delay.
Range
Function
Size related*
[0-99 s]
N O T I C E
Setting this parameter too high may cause overpressure to some systems.
Spin Time for Unused Pumps
sets the length of time to spin unused pumps. If a xed-speed pump has not
been run in the last 72 hours, it is turned on for the time set in this parameter. This is to prevent damage
caused by leaving the pump o too long. The spin feature may be disabled by setting the value of this parameter to 0.
Option
Function
Reset Current Runtime Hours is used for resetting all current runtime hours to 0. This time is used for runtime
balancing.
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Table 13: Parameter 27-13 Max Number of Pumps Running
Table 14: Parameter 27-14 Pump Capacity
Table 15: Parameter 27-16 Runtime Balancing
Parameter Descriptions
Table 16: Parameter 27-17 Motor Starters
Table 17: Parameter 27-18 Spin Time for Unused Pumps
Table 18: Parameter 27-19 Reset Current Runtime Hours
AQ326832164524en-000101 / 130R034536 | Danfoss A/S © 2020.08
Page 37

Option
Function
[0]
Do not reset
[1]
Do reset
Range
Function
Size related*
[1-100%]
Normal Operating Range is the allowed oset from the setpoint before a pump may be added or removed.
The system must be outside this limit for the time specied in parameter 27-23 Staging Delay or in parameter
27-24 Destaging Delay before a cascade operation takes place. Normal refers to the system operating with at
least 1 variable-speed pump available. This value is entered as a % of maximum reference, see parameter
21-12 Ext. 1 Maximum Reference in the VLT® AQUA Drive FC 202 Programming Guide for further information.
SBW (27-20)
SBW (27-20)
Setpoint
SBW staging delay (27-23)
e75za672.13
e75za671.12
(27-24) SBW destage delay
SBW
SBW
Setpoint
(27-20)
(27-20)
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
6.1.3 Parameter Group 27-2*, Bandwidth Settings
Parameters for conguring control response.
Table 19: Parameter 27-20 Normal Operating Range
Parameter Descriptions
Illustration 24: SBW Staging Delay
Illustration 25: SBW Destage Delay
AQ326832164524en-000101 / 130R0345 | 37Danfoss A/S © 2020.08
Page 38

Range
Function
100%*
[1-100%]
Override Limit is the allowed oset from the setpoint before a pump immediately is added or removed (for
example, if a re tab is turned on). Normal operating range includes a delay that limits the system response
to transients. This makes the system respond too slowly to large demand changes. The override limit causes
the drive to respond immediately. The value is entered as a % of maximum reference (parameter 21-12 Ext. 1
Maximum Reference). Override operation may be disabled by setting this parameter to 100%.
N O T I C E
In master/follower applications, the override limit is used as wake-up condition.
Setpoint
SBW (27-70)
OBW (27-71)
SBW (27-70)
OBW (27-71)
Actual head
OBW timer (27-25)
e30ba370.12
Range
Function
Size related*
[0- Par
27-21 %]
Fixed Speed Only Operating Range is the allowed oset from the setpoint before a pump may be added or
removed when there are no operational variable-speed pumps. The system must be outside this limit for
the time specied in parameter 27-23 Staging Delay or parameter 27-24 Destaging Delay before a cascade
operation may take place. The value is entered as a % of maximum reference. When there are no operational variable-speed pumps, the system tries to maintain control with the remaining xed-speed pumps.
SBW (27-20)
SBW (27-20)
Setpoint
SBW staging delay (27-23)
e75za672.13
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Table 20: Parameter 27-21 Override Limit
Parameter Descriptions
Illustration 26: Override Bandwidth
Table 21: Parameter 27-22 Fixed Speed Only Operating Range
Illustration 27: SBW Staging Delay
AQ326832164524en-000101 / 130R034538 | Danfoss A/S © 2020.08
Page 39

e75za671.12
(27-24) SBW destage delay
SBW
SBW
Setpoint
(27-20)
(27-20)
Range
Function
15 s*
[0-3000 s]
Staging Delay is the time that the system feedback must remain below the operating range before a pump
may be turned on. If the system is operating with at least 1 variable-speed pump available, parameter 27-20
Normal Operating Range is used. If there are no variable-speed pumps available, parameter 27-22 Fixed Speed
Only Operating Range is used.
Range
Function
15 s*
[0-3000 s]
Destaging Delay is the time that the system feedback must remain above the operating range before a pump
may be turned o. If the system is operating with at least 1 variable-speed pump available, parameter 27-20
Normal Operating Range is used. If there are no variable-speed pumps available, parameter 27-22 Fixed Speed
Only Operating Range is used.
Range
Function
10 s*
[0-300 s]
Override Hold Time is the minimum time that must elapse after a stage or destage before a stage or destage
may take place due to the system exceeding the override limit (parameter 27-21 Override Limit). The override
hold time is designed to allow the system to stabilize after a pump is turned on or o. If this delay is not long
enough, the transients caused by turning a pump on or o may cause the system to add or remove another
pump when it should not.
Range
Function
15s*[0-300 s]
Min-Speed Destage Delay is the time that the lead pump must be running at minimum speed while the system
feedback is still inside the normal operating band before a pump is turned o to save energy. Energy savings
may be realized by turning o a pump if the variable-speed pumps are operating at minimum speed but the
feedback is still in band. Under these conditions, a pump may be turned o and the system is still able to maintain control. The pumps that remain on will then be operating more eciently.
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Illustration 28: SBW Destage Delay
Table 22: Parameter 27-23 Staging Delay
Parameter Descriptions
Table 23: Parameter 27-24 Destaging Delay
Table 24: Parameter 27-25 Override Hold Time
Table 25: Parameter 27-27 Min-Speed Destage Delay
AQ326832164524en-000101 / 130R0345 | 39Danfoss A/S © 2020.08
Page 40

