

CaptiveAire M1103S Installation Manual

MC1000 Series
Installation and Operation Manual

Manual Number: M101P-e1
TABLE OF CONTENTS
1.0 GENERAL....................................................................................................... 1
PRODUCTS COVERED IN THIS MANUAL.................................................. 1
PRODUCT CHANGES..................................................................................... 1
WARRANTY.................................................................................................... 1
RECEIVING..................................................................................................... 1
CUSTOMER MODIFICATION....................................................................... 1
2.0 MC1000 SPECIFICATIONS........................….............………...........…...... 2
3.0 MC1000 MODEL DESIGNATION CODE.................................…..…........ 3
4.0 MC1000 DIMENSIONS....................................................................….......... 4
5.0 MC1000 RATINGS...........................................................................….......... 8
6.0 THEORY......................................................................................................... 12
7.0 INSTALLATION............................................................................................ 16
8.0 INPUT AC REQUIREMENTS...................................................................... 18
9.0 VOLTAGE SELECTION............................................................................... 19
10.0 POWER WIRING........................................................................................... 20
11.0 MC1000 POWER WIRING DIAGRAM....................................................... 21
12.0 INITIAL POWER UP..................................................................................... 22
13.0 KEYPAD CONTROL..................................................................................... 24
14.0 CONTROL WIRING...................................................................................... 30
15.0 MC1000 CONTROL WIRING DIAGRAMS................................................ 37
16.0 PROGRAMMING THE MC1000 DRIVE.................................................... 41
17.0 PARAMETER MENU.................................................................................... 44
18.0 DESCRIPTION OF PARAMETERS............................................................ 47
19.0 TROUBLESHOOTING.................................................................................. 73
20.0 USER SETTING RECORD............................................................................75
DESCRIPTION OF AC MOTOR OPERATION.............................................. 12
DRIVE FUNCTION DESCRIPTION...............................……........................ 14
KEYPAD FUNCTIONS......................................................................….......... 24
MC1000 DISPLAY.............................................................................….......... 25
GENERAL........................................................................................................ 30
START/STOP AND SPEED CONTROL......................................................... 3 1
MC1000 TERMINAL STRIP........................................................................... 37
TWO-WIRE START/STOP CONTROL.......................................................... 38
THREE-WIRE START/STOP CONTROL...................................................... 39
SPEED POT AND PRESET SPEED CONTROL............................................. 40
PROGRAMMING THE PARAMETERS......................................................... 4 1
PARAMETER ACCESS USING SPEED DIAL............................................... 4 3

1.0 GENERAL
1.1 PRODUCTS COVERED IN THIS MANUAL
This manual covers the AC Tech MC1000 Series Variable Frequency Drive.
1.2 PRODUCT CHANGES
AC T echnology Corporation reserves the right to discontinue or make modifications to the
design of its products and manuals without prior notice, and holds no obligation to make
modifications to products sold previously. AC T echnology Corporation also holds no liability
for losses of any kind which may result from this action. Instruction manuals with the most
up-to-date information are available for download from the AC Tech website
(www.actechdrives.com).
1.3 WARRANTY
AC T echnology Corporation warrants the MC Series AC motor control to be free of defects
in material and workmanship for a period of eighteen months from the date of sale to the
user, or two years from the date of shipment, which ever occurs first. An MC Series control,
or any component contained therein, which under normal use, becomes defective within
the stated warranty time period, shall be returned to AC Technology Corporation, freight
prepaid, for examination (contact AC Technology Corporation for authorization prior to
returning any product). AC Technology Corporation reserves the right to make the final
determination as to the validity of a warranty claim, and sole obligation is to repair or
replace only components which have been rendered defective due to faulty material or
workmanship. No warranty claim will be accepted for components which have been
damaged due to mishandling, improper installation, unauthorized repair and/or alteration
of the product, operation in excess of design specifications or other misuse, or improper
maintenance. AC Technology Corporation makes no warranty that its products are
compatible with any other equipment, or to any specific application, to which they may be
applied and shall not be held liable for any other consequential damage or injury arising
from the use of its products.
This warranty is in lieu of all other warranties, expressed or implied. No other person,
firm or corporation is authorized to assume, for AC Technology Corporation, any
other liability in connection with the demonstration or sale of its products.
1.4 RECEIVING
Inspect all cartons for damage which may have occurred during shipping. Carefully unpack
equipment and inspect thoroughly for damage or shortage. Report any damage to carrier
and/or shortages to supplier. All major components and connections should be examined
for damage and tightness, with special attention given to PC boards, plugs, knobs and
switches.
1.5 CUSTOMER MODIFICATION
AC Technology Corporation, its sales representatives and distributors, welcome the
opportunity to assist our customers in applying our products. Many customizing options
are available to aid in this function. AC Technology Corporation cannot assume
responsibility for any modifications not authorized by its engineering department.
1

2.0 MC1000 SPECIFICATIONS
Storage T emperature -20° to 70° C
Ambient Operating T emperature Chassis -10° to 55° C
(With 2.5, 6, and 8 kHz carrier, Type 1 (IP 31) -10° to 50° C
derate for higher carriers) Type 4 (IP 65) -10° to 40° C
Type 12 (IP 54) -10° to 40° C
Ambient Humidity Less than 95% (non-condensing)
Altitude 3300 feet (1000 m) above sea level
without derating
Input Line Voltages 240/120 Vac, 240/200 Vac,
480/400 Vac, and 590/480 Vac
Input Voltage Tolerance +10%, -15%
Input Frequency Tolerance 48 to 62 Hz
Output Wave Form Sine Coded PWM
Output Frequency 0-120 Hz, Optional up to 1000 Hz
Carrier Frequency 2.5 kHz to 14 kHz
Frequency Stability +0.00006% / °C
Service Factor 1.00
Efficiency > 97% throughout speed range
Power Factor (displacement) > 0.96
Overload Current Capacity 150% of output rating for 60 seconds
180% of output rating for 30 seconds
Speed Reference Follower 0-10 VDC, 4-20 mA
Control Voltage 15 VDC
Analog Outputs 0 - 10 VDC, or 2 - 10 VDC
Proportional to speed and load
Digital Outputs Form C relay: 2 A at 28 VDC or 120 Vac
Open-collector outputs: 40 mA at 30 VDC
2
3.0 MC1000 MODEL DESIGNATION CODE
The model number of an MC1000 Series drive gives a full description of the
basic drive unit (see example below).
EXAMPLE: M1450BP
(MC1000, 480 Vac, 5 HP, Type 1 Enclosure, with a Remote Keypad Assembly)
Series:
M1 = M1000 S eries Variable Speed AC Motor Drive
Input Voltage:
1 = 240/120 V ac (For 110, 115, 120, 230 and 240 Vac; 50 or 60 Hz)
2 = 240/200 V ac (For 208, 230, and 240 Vac; 50 or 60 Hz)
4 = 480/400 V ac (For 380, 415, 440, 460 and 480 Vac; 50 or 60 Hz)
5 = 590/480 V ac (For 440, 460, 480, 575 and 600 Vac; 50 or 60 Hz)
Rating:
03 = ¼ HP (0.18 k W) 50 / 51 = 5 HP (3.7 kW) 300 = 30 HP (22 kW)
05 = ½ HP (0.37 k W) 75 = 7½ HP (5.5 k W) 400 = 40 HP (30 kW)
10 = 1 HP (0.75 kW) 100 = 10 HP (7.5 kW) 500 = 50 HP (37.5 kW )
15 = 1½ HP (1.1 k W) 150 = 15 HP (11 kW ) 600 = 60 HP (45 kW)
20 = 2 HP (1.5 kW) 200 = 20 HP (15 kW)
30 = 3 HP (2.2 kW) 250 = 25 HP (18.5 kW)
Input Phase:
S = Single phase input only.
No charact er indic at e s t hr ee phas e input only
Enclosure Type:
A = Chassis - Open Enclosure with Cover Removed
B = NEMA 1 - General P ur pos e, vented
C = NEMA 4 - W ater-tight and Dust- t ight
D = NEMA 12 - Oil-t ight and Dus t - t ight
E = NEMA 4X - Water-tight, Dus t - t ight , and Corr os ion Res istant (S t ainless S t eel)
Standard Options:
H = Addit ional Form C Relay circuit board
J = Dynamic Braking circuit board
K = Dynamic Braking & Additional Form C Relay board (not available on all HP sizes - consult factor y)
No charact er when this type of option is not spec ified
Interface Options:
P = Remote key pad as s embly
No charact er when this type of option is not spec ified
M1 4 50 B P
3
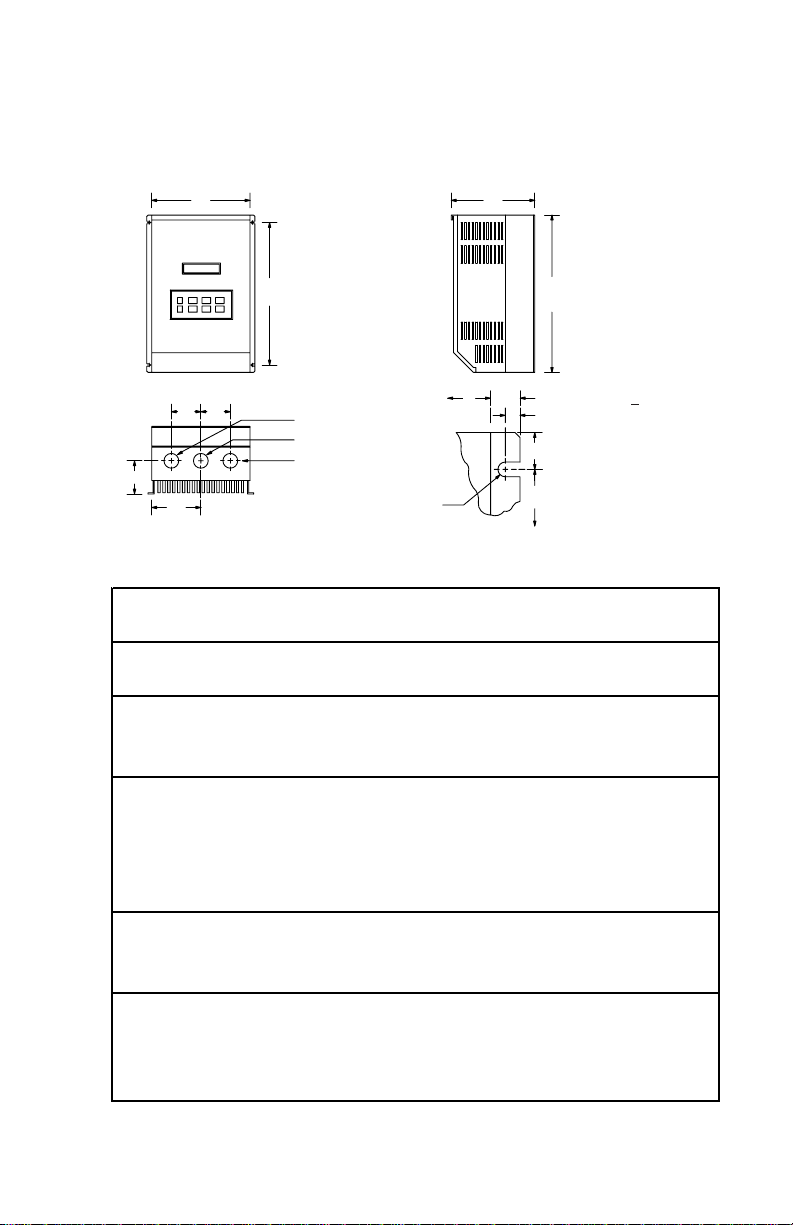
4.0 MC1000 DIMENSIONS
4.1 CHASSIS AND TYPE 1 ENCLOSED
W
R
QQ
P
N
Conduit Holes:
S Dia.
