

Page 1

Servoválvula direccional
en versión de 4 vías
Tipo 4WS.2E...
Tamaño nominal 10
Serie 5X
Máxima presión de servicio 315 bar
Caudal máximo 180 l/min
RS 29583/05.11
Reemplaza a: 07.03
Tipo 4WSE2ED 10-5X/...B...K31EV
1/20
HAD5893HAD5892
Tipo 4WS2EM 10-5X/...B...K31EV
Indice
Contenido Página
Características 1
Datos para el pedido 2
Símbolos 3
Funcionamiento, corte 4, 5
Datos técnicos 6, 7
Accesorios disponibles 7
Conexión eléctrica 7, 8
Curvas características 9 hasta 15
Dimensiones 16 hasta 18
Placa de lavado con orificios 19
Informaciones sobre repuestos suministrables:
www.boschrexroth.com/spc
Características
– Válvula para la regulación de posición, fuerza, presión
o velocidad
– Servoválvula de 2 etapas con realimentación mecánica o
mecánica y eléctrica
– 1a. etapa como amplificador de tobera-placa deflectora
– Montaje en placas:
posición de las conexiones según ISO 4401
– Motor de mando seco, el entrehierro no se ensucia por el
fluido hidráulico
– También se emplea como versión de 3 vías
– Elemento de retorno de la corredera de mando libre
de desgaste
– Mando
•electrónicademandoexternaenformatoeuropeooen
diseño modular (pedido por separado), ver página 8
•oelectrónicademando(OBE)integradaenlaválvula
– Válvula y electrónica de mando integrada están ajustadas
y ensayadas
– Corredera de mando con compensación de fuerzas de flujo
– Casquillo de mando centrado fijo, por ello poca resistencia a
la temperatura/presión
– Cámara de presión del casquillo de mando con junta de
cierre, sin desgaste del anillo de junta
– Filtro para 1a. etapa con libre acceso desde afuera,
ver páginas 16, 17 y 18
Page 2
2/20 Bosch Rexroth AG Hydraulics 4WS.2E... RS 29583/05.11
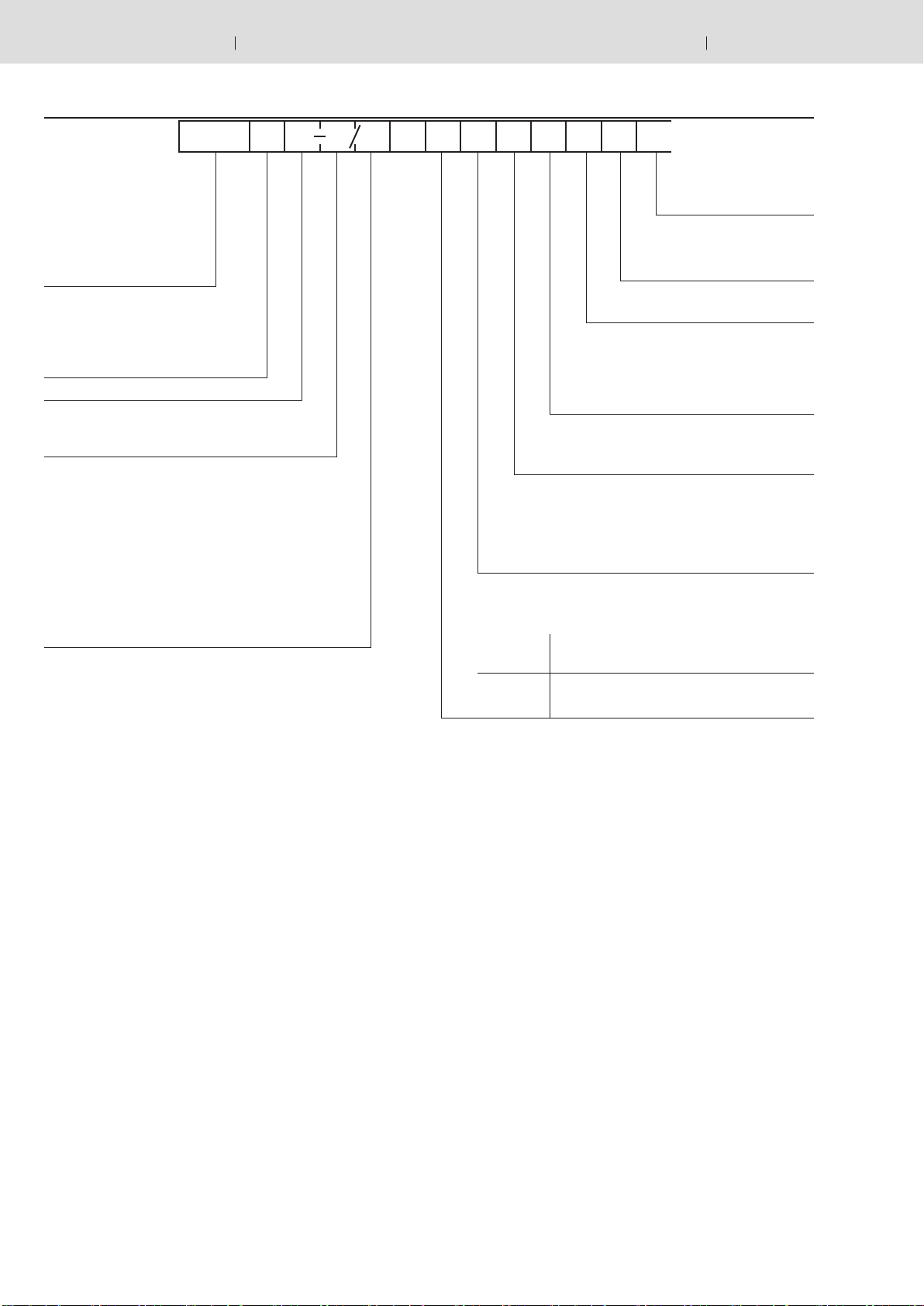
Datos para el pedido
10 5X B K31 E V
Servoválvula direccional
en versión de 4 vías para:
Electrónica de mando
externa = 4WS2E
Con electrónica de mando
integrada = 4WSE2E
Realimentación mecánica = M
Realimentación mecánica
y eléctrica = D
(sólo disponible con
electrónica integrada)
Tamaño nominal 10 = 10
Serie del aparato 50 hasta 59 = 5X
(50 hasta 59: medidas invariadas de conexión
y montaje)
Caudal nominal
1)
para diferencia de presión de válvula Δp = 70 bar
5 l/min = 5
10 l/min = 10
20 l/min = 20
30 l/min = 30
45 l/min = 45
60 l/min = 60
75 l/min = 75
90 l/min = 90
Caudal nominal
1)
El caudal nominal se refiere al 100% de la señal de valor nominal con 70 bar de diferencia de presión (35 bar por cada
canto de mando) La diferencia de presión de la válvula se
debe considerar como magnitud de referencia. Valores diferentes provocan una variación del caudal.
Se debe considerar una tolerancia posible de caudal nominal
de ±10 % (ver función caudal-señal en página 9).
*
Otros datos en
texto explícito
V = juntas FKM
apropiadas para aceite minera
(HL, HLP) según DIN 51524
Solapamiento de pistón
E = 0 a 0,5 % negativo
Conexión eléctrica
K31 = sin conector con zócalo según
EN 175201-804
Conector - pedido por separado
ver página 7
Rango de presión de entrada
210 = 10 hasta 210 bar
315 = 10 hasta 315 bar
Alimentación y retorno de aceite de mando
– = alimentación externa, realimentación externa
E = alimentación interna, retorno externo
T = alimentación externa, retorno externo
ET = alimentación interna, retorno interno
Válvulas para electrónica de mando externa:
11 = bobinanro.11(30mA/85Ωcadabobina)
Válvula con electrónica de mando integrada:
Valor
nominal
(sólo disponible en 4WSE2ED…)
Valor real
9 = ±10 V ±10 V
13 = ±10 mA ±10 mA
Rango de presión de entrada
4)
Se debe procurar en lo posible presión de sistema constante.
Rango de presión de pilotaje: 10 hasta 210 bar ó
10 hasta 315 bar
Respecto a la dinámica, se debe considerar la dependencia de la
respuesta en frecuencia dentro del rango de presión admisible.
7)
6)
l
5)
4)
3)
2)
Datos de mando eléctricos
2)
Válvulas para electrónica de mando externa:
La señal de ajuste debe generarse a partir de una etapa final
regulada en corriente. Servoamplificador, ver página 7.
Válvula con electrónica de mando integrada:
