

Page 1

Installation, Operation and Maintenance Manual
IM 959
Group: Aftermarket Products
Enclosed Variable Frequency Drive
Installation and Operation Manual
Part Number: IM 959
Date: September 2008
Supersedes: New
For McQuay enclosed variable frequency drive products
incorporating MD-2 variable frequency drives
460-480 Volt, 1-100 HP
200-240 Volt, 1-40 HP
Page 2

Table of Contents
Introduction................................................................................................................................................................................. 4
Safety Symbols, Words and Labels........................................................................................................................................ 4
Hazardous Identification Information................................................................................................................................ 4
Before You Begin................................................................................................................................................................... 5
Specifications .............................................................................................................................................................................. 6
Receiving and Preliminary Inspection ........................................................................................................................................ 9
Storing and Shipping.............................................................................................................................................................. 9
Lifting and Handling ............................................................................................................................................................ 10
Dimensions and Weights........................................................................................................................................................... 11
Accessories and Options ........................................................................................................................................................... 12
NEMA Enclosure Type ................................................................................................................................................... 13
Disconnect Type.............................................................................................................................................................. 13
Phase Failure Monitoring ................................................................................................................................................ 13
Panel Door Security......................................................................................................................................................... 14
Wiring to Terminal Blocks .............................................................................................................................................. 14
Electrical Bypass ............................................................................................................................................................. 14
Auxiliary Contacts........................................................................................................................................................... 14
Hand/Off/Automatic Selector Switch.............................................................................................................................. 14
Local/ Remote Selector Switch........................................................................................................................................ 14
Communication Protocol................................................................................................................................................. 14
Forced Air Ventilation..................................................................................................................................................... 15
Interior Heater.................................................................................................................................................................. 15
Pressure Transmitter........................................................................................................................................................ 15
Remote Keypad ............................................................................................................................................................... 15
Spare Filters..................................................................................................................................................................... 15
Spare Fuses...................................................................................................................................................................... 15
Transient Arrestor............................................................................................................................................................ 16
Mounting the Drive Controller.................................................................................................................................................. 17
Clearances ............................................................................................................................................................................ 17
Mounting Methods ............................................................................................................................................................... 18
Bus Voltage Measurement Procedure .................................................................................................................................. 19
Wiring ....................................................................................................................................................................................... 20
Wiring Recommendations.................................................................................................................................................... 20
Branch Circuit Protection ................................................................................................................................................ 20
Grounding........................................................................................................................................................................ 21
Power Wiring................................................................................................................................................................... 22
Power Terminals.............................................................................................................................................................. 25
Control Terminals............................................................................................................................................................ 26
Integrated Display Terminal...................................................................................................................................................... 30
Programming the Drive Controller....................................................................................................................................... 31
Mode Access.................................................................................................................................................................... 31
Parameter Groups ............................................................................................................................................................ 32
Access to Menus and Parameters ......................................................................................................................................... 33
AUF Quick Menu................................................................................................................................................................. 35
Complete List of Parameters and Definitions ........................................................................................................................... 37
Logic Input Functions .......................................................................................................................................................... 42
Relay Output Functions........................................................................................................................................................ 46
Analog Inputs ....................................................................................................................................................................... 49
Analog Outputs..................................................................................................................................................................... 50
PID Control .......................................................................................................................................................................... 52
PID Setpoint .................................................................................................................................................................... 53
PID Tuning ...................................................................................................................................................................... 54
Floating Point Control ..................................................................................................................................................... 56
Wiring Diagram ........................................................................................................................................................................ 57
Troubleshooting ........................................................................................................................................................................ 58
Drive Controller Fault Conditions........................................................................................................................................ 58
2 IM 959
Page 3

Pre-alarm Displays ............................................................................................................................................................... 63
Drive Controller Alarm Conditions...................................................................................................................................... 64
Resetting the Drive Controller after a Fault Condition is Detected...................................................................................... 66
Parts........................................................................................................................................................................................... 67
Parts List............................................................................................................................................................................... 67
Product Support......................................................................................................................................................................... 70
IM 959 3
Page 4
Introduction
McQuay enclosed variable frequency drives (VFDs) can be added to most motor and pump applications to reduce energy
costs during low demand periods of a heating, ventilating, and air conditioning (HVAC) system. McQuay VFDs are
designed and tested for use with a variety of HVAC system components including:
• Rooftop units
• Air handling units
• Chilled water pumps
• Heating water pumps
• Cooling tower fans
• Condenser water pumps
This manual contains information regarding the installation and startup of a McQuay enclosed variable frequency drive
product. The information in this manual pertains to the following enclosed drive products.
• 1-100 horsepower, 400-480 volt Enclosed Variable Frequency Drives
• 1-40 horsepower, 200-240 volt Enclosed Variable Frequency Drives
Safety Symbols, Words and Labels
The following symbols and labels are used throughout this manual to indicate immediate or potential hazards. It is the owner
and installer’s responsibility to read and comply with all safety information and instructions accompanying these symbols.
Failure to heed safety information increases the risk of property damage and/or product damage, serious personal injury or
death. Improper installation, operation and maintenance can void the warranty.
Hazardous Identification Information
!
DANGER
Dangers indicate a hazardous situation which will
result in death or serious injury if not avoided.
!
WARNING
Warnings indicate potentially hazardous situations
which can result in property damage, severe
personal injury, or death if not avoided.
!
CAUTION
Cautions indicate potentially hazardous situations,
which can result in personal injury or equipment
damage if not avoided.
4 IM 959
Page 5

Before You Begin
Read and understand these instructions before performing any procedure on this drive controller.
!
DANGER
HAZARD OF ELECTRIC SHOCK, EXPLOSION OR ARC FLASH
• Read and understand this manual before installing or operating the McQuay Enclosed Variable
Frequency Drive controller. Installation, adjustment, repair and maintenance must be performed by
qualified personnel.
• The user is responsible for compliance with all international and national electrical code requirements
with respect to grounding of all equipment.
• Many parts of this drive controller, including the printed circuit boards, operate at line voltage. DO
NOT TOUCH. Use only electrically insulated tools.
• DO NO TOUCH unshielded components or terminal strip screw connections with voltage present.
• DO NOT short across terminals PA/+ and PC/- or across the DC bus capacitors.
• Before servicing the drive controller:
− Disconnect all power, including external power control that may be present.
− Place a “Do Not Turn On” label on all power disconnects.
− Lock all power disconnects in the open position.
− WAIT 15 MINUTES to allow the DC bus capacitors to discharge. Then follow the DC bus voltage
measurement procedure on page
LED is not an indicator of the absence of DC bus voltage.
• Install and close all covers before applying power or starting and stopping the drive controller.
Failure to follow these instructions will result in death or serious injury.
19 to verify that the DC voltage is less than 45 volts. The drive
IM 959 5
Page 6

Specifications
®
Table 1: McQuay Enclosed Drive Specifications
Input voltage
Displacement power factor
Input frequency
Output voltage
Galvanic isolation
frequency range of the power converter
Current limit
switching frequency
Speed reference
Frequency resolution in analog reference
Speed accuracy
20-100% of motor rated torque
Efficiency
Reference sample time
Acceleration and decelerations ramps
Motor protection
Keypad display
Storage temperature
Operating temperature
Humidity
Altitude
Enclosure
Codes and standards
208 Vac +/- 10%, 230 Vac +/- 10%, 460 Vac +/- 10%
Approximately 0.96
50/60 Hz +/- 5%
Three-phase output, maximum voltage equal to input voltage
Galvanic isolation between power and control (inputs, outputs, and power supplies)
0.5 to 200 Hz (factory setting of 60 Hz maximum)
110% of nominal drive full load amperage (FLA) for 60 seconds
Selectable from 6 to 16 kHz
factory setting: 6 kHz
1
VIA
: 4 to 20 mA, Impedance = 242 ohm or
0 to 10 Vdc, Impedance = 30 kohm
0 to 20 mA (reassignable, X-Y range with keypad display)
VIB: 0 to +10 Vdc, Impedance = 30 kohm
030048 Hz (11bits)
+/- 10% of nominal slip without speed feedback
Typically greater than 95%
2 ms
0.1 to 3,200 seconds (adjustable in 0.1 sec. increments)
Class 10 overload protection when any bypass option is installed and internal
electronic thermal protection on drive controller
Self-diagnostics with fault messages
-13 to +158 oF (-25 to + 70 oC) with vent cover on the VFD removed and without
derating
NEMA 1, non-ventilated, no direct sunlight: +14
NEMA 1, ventilated, no direct sunlight: +14
NEMA 12: +14
NEMA 3R: +14
o
to +122oF (-10o to +50oC)
o
to +122oF (-10oto +50oC), 0oF (-17.8oC) with heater option
o
to +104oF (-10o to +40oC)
o
to +122oF (-10o to +50oC)
95% with no condensation or dripping water, conforming to IEC 60068-2-3
3,300 ft. (1000 m) maximum without derating; derate the current by 1% for each
additional 330 ft. (100 m) up to 10,000 ft. (3000 m)
UL Type 1, UL Type 12, or UL Type 3R
UL Listed per UL508A. Conforms to applicable NEMA ICS, NFPA, and IEC
standards.
1
Not available with the following communication card options: BACnet®, LonWorks
Metasys® N2, ApogeeTM P1
Factory set for voltage control.
6 IM 959
Page 7
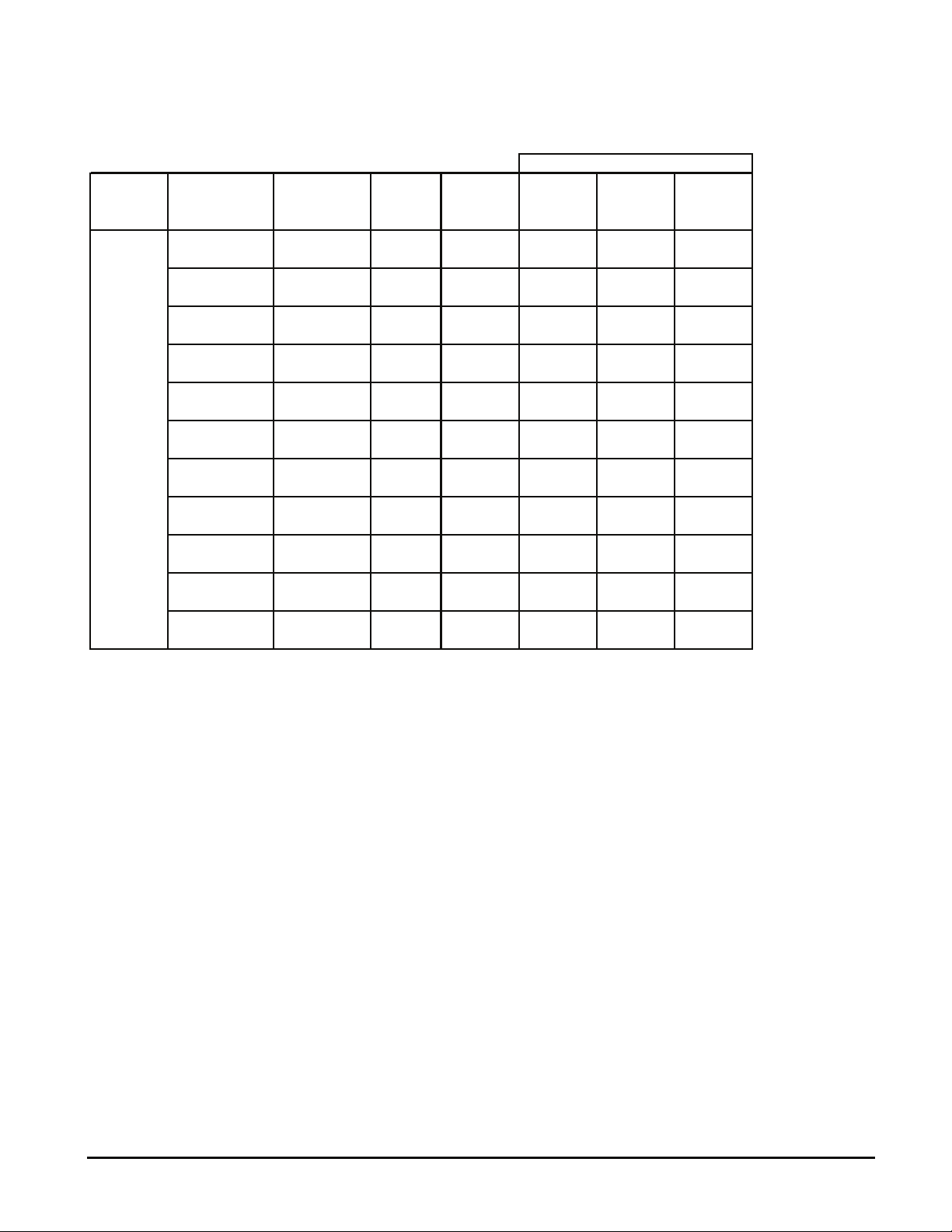
Table 2 and Table 3 list specifications of each enclosed drive controller according to voltage, horsepower, and ampere rating.
(A)
(kg)
-
)
(
)
(
)
(
)
-
-
)
(
)
(
)
(
)
-
)
(
)
(
)
(
)
-
-
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
(
)
(
)
(
)
Mounting dimensions and maximum weight dimensions are illustrated in Table 4 on page
11.
Table 2: 200-240V Enclosed Drive Controller Specifications
Nominal Dimensions in. (mm)
Nominal
Voltage
230
Horsepower
(kW)
1 (0.75) 4.6
2 (1.5) 7.5
3 (2.2) 10.6
5 (4) 17.5
7.5 (5.5) 24.2
10 (7.5) 32
15 (11) 46.2
20 (15) 61
25 (18.5) 74.8
30 (22) 88
40 (30) 117
Maximum
Continuous
Current
Average
Weight
lbs.
70-80 (32
36
70-80 (32
36)
70-80 (32
36
70-80 (32
36
70-80 (32
36)
70-80 (32
36
115-135
52-61
115-135
(52-61)
115-135
52-61
250-280
(113-
250-280
113-
Frame
Size
1
1
1
1
1
1
2
2
2
4
4
Width Height Depth
11.40
289.56
11.40
(289.56)
11.40
289.56
11.40
289.56
11.40
(289.56)
11.40
289.56
13.25
336.35
13.25
(336.35)
13.25
336.35
16.50
(368.30)
16.50
368.30
43.50
1104.9
43.50
(1104.9)
43.50
1104.9
43.50
1104.9
43.50
(1104.9)
43.50
1104.9
50.00
1270.00
50.00
(1270.00)
50.00
1270.00
71.00
(1803.40)
71.00
1803.40
10.25
260.35
10.25
(260.35)
10.25
260.35
10.25
260.35
10.25
(260.35)
10.25
260.35
12.10
307.34
12.10
(307.34)
12.10
307.34
15.35
(389.89)
15.35
389.89
* Exact weight of each drive controller varies and depends on the options selected at time of purchase.
IM 959 7
Page 8