0.88" Dia.
S Dia.
Dia. Slot
D
W
U
V
T
Mounting Tab Detail
1.00"
R
H
IF W
< 7.86"
T = 0.20"
U = 0.34"
V = 0.19"
IF W = 10.26"
T = 0.28"
U = 0.44"
V = 0.24"
HP INPUT
(kW) VOLTAGE MODEL H W D N P Q R S
0.25
(0.18)
240 / 120 M1103S 7.50 4.70 5.50 0.883.33 2.35 1.60 1.37
0.5 240 / 120 M1105S 7.50 6.12 3.63 3.77 1.80 1.37 5.50 0.88
(0.37) 240 M1205S 7.50 4.70 3.63 2.35 1.90 1.37 5.50 0.88
240 / 200 M1205 7.50 4.70 3.63 2.35 1.90 1.37 5.50 0.88
1 240 / 120 M1110S 7. 50 6.12 4.22 3.77 2.40 1. 37 5.50 0.88
(0.75) 240 M1210S 7.50 4.70 4.33 2.35 2.60 1.37 5.50 0.88
240 / 200 M1210 7.50 4.70 4.33 2.35 2.60 1.37 5.50 0.88
480 / 400 M1410 7.50 4.70 3.63 2.35 1.90 1.37 5.50 0.88
590 M15107.504.703.632.351.901.375.500.88
1.5 240 / 120 M1115S 7.50 6.12 4.22 3.77 2.40 1.37 5.50 0.88
(1.1) 240 M1215S 7.50 6.12 4.22 3.77 2.40 1.37 5.50 0.88
240 / 200 M1215 7.50 4.70 4.33 2.35 2.60 1.37 5.50 0.88
2 240 M1220S 7.50 6.12 5.12 3.77 3.30 1.37 5.50 0.88
(1.5) 240 / 200 M1220 7.50 6.12 5.12 3.77 3.30 1.37 5.50 0.88
480 / 400 M1420 7.50 6.12 4.22 3.77 2.40 1.37 5.50 0.88
590 M15207.506.124.223.772.401.375.500.88
4
DIMENSIONS - CHASSIS AND TYPE 1 ENCLOSED (continued)
HP INPUT
(kW) VOLTAGE MODEL H W D N P Q R S
3 240 M1230S 7.50 6.12 5.12 3.77 3.30 1.37 5.50 0.88
(2.2) 240 / 200 M1230 7.50 6.12 5.12 3.77 3.30 1.37 5.50 0.88
480 / 400 M1430 7.50 6.12 5.12 3.77 3.30 1.37 5.50 0.88
590 M1530 7.50 6.12 5.12 3.77 3.30 1.37 5.50 0.88
5 240 / 200 M1250 7.88 7.86 5.94 5.13 3.95 1.50 5.88 1.13
(3.7) 480 / 400 M1450 7.50 6.12 5.12 3.77 3.30 1.37 5.50 0.88
590 M1551 7.88 7.86 5.94 5.13 3.95 1.50 5.88 1.13
7.5 240 / 200 M1275 9.38 7.86 6.84 3.93 4.19 2.00 5.88 1.13
(5.5) 480 / 400 M1475 9.38 7.86 6.25 5.13 3.95 1.50 7.38 1.13
590 M1575 9.38 7.86 6.25 5.13 3.95 1.50 7.38 1.13
10 240 / 200 M12100 11.25 7.86 6.84 3.93 4.19 2.00 7.75 1.38
(7.5) 480 / 400 M14100 9.38 7.86 6.84 3.93 4.19 2.00 5.88 1.13
590 M15100 9.38 7.86 7.40 3.93 4.19 2.00 5.88 1.13
15 240 / 200 M12150 12.75 7.86 6.84 3.93 4.19 2.00 9.25 1.38
(11) 480 / 400 M14150 11. 25 7.86 6.84 3.93 4.19 2.00 7.75 1.38
590 M15150 12.75 7.86 6.84 3.93 4.19 2.00 9.25 1.38
20 240 / 200 M12200 12.75 10. 26 7.74 5.13 5.00 2.50 9.25 1.38
(15) 480 / 400 M14200 12. 75 7.86 6.84 3.93 4.19 2.00 9.25 1.38
590 M15200 12.75 7.86 7.40 3.93 4.19 2.00 9.25 1.38
25 240 / 200 M12250 15.75 10. 26 8.35 5.13 5.00 2.50 12.25 1.38
(18.5) 480 / 400 M14250 12.75 10.26 7.74 5.13 5.00 2.50 9.25 1.38
590 M15250 12.75 10.26 7.74 5.13 5.00 2.50 9.25 1.38
30 240 / 200 M12300 15.75 10.26 8.35 5.13 5.00 2.50 12. 25 1.38
(22) 480 / 400 M14300 12. 75 10.26 7.74 5.13 5.00 2.50 9.25 1.38
590 M15300 12.75 10.26 8.25 5.13 5.00 2.50 9.25 1.38
40 480/400 M14400 15.75 10.26 8.35 5.13 5.00 2.50 12.25 1.38
(30) 590 M15400 15.75 10.26 8.35 5.13 5.00 2.50 12.25 1.38
50 480/400 M14500 19.75 10.26 8.55 5.13 5.75 2.50 16.25 1.75
(37.5) 590 M15500 19.75 10.26 8.55 5.13 5.75 2.50 16.25 1.75
60 480/400 M14600 19.75 10.26 8.55 5.13 5.75 2.50 16.25 1.75
(45) 590 M15600 19.75 10.26 8.55 5.13 5.75 2.50 16.25 1.75
5
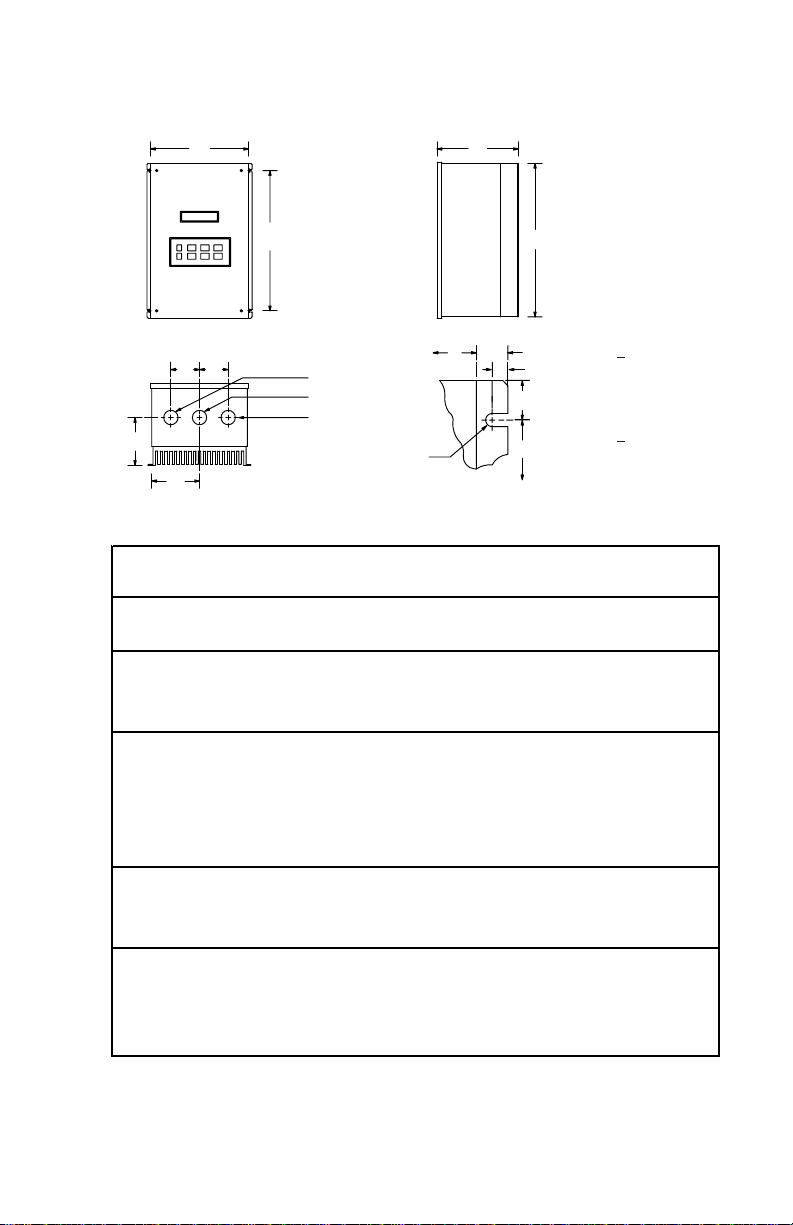
4.2 TYPE 4, 4X, AND 12 ENCLOSED
W
R
QQ
P
N
Conduit Holes:
S Dia.