En la electrónica integrada el valor nominal puede ser alimentado como tensión (datos para el pedido "9") o para distancias grandes (> 25 m entre mando y válvula) como corriente
(datos para el pedido "13").
Aceite de mando
3)
Se debe procurar en lo posible presión de pilotaje constante.
Por ello a menudo es conveniente un pilotaje externo a través de la conexión X. Para afectar positivamente la dinámica
se puede operar la válvula con mayor presión en X que en P.
Conexiones X e Y también están presurizadas "internamente"
para aceite de mando.
Solapamiento de pistón
5)
El solapamiento de pistón en % se refiere a la carrera nominal de la corredera de mando.
Otros solapamientos de corredera de mando a pedido!
Material de junta
6)
De requerirse otros materiales de junta, consultar!
Datos en texto explícito
7)
Aquí se deben especificar requerimientos especiales en texto
explícito. Luego de la entrada el pedido se verifica en fábrica
y se completan los códigos de tipo con un número asignado.
Page 3
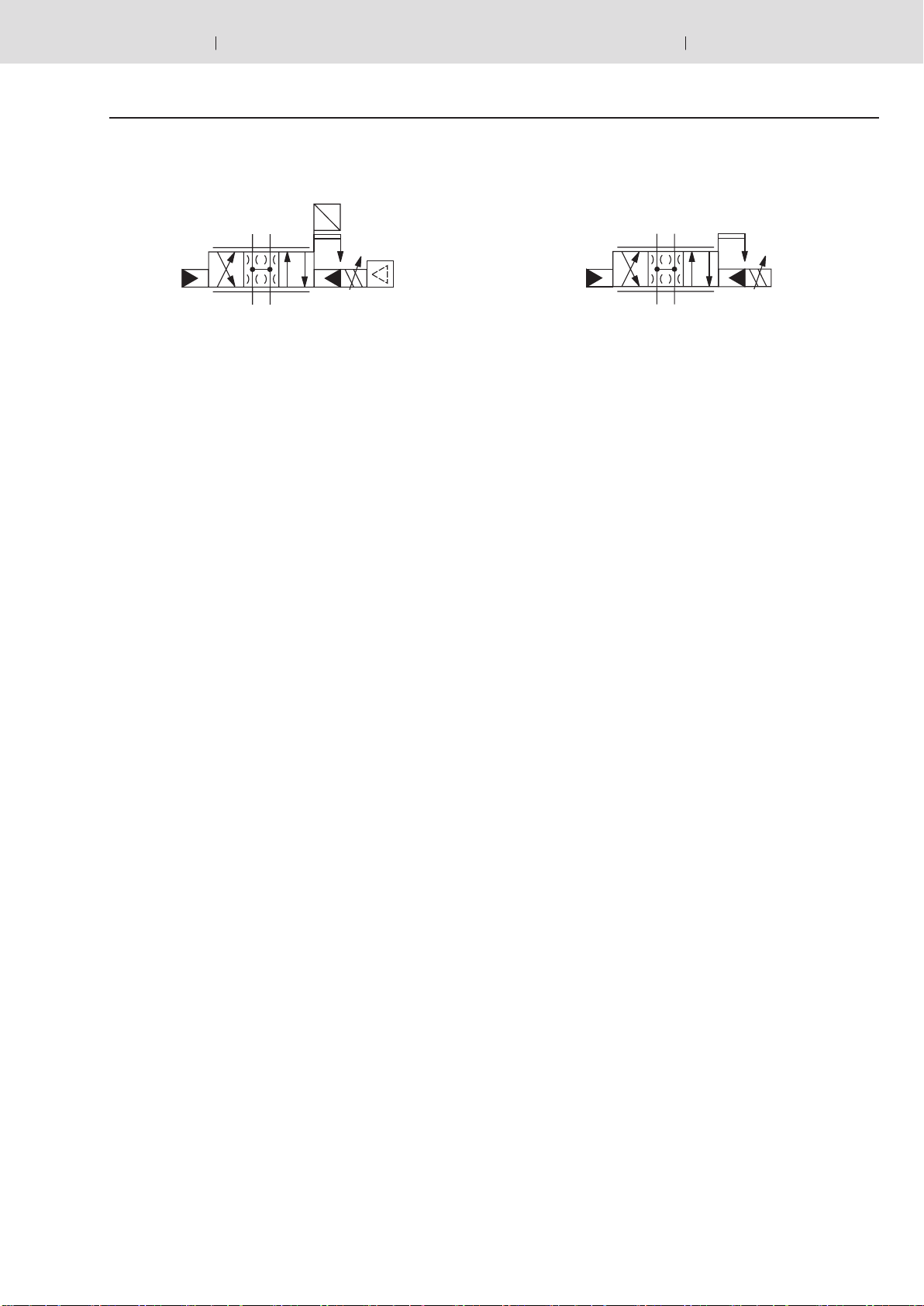
Símbolos
AB
PT
a, b
G
U
AB
PT
a, b
Hydraulics Bosch Rexroth AGRS 29583/05.11 4WS.2E...
3/20
Válvulas con realimentación eléctrica y mecánica,
con OBE
(ejemplo: 4WSE2ED 10-5X…ET…)
Válvulas con realimentación mecánica, sin OBE
(ejemplo: 4WS2EM 10-5X…ET…)
Page 4
TA
A
P
B
TB
6
3
2
4
5
1
9
7
8
4/20 Bosch Rexroth AG Hydraulics 4WS.2E... RS 29583/05.11
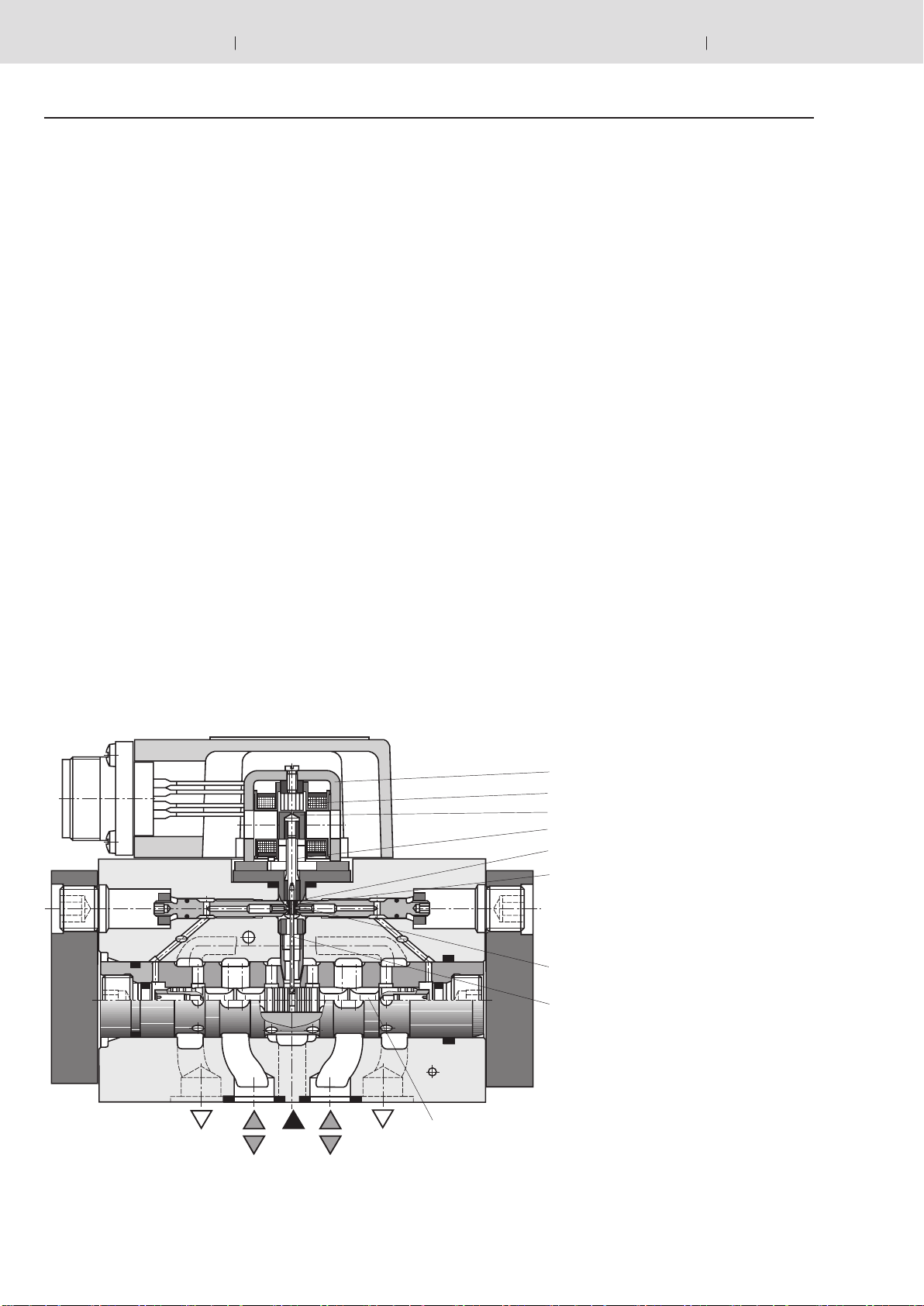
Funcionamiento, corte
4WS(E)2EM10-5X/...
Las válvulas del tipo 4WS(E)2EM10-5X/... son servoválvulas direccionales de 2 etapas, accionadas eléctricamente. Se
emplean principalmente para regulaciones de posición, fuerza y velocidad.
Estas válvulas constan de un convertidor electromecánico
(motor de torque) (1), un amplificador hidráulico (principio tobera - placa deflectora) (2) y una corredera de mando (3) con
un casquillo (2da etapa), que está unido con el motor de torque mediante un retorno mecánico.
Mediante una señal eléctrica de entrada en la bobina (4) del
motor de torque se genera una fuerza sobre el inducido (5)
por medio de un imán permanente, que en combinación con
el tubo curvo (6) provoca un par de giro. Con ello la placa deflectora unida por un perno con el tubo curvo (6) se desplaza
de la posición central entre ambas toberas de regulación (8)
y se establece una diferencia de presión en la cara frontal de
la corredera de mando. Esta diferencia de presión provoca
un cambio de posición de la corredera de mando, con la cual
la conexión de presión se vincula con una conexión de consumidor y simultáneamente la otra conexión de consumidor
con la conexión de realimentación.
La corredera de mando está conectada por medio de un resorte de flexión (retorno mecánico) (9) con la placa deflectora
o el motor de torque. El cambio de posición de la corredera
de mando se efectúa hasta que el momento de giro del retorno debido al resorte de flexión y el momento de giro electromagnético del motor de torque se encuentren en equilibrio y
la diferencia de presión en el sistema tobera-placa deflectora
se anule.
La carrera de la corredera de mando y con ello el caudal de
la servoválvula se regula por ello en forma proporcional a la
señal eléctrica de entrada. Por ello se debe tener en cuenta
que el caudal depende de la caída de presión de la válvula.
Electrónica de mando externa, tipo 4WS2EM10-5X/...
(pedido por separado)
Para el mando de la válvula se utiliza una electrónica (servoamplificador), que amplifica una señal analógica de entrada (valor nominal) de manera que con la señal de salida la
servoválvula se comanda regulada en corriente.
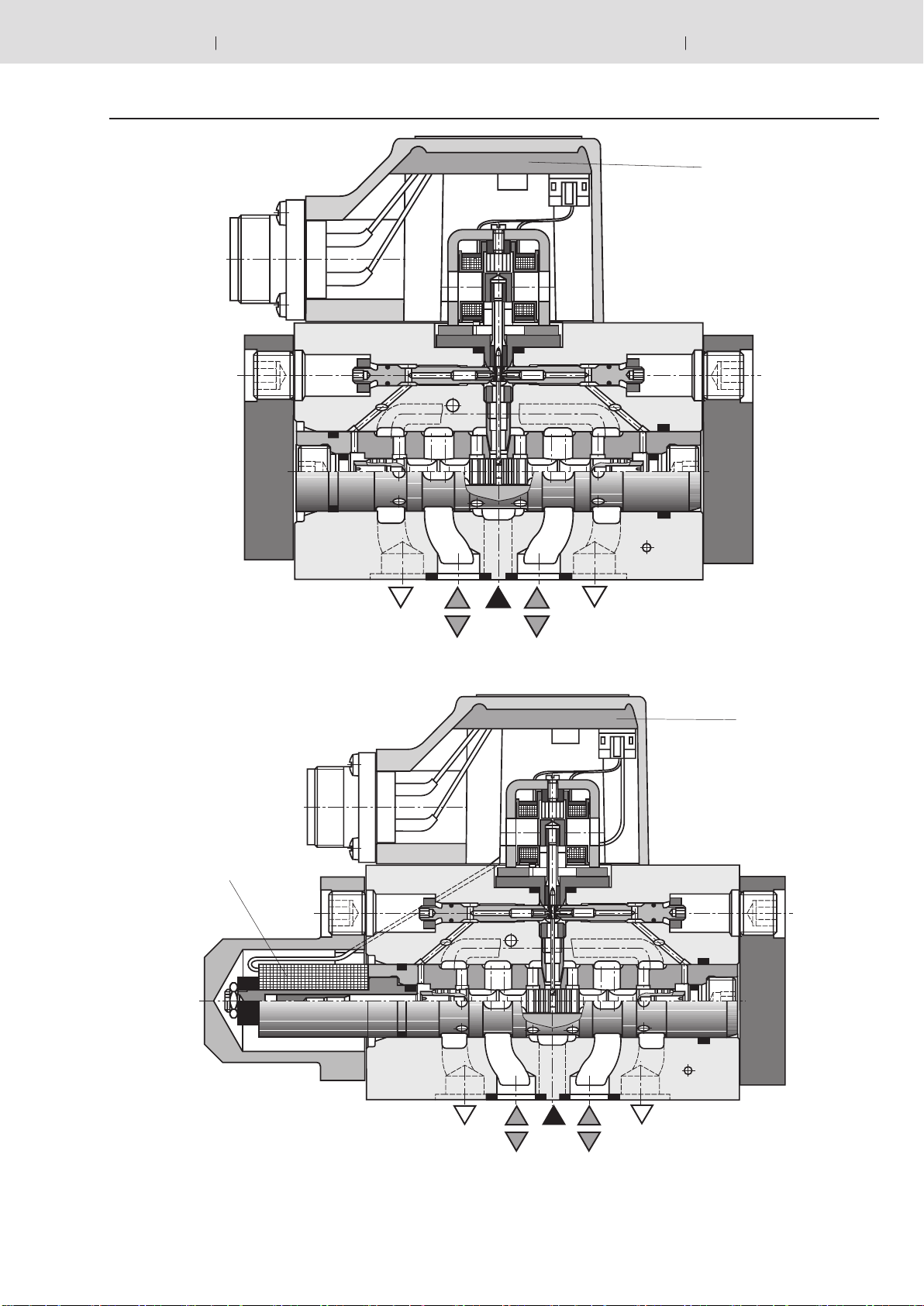
Electrónica de mando integrada, tipo 4WSE2EM10-5X/...
y 4WSE2ED10-5X/...
Para la amplificación de la señal analógica de entrada está integrada una electrónica de mando (10) especialmente adaptada para este tipo de válvula: Esta se añade en la cubierta del
motor de torque. El punto nulo de válvula se puede ajustar por
medio de un potenciómetro accesible desde afuera.
4WSE2ED10-5X/...
Las válvulas de este tipo están equipadas además de la regulación mecánica con resorte de retorno con un regulador