e75za640.12
(4-12)
(27-27)
F
min
F
VLT pump
Destage
timer period
Pump
switch-off
Option
Function
[0]
Disabled
[1]
Enabled
Parameters 27-31 to 27-34 are kept up-to-date with new automatically calculated values. If parameters 27-31 to
37-34 are modied from the bus or LCP, the new values are used but continue to be tuned automatically. Values
are recalculated and the parameters are updated when staging occurs.
Range
Function
Size related*
[0-par. 4-13
RPM]
To be used if RPM is selected. If the lead pump is operating above stage on speed for the time
specied in parameter 27-23 Staging Delay and a variable-speed pump is available, it is turned on.
SBW (27-20)
SBW (27-20)
Setpoint
SBW staging delay (27-23)
e75za672.13
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Illustration 29: Destage Timer Period
6.1.4 Parameter Group 27-3*, Staging Speed
Use these parameters for conguring master/follower control response.
Table 26: Parameter 27-30 Auto Tune Staging Speeds
Parameter Descriptions
Table 27: Parameter 27-31 Stage On Speed [RPM]
Illustration 30: SBW Staging Delay
AQ326832164524en-000101 / 130R034540 | Danfoss A/S © 2020.08
Page 41

e75za671.12
(27-24) SBW destage delay
SBW
SBW
Setpoint
(27-20)
(27-20)
Range
Function
Size related*
[0-par. 4-14
Hz]
To be used if Hz is selected. If the lead pump is operating above stage on speed for the time specied in parameter 27-23 Staging Delay and a variable-speed pump is available, it is turned on.
Range
Function
Size related*
[0-1500
RPM]
If the lead pump operates below stage o speed for the time specied in parameter 27-24 Destag-
ing Delay and more than 1 variable-speed pump is on, another variable-speed pump is turned o.
Range
Function
Size related*
[0-50 Hz]
If the lead pump operates below stage o speed for the time specied in parameter 27-24 Destaging
Delay and more than 1 variable-speed pump is on, another variable-speed pump is turned o.
Option
Function
[0]
Disabled
Staging or destaging threshold.
[1]
Enabled
Staging and destaging threshold are auto tuned during operation. The auto tuning optimizes the settings and
thereby prevents pressure overshoot and undershoot when staging and destaging.
Range
Function
10 s*
[0-120 s]
Ramp Down Delay sets the delay between turning on a soft starter-controlled pump and ramping down a
drive-controlled pump. This is only used for soft starter and star/delta-controlled pumps.
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Illustration 31: SBW Destage Delay
Table 28: Parameter 27-32 Stage On Speed [Hz]
Parameter Descriptions
Table 29: Parameter 27-33 Stage O Speed [RPM]
Table 30: Parameter 27-34 Stage O Speed [Hz]
6.1.5 Parameter Group 27-4*, Staging Settings
Use these parameters for conguring staging transitions.
Table 31: Parameter 27-40 Auto Tune Staging Settings
Table 32: Parameter 27-41 Ramp Down Delay
AQ326832164524en-000101 / 130R0345 | 41Danfoss A/S © 2020.08
Page 42

(27-41)
e30ba598.12
Speed
Ramp
down
delay
Ramping starts
Soft starter
controlled pump
Lead pump
variable speed
Staging starts
Time
Range
Function
2 s*
[0-12 s]
Sets the delay between turning o a soft starter-controlled pump and ramping up the drive-controlled pump.
This is only used for soft starter-controlled pumps.
N O T I C E
Not used with star/delta-controlled pumps.
(27-42)
e30ba599.12
Speed
Ramp-up
delay
Ramping starts
Lead pump
variable speed
Soft starter
controlled speed
Time
Staging starts
Range
Function
Size related*
[0-100%]
Staging threshold is the speed in the staging ramp at which the xed-speed pump should be turned on. Set
as a percentage of the maximum pump speed. If parameter 27-40 Auto Tune Staging Settings is [1] Enabled,
parameter 27-43 Staging Threshold and parameter 27-44 Destaging Threshold are kept up-to-date with new
automatically calculated values. If parameter 27-43 Staging Threshold and parameter 27-44 Destaging Thresh-
old are modied from the bus or LCP, the new values are used but continue to be tuned automatically.
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Illustration 32: Ramp-down Delay
Table 33: Parameter 27-42 Ramp Up Delay
Parameter Descriptions
Illustration 33: Ramp-up Delay
Table 34: Parameter 27-43 Staging Threshold
AQ326832164524en-000101 / 130R034542 | Danfoss A/S © 2020.08
Page 43

e30bd075.12
Motor s
peed
h
igh
Motor s
pee
d
lo
w
Staging spe
ed
Vari
able sp
eed pump
Fixed speed pump
Monitor feedback and
change to closed loop if
Closed loo
p
Time
(27-43)
setpoint is reached
Range
Function
Size related*
[0-100%]
Destaging threshold is the speed in the staging ramp at which the xed-speed pump should be turned on.
Set as a percentage of the maximum pump speed. If parameter 27-40 Auto Tune Staging Settings is [1] Ena-
bled, parameter 27-43 Staging Threshold and parameter 27-44 Destaging Threshold are kept up-to-date with
new automatically calculated values. If parameter 27-43 Staging Threshold and parameter 27-44 Destaging
Threshold are modied from the bus or LCP, the new values are used but continue to be tuned automatical-
ly.
e30bd076.12
Motor speed
high
Motor speed
low
Destaging
speed
Variable speed
pum
p
Fixed speed pum
p
Closed loo
p
Monitor feedback and
change to closed loop if
Time
(27-44)
setpoint is reached
Range
Function
0 RPM*
[0-0 RPM]
Staging Speed is a readout parameter that shows the actual staging speed based on the staging threshold.
Range
Function
0 Hz*
[0-0 Hz]
Staging Speed is a readout parameter that shows the actual staging speed based on the staging threshold.
Range
Function
0 RPM*
[0-0 RPM]
Destaging Speed is a readout parameter that shows the actual staging speed based on the destaging
threshold.
Range
Function
0 Hz*
[0-0 Hz]
Destaging Speed is a readout parameter that shows the actual staging speed based on the destaging threshold.
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Illustration 34: Staging Speed, Master/follower Conguration
Table 35: Parameter 27-44 Destaging Threshold
Parameter Descriptions
Illustration 35: Destaging Speed, Master/follower Conguration
Table 36: Parameter 27-45 Staging Speed [RPM]
Table 37: Parameter 27-46 Staging Speed [Hz]
Table 38: Parameter 27-47 Destaging Speed [RPM]
Table 39: Parameter 27-48 Destaging Speed [Hz]
AQ326832164524en-000101 / 130R0345 | 43Danfoss A/S © 2020.08
Page 44