Table 3: 400-480 Enclosed Drive Controller Specifications
-
-
-
-
-
-
-
Nominal Dimensions in. (mm)
Nominal
Voltage
480
Horsepower
(kW)
1 (0.75) 2.2
2 (1.5) 3.7
3 (2.2) 5.1
5 (4) 9.1
7.5 (5.5) 12
10 (7.5) 16
15 (11) 22.5
20 (15) 30.5
25 (18.5) 37
30 (22) 43.5
40 (30) 58.5
50 (37) 79
60 (45) 94
75 (55) 116
100 (74.6) 160
Maximum
Continuous
Current (A)
Average
Weight
lbs. (kg)
70-80 (32
36)
70-80 (32
36)
70-80 (32
36)
70-80 (32
36)
70-80 (32
36)
70-80 (32
36)
70-80 (32
36)
115-135
(52-61)
115-135
(52-61)
180-200
(82-91)
180-200
(82-91)
180-200
(82-91)
180-200
(82-91)
250-280
(113-
127)
250-280
(113-
127)
Frame
Size
1
1
1
1
1
1
1
2
2
3
3
3
3
4
4
Width Height Depth
11.40
(289.56)
11.40
(289.56)
11.40
(289.56)
11.40
(289.56)
11.40
(289.56)
11.40
(289.56)
11.40
(289.56)
13.25
(336.35)
13.25
(336.35)
13.25
(336.55)
13.25
(336.55)
13.25
(336.55)
13.25
(336.55)
16.50
(368.30)
16.50
(368.30)
43.50
(1104.90)
43.50
(1104.90)
43.50
(1104.90)
43.50
(1104.90)
43.50
(1104.90)
43.50
(1104.90)
43.50
(1104.90)
50.00
(1270.00)
50.00
(1270.00)
61.50
(1562.10)
61.50
(1562.10)
61.50
(1562.10)
61.50
(1562.10)
71.00
(1803.40)
71.00
(1803.40)
10.25
(260.35)
10.25
(260.35)
10.25
(260.35)
10.25
(260.35)
10.25
(260.35)
10.25
(260.35)
10.25
(260.35)
12.10
(307.34)
12.10
(307.34)
12.10
(307.34)
12.10
(307.34)
12.10
(307.34)
12.10
(307.34)
15.35
(389.89)
15.35
(389.89)
* Exact weights of each drive controller vary and depend on the options selected at time of purchase.
8 IM 959
Page 9

Receiving and Preliminary Inspection
!
WARNING
DAMAGED PACKAGING
If the packaged appears damaged, it can be dangerous to open it or handle it. Handle with care.
Failure to follow this instruction can result in death, serious injury, or equipment damage.
!
WARNING
DAMAGED EQUIPMENT
Do not operator or install any drive controller that appears damaged.
Failure to follow this instruction can result in death, serious injury, or equipment damage.
Before installing the McQuay enclosed VFD controller, read this manual and follow all precautions.
Before removing the drive controller from its packaging, verify that the carton was not damaged in shipping. Carton damage
usually indicates improper handling and the potential for device damage. If any damage is found, notify the carrier and your
McQuay Parts Distributor.
Storing and Shipping
If the drive controller is not being immediately installed, store it in a clean, dry area where the ambient temperature is
between -13 and +158
shipping carton and packing material to protect it.
o
F (-25 and +70 oC). If the drive controller must be shipped to another location, use the original
IM 959 9
Page 10

Lifting and Handling
!
WARNING
HANDLING AND LIFTING HAZARD
Keep the area below any equipment being lifted clear of all personnel and property. Use the lifting method illustrated
in Figure 1 on page
Failure to follow this instruction can result in death, serious injury, or equipment damage.
RISK OF TOPPLING
• Keep the drive controller on the pallet until ready to install.
• Never place the drive controller in an upright position without proper support, such as a hoist, braces, or other
mounting support.
Failure to follow this instruction can result in death, serious injury, or equipment damage.
• A hoist must be used for handling and lifting all McQuay drive controllers.
• After removing the drive controller from its packaging, inspect it for damage. If any damage is found, notify the
carrier and your McQuay Parts Distributor.
• Verify that the drive controller nameplate and label conform to the packing slip and corresponding purchase order.
10.
!
WARNING
Figure 1: Lifting and Hoisting the Drive Controller
10 IM 959
Page 11

Dimensions and Weights
Figure 2: Enclosed Drive Dimensions
Table 4: Enclosed Drive Dimensions and Weights Frame size is determined by voltage and horsepower and is
shown in Tables 2 and 3, of pages 7 and 8 respectively.
FRAME
SIZE
1
2
3
4
DIMENSIONS, in. (mm)
A B C D E G H
11.40
(289.56)
13.25
(336.35)
13.25
(336.55)
16.50
(368.30)
12.64
(321.05)
14.49
(368.05)
14.49
(368.05)
17.74
(450.60)
10.25
(260.35)
12.10
(307.34)
12.10
(307.34)
15.35
(389.89)
0.39
(9.91)
0.39
(9.91)
0.39
(9.91)
0.39
(9.91)
13.58
(344.93)
15.43
(391.92)
15.43
(391.92)
18.68
(474.47)
41.28
(1048.51)
47.78
(1213.61)
59.28
(1505.71)
68.78
(1747.01)
43.50
(1104.90)
50.00
(1270.00)
61.50
(1562.10)
71.00
(1803.40)
AVERAGE
WEIGHT
lbs. (kg)
70-80
(32-36)
115-135
(52-61)
180-200
(82-91)
250-280
(113-127)
IM 959 11
MAXIMUM
WEIGHT,
lbs. (kg)
100 (45)
150 (68)
220 (100)
300 (136)
Page 12