y captador de posición de pistón. La posición de la corredera de mando se determina por medio de un captador de
posición inductivo (11). La señal del captador de posición
se compara con el valor nominal mediante la electrónica de
mando integrada (10). La desviación de regulación eventualmente existente se amplifica en forma eléctrica y se suministra al motor de torque como señal de mando. Con el retorno
eléctrico adicional se logran, debido a la amplificación eléctrica en el rango de baja señal, valores dinámicos superiores
a los de la variante puramente mecánica. El retorno mecánico que está a continuación se encarga de posicionar al pistón
de la válvula en rango nulo en caso de caída de la alimentación de tensión eléctrica.
La válvula es disponible sólo con electrónica de mando integrada. El punto nulo de válvula se puede ajustar por medio
de un potenciómetro accesible desde afuera.
Atención:
la modificación del punto nulo puede ocasionar daños en
la instalación y sólo debe ser ejecutada por personal técnico capacitado.
Tipo 4WS2EM10...
Page 5
10
TA
A
P
B
TB
11
10
TA
A
P
B
TB
Corte
Tipo 4WSE2EM10...
Hydraulics Bosch Rexroth AGRS 29583/05.11 4WS.2E...
5/20
Tipo 4WSE2ED10...
Page 6
6/20 Bosch Rexroth AG Hydraulics 4WS.2E... RS 29583/05.11
Datos técnicos (¡consúltenos en caso de utilizar el equipo fuera de los valores indicados!)
Generales
Masa Con realimentación mecánica kg 3,56
Con realimentación mecánica y eléctrica y
electrónica integrada
Posición de montaje A elección, cuando esté garantizado que al arrancar el siste-
Rango de temperatura de almacenamiento °C –20 hasta +80
Rango de temperatura ambiente °C –20 hasta +60 válvula con OBE
kg 3,65
maelpilotajesealimentaconsuficientepresión(≥10bar)!
–30 hasta +100 válvula sin OBE
Hidráulicos (medidos con HLP 32, ϑ
Presión de
servicio
Etapa de pilotaje, alimentación de
aceite de mando
= 40 °C ±5 °C)
ac.
bar 10 hasta 210 bar ó 10 hasta 315 bar
Válvula principal, conexión P, A, B bar Hasta 315
Presión de
retorno
Conexión T
Retorno de aceite de mando interno bar Pico de presión admisible < 100, estático < 10
Retorno de aceite de mando externo
bar Hasta 315
Conexión Y bar Pico de presión admisible < 100, estático < 10
Fluido hidráulico Ver tabla página 7
Rango de temperatura del fluido hidráulico °C –15 hasta p
2
Rango de viscosidad mm
Grado máximo admisible de impurezas del fluido
/s 15 hasta 380, preferentemente 30 hasta 45
Clase 18/16/13
4)
+80, preferentemente +40 hasta +50
P
1)
clase de pureza según ISO 4406 (c)
Caudal nominal Q
V,L
2)
medido sin señal Dither
Caudal nominal Q
3)
, tolerancia ±10 %
v nom
para diferencia de presión de válvula ∆p =70 bar
l/min
•
0,7
70 bar mín.
4)
pP
l/min 5 10 20 30 45 60 75 90
4)
l
pP
70 bar mín.
•
0,9
l
4)
pP
70 bar mín.
•
1,2
l
4)
pP
70 bar mín.
•
1,5
l
4)
pP
70 bar mín.
Carrera de pistón de mando máxima posible con posición
final mecánica (en caso de falla) respecto a la carrera nula
Amplificación de presión 1 % de la variación de
carrera del pistón (desde el punto nulo hidráulico)
% 120 hasta 170 120 hasta 150
% de p
4)
P
≥ 30 ≥ 60 ≥ 80
Sistema de realimentación mecánico "M" mecánico y
eléctrico "D"
Histéresis (optimizada por ruidos)
Tensión de inversión (optimizada por ruidos)
Sensibilidad de reacción (optimizada por ruidos)
% ≤1,5 ≤0,8
% ≤0,3 ≤0,2
% ≤0,2 ≤0,1
Corriente de equilibrio de punto nulo
a través de todo el rango de presión % ≤ 3, permanente ≤ 5 ≤ 2
Desplazamiento del punto nulo por variación de:
Temperatura del fluido hidráulico
Temperatura ambiente
Presión servicio 80 a 120 % de p
Presión de retorno 0 a 10 % p
4)
P
4)
P
%/20 °C
%/20 °C
%/100 bar
%/bar
≤ 1 ≤ 2
≤ 1 ≤ 2
≤ 2 ≤ 2
≤ 1 ≤ 1
•
1,7
l
1)
En los sistemas hidráulicos se deben mantener las clases
de pureza indicadas para los componentes. Un filtrado
efectivo evita disfunciones y aumenta simultáneamente la
vida útil de los componentes.
Para seleccionar los filtros ver www.boschrexroth.com/filter
2)
Q
= Caudal nulo en l/min
V,L
3)
Q
4)
pP = Presión de servicio en bar
= Caudal nominal (válvula completa) en l/min
V nom
Page 7

