


nx
变频器
轴同步应用
用户手册
APFIFF11

2 • vacon
轴同步应用手册介绍
感谢选择使用由 Vacon NX 变频器提供的平滑控制!
本手册有纸质和电子文档。推荐使用使用电子文档。如果使用电子文档可带来如下优点:
本手册包含了一些在本手册其它位置的链接和交叉参考,方便读者快速查找和检查。
本手册包含了到网页的超链接。通过此链接查看网页需要在计算机上安装网络浏览器。
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

vacon • 3
Vacon 轴同步应用宏手册
目录 文档代码: ud01284B
日期: 18/10/2010
1.
简介...................................................................................................................................................................5
1.1 要求......................................................................................................................................................................6
1.2 试用时间周期...................................................................................................................................................... 6
2. 控制I/O ............................................................................................................................................................. 7
3. 主机与从机之间的信号连接(OPT‐A7)................................................................................................................8
4. 在OPT‐A7 板上的跳线设置 ................................................................................................................................9
5. “端子到功能”(TTF)编程准则...................................................................................................................10
5.1 在面板上给一个特定的功能定义一个输入/输出 .......................................................................................... 10
5.2 用NCDRIVER编程工具为一个端子定义一个特定的功能 ................................................................................ 11
5.3 定义没使用的输入/输出.................................................................................................................................. 12
6. 轴同步应用-参数列表 ...................................................................................................................................13
6.1 监控值(控制面板:菜单 M1) ...................................................................................................................... 13
6.2 基本参数 (控制面板:菜单 M2 Æ G2.1)...................................................................................................... 14
6.3 输入信号............................................................................................................................................................15
6.3.1
6.3.2
6.3.3
6.3.4
6.3.5
6.4 输出信号............................................................................................................................................................18
6.4.1
6.4.2
6.4.3
6.4.4
6.4.5
6.4.6
6.4.7
6.4.8
6.5 驱动控制参数 (控制面板:菜单 M2 Æ G2.4).............................................................................................. 23
6.6 电机控制 参数 (控制面板:菜单 M2 Æ G2.5)............................................................................................. 24
6.6.1 PMSM
6.7 保护(控制面板:菜单M2ÆG2.6) .................................................................................................................. 26
6.8 总线参数(控制面板:菜单M2ÆG2.7).......................................................................................................... 28
6.9 转矩控制参数(控制面板:菜单M2ÆG2.8)................................................................................................... 29
6.10 轴同步参数(控制面板:菜单M2ÆG2.9)...................................................................................................... 30
6.11 许可密钥(控制面板:菜单M2ÆG2.10).........................................................................................................31
6.12 面板控制(控制面板:菜单M3)....................................................................................................................... 31
6.12.1
6.12.2
基本设置(控制面板:菜单
模拟输入
模拟输入
1(
控制面板:菜单
2(
控制面板:菜单
M2ÆG2.2.1) ............................................................................................. 15
M2ÆG2.2.2) .......................................................................................... 15
M2ÆG2.2.3) .......................................................................................... 16
自由模拟输入,信号选择(控制面板:菜单
数字输入(控制面板:菜单
延迟数字输出
延迟数字输出
1(
控制面板:菜单
2 (
控制面板:菜单
数字输出 信号(控制面板:菜单
限制设置(控制面板:菜单
模拟输出
模拟输出
模拟输出
1(
控制面板:菜单
2(
控制面板:菜单
3(
控制面板:菜单
机械抱闸(控制面板:菜单
电机设置(控制面板:菜单
系统菜单(控制面板:菜单
扩展板(控制面板:菜单
M2ÆG2.2.5) .............................................................................................. 17
M2ÆG2.3.1)...................................................................................18
M2 Æ G2.3.2).................................................................................. 18
M2 Æ G2.3.3)..................................................................................... 19
M2ÆG2.3.4) ............................................................................................. 20
M2ÆG2.3.5) .......................................................................................... 21
M2ÆG2.3.6) .......................................................................................... 21
M2ÆG2.3.7) .......................................................................................... 22
M2ÆG2.3.8) ............................................................................................. 22
M2ÆG2.5.19) .................................................................................... 25
M6) .............................................................................................................. 31
M7).................................................................................................................. 31
M2ÆG2.2.4).................................................................... 16
7. 参数说明..........................................................................................................................................................32
7.1 面板控制参数.................................................................................................................................................... 83
7.2 总线接口和监控菜单中的特殊变量应用........................................................................................................ 84
8. 轴同步控制操作 ..............................................................................................................................................85
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com
4 • vacon
8.1 轴同步总线接口................................................................................................................................................ 88
9. 附录.................................................................................................................................................................89
9.1 闭环参数(ID612到621)...................................................................................................................................89
9.1.1
9.2 电机热保护参数(ID704到708):....................................................................................................................... 90
9.3 失速保护参数(ID709到712)............................................................................................................................90
9.4 现场总线控制参数(ID850到859).................................................................................................................... 90
10. 轴同步应用特殊故障码 ............................................................................................................................... 91
11. 轴同步应用调试 ..........................................................................................................................................92
使用永磁电机
(“AC
无刷”电机)注意事项
................................................................................................ 89
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
简介 vacon • 5
轴同步应用
(软件 APFIFF11 V1.13 或更高版本)
S6.2
在
页的菜单 M6 选择轴同步应用。
1. 简介
轴同步应用提供了控制从机与主机位置信号的位置同步功能,具有经过总线、参数或使用数字调整+/-
输入端在线控制同步率的功能。变频器要求有来自于编码器和旋转变压器的信号。主机位置信号来自
于增量编码器或者单相脉冲发生器,如果从机使用的是感应电动机使用 OPT-A7 板读取脉冲,如果从
机使用的是永磁同步电机使用 OPT- BC 板。当轴同步模式不使能时,此应用还提供了通用的独立的速
度和转矩控制功能。
特殊应用特点:
• 同步命令:使能同步模式,
度参考。
• 在运行 RUN 模式下,用参数或总线可以控制步长的变化范围是-4 到 +4 的 1/65536 。
• 可从数字输入编程调整输入和调整率变化参数为临时变化率。
• 可编程的斜坡变化率。
• 可编程的
闭锁 /释放斜坡。
• 数字或继电器输出表示“变化率” 和“同步闭锁”。
• 支持总线:Profibus, CanOpen, Modbus, Modbus TCP
• 同步调整器循环周期时间是 5 ms。
• 静止调相和运行中调相(跟踪位置偏差)。
• 机械抱闸控制。
其它通用特点:
• 感应电机辨识功能
• PM 电机转子角度辨识功能
• 所有数字和模拟输入自由编程
• 模拟输入信号范围选择,自动调整
• 两个频率阈值监控
• 转矩限制监控
• 参考限制监控
• 可编程的第二斜坡和 S 曲线斜坡。
• 可编程的启动/停止和反向逻辑
• 启动和停止时的 DC 制动
• 可编程的 U/f 曲线和开关频率
• 完全可编程的电机热保护和堵转保护
• 输入输出缺相监控
• 具有可编程滞环的操纵杆控制
注: 轴同步应用在主轴和从轴之间产生刚性电气耦合。如果在主轴和从轴之间有刚性机械耦合则不适
用此应用。
闭锁 /释放engage/release,用数字输入或总线控制寄存器冻结速
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

6 • vacon 简介
1.1 要求
− 具有 VB00561(“nxp2” 型)控制板或更新的控制板的 NXP 变频器。
− NXP00002V155 系统软件包(NXP00002V160 支持单相主机脉冲参考)。
− 双编码器板 OPTA7 用于带有 HTL 电平增量编码器的感应电机闭环控制。第二编码器通道用于主机
脉冲参考。
− 旋转变压器板 OPTBC 用于带有旋转变压器反馈的永磁同步电机闭环控制。第二编码器通道用于主
机脉冲参考。
对于轴同步功能需要应用
动器也可以在多目标模式下运行。
许可密钥(基于功率单元序列号),有两周的免费测试时间。没有 许可密钥驱
1.2 试用时间周期
试用时间对于 测试与评估很重要。在 2 周的试用时间末,如果变频器必须被取代,在此期间可以从
Vacon订新的
安装应用后的 2 周(336 小时)内没有
在试用期的步骤
1. 在每次运行轴同步功能请求的上升沿,带有文本“Trial time”的 F72 报警在面板显示上出现,
2. 如果变频器运行在轴同步功能,当只有 24 小时的试用时间时,将触发 F73 “<24 hours left”报
3. 当超过试用时间时,变频器触发 F72 故障:“TrialTimeOver”。注:驱动将跳转到运行模式。
4. 面板上的监控值 V1.23 显示 Trial time left (h)。试用时间从小时开始计数器降为 0。
注:试用时间计数器从用数字输入或总线把轴同步功能使能开始计时。
许可密钥。
许可密钥也可以运行周同步功能。
(直到剩余时间 <24 小时) 。
警并一直保持。
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
控制 I/O vacon • 7
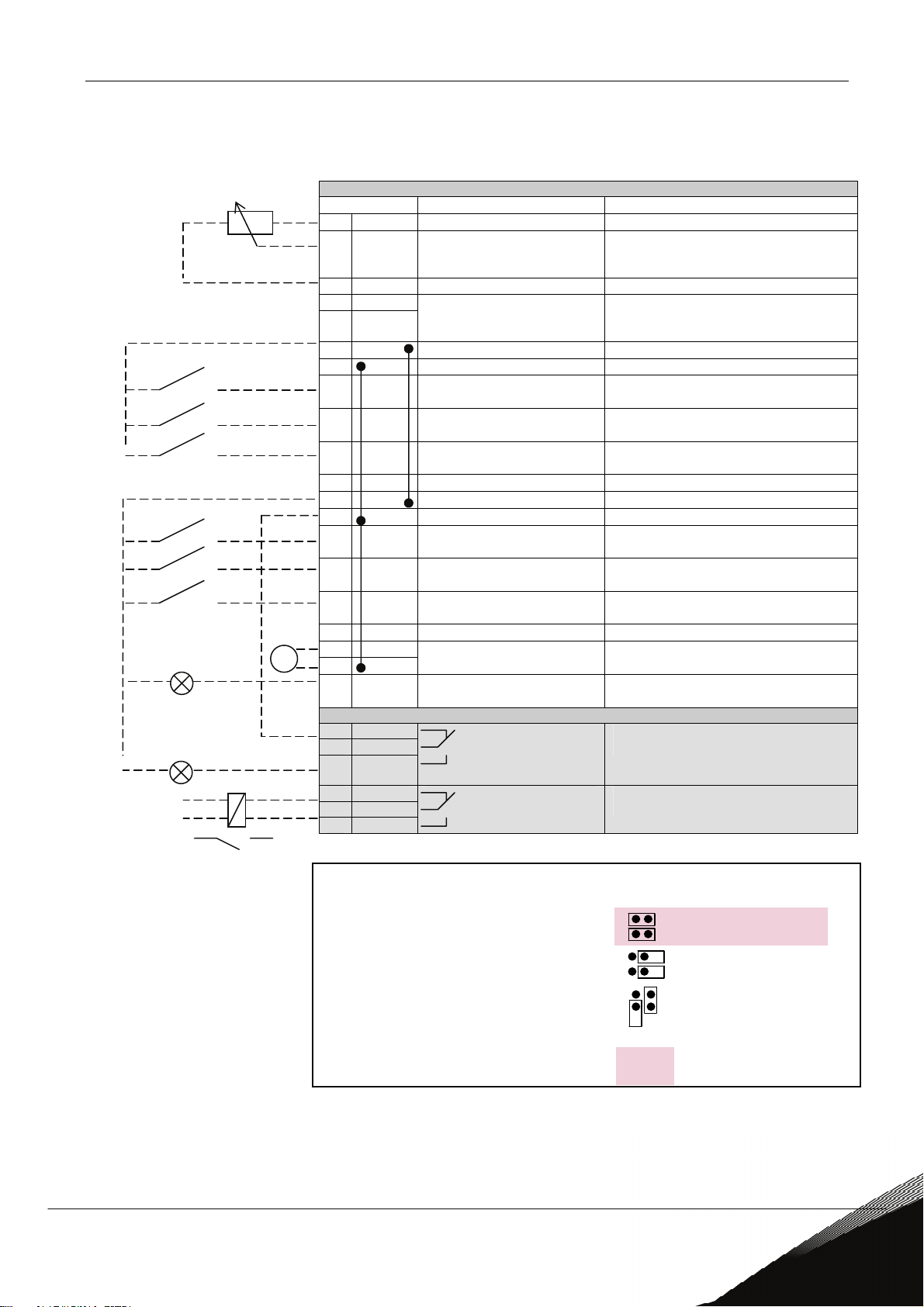
2. 控制 I/O
参考电位器 1…10 kΩ
READY
RUN
220V
AC
mA
OPT-A1
端子 信号 说明
1 +10V
2 AI1+
3 AI14 AI2+
5 AI2-
6 +24V
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CMA
12 +24V
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CMB
18 AOA1+
19 AOA120 DOA1
OPT-A2
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
参考输出 用于电位器、等器件的电压
ref
模拟输入,
电压范围: 0—10V DC
I/O 接地 用于参考和控制的地
模拟输入,
电流范围 0—20mA
控制电压输出 用于开关、等器件 的电压。最大 0.1 A
I/O 接地 用于参考和控制的地
正向启动
(可编程)
反向启动
(可编程)
轴同步使能
(可编程)
DIN 1—DIN 3 的公共端 连接到 GND 或 +24V
控制电压输出 用于开关的 电压(参见 #6)
I/O 接地 用于参考和控制的地
同步模式 BIT0
(可编程)
同步模式 BIT1
(可编程)
自由
(可编程)
DIN4—DIN6 的公共端 连接到 GND 或 +24V
输出频率
模拟输出
数字输出
就绪
继电器输出 1 运行
运行
继电器输出 2 故障 可编程
RUN
表 1.轴同步应用缺省 I/O 配置和连接例子.
输入频率参考电压
输入频率参考电流
触点闭合 =正向启动
触点闭合=反向启动
触点闭合=使能
触点闭合 =使能 同步
触点闭合 = 冻结从机速度
可编程
可编程
范围: 0—20 mA/R
可编程
集电极开路, I≤50mA, U≤48 VDC
可编程
, 最大. 500Ω
L
注:见下面的 选择。在产品用户手册有
更多信息。
Jum p er b l o ck X 3 :
CMA and CMB grounding
CM B connected to GN D
CM A connected to G N D
CMB isolated from GND
CMA isolated from GND
CMB and CMA
inter nal ly connected tog ether,
isolated from GN D
= Factory default
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com
8 • vacon 主机与从机之间的信号连接(OPT-A7)
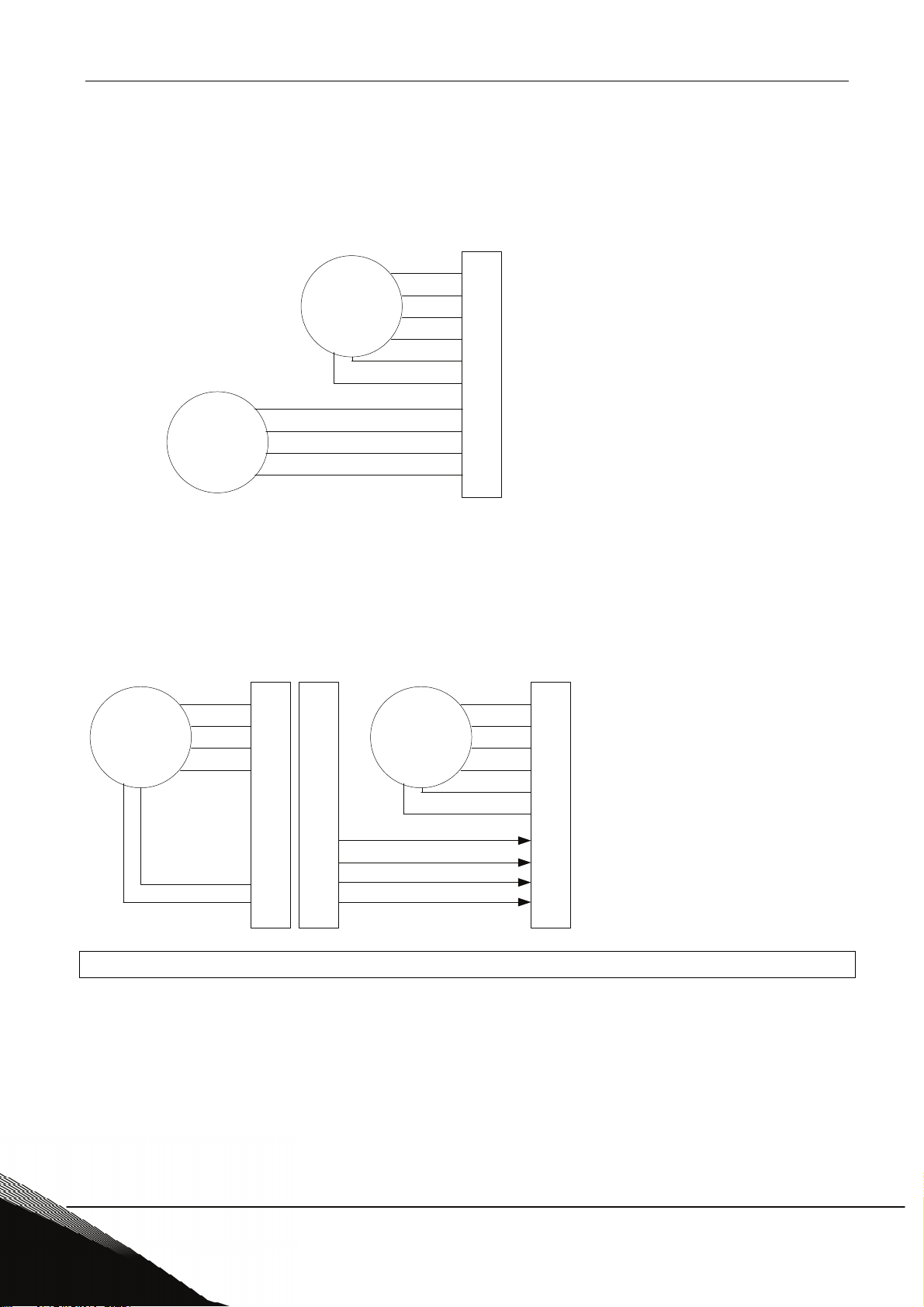
3. 主机与从机之间的信号连接(OPT-A7)
当主机是带有编码器的从动轮时:
编码器输入通道 2 输入端子 11-14 用于主机脉冲并且与来自于从机的端子 1、2、3、4 的脉冲比
较。
1
Enc.
CL
主机轮
编码器
当主机是 NXP 变频器时:
从主机来的 OPT-A7 板的重复输出端子 17-20 连接到从机的 OPT-A7 板的输入通道 2 端子 11
-14,(最大距离 300 米)
A7:主机
2
3
4
9
10
11
12
13
14
编码器
通道1
编码器
通道2
A7:从机
1
11
Enc.
CL
注: 为消除电气噪声,使用带有屏蔽层的双绞线连接。
2
3
4
5
6
7
8
9
10
12
13
14
15
16
17
18
19
20
Enc.
CL
1
2
3
4
9
10
11
12
13
14
编码器
通道1
编码器
通道2
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
在 OPT-A7 板上的跳线设置 vacon • 9
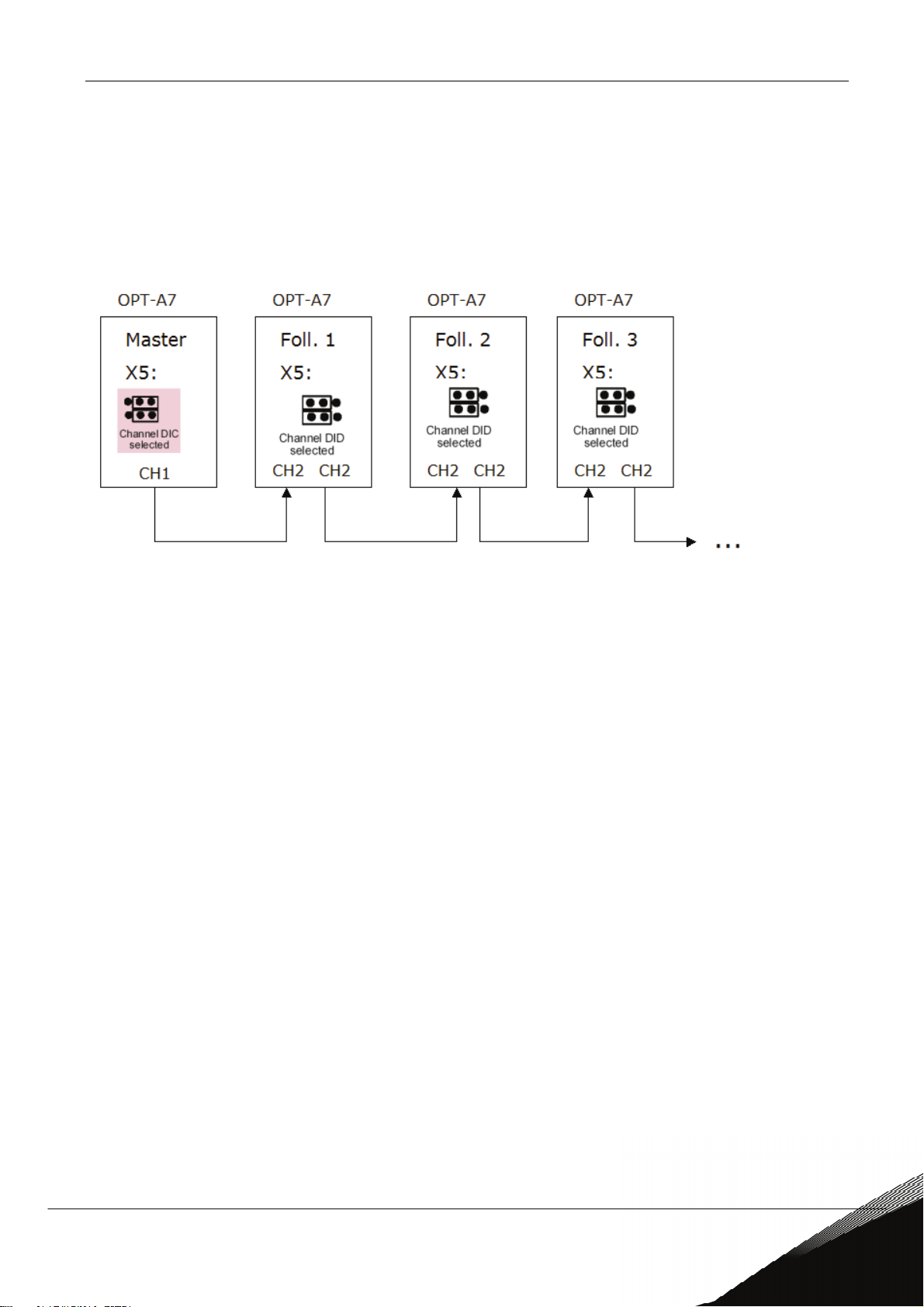
4. 在 OPT-A7 板上的跳线设置
X5 跳线选择通道,此通道发送到脉冲数据到重复输出通道(接线端子 17-20)。
在主机的 OPT-A7 通道 1 (DIC)必须是发送脉冲数据到重复输出通道的通道。
如果有多于一个的从机,一般通道 2(DID)是发送从机到从机脉冲的通道。所有的从机跟随主机。
更多信息参见控制板手册 UD00741。
主机可使用任何软件应用。从机基于通道 2 输入的脉冲进行调整。
调试注意:
在选件板菜单(M7)检查主机脉冲传送到从机 OPT-A7 板的编码器通道 2(如果使用旋转变压器则是
OPT-BC)。
从机通道 2 (OPT-A7 板的 P7.3.1.4 Enc 2 Pulse/rev )的每转脉冲一般应设置等于主机的每转脉冲
数。
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com
10 • vacon “端子到功能”(TTF)编程准则
5. “端子到功能”(TTF)编程准则
在多目标控制应用与泵机和风机控制应用中(一部分其它应用)的输入和输出信号的编程准则不同于
在其它 Vacon NX 应用中所使用的一般方式。
通常的设置方法,是给固定的输入或输出定义一个特定的功能,为
而在这里的应用中,使用了
为参数显示,操作员为参数定义一个特定输入/输出。参见 11 页的
端子到功能的编程方法
(TTF),其编程过程使用了另一种方法:功能作
功能到端子编程方法
报警
。
(FTT)。然
5.1 在面板上给一个特定的功能定义一个输入/输出
通过设定相应的参数值,将输入和输出与特定功能(参数)联系起来。这个值由 Vacon NX 控制板
槽
(见产品用户手册,)和相应的
功能名称
插槽号 功能端子序号
端子类型
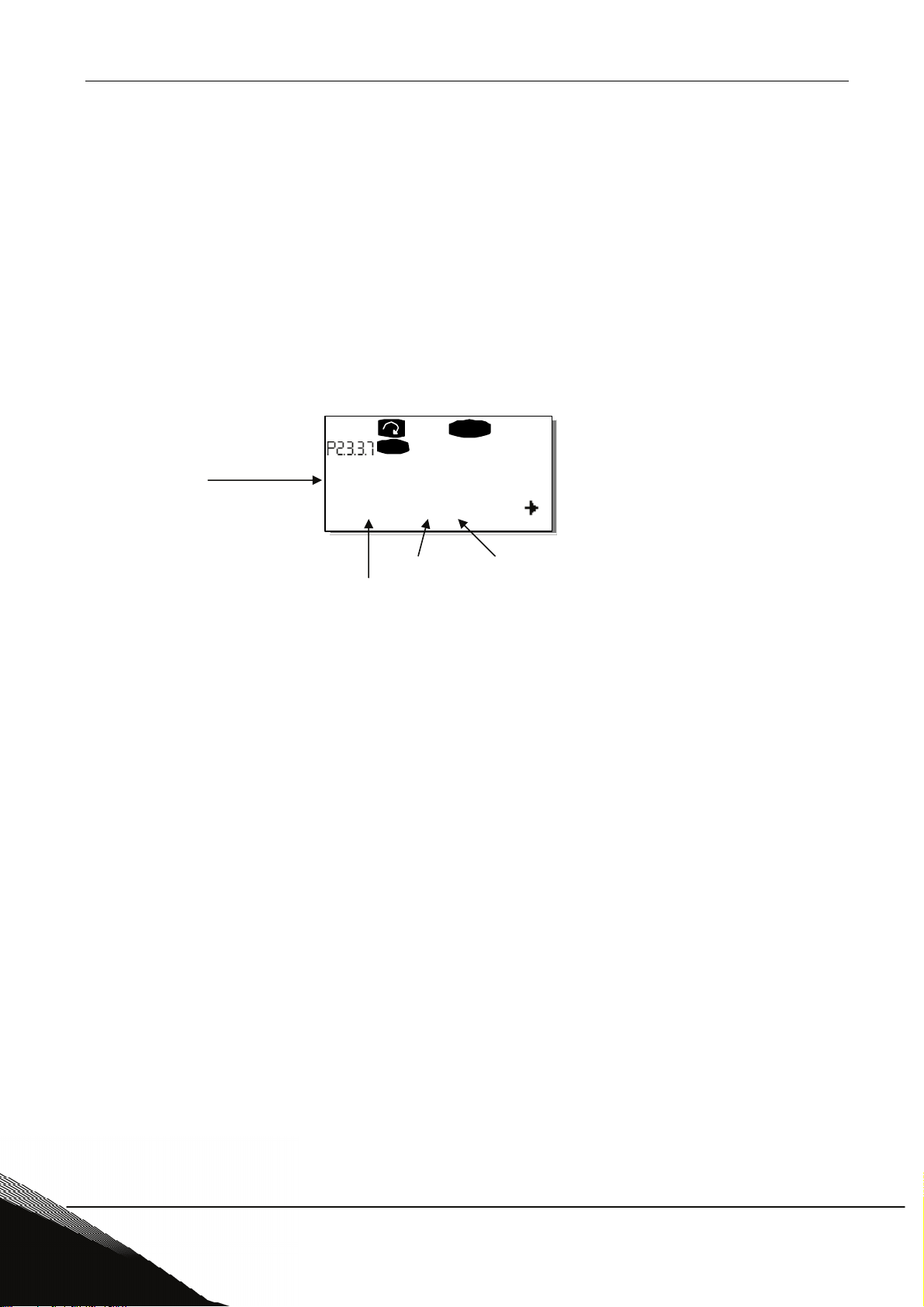
例如:希望定义数字输出功能
(见产品用户手册)。
首先,在面板上找到参数 P2.3.3.7。按一次
端子类型(数字输入,数字输出,模拟输出,模拟输出),右边为与目前输入/输出功能关联的板槽
和信号的值(B.3,A.2 等),如果没有关联的板槽和信号,则为(0. #)。
当值在闪烁,
E,I/O 选择数目从 1 到 10。
一旦设定了期望值,按下
上下浏览浏览按钮
回车 Enter
信号编号
组成。如下所示:
READY
I/O term
AI Ref Faul/Warn
DigOUT:B.1
参考故障/报警
找到希望的板槽和信号编号。程序中,板槽是从 0 开始,并从 A 到
按钮以确定做的改变。
(参数 P2.3.3.7)到基本板 OPT-A1 上的数字输出 DO1
菜单按钮右键
进入编辑模式。在
数值行
可以看到,左边为
板
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
“端子到功能”(TTF)编程准则 vacon • 11
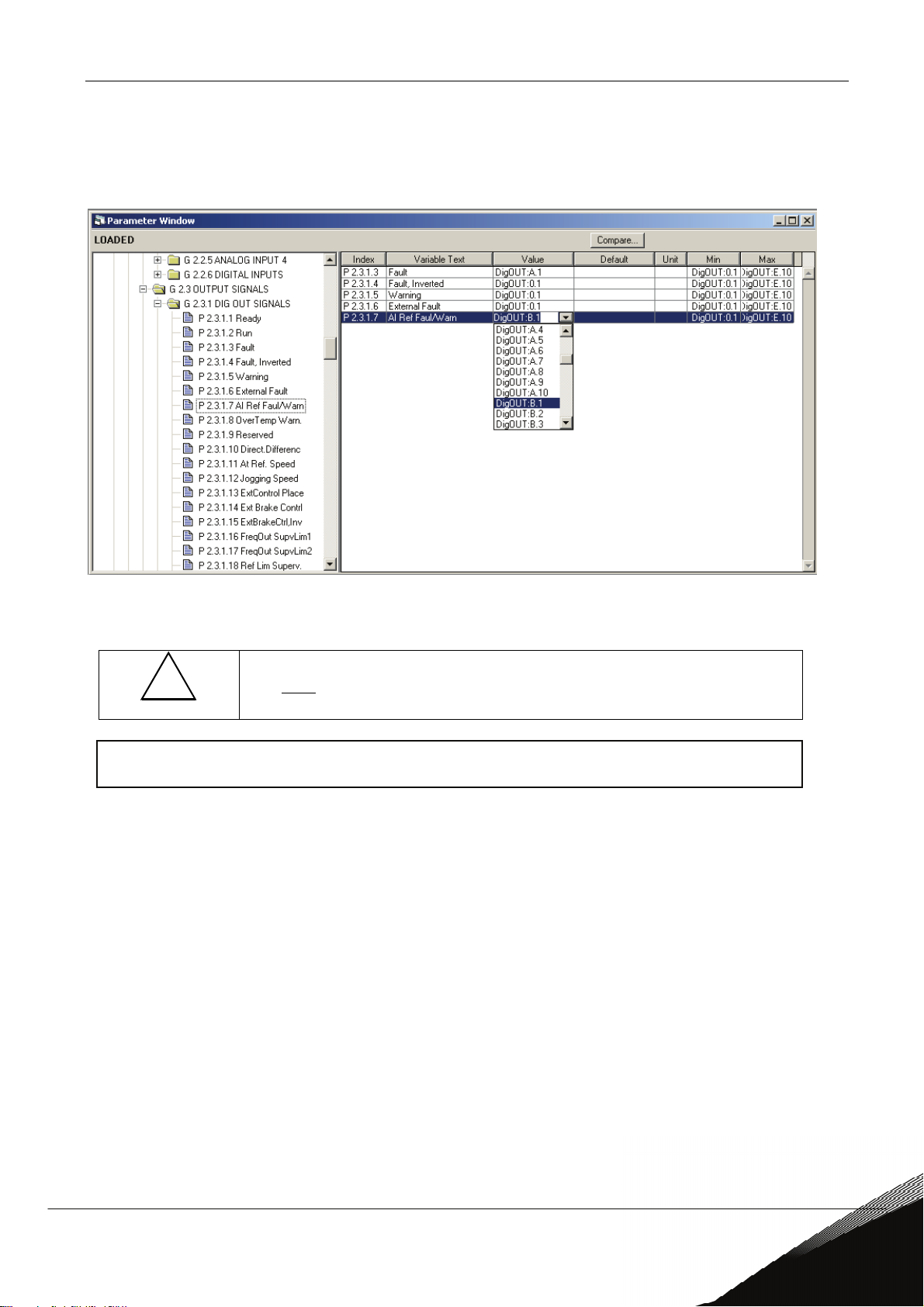
5.2 用 NCDRIVER 编程工具为一个端子定义一个特定的功能
使用 NCDRIVER 编程工具确定功能参数,必须在功能和输入/输出之间建立一个连接,如同使用控制面
板设置连接一样。在
Value
一列的下拉菜单中选择地址代号(见下图):
图 1. NCD 编程工具屏幕显示;输入地址代码
为了避免功能冲突以及确保正确运行,一定不能有两个功能连接到一个相
!
WARNING
注意!输入不同于输出,不能在运行状态下被改变
同的输出
上。
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