0.88" Dia.
S Dia.
Dia. Slot
D
W
U
V
T
Mounting Tab Detail
1.00"
R
H
< 7.86"
IF W
T = 0.20"
U = 0.34"
V = 0.19"
IF W > 10.26"
T = 0.28"
U = 0.44"
V = 0.24"
HP INPUT
(kW) VOLTAGE MODEL H W D N P Q R S
0.25
(0.18)
240 / 120 M1103S 7.88 6.12 5.88 0.883.63 3.06 2.00 1.37
0.5 240 / 120 M1105S 7.88 7.86 3.75 4.80 2.10 1.37 5.88 0.88
(0.37) 240 M1205S 7.88 6.12 4.35 3.06 2.70 1.37 5.88 0.88
240 / 200 M1205 7.88 6.12 4.35 3.06 2.70 1.37 5.88 0.88
1 240 / 120 M1110S 7. 88 7.86 4.90 4.80 3.25 1. 37 5.88 0.88
(0.75) 240 M1210S 7.88 6.12 4.35 3.06 2.70 1.37 5.88 0.88
240 / 200 M1210 7.88 6.12 4.35 3.06 2.70 1.37 5.88 0.88
480 / 400 M1410 7.88 6.12 4.35 3.06 2.70 1.37 5.88 0.88
590 M15107.886.124.353.062.701.375.880.88
1.5 240 / 120 M1115S 7.88 7.86 4.90 4.80 3.25 1.37 5.88 0.88
(1.1) 240 M1215S 7.88 7.86 4.90 4.80 3.25 1.37 5.88 0.88
240 / 200 M1215 7.88 6.12 5.25 3.06 3.60 1.37 5.88 0.88
2 240 M1220S 7.88 7.86 4.90 4.80 3.25 1.37 5.88 0.88
(1.5) 240 / 200 M1220 7.88 7.86 4.90 4.80 3.25 1.37 5.88 0.88
480 / 400 M1420 7.88 7.86 4.90 4.80 3.25 1.37 5.88 0.88
590 M15207.887.864.904.803.251.375.880.88
6
DIMENSIONS - TYPE 4, 4X, AND 12 ENCLOSED (continued)
HP INPUT
(kW) VOLTAGE MODEL H W D N P Q R S
3 240 M1230S 7.88 7.86 5.9 4.8 4.25 1.37 5.88 0.88
(2.2) 240 / 200 M1230 7.88 7.86 5.9 4.8 4.25 1.37 5.88 0.88
480 / 400 M1430 7.88 7.86 4.9 4.8 3.25 1.37 5.88 0.88
590 M1530 7.88 7.86 4.9 4.8 3.25 1.37 5.88 0.88
5 240 / 200 M1250 9.75 10.26 7.20 5.13 5.25 2.00 7.75 1.13
(3.7) 480 / 400 M1450 7.88 7.86 5.90 4.80 4.25 1.37 5.88 0.88
590 M1550 7.88 7.86 5.90 4.80 4.25 1.37 5.88 0.88
7.5 240 / 200 M1275 11. 75 10.26 8.35 5.13 5.75 2.00 9.75 1.13
(5.5) 480 / 400 M1475 9.75 10.26 7.20 5.13 5.25 2.00 7.75 1.13
590 M1575 9.75 10.26 7.20 5.13 5.25 2.00 7.75 1.13
10 240 / 200 M12100 13.75 10.26 8.35 5.13 5.75 2.00 11.75 1.38
(7.5) 480 / 400 M14100 11.75 10.26 8.35 5.13 5.75 2.00 9.75 1.13
590 M15100 11.75 10.26 8.35 5.13 5.75 2.00 9.75 1.13
15 240 / 200 M12150 15.75 10.26 8.35 5.13 5.75 2.00 13.75 1.38
(11) 480 / 400 M14150 13. 75 10.26 8.35 5.13 5.75 2.00 11.75 1.38
590 M15150 13.75 10.26 8.35 5.13 5.75 2.00 11.75 1.38
20 240 / 200 M12200* 15.75 10.26 8.35 5.13 5.75 2.00 11.75 1.38
(15) 480 / 400 M14200 15. 75 10.26 8.35 5.13 5.75 2.00 13.75 1.38
590 M15200 15.75 10.26 8.35 5.13 5.75 2.00 13.75 1.38
25 240 / 200 M12250* 20.25 10.26 8.35 5.13 5.75 2.00 16.25 1.38
(18.5) 480 / 400 M14250* 15.75 10.26 8.35 5.13 5.75 2.00 11.75 1.38
590 M15250* 15.75 10.26 8.35 5.13 5.75 2.00 11.75 1.38
30 240 / 200 M12300* 20.25 10.26 8.35 5.13 5.75 2.00 16.25 1.38
(22) 480 / 400 M14300* 15.75 10.26 8.35 5.13 5.75 2.00 11.75 1.38
590 M15300* 15.75 10.26 8.35 5.13 5.75 2.00 11.75 1.38
40 480 / 400 M14400* 20.25 10.26 8.35 5.13 5.75 2.00 16.25 1.38
(30) 590 M15400* 20.25 10.26 8.35 5.13 5.75 2.00 16. 25 1.38
50 480 / 400 M14500* 21.00 13.72 8.35 5.13 6.10 2.00 16.25 1.38
(37.5) 590 M15500* 21.00 13.72 8.35 5.13 6.10 2.00 16.25 1.38
60 480 / 400 M14600* 21.00 13.72 8.35 5.13 6.10 2.00 16.25 1.38
(45) 590 M15600* 21.00 13.72 8.35 5.13 6.10 2.00 16. 25 1.38
* MODELS AVAI LA BLE IN NEMA 12 ONLY.
7
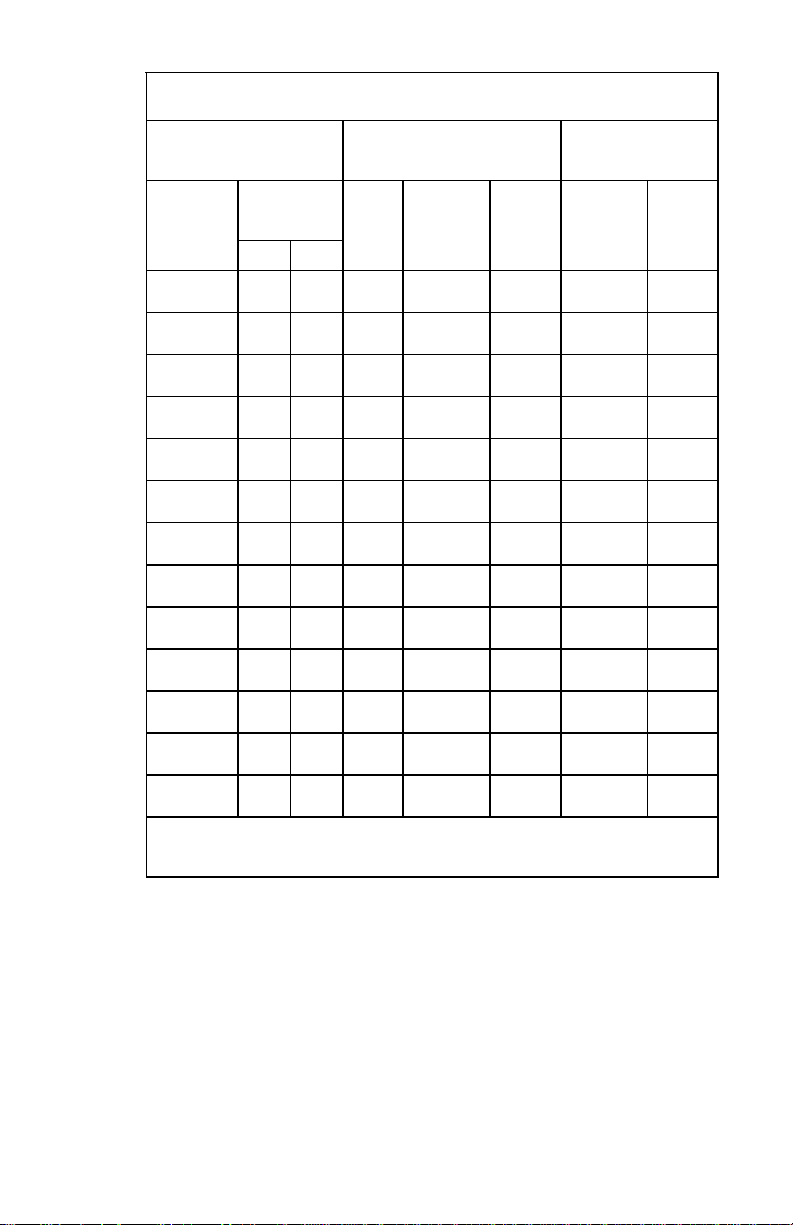
5.0 MC1000 RATINGS
The following tables indicate the input and output ratings of the MC1000 Series
drive.
NOTE: The output current ratings are based on operation at carrier frequencies
of 8 kHz and below. At full ambient temperature, operation at carrier frequencies
above 8 kHz require derating the drive by multiplying the output current rating by
the following factors: 0.94 at 10 kHz, 0.89 at 12 kHz, and 0.83 at 14 kHz. Refer
to Parameter 23 - CARRIER in Section 18.0 - DESCRIPTION OF
PARAMETERS.