Accessories and Options
This section defines all available options that can be selected with a McQuay enclosed VFD. Figure 3 illustrates a twodimensional layout of the entire VFD enclosure and shows individual component locations. Refer to Figure 22 on page
for a typical wiring schematic for each or all of the components shown on the two-dimensional layout.
Figure 3: Enclosed Drive Controller Dimensional Layout and Internal Components
57
12 IM 959
Page 13
NEMA Enclosure Type
The National Electrical Manufacturing Association (NEMA) sets electrical manufacturing standards for the United States.
NEMA establishes specific design criteria for which industrial electrical panels and enclosures should be designed and built.
NEMA establishes ratings and definitions for each type of industrial panel. The following definitions are referenced in
accordance with NEMA Standard 250-2003 (NEMA Enclosures section, November 2005). These NEMA types apply to the
McQuay Enclosed Variable Frequency Drive product.
• NEMA Type 1 - Enclosures are intended for indoor use, primarily to provide a degree of protection against the
contact with the enclosed equipment. The McQuay enclosed drive controller temperature limit for this NEMA type
without forced air ventilation is +14
installed is +14
o
to +122oF (-17.8o to +50oC).
• NEMA Type 12 - Enclosures are intended for indoor use, primarily to provide a degree of protection against
circulating dust, falling dirt, and non-corrosive liquids. The McQuay enclosed drive controller temperature limit for
this NEMA type is +14
o
to +122oF (-10o to +50oC).
• NEMA Type 3R (non-filtered) - Enclosures are intended for outdoor use, primarily to provide a degree of protection
against rain, sleet, and damage from external ice formation. The McQuay enclosed drive controller temperature
limit for this NEMA type is +14
when the heater option is present.
o
to +104oF (-10o to +40oC). The temperature range with forced air ventilation
o
to +122oF (-10o to +50oC). The drive controller is rated down to 0°F (-17.8°C)
• NEMA Type 3R (filtered) -
Enclosures are intended for outdoor use, primarily to provide a degree of protection
against rain, sleet, and damage from external ice formation, as well as a degree of protection against circulating dust,
falling dirt, and non-corrosive liquids.. The McQuay enclosed drive controller temperature limit for this NEMA type
o
to +122oF (-10o to +50oC). The controller is rated down to 0°F (-10°C) when the heater option is installed.
is +14
Disconnect Type
The National Electric Code (NEC) requires a unit disconnect on electrical motor circuits. A unit disconnect is a selectable
option on McQuay enclosed drive products. A disconnect allows power to be isolated from the enclosed drive controller for
serviceability and safety. Refer to DS1 of Figure 3 on page
12 for the disconnect location inside the enclosure. The
following types of disconnects are selectable with McQuay enclosed drive controllers.
• None – If a disconnect is located upstream of the motor power circuit, then a unit disconnect may not have been
installed inside the drive controller enclosure. Power may have to be shut down upstream within the power circuit
before installation and startup of the drive controller can be carried out in this situation.
• Non-Fusible Disconnect – This type of disconnect is manually operated and allows incoming power to be isolated
from the drive controller. This type of disconnect adds no circuit protection to the unit.
• Fusible Disconnect – This type of disconnect is manually operated and allows incoming power to be isolated from
the drive controller. This type of disconnect adds a certain level of circuit protection by incorporating a J type fuse.
• Circuit Breaker Disconnect – This type of disconnect is manually operated and allows incoming power to be isolated
from the drive controller. This type of disconnect adds a certain level of circuit protection by incorporating a circuit
breaker that can be manually reset.
Phase Failure Monitoring
A phase failure monitor is a selectable option on McQuay enclosed drive controllers. Refer to PVM1 of Figure 3 on page 12
for the location of the phase failure monitor inside the enclosure. The phase failure monitor is a device that protects the
motor from the following system failures:
• Single phasing (loss of any phase)
• Low voltage
• High voltage
• Voltage imbalance
• Phase reversal
• Rapid cycling
IM 959 13
Page 14
Panel Door Security
Panel door security is a selectable option on McQuay enclosed drive controllers that allows the enclosure to be locked by way
of a paddle lockable device. This keeps unauthorized personnel from entering the enclosure or tampering with the drive
controller and internal components.
Wiring to Terminal Blocks
This option terminates all enclosed drive control wiring (I/O) to a common terminal block. Refer to Figure 10 on page 28 for
terminal designations. Figure 3 on page
12 shows the location of the terminal block (TB2) inside the enclosure.
Electrical Bypass
Electrical bypass is an available option on enclosed drive controllers. A bypass allows the variable frequency drive to be
eliminated from the power circuit. When the drive controller is put in the bypass mode, an independent circuit is enabled that
does not include (bypasses) the VFD. The unit operates at full speed with an across-the-line start when bypass mode is
selected. Variable speed control by way of the VFD is lost when the controller is in the bypass mode.
There are two types of electrical bypass options on McQuay enclosed drive controllers. A two-contactor bypass does not
isolate the VFD from main line voltage power. If the VFD fails and the bypass mode is enabled, the drive controller cannot
be serviced until the unit is completely shut down. A three-contactor bypass isolates the bypass circuit from the inverter
circuit. This means that the VFD can be serviced while running in the three-contactor bypass mode. M10B of Figure 3 on
12 represents the two contactor bypass option. M10C is the three contactor bypass and shown as a selectable option
page
within Figure 3.
Auxiliary Contacts
Each contactor on the enclosed drive controller is equipped with one normally open and one normally closed contact. If this
option is selected, an additional normally open and normally closed contact is added to each contactor within the McQuay
enclosed drive controller. When this option is selected with a two-contactor bypass, then four normally open and four
normally closed contacts are equipped on the unit. If a three-contactor bypass is present within the unit, and the auxiliary
contacts option is selected, then six (6) normally open and six (6) normally closed contacts will be present within the
enclosed drive controller.
Hand/Off/Automatic Selector Switch
S1 shown within Figure 3 on page 12 represents the Hand/Off/Automatic (HOA) switch. This option is a three-position
selector switch located on the outside of the enclosure. When this option is selected, the drive controller can be switched
between three different modes: Hand, Off, or Auto mode. The Hand mode allows the drive speed to be controlled via the
display keypad. The Off mode stops power to the VFD. The Automatic mode allows the system to control motor speed.
Local/ Remote Selector Switch
S2 represents the local/remote selector switch within Figure 3 on page 12. This option is a two-position selector switch
located on the outside of the enclosure. This option allows the drive controller to be selected between two modes - Local or
Remote mode. Local mode allows the drive speed to be controlled via the display keypad or system controls. Remote mode
allows the drive to be controlled by the building automation system (BAS) controls.
Communication Protocol
Modbus® is the standard communication protocol within the McQuay enclosed drive controller. Other communication
options are available. Separate installation and operation instructions are included with the enclosed drive controller when a
communication option other than Modbus is selected. The following communication protocols are available for the McQuay
enclosed drive controller:
• Modbus (Standard)
• Metasys® N2
• BACnet®
ONWORKS®
• L
14 IM 959
Page 15

• Apogee P2™
Forced Air Ventilation
McQuay enclosed drive controllers may have thermostatically controlled forced air ventilation installed as an option. When
this option is selected, the ventilation fan (located at the top of the enclosure as shown in Figure 3 on page 12) will cycle on
o
F (29.4oC), and will shut off at 67oF (19.4oC). This option comes standard on NEMA 12 and 3R enclosures.
at 85
Thermostatically controlled forced air ventilation is a selectable option on NEMA 1 enclosure types. The upper temperature
limits for this selectable option are listed below.
• NEMA 1, non-ventilated: +104
• NEMA 1, ventilated: +122
• NEMA 12: +122
• NEMA 3R: +122
o
F (+50oC)
o
F (+50oC)
o
F (+40oC)
o
F (+50oC)
Interior Heater
McQuay enclosed drive controllers are selectable with an enclosed heater where weather conditions require it. The heater
will cycle on at 40
is positioned on the inside of the enclosure, along the side of the VFD (see Figure 3 on page 12 for details). When this option
is selected on Frame 4 enclosed drive controllers, two heaters are installed inside the enclosure. All other frame sizes ship
with one heater installed. The temperature limits with or without a heater installed are listed below.
• Enclosures with a heater installed: 0
• Enclosures without a heater installed: +14
o
F (4.4oC), and shut off at 50oF (10oC) when this option is installed inside the drive enclosure. The heater
o
F (-17.8oC)
o
F (-10oC)
Pressure Transmitter
This option is selectable when the drive controller will be installed in a fan application, where VFD speed will be controlled
by a pressure transmitter. The pressure transmitter can either be selected to mount on the inside of the enclosure (NEMA 1)
or outside of the enclosure (NEMA 4X). The pressure transducer is represented as SPS1 on the two dimensional layout of
Figure 3 on page
12.
The transducer is powered by 24 VDC via the P24 terminal of the MD-2 VFD. It transmits a 4-20 mA signal to the VIB
analog input terminal at the MD-2 VFD. The 4-20 mA signal is converted to a 2-10 VDC signal via a 499 ohm resistor
installed between the VIB and CC terminals of the VFD (refer to SPS1 of Figure 22 on page
57 for details).
Remote Keypad
The remote keypad is an available option on McQuay enclosed drive controllers. The remote keypad comes with a 9.8-foot
(3 m) cable that allows the user display and keypad to be accessed from a remote location. The remote keypad option is
available in a NEMA 1 or NEMA 3R rating. The NEMA 1 option is shipped loose, inside the enclosure for field mounting in
an indoor application. The NEMA 3R option is shipped loose, inside the VFD enclosure for field mounting in an outdoor
application.
Spare Filters
When this option is selected, the enclosed drive controller will ship with extra filters on NEMA 12 and NEMA 3R (filtered)
enclosure types. In these types of enclosure types, one filter is mounted inside the bottom of the enclosure at the outside air
intake louver. A second filter is mounted inside the top of the enclosure at the exhaust air louver. When spare filters are
ordered, an additional five (5) filters are shipped with the unit.
Spare Fuses
When this option is selected, the enclosed drive controller will ship with extra fuses when a fused disconnect or control
power transformer is installed in the unit. There are three large, fast acting, J type fuses when a fused disconnect is selected.
There are also three fuses installed on the control power transformer (CPT) when 115 VAC power is installed inside the drive
controller enclosure. When spare fuses are ordered, an additional quantity of three fuses for a fused disconnect, and three
fuses for the CPT are shipped with the unit.
IM 959 15
Page 16

Transient Arrestor
The transient arrestor is a selectable option on McQuay enclosed drive controllers. This option adds a certain level of circuit
protection to the drive controller. The transient arrestor acts like a filter to stop sudden over-voltage transient conditions that
may exist in the power circuit. The large transients can be caused internally by the distribution network, or externally from
events such as lightning or motor arcing. The transient arrestor is shown as TA1 on the two-dimensional layout of Figure 3
on page 12.
16 IM 959
Page 17

Mounting the Drive Controller
Clearances
When mounting a McQuay drive controller:
• Install the drive controller vertically, +/- 10
• Do not place the drive controller close to heat sources.
• Leave sufficient free space around the drive controller to ensure that air can circulate from the bottom to the top of
the unit.
• Leave enough free space in front of the drive controller enclosure door so that it opens at least 90
• Clearances must be in accordance with local AHJ requirements.
The enclosed drive controller has certain clearance requirements. Refer to Figure 4
mounting. The top of the enclosure should have a clearance of no less than six (6) inches (not including the shroud on
NEMA 3R enclosures). The bottom of the enclosure should also have a clearance minimum of six inches. There is no side
minimum clearance limit for mounting the drive controller. However, the drive controller should be mounted in a way that
still allows adequate clearance room for the enclosure door to open.
Figure 4: Minimum Clearance Requirements for Mounting the Enclosures
o
.
6 inch minimum
o
.
below for necessary clearances when
No
Limit
6 inch minimum
No
Limit
IM 959 17
Page 18