12 • vacon “端子到功能”(TTF)编程准则
5.3 定义没使用的输入/输出
所有没有使用的输入和输出,板槽值必须设为 0,端子功能序号设为 1。值 0.1 在大部分应用中被设定
为默认值。然而,如果想使用数字输入信号的值,例如仅用于测试目的,可以设定板槽值为 0,端子
功能序号为 2 到 10 之间的任何数,以确保输入为一个真状态。换句话说,值 1 对应于“打开触点”,
值 2 到 10 对应于“闭合触点”。
在模拟输入的情况,给定的端子功能序号为 1 代表 0%,值 2 对应 20%,3 到 10 之间的任何值代表
100%。
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
轴同步应用-参数列表 vacon • 13
6. 轴同步应用-参数列表
在下一页可以看到在各自参数组内的参数表。在第31到84页上给出了参数描述。
名词解释:
代码 = 面板上的位置指示;向操作员显示目前的参数号
参数 = 参数名
最小值 = 参数最小值
最大值 = 参数最大值
单位 = 参数值的单位;如果有就给出。
缺省值 = 工厂设定值。
用户值 = 用户自己设定值
ID = 参数的 ID 号码(使用的 PC 工具)
= 使用 TTF 方法设置这些参数,见章节 3。
= 在参数代码上:当变频器停机后 ,参数值才可以被改变。
6.1 监控值(控制面板:菜单 M1)
监控值是参数、信号以及状态和测量的实际值,监控值不可以被编辑。
参见Vacon NX用户手册可以得到更多的信息。
代码 参数 单位
V1.1
V1.2
V1.3
V1.4
V1.5
V1.6
V1.7
V1.8
V1.9
V1.10
V1.11
V1.12
V1.13
V1.14 DIN4, DIN5, DIN6 16
V1.15
V1.16
V1.17
V1.18
V1.19
V1.20
V1.21
V1.22
V1.23
V1.24
G1.25
输出频率
频率参考
电机速度
电机电流
电机转矩
电机功率
电机电压
DC 直流母线电压
单元温度
电机温度
模拟输入 1
模拟输入 2
DIN1, DIN2, DIN3 15
模拟输出
转矩参考
实际比例*2^16
位置误差
编码器 1 频率
编码器 2 频率
极对数
ID 辨识运行状态
剩余试用时间
积累空间误差
多项监控
Hz 1
Hz 25
rpm 2
A 3
% 4
% 5
V 6
V 7
°C
%
V/mA
V/mA
MA 26 AOA1
%
1700
u
Hz
Hz
h
u
表2. 监控值
ID
到电机的输出频率
控制电机的频率参考
以 rpm 为单位的电机速度
电机额定转矩的百分比
电机轴功率
8
散热片温度
电机温度计算值
9
13 AI1
14 AI2
数字输入状态
数字输入状态
18
实际同步比例
1701
1124
1803
以用户单位表示的位置误差
滤波后的轴频率
主机编码器频率
53
基于给定的电机数据计算的电机
58
极对数
ID 辨识运行状态
49
剩余试用时间小时数
67
当从机没有以同步模式运行时,
显示累加位置误差。
选择三个监控值显示
说明
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com
14 • vacon 轴同步应用-参数列表
6.2 基本参数 (控制面板:菜单 M2 Æ G2.1)
代码 参数 最小值 最大值 单位 缺省值 用户
P2.1.1
P2.1.2
P2.1.3
P2.1.4
P2.1.5
P2.1.6
P2.1.7
P2.1.8
P2.1.9
P2.1.10
P2.1.11
P2.1.12
P2.1.13
P2.1.14
P2.1.15
P2.1.16
P2.1.17
P2.1.18
P2.1.19
P2.1.20
最大频率
加速时间 1
减速时间 1
电流限制
电机额定电压
电机额定频率
电机额定速度
电机额定电流
电机功率因数 cosϕ
I/O 参考
面板控制参考
总线控制参考
点动速度参考
预置速度 1
预置速度 2
预置速度 3
预置速度 4
预置速度 5
预置速度 6
预置速度 7
P 2.1.1 320,00 Hz 50,00 102
0,1 3000,0 s 1,0 103
0,1 3000,0 s 1,0 104
0,4 x IH 2 x IH A IL
NX2: 230V
180 690 V
30,00 320,00 Hz 50,00 111
300 20 000 rpm 1440 112
0,4 x I
2 x IH A IH
H
0,30 1,00 0,85 120
0 14 0 117
0 9 8 121
0 9 9 122
0,00 P2.1.2 Hz 5,00 124
0,00 P2.1.2 Hz 10,00 105
0,00 P2.1.2 Hz 15,00 106
0,00 P2.1.2 Hz 20,00 126
0,00 P2.1.2 Hz 25,00 127
0,00 P2.1.2 Hz 30,00 128
0,00 P2.1.2 Hz 40,00 129
0,00 P2.1.2 Hz 50,00 130
NX5: 400V
NX6: 690V
表 3. 基本参数 G2.1
值
110
ID
注: 如果 f
速度,检查电机和系统是
否适合。
107
查看电机名牌
缺省值用于 4 极电机和额
定尺寸的变频器
查看电机名牌
113
查看电机名牌
0=AI1
1=AI2
2=AI1+AI2
3=AI1-AI2
4=AI2-AI1
5=AI1xAI2
6=AI1 操纵杆
7=AI2 操纵杆
8=面板
9=总线
10=电机电位器
11=AI1, AI2 的最小值
12=AI1, AI2 的最大值
13=最大频率
14=AI1/AI2 选择
0=AI1
1=AI2
2=AI1+AI2
3=AI1-AI2
4=AI2-AI1
5=AI1xAI2
6=AI1 操纵杆
7=AI2 操纵杆
8=面板
9=总线
参见参数 P 2.1.10
多段速速度 1
多段速速度 2
多段速速度 3
多段速速度 4
多段速速度 5
多段速速度 6
多段速速度 7
注
> 电机同步
max
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
轴同步应用-参数列表 vacon • 15
6.3 输入信号
6.3.1 基本设置 (控制面板:菜单 M2 Æ G2.2.1)
代码 参数 最小值 最大值 单位 缺省值 用户
启动
P2.2.1.1
P2.2.1.2
P2.2.1.3
/停止逻辑选择
电机电位器斜坡时间
电机电位器频率参考记
忆复位
0 7 0 300
0,1 2000,0 Hz/s 10,0 331
0 2 1 367
表 4. 输入信号:基本设置, G2.2.1
6.3.2 模拟输入 1 (控制面板:菜单 M2 Æ G2.2.2)
代码 参数 最小值 最大值 单位 缺省值
P2.2.2.1
P2.2.2.2
P2.2.2.3
P2.2.2.4
P2.2.2.5
P2.2.2.6
P2.2.2.7
P2.2.2.8
P2.2.2.9
表 5. 模拟输入 1 参数, G2.2.2
AI1 信号选择
AI1 滤波时间
AI1 信号范围
AI1 用户设置最小值
AI1 用户设置最大值
AI1 参考标定最小值
AI1 参考标定最大值
AI1 操纵杆滞环
AI1 操纵杆偏移量
0 A.1
0,00 10,00 s 0,10
0 3 0
-100,00 100,00 % 0,00
-100,00 100,00 % 100,00
0,00 320,00 Hz 0,00
0,00 320,00 Hz 0,00
0,00 20,00 % 0,00
-50,00 50,00 % 0,00
*记住替换对应的跳线块 X2。参见 NX 用户手册,章节
6.2.2.2
值
用户
值
ID
启动信号 1
(缺省:
DIN1)
正向启动
0
启动/停止
1
启动/停止
2
脉冲启动
3
启动
4
脉冲正向
5
脉冲启动
6
脉冲启动
7
0=不复位
1=如果停机或者掉电复位
2=如果掉电复位
ID
377
0=不滤波
324
0=0…100%*
1=20…100%*
320
2= -10V…+10V*
3=用户范围*
321
322
选择对应于最小参考信号
303
的频率。
选择对应于最大参考信号
304
的频率。
384
165
注
启动信号 2
(缺省:
DIN2)
反向启动
反向
运行使能
脉冲停止
电机电位器
上升
脉冲反向
脉冲反向
脉冲使能
注
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com
16 • vacon 轴同步应用-参数列表
6.3.3 模拟输入 2 (控制面板:菜单 M2 Æ G2.2.3)
代码 参数 最小值 最大值 单位 缺省值
P2.2.3.1
P2.2.3.2
P2.2.3.3
P2.2.3.4
P2.2.3.5
P2.2.3.6
P2.2.3.7
P2.2.3.8
P2.2.3.9
AI2 信号选择
AI2 滤波时间
AI2 信号范围
AI2 用户设置最小值
AI2 用户设置最大值
AI2 参考标定最小值
AI2 参考标定最大值
AI2 操纵杆滞环
AI2 操纵杆偏移量
0 A.2
0,00 10,00 s 0,10
0 3 1
-100,00 100,00 % 0,00
-100,00 100,00 % 100,00
0,00 320,00 Hz 0,00
0,00 320,00 Hz 0,00
0,00 20,00 % 0,00 395
-50,00 50,00 % 0,00
表 6. 模拟输入 2 参数, G2.2.3
6.3.4 自由模拟输入, 信号选择 (控制面板:菜单 M2 Æ G2.2.4)
代码 参数
P2.2.4.1
P2.2.4.2
电流限制标定
转矩限制
最小
值
0 3 0
0 3 0
最大值 单位 缺省值
表 7. 自由模拟输入信号选择, G2.2.4
用户
值
用户
值
ID
388
0=不滤波
329
0=0…100%*
1=20…100%*
325
2= -10V…+10V*
3=用户范围*
326
327
选择对应于最小参考信号
393
的频率。
选择对应于最大参考信号
394
的频率。
166
ID
0=不使用
1=AI1
399
2=AI2
3=总线
参见 参数 P2.2.4.1
485
注
注
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
轴同步应用-参数列表 vacon • 17
6.3.5 数字输入(控制面板:菜单 M2 Æ G2.2.5)
代码 参数
P2.2.5.1
P2.2.5.2
P2.2.5.3
P2.2.5.4
P2.2.5.5
P2.2.5.6
P2.2.5.7
P2.2.5.8
P2.2.5.9
P2.2.5.10
P2.2.5.11
P2.2.5.12
P2.2.5.13
P2.2.5.14
P2.2.5.15
P2.2.5.16
P2.2.5.17
P2.2.5.18
轴同步特殊 参数
P2.2.5.19
P2.2.5.20
P2.2.5.21
P2.2.5.22
P2.2.5.23
P2.2.5.24
启动信号 1
启动信号 2
运行使能
反向
预置速度 1
预置速度 2
预置速度 3
电机电位器 下降
电机电位器增加
故障复位
外部故障(闭合)
外部故障(断开)
加速 /减速时间选择
加速 /减速禁止
DC制动
点动速度
AI1/AI2 选择
电机控制模式 1/2
同步使能
同步模式位 0
同步模式位 1
同步调整 +
同步调整 -
抱闸断开 应答
表 8.数字输入信号, G2.2.4
最小
值
缺省值 用户值
0 A.1 403
0 A.2 404
0 0.2 407
0 0.1 412
0 0.1 419
0 0.1 420
0 0.1 421
0 0.1 417
0 0.1 418
0
0
0 0.2 406
0 0.1 408
0 0.1 415
0 0.1 416
0 0.1 413
0 0.1 422
0 0.1 164
0 A.3 1710
0 A.4 1711
0 A.5 1712
0 0.1 1713
0 0.1 1714
0 0.1 1602
0.1
0.1
414
405
ID
注
电机启动使能 (cc)
正向 (oc)
反向 (cc)
电机电位器参考减小 (cc)
电机电位器参考增加 (cc)
所有故障复位 (cc)
外部故障显示 (cc)
外部故障显示(oc)
加速/减速时间 1 (oc)
加速/减速时间 2 (cc)
加速/减速禁止 (cc)
DC 制动 激活 (cc)
变频器参考的点动速度选择
(cc)
触点闭合=模式 2
触点闭合=模式 1
参见参数 P 2.6.1, P2.6.12
轴同步控制模式使能 (需要软件
许可)
无效 = 多目标控制模式
锁定同步输入
参考速度/冻结从机速度根据输
入 t
调整输入端子用于在运行模式
下增加比率
调整输入端子用于在运行模式
下减小比率
来自于机械抱闸的硬件反馈
cc = 常闭触点
oc = 常开触点
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com
18 • vacon 轴同步应用-参数列表
6.4 输出信号
6.4.1 延迟数字输出 1 (控制面板:菜单 M2 Æ G2.3.1)
代码 参数 最小值 最大值 单位 缺省值
P2.3.1.1
P2.3.1.2
P2.3.1.3
P2.3.1.4
数字输出 1 信号选择
数字输出 1 功能
数字输出 1 高电平
延迟
数字输出 1 低电平
延迟
0 0.1 486
0 26 1 312
0,00 320,00 s 0,00 487
0,00 320,00 s 0.00 488
表 9. 延迟数字输出 1 参数, G2.3.1
用户
值
ID
0=不使用
1=准备好
2=运行
3=故障
4=故障取反
5=FC 过热报警
6=外部故障或报警
7=参考值故障或报警
8=报警
9=反向
10=点动速度选择
11=速度到达
12=电机电位器调节器激
活
13=频率限制 1 监控
14=频率限制 2 监控
15=转矩限制监控
16=参考限制监控
17=外部机械抱闸控制
18=I/O 控制位置激活
19=FC 温度限制监控
20=参考取反
21=外部抱闸控制取反
22=温度故障或报警
23=On/Off 控制
24=总线输入数据 1
25=总线输入数据 2
26=总线输入数据 3
0,00 = 不使用延迟
0,00 = 不使用延迟
注
6.4.2 延迟数字输出 2 (控制面板:菜单 M2 Æ G2.3.2)
代码 参数 最小值
P2.3.2.1
P2.3.2.2
P2.3.2.3
P2.3.2.4
数字输出 2 信号选择
数字输出 2 功能
数字输出 2 高电平
延迟
数字输出 2 低电平
延迟
0,00 320,00 s 0,00 491
0,00 320,00 s 0,00 492
0 0.1 489
0 26 0 490
Max
表 10. 延迟数字输出 2 参数, G2.3.2
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
单位 缺省值
用户
值
ID
参见参数 P2.3.1.2
0,00 = 不使用延迟
0,00 = 不使用延迟
注
轴同步应用-参数列表 vacon • 19
6.4.3 数字输出 信号(控制面板:菜单 M2 Æ G2.3.3)
代码 参数
P2.3.3.1
P2.3.3.2
P2.3.3.3
P2.3.3.4
P2.3.3.5
P2.3.3.6
P2.3.3.7
P2.3.3.8
P2.3.3.9
P2.3.3.10
P2.3.3.11
P2.3.3.12
P2.3.3.13
P2.3.3.14
P2.3.3.15
P2.3.3.16
P2.3.3.17
P2.3.3.18
P2.3.3.19
P2.3.3.20
P2.3.3.21
P2.3.3.22
P2.3.3.23
P2.3.3.24
P2.3.3.25
P2.3.3.26
P2.3.3.27
P2.3.3.28
P2.3.3.29
P2.3.3.30
准备好
运行
故障
故障取反
报警
外部故障
参考值故障 /报警
过温报警
取反
没有要求的方向
速度到达
点动速度
外部控制位置
外部抱闸控制
外部抱闸控制取反
输出频率限制 1 监控
输出频率限制 2监控
参考值限制监控
温度限制监控
转矩限制监控
电机温度保护
电机调节器激活
总线输入数据 1
总线输入数据 2
总线输入数据 3
总线输入数据 4
总线输入数据 5
同步闭锁
变化率
外部抱闸开闸
表 11. 数字输出信号, G2.3.3
最小
值
0 A.1 432
0 B.1 433
0 B.2 434
0 0.1 435
0 0.1 436
0 0.1 437
0 0.1 438
0 0.1 439
0 0.1 440
0 0.1 441
0 0.1 442
0 0.1 443
0 0.1 444
0 0.1 445
0 0.1 446
0 0.1 447
0 0.1 448
0 0.1 449
0 0.1 450
0 0.1 451
0 0.1 452
0 0.1 454
0 0.1 455
0 0.1 456
0 0.1 457
0 0.1 169
0 0.1 170
0 0.1 1720
0 0.1 1721
0 0.1 1722
缺省值
用户值
ID
注
参见 52 页的解释。
指示机械抱闸完全开闸
为避免功能重叠和正确操作,确保没有不两个功能连接到同一个输出
!
WARNING
端子。
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com
20 • vacon 轴同步应用-参数列表
6.4.4 限制设置 (控制面板:菜单 M2 Æ G2.3.4)
代码 参数 最小值
P2.3.4.1
P2.3.4.2
P2.3.4.3
P2.3.4.4
P2.3.4.5
P2.3.4.6
P2.3.4.7
P2.3.4.8
P2.3.4.9
P2.3.4.10
输出频率限制 1 监控
输出频率限制 1;
监控值
输出频率限制 2 监控
输出频率限制 2;
监控值
转矩限制监控
转矩限制监控值
参考限制监控
参考限制监控值
FC 变频器温度监控
FC 变频器温度监控值
表 12. 限制设置, G2.3.4