Option
Function
Select the staging principle for the staging of xed-speed pumps (direct online mode).
[0]*
Normal
[1]
Rapid Staging
The drive returns to closed-loop operation immediately after a pump was staged or destaged. Use this
setting in systems with rapid demand changes.
Option
Function
[0]O[1]
At destage
Range
Function
0 min*
[0-10080
min]
Use this parameter for setting the time between alternations. Disable the function by setting the parameter to 0. To see the time remaining until the next alternation occurs, check parameter 27-53 Alternation
Timer Value.
Range
Function
0 min*
[0-10080
min]
Alternation Timer Value is a readout parameter that shows the time remaining before an interval-based
alternation takes places. Parameter 27-52 Alternation Time Interval sets the time interval.
Option
Function
Alternate at Time of Day allows selecting a specic time of day for alternating pumps. The time is set in parameter
27.55 Alternation Predened Time. Alternation at Time of Day requires the real-time clock to be set.
[0]
Disabled
[1]
Enabled
Range
Function
Size related*
[0-0]
Alternation Predened Time is the time of day for pump alternation. This parameter is only available if parameter 27-54 Alternation At Time of Day is enabled.
Range
Function
0%*
[0-100%]
Alternate Capacity is < requires the lead pump to be operating below this capacity before time-based alternation is allowed to take place. This feature ensures that alternation only takes place when the pump is running
below a speed where interruption in operation will not aect the process. This minimizes the system disturbance caused by alternations. The value is entered as a % of the capacity of pump 1. To disable operation with
Alternate Capacity is <, set this parameter to 0%.
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Table 40: Parameter 27-49 Staging Principle
6.1.6 Parameter Group 27-5*, Alternation Settings
Use these parameters for conguring alternations.
Table 41: Parameter 27-51 Alternation Event
Table 42: Parameter 27-52 Alternation Time Interval
Parameter Descriptions
Table 43: Parameter 27-53 Alternation Timer Value
Table 44: Parameter 27-54 Alternation at Time of Day
Table 45: Parameter 27-55 Alternation Predened Time
Table 46: Parameter 27-56 Alternate Capacity is <
AQ326832164524en-000101 / 130R034544 | Danfoss A/S © 2020.08
Page 45

Range
Function
0.1 s*
[0.1-5 s]
Run Next Pump Delay is a delay between stopping the current lead pump and starting the next lead pump
when alternating lead pumps. This provides time for the contactors to switch while both pumps are stopped.
(27-58)
Speed
Current lead pump New lead pump
Run next pump delay
Time
e30ba597.12
Option
Function
[0]
No operation
[1]
Reset
[2]
Coast inverse
[3]
Coast and reset inv
[5]
DC-brake inverse
[6]
Stop inverse
[7]
External interlock
[8]
Start
[9]
Latched start
[10]
Reversing
[11]
Start reversing
[14]
Jog
[15]
Preset reference on
[16]
Preset ref bit 0
[17]
Preset ref bit 1
[18]
Preset ref bit 2
[19]
Freeze reference
[20]
Freeze output
[21]
Speed up
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Table 47: Parameter 27-58 Run Next Pump Delay
Illustration 36: Run Next Pump Delay
6.1.7 Parameter Group 27-6*, Digital Inputs
Table 48: Parameter 27-60 Terminal X66/1 Digital Input
Parameter Descriptions
AQ326832164524en-000101 / 130R0345 | 45Danfoss A/S © 2020.08
Page 46

Option
Function
[22]
Speed down
[23]
Set-up select bit 0
[24]
Set-up select bit 1
[34]
Ramp bit 0
[36]
Mains failure inverse
[51]
Hand/Auto start
[52]
Run permissive
[53]
Hand start
[54]
Auto start
[55]
DigiPot increase
[56]
DigiPot decrease
[57]
DigiPot clear
[62]
Reset counter A
[65]
Reset counter B
[66]
Sleep mode
[78]
Reset preventive maintenance word
[80]
PTC card 1
[85]
Latched pump derag
[120]
Lead pump start
[121]
Lead pump alternation
[130]
Pump 1 interlock
[131]
Pump 2 interlock
[132]
Pump 3 interlock
[133]
Pump 4 interlock
[134]
Pump 5 interlock
[135]
Pump 6 interlock
[136]
Pump 7 interlock
[137]
Pump 8 interlock
[138]
Pump 9 interlock
Option
Function
The options of this parameter are the same as for parameter 27-60 Terminal X66/1 Digital Input.
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Parameter Descriptions
Table 49: Parameter 27-61 Terminal X66/3 Digital Input
AQ326832164524en-000101 / 130R034546 | Danfoss A/S © 2020.08
Page 47