Mounting Methods
• Mount the drive in an upright position.
• Mount the drive controller against a back panel or mounting support capable of supporting the maximum controller
weights shown in Table 5.
• Use mounting hardware capable of supporting the drive controller weight. Again, refer to Table 5 for maximum
weight requirements.
Table 5: Maximum Weights for Enclosed Drives.
VOLTAGE HORSEPOWER
1–10 1 100 (45)
208-230
460
Install the drive controller using the mounting feet provided on the outside of the enclosure. Refer to dimensional references
B and G of Table 4 on page
question.
15-25 2 150 (68)
30-40 4 300 (136)
1 - 15 1 100 (45)
20 - 25 2 150 (68)
30 - 60 3 220 (100)
75 - 100 4 300 (136)
11 for the mounting dimensions between each mounting foot depending on the frame size in
FRAME
SIZE
MAXIMUM WEIGHT,
lbs (kg)
18 IM 959
Page 19

Bus Voltage Measurement Procedure
Before working on the drive controller, remove all power and wait 15 minutes to allow the DC bus to discharge. Then
measure the DC bus voltage between the PA/+ and PC/- terminals.
!
DANGER
HAZARD OF ELECTRIC SHOCK, EXPLOSION, OR ARC FLASH. DISCONNECT ALL POWER.
Read and understand the precautions in the “Before You Begin” section on page
Failure to follow this instruction can result in death or serious injury.
The DC bus voltage can exceed 1,000 VDC. Use a properly rated voltage-sensing device when performing this procedure.
To measure the DC bus voltage:
1. Disconnect all power.
2. Wait 15 minutes to allow the DC bus to discharge.
3. Measure the voltage of the DC bus between the PA/+ and PC/- terminals to ensure that the voltage is less than 45
VDC.
4. If the DC bus capacitors do not discharge completely, contact your local McQuay Parts Distributor. Do not repair or
operate the drive controller.
4 before performing this procedure.
Figure 5: Capacitor Charging LED
IM 959 19
Page 20

Wiring
Wiring Recommendations
Good wiring practice requires the separation of control wiring from all power (line) wiring. In addition, power wiring to the
motor must have the maximum possible separation from all other power wiring, whether from the same drive controller or
other drive controllers. Do not run power and control wiring, or multiple power wiring, in the same conduit. This
separation reduces the possibility of coupling electrical transients from power circuits into control circuits or from motor
power wiring into other power circuits.
!
DANGER
IMPROPER WIRING PRACTICES
• Follow the wiring practices described in this document in addition to those already required by the
National Electrical Code and local electrical codes.
• Do not apply input line voltage to the output terminals (U/T1, V/T2, W/T3).
• Check the power connections before energizing the drive controller.
• If replacing another drive controller, verify that all wiring connections to the McQuay enclosed drive
controller comply with all wiring instructions in this manual.
Failure to follow these instructions will result in death, serious injury, or equipment damage.
Follow the practices listed below when wiring McQuay drive controllers:
• Verify that the voltage and frequency of the input supply line and the voltage, frequency, and current of the motor
match the rating on the drive controller nameplate.
• Use metallic conduit for all drive controller wiring. Do not run control and power wiring in the same conduit.
• Separate the metallic conduits carrying power wiring or low-level control wiring by at least 3 in. (76 mm).
• Separate the non-metallic conduits or cable trays carrying power wiring form the metallic conduit carrying control
wiring by at least 12 inches (305 mm).
• Whenever power and control wiring cross, the metallic conduits and non-metallic conduits or trays must cross at
right angles.
• Equip all inductive circuits near the drive controller (such as relays, contactors, and solenoid valves) with noise
suppressors.
• Cable lengths greater than 100 feet (30.5 m) can affect the drive controller and motor performance. For cables
longer than 100 feet, an output filter may be necessary.
Branch Circuit Protection
Refer to NEC Article 430 for sizing of branch circuit conductors. Ensure that all branch circuit components and equipment
(such as transformers, feeder cables, disconnect devices and protective devices) are rated for the input current of the drive
controller, or for the rated output current, whichever value is larger. Rated input and output current values are shown on the
drive controller nameplate.
NOTE: Ensure that the branch circuit feeder protection rating is not less than the rated output current of the drive controller.
20 IM 959
Page 21

!
DANGER
INADEQUATE OVERCURRENT PROTECTION
• Over current protective devices must be properly coordinated.
• The National Electrical Code and the Canadian Electricity Code require branch circuit protection. Use
the fuses recommended on the drive controller nameplate to achieve published fault-withstand current
ratings.
• Do not connect the drive controller to a power feeder whose short circuit capacity exceeds the drive
controller short circuit current rating listed on the drive controller nameplate.
Failure to follow these instructions will result in death, serious injury, or equipment damage.
Grounding
Grounding of the drive controller should be done using the ground lug located at the bottom, on the inside of the enclosure.
The ground lug has a tag designation and is labeled GLG1
.
Figure 6: Ground Lug Location on McQuay Enclosed Drive Controllers
Ground Lug
(GLG1)
!
DANGER
HAZARD OF ELECTRIC SHOCK, EXPLOSION, OR ARC FLASH
Ground the equipment using the provided ground connecting point as shown in Figure 8 on page
22. The drive controller panel must be properly grounded before power is applied.
Failure to follow these instructions will result in death, serious injury, or equipment damage.
IM 959 21
Page 22

Ground multiple drive controllers as shown in Figure 7 below. Do not loop the ground cables or connect them in series.
Figure 7: Grounding Multiple Controllers
Power Wiring
The drive controller enclosure does not come equipped with standard knockouts installed. Field-drilled power and control
wiring openings will have to be cut into the enclosure. Power and control wiring can be brought into the drive controller
through the bottom, the right side, or the left side of the enclosure. It is up to the installer to size, place, and cut the power
and control wiring holes correctly for their specific application, and according to the necessary conductor sizes shown in
Table 6 or Table 7 depending on power termination locations. Wire size must be selected in accordance with NEC table
310.16 for copper conductors at a temperature rating of 165
o
F (75oC) and/or local codes.
Figure 8: Typical Knockout Locations for Control and Power Wiring of the Drive Controller
Typical knockout locations
22 IM 959
Page 23

Maximum conductor sizes for the McQuay MD-2 variable frequency drives are shown in Table 6 below. All other conductor
wire sizing for components inside the enclosure should be selected according to Table 7 on page
24.
Table 6: Maximum Conductor Sizes for Power Terminals on the MD-2 VFD only.
Voltage HP
1 1 6 10 1.3 11.5
2 1 6 10 1.3 11.5
3 1 6 10 1.3 11.5
4 1 6 10 1.3 11.5
200
To
240
400
To
480
5 1 6 10 1.3 11.5
7.5 1 16 6 2.5 22
10 1 16 6 2.5 22
15 2 25 3 4.5 40
20 2 25 3 4.5 40
25 2 25 3 4.5 40
30 4 50 1/0 24 212
40 4 150 300 mcm 41 363
1 1 6 10 1.3 11.5
2 1 6 10 1.3 11.5
3 1 6 10 1.3 11.5
4 1 6 10 1.3 11.5
5 1 6 10 1.3 11.5
7.5 1 6 10 1.3 11.5
10 1 6 6 2.5 22
15 1 16 6 2.5 22
20 2 25 3 4.5 40
25 2 25 3 4.5 40
30 3 50 1/0 24 212
40 3 50 1/0 24 212
50 3 50 1/0 24 212
60 3 50 1/0 24 212
75 4 150 300 mcm 41 363
100 4 150 300 mcm 41 363
Frame
Size
Power Terminals (Input,
Output, and Ground
Wires)
mm2 AWG N-m lb-in
Maximum Tightening
Torques
IM 959 23
Page 24

McQuay enclosed drive controllers are available with a variety of options. Wire termination locations for input power,
output power, and ground wiring will vary depending on the options installed within the unit. Wire conductor sizes should be
chosen according to Table 7
below when terminating power at components other than the variable frequency drive (i.e.
disconnects, overload relays, power blocks, etc.).
Table 7: Recommended conductor sizes for specified voltage and horsepower ranges on McQuay enclosed drives,
according to NEC Table 310.16 at 75
Voltage HP Full Load Amps
208
230
460
o
C temperature rating for copper conductors.
Recommended Wire Size
1
1.5
2
3
5
7.5
10
15
20
25
30
40
1
1.5
2
3
5
7.5
10
15
20
25
30
40
1
1.5
2
3
5
7.5
10
15
20
25
30
40
50
60
75
100
4.6
6.6
7.5
10.6
16.7
24.2
30.8
46.2
59.4
74.8
88.0
114.0
4.2
6.0
6.8
9.6
15.2
22.0
28.0
42.0
54.0
68.0
80.0
104.0
2.1
3.0
3.4
4.8
7.6
11.0
14.0
21.0
27.0
34.0
40.0
52.0
65.0
77.0
96.0
124.0
(AWG)
14
14
14
14
12
10
8
6
4
3
2
1/0
14
14
14
14
14
10
10
6
4
4
3
1
14
14
14
14
14
14
14
10
10
8
8
6
4
3
1
2/0
24 IM 959
Page 25

Power Terminals
Incoming power should be terminated at the main unit disconnect (DS1), or the power distribution block (PB1) if a
disconnect was not installed in the unit. Phases shall be kept consistent to insure proper motor rotation and power
distribution to the motor control circuit. Identify each phase leg (L1, L2, and L3) and match it up to the proper label shown
on the inside of the unit enclosure back panel. See Figure 9 for details.
Outgoing power to the motor should be terminated at the overload relay (OL10), connected to the inverter contactor (M10).
If the drive is not ordered with a bypass, output power shall be terminated at the T1, T2, and T3 terminals of the inverter. All
phases should be kept consistent to keep motor rotation correct (T1, T2, and T3). See Figure 9
below for details.
Figure 9: Input and Output Power Wiring Termination Locations
IM 959 25
Page 26

Control Terminals
The McQuay enclosed drive is equipped with multiple control terminals capable of a wide range of control schemes. The
drive controller is quipped with the following control terminals:
• 1 External power supply input (PLC)
• 1 Internal power supply (P24)
• 2 Common terminals (CC)
• 5 Configurable relay outputs (FLA, FLB, FLC, RY, RC)
• 3 Configurable logic inputs (F, R, RES)
• 1 Configurable analog output (FM)
• 1 Configurable analog/logic input (VIA)
• 1 Configurable analog input (VIB)
• 1 Internal supply (PP)
Table 8 defines each terminal in detail. Refer to the Programming section on page
control terminals for various applications.
31 for more detail on utilizing these
Table 8: Terminal Designations and Their Function
26 IM 959
Page 27

Table 8: Continued
The drive controller has two different control wiring terminal locations depending on the options that were selected with the
unit. Figure 10 on page
applies if this option was selected and installed on the drive controller at the time of purchase. If the drive controller was not
selected with the TB 2 terminal block option, then all control wiring will be terminated at the McQuay MD-2 variable
frequency drive. Figure 11 on page
28 shows the McQuay MD-2 wiring terminations located at the TB 2 terminal block. This figure
29 illustrates these control terminal designations.
IM 959 27
Page 28

Figure 10: Control Terminal Locations of the Drive Controller, when the terminal block option is selected (TB2).
Terminal Block 2 (TB 2)
Terminal Block 1 (TB 1)
28 IM 959
Page 29