Max
0 3 0 315
0,00 P2.1.2 Hz 0,00 316
0 4 0 346
0,00 P2.1.2 Hz 0,00 347
0 3 0 348
-1000,0 1000,0 % 100,0 349
0 2 0 350
0,00 P2.1.2 Hz 0,00 351
0 2 0 354
–10 75
单位 缺省值
°C
0 355
用户
值
ID
0=无限制
1=低限监控
2=高限监控
3=抱闸闭合控制
0=无限制
1=低限监控
2=高限监控
3=抱闸断开控制
4=抱闸闭合/断开控制
0=不使用
1=低限监控
2=高限监控
3=抱闸断开控制
0=不使用
1=低限
2=高限
0=不使用
1=低限
2=高限
注
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
轴同步应用-参数列表 vacon • 21
6.4.5 模拟输出 1 (控制面板:菜单 M2 Æ G2.3.5)
代码 参数 最小值
P2.3.5.1
P2.3.5.2
P2.3.5.3
P2.3.5.4
P2.3.5.5
P2.3.5.6
P2.3.5.7
模拟输出 1 信号选择
模拟输出 1 功能
模拟输出 1 滤波时间
模拟输出 1 取反
模拟输出 1 最小值
模拟输出 1 比例
模拟输出 1 偏移量
-100,00 100,00 % 0,00 375
表 13. 模拟输出 1 参数, G2.3.5
Max
单位 缺省值
用户
值
ID
0 A.1 464
0=不使用
1=输出频率 (0—f
2=频率参考(0—f
3=电机速度 (0—电机额定
速度)
4=电机电流 (0—I
5=电机转矩 (0—T
6=电机功率 (0—P
0 14 1 307
7=电机电压 (0-U
8=DC-母线电压 (0—1000V)
9=AI1
10=AI2
11=输出频率 (f
12=电机转矩
(–2…+2xT
13=电机功率
(–2…+2xT
14=PT100 温度
0,00 10,00 s 1,00 308
0 1 0 309
0 1 0 310
0=不滤波
0=不取反
1=取反
0=0 mA
1=4 mA
10 1000 % 100 311
注
min
Nmot
Nmot
max
max
nMotor
nMotor
nMotor
nMotor
- f
)
)
)
)
)
)
)
)
)
max
6.4.6 模拟输出 2 (控制面板:菜单 M2 Æ G2.3.6)
代码 参数 最小值 最大值 单位 缺省值
P2.3.6.1
P2.3.6.2
P2.3.6.3
P2.3.6.4
P2.3.6.5
P2.3.6.6
P2.3.6.7
模拟输出 2 信号选择
模拟输出 2 功能
模拟输出 2 滤波时间
模拟输出 2 取反
模拟输出 2 最小值
模拟输出 2 比例
模拟输出 2 偏移量
0 0.1 471
0 14 4 472
0,00 10,00 s 1,00 473
0 1 0 474
0 1 0 475
10 1000 % 100 476
-100,00 100,00 % 0,00 477
表 14. 模拟输出 2 参数, G2.3.6
用户
值
ID
参见参数 P 2.3.5.2
0=不滤波
0=不取反
1=取反
0=0 mA
1=4 mA
注
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com
22 • vacon 轴同步应用-参数列表
6.4.7 模拟输出 3 (控制面板:菜单 M2 Æ G2.3.7)
代码 参数 最小值 最大值 单位 缺省值
P2.3.7.1
P2.3.7.2
P2.3.7.3
P2.3.7.4
P2.3.7.5
P2.3.7.6
P2.3.7.7
模拟输出 3 信号选择
模拟输出 3 功能
模拟输出 3 滤波时间
模拟输出 3 取反
模拟输出 3 最小值
模拟输出 3 比例
模拟输出 3 偏移量
0 0.1 478
0 14 5 479
0,00 10,00 s 1,00 480
0 1 0 481
0 1 0 482
10 1000 % 100 483
-100,00 100,00 % 0,00 484
表 15. 模拟输出 3 参数, G2.3.7
6.4.8 机械抱闸 (控制面板:菜单 M2 Æ G2.3.8)
代码 参数 最小值 最大值 单位 缺省值
P2.3.8.1
P2.3.8.2
P2.3.8.3
P2.3.8.4
P2.3.8.5
P2.3.8.6
P2.3.8.7
P2.3.8.8
使用机械抱闸
开闸电流限制
开闸频率限制,开环
开闸频率限制,闭环
开闸延迟
抱闸响应时间
合闸频率限制
抱闸闭合延迟
0 1 0 1550
0 P2.1.8 A 0,00 1551
0 P2.1.6 Hz 1,00 1535
0 P2.1.6 Hz 0,00 1553
0 10,00 s 0,00 1554
0 10,00 s 0,10 1544
0 P2.1.6 1,00 1539
0 10,00 s 0,00 1541
表 16. 模拟输出 3 参数, G2.3.7
用户
值
用户
值
ID
参见参数 P 2.3.5.2
0=不滤波
0=不取反
1=取反
0=0 mA
1=4 mA
ID
0 = 不使用
1 =使用机械抱闸
抱闸断开使能电流限制
开环控制开闸时频率限制
闭环控制开闸时频率限制
开闸延迟时间
物理响应时间
抱闸闭合的频率限制
到达闭合频率限制后的闭
合延迟
注
注
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
轴同步应用-参数列表 vacon • 23
6.5 驱动控制参数 (控制面板:菜单 M2 Æ G2.4)
代码 参数 最小值 最大值 单位 缺省值 用户
P2.4.1
P2.4.2
P2.4.3
P2.4.4
P2.4.5
P2.4.6
P2.4.7
P2.4.8
P2.4.9
P2.4.10
P2.4.11
P2.4.12
P2.4.13
斜坡 1 形状
斜坡 2 形状
加速时间 2
减速时间 2
制动斩波器
启动功能
停止功能
DC 直流制动电流
停车时
DC直流制动
时间
斜坡停车期间开始
DC 直流制动的频率
启动时 DC制动时间
磁通制动
磁通制动电流
0,0 10,0 s 0,0
0,0 10,0 s 0,0
0,1 3000,0 s 10,0
0,1 3000,0 s 10,0
0 4 0
0 1 0
0 3 0
0,4 x IH 2 x IH A IH
0,00 600,00 s 0,00
0,10 10,00 Hz 1,50
0,00 600,00 s 0,00
0 1 0
0,4 x IH 2 x IH A IH
表 17. 驱动控制参数, G2.4
值
ID
0=线性
500
>0=S 曲线斜坡时间
0=线性
501
>0=S 曲线斜坡时间
502
503
0=不使用
1=运行中使用
2=外部
504
3=停止/运行中使用
4=运行中使用(不测试)
0=斜坡
505
1=飞车启动
0=自由停车
1=斜坡
506
2=斜坡+运行使能自由停车
3=自由停车+运行使能斜坡
507
0=在停车时 DC 失效
508
515
0=在启动时 DC 直流制动无
516
效
0=关闭
520
1=打开
519
注
制动斩波器
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com
24 • vacon 轴同步应用-参数列表
6.6 电机控制 参数 (控制面板:菜单 M2 Æ G2.5)
代码 参数 最小值 最大值 单位 缺省值 用户
P2.5.1
P2.5.2
P2.5.3
P2.5.4
P2.5.5
P2.5.6
P2.5.7
P2.5.8
P2.5.9
P2.5.10
P2.5.11
P2.5.12
P2.5.13
P2.5.14
P2.5.15
P2.5.16
P2.5.17
闭环参数组 2.5.18
P2.5.18.1
P2.5.18.2
P2.5.18.3
P2.5.18.5
P2.5.18.6
P2.5.18.7
P2.5.18.8
P2.5.18.9
P2.5.18.10
P2.5.18.11
电机控制模式
U/f 优化
U/f 曲线选择
弱磁点
弱磁点电压
U/f 曲线中间点频率
U/f 曲线中间点电压
零频输出电压
开关频率
过电压控制
欠 电压控制
电机控制模式 2
速度控制器 P 增益
(开环)
速度控制器
I 增益 (开环)
负载下垂
速度控制 P 增益
速度控制I 时间
启动时 0 速度时间
停车时 0 速度时间
drooping
辨识
Rs电阻电压降
励磁电流
加速度补偿
滑差调节
启动励磁电流
启动励磁时间
启动转矩
0 6 0 600
0 1 0 109
0 3 0 108
8,00 320,00 Hz 50,00
10,00
0,00 P2.6.4 Hz 50,00
0,00 100,00 % 100,00
0,00 40,00 % 0,00
1,0
0 2 1 607
0 1 1 608
0 2/6 2
0 32767 3000 637
0 32767 300
0,00 100,00 % 0,00
0 5 0 631
0 30000 0
0,00 100,00 A 0,00
0 1000 30
0,0 500,0 ms 30,0
0,00 300,00 s 0,00
0 500 % 100 619
电机电流
最小值
0,000 60,000 s 0,0
0 32000 ms 100
0 32000 ms 100
0 3 0 621
200,00 % 100,00
变化
电机电流
最大值
kHz
变化
A 0,00
值
ID
0=频率控制
1=速度控制
2=转矩控制
3=闭环速度控制
4=闭环转矩控制
5=高级开环频率控制
6=高级开环速度控制
0=不使用
1=自动转矩提升
0=线性
1=平方
2=可编程
3=具有磁通优化的线性
602
603 n% x U
604
n% x U
605
参数最大值 =P 2.6.5
606 n% x U
准确值参见 表 35
601
0=不使用
1=使用 (无斜坡)
2=使用 (斜坡)
0=不使用
1=使用
参见参数 P 2.6.1
521
638
620
0=不辨识
1=ID 辨识电机不运行
2=ID 辨识电机运行
3=采用编码器 ID 辨识
4=无动作
5=ID 辨识运行失败
Rs电阻电压降测量值
662
612
613
614
626
627
628
615
616
0=不使用
1=转矩记忆
2=转矩参考
nmot
nmot
nmot
注
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
轴同步应用-参数列表 vacon • 25
3=正转/反转启动转矩
P2.5.18.12
P2.5.18.13
P2.5.18.14
P2.5.18.15
P2.5.18.16
P2.5.18.17
P2.5.18.18
P2.5.18.19
P2.5.18.20
正转启动转矩
反转启动转矩
编码器 滤波时间
电流控制 P 增益
KpF1 速度阈值
KpF0 速度阈值
%Kp 设定调节 @ F0
停车状态磁通
磁通消失延迟
–300,0 300,0 s 0,0
–300,0 300,0 s 0,0
0 100,0 ms 0
0,00 100,00 % 40,00
P2.5.18.17 P2.1.2 Hz 2,00
0,00 P2.5.18.16 Hz 1,00
0 100 % 50 1557
0,0 150,0 % 100,0 1401
-1 32000 s 0
633
634
618
617
1555
1556
1402
转换成额定速度调节器增
益的频率阈值
转换成低速调节器增益的
频率阈值
在低速的速度调节器增
益,为额定增益(P2.5.18.2)
的百分比
停车状态励磁电流,为额
定励磁电流的百分比
停车状态励磁的最大时间
表 18. 电机控制参数, G2.5
6.6.1 PMSM 电机设置 (控制面板:菜单 M2 Æ G2.5.19)
代码 参数 最小值 最大值 单位 缺省值
P2.5.19.1
P2.5.19.2
P2.5.19.3
P2.5.19.4
P2.5.19.5
P2.5.19.6
电机类型
磁通电流 Kp
磁通电流Ti
PMSM轴位置
使能Rs电阻辨识
调制度限制
0 1 0 650
0 32000 500
0 1000 ms 50
0 65535 0
0 1 1 654
0 200 100 655
表 19. 永磁同步电机参数, G2.5.19
用户
值
ID
651
652
649
注
0=异步电机
1=PMS 电机
磁通电流控制增益
磁通控制积分时间
对应于轴 0 位置的编码器
角度的低字节
在启动时的DC直流制动
期间
使能Rs电阻辨识
在弱磁点的调制度限制
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com
26 • vacon 轴同步应用-参数列表
6.7 保护(控制面板:菜单 M2 Æ G2.6)
代码 参数 最小值 最大值 单位 缺省值
P2.6.1
P2.6.2
P2.6.3
P2.6.4
P2.6.5
P2.6.6
P2.6.7
P2.6.8
P2.6.9
P2.6.10
P2.6.11
P2.6.12
P2.6.13
P2.6.14
P2.6.15
P2.6.16
P2.6.17
P2.6.18
P2.6.19
对 4mA 参考故障的
响应
4mA 参考故障频率
对外部故障的响应
输入缺相监控
对欠电压故障的响应
输出缺相监控
接地故障保护
电机热保护
电机环境温度因子
在 0 速电机冷却因子
电机热时间常数
电机任务周期
堵转保护
堵转电流
堵转时间限制
堵转频率限制
热敏电阻故障响应
总线故障响应
插槽故障响应
0 5 0
0,00 P2.1.2 Hz 0,00
0 3 2
0 3 0
0 1 0
0 3 2
0 3 2
0 3 2
–100,0 100,0 % 0,0
0,0 150,0 % 40,0
1 200 min 45
0 100 % 100
0 3 0
0,1 I
1,00 120,00 s 15,00
1,0 P 2.1.2 Hz 25,0
0 3 2
0 3 2
0 3 2
x 2 A IL
nMotor
用户
值
ID
0=无响应
1=报警
2=报警+以前的频率
3=报警+预置频率 P2.7.2
700
4=故障,根据参数 P2.4.7
方式停车
5=故障,自由停车
728
0=无响应
701
1=报警
2=故障,根据参数 P2.4.7
730
方式停车
3=故障,自由停车
0=故障存入故障历史
727
1=故障不存储
0=无响应
702
1=报警
703
2=故障,根据参数 P2.4.7
方式停车
704
3=故障,自由停车
705
706
707
708
0=无响应
1=报警
2=故障,根据参数 P2.4.7
709
方式停车
3=故障,自由停车
710
711
712
0=无响应
1=报警
2=故障,根据参数 P2.4.7
732
方式停车
3=故障,自由停车
参见 P2.6.17
733
参见 P2.6.17
734
注
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
轴同步应用-参数列表 vacon • 27
轴同步特殊参数
P2.6.20
P2.6.21
P2.6.22
P2.6.23
P2.6.24
P2.6.25
P2.6.26
P2.6.27
位置误差的响应
位置误差阈值
功率单元温度传感
器监控
编码器监控
锁定响应
锁定频率差值
锁定故障延迟
无效停车锁定
0 3 2 1730
0
0 1 0 1732
0 1 0 1733
0 3 2 1734
0,00 P2.1.2 Hz 2,00
0,00 10,00 s 0,50
0 1 0 1086
2147483647
u 3932160
1731
1735
1736
参见 P2.6.17
在同步期间位置误差的阈
值
0=读取
1=忽略
0=使能
1=无效
参见 P2.6.17
允许输出频率与编码器反
馈频率间的差值
如果频率差值高于
ID1735 ,在此时间触发锁
定故障
当此 参数 设置为 1 时,
只有 Vacon 技术人员可以
在运行状态改变此 参数
表 20. 保护, G2.6
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com
28 • vacon 轴同步应用-参数列表
6.8 总线 参数 (控制面板:菜单 M2 ÆG2.7)
代码 参数
P2.7.1
P2.7.2
P2.7.3
P2.7.4
P2.7.5
P2.7.6
P2.7.7
P2.7.8
轴同步特殊参数(参见分散著录)
P2.7.9
P2.7.10
P2.7.11
P2.7.12
P2.7.13
总线数据输出 1 选择
总线数据输出 2 选择
总线数据输出 3 选择
总线数据输出 4 选择
总线数据输出 5 选择
总线数据输出 6 选择
总线数据输出 7 选择
总线数据输出 8 选择
总线数据输出 1_2
选择
同步比例寄存器 选
择
同步控制寄存器 选择
转矩参考选择
自由信号选择
表 21. 总线参数
最小
值
0 10000 0
0 10000 0
0 10000 1703
0 10000 4
0 10000 5
0 10000 6
0 10000 7
0 10000 37
0 10000 1702
0 7 0
0 8 1
0 8 6
0 8 7
最大值 单位 缺省值
用户
值
ID
852
853
854
855
856
857
858
859
1740
1741
1742
1680
1681
注
用参数 ID 选择监控数据
用参数 ID 选择监控数据
用参数 ID 选择监控数据
用参数 ID 选择监控数据
用参数 ID 选择监控数据
用参数 ID 选择监控数据
用参数 ID 选择监控数据
用参数 ID 选择监控数据
用参数 ID 选择 32 位的监
控数据参见分散著录
为比例寄存器选择 PD 通
道。占用 2 个 PD 通道 !
为同步控制寄存器选择
PD 通道。参见 表 39.
为转矩参考寄存器选择
PD 通道。
为自由信号寄存器选择
PD 通道。可用于转矩或
电流限制参见 G2.2.4.
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