Option
Function
The options of this parameter are the same as for parameter 27-60 Terminal X66/1 Digital Input.
Option
Function
The options of this parameter are the same as for parameter 27-60 Terminal X66/1 Digital Input.
Option
Function
The options of this parameter are the same as for parameter 27-60 Terminal X66/1 Digital Input.
Option
Function
The options of this parameter are the same as for parameter 27-60 Terminal X66/1 Digital Input.
Option
Function
The options of this parameter are the same as for parameter 27-60 Terminal X66/1 Digital Input.
Option
Function
This parameter is an array parameter used to set up the function of the option relays. Depending on
which option is installed, only the available relays are visible. If VLT® Extended Cascade Controller MCO
101 is installed, relays 10–12 are visible. If VLT® Advanced Cascade Controller MCO 102 is installed, relays 13–20 are visible. In both cases, the standard relays (relay 1 and relay 2) are accessible as well as
the relays in the B option VLT® Relay Card MCB 105 (if that option is installed in combination with advanced cascade). To set up the function of each relay, select the specic relays and then select the
function. If the function option [0] Standard Relay is selected, the relay can be used as general purpose
relay and the wanted function can then be set up in parameter group 5-4* Relays.
[0]
Standard Relay
Enable follower drive X
[1]
Drive 2 Enable
[2]
Drive 3 Enable
[3]
Drive 3 Enable
[4]
Drive 3 Enable
[5]
Drive 3 Enable
[6]
Drive 3 Enable
[7]
Drive 3 Enable
[8]
Pump 1 to Drive 1
[9]
Pump 1 to Drive 2
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Table 50: Parameter 27-62 Terminal X66/5 Digital Input
Table 51: Parameter 27-63 Terminal X66/7 Digital Input
Table 52: Parameter 27-64 Terminal X66/9 Digital Input
Table 53: Parameter 27-65 Terminal X66/11 Digital Input
Parameter Descriptions
Table 54: Parameter 27-66 Terminal X66/13 Digital Input
6.1.8 Parameter Group 27-7*, Connections
Table 55: Parameter 27-70 Relay
AQ326832164524en-000101 / 130R0345 | 47Danfoss A/S © 2020.08
Page 48

Option
Function
[10]
Pump 1 to Drive 3
[11]
Pump 1 to Drive 4
[12]
Pump 1 to Drive 5
[13]
Pump 1 to Drive 6
[14]
Pump 1 to Drive 7
[15]
Pump 1 to Drive 8
[16]
Pump 2 to Drive 1
[17]
Pump 2 to Drive 2
[18]
Pump 2 to Drive 3
[19]
Pump 2 to Drive 4
[20]
Pump 2 to Drive 5
[21]
Pump 2 to Drive 6
[22]
Pump 2 to Drive 7
[23]
Pump 2 to Drive 8
[24]
Pump 3 to Drive 1
[25]
Pump 3 to Drive 2
[26]
Pump 3 to Drive 3
[27]
Pump 3 to Drive 4
[28]
Pump 3 to Drive 5
[29]
Pump 3 to Drive 6
[30]
Pump 3 to Drive 7
[31]
Pump 3 to Drive 8
[32]
Pump 4 to Drive 1
[33]
Pump 4 to Drive 2
[34]
Pump 4 to Drive 3
[35]
Pump 4 to Drive 4
[36]
Pump 4 to Drive 5
[37]
Pump 4 to Drive 6
[38]
Pump 4 to Drive 7
[39]
Pump 4 to Drive 8
[40]
Pump 5 to Drive 1
[41]
Pump 5 to Drive 2
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Parameter Descriptions
AQ326832164524en-000101 / 130R034548 | Danfoss A/S © 2020.08
Page 49

Option
Function
[42]
Pump 5 to Drive 3
[43]
Pump 5 to Drive 4
[44]
Pump 5 to Drive 5
[45]
Pump 5 to Drive 6
[46]
Pump 5 to Drive 7
[47]
Pump 5 to Drive 8
[48]
Pump 6 to Drive 1
[49]
Pump 6 to Drive 2
[50]
Pump 6 to Drive 3
[51]
Pump 6 to Drive 4
[52]
Pump 6 to Drive 5
[53]
Pump 6 to Drive 6
[54]
Pump 6 to Drive 7
[55]
Pump 6 to Drive 8
[56]
Pump 7 to Drive 1
[57]
Pump 7 to Drive 2
[58]
Pump 7 to Drive 3
[59]
Pump 7 to Drive 4
[60]
Pump 7 to Drive 5
[61]
Pump 7 to Drive 6
[62]
Pump 7 to Drive 7
[63]
Pump 7 to Drive 8
[64]
Pump 8 to Drive 1
[65]
Pump 8 to Drive 2
[66]
Pump 8 to Drive 3
[67]
Pump 8 to Drive 4
[68]
Pump 8 to Drive 5
[69]
Pump 8 to Drive 6
[70]
Pump 8 to Drive 7
[71]
Pump 8 to Drive 8
[72]
Pump 1 to Mains
[73]
Pump 2 to Mains
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Parameter Descriptions
AQ326832164524en-000101 / 130R0345 | 49Danfoss A/S © 2020.08
Page 50

Option
Function
[74]
Pump 3 to Mains
[75]
Pump 4 to Mains
[76]
Pump 5 to Mains
[77]
Pump 6 to Mains
[78]
Pump 7 to Mains
[79]
Pump 8 to Mains
Range
Function
0%*
[-200 200%]
Cascade Reference is a readout parameter that shows the reference output for use with the follower drives.
This reference is available even when the master drive is stopped. This is the speed that the drive operates at
or would be operating at if it was on. It is scaled as a percentage of parameter 4-13 Motor Speed High Limit
[RPM] or parameter 4-14 Motor Speed High Limit [Hz].
Range
Function
0%*
[0-0%]
% of Total Capacity is a readout parameter that shows the system operating point as a % capacity of total system
capacity. 100% means that all pumps are on at full speed.
Option
Function
[0]
Disabled
The cascade option is not used.
[1]O[2]
Running
[3]
Running at FSBW
[4]
Jogging
[5]
In open loop
[6]
Freezed
[7]
Coast
[8]
Alarm
[9]
Staging
[10]
Destaging
[11]
Alternating
[12]
All oine
[13]
Cascade CTL sleep
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
6.1.9 Parameter Group 27-9*, Readouts
Table 56: Parameter 27-91 Cascade Reference
Parameter Descriptions
Table 57: Parameter 27-92 % Of Total Capacity
Table 58: Parameter 27-93 Cascade Option Status
AQ326832164524en-000101 / 130R034550 | Danfoss A/S © 2020.08
Page 51

