

Page 1
Fișă tehnică
Servomotoare pentru controlul modulant
AME 55, AME 56
Descriere
Servomotoarele sunt utilizate cu vanele:
• VFM 2 (DN 65 – 150) numai în combinație
cu AME 55,
• VFS 2 (DN 15 – 50) numai în combinație
cu AME 56. Cuplaj disponibil la cerere,
• VFS 2 (DN 65 – 100),
• VL 2/3 (DN 100),
• VF 2/3 (DN 100 – 150),
• VL 2/3 și VF 2/3 (DN 65, 80) numai
în combinație cu AME 56 și cu adaptorul
065Z0312,
• AFQM (DN 65 – 125) și AFQM 6 (DN 40 – 50)
Caracteristici:
• Funcție de „autoreglare”
• Funcție „Deconectare” asociată sarcinii,
care previne suprasarcina la vană sau
la servomotor
• LED de diagnosticare
Date principale:
• Tensiune nominală: 24 V c.a., 50/60 Hz
• Semnal de intrare de comandă:
0(4) – 20 mA,
0(2) – 10 V
• Forță:
2000 N (AME 55),
1500 N (AME 56)
• Cursă: 40 mm
• Viteză:
8 s/mm (AME 55),
4 s/mm (AME 56)
• Temperatură max. a agentului de lucru: 200 °C
cu vană izolată
• Acționare manuală
Comandare
© Danfoss | 2019.01
Servomotoare
Tip Alimentare cu energie Nr. c od
AME 55
AME 56 082H3025
24 V c.a.
082H3022
Accesorii
Tip Nr. c od
Încălzitor tijă 24 V c.a. /c.c.; 40 W
(vane VF, VL DN 65 – 80)
Încălzitor tijă 24 V c.a. /c.c.; 20 W
(vane VF, VL DN 100 și
vane VFS2 DN 15 – 50)
Încălzitor tijă 24 V c.a. /c.c.; 40 W
(vane VF DN 125, 150 și VFS DN 65 – 100)
Adaptor (vane VF, VL DN 65 – 80) 06 5Z0312
Cuplaj AME 56 (VFS 2 DN 15 – 50) 065Z7551
065Z0 315
065Z7020
065Z7022
ED.LF.Z3.46 | 1
Page 2
Fișă tehnică AME 55, AME 56
Date tehnice
Tip AME 55 AME 56
Alimentare cu energie V c.a. 24; ±10%
Putere consumată VA 9 19,5
Ciclu de funcționare S3 60% ED (IEC 60034)
Frecvență Hz 50/60
Semnal de intrare Y
Semnal de ieșire X V 0 – 10 (2 – 10)
Forță de închidere N 2000 150 0
Cursă ma ximă mm 40
Viteză s/mm 8 4
Temperatură max. agent de lucru