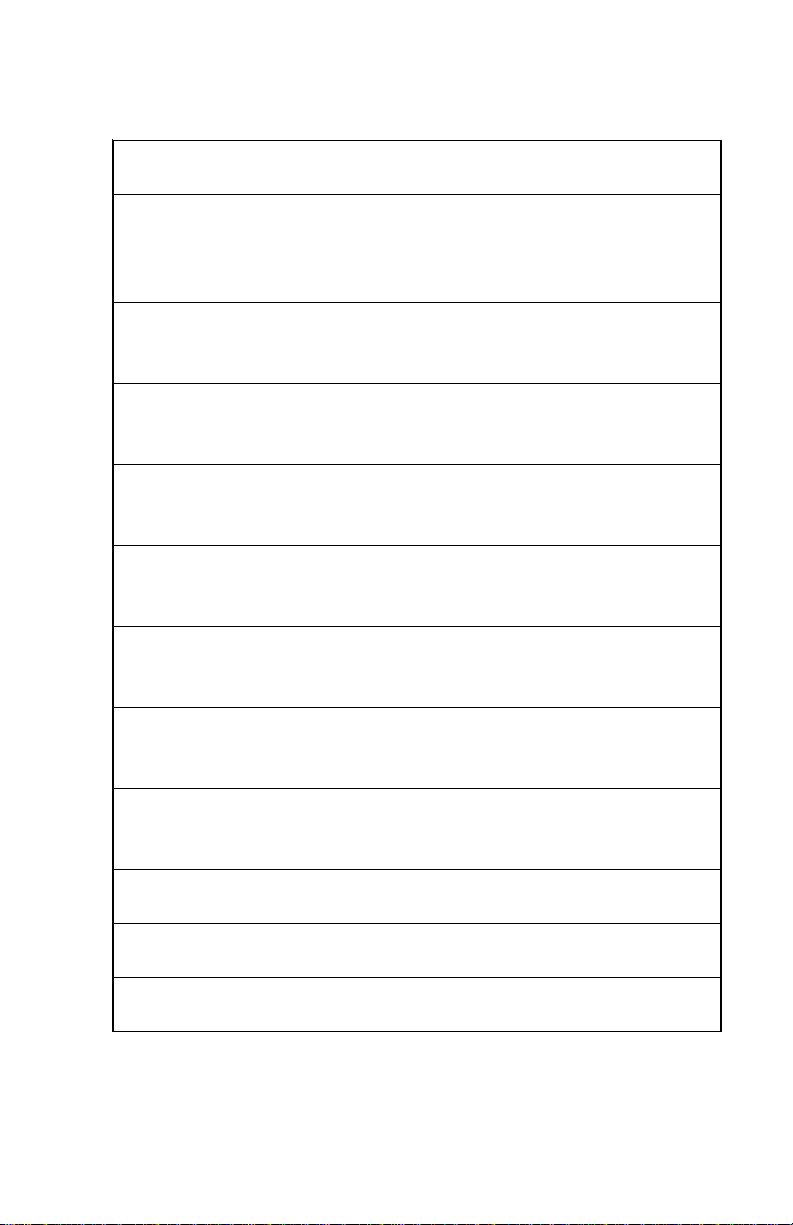
M1100 SERIES RATINGS
MODEL
MODEL NOMINAL NOMINAL
NUMBER INPUT CURRENT POWER CURRENT POWER
(NOTE 1) HP kW PHASE (AMPS) (KVA) (AMPS) (KVA)
M1103S 0.25 0.18 1 6.0 / 3.0 0.72 1.4 / 1.4 0.56
M1105S 0.5 0.37 1 9.2 / 4.6 1.1 2. 2 / 2. 2 0.88
M1110S 1 0. 75 1 16.2 / 8.1 1.9 4. 0 / 4. 0 1.6
M1115S 1.5 1.1 1 21 / 10.4 2. 5 5. 2 / 5. 2 2.1
FOR MOTORS
RATED
(120 / 240 Vac, 50 - 60 H z)
INPUT
OUTPUT
(0 - 230 Vac)
NOTE 1: See Se ction 3.0 for m odel number break do w n.
NOTE 2: See Se ction 8.0 for r ecommended fuse t ype.
8
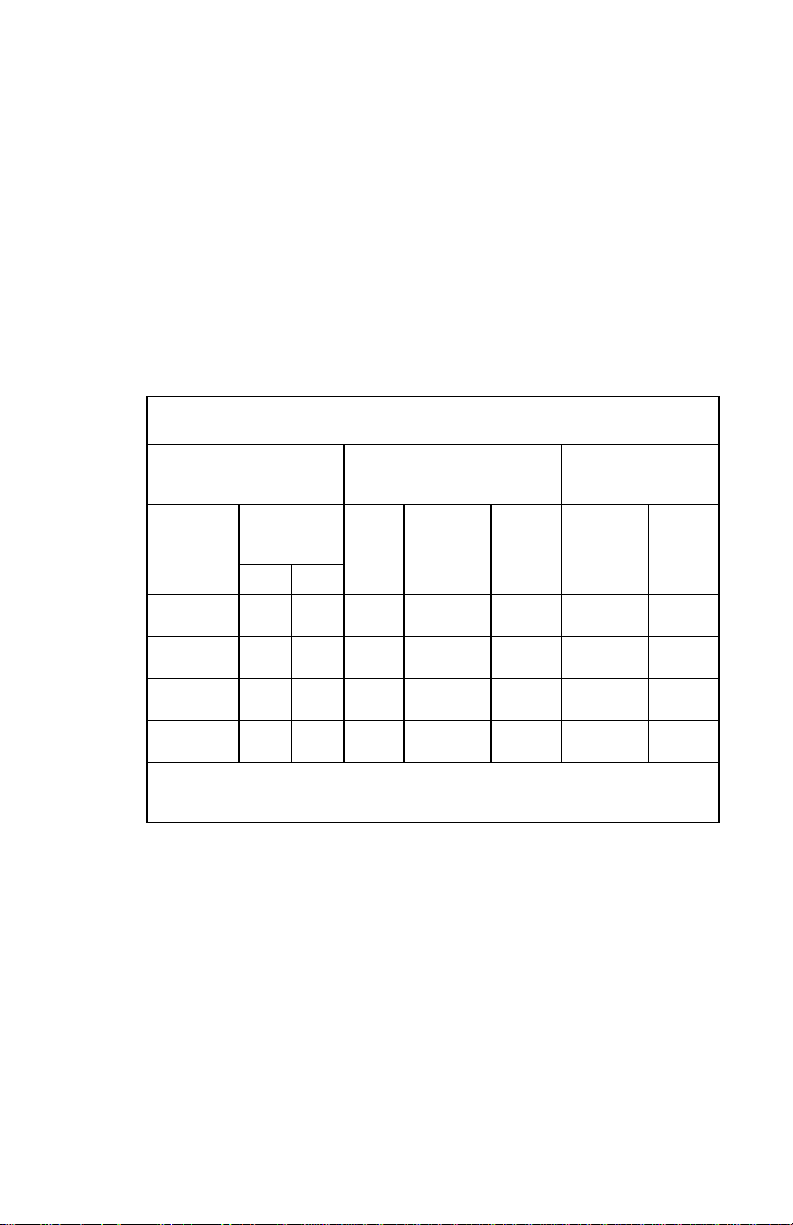
M1200 SERIES RATINGS
MODEL
MODEL NOMINAL NOMINAL
NUMBER INPUT CURRENT POWER CURRENT POWER
(NOTE 1) HP kW PHASE (AMPS) (KVA) (AMPS) (KVA)
M1205S 0.5 0.37 1 5.8 / 5. 0 1.2 2. 5 / 2. 2 0.9
M1205S 0.5 0.37 3 3.1 / 2. 7 1.1 2. 5 / 2. 2 0.9
M1210S 1 0.75 1 10.4 / 9.0 2.2 4. 6 / 4.0 1.6
M1210 1 0.75 3 5. 5 / 4. 8 2.0 4. 6 / 4. 0 1.6
M1215S 1.5 1.1 1 13. 3 / 11. 6 2.8 6.0 / 5.2 2. 1
M1215 1.5 1.1 3 7.1 / 6. 2 2.6 6. 0 / 5. 2 2.1
M1220S 2 1.5 1 17.1 / 14. 9 3.6 7.8 / 6. 8 2.7
M1220 2 1.5 3 9.3 / 8.1 3.4 7.8 / 6.8 2.7
M1230S 3 2.2 1 24 / 21 5.0 11.0 / 9. 6 3.8
M1230 3 2.2 3 13.0 / 11.3 4.7 11.0 / 9. 6 3.8
M1250 5 3.7 3 20 / 17.7 7.4 17.5 / 15.2 6.1
FOR MOTORS
RATED
(200 / 240 Vac, 50 - 60 H z)
INPUT
OUTPUT
(0 - 200 / 230 Vac)
M1275 7.5 5.5 3 30 / 26 10.6 25 / 22 8.8
M12100 10 7.5 3 37 / 32 13. 2 32 / 28 11. 2
M12150 15 11 3 55 / 48 19.8 48 / 42 16. 7
M12200 20 15 3 70 / 61 25.3 62 / 54 21. 5
M12250 25 18.5 3 89 / 77 32.0 78 / 68 27. 1
M12300 30 22 3 104 / 90 37.6 92 / 80 31.9
NOTE 1: See Sectio n 3.0 for m od el num ber br eakdown.
NOTE 2: See Sectio n 8.0 for r ecommended fuse type.