Range
Function
0*
[0-25]
Cascade System Status is a readout parameter that shows the status of each individual pump.
Range
Function
0*
[0-255]
Advanced Cascade Relay Output [bin] is a readout parameter that shows the status of each individual relay. From left
to right, the bits correspond to the relays 13, 14, 15, 16, 17, 18, 19, 20, respectively.
Parameter
number
Parameter description
Default value
4 setup
Change during operation
Conversion index
Type
25-0* System Settings
25-00
Cascade Controller
ExpressionLimit
2 setups
FALSE
–
Uint8
25-02
Motor Start
[0] Direct on line
2 setups
FALSE
–
Uint8
25-04
Pump Cycling
ExpressionLimit
All setups
TRUE–Uint8
25-05
Fixed Lead Pump
ExpressionLimit
2 setups
FALSE
–
Uint8
25-06
Number of Pumps
2 N/A
2 setups
FALSE
0
Uint8
25-2* Bandwidth Settings
25-20
Staging Bandwidth
ExpressionLimit
All setups
TRUE0Uint8
25-21
Override Bandwidth
100%
All setups
TRUE0Uint8
25-22
Fixed Speed Bandwidth
casco-staging-bandwidth (P2520)
All setups
TRUE0Uint8
25-23
SBW Staging Delay
15 s
All setups
TRUE0Uint16
25-24
SBW Destaging Delay
15 s
All setups
TRUE0Uint16
25-25
OBW Time
10 s
All setups
TRUE0Uint16
25-26
Destage at No-ow
[0] Disabled
All setups
TRUE–Uint8
25-27
Stage Function
ExpressionLimit
All setups
TRUE–Uint8
25-28
Stage Function Time
15 s
All setups
TRUE0Uint16
25-29
Destage Function
ExpressionLimit
All setups
TRUE–Uint8
25-30
Destage Function Time
15 s
All setups
TRUE0Uint16
25-4* Staging Settings
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Table 59: Parameter 27-94 Cascade System Status
Table 60: Parameter 27-95 Advanced Cascade Relay Output [bin]
Parameter Descriptions
6.2 Parameter Lists
N O T I C E
Parameter group 25-** Cascade Controller is only to be used for the Basic Cascade Controller or if 1 of the options is used for ex-
tending the number of pumps of the Basic Cascade Controller. In all other cases, use parameter group 27-** Cascade CTL Option.
6.2.1 25-** Cascade Controller
Table 61: Parameter List, 25-** Cascade Controller
AQ326832164524en-000101 / 130R0345 | 51Danfoss A/S © 2020.08
Page 52

Parameter
number
Parameter description
Default value
4 setup
Change during operation
Conversion index
Type
25-40
Ramp Down Delay
10 s
All setups
TRUE-1Uint16
25-41
Ramp Up Delay
2 s
All setups
TRUE-1Uint16
25-42
Staging Threshold
ExpressionLimit
All setups
TRUE0Uint8
25-43
Destaging Threshold
ExpressionLimit
All setups
TRUE0Uint8
25-44
Staging Speed [RPM]
0 RPM
All setups
TRUE67Uint16
25-45
Staging Speed [Hz]
0 Hz
All setups
TRUE-1Uint16
25-46
Destaging Speed
0 RPM
All setups
TRUE67Uint16
25-47
Destaging Speed
0 Hz
All setups
TRUE-1Uint16
25-5* Alternation Settings
25-50
Lead Pump Alternation
ExpressionLimit
All setups
TRUE–Uint8
25-51
Alternation Event
[0] External
All setups
TRUE–Uint8
25-52
Alternation Time Interval
24 h
All setups
TRUE74Uint16
25-53
Alternation Timer Value
0 N/A
All setups
TRUE0VisStr[7]
25-54
Alternation Predened
Time
ExpressionLimit
All setups
TRUE0TimeOfDayWoDate
25-55
Alternate if Load < 50%
[1] Enabled
All setups
TRUE–Uint8
25-56
Staging Mode at Alternation
[0] Slow
All setups
TRUE–Uint8
25-58
Run Next Pump Delay
0.1 s
All setups
TRUE-1Uint16
25-59
Run on Mains Delay
0.5 s
All setups
TRUE-1Uint16
25-8* Status
25-80
Cascade Status
0 N/A
All setups
TRUE0VisStr[25]
25-81
Pump Status
0 N/A
All setups
TRUE0VisStr[25]
25-82
Lead Pump
0 N/A
All setups
TRUE0Uint8
25-83
Relay Status
0 N/A
All setups
TRUE0VisStr[4]
25-84
Pump ON Time
0 h
All setups
TRUE74Uint32
25-85
Relay ON Time
0 h
All setups
TRUE74Uint32
25-86
Reset Relay Counters
[0] Do not reset
All setups
TRUE–Uint8
25-9* Service
25-90
Pump Interlock
[0] O
All setups
TRUE–Uint8
25-91
Manual Alternation
0 N/A
All setups
TRUE0Uint8
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Parameter Descriptions
AQ326832164524en-000101 / 130R034552 | Danfoss A/S © 2020.08
Page 53

