


RSD6

The Leader In
Solid State Motor Control
Technology
Publication #: 890001-05-07
REDISTART DIGITAL
RSD6 SERIES
INSTRUCTION MANUAL
BENSHAW

Quick Start
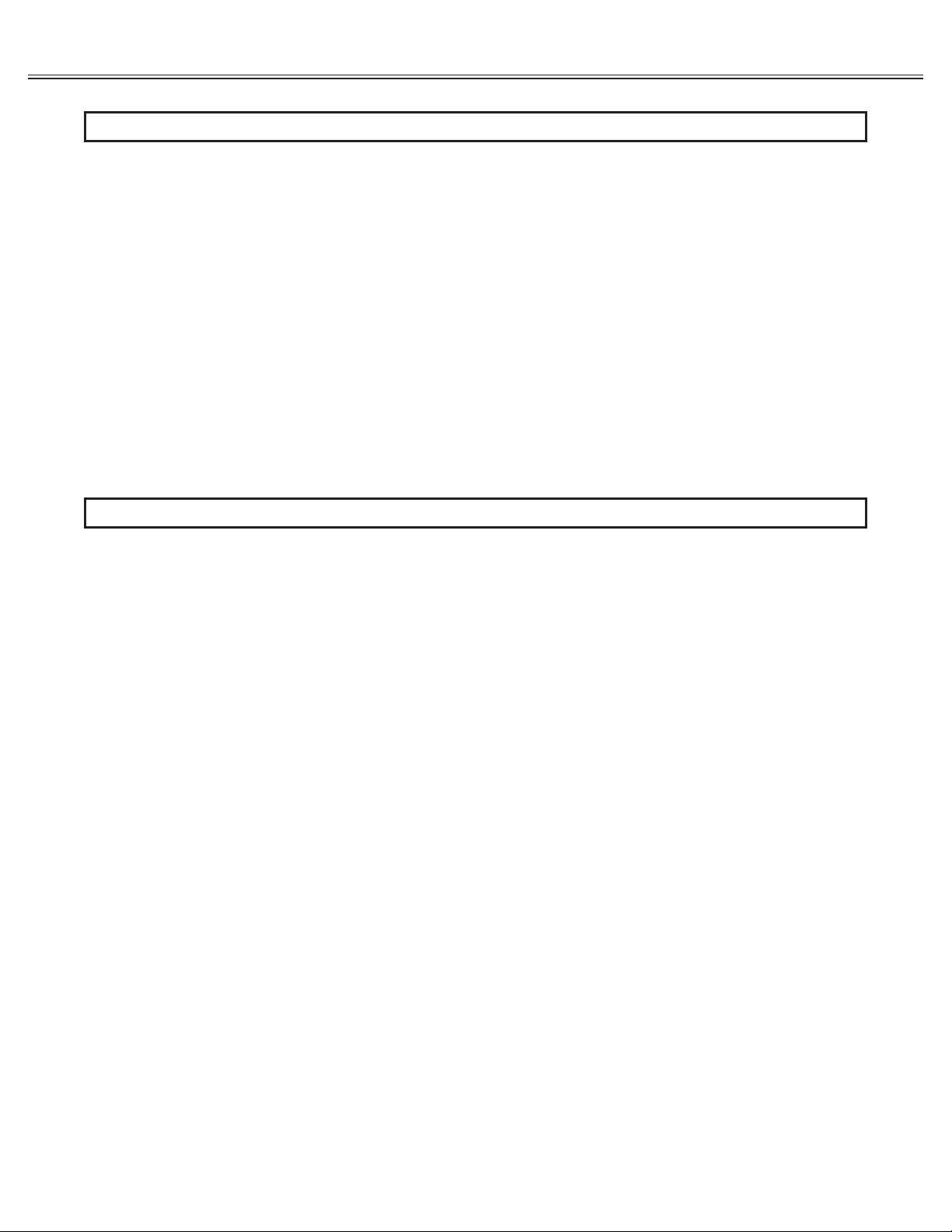
General This quickstart guide provides the information necessary for the operator to set the
starter for basic operation. This manual should be read in its entirety before the
starter is put into service.