9
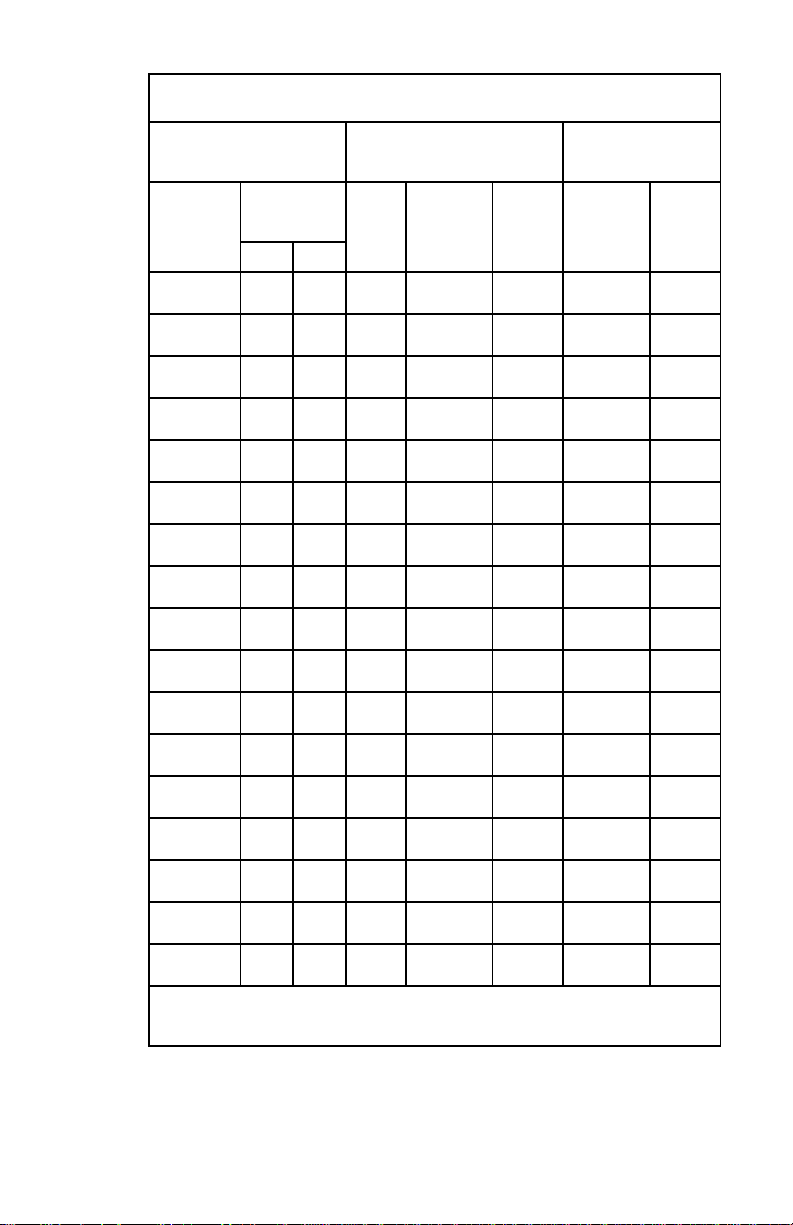
M1400 SERIES RATINGS
MODEL
MODEL NOMINAL NOMINAL
NUMBER INPUT CURRENT POWER CURRENT POWER
(NOTE 1) HP kW PHASE (AMPS) (KVA ) (AMPS) (KVA)
M1410 1 0.75 3 2.8 / 2. 4 2. 0 2. 3 / 2. 0 1.6
M1420 2 1.5 3 4.7 / 4. 1 3.4 3.9 / 3. 4 2. 7
M1430 3 2.2 3 6.6 / 5. 7 4.7 5.5 / 4. 8 3. 8
M1450 5 3.7 3 10.2 / 8. 9 7.3 8. 7 / 7. 6 6.1
M1475 7.5 5.5 3 14. 7 / 12. 8 10. 6 12.6 / 11.0 8.8
M14100 10 7.5 3 18. 3 / 15. 9 13. 2 16. 0 / 14. 0 11.2
M14150 15 11 3 28 / 24 19. 8 24 / 21 16.7
M14200 20 15 3 36 / 31 25. 3 31 / 27 21.5
M14250 25 18. 5 3 44 / 38 31.9 39 / 34 27. 1
M14300 30 22 3 52 / 45 37. 6 46 / 40 31.9
M14400 40 30 3 68 / 59 49. 0 60 / 52 41.4
FOR MO TO RS
RATED
(400 / 48 0 Vac, 50 - 60 H z)
INPUT
OUTPUT
(0 - 400 / 460 Va c)
M14500 50 37 3 85 / 74 61. 5 75 / 65 51.8
M14600 60 45 3 100 / 87 72.3 88 / 77 61.3
NOTE 1: See Secti on 3.0 for m ode l num ber br ea k do w n.
NOTE 2: See Secti on 8.0 for r ecommended fuse type.
10
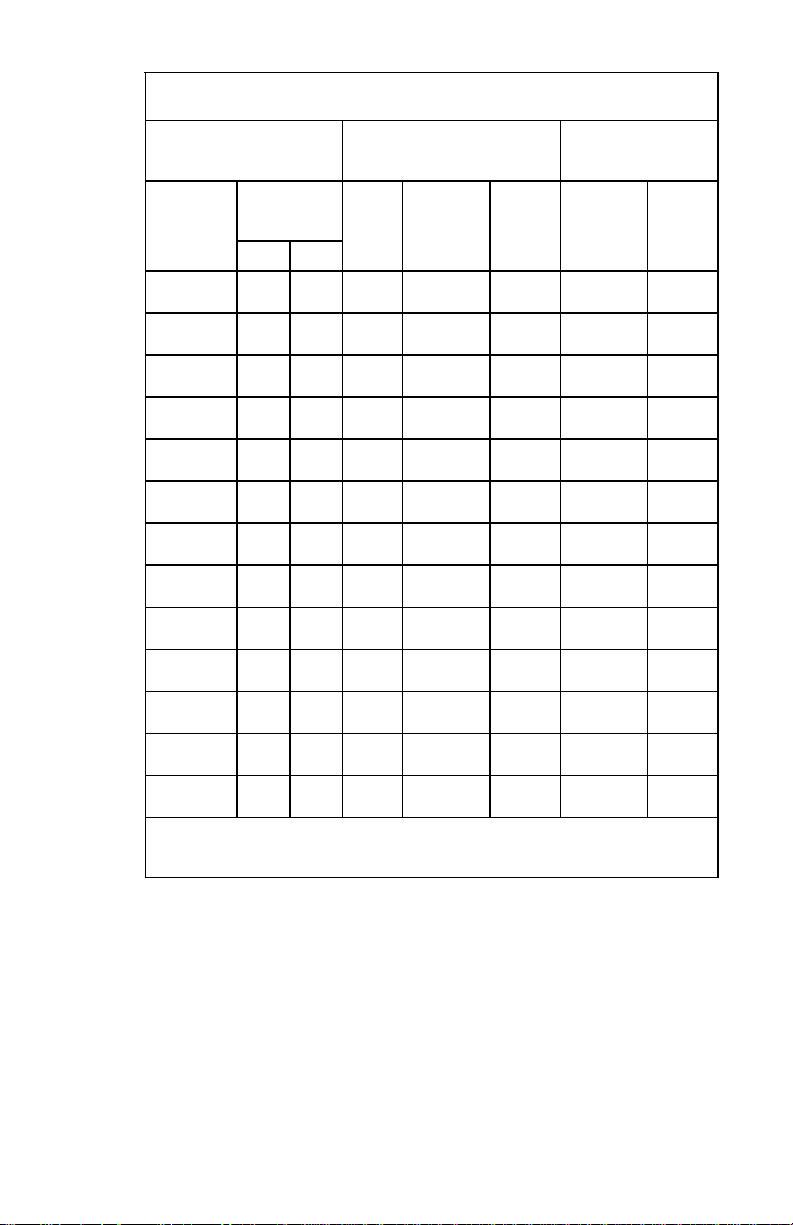
M1500 SERIES RATINGS
MODEL
MODEL NOMIN AL NOMINAL
NUMBER INPUT CURRENT POWER CURRENT POWER
(NOTE 1) HP kW PHASE (AMPS) (KVA) (AMPS) (KVA)
M1510 1 0.75 3 1.9 / 1.9 1.9 1.6 / 1.6 1.6
M1520 2 1.5 3 3.3 / 3.3 3.4 2.7 / 2.7 2.7
M1530 3 2.2 3 4.6 / 4.6 4.7 3.9 / 3.9 3.9
M1551 5 3.7 3 7.1 / 7.1 7.3 6.1 / 6.1 6.1
M1575 7.5 5.5 3 10. 5 / 10. 5 10.7 9.0 / 9. 0 8.8
M15100 10 7.5 3 12. 5 / 12. 5 12.8 11.0 / 11.0 11.0
M15150 15 11 3 19.3 / 19. 3 19.7 17.0 / 17.0 16. 9
M15200 20 15 3 25 / 25 25. 4 22 / 22 21.5
M15250 25 18. 5 3 31 / 31 31.2 27 / 27 26. 9
M15300 30 22 3 36 / 36 37. 1 32 / 32 31.9
M15400 40 30 3 47 / 47 47. 5 41 / 41 40.8
FOR MO TO RS
RATED
(480 / 590 Vac, 50 - 60 H z)
INPUT
OUTPUT
(0 - 460 / 575 Vac)
M15500 50 37 3 59 / 59 60. 3 52 / 52 51.8
M15600 60 45 3 71 / 71 72. 5 62 / 62 61.7
NOTE 1: See Se ction 3.0 for m odel nu m ber br eakdown.
NOTE 2: See Se ction 8.0 for r ecommended fuse t ype.
11

6.0 THEORY
6.1 DESCRIPTION OF AC MOTOR OPERATION
Three phase AC motors are comprised of two major components, the stator and
the rotor. The stator is a set of three electrical windings held stationary in the
motor housing. The rotor is a metal cylinder, fixed to the motor drive shaft,
which rotates within the stator. The arrangement of the stator coils and the presence
of three phase AC voltage give rise to a rotating magnetic field which drives the
rotor. The speed at which the magnetic field rotates is known as the synchronous
speed of the motor. Synchronous speed is a function of the frequency at which
the voltage is alternating and the number of poles in the stator windings.
The following equation gives the relation between synchronous speed, frequency,
and the number of poles:
Ss = 120 f/p
Where: Ss = Synchronous speed (rpm ), f = frequency (Hz),
p = number of poles
In three phase induction motors the actual shaft speed differs from the synchronous
speed as load is applied. This difference is known as “slip”. Slip is commonly
expressed as a percentage of synchronous speed. A typical value is three percent
at full load.
The strength of the magnetic field in the gap between the rotor and stator is
proportional to the amplitude of the voltage at a given frequency. The output
torque capability of the motor is, therefore, a function of the applied voltage
amplitude at a given frequency. When operated below base (rated) speed, AC
motors run in the range of “constant torque”. Constant torque output is obtained
by maintaining a constant ratio between voltage amplitude (Volts) and frequency
(Hertz). For 60 Hz motors rated at 230, 460, and 575 Vac, common values for
this V/Hz ratio are 3.83, 7.66, and 9.58 respectively . Operating with these V/Hz
ratios generally yields optimum torque capability. Operating at lower ratio values
results in lower torque and power capability. Operating at higher ratio values will
cause the motor to overheat. Most standard motors are capable of providing full
torque output from 3 to 60 Hz. However, at lower speeds, where motor cooling
fans become less effective, supplemental cooling may be needed to operate at full
torque output continuously.