Parameter
number
Parameter description
Default value
4 setup
Change during operation
Conversion index
Type
27-0* Control & Status
27-01
Pump Status
[0] Ready
All setups
TRUE–Uint8
27-02
Manual Pump Control
[0] No Operation
2 setups
TRUE–Uint8
27-03
Current Runtime Hours
0 h
All setups
TRUE74Uint32
27-04
Pump Total Lifetime Hours
0 h
All setups
TRUE74Uint32
27-1* Conguration
27-10
Cascade Controller
null
2 setups
FALSE
–
Uint8
27-11
Number of Drives
ExpressionLimit
2 setups
FALSE
0
Uint8
27-12
Number of Pumps
ExpressionLimit
2 setups
FALSE
0
Uint8
27-14
Pump Capacity
100%
2 setups
FALSE
0
Uint16
27-16
Runtime Balancing
[0] Balanced Priority
1
2 setups
TRUE–Uint8
27-17
Motor Starters
[0] Direct Online
2 setups
FALSE
–
Uint8
27-18
Spin Time for Unused Pumps
ExpressionLimit
All setups
TRUE0Uint16
27-19
Reset Current Runtime Hours
[0] Do not reset
All setups
TRUE–Uint8
27-2* Bandwidth Settings
27-20
Normal Operating Range
ExpressionLimit
All setups
TRUE0Uint8
27-21
Override Limit
100%
All setups
TRUE0Uint8
27-22
Fixed Speed Only Operating
Range
ExpressionLimit
All setups
TRUE0Uint8
27-23
Staging Delay
15 s
All setups
TRUE0Uint16
27-24
Destaging Delay
15 s
All setups
TRUE0Uint16
27-25
Override Hold Time
10 s
All setups
TRUE0Uint16
27-27
Min Speed Destage Delay
ExpressionLimit
All setups
TRUE0Uint16
27-3* Staging Speed
27-30
Auto Tune Staging Speeds
[1] Enabled
All setups
TRUE–Uint8
27-31
Stage On Speed [RPM]
ExpressionLimit
All setups
TRUE67Uint16
27-32
Stage On Speed [Hz]
ExpressionLimit
All setups
TRUE-1Uint16
27-33
Stage O Speed [RPM]
ExpressionLimit
All setups
TRUE67Uint16
27-34
Stage O Speed [Hz]
ExpressionLimit
All setups
TRUE-1Uint16
27-4* Staging Settings
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
6.2.2 27-** Cascade CTL Option
Table 62: Parameter List, 27-** Cascade CTL Option
Parameter Descriptions
AQ326832164524en-000101 / 130R0345 | 53Danfoss A/S © 2020.08
Page 54

Parameter
number
Parameter description
Default value
4 setup
Change during operation
Conversion index
Type
27-40
Auto Tune Staging Settings
[0] Disabled
All setups
TRUE–Uint8
27-41
Ramp Down Delay
10.0 s
All setups
TRUE-1Uint6
27-42
Ramp Up Delay
2.0 s
All setups
TRUE-1Uint16
27-43
Staging Threshold
ExpressionLimit
All setups
TRUE0Uint8
27-44
Destaging Threshold
ExpressionLimit
All setups
TRUE0Uint8
27-45
Staging Speed [RPM]
0 RPM
All setups
TRUE67Uint16
27-46
Staging Speed [Hz]
0.0 Hz
All setups
TRUE-1Uint16
27-47
Destaging Speed [RPM]
0 RPM
All setups
TRUE67Uint16
27-48
Destaging Speed [Hz]
0.0 Hz
All setups
TRUE-1Uint16
27-5* Alternate Settings
27-50
Automatic Alternation
[0] Disabled
All setups
FALSE
–
Uint8
27-51
Alternation Event
Null
All setups
TRUE–int8
27-52
Alternation Time Interval
0 min
All setups
TRUE70Uint16
27-53
Alternation Timer Value
0 min
All setups
TRUE70Uint16
27-54
Alternation At Time of Day
[0] Disabled
All setups
TRUE–Uint8
27-55
Alternation Predened Time
ExpressionLimit
All setups
TRUE0TimeOfDayWoDate
27-56
Alternate Capacity is <
0%
All setups
TRUE0Uint8
27-58
Run Next Pump Delay
0.1 s
All setups
TRUE-1Uint16
27-6* Digital Inputs
27-60
Terminal X66/1 Digital Input
[0] No operation
All setups
TRUE–Uint8
27-61
Terminal X66/3 Digital Input
[0] No operation
All setups
TRUE–Uint8
27-62
Terminal X66/5 Digital Input
[0] No operation
All setups
TRUE–Uint8
27-63
Terminal X66/7 Digital Input
[0] No operation
All setups
TRUE–Uint8
27-64
Terminal X66/9 Digital Input
[0] No operation
All setups
TRUE–Uint8
27-65
Terminal X66/11 Digital Input
[0] No operation
All setups
TRUE–Uint8
27-66
Terminal X66/13 Digital Input
[0] No operation
All setups
TRUE–Uint8
27-7* Connections
27-70
Relay
[0] Standard Relay
2 setups
FALSE
–
Uint8
27-9* Readouts
27-91
Cascade Reference
0.0%
All setups
TRUE-1Int16
27-92
% Of Total Capacity
0%
All setups
TRUE0Uint16
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Parameter Descriptions
AQ326832164524en-000101 / 130R034554 | Danfoss A/S © 2020.08
Page 55

Parameter
number
Parameter description
Default value
4 setup
Change during operation
Conversion index
Type
27-93
Cascade Option Status
[0] Disabled
All setups
TRUE–Uint8
27-94
Cascade System Status
0 N/A
All setups
TRUE0VisStr[25]
27-95
Advanced Cascade Relay
Output [bin]
0 N/A
All setups
TRUE0Uint16
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Parameter Descriptions
AQ326832164524en-000101 / 130R0345 | 55Danfoss A/S © 2020.08
Page 56