•
Connect the incoming power connections to terminals L1, L2 and L3.
•
Connect the motor leads to T1, T2, and T3.
•
Connect the control wiring to TB1 on the control card, as shown in the following
diagram. USE ONLY THE START/STOP BUTTONS OR THE EXTERNAL
AUTO CONTROL.
•
Turn on the power to the starter. The display should show the software release
number and then rdy. If not, refer to the starter diagnostics beginning on page
37.
•
See the programming chapter beginning on page 19 for a complete description of
programming procedures and parameter descriptions. The important
parameters to program are P1, P2, P3, P4, and P6.
•
Provide a short Start/Stop sequence to the starter to check motor rotation. If the
motor rotates backwards, swap any two power leads.
•
Give a Start command and allow the motor to accelerate to speed.
•
If the motor doesn’t begin accelerating immediately, increase parameter P4. If it
takes off too quickly, decrease P4.
•
If the motor takes too long to accelerate, decrease P6. If the motor accelerates
too quickly, increase P6.
i
QUICK START GUIDE
.5A
FU1
MOTOR
POWER
UP TO
SPEED
FAULT
CUSTOMER EXTERNAL
FIELD TRIPS
OPTIONAL
CONTROL
EXTERNAL AUTO
FAULT (L)
FAULT (N)
EXTERNAL
EXTERNAL

Table of Contents
1. INTRODUCTION .......................................1
1.1 How To Use This Manual ...................................1
1.2 Product Description ......................................2
2. TECHNICAL INFORMATION ...............................4
2.1 Physical Specifications.....................................4
2.2 Control Power .........................................4
2.3 Storage..............................................5
2.4 EU Declaration of Conformity ................................6
2.5 Solid State Overload ......................................7
2.6 UL/CUL Fault Rating .....................................8
2.7 Circuit Card Layout ......................................9
2.8 Spare Parts ...........................................10
3.INSTALLATION........................................11
3.1 Site Preparation.........................................11
3.2 EMC Installation guidelines .................................11
3.3 Installation Procedures ....................................12
3.4 CT Ratio Scaling Switches...................................15
3.5 Hardware Deceleration Control ...............................16
3.6 Variable Voltage or Current Input ..............................17
3.7 Door Mounted Display ....................................17
4. OPERATING PARAMETERS ................................19
4.1 General Operating Parameter Information .........................19
4.2 P1 - Motor Full Load Amps ..................................20
4.3 P2 - Overload Multiplier ...................................20
4.4 P3 - Motor Thermal Overload ................................21
4.5 P4 - Initial Motor Starting Current ..............................21
4.6 P5 - Maximum Motor Starting Current ...........................22
4.7 P6 - Motor Ramp Time ....................................22
4.8 P7 - Motor Stall Time .....................................23
4.9 P8 - Deceleration Level 1 ...................................23
4.10 P9 - Deceleration Level 2 ...................................24
4.11 P10 - Deceleration Time ...................................24
4.12 P11 - Overcurrent Trip Level ................................25
4.13 P12 - Overcurrent Trip Time.................................25
4.14 P13 - Undercurrent Trip Level................................25
ii
TABLE OF CONTENTS

4.15 P14 - Undercurrent Trip Time ................................26
4.16 P15 - Line Phase Sensitivity .................................26
4.17 P16 - Motor Current Imbalance ...............................27
4.18 P17 - Current Transformer Ratio ..............................27
4.19 P18 - Meter Mode .......................................27
4.20 P19 - Meter Dwell Time ...................................28
4.21 P20 - Passcode .........................................28
4.22 P21 - 500% Current Kick Time................................28
4.23 P22 - Starter Mode ......................................29
5. OPERATING PROCEDURES ................................30
5.1 Pushbutton Functions .....................................30
5.2 Starting The Motor .......................................31
5.3 Operating Messages ......................................34
5.4 Fault Codes ...........................................35
5.5 Preventative Maintenance...................................36
5.6 Starter Diagnostics .......................................37
5.7 Default Settings.........................................40
6. DISPLAY TEMPLATE ....................................42
6.1 Door Mounted Display Template ..............................42
iii
TABLE OF CONTENTS
1.1 How To Use This Manual
General Information The RediStart Digital motor starter operations manual provides the following
information:
•
Specifications.