Figure 11: Terminal Locations of Main Control Terminal Board of the MD-2 VFD Controller.
IM 959 29
Page 30

Integrated Display Terminal
The LEDs and keys on the integrated display terminal are illustrated in Figure 12 below.
Figure 12: Description of Display Terminal
Table 9: Display Terminal Features
30 IM 959
Page 31

Programming the Drive Controller
This section describes how to access drive controller modes and parameters, and how to configure the drive controller for the
most common applications.
Refer to the Complete List of Parameters and Definitions section starting on page
used in most HVAC applications.
Mode Access
The McQuay drive controller has three modes of operation described in Table 10.
Table 10: Mode Descriptions
Figure 13 illustrates how to access the modes with the MODE key on the keypad display.
Figure 13: Mode Access
37 for a list of drive controller parameters
IM 959 31
Page 32

Parameter Groups
Table 11 describes the drive controller parameter groups. For a complete list of parameters that are generally used for most
HVAC applications, refer to Table 13 on page 35.
For more information on configuring the other basic parameters and the extended parameters, refer to the Commonly Used
Parameters and Definitions section on page 34 of this manual.
Table 11: McQuay Drive Parameter Groups
32 IM 959
Page 33

Access to Menus and Parameters
Figure 14 illustrates how to access menus on the drive display keypad.
Figure 14: Menu Access
IM 959 33
Page 34

Figure 15 illustrates how to access parameters on the drive display keypad.
Figure 15: Access to Parameters
34 IM 959
Page 35

AUF Quick Menu
The drive has a quick menu for easy access to the most commonly used basic and extended parameters.
Figure 16: Quick Menu Parameters
IM 959 35
Page 36

Table 12 describes the parameters that can be accessed from the AUF Quick menu. With the exception of ACC and DEC,
the parameters cannot be modified while the drive controller is running.
Table 12: AUF Quick Menu Parameters
36 IM 959
Page 37

Complete List of Parameters and Definitions
The most commonly used parameters in most HVAC applications are listed in Table 13. The drive has other programmable
parameters that are not listed here. A complete list of parameters and more information about the drive controller is available
in the Schneider Electric Instruction Bulletin #30072-451-63.
Table 13: Complete List of Programming Parameters for Most HVAC Applications
Parameter
Title
AU1 0000
CnOd 0003
FnOd 0004
FnSL 0005
Fn 0006
tyP 0007
IM 959 37
Communication
Address
Function
Automatic
Acceleration/
Deceleration
Command
mode
selection
Frequency
setting mode
selection 1
Meter
selection
Meter
adjustment
Default
setting
Default
Value
0 0 2
0 0 2
2 1 5
0 0 19
145 1 1280 1-1280 steps
2 0 9
Lowest
Value
Highest
Value
Description Notes
0: Disabled (manual)
1: Automatic
2: Automatic (only at
acceleration)
0 : Terminal Board
1: Operation Panel
2: Serial
Communication
1: VIA
2: VIB
3: Operation panel
4: Communication
5: UP/DOWN frequency
0: Output frequency
1: Output current
2: Set frequency
3: DC voltage
4: Output voltage
command value
5: Input power
6: Output power
7: Torque
8: Torque current
9: Motor cumulative
load factor
10: Inverter cumulative
load factor
12: Frequency setting
value (after PID)
13: VIA Input value
14: VIB Input value
15: Fixed output 1
(Output current: 100%)
16: Fixed output 2
(Output current: 50%)
17: Fixed output 3
(Supposition output at
fsl = 17)
18: Serial
communication data
(FA51 = 1000)
19: For adjustments (c
set value is displayed.)
0: - (invalid)
1: 50Hz default setting
2: 60Hz default setting
3: Standard Default
setting (Initialization)
4: Trip record clear
5: Cumulative operation
time clear
6: Initialization of type
information
7: Save user-defined
parameters
8: Call user-defined
parameters
9: Cumulative fan
operation time record
clear
This parameter allows the drive to
automatically adjust acceleration
(ACC) and deceleration (dEC) time in
line with load size. It can be disabled
by setting this parameter to 0.
These parameters are used to specify
which input device takes priority in
entering an operation stop command
or a frequency setting command
(internal potentiometer, VIA, VIB,
operation panel, serial communication
device, external contact up/down).
These parameters are used to specify
which input device takes priority in
entering a frequency setting command
during operation panel, terminal
board, or serial communication
control.
The signal output from the FM
terminal is an analog voltage signal.
This parameter allows you to output a
signal based on any of the 19 options
listed here. For the meter, use either
a full-scale 0-1mAdc ammeter or fullscale 0-7.5Vdc (or 10Vdc-1mA)
voltmeter.
Switching to 0-20mAdc (4-20mAdc)
output current can be made by tuning
the FM (SW2) slide switch to the I
position. When switching to 4-20mAdc
current input, make adjustments using
F691 (analog output gradient) and
F692 (analog output bias).
Adjusts the analog output signal that
is sent out through terminal FM of the
drive. See the Analog Output Section
on page 46 Of this manual for more
details.
Setting this parameter to 3 changes all
parameters back to factory default
values.
Note that Fn, FnsL, F109, F470 –
F473, F669and F880 will not be reset
to their factory default settings.
Page 38

Table 13: Complete List of Programming Parameters for Most HVAC Applications, Continued
Parameter
Title
ACC 0009
DEC 0010
FH 0011
UL 0012
LL 0013
uL 0014
uLu 0409
Pt 0015
ub 0016
*tHr 0600
Communication
Address
Function
Acceleration
time 1
Deceleration
time 1
Maximum
frequency
Upper limit
frequency
Lower limit
frequency
Base
frequency 1
Base
frequency
voltage 1
V/F control
mode
selection 1
Torque boost
1
Motor
electronic-
thermal
protection
level 1
Default
Value
Varies 0 3200 0.0-3200 seconds
Varies 0 3200 0.0-3200 seconds
60 30 200 30.0-200.0 hertz
60 0.5 200 0.5-200.0 hertz
0 0 50 0.0-50.0 hertz
60 25 200 25.0-200.0 hertz
460
208
230
1 0 6
Varies 0 30
Varies 0
Lowest
Value
50
Highest
Value
660
330
drive
rating
Description Notes
Sets the time for the drive to accelerate
from 0 (Hz) frequency to maximum
frequency set by parameter FH.
Sets the time it takes for the drive to
decelerate from maximum frequency set
by parameter FH to 0 (Hz) frequency.
Programs the maximum frequency that
other drive parameters are allowed to
operate in. This parameter is used as the
reference for the acceleration /
deceleration time.
Programs the maximum frequency that the
drive is allowed to operate in. This
parameter's maximum value is limited to
the setting of FH.
Programs the lower limit frequency that
the drive is allowed to operate.
Sets the drive base frequency. This
parameter sets the constant torque control
50-330 volts (200-
240V class)
50-660 volts (400-
480V class)
0: V/f constant
1: Variable torque
2: Automatic
torque boost
control
3: Vector control
4: Energy Saving
5: (Do not select)
6: PM motor
control
0.0-30.0 adjustable
range
0-drive rating
(amperes)
area.
Sets the base frequency voltage of the
drive. This parameter sets the constant
torque control area.
0: This parameter applies to loads that
require the same torque at low speed as at
rated speeds.
1: Select this option when applying the
drive to variable torque loads like
centrifugal fans and pumps
2: This option detects load currents in all
speed ranges and automatically adjusts
voltage output (torque boost) from the
drive.
3: Using this selection with a standard
motor will provide the highest torque at low
speed ranges.
4: This options saves energy in all speed
areas by detecting load current and
flowing the optimal current to fit the load.
6: This feature can be used with
permanent magnet motors (not induction
motors), and can be operated in sensorless operation mode.
This parameter has the ability to increase
the starting torque of the system, however
increasing the torque boost to high can
cause over current trips at startup. This
parameter is generally not changed from
default for HVAC applications.
Ampere ratings for each drive vary by
model. Refer to the drive specifications
section of this manual for information on
drive voltage and ampere ratings.
38 IM 959
Page 39

Table 13: Complete List of Programming Parameters for Most HVAC Applications, Continued
Parameter
Title
OLM 0017
F108 0108
F109 0109
F111 0111
F112 0112
F113 0113
F118 0118
F130 0130
F132 0132
F137 0137
F139 0139
F201 0201
Communication
Address
Function
Electric-
thermal
protection
characteristic
selection
Always-active
function
selection
Analog/conta
ct input
function
selection
(VIA/VIB)
Input terminal
selection1 (F)
Input terminal
selection 2
(R)
Input terminal
selection 3
(RES)
Input terminal
selection 8
(VIA)
Output
terminal
selection 1A
(RY-RC)
Output
terminal
selection 3
(FL)
Output
terminal
selection 1B
(RY-RC)
Output
terminal logic
selection (RY-
RC/OUT-NO)
VIA input
point 1 setting
Default
Value
0 0 7
0 0 71 57 types of settings
0 0 2
2 0 71 57 types of settings
1 0 71 57 types of settings
48 0 71 57 types of settings
7 0 71 57 types of settings
4 0 255
11 0 255
255 0 255
0 0 1
0 0 100 0-100%
Lowest
Value
Highest
Value
Description Notes
0: Standard motor,
overload protection,
non overload stall
1: Standard motor,
overload protection,
overload stall
2: Standard motor,
non overload
protection, non
overload stall
3: Standard motor,
non overload
protection overload
stall
4: Special motor,
overload protection,
non overload stall
5: Special motor,
overload protection,
overload stall
6: Special motor,
non overload
protection, non
overload stall
7: Special motor,
non overload
protection, overload
stall
0: VIA - analog
input
1: VIA - contact
input (sink)
2: VIA - contact
input (source)
59 functions
available
59 functions
available
59 functions
available
0: F130 (primary)
and F137
(secondary)
1: F130 (primary)
or F137
(secondary)
This parameter allows selection of the
appropriate electronic thermal protection
characteristics according to the particular
rating and characteristics of the motor.
See Table 14 on page
options when setting this parameter.
The parameter allows you to choose
between signal input and contact input for
the VIA terminal. When using VIA
terminal as a contact input, slide switch 3
(SW3) to V on the terminal board. A
resistor of 4.7k ohm - 1/2 W should be
used across P24 and VIA when using a
contact input in the sink mode.
See Table 14 on page
of options for setting this parameter.
See Table 14 on page
of options for setting this parameter.
See Table 14 on page
of options for setting this parameter.
See Table 14 on page
of options for setting this parameter.
See Table 15 on page
available functions for setting this
parameter.
See Table 15 on page
available functions for setting this
parameter.
See Table 15 on page
available functions for setting this
parameter.
The RY-RC relay can be configured to
energize when either:
• Both the primary AND secondary
• Or only one OR the other is met (true)
Sets the low limit analog signal input at
VIA according to the frequency that is
programmed through parameter F203.
Refer to the Analog Inputs Section on
page
42, for available
42 for the 57 types
42 for the 57 types
42 for the 57 types
42 for the 57 types
46 for all 59
46 for all 59
46 for all 59
conditions are met (true) (F139=0),
(F139=1).
49 for details.
IM 959 39
Page 40