A
C
B
D
E
F
P
E
Hydraulics Bosch Rexroth AGRS 29583/05.11 4WS.2E...
Datos técnicos (¡consúltenos en caso de utilizar el equipo fuera de los valores indicados!)
7/20
Fluido hidráulico Clasificación Materiales de junta
adecuados
Aceites minerales e hidrocarburos compatibles HL, HLP NBR, FKM DIN 51524
Difícilmente inflamable – acuoso HFC NBR ISO 12922
Importante ¡Indicaciones sobre fluidos hidráulicos!
– ¡Para más información e indicaciones sobre la utilización
de otros fluidos hidráulicos, ver catálogo técnico 90220
o consultar!
– ¡Es posible que haya restricciones para datos técnicos de
válvula (temperatura, rango de presión, vida útil, intervalos
de mantenimiento, etc.)!
– El punto de inflamación del medio de proceso y servicio
empleado debe estar 40 K por encima de la temperatura
superficial máxima del solenoide.
– Difícilmente inflamable – acuoso: Diferencia máxima de
presión por canto de mando 175 bar, de lo contrario gran
erosión por cavitación!
Precompresión del tanque < 1 bar o > 20 % de la diferencia de presión. ¡Los picos de presión no deberían exceder
las presiones máximas de servicio!
Normas
Eléctricos
Sistema de realimentación Mecánico "M" Mecánico y eléctrico "D"
Protección de la válvula según EN 60529 IP 65 con conector montado y enclavado
Tipo de señal Analógica
Corriente nominal por bobina mA 30
Resistencia por bobina
Inductancia para 60 Hz y
100 % de corriente nominal
Para comandar amplificadores que no son de Rexroth recomendamos una señal Dither superpuesta.
Conexión en serie H 1,0
Conexión en paralelo H 0,25
Ω
85
Eléctricos, electrónica de mando externa (sólo versión "M")
Amplificador
(pedido por separado)
Observación:Ver datos de ensayo de simulación de medioambiente para el análisis de resistencia a perturbaciones electromagnéticas, solicitaciones climáticas y mecánicas en RS 29583-U (aclaración sobre compatibilidad con el medioambiente).
Tarjeta forma europea
Diseño modular
Analógica
Analógica
Tipo VT-SR2-1X/... según catálogo 29980
Tipo VT 11021 según catálogo 29743
Accesorios disponibles
Maleta de servicio con dispositivo de prueba para válvulas continuas con electrónica integrada tipo VT-VETSY-1
según catálogo RS 29685.
Maleta de servicio con dispositivo de prueba para válvulas continuas para electrónica externa tipo VT-SVTSY-1
según catálogo RS 29681.
Conexión eléctrica, electrónica de mando externa
Tipo 4WS2EM 10-5X...
Bobina A
Bobina B
La conexión eléctrica puede realizarse en serie o en paralelo. Por motivos de seguridad
de servicio y la pequeña inductancia resultante de la bobina, recomendamos la conexión
en paralelo.
El puente E-F puede utilizarse para la detección eléctrica de la correcta vinculación del
conector o de la rotura de cable.
Conexión en paralelo:
en el conector unir contacto A con B y C con D.
Conexión en serie:
en el conector unir contacto B con C.
Un mando eléctrico de A (+) hacia D (–) provoca un sentido de flujo P hacia A y B hacia T.
Un mando en el sentido inverso provoca un sentido de flujo P hacia B y A hacia T.
E→F=Puente
Page 8