Temperatură ambiantă 0 … 55
Temperatură de depozitare
și transport
Umiditate ambiantă UR 95%, fără condens
Clasă de protecție III
Grad de protecție IP 54
Greutate kg 3,8
– marcaj conform standardelor
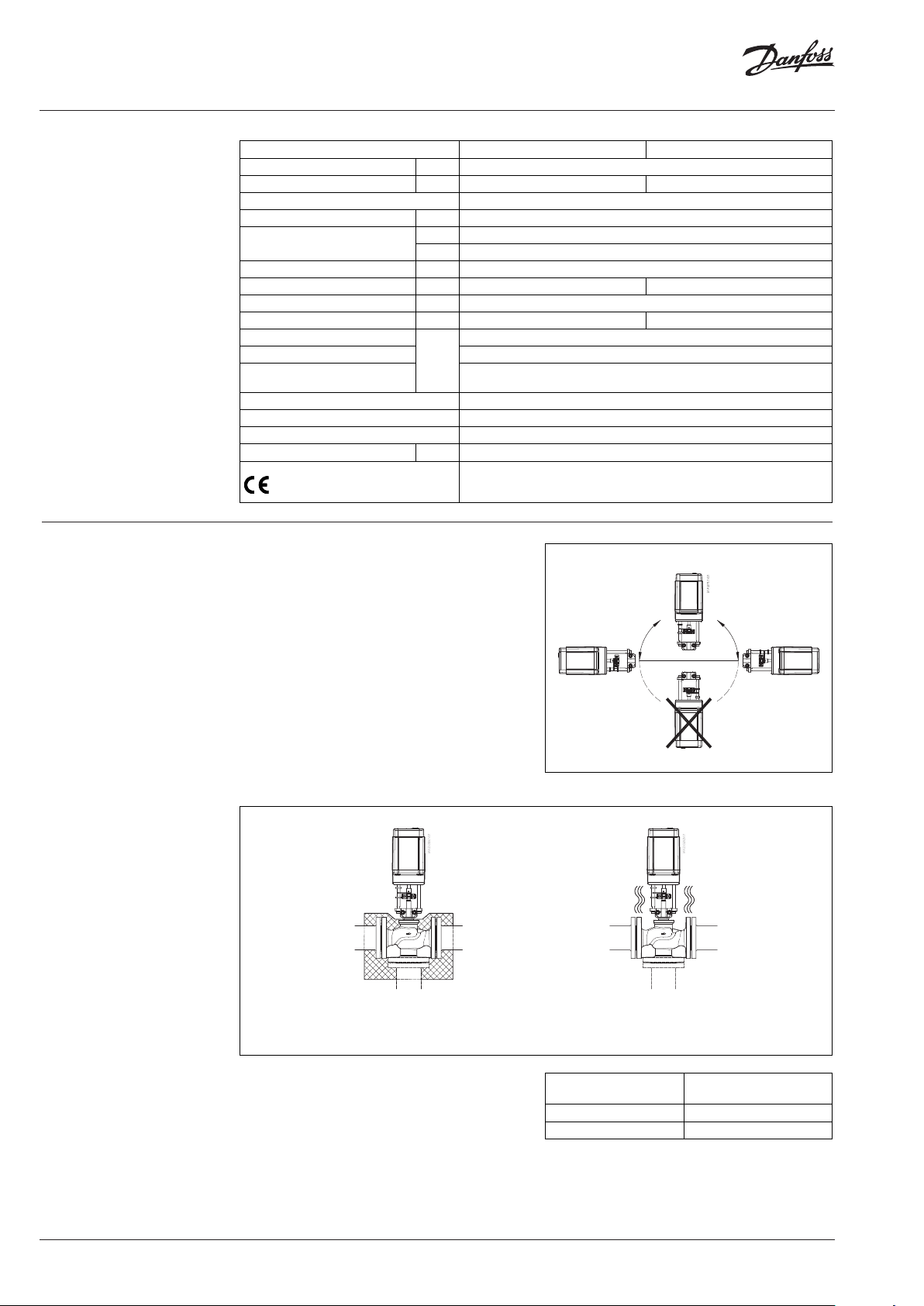
Montarea Mecanică
Servomotorul trebuie montat cu tija vanei
(utilizați o cheie imbus de 4 mm – nefurnizată) fie
în poziție orizontală, fie orientată în sus. Pentru
montarea servomotorului pe corpul vanei, utilizați o cheie imbus M8/SW13 (nefurnizată). Lăsați
spațiu suficient pentru efectuarea întreținerii.
V 0 – 10 (2 – 10) Ri = 24 kΩ
mA 0 – 20 (4 – 20) Ri = 500 Ω
200
°C
-40 … 70
Directiva pentru tensiuni joase (LVD) 2014/35/UE: EN 60730-1, EN 60730-2-14
Directiva privind compatibilitatea electromagnetică (CEM) 2014/30/UE: EN
61000-6-2, EN 61000-6-3
Inelele roșii de indicare a poziției trebuie
apropiate înainte de punerea în funcțiune.
Acestea indicăgradul de deschidere a vanei
după autoreglare.
Asigurați o izolație adecvată a vanei pentru
a evita transferul de căldură direct către
servomotor.
Racordare electrică
Conexiunile electrice pot fi accesate
prin scoaterea capacului.
Sunt asigurate două intrări pentru cabluri M16
× 1,5. Ambele presetupe sunt prevăzute cu
garnituri de cauciuc, utile în cazul cablurilor
flexibile. Rețineți că, în scopul menținerii
gradului de protecție IP, este necesară utilizarea
unor presetupe adecvate pentru cabluri.
Lungimea cablului
electric de alimentare
0 – 50 m 0,75 mm²
> 50 m 1,5 mm²
Secțiunea transversală
recomandată a cablului
2 | ED.LF.Z3.46
© Danfoss | 2019.01
Page 3
Fișă tehnică AME 55, AME 56
Scoaterea din uz
Setarea comutatorului DIP
Înainte de a fi eliminat, servomotorul trebuie
demontat și componentele acestuia sortate în
diverse grupe de materiale.