12
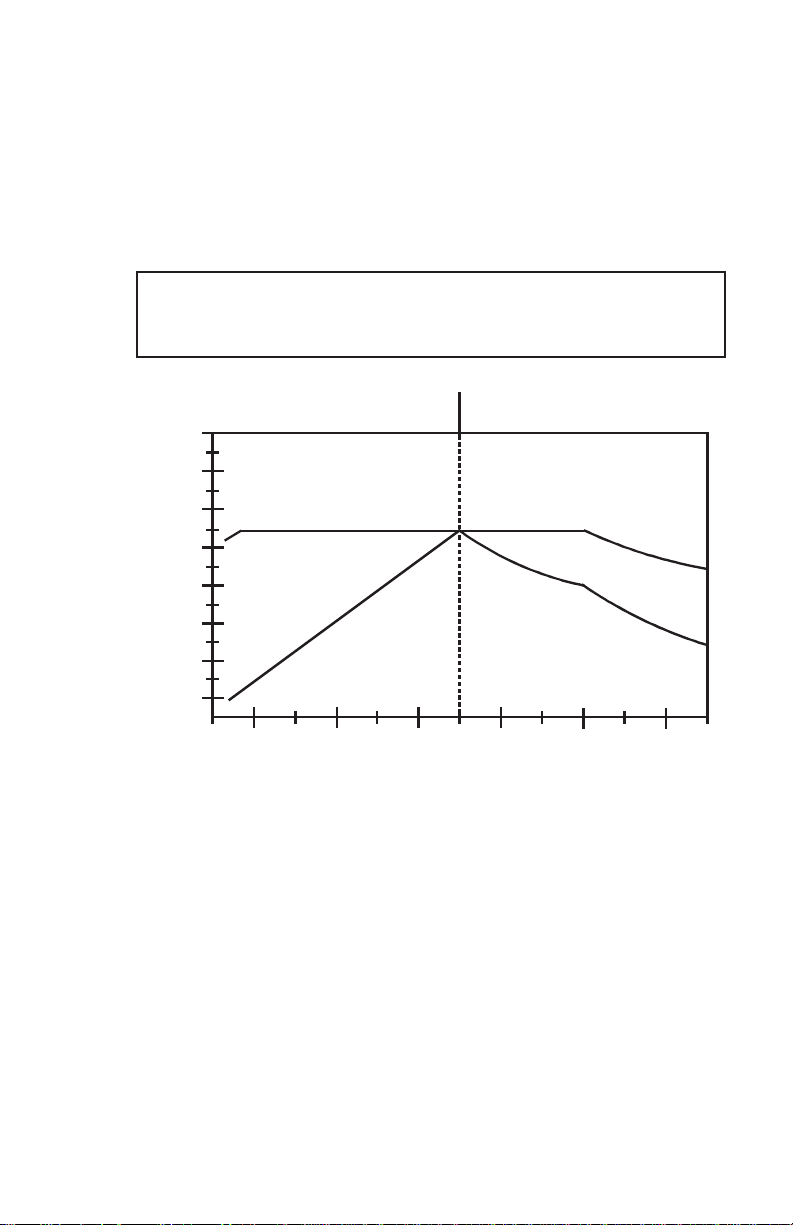
If the frequency applied to the motor is increased while the voltage remains
constant, torque capability will decrease as speed increases. This will cause the
horsepower capability of the motor to remain approximately constant. Motors
run in this mode when operated above base speed, where drive output voltage is
limited by the input line voltage. This operating range is known as the “constant
horsepower” range. The typical maximum range for constant horsepower is about
2.3 to 1 (60 to 140 Hz). The diagram below depicts the characteristics of a typical
AC induction motor with a 60 Hz base speed.
WARNING!
Consult motor manufacturer before operating motor and/or driven equipment above
base speed.
150
130
110
TORQUE (%)
CONSTANT TORQUE CONSTANT HP
90
70
50
30
10
TORQUE
HORSEPOWER
20 40 60 80 100 120
HORSEPOWER
TORQUE
FREQUENCY (Hz)
6.1.1 VARIABLE TORQUE VS. CONSTANT TORQUE
Variable frequency drives, and the loads they are applied to, can generally be
divided into two groups: constant torque and variable torque. Constant torque
loads include: vibrating conveyors, punch presses, rock crushers, machine tools,
and just about every other application that is not considered variable torque.
Variable torque loads include centrifugal pumps and fans, which make up the
majority of HVAC applications.
Variable torque loads are governed by the affinity laws, which define the
relationships between speed, flow, torque and horsepower. The diagram below
illustrates these relationships:
13
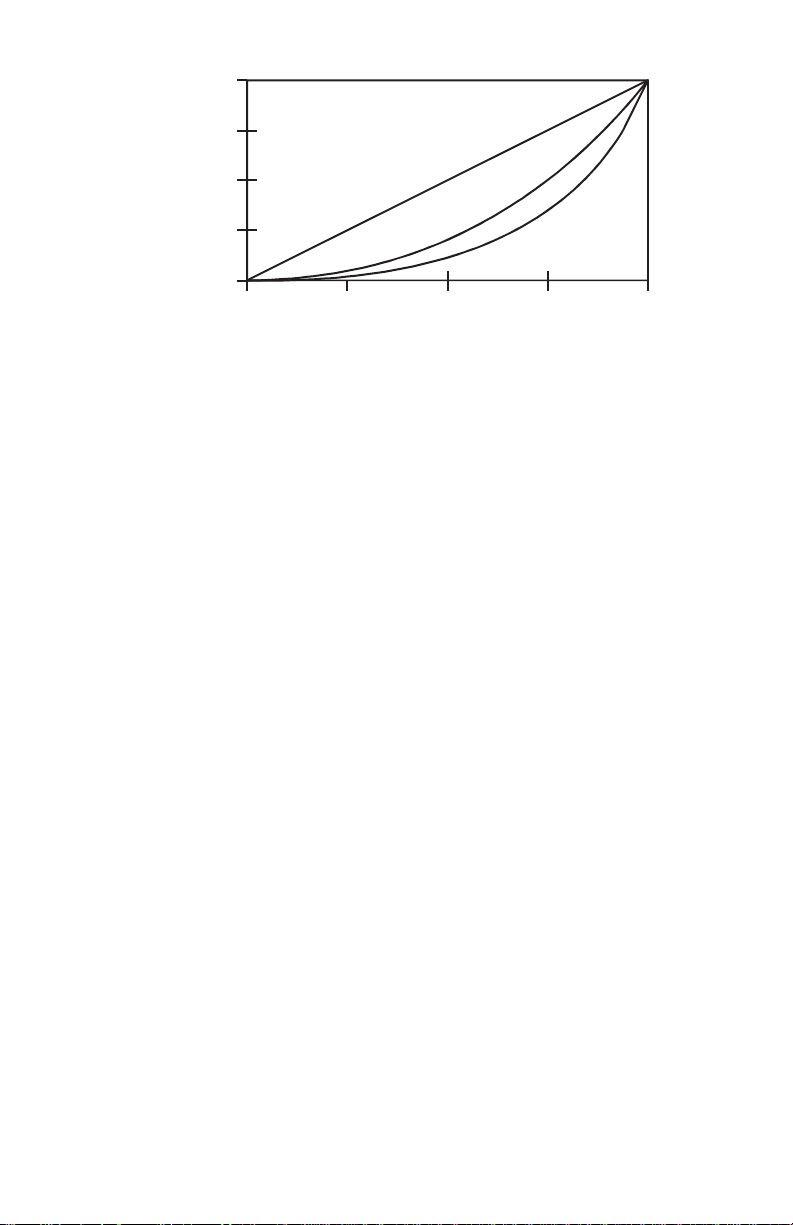
100%
75%
50%
% FLOW
25%
0%
% TORQUE
% HORSEPOWER
100%75%50%25%0%
% SPEED
“V ariable torque” refers to the fact that the torque required varies with the square
of the speed. Also, the horsepower required varies with the cube of the speed,
resulting in a large reduction in horsepower for even a small reduction in speed.
It is easily seen that substantial energy savings can be achieved by reducing the
speed of a fan or pump. For example, reducing the speed to 50% results in a 50
HP motor having to produce only 12.5% of rated horsepower , or 6.25 HP . Variable
torque drives usually have a low overload capacity (110% - 120% for 60 seconds),
because variable torque applications rarely experience overload conditions. To
optimize efficiency and energy savings, variable torque drives are usually
programmed to follow a variable V/Hz ratio.
The term “constant torque” is not entirely accurate in terms of the actual torque
required for an application. Many constant torque applications have reciprocating
loads, such as vibrating conveyors and punch presses, where the rotational motion
of the motor is being converted to a linear motion. In such cases, the torque
required can vary greatly at different points in the cycle. For constant torque
loads, this fluctuation in torque is not a direct function of speed, as it is with a
variable torque load. As a result, constant torque drives typically have a high
overload rating (150% for 60 seconds) in order to handle the higher peak torque
demands. T o achieve maximum torque, constant torque drives follow a constant
V/Hz ratio.
Both MC Series product lines (MC1000 and MC3000) have full overload capacity
(150% for 60 seconds, 180% for 30 seconds), so that either one can be used for
either type of application. The V/Hz ratio can also be changed to optimize
performance for either type of application.
6.2 DRIVE FUNCTION DESCRIPTION
The MC Series is a 16 bit microprocessor based, keypad programmable, variable
speed AC motor drive. There are four major sections: an input diode bridge and
filter, a power board, a control board, and an output intelligent power module.
14

6.2.1 DRIVE OPERATION
Incoming AC line voltage is converted to a pulsating DC voltage by the input
diode bridge. The DC voltage is supplied to the bus filter capacitors through a
charge circuit which limits inrush current to the capacitors during power-up. The
pulsating DC voltage is filtered by the bus capacitors which reduces the ripple
level. The filtered DC voltage enters the inverter section of the drive, composed
of six output intelligent insulated gate bi-polar transistors (IGBTs) which make
up the three output legs of the drive. Each leg has one intelligent IGBT connected
to the positive bus voltage and one connected to the negative bus voltage.
Alternately switching on each leg, the intelligent IGBT produces an alternating
voltage on each of the corresponding motor windings. By switching each output
intelligent IGBT at a very high frequency (known as the carrier frequency) for
varying time intervals, the inverter is able to produce a smooth, three phase,
sinusoidal output current wave which optimizes motor performance.