Table 13: Complete List of Programming Parameters for Most HVAC Applications, Continued
Parameter
Title
F202 0202
F203 0203
F204 0204
F210 0210
F211 0211
F212 0212
F213 0213
F268 0268
F294 0294
F300 0300
F303 0303
F359 0359
F360 0360 PID control 0 0 2
F362 0362
Communication
Address
Function
VIA input
point 1
frequency
VIA input
point 2 setting
VIA input
point 2
frequency
VIB input
point 1 setting
VIB input
point 1
frequency
VIB input
point 2 setting
VIB input
point 2
frequency
Initial value of
UP/DOWN
frequency
Forced-fire
speed setting
frequency
PWM carrier
frequency
Retry
selection
(number of
times)
PID control
waiting time
Proportional
gain
Default
Value
0 0 200 0-200 hertz
100 0 100 0-100%
60 0 200 0-200 hertz
0 0 100 0-100%
0 0 200 0-200 hertz
100 0 100 0-100%
60 0 200 0-200 hertz
0 0 50 0-50 hertz
50 0 50 0-50 hertz
6 6 16 6-16 KHZ
3 0 10
0 0 2400 0-2400 seconds
0.3 0.01 100 0.01-100 unitless
Lowest
Value
Highest
Value
Description Notes
0: Disabled
1-10 Times
0: Disabled
1: Enabled
(Feedback: VIA)
2: Enabled
(Feedback: VIB)
Sets the frequency that the low limit
analog signal input will correspond to
through the VIA terminal. Refer to the
Analog Inputs Section on page
details.
Sets the high limit analog signal input at
VIA according to the frequency that is
programmed through parameter 204.
Refer to the Analog Inputs Section on
page
Sets the frequency that the high limit
analog signal input will correspond to
through the VIA terminal. Refer to the
Analog Inputs Section on page
details.
Sets the low limit analog signal input at
VIB according to the frequency that is
programmed through parameter 203.
Refer to the Analog Inputs Section on
page
Sets the frequency that the low limit
analog signal input will correspond to
through the VIB terminal. Refer to the
Analog Inputs Section on page
details.
Sets the high limit analog signal input at
VIB according to the frequency that is
programmed through parameter 204.
Refer to the Analog Inputs Section on
page
Sets the frequency that the high limit
analog signal input will correspond to
through the VIB terminal. Refer to the
Analog Inputs Section on page
details.
This parameter is used to set an output
frequency by means of a signal from an
external device. This parameter is used
during floating point control when Fnod is
set to 5. See page
This parameter is used to set a speed
reference frequency during an
emergency. It's used when an input
function is set to 54 (FORCE) or 53
(FIRE).
This parameter allows the pulse width
modulation (PWM) carrier frequency to be
increased or decreased. Increasing this
parameter increases the control resolution
of the drive, but de-rates the ambient
temperature rating. Decreasing this
parameter decreases control resolution,
but increases the ambient temperature
rating of the drive.
This parameter resets the inverter
automatically when the inverter gives an
alarm. During the retry mode, the motor
speed search function operates
automatically as required and thus allows
smooth motor restarting.
This parameter sets the amount of time (in
seconds) that the drive will not enter the
PID control mode upon startup of the
drive. During this time period the drive will
accelerate to its speed reference input.
See PID control section on page
details.
This parameter enables feedback control
through either the VIA or VIB input
terminals. See PID control section on
page
signal of 4-20 mA or 0-10 VDC can be
used, or a scaling of these inputs can be
done through parameters F202 - F213.
This parameter adjusts the proportional
gain level during PID control. See PID
control section on page
49 for
49 for details.
49 for
49 for details.
49 for
49 for details.
49 for
56 for details
52 for
52 for details. A default analog input
52 for details.
40 IM 959
Page 41

Table 13: Complete List of Programming Parameters for Most HVAC Applications, Continued
Parameter
Title
F363 0363 Integral gain 0.2 0.01 100 0.01-100 unitless
F366 0366 Differential gain 0 0 2.55 0-2.55 unitless
F415 0415
F417 0417
F605 0605
F608 0608
F650 0650
F701 0701
F800 0800
F801 0801 Parity 1 0 2
F802 0802 Inverter number 1 0 247
F803 0803
F880 0880 Free notes 121 0 65,535 0-65,535 (unitless)
Communicatio
n Address
Function
Motor rated
current
Motor rated
speed
Output phase
failure detection
mode selection
Input phase
failure detection
mode selection
Forced/Fire-
speed control
selection
Current/voltage
display mode
Modbus or TSB
baud rate
Communication
error trip time
Default
Value
Varies 0.1 200 0.1-200 amperes
1430 100 15,000 100-15,000 RPM
3 0 5
1 0 1
0 0 1
1 0 1
1 0 1
3 0 100
Lowest
Value
Highest
Value
Description Notes
This parameter adjusts the integral gain level
during PID control. See PID control section on
page
This parameter adjusts the differential gain level
during PID control. See PID control section on
page
This parameter should be set to the rated
current of the motor. This is usually listed as the
FLA (full load amps) on the motor nameplate or
the motor test report.
This parameter should be set to the motor's
0: Disabled1: At
start-up (only one
time after power is
turned on)2: At start-
up (each time)3:
During operation4:
At start-up + during
operation5:
Detection of cutoff on
output
0: Disabled
1: Enabled
0: Disabled
1: Enabled
0: %
1: A (ampere)/ V
(volt)
0: 9600bps
1: 19200bps
0: NONE (No parity)
1: EVEN (Even
parity)
2: ODD (Odd parity)
1-247 address
number
0: Disabled
1-100 Seconds
rated rotational speed in RPM.
This parameter detects drive output phase
failure. If the phase failure status persists for
one second or more, the tripping function and
the FL relay will be activated. At the same time,
fault EPHO will be shown on the drive display.
This parameter detects drive input phase failure.
If the abnormal voltage status of the main circuit
capacitor persists for a few minutes or more, the
tripping function and the FL relay will be
activated. Therefore, input phase failures
cannot always be detected. A fault of EPH1 will
be shown on the drive display.
This parameter enables or disables the drive to
enter an emergency state through an input
terminal function assigned to type 52 (FORCE)
or type 53 (FIRE) functions. The frequency
setting when the drive enters this state is set by
parameter F294. For details see page
This parameter is used to switch between a
percentage or volt/ ampere read out on the
keypad display for certain parameters.
This parameter allows the baud rate to be
established through a data communication
network for exchanging data between a host
computer or controller and the drive by
connecting an internal RS485 communication
function or optional USB communication
conversion unit.
The data transfer speed, parity type, drive
controller number, and communication error trip
time can be set/edited by the operation panel or
communication function.
This parameter is used to set the communication
address for the drive when used with a
communication protocol.
This parameter allows the drive to fault if a
communication time-over occurs. The "Err5" will
be shown on the drive display when this
parameter is enabled and causes a drive fault.
This parameter is a free notes parameter in the
form of a number. McQuay utilizes this
parameter upon pre-programming of the drive
controller in very specific applications for certain
product lines.
52 for details.
52 for details.
* Denotes parameters that are interchangeable between an ampere display, or a display as a percentage by changing parameter
F701 (keypad display).
42.
IM 959 41
Page 42

Logic Input Functions
Table 14 below lists logic input functions available for programming parameters F108 – F118 (logic inputs F, R, RES, and
VIA). There are 57 available input types (0-71) that can be assigned to any one of these four parameters.
Table 14: Logic Input Functions
42 IM 959
Page 43

IM 959 43
Page 44

44 IM 959
Page 45

IM 959 45
Page 46

Relay Output Functions
Table 15 lists relay output functions available for programming parameters F130 – F137 (relay outputs FLA, FLB, FLC, RY,
RC). There are 52 available output types (0-61, 254, 255) that can be assigned to any one of these three parameters.
Table 15: Relay Output Functions
46 IM 959
Page 47

Table 15: Relay Output Functions, Continued
IM 959 47
Page 48

Table 15: Relay Output Functions, Continued
48 IM 959
Page 49

Table 15: Relay Output Functions, Continued
Analog Inputs
Two analog inputs are supplied with the drive controller. Terminals VIA and VIB located on the bottom right terminal strip
of the main unit control board are the analog inputs. If the drive controller has any communication card installed other than
the default Modbus card, then the VIA analog output is not available.
• VIA can accept the following signal types:
− Voltage (V): 0-10 VDC, voltage or potentiometer input
− Current (I): 0-20 mA or 4-20 mA
− Selecting between a voltage or current signal (V or I) is done with the red switch 3 (SW3) located on the right side
of the main control board.
• VIB can accept the following signal types:
− Voltage (V): 0-10 VDC, voltage or potentiometer input
Basic parameter FNOD (Frequency Setting Mode Selection 1) determines which input signal the drive controller will use to
control motor speed. Refer to Table 13 on page
The scaling or slope of the analog input can be adjusted through extended parameters F201 – F204 (for VIA), and F210 –
F213 (for VIB).
Table 16: Scaling Analog Inputs VIA or VIB
37 for details.
IM 959 49
Page 50

Figure 17: Graphical Representation of Scaling the Default 0-10 VDC Analog Input Signal
Figure 18: Graphical Representation of Scaling the Default 4-20 mA Analog Input Signal
Any input can be scaled to control motor speed to any desired speed reference values. However, it is important to understand
that as control range decreases, the resolution of control also decreases. Care must be taken when adjusting these parameters.
Poor speed control may result if the analog input resolution is decreased too far.
Analog Outputs
One analog output is supplied with the drive controller. Terminal FM located on the bottom right terminal strip of the main
unit control board is the analog output. FM is a multifunctional programmable analog output supplying an output frequency
signal as the factory default.
The FM terminal can output a voltage or current signal:
• When the red switch 2 (SW2) is set to V (voltage), FM outputs a 0-10 VDC signal at 1 mA
• When SW2 is set to I (current), FM outputs a 0-20 mA signal up to 24 VDC
The specific type of signal that the FM terminal will output can be adjusted through parameter FNSL. There are 19 different
values that can be programmed through parameter FNSL that effect what type of signal the FM terminal will output.
50 IM 959
Page 51