Basic settings (master and follower)
Example/remarks
Parameter 0-02 Motor Speed Unit
[1] Hz
Parameter 1-20 Motor Power [kW]
–
Parameter 1-22 Motor Voltage [V]
–
Parameter 1-23 Motor Frequency [Hz]
50
Parameter 1-24 Motor Current [A]
–
Parameter 1-25 Motor Nominal Speed [RPM]
–
Parameter 1-29 Automatic Motor Adaptation (AMA)
–
Parameter 3-41 Ramp 1 Ramp Up Time [s]
The settings must be the same for master and follower.
Parameter 3-42 Ramp 1 Ramp Down Time [s]
Parameter 4-11 Motor Speed Low Limit [RPM]
Parameter 4-12 Motor Speed Low Limit [Hz]
Parameter 4-13 Motor Speed High Limit [RPM]
Parameter 4-14 Motor Speed High Limit [Hz]
Display settings - master drive
Example
Parameter 0-20 Display Line 1.1 Small
[1601] Reference
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Conguration Example
7 Conguration Example
7.1 Master/Follower
In this example of a master/follower conguration with 3 variable-speed pumps, it is assumed that the pressure transmitter is used
as feedback sensor and has a range from 0–10 bar. Furthermore, an internal reference is used.
For more detailed information on the master/follower application and on the staging/destaging principle, see 3.2.2 Hardware Con-
guration for Master/Follower Cascade Control and 5.1 Conguration of the Extended and Advanced Cascade Controllers.
The required steps for the conguration are:
•
Basic settings for the master and for the follower (motor data, display, and so on).
•
Conguration of the master.
•
Conguration of 1 of the followers.
•
Copying the setting with the LCP from this follower to the other follower.
7.1.1 Basic Settings
The basic settings of master/follower congurations consist of:
•
Basic motor settings for master and follower drives, see 7.1.1.1 Basic Settings, Master and Follower.
•
Display settings for master and follower drives, see 7.1.1.2 Display Settings, Master and Follower.
7.1.1.1 Basic Settings, Master and Follower
Table 63: Basic Settings
Ensure that the motor is running properly before setting the master drive to closed-loop operation.
7.1.1.2 Display Settings, Master and Follower
Table 64: Display Settings
N O T I C E
AQ326832164524en-000101 / 130R034556 | Danfoss A/S © 2020.08
Page 57

Display settings - master drive
Example
Parameter 0-21 Display Line 1.2 Small
[1652] Feedback
Parameter 0-22 Display Line 1.3 Small
[1614] Motor Current
Parameter 0-23 Display Line 2 Large
[1613] Frequency
Parameter 0-24 Display Line 3 Large
[2794] Cascade System Status
Display settings - follower drives
Parameter 0-20 Display Line 1.1. Small
[1650] External Reference
Parameter 0-24 Display Line 3 Large
[1613] Frequency
27-1* Conguration
Example
Parameter 27-10 Cascade Controller
[1] Master/Follower
Parameter 27-11 Number of Drives
3
Parameter 27-16 Runtime Balancing
[0] Array, Balanced Priority 1
Parameter 27-18 Spin Time for Unused Pumps
0 [s], O
Parameter 27-19 Reset Current Runtime Hours
[1] Do reset
27-2* Bandwidth settings
Example
Parameter 27-21 Override Limit
100 [%]
Parameter 27-23 Staging Delay
15 (s)
Parameter 27-23 Destaging Delay
15 (s)
27-3* Staging Speeds
Example/Remarks
Parameter 27-30 Auto Tune Staging Speeds
[1] Enabled
Parameter 27-31 Stage On Speed [RPM]
Arrays for the staging speeds.
Parameter 27-32 Stage On Speed [Hz]
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
7.1.2 Master Drive Settings
The master drive settings for master/follower congurations consist of:
•
Conguration settings, see 7.1.2.1 Conguration Settings
•
Bandwidth settings, see 7.1.2.2 Bandwidth Settings
•
Staging speed settings, see 7.1.2.3 Staging Speed Settings
•
Alternate settings, see 7.1.2.4 Alternate Settings
•
Connection settings, see 7.1.2.5 Connection Settings
Conguration Example
7.1.2.1 Conguration Settings
Table 65: Master Drive Settings, Conguration
7.1.2.2 Bandwidth Settings
Table 66: Master Drive Settings, Bandwidth Settings
7.1.2.3 Staging Speed Settings
Table 67: Master Drive Settings, Staging Speeds
AQ326832164524en-000101 / 130R0345 | 57Danfoss A/S © 2020.08
Page 58

27-3* Staging Speeds
Example/Remarks
Parameter 27-33 Stage O Speed [RPM]
Parameter 27-34 Stage O Speed [Hz]
27-5* Alternate Settings
Example
Parameter 27-52 Alternation Time Interval
0 (min), Disabled
Parameter 27-54 Alternation At Time of Day
[0] Disabled
Parameter 27-56 Alternate Capacity is <
0 (s), O
27-7* Connections
Example
Parameter 27-70.0 Relay 1
[1] Drive 2 Enable
Parameter 27-70.1 Relay 2
[2] Drive 3 Enable
Open-loop settings
Example/remarks
Parameter 1-00 Congurations Mode
[0] Open loop
Parameter 3-02 Minimum Reference
0
Parameter 3-03 Maximum Reference
50 [Hz]
Parameter 3-15 Reference 1 Source
[7] Pulse Input 29
5-** Digital in/out (follower)
Example/remarks
Parameter 5-02 Terminal 29 Mode
[0] Input
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Conguration Example
7.1.2.4 Alternate Settings
Table 68: Master Drive Settings, Alternate Settings
7.1.2.5 Connection Settings
N O T I C E
An array parameter is used for conguring the output of the master drive for the start signal of the follower drives.
Table 69: Master Drive Settings, Connections
7.1.3 Follower Drive Settings
Follower drive must be congured for open-loop operation with basic settings as described in
of the followers and copy the settings via the LCP.
Terminal 29 is used as a pulse input for the reference signal and must be scaled.
The settings of the follower drives consist of:
•
Open-loop settings, see 7.1.3.1 Open-loop Settings
•
Digital in/out settings, see 7.1.3.2 Digital In/Out Settings
7.1.3.1 Open-loop Settings
Table 70: Open-loop Settings, Follower Drive
7.1.1 Basic Settings. Congure only 1
7.1.3.2 Digital In/Out Settings
Table 71: Follower Drive Settings, Digital In/Out
AQ326832164524en-000101 / 130R034558 | Danfoss A/S © 2020.08
Page 59