轴同步应用-参数列表 vacon • 29
6.9 转矩控制参数 (控制面板:菜单 M2 ÆG2.8)
代码 参数 最小值 最大值 单位 缺省值
P2.8.1
P2.8.2
P2.8.3
P2.8.4
P2.8.5
P2.8.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
转矩限制
转矩限制控制
P 增益
转矩限制控制
I 增益
转矩参考选择
转矩参考最大值
转矩参考最小值
转矩速度限制
开环转矩控制
最小频率
转矩控制
P 增益
转矩控制
I 增益
0,0 400,0 % 400,0
0,0 32000 3000
0,0 32000 200
0 8 0
–300,0 300,0 % 100
–300,0 300,0 % 0,0
0 2 1
0,00 P2.1.1 Hz 3,00
0 32000 150
0 32000 10
表 22. 转矩控制参数, G2.8
用户
值
ID
609
610
只在开环控制模式使用
611
0=不使用
1=AI1
2=AI2
3=AI3
4=AI4
641
5=AI1 操纵杆
6=AI2 操纵杆
7=来自于面板 R3.5 的转
矩参考
8=总线
642
643
0=最大频率
1=选择频率参考
644
2=预置速度 7
636
639
640
注
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

30 • vacon 轴同步应用-参数列表
6.10 轴同步参数 (控制面板:菜单 M2 Æ G2.9)
代码 参数 最小值 最大值
主机设置参数组 G2.9.1 (参见分散章节)ngs
P2.9.1.1
P2.9.1.2
P2.9.1.3
P2.9.1.4
P2.9.1.5
从机设置参数组 G 2.9.2
P2.9.2.1
P2.9.2.2
P2.9.2.3
P2.9.2.4
P2.9.2.5
P2.9.2.6
P2.9.2.7
P2.9.2.8
P2.9.2.9
P2.9.2.10
P2.9.2.11
调整相位设置参数组 G 2.9.3
P2.9.3.1
P2.9.3.2
P2.9.3.3
主机距离
主机距离小数部分
主机转数
主机转数小数部分
主机速度滤波器 TI
从机距离
从机距离小数部分
从机转数
从机转数小数部分
从机速度滤波器 TI
PID 控制比例增益
PID 控制 I 增益
同步加速度
电子齿轮比值
斜坡比例时间
调整变比
距离
选择正相位
选择负相位
1 32767 u 360 1750
0 65535 u 0
1 32767 1
0 65535 0
0,000 32,767 0,100
1 32767 u 360 1757
0 65535 u 0
1 32767 1
0 65535 0
0,000 32,767 0,010
0 2147483647 30
2147483647 1
1 32767 u/s
-262144 262144 65536
0,000 2147483,647 ms 10,000
0,1 200,0 % 10,0
-32000 32000 U 1
0.1 E.10 0.1
0.1 E.10 0.1
表 23. 轴同步参数, G2.9
单
位
2
缺省值
3600
用户
值
ID
以用户单位表示的主机距
离,整数部分
以用户单位表示的主机距
1751
离,小数部分
主机转数,整数部分对应
1752
P2.9.1.1 和 P 2.9.1.2
主机转数,小数部分对应
1753
P2.9.1.1 和P 2.9.1.2
用于主机速度测量的一阶
1754
低通滤波器的时间常数
以用户单位表示的从机距
离,整数部分
以用户单位表示的从机距
1758
离,小数部分
从机转数,整数部分对应
1759
P2.9.2.1 和 P 2.9.2.2
从
1760
1761
1762
1763
1764
1765
1766
1767
1805
1716
1717
机转数,小数部分对应
P2.9.2.1 和 2.9.2.2
用于从机速度测量的一阶
低通滤波器的时间常数
同步调节器的比例增益
同步调节器的积分增益
进行同步的加速度和放弃
同步命令的减速度
运行模式中比值变化的调
节寄存器
根据参数 P2.9.2.9 的变
比,以为单位的斜坡时间
用数字调整输入影响变比
时的设置值
以用户单位表示的调整相
位命令
正相位调整,用编程选择
输入。
负相位调整,用编程选择
输入。
注
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

轴同步应用-参数列表 vacon • 31
6.11 许可密钥(控制面板:菜单 M2 Æ G2.10)
代码 参数 最小值 最大值 单位 缺省值
P2.10.1
V2.10.2
许可密钥
功率单元序列号
钥
密
0 65535 0
0 65535 0
用户
值
ID
1694
1515
软件使能代码,对应功率
单元的序列号
功率单元序列号 密钥,
此值只用于监控。
表 24. 许可密钥参数
6.12 面板控制 (控制面板:菜单 M3)
此参数选择控制位置和面板上的方向,列表如下。参见产品用户手册的面板控制菜单。
代码 参数 最小值 最大值 单位 缺省值
P3.1
R3.2
P3.3
P3.4
R3.5
控制位置
面板参考
方向 (面板上)
停止按钮
转矩参考
1 3 1 125
P2.1.1 P2.1.2 Hz
0 1 0 123
0 1 114
0,0 100,0 % 0,0
表 25. 面板控制参数, M3
用户
值
ID
1= I/O 端子
2=面板
3=现场总线
0=正转
1=反转
0=限制停止按钮功能
1=停止按钮一直起作用
注
注
6.12.1 系统菜单(控制面板:菜单 M6)
与变频器一般使用相关的功能和参数,例如应用和语言选择,用户自定义的参数设置或有关硬件和软
件的信息,都可在 Vacon NX 用户手册.
6.12.2 扩展板 (控制面板:菜单 M7)
M7 菜单显示了控制板上的扩展板和选件板以及与它们相关的信息,参见产品用户手册可以得到更多
的信息。
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com
32 • vacon 参数说明
7. 参数说明
给出了出现在不同应用中的参数的参数号。以下参数说明按 ID 号的顺序进行了编排。有阴影的
参数 ID 号(如
某些参数名后接数字代码,表明在“ALL IN ONE”应用中包含这些参数。如果没有代码,则参数适
合所有应用。
102 最大频率
103 加速时间1
104 减速时间
105 预置速度1
106 预置速度
418 电机电位器上升
定义变频器的频率限制。
这些参数的最大值为 320Hz。
软件将自动检测参数 ID105,ID106,ID315 和 ID728 的值。
1
(2.1.3)
这些限制值对应于输出频率从 0 频率加速到设置的最大值(参数ID102)的时间。也可见
参数
ID1764
2
参数值自动限制在最小和最大频率之间(参数 ID101,ID102)。
注意 TTF 编程方式在多目标控制应用中的使用。见参数 ID419,ID420 和 ID421。
速度
基本速度
ID105 1 0
ID106 0 1
表 26.预置
)表明此参数使用 TTF 编程方式。(见第 5 章)。
(2.1.1)
(2.1.2)
多段速度选择
1(DIN4)
(2.1.14)
(2.1.15)
多段速度选择
2(DIN5)
0 0
107 电流限制
这个参数定义了来自变频器的最大电机电流。这个参数值范围根据规格的不同而不同。
108 U/f 比率选择
线性: 0 电机的电压随频率线性变化,线性段是频率从 0Hz 到弱磁点的恒磁通区,对应
(2.1.4
)
(2.5.3)
弱磁点的电机电压为额定电压。线性 U/f 比率应用于恒转矩负载。如果没有另
外的特殊要求设定值,就应该采用该缺省值。
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 33
平方: 1 电机电压随频率从 0Hz 到弱磁点按一条平方曲线变化。弱磁点对应电机的额定
电压。在低于弱磁点区域,电机是欠励磁运行,因而转矩和电机噪音要小一
些。平方 U/f 比可用于要求转矩正比于速度平方的情况,如离心泵和离心风
机。
U[V]
Un
Default: Nominal
ID603
voltage of the motor
Linear
Field weakening
point
图 2. 电机电压的线性变化和平方变化
可编程 U/F 曲线:
2
U/F 曲线可以用 3 个不同的点进行设置。如果其它设置不能满足应用的要求,
可以采用可编程的 U/F 曲线。
ID603
ID605
(Def. 10%)
ID606
(Def. 1.3%)
图3.可编程的 U/f 曲线
U[V]
Un
Default: Nominal
voltage of the motor
ID604
(Def. 5 Hz)
Squared
Default: Nominal
frequency of the
motor
Field weakening point
Default: Nominal
frequency of the motor
ID602
f[Hz]
NX12K07
f[Hz]
NX12K08
带磁通优化的线性:
3
为了节能、降低干扰等级和噪音,变频器开始搜寻电机的最小电流。这个功能
可以用于一些恒定负载的情况,比如风机、泵等。
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

34 • vacon 参数说明
109 U/f 优化
自动转矩提
升:
例如:
在电机 0Hz 带载启动时,要求什么改变?
♦ 首先设置电机额定值(参数组 2.1)
选择 1
选择 2
要获得适合的转矩需要设置 0 点电压和中间点电压/频率(在参数组 2.6 中),这样,电机
在低频时可以得到足够的电流。
首先设定参数 ID108 为 2(可编程 U/F 曲线)(值 2)。增加 0 点电压(ID606)可在 0 速
时得到足够的电流。然后, 设定中间点电压(ID605)为 1.4142*ID606,中间点频率
(ID604)为值 ID605/100% * ID111。
: 激活自动转矩提升.
: 可编程 U/F 曲线
注意! 在高转矩低速度的应用场合,电机可能会过热。如果电机必须长时间的工
110 电机额定电压
(2.5.2)
电机电压自动改变,以使电机在低频时能产生足够的转矩来启动和运行。
电压的增加取决于电机的类型和功率。自动转矩提升可用于因启动摩擦力
大而要求高启动转矩的场合,如传送带。
作在这样的条件下,那么要特别注意对电机进行冷却。如果有升温过高的
趋势,就应对电机采取外部冷却措施。
(2.1.5)
在电机铭牌上找到 Un。这个参数设定弱磁点电压(ID603)为 100%*Unmotor。
111 电机额定频率
在电机铭牌上找到 fn。这个参数设定弱磁点频率(ID602)为同样的值。
112 电机额定转速
在电机铭牌上找到 nn。
113 电机额定电流
在电机铭牌上找到 In。
(2.1.6)
(2.1.7)
(2.1.8)
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 35
117 I/O 频率参考值选择
当控制位置为 I/O 时,确定频率参考值来源。
应用
选择
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
表27. 参数
ID117
6
电位器参考;方式控制方式为 DIN5(真值=增加)和 DIN6(真值=减少)
的选择
(2.1.10)
模拟电压参考值
端子 2-3
模拟电流参考值
端子 4-5
AI1+AI2
AI1–AI2
AI2–AI1
AI1*AI2
AI1 操纵杆
AI2 操纵杆
面板参考(菜单 M3)
现场总线参考
AI1 或 AI2 中较小的
AI1 或 AI2 中较大的
最大频率
(推荐只用于转矩控制)
AI1/AI2 选择
120 电机功率因数
cos
可在电机铭牌上找到“cos φ”。
121 面板频率参考选择
当使用面板控制时,定义频率参考值源。
应用
选择
0
1
2 AI1+AI2
3 AI1–AI2
4 AI2–AI1
5 AI1*AI2
6
7
8
9
6
表28.参数 ID121 选择
φ
(2.1.9)
(2.1.11)
模拟电压参考值
端子 2-3
模拟电流参考值
端子 4-5
AI1 操纵杆
AI2 操纵杆
面板参考(菜单 M3)
现场总线参考
*FB 速度参考
122 现场总线参考选择
(2.1.12)
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

36 • vacon 参数说明
当从现场总线控制时,定义频率参考源。在不同的应用中的选择请见 ID121。
124 点动速度参考
(2.1.13)
用 DIN3 端子输入定义点动速度选择,它可以编程点动速度, 见参数 ID301。
参数值被自动限制在最小和最大频率之间(ID101 和 102)。
126 预置速度 3
(2.1.16)
127 预置速度 4
128 预置速度 5
129 预置速度 6
130 预置速度 7
在多段速度应用中,用 DIN3,DIN4,DIN5 和 DIN6 数字输入选择预设速度,这些激活的
输入组合选择预设速度参考值。也可见参数 ID105 和 106.
参数值自动限制在最小和最大频率之间(
速度
基本速度
P2.1.16 (3) 1 1 0 0
P2.1.17 (4) 0 0 1 0
P2.1.18 (5) 1 0 1 0
P2.1.19 (6) 0 1 1 0
P2.1.20 (7) 1 1 1 0
表 29. 预置速度 3 至 7
141 AI3 信号选择
多段速度选择
1(DIN4)
0 0 0 0
(2.2.4.1)
(2.1.17)
(2.1.18)
(2.1.19)
(2.1.20)
多段速度选择
2(DIN5)
ID101 和 102)。
多段速度选择
3(DIN6)
多段速度选择
4(DIN3)
可用本参数连接 AI3 信号到选择的模拟输入。更多信息可见第 5 章。
142 AI3 信号滤波时间
该参数的值大于 0 时,可从输入模拟信号中滤掉干扰。长的滤波时间使调节响应变慢,见
参数 ID324.
(2.2.4.2)
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 37
143 AI3 信号范围
(2.2.4.3)
用这个参数可以选择 AI3 信号范围。
应用
选择
0 0…100%
1 20…100%
2 –10…+10V
3
表 30.
ID143
144 AI3 用户定义最小值
145 AI3 用户定义最大值
6
用户自定义
参数选择
(2.2.4.4)
(2.2.4.5)
设在 0…100%间设置用户最小和最大的 AI3 信号水平。
151 AI3 信号倒置
(2.2.4.6)
0 =不倒置
1 =信号倒置
152 AI4 信号选择
(2.2.5.1)
参见 ID141.
153 AI4 滤波时间
(2.2.5.2)
参见 ID142.
154 AI4 信号范围
参见 ID 143.
155 AI4 用户定义最小值
(2.2.5.4)
156 AI4 用户定义最小值
参见 ID 144 和 145.
162 AI4 信号倒置
(2.2.44, 2.2.5.6)
参见 ID 151.
164 电机控制模式 1/2
(2.2.5.18)
触点断开 =选择电机控制模式 1
触点闭合 =选择电机控制模式 2
参见参数 ID
600 和 521。
165 AI1 手柄控制偏移量
以如下方式定义频率 0 点:当面板上显示该参数时,调节电位器到假定的 0 频率点,按
(2.2.5.3)
(2.2.5.5)
(2.2.2.9)
Enter 键。注意:不管如何,这个设置不改变参考值的定标。
按
复位
Reset 键将参数值变回到 0.00%
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

38 • vacon 参数说明
166 AI2 手柄控制偏移量
(2.2.3.9)
参见参数 ID165.
169 现场总线数据 4 (FB 固定控制字 bit 6)
170 现场总线数据 5 (FB 固定控制字 bit 7)
现场总线的数据(FBFixedControlWord)可以送到变频器的数字输出。
300 启动/停止 逻辑选择
(2.2.1.1)
0 DIN1:触点闭合=正向启动
DIN2:触点闭合=反向启动
FWD
REV
Output
frequency
Stop function
(ID506)
= coasting
(2.3.3.26)
(2.3.3.27)
t
DIN1
DIN2
1 2 3
NX12K09
图4. 正向启动/反向启动
① 最先选择的方向有最高优先权
② 当 DIN1 触点断开时,旋转方向开始改变
③ 若正向启动(DIN1)和反向启动(DIN2)信号同时起作用,则正向启动(DIN1)优
先。
1 DIN1:触点闭合=启动 触点断开=停车
DIN2: 触点闭合=反向 触点断开=正向
见下图。
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 39
FWD
REV
DIN1
DIN2
Output
frequency
Stop function
(ID506)
= coasting
t
NX12K10
图 5. 启动、停车、反向
2 DIN1: 触点闭合=启动 触点断开=停车
DIN2: 触点闭合=可以启动 触点断开=不能启动,并且,如果变频器在运行则停
车
3 3线连接(脉冲控制)
DIN1:触点闭合=启动脉冲
DIN2:触点打开=停车脉冲
(DIN3 可编程设置为反向指令)
见
图 6。
REV
DIN1
Start
DIN2
Stop
Output
frequency
Stop function
(ID506)
= coasting
If Start and Stop pulses are
simultaneous the Stop pulse
overrides the Start pulse
t
NX012K11
图 6. 启动脉冲/停车脉冲
应该使用“上升沿启动”,以排除发生下列情况时可能的无意识启动,如,上电,电源失
灵后、故障复位或运行许可(运行许可=False)造成停机之后、控制位置改变后重新通电。
在电机可以启动前,起/停逻辑必须打开。
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

40 • vacon 参数说明
4 DIN1:闭合触点= 正向启动
DIN2; 闭合触点=参考值增加(电机电位器参考值;如果参数
ID117设为 3 或 4 则此参
数自动设置为 4)。
5 DIN1:闭合触点= 正向启动(要求上升沿启动)
DIN2:闭合触点= 反向启动(要求上升沿启动)
6 DIN1:闭合触点= 启动(要求上升沿启动)
打开触点= 停车
DIN2:闭合触点= 反向
打开触点= 正向
7 DIN1:闭合触点= 启动(要求上升沿启动)
打开触点= 停车
DIN2:闭合触点= 启动使能
打开触点= 不能启动,如果变频器在运行则停车。
303 参考值定标,最小值
(2.2.2.6)
304 参考值定标,最大值
设定值的限制为:0 ≤ 参数ID303 ≤ 参数ID304 ≤参数 ID102。当参数ID303 =0,缩放比例设
置取消。用频率最大值和最小值来确定缩放比例。
Output
frequency
Max freq. ID102
ID304
ID303
Min freq. ID101
图 7. 左: 参考值定标 右:不使用定标(参数 ID303 = 0)
307 模拟输出功能
(2.3.5.2)
(2.2.2.7)
100
Analogue
input [V]
Output
frequency
Max freq. ID102
100
Analogue
input [V]
Min freq. ID101
NX12K13
这个参数给模拟输出信号定义所需要的功能。
在应用中的参数可用值参见 21 页。
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 41
308 模拟输出滤波时间
定义模拟输出滤波时间。
设定参数值为 0 会禁止这个功能。
309 模拟输出倒置
(2.3.5.3)
(2.3.5.4)
%
Unfiltered signal
100%
63%
ID308
图 8. 模拟输出滤波
Filtered signal
t [s]
NX12K16
模拟输出信号倒置:
最大输出信号= 最小设定值
最小输出信号= 最大设定值
参见下面的参数
310 模拟输出最小值
定义信号最小值,可以是 0 或 4mA(活性 0)。注意在参数 ID311(图 10 中)中模拟输出定
标的不同。
0 设定最小值为 0 mA
1 设定最小值为 4 mA
ID311。
(2.3.5.5)
Analog
output
current
20 mA
12 mA
10 mA
4 mA
0 mA
ID311=
50%
ID311 =
100%
ID311 =
200%
0
0.5
Max. value of signal
selected with ID307
1.0
NX12K17
图9. 模拟输出倒置
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