A
B
C
D
E
F
P
E
R
e
A
B
C
D
E
F
P
E
R
e
R
i
A
B
C
D
E
F
Ø8…Ø13,5
85
8/20 Bosch Rexroth AG
Hydraulics 4WS.2E... RS 29583/05.11
Conexión eléctrica, electrónica de mando integrada
Tipo 4WSE2EM 10-5X...
Ajuste de punto nulo
Señal
Zitter
Tipo 4WSE2ED 10-5X...
Ajuste de punto nulo
Ajuste de
sensibilidad
Mando
de corriente
Mando "13" Mando "9"
⊥ ⊥
= 100 Ω Re≥50kΩ
e
±10 mA 2)
Carga máx. 1 kΩ
Tensión de
alimentación
Valor nominal
Salida de medición para pistón
Designación
de conectores
A +15 V +15 V
B -15 V -15 V
C
D ±10 mA ±10 V
E R
1)
F
de mando
1)
En válvulas con realimentación mecánica la conexión F no está designada.
2)
Para carrera nominal de pistón
Consumo de
corriente en
la conexión
de conector
A
B
D
E
Máx. 150 mA Máx. 150 mA
0 hasta ±10 mA ≤0,2mA
Mando
de tensión
+10 V respecto
2)
a⊥
R
≈4,7kΩ
i
Ajuste de
señal Zitter
Tensión de alimentación:
±15 V ±3 %, ondulación residual < 1 %
Valor nominal: Un valor nominal en la conexión de conector D = positivo con respecto a la conexión de conector E
provoca un flujo desde P hacia A y B hacia T.
LasalidademediciónFtieneunaseñalpositivaconrespectoa⊥.
Un valor nominal en la conexión de conector D = negativo con respecto a la conexión de conector
E provoca un flujo desde P hacia B y A hacia T.
LasalidademediciónFtieneunaseñalnegativaconrespectoa⊥.
Salida de medición: La señal de tensión o corriente es proporcional a la carrera del pistón de mando.
Observación: Las señales eléctricas emitidas mediante una electrónica de mando (por ej. valor real) no deben
utilizarse para la desconexión de funciones relevantes en cuanto a la seguridad!
Conexión eléctrica, conectores
Conector según DIN EN 175.201-804
pedido por separado bajo nro. de material R900223890
(versión metálica)
Page 9

5
10
20
30
40
70
100
50
200
1
2
3
4
5
6
7
8
3020
10
70
50
40
200 300100
1
2
8
15
45
60
75
90
60
100
90
60
80
20
40
20
60
40
100
90
80
-20-40-60-80
4020 60 80
-5
5
110
-100
100
110
Hydraulics Bosch Rexroth AGRS 29583/05.11 4WS.2E...
Curvas características (medidas con HLP 32, ϑac = 40 °C ±5 °C)
9/20
Función caudal-carga (tolerancia ±10 %)
para 100 % de la señal de valor nominal
Caudalenl/min→
Caudal nominal
5 l/min
10 l/min
20 l/min
30 l/min
=
=
=
=
Curva 1
Curva 2
Curva 3
Curva 4
45 l/min
60 l/min
75 l/min
90 l/min
=
=
=
=
Curva 5
Curva 6
Curva 7
Curva 8
Diferenciadepresióndeválvulaenbar→
Δp = Diferencia de presión de válvula (presión de entrada p
menos presión de carga pL menos presión de retorno pT)
P
Area de tolerancia de la función caudal-valor nominal
para diferencia constante de presión de válvula
P→A;B→T
Caudal en %
Area de tolerancia
Curva típica
de caudal
Valor nominal en %
P→B;A→T
Page 10