Table 17: Analog Output Function Selection (Meter Selection)
Scaling of the analog output through the FM terminal can be done in order to output a specific range of analog signal. The
FM terminal will output a default 0-10 VDC signal if SW2 is set to V. The FM terminal will output a 0-20 mA signal if SW2
is set to I. In order to output any range other than the drive default, the following procedure must be carried out.
1. Set SW2 to the desired output, V (Voltage) or I (Current).
2. Change parameter FNSL to either 15 or 17 depending on the desired output. For current output, select 15; for
voltage output, select 17.
3. Go to parameter Fn on the VFD display. Hit Enter. 100 should be displayed.
4. Disconnect all control wiring at terminal FM on the main unit control board.
5. With a digital multimeter measure the voltage or current at the FM terminal. For a voltage measurement, measure
across FM and any common (CC) terminal.
6. Use the Up or Down keys to adjust the desired output range while measuring the value at the FM terminal with a
digital multimeter. Notice that 100 is flashing on the display of the keypad even while voltage or current readings
on the digital multimeter change.
7. Once the desired range has been set, hit Enter on the drive keypad. Fn and 100 should flash back and forth on the
screen. This means that the desired output value has been locked in or set within the drive controller.
IM 959 51
Page 52

8. Go back to parameter FNSL on the drive display. Set it back to the desired type of output (output frequency, output
current, etc.).
Parameter Fn has an adjustable range of 1 – 1280 and is a unitless parameter. To find out what value was set at parameter Fn
(to achieve the desired output) in steps 1 through 8, follow steps 9 through 11. This procedure is not necessary, but
sometimes beneficial to record the actual value that was set at parameter Fn for future reference in case this parameter would
happen to be changed, or set back to default at any point in the future.
9. Change parameter FNSL to 19. This setting displays the set value at parameter Fn.
10. Go to parameter Fn on the VFD display. Hit Enter. The true value that was locked or set at parameter Fn in steps 1
through 8 should be displayed.
11. Go back to parameter FNSL on the drive display. Set it back to the desired type of output (output frequency, output
torque, etc.).
PID Control
The drive controller is equipped with its own internal PID loop for analog input signal control. The PID loop can be set to
control to an analog input signal through the VIA terminal, VIB terminal, or a combination of both. The following procedure
shows how to setup a PID control loop, and guidelines for tuning the loop.
1. Enable the PID control through parameter F360. It can be defined to control an analog input source at the VIA
terminal or the VIB terminal. The default input for the enclosed drive controller is through the VIB terminal. The
VIA analog input is not available on any other communication card option other than Modbus.
Table 18: Enabling the PID loop and Defining the Feedback Source
2. Set parameter F359 to a desired value depending on the application. F359 is the PID control waiting period (in
seconds). Parameter F359 defines the time period that the drive controller will ignore the feedback signal during
PID control. The motor will accelerate to the speed set by the reference input during this time period.
Table 19: Adjusting the PID Control Waiting Period
3. Set parameter FNOD to 3 (Keypad).
Table 20: Frequency Setting Mode Selection Parameter Options (FNOD).
52 IM 959
Page 53

4. Once FNOD is set to 3, hit Enter and press the Mode button twice. The drive is now put into a mode that allows the
PID setpoint to be established by way of the keypad display.
5. Press the Up and Down arrows on the keypad until the desired PID setpoint shows on the display. Once the desired
setpoint is displayed, press the Enter key to lock in the setpoint value (the value should blink for a few seconds when
setpoint is locked in). Hit the Mode key to return back to the main display.
PID Setpoint
The PID setpoint is defined by the user and scaled according to parameters F202 and F204 for the VIA analog input. F211
and F213 define the scale for the PID setpoint through the VIB analog input. To understand what value should be entered on
the keypad for a desired PID setpoint, the values entered in these parameters must be known. The transducer range feeding
back an analog signal to the VIA or VIB terminal must also be known. Use the following examples to understand how to
program in the correct PID setpoint at the keypad using one of the analog inputs (VIA, or VIB).
Example 1
Transducer range = 0-5 inches of water column on an HVAC fan application
Analog input range at VIA = 0-10 VDC
Desired PID setpoint = 1.5 inches of water column
PID value entered at the keypad to give a PID setpoint of 1.5” WC = ???
1. Understand what scaling values are entered at parameters F202 and F204. The drive controller default is:
• F202 = 0 Hz
• F204 = 60Hz
2. Understand what the transducer range is. In this example:
• Lowest point = 0 inches of water column
• Highest point = 5 inches of water column
3. Understand what the PID setpoint should be for the system. In this example, 1.5 inches of water column.
4. Conduct a linear interpolation between the five known values to come up with the unknown value (PID setpoint at
the keypad):
Table 21: Linear Interpolation to Find a Desired PID Setpoint to be Entered at the Keypad Display.
Transducer Low Limit =
Desired PID Pressure Setpoint = 1.5 ?? = Desired PID Setpoint (to be entered at the keypad)
Transducer High Limit = 5 60 = F204 Value
0 0
= F202 Value
The desired PID setpoint to be entered on the keypad display is 18 Hz, and is calculated the following way:
(1.5 ÷ 5) = 0.3 (or 30%)
0.3 X 60 = 18 Hz (desired setpoint)
* Note: The analog input range (in this case 0-10 VDC) does not affect this calculation. However, the scaling of this input
(0-10 VDC) is adjusted through parameter settings F201 and F203.
IM 959 53
Page 54

Example 2
Transducer range = 0-20 psi on a loop water pump application
Analog input range at VIB = 4-20mA or 2-10VDC when a 500 ohm resistor is jumpered across VIB and CC (this must be
done since VIB does not take a 4 – 20 mA feedback)
Desired PID setpoint = 12 psi
PID value entered at the keypad to give a PID setpoint of 12 psi = ???
1. Understand what scaling values are entered at parameters F211 and F213. The drive controller default is:
• F211 = 0 Hz
• F213 = 60Hz
2. Understand what the transducer range is. In this example:
• Lowest point = 0 psi
• Highest point = 20 psi
3. Understand what the PID setpoint should be for the system. In this example, 12 psi.
4. Conduct a linear interpolation between the 5 known values to come up with the unknown value (PID setpoint at the
keypad):
Table 22: Linear interpolation to find a desired PID setpoint to be entered at the keypad display.
Transducer Low Limit =
Desired PID Pressure Setpoint = 12 ?? = Desired PID Setpoint (to be entered at the keypad)
Transducer High Limit = 20 60 = F213 Value
0 0
= F211 Value
The desired PID setpoint to be entered on the keypad display is 36 Hz, and is calculated the following way:
(12 ÷ 20) = 0.6 (or 60%)
0.6 X 60 = 36 Hz (desired setpoint)
* Note: The analog input range (in this case 4-20 mA) does not affect this calculation. However, the scaling of this input (in
this case) is adjusted through parameter settings F210 and F212.
PID Tuning
Once the PID loop is enabled and a setpoint established, tuning of the proportional and integral bands may be necessary if
any of the following problems are occurring within the system:
• The VFD is hunting or ramping up and down sporadically.
• The VFD is not making speed adjustments fast enough to control to the PID setpoint.
• The VFD is making speed changes to fast, and trying to control to the PID setpoint too precisely.
In order to alleviate these problems, four parameters may have to be adjusted to properly tune the PID feeback loop. It is
recommended that the acceleration and deceleration parameters be set to a relatively low value to start, somewhere in the
range of 1-10 seconds.
Table 23: Acceleration and Deceleration Parameter Settings (in seconds)
54 IM 959
Page 55

Next, adjust the proportional band (parameter F362), and the integral band (parameter F363) to values that yield the best
possible control of the system, and get rid of any hunting or sporadic ramping problems in the loop. A rule of thumb is to set
the integral band low (somewhere in the range or 0.01 - 1), and the proportional band high (somewhere in the range of 10 –
100).
Table 24: Proportional Band Parameter Setting
Parameter F362 adjusts the proportional gain applied during PID control. The speed change applied to the motor is a
correctional value proportional to the product of this parameter’s setting and the process error (deviation between the setpoint
and the feedback value).
Figure 19: Graphical Representation of the Proportional Gain Parameter Setting
Table 25: Integral Band Parameter Setting
Parameter F363 adjusts the integral gain applied during PID control. Any residual process errors that remain after correction
by the proportional gain are cleared to zero over time by the integral gain function. A higher setting of F363 provides a fast
response to a process error but may also result in instability in the system such as hunting.
produced by adjusting F363.
Figure 20: Graphic Representation of the Integral Gain Parameter Setting
Figure 20 illustrates the effect
IM 959 55
Page 56

Floating Point Control
Many of McQuay’s applied air products utilize a floating point control scheme to control motor speed. This type of control
utilizes dry contact relays in order to increase or decrease the speed of the drive controller. A typical control wire scheme to
carry out this type of control is shown in Figure 23.
Figure 21: Typical Control Wiring Diagram for Floating Point Control
The parameter changes necessary to achieve this type of motor control are listed in Table 26 below.
Table 26: Parameter Changes for Floating Point Control
Parameter Description Default Setting Floating Point Control Setting
Fnod Frequency setting mode selection 1 1 5
F112 Input terminal selection 2 ( R ) 6 41
F113 Input terminal selection 3 (RES) 10 42
56 IM 959
Page 57

Wiring Diagram
Figure 22: Typical Wiring Schematic for McQuay Enclosed Drive Controllers (460V shown)
IM 959 57
Page 58

Troubleshooting
Refer to Tables 27 and 29 to diagnose and resolve problems when a fault or alarm occurs. A fault will cause the drive to stop
supplying power at its output terminals, causing the motor to completely stop. An alarm will not cause the drive to stop
supplying power to its output terminals, but will show the alarm code on the keypad display of the drive controller.
If the problem cannot be resolved by the actions described in the tables, contact one of the product support options shown on
70 of this manual, or contact your McQuay Parts Distributor.
page
Drive Controller Fault Conditions
Table 27: Fault Codes
58 IM 959
Page 59

Table 27: Fault Codes, Continued
IM 959 59
Page 60

Table 27: Fault Codes, Continued
60 IM 959
Page 61

Table 27: Fault Codes, Continued
IM 959 61
Page 62

Table 27: Fault Codes, Continued
62 IM 959
Page 63

Pre-alarm Displays
The drive controller has several pre-alarm codes that will display before an actual fault occurs. Pre-alarms are displayed,
blinking, in the following order from left to right: C, P, L, H. If two or more problems arise simultaneously, one of the
following alarms appears and blinks: CP, PL, CPL.
Table 28: Pre-alarm Displays
IM 959 63
Page 64

Drive Controller Alarm Conditions
Alarms do not cause the drive controller to enter a fault condition.
Table 29: Alarm Codes
64 IM 959
Page 65

Table 29: Alarm Codes, Continued
IM 959 65
Page 66

Resetting the Drive Controller after a Fault Condition is Detected
Clear the cause of a fault trip condition before resetting the drive controller. Resetting the tripped drive controller before
eliminating the problem causes it to fault again.
The drive controller can be reset after a fault with any of the following operations:
1) By turning off the power.
2) By means of an external signal.
3) With the Stop key on the display terminal:
a) Press the Stop key and make sure that CLr is displayed.
b) Eliminate the cause of the fault.
c) Press the Stop key again to reset the drive controller.
4) By a fault clear signal from a remote communication device.
When any overload function (O11 or OL2) is active, the drive controller cannot be reset by inputting a reset signal from an
external device or with the Stop key on the display terminal if the calculated cooling time has not expired. Calculated
cooling time:
• OL1: 30 seconds after the fault has occurred
• OL2: 120 seconds after the fault has occurred
!
CAUTION
MOTOR OVERHEATING
• Repeated reset of the thermal state after a thermal overload can result in thermal stress to the motor.
• When the faults occur, promptly inspect the motor and driven equipment for problems (such as locked shaft or
mechanical overload) before restarting. Also check the power supplied to the motor for abnormal conditions (such as
phase loss or phase imbalance).
Failure to follow this instruction can result in equipment damage.
66 IM 959
Page 67