I
0 …--- V
Invers
Secvențial
5(6) … 10 V
În 3 puncte/RL
Resetare
Caracteristica
LINIARĂ
Kvs redus
ON (PORNIT)
U
2 …--- V
- - -
Direct
0(2) … 5(6) V
INV
ON (PORNIT)
vs
100 % K
Resetare
Proporțional
Caracteristica
LOGARITMICĂ
DIR
INV
ON (PORNIT)
DIR
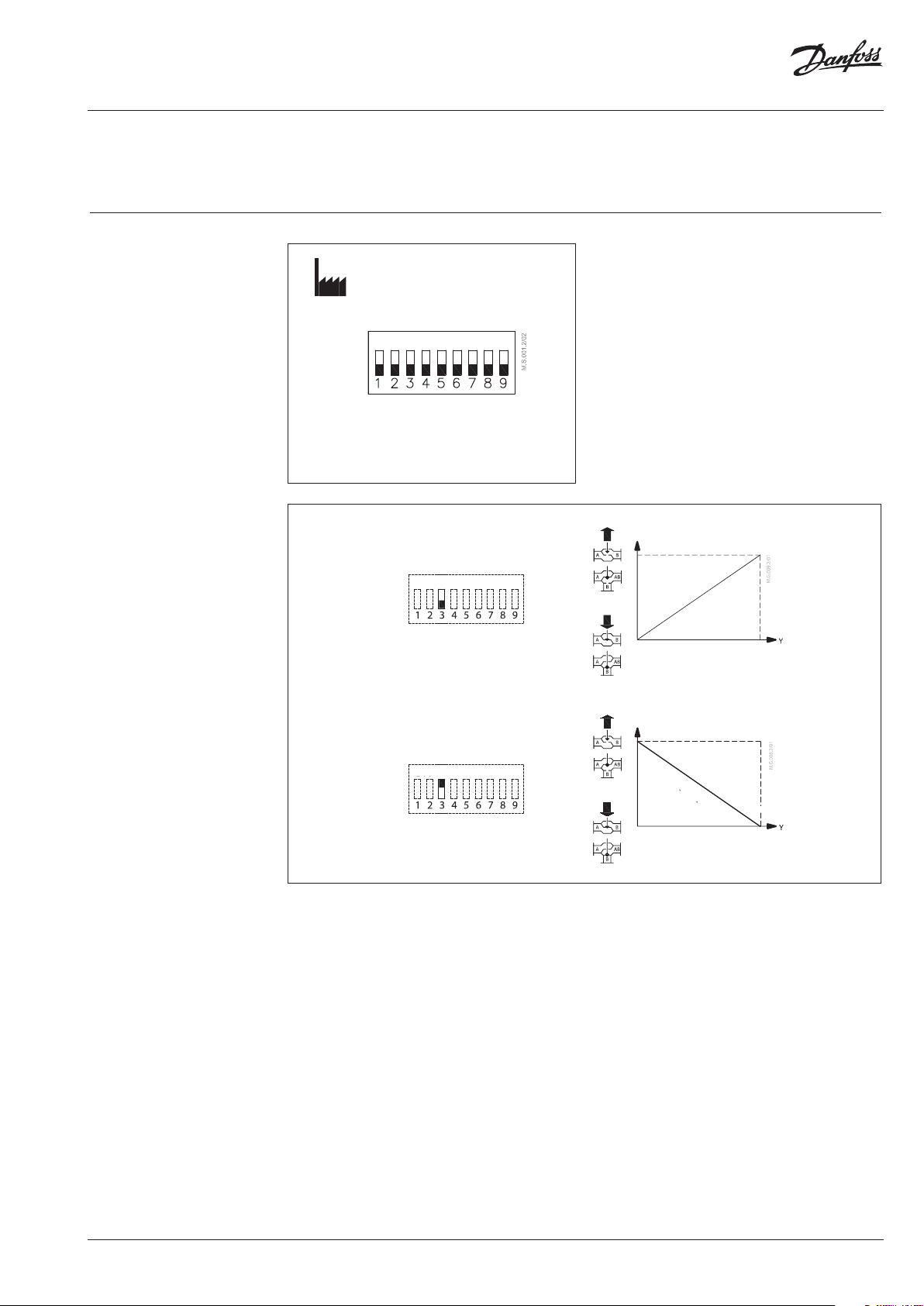
Servomotorul prezintă o serie de comutatoare
DIP situate sub capacul detașabil.