–30
–25
–20
–15
–10
–5
0
5
10
100
700
0
–45
–90
–135
–180
–225
–270
–315
50
500
20
200
–30
–25
–20
–15
–10
–5
0
5
10 100
700
0
–45
–90
–135
–180
–225
–270
–315
50
500
20
200
0
10
20
30
40
50
60
70
80
90
100
50 100 150
200 250 300 325
0
10
20
30
40
50
60
70
80
90
100
50 100 150 200 250
300
325
020
40
60
80
100
10
20
30
50
70
10
90
020
40
60
80
100
10
20
30
50
70
10
90
10/20 Bosch Rexroth AG Hydraulics 4WS.2E... RS 29583/05.11
Curvas características: Tipo 4WS.2EM 10 y 4WSE2ED 10 (medidas con HLP 32, ϑac = 40 °C ±5 °C)
Función de transferencia con nivel de presión 315 bar, respuesta a escalón sin caudal
4WS.2EM 10
Caudal nominal 5, 10, 20 l/min
4WSE2ED 10
Caudal nominal 5, 10, 20 l/min
Carrera de pistón en % →
Tiempo en ms →
40 bar
70 bar
Carrera de pistón en % →
Tiempo en ms →
140 bar 210 bar
Función de transferencia con nivel de presión 315 bar, respuesta en frecuencia al escalón sin caudal
4WS.2EM 10
Caudal nominal 5, 10, 20 l/min
4WSE2ED 10
Caudal nominal 5, 10, 20 l/min
Angulo de fase en ° →
Relación de amplitud en dB →
Frecuencia en Hz →
5 % 25 %
Relación de amplitud en dB →
Frecuencia en Hz →
100 %
315 bar
Angulo de fase en ° →
Dependencia de la frecuencia f para –90 ° de presión de servicio p y amplitud de entrada
4WS.2EM 10
Caudal nominal 5, 10, 20 l/min
4WSE2ED 10
Caudal nominal 5, 10, 20 l/min
Amplitud de entrada en % →
Frecuencia para –90° en Hz →
40 bar
70 bar
Amplitud de entrada en % →
Frecuencia para –90° en Hz →
140 bar 210 bar
315 bar
Page 11

020
40
60
80
100
10
20
30 40
30
50
70
10
90
020
40
60
80
100
10
20
30 40
30
50
70
10
90
–30
–25
–20
–15
–10
–5
0
5
10 100
700
0
–45
–90
–135
–180
–225
–270
–315
50
500
20
200
–30
–25
–20
–15
–10
–5
0
5
10 100 700
0
–45
–90
–135
–180
–225
–270
–315
50
500
20
200
0
10
20
30
40
50
60
70
80
90
100
50 100 150
200 250 300 325
0
10
20
30
40
50
60
70
80
90
100
50 100 150
200 250 300 325
Hydraulics Bosch Rexroth AGRS 29583/05.11 4WS.2E...
11/20
Curvas características: Tipo 4WS.2EM 10 y 4WSE2ED 10 (medidas con HLP 32, ϑac = 40 °C ±5 °C)
Función de transferencia con nivel de presión 315 bar, respuesta a escalón sin caudal
4WS.2EM 10
Caudal nominal 30 l/min
4WSE2ED 10
Caudal nominal 30 l/min
Carrera de pistón en % →
Tiempo en ms →
40 bar
70 bar
140 bar 210 bar
Carrera de pistón en % →
Tiempo en ms →
315 bar
Función de transferencia con nivel de presión 315 bar, respuesta en frecuencia al escalón sin caudal
4WS.2EM 10
Caudal nominal 30 l/min
4WSE2ED 10
Caudal nominal 30 l/min
Angulo de fase en ° →
Relación de amplitud en dB →
Frecuencia en Hz →
5 %
Relación de amplitud en dB →
Frecuencia en Hz →
25 % 100 %
Angulo de fase en ° →
Dependencia de la frecuencia f para –90 ° de presión de servicio p y amplitud de entrada
4WS.2EM 10
Caudal nominal 30 l/min
Amplitud de entrada en % →
Frecuencia para –90° en Hz →
40 bar
4WSE2ED 10
Caudal nominal 30 l/min
Amplitud de entrada en % →
Frecuencia para –90° en Hz →
70 bar
140 bar 210 bar
315 bar
Page 12

020
40
60
80
100
10
20
30 40
30
50
70
10
90
020
40
60
80
100
10
20
30 40
30
50
70
10
90
22050 100
–25
–20
–15
–10
–5
0
5
300 700
–150
–120
– 90
– 60
– 30
10
– 0
–30
200
0
10
20
30
40
50
60
70
80
90
100
50 100 150
200 250 300 325
0
10
20
30
40
50
60
70
80
90
100
50 100 150
200 250 300 325
12/20 Bosch Rexroth AG Hydraulics 4WS.2E... RS 29583/05.11
22050 100
–25
–20
–15
–10
–5
0
5
700
–150
–120
– 90
– 60
– 30
10
– 0
–30
300200
Curvas características: Tipo 4WS.2EM 10 y 4WSE2ED 10 (medidas con HLP 32, ϑac = 40 °C ±5 °C)
Función de transferencia con nivel de presión 315 bar, respuesta a escalón sin caudal
4WS.2EM 10
Caudal nominal 45 l/min
4WSE2ED 10
Caudal nominal 45 l/min
Carrera de pistón en % →
Tiempo en ms →
40 bar
70 bar
140 bar 210 bar
Carrera de pistón en % →
Tiempo en ms →
315 bar
Función de transferencia con nivel de presión 315 bar, respuesta en frecuencia al escalón sin caudal
4WS.2EM 10
Caudal nominal 45 l/min
4WSE2ED 10
Caudal nominal 45 l/min
Angulo de fase en ° →
Relación de amplitud en dB →
Frecuencia en Hz →
5 %
Relación de amplitud en dB →
Frecuencia en Hz →
25 % 100 %
Angulo de fase en ° →
Dependencia de la frecuencia f para –90 ° de presión de servicio p y amplitud de entrada
4WS.2EM 10
Caudal nominal 45 l/min
4WSE2ED 10
Caudal nominal 45 l/min
Amplitud de entrada en % →
Frecuencia para –90° en Hz →
40 bar
70 bar
Amplitud de entrada en % →
Frecuencia para –90° en Hz →
140 bar 210 bar
315 bar
Page 13