42 • vacon 参数说明
311 模拟输出定标
模拟输出的比例因子。
信号
输出频率
频率参考
电机速度
输出电流
电机转矩
电机功率
电机电压
直流环节电压信号
信号的最大值
最大频率 (参数 ID102)
最大频率 (参数.ID102)
电机额定速度 1xn
电机额定电流 1xI
电机额定转矩 1xT
电机额定功率 1xP
100% x U
1000 V
表 31. 模拟输出定标
312 数字输出功能
设定值 信号内容
0=没有使用 停止运行
1=准备就绪 变频器已经准备好运行
2=运行 变频器运行
3=故障 已发生故障跳闸
4=故障倒置 没有发生故障跳闸
5=变频器过热报警 散热器温度超过+0700℃
6=外部故障或报警 故障或报警,取决于参数 ID701
7=参考值故障或报警 故障或报警,取决于参数 ID700。若模拟参考值是 4-20mA,
8=报警 只要有报警就一定执行
9=反向 已选择反向指令
10=预置速度 1(应用 2)
10=点动速度(应用 3456)
11=已达到转速 输出频率已达到设定的参考值
12=电机调节器起作用 过电压或过电流调节器已激活
13=输出频率限制监控 输出频率超出设定的监控上/下限(见参数 ID315 和 ID316)
(2.3.1.2)
(2.3.5.6)
mMotor
nMotor
nMotor
nMotor
nmotor
图 10. 模拟输出定标
下列情况下,数字输出 DO1 下拉电流,可编程的继电器
(RO1,RO2)被激活:
信号<4mA
用数字输入选择了预置速度
用数字输入选择了点动速度
Analogue
output
current
20 mA
12 mA
10 mA
ID310 = 1
4 mA
ID310 = 0
0 mA
ID311 =
200%
0
0.5
ID311 =
100%
ID311 =
50%
Max. value of signal
selected by ID307
1.0
NX12K18
14=从 I/O 端子控制 (应用 2)
14=输出频率限制 2 监控(3456)
15=热电阻故障或报警(应用 2)
15=转矩限制监控(应用 3456)
选择 I/O 控制模式(在菜单 M3)
输出频率超出设定的监控上/下限(见参数 ID346 和 ID347)
热电阻输入的选件板显示过温,故障或报警取决于 ID732
电机转矩超出了设定的监控上/下限(见参数 ID348 和 ID 349)
16=现场总线输入数据(应用 2)
16=参考值限制监控
现场总线输入数据(总线固定控制字)给 DO/RO
被激活的参考值超出了设定的监控上/下限(ID350 和 ID351)
17=外部制动控制(应用 3456) 用可设置的延时控制外部制动开/关(参数 ID352 和 ID353)
18=从 I/O 端子控制(应用 3456) 外部控制模式(菜单 M3:参数 ID125)
19=变频器温度限制监控(应用 3456) 变频器散热器温度超过了设定的监控值(参数 ID354 和 ID355)
20=没有要求的旋转方向(应用 345)
电机旋转方向与要求的旋转方向不同
20=参考值倒置(应用 6)
21=外部制动控制倒置(应用 3456) 外部制动开/关控制(参数 ID352 和 ID353);当制动控制为关
时输出被激活。
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 43
22=热电阻故障或报警(应用 3456) 热电阻输入的选件板显示过温,故障或报警,取决于 ID732
23=现场总线输入数据(应用 5)
23=开关控制(应用 6)
24=现场总线输入数据 1(应用 6) 总线输入数据(总线固定控制字)给 DO/RO
25=现场总线输入数据 2(应用 6) 总线输入数据(总线固定控制字)给 DO/RO
26=现场总线输入数据 3(应用 6) 总线输入数据(总线固定控制字)给 DO/RO
总线输入数据(总线固定控制字)给 DO/RO
选择模拟输入进行监视.见参数 ID356,ID357,ID358 和 ID463
表 32. 经 DO1 的输出信号
315 输出频率限制监控功能
(2.3.4.1)
0 没有监控
1 下限监控
2 上限监控
3 制动控制
如输出频率低于/高于设定的限制值(ID316),该功能就通过数字输出DO1 或通过由参数
ID312…ID314设定的继电器输出RO1 或RO2 给出报警信息。
316 输出频率限制监控值
(2.3.4.2)
由 ID315 选择频率监控值。参见图 11。
ID316
Example:
f[Hz]
21 RO1
22 RO1
23 RO1
ID315 = 2
21 RO1
22 RO1
23 RO1
图 11. 输出频率监控
t
21 RO1
22 RO1
23 RO1
NX12K19
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

44 • vacon 参数说明
320 AI1 信号范围
应用
选择
0 0…100%
1 20…100%
2 –10…+10V
3
(2.2.2.3)
ASFIFF06
用户自定义
表 33.参数 ID320 选择
关于“用户自定义”选择,参见参数 ID321 和 ID322。
321 AI1 用户设定最小值
322 AI1 用户设定最大值
这些参数为任何输入信号设定模拟输入信号范围为 0—100%。
324 AI1 信号滤波时间
(2.2.2.2)
当参数被设置为大于 0 的值,输入模拟信号中的
干扰将被滤掉。
滤波时间越长,调节响应就越慢。见图 12。
(2.2.2.4)
(2.2.2.5)
%
Unfiltered signal
100%
Filtered signal
63%
325 模拟输入 AI2 信号范围
选择 值
0 0…100%
1 20…100%
2 –10…+10V
3
表 34.参数 ID325 选择
用户自定义
(2.2.3.3)
ID324
图 12. AI1 信号滤波
t [s]
NX12K74
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 45
326 模拟输入 AI2 用户设定最小值
327 模拟输入 AI2 用户设定最大值
这些参数为任何输入信号设置 AI2 范围为 0…100%。
329 模拟输入 AI2(Iin)滤波时间
参见 ID324。
331 电机电位器斜坡时间
(2.2.3.4)
(2.2.3.5)
ID304
ID303
Output
frequency
ID325 = 0
AI2 = 0—100%
ID326
图13.模拟输入 AI2 定标
(2.2.3.2)
(2.2.1.2)
ID325 = Custom
ID325 = 1
AI2 = 20-100%
4 mA
ID327
AI2
(term. 3,4)
20 mA0
NX12K75
定义电机电位器值变化的速度。
346 输出频率限制 2 监控功能
0 没有监控
1 下限监控
2 上限监控
3 制动开控制
4 制动开/关控制(只对应用 6)
如输出频率低于/超过了设定的限制值(ID347),该功能就通过数字输出 DO1、或继电输
出 RO1、或 RO2 给出报警信息,这取决于:
1)参数 ID312 到 ID314 的设置。(应用 3,4,5)或
2)连接到哪个输出监控信号(参数 ID447 和 448)(应用 6,7)。
347 输出频率限制 2 监控值
选择由参数 ID346 监控的频率值。见图 11
(2.3.4.3)
(2.3.4.4)
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

46 • vacon 参数说明
348 转矩限制,监控功能
0 =没有监控
1 =下限监控
2 =上限监控
3 =制动控制
如计算转矩低于或超过了设定的限制(ID349),该功能就通过数字输出 DO1 或根据连接
到输出监控信号(参数 ID451)的继电输出 RO1、或 RO2 给出报警信息。
(2.3.4.5)
349 转矩限制,监控值
在这里设定由参数 ID348 监控的转矩值。
350 参考限制,监控功能
0 =没有监控
1 =下限监控
2 =上限监控
如参考值低于或超过了设定的限制(ID351),该功能就通过数字输出 DO1 或根据连接到
输出监控信号(参数 ID449)的继电器输出 RO1、或 RO2 给出报警信息。
被监控参考值是当前有效的参考值。它可能来自位置 A 或位置 B,取决于 DIN6 输入,如
果面板是当前控制位置,可能来自面板参考值。
(2.3.4.7)
351 参考值限制,监控值
(2.3.4.6)
(2.3.4.8)
这里可以设置参数 ID350 监控的参考值。
354 变频器温度限制监控
0 =没有监控
1 =下限监控
2 =上限监控
如变频器温度低于或超过了设定的限制(ID355),该功能就通过数字输出 DO1 或根据连
接到输出监控信号(参数 ID450)的继电器输出 RO1、或 RO2 给出报警信息。
(2.3.4.11)
355 变频器温度限制值
这里可以设置参数 ID354 监控的参考值。
(2.3.4.12)
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
参数说明 vacon • 47
356 开/关控制信号
用此参数可以选择要监控的模拟输入。
0 =未用
1 = AI1
2 = AI2
3 = AI3
4 = AI4
357 开关控制下限
(2.3.4.14)
358 开关控制上限
这些参数设置参数ID356 选择的信号的高、低限值。见图 图 14。
Analogue input (selected with par. ID356)
ID358
(2.3.4.13)
(2.3.4.15)
ID357
1
RO1
0
In this example the programming of par. ID463 = B.1
图 14. 开/关控制举例
367 电机电位器存储复位(频率参考)
0 无复位
1 停车或断电时存储复位
2 断电时存储复位
375 模拟输出偏移
(2.3.5.7)
加-100.00% 到 100.0% 到模拟输出上。
377 AI1 信号选择
(2.2.2.1)
连接 AI1 信号到用这个参数选择的模拟输入端。在第 5 章可以找到有关 TTF 编程更多的信
息
。
Time
NX12k116
(2.2.1.3)
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

48 • vacon 参数说明
384 Al1 操纵杆滞后
这个参数定义手柄在 0 到 20% 之间滞后。
当操纵杆或者电位器控制从反向变为正向,输出频率线性下降到选择的最小频率(操纵杆
/电位器在中间位置),并且停留在那里,直到操纵杆/电位器变为前向命令。停留时间取
决于该参数定义的值,操纵杆/电位器才开始增加频率至选择的最大频率。
如果这个参数值为 0,操纵杆/电位器在中间位置变为前向命令,频率立即线性增加。当控
制从前向变到反向时,频率以同样的模式变化。如图 15。
Frequency reference
Hz
Reference
scaling max
ID304 = 70Hz
Max freq. ID102
= 50Hz
Min freq. ID101 =
Ref. scaling min
ID303 = 0Hz
Par. ID321
= 20 %
(2.2.2.8)
REVERSE
A
50%
J
oystick hysteresis,
ID384 = 20 %
FORWARD
50%
B
Par. ID322
= 90 %
From reverse to forward
From forward to reverse
Analogue
input (V/mA)
(0-10V/20mA)
NX12k92
图 15. 一个操纵杆延时的例子。在这个例子中,ID385(休眠限制)的值为 0
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 49
Frequency reference
Hz
Reference
scaling max
ID304 = 70Hz
Max freq. ID102
= 50Hz
Min freq. ID101 =
Ref. scaling min
ID303 = 0Hz
ID321
= 20 %
REVERSE
A
50%
J
oystick hysteresis,
ID384 = 20 %
FORWARD
50%
ID322
= 90 %
B
From reverse to forward
From forward to reverse
Analogue
input (V/mA)
(0-10V/20mA)
NX12k95
图 16.最小频率在 35Hz 操纵杆滞环
388 AI2 信号选择
(2.2.3.1)
连接 AI1 信号到用这个参数选择的模拟输入端。在第 5 章可以找到有关 TTF 编程更多的信
息
。
393 AI2 参考值定标,最小值
(2.2.3.6)
394 AI2 参考值定标,最大值
见 ID 303 和 304。
395 AI2 操纵杆滞后
见 ID384。
399 电流限制定标
0 =未用
1 = AI1
2 = AI2
3 =现场总线
这个信号会在 0 到参数 ID107 设置的最大限制值之间调整最大电机电流。
(2.2.3.7)
(2.2.3.8)
(2.2.4.1)
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

50 • vacon 参数说明
403 启动信号 1
起/停逻辑信号选择 1。
默认设置 A.1。
(2.2.5.1)
404 启动信号 2
起/停逻辑信号选择 2。
默认设置 A.2。
405 外部故障(闭合)
闭合触点:显示故障和电机停止。
406 外部故障(断开)
断开触点:故障显示和电机停止。
407 运行使能
闭合触点:启动电机允许。
断开触点:启动电机禁止。
408 加/减速时间选择
(2.2.5.13)
(2.2.5.3)
(2.2.5.2)
(2.2.5.11)
(2.2.5.12)
断开触点:选择加/减速时间 1 。
闭合触点:选择加/减速时间 2。
用 ID103 和 104 设置加/减速时间。
409 从 I/O 端子控制
闭合触点:强制从 I/O 端子控制。
410 从面板控制
触点闭合:强制控制位置为面板。
(2.2.7.18)
(2.2.7.19)
411 从现场总线控制
触点闭合:强制控制位置为现场总线。
注意: 当控制位置被改变时,对应的启/停、方向、参考值有效。ID125 的值(面板控
制)不可改变。当输入打开,控制位置按面板控制参数 ID125 选择。
412 反向
(2.2.5.4)
触点断开:方向正向。
(2.2.7.20)
触点闭合:方向反向。
413 点动速度
触点闭合:点动速度选作频率参考。
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
(2.2.5.16)

参数说明 vacon • 51
见参数 ID124。
缺省设定:A.4。
414 故障复位
触点闭合:所有故障复位。
415 加/减速禁止
触点闭合:禁止加/减速直到触点打开。
(2.2.5.14)
416 直流制动
触点闭合:在停止模式,执行直流制动直到触点打开。
(2.2.5.10)
(2.2.5.15)
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

52 • vacon 参数说明
417 电机电位器下降
触点闭合:电机电位器参考减少直到触点打开。
418 电机电位器上升
触点闭合:电机电位器参考增加直到触点打开。
419 预置速度 1
420 预置速度 2
421 预置速度 3
参数值自动限制在最小和最大频率之间(参数 ID101 和 ID102)。
422 AI1/AI2 选择
用此参数,可以选择 AI1 或 AI2 信号作为频率参考。
432 就绪
变频器准备好运行。
433 运行
变频器运行(电机运行)。
434 故障
(2.2.5.8)
(2.2.5.9)
(2.2.5.5)
(2.2.5.6)
(2.2.5.7)
(2.2.5.17)
(2.3.3.1)
(2.3.3.2)
(2.3.3.3)
出现故障跳闸。
默认设置:A.1。
435 故障倒置
没有出现故障跳闸。
436 报警
通用报警信号。
437 外部故障或报警
故障或报警取决于参数 ID701。
438 参考值故障或报警
故障或报警取决于参数 ID700。
439 过热报警
散热器温度超过 700℃。
(2.3.3.8)
440 反转
(2.3.3.4)
(2.3.3.5)
(2.3.3.6)
(2.3.3.7)
(2.3.3.9)
选择反转命令。
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 53
441 无方向要求
电机旋转方向与要求的旋转方向不同。
442 已达到转速
输出频率已经达到设定值。
443 点动速度
选择了点动速度。
444 外部控制位置
选择从 I/O 端子控制(菜单 M3;参数 ID125)。
445 外部制动控制
当抱闸线圈没有电压时机械抱闸断开的应用中使用。
带编程延时的外部制动断开/闭合控制。
446 外部制动控制,倒置
外部制动断开/闭合控制:输出激活时抱闸制动控制为断开。当抱闸线圈没有电压时机械
抱闸合闸的应用中使用。
447 输出频率限制值 1 监控
(2.3.3.10)
(2.3.3.12)
(2.3.3.13)
(2.3.3.14)
(2.3.3.15)
(2.3.3.11)
(2.3.3.16)
输出频率在设定的监控下限值/上限值范围之外(见参数 ID315 和 ID316)。
448 输出频率限制值 2 监控
输出频率在设定的监控下限值/上限值范围之外(见参数 ID346 和 ID347)。
449 参考值限制监控
当前参考值在设定的监控下限值/上限值范围之外(见参数 ID350 和 ID351)。
450 温度限制监控
变频器散热器温度在设定的监控下限值/上限值范围之外(见参数 ID354 和 ID355)。
451 转矩限制监控
电机转矩在设定的监控限制值范围之外(见参数 ID348 和 ID349)。
452 电机热保护
电机热敏电阻产生一个过温信号,这个温度信号连到数字输出。
注意!如果没有接 Vacon NXOPTA3 或 NXOPTB2(热敏电阻继电器板),那么这个参数不
会起作用。
454 电机调节器激活
(2.3.3.22)
(2.3.3.17)
(2.3.3.18)
(2.3.3.19)
(2.3.3.20)
(2.3.3.21)
过电压或过电流调节器被激活。
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

54 • vacon 参数说明
455 现场总线数据输入 1 (现场总线固定控制字, bit 3)
456 现场总线数据输入 2 (现场总线固定控制字,bit 4)
457 现场总线数据输入 3 (现场总线固定控制字,bit 5)
来自于现场总线的数据(现场总线固定控制字),可以连接到变频器数字输出。
463 模拟输入监控限制
被选择的模拟输入信号超出了设定的监控值范围(见参数 ID372,ID373,ID374)
464 模拟输出 1 信号选择
连接 AO1 信号到用参数选择的模拟输出。有关 TTF 编程更多信息,请参阅第 5 章。
471 模拟输出 2 信号选择
连接 AO2 信号到用参数选择的模拟输出。有关 TTF 编程更多信息,请参阅第 5 章。
472 模拟输出 2 功能
(2.3.5.1)
(2.3.6.1)
(2.3.6.2)
473 模拟输出 2 滤波时间
474 模拟输出 2 倒置
475 模拟输出 2 最小值
476 模拟输出 2 定标
(2.3.3.)
(2.3.6.3)
(2.3.6.4)
(2.3.6.5)
(2.3.6.6)
(2.3.3.23)
(2.3.3.24)
(2.3.3.25)
要了解这 5 个参数的更多信息,请参阅 39 到 41 页的模拟输出 1 相应参数。
477 模拟输出 2 偏移
加-100.0% 至 100.0% 到模拟输出。
478 模拟输出 3,信号选择
参见 ID464。
(2.3.6.7)
(2.3.7.1)
479 模拟输出 3,功能
参见 ID307。
480 模拟输出 3,滤波时间
参见 ID308。
481 模拟输出 3 倒置
参见 ID309。
(2.3.7.2)
(2.3.7.3)
(2.3.7.4)
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 55
482 模拟输出 3 最小值
(2.3.7.5)
参见 ID310。
483 模拟输出 3 定标
(2.3.7.6)
参见 ID311。
484 模拟输出 3 偏移
(2.3.7.7)
参见 ID375。
485 转矩限制
(2.2.4.2)
选择参见参数 ID399 。
486 数字输出 1 信号选择
(2.3.1.1)
将延时的 DO1 信号连接到该参数所选择的数字输出。TTF 编程准则中有详细的描述,参见
第 5 章。
487 数字输出 1 开-延时
(2.3.1.3)
488 数字输出 1 关-延时
用这些参数可以设置数字输出的开和关延时。
(2.3.1.4)
Signal programmed to
digital output
DO1 or DO2 output
ON-delay OFF-delay
图17. 数字输出 1 和 2,开关延时
489 数字输出 2 信号选择
参见 ID486。
490 数字输出 2 功能
参见 ID312。
491 数字输出 2 开-延时
参见 ID487。
492 数字输出 2 关-延时
(2.3.2.1)
(2.3.2.2)
(2.3.2.3)
(2.3.2.4)
NX12k102
参见 ID488。
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

56 • vacon 参数说明
500 加/减速斜坡 1 形状
501 加/减速斜坡 2 形状
(2.4.1)
(2.4.2)
这些参数可设置平滑的加减速。设定值 0 产生线性的斜坡形状,使加减速立即跟随参考信
号改变量变化。设定值 0.1-10 秒,使加减速变为 S 形。加减速时间由参数 ID103/104
(ID502/503)决定。
[Hz]
ID103, ID104
(ID502, ID503)
ID500 (ID501)
ID500 (ID501)
图 18. 加/减速(S-形状)
502 加速时间 2
503 减速时间 2
这些值对应于输出频率从 0 频率加速到最大频率(ID102)所需要的时间。这些参数值使
得在一种应用中可以设置两组加/减速时间。使用哪一组加减速时间可通过可编程信号
DIN3(参数 ID301)进行选择。
也可参见参数
ID1764。
504 制动斩波器
0= 无制动斩波器
1= 运行中使用并检测制动斩波器,也可以在准备好状态下检测
2= 外接制动斩波器(无检测)
3= 在就绪状态和运行状态下使用和检测
4= 运行中使用(无检测)
当变频器使电机减速时,电机和负载的惯量被送入外接制动电阻。若其阻值选择正确,变
频器就能产生等同于加速时的转矩,使电机减速(需要选择适当的制动电阻)。参见单独
的制动电阻安装手册。
[t]
NX12K20
(2.4.3)
(2.4.5)
(2.4.4)
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 57
505 启动功能
斜坡:
0 变频器从 0Hz 开始,在设定的加速时间内加速到设定的参考频率值(负载惯量或
飞车启动:
1 通过对电机施加一个较小的转矩,并搜寻对应电机运行转速的频率值,变频器
506 停车功能
惯性:
0 电机在接到停车指令后按惯性减速至停车,变频器无任何控制。
斜坡:
1 发出停止指令后,电机按设定的减速参数进行减速。
(2.4.6)
启动摩擦可能使加速时间延长)。
可以启动并切入正在运转的电机。搜寻从最大频率开始至实际的频率,直到检
测出正确值。然后,输出频率将按照设定的加/减速时间加速或减速到设定的参
考值。
如果给出启动指令时,电机在惯性运动,则可使用该模式。有了“飞车启动”,
还可以克服短时的电源电压中断。
(2.4.7)
若再生能量较大,可能需要使用外接制动电阻,以加快减速。
正常停车:斜坡/运行许可停车:惯性
2 在停车指令后,电机按设定的减速参数进行减速。然而当运行许可被选择,电
机按惯性停车。
正常停车:惯性/运行许可停车:斜坡
3 电机按惯性停车。然而,当运行许可信号被选择,电机根据设定的减速参数减
速。若再生能量较大,可能需要使用外接制动电阻,以加快减速。
507 直流制动电流
确定直流制动时注入电机的电流。
(2.4.8)
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