6.2.2 CIRCUIT DESCRIPTION
The control section consists of a control board with a 16 bit microprocessor,
keypad and display. Drive programming is accomplished via the keypad or the
serial communications port. During operation the drive can be controlled via the
keypad, by control devices wired to the control terminal strip, or by the serial
communications port. The Power Board contains the control and protection circuits
which govern the six output IGBTs. The Power Board also contains a charging
circuit for the bus filter capacitors, a motor current feedback circuit, a voltage
feedback circuit, and a fault signal circuit. The drive has several built in protection
circuits. These include phase-to-phase and phase-to-ground short circuit
protection, high and low line voltage protection, protection against excessive
ambient temperature, and protection against continuous excessive output current.
Activation of any of these circuits will cause the drive to shut down in a fault
condition.
6.2.3 MC1000 INPUTS AND OUTPUTS
The drive has two analog inputs (0-10 VDC and 4-20 mA) that can be used for
speed reference, PID setpoint reference, or PID feedback. A speed potentiometer
(10,000 Ohm) can be used with the 0-10 VDC input.
There are also two analog outputs: one is proportional to speed (frequency), and
the other is proportional to load.
The drive has three programmable outputs for status indication: one Form C
relay and two open-collector outputs.
Refer to Sections 14.0 - CONTROL WIRING and 15.0 - CONTROL WIRING
DIAGRAMS for more information.
15
7.0 INSTALLATION
DRIVES MUST NOT BE INSTALLED WHERE SUBJECTED TO ADVERSE
ENVIRONMENTAL CONDITIONS! DRIVES MUST NOT BE INSTALLED
WHERE SUBJECTED TO: COMBUSTIBLE, OILY, OR HAZARDOUS
VAPORS OR DUST; EXCESSIVE MOISTURE OR DIRT; STRONG
VIBRATION; EXCESSIVE AMBIENT TEMPERATURES. CONSULT AC
TECHNOLOGY FOR MORE INFORMATION ON THE SUITABILITY OF A
DRIVE TO A PARTICULAR ENVIRONMENT.
The drive should be mounted on a smooth vertical surface capable of safely
supporting the unit without vibrating. The LCD display has an optimum field of
view, this should be considered when determining the mounting position.
Chassis models must be installed in an electrical enclosure which will provide
complete mechanical protection and maintain uniform internal temperature within
the drive’s ambient operating temperature rating. All drive models MUST be
mounted in a vertical position for proper heatsink cooling.
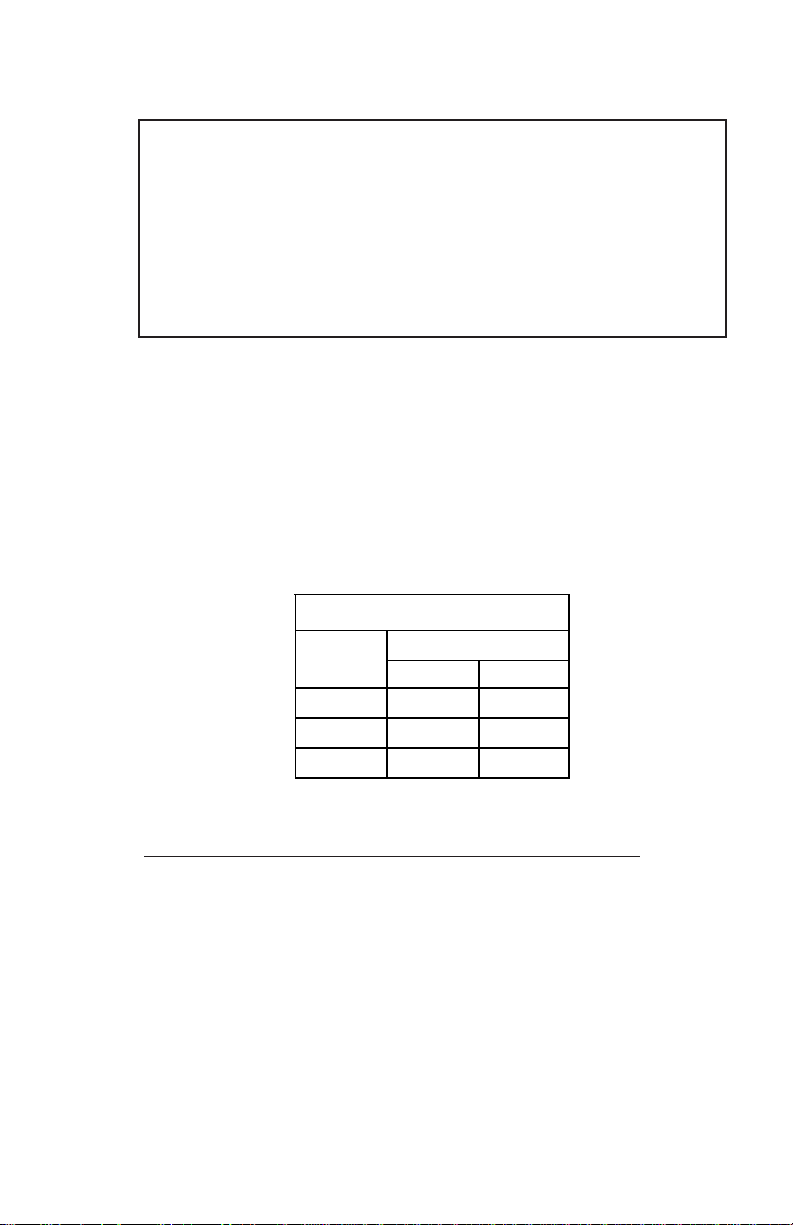
Maintain a minimum spacing around the drive as follows:
WARNING!
SPACIN G REQUIREMENTS
HP
0.25 - 5 2 50
7.5 - 25 4 100
30 - 60 6 150
SPACING
INCHES mm
All drive models MUST be mounted in a vertical position for proper heatsink
cooling. Fans or blowers should be used to insure proper cooling in tight quarters.
Do not mount drives above other drives or heat producing equipment that would
impede the cooling of the drive. Note the ambient operating temperature ratings
for each drive model.
If it is necessary to drill or cut the drive enclosure or panel, extreme care must be
taken to avoid damaging drive components or contaminating the drive with metal
fragments (which cause shorting of electrical circuits). Cover drive components
with a clean cloth to keep out metal chips and other debris. Use a vacuum cleaner
to clean drive components after drilling, even if chips do not appear to be present.
Do not attempt to use positive air pressure to blow chips out of drive, as this tends
to lodge debris under electronic components. Contaminating the drive with metal
chips can cause drive failure and will void the warranty.
16
The MC1000 Series is UL approved for solid state motor overload protection.
Therefore, a separate thermal overload relay is not required for single motor
applications. In applications where one drive is operating more than one motor,
a separate thermal overload relay is required for each motor per NEC.
7.1 INSTALLATION AFTER A LONG PERIOD OF STORAGE
WARNING!
Severe damage to the drive can result if it is operated after a long period of storage
or inactivity without reforming the DC bus capacitors!
If input power has not been applied to the drive for a period of time exceeding
three years (due to storage, etc), the electrolytic DC bus capacitors within the
drive can change internally, resulting in excessive leakage current. This can result
in premature failure of the capacitors if the drive is operated after such a long
period of inactivity or storage.
In order to reform the capacitors and prepare the drive for operation after a long
period of inactivity, apply input power to the drive for 8 hours prior to actually
operating the drive/motor system.
7.2 EXPLOSION PROOF APPLICATIONS
Explosion proof motors that are not rated for inverter use lose their certification
when used for variable speed. Due to the many areas of liability that may be
encountered when dealing with these applications, the following statement of
policy applies:
“AC T echnology Corporation inverter products are sold with no warranty of
fitness for a particular purpose or warranty of suitability for use with explosion
proof motors. AC Technology Corporation accepts no responsibility for any
direct, incidental or consequential loss, cost, or damage that may arise through
the use of its AC inverter products in these applications. The purchaser
expressly agrees to assume all risk of any loss, cost, or damage that may arise
from such application."
17

8.0 INPUT AC REQUIREMENTS
WARNING!
Hazard of electrical shock! Disconnect incoming power and wait three minutes
before servicing the drive. Capacitors retain charge after power is removed.
8.1 INPUT AC POWER REQUIREMENTS
8.1.1 VOLTAGE
The input voltage must match the drive’s nameplate voltage rating. Voltage
fluctuation must not vary by greater than 10% overvoltage or 15% undervoltage.
NOTE: Drives with dual rated input voltage must be programmed for the proper
supply voltage. Refer to Parameter 0 - LINE VOLTS in Section 18.0 DESCRIPTION OF PARAMETERS.
The drive is suitable for use on a circuit capable of delivering not more than
200,000 RMS symmetrical amperes, at the drive’s rated voltage.
Three phase voltage imbalance must be less than 2.0% phase to phase. Excessive
phase to phase imbalance can cause severe damage to the drive’s power
components.
Motor voltage should match line voltage in normal applications. The drive’s
maximum output voltage will equal the input voltage. Use extreme caution when
using a motor with a voltage rating which is different from the input line voltage.
8.1.2 SUPPLY TRANSFORMER kVA RATINGS
If the kVA rating of the AC supply transformer is greater than ten times the input
kVA rating of the drive, a drive isolation transformer, or a 2 - 3% input line
reactor (also known as a choke) must be added.
8.2 INPUT FUSING AND DISCONNECT REQUIREMENTS
A circuit breaker or a disconnect switch with fuses must be provided in accordance
with the National Electric Code (NEC) and all local codes.
The MC1000 drive is capable of withstanding up to 150% current overload for 60
seconds. Select a fuse or magnetic trip circuit breaker rated at 1.5 times the input
current rating of the drive (the minimum size should be 10 amps, regardless of
input current rating). Refer to Section 5.0 - MC1000 RATINGS.
18

Minimum voltage rating of the protection device should be 250 Vac for 240/120
Vac and 240/200 Vac rated drives, and 600 Vac for 480/400 Vac and 590/480 V ac
drives.
Current limiting type fuses should be used when input fusing is required. Select
fuses with low I
type KTK-R. Similar fuses with equivalent ratings by other manufacturers may
also be acceptable.
2
T values, rated at 200,000 AIC. Recommended fuses are Bussman
9.0 VOLTAGE SELECTION
9.1 INPUT VOLTAGE RATINGS
M1100 Series drives are rated for 240/120 Vac, 50-60 Hz input. The drive will
function with input voltage of 120 Vac (+ 10%, -15%) at 48 to 62 Hz when wired
for 120 Vac input, or with input voltage of 240 Vac (+ 10%, - 15%), at 48 to 62
Hz, when wired for 240 Vac input.