020
40
60
80
100
10
20
30 40
30
50
70
10
90
020
40
60
80
100
10
20
30 40
30
50
70
10
90
22050 100
–25
–20
–15
–10
–5
0
5
300
700
–150
–120
– 90
– 60
– 30
10
– 0
–30
200
22050 100
–25
–20
–15
–10
–5
0
5
700
–150
–120
– 90
– 60
– 30
10
– 0
–30
300200
0
10
20
30
40
50
60
70
80
90
100
50 100 150
200 250 300 325
0
10
20
30
40
50
60
70
80
90
100
50 100 150
200 250 300 325
Hydraulics Bosch Rexroth AGRS 29583/05.11 4WS.2E...
13/20
Curvas características: Tipo 4WS.2EM 10 y 4WSE2ED 10 (medidas con HLP 32, ϑac = 40 °C ±5 °C)
Función de transferencia con nivel de presión 315 bar, respuesta a escalón sin caudal
4WS.2EM 10
Caudal nominal 60 l/min
4WSE2ED 10
Caudal nominal 60 l/min
Carrera de pistón en % →
Tiempo en ms →
40 bar
70 bar
140 bar 210 bar
Carrera de pistón en % →
Tiempo en ms →
Función de transferencia con nivel de presión 315 bar, respuesta en frecuencia al escalón sin caudal
4WS.2EM 10
Caudal nominal 60 l/min
4WSE2ED 10
Caudal nominal 60 l/min
Angulo de fase en ° →
Relación de amplitud en dB →
Frecuencia en Hz →
5 %
25 % 100 %
Relación de amplitud en dB →
Frecuencia en Hz →
315 bar
Angulo de fase en ° →
Dependencia de la frecuencia f para –90 ° de presión de servicio p y amplitud de entrada
Amplitud de entrada en % →
4WS.2EM 10
Caudal nominal 60 l/min
Frecuencia para –90° en Hz →
40 bar
70 bar
4WSE2ED 10
Caudal nominal 60 l/min
Amplitud de entrada en % →
Frecuencia para –90° en Hz →
140 bar 210 bar
315 bar
Page 14

0
30
40
60
80
100
10
20
20
30
50
70
10
90
40
020
40
60
80
100
10
20
30 40
30
50
70
10
90
22050 100
–25
–20
–15
–10
–5
0
5
300 700
–150
–120
– 90
– 60
– 30
10
– 0
–30
200
22050 100
–25
–20
–15
–10
–5
0
5
300 700
–150
–120
– 90
– 60
– 30
10
– 0
–30
200
0
10
20
30
40
50
60
70
80
90
100
50 100
150 200 250 300 325
50 100 150
200 250 300325
0
10
20
30
40
50
60
70
80
90
100
14/20 Bosch Rexroth AG Hydraulics 4WS.2E... RS 29583/05.11
Curvas características: Tipo 4WS.2EM 10 y 4WSE2ED 10 (medidas con HLP 32, ϑac = 40 °C ±5 °C)
Función de transferencia con nivel de presión 315 bar, respuesta a escalón sin caudal
4WS.2EM 10
Caudal nominal 75 l/min
4WSE2ED 10
Caudal nominal 75 l/min
Carrera de pistón en % →
Tiempo en ms →
40 bar
70 bar
140 bar 210 bar
Carrera de pistón en % →
Tiempo en ms →
Función de transferencia con nivel de presión 315 bar, respuesta en frecuencia al escalón sin caudal
4WS.2EM 10
Caudal nominal 75 l/min
4WSE2ED 10
Caudal nominal 75 l/min
Angulo de fase en ° →
Relación de amplitud en dB →
Frecuencia en Hz →
5 %
25 % 100 %
Relación de amplitud en dB →
Frecuencia en Hz →
315 bar
Angulo de fase en ° →
Dependencia de la frecuencia f para –90 ° de presión de servicio p y amplitud de entrada
4WS.2EM 10
Caudal nominal 75 l/min
4WSE2ED 10
Caudal nominal 75 l/min
Amplitud de entrada en % →
Frecuencia para –90° en Hz →
40 bar
70 bar
Amplitud de entrada en % →
Frecuencia para –90° en Hz →
140 bar 210 bar
315 bar
Page 15

030
40
60
80
100
10
20
20
30
50
70
10
90
40
020
40
60
80
100
10
20
30
30
50
70
10
90
40
22050 100
–25
–20
–15
–10
–5
0
5
300 700
–150
–120
– 90
– 60
– 30
10
– 0
–30
200
22050 100
–25
–20
–15
–10
–5
0
5
300 700
–150
–120
– 90
– 60
– 30
10
– 0
–30
200
0
10
20
30
40
50
60
70
80
90
100
50 100
150 200 250 300 325
50 100 150
200 250 300325
0
10
20
30
40
50
60
70
80
90
100
Hydraulics Bosch Rexroth AGRS 29583/05.11 4WS.2E...
15/20
Curvas características: Tipo 4WS.2EM 10 y 4WSE2ED 10 (medidas con HLP 32, ϑac = 40 °C ±5 °C)
Función de transferencia con nivel de presión 315 bar, respuesta a escalón sin caudal
4WS.2EM 10
Caudal nominal 90 l/min
4WSE2ED 10
Caudal nominal 90 l/min
Carrera de pistón en % →
Tiempo en ms →
40 bar
70 bar
140 bar 210 bar
Carrera de pistón en % →
Tiempo en ms →
Función de transferencia con nivel de presión 315 bar, respuesta en frecuencia al escalón sin caudal
4WS.2EM 10
Caudal nominal 90 l/min
4WSE2ED 10
Caudal nominal 90 l/min
Angulo de fase en ° →
Relación de amplitud en dB →
Frecuencia en Hz →
5 %
25 % 100 %
Relación de amplitud en dB →
Frecuencia en Hz →
315 bar
Angulo de fase en ° →
Dependencia de la frecuencia f para –90 ° de presión de servicio p y amplitud de entrada
Amplitud de entrada en % →
4WS.2EM 10
Caudal nominal 90 l/min
Frecuencia para –90° en Hz →
40 bar
70 bar
4WSE2ED 10
Caudal nominal 90 l/min
Amplitud de entrada en % →
Frecuencia para –90° en Hz →
140 bar 210 bar
315 bar
Page 16

95
15
68
9,5
M6
80
60
64
32
9610
3
1
54
24
102
127
12,5
46
65
3,7
9,5
P
A
B
TBTA
Y
X
578
10
1,5
6
2
4
F1
F2
P
BA
T
F3
F4
105
25,5
68
11
T1
9
XY
0,01/100
Rzmax 4
16/20 Bosch Rexroth AG Hydraulics 4WS.2E... RS 29583/05.11
Dimensiones: Tipo 4WS2EM 10 (medidas en mm)
Realimentación mecánica / electrónica de mando externa,
tipo 4WS2EM 10-5X/…
1 Cubierta
2 Conectores
(pedido por separado, ver página 7)
3 Espacio requerido para retirar el
conector, además considerar el cable de conexión!
4 Elemento filtrante reemplazable con juntas
Nro. de material: R961001950
5 Junta de perfil para tornillo de filtro 16 x 1,5,
componente de pos. 4
6 Placa de características
7 Juntas anulares idénticas para conexiones
A, B, P, TA y TB
8 Juntas anulares idénticas para conexiones X e Y
Conexiones X e Y también están presurizadas
"internamente" para aceite de mando.
9 Superficie de apoyo de la válvula mecanizada,
posición de las conexiones según
ISO 4401-05-05-0-05
La conexión T1 es opcional y se recomienda para la
reduccióndelacaídadepresióndeB→Tparacaudal nominal > 45 l/min.
10 Tornillos de fijación de la válvula
Por motivos de resistencia emplear exclusivamente
los siguientes:
4 tornillos cilíndricos
ISO 4762-M6x70-10.9-flZn-240h-L
(número de rozamiento 0,09 - 0,14
según VDA 235-101) (incluidos en el suministro)
Terminación requerida de la
superficie de la contraparte
Placas de conexión según catálogo RS 45054, deben solicitarse por separado.
Page 17