58 • vacon 参数说明
508 停车时的直流制动时间
确定电机停车时,制动开启还是关闭,以及直流制动的时间。直流制动的功能取决于停车
功能,参数 ID506。
0 不使用直流制动
>0 使用直流制动,其功能取决于停车功能(参数 ID506),其时间取决于本参数的
取值。
参数 ID506 = 0;停车功能= 惯性:
在发出停车指令后,电机按惯性减速至停车,变频器无任何控制。
通过注入直流,可在不使用外接制动电阻的情况下,使电机以尽可能短的时间停车。
当直流制动开始时,制动时间是根据频率决定的。若频率≥电机额定频率,则参数 ID508
的值决定制动时间;若频率≤额定值的 10%,则制动时间是参数 ID508 设定值的 10%。
f
out
f
n
DC-braking ON
RUN
STOP
Output frequency
Motor speed
t = 1 x Par. ID508
图 19. 当“停车功能=惯性”时的直流制动时间
(2.4.9)
0,1 x f
t
f
out
f
n
Output frequency
n
RUN
STOP
Motor speed
DC-braking ON
t = 0,1 x Par. ID508
t
NX12K21
参数 ID506 = 1;停车功能 = 斜坡:
f
在发出停车指令后,电机转速尽可能快地按设定
out
Motor speed
Output frequency
的减速参数下降到参数 ID515 所定义的值,从这
里开始直流制动。
制动时间由参数 ID508 确定。若存在大惯量,建
par. ID515
DC-braking
议使用外接制动电阻,以加快减速。见图 20。
t = Par. ID508
RUN
STOP
图 20. 当“停车功能=斜坡”时的直流制动时间
t
NX12K23
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
参数说明 vacon • 59
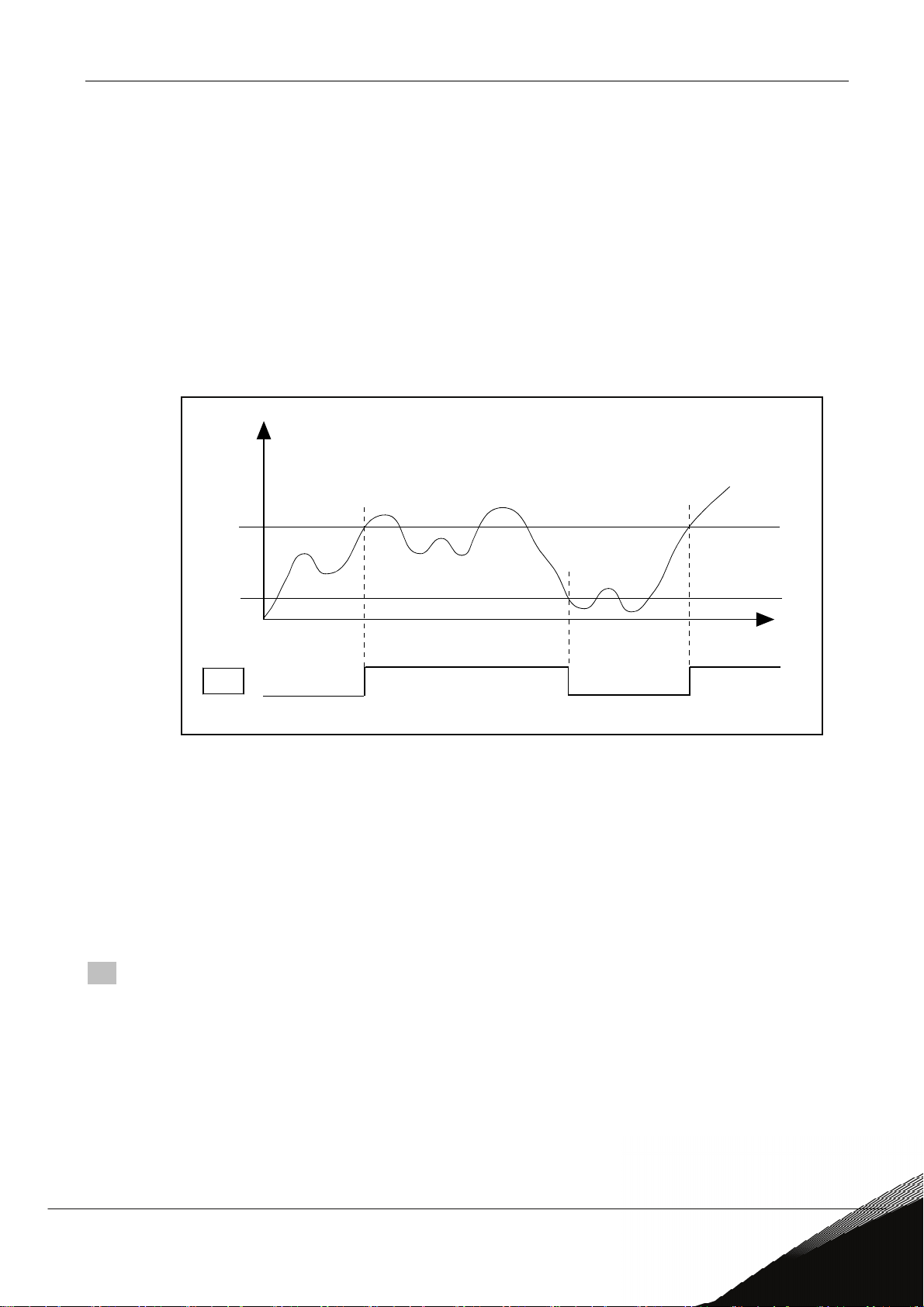
509 禁用频率段 1;下限
(2.5.1)
510 禁用频率段 1;上限
511 禁用频率段 2;下限
512 禁用频率段 2;上限
513 禁用频率段 3;下限
514 禁用频率段 3;上限
在有些系统中,由于机械共振等问题,
可能需要避开某些频率。有了这些参
数,就可以设置一个“跨跳频率”区
域。见图 21。
(2.5.2)
(2.5.3)
(2.5.4)
(2.5.5)
(2.5.6)
Output
frequency [Hz]
ID509 ID510
ID511 ID512
ID513 ID514
Reference [Hz]
NX12K33
515 停车时的直流制动频率
(2.4.10)
直流制动时的输出频率。见图 21。
516 启动时的直流制动时间
(2.4.11)
当发出了启动命令,直流制动就被激活。这个参数定义了制动起作用前的时间。制动起作
用后,输出频率根据由参数 ID505 设定的启动功能增加。
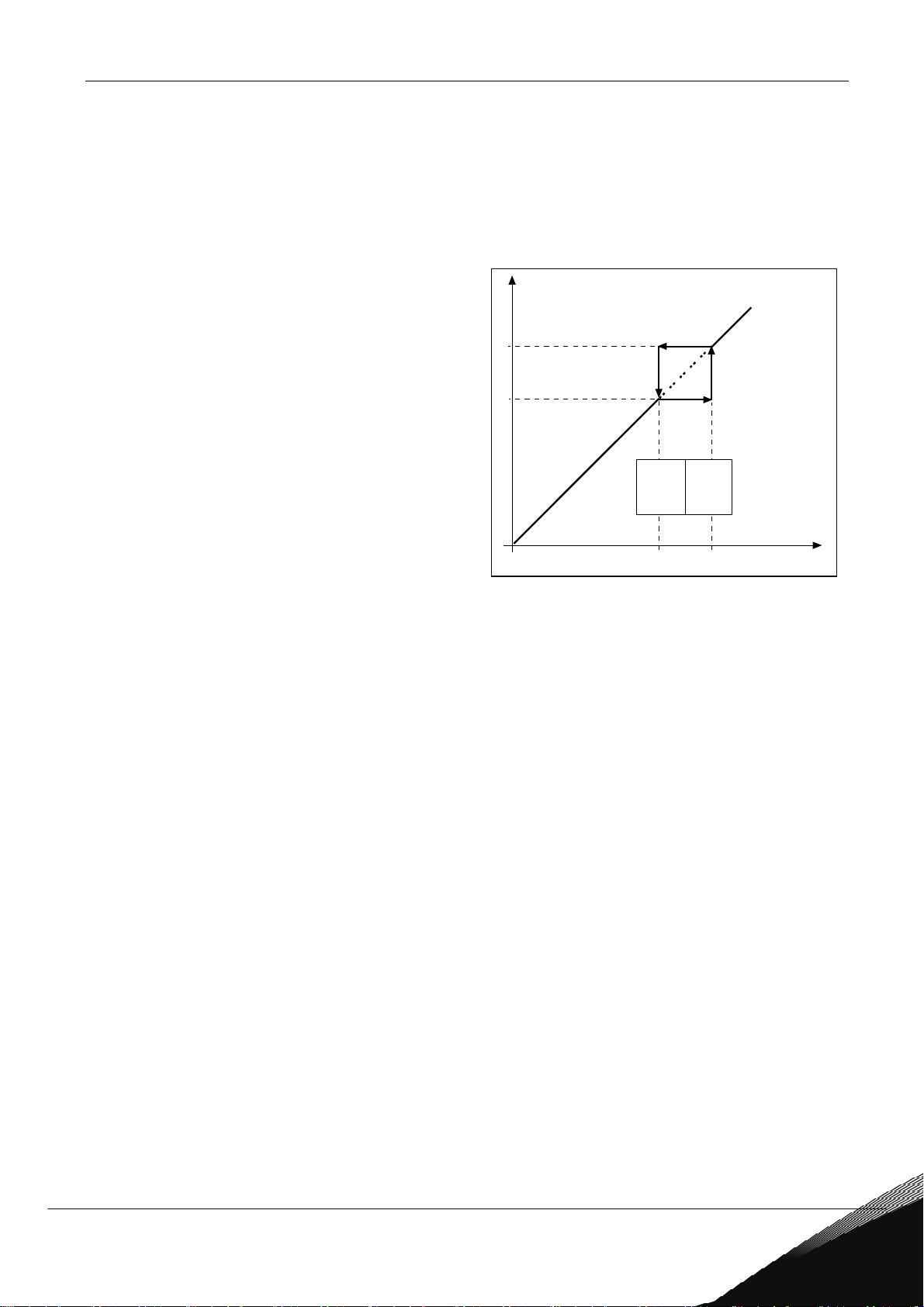
518 在禁用频率段的加/减速斜坡速度定标比率
定义了输出频率在禁用频率范围(参数 ID509 和 ID510)的加/减速时间。斜坡速度(选
择加/减速时间 1 或 2)和这个因数相乘。例如,值为 0.1,使得加速时间比禁用频率范
围外的加速时间快了 10 倍。
图21. 禁用频率区域设置举例
(2.5.3, 2.5.7)
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

60 • vacon 参数说明
fout [Hz]
Par. ID518 = 0,2
Par. ID510
(ID512; ID514)
Par. ID509
(ID511; ID513)
Par. ID518 = 1,2
Time [ s]
NX12k81
图 22. 在禁用频率段的斜坡速度定标
519 磁通制动电流
(2.4.13)
定义磁通制动电流值。此值可以被设置为介于 0.4*IH 和电流限制值之间。
520 磁通制动
(2.4.12)
对于不需要制动电阻的情况,替代直流制动,磁通制动是很有用的制动方式。
当需要制动时,频率被减小,同时,电机磁通增大,这样就加大了电机的制动能力。不同
于直流制动,电机速度在制动过程中始终受控。
磁通制动可以被设定为开或关。
0 =磁通制动关
1 =磁通制动开
注意:磁通制动在电机中将能量转换成热量,需要间歇使用以避免损坏电机。
521 电机控制模式 2
用这个参数可以选择另一个电机控制模式,用哪个模式决定于 ID164。
见 ID600 中的不同选择。
(2.5.12)
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 61
600 电机控制模式
NXS:
0 频率控制: I/O 端子和面板参考作为频率参考,变频器控制输出频率(输
1 速度控制: I/O 端子和面板参考作为速度参考,变频器控制电机速度,补
2 转矩控制 在转矩控制模式,参考值用于控制电机转矩。
3 速度控制(闭环) I/O 端子和面板参考作为速度参考,通过比较从转速计读到的
4 转矩控制(闭环) I/O 端子和面板参考作为转矩参考,变频器控制电机转矩。
5 频率控制(高级开环) 在低速时具有更好的特性的频率控制。
6 速度控制 (高级开环) 在低速时具有更好的特性的速度控制。
601 开关频率
(2.5.9)
采用高开关频率可使电机噪声减到最小。增加开关频率会使变频装置的容量降低。该参数
范围取决于变频器的尺寸。
型号 最小(KHz) 最大(KHz) 缺省(KHz)
0003—0061 NX_5
0003—0061 NX_2
0072—0520 NX_5 1.0 10.0 3.6
0041—0062 NX_6
0144—0208 NX_6
表35. 开关频率取决定于变频器规格
(2.5.1)
出频率分辨率 =0.01 Hz )。
偿电机滑差(精度 ± 0.5%)。
实际速度与速度参考,变频器很准确的控制电机速度 (精度
±0.01%)。
1.0 16,0 10.0
1.0 6.0 1.5
602 弱磁点
(2.5.4)
弱磁点是当输出电压达到设置的最大值(ID603)时的输出频率。
603 弱磁点电压
(2.5.5)
大于弱磁点频率值,输出电压保持仍为设定的最大值。小于弱磁点频率值,输出电压取决
于 U/f 曲线。参见参数 ID109,ID108,ID604,ID605。
当参数 ID110 和 ID111,(额定电压和额定频率)被设置时,参数 ID602 和 603 也自动被
设置为对应值。如果弱磁点和最大输出电压需要设置为其他值,在设置参数 ID110 和 111
之后改变这些参数。
604 U/f 曲线,中间点频率
(2.5.6)
若参数 ID108 选择为可编程 U/F 曲线,则这个参数确定曲线中间点的频率,见图 3。
605 U/f 曲线,中间点电压
(2.5.7)
若参数 ID108 选择为可编程 U/F 曲线,则这个参数确定曲线中间点的电压,见图 3。
606 零频率时的输出电压
(2.5.8)
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

62 • vacon 参数说明
若参数 ID108 选择为可编程 U/F 曲线,则这个参数用来确定曲线 0 频率时的电压,见图
3。
607 过电压控制器
这些参数可使过/欠电压控制器关闭。这可用于如下场合,例如,电源电压变化超出了15%—+10%的范围,应用程序将不容许这样的过/欠电压。在这种情况下,调节器将考虑
电源波动的情况控制输出频率。
0 控制器关
1 控制器开(无斜坡)=对开环频率进行较小的调整
2 控制器开(有斜坡)=调节输出频率最大到最大频率。
608 欠电压控制器
参见参数 ID607。
注意: 当控制器关闭时,可能产生过/欠电压故障动作。
0 控制器开关断开
1 控制器开关闭合
609 转矩限制
(2.5.10)
(2.5.11)
(2.8.1)
该参数可以在 0.0 – 400.0 %之间设置转矩限制。
610 转矩限制控制 P 增益
此参数定义转矩限制控制器增益。只应用于开环控制模式中。
(2.8.2)
611 转矩限制控制 I 增益
此参数定义转矩限制控制器 I 积分增益。只应用于开环控制模式中。
612 CL: 励磁电流
电机励磁电流(空载电流),见 9.1 节。
(2.5.18.1)
613 CL: 速度控制 P 增益
设速度控制器的增益,以%每 Hz 表示,见 9.1 节。
614 CL: 速度控制 I 时间
为速度控制器设置积分时间常数。增加积分时间常数增加稳定性,但是延长响应时间。见
9.1 节
615 CL: 启动时的 0 速度时间
(2.8.3)
(2.5.18.2)
(2.5.18.3)
(2.5.18.9)
在给定启动命令后,变频器将在此参数设定的时间内保持 0 速。斜坡也将在这个时间之后开
始跟随设定的频率/速度参考。见 9.1 节
616 CL: 停止时的 0 速时间
当停止命令给出,在达到 0 速后,控制器有效,变频器仍然保持 0 速的时间。如果选择停
车功能(ID506)为
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
惯性
(2.5.18.10)
,这个参数无效,见 9.1 节。

参数说明 vacon • 63
617 CL: 电流控制 P 增益
设置电流控制器的增益。只在闭环和高级开环时该控制器有效。控制器为调制器产生电压
矢量参考。见 9.1 节。
618 CL: 编码器滤波时间
为速度测量设置滤波时间常数。
这个参数可以用于消除编码器信号的噪声,太高的滤波时间降低速度的稳定性,见 9.1
节。
619 CL: 转差调节
电机铭牌速度用于计算额定转差。该值用于调节带载时的电机电压。铭牌速度有时会有些
不准确,这个值用于修正转差。当电机带载时,减少转差调节值会增加电机电压。见 9.1
节。
620 负载下垂 drooping
此功能允许速度与负载成一定关系下降。这个参数的设置值对应电机的额定转矩。
621 CL: 启动转矩
(2.6.18.11)
(2.5.18.15)
(2.5.18.14)
(2.5.18.6)
(2.5.15)
选择启动转矩。
转矩存储用于起重机应用。启动转矩正/反可以用于其它应用中,方便速度控制。见 9.1
节。
0 =不用
1 =转矩存储
2 =转矩参考
3 =转矩正/反
626 CL: 加速补偿
在加速和减速时,设定惯性补偿来增加速度响应。这个时间定义为,在额定转矩下,达到
额定速度所需的加速时间。这个参数在高级开环模式中同样有效。
627 CL: 在启动时的励磁电流
(2.6.18.7)
628 CL: 在启动时的励磁时间
设置励磁电流的上升时间。
631 识别
参数识别运行是微调电机和变频器特定参数的一部分。它是现场调试和服务时的工具,旨
在为众多变频器找到尽可能好的参数值。自动电机参数识别功能计算或测量电机参数,这
些参数需要在最优电机和速度控制中使用。
(2.5.16)
(2.6.18.5)
(2.6.18.8)
0 =无动作
不需要识别。
1 =电机不运行中识别
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

64 • vacon 参数说明
变频器 0 速运行时识别电机参数。电机只有输入电流和电压,但是频率为 0。
2 =运行中识别
变频器有速度运行时识别电机参数。
注意:为了得到最佳结果,建议参数识别时电机不带载。
在设置参数识别前,必须正确设定电机铭牌数据:
ID110 电机额定电压(参数 2.1.6)
ID111 电机额定频率 (参数 2.1.7)
ID112 电机额定速度(参数 2.1.8)
ID113 电机额定电流(参数 2.1.9)
ID120 电机功率因数(参数 2.1.10)
在装有编码器的闭环应用中,还要设置脉冲/转数(在菜单 M7)。
通过设定该参数为适当值,接着,发出要求电机方向的启动命令,自动参数识别功能有
效。变频器的启动命令必须在 20 秒内给出。如果 20 秒内没有给出启动命令,参数识别运
行将被取消,参数复位至默认设置。
任何时间用停止命令可停止识别运行,参数会恢复至初始值,一旦在识别运行时,检测出
故障或其它问题,如果可能的话,识别运行完成。识别运行完成后,应用程序检查参数识
别的状态,并产生故障/警告信号。
参数识别时,抱闸控制无效。
3 =编码器识别运行
当使用 PMS 电机和绝对值编码器时,进行角度识别。
4 = 无动作
5 = 识别失败
633 CL: 启动转矩,正向
如果用参数 ID621 选择,设定启动转矩方向为正向。
634 CL: 启动转矩,反向
如果用参数 ID621 选择,设定启动转矩方向为反向。
636 开环转矩控制的最小频率
(2.5.18.12)
(2.5.18.13)
(2.8.8)
定义频率限制,低于这个频率,变频器运行在
因为使用电机的频定转差,在低速情况下,内部转矩计算不精确,建议使用频率控制方
式。
637 速度控制 P 增益,开环
定义开环控制方式中速度控制的 P 增益。
638 速度控制 I 增益,开环
定义在开环控制方式中速度控制的 I 增益。
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com
频率控制方式
(2.5.13)
(2.5.14)
。

参数说明 vacon • 65
639 转矩控制 P 增益
定义转矩控制器 P 增益。
640 转矩控制 I 增益 (
定义转矩控制器 I 增益。
(2.8.9)
2.8.10)
641 转矩参考选择
定义转矩参考源。
0 不用
1 模拟输入 1
2 模拟输入 2
3 模拟输入 3
4 模拟输入 4
5 模拟输入 1(操纵杆控制)
6 模拟输入 2(操纵杆控制)
7 来自面板参考,参数 R3.5
8 现场总线
642 转矩参考定标,最大值
(2.8.4)
(2.8.5)
643 转矩参考定标,最小值
在-300%和 300%之内,定标模拟输入最小和最大值。
644 转矩速度限制
用此参数选择转矩控制的最大频率。
0 最大频率,参数
1 选择频率参考
2 预置速度 7,参数
649
PMS
电机轴位置
(2.8.7)
ID102
ID130
(2.5.19.4)
(2.8.6)
辨识轴位置,使用绝对编码器时,编码器自辨识运行时更新。
650 电机类型
用参数选择当前电机类型,变频器必须在停车状态下编辑。
0 感应电机
1 永磁同步电机(“交流无刷”)控制
651 磁通电流 Kp
当使用 PMSM 电机时,为磁通电流控制器定义增益。
652 磁通电流 Ti
当使用 PMSM 电机时,为磁通电流控制器定义积分时间。
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
(2.5.19.1)
(2.5.19.2)
(2.5.19.3)
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

66 • vacon 参数说明
654 激活
Rs
辨识
用此参数可以取消在 DC 制动启动时的 Rs 辨识。
(2.5.19.5)
655 调制度限制
用 PMSM 电机时定义在弱磁区域的电压量值。
662 Rs 压降
电机额定电流时,在两相间的定子阻抗测量压降。
(2.5.17)
700 4mA 参考值故障时的响应
0=没有响应。
1=报警。
2=报警,10 秒以前的频率设置为参考值。
3=报警,预设置的频率(参数 ID728)作为参考值。
4=故障,故障后根据参数 ID506 停车
5=故障,故障后始终按惯性方式停车
若使用 4-20mA 参考信号,且信号降至 3.5mA 以下并维持 5 秒,或者低于 0.5mA 维持 0.5
秒,就会产生一个报警或故障动作和信息。信息可以被设置到数字输出 DO1,或继电器输
出 RO1 和 RO2。
701 对外部故障响应
(2.5.19.6)
(2.6.3)
(2.6.1)
0=没有响应
1=报警
2=故障,故障后根据参数 ID506 停车
3=故障,故障后始终按惯性方式停车
在可编程数字输入 DIN3 的外部故障信号中,会产生一个报警或故障动作和消息。信息可
以被设置到数字输出 DO1,或继电输出 RO1 和 RO2。
702 输出相监控
0=没有响应
1=报警
2=故障,故障后根据参数 ID506 停车
3=故障,故障后始终按惯性方式停车
电机输出相监控确保电机相电流大致相等。
(2.6.6)
703 接地故障保护
0=没有响应
1=报警
(2.6.7)
2=故障,故障后根据参数 ID506 停车
3=故障,故障后始终按惯性方式停车
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 67
接地故障保护确保电机相电流之和为零。过电流保护始终在工作,并保护变频器免受大电
流接地故障的危害。
704 电机热保护
(2.6.8)
如果选择跳闸,变频器将停车并激活故障。
0=没有响应
1=报警
2=故障,故障后根据参数 ID506 停车
3=故障,故障后始终按惯性方式停车
解除保护,例如设定参数为 0,会复位电机热状态到 0%。见 9.2 节。
705 电机热保护:电机环境温度因数
(2.6.9)
这个参数可以设定在-100% --100%之间。见 9.2 节。
706 电机热保护:0 速时电机冷却因子
(2.6.10)
电流可以设置在 0-150%×I
。此参数设置 0 频率时的热电流,见图 23。
nMotor
默认值被设置假设了没有外部风扇冷却电机。如果使用冷却风扇,那么参数值可以被设置
为 90%(或更高)。
注意:这个值作为电机铭牌数据的百分比,参数 ID113(电机额定电流),不是变频器的
额定输出电流。电机的额定电流是电机不过热能够承受的电流。
如果改变电机的额定电流参数值,本参数自动改变为默认值。
设置这个参数不会影响变频器的最大输出电流,它只由 ID107 决定。见 9.2 章。
P
cooling
100%
Par.
ID706=40%
0
Overload area
NX12k62
I
T
f
f
n
图 23. 电机热电流 IT曲线
707 电机热保护:时间常数
(2.6.11)
该时间可在 1-200 分钟范围内设置。
这是电机的热时间常数。电机越大,则时间常数也越大。时间常数是计算的热量级达到其
最终值的 63%所需要的时间。
电机的热时间常数与电机设计有关,电机生产厂家不同,其值也不同。
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