Comutatorul oferă următoarele funcții:
DIP1: U/I – Selector pentru tipul semnalului
de intrare:
• Dacă este setat în poziția OFF (Oprit),
semnalul de intrare Y este de tip tensiune (Y).
Dacă este setat în poziția ON (Pornit),
semnalul de intrare Y este de tip curent (mA).
DIP2: 0/2 – Selector pentru intervalul
semnalului de intrare:
• Dacă este setat în poziția OFF (Oprit), semnalul
de intrare se situează în intervalul 2 V ... 10
V (semnal de tensiune) sau 4 mA ... 20 mA
(semnal de curent). Dacă este setat în poziția
ON (Pornit), semnalul de intrare se situează
în intervalul 0 V ... 10 V (semnal de tensiune)
sau 0 mA ... 20 mA (semnal de curent).
DIP 3 = OFF (OPRIT)
0 V (2 V)
0 MA (4 MA)
0 V (2 V)
0 MA (4 MA)
(DIR)
DIP 3 = ON (PORNIT)
(INV)
10 V
20 MA
10 V
20 MA
DIP3: D/I – Selector pentru acționare
directă sau inversă:
• Dacă este setat în poziția OFF (Oprit)),
servomotorul acționează direct (tija
se extinde când tensiunea crește).
Dacă este setat în poziția ON (Pornit),
servomotorul acționează invers
(tija se retrage când tensiunea crește).
DIP4: —/Seq – Selector pentru mod de
funcționare normal sau secvențial:
• Două servomotoare pot fi setate să lucreze
în paralel, cu un singur semnal de comandă.
Dacă este setat SECVENȚIAL, atunci un
servomotor răspunde la semnalul de
comandă distribuit (vezi 0(2) V … 5(6 V) /
5(6)V…10V).
NOTĂ : Aceas tă combinație funcțion ează în combinație
cu DIP5: 0(2) V … 5(6 V)/5(6) V … 10 V
© Danfoss | 2019.01
ED.LF.Z3.46 | 3
Page 4

Fișă tehnică AME 55, AME 56
Setarea comutatorului DIP
(continuare)
DIP5: 0 – 5 V/5 – 10 V – Intervalul semnalului
de intrare în modul de funcționare
secvențial:
• Această funcție este disponibilă în cazul
în care DIP4:---/Secvențial este setat în
poziția ON (Pornit), în caz contrar,
servomotorul funcționează în intervalul de
comandă totală (0(2) – 10 V sau 0(4) – 20 mA).
• Când DIP5 este setat în poziția Off (Oprit),
servomotorul se va încadra în intervalul
semnalului de comandă:
2 … 6 V (când D IP1 și DIP2 sunt setate la O ff (Oprit))
0 … 5 V (când DIP1 este setat la Off (Oprit), iar DIP2
este setat la ON (Pornit))
4 … 12 mA (când DIP1 este setat la ON (Pornit), iar DIP2
este setat la Off (Oprit))
0 … 10 mA (când DIP1 și DIP2 sunt setate la ON (Porn it))
Secvențial
5(6) V...10 V
• Când DIP5 este setat în poziția ON (Pornit),
servomotorul se va încadra în intervalul
semnalului de comandă:
6 … 10 V (când DI P1 și DIP2 sunt setate la Off (Oprit))
5 … 10 V (când DIP1 este setat la Off (Oprit), iar DIP2
este setat la ON (Pornit))
20 … 12 mA (când DIP1 este setat la ON (Pornit), iar DIP2
este setat la Off (Oprit))
10 … 20 mA (când DIP1 și DIP2 sunt setate la ON (Porn it))
Secvențial
5(6) V...10 V
DIP6: Prop./3 pct – Selector pentru alegerea
modului de control modulant sau
în 3 puncte:
Servomotorul poate funcționa în modul
de control modulant (DIP 6 la OFF (Oprit))
sau în modul „simplu” în 3 puncte, dacă
este selectată funcția în 3 puncte (DIP 6
la ON (Pornit)).
Mod modulant; DIP 6 este setat la OFF
(Oprit) (setare de fabrică)
• După ce servomotorul a fost conectat
la sursa de alimentare, acesta va porni
procedura de autoreglare. LED-ul
indicator se aprinde intermitent
până la terminarea autoreglării.
• Tija servomotorului va ajunge în poziția
complet extinsă sau retrasă montând o
punte pentru semnalul SN la borna 1 sau 3
și va rămâne în poziție atât timp cât există
potențial.