75
2,5
M6
10
60
64 47
111
12,5 24
54
102
127
46
9,5
3,7
65
1
11 57
8
9
X
P
Y
AB
TA
TB
2
1,5
6
95
15
80
4
3
0,01/100
Rzmax 4
F1
F2
P
BA
T
F3
F4
105
25,5
68
11
T1
10
XY
Dimensiones: Tipo 4WSE2EM 10 (medidas en mm)
Realimentación mecánica / electrónica de mando integrada,
tipo 4WSE2EM 10-5X/…
Hydraulics Bosch Rexroth AGRS 29583/05.11 4WS.2E...
17/20
1 Cubierta con electrónica de mando integrada
2 Ajuste eléctrico de punto nulo:
luego de retirar los tornillos de cierre SW 2,5 se
puede corregir el punto nulo mediante
un potenciómetro
3 Conectores (pedido por separado, ver página 7)
4 Espacio requerido para retirar el conector,
además considerar el cable de conexión!
5 Elemento filtrante reemplazable con juntas
Nro. de material: R961001950
6 Junta de perfil para tornillo de filtro 16 x 1,5,
componente de pos. 5
7 Placa de características
8 Juntas anulares idénticas para conexiones
A, B, P, TA y TB
9 Juntas anulares idénticas para conexiones X e Y
Conexiones X e Y también están presurizadas
"internamente" para aceite de mando.
10 Superficie de apoyo de la válvula mecanizada, posi-
ción de las conexiones según ISO 4401-05-05-0-05
La conexión T1 es opcional y se recomienda para la
reduccióndelacaídadepresióndeB→Tparacaudal nominal > 45 l/min.
11 Tornillos de fijación de la válvula
Por motivos de resistencia emplear exclusivamente
los siguientes:
4 tornillos cilíndricos
ISO 4762-M6x70-10.9-flZn-240h-L
(número de rozamiento 0,09 - 0,14
según VDA 235-101) (incluidos en el suministro)
Terminación requerida de la
superficie de la contraparte
Placas de conexión según catálogo RS 45054, deben solicitarse por separado.
Page 18

75
44,5
2,5
M6
159
60
64
47
11110
3,7
54
24
102
46
65
9,5
XY
P
A
TA
TB
B
11 57
89
1
2
1,5
6
95
15
80
3
4
0,01/100
Rzmax 4
F1
F2
P
BA
T
F3
F4
105
25,5
68
11
T1
10
XY
18/20 Bosch Rexroth AG Hydraulics 4WS.2E... RS 29583/05.11
Dimensiones: Tipo 4WSE2ED 10 (medidas en mm)
Realimentación eléctrica y mecánica / electrónica de mando integrada,
tipo 4WSE2ED 10-5X/…
1 Cubierta con electrónica de mando integrada
2 Ajuste eléctrico de punto nulo:
luego de retirar los tornillos de cierre SW 2,5
se puede corregir el punto nulo mediante
un potenciómetro
3 Conectores (pedido por separado,
ver página 7)
4 Espacio requerido para retirar el conector,
además considerar el cable de conexión!
5 Elemento filtrante reemplazable con juntas
Nro. de material: R961001950
6 Junta de perfil para tornillo de filtro 16 x 1,5,
componente de pos. 5
7 Placa de características
8 Juntas anulares idénticas para conexiones
A, B, P, TA y TB
9 Juntas anulares idénticas para conexiones X e Y
Conexiones X e Y también están presurizadas
"internamente" para aceite de mando.
10 Superficie de apoyo de la válvula mecanizada, posi-
ción de las conexiones según ISO 4401-05-05-0-05
La conexión T1 es opcional y se recomienda para la
reduccióndelacaídadepresióndeB→Tparacaudal nominal > 45 l/min.
11 Tornillos de fijación de la válvula
Por motivos de resistencia emplear exclusivamente
los siguientes:
4 tornillos cilíndricos
ISO 4762-M6x70-10.9-flZn-240h-L
(número de rozamiento 0,09 - 0,14
según VDA 235-101) (incluidos en el suministro)
Terminación requerida de la
superficie de la contraparte
Placas de conexión según catálogo RS 45054, deben solicitarse por separado.
Page 19

X
A
TA
B
P
TB
Y
18
90
2
6,6
2
2
12
70
9,5
40,5
46,5
1
3
TA PX
A
B
YTB
Hydraulics Bosch Rexroth AGRS 29583/05.11 4WS.2E...
19/20
Placa de lavado con posición de las conexiones según ISO 4401-05-05-0-05 (medidas en mm)
Símbolo
Con juntas FKM,
Nro. de material R900912450, masa: 2 kg
1 Anillo rectangular 13 x 1,6 x 2 (A, B, P, TA y TB)
2 Anillo rectangular 11,18 x 1,6 x 1,78 (X, Y)
3 Tornillos de fijación
Por motivos de resistencia emplear exclusivamente
los siguientes:
4 tornillos cilíndricos
ISO 4762-M6x50-10.9-flZn-240h-L
(número de rozamiento 0,09 - 0,14 según VDA 235-101)
(incluidos en el suministro)
Para garantizar un correcto funcionamiento de la servoválvula es estrictamente necesario lavar la instalación antes de su
puesta en servicio.
Como punto de referencia para el tiempo de lavado por instalación vale:
t = Tiempo de lavado en h
V
t≥ •5
V = Volumen del tanque en l
Q
V
Q
= Caudal de bombas en l/min
V
Al recargar más del 10 % del volumen del tanque se debe repetir el proceso de lavado.
Más apropiado que una placa de lavado es la aplicación de
una válvula direccional con conexión según
ISO 4401-05-05-0-05. Con esta válvula se pueden lavar también las conexiones de consumidor. Ver al respecto también
el catálogo RS 07 700.
Page 20

20/20 Bosch Rexroth AG Hydraulics 4WS.2E... RS 29583/05.11
Notas
Bosch Rexroth AG
Hydraulics
Zum Eisengießer 1
97816 Lohr am Main, Germany
Teléfono
+49 (0) 93 52 / 18-0
Telefax +49 (0) 93 52 / 18-23 58
documentation@boschrexroth.de
www.boschrexroth.de
© Todos los derechos de Bosch Rexroth AG, también para el caso de
solicitudes de derechos protegidos. Nos reservamos todas las capacidades dispositivas tales como derechos de copia y de tramitación.
Los datos indicados sirven sólo para describir el producto. De nuestras
especificaciones no puede derivarse ninguna declaración sobre una
cierta composición o idoneidad para un cierto fin de empleo. Las
especificaciones no liberan al usuario de las propias evaluaciones y
verificaciones. Hay que tener en cuenta que nuestros productos están
sometidos a un proceso natural de desgaste y envejecimiento.
 Loading...
Loading...