•
Installation site requirements.
•
Installation.
•
Programming.
•
Operation.
•
Diagnostics.
How to Use this Manual The operations manual is divided into five sections:
•
Introduction.
•
Technical information.
•
Installation procedures.
•
Operating parameters.
•
Operating procedures.
Each section contains subsections with detailed information on the relative topics.
The subsections contain general information, details and any necessary precautions
about the individual topics. The specific information contained in the subsections can
be found quickly and easily by reviewing the subject headings on the left margin.
Operations Manual The operations manual can be found on-line at:
On-Line http://www.benshaw.com
The manual is available in Adobe Acrobat portable document format (pdf). Adobe and
Acrobat are trademarks of Adobe Systems Incorporated.
Parameter Chart There is a parameter chart on page 40 of the manual. This parameter chart lists each
operating parameter with its name, values and defaults. A space is provided on the
chart for the user’s current parameter settings. When the operating parameters are
set for the current application, they should be listed on the chart for future reference.
1
1. INTRODUCTION
1.2 Product Description
General Information The RediStart Digital motor starter is a microprocessor-controlled starter for single or
three-phase induction motors. The starter can be custom designed for specific
applications.
The starter offers:
•
Solid state design.
•
Current limited reduced voltage starting.
•
Closed-loop motor current control.
•
Programmable motor protection.
•
Programmable operating parameters.
•
Programmable metering.
Available in NEMA (National Electrical Manufacturers Association) specified frame
sizes, the starter may be used in numerous industrial applications. Each starter can
operate within applied voltage and frequency values of 100VAC to 600VAC (optional
1000VAC) and 23 to 75Hz. These features enable the RSD6 to be installed in a wide
range of sites and countries.
The starter can be programmed for any motor FLA and all of the common motor
service factors. It enables operators to control both motor acceleration and
deceleration. It also protects the motor and its load from damage that could be caused
by incorrect phase order wiring.
The starter continually monitors the amount of current being delivered to the motor.
This protects the motor from overheating or drawing excess current. The starter will
automatically stop the motor if the line-to-line current is not within acceptable ranges
or if the current is lost in a line.
Features The enhanced engineering features of the starter include:
•
Multiple frame sizes.
•
Universal voltage operation.
•
Universal frequency operation.
•
Programmable motor overload multiplier.
•
Controlled acceleration and deceleration.
•
Phase rotation protection.
•
Regulated current control.
•
Electronic motor thermal overload protection.
•
Electronic over/under current protection.
•
Single phase protection.
•
Line-to-line current imbalance protection.
•
Stalled motor protection.
•
Programmable metering.
•
Passcode protection.
2
1. INTRODUCTION

Optional Features Depending on the system configuration and customer specifications, the starter can be
customized to include:
•
Door mounted keypad/display.
•
Over and under voltage relays.
•
Voltage unbalance sensors.
•
Over and under current relays.
•
Current unbalance sensors that also detect single-phase fault conditions.
•
Ground fault relays.
•
Motor protection systems.
•
Display indicator lights mounted on the cabinet.
•
External overload relays.
•
Meters or metering packages.
•
Circuit disconnecting devices.
Components The major components of the starter are:
•
Customized line and load lugs or pads.
•
Six (three-phase) or four (single-phase) SCRs with SIOV protection.
•
Printed circuit assembly control card.
•
Terminals for two-wire or three-wire 120VAC control.
•
Current feedback transformers.
•
An isolated heat sink with dual-SCR flat packs or a live heat sink with
puck-shaped SCRs.
LED Display A three character, alphanumeric LED display located on the control card (or on the
optional door mounted display) displays:
•
Status information.
•
Operating parameters.
•
Fault codes.
•
Thermal Overload Content.
•
Motor current.
•
Motor current imbalance percentage.
Control Relays The starter has four control relays:
•
Start/Stop input relay.
•
Fault output relay.
•
UTS (up to speed) output relay.
•
Motor power output relay.
3
1. INTRODUCTION
2.1 Physical Specifications
General Information The physical specifications of the starter vary depending upon its configuration. The
configuration is determined by the applicable motor current and its specific
application requirements.