Parts
Parts for the McQuay enclosed drive product can be ordered through any local McQuay parts distributor. Go to
www.mcquay.com to find a McQuay Parts Distributor near you. A specific parts list ships with every custom built McQuay
enclosed drive controller. This as-built parts list is specially created for each enclosed drive unit. This as-built or custom
parts list should be referred to for specific component part numbers within the drive enclosure.
Table 30
replacement parts within the enclosure. Find specific parts by referring to the device ID tag on the two-dimensional layout
drawing of Figure 3 on page
should be selected according to voltage, horsepower, or ampere rating. This information may have to be field verified before
the right part can be chosen from the generic parts list shown in Table 30.
Parts List
Table 30: Typical Parts List for the McQuay Enclosed Drive Controller
below shows a generic parts list good for the entire product line. This parts list can also be used to select
10, or according to the wiring schematic of Figure 22 on page 57. Some of the parts in the list
Device ID Description
DS1 Non-fusible disconnect switch 100 Amp 193422001
DS1 Circuit Breaker Disconnect 100A 349935125
DS1 Circuit Breaker Disconnect 150A 349935126
FU2 Disconnect Fuse (3A) 349964102
FU2 Disconnect Fuse (6A) 349964103
FU2 Disconnect Fuse (10A) 349964104
FU2 Disconnect Fuse (15A) 349964105
FU2 Disconnect Fuse (20A) 349964107
FU2 Disconnect Fuse (25A) 349964108
FU2 Disconnect Fuse (35A) 349964110
FU2 Disconnect Fuse (45A) 349964112
FU2 Disconnect Fuse (60A) 349964114
FU2 Disconnect Fuse (70A) 349964115
FU2 Disconnect Fuse (90A) 349964117
FU2 Disconnect Fuse (100A) 349964118
FU2 Disconnect Fuse Holder (30A) 349964201
FU2 Disconnect Fuse Holder (60A) 349964202
FU2 Disconnect Fuse Holder (100A) 349964203
DS1 Disconnect Fuse (110A) 113085258
DS1 Disconnect Fuse (125A) 113085201
DS1 Disconnect Fuse (150A) 113085202
DS1 Disconnect Fuse (175A) 113085203
DS1 Disconnect Fuse (200A) 113085204
DS1 Circuit Breaker Disconnect (15A) 349939621
DS1 Circuit Breaker Disconnect (20A) 349939622
DS1 Circuit Breaker Disconnect (30A) 349939624
DS1 Circuit Breaker Disconnect (40A) 349939626
DS1 Circuit Breaker Disconnect (50A) 349939628
DS1 Circuit Breaker Disconnect (60A) 349939629
DS1 Circuit Breaker Disconnect (70A) 349939630
DS1 Circuit Breaker Disconnect (80A) 349939631
McQuay Part
Number
IM 959 67
Page 68

Device ID Description
DS1 Circuit Breaker Disconnect (90A) 349939632
DS1 Circuit Breaker Disconnect (100A) 349939633
M10C Bypass Contactor (9A) 349932121
M10C Bypass Contactor (12A) 349932122
M10C Bypass Contactor (18A) 349932123
M10C Bypass Contactor (25A) 349932321
M10C Bypass Contactor (32A) 349932322
M10C Bypass Contactor (40A) 349932521
M10C Bypass Contactor (50A) 349932522
M10C Bypass Contactor (65A) 349932523
M10C Bypass Contactor (80A) 349932621
M10C Bypass Contactor (115A) 349932721
M10C Bypass Contactor (150A) 349932722
M10 & M10B Reversing Bypass Contactor (9A) 349933121
M10 & M10B Reversing Bypass Contactor (12A) 349933122
M10 & M10B Reversing Bypass Contactor (18A) 349933123
M10 & M10B Reversing Bypass Contactor (25A) 349933321
M10 & M10B Reversing Bypass Contactor (32A) 349933322
M10 & M10B Reversing Bypass Contactor (40A) 349933521
M10 & M10B Reversing Bypass Contactor (50A) 349933522
M10 & M10B Reversing Bypass Contactor (65A) 349933523
M10 & M10B Reversing Bypass Contactor (80A) 349933621
M10 & M10B Reversing Bypass Contactor (115A) 349933721
M10 & M10B Reversing Bypass Contactor (150A) 349933722
M10B Bypass Contactor Auxiliary Contact (1NO, 1NC) 349931923
OL10 Overload Relay (0.10 - 0.16A) 349934651
OL10 Overload Relay (0.16 - 0.25A) 349934652
OL10 Overload Relay (0.25 - 0.40A) 349934653
OL10 Overload Relay (0.40 - 0.63A) 349934654
OL10 Overload Relay (0.63 - 1A) 349934655
OL10 Overload Relay (1 - 1.6A) 349934656
OL10 Overload Relay (1.6 - 2.5A) 349934657
OL10 Overload Relay (2.5 - 4A) 349934658
OL10 Overload Relay (4 - 6A) 349934659
OL10 Overload Relay (5.5 - 8A) 349934660
OL10 Overload Relay (7 - 10A) 349934661
OL10 Overload Relay (9 - 13A) 349934662
OL10 Overload Relay (12 - 18A) 349934663
OL10 Overload Relay (16 - 24A) 349934664
OL10 Overload Relay (23 - 32A) 349934665
OL10 Overload Relay (30 - 40A) 349934669
OL10 Overload Relay (37 - 50A) 349934670
OL10 Overload Relay (48 - 65A) 349934671
OL10 Overload Relay (63 - 80A) 349934673
OL10 Overload Relay (60 - 100A) 349934675
OL10 Overload Relay (90 - 150A) 349934676
T1 Control Power Transformer 240/480V (100VA) 038253951
T1 Control Power Transformer 240/480V (250VA) 193420201
T1 Control Power Transformer 208V (100VA) 038253969
McQuay Part
Number
68 IM 959
Page 69

Device ID Description
T1 Control Power Transformer 208V (250VA) 193420202
T1 Fuse Puller Kit for Transformer (T1) 349955801
T1 Finger safe cover for 100VA 349955902
T1 Finger safe cover for 250VA 349955901
F1A Transformer Fuse (1A) 049759804
F1A Transformer Fuse (2A) 049759807
F1A Transformer Fuse (5A) 049759811
F1A Transformer Fuse (6A) 300041289
F1C Non Rejection Fuse 3A 042753111
AFD10 VFD 1HP 200-240V 349956604
AFD10 VFD 1.5/2HP 200-240V 349956606
AFD10 VFD 3HP 200-240V 349956607
AFD10 VFD 5HP 200-240V 349956609
AFD10 VFD 7.5HP 200-240V 349956610
AFD10 VFD 10HP 200-240V 349956611
AFD10 VFD 15HP 200-240V 349956612
AFD10 VFD 20HP 200-240V 349956613
AFD10 VFD 25HP 200-240V 349956614
AFD10 VFD 30HP 200-240V 349956615
AFD10 VFD 40HP 200-240V 349956616
AFD10 VFD 1HP 400-480V 349956621
AFD10 VFD 1.5/2HP 400-480V 349956622
AFD10 VFD 3HP 400-480V 349956623
AFD10 VFD 5HP 400-480V 349956625
AFD10 VFD 7.5HP 400-480V 349956626
AFD10 VFD 10HP 400-480V 349956627
AFD10 VFD 15HP 400-480V 349956628
AFD10 VFD 20HP 400-480V 349956629
AFD10 VFD 25HP 400-480V 349956630
AFD10 VFD 30HP 400-480V 349956631
AFD10 VFD 40HP 400-480V 349956632
AFD10 VFD 50HP 400-480V 349956683
AFD10 VFD 60HP 400-480V 349956684
AFD10 VFD 75HP 400-480V 349956685
AFD10 VFD 100HP 400-480V 349956686
AFD10KP Remote Keypad Kit (Includes Cable) 349958801
AFD10KP Keypad Cable 3 meter 349927302
TS1 Thermostat (for Heater) 193418402
HTR Heater 193418301
FAN Cooling Fan, NEMA 1, NEMA 3R Unfiltered (Frame 1 & 2) 193419101
FAN Cooling Fan, NEMA 1, NEMA 3R Unfiltered (Frame 3 & 4) 193419102
FAN Spare Filters for Frame 1 (QTY 5) 193422401
FAN Spare Filters for Frames 2 & 3 (QTY 5) 193422402
FAN Spare Filters for Frame 4 (QTY 5) 193422403
FAN Cooling Fan, NEMA 12, NEMA 3R Filtered (Frame 1) 193418601
FAN Cooling Fan, NEMA 12, NEMA 3R Filtered (Frame 2 & 3) 193418602
FAN Cooling Fan, NEMA 12, NEMA 3R Filtered (Frame 4) 193418603
FAN Louver, NEMA 12, NEMA 3R Filtered (Frame 1) 193418701
FAN Louver, NEMA 12, NEMA 3R Filtered (Frame 2 & 3) 193418702
McQuay Part
Number
IM 959 69
Page 70

Device ID Description
FAN Louver, NEMA 12, NEMA 3R Filtered (Frame 4) 193418703
TS2 Thermostat (for Cooling Fan) 193418401
R1 HOA Switch Relay 349934724
R1 HOA Socket 074805901
SPS1 Duct Static Sensor (Internal) 193419601
SPS1 Duct Static Sensor (External) 300043535
PVM1 Phase Voltage Monitor 112022001
TA1 Transient Arrestor 193421701
DOOR_CLOSURE Padlock Hasp 193419201
Product Support
For drive startup and drive programming support contact:
McQuay International, Parts Group
Phone: 763-553-5403
Toll-free: 1-800-37-PARTS (377-2787)
Fax: 763-509-7608
Email: partsid@mcquay.com
For all other support contact your local McQuay Parts Distributor. Visit
Distributor in your area, or call 800-377-2787.
www.mcquay.com to find the nearest McQuay Parts
McQuay Part
Number
70 IM 959
Page 71

This page is intentionally blank.
IM 959 71
Page 72

All McQuay equipment is sold pursuant to its standard terms and conditions of sale, including Limited Product
Warranty. Consult your local McQuay Parts Distributor for warranty details. Refer to Form 933-43285Y. To find
the nearest McQuay Parts Distributors in your area, visit www.mcquay.com or call 800-377-2787.
This document contains the most current product information as of this printing. For the most up-to-date product
information, please go to www.mcquay.com.
© 2008 McQuay International · www.mcquay.com · 800-432-1342
72 IM 959
 Loading...
Loading...