Nu se permite conectarea SP la borna 1
sau 3, atunci când DIP 6 este setat
la OFF (Oprit).
Modul în 3 puncte; DIP 6 este setat la On
(Pornit)
Consultați cu atenție schema de conexiuni,
deoarece cablarea este diferită pentru
regulatoarele cu ieșire triac (ECL) față
de controlerele cu ieșire pe releu.
• Conectați SN (Neutru) și alimentarea
cu energie (24 V c.a.) prin regulator
la borna 1 sau 3.
• Semnalul de retur X (depinde de DIP 2, 3, 4
și 5) este posibil dacă alimentarea
cu energie este conectată la SP și SN.
DIP7: LOG/LIN – Selector pentru alegerea
caracteristicii de debit prin vană,
în procentaj egal sau liniar1):
• Caracteristica vanei este neschimbată
de setarea de fabrică (DIP 7 OFF (Oprit)).
Vanele Danfoss precum VF, VFS și VFM
care sunt adecvate pentru a funcționa cu
servomotorul au caracteristică de debit
logaritmic (procentaj egal). Prin setarea
comutatorului în poziția de debit LIN, va
fi afectată caracteristica vanei motorizate.
Combinația de servomotor și vană poate
funcționa ca vană cu caracteristică LINIARĂ.
DIP8: K
100%/K
VS
pentru debit redus prin vană1):
redus – Selector
VS
• Dacă este setat în poziția OFF (Oprit), debitul
prin vană nu este redus. Dacă este setat în
poziția ON (Ponit), debitul prin vană este
redus cu jumătate din valorilor standard
KVS de creștere (exemplu: vană cu KVS 16 și
comutatorul DIP8 în poziția ON (Pornit) –
înseamnă că valoarea maximă a fluxului
prin vană este KVS13 (valoarea medie
între valorile standard KVS16 și KVS10).
1)
NOTĂ : Trebuie utilizat numai în combinație cu vanele
ce au caracteristi că de debit logaritmic.
DIP9: Resetare:
• Modificarea poziției acestui comutator
va determina pornirea unei proceduri
de autoreglare.
4 | ED.LF.Z3.46
© Danfoss | 2019.01
Page 5

Fișă tehnică AME 55, AME 56
Cablare
Numai 24 V c.a.
DIP 6 = OFF (OPRIT)
Cablare pentru modul de control
modulant
Proporțional În 3 punct e/RL
Procedura de autoreglare automată
Servomotorul se va adapta automat la cursa
vanei atunci când alimentarea cu energie este
conectată la servomotor pentru prima dată sau
atunci când servomotorul este resetat.
LED-ul indicator se aprinde intermitent până la
terminarea autoreglării. Durata depinde de cursa
axului și în mod normal, va dura câteva minute.
Pentru a reporni autoreglarea, modificați poziția
comutatorului RESETARE (DIP9).
Dacă tensiunea de alimentare este oprită
sau scade sub 80% pentru mai mult de 0,1 s,
poziția curentă a vanei va fi stocată în memorie
și după oprirea alimentării cu energie.
Semnalul la borna 1 sau 3 are prioritate
către semnalul de intrare Y.
REG ULAT OR
LED de diagnosticare
LED-ul roșu de diagnosticare este situat pe
placa circuitelor integrate aflată sub capac.
Acesta furnizează indicații cu privire la
următoarele stări de funcționare:
Lumină continuă
– funcționare normală
Nicio lumină
– nu funcționează sau nu există
alimentare cu energie
Lumină intermitentă (1 Hz)
– mod autoreglare
Lumină intermitentă (3 Hz):
– alimentare cu energie are
un nivel pre scăzut
– cursă insuficientă a vanei (< 20 s)
– capătul de cursă nu poate fi atins.
SN 0 V Neutru
SP 24 V c.a.
Y
1
3
0(2) – 10 V c.c.
0(4) – 20 mA
0 V Intrare
Alimentare
cu energie
Intrare
DIP 6 = ON (PORNIT)
Cablare pentru modul flotant în 3 puncte
Regulator cu ieșire pe releu
Servomotorul trebuie să efectueze autoreglarea
înainte de a schim ba poziția DIP 6 la ON (PORNI T).
Semnalul de i eșire depinde de setările D IP 2, 3 și 5.