Heat sink The starter uses one of two distinct types of heat sinks:
•
An isolated heat sink using dual SCR flat packs is used on models in the
fractional through 124 Amp range.
•
A live heat sink with puck-style SCRs is used on models in the 125 through 1200
Amp range.
NOTE: The starter may also be equipped with cooling fans or a bypass or in-line
contactor, depending upon the application.
Dimensions Models range in size from small, wall-mounted chassis to large free-standing
enclosures. The specific dimensions of the starter are determined by the current and
options requested with the starter and will be specified at the time of the order.
Enclosures Enclosures adhere to the rating system of the National Electrical Manufacturers
Association (NEMA).
2.2 Control Power
General The starter requires a 120VAC source of power and is operated by energizing a control
relay. The starter also has three form ‘C’ output contacts for use by the customer that
provide the operational status of the starter.
Control Power The power requirements for the control card are:
•
120VAC single phase ±15%, 50 to 60 Hz, 25VA.
The power requirements of the starter package also depend on the other devices in the
package. The VA requirements of some common devices are:
•
4” fan - 23VA
•
6” fan - 42VA
•
Pilot Light - 3VA
•
Control Relay - 5VA
Add the VA requirements of the control card and the other devices to get the total VA
requirements of the package.
4
2. TECHNICAL INFORMATION

Control Terminals The TB1 terminal block has the following control terminal configuration:
•
TB1-1 Control power - Line.
•
TB1-2 Control power - Neutral.
•
TB1-3 Run relay holding contact.
•
TB1-4 Run relay line.
•
TB1-5 Run relay neutral.
•
TB1-6 Fault contact N.O. (not faulted).
•
TB1-7 Fault contact common.
•
TB1-8 Fault contact N.C. (not faulted).
•
TB1-9 Up-to-speed contact N.O. (not at full speed).
•
TB1-10 Up-to-speed contact common.
•
TB1-11 Up-to-speed contact N.C. (not at full speed).
•
TB1-12 Motor power N.O. (When motor is stopped).
•
TB1-13 Motor power common.
•
TB1-14 Motor power N.C. (When motor is stopped).
•
TB1-15 External trip input line (120VAC applied or trip occurs).
•
TB1-16 External trip input neutral.
•
TB2-1 Internal power for potentiometer voltage control.
•
TB2-2 Voltage or current control signal input.
•
TB2-3 Voltage or current control signal common.
NOTE: The up-to-speed contact works as a motor power contact when the starter is
in voltage controller mode.
Output Contact Ratings Fault Relay:
2A resistive, 1A inductive, 100VA inrush, 125VAC
Up-to-Speed Relay & Motor Power Relay:
16A resistive, 8A inductive, 2000VA inrush, 250VAC
2.3 Storage
General If the starter is to be stored for a significant period of time before being installed,
certain storage environmental conditions must be maintained.
NOTE: The suggested maximum storage length is two years.
Environmental Conditions To protect the starter during the storage period the following environmental
conditions must be maintained:
•
-40 degrees Fahrenheit to 158 degrees Fahrenheit (-40 degrees Centigrade to 70
degrees Centigrade).
•
20% to 95% relative humidity (non-condensing).
The maximum acceptable temperature and humidity changes in 30 minutes are:
•
10.8 degrees Fahrenheit (6 degrees Centigrade).
•
10% humidity.
5
2. TECHNICAL INFORMATION

2.4 EU Declaration of Conformity
According to the EMC – Directive 89/336/EEC as Amended by 92/31/EEC and 93/68/EEC
Product Category: Motor Controller
Product Type: Reduced Voltage Solid State Motor Controller
Model Numbers: RSD6
Manufactures Name: Benshaw, Inc.
Manufacture’s Address: 1659 East Sutter Road
Glenshaw, PA USA
15116
The before mentioned products comply with the following EU directives and Standards:
Safety: UL 508 Standard for Industrial Control Equipment covering devices for starting,
stopping, regulating, controlling, or protecting electric motors with ratings of 1500
volts or less.