M1200 Series drives are rated for 240/200 Vac, 50-60 Hz input. The drive will
function with input voltages of 200 to 240 Vac (+ 10%, - 15%), at 48 to 62 Hz.
M1400 Series drives are rated for 480/400 Vac, 50-60 Hz input. The drive will
function with input voltages of 400 to 480 Vac (+ 10%, - 15%), at 48 to 62 Hz.
M1500 Series drives are rated for 590/480 Vac, 50-60 Hz input. The drive will
function with input voltages of 480 to 590 Vac (+ 10%, - 15%), at 48 to 62 Hz.
19
10.0 POWER WIRING
WARNING!
Hazard of electrical shock! Disconnect incoming power and wait three minutes
before servicing the drive. Capacitors retain charge after power is removed.
Note drive input and output current ratings and check applicable electrical codes
for required wire type and size, grounding requirements, overcurrent protection,
and incoming power disconnect, before wiring the drive. Size conservatively to
minimize voltage drop.
Input fusing and a power disconnect switch or contactor MUST be wired in series
with terminals L1, L2, and L3 (L1 and L2 if input is single phase). If one has not
been supplied by AC T echnology Corporation, a disconnect means must be wired
during installation. This disconnect must be used to power down the drive when
servicing, or when the drive is not to be operated for a long period of time, but
should not be used to start and stop the motor.
Repetitive cycling of a disconnect or input contactor (more than once every
two minutes) may cause damage to the drive.
10.1 WIRING FOR SINGLE PHASE OR THREE PHASE INPUT
If the drive is nameplated for 240/120 Vac single phase input, wire the input to
terminals L1 and N and jumper terminals L1 to L2 for 120 Vac input voltage, or
wire to terminals L1 and L2 (do not wire to N) for 240 Vac input voltage. Refer
to Section 11.0 - MC1000 POWER WIRING DIAGRAM.
If the drive is nameplated for three phase input only, wire the input to terminals
L1, L2, and L3.
All three power output wires, from terminals T1, T2, and T3 to the motor , must be
kept tightly bundled and run in a separate conduit away from all other power and
control wiring.
It is not recommended to install contactors or disconnect switches between the
drive and motor. Operating such devices while the drive is running can potentially
cause damage to the drive's power components. If such a device is required, it
should only be operated when the drive is in a STOP state. If there is potential for
the device to be opened while the drive is running, the drive must be programmed
for COAST TO STOP (see Parameter 26 - STOP), and an auxiliary contact on the
device must be interlocked with the drive's run circuit. This will give the drive a
stop command at the same time the device opens, and will not allow the drive to
start again until the device is closed.
20
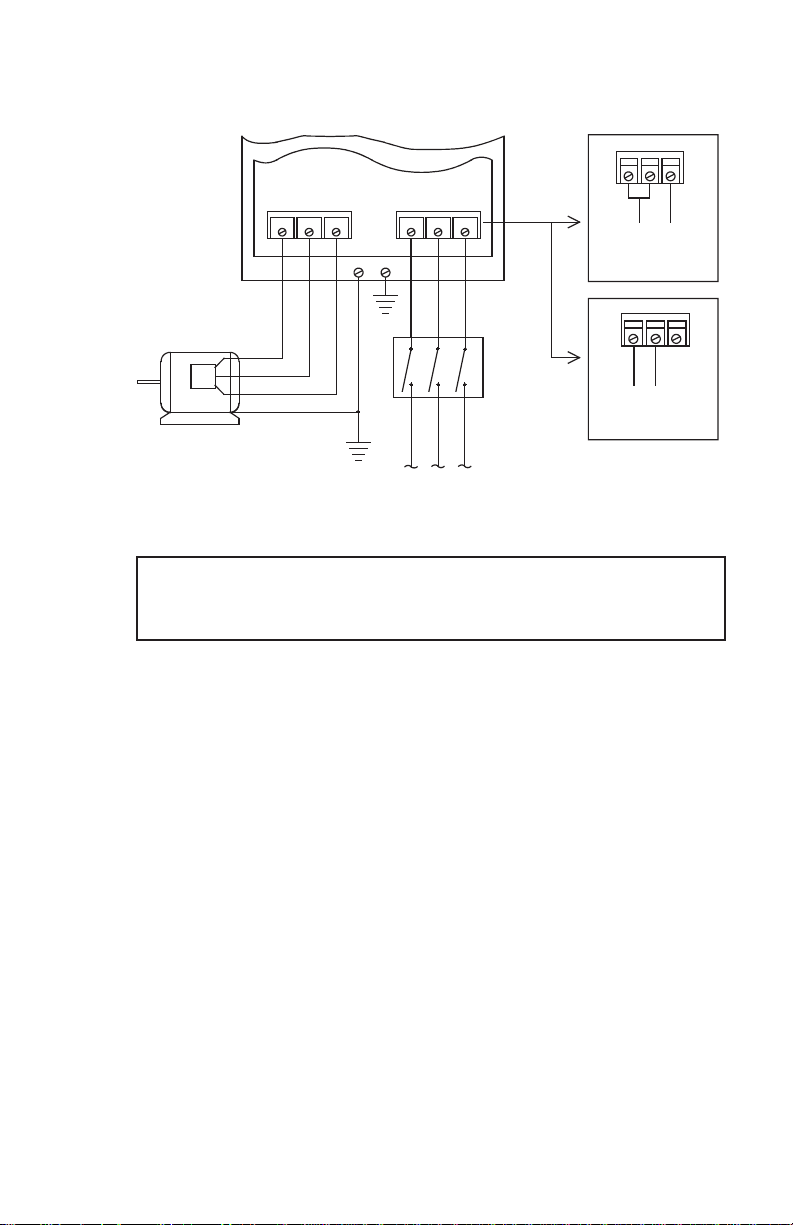
11.0 MC1000 POWER WIRING DIAGRAM
T1 T2 T3 L1 L2 L3
GNDGND
L1 L2 N
120 Vac SINGLE
PHASE INPUT
WIRING DIAGRAM
L1 L2 N
240 Vac SINGLE
PHASE INPUT
WIRING DIAGRAM
THREE PHASE
AC MOTOR
GND
DISCONNECT
MEANS
(REQUIRED)
FUSED INPUT
VOLTAGE
WARNING!
Do not connect incoming AC power to output terminals T1, T2, or T3! Severe
damage to the drive will result.
INSTALL, WIRE, AND GROUND IN ACCORDANCE WITH ALL
APPLICABLE CODES.
NOTES:
1. Wire the motor for the proper voltage per the output rating of the drive. Motor
wires MUST be run in a separate steel conduit away from control wiring and
incoming AC power wiring.
2. Do not install contactors between the drive and the motor without consulting
AC Technology for more information. Failure to do so may result in drive
damage.
3. Remove any existing, and do not install, power factor correction capacitors
between the drive and the motor. Failure to do so will result in drive damage.
4. Use only UL and CSA listed and approved wire.
5. Minimum wire voltage ratings: 300 V for 120, 200 and 240 Vac systems, and
600 V for 400, 480, and 590 Vac systems.
6. Wire guage must be based on a minimum of 150% of the rated output current
of the drive, and a minimum 75°C insulation rating. Use copper wire only.
7. Wire and ground in accordance with NEC or CEC, and all applicable local
codes.
21
12.0 INITIAL POWER UP
Hazard of electrical shock! W ait three minutes after disconnecting incoming power
before servicing drive. Capacitors retain charge after power is removed.
Before attempting to operate the drive, motor, and driven equipment be sure all
procedures pertaining to installation and wiring have been properly followed.
Severe damage to the drive can result if it is operated after a long period of storage
or inactivity without reforming the DC bus capacitors!
If input power has not been applied to the drive for a period of time exceeding
three years (due to storage, etc), the electrolytic DC bus capacitors within the
drive can change internally, resulting in excessive leakage current. This can result
in premature failure of the capacitors if the drive is operated after such a long
period of inactivity or storage.
In order to reform the capacitors and prepare the drive for operation after a long
period of inactivity, apply input power to the drive for 8 hours prior to actually
operating the drive/motor system.
WARNING!
WARNING!
Disconnect the driven load from the motor. Verify that the drive input terminals
(L1, L2, and L3) are wired to the proper input voltage per the nameplate rating of
the drive.
WARNING!
DO NOT connect incoming AC power to output terminals T1, T2, and T3! Do
not cycle input power to the drive more than once every two minutes. Damage to
the drive will result.
Energize the incoming power line. The LCD display should light and flash
“TESTING” and then show the voltage and horsepower rating of the drive. The
display should then show “STOP > 20.00 HZ” which indicates that the drive is in
a STOP condition, and the speed setpoint is 20.00 Hz:
STOP > 20.00 HZ
22

If the display does not appear, remove the incoming power , wait three minutes for
the bus capacitors to discharge, and verify correct installation and wiring. If the
wiring is correct, re-apply incoming power and note the display for drive status.
If the display still does not appear contact the factory for assistance.
NOTE 1: If the drive's display is blank after power up, and it is a model equipped
with heatsink fans, check to make sure the fans are operating (they should be
spinning anytime power is applied to the drive). If they are not spinning, the
drive's display will be blank and the drive cannot be operated. If the fans are
clogged or jammed, disconnect power from the drive and remove any obstructions
from the fans. Re-apply power to the drive and check the fans. If they are spinning,
the drive's display should appear and the drive should operate properly. If there
are no obstructions, the fan itself may be defective. Please contact the factory for
assistance.
If the drive powers up correctly, follow the procedure given below to check the
motor rotation:
1. Use the ! key to decrease the speed setpoint to the minimum value allowed
(.50 Hz if Parameter 10 - MIN FRQ has not been changed).
2. Press the STAR T key . The drive should indicate RUN, but if the speed setpoint
is .50 Hz, the motor may not rotate. Press the " key to increase the speed
setpoint until the motor starts to rotate.
3. If the motor is rotating in the wrong direction, press the STOP key and remove
power from the drive. W ait three minutes for the bus capacitors to dischar ge,
and swap any two of the motor wires connected to T1, T2, and T3.
NOTE 2: The drive is phase insensitive with respect to incoming line voltage.
Therefore, to change the motor rotation, the phases must be swapped at the drive
output terminals or at the motor.
23
 Loading...
Loading...