68 • vacon 参数说明
若已知电机的 t6 时间(t6 是电机在 6 倍额定电流下能安全运行的时间,由厂家提供),
则时间常数可根据 t6 时间进行设置。按经验公式,电机的热时间常数等于 2×t6。如果变
频器处于停车状态,则时间常数会在内部增大至三倍设定参数值。停车状态下的冷却靠对
流,因而时间常数会增加。见图 24。
708 电机热保护:电机负载占空比
(2.6.12)
定义使用电机额定负载的百分比,值可以被设置为 0%…100%。见 9.2.章。
Motor temperature
Trip area
105%
Motor
current
I/I
T
图 24. 电机温度计算
709 电机失速保护
0=没有响应
1=报警
2=故障,故障后根据参数 ID506 停车
3=故障,故障后始终按惯性方式停车
将参数设置为 0,就会退出失速保护,并使失速时间计数器复位。见
710 失速电流限制
Time constant T
Motor temperature
*) Changes by motor size and
adjusted with parameter ID707
Θ
= (I/I
(2.6.13)
(2.6.14)
*)
)2 x (1-e
T
Fault/warning
par. ID704
-t/T
)
Time
NX12k82
9.3章。
电流可设置在 0.1…I
*2 范围内。失速发生
nMotor
时,电流必定超过这个限制值。见图
图 25。
I
软件不能允许值超过。如果参数ID113(电机
额定电流)改变,这个参数自动恢复为缺省
值(I
)。见 9.3 章。
L
Stall area
Par. ID710
f
Par. ID712
NX12k63
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 69
图 25. 失速特征设置
711 失速时间
(2.6.15)
该时间可设置在 1.0 到 120s 范围内。
这是失速状态允许持续的最大时间。变频
器内部有一个升/降型计数器计算失速时
间。
一旦计数器值超过了该极限值,就会引起
跳闸(见参数 ID709 )。见 9.3 节。
712 失速频率限制
该频率可设置为 1 至 f
max
失速产生时,输出频率必须保持在该限制值以下。见 9.3 节。
717 自动重新启动:等待时间
图26. 失速时间的计数
(2.6.16)
之间(参数 ID102)。
(2.8.1)
Par. ID711
Stall
No stall
Stall time counter
Trip area
Trip/warning
par. ID709
Tim e
NX12k64
定义了故障消失后,变频器尝试自动重启动前的时间。
718 自动重新启动:尝试时间
当参数 ID720 到 ID725 选择的故障消失后,并且过了等待时间,自动重新启动功能使变频
器重新启动。
Fault trigger
Motor stop signal
Motor start signal
Supervision
Fault active
RESET/
Fault reset
(2.8.2)
Wait time
Par.ID717
Restart 1 Restart 2
Wait time
Par.ID717
Trial time
Par. ID718
Autoreset function: (Trials = 2)
Wait time
Par.ID717
NX12k67
图 27. 两次自动重启动的例子
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

70 • vacon 参数说明
参数 ID720 到 ID725 决定在参数 ID718 设置的尝试时间里进行自动重新启动的最多次数。
计数时间从第一次自动重新启动开始。若重新启动的次数在尝试时间内超过参数 ID720 至
ID725 的值,则激活故障状态。否则,超过尝试时间后故障清除,下一次故障时又开始计
数。
如果在尝试时间内仍有一个故障,则故障状态为真。
719 自动重新启动:启动功能
选择自动重启动功能。该参数确定启动模式:
0=以斜坡方式启动
1=飞起
2=根据参数 ID505 启动
720 自动重启动:欠电压故障跳闸后的尝试次数
定义欠电压跳闸后,在参数 ID718 设定的尝试时间内可进行的自动重启动次数。
0 = 没有自动重启动
>0 = 欠电压故障跳闸后自动重启动次数。在直流环节电压回到额定水平
后,故障复位,变频器自动重启动。
721 自动重启动:过电压跳闸后的尝试次数
(2.8.3)
(2.8.4)
(2.8.5)
定义过电压跳闸后,在参数 ID718 设定的尝试时间内可进行的自动重启动次数。
0 = 过电压故障跳闸后没有自动重启动
>0 = 过电压故障跳闸后自动重启动次数。在直流环节电压回到额定水平
后,故障复位,变频器自动重启动。
722 自动重启动:过电流跳闸后的尝试次数
(注意!也包括 IGBT 温度故障)
参数定义过流跳闸后,参数 ID718 设定的尝试时间内可以进行的自动重启动次数。
0 = 过电流故障跳闸后没有自动重启动
>0 = 过电流故障跳闸,饱和跳闸以及 IGBT 温度故障后自动重启动次数。
723 自动重启动:参考值跳闸后的尝试次数
定义了参数 ID718 设定的尝试时间内可以进行的自动重启动次数。
0 = 参考值故障跳闸后没有自动重启动
>0 = 模拟电流信号(4..20mA)恢复到正常水平(≥4mA)后的自动重启
动次数。
725 自动重启动:外部故障跳闸后的尝试次数
(2.8.6)
(2.8.7)
(2.8.9)
定义在参数 ID718 设定的尝试时间内可进行的自动重启动次数。
0 = 外部故障跳闸后没有自动重启动。
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 71
>0 = 外部故障跳闸后自动重启动次数。
726 自动重启动:电机温度故障跳闸后的尝试次数
此参数定义在参数 ID718 设定的尝试时间内可进行的自动重启动次数。
0 = 电机温度故障跳闸后没有自动重启动。
>0 = 电机温度恢复到正常水平后自动重启动次数。
727 欠电压故障响应
0=故障储存于故障历史
1=故障没有储存于故障历史
在产品用户手册中可以得到欠电压限制。
728 4mA 故障:预设频率参考
如果参数 ID700 的值被设定为 3,并且,出现 4mA 故障,则电机频率参考值等于这个参
数。
730 输入相监控
(2.6.5)
(2.6.2)
(2.6.4)
(2.8.8)
0=没有响应
1=报警
2=故障,故障后根据参数 ID506 停车
3=故障,故障后始终按惯性方式停车
输入相监控确保变频器的输入相电流大致相等。
731 自动重新启动 1
该参数确定是否使用自动重启动。
0=禁止
1=允许
此功能复位以下故障(最多 3 次)(见 VACON NX 手册 第 9 节):
y 过电流(F1)
y 过电压(F2)
y 欠电压(F9)
y 变频器过热(F14)
y 电机过热 (F16)
(2.20)
y 参考故障(F50)
732 对热电阻故障的反应
0= 没有响应
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com
(2.6.17)

72 • vacon 参数说明
1= 报警
2= 故障,故障后根据参数 ID506 停车
3= 故障,故障后始终按惯性方式停车
设本参数为 0 将屏蔽此功能。
733 现场总线故障响应
如果使用了现场总线板,在这里设置对现场总线故障的响应模式。在各现场总线板手册
中,可以得到更多的信息。
见参数 ID732。
734 插槽故障响应
设置由于扩展板丢失或损坏造成板槽故障的响应模式。
见参数
ID732。
(2.6.19)
738 自动重启动:欠电压故障跳闸后的尝试次数
(2.6.18)
(2.8.10)
定义欠电压跳闸后,在参数 ID718 设定的尝试时间内可进行的自动重启动次数。
0 = 在欠电压故障跳闸后没有自动重启动
>0 = 在欠电压故障跳闸后自动重启动次数。
739 使用的 PT100 输入个数
如果变频器装有 PT100 输入选件卡,可以选择所使用的 PT100 输入个数。也可参见
Vacon I/O 选件板手册。
注意:如果设置的值比实际使用的 PT100 输入值大,将显示 200
示 - 30
O
C。
(2.7.24)
740 PT100 的故障响应
0=无响应
1= 警告
2= 故障,故障后根据参数 ID506 停车
3= 故障,故障后始终按惯性方式停车
741 PT100 报警极限
设置限制值,超过这个值,PT100 报警。
742 PT100 故障极限
(2.7.26)
(2.7.27)
(2.7.25)
O
C。如果输入短路,将显
设置限制值,超过这个值,PT100 故障(F56)。
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

0
0
0
0
0
0
0
0
参数说明 vacon • 73
I
I
I
I
I
I
I
I
850 现场总线参考最小定标
5
5
5
5
5
5
(2.9.1)
851 现场总线参考最大定标
使用这 2 个参数去定标现场总线参考信号。
设定值限制:
D
D
D
D
0
0
0
0
0
0
0
用最小和最大频率定标。参照图 7。也可参见 9.4 节。
注意:使用自定义定标功能也影响实际值的定标。
0
I
D
8
5
0
ID851ID102≤≤≤,如果参数 ID851=0,则不使用自定义定标,而使
852 to
859 现场总线输出选择 1 到 8
用这个参数,可以从现场总线监控任何监控值和参数。输入想要监控的参数值的 ID 号。
参见轴同步 ID1740 的其它描述。
852 现场总线数据输出选择 1
输出变量选择器被映射到过程数据 1 输出通道。选择在表 4 中列出的变量的 ID 值。变量
分配只能选择通道 1。
0
0
注: 为避免通道分配冲突,使用ID852 和 ID853,使用双通道传送时参数
为 0.
853 现场总线数据输出选择 2
(2.7.2)
(2.7.1 到 2.7.8)
(2.7.1)
(2.9.2)
ID1740必须设置
输出变量选择器被映射到过程数据 2 输出通道。选择方式同 ID852。
注: 为避免通道分配冲突,使用ID852 和 ID853,使用双通道传送时参数
为 0.
854 现场总线数据输出选择 3
输出变量选择器被映射到过程数据 3 输出通道。选择方式同 ID852。
855 现场总线数据输出选择 4
输出变量选择器被映射到过程数据 4 输出通道。选择方式同 ID852。
856 现场总线数据输出选择 5
输出变量选择器被映射到过程数据 5 输出通道。选择方式同 ID852。
857 现场总线数据输出选择 6
输出变量选择器被映射到过程数据 6 输出通道。选择方式同 ID852。
858 现场总线数据输出选择 7
输出变量选择器被映射到过程数据 7 输出通道。选择方式同 ID852。
859 现场总线数据输出选择 8
ID1740必须设置
(2.7.3)
(2.7.4)
(2.7.5)
(2.7.6)
(2.7.7)
(2.7.8)
输出变量选择器被映射到过程数据 8 输出通道。选择方式同 ID852。
一些典型值:
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
I
I
I
8
8
8
8
8
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

74 • vacon 参数说明
1
输出频率
2
电机转速
3
电机电流
4
电机转矩
5
电机功率
6
电机电压
7
直流环节电压
8
变频器温度
9
电机温度
13
AI1 37
14
AI2 45
15
16
17
25
26
27 AI3
28 AI4
31
32
数字输入 1,2,3 状态
数字输入 4,5,6 状态
数字输出和继电器输出状态
频率参考值
模拟输出电流
AO1(扩展板)
AO2(扩展板)
当前故障 1
电机电流(基于变频器型号)具有一位
小数点
表 36.
应用的特殊变量
要求分配的通道
号#
2 1702
1 1703
2 1700
1 1701
1 45
高动态诊断变量
要求分配的通道
号#
1 37
1 1113
1 1125
1 44
1 43
监控变量
1 1
1 25
1 2
1 3
1 4
1 5
1 6
1 7
1 8
1 9
1 13
ID
ID
变量 分辨率
高分辨率位置误差 65536 转 = 1 工程单位
轴同步状态寄存器
实际电子齿轮比率 1 转 = 1/2
位置误差 1 工程单位 [u]
电机电流,固定分辨率
变量 分辨率
最后激活的故障码
未滤波电机电流 同监控变量,基于变
未滤波电机转矩 0.1% 的电机额定转矩
未滤波 DC 电压
电机控制状态字
输出频率
频率参考
电机速度
已经滤波的电机电流 基于变频器型号
已经滤波的电机转矩 0.1%的电机额定转矩
电机功率 0.1% 电机的额定功率
电机电压
DC 母线电压
单元温度
电机温度 额定温度的 1 %
模拟输入 1 1 转 = 范围的
[u]
65536 转 = 单位比率
0.1 A
频器型号
1 V
0.01 Hz
0.01 Hz
1 rpm
0.1 V
1 V
1 ° C
16
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 75
1/10000 ,转换为分辨
率 10 位
1 14
1 15 DIN1*20+DIN2*21+DIN3*22
1 16 DIN4*20+DIN5*21+DIN6*22
1 26
1 18
表 37. 用于过程数据输出的输出变量
模拟输入 2 1 转 = 范围的
1/10000 ,转换为分辨
率 10 位
模拟输出 满刻度为 2000 转
转矩参考
0.1 %
1401 停车状态磁通
(P2.5.18.19)
变频器停机后电机保持的磁通与额定磁通的百分比。保持的时间由参数 ID1402 设定。此
参数仅可以在闭环控制模式下使用。
1402 磁通断开延时
(P2.5.18.20)
此参数定义了变频器停机后 ID1401 保持在电机的时间。此功能用来缩短达到全转矩前的
时间。
0 停机后无磁通
>0 磁通以秒延时关闭
<0 停机后磁通保持在电机内,直到下一个启动命令发出。
注: 当使用大电机具有相对长的励磁时间并且电机频繁启动时,使用停机状态励磁有益
处。电机已经准备好励磁并且准备好启动。
1515 功率单元序列号许可钥匙
功率单元序列号许可钥匙的监控值。
此应用软件(轴同步模式)是根据软件安装的变频器的功率单元序列号中的许可钥匙来保
护的。
单元只工作在多目标模式,除非通过参数 P2.10.1 安装了正确的软件许可(在试用时间内
没有许可钥匙轴同步模式可以运行 2 星期)。
根据用户的许可协议请向 Vacon 代理商申请正确的许可钥匙。需要如下数据说明来获得许
可钥匙:
(V2.10.2)
− 变频器序列号,和在更换了管理单元和功率卡后重新启动单元的情况。
− 参数值
PowerUnitSerNoKey
在同一个菜单下读取 ID1694 的值。
在参数 P2.10.1 中输入许可钥匙,单元就能够准备使用轴同步模式。设定正确的许可钥匙
后,参数 P2.10.1 中能自动锁存在防止此值意外损坏的状态。当使用计算机工具 NCDrive
下载参数设置时,在此参数上可能写一个错误的值。这不影响参数组的下载 操作。
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

76 • vacon 参数说明
机械抱闸控制参数
1535 开闸频率限制,开环
在开环控制中的抱闸开闸频率限制。
在开闸之前频率参考也被此值限制。
1539 合闸频率限制
抱闸合闸使能的频率限制。
当给出停机命令并且频率斜坡下降到此限制值时抱闸合闸延时
1541 抱闸合闸延时
由参数 ID1539设置的合闸频率限制达到后的延时时间。此参数一般设置为 0,00 s。
1544 抱闸响应时间
此参数设置机械抱闸的物理响应时间。
给出抱闸开闸命令后经过此时间参考频率才送出。
注:此参数不影响数字输入编程为开闸应答信号,参见参数
1550 使用机械抱闸
当在系统中使用机械抱闸时设置此参数为 1。
则频率参考将被参数 ID1535/ID1553 限制,直到抱闸开闸。
1551 开闸电流限制
(2.3.8.7)
(2.3.8.8)
(2.3.8.6)
(2.3.8.1)
(2.3.8.2)
(2.3.8.3)
ID1541开始计时。
P2.2.5.24.
电机电流必须超过此限制,抱闸才能开闸。
1553 开闸频率限制,闭环
闭环控制的开闸频率限制。
频率参考也被此值限制直到抱闸开闸。
此参数一般设置成 0。
1554 抱闸开闸延时
开闸条件全部满足后抱闸开闸的延时时间 (电流和频率限制)。
开闸也要求闭环内部变量转子磁通准备好。
经过此延时时间机械抱闸命令开闸。
1555 KpF1 速度阈值
转换到正常速度调节器增益的频率阈值,参见图 28。
1556 KpF0 速度阈值
转换到低速度调节器增益的频率阈值,参见图 28。
(2.3.8.4)
(2.3.8.5)
(2.5.18.16)
(2.5.18.17)
1557 %Kp 速度调节器 @ F0
(2.5.18.18)
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 77
在低速时的速度调节器增益,为额定增益的百分比 (P2.5.17.2 速度控制 Kp, ID 613)。参见
图 1。 当使用增量编码器或者旋转变压器时,为了避免振动在低速/静止状态下减小增
益。当频率低于某值决定于编码器脉冲数/转,最终增益应该低于 20。表 38 给出一些推荐
数字。
编码器脉冲/转 电机极数 临界速度 推荐值 KpF0 推荐值 KpF1
256 或者具有 10 位转换的旋转
变压器
1024 或者具有 12 位转换的旋
转变压器
1024 2 15 rpm 0.25 Hz 0.5 Hz
4096 4 4 rpm 0.13 Hz 0.25 Hz
表 38.实例数据的推荐增益表参数
4 60 rpm 2 Hz 4 Hz
4 15 rpm 0.5 Hz 1 Hz
Gain -%
W SpeedControl_Kp_f0
W SpeedControl_f0
W SpeedControl_f1
图 28. 低速速度调节器增益表
1602 抱闸开闸应答
使用此输入端子,当此输入端子变为高电平时频率参考送出。如果此参数没有使用,参数
P2.3.8.6 给出的抱闸机械延时用于送出参考。
1680 转矩参考选择
(2.7.12)
把转矩参考映射到过程数据输入通道的选择器。与 ID1742中的值相同。
1681 自由信号选择
(2.7.13)
100%
f
(2.2.5.24)
映射“自由模拟输入”到过程数据通道的映射选择器。“自由模拟输入”的使用由参数
ID399 和 ID485定义。与 ID1742中的值相同。
1694 许可钥匙
(2.10.1)
当两星期的试用时间结束后,需要正确的许可钥匙使能轴同步模式。
试用时间过后没有正确的许可钥匙只能运行在多目标功能。
注:如果错误的许可设置了三次或更多次,变频器必须重新上电。
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

78 • vacon 参数说明
1710 轴同步使能
数字输入选择格式。
选择轴同步模式使能的信号源。
如果轴同步模式必须长久使能,设置值“DigIn:0.2”
在无效模式,使用多目标命令。
如果使用总线控制,轴同步使能信号来自于总线控制字(由参数 P2.7.11选择)。参见表
39。
1711 同步模式位 0
同步控制模式的位 0 的数字输入选择器。参见表 39。
1712 同步模式位 1
同步控制模式的位 1 的数字输入选择器。参见表 39。
同步模式位 1 同步模式位 0 功能
0 0
0 1
1 0
1 1
表 39.同步模式命令位
(2.2.5.19)
(2.2.5.20)
(2.2.5.21)
释放同步模式
锁定同步模式
使用从参考位置选择的参考速
度。
冻结从机速度。只有在同步锁
定主机速度时才可能。
1713 同步调整 +
选择数字输入端子用于调整 + 命令。
由参数 P2.9.2.11 定义的调整变化率的百分比作为暂时的变化率。增加从机速度。
1714 同步调整 -
选择数字输入端子用于调整 - 命令。
由参数 P2.9.2.11 定义的调整变化率的百分比作为暂时的变化率。减小从机速度。
(2.2.5.23)
1716 选择正相位
选择数字输入端子用于正相位命令。在总线控制的总线控制字位 3 由参数 P2.7.11 选择
(缺省值过程数据输入 1)用于正相位命令。相位距离由参数 P2.9.3 以用户单位(u)设置。
1717 选择负相位
选择数字输入端子用于负相位命令。同参数 ID 1716 但在负方向上。在总线控制的总线控
制字位 4 由参数 P2.7.11 选择(缺省值过程数据输入 1)用于负相位命令。
1720 同步锁定
为“同步锁定”信号选择数字或者继电器输出。此监控信号指示从机已经取得与主机参考
的空间同步(参见图 3)。
(2.2.5.22)
(2.3.3.28)
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 79
1721 变化率
(2.3.3.29)
为“变化率”信号选择数字或者继电器输出。此监控信号指示从机同步主机的速度变化的
比率。在新的变化率值被设定后(从参数或者总线),控制保持原斜坡变化直到新值。
1722 外部抱闸开闸
(2.3.3.30)
选择数字输出指示机械抱闸完全开闸。当从机已经准备好运行时,此输出可以连接到其它
变频器(主机)用于送出参考。
1730 位置误差 F R
(2.6.20)
对位置误差故障的响应。
0= 无动作
1= 报警
2= 故障,基于参数 P2.4.7 停机功能停机。
3= 故障,自由停机。
1731 位置故障阈值
(2.6.21)
用于位置误差故障监控的位置阈值。
65536 转 = 1 工程空间单位 [u].
缺省值是 3932160 = 60 [u]. 范围是 0~ 2
从机的实际位置用对称误差带 +/- P2.6.21 参考位置监控。
1732 功率单元温度传感器监控
31
-1.
功率单元温度监控可以置为无效通过设置此参数为 1。
1733 编码器监控
编码器故障的软件监控模式。
0= 使能
1= 无效
如果电缆断开,编码器故障监控是基于硬件检测丢失单一信号外加软件监控。静止时如果
驱动器运行达到电流限制,软件检测可能导致有害的触发。对于当要求此行为的特殊情
况,可取消软件监控功能。
1734 锁定响应
对锁定误差故障的响应。只用于闭环控制
0= 无响应
1= 报警
2= 故障,基于参数 P2.4.7 停车功能停车。
3= 故障,自由停车
1735 锁定频率差
(2.6.23)
(2.6.24)
(2.6.25)
输出频率和编码器反馈频率之间允许的最大差值。如果频率差值超过此参数值就开始计
时,由参数
ID1736给出锁定故障延时时间。
1736 锁定故障延迟
(2.6.26)
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