EMC: EN 50081-2 Emissions Radiated/Conducted
EN 55011/05.98+A1:1999
EN 50082-2 Immunity/Susceptibility which includes:
EN 61000-4-2 Electrostatic Discharge
EN 61000-4-3 Radiated RF
EN 61000-4-4 Electrical Fast Transient/Burst
EN 61000-4-6 Injected Currents
The technical files and other documentation are on file at Benshaw, Inc. and controlled by the Product Engineering
Group. Benshaw, Inc. has internal production control systems that ensures compliance between the manufactured
products and the technical documentation.
The product is CE marked in April 2000.
Brian Seman Harry Hagerty
Quality Control Manager Advanced Controls and Drives Manager
Charles E. Cook
Product Development Manager
6
2. TECHNICAL INFORMATION

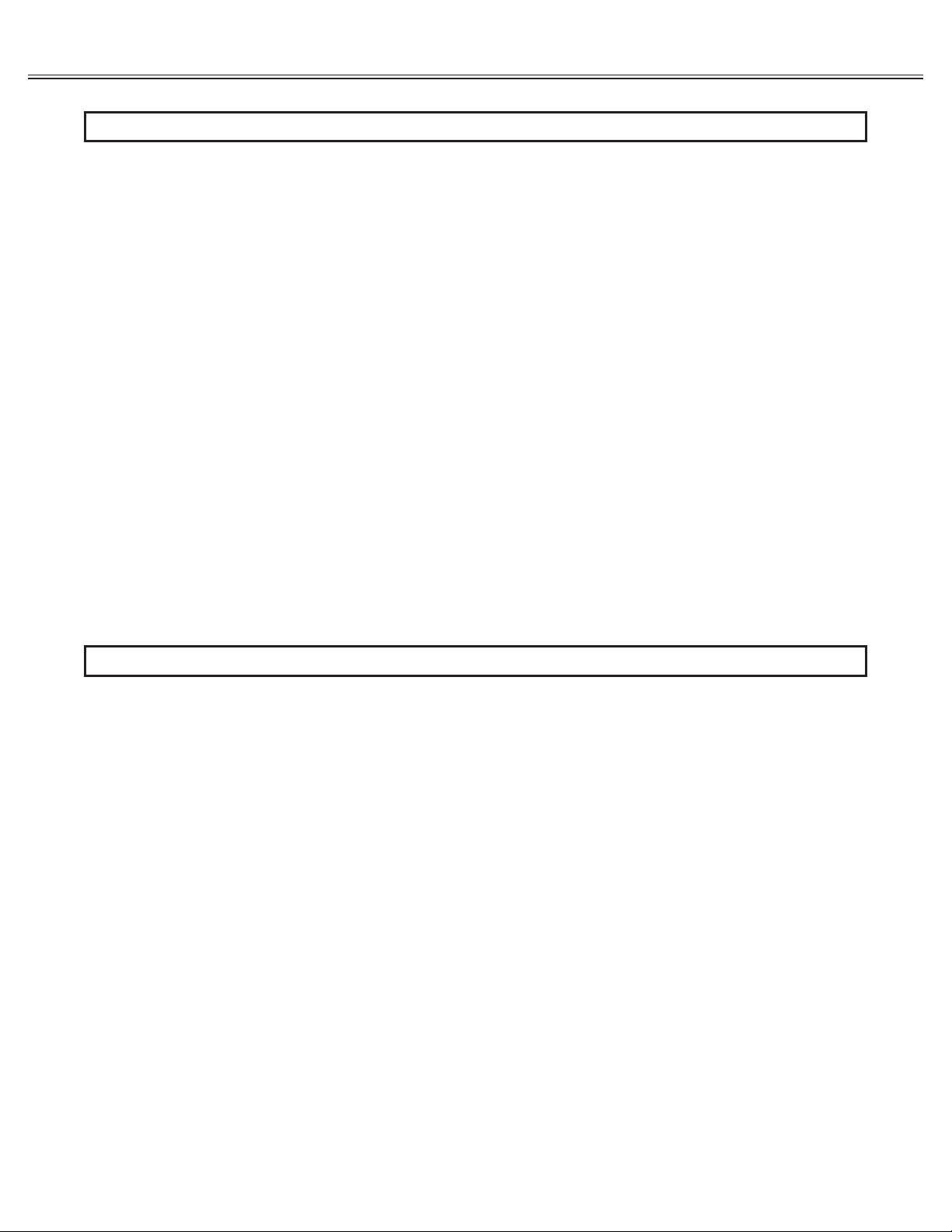
2.5 Solid State Overload
General The starter incorporates an electronic overload which allows the user to select a class
10, 20, or 30 overload. The following curves serve to define the different overload
classes.