5-** Digital in/out (follower)
Example/remarks
Parameter 5-13 Terminal 29 Digital Input
[32] Pulse Input
Parameter 5-50 Terminal 29 Low Frequency
0 [Hz]
Parameter 5-51 Terminal 29 High Frequency
6000 [Hz]
Parameter 5-52 Terminal 29 Low Ref. Value
0
Parameter 5-53 Terminal 29 High Ref. Value
50 [Hz]
Parameter 5-10 Terminal 18 Digital Input
[8] Start
Stage
Stage ON [Hz]
Stage OFF [Hz]
1
48.5 (parameter 2732.1)
30 (parameter 2734.1)
2
48.5 (parameter 2732.2)
40 (parameter 2734.2)
3
– (parameter 2732.3)
42 (parameter 2734.3)
VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Conguration Example
7.1.4 Conguring Sleep Mode
This procedure describes how to congure the drive for destaging the last variable-speed pump in applications with more than 1
drive.
Procedure
1.
Set parameter 27-34.01 higher than the minimum speed in parameter 4-11 Motor Speed Low Limit [RPM]/parameter 4-12 Motor Speed Low Limit [Hz] to enable the sleep function (setting it to 0 disables the function).
2.
Set parameter 27-21 Override Limit to wake up the application.
After wake-up, the pump with the least running hours starts.
N O T I C E
If the master drive does not wake up properly, the drive is not able to reach its destaging speed and the delays in
parameter group 27-** Cascade CTL Option have to be adjusted.
Example
This is an example of an application with 3 pumps with sleep mode enabled.
Table 72: Example Settings for Parameter Group 27-3* Staging Speeds
•
Stage refers to the stage the cascade is running in (stage 1 ⇒ cascade is running in stage 1, only 1 pump is running).
Pumps 1 and 3 are started on 48.5 Hz.
•
•
Pump 3 is stopped on 42 Hz, pump 2 is stopped on 40 Hz, and pump 1 is stopped on 30 Hz.
•
It might be necessary to ne-adjust the stage on/o speeds to optimize the energy consumption if not autotuned. It is recommended to enable Auto Tune Staging Speeds in parameter 27-30 Auto Tune Staging Speeds.
Parameter 2732.3 is irrelevant in this case because there is nothing left to stage on in stage 3.
Alternatively, the sleep mode can also be congured by using parameter 22-22 Low Speed Detection and parameter group 22-4*
Sleep Mode.
N O T I C E
N O T I C E
AQ326832164524en-000101 / 130R0345 | 59Danfoss A/S © 2020.08
Page 60

VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Index
A
Alternation
Mixed-pump conguration.............................................................18
Lead pump.............................................................................................31
Settings...................................................................................................44
B
Bandwidth settings......................................................................................37
Basic cascade controller......................................................................12, 20
C
Cascade control options...............................................................................6
Closed-loop control.....................................................................................28
Conguration settings................................................................................35
Critical systems..............................................................................................32
D
Destaging
Master/follower....................................................................................14
Variable-speed pumps...................................................................... 28
Fixed-speed pumps............................................................................29
Mixed-pump conguration.............................................................31
Override..................................................................................................32
in xed-speed operation.................................................................. 32
E
Extension, relays........................................................................................... 12
F
Feedback
Pressure.......................................................................................15,31,33
Sensor................................................................................................28,56
Flow compensation.....................................................................................32
I
Installation
Qualied personnel.............................................................................. 8
L
Lead pump......................................................................................................31
Index
Leakage current.................................................................................................
Lifetime hours................................................................................................30
Lifetime hours, total..............................................................................31, 31
M
Multiple drives...............................................................................................28
P
Pump spin....................................................................................................... 31
Q
Qualied personnel........................................................................................8
R
Run-time balancing..................................................................................... 30
S
Spin time......................................................................................................... 31
Staging
Master/follower....................................................................................14
Variable-speed pumps...................................................................... 28
Fixed-speed pumps............................................................................29
Mixed-pump congurations........................................................... 31
Override..................................................................................................32
in xed-speed operation.................................................................. 32
Switches
Disconnect..................................................................................................
Symbols..............................................................................................................8
U
Unintended start...............................................................................................
V
Voltage
Safety warning..........................................................................................
W
Wiring
Master/follower....................................................................................14
AQ326832164524en-000101/130R034560 | Danfoss A/S © 2020.08
Page 61

VLT® Extended/Advanced Cascade Controllers MCO 101/MCO 102
Operating Guide
Index
AQ326832164524en-000101/130R0345 | 61Danfoss A/S © 2020.08
Page 62

Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
Danfoss can accept no responsibility for possible errors in catalogs, brochures and other printed material. Danfoss reserves the right to alter its products without notice. This
also applies to products already on order provided that such alterations can be made without subsequential changes being necessary in specications already agreed. All
trademarks in this material are property of the respective companies. Danfoss and the Danfoss logotype are trademarks of Danfoss A/S. All rights reserved.
*130R0345*
Danfoss A/S © 2020.08
AQ326832164524en-000101 / 130R0345
*M0021901*
 Loading...
Loading...