Proporțional În 3 punct e/RL
DIP 6 = ON (PORNIT)
Cablare pentru modul flotant
în 3 puncte
Regulator cu ieșire triac ECL
Servomo torul trebuie să efectu eze
autoreglare a înainte de a schimba
poziția DIP 6 la O N (PORNIT).
Semnalul de i eșire depinde de setările
DIP 2, 3 și 5.
*R1, *R2 = 2,6 kΩ (0 ,5 W)
Proporțional În 3 punct e/RL
7 = reacție tijă
servomotor
6 = reacție tijă
servomotor
REG ULAT OR
X 0(2) – 10 V c.c. Ieșire
SN 0 V Neutru
SP 24 V c.a.
1
24 V
c.a.
3
X 0(2) – 10 V c.c. Ieșire
SN 24 V c.a. Neutru
SP 0 V
1
24 V
c.a.
3
X 0(2) – 10 V c.c. Ieșire
Alimentare
cu energie
Intrare
Alimentare
cu energie
Intrare
© Danfoss | 2019.01
ED.LF.Z3.46 | 5
Page 6

Fișă tehnică AME 55, AME 56
Punerea în funcțiune Caracteristica de punere în funcțiune/testare
Supracontrolul manual
Realizați complet montarea mecanică și electrică
și efectuați următoarele verificări și teste necesare:
• Izolați agentul de lucru de control
(de exemplu, autoreglarea într-o aplicație
cu abur poate crea situații periculoase,
în lipsa unei izolări mecanice adecvate).
• Alimentați cu tensiune. Rețineți
că servomotorul va efectua în acest
moment procedura de autoreglare.
• Aplicați semnalul de comandă adecvat
și verificați dacă sensul de deplasare
al tijei corespunde aplicației.
• Asigurați-vă că servomotorul asigură
antrenarea vanei pe întreaga cursă a acesteia,
prin aplicarea semnalului de comandă adecvat.
Această acțiune va determina lungimea
cursei vanei.
Punerea în funcțiune a unității este acum
completă.
Servomotorul poate fi acționat în poziția complet
deschis sau complet închis (în funcție de tipul
de vană NI sau ND), prin conectarea SN
la bornele 1 sau 3.
Comanda manuală se realizează prin rotirea
cheii imbus de 4 mm în poziția necesară
(cheia imbus nu este inclusă în livrare).
Observați simbolul ce indică sensul de rotație.
• Deconectați alimentarea cu tensiune
• Reglați poziția vanei cu ajutorul unei
chei imbus
• Setați vana în poziția închis
• Reconectați alimentarea cu tensiune
Dacă a fost utilizat controlul manual, semnalele
X și Y sunt corecte numai după ce servomotorul
atinge poziția de capăt de cursă. Dacă aceasta nu
este acceptată, resetați servomotorul sau utilizați
accesoriile unui kit semnal de retur activ.
Nu este permisă utilizarea unei mașini
de găurit electrice.
6 | ED.LF.Z3.46
© Danfoss | 2019.01
Page 7

Fișă tehnică AME 55, AME 56
Dimensiuni
120
min 478
328
55
Combinații
servomotor - vană
AME 56 +
VL 2, VF 2 (DN 65 – 180) +
adaptor 065 Z0312
VFM 2 (DN 65 – 150)
VL 3, VF 3 (DN 65, 80) +
adaptor 065 Z0312
AME 55 +
AME 56 +
VFS 2 (DN 15 – 50) +
cuplaj 065Z 7551
AME 55, AME 56 +
VL 2 (DN 100)
VF 2 (DN 100 – 150)
AME 56 +
AME 55, AME 56 +
VFS 2 (DN 65 – 100)
AME 55, AME 56 +
VL 3 (DN 100)
VF 3 (DN 100 – 150)
AME 55, AME 56 +
AFQM (DN 65 – 125)
AFQM 6 (DN 40 – 50)
© Danfoss | 2019.01
ED.LF.Z3.46 | 7
Page 8

Fișă tehnică AME 55, AME 56
S.C. Danfoss SRL • Sos. Oltenitei 208 • RO-077160, Popești-Leordeni, jud. Ilfov • Romania
Danfoss Încălzire • heating.danfoss.ro • +40 031 2222 101 • E-mail: danfoss.ro@danfoss.com
Nr. Inreg. Registrul Comertului: J23/1052/2009 • C.U.I.: RO8127710
8 | ED.LF.Z3.46
© Danfoss | DHS-SRMT/SI | 2019.01
 Loading...
Loading...