The thermal overload trip time will change according to the load on the motor. See
page 32 for a compete description of the overload operation.
7
2. TECHNICAL INFORMATION
1
10
100
1000
10000
1
00000
12345678910
Current (Multiples of FLA)
Time
(Seconds)
Class 30
Class 20
Class 10

2.6 UL/CUL Fault Rating
8
2. TECHNICAL INFORMATION
FLA (amps)
125%
Current
Rating
(amps)
Unit
Withstand
Rating
Fuse Protected Rating Current Limiting Circuit Breaker Protected Rating
Fuse Class
Max. Fuse
Current Rating
Short Circuit
Rating
Catalog Number Trip Plug
Short Circuit
Rating
1200 1440 85kA L
1600A 100kA
HPD63F160 1200-1600A 85kA
2000A 50kA
960 1200 85kA L
1600A 100kA
HPD63F160 1200-1600A 85kA
2000A 50kA
840 1050 85kA L 1600A 100kA
CND63B 1200A
85kA
CMD63B 800A
720 900 42kA L 1600A 100kA
CND63B 1200A
85kA
CMD63B 800A
590 737 42kA L 1400A 100kA
CND63B 1200A
85kA
CMD63B 800A
477 596 42kA
J, 600VAC T,
RK-1
800A 100kA
CLD63B 600A
65kA
CJD63B 400A
361 421 42kA
J, 600VAC T,
RK-1
800A 100kA
CLD63B 600A
65kA
CJD63B 400A
302 377 42kA
J, 600VAC T,
RK-1
800A 100kA CFD63B 400A 65kA
240 300 42kA
J, 600VAC T,
RK-1
600A 100kA CFD63B 400A 65kA
180 225 42kA
J, 600VAC T,
RK-1
400A 100kA CFD63B 250A 65kA
156 195 42kA
J, 600VAC T,
RK-1
400A 100kA CFD63B 225A 65kA
124 155 42kA
J, 600VAC T,
RK-1
350A 100kA
Consult Factory
96 120 42kA
J, 600VAC T,
RK-1
225A 100kA
77 96 42kA
J, 600VAC T,
RK-1
225A 100kA
65 81 42kA
J, 600VAC T,
RK-1
225A 100kA
52 65 42kA RK-1
60A 100kA
100A 50kA
40 50 42kA RK-1
60A 100kA
100A 50kA
27 33 42kA
J, 600VAC T,
RK-1, G, CD
40A 100kA
60A 50kA

2.7 Circuit Card Layout
9
2. TECHNICAL INFORMATION
FU1 CONTROL
JP1 DECEL
TP3 GROUND
ASSEMBLY
TB1
TB1
TB1
TB1
TB1
TB1
TB2
TB3
LED7
DISP1
12
O
N
SW1-SW4
PUSHBUTTON
SWITCHES
SWITCH
DIP
S1
TP1
TB9
LED5,6
TB8
TB7
LED3,4
TB6
TB5
LED1,2
TB4
FUSE
OVERRIDE
NUMBER
CONTROL
POWER
START/
STOP
FAULT
RELAY
UP TO
SPEED
RELAY
MOTOR
POWER
RELAY
EXTERNAL
FAULT
ANALOG
INPUT
CT
INPUTS
POWER
GOOD
LED
+5VDC
SCR6
SCR
STATUS
SCR3
SCR5
SCR
STATUS
SCR2
SCR4
SCR
STATUS
SCR1
TB2 +24VDC
CON1
DIAGNOSTICS UART
CON2
SW4SW3SW2SW1
PARAMETER UP DOWN ENTER
THERMAL RESET
DISP1
PWR
GOOD
OVERRIDE
DECEL
+VDC
GND
K2
K3
K4
FU1

2.8 Spare Parts
General The following lists the spare parts for the different starter sizes:
Part Number Description Used On Quantity
BIPCDMS control card all 1
BI-M-FU1 control card fuse all 1
BISCR5012X 50 amp dual flat pack SCR 1 to 39 amp units 3
BISCR10012X 100 amp dual flat pack SCR 40 to 64 amp units 3
BISCR13212X 132 amp dual flat pack SCR 65 to 95 amp units 3
BISCR16112X 161 amp dual flat pack SCR 96 to 123 amp units 3
BISCR21012X 210 amp dual flat pack SCR 124 to 155 amp units 3
BISCR6601218 660 amp puck style SCR 156 to 301 amp units 6
BISCR8801230 880 amp puck style SCR 302 to 476 amp units 6
BISCR15001850 1500 amp puck style SCR 477 to 839 amp units 6
BICT2881M 288:1 ratio current transformer 1 to 65 amp units 3
BICT8641M 864:1 ratio current transformer 66 to 156 amp units 3
BICT26401M 2640:1 ratio current transformer 180 to 476 amp units 3
BICT57601M 5760:1 ratio current transformer
³ 477 amp units
3
BIFA-600 4” fan 156 to 839 amp units 3 or 6
BIFA-607 6” fan
³ 840 amp units
3or6
BIOT Over temperature Switch