80 • vacon 参数说明
如果在此时间内频率差高于 ID1735就触发锁定故障。
1740 FB 数据输出 1 和 2 选择
映射到过程数据输出通道 1 和 2 的输出变量选择器。两个字的数据传送保证了在时间上的
连续。在
注:为避免分配通道冲突,当使用双通道传送 32 位变量时,参数 ID852 和 ID853 必须设置
为 0。
表 37列出了被选择分配的这些变量的ID值。只有两个通道可以选择分配变量。
1741 轴同步比例寄存器选择
参考比例对应的两个过程数据输入通道的选择器。
两个字的数据传送保证了在时间上的连续。
用于主机/从机间的电子齿轮传动比的变化。可以在运行期间精调传动比的变化。
0 PD0 低位 + PD1 高位; 低位字节部分在 PD0, 高位字节部分在 PD1
1 PD1 低位 + PD2 高位; 低位字节部分在 PD1, 高位字节部分在 PD2
2 PD2 低位 + PD3 高位; 低位字节部分在 PD2, 高位字节部分在 PD3
3 PD3 低位 + PD4 高位; 低位字节部分在 PD3, 高位字节部分在 PD4
4 PD4 低位 + PD5 高位; 低位字节部分在 PD4, 高位字节部分在 PD5
5 PD5 低位 + PD6 高位; 低位字节部分在 PD5, 高位字节部分在 PD6
6 PD6 低位 + PD7 高位; 低位字节部分在 PD6, 高位字节部分在 PD7
7 PD7 低位 + PD8 高位; 低位字节部分在 PD7, 高位字节部分在 PD8
1742 轴同步控制寄存器选择
(2.7.9)
(2.7.10)
(2.7.11)
轴同步控制寄存器对应一个过程数据输入通道的选择器。参见 表 39。
可选择值:
0 PD0
1 PD1
2 PD2
3 PD3
4 PD4
5 PD5
6 PD6
7 PD7
8 PD8
1750 主机距离
以工程单位[u]表示的数值,对应于用参数 ID1752 和 ID1753 定义的主机的电机轴转数数
值。整数部分。
(2.9.1.1)
1751 主机距离小数部分* 2^16
以工程单位[u]表示的数值,对应于用参数 ID1752 和 ID1753 定义的主机的电机轴转数数
值。小数部分× 2
1752 主机转数
(2.9.1.3)
16
。
(2.9.1.2)
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 81
电机轴转数的数值,对应于用参数 ID1750 和 ID1751 定义的主机的工程单位[u]距离。整数
部分。
1753 主机转数小数部分 * 2^16
(2.9.1.4)
电机轴转数的数值,对应于用参数 ID1750 和 ID1751 定义的主机的工程单位[u]距离。小数
部分× 2
16
。
1754 主机速度滤波器 TI
(2.9.1.5)
主机速度测量的一阶低通滤波器时间常数[s] 。
1757 从机距离
(2.9.2.1)
以工程单位[u]表示的数值,对应于用参数 ID1759 和 ID1760 定义的从机的电机轴转数数
值。整数部分。
1758 从机距离小数部分 * 2^16
以工程单位[u]表示的数值,对应于用参数 ID1759 和 ID1760 定义的从机的电机轴转数数
值。小数部分× 2
16
。
1759 从机转数
(2.9.2.3)
电机轴转数的数值,对应于用参数 ID1757 和 ID1758 定义的从机的工程单位[u]距离。整数
部分。
1760 从机转数小数部分 * 2^16
电机轴转数的数值,对应于用参数 ID1757 和 ID1758 定义的从机的工程单位[u]距离。小数
部分× 2
16
。
1761 从机速度滤波器 TI
(2.9.2.5)
(2.9.2.2)
(2.9.2.4)
从机速度测量的一阶低通滤波器时间常数[s] 。
1762 PID 控制增益
(2.9.2.6)
同步调节器比例增益。每单位增益使得速度改变是 1 u/s 单位位置误差,过高的增益导致
震荡。
1763 PID 控制 I 增益
同步调节器积分增益。每单位增益使得速度改变的增加是 200 u/s,即每秒单位位置误
差。积分作用的限制是+/- 10000 u/s 的速度校正值。
1764 同步加速
(2.9.2.8)
加速用于锁定同步命令,减速用于释放同步命令。单位[u/s2]。
注: 同步释放命令在位置控制时使用同步斜坡参数 ID1764 让驱动器减速到静止状态。可是
在有停机命令或响应故障期间同步模式无效,因此不使用参数同步斜坡(ID1764)。斜坡时
间使用参数 D104 减速时间
ID503)应调试好用于紧急情况斜坡。
1765 齿轮传动比* 2
166
(2.9.2.7)
1
或者 ID503 减速时间 2 (看哪一个被选择)。因此 ID104 (或
(2.9.2.9)
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

82 • vacon 参数说明
从机速度参考和位置参考相对于主机实际速度和位置的电子齿轮传动比。运行中改变齿轮
传动比很有用。
1 转 = 1/2
从 –262144 到 + 262144 范围对应于–4 到 +4 的比例。
1766 比例斜坡时间
以 ms 表示的比例变化的斜坡时间。
比例从 0 到 +4 (242144 转)的变化占用的时间等于此参数值。
1767 调整率变化 Trim ratio change
此参数用于调整输入+ID1713和调整输入- ID1714 比例变化的影响大小。设置范围是 0200%。
此功能只是在同步模式下工作。比例变化率使用比例斜坡时间参数 ID1766。当调整输入+
有效时新的比例目标是 ID1765 +ID1767*ID1765/100,当调整输入–有效时新的比例目标是
ID1765 - ID1767* ID1765/100。
16
比例,也就是说 65536 代表单位比例。
(2.9.2.10)
(2.9.2.11)
1805 相位跟踪距离
以用户单位表示的设置的相位跟踪命令的距离。使用总线控制时,相位跟踪距离可以使用
参数 ID 号写入。
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

参数说明 vacon • 83
7.1 面板控制参数
与上面所列参数不同,这些参数位于控制面板的 M3 菜单。参考参数没有 ID 号。
114 停车按钮激活
如果用户希望使停车按钮为“热键”即不管控制位置的选择总是使变频器停车,此参数设
置为 1。
参见参数 ID125.
125 控制位置
用此参数可以改变当前的控制位置。更多信息参见产品用户手册。
按启动按钮
(启动/停止,方向和参考)。
123 面板方向
(3.4, 3.6)
(3.1)
Start button
(3.3)
3 秒,选择控制面板为当前控制位置并且拷贝运行状态的信息
0 正方向: 当面板为当前控制位置时,电机的旋转是正方向。
1 反方向: 当面板为当前控制位置时,电机的旋转是反方向。
更多信息参见产品用户手册。
R3.2 面板参考
从面板上的此参数可以调节频率参考。
在菜单M3 的任何页,按停车按钮
参见产品用户手册。
R3.5 转矩参考 6
定义转矩参考在 0.0…100.0%范围。
(3.2)
(3.5)
Stop button
3 秒,输出频率拷贝为面板参考。更多信息
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

84 • vacon 参数说明
7.2 总线接口和监控菜单中的特殊变量应用
1700 监控值: 实际比例 * 2^16
斜坡后的比例实际值。65536 转= 单位值。
1701 监控值: 位置误差
位置误差实际值=主机位置×实际比例-从机位置。
1 转=1 工程距离单位。正误差表示在正方向上运行从机落后主机。
1702 总线高分辨率位置误差
位置误差实际值=主机位置×实际比例-从机位置。
65536 转 = 1 工程空间单位。
(V1.17)
(V1.18)
1703 总线同步状态寄存器
在 表 41中显示状态寄存器。
1803 累计空间误差
显示主机与从机间的以用户单位表示的累计位置误差。在停机前,如果从机驱动触发并且
主机继续运行此值就会增加。(当从机有故障时,一般从机的故障输出应停止主机驱动)。
注: 当同步再次使能(B0)时复位此值。
当使用总线控制时,此值用于校正主机与从机间的位置误差。在此情况下,此值能传送给
参数 P2.9.3.1 (ID 1805)去校正误差。
在此情况下,再次同步之前确保控制器的值存储到累计空间误差。
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

轴同步控制操作 vacon • 85
8. 轴同步控制操作
图 36 到 39 显示了轴同步控制的操作。
Motor control
Master encoder
counter
Enc1 position
Slave encoder
counter
Enc2 position
Frequency
reference
Master distance, ID1750
Master distance fractional, ID1751
Master turns, ID1752
Master turns fractional, ID1753
Scaling
SE enable
Actual ratio, ID1700
Follower distance, ID1757
Follower distance fractional, ID1758
Follower turns, ID1759
Follower turns fractional, ID1760
Scaling
Shaft sync Enable
Reference from Speed control pattern (Multipurpose)
Master speed filter TI, ID1754
Filter
Ratio
Space error
Follower speed filter TI, ID1761
Filter
V1.18 Position error, ID1701
High resolution position error, ID1702
X
Follower synchr. acc., ID1764
Synchronization engaged
ES synchro
Command
sequencer
SE enable
Feed fwd enable
PID enable
PID P gain, ID1762
PID I gain, ID1763
PID-
regulator
Pole pair number
Frequency scale
Follower distance, ID1757
Follower distance fractional, ID1758
Follower turns, ID1759
Follower turns fractional, ID1760
Feed
forward
+
+
Scaling
k_sha2.fh8
图 29. 轴同步应用,功能块图
Fieldbus
interface
Ratio
PD
n
k_sha3.fh8
Gear Ratio * 2
ID1765
16
,
+4x
-4x
Ratio PD
channel
configured with
ID1741
In general: The gear ratio between Master and
Follower can be changed during running in
synchronization mode with par. ID1765 or
by the register in the Fieldbus control
图 30.控制比例 (运行模式)
Ratio ramp time, ID1766
Ratio change
(ramping)
Actual ratio, ID1700
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

86 • vacon 轴同步控制操作
s p e e d
s p e e d
1
1
1
1
M a s t e r
S l a v e
S y n c
o u t p u t
E n g a g e / R e l e a s e
c o m m a n d
F r e e z e
c o m m a n d
T a r g e t
A c t u a l
R a t i o
o u t p u t
e n g a g e d
r a t i o
r a t i o
c h a n g i n g
1
F o l l o w e r
2
R a t i o
2
1
0
s y n c h r o n i z a t i o n ac c e l e r a t i o n
t i m e
I D 1 7 6 6
r a m p
2 2
I D 1 7 6 4
图 31. 轴同步应用;命令,速度和输出定时
Unfreeze
Speed frozen
Synchronized
Freeze
k_sha4.fh8
Co m m a n d
tab l e
Re l e a s e
En g a g e
Fre e z e
B 1 B0
0
0
1
0
1
1
Engage
Standstill under position
control
Start
(Es_enable = 1)
图 32. 轴同步,状态图
Ramping to
standstill
Es_enable = 0
Start
(Es_enable = 0)
Engage
control
Synch
completed
Freeze
Synchronizing
“Multipurpose”
Drive stopped
Release
Es_enable = 1
Stopping
Stopped
Stop
Release
Fault
Fault stopping
Stopped
Faulted
Reset
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

轴同步控制操作 vacon • 87
由用户定义工程距离单位。
为主机(P2.9.1.1 … P2.9.1.4)和从机(P2.9.2.1 … P2.9.2.4) 设置运动的动态比例。这说明的是主机与从机
间的物理关系。
同步命令:
通过数字输入(参见 P2.2.5.20, P2.2.5.21)或者 总线接口(参见
表 39) 执行同步命令。
接受执行这些命令要求轴同步模式必须使能。
注: 当轴同步模式无效时,可以激活正常的多目标速度控制应用。
同步模式 位 1 同步模式位 0 动作
0 0
0 1
1 0
1 1
释放同步控制
锁定同步控制
使用参考位置选择的参考速度
冻结从机速度。当主机速度锁
定同步控制时才可以。
相位跟踪命令:
接受执行这些命令要求轴同步模式必须使能和同步模式 Sync mode B0=1。
相位跟踪命令是以用户单位表示的准确调整从机位置。当从机在静止状态或者运行同步时可以执行相
位跟踪命令。控制位 B0 必须是高电平接收相位跟踪命令。
在相位跟踪期间最大频率是速度限制。
对于锁定/释放相位同步,在相位跟踪期间加速度/减速度是相同的。参见参数
P2.9.2.8同步加速度。
速度
相位速度
主机速度
位置
从机可见到的主机位置
时间
相位跟踪
距离
时间
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

88 • vacon 轴同步控制操作
运行期间改变齿轮传动比:
从机与主机的速度比和位置可以通过斜坡和高分辨率比控制动态地改变。比例可以用来自于面板的参
P2.9.2.9改变。
数
如果使用现场总线控制,通过参数
图 36。
参见
P2.7.10选择使用 2 个过程数据更好。
在I/O控制时,由参数
P2.2.5.22 和 P2.2.5.23选择的数字输入连接到调节 +/-输入,通过参数
P2.9.2.11 动态地改变比例。
当调节输入激活时,比例是暂时的变化。
此功能对于运行期间齿轮传动比变化很有用。参见
图 36。
用于诊断的输出信号:
数字或继电器输出包括了比例值变化信号标志和达到空间同步标志。
输出变化比例可以在任何要求比例变化时设置,此设置值保持不变直到达到要求的斜坡值。
在执行完锁定同步命令后设置锁定同步输出。
当驱动停机或者发生故障时清除锁定同步输出。
8.1 轴同步总线接口
在 表 40中显示控制寄存器。(参数 P2.7.11选择控制的过程数据)。
Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8
同步使能 保留 保留 保留 保留 保留 保留 保留
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
保留 保留 保留 负相位调整 正相位调整 使能同步序列
(此位总设置
为 1)
同步模式 位
1 (斜坡到参
考速度)
同步模式位 0
(闭锁 /释放同
步功能)
表 40. 轴同步控制寄存器
在 表 41中显示状态寄存器。状态寄存器包含更多同步命令的内部操作的信息,那些信息保留将来用于
总线接口。重要的状态位指示已经存在的控制接口以高亮度字符显示。
Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8
轴同步使能 前馈使能 位置误差使能 位置环激活 比率变化 PID 调节器使能 PID 积分作用
使能
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
保留 保留 保留 保留 冻结速度 同步到达 释放同步 锁定同步
PID 微分作用
使能
表 41. 轴同步状态存器
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

附录 vacon • 89
9. 附录
在此章中有特殊参数组的额外说明。参数组有:
闭环参数 (第 9.1章)
电机热保护参数(第 9.2章)
电机堵转变化参数(第 9.3章)
现场总线控制参数(第 9.49.1章)
9.1 闭环参数 (ID 612 到 621)
设置参数 ID600为 3 或者 4 选择闭环控制模式。
当需要在 0 速附近提高性能和高速时需要更好的静态速度精度时,使用闭环控制模式(参见
环控制模式是基于“转子磁通定向电流矢量控制”。采用此控制原理,相电流被分解成产生转矩电流
分量和励磁电流分量。这样鼠笼式感应电机能够象 DC电机一样精确控制。
注:这些参数只能用在 Vacon NXP 变频器上。
例如:
61页)。闭
电机控制模式 e = 3 (闭环速度控制)
当要求快速响应时间、高精度和 0 频控制运行时常使用此操作模式。编码器板应连接到控制
单元的C槽。设置编码器脉冲/转P/R参数(P7.3.1.1)。在开环下运行并且检查编码器速度和方
向 (V7.3.2.2)。如果需要改变方向参数 (P7.3.1.2)或者交换电机电缆接线 。如果编码器速度错
误就不要运行。设置参数
频率的 66% 处使得电压略高于线性U/f 曲线。电机额定速度参数(
机额定电流,电流限制参数(
9.1.1 使用永磁电机(“AC 无刷”电机)注意事项
参数励磁电流(
其它闭环电机控制参数推荐值:
•
ID613速度控制
•
ID617 电流控制
ID612) 与这些电机闭环控制无关。
Kp
: 更低的值, 10 到 20, 对应低惯量负载。
Kp
= 20 对于典型的 V/f 值 (例如. 400V/150Hz),与满负荷V/f比值成比例。
ID612为无负载电流并且设置参数 ID619 (滑差调节) ,在电机额定
ID107)控制了可能的转矩线性。
ID112)是重要的。相对于电
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com
90 • vacon 附录
9.2 电机热保护参数(ID 704 到 708):
概述
电机热保护是保护电机不过热。VACON 变频器可提供高于电机额定电流的电流。如果负载要求高电
流,那么就有电机热过载的危险存在,尤其在低频运行时。在低频,冷却效果的降低与容量同时作
用。如果电机装备了外风扇,那么低频时负载的降容作用就会小些。
电机热保护是基于计算模型的,它使用变频器的输出电流确定电机负载。
电机热保护可以用参数调节。热电流 I
率的函数。
电机的热级可以在面板显示上监控。参见产品用户手册。
小心! 如果电机通风管道减小,计算模型不保护电机。
说明,负载电流超过 IT时电机过载。这个电流限制是输出频
T
!
9.3 失速保护参数(ID 709 到 712)
概述
电机失速保护是保护电机短时过载情况,如轴堵转。相应的失速保护可设为短于电机热过载保护。失
速状态由 2 个参数定义,ID710(失速电流)和 ID712(失速频率限制)。如果电流高于设定限制和输出频
率低于设定限制,失速态为真。实际没有什么表明轴的旋转情况。失速保护是一种过流保护。
9.4 现场总线控制参数(ID 850 到 859)
当频率或速度参考来自于总线(Modbus, Profibus, DeviceNet etc.)时使用总线控制参数。用总线数据输
出选择 1…8 用户可以监控来自于总线的值。
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

轴同步应用特殊故障码 vacon • 91
10. 轴同步应用特殊故障码
轴同步应用包括了产品手册中说明的报警和故障。在 NX All-in-one 手册中说明了故障码、产生故障原
因和改正方法 (W=报警, F= 故障)。
代码 故障/报警 类型 存储到
故障
历史中
61
62
72
72
73
位置误差 可编程 存储 位置误差超过了规定的阈值 调整驱动跟踪上主机或者改变位置
轴锁定 可编程 存储 机械抱闸没有开闸或者编
试用时间 报警 不存储 在试用时间期间,正确的
试用时间过期 故障 存储 试用时间超过了 2 周 在参数 P2.10.1 中设定正确的许可
剩余时间<24 h 报警 不存储 剩余试用时间小于 24 小时 如果密钥有效,在参数 P2.10.1 中
码器故障
软件许可密钥丢失。.
可能原因 改正方法
误差阈值
检查机械抱闸控制。
检查编码器和电缆。
如果密钥有效,在参数 P2.10.1 中
设定正确的许可密钥。
密钥。
设定正确的许可密钥。
注:试用时间过期驱动器也可以在
运行模式下工作!
Vacon China 电话:+86-512-62836630 传真: +86-512-62837233
24 小时支持热线:+86-4008 876 811 Emai:vacon@vacon.com

92 • vacon 轴同步应用调试
11. 轴同步应用调试
调试期间按下面步骤进行:
1. 在基本参数组 P2.1.5-P2.1.9 正确设置电机名牌数据。
2. 用参数 P2.9.1.1-P2.9.1.4 和 P2.9.2.1-P2.9.2.4 设置传动齿轮速比参数。
3. 如果可能在不连接负载条件下用RUN (2)运行自动辨识电机参数。参见参数
步。如果不能断开负载,执行第 4 步。
4. 如果不能执行步骤 3,手动设置励磁电流 P2.5.18.1。(如果励磁电流设置为 0,系统软件基于电
机数据计算励磁电流)
5. 进行开环运行测试,在扩展板菜单检查编码器方向,如果编码器速度反馈方向与输出频率相
反,交换编码器 A/B 通道。
6. 改变参数
7. 检查从机编码器通道 2 的脉冲。(扩展板菜单)
8. 设置最大频率参数 P2.1.1,留出足够的调整余量。如果来自于主机的速度命令高于从机运行允
许的最大频率,在同步调节器上自动溢出。
9. 设置驱动器允许,使能同步控制,设置同步模式 Synch. mode B0 = 1
10. 以很低的速度运行主机,检查从机跟踪情况。
11. 如果从机的旋转方向错误。在编码器板的通道 2 (CH2)交换编码器通道 A/B 。
12. 如果使用了机械抱闸,在参数组G2.3.8 设置机械抱闸控制。编程用于抱闸控制的数字输出
ID445/ID446 和最终的用于硬件应答的输入端子
P2.5.1= 3 进行速度闭环控制。(只有在速度闭环控制才能轴同步工作)
ID1602。
P2.5.16,跳到第 5
Vacon Plc 24 小时支持热线:+358-40-8371 150 • 电子邮箱: vacon@vacon.com

0/3,-2.*1+
;;;4684:56984697
 Loading...
Loading...