³ 156 amp units
3
10
2. TECHNICAL INFORMATION
3.1 Site Preparation
General Information Before the starter can be installed, the installation site must be prepared. The
customer is responsible for:
•
Providing the correct power source.
•
Selecting the control mechanism.
•
Obtaining the connection cables.
•
Ensuring the installation site meets all environmental specifications for the
enclosure NEMA rating.
•
Installing the motor.
Connection Cables The connection cables for the starter must have the correct current NEC/CSA rating
for the unit being installed. Depending upon the model, the connection cables can
range from a single #14 AWG conductor to four 750 MCM cables.
Site Requirements The installation site must adhere to the applicable starter NEMA/CEMA rating. For
optimal performance, the installation site must meet the following specifications:
•
Temperature: 32 degrees Fahrenheit to 104 degrees Fahrenheit (0 degrees
Centigrade to 40 degrees Centigrade).
•
Humidity: 20% to 95% non-condensing.
•
Airways: Clearances are provided around all heat sinks.
•
Altitude: Less than 3300 feet (1000 meters) above sea level.
NOTE: At altitudes greater than 3300 feet (1000 meters) above sea level, the starter
size must be derated 1% for every 330 feet (100 meters) above this level.
Mounting The starter must be mounted so the heat sink fins are vertically oriented in an area
that does not experience excessive shock or vibration. All models require airway
passages around the heat sink. During normal operation the heat sink may reach 194
degrees Fahrenheit (90 degrees Centigrade). Do not install the starter in direct
contact with any materials that cannot withstand these temperatures.
3.2 EMC Installation guidelines
General In order to help our customers comply with European electromagnetic compatability
standards, Benshaw Inc. has developed the following guidelines.
Attention: This product has been designed for Class A equipment. Use of the product
in domestic environments may cause radio interference, in which case the installer
may need to use additional mitigation methods.
Enclosure Install the product in a grounded metal enclosure.
Grounding Connect a grounding conductor to the screw or terminal provided as standard on each
controller. Refer to layout/power wiring schematic for grounding provision location.
Wiring Wire in an industrial application can be divided into three groups: power control and
signal. The following recommendations for physical separation between these groups
are provided to reduce the coupling effect;
•
Different wire groups should cross at 90 degrees inside an enclosure.
•
Minimum spacing between different wiring groups in the same tray should be
six inches.
•
Wire runs outside an enclosure should be run in conduit or have shielding/armor
with equivalent attenuation.
•
Different wire groups should be run in separate conduits.
•
Minimum spacing between conduits containing different wire groups should be
three inches (8cm).
Filtering To comply with Conducted Voltage Limits a 0.33 uF L-G capacitor should be
connected to each line at point nearest to the incoming power.
11
3. INSTALLATION
 Loading